Futómű rendszerek mechatronikája
Szerzői jog © 2014 Kőfalusi Pál

A tananyag a TÁMOP-4.1.2.A/1-11/1-2011-0042 azonosító számú „ Mechatronikai mérnök MSc tananyagfejlesztés ” projekt keretében készült. A tananyagfejlesztés az Európai Unió támogatásával és az Európai Szociális Alap társfinanszírozásával valósult meg.

Kézirat lezárva: 2014 január
Lektorálta: Dr. Lakatos István
További közreműködők: Dr. Aradi Petra, Dr. Lipovszki György, Dr. Ábrahám György, Czmerk András, Gräff József
A kiadásért felel a(z): BME MOGI
Felelős szerkesztő: BME MOGI
2014
- 1. Tengelykapcsolók működtetésének mechatronikája
- 2. A kerekek geometriai beállítása és megvezetése
- 3. Rugózás és stabilizátorok
- 3.1. Futómű a biztonság záloga
- 3.2. A személygépkocsik rugózása
- 3.3. A gépjárműveknél alkalmazott rugó fajták
- 3.4. Stabilizátor kialakítása és feladata
- 3.5. Személygépkocsik légrugózással
- 3.6. Aktív kerékfelfüggesztés
- 3.7. Haszonjárművek elektronikus légrugózása
- 3.7.1. A fejlesztések főbb céljai
- 3.7.2. A haszonjárműveknél alkalmazott légrugók
- 3.7.3. Légrugó szintállító szelepek
- 3.7.4. Légrugó és laprugó kombinációja
- 3.7.5. Elektronika a légrugózásnál
- 4. Lengéscsillapítás
- 4.1. A gépjárművek lengéscsillapítóinak feladata és műszaki jellemzői
- 4.2. Egy és kétcsöves hidraulikus lengéscsillapítók
- 4.3. Lengéscsillapító karakterisztikák
- 4.4. 4. Elektronikusan változtatható karakterisztikájú lengéscsillapító
- 4.5. CDC lengéscsillapító (continous damping control)
- 4.5.1. CDC2e lengéscsillapító
- 4.5.2. Együttműködés a CDC és az ESP között
- 4.5.3. A CDC előnyei folyamatosan élvezhetők
- 4.5.4. A Skyhook szabályozásnak megfelelő lengéscsillapító karakterisztika
- 4.5.5. A lengéscsillapító karakterisztika elektromos változtatása
- 4.5.6. Alkalmazási példák személygépkocsinál és autóbusznál
- 4.6. PDC lengéscsillapító
- 4.7. Magneto-rheologiai lengéscsillapítás
- 5. Differenciálzárak elektronikus működtetése
- 5.1. Összefoglaló a differenciálművekről
- 5.2. A differenciálzár, vagy a növelt belső súrlódás szükségessége és csoportosítása
- 5.3. Személygépkocsi kézi kapcsolású differenciálzárakkal
- 5.4. Homlokkerekes differenciálmű
- 5.5. Középső homlokkerekes differenciálmű visco differenciálzárral
- 5.6. Középső kúpkerekes differenciálmű visco differenciálzárral
- 5.7. A VISCO differenciálzárak hátrányai
- 5.8. A differenciálművek belső súrlódása
- 5.9. Önzáró differenciálmű
- 5.10. Elektrohidraulikus működtetésű differenciálzárak
- 5.11. Villanymotorral működtetett differenciálzárak
- 5.12. Csigakerekes, részlegesen önzáró differenciálművek (Torsen = Torque Sensing)
- 5.13. EDS (Elektronische Differential Sperre)
- 5.14. Haszonjárművek differenciálzárral
- 6. Elektrohidraulikus szervokormányok
- 6.1. A kormányzással kapcsolatos alapfogalmak
- 6.1.1. Kormányzási módok
- 6.1.2. A kormányberendezéssel szemben támasztott követelmények
- 6.1.3. A gépkocsi kormányzási tulajdonságai
- 6.1.4. A kormányrudazat
- 6.1.5. A kormányművek és a velük szemben támasztott követelmények
- 6.1.6. A kormányberendezések csoportosítása az alkalmazott energia szempontjából
- 6.1.7. A mechanikus kormánygépek néhány változata
- 6.2. Hidraulikus szervokormányok (HPS = Hidraulic Power Steering)
- 6.2.1. A szervokormány modellje
- 6.2.2. A segédenergiát hasznosító kormányberendezések, szervokormányok főbb részegységei
- 6.2.3. A kormányzásnál használatos segédenergia változatok
- 6.2.4. A hidraulikus szervokormány energiaellátásának lehetőségei
- 6.2.5. A különböző gépkocsik hidraulikus szervokormányaihoz használatos szervo-szivattyúk
- 6.2.6. Servotronic a sebességfüggő rásegítés
- 6.2.7. Ellenőrző kérdések a hidraulikus szervokormányok részhez
- 6.3. Elektrohidraulikus szervokormány EPHS
- 6.4. A különböző szervokormány változatok összehasonlítása
- 6.5. Ellenőrző kérdések az elektrohidraulikus szervokormány részhez
- 7. Elektromechanikus szervokormány (EPS)
- 7.1. Az elektro-mechanikus szervokormányok fontosabb elvárásai
- 7.2. Az aktív biztonság növelésének lehetőségei az EPS rendszerrel
- 7.3. Az elektromechanikus szervokormány előnyei
- 7.4. Az elektromechanikus szervokormányok csoportosítása
- 7.5. Az elektromechanikus szervokormány részegységei
- 7.6. Az elektromechanikus szervokormányoknál alkalmazott villanymotorok
- 7.7. A nyomatékérzékelő
- 7.8. Az EPS elektronika
- 7.9. Az EPS c változat
- 7.10. EPS –p (pinion) változat
- 7.11. EPS dp típus elektromechanikus szervokormány
- 7.12. EPS apa fogasléccel párhuzamos villanymotor beépítéssel
- 7.13. Fogasléccel párhuzamos villanymotor, melynek forgórészén fűzték át a fogaslécet
- 7.14. Ellenőrző kérdések az elektromechanikus szervokormányok témakörhöz
- 8. Aktív kormányzás
- 8.1. A passzív és az aktív kormányrendszer összehasonlítása
- 8.2. A különböző elektronikus menetdinamikai szabályozó rendszerek együttműködése
- 8.3. Menet közben változó áttétel, nagyobb komfort és biztonság
- 8.4. Aktív kormányzás bolygóművel és csigahajtásos villanymotorral
- 8.5. Aktív szervokormány hullámhajtással
- 8.6. Elvárások a közeljövő szervokormányaival szemben
- 8.7. Ellenőrző kérdések az aktív szervokormány témakörhöz
- 9. Összkerék kormányzás
- 9.1. Az összkerék kormányzás alkalmazása, előnyei, és hátrányai
- 9.2. Néhány példa az aktív összkerék kormányzású gépkocsikra
- 9.3. Az összkerék kormányzás konstrukciós megoldásai
- 9.4. Hidraulikus működésű aktív összkerék kormányzás
- 9.5. Elektromechanikus működésű aktív összkerék kormányzás
- 9.6. Delphi Quadrasteer™ összkerék kormányzás
- 9.7. Passzív hátsó kerék kormányzás
- 9.8. Steer - by - wire
- 10. Hidraulikus fék, ABS ASR rendszerek
- 10.1. Bevezetés és áttekintés
- 10.2. Az üzemi fékrendszert kiegészítő menetdinamikai szabályozó rendszerek
- 11. ESP rendszerek
- 11.1. Az ESP rendszer bemeneti információi és működése
- 11.2. Az ESP beavatkozások
- 11.3. Az ESP rendszer önellenőrzése
- 11.4. ESP hidraulika egység és elektronika
- 11.5. Az ESP rendszer perdülés érzékelője
- 11.6. Kereszt (és menet irányú) gyorsulás érzékelő
- 11.7. Kerékfordulatszám érzékelők legújabb változata
- 11.8. Az ESP rendszerek kormánykerék elfordítás érzékelői
- 11.9. Fékező nyomás érzékelő
- 11.10. Az ESP működéséhez a fékező nyomás létrehozása
- 11.11. Az újabb ESP rendszerek összetett menetdinamikai szabályozó rendszerré váltak
- 12. Elektrohidraulikus fékrendszer
- 13. Elektropneumatikus fékrendszer
- 13.1. Az elektro-pneumatikus fékrendszerek fejlesztésének céljai és a lehetőségek
- 13.2. Az elektro-pneumatikus fékrendszer az adatátvitelhez több CAN-hálózatot is használ.
- 13.3. Az EBS rendszer biztonsági fékje
- 13.4. Amit csak az elektronika tud teljesíteni
- 13.5. Az elektropneumatikus fékrendszer működésmódjai
- 13.6. Az elektropneumatikus fékrendszer részegységei
- 13.6.1. pedálmodul és működése
- 13.6.2. Egycsatornás nyomásmodul
- 13.6.3. Két csatornás nyomásmodul
- 13.6.4. Pótkocsi fékvezérlő modul
- 13.6.5. Az elektropneumatikus fékrendszer központi elektronikája
- 13.6.6. Az elektropneumatikus fékrendszer ellenőrző lámpái
- 13.6.7. ESP szabályozás az elektropneumatikus fékrendszer egyik alprogramja
- 13.7. A pótkocsi elektropneumatikus fékrendszere
- 13.8. Ellenőrző kérdések
- 14. Elektromechanikus fékezés
- 14.1. Az elektromechanikus fékrendszer fejlesztésének összefoglalása
- 14.2. Villanymotorral működtetett úszónyerges üzemi fék
- 14.3. ISAD az elektromechanikus fékezés egyik lehetősége
- 14.4. A hibrid hajtással megvalósítható elektromechanikus fékezés
- 14.5. Ékes működtetésű elektromechanikus fék személygépkocsikhoz (EBW)
- 14.6. Személygépkocsik elektromechanikus rögzítő fék rendszerei
- 14.6.1. Központi rögzítő fék működtető egység villanymotorral és mechanikus áttétellel, mely bowdenekkel fékez
- 14.6.2. Elektromechanikus rögzítő fék, féknyeregbe integrált Ci változat, Electrical Parking Brake – Caliper Integrated
- 14.6.3. Elektromechanikus rögzítő fék duo-szervo kivitel Electrical Parking Brake – Duo Servo EPB-DS
- 15. Brake by wire rendszerek
- 16. Motor fékező nyomaték szabályozás és a retarderek szabályozása
- 16.1. A tartós lassító fékberendezések áttekintése
- 16.2. Növelt hatású motorfékek
- 16.3. Olajjal működő hidrodinamikus retarderek
- 16.3.1. Az olajjal működő hidrodinamikus retarderek csoportosítása a beépítés helye szerint
- 16.3.2. A Retarderek csoportosítása a vezérlés szerint
- 16.3.3. A retarderek elektronikus működtetése
- 16.3.4. Az ABS és a retarder együttműködése:
- 16.3.5. Szekunder beépítésű hidrodinamikus retarder
- 16.3.6. Intarder
- 16.3.7. DIWA sebességváltó, fékező hidrodinamikus nyomatékváltóval
- 16.3.8. Primer retarder
- 16.4. Hűtőfolyadékkal működő hidrodinamikus retarderek
- 16.5. A különböző hidrodinamikus retarderek alkalmazási területei:
- 16.6. Örvényáramú retarderek
- 16.7. Tartós lassító fékezés energiatárolással
- 17. Elektronikus asszisztens rendszerek
- 17.1. A közlekedési balesetek elemzése és a célkitűzések
- 17.2. A gépkocsivezető munkáját támogató elő asszisztens renszerek
- 17.3. Ember-gép kapcsolat (Human-Machine-Interface) (HMI)
- 17.4. Önálló modulokból közös rendszer
- 17.4.1. A forgalmi sáv tartása Line Departure Warning (LDW)
- 17.4.2. Az ütközés elkerülése kis sebességnél (Closing Velocity System)
- 17.4.3. A forgalmi táblák felismerése
- 17.4.4. A forgalmi torlódás asszisztens
- 17.4.5. A visszapillantó tükrök holt terének figyelése (Blind Spot Detektion) és a sávváltási asszisztens (Lane Change Assist)
- 17.4.6. Kiszállási asszisztens (Safety-Get-OFF-Assistant)
- 17.4.7. Éjszaka látó berendezés (Nightvision)
- 17.4.8. Sensitive Gudance
- 17.4.9. Elektronikus horizont
- 17.4.10. Az ultrahangos érzékelő
- 17.4.11. Adaptive Cruise Control (ACC)
- 17.4.12. Közeli radar érzékelő (SLR radar)
- 17.4.13. Az UWB technológia
- 17.4.14. Lidar érzékelő
- 17.4.15. Laser-scanner
- 17.4.16. Predektív biztonsági rendszer „Predictive Safety System” (PSS)
- 17.4.17. Video rendszerek
- 17.5. Haszonjárművek asszisztens rendszerei
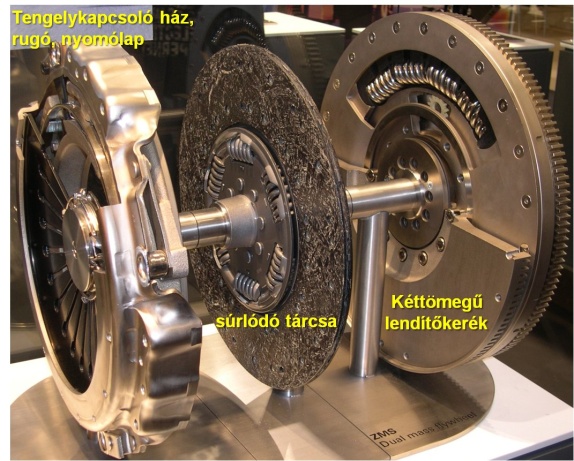
- 1.1. Egy tárcsás száraz lemezes tengelykapcsoló és kéttömegű lendítőkerék. (Gyártó LuK)
- 1.2. Két tárcsás száraz lemezes tengelykapcsoló DSG sebességváltóhoz. (Gyártó LuK)
- 1.3. Elektromechanikus tengelykapcsoló működtetés
- 1.4. Elektro-mechanikus tengelykapcsoló működtetés (LuK ).
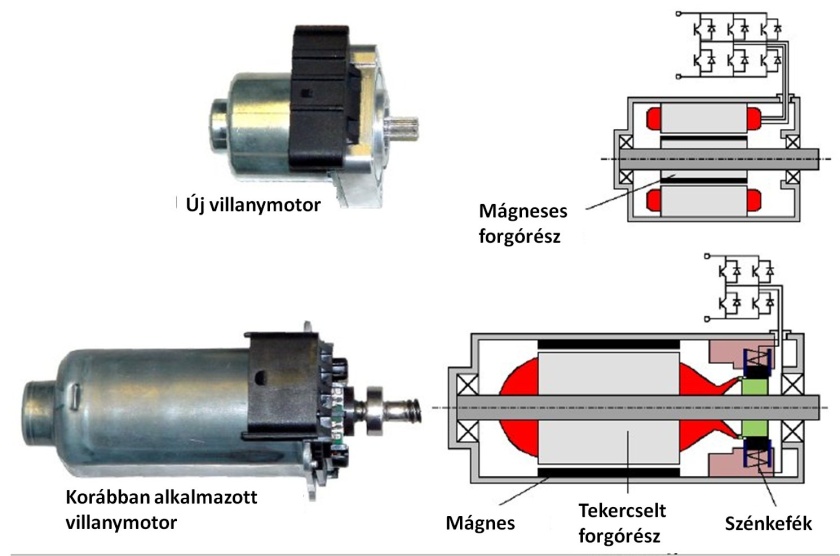
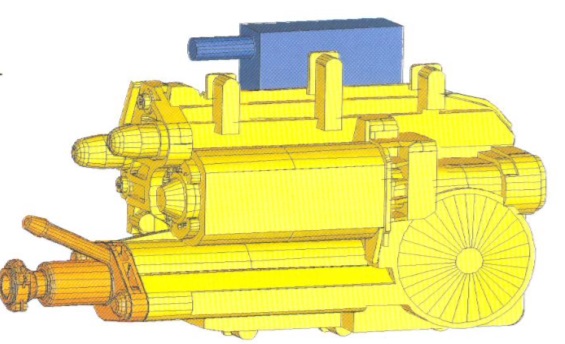
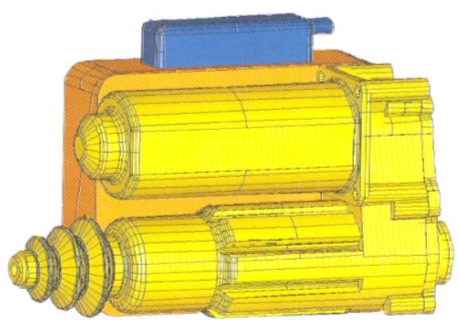
- 1.5. Az új és a régi tengelykapcsolót működtető villanymotorok összehasonlítása.
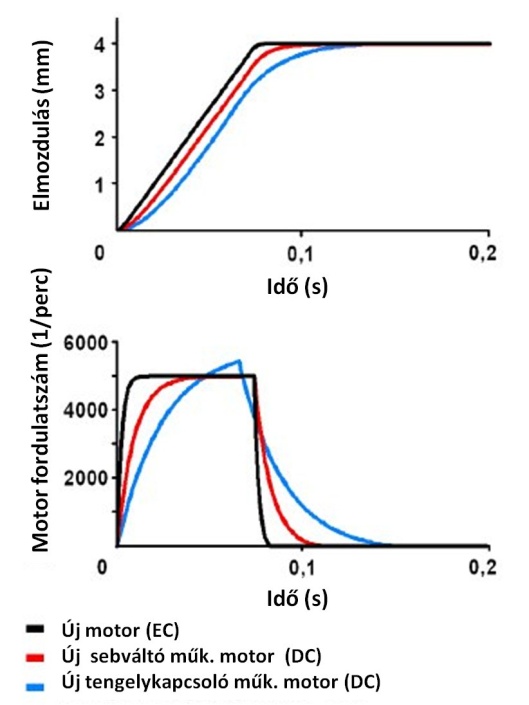
- 1.6. Az új fejlesztésű tengelykapcsolót működtető és sebességváltó fokozatkapcsolást végző villanymotorok karakterisztikái.
- 1.7. Az LUK által sorozatban gyártott tengelykapcsolót működtető egység
- 1.8. Továbbfejlesztett tengelykapcsolót működtető egység
- 1.9. Toyota elektromechanikus tengelykapcsoló működtetés
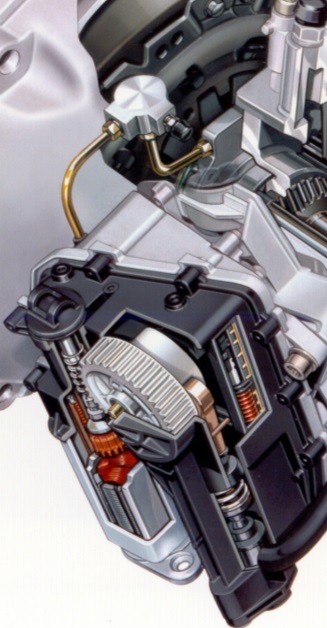
- 1.10. Villanymotor, csigahajtással és mechanikus áttétellel a fő henger dugattyújának elmozdításával hozza létre az olajnyomást, mely a munkahenger segítségével emeli ki a tengelykapcsolót. A sebességváltó elektronika vezérli a villanymotort. Erre az egységre szerelik az elektronikát is
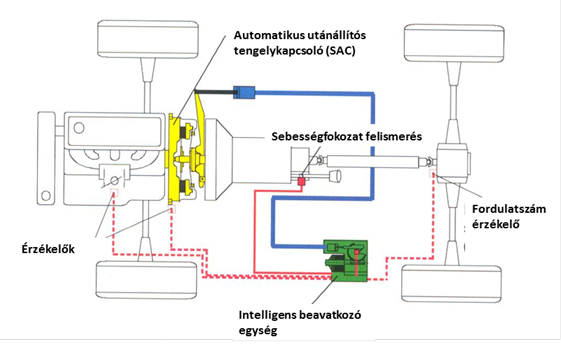
- 1.11. Automatikus, elektrohidraulikus tengelykapcsoló működtetés.
- 1.12. Elektrohidraulikus tengelykapcsoló működtetés
- 1.13. Hidraulikusan működtetett központi kinyomó csapágy (FTE)
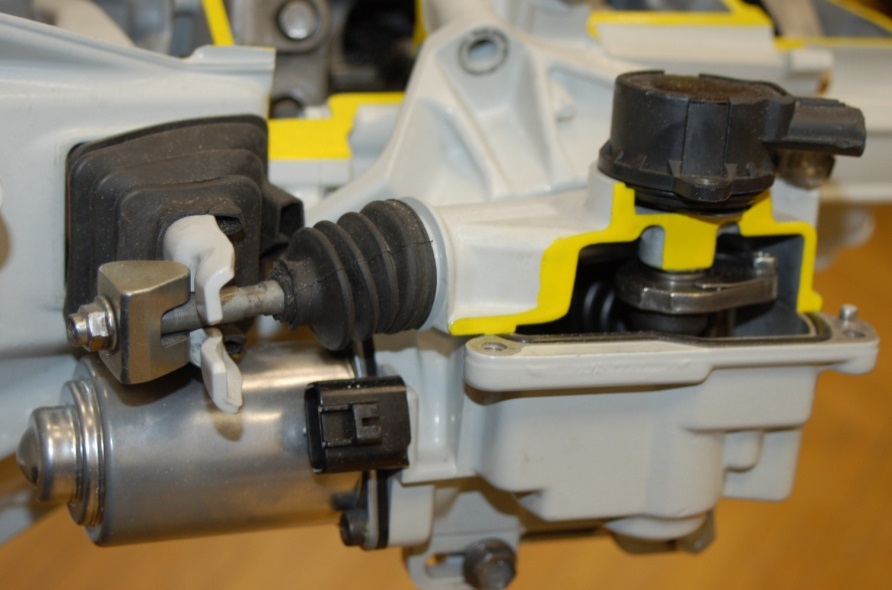
- 1.14. Tengelykapcsolót működtető elektrohidraulikus egység. (FTE gyártmány)
- 1.15. A szénkefe nélküli villanymotor PWM feszültséggel működik
- 1.16. Lineáris motoros tengelykapcsoló működtető egység az Opel Corsa Easytronic sebességváltóhoz
- 1.17. H-hidas, lineáris motor táplálás
- 1.18. H-hidas lineáris motor táplálás oszcillogramja
- 1.19. A tengelykapcsoló pedálnál elhelyezett érzékelő.
- 1.20. Haszonjárműveknél alkalmazott elektro-pneumatikus tengelykapcsoló működtető egység
- 1.21. Az elektromágneses szelepek sűrített levegőt vezérelnek ki, mely elmozdítja a dugattyút és old a tengelykapcsoló.
- 1.22. Az elektromágneses szelepek kiengedik a sűrített levegőt, zár a tengelykapcsoló
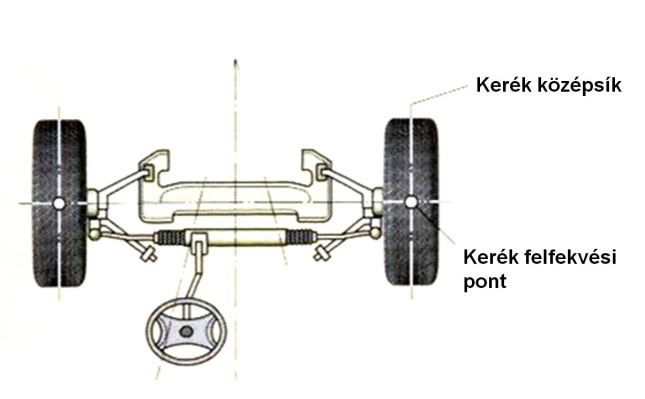
- 2.1. A kerék középsíkja és felfekvési pontja.
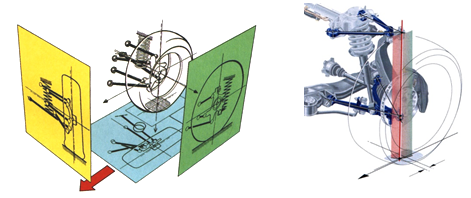
- 2.2. A futóművek geometriai beállítása három síkban értelmezhető.
- 2.3. A kerékösszetartás
- 2.4. Az utánfutás ferde és függőleges függőcsapnál
- 2.5. Különböző kormánylegördülési sugár kialakítások
- 2.6. kerékdőlés és csapterpesztés szögeinek összege állandó.
- 2.7. Összetartás és kerékdőlés változása a terhelés és a menetviszonyok függvényében piros – összetartás, kék - kerékdőlés.
- 2.8. a különböző sugarú körökön gördülő kerekek eltérő elkormányzást igényelnek
- 2.9. a gépkocsi geometriai menettengelye és a szimmetria tengely egymástól eltér.
- 2.10. Négy mérőfejes optikai, számítógépes futómű vizsgáló Beissbarth microline 5000
- 2.11. Mechanikus két mérő készülékkel ellátott automatikus működésű futómű vizsgáló
- 2.12. John Bean Visualiner 3D új optikai mérési elvű futómű beállító berendezés
- 2.13. A körök torzulásából állapítja meg a számítógép a futómű geometriai adatait.
- 3.1. A két tömegű lengő rendszer matematikai modellje.
- 3.2. A különböző futómű konstrukcióknál a dinamikus kerékterhelések változása.
- 3.3. A személygépkocsi rugózó elemei.
- 3.4. A személygépkocsi rugózott és a rugózatlan részei és az ott ébredő lengések.
- 3.5. A tömeg hatása a rugózásra.
- 3.6. Különböző kivitelű stabilizátorok.
- 3.7. Az aktív stabilizátor szétkapcsolt állapotban a bal oldalon, és összekapcsolt állapotban a jobb oldalon.
- 3.8. Az aktív stabilizátort működtető hidraulikus tápegység a nyomástárolóval és az elektromágneses szelepekkel
- 3.9. Az aktív stabilizátor nyomaték kifejtésére alkalmas hidraulikus beavatkozó egységgel
- 3.10. BMW 7 Dynamik Drive (2001) aktív stabilizátor a hátsó futóműnél
- 3.11. A Teneco aktív stabilizátor változatai
- 3.12. A stabilizátor felek közötti hidraulikus kapcsolat
- 3.13. Az első és a hátsó futómű stabilizátorai közötti hidraulikus összeköttetés hidraulikus kapcsolat
- 3.14. A csomagtartóban elhelyezett sűrített levegő ellátó és tároló egység, a gördülőmembrános légrugó a lengéscsillapítóval kombinálva.
- 3.15. Légrugó a lengéscsillapító körül koaxiálisan elhelyezve (első futómű).
- 3.16. Légrugó a lengéscsillapítótól függetlenül beszerelve (hátsó futóműnél).
- 3.17. Különböző térfogatú légrugók karakterisztikái.
- 3.18. A villanymotorral hajtott kompresszor egység az elektronikával és a légrugók nyomását beállító elektromágneses szelepek.
- 3.19. Az olajmentes egyhengeres villanymotorral hajtott kompresszor metszete a légszárítóval együtt.
- 3.20. Az első kerék hajtású modellnél a szintérzékelő elhelyezése a hátsó futómű közelében.
- 3.21. A HALL elemes szintérzékelő működési elve és a jel.
- 3.22. A hátsó légrugós futómű és a szintszabályozó rendszer elvi ábrája.
- 3.23. Audi Allroad Quattro légrugós futóművekkel.
- 3.24. Audi Allroad Quattro kompresszor egység.
- 3.25. Audi Allroad Quattro légrugó rendszere
- 3.26. A futóműre szerelt szint érzékelő belső szerkezete.
- 3.27. Indukciós elven működő szint érzékelő szerkezeti kialakítása és a vevő tekercsekben indukálódott jelek működés közben.
- 3.28. Villanymotoros Wabco kompresszor légrugózású személygépkocsikhoz.
- 3.29. A gépkocsira menet közben ható erők, hatásukra létrejövő elmozdulások és elfordulások.
- 3.30. Az aktív kerékfelfüggesztésnél alkalmazott szabályozási elv működésének vázlata.
- 3.31. Mitsubishi Galant aktív kerék-felfüggesztés, mely megvalósítja a - szintszabályozást, - változtatja a rugó karakterisztikát, - változtatja a lengéscsillapító karakterisztikát
- 3.32. Citroën C5 a hidraktív kerék-felfüggesztés, harmadik generációja.
- 3.33. A Hidraktív kerékfelfüggesztésnél alkalmazott központi nyomástároló és az első futómű kiegészítő gázrugója továbbá az aktív stabilizátor nyomástárolója az elő futómű alatt elhelyezve.
- 3.34. A Hidraktív kerékfelfüggesztés az egyik futóműnél kemény fokozatban megrajzolva.
- 3.35. A Citroën C5 hidraulika tápegység
- 3.36. A Citroën C5 hidraulika szivattyúja és a gáztöltésű nyomástároló.
- 3.37. Az hidraulika rendszer LHM 3 hidraulikafolyadék tartálya a motortérben, mellette a bal első lengéscsillapítóra szerelt gázrugó gömb.
- 3.38. A hátsó futómű gázrugói és a kiegészítő rugó, továbbá az aktív stabilizátor és a leülés gátló nyomástárolói. A lengéscsillapító vízszintes beépítésű.
- 3.39. Az aktív stabilizátor hidraulika rendszere
- 3.40. Az aktív stabilizátor hidraulikus munkahengere a lengéscsillapító mellett az első futóműnél.
- 3.41. A rugó és a csillapítási karakterisztika pillanatnyi változtatásával kanyarban, gyorsításkor, lassításkor és rossz úton mérsékli a felépítmény elmozdulását.
- 3.42. A Mercedes ABC futómű rendszer
- 3.43. Az ABC futómű hidraulika rendszerének elvi felépítése
- 3.44. Az ABC futómű hidraulikaszivattyúja a nyomástárolóval.
- 3.45. Mercedes ABC futómű hidraulika rendszere
- 3.46. Mercedes ABC első futómű szeleptömbje
- 3.47. Az ABC futómű kanyarodás közben
- 3.48. Mercedes ABC futómű első lengéscsillapító
- 3.49. Mercedes ABC futómű szoftverévek részei és a működési vázlat.
- 3.50. Az ABC futómű fékezés közben
- 3.51. Gyűrűs légrugó metszete
- 3.52. SAF haszonjármű futóműbe szerelt gyűrűs légrugó metszete
- 3.53. Haszonjárművekbe szerelt gördülőmembrános légrugó metszete
- 3.54. Pneumatikus térdepeltetéses szintállító szelep.
- 3.55. Egyenszilárdságú laprugó és gördülőmembrános légrugó kombinációja.
- 3.56. Wabco ECAS rendszer részegységei.
- 3.57. Wabco ECAS elektromágneses szelepcsoport első generációja.
- 3.58. Wabco ECAS elektromágneses szelepcsoport második generációja.
- 3.59. Wabco ELM pótkocsihoz.
- 3.60. A légrugó belsejébe szerelhető kombinált nyomás és elmozdulás érzékelő.
- 3.61. Légrugós vezetőfülke.
- 3.62. Légrugó és sűrített levegős lengéscsillapító kombinációja vezető fülkéhez.
- 3.63. Wabco CALM a vezetőfülke légrugó és lengéscsillapító egység a szeleppel kombinálva.
- 3.64. Knorr-Bremse elektronikus légrugó rendszer szintérzékelői, nyomásmoduljai és az elektronika.
- 3.65. A szintérzékelő felszerelve az autóbuszra.
- 3.66. Felszerelési alaphelyzetben a ház és a mozgó rész furata egymással szemben kell legyenek.
- 3.67. A hátsó futómű szelep egysége.
- 3.68. Az első futómű szelep egysége.
- 3.69. Mercedes autóbusz elejének „letérdeltetése”.
- 4.1. A kocsiszekrény és a kerék lengései lengéscsillapító nélkül és lengéscsillapítóval.
- 4.2. Egycsöves gáztöltésű lengéscsillapító be-, és kirugózás közben.
- 4.3. Kétcsöves gáztöltésű lengéscsillapító be-, és kirugózás közben.
- 4.4. A kerék mozgása normál haladáskor és a különböző útegyenetlenségeknél.
- 4.5. A lágy és a kemény csillapításnál a lengés lecsengése.
- 4.6. A lengéscsillapító karakterisztikája ki-,és berugózáskor a löket függvényében.
- 4.7. A lengéscsillapító karakterisztikája ki-, és berugózáskor a dugattyúsebesség függvényében.
- 4.8. A futóműveknél alkalmazott kapacitív gyorsulás érzékelő működési elve.
- 4.9. Légrugós szintállítás és elektronikusan változtatható lengéscsillapítási rendszer egyik lehetséges változata.
- 4.10. Haszonjármű CDC lengéscsillapítóval.
- 4.11. Autóbusznál a CDC lengéscsillapítóra szerelt elektromágneses szeleppel változtatja az elektronika a csillapítási tényezőt.
- 4.12. Hagyományos futóművekkel és CDC-vel szerelt haszonjárművek azonos sebességgel, azonos ívben történő kanyarodáskor.
- 4.13. Így képzelhető el a Skyhook algoritmus.
- 4.14. A lengéscsillapító karakterisztika változtatása a szelep áramának szabályozásával
- 4.15. A lengéscsillapító karakterisztika változtatása a gerjesztő áram változtatásával.
- 4.16. A lengéscsillapító karakterisztika változtatása a gerjesztő áram változtatásával.
- 4.17. A karakterisztika változtatása a lengéscsillapítón kívüli szeleppel.
- 4.18. A PDC lengéscsillapító metszete a pneumatikus működtetésű szeleppel.
- 4.19. PDC lengéscsillapító karakterisztikája ki-, és berugózáskor a dugattyúsebesség függvényében.
- 4.20. A mágnesezhető részecskék elhelyezkedése a folyadékban a mágneses erőtér hatására
- 4.21. Az Audi TT Coupé MagneRide™ kerék ífelfüggesztési rendszer.
- 4.22. A magneto rheológiai lengéscsillapító karakterisztikája a mágneses erőtérrel arányosan változik.
- 4.23. Az Audi TT Coupé MagneRide™ kerék felfüggesztésének elektronikája.
- 4.24. Az Audi TT Coupé MagneRide™ kerék felfüggesztésének elmozdulás érzékelője.
- 4.25. Különböző lengéscsillapítók karakterisztikáinak összehasonlítása
- 4.26. Az Audi TT lengéscsillapítási karakterisztika változtatása
- 5.1. A differenciálmű feladata a nyomaték felosztás, miközben a kerekek eltérő útszakaszokat tesznek meg.
- 5.2. Kúpkerekes differenciálmű fele – fele arányban osztja szét a nyomatékot.
- 5.3. Az Audi 80 –nál alkalmazott kézi kapcsolóval ellátott pneumatikus működtetésű differenciálzárak.
- 5.4. VW Transporter hátsó pneumatikus működtetésű differenciálzár.
- 5.5. Homlokkerekes differenciálműnél a megvalósuló nyomaték felosztás a fogaskerekek átmérőjével arányos.
- 5.6. Homlokkerekes differenciálmű VISCO differenciálzárral.
- 5.7. Kúpkerekes középső differenciálmű VISCO differenciálzárral (Mitsubishi Galant).
- 5.8. A VISCO differenciálzár teszi lehetővé az elindulást eltérő tapadási tényező esetén.
- 5.9. Növelt belső súrlódású kúpkerekes differenciálmű. A kúpkerekeknél ébredő axiális erő szorítja neki a differenciálmű háznak a fogaskereket. Ez a súrlódó erő egyenlíti ki a kerekek forgási sebesség különbségét.
- 5.10. Olajlemezes tengelykapcsolókat szerelnek be a féltengely és a differenciálmű ház közé differenciálzárként.
- 5.11. Önzáró differenciálmű kinematikai vázlata.
- 5.12. ZF gyártmányú önzáró differenciálmű.
- 5.13. A differenciálmű házba szerelt olajlemezes tengelykapcsolók működnek differenciálzárként.
- 5.14. Mercedes 4matic automatikus működésű differenciálzárakkal az osztóműben és a hátsó futóműnél.
- 5.15. BMW hátsó futóműbe szerelt olajlemezes tengelykapcsolók működnek differenciálzárként.
- 5.16. GKN Powerlock II elektromechanikus működtetésű differenciálzár.
- 5.17. Powerlock differenciálzár rendszer felépítése.
- 5.18. A VW Tuareg -be szerelt differenciálművek és differenciálzárak.
- 5.19. A VW Tuareg homlokkerekes differenciálmű és villanymotorral működtetett differenciálzár.
- 5.20. A VW Tuareg hátsó futóműbe szerelt kúpkerekes differenciálművének villanymotorral működtetett differenciálzárja.
- 5.21. Részlegesen önzáró csigakerekes, úgynevezett TORSEN differenciálmű első generációs változata.
- 5.22. PAT (Paralell Axis Torsen) differenciálművek különböző változatai. A csiga fogazatú bolygókerekek forgástengelye párhuzamos a féltengelyekkel
- 5.23. PAT (Paralell Axis Torsen) differenciálmű osztja szét a nyomatékot a futóművek között.
- 5.24. Teves ABS/EDS hidraulika egység.
- 5.25. Az EDS hidraulikarendszere beavatkozás mentes alap helyzetben.
- 5.26. Az EDS beavatkozás közben a hidraulikarendszer.
- 5.27. Haszonjárművek EDS beavatkozással.
- 6.1. A tengelycsonk-, vagy „Ackermann” kormányzás. A szokásos nyomtávnál az első kerekek elkormányzási szög eltérése 3˚.
- 6.2. Alul (bal oldal) és túlkormányzott gépkocsi (jobb oldal) viselkedése
- 6.3. A személygépkocsiknál korábban széles körűen alkalmazott globoid csigás kormánymű
- 6.4. Fogasléces kormánymű
- 6.5. Visszavezetett golyósoros csavarorsós kormánymű
- 6.6. A szervokormány modellje
- 6.7. A szervokormány rásegítésének elméleti jelleggörbéje.
- 6.8. Saját belső szabályo-zással ellátott szárnylapátos szervo-szivattyú
- 6.9. Fogaskerekes szervo-szivattyú
- 6.10. A szervo-szivattyú szabályozása
- 6.11. A szervokormány energia igénye.
- 6.12. A servotronic rendszer részegységei.
- 6.13. A sebességfüggő rásegítést megvalósító elektrohidraulikus egység.
- 6.14. A rásegítés kis és nagy sebességnél.
- 6.15. Az EPHS szervokormány rendszer működési elve.
- 6.16. A TRW által gyártott szervo-szivattyú működési karakterisztikája.
- 6.17. A „stand by” üzemmód után a szivattyú újraindítás jellemzőjének két különböző szállítási karakterisztikája.
- 6.18. Villanymotorral és az elektronikával egyetlen közös egységet alkotó fogaskerekes szervo-szivattyú.
- 6.19. Elektrohidraulikus szervokormány rendszer.
- 6.20. Elektrohidraulikus fogasléces szervokormány.
- 6.21. A hidraulikus szervokormány vezérlő tolattyúja egyenes meneti helyzetben.
- 6.22. A vezérlő tolattyú balra kanyarodáskor.
- 6.23. A kormánykerék elfordítási szög jeladója.
- 6.24. A szög jeladó belső szerkezete.
- 6.25. Az EPHS rendszer CAN hálózati kapcsolatai.
- 6.26. A tüzelőanyag fogyasztás csökkentés lehetőségei.
- 6.27. Különböző szervokormány és szervo-szivattyúk összehasonlítása.
- 7.1. Elektro-mechanikus szervokormány változatok balról jobbra: EPS-c, EPS-p, EPS-apa.
- 7.2. Az elektromechanikus szervokormány elvi felépítése.
- 7.3. Az elektromechanikus szervokormány villanymotorja és a közvetlenül rá szerelt elektronika.
- 7.4. Az EPS-apa típusú szervokormány elektronikája.
- 7.5. A különböző elektromechanikus szervokormányok műszaki jellemzői.
- 7.6. Az EPS változatok alkalmazási területei.
- 7.7. A kormányoszlopra szerelt EPS c változat.
- 7.8. A kormányoszlopra szerelt EPS c változat szétszerelve.
- 7.9. Az EPS c változat torziós tengelye.
- 7.10. Az EPS c változatnál alkalmazott csiga hajtás.
- 7.11. Nyomaték és szöghelyzet érzékelő.
- 7.12. A kormányoszlopra szerelt villanymotoros szervokormány.
- 7.13. Toyota Prius elektromechanikus szervokormány.
- 7.14. A nyomaték érzékelő kivitele és elvi felépítése.
- 7.15. Toyota Prius elektromechanikus szervokormány rendszer áttekintés.
- 7.16. Az EPS dp típusú szervokormány rendszer elemei.
- 7.17. Az EPS dp szervokormánynál az aszinkron motor csigahajtáson keresztül közvetlenül a fogaslécre adja át a rásegítést.
- 7.18. Az EPS dp szervokormány működésének blokdiagramja.
- 7.19. A szervokormány felszerelve a tartóra.
- 7.20. VW Touran –ba szerelt EPS dp szervokormánnyal végrehajtott rénszarvas teszt akkumulátorral és anélkül.
- 7.21. EPS apa fogas szíj és golyósoros csavarhajtással.
- 7.22. A villanymotor és a mechanikus áttétel metszetbe.
- 7.23. Közvetlenül a villanymotorra szerelt elektronika, a fogazott szíjjal hajtott csavaranya és a csavarorsó.
- 7.24. Az EPS apa energiamérlege.
- 7.25. A három fázisú villanymotor táplálását végző egység.
- 7.26. A szétszerelt szervokormány a villanymotorral és az elektronikával.
- 7.27. A visszavezetett golyósoros csavarhajtás és a villanymotor.
- 7.28. Hall érzékelős nyomaték mérő egység.
- 7.29. Forgórész és a helyzet érzékelője.
- 8.1. Az aktív szervokormány modellje.
- 8.2. Az Audi változó áttételű aktív szervokormány szabályozásának modellje.
- 8.3. Egymással párhuzamosan működő menetdinamikai szabályozó rendszerek.
- 8.4. Az aktív dinamikus kormányzás és további menetdinamikai szabályozó rendszerek együttműködése a beavatkozások területén.
- 8.5. Kormányzás közben változik az áttétel.
- 8.6. Eltérő tapadású útfelületen fékezve, ha szükséges aktív kormánykorrekció jön létre.
- 8.7. Aktív szervokormány bolygóművel, csigahajtással és villanymotorral.
- 8.8. Az aktív szervokormány rendszer részei.
- 8.9. A gépkocsi viselkedése akadály kerülésekor aktív szervokormánnyal és anélkül.
- 8.10. Rendszerhiba esetén automatikus reteszelés következik be a villanymotorra szerelt csigaorsó tengelyének fogazatánál.
- 8.11. A villanymotor hullám-hajtóművön keresztül a vezetőtől függetlenül változtatja az első kerekek elkormányzását.
- 8.12. Az aktív szervokormánynál alkalmazott hullám-hajtómű.
- 8.13. Akadály kerülésénél az aktív szervokormány működésével az ESP kisebb fékező nyomás kivezérléssel avatkozik be.
- 8.14. Az ESP egy kerék fékezésén kívül az aktív szervokormány működtetésével is beavatkozhat. Ez utóbbi az elsődlegesen alkalmazott korrekció.
- 9.1. Német és amerikai katonai terepjáróknál alkalmazott összkerék kormányzás.Jelentős hátsó kerék elkormányzási szöggels.
- 9.2. Honda Prelude 4WS nél a hátsó kerekek elkormányzási szöge csupán néhány foknyi.
- 9.3. A bójákkal kitűzött pálya összkerék kormányzással precízebben követhető és stabilabb lesz a gépkocsi.
- 9.4. Elkormányzási tényező a gépkocsi sebességének függvényében.
- 9.5. Hidraulikus összkerék kormányzási rendszer elemei:
- 9.6. SAF haszonjármű tengelyre felszerelt elkormányzási szög jeladó.
- 9.7. SAF gyártmányú, a futómű testtel párhuzamosan felszerelt hidraulikus beavatkozó egység a kormányzáshoz.
- 9.8. A kormányösszekötő rúd részét képező, ZF gyártmányú, villanymotorral működő beavatkozó egység.
- 9.9. Sávváltás dinamikai jellemzői v=125 km/ sebességgel hagyományos és összkerék kormányzású gépkocsival.
- 9.10. Elektromechanikus összkerék kormányzás.
- 9.11. Delphi Quadrasteer™ összkerék kormányzás kormánykerék szöghelyzet érzékelő.
- 9.12. Delphi Quadrasteer™ összkerék kormányzás elektronikája a hátsó futómű közelében.
- 9.13. Delphi Quadrasteer™ elektromechanikus összkerék kormányzásnál alkalmazott merevhidas hátsó futómű.
- 9.14. Delphi Quadrasteer™ beavatkozó egység elektromos bekötése.
- 9.15. Különleges kivitelű szilentblokkal megvalósítható, hogy a kapcsolt felfüggesztésű hátsó futómű a kanyarnak megfelelően kissé elforduljon.
- 9.16. A hagyományos kormányzású és a passzív hátsókerék kormányzású futóművel szerelt gépkocsik viselkedésének összehasonlítása kanyarodás közben.
- 10.1. A személygépkocsik hidraulikus üzemi fékrendszerének áttekintése, szaggatott fekete vonallal megjelölve a mechatronika alkalmazási területeit.
- 10.2. Villanymotoros vákuumszivattyú.
- 10.3. Nyomás érzékelővel ellátott, szabályozással működő villanymotoros vákuumszivattyú.
- 10.4. A Toyota Prius fékező egység az elektromágneses szelepekkel és az elektronikával.
- 10.5. villanymotorral hajtott fékfolyadék szivattyú és nyomástároló.
- 10.6. A Toyota Prius III ECB-3 hidraulikus rásegítős fékrendszere az ABS szabályozás elektromágneses szelepeivel.
- 10.7. A Toyota Prius –nál lezajló fékezési folyamat.
- 10.8. Egy bizonyos menetciklusnál végrehajtott fékezések.
- 10.9. Az előző menetciklus szerinti fékezések, amikor a regeneratív lassítás is működik.
- 10.10. A gyorsításhoz, és a haladáshoz szükséges motor teljesítmény és a visszanyerhető energia.
- 10.11. A regeneratív fékezés energia visszanyerési potenciálja.
- 10.12. Különböző gépkocsiknál a fékerők felosztása a hidraulikus és a regeneratív fékezés között.
- 10.13. Az előzőekben ismertetett menetciklusnál a regeneratív fékezéssel újrahasznosítható energia.
- 10.14. A hidraulikus fék mind a négy kerékre hat, a regeneratív fékezés csak a hajtottakra.
- 10.15. A Mitsubishi i-MiEV villanyautóba szerelt villanymotoros vákuumszivattyú.
- 10.16. A hidraulikus és a regeneratív fékezés a Mitsubishi i-MiEV villany autónál.
- 10.17. iBooster a Robert Bosch GmBH új elektromechanikus fékrásegítője.
- 10.18. iBooster belső kialakítása. A villanymotor után két körös, két fokozatú mechanikus áttétel.
- 10.19. Continental Teves MK C1 integrális fékrendszer hidraulikaegység az elektronikával.
- 10.20. Continental Teves MK C1 hidraulikaegység részegységei és az elektronika.
- 10.21. Kísérleti autóba szerelt Continental Teves MK C1 fékrendszer működési diagramja.
- 10.22. Az MK C1 fékrendszer gázolásos baleseteknél túlélési esélyt ad.
- 10.23. Az MK C1 –el végrehajtott vészfékezés +20˚C környezet hőmérsékleten.
- 10.24. Az MK C1 –el végrehajtott vészfékezés -30˚C környezet hőmérsékleten.
- 10.25. A személygépkocsik ABS alapú menetdinamikai szabályozó rendszereinek áttekintése, melyeknél mechatronikát alkalmaznak.
- 10.26. Fékezés és kanyarodás ABS-el és anélkül csúszós úton a sajtóbemutatón 1970 -ben. A résztevőket a bemutató meggyőzte az ABS fontosságáról.
- 10.27. ABS szabályozás kerületi lassulás küszöbértékek alapján
- 10.28. A gumiabroncs tapadása különböző útfelületeken
- 10.29. ABS szabályozás a kerékcsúszás alapján
- 10.30. Kombinált ABS szabályozás a kerékcsúszás és a kerék kerületi lassulása alapján
- 10.31. Hidraulikus ABS –nél alkalmazott gép állapot szabályozási elv.
- 10.32. A tapadási tényező alakulása az egyik keréknél a csúszás függvényében.
- 10.33. Az egyik kerék ABS szabályozásának modellje.
- 10.34. Az ABS szabályozással kiegészített fékrendszer.
- 10.35. A tapadási tényező hirtelen növekedésének felismerési elve homogén útfelületen.
- 10.36. Rossz úton, illetve terepen történő közlekedés felismerése.
- 10.37. A kerékfordulatszám érzékelők csoportosítása
- 10.38. Axiális elrendezésű, induktív kerékfordulatszám érzékelő szerkezete és jelalakja kis és nagy fordulatszámnál.
- 10.39. Aktív kerékfordulatszám érzékelő.
- 10.40. Magnetorezisztív kerékfordulatszám érzékelő röntgen felvétele és működési elve
- 10.41. A kódkártya láthatóvá teszi a csapágy tömítő ajkában kialakított mágneses pólusokat
- 10.42. Műszer az aktív érzékelő vizsgálatához áramkorlátozón keresztül tápfeszültséget is biztosít.
- 10.43. Az aktív kerékfordulatszám érzékelőbe szerelt híd kapcsolású ellenállások.
- 10.44. Az aktív kerékfordulatszám érzékelő összeszerelésének végső fázisai.
- 10.45. Különböző gépkocsik műszerfalán elhelyezett ABS ellenőrzőlámpák.
- 10.46. Az ABS –el szemben támasztott alapkövetelmények.
- 10.47. ABS/ASR hidraulika rendszer felépítése
- 10.48. Az ABS országúti és terep működési fokozata
- 10.49. Az ABS –el megvalósított elektronikus fékerő felosztás működési jelleggörbéje
- 10.50. Az ABS –el megvalósított elektronikus fékasszisztens működési jelleggörbéje
- 10.51. Bosch ABS 8 –nál közvetlenül az elektronikára szerelik a szelepek tekercseit
- 10.52. A hidraulika egységbe sajtolt szelepek mechanikus részei.
- 10.53. Bosch ABS8 a fékfolyadék szivattyút hajtó egyenáramú villanymotor tekercselt forgórész és állandó mágneses állórész.
- 10.54. Bosch ABS8 hidraulikaegység részei. A nyomásérzékelő a szelepek között.
- 10.55. Bosch ABS9 hidraulikaegység különböző változatai.
- 10.56. A Continental Teves MK20 hidraulika egység a motortérbe szerelve.
- 10.57. A Continental Teves újabb ABS rendszerei
- 10.58. Az MK60 elektronika „kern redundanciát” valósít meg
- 10.59. A hidraulika egység a fékfolyadék szivattyút hajtó villanymotorral.
- 10.60. Az elektronika az elektromágneses szelepek tekercseivel.
- 10.61. A BMW –nél alkalmazott elektronikus menetdinamikai szabályozó rendszerek
- 10.62. A BMW X3 és X5 típusoknál az elektronikus fék menedzsment működteti az összkerékhajtást
- 10.63. A Koordinátor alá rendelt domének.
- 10.64. Delphi Brake Control DBC 7 a motortérbe szerelve
- 10.65. A szelepek mechanikus része a hidraulika egységbe sajtolva.
- 10.66. A tekercsek közvetlenül az elektronikára szerelve.
- 10.67. A villanymotor az excenterrel működteti a kétkörös, dugattyús fékfolyadék szivattyút
- 10.68. A kétkörös, fékfolyadék szivattyúi dugattyúi a hidraulika egység házában.
- 10.69. Az elektromágneses szelepek különböző változatai
- 10.70. A Delphi Brake Control (DBC 7) hidraulika egység ábrázolása metszetben
- 10.71. Az egyik fékkörhöz tartozó, átlósan elhelyezkedő két kerék ABS csatornái
- 10.72. Az egyik fékkörhöz tartozó fékfolyadék szivattyú
- 10.73. A nyomásnövelő szelep árammentes állapotban nyitott.
- 10.74. A nyomáscsökkentő szelep árammentes állapotban zárt
- 11.1. A gépkocsi ESP nélkül kritikus körülmények között alul-, és túlkormányzott módon is viselkedhet.
- 11.2. Az ESP rendszer részegységei.
- 11.3. Az ESP rendszer működési elve.
- 11.4. Az ESP beavatkozási lehetőségei egy kerék szabályozott fékezése, motor nyomaték csökkentés aktív kormányzási beavatkozás.
- 11.5. Nagy sebességgel végrehajtott hirtelen kitérés a gépkocsi megperdülését okozhatja.
- 11.6. Az ESP az egyik kerék szabályozott fékezésével stabilizálja a gépkocsit. A kanyarodás kezdetén a bal hátsó, majd a jobb első és a visszakanyarodáskor pedig a bal első kereket fékezi.
- 11.7. Az ESP összetett menetdinamikai szabályozó rendszer, mely számos részműködést ötvöz magába és együttműködik más elektronikus rendszerekkel is.
- 11.8. Első generációs Bosch perdülés érzékelő piezo-kristályos kivitelben.
- 11.9. Az ESP rendszer mikro-mechanikai perdülés érzékelője.
- 11.10. A Continental Teves ESP rendszer perdülés érzékelője a tartóra szerelve.
- 11.11. A Continental Teves perdülés érzékelője kettős hangvillával működik.
- 11.12. A Continental Teves kettős hangvillához hasonlító perdülés érzékelő belső áramköri egységei.
- 11.13. A Continental Teves perdülés érzékelő és a Corioli erőt mérő mikro-mechanikai érzékelő működési elve.
- 11.14. A Continental Teves új kialakítású perdülés érzékelője.
- 11.15. Kapacitív gyorsulás érzékelő nyugalmi állapotban.
- 11.16. Kapacitív érzékelő amikor gyorsulás hat rá.
- 11.17. A gyorsulás érzékelő kimeneti jele.
- 11.18. Az újabb kivitelű gyorsulás érzékelő elvi működési ábrája.
- 11.19. Az újabb kivitelű gyorsulás érzékelő tömegeinek kialakítása és a működési algoritmus elvi működési ábrája.
- 11.20. A perdülés érzékelő és a gyorsulás érzékelők alkotják a Sensor Clustert.
- 11.21. Continental Teves aktív kerékfordulatszám érzékelő újabb változata.
- 11.22. Az ESP rendszer magnetorezisztív elven működő kormánykerék elfordítás érzékelője.
- 11.23. Optokapus kormánykerék elfordítás érzékelő.
- 11.24. Opto-kapus kormánykerék elfordítás érzékelő belő kialakítása.
- 11.25. Az opto-kapus kormánykerék elfordítás érzékelő működési elve. Az egyik kódtárcsa az opto-kapunál digitális jelnek megfelelően szaggatja a fénysugarat, ez adja a szöghelyzetre vonatkozó jelet. Az egyenletes osztású másik tárcsa a elfordítás sebességére vonatkozó jelet adja.
- 11.26. Mercedes gépkocsinál alkalmazott opto-kapus kormánykerék elfordítás érzékelő, melynél speciális diódákat alkalmaznak.
- 11.27. További más gyártóktól származó, opto-kapus elven működő kormánykerék elfordítás érzékelők.
- 11.28. Continental Teves kormánykerék elfordítás érzékelő szerkezeti kialakítása.
- 11.29. Continental Teves kormánykerék elfordítás érzékelő jelképzése.
- 11.30. Kapacitív elven működő nyomás érzékelő alap helyzetben (bal oldal) és amikor nyomás hat rá.
- 11.31. Az aktív vákuumos rásegítőbe szerelt kapcsoló jelzi vissza az elektronikának a működést.
- 11.32. Bosch ESP 8 hidraulika egység az elektronikával.
- 11.33. Az ESP rendszer régebbi és újabb ellenőrző lámpája és a kikapcsolt állapot visszajelzése.
- 11.34. Boschí ESP 8 hidraulika egység Audi A5 –típusú gépkocsiba szerelve.
- 11.35. Sávváltási manőver összehasonlítása ABS- el és ESP -vel.
- 11.36. A Continental Teves ESP rendszer áttekintése.
- 11.37. A Bosch ESP rendszer 9. generációja.
- 12.1. Gyors működésű hidraulikus nyomásnövelő egység, mely az elektrohidraulikus . fékrendszer része.
- 12.2. Robert Bosch GmBH. elektrohidraulikus fékrendszer
- 12.3. Az ESP kikapcsolható (Mercedes E osztály)
- 12.4. Az SBC hidraulika egység elhelyezése a Mercedes E osztályban
- 12.5. Az elektrohidraulikus fékrendszer működtető egysége a főfékhengerrel és a fékfolyadék tartállyal
- 12.6. Az elektrohidraulikus fékrendszernél alkalmazott kétkörös főfékhenger a pedálút szimulátorral
- 12.7. Az ABC hidraulikaegység, a rászerelt nyomástárolóval és a hidraulikaszivattyút hajtó villanymotorral.
- 12.8. Meghibásodás esetén a sebességmérő középső része piros színben világít, így láthatóvá válik az azon feltüntetett stop tábla és az aktuális hibára vonatkozó üzenet. Ezen kívül világít a piros fék ellenőrző és a sárga ABS ellenőrző lámpa is.
- 12.9. Az SBC elektronika kapcsolatai más rendszerekkel.
- 12.10. Az elektrohidraulikus fékrendszer elektronikája a zárófedél belsejében
- 12.11. Az EHB hidraulika egység a motortérben
- 12.12. A szelepeket működtető elektromágnesek tekercsei az elektronikára forrasztva
- 12.13. A szelepek mechanikus része a hidraulika tömbbe sajtolva
- 12.14. Az elektrohidraulikus fékrendszer felépítése
- 12.15. Az SBC teljes hidraulikus rendszere
- 12.16. A Continental Teves első elektrohidraulikus fékrendszer működtető egysége
- 12.17. A Continental Teves első elektrohidraulikus fékrendszer átviteli része
- 12.18. Continental Teves elektrohidraulikus fékrendszer ESP- és elektromechanikus rögzítő fék működéssel.
- 12.19. A hagyományosan alkalmazott egységeket egyetlen kompakt fékező egység válthatja fel.
- 12.20. Continental MK C1 elektrohidraulikus fékrendszer.
- 12.21. Continental MK C1 elektrohidraulikus fékrendszer.
- 12.22. Continental Teves MK C1 működési diagram.
- 13.1. Az elektropneumatikus fékrendszer részegységei.
- 13.2. Az elektropneumatikus fékrendszer sűrített levegő hálózata.
- 13.3. Az elektropneumatikus fékrendszer CAN hálózatai.
- 13.4. Az elektropneumatikus fékrendszer pedálmodulja.
- 13.5. Egycsatornás nyomásmodul.
- 13.6. Kétcsatornás nyomásmodul.
- 13.7. Pótkocsi fékező modul.
- 13.8. Az elektropneumatikus fékrendszer központi elektronikája.
- 13.9. Az ESP kormánykerék elfordítás érzékelője.
- 13.10. Az ESP perdülés és kereszt irányú gyorsulás érrzékelője.
- 13.11. Pótkocsi elektropneumatikus fékrendszere.
- 13.12. Második generációs pótkocsi fékező modul az elektronikával.
- 14.1. A Continental Teves EMB V2 típusjelzésű villanymotorral működtetett úszónyerges tárcsafék (1994).
- 14.2. Az EMB V2 villanymotoros úszónyerges tárcsafék (1994) metszete.
- 14.3. Az EMB V4.1 villanymotoros úszónyerges tárcsafék (2000).
- 14.4. Az EMB V4.1 villanymotoros úszónyerges tárcsafék (2000) metszeti ábrája.
- 14.5. Az elektromechanikus fék működési elve.
- 14.6. ISAD a lendítőkerékbe épített elektromos forgó gép és az elektromágnesekkel mozgatott szelepek egy BMW motoron.
- 14.7. ISAD a regeneratív fékezés egyik lehetősége.
- 14.8. A regeneratív fékezéssel megvalósítható tüzelőanyag megtakarítás.
- 14.9. Toyota Prius ECB (Electronikally Controlled Brake) fékrendszere regeneratív lassítást tesz lehetővé.
- 14.10. Energia visszatáplálásos fékezés a Toyota Prius -nál.
- 14.11. Plug in hibrid külső energiaforrástól is tölthető.
- 14.12. A belsőégésű motor mellett elhelyezett inverter.
- 14.13. Siemens VDO elektromechanikus ékes fék.
- 14.14. Az ékkel működtetett fékszerkezetnél képződő erők.
- 14.15. Az ékek görgők közbeiktatásával feszítik a fékbetéteket a féktárcsára
- 14.16. Az ékes fékszerkezetnél ébredő erők
- 14.17. Siemens VDO E-corner
- 14.18. Elektromechanikus rögzítő fék
- 14.19. Elektromechanikus rögzítő fék központi egység elvi vázlata
- 14.20. Elektromechanikus rögzítő fék központi egység
- 14.21. Elektromechanikus rögzítő fék, melyet az ESC elektronika működtet.
- 14.22. Féknyeregre integrált elektromechanikus rögzítő fék.
- 14.23. Féknyeregre integrált elektromechanikus rögzítő fék belső szerkezeti kialakítása.
- 14.24. A duo-szervo dobfékkel működő elektromechanikus rögzítő fék rendszer.
- 14.25. A duo-szervo dobféket működtető villanymotoros egység.
- 14.26. A villanymotoros feszítő egység a rugóerő tárolós utánfeszítő résszel.
- 15.1. A hagyományos hidraulikus fékrendszer felépítés.
- 15.2. Brake by wire fékrendszer felépítés.
- 15.3. A villanymotor, csiga hajtás, csavarorsó és csavaranya segítségével, bowdenek közvetítésével tartja rögzítve a gépkocsit.
- 15.4. BMW 7-es elektromechanikus rögzítő fék
- 15.5. A gépkocsivezető nyomógombbal működtetheti a rögzítő féket, mely a műszerfal bal szélén található
- 15.6. A rögzítő fék működtető kapcsolója a sebességváltó közelében
- 15.7. TRW-Lucas féknyeregre integrált elektromechanikus rögzítő fék
- 15.8. TRW-Lucas működtető egység metszete és a villanymotor
- 15.9. TRW-Lucas a villanymotor és a támolygó tárcsás fokozat
- 15.10. Az elektronikus rendszer blokkvázlata
- 15.11. Az elektronikus rögzítő fék ellenőrző lámpái
- 15.12. TRW-Lucas fékezési és fékoldási helyzet
- 15.13. A statikus fékezés működés jellemzői
- 15.14. Statikus fékoldás működés jellemzői
- 15.15. Dinamikus fékezés ABS szabályozással
- 15.16. Az anya helyzete kopott fékbetétnél és a visszaállítás után.
- 15.17. Volvo műszerfalra szerelt rögzítő fék működtető kapcsoló.
- 15.18. A rögzítő fék működtető kapcsoló három érintkezős csatlakozóval kapcsolódik az elektronikus hálózathoz.
- 15.19. Az EAC 2.5 integrális részét képezi az elektronikus rögzítő féket működtető relé szelep.
- 16.1. A haszonjárművek tartós lassító fékberendezéseinek csoportosítása
- 16.2. DAF Engine Brake (DEB) hengerfejre szerelt kiegészítő hidraulika egységek és a hengerek közötti működtető olajcsatornák.
- 16.3. DEB kikapcsolva, az elektromágneses szelep árammentes, motor normál működés.
- 16.4. Fékezéskor a DEB bekapcsol, az elektromágneses szelep nyit, olaj rendszer feltöltődik.
- 16.5. Motorfék működésekor a 4-es dugattyú által létrehozott hidraulikus nyomás nyitja az egyik kipufogó szelepet a felső holtpont közelében.
- 16.6. A 2-es dugattyú elmozdulása miatt az olaj távozik a hidraulika rendszerből, ezért megszűnik a motorfék hatás.
- 16.7. A Volvo növelt hatású motorfék részei
- 16.8. A motor működik az elektromágneses szelep árammentes.
- 16.9. A nyomásszabályozó szelep tápfeszültséget kap, a motorfék bekapcsol.
- 16.10. A nyomásszabályozó tolattyú.
- 16.11. Görgős szelepemelő himba hidraulikus működtetéssel.
- 16.12. A kiegészítő bütykök hatására még kétszer nyitnak a kipufogó szelepek.
- 16.13. Ha 2 bar –nál kisebb az olajnyomás elmaradnak a kiegészítő szelepnyitások.
- 16.14. 2 bar –nál nagyobb olajnyomás esetén a kiegészítő bütykök még kétszer nyitják a szelepeket.
- 16.15. A motor hűtőfolyadék rendszere a retarder beszerelése után.
- 16.16. A hidrodinamikus retarder belső munkaterében a kék színű lapátkoszorú az állórész, mely a házhoz rögzített, a piros színű a forgó rész, mely a kardántengelyhez csatlakozik. (Voith 133 –as sorozat, nehéz teherautókhoz és turista autóbuszokhoz).
- 16.17. Az olaj áramlása a hidrodinamikus retarderben
- 16.18. Az on-line beépítésű hidrodinamikus retarder részei:
- 16.19. A kerék megcsúszásakor az ABS beavatkozásakor a retarder kikapcsol, de ehhez néhány tized másodpercre szükség van.
- 16.20. Voith 120 –as sorozatú, közvetlenül a sebességváltóra szerelt, szekunder beépítésű hidrodinamikus retarder a hőcserélővel.
- 16.21. Voith 120 –as sorozatú hidrodinamikus retarder működtető egységei.
- 16.22. Voith 120 –as sorozatú hidrodinamikus retarder elektromos kapcsolási rajza.
- 16.23. Scania szekunder beépítésű hidrodinamikus retarder autóbuszba az automatikus sebességváltó bolygóműves fokozatai után szerelve.
- 16.24. Az Intarder elvi felépítése. Gyorsító áttétellel ellátott hidrodinamikai fékberendezés.
- 16.25. Közvetlenül a sebességváltóra szerelt Intarder a gyorsító áttétellel.
- 16.26. Gyorsító fogaskerék áttétellel ellátott ZF Intarder és a hőcserélő.
- 16.27. A ZF Intarder működési jelleggörbéje.
- 16.28. A sebességváltóra szerelt, gyorsító áttétellel ellátott Voith 115 HV intarder felépítése.
- 16.29. Off - line beépítésű Voith intarder Mercedes sebességváltóra szerelve. A kardántengely mellett van elhelyezve.
- 16.30. Off - line beépítésű Voith intarder, melyet egyebek között a Mercedes sebességváltóra is szerelnek.
- 16.31. Membrán választja szét egymástól az olaj és a sűrített levegő teret.
- 16.32. A ventillációs veszteség csökkenése a forgó rész eltávolításával.
- 16.33. Scania tehergépkocsira szerelt off line beépítésű szekunder retarder.
- 16.34. Scania off line retarder a gyorsító áttétellel és a kettős lapátkoszorúval.
- 16.35. A fékpedálra szerelt potenciométer karakterisztikája.
- 16.36. A gázpedál érzékelő PWM jele különböző motor nyomatékoknál.
- 16.37. A retarderkapcsoló.
- 16.38. Retarderkapcsoló karakterisztika.
- 16.39. Az arányos működésű szelep a kettős lapátozású álló és a forgórész közötti olajmennyiséget szabályozza, amellyel arányos lesz a fékező nyomaték.
- 16.40. A Scania retarder hidraulika rendszerének áttekintése.
- 16.41. A Scania retarder kikapcsolva.
- 16.42. A Scania retarder fékezés közben.
- 16.43. Üres Scania tehergépkocsi gyorsítása 50 km/h sebességre két sebességfokozat kapcsolásával és fékezés retarderrel. (zöld színű görbe a kereszt irányú gyorsulás).
- 16.44. Rakott Scania tehergépkocsi gyorsítása 50 km/h sebességre három sebességfokozat kapcsolásával és fékezés retarderrel. (piros színű görbe a kereszt irányú gyorsulás).
- 16.45. Voith DIWA automatikus sebességváltó, melynél a hidrodinamikus sebességváltó működik retarderként.
- 16.46. Primer beépítésű hidrodinamikus retarder elektronikus vezérlésű bolygóműves automatikus sebességváltóban
- 16.47. ZF EcoLife sebességváltó primer beépítésű hidrodinamikus retarderrel.
- 16.48. ZF EcoLife sebességváltó primer beépítésű hidrodinamikus retarderrel.
- 16.49. Az MAN D2876 típusú motor főtengelyére szerelt Pritarder. 25 kg tömegével a 80 kg –os retardert helyettesíti.
- 16.50. A Voith Pritarder hűtőfolyadék szivattyú és a tartós lassító fékberendezés is. A piros lapátkoszorú a forgórész.
- 16.51. A Daimler AG és a Voith együttműködésében kifejlesztett Sekundär-Wasserretarder a sebességváltóra szerelve.
- 16.52. Voith SWR retarder, közvetlenül hűtőfolyadékkal működik és offline szekunder beépítésű fogaskerekes gyorsító fokozattal.
- 16.53. A Voith SWR retarder amikor nem fékez, veszteség csökkentésére a szivattyú- és a turbinakerék eltávolodik egymástól.
- 16.54. A hűtőfolyadék áramlás normál motor működésnél.
- 16.55. A hűtőfolyadék áramlás, amikor az SWR fékez.
- 16.56. A Retarder-Control Modul (RCM) és elektromos kapcsolatai.
- 16.57. A fékező teljesítmények összehasonlítása.
- 16.58. Hidrodinamikus retarderek összehasonlítása
- 16.59. Az örvényáramú retarder az alváz hossztartói közé gumibakokkal szerelik fel.
- 16.60. Örvényáramú retarder gerjesztő tekercsei az állórészre szerelve a forgórészek között.
- 16.61. Telma örvényáramú retarder gerjesztő tekercsek keresztmetszete.
- 16.62. Telma örvényáramú retarder gerjesztő tekercs hosszmetszete.
- 16.63. Az örvényáramú retardert működtető áramkörök
- 16.64. Lassulás érzékelős retarder működtetés
- 16.65. Az örvényáramú retarder vizsgálata
- 16.66. Telma gyártmányú örvényáramú retarder a hátsó futóműre szerelve
- 16.67. A legkisebb méretű örvényáramú retarder VW Crafterhez
- 16.68. Voith Magnatarder álló és forgórésze
- 16.69. A Magnatarder kikapcsolt állapotban és fékezés közben. A pólusvasak helyzete és az erővonalak.
- 16.70. Magnatarder a kardántengelyre szerelve.
- 16.71. Magnatarder a sebességváltóra szerelve.
- 16.72. Haszonjárművekhez kifejlesztett energia újrahasznosítással működő fék rendszer.
- 16.73. A rendszer működtetését elektronika végzi, mely a hidraulikus vezérlést irányítja.
- 16.74. A hidraulikus nyomásként tárolt energia a kerékagyba szerelt hidromotorral hasznosítható.
- 16.75. Az energia visszatáplálásos fékezés is lehet tartós lassító fék
- 16.76. Haszonjárművek hibrid hajtásánál használatos három fázisú villanymotor.
- 16.77. Voith ElvoDrive soros hibrid hajtás villanymotorja.
- 16.78. Voith ElvoDrive soros hibrid hajtás villanymotor belső szerkezete.
- 16.79. ZF TraXon rendszer hibrid hajtás vezérlése.
- 16.80. ZF TraXon rendszer hajtó villanymotorja a sebességváltó és a belsőégésű motor között.
- 17.1. Az EU célkitűzése, de a végső cél a balesetmentes közlekedés megvalósítása
- 17.2. Az ESP hatása a balesetek gyakoriságára
- 17.3. A baleset elkerülhetőségének lehetőségei elektronikus érzékelőkkel és beavatkozó egységekkel
- 17.4. Az aktív és a passzív biztonság áttekintése
- 17.5. Az ember-gép kapcsolat megvalósítása
- 17.6. A szélvédő, mint Head up Display
- 17.7. A Head up Display-n megjelenő információ
- 17.8. Az asszisztens rendszereknél alkalmazott különböző érzékelők
- 17.9. A forgalmi sáv figyelése
- 17.10. A Continental Automotive Systems CV rendszere
- 17.11. A visszapillantó tükör holt terének figyelése
- 17.12. Éjszaka látó berendezés
- 17.13. Az éjjel látó rendszer működési elve
- 17.14. Siemens VDO HUD Head-up Display Modul
- 17.15. Amit a tompított fényszóró nem világít meg, azt láthatóvá teszi az infra kamera
- 17.16. Sensitive Guidance
- 17.17. Negyedik generációs ultrahangos érzékelők
- 17.18. Az asszisztens rendszerek érzékelési tartományainak áttekintése
- 17.19. Az ACC rendszer működése utoléréskor
- 17.20. Az ACC rendszer radar érzékelője
- 17.21. Az ACC rendszer beállító kapcsolója
- 17.22. Az ACC rendszernél alkalmazott műszerfal
- 17.23. Az ACC és más elektronikus rendszerek csatlakozása
- 17.24. Az ACC rendszer Lidar érzékelője
- 17.25. Laser-scanner beépítése a gépkocsiba
- 17.26. Automotive Laser-scanner szerkezete
- 17.27. A Laser-scanner jelének megjelenítése és mellette a video kép
- 17.28. Bosch video érzékelő
- 17.29. A video érzékelő működési elve
- 17.30. A tolató kamera
- 17.31. Éjszaka látó berendezés a haszonjárművekben
- 17.32. Korlátozott a kilátás a vezetőfülkéből
- 17.33. Nagy látószögű radar érzékelő
- 17.34. Közeli radar a nyerges-vontatónál
1. fejezet - Tengelykapcsolók működtetésének mechatronikája
1.1. A gépjárművek tengelykapcsolóinak feladata
A motor és a hajtómű között létesít súrlódás révén, a sebességfokozatok kapcsolását lehetővé tevő, oldható nyomaték átviteli kapcsolatot. A tengelykapcsoló teszi lehetővé, hogy a belsőégésű motor alapjárati fordulatszámon működjön, miközben a gépkocsi áll. A gépkocsi indulásakor és azután a sebességfokozatok váltásánál pontos és mérsékelt sebességű tengelykapcsoló működtetés szükséges. Menet közben, különösen hegymenetben a sebességváltás gyors kell legyen, hogy a gépkocsi ne veszítse el a lendületét, a tengelykapcsoló működtetés is ennek megfelelően a megszokottól gyorsabb kell bekövetkezzen. Ezen kívül a tengelykapcsoló kiegyenlíti a motor és a sebességváló közötti kis mértékű forgástengelyek közötti szögeltérést és az egytengelyűségtől való eltérést, továbbá csillapítja a torziós lengéseket is.
Ezen kívül lehetővé teszi:
a gépkocsi megállását anélkül, hogy leállna a motor,
a tengelykapcsoló csúszása miatt lágy, rángatás mentes lehet a gépkocsi elindulása,
csillapítja a motortól származó nyomatéklengéseket,
védelmet nyújt a hajtómű egység mechanikus túlterhelése esetén.
A korszerű gépkocsikba a SAC, (Self Adjusting Clutch) önműködő utánállítású tányérrugós tengelykapcsolókat szerelnek be. Ezzel csökken a működtetéshez szükséges erő és a karbantartási igény is. A tengelykapcsoló házba szerelik be az automatikusan működő utánállító szerkezet ferd helyzetű rámpáját.
1.2. A gépjárműveknél alkalmazott tengelykapcsolók
egy tárcsás, szárazlemezes tengelykapcsoló, melyet személygépkocsiknál és haszonjárműveknél egyaránt alkalmaznak. Kiviteli változatai:
tekercsrugós (régebben alkalmazott változat)
tányérrugós (jelenleg ez az általánosan elterjedt változat)
két tárcsás, szárazlemezes (haszonjárműveknél a nagyobb nyomaték miatt és személygépkocsik DSG sebességváltóinál alkalmazzák. Ez utóbbi a gyorsabb fokozatkapcsolást tesz lehetővé.
több tárcsás olajlemezes (automatikus működésű sebességváltóknál)
röpsúlyos (mopedeknél, motorkerékpároknál)
hidrodinamikus (hűtő ventilátor hajtásnál)
mágnes-poros tengelykapcsoló (fokozatmentes hajtóműveknél)
körmös kapcsolók (ezeket újabban az automatikus működésű DSG sebességváltó bizonyos fokozatainak kapcsolásánál alkalmazzák).

A gépjárművek tengelykapcsolóinak működtetése:
A komfort igények növekedése miatt a tengelykapcsoló működtetését a konstruktőrök igyekeznek minél kisebb erőszükséglettel megvalósítani, illetve automatizálni. Hasonló módon mint a sebességváltóknál. A kisebb zajszinthez és a komfortosabb működéshez hozzájárul az 1985 –óta alkalmazott kéttömegű lendítőkerék is (ZMS). A másik fontos tendencia, hogy a gyártók szeretnének rendszerbeszállítókká válni. Egy tányérrugós tengelykapcsolónál például a kinyomó-csapágy elmozdításához szükséges kb. 2000 N erőt hidraulikus működtetéssel, vagy különböző mechanikus áttételekkel igyekeznek jelentősen csökkenteni.
A tengelykapcsoló működtetésének főbb szempontjai:
kifogástalan, vonszoló nyomaték mentes oldás,
ergonómiailag kedvező pedálerő és elmozdulás karakterisztika megvalósítása, hideg és meleg állapotban egyaránt,
zaj és vibráció mentes működtetés,
kifogástalan működtetés induláskor és sebességváltás közben,
lengésmentes és minimális holtjátékú működtetés.
A tengelykapcsoló működtetésének lehetőségei:
mechanikus működtetés (bowdennel, vagy rudazattal)
elektromechanikus többnyire automatizált sebességváltóknál (a villanymotor, csigahajtás és golyósoros csavarorsó – csavaranya áttétellel, vagy újabban már lineáris motorral végzett működtetés).
hidraulikus működtetés (a pedálerő a fő-hengerben hidraulikus nyomást hoz létre, amit csövön a munkahengerhez vezetve, az mechanikai munkává alakít, a működtetéshez a nyomástárolóban lévő nyomás is felhasználható).
pneumatikus működtetés mely a sűrített levegő rendszerrel ellátott haszonjárművekre jellemző. Jelentősen csökkenti az erőszükségletet.
A tengelykapcsolók fokozódó automatizálási igénye
Az egyre nagyobb forgalomsűrűség, a dráguló hajtóanyagok, a környezetkímélőbb közlekedés, a komfortosabb autózás igénye miatt a egyre nagyobb a jelentősége, hogy automatizálják a hajtáslánc elemeit. Ennek egyik példája a kézi kapcsolású sebességváltók automatizálása ASG (Automatisierten Schaltgetrieben), amely önműködő tengelykapcsolót igényel. Ez különösen a kisautóknál vált sikeressé (például: Opel Cosa Easytronic sebességváltó, VW Lupo, Toyota Jaris).
1.3. A mechatronika alkalmazásának fontosabb területei a tengelykapcsoló működtetésénél
a tengelykapcsoló kiemelésének megvalósítása elektrohidraulikus, vagy elektromechanikus módon.
a tengelykapcsoló működtetési útjának érzékelése, illetve a súrlódó betét kopásának érzékelése (induktív elmozdulás érzékelővel, vagy potenciométerrel).
a tengelykapcsoló csúszásának érzékelése fordulatszám különbség alapján (motor fordulatszám és sebességváltó bemeneti fordulatszám összehasonlításával).
A tengelykapcsoló automatikus működtetetést, és ellenőrzését a sebességváltó elektronika végzi. Alkalmazhatnak mechatronikus tengelykapcsoló működtetést kézi kapcsolású sebességváltóknál is, amely megkönnyíti a gépkocsi vezetését, mert nem kell „kuplungolni” (pl.: rokkant autók).
1.3.1. Elektromechanikus tengelykapcsoló működtetés
A fejlesztés az LuK és a Robert Bosch GmbH. együttműködésében történt. Az XSG családnál a mechanikus működtetés önzáró csavarhajtással, vagy csigahajtással történhet. Ennél az egységnél nem alkalmaznak hidraulikát.
Szénkefe nélküli villanymotor végzi a működtetést.
Ha nem kéttömegű lendítőkereket alkalmaznak a működtető elektronikát ellátják egy csúszás szabályzó algoritmussal is.
A mechanikus kiemelő szerkezetnél golyósoros emelőpályát alkalmaznak, melynél a működtető egység bowden huzallal fejti ki az erőt. Ekkor a beavatkozó egység a tengelykapcsoló közelébe szerelhető fel. A kinyomó-csapágy működtetése a másik típusváltozatnál mechanikus állétellel is történhet. Ennek azonban nagyobb a helyigénye.
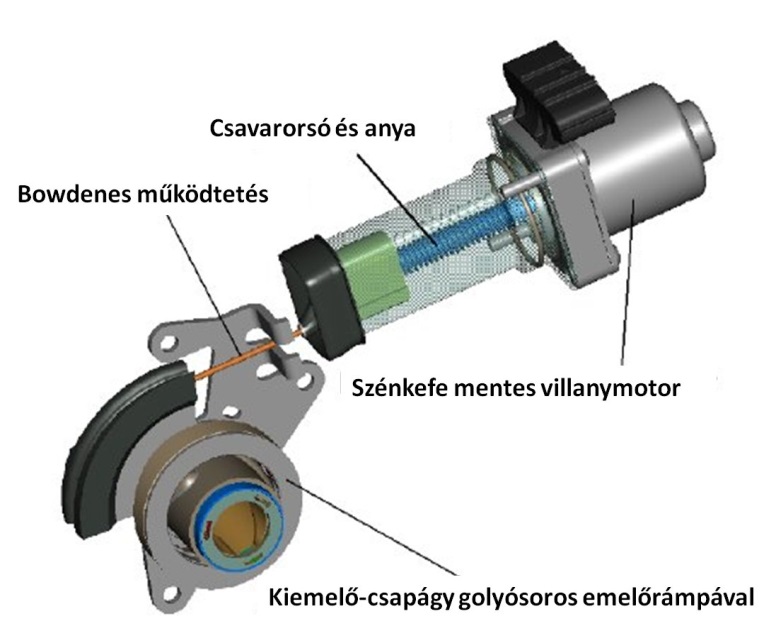
A tengelykapcsoló és a sebességváltó működtetéséhez új villanymotorokat fejlesztettek ki. Ezzel helyettesítik a korábban alkalmazott ablak-emelőknél is használatos DC motorokat. Azért is szükségessé vált a fejlesztés, mert ennél nagyobb a mechanikai igénybevétel, a hőmérséklet és a rezgés is, valamint a sós víz is hatást gyakorol rá. Az tűzték ki célul, hogy a hidraulika nélkülözhetővé váljék és a lehető legkisebb tömegű lehessen a beavatkozó egység. A Bosch-al közösen fejlesztetté ki az olcsóbb kivitelű, de nagyobb teljesítményű szénkefe nélküli típusból. Elektronikus kommutációt valósítanak meg, ez adja a villanymotor típusmegjelölésnél használt EC rövidítést. A mágnesnél alkalmazott ritka földfém ötvözők alkalmazásával a motor kompakt kivitelű lett. A forgórész tömege kedvezően kicsi. A villanymotor közvetlenül a tengelykapcsoló házra szerelhető.
Toyota elektromechanikus tengelykapcsoló működtetés:
A villanymotor mechanikus áttételek segítségével végzi a tengelykapcsoló működtetését. A működtető elektronikának potenciométer jelzi vissza a tengelykapcsoló működtetési útját. Ebből meghatározható a tengelykapcsoló súrlódó betétjének kopása.
1.3.2. Elektrohidraulikus tengelykapcsoló működtetés
Elektronisches Kupplungsmanagement (EKM), rendszert építettek be például a Mercedes A-osztályba és az Opel Corsa Easytronic automatizált sebességváltónál.
A tengelykapcsoló működtetéséhez villanymotoros, csigahajtással és mechanikus áttétellel mozdítja el a hidraulikus főhenger dugattyúját. Az így létrehozott olajnyomást cső vezeti a munkahengerhez, melynek dugattyúja kar áttétellel emeli ki a tengelykapcsolót. Ennek a változatnak az előnye az, hogy a működtető hidraulikarendszerhez nem szükséges nyomástárolót felszerelni.
A tengelykapcsoló működtetésekor több tényezőt is figyelembe kell venni
A tengelykapcsoló működtetése különösen elinduláskor és manőverezésnél, de a sebességfokozatok kapcsolásakor finoman adagolható kell legyen. Vészfékezésnél vagy megálláskor az indulásnál lényegesen nagyobb dinamikával kell nyitni a tengelykapcsolót. Emelkedőn, vagy lejtőn haladáskor is más a dinamikai igény. A sebességfokozat bekapcsolásakor a működtetés precízen és a kellő pillanatban kell bekövetkezzen.
Elektronikus tengelykapcsoló működtetés
Egyre nagyobb a jelentősége az elektronikus tengelykapcsoló működtetésnek. A LuK által kifejlesztett elektronikus tengelykapcsoló működtetés főbb egységei:
egytárcsás, szárazlemezes tengelykapcsoló
hidraulikus teljesítmény szabályozás
elektronikus szabályozás
érzékelők.
Az alkalmazott hidraulikus nyomás általában 40 – 60 bar közötti, melyet vagy egy villanymotorral hajtott hidraulikaszivattyú hozza létre, vagy a gépkocsi központi hidraulika rendszere biztosítja. A tengelykapcsoló működtetését végző munkahenger arányos működtetésű szeleppel történik, melyet az elektronika működtet.
Az alkalmazott érzékelők:
Tengelykapcsoló elmozdulás érzékelő Induktív útadó, vagy potenciométer)
A sebességfokozat felismerése (állandó mágnes a kapcsoló rudazaton és Hall érzékelő)
Motor fordulatszám (mágnesesen kódolt gyűrű és Hall érzékelő)
Sebességváltó bemeneti fordulatszám (mágnesesen kódolt gyűrű és Hall érzékelő)
Gázpedál helyzet (potenciométer, vagy PWM jeladó)
Pillangószelep helyzet (potenciométer).
A szabályozó program három almodulból áll:
Ezek különböző működési módoknál avatkoznak be.
álló helyzet és elindulás
sebességfokozatok kapcsolása
gyorsítás, lassítás, manőverezés
Az EKM (Elektronikus Kuplung Működtetés) flexibilis működésű és a gépkocsi számos működési paraméterét figyelembe veszi.
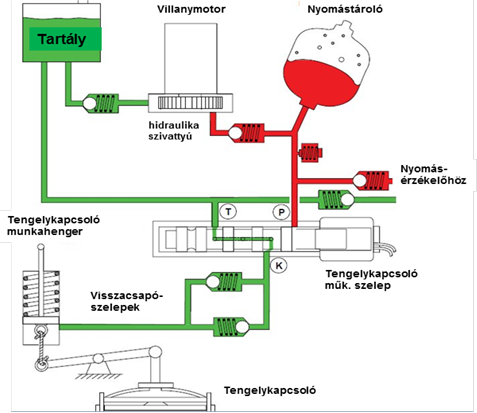
Elektrohidraulikus tengelykapcsoló működtetés
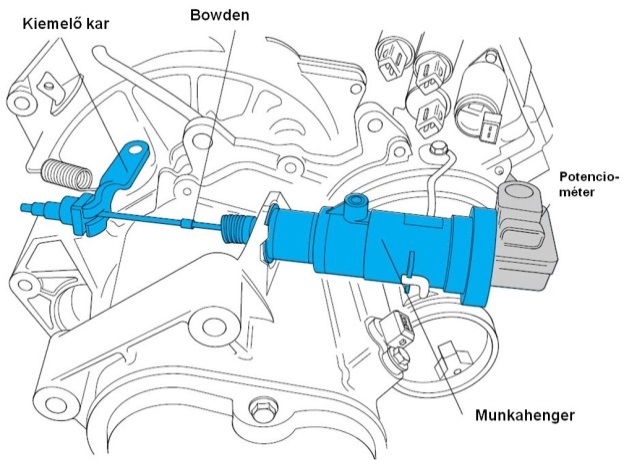
A Renault és a Fiat automatizált sebességváltóinál villanymotorral hajtott hidraulika szivattyút és nyomástárolót alkalmaznak a tengelykapcsoló működtetésére és a sebességfokozatok kapcsolásához.
A tengelykapcsoló nyitásához a nyomástárolóból elektromágneses szelep vezérli ki az olajnyomást a munkahengerbe. Annak dugattyúja Bowdennel adja át a működtető erőt a kiemelő szerkezetnek. A tengelykapcsoló zárása és a munkahenger dugattyújának visszaállítása rugókkal történik. A tengelykapcsoló elmozdulását potenciométer jelzi vissza az elektronikának. Ebből az elektronika a megfelelő algoritmussal a betét kopottságát is meg tudja állapítani.
A villanymotor, a mechanikus áttétel és a hidraulika egyetlen közös szerelési egységet alkot. Amikor zár a tengelykapcsoló nincs kivezérelt nyomás.
Elektrohidraulikus tengelykapcsoló működtetés
A tengelykapcsoló nyitásához a nyomástárolóból elektromágneses szelep látja el olajnyomással a munkahengert. Nem szabad megfeledkezni a nyomás kivezérlés és a nyomás csökkentés dinamikájáról sem, mert alapvetően az befolyásolja a tengelykapcsoló működésének minőségét. A munkahenger dugattyúja például egy bowdennel adhatja át a működtető erőt a kiemelő szerkezetnek. A tengelykapcsoló zárása és a munkahenger dugattyújának visszaállítása rugókkal történik. A tengelykapcsoló elmozdulását potenciométer jelzi vissza az elektronikának. Ebből az elektronika a megfelelő algoritmussal a betét kopottságát is meg tudja állapítani.
A VW Lupo –nál a hidraulikus tápegységen helyezik el a tengelykapcsolót működtető elektromágneses szelepet. Az elektronika áramot kapcsol az elektromágneses szelepre, amikor a tengelykapcsoló nyit, részlegesen, vagy teljesen. Nincs kivezérelt nyomás, amikor zár a tengelykapcsoló.

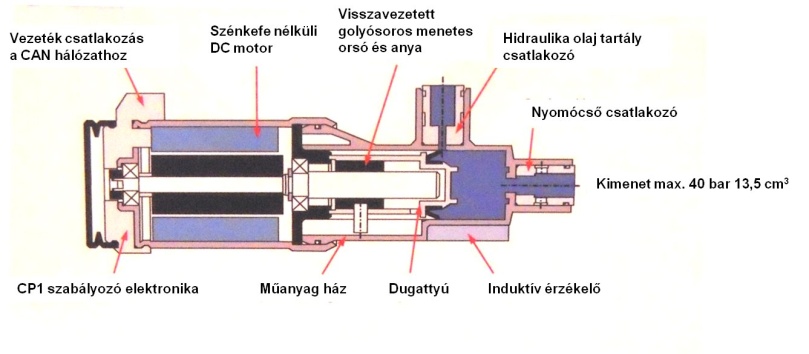
Tengelykapcsolót működtető elektrohidraulikus FTE gyártmány egység
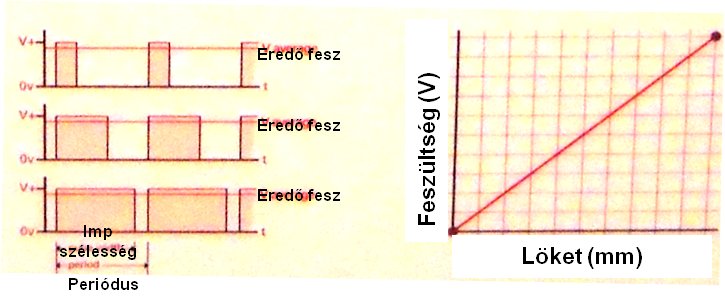
Az FTE vállalat olyan elektrohidraulikus tengelykapcsoló működtető egységet gyárt, amely az elektronikától a CAN hálózaton keresztül kapja az utasítást a tengelykapcsoló kiemelésére illetve zárására. Az egyenáramú villanymotort impulzus szélesség vezérelt jel működteti. Az eredő feszültséggel arányos lesz a dugattyú elmozdulás. A kedvezőbb hatásfok érdekében golyó visszavezetéses menetes orsóval mozgatja a dugattyút, amely a működtető nyomást hozza létre.
1.3.3. Elektromechanikus tengelykapcsoló működtetés lineáris motorral
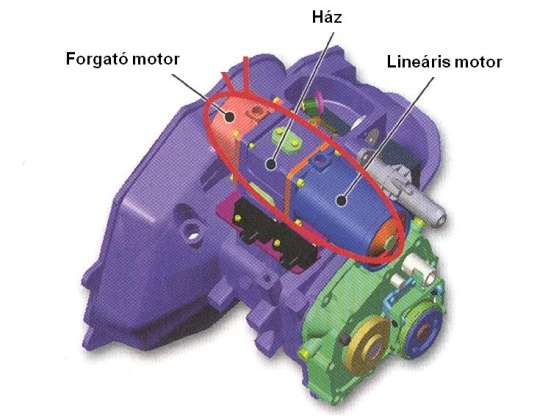
Az Opel Corsa Easytronic automatizált sebességváltóhoz az olaszországi Ricardo vállalat lineáris motoros tengelykapcsoló működtető egységet fejlesztett ki.
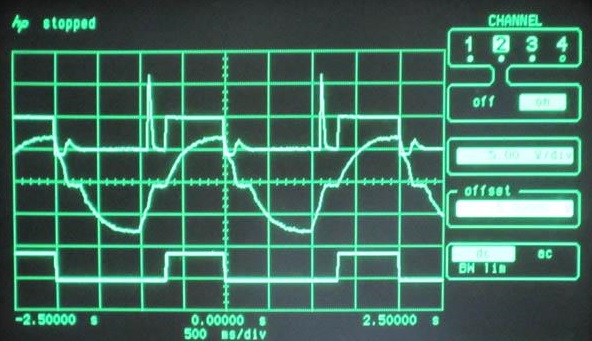
A fejlesztéseknél azt kellett figyelembe venni, hogy a tengelykapcsoló működtetés szempontjából az a legnehezebb üzemállapot, amikor a gépkocsi a legnagyobb teljesítménnyel gyorsul és utána, mindjárt nagy fékezés következik valamely váratlan forgalmi esemény miatt. Először induláskor zár a tengelykapcsoló és nagy nyomatékot visz át, majd röviddel utána nyit, hogy a motor ne fulladjon le. Erre a folyamatra csupán 50 - 90 ms áll rendelkezésre. Ez nagy követelményt támaszt a villanymotoros tengelykapcsoló működtetéssel szemben, mert a zárás után le kell győzni a működtető egység tehetetlenségét és gyorsan ellentétesen kell mozgatni. Amennyiben ezt elektromos lineáris motorral valósítják meg, a működtetéshez szükséges energia az akkumulátorból nyerhető ki.
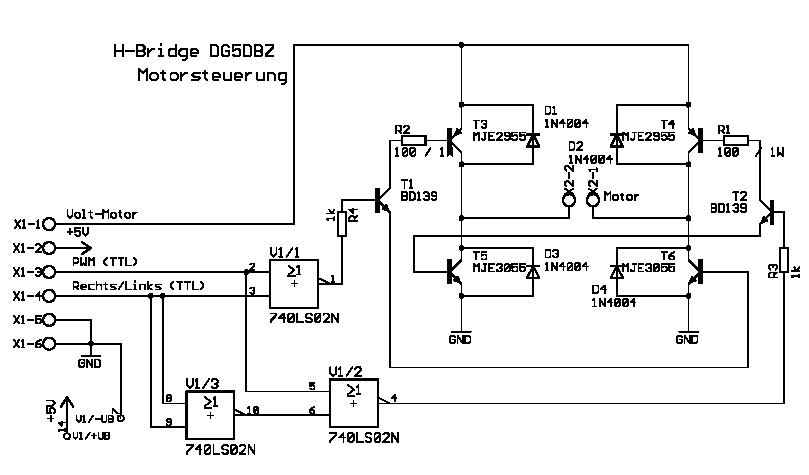
A lineáris villanymotor előnyös, mert elmarad a mechanikus hiszterézis. Kevesebb részegységből áll, ezért nagyobb a megbízhatósága. Közvetlen működtető erő valósítható meg mechanikus áttétel nélkül. A feladat ellátására úgynevezett „elektromechanikus lineáraktuátort” fejlesztettek ki. A teljesítmény erősítéshez egy elektronikus vezérlésű H-hidat alkalmaznak.
1.4. A tengelykapcsoló pedálnál alkalmazott érzékelők
A hagyományos tengelykapcsolóval és sebességváltóval szerelt korszerű személygépkocsiknál egyre több tengelykapcsoló működtetés függő elektronikus szabályozást valósítanak meg. Az ezzel kapcsolatos tudnivalókat itt foglaljuk össze.
Néhány példa a tengelykapcsoló pedál érzékelők alkalmazására:
A motor elektronika a takarékosság jegyében megváltoztatja a tüzelőanyag befecskendezést nyitott tengelykapcsolónál. Ezzel egyaránt csökkenthető a tüzelőanyag fogyasztás és a kipufogógáz emisszió is. Ennek megfelelő működés különösen városi forgalomban nagy jelentőségű.
A tengelykapcsoló pedál helyzet érzékelőjének jelét hasznosító rendszerek közé sorolható az USA-ban és Japánban a gépkocsikba kötelező alkalmazású úgynevezett „Start-Lock” működés. Ezt a hagyományos mechanikus sebességváltós gépkocsiknál alkalmazzák. Megakadályozza, hogy bekapcsolt sebességfokozatnál az indítómotor azonnal mozgásba hozza a gépkocsit. Ezzel elkerülhetővé válnak a kisebb koccanásos balesetek. Ez a rendszer csak akkor engedi az indító motort működni, amikor a tengelykapcsoló kiemelt állapotban van. Ezt az állapotot érzékelő jelzi az indítómotor áramkörének.
A tengelykapcsoló állapot információt használja fel az elektromechanikus rögzítő fék is a működéséhez. Erre a jelre kezdődhet a rögzítő fék automatikus oldása.
A fentiekben említett rendszerek működéséhez fontos a tengelykapcsoló pedál helyzetének, illetve elmozdulásának pontos érzékelése. Ez utóbbi információnak a betét kopottságára vonatkozó diagnosztikai tartalma is van. Ezek miatt különböző érzékelőket szerelnek fel a kuplung pedálra. Ezeknek olykor szélsőséges hőmérsékleteknél is működniük kell. Figyelembe kell venni továbbá azt, hogy a tengelykapcsoló pedálnál az érzékelő felszerelésének helyén 20 – 30 mm az elmozdulás.

A tengelykapcsoló pedálnál alkalmazható érzékelők, melyek más célokra a továbbiakban tárgyalt egységeknél is előfordulhatnak:
Mikrokapcsoló, melynek házában mechanikusan működtetett érintkezőket szerelnek be. Költségkímélő megoldásnak számít, de felléphetnek korróziós problémák kopás és a rugó kifáradása is. Ezek a jelenségek hátrányosan befolyásolják a működést és korlátozzák az élettartamot.
Reed relé érintésmentesen működik, nem tartalmaz kopó alkatrészt. Légmentesen zárt térben lévő érintkezőket zár a tengelykapcsoló pedállal együtt elmozduló állandó mágnes. Működése megbízható, élettartama hosszú.
Hall elemes kapcsoló egy IC tartalmazza ezt az egységet. A mágneses erőtér változása μV nagyságú feszültséget kelt, amit erősítő fokozaton keresztül válik használható információvá. Nagyon pontos, érintésmentes működésű kapcsoló. Széles körűen alkalmazzák.
Potenciométer ezzel a pedál elmozdulás nagysága és a pillanatnyi helyzete is kiértékelhető. Gyakran alkalmazzák az elforduló kivitelű változatot. Hátránya az, hogy kopó részegységet tartalmaz, ami korlátozza az élettartamát és a megbízhatóságát. A rákapcsolt tápfeszültségből az elmozdulással arányos feszültség jelet ad.
Induktív érzékelő a potenciométer hátrányos tulajdonsága ezzel kiküszöbölhető. Érintésmentesen működik és nem tartalmaz kopó alkatrészt. Váltakozó mágneses erőterű adó tekercsből és több vevő tekercsből is állhat. Az elektromos jel a vevő tekercs helyzetével arányos. Hosszú élettartam és nagy megbízhatóság jellemzi.
Magneto-induktív érzékelő az alkalmazott állandó mágnes elmozdulását érzékeli a PLCD (Permanantmagnetic-Linear-Contactless-Displacement) érzékelő. A lágymágnes magot egy tekercs veszi körül és két kiértékelő tekercset alakítanak ki a végeinél. A jelképzésnél egy állandó mágnes közelít az érzékelőhöz. Differenciál transzformátorként történik a jel kiértékelése. Az érzékelőben a mágnes helyzetétől függő jel jön létre.
1.5. Elektro-pneumatikus tengelykapcsoló működtetés
Ezt a tengelykapcsoló működtető változatot sűrített levegő ellátó és tároló rendszerrel ellátott haszonjárműveknél alkalmazzák. Az elektro-pneumatikus tengelykapcsoló működtető egység betölti a rásegítő feladatát is, mert hatékonyan csökkentik a működtető erő szükségletet. Leggyakrabban automatizált sebességváltóval szerelt haszonjárműveknél alkalmazzák. Minden sebességváltáskor működteti a tengelykapcsolót. A működtető egységet (1) a sebességváltón kialakított tengelykapcsoló házra szerelik. A pneumatikus tengelykapcsoló működtetés teljesen automatikusan történik. A vezérlését a sebességváltó elektronika végzi (2). A kábelköteg (3) a tengelykapcsoló működtető egységhez van rögzítve és egy elektromos csatlakozón keresztül áll kapcsolatban a sebességváltó elektronikával.
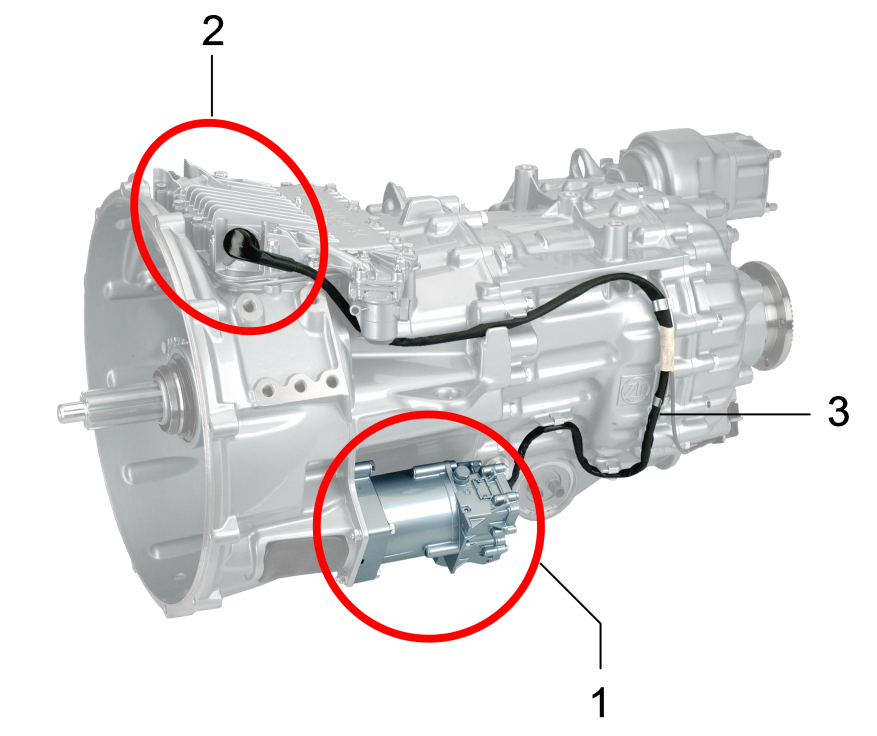
Az elektro-pneumatikus tengelykapcsoló működtető egység: olyan konstrukció, hogy bizonyos zavaró körülmények nem váltanak ki váratlan reakciókat a tengelykapcsoló működtetésében. A négy elektromágneses szelep, az elmozdulás érzékelő, és a visszacsapó-szelep biztonságos és precíz tengelykapcsoló működtetést tesz lehetővé.
A tengelykapcsoló működtető egység fő részei:
Az első házrészben található a munkadugattyú.
A hátsó részben van a négy elektromágneses szelep, az elmozdulás érzékelő, az elektronika és a visszacsapó szelep. A hátsó házrész fedelébe rögzítik a kábelköteget.
A négy elektromágneses szelep működteti a sűrített levegő energiájával a tengelykapcsolót. Ezek közül kettő kis átömlési keresztmetszetű és a lassú működtetést végzi. A másik kettő nagyobb átömlési keresztmetszetű, ezek feladata a gyorsabb működtetés.
A munkahenger dugattyú helyzetét és ezzel együtt a tengelykapcsoló helyzetét is induktív elmozdulás érzékelő figyeli. Az elmozdulás érzékelő egy rögzített tekercsből és egy mozgó vasmagból áll, amely kapcsolatban van a dugattyúval. Az elmozdulás érzékelő a sebességváltó elektronikától pontosan beállított tápfeszültséget kap és a dugattyú helyzetének megfelelő feszültség jelet ad az elektronikának. Ebből a jelből az elektronika pontosan meghatározza a tengelykapcsoló pillanatnyi helyzetét és a löketet. Így a tengelykapcsoló kiemelése és zárása a pillanatnyi igényeknek mindig megfelelő. További lehetőség, hogy a sebességváltó elektronika a löket meghatározása alapján meg tudja állapítani a súrlódó betétek pillanatnyi kopottságát. Így a vezető megfelelő időpontban tájékoztatást kaphat a szükségessé váló súrlódó betét cseréről.
A ház hátsó részén helyezték el a sűrített levegő csatlakozást. Ha sűrített levegő ellátásban nem várt tömítetlenség lép fel, a csatlakozóba beépített visszacsapó-szelep megakadályozza, hogy az éppen nyitott tengelykapcsoló záródjon. Erről az állapotról a sebességváltó elektronika nem kap jelzést.
Kiemelt tengelykapcsoló
A tengelykapcsoló oldásához a munkahenger két elektromágneses szelepen keresztül sűrített levegővel töltődik fel. Így a dugattyú ballra mozdul és magával viszi a tengelykapcsoló kinyomó-csapágy működtető karját.
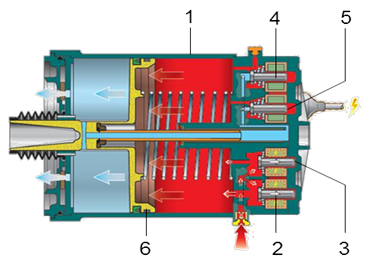
1 henger; 2 nagy keresztmetszetű nyomásnövelő elektromágneses szelep; 3 kis keresztmetszetű nyomásnövelő elektromágneses szelep; 4 nagy keresztmetszetű nyomáscsökkentő elektromágneses szelep; 5 kis keresztmetszetű nyomáscsökkentő elektromágneses szelep
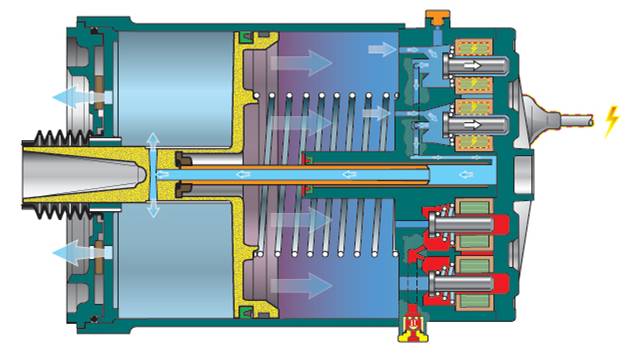
Zárt tengelykapcsoló
A tengelykapcsoló záráshoz a munkahengerből a sűrített levegőt két másik elektromágneses szelep engedi a szabadba. A tengelykapcsoló visszaállító ereje mozdítja vissza a dugattyút alaphelyzetbe.
Alkalmazási példák: ZF AS Tronic sebességváltó, VolvoI „I-Shift“ sebességváltó.
2. fejezet - A kerekek geometriai beállítása és megvezetése
A futómű geometria határozza meg a kerekek helyzetét a kocsiszekrényhez képest és ezáltal a gépkocsi menetviselkedését is. Ez alapvető fontosságú a közlekedésbiztonság szempontjából. A futómű geometria helyes beállítása befolyásolja:
a gépkocsi kifogástalan egyenes menetét,
a normális kerékkopást,
fékezés közben a gépkocsi korrekt viselkedését,
a biztonságos kanyarodást.
2.1. A kerékgeometriával kapcsolatos alapfogalmak
2.1.1. A kerék középsíkja
A gumiabroncs felező síkja, ez osztja két egyforma részre az abroncsot és merőleges a kerék forgástengelyére.
2.1.2. A kerék felfekvési pontja
A kerék középsík és a forgástengely metszéspontja, melyet az útfelületre merőlegesen vetítünk.
2.1.3. A gépkocsi hosszanti középvonala
A kocsiszekrény hosszanti középsíkjának az útfelülettel alkotott merőleges metszésvonala. Felezi az első és a hátsó futómű nyomtávját. Szimmetriavonalnak is nevezhető. Ebből viszont nem következik, hogy a gépkocsi ebben az irányban fog haladni.
2.1.4. Geometriai menettengely
Ez adja meg a gépkocsi tényleges haladási irányát. A hátsó kerekek aktuális beállítási helyzete határozza meg. A hátsó futómű teljes összetartásának szögfelezője jelöli ki ezt az egyenest.
2.1.5. Keréktávolság, vagy tengelytávolság
Az első és a hátsó kerekek forgástengelyei között mérhető távolság. Ez a konstrukciós geometriai adat is befolyásolja a gépkocsi menetviselkedését. Nagyobb tengelytávolság nagyobb menetkomfortot eredményez és tágasabb lehet az utastér is. A rövidebb tengelytávolság esetén jobb fordulékonysága és a manőverező képessége a gépkocsinak.
2.1.6. Nyomtáv
A futómű jobb és bal oldali kerekeinek középsíkja közötti távolság. Nagyobb nyomtáv növeli a stabilitást és ezért nagyobb lehet a kanyarodási sebesség.
2.2. A futóművek kinematikai jellemzői
A gépkocsi első futóműveinél a kedvező menettulajdonságok, a kifogástalan kormányozhatóság és a lehető legkisebb gumikopás érdekében a kerekek mindhárom síkhoz képest ferde helyzetet vesznek fel. Szögértékük a gépkocsi típusától függ és attól, hogy melyik a hajtott kerék.
2.2.1. Kerékösszetartás (δ)
A kerekenkénti összetartás felülnézetben a gépkocsi hosszanti szimmetriatengelye és a kerék középsíkja által bezárt szögként értelmezhető. Pozitívnak tekintjük, amikor a keréktárcsák pereme elöl egymáshoz közelebb van, mint hátul. Az első kerék hajtású gépkocsiknál általában az első kerekek egymástól széttartanak. A kerékdőlés és a kerekek összetartása egymással összefüggő geometriai beállítási helyzet.
A kerék felfekvő felületének középpontjában ébred a vonóerő. A kormánylegördülési sugár tekinthető erőkarnak. Ez a kettő együtt nyomatékot alkot, ami a kerekeket egymástól szétfordítani igyekszik. Ezen hatások következtében és a meglévő illesztési hézagok miatt, az egymással párhuzamosan beállított kerekek szitálnának és radíroznának, ezzel pedig nehezítenék a kormányzást, valamint a kerekeket egymással összekötő rudazat elemeit mechanikailag folyamatosan és periodikusan terhelnék. Ezeknek a hatásoknak az ellensúlyozására a gyártó által megadott összetartást kell beállítani. Ezzel megnő a visszatérítő nyomaték és a menetstabilitás. A túl nagy összetartás viszont fokozott gumikopást és nagyobb gördülési ellenállást eredményez.
A hajtott első keréknél az összetartás kompenzálja az elaszto-kinematikus felfüggesztés miatt fellépő nyomtáv változást is.
A kerékösszetartás szokásos értéke hátsókerék hajtású gépkocsiknál általában 5-20 szögperc, első kerék hajtás esetén –20 szögperc (ez ellensúlyozza a vonóerő hatását).
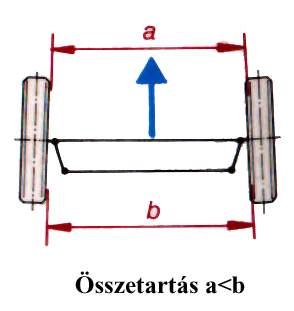
Teljes összetartás a keréktárcsák peremei között elöl és hátul mérhető távolságok közötti különbség mm-ben megadva.
2.2.2. Utánfutás (n, τ)
Az utánfutás mm-ben megadott távolság (n), mely a függőcsap irányának útfelülettel alkotott döféspontja és a kerék felfekvő felületének középpontja között oldalnézetben mérhető. Hozzájárul a kerekek egyenes meneti helyzetbe történő visszaállításához, befolyásolja az elkormányzáshoz szükséges nyomatékot, valamint stabilizálja az egyenes meneti kerékhelyzetet. Nem csak mm-ben hanem szöghelyzetként fokban is megadható (τ). Oldalnézetben a függőcsap középvonala és a függőleges között bezárt szög. Értéke általában 1-5º közötti tartományba esik.
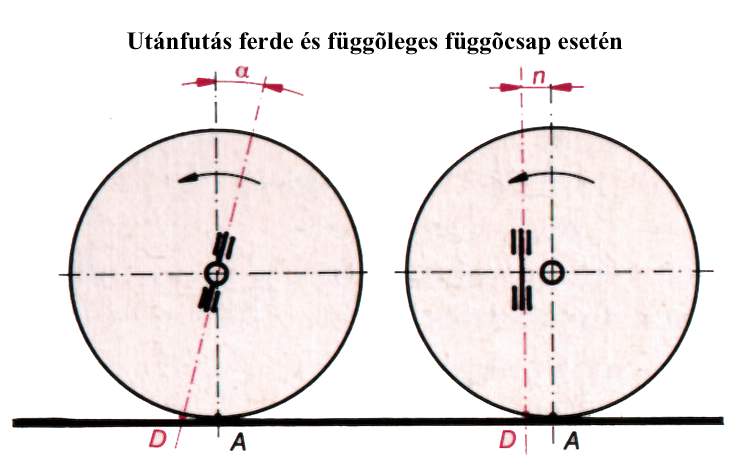
2.2.3. A zavaró erő karja (rSt)
A zavaró erő karja a kerék középpontja és a függőcsap iránya között mérhető legrövidebb, azaz merőleges távolság. Nagysága meghatározza az első kerék hajtású gépkocsinál a vonóerő hatását a kormányzásra, illetve hátsókerék hajtásúnál a gördülési ellenállás hatását a kormányzásra. Ez a kerékgeometriából adódó érték, külön nem állítható.
2.2.4. Kormánylegördülési sugár (rs)
Az elkormányzási tengely (régebbi gépkocsiknál ez a függőcsap iránya) útfelülettel alkotott döféspontja és a kerék felfekvési felületének középpontja között elölnézetben mérhető távolsága. Nagyságát a kerékdőlés és a csapterpesztés beállított értéke határozza meg. Negatív kormánylegördülési sugárról beszélünk, ha az elkormányzási tengely döféspontja a kerék felfekvő felület középpontjától kijjebb esik. A fékerő és a vonóerő ezen a karon keresztül hatást gyakorol a kormányzásra. Fékezés közben eltérő tapadási tényező esetén a kormányzásra stabilizáló nyomatékként hat, megakadályozza a gépkocsi kitörését. A pozitív kormánylegördülési sugár ezzel ellentétes hatást fejt ki. Értékét különösen a nem szervokormányos futóműveknél igyekeznek minél kisebb értéken tartani, hogy mérséklődjön a zavaró erő hatása és minél könnyebb legyen a kormányzás. Ha értéke nulla, akkor szinte ellenállás nélkül lehetne forgatni a kormánykereket. Az ötvenes években alkalmazott 50-60 mm-es kormánylegördülési sugár a hatvanas években már 30 mm-re csökkent és ez a tendencia napjainkig tovább folytatódik.
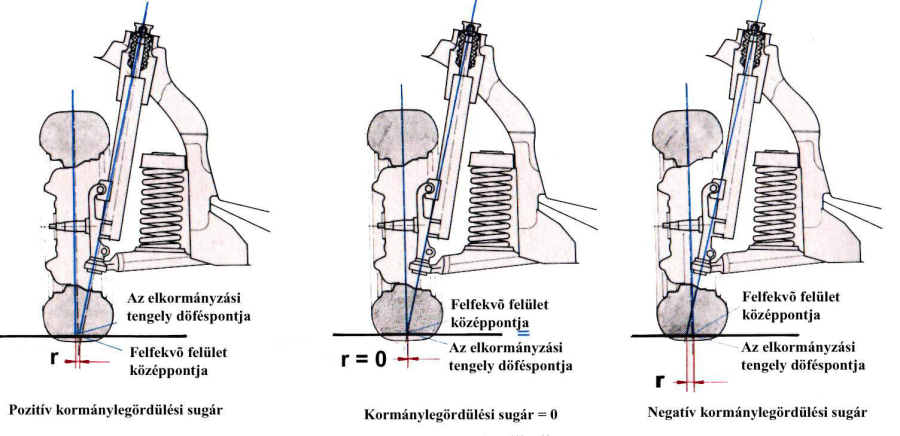
2.2.5. Kerékdőlés (γ)
Elölnézetben a kerék síkjának dőlése a függőlegeshez képest. Negatív értékű, ha a kerék síkja felül közelebb van a gépkocsi hosszanti szimmetriatengelyéhez. Befolyásolja a kerék oldalvezetését. A gumiabroncstól függően értéke kicsi (–3º és 0º közötti) azért, hogy ne okozzon a gumiabroncs futófelületének egyik oldalán intenzívebb elhasználódását.
A pozitív kerékdőlés esetén a kerékre egy tengely irányú erőkomponens hat, amely a kerékanyát tehermentesíti és a csapágyhézagot kiküszöböli. A kerék szitálási hajlama ellen hat, amit a kisebb útegyenetlenségek gerjesztenek olyankor, amikor még nem történik berugózás. Ilyenkor a kerék függőcsap körüli lengéseket végez. A kerékdőlés értékét a csapterpesztéssel összhangban állapítják meg.
2.2.6. Csapterpesztés (σ)
Az elkormányzási tengely (korszerű gépkocsiknál ez a függőcsap iránya) és a gépkocsi hosszanti középsíkja által bezárt szög. Befolyásolja a kormányzáshoz szükséges nyomatékot. Értéke 2-8º közötti. Ennek hatására a kerék elkormányzásakor kissé megemeli a kocsiszekrényt és így visszatérítő erő keletkezik. Ez a kereket egyenes meneti helyzetbe igyekszik visszaállítani. A kerékdőlés és a csapterpesztés összege állandó érték marad. Ha állítjuk a kerékdőlést, ugyanennyivel állítódik a csapterpesztés is.
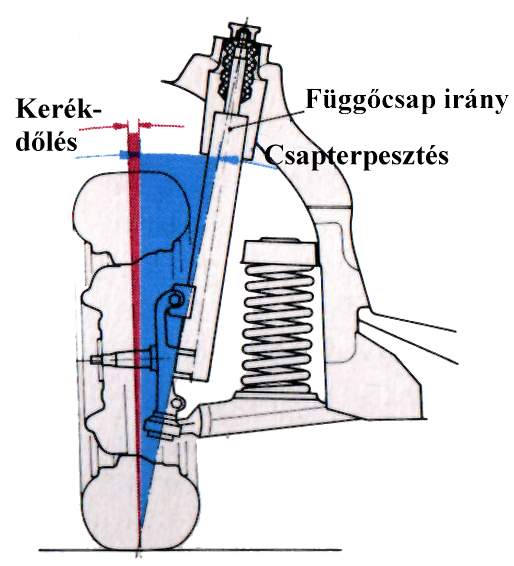
Az összetartás és a kerékdőlés változása
Az összetartás és a kerékdőlés értékei egy adott futóműnél egymással összhangban kell legyenek. Pozitív kerékdőléshez pozitív összetartás tartozik. Menet közben a futóművek ki-, illetve berugózáskor és a terhelésváltozás hatására a kerekekre különböző erők hatnak. Ezért az alábbi diagram szerint változnak az összetartás és a kerékdőlés értékei. Ez egy általános esetnek tekinthető, de valóságban az értékek a futómű konstrukciójától függnek.
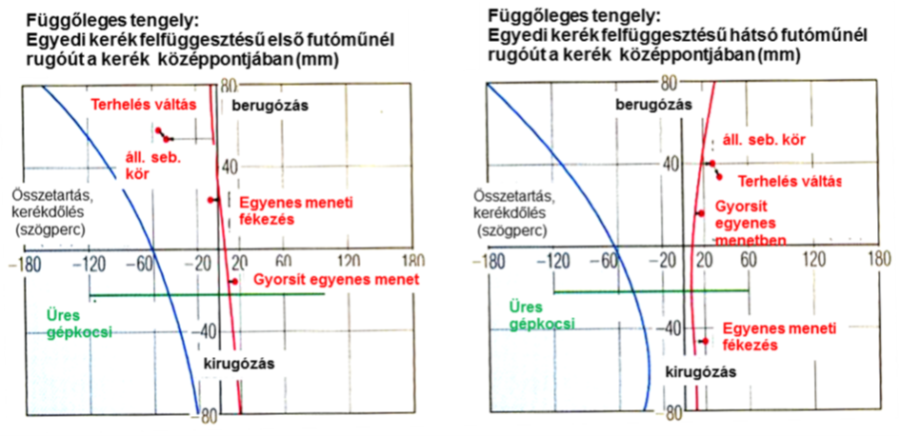
2.2.7. Kanyarodási szögeltérés
A gömbcsuklókkal összekötött, trapéz alakú nyomtávrudazat létesít kapcsolatot a bal és jobb oldali első kerekek között. Független kerékfelfüggesztésnél ez osztott kivitelű, több tagból áll. Lehetővé teszi, hogy elkormányzáskor a kanyarodási középpontnak megfelelően a belső íven futó kerék elfordítása nagyobb legyen, mint a külső íven haladóé. 20º -os elkormányzásnál a kanyarodási szögeltérés értéke 3º.
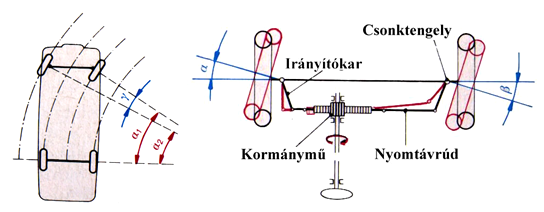
2.2.8. A gépkocsi tényleges haladási iránya, vagy geometriai menettengely
A gépkocsi tényleges haladási irányát a hátsó kerekek összetartásának szögfelezője határozza meg. Ha ez nem esik egybe a kocsiszekrény hossztengelyével egyenesen haladva állandó ellenkormányzás szükséges. A megengedhető eltérés ± 15’. Ez egyszerű módon négy mérőfejes futómű vizsgáló berendezéssel mérhető ki. Ha a rossz beállítás miatt szükségessé válik a korrekció, először a hátsó futómű ferde helyzetét kell megszüntetni és utána állítható be az első futómű. Ha valami miatt nem lehetséges a hátsó futómű visszaállítása, a tényleges menethelyzethez viszonyítva kell az első futóművet beállítani.
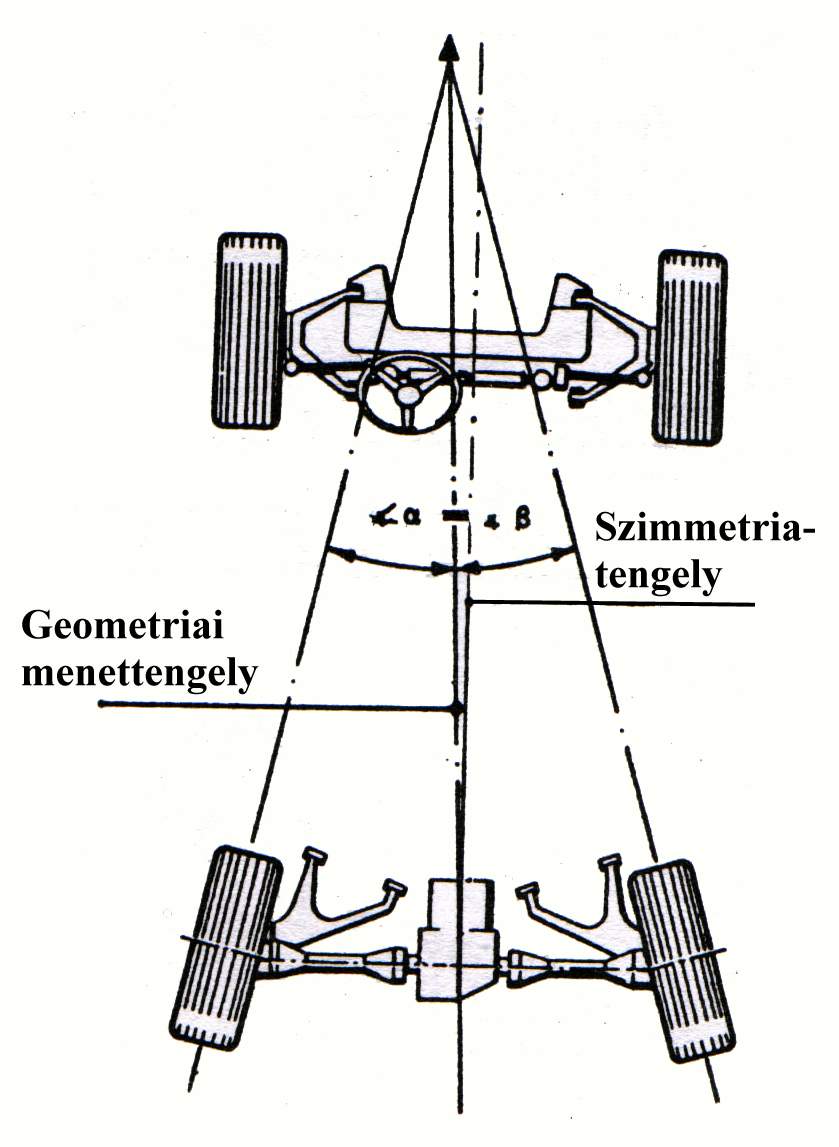
2.3. Elaszto-kinematika
A kerék beállítási adatai menet közben az ébredő erők hatására folyamatosan változnak. Ennek okai:
A kerékfelfüggesztésnél a lengőkarokkal meghatározott kinematikai jellemzők ki-, illetve berugózáskor folyamatosan változnak. Ennek mértéke a kerékösszetartás és a kerékdőlés nagyságától függ.
Menet közben a kerekeken különböző folyamatosan változó nagyságú erők lépnek fel, mint például vonóerő, fékező erő, oldalvezető erő, dinamikus kerékterhelés, gördülési ellenállás. Ezek hatására a kerekeket vezető elemek illesztési hézagainál elmozdulások jönnek létre és a szilentblokkok (gumiperselyek) deformálódnak. Ezek miatt a kinematikai beállítási adatok folyamatosan változnak.
A két előbb összefoglalt hatás váltja ki az elaszto-kinematikának nevezett jelenséget. A gyártók arra törekszenek, hogy a futómű beállítási adatai a menet közben fellépő erők hatására úgy változzanak, hogy a gépkocsi dinamikai viselkedése minél kedvezőbben alakuljon. A futóműnél menet közben bekövetkező kinematikai, eleszto-kinematikai változások csak olyanok lehetnek, hogy a gépkocsi alulkormányzottá váljon. Az ellentétes hatás veszélyt rejt magában.
Néhány példa az elaszto-kinamatikára:
A korszerű hátsó futóműveknél eleaszto-kinematikai lengőkarokkal igyekeznek kompenzálni a gyorsításkor, illetve fékezéskor bekövetkező terhelésváltozások hatását.
A kerekenként különböző nagyságú hosszanti és függőleges irányú erők megbillentik a kocsiszekrényhez rugalmasan felerősített futómű testet, illetve lengőkart. Kanyarban a külső íven futó keréknél így nagyobb lesz az összetartás és a hátsó keréknél stabilizáló elkormányzás jön létre.
2.4. A futóművek műszeres ellenőrzése
A futómű geometriai beállításának ellenőrzése és a szükségessé váló beállítások speciális műszerekkel végezhetők el.
2.4.1. Futómű ellenőrző műszerek csoportosítása
2.4.1.1. Működésük szerint
Statikus mérésre alkalmasak műszerek. Álló gépkocsi kerekeire felszerelt (többnyire optikai) eszközökkel hajtható végre a mérés. Ebbe a csoportba tartozik a legtöbb szervizben használatos berendezés változatok.
 2.10. ábra - Négy mérőfejes optikai, számítógépes futómű vizsgáló Beissbarth microline 5000
2.10. ábra - Négy mérőfejes optikai, számítógépes futómű vizsgáló Beissbarth microline 5000
 2.11. ábra - Mechanikus két mérő készülékkel ellátott automatikus működésű futómű vizsgáló
2.11. ábra - Mechanikus két mérő készülékkel ellátott automatikus működésű futómű vizsgáló
A dinamikus gyorsellenőrző berendezések. A gépkocsi áthajt a mérőlapon, melynek lapja oldal irányban az első kerék geometriai beállítottságától függően elmozdul. Ennek nagysága alapján jelzi ki az összetartás, illetve a kerékdőlés értékét.
2.4.1.2. Mérési elv szerint
Libellás eszközök, melyeknél mérőcsavarok skálájáról olvashatók le az értékek. Régebben gyártott olcsóbb kivitelű mérőeszközök.
Optikai berendezések a régebbi vetítős változatoknál a megfelelő távolságban felállított táblákról voltak leolvashatók a mért értékek. A fényforrás lehet halogén izzó, vagy lézer sugár is. Továbbfejlesztett konstrukcióknál a fénysugarat belső ingás felfüggesztésű tükör vetíti a skálával ellátott opálüveg ernyőre, ahol a mért adatok leolvashatók. Így a korábbi eszközöknél használatos vetítőtáblák szükségtelenné válnak.
Gumi zsinóros változat, A rugalmas zsinórt a mérőfejek között feszítenek ki. Ezek mozgatják a mérőfejekbe szerelt belső tükröket a használat közben.
Kombinált eszközök ezeknél az előbb felsorolt különböző mérési elveket együttesen alkalmazzák.
Új optikai mérési elv, melynél a ke rekekre csak táblákat szerelnek
Először 1998-ban alkalmazták ezt a mérési elvet. A drága optikai mérőfejek helyett gépkocsi kerekeire, csak a könnyű és kevésbé érzékeny táblákat szerelnek fel a szokásos felfogató készülékkel. A táblákon a gyártótól függően kör, négyzetes, háromszög alakú, vagy hatszögletes rajzolatot helyeznek el. A mérőhely elé telepített berendezés tartalmazza a megvilágító egységet, és a kamerát, valamint a kiértékelő számítógépet. A szabályos alakzatokon a kerék helyzetétől függő torzulásokat észlel a kamera. A számítógépes program a torzulásokból egy matematikai modellel határozza meg a futómű beállítási paramétereit.
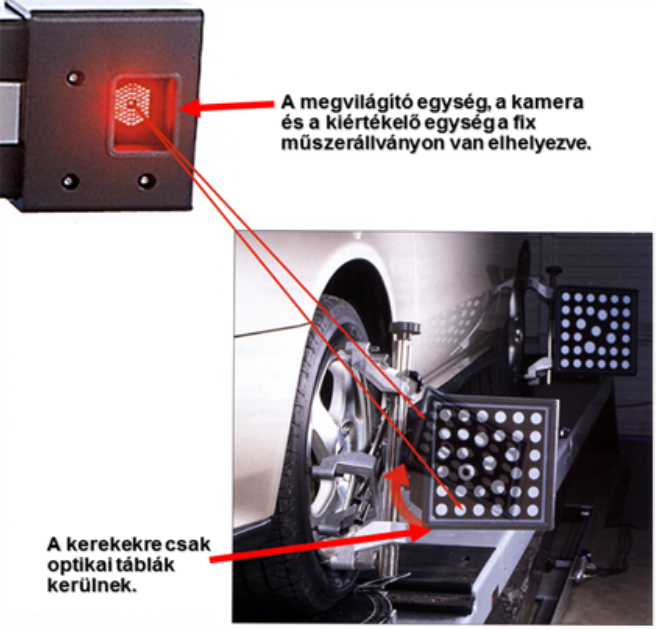
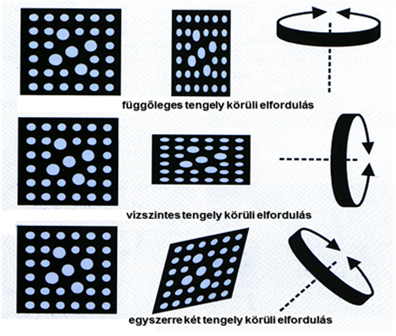
2.4.1.3. A mérőfejek száma szerint
Két mérőfejes műszerek
Egyszerre két kerékre lehet felszerelni mérőfejet felfogató készülék segítségével. Az első kerekek geometriai adatainak ellenőrzése után ezek átszerelhetők a hátsó kerekekre is.
Négy mérőfejes műszerek
Mind a négy kerékre egyidejűleg felszerelhető mérőfej. A két mérőfejes műszereket váltották fel ezek az igényesebb típusok, melyek előnye az összetettebb vizsgálatok egyszerűbb elvégzésének lehetősége. Megállapítható például a hátsó futómű elsőhöz képesti oldal irányú eltolódása és a ferde állása, mely a gépkocsi egyenes menetében a kocsiszekrény helyzetét határozza meg. A négy mérőfej lehetővé teszi, hogy egy meghatározott műveletsort követően az összes futómű paraméter meghatározható legyen.
2.4.1.4. A berendezés szolgáltatása szerint
Hagyományos futómű vizsgálók, melyeknél bizonyos műveletek elvégzése után skálákról olvashatók le a mért értékek. A beállítási adatokat nem tartalmaznak, ezeket különböző forrásokból kell beszerezni.
Számítógépes futómű ellenőrző eszközök
A legújabb számítógépes változatok sok tekintetben megkönnyítik, hatékonyabbá teszik a munkavégzést. A mérőfejbe szerelt elektronikus érzékelők lehetővé teszik, hogy a mérés eredményeit színes képernyőn jelenítsék meg, ahol láthatók a gyári alapadatok is. A képernyőn látható a gyárilag megadott tűrésmező is, mellyel a mért érték összevethető. Vannak olyan típusok melyeknél már az összehasonlítást is a számítógép végzi. Nagyobb eltérés esetén a mérési eredmény piros színűre vált. Legnagyobb előnyük, hogy a mérő személy szubjektivitása kiküszöbölhetővé válik. A számítógépes változat lehetővé teszi például az aknában egy kiegészítő monitor elhelyezését, így beállítás közben a gépkocsi alatt is láthatók a mért értékek. További előny, hogy ismeretlen típusok esetén, ha szükséges ábrák segítségével szemléltetik a beállítás lehetőségeit. Több futómű paraméter mérésére alkalmasak, négy mérőfejjel látták el őket és adatbankkal is rendelkeznek. Ezeknél a forgózsámolyokat is elektronikus szögmérővel látják el, melyek megkönnyítik a pontos elkormányzási szögérték beállítását. Tartozékként megtalálhatók a mérőfejek gyors és egyszerű felfogatását lehetővé tevő típus specifikus kiegészítők is, illetve könnyűfém keréktárcsákhoz alkalmas felfogató eszközök. Megvalósítható például a számítógép és a mérőfejek közötti vezetékmentes adatátvitel. A nyomtató lehetővé teszi a dokumentálást és a hálózati csatlakozón keresztül a mérési adatok elektronikusan tárolhatók, vagy a végzett munka a számla mellékleteként is megjeleníthető.
3. fejezet - Rugózás és stabilizátorok
- 3.1. Futómű a biztonság záloga
- 3.2. A személygépkocsik rugózása
- 3.3. A gépjárműveknél alkalmazott rugó fajták
- 3.4. Stabilizátor kialakítása és feladata
- 3.5. Személygépkocsik légrugózással
- 3.6. Aktív kerékfelfüggesztés
- 3.7. Haszonjárművek elektronikus légrugózása
- 3.7.1. A fejlesztések főbb céljai
- 3.7.2. A haszonjárműveknél alkalmazott légrugók
- 3.7.3. Légrugó szintállító szelepek
- 3.7.4. Légrugó és laprugó kombinációja
- 3.7.5. Elektronika a légrugózásnál
3.1. Futómű a biztonság záloga
Az utóbbi évek baleseti statisztikai adatait elemezve megállapítható, hogy Németországban a halálos kimenetelű balesetek harmad része azért következik be, mert a gépkocsi elhagyta az útpályát. Ennek okait tovább kutatva az derült ki, hogy ezekben az esetekben a következő tényezők játszanak fontos szerepet:
a gépkocsivezető figyelmetlensége,
a körülményekhez képest túl nagy a sebesség,
a rossz minőségű útburkolat.
Annak valószínűsége, hogy a gépkocsi az úton marad, annál nagyobb, minél biztonságosabban működik a futómű. Ebben a konstrukciós kialakításon kívül fontos szerepet játszik az üzemeltetés során végzett karbantartás is.
A rugózás és a következő fejezetben tárgyalandó lengéscsillapítás a futómű fontos részét képezik, ezért jelentős hatása van a közlekedésbiztonságra.
A futóműnek azért nagy a jelentősége, mert ez létesít kapcsolatot a gépkocsi és az útfelület között, tehát elsődlegesen felelős az útpályán maradásért.
A tömegből adódó tehetetlenségi erőkön, a vonó- és a fékező erőn kívül még aerodinamikai erők is létrejönnek a kocsiszekrényen. Ezen külső erők és nyomatékainak hatását a gumiabroncsok felfekvő felületei és az útfelület között ébredő reakcióerők ellensúlyozzák.
3.1.1. A futóművek feladatai sokrétűek
Rugózott módon hordozza a gépkocsi és rakományának tömegét.
A kerekeknek csapágyazott felfüggesztést biztosít.
Lehetővé teszi a gépkocsi biztonságos és komfortos haladását.
Menet közben az út egyenetlensége által gerjesztett lengéseket és rezgéseket csillapítja.
A mozgáson kívül, ha szükséges lehetővé teszi a biztonságos megállást.
Lehetővé teszi a vonóerő és a fékező erő biztonságos átvitelét.
Haladás közben a jól megszerkesztett futómű hozzájárul a nyomtartó haladáshoz.
Kiküszöböli a zavaró körülmények hatásait a gépkocsira, mint például az oldalszél.
Röviden összefoglalva a futómű teszi lehetővé:
a biztonságos közlekedést és
a komfortos utazást,
Az utazási komfort
Ezen a kifejezésen azt értjük, hogy menet közben az útegyenetlenségeket a vezető és az utasok egyáltalán nem érezik, mint lengéseket, vagy rezgéseket. Ennek érdekében a kerekek függőleges irányban előre definiált módon ki tudnak térni. Elinduláskor, illetve fékezéskor nem következik be a karosszériánál bólintó mozgás, a kanyarban pedig a kocsiszekrény megdőlése.
A menetbiztonság
Ez alatt azt értjük, hogy menet közben a kerekeknek előre meghatározott módon olyan helyzetben kell lenniük, hogy képesek legyenek az ébredő erőket (pl. oldalvezető erőt, fékező, vagy vonóerőt) biztonságosan átvinni az útfelületre. A kerékfelfüggesztés rugózatlan tömegei lehetőleg kicsik legyenek.
3.1.2. Egy adott futómű tulajdonságai
A vezető szubjektív véleményén túl az alábbi menetviselkedések alapján minősíthető a futómű:
egyenes meneti viselkedés,
állandó sebességű haladás kör pályán,
viselkedés átmeneti körülmények között,
terhelés változás ívmenetben,
fékezés kanyarban,
oldalszél érzékenység,
alul-, illetve túlkormányzott viselkedés.
Ebben a fejezetben az elektronikus működésű rugózási és lengéscsillapítási rendszerekről adunk áttekintést. Sok esetben alkalmaznak elektronikus működésű változtatható karakterisztikájú lengéscsillapítókat. Ezek együttesen pedig már a szemiaktív és az aktív kerékfelfüggesztés részei.
3.2. A személygépkocsik rugózása
A gépkocsi kerekei és a kocsiszekrény közé a minél komfortosabb utazás érdekében rugókat szerelnek. A fúvott gumiabroncsok rugalmassága is ezt a célt szolgálja, de önmagában nem tudják a komfort igényeket kielégíteni. Az utasok kényelmét az ülések rugózása tovább fokozza. Ezeket a rugalmas elemeket egymással össze kell hangolni.
A rugózás révén a gépkocsi több tömegű lengő rendszerré válik. Saját lengésszámát a saját tömeg, a rugó- és a lengéscsillapító karakterisztikák határozzák meg.
3.2.1. A gépkocsi, mint két tömegű lengőrendszer
A matematikai modellalkotásnál a gépkocsi tömegét két részre osztjuk. A kerekek, a kerékfékszerkezet, a kerékfelfüggesztés és a hajtó féltengely tömegének egy része alkotják a rugózatlan tömeget. A rugózott tömeg pedig a karosszéria és az abba szerelt egységek.
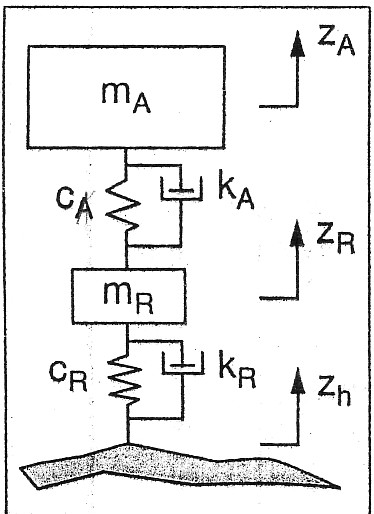
A kéttömegű lengőrendszer mozgási egyenletei
A fenti kettébontásnak megfelelően írhatjuk fel az egyes részekre a mozgásegyenleteket.

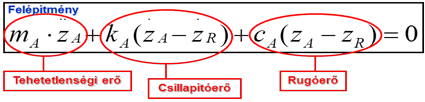
A mozgásegyenletek összevonásából adódik a következő összefüggés:
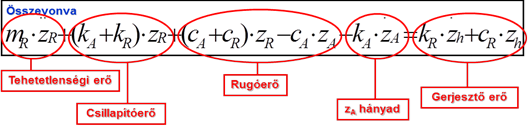
Az egyenletrendszer megoldása és grafikus ábrázolása után vizsgálhatók, elemezhetők a különféle futómű konstrukciók viselkedése.
Az egyenlet megoldásaként adódik a felépítmény gyorsulás és a dinamikus kerékterhelés nagyítási tényezője. A következő ábra az egyszerű lengő rendszerre vonatkozó összehasonlításokat teszi meg. A kéttömegű lengő rendszerként modellezett „D” változatnál két rezonancia csúcs mutatkozik. Az egyik a felépítmény saját frekvenciájánál, a másik pedig a futómű saját frekvenciájánál. Jelentős különbség látszik az „A” és a „B” modellnél, melyeknél nincs rugózás a felépítménynél sem és a keréknél sem, illetve az utóbbinál ahol a keréknél nincs rugózás. A felépítmény gyorsulás és a dinamikus kerékterhelés változás végtelen nagy. A frekvencia növekedésével véges értékű marad. Ez a probléma a rugózott fúvott abroncsokkal megszűnik. A „C” modellnél már a menetkomfort és a menetbiztonság is kedvezőbbé válik. Csak a „D” modellnél lesz kisebb a nagyítási tényező a rezonancia frekvenciáknál. Ez a jármű 240 km/h sebességgel is közlekedhet anélkül, hogy kerékpattogás lépne fel. biztonsági okból a „C” jelű modellnek megfelelő jármű csak 8 km/h sebességgel közlekedhet.
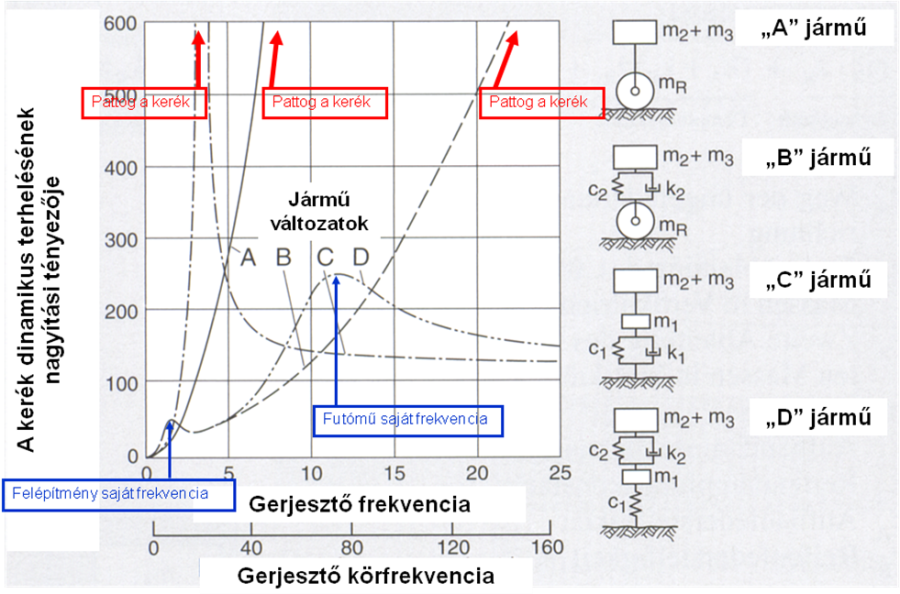
3.2.2. A személygépkocsiknál menet közben kialakuló lengések
Menet közben, amikor a gépkocsi kereke az útfelület mélyedésein, vagy kiemelkedésein gördül át, a kerekek és a karosszéria is lengéseket végeznek. Ha a kerék felfelé mozdul, összenyomja a rugót, ezért a rugóerő felfelé gyorsítja a kocsiszekrényt. A kirugózáskor során csökken a rugóerő és lassul a karosszéria, majd eléri a felső holtpontot. A rugóerő csökkenésekor a nehézségi erő a karosszériát függőlegesen felfelé gyorsítja, és áthalad a nyugalmi helyzeten. Ennek során a rugó összenyomódik, a létrejövő rugóerő a karosszéria mozgását az alsó holtpontig lefékezi. A felsőtől az alsó holtpontig tartó utat a lengés amplitúdójának nevezik. Ez a mozgásfolyamat addig ismétlődik, ameddig a rugó és a kerékfelfüggesztés elemeinek belső súrlódása és a beépített lengéscsillapító a mozgási energiát hővé alakítja. A csillapító fontos szerepet játszik a lengés amplitúdójának mérséklésében.
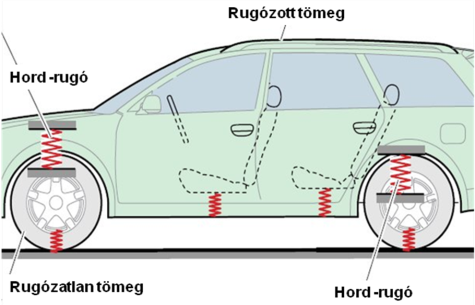
A gumiabroncsok, a futómű és a kocsiszekrény közötti és az ülésekbe beépített rugók.
3.2.3. Rugózott és rugózatlan tömegek
A gépjármű rugózott tömege a kocsiszekrény, az utasok és szállítmány együttes tömege. Ennek a résznek az önfrekvenciája személygépkocsiknál 10 – 16 Hz közötti tartományban van. A rugózatlan tömeg a kerék, a kerékagy, a fékszerkezet és a kerékfelfüggesztés elemeinek egyes részéből adódik össze. Ennek a résznek az önfrekvenciája 1 – 1,5 Hz közötti tartományban van. Ezeket a frekvenciákat elsődlegesen a tömegek és a rugóállandók határozzák meg. A nagyobb tömeg és a lágyabb rugó kisebb frekvenciát eredményez. Az előzőekben említett részeket a rugók kapcsolják egymáshoz. Emiatt azok kölcsönösen hatnak egymásra. A két tömeg egymástól függetlenül különböző frekvencia tartományokban leng. A két tömeg közé szerelt lengéscsillapító csökkenti az amplitúdót és a lengés lecsengése rövidebb lesz.
Fontos, hogy a rugózatlan tömeg minél kisebb legyen, mivel így csökken a tehetetlenségi erő és a periodikusan ható erők miatt a kerék nem fog elválni az útfelületről. Ha ez mégis megtörténik, azért veszélyes, mert ilyenkor a gumiabroncs nem tud erőt átadni az útfelületre.
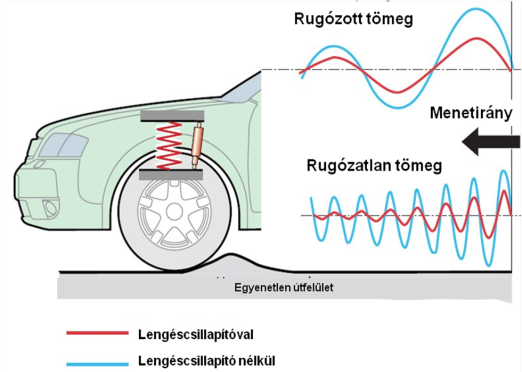
A kényelem szempontjából a lágy rugózás kedvező, de ennél a kocsiszekrény terhelésének kis változása (pl. csomagok elhelyezése) nagy rugóelmozdulást okoz. Lineáris karakterisztikájú rugónál a deformáció egyenesen arányos a terhelés tömegével. Progresszív rugót alkalmazva lassabban nő az alakváltozás a terheléstől függően. Állandó felépítmény magasságot (pl. rakodásnál) csak szintszabályozással lehet megvalósítani. Ehhez például pneumatika, vagy hidraulika alkalmazása válik szükségessé.
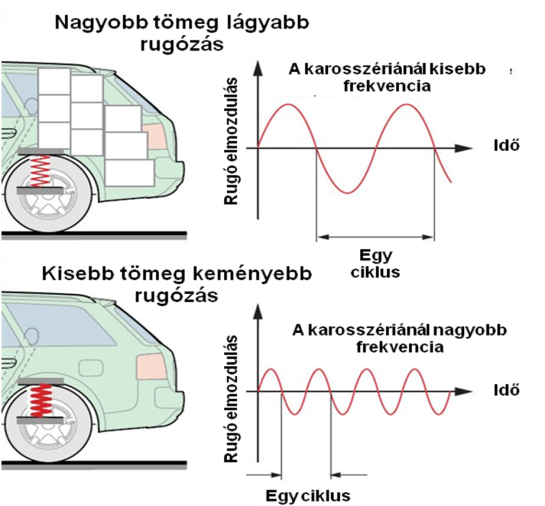
A rugózás miatt kialakuló kellemetlen hatások közé sorolandó, hogy vízszintes irányú erő következtében a jármű megbillen, megdől. Ez történik kanyarodáskor, amikor a centrifugális erő hatására a karosszéria kifelé billen, valamint amikor a jármű gyorsításkor hátul, illetve fékezéskor elől lesüllyed (bólintó mozgás). A kanyarban bekövetkező billenést stabilizátorok beszerelésével és a súlypont alacsonyabbra helyezésével, illetve a nyomtáv növelésével lehet csökkenteni.
A karosszéria önlengésszáma a kerekeket megtámasztó rugók jellemzőiről tájékoztat. A lengésszám tengelyenként határozható meg, a kocsi első és hátsó részének lenyomásával és elengedésével, tehát lengetésével. Egy teljes lengés be- és kirugózásból áll, a percenkénti lengések száma adja meg a karosszéria lengésszámát. A lengéscsillapítók a lengésszámot nem befolyásolják, csak be- és kirugózás számára jelentenek ellenállást, aminek következtében az amplitúdó csökken. Nagy szerepe van viszont a tömegnek. Minél nehezebb a jármű, illetve a rakomány, annál kisebb a lengésszám.
A percenként hatvannál kisebb lengésszám a nagyon lágy rugózás jellemzője, egyes embereknél rosszullétet okoz. Az erős csillapítás megakadályozza, hogy a rugó több teljes lengést végezhessen, és így a rosszullét oka megszűnik. Kemény, percenként 90 körüli lengésszámú rugózás rázza a gerincet, a hátsó futómű nagy terhelhetősége miatt mégis gyakran szükséges. Harmonikusan hangolt csillapítással azonban még ebben az esetben is megvalósítható a kényelmes rugózás. A saját tömeg és a maximális terhelés kedvezőtlen aránya miatt kisebb kocsikban keményebb rugózást kell alkalmazni, aminek mérsékelt utazási komfort a következménye (percenként száznál nagyobb lengésszám). Leginkább a nagy és nehéz járművek esetében fordulnak elő a kis lengésszámok.
3.3. A gépjárműveknél alkalmazott rugó fajták
Laprugók
Hagyományos laprugó köteg
Parabola laprugó
Kompozit műanyagból készült laprugó
Tekercsrugó
Torziós rugó
Gumirugó
Légrugó
Légrugó, és tekercsrugó kombinációja (személygépkocsiknál)
Légrugó, és laprugó kombinációja (haszonjárműveknél)
Ezek közül a légrugó alkalmas a leginkább a karakterisztika menet közbeni egyszerű megváltoztatására például segédkamra hozzá és lekapcsolásával. A légrugózás másik előnye, hogy viszonylag egyszerűen megvalósítható a szintszabályozás a nyomás változtatásával. Ezért nem csak a haszonjárműveknél, hanem újabban a felsőbb osztályba tartozó személygépkocsiknál is egyre gyakrabban alkalmazzák annak ellenére, hogy ezeknél a járműveknél még a sűrített levegő ellátást és tárolást is meg kell oldani.
Meg kell jegyezni továbbá a futómű konstrukció szempontjából azt a fontos tényt, hogy a tekercsrugók és a légrugók csupán a szimmetriatengelyükkel megegyező irányú erők átvitelére alkalmasak ezért az ettől eltérő irányú erők és az általuk keltett nyomatékok miatt lengőkarok beépítése válik szükségessé. Emiatt ezeknél a futóműveknél egy kicsit bonyolultabbá válik a kerékfelfüggesztés.
3.4. Stabilizátor kialakítása és feladata
Kanyarodáskor a gépkocsi tömegközéppontjában ható centrifugális erő nyomatéka megbillenti a kocsiszekrényt. A kanyarbelső kerekek ilyenkor kirugóznak, a kanyarkülsők pedig berugóznak. Az oldal irányú dőlés csökkentésére építik be a stabilizátort. Ezt a feladatot többnyire torziósrugó látja el, mely a karosszéria dőlési szög merevséget növeli. Ennek mellékhatása, hogy a rugó karakterisztikát is keményebbé teszi abban az esetben, ha például a két első kerék nem egyszerre rugózik ki-, vagy be.
A stabilizátor a kerékterhelések változtatása révén befolyásolja a gépkocsi önkormányzási tulajdonságát. Ha például elöl merevebb a stabilizátor az a gépkocsi alulkormányzási hajlamát növelni fogja. Ha pedig hátulra kerül merevebb a stabilizátor, inkább túlkormányzottá fog válni a gépkocsi. Ha kanyarodáskor a belső kerekek terhelése csökken, ezzel az oldalvezető erő is csökken, ezért kis tapadási tényező esetén a gépkocsi kisodródhat. A rugó, a lengéscsillapító, és a stabilizátor megfelelő méretezésével és összehangolásával lehet gondoskodni arról, hogy a kerekek megfelelő oldalerő átvitelére legyenek képesek.
A stabilizátor beépítésének másik fontos szempontja, a menetkomfort növelése. Ezzel ugyanis csökkenthető a kocsiszekrény oldal irányú billenése. Nem csak a független kerék felfüggesztésű, hanem a merevhidas futóműveknél is alkalmaznak stabilizátorokat. Általában négy helyen rugalmas gumielemekkel rögzítik a torziós rugót az alsó lengőkarhoz. Lehet azonban két helyen a futómű testhez, két helyen pedig a lengőkarhoz rögzíteni. Alkalmaznak olyan beépítési módot is, ahol kiegészítő rudazattal a lengéscsillapítóhoz csatlakoztatják a stabilizátort. Ilyen esetben a lengőkarok karcsúbbak és könnyebbek lehetnek, mert kisebb lesz a terhelésük. Ez egyúttal lehetőséget kínál a rugózatlan tömeg részarányának csökkentésére is.
A stabilizátor alkalmazásának hátrányos következményei:
a stabilizátor tömege növeli a futómű tömegét,
a beszerelésének van egy bizonyos helyigénye,
ha az első kerekek nem egymással párhuzamosan mozognak, növeli a rugómerevséget,
megváltoztatja a kerekek terhelését.
A stabilizátor alkalmazásának előnyei:
a stabilizátorral a kívánalmaknak megfelelően befolyásolható a gépkocsi önkormányzási tulajdonsága.
Az alábbi ábrán a hagyományos passzív stabilizátorra látunk példákat. Korszerű futóműveknél elektronika által működtetett, úgynevezett aktív stabilizátorokat építenek be, melyek a villanymotoros, vagy hidraulikus beavatkozó egység segítségével akár aktív nyomaték kifejtésére is képesek és a legkülönbözőbb menetviszonyok között is meg tudják akadályozni a kocsiszekrény billenését, továbbá kedvező módon befolyásolják a gépkocsi önkormányzási tulajdonságát.

3.4.1. Aktív és félig aktív stabilizátorok
A személygépkocsiknál eddig alkalmazott legtöbb aktív stabilizátor hidraulikával működik. Ugyanis az elektromos beavatkozó egységek nagy teljesítmény igényük miatt nagyon megterhelnék a gépkocsi jelenleg még általánosan elterjedt 12 V-os elektromos hálózatát, mert nagy az áramfelvételük.
A különböző autógyárak által jelenleg alkalmazott aktív-, és fél aktív stabilizátorok:
BMW Dynamic Drive
Porsche Cayenne / VW Touareg ORS (Off Road Stabilisator)
Land Rover ACE (Active Cornering Enchancement)
Jeep Grand Cherokee
Nissan Patrol
Mercedes ABC (Active Body Control)
Citroën AFS (Aktive Fahrwerk Stabilisierung)
Bose Lineármotoros kerékfelfüggesztés
Michelin Active Wheel
Audi DRC (Dynamic Ride Control)
Teneco-Kinetic XX, H2, RFS
3.4.2. Porsche Cayenne és VW Touareg –nél alkalmazott aktív stabilizátor
Az utóbbi évtizedekben a SUV (Sport Utillity Vehicle) (sport célú gépkocsik) és a terepjárók egyre kedveltebbé váltak és egyre többet adnak el belőlük. Ugyanolyan jól kell teljesítsenek a terepen, is legalább úgy, mint közúton. A terepjáró képesség fokozása érdekében a nagyobb has-magasság miatt feljebb került az autó tömegközéppontja és az ülések is. Terepjáró képességük jó, az összkerékhajtás és a szokásosnál nagyobb első és hátsó terepszögek miatt. Nem engedhető meg azonban, hogy menet közben billegjenek, imbolyogjanak. Ezért ez a járműkategória nagy figyelmet igényel a futómű fejlesztőktől. A szilárd burkolatú úton „feszes rugózás” szükséges egy megfelelően erős csillapítással együtt. Ezzel ellentétben terepen jó, ha a kerekek lágy rugózásúak, mert így egyik kerék sem veszíti el kapcsolatát a talajjal.
A Tyssenkrupp Automotive Mechatronics új fejlesztése hatékonyan köti össze a terepen és közúton történő autózást. Az új stabilizátort a VW és a Porsche együttműködésében létrehozott luxusterepjáróba építették be először. (VW Touareg és Porsche Cayenne modellek).
A fejlesztés abból a szempontból is sikeres, hogy lehetővé teszi a nagy sebességű autózást (Porsche Cayenne Turbo 266 km/h) úgy, hogy megfelelő marad az oldalstabilitás. Ez főleg kanyarmenetben lényeges, mert a centrifugális erő jelentős oldal irányú dőlést okozhat. Ekkor a stabilizátor két felét a beavatkozó egység segítségével összekapcsolja az elektronika. Terepen viszont szétkapcsolja, így megszűnik a hagyományos stabilizátor hatása.

Ezzel az Off-Road Stabilisator System-el (ORS System) rendelhető a Porsche Cayenne. Ezt kiegészíti mindkét futóműhöz tartozó önzáró differenciálmű.
Az alkalmazott hidraulikarendszer előnye, hogy a villanymotorral hajtott fogaskerekes olajszivattyú csak akkor kapcsol be, amikor a nyomás az előírt érték alá csökken. Egyébként a nyomástárolók biztosítják az energia ellátást. A szivattyúházra szerelik a szelep egységet. A teljes hidraulika rendszert a gépkocsi hátuljába szerelik be. Az aktív stabilizátor nyitónyomása 110 bar. A szivattyú addig működik, amíg a rendszer el nem éri a 145 bar-t és a nyomástároló is feltöltődik. Ha a stabilizátor összezárt állapotban van, és a rendszernyomás 70 bar alatti, a hátsótengely kapcsolására sokat kell várni.
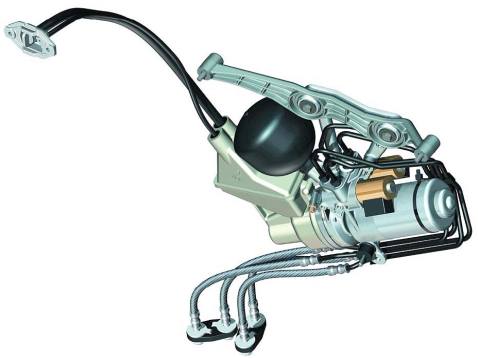
A rendszer automatikusan összekapcsolja mindkét futóműnél a stabilizátor feleket ha:
a sebesség nagyobb 50 km/h –nál,
a keresztirányú gyorsulás nagyobb 0,9 g –nél és a sebesség nagyobb 35 km/h-nál.
Az aktív stabilizátor előnye:
ez a konstrukció egyaránt jól kielégíti az elvárásokat terepen és közúton nagy sebességnél,
egyszerű, jól használható tekercs- és légrugós futóműveknél egyaránt,
szennyeződésekre nem érzékeny,
nagy kerékmozgásokat tesz lehetővé.
Hátránya:
a passzív stabilizátor hatásán kívül nem alkalmas más karosszériamozgások csökkentésére,
kedvezőtlen ár/érték arány,
villanymotoros hajtású szivattyú egységet kell felszerelni,
3.4.3. BMW „Dynamic Drive” aktív stabilizátor
Ennek a beavatkozó egysége egy olyan hidraulikus állítómű, amely közvetlenül csavaró nyomaték kifejtésére alkalmas. A stabilizátor egyik fele, a belső, a házhoz képest elforduló részhez kapcsolódik, a másik fele pedig a házhoz. Így a kocsiszekrény billenése előtt már az ellen ható aktív nyomaték hozható létre. Elfordulási szögtartománya ±38˚.
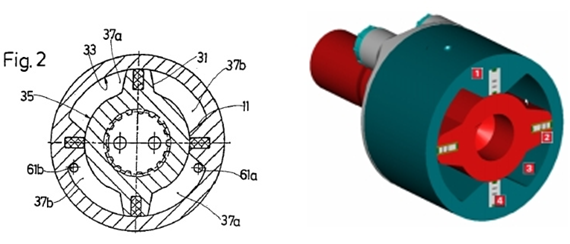
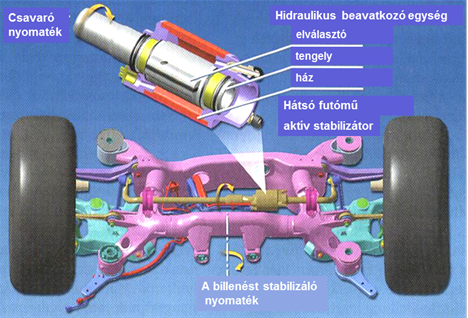
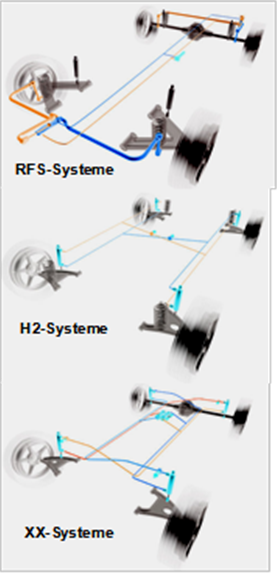
3.4.4. Teneco Kinetic
A Teneco Vállalat három hasonló aktív stabilizátor rendszert fejlesztett ki, melyeket a H2, XX, RFS nevekkel különböztetik meg egymástól. Ezek a konstrukciók úgy képzelhetők el, mintha a stabilizátor rúdját kettévágták volna. A különböző átmérőjű két rész egymásba illeszkedik és egymáshoz képest el tud forogni. Az egyik részhez a hidraulikus munkahenger, a másikhoz a benne lévő dugattyú és annak rúdja csatlakozik.
A stabilizátor két végének egymáshoz képesti elfordulásakor a dugattyú a hengerben elmozdul. A henger azonban olajjal fel van töltve, így amikor a szelepek zárva vannak a folyadék zárt térbe kerül és ez megakadályozza a stabilizátor felek egymáshoz képesti elfordulását. A teljes hidraulikus egység merev testként viselkedik. Ilyenkor olyanná válik, mint egy hagyományos stabilizátor. Kanyarodáskor az egyik végén keletkező csavaró nyomaték megjelenik a másik végén is.
Nyitott szelepeknél viszont a folyadék szabadon áramolhat, ezért a stabilizátor mindkét vége elmozdulhat. Nem alakul ki csavaró nyomaték a torziós rúdban ezt az állapotot célszerű használni terepen.
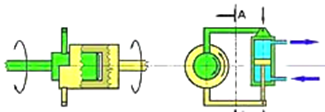
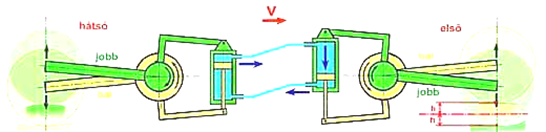
Egy elektronikus szabályzó rendszer gondoskodik arról, hogy a munkahenger olajterei mindig a pillanatnyi helyzetnek megfelelően legyenek nyitva vagy zárva. TENECO Automotive két stabilizátor hengereinek tereit összekötötte. Így a dugattyú alatti és feletti tér között az olaj szabadon áramolhat. Ez az állapot terepen haladáskor következik be, amikor például két-két kerék átlósan emelkedik meg, illetve süllyed le.
Ívmenetben mindkét stabilizátorban ugyanolyan irányú csavaró nyomaték alakul ki, mindkét munkahengerben azonos irányban mozdulna el a dugattyú, de a folyadék nem tud átáramlani egyikből a másikba. A stabilizátor két fele mereven összekapcsolódik, mintha nem is két darabból lenne. A csavaró nyomaték átadódik a másik oldalra, a kocsiszekrény dőlése mérsékelt marad.
Az előző két eseten kívül a valóságban végtelen sokféle kombináció fordulhat elő, mint például kanyarodás terepen, vagy nem egyforma kerék elmozdulások. Ezért tehát a szerkezet nem mindig működik ideálisan, de mindig jobban, mint a hagyományos stabilizátor.
3.5. Személygépkocsik légrugózással
A személygépkocsik futóműveire elsősorban az acélrugók beépítése jellemző, de ennek ellenére a légrugózás kínálta kedvező lehetőségeket a személygépkocsi gyártók is évtizedek óta igyekeznek kihasználni. Az első légrugó alkalmazások a személygépkocsiknál a 60-as évek elején a Mercedesnél kezdődtek. Leggyakrabban az acél és a légrugók kombinációival találkozunk. Az alkalmazott légrugók általában gördülőmembránosak és a helytakarékosság miatt a lengéscsillapítóval koncentrikusan helyezik el. A személygépkocsiknál a sűrített levegő ellátáshoz gondoskodni kell a légszárításról és a nyomásszabályozással és légtartállyal ellátott villanymotorral hajtott kompresszorról. Az egyes feladatok ellátása mechatronikai egységekkel valósul meg legyen az akár az energia ellátás, vagy a működési paraméterek beállítása, illetve a szintszabályozás. Meg kell jegyezni azonban, hogy személygépkocsiknál a légrugós futómű konstrukció jelenleg még elsősorban a felsőbb géposztály jellemzője.
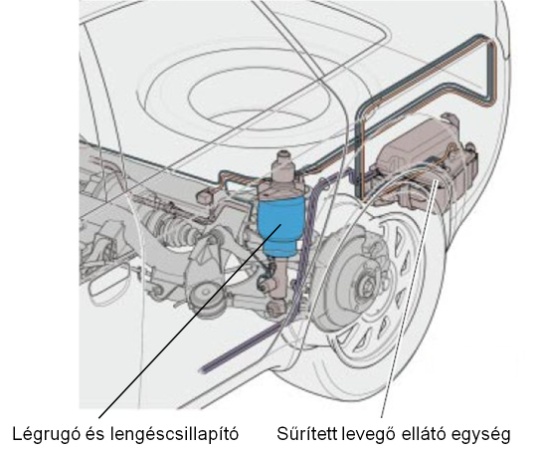
3.5.1. VW Passat légrugózással és elektronikus szintszabályzással
A VW Passat –ot már 1989 után elektronikus szintszabályzással ellátott légrugós futóművel is lehetett rendelni. Ez még akkor nem volt széria kialakítás. A terhelésétől függetlenül a felépítmény magasságát ez a rendszer automatikusan előre meghatározott helyzetben tartja. Ehhez hasonló továbbfejlesztett futóműveket építettek be évtizedekkel később a VW és az Audi több modellébe is (Audi A6, Audi Allroad) .
Az elektronikus szintszabályzásos légrugózás előnyei
Terhelt gépkocsiknál is nagyobb lehet a menetkomfort még rossz úton is,
A teljes rugóút kihasználható.
A kerékdőlés és a kerékösszetartás nem változik.
Nem „ágaskodik” a gépkocsi gyorsításkor, ezért nem romlik a cw érték.
A fényszóró nem vakítja a szemből jövő gépkocsi vezetőjét, amikor a csomagtartót megterhelték.
Nagyobb lehet a szabad has-magasság terhelt gépkocsinál is.
Nagyobb a gépkocsi terhelhetősége.
3.5.1.1. A légrugó
A gáztöltésű lengéscsillapítóra szerelik fel a segédtérrel is ellátott, gördülőmembrános légrugót. A teljes terhelést a légrugó viseli.
A rugómerevség arányos a terheléssel.
|
|

A felépítmény saját frekvenciája nem változik.
3.5.1.2. Kompresszor és elektronika
A légrugókat egy kis méretű, a csomagtérben elhelyezett, villanymotorral hajtott kompresszor látja el sűrített levegővel. A levegő szállítása 30 l/perc, 15 bar nyomás esetén. A rendszer üzemi nyomását a szabályozó egység 13 bar-ra állítja be. Egy biztonsági szeleppel is ellátják az egységet. A villanymotor áramkörét a túlterheléstől egy áramkör védi, mely 120C hőmérséklet felett kikapcsol, és csak a kompresszor lehűlése után kapcsol vissza. Automatikus regenerációval ellátott légszárító gondoskodik arról, hogy páramentes levegő kerüljön a légrugó rendszerbe és így ne képződhessen kondezvíz.
A szabályzó elektronika és a kapcsoló, mellyel a különböző üzemállapotokat lehet kiválasztani a kompresszorral egy kompakt egységet alkot. Az elektronikától függetlenül ki és be lehet kapcsolni a kompresszort, és a normálnál 10 mm -el nagyobb, illetve kisebb utazási szintet lehet beállítani.
3.5.1.3. Szintérzékelő
Az mechanikus kapcsolatot nélkülöző, induktív érzékelő vasmagja maga a futóműre szerelt lengéscsillapító, melyet egy tekercs vesz körül. Csak a baloldali lengéscsillapítót látják el ezzel a szintérzékelővel. Az elektronika folyamatosan figyeli az érzékelő induktivitását. A terhelés növekedésével a lengéscsillapító beljebb kerül a tekercs belsejébe és nő az induktivitása. Ezért az elektronika növeli a nyomást, ha kell, bekapcsolja a kompresszort. Ha csökken a terhelés, az elektronika az elektromágneses szelepet kinyitva csökkenti a nyomást.
A kompresszor meghibásodása esetén egy erre a célra beépített abroncstöltő szelepen keresztül kívülről feltölthető a rendszer. Terheletlen gépkocsinál 5 bar, terhelve 10 bar nyomás szükséges. Így feltöltve a rendszert a legközelebbi műhelyt fel lehet keresni a javítás céljából. Javítás, szerelés előtt ez a szelep nyomásmentesítésre is használható.
3.5.1.4. A tengelyterhelés függő fékerő módosító működése
A nagy tengelyterhelés változások miatt, volt szükséges a fékerő módosító ennél a régi változatnál, hiszen a futómű és a kocsiszekrény között nincs távolság változás a szintszabályozás miatt. Ez tehát nem használható a fékerő módosító működtetésére. Ezzel a konstrukciós megoldással megakadályozható terheletlen gépkocsiknál a hátsó kerekek túlfékezettségét. Terhelt gépkocsinál viszont lehetővé teszi a legnagyobb fékerő kivezérlését. A szintszabályozás miatt a fékerő módosító kapcsolópontját egy sűrített levegős munkahenger segítségével a légrugó nyomással közvetetten a tengelyterheléssel arányosan változtatja.
A korszerű gépkocsiknál a fékerő módosító feladatát az ABS egyik részprogramja az elektronikus fékerő felosztás vette át.
3.5.1.5. A személygépkocsiknál alkalmazott légrugók
Jó minőségű elasztomert és poliamid szálakból készült szövetvázat használnak fel a személygépkocsik légrugóinak gyártásához. A légrugó karakterisztikáját az effektív felület nagysága és a nyomás határozza meg. Nagy rugótérfogat lapos, progresszív karakterisztikát eredményez, ilyen a lágy rugó. Kis térfogatú légrugó meredekebb progresszív karakterisztikájú. A légrugó karakterisztikájának progresszivitását a dugattyú alakja is befolyásolja. Ezzel a progresszivitás tovább növelhető. Az alábbi ábrák a személygépkocsiknál alkalmazott kétféle légrugót szemléltetik.
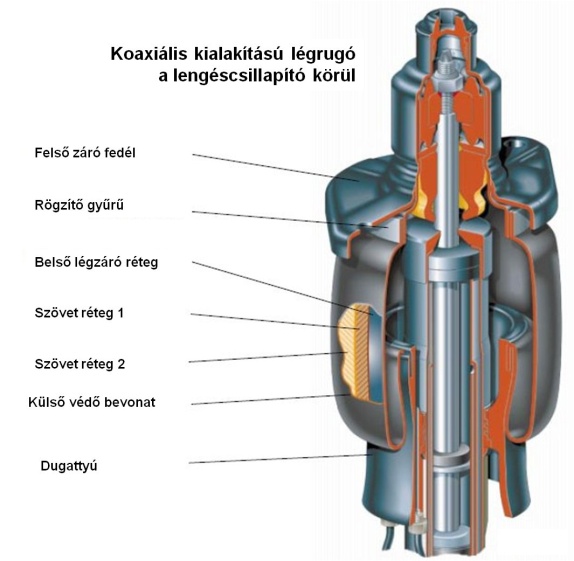
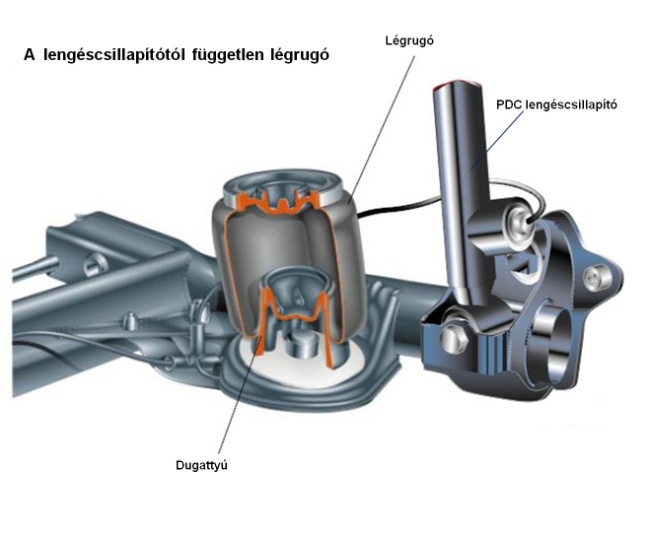
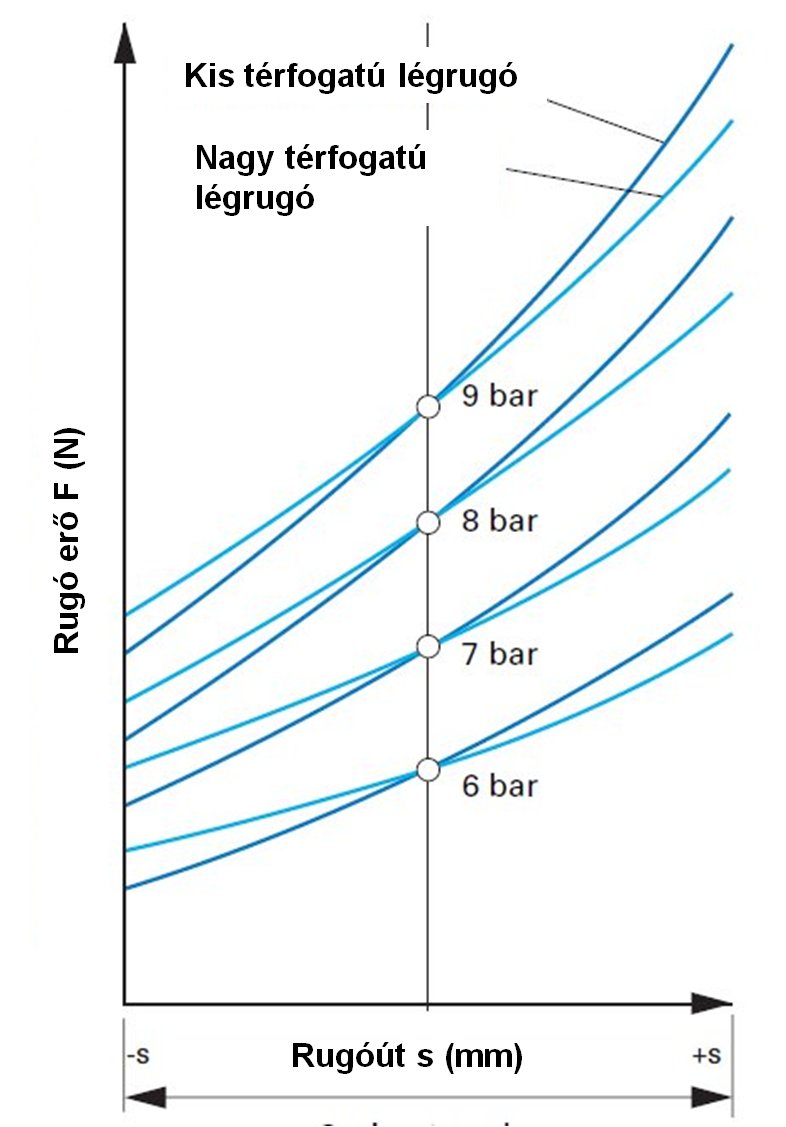
3.5.2. Audi A6 légrugós futóművel
Ezt a típust első kerék hajtású és Quattro, vagyis összkerékhajtású változatban is gyártják. A hátsó futóművet látták el légrugós kerékfelfüggesztéssel. Ennek közelében helyezik el a HALL elemes szintérzékelőt, melyet egy rudazat köt össze a futóművel és működtet. A hátsó futómű és a kocsiszekrény közötti távolság változását érzékeli. A csomagtartóba szerelik be a sűrített levegő ellátó egységet.
3.5.2.1. Sűrített levegő ellátás
Légszárítóval ellátott, egyhengeres villanymotorral hajtott olajmentes kompresszor biztosítja a légrugóknak a megfelelő nyomású sűrített levegőt. A kompresszor csapágyazása zsír kenésű és a dugattyúgyűrű teflonból készül, ezért nem igényel kenőolajat. A nyomásszabályozó egység a légszárító részét képezi. Egy bizonyos nyomás elérésekor az elektronika lekapcsolja a hajtó motor tápfeszültségét. Ugyan ez történik akkor is, amikor túlmelegszik a kompresszor.
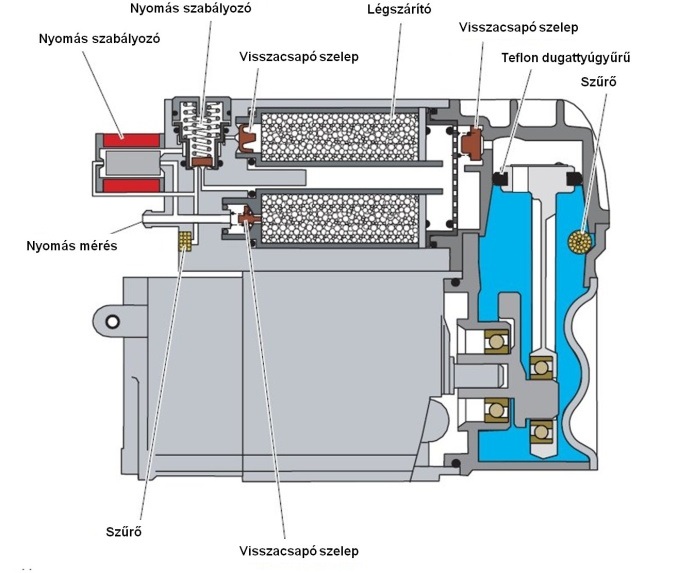
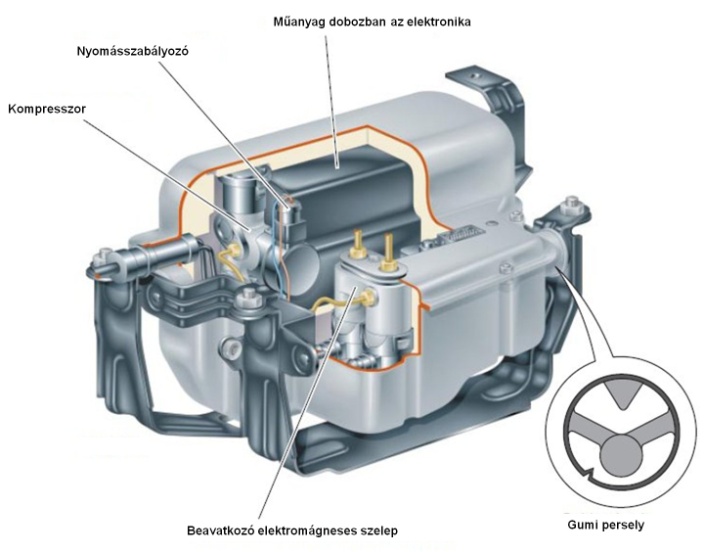
A hátsó légrugók nyomását a terhelésnek megfelelően 2 db elektromágneses szelep állítja be, melyeket a kompresszor egységre szerelnek. Ezek 2/2 –es kivitelű szelepek, ami azt jelenti, hogy két működési helyzetük van és két csőszakasz között létesítenek kapcsolatot.
3.5.2.2. HALL elemes szint érzékelő
Ezt az érzékelőt a kocsiszekrényre szerelik és a működtető karja egy csuklós rudazattal csatlakozik a hátsó futóműhöz. A kocsiszekrény és a futómű között a távolság változásakor azzal arányosan fog elfordulni a mágnesezett gyűrű, melyet az érzékelő belsejébe szerelnek. Az álló rész osztott, kivitelű lágyvasból készült testében a kialakuló erővonalak az ábra szerint megváltoznak attól függően, hogy ballra, vagy jobbra történik az elmozdulás. Ez a HALL érzékelőben feszültség változást fog eredményezni. Az érzékelő kimeneti feszültsége az ábrán látható lineáris karakterisztikájú. A jel feszültsége arányos a mozgó rész pillanatnyi szöghelyzetével, vagyis a karosszéria és a futómű közötti távolsággal.
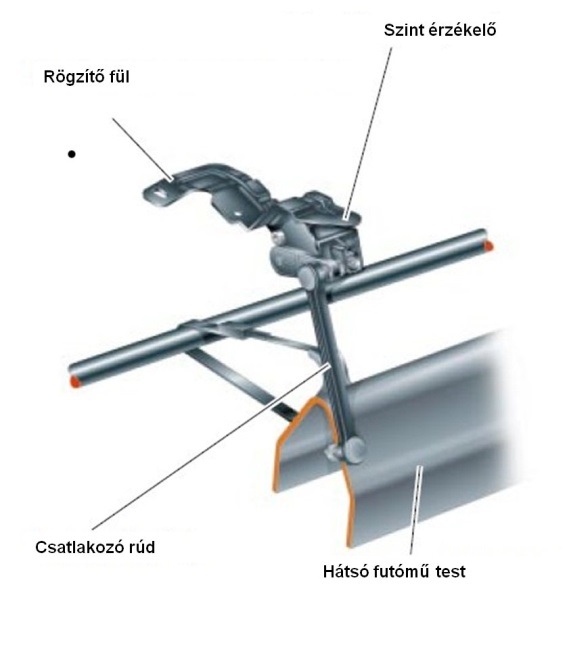
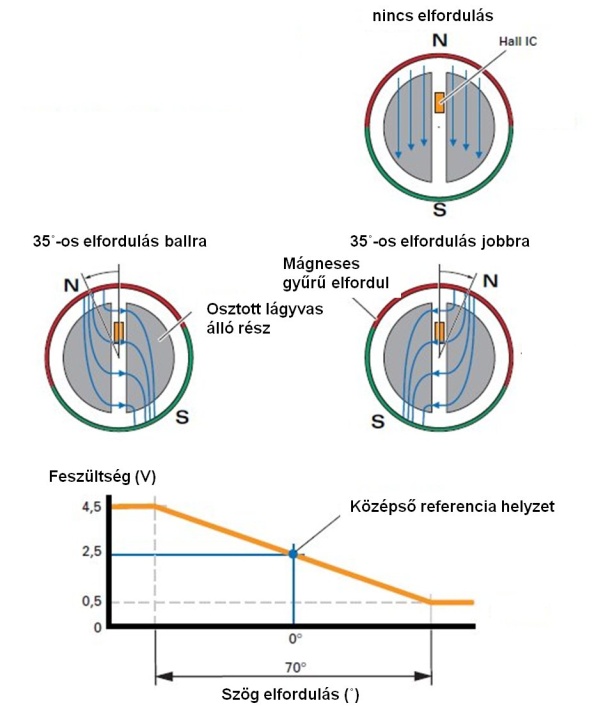
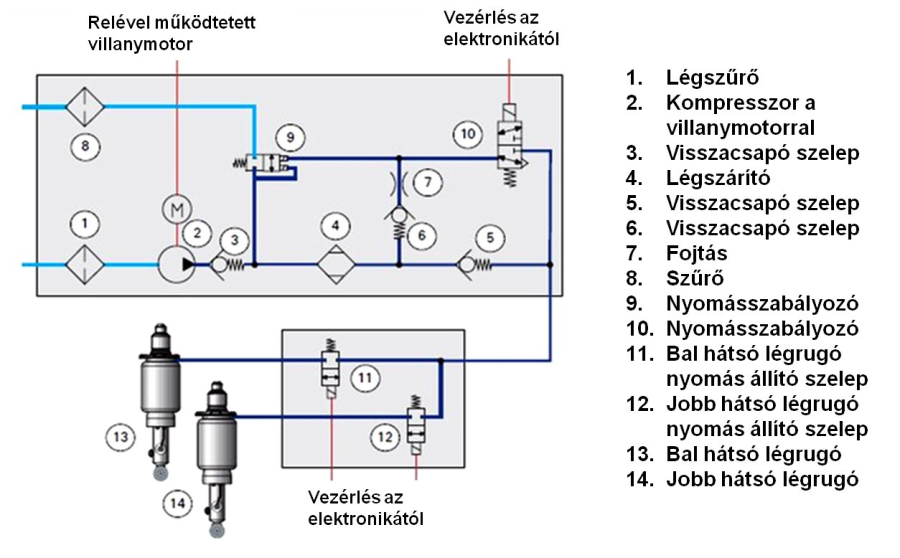
3.5.3. Audi Allroad Qattro
Ennél a típusnál már mind a négy keréknél elektronikus szintszabályozással ellátott légrugókat alkalmaznak. A normál utazási szinthez képest a gépkocsi sebességétől függően a gépkocsivezető további két magasabb és egy alacsonyabb szintet állíthat be nyomógomb segítségével. Az ESP rendszerrel megvalósuló adatcsere révén kanyarodás közben a szintállítás nem lehetséges.
Az első és a hátsó légrugók is gördülőmembránosak és a lengéscsillapítóval koncentrikus elrendezésűek. A hátsó lengéscsillapítók PDC kivitelűek (Pneumatic Damping Control).
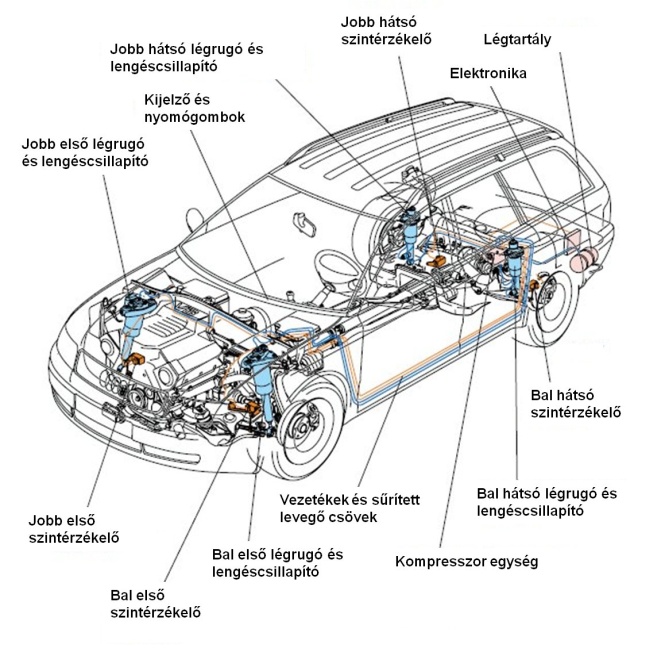
3.5.3.1. Sűrített levegő ellátó egység
A kompresszor csak akkor működik, amikor üzemel a belsőégésű motor. A légrugó rendszert 6,5 l –es, 16 bar maximálisan megengedett nyomású légtartállyal is ellátják. A kompresszor hengerfején helyeik el a hőmérséklet érzékelőt, mely védelmet nyújt túlmelegedés esetén. A nyomásérzékelő a szelepegység részét képezi. 6 percenként küld jelet az elektronikának.
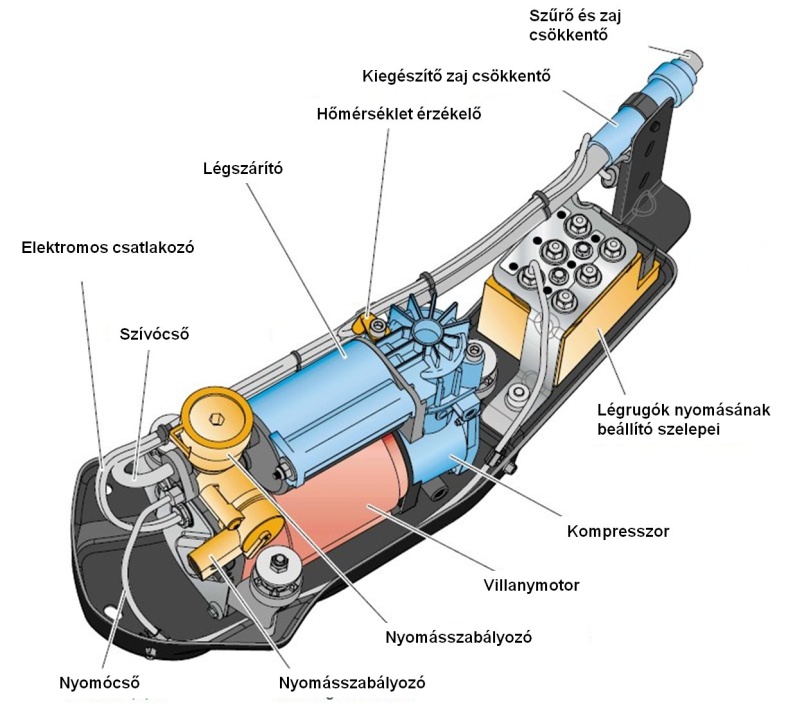
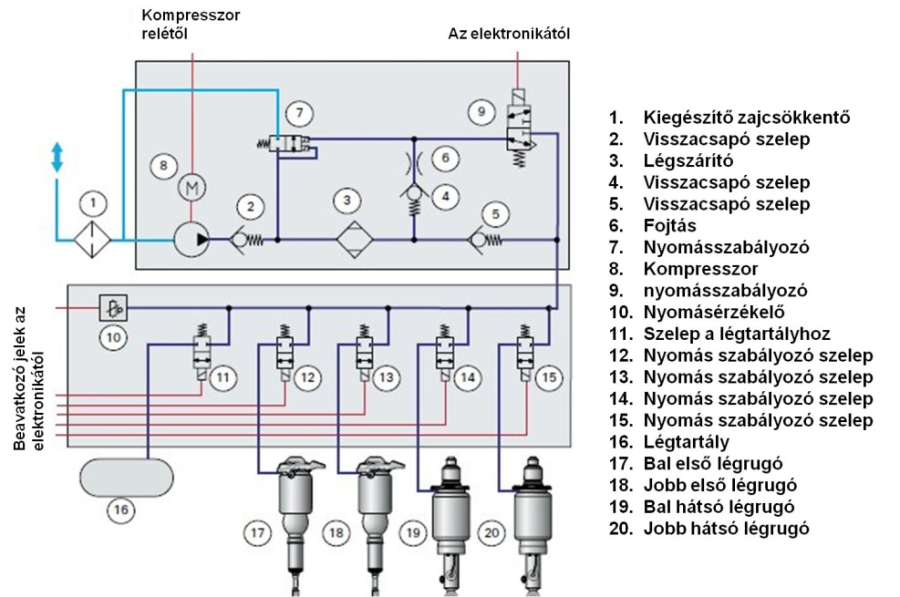
3.5.3.2. Szint érzékelő
Ezt a gépkocsit egy újabb fejlesztésű, szintén érintésmentes működésű szintérzékelővel látták el, mely indukciós elven működik. Mindkét futóműre kettőt – kettőt szerelnek fel. Tápfeszültséggel a szintszabályozó elektronika látja el. Két egymástól független jelet adnak az elektronikáknak. Az egyik PWM jelet a 4 db légrugó nyomásának szabályozásához, a másik feszültség jelet pedig a megvilágítási távolság beállításához használja fel a fényszóró elektronikája.
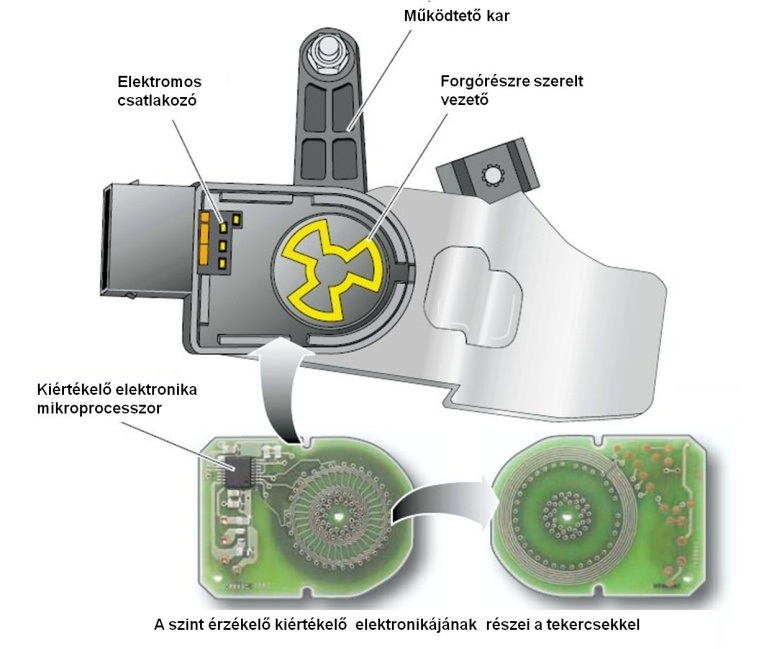
Az érzékelő álló részére szerelt gerjesztő tekercsre kapcsolt váltakozó feszültség a mozgó rész vezető hurkában feszültséget indukál. Abban egy másodlagos elektromágneses teret hoz létre. Ez a két elektromágneses mező együttesen hatást gyakorol a vevő tekercsekre. A szintén az álló részre szerelt úgynevezett „fogadó” tekercsekben indukált feszültségek és frekvenciájuk a mozgó rész helyzetétől függ. Ezeket a jeleket fogadja és értékeli ki az érzékelőbe szerelt elektronika. Így állapítja meg a mozgó rész pillanatnyi szöghelyzetét és ennek megfelelő jelet ad a futómű elektronikáknak.
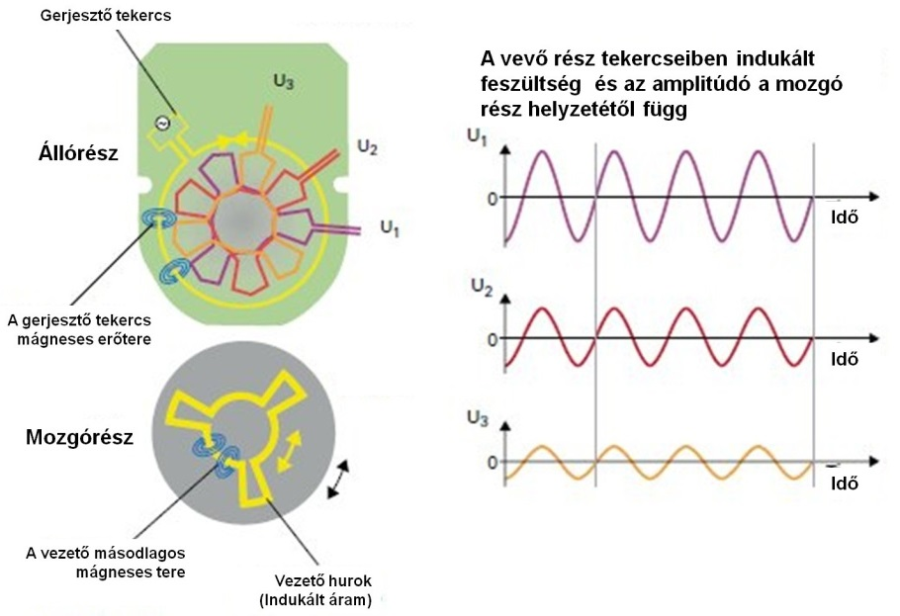
Több személygépkocsi típusnak is beszállítója a villanymotoros kompresszor területén a Wabco.
A villanymotorral hajtott egyhengeres „száraz” kompresszor egy egységet képez a légszárítóval és a nyomásszabályozó egységgel.

3.6. Aktív kerékfelfüggesztés
A hetvenes évekig kevés kivétellel passzív rugókat és lengéscsillapítókat szereltek a gépkocsikba. Ezeknél menet közben nincs lehetőség a karakterisztika megváltoztatására.
A menetkomfort és a biztonságos autózás közötti ellentmondás feloldásának lehetőségét az aktív kerékfelfüggesztés kínálja. Ez a pillanatnyi menetviszonyoknak megfelelően egyrészt folyamatosan az optimális értékre állítja be a rugó és a lengéscsillapító karakterisztikáját, másrészt viszont különböző módon a kocsiszekrényre ható erőket igyekeznek kiegyenlíteni. Az a beavatkozás a leghatékonyabb, amely a ható erő keletkezésének pillanatában, például a kocsiszekrény megbillenésekor, illetve bólintásakor, létre tudja hozni a megfelelő nagyságú és irányú ellenerőt. A legtöbb megvalósított rendszer adaptív működésű, hiszen folyamatosan és a vezető beavatkozása nélkül, automatikusan alkalmazkodik a menetviszonyok változásaihoz.
A digitális elektronika műszaki fejlesztései tették lehetővé a menetviszonyokhoz és a vezetési stílushoz folyamatosan alkalmazkodó aktív kerékfelfüggesztés alkalmazását. Ezt általában a karosszéria automatikus szintszabályzásával is kiegészítik. Így tehát az aktív kerékfelfüggesztés jelentősen növeli a gépkocsi aktív biztonságát.
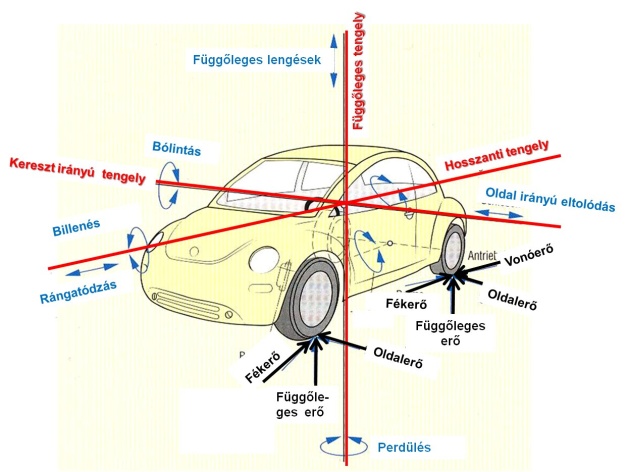
A gépkocsira menet közben különböző erők hatnak. Ezek a gépkocsi karosszériájának különböző irányú elmozdulásait és elfordulásait okozzák. Ezt igyekeznek az aktív kerékfelfüggesztéssel megakadályozni illetve mérsékelni, úgy hogy az ne veszélyeztesse a biztonságos autózást, illetve ne érintse hátrányosan az utazási komfortot és a kettő közötti ellentmondást minél kisebb kompromisszum árán lehessen kiegyenlíteni.
Az elmúlt időszakban a különböző autógyárak fejlesztési irányai egymástól eltérőek voltak. Ezért ugyanazt a célt különböző módon igyekeztek elérni, mint például pneumatikus, vagy hidraulikus, aktív illetve szemi-aktív futómű rendszerekkel.
A legtöbb változatnál az aktív futóműveknél az elektronikus rendszer specifikus érzékelők jeleit dolgozza fel, melyeket különböző jellegmezőkkel hasonlít össze és ez alapján adja ki a beavatkozó egységeknek a parancsokat. A kifogástalan működéshez azonban meg kell határozni, illetve az elektronikában tárolni is kell, hogy mely esetekben milyen beavatkozásra van szükség. Ennek megfelelően kell nagyon rövid időn belül kiadni a beavatkozási parancsokat.
Az aktív kerékfelfüggesztésnél használatos szabályozási algoritmusok:
küszöbértékek alapján megvalósuló szabályozás
Ennél érzékelőkkel figyeli az elektronika a pillanatnyi menetviszonyokat és az út állapotát. Ennek megfelelően történik a csillapítási karakterisztika változtatása egy bizonyos küszöbérték átlépésekor egy előre meghatározott stratégia alapján. A cél a menetkomfort növelése. Ez a módszer nem állít különösebb követelményeket az érzékelőkkel szemben. Ez a szabályozás tovább finomítható a sebességfüggő elkormányzási szög, a kereszt irányú gyorsulás, és a fékező nyomás érzékelésével. Így csökkenthető a kocsiszekrény billenése, bólintása és növelhető a menetbiztonság a csillapítási fokozat keményítésével.
skyhook szabályozás.
Ennél a szabályozási változatnál megszűntetik a kapcsolatot a menet közben útról adódó gerjesztés és a felépítmény között. A karosszéria nyugodtan marad az adott helyzetben, mert a különböző beavatkozásokkal ellene hatnak a zavaró gerjesztéseknek. Ennél egy járulékos kerék csillapítás valósul meg. Olyan a szabályozás stratégiája, mintha a kocsiszekrény horgokkal (hook) az égbe (sky) lenne felfüggesztve. A kocsiszekrény periodikus emelésével és süllyesztésével a zavaró gerjesztések ellenében avatkoznak be. Ezzel párhuzamosan a rendszer képes gyorsan és hatékonyan a csillapítási karakterisztikát is megváltoztatni. Ennek érdekében kiegészítő érzékelőket kell szerelni a kocsiszekrényre és a futóműre is. Egy speciális szabályozási algoritmust fejlesztettek ki a működéséhez. Ennél a szabályozási változatnál az érzékelőkkel szemben fokozottabb követelményeket támasztanak.
A fentiekben összefoglalt rendszerek teljes elektronikus működését az öndiagnosztika felügyeli, melyet hibakód tárolóval is ellátnak. Ez meghibásodás esetén könnyebbé teszi a diagnosztikát és a szükségessé váló javítást. Különös gondot fordítanak a vezető tájékoztatására, mely az elektronikus ember-gép (HMI) kapcsolat révén valósul meg. A megalkotott rendszerek szép példái a mechatronika alkalmazásának, hiszen a mechanikus működésű beavatkozó egységeket elektronika segítségével működtetik.
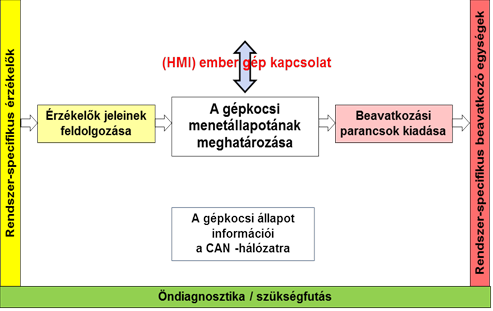
Szemi-aktív futómű
A viszonylag lassabb működésű aktív rendszereket szokták „szemi-aktív” változatnak nevezni. Ezek a felépítmény elmozdulásokat és a kerékterhelések változását csak némi késlekedéssel tudják mérsékelni, illetve elhárítani.
Aktív futómű
A teljesen aktív futóművek jelenleg még fejlesztés alatt állnak. Hátrányos tulajdonságuk, hogy működésükhöz folyamatos energiaellátás szükséges. A teljesítmény igénye 7 – 20 kW közötti. Ezért eddig még nem terjedtek el. Jellemzőjük a folyamatos gyors beavatkozás.
Vannak olyan rendszerek is, melyek egy bizonyos sebességtartományban teljesen aktív kerékfelfüggesztésként működnek, és a gyorsabb haladásnál az úgynevezett szemi-aktív működésre váltanak át.
3.6.1. Mitsubishi Galant szemi-aktív kerékfelfüggesztés
A nyolcvanas évek végén jelent meg az európai piacon a Mitsubishi Galant Royal és a Sapporo. Ezek voltak az elő nagyobb sorozatban gyártott aktív kerék-felfüggesztésű típusok. A Galant-ot még ezen kívül összkerék hajtással (4WD), összkerék kormányozással és széria ABS-el is ellátták.
A futóműveknél tekercsrugó és kétkamrás gördülőmembrános légrugó kombinációja látja el a rugózás feladatát. A csomagtartóban helyezték a villanymotorral hajtott kompresszort, a légszárítóval és a légtartállyal, melyet elektronikus nyomásszabályozással is elláttak.
A szintszabályozás,
Ennek működése egyrészt a terheléstől, másrészt a gépkocsi sebességétől függ. Ezt a feladatot a légrugó nyomásának változtatásával valósították meg. A futóműre elektromos szintérzékelőt szerelnek. Ennek jele alapján történnek a beavatkozások, melyek a légrugó nyomásának változtatását jelentik. Ehhez a légtartályban tárolt sűrített levegő ad megfelelő tartalékot.
Két fokozatban változtatható a rugó karakterisztika
A légrugó közelében egy segédteret is kialakítottak. Ez a fő térhez hozzá, vagy lekapcsolható. Hatására változik a légrugó térfogata és ezzel a rugó karakterisztikája is. A beavatkozás villanymotorral és mechanikus áttétellel elfordítható cső végére szerelt körtolattyú segítségével történik. Egy összeköti, vagy szétválasztja a légrugó két terét. Ez az állító villanymotor a lengéscsillapító felső bekötési pontjánál van elhelyezve és kar áttétellel fordítja el a tolattyút és ezzel változtatja a légrugó karakterisztikáját. A légrugóval párhuzamosan egy tekercsrugót is beszerelnek. Nyomásmentes állapotban ez viseli a karosszéria tömegét és látja el a rugózás feladatát. A légrugó és a tekercsrugó együtt határozza meg a futómű rugókarakterisztikáját.
A kétcsöves változtatható karakterisztikájú lengéscsillapító
A kétféle csillapítási fokozatot a pillanatnyi menetviszonyoknak megfelelően az elektronika állítja be az érzékelők jelei alapján. A lágyabb, vagy keményebb csillapítási fokozat a lengéscsillapító dugattyúrúdjának elfordításával egy körtolattyú segítségével változtatható. Ezt a műveletet is az elektronika végzi a pillanatnyi menetállapotnak megfelelően egy állítómotor segítségével. Egy kiegészítő szelepet kapcsol hozzá a kemény fokozatban, vagy megkerüli azt az olaj áramlása a lágy fokozatban. Például a gyorsulásérzékelő és a féklámpa kapcsoló jelére a lengéscsillapító karakterisztikáját az elektronika keményebbre állítja, így a kocsiszekrény billenése megakadályozható.
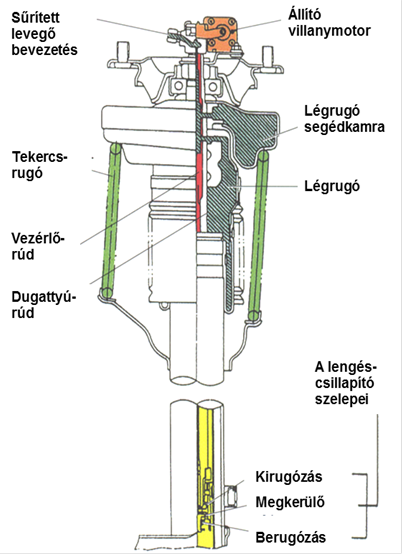
3.6.2. Citroën hidraktív kerékfelfüggesztés
A hidro-pneumatikus kerékfelfüggesztés elválaszthatatlan a Citroën műszaki hagyományaitól. 1989-ben szereltek először az XM típusba a „hidraktív” futóműveket. 1993-ban a Xantiába már a második generációs változatot alkalmazták. 1994 őszén mutatták be a Párizsi Autószalonon a Citroën Xantia Activa automatikus futómű stabilizáló rendszerét, melyet a szakirodalom AFS rövidítéssel nevezett el. Ez a német elnevezésből ered (Automatischen Fahrwerk Stabilisierung). Az új AFS rendszert kombinálták a Citroën XM -nél és a Xantiánál már jól bevált hidraktív kerékfelfüggesztéssel.
Hamarosan követte ezt a C5-ben alkalmazott harmadik generáció. Ezeknél a gépkocsiknál a rugó-, és a lengéscsillapító karakterisztika változtatása, valamint a szintszabályozás a hidraulika rendszer segítségével valósul meg. Az aktív erőkifejtére alkalmas elem a stabilizátor. A Hidraktív 3 ++ változatot már ESP működéssel is ellátták.
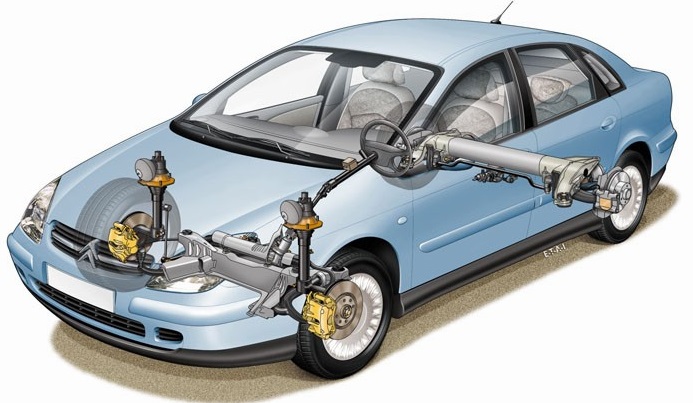
A rugómerevség a terhelés növekedésével négyzetesen arányos
|
|

ahol:
|
C(z) |
rugómerevség a berugózási út (z) függvényében | |
|
A |
a dugattyú felülete | |
|
n |
politrópikus kitevő | |
|
p(z) |
berugózáskor a nyomás | |
|
h |
rugóhossz a munkapontban | |
|
p 1 |
belső nyomás a munkapontban |
Az alkalmazott hidropneumatika előnye, az hogy a szintszabályozáson kívül a hidraulikus csillapítás is több fokozatban valósulhat meg.

A hidraktív kerékfelfüggesztés alkalmazásának célja:
A kerék kövesse az útprofilt anélkül, hogy a kocsiszekrénynek nagy lökéseket adna át.
Ne szakadjon meg a kerék és az útfelület közötti kapcsolat.
Az utastérnek átadódó rezgések és lengések minél jobban csillapítottak legyenek.
A kerékfelfüggesztés műszaki jellemzőit a rugó és a lengéscsillapító kombinációja befolyásolja. Alapvetően meghatározzák például a futómű önlengésszámát. Az elektronikusan szabályozott aktív hidro-pneumatikus kerékfelfüggesztést röviden hidraktív futóműnek nevezik.
A hidraktív rendszer érzékelői
Kormánykerék elfordítás érzékelő
A Valeo gyártmányú kompakt kormánykerék elfordítás érzékelő egység. Az opto-elektronikus jeladót a kormánykerék tengelyére szerelik. Ennek belsejében a kormánykerékkel együtt 28 nyílással ellátott tárcsa fordul el. A mozgás irányról, a szögsebességéről és az elfordítási szöghelyzetről ad információt az elektronikának.
A két opto-elektronikus érzékelő egymáshoz képest 90°-kal, és egy fél nyílásnyival van elhelyezve. Az 5 V-os tápfeszültség hatására „ablakonként” egy impulzus keletkezik. A két érzékelő egymáshoz viszonyított helyzete teszi lehetővé, hogy az elektronika az ehhez kifejlesztett algoritmus segítségével képes legyen megállapítani, hogy melyik irányban fordították el a kormánykereket. További fontos információ az elfordítás mértéke és szögsebessége. Ezeket az elektronika állapítja meg és értékeli ki.
Gázpedál elmozdulás érzékelő
A Valeo gyártmányú potenciométerrel ellátott érzékelő rudazattal kapcsolódik a gázpedálhoz. Működéséhez az elektronika adja az 5 V-os tápfeszültséget. A pedál elmozdításával arányosan változik az ellenállása és ennek megfelelően a kimeneti feszültség. A működés szempontjából fontos információ a pedál lenyomásának, illetve a visszaengedésének a gyorsasága is.
Az elektronika azt érzékeli, hogy mennyi idő szükséges a gázpedál teljes elmozdulásának 10%-ához. Mielőtt még a menetdinamikai változás hatására a kocsiszekrény helyzete megváltozna az elektronikának lehetősége lesz a ezt megelőző beavatkozás megvalósítására, (például a csillapítási tényező keményebbre állítása).
Fékező nyomás érzékelő
A Bendix gyártmányú érzékelőt az első fékkörhöz csatlakoztatják. Fékoldáskor és kis pedálerőnél zárt az áramkör. 30 bar-nál nagyobb nyomás esetén pedig nyit. Egy előre meghatározott nyomásküszöb felett keményebb rugózási fokozatot állít be az elektronika.
Kocsiszekrény elmozdulás érzékelő
Az első futómű kereszt-stabilizátorára szerelik, mely annak elfordulását optikai úton érzékeli. Ez arányos a felépítmény elmozdulásával és annak sebességével. Ki- és be-rugózáskor például, ha a lengés amplitúdója egy bizonyos küszöböt átlép, keményebb csillapítási fokozatot állít be.
Működési elve azonos a kormánykerék elfordítás érzékelőével, tehát ez is egy opto-elektronikus változat. Ez azonban 12 V tápfeszültséggel működik és több, azaz 45 db ablakkal látják el az érzékelő tárcsáját. Az elektronika ennek az érzékelőnek a jele alapján határozza meg a felépítmény elmozdulásának irányát, sebességét és mértékét. Átkapcsolás keményebb fokozatra akkor következik be, ha a karosszéria elmozdulásának amplitúdója egy bizonyos értéknél nagyobb.
Menetsebesség érzékelő
A régebbi típusoknál a Hall elemes érzékelőt a sebességváltóra szerelték. A 12 V-os tápfeszültség rákapcsolásakor fordulatonként 8, megtett méterenként pedig 5 impulzust ad. A jel frekvenciája arányos a gépkocsi sebességével. Jele alapján számítja ki az elektronika a gépkocsi gyorsulását és lassulását, mely adatokat a tárolt küszöbértékekkel hasonlítja össze. Így a különböző beavatkozások egyrészt egy bizonyos prioritást, másrészt pedig sebességfüggést kaphatnak. A gépkocsi kis sebességénél például az elsődleges beavatkozási jelet a kocsiszekrény elmozdulás érzékelője, nagy járműsebességnél viszont a kormánykerék elfordulás érzékelője adja a beavatkozáshoz szükséges alapinformációt. Ezt az érzékelőt az újabb gépkocsi típusoknál már a CAN hálózaton keresztül érkező ABS kerékfordulatszám érzékelők jelei helyettesítik.
Ajtó és csomagtartó fedél nyitásérzékelő
Ha valamelyik ajtót kinyitották, az elektronika a futóművet lágy rugózásra kapcsolja. Ezzel megakadályozható, hogy terhelésváltozás után a gyújtáskulcsot elfordítva ne következzen be hirtelen felépítmény elmozdulás. Ha az ajtó nyitva marad, az elektromágneses szelep vezérlése 10 perc elteltével lekapcsol.
A hidraulika rendszer
A hagyományos hidro-pneumatikus rendszerhez hasonló egységek:
gázrugók
lengéscsillapító szelepek
A szintszabályzó szelep, melyet a stabilizátor közepére felszerelt rudazat működtet. A terhelés függvényében ez szabályozza a lengéscsillapítókban a nyomást.
A nagynyomású csövek keresztmetszetét az alap rendszerhez képest jelentősen megnövelték. Ez alapján ismerhető fel a Hydractive felfüggesztés, ha nyitva van a motorháztető.
Kiegészítető egységek:
Futóművenként egy kiegészítő gázrugót és lengéscsillapító szelepet szerelnek be. Ez kiegészül még az elektromágnessel működtetett tolattyús átkapcsoló szeleppel, mellyel az elektronika a rugózási és a csillapítási fokozatokat tudja beállítani.
Az alkalmazott rugózási és csillapítási és fokozatok:
Keményebb rugózási fokozat
Az elektromágneses szelep nyugalmi helyzetben van, mert árammentes. Ez az alaphelyzet, így elektromos hiba esetén ezzel a kevésbé kényelmes, de biztonságos fokozattal lehet autózni. A tolattyúk leválasztják a rendszerről a középső kiegészítő gázrugó elemeket és lengéscsillapító szelepeket. Optimális útfekvés, rövid rugóút, keményebb csillapítás jellemzi ezt az állapotot. Kanyarban kisebb lesz a kocsiszekrény dőlése, mert a bal- és a jobboldali rugók és lengéscsillapítók hidraulikus terei egymástól elválasztódnak. Fékezéskor és gyorsításkor a rugózási és csillapítási paraméterek ilyen beállítása mellett csökken a kocsiszekrény bólintása.
Lágyabb rugózás, komfort fokozat
Ha az útviszonyok és a vezetési stílus lehetővé teszi, az elektronika bekapcsolja az elektromágneses szelepet. A beépített rugó ellenében a tolattyú ennek hatására elmozdul és futóművenként egy-egy gázrugót és lengéscsillapító szelepet hozzákapcsol a futómű hidraulikus rendszeréhez. Ezért nagyobb lesz a gázrugó térfogata, így lágyabb lesz a rugózás. A lengéscsillapító szelepekkel párhuzamosan még egy-egy bekapcsolódik, ezért növekszik az átáramlási keresztmetszet és a csillapítás lágyabbra változik. A jobb-, és bal oldali kerékfelfüggesztések hidraulika terei egymással összekapcsolódnak. Hosszabb rugóút és kisebb csillapítás jellemzi ezt az állapotot.
Kapcsoló a műszerfalon
A gépkocsivezető sport, és automatikus működés között választhat ezzel a kapcsolóval. A sport fokozatban az elektromágneses szelep alaphelyzetben marad. Ekkor a rugózás és a csillapítás kemény lesz. Automatikus fokozatban az elektromágneses szelep gerjesztést kap, és így lágy rugókarakterisztikára és kis csillapításra kapcsol. Ha menet közben a menetdinamikai körülmények megváltozása miatt az érzékelők jelei alapján az elektronika a tárolt jellegmezőkkel történő összehasonlítás alapján szükségesnek ítéli meg automatikusan átkapcsol kemény fokozatra.
Menetdinamikai jellemzők
A széria gépkocsikkal általában 0,9 g keresztirányú gyorsulással szoktak kanyarodni. A Cirtroën Xantia Activa -val gond nélkül elérhető az 1,2 g kereszt irányú gyorsulás is, miközben a kocsiszekrény csupán 1,5°-ot dől meg. Sportos vezetés esetén, a fizikai lehetőségek határán autózva, az elektronikus rendszer érzékeli a veszélyhelyzetet és a kocsiszekrényt néhányszor keresztirányban megbillentve figyelmeztet.
A hidraktív kerékfelfüggesztés és a vele megvalósított szintszabályzás, a menetbiztonság és a kényelmes utazás közötti kompromisszumot hatásosan alakítja ki. Az alkalmazott aktív stabilizátor, a futóművenként beszerelt kettős működésű hidraulikus munkahengerekkel változtatja a torziós rúd nyomatékát. Ezzel megakadályozza a kocsiszekrény bólintó és billenő mozgását.
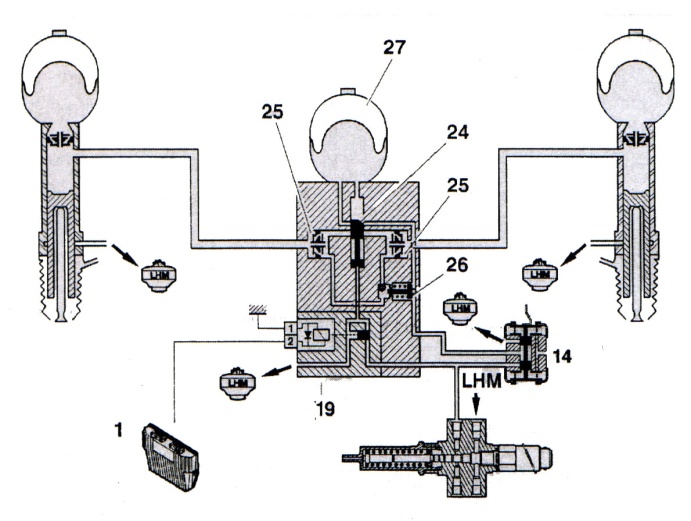
1.-futómű elektronika, 14.-szintállító szelep, 19.-kiegészítő elektromágneses szelep egység, 25.-lengéscsillapító szelep, 26.-szintszabályozás csatlakozása, 27.-kiegészítő gázrugó.
A hidraulikaszivattyú
A hidraktív futómű működéshez szükséges energiát több fokozatú radiál-dugattyús hidraulikaszivattyú biztosítja. (korábban támolygó tárcsás axiál-dugattyús változatot alkalmaztak). A szivattyú hajtása ékszíjjal a motor főtengelyéről történt. A dugattyúkat excenter mozgatja.
Ennél a gépkocsinál a kerékfelfüggesztésnek, a szervokormánynak, és a fékrendszernek közös hidraulika rendszere van. A biztonság érdekében az egyik, hat szivattyúelemből álló fokozat a szervokormányt látja el tápnyomással a másik, két szivattyúelemből álló fokozat pedig a fékrendszert és a kerékfelfüggesztést működteti.
Az újabb C5 típusnál villanymotorral hajtott támolygó tárcsás 5 elemből összeállított axiál-dugattyús szivattyút alkalmaznak. Változott a hidraulika folyadék is. Újabban LDS (Liquide Direction Suspension), narancssárga színű és teljesen szintetikus anyagot alkalmaznak. A korábbi neonzöld színű LHM 3, illetve LHM 3 PLUS helyett.
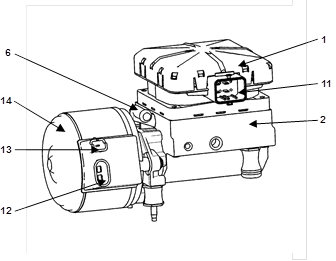
1.-elektonika, 2.-hidraulikus szelepek, 6.-szívó cső, 11.-elektromos csatlakozó, 12.-villanymotor elektromos csatlakozó, 13.-villanymotor vezérlő relé csatlakozója, 14.-villanymotor.
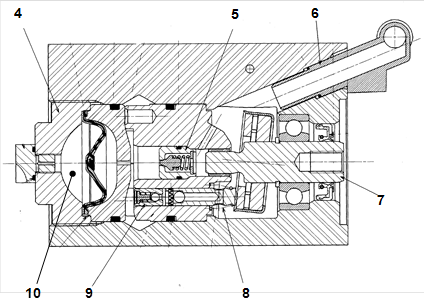
4.-nyomástároló, 5.-biztonsági szelep, 6.-szívó cső, 7.-hajtó tengely, 8.-szivattyú elem, 9.-nyomó szelep, 9 gáz töltet.
Központi nyomásszabályzó és tároló egység
A rugó ellenében elmozduló tolattyúval működő nyomásszabályzó egység lekapcsolási nyomása 170 bar, a bekapcsolási nyomás pedig 145 bar. A 400 cm3-es gömb alakú nyomástároló 62 bar táranyomású nitrogénnel van feltöltve. A gáz töltettől gumimembrán választja el a hidraulika folyadékot. Ugyan olyan belső kialakítású gömböt alkalmaznak a nyomástárolási és a rugózási feladat ellátására. A gázrugó gömbök nyak részébe szerelik be a lengéscsillapító szelepeket. A nyomástárolónál viszont ez a szelep hiányzik.

Rugók és működtető elemei
Mindegyik lengéscsillapítóhoz a korábbiaknál nagyobb átmérőjű csővel egy gömb alakú rugóelem csatlakozik. Ennek szerkezete hasonlít a központi nyomástárolóéhoz, azonban a nyak részbe beépítik a lengéscsillapító szelepet is. Ezen kívül futóművenként egy újabb kiegészítő gázrugót csatlakoztatnak, melybe két újabb csillapító szelepet szerelnek. Ezeket az elektronika elektromágneses szelepekkel működtetett három csövet összekötő tolattyúk segítségével szabályozza. Hozzá, vagy lekapcsolja a rugóelemekhez. A bal- és a jobboldali rugóelemeket egymástól hidraulikusan elkülöníthetők, illetve összekapcsolhatók. A jobb és baloldali kerékfelfüggesztés egymással hidraulikusan kapcsolatba van a gépkocsi használatának 80%-ában. Az elválasztás akkor szűnik meg, amikor a szintszabályzás beavatkozik. Fékezéskor és gyorsításkor a rugózási és a csillapítási paraméterek megváltozásának köszönhetően csökken a kocsiszekrény bólintása. A gépkocsi használata során az út 15%-át ilyen körülmények között teszik meg. Lágy rugózást, vagyis komfort fokozatot kapcsol az elektronika, ha az útviszonyok és a vezetési stílus ezt lehetővé teszi.
„Leülés”- gátló
A hidropneumatikus felfüggesztés korábbi változatainál a gépkocsi leállítása után, amikor megszűnik a folyamatos nyomás ellátás, a hátsó futóműnél előbb, az elsőnél később lecsökken a has-magasság. Ezt akadályozza meg S.C./M.A.C. (Systeme Citroën / De Maintien en Assiette Constante) magyarul nyomástartó rendszer állandó szabad has-magassághoz. Elkülöníti a rugózást a hidraulikarendszer többi elemétől, ha annak nyomása kisebb lesz, mint ami a kerékfelfüggesztésnél van. Járó motornál, amikor a hidraulikarendszer nyomása nagyobb, mint a szelep nyitónyomása, a rugóelemek ismét kapcsolatba kerülnek a szintszabályzó szeleppel. A motor leállítása után, amikor lecsökken a rendszernyomás a szelep bezár. Ekkor a rugóelemek összeköttetése megszűnik a hidraulikarendszerrel. A felépítmény szintmagassága ezért nem csökken.

Az elektronika
A francia Valeo gyártmányú elektronikát alumínium dobozba szerelik. 2 db 15 pólusú elektromos csatlakozóval kapcsolódik az elektromos hálózathoz. Áramfelvétele csukott ajtók és a csomagtartó esetén 2 mA. Azonban amikor valami nyitva van 100 mA. Menet közben a mikroprocesszor folyamatosan összehasonlítja az érzékelők jelét a memóriában tárol jellegmezőkkel. Eltérés észlelése esetén a végfokozaton keresztül beavatkozó jelet továbbít az elektromágneses szelepekhez. Ezzel megváltoztatja a felfüggesztés paramétereit. Az elektronikát ellátták öndiagnosztikai-, és hibakód tároló áramkörrel is. Az elektromos rendszer bizonyos hibái esetén átkapcsol az úgynevezett szükség működésre.
A működéséhez a tápfeszültséget a gyújtás bekapcsolása után kapja meg, de memóriája folyamatosan tárolja a jellegmezőket, melyekkel a mikroprocesszor folyamatosan összehasonlítja a futómű rendszer érzékelőinek jeleit. Ez alapján tudja megállapítani, hogy mikor kell változtatni a felfüggesztés paraméterein. A végfokozaton keresztül 0,05 másodpercen belül adja ki a beavatkozási parancsokat, melyekkel működteti a különböző elektromágneses szelepeket.
A rugózás előválasztó kapcsoló
A kézifékkar mellett elhelyezett kapcsolóval két futómű állapot közül választhat a gépkocsivezető. A tényleges kapcsolást az elektronika végzi, bizonyos feltételek teljesülése esetén. Sport fokozatban a rugózás és a csillapítás kemény, ekkor világít a visszajelző lámpa. Normál fokozatban lágy rugókarakterisztikára és kis csillapítás valósul meg.
Sport fokozat visszajelző
A műszerfalon elhelyezett ellenőrzőlámpa sport fokozatban folyamatosan világít. Hibátlan rendszer esetén a gyújtás bekapcsolásakor néhány másodpercre felvillan, meghibásodáskor azonban folyamatosan villog.
Aktív futómű stabilizátor
A Citroën 1995-ben mutatta be a Xantia Activa modellben az aktív stabilizátort (AFS). Ívmenetben a gépkocsi tömegközéppontjában ható centrifugális erő billenti a kocsiszekrényt. Ez annál jelentősebb, minél nagyobb a sebesség, illetve minél kisebb a kanyarodási sugár. Ez a jelenség rontja a menetkényelmet, csökkenti a menetbiztonságot és a korlátozza a megvalósítható vonóerőt is. Az autógyárak konstruktőrei olyan megoldásokat igyekeznek kifejleszteni, melyek csökkentik ezeket a biztonságot is veszélyeztető jelenségeket.
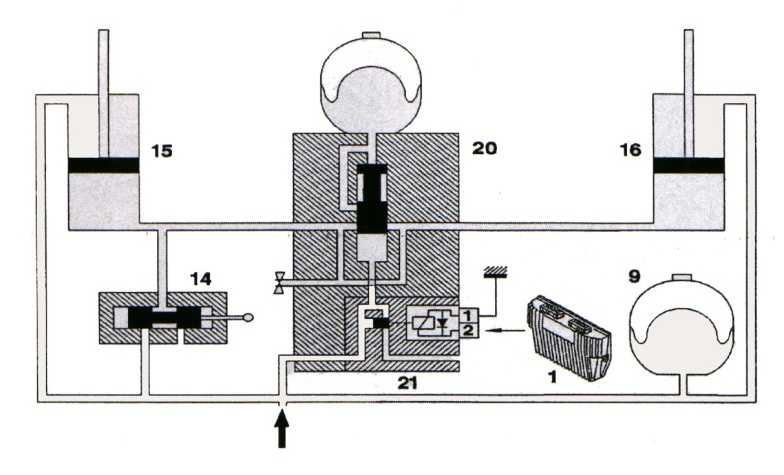
1. –elektronika, 9.-nyomástároló, 14.-szintszabályozó szelep, 15.-munkahenger az első futóműnél, 16. munkahenger a hátsó futóműnél, 20 és 21. működtető szelepegység az elektromágneses szeleppel.
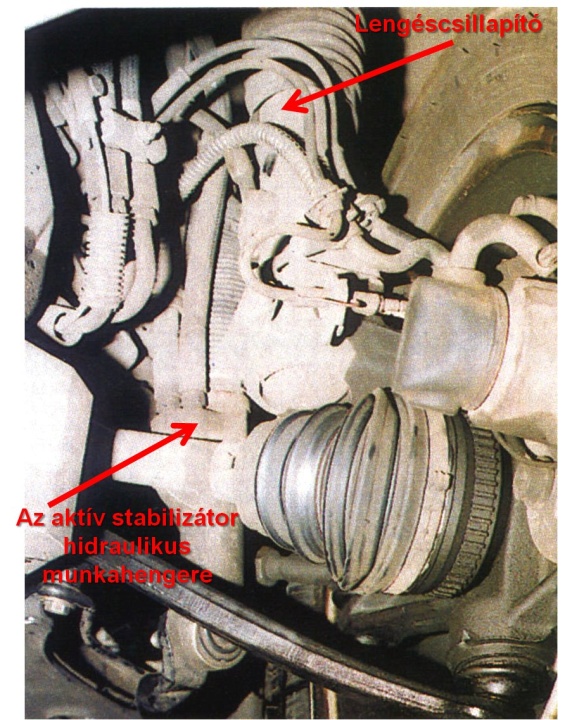
Az AFS rendszer részei:
érzékelők: gépkocsi sebesség, és kormánykerék szöghelyzet
elektronika
mechanikus elemek: stabilizátorok, az első 28 mm, a hátsó 25 mm átmérőjű. A stabilizátor rudazattal és a kettős működésű hidraulikus munkahengerrel csatlakozik a lengéscsillapítóhoz.
hidraulikus elemek.
Az aktív stabilizátornál két darab kettős működésű hidraulikus munkahengert szerelnek fel átlósan, a bal első és jobb hátsó kerékhez, a lengéscsillapítóval párhuzamosan. Ezek a lengéscsillapító és a stabilizátor egyik vége között létesítenek kapcsolatot. A munkahengerben, amikor a dugattyú szabadon elmozdulhat, a stabilizátor nem visz át nyomatékot. Ez az állapot akkor jön létre, amikor az elektromágneses szelep nyitott és lehetővé teszi a hidraulika folyadék szabad áramlását.
Billenési korrektor, mely a kocsiszekrény oldal irányú billenését érzékeli és a hidraulikus munkahengerekben nyomásnövekedést eredményez az elektromágneses szelep működtetésével.
Az aktív stabilizátor működése:
A kormánykerék elfordítást érzékelővel figyeli az elektronika. Így felismerhető az ívmenet. A másik fontos bemeneti jellemző a gépkocsi sebessége. A beavatkozás két fokozatban történik.
Az első fokozatban lekapcsolás
Az elektronika az AFS gázrugó gömböket kiiktatja a rendszerből. Ezzel gyorsan megnöveli a rugómerevséget. Elzárja a két hidraulikus munkahenger csőcsatlakozóit, ezért azok merev testként viselkedik, és a stabilizátor megakadályozza a kocsiszekrény dőlését.
A második fázisban aktív beavatkozás:
Az előző fokozatban viszonylag merevvé váló stabilizátorok ellenére kicsit megbillen a kocsiszekrény. Ha a dőlésszög 0,5 -nál nagyobb, melyet az első futómű korrektora érzékel, az elektronika az elektromágneses szelepekkel változtatja az aktív stabilizátor hidraulikus munkahengerének nyomását. Ez úgy történik, hogy a kocsiszekrény billenése ellen hasson. A munkahenger egy aktív csavaró nyomatékot hoz létre a stabilizátornál.
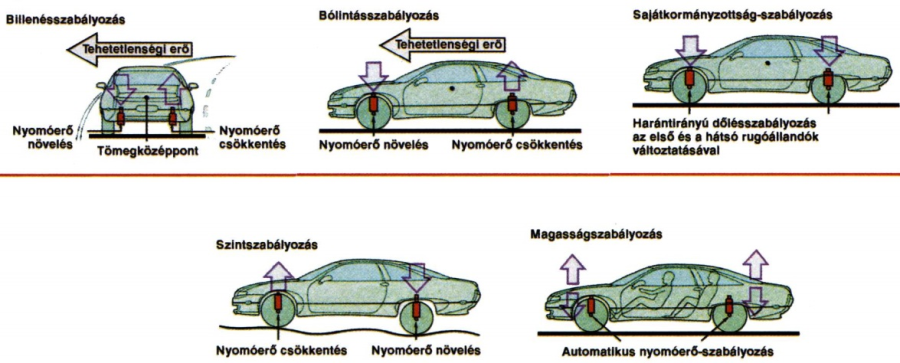
3.6.3. Mercedes Activ Body Controll (ABC)
A Mercedes-Benz 1999 őszén mutatta be a CL-Coupé-ban, mit széria felszereltséget és az S-osztályban, mit rendelhető tartozékot a részlegesen aktív új futóművet. 2001-ben az SL 500 típusban is széria tartozék lett az ABC (Active Body Control), az új elektrohidraulikus kerék felfüggesztési rendszer. 2005-ben már a második generációt szerelték be az S-osztályba.
A fejlesztés célja a menetdinamika és a menetkomfort további növelése volt. A kis frekvenciás kocsiszekrény mozgásokat jelentősen csökkenti ez a futómű. A manővereknél bekövetkező kocsiszekrény billenés és bólintás szinte teljesen kiküszöbölhetővé válik ezzel a futóművel. Ez a rendszer a karosszériát minden útviszonyok között azonos helyzetben tartja. Ezen kívül a lengéscsillapító-karakterisztikát, és a rugózást is szabályozza. A gépkocsi terhelésétől függetlenül azonos marad a karosszéria magassága. A vezető rossz minőségű úton, vagy mély hóban további két magasabb utazási szintet is be tud állítani. Nagy sebességnél viszont az utazási magasság automatikusan csökken, hogy mérséklődjön a légellenállás. A vezető nyomódombokkal sportos és komfortos utazási körülmények között tud választani.
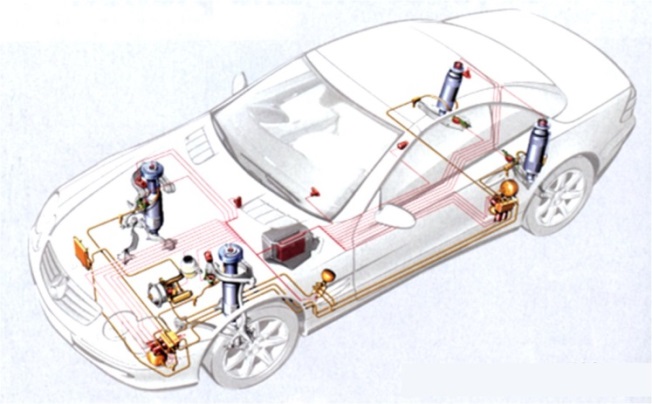
Különleges szoftver alkalmazása révén a vezető különböző körülményekhez optimalizált futómű tulajdonságokat programozhat be. Nagyon sportos, kevésbé sportos, vagy komfortos változatok közül választhat. Ezek mindegyikénél a gépkocsi biztonságos marad. Olyanok a futóművek konstrukciói, hogy valamennyi rugóhoz kettős működésű hidraulikus munkahengert szerelnek, amivel nagyon érzékeny szintszabályzást lehet megvalósítani. Ezekkel a hidraulikus munkahengerekkel menet közben a kerekek és a felépítmény között ébredő erőket tudják megváltoztatni. Ezzel befolyásolható a rugózás és a csillapítás. Egy olyan szabályozási folyamatot valósítanak meg, amely folyamatosan figyelembe veszi az érzékelők jeleit.
A részlegesen aktív rendszer elemei
Az aktív és a passzív rugóelemek egy tekercsrugóból és egy vele sorban bekötött hidraulikus munkahengerből állnak. A tekercsrugó a hagyományos futóműveknél alkalmazottnál lényegesen keményebb. Ez hátrányosan érinti a rugózási komfortot. Ezt azonban aktív beavatkozásokkal egyenlítik ki. Ezekkel az elemekkel párhuzamosan kötik be a lengéscsillapítót, ami viszont a szokásosnál lényegesen lágyabb. Ennél a futóműnél nem alkalmaznak stabilizátort. A kocsiszekrény billenését az egyszeres működésű hidraulikus munkahenger aktív beavatkozásával akadályozzák meg. A részlegesen aktív rendszernek megfelelően a kocsiszekrény önfrekvenciájának csak az 1-2 Hz közötti tartományában aktívan befolyásoltak a futómű tulajdonságai. Ez a tartomány maximum 5 Hz ig tart. A kerekek csillapítása 14 Hz frekvenciáig passzív elemekkel történik. Így mérsékelt marad az energiaigény.
Ennek a rugózási rendszernek az előnyei:
menet közben folyamatosan kiegyenlíti a kocsiszekrény mozgásokat, mint például a billenést, dőlést és a be-, és kirugózást.
a stabilizátor hiányát a hidraulikus munkahengernél ellentétes nyomásváltozásokkal egyenlítik ki a bal és a jobb oldalon.
a gépkocsi vezetési tulajdonsága független a terheléstől.
manuális és automatikus szintállítás és folyamatos szabályozás valósítható meg.
a vezető gombnyomással választhat a sportos és a komfortos autózás között.
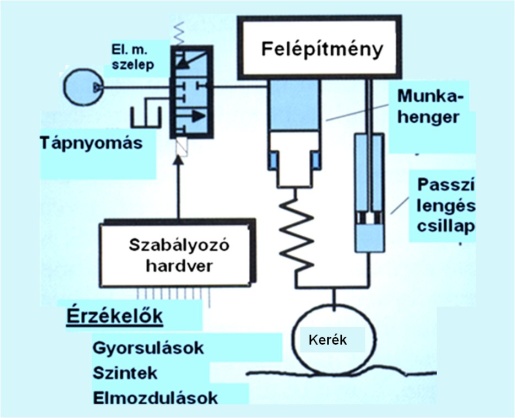
A részlegesen aktív futómű működésének fontosabb alapadatai:
a perdülés szögsebessége,
a hosszanti gyorsulás
a kereszt irányú gyorsulás,
a felépítmény függőleges irányú gyorsulásai,
a kerék és a felépítmény közötti relatív elmozdulás.
Ezek a paraméterek folyamatosan kiegyenlítődnek. Kanyarban például nem dől meg a kocsiszekrény, de elmarad a bólintás a hirtelen fékezéskor, vagy lassításkor.
Ahhoz, hogy a kocsiszekrény három tengelye körüli elfordulásokat érzékelni lehessen a következő egységeket kell beszerelni:
kerékfordulatszám érzékelő (az ESP-től érkezik CAN hálózaton)
kormány elfordítási szög és sebesség
hossz és keresztirányú gyorsulás
szintérzékelés
A hidraulikus tápegység
A futómű aktív beavatkozásaihoz szükséges energiát a hidraulikus tápegység biztosítja. A rendszert radiál dugattyús olajszivattyú látja el, melyet a közepes térfogatáram igénynek (2 l/perc) megfelelően méreteztek. A szivattyú hajtásának energia igénye 0,3 l/100 km többlet tüzelőanyag fogyasztást okoz. Közös egységet alkot a szervo-szivattyúval. Az üzemi nyomás 200 bar. A hidraulika egységbe egy nyomáspulzálás kiegyenlítő és zaj csillapító egységet és nyomásérzékelőt is beszerelnek.
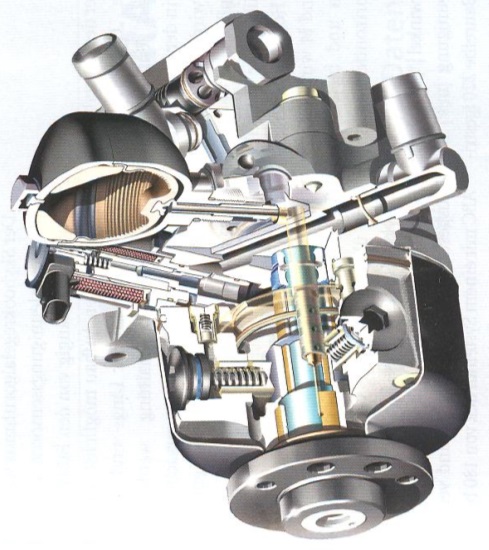
Mindkét futóműhöz beépítenek egy-egy szelep egységet. Ezeket nyomástárolóval is ellátják, melyek az energia igény csúcsokat hivatottak kiegyenlíteni.
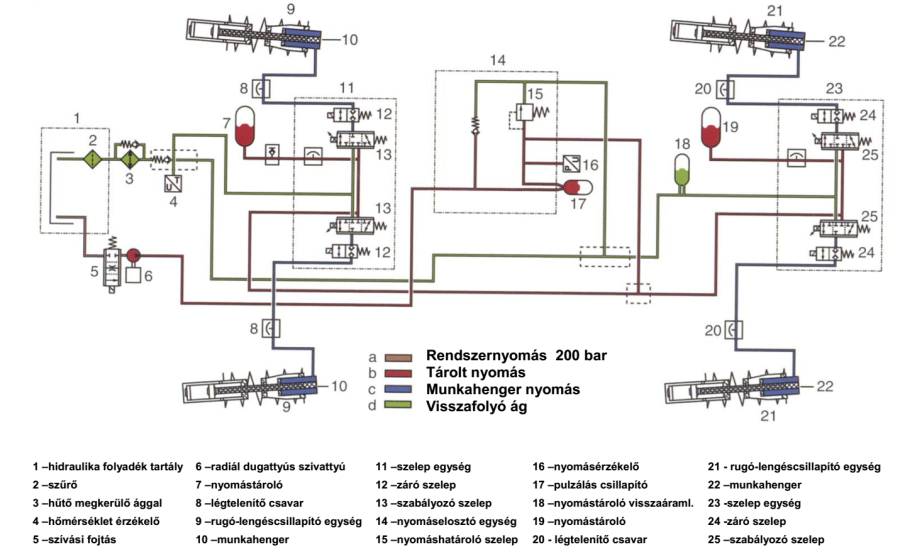
Kerekenként egy 3/3-as elektromágneses szelep végzi a működtetéseket. Árammentes állapotban a középső helyzetben van. A gépkocsi álló helyzetében pedig egy záró szelep akadályozza meg a nyomás gyors megszűnését.
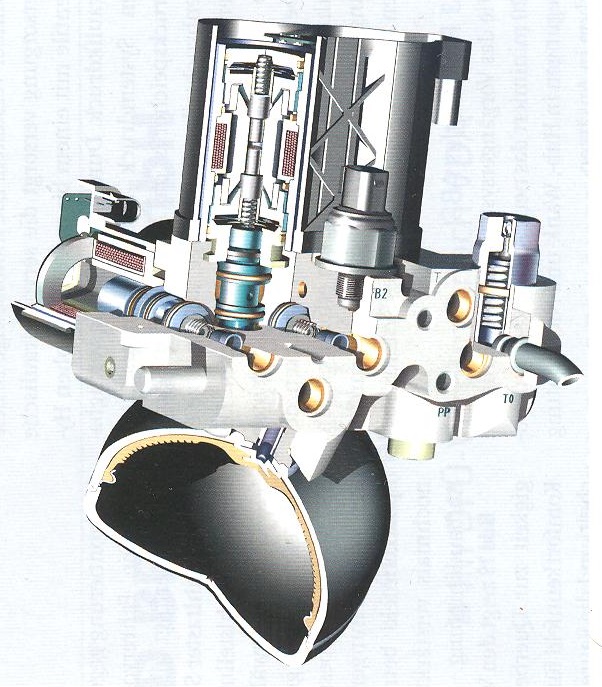
Ez a szelep egyúttal része a biztonsági koncepciónak is, mert meghibásodás esetén lezár és lehetővé teszi a gépkocsi passzív futóművel történő tovább haladását.
A szintszabályzás úgy valósul meg, hogy mind a négy kerékhez hidraulikus állítóhengert szereljenek be. Az olaj nyomás változtatásával a rugó előfeszítése változtatható. A dugattyúrúd pillanatnyi helyzetének megállapításához elmozdulás érzékelőt szerelnek be.
Az olajnyomást az elektronika a futóműveknél elhelyezett elektromágneses szelepekkel automatikusan szabályozza. Nyomás növelésre és csökkentésre egyaránt van lehetőség. A szelep zárva van, ha árammentes pl: álló motornál, vagy hiba esetén.
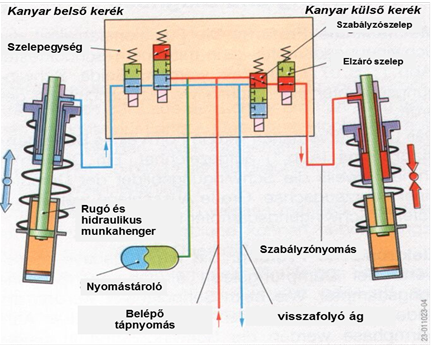
Működés:
A vezető felőli ajtó kinyitásakor az elektronika aktívvá válik és az aktuális körülményeknek megfelelő kocsiszekrény magasságot állítja be. Az ABC elektronika menet közben folyamatosan összesen 13 érzékelő jelét dolgozza fel, melyek a következők:
a kerék és a felépítmény közötti relatív elmozdulás
függőleges irányú gyorsulás a kocsiszekrény négy pontján
kereszt irányú gyorsulás
olajnyomás és hőmérséklet
Gyorsításkor és fékezéskor egyaránt elvégzi a kocsiszekrény szintkiegyenlítését úgy, hogy a futóműveknél a szükséges mértékben, de ha kell eltérő mértékben növeli, illetve csökkenti a rugók előfeszítését.
Egyenes menetben nagyobb sebességnél csökkenti a kocsiszekrény magasságát (az első és a hátsó futóműnél egyaránt). Ez a beavatkozás csökkenti a gépkocsi légellenállását.
Kanyarodáskor a keresztirányú gyorsulásérzékelő jele alapján az elektronika az elektromágneses szelep működtetésével csökkenti a hidraulika nyomást a kanyarbelső rugóstagon és növeli a kanyar külsőnél. Így kanyarodás közben kiegyenlíti az oldaldőlést.
Az ABC futómű változat előnyei:
csekély többletfogyasztás
kis tömeg
a hidraulika meghibásodása esetén passzív stabilizátorként működik
sport illetve komfortfokozat választható
Hátrányok:
Ez csak félig aktív rendszer.
A lengéscsillapító karakterisztika nem változik a pillanatnyi rugóerőnek megfelelően.
A tudásához és a nyújtott szolgáltatáshoz képest drága
Sok, bonyolult karbantartás igényes alkatrészt tartalmaz.
A rugós tagok
A tekercsrugó, az egyszeres működésű hidraulikus munkahenger, mely a szintállítást végzi, a lengéscsillapító és a szintérzékelő egyetlen közös egységet alkot. A tekercsrugó egyik vége a lengéscsillapítóhoz rögzített rugótányérhoz, a másik vége pedig a tolattyúra támaszkodik.
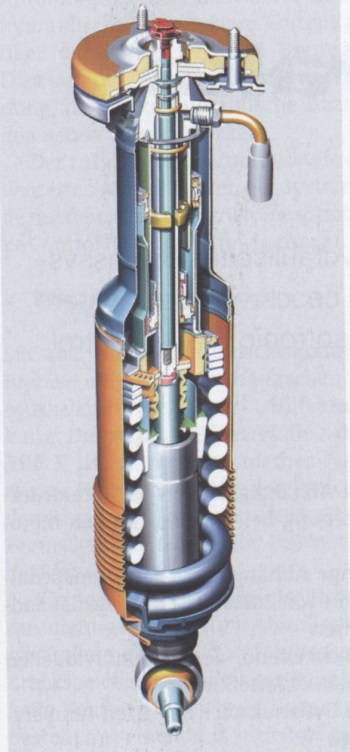
Az elektronika és a szoftver
Az ABC elektronika fogadja, szűri és digitalizálja a bemeneti jeleket és a szoftverben meghatározottak szerinti az algoritmussal beavatkozási jeleket ad ki. Folyamatosan figyeli a rendszer valamennyi elemének működését. Hiba esetén szükségfutási parancsot ad ki és tájékoztatja a vezetőt az ellenőrzőlámpa segítségével. Több mikroprocesszorból álló rendszert alkalmaznak.
A szoftver három szabályozási stratégiát valósít meg, melyek a gépkocsi menetdinamikai viselkedését befolyásolják:
Aktív kocsiszekrény kontrol, ez az algoritmus írja le a kocsiszekrény pillanatnyi helyzetét és mozgását.
Skyhook szabályozás, melynél nagy jelentősége van a jel gyorsaságának. Ez befolyásolja ugyanis a kocsiszekrénynél a csillapítást. A szabályozás bemeneti információi a három helyen mért függőleges elmozdulások és gyorsulások. Ezeket a lehető legkisebb értéken tartja. Ezzel érhető el a lehető legnagyobb komfort.
Reagálás a hossz- és a kereszt irányú gyorsulásokra. A kereszt irányú gyorsulások figyelése révén lehet a megfelelő beavatkozással megakadályozni a kocsiszekrény billenését, ami például dinamikus kormánymozdulatoknál szokott bekövetkezni. A szintszabályozás ugyanis nagyon lassan reagál az ilyen változásokra. A kereszt irányú gyorsulással lesz arányos a hidraulikus munkahengerekben az elektromágneses szelepekkel beállított nyomás, mert ezzel egyenlíthető ki a kocsiszekrény billenése. Hasonló módon avatkozik be a hosszirányú gyorsulás, illetve lassulás esetén is, amikor a kocsiszekrény bólintó mozgását kompenzálja.
A szabályozási stratégiák összehangolása
Menet közben az elektronika az előzőekben ismertetett különböző részműködéseket a pillanatnyi helyzetnek és a gépkocsi sebességének megfelelően súlyozza. Az aktuális paraméterek beállítása attól függ majd, hogy a vezető a sportos, vagy a komfortos utazást választotta. Az így meghatározott paraméterektől függ majd az elektromágneses szelepekre kapcsolt gerjesztő áram.
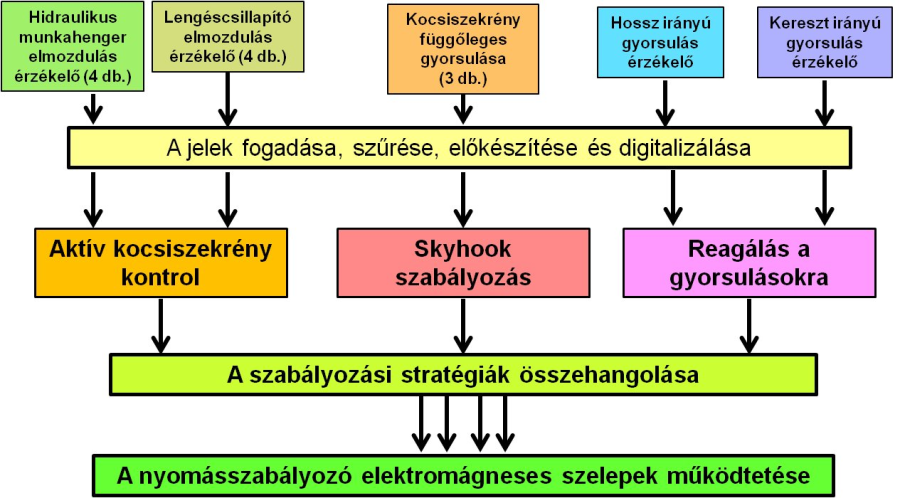
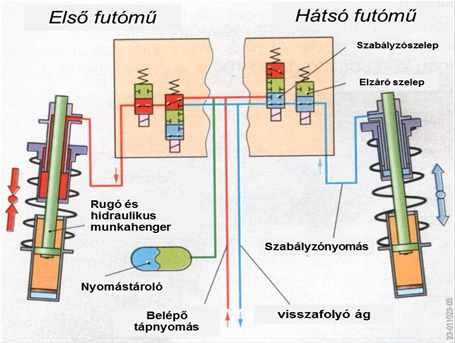
Az ABC futómű működésének előnyös tulajdonságai az állandó sebességű körpályán, a szlalom menetben, és a hirtelen kormánymozdulatoknál a legszembetűnőbb. Azonos körülmények között ívmenetben a hagyományos futóművel szerelt S-osztályú Mercedes billenési szöge 3,1˚ volt az ABC futóművel szerelt változatnál csupán 1,2˚.
3.7. Haszonjárművek elektronikus légrugózása
Az utasok kényelme, az áruk kíméletesebb szállítása miatt a haszonjárműveknél széles körűen alkalmazzák a légrugózást. Ezen a területen egyre nagyobb a jelentősége az elektronikus működésű változatnak.
A járműfelépítmények rezgéseit és lengéseit az útegyenetlenségek a kerekek tömegére gyakorolt periodikus hatása váltja ki. Intenzitása elsődlegesen a gépkocsi sebességétől függ. A függőleges irányú felépítmény elmozdulásokat a rugózás és a lengéscsillapítás révén igyekeznek megfelelő értékek között tartani. Az utazási kényelmet, azaz a gyorsulások az emberi szervezetre gyakorolt hatását kísérletekkel megállapított mérőszámokkal jellemzik, melynél a frekvencia és az amplitúdó együttes hatását veszik figyelembe (VDI görbék).
Az is hozzájárult a haszonjárműveknél a légrugózás széles körű elterjedéséhez, hogy a sűrített levegő ellátó és tároló rendszer a nagyobb ősz-gördülőtömegű járműveknél a fékrendszer révén már rendelkezésre áll, csupán a kapacitását kell kissé megnövelni, a légrugók sűrített levegő fogyasztásának megfelelően.
Kedvelt a szintszabályozás lehetősége, a progresszív és változtatható karakterisztika miatt.
3.7.1. A fejlesztések főbb céljai
Menet közben a futómű, illetve a kocsiszekrény rezonancia frekvenciája közelében minél kisebb, azaz csak jól elviselhető felépítmény gyorsulások lépjenek fel.
Minél jobb legyen a jármű menetdinamikája a teljes terhelési tartományban (üresen és teljes terhelésnél ne változzon észrevehetően a rugózás).
A kerékfelfüggesztésnél alkalmazott szerkezeti elemek belső súrlódása ne tegye keményebbé a rugózást.
A karosszériának minél nagyobb legyen a kanyarstabilitása, ami ellentétes szempont a lágy komfortos rugózással.
Minél hatékonyabb legyen a gumiabroncs és az útfelület közötti kapcsolat. Ezért a függőleges irányú dinamikus kerékterhelés változás minél kisebb legyen. A jelentős változások korlátozzák a fékezés és a kormányzás lehetőségeit.
Turista buszoknál a fel- és leszállás az egyik ajtónál a légrugó nyomásának csökkentésével, az úgynevezett letérdepeltetéssel legyen megkönnyíthető.
Tehergépkocsiknál a rakodás megkönnyítésére minél tágabb határok között legyen változtatható a padlómagasság. Kedvező, ha a rámpa magasságának megfelelően a padlómagasság a ki és berakodás közben automatikusan tartható.
A különböző, szélsőséges terhelés változások ne okozzanak felépítmény magasság változást.
A felsoroltak közül számos szempont egymással ellentétes konstrukciós kialakításokat igényel. Ezek között kell kompromisszumok révén megtalálni az optimális megoldási lehetőségeket.
3.7.2. A haszonjárműveknél alkalmazott légrugók
A jármű statikus terhelésétől független állandó térfogat és terheléstől függő nyomás jellemzi. A szintszabályozásnak köszönhetően a padlómagasság, illetve a felépítmény lengésszáma a terheléstől függetlenül közel állandó. A sűrített levegőben bekövetkező nyomás- és az emiatt bekövetkező termodinamikai állapotváltozások miatti progresszív karakterisztikájú. Ezért a légrugós kerékfelfüggesztés nagyobb kényelmet biztosít, és nagyobb menetstabilitást eredményez. A futóműre szerelt különböző speciális tartószerkezetek kialakításával széles határok között változtatható a rugóbázis, ami alapvetően meghatározza a jármű kanyarstabilitását. Kis hely- és karbantartási igény jellemzi a légrugókat.
Speciális hosszú löketű légrugókat alkalmaznak az úgynevezett liftes tengely mozgatására, azaz emelésére, illetve süllyesztésére. Az alvázon csapágyazott karokat is felszerelnek ilyen konstrukciókhoz. Ehhez kézi-, és/vagy automatikus működésű szelepet is felszerelnek.
A gyűrűs légrugó
Acélgyűrűk segítségével kialakított kettő, vagy több részes tórusz alakú, szövetváz erősítésű gumitömlőből áll. Sűrített levegővel töltött rugalmas párnák elvén működik. Kis térfogatnál karakterisztikája meredekebb. Térfogata segédtér kialakításával növelhető. Korábban általában kisebb terhelésű helyeken alkalmazzák, mint például vezetőülés, vagy a vezetőfülke rugózása. Jelenleg a gördülőmembrános változatok már kiszorították a gyűrűs légrugókat.
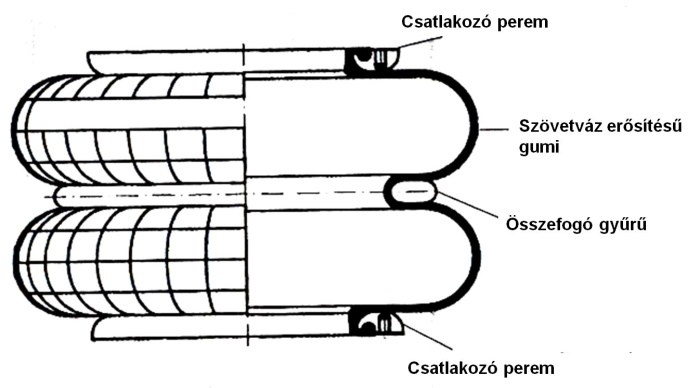
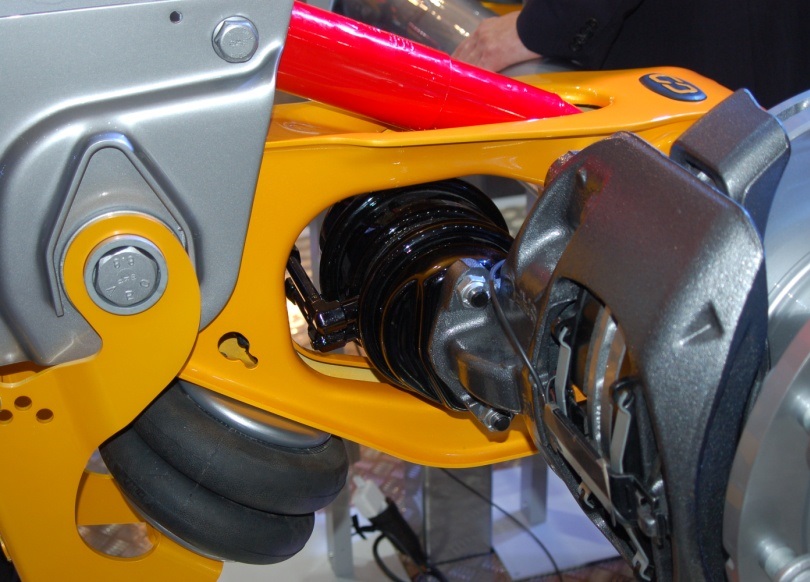
Gördülőmembrános légrugó
A membrán több rétegű kord, vagy nylon szálakból készített szövetváz erősítésű gumiból készül. Ez a gumianyag öregedésálló a hajtogatást és a nyíró erőket jól viselő összetételű. A belső gumiréteg légzáró és olajálló kivitelű, amire a kompresszor kenéséhez használt olaj sűrített levegőbe kerülése miatt van szükség. A gumimembrán létesít kapcsolatot a fedél és a dugattyúszerűen kialakított alsó rész között. Működés közben az elnevezésének megfelelően alsó részen az erő hatására legördül. A korábbi kiviteleknél külső felületét acél szalagból készített gyűrű fogta át, mely mechanikai védelmet is nyújtott.
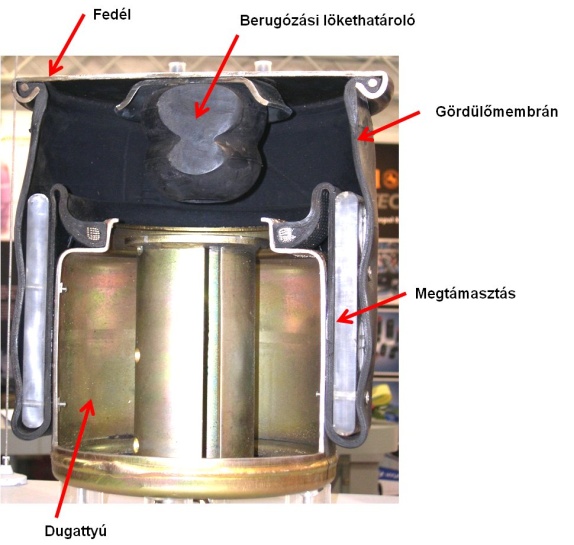
A felső fémből készült fedél zárja le és adja át a terhelést a légrugónak. Itt alakítják ki a sűrített levegő cső csatlakozását. Belülről erre szerelik a löket határoló gumirugót. Nyomásmentes állapotában támasztja meg a jármű felépítményt.
A légrugó alsó részét dugattyú szerűen alakítják ki, mely a térfogat növelő résszel is kiegészülhet. Ezt a részt szerelik a futóműre. A külső palást felületének alakjával a légrugó karakterisztikája még progresszívebbé tehető. (például felülről lefelé fokozatosan növekvő átmérővel). Ekkor az elmozdulás függvényében a lapos lineáris szakaszt meredekebb erősen progresszív rész követi. Leggyakrabban haszonjárművek felépítményének rugózására használják. A kanyarodáskor az oldalerők hatására bekövetkező billenést jobban elviseli, mint a gyűrűs légrugó.
3.7.3. Légrugó szintállító szelepek
A légrugó szintállító szelepet a jármű felépítményére szerelik és beállítható hosszúságú karok segítségével a futóműhöz csatlakozik. Csövekkel a légtartályhoz (1-es csatlakozó), illetve a légrugóhoz (2-es) csatlakoztatják. Nyomáscsökkentéskor a szelep alsó részén (3) áramlik a sűrített levegő a szabadba.
Belsejébe kettős szelepet építenek. Az egyik a légrugó nyomását állítja be a másik a légtartály csatlakozóját zárja le.
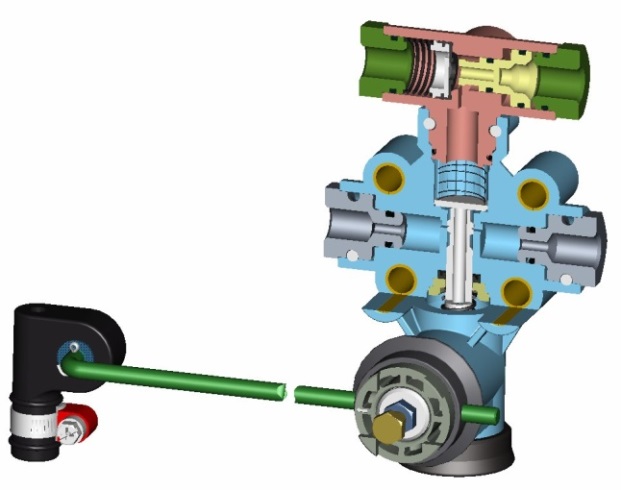
A jármű terhelésének növekedésekor a felépítmény lejjebb mozdul. Hatására a kar elfordul és egy excentikus csap segítségével nyitja a nyomásnövelő szelepet. A nyomásnövekedés visszaállítja az eredeti felépítmény magasságot. Ekkor a kar elfordulása zárja a szelepet. A jármű terhelésének csökkenésekor a másik szelep nyit és sűrített levegő áramlik a légrugóból a szabadba. Ez a felépítmény szintjének csökkenését okozza. Hatására a szintállító szelep karja ellentétes irányba mozdul és visszazár a nyomáscsökkentő szelep. Az átömlő keresztmetszetek viszonylag kicsik, 1-1,5 mm átmérőjűek.
A felépítmény rugómozgásai miatt állandóan mozog az állítókar. Ez koptatja a szelep belső szerkezetét. Az újabb szintállító szelepeket kopásnak ellenálló kerámia betéttel látják el. Normál útviszonyoknál a rugómozgások nem okoznak nyomásváltozást. Ez csak nagyobb elmozdulásnál következik be. Az ilyen kivitelű változat sűrített levegő felhasználása kevesebb. A kanyarodáskor, sávváltáskor bekövetkező kedvezőtlen kereszt irányú lengések elkerülése miatt gyakran az első futóműnél középen egy szintállító szelepet alkalmaznak, a hátsónál pedig mindkét oldalon egyet-egyet. Kiegészítő pneumatikus egységgel válik lehetővé a „letérdepeltetés”.
3.7.4. Légrugó és laprugó kombinációja
A teherautóknál alkalmazzák egy futóművön belül a légrugó és a laprugó kombinációját. A légrugó a futómű, illetve a felépítmény felől szimmetriatengelyükkel párhuzamos, függőleges irányú erőket vesznek fel. A menet irányú és az oldal irányú erőket, valamint a fékezéskor a futóműre ható nyomatékot a laprugó veszi fel, mely leggyakrabban egyenszilárdságú kivitelű. Így részt vesz a kerék vezetésében is. A két rugóelemet összehangolják egymással.

3.7.5. Elektronika a légrugózásnál
Az első elektronikus légrugó rendszert a Wabco valósította meg. 1986-ban kezdődött az ECAS (Electronically Controlled Air Suspension) sorozatgyártása. A jelentősebb haszonjármű gyártók közül egyre többen kezdték alkalmazni. 1996-ban jelent meg pótkocsikhoz kifejlesztett újabb változat. Ezt követően a vezetőfülkéknél is alkalmaztak hasonló újabb rendszereket.
A moduláris felépítésű, könnyen áttekinthető elektronikus légrugózási rendszer számos előnyt kínál úgy a járművek gyártóinak, mint üzemeltetőinek. A laprugós járműveknél lényegesen komfortosabb utazást, illetve szállítást tesz lehetővé. A felépítmény magassága a terheléstől függetlenül állandó értéken tartható.
Az elektronika számos kiegészítő működést tesz lehetővé, mint például:
A felemelhető tengely (liftes tengely) vezérlése,
Elindulási segítség, melynél az ASR működésekor az automatikusan felemelt segédtengely nagyobb kerékterheléseket hoz létre a hajtott kerekeknél, ami csúszós úton megkönnyíti az elindulást. Ezt a működést az Európai előírásoknak megfelelően konfigurálható.
Lehetővé teszi az előre beállított felépítmény magasság tartását, függetlenül a terhelés változásától.
A nagy átömlő keresztmetszetű szelepek gyors szintváltoztatást tesznek lehetővé úgy az emelés, mint a süllyesztés irányában.
Előzetesen meghatározott különböző utazási szintek állíthatók be.
3.7.5.1. Wabco ECAS
A Wabco ECAS rendszer az alváz és a futómű közé szerelt elmozdulás érzékelőből, öndiagnosztikai rendszerrel ellátott elektronikából és elektromágneses szelepcsoportokból áll. Az alkalmazott érzékelők a felépítmény és a futómű közötti távolsággal arányos elektromos jelet adnak az elektronikának. Ha, az különbséget észlel az előre megadott távolság és a pillanatnyi érték között, aktiválja a megfelelő elektromágneses szelepeket, melyek segítségével a megfelelő szint beáll. Ennek megfelelően a légrugó nyomását növeli, vagy csökkenti az eltéréstől függően. Az útegyenetlenségek miatt bekövetkező érzékelő elmozdulásokat az elektronika a szintszabályozás szempontjából nem veszi figyelembe.
A távirányító segítségével a felépítmény magassági helyzete a vezetőfülkéből, illetve azon kívülről is kézzel állítható. Így például a rakodórámpának megfelelő magasság felépítmény magasság beállítható és a ki, illetve berakodás folyamán ezt a szintet automatikusan tartja is a rendszer. Lehetőség adódik a felemelhető segédtengely helyzetének manuális beállítására is. Ha azonban a tengelyterhelés átlépi a hatóságilag megengedett határértéket, melyről a légrugókhoz csatlakozó nyomásérzékelők adnak információt, az elektronika automatikusan aktiválja a segédtengely lebocsátását az útfelületre.

A diagnosztika az ISO 9141, illetve a KWP 2000 szabványok szerinti protokollal lehetséges az erre a célra kifejlesztett számítógépes szoftver segítségével. A rendszer eleme a kézi működtető egység, mely a kiviteltől függően a vezetőfülkébe, illetve az alvázon elhelyezett dugaszoló aljzatokhoz csatlakoztatható. Más elektronikus rendszerekkel a gépkocsi CAN hálózatán keresztül létesít kapcsolatot. Felszerelése egyszerűen és gyorsan végezhető.
Lehet csak a hátsó futómű, illetve mindkettő elektronikus légrugóval ellátott, illetve kiterjeszthető ez a kiegészítő segédtengelyre is.


3.7.5.2. Elektronikus légrugózás, lengéscsillapítással kombinálva ESAC
A menetkomfort további növelése érdekében a Wabco egy integrális rendszert is kínál a járműgyártóknak, melynél nem csak a légrugózás elektronikus működésű, hanem a lengéscsillapítás karakterisztikája is hasonló módon automatikusan változik. Ezt a kombinált rendszert ESAC- nak nevezik, mely az angol megnevezésből képzett mozaik szó (Electronic Shock Absorber Control).
Az ESAC-nál alkalmazott érzékelők nem csak a jármű terhelését figyelik, hanem az út profilját, a légrugó nyomását, a felépítmény mozgását, a kereszt irányú gyorsulást, a gépkocsi sebességét, a fékezőnyomás pillanatnyi értékét és a menetpedál helyzetét is.
Az elektronika az aktuális menetállapotnak megfelelő lengéscsillapítási karakterisztikát állítja be, milliszekundumon belül, az elektromágneses szelepek segítségével. A rendszerhez szükséges állítható karakterisztikájú lengéscsillapítókat a ZF Sachs fejlesztette ki és szállítja.
A fontosabb előnyök közé tartozik: a még jobb menetkomforton kívül, a jobb menetstabilitás, különösen a nagyobb sebességű kanyarvételeknél. A csillapítási karakterisztika változtatásával csökkenthető a felépítmény dőlése kanyarokban, de csökkenthető a fékezéskor, illetve elinduláskor bekövetkező bólintó mozgás is, különösen a rövid tengelytávolságú járműveknél fontos, mint például a nyerges vontatók. Természetesen az útburkolatot is kíméli a légrugós kerékfelfüggesztés révén.
3.7.5.3. A pótkocsihoz ELM
A pótkocsikhoz kifejlesztett kompakt elektronikus légrugó rendszernél közös egységbe került a szintérzékelő és az elektronika. Az alvázra pedig egy nyomógombokkal ellátott kiszolgáló egységet szerelnek fel, mely a kézi szintbeállításokat teszi lehetővé. A sebességjelet a VCS-től, vagyis a pótkocsi ABS rendszertől (Vario Compact System), illetve az EBS rendszertől a CAN hálózaton keresztül érkezik.
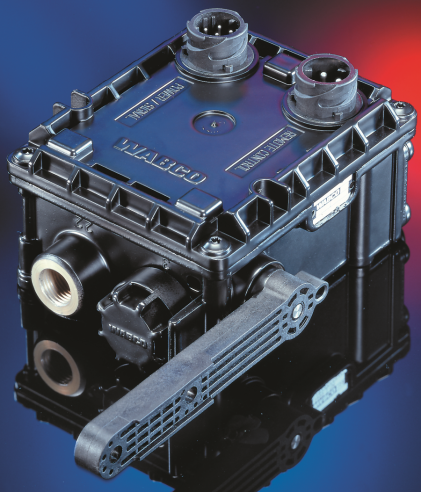
3.7.5.4. Intelligens légrugózás új érzékelővel
Az elektronikus légrugózási rendszereknél különböző elven működő érzékelőket alkalmaznak, melyek a rugóúttal arányos elektromos jelet adnak az elektronikának. A felépítményre szerelt érzékelő két részes rudazattal csatlakozik a futóműhöz. Ez szükségessé teszi a beállítást, további hátránya, hogy ki van téve mechanikus sérüléseknek. A bekövetkező deformáció hátrányosan érinti a rendszer működését. A Conti-Tech Luftfedersysteme GmbH. célul tűzte ki egy olyan érzékelő kifejlesztését az elektronikus légrugózáshoz, mely mechanikus kapcsolat nélkül, kopásmentesen működik.

A kísérletek során radar és optikai elven működő érzékelőket is kipróbáltak, de a költségek és a műszaki lehetőségek szempontjából a legkedvezőbbnek az ultrahangos bizonyult.
Mivel a pillanatnyi légrugó nyomást is célszerű mérni, ennél az új érzékelőnél ultrahangos elmozdulás jeladót kombinálják a nyomásérzékelővel és közvetlenül a légrugó felső részébe építik be. A beépített jelgenerátor hozza létre az ultrahangot, mely a légrugó alsó részén kialakított dugattyú felületéről verődik vissza. Az elektronika a kibocsátás pillanata és a visszaverődés között eltelt idő alapján határozza meg a felépítmény és a futómű közötti távolságot. Mechanikus sérüléseknek kitett alkatrészeket ez az egység nem tartalmaz és a különböző szennyeződésektől védett módon szerelik be. Helyigénye minimális. Az érzékelőt a pontosságellenőrzés után a légrugó felső részébe építik be. Egy elektromos csatlakozó bekötése után mindkét érzékelő jelátvitele biztosított, így a felszerelés gyorsan megvalósítható.
Az elmozdulás mérése azonban a gyakorlatban nem annyira egyszerűen valósítható meg. Az ultrahang terjedési sebességét ugyanis befolyásolja a légrugó belsejében uralkodó pillanatnyi nyomás és a hőmérséklet is. A kiértékelő elektronikát el kell tehát látni ennek megfelelő kompenzálását végző áramkörrel.
A gyártó szerint az új érzékelő kompatibilis valamennyi jelenleg gyártásban lévő elektronikus légrugózási rendszer elektronikájával.
3.7.5.5. Vezetőfülke rugózás és lengéscsillapítás sűrített levegővel
A vezetőfülke egymással jól összehangolt rugózása és lengéscsillapítása gondoskodik arról, hogy a vezető hosszú úton is minél később fáradjon ki a mechanikai igénybevételek miatt.
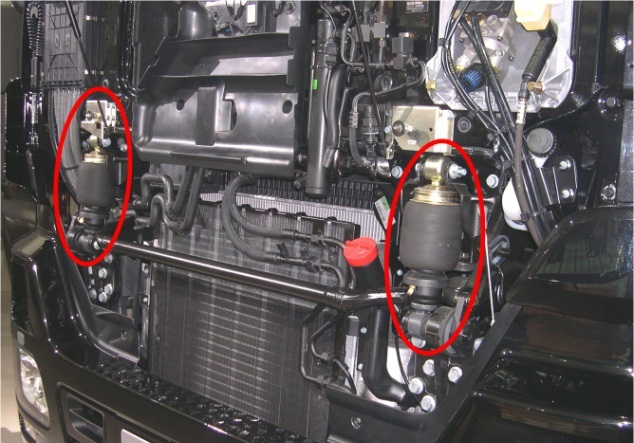
A Conti-Tech Luftfedersysteme GmbH. A légrugós vezetőfülke felfüggesztést sűrített levegővel működő lengéscsillapítóval kombinálta. Nem csak az egyetlen közös, kompakt szerkezeti elem előnyét lehet kihasználni, hanem biztosított az adaptív lengéscsillapítás is. Mivel az alkalmazott munkaközeg nem olaj, hanem sűrített levegő, ez a megoldás környezetvédelmi előnyökkel is jár. Továbbá az olajszivárgás miatti lengéscsillapító élettartama nem korlátozott.
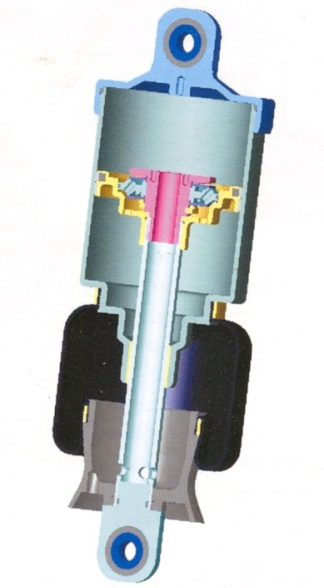
A légrugó-lengéscsillapító egység három- vagy két sűrített levegővel töltött kamrából áll, melyek egymással kapcsolatban állnak. A rugóelem egy gördülőmembrános légrugó. A csillapítást a dugattyúba szerelt szelepek végzik melyeken keresztül az áramlást a kamrák a ki és berugózás közbeni térfogat változása hozza létre. A fizikai törvényszerűségek biztosítják az újabb előnyt ennél a lengéscsillapítónál. A csillapító közegnek, a sűrített levegőnek, a sűrűsége a terhelés növekedésével arányosan növekszik. Így a rugózási és a lengéscsillapítási karakterisztika egyaránt automatikusan igazodik a terhelése függvényében. Minél nagyobb a tömeg, annál nagyobb a lengéscsillapítási teljesítmény. Ez lehetővé teszi például, hogy különböző vezetőfülke változatokat, ugyanarra a rugó - lengéscsillapító egységre szereljenek fel. Ennek más vonatkozású előnye az, hogy csökken a javításokhoz raktáron tartandó alkatrészek száma. Az új rendszer különösen előnyös a nagy frekvenciájú rezgések tartományában, melyet például a macskaköves útburkolat jelent. Lényegesen kedvezőbb csillapítást biztosít, mint az összenyomhatatlan közeggel, az olajjal működő lengéscsillapítók. Megvalósították ennek a légrugó-lengéscsillapító egységnek a rövidebb, kétkamrás változatát is, melynél a dugattyú alatti tér közös a légrugóval. Kisebb mérete miatt ez a változat arra is alkalmas, hogy vezető ülésbe beépítsék.
CALM
A vezetőfülkékhez a Wabco által kifejlesztett légrugó és lengéscsillapító modul angol elnevezésének (Cabin Air Leveling Module) megfelelő mozaikszó a CALM. A ZF Sachs -al együttműködve fejlesztették ki és szabadalmaztatták. A közös légrugó és lengéscsillapító egységbe szerelik be a kerámia alkatrészekből készített szintállító szelepet is. Felszerelésének időszükséglete kevesebb a hagyományos rendszerekénél, mivel kevesebb egységből áll és helyigénye is kisebb. A vezetőfülke két első felfüggesztési pontját valamint egy hátsót alkotják a CALM egységek. Hátra még egy hagyományos légrugó-lengéscsillapító egységet is felszerelnek. A vezetőfülke és az alváz közötti relatív elmozdulást befolyásolják ezek a felfüggesztő elemek.

3.7.5.6. Knorr-Bremse ELC 4
Az elektronikus rendszernél szintérzékelők jelei alapján működteti az elektronika az elektromágneses szelepcsoportokat, melyek a légrugók nyomását állítják be a pillanatnyi menetviszonyoknak megfelelően.
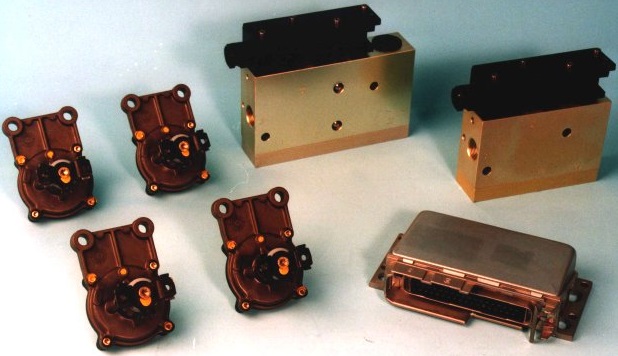
Az elektronikus légrugózás részegységei
3.7.5.6.1. Szintérzékelő
Az elektronika bemeneti információja a felépítmény és a futómű közötti távolság. Az ezzel arányos jelet szintérzékelő közvetíti. Belsejébe a környezeti behatásoktól védetten potenciométert építenek be. Az elektronika bemeneti információja az ellenállás változása. A lineáris karakterisztika megkönnyíti a kiértékelést.
Az első futóműnél középre általában egy szintérzékelőt, a hátsó futómű két szélén egy-egy darabot szerelnek fel. Ha a „letérdeltetést” is meg akarják valósítani, az érzékelők elhelyezése és száma ettől el fog térni. A szintérzékelő elfordítható része egy beállítható hosszúságú vízszintes rudazattal és ugyancsak állítható hosszúságú függőleges karral csatlakozik a futóműhöz. A felszereléskor a potenciométert az összejelölt középső helyzetbe kell állítani. A jármű felépítménye a gyártó által előírt normál menet magasságban kell legyen ilyenkor. Ennek megfelelően kell a rudazatot beszerelni. Ezt követően a jármű gyártója által meghatározott különböző szinteket lehet beszabályozni. Ezeket az értékeket az elektronika memóriája tárolja. Megadásához, illetve beállításához a diagnosztikai laptop és kiegészítő egységei szükségesek.

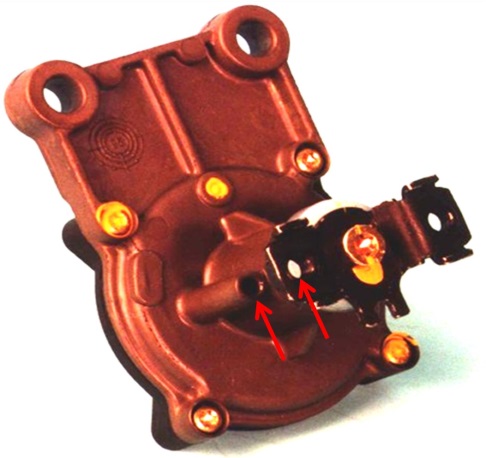
3.7.5.6.2. Az ELC elektronikája
Az elektronikát a járműbe védett helyre, vagy az utastérbe, vagy valamelyik oldalládába, illetve a mennyezet alatti levegőcsatornákba szerelik. A gyárilag alumínium dobozba beépített elektronika a hagyományosnak tekinthető, 35 pólusú csatlakozón keresztül létesít kapcsolatot az elektronikus légrugó rendszer perifériájával, azaz az érzékelőkkel, kapcsolókkal és a szelepcsoportokkal. Az újabb változatoknál már több csatlakozós, úgynevezett moduláris rendszert alkalmaznak.
Az indítókulcs elfordítását követően az elektronika automatikusan végrehajtja a rendszer ellenőrzést, eközben a kontrollámpa világít. A folyamat során az elektronika rövid impulzusokat küld a működtető elektromágnesek tekercseinek, amivel ellenőrzi ezeket az áramköröket. Ha a rendszer hibátlan az ellenőrzőlámpák kialszanak. Ha a légtartályban a rendszer működéshez nem elegendő a nyomás, az ellenőrző lámpa villog. Ehhez a jelet a légtartály közelében elhelyezett nyomásérzékelő adja.
Működés során az elektronika tápfeszültséggel látja el a szintérzékelő potenciométereket, és fogadja az onnan érkező feszültség jeleket, továbbá a vezető által a kapcsolókkal közvetített szintállítási parancsokat. Kiértékeli ezeket a jeleket, eredményeként beavatkozási parancsot ad ki. Működése során folyamatosan ellenőrzi a rendszer elemeinek állapotát. Ha a szintállítás szükségessé válik, áramot kapcsol a megfelelő szelepcsoport elektromágneseire.
Beállíthatók az egyes működtetésekhez az ezeknek megfelelő sebességküszöbök, például a különböző szintek aktiválására, illetve a térdepeltetés visszakapcsolására.
Az elektronika a légrugók nyomásának változtatását némi késedelemmel végzi azért, hogy a rossz úton bekövetkező futómű lengések ne okozzanak túl nagy sűrített levegő felhasználást.
A kanyarodást az elektronika a jobb és bal oldali szintérzékelők ellentétes elmozdulása alapján ismeri fel, ilyenkor a jobb és baloldali légrugók egymástól leválaszthatók az elektromágneses szelepek segítségével. Ezt nevezik keresztzárásnak, ami csökkenti a felépítmény billenését.
A különböző országok előírásainak megfelelő működési paraméterek programozhatók be az elektronikába.
A hibakódok kiolvasása és törlése diagnosztikai számítógéppel lehetséges. A diagnosztikai vizsgálatnál lehetőség van a villogókód aktiválására is.
Csuklós autóbuszoknál a régebbi változatnál még kettő, megfelelően konfigurált (master ésslaver) elektronika szükséges, melyek működés közben egymással adatátviteli kapcsolatban állnak.
3.7.5.6.3. Elektromágneses szelep egységek
Menet közben ezek a szelepcsoportok szabályozzák a sűrített levegő áramlását annak érdekében, hogy a felépítmény feljebb, vagy lejjebb mozduljon, illetve megakadályozható legyen a kocsiszekrény billenése, vagy a ki- és beszállás megkönnyítéséhez letérdepeltethető legyen az autóbusz.
A hátsó futómű szelep egysége:
Három elővezérlő elektromágnesből és az azokhoz csatlakozó relé-szelepekből áll. Az elektromágneses szelepek alaphelyzetben árammentesek. A fenti I. II. és a III.-as jelű kamrákban nincs sűrített levegő nyomás. A relé-szelepek dugattyúi (7, 8, 9) alaphelyzetben vannak. Az alsó részbe szerelt kettős szelepek (10, 11, 12) zárnak az ülékekhez. Az „A” -jelű 3/2-es, vagyis három csőcsatlakozó között két működési állapotban kapcsolatot létesítő központi szelep növeli, vagy csökkenti a nyomást a légrugóban, attól függően, hogy a légtartállyal, vagy a környezettel van kapcsolatban.
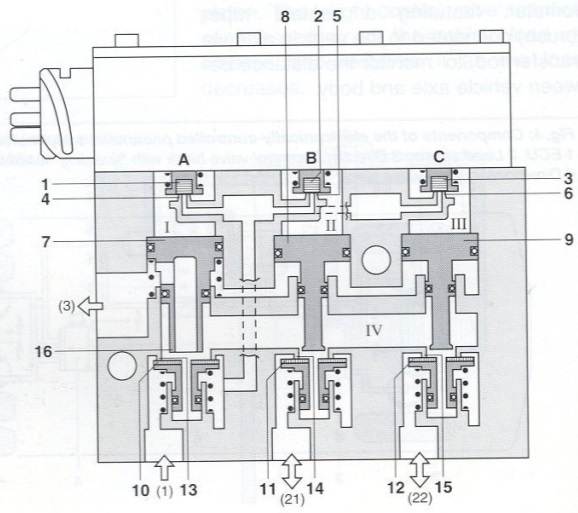
A másik két „B” és „C” -jelű 2/2-es elektromágneses szelepek a bal és a jobb oldali légrugók kiválasztására adnak lehetőséget. Ha növekszik a gépkocsi terhelése, a tekercsek gerjesztő áramot kapnak. Az I. II. és a III. kamrákba sűrített levegő kerül és a relé-szelep dugattyúk lefelé mozdulnak.
Az „A” -jelű szelep megszűnteti az összeköttetést a környezettel és a kettős-szelep nyitásával sűrített levegőt enged a „IV” térbe. A 8-as és a 9-es relé-szelepek dugattyúinak elmozdulása lehetővé teszi, hogy a 21-es és a 22-es csatlakozó furatokon keresztül sűrített levegő áramoljon a bal és a jobb hátsó légrugókba. Ha az egyik, vagy a másik légrugó nyomását nem szükséges növelni, az természetesen lezárható.
Ha az „A” -jelű szelep tekercse árammentes, a „B” és a „C” –jelű szelepekkel kiválasztott légrugók nyomása hasonló módon változtatható, de most nyomáscsökkentésnek megfelelően.
Az első tengelynél alkalmazott, „letérdeltetést” is lehetővé tevő szelepváltozat (autóbusz)
Ezt az egységet a szeleptömb felső részébe szerelt három elektromágnes működteti. A bal, valamint a jobb oldali légrugók kimenetei között a szeleptömbön belül egy fojtófuratot alakítottak ki (6).
Az „A” –jelű központi elektromágneses szelep alaphelyzetben árammentes. Ilyenkor a légrugók nyomásának csökkentésére válik lehetőség. A gerjesztő áram hatására működteti az alatta lévő relé-szelepet, ami lehetővé teszi a légrugók nyomásának növelését.
A „B” –jelű elektromágnes a 21-es illetve a 22-es kimeneti csatlakozókhoz engedi a sűrített levegőt, vagy azok ürítését teszi lehetővé. A „C” –jelű elektromágneses szelep a szintállításhoz nem használatos. A „letérdepentetés”, vagyis az utasok fel és leszállását megkönnyítő belépőszint csökkentés az ajtó felőli oldalon a B és a C elektromágnesek működtetésével lehetséges. A C zárja a 22-es csatlakozót, melynél nem lesz nyomásváltozás. A nyomáscsökkentést a 21-es kimeneten a B elektromágnes gerjesztése hozza létre a relé-szelep segítségével. Ez az előre meghatározott és pontosan beállított szintig engedi csökkenni az autóbusz fellépő magasságát.
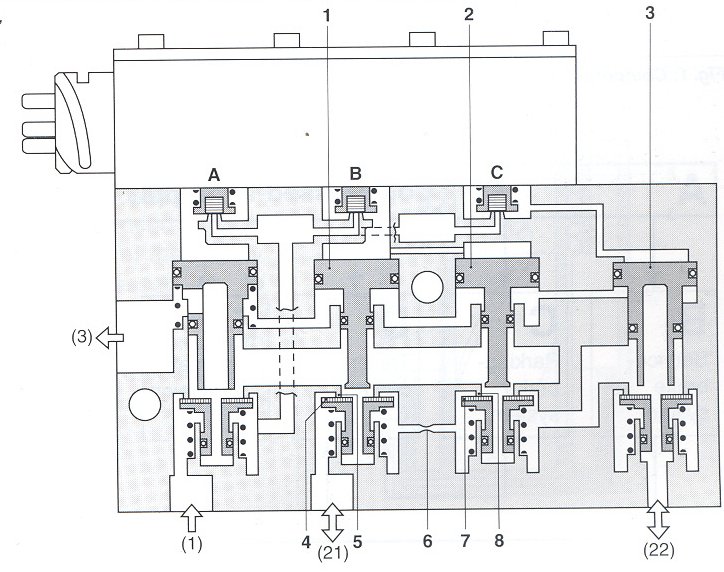
3.7.5.6.4. Kapcsolók és ellenőrző lámpák
Ha az indítókulcsot a vezető elfordítja az elektronikus légrugó rendszer automatikusan beállítja a jármű gyártója által meghatározott, úgynevezett „normál” szintet.
Ezt a kapcsolók segítségével meg lehet változtatni, ennél alacsonyabb, vagy magasabb szint is beállítható. Ehhez általában háromállású kapcsolót szerelnek fel. Ettől függetlenül egy másik kapcsoló aktiválja a letérdepeltetést. Ez viszont csak a normál szintből kapcsolható. A véghelyzet elérése előtt, ha a vezető visszaengedi a nyomva tartott kapcsolót, biztonsági okból visszaáll a normál szint. Az esetleges személyi, vagy jármű sérülések elkerülése érdekében a rendszer felszerelhető az úgynevezett „járdaszegély kapcsolóval”. Ez egy hosszan a küszöb alatt elhelyezett érzékelő, mely megszakítja a további szintcsökkentést, ha valakinek a lábfeje, vagy más tárgy, például egy kő, vagy a járdaszegély megközelítette a fenéklemezt. Az ellenőrzőlámpák a szintállítás közben folyamatosan világítanak.

4. fejezet - Lengéscsillapítás
- 4.1. A gépjárművek lengéscsillapítóinak feladata és műszaki jellemzői
- 4.2. Egy és kétcsöves hidraulikus lengéscsillapítók
- 4.3. Lengéscsillapító karakterisztikák
- 4.4. 4. Elektronikusan változtatható karakterisztikájú lengéscsillapító
- 4.5. CDC lengéscsillapító (continous damping control)
- 4.5.1. CDC2e lengéscsillapító
- 4.5.2. Együttműködés a CDC és az ESP között
- 4.5.3. A CDC előnyei folyamatosan élvezhetők
- 4.5.4. A Skyhook szabályozásnak megfelelő lengéscsillapító karakterisztika
- 4.5.5. A lengéscsillapító karakterisztika elektromos változtatása
- 4.5.6. Alkalmazási példák személygépkocsinál és autóbusznál
- 4.6. PDC lengéscsillapító
- 4.7. Magneto-rheologiai lengéscsillapítás
A futómű egyik fontos eleme a lengéscsillapító
A futómű a gépkocsi és az útfelület között létesít kapcsolatot, melynek egyik fontos eleme a lengéscsillapító. A gépkocsira ható külső erők és nyomatékainak hatását a gumiabroncsok felfekvő felületei és az útfelület között ébredő reakcióerők adják át az útfelületnek. Ebben a feladatban fontos szeret játszanak a lengéscsillapítók. Elsősorban a függőleges irányú erők átadásában vesznek részt.
4.1. A gépjárművek lengéscsillapítóinak feladata és műszaki jellemzői
Menet közben az útegyenetlenségek által a kerekeknél gerjesztett periodikus lengő mozgás energiáját lengéscsillapító alakítja át hőenergiává. Ennek köszönhetően a kerékterhelés dinamikus változása gyorsabban lecseng, egyenletesebb lehet a gumiabroncs és a kerekek között az útfelület síkjában átvihető erő. Ezért a lengéscsillapító fontos szerepet tölt be a közlekedésbiztonság területén.
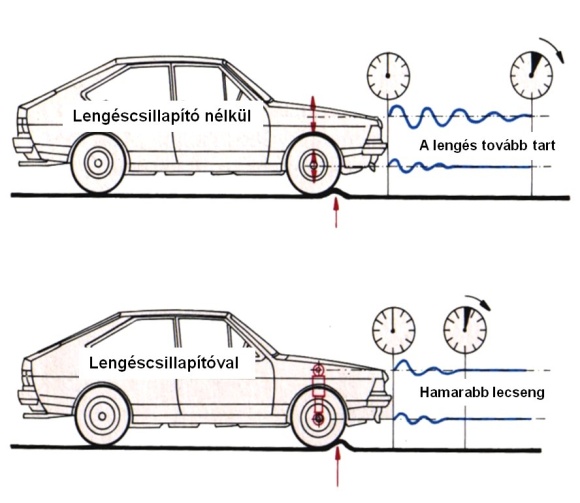
Ki- és berugózáskor egy azonos mértékű energiaátalakítás súrlódással is megvalósítható lenne. Régebben, az autózás kezdetén alkalmaztak is ilyen lengéscsillapítókat. Ezek csillapítása azonban nem sebességfüggő, és a másik hátránya az, hogy keményebbé teszi a rugókarakterisztikát. Nem felel meg a jelenlegi menetkényelmi szempontoknak.
A másik fontos szempont az, hogy az ellentétes mozgásirányokban (be-, és kirugózáskor) célszerű, ha különböző erősségű csillapítást valósítanak meg. Ez hidraulikus munkaközeggel, sebesség függő áramlási ellenállással, különböző hatású szelepekkel érhető el. Ezért tehát a gépjárműveknél elsősorban teleszkóp szerűen kialakított, hidraulikus lengéscsillapítókat alkalmaznak. Ezt a kerék és a felépítmény közé szerelik be, rugalmas rezgés-, és zajcsillapító elemmel (gumi betétekkel) kiegészítve. A futóműbe szerelt úgynevezett „hord rugót” és a lengéscsillapítót össze kell hangolni egymással.
Ha például túl kicsi a csillapítás, nem lesz megfelelő a kerekek tapadása az útfelületen, mert erőteljesen változik a dinamikus kerékterhelés. A szükségesnél kisebb csillapításnál, (lágy lengéscsillapító) a felépítmény függőleges gyorsulása növekszik, a futóműnél az amplitúdó kissé csökken a dinamikus kerékterhelés változás növekszik.
Amennyiben a szükségesnél nagyobb a csillapítás a felépítmény függőleges gyorsulása csökken, a futóműnél a gyorsulás pedig növekszik, a dinamikus kerékterhelés változás csökkenni fog.
4.2. Egy és kétcsöves hidraulikus lengéscsillapítók
A lengéscsillapító csőben a dugattyú alatti és feletti folyadék mennyisége a dugattyúrúd térfogatával eltér egymástól. Ennek kiegyenlítését egy rugalmas gázpárna bízzák, melyet a lengéscsillapító belsejében alakítanak ki. Kedvezőtlen azonban, ha működés közben a gáz és a folyadék buborékok formájában egymással keveredik, mert csökken a csillapítás és növekszik a kavitáció veszélye.
A gáz- és a folyadék terek szétválasztása szempontjából a következő lengéscsillapító változatokat különböztethetjük meg:
egycsöves lengéscsillapítók
Ez a változat a működés közben képződő hőt gyorsabban és közvetlenebbül át tudja adni a környezetnek, de a gáz és a folyadék tér szétválasztásához a két közeget egymástól szétválasztó dugattyút kell beszerelni. A nagyobb igénybevételű sport lengéscsillapítók általában egycsövesek,ezért kedvezőbb lesz a hűlése.
kétcsöves lengéscsillapítók
Ennél a változatnál a gáz tér a két cső közé kerül, jól elkülönül a folyadéktól. Ez hatékonyan csökkenti a habképződés veszélyét. Az a hátránya viszont, hogy rosszabb a hőátadási tulajdonsága.
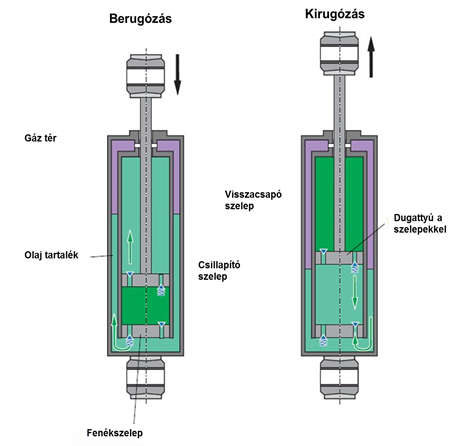
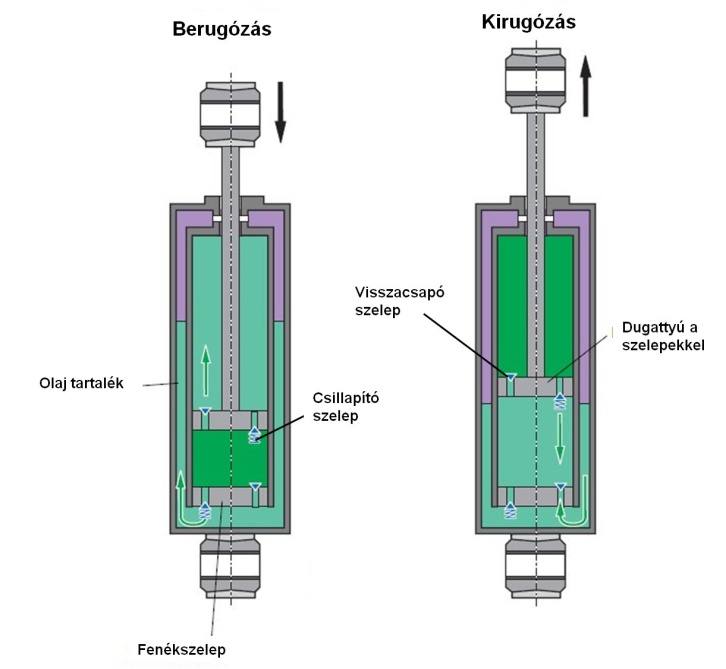
Mindkét változatnál túlnyomást is szoktak alkalmazni, ami tovább csökkenti a buborékképződés veszélyét és a kavitáció lehetőségét.
4.3. Lengéscsillapító karakterisztikák
A lengéscsillapítóknál két tényező határozza meg a csillapítási karakterisztikát.
Egyrészt a dugattyúba szerelt a szelepekben, illetve furataiban létrejövő fojtás.
Másrészt a bizonyos előfeszítésű rugók elmozdulásakor kinyíló furatok által képviselt fojtás. Ez utóbbi egy bizonyos nyomásnál intenzívebb áramlást tesz lehetővé. Ilyen kialakítható a dugattyúban, de készülhet fenékszelepként is a külső és a belső cső között a kétcsöves lengéscsillapítónál.
Ezen két csillapítási lehetőség egymással történő összehangolásával különböző lengéscsillapító karakterisztikák valósíthatók meg.
A berugózási és a kirugózási karakterisztika egymástól jelentősen eltérnek
Általánosságban elmondható, hogy hozzávetőleg 30-50%-a a berugózási, a kirugózásinak. Berugózásnál kisebb-, kirugózásnál nagyobb a csillapító erőt valósítanak meg a különböző hidraulikus szelepekkel.
Így ha az útegyenetlenség kiemelkedik a síkból, berugózáskor a kocsiszekrényt kisebb ütés éri, illetve mérsékeltebb lesz a kerék gyorsulása, csökkentett lesz a felépítmény gyorsulása is.
Ha pedig gödörbe fut a kerék, nem fog egészen az úthiba legalsó pontjáig elmozdulni, ahonnan ismét gyorsulhat visszafelé. A lengéscsillapító karakterisztikája egyrészt a menetkomfortot, másrészt pedig a kerékterhelés dinamikus változását befolyásolja és ezzel a biztonságos közlekedést.
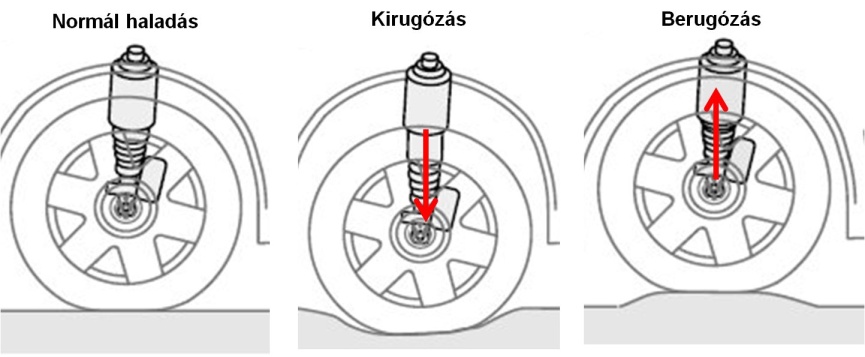
Változtatható lengéscsillapító karakterisztika:
Amikor egy gépkocsinál fixen előre meghatározzák a csillapítási tényezőt, ez minden esetben kompromisszumot jelent a komfort és a menetbiztonság között.
Sokkal kedvezőbb a változtatható csillapítási karakterisztika. Ez megvalósítható egyszerű módon egy változó keresztmetszetű megkerülő csatornával a dugattyú löket függvényében. Évtizedekkel korábban alkalmaztak gombnyomásra változtatható csillapítású lengéscsillapítókat is, de a változtatás a vezetőre volt bízva. Sokkal hatékonyabb, ha a csillapítást az érzékelők jelei alapján automatikusan állítja be az elektronika. A memóriában tárolt referencia értékekkel összehasonlítja a mért értékeket és ez alapján adja ki a parancsokat a beavatkozó egységnek. Ez a beavatkozás már a vezetőtől függetlenül, automatikusan fog bekövetkezni.
A lengés lecsengésének gyorsasága alapján megkülönböztetünk egymástól:
- lágy lengéscsillapítót, melynél csak lassan csökken a lengés amplitúdója
- kemény lengéscsillapítót, melynél gyorsan csökken a lengés amplitúdója
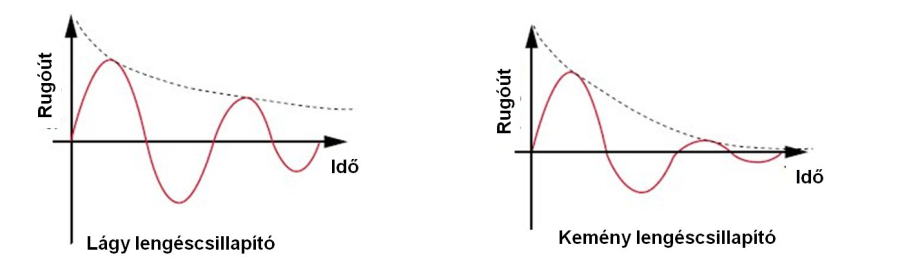
A lágy csillapítás komfortos utazást biztosít. A kemény csillapítás inkább a közlekedésbiztonságot szolgála.
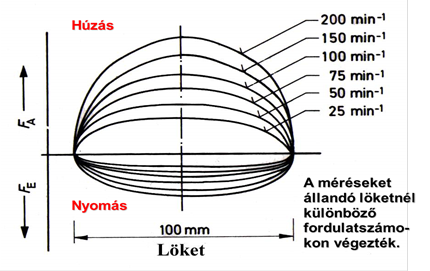
Csak az elektronikusan változtatható adaptív, a menetviszonyokhoz folyamatosan alkalmazkodó csillapítás oldhatja fel a menetkomfort és a biztonság közötti ellentmondást.
Gyakran alkalmazzák a szemi-aktív szabályozást, melynél a csillapítási tényező a gépkocsi sebességétől függ.
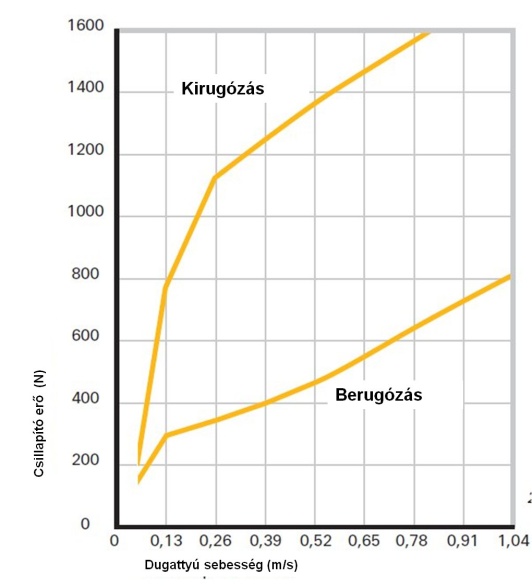
4.4. 4. Elektronikusan változtatható karakterisztikájú lengéscsillapító
A szokásosnál keményebb csillapítás ugyan rontja a menetkomfortot, de biztonságosabb vele az autózás. Komfortosabban mindig csak a biztonság rovására lehet autózni. Az igényesebb gépkocsiknál ezt az ellentmondást aktív elektronikus rendszerrel oldják fel. Az érzékelők jelei alapján az elektronika felismeri a veszélyes menetállapotot és ilyenkor keményebb csillapítást valósít meg.
A kocsiszekrényen tapasztalható menetdinamikai jelenségek:
Rossz úton elöl és hátul váltakozva ható függőleges gyorsulások miatt a gépkocsi karosszériája hullámzó mozgást végez.
Hosszirányú gyorsulás, vagy lassulás hatására a gépkocsi úgynevezett bólintó mozgást végez, fékezésnél a hátulja felemelkedik, az eleje pedig lesüllyed.
Keresztirányú gyorsulás hatására a kocsiszekrény egyik, vagy másik irányban megbillen.
Ezek, az előzőekben összefoglalt nem kívánatos jelenségek automatikusan csökkenthetők, vagy akár teljesen kiküszöbölhetők elektronikus rendszerek alkalmazása révén, mely adaptív módon, automatikusan változtatja a csillapítási tényezőt.
4.4.1. Az elektronikusan változtatott lengéscsillapítóknál alkalmazott érzékelők összefoglalása
Menetsebesség érzékelő régebbi személygépkocsiknál a sebességváltóra szerelt jeladó, újabban az ABS kerékfordulatszám érzékelő jele használatos, mely a CAN hálózaton keresztül érkezik.
Gyorsulás érzékelők. Ezeket a lengéscsillapítókon és a kocsiszekrényen is el szoktak helyezni.
Karosszéria magasság érzékelő (elmozdulás érzékelő), újabban induktív változatot alkalmaznak.
Információk a motormenedzsment rendszertől (motorelektronikától)
pillangószelep helyzet, és elmozdulási sebesség
Kormánykerék elfordítás érzékelő
az elfordítás iránya, szöghelyzet, szögsebesség, és szöggyorsulás a fontosabb bemeneti információk.
Kézi kapcsoló, melyet a műszerfalon helyeznek el. Ennek segítségével a gépkocsivezető választhatja a vezetési stílust, mely lehet:
"Komfortos, vagy AUTOMATIKUS" fokozat és,
"SPORT" fokozat.
4.4.2. Gyorsulás érzékelő
A kapacitív elven működő gyorsulás érzékelő
kocsiszekrény gyorsulását mérik:
a menet irányban,
arra merőlegesen és
a futóművek közelében függőleges irányban szerelik fel.
a kerekek gyorsulását a lengéscsillapítóra felszerelt érzékelők mérik.
Az érzékelők szerkezeti kialakítása általában azonos, de méréshatáruk és érzékenységük jelentősen eltér egymástól. A kerekeknél alkalmazottaknak a méréshatára például tízszerese a kocsiszekrényre szereltekének. A kocsiszekrénynél általában 1,0 – 1,5 g közötti, a lengéscsillapítónál 1 – 15 g közötti változatot használnak.
Az érzékelő belsejében egy rugólapra szerelik fel az „m” tömeget, mely nyugalmi helyzetben előre meghatározott távolságban van a két szélső álló fegyverzettől. A d1 és a d2 távolságok egy – egy kapacitást határoznak meg. Amikor az érzékelőre gyorsulás hat a tömeg a rugó ellenében elmozdul és emiatt mindét kondenzátor kapacitása megváltozik. Ez alapján méri az elektronika a pillanatnyilag ható gyorsulást.
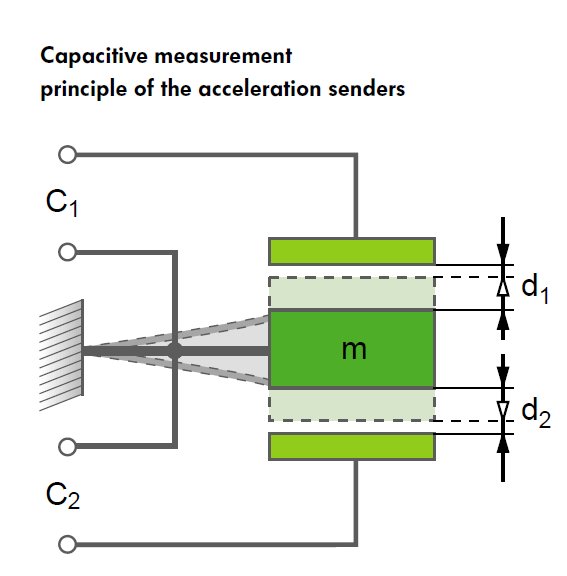
4.4.3. A lengéscsillapító karakterisztikáját beállító elektronika
A környezeti behatásokkal szemben védetten, többnyire alumínium dobozba a kocsiszekrénybe szerelik be. Általában az első utas ülés lábterében, vagy alatta helyezik el. Az elektromos hálózat sokpólusú csatlakozóval létesít kapcsolatot az elektronikával. A működéshez szükséges tápfeszültséget a gyújtás bekapcsolása után kapja meg.
Az öndiagnosztikát a gyújtás bekapcsolásakor az elektronika néhány másodperc alatt elvégzi. Ez a teljes elektronikusan változtatható lengéscsillapító rendszer elektromos hálózatára vonatkozik. Ez idő alatt az ellenőrzőlámpa folyamatosan világít, ha a rendszerben nincs elektromos hiba, kialszik a lámpa. Meghibásodott áramköri elem esetén az ellenőrzőlámpa villog. A hiba jellegétől függően szükségállapotban is működhet a rendszer, melyet elsősorban a gépkocsi sebessége befolyásol.
Például, ha karosszéria magasság érzékelője hibásodott meg és a gépkocsi sebessége kisebb 100 km/h-nál a normál csillapítási karakterisztika valósul meg. Ha nagyobb a sebesség, mint a küszöbérték (100 km/h), akkor az úgynevezett „szükség működés” aktiválódik és az elektronika automatikusan sport üzemmódba kapcsol.
A diagnosztikai áramkör általában az alábbi részegységek állapotát figyeli:
állítómotorok,
kormánykerék elfordítás érzékelő,
kocsiszekrény magasság érzékelő,
sebesség érzékelő,
pillangószelep helyzet érzékelő,
elektronika.
A diagnosztikai áramkör azon kívül, hogy a meghibásodott részegység kódját megjegyzi, további két információt rendel hozzá:
a kilométer számláló állása,
a gépkocsi sebessége a hiba bekövetkezésekor.
Az elektronikus rendszer lehetővé teszi:
az elektronika azonosítását,
a működési paraméterek mérését,
az állítómotor működésének ellenőrzését,
országúti vizsgálatot.
4.3 A lengéscsillapító beavatkozó egysége i
lengéscsillapítóra szelepet állító motorok, elektromágnesek.
ellenőrzőlámpa a műszerfalon
diagnosztikai csatlakozó (EOBD)
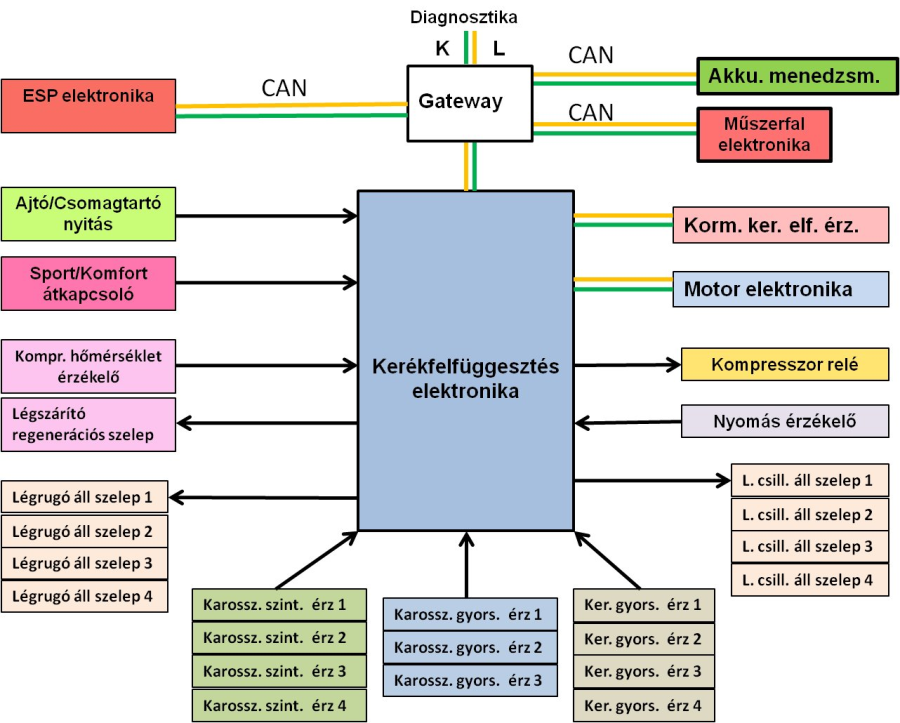
4.5. CDC lengéscsillapító (continous damping control)
A ZF Sachs elektronikusan szabályozott lengéscsillapító rendszerét 1997-ben mutatták be. Először az Audi A8-ba, ezt követően a Ferrari Maranello-ba építették be. A közelmúltban megjelent már a középosztályban is és 2004-től a kompakt osztályban is találkozhatunk vele. Például az Opel több típusában is alkalmazzák, mint extra tartozékot. Normál körülmények között növeli a komfortot, veszélyes helyzetekben pedig a biztonságot. Skyhook szabályzási algoritmusnak nevezik azt a programot, amelyet a ZF Sachs fejlesztett ki a lengéscsillapító karakterisztika beállítására.
A lengéscsillapítónak ezt a változatát elsősorban az alsó középosztályban alkalmazzák. A rövidítés a „continous damping control” angol elnevezésből származik, ami folyamatosan ellenőrzött lengéscsillapításnak nevezhető magyarul.
A CDC előnye a hagyományos lengéscsillapítóval szemben, hogy nem csak egy előre definiált csillapítási jelleggörbéje van, mely macskaköves úton, lassú menetben is ugyanazt a csillapítást adja, mint gyorsan haladva kanyarodáskor. A CDC minden menethelyzetben a legmegfelelőbb csillapítást állítja be. Ez elektronikusan szabályozható arányos működésű elektromágneses szeleppel válik lehetővé. Ez a lengéscsillapító csőben az olaj áramlását kisebb, vagy nagyobb értékre állítja be. Ha csökken az olaj áramlása a lengéscsillapító keményebb lesz, ha nagyobb lesz az olaj térfogatáram a lengéscsillapító lágyabb karakterisztikájú lesz.
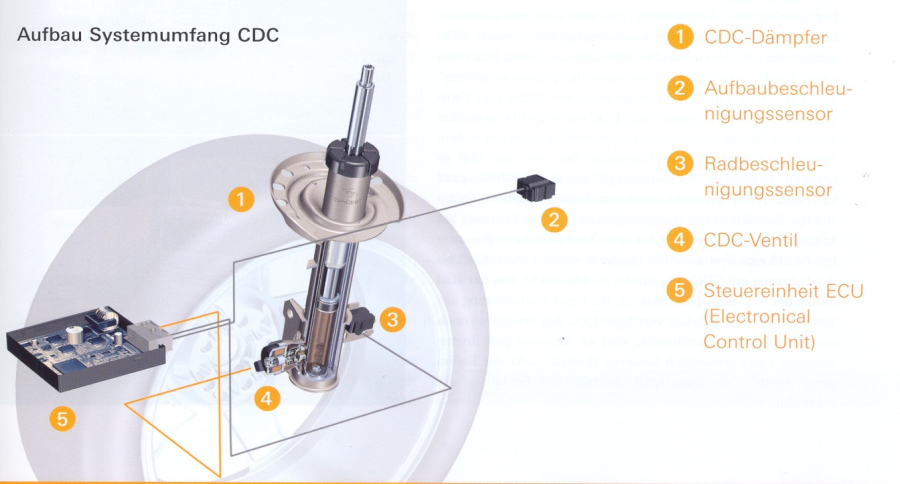
1- CDC lengéscsillapító, 2 – A kocsiszekrényre szerelt gyorsulás érzékelő, 3 – A kerék közelében elhelyezett gyorsulás érzékelő, 4 – CDC szelep a lengéscsillapítón 5 – Működtető elektronika
Ilyen lengéscsillapító változatokat már évtizedek óta alkalmaznak, de világviszonylatban is újnak számít az olyan elektronikus futómű technika, mely intelligens kapcsolatban van a gépkocsi más elektronikus rendszereivel is. ZF Sachs az „Active Roll Stabilization” ARS, a CDC és a CDC2e rendszereket gyártja és ajánlja az autógyáraknak.
Az utóbbit a BMW 7-es sorozatában alkalmazzák. Az elektronikusan szabályozható, arányos működésű szeleppel az olaj átáramlása folyamatosan állítható kirugózáskor és berugózáskor egyaránt. Ezen kívül a lengéscsillapító dugattyúját mindkét mozgásirányban kiegészítő szelepekkel is ellátták. Ez számos beállítási lehetőséget kínál.
A gépkocsi más elektronikus rendszereinek érzékelőitől származó adatokat, mint például a gépkocsi sebessége, a kormánykerék pillanatnyi helyzete, a hossz- és kereszt irányú gyorsulások, a futómű elektronika felhasználja a szabályozható stabilizátor és a lengéscsillapító beállításához is. Ilyen módon a kocsiszekrény elmozdulásait ez a program minimalizálja. Ezzel a gépkocsi dinamikai tulajdonságai javulnak, például kisebb lesz az oldal irányú dőlése és lényegesen jobb lesz a menetkomfort is.
Ez az elektronikusan szabályozott futómű csökkenti az útfelület felől jövő gerjesztéseket. Különösen előnyös, amikor úthibáktól érkeznek dinamikus hatások. Ilyenkor lágyabb csillapítást állít be az elektronika. Ezzel a komfort szempontjai érvényesülnek. Ez a karakterisztika hátrányos kanyarban, amikor a jármű önkormányzási tulajdonságát kell támogatni, éppen a kemény csillapítás válik szükségessé. Ez a két ellentétes kívánság jól teljesíthető a lengéscsillapítóba beépített arányos működésű szelep átállításával, amit az elektronika automatikusan végez.

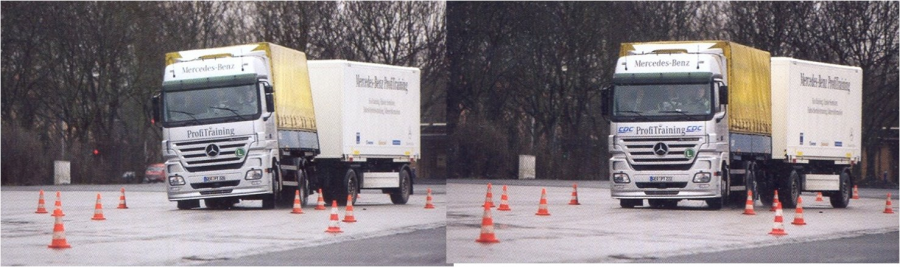
4.5.1. CDC2e lengéscsillapító
A CDC (Continuous Damping Control) előnye a hagyományos lengéscsillapítóval szemben, hogy nem csak egy előre definiált csillapítási jelleggörbéje van, hanem minden menethelyzetben a legmegfelelőbb csillapítást állítja be. Ez elektronikusan szabályozható arányos működésű elektromágneses szeleppel valósul meg. Ez a lengéscsillapító csőben az olaj áramlását változtatja. Ha csökken az áramlás, keményebb lesz a lengéscsillapító, ha nagyobb lesz az olaj térfogatáram a lengéscsillapító lágyabb karakterisztikájú lesz.
A CDC2e-nél a lengéscsillapítóba két kiegészítő szelepet építettek be a ki- és a berugózási fokozathoz, mely külön-külön szabályozható. Ezen kívül további szelepek is rendelkezésre állnak a beállításokhoz. A lengéscsillapítóhoz tartozó elektronikával együtt ez a szeleprendszer egyszerre biztosít kiváló menetdinamikát és rendkívül jó menetkomfortot.
4.5.2. Együttműködés a CDC és az ESP között
A CDC képes kifogástalan együttműködésre az ESP rendszerrel. Ez a CAN hálózat révén valósulhat meg. Amikor például az ESP aktívvá válik és kormányzási beavatkozással, vagy az egyik kerék fékezésével, és ezzel párhuzamosan a motor nyomatékának csökkentésével stabilizálja a gépkocsit, a CAN hálózaton keresztül utasítást ad a CDC elektronikának és az keményebbre állítja a lengéscsillapítót annál a keréknél, amelyiknél ez szükségessé válik. Így a két elektronikus rendszer támogatja egymás hatását. Kritikus manővereknél is megtartja forgalmi sávját a gépkocsi. A tapasztalatok szerint a CDC-vel szerelt gépkocsiknál az ESP csak ritkábban avatkozik be. Ugyanis a kellő pillanatban keményre állított lengéscsillapító nyomon tartja a gépkocsit. Az ABS beavatkozással történő fékezéseknél a CDC további centiméterekkel képes rövidíteni a fékutat, mert fékezés közben jobb lesz a kerék érintkezése az útfelülettel. Így nagyobb fékerő valósulhat meg.
4.5.3. A CDC előnyei folyamatosan élvezhetők
A járművek biztonságát növelő műszaki megoldások csak kritikus körülmények között avatkoznak be. Normál utazás közben jelenlétükről általában nem is veszünk tudomást.
Bár az előzőekben leírtak alapján a CDC rendszer is tekinthető biztonsági berendezésnek, hiszen növeli a jármű aktív biztonságát, de hatékony jelenlétét a teljes utazás során élvezhetjük. Normál utazás során növeli a komfortot, kritikus forgalmi viszonyok között viszont, növeli a menetbiztonságot. A jármű úgy halad el az útegyenetlenségek felett, legyen az kisebb gödör, vagy éppen kiemelkedés, akár a jelzőlámpák előtt meghullámosított útburkolat, hogy a felépítmény szinte semmilyen függőleges irányú mozgást nem végez. Ezt a hatást nem úgy érik el, hogy gyárilag jó kemény lengéscsillapítót szerelnek a gépkocsiba, hanem ez a CDC rendszer elektronikájába beprogramozott úgynevezett „Skyhook” szabályozási algoritmusnak köszönhető. Ez minden pillanatban az optimális lengéscsillapítást állítja be. Amikor lehetséges komfortosan lágy, de amikor szükséges a sportosnál is keményebb csillapításra vált át. Az elnevezés onnan ered, hogy igyekeznek azt a hatást elérni, mintha a kocsiszekrény magasan az égben lenne felfüggesztve és a föld felszínével párhuzamosan suhanna tova. Így az útfelület egyenlőtlenségei kiegyenlítődnek. Ezt a szabályozási algoritmust a ZF Sachs fejlesztette ki és 2005-ben több Opel típusban is már bevezették. Ezt hamarosan követte az „Advanced Skyhook” algoritmus, mely elődjénél még jobban képes megvalósítani a kitűzött célt.
4.5.4. A Skyhook szabályozásnak megfelelő lengéscsillapító karakterisztika
A Skyhook szabályozásnak megfelelő lengéscsillapító karakterisztika, melyet az elektronika az állító szelepre kapcsolt áramerősség szabályozásával állít be.
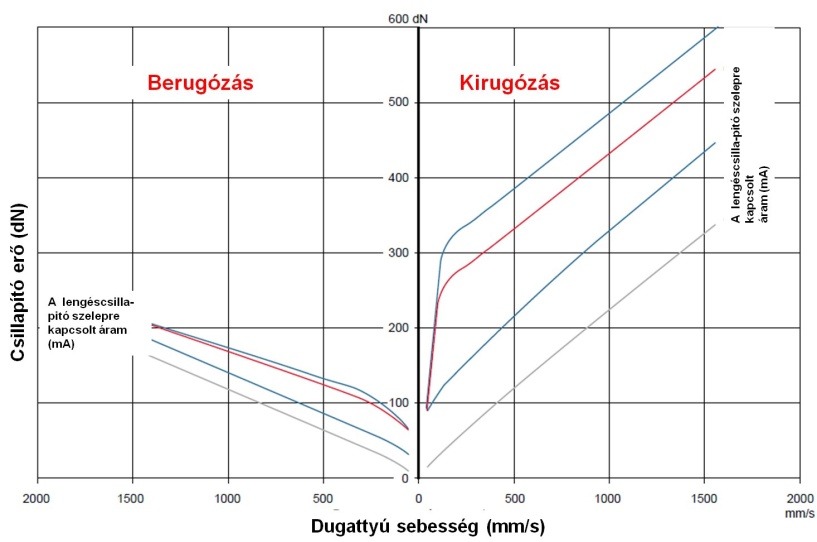
4.5.5. A lengéscsillapító karakterisztika elektromos változtatása
A gyakorlatban a különböző gépkocsi típusoknál többféle megoldással lehet találkozni. Ezek közül egyik egyszerű változat elvi működését foglaljuk össze.
A kétcsöves, gáz töltésű lengéscsillapítóba egy előfeszített rugóval zárva tartott szelepet szerelnek be. Ennek közelében helyezik el a működtető tekercset. Árammentes állapotban a szelepet zárva tartja a rugóerő. A csillapítási tényezőt a dugattyúban kialakított szelepek határozzák meg, melyek kemény csillapítást adnak. A dugattyú mozgási sebessége berugózáskor az ábrán jelölt „v”.
A tekercsre kapcsolt gerjesztő áram mágneses hatása a szelepre (3) erőt fejt ki, mely a rugóerő (FF) ellenében érvényesül. Ha a belső hidraulikus nyomásból származó erő (Fp) és a mágnes erejének (FM) összege nagyobb a rugóerőnél (FF), elmozdul és nyit a szelep. A csillapítási tényező tehát az elektromágnesre kapcsolt gerjesztő árammal lesz arányos, mert az elmozduló szelep kúpos felülete egy folyamatosan változó fojtást fog eredményezni.
4.5.5.1. A lengéscsillapító belsejébe szerelt elektromágneses szeleppel
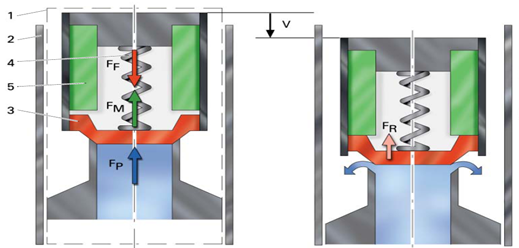
1 –elektromágneses szelep, 2 –lengéscsillapító cső, 3 –szelep, 4 –rugó, 5 –tekercs,
A legnagyobb csillapítás árammentes állapotban valósul meg. Ez az állapot az elektronikus rendszer meghibásodás esetén is. A leglágyabb csillapítás pedig akkor lesz, amikor a gerjesztő áram 1,8 A körüli értékű.
A fenti elvi ábra a működési elv megismeréséhez jó, de a valóságos szerkezet ettől kissé eltér. A következő ábra már egy valóságos kivitelről készült metszetet mutat.
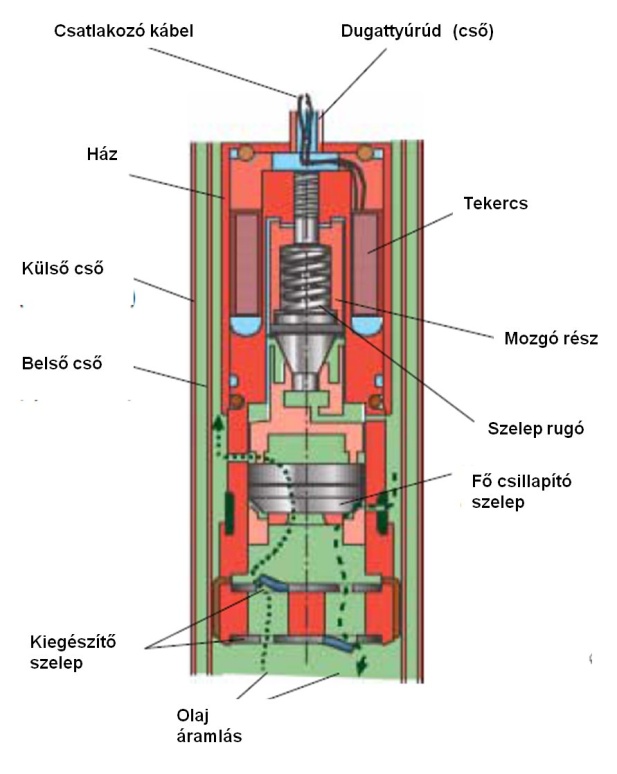
4.5.5.2. A lengéscsillapító csövén kívül elhelyezett elektromágneses szeleppel
Az alábbi ábrán kétcsöves gáztöltésű lengéscsillapítót látunk, melynél a csövön kívül helyezték el az elektromágneses szelepet. Néhány milliszekundumon belül lehetőség van a csillapítási karakterisztika változtatására az olajáramlás befolyásolása révén. A CDC szelepen keresztül úgy ki-, mint berugózáskor átáramlik az olaj. A pillanatnyi menetviszonyoknak megfelelő jellegmezők az elektronikában vannak tárolva.
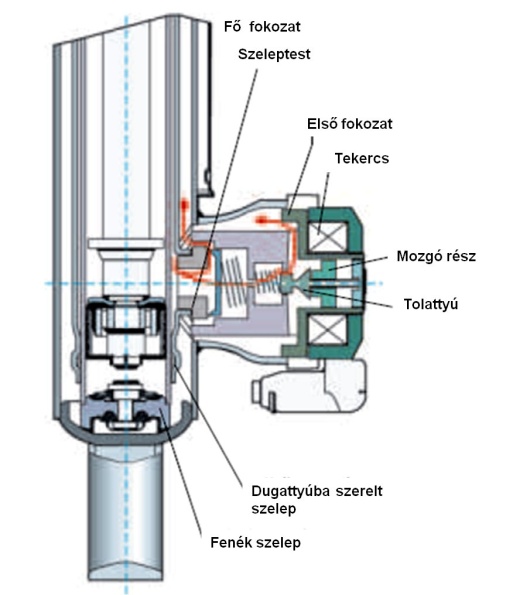
4.5.6. Alkalmazási példák személygépkocsinál és autóbusznál
A CDC lengéscsillapítást a VW és az Audi több modelljénél is alkalmazzák, de más gyártmányú gépkocsiknál is találkozunk vele.
FlexRide az Opel Insigna adaptív futóműve
A 2008-as év autója címet elnyert Opel futóművét is a ZF Sachs CDC, vagyis az elektronikusan változtatható lengéscsillapító rendszere teszi különlegessé. Így valósulhat meg az, hogy a sportos vezetési stílus is összeegyeztethetővé válik a komforttal. A fejlesztőmérnököknek mindig komoly fejtörést okoz a két ellentétes szempont között megtalálni az arany középutat. Egyszerűbben meg lehetett oldani ezt a feladatot az Opel Insigna-nál.
Autóbusz CDC-vel
Neoplan Starliner 2 (14 tonnás turista autóbusz) menetdinamikájára kedvező hatással van a CDC független kerékfelfüggesztés. A 13 m hosszú autóbuszt havas úton is könnyű a forgalmi sávban tartani. 60 km/h sebességnél is stabilan végre lehet hajtani az előzési manővert. A kerekek folyamatosan az útfelületen maradnak. Nincs billenés. A lengéscsillapítás a pillanatnyi menetviszonyokhoz folyamatosan hozzá van igazítva. Kisebb a gumiabroncs kopása, kisebb a futómű egyes alkatrészeinek a kopása, komfortosabb az utazás.
4.6. PDC lengéscsillapító
A légrugóval szerelt gépkocsiknál alkalmazzák a PDC (Pneumatic Damping Control) lengéscsillapítókat. A csillapító erő egy hidraulikus szelep segítségével változtatható. A légrugó pillanatnyi nyomása a mindenkori tengelyterheléssel arányos. Ezt a nyomást használják fel a csillapítási karakterisztika beállítására egy fojtó furaton keresztül. A PDC szelepet közvetlenül a lengéscsillapítóra szerelik fel. Kis légrugó nyomásnál a PDC szelep nyitott kicsi lesz az áramlási ellenállás és a csillapítás is, mert a nyitott szelepen keresztül az olaj egy része meg tudja kerülni a dugattyúba szerelt szelepeket. Nagy légrugó nyomásnál záródik a PDC szelep és nagyobb lesz a csillapítás, mert a teljes olaj mennyiség átáramlik a dugattyú szelepein.
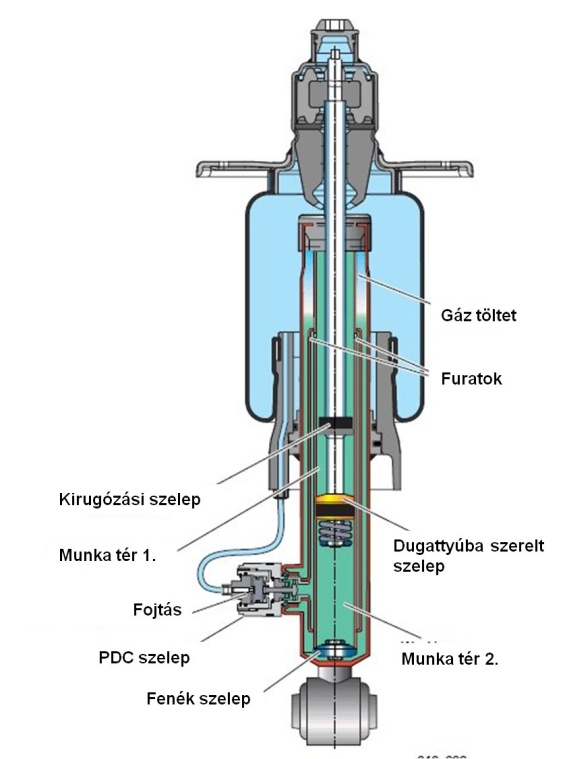
Az következő diagram a csillapító erőket ábrázolja a lengéscsillapító dugattyúsebessége függvényében a paraméterek pedig a különböző légrugó nyomások.
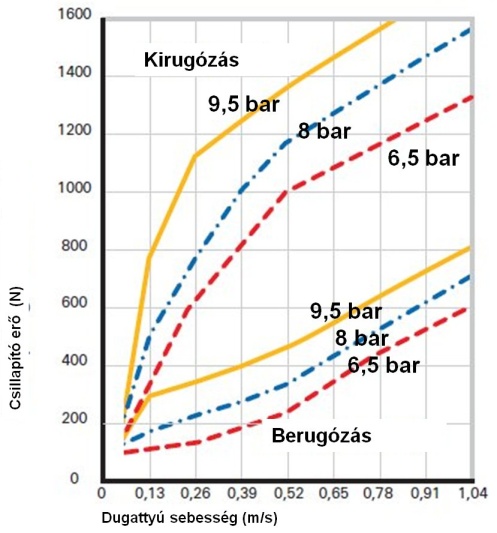
4.7. Magneto-rheologiai lengéscsillapítás
A Delphi által kifejlesztett lengéscsillapítókba magneto-rheologiai folyadékot töltenek, ennek megfelelően a MagnaRide™ elnevezést kapták. Az eddigi alkalmazások bizonyítják, hogy alkalmas arra, hogy javítsa a gépkocsik úttartását és vezetési tulajdonságait méghozzá úgy, hogy nem növeli bonyolult megoldásokkal a tömeget. A különleges lengéscsillapítóval megvalósított, elektronikusan szabályozott kerék-felfüggesztési rendszer hatékonyan megvalósítja a kompromisszumot a komfortos és a biztonságos futómű között. Olyan veszélyes helyzetekben segít hatékonyan, mint például az egyidejű kanyarodás és fékezés.
A MagneRide™ jelenleg a világon a legígéretesebb szabályozott kerék-felfüggesztési rendszer megvalósítását teszi lehetővé. Egyszerű szerkezeti kialakítású lengéscsillapítót alkalmaz, melynek karakterisztikáját a mágneses erőtér hatására a különleges, úgynevezett MR szintetikus szénhidrogén alapú folyadék révén tudja változtatni. Ez az anyag speciális, szénhidrogén alapú, szintetikus folyadék, mely 3-10 µm átmérőjű mágnesezhető részecskéket tartalmaz, de azok gyorsan és csak a mágneses erőtér működéséig mágnesezhetők. A folyadék stabilizálásához adalékokat kevernek.
A mágnesezhető részecskék a folyadékban egyenletesen, véletlenszerűen oszlanak el. Ilyenkor ki és berugózáskor a dugattyú elmozdulásakor a csillapító erő annak furataiban kialakuló hidraulikus fojtástól függ. Viszonylag kicsi az ellenállás, hasonló, a karakterisztika, mint a hagyományos lágy lengéscsillapítónál.
Ebből a szempontból a lágyvashoz hasonlóan viselkednek ezek a részecskék. A gerjesztő áram hatására az áramlási jellemzői megváltoztathatók anélkül, hogy más lenne a viszkozitása. Így tehát különböző lengéscsillapító karakterisztikák állíthatók be rendkívül gyorsan és zajhatásoktól mentesen. Különösen jól alkalmazható a futóművekre jellemző frekvencia tartományban.
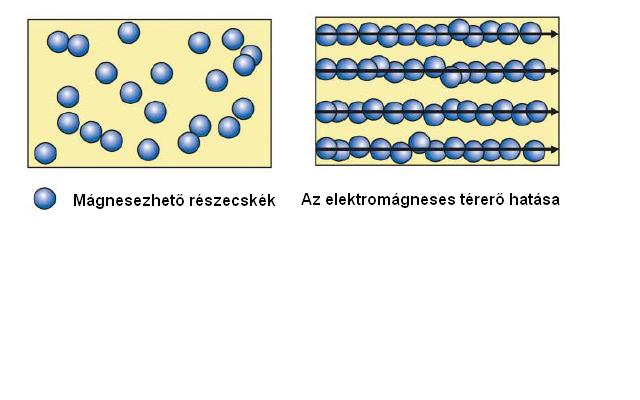
A változtatható csillapítás lehetővé teszi a gépkocsi úttartási és vezetési jellemzőinek optimális értéken tartását. „szemi-aktív” kerék-felfüggesztési rendszer valósul meg, mozgó alkatrészek nélkül. Más változtatható karakterisztikájú lengéscsillapítóknál különböző elektromechanikus szelepeket építenek be, gyakran a lengéscsillapító külsejére, ami növeli a helyigényt, a tömeget és a sérülékenységet is.
A MagneRide™ lengéscsillapító 46 mm átmérőjű dugattyújába szerelt tekercs energia felvétele 20 W. Minimális a holt löket. A folyadék és a gáz a belső térben egymástól elkülönített.
Az elektronika nagy sebességgel kiértékeli a kerekek és a felépítmény elmozdulásait, figyelembe veszi a vezető kívánságait, és ezek alapján széles határok között folyamatosan változtatja a lengéscsillapítást. Az érzékelő jelei, illetve az ESP rendszertől kapott információk alapján, állítja be a dugattyúkba szerelt tekercs gerjesztő áramát. Ennél a rendszernél szoftveresen állítható a csillapítási tényező. A kanyarban egymástól függetlenül akár minden keréknél is más lehet a lengéscsillapítók keménysége. A MagneRide™ rendszer egyaránt beépíthető a prémium szegmens autóiba, a sport kategóriába, és a kisteherautókba is.
Elsőként 2002-ben a Cadillac Seville STS-be építették be, majd a Chevrolet Corvette-be. Az európai személygépkocsik közül az Audi TT Coupé, Audi R8, Ferrari 599 GTB Fiorano, Ferrari California alkalmazza.
A jelenlegi fejlesztések arra irányulnak, hogy a kemény karakterisztikát még keményebbé tegyék, illetve a lágy még lágyabb legyen. Törekszenek a kisebb reakcióidőre és a kisebb súrlódásra a lengéscsillapító mozgó részeinél. Precízebb és gyorsabb adatnyerést és kiértékelő algoritmust szeretnének megvalósítani. Egy új valós idejű csillapító erőt generáló modellel igyekeznek a reakcióidőt csökkenteni és így jobban kihasználni az alkalmazott, különleges folyadékban rejlő tulajdonságokat.
Az MR folyadékot alkalmazó motorfelfüggesztés is előnyös a rezonancia elkerülése és a rezgések továbbterjedésének megakadályozása szempontjából.
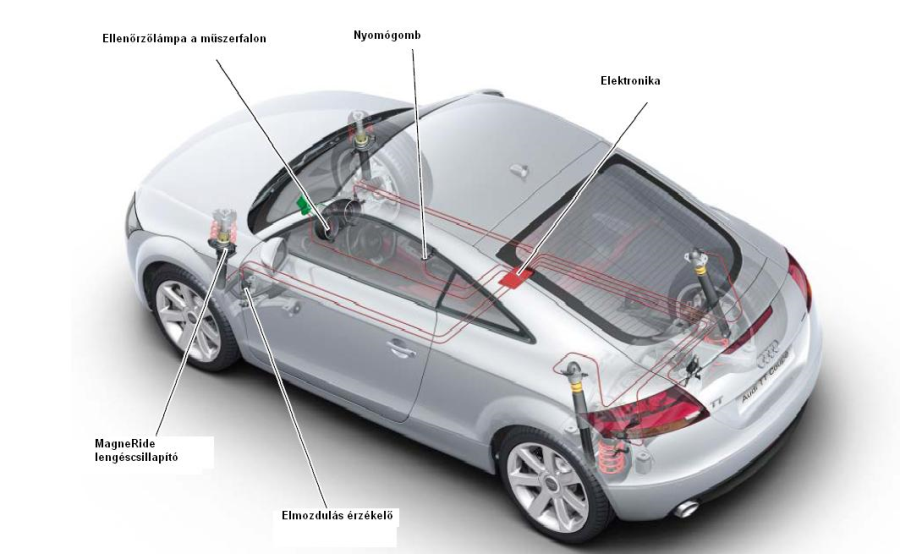
4.7.1. Audi TT Magnetic Ride
Az Audi „magnetic ride”-nak nevezte el ezt az új lengéscsillapítót és Audi TT-be szerelte be először. Így egy „semi-active” kerék-felfüggesztési rendszer valósult meg az elektronikusan szabályozott lengéscsillapítók révén. A sebességváltó karnál lévő gombbal a „komfort”-ról átkapcsolható sport fokozatra, amit LED dióda jelez vissza. A műszerfalon az ellenőrzőlámpa hiba esetén világít. A lengéscsillapítók magneto rheologiai elven működnek.
4.7.2. Mágneses erőtér hatása a lengéscsillapítóra
Ha a dugattyúba beépített tekercsben áram folyik, kialakul a mágneses erőtér. Ennek hatására a lengéscsillapítóban a folyadék alapvető tulajdonságai megváltoznak. Az erőtér hatására a parányi mágnesezhető részecskék a fluxusnak megfelelően sorba rendeződnek és hosszú láncot alkotnak. Ezek a láncok a dugattyú furatára merőlegesen alakulnak ki a tekercs helyzetének megfelelően. Emiatt a ki és berugózáskor az elmozdulás lefékeződik, megnő a hidraulikus ellenállás és vele arányosan a csillapítási tényező is. A lengéscsillapító keményedése a mágneses erőtér változásával arányos.
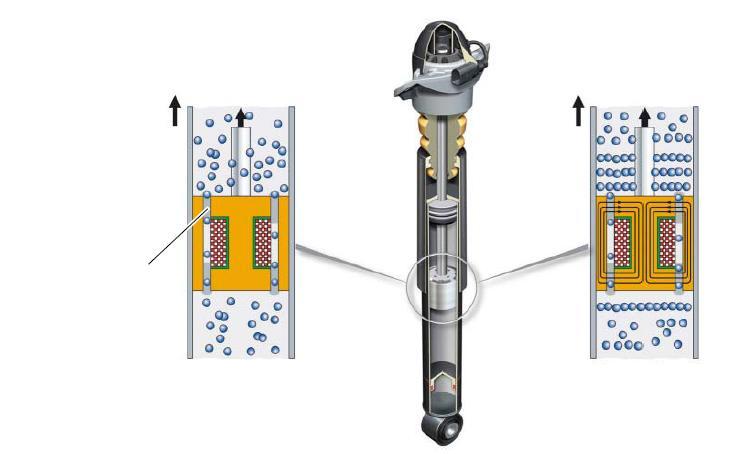
Szerkezetét tekintve egyszerűbb a hagyományos lengéscsillapítóknál. Egycsöves változatban készül, összetett szeleprendszerre nincs szükség. A dugattyúban kialakított furatok, a belsejébe szerelt tekercs, a változtatható mágneses erőtér, és a különleges folyadék helyettesíti. A csőszerű dugattyúrúdba fűzik be az elektromos vezetéket. Az elektronika az áramot a pillanatnyi igényeknek megfelelően szabályozza, így a lengéscsillapító karakterisztikája széles határok között változik a másodperc töredéke alatt.
4.7.3. Az EDC elektronikus rendszere
Az angol elnevezése EDC (Electronically Controlled Damping = elektronikusan szabályozott csillapítás). Az Audi TT-ben a futómű elektronikát a jobb első ülés alatt helyezték el.
A legfontosabb bemeneti információ az első futóműre szerelt elmozdulás érzékelőtől érkezik. A mintavételi rátája 800 Hz. A gépkocsi pillanatnyi menetállapotra vonatkozó információ az ESP elektronikától érkezik a CAN hálózaton keresztül. Az elektronika az információk kiértékelése alapján dönti el, hogy éppen milyen csillapítás lesz a legoptimálisabb.


A hőmérséklet kompenzáció az elektronika szoftverének integrális részét képezi. A növekvő folyadékhőmérsékletet növekvő gerjesztő árammal egyenlíti ki. Téli hidegben pedig csökkenti a gerjesztő áramot. A hőmérséklet mérését indirekt módon végzi. A gerjesztő tekercs ellenállásának változása alapján állapíthatja meg. A tekercs hőmérsékletét természetesen a rákapcsolt áram is befolyásolja, amit a kalkulációnál figyelembe kell venni. Ha huzamosabb ideig a „sport” fokozatban működnek a lengéscsillapítók, a tekercs túlmelegedhet. Ha a hőmérséklet túllépi a 90ºC küszöbértéket, tovább nem maradhat bekapcsolva a sport fokozat. Ha a tekercsnél a hőmérséklet meghaladja a 110ºC-ot az elektronika a teljes rendszert lekapcsolja. Mindegyik lengéscsillapítót egyedileg állítja be. A lengéscsillapítók nincsenek aktiválva, amikor a gépkocsi áll. Az alapbeállítás a komfort karakterisztika. Ezen a sebességváltó kar közelében elhelyezett gombbal lehet változtatni. A gomb megnyomásával a sport fokozat kapcsolódik be. Az ellenőrző lámpa világít hiba, vagy nem megfelelő kódolás esetén.
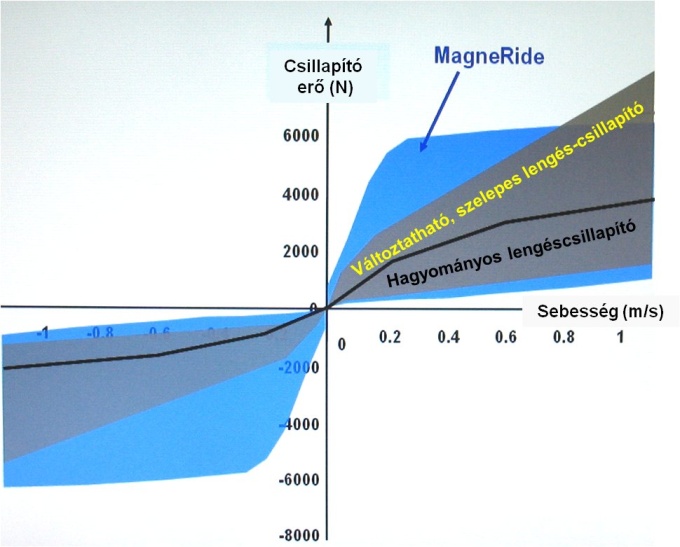
Lengéscsillapító vizsgálat a MagneRide rendszernél:
Ha az aktív lengéscsillapító nyomógombját 5 másodpercnél hosszabb ideig nyomva tartjuk, akkor a dugattyúkba beépített tekercseket az elektronika egy a gyártó által előre meghatározott árammal táplálja. Ekkor a nyomógombba beépített LED villog. Ilyen állapotban kell a lengéscsillapító próbapadi vizsgálatát elvégezni.
Ebből az üzemmódból ki lehet lépni, ha:
a nyomógombot ismételten megnyomják,
a gyújtást ki-, majd ismét bekapcsolják,
ha átlépik a 10 km/h küszöbsebességet.
A MagneRide rendszer előnyös tulajdonságai:
Csökkenti a felépítmény függőleges mozgását a rossz úton
Csökkenti a felépítmény billenését, borulási hajlamát
Optimalizálja a rezgési tulajdonságokat
Optimalizálja a gépkocsi úttartását
Javítja a kormányzási jellemzőket.
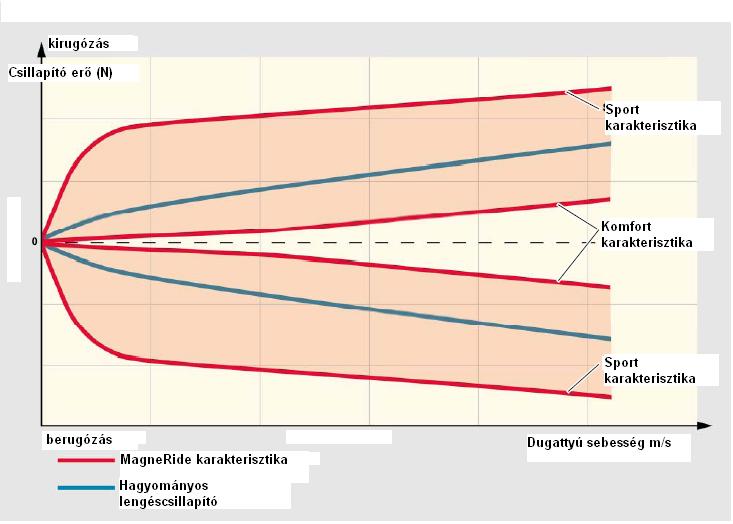
5. fejezet - Differenciálzárak elektronikus működtetése
- 5.1. Összefoglaló a differenciálművekről
- 5.2. A differenciálzár, vagy a növelt belső súrlódás szükségessége és csoportosítása
- 5.3. Személygépkocsi kézi kapcsolású differenciálzárakkal
- 5.4. Homlokkerekes differenciálmű
- 5.5. Középső homlokkerekes differenciálmű visco differenciálzárral
- 5.6. Középső kúpkerekes differenciálmű visco differenciálzárral
- 5.7. A VISCO differenciálzárak hátrányai
- 5.8. A differenciálművek belső súrlódása
- 5.9. Önzáró differenciálmű
- 5.10. Elektrohidraulikus működtetésű differenciálzárak
- 5.11. Villanymotorral működtetett differenciálzárak
- 5.12. Csigakerekes, részlegesen önzáró differenciálművek (Torsen = Torque Sensing)
- 5.13. EDS (Elektronische Differential Sperre)
- 5.14. Haszonjárművek differenciálzárral
5.1. Összefoglaló a differenciálművekről
A gépkocsikba szerelt differenciálművek feladata, hogy a sebességváltótól érkező nyomatékot szétossza a két hajtott kerékre, hogy azoknál az elinduláshoz és a haladáshoz szükséges vonóerő alakuljon ki. Eközben lehetővé teszi a gépkocsival a kanyarodást is úgy, hogy a külső és a belső íven gördülő kerekek eltérő úthosszakat tesznek meg. Hosszanti motor beépítésű gépkocsiknál a differenciálművet összeépítik a haránthajtással és a hátsó futóműbe szerelik be. Ennél a tányérkerék forgatja a differenciálművet. Kereszt irányú motor beépítésnél pedig a sebességváltó kimenő tengelyéről egy nagy átmérőjű homlok fogaskerék hajtja és a sebességváltóba szerelik be. A differenciálmű leggyakrabban kúp alakú fogaskerekei, a bolygókerekek osztják szét a nyomatékot a két kimeneti kúpkerék felé.
Ha nagy a tapadási tényező különbség a jobb és a bal kerék alatt (havas, jeges út), a csúszós felületen lévő kerék kipörög, ezért nem alakul ki vonóerő sem ott, sem a jól tapadó keréknél. Ugyanis a leggyakrabban alkalmazott kúpkerekes differenciálmű fele – fele arányban osztja szét a nyomatékot a kerekek, vagy a futóművek között.
A leggyakrabban alkalmazott kúpkerekes differenciálmű fele – fele arányban osztja szét a nyomatékot a bal- és a jobb oldali kerék között.
5.2. A differenciálzár, vagy a növelt belső súrlódás szükségessége és csoportosítása
Differenciálzár, vagy növelt belső súrlódású differenciálmű nélkül nem tud elindulni a gépkocsi, amikor jelentősen eltér egymástól a tapadási tényező a bal- és a jobb oldali kerék alatt. A differenciálzárat inkább terepjáróknál alkalmazzák, és gyakrabban találkozunk vele a haszonjárműveknél.
A személygépkocsikba leggyakrabban kúpkerekes differenciálműveket szerelnek, melynek belső súrlódását különböző konstrukciós megoldásokkal növelik.
A differenciálzárak csoportosítása a szerkezeti kialakítás szerint:
alakzáró változatok (körmös kapcsoló) ennél nincs fordulatszám különbség a hajtott kerekek között (100% -os zárás).
súrlódásos változatok (olajlemezes tengelykapcsoló) fokozatos működésű, lehet fordulatszám különbség a hajtott kerekek között.
VISCO differenciálzár
önzáró, vagy részlegesen önzáró differenciálművek (csigakerekes változatok)
A differenciálzárak csoportosítása a működtetési módjuk szerint:
kézzel kapcsolható,
automatikus működésű.
5.3. Személygépkocsi kézi kapcsolású differenciálzárakkal
5.3.1. Audi Quattro (1980)
Érdekes megoldása volt a 80-as években ennél az állandó összkerékhajtású gépkocsinál a középső differenciálmű integrálása a sebességváltóba. Ezzel a „Quattro” technikával új fejezet kezdődött az állandó összkerékhajtás történetében. A középső differenciálmű 50% - 50% arányban osztja szét a nyomatékot az első és a hátsó futómű között. Az Audi 80 állandó összkerékhajtású változatánál a középső differenciálműnél és a hátsó futóműbe szereltnél alkalmaztak differenciálzárakat.
Ha a bal és a jobb oldali kerekek alatt azonos a tapadási tényező a kerekek hajtása azonos fordulatszámmal történik, de kanyarban lehetőség van a fordulatszám kiegyenlítésre. Ha egy első-, és egy hátsó kerék kipörög nincs lehetőség a közlekedésre. Ilyenkor a gépkocsivezető kapcsolhatja a differenciálzárakat külön – külön, vagy mindkettőt együtt.
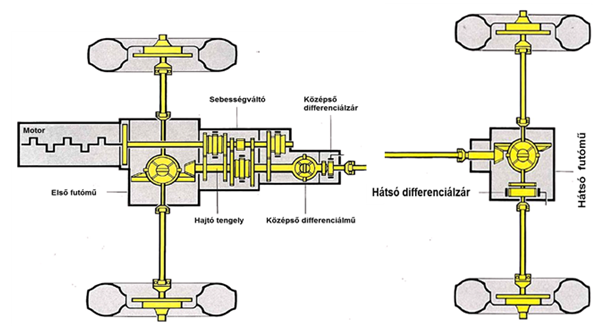
Ha a középső differenciálzár van bekapcsolva a futóművek között fix lesz a nyomatékarány. Fékezéskor megakadályozható, hogy valamelyik futómű túlfékezetté váljon. Erős fékezéskor mind a négy kerék egyszerre fog blokkolni és a gépkocsi elveszti a stabilitását. Ha mindkét differenciálzár be van kapcsolva, minden útviszonynál a legnagyobb vonóerő alakulhat ki. Ebben az állapotban az első és a hátsó kerekek hajtása azonos fordulatszámmal történik és nincs lehetőség a fordulatszám kiegyenlítésre. A differenciálzár a differenciálmű ház és az egyik féltengely között hoz létre közvetlen záró kapcsolatot.
A hátsó differenciálzárat szilárd burkolatú úton azonnal oldani kell, hogy lehessen kanyarodni. Ennek elmulasztásakor fokozódik a gumikopás, és növekszik a hajtásláncban kialakuló belső feszültség. A differenciálzárakat kapcsolóhüvellyel kapcsolják. Ennek elmozdulásakor világít a műszerfalon az ellenőrző lámpa. Két fokozatú pneumatikus húzó kapcsolóval működtethetők a differenciálzárak. A differenciálzár bekapcsolásakor az ABS működése elektromos jel segítségével kikapcsol. Erre a kerekek mechanikus összezárása miatt van szükség, mert ilyenkor a blokkolásgátló képtelen a működésre.
A differenciálzárak működtetése ennél a típusváltozatnál a gépkocsivezetőre van bízva. Ha ügyes és kellő gyakorlattal rendelkezik, kedvező lesz a dinamikai viselkedés és jó lesz a gépkocsi menetstabilitása is. Különböző automatikus működésű differenciálzárakkal és más konstrukciós megoldásokkal igyekeztek a gépkocsivezetőtől független menetdinamikát megvalósítani.
A második generációs Audi Quattro változat, melyet a 200 –as típusnéven 1984 –ben mutattak be a differenciálzárak működtetése a gépkocsivezetőre volt bízva és azokat a középkonzolon elhelyezett forgató gombbal vákuum segítségével tudta működtetni.
5.3.2. VW Transporter (2004)
Évtizedekkel később is alkalmaztak hasonló differenciálzár megoldást például a Haldex rendszerű összkerék hajtással, a 4MOTION –al szerelt VW Transporter hátsó futóművében. Ez a kézi kapcsolású differenciálzár opcionális. A műszerfalon elhelyezett nyomógombbal kapcsolhatja be a vezető. Ekkor jelet kap a működtető elektronika és hatására kapcsolja az elektromágneses szelepeket. Ekkor a műszerfalon is világítani kezd az ellenőrző lámpa. A vákuumot kapcsoló elektromágneses szelepeket ellátták egy – egy „Read – relével” melyek az elektronikának visszajelzik a pillanatnyi állapotot. Az ESP elektronika is megkapja az erre vonatkozó jelet. Az elektromágneses szelepek a működtető munkahenger egyik kamrájába vákuumot vezérelnek ki. Visszakapcsoláskor a vákuum a másik kamrába kerül. Ennek hatására az emelőkar segítségével bekapcsolja a körmös kapcsolóként kialakított differenciálzárat, vagy kikapcsolja. Ekkor alakzárással egymáshoz kapcsolódik a differenciálmű és az egyik kerék féltengelye.
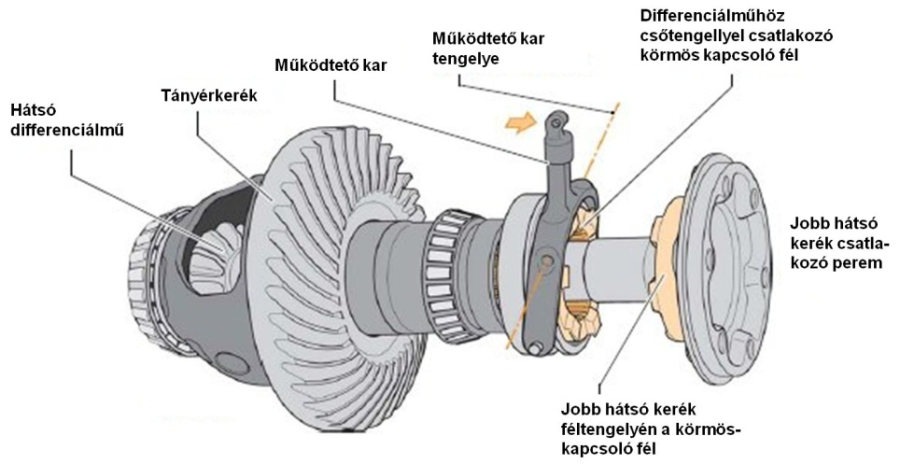
A differenciálzárat működtető-, az összkerék hajtás-, és az ESP elektronikák között a CAN hálózaton keresztül folyamatos kommunikáció valósul meg. A differenciálzár csak akkor kapcsol be, ha a gépkocsi sebessége kisebb 72 km/h –nál. Amikor a differenciálzár bekapcsol, az ESP működése kikapcsol.
5.4. Homlokkerekes differenciálmű
Ha összkerék hajtású gépkocsinál a tengelyterhelések elöl és hátul nem azonosak és mégis azzal arányos nyomaték felosztást akarnak megvalósítani a futóművek között, homlokkerekes differenciálművet kell beépíteni. Ez a fogaskerekek átmérőjével arányos nyomaték felosztást valósít meg. Gyakran középső differenciálműnek is szokták nevezni, mert a két futómű között osztja szét a nyomatékot.
Ennél a változatnál a sebességváltótól érkező nyomaték a bolygókerék tartót forgatja. A nagyobb átmérőjű, belső fogazatú koszorú kerék például a mellékelt ábrán a hátsó futómű felé közvetíti a bejövő nyomaték 63%-át. A kisebb átmérőjű külső fogazatú napkerék pedig az első futóműnek adja a bejövő nyomaték 37%-át.
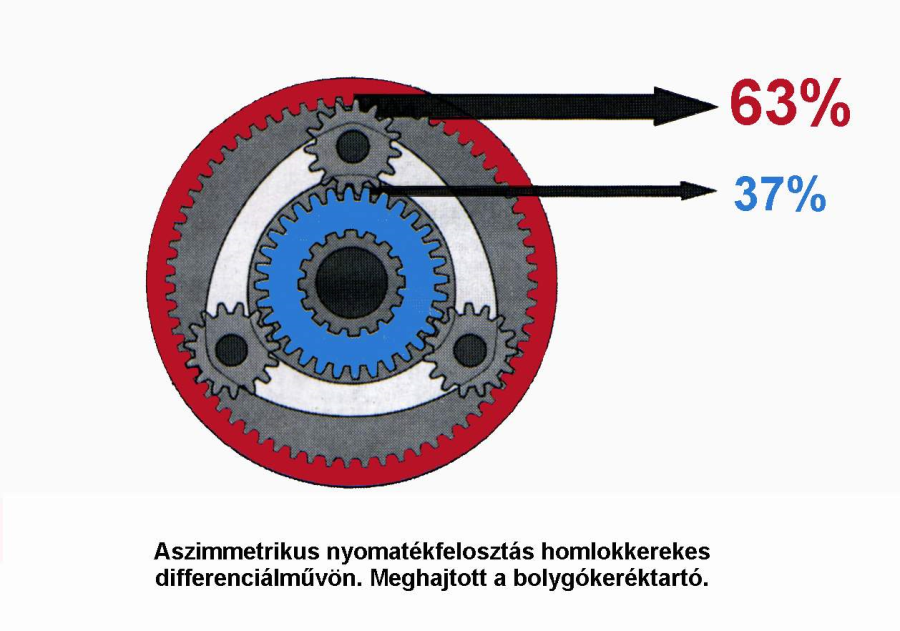
5.5. Középső homlokkerekes differenciálmű visco differenciálzárral
A homlokkerekes differenciálműveknél jelentősen eltérő tapadási tényező esetén hasonló problémákkal állunk szemben, mint az előzőekben leírtuk. Ennek elhárítására a hetvenes évek második felében gyakran alkalmazták a VISCO tengelykapcsolót, mint differenciálzárat. Előnye az volt, hogy automatikusan működésbe lép, amikor szükséges és egy bizonyos fordulatszám különbséget például kanyarodáskor lehetővé tesz. Erre látunk néhány példát a Ford Scorpió és a Mitsubishi Galant esetében.
Ennek az automatikusan működő differenciálzárnak a zárási foka egyrészt függ a fordulatszám különbségtől, másrészt pedig konstrukciós tényezőkkel befolyásolható, melyek:
a VISCO tengelykapcsolóba betöltött szilikon olaj minősége és térfogata,
a beépített lemezek száma.
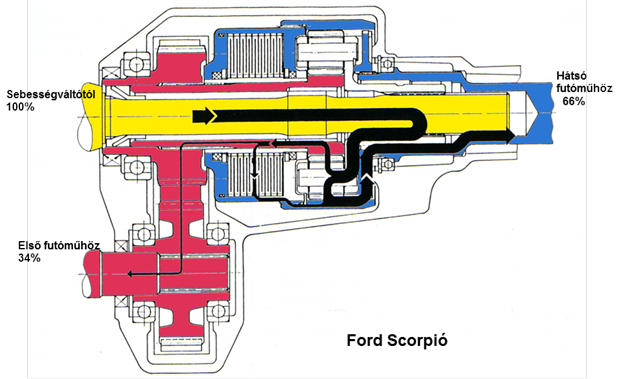
5.6. Középső kúpkerekes differenciálmű visco differenciálzárral
Az előzőhöz hasonló VISCO differenciálzárat szereltek be például a Mitsubishi Galant középső, kúpkerekes differenciálművébe is. Ez csak bizonyos fordulatszám különbség felett kezd zárni és az ABS működését kevésbé befolyásolta, mint a hagyományos differenciálzárak.
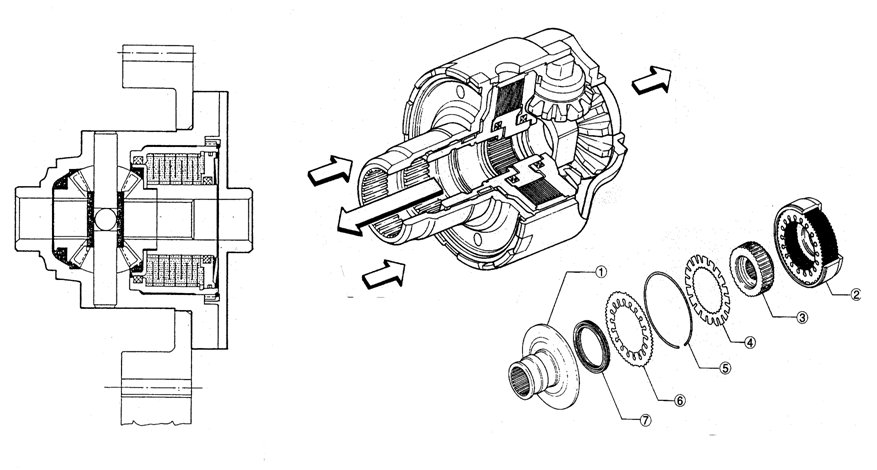
Az egyik kerék kipörgése esetén a VISCO differenciálzár működése révén átvitt nyomaték került a jól tapadó kerékre és ezzel lehetővé tette az elindulást, illetve e gyorsítást.
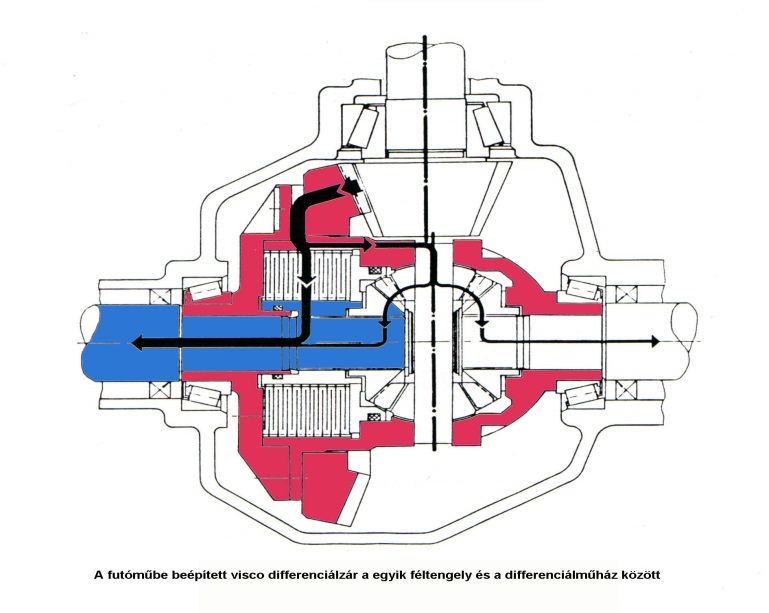
5.7. A VISCO differenciálzárak hátrányai
A VISCO technikával bár megvalósult az automatikusan záródó differenciálmű, de azzal a hátránnyal járt, hogy nagyon megnehezítette ezen gépkocsiknál a görgős fékpadi mérést. A fékpad görgőivel forgatott kereke és a másik két álló kerék közötti fordulatszám különbség hatására zár a VISCO differenciálzár és nyomatékot ad a műhely padlóján lévő kerekekre. Ennek hatására a gépkocsi kiugrik a fékpadról. Ez balesetet is okozhat. A további kísérletezés megnöveli e VISCO differenciálzár igénybevételét és ezzel arányosan a hőterhelését is, ami tönkreteszi a szerkezetet. A problémát tovább tetézi, ha kereszt irányban, vagyis a jobb és a bal kerék közé is beépítettek VISCO differenciálzárat és a görgőpárok a kisebb áramfelvétel érdekében külön – külön indíthatók. A megoldás vagy szabadon futó kiegészítő görgőpár, vagy speciális görgős fékpad alkalmazása lehet.
Ezen hátrányos tulajdonságok miatt a VISCO technika alkalmazása az utóbbi évtizedekben már háttérbe szorult. Helyette inkább elektronika segítségével automatikusan bekapcsolódó összkerékhajtást alkalmaznak.
5.8. A differenciálművek belső súrlódása
A differenciálműveknél a belső súrlódás előnyös, mert a jobb és a bal oldali kerekek között, ha elér a tapadási tényező, ez teszi lehetővé az elindulást. Ugyanis a belső súrlódással arányos nyomaték kerül a jól tapadó kerékre. A differenciálművek belső súrlódását különböző konstrukciós megoldásokkal igyekeznek megvalósítani, illetve növelni:
növelt belső súrlódású differenciálmű,
önzáró, vagy részlegesen önzáró (csigakerekes) differenciálmű,
különböző konstrukciójú fokozatos működésű differenciálzárak beépítése.
5.8.1. Növelt belső súrlódású kúpkerekes differenciálmű
Ennél a változatnál a differenciálműbe szerelt kúpkerekek mögé olajban futó súrlódó lemezeket építenek be. A kúpkerék hajtásnál ébredő tengely irányú erő fogja összeszorítani a súrlódó felületeket. A zárási foka a működtető erővel és a lemezek számával lesz arányos. Ez az olajlemezes tengelykapcsoló a kipörgő kereket összefékezi a differenciálmű házzal, miközben a másik kerékre nyomatékot ad és gyorsítja azt.
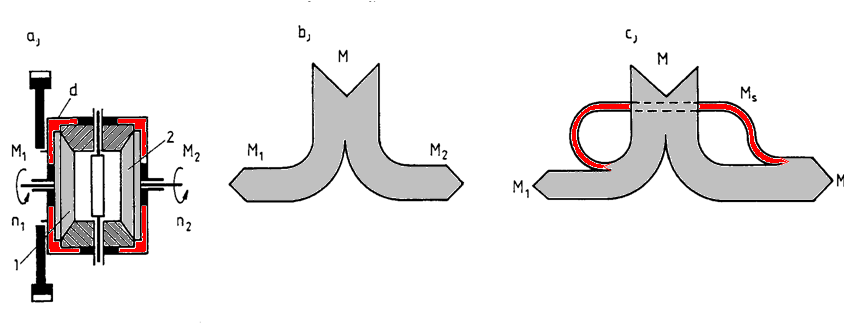
A differenciálmű belső súrlódása tovább növelhető, ha növeljük a súrlódó felület nagyságát. Ez több súrlódó lemez beépítésével válik lehetővé. Beépíthető például egy - egy olajlemezes tengelykapcsoló a differenciálmű ház és a féltengelyek közé. Ezeket az olajlemezes tengelykapcsolókat összeszoríthatja például
a kúpkerekeknél ébredő tengely irányú erő, (mint az előző példánál láttuk)
hidraulikus munkahengerbe kivezérelt olajnyomás segítségével,
villanymotorral és mechanikus áttétellel működő feszítő szerkezettel.
Ezek mindegyikénél növekszik a differenciálmű belső súrlódása, emiatt a kipörgő kerékről nyomaték adódik át a másik kerékre.
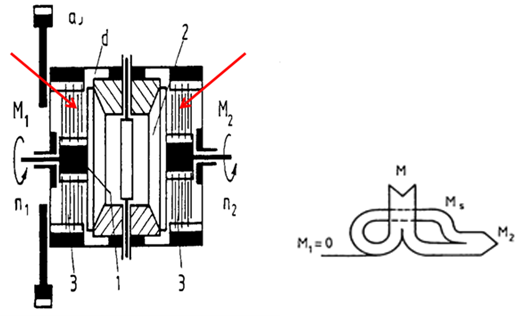
5.9. Önzáró differenciálmű
A ZF által gyártott önzáró differenciálművet elsősorban hátsó kerék hajtású gépkocsik hátsó futóművénél alkalmazták. Akkor teszi lehetővé az elindulást, amikor az egyik hajtott kerék csúszós, a másik jól tapadó útfelületen van. Különböző zárási fokú változatok készültek. Széria gépkocsiknál a zárás általában 25 – 45% közötti, rally autóknál ennél nagyobb is lehet.
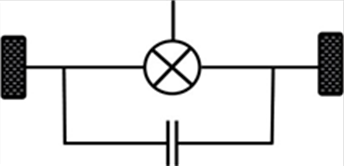
Szerkezeti kialakítása olyan, hogy a differenciálmű belsejébe két tengely irányban elmozduló nyomótagot és két olajlemezes tengelykapcsolót építenek be. A súrlódó lemezek a féltengely és a differenciálmű ház között hoznak létre kapcsolatot, amikor a differenciálmű kúpkerekei között fordulatszám különbség alakul ki. A kúpfogaskerekeknél keletkező axiális erő a prizmák segítségével ad át az olajlemezes tengelykapcsolóknak az előző konstrukciónál nagyobb összeszorító erőt. Hatására részlegesen zár a differenciálmű. Ennek hatása a lemezek számával és a prizma szögével befolyásolható. Ennek köszönhetően a gyorsabban forgó kerék magával viszi a lassabban forgót, így lehetővé válik az elindulás jelentősen eltérő tapadási tényező esetén is.
A zárási fok: 
Ahol: M 1 az egyik kerék nyomatéka, M 2 pedig a másiké.
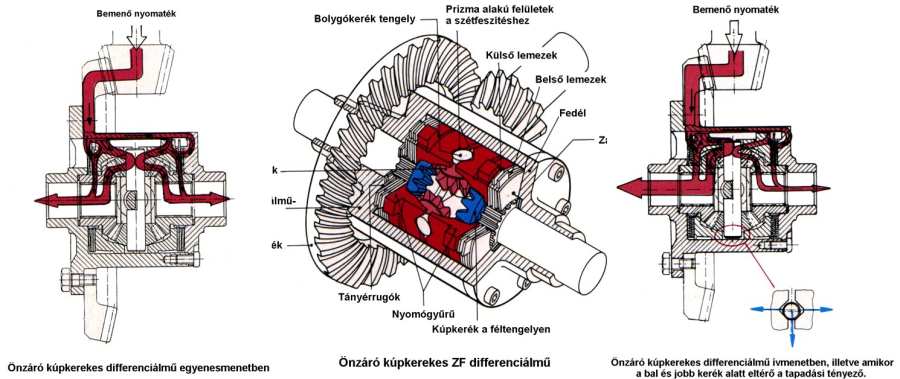
5.10. Elektrohidraulikus működtetésű differenciálzárak
Ez is egy a ZF által kifejlesztett megoldás. Hatása hasonlít az előző változatéhoz, de ennél a működtetéshez már felhasználják az elektronikát és a hidraulikát is. A differenciálműbe beszerelt hidraulikus munkahengerek szorítják össze az olajlemezes tengelykapcsolókat. Így a zárási fok elérheti akár a 100%-ot is.
A blokkolásgátló rendszereknél alkalmazott kerékfordulatszám érzékelők adják a működéshez szükséges jeleket az elektronikának. Az elektronika a differenciálzár működtetése során a következő tényezőket veszi figyelembe:
kormánykerék elfordítás érzékelő jele,
a gépkocsi sebessége,
gyorsulása
a gázpedál elmozdítás gyorsasága és mértéke.
A működtetés integrálható az ABS és az ASR rendszer elektronikájával. Az első sorozatbeépítése ennek a rendszernek az Audi A8 automatikus sebességváltóval szerelt összkerékhajtású változatába volt. A 90-es években a Mercedes Benz is kínálta külön tartozékként az automatikus működésű differenciálzárat (ASD). Úgy működik, hogy amikor a hajtott kerekek fordulatszáma eltér egymástól, automatikusan bekapcsol a differenciálzár, melynek zárási foka elérheti a 100%-ot is. Ez azonban csak akkor következhet be, ha a gépkocsi sebessége nem nagyobb 25 km/h-nál.
A működtetéshez az energiát a belsőégésű motorral hajtott hidraulika szivattyú biztosította. Az elektronika elektromágneses szelep vezérlése révén juttatta el az olajnyomást a differenciálmű munkahengereihez. Nem csak nagyobb vonóerő valósul meg ezzel, hanem növekszik a gépkocsi menetstabilitása is. Toló üzemben a differenciálzár nem kapcsol be. Ezt a féklámpa kapcsoló jele alapján állapítja meg az elektronika. Így tehát a differenciálzár ezen változata már nem befolyásolja hátrányosan az ABS működését.
A bekapcsolt differenciálzárnál folyamatosan világít a műszerfalon elhelyezett ellenőrző lámpa, ami tájékoztatja a vezetőt erről az állapotról. Ez az automatikus működésű differenciálzár is az elektronika öndiagnosztikájának felügyelete alatt működik. Meghibásodás esetén folyamatosan világít az ellenőrző lámpa. A hibakód a megfelelő diagnosztikai műszer alkalmazásával kiolvasható és ez megkönnyíti a javítást.
5.10.1. ASD (Automatisches Sperrdifferenzial) automatikus differenciálzár
Automatikus működésű differenciálzár, melyet egyebek között a Mercedes személygépkocsiba is szerelnek, fokozatos, elektrohidraulikus működésű változat.
A futóművek közötti nyomatékfelosztást homlokkerekes differenciálmű végzi. A nyomatékarány változtatására a középső differenziálzár működtetése ad lehetőséget.
A gépkocsi hátsó futóművébe automatikusan záródó olajlemezes tengelykapcsolóval működő differenciálzárat szerelnek. A működtetéshez szükséges, az átlagos olajmennyiséget szállító hidraulikaszivattyút a belsőégésű motor hajtja. A hidraulikarendszert ezért nyomástárolóval is ellátták. Az elektromágneses szelepekkel kivezérelt olaj nyomás, a munkahenger dugattyújának segítségével szorítja egymásnak az olajban futó súrlódó lemezeket. Ezáltal akár 100% -os zárás is lehetséges. A hidraulika egységre szerelik fel az elektromágneses szelepeket. A hidraulika rendszer üzemi nyomása 25 – 36 bar közötti.
Az elektronikus rendszer részei:
az induktív működésű kerékfordulatszám érzékelők
kormánykerék szögelfordítás érzékelő
féklámpa kapcsoló
működtető elektronika
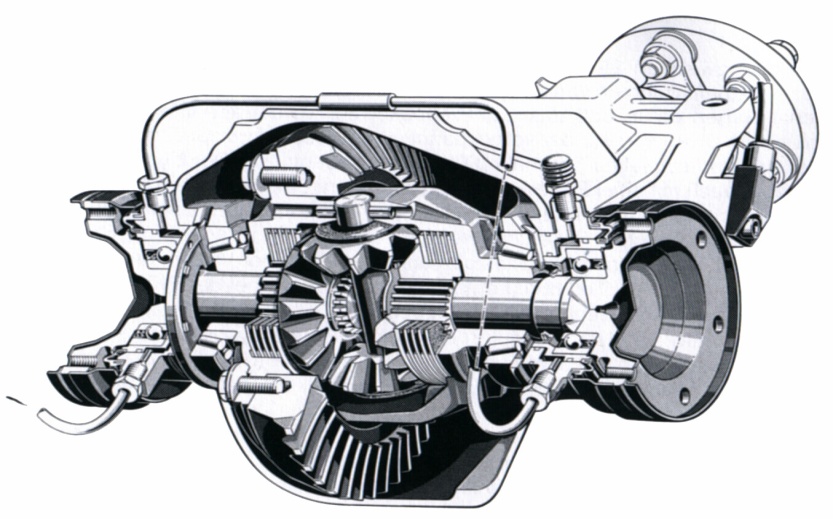
A Mercedes 4-MATIC hajtás
Az elektronika automatikusan hozzá kapcsolja az első kerekek hajtását is a hátsókéhoz bizonyos feltételek között. Ilyen például, ha a gépkocsi sebessége nagyobb 100 km/h –nál és a futóművek között a sebességkülönbség legalább 2 km/h. A futóművek közötti differenciálzár addig van bekapcsolva, amíg a kerekek között a fordulatszám különbség nagyobb 2% -nál. Ha induláskor kerékcsúszás lép fel, automatikusan bekapcsol a differenciálzár. Ezt az állapotot a műszerfalon az ellenőrző lámpa világítása jelzi a gépkocsivezetőnek. A szakirodalom ezt az egyéget EDS –nek (Elektronische Differential Sperre) nevezi.
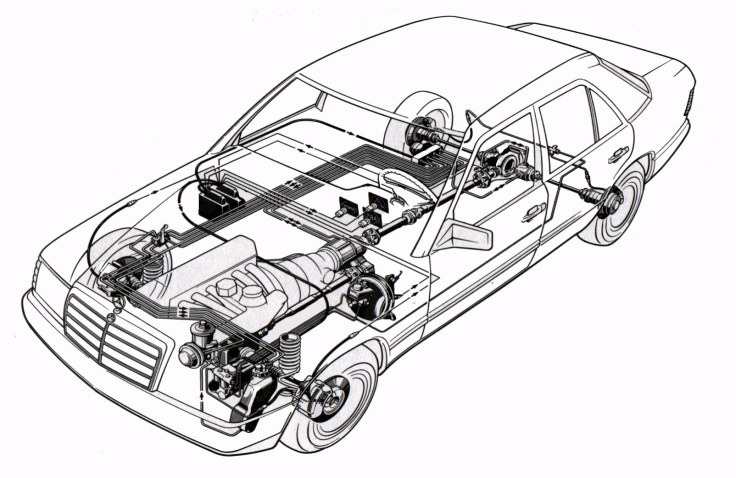
Elektrohidraulikus differenciálzár (BMW)
Korábbi modelleknél a BMW is alkalmazott hidraulikus működtetésű olajlemezes tengelykapcsolót, mint differenciálzárat.
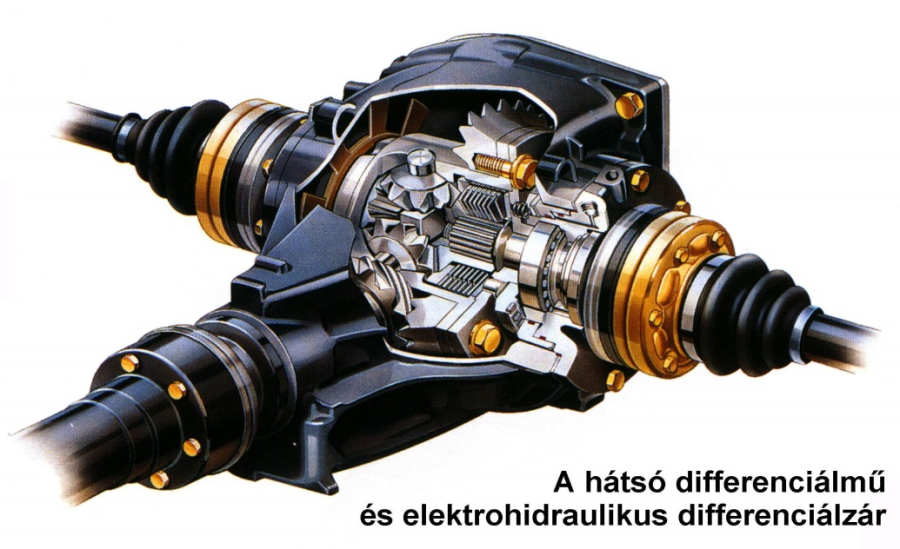
5.11. Villanymotorral működtetett differenciálzárak
Ebbe a csoportba azok a differenciálzár változatok sorolhatók, melyeknél az olajlemezes súrlódó tengelykapcsoló működtetéséhez elektronikát és villanymotort használnak.
5.11.1. Powerlock II (GKN Automotive Gruppe)
A GKN Automotive Gruppe fokozatmentes, automatikus működésű elektronikusan szabályozott differenciálzárat fejlesztett ki első-, hátsó, és összkerék hajtású gépkocsikhoz. Futóműbe szerelt és a futóművek közötti középső differenciálzár változatban is készül.
A működtetése elektro-mechanikusan, tehát villanymotorral történik. Ez mechanikus fogaskerék áttétel segítségével fejti ki a szükséges összeszorító erőt. Ezzel hat a differenciálműbe szerelt olajlemezes tengelykapcsolóra. A beépített lassító áttételen kívül egy feszítő mechanikára is szükség van, mely a forgó mozgást egyenes vonalúvá alakítja. Ez két tárcsából álló, egymáshoz képest elforduló golyósoros rámpával valósul meg. Így hozzák létre a szükségessé váló lemezeket összeszorító erőt, amely finoman szabályozható zárást tesz lehetővé. 10 A –nél kisebb áramfelvétellel kellő gyorsasággal valósulhat meg a működtetés. A megvalósított mechanikus áttétel a zárási foktól függően 1:30, 1:50 közötti. Az áram kikapcsolások a differenciálzár működése azonnal meg kell szűnjön, ezért egy visszaállító rugót is be kell szerelni. 8 lemezpár alkalmazásával 1600 Nm nyomatékot értek el. Ez nagy tengelyterhelésnél is lehetővé teszi a személygépkocsi differenciálművének teljes zárását. A mechanika az elektronikával kombinálva költségkímélő megoldást eredményezett. Az ABS működését nem befolyásolja hátrányosan ez a szerkezet, mert fékezéskor 100 ms –on belül automatikusan old a differenciálzár a féklámpa kapcsoló jelére.
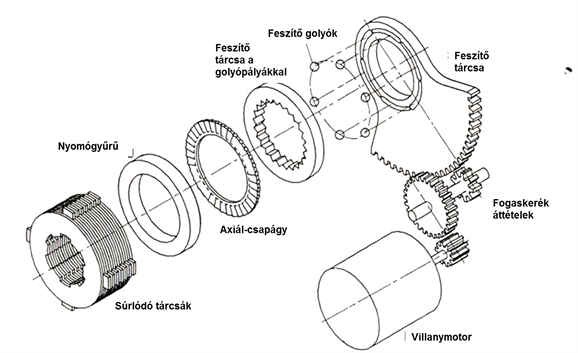
Az elektronikus működtetés bemeneti információi:
ABS kerékfordulatszám érzékelők jelei
féklámpa kapcsoló állapota
kormánykerék elfordítás érzékelő jele
a sebességváltó bekapcsolt fokozata.
A kormánykerék elfordítás érzékelő jele alapján tudja az elektronika megállapítani, hogy a hajtott kerekek közötti fordulatszám különbség az eltérő tapadási viszonyok miatt, vagy a kanyarodás miatt alakult ki.
Olyan elektronikus működtetést valósítottak meg, melynél kis gépkocsi sebesség esetén a minél nagyobb vonóerőnek, míg nagy sebességnél a gépkocsi stabilitásának van elsőbbsége.
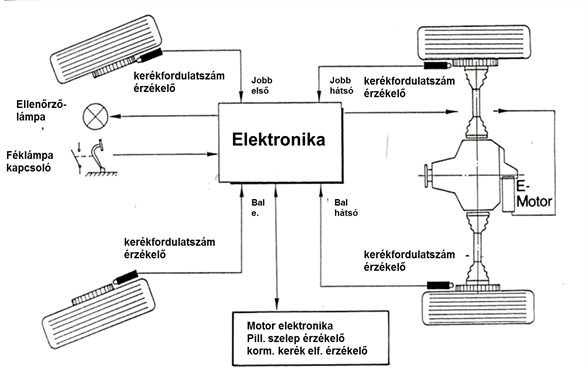
A harmadik generációs Audi Qattot 1987 –ben mutatták be. Ennél alkalmaztak először csigakerekes TORSEN differenciálművet, mely a futóművek közötti nyomatékfelosztást végzi. Ez folyamatosan változó nyomatékarányt tud megvalósítani és kedvezőbb a hatása a sportos indulásoknál.
5.11.2. A VW Tuareg –nél alkalmazott villanymotoros differenciálzárak
Szerkezeti kialakítását tekintve hasonló automatikus működésű differenciálzárakat alkalmaznak a VW Tuareg -nél. Ez egy hosszanti motor beépítésű, állandó összkerékhajtású gépkocsi. A nyomatékot a középső homlokkerekes differenciálmű osztja szét a futóművek között fele - fele arányban. a középső- és a hátsó futóműbe szerelt differenciálművet is ellátják villanymotorral működtetett olajlemezes tengelykapcsolós differenciálzárral. Az első futóműnél nincs differenciálzár, mert az a kormányzást hátrányosan érintené.
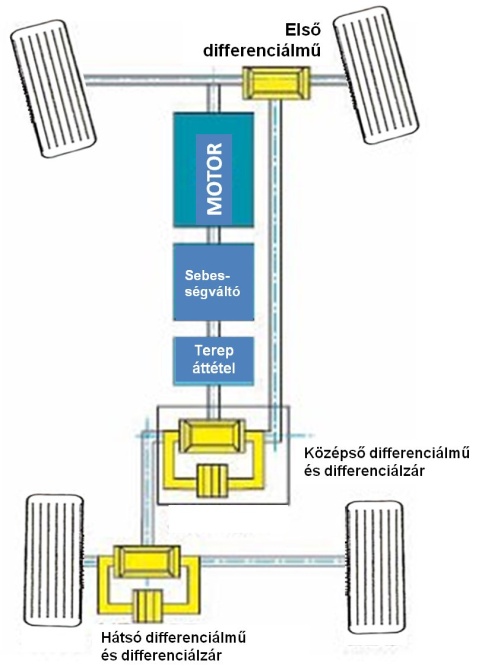
A középső, villanymotorral működtetett differenciálzárat az osztóműbe szerelik be. A villanymotor nyomatékát egy közvetlenül rá szerelt bolygóműves fokozattal növelik. Körhagyó és karos áttétel hozza létre a szükséges működtető erőt, mely a nyomólap segítségével szorítja össze a súrlódó lemezeket. Az így megvalósított elektromechanikus működtetés gyors és pontos. Terepen teljes zárás is megvalósulhat. A hajtómű egység megfelelő kenéséről egy a bemeneti tengely által hajtott olajszivattyú gondoskodik.
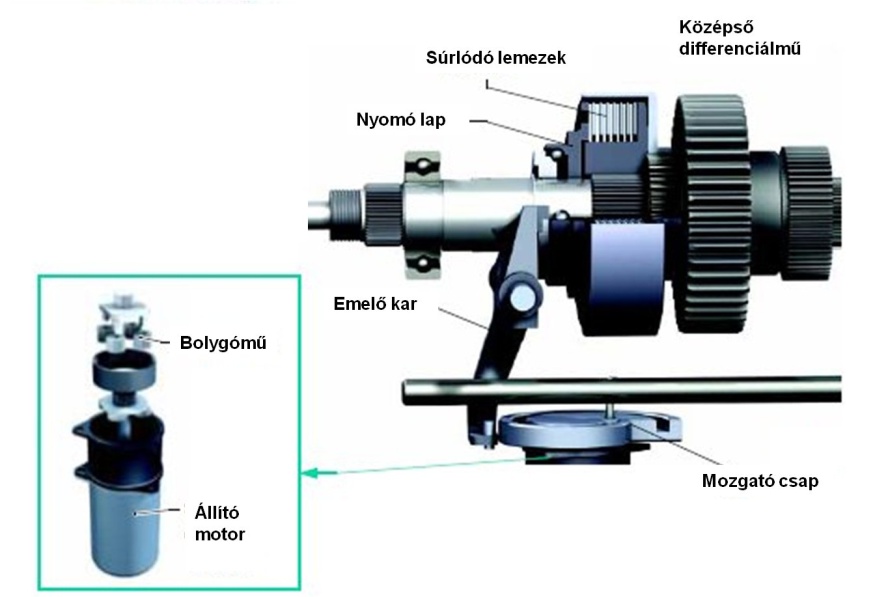
A hátsó futóműbe szerelt differenciálművet is villanymotorral működtetett olajlemezes tengelykapcsolóval látják el, mint differenciálzárral. A motor nyomatékát fogaskerék áttételekkel növelik a szükséges értékre. A lemezeket összeszorító nyomóerőt golyósoros emelőpálya hozza létre és egyúttal a forgó mozgást is egyenes vonalúvá alakítja.
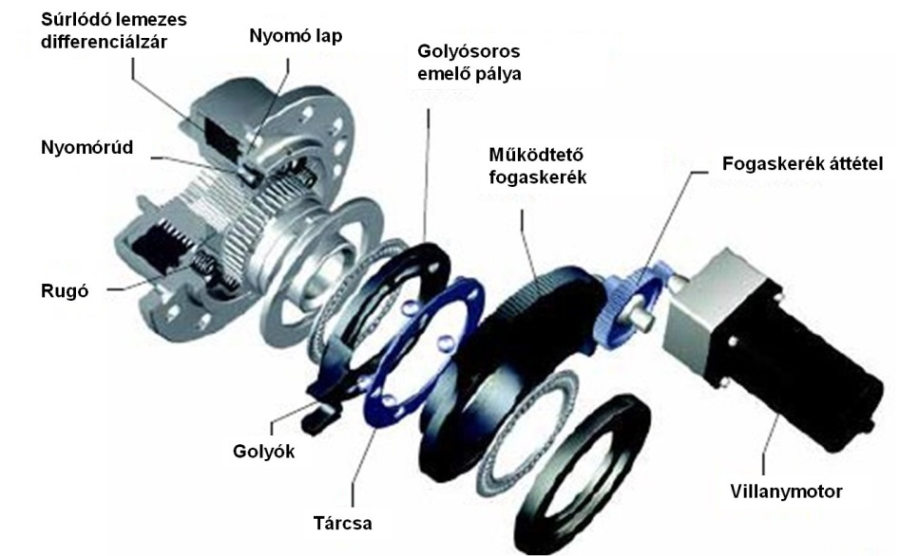
A differenciálzárakat az elektronika a pillanatnyi útviszonyoknak megfelelően automatikusan működteti. Általában nem valósítja meg a 100% -os zárást. Ettől függetlenül a gépkocsivezető a műszerfalon elhelyezett forgató kapcsolóval kezelheti azokat Terepen, amikor a lassító fokozat aktív és a gépkocsi sebessége kisebb 15 km/h –nál az elektronika a differenciálzárakat automatikusan bekapcsolja.
5.12. Csigakerekes, részlegesen önzáró differenciálművek (Torsen = Torque Sensing)
Személygépkocsiknál gyakran alkalmazzák a részlegesen önzáró csigakerekes differenciálműveket. A szakma gyakran alkalmazza az angol TORSEN elnevezést. Ez magyarul nyomaték érzékenynek nevezhető. A középső differenciálműnél és a hátsó futóműnél is lehet ilyen kialakítású változatot alkalmazni. Az első generációs kivitelnél a bolygókerekeket középen csiga-, a két szélén pedig egyenes homlokfogazattal látták el. Ez utóbbival kapcsolódnak egymáshoz a jobb és a bal oldali bolygókerekek. A bolygókerekek forgácsolással nem, csak porkohászati technológiával gyárthatók. Az első generációnál a féltengelyek forgástengelyére merőlegesen helyezték el a bolygókerekeket. A következő generációnál már a kisebb helyigényű, és egyszerűbb szerkezetű PAT (Paralell Axis Torsen) differenciálművet alkalmazták. Ennek különböző típusváltozatait elsősorban középső differenciálműként alkalmazzák. Ezek a differenciálművek a csiga fogazat emelkedési szögétől függően részlegesen önzáróak, ezért nem szükséges differenciálzárral ellátni, így is kedvezőbb menetdinamikai jellemzőket biztosítanak, mint például az automatikus működésű differenciálzárak.
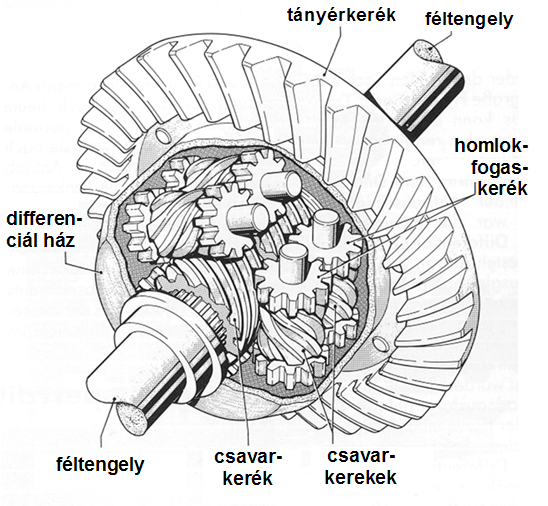
PAT (Paralell Axis Torsen) differenciálmű
Az ilyen kivitelű középső differenciálmű, is képes fele – fele arányban szétosztani a nyomatékot a futóművek között. Ez a differenciálmű a Quattro hajtásnál az automatikus sebességváltó integrális részét képezi. Nagy fordulatszám különbség esetén automatikus zárás következik be, de ez nem befolyásolja hátrányosan a gépkocsi kormányozhatóságát. Automatikus EDL (Elektronic Differential Lock) funkciónak is tekinthető ez a konstrukció.
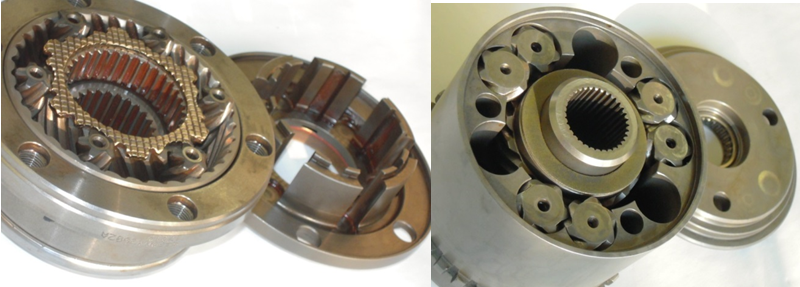
Ilyen részlegesen önzáró középső differenciálművet építenek be egyebek között az AUDI Q7, Audi S4, Audi RS4 típusokba. Lehetővé teszi az aszimmetrikus nyomatékfelosztást is. A geometriailag meghatározott nyomaték arány az első és a hátsó futómű között 42% / 58%. A pillanatnyi menetviszonyoktól és a kerekek közötti fordulatszám különbségtől függően a hajtó nyomaték 85% -a is kerülhet a hátsó futóműre, illetve 65% -a az elsőre anélkül, hogy automatikus működésű differenciálzárat építenek be. A fogaskerekek mögé beépített támasztó gyűrűkön (sárga színű) ébredő súrlódás, mely az axiális erő miatt jön létre növeli a zárási fokot. Az első futómű felé a nyomatékot speciális lánc hajtás közvetíti. A futóművekbe szerelt differenciálműveket hasonlóan a Tuareg -hez a ZF Getriebe GmbH. szállítja be. A 6 fokozatú kézi kapcsolású és a 6 fokozatú automatikus sebességváltó is ugyanettől a beszállítótól származik.
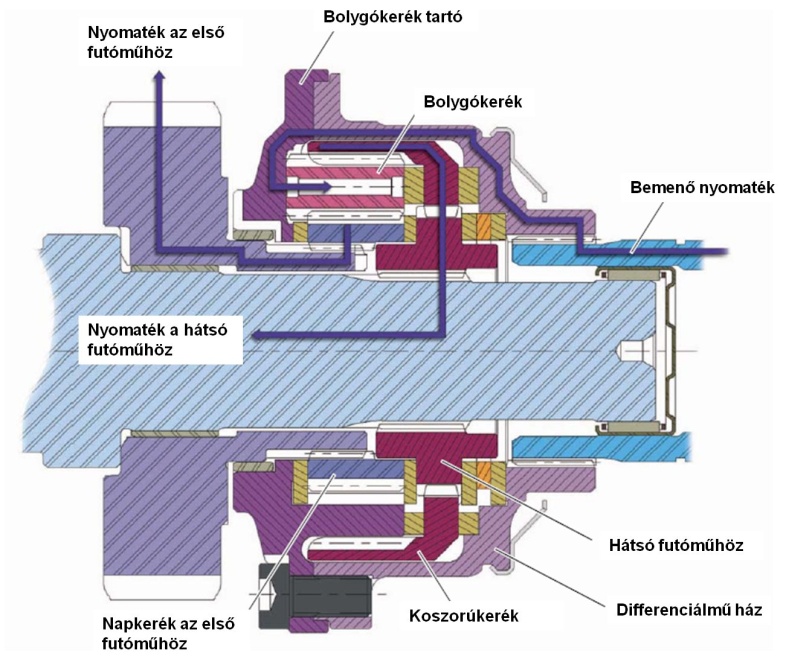
5.13. EDS (Elektronische Differential Sperre)
Az ABS/ASR rendszer veszi át a differenciálzár feladatát. Erre úgy van lehetőség, ha az egyik (a kipörgő) kereket a vezetőtől függetlenül szabályozott módon megfelelő nagyságú erővel lefékezik. A differenciálművön keresztül ekkor is ki tud alakulni a megfelelő vonóerő.
A differenciálzáréhoz hasonló hatást a fékrendszerrel is el lehet érni, ha a kipörgő kereket lefékezik. Ezt a beavatkozást kezdetben EDS-nek nevezték, annak ellenére, hogy a differenciálzárhoz már nem volt köze. A VW Golf 92-es modellévben a Continental Teves által gyártott ABS és EDS működést lehetővé tevő rendszert alkalmazott. A Teves MK IV ABS hidraulika egységgel és a kerékfékszerkezetekkel valósítja meg a differenciálzár hatást. Ennél a gépkocsinál már átlós fékkör felosztást valósítottak meg. Az EDS működés az ABS rendszer egyik alprogramja. A hajtott kerekek szabályozott fékezésével avatkozik be, melynek olyan a hatása, mintha differenciálzárat kapcsolták volna be.
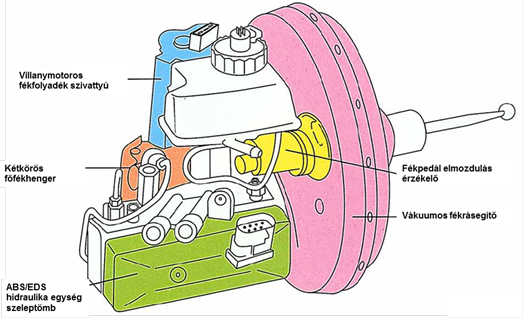
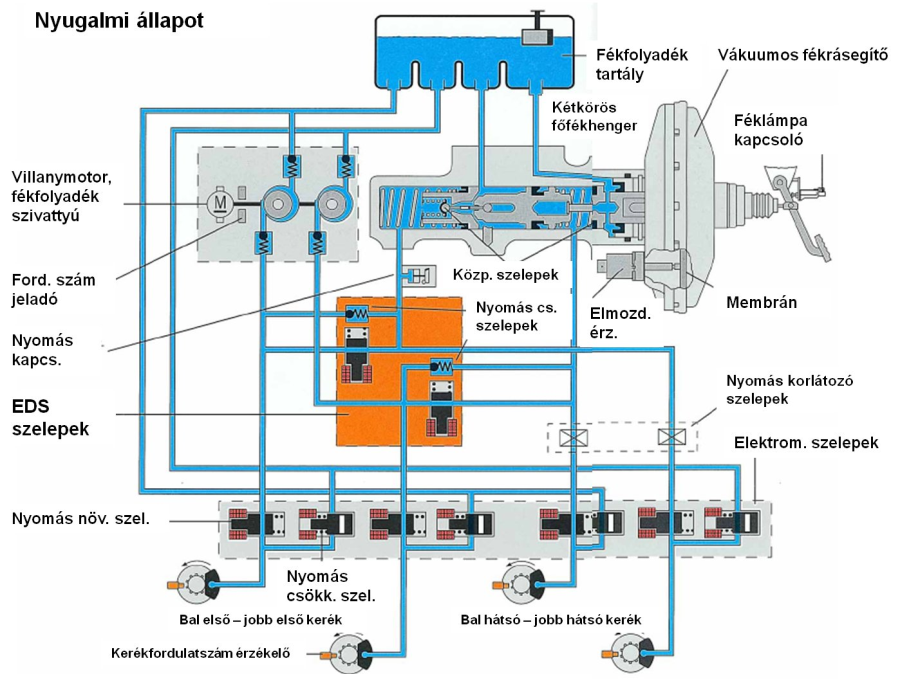
A fékezés és az ABS működés nagyobb nyomáson történik, mint az EDS beavatkozás. Ezért ilyenkor az elektronika közvetlenül működteti a villanymotorral hajtott fékfolyadék szivattyút. EDS beavatkozáskor ez egy előtét ellenálláson keresztül kisebb fordulatszámon következik be, ami kisebb nyomást eredményez.
Induláskor, ha valamelyik hajtott első kerék a kis tapadási tényező miatt kipörgés közeli állapotba kerül, de a gépkocsi sebessége kisebb 40 km/h –nál, ezt az állapotot a kerékfordulatszám érzékelő jelei alapján ismeri fel az elektronika.
Beavatkozási parancsokat ad az EDS azon elektromágneses szelepeinek, melyekhez tartozó kerekek nem pörögnek ki, továbbá a villanymotorral hajtott hidraulika szivattyúnak. Ennek hatására zárnak a nem hajtott kerekek fék munkahengerei, növekszik viszont a fékező nyomás a kipörgő kerekek fék munkahengereiben és azok fékeződni kezdenek. Az EDS szelepek megakadályozzák a hátsó kerekeknél a nyomás jelenős növekedést, továbbá a kiegyenlítő tartály irányában. Az EDS lágy, fokozatos beavatkozását két nyomásdifferencia alapján működő szelep biztosítja. A fékező nyomást 70 bar értékben korlátozzák az EDS működésnél. Ha a nyomás ennél nagyobb, fékfolyadék áramlik vissza a fékfolyadék tartály felé. Az EDS is az öndiagnosztika felügyelete alatt működik. Hiba esetén kikapcsol a működés, hibajelzést ad és tárolódik a hibakód, ami a típusnak megfelelő diagnosztikai műszerrel kiolvasható.
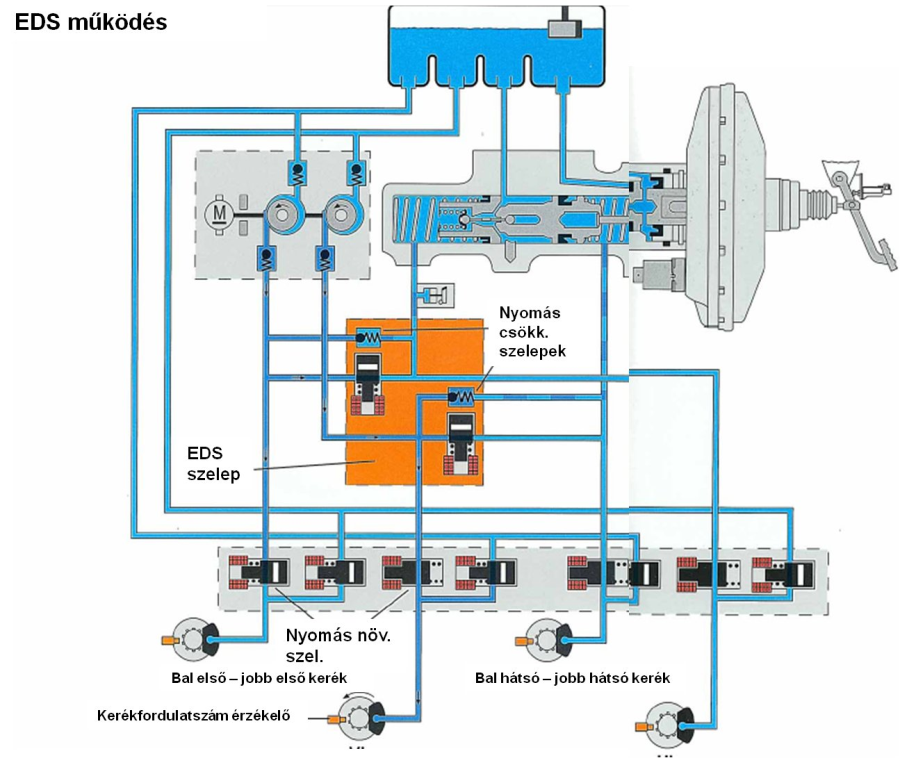
5.13.1. További elektronikus differenciálzár (EDS) működések:
Az Audi A8 Bosch ABS 5.0 típusváltozata is alkalmazta az EDS működést. (1994)
Az Audi A6, melyet ABS 5.3 rendszerrel láttak el 1996-ban szintén EDS szabályozással volt ellátva. Ez utóbbi elindulási segítséget jelent csúszós úton. Az EDS automatikusan fékezi a kipörgő kereket. Ilyenkor a differenciálművön keresztül a nyomaték a másik kerékre adódik át. Az elsőkerékhajtású változatnál az EDS 40 km/h sebességig működik. Az összkerékhajtású változatnál ez a szabályozás 80 km/h sebességhatárig működik.
5.14. Haszonjárművek differenciálzárral
A kipörgésgátló célja, hogy megakadályozza a hajtott kerék kipörgését gyorsításkor, amikor kicsi a tapadás. Ezzel megakadályozható kanyarban a kereszt irányú stabilitás elvesztése.
Az ATC két egymástól független szabályozó körből áll:
differenciális fékezés, amely a differenciálzárat helyettesíti,
motor nyomaték csökkentés
Ez a beavatkozás a kerékfék szerkezettel történik, de olyan a hatása, mint a differenciálzáré. Az a hátránya viszont, hogy alkalmazása növeli a kerékfékszerkezet igénybevételét.
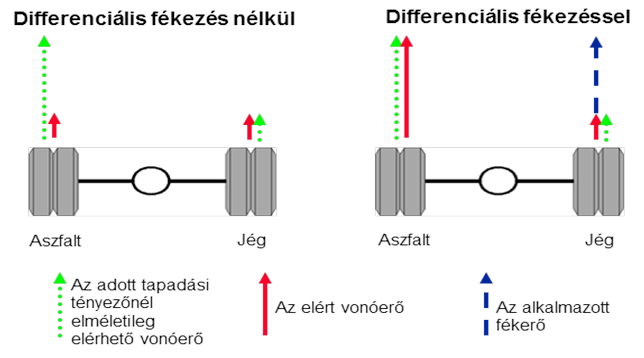
Ha a gépkocsit elektronikus fékrendszerrel látták el az fogja működtetni a beépített differenciálzárat.
6. fejezet - Elektrohidraulikus szervokormányok
- 6.1. A kormányzással kapcsolatos alapfogalmak
- 6.1.1. Kormányzási módok
- 6.1.2. A kormányberendezéssel szemben támasztott követelmények
- 6.1.3. A gépkocsi kormányzási tulajdonságai
- 6.1.4. A kormányrudazat
- 6.1.5. A kormányművek és a velük szemben támasztott követelmények
- 6.1.6. A kormányberendezések csoportosítása az alkalmazott energia szempontjából
- 6.1.7. A mechanikus kormánygépek néhány változata
- 6.2. Hidraulikus szervokormányok (HPS = Hidraulic Power Steering)
- 6.2.1. A szervokormány modellje
- 6.2.2. A segédenergiát hasznosító kormányberendezések, szervokormányok főbb részegységei
- 6.2.3. A kormányzásnál használatos segédenergia változatok
- 6.2.4. A hidraulikus szervokormány energiaellátásának lehetőségei
- 6.2.5. A különböző gépkocsik hidraulikus szervokormányaihoz használatos szervo-szivattyúk
- 6.2.6. Servotronic a sebességfüggő rásegítés
- 6.2.7. Ellenőrző kérdések a hidraulikus szervokormányok részhez
- 6.3. Elektrohidraulikus szervokormány EPHS
- 6.4. A különböző szervokormány változatok összehasonlítása
- 6.5. Ellenőrző kérdések az elektrohidraulikus szervokormány részhez
6.1. A kormányzással kapcsolatos alapfogalmak
A gépkocsivezető kormánykerék elfordításával arányosan az első kerekeket fordítja el, és ezzel irányítja a gépkocsit. A kormányberendezés áttétele olyan kell legyen, hogy a vezető ereje elegendő legyen annak működtetéshez, továbbá a szükséges elfordítás feleljen meg az emberek teljesítőképességének. Nagyobb erőszükségletnél szervokormányt, vagy kormányrásegítőt alkalmaznak. Az újabb műszaki fejlesztések révén egyre több mechatronikai egységet alkalmaznak a kormányzásnál. A hidraulikus szervokormányokat az elektrohidraulikus, majd az úgynevezett „száraz”, vagyis elektromechanikus változatok követték. Jelenleg már egyre több gépkocsiba az aktív szervokormányokat szerelnek be.
A korábban alkalmazott mechanikus, illetve hidraulikus egységeket összetett elektronikus rendszerek váltották fel, melyek újabb követelmények fogalmaznak meg a szerkezetek és a működtető szoftverek fejlesztése, valamint a gépkocsik vizsgálatával szemben.
6.1.1. Kormányzási módok
Tengelycsonk kormányzás. A közúti járművek jelentős részénél ezt alkalmazzák. Az első kerekek saját elkormányzási tengely körül fordulnak el a kormányberendezés segítségével.
Forgózsámolyos kormányzás. Leggyakrabban több tengelyes pótkocsik első futóművénél alkalmazzák. A forgózsámoly segítségével a vonó háromszög fordítja el a teljes futóművet. Hátránya, hogy nagyobb elkormányzásnál csökken a nyomtáv és ezzel arányosan a stabilitás is.
Kormányzás a jármű két részének egymáshoz képesti becsuklásával. Elkormányzáskor így a két futómű egymással bizonyos szöget zár be. Általában munkagépeknél és mezőgazdasági gépeknél alkalmazzák.
Kormányzás a kerék fordulatszám szabályozásával. Hidro-hajtású munkagépeknél alkalmazzák.
Talajerő kormányzás. Három, vagy többtengelyes haszonjárművek leghátsó tengelyénél használatos. Kanyarodáskor a gumiabroncson kialakuló oldalerő kormányozza el a kerekeket.
6.1.2. A kormányberendezéssel szemben támasztott követelmények
A kormányberendezés tegye lehetővé a gépkocsi könnyű és biztonságos irányítását.
Olyan legyen a kormányberendezés, hogy egyenes menetből 6 másodpercen belül 12 m sugarú kör pályára lehessen kormányozni a gépkocsit.
Ha a kormánykeréken kifejtett erő nagyobb 250 N-nál, segéderő alkalmazása szükséges.
Ha nem áll rendelkezésre a rásegítő erő, a szükséges működtető erő nem haladhatja meg a 600 N -ont.
A működtető erő a közép helyzettől a szélső helyzetig harmonikus legyen, és az kormányzás közben nem csökkenhet.
Menet közben nem megengedett a szokatlan kormánykorrekció igény. A mechanikus alkatrészeknél nem lehet holtjáték.
Az összes mechanikus alkatrész szilárdsága feleljen meg a menet közben fellépő igénybevételeknek.
Szokatlan manővereknél, az üzemszerűnél nagyobb terhelésnél, például áthajtás akadályon, vagy járdaszigeten, illetve egy kisebb baleset bekövetkeztében, nem keletkezhet törés, vagy repedés a mechanikus alkatrészeknél.
6.1.3. A gépkocsi kormányzási tulajdonságai
Az útegyenetlenségek okozta lökések a kormánykerékre csak csillapítva adódhatnak át, de a csillapítás miatt nem veszhet el a kormánykerék és az útfelület közötti kapcsolat. Ennek érdekében gyakran alkalmaznak hidraulikus kormányzási lengéscsillapítót.
A kormányzás kinematikája feleljen meg az „Ackermann” elvnek. Vagyis az első kerekek forgástengelyei a hátsók meghosszabbított tengelyvonalában metszik egymást. Ennek megfelelően az első kerekek elkormányzási szög értékei különbözőek.
A kormányrendszer megfelelő szilárdsága révén, (különösen az elaszto-kinematikus futóműveknél) minimális kormánykorrekció szükséges.
Elengedett kormánykeréknél az első kerekek automatikusan vissza kell térjenek egyenes-meneti helyzetbe és stabilan tartják azt.
A kormánynak lehetőleg kicsi legyen az áttétele, a jó kormányozhatóság miatt. A kormányzás erőszükségletét nem csak az áttétel, hanem az első tengely terhelése, a kanyarodási sugár, a futómű geometria és az alkalmazott gumiabroncs is befolyásolja.
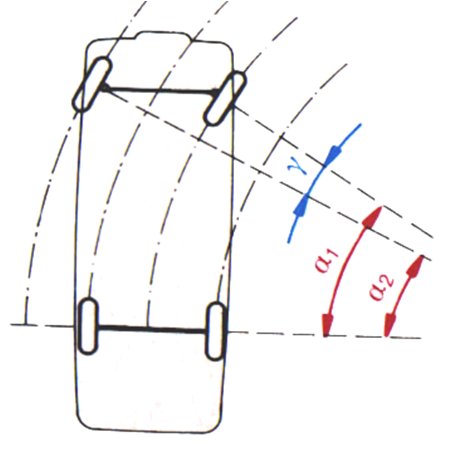
6.1.4. A kormányrudazat
Azért, hogy az első kerekek a kormányzáskor megfelelő szöghelyzetbe kerüljenek, trapéz alakú rudazatra van szükség. Ennek részei gömbcsuklókkal kapcsolódnak egymáshoz. Ez a merev futóműveknél egyszerű kivitelű. A kormány irányító karból és a nyomtáv rúdból áll. Az egyedi kerékfelfüggesztésnél, a kerekek egymástól független elmozdulásai miatt már több tagú, bonyolultabb, több csuklóval ellátott rudazatra van szükség.
6.1.4.1. A gépkocsi menettulajdonsága
Túlkormányzott viselkedés, amikor a gépkocsi fordulóköre kisebb, mint ami az elkormányzás geometriájából adódna. Ez a hátsó kerék hajtású és far nehéz gépkocsik jellemzője.
Alulkormányzott viselkedés, amikor a gépkocsi fordulóköre nagyobb, mint ami az elkormányzásból adódna. Általában az első kerék hajtású gépkocsik viselkednek így.
Semleges kormányzású a gépkocsi, amikor a fordulókör pontosan akkora, mint ami az elkormányzásból adódik. A gyártók ennek megvalósítására törekszenek.

6.1.5. A kormányművek és a velük szemben támasztott követelmények
A kormánykerék elfordítását a kormánymű a rudazat segítségével alakítja át az első kerekeket elfordító erővé. az ezzel kapcsolatos elvárások a következő módon foglalhatók össze:
Egyenes menetben ne legyen holtjáték.
Kicsi legyen a súrlódás, és minél kedvezőbb a hatásfok.
Kellően nagy legyen a szilárdság.
Biztosított legyen az utánállítás lehetősége.
Személygépkocsiknál hatóságilag maximum négy kormánykerék elfordítás megengedett.
A kézi nyomatékra pedig nemzetközileg elfogadott ajánlások vannak
6.1.6. A kormányberendezések csoportosítása az alkalmazott energia szempontjából
Kormányzás izomerővel: a gépkocsi irányításához szükséges teljes erőt a vezető fejti ki.
Kormányzás idegen erővel: a kormányzáshoz szükséges erőt a gépkocsi valamely energiaforrása (hidraulika szivattyú) adja. Elsősorban lassú járműveknél alkalmazzák.
Szervo kormány: a vezető izomerejét a gépkocsi valamely energiaforrása (szervo-szivattyú) növeli. Személygépkocsiknál és haszonjárműveknél is ezt alkalmazzák. A rásegítés meghibásodásakor nagyobb erővel ugyan, de lehetséges a kormányzás.
6.1.7. A mechanikus kormánygépek néhány változata
Ezek az úgynevezett alap kormány berendezés változatok, a vezető izomerejét használják a gépkocsi irányítására. Némelyiket azonban továbbfejlesztették olyan szervokormánnyá, melynél már elektronikát is alkalmaznak.
6.1.7.1. Globoid-csigás kormánygép
Személygépkocsiknál korábban széles körűen alkalmazott változat volt. A csigakerék két fogát helyettesíti a golyóscsapágyakkal ellátott két görgő. A csigaorsó külső burkoló görbéje ennek mozgásához igazodik. Kopás esetén a kézi utánállítás a kormánygép házán található csavarorsó segítségével lehetséges. Olajjal feltöltött hermetikusan zárt házba szerelik be.
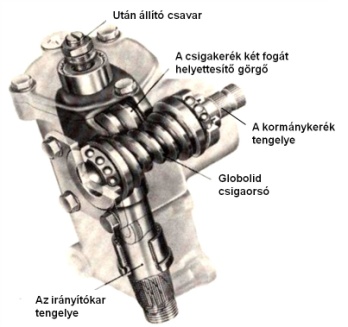
6.1.7.2. Fogasléces kormánymű
Egy zárt házba beépített fogaskerékből és fogaslécből áll. A kormánykerék elfordítását közvetlenül egyenes vonalú elmozdulássá alakítja át. Egyenes és különlegeses fogazásokat is alkalmazhatnak. A fogaskerék elforgatható excenteres csapágyazása teszi lehetővé kopás esetén az utánállítást. Az áttétel a kormánykerék elfordítás és a fogasléc elmozdulás viszonya. Különleges fogazattal az áttétel a löket függvényében változik. Ez csökkenti a működtető erőt, illetve a szükséges kormánykorrekciót. A személygépkocsiknál használatos szervokormányok jelentős részét ebből a kormánygépből fejlesztették ki. Egyszerű, kis helyigényű és olcsó kivitelű változat.
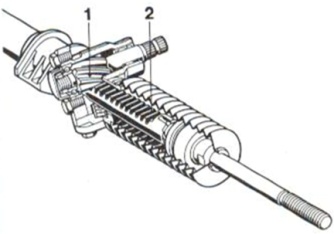
6.1.7.3. Csavarorsós kormányművek
A személygépkocsik egyszerűbb kormányműveinél gyakran a bronzból készült anyának csak az egyik felét szorítják rá a menetes orsóra. Ez biztosítja az utánállítás lehetőségét is egyúttal. Haszonjárműveknél a kormánykerékkel forgatott csavarorsó és a csavaranya közötti súrlódást egy végtelenített golyósor beépítésével lehet csökkenti. A csavaranya fogazattal továbbítja az erőt a „Pitman” tengely felé. Az áttétel lehet változó is. Ebből a változatból fejlesztettek ki a haszonjárműveknél használatos hidraulikus szervokormányokat.
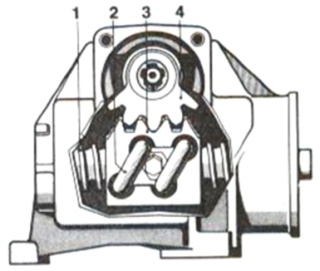
6.2. Hidraulikus szervokormányok (HPS = Hidraulic Power Steering)
A kormánykeréken kifejtett nyomatékkal arányosan, hidraulikus berendezés segítségével növeli a kormányzott kerekeket elfordító erőt. A kezdeti időben elsősorban a haszonjárműveknél alkalmazták, de nem sokkal később a személygépkocsikba is hidraulikus működésű szervokormányokat szereltek. Ezzel hatékonyan növekedett a vezetési komfort.
6.2.1. A szervokormány modellje
A szervokormányt a gépkocsi menetidejének kb.15%-ában használják kormányzásra, de ennek ellenére folyamatos energia ellátást igényel. Ez alól csak az újabb fejlesztésű elektromechanikus szervokormányok (EPS) jelentenek kivételt. Ennél a kormányberendezésnél is a vezető végzi a kormányzási munkát, amihez segédenergiát vesz igénybe. Így jelentősen nagyobb erő jön létre a kormányrudazaton. Természetesen ennél a rendszernél is kell veszteség teljesítménnyel számolni.
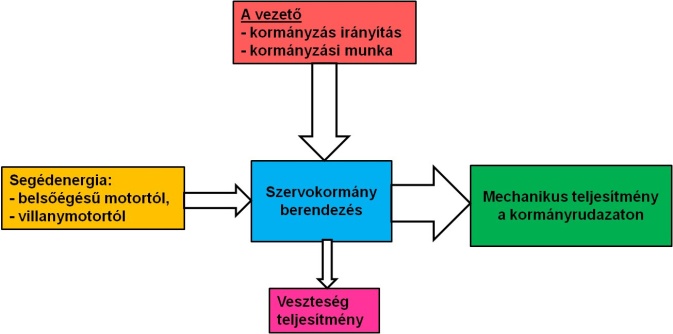
6.2.2. A segédenergiát hasznosító kormányberendezések, szervokormányok főbb részegységei
Mechanikus kormánymű (a rásegítés kimaradása esetén is nagyobb erővel ugyan, de lehetővé teszi a gépkocsi irányítását.
Vezérlő egység (a kormánykeréken kifejtett nyomatékkal arányos hidraulikus nyomást vezérel ki jobbra és ballra kormányzáskor).
Munkahenger (a kivezérelt hidraulikus nyomást alakítja át a kerekek elkormányzását végző erővé)
6.2.3. A kormányzásnál használatos segédenergia változatok
A belsőégésű motorral ékszíj áttételen keresztül hajtott hidraulika szivattyú
Villanymotorral, a belsőégésű motortól függetlenül hajtott hidraulika szivattyú
A villanymotor rásegítő nyomatéka közvetlenül egy mechanikus áttételen keresztül a kormánygépre hat (ez gazdaságosabb változat). Nélkülözi a hidraulikus egységeket.
Az alábbi diagram szemlélteti a kormánykerék ballra, illetve jobbra forgatásakor a rásegítés alakulását el- és visszakormányzáskor. A rásegítés egy bizonyos kézi nyomaték felett kezdődik el. Amikor nincs elkormányzás a szervo-szivattyú folyamatosan keringeti a hidraulika olajat a rendszerben. Ez egyúttal folyamatosan biztosítja a légtelenített állapotot. A rendszer bármely pillanatban készen áll arra, hogy létre jöjjön a rásegítés.
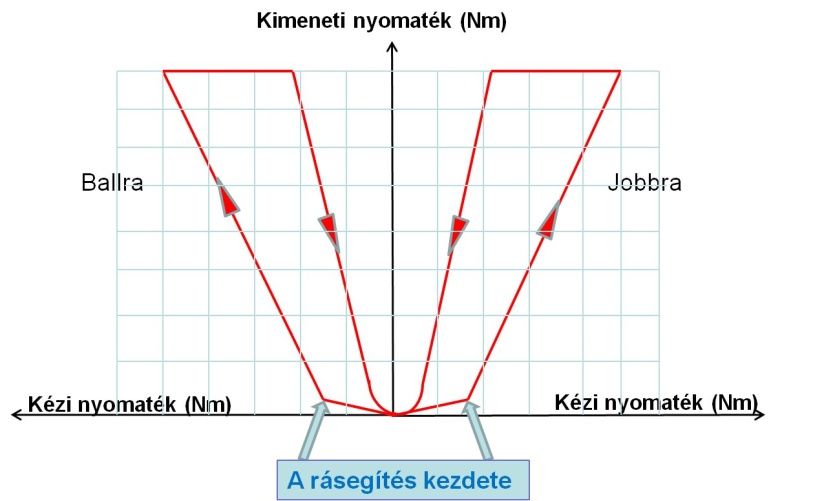
6.2.4. A hidraulikus szervokormány energiaellátásának lehetőségei
A belsőégésű motorról ékszíjjal hajtott szárnylapátos, vagy fogaskerekes hidraulika szivattyúval. Ennek a megoldásnak az a hátránya, hogy egyenes menetben, amikor nem szükséges rásegítés, akkor is energiát vesz fel. Ha a szivattyút térfogatáram szabályozással látják el csökkenthető a veszteség teljesítmény. Nyomásfüggő mechanikus, vagy elektronikus térfogatáram szabályozás valósítható meg. Ezt gyakran a szivattyú belső szabályozásával valósítják meg. Ezért a nyomás hatására állítható forgórészű szivattyút alkalmaznak.
Villanymotorral hajtott hidraulika szivattyú, ez független a belsőégésű motortól, tehát hibrid járműveknél is alkalmazható. A szivattyú fordulatszáma a pillanatnyi menetállapottól függ, de álló motornál is működik. A hajtó motor fordulatszámának szabályozása történhet elektronikával. Azért, hogy komfortos legyen a kormányzás, kellő gyorsasággal megfelelő rásegítő teljesítményt kell biztosítani. Az újabb változatoknál „stand-by” üzemállapotot is igyekeznek megvalósítani. Ennél egyenes meneti helyzetben a szivattyút hajtó villanymotort az elektronika egy kisebb fordulatszámra kapcsolja.
6.2.5. A különböző gépkocsik hidraulikus szervokormányaihoz használatos szervo-szivattyúk
Szerkezeti kialakításuk szerint lehetnek:
szárnylapátosak,
fogaskerék szivattyúk.
Általánosságban elmondható, hogy a 3,5 t össztömegig használatos gépkocsik szervo-szivattyúi 890 W - 1000 W. teljesítmény igényűek.
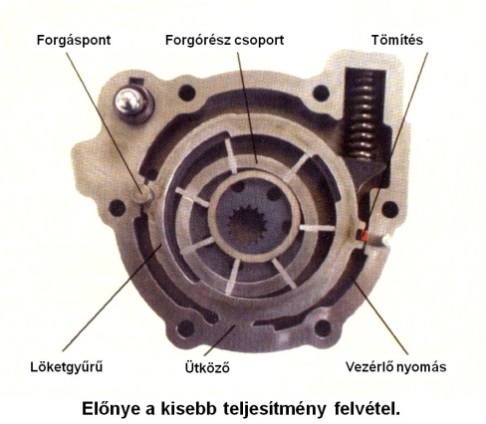

Amennyiben a szervo-szivattyút nem látják el belső szabályozással, célszerű egy külső szabályozó egységről gondoskodni. Ez lehetővé teszi, hogy egyenes menetben nagyobb olajmennyiség cirkuláljon a rendszerben és ne alakuljon ki jelentős nyomás. Az elkormányzáshoz már kisebb mennyiség, de lényegesen nagyobb nyomás szükséges.
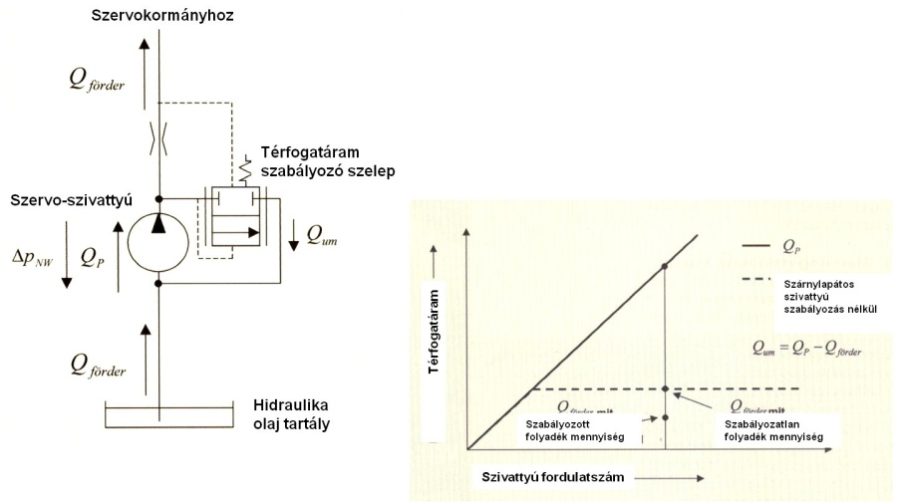
A szervo kormány energia igénye, melyet a szervo-szivattyúk teljesítenek:
A szervokormány térfogatáram igénye egyrészt a gépkocsi sebességétől, másrészt az elkormányzási szöghelyzettől függ. Ez diagramban egy térfelülettel ábrázolható.
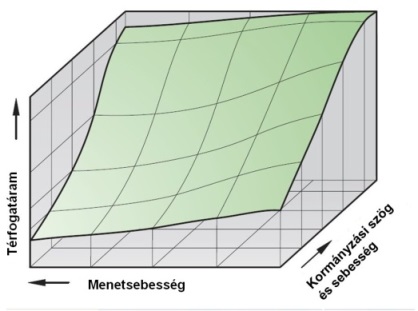
6.2.6. Servotronic a sebességfüggő rásegítés
Kis sebességnél, a gépkocsival történő manőverezés megkönnyítésére a nagyobb rásegítés előnyös, mert komfortosabbá teszi a kormányzást, megkönnyíti a vezető munkáját. Nagy sebességnél viszont, például autópályán sokkal kisebb kell legyen a rásegítés. Ennek az oka az, hogy biztosítani kell a gépkocsi minél biztonságosabb, nyomtartó vezethetőségét. Meglepő lenne, ha ilyenkor is kis kormánymozdulatra, nagy erővel és jelentős szöggel következne be az első kerekek elkormányzása. Emiatt a gépkocsi instabillá válna. Ezt az ellentmondást sebességfüggő rásegítéssel oldható fel. Ennek megfelelő a „Servotronic” szervokormány, melyet 1989 –óta alkalmaznak a személygépkocsikban. Ekkoriban még a belsőégésű motorról ékszíjjal hajtott szervo-szivattyú adta az energiát a rásegítéshez. A vezérlést az elektronika és a hidraulika kombinációjával oldották meg. Ehhez a szervokormány rendszerhez új forgótolattyús vezérlést, új elektronikát, elektromágneses szelepet és a műszerfalon elhelyezett ellenőrző lámpát alkalmaztak.
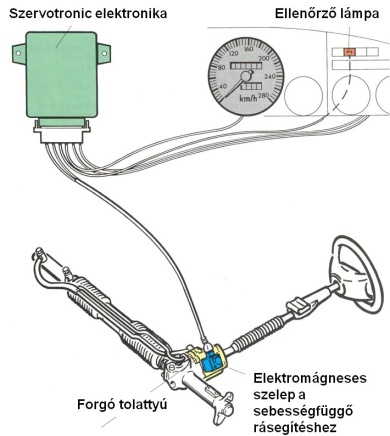
A gépkocsi sebesség jelét az elektronika az elektronikus működésű sebességmérőtől kapja. Újabban az ABS elektronikától a CAN hálózaton érkező jelet használják erre a célra. A jel kiértékelése alapján működteti az elektromágneses szelepet, ami a rásegítést szabályozza. A kezdeti időben a gyújtás bekapcsolásakor világítani kezdett az ellenőrző lámpa és hibátlan rendszer esetén 5,5 km/h sebesség elérése után aludt csak ki. A szervokormány működéséhez szükséges 150 bar olajnyomást a szervo-szivattyú hozza létre és csövön keresztül a forgótolattyús vezérlő szelephez juttatja. Egyenes menetben a forgó tolattyú a hüvelyhez képest semleges helyzetben van. Az olaj szinte nyomásmentesen (0,5 – 1 bar) áramlik rajta keresztül a munkahenger mindkét felébe és onnan vissza az olaj tartályhoz.
Jobbra kormányzáskor a kormánykeréken kifejtett kézi nyomatékkal arányosan elcsavarodik a torziós rúd. Ezzel arányos lesz a forgó tolattyú elfordulása az álló hüvelyhez képest. Emiatt változnak a tolattyúnál kialakított rések és így az olajnyomás is. A munkahenger dugattyújának bal oldali terében növekszik a nyomás, (a legnagyobb érték 150 bar lehet). Ennek hatására a dugattyú elmozdul. A jobb oldali munkatérből eközben az olaj a tartályba visszaáramlik.
Ballra kormányzáskor a folyamat hasonló módon zajlik le, de ekkor a munkahenger másik oldali terében fog kialakulni az olajnyomás, mely a kormánymű fogaslécére az előzővel ellentétes irányú erőt fejt ki.
A sebességfüggő rásegítéshez az elektromos sebesség jelet a szervokormány elektronikája kiértékeli és ennek megfelelő kitöltési tényezővel működteti az elektromágneses szelepet. Ezzel valósul meg a diagram szerinti áram szabályozás. Az elektromágnes a kúpos szelepet az árammal arányosan mozdítja el különböző helyzetekbe. Ezzel arányosan változni fog a fojtás, és így változni fog a nyomás, mely a rásegítést szabályozó tolattyúra hat és akadályozza annak elfordulását.
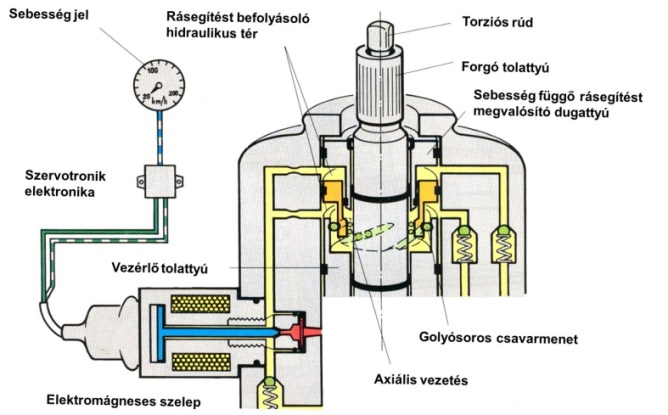
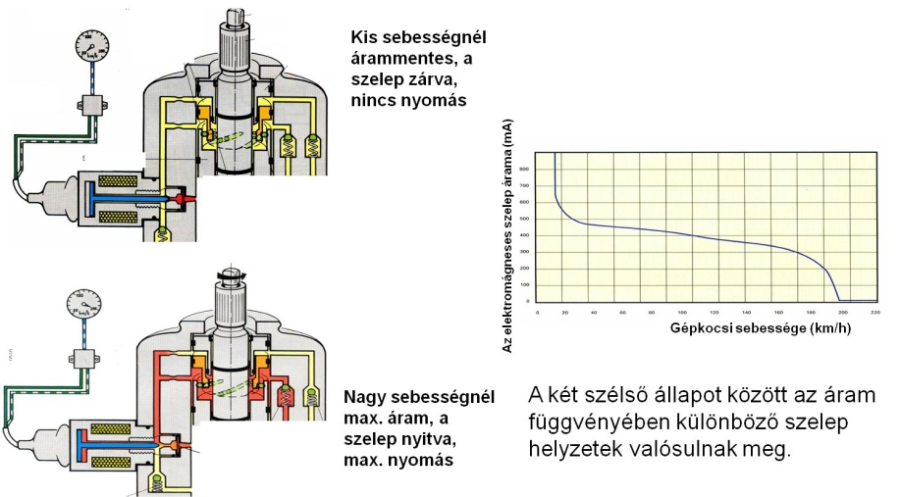
Napjainkban valamennyi korszerű szervokormány változat megvalósítja a sebességfüggő rásegítést.
6.2.7. Ellenőrző kérdések a hidraulikus szervokormányok részhez
Milyen segédenergia használható a szervokormányok működtetéséhez?
Milyen szabályozásokat alkalmaznak a szervo-szivattyúknál és ez miért szükséges?
Milyen működési elvű szervo-szivattyúkat alkalmaznak a hidraulikus szervokormányoknál?
Miért hátrányos, ha a belsőégésű motor ékszíjjal hajtja a szervo-szivattyút?
Mit jelent a „servotronic” működésmód és miért előnyös?
Hogyan jellemezhető egy szervokormány energia igénye?
Rajzolja le és magyarázza meg a hidraulikus szervokormány rásegítési diagramját!
Melyek a hátrányai a hagyományos hidraulikus szervokormányoknak?
6.3. Elektrohidraulikus szervokormány EPHS
Angol rövidítése és elnevezése EPHS, vagyis Electrically Powered Hydraulic Steering. A kilencvenes évek végétől szerelik be a különböző gépkocsikba. Kezdetben kisebb városi autókban jelent meg, később aztán a nagyobb teljesítményű villanymotoros szivattyúk kifejlesztése után a felsőbb osztályban is alkalmazták. Hamarosan megjelent a SUV kategóriában és a kis teherautókban is.
Az elektrohidraulikus szervokormány legfőbb előnye az, hogy a hagyományos ékszíjjal a belsőégésű motor főtengelyéről hajtott változathoz képest 0,3 l/100 km hajtóanyag megtakarítást tesz lehetővé.
További előnyei:
A szállított olaj mennyiség a működtető elektronika segítségével a pillanatnyi igényeknek megfelelően szabályozható és ezért kisebb mennyiség is elegendő.
Amikor a belsőégésű motor nem működik, akkor is van kormányrásegítés (hibrid, illetve elektromos hajtású gépkocsik).
A rásegítési karakterisztika az elektronika programozása révén könnyen illeszthető a különböző gépkocsi változatokhoz.
Az egyik típusváltozat műszaki jellemzői:
Villanymotor: 12 V DC
Áramfelvétel: 5,5 A – 85 A
A szervo-szivattyú: 1,5 cm3
Legnagyobb nyomás: 119 bar
Hidraulikus teljesítmény: 680 W
Sebességfüggő rásegítés megvalósítása lehetséges
Az átlagos térfogatáram: 2,6 – 5,2 l/perc
A legnagyobb térfogatáram: 6,9 l/perc
A szervokormány fogaslécén kifejtett legnagyobb erő: 9000 N
Az elektrohidraulikus szervokormánnyal elérhető széndioxid kibocsátás csökkenés a hagyományos változathoz képest: 3,9%.
6.3.1. Az EPHS működési elve
A rendszer elemei:
villanymotoros fogaskerék szivattyú egység.
nyomás és mennyiségi szabályozó
elektronika CAN buszos kapcsolattal.
szervokormány egység
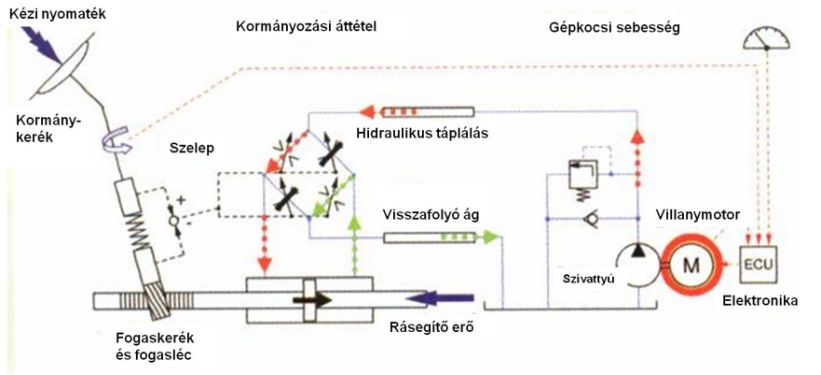
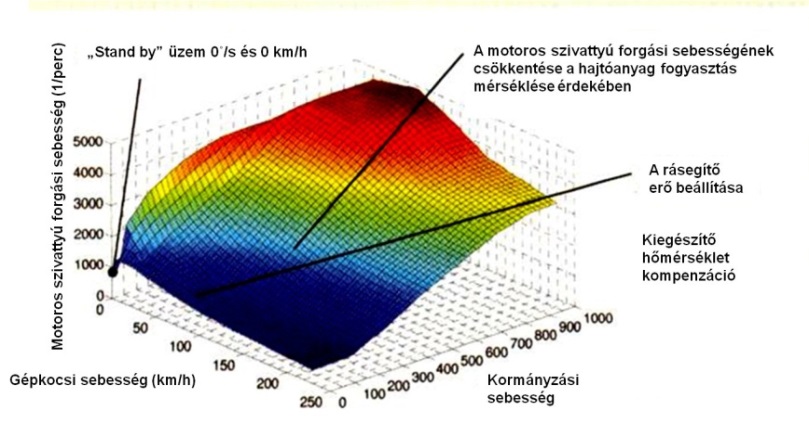
A korszerű, elektronikával vezérelt villanymotoros hajtású szervo-szivattyúknál megvalósítják az úgynevezett „stand by” üzemmódot. Ez a megoldás az energia megtakarítás és a káros anyag kibocsátás szempontjából is fontos. Amikor az elektronika azt érzékeli, hogy nem mozdul a kormánykerék és a gépkocsi álló helyzetben van a villanymotor az üzemi értéknél kisebb fordulatszámon fog működni. Ez az állapot addig tart, amíg a fenti üzemi jellemzők valamelyikében nem következik be változás. Az üzemállapot megváltozásának pillanatában bekövetkezik a szivattyú újraindítása normál üzemi fordulatszámon. Az ekkor megvalósuló térfogatáramot nem csak a motor fordulatszáma, hanem a szivattyú szállítási teljesítménye is befolyásolja.
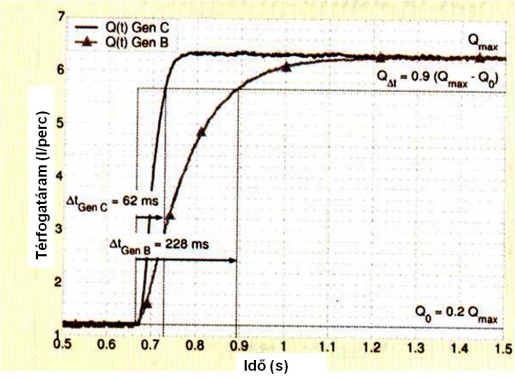
6.3.2. TRW elektrohidraulikus szervokormány szivattyúja és elektronikája
Ez az amerikai nagyvállalat az első hidraulikus szervokormányát 1998-ban hozta piacra. Nagy sorozatú beépítése az Opel Astra-ban volt. Az elektronika 12 V –os villanymotort működtet, mely a szivattyút hajtja, a szükségletnek megfelelően be-, kikapcsolja. Tüzelőanyag megtakarítás és CO2 emisszió csökkentés érhető el vele. Az elektromechanikus változattal további energia megtakarítás és emisszió csökkentés is elérhető.
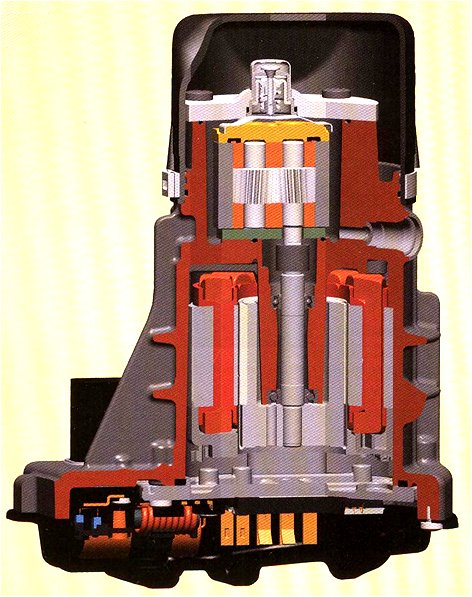
6.3.3. Az EPHS szervokormány rendszer felépítése és működése
Electrically Powered Hydraulic Steering rendszert építenek be például az Audi A2 típusú gépkocsiba, mely két főbb egységből áll:
működtető elektronikával egybe épített szivattyú,
hidraulikus szervokormány.
A szervo-szivattyú egység részei:
olajtartály,
fogaskerék szivattyú a villanymotorral,
elektronika.
Az egység elhelyezés a gépkocsiba olyan, hogy az olajtartály feltöltése, illetve utántöltés előtt a bal oldali fényszórót ki kell szerelni. Azért igyekeznek az utastértől minél messzebb elhelyezni a szivattyút, hogy a működési zaj távol tartható legyen. A tartályról a csőcsatlakozókat nem szabad leszerelni.
A szivattyú egységre szerelt szervokormány elektronika folyamatosan kiértékeli a bemeneti adatokat, melyek a következők:
motor fordulatszám,
gépkocsi sebesség,
kormánykerék helyzete, illetve elfordítási sebessége,
A fogaskerék szivattyú hajtása a menetsebességtől és kormányzási helyzettől függ. A gépkocsi többi elektronikus rendszerével a kommunikáció és diagnosztika a hajtáslánc CAN hálózatán keresztül történik. A hibajelzés a műszerfalon elhelyezett ellenőrző lámpa segítségével történik. A kormánykerék elfordításának szögsebességétől és gépkocsi sebességétől függ a rásegítés. A fogaskerék szivattyú bekapcsolt gyújtásnál és járó motornál működik. Az elektronika szabályozza a villanymotor fordulatszámát és ezzel a szállított olaj térfogatáramát. Ismételt bekapcsolás ellen védett (például hiba és ütközés esetén). A szivattyú kikapcsol a gyújtás kikapcsolásakor. Túlmelegedés esetén csak 15 perc elteltével indul újra.
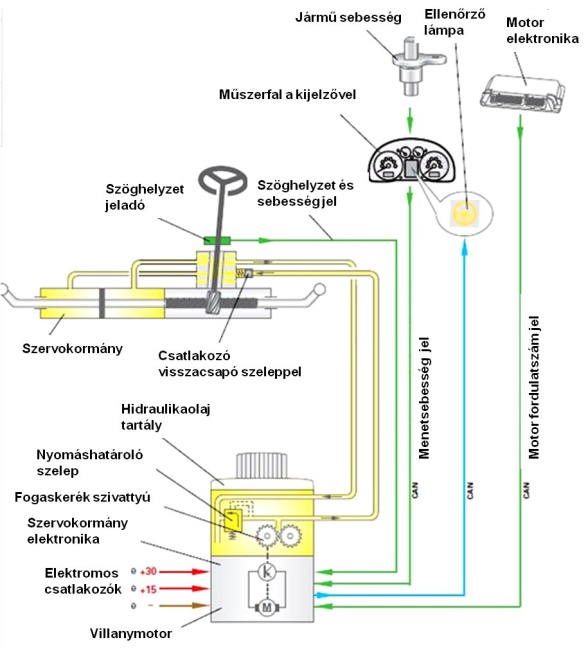
A szervokormány a hagyományos kivitelnek annyiban felel meg, hogy a torziós rúd egyik végéhez a forgó vezérlő tolattyú, a másikhoz a fogaskerék és a vezérlő hüvely csatlakozik.
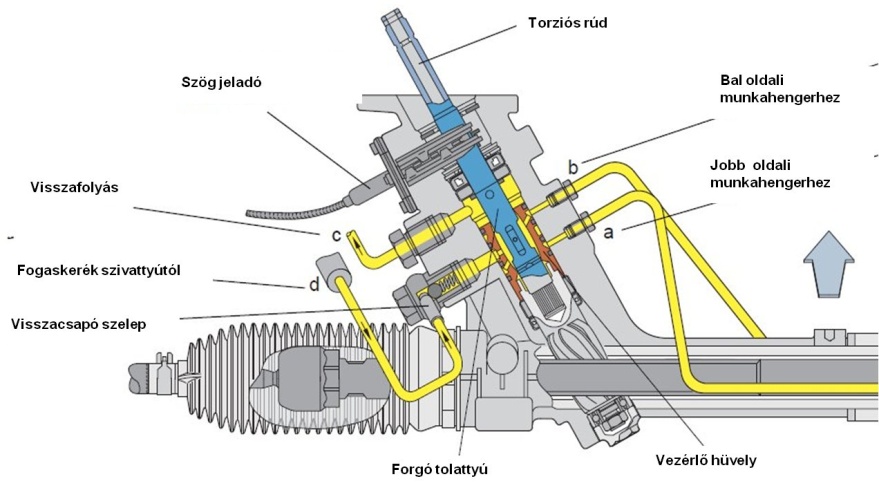
6.3.4. A hidraulikus szervokormány vezérlő tolattyúja
A hidraulikus szervokormányoknál úgy a haszonjárműveknél, mint a személyautóknál a rásegítés szabályozására vezérlő tolattyút alkalmaznak. Ez a kormánykerék tengelyéhez csatlakozik.
A vezérlő tolattyú helyzete egyenes menetben:
Egyenes menetben a szervokormány torziós rúdjára nem hat nyomaték. Ezért a forgó tolattyú és a vezérlő hüvely is semleges, középhelyzetben van. Egyik csatornánál sem alakul ki fojtás. A szögelfordulás érzékelő nem ad elmozdulási jelet. Az olaj szinte nyomásmentesen átáramlik a vezérlő tolattyún és vissza jut az olaj tartályba. Nagy térfogatáram alakulhat ki, de szinte nyomásmentes a rendszer.
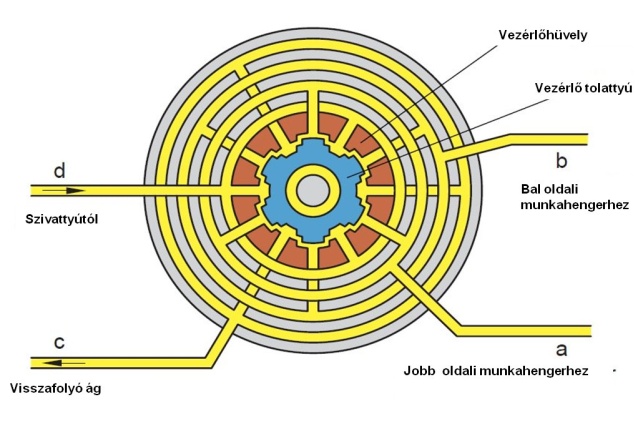
Ba lra kanyarodáskor a vezérlő tolattyú:
A torziós rúd elcsavarodása miatt egymáshoz képest elfordul a forgó tolattyút és a vezérlő hüvely. Kialakul egy bizonyos fojtás, ami nyomásnövekedéssel jár. A vezérlő hornyok a jobb oldali munkahengert összekötik a visszafolyó ággal. Az olaj nyomással áramlik a másik oldali munkahengerbe és a szervokormány ballra kormányoz.
Ezzel egy időben a tolattyú zárja a bal oldali munkahenger nyomó ágát és nyitja a visszafolyót. Így a jobb oldali munkahenger kinyomja az olajat a bal oldaliból.
Ha kormányzási folyamat befejeződik, a torziós rúd visszaállítja a tolattyút semleges helyzetbe és ismét lecsökken az olajnyomás.
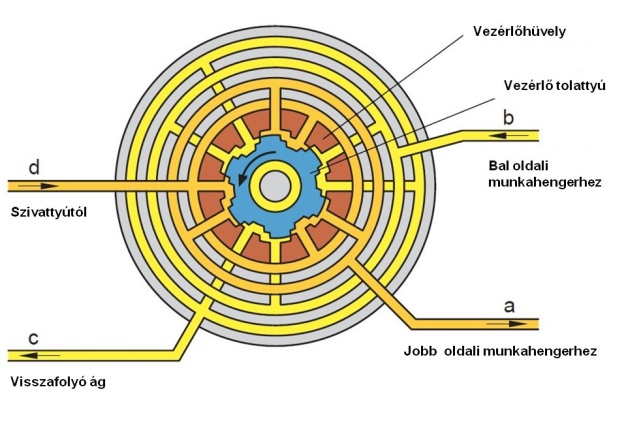
6.3.5. Kapacitív működésű szögjel adó
A kormánykerék tengelyére szerelik fel az érzékelő forgó részét. Ez az állórészbe szerelt 9 db kondenzátor fegyverzete felett fordul el elkormányzáskor. Emiatt bizonyos szegmenseknél változni fog a kapacitás. Ebből számítja ki az érzékelő elektronikája a kormánykerék pillanatnyi szöghelyzetét és az elfordítás sebességét.
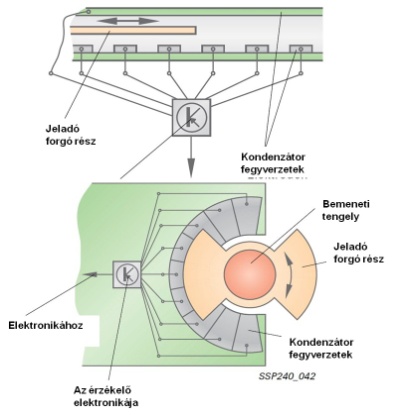
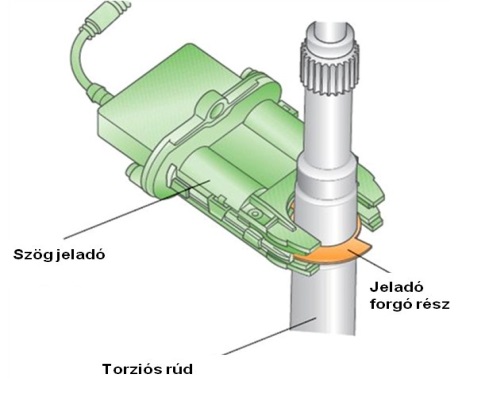
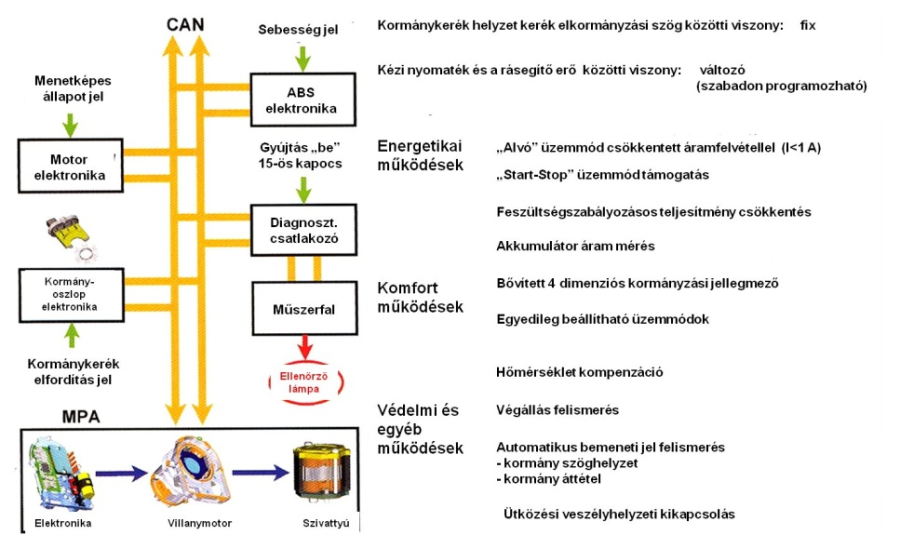
6.4. A különböző szervokormány változatok összehasonlítása
A jelenleg használatos elektrohidraulikus szervokormányoknál a kormányberendeléssel szemben támasztott jövőbeli igényeket már nem tudják teljesíteni a következő szempontok szerint.
a gépkocsi agilitása,
a menetkomfort,
a menetstabilitás,
a tüzelőanyag fogyasztás szempontjából.
Bár az elektrohidraulikus szervokormányokat az utóbbi években továbbfejlesztették, optimalizálták, de a lehetőségei korlátozottak. Kedvezőbbé válik a tüzelőanyag fogyasztás, és a kormányzási nyomaték befolyásolása területén is új lehetőségeket kínálnak az elektromechanikus szervokormányok újabb változatai.
Az elektrohidraulikus szervokormány a hagyományos hidraulikus szervokormánnyal összehasonlítva
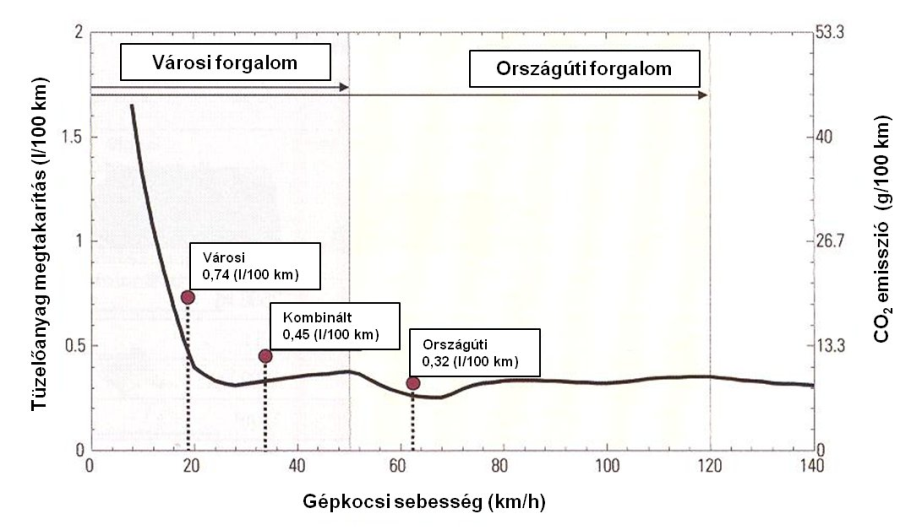
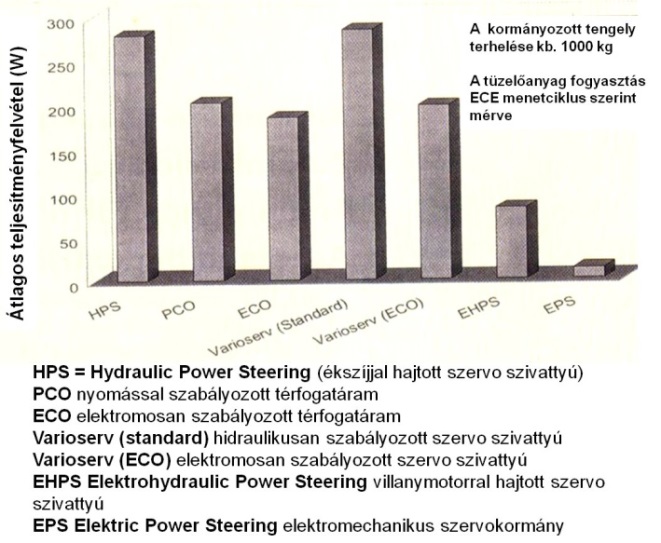
6.5. Ellenőrző kérdések az elektrohidraulikus szervokormány részhez
Melyek az előnyei az elektrohidraulikus szervokormányoknak?
Ismertesse egy elektrohidraulikus szervokormány rendszer részegységeit!
Foglalja össze egy EPHS rendszer CAN hálózati kapcsolatait!
Milyen működési elvű kormánykerék elfordítás érzékelőt alkalmazhatnak az EPHS rendszernél és miért van rá szükség?
Mi a feladata a vezérlő tolattyúnak és hova szerelik fel?
Melyik szervokormány változat a legjobb a gépkocsi tüzelőanyag fogyasztása szempontjából?
Mit jelent az EPHS rendszernél a „stand by” üzemmód és hogyan valósítható meg?
Foglalja össze a szervokormány elektronika bemeneti adatait!
Milyen villanymotort alkalmaznak a szervo-szivattyú hajtásához?
7. fejezet - Elektromechanikus szervokormány (EPS)
- 7.1. Az elektro-mechanikus szervokormányok fontosabb elvárásai
- 7.2. Az aktív biztonság növelésének lehetőségei az EPS rendszerrel
- 7.3. Az elektromechanikus szervokormány előnyei
- 7.4. Az elektromechanikus szervokormányok csoportosítása
- 7.5. Az elektromechanikus szervokormány részegységei
- 7.6. Az elektromechanikus szervokormányoknál alkalmazott villanymotorok
- 7.7. A nyomatékérzékelő
- 7.8. Az EPS elektronika
- 7.9. Az EPS c változat
- 7.10. EPS –p (pinion) változat
- 7.11. EPS dp típus elektromechanikus szervokormány
- 7.12. EPS apa fogasléccel párhuzamos villanymotor beépítéssel
- 7.13. Fogasléccel párhuzamos villanymotor, melynek forgórészén fűzték át a fogaslécet
- 7.14. Ellenőrző kérdések az elektromechanikus szervokormányok témakörhöz
1981-ben a ZF kifejlesztett egy elektromechanikus szervokormányt, de ez a helyigény, a kormányzási tulajdonságai és a felmerülő költségek miatt még nem volt érett a sorozatgyártásra. 2005 ThyssenKrupp Presta SteerTec mutatott be korszerű elektromechanikus szervokormányt. Az amerikai TRW fejlesztések se várattak sokáig magukra.
7.1. Az elektro-mechanikus szervokormányok fontosabb elvárásai
Kicsi legyen a szükséges kormányzási nyomaték parkoláskor.
Egyenletes legyen a rásegítő nyomaték felépülés zavaró rásegítés kimaradás nélkül.
Határozott egyenes meneti helyzet alakuljon ki.
Jó visszacsatolás legyen az útról.
Gyors rásegítési reakció valósuljon meg.
Minimális energiafelhasználás működjön.
Ezek közül az ellentétes elvárások a határozott egyenes meneti helyzet és a kis elkormányzási nyomaték parkoláskor. Ez úgy oldható fel, ha a rásegítést sebességfüggővé teszik, ami a hidraulikus szervokormányoknál jelentősen megnövelte a költségeket.
A jelenleg gyártásban lévő elektromechanikus szervokormányok általában tizenötszörösére növelik a kézi erőt.
A hagyományos hidraulikus szervokormányok átlagosan 1 kW teljesítményt vesznek fel, mert a szivattyút akkor is hajtani kell, amikor nincs rásegítés. Ugyanakkor csupán 10 W teljesítményt adnak le a kormánygép fogaslécén.
A legnagyobb előnye az, hogy az EPS (Electronic Power Steering) az elektrohidraulikus szervokormányhoz viszonyítva 0,4 l/100 km hajtóanyag megtakarítást tesz lehetővé.
Az elektromechanikus szervokormány együttműködik az ESP rendszerrel és a fék rendszerrel is. A vezető a kormánykerékkel ennél csak egy kanyarodási igényt állít be. Ha például eltérő tapadási tényezőjű úton történik a fékezés és a gépkocsi félrehúz, ezt felismeri az ESP rendszer és utasítást ad az automatikus kormánykorrekcióra. Nem válik szükségessé például a fékező nyomás csökkentés az egyik, vagy másik keréknél, ami növelné a fékutat. A rendszerek integrációjának egyre nagyobb a jelentősége.
A kormányzási nyomaték és az elkormányzási szög egy bizonyos mértékig egymástól függetlenül befolyásolható.
7.2. Az aktív biztonság növelésének lehetőségei az EPS rendszerrel
Veszélyes menethelyzetben, amit az ESP rendszer elektronikája ismer fel, a vezető figyelmeztetése pl. kormánykerék vibrációval történhet.
Asszisztens rendszerek alkalmazását is lehetővé teszi az EPS. Például intelligens stabilizáció oldalszélben az ESP rendszer segítségével. A hagyományos kormányműnél nincs adatátviteli kapcsolat az ESP és a szervokormány között. Lehetőséget ad a parkolási asszisztens megvalósításához.
Vezetési hibák korrigálására is lehetőséget ad. Például akaratlan sávelhagyáskor a kormány rezgetésével figyelmeztet, és ha a vezető erre nem reagál, beavatkozik. A szomszédos sávok figyelése előzéskor. Ha nem szabad a sáv figyelmeztet és beavatkozik.
7.3. Az elektromechanikus szervokormány előnyei
Az elektromechanikus szervokormány előnye, hogy nem szükségesek csövek, olajtartály és szivattyú ez a gépkocsi gyártásakor jelentős megtakarítást eredményez, mert egyszerűbbé válik a szerelés. A Golf IV típus szervokormányánál több mint 50 csőkötésre volt szükség.
Mivel az olaj, mint munkaközeg szükségtelenné vált a környezetvédelmi szempontok is jól érvényesülnek. Ez az üzemeltetés során is számos előnnyel jár, hiszen nem szükséges beszerezni, majd a használt olajat gyűjteni és elszállítani.
A legnagyobb előny azonban az elérhető tüzelőanyag megtakarítás, hiszen csak akkor van áramfelvétel, amikor bekövetkezik a kormányzás.
Az üzemeltetés során nagyobb biztonságot és komfortot képvisel,
Egyszerűbb és hatékonyabb a diagnosztikája, mint a hidraulikus szervokormánynak.
Jól együttműködik a különböző asszisztens rendszerekkel, mint például (Parklenkassistent, Lane Departure Warning).
7.4. Az elektromechanikus szervokormányok csoportosítása
|
villanymotor a kormányoszlopon villanymotor a kis fogaskeréknél két kis fogaskerekes fogasléccel párhuzamos villanymotor |

7.5. Az elektromechanikus szervokormány részegységei
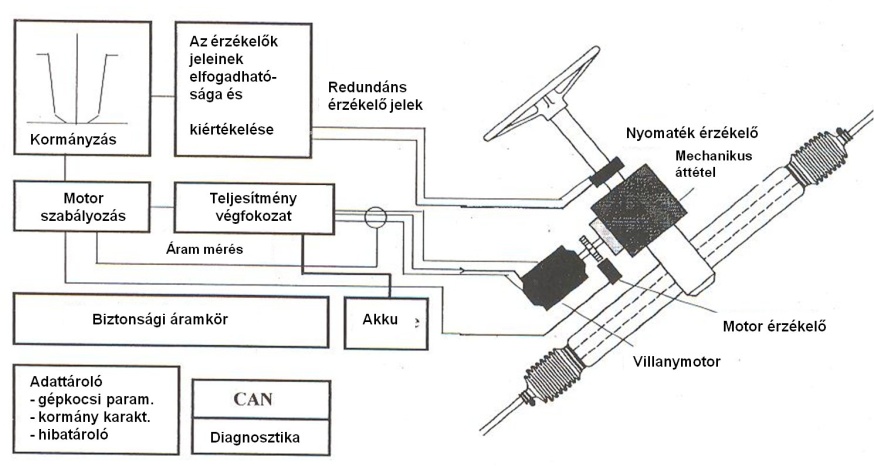
7.6. Az elektromechanikus szervokormányoknál alkalmazott villanymotorok
Szigorú követelményeket kell teljesítsenek, mert az emberi szervezethez hasonlítva, ez a szervokormány „szíve”.
A fontosabb elvárások:
jó hatásfok,
minél kisebb méret és helyigény,
nagy-, és gyorsan megvalósuló nyomaték.
Amiket a szervokormányokra szerelnek, nem sorozatban gyártott közönséges villanymotorok, hanem az adott célnak megfelelően speciálisan fejlesztik ki. Többnyire közvetlenül erre szerelik a vezérlő elektronikát is. Leggyakrabbal állandó mágneses szinkron motorokat alkalmaznak, de a kisebb városi autóknál egyenáramú motor is használnak. A 12 V-os hálózat korlátozza a lehetőségeket. Rövid időre max. 80 A-el terhelhető. Ez 1 kW teljesítménynek felel meg. A szinkron motoroknál elektronikus kommutációt alkalmaznak, melyet a forgórész szöghelyzet érzékelő vezérel. A fogaslécnél a nagy erőre van szükség, ami nagy áramfelvételt (120 A) jelent. Az alkalmazott nagy frekvenciával együtt és a motor közeli elektronika elhelyezés nagy követelményeket támaszt az elektromágneses összeférhetőség vonatkozásában az elektronikával szemben. A villanymotor tekercselése rövidzárlattal szemben védett kell legyen.
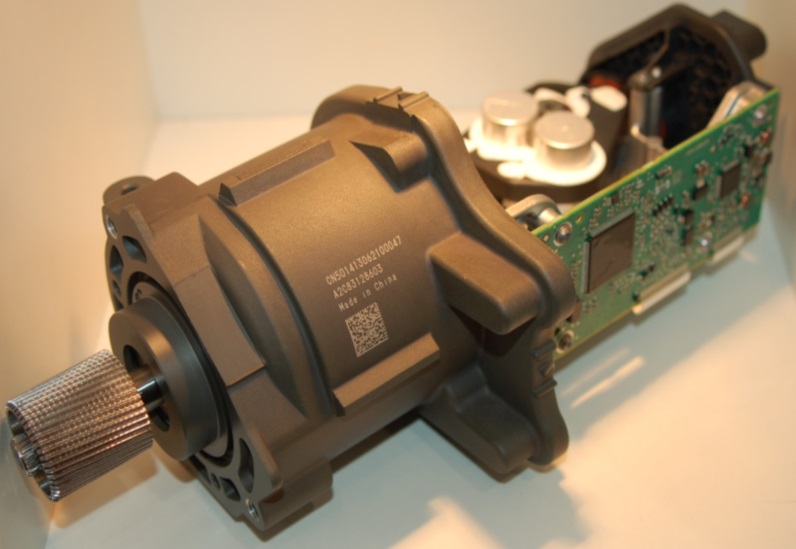
7.7. A nyomatékérzékelő
Ez az egység nevezhető a szervokormány rendszer „szeméneke”.
Nagy pontossággal kell működjön.
Folyamatosan az öndiagnosztika felügyelete alatt áll.
Az elektronika fel kell ismerje az esetleg bekövetkező hibát.
A nyomatékérzékelő meghibásodása nem okozhatja a kormányzás megszűnését. Ennek egyik fontos eleme a torziós tengely, melynek szokásos merevsége 2,5 Nm/˚. Ennek ismeretében lehet pontosan meghatározni a szögelfordulás érzékelő jele alapján a nyomatékot. Az a megbízhatóbb működésű változat, melynél érintésmentes érzékelőt alkalmaznak. A biztonság miatt általában két komplementer jeladót építenek be. Ilyen módszerrel lehetséges megvalósítani a folyamatos elfogadhatósági (plausibilitás) vizsgálatot. A nyomatékon kívül pontos szög elfordítási helyzet értéket is ad.
7.8. Az EPS elektronika
Általában közvetlenül a szervokormány villanymotorjára szerelik.
Részei:
Mikroprocesszoros vezérlés, mely védett a téves működésekkel szemben és folyamatosan ellenőrzi a rendszer működését.
Illesztő áramkör (interface) az érzékelők és az elektronika között.
Teljesítmény végfokozat, amely a villanymotort vezérli.
A kommunikáció az egyes részegységek között soros adatbuszon keresztül történik.

A különböző kategóriájú gépkocsik más konstrukciójú villanymotoros szervokormányt igényelnek.
A kompakt osztály jellemzői:
Ebben a gépkocsi kategóriában viszonylag kicsi az erőigény. A kormányoszlopra felszerelhető az elektromechanikus szervokormány, annak érzékelői, a villanymotor a csigahajtással, és az elektronika.
A közép osztály jellemzői:
Ezeknél a gépkocsiknál a fogaslécen a kormányzáshoz már nagyobb erőre van szükség. A szervo hatás a fogasléchez kapcsolódó fogaskeréken érvényesül. A mechanikus rész is nagyobb szilárdságú kell legyen, mint az előző kategóriánál.
A felső osztály jellemzői:
Nagyobb a gépkocsi tömege, nagyobb lehet a sebessége is, így nagyobb az első kerekek terhelése, ezért nagyobb a kormányzási erőszükséglet. A villanymotor golyósoros csavarhajtáson keresztül közvetlenül a fogaslécre fejti ki az erőt.
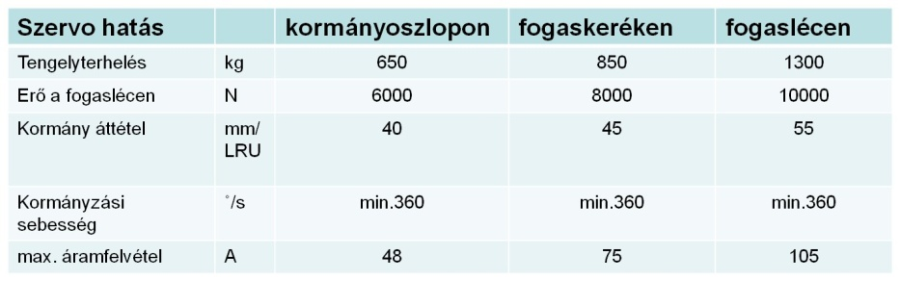
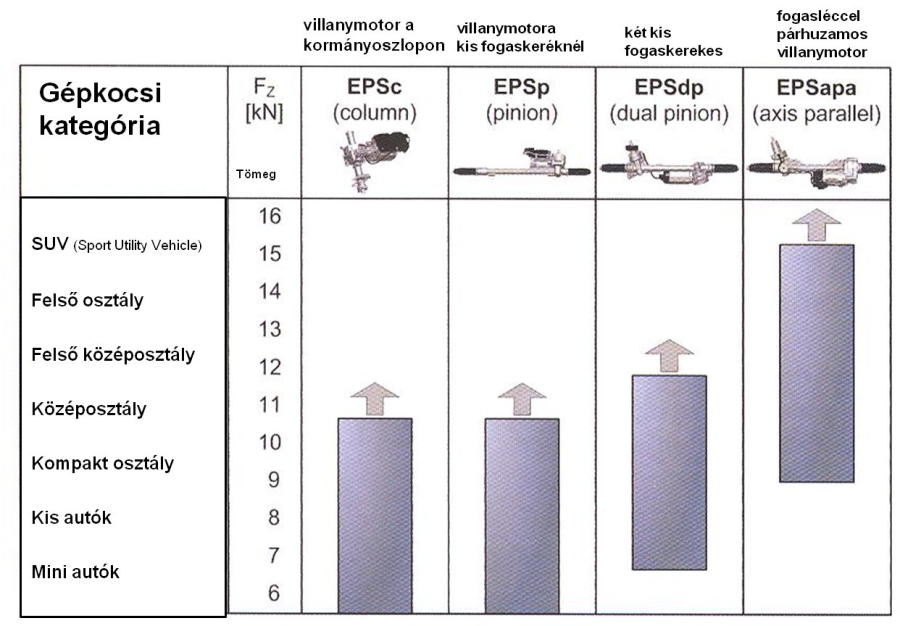
7.9. Az EPS c változat
Az elektromechanikus szervokormány egy kompakt egységet alkot. Ezért nem szükséges a kocsiszekrényben szerteágazó vezetékhálózat kiépíteni. Sebességfüggő és a menetviszonyoknak megfelelő rásegítést biztosít a villanymotor segítségével különböző mechanikus áttételek segítségével.
Alkalmazási példa:
A VW Lupo 3l TDI változata. A rásegítő hatás a kormánykerék tengelyére szerelt kardántengely előtt villanymotor és mechanikus áttételek segítségével valósul meg. Tömege: 11,3 kg. Teljesítmény felvétele: 10 – 25 W.
Tüzelőanyag többletfogyasztás: 0,01 l/100 km
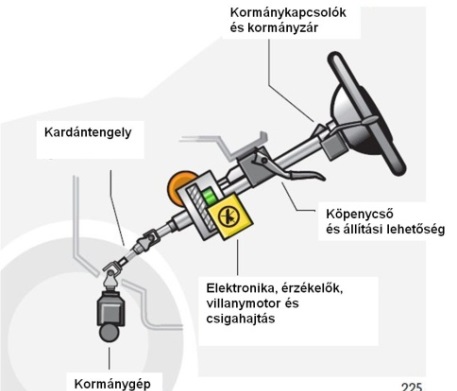
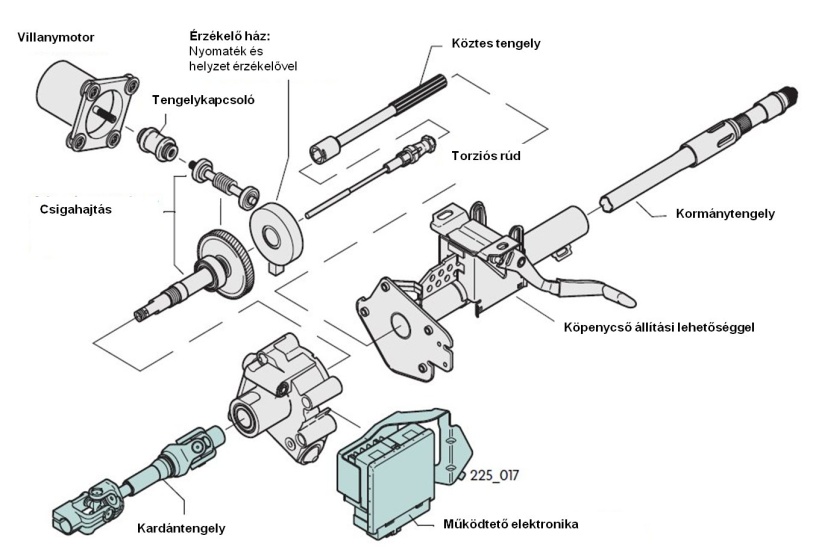
Torziós tengely
Az EPS c elektromechanikus szervokormány fontos központi egysége a torziós tengely. A köztes orsót mechanikusan köti össze a csigahajtással. A kormánykerék elfordításának hatására rugalmassági jellemzőjének megfelelően elfordul. Ennek alapján elektromos érzékelő segítségével állapítható meg a kormányozás kezdete és a kézzel a kormánykeréken kifejtett nyomaték.
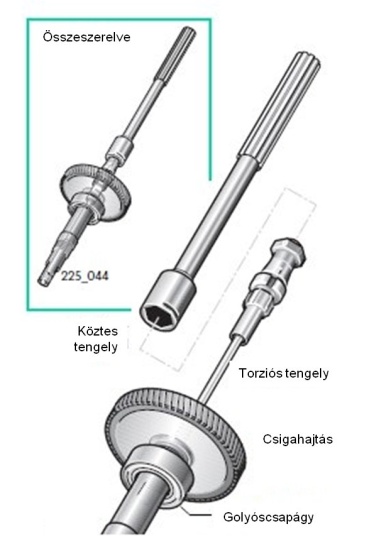
A csigahajtás
A 22:1 áttételű csigahajtást alumínium házba szerelik. Erre rögzítik fel a villanymotort is. A motor forgatja a fémből készült csigaorsót. A nagy átmérőjű csigakerék műanyagból készül, így mérséklődik a zaj hatás. A csigahajtás növeli a kellő mértékig a villanymotorral kifejtett nyomatékot.
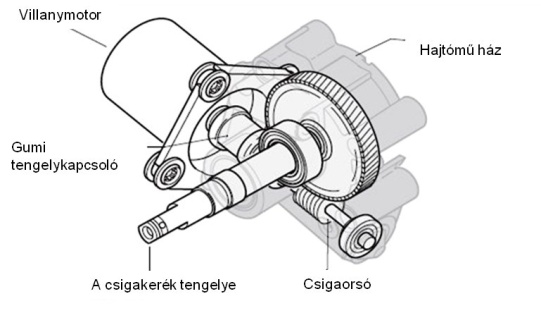
Az EPS c érzékelői
Két érzékelőt szerelnek egy közös házba. Ezek a kormánykerék helyzetével és nyomatékkal arányos elektromos jelet küldenek az elektronikának. A csigakerék tengelyéhez csatlakoznak. Ehhez az érzékelőhöz kapcsolódik a torziós rúd is. Hat pólusú elektromos csatlakozó létesít kapcsolatot az elektronika felé.
A kormánykerék helyzet érzékelője
Ez az egység három érintkezővel csatlakozik az elektronikához. Ha meghibásodik, az aktív visszaállítás kikapcsol és hibajelzést ad.
A kézi kormányzási nyomaték érzékelője
A torziós rúd elcsavarodási szögét érzékeli. Az elektronika ez alapján határozza meg a gépkocsivezető által a kormánykeréken kifejtett nyomatékot. Ha nyomaték nagyobb 0,01 Nm-nél elkezdődik a rásegítő működése. Ez az érzékelő három érintkezővel csatlakozik az elektronikához. Ha meghibásodik, a szervokormány kikapcsol és hibajelzést ad.
Mindkét érzékelő potenciométer. Az alsó a szöghelyzetet, a felső pedig a nyomatékot érzékeli. A belső gyűrű a csigakerékhez kapcsolódik a körmös gyűrűvel és a házhoz képest elfordulhat. Ez alapján ismertté válik az elkormányzási szöghelyzet. A torziós rúd elfordulásával lesz arányos a másik potenciométer állása. Mindkét potenciométerhez két pár érintkező tartozik. A potenciométerek vezetőpályáiról a mozgó érintkezőn keresztül a jelek az elektronikához érkeznek.
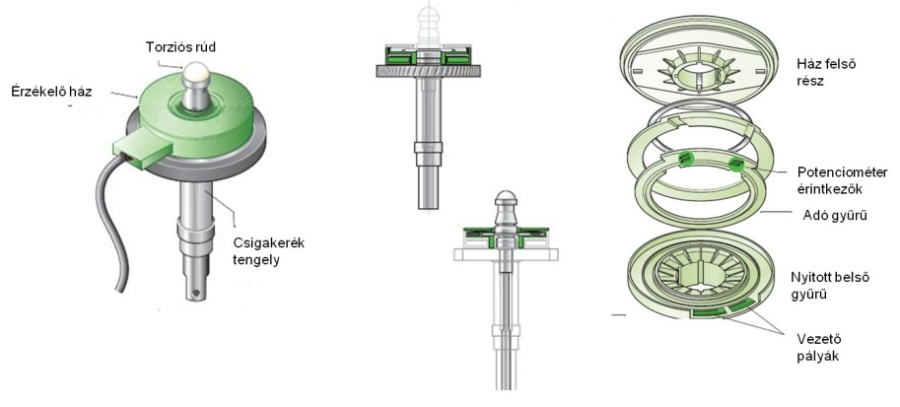
Az elektronika
A csigahajtás házára rögzített tartóra szerelik az elektronikát. Öt egymástól eltérő csatlakozóval látták el, hogy ne legyenek felcserélhetők. Az érzékelők jeleit és a CAN hálózat üzeneteit felhasználva kiszámítja, hogy mekkora rásegítésre van szükség. Ez mindig sebességfüggő. Az elektronika meghibásodásakor világít az ellenőrzőlámpa.
Ha az elektromechanikus szervokormány meghibásodik, azt felismeri az öndiagnosztikai rendszere és a műszerfalon elhelyezett ellenőrző lámpa világít.
Az egyenáramú motor
Maximális teljesítményfelvétele 720 W. Nyomatéka 2 Nm. Áramellátását és vezérlését a szervokormány elektronika végzi. A csigahajtás házához gumi elemekkel csatlakozik, melyhez csavarokkal rögzítik. Tengelye a csiga orsóhoz gumi elemmel csatlakozik. Ezzel a rezgés csillapítás megvalósul.
A szervokormány működése
A kormánykerék tengelye egy felső és egy alsó részből áll. A kettő között kardáncsukló létesít kapcsolatot. A felső részre szerelik fel az érzékelőket. Itt található az alsó szöghelyzet-, és a felső nyomaték adó. Amikor a vezető elfordítja a kormánykereket elcsavarodik a torziós rúd. A két jeladó információt ad az elektronikának a szöghelyzetről és a nyomatékról. Ezek alapján meghatározza a elektronika a szükséges rásegítő nyomatékot és működteti a villanymotort. A kerekeket elkormányzó hatásos nyomaték a kézi és a rásegítő nyomaték összege. Ha a vezető még nagyobb nyomatékot fejt ki a kormánykeréken, ennek hatására a villanymotor növeli a rásegítő nyomatékot.
Ha kisebb a vezető által kifejtett nyomaték, kisebb lesz a torziós rúd elcsavarodása és a rásegítő nyomaték is, mert jeladó kisebb jelet közvetít az elektronikának, amely csökkenti a rásegítő nyomatékot. A futómű geometriának megfelelően a kerekek visszatérnek egyenes meneti helyzetbe.
Ha a kézi és a rásegítő nyomaték nagyobb, mint a visszakormányzó nyomaték, a rásegítő egyenes állásba fordítja vissza a kerekeket. Ha a vezető a kanyarban elengedi a kormánykereket, megszűnik a torziós rúd elcsavarodása, az elektronika lekapcsolja a villanymotort. Ezzel megszűnik a rásegítő hatás. Ha a gépkocsi nem egyenesen halad, a szöghelyzet adó jele alapján, bekapcsol a villanymotort úgy, hogy az egyenes meneti helyzetbe kerüljenek a kormányozott kerekek.
Diagnosztika
A gépkocsi típusának megfelelő, például a Wolkswagen-nél és az Audinál a VAS 5051 diagnosztikai számítógép használatakor a „44 lenkhilfe” címszó alatt található a vizsgálati program. (Újabban már magyar nyelvű programmal működő változatok is vannak.)
A következő lehetőségeket közül lehet választani:
Lekérdezhető az elektronika változata,
Kiolvashatók a hibakódok,
Törölhetők a hibakódok,
Kiolvashatók a mérési adatok,
Elvégezhetők az alapbeállítások,
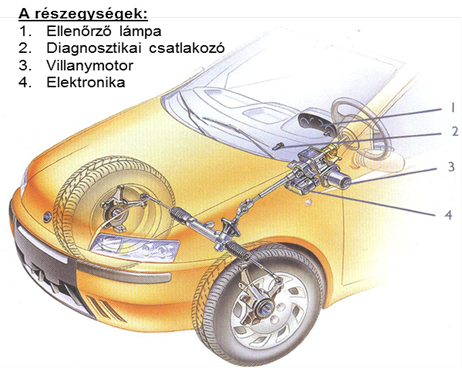
7.10. EPS –p (pinion) változat
Ilyen elektromechanikus szervokormánnyal találkozunk például a Toyota Prius-ban. Ezt gyártója Electric Motor-Assist Power Steering-nek nevezi és a EMPS rövidítést is használja.
EMPS szervokormánynál az egyenáramú motort a szervokormány elektronikája működteti. Az érzékelők jelei alapján határozza meg a szükséges rásegítést és az irányát.
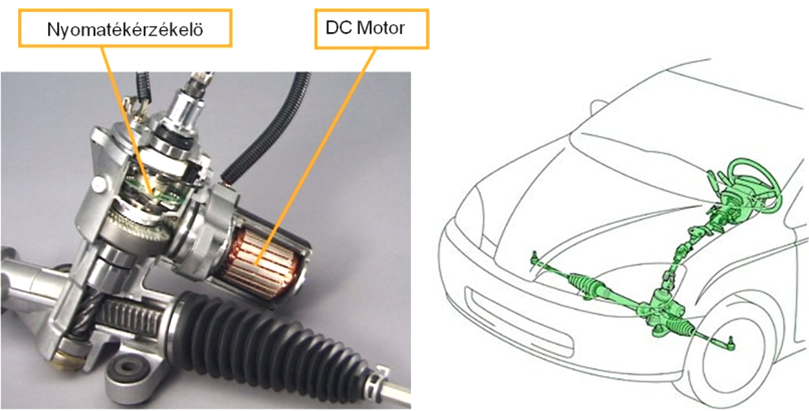
A kormánykeréken kifejtett nyomaték érzékeléséhez potenciométert alkalmaznak. Ennek elmozdulását a kormánykerék tengelye és a csigahajtás közé szerelt torziós rúd határozza meg. Elfordulási szögével lesz arányos a mért nyomaték és az ellenállás változás. Ennek megfelelő polaritással fogja az elektronika az egyenáramú motorra rákapcsolni a gerjesztő áramot és szabályozza annak nagyságát.
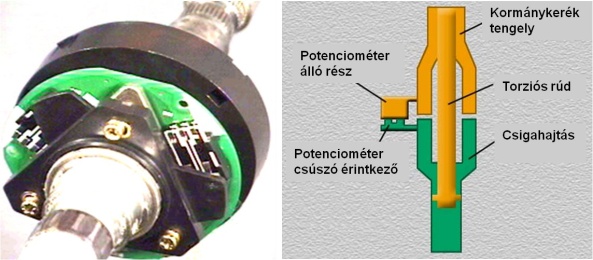
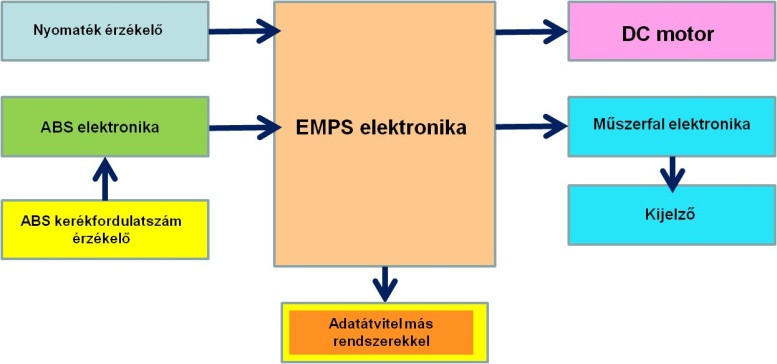
7.11. EPS dp típus elektromechanikus szervokormány
Ilyen villanymotoros szervokormányt szereltek a VW Touran –ba, a Kompakt-Van kategóriában elsőként. Az Audi A3 elektromechanikus szervokormány Electrical Power Steering-nél (EPS) a fejlesztés célja a komfortosabb, könnyebben kormányozható, robosztusabb, kevésbé összetett, könnyebben beszerelhető, energia takarékosabb szervokormány megvalósítása volt. A típusváltoztatás oka az volt, hogy a felmerült igényeket az elektrohidraulikus változattal már nem lehetett kielégíteni. Ennél a változatnál a villanymotor csigahajtással egy fogaskeréken keresztül adja a rásegítő erőt a fogaslécre. Annak másik végéhez csatlakozik a másik fogaskerékkel a kormánykerék tengelye. Ez a szerkezeti kialakítás így dual pinion változat. Az előnye ennek a konstrukciónak az, hogy a villanymotor meghibásodása esetén a kormánykerék tengelyére szerelt fogaskerékkel nagyobb erővel ugyan, de kormányozható marad a gépkocsi. A rásegítő villanymotor nyomatékát egy csigahajtás növeli meg és ezen keresztül adja át a rásegítő erőt a fogaslécre.
Az alkalmazott szénkefe mentes aszinkron motor robosztus kivitelű és különös előnye az, hogy a különböző szennyeződésekkel szemben jól ellenálló. A leadott nyomaték egyenletes, nincsenek nyomatékhullámzások és működése zajmentes. Közvetlenül a villanymotorra szerelik fel a mikro-hibrid technológiával készülő elektronikát. Ez a kompakt kivitel több tekintetből is előnyös:
egyszerű kábelezés
biztonságos működés
széles hőmérséklettartományban alkalmazható.
A szervokormány részei:
A kormánymű házba szerelt fogasléc és a hozzá kapcsolódó a kormánykerék tengelyhez kapcsolódó fogaskerék elé a torziós rúdhoz kapcsolódó két csatornás magnetorezisztív elven működő nyomaték érzékelőt szerelnek. Ezt a kormánygép felső részénél helyezik el. A hidraulikus szervokormányokéhoz hasonló merevségű torziós rudat alkalmaznak ennél is. A szénkefe nélküli 12 V-os aszinkron motor fordulatszámát is magnetorezisztív elven működő fordulatszám érzékelő jelzi vissza az elektronikának. Erre azért van szükség, hogy a rásegítő nyomaték az igényekhez illeszthető legyen. Ehhez még a gépkocsi CAN hálózatán keresztül további adatok is érkeznek, mint például a motor fordulatszáma, a gépkocsi sebessége, az elkormányzási szöghelyzet. A villanymotor csigahajtáson keresztül egy fogaskerékkel kapcsolódik a fogasléchez. Az elektronikát a szokásos módon elektromos csatlakozóval látják el. Nyomtáv rudakat és a hozzájuk csatlakozó csuklókat védőharmonikák burkolják. Analóg működésű a kormánykerék szöghelyzet érzékelő.
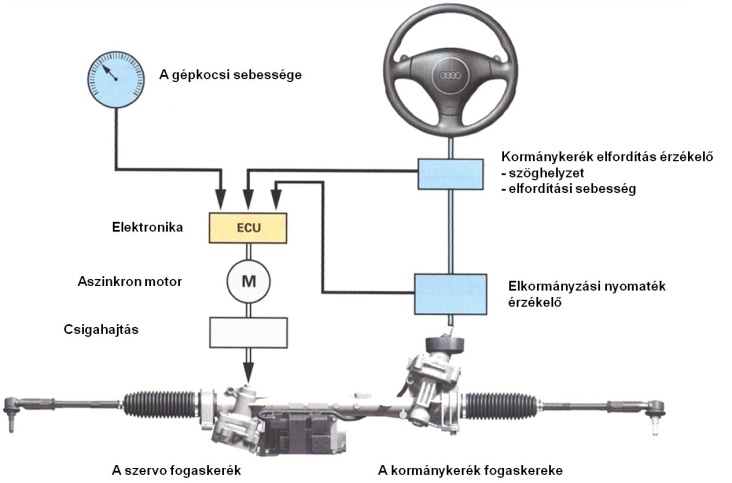
Működése
A fogaslécen létrejövő maximális erő 9000 N. A rásegítő erő a kormányon kifejtett nyomatéktól, az elkormányzási helyzettől, annak sebességétől, továbbá a gépkocsi sebességétől függ. A működéshez szükséges adatok a CAN hálózaton keresztül érkeznek.
Olyan működésmódok valósulhatnak meg, amelyek eddig a hidraulikus szervokormányoknál nem voltak. Ez egy természetes kormányzási érzetet kelt a vezetőben. Ilyenek például az aktív egyenes-meneti visszaállítás.
Az elektronikába implementált egyenes-meneti korrekció a vezető aktív korrigálása nélkül oldalszélnél és kereszt irányban lejtős úton is megtartja a menetirányt. Automatikusan felismeri és „megtanulja” a kormányzási középhelyzetet és ezt veszi figyelembe a visszaállításnál. Ezzel tehermentesíti a vezetőt.
Ez az algoritmus két részből tevődik össze. Az egyik a rövidtávú, a másik a hosszú távú. Ezek aktivitása az elkormányzási szögtől, a kormány elfordításának és a gépkocsi haladási sebességétől függ. A hosszú távú figyeli az egyenes menettől való eltérést és kiegyenlíti azt.
Növelték a sebességfüggő rásegítési teljesítményt, melyet kiegészít a teljes frekvencia tartományban működő zavaró lengések csillapítása. A teljes mechanikus áttétel: i = 16,2. Ez a kormánykerék szöghelyzet és a kerék szöghelyzet viszonyaként értelmezhető. A sebességfüggő rásegítés parkolásnál nagyobb támogatást biztosít a vezetőnek.
Különösen nagy sebességű autózásnál előnyös a stabil egyenes meneti helyzetben tartás, amely hatékonyan csökkenti a gépkocsivezető kifáradását.
Külön programrész határozza meg az egyenes meneti helyzetbe történő visszatérés dinamikáját. Ez a gépkocsi sebességétől, a korábban megvalósult kormányzási nyomatéktól, és a kormánykerék szöghelyzetétől függ.
Az alábbi metszetről készült képen látható, hogy a villanymotor csigahajtás segítségével adja a rásegítő nyomatékot a szervokormány fogaslécére a fogaskerék segítségével.
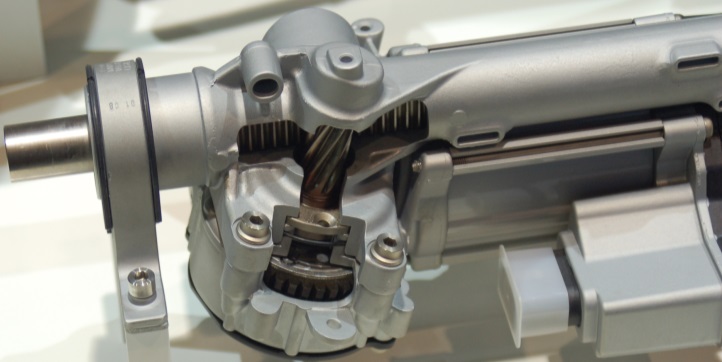
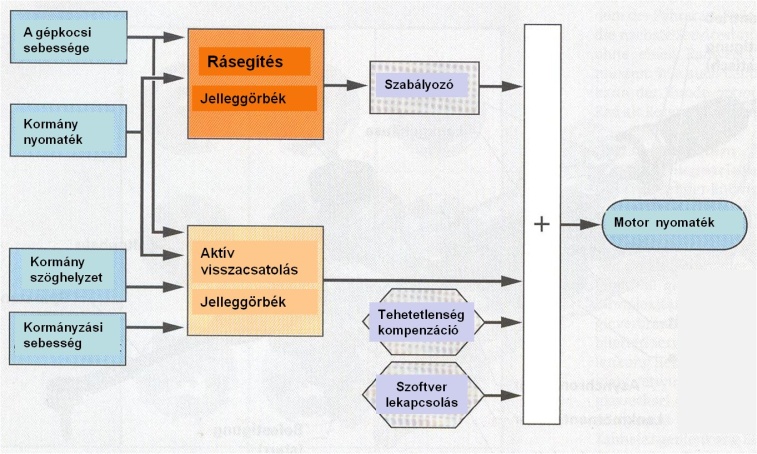
Ennek a konstrukciónak az előnye az, hogy a gyártás során a próbapadon már ellenőrzött szervokormány az első futómű fő tartójára felszerelhető. A szerelősor végén aktiválják az elektronika programját. A típusváltozatnak megfelelő egyedi programokkal működhetnek a különböző gépkocsi típusokba szerelt egyedek. Ennek a módszernek köszönhetően feleslegessé válik a különböző típusú szervokormányok raktározása és a javítói hálózatban alkatrészként tartása. A beszerelés egyszerűbb, mert nem szükséges szervo-szivattyú egység, csövek és hőcserélő. Az elektronika öndiagnosztikai egysége a tárolt hibakódok révén megkönnyíti a javítást.
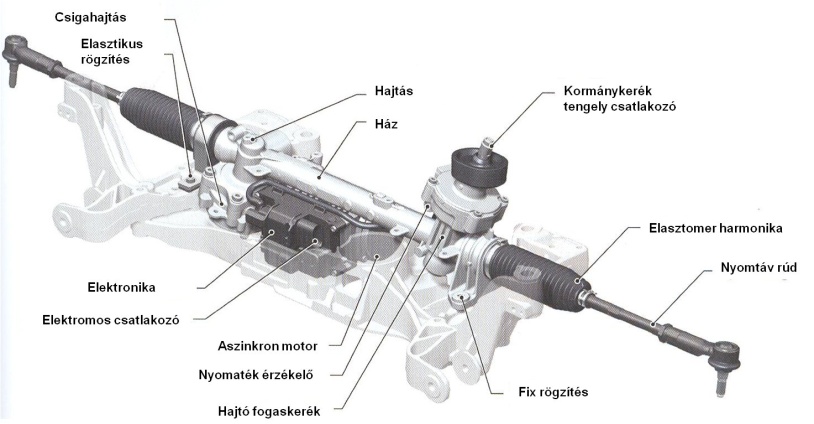
Az EPS dp Biztonsági koncepciója
A lehető legszélesebb körű működési lehetőségre törekedtek a biztonsági rendszer kialakításánál. Például amikor a gépkocsi sebességre, vagy a kormányzási szög jele hiányzik valamilyen meghibásodás miatt a szükségműködési program lép működésbe. Erre a gépkocsi vezetőt egy ellenőrző lámpa világítása figyelmezteti, de a gépkocsi biztonságos kormányozhatósága megmarad. A kormányzási nyomaték jele redundás módon van megvalósítva. Ha mindkettő meghibásodik, egy bizonyos átmenettel rásegítés mentes kormányzás fog megvalósulni. Valamely érzékelő meghibásodása esetén sem fog hirtelen bekövetkezni a kormányozhatóság megváltozása. Ugyanez vonatkozik a villanymotor forgás érzékelőjének meghibásodására is.
Hasonló gondot fordítottak a hálózati feszültség kimaradására is. Az elektromos rendszerek alkalmazása egyre szélesebb körűvé válik a gépjárművekben, ezért egyre nagyobb a hálózat terhelése. A nagy áramfelvételű fogyasztóknak megfelelően reagálni kell például a lemerült akkumulátorra, hogy elkerülhető legyen a teljes energiaellátás összeomlása. Kidolgoztak egy hálózatot figyelő algoritmust. Ez lehetővé teszi, hogy a pillanatnyi hálózati feszültséghez igazodó maximális rásegítés valósuljon meg. Csökkenő feszültségnél kisebb lesz a rásegítés, egy csökkentett üzemmód lép életbe.
Ha kábelszakadás következik be, vagy leesik a kábelsaru és az akkumulátor már nem csatlakozik a hálózathoz, az elektromos hálózatot felügyelő elektronika figyelmeztető jelzést küld a villanymotoros szervokormány elektronikájának, ekkor az korlátozni fogja az áramfelvételt, hogy a generátor túlterhelése csökkenjen.
Az alábbi ábrán egy „rénszarvas teszt” során végrehajtott mérések eredményét ábrázolták diagramban. A csatlakoztatott és a lekötött akkumulátorral végrehajtott próbák eredményei hasonlíthatók össze. Az utóbbi esetben a villanymotoros szervokormány teljes energia igényét a generátor hozta létre. A mérésekből megállapítható, hogy a vizsgált esetekben a gépkocsi nem csak biztonságosan, hanem dacára a megsérült hálózatnak, komfortosan kormányozható maradt. A rendszer működésének folyamatos figyelésén kívül a megfelelő intézkedések meghozatalával a kormányzás fontosságához méltón mindig működőképes marad.
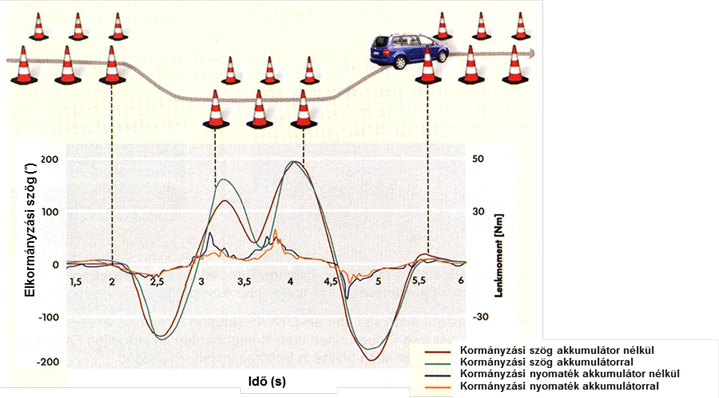
7.12. EPS apa fogasléccel párhuzamos villanymotor beépítéssel
Ennél a változatnál a villanymotor nem csigahajtással, hanem fogazott szíj áttétellel és egy golyósor visszavezetéses csavarorsó, csavaranya kapcsolattal adja a rásegítő erőt a fogaslécre.
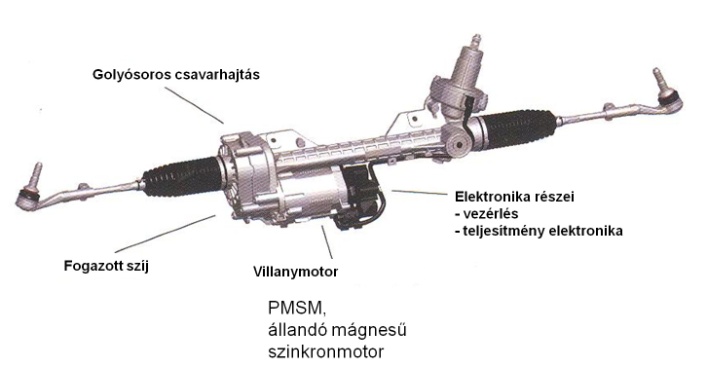
Az elektronika által vezérelt villanymotor nyomatékát először egy fogazott szíj áttétel növeli. Ezután következik golyósoros csavarhajtás, mely a forgó mozgást jó hatásfokkal egyenes vonalúvá alakítja át a kormánymű fogasléc mozgásának megfelelően.
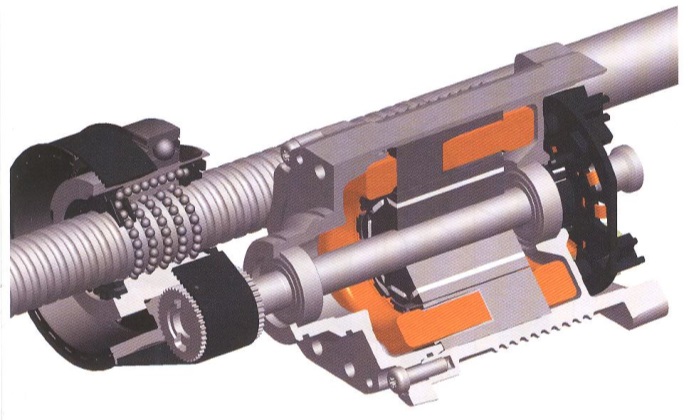
Az alábbi fényképen látható, hogy az elektromechanikus szervokormányt működtető elektronika a villanymotorral közös szerelési egységet alkot. Ez folyamatosan felügyeli a rendszer működését. Meghibásodás esetén figyelmezteti a gépkocsivezetőt a műszerfalon elhelyezett ellenőrző lámpával. A tárolt hibakódokat a gépkocsi típusának megfelelő diagnosztikai műszerrel lehet kiolvasni.
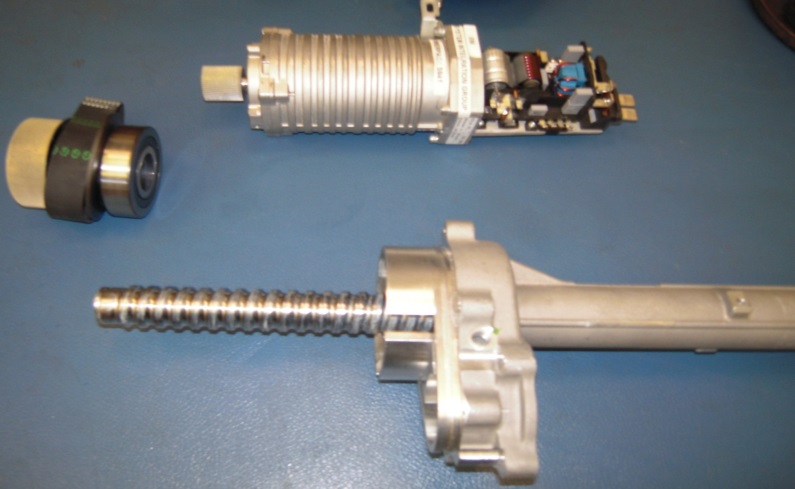
Az elektromechanikus szervokormány energiamérlege:
Az alábbi diagram szemlélteti, hogy az elektromechanikus szervokormánynál az egyes részegységeknek mekkora az energia igény. Ebből kitűnik, hogy a mechanikus egységek viszonylag kis veszteséggel működnek.
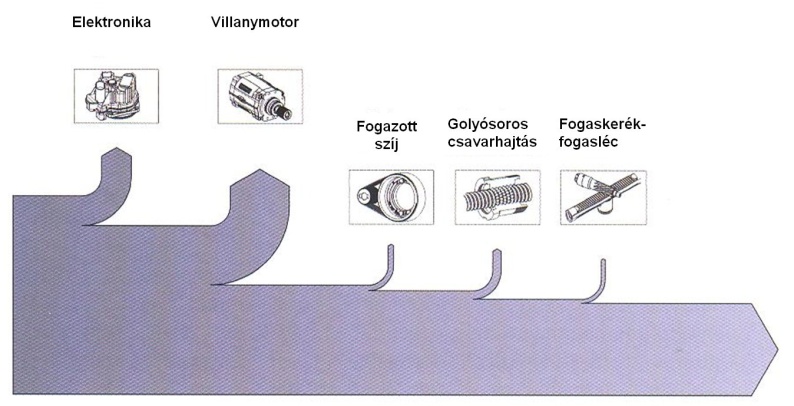
Ha a rásegítést adó villanymotor három fázisú váltakozó áramú, akkor egy áram átalakítóra is szükség van, amely hat impulzusos híd kapcsolásos egység. A felvett egyenáramból 3 fázisú váltakozó áramot állít elő a villanymotor működtetéséhez.
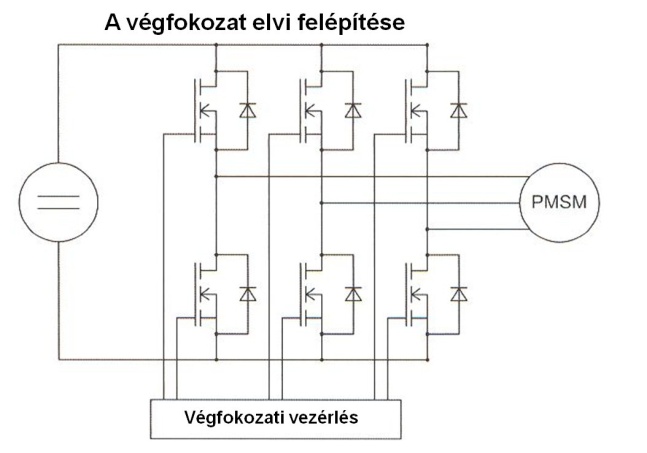
7.13. Fogasléccel párhuzamos villanymotor, melynek forgórészén fűzték át a fogaslécet
Ez a típusváltozat a legújabb fejlesztések eredménye. Ennél is a rásegítést adó villanymotor a fogasléccel párhuzamos beépítésű. Érdekessége az, hogy a villanymotor forgórészének belsejében van a fogasléc elhelyezve. A mechanikus áttételt a jó mechanikai hatásfokú visszavezetett golyósoros csavarhajtás adja. A csavaranyát közvetlenül a villanymotor forgórészére szerelik.
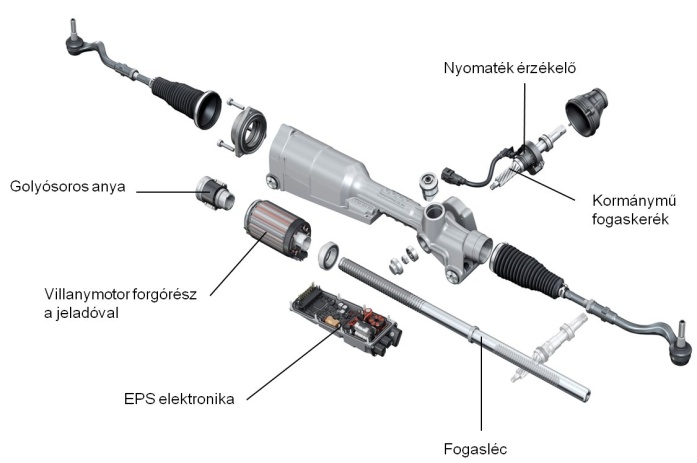
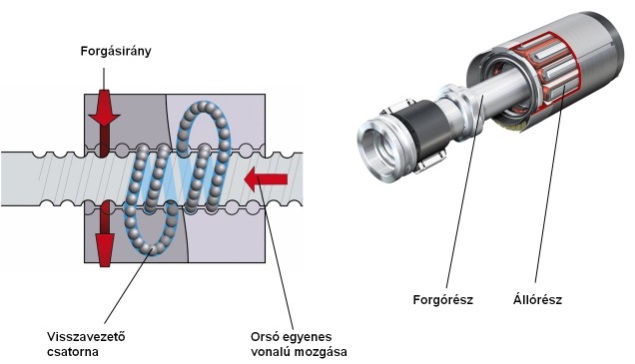
A nyomaték érzékelés ennél a típusnál is a torziós rúd elfordulásának mérésére vezethető vissza, De ezt a változatot már kopásmentes működésű Hall elemes érzékelővel látták el, mely hosszabb élettartamú és nagyobb működés biztonságot eredményez.
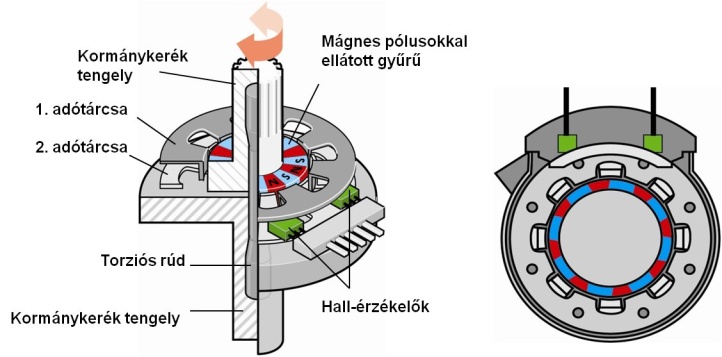
A működés egy másik fontos érzékelője a villanymotor forgórészének helyzetével arányos jelet ad az elektronikának.
Ez az elkormányzás mértékének ellenőrzésére és az egyenes meneti visszaállítás vezérléséhez is használható. A forgórészhez egy speciális alakú gyűrűt az állórészbe pedig az ezzel együttműködő érzékelő tekercseket szerelik be.
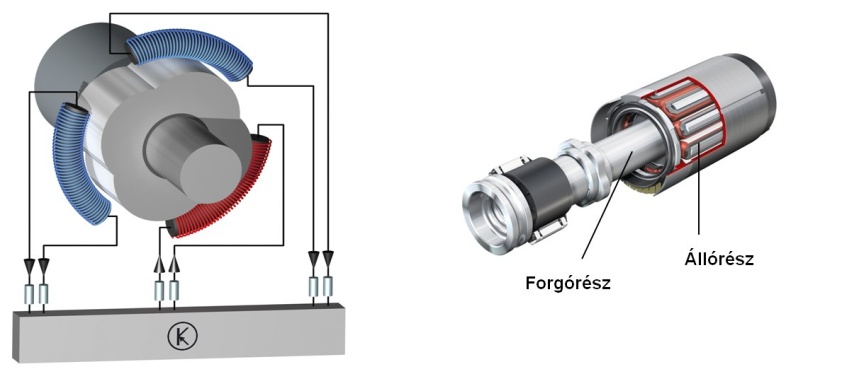
7.14. Ellenőrző kérdések az elektromechanikus szervokormányok témakörhöz
Foglalja össze az elektromechanikus szervokormányok előnyös tulajdonságait!
Foglalja össze az elektromechanikus szervokormányok típusváltozatait!
Milyen villanymotorokat alkalmaznak az elektromechanikus szervokormányoknál és melyek ezek fontosabb műszaki jellemzői?
Milyen működési elvű kormánykerék szöghelyzet érzékelőket alkalmaznak az elektromechanikus szervokormányoknál?
Hogyan működnek az elektromechanikus szervokormányoknál alkalmazott nyomaték érzékelők?
Rajzoljon fel egy EPS szervokormány működését szemléltető blokkdiagramot!
Sorolja fel az elektromechanikus szervokormányoknál alkalmazott nyomaték érzékelőket és minősítse azokat a működésbiztonság és a költség szempontjából!
Foglalja össze az elektromechanikus működésű szervokormányok diagnosztikai lehetőségeit!
Ismertesse az egyik nyomaték és szöghelyzet érzékelő szerkezeti kialakítását és működési elvét!
Hogyan valósítható meg az egyenes meneti visszaállítás? Mit jelent ez a fogalom?
8. fejezet - Aktív kormányzás
- 8.1. A passzív és az aktív kormányrendszer összehasonlítása
- 8.2. A különböző elektronikus menetdinamikai szabályozó rendszerek együttműködése
- 8.3. Menet közben változó áttétel, nagyobb komfort és biztonság
- 8.4. Aktív kormányzás bolygóművel és csigahajtásos villanymotorral
- 8.5. Aktív szervokormány hullámhajtással
- 8.6. Elvárások a közeljövő szervokormányaival szemben
- 8.7. Ellenőrző kérdések az aktív szervokormány témakörhöz
8.1. A passzív és az aktív kormányrendszer összehasonlítása
A hagyományos szervokormány passzív rendszernek nevezhető, mert a vezető kormányzási beavatkozásaira mechanikusan, előre meghatározott módon reagál.
Az aktív kormányzásnál a vezető kormányzási beavatkozásain kívül más elektronikus rendszerek is hatást gyakorolhatnak egy elektronikán és szabadon vezérelhető beavatkozó egységen keresztül. Egy állító motorral a vezetőtől független a pillanatnyi dinamikai állapotnak megfelelő kiegészítő kerék elkormányzás válik megvalósíthatóvá. Így tehát az elkormányzási szög az aktív szervokormánynál δ k két részből tevődik össze. Az alap szervokormány által megvalósított értéket egészíti ki a beavatkozó egység által végzett módosítás.
|
|
ahol:
|
δ k |
az első kerék elkormányzási szöge | |
|
i D |
a kormánygép közvetlen áttétele | |
|
i m |
a villanymotor hajtóművének áttétele | |
|
δ g |
a kormánykerék elfordítási szöge | |
|
δ m |
a villanymotor elfordítási szöge |
Az aktív szervokormány a menetbiztonság és a menetdinamika fokozását teszi lehetővé. Fontos szerepet tölt be a gépkocsi aktív biztonságánál.
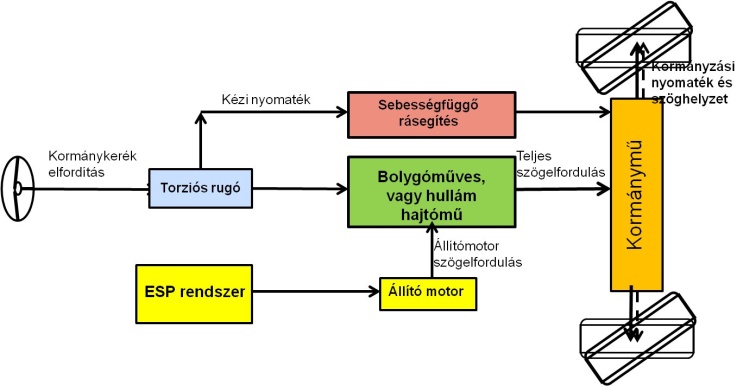
Az aktív kormányzásnál megvalósul a sebességfüggő kormányzási nyomaték rásegítés, hasonlóan a jól bevált „szervotronik” működéshez. Az EPS (Elektronic Power Steering) lehetővé tette a kormányzás csillapításának befolyásolását és az aktív egyenes meneti visszaállást.
A működési területek kibővítése az aktív kormányzásnál tovább folytatódott. Az áttétel folyamatos változásával a kormányzási nyomaték és a fogaslécen kifejtett erő is befolyásolhatóvá vált. Az aktív kormányzásnál a gépkocsivezető csak az első kerekek elkormányzási szögét állítja be. Ezzel a menetbiztonság, a komfort és a gépkocsi agilitása tovább növekedett. Ez a konstrukció egyúttal jó előkészítés lett a Steer-by-Wire rendszer bevezetésének, mely azért még várat magára. Megtörtént ugyanis bizonyos működésmódok szétválasztása egymástól. A változó áttételű aktív kormányzásnál ugyanis két terület világosan szétválasztható egymástól:
az elkormányzási szög függvényében a gépkocsi agilitását növelő működésmód, amely optimalizálja a gépkocsi reakcióit a kormánykerék elfordítására.
a gépkocsi stabilizálását végző működésmód, mely különösen a határtartományban fontos.
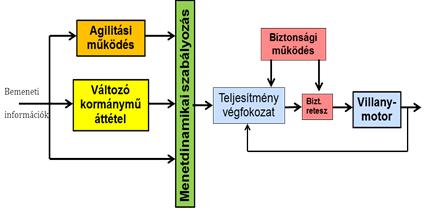
A változó áttételű aktív kormányzásnál meghibásodás esetén a kormánykerék és a kormányzott kerekek közötti közvetlen összeköttetés megmarad. Hasonló módon menet közben folyamatosan megvalósul az útfelületről a megfelelő visszacsatolás. Az Audi a szabályozási struktúrák fejlesztésénél ezen a területen a Matlab/Simulink programot alkalmazta.
A fejlesztéseknél fontos szerepet játszik a változó áttételű aktív kormányzás együttműködése a többi különböző menetdinamikai szabályozó rendszerekkel. mint például a belsőégésű motor, a futómű és a fékrendszer. Ez utóbbinál fontos például a nem homogén útfelületen történő fékezésnél a különböző szabályozó rendszerek együttműködése. A kormányzás és a fékezés párhuzamos együttműködését szemlélteti az alábbi ábra blokkdiagramja.
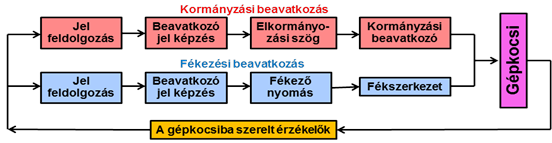
8.2. A különböző elektronikus menetdinamikai szabályozó rendszerek együttműködése
Menet közben például az ESP határozza meg a gépkocsivezető szándékának megfelelő menetpályát. Ezt a fontos információt azonban a változó áttételű aktív kormányberendezés is fel tudja használni az első kerekek szükséges elkormányzási szögének meghatározásához.
Sokkal összetettebbé és hatékonyabbá is válik a működés további menetdinamikai szabályozó rendszerek bevonásával. A Global Chassis Controls (GCC) rendszernél például valamennyi, a menetdinamikát befolyásoló rendszer összevonva működik. Az aktív kormányzás tehát a fék-, az ESP rendszerrel és a változtatható karakterisztikájú lengéscsillapítókkal is kapcsolatban áll és kölcsönösen befolyásolják egymás működését.
Nem csupán a bemeneti adatokat használják együttesen, de a beavatkozások is összehangoltak. Például a perdítő nyomaték szabályozásnál a beavatkozási lehetőségeket is szétosztják az egyes alrendszerek aktuátorai között. Ezzel a kerekeknél az „üzemi pontot” úgy igyekeznek beállítani, hogy a gépkocsinál teljesen kihasználható legyen az erőátviteli potenciál.
A fentiekből egyértelműen kiderül. hogy a többi rendszertől függetlenül nem lehet az aktív szervokormányt sem fejleszteni. Ez csak úgy lehetséges, ha figyelembe veszik, hogy a többi menetdinamikai szabályozó rendszerrel elektronikus adatátviteli kapcsolatban áll, és a folyamatos együttműködés valósul meg.
Itt kell megjegyezni, hogy az egyes részrendszerek közötti együttműködés is sokkal összetettebbé vált, mint az eddig tapasztalható volt.
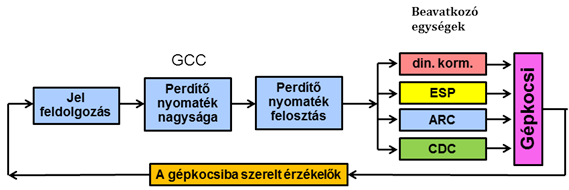
8.3. Menet közben változó áttétel, nagyobb komfort és biztonság
A kormányzásnál tovább fokozható a komfort és biztonság az aktív szervokormánnyal. Ennél nem csak a rásegítés nagysága, hanem a kormányberendezés áttétele is a pillanatnyi menethelyzethez igazodik.
A gyorsan reagáló közvetlen kormányzás kis áttételt igényel. Ez különösen szűk helyre történő beállásnál, különböző manőverezéseknél előnyös, mert elegendőek csupán kis kormánymozdulatok. Ennek viszont az a hátránya, hogy jelentős erőkifejtésre van szükség. Nagy sebességű autózásnál például kis rásegítés szükséges a kormányzás indirektebbé válhat.
Optimális lenne lassú haladáskor kisebb-, és gyorsabb haladáskor nagyobb áttétel megvalósítása, továbbá ezzel párhuzamosan a sebességfüggő rásegítésre is szükség van.
A kisebb, vagy nagyobb rásegítés hidraulikusan, vagy elektromosan is lehetséges. A kormányberendezés áttételének változtatása már egy másik feladatot jelent, amely mechanikusan, egy differenciális szöghajtás segítségével működhet. Ehhez a kormánykerék és a fogasléchez kapcsolódó kis fogaskerék közé egy bolygóművet, vagy egy hullámhajtást kell beszerelni. Ilyen módon eggyel megnövelhető a kormánymű szabadságfoka. Ezt, ha egy mechanikus áttétellel növelt villanymotorral kötjük le, a vezetőtől független kormányzási korrekciók válnak lehetségessé. Méghozzá úgy, hogy a kormánykerék pillanatnyi helyzetére ez nincs befolyással. A kormánykerék elmozdításával azonos, vagy akár ellentétes irányú kiegészítő forgatást tud végezni az elektronika a fogasléces kormányberendezés kis fogaskerekén. Ennek olyan a hatása, mintha megváltozott volna a mechanikus áttétel.
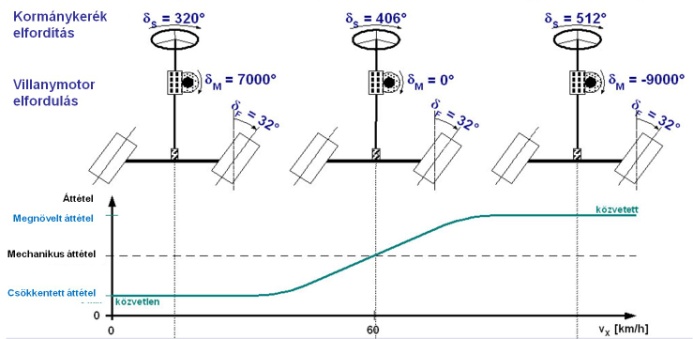
Ehhez a kiegészítéshez az is szükséges, hogy elfordulási szög jeladót szereljenek a kormányberendezés fogaskerekére és a villanymotorra is. Amennyiben az érzékelőktől érkező jelek elfogadhatatlanok, vagyis valamilyen hiba áll fenn, a kormányberendezés visszakapcsol normál mechanikus működésre. Ez a kiegészítő hajtómű mechanikus reteszelésével valósulhat meg. Például ilyenkor egy elektromágnes árammentes állapotba kerül és ezért a beépített rugó reteszelni fogja egy csap segítségével a kiegészítő beavatkozó egységet.
Az aktív szervokormány tehát lehetővé tesz egy külső beavatkozást a kormányzásba. Például amikor a gépkocsi olyan útfelületen fékez, melynél a jobb-, és a bal oldali kerekek alatti tapadási tényező egymástól jelentősen eltér, és ezért kitörne a nagyobb tapadású rész irányába, a beavatkozással ezt megakadályozza. A különböző elektronikus rendszerek ezen a területen egymással együttműködnek. Ugyanis az ESP rendszer érzékeli a gépkocsi instabil viselkedését és a CAN hálózaton keresztül beavatkozási parancsot tud küldeni az aktív kormányzásnak, ami végrehajtja a szükséges korrekciót. Így a gépkocsi nyomtartó marad. Ha ez nem lenne elegendő az ESP rendszer aktiválhatja a fékezési beavatkozást.
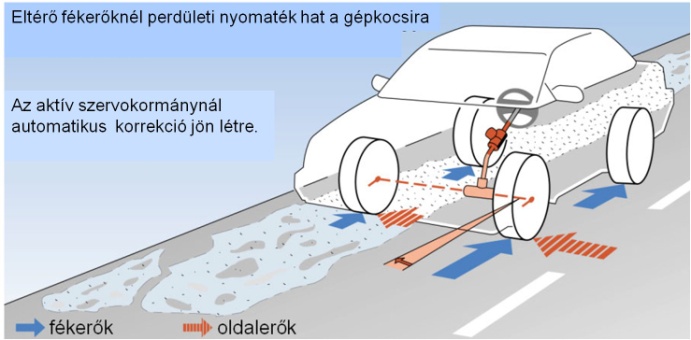
8.4. Aktív kormányzás bolygóművel és csigahajtásos villanymotorral
A ZF Lenksysteme, a Robert Bosch GmbH és a ZF Friedrichshafen AG 50-50%-os részesedéssel létrehozott közös vállalata fejlesztette ki az új, aktív szervokormány egyik változatát. Az első alkalmazó a BMW, mely közreműködött az aktív kormányzási rendszer kifejlesztésében. Az aktív kormánymű, vagy angolul Active Steering már csaknem egy évtizede sorozatgyártásban van. A fogasléces hidraulikus szervokormányhoz bolygómű segítségével villanymotor csatlakozik, mely végrehajtja a szükséges kormánykorrekciót. Eközben az első kerekek és a kormánykerék közötti mechanikus kapcsolat folyamatosan megmarad.
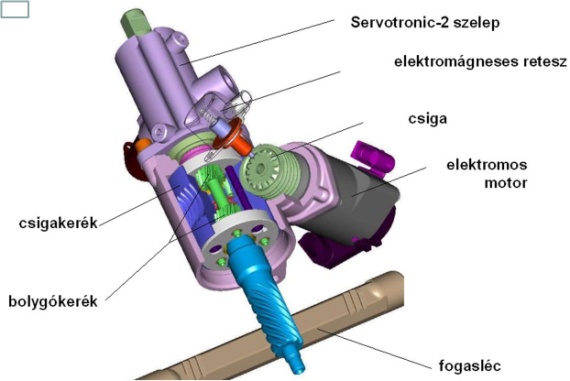
8.4.1. A ZF – Bosch aktív szervokormány szerkezeti kialakítása
Az aktív kormányzás vezetőtől független beavatkozását a beépített bolygómű teszi lehetővé, melyet a kormányoszlopba építettek be. Az így megvalósított többlet szabadságfok lehetővé teszi a kormánymű folyamatos- és helyzettől függően változó áttételét. Így komfortos kormányzás valósulhat meg, mert optimalizálható a működtetés erőszükséglete. A kiegészítő bolygóműves hajtásnak két bemenő és egy kimenő tengelye van. Az egyik bemenő tengely a kormánykerékhez kapcsolódik, a másik pedig egy csigakerekes áttétellel a villanymotorhoz. Ez valósítja meg a vezetőtől független kormányzási beavatkozásokat. A kerekek elkormányzási helyzete a pillanatnyi menetviszonyoktól függően kisebb, vagy nagyobb is lehet, mint amit a vezető a kormánykerékkel beállított. Amikor a villanymotor nem forog a kormánykerék és a kerekek között közvetlen kapcsolat jön létre hasonlóan, mint a hagyományos rendszereknél.
Az aktív szervokormány elektronikája dolgozza fel az érzékelők jeleit, ha szükséges működteti a villanymotort és ellátja a teljes kormánymű felügyeletét is.
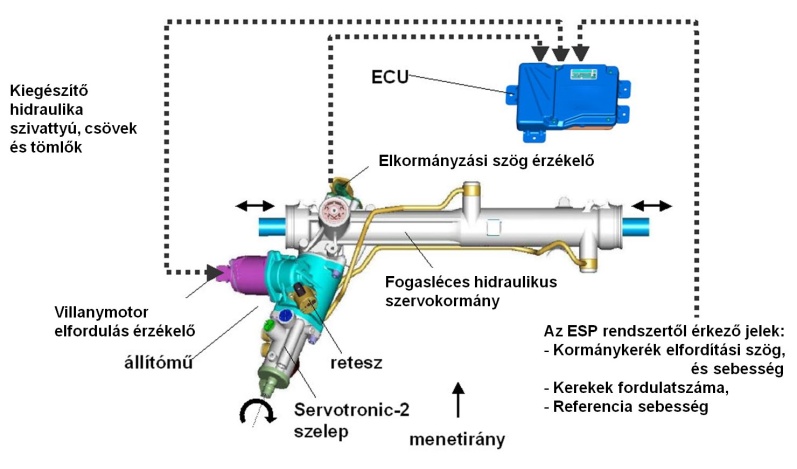
8.4.2. Az aktív szervokormány és az ESP együttműködése
Az aktív kormánymű egyik nagy előnye, hogy együttműködésre képes az ESP rendszerrel és támogatja annak beavatkozását. Az aktív kormánymű elektronikája, az érzékelők jelei alapján a gépkocsi alul-, vagy túlkormányzott viselkedését automatikus kormánykorrekcióval szűnteti meg. A menetdinamikai szabályozó ESP rendszer így már nem csak a fékrendszeren keresztül végzett beavatkozással és a belsőégésű motor nyomatékának csökkentésével, hanem kormányozással is beavatkozhat. Előnye az, hogy a kormányművön keresztüli beavatkozás gyorsabb, hatását is kevésbé érzi a vezető és az utasok, mint amikor célzottan egy bizonyos kerék fékezésével végzi a korrekciót.
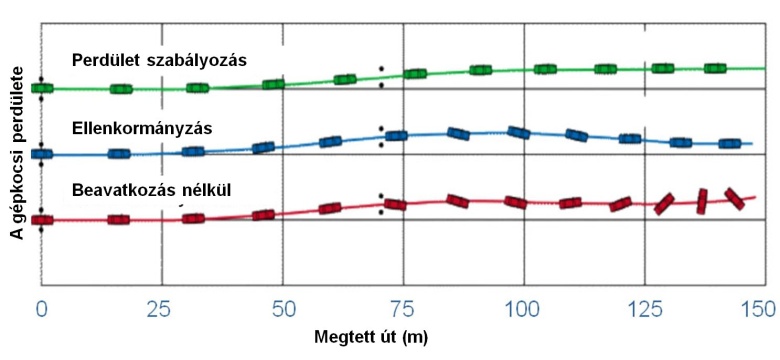
8.4.3. Az aktív szervokormánnyal komfortosabbá válik a vezetés
Az új aktív szervokormány, a menetdinamikailag kritikus helyzetekben nyújtott hatékony stabilizáló beavatkozásán kívül komfortosabbá teszi a vezetést. Az aktív kormánymű változó áttételi aránnyal működhet, például a gépkocsi haladási sebességének függvényében.
Amikor például kicsi a gépkocsi sebessége, a villanymotor a kormánykerék elfordításával azonos irányban forgatva segíti a parkolást, és a kis ívű kanyarok bevételét. Ezáltal a gépkocsi aktívabbá, jobban irányíthatóvá válik. Nagyobb sebességnél ellenkező irányba forgatva avatkozik be a villanymotor, ezzel csökkenti a kerék elkormányzási szögét. A kormánymű indirekté válik, a gépkocsi nyugodtabban reagál, a vezetés biztonságosabb. Az érzékelők másodpercenként százszor közvetítenek adatokat az elektronikának. Ezek alapján születik meg a döntés arról, hogy szükséges –e, és ha igen, akkor melyik irányba a villanymotorral a rásegítés. Az aktív szervokormánnyal a szűk kanyarokban haladva meggyőző a különbség a hagyományos szervokormányhoz hasonlítva a vezető munkájánál.
8.4.4. Rendszerhiba esetén is biztonságos a kormányzás
Ha valamilyen elektromos hiba miatt az elektronika kikapcsolja az aktív kormányzást, az állító motor és a hozzá kapcsolódó bemenő tengely rögzített állapotban marad. A bolygómű rövidre zárt rendszerként forog, a gépkocsi korlátozás nélkül, állandó áttétellel kormányozható. Az aktív kormányzás üzembiztonsága nagyobb, mint a teljesen elektronikus „steer-by-wire” koncepciót megvalósító rendszeré. Ez utóbbi ugyanis meghibásodás esetén nem tud közvetlen mechanikus kapcsolatot létesítve vész üzemmódra átkapcsolni. A mechanikus kapcsolat olyan érv, amellyel az autóvezetők meggyőzhetők az új rendszer elfogadásáról. Ők ugyanis csak akkor döntenek majd az új működési elv mellett, ha minden körülmények között biztonságban érzik magukat.
A „by-wire” megoldással csak akkor érhető el tökéletes biztonság, ha beépítenek egy második, redundáns rendszert. Ehhez két elektromos hálózat, két akkumulátor, megkettőzött érzékelők, vezérlőegység, vagy egy kiegészítő hidromechanikus kormánymű szükséges. A többletköltségek jelenleg még kizárják az elektronikus átvitellel működő kormánymű sorozatgyártását és gépkocsiba szerelését. A hatósági előírások sem engedélyezik még jelenleg.
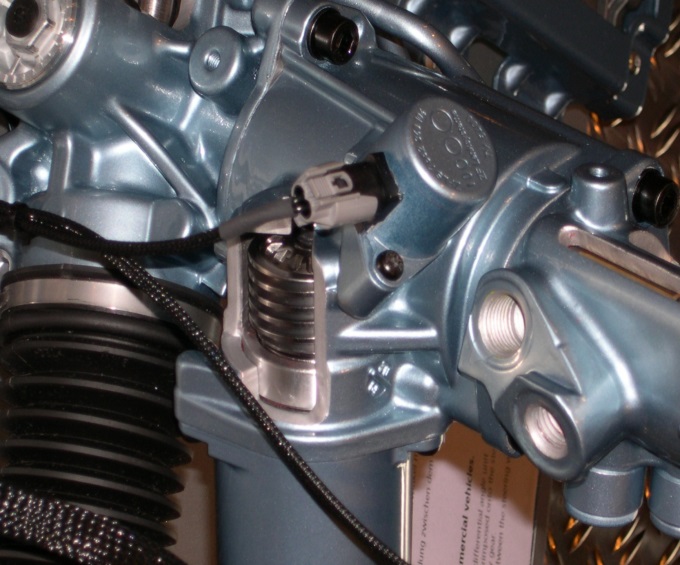
8.5. Aktív szervokormány hullámhajtással
Ezt a szervokormányt Audi „Drive Select” programján belül működő „Dinamiklenkung” gépkocsi irányítási program valósítja meg, melyet az új Audi A4 típussal együtt, annak új egységeként mutattak be. Azóta már más típusokba is alkalmazzák. A Drive Select a vezetőnek olyan lehetőséget kínál, hogy egyetlen gombnyomással sportos, vagy komfortos működésnek megfelelően egyszerre több elektronikusan működő rendszert állítson be. az egyik, vagy a másik működési módra. Ennek során a következő részegységeket befolyásolhatja:
a belsőégésű motor,
az automatikus sebességváltó,
a kormányzás,
a lengéscsillapítás karakterisztikája.
A dinamikus kormányzás „Dynamiklenkung” egy hullámhajtás segítségével változó kormánygép áttételt valósít meg. Ennek a hajtómű egységnek a reteszelő berendezése az elektronika öndiagnosztikai vizsgálata után az elektromágnes segítségével csak hibamentes állapotban old. Ha a villanymotor azonos irányban forgat a kormánykerékkel, növelni fogja az elkormányzási szöget. Ellentétes irányba forgatva csökkenti azt! Ezzel azt a hatást éri el, mintha a kormánygép áttétele változna meg.
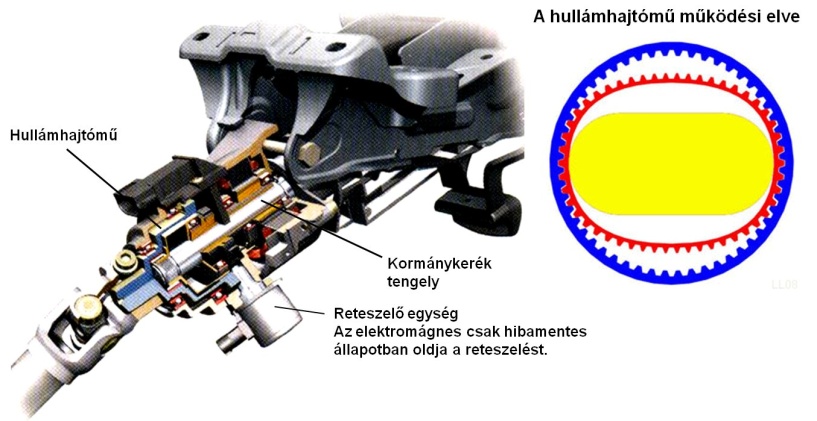
Ezt a hajtómű egységet a kormánykerék tengelyére szerelik fel. Lehetőséget ad arra is, hogy az ESP rendszer is használja mint beavatkozó egységet. Ennek az előnye az, hogy az ilyen beavatkozás hatására a gépkocsi nem fog lassulni.
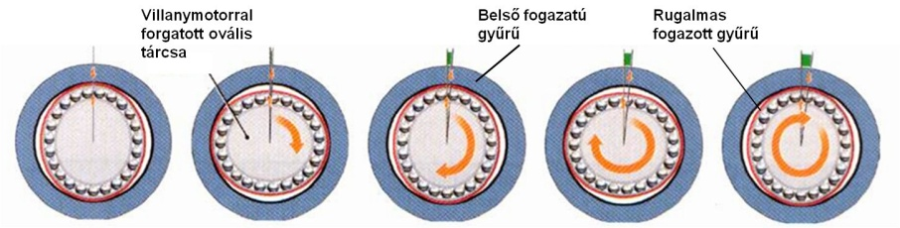
A hullám-hajtómű ovális tárcsáját a beavatkozást végző villanymotor forgatja. Ennek hatására a rugalmas, fogazott gyűrűvel fordít a belső fogazatú gyűrűn. A forgásiránytól függően ennek hatására az első kerekek elkormányzása kisebb, vagy nagyobb lesz.
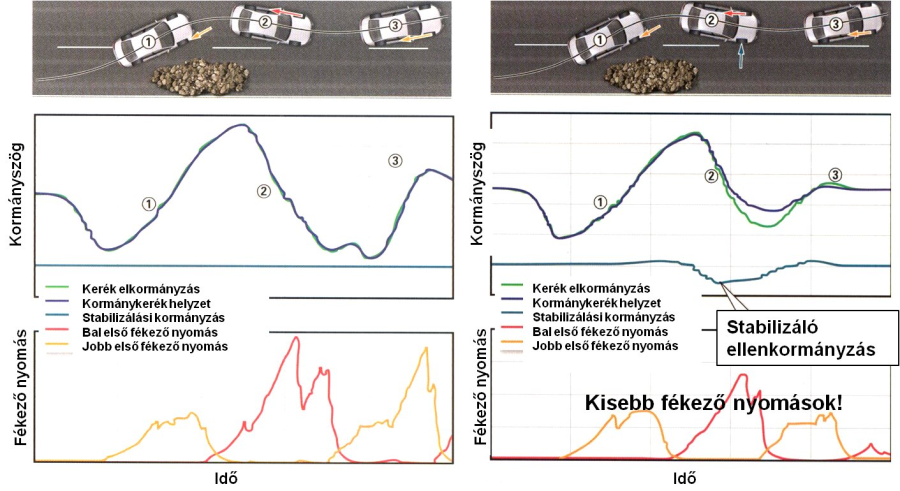
Az ESP rendszer elsődleges beavatkozása az ilyen aktív szervokormánnyal ellátott gépkocsiknál már a kormánykorrekció lett. Sok esetben az egyik kerékre kiadott fékezési impulzus el is maradhat, amennyiben a gépkocsi menetállapotán az első kerekek elkormányzásával sikerült a szükséges mértékben módosítani. Ennek az előnye az, hogy így nem fog csökkenni a gépkocsi sebessége, mint amikor egy – egy kerék fékezésével történik a beavatkozás.
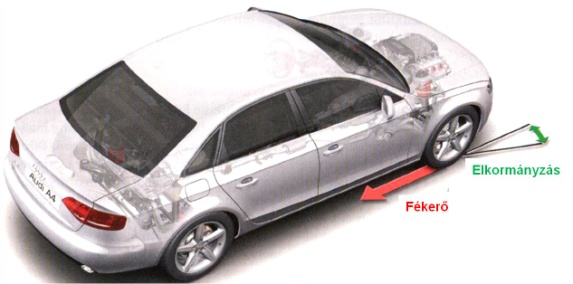
8.6. Elvárások a közeljövő szervokormányaival szemben
A megszokott kormányzási tulajdonságok megtartása mellett tegye lehetővé a „steer-by-wire” megvalósítását. Ez azt fogja jelenteni, hogy amikor a hatósági előírások is lehetővé teszik ezt, megszűnik a mechanikus összeköttetés a kormánykerék és az első kormányzott kerekek között. Ennél a biztonság miatt az elektromos működtetés és a tápfeszültség ellátás is két körös kell legyen.
Járuljon hozzá a gépkocsik tüzelőanyag fogyasztásának jelentős csökkentéséhez.
A gépkocsik valamennyi típusváltozatához legyen elegendő a teljesítménye.
Meghibásodás esetén váljon lehetővé a vezető által a mechanikus kormányzás.
8.7. Ellenőrző kérdések az aktív szervokormány témakörhöz
Hasonlítsa össze az aktív és a passzív szervokormányokat!
Mit jelent az aktív szervokormányoknál a változó áttétel?
Foglalja össze az aktív szervokormány és az ESP rendszer együttműködését!
Ismertesse a bolygóműves aktív szervokormány szerkezeti kialakítását!
Ismertesse a hulláhajtóműves aktív szervokormány szerkezeti kialakítását!
Foglalja össze a hullámhajtómű működésének lényegét!
Milyen biztonsági berendezést alkalmaznak az aktív szervokormányoknál, mely rendszerhiba esetén lép működésbe?
Foglalja össze az aktív szervokormányoknál tapasztalható vezetési komfort növelő vonatkozásokat!
9. fejezet - Összkerék kormányzás
- 9.1. Az összkerék kormányzás alkalmazása, előnyei, és hátrányai
- 9.2. Néhány példa az aktív összkerék kormányzású gépkocsikra
- 9.3. Az összkerék kormányzás konstrukciós megoldásai
- 9.4. Hidraulikus működésű aktív összkerék kormányzás
- 9.5. Elektromechanikus működésű aktív összkerék kormányzás
- 9.6. Delphi Quadrasteer™ összkerék kormányzás
- 9.7. Passzív hátsó kerék kormányzás
- 9.8. Steer - by - wire
9.1. Az összkerék kormányzás alkalmazása, előnyei, és hátrányai
A kormányzással a gépkocsi kereszt irányú dinamikáját tudja megváltoztatni a vezető. Ennek segítségével irányíthatja a gépkocsit. Különböző kormányzási módokat alkalmaznak. a közúti járműveknél leggyakoribb az „Ackermann” féle tengelycsonk kormányzás az első kerekeknél. Speciális kivitelű gépkocsiknál alkalmazzák az összkerék kormányzást. Targoncáknál rakodó gépeknél inkább a hátsó kerék kormányzás a jellemző. Két részes felépítményű mezőgazdasági gépeknél és különböző munkagépeknél az ízelt kormányzással is találkozhatunk. Az összkerék kormányzású gépkocsik részaránya a teljes kínálathoz képest viszonylag kicsi. Ennek ellenére ebben a fejezetben összefoglaljuk a különböző változatokat.
Már a gépkocsik kezdeti fejlesztési időszakában is alkalmazták az összkerék kormányzási módot, hogy az első kerekekkel együtt a hátsókat is elkormányozzák. Ezt aktív összkerék kormányzásnak nevezzük. A fejezet végén a passzív változatról is szót ejtünk. A Mercedes-Benz 1937-ben gyártotta a képen látható G5 típusjelű összkerék kormányzású gépkocsit. Elsősorban katonai terepjáróknál, illetve újabban nagy sebességű személygépkocsiknál találkozhattunk ilyen megoldásokkal. Erre látunk példákat az alábbi képeken.

Az első képen látható, vagy ehhez hasonló konstrukciókkal jelenleg már csak a terep versenyeken résztvevő gépkocsiknál találkozunk. A jelenleg gyártott nagy sebességű, országúti autóknál azonban lényegesen kisebb elkormányzási szögeket alkalmaznak a hátsó kerekeknél, mint a katonai terepjáróknál, ráadásul az elkormányzás iránya és a szöghelyzet a sebességtől függően vagy azonos, vagy ellentétes az első kerekekével. Ezekben az esetekben más teszi indokolttá az összkerék kormányzás létjogosultságát.

A hagyományos kormányzásnál ugyanis a kormánykerék elfordítását csak némi késedelemmel követi a gépkocsi dinamikus reakciója. Összkerék kormányzásnál ez a késedelem lényegesen kisebb lesz. Stabilabbá válik a gépkocsi és javul a dinamikai viselkedése. Ehhez azonban az első és a hátsó kerekek kormányzását megfelelő módon össze kell hangolni. Ebben jelenleg már segítségül hívják az elektronikát is. Az összkerék kormányzás számos előnyén kívül hátrányként kell megemlíteni, hogy a kiegészítő szerelvények miatt drágábbá válik a gépkocsi. A bonyolultabb műszaki megoldás üzemeltetési és javítási költségei is növekszenek. Az sem elhanyagolható, hogy a tömege is egy kicsit nagyobbá válik.
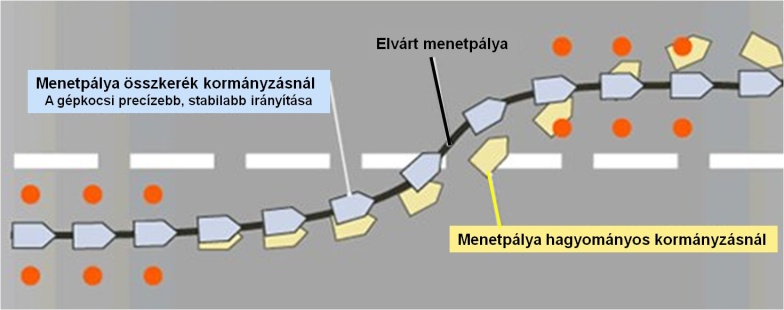
9.2. Néhány példa az aktív összkerék kormányzású gépkocsikra
A 80-as, 90-es évektől folytak intenzív fejlesztések az összkerék kormányzással kapcsolatban. A japán gépkocsik voltak ezen a területen az élenjárók. A Mitsubishi Galant bizonyos típusváltozatainál például ebben az időben már a széria felszereltséghez tartozott az összkerék kormányzáson kívül, az összkerék hajtás, az aktív kerékfelfüggesztés és az ABS is. A Honda Prelude mechanikus összkerék kormányzást alkalmazott. A Honda Accordnál már sebességfüggő módon működött az összkerék kormányzás. A Mazda 626 –os típusnál 50 km/h sebesség felett vált aktívvá az összkerék kormányzás. A gépkocsi menetbiztonságára is nagy gondot fordítottak. Ha például a hidraulika rendszerben csőtörés, vagy más meghibásodás következik be a gépkocsi automatikusan első kerék kormányzásúvá válik. A Nissan például több típusában is a HICAS (High Capacity Actively Controlled Steering) rendszert alkalmazza, melyet 1985-ben mutattak be. Ennél a hátsó kerekek kormányzása is hidraulikusan történik. Az első kerekek szervokormányához alkalmazott, nagyobb teljesítményű szervo szivattyú látja el tápnyomással a hátsó kerekek kormányzását is.
Nem sokkal az ezredforduló után kezdték alkalmazni a Renault Laguna némely változatában az összkerék kormányzást. 2002-ben mutatták be és „4 control”-nak nevezték el. Ennél 60 km/ sebességig a hátsó kerekek elkormányzása az elsőkkel ellentétes irányú és a legnagyobb értéke 3,5˚. Ezért kisebb lesz a gépkocsi fordulóköre. Nagyobb sebességnél viszont azonos irányú lesz a hátsó kerekek elkormányzása, ami jelentősen növeli a kanyarstabilitást.
Az amerikai General Motors-hoz tartozó Delphi Corporation fejlesztette ki a Quadrasteer™ összkerék kormányzási rendszert, melyet 2002-ben mutattak be. Egyebek között a Chevy Silverado 2500 és a GMC Sierra 2500 pickup modellekben és a SUV kategória több típusában is alkalmazzák ezt.
9.3. Az összkerék kormányzás konstrukciós megoldásai
A konstruktőrök egyrészt azt a célt tűzték ki, hogy az összkerék kormányzással kis sebességnél csökkenjen a gépkocsi fordulókörének átmérője. Másrészt pedig, nagyobb sebességnél növekedjen a kanyarodási stabilitás. A célok ilyen megfogalmazásából az is következik, hogy az összkerék kormányzás hasonlóan a korszerű szervokormányokhoz, akkor éri el célját, ha működése sebességfüggő módon valósul meg. A működést jellemző paraméternek a hátsó és az első kerekek elkormányzási szögének hányadosát szokták tekintene, melyet a gépkocsi sebességének függvényében diagramban is ábrázolni szoktak, lásd az alábbi ábrát.
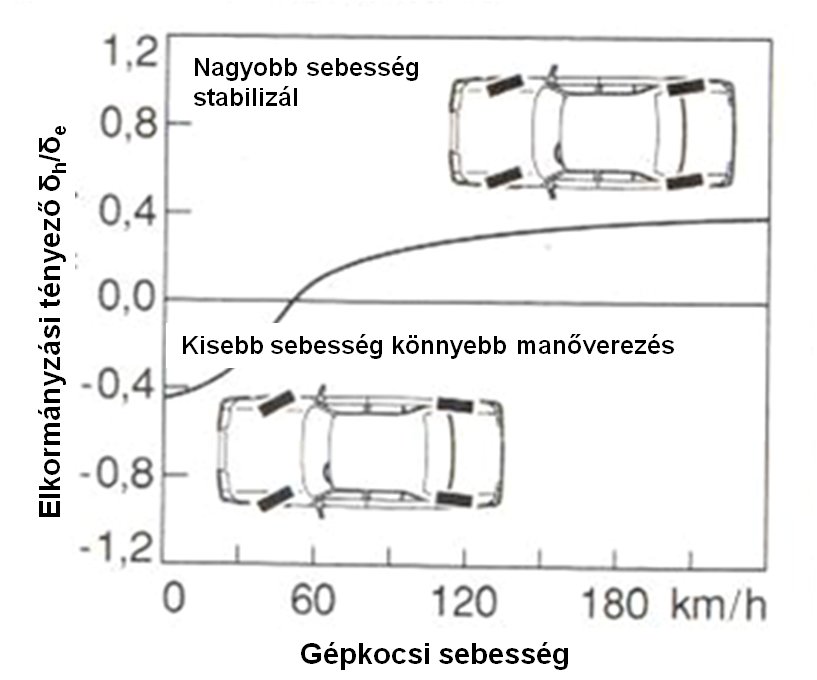
Az összkerék kormányzás konstrukciós megvalósítási lehetőségei:
mechanikus,
hidraulikus,
villanymotoros,
elektronikával kombinált mechanikus, illetve hidraulikus rendszerek összeépítése is lehetséges.
A kormányzási beavatkozások lehetőségei
aktív és
passzív összkerék kormányzási változatokkal is találkozunk.
Az aktív változatnál úgy az első, mint a hátsó kerekek hidraulikusan, vagy elektro-mechanikusan kormányozottak, melyek beavatkozásait egymással összehangolják.
Passzív összkerék kormányzásnál a kanyarban ébredő oldalerőt használják a beavatkozásra. Ez a haszonjárművek iker hátsó kerekeinél alkalmazott megoldás, melyet talajerő kormányzásnak is szoktak nevezni. A független, vagy kapcsolt kerék-felfüggesztésű személygépkocsi futóműveknél például speciális kialakítású szilentblokkok segítségével kis mértékben megváltoztatják a kerekek geometriai beállítását és ezzel teszik a hátsó kerekeket is kormányzottá.
Az összkerék kormányzási rendszerek bemeneti információi:
Leggyakrabban két bemeneti információt szoktak alkalmazni, melyek:
a kormánykerék elfordítási szöge
a gépkocsi sebessége.
További bemeneti jellemzők figyelésével a gépkocsi dinamikai viselkedése tovább javítható. A felsorolt műszaki jellemzőket a biztonság érdekében megkettőzött módon egymással párhuzamosan érzékeli az elektronika. A jelek kiértékelése után összehasonlítja az eltárolt értékekkel, majd ez alapján ad beavatkozási parancsot a hátsó kerék elkormányozására. Egy dinamikus szabályozást valósítanak meg, melynél az elektronika érzékeli a munkahenger dugattyújának helyzetét, melyet figyelembe vesz, ha további beavatkozás válik szükségessé.
A hátsó kerekek nyomtávrúdját például néhány fokos elkormányzási szögnek megfelelően a hidraulikus munkahengeren kívül villanymotoros beavatkozó egység is végezheti kellően nagy mechanikus áttétellel.
9.4. Hidraulikus működésű aktív összkerék kormányzás
Ennél a változatnál hidraulika rendszer segítségével történik az első és a hátsó kerekek egymással összehangolt elkormányzása. működéséhez elektronikát is alkalmaznak.
9.4.1. A rendszer bemeneti információi és az érzékelők
9.4.1.1. Kormánykerék elfordítás
A kormánymű bemeneti részére szerelik fel az általában érintésmentes, induktív működésű érzékelőt. A teljes elkormányzási tartományban indirekt módon érzékeli az első kerekek elkormányzási szöghelyzetét. Ez egy durva jel. Ezen kívül fordulatonként periodikusan változó finom jelet is ad az érzékelő.
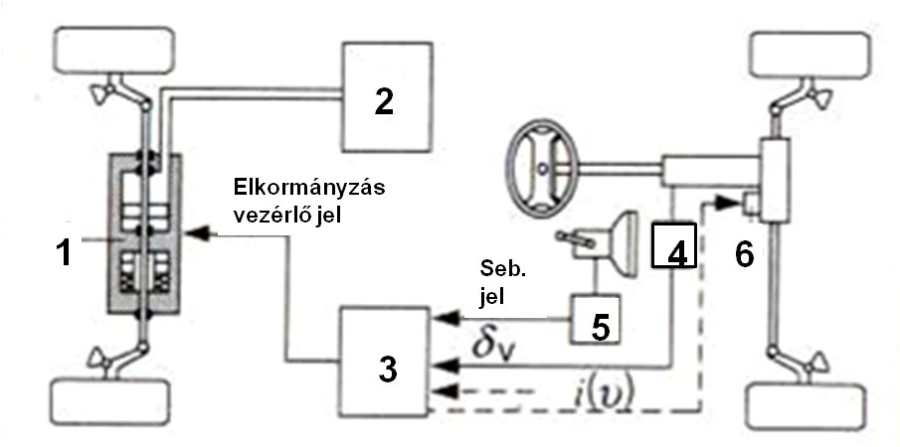
1 hátsó kerekeket kormányzó hidraulika; 2 hidraulikus tápnyomás; 3 működtető elektronika; 4 kormánykerék elfordítás érzékelő; 5 sebesség érzékelő; 6 első kerekek kormányzásának vezérlése; δ v első elkormányzási szög; i (v) sebességfüggő jel

9.4.1.2. A gépkocsi sebessége
Ezt az információt közvetítheti a gépkocsi sebességváltójára felszerelt jeladó. De újabban már a CAN hálózaton keresztül érkező ABS kerékfordulatszám érzékelőktől származó jelet használja az elektronika.
9.4.2. A működtető elektronika
Az elektronika a legtöbb változata a biztonság miatt kétcsatornás kivitelű. Két mikroprocesszort kötnek be egymással párhuzamosan. A működéshez szükséges jelek is megkettőzötten (redundáns módon) mindkét mikroprocesszorhoz eljutnak. Ezek közül az első mikroprocesszor egy gyors működésű programmal határozza meg a hátsó kerekek szükséges elkormányzási szöget és ennek megfelelően kiadja a beavatkozási parancsot. A második mikroprocesszor az elsővel párhuzamosan működik és a teljes rendszer ellenőrzést is elvégzi. Egy komplex modellel a teljes szabályozási folyamatot működés közben ellenőrzi. A hátsó kerekek elkormányzásához a kimenet jelszélesség modulált, a beavatkozó egységek működtetéséhez megfelelő teljesítményű jelet ad ki. A két mikroprocesszor a jeleket folyamatosan kölcsönösen összehasonlítja. Ha azok nem egyeznek, a működtető egységet a biztonsági koncepciónak megfelelően közép helyzetben reteszeli az elektronika. Ezt követően hagyományos első kerék kormányozás fog megvalósulni.
9.4.3. Az összkerék kormányzás beavatkozó egységei
Az összkerék kormányzás beavatkozó egységei a pillanatnyi menetállapotnak megfelelően a hátsó kerekek elkormányzási szögét állítják be különböző módon.
A hidraulikus változat megfelelő nagyságú állító erőt hoz létre és a beavatkozás gyorsasága is az igényeknek megfelelő. Ehhez a szivattyú által létrehozott olajnyomás energiáját használja fel. A hidraulikus munkahengert általában a futóművel párhuzamosan építik be. Lehet olyan kivitelű is, hogy ennek meghosszabbítása a hátsó kerekeket egymással összekötő nyomtávrúd. A beavatkozás ennek elmozdításával történik. Az állító munkahengerben a nyomást az elektronika elektromágneses szelep segítségével állítja be.
A működtetéshez leggyakrabban a belsőégésű motor által ékszíjjal hajtott radiál-dugattyús hidraulika szivattyút és nyomástárolót alkalmaznak. Nyomásérzékelők jelzik vissza a nyomásokat az elektronikának. A biztonságos működés érdekében, ha nincs elektromos tápfeszültség, vagy hidraulikus nyomás, az állító munkahenger két egymástól független egységgel mechanikusan reteszelődik.
Az újabb személygépkocsiknál az egyszerűbb kivitel lehetősége miatt szívesebben alkalmazzák a villanymotoros beavatkozó egységeket. Ez is beépíthető a nyomtávrudazatba. A villanymotor nyomatékát fogazott szíj áttétel és visszavezetett golyósoros csavarhajtás növeli a szükséges értére.

9.4.4. A gépkocsi menetviselkedésének összehasonlítása hagyományos és összkerék kormányzás esetén
A kísérletek során az összkerék kormányzást jól tapadó és kis tapadási tényezőjű úton is kipróbálták. Sávváltás, kettős sávváltás, hirtelen kormánymozdulatok, szlalom menet és körpályán történő haladás is beletartozott a vizsgálati programba. Különböző működtető algoritmusoknak és a hozzájuk tartozó különböző jellegmezőknek a működésre gyakorolt hatását is megvizsgálták.
A normál egyszeres sávváltásnál például az adott ív kicsúszási határsebességének közelében autózva az összkerék kormányzással a gépkocsi perdülési sebessége hozzávetőleg a felére csökken, ha egy hagyományos kormányzású gépkocsival hasonlítjuk össze azonos körülmények között. Az összkerék kormányzásnál nem fog a gépkocsi túllendülni a kívánatos pályán, mint ahogy az normál kormányzásnál gyakran bekövetkezik. Ugyanez tapasztalható a kanyar után az egyenesbe történő visszakormányzásnál is. Ez a kedvező tulajdonság egyrészt vezetés közben tehermentesíti a gépkocsivezetőt, másrészt pedig nagyobb menetstabilitást eredményez.
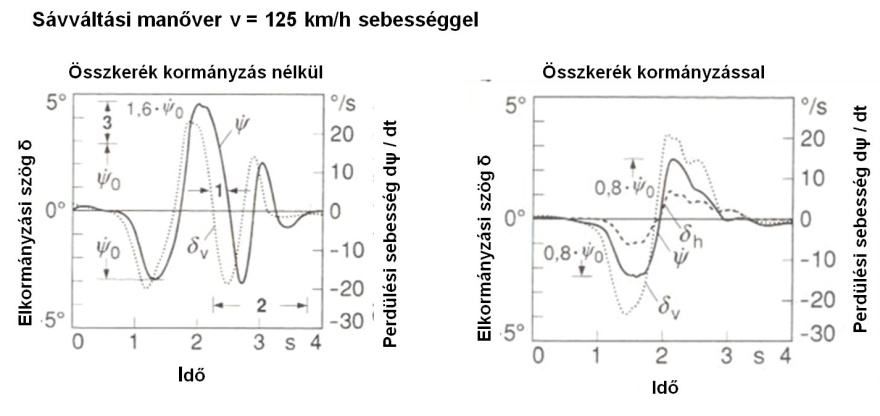
9.4.5. A menetdinamikai szabályozó rendszerek egymáshoz kapcsolódása
Az összkerék kormányzással nagyobb menetstabilitás érhető el az ívmeneteknél és a hirtelen szükségszerűvé váló kitéréseknél. A perdítő nyomaték korlátozás, amely az ABS rendszerrel együtt valósítható meg hatékonyan növeli a gépkocsi iránystabilitását, amikor fékezés közben az útfelület bal és jobb oldalán a tapadási tényező jelentősen eltér egymástól. Az összkerék kormányzás alkalmas arra, hogy további menetdinamikai szabályozó rendszerekkel hatékonyan együttműködjön és így a gépkocsi menetstabilitása jelentősen javul.
9.5. Elektromechanikus működésű aktív összkerék kormányzás
A szervokormányokhoz hasonlóan az összkerék kormányzásnál is kifejlesztették az elektromechanikus változatot. A hidraulika rendszer hátránya ugyanis az, hogy folyamatos tápnyomást igényel annak ellenére, hogy a kormányzás normál körülmények között csak a teljes menetidő kb. 15%-ában működik. A hidraulika szivattyú folyamatos működése növeli a gépkocsi tüzelőanyag fogyasztását és a károsanyag kibocsátást is. Ezért az összkerék kormányzásnak is kifejlesztették azt a változatát, amelynél úgy az első, mint a hátsó futóműnél is villanymotoros beavatkozó egységet alkalmaznak. Az előző részben ismertetettekhez hasonló biztonsági koncepciót valósítanak meg ennél a rendszernél is. A nyomás érzékelő kivételével hasonló érzékelőket alkalmaznak. Találkozunk olyan összkerék kormányzási változattal is ahol az első futóműnél hidraulikus, a hátsónál pedig elektromechanikus kormányzást alkalmaznak.
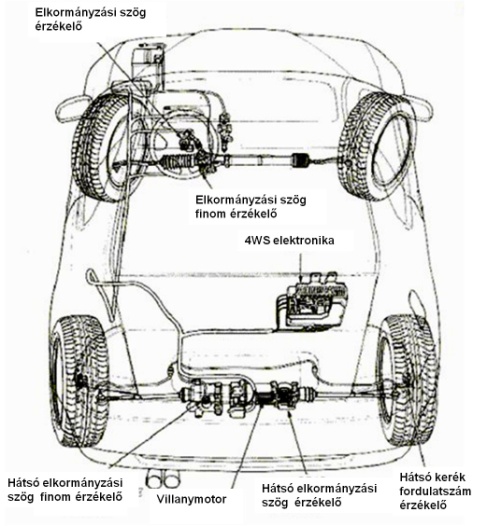
9.6. Delphi Quadrasteer™ összkerék kormányzás
A Delphi Corporation által kifejlesztette Quadrasteer™ összkerék kormányzási rendszert, 2002-ben mutattak be. Az Amerikai Egyesült Államokban számos pickup modellben és a SUV kategóriában is sikerrel alkalmazzák.
Ennél a hagyományos hidraulikus első kerék kormányzást kombinálták elektromechanikus hátsó kerék kormányzással. A központi elektronika érzékelők segítségével figyeli a gépkocsi sebességét és az első kerekek elkormányzási szögét. Ennek alapján történik a hátsó kerekek kormányzása elektromechanikus módon a következőképpen:
Kis sebességnél, 64 km/h sebesség alatt a hátsó kerekeket az elsőkhöz képest ellentétesen kormányozza. A hátsó kerekek legnagyobb elkormányzási szöge ilyenkor 12˚. Ennek köszönhetően 20%-al kisebb lesz a fordulási sugár, ami megkönnyíti a manőverezést, illetve a parkolóhelyre történő beállást.
Közepes sebességnél a hátsó kerekek egyenes meneti helyzetbe kerülnek. Ez a semleges kormányzásnak felel meg.
Nagy sebességnél a hátsó kerekek elkormányzása azonos irányú lesz, mint az elsőké. Ezzel sáv váltásoknál nagyobb stabilitás érhető el.
Működhet automatikusan is az összkerék kormányzás, de a vezető ki-, illetve be- is kapcsolhatja azt. Bizonyos típusoknál a vezetőnek arra is lehetősége van, hogy különböző hátsó kerék kormányzási kondíciókat állítson be. A műszerfalon ellenőrző lámpa jelzi vissza az aktuálisan beállított működési módot.
9.6.1. A rendszer érzékelői
Kormánykerék elfordulás érzékelő
A kormánykerék tengelyére szerelt kardáncsukló közelében helyezik el. 5 V-os tápfeszültséggel működik, melyet az elektronika biztosít. Ez az érzékelő egy analóg és egy digitális jelet ad az elektronikának.
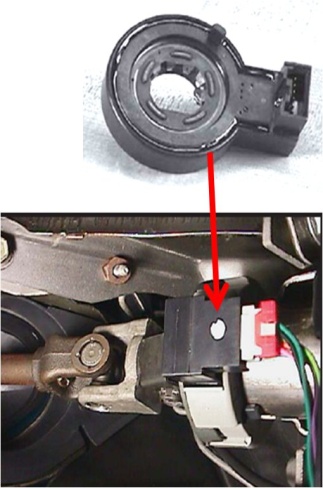
Az ennél a rendszernél alkalmazott további érzékelők:
perdülés és kereszt irányú gyorsulás érzékelő (hasonlóan az ESP rendszerekhez)
kerék fordulatszám érzékelők
9.6.2. A működtető elektronika
A hátsó kerék kormányzását működtető elektronika a hátsó futómű közelében van elhelyezve. Tápfeszültséggel látja el az érzékelőket és a hátsó futóműre szerelt beavatkozó egységet. Fogadja és kiértékeli az érzékelők jeleit.
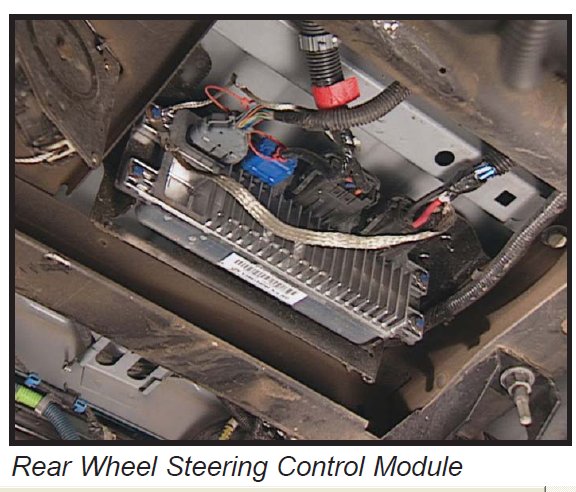
9.6.3. A hátsó kerekek elkormányzását végző beavatkozó egység
A differenciálmű közelében a hátsó futóműre szerelik fel a beavatkozó egységet. A kerékagyak közelében homokinetikus tengelycsuklókat építenek be, ami lehetővé teszi a merevhidas futóműnél egyrészt a hátsó kerekek elkormányzását a beszerelt függőcsapok körül, másrészt pedig a nyomatékátvitelt. A nyomtávrúd több tagból áll és gömbcsuklókkal kapcsolódik a kerekeknél kialakított irányító karokhoz. Az elkormányzási szöghelyzet érzékelőt a hajtó fogaskerék alsó részénél helyezik el. A villanymotor 45:1 –es bolygómű áttétellel forgatja a fogasléchez kapcsolódó kis fogaskereket. A beavatkozó egységet 3 fázisú szénkefe nélküli DC motor működteti. Forgórészét 3 db 12 V –os HALL helyzet érzékelővel is ellátják. A villanymotort relé segítségével kapcsolja be a működtető elektronika.
Az összkerék kormányzás elektronikus rendszere a TECH 2 diagnosztikai berendezéssel vizsgálható.
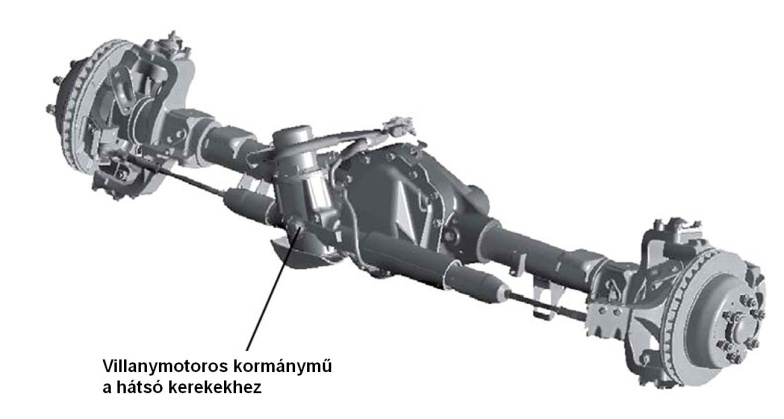
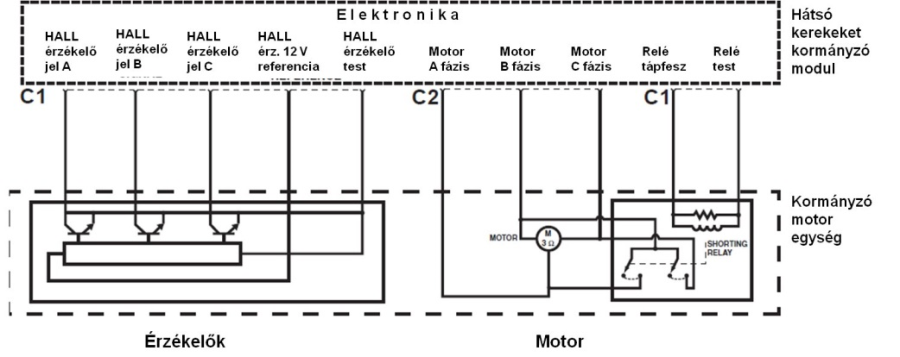
9.7. Passzív hátsó kerék kormányzás
A kanyarban ébredő oldal irányú erőt használja fel a hátsó kerekek néhány fokos szöggel történő elkormányozására, vagyis a kerekek szöghelyzetének megváltoztatására. Az előnye, hogy nagy sebességű kanyarvételnél növeli a gépkocsi stabilitását. Ellene hat az első kerék hajtású gépkocsik alulkormányozott viselkedésének. Általában független-, vagy kapcsolt hátsó kerék felfüggesztésű gépkocsiknál alkalmazzák.
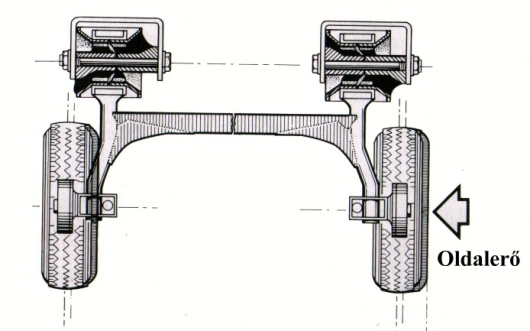
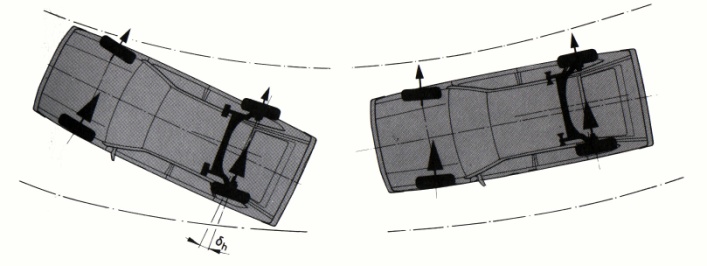
9.8. Steer - by - wire
Ez a repülőgépeknél már évek óta alkalmazott „fly-by-wire” koncepció átültetése a közúti közlekedésnek megfelelően. Ez most a közúti járműveknél azt jelentené, hogy nincs mechanikus összeköttetés a kormánykerék és a kerekek között. Az elkormányzást szervo-motorral végzik az elektronika utasításának megfelelően. A beavatkozó egységgel csak elektromos vezeték létesít kapcsolatot. Ebből ered az elnevezése is. A hagyományos kormány rendszerből néhány mechanikus elemet is felhasználhatnak. A biztonság érdekében a megkettőzött energia ellátásnak és az adat átvitelnek nagy jelentősége van. A Steer – by – wire rendszer jelenleg hatóságilag még nem engedélyezett, ezért a közúti közlekedésnél nem alkalmazható.
10. fejezet - Hidraulikus fék, ABS ASR rendszerek
- 10.1. Bevezetés és áttekintés
- 10.2. Az üzemi fékrendszert kiegészítő menetdinamikai szabályozó rendszerek
10.1. Bevezetés és áttekintés
A személygépkocsik hidraulikus fékrendszereinél alkalmazott mechatronikai alkalmazások
A fékrendszer működése révén lassítja, megállítja, illetve rögzített helyzetben tartja a járművet. Nagy jelentősége miatt a különböző országokban, és az egyes országokon átívelő nemzetközi hatósági előírások vonatkoznak rájuk. A fékrendszer a gépkocsik aktív biztonságának fontos eleme, ezért hatásosságukat és kialakításukat is rögzítik az előírások.
A személygépkocsik üzemi fékrendszerénél általában vákuumos, vagy hidraulikus rásegítővel ellátott hidraulikus féket alkalmaznak. A mechatronika alkalmazásának lehetőségei ezen a területen:
10.1.1. Az üzemi fék rásegítőinek energiaellátása
Az üzemi fék rásegítőinek energiaellátása
vákuumszivattyúk, vagy a
hidraulikaszivattyúk működtetése vezérléssel, vagy szabályozással.
Dízel motoros gépkocsiknál és villanyautóknál szükséges a vákuumszivattyú a fékezéshez az energia előállítására. Újabban már az Otto-motoros járműveknél is alkalmazzák, mert így nagyobb vákuum hozható létre. Így egyrészt kisebb lehet a vákuumos fékrásegítő átmérője és emiatt a helyigénye, másrészt pedig komfortosabbá tehető a fékezési folyamat.
A fékasszisztens alkalmazásának kezdetén a vákuumos fékrásegítőt is kiegészítették elektronikával, fékpedál elmozdulás érzékelővel és elektromágneses szeleppel. Újabban a fékasszisztens az ABS rendszer kiegészítő rendszereként valósul meg.
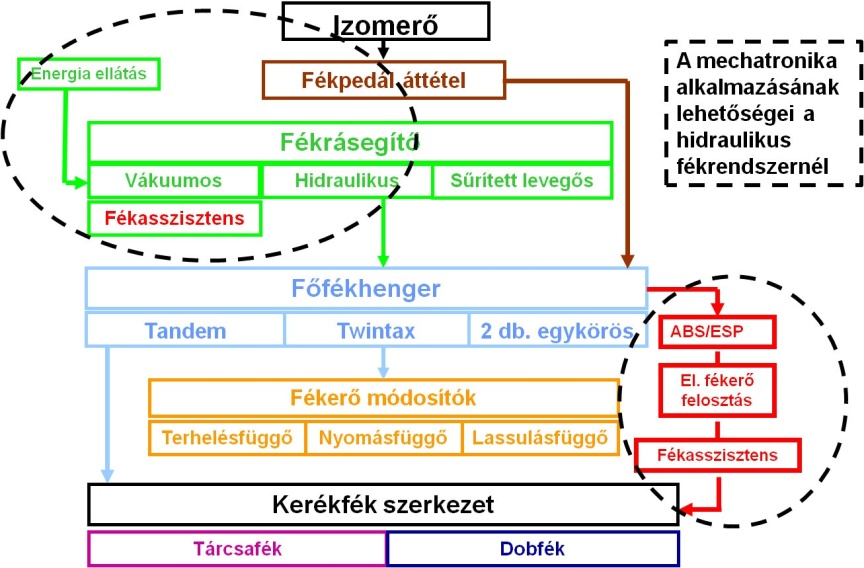
Villanymotoros vákuumszivattyú
Ez az egység a vákuumos fékrásegítő energia ellátását biztosítja. Egy egyenáramú villanymotorból és egy többnyire szárnylapátos működésű vákuumszivattyúból áll. Beépítése és működése független a belsőégésű motortól. Az excentrikus forgórészbe beillesztett lapátok forgás közben a centrifugális erő hatására felfekszenek a ház belső palástjára. A lapátok közötti folyamatosan növekvő térfogat hozza létre a vákuumot, melyet a vákuumos rásegítő működtetésére használnak fel. Elektromosan általában úgy kötik be, hogy a belsőégésű motor indítását követően néhány másodpercen belül működésbe lép a vákuumszivattyú is.
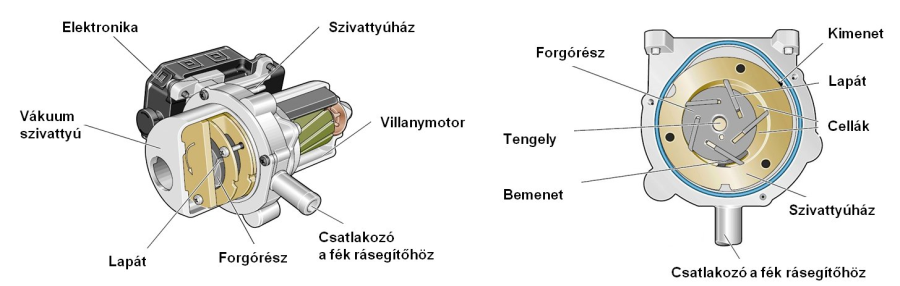
Vezérléssel működő villanymotoros vákuumszivattyú
Ennél a változatnál nem alkalmaznak nyomás érzékelőt, így tehát nincs visszacsatolás a szivattyú működéséről, melyet a motor elektronika felügyel. A vákuumos fékrásegítő által a rendszerben létrehozott nyomást az elektronika a következő működési paraméterek érzékelése alapján becsli meg:
a pillangó szelep helyzete,
a belsőégésű motor fordulatszáma,
a féklámpa kapcsoló nyitott, vagy zárt állapota.
Egy az elektronikában tárolt matematikai modell segítségével határozza meg a pillanatnyi nyomást. Ennek megfelelően a test rá-, vagy lekapcsolásával működteti a szivattyút hajtó villanymotort. Ennek a vezérlésnek természetesen egy bizonyos hiszterézise van.
Szabályozással működő villanymotoros vákuumszivattyú
Ennél a változatnál nyomásérzékelőt alkalmaznak, melyet a vákuumszivattyú és a vákuumos fékrásegítő közötti csőszakaszba kötnek be. A membrános nyomásérzékelőt az elektronika a gyújtás bekapcsolása után folyamatosan ellátja 5 V tápfeszültséggel. Az aktuális nyomás okozta membrán deformációval arányos feszültség jelet a működtető elektronika folyamatosan kiértékeli és összehasonlítja az eltárolt szükséges értékkel. Ennek megfelelően működteti a szivattyút. A működési jelleggörbe az elektronikában el van tárolva. Ha a nyomásérzékelő meghibásodik, az elektronika automatikusan átkapcsol a vezérelt üzemmódra.
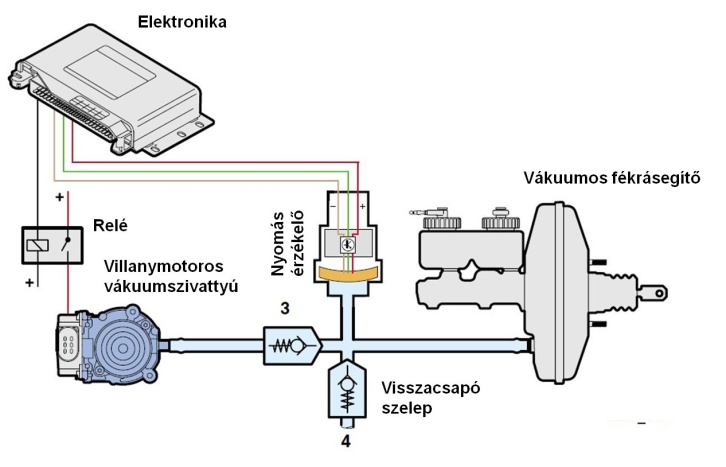
10.1.2. Hidraulikus rásegítővel működő fékrendszer
A Toyota Prius Hibrid hajtású gépkocsinál nem vákuumos, hanem hidraulikus fékrásegítőt alkalmaznak. A gépkocsi harmadik generációjának fékrendszerét a gyártója ECB-3 –nak nevezi az angol Electronic Controlled Brake megnevezés alapján. A Japán Aisin a beszállítója a rendszer fontosabb elemeinek. A fékrendszer a kerékfékszerkezeteken kívül két egységből áll:
Kompakt fékező egység az elektromágneses szelepekkel és az elektronikával.
Villanymotorból, szivattyúból, és nyomástárolóból álló egység.
A hidraulikus tápegységnél villanymotorral hajtott szivattyú hozza létre a fékezéshez szükséges rásegítő nyomást és egy nyomástárolót is felszerelnek az egységre. A villanymotorral hajtott hidraulika szivattyút a nyomáskapcsolók működtetik.
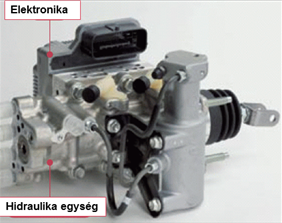
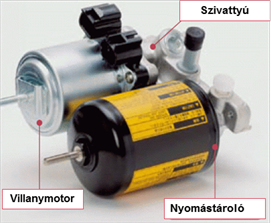
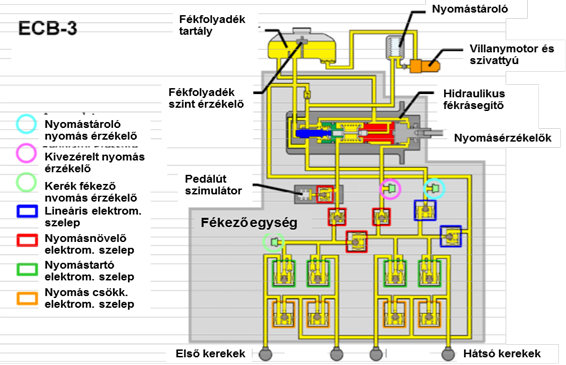
A fékezési folyamat úgy zajlik a Toyota Prius III -nál, hogy a fékpedál lenyomásakor a kialakult nyomást az érzékelő megméri, és az értéket továbbítja az elektronikának. Ez a vezető szándékának megfelelő teljes fékerő. Ebből az elektronika kikalkulálja, hogy mekkora fékező nyomaték valósítható meg regeneratív módon. A parancs kiadása után megméri, hogy ténylegesen mekkora az így megvalósult fékerő hányad. Ezután meghatározza, hogy a hidraulikus fékrendszernél mekkora fékező nyomás szükséges. Ezt felosztja az elő-, és a hátsó futóműnek megfelelő értékre. Ennek megfelelően elektromágneses szelepekkel módosítja a vezető által létrehozott nyomást az első és a hátsó futómű kerekeinél. Tehát a teljes fékerő két részből tevődik össze, a regeneratív és a hidraulikus fékerőből. Regeneratív fékezés természetesen csak a hajtott kerekeknél lehetséges. Az előbbiekben vázolt folyamat természetesen a valóságban a másodperc töredéke alatt zajlik le.
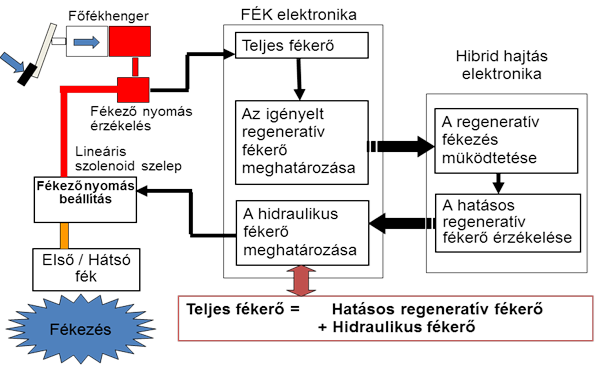
10.1.3. A hibrid és villanyautók kétféle fékezési lehetősége
Hagyományos súrlódásos fékkel, általában hidraulikus működtetéssel.
Energia visszatáplálásos fékezéssel.
Ez utóbbi az előnyösebb, mert a gépkocsi mozgási energiáját át tudja alakítani másfajta energiává, mely újra hasznosíthatóvá válik. Az a hátránya viszont, hogy csupán a gépkocsi lassításra alkalmas. A teljes megálláshoz, illetve a rögzítve tartáshoz súrlódásos fékre van szükség. A kétféle fékezési mód összehangolását elektronika segítségével lehet megvalósítani.
Energia visszatáplálásos fékezés
A gépkocsi menetciklusait megvizsgálva látható, hogy az energia visszatáplálásos fékezésnél lényegesen rövidebb ideig működik a hidraulikus fék berendezés. A gyorsításra felhasznált energia egy részét vissza lehet nyerni. Ezért a gépkocsi üzemeltetése gazdaságosabb lesz.
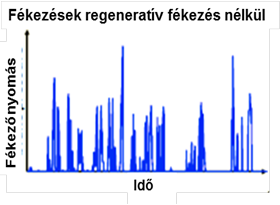
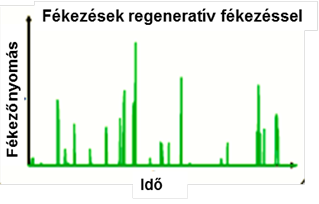
A menetciklus egyes szakaszai a gépkocsi felgyorsításából, állandó sebességű haladásból lassításból és megállásból tevődnek össze. A gyorsítás során felhasznált energia arra fordítódik, hogy le lehessen győzni a tehetetlenségi erőket, a gördülési ellenállást és a légellenállást.
A tömegtehetetlenség legyőzéséhez szükséges motor teljesítmény:
|
|

A légellenállás legyőzéséhez szükséges motor teljesítmény:
|
|
A gördülési ellenállás legyőzéséhez szükséges motor teljesítmény:
|
|

Ebből az energiából a következő lassításnál viszont csak a tehetetlenségi erővel arányos energia nyerhető vissza a generátoros fékezés segítségével.
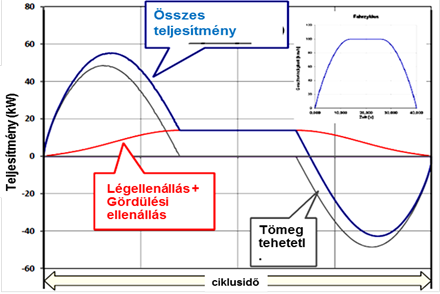
Az energia visszanyerési potenciál (E p ) a gyorsításhoz befektetett és a lassításnál visszanyerhető energia hányadosa:
|
|

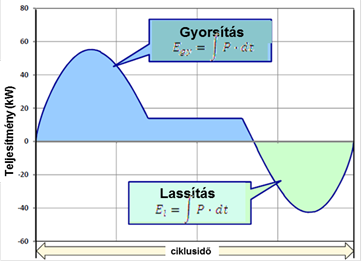
Az energia visszatáplálásos fékezés megvalósításának lehetőségei:
A hibrid, vagy villany autók fékezésénél az egyes futóművek közötti fékerő felosztáson kívül azt is figyelembe kell venni, hogy mely kerekek a hajtottak. A hidraulikus és a generátoros fékezés között is meg kell találni az optimális fékerő arányt. Ezt szemlélteti az alábbi ábra.
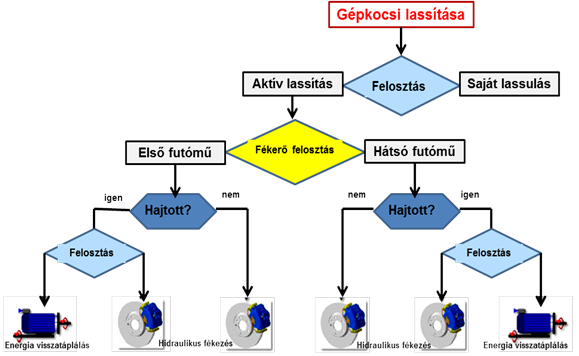
Az energia visszatáplálásos fékezéseknél különböző veszteségekkel is számolni kell. A teljes mozgási energia nem használható fel a generátor hajtására a súrlódásos és a ventillációs veszteségek miatt. Az akkumulátorban történő energia tárolásnál is kell veszteséggel számolni. Ezek miatt az újrahasznosítható energia kisebb, mint a gépkocsi mozgási energiája volt a fékezés pillanatában. Jelenleg a tervezéseknél 75% -os hatásfokot szoktak figyelembe venni az energia újrahasznosításnál.
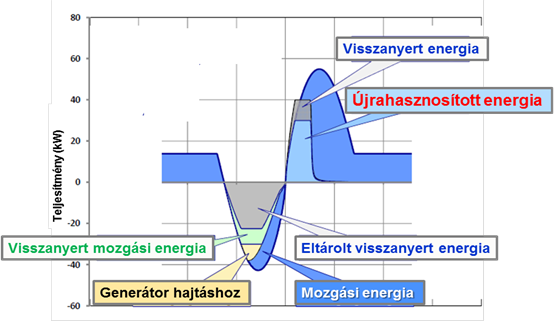
A jelenleg megvalósított hibrid hajtás változatok:
mild hibrid, - többnyire egyszerű „start-stopp” működést tesz lehetővé
mikro hibrid - lehetővé teszi az energia visszatáplálásos fékezést és gyorsításkor a rásegítést
full hibrid – ennél a változatnál már tisztán elektromos hajtás is lehetséges.
Ez utóbbiak lehetnek soros és párhuzamos hibridek is.
A hibrid hajtású gépkocsikat, mint például a Toyota Prius is ECB (Electronically Controlled Brake) elektronikusan szabályozott fékrendszert építenek be, mely egyesíti a kétféle fékezés lehetőségét. A 2001 – 2003 között gyártott változatok hidraulikus fékrendszerét ABS -el és elektronikus fékerő felosztással is ellátták. A 2004 után gyártottaknál már olyan ESP rendszert szereltek be, mely az elektromechanikus szervokormányon keresztüli beavatkozásra is alkalmas, továbbá az elektronikus fékerő felosztáson kívül fékasszisztenssel is kiegészült.
A Toyota Prius -ba a belsőégésű motoron kívül két villamos gépet szerelnek, Az egyik rendszerint generátorként, a másik motorként működik. A három erőforrás között egy bolygóműves egység létesít kapcsolatot. A csomagtartóban helyezik el a 300 V névleges feszültségű akkumulátor egység. A három fázisú váltakozó áramú gép miatt inverre és transzformátorra is szükség van. A gépkocsiba beépített egyéb elektromos rendszerek a szokásos módon 12 V feszültséggel működnek, ezért egy normál akkumulátor sem nélkülözhető ennél a gépkocsinál.
10.1.3.1. Fékezés hagyományos hidraulikus fékrendszerrel
Ez a többi személygépkocsinál alkalmazott hidraulikus féknek megfelelően működik és mind a négy kerékre hat. A fékrendszer kiegészülhet ABS, illetve ESP szabályozással is. Az ABS, vagy az ESP meghibásodása esetén annak ellenőrző lámpája folyamatosan világít. A normál fékrendszer ilyenkor is működőképes marad. A Toyota Prius -nál hidraulikus fékrásegítőt alkalmaznak, mely fékezéskor hatékonyan csökkenti a szükséges pedálerőt. A nyomás energiát villanymotorral hajtott hidraulika szivattyú és nyomástároló biztosítja. A szivattyút hajtó villanymotort nyomáskapcsolók vezérlik. A hidraulikus rásegítő vezérlő egységét és a munkahengerét a főfékhengerre szerelik. A 2004 utáni modellnél a fékpedálhoz hidraulikus pedálút szimulátort is beszerelnek. Ezen található az elmozdulás érzékelő, amely a fékasszisztens működéshez szükséges.
Más hibrid autóknál alkalmazhatnak vákuumos fékrásegítőt is. Ilyen esetben villanymotoros hajtású vákuumszivattyút és nyomástárolót építenek be. Ha a fékrendszer energiaellátásában rendellenesség lép fel, pl. hiba a szivattyú villanymotorjának áramkörében, vagy nem megfelelő a rendszernyomás, a piros színű fék kontrollámpa világítása figyelmezteti a vezetőt és sípoló hangjelzés is hallható.
A hidraulikus fékrendszer általában az intenzív fékezéseknél aktív. A fékpedál elmozdulását és a lenyomási sebességét érzékeli az elektronika és ez alapján dönt a fékezés módjáról. A hidraulikus fékrendszernél a kerekeket tárcsafékek lassítják. Valamennyi kerékagynál fordulatszám érzékelőt is beépítenek. A rögzítő fék a Toyota Prius –nál a féktárcsa agy részébe beszerelt szimplex dobfék, mely egy külön elhelyezett, a többinél kisebb pedállal működtethető és oldható.
10.1.3.2. Energia visszatáplálásos fékezés
A fék elektronika a leggyakrabban, amikor nincs szükség vészfékezésre, az energia visszatáplálásos fékezést működteti. Ilyenkor az elektromos hajtó motor generátorként üzemel, mely természetesen csak a hajtott kerekek fékezésére képes. Az így létrehozott három fázisú 300 V os névleges értékű váltakozó áramot a konverter alakítja egyenárammá és transzformálja is. A 2004 utáni változatba a 12 V –os akkumulátor töltéséhez 28 db kondenzátorból összeállított telepet is beépítenek a gépkocsi csomagtartójába. Ez a töltőáram csúcsokat hivatott kissé kisimítani. Így valósítják meg a normál akkumulátor töltését. A regeneratív fékezés akkor valósul meg, amikor a fékpedált a gépkocsivezető nem hirtelen nyomja le. Az akkumulátor töltésére pillanatnyilag 21 kWh energia fordítható. A fékezések java részénél ennyi energia jön létre. Az ennél nagyobb energia, ha szükségessé válik a súrlódásos fékkel alakítandó hővé úgy, mint a többi gépkocsinál. A két fékrendszer működését az elektronika hangolja össze. Ha a regeneratív fékezés meghibásodik, csak a hidraulikus fékrendszer lassítja a gépkocsit.
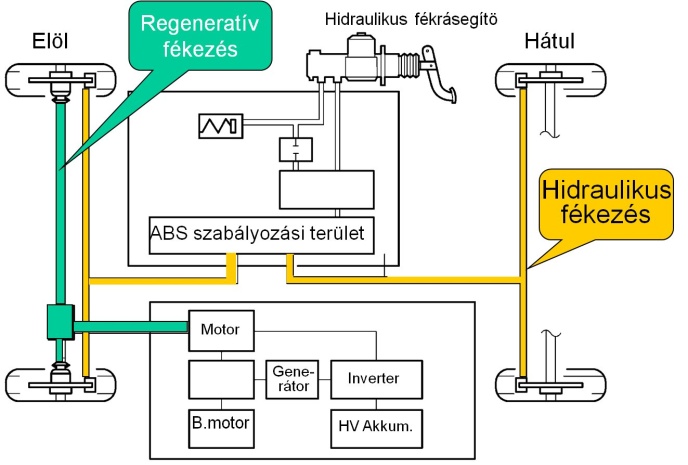
A kétféle fékezés összehangolása
A kétféle fékezés lehetőségét a fék elektronika úgy hangolja össze, hogy a lehető legnagyobb energia hányad fordítódhasson az akkumulátorok töltésre. A kétféle fékerő összege pedig mindenkor meg kell feleljen a gépkocsivezető lassítási igényének. Ezt az információt a fékpedál elmozdulás érzékelője közvetíti az elektronikának. A fék elektronika a kerekeknél lévő munkahengerekben a nyomást növelni, vagy csökkenteni is tudja úgy, hogy a fékezés közbeni stabilitásnak és a lassítási igénynek is megfeleljen. A fékerők megosztása függ a gépkocsi sebességétől és a fékezés időtartamától is.
10.1.3.3. Mitsubishi i-MiEV (2011) villanyautó fékrendszere
Ennek a gépkocsinak nincs belsőégésű motorja. Az erőforrása a csomagtartó alá szerelt, tekercselt álló részű, állandó mágneses forgórészű háromfázisú, 49 kW teljesítményű vízhűtéses szinkronmotor. Legnagyobb nyomatéka 180 Nm, maximális fordulatszáma 8500 f/perc. Lassító áttételen keresztül hajtja a hátsó futómű differenciálművét. Az energia tárolására 330 V névleges feszültségű lithium-ion akkumulátor egységet építenek be. Kapacitása 16 kWh. Az ülések alatt található. Az akkumulátor egység egyenáramú tápfeszültségét az inverter alakítja át váltakozó árammá. Az Inverterbe 6db szigetelt bázisú bipoláris tranzisztort (IGBT) szerelnek. Ezeknek a megfelelő sorrendben való átkapcsolása az egyenáramot 3 fázisú váltakozó árammá alakítja át. Az invertert a motor mellett a csomagtartó alatti térben helyezték el.
A fékrendszer
A gépkocsi összetett fékrendszerrel látták el. A pedálműködésnek megfelelően az EU fék előírás szerinti fékerőket hoz létre
a hidraulikus fékrendszer
energia visszatáplálásos fékezés valósul meg a hajtott kerekeknél, mellyel az akkumulátorok tölthetők.
A mechanikus működésű fékasszisztens, és az ESP az európai kivitelek alapfelszereltségéhez tartozik. Azért, mert ebbe a gépkocsiba nem szereltek belsőégésű motort, a vákuumos fékrásegítő energia ellátását a csomagtartó alatt elhelyezett villanymotoros vákuumszivattyú biztosítja.

Nyomásérzékelő jele alapján valósul meg a hajtó villanymotor vezérlése.
Mechanikus fékasszisztenssel kiegészített 9” –os vákuumos fékrásegítőt szerelnek a gépkocsiba. Ennek köszönhetően hirtelen fékpedál lenyomás esetén a lehető legnagyobb rásegítés valósul meg. A fékpedálra egy gyárilag beállított elmozdulás érzékelőt szerelnek.
Az első kerekeknél 257 mm átmérőjű hűtött féktárcsákat alkalmaznak. A munkahenger dugattyújának átmérője 51,1 mm. A hátsó kerekeknél dobféket találunk. A fékdob átmérője 203 mm, a munkahenger átmérője 19 mm.
A Mitsubishi az európai fogalmak szerinti ESP rendszert ASC -nek (Automatic Stability Control) nevezi. Az ESP rendszer rész működése a blokkolásgátló (ABS) és a kipörgésgátló (ASR). Ha a gépkocsi alul-, illetve túlkormányzott módon viselkedik, differenciális fékezéssel és hajtó motor nyomaték csökkentésével avatkozik be. Az ESP és az ASR működés a műszerfal bal oldalán elhelyezett kapcsolóval kikapcsolható. Ez az állapotot ellenőrző lámpa jelzi vissza.
Az energia visszatáplálásos fékezés
Az inverter segítségével a váltakozó áram fázisainak felcserélésével a lassító fékezés valósul meg, a villanymotor ilyenkor generátorként működik. Áramot fejleszt, amivel az akkumulátorok az inverteren keresztül tölthetők. Ezt nevezzük regeneratív fékezésnek. A visszatáplálásos fékezés nyomatékát az EV elektronika szabályozza a fékpedál elmozdulás érzékelő jele alapján. Ez az elektronika az ESP elektronika részét képezi. Amikor az ESP rendszer működik csökkenti az energia visszatáplálásos fékezés nyomatékát.
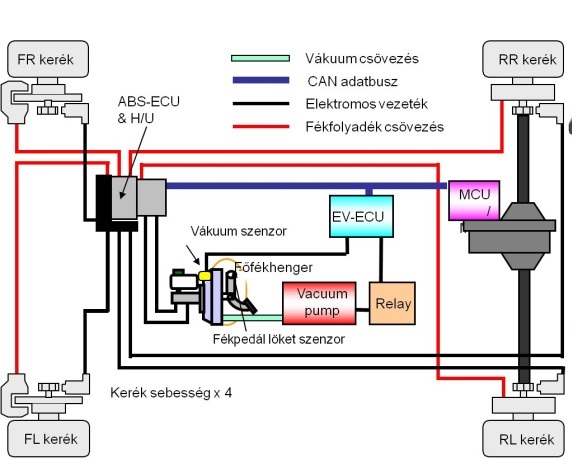
10.1.4. i Booster az elektromechanikus fékrásegítő
2013 –ban az IAA –n (nemzetközi automobil kiállítás) Frankfurtban mutatták be. A Robert Bosch GmBH ezt az új elektromechanikus fékrásegítőt elsősorban hibrid, illetve villany autókhoz fejlesztette ki, de jól használhatók a hagyományos kivitelű személygépkocsikhoz is. Előnye az, hogy kedvező együttműködésre képes a különböző asszisztens rendszerekkel. Gyártója az Automotive Technology, a Bosch Csoport legnagyobb tagja. 2013 –ban kezdték el a sorozatgyártást. Ez a változat nélkülözi a vákuumot és a hidraulikát. Közös egységet alkot:
- az elektronikus kommutációjú villany motor,
- a mechanikus hajtómű egység,
- az elektronika és a
- két körös főfékhenger.
Elsősorban az európai személygépkocsikba fogják beszerelni. Mivel a személygépkocsikban egyre szélesebb körben alkalmazzák a start/stop rendszereket egyre nagyobb a jelentősége ennek a rásegítőnek, hiszen az elektromos hálózat biztosítja az energia ellátását.
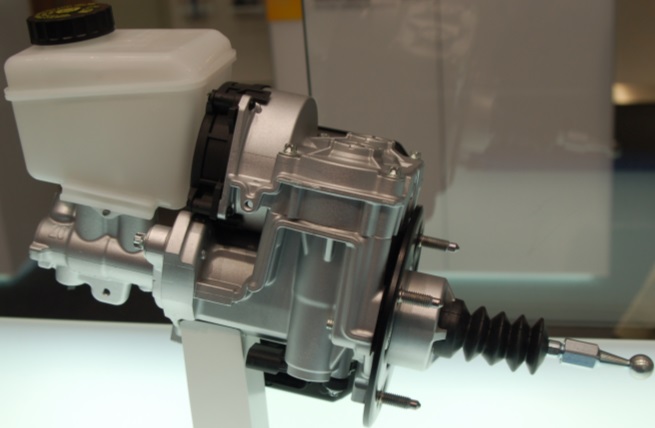
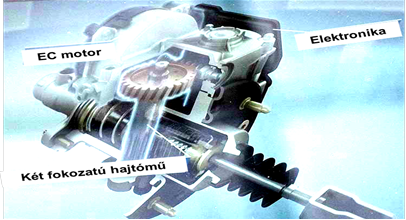
Műszaki jellemzők:
Az iBooster nyomáskivezérlése háromszor gyorsabb, mint a hagyományos vákuumos fékrásegítőé.
Rásegítő erő 5,5 kN (megfelel a 8+9” –os vákuumos fékrásegítőnek)
Működési feszültség > 9,8 V –nál.
Helyigény megfelel a 8+9” –os vákuumos fékrásegítőének.
Tömege 5 kg
Áramfelvétel: 10 bar –onként 1 A.
Motor teljesítmény 300 W.
Bemutatásakor elsősorban az Audi A4 –hez és az Opel Ampera –hoz ajánlották.
Ha például a gépkocsiba szerelt „emergency braking system” veszély helyzetet ismer fel a teljes fékezéshez szükséges nyomás 120 ms –on belül a vezetőtől függetlenül önállóan kivezérlődik.
10.1.5. Continental Teves MK C1 az integrált fékrendszer
Az elmúlt időszakban a személygépkocsik fékrendszerének fejlesztésénél a következő tendenciák tapasztalhatók:
Az ESP beszerelése a középkategóriás gépkocsikba csaknem széria felszereltséggé vált.
Az ACC (Automatic Cruise Control) a követési távolság szabályozó rendszer beépítése egyre szélesebb körben elterjedt.
A belsőégésű motoroknál a szívócső légtorkában keletkezett vákuum felhasználása helyett egyre szélesebb körben a villanymotoros vákuumszivattyút alkalmazzák.
A mikro-hibrid és az elektromos hajtású gépkocsik száma fokozatosan növekszik.
Az autógyárak törekszenek gépkocsiknál az optimális lassítás megvalósítására és a fékezési komfort növelésére.
A városi forgalomban egyre nagyobb jelentőséget kap a gázolásos baleseteknél a gyalogosvédelem.
A Continentel Teves által kifejlesztett integrális fékrendszer az MK C1 egyesíti a főfékhenger, a fékrásegítő, az ABS illetve az ESP fékezőnyomás modulátor működését egy kompakt egységben a működtető elektronikával egybeépítve. Ezt a fékező egységet a kis tömeg (4 kg) és kis helyigény jellemzi. Működéséhez nem szükséges vákuum. Hasonló fékhatás valósít meg, mint ami egy 8”/9” vákuumos fékrásegítővel érhető el.
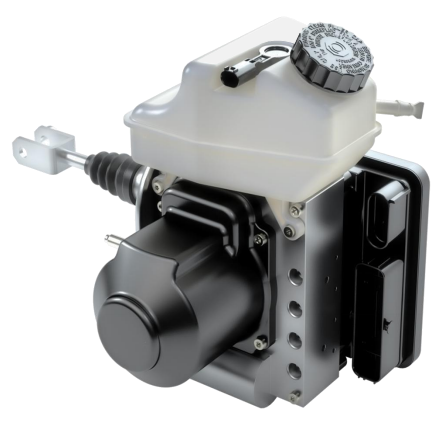
Az Mk C1 rendszer részegységei:
A beépített hidraulikus fékrásegítő
Szénkefe nélküli villanymotor nagy dinamikával, csavarorsó-csavaranya hajtással mozdítja el a rásegítő dugattyúját és ezzel létrehozza a fékező nyomást. Az elmozdulásról elektromos érzékelő ad visszajelzést az elektronikának. Ezzel az egységgel 500 bar/sec fékezőnyomás kivezérlés érhető el mind a négy keréknél.
A fékrásegítő működése hidraulikus pulzáció-, és zajmentes.
Minden hőmérsékleten nagy dinamikával működik. 150 ms-on belül teljes fékezőnyomás kivezérlés, a blokkolási határig megtörténik.
Hatékony és precíz működés jellemzi.
Hosszú élettartam.
Pedálút szimulátor
Ez a hidraulikaegység részét képezi. Egy szeleppel a hidraulikarendszerhez hozzákapcsolható, és lekapcsolható (meghibásodás esetén). Lehetővé teszi a gyártó által beállított biztonságos és komfortos fékpedál karakterisztika megvalósulását.
Kétkörös tandem főfékhenger (TMC)
Kis átmérőjű kétkörös tandem főfékhenger (Tandem Master Cylinder), elektromos hiba esetén, például amikor nincs tápfeszültség, is kis működtető erőt igényel és nagy lassulás megvalósulását teszi lehetővé. 500 N pedálerőnél 6,44 m/s2 lassulás érhető el. Az ehhez szükséges fékpedál elmozdulás 100 mm. Az így elérhető lassulás érték jóval meghaladja a hatóság által a biztonsági fékre előírt értéket. A kivezérelt fékezőnyomásokat elektromos érzékelők jelzik vissza az elektronikának.
Elektromágneses szelepek
Ezeket a szelepeket a közvetlenül a fékezőegységre szerelt elektronika működteti. Az egyik elektromágneses szelepcsoport a kerekek egyedi fékezőnyomás modulációját teszi lehetővé az ABS/ASR és az ESP működésnél. Ehhez 4 db. nyomásnövelő és 4 db. nyomáscsökkentő szelep szükséges.
A másik elektromágneses szelepcsoport a brake by wire, és a biztonsági fék működésekhez szükségesek. 2 db fékrásegítőt a rendszerhez kapcsoló szelep és 2 db. elzáró szelepet építenek be.
Elektronika
A működtető elektronikát is a hidraulika egységre szerelik. Ez biztosítja a fékrásegítőt működtető villanymotor áramellátását. Működés közben fogadja a nyomás-, és az elmozdulás érzékelők jeleit. Az ABS/ASR és az ESP rendszer működtetését is ez az elektronika végzi, továbbá a teljes rendszer működését felügyeli. Ellátták hibakód tárolóval is.
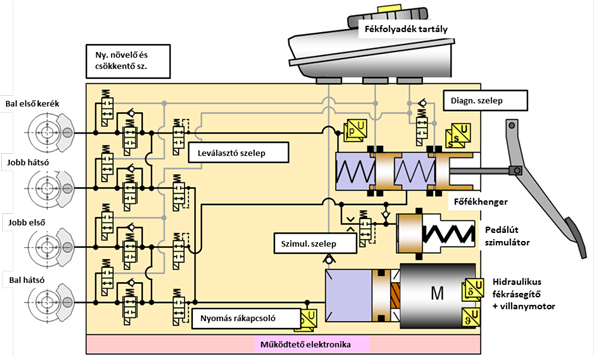
Az elektromos rögzítő fék (EPB) működtetés
Ez a fékező egység alkalmas az elektronikus rögzítő fék DSe akuktuátoránál az elektromechanikus befékezésre és az oldásra, ha a gépkocsi sebessége kisebb 3 km/h –nál.
Dinamikus fékezés és vészfékezés
Amikor a gépkocsi sebessége nagyobb 3 km/h –nál az aktív fékrásegítővel megvalósítható az üzemi fék működtetése.
Drive Away Release
Az elektronika felismeri a vezető elindulási szándékát és automatikusan oldja az elektromechanikus rögzítő féket.
Opcionális működési lehetőségek:
A CAN hálózaton keresztül érkező külső fékezési parancsok fogadására is képes és hatására megvalósul a befékezés.
Működése:
Amikor a gépkocsivezető a fékpedálra lép, a nyomásérzékelő jelére gerjesztő áramot kap a fékrásegítőt működtető villanymotor. Az áttétel és a csavaranya – csavarorsó áttételen keresztül elmozdítja a tandem rendszerű hidraulikus egység dugattyúit és ezzel létrehozza a rásegítő nyomást. Az egyes kerekek fék munkahengereiben a fékező nyomásokat a pillanatnyilag fennálló tapadási tényezőnek megfelelően az elektromágneses szelepek állítják be. A kerekek mozgásállapotát az ABS rendszereknél használatos kerékfordulatszám érzékelők jelzik vissza az elektronikának, mely alapján működik a nyomás moduláció fékezés közben. Ha a vezető kissé visszaengedve a fékpedált, csökkenti a fékező nyomást, a nyomás érzékelő jelére az elektronika ellentétes polaritású gerjesztő áramot kapcsol a rásegítő villanymotorjára, az visszafelé mozgatja a dugattyúkat és ezzel csökkenti a rásegítő nyomást. Ehhez hasonlóan történik a teljes fékoldáskor a fékező nyomás megszűntetése.
Ha a gépkocsi fékrendszerét az ABS kerékfordulatszám érzékelőkön kívül kiegészítik az ESP rendszereknél használatos speciális érzékelőkkel: kormánykerék elfordítás érzékelő, perdülési sebesség és kereszt irányú gyorsulás érzékelő, az MK C1 is alkalmas ESP működésre.
A következő ábra diagramja az MK C1 integrális fékrendszer működési jellemzőit mutatja hibátlan és meghibásodás miatt kikapcsolt állapotban.
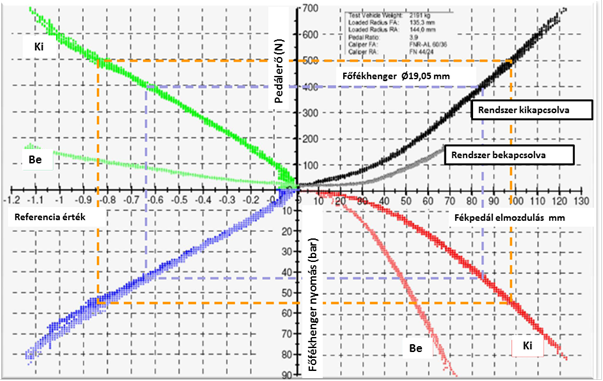
Gyalogos védelem és az MK C1 fékrendszer
Ennél az új fékrendszernél a külső fékezési parancsok fogadására vonatkozó működésre jó példa az alábbiakban leírt, kedvező eredményeket adó kísérlet. Az EU előírásainak megfelelően egyre nagyobb figyelem irányul a gyalogosok védelmére. Az első lökhárítóba szerelt érzékelő, mely a gázolás pillanatában aktiválja a motorháztetőt kissé megemelő egységet és az első szélvédőre kívülről ráterülő légzsákot, a vezetőtől függetlenül aktiválni tudja ezt a fékrendszert is.

Az így végrehajtott vészfékezés 20˚C környezeti hőmérsékletnél megállítja a gépkocsit,-30 ˚C környezeti hőmérsékleten pedig a sebességét 15 km/h sebességre mérsékli. Az első esetben az elgázolt személy sérülése a MAIS 1 fokozatba sorolható könnyű sérülés. A második esetben pedig MAIS 2 – 4 fokozatba sorolható közepesen súlyos sérülés. Ezek a 66 km/h sebességgel végrehajtott gázolási kísérletek fékezés nélküli esetekben, vagy amikor a vezető fékezett, az elgázolt dummykkal kiértékelve MAIS 5 – 6 fokozatúak, tehát halálos kimenetelűek.
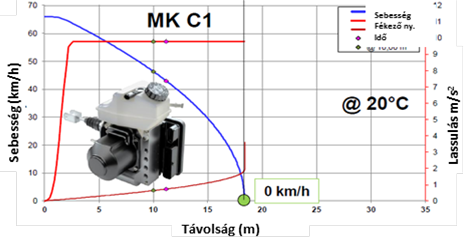
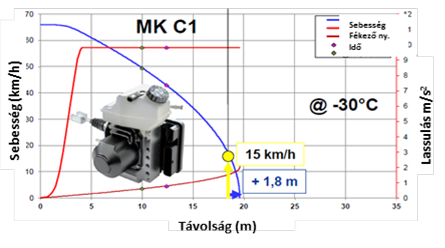
10.1.6. Ellenőrző kérdések
A személygépkocsik üzemi fék berendezéseinél milyen feladatokra alkalmazzák a mechatronikát?
Ismertesse a vezérléssel működő villanymotoros vákuumszivattyú működését!
Ismertesse a szabályozással működő villanymotoros vákuumszivattyú működését!
Ismertesse a hibrid autók fékezési lehetőségeit!
Mi hangolja össze és hogyan a hibrid autók kétféle fékezési módját?
Mi a különbség a „mild hibrid”, a „mikro hibrid” és a „full hibrid” autók között?
Foglalja össze a személygépkocsik fékrendszerének elemeit, megnevezve a mechatronika alkalmazásának lehetőségeit!
Hogyan működik az energia visszatáplálásos fékezés?
Foglalja össze a Robert Bosch GmBH iBooster mechanikus fékrásegítő működési elvét és előnyeit!
Foglalja össze a Continental Teves MK C1 integrális fékrendszer működési elvét és előnyeit!
10.2. Az üzemi fékrendszert kiegészítő menetdinamikai szabályozó rendszerek
Az első, már digitális elektronikát alkalmazó elektronikus menetdinamikai szabályozó rendszer, a blokkolásgátló volt. Sorozatos beépítése a személygépkocsik hidraulikus fékrendszerébe 1978-ban kezdődött. Az elektronika folyamatos fejlesztése révén tömege folyamatosan csökkent, az elektronika teljesítőképessége egyre bővült és műveleti sebessége fokozódott. Lehetővé vált az is, hogy bizonyos peremfeltételek teljesülése alapján más algoritmusokkal különböző újabb és újabb elektronikus szabályozások valósulhassanak meg. Ezek az alapfeladat, az ABS működésének megtartása mellett bővítették a lehetőségeket. Leggyakrabban ezek az algoritmusok is ugyanazon érzékelők, például a kerékfordulatszám érzékelők jelei alapján működnek, de azokat más szempontok szerint értékelik ki. Ezeket a jeleket kiegészíthetik újabb információk, mint például a fékláma kapcsoló zárt, vagy nyitott állapota. Az újabb rendszerek működéséhez, mint például az ESP, kiegészítő érzékelőket is alkalmaznak, mit például a kereszt irányú gyorsulás, a fékpedál lenyomásának mértéke és gyorsasága, vagy a gépkocsi perdülési sebessége, illetve a kormánykerék elfordítása. Ezek a mechatronika segítségével megvalósított jelenleg használatos menetdinamikai szabályozó rendszerek, melyek a blokkolásgátlót egészítik ki a következők:
Vészfékezési asszisztens,
Elektronikus fékerő felosztás,
A blokkolásgátló terep fokozata,
Kerék légnyomás ellenőrző, illetve defekt előrejelző rendszer,
Elektronikus differenciálmű zár,
Kipörgés gátló rendszer,
Motor fékerő nyomaték szabályozás.
Az előzőekben felsorolt rendszerek a gépkocsi menet irányú, vagyis hosszdinamikáját képesek befolyásolni. A szintén az ABS –re épülő ESP rendszer már a gépkocsi kereszt irányú dinamikájára is hatással van. Ennek jelenleg már három féle beavatkozása is lehetséges:
A motor nyomatékának csökkentése,
Az egyik kerék szabályozott fékezése,
Kormánykorrekció az aktív szervokormány segítségével.
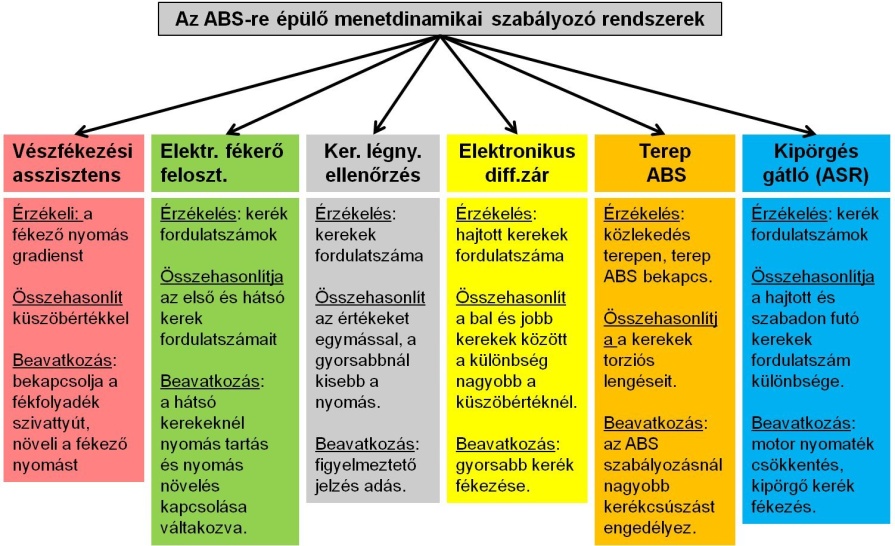
10.2.1. Személygépkocsik blokkolásgátlói
10.2.1.1. A blokkolásgátlók fejlesztésének kezdeti lépései
A Bosch ABS 1 és sajtóbemutatója 1970-ben volt. A több mint 2000 áramköri elemből összeállított analóg működésű elektronika megbízhatósága még nem volt megfelelő. Ez a rendszer még nem volt alkalmas a sorozatgyártásra. Ennek ellenére bebizonyította a blokkolásgátló előnyeit, rendkívül pozitív hatását a közlekedésbiztonságra. Az ABS –nélkül gépkocsi csúszós úton kanyarodás közben ha intenzív fékezés válik szükségessé, a blokkoló kerekek miatt megszűnik az oldalvezető erő. Ennek következménye, hogy a gépkocsi kitör, letér az útról, ezzel súlyos balesetet okoz. Ugyanilyen körülmények között ha az ABS -el felszerelt gépkocsit fékezik, kerekei nem blokkolnak. Nem éri meglepetés a gépkocsivezetőt, az autó nem tör ki, és lassulás közben is követi az út vonalvezetését. A blokkolásgátlóval ellátott gépkocsival tehát kanyarodás közben is végre lehet hajtani intenzív fékezést, méghozzá biztonságosan.

1970 –ben mutatták be az Amerikai Egyesült Államokban a mikroprocesszort. Hamarosan elkezdődött a gyártása. Szélesebb körű elterjedése újabb lendületet adott a különböző elektronikák fejlesztésének. A digitális elektronika megbízhatóvá, és gyors működésűvé tette a blokkolásgátlót is.
1978 –ban kezdődött el a Bosch ABS 2S sorozatgyártása és beépítése, kezdetben a Mercedes S osztályba, majd a Volvo 780 –as személygépkocsikba.
Ha a kerékcsúszás egy bizonyos határértéknél nagyobb, a tapadási tényező átvált a csúszó súrlódásnak megfelelő kisebb értékre. Ez okozza azt, hogy a kerék egy tized másodpercen belül blokkol. A mozgó gépkocsi és az álló kerék intenzív helyi abroncskopást eredményez. Az ABS, amely megakadályozza a kerék blokkolását, elkerülhetővé teszi a jelentős helyi kopást. Viszont a féknyom alig látható, amely megnehezíti a baleseti helyszínelést.
Az ABS tehát, mint a gépkocsik aktív biztonságának egyik fontos eleme, növeli a menetbiztonságot.
Ha működik az ABS, a gépkocsi pánikszerű fékezéskor is megőrzi kormányozhatóságát. Ezért számos baleset elkerülhetővé válik. Az esetek többségében, szilárd burkolatú úton rövidül a fékút is. Terepen, homokos, sóderos felületen, de laza friss hóban is a blokkoló kerék maga előtt a laza anyagból éket túr, ami alakzárásával csökkenti a fékutat. Ezt a jelenséget használják ki újabban az ABS terep fokozatánál, mely nagyobb kerékcsúszást engedélyez, mint a szilárd burkolaton működő algoritmus. A kezdeti alkalmazásoknál még a gépkocsivezetőre bízták az átkapcsolást. Az újabb ABS algoritmusok figyelik a kerekek torziós lengéseinek amplitúdóit és frekvenciáit, mely alapján felismeri, hogy a gépkocsi terepen közlekedik. Ilyenkor automatikusan aktiválja az ABS terep fokozati működését. Ez a lehetőség jelenleg még csak az újabb terepjáró személygépkocsiknál áll rendelkezésre.
10.2.1.2. Az ABS szabályozás
A fékezési kerékcsúszás szabályozás már a harmincas évek óta foglalkoztatja a fejlesztő mérnököket. Ez volt a diplomamunka feladata annakidején Fritz Ostwaldnak, a müncheni Egyetem fizika szakos hallgatójának. Sikeresen el is készítette a modellt, mely sűrített levegős fékkel működött és mechanikus kerécsúszás érzékelőt alkalmazott. Ez volt tehát a blokkolásgátló őse.
Az egyik lehetséges ABS szabályozási kritérium
A szabadalmakban gyakran megjelenik az ABS szabályozási kritériumaként a következő összefüggés:
|
|

Ennek sikeres alkalmazásához a fékerőt és a nyomást a teljes működési tartományban legalább 2%-os pontossággal kellene mérni. A nyomás érzékelése és mérése még nem okozna problémát, de a fékerő esetében már komoly nehézségeket kellene megoldani.
A fékezés kezdetétől számított 120 – 130 ms-on belül blokkol a kerék, ha nem történik meg a megfelelő beavatkozás. Ezért tehát nagyon gyorsan kell megvalósítani a beavatkozáshoz szükséges adatnyerést, az adat feldolgozását, és a fékező nyomás módosítását.
10.2.1.3. Gép állapot szabályozás (state machine)
Ennél a szabályozási módnál az előre meghatározott fizikai állapotok bekövetkezésekor történnek a különböző beavatkozások. Ezt a módszert évtizedeken át alkalmazták az ABS szabályozásnál. Előre meghatároznak bizonyos küszöbértékeket. Ha ezt az érzékelt a fizikai mennyiségek meghaladják, akkor történik a beavatkozás, a fékező nyomás módosítása. A blokkolásgátlónál az elektronika a kerék kerületi lassulás, vagy a kerék csúszás küszöbérték átlépésekor működteti a nyomásszabályozó elektromágneses szelepeket. A különböző gyártók több küszöbértéket is meg szoktak határozni.
A kerék kerületi lassulás alapján történő szabályozás
Az ennél a szabályozási módnál alkalmazott kerék kerületi lassulás „-b” küszöbértéke a jól tapadó úton elérhető legnagyobb lassuláshoz igazodik. Értéke általában 14 m/s2 körüli. A szabályozás működése közben azonban bizonyos veszteségidőkkel is számolni kell, melyek a következők:
Szűrési idő:
A küszöbérték elérését követően az úgynevezett „szűrési idő” alatt határozza meg az elektronika a beavatkozás szükségességét. Csak ennek elteltével történhet meg a fékező nyomás változtatása. Az érzékelőhöz tartozó, a kerékagyra szerelt póluskerék jó néhány fogának el kell mozdulnia a kerékfordulatszám érzékelő előtt ahhoz, hogy a kerületi lassulás nagy biztonsággal meghatározható legyen.
Az elektromágneses szelepek veszteség ideje:
Az elektromágneses szelepnél például a mágneses erőtér felépüléséhez és a mozgó résznél a mechanikai súrlódások legyőzéséhez például 2 – 5 ms idő szükséges.
Teljes veszteségidő:
Az ezekből az előzőekben ismertetett értékekből összeadódó teljes veszteségidő közepes jármű sebességnél 12-15 ms körüli értékű.
Az előre meghatározott „+b1” küszöbérték átlépésekor nyomásnövelés fog bekövetkezni. A „+b2” küszöbérték átlépésekor pedig nyomástartás. Ennél a szabályozási változatnál például a kanyarbelső hátsókerék kerületi lassulása jóval a „–b” küszöbérték alá csökkenhet és akár blokkolhat is, amit ez a szabályozás nem fog felismerni, csupán a küszöbérték átlépését. De az is lehetséges, hogy a küszöb átlépése után azonnal megszűnik a további lassulás. Ezek alapján megállapítható, hogy a kerületi lassulás alapján történő szabályozás egy kerékhez megfelelő lehetne, de a teljes gépkocsiéhoz már nem.
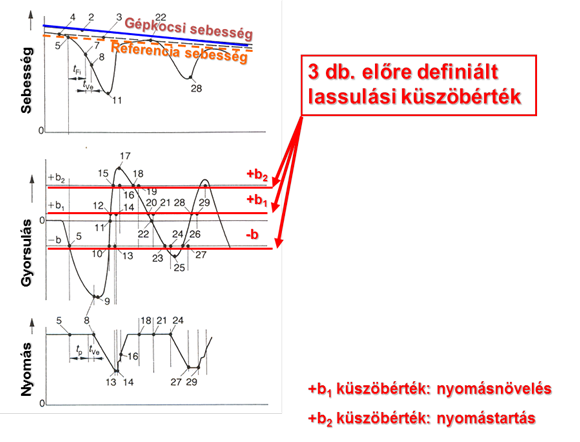
Szabályozás a kerékcsúszás alapján
Fékezéskor mindig kialakul egy bizonyos kerékcsúszás. Ezért kézenfekvő, ez alapján megvalósítani a szabályozást. A kerékcsúszás a vizsgált kerék és a gépkocsi sebességek különbségeként határozható meg, melyet a gépkocsi sebességére vonatkoztatunk.
|
|
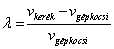
Mindkét sebesség a kerék síkjára vonatkoztatott érték. A szabadon gördülő keréknél a csúszás (szlip) 0%, a blokkoló keréknél a csúszás (szlip) 100%. A tapadási tényező egyrészt az útburkolat fajtájától, másrészt pedig az időjárási viszonyoktól, a környezeti hőmérséklettől függ. A tapadási tényező a fékezés kezdetén erőteljesen, szinte lineárisan növekszik. Ezt stabil szakasznak nevezzük. Addig tart, amíg a tapadási tényező eléri a maximális értékét.
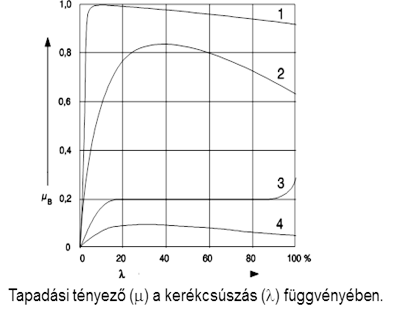
1. száraz aszfalt; 2. nedves aszfalt; 3. laza, friss hó; 4. nedves jég
A gépkocsi sebességét nem ismerjük, de lehetőség van arra, hogy viszonylag pontosan megközelítsük az értékét. Ehhez az elektronika egy bizonyos algoritmus alapján a kerekek sebességeiből meghatározza az úgynevezett referencia sebességet. Ez nem tekinthető egy matematikai átlagnak, hanem bizonyos logikai feltételeket is figyelembe vesznek. Csak így valósulhat meg egy működőképes szabályozás.
A kerékcsúszás alapján történő szabályozáshoz az elektronika a referencia sebességhez képest meghatároz egy λ 1 és egy λ 2 kerék csúszás küszöbértéket. Ez után pedig azt figyeli, hogy a kerekek csúszása mikor lépi át ezeket a küszöbértékeket. Ennél a szabályozási változatnál nagy jelentősége van a referencia sebesség pontos meghatározásának. Ha a négy kerék sebességének átlagát tekintenénk referencia sebességnek, az egyik kerék blokkolása az értéket nagyon lecsökkentené és a szabályozás működése nem lenne megfelelő. Ezért ilyen esetben egy bizonyos ideig kizárják az átlag képzésből ezt a blokkoló kerék értékét.
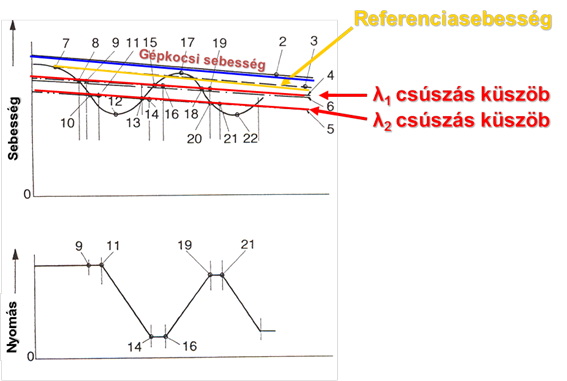
Kombinált szabályozás a kerék kerületi lassulása és a kerékcsúszás alapján
Önállóan a fentiekben ismertetett egyik szabályozás sem lenne használható egy gépkocsi ABS működéséhez. Az alkalmazható eredményesen, ha a kerék kerületi lassulás alapján-, illetve a kerékcsúszás alapján történő szabályozások kombinációját használják.
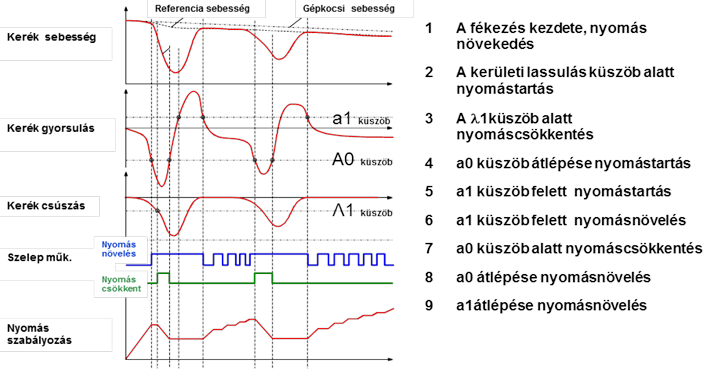
A „gép állapot” szabályozás nál az elektronika a gépkocsi pillanatnyi állapotát fizikai jellemzőinek mérése és azok bizonyos küszöbértékkel történő összehasonlítása alapján állapítja meg. Ezek az állapotok bizonyos beavatkozásokat fognak kiváltani. Ez az ABS -nél lehet az elektromágneses szelepek működtetése, vagy például a fékfolyadék szivattyú bekapcsolása. Hatásukra hirtelen változások fognak bekövetkezni. Ezeket nem csak az alkalmazott elektronikus érzékelők, hanem a gépkocsiban utazók is érzik. Az alábbi ábra szemlélteti ezt a szabályozási elvet. Bizonyos állapotokat, bizonyos beavatkozások követnek.
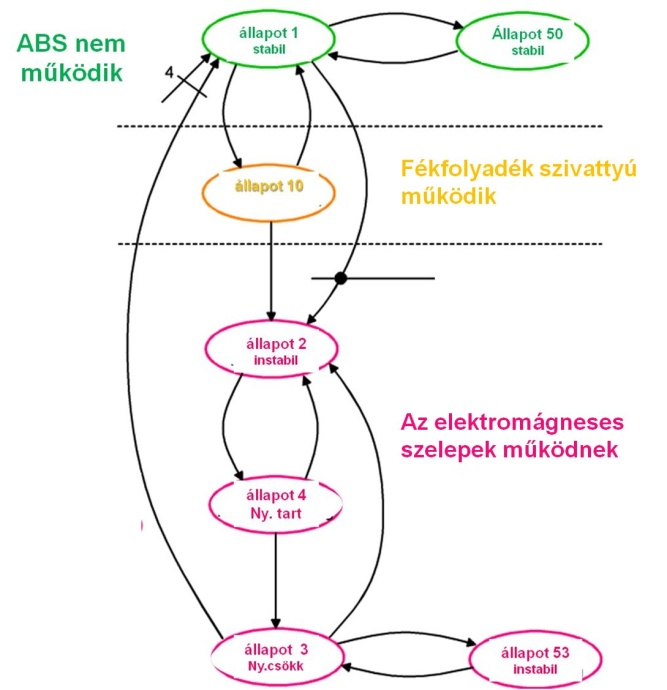
A személygépkocsik különböző futóműveinél alkalmazott beavatkozási változatok:
Egyedi szabályozás: az ABS elektronika mindegyik kerékhez a pillanatnyi tapadási tényezőnek megfelelő fékező nyomás vezérli ki. Így a lehető legrövidebb lesz fékút, de nagy perdítő nyomaték alakulhat ki, ha a jobb és a bal oldali kerekek között nagy a tapadási tényező eltérés.
Alsó szintű szabályozás: Az először megcsúszó keréknek megfelelő lesz a fékező nyomás a nagyobb tapadási tényezőjű útfelületen is. Ezért nagyon megnövekszik a fékút, viszont előnyös azért, mert a gépkocsira nem hat perdítő nyomaték. Nem alakul ki stabilitás vesztés.
Módosított egyedi szabályozás : ez a szabályozás úgy kezdődik, mint az alsó szintű, de a nagyobb tapadási tényezőjű felületen gördülő keréknél a fékező nyomást lassan fokozatosan növeli arra az értékre, amit a tapadási tényező lehetővé tesz. A gépkocsira ható perdítő nyomaték ilyenkor csak lassan, fokozatosan alakul ki. Értéke olyan, amit a vezető ellenkormányzással még képes kiegyenlíteni. Az eredmény: kedvező fékút, elfogadható és uralható perdítő nyomaték.
10.2.1.4. PID szabályozás
Az újabb ABS elektronikák már az úgynevezett PID szabályozást alkalmazzák, melynek az előnye az, hogy működése közben nem következnek be annyira drasztikus fékezőnyomás változások, mint a korábbi változatnál. Ez egyébként észlelhető fékezés közben a gépkocsi dinamikai viselkedésén is. Ennél a szabályozási módnál a kiválasztott fizikai jellemző, (itt a fékezőnyomás) integrális és differenciális tagjait számítja ki az elektronika, és veszi figyelembe a fékező nyomás pillanatnyi beállításánál, vagyis a szabályozásánál. A szabályozás elnevezése az alábbi rövidítésekből származik:
P tag (itt a fékező nyomás) = f (aktuális sebesség – cél sebesség)
I tag (integrális tag) = f (∫ (aktuális sebesség – cél sebesség)dt )
D tag (differenciális tag) = f (Δ(aktuális sebesség – cél sebesség))
10.2.1.5. A blokkolásgátló rendszer működése
A blokkolásgátlók önálló rendszerként is beszerelhetők a gépkocsikba, de jelenleg egyre gyakrabban mint az ESP rendszer egyik részműködése kerülnek alkalmazásra.
Az ABS –nek, mint elektronikus menetdinamikai szabályozó rendszernek az a feladata, hogy a kerekek blokkolását fékezés közben lehetőleg minden helyzetben, és minden körülmények között megakadályozza. Ez úgy lehetséges, hogy a kerékfékszerkezetben olyan nyomás modulációt valósít meg, ami az adott kereket a lehető leghosszabb ideig az optimális csúszás tartományban tartja. Ez az alapelv egyúttal biztosítja a kerék jó oldalvezetését is, ami az egész gépkocsi menetdinamikájára kedvező hatással van. Ezt még további különleges beavatkozásokkal lehet javítani.
Ha sikerül a kerék blokkolását megakadályozni, az a következő előnyökkel jár:
a legtöbb helyzetben megközelítőleg optimális lesz a lassulás,
a gépkocsi irányíthatósága és stabilitása fenntartható marad,
a gumiabroncs egyenlőtlen kopása elkerülhetővé válik.
Az ABS működésének megvalósításánál azonban néhány problémával szembe kell nézni. Ezek a következők:
Nem ismerjük az adott gumiabroncsra vonatkozó ideális kerékcsúszást, és így nem határozható meg a kívánatosnak tartott érték sem.
A gépkocsi pontos sebessége is ismeretlen.
Továbbá nem határozható meg az egyes kerekek pontos, valóságos csúszás sem.
A kerék blokkolásának megakadályozása így tehát nem egyszerű, de nem is megoldhatatlan feladat.
ABS szabályozás elve egy kiválasztott keréknél:
Ha az elektronika azt érzékeli, hogy fékezés közben fokozódik a kerékcsúszás, ez azt jelenti, hogy a tapadási tényező – kerékcsúszás diagramon a maximális értéket, vagyis az ideális pontot már túlléptük. Nagyon gyors, de finoman szabályozott nyomáscsökkentéssel a kerék ismét a tapadási tényező – kerékcsúszás diagram stabil tartományba gyorsítható. Ez után már csak lassan növelhető a fékező nyomás az optimális munkapontig.
További problémákkal kell megküzdeni:
Végtelenül gyors szabályzás tudná minden pontban a kerék látszólagos stabil viselkedését megvalósítani.
A tapadási tényező (µ) és a kerékcsúszás (λ) diagramon nagyon sok optimális munkapont lehetséges a
a különböző útminőségekre,
a különböző gumiabroncs változatokra vonatkozóan.
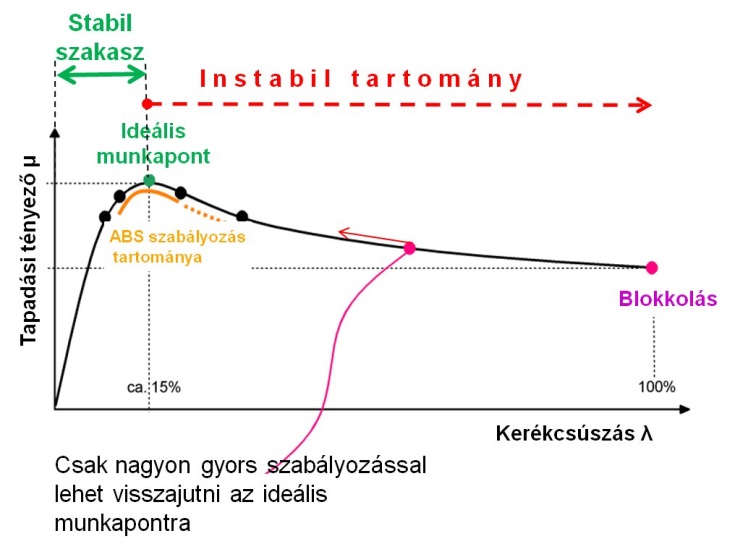
A szabályozás tapasztalati modellje
A gépkocsi az előzőekben ismertetett referenciasebességének (vref) és a különböző küszöbértékeknek a képzését az elektronika a beérkező kerékfordulatszám jelek és a tárolt adatok alapján végzi. Az említett küszöbértékek azért szükségesek, hogy:
felismerhető legyen a kerék instabil viselkedése,
a fékfolyadék szivattyú bekapcsolásához kiadható legyen az utasítás,
a nyomás modulációt végző elektromágneses szelepek működtetéséhez a jelek kiadhatók legyenek. (nyomáscsökkentő és nyomásnövelő fázisok).
A meghatározott küszöbértékek alapján működhet a kerék mozgásállapotát felismerő egység, mely a pillanatnyi „fázist” definiálja. Ez az úgynevezett „gép állapot szabályozás” alapja. Az egyes fázisoknak megfelelően történhet az ABS hidraulikaegységbe szerelt fékfolyadék szivattyú és az elektromágneses szelepek vezérlése, ami beállítja a kerekeknél a megfelelő fékező nyomást. A kerekek mozgásállapotának változásait a fordulatszám érzékelők jelei alapján tudja megállapítani az elektronika. Ez adja a szabályozáshoz a tulajdonképpeni visszacsatolást. A jelek különböző szűrőkön keresztül érkeznek, és ezekkel párhuzamosan van egy úgynevezett „stabil állapot figyelő” áramkör is bekötve.
A kerék instabil viselkedésének megítélése, és a szabályozási fázisok meghatározása a következő ismérvek alapján történik:
abszolút kerékcsúszás
keréksebesség változása
keréksebesség változás megszűrt jele
keréksebesség változás iránya
Ezeken kívül az elektronika még kiszámítja a megbecsült gépkocsi lassulást is. A referencia sebesség meghatározásánál még egyéb körülményeket is figyelembe vesz.
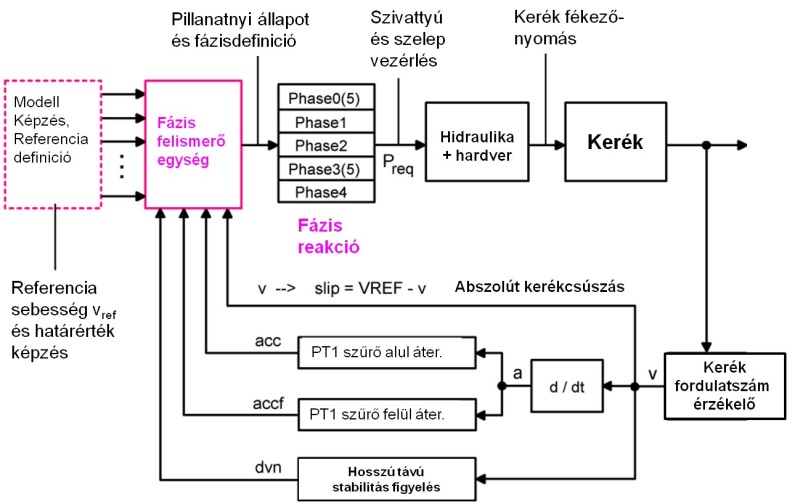
Összkerékhajtású gépkocsiknál például előfordulhat, bizonyos körülmények között, hogy mind a négy kerék kipörög. Emiatt nagyobbra adódik a referencia sebesség, ami hátrányosan befolyásolja az ABS működését, ha közvetlenül ez után történne egy intenzív fékezés. Ezt az állapotot felismeri a szoftver és a tényleges gépkocsi sebességnek megfelelően lecsökkenti a referencia sebességet a megfelelő értékre.
Blokkolási veszély esetén a beavatkozás, aszimmetrikus nyomáscsökkentés és növelés:
A gyors nyomáscsökkentés célja a blokkolási veszély további növekedésének megakadályozása, és a kerék mozgásállapotának stabilizálása.
Azért követi ezt egy lassú nyomásnövelés, hogy az optimális kerékcsúszás fokozatosan megközelíthető legyen és az optimális értéken tartása minél hosszabb ideig lehetővé váljon. A gyakorlatban alkalmazott szabályozásoknál általában az első nyomásnövelő impulzus az előző nyomáscsökkentéshez tartozó érték felével fogja növelni a fékező nyomást. Ezután a másik két nyomásnöveléssel a beavatkozás kezdetén megvalósított nyomást fogják visszaállítani, amennyiben az útfelület homogén.
ABS hidraulikaegység és a fékrendszer felépítése
Fékfolyadék szivattyú:
Az ABS hidraulikaegységbe a két fékkörnek megfelelően egy DC villanymotor által forgatott excenterrel működtetett kétkörös dugattyús fékfolyadék szivattyút építenek be. Ez szükséges ahhoz, hogy a nyomáscsökkentésekkel a fékrendszerből távozó energia pótolható legyen és felkészüljön a következő újrafékezésre. A dugattyús működés miatti nyomás lüktetését a szivattyú közelébe beépített két kis légüst csillapítja.
Elektromágneses szelepek:
A kerekenként kialakított egy - egy ABS csatornához egy nyomásnövelő és egy nyomáscsökkentő elektromágneses szelep tartozik. A nyomáscsökkentő szelep nyitásakor a fék munkahengerből kiáramló fékfolyadékot fékkörönként egy – egy kisnyomású dugattyús tároló tér fogadja. Innen juttatja vissza a szivattyú az adott fékkörbe a fékfolyadékot.
Az elektronika:
A hidraulika egységre szerelik fel a felületre szerelt technológiával készülő működtető elektronikát. A működéshez szükséges különböző algoritmusokat programosnak be.
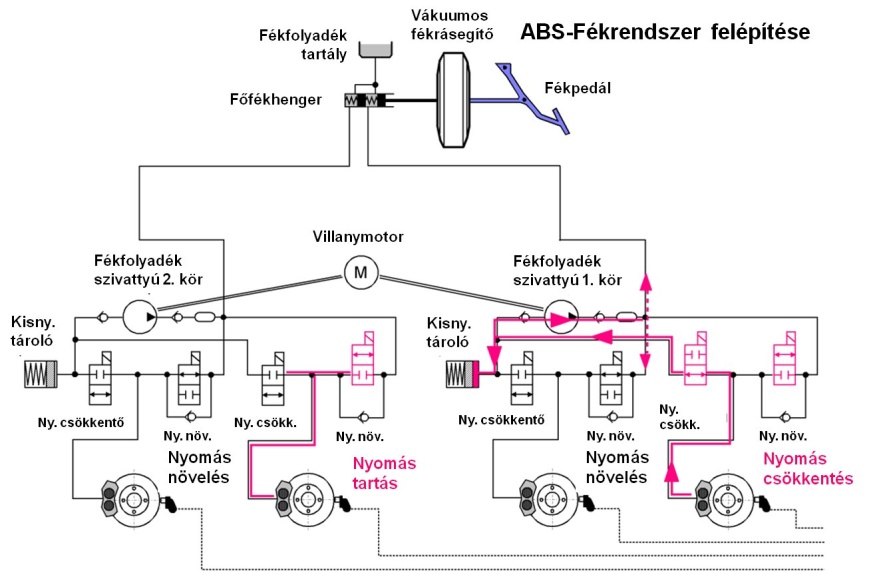
A kis tapadási tényezőjű útfelület felismerése („low µ“)
Az elektronika a kis tapadási tényezőjű útfelületet arról ismerhető fel, hogy hirtelen nagy lesz a kerékcsúszás. Ilyenkor a kerék mozgásállapotának stabilizáláshoz jelentős nyomáscsökkentés szükséges. Ez az érték elérheti a 70% -ot is.
Hirtelen átmenet kis tapadásúról nagyobb tapadású útfelületre
A kis tapadási tényezőjű útszakasz elhagyása a váratlanul bekövetkező, jelentős kerékgyorsulásról ismerhető fel. Az első kerekeknél ez az érték akár 8g –t is elérheti, a hátsó kerekeknél pedig 4g -t. Ha ez a jelenség mind a két első keréknél bekövetkezik, és utána egy bizonyos rövid időn belül a hátsóknál is tapasztalható, jelentős tapadási tényező növekedés történt. Ezt követően aztán mind a négy keréknél légyegesen kisebb lesz a kerékcsúszás mint korábban. Az alábbi ábrán a könnyebb felismerhetőség miatt a függőleges irányban a keréksebesség jelek kissé szét vannak húzva, hogy egymástól jól megkülönböztethetők legyenek. A felsők az eső két kerék sebesség jele, a két alsó a hátsó kerekeké.
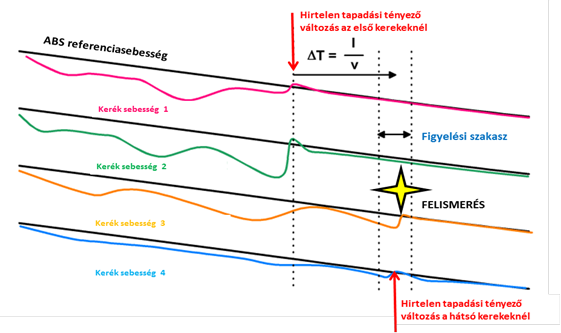
Az extrém rossz út (terep) felismerése
Rossz úton és terepen a kerék dinamikus terhelése nagyon szélsőséges értékek között változik. Arról ismerhető fel ez az állapot, hogy ilyenkor a keréksebesség változások egy bizonyos amplitúdóval, és egy bizonyos frekvencia tartományban észlelhetők. Periodikusan nagy kerékgyorsulás változások alakulnak ki anélkül, hogy azt a fékező nyomás változások indokolttá tennék.
A jelenség felismerését követően az elektronika megpróbál ilyenkor az átlagos dinamikus kerékterhelésnek és a jó útnak megfelelő, a legnagyobb tapadási tényezőnél egy kicsit kisebb értéknek megfelelő fékező nyomást beállítani és viszonylag kis nyomás modulációval hagyja a kereket lengeni.
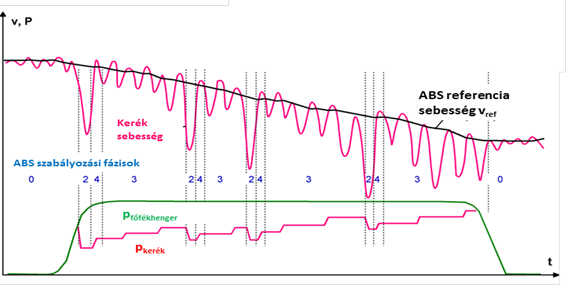
Az ABS –nek a közelmúltban alkalmazott változatainál a nagyobb kerékcsúszásokat megengedő terep fokozatát a gépkocsivezetőnek egy gomb megnyomásával kellett aktiválnia. Ebben az üzemmódban folyamatosan villog a műszerfalon elhelyezett ABS ellenőrző lámpa. Hasonló megoldásokat alkalmaztak a terepjáró személygépkocsiknál és a haszonjárműveknél is.
Az újabb ABS elektronikák az előbb ismertetett módszerrel a megfelelő program segítségével képesek a rossz út, illetve a terep felismerésére és automatikusan átkapcsolnak a terep működésre. Ha a gépkocsi átlépi a 40 km/h sebességet a visszakapcsolás a normál ABS működésre automatikusan bekövetkezik.
A teljes gépkocsi ABS szabályozása
A gépkocsi ABS szabályozása kompromisszumok árán valósulhat meg. Az ABS működése közben bizonyos esetekben, egyes kerekek alulfékezettek lesznek, mert a gépkocsi fékezés közbeni stabilitása csak így őrizhető meg, illetve a gépkocsi uralhatósága csak így javítható tovább.
Ennek érdekében a legegyszerűbb intézkedés a „Select – Low Regelung” (alsószintű szabályozás) megvalósítása. Ami a hátsó kerekek azonos, a kisebb tapadási tényezőnek megfelelő nyomással történő fékezését jelenti. Az optimális lefékezettség szempontjából azonban az alsószintű szabályozás (Select – Low Regelung) kissé „gyengített” változata valósul meg a gyakorlatban. Jól tapadó úton, egyenes meneti fékezéskor, kis sebességnél és bizonyos manővereknél a hátsó kerekeknél megváltozik az alsószintű szabályozási koncepció. Fokozatosan nyomáskülönbség fog kialakulni annak érdekében, hogy rövidülhessen a fékút.
Emellett az is fontos, hogy a gépkocsi minden esetben „kielégítően“ kormányozható maradjon. Legyen könnyen irányítható kanyarmenetben, és ne törjön ki. A cél az, hogy a gépkocsi kanyarodás közben még teljes fékezéskor is uralható legyen. A gépkocsi stabilitása kerül előtérbe ilyenkor. A különböző menetállapotokban bekövetkező reakció változó tapadási viszonyok mellett se legyen kiszámíthatatlan. Fontos, hogy a tapadási tényező hirtelen változására gyorsan reagáljon az ABS. Elkerülhető legyen a túlfékezés, és főleg a kívánatosnál gyengébb fékezés. Ne növekedjék a fékút.
További működési jellemzők:
A hátsó kerekeknél tehát kissé módosították az alsó szintű szabályozást (Select – Low Regelung). Az első futóműnél a perdítő nyomaték csökkentés módosított egyedi szabályozással valósul meg. A kis és nagy tapadási tényező átmenetére érzékeny a szabályozás.
Az újabb ABS algoritmusoknál a részleges, és teljes fékezésnél is speciális „kanyarmeneti” blokkolásgátló működés valósul meg. Ez azt jelenti, hogy a kanyar-külső és a kanyar-belső kerekeknél az eltérő dinamikus kerékterheléssel arányos fékező nyomás valósul meg. Ezt a szabályozási módot korábban a különböző Continental Teves ABS típusváltozatoknál az „ABS – plus”, az „ESBS”, vagy a „CBC” működésnek nevezték. Ezek mindegyike a kanyar-belső kerekeken egy kis fékező nyomás csökkentést állít be. A kis nyomáskülönbség egy stabilizáló nyomatékot hoz létre a gépkocsi tömegközépponti függőleges tengelye körül. Teljes fékezésnél a nyomáskülönbséget kissé növeli az elektronika. Ez az utóbbi módosított szabályozás az egyszerűbb és ezért olcsóbb úgynevezett „standard ABS” változatoknál nem valósul meg.
Az ABS rendszer részegységei
Kerékfordulatszám érzékelők
Az ABS működés szempontjából nagyon fontos a kerékfordulatszámok pontos ismerete. Az érzékelő érintésmentesen méri mindegyik kerék fordulatszámát. Az elektronika részére a jel kiértékeléséhez egy teljes kerékfordulatnál kevesebb is elegendő. Az összetettebb szabályozásokhoz azonban pontosabb jelképzés szükséges. Jelenleg kétféle kerékfordulatszám érékelőt alkalmaznak.
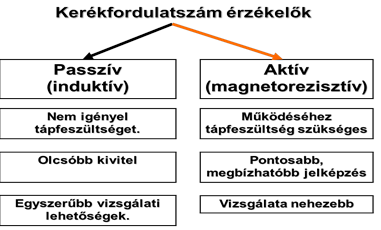
Passzív, vagyis induktív működésű kerékfordulatszám érzékelők
Állandó mágnesből, lágyvasból készült póluscsapból és az azt körülvevő tekercsből áll. A kerék forgástengelyéhez képest axiális, és radiális elhelyezésűek is lehetnek ezek az érzékelők.
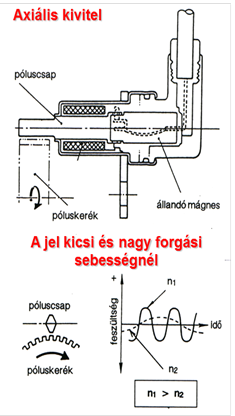
Az érzékelővel szemben a kerékagyra fogazott póluskereket szerelnek. A kerékagy forgása közben az egymást követő fogak és fogárkok az érzékelő állandó mágnes erőterének fluxusát a kerék kerületi sebességével arányosan váltakozóvá teszik. Emiatt a tekercsben a forgási sebességgel arányos frekvenciájú szinuszosan váltakozó feszültség indukálódik. Az ABS elektronika bemeneti információja a frekvencia, mert a feszültséget nem csak a forgási sebesség, hanem az érzékelő és a póluskerék közötti távolság is befolyásolja.
Az induktív ABS kerékfordulatszám érzékelők diagnosztikai vizsgálatának lehetőségei:
Tekercselési ellenállás mérése. Személygépkocsiknál 0,8-1,2 kW közötti.
A kerék forgatása közben váltakozó feszültség mérése. Másodpercenként egyszer körbefordítva 0,3 V váltakozó feszültség mérhető.
A kerék forgatása közben oszcilloszkópos jelalak vizsgálat. Egyenletes szinuszos jel látható az oszcilloszkópon. Az esetleges fogtörés csak így állapítható meg, mert ilyenkor a szinusz hullám megszakad, torzul.
A kerékcsapágy állapota is befolyásolja a jelképzést. Ha nagy a csapágyhézag, a kerékagy mozgása miatt változik a jel, melyet az elektronika nem tud kiértékelni, ezért hibajelzést ad.
Aktív kerékfordulatszám érzékelők
Ezek az érzékelők lényegesen kisebbek, mint az induktív változatok, jelképzésük kis sebességnél is sokkal pontosabb és jól kiértékelhető. A kerékkel mágnesesen kódolt gyűrű forog együtt. Ez lehet a zárt kerékcsapágy tömítő ajka is, vagy önálló jeladó gyűrű.
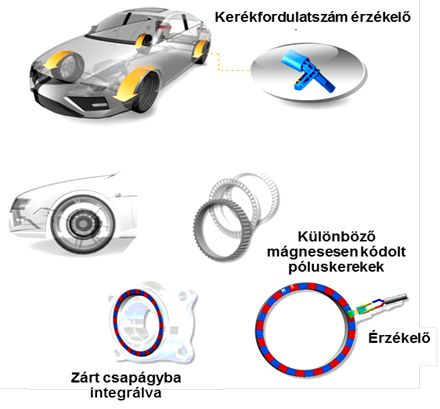
Elnevezésük onnan ered, hogy működésükhöz aktív tápfeszültség szükséges. Ennek az érzékelőnek a jelét más elektronikus rendszerek is használni tudják. Azokhoz a CAN hálózaton keresztül jut el. A kerékcsapágy közelében helyezik el, mert annak tömítő gyűrűjét látják el mágneses kódolással, ami a jelképzéshez szükséges.
Magneto-rezisztív elven működő érzékelők
Az érzékelőbe két darab mágneses erőtér hatására változó ellenállást (magnetorezisztív, innen származik az elnevezése) és két darab referencia ellenállást kötnek Wheastone híd kapcsolásba. Ezzel a módszerrel ellenállás változásra visszavezethető nem elektromos mennyiségeket tudunk mérni. Az elkülöníthető kis egységbe szerelt érzékelőhöz négy vezetékkel csatlakozik az elektronikus jel átalakító és erősítő egység. Két vezeték a híd táplálását kettő pedig a jel fogadását szolgálja. Forgás közben a mágneses pólusok váltakozása hozza létre a jelet. A zárt kerékagycsapágy elasztomerből készült tömítő gyűrűje mágnesesen kódolt. Ennek helyzetét a csapágy beszerelése előtt az indikátor kártyával ellenőrizni kell. Ez láthatóvá teszi a mágneses pólusokat, melyek az érzékelő felőli oldalra kell kerüljenek.
Az aktív kerékfordulatszám érzékelő vizsgálatához célműszert fejlesztettek ki. Ez biztosítja a működéséhez a tápfeszültséget, és korlátozza az áramfelvételt is. A műszerbe szerelt LED diódák váltakozó felvillanása láthatóvá teszi a kerék forgatása közben a jelképzést. A műszer csatlakozási lehetőség biztosít az oszcilloszkóphoz, mellyel az érzékelő jelalakja is ellenőrizhető.
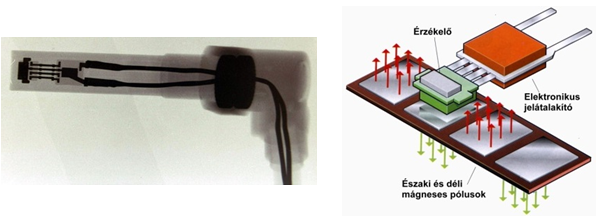
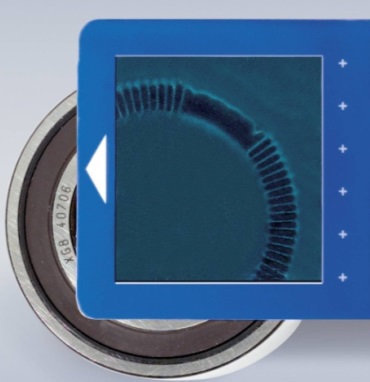
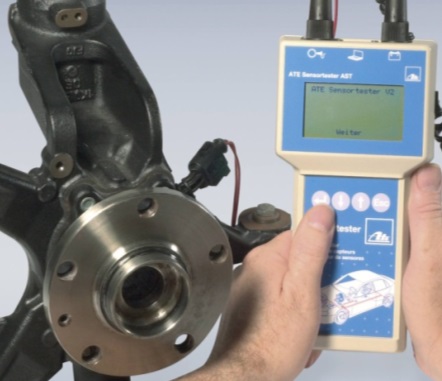
A ferromágneses vezetőből készült, a mágneses erőtér hatására érzékeny ellenállása értéke függ a saját mágnesezési irány (M kék) és az áram iránya között (I piros) bezárt (α) szögtől a következő egyenlet szerint:
|
|

Az alkalmazott ellenállások közötti eltérés csupán 2 – 3%. Az alkalmazott Wheatstone híd kapcsolás teszi az érzékelőt kellően érzékennyé. A különböző mágnesesen kódolt gyűrűk kompatibilisek a hozzájuk tervezett érzékelőkkel. A hatékony jelképzés érdekében egy érzékelőbe jó néhány híd kapcsolása kötött ellenállást építenek be, mint ahogy azt az alábbi ábra szemlélteti.
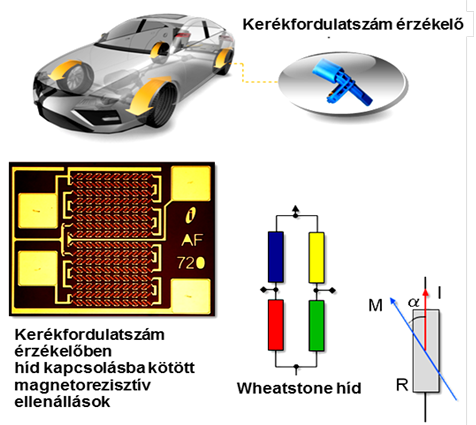
A híd kapcsolásba összeépített AMR (Anisotropic Magnetoresistive Resistance) érzékelő egységet és az erősítő áramkört közös epoxi műanyagból készült házba szerelik be, de előtte rásajtolják a csatlakozó vezetékeket. Az alkalmazott jelképző gyűrű fajtájától függően egyéb egységekkel is kiegészíthetik, mint például állandó mágnes. Ezt akkor alkalmazzák, ha mágnesesen vezető fogazott gyűrű a jelképzéshez alkalmazott póluskerék.
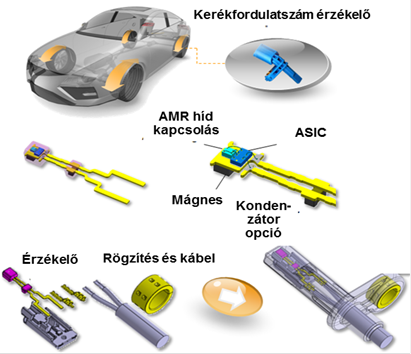
HALL IC-s érzékelők
Az érzékelőben a kerék forgása miatt a mágneses pólusok váltakozása periodikus Hall feszültséget hoz létre. Ezt a jelet az IC alakítja át négyszög jellé. Az érzékelő működéséhez szükséges tápfeszültséget is az ABS elektronika biztosítja, továbbá fogadja és kiértékeli a jeleket. A mágneses kódolás arra is lehetőséget ad, hogy megállapítható legyen a kerék forgási iránya. Ez a gépkocsi helyzetének meghatározásánál lehet fontos, mert nem mindegy, hogy egy adott referencia ponthoz képest előre, vagy hátra menetben haladt a gépkocsi.
Az újabb aktív érzékelők jelképzése pontosabb és kisebb sebességnél is megbízhatóan működik, mint a korábban alkalmazott induktív érzékelők.
Az ABS elektronika
A kezdeti időben az elektronikát alumínium lemezből készült kis dobozba szerelték be, és 32 pólusú csatlakozóval látták el. A gépkocsi utasterében, rezgésektől, szélsőséges hőmérsékletektől védett helyre építették be. Ha az ABS meghibásodott az elektronika az elektromágneses szelepeket relé segítségével tudja lekapcsolni. Egy másik relé pedig a fékfolyadék szivattyút hajtó villanymotort kapcsolja. A jelentős áramfelvétel miatt külön, a szokásosnál nagyobb áramra méretezett biztosítékokat alkalmaznak ezeknél az áramköröknél. Jelenleg a hibrid áramkörös elektronikák már az ABS vagy az ESP rendszer hidraulika egységének részét képezik. Ezzel nagyon leegyszerűsödött a vezetékhálózat és ezzel arányosan növekedett a megbízhatóság. A reléket pedig az elektronika részét képező kapcsoló tranzisztorok helyettesítik.
Az elmúlt évtizedek fejlesztői tevékenységének köszönhetően az elektronikák kapacitása rohamosan növekedett, az ABS hidraulika egységek tömege és helyigénye pedig csökkent.
A kerékfordulatszám érzékelők jelei alapján az elektronika megállapítja az úgynevezett referencia sebességet. Ehhez hasonlítja az egyes kerekek sebességét. Ha egy bizonyos küszöbértéknél nagyobb az eltérés, valamelyik keréknél, vagyis megközelíti a blokkolási határt beavatkozik a blokkolásgátló. Az elektronika az elektromágneses szelepek segítségével csökkenti, szinten tartja, illetve ha megszűnt a blokkolási hajlam, visszanöveli a fékező nyomást.
Az ABS öndiagnosztikája
A gyújtás bekapcsolásakor az ABS ellenőrző lámpa világít (kb. 5 – 10 másodpercig). Eközben az elektronika a rendszer ellenőrzését végzi. Hibamentes állapotban ezután kialszik az ellenőrző lámpa. Az öndiagnosztikai rendszer eközben rövid időre be- és ki kapcsolja az elektromágneses szelepeket és a fékfolyadék szivattyút hajtó villanymotort és ellenőrzi azok áramkörét. Amikor ez rendben van, kialszik az ABS ellenőrző lámpa. Az ezt követő szakaszban hajtja végre a dinamikus önellenőrzést. Ehhez az szükséges, hogy a gépkocsi sebessége nagyobb legyen 5-7 km/h –nál. Ekkor következik a kerékfordulatszám érzékelők jelének dinamikus ellenőrzése. Az elektronika megállapítja, hogy a jelszint eléri –e a kiértékeléshez szükséges küszöbértéket. Az elektronika menet közben is folyamatosan ellenőrzi a rendszer elemeit. Ha az ABS rendszer meghibásodik, az elektronika bekapcsolja a műszerfalon elhelyezett, narancssárga színű ABS ellenőrző lámpát és megjegyzi a hibakódot. Továbbá kikapcsolja az ABS működését. Ha a hiba megszűnik, az ABS visszakapcsol, az ellenőrző lámpa kialszik, a hibakód törlődik az aktív hibák közül. A hibakódok a régebbi ABS rendszereknél villogókódként, vagy a gépkocsi típusának megfelelő diagnosztikai műszerrel szöveges üzenetként olvashatók ki.
Külső diagnosztikai kapcsolat: a DIN/ISO 4797 előírásnak megfelelően az ABS elektronikát is el kell látni a K és az L jelű diagnosztikai vezetékkel. Az előbbi a két irányú, az utóbbi az egy irányú adatforgalmat teszi lehetővé, mellyel a villogókód kiolvasás aktiválható.

A fékrendszer légtelenítéséhez diagnosztikai műszer kell
Az ABS –el ellátott fékrendszerek légtelenítéséhez használni kell a diagnosztikai műszert, mellyel a légtelenítési módban ki lehet nyitni az egyébként zárt állapotban lévő nyomáscsökkentő szelepeket. Így teljességgel kizárható, hogy légbuborék maradjon a zárt szelep mögött.
Nyitott és zárt rendszerű blokkolásgátlók
A fékezéshez szükséges nyomás energiát a vákuumos fékrásegítő és a kétkörös főfékhenger hozza létre. A hidraulika egységbe szerelt elektromágneses szelepekkel az elektronika modulálja azt.
Még a nyolcvanas években is gyártottak nyitott és zárt rendszerű blokkolásgátló hidraulikus egységeket, melyeknél a fékező nyomást különböző működési elvű elektromágneses szelepek modulálták. A nyitott blokkolásgátlónál nyomáscsökkentéskor a fékfolyadékot az elektromágneses szelep a fékfolyadék tartályba engedi. Ha ez a szelep meghibásodik, nyitva marad a hozzá tartozó fékkörben nem lesz fékező nyomás. Jelenleg már csak a sokkal biztonságosabb zárt rendszerű ABS –eket gyártják. Ez csatornánként egy alaphelyzetben nyitott nyomásnövelő és egy alaphelyzetben zárt nyomáscsökkentő szeleppel látják el. Ezek árammentesek, amikor nincs ABS beavatkozás. A nyomásnövelő szeleppel párhuzamosan egy visszacsapó szelepet is beépítenek, mely lehetővé teszi a fékoldást akkor is, amikor az ABS szabályozás közben a nyomásnövelő szelep éppen zárva van, de a vezető visszaengedte a fékpedált.
A kerék blokkolásának megakadályozásához nyomáscsökkentés szükséges. Ilyenkor a munkahengerből a kinyíló nyomáscsökkentő szelep a fékfolyadékot egy dugattyús tárolótérbe juttatja. Ennek térfogata kisebb, mint a fékköré, ezért nem csökkenhet le teljesen a fékező nyomás. A nyomás csökkentéskor energiát vezetünk el a rendszerből, hiszen a fékfolyadék egy része egy dugattyús nyomástárolóba kerül. Ezt a hiányzó energiát pótolni kell, hogy a blokkolási veszély elmúltával a fékező nyomás ismét visszanövelhető legyen. Ha ez nem történne meg, nagyon hosszúvá válna a fékút. Ezért szerelnek be az ABS hidraulika egységbe fékfolyadék szivattyút, hogy visszanövelje a nyomásenergiát. Ez a szivattyú a fékköröknek megfelelően két körös kell legyen. Egyenáramú villanymotorral hajtott dugattyús működésű szivattyút alkalmaznak.
Jelenleg a blokkátlókat a legtöbb esetben kipörgésgátlóval (ASR) is kiegészítik. Ez további elektromágneses szelepek beépítését teszi szükségessé.
10.2.1.6. Az ABS -el szemben támasztott követelmények
Az ECE 13 fékezési előírás 13. melléklete vonatkozik a blokkolásgátlókra. Ebben fogalmazzák meg a rendszerrel szemben támasztott fontosabb követelményeket. Ezek közül néhány:
A lehető legrövidebb fékút elérése érdekében a tapadási tényező lehető legjobb kihasználása az egyik fontos cél.
A lehető legnagyobb lassulás legyen elérhető a gépkocsi stabilitásának és kormányozhatóságának megőrzése mellett az alábbi szélsőséges körülmények között is:
száraz, jól tapadó aszfalton és jeges, csúszós úton egyaránt,
akkor is, amikor a bal- és a jobb oldali kerekek között jelentősen eltér a tapadási tényező. (a különbség akár 5 – 8 szoros is lehet)
ha fékezés közben változik a tapadási tényező nagyról kicsire, vagy fordítva
a gépkocsi teljes sebességtartományában legyen működőképes a blokkolásgátló
kanyarodás közben is legyen hatékony.
Működés közben végezzen folyamatos önellenőrzést és meghibásodáskor figyelmeztesse a vezetőt.
Legyen karbantartásmentes.
A blokkolásgátló biztonságosan és megbízhatóan működjön a gépkocsi teljes élettartamában.
Korlátozások nélküli működjön, függetlenül az üzemállapottól, az útviszonyoktól, a gumiabroncsok állapotától, és a gépkocsi menettulajdonságaitól.
Az ABS rendszerrel szemben támasztott nemzetközi követelmények összefoglalása:
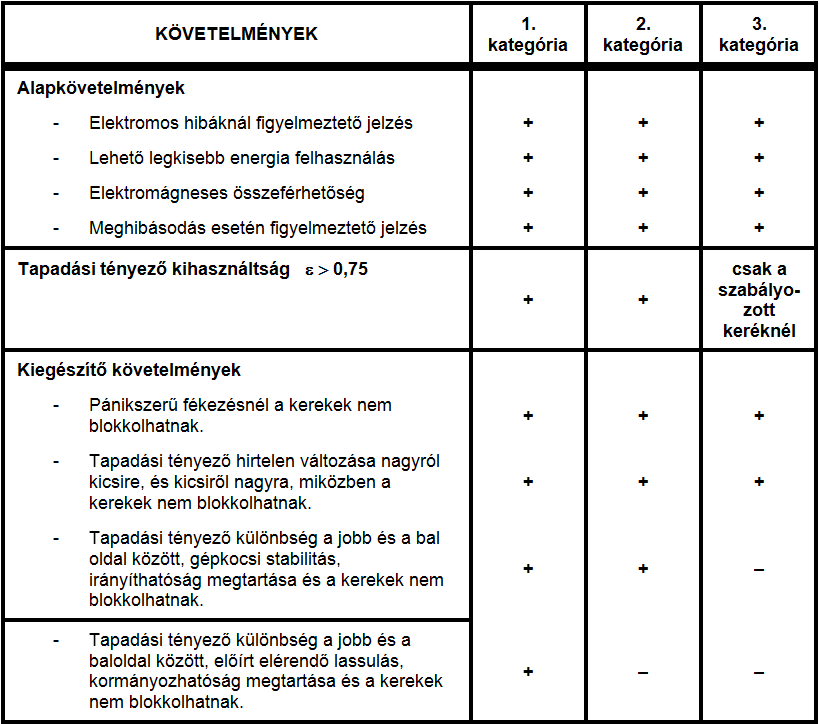
A különböző ABS rendszerek az alapján sorolhatók az 1. 2. illetve a 3. kategóriába, hogy hogyan teljesítik a kiegészítő követelményeket. A korszerű, elektronikus működésűek az első kategóriába tartoznak. A pótkocsiknál alkalmazott egyszerűbb szabályozást megvalósítók a második kategóriába, a kilencvenes években még gyártott hidromechanikus változatok pedig a harmadik kategóriába.
10.2.2. A kipörgés gátló (ASR)
A további menetdinamikai szabályozó rendszerek közül soknak az alapja a blokkolásgátló rendszer. Az első jelentősebb továbbfejlesztése az ABS –nek, amely fékezés közben javítja a gépkocsi hosszdinamikáját az ASR, vagyis a kipörgésgátló. Ez is a gépkocsi hosszdinamikáját javítja.
A kipörgésgátló, az ASR működési elve
A hagyományos differenciálművel szerelt gépkocsiknál amikor a bal, és a jobb oldali kerekek alatt a tapadási tényező jelentősen eltér egymástól, csak kis vonóerő valósulhat meg, de vannak esetek amikor a gépkocsival el sem lehet indulni. Ennek az oka az, hogy a differenciálmű fele – fele arányban osztja szét a nyomatékot és amikor az egyik hajtott kerék csúszik, a másik sem képes vonóerőt átvinni.
Amikor a kipörgésgátló csúszós úton, a kipörgő a túl nagy nyomatékot kapó kerék aktív és szabályozott fékezésével beavatkozik, a gépkocsi már el tud indulni, és utána stabil gyorsításra is képes. Tehát a blokkolásgátlót kiegészítő kipörgésgátló (ASR) különösen a csúszós utakon támogatja hatékonyan a vezetőt. Kis sebességnél a kipörgő kerék szabályozott lefékezésével avatkozik be. Ezáltal a másik hajtott keréken ki tud alakulni a megfelelő nyomaték. Nagyobb sebességnél ez a beavatkozás már veszélyezteti a menetstabilitást, ezért másféle intézkedés szükséges. Amikor a kipörgő kerék szabályozott fékezése nem elég hatékony, illetve ha a gépkocsi sebessége nagyobb 40 km/h –nál a CAN hálózaton érkező parancs hatására a motor elektronika csökkenti a hajtó nyomatékot. Ennek is jelentős stabilizáló hatása van a gépkocsira.
A kipörgésgátlóval kapcsolatos elnevezések
A szakma ezzel a menetdinamikai szabályozóval kapcsolatosan sokféle elnevezést és rövidítést használ. Az ASR például a német Antrieb Schlupf Regelung elnevezésből származik. Ugyanezt angolul Traction Control System –nek nevezik és a TCS rövidítést használják. A motor hajtó nyomatékának csökkentését, illetve leszabályozását Engine Traction Control –nak nevezik és ETC –nek rövidítik. A vonóerő átvitel kihasználásnak javítására használják kis sebességnél a Brake - Lock Differential kifejezést (BLD). Motorfék használatakor (toló üzem) a szabályozást Engine Dragtoque Controlnak nevezik, amit EDC –nek rövidítenek.
Mindkét oldalon a túlpörgő kerék nyomatékszintjére szabályoz az elektronika az ETC szabályzás révén. Ez hatékonyan növeli a gépkocsi menetstabilitását.
Amikor az útfelület két oldalán jelentősen eltérő a tapadási tényező, irányított nyomatékelosztás (torque vectoring) valósul meg. Ez különösen a nagyobb tapadási tényezőnél, illetve kanyarban 0 – 100 km/h közötti sebességtartományban valósul meg.
Elinduláskor és gyorsításkor is a tapadási tényezővel arányos az átvihető nyomaték. A kipörgésgátló (ASR) felismeri, ha a keréken a pillanatnyi tapadási tényezőhöz képest túl nagy a vonóerő és ezért túlpörög a hajtott kerék. Ezen állapot elkerülésére az ABS/ASR elektronika a CAN hálózaton keresztül a motor elektronikának küldött paranccsal csökkenti a motor hajtó nyomatékát. Ha a gépkocsi sebessége 40 km/h –nál kisebb, lefékezi a kipörgő kereket. Ehhez bekapcsolja a hidraulika egység fékfolyadék szivattyúját, hogy létre jöjjön a szükséges fékező nyomás. Ez azonban a többi elektromágneses szelep működtetése révén csak a kipörgő kerékhez jut el. Így elkerülhetővé válik a gépkocsi megfarolása, kitörése, ami súlyos balesethez vezetne.
Ottó motoroknál a nyomaték csökkentése többféle módon is megvalósulhat:
Előgyújtás vissza állítás. Ennek az eredménye nagyon gyors, de a katalizátor kímélése miatt csak rövid ideig használható.
A benzinbefecskendező szelepek kitöltési tényezőjének csökkentése. Az előző beavatkozásnál ez nagyobb nyomatékcsökkenést eredményez, de hatása annál lomhábban következik be. Nem szükséges viszont korlátozni, mert ez nem veszélyezteti a katalizátort.
A pillangószelep villanymotoros állítása zárás irányban. Ennek a legnagyobb a nyomaték csökkentő hatása, de a többinél lassabban vezet eredményre.
A különböző autógyárak ezeket a beavatkozási lehetőségeket kombinálni szokták. A dízel motorok nyomatékcsökkentése a dózis mérséklésével történik. A korszerű motoroknál ezek a beavatkozások az ABS/ASR elektronika és a motor elektronika közötti CAN hálózati adatátvitel révén valósulnak meg.
A hidraulika egység működése ABS szabályozáskor
A kerékcsúszástól függően az elektronika parancsára a kerekenként beépített egy – egy nyomásnövelő és nyomáscsökkentő szelep modulálja a fékező nyomást. Nyomáscsökkentéskor a visszafolyó ágon keresztül a fékkörönként egy-egy dugattyús tárolótérbe kerül a fékfolyadék. Onnan a kétkörös fékfolyadék szivattyú vissza juttatja a fékkörbe.
A hidraulika egység működése ASR szabályozáskor
A két fékkörnek megfelelően nyitnak az SV1 és az SV2 szelepek. Azokon keresztül a közben az elektronika által bekapcsolt a fékfolyadék szivattyú a tartályból szív és a vezetőtől függetlenül létrehoz egy bizonyos fékező nyomást. Az elektronika az ASR1 és az ASR2, valamint a kerekenkénti elektromágneses szelepeket működtetve az éppen kipörgő kereket fékezi a szükséges mértékben.
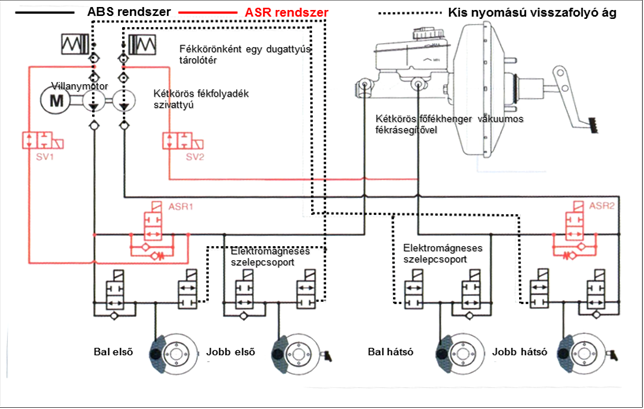
10.2.3. Blokkolásgátló terep fokozata
A terepjáró személygépkocsik ABS rendszerét ellátják terep fokozattal is. Erre azért van szükség, mert laza talajon (homok, sóder, sár, vagy laza friss hó) az ABS működése növeli a fékutat. Blokkolás közeli állapotban a kerekek ugyanis a laza anyagból éket túrnak, ami alakzárásával rövidíti a fékutat. A terep ABS tehát nagyobb kerékcsúszásokat enged meg, mint a normál országúti változat. Ezt az alábbi diagram jól szemlélteti, ahol a kerekek kerületi lassulása különböző színekkel rajzolódik ki. Az átlagos kerékcsúszás az országúti ABS –nél 10%-os és az elért lassulás 2,4 m/s2. Ha viszont a gépkocsivezető átkapcsol terep fokozatra az ABS ellenőrző lámpa folyamatosan villogni fog és az átlagos kerékcsúszás eléri a 25% -ot, a lassulás pedig a 3 m/s2 értéket. A normál országúti ABS működés visszakapcsolás, vagy a gyújtás ki- és visszakapcsolása után, vagy amikor átlépték a 40 km/h sebességet ez után lesz ismét aktív. Az újabb ABS változatok egy újabb szoftver segítségével a kerekek torzós lengései alapján automatikusan felismerik a terepen közlekedést és aktiválják az ABS terep fokozatát.
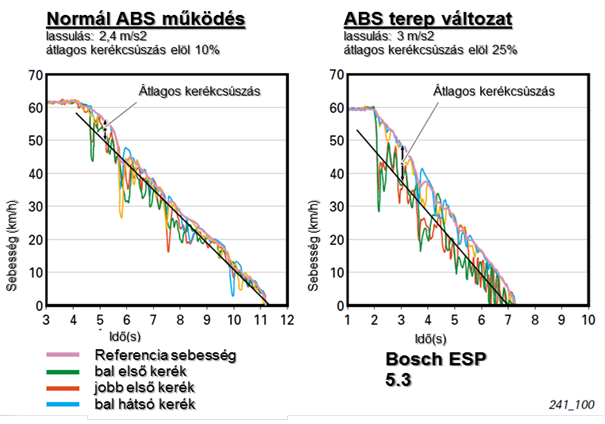
10.2.4. Elektronikus fékerő felosztás
A blokkolásgátló elektronikát az ABS és ASR szabályozáson kívül újabb programmal is ellátják. Jelenleg már az elektronikus fékerő felosztás látja el a fékerő módosítók feladatát. Ezek a hátsó kerekek túlfékezettségét voltak hivatottak megakadályozni a gépkocsi terhelése, az alkalmazott fékező nyomás, vagy éppen az elért lassulás függvényében.
Az elektronikus fékerő felosztásnál az első kerekek átlagos sebességét a hátsók átlagához hasonlítja a blokkolásgátló elektronikája. Ha a hátsó kerekek átlagos sebessége kisebb, mint az elsőké, akkor azok túlfékezettek. Ekkor az elektronika rövid időre bezárja a hátsó kerekekhez tartozó nyomásnövelő szelepek. Ez az állapot nem maradhat így sokáig, mert nagyon megnövelné a fékutat. Ezért a szelep a következő pillanatban kinyit, majd ismét bezár. Ezek az állapotok sűrűn, egy bizonyos frekvenciával váltogatják egymást. Ennek a működési módnak az eredménye egy mérsékeltebb, lépcsőzetes nyomásnövekedés a hátsó kerekek fék munkahengereiben. Az így kialakuló nyomás alulról hozzásimul az adott gépkocsi ideális fékerő arányát jellemző parabolához. Ez azonos módon működik az üres és terhelt gépkocsinál a kerékcsúszás függvényében. Ezt nevezik elektronikus fékerő felosztásnak német rövidítése EBV (Elektronische Bremskraft Verteilung) az angol pedig EBD (Elektronic Brakeforce Distribution). Ez a beavatkozás már szabályozásnak nevezhető, mely a kerékcsúszás függvényében szabályozza a fékerőt. Feleslegessé teszi a hagyományos hidromechanikus fékerő módosítókat.
Ha meghibásodik az EBV, kritikus menetdinamikai állapot alakulhat ki a hátsó kerekek túlfékezettsége miatt. Erre az állapotra a piros színű fék- és a narancssárga ABS ellenőrző lámpa együttes világítása hívja fel a gépkocsivezető figyelmét. Ilyenkor lassan és óvatosan azonnal a szervizbe kell menni, hogy a hibát elhárítsák. Úgy alakították ki a szoftvert, hogy ha az egyik kerékfordulatszám érzékelő meghibásodik, a vele azonos futóműre szerelt másik kerékfordulatszám érzékelő jelét tekinti az átlagértéknek és továbbra is működőképes marad, bár kissé durvábbá válik a szabályozás. Ebben az állapotban az ABS már hibajelzést ad. Az EBV működéséhez nincs szükség továbbá az első kerekek elektromágneses szelepeire és a hátsók közül is csak a nyomásnövelők kellenek. Az EBV szabályozáshoz nem szükséges a villanymotoros fékfolyadék szivattyú sem. Így tehát az EBV meghibásodási valószínűsége sokkal kisebb, mint a blokkolásgátlóé.
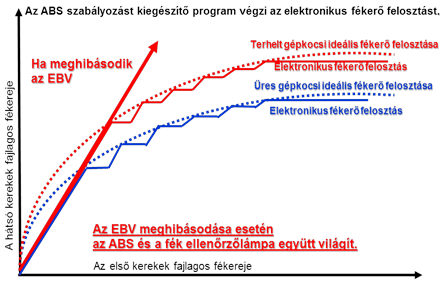
10.2.5. A blokkolásgátló mint fékasszisztens
Számos baleset azért következik be, mert a gépkocsivezető figyelmetlen. Például nem veszi észre az előtte haladó gépkocsi sebességváltozását, illetve nem megfelelően reagál erre. A fékezési folyamat hatékonyságának növelésével számos baleset elkerülhetővé válik. Szimulátoros mérések során bebizonyosodott, hogy a vezetők bár kellő gyorsasággal reagálnak a veszély helyzetekre, de nem elég nagy erővel nyomják a fékpedált. Ennek az oka az, hogy viszonylag ritkán alakul ki veszélyes helyzet, így nem rendelkeznek kellő tapasztalattal arról, hogy hogyan is kell ilyenkor nyomni a fékpedált. Ezt a helyzetet tovább rontja az a tény, hogy a hirtelen fékezéseknél gyakran beavatkozik az ABS, melynek működése a fékpedál pulzálásával jár. Ettől sok vezető, különösen a kellő gyakorlattal nem rendelkezők megijednek és visszaengedik a fékpedált. Ezért a gépkocsiba beépített fékrendszer lehetőségeit nem tudják kihasználni. Ezen a helyzeten a fékasszisztens beszerelésével igyekeznek segíteni az autógyárak. Így a legtöbb típusba beszerelik a vészfékezési asszisztens valamely változatát. Ezek közül a következőkben csak azokat ismertetjük, melyeknél a mechatronika segíti a pánikszerű fékezést.
Az ABS rendszerre épülő fékasszisztens:
A bemeneti információk:
a fékezőnyomás érzékelő jele, az alkalmazott pedálerőről, illetve növekedésének sebességéről ad információt. Ebből meghatározható a nyomás-gradiens. Ha ez egy előre meghatározott küszöbértéknél nagyobb csak akkor lép működésbe a fékasszisztens. Általában piezo-elktromos érzékelőt alkalmaznak, mely korábban a Bosch ABS/ESP 5.3 rendszereknél külön egységet alkotott és a hidraulika egységbe csavarták be. Az újabb változatoknál a szeleptömb belsejébe szerelték be és kívülről nem volt látható. Az érzékelő jelét az öndiagnosztikai rendszer figyeli. Hiba esetén nem működik a fékasszisztens és hibakód tárolódik.
a féklámpa kapcsoló jele a fékezés kezdetéről informálja az elektronikát. Csak zárt féklámpa kapcsolónál működik a fékasszisztens.
a kerékfordulatszám érzékelők jelei alapján az elektronika a gépkocsi sebességét tudja.
Az elektronika amikor bekapcsolja a fékasszisztens működést, az ABS/ESP hidraulikaegységbe szerelt két fokozatú, kettős működésű fékfolyadék szivattyút kapcsolja be, mely megnöveli a fékező nyomást.
Fékasszisztens nélkül a gépkocsi később éri el az ABS beavatkozás tartományát és ezért hosszabb lesz a fékút.
Kezdetben a vákuumos fékrásegítőt elektronikával, fékpedál elmozdulás érzékelővel és elektromágneses szeleppel kiegészített fékasszisztens alkalmazták.
A blokkolásgátló a vákuumos fékrásegítőtől átvette a fékasszisztens feladatát. Az elektronika már nem a fékpedál lenyomásának sebességét, hanem egy nyomásérzékelő segítségével a nyomásgradienst figyeli. Ha ez átlép egy bizonyos küszöböt, az elektronika bekapcsolja a fékfolyadék szivattyút, mely jelentősen megnöveli a fékező nyomást. Viszonylag gyorsan el lehet így érni az ABS beavatkozási tartományt. Így elkerülhetővé válik a kerekek blokkolása és rövidül a fékút.
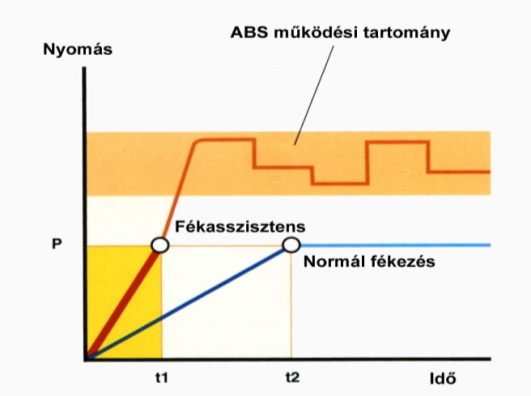
10.2.6. Blokkolásgátló gyártók, típusváltozatok és azok sajátosságai
10.2.6.1. Robert Bosch GmBH ABS 8
Ennek a típusváltozatnak az első sorozatbeépítése a Renault Megane II -be 2001-ben kezdődött. Hibrid áramkörös, továbbfejlesztett elektronikával látták el. A fejlesztési cél a tömeg és a helyszükséglet további csökkentése volt. A nyomásszabályozó szelepek mechanikus részét a hidraulikaegységbe sajtolják. A működtető elektromágneseket közvetlenül az elektronikára szerelik. A fékfolyadék szivattyút hajtó egyenáramú villanymotor tekercselt forgórészű és állandó mágneses állórészű. Ez a blokkolásgátló a korábbi változatoknál kisebb és könnyebb kivitelű.
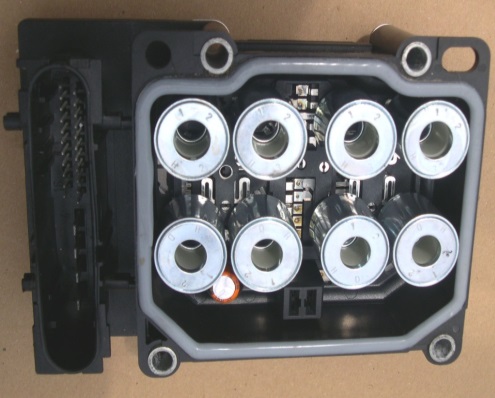
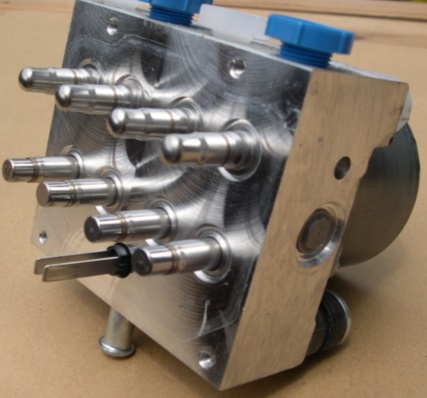
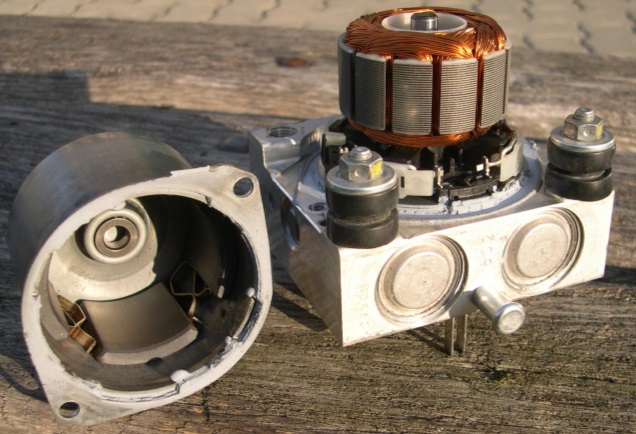
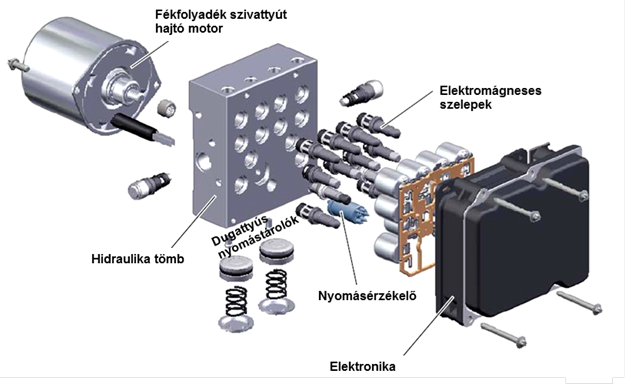
10.2.6.2. Robert Bosch GmBH ABS 9
Jelenleg a Robert Bosch GmBH az ABS 9 –típust, vagyis a kilencedik generációt gyártja. Ez a következetes továbbfejlesztések eredménye. Ennek a kompakt kivitelű ABS hidraulika egységnek a tömege csupán 1,1 kg. Ezzel a világ legkönnyebb blokkolásgátlójává vált. Kedvezően kicsi a helyigénye. Valamennyi személygépkocsi szegmensnél sikeresen alkalmazhatják. Elektronikáját az SMD technológiával gyártott optimalizált mikroprocesszoros technika jellemzi. Integrális részét képezi a hidraulika egységnek a nyomásérzékelő. Moduláris szoftver architektúra jellemzi, mely megfelel a legújabb műszaki megoldásoknak. FlexRay interface is lehetséges.
10.2.6.3. A Continental Teves blokkolásgátlók
Az Ate MK 20 típusú blokkolásgátlókat extrudált alumínium profikból 1995 –től kezdték gyártani. 1997 –ben készült el az MK 20 E változat. Ezek kompakt, moduláris felépítésű, hibrid elektronikás, zárt ABS rendszerek. Megvalósították az elektronikus fékerő felosztást (EBV), a motor fékezőnyomaték szabályozást (MSR). Melynél már CAN kommunikációval adott parancsot a motor elektronikának a nyomaték csökkentésére. A korábbi változatokhoz képest könnyebbé vált ez a kivitel.

1994 – 1999 között az elektronika biztonsági koncepciója az aszimmetrikus redundancia lett. Ennek megfelelően egy 16 bites fő-, és egy 8 bites segédprocesszort kötöttek párhuzamosan. Így kiszűrhetővé vált az esetleges azonos gyártási hibából adódó egyformán helytelen eredmény is. A két különböző processzor ugyanis más technológiával és más gépen készül. A 8 bites segédprocesszor végzi a kerékfordulatszám érzékelők jeleinek előkészítését. A korábbi mechanikus reléket az elektronika alaplapjára szerelt kapcsoló tranzisztorok váltották fel. Az MK 20 ABS –t a Fiat Brava és Bravo modellekbe, valamint a VW Golf, Beetl, Skoda, Audi TT típusokba építették be. Ennél a típusnál már belső és külső CAN hálózattal működő hibrid áramkörös elektronikát alkalmaztak. A szelepek mechanikus részét a hidraulikaegységbe sajtolták, a működtető elektromágnesek tekercseit pedig közvetlenül az elektronika alaplapjára szerelték.
Az Audi TT –be kezdetben MK 20 –as ABS –t és utána ESP rendszert szerelnek. Ezeknél széria tartozék a kipörgés gátló (ASR), az elektronikus fékerő felosztás (EBV), és a differenciális fékezéssel megvalósuló (EDS) működés.
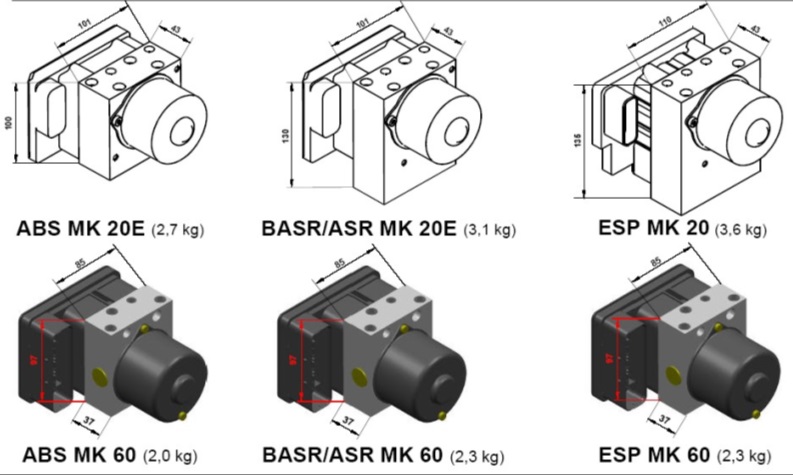
Ate MK 20 GI ABS már a gépkocsi kereszt irányú dinamikájának befolyásolására is képes. Fékezéskor a kerék fordulatszám érzékelők jeleiből az elektronika felismeri, ha nem elegendő az oldalvezető erő, és a gépkocsi a kanyar kiegyenesítésére törekszik. Csökkenti az első kerekek fékező nyomását, így nő az oldalvezető erő. A gépkocsi követi a kormánymozdulatot. Amikor pedig a hátsó kerekek csúszása miatt azoknál csökken az oldalvezető erő és a gépkocsi túlkormányozottá kezd válni, az elektronika a kanyarbelső kerekeknél csökkenti a fékező nyomását.
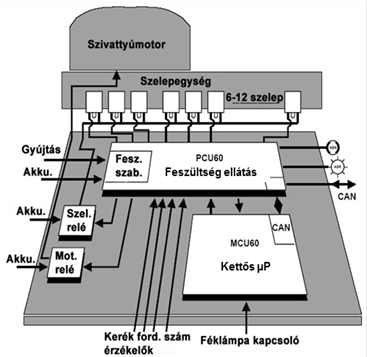
Ate MK 60 ABS változatot 2000 től gyártják. Ennél a típusnál új szelep konstrukciót alkalmaznak és új a fékfolyadék szivattyút hajtó motor is. Két magos mikroprocesszort alkalmaznak. Aktív kerékfordulatszám érzékelők adják a bemeneti jeletet. További súlycsökkentés történt és kisebb lett az ABS egység helyigénye is. Az elektronika jellemzői: nagy integráció, ezért kevés az áramköri elem. FLASH tárolóval látják el. Nagy teljesítményű 32 bites mikroprocesszort alkalmaznak, a félvezetős reléket az alaplapon helyezik el. A programozási nyelv C, így a szoftver újra felhasználható. 2000 –től már az úgynevezett „kern redundanciát” alkalmazzák. Az MK 60 –as blokkolásgátló elektronikák már Budapesten készülnek. Kezdetben a Temic vállalatnál, melyet aztán megvásárolt a Continental Teves. A BMW is a Continental Teves elektronikus fékrendszereit alkalmazza.


A BMW –nél alkalmazott összetett elektronikus menetdinamikai szabályozó rendszerek
A BMW alapfelszereltségéhez tartozik az ASC rendszer (Automatischen Stabilitäts Control). Azt a változatot, mely a fékezési beavatkozásokon kívül, a motor működését is befolyásolni tudja, DSC (Dinamischen Stabilitäts Control) rendszernek nevezik.
A BMW 1991 –től kezdte alkalmazni a DSC1 menetdinamikai szabályozó rendszert, melynek része az ABS szabályozás is. A DSC egyrészt a vezető kívánsága szerint, másrészt pedig a pillanatnyi menetdinamikai állapotnak megfelelően avatkozik be. Menet közben folyamatosan menetbiztonsági ellenőrzést végez.
A 2004 –től a BMW X3 és X5 a modellsorozatnál azt a gyors működésű, továbbfejlesztett ABS rendszert alkalmazzák, mely már képes a gépkocsi hossz- irányú dinamikáján kívül, egy kombinált hossz- és kereszt irányú dinamika befolyásolására is.
A DSC2, vagyis a második generációs változat már az ABS beavatkozási küszöbérték alatt is, a pillanatnyi menetállapotnak megfelelően oldalanként különböző nagyságú fékerőket is ki tud vezérelni. Ez az úgynevezett CBC (Cornering Brake Control) működésmód.
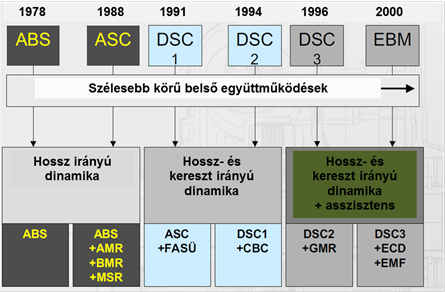
Az EMB (Elektronischen Bremsen Management) rendszer, melynek első sorozatbeépítése 2001 –ben volt a 7 -es BMW –be, már a fékezéssel kapcsolatos asszisztens működések megvalósítására is képes. Továbbá a futómű rendszerekkel is az eddiginél is több kapcsolata van. Ezek az eddig ismertetett elektronikus működésmódok az (ECM) Elektronische Chassies Management rendszerben öltenek testet.
Az egyre több, a fékrendszerrel kapcsolatos szabályozások és a vezetőt támogató asszisztens rendszerek és az EBM miatt egy koordinációs platformot valósítottak meg, mely a gépkocsi hossz- és kereszt irányú menetdinamikáját továbbá az asszisztens rendszereket felügyeli. Meghatározták az egyes beavatkozási lehetőségek határait is azért, hogy ne következhessenek be áttekinthetetlenné váló interferenciák az egyes beavatkozások között. Definiálták az egyes szabályozó rendszerektől független koordinátori feladatot. Így nem fordulhat elő, hogy az elméletileg lehetséges teljesítménypotenciált csak korlátozott mértékben lehessen kihasználni.
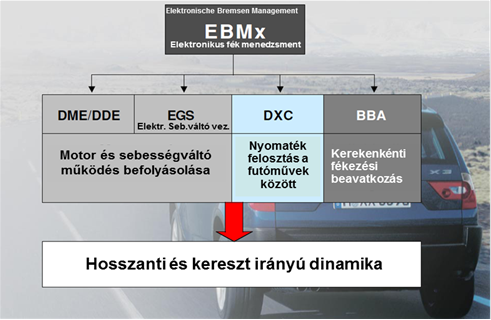
Az elektronikus rendszerek közötti integrációs lehetőségek:
Napjainkban a személygépkocsikba a blokkolásgátlókon kívül egyre több feladatot ellátó különböző elektronikus rendszereket szerelnek be. Ezek hatékony együttműködésének különböző lehetőségei vannak:
Központi architektúra,
Domén architektúra
Koordinációs megoldás választása
Központi architektúra
Ez a megoldás nem korlátozza az egyes rendszerek működését. A rendszer felügyelet és a redundancia vonatkozásában nincsenek különleges elvárások. Ennél egy koordinátor határoz az egyes beavatkozások menetdinamikai ésszerűségéről. Ha a koordinátor meghibásodik definiálni kell egy visszakapcsolási szintet. Ha egy menetdinamikai beavatkozó egység hibásodik meg, a továbbra is működőképes rendszerek kell megvalósítani a menetdinamikailag veszélytelen állapotot.
Domén architektúra
Menetdinamikai doménok lehetnek például,
a hossz dinamikát befolyásoló rendszerek,
kereszt, dinamikát befolyásoló rendszerek,
függőleges dinamikát befolyásoló rendszerek.
A teljes rendszerhez tartozó beavatkozókat a fő feladatuk alapján rendelik az egyes doménokhoz. Ugyanazt a beavatkozó egységet több domén is működtetheti. Például a függőleges dinamikai rendszerben egyenes menetben érkezhet parancs a stabilizátor szétkapcsolására, vagy éppen a billenés kiegyenlítésre is.
A kereszt irányú dinamikai beavatkozásnál ugyanaz az eredmény érhető el például az első kerekek aktív elkormányzásával az AFS rendszer (Aktíve Front Steering) segítségével és az aktív hátsókerék kormányzással AHK (Aktíve Hinterachs Kinematik) is.
Hasonló a helyzet az asszisztens rendszerek beavatkozásainál is. A követési távolságot szabályozó tempomattal, vagy más néven az ACC rendszerrel ugyanaz az eredmény érhető el, mint az aktív elektromechanikus rögzítő fékkel EMF (Elektro-mechanische Feststellbremse). A előbbiekben példaként említett rendszerek mindegyike hosszdinamikai beavatkozást végez, de mégis különböző doménekhez tartoznak. Belátható tehát, hogy a domén architektúrán belül elengedhetetlen egy koordinátori feladat elvégzése. Erre a célra vagy egy újabb elektronikát kell beépíteni, vagy valamelyik domént ennek a feladatnak megfelelően kialakítani.
A rendszer megítélésének fontos kritériumai
a teljes rendszer feltételek nélkül biztonságosan működtethető legyen,
az elektronikák száma a lehető legkevesebb legyen.
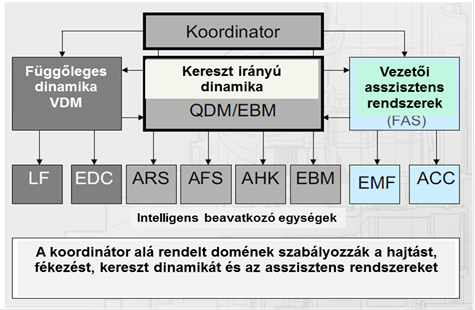
10.2.6.4. Delphi Brake Control DBC 7
Delphi Corporation 1994 –ben vált függetlenné a GM –tól. 2002 óta használja ezt a nevet. Az Amerikai Egyesült Államokban, Michigenben van a központja. A Delphi Brake Control (DBC) 7 blokkolásgátló rendszert 1999-ben mutatták be a Buick Regal és a Century modellekben, továbbá a Chevrolet Tracker –ben. A többi európai rendszerekhez hasonlóan ABS csatornánként egy nyomásnövelő és egy nyomáscsökkentő elektromágneses szeleppel szabályozza a fékező nyomást. Ha ABS/ASR szabályozást valósít meg összesen 10 db elektromágneses szelepre van szükség. Nyomáscsökkentéskor a fékfolyadék a két fékkörnek megfelelően kialakított dugattyús tárolótérbe kerül.

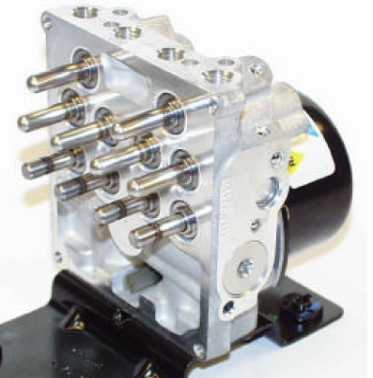


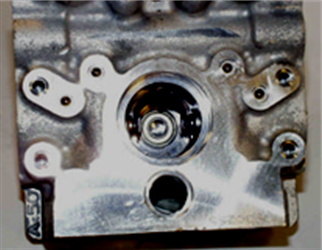
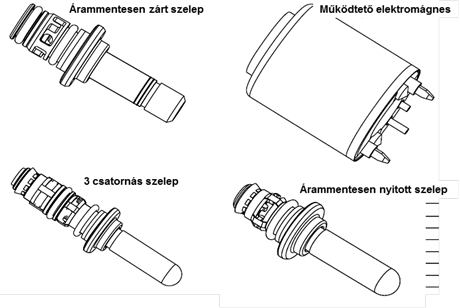
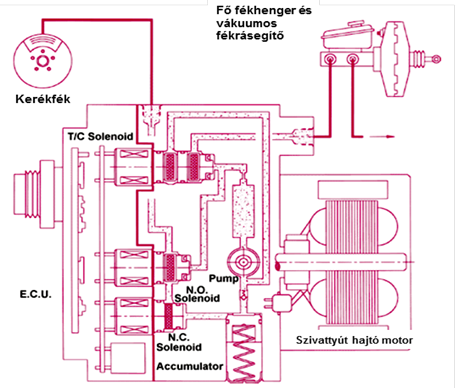
10.2.6.5. Sumitomo ABS
A Japán Sumitomo Corporation Bosch licenc alapján kezdte gyártani a blokkolásgátlókat. Így működési elvük is azonos azokkal a típusokkal. Az Európában is ismertebb gépkocsik közül ilyen blokkolásgátlót szerelnek a Honda Acura és Leged típusokba (1990-92 között), Mazda 626 (1987 –óta), a Toyota Yaris (1999 -óta) gépkocsikba. Az „add-on” rendszernek megfelelően a vákuumos fékrásegítővel és normál kétkörös főfékhengerrel ellátott alap fékrendszert egészíti ki.
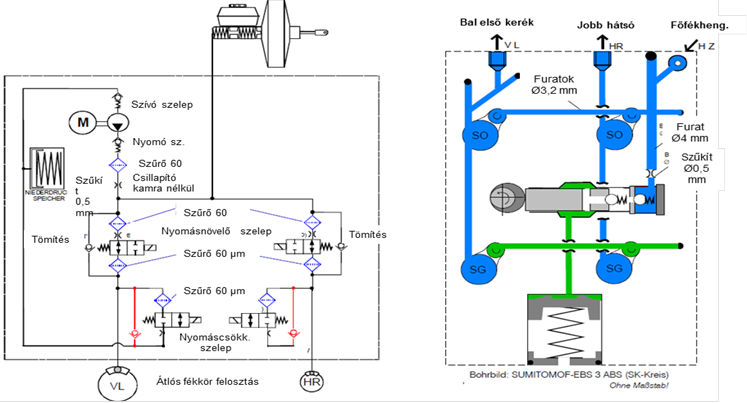
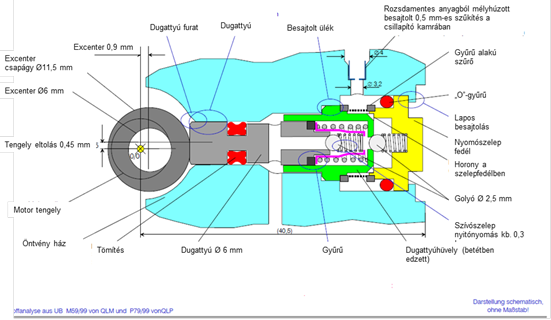
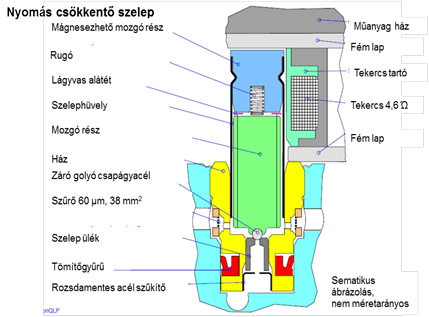
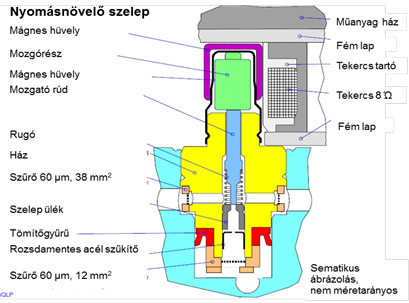
Összefoglalva tehát a blokkolásgátlók fejlesztése területén elért eredményeket elmondható, hogy a különböző szoftverbővítések révén jelenleg a következő feladatokat képes ellátni:
fékasszisztens
ABS/ASR szabályozás
elektronikus fékerő felosztás
terep működés
11. fejezet - ESP rendszerek
- 11.1. Az ESP rendszer bemeneti információi és működése
- 11.2. Az ESP beavatkozások
- 11.3. Az ESP rendszer önellenőrzése
- 11.4. ESP hidraulika egység és elektronika
- 11.5. Az ESP rendszer perdülés érzékelője
- 11.6. Kereszt (és menet irányú) gyorsulás érzékelő
- 11.7. Kerékfordulatszám érzékelők legújabb változata
- 11.8. Az ESP rendszerek kormánykerék elfordítás érzékelői
- 11.9. Fékező nyomás érzékelő
- 11.10. Az ESP működéséhez a fékező nyomás létrehozása
- 11.11. Az újabb ESP rendszerek összetett menetdinamikai szabályozó rendszerré váltak
Személygépkocsik ESP rendszerei
Az ESP rendszer a gépkocsik aktív biztonságának fontos eleme, hiszen a hossz- és a kereszt irányú dinamikai viselkedést is képes befolyásolni. Kifejlesztését a sokszor ”megmagyarázhatatlan” egy résztvevős balesetek indokolták, melyeknél a gépkocsivezető elvesztette uralmát autója felett. Gyakran ezek valódi oka vezetési hiba volt. Aminek következtében a gépkocsi kisodródott, megfarolt, és oldalával ütközött neki például egy útszéli fának, villanypóznának, vagy más objektumoknak. A statisztikai adatok alapján megállapítható, hogy a becsatolt biztonsági övvel bekövetkezett halálos balesetek 60%-a oldal irányú ütközés következménye volt. Ezek jelentős része elkerülhető lenne, ha a gépkocsiba ESP-t szerelnének. Ez az elektronikus stabilizáló program szélsőséges menetviszonyoknál is hatékonyan stabilizálja a gépkocsit a fizikai törvények határain belül.

A gépkocsi menetdinamikája akkor jó, ha pánikhelyzetben sem kényszerül a vezető a megszokottól eltérő cselekvésre. Ilyenkor ugyanis az ijedtség miatt gyakran helytelenül cselekszik.
Amikor a kerekek csúszás miatt lecsökkent az oldalvezető erő, a vezető a túlzott, és hirtelen kormánykorrekcióval gyakran a veszélyes helyzetet tovább rontja. A legkritikusabb körülmények között is uralhatóvá teszi az autót az ESP működése, mely megfelelően reagál a vezető helytelen cselekvéseire is, amikor például teljes gázt ad, vagy egyik irányban teljesen elrántja a kormányt.

A címben is olvasható elnevezésen kívül használatos még ugyanerre a menetdinamikai szabályozó rendszerre az Electronic Stability Control elnevezés is és az ebből származó ESC rövidítés. Ez egy klasszikus perdület-szabályozás, (a gépkocsi függőleges tömegközépponti tengelye körüli elfordulás sebességének a szabályozása), mely egy megadott járműmodell alapján működik. Ezt egészíti ki a kúszási szög változásának kompenzálása. Ez a rendszer már nem csak fékezéskor, vagy gyorsításkor avatkozik be, hanem akkor is, amikor a gépkocsi stabilitása azt megkívánja. Nem szabad azonban megfeledkezni arról, hogy ez is csak a fizikai törvények határain belül képes stabilizálni a gépkocsit.
Támogatja a gépkocsi iránytartását, erős terhelésváltás esetén. De javítja a menetstabilitást akkor is, amikor nagy nyomatékkal a motorféket használják. Könnyebbé teszi a dinamikus kormányzási akciót, megakadályozza a gépkocsi „túlfordulását”. Az újabb fejlesztéseknek köszönhetően egyre több különleges működéssel is kiegészült a beavatkozások sora. Ilyen például az utánfutó stabilizáló algoritmussal. Ez a vontató gépkocsira fejti ki hatását, amikor nagy sebességnél az utánfutó kezdi belengetni azt. Ez a szabályozási módot Trailer Stability Program –nak nevezik, és TSP –nek rövidítik. Ennek keretében egy valódi kúszási szög szabályozás valósul meg.
Az ESP rendszer részei:
Elektro - hidraulikus szabályozó egység, mely hasonlatos az ABS / ASR hidraulikaegységhez
Aktív vákuumos fékrásegítő (ez hozza létre a vezetőtől függetlenül a fékező nyomást az egyes kerekeknél történő beavatkozásokhoz a Continental Teves ESP rendszernél)
Kormányzási szöghelyzet érzékelő,
CAN hálózati kommunikáció a motor nyomaték szabályozáshoz,
Kerékfordulatszám érzékelők (4 db),
Perdülés és keresztirányú gyorsulás érzékelő
Az ESP összetett menetdinamikai szabályozó rendszer
Azáltal, hogy a gépkocsi hossz-, és kereszt irányú dinamikáját is képes javítani beavatkozásaival, jelentősen növeli a gépkocsik aktív biztonságát. Ez az alapján történik, hogy minden hatodik milliszekundumban összehasonlítja a vezető által kívánatosnak tartott menetpályát, a gépkocsi tényleges menetpályájával a szoftver által tárolt matematikai modell alapján.
A vezető szándéka a kormánykerék elfordítási iránya, az elfordítás sebessége és szöghelyzete és hozzá hasonlóan a gáz, illetve a fékpedál helyzete és annak változása, valamint a sebesség alapján határozható meg.
A gépkocsi tényleges menetpályájára vonatkozó információk a perdülés, a kereszt-, illetve összkerékhajtásúaknál a hossz - irányú gyorsulás érzékelők-, továbbá a kerékfordulatszám érzékelők jeleinek kiértékelése révén válik ismertté. Ebből is kitűnik, hogy ezeknek a speciális érzékelőknek a kifogástalan működése nagyon fontos az ESP szabályozás szempontjából.
Az ESP működése során számos korábban önálló szabályozó algoritmus, most mint részprogram válik a rendszer részévé. Ezek közül az alábbiakban felsorolunk néhányat:
blokkolásgátló (ABS) és annak „terep fokozata”, mely nagyobb kerékcsúszást engedélyez a laza talajon, vagy a friss hóban.
kipörgésgátló ASR, (és annak nagyobb kerékcsúszást lehetővé tevő „terep fokozata”
perdülési nyomaték szabályozás GMR,
elektronikus fékerő felosztást EBV,
fékasszisztens működés.
utánfutó stabilizálás
ESP beavatkozás módja és hatása a közlekedésbiztonságra:
Az ESP megakadályozza a gépkocsi alulkormányzott, illetve túlkormányzott viselkedését. Ez a pillanatnyi menetállapottól függően, az egyik kerék szabályozott fékezésével valósulhat meg. Alulkormányzott esetben például a kanyar belső ívén futó hátsó kerék fékezésével történik a beavatkozás. Túlkormányzott esetben a kanyar a külső íven futó első kerék fékezésével stabilizálható a gépkocsi. Dinamikus kormányzási manőver esetén az ellenkormányzást könnyítheti meg az ESP, amikor a kanyarodást követően a gépkocsit vissza kell hozni egyenes menetbe. Ezeket a beavatkozásokat a motor hajtó nyomatékának csökkentésével is támogatja az elektronika.
Standard ESP
A gépkocsi perdületi gyorsulásának és kúszási szög változásának alapján történik a beavatkozás.
SESP
A rövidítés első „S” betűje a szenzitiv szót helyettesíti, mely magyarul „érzékeny” –t jelent. Ennek a szabályozásnak az előnyei különösen terhelésváltáskor mutatkoznak meg.
ARP
Active Rollover Prevention – ez a borulás elleni védelmet jelenti. Nagyon dinamikus sávváltásnál, illetve kitérés esetén növeli hatékonyan az aktív biztonságot.
TSP
Trailer Stability Program - utánfutó stabilizálás.
Continental Teves ESP hidraulika egységek:
A Continental Teves MK 20 típusjelzésű ABS/ASR változat volt a vállalat első olyan hidraulika egysége, mely a speciális kiegészítő érzékelőkkel ESP szabályozásra alkalmassá vált. Külön egységet alkotott az optokapus kormánykerék elfordítás érzékelő,továbbá a speciális kettős hangvillához hasonlító speciális kvarckristályból kialakított perdülés érzékelő. Ez utóbbinak házába szerelték a kereszt irányú gyorsulás érzékelőt, illetve összkerék hajtású gépkocsiknál a hossz irányú lassulás érzékelőt is. Hamarosan ebből az egységből fejlesztették ki az intelligens, úgynevezett „sensor-cluster” –t. Ez saját maga kiértékeli az érzékelők jeleit, melynek eredményét a CAN hálózaton küldi az ESP elektronikának. Ennek az MK 20 rendszernek a gyártása 2000 –ig tartott. Ezt követték MK 60 típus, melyet 2000 - 2002 között szereltek a gépkocsikba. Az MK 70 változatot jelenleg is gyártják. Bizonyos speciális működésekre csak az MK25E, illetve az MK60E típusok képesek. Az MK 60 típusnál két kiegészítő nyomásérzékelőt is beszerelnek. A blokkolásgátló és a kipörgésgátló működése bizonyos változatoknál kiegészül a TPMS működéssel. Ez a többitől kisebb nyomású gumiabroncsot veszi észre a kerékfordulatszám érzékelők jeleinek kiértékelése alapján és figyelmezteti a gépkocsivezetőt az ellenőrzőlámpa segítségével. Az észlelés alapja az, hogy a kisebb nyomású, laposabb keréknek kisebb a gördülési sugara ezért egyenes menetben a többi keréknél nagyobb lesz a kerületi sebessége. Ezt a működésmódot a német szakirodalom Reifendruckverlust-Erkennungssystem –nek nevezi. Használatos még erre a működésmódra a DDS rövidítés is az angol „Deflation Detektion System” elnevezés alapján.
Az ESP rendszernek is egyik fontos kiegészítő működése a fékasszisztens, melyet a vállalat a Hydraulischer Bremsassistent elnevezés alapján HBA –nak rövidít. A lejtőn lefelé közlekedést teszi biztonságosabbá a Berg-Anfahrhilfe. Az elektromechanikus rögzítő fék dinamikus működtetésénél a CAN hálózaton keresztül érkező parancs működteti az ESP hidraulika egységet, amely elvégzi a fékezési beavatkozást.
11.1. Az ESP rendszer bemeneti információi és működése
Az ESP szabályozás különböző algoritmusai meghatározzák a gépkocsi sebességét és lassulását, a kerékcsúszást, a fékező nyomást. Ezek alapján a matematikai modell segítségével kiszámítja a ferdefutási szöget, a kerekek oldalkúszási szögét, a keresztirányú gyorsulást, a kerekeknél az oldalvezető erő nagyságát, a függőleges irányú terhelését és az eredő erőket. A ferdefutási szög meghatározásához a kétnyomú járműmodell mozgásegyenleteit használja fel az elektronika. Ezeket az egyenleteket azután linearizálja és diszkretizálja. Az oldalerők meghatározásához a HSRI gumiabroncs modellt alkalmazzák. Így kiküszöbölhetők a nem lineáris egyenletek és a kerekeknél meghatározhatók a hossz- és a kereszt irányú erők.
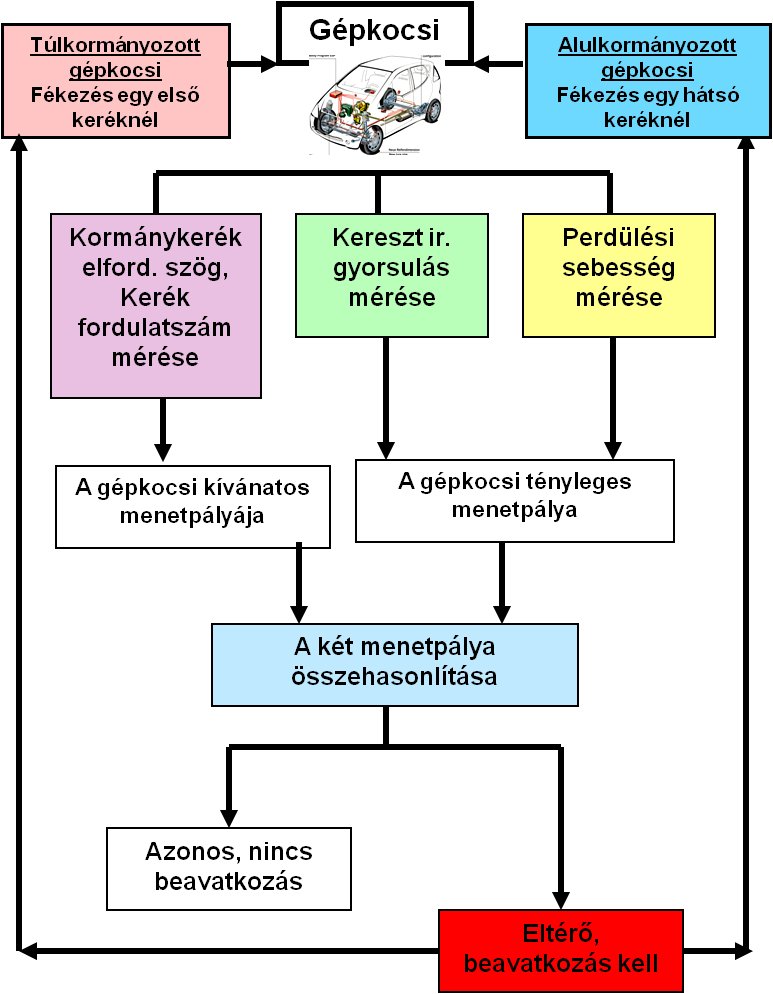
11.2. Az ESP beavatkozások
Az ESP rendszernek jelenleg már több beavatkozási lehetősége is van. A gépkocsi pillanatnyi menetdinamikai viselkedésétől függően:
egy kiválasztott kerék szabályozott fékezése,
motor nyomaték csökkentése,
az aktív szervokormány segítségével kormánykorrekció végrehajtása.
A kerék csúszás szabályozása a gépkocsivezetőtől függetlenül végrehajtott fékezésekkel valósul meg. Pontosan kell meghatározni, hogy mekkora kerékcsúszás változás szükséges. Túlkormányzott gépkocsinál előnyös, ha intenzív fékezés közben az ESP a külső íven haladó első keréknél a kerékcsúszást növeli, a belső íven pedig csökkenti. A két hátsó keréknél a csúszást fékezés közben nem módosítják.
Az egyik oldalon csúszós úton gyorsításkor a vonóerő a kisebb tapadási tényezőjű részen haladó kerék fékezésével növelhető (differenciálzár hatás). Ekkor a gépkocsira a vezető szándékától független perdítő nyomaték hat, melyet a kormánykerék elfordításával kompenzálni kell. Ha az ébredő perdítő nyomaték a gépkocsi gyártója szerint túl nagy, a csúszó keréknél a fékező nyomást és ezzel egyidejűleg a motor nyomatékát is csökkenteni kell.
Fékezéskor a szlip nagyságát a kerékcsúszás szabályozó egység állítja be. A fékezőnyomás modulációhoz a hidraulikaegység elektromágneses szelepeit működtetik. A kerékcsúszás nagyságát gyorsításkor a hajtott kerekeknél módosítja az ASR. A motor nyomatékát a motormenedzsment szabályozza a CAN hálózaton keresztül érkező üzenetnek megfelelően.

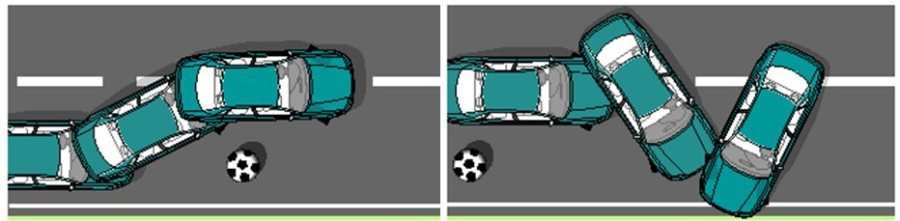

11.3. Az ESP rendszer önellenőrzése
Az ESP olyan aktív menetdinamikai szabályozó rendszer, amely a gépkocsi bármely sebességénél és manővernél a vezető szándékához hasonlítja a tényleges menetpályát és szükség esetén beavatkozik. Ha nem lenne hatékony az önellenőrzés, egy érzékelőtől érkező hibás jel súlyos következménnyel járna. Biztonsági okból az érzékelők redundanciája, azaz a megduplázás a kezdeti időben még jelentősen megdrágította a rendszert, ezért más módszert alkalmaztak.
Az érzékelők jeleinek ellenőrzéséhez a légi közlekedésben alkalmazott elevet, az analitikus redundanciát használták. A gépkocsi matematikai modelljével a különböző érzékelők jelei között fizikai kapcsolatok állíthatók fel, mely jól használható az ellenőrzésre. A perdülési sebesség érzékelőnél például, a Bosch ESP rendszereknél két rugózottan megvezetett és egymással kapcsolatban lévő mikro-mechanikai tömegből áll, a Lorenz erőkkel rezonancia frekvenciájuknak megfelelően gerjesztik. Ha az érzékelő a vibrációs síkra merőlegesen elfordul a tömegekre Corioli gyorsulás hat, mely ennél a változatnál kapacitív módon mérhető. A Corioli gyorsulás növelhető, vagy csökkenthető az elektronika által gerjesztett zavaró erővel. Pontosan meghatározott zavaró erővel ellenőrizhető az érzékelő elektromos, elektronikus és mechanikus része. Ezzel a hibás jelek azonnal felismerhetők. Az elektronika a zavaró jelet 40 milliszekundumonként kapcsolja rá az érzékelőre. Ezzel megvalósítható a folyamatos ellenőrzése. Nemcsak az érzékelőben, hanem a jelátviteli láncban ébredő esetleges hibák is feltárhatók így. Jelenleg a gyártás már annyira felfutott, hogy olcsóbbá váltak az érzékelők is. Így már azok megduplázása a biztonság érdekében nem okoz gondot, mint a kezdeti időkben.
11.4. ESP hidraulika egység és elektronika
Az ESP hidraulikatömbje az ABS/ASR rendszerhez hasonlóan tartalmazza a két körös, dugattyús fékfolyadék szivattyút, melyet az elektronika által működtetett egyenáramú, szénkefe nélküli villanymotorral hajt. Ez hozza létre a gépkocsivezetőtől független fékezési beavatkozásokhoz a fékező nyomást. Amit például az EDS, vagy az ESP használ egy-egy kerék megfékezéskor, de ez biztosítja a megfelelő energiát a fékasszisztens működéséhez is. A Continental Teves ESP rendszernél az aktív vákuumos rásegítőt használják ugyan erre a célra.
A hidraulika egységbe sajtolják be a fékfolyadék nyomását szabályozó szelepek mechanikus részét. Kerekenként egy nyomásnövelő, egy nyomáscsökkentőt szelepen kívül fékkörönként egy átkapcsoló szelep és egy a fékfolyadékot a szivattyúhoz engedő szelepet is felszerelnek. A hidraulika egységben található továbbá a fékkörönként egy dugattyús nyomástároló egység is ahová nyomáscsökkentéskor kerül a fékfolyadék. Mivel ez az egység látja el a fékasszisztens feladatát is, ide szerelik be a nyomásérzékelőt is, amellyel az elektronika a nyomásgradienst méri fékezés közben. Fékkörönként egy-egy automatikus nullpont kiegyenlítésű nyomásérzékelőt alkalmaznak, melynek mérési tartománya 0-250 bar. Ez adja a visszajelzést is az elektronikának. A BMW az ESP rendszert DSC-nek (dinamikus stabilitás szabályozó rendszer) nevezi, elterjedt még az ESC rövidítés is, melynek „C” betűje a control szót helyettesíti. Van több más autógyár is, melyeknél a megszokottól eltérő megnevezéseket alkalmaznak, például a Mitsubishi ASC Automatikus Stabilitás Control. Közben az utóbbi években egyre több gépkocsitípusban az ESP rendszer már az alapfelszereltséghez tartozik.
Az SMD technológiával gyártott elektronikát, mely a mechanikai és más egyéb környezeti igénybevételeket jobban elviseli, már közvetlenül az ESP hidraulika egységre szerelik. Az elektronika nyomtatott áramköri paneljére szerelik fel a szelepeket működtető elektromágneseket. Az ESP elektronika mikrohibrid kivitelű. A mikrokontroller egyik változata lehet például az Intel 88C196BC 265kB ROM-al és 40 MHz működési frekvenciával. A tápfeszültséget közvetlenül a gépkocsi elektromos hálózatának 30-as kapcsáról kapja. Bekapcsolását egy külön Wake Up elektronikus elem végzi. Az elektronika gyárilag kódolatlan. A gépkocsi specifikus adatok automatikus kódolás útján rögzítődnek az elektronikában. Az ehhez szükséges információkat a gépkocsi elektromos hálózata alapján ismeri fel. A sikeres kódolás után az elektronika a gépkocsit az alvázszáma (VIN szám) alapján azonosítja.
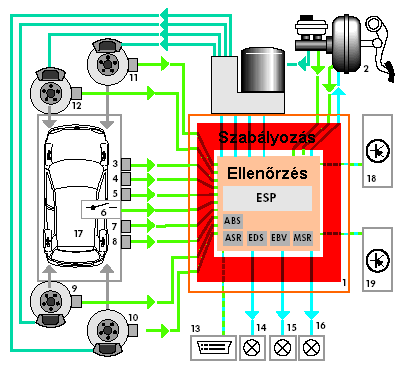
1 ABS hidraulikaegység és elektronika; 2 Aktív vákuumos fékrásegítő; 3 Hosszirányú gyorsulás érzékelő; 4 Keresztirányú gyorsulás érzékelő; 5 Perdülés érzékelő; 6 ASR/ESP kapcsoló; 7 Kormánykerék elfordítás érzékelő; 8 Féklámpa kapcsoló; 9 kerékfordulatszám érzékelő; 10 kerékfordulatszám érzékelő; 11 kerékfordulatszám érzékelő; 12 kerékfordulatszám érzékelő; 13 Diagnosztikai csatlakozó; 14 Fék ellenőrző lámpa; 15 ABS ellenőrző lámpa; 16 ASR/ESP ellenőrző lámpa; 17 A gépkocsi; 18 Motorelektronika; 19 Automatikus sebességváltó elektronika
11.5. Az ESP rendszer perdülés érzékelője
A perdülés érzékelő a gépkocsi tömegközépponti függőleges tengely körüli elfordulás sebességét méri. Az első gépjárművekbe szerelt ilyen érzékelők a légiközlekedésben használatos változatok módosítása alapján készültek.
11.5.1. A Robert Bosch GmbH. perdülés érzékelők
A Bosch kezdetben piezo-kristályos érzékelőt alkalmazott. Az alábbi ábrán a torony szerűen, kissé kúposan kiemelkedő rész belsejében a magyarázó vázlaton bejelölt A – A’ és a B – B’ síkban elhelyezett piezo kristályokkal a réz hengert az önlengésszámnak megfelelő rezonanciában lebegve tartja. A hullám alakok szélső helyzeteit kissé felnagyítva a szaggatott vonallal megrajzolt ellipszisek szemléltetik. A C – C’ és a D – D’ síkban érzékelő piezo kristályokat helyeztek el. Ezek pontosan a rezgési „csomópontok”-ban vannak, ahol nincs elmozdulás. Ha a gépkocsi megperdül, vele együtt elmozdulnak a piezo kristályok is, de az önlengésszámmal rezgő és lebegő henger megtartja az eredeti helyzetét. Ezért az érzékelő kristályok most rezgést fognak detektálni. Annak intenzitása a perdülési sebességgel arányos. Ezt a kiértékelő elektronika feszültség jelként küldi az ESP elektronikának.
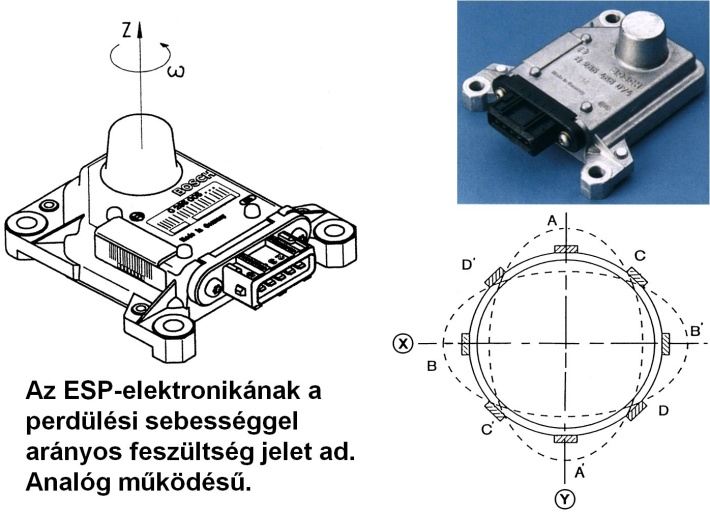
A fentiekben ismertetett változatot követte a jelenleg is használatban lévő második generációs mikromechanikai perdülés érzékelő. Nem csak személygépkocsiknál, de haszonjárműveknél is ezt alkalmazzák. Belsejében egy 7x7 mm-es szilícium chip található. Szerkezeti kialakítása csak 50 szeres nagyításban válik láthatóvá. A 600 µm vastagságú szilíciumlapkára viszik fel a szilíciumoxid-, majd egy 10 µm vastagságú poliszilícium réteget. Az érzékelő alaplapjából két 50 µm -es lapkát maratnak ki. Ezekből készülnek a rezgő tömegek, melyeket rugók tartanak a helyükön. A rezgési tengelyre merőlegesen poliszilíciumból készült kapacitív elven működő érzékelőt illesztenek rájuk. Hajszál vékony arany huzal létesít kapcsolatot az érzékelők és a kiértékelő elektronika között. Ez utóbbi a rezgő tömegek gerjesztéséhez szükséges feszültséget is létrehozza, továbbá kiértékeli a mérési eredményeket. Az érzékelőket, a kiértékelő áramkört és a felületre szerelt többi elektromos egységet egy közös kerámia lapkára szerelik, melyet fém foglalatban helyeznek el. A házat atmoszférikus nyomású, száraz nitrogén gáz tölti ki. A külső burkolata műanyagból készül. Ezen alakítják ki a gépkocsi specifikus elektromos csatlakozókat és a rögzítési helyeket.
A gyújtás bekapcsolásakor a beépített gerjesztő egység a két kis rezgő tömeget vízszintes síkban egymással ellenkező fázisban és ellentétes irányban mozgatja. Amikor az érzékelő belsejében az egyenes vonalú mozgást végző tömegekkel függőleges tengelye körül elfordul, a vízszintes síkban Corioli erő keletkezik. Ez hatást fejt ki a rezgő tömegeken elhelyezett kapacitív elven működő gyorsulásérzékelők szeizmikus tömegeire.
A gyorsulásérzékelő ellentétes fázisú feszültségei egymásból kivonódnak, így megszűnnek a lineáris összetevők és kétszeres nagyságú a Corioli erővel arányos jel keletkezik. Ennek nagysága attól függ, hogy mekkora volt a gépkocsi perdülete. Az érzékelő analóg jelet szolgáltat a menetdinamikai szabályozó elektronikának. Az újabb változatoknak már analóg és digitális jelkimenete is van. Ez biztosítja a kompatibilitást és az alkalmazhatósága is így szélesebb körűvé válik. A működéshez szükséges tápfeszültséget az ESP elektronika szolgáltatja. A rendszer a bekapcsolást követően egy másodpercen belül válik üzemképessé. Menet közben az ESP elektronika folyamatosan ellenőrzi az érzékelő mechanikus és elektronikus részeinek állapotát.
A perdülés érzékelő mérési tartománya ± 1,4 g keresztirányú gyorsulás és ± 100 ˚/s perdülési sebesség. Az érzékenysége ± 0,2 ˚/s .
Az újabb perdülés érzékelő változat típusjelölése DRS-MM1.1 mely a gépkocsi függőleges tömegközépponti tengely körüli elfordulását érzékeli. Ezzel egyidejűleg méri a kereszt irányú gyorsulást is. Az érzékelőt rezgéscsillapítóval is ellátták és PT-CAN hálózaton keresztül adja át a mért értékeket az ESP elektronikának. Működésellenőrzését szoftveresen úgy oldják meg, hogy az általa továbbított információkat összevetik a többi érzékelők jeleivel. Így végzi el az elektronika a plauzibilitás (elfogadhatósági) vizsgálatot.
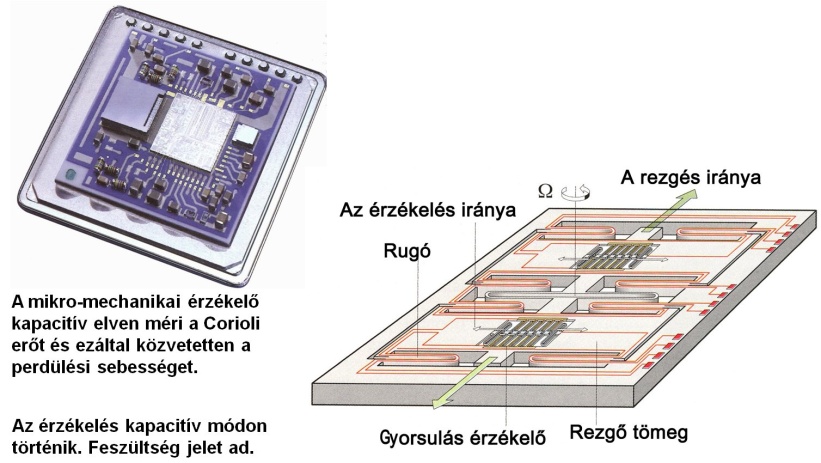
11.5.2. Continental Teves perdülés érzékelő
Kezdettől fogva más elven működő perdülés érzékelőt alkalmazott a Continantal Teves vállalat, de eredetileg ez is a légiközlekedésből származik. A keresztirányú gyorsulás érzékelővel egy közös házba szerelték be és a gépkocsi tömegközéppontjához a lehető legközelebb helyezték el.
A kettős hangvillából álló mikromechanikai érzékelő a függőleges tengely körüli elfordulás sebességét méri. Ha meghibásodik az ESP nem működik.
Az érzékelő szilícium kristályból készült kettős hangvillához hasonlító egyik része végzi a gerjesztést, a másik a mérést. 11 kHz-es váltakozó feszültséget rákapcsolva rezgésbe jön a gerjesztő rész. A mérő rész önfrekvenciája 11,33 kHz. A saját frekvenciával rezgő rész megtartja a rezgési síkját. A gépkocsi perdülésekor az érzékelőre ható erő csavaró nyomatékot fejt ki a szilícium kristályra, ezért elektromos töltés keletkezik benne. Ez előerősítő és erősítő áramkörök révén adja a jelet, amit az elektronika kiértékel.
A továbbfejlesztés során ez „intelligens érzékelővé” vált, mert saját kiértékelő elektronikával is ellátták, mely a perdüléssel és a kereszt irányú gyorsulással arányos jeleket feldolgozza és a mért értékeket a CAN hálózaton keresztüli adattáviratként küldi az ESP elektronikának. A működéséhez szükséges tápfeszültséget is az ESP központi elektronikától kapja.
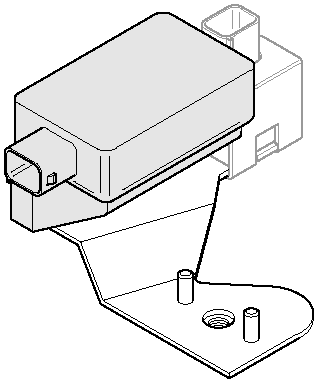
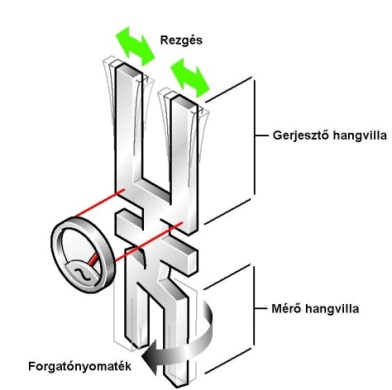
A következő ábra szemlélteti a szilícium lapkából készített kettős hangvilla ként kialakított mikromechanikai érzékelő egyes belső áramköreinek kialakítását.
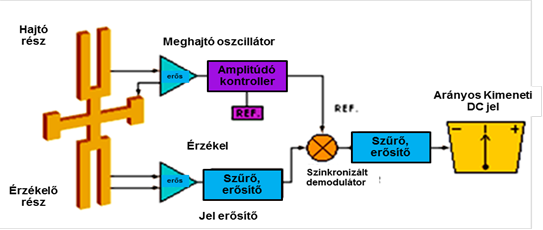
A jelenleg gyártásban lévő ESP MK 60 rendszernél a perdülés érzékelő már nem alkot külön egység. Közvetlenül az elektronikába szerelik be, melyet a vállalat budapesti üzemében gyártanak. A gépkocsi tömegközéppontjától eltérő elhelyezése miatt a szoftvernél ezt korrekciós tényezővel veszik figyelembe. A fentiekben ismertetettől eltérő mérési elvű mikro-mechanikai perdülés érzékelőt a Panasonic szállítja be.
A most használatban lévő perdülés érzékelő magába ötvözi a kereszt irányú gyorsulás érzékelőt is, ezért szerkezeti kialakítása kissé összetetté vált.
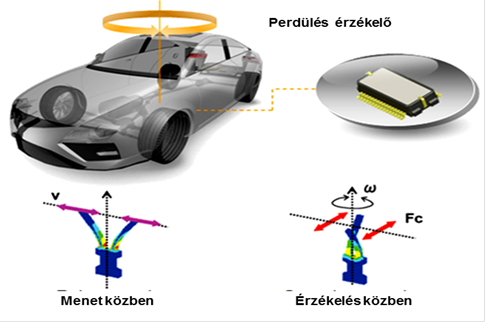
A perdülés érzékelő belső szerkezete és működési elve kissé megváltozott. A forgó villát használják a kocsiszekrény szögsebességének érzékelésére. A piezoelektromosan gerjesztett erő hatására menet közben a villára egy vibráció hat. A kocsiszekrény megpördülésekor az érzékelési módban a villára a Corioli erő hat. A rezgés és a rá szuperponálódó Corioli erő hatására a villa karjaiban elektromos töltés keletkezik, mely arányos a gépkocsi perdülési sebességével. Az egységbe szerelt erősítő ezt a jelet annyira felerősíti, hogy kiértékelhető legyen. A gerjesztett rezgés 8 kHz frekvenciájú. Két csatlakozó tömeg rezeg különböző módon.
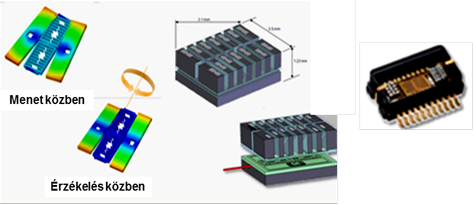
11.6. Kereszt (és menet irányú) gyorsulás érzékelő
Az érzékelés irányának megfelelően a gépkocsi tömegközéppontjának közelében helyezik el. Ennek jele alapján tudja az elektronika meghatározni, hogy milyen oldalgyorsulás hat a gépkocsira a pillanatnyi menetviszonyok között. Ez az információ fontos a gépkocsi stabilitásának megtartása miatt. A keresztirányú gyorsulás érzékelő meghibásodása esetén az ESP nem működik.
Működési elve kapacitív. Két, sorba kapcsolt kondenzátorból áll. Ha nincs keresztirányú gyorsulás a középső fegyverzet azonos távolságban van a szélsőtől. A beépített két kondenzátor kapacitása azonos.
Keresztirányú gyorsuláskor a közös középső fegyverzet tömegére a tehetetlenségi erő hat, ezért elmozdul a felfüggesztő rugó ellenében és az érzékelő két részének kapacitása a kereszt irányú gyorsulással arányosan változik. Az érzékelő az alábbi diagram szerinti lineáris feszültség jelet adja, mely arányos a kereszt irányú gyorsulással.
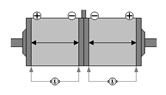
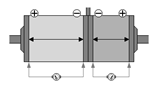
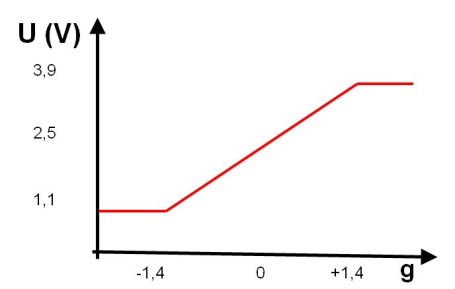
Az újabb kivitelű gyorsulás érzékelőnél a MEMS technológiával gyártott tömeget rugó tartja a helyén. Az érzékelt lassulás irányában a tömeg kitér a semleges helyzetéből. A kapacitív érzékelési elv a pillanatnyi lassulással arányos jelet hoz létre
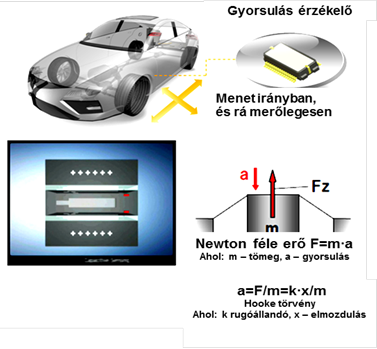
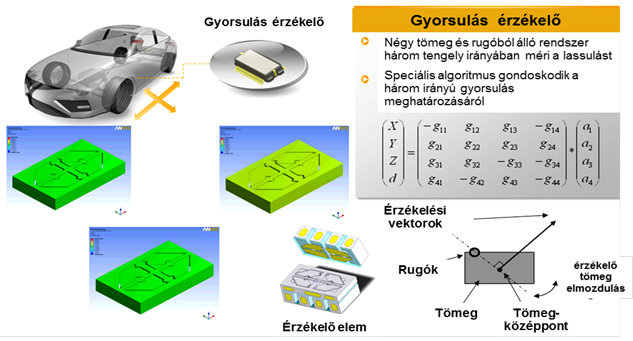
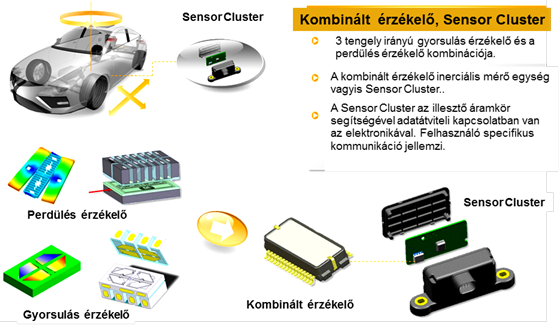
A gyorsulás érzékelő újabb változatai olyan kialakításúak, hogy a különböző irányú gyorsulások érzékelésére alkalmas a fizikailag egyetlen test. Ezt a változatot már könnyű kombinálni a perülés érzékelővel, mert mindkettőnek rendkívül kicsi a helyigénye. Így alkották meg aztán a „sensor cluster” újabb változata, mely lényegesen kisebb, mint a régebbi volt. Így tehát már a hidraulika egységre szerelt elektronikába beépíthető. Ezt az újabb elhelyezést korrekciós tényezőkkel kell figyelembe venni az ESP algoritmusánál. Ezzel az új kialakítással egyszerűsödött az ESP rendszer hálózata, amely hozzájárul a megbízhatóság növekedéséhez is.
11.7. Kerékfordulatszám érzékelők legújabb változata
Az ESP rendszer működéséhez nélkülözhetetlenek a kerékfordulatszám érzékelők jelei. Ezeket az ABS -ről szóló részben már ismertettük. Jelenleg az aktív változatokat alkalmazzák, mely a mágneses kódolása alapján lehetővé teszi a forgásirány felismerését is. Ezek gyártásánál is történtek változások a közelmúltban. A működés precizitása miatt az ESP rendszernél különösen fontos ezen a területen is a minél pontosabb jelképzés. Ezt szolgálják az érzékelők újabb változatai.
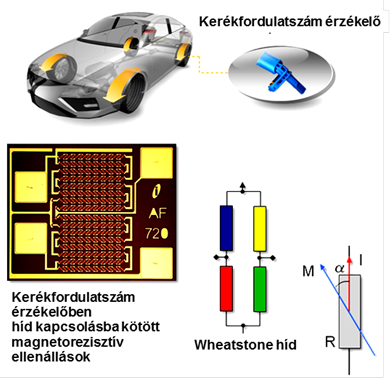
11.8. Az ESP rendszerek kormánykerék elfordítás érzékelői
A kormánykerék tengelyére szerelik fel. A gyártók különböző működési elvű változatokat szállítanak be az autógyáraknak. Az érzékelő a CAN hálózaton keresztül továbbítja a jeleket az ESP elektronikának. Innen kapja a működéséhez szükséges tápfeszültséget is.
Az érzékelő által küldött információk:
a kormánykerék elfordítási iránya,
a mozgás sebessége,
a pillanatnyi szöghelyzet.
11.8.1. Robert Bosch GmbH kormánykerék elfordítás érzékelő
Az új fejlesztésű kormánykerék elfordítás érzékelő a kormányoszlopon elhelyezett különböző kapcsolókkal alkot közös egységet. Gyakran kombinálják a kormánykerék légzsák átvezető spiráljával is. Az alábbi elvi ábrán érzékelő belsejében elhelyezett nagy fogaskerék mechanikus kapcsolatban van a kormánykerék tengelyével. Hozzá két kisebb fogaskerék kapcsolódik, melyek fogszáma egymáshoz képest eggyel eltér, de ezek egymáshoz nem kapcsolódnak. Ezekre a kis fogaskerekekre egy-egy állandó mágnest szereltek. A fogszám különbség miatt eltérő a forgási sebességük. Mindkét érzékelőben egy-egy szinuszos jelet hoznak létre. Ebből a két jelből bármely időpillanatban egyértelműen meghatározható a kormánykerék szöghelyzete és az elfordítás iránya. Az egyik jel az idő függvényében pedig a kormánykerék elfordítási sebességét adja. Egy számláló mű pedig meghatározza a kormánykerék elfordításainak számát.
Önálló jelkiértékelő, diagnosztikai és hibakód tároló egységgel látják el. Kicserélése, vagy a kormányberendezésen, illetve a futóművön végzett megbontásos javítás után az egyenes meneti helyzetet újra kalibrálni kell. Ez az alapfeltétele az ESP kifogástalan működésének. Az érzékelő meghibásodása, vagy nem megfelelő kalibrálás esetén az ESP rendszer nem működik, de az ABS és az EBV aktív marad. A kalibráláshoz a gépkocsi típusának megfelelő diagnosztikai műszert kell használni és a megadottak szerint kell végezni a műveletet.
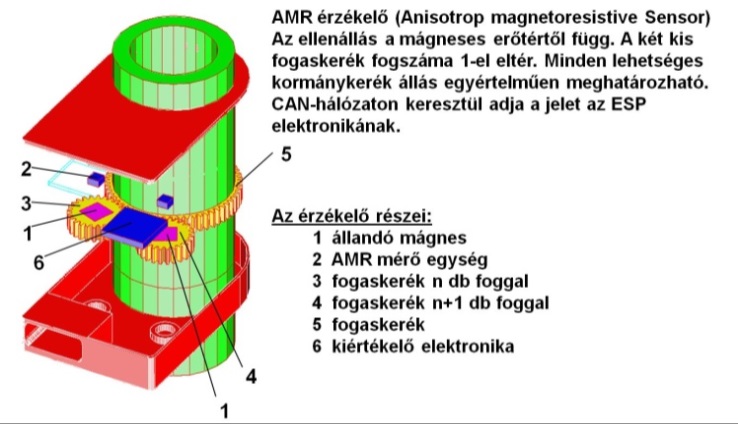
11.8.2. Continental Teves kormánykerék elfordítás érzékelő
Az opto-kapus működési elvű érzékelőt a kormányoszlopon helyezik el. A légzsák átvezető spiráljával egy közös egységet alkot. Ha meghibásodik ez az érzékelő az ESP működésképtelenné válik. Az elektronika, vagy az érzékelő cseréje után újra kell kalibrálni a kormánykerék egyenes meneti állásának megfelelően. Ehhez a gépkocsi diagnosztikai műszerét kell használni. Az érzékelőbe beépített kódtárcsa két különböző jelet képező gyűrűből áll.
Az egyenletes osztású fog – fogárok az elfordítási sebességjel képzéséhez szükséges.
A hexadecimális kódolásút a szöghelyzet pontos meghatározásához szerelték be.
a. Fényforrás; b. Kódtárcsa; c. Optikai érzékelő; d. Optikai érzékelő; e. A teljes fordulatok számolója
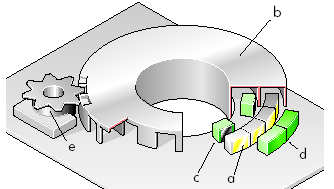
a. Fényforrás; b. Kódtárcsa; c. Optikai érzékelő; d. Optikai érzékelő; e. A teljes fordulatok számolója
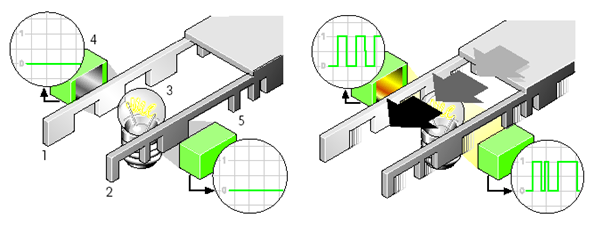
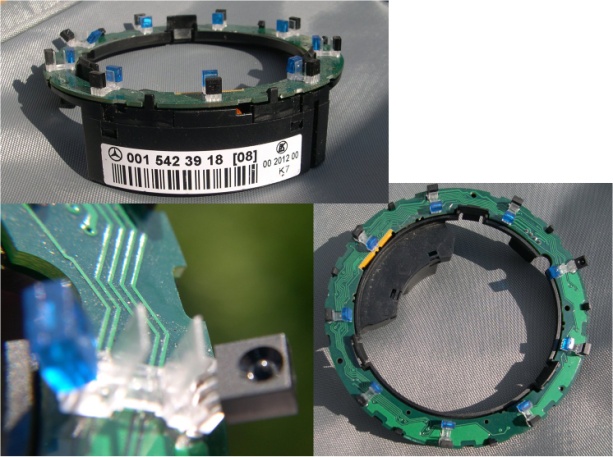
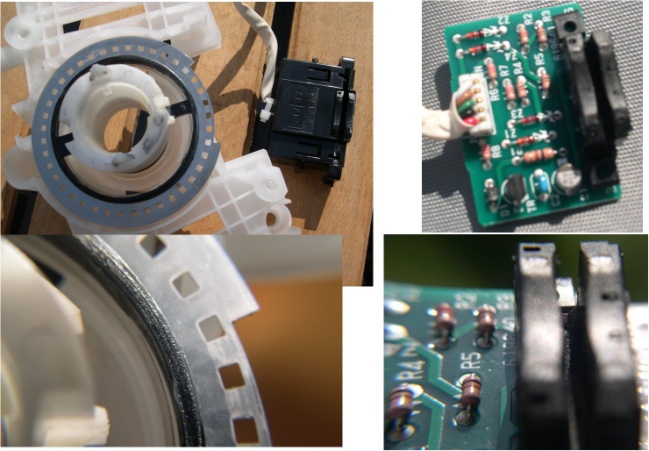
A Continental Teves újabb kormánykerék elfordítás érzékelője
Ez az érzékelő határozza meg a gépkocsivezető által helyesnek tartott kormánykerék elfordítási helyzetet.
Az érzékelőt a kormánykerék tengelyére szerelik fel. A szöghelyzet érzékelés magneto-rezisztív, módon történik. A belsejébe mechanikai hajtóművet szerelnek, amely az abszolút szöghelyzet meghatározásához szükséges. Összesen 4 kormánykerék körülfordítást tesz lehetővé. A biztonságos érzékeléshez két jel szükséges. Az egyik híd kapcsolású AMR egység ad egy jelet. A jelképzésbe további hasonló két egységet vonnak be, melyek egymáshoz képest 45˚ -os szöggel vannak elékelve. A színuszos jelelakok egy adott pillanatban megállapított metszékei alapján a kidolgozott matematikai algoritmus segítségével kellő pontossággal, egyértelműen meghatározható a:
a kormánykerék elfordítási helyzete,
az elfordítás iránya
az elfordítás sebessége.
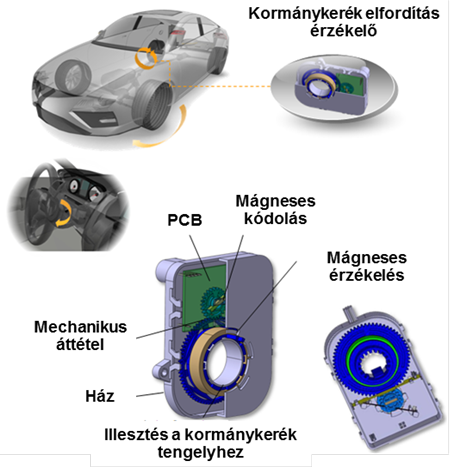
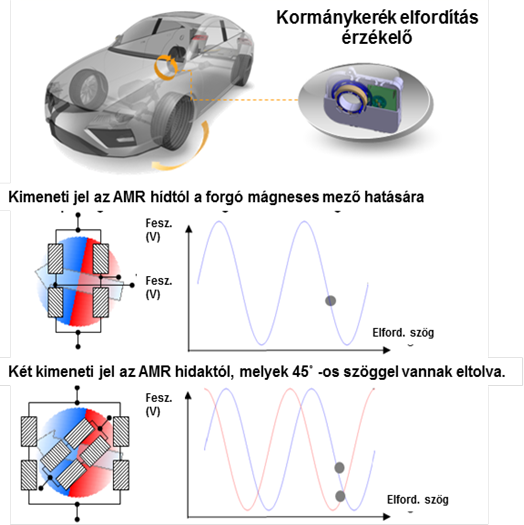
11.9. Fékező nyomás érzékelő
A régebbi Continental Teves ESP rendszereknél a főfékhengerhez csatlakoztatták, újabban már az ESP hidraulika egységbe szerelik be. A kivezérelt fékező nyomásról ad visszacsatolást az elektronikának. Korábban mindkét fékkörhöz beszereltek egyet. Ha az egyik meghibásodik, az ESP kikapcsol. A kapacitív elven működő érzékelőn kívül használnak még piezo-fóliás, változatot is.
A kapacitív érzékelőnél a kondenzátor egyik fegyverzete a házhoz rögzített, a másikat a dugattyú a nyomással arányosan rugó ellenében elmozdítja. A kondenzátor kapacitását a fegyverzetek közötti távolság határozza meg. Ha a fegyverzetek közelebb kerülnek egymáshoz a nyomás hatására, a kapacitás nagyobb lesz.
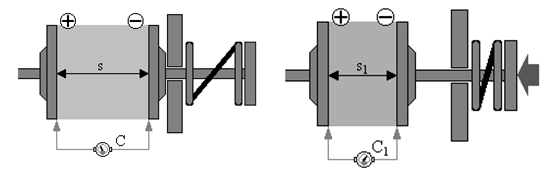
11.10. Az ESP működéséhez a fékező nyomás létrehozása
Az ESP működésekor a beavatkozáshoz a fékező nyomás a vezetőtől függetlenül két módon hozható létre:
a hidraulikaegység fékfolyadék szivattyújának bekapcsolásával.
aktív vákuumos rásegítő alkalmazásával.
Mindkét esetben az ESP elektronika végzi az egység aktiválását. Az utóbbi változatot a Continental Teves alkalmazza az ESP rendszereinél.
Az aktív vákuumos fékrásegítő működése
Az ESP elektronika a fékrásegítőbe szerelt elektromágnesre áramot kapcsol és ezzel elmozdítja annak szelepét. Hatására atmoszférikus nyomású levegő áramik a fékrásegítő membránjának jobb oldali kamrájába. Ez 10 bar-os fékezőnyomást hoz létre a főfékhenger dugattyúinak elmozdításával. Ha ennél nagyobb nyomásra van szükség az elektronika bekapcsolja hidraulikaegység fékfolyadék szivattyúját. Az így létrehozott nyomásból az ESP hidraulika egység elektromágneses szelepei tudják a szükséges értéket kivezérlni a fékezendő kerékhez. Az aktív fékrásegítő működését az abba beszerelt kapcsoló jelzi vissza az elektronikának.
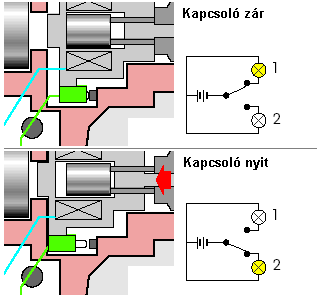
11.11. Az újabb ESP rendszerek összetett menetdinamikai szabályozó rendszerré váltak
Az újabb ESP rendszerek két fokozatú beavatkozásra is alkalmasak, és számos újabb, a gépkocsivezető tevékenységét megkönnyítő működéssel is ellátták. Az egyik beavatkozás a hagyományos egy kerék szabályozott fékezésével járó működésmód, a másik beavatkozás pedig az aktív szervokormány működtetésével végrehajtott kormánykorrekció.
ESP beavatkozás kormánykorrekcióval
Az Audi és az újabb VW Passat több típusánál is az opcionális felszereltségéhez tartozik a „Dinamiklenkung”, dinamikus kormányzás nevű program és a hozzá tartozó aktív szervokormány. Ha az ESP nem az egyik kerék fékezésével, hanem kormánykorrekcióval avatkozik be a gépkocsi nem fog lassulni az ESP működése miatt. Így tehát nem veszít a lendületéből agilisabbá válik. Az ESP kormányzási beavatkozásnak az előnye az, hogy nagyobb szabályozási komfortot biztosít és a hosszdinamikát nem befolyásolja annyira, mint a régebbi ESP. A stabilizáláshoz szükséges elkormányzást az ESP elektronika határozza meg, melyet utasításként a CAN hálózaton keresztül átküld a dinamikus kormányzás elektronikának. Ennek megfelelően egészítették ki a szabályozási algoritmust, valamint ehhez igazították a hardvert is. Ennek a beavatkozásnak a hatására a kormánykerék nem fordul el. A kormánykerék szöghelyzetén kívül ennél a változatnál a kerekek elkormányzási szögét is méri az elektronika. A működés dinamikusabb állító tag beavatkozásokkal történik. Ez a rendszer az IEC61508 biztonsági előírásnak felel meg.
További kiegészítő ESP működések
A rögzítő fék dinamikus használata
Az újabb személygépkocsikat már elektromechanikus rögzítő fékkel is ellátják. Ha a rögzítő féket a gépkocsi mozgása közben működteti a gépkocsivezető a CAN hálózaton keresztül az ESP hidraulika egységhez érkező parancs hatására a fékfolyadék szivattyú bekapcsolásával hozza létre a szükséges fékező nyomást és az ESP hidraulikaegysége hajtja végre a fékezést.
Utánfutó stabilizálás
Ez is az ESP rendszer egy újabb kiegészítő programja. Az utánfutó lengései 1 Hz körüli frekvencián a vonókészüléken keresztül adódnak át a vontató gépkocsinak. Az ESP rendszer érzékeli az emiatt bekövetkező perdítő nyomaték lengéseket. Ha az a kritikus érték küszöbét átlépi elkezdődik a beavatkozás. Az elektronika visszaveszi a gázt és működteti a féket. Mind a négy kereket fékezi 0,15 g lassulással. Ha ez nem elegendő, a lassítás elérheti a 0,3 g értéket. A fékezés addig folytatódik, amíg nem szűnik meg az utánfutó lengése. Az ESP az utánfutó felől érkező kereszt irányú erőket a gépkocsi első kerekeinek váltakozva történő különböző nagyságú erővel történő fékezésével egyenlíti ki. Ennek eredményeként stabilizálás következik be és lassulás jön létre.
Szárazfék funkció
Az ESP rendszernek lehet egy úgynevezett ”szárazfék funkció”-ja is. Az eső érzékelő tudja automatikusan aktiválni ezt a működési módot. Ilyenkor ha a gépkocsi nem fékez és nem áll fenn biztonságkritikus menet állapot az ESP hidraulika egység néhány tized bar fékező nyomás kivezérlésével menet közben felfekteti a fékpofákat a féktárcsára. Ennek hatására azok megszáradnak és bármely pillanatban rendelkezésre áll a teljes fékező teljesítmény. Nem veszélyezteti a fading jelenség a közlekedésbiztonságot.
Az előzőekben felsoroltakon kívül az ESP rendszer alkalmas a sebesség szabályozásra is. Ha például a nagy sebességgel működő video rendszer sebességkorlátozó táblát érzékel, automatikusan beállítja az azon feltüntetett sebességet.
A Bosch ESP 8 rendszer alkalmas ezeknek a kiegészítő működésmódoknak a megvalósítására. Sajátosságai közé tartozik a hibrid áramkörös elektronika, melyet Texas Instrument mikrokontrollerekkel láttak el. 768 kB –os flash memory -t alkalmaznak. Két különböző, egymástól független radundáns processzor szolgálja a biztonságos működést. Az új nyomásérzékelőt a hidraulika egységbe integrálták, így az nem képez külön becsavarható egységet, mint korábban.
Ennél a rendszernél a gépkocsi stabilizálása különböző beavatkozásokkal történik, melyek a következők:
Motor nyomatékszabályozás.
Beavatkozás az automatikus sebességváltó fokozatkapcsolás dinamikájába.
Egy kerék szabályozott fékezése.
Kormányzási beavatkozás, mely különösen nagy sebességnél, kis beavatkozással hatékonyan stabilizál.
A kevesebb fékezési beavatkozásnak köszönhetően a gépkocsi azonos körülmények között agilisabban (dinamikusabban) halad és nem következnek be kritikus szituációk. Nagyobb lehet a gépkocsi átlagsebessége.
Az ESP rendszer alprogramját képező ABS szabályozás új algoritmussal működik.
Offroad ABS
A fejlesztési cél az volt, hogy ezzel a működési móddal a gépkocsival úgy a szilárd burkolatú úton, mint terepen a lehető legnagyobb lassulás legyen elérhető. Laza talajon a blokkolás közeli, majdnem csúszó kerekekkel rövidül a fékút, mert a kerekek éket túrnak maguk előtt az alattuk lévő laza anyagból. Az ABS új logikája figyeli a kerekek torziós lengéseit az aktív kerékfordulatszám érzékelők jelei alapján. Felismeri a laza talajt és automatikusan átkapcsolja az ABS működését nagyobb csúszást engedélyező működésmódra. A kerekenkénti és az elkormányzási szögtől is függő kerékcsúszás szabályozás révén a gépkocsi megőrzi a kormányozhatóságát. Ha a vezető bekapcsolja az offroad gombot, akkor az ABS terep fokozatának aktiválása egyértelműbbé és gyorsabbá válik.
Offroad ESP és egy fokozatú ESP lekapcsolás
Az ESPplus teszi lehetővé ezeket a működési módokat. A terep és a normál ESP működés között lényeges különbség van. Az ESP off gomb rövid megnyomásával az Offroad működés válik aktívvá és a kijelzőn az „ESP offroad” felirat jelenik meg és az ESP szimbólum világít. Ilyenkor kisebb sebességnél a motornyomaték csökkentő és a fékezési beavatkozások kisebbek lesznek. Ha az automatikus offroad felismerés válik aktívvá valamennyi offroad funkció erősödik. A gomb ismételt megnyomásakor a normál ESP működés kapcsol be.
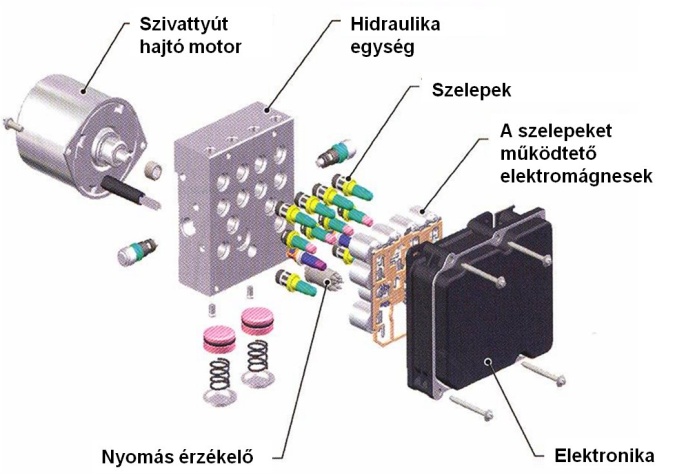
Az ESP kikapcsolható
Újabban kétfokozatú kikapcsolási lehetőséggel látták el az ESP rendszereket.
Ha 5 másodpercnél rövidebb ideig nyomják meg az „ESP off” gombot, akkor először az ASR kapcsol ki. A kijelzőn az „ASR off” felirat tűnik fel, az ESP szimbólum pedig világít. Ekkor a motor nyomaték csökkentés és a fékezési beavatkozás is a sebességtől függően kikapcsol. Az „ESP off” nyomógomb ismételt megnyomására és egy bizonyos sebesség átlépésekor az ASR visszakapcsol.
Ha az „ESP off” gombot 5 másodpercnél hosszabb ideig nyomva tartják kikapcsol az ESP és csak az ABS és az EDC marad bekapcsolva. A folyadékkristályos kijelzőn az „ESP switched off” felirat jelenik meg, más típusoknál az ESP szimbólum és alatta az „OFF” felirat. A gomb ismételt megnyomására az ESP működés visszakapcsol. A gyújtás ki-, majd visszakapcsolása után az ESP ismét bekapcsolt állapotba kerül.
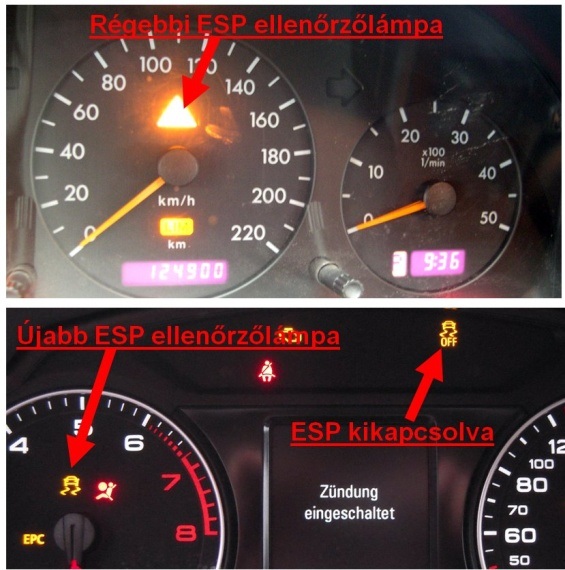
Hidraulikus fading kompenzáció (HFC)
Ez a fékasszisztens működésének egyfajta kiterjesztése. Erőteljes, huzamos, illetve többször ismételt fékezésnél, amely jelentős melegedés miatt fékhatás csökkenéssel jár, ezt felismerve az ESP automatikusan megnöveli a hidraulikus működtető nyomást. A vezető így már a szokásos pedálerőnél eléri az ABS beavatkozási küszöböt.
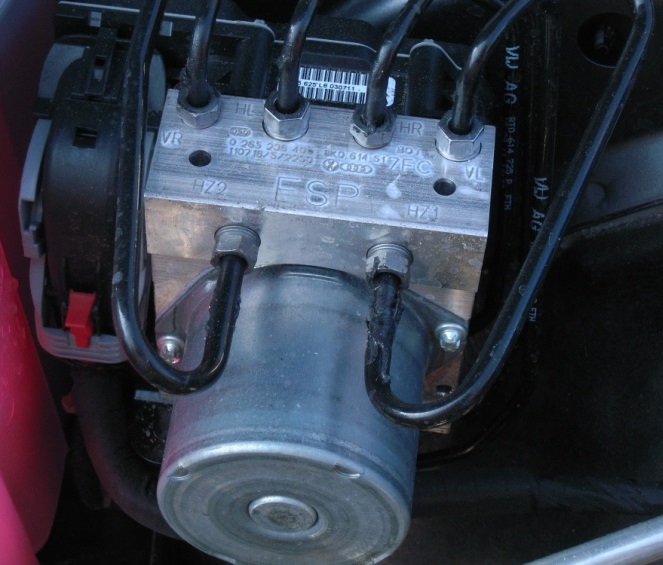
Az ESP vezérelte vészfékezés rögzítő fékkel
A gépkocsikba újabban beszerelt elektromos rögzítő féknek van egy dinamikus működésmódja is. Ha a hidraulikus fékműködtetetés meghibásodik, az ESP parancsára az elektromos rögzítő fékkel 8 m/s –os lassulást tud megvalósítani. Ez lényegesen nagyobb, mint ami egy hagyományos rögzítő fékkel megvalósítható. Kis tapadási tényezőjű úton ABS szabályozás is működik eközben.
Hold assist
Az üzemi fék automatikus működtetésével és oldásával támogatja a vezetőt. Az aktiválása a műszerfalra szerelt nyomógombbal lehetséges. Ez a működésmód a fékezés után hidraulikus nyomással tartja befékezve a gépkocsit. Erről az állapotról visszajelző lámpa tájékoztatja a gépkocsivezetőt. Ha a fékhatás egy meredekebb szakaszon nem elegendő, még kétszer meg tudja növelni a fékező nyomást a rendszer. Ha még ez sem elegendő, működteti az elektromos rögzítő féket is. Elinduláskor a tengelykapcsoló lenyomásakor automatikusan oldja a féket. Emelkedőn a rögzítő fék csak akkor old, ha a motor nyomatéka elegendő a visszagurulás megakadályozásához. Ilyenkor az elektronika kiértékeli a bekapcsolt sebességfokozatot, az emelkedő meredekségét, a motor fordulatszámát és a motor nyomatékát.
Sebességszabályozó
Ez is egy vezetőt támogató asszisztens rendszer. A hagyományos ESP rendszer egy továbbfejlesztett változata. Hegyről lefelé menetnél fékezési beavatkozással tartani tudja a vezető által beállított sebességet. Ilyenkor az ESP hidraulika egység végzi a fékezést.
HDC hegyről lefelé ereszkedő asszisztens
A HDC program széria tartozék például az Audi Q5-nél, melyet a gépkocsivezető egy erre a célra beépített nyomógombbal tud be-, illetve kikapcsolni. A működés alapfeltétele, hogy a gépkocsi sebessége kisebb legyen 60 km/h -nál. A pillanatnyi állapotot LED dióda jelzi vissza. Az ESP rendszer részét képezi ez a komfortot növelő program. Mind a négy kereket fékezi a lejtőn lefelé, méghozzá annyira, hogy a gépkocsi tartja a vezető szándéka szerinti sebességet. Ha ehhez nem elegendő a motorfék, automatikusan működésbe lép a hidraulikus fékrendszer, mely a vezetőtől függetlenül létrehozza a szükséges fékező nyomást. Bizonyos határok között (9 km/h és 30 km/h) (10%-os és 50%-os lejtőn) a gáz-, illetve a fékpedál lenyomásával a sebesség szabályozható. 60 km/h feletti sebességnél automatikusan lekapcsol. Bekapcsolt és kikapcsolt sebességfokozatnál egyaránt használható. Ha például a hátrameneti fokozat van bekapcsolva, akkor a hátsó kerekekre jut a nagyobb fékhatás.
Tetőcsomagtartó felismerés
A menetkomfortra és a menetdinamikára nagy gondot fordítottak a fejlesztés során. Az offroad és az országúti jellemzők összehangolása is fontos volt. Az összes Q5-ös széria tartozéka a tetőcsomagtartó felismerés, melyhez egy speciális érzékelőt szereltek fel a tetőcsomagtartó rögzítési pontjához. Ez közvetlenül az ESP elektronikának ad jelet a megváltozott tömegközéppont helyzete miatt, mely a menetdinamika szempontjából az ESP -nek fontos információ.
Fékezés a bal- és a jobb oldalon eltérő a tapadási tényezőnél
A gépkocsit a jobban tapadó útfelületen kialakuló nagyobb fékerő erre az oldalra húzza. Az ESP a „dynamiklenkung” –al ellátott gépkocsinál automatikusan létrehozza a szükséges kormánykorrekciót, méghozzá gyorsabban, mint ahogy azt a gépkocsivezető egyébként meg tudná tenni. Ebből a vezető semmit nem vesz észre, mert közben a kormánykerék egyenes meneti helyzetben marad. A gépkocsi stabilizálása érdekében nem kell csökkenteni a fékerőt. Ez előnyös, mert nem hosszabbodik meg a fékút. Ehhez a működési módhoz nem szükséges kiegészítő kerékfék munkahenger nyomás érzékelő, mint más rendszereknél.
ESP kormányzási beavatkozás túlkormányozott gépkocsinál
A túlkormányozott viselkedésű gépkocsit az ESP rendszer a „dynamiklenkung” segítségével egy előre meghatározott ellenkormányzással stabilizál. Ez megakadályozza a gépkocsi hátsó részének kitörését. Különösen nagy sebesség esetén ez a beavatkozás sokkal hatékonyabb, mint egy kerék fékezése, ahol a megfelelő fékező nyomás kialakulásához egy bizonyos időre van szükség. Azért is előnyös ez a beavatkozás, mert sokkal komfortosabb, mint amikor fékezéssel történik. Továbbá nem lassul a gépkocsi a stabilizáló beavatkozás következtében, ami a fékezéses beavatkozásnál elkerülhetetlen. Különösen csúszós úton előnyösebb, amikor kormányzás végzi a korrekciót. A két beavatkozást (kormányzási és a fékezési) a gépkocsi instabilitásától függően egymásba integrálják. Enyhe instabilitásnál csak kormányzási beavatkozás valósul meg. Minél nagyobb a stabilitás vesztés, annál nagyobb lesz a fékezési beavatkozás. A kettő beavatkozás együtt hatékonyabb, mint ahogy a hagyományos ESP -nél ez hagyományosan megszokott volt.
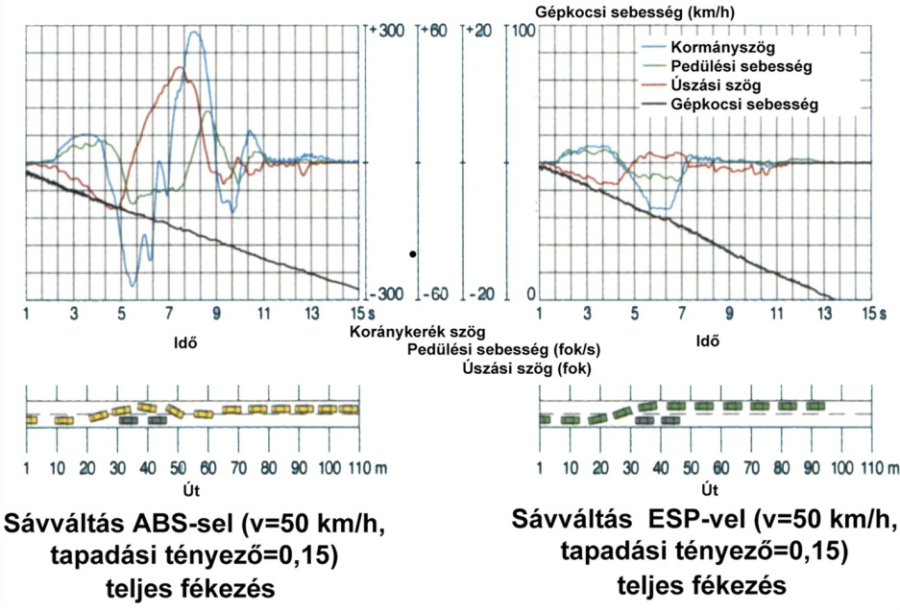
Az ESP kormányzási beavatkozás alulkormányozott gépkocsinál
Alulkormányzott viselkedésnél az ESP a „dynamiklenkung” (aktív szervokormány) segítségével megváltoztatja a kormányáttételt, így a gépkocsivezető a tapadási tényező maximumát nem tudja olyan gyorsan elérni. Így az első kerekek csúszása és ezzel a gépkocsi elejének kisodródása, vagyis az alulkormányzott viselkedés nem fog kialakulni olyan gyorsan. Az alulkormányozott állapotot az ESP ismeri fel és a beavatkozás a „dynamiklenkung” –nál következik be. Az áttétel változás csupán olyan mértékű, hogy a vezető azt nem veszi észre, de ennek ellenére a stabilizáló hatás érvényesülni tud. Kisebb mértékű alulkormányozott viselkedésnél ez a beavatkozás előbb fog bekövetkezni, mint a fékezési stabilizálás. Nem érezhető annyira, mint a motor nyomaték csökkentés és az egyik kerék célzott lefékezése. A gépkocsival így sokkal dinamikusabban lehet közlekedni és a stabilitása is növekszik.
Biztonsági koncepció a kormányzási beavatkozásnál
Az ESP elektronika által meghatározott stabilizáló elkormányzási szög a gépkocsi CAN hálózatán keresztül üzenetként jut el a kormányzás elektronikájához. Mivel az aktív kormányzási beavatkozás nagyobb kockázatú, mint az egyik kerék megfékezése, biztonságtechnikailag ennek megfelelően készítették fel az ESP rendszert. Hardver vonatkozásában egy második perdülés és kereszt irányú gyorsulás érzékelővel is ellátják a rendszert, mely egy redundáns jelet ad. Így a perdülés érzékelő jelének elfogadhatósági vizsgálata biztonságosabb lesz. A szoftver oldalról pedig a kormányzási stabilizáló algoritmus kétprocesszoros kivitelben működik. Mindkettő eredményét folyamatosan bitenként összehasonlítják az ESP elektronikáéval. Amennyiben különbséget észlel az ESP elektronika kikapcsol és hibajelzést ad.
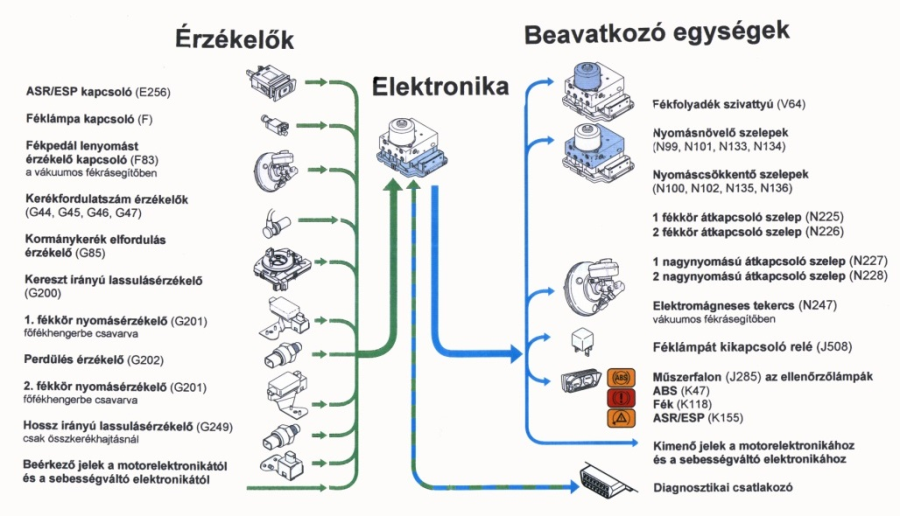
A Robert Bosch GmBH kilencedik generációt képviselő ESP rendszere
Ennél a vállalatnál elsőként az ESP gyártása és alkalmazása 1995 –ben kezdődött. Jelenleg a 9 generációhoz tartozó termékcsaládot kínálja az autógyáraknak. A legkülönbözőbb kategóriába sorolható gépkocsi változatokhoz fejlesztették ki. Ezek a változatok különböző működési módokat tesznek lehetővé. Jelenleg a következő változatokat gyártják:
ESP light
ESP base
ESP enhanced
ESP pus
ESP premium
Ezeket a változatokat egyre több kiegészítő működéssel is ellátták.
Az ESP premium-nál például az alap működés számos, a vezetőt támogató asszisztens rendszerrel egészülhet ki. Ennél a szokásos kettő helyett hat dugattyús fékfolyadék szivattyút építenek be a hidraulika egységbe. Ennek köszönhetően a fékező nyomás nagyon gyorsan kialakul, de ezen kívül maximális komfortot is biztosít, mert így sokkal kisebb a rezgés működés közben. Az SMI650 típusjelzésű kombinált érzékelőt (perdülés és kereszt irányú gyorsulás) már az elektronikába szerelik. Ennek az érzékelőnek integrális része a rezgéscsillapító egység. Így tovább egyszerűsödött a rendszer vezetékhálózata. Ez az elektronika már másodpercenként 25 -ször hasonlítja össze a vezető szándékát a gépkocsi pillanatnyi menetpályájával és ez alapján működik az ESP szabályozás.

12. fejezet - Elektrohidraulikus fékrendszer
12.1. Az elektrohidraulikus fékrendszerek felépítése és változatai
Az elektrohidraulikus fékrendszereknél részben a hagyományos és jól bevált hidraulikus elemeket és technológiát alkalmazzák, viszont energetikailag a főfékhengert és a fékpedált függetlenítik a fékrendszertől.
Két különböző változata van:
Nyomástárolóval és nyomásmodulátorral ellátott változat.
Nyomástároló nélküli, gyors működésű villanymotoros nyomásnövelő egységgel ellátott elektrohidraulikus fékrendszer.
12.1.1. Nyomástárolóval és nyomásmodulátorral ellátott elektrohidraulikus fékrendszer
Ez egy olyan elektronikusan támogatott hidraulikus fékrendszer, melynek a legfontosabb eleme a nyomástároló, mely a fékezéshez szükséges energiát szolgáltatja. A gömb alakú nyomástárolót egy membrán osztja gáz térre és folyadék térre. Ezt a változatot 2001 óta gyártják. A működtető egységet (fékpedál) elektromos jelképző egységgel látják el. Ez adja a fékezési jelet az elektronikának, amely működteti az átviteli egységet. Ellátják egy komfortos fékpedál karakterisztikát biztosító pedálút szimulátorral. A működtető egység belső (pl. hidraulikus) és külső (pl. elektromos) jelek képzésére alkalmas. A hidraulika rendszernek nincs zavaró visszahatása például az ABS nyomás moduláció esetén a fékpedálra. A működtető és az átviteli rendszer hidraulikusan egymástól független. Megvalósulhat a „brake by wire” koncepció is. Az átviteli rendszer egy puffer hidraulikus energiatárolóhoz kapcsolódik, és kerekenkénti nyomáskivezérlést, és modulációt is lehetővé tesz. Ez utóbbit az elektronika által működtetett elektromágneses szelepekkel valósul meg. Az elektronika a kivezérelt nyomásokról visszajelzést kap. Ennél a fékrendszernél a hagyományos kerékfékszerkezeteket alkalmazzák, így tehát a fejlesztési költségek mérsékeltek maradnak. Elektromos hiba esetén a biztonsági fék működésére vonatkozó előírás érvényesül.
A hidraulika alkalmazása miatt az elektromos fékezés nem minden előnye használható ki ennél a rendszernél. A nyomáskivezérlés és a fékoldás gyorsasága a csövek és a különféle szelepek fojtási veszteségei miatt csak a hidraulikus fékekével vethetők össze. A rendszer beszerelése, karbantartása és környezetvédelmi problémái is a hagyományos hidraulikus fékekéhez hasonlatosak. Az alkalmazható rögzítő fék rendszer is hasonlatos a jelenleg alkalmazott változatokhoz.
Normál működéskor a vezető fékezési igényét az elektronika az alkalmazott érzékelők jelei alapján értékeli ki. A vezető által kifejtett erőt a fékrendszer működtetéséhez közvetlenül nem használják fel. A fék idegen erővel működtetett rendszerként fejti ki hatását. A pedálerővel, illetve az elmozdulással lesz arányos a kerekeknél megvalósuló fékező nyomás. Ezt az elektronika szabályozza (fékerő felosztás, ABS szabályozás, stb.). Ilyenkor a főfékhenger és a pedálút szimulátor közötti összeköttetés nyitott, a kerékfék szerkezetek felé viszont zárt.
Az elektromos, vagy a hidraulikus energia ellátás hibája esetén, vagy más elektromos meghibásodás esetén az elektrohidraulikus fékrendszer szükségműködésre kapcsol át. Ekkor záródik az összeköttetés a pedálút szimulátor felé és nyit a fék hidraulika rendszere felé. Ilyenkor a kifejtett pedálerővel lesz arányos a lassulás.
12.1.2. Nyomástároló nélküli gyors működésű hidraulikus nyomásnövelő egységgel ellátott elektrohidraulikus fékrendszer
A gyors működésű villanymotoros nyomásnövelő egység hozza létre a kerékfékszerkezetek működtetéséhez és a nyomás modulációhoz szükséges energiát. Az energia tárolását a gépkocsi elektromos rendszere, illetve az akkumulátor végzi. Ez a rendszer nyomástárolót viszont nem alkalmaz. A fékrendszer hidraulikus része, a működtető egység, és a kerékfékszerkezet vonatkozásában hasonlít a hagyományos változatokhoz. Elektromos hiba esetén ennél a rendszernél is átkapcsolás történik szükségműködésre. Ilyenkor a kétkörös főfékhenger biztosítja a biztonsági fék működtetéséhez szükséges energiát. Az elektrohidraulikus nyomás növelő egység lehet például egy villanymotorral működtetett dugattyús egység. A villanymotor forgó mozgását mechanikus áttétellel is ellátott golyó visszavezetéses csavar hajtás alakítja át egyenes vonalú mozgássá. Így mozdítja el a főfékhenger dugattyúját.
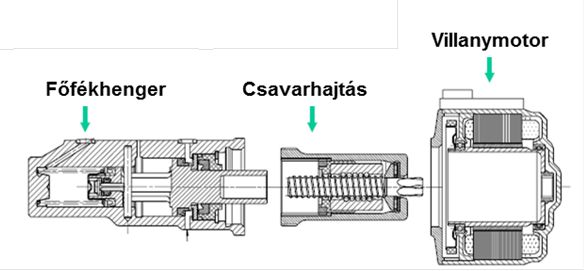
Az elektrohidraulikus fékrendszerek fejlesztésével mindkét nagy európai hidraulikus fék gyártó a Robert Bosch GmBH és a Continental Teves is évtizedek óta foglalkozik. Történtek ezen a területen előre-, és visszalépések is. Törekedtek arra, hogy ilyen módon megvalósítsák a személygépkocsik „brake by wire” fékrendszerét. Ezzel párhuzamosan több elektronikus menetdinamikai szabályozó rendszert is kifejlesztettek, melyek aztán integrális részét képzik az elektrohidraulikus fékrendszernek.
12.2. A Robert Bosch GmbH. Elektrohidraulikus fékrendszere
A Robert Bosch GmbH.-nál már a 90-es évek elején elkezdődött a „Bremse 2000” projekt, vagyis a személygépkocsik hidraulikus fékrendszerét továbbfejlesztő program. Ennek keretében a Daimler-Benz -zel közösen láttak hozzá az elektrohidraulikus fékrendszer megalkotásához. Ez a bevezetőben ismertetett nyomástárolós rendszer. Szériabeszerelése 2001 őszén kezdődött a Mercedes S, az SLK, majd az E osztályba. Ezek közül volt olyan típus, melyben opcionális volt ez az új fékrendszer, de olyan is volt, melyben már széria tartozékká vált.
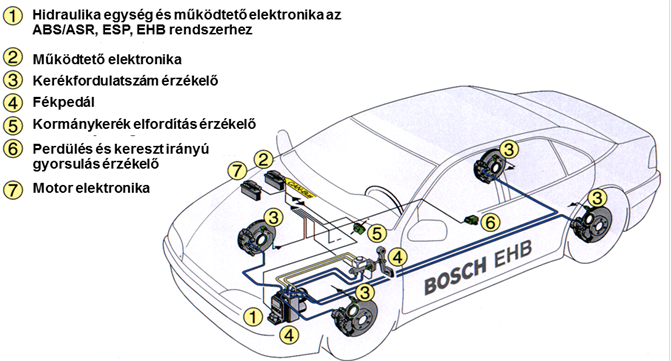
Az új projekt fejlesztési céljai:
a fékkésedelmi idő csökkentése,
a gépkocsi lehető legnagyobb lassulásának megvalósítása,
a pillanatnyi menetállapotnak megfelelő egyedi kerékfékerő létrehozása.
A hidraulikus működtetések közül minél több feladatot az elektronika felügyelete alatt valósítottak meg. Egymástól függetlenítették a fékpedált és a beavatkozó egységet. Ezek önálló részei lettek a fékrendszernek és egymással csak elektromos vezetékekkel állnak kapcsolatban. Így tehát ezzel, első alkalommal valósulhatott meg a Brake-by-Wire koncepció. Ez a rendszer a biztonság tekintetében hálózati tápfeszültséggel szemben fokozott követelményeket támaszt. Arra törekedtek továbbá, hogy a fék- valamint az ABS, ASR és az ESP rendszerek között minél nagyobb mértékű integráció jöhessen létre.
A dinamikusabbá váló fékrendszer részei:
A Brake-by-Wire koncepció előnyeit és a hidraulika jó teljesítményét egyesíti a kifejlesztett elektrohidraulikus fékrendszer, az EHB (Elektrohydraulische Bremse). Kezdetben még így nevezte a gyártója ezt a fékrendszert. Miután elkezdődtek a sorozat beépítések a különböző Mercedes személygépkocsikba, az autógyár az angol Sensotronic Brake Control elnevezést alkalmazta, ami aztán hamarosan elterjedt. 2004 – 2005 között a Mercedes 2 millió gépkocsit szerelt fel az SBC fékrendszerrel.
Dinamikusabb működése elsősorban a hatékonyabb lassítást és a nagyobb biztonságot szolgálja. A villanymotorral hajtott fékfolyadék szivattyúval létrehozott hidraulikus tápnyomás és az elektronikus nyomáskivezérlés rendkívül gyorsan, nagy működtető erőt hoz létre és hasonlóan gyors a fékoldás is. Ennek az eredménye a fékút kedvező lerövidülése és az aktív biztonság növelése.
Az ESP rendszernél is alkalmazott érzékelők az elektrohidraulikus féknek is nélkülözhetetlen elemei lettek és így az ESP működésre is képessé vált. A rendszer fontosabb érzékelői:
kerék fordulatszám érzékelők,
kormánykerék elfordítási szöghelyzetét, irányát és gyorsaságát érzékelő egység,
a gépkocsi tömegközépponti függőleges tengelye körüli perdülési sebességet és a kereszt irányú gyorsulást érzékelő.
Az itt említett érzékelők működését az ABS –ről, illetve az ESP –ről írt fejezetekben ismertettük, ezért itt nem térünk ki rájuk. Ennél is kikapcsolható az ESP a műszerfalba szerelt kapcsolóval.

Az érzékelőkön kívül két fő egységből áll az SBC (EHB) rendszer,
a fékpedállal mechanikus összeköttetésben álló működtető egységből, melyet a motortérben az utasteret elválasztó homlokfalra szerelnek. Hagyományos fékrendszerű gépkocsiknál a főfékhengert helyezik el itt.
az elektronikával egybeépített hidraulikaegységből, melyet általában a jobb első kerékdob előtt helyeznek el szintén a motortérben.
A két egység között csupán elektromos kábelek létesítenek kapcsolatot.
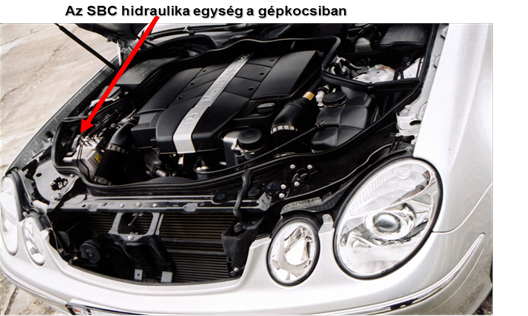
12.2.1. Az SBC működtető egysége
Ezt a fékpedállal közvetlenül mechanikus összeköttetésben lévő működtető egységet a motorteret az utastértől elválasztó homloklemezre szerelik. Kétkörös, központi szelepes, tandem rendszerű főfékhengerből és a fékpedál karakterisztikáját meghatározó pedálút szimulátorból áll. Az ebbe beépített rugókkal, és különösen a különleges alakú, progresszív karakterisztikájú elesztomerből készült rugó határozzák meg a pedálerő - elmozdulás karakterisztikát. A pedál rudazatának elmozdulásakor a beépített érzékelő jelet ad az elektronikának. Ez alapján történik az üzemi fék használatakor az elektromágneses szelepekkel a nyomástárolóból a fékezőnyomás kivezérlése a féknyergekbe. A biztonsági fék működésekor az ennek az egységnek részét képező két körös főfékhenger hozza létre elektromos hiba esetén az első kerekeket lassító fékező nyomást.
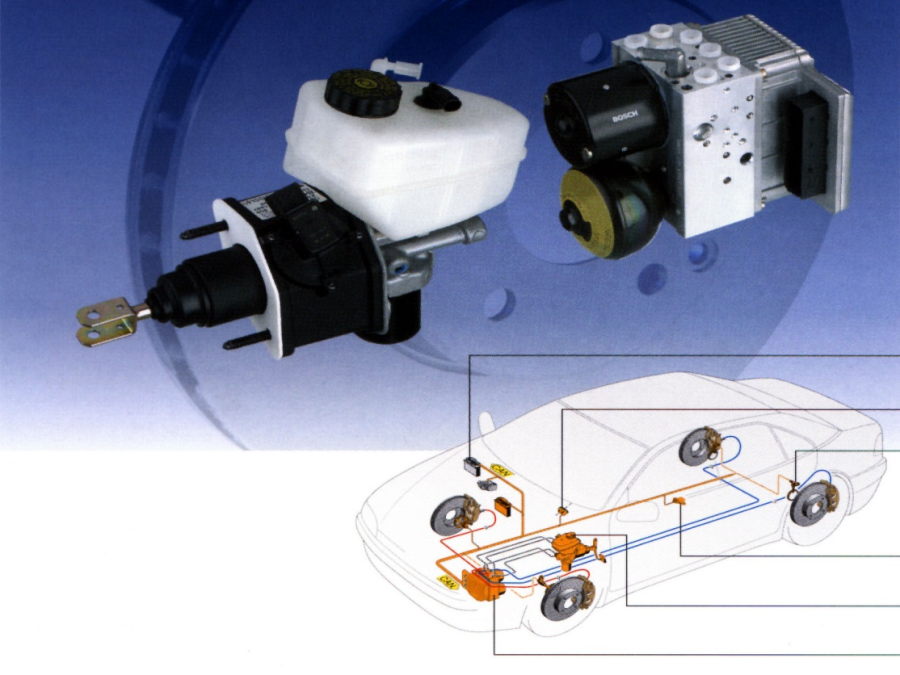
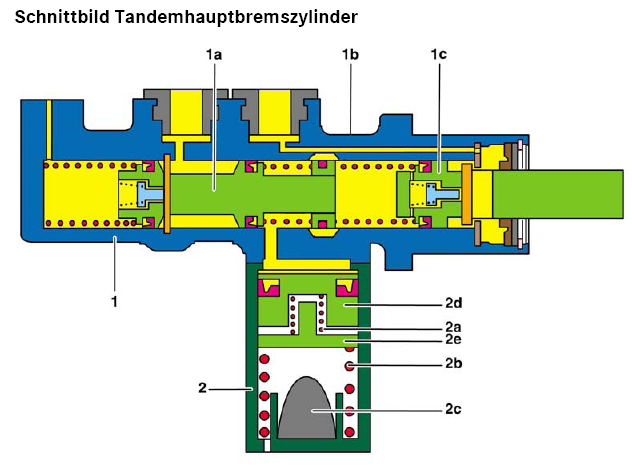
1-főfékhenger; 1a –központi szelepes dugattyú (második fékkör); 1b - központi szelepes dugattyú (első fékkör); 2 –pedálút szimulátor; 2a –rugó; 2b –rugó; 2c –gumirugó; 2d –dugattyú; 2e –rugótányér
12.2.2. Az SBC rendszer hidraulika egysége:
Ezt az egységet gumibakokkal rögzítik a jobb első kerékdob közelében. Ezek a rögzítő elemek csillapítják a dugattyús szivattyú működése miatt keletkező zajt és rezgést. Megakadályozza, hogy működési zaja az utastérben észlelhető legyen.
A közös alumíniumtömbből kialakított házba szerelik be a villanymotorral hajtott fékfolyadék szivattyút. Erre szerelik fel a membránnal ketté választott, nitrogén gáz töltésű nyomástárolót. Ennek az a feladata, hogy 140-180 bar közötti értéken tárolja a fékfolyadékot. Ez biztosítja ugyanis a fékezéshez szükséges energiát. Így tehát hidraulikus fékrásegítő feladatát is ellátja.
A nyomástárolóból az elektronika parancsára elektromágneses szelepekkel vezérlik ki kerekenként egyedileg a gépkocsi menetdinamikai állapotától függő fékező nyomást. A kivezérelt nyomásokat érzékelők jelzik vissza az elektronikának.
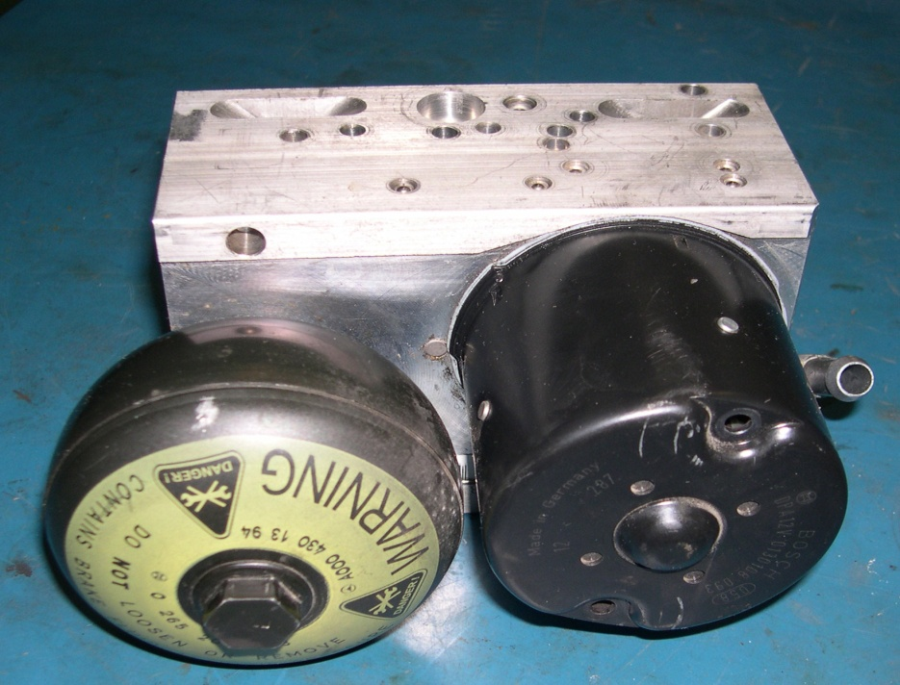
A hidraulika egységbe szerelik be az átkapcsoló szelepeket is, melyek elektromos hiba esetén a hidraulika rendszert a szükségműködésnek megfelelő állapotba kapcsolják át. Ezen szelepek mögé építik be az elválasztó dugattyúkat. Ezek lehetővé teszik, hogy a nyomástárolóból az elektromágneses szelepek által kivezérelt nyomás is érvényesüljön a fék munkahengerekben, és amikor a biztonsági fék működik, a főfékhengertől érkező nyomás is kifejthesse hatását. Az elválasztó dugattyú megakadályozza viszont, hogy a két különböző irányból érkező fékfolyadék egymással összekeveredjék. Ez azért fontos, mert a nyomástároló felől érkező fékfolyadék tartalmazhat a nitrogén gáz töltetből a membránon átdiffundálódó gázt. Ez a folyadék azonban nyomáscsökkentéskor a fékfolyadék tartályba kerül, ahol a nitrogén távozni tud. A főfékhenger felől érkező fékfolyadék azonban egy zárt térben marad. Ha ide bekerülne nitrogén, annak olyan lenne a hatása, mintha a hidraulika rendszer nem lenne megfelelően légtelenítve. Vagyis legrosszabb esetben beesne a fékpedál anélkül, hogy a gépkocsi lassulna.
Az elektronika
Közvetlenül a hidraulikaegységre szerelik fel a működtető elektronikát. Ennek az is feladata, hogy folyamatosan végezze a teljes rendszer működésének ellenőrzését. Ez kiterjed az ESP rendszer valamennyi érzékelőjére és a teljes fékrendszerre is. Hiba esetén a műszerfalon elhelyezett ellenőrző lámpa bekapcsolásával figyelmezteti a gépkocsivezetőt.
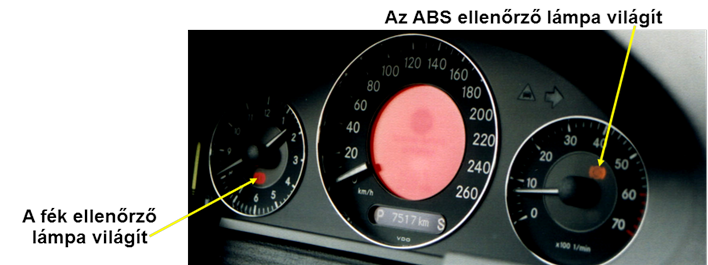
Kikapcsolt gyújtásnál az elektronika „alvó üzemmódba” átkapcsol. Ilyenkor, vagyis a gépkocsi álló helyzetében kikapcsolt gyújtásnál az elektronika bizonyos időnként elvégzi a hidraulika rendszer tömítettség vizsgálatát. Kivezérel egy bizonyos fékező nyomást és egy bizonyos ideig tartja azt. Eközben figyeli, hogy nem történik –e nyomáscsökkenés. Ez az üzemmód balesetveszélyt jelent, ha például éppen a fékbetét csere közben történik ilyen önellenőrzés. Ezért előtte, egy erre a célra szolgáló egységgel, vagy a gépkocsi diagnosztikai műszerével a fékbetét szerelés idejére „hatástalanítani” kell a fékrendszert.
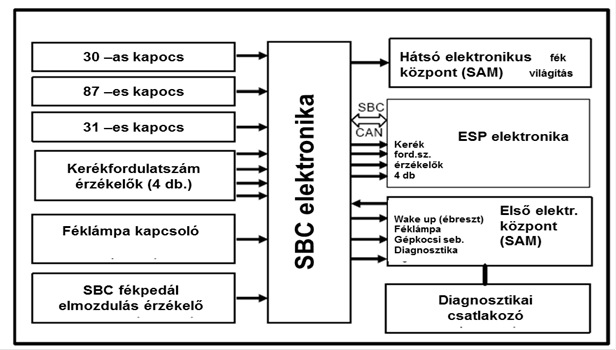
Az elektronika „ébresztése” a következő események egyikének bekövetkezése esetén történik meg:
ha az ajtók reteszelésének oldása a távkapcsolóval megtörtént, és az ajtó nyitása is megtörtént (ez a CAN-hálózaton keresztül érkező információ),
ha a csomagtér ajtót kinyitották, CAN-hálózaton keresztül érkező információ,
ha a gyújtáskulcsot az 1-es állásba fordították,
a rögzítő féket kioldották, vagy automatikusan oldódott,
a fékpedál lenyomták.
Ezt követően történik az úgynevezett „Pre-Drive Check” (PDC) végrehajtása, vagyis az indulás előtti ellenőrzés, mely a következőkből áll.
~60 bar fékező nyomás kivezérlés a féknyergekhez,
ha a tárolt nyomás nem elegendő bekapcsol a hidraulika szivattyú,
a nyomás érzékelők ellenőrzése
a szelepek ellenőrzése
tömítettség ellenőrzés
működőképesség ellenőrzés
Elindulás után az önellenőrzés menet közben folyamatosan megtörténik kb. minden tizenhatodik fék működtetésnél.
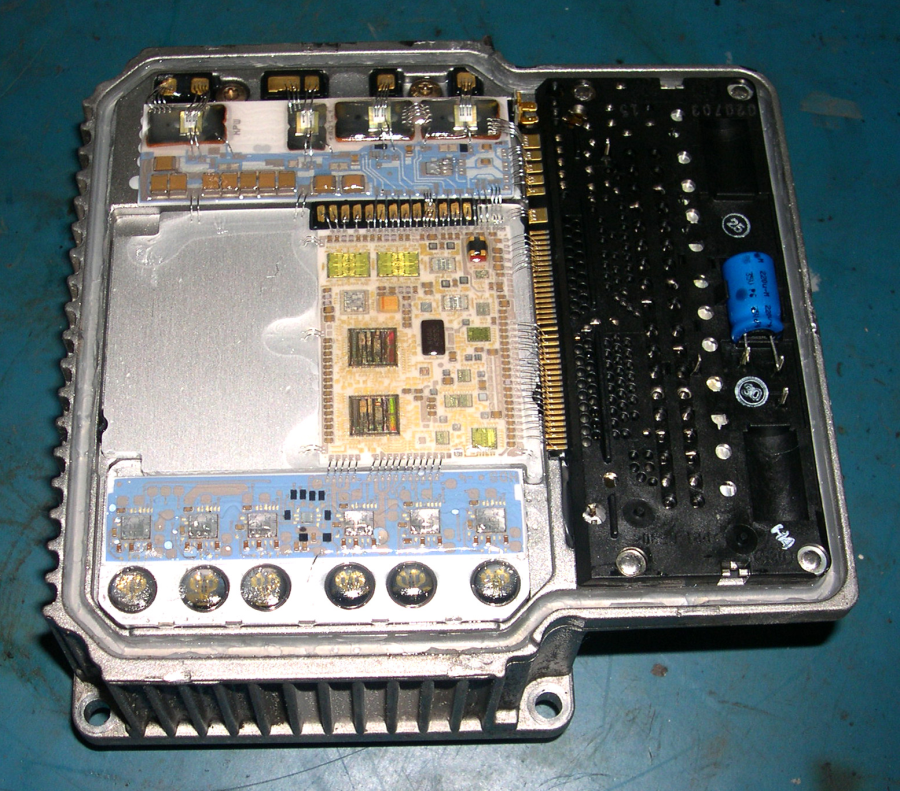
Az EHB elektronika tartalmazza az ABS, ASR, az ESP, fékasszisztens, elektronikus fékerő felosztás működtető algoritmusait is. A fékezés komfortját egyrészt a fékrásegítő miatti kis pedálerő növeli, másrészt a fékpedál pulzálás mentessége is hozzájárul ehhez, az ABS beavatkozások közben. Az elektronika megfelelő programozásával elérhető, hogy a legkülönbözőbb gépkocsi típusoknál a fékrendszer térfogatától és a gépkocsi terhelésétől függetlenül azonos pedálerő - lassulás karakterisztika valósulhasson meg. Ennek ellenére valamennyi gépkocsihoz azonos hardver használható.
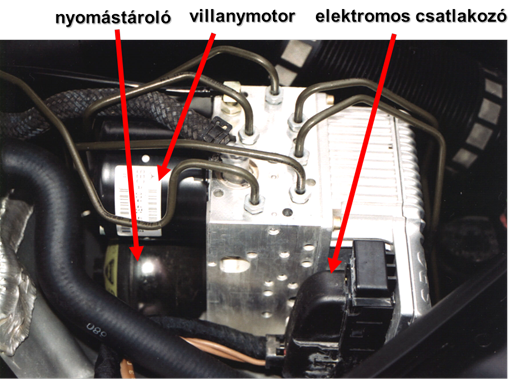
Különböző működésmódok
A biztonság érdekében az EHB kétféle működésre alkalmas. Ha az elektromos és elektronikus rendszer működőképes, a fékpedálhoz beszerelt érzékelő közvetíti az elektronika felé a vezető fékezési szándékát és az általa szükségesnek tartott lassulás mértékét. Ennek megfelelően kerekenként működteti az elektromágneses szelepeket, melyek a fékezőnyomást a munkahengerekbe kivezérlik. Ezek a szelepek végzik az ABS működésekor a fékező nyomás modulációját. A működtető elektromágneseket közvetlenül az elektronika paneljére forrasztják. A szelepek mechanikus részét pedig a hidraulikaegységbe sajtolják be. Az üzemi fék működésekor nincs közvetlen hidraulikus kapcsolat a fékpedál és a kerékfékszerkezet között.

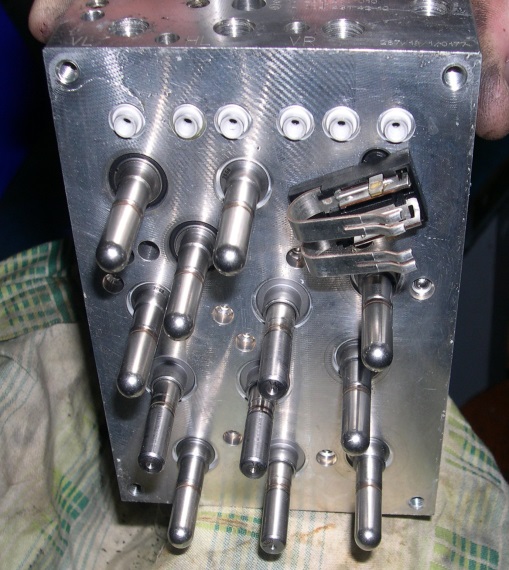
A pedálút szimulátor, melynek dugattyúja egy rugó ellenében a főfékhenger által létrehozott nyomás hatására elmozdul, biztosítja a megszokott fékpedál elmozdulást. A legmegfelelőbb karakterisztikát acél és gumirugó kombinációjával valósítják meg. Ez a szerkezeti kialakítás azzal az előnnyel jár, hogy az ABS, illetve az ESP működése közben a nyomás moduláció nem okoz a fékpedálon pulzálást.
Kanyarban a külső íven gördülő kerekeknél az EHB nagyobb fékerőt valósít meg, hátramenetben pedig a hátsó kerekeknél teszi ezt hasonló módon. Tartós lejtmenetben a gépkocsi sebességének állandó értéken tartásához felváltva hol az első, hol a hátsó kerekeket fékez nagyobb erővel. Ezzel a fading hajlam csökkenthető. Az elektronikus fékerő felosztásnál figyelembe veszi a dinamikus tengelyátterhelődést. Az első kerekek fékerejének pillanatnyi csökkentésével ellensúlyozható a kocsiszekrény bólintó mozgása. A precízen megvalósított fékerő felosztás egyenletes fékbetét kopást eredményez.
Ha az elektromos rendszer meghibásodott a szükségműködés, vagyis a biztonsági fék, lép működésbe. Ilyenkor az átkapcsoló szelepek kiiktatják a pedálút szimulátort és a működtető egység főfékhengere hagyományosan, hidraulikus módon fékezi az első kerekeket. Ez a biztonsági fékkel szemben támasztott nemzetközi előírásoknak megfelelő lassulást eredményez.
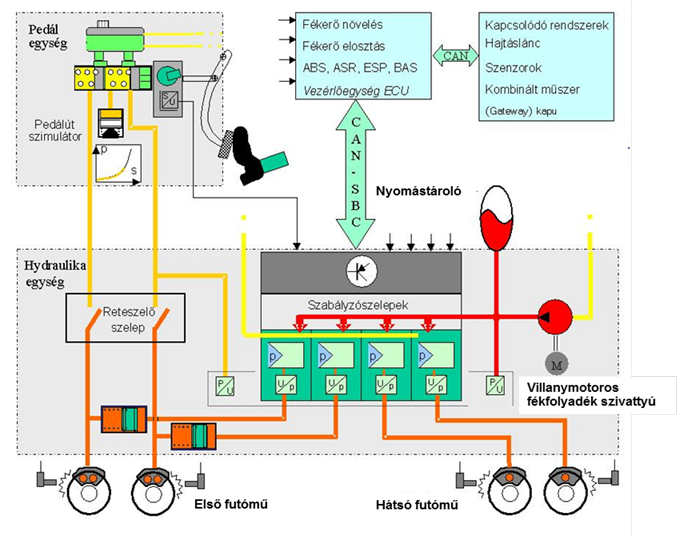
Különleges feladatok ellátása az SBC rendszerrel
Felkészülés a vészfékezésre (Prefill) :
Ha a gépkocsivezető hirtelen lelép a gázpedálról feltehetően vészfékezés fog következni, melyre az SBC úgy készül fel, hogy egy kis fékezőnyomást kivezérelve megszűnteti a mechanikus holtjátékokat és a hézagot a féktárcsa, valamint a fékbetétek között. Így tehát a fékpedálra lépés pillanatában azonnal kialakul a lehető legnagyobb fékező nyomás. A kerekek megcsúszását az ABS működés hárítja el.
Az eddigieknél rövidebb fékút:
A biztonságos fékezés megvalósításának másik lehetősége a kerekenkénti elektronikus fékerő felosztás, ami lassítás közben növeli a gépkocsi stabilitását. A hátsó kerekek hatékonyabban fékezhetők, mint a hagyományos fékrendszereknél, ahol csak mérsékeltebb nyomásnövekedés vált lehetővé.
Nem gurul vissza az emelkedőn (hill holder ):
Az SBC a gépkocsival történő elindulást könnyebbé teszi az emelkedőn azzal, hogy megakadályozza a gépkocsi visszagurulását és feleslegessé teszi eközben a rögzítő fék használatát (hill holder működés).
Mindig száraz féktárcsák:
Esős időben autózva az elektrohidraulikus fék megakadályozza a fading kialakulását. A féktárcsán és a fékbetéten kialakuló vízfilm csökkenti a fékezés kezdetén a hatásosságot, hiszen a súrlódó felületek közé szoruló vízgőz nyomása a működtető erő ellen hat. Az első szélvédőre szerelt esőérzékelő nemcsak az ablaktörlőt indítja el automatikusan, hanem ilyenkor az SBC a nem kritikusnak ítélt menetviszonyok között ismételt csekély fékműködtetésekkel elpárologtatja a súrlódó felületeken kialakult vízfilmet. Ennek eredménye, hogy esős időben is bármely pillanatban hatékony marad a fék.
Az úgynevezett forgalomtorlódási asszisztens (Stop and go)
A sűrű városi forgalomban, amikor egymást gyakran követik az elindulások és megállások, könnyíti meg a vezetést. Ha a vezető igénybe szeretné venni, be kell kapcsolni ezt a működési módot. Ezután ha leveszi lábát a gázpedálról az EHB mérsékelt lassítással megállítja az autót. A vezetőnek csak a gázpedálra lesz ezután gondja. Természetesen bármely pillanatban, ha a fékpedálra lép, annak elmozdításával lesz arányos a lassulás.
Fékasszisztens működés:
Az SBC rendszer a jól bevált fékasszisztens feladatát is ellátja. A felmérések szerint a legtöbb gépkocsivezető nem használja ki az ABS-szel ellátott fék lehetőségeit. Bár elég gyorsan, de nem elég erőteljesen lép a fékpedálra. Az ABS nyomás modulációja miatt bekövetkező fékpedál pulzálástól pedig megijed és visszaengedi a fékpedált. Különösen akkor, amikor a fékezés kezdetén a lehetségesnél kisebb a fékező nyomás, ez megnöveli a fékutat. A fékasszisztens üzemmódban az elektronika felismeri a hirtelen fékpedál lenyomást és kivezérli a lehető legnagyobb fékező nyomást. A kerék megcsúszásának veszélyét pedig az ABS működése hárítja el.
Soft-stop fék működés
Ez a működésmód azt jelenti, hogy közvetlenül a megállás előtt csökkenti a rendszer a kivezérelt fékező nyomást. Emiatt csökken a lassulás is és az utasok nem mozdulnak előre a tehetetlenségi erő miatt. Ez egy utazási komfort növelő tényező.
Ritkább szervizlátogatás szükséges,
Ez annak köszönhető, hogy az első és a hátsó futóműveknél a fékbetétek kopását kiegyenlíti az elektronika azzal, hogy a mérsékelt lassító fékezésnél a vastagabb fékbetétű futómű fékjét működteti. Hatására a fékbetétek azonos mértékben fognak kopni.
Kanyarban is rövidebb fékút
Ez úgy valósulhat meg, hogy a kereszt irányú gyorsulás érzékelő jele alapján az elektronika felismeri a kanyarodást. Ez alapján a kanyar külső kerekeknél nagyobb fékező nyomást vezérel ki.
2005 -től az SBC a felső- és a felső középkategóriában jelent meg például a Mercedes különböző típusaiban. Úgy tűnt, hogy az elektrohidraulikus fék alkalmazása újabb jelentős lépés lesz a személygépkocsik aktív biztonságának növelése területén. Azonban kezdetben különböző meghibásodások miatt visszahívások történtek, majd beszűntették ennek a fékrendszernek a beszerelését. A legnagyobb gondot az okozta, hogy a biztonsági fék működésekor bár a hatóságilag előírtnak megfelelő, de hagyományos fékrendszerekhez képest kicsi volt az elérhető lassulás.
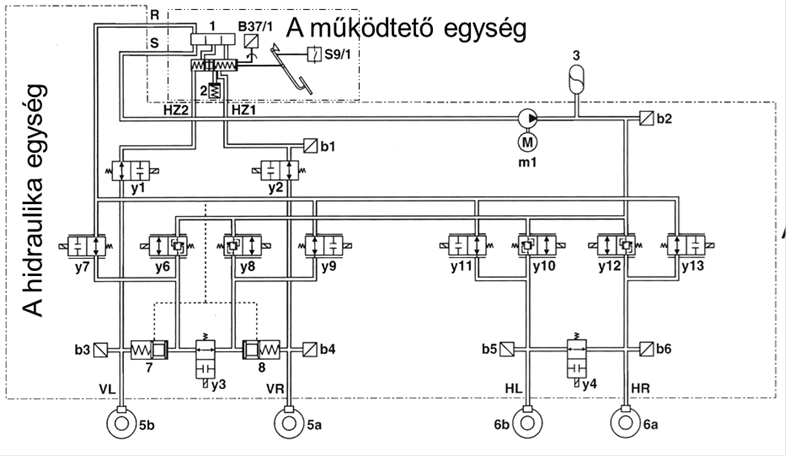
1 fékpedál elmozdulás érzékelő; 2 pedálút szimulátor; 3 nyomástároló; 7 és 8 elválasztó dugattyúk
12.3. A Continental Teves elektrohidraulikus fékrendszere
A fejlesztés eredményének első változatát a Continental Teves már évtizedekkel korábban bemutatta, de nem került sorozatgyártásba. A rendszer két egységből áll, a fékpedállal működtetett főfékhenger részből és az ettől független nyomás átviteli részből. Ez utóbbi működik az elektronika felügyelete alatt és végzi a működéshez szükséges energia tárolását, a fékerő felosztást és egyebek között az ABS működése közbeni nyomás modulációt.
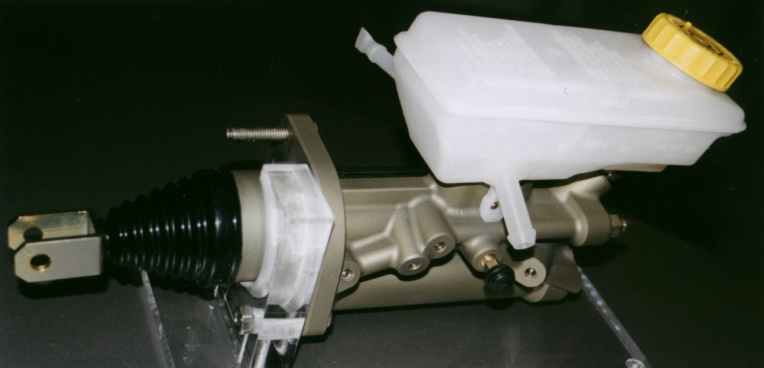
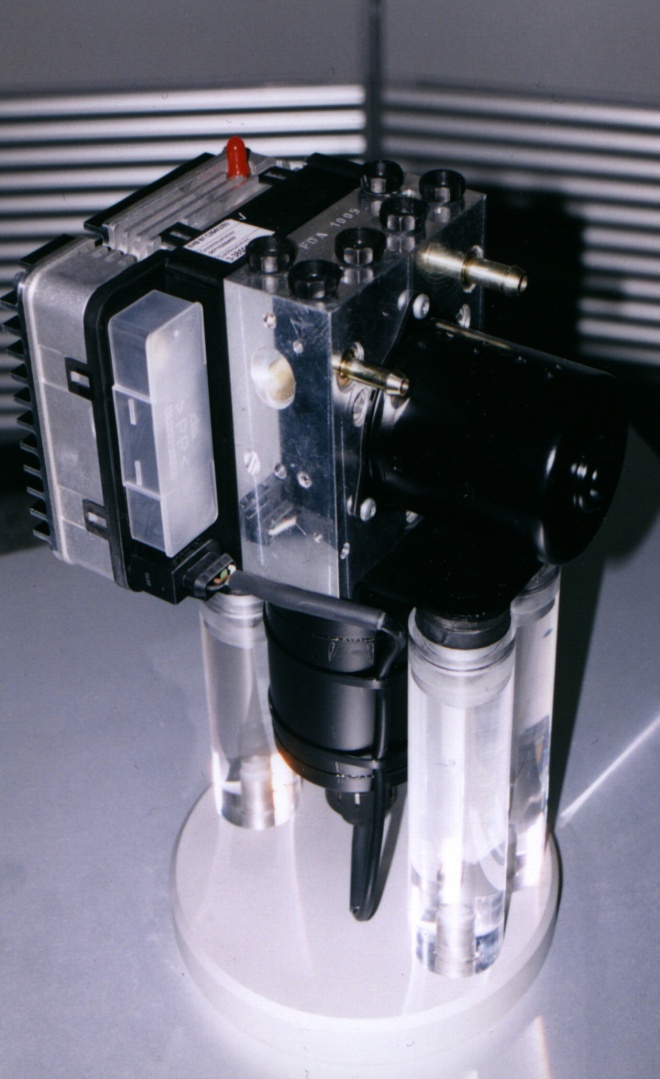
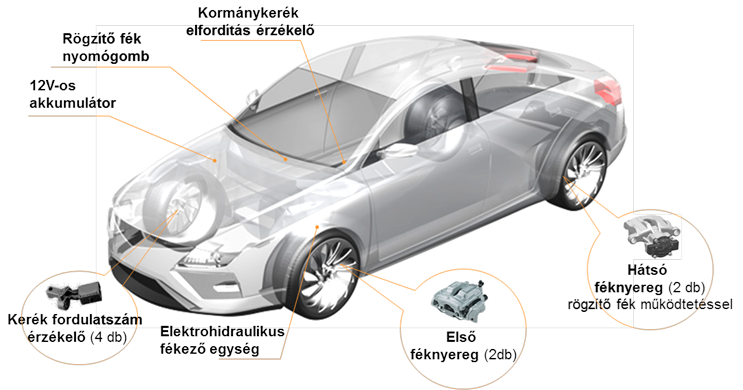
Nyomástároló nélküli, gyors működésű nyomásnövelő egységgel működő elektrohidraulikus fékrendszer
Ezt gyártója, a Continental Teves teljesen integrált fékrendszernek nevezi, melynek MK C1 a rövidítése. A személygépkocsiknál végzett fejlesztéseknek köszönhetően a közeljövőben a következő változások és tendenciák várhatók:
az ESP rendszer alapfelszereltséggé válik a személygépkocsikban.
A belsőégésű motor szívócsövében létrejövő vákuum helyett villanymotorral hajtott vákuumszivattyúkat alkalmaznak.
Hibrid és elektromos hajtású autók száma növekszik.
Optimális dinamika valósul meg.
a gyalogos védelem és komfort egyre nagyobb jelentőséget kap.

A hidraulikus rásegítő résznél a villanymotorral hajtott golyósoros menetes orsó mozgatja a dugattyút, mely létrehozza a rásegítő nyomást.
Meghibásodás esetén két visszakapcsolási szintet definiáltak.
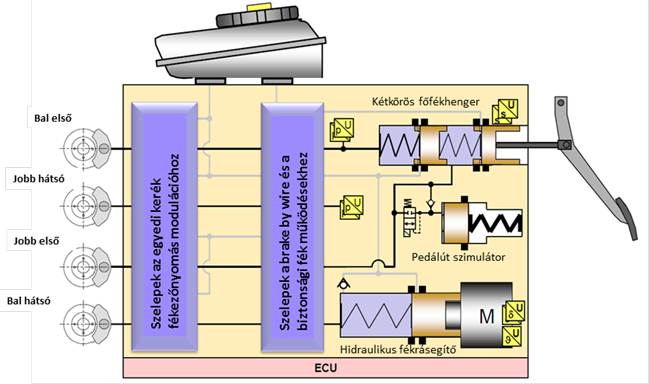
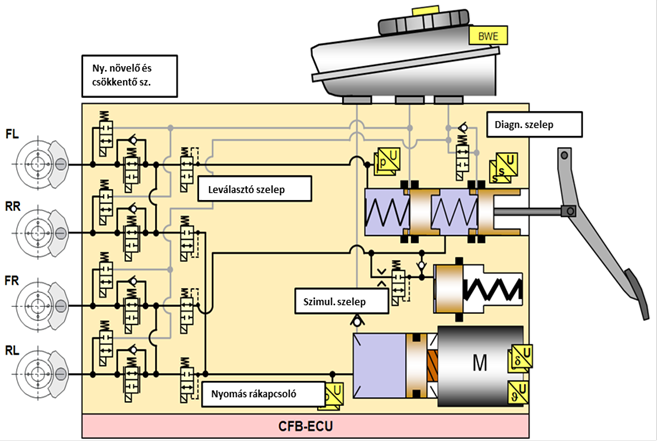
Az új fékező rendszer az MK C1 lkalmazásának előnyei:
alacsonyabb zajszint a lineális működésű dugattyús szivattyú alkalmazása miatt
komfortosabb működés
dinamikusabb fékezőnyomás kivezérlés
növekvő aktív biztonság 150 ms –on belül a kivezérelt fékezőnyomással elérhető a kerék blokkolási határa.
az elektromos rendszer meghibásodása esetén a biztonsági fék működése esetén 500 N pedálerővel 6,44 m/s2 lassulás érhető el.
Dinamikus vészfékezés 3 km/h –nál nagyobb sebesség esetén a hidraulikus fékrásegítővel és az üzemi fék rendszerrel történik.
Opcionális a CAN hálózaton keresztül érkező külső fékezési parancs fogadása
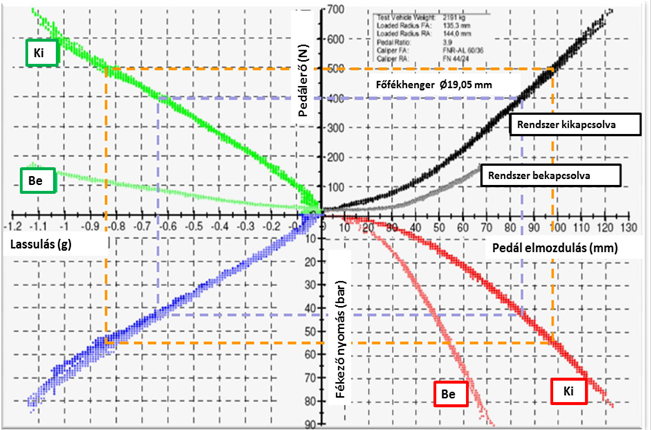
13. fejezet - Elektropneumatikus fékrendszer
- 13.1. Az elektro-pneumatikus fékrendszerek fejlesztésének céljai és a lehetőségek
- 13.2. Az elektro-pneumatikus fékrendszer az adatátvitelhez több CAN-hálózatot is használ.
- 13.3. Az EBS rendszer biztonsági fékje
- 13.4. Amit csak az elektronika tud teljesíteni
- 13.5. Az elektropneumatikus fékrendszer működésmódjai
- 13.6. Az elektropneumatikus fékrendszer részegységei
- 13.6.1. pedálmodul és működése
- 13.6.2. Egycsatornás nyomásmodul
- 13.6.3. Két csatornás nyomásmodul
- 13.6.4. Pótkocsi fékvezérlő modul
- 13.6.5. Az elektropneumatikus fékrendszer központi elektronikája
- 13.6.6. Az elektropneumatikus fékrendszer ellenőrző lámpái
- 13.6.7. ESP szabályozás az elektropneumatikus fékrendszer egyik alprogramja
- 13.7. A pótkocsi elektropneumatikus fékrendszere
- 13.8. Ellenőrző kérdések
13.1. Az elektro-pneumatikus fékrendszerek fejlesztésének céljai és a lehetőségek
A haszonjárművek légfékrendszereinél a fékezés dinamikájának növelése volt a cél ennél az új fékrendszer kifejlesztésénél. A légfékeknél már évtizedek óta alkalmazták a blokkolásgátlókat és a kipörgésgátlókat, melyek az elektronikát már bizonyos mértékig alkalmazásba hozták a pneumatikus működésű fékeknél. Ezeknél a rendszereknél a nyomáskivezérlést a hagyományos fékrendszer végezte csupán a kerékcsúszás függvényében a fékező nyomás szabályozását bízták az elektronikus rendszer.
Az elektro-pneumatikus fékrendszerek kifejlesztése a különböző gyártóknál a nyolcvanas években kezdődött. Az angol elnevezése Electronic Brake System alapján EBS-nek rövidítik. A fékezés dinamikájának növelésén kívül alkalmazásának további előnye az, hogy nagyon egyszerűvé vált a fékrendszer. A korábban alkalmazott számos szelep az EBS –nél a különböző működtető programokkal helyettesíthető. Így csupán néhány fajta modult kell gyártani, és az üzemeltetőknek raktáron tartani. A különböző haszonjárművekhez a fékrendszer szoftveresen illeszthető.
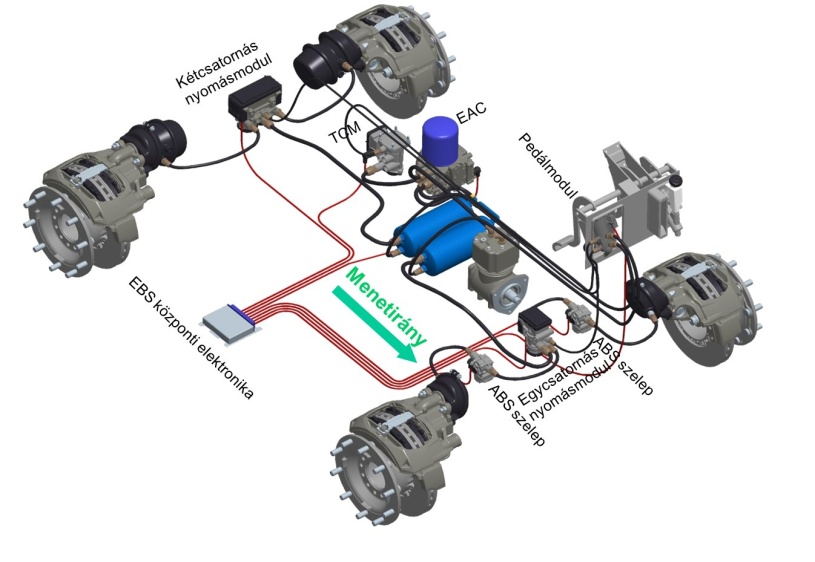
A központi EBS elektronika végzi az úgynevezett „magas szintű” műveleteket, melyek egyebek között a fékrendszer egyes moduljainak összehangolása. Ehhez a CAN hálózatot használja. A kerekek közelében elhelyezett tengely-modulokat saját elektronikákkal látták el. Ezek fogadják a keréksebesség-, a fékbetét kopás-, fékezőnyomás érzékelőinek jeleit. Ezeket megszűrve és digitalizálva CAN üzenetként továbbítják a központi elektronika felé. A központi elektronika által kért nyomás létrehozását a nyomásmodulok végzik. A központi elektronika fogadja a fékpedál-modul analóg elektromos jeleit, melyek a vezető fékezési igényével arányosak. Ezekből, valamint a moduloktól érkező jelek alapján kiszámítja a kerekenként szükséges fékező nyomást. Ezt a nyomásigényt a CAN hálózaton keresztül elküldi a moduloknak, amelyek előállítják azokat.
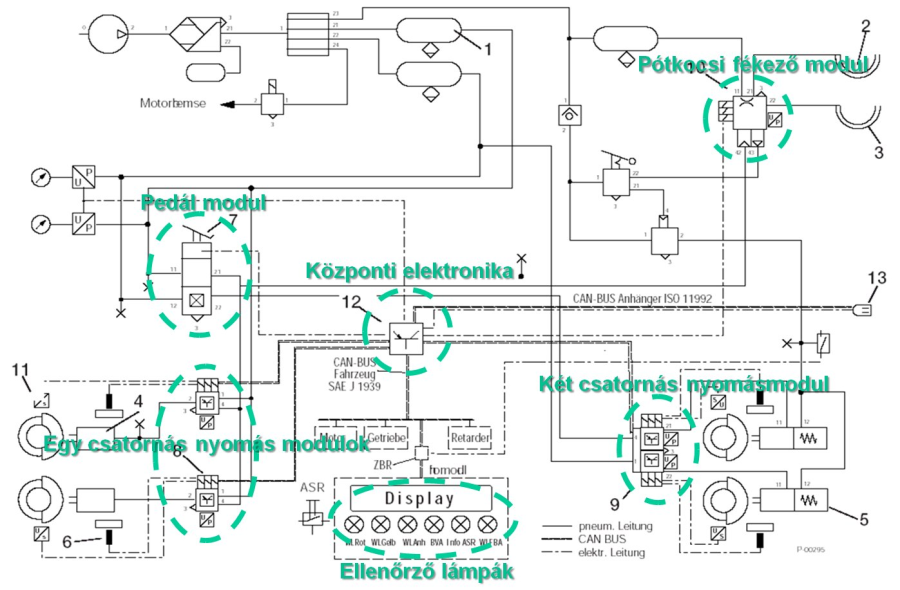
13.2. Az elektro-pneumatikus fékrendszer az adatátvitelhez több CAN-hálózatot is használ.
„Jármű-CAN”
Ezen keresztül a gépkocsi többi elektronikájához, mint például a motor-, az automatikus sebességváltó-, a tartós lassító fék-, a kerékfelfüggesztés- és a sűrített levegő ellátó rendszer elektronikájához kapcsolódik.
„Pótkocsi-CAN”
Ez teszi lehetővé a pótkocsi elektronikus fék rendszere (TEBS) felé a gyors elektronikus adatátvitelt.
„Fék-CAN”
Ez valósítja meg az EBS központi elektronika és az egyes futóműveknél elhelyezett nyomásmodulok közötti információcserét.
„ESP-CAN”
Ez juttatja el az EBS központi elektronikához a kormánykerék elfordítás- és a perdülés-érzékelő jeleit.
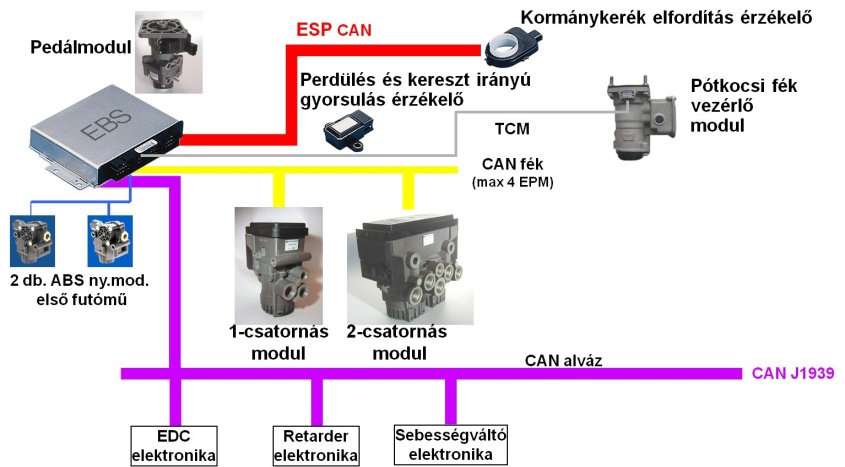
13.3. Az EBS rendszer biztonsági fékje
Ez egy úgynevezett back-up rendszer, mely sűrített levegővel működik. Az elektronikus rendszerrel párhuzamosan kiépítenek egy kétkörös sűrített levegős fékrendszert is. Ez látja el a biztonsági fék feladatát. Elektronikus hiba esetén ez teszi lehetővé a biztonsági fékre előírtak teljesítését. Ilyen esetben a nyomás-modulok relé-szelepként működnek. Az ehhez szükséges vezérlő nyomást a fékpedál modul két pneumatikus back-up köre adja. Az EBS pedálmodul hasonló felépítésű, mint egy hagyományos kétkörös pedálszelep, azonban mérete és átömlő keresztmetszetei kisebbek annál, és szerkezetük is egy kicsit egyszerűbb. Ezt a kört ellátták elektromos jeladókkal, kapcsolókkal. A back-up rendszer csak ritkán, elektromos hiba esetén üzemel, ezért fék-karakterisztikája, megszólalási- és fékoldási ideje másodlagos.
13.4. Amit csak az elektronika tud teljesíteni
Az elektropneumatikus fékrendszer legfőbb előnye az, hogy a fékező nyomást korlátozások nélkül tudja szabályozni. Ez a különleges működések széles skáláját teszi lehetővé egyszerű módon. Ehhez hasonló de nála gyengébb működésmóddal a hagyományos szelepek alkalmazásával lényegesen több szerelvény felhasználásával lenne megvalósítható. További előnye az elektronikus jelátvitelnek és moduláris felépítésnek a rugalmas konfigurálhatóság.
A modularitás azt jelenti, hogy az elektropneumatikus fékrendszer mechatronikai szerelvényei a különböző járműtípusoknál más módon konfigurálhatók, így a gyártók eltérő igényei egyszerűen kielégíthetők.
Az elektronikus adatátvitel miatt rövidebb a fék „megszólalási-” és „küszöb”-ideje, vagyis gyorsabb a fékezés és a fékoldás folyamata is, ami rövidebb fékutat eredményez.
Üzemeltetési előnyként kell megemlíteni, hogy a tartós lassító fék működésének integrációja révén kisebb lesz a fékbetétek kopása. Lehetőség van továbbá a fékbetét kopások tengelyek közötti kiegyenlítésére is. Ez utóbbi azzal az előnnyel jár, hogy a járműszerelvény valamennyi tengelyénél azonos időben lesz esedékes a fékbetét csere. Így nem kell gyakran vinni a műhelybe a járműszerelvényt.
Vezetésbiztonsági előny, hogy a fékrendszer elektronikája a jeladókra támaszkodva folyamatosan figyeli a kerékfék szerkezetek állapotát. Rendellenesség esetén azonnal figyelmeztet.
Optimális fékerő felosztást valósít meg a vontató és a pótkocsi között, mely kifogástalan menetstabilitást eredményez. Elkerülhetővé válik például a járműszerelvény becsuklása.
Az elektropneumatikus fékrendszer további előnye, a hagyományos fékrendszerhez képest, hogy a „mechatronika” alkalmazása révén a részegységei kisebbek, könnyebbek lettek. A szoftveresen megvalósított működtetésekkel egyszerűsödött a fékhálózat, így csöveket, és szelepeket lehet megtakarítani. Például a pótkocsi megkettőzött vezérlése, amit korábban kétkörös pneumatikával oldottak meg. (a hatósági előírás megköveteli, hogy kettős vezérlés a gyújtás levétele után is ellássa feladatát.) Az egyik sűrített levegős kört az elektronikus rendszer helyettesíti oly módon, hogy gyújtás levétel után a fékpedál lenyomására a pedálmodulba beépített kapcsoló segítségével „felébreszti” az elektronikát, mely biztosítja a második vezérlő kört.
13.5. Az elektropneumatikus fékrendszer működésmódjai
13.5.1. Alapműködés
Elektro-pneumatikus fékezőnyomás kivezérlés:
terhelés érzékelők nélkül; lassulás-kontrol és keréksebesség alapú, tengelyek közötti fékerő felosztás, tanuló algoritmussal.
terhelés érzékelővel; tengelyterheléssel arányos fékerő felosztás.
A két működési változat közül a diagnosztikai műszerrel beállítható, hogy melyik legyen az aktív.
13.5.2. A gépkocsi stabilitásának és dinamikájának növelése
13.5.2.1. Az ABS
Fékezés közben a kerékcsúszás függvényében szabályozza a fékkamra nyomását. Ez az egyik részprogramja az EBS-nek. Ennél is lehetséges az átkapcsolható, un. „terep” működés, mit a korábban gyártott blokkolásgátló rendszereknél.
13.5.2.2. Kipörgés gátló
Ez a blokkolásgátlót hatékonyan kiegészítő menetdinamikai szabályozó elinduláskor és gyorsításkor avatkozik be. Kétféle módon tudja ezt megtenni:
motor nyomaték csökkentés (üzenet a motor elektronikának a CAN hálózaton keresztül)
differenciális fékezés (a kipörgő kerék vezetőtől független fékezése).
13.5.2.3. Motor fékező nyomaték szabályozás (DTC)
Hirtelen gázpedál visszaengedés csúszós úton a hajtott kerekek csúszását, blokkolását okozza. Ezért az elektronika a CAN hálózaton keresztül utasítást ad a motor elektronikának a fékező hatását csökkentésére az alapjárati fordulatszám növelésével. Ezzel a beavatkozással elkerülhetővé válik a farolás.
13.5.2.4. A differenciálzár működtetés
Ez a járműgyártó igénye szerint különböző módon történhet:
differenciálmű védelem, (a differenciálzár bekapcsolásának megakadályozása, ha nem azonos a kerekek fordulatszáma.)
a kerekek fordulatszámának össze-szinkronizálása, a differenciálzár bekapcsolása előtt
automatikus differenciálzár működtetés.
13.5.2.5. ESP (Elektronikus Stabilitás Program)
Ez is az elektropneumatikus fékrendszer egyik alprogramja, melynek a beavatkozásai:
a jármű perdülés szabályozása (pótkocsis szerelvénynél elkerülhető becsuklás veszélye.)
a borulásgátlás, melynek különösen magas tömegközéppontú járműveknél van jelentősége.
13.5.2.6. Kapcsolóponti erőszabályozás
Ennek angol elnevezése „Coupling Force Control” ezért gyakran CFC-nek rövidítik. A vontató gépkocsi és a pótkocsi közötti fékerő összehangolását végzi.
13.5.3. Fékbetét kopás befolyásolása
Ennek a működésmódnak az egyik hatékony eleme az üzemi- és a tartós lassító fék működésének összehangolása. Ennek az a lényege, hogy a fékpedál lenyomásakor kezdetben a súrlódásos fék lassít, de amint kialakul a tartós lassító fék megfelelő fékező nyomatéka, az kopásmentes módon átveszi a lassítás feladatát. Kisebb sebességnél, amikor csökken a tartós lassító fék nyomatéka, a lassítás egyre nagyobb részét ismét a súrlódásos elven működő üzemi fék fogja veszi át.
13.5.4. Fékbetét kopás kiegyenlítés
Ez a beavatkozás csak mérsékelt lassításoknál működik. Előfeltétele hogy a járműszerelvény valamennyi tárcsafékje el legyen látva kopásérzékelővel. Ennél a működési módnál a vastagabb fékbetétű tengely lesz csak fékezett. Intenzív lassításoknál, pánik szerű fékezéseknél ez nem aktiválható. Ez a részműködés az üzemeltető számára kedvező, mert a teljes járműszerelvénynél megközelítőleg egyidejű fékbetét cserét tesz lehetővé. Az járműgyártók igényeihez igazodva van olyan EBS programváltozat, melynél a fékbetét vastagság érzékelőt az új fékbetét beszerelését követően a diagnosztikai műszerrel „nullázni” kell és van olyan változat is ahol ez az algoritmus automatikusan felismeri az új fékbetétek beszerelését és felesleges a „nullázás”.
13.5.5. Kerékfék állapot megfigyelése
Az EBS figyelmeztető jelzést ad, ha a fékbetét elérte a megengedett kopáshatárt és akkor is amikor a féktárcsa túlhevült. Ez utóbbi egy matematikai modellel becsléssel történik.
13.5.6. Kiegészítő működések
13.5.6.1. Fék-asszisztens
Pánikszerű fékezéskor 1,5 – 2 szeres fékezőnyomást vezérel ki, mint ami hasonló körülmények között normál fékezéskor megtörténne. Így intenzívebben lassítja a gépkocsit, tehát rövidül a fékút.
13.5.6.2. „Tilt prevention”
Intenzív fékezéskor a vontatmány nélkül közlekedő nyergesvontató előre billenését akadályozza meg, a fékerő határolásával az első tengelyen.
13.5.6.3. „Hill Start Assistance”
Lejtőn megtartja a fékező nyomást akkor is, amikor a vezető visszaengedi a fékpedált. A járműszerelvény álló helyzetben tartásával egyszerűbbé és biztonságosabbá teszi az elindulást.
13.5.6.4. „Door brake”
Automatikus fékezést aktivál az autóbusz ajtajának kinyitásakor. Befékezve tartja a járművet amíg az ajtó nyitva van. A diagnosztikai műszerrel aktiválható, illetve tiltható le ez a működés, illetve beprogramozható, hogy melyik tengelyt, illetve mekkora nyomással fékezze.
13.5.6.5. Külső fékezési igény
Ennek a szakmában elterjedt angol elnevezése az external brake demand – illetve az XBR rövidítés. A fékezési igény a jármű más elektronikus rendszereitől érkezik. Automatikus fékezés történhet például az autóbusznál a becsuklás-gátló, vagy a radar érzékelő jele alapján, amit az Adaptive Cruise Control-nál (ACC) értékel ki.
13.6. Az elektropneumatikus fékrendszer részegységei
13.6.1. pedálmodul és működése
Ezt az egységet működteti a fékpedál, amellyel a vezető kezdeményezni tudja a lassítást.
Két fontosabb egységből áll:
elektromos jeladó a mikrokapcsolókkal,
kétkörös főfék-szelep.
Elektromos jeladók:
Ezt az egységet a fékpedál közelében műanyag burkolat alatt helyezik el. Két egymással ellentétesen elmozduló potenciométert és mikrokapcsolókat tartalmaz. Ezeket a gyártó sor végén, próbapadon, a gépkocsi típusának megfelelő karakterisztika alapján állítják be. A pedálmodul csak arra a gépkocsira szerelhető fel, amelyikre tervezték és beállították. Az EBS központi elektronikától 5 V-os tápfeszültséget kapnak a potenciométerek, ennek megfelelően feszültség jelet adnak. Hibamentes állapotban a fékpedál lenyomásakor először a kapcsolók testet kapcsolnak az elektronika megfelelő érintkezőjére. Ez kikapcsolt gyújtásnál is üzemképes állapotba hozza az elektronikát. A fékpedál pillanatnyi helyzetnek megfelelően a potenciométerek az 5 V-os tápfeszültséget felhasználva egy-egy feszültségjelet adnak. Az egyik csökkenő a másik növekvő jellegű, de összegük minden pillanatban állandó értékű. Ez biztosítja az ellenőrzés lehetőségét. Ezen jelek kiértékelése, és további információk figyelembevétele alapján ad parancsot a központi EBS elektronika a tengelymoduloknak a fékező nyomás kivezérlésére. Ekkor azok „back-up” szelepe zár és a pedálmodultól érkező sűrített levegőnek nincs befolyása a fékezési folyamatra.
Ha a pedálmodul jeladója meghibásodik, az EBS kikapcsol és az ellenőrzőlámpa, folyamatosan világít. Ekkor a fékezés a pneumatikus „back-up” körök, révén valósul meg. Ilyenkor az ABS és az elektronikus fékerő felosztás nem működik.
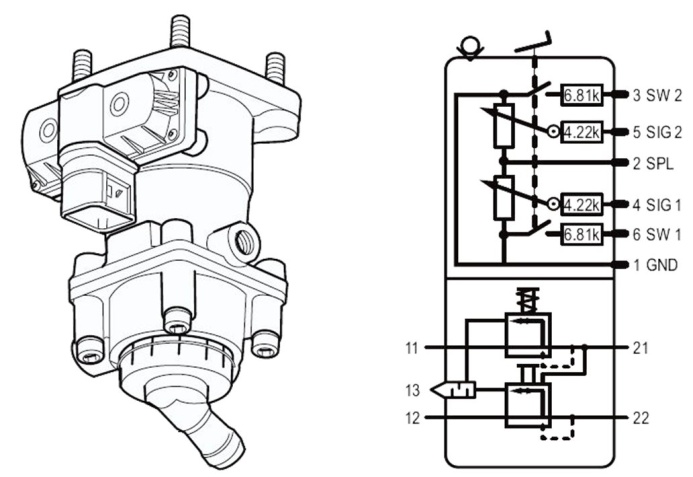
Fő-fékszelep egység
A pedálmodul kétkörös sűrített levegős része hasonló a kétkörös pedálszelepéhez, bár annál kisebb méretű és csatlakozói is kisebb átmérőjűek. Ennek az egységnek csak a biztonsági fékre előírt lassuláshoz tartozó nyomáskivezérlést kell teljesítenie. Elektromos hiba esetén ez látja el a biztonsági fék működtetésének feladatát. A fékpedál lenyomásakor nyomást vezérel ki a nyomásmodulokba. Elektromos hiba esetén a nyomásmoduloka beszerelt „back-up” szelepek árammentesek, ezért nyitva vannak. A beáramó sűrített levegő ilyenkor működteti a relészelepet, amely fékező nyomást vezérel ki a fékkamrákba.
13.6.2. Egycsatornás nyomásmodul
Általában az első futómű közelében szerelik fel rögzítő csavatokkal az alvázra. Két db. 30 négyzetcol méretű fékkamrát képes működtetni. A modul felső műanyag fedele alatt található az elektronika és ennek közelében az elektomos csatlakozók.
Az EBS központi elektronikával a „Fék – CAN”-en keresztül áll kapcsolatban. Két kerékfordulatszám-, és két fékbetét kopás érzékelő jelét tudja fogadni. Ezeket az információkat CAN üzenetként továbbítja a központi elektronikának.
Részei:
Elektronika, a műanyag fedél alatt.
3 db. elektromágneses szelep, (nyomás növelő, -csökkentő és back-up)
nyomásérzékelő, az elektronika paneljére szerelve
relé-szelep, a ház alsó részében.
elektromos és sűrített levegő csatlakozók.
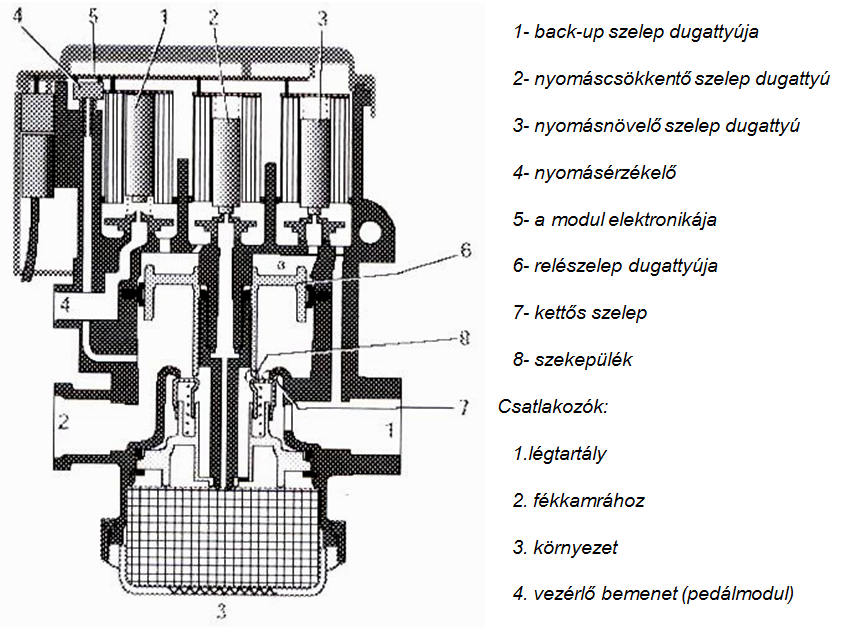
Működése:
Ha az elektromos rendszer működőképes, a back-up szelep zárva van. A nyomáskivezérlés az elektromágneses szelepekkel történik, melyeket a modul elektronikája működtet a központi elektronika parancsának megfelelően. Elektromos hiba esetén a nyitott „back-up” szelepen keresztül a pedálmodullal kivezérelt nyomás jut el a relé-szelephez, amely a fékkamrát fékező nyomással látja el. A nyomásérzékelő adja a visszacsatolást a modul elektronikájának. A kezdeti időkben az első futóműre két modult szereltek. A nyomáskivezérlésen kívül ezek végezték az ABS szabályozást is. Jelenleg a legtőbb haszonjármű típusra egy nyomásmodult és két ABS szelepet szerelnek. Így olcsóbb lesz a rendszer és dinamikusabban működik az ABS szabályozás is.
Menet helyzet:
A modul 1-es csatlakozójánál tartálynyomás van. A 2-es és a 4-es csatlakozók nyomásmentesek. Az elektromágneses „back-up” szelep nyitott. Nyomásnövelő és a nyomáscsökkentő szelepek zártak.
Fékezés:
Ha az EBS hibamentes, először a „back-up” szelep zár, így a fékezési folyamatra a 4-es vezérlő bemenetéhez érkező nyomásnak nincs befolyása. Az elektronika a nyomásnövelő és a nyomáscsökkentő szelepekkel állítja be a relé-szelep dugattyúja feletti nyomást. Ezért az lefelé mozdul és a 2-es kimeneti csatlakozón megjelenik a nyomás, melyet nyomásérzékelő visszajelez a modul elektronikájának. Ha eltérés van a számított és a tényleges nyomásérték között, az elektronika beavatkozik.
ABS, illetve ASR szabályozás esetén is a nyomáscsökkentő, illetve a nyomásnövelő szelepek fognak működni, ha mindkét kerékhez tartozik egy - egy nyomásmodul.
Meghibásodás:
Ha a modul meghibásodik, például megszakad a CAN- kapcsolat, illetve a tápfeszültség, a „back-up” szelep nyitva marad. A 4-es csatlakozóhoz érkező nyomás relé-szelepként működteti a modult.
13.6.3. Két csatornás nyomásmodul
Ezt a hátsó futómű fékezéséhez fejlesztették ki, de az iker tengelyhez is használható. Konstrukciós kialakítása olyan, mint amikor két darab egycsatornás modult építenek össze. Összesen 4 db 30 négyzetcolos fékkamrának a fékező nyomás kivezérlését tudja ellátni. A modul fedele alá beépített elektronika az elektropneumetikus fékrendszer központi elektronikájával CAN adatátviteli kapcsolatban van. Négy kerékfordulatszám-, és négy fékbetét kopás érzékelő jelét tudja fogadni. Így tehát ez egy négy csatornás szerelvény. Csatornánként 1 db. „back-up” és 1 db. nyomásnövelő és 1 db. nyomáscsökkentő elektromágneses szeleppel vezérli ki a fékezőnyomást. Mindkét csatornához tartozik egy-egy nyomásérzékelő is. A csatornánkénti működése olyan, mint az egycsatornás modulé.
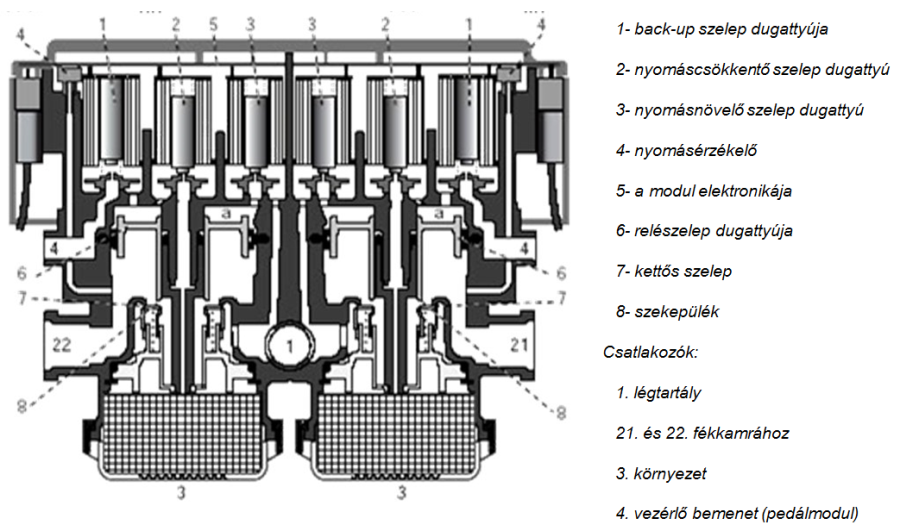
13.6.4. Pótkocsi fékvezérlő modul
A hagyományos légfék rendszerrel ellátott régebbi pótkocsik fékezésére használják. Az elektronikus fékrendszerrel szerelt pótkocsik fékezése a vontató központi fék elektronikájától a ”Trailer CAN” -en keresztül elektronikus működtetéssel történik.
Ezt az egységet az angol Trailer Control Modul elnevezése alapján TCM –nek rövidítik. Feladata a pótkocsi sűrített levegő ellátásának és fékezésének a biztosítása. Ezen keresztül töltődik a pótkocsi sűrített levegő hálózata. A vontató bármely fékkörének működésekor (üzemi-, vagy rögzítő fék) a pótkocsi fékező vezetékébe (sárga) a fékezés intenzitásának megfelelő nyomású sűrített levegőt vezérel ki. A pótkocsi leszakadásakor teljesíti az automatikus befékeződés feladatát. A központi elektronika működteti a modulba beépített elektromágneses szelepeket. A TCM és a központi fék elektronika között analóg elektromos jelátvitel valósul meg.
A pótkocsi fékező modul (TCM) részei:
elektromágneses szelepek (1 db. back-up, 1 db. nyomásnövelő- 1. db. nyomáscsökkentő),
nyomásérzékelő,
elektromos és sűrített levegő csatlakozók,
két vezérlőkamrás relé-szelep az üzemi fékkörökhöz,
egy vezérlőkamrás relé-szelep a rögzítő fékhez,
hangtompító.
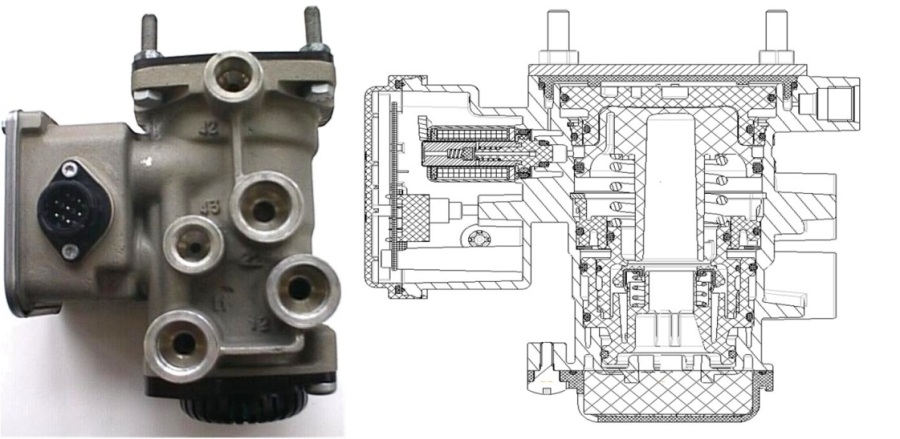
Működése menethelyzetben
Az 1-es 21 és a 43-as sűrített levegő csatlakozóknál tartálynyomás van. A 22 és a 42-es csatlakozók ilyenkor nyomásmentesek.
Fékezés üzemi fékkel
Az újabb változatnál már az EBS központi elektronika működteti a TCM elektromágneses szelepeit a pótkocsi fékezésekor. Ennek közreműködésével valósul meg a „kapcsolóponti erőszabályozás”, vagyis a vontató és a pótkocsi fékrendszerének összehangolása. A pedálmodultól csak az egyik „back-up” kört kötik be ehhez a szerelvényhez. Hibamentes állapotban a „back-up” szelep zár. A fékező nyomást a nyomásnövelő és a nyomáscsökkentő szeleppel állítja be az elektronika. A pótkocsi fékező vezeték kapcsolófejéhez a nyomást az egységbe integrálisan beépített relé-szelep vezérli ki és a nyomásérzékelő jelzi vissza.
Fékezés rögzítő fékkel
A rögzítő fék szelep működtetésekor a 43-as csatlakozó nyomásmentessé válik. Ennek hatására a belső szeleptest fölfelé mozdul a szelepházban lévő nyomás miatt és a 22-es csatlakozóhoz, nyomás vezérlődik ki.
Elektromos hiba:
Ilyenkor a back-up szelep nyitva marad, a 42-es csatlakozón keresztül a vezérlőkamrába nyomás kerül, melyet a pedál modul küld ide. Hatására a relé dugattyú lefelé mozdul és 22-es kimenetnél megjelenik a fékező nyomás. A leszakadáskor történő befékeződés a hagyományos pótkocsi fékvezérlő szelephez hasonlóan egy integrálisan beépített 2/2-es szelep révén valósul meg.
13.6.5. Az elektropneumatikus fékrendszer központi elektronikája
Ez a fékrendszer központi szabályozó egysége. Általában a vezetőfülkében, vagy autóbuszban valamely zárt részbe védett helyre szerelik be. A fém dobozban a nyomtatott áramköri panelre szerelik a mikrokontrollereket és más áramköri elemeket. Szűrő áramkörök védik a különböző elektromos zavaró tényezőktől a bemeneteket. A futóműveknél elhelyezett fékező modulokat (EPM) és a pótkocsit fékező modult (TCM)-et 24 V-os, a fékpedál modult (FBM) pedig 5 V-os tápfeszültséggel látja el. Az elektronika két redundáns mikrokontrollerrel működik, melyeket EEPROM-al is elláttak, továbbá 4 db. CAN kontrollert is tartalmaz. A mikrokontrollerek a bemeneti áramkörök által szűrt és előkészített jeleket értékelik ki és vezérlik a kimeneteket. Az elektronika a gyújtás bekapcsolását követően egymás után mindegyik modult bekapcsolja. Ha valamelyiknél elektromos hibát észlel, azt kikapcsolja és a műszerfalon elhelyezett ellenőrző lámával hibajelzést ad a gépkocsivezetőnek.
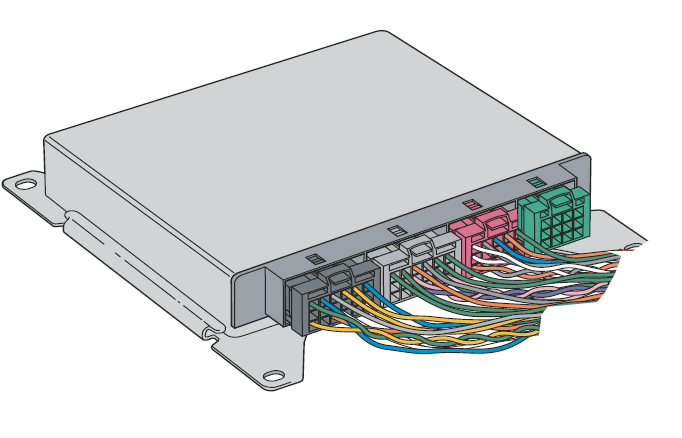
13.6.6. Az elektropneumatikus fékrendszer ellenőrző lámpái
Ha a központi elektronika a fékrendszerben hibát észlel, a CAN hálózaton keresztül a műszerfalba beépített információs modulnak üzenetet küld, ami működteti az ellenőrző lámpát. Ezzel tájékoztatja a vezetőt az elektropneumatikus fékrendszer pillanatnyi állapotáról. Pótkocsi vontatására feljogosított gépkocsiknál egy piros és egy sárga ellenőrző lámpa a vontató hibáit jelzi. A másik piros és sárga ellenőrző lámpa pedig a pótkocsi elektropneumatikus fékrendszerére vonatkozik.
A piros színű ellenőrzőlámpa
Akkor világít, ha:
az üzemi fékkörökben a tartálynyomás veszélyesen lecsökken, vagy
olyan elektromos hiba van, ami miatt jól tapadó, szilárd burkolatú úton fékezve a hatóságilag előírt lassulás nem érhető el.
Ez az ellenőrző lámpa hibamentes állapotban a gyújtás bekapcsolását követően 3 másodpercig világít, majd kialszik.
EBS sárga színű ellenőrzőlámpa
Akkor világít, ha az elektropneumatikus fékrendszer valamelyik szabályozási, köre meghibásodott ugyan, de ekkor is jól tapadó, szilárd útburkolaton fékezve a hatóságilag előírt lassulás a gépkocsival elérhető. Hibamentes esetben a gyújtás bekapcsolásakor 3 másodpercig világít, majd kialszik.
13.6.7. ESP szabályozás az elektropneumatikus fékrendszer egyik alprogramja
Az elektropneumatikus fékrendszert ellátják egy a haszonjárművek speciális sajátosságait figyelembe vevő Elektronikus Stabilitás Programmal. Ez a rendszer a fizikai törvények határain belül képes stabilizálni a járművet a legkülönbözőbb veszélyes menethelyzetben. Megakadályozza a gépkocsi alul-, illetve a túlkormányozott viselkedését kisodródását az útról és csökkenti a felborulás veszélyét. Az ESP két speciális érzékelője (kormánykerék elfordítás-, és a perdülés érzékelő. Az ESP működés jelenleg a központi fék elektronika integrális része. Korábban ehhez egy külön elektronikát kellett beszerelni.
Az ESP beavatkozási lehetőségei:
Amikor az elektronika felismeri, hogy a gépkocsi alulkormányzott módon viselkedik, az ESP, a kanyar irányától függően az egyik hátsó kereket impulzus szerűen fékezi. Túlkormányzott esetben az ESP a kanyar irányától függően az egyik első kereket és a nyerges félpótkocsit is fékezi. Ez utóbbival megakadályozza a szerelvény becsuklását. Amennyiben szükséges a fékezési beavatkozások a motor nyomatékának csökkentésével is együtt járnak.
13.6.7.1. Az ESP kormánykerék elfordítás érzékelője
A fékrendszer központi elektronikája látja el 5 V –os tápfeszültséggel a magneto-rezisztív elven működő érzékelőt, melyet a kormánykerék tengelyére szerelnek fel. Arra rögzítik az érzékelő nagy fogaskerekét, melyhez két kissebb kapcsolódok. A kis fogaskerekek egymáshoz nem kapcsolódnak. Fogszámuk viszont egymástól eggyel eltér. Ezekre a kis fogaskerekekre egy-egy állandó mágnest rögzítenek, melyek az érzékelők előtt forognak. Ennek hatására azokban egy-egy színuszos jel képződik. Az érzékelő saját elektronikája a jelek alapján folyamatosan megállapítja a kormánykerék elfordításának irányát, sebességét és szöghelyzetét. Ezeket az információkat a CAN hálózaton keresztül küldi a fékrendszer központi elektronikának.
Az érzékelő működési tartománya 1560°, azaz 4,3 kormánykerék fordulat. Meghibásodása esetén az ESP kikapcsol és az ESP ellenőrző lámpa világít. Ezzel figyelmezteti a gépkocsivezetőt a hibára.
Az egyenes-meneti kalibrációt a gépkocsi típusának megfelelő diagnosztikai műszerrel a következő esetekben kell elvégezni:
a gépkocsi első üzembe helyezése előtt, a szerelősor végén,
az érzékelő cseréje után,
a futóművön végzett javítási, beállítás, alkatrészcsere után,
a kormánymű cserét követően.
A különböző gépkocsitípusoknál a kalibrációt a gyártó előírásai szerint kell végrehajtani. Ennek során a hibakód-tárolót törölni kell. Ha nem végezték el az egyenes-meneti kalibrációt a hibajelzés nem szűnik meg.
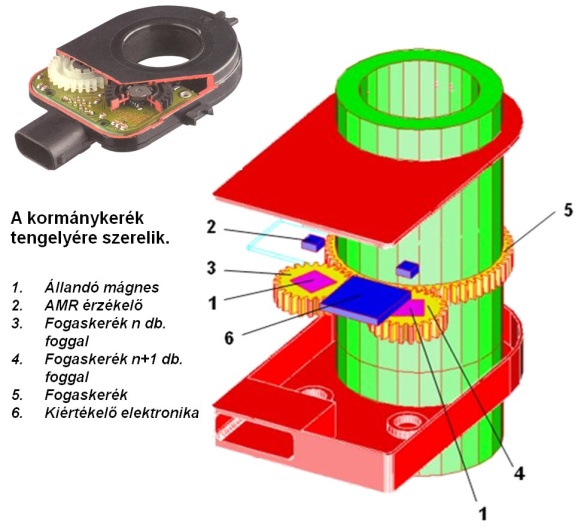
13.6.7.2. Az ESP perdülés- és kereszt irányú gyorsulásérzékelője
Az érzékelőt a gépkocsi alvázára, a tömegközéppont közelében egy meghatározott helyre szerelik fel. Ettől nem szabad eltérni. Ha ez az érzékelő meghibásodik, az ESP kikapcsol. A fékrendszer ekkor is működőképes marad.
Ez az érzékelő a gépkocsi tömegközépponti függőleges tengely körüli elfordulás sebességét, irányát és a kereszt irányú gyorsulást méri. Ehhez egy közös házba két érzékelőt építenek be. A fékrendszer központi elektronika látja el 5 V tápfeszültséggel.
A mikromechanikai perdülés érzékelő belsejében kvarckristályból kialakított két oszcilláló tömeget helyeznek egy szintén kvarckristálynól készített keretbe. Amikor a gépkocsi megperdül a saját frekvenciával rezgetett tömegekre Coriolis erő hat. Az oszcilláló irányra merőlegesen, kapacitív elven méri a perdülési sebességet. Az egymással párhuzamosan beszerelt differenciál kondenzátorok fegyverzetei közötti távolság az Coriolis erő hatására egyik oldalon nagyobb, a másikon pedig kisebb lesz, ezért változik a kapacitás.
Ugyanabba az érzékelő házba építik be a kereszt irányú gyorsulásérzékelőt is. Az érzékelők jeleit a saját elektronika értékeli ki és az információkat a CAN hálózaton keresztül továbbítja az elelektopneumatikus fékrendszer központi elektronikájának.
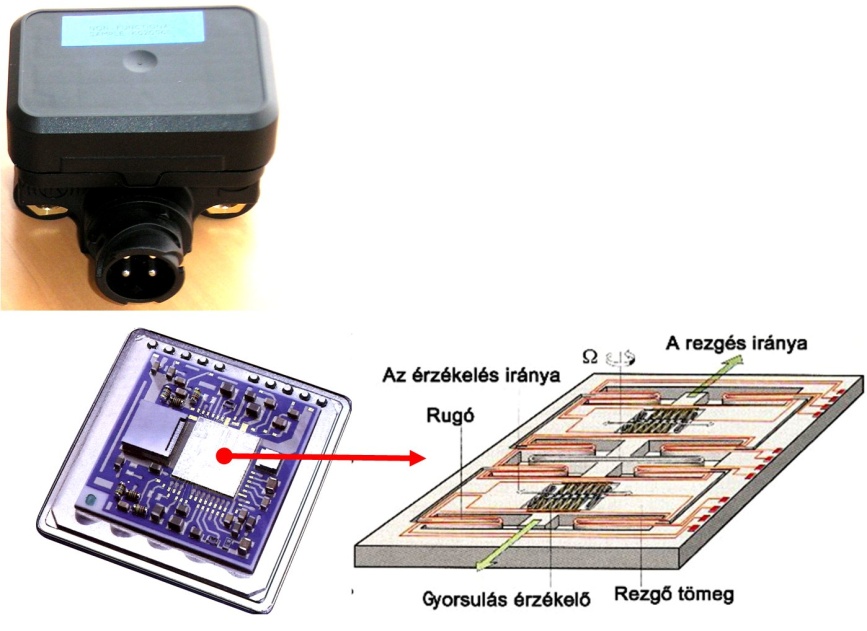
13.7. A pótkocsi elektropneumatikus fékrendszere
A pótkocsikhoz kifejlesztett speciális elektropneumatikus fékrendszer, a TEBS, fékkamrákkal, vagy kombinált rugóerő tárolós munkahengerrel működtetett tárcsa-, vagy dobfékes pótkocsiknál alkalmazható.
Előnyei:
Rövidebb fékút.
Fékezés a CAN üzenet, vagy a pneumatikus fékezőjel alapján is történhet.
Terhelés függő fékerő elosztás a programozott karakterisztika szerint, vagy csúszás különbség szabályzás alapján.
Javított ABS működés.
Borulás gátló rendszer is a pótkocsi fékrendszer részét képezheti.
Fék asszisztens szolgáltatás
Túlterhelés védelem az integrált kétutas szelepen keresztül.
Fékbetét kopás ellenőrzés.
Felemelhető (liftes) tengely vezérlése.
Javított figyelmeztető lámpa működés.
A ”Pótkocsi Információs Modul” (TIM) diagnosztikai berendezés használható a hibák feltárására.
Párhozamosan használható tápfeszültség kialakítás ISO 7638, illetve ISO 1185 szerint.
Pneumatikus „Back up” lehetőség.
Szervizbarát diagnosztika.
A TEBS fékrendszerrel felszerelt pótkocsi vontatható hagyományos, ABS-el, vagy EBS-el ellátott vontatóval is. A TEBS rendszer teljes működéséhez ki kell építeni az ISO7638 szerinti tápfeszültség ellátást (EBS rendszerű vontató esetén a CAN vezetékeket ISO 11992). Amennyiben csak az ISO1185 szerinti tápfeszültség ellátás érhető el, akkor az ABS és az ALB (2002 júliusától) működések aktívak.
13.7.1. A pótkocsi elektropneumatikus fékrendszerének felépítés és működése
A hagyományos pótkocsi fékrendszerekhez képest a TEBS lényegesen kevesebb részegységből áll. A pótkocsi fékrendszerének kialakításához a következő elemek szükségesek:
Kapcsolófejek, és elektromos csatlakozók,
Kombinált oldó-szelep integrált leszakadás védelemmel,
Pótkocsi modul, és
a hagyományos rendszereknél alkalmazott kombinált fékkamrák.
Menet helyzetben az összekapcsolt töltő vezetéken keresztül megtörténik a pótkocsi légtartályának és a fékrendszerének a feltöltése sűrített levegővel. Amennyiben a rögzítő fék rendszer nincs befékezve, akkor a rugóerőtárolós fékkamrák is feltöltődnek az integrált leszakadás védelemmel ellátott kombinált oldó-szelepen keresztül. Először az üzemi és a rögzítő fékrendszerek töltődnek, majd az áteresztő szelep nyitása után a többi sűrített levegő fogyasztó is.
A gyújtás bekapcsolása után a pótkocsi fékvezérlő modulba beépített elektronika elvégzi az ön-, és rendszer ellenőrzést és az esetleges hibákat a hibakódként megjegyzi. Hiba esetén a rendszer részlegesen kikapcsol. A pótkocsi modulba beépített nyomás érzékelő méri a tápnyomást, és amennyiben az 4,5 bar alatt, vagy 10 bar fölött van, akkor bekapcsolja a figyelmeztető lámpát.
A terhelés a légrugóktól a 42-es csatlakozóra érkező nyomás alapján határozható meg, amelyet egy nyomásérzékelő figyel.
Az elektronikába betáplált póluskerék fogszám és a gumiabroncs mérete alapján az elektronika kiszámítja a sebességet a kerékfordulatszám érzékelők jelei alapján, továbbá megállapítja, hogy kanyarban vagy egyenesen halad a jármű.
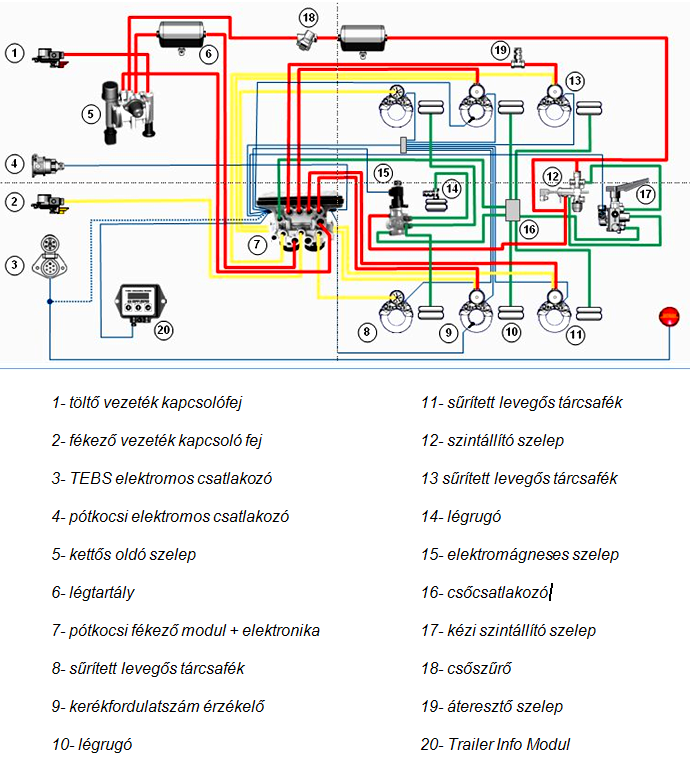
Üzemi fékezéskor
A fékező vezeték nyomása eljut a pótkocsi fékező modulba, ahol a nyomás érzékelő elektromos jelként küldi a fékezési igényt a modulba beépített elektronikának. A fékezési igény és a terhelési állapot alapján az előre beprogramozott karakterisztika alapján az elektronika meghatározza a fékező nyomást, amelyet az elektromágnesek vezérlésével juttat a fékkamrákba. Ezt a kimenethez beszerelt nyomás érzékelő méri és az eredményt visszacsatolja az elektronikának. Ezzel a zárul a belső szabályzó kör.
Ha a vontató EBS rendszerrel van ellátva és ki van építve az ISO11992 szerinti CAN kommunikáció, akkor a fékezési igény a CAN rendszeren keresztül érkezik a pótkocsihoz, amelynek prioritása van a pneumatikus jellel szemben. Egyébként a fékezési folyamat az előzőekben leírtak szerint történik, de annál sokkal dinamikusabban.
A rögzítő fék használata
A rögzítő fék működtetése a kombinált oldószelep segítségével lehetséges, a dobfékek védelmében a pótkocsi modul integráltan tartalmaz egy kétutas szelepet, amely megakadályozza az üzemi fék és a rögzítőfék hatásának összeadódását kerékfékszerkezetnél.
Az automatikus befékeződés
Ez a töltővezeték szétkapcsolásakor, vagy sérülésekor lép működésbe, szintén a kombinált oldó szelepen keresztül működteti a fékrendszert az integrált leszakadás-védelmi működésnek köszönhetően. A fékhatás a hagyományos pótkocsiktól eltérően nem az üzemi féken keresztül, hanem a rögzítő fék révén fejti ki a fékerőt.
13.7.2. A pótkocsi elektropneumatikus fékrendszerének kiegészítő működései
A pótkocsi elektronikus fékező modulján keresztül különféle kiegészítő működések valósíthatók meg, amelyek vagy a sebességjelhez, vagy a légrugóktól érkező terhelésjelhez vannak kötve. A működési paraméterek a szerelősor végén a diagnosztikai berendezés segítségével (EOL = End of Line szerelősor végi) programozással aktiviválhatók, illetve kikapcsolhatók.
A fontosabb kiegészítő működések:
RTR funkció: (Reset to ride) A konténer-kapcsoló szelep automatikus visszaállítása menethelyzetbe. Ezzel automatikusan beáll a gyárilag megadott utazási felépítmény magasság.
ISS működés: Sebesség függő kapcsoló, ami a kimenetére vagy testet, vagy feszültséget kapcsol.
LAC funkció: (Lift axe control) Automatikus felemelhető tengely vezérlés. (Amely álló helyzetben is aktív lehet.)
Terhelés jelzés: A aktuális légrugó nyomás alapján a TIM-en (pótkocsi információs modul) keresztül kijelezhető.
Kilométer számláló: A póluskerék fogszáma és a kerék dinamikus gördülési sugara segítségével határozza meg a megtett távolságot, abba az esetben, ha az elektronika feszültség alatt van.
TRSP: (Trailer Roll Satbility Program) elektronikusan vezérelt stabilitás program. A pótkocsi fékező modulba beépített oldalgyorsulás érzékelő küszöbérték feletti jelére lép működésbe. Az elektronika egy fékező impulzust küld, a kanyar ívének belső kerekeire. Azok erre kétféle módon reagálhatnak.
A kanyarív külső kerekekhez képest nincs jelentős keréksebesség változás. Ez azt jelenti, hogy a beállított határérték az adott járműnél nem helyes, ezért a határértéket újra kalkulálja (öntanuló rendszer) és inaktív állapotba kapcsolja a TRSP működést.
A kanyarív külső kerekekhez képest jelentős keréksebesség változás a belső íven, ami azt jelenti, hogy a pótkocsi borulási határhoz közelít, ezért az elektronika az úton maradó kerekeket erőteljesen fékezi. Emiatt egyrészt csökken a jármű sebessége, másrészt a gumiabroncsok oldaltartási képessége is csökken a fékezőerő hatására. Ezen két tényező együttes hatása a borulás közeli helyzet elhárul. Amikor a pótkocsi visszanyerte stabilitását ez a működésmód kikapcsol.
Elindulás segítés: A terhelt nyerges pótkocsinál lehetséges egy kapcsoló jelére a liftes tengelyt felemelni, ezzel megnövekszik a nyereg-, és emiatt a vontató hajtott kerekek terhelése. Csúszós úton ez megkönnyíti az elindulást. Ennél a működésmódnál az alapkonfiguráció szerint a pótkocsi tengelyének maximum 30%-os túlterhelést engedélyezi, és maximum 30 km/h sebességhatárig aktív ez a működési mód.
LAC kikapcsolása: Egy kapcsoló jelre az elektronika a pótkocsi üres állapotában is engedélyezi a liftes tengely leengedését. Ez nagy sebességnél a járműszerelvény stabilizálását eredményezi.
Fék asszisztens: Mint ahogy a vontatón, úgy a pótkocsin is aktív ez a vezetőt támogató asszisztens működés. A 90%-os fékezési igény átlépése esetén a terhelési állapottól függetlenül engedélyezi a maximális fékerő kivezérlését.
Betétkopás érzékelés: A kerékfékszerkezetben elhelyezett fékbetét kopás érzékelő jelére a kopáshatár elérésekor bekapcsolja a figyelmeztető lámpát.
Hibafelismerés: Az elektronika a rendszerben fellépő elektromos hibákat felismeri. Meghibásodás esetén részben, vagy egészben kikapcsolja a rendszert, a hiba jellegétől függően és hibajelzést ad.
TIM: Pótkocsi információs modul, amelyen keresztül lehetséges a TEBS rendszer gyorsdiagnosztikáját elvégezni és a metett km-eket kiolvasni.

13.8. Ellenőrző kérdések
Foglalja össze az elektropneumatikus fékrendszer előnyeit!
Mi biztosítja az elektropneumatikus fékrendszer működéséhez az energiát?
Hogyan történik az elektropneumatikus fékrendszernél a fékezésre vonatkozó információk átvitele?
Ismertesse egy közúti vontató gépkocsi elektropneumatikus fékrendszerének részeit!
Ismertesse az elektropneumatikus fékrendszer egycsatornás nyomásmoduljának felépítését és működését!
Ismertesse az elektropneumatikus fékrendszer kétcsatornás nyomásmoduljának felépítését és működését!
Ismertesse az elektropneumatikus fékrendszer pedálmoduljának felépítését és működését!
Ismertesse az elektropneumatikus fékrendszer pótkocsi fékező moduljának felépítését és működését!
Milyen feladatokat lét el az elektropneumatikus fékrendszer központi elektronikája?
Ismertesse az elektropneumatikus fékrendszer ellenőrző lámpáinak működését!
Hogyan működik és milyen érzékelők jeleit használja az ESP?
Milyen fő-, és kiegészítő működései vannak az elektropneumatikus fékrendszernek?
Ismertesse a pótkocsi elektropneumatikus fékrendszerének felépítését és működését!
Milyen fő-, és kiegészítő működései vannak a pótkocsi elektropneumatikus fékrendszerének?
Hogyan működik a TRSP?
14. fejezet - Elektromechanikus fékezés
- 14.1. Az elektromechanikus fékrendszer fejlesztésének összefoglalása
- 14.2. Villanymotorral működtetett úszónyerges üzemi fék
- 14.3. ISAD az elektromechanikus fékezés egyik lehetősége
- 14.4. A hibrid hajtással megvalósítható elektromechanikus fékezés
- 14.5. Ékes működtetésű elektromechanikus fék személygépkocsikhoz (EBW)
- 14.6. Személygépkocsik elektromechanikus rögzítő fék rendszerei
- 14.6.1. Központi rögzítő fék működtető egység villanymotorral és mechanikus áttétellel, mely bowdenekkel fékez
- 14.6.2. Elektromechanikus rögzítő fék, féknyeregbe integrált Ci változat, Electrical Parking Brake – Caliper Integrated
- 14.6.3. Elektromechanikus rögzítő fék duo-szervo kivitel Electrical Parking Brake – Duo Servo EPB-DS
14.1. Az elektromechanikus fékrendszer fejlesztésének összefoglalása
A személygépkocsik fékrendszerének továbbfejlesztésénél egy fontos lépés az elektromechanikus fékezés (EMB).
A gépkocsik folyamatos műszaki fejlesztései évről évre forradalmi változásokkal lepik meg az autósokat. Egyre több mechanikus részegységet elektromos és elektronikus működésű rendszerek váltanak fel. Ez alól természetesen a fék sem kivétel. Eddig az elektronikus működésű blokkolásgátlók egyre szélesebb körű alkalmazásával igyekeztek a konstruktőrök a gépkocsik aktív biztonságát javítani. A hagyományos hidraulikus fékeken elvégzett "finomítások" a különböző fékerő módosítók és azok kombinációinak beszerelésével, melyek kanyarban már a belső-, és a külső íven futó kerekeknél, azok terhelésével arányosan akár eltérő fékerőket is meg tudnak valósítani. Ezzel jól megközelítették a műszaki lehetőségek határát. A mechanikus fékerő módosítók feladatát aztán az elektronikus fékerő felosztás váltotta fel. Különösen a nagysebességű gépkocsik fékútját lehet tovább rövidíteni, ha sikerül csökkenteni a fékkésedelmi időt. A másodpercnek csupán töredékrészéről van itt szó, amely ahhoz szükséges például, hogy a főfékhengerben kialakuló fékezőnyomás a fékcsöveken és a közbeiktatott szerelvényeken keresztül a fék munkahengerbe kifejtse hatását, ahol legyőzve a tömítések és a munkahenger palástja közötti súrlódást, elmozduljon a dugattyú. A fékerő létrejöttéig azonban még az alkatrészek közötti hézagoknak is meg kell szűnniük. Az ötlet, hogy a „lomha” hidraulika helyett sokkal gyorsabb és környezetkímélőbb elektromos működtetést alkalmazzanak, kézenfekvő. Nem szabad figyelmen kívül hagyni azt sem, hogy az évtizedek óta a fékrendszerek hidraulikus elemeit gyártó vállalatoknak ez nem áll érdekében. De ettől a ténytől eltekintve az elektromechanikus fékezés megvalósulásig hosszú és költséges fejlesztőmunkára van szükség. Például a Continental Teves és a Darmstadti Műszaki Egyetem Automatizálási Tanszéke együttműködött ilyen fékszerkezet megvalósításán, illetve a Siemens VDO végzett jelentős fejlesztéseket.
14.1.1. Az elektromechanikus fékrendszer előnyei
Az elektromechanikus fékrendszer mentes a fékfolyadéktól, ezért száraz féknek is szokták nevezni. Környezetkímélőbb és ugyanakkor dinamikusabb fékezést tesz lehetővé. További előnyei a hagyományos fékrendszerhez viszonyítva:
Adott az optimális fékpedál karakterisztika megvalósításának lehetősége.
Nincs pedál vibráció az ABS működése közben.
Egyénileg beállítható pedál modul.
A fékpedál beszerelése a legoptimálisabb helyre történhet, mert nincs vákuumos fékrásegítő és főfékhenger. Ezért gyorsabb lehet a láb áthelyezése a gázpedálról a fékpedálra.
Teljesen zajmentes a működése.
Nagyobb ütközésbiztonság.
Környezetkímélő és tűzveszély mentes fékrendszer valósítható meg.
Az autógyáraknak nyújtott előnyök:
Kisebb helyigény és gyorsabb beszerelési lehetőség.
A gépkocsivezető energetikailag el van választva a fék beavatkozó egységétől.
A vákuumtól független fékrendszer optimális motor szívócső viszonyokat tesz lehetővé.
Lehetséges kapcsolódási pontot biztosít a különböző vezetőt támogató asszisztens rendszereknek.
Viszont nincs biztosítva a hidraulikus biztonsági működtetés lehetősége egy esetleges meghibásodás esetén. Egy redundáns átviteli rendszert és energiaellátást kell biztosítani.
14.1.2. Az EMB rendszer részegységei és működtetése
Ez egy úgynevezett elektronikus fékpedállal történik, mely egy beállítható pedálmodul részét képezi. Mindjárt mellette a menet pedál is elhelyezhető, melyek közvetlenül egy elektronikához csatlakoznak. Lehetne a gépkocsit egy yoystick –al is lassítani, de a hatósági előírások ezt jelenleg nem teszik lehetővé. Az információk két csatornás bus hálózaton keresztül jutnak el az érintett elektronikákhoz. A pedálerő, a pedál elmozdulás és a lassulás között nincs közvetlen összefüggés.
Az EMB beavatkozó egysége
A kerékfékszerkezet egy jól bevált súrlódásos fék, melyet kiegészít az elektromechanikus beavatkozó egység és a működtető teljesítmény elektronika. Az elektromechanikus féknél a fékbetéteket egy nagy energiasűrűségű szénkefe nélküli egyenáramú villanymotor mechanikus áttételek segítségével szorítja rá a féktárcsára. A mechanikus áttételként a bolygóműves fokozat és a csavarhajtás kombinációját szokták alkalmazni. Ez utóbbi alakítja át a forgó mozgást egyenes vonalúvá. A hajtómű egység kivitele alapvetően meghatározza a megvalósítható rászorító erőt, a működtetés dinamikáját, a helyigényt, és a felmerülő költségeket. Az ESP alkalmazása miatt célszerű valamennyi kereket önálló erőmérő egységgel is ellátni. Ez biztosítja a legjobb működést és a legtökéletesebb szabályozhatóságot. Elképzelhető azonban erőmérő nélküli változat is. A villanymotor forgórészét viszont ellátják egy érzékelővel, mely hasznos információkat ad a fék működésére vonatkozóan. Ezek a fékbetét helyzete, kopása, a féktárcsa és a fékbetét közötti távolság. Kellő időben információt ad a fékbetét csere szükségességére. Megakadályozható ezen információk birtokában a fékbetét folyamatos súrlódása, és az emiatt bekövetkező túlmelegedés.
Az EMB lehetővé teszi az eddig ismert valamennyi lehetséges fékezési beavatkozást, melyek a következők:
blokkolásgátló és kipörgésgátló ABS/ASR,
elektronikus fékerő felosztás EBV,
elektronikus stabilitás program ESP,
fékasszisztens BA,
Követési távolság szabályozás ART.
Ezeken kívül az elektromechanikus rögzítő fék kis ráfordítással könnyen megvalósítható.
További előny az elektromechanikus kerékfék szerkezetnél az egyszerűen, gyorsan és pontosan végrehajtható a fékbetét csere előtt szükségessé váló aktív visszaállítás.
Az energia ellátás és végkövetkeztetés
Menet közben a generátor az energia forrás. Az e mellett a biztonság miatt beépítendő két akkumulátor a másik energia tartalék. Ezeknek azonban folyamatosan ellenőrizni kell a töltöttségi állapotát. A bár rövid idejű csúcsterhelések miatt backup megoldásról is kell gondoskodni. A gépkocsik jelenlegi 12 V –os hálózati feszültségéről az elektromechanikus fék biztonságosan nem üzemeltethető. A dinamikus működések ugyanis jelentős terhelést jelentenek a teljes elektromos hálózatra. A 42 V –os hálózati feszültség lenne megoldás, de ennek megvalósítása jelentős költséggel jár.
14.2. Villanymotorral működtetett úszónyerges üzemi fék
A prototípus próbapadi méréseinél a féknyeregbe szerelt nagy teljesítményű villanymotor szorítja rá a fékbetéteket a féktárcsára. Talán már a közeljövőben a hidraulikát az elektromos működtetés fogja felváltani a személygépkocsik fékrendszerében, - remélik a fejlesztők. Ezzel megszűnnek a légtelenítéssel, a fékfolyadék forráspont csökkenésével járó gondok. Az üzemeltetés során. Ennek kedvezőek a környezetvédelmi vonatkozásai is.
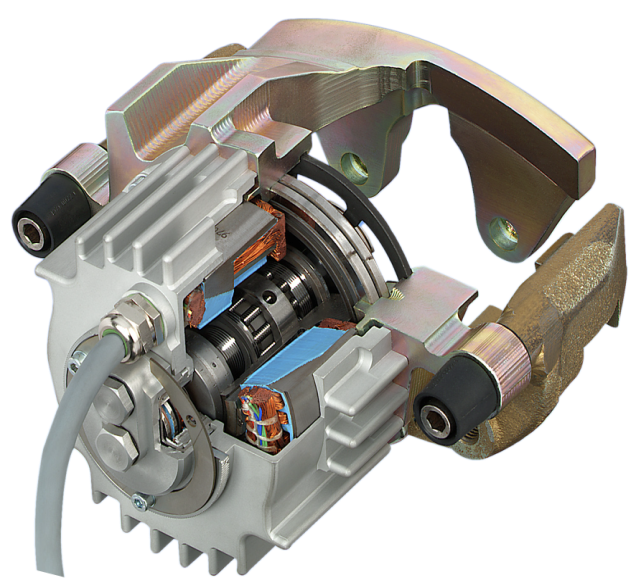
Az elektromechanikus kerékfékszerkezet kifejlesztése nem volt egyszerű feladat, mert:
a széles körűen elterjedt tárcsaféknél az önerősítés hiánya miatt nagy működtető erőre van szükség.
a villanymotor nyomatékát mechanikus áttétellel növelni kell, de ez rendkívül jó hatásfokú kell legyen.
a fékezés és a fékoldás gyorsan, szinte késedelem nélkül kell bekövetkezzen.
a gépkocsi mozgási energiáját a kerékfékszerkezet hőenergiává alakítja, ezért jelentős az alkatrészek melegedése. Ezt a villanymotor belső szigetelése el kell viselje.
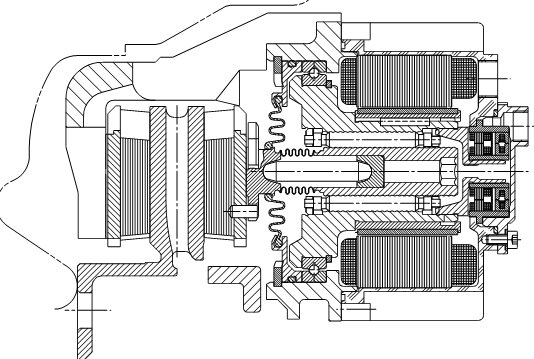
A fejlesztés fontosabb részletei
Ennek a konstrukciós változatnak a fejlesztése 1990 – 2005 között zajlott. 10 különböző típusváltozat készült belőlük. Az ITT Automotive (jelenleg Continental Teves) EMB típusjelzést adott az elektromechanikus fékszerkezetnek a német Elektro-Mechanische Bremse név alapján. A fejlesztőmérnökök nagy nyomatékú villanymotort választottak az elektromechanikus kerékfékszerkezet prototípusához, melyet egyfokozatú hajtóművel egészítettek ki. Ez a nyomaték növelésen kívül a forgó mozgást is egyenes vonalúvá kell átalakítsa. Az személygépkocsik első kerekeinek tárcsafékeinél, figyelembe véve nagy hőmérsékleten a fékhatás csökkenését (fading) a számítások szerint 30 kN működtető erő szükséges. Ha a fékpofát a féktárcsára 200 ms-on belül akarják rászorítani, 500 W teljesítményű beavatkozó egységre van szükség. Ennél az értéknél az elektromechanikus működtetés hatásfokát is figyelembe kell venni. A nagy teljesítményigény miatt a szokásos 12 V-nál célszerű lenne nagyobb tápfeszültséget, például 48 V-ot alkalmazni. Fontos követelmény az is, hogy árammentes állapotban a fékerő meg kell szűnjön.
A forgó mozgású működtetés előnye, hogy teljesítménye független a beavatkozó elem helyzetétől. Így alkalmas a féktárcsa és a fékpofák közötti hézag legyőzésére és a betétkopások miatti automatikus utánállításra is anélkül, hogy erre a feladatra külön mechanikus szerkezetet kellene beszerelni. Lehetőséget kell biztosítani működtetés közben a fékerő fokozatos növelésére és csökkentésére (ABS szabályozás). A féknyereg kis helyszükségletű és tömegű kell legyen. A hidraulikus dugattyú helyett menetes orsó anyával és a nyomótaggal szorítja rá a fékpofát a féktárcsára. Az orsóhoz kapcsolódó anyát mechanikus áttételen keresztül a nagy nyomatékú villanymotor hajtja. A mozgórész a helytakarékosság miatt egyetlen központi csapágyra támaszkodik, mely a radiális és az axiális erőket egyaránt felveszi. A működtető mechanizmust érintésmentes útadóval látják el, melynek jele alapján szabályozza az elektronika a villanymotor működését. A helyzetérzékelő is az öndiagnosztikai rendszer felügyelete alatt működik. Ezzel a működtetési móddal a fékkésedelmi idő jelentősen csökken. Fékoldás után pedig a fékezőnyomaték teljesen megszűnik, a fékbetét nem fog a féktárcsához hozzáérni.
A kerékfék szerkezet a Continental Teves jól bevált FN sorozatú hagyományos úszónyeregének felel meg. A fékpofákat megtámasztó keretet csavarokkal rögzítik a futóműre. A nyeregszerkezet a vezetőcsapok mentén a működtető erő hatására egy szabadságfoknak megfelelően mozdulhat el. A működtető erőt szinkron motor hozza létre, melyhez a váltakozó feszültséget elektronikus kommutátor állítja elő. A forgórészt állandó mágneses pólusokkal látják el, melynek tengelyvégződését fogazattal látják el. Ez a bolygóműves mechanikus nyomatéknövelő fokozat napkereke. A belső fogazatú koszorúkereket a házhoz rögzítik.
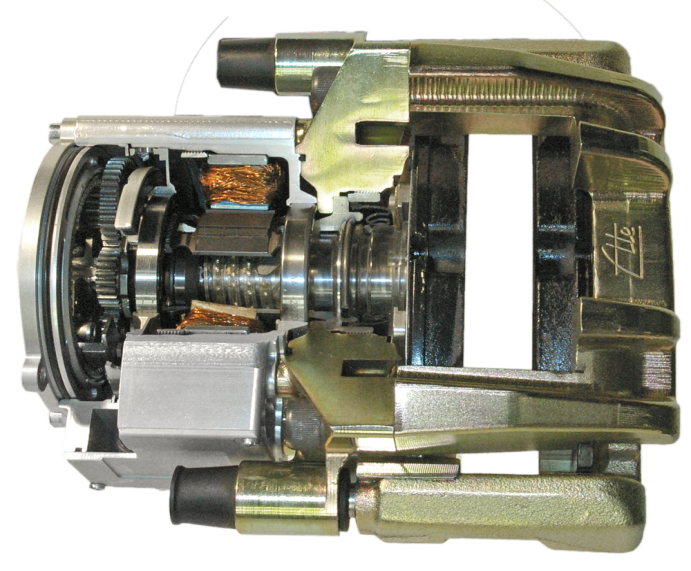
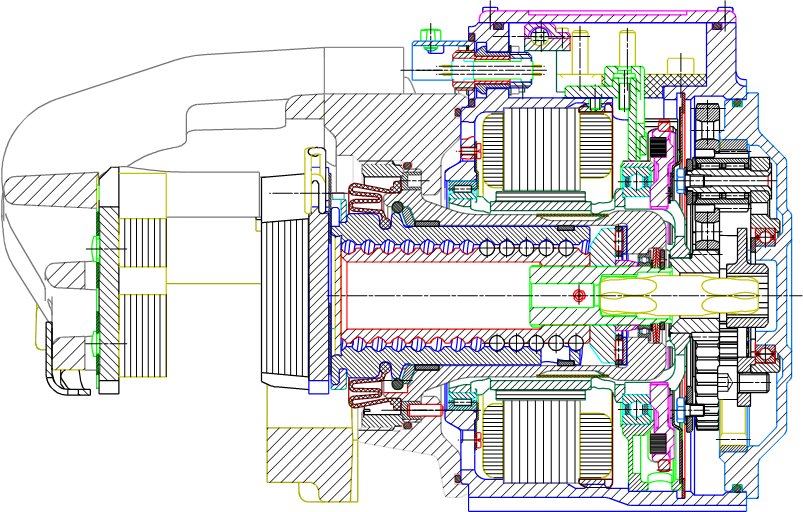
A bolygókerék tartó forgatja a golyósorral ellátott menetes orsót, mely aztán az anya segítségével, a bolygóművel megnövelt forgató nyomatékot egyenes vonalú feszítő erővé alakítja át. Az orsót csőtengelyként alakították ki, mely helyet biztosít az elektronikus visszacsatolást biztosító erőmérő egységnek és az erőátadó csapnak. A fék működtetésekor, amikor a motor felőli fékbetét felfekszik a féktárcsára, elmozdul a féknyereg, és rászorítja a másik fékbetétet is a tárcsára. A forgórészt tűgörgős és mélyhornyú golyóscsapágyak vezetik meg.
A fékezési jel a pedál elmozdulásával arányos ellenállás változás. Az ehhez tartozó működtető erőt a mechanikus szerkezetbe beépített egység méri. A vezető által kívánt értéket a megvalósult erővel 16 bit-es mikroprocesszor hasonlítja össze és dönt arról, hogy tovább kell e növelni a működtető erőt, vagy az értéke megfelelő.
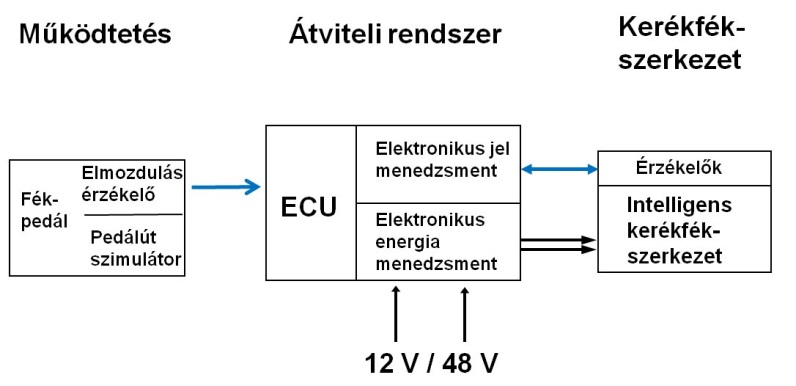
A prototípussal végzett kísérletek során, amikor tartós lassító fékezést szimuláltak a mechanikus alkatrészeken mért hőmérséklet elérte a 200°C-ot. Ez fokozott követelményeket támaszt az egymáson elmozduló részek kenőanyagával, illetve a motor tekercselésének szigetelésével szemben.
Ennek a fékrendszernek különböző változatainál a fékpedál egy érzékelőt mozdít el. Az elektronika ennek jele alapján állítja be a szükséges fékerőt. A gépkocsira felszerelt érzékelőkkel képes figyelembe venni a dinamikus tengelyátterhelődést is. Az elektronikus fékrendszer szerves része az ABS, ASR és az ESP szabályzás is. Ennél a villanymotoros fék működtetésnél megszűnik a hidraulikus ABS működésekor tapasztalható fékpedál pulzálás és kisebb pedálerő szükséges a fékezéshez, ami jelentősen növeli a fékezés komfortját. Talán ami a legfontosabb, rövidebb lesz a fékút.
Az elektromos fékezés biztonsága
Ennél a megoldásnál a gépkocsivezetőnek nincs közvetlen mechanikus kapcsolata a féket működtető elemekkel, ami megfelel a „brake by wire” koncepciónak. Ezért különösen fontos a megfelelő biztonság megvalósítása. Minden meghibásodás esetén automatikusan egy szükségműködtetés kell beavatkozzon. Ennek érdekében üzemképtelenség esetén aktívvá váló második párhuzamos, úgynevezett redundáns rendszert kell kialakítani. Ennek összeköttetésben kell lenni a nagy teljesítményű közvetlen működésű diagnosztikai rendszerrel, amely minden hibát felismer. Ez aktiválja a szükségműködést és a műszerfalra szerelt ellenőrző lámpával figyelmezteti a gépkocsivezetőt. Ugyanez a biztonsági koncepció vonatkozik a központi fékszabályzásra és a rendszer energiaellátására is. Ennek biztonságát a gépkocsi megduplázott "tandem" 12/48 V elektromos hálózata szolgálja. Az egyik tápfeszültség hiánya, illetve meghibásodása esetén a másik veszi át a feladatot. Az elektronikus fékszabályzást a biztonság érdekében két párhuzamos kör végzi. Ez lehetővé teszi a működés folyamatos ellenőrzését.
A „brake by wire”-elv alkalmazásának előnyei és hátrányai:
A fékrendszer kevesebb elemből áll, így egyszerűbb lehet a fékrendszer.
A fékfolyadék szükségtelenné válik, ezzel nemcsak a karbantartási igény csökken, hanem a fékrendszer környezetkímélőbbé válik.
Szétválasztható a fékpedál a működtető egységtől, ami ergonómiailag kedvezőbb pedál elhelyezést, és pedálút - erő karakterisztikát tesz lehetővé.
A lassításhoz szükséges pedálerőt nem befolyásolja a gépkocsi aktuális terhelési állapota, illetve a lejtő meredeksége.
A szükségtelenné válik a jelentős helyigényű vákuumos fékrásegítő, ezért a motortér kialakítását az már nem korlátozza.
Nem növeli a vákuumos rásegítő a fékkésedelmi időt.
A rásegítés mértéke nem függ a vákuum nagyságától, dízelmotorral szerelt, illetve az elektromos hajtású gépkocsikhoz nem kell vákuumszivattyút beszerelni.
Számos előnye ellenére természetesen az elektromechanikus féknek is vannak hátrányai.
Az elektronikus, vagy az elektromechanikus rész meghibásodása esetén nincs lehetőség olyan mechanikus biztonsági fék megoldásra, mint ami a hagyományos fékrendszernél megvalósítható.
A „brake by wire” – fékezési elv egyik központi kérdése a biztonság.
A fék működtetés hatásfoka függ a hőmérséklettől, a kopástól és más külső zavaró körülményektől.
A fék működését befolyásoló tényezőket nemlineáris függvénnyel kell figyelembe venni.
14.3. ISAD az elektromechanikus fékezés egyik lehetősége
Az ITT Teves, jelenleg Continental Teves fejlesztette ki egy a lendítőkerékbe épített elektromos forgó gépet, amely egyaránt ellátja az indítómotor, a generátor és a torziós lengéscsillapító feladatát. Ebből a működésmódból származik az ISAD rövidítés szó, mely az eredeti német Integrierten Starter Alternator Dempfer elnevezésből ered.
Mint indítómotor azért előnyös, mert a szokásosnál lényegesen nagyobb fordulatszámon forgatja meg a motort, mely ezért könnyebben és környezetkímélő módon indítható, hiszen csekélyebb tüzelőanyag dúsítás is elegendő lehet, és rövidebb ideig kell működtetni.
Mint generátor lehetőséget ad arra, hogy a szokásos 12 V-nál nagyobb feszültséggel (48 V-al) töltse az akkumulátor telepet és ezzel lehetővé válik a két feszültségű elektromos hálózat kialakítása és ellátása. Ez egyaránt felhasználható a villanymotorral működtetett fékrendszerhez, illetve az elektromágnesekkel mozgatott szelepvezérléshez.
Továbbá az ISAD hatékonyan csillapítja a belsőégésű motor működésekor keletkező torziós lengéseket.
Az ISAD –ot a Continental Automotive Systems termékeként 2003-ban szerelték be a GMC Sierra egyik speciális sorozatába.

Az ISAD lehetővé teszi a gépkocsik regeneratív fékezését is. A mozgási energia így az akkumulátorok töltésére fordítható fékezés közben, mert az elektromos gép ilyenkor generátoros üzemben működik. Fontos megjegyezni, hogy ez a lassító hatás csak a hajtott kerekeknél érvényesül. Az ábrán látható fékerők vektorainak zöld színű része szemlélteti ezt a fékerő hányadot. Az elektronika segítségével precízen össze kell hangolni az elektromos fékezést, a gépkocsi hagyományos hidraulikus fékrendszerének működésével annak érdekében, hogy megfelelő legyen a lassulás. Csak ilyen módon lehet megvalósítani a futóművek közötti, a hatósági előírásoknak megfelelő fékerő arányt. Ez a fékezési mód is hozzájárulhat a gépkocsik tüzelőanyag takarékosabb üzemeltetéséhez, amint azt a mellékelt diagram szemlélteti a különböző menetciklusoknál. Ez különösen előnyös amikor gyakori a start-stop működés.
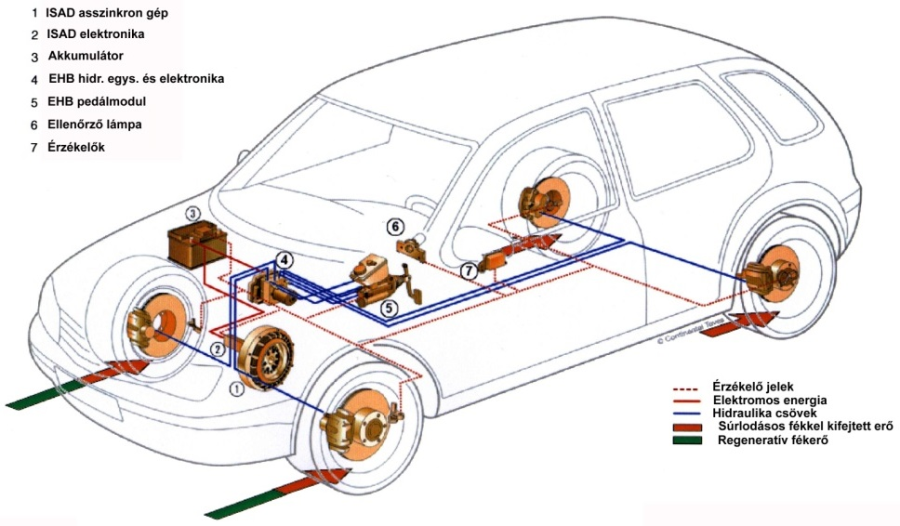
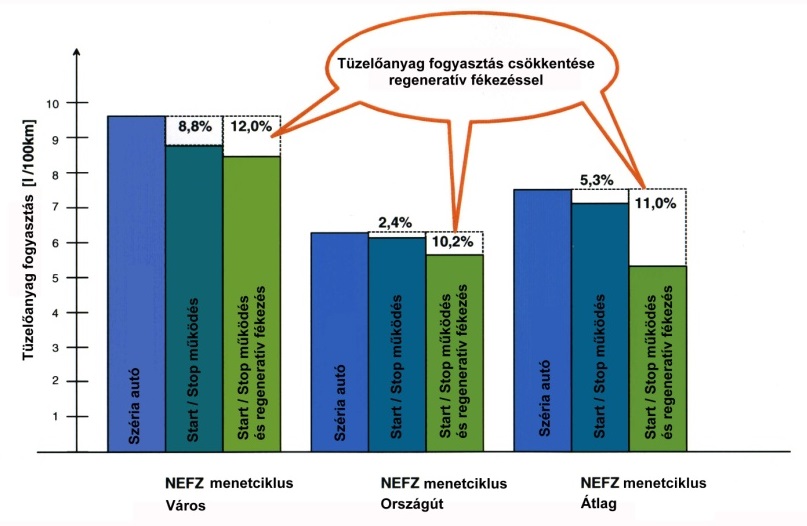
Az előzőekben ismertetett ISAD alapötlete jelenleg a hibrid hajtású autóknál él tovább, ahol a nagyobb teljesítményű villanymotor lehetővé teszi a gépkocsi folyamatos hajtását is.
14.4. A hibrid hajtással megvalósítható elektromechanikus fékezés
A hibrid autóknál két, vagy több, különböző elven működő motort használnak a jármű hajtására. Leggyakrabban belsőégésű-, és villanymotort szerelnek be. A belsőégésű motor rendszerint kisebb, mint amit az azonos kategóriájú csupán belsőégésű motoros gépkocsiba építenek be. Az energia tárolására akkumulátorokat használnak. Nikkel – metallhibrid, vagy újabban a könnyebb és gazdaságosabb lítium-ion akkumulátorokat.
Soros és párhuzamos hibrid személygépkocsik is léteznek, de a jobb hatások miatt gyakrabban a párhuzamos hibridekkel találkozunk. Ennél a kerekek hajtása egyaránt lehetséges a belsőégésű és a villany motorok segítségével. A fékezésnél pedig rendszerint a mozgási energiát újrahasznosító, úgynevezett regeneratív fékezést alkalmazzák. De ezzel párhuzamosan működik egy hidraulikus fékrendszer is.
A Toyota Prius hibrid gépkocsi elektromechanikus fékezése
Az elektromechanikus fékezési módra példaként nézzük a Toyota Prius hibrid hajtású gépkocsit, melynél lehetőség van a generátoros, úgynevezett regeneratív fékezésre is!
A Toyota Prius-ba a belsőégésű motor egy különleges, hajtóművön keresztül adja a nyomatékot a kerekek felé. A hajtómű egységbe egy bolygóműves áttételt és két darab 300 V-os váltakozó áramú elektromos gépet szerelnek be.
Ha az elektromos gép forgórészének mechanikai fordulatszáma kisebb, mint az állórész három fázisú tekercseiben az elektromágneses mező körfrekvenciája motorként üzemel, ha pedig nagyobb generátorként működik. A hajtómű egység felett elhelyezett inverter az egyenáramot váltakozó árammá alakítja és lehetőséget ad a frekvenciájának elektronikus változtatására is.
Ebbe a gépkocsiba ECB (Electronikally Controlled Brake) fékrendszert építenek be, mely egy generátoros-, és egy vele párhuzamosan beépített hidraulikus fékrendszerből áll. A fékpedál lenyomásakor a potenciométer ellenállás változása adja az információt a lassítási igényről a fék elektronikának. A jeladók mellett a pedál egységbe egy hidraulikus pedálút szimulátort is beszerelnek. Ezzel lehet beállítani a gyártó terveinek megfelelő fékpedál karakterisztikát.
Olyan fékműködés valósítanak meg ebben a gépkocsiban, melynél már a gázpedál visszaengedésekor a fék elektronika azonnal aktiválja a generátoros fékezést. Ilyenkor a hibrid hajtás MG2 jelű elektromos forgó gépét a kerekek forgatják és az generátorként fog működni. Tölteni kezdi az akkumulátorokat. Ekkor még a hidraulikus fékrendszer nem aktív. Az csak akkor lép működésbe, ha erőteljesebb a fékpedál lenyomása, mert nagyobb lassításra van szükség.
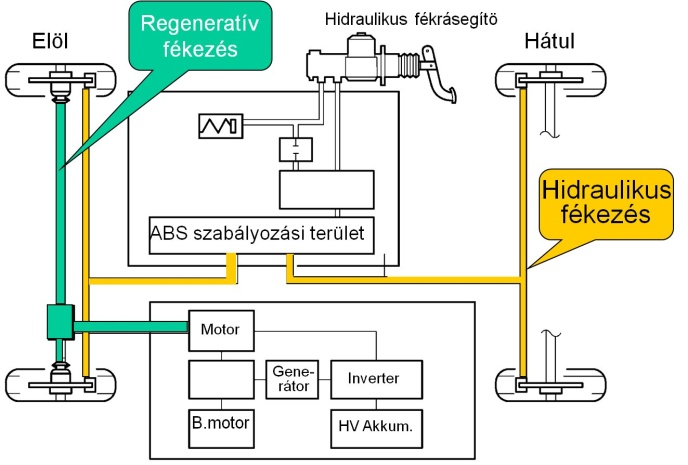
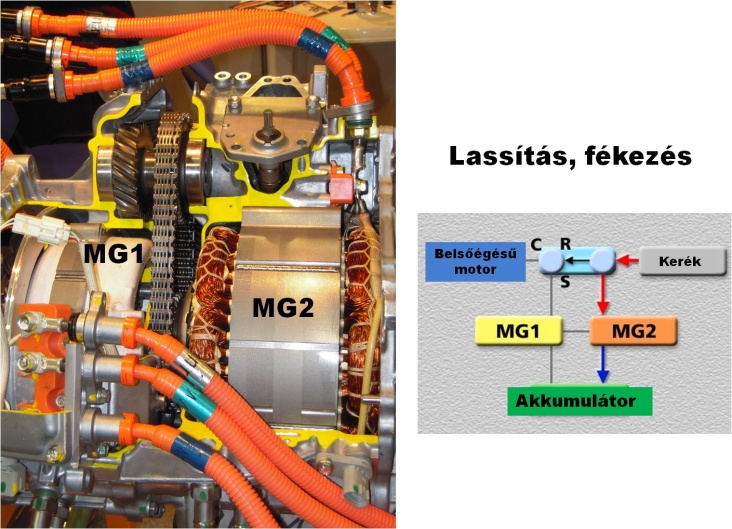
Az energiahatékonyság növelése érdekében a generátoros fékezés mindig működik, amikor ez lehetséges. A sebességváltó kart helyettesítő előválasztó kar „B” állásánál az energia 30% -a az akkumulátortelep töltésére fordítódik. A generátoros fékezésnek az a korlátja, hogy az akkumulátor töltésére 20 – 21 kWh fordítható. Ennél nagyobb energia az akkumulátor túltöltését okozza, ami meghibásodáshoz vezet. Az energia csúcsok kiegyenlítésére a töltő áramkörbe kondenzátor telepeket is beépítenek. Ezzel időben kissé elnyújtható a töltési folyamat.
Az enyhébb fékezéseknél, illetve a kisebb sebességű erőteljesebb fékezéseknél is az energia teljesen újrahasznosítható. Intenzívebb lassítás esetén, például vészfékezésnél, az energia további részét a hidraulikus fékrendszer fogja hővé alakítani.
Toyota Prius plug in hibrid
A Plug in Hybrid olyan hibrid autó, melynek akkumulátortelepe külső energiaforrásról, például elektromos hálózatról is tölthető.


A Honda autógyár több típusa is hibrid hajtású. 1999-ben kezdték az Integrated Motor Assist (IMA) elnevezésű rendszereket gyártani. Ez indítómotorként, gyorsításkor rásegítőként működik és lehetővé teszi a regeneratív fékezést is, de ez a villanymotor még nem volt alkalmas a gépkocsi önálló hajtására. Ezt követően 2006-tól a Honda több típusa is teljes értékű hibrid autóvá vált.
14.5. Ékes működtetésű elektromechanikus fék személygépkocsikhoz (EBW)
A Siemens VDO Automotive 19996 –ban kezdte meg a 42 V-os ékes működésű elektromos kerékfék szerkezetet fejlesztését (EWB = Wedge Brake) . Az alapötletet az a tény tette indokolttá, hogy az elektromos rendszerek gyorsasága 100 szorosa a mechanikus rendszerekének.
2005-ben elkészült a 12 V-os, mechanikus önerősítő hatású ékes kerékfék szerkezet. Erre egyre nagyobb szükség van, mert a különböző asszisztens rendszerek gyors, autonóm működésű fékberendezést igényelnek, ráadásul kerekenként külön-külön működtethetőt. Az EWB elektromechanikus ékes fék használatához nem szükséges sem sűrített levegő, sem hidraulikus nyomás. Ez egy úgynevezett „száraz” by – wire” fékszerkezet, mely kerekenkénti gyors beavatkozásra alkalmas az elektronikus hálózaton keresztül érkező parancs hatására.
A hagyományos fékműködtetéseknél a teljes normál erőt létre kell hozni, amely a fékpofákat a tárcsára szorítja. Az így létrejövő súrlódó nyomaték lassítja a kereket. Ezért a beavatkozó egységet mechanikailag kellő képen robosztusra kell méretezni. Ez jelenős költséggel, tömeggel és helyigénnyel jár együtt. A működtetésnek jelentős a tehetetlensége és a teljesítmény igénye.
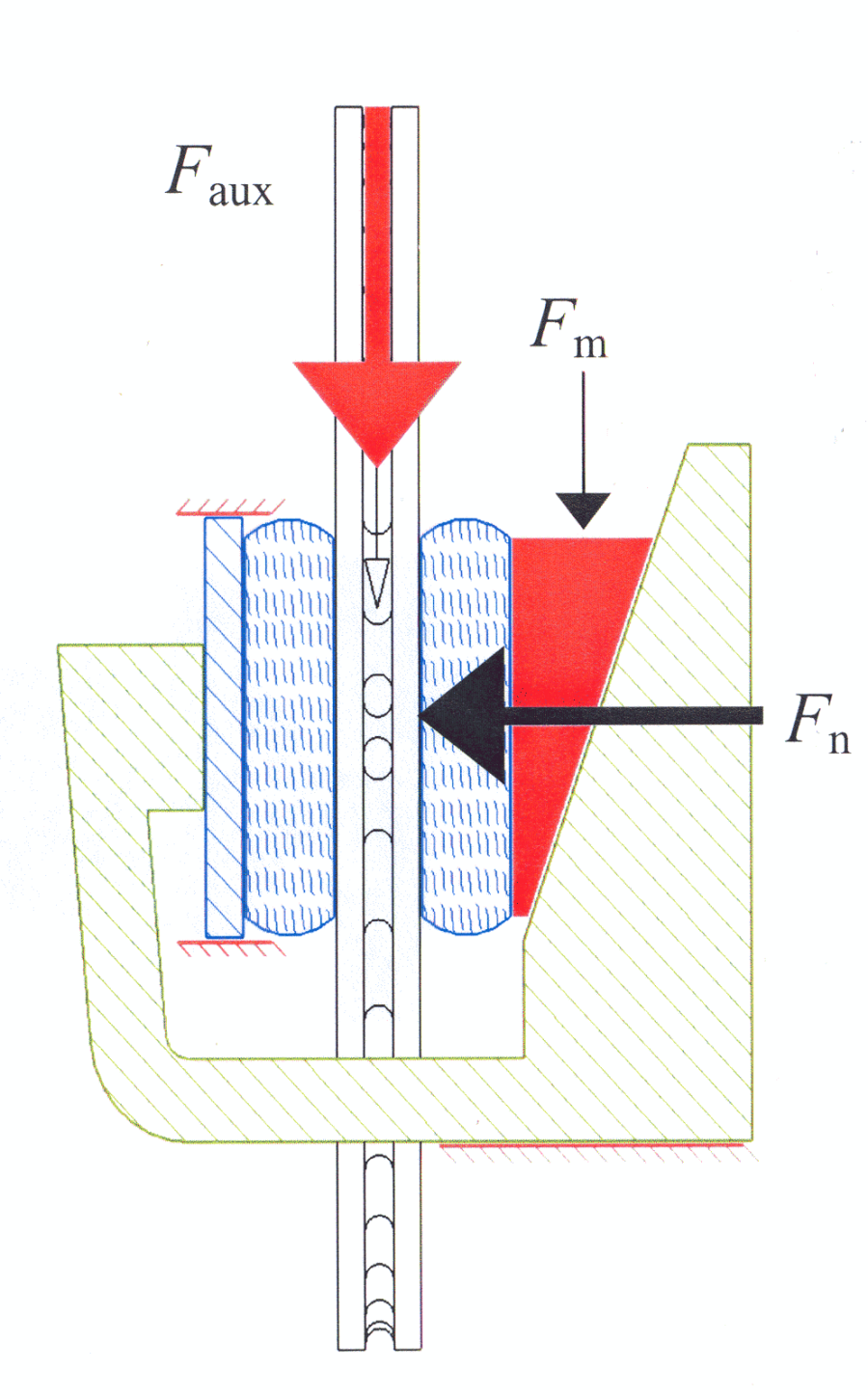
F aux – kerületi erő, F m – működtető erő, F n – Normál erő
Az ékes működtető mechanika önerősítése révén kisebb működtető erővel nagy normálerőt képes létrehozni. A fékszerkezet belső áttétele a következő összefüggéssel számítható:
|
|
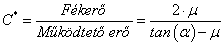
Az ékes felületekből többet alakítanak ki és a jó hatásfokú erőátadás görgők segítségével valósul meg. Amíg hasonló körülmények között a hagyományos kerékfékszerkezetnél 35 kN működtető erő szükséges a görgős kivitelű ékes féknél csupán 3,5 kN.
A prototípus féknyergébe két kis villanymotort szereltek, amely az ékes működtetésnél a részegységek között a holtjátékot megszűnteti.
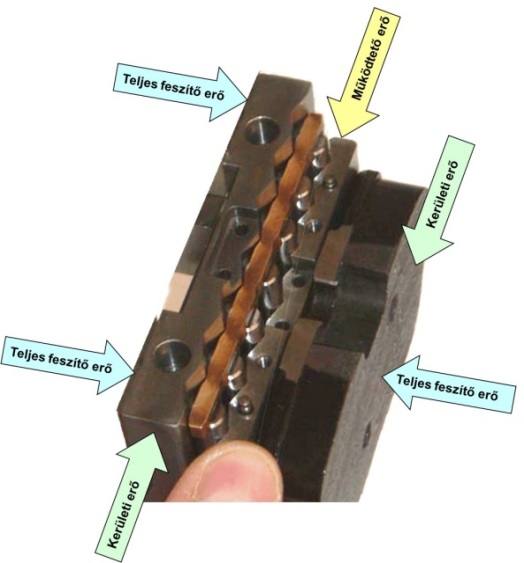
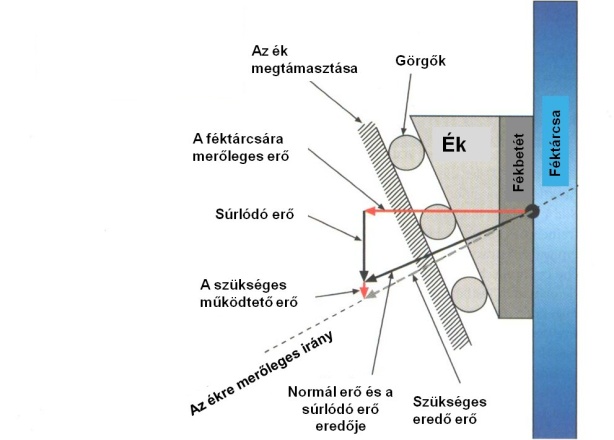
Az ékes működésű elektromechanikus fékszerkezet előnyei:
lényegesen kisebb működtető erő és teljesítmény szükséges
lényegesen kisebb a beavatkozó egység
lényegesen kisebb a rugózatlan tömeg
olcsóbb szerkezet, mint a villanymotorral működő változatnál
a működéséhez nem szükséges a hálózati feszültség 12 V fölé növelése
dinamikusabb fékerő szabályozás valósítható meg vele
lehetővé teszi az integrális rögzítő fék megvalósítását
biztonságosabb és komfortosabb fék működtetés.
Dinamikus fékműködtetést biztosít az ékes kerékfék szerkezet. Az ABS szabályozás zajmentes és nincs visszahatás a fékpedálra. Nem érezhető pulzálás. Az ESP szabályozást is a precízebb működés jellemzi. Nagyobb biztonságot és komfortosabb autózást tesz lehetővé ez a kerékfékszerkezet.
Az EWB rendszer biztonsága
A Siemens VDO az alkalmazott Flexray hálózaton keresztül optimális adatátvitelt fejlesztett ki a központi fék elektronika és a kerékmodulok között. A két vezetékével redundáns adatátvitel valósul meg. Ez a busz hálózaton keresztül megvalósuló adatátvitel kellő gyorsaságú és biztonságos működésű. Normál fékezésnél az elektronika folyamatosan áramot kapcsol a fékszerkezetre.
Az így kialakított ékes működtetésű fékszerkezet megfelel az IEC 61508 nemzetközi biztonságtechnikai szabvány SIL 3 szintjének. Ennek megfelelően megvalósít egy „Fail-safe” koncepciót.
Ha például az egyik kerékfékszerkezetnél valamilyen kommunikációs hiba lép fel, annál a keréknél a biztonsági rendszer fékoldást állít be, hogy esetleg valamilyen téves fékműködtetés ne veszélyeztesse a gépkocsi dinamikai viselkedését. Ilyen esetben az ék 40 ms-on belül a fékoldási semleges helyzetbe mozdul és ott rögzítődik. Ezzel az akaratlan fékezés megakadályozhatóvá válik. A gépkocsi lassítását a másik három működőképes fékszerkezet végzi.
Az is a biztonságot szolgálja, hogy az EWB rendszer energia ellátását két egymástól független akkumulátor biztosítja. Ez elegendő energiát ad egy bizonyos előre meghatározott számú fékezéshez.
Ha a forgalmi helyzet megkívánja, a vészfékezés nem csak az üzemi fékkel, hanem az elektromechanikus rögzítő fékkel is végrehajtható.
Az „e-corner”
A Siemens VDO kihasználva az EWB modularitását a továbbfejlesztést úgy tervezte, hogy kiegészítik a szerkezetet a generátoros fékezés lehetőségével is. Továbbá az ABS kerékfordulatszám érzékelő és a szabályzás, továbbá a lengéscsillapítás szabályozása is a kerékmodul részét képezi. Ezen kívül ellátják a kormányzást lehetővé tevő egységgel és elektromos kerékagy motoros hajtással. Ezek az előbb felsorolt egységek mindegyike, az elektromos kerékmodul integrális részét képezi. Ez alkotja végül az úgynevezett „corner modult”. Ez a futómű technikánál egy ugrásszerű fejlődést fog jelenteni és gyökeresen megváltoztatja a jövő autóját. Az eddigieknél lényegesen gyorsabban és hatékonyabban lehetséges a gépkocsi stabilizálása a legkülönbözőbb menetdinamikai helyzetekben a kerekenkénti, egymástól független beavatkozásokkal. Egy gombnyomásra lehet például a két kerék hajtású gépkocsiból összkerékhajtásút fejleszteni.
1.-keréktárcsa, 2.-kerékagy villanymotor, 3.-elektromechanikus ékes fék, 4.-aktív lengéscsillapító, 5 elektronikus kormány-berendezés.
14.6. Személygépkocsik elektromechanikus rögzítő fék rendszerei
Az aktív biztonság és a vezetési komfort növelése területén végzett fejlesztések eredménye az elektromos rögzítő fék (német elnevezése és rövidítése: Elektrische Parkbremse (EPB) és az aktív rögzítő fék (aktive Parkbremse (APB)). Ezeknél a rögzítő fék elektromechanikus működésű és a hagyományos mechanikus rögzítő féket helyettesíti. De a hagyományosnál lényegesen többféle feladatot is ellát. Automatikusan vagy a vezető közelében elhelyezett kapcsolóval működtethető egy elektronikával, mely a rendszer felügyeletét is ellátja. A következő változatait építik be a személygépkocsikba:
a központi működtető egységbe szerelt villanymotorral és mechanikus áttétellel bowden huzalokkal a hagyományos kerékfékszerkezettel fékezi, illetve rögzíti a gépkocsit.
a féknyeregbe integrálisan beépített villanymotor és mechanikus áttétel látja el a rögzítő fék feladatát.
a féktárcsa belsejébe szerelt duo-szervo dobféket működteti a villanymotorból és mechanikus áttételekből álló egység, melyet közvetlenül a kerékfékszerkezetre szerelnek.
A mechanikus rész önzáró kell legyen, hogy a befékezve tartás követelménye teljesüljön. Az egységet érzékelőkkel is el kell látni (erő, vagy elmozdulás) hogy az elektronika meg tudja állapítani a be-, és a kifékezett állapotot. Az elektromechanikus rögzítő fékeket el kell látni a mechanikus szükségoldás lehetőségével. Ez lehetővé teszi a rögzítő fék oldását olyankor is, amikor az akkumulátor lemerült.
14.6.1. Központi rögzítő fék működtető egység villanymotorral és mechanikus áttétellel, mely bowdenekkel fékez
Ez az egység erőkiegyenlítő himbál keresztül azonos erővel húzza meg a bowden huzalokkal, melyek a hátsó kerekek rögzítő fékeit működtetik. A túlterhelés elleni védelmet egy bizonyos nyomatéknál megcsúszó tengelykapcsoló biztosítja. Az elektronika is leggyakrabban a központi egység részét képezi és két fő részre osztható:
szabályozó elektronika,
teljesítmény elektronika.
Az elektronika főbb feladatai:
szabályozza a feszítő erőt
a műszerfalon elhelyezett figyelmeztető és az ellenőrző lámpák vezérlése
folyamatos működés ellenőrzés és diagnosztika lehetővé tétele
a fékbetét kopás felismerése
illetéktelen működtetés esetén riasztás (opcionális)
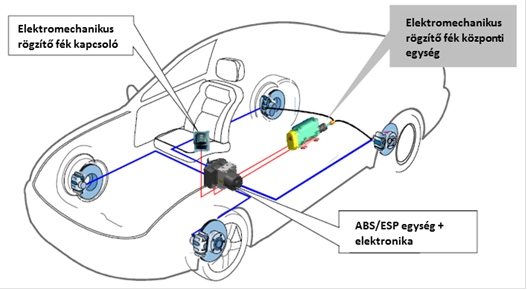
1.-villanymotor, 2.-fogaskerék áttétel, 3.-menetes orsó, 4.-bowden huzal menetes végződése, 5. elektronika, 6.-rugó, 7.-elektronika csatlakozója, 8.-bowden csatlakozás, 9.-bowden, 10.-bowden, 11.-szükségoldó horog.
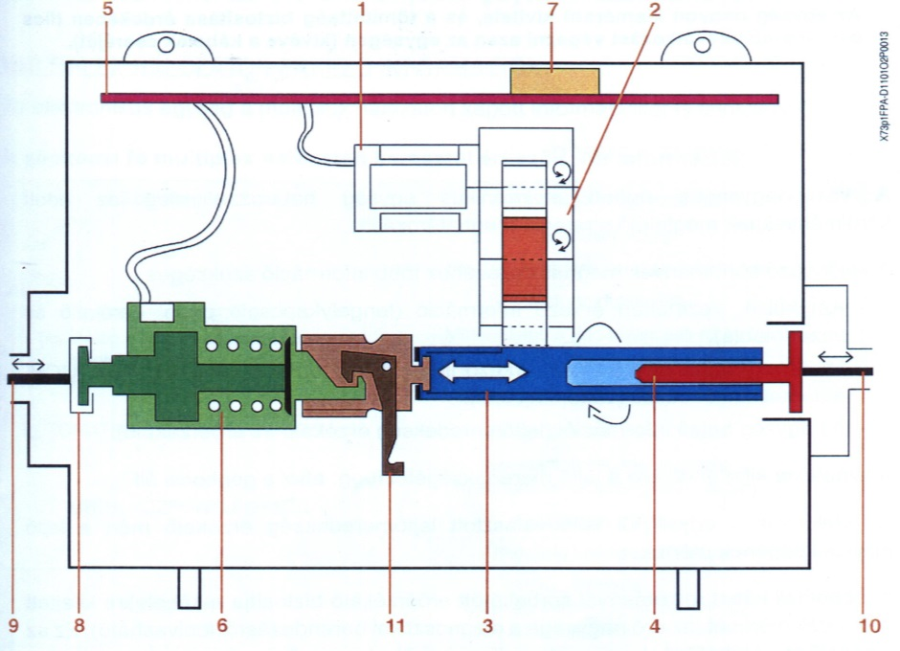
1.-villanymotor, 2.-fogaskerék áttétel, 3.-menetes orsó, 4.-bowden huzal menetes végződése, 5. elektronika, 6.-rugó, 7.-elektronika csatlakozója, 8.-bowden csatlakozás, 9.-bowden, 10.-bowden, 11.-szükségoldó horog.
Az elektronika a gyújtáskapcsoló be-, vagy kikapcsolt állapotán kívül az ABS/ESP elektronikától is információt kap arról, hogy a gépkocsi áll, vagy még mozog. A fő feladata a rögzítő fék be-, vagy kifékezése, amikor a gépkocsi áll. Aktív rögzítő fék működésnek nevezik azt az esetet, amikor a gépkocsi mozgása közben kapcsolják be a rögzítő féket. Ezen kívül egyéb kiegészítő működések is beprogramozhatók az elektronikába. A gépkocsi emelkedőkön történő elindulását segíti a „Hill Holder” működés. Ez nem engedi visszagurulni a gépkocsit, ha kissé késlekedik a gázadás, vagy éppen lefullad a motor. A beparkolási asszisztens is és az indításgátló is aktiválni tudja az elektromechanikus rögzítő féket. Ennél a típusváltozatnál az akkumulátor lemerülésekor a szükség rögzítő fék oldást egy bowden huzallal szokták megoldani.
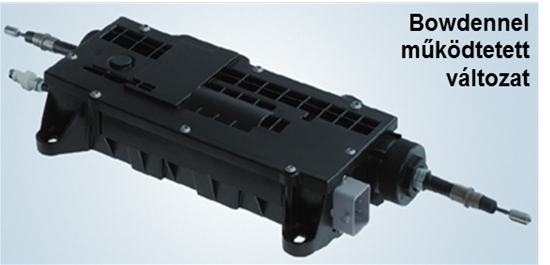
14.6.2. Elektromechanikus rögzítő fék, féknyeregbe integrált Ci változat, Electrical Parking Brake – Caliper Integrated
Ez az új elektromechanikus rögzítő fék rendszer a Continental Teves vállalatnál folyó fejlesztő munka eredménye. A gépkocsivezető a rögzítő féket kapcsolóval is működtetheti, de üzemszerűen az automatikus működések is segítik a munkáját.
A gépkocsiba kombinált féknyerget szerelnek be, melyet elláttak elektromechanikus rögzítő fék működtetéssel is.

A féknyeregbe beépített villanymotor két fokozatú csigahajtással növeli a nyomatékot, majd egy visszavezetett golyósoros csavarorsó - csavaranya áttétellel történik a forgó mozgás átalakítása egyenes vonalúvá. Ez erőt fejt ki a hidraulikus munkahenger dugattyújára és rászorítja a fékbetétet a féktárcsára. Eközben elmozdul a féknyereg (úszónyerges kialakítás) és a másik oldali fékbetétet is rászorítja a féktárcsára.
Az elektromechanikus rögzítő fék vezérlését is az ESP –elektronika végzi a PBC Park Brake Control Actuator control functions, vagyis a működtető egység vezérlés programrész segítségével.
HOST (SSM) Stand Still Manager driver experienceable function A vezető által észlelhető működésmódok:
Statikus fékezés és fékoldás
DAR = elindulás támogatás
Dinamikus fékezés ESC és vagy IPB útján
Lehűlő féktárcsánál a fékbetétek utánfeszítése
Görgős fékpad felismerés
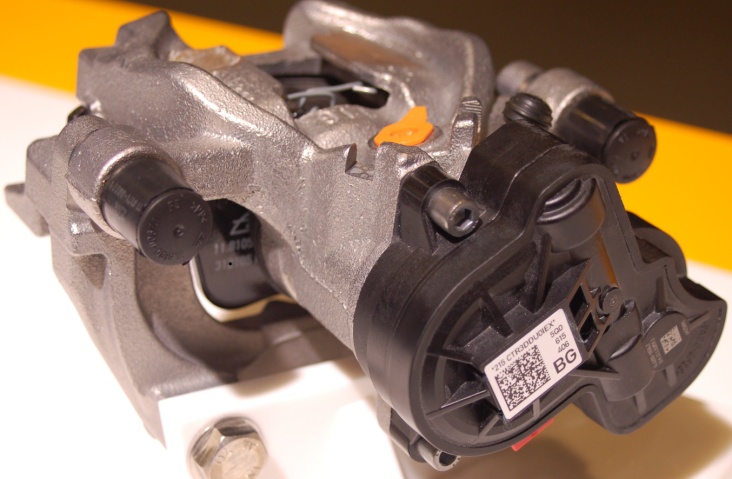
Műszaki jellemzők:
Fék feszítő erő: min. 17,5 kN
Befékezés ideje: ~1,0 s @ Fnom
Oldás ideje: ~0,9 s (légréssel)
Élettartam: 100.000 ciklus @ Fnom
A megvalósított koncepció előnyei:
Költségcsökkentés
Saját elektronika nem szükséges
Minimális helyigény
Központi, védett elektronika
Integrált rögzítő fék működtetés
Elsőrangú, csendes működés
Dinamikus rögzítés és oldás
Nyomaték növelő áttétel különösen jó hatásfokkal kis áramfelvétellel működik.
14.6.3. Elektromechanikus rögzítő fék duo-szervo kivitel Electrical Parking Brake – Duo Servo EPB-DS
Ezt az új elektromechanikus rögzítő féket olyan tárcsafékekhez fejlesztette ki a Continental Teves vállalat, melynek a kerékagynak helyt adó kiöblösödő részbe egy kis duo-szervo dobféket szerelnek be. Az elektromechanikus működtető egységet (aktuátort) önálló elektronikával (ECU) látják el.
A fék működtetéséhez az energiát egyenáramú villanymotor adja. Ennek nyomatékát egy vele egy közös házba szerelt bolygóműves fokozat növeli. Utána következik egy csigahajtás, amely forgatja a csavarorsós szétfeszítő mechanikát. Mivel a csigahajtás önzáró, garantált a befékezve tartás. A feszítő műbe tányérrugókból összeállított rugóerő tárolós egységet szerelnek. Ez biztosítja a fékszerkezet hűlése közben szükségessé váló utánfékezést.
Amikor a gépkocsi nagyobb sebességgel halad dinamikus fékezésre van szükség. Ez, továbbá a vészfékezés az ESP hidraulikaegység szivattyújának bekapcsolásával hidraulikus nyomással történik.
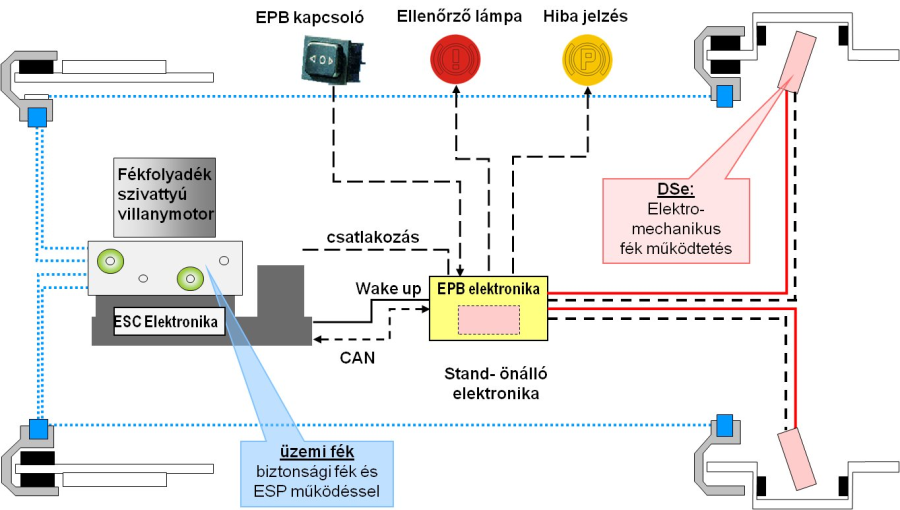
Jellemző műszaki adatok
Fékező nyomaték 2000 Nm-től max.2500 Nm-ig a tényleges érték a dobfék méretétől függ.
Áramfelvétel fékenként 8A (befékezéskor) maximum 25A (bekapcsoláskor és vészfékezéskor)
Befékezés ideje Fmax -értékig kb. 1500 ms; a fékoldás ideje 0 Nm fékező nyomatékig kb. 1200 ms (névleges érték)
További jellemzők: kis helyigény, nagyon halk működés
Élettartam 100.000 rögzítési ciklus (fékezés / fékoldás)
Tápfeszültség 9 V -tól 16 V –ig.
Tömege: a 180 x 20 méretű dobféknél kb. 2 x 0,6 kg; az elektronika (ECU) kb. 0,2kg
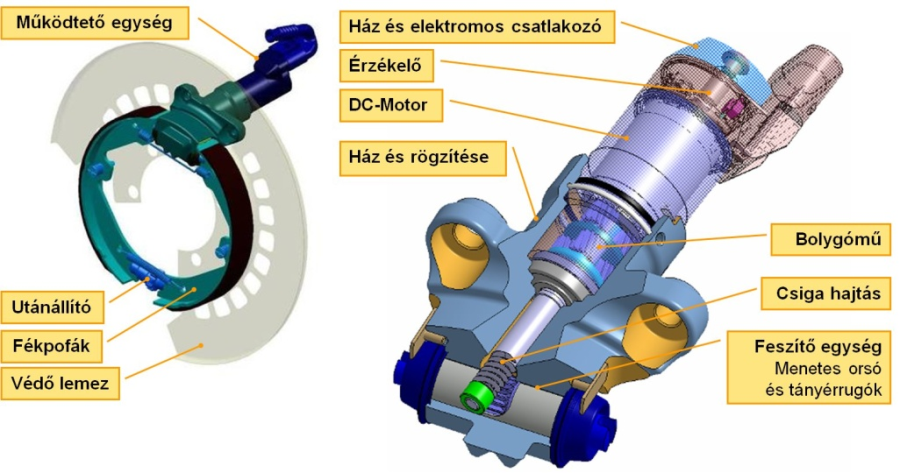
A rendszer részei
Ennél a rendszernél önálló elektronikát alkalmaznak (EPB-ECU). A gépkocsira 2 db EPB beavatkozó egységet szerelnek fel, közvetlenül a kerekek féktartó lemezeire.
Az elektromechanikus rögzítő fék ezen típusának működése:
EPB befékezés és fékoldás álló helyzetben történik. Elinduláskor automatikusan bekövetkezik a fékoldás. A CAN hálózaton keresztül létrejön a kapcsolat más elektronikus rendszerekkel is. Önműködő befékezés következik be elektromos hiba esetén.
A gépkocsi mozgása közben dinamikus fékezést az ABS/ESP rendszer hidraulika szivattyúja aktiválása után tud végrehajtani. Az elektronika támogatja a különböző műhely funkciókat, mint például műszaki vizsgáztatás, görgős fékpadi mérés.
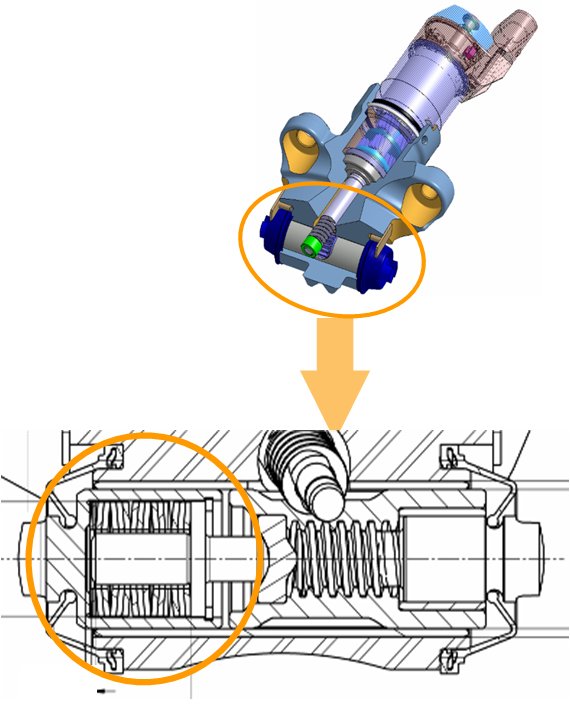
EPB ECU
A mikroprocesszor: µC PACE 1T Flash (DualCore) 384 KbROM / 12KbRam / 2k EEprom
Tömítettség: IP 5k2 (rásajtolt házfedélnél) IP 67, (felragasztott házfedélnél).
Elektromos csatlakozó: Megrendelő specifikus, a standard csatlakozó: 30 érintkezős. Ebből 22 jelvezeték, 0,63 x 0,63, 8 db tápfeszültség 5,8 x 0,8 méretű.
Tömeg: 200g.
A duo – szervo dobfék
Típus megnevezés: ZSB DSe
A működtető egységet és a fékpofákat, valamint az egyéb tartozékokat a féktartó lemezre szerelik.
A dobfék méretek: DS Ø210 x 30, vagy DS Ø185 x 25
A működtető egység tömítettsége: IP x9k
Elektromos csatlakozó: Megrendelő specifikus, a standard csatlakozó: VW-RD 4 érzékelős 2.8 x 0.8
Tömeg: DS Ø210 x 30 dobfékkel ~ 2550 g a kb. ~ 900g tömegű működtető egységgel együtt
A fékpofák közötti kézi utánállítóval látták el. A működtetést DC motor végzik. A mechanikus áttétel bolygóműves fokozatból és csigahajtásból áll. A fékpofákat szétfeszítő egység golyósoros csavarhajtás.
15. fejezet - Brake by wire rendszerek
15.1. Összefoglaló a Brake by wire rendszerekről
A jelenlegi korszerű fékrendszerek messze meghaladták már a kezdeti célkitűzéseket, vagyis hogy a gépkocsivezető által kezdeményezett lassítási folyamatot biztonságosan hajtsa végre.
A jelenlegi autókkal már a szokásostól eltérő útviszonyok esetén is, például kanyargós, rossz úton, kis tapadási tényezőjű útfelületen is biztonságosan lehet fékezni. Az elindulás, vagy a gyorsítás sem okoz gondot, akkor sem, ha az út jobb és bal szélén jelentősen eltérő (5 – 8 szoros) a tapadási tényező különbség. A gépkocsikba egyre több olyan asszisztens rendszert szerelnek be, melyek mostoha útviszonyok között is támogatják a vezető munkáját és növelik a közlekedésbiztonságot. Ezeknek a vezetőt támogató rendszereknek az elmúlt évtizedekben a fékrendszer lett az egyik legalapvetőbb beavatkozó egysége.
A fékrendszer fejlesztésének az első jelentős mérföldköve a biztonság növelése területén történt. A blokkolásgátló rendszer (ABS), a fékezés közben végrehajtott egyedi kerékcsúszás szabályozással kis tapadási tényezőjű úton is uralhatóvá tette a gépkocsit.
A második fontos mérföldkő az volt, amikor a blokkolásgátlót kiegészítő kipörgésgátló (ASR) széles körűen alkalmazásra került. Ezzel ugyanis megkezdődött a vezetőtől független, kerekenként egyedileg szabályozott, fékezési beavatkozások korszaka. Ez volt az előfutára a hidraulikus fékekre alapozott további menetdinamikai szabályozó rendszerek megvalósításának.
Az alábbi ábrán a hagyományos fékrendszer elvi ábrája látható. Ebből jól kitűnik, hogy a fékrendszer az elektronika nélkül is működőképes egységet alkot. A fékpedál lenyomásával a gépkocsivezető a lassításhoz szükséges energia egy jelentős részét beviszi a fékrendszerbe. Ezt a különböző elven működő rásegítők tovább növelik. Az elektronika feladata ennél a rendszernél például a kerékcsúszás szabályozás.
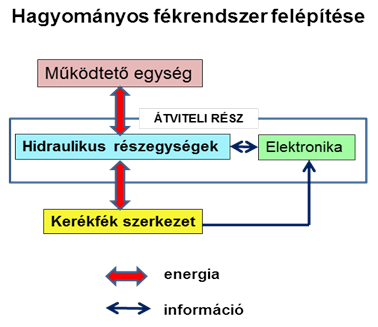
Jelenleg a következő elvárások fogalmazódnak meg a korszerű fékrendszerekkel szemben:
Optimális integrációt valósítson meg a kerékcsúszás szabályozás, a sebességszabályozás, a gépkocsi stabilitásának szabályozása és a vezetőt támogató asszisztens rendszerek között.
A fizikai lehetőségekhez folyamatosan jól alkalmazkodó, kerekenként jól szabályozott fékező nyomás valósuljon meg.
Minél nagyobb rendszerdinamikával és a késedelmi idő csökkentésével hatékonyan rövidíteni lehessen a fékutat.
Más elektronikus rendszerektől érkező utasítások is kiválthassanak fékezési beavatkozást.
Mindig optimális döntéseket tudjon hozni a párhuzamosan működő fékezési parancsok között (például a vezető és a szabályozó elektronika).
A kezelő elemeknél az ergonómiai szempontok minél következetesebben kerüljenek alkalmazásra.
A fékrendszer elemeinél, de különösen a kerékfékszerkezetnél a rugózatlan tömegek csökkentése következetesen valósuljon meg.
Biztonságosan működő legyen a folyamatos hibafelismerés, és ennek eredményeként a szükségessé váló intézkedések optimálisan megtörténjenek.
A fékoldást követően ne legyen visszamaradó fékező nyomaték, teljesen szűnjön meg a fékhatás (a kopás és a melegedés kiküszöbölése).
Minél nagyobb mértékű legyen az energia újrahasznosítás a fékezésnél.
Egyszerű szerelhetőség és kis karbantartási igény valósuljon meg.
Legyen környezetkímélő a fékrendszer.
Egyszerűen újrahasznosítható anyagokat alkalmazzanak a fékrendszernél.
A fékrendszerek vonatkozásában egy nagy optimalizációs folyamat előtt állunk jelenleg. Az előzőekben összefoglalt elvárások ugyanis a hagyományos fékezési technológiával már nem lehet minden vonatkozásában megvalósítani.
A fizikai törvények adta lehetőségeket teljes körűen csak az optimális menetdinamika megvalósításával lehet maximálisan kihasználni. Ehhez célorientáltan kell továbbfejleszteni a fékrendszert, messzemenően figyelembe véve az ergonómia és a környezetvédelem szempontjait, továbbá a minél kisebb karbantartási igényt is.
Az egyik jelentős probléma az, hogy a hagyományos fékrendszereknél a gépkocsivezető által használt működtető egységek, a fékrásegítő és a főfékhenger energetikailag az átviteli rendszerrel összeköttetésben vannak. Ezért nem lehet megakadályozni, hogy az átviteli rendszernél megvalósított nyomás modulációk, és további más egyéb fékezési beavatkozások visszahassanak a működtető egységre. A fékrendszer működtető egységének energetikai szétkapcsolása az átviteli rendszertől egy eddig még be sem látható szabadságfokot tesz lehetővé az ember – gép kapcsolat területén.
Nagyon elbizonytalaníthatja ugyanis a vezetőt, amikor egy hagyományos fékrendszernél hirtelen a fékpedálra lépve, működésbe lép a fékasszisztens és ennek hatására jelentős mértékben befelé mozdul a fékpedál, vagy pedig amikor fékezés közben beavatkozik az ABS és pulzálni kezd a fékpedál. A fékrendszer részegységeinek szétkapcsolásával (működtető és átviteli egységek) lehetőség nyílik ezeknek a hatásoknak a kiküszöbölésére.
Továbbá a higroszkópikus, tűzveszélyes és környezetszennyező fékfolyadék, mint munkaközeg kiküszöbölésével pedig megvalósulhat egy karbantartásmentes és környezetkímélő fékrendszer. De ezeknél a szempontoknál is fontosabb, a hidraulika fojtásos áramlásainak kiküszöbölésével egy sokkal dinamikusabb működésű fékrendszer megvalósítása.
Ha megvalósulhat a fékezésre kész állapot, a súrlódó alkatrészek közötti távolság kiküszöbölésével, ez egyúttal a fékkésedelmi időt is hatékonyan csökkentheti.
Szükségtelenné válik a hézag növelése a visszamaradó fékhatás, a folyamatos súrlódó alkatrész kopás elhárítása érdekében. A fentiekben felsorolt célok elérhetőségét a brake by wire fékrendszer biztosítja. Ennél a fő hangsúly a működtető és az átviteli rendszer szétkapcsolásán van, melynek megvalósítási lehetőségét az elektromosság kínálja. A brake by wire fékrendszer felépítését az alábbi ábra szemlélteti, melyből kitűnik, hogy elektronika nélkül ez a rendszer működésképtelen. A fékrendszer beavatkozásainak további bővítésére a lehetőségek szoftveres módon adottak. Ehhez nem szükséges újabb kiegészítő hidraulikus, vagy mechanikus egységekkel bővíteni a rendszert.
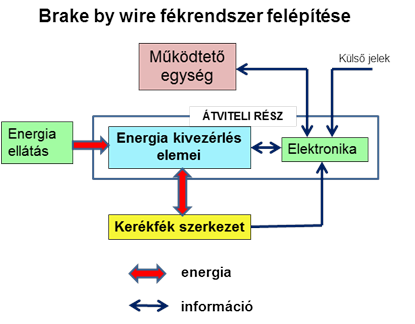
A brake-by-wire fékrendszert univerzális és moduláris rendszerű működés jellemzi. Világossá válik, hogy a működtető egység (fékpedál) és az átviteli rendszer közötti energetikai szétválasztás létrehozza az idegen fékezési igények megvalósításának lehetőségét. Mivel a vezető a fékrendszerbe nem visz be energiát, megoldást kell találni az idegen működtető energia hiánya esetén is működőképes maradjon a fékrendszer. Mivel az energiaellátó – az átviteli - és kerékfékszerkezet között feltüntetett energiafolyam előre nem definiált minden lehetséges energia felhasználható a rendszer működtetéséhez. Személygépkocsiknál például a hidraulikus, vagy elektromos energia vehető számításba, a haszonjárműveknél pedig a sűrített levegő.
15.2. A Brake by wire fékrendszerek már megvalósult változatai
Ezek olyan új fejlesztésű fékrendszerek, melyeknél a működtetés elektromos vezetékeken keresztül valósul meg, anélkül, hogy a működtető egység és a beavatkozó egyság között mechanikus, hidraulikus, vagy pneumatikus kapcsolat fennállna. Ez adja ennek a fékrendszernek az elnevezését is. Nagy kihívás olyan rendszer megvalósítása, mely elektromos hiba esetén is biztonságos működést tesz lehetővé. Ezen a területen jelentős lépésnek számított a Robert Bosch GmbH által kifejlesztett SBC (Sensatronic Brake Control) rendszer. Erről az elektrohidraulikus fékrendszerről szóló fejezetben lehet olvasni. Ezt a rendszert ellátták egy hidraulikus „back up” működési lehetőséggel is. A haszonjárművek elektro-pneumatikus fékrendszereinél sűrített levegős „back up” működést valósítanak meg. A rögzítő fékeknél valósultak meg az első teljesen „brake by wire” működések. Sok esetben ezek látják el a biztonsági fék feladatát is, és emellett növelve a vezetési komfortot, számos automatikus működést tesznek lehetővé. Ezen kívül a balesetek elkerülése érdekében a vezetőtől függetlenül, önálló fékezési feladatokat is elláthatnak.
15.3. A személygépkocsik rögzítő fékrendszerénél alkalmazott mechatronikus működések
A rögzítő fék a vezető távollétében is, mechanikus alkatrészekkel, segédenergia nélkül, az emelkedőn biztonságosan rögzítve kell tartsa a gépkocsit. A fékhatás a vezető ülésből szabályozható. A vezetőt egyéb más működések révén is támogathatja a rögzítő fék, mint például:
Elinduláskor automatikus fékoldás.
Emelkedőn automatikusan megakadályozni a visszagurulást.
A rögzítő fék egy az üzemi féknél kisebb lassulással elláthatja a biztonsági fék feladatát is, meghibásodás esetén. Eközben is meg kell őrizze a gépkocsi a stabilitását.
Egyre szélesebb körben alkalmazzák az elektromechanikus rögzítő fék rendszereket, melynek előnyei közé sorolható, hogy automatizálható a működése, továbbá alkalmas a gépkocsi más elektronikus rendszerével is az együttműködésre. Ilyen lehet például a lopás gátló, vagy a biztonsági fék megvalósítása. Az elektromechanikus rögzítő fék rendszernek a teljes terhelésű gépkocsit biztonságosan rögzítenie kell 30%-os lejtőn. Az általa megvalósított dinamikus lassulás 0-30 km/h sebességtartományban legalább 1,5 m/s² kell legyen. Az elektromechanikus rögzítő fék EPB (Elektrische Park Bremse) a gépkocsi vezető munkáját támogató asszisztens rendszer. Különböző megvalósítási változatokkal találkozunk a személygépkocsikban.
Központi működtető egységgel ellátott, bowdennel történő rögzítés. Ezt 1991 ben a Lucas szabadalmaztatta. Legtöbb változata csiga-, vagy csavar hajtással ellátott villanymotorral működik.
Közvetlenül a féknyeregre szerelt villanymotoros rögzítő fék. Ennél is szükség van a nagy mechanikus áttételre és az önzárásra, hogy a működtető energia lekapcsolásakor is befékezett állapotban maradjon a gépkocsi. Ez a megoldás azért előnyösebb az előzőnél, mert szükségtelenné teszi a szennyeződésekre érzékeny bowdenes erőátvitelt. Hátránya viszont az, hogy közvetlenül a féknyeregre történő felszerelése miatt nagyobb a rugózatlan tömeg.
Van olyan változat is, melynél a befékezést a hidraulikus fékrendszer végzi, és csak a rögzítés történik villanymotorral és mechanikus áttétellel.
15.3.1. Központi működtető egységgel ellátott, bowdenes változat
A Lucas 1991-ben szabadalmaztatott egy ilyen változatot. Ennél az egyenáramú villanymotor nyomatékát csigahajtás és csavarorsó-csavaranya növeli, illetve alakítja át a forgómozgást egyenes vonalúvá. A bal, illetve a jobb oldali kerekekhez működtető erőt kiegyenlítő himba és bowden-huzal közvetíti. A Lucas jelenleg a TRW konszernhez tartozik. Az utóbbi években egyre több személygépkocsiba szerelnek különböző működési elvű, elektromechanikus rögzítő féket.
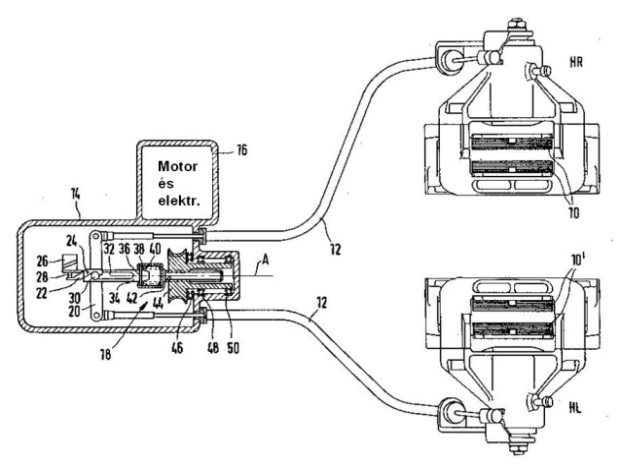
A gépkocsi befékezve tartását a csiga áttétel, illetve a csavarhajtás önzárása biztosítja.
Az elektromechanikus rögzítő fék működtetése, illetve a fékoldás történhet:
a vezető kezdeményezésére, elektromos kapcsolóval,
automatikusan az elektronika parancsára elinduláskor.
A hatósági előírásnak megfelelően az elektromechanikus rögzítő féket el kell látni mechanikus „szükség oldási” lehetőséggel. Ezzel lehet például lemerült akkumulátornál elvégezni a kifékezést.
Az elektromechanikus rögzítő fék a CAN hálózaton keresztül információt kap a gépkocsiba szerelt többi elektronikus rendszertől és azoknak információkat is továbbít a be-, illetve kifékezett állapotról.
Ez a fékrendszer nem a hagyományos módon működtethető. Üzemszerűen automatikusan, az elektronika parancsára lép működésbe, de ettől függetlenül a vezető is működtetheti egy kapcsolóval. Induláskor a rögzítő fék oldása automatikus, melynek dinamikáját egy az elektronikába szerelt lejtő szög érzékelő befolyásolja. Vízszintes úton, vagy lejtőn a rögzítő fék oldása gyors. Emelkedőn viszont lassan old, hogy gázadással a visszagurulás megakadályozható legyen. Az elektromos rögzítő féknél megvalósítható az ajtó kinyitásakor az automatikus befékezés. Ha a motor lefullad, a motorfordulatszám jel megszűnése aktiválja a rögzítő féket, így a gépkocsi elgurulása megakadályozható. Ezek a lehetőségek vezetők stressz helyzetét hatékonyan mérsékli. A legnagyobb segítséget az emelkedőn történő elinduláskor nyújtja. Ekkor válik aktívvá a Hill-Start-Assist. Az elektronika ilyenkor a motor nyomaték növekedésével arányosan csökkenti a fékező erőt. A teljes fékoldás akkor következik be, amikor a motor nyomatéka biztonságosan elegendő a visszagurulás mentes elinduláshoz. A közel-téri radar, vagy ultrahangos érzékelők jeleinek felhasználásával és az elektromechanikus aktív szervokormánnyal parkolási asszisztensként is működhet a rendszer. A parkolóhelyre beállás után automatikusan befékez az elektromos rögzítő fék. Az üzemi fék meghibásodásakor működhet biztonsági fékként is. Sokkal hatékonyabb, mint az izomerővel működtetett biztonsági fék. Dinamikus fékezéskor a kerekek megcsúszását az ABS-hez hasonló szabályozás teszi elkerülhetővé. Ilyenkor a villanymotor ellentétes polaritású működtetése hozza létre a fékező nyomaték csökkentését.
Az elektromechanikus rögzítő fék előnyei:
A komfortosabb és a biztonságosabb a rögzítő fék működtetés.
Feleslegessé válik a működtető kar, vagy pedál.
Az utastér kialakításánál kevesebb a kötöttség.
Megvalósítható a Hill-Start-Asszisztens és a Stop-and-Go-Automatika.
Folyamatosan a működtető elektronika öndiagnosztikája. Ez a felügyelet fokozza a működésbiztonságot. Meghibásodás esetén figyelmeztető jelzést ad.
Megkönnyíti az elindulást emelkedőn.
Meleg kerékszerkezetnél befékezve a gépkocsit, a lehűlés során automatikusan több alkalommal is utánfékezést haj végre, akkor is amikor a gyújtást kikapcsolták.
15.3.2. BMW elektromos rögzítő fék
Az elektromos rögzítő fék a Bosch-al és a Siemens VDO-val együttműködésben készült, és a világon ez volt az első nagy sorozatba beépített változat. A prémium osztály gépkocsijánál nagy gondot fordítanak a biztonságra és a komfortra.
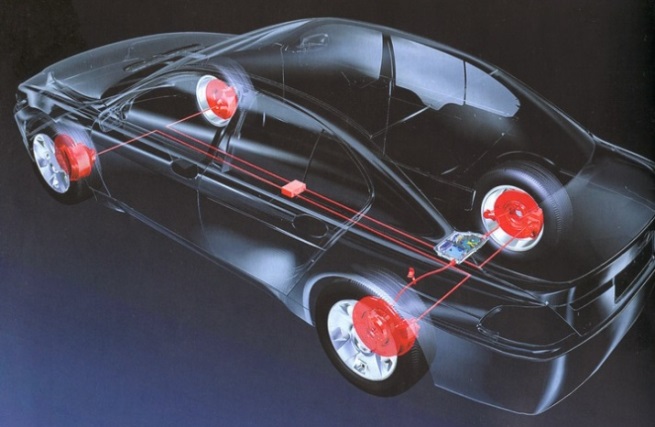
A csomagtartó fenéklemezére szerelik be a központi működtető egységet, a pótkeréktartó alá. Bowden huzalokkal hat a hátsó kerekek duo-szervo fékszerkezetére. Az automatikus működésen kívül a gépkocsivezető a műszerfal bal szélén elhelyezett gomb segítségével használhatja a rögzítő féket. A működtetésről ellenőrző lámpa és szöveges üzenet tájékoztat. Az elektromos rögzítő fék működtető elektronika a gépkocsi CAN-busz hálózatán keresztül áll kapcsolatban a hidraulikus üzemi fék rendszerrel (DSC), a műszerfal kijelzőjével, a motor és a sebességváltó elektronikával.
A motor leállításakor az elektromechanikus rögzítő fék befékez. Egy szoftver határozza meg a működtető erő nagyságát. Járó motornál valamennyi statikus és dinamikus rögzítő fék program működésre kész. Ha a gépkocsi áll és az elektromos rögzítő fék gombját megnyomják a DSC rendszer valamennyi kereket hidraulika szivattyú működtetésével befékezi. Az elektromos rögzítő fék meghibásodása, vagy az energiaellátás hiánya esetén a csomagtartóban a központi egységen egy kar biztosítja a szükség fékoldás lehetőségét.

Ha a DSC rendszer elektronikája a kerékfordulatszám érzékelők jelei alapján megállapítja, hogy a gépkocsi pakolás közben lejtős úton megmozdul, automatikusan növeli a fékező erőt.
A gomb ismételt megnyomásakor a rögzítő fék kifékez. A működtetett rögzítő fék állapotától függően a motor indításakor automatikusan a rögzítő fékkel történő fékezés helyett a hidraulikus (DSC) lép működésbe, illetve fordítva.
„Automatic Hold” működés
Ez járó motornál aktív, ha beprogramozták használatát. Ilyenkor a kijelzőn is megjelenik „Automatic Hold” felirat. A gépkocsi rögzítve tartása automatikusan bekövetkezik, amikor az érzékelők felismerik az álló helyzetet. A gépkocsivezető ilyenkor nem kell a fékpedált nyomva tartsa (automatikus sebességváltós változatnál sem, melynél a motor alapjáratánál vonszoló nyomaték van). Ez a gyakori indulással és megállással járó városi forgalomban tehermentesíti a gépkocsivezetőt.
Ha a vezető álló helyzetben nyomva tartja a fékpedált, automatikusan működésbe lép a rögzítő fék. A fék oldása a sebességfokozat bekapcsolása és a gázpedál lenyomása után automatikusan történik.
A biztonság érdekében az automatikus működés aktiválódik az utastér ajtó, a motorház tető, vagy a csomagtartó kinyitásakor, az automatikus sebességváltó előválasztó karjának „N” helyzetében, motor leállásakor, vagy leállításakor.
Dinamikus fékezés
A gépkocsi mozgása közben, ha a vezető az elektromos rögzítő féket működteti a motor üzemállapotától függetlenül a DSC hidraulika rendszere egy előre meghatározott lassítást valósít meg. A fékezés közben a működtető gombot nyomva kell tartani. Ez hatékony, mert ilyenkor hidraulikusan valamennyi kereket fékezi. A 7-es BMW-nél a lassulás kezdetben 3 m/s2 lesz és 3 másodperc elteltével 5 m/s2-re növekszik. Ilyenkor a féklámpa is világít. A fékezés közben az ABS szabályozás aktív, így a gépkocsi stabilitása megfelelő marad. A gomb visszaengedésekor a fékező nyomás azonnal megszűnik. Ha a gombot egészen a megállásig nyomva tartják a gépkocsi nyugalomba jutásakor az elektromos rögzítő fék fog működésbe lépni.
A működtető mechanika:
A működtető mechanika olyan, hogy a teljesen terhelt gépkocsit 32%-os emelkedőn rögzítve tartja. A működtető orsónál ehhez 3600 N erő szükséges. A villanymotor fordulatszáma olyan, hogy 12 V feszültségnél 20°C hőmérsékleten ez az erő 15 másodperc alatt eléri.
Kézi működtetésnél a fékező erő nagysága a körülményeknek megfelelő.
A működtető egység részei:
elektronika,
mechanikus áttétel
működtető bowdennek
A villanymotornál elhelyezett két hall elem jelei alapján állapítja meg az elektronika a forgásirányt, a forgórész helyzetét, és a fordulatszámot. A motor áramát impulzusszélesség modulációval szabályozzák. Az elektronikát diagnosztikai áramkörrel és hibakód tároló EE-PROM-mal is ellátták. A gépkocsi többi elektronikus rendszerével a CAN-busz hálózaton keresztül kapcsolatban áll. A nyomógomb megnyomásakor az „alvó üzemmódból” aktív állapotba kapcsol át. A kerekek fordulatszáma fontos bemeneti információ. Az üzemi fék DSC elektronikájával is adatcsere kapcsolatban áll.
A fékszerkezetnél kifejtett erő reprodukálható, és független kell legyen a hálózati feszültségtől, a bowden huzalok állapotától, a környezeti hőmérséklettől, a villanymotor öregedési folyamatától, a fékbetét kopottságától. Erről a hall érzékelőkkel győződik meg az elektronika.
A működtetés két egymástól független módon történhet. A műszerfalon lévő nyomógombbal statikusan, álló helyzetében és menet közben dinamikusan működtethető, illetve oldható a rögzítő fék. A különböző automatikus működések a vezető igényeinek megfelelően programozhatók a kormánykerék nyomógombjaival. Az eredmény a folyadékkristályos kijelzőn olvasható.
15.3.3. Féknyeregre szerelt elektromechanikus rögzítő fék
A TRW-Lucas által gyártott elektromos rögzítő féket több európai autógyár is alkalmazza, egyebek között a Ford, VW, Audi. A rögzítő fék működtető kapcsolóját általában a sebességváltó kar közelében a középkonzolon helyezik el.

Közvetlenül a hátsó tárcsafék úszónyergére szerelik fel a villanymotoros működtető egységet, mely a rögzítő csavarok oldása után a féknyeregről egyszerűen leszerelhető. A villanymotor fordulatait egy Hall érzékelő jele alapján figyeli a működtető elektronika. A mechanikus áttétel három fokozatban valósul meg. Az első egy fogazott szíj áttétel, mely 1:3-as lassítást ad. Ezt támolygó tárcsa pár áttétele növeli tovább. Az egymáshoz kapcsolódó tárcsák között egy fog különbség van. Egy fordulat megtételével csupán egyetlen fognyit fordít a másik tárcsán. A harmadik áttétel csavarorsó – csavaranya. Ez alakítja a forgó mozgást egyenes vonalúvá és önzárásával biztosítja a befékezve tartást. A teljes mechanikai áttétel 1:147. Az anya a munkahenger dugattyújának belsejében van egyenesbe vezetve. Az anya szorítja rá a dugattyút a fékbetétre. Így tartja rögzítve a gépkocsit.
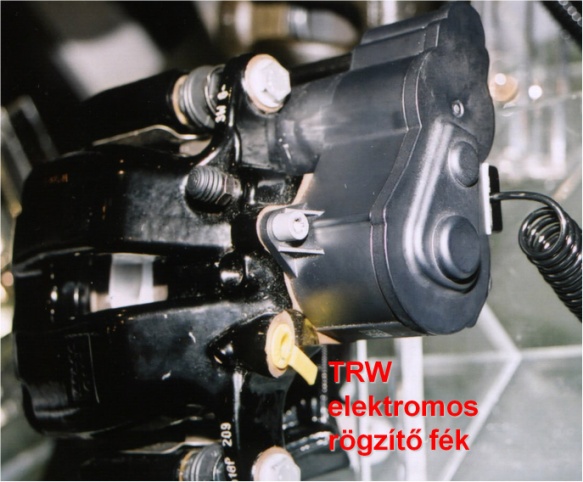
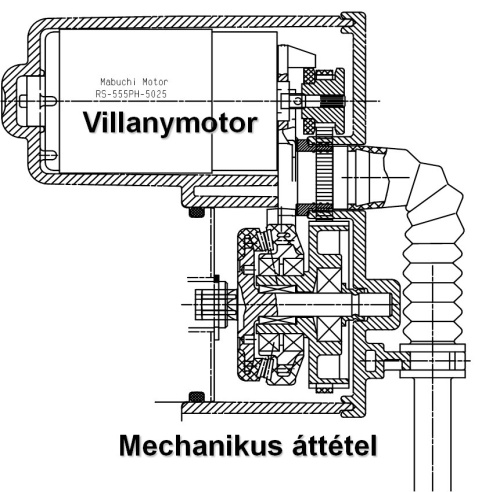
A konstrukciónál alkalmazott fontosabb biztonsági szempontok
Ütközés szempontjából optimalizált a működtető egység
Meg tudja akadályozni a gépkocsi visszagurulását az emelkedőn.
A rögzítő féknél teljes körű öndiagnosztikát valósít meg.
Dinamikus fékezés közben a kerék blokkolása megakadályozható
Kiegészítő működési lehetőségek
Automatikus befékezés a gyújtáskulcs kivételekor
A rögzítő fék automatikus oldása induláskor (DAA)
Az emelkedőn automatikus rögzítve tartás HH (Hill Hold) működés
A fékbetét kopás megállapítása a menetes orsó helyzete alapján kiegészítő algoritmussal
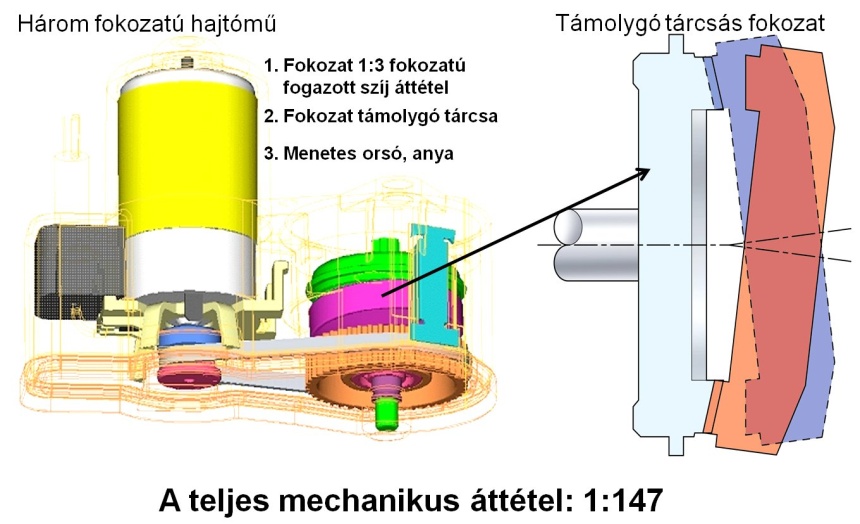
A működtető elektronika
Az elektromechanikus rögzítő fék rendszer elektronikáját általában az utastér belsejében a középkonzolon, vagy annak közelében helyezik el. Két processzoros változatban készül. A CAN hálózaton keresztül kapcsolatban áll az ABS/ESP elektronikával. Az átviteli sebesség 500 kbit/s. Az újabb változatoknál a „sensor cluster” –t is az elektronikába szerelik. A hossz és a kereszt irányú lassulásérzékelő jeleit összehasonlítja az ESP rendszer jeleivel. Ezeket a jeleket a két rendszer kölcsönösen ellenőrzi. Bekapcsolt gyújtásnál az elektromechanikus rögzítő fék a nyomógombbal működtethető. Ilyenkor az ellenőrző lámpa folyamatosan világít. A fék oldása csak bekapcsolt gyújtásnál lehetséges a nyomógombbal, de a fékpedál lenyomásakor is bekövetkezik ez. Amikor a vezető becsukja az ajtót, becsatolja a biztonsági övet, elindítja a motort és a gázpedálra lép az elektromechanikus rögzítő fék automatikusan old.
Használat közben folyamatosan érzékeli a fékbetét kopását és a működtetés során azt figyelembe veszi.
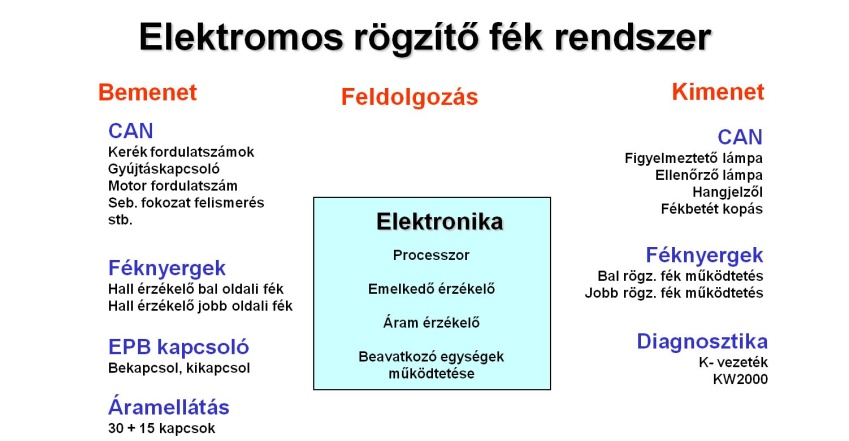
Az elektromechanikus rögzítő fék rendszernek a tengelykapcsoló pedálra szerelt elmozdulás érzékelő is jelet küld. Ennek a felhasználási területe a következő:
motor indítás,
„cruise control system” aktiválása (követési távolság szabályozás),
a sebességváltás közben a motor fordulatszám csökkentése,
"dynamic drive-off assist" működésmód aktiválása
Az elektromechanikus rögzítő fék rendszer állapotáról a gépkocsi vezetőt fény és hangjelzés tájékoztatja:
Piros színű fék ellenőrző lámpa:
Nem világít fékoldáskor
Világít: befékezett állapotban, illetve amikor fék aktív
Villog: amikor hiba lépett fel működtetéskor
Narancssárga rögzítő fék ellenőrző lámpa:
Nem világít, ha nincs hiba, vagy a hiba megszűnt
Világít: hiba esetén a gyújtás kikapcsolása után még 30 másodpercig
Hangjelzés
Nincs, amikor hibátlan a rendszer
Hangjelzés hallható hiba esetén, illetve dinamikus működés közben

Működésmódok:
Statikus működés
Akkor valósul meg, amikor a gépkocsi sebessége 0 km/h. Ekkor kivezérli a legnagyobb működtető erőt, illetve megszünteti azt ismételt gombnyomásra.
Dinamikus működés
Ilyenkor a gépkocsi sebessége > 0. A működtető erő a kapcsoló nyomva tartási idejével arányos, felengedve fékoldás.
A gyújtás kikapcsolásakor:
Automatikus befékeződés. Az elektronika átprogramozásával ez a működésmód megszüntethető.
Szerviz módusz:
A fékbetét cseréhez a diagnosztikai műszerrel aktiválható. A villanymotor visszafelé forgatja a működtető mechanikát alap helyzetig. Csak ez után nyomható vissza a fék munkahenger dugattyúja. Normál működéskor ugyanis csak a fékoldáshoz éppen szükséges visszamozgatás valósul meg. Ez így az automatikus utánállító feladatát is ellátja.
Statikus fékezésnél a gépkocsi vezető megnyomja a rögzítő fék gombot – fékezés.
Az elektronika a motorra fékezés irányú áramot kapcsol. Ezzel felfekteti és rászorítja a fékbetétet a féktárcsára. Lekapcsolja a villanymotort egy bizonyos előre meghatározott áramfelvételnél. Bekapcsolja az ellenőrző lámpát.
Ezekhez a műveletekhez szükséges információk:
A kerekek fordulatszáma
A kapcsoló helyzete
A motor áramfelvétele
A motor forgása
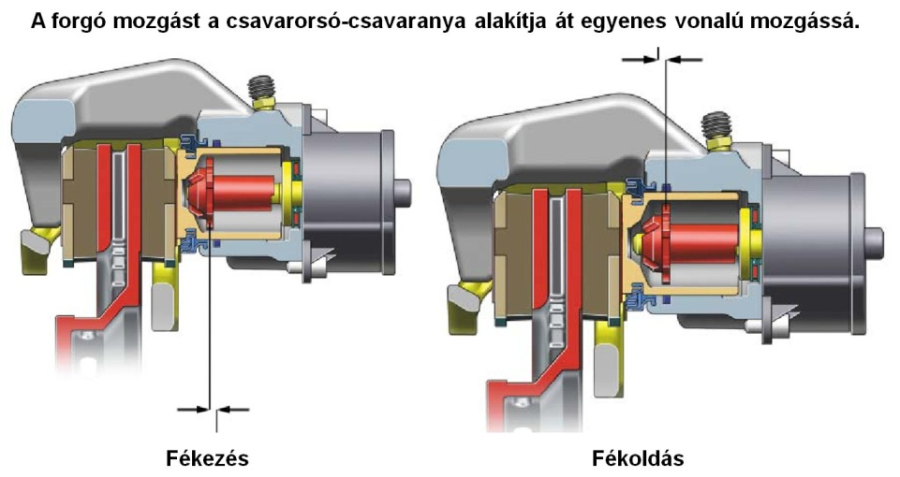
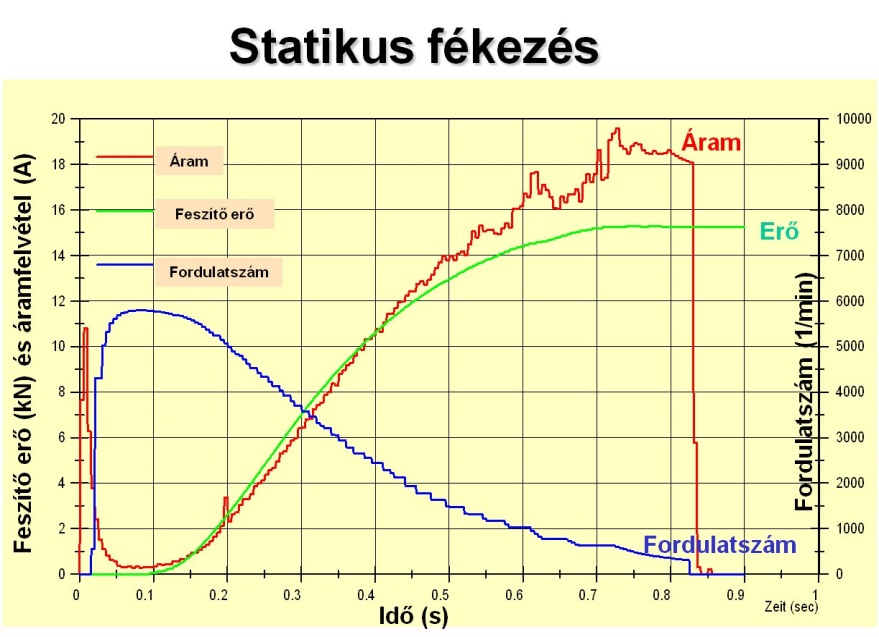
Statikus fékoldásnál a gépkocsivezető megnyomja a rögzítő fék gombot a rögzítő fék oldásához.
Az elektronika ellenőrzi a gyújtáskapcsoló helyzetét, ha az be van kapcsolva, a villanymotorra fékoldás irányban áramot kapcsol. Ha a fékbetétnél a hézag eléri a 0,5 mm –t a villanymotort kikapcsolja. Az ellenőrző lámpát kikapcsolja.
Az ezekhez a műveletekhez szükséges információk:
A rögzítő fék kapcsoló helyzete,
A gyújtáskapcsoló helyzete,
A motor áramfelvétele,
Motor fordulatok száma.
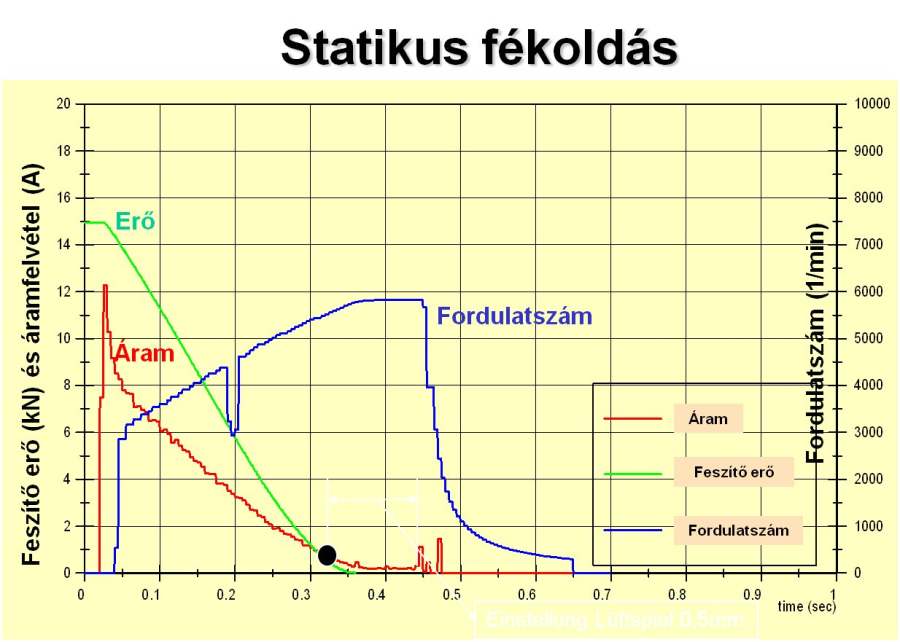
Dinamikus fékezésnél a gépkocsi vezető megnyomja a rögzítő fék gombot - fékezés
Az elektronika bekapcsolja a féklámpát és az ellenőrző lámpát. A motorra fékezés irányú áramot kapcsol. A kerék csúszásakor a fékerő csökkentés, majd ismételt növelés.
Ha a gépkocsi megállt statikus befékezés.
Ezekhez a műveletekhez szükséges információk:
A rögzítő fék kapcsoló helyzete,
Kerék fordulatszám,
Motor áramfelvétel,
Motor forgás.
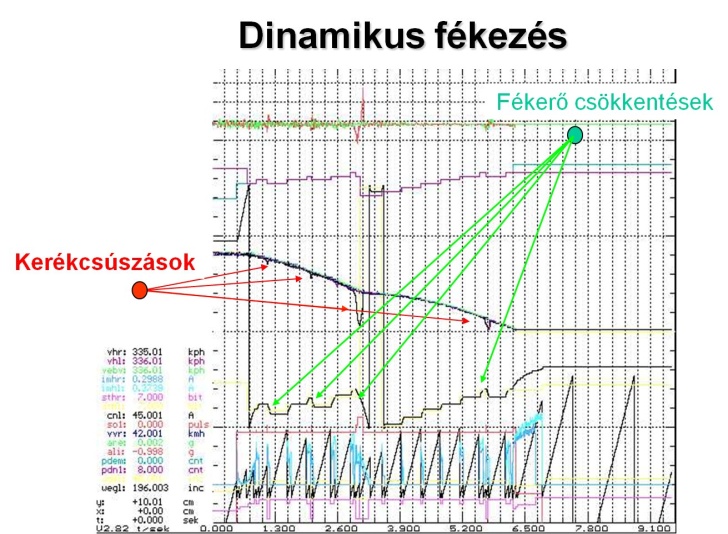
Az elindulás segítése (DAA)
Vezetői aktivitás: elindulás. Az elektronika ellenőrzi az emelkedőt és felismeri a menetirányt. Egy előre meghatározott motor nyomatéknál oldja a rögzítő féket. Ha esetleg leállna a motor (lefulladás) ismét fékezés.
Ezekhez a műveletekhez szükséges információk:
Motor nyomaték,
Motor fordulatszám,
Emelkedő meredekség,
Bekapcsolt sebességfokozat.
Befékezve tartás Hill Hold (HH)
Vezetői aktivitás: megáll a gépkocsival. Az elektronika, ha a fékpedál 5 s-nál tovább le van nyomva, működteti a rögzítő féket. CAN üzenet küld. Ha a gépkocsi áll és 3 s után a fékező nyomás 5 bar-nál nagyobb, fékoldás, mint az elindulás támogatásnál.
A szükséges információk
Kerekek fordulatszáma,
Motor nyomaték,
Motor fordulatszám,
Emelkedő meredekség,
Bekapcsolt sebességfokozat.
A TRW-Lucas elektromechanikus fékrendszer fontosabb műszaki jellemzői:
Működésbe lépés ideje 1 másodpercnél rövidebb.
A fékoldás ideje 0,6 másodpercnél rövidebb.
A működéshez szükséges feszültség: 9 - 16 V között.
Legnagyobb működtető erő: 17 kN.
Áramfelvétele működéskor: 2 x 19 A.
Üzemkész állapotban: 195 mA.
Nyugalmi állapotban: 0,1 mA.
A dinamikus fékezéskor elérhető lassulás 0,3 g.
Fékbetét csere előtt az elektromechanikus rögzítő féket vissza kell állítani alaphelyzetig.
A féknyereg dugattyúja csak ezután nyomható vissza és ezután szerelhető be az új fékbetét. A féknyeregre szerelt változatnál a mechanikus működtető egység ellátja az automatikus utánállító feladatát is, mert fékoldáskor éppen csak annyit mozdít vissza a villanymotor, amennyire szükség van. Ezért a dugattyú és a működtető anya is a fékbetét kopásával arányosan egyre kijjebb mozdul. A fékbetétek cseréje előtt, azért, hogy a dugattyú visszanyomható legyen, teljesen vissza kell állítani a működtető szerkezetet a kiindulási alaphelyzetbe.
A visszaállítás történhet:
A gépkocsi diagnosztikai eszközének egy erre a célra kifejlesztett programjával, mely a villanymotort ellentétes forgásirányban működteti.
Kézzel mechanikusan, a menetes orsó forgatásával is elvégezhető, bár ez időigényes.
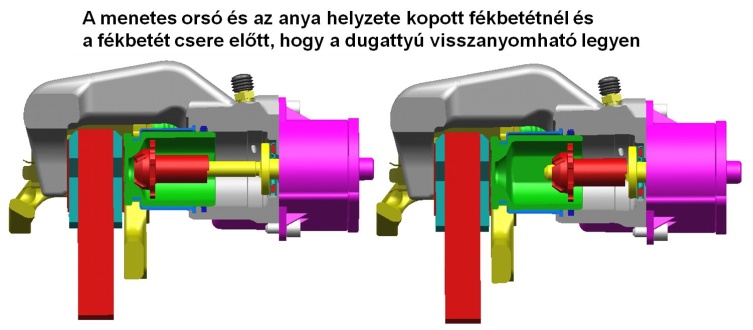
15.4. Smart Parking Brake
Az elektromechanikus rögzítő fék EPB (elektrische Parkbremse, Electric Parking Brake) továbbfejlesztett változata az SPB (Smart Parking Brake), melynek már nincs külön elektronikája, hanem az ESP integrális részét képezi. A beavatkozó egységre szerelnek egy kis „smart” elektronikát (SECU) Ez a korábbi EPB elektronikánál lényegesen kisebb intelligenciával rendelkezik, de az alapműködésekre képes, mint a fékező erő szabályozása és a működés felügyelete. A teljes rendszer felügyeletét az ESP elektronika, vagy egy sensor cluster látja el. Az adatátvitel CAN hálózaton keresztül történik. Az SPB rendszer az üzemi fék integrális része. A gépkocsi hajtásláncával, a passzív biztonság elemeivel is kapcsolatban van az SPB rendszer. A vezető lefékezési, illetve lassítási igényt közöl az SPB rendszerrel. A rendszernek tudomására kell jusson, hogy a vezető jelen van, vagy nincs. Az üzemi fék is küldhet fékezési igényt az SPB rendszernek és fogadhatja is azt. A két rendszer a pillanatnyi állapotra vonatkozó információkat is kicseréli egymás között. A gépkocsi a pillanatnyi állapotra vonatkozó jeleket is küldhet az SPB rendszernek. Ezek lehetnek a gépkocsi pillanatnyi sebessége, a lejtő meredeksége, és a pillanatnyi vonóerő. Az SPB rendszer a feszítőerőre vonatkozó információt közli a gépkocsival. A gépkocsivezetővel a kapcsolatot a műszerfalra szerelt két állapotú kapcsoló jelenti. A vezetőt ellenőrző lámpa és felirat, továbbá hangjelzés tájékoztatja. A vezető jelenlétéről a passzív biztonsági rendszer tájékoztatja az SPB rendszert. A vezető tevékenységéről a gáz-, a fék-, és a tengelykapcsoló pedálon keresztül, továbbá a bekapcsolt sebességfokozat révén szerez tudomást a rendszer. A központi elektronika létesít kapcsolatot a többi elektronikus rendszerrel.
Az SPB használja az EPB féknyerget, és az üzemi fékrendszert is. A féknyeregre az elektromos csatlakozó közelébe szerelik fel az elektronikát. Ezen keresztül kapja a tápfeszültséget és CAN csatlakozóval, valamint a villanymotor működtető áramkörrel is el van látva. A villanymotor mechanikus áttételen keresztül forgatja a menetes orsót, mely az anyát fékezés, vagy fékoldás irányában mozgatja. Az önzáró anyamenet a motor kikapcsolása után is megtartja a feszítő erőt.
A Smart Electronic Control Unit (SECU) új működésmódokat tesz lehetővé és számos előnyt kínál:
Kevésbé összetett a rendszer,
Egyszerűbb a vezetékhálózat,
Más rendszerekkel közösen lehet használni a processzor kapacitást, ez csökkenti a költségeket és az applikációt,
szükségtelenné válik egy elektronika doboz,
a kormánykerék zárral is kombinálható a fék működtetés,
az elektromechanikus elemek működésének felügyelete jobban megvalósítható.
Az SPB-nél először kerül az elektronika közvetlenül a kerék közelébe. A speciális elhelyezés miatt robosztus kivitel és megbízható vizsgáló program szükséges. Vibrációnak és hő terhelésnek kitett helyre került az elektronika.
Az SPB különbséget tesz a vezető által kezdeményezett és az automatikus beavatkozások között. Különbséget tesz továbbá a statikus és a dinamikus, illetve az ismeretlen járműállapot között. Az egyes működések prioritása a menetállapottól függ. A szoftverfunkciókat több elektronika között osztják meg. A központi elektronika (CECU) hozza létre a parancsokat a SPB beavatkozó egysége számára.
A CECU a következő feladatokat látja el:
Átveszi, és fogadja a különböző információkat.
Kiértékeli a rendszer információkat és kiválasztja a megfelelő rendszerműködést és a hozzá tartozó állító tag beavatkozásokat.
Meghatározza a feszítő erő nagyságát az egyes beavatkozó egységeknél.
Diagnosztizálja a teljes rendszer működését.
Tárolja a hibakódokat.
Biztosítja a diagnosztikai csatlakozás lehetőségét.
Azonosítja a rendszer beavatkozó egységeit.
Hiba esetén kikapcsolja az SPB villanymotorok vezérlését.
Tárolja a gépkocsi paramétereit.
Felügyeli a hálózati tápfeszültséget.
A feladatok teljesítéséhez megfelelő processzor teljesítmény és tároló kapacitás szükséges. Meg kell feleljen a biztonsági koncepcióknak.
15.5. Haszonjárművek elektronikus rögzítő fék rendszere
A Knorr-Bremse fejlesztett ki haszonjárművekhez a „brake by wire” elven működő elektronikus rögzítő féket. Az előzetes számítások alapján megállapították, hogy önálló termékként nem kifizetődő a gyártása. Célszerű tehát egy már meglévő rendszerbe integrálni, melyet egyébként is felszerelnek a haszonjárművekre. Az elektronikus sűrített levegő előkészítő egység az EAC tűnt ehhez megfelelőnek, mert méretét, és az elektronika kapacitását tekintve elég tartalékkal rendelkezik ahhoz, hogy ez az integráció megvalósulhasson.
A költségeken kívül, a változtatást a formatervezők régi vágya is indokolta, hogy a rögzítő fék működtető elem is könnyen beilleszthető legyen a legkülönbözőbb formaterekbe.
Különösen a billenthető fülkés teherautóknál okozott gondot és költséget a kézifék szelephez vezető csövek elhelyezése. A flexibilis műanyag csövek alkalmazása a nehézségeket mérsékelte, de az optimális megoldást az elektromos működtetés jelenti. Ennél a gépkocsivezető az újabb személygépkocsikhoz hasonlóan, elektromos kapcsolóval tudja működtetni a sűrített levegős, rugóerő tárolós munkahengerrel ellátott rögzítő féket. Ehhez az EAC –re felszereltek egy relé-szelepet, melyre a nagy sűrített levegő térfogatigény miatt van szükség. Változatlanok maradtak a rugóerő tárolós munkahengerek.

Fontos kritérium volt a rendszerrel szemben, és ez jelentette a legnagyobb újdonságot, hogy ez az első olyan fékrendszer, amelynek önálló beavatkozási joga van, ráadásul úgy, hogy nincs pneumatikus back-up –ja. Hiba esetén is megtartja a működőképességét a rendszer. Ha például vezetékszakadás miatt megszűnik a kapcsolat a műszerfalon elhelyezett rögzítő fék kapcsolóval, a gépkocsival el lehet indulni az automatikus fékoldás révén és megállás után a gyújtás lekapcsolása után automatikusan működésbe lép a rögzítő fék.
A vezető erről a hibáról úgy szerez tudomást, hogy a gépkocsi csak nagyobb gázpedál lenyomásra fog elindulni.
A rögzítő fék légtartály feltöltődésekor nem következik be automatikusan a fékoldás, mint hagyományos rendszereknél, amikor például a kézi fék kar fékoldási helyzetben maradt. Azokhoz a rendszerekhez ennek elkerülésére egy újabb szelepet kell beépíteni. Ez az elektronikus parkoló féknél kiegészítő szerelvény nélkül megvalósul. A fék oldására az EPB a vezető részéről egy megerősítést kér, hogy valójában ott ül az ülésben. Ehhez nem kell külön szerelvény. A vezető részéről a fékoldási megerősítés azt jelenti, hogy kissé lenyomja a gáz-, vagy a fékpedált.

Az elektronikus rögzítő fék alapszolgáltatásai
Az egyik fontos alapkövetelmény, hogy a rögzítő fék a befékezett, vagy a fékoldási állapotot biztonságosan tartsa. Egy elektronikus rendszernél ezt nem olyan egyszerű biztosítani, de végül sikerült megvalósítani, hogy semmilyen elektronikus, vagy pneumatikus hiba, illetve működési körülmény ne tudja ezt az alapfeladatot befolyásolni.
A rögzítő fék oldásakor az elektronika meg tudja vizsgálni, hogy egyáltalán végrehajtható –e ez a feladat. Először ellenőrzi például, hogy az üzemi fék két körében rendelkezése áll -e a megfelelő nyomás.
Biztosítható az EPB (Electronic Parking Brake) akaratlan oldás ellen. Ehhez a vezető részéről megerősítésre van szükség, ami lehetséges a fék-, vagy a gázpedál lenyomásával. Csak ezután következik be a rögzítő fék oldása.
A rögzítő fék az aktiválás előtt ellenőrzést végez. Ha például a gépkocsi 80 km/h sebességgel halad és véletlenül működtetik a rögzítő fék kapcsolót, ezt a parancsot nem fogja végrehajtani. Ebben az állapotban csak biztonsági fékként, lassító fékezés hajtható vége, de nem rögzítő fékezés. Ezt a kapcsoló elmozdításával arányos működést, mint biztonsági féket, a nemzetközi előírás is megköveteli. Az elektronikus rendszernél ez a működésmód sokkal kisebb késedelemmel működik, mint a hagyományos rögzítő fékeknél és sokkal finomabban szabályozható.
A rögzítő fék használatakor a pótkocsi kétféle módon fékezhető. Hagyományosan a pótkocsi üzemi fék rendszerét működtetve. Az újabb pótkocsikat már rugóerő tárolós rögzítő fékkel látták el, mely más módon működtethető. Mindkét változat megvalósítható az új fejlesztésű EPB –vel. Ehhez az szükséges, hogy az ennek megfelelő csatlakozóhoz kell bekötni a szerelvényt.
Ennél a rendszernél is van lehetőség az ellenőrzésre. Ekkor a gépkocsi vezető oldani tudja a befékezett pótkocsit és meggyőződhet arról, hogy a pótkocsi légtartályaiban a nyomás megszűnte után nem fog –e elgurulni a szerelvény, amikor a vontató hátsó tengelye marad csupán befékezve.

Az rögzítő fék alapszolgáltatásainak bővítése
A vezető munkáját az automatikus rögzítő fék működtetés megkönnyíti. Elinduláskor a kifékezés automatikusan bekövetkezik a gázpedál lenyomásakor. A gyújtás kikapcsolásakor pedig a rögzítő fék automatikusan befékeződik. Ez a vezetési komfort növelésén túl a biztonságosabb közlekedést is szolgálja.
Az elektronikus rögzítő féket külső fékezési parancsok is működtethetik. Ezek a működésmódok más elektronikákkal a CAN hálózaton keresztüli kommunikáció révén valósulnak meg. Ilyen fékezési parancs érkezhet például a radarral működő követési távolság szabályozó rendszertől, ha az előtte haladó gépkocsit a biztonságosnál jobban megközelítette.
16. fejezet - Motor fékező nyomaték szabályozás és a retarderek szabályozása
- 16.1. A tartós lassító fékberendezések áttekintése
- 16.2. Növelt hatású motorfékek
- 16.3. Olajjal működő hidrodinamikus retarderek
- 16.3.1. Az olajjal működő hidrodinamikus retarderek csoportosítása a beépítés helye szerint
- 16.3.2. A Retarderek csoportosítása a vezérlés szerint
- 16.3.3. A retarderek elektronikus működtetése
- 16.3.4. Az ABS és a retarder együttműködése:
- 16.3.5. Szekunder beépítésű hidrodinamikus retarder
- 16.3.6. Intarder
- 16.3.7. DIWA sebességváltó, fékező hidrodinamikus nyomatékváltóval
- 16.3.8. Primer retarder
- 16.4. Hűtőfolyadékkal működő hidrodinamikus retarderek
- 16.5. A különböző hidrodinamikus retarderek alkalmazási területei:
- 16.6. Örvényáramú retarderek
- 16.7. Tartós lassító fékezés energiatárolással
16.1. A tartós lassító fékberendezések áttekintése
A tartós lassító fékberendezések kopásmentes lassítást tesznek lehetővé. Ezek az üzemi féktől független berendezések jelentősen növelik a haszonjárművek aktív biztonságát és növelik a használat gazdaságosságát. Az össztömegtől függően hatóságilag is kötelezővé teszik beszerelését.
A korábban gyakran alkalmazott kipufogóféket nagy zajhatása miatt jelenleg már csak a növelt hatású motorfékkel kombinálva szokták alkalmazni. Az utóbbi évtizedekben széles körben elterjedtek viszont a haszonjárműveknél a hidrodinamikus és az örvényáramú retarderek különböző változatai. A Primer beépítés azt jelenti, hogy a lassító fékberendezést a belsőégésű motor és a sebességváltó közé, vagy közvetlenül a motorra szerelik. Gyakoribbak a szekunder beépítésű változatok. Ezek a sebességváltó és a hátsó futómű között, vagy a hátsó futóművön találhatók. A retarderek felszerelése a gépkocsira jelentős többlet költséget jelent. Alternatívát jelent a növelt hatású motorfék alkalmazása.
A retarder méretének és tömegének csökkentését egy gyorsító fogaskerék állétel beépítésével lehet elérni. Ezeket a változatokat Intarder -nek nevezik. Az Off-line kialakítás családjába tartoznak, ami azt jelenti, hogy a berendezés a hajtáslánc tengelyvonala mellé kerül. Az újabb változatoknál a munkaközeg közvetlenül a belsőégésű motor hűtőfolyadéka. Ez hatékonyabb hő átadást tesz lehetővé és kisebb lesz a szerkezet tömege is.
A retarderek működését is elektronika szabályozza, melynek során figyelembe veszik a különböző üzemi körülményeket.
A legújabb tartós lassító fékberendezések a különböző energiatárolást lehetővé tevő egységek, melyek a gépkocsi mozgási energiáját alakítják át és tárolják. Ez különböző módon történhet. Az energia újrahasznosításos fékezés egyik példája a hibrid hajtás. Ez már nem csak személygépkocsiknál, hanem egyre szélesebb körben a haszonjárműveknél is kezd elterjedni. Az energia tárolása különleges akkumulátorokban történik.
A gépkocsi mozgási energiája fékezés közben hajthat hidraulika szivattyút is, mely nyomás növekedést eredményez. A nyomás energia is tárolható, például hidro-akkumulátorokban. Ez aztán a kerékagyba szerelt hidro-motorokkal felhasználható a gépkocsi gyorsítására. Ilyen megoldásokat jelenleg még csak kísérleti járművekbe szereltek be. Az ilyen berendezés lényegesen nagyobb tömegű és helyigényű, mint a hibrid hajtás.
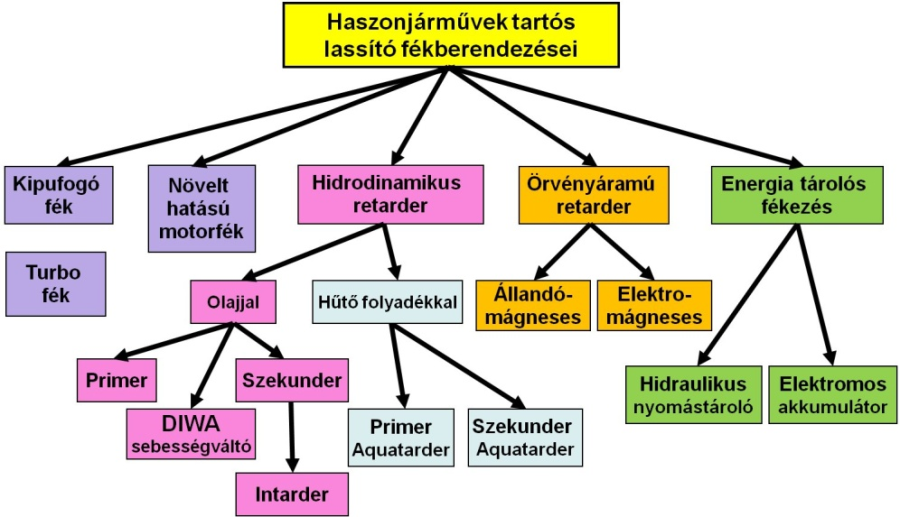
16.2. Növelt hatású motorfékek
A növelt hatású motorfék berendezések a tartós lassító fékek csoportjába tartoznak. Ezekkel hosszú lejtmeneteknél kopásmentesen lehet állandó értéken tartani a gépkocsi sebességét. Nem alkalmasak azonban az álló helyzetig történő fékezésre. Használata kopásmentes, miközben a kerékfék szerkezet nem melegszik. Ez azzal az előnnyel jár, hogy az üzemi fék bármikor teljes hatásossággal igénybe vehető akár vészfékezésre is. A tartós lassító fékberendezések hatékonyan növelik a közlekedésbiztonságot, ezért Európában a gépkocsi össztömegétől függően hatóságilag előírták a beszerelési kötelezettségét.
A növelt hatású motorfékről általánosságban elmondható, hogy a hengerfejre szerelt kiegészítő hidraulikus egységekkel és az annak részét képező elektromágneses szeleppel működteti a motor elektronika a vezető igényének megfelelően az elektronika segítségével. Hatásossága a fordulatszámon kívül attól is függ, hogy hengerenként egy – egy kipufogószelep mikor és hányszor nyit ki. A következő szakaszban látunk ezekre példákat. A szelepvezérlésbe történő beavatkozás révén valósul meg a nagyobb fékező nyomaték. A korszerű haszonjárműveknél ezt a fékező berendezés is az EBS, (vagyis az elektronikus fékrendszer) elektronikája működteti a CAN hálózaton a motor elektronikának küldött parancs útján.
16.2.1. Egyszeri kiegészítő szelepnyitással működő növelt hatású motorfék
Erre a berendezésre példaként nézzük a DAF motorféket (DAF Engine Brake), amit angol elnevezése alapján DEB –nek neveznek.
Egyebek között a hengerenként négy szeleppel szerelt, 12,6 literes, 6 hengeres, 16 szelepes, XF típusjelű motort is ezzel a kiegészítő fékberendezéssel látják el. Három – három henger fölé kerül egy – egy hengerfej, ezért két kiegészítő hidraulika egységgel látják el. Ezekre szerelik a működtetéshez szükséges elektromágneses szelepet. A fékberendezés használatakor ezek a motor kenőolaj rendszerből olajat juttatnak a működtető hidraulika rendszerbe. Ez a dugattyút (4) a lemezrugó ellenében lefelé mozdítja.
A fékező hatás növeléséhez a szomszédos henger szelepemelő himbája, amikor felfelé mozog, az állító csavar is felfelé mozdítja a dugattyút (4). Így létre jön a hengerenként két kipufogó szelep közül az egyik nyitásához szükséges olajnyomás az összekötő csatornában. Ennek hatására a hosszú rúddal ellátott dugattyú (3) lefelé mozdul és az egyik kipufogó szelepet egy kissé kinyitja a sűrítési felső holtpont közelében. Emiatt a hengerben a már összesűrített levegő a kipufogó gyűjtőcsőbe áramlik. A következő ütemben, amikor a dugattyú lefelé mozog, vákuum keletkezik, ami lassítja a motor forgattyús tengelyének forgását. Ez adja a fékező hatást.
Amikor a gépkocsivezető használja a motorféket, egy kapcsolóval tápfeszültséget ad az elektromágneses szelepre.
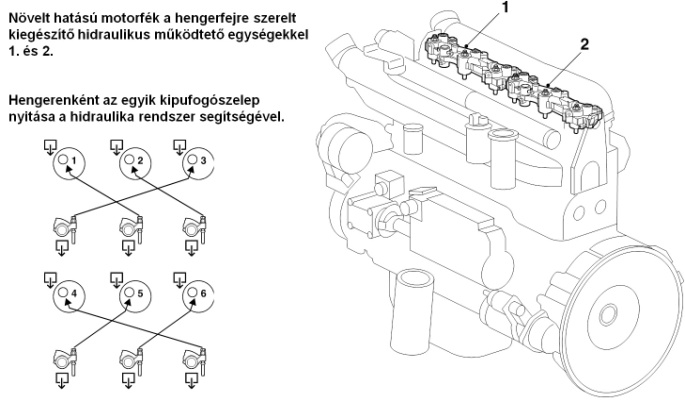
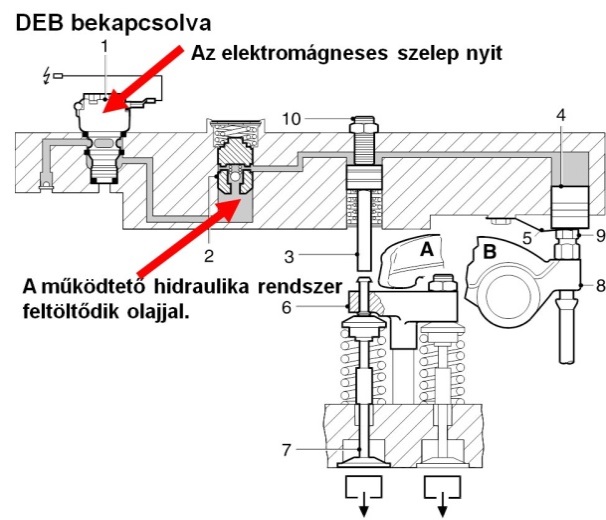
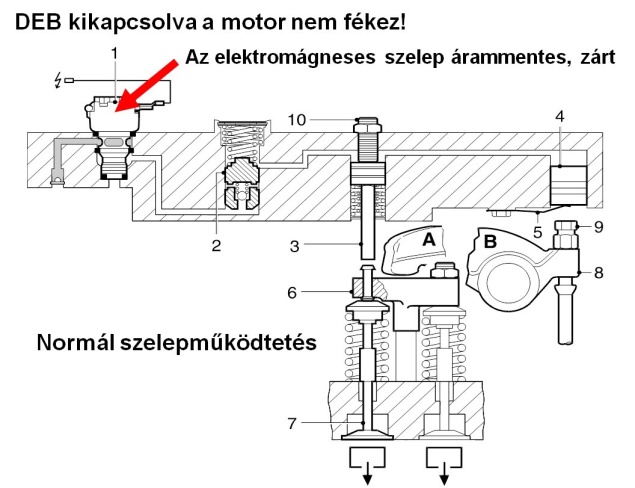
Amikor már nincs szükség a motorfékre, a vezető lekapcsolja az elektromágneses szelepről a tápfeszültséget, a szelep zár és a 2-es dugattyú alsó felületére nem hat nyomás. A szelepemelő himba mozgása és a dugattyú (4) mozgása miatt létrejövő nyomás a 2-es dugattyút lefelé mozdítja, amely lehetővé teszi a motorolaj visszaáramlását a motor kenőolaj rendszerébe. Hatására megszűnik a motorfék hatás.
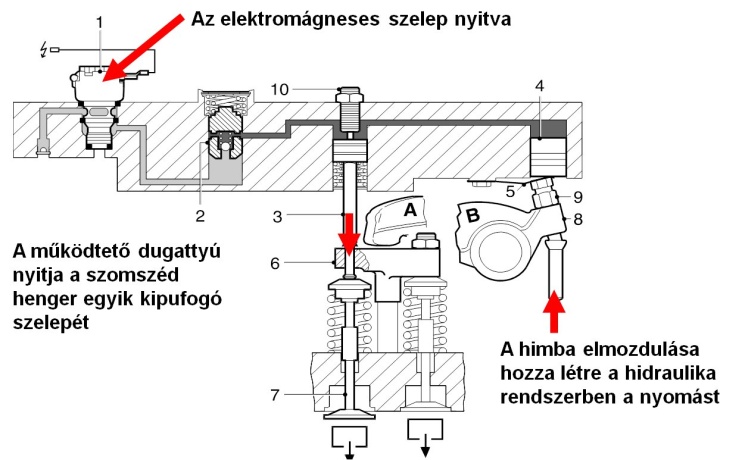
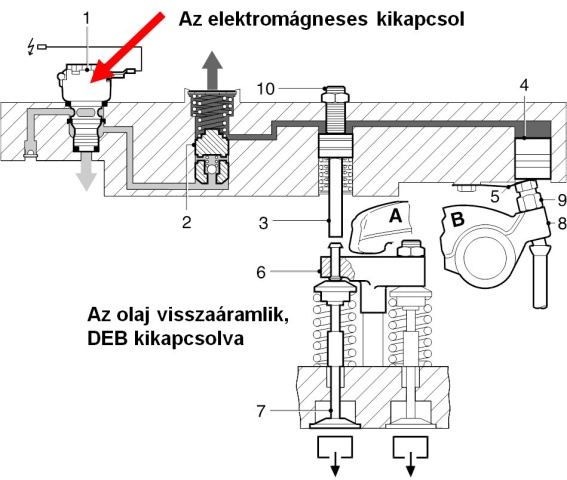
16.2.2. Kétszeri kiegészítő szelepnyitással működő növelt hatású motorfék
Így működik egyebek között a Volvo Engine Brake (VEB). Ennél két fékező berendezés (a kipufogófék és a növelt hatású motorfék) hatása is összeadódhat.
Kipufogó fék, mely a turbótöltő utáni részen egy fojtószelep zárásával működik. Ezt az egységet összeépítették egy nyomásszabályozó egységgel is. A fékező hatás a kipufogási ütemben a kipufogó gáz áramlásának fojtásával jön létre az által, hogy a dugattyú és a fojtószelep között túlnyomás alakul ki a gyűjtőcsőben.
Növelt hatású motorfék, ez a sűrítési és a terjeszkedési ütemben fejti ki lassító hatását. A szelepvezérlésnél történő beavatkozás révén működik. A szívási ütemben a kipufogószelep nyitásával a dugattyú feletti térben túlnyomás alakul ki. Emiatt nagyobb lesz a kompresszió és a fékező hatás. A másik szelepnyitás a kompresszió ütem végén következik be. Az összesűrített levegő a kipufogócsőbe áramlik. Emiatt a következő ütemben vákuum jön létre, amely fékezi a főtengelyt. Ez a működési módot a kipufogó szelep bütykén két kis nyitású kiegészítő bütyökkel érik el. Ezek a hidraulikus szelephézag kiegyenlítőn keresztül fejtik ki hatásukat, amikor a növelt hatású motorfék be van kapcsolva, a normál működésnél nagyobb olajnyomás váltja ki ezt a hatást.
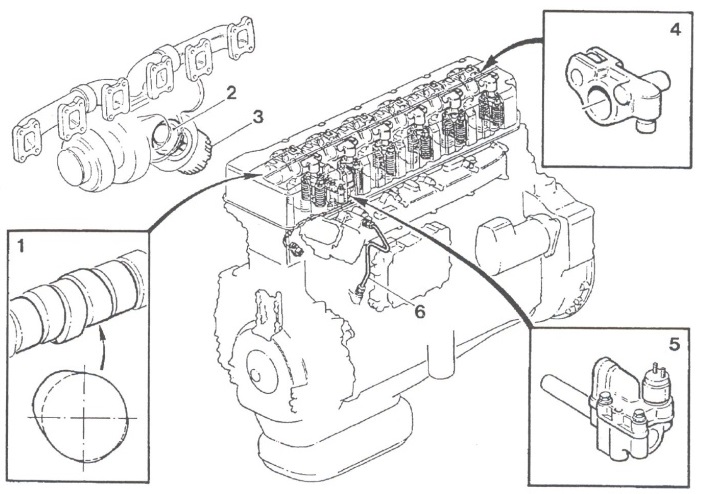
1.- vezérmű tengelyen kiegészítő kipufogó bütykök; 2.- kipufogófék záró tolattyú; 3.– kipufogófék nyomás szabályozó; 4.- szelephimba kiegészítő szerelvényekkel; 5.- olajnyomás szabályozó szelep; 6.- olaj nyomócső
A növelt hatású motorfék működtetéséhez hengerfejen a szelepfedél alá szerelik be a szabályozó szelepet. Ez a motor kenőolaj rendszerétől egy nyomócsövön keresztül érkező, a szelepemelő himbasor kenéséhez használt olaj nyomását két fokozatban állítja be. A motor normál működésekor az elektromágneses szelep nyitva van, ekkor 1 bar az olajnyomás. A motorfék bekapcsolásakor az elektromágneses szelep zárása miatt 2 bar lesz az olajnyomás. Ha a gépkocsivezető kikapcsolja a motorféket a nyomás a rugó segítségével visszacsökken 1 bar –ra.
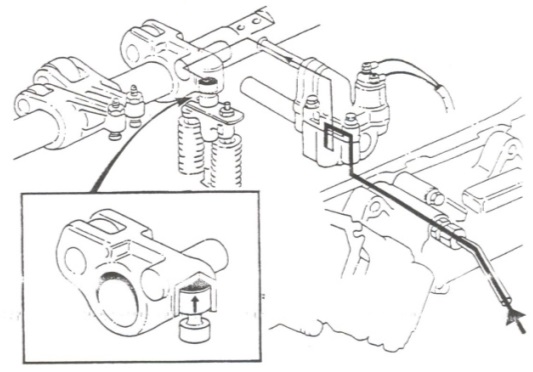
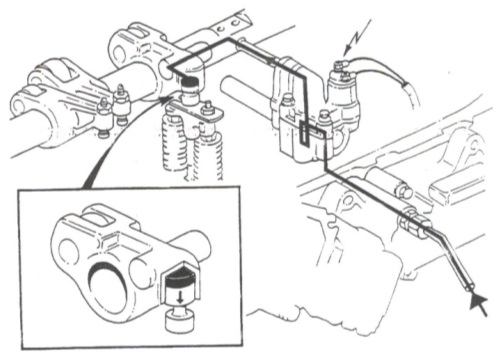
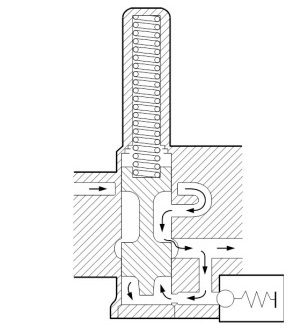
A VEB -el szerelt motoroknál a többitől eltérő vezérműtengelyt alkalmaznak. A normál kipufogó bütyök kiegészül két kisebb emelésűvel. Ez az alapkörhöz képest 0,8 mm magas. A mechanikus áttétel miatt a szelepszárnál mérve 1,1 mm elmozdulás tud létrehozni.
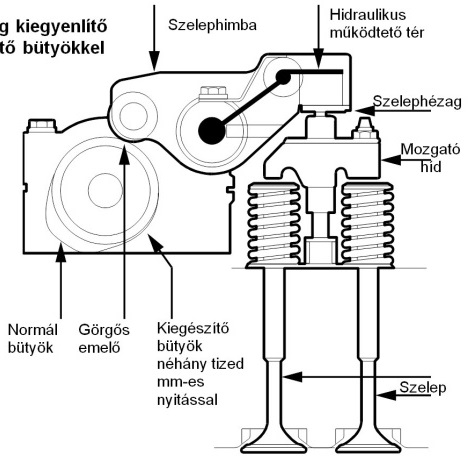
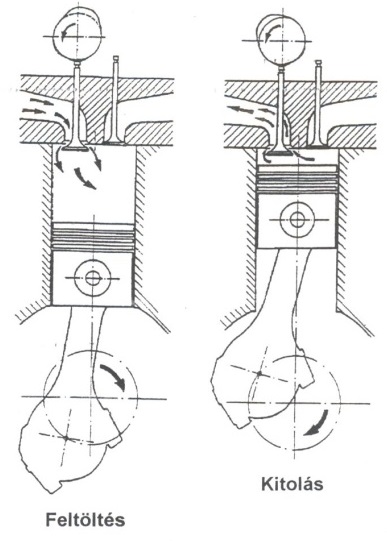
Motorfék üzemben, a 2 bar olajnyomás esetén, a kiegészítő bütykök a sűrítési ütem kezdetén és a kipufogási ütem végén emelik meg a kipufogó szelepet a hidraulikus szelephézag kiegyenlítő egységen keresztül.
A szelepemelő himbába szerelt visszacsapó szelep biztosítja a motorfék működéséhez szükséges nyomást, amikor a szelephézag jól be van állítva. A motor normál működésekor a szelepemelő himbába az 1 bar olajnyomás érkezik. Ekkor a kis bütykök nem emelik meg a szelepet, mert a kis olajnyomás miatt az elmozdulás a hidraulikus szelepemelő tőkénél kiegyenlítődik. Amikor a szabályozó szelep a nagyobb, 2 bar olajnyomást állítja be, a szabályozó szelep, a himbába szerelt visszacsapó szelep a felette lévő dugattyú rugó ellenében történő elmozdulása miatt tartja ezt az értéket. A kipufogószelep a kis bütykök segítségével két kiegészítő elmozdulást is végez. Ekkor működik a növelt hatású motorfék.
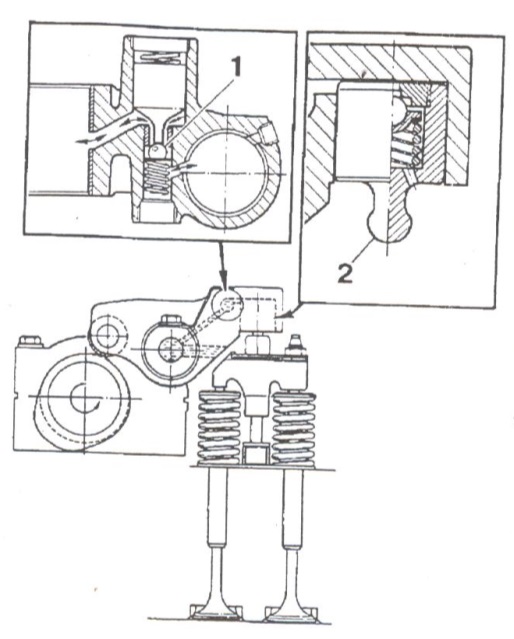
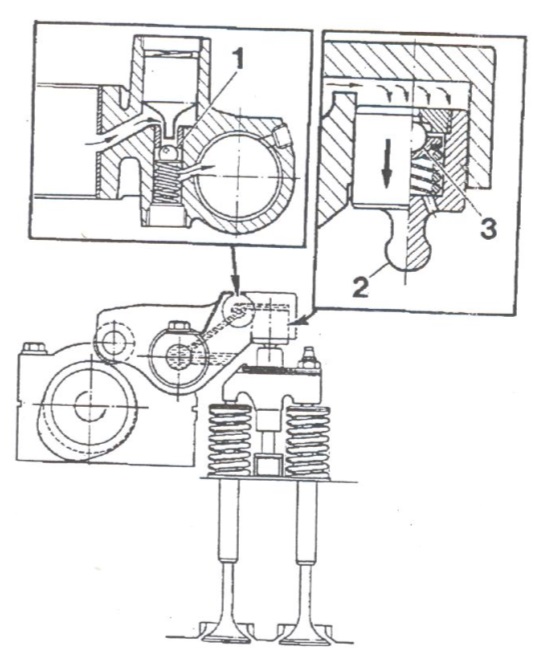
A fékező hatás:
A szívó ütemben a kissé nyíló kipufogó szelepen keresztül túlnyomás kerül a kipufogó gyűjtő csőből a dugattyú fölötti térbe és így a sűrítés nagyobb nyomással valósul meg, ezért nagyobb lesz a főtengely lassulása és a fékező hatás.
A sűrítési ütem végén ismét kissé nyit a kipufogó szelep, és az összesűrített levegő a kipufogócsőbe távozik. A dugattyú lefele mozgásakor a dugattyú feletti térben nagyobb vákuum keletkezik, ami nagyobb fékező hatást fejt ki a főtengelyre.
A motorfék működéséhez a következő feltételeknek kell teljesülniük:
bekapcsolta a gépkocsivezető a motorféket,
a gázpedált teljesen visszaengedte,
a motor fordulatszáma nagyobb, mint 1000 1/perc,
a motor hőmérséklete nagyobb + 75˚C –nál,
A műszerfalra szerelt működtető kapcsoló három állású:
kikapcsolva
növelt hatású motorfék bekapcsolva
növelt hatású motorfék és a kipufogófék együtt bekapcsolva
A motorfék működési jellemzői:
A kipufogófék a kipufogó gyűjtőcsőben 7,5 bar nyomást állít be. Minél nagyobb a motor fordulatszáma annál nagyobb a fékhatás. Meghibásodás esetén a motor elektronikában hibakódok tárolódnak, melyek a megfelelő diagnosztikai műszerrel kiolvashatók.
16.3. Olajjal működő hidrodinamikus retarderek
A gépkocsi mozgási energiáját a lapátkoszorúk közé beáramló olaj alakítja át hő energiává. Ennek megfelelően kell méretezni a motor hűtő rendszerét. Nagyobb átmérőjű csövek és nagyobb szállítóképességű folyadék szivattyú, nagyobb átömlő keresztmetszetű termosztát szükséges. Ennek a retarder változatnak nagy a specifikus fékező teljesítménye, bár körülményes az utólagos beszerelése. A fékező nyomaték fokozatmentesen szabályozható az olajmennyiség változtatásával.
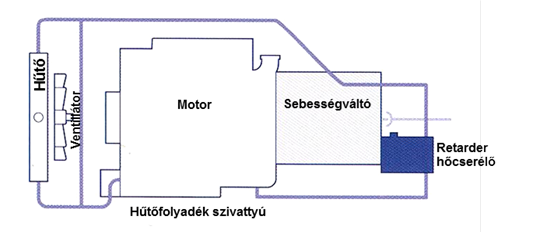
A jelenlegi retarderek az elektronikus szabályozásukkal a haszonjárművek fékrendszerének integrális részét képezik. Működtetését a fékelektronika automatikusan végzi, de a gépkocsivezető igényének megfelelően változtatni is tud az automatikus működésen. Ezen lassító fék berendezések működéséhez a következőkre van szükség:
speciális olajra, mint munkaközegre,
elektromos áramra a szabályozó elektronika és az elektromágneses szelepek működéséhez,
a belsőégésű motor hűtőfolyadékára, mely a hőt vezeti el,
olaj/hűtőfolyadék hőcserélőre,
sűrített levegőre a fékező nyomaték csökkentésére, illetve megszűntetésére.
A fentiekben összefoglalt feltételek teljesülése miatt, ennek a retardenek az utólagos beszerelése a gépkocsiba nagyon körülményes.
Az áramlástani elven működő fékberendezés különböző változati használatosak. A turbinakerék, melyet a gépkocsi mozgási energiája forgat, az olajrészecskéket felgyorsítja. Az állórész pedig fékezi, amelyet a retarder álló részéhez rögzítenek. Az olajrészecskék mozgásállapotának jelentős megváltozása hő fejlődéssel jár. Ez melegíti az olajat, mely egy olaj – hűtőfolyadék hőcserélő alkalmazásával adódik át a belsőégésű motor hűtő rendszerének és onnan a környezetnek.
Az elektronika elektromágneses szeleppel szabályozza a fékezési igénynek megfelelő olajmennyiséget, mely a lapátkoszorúk közé kerül. A retarder működésekor a féklámpának világítani kell.
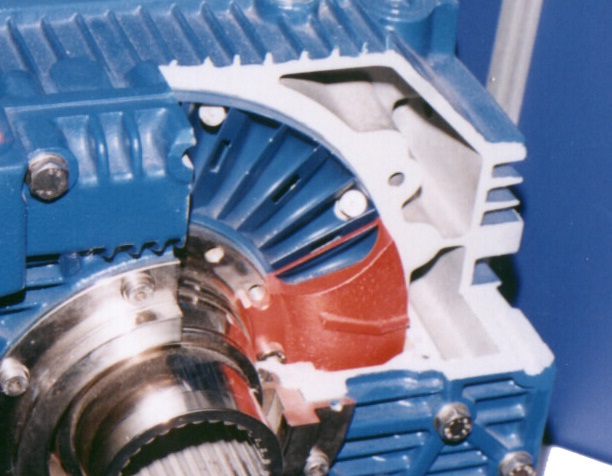
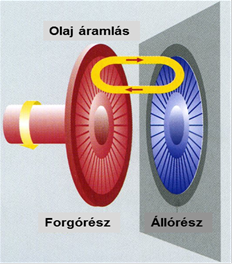
A fékező nyomaték csökkentésekor, illetve a retarder kikapcsolásakor egy másik elektromágneses szelep sűrített levegőt enged a munkatérbe, ennek hatására csökken az olaj sűrűsége és vele arányosan a fékező nyomaték. Kikapcsoláskor a munkatérből a teljes olaj mennyiséget a sűrített levegő a tároló térbe juttatja, és ezzel megszűnik a fékező hatás. Ezután már csak a ventillációs veszteség áll fenn. Ezt kezdetben a Voith az úgynevezett „retarde csapokkal” csökkentette a jelenlegi korszerűbb változatoknál a lapátozott tárcsákat egymástól eltávolítják, amikor nincs szükség fékező nyomatékra. Amikor a retarder működik a tárcsák közötti távolságot minimálisra csökkentik.
A hidrodinamikus retarder hátrányos tulajdonsága, hogy amikor nem fékeznek vele, vagyis olajmentes állapotban is a lapátozás miatt, folyamatosan fennáll egy ventillációs veszteség.
Előnye az, hogy működése hatékony, és kicsi a karbantartási igénye. A retarderek fajlagos teljesítménye kedvezően nagy, ezért az üzemi fékezések 90%-át a kopásmentesen lehet megvalósítani.
16.3.1. Az olajjal működő hidrodinamikus retarderek csoportosítása a beépítés helye szerint
Szekunder beépítés, on line változat, melyet a sebességváltóra szerelik fel. Egy rövidebb kardántengellyel csatlakozik a hátsó futóműhöz.
Szekunder beépítés, on line változat, a sebességváltó és a hátsó futómű közé szerelik két rövidebb kardántengellyel. „Szabad beépítés” -nek is szokták nevezni. Lehetővé teszi a mellékhajtás felszerelését is.
Szekunder beépítés, off line változat, a kardántengely forgástengelyéhez képest oldalra eltoltan, rendszerint gyorsító áttétel közbeiktatásával szerelik be.
Primer beépítés ezt a változatot vagy a motor és a sebességváltó közé, vagy a motor elé szerelik be. Ez utóbbira példa a Voith Aquatarder. Ugyanezt az MAN Pritarder®-nek nevezi.
Voith DIWA automatikus sebességváltó bolygóműves fokozatai közé szerelt változat.
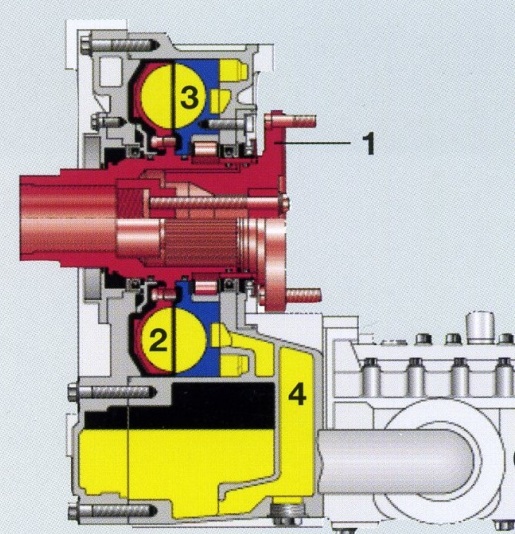
1. kardántengely csatlakozó perem; 2. forgórész; 3. állórész; 4. olaj segédtér
16.3.2. A Retarderek csoportosítása a vezérlés szerint
Független vezérlés (más elektronikusrendszerekkel (pl. fék) nincs adatátviteli kapcsolatban) ezek a régebbi változatok.
Integrált vezérlés (a különböző fékrendszereket, üzemi légfék, motorfék, kipufogó fék és a retardert, a közös elektronika működteti).
Gépkocsi sebességfüggő retarder vezérlés.
Kombinált vezérlés például az elektronikus légféknél, melynek elektronikája vezérli a retardert is.
16.3.3. A retarderek elektronikus működtetése
A korszerű haszonjárművekben a retarder működtetését az EBS elektronika végzi.
Ettől függetlenül a gépkocsivezető a retardert többféle módon is használhatja:
a kormányoszlopra, vagy a műszerfalra szerelt többfokozatú kapcsolóval,
fékpedállal működtetett retarder kapcsolókkal,
a pedálszelep után beszerelt nyomáskapcsolókkal.
Az egyes fokozatok aktiválásakor az elektromágneses szelepekkel a bekapcsolt fokozatnak megfelelő mennyiségű olaj kerül a tároló térből munkatérbe, az álló és forgó lapátkoszorúk közé. Ezzel érhető el a kívánt fékező nyomaték. Ha a működtető kapcsolót nem mozdítják el, egy bizonyos fordulatszám tartományban a beállított fékezőnyomatékot az elektronika állandó értéken tartja.
Hőmérséklet érzékelő informálja a retarder elektronikát a pillanatnyi üzemállapotról. Ha a hűtőfolyadék túlmelegedne, az elektronika csökkenti a fékező nyomatékot, illetve lekapcsolja a retarder működését. A vezető ekkor az üzemi fékkel kell lassítsa a gépkocsit.
A retarderek működtetéséhez általában mikroprocesszoros elektronikákat alkalmaznak. Ennél a típusváltozatnál a kézi kapcsoló hat fokozatú. A gépkocsi össztömegének és a lejtő meredekségének megfelelően hat különböző szabályozott lassító fokozat használható.
A retarder kapcsoló kar végén lévő nyomógomb megnyomásakor az elektronika tárolja a pillanatnyi járműsebességet, melyet az elektronika pontosan tart, akkor is ha változik közben a lejtő meredeksége. A gomb ismételt megnyomására a sebesség tartó szabályzás kikapcsol.
A retarder működtetés elektromos energia igénye igen csekély. Az ellenőrző lámpa, a féklámpa relé, és az elektromágneses szelep működtetéséhez összesen 1,6 A áramerősség szükséges.
A szabályzó elektronikát a gépkocsin a környezeti hatásoktól védett helyre szerelik fel. Ezt az elektronikát is ellátták öndiagnosztikai egységgel és hibakód tároló áramkörrel is. A gyújtás bekapcsolásakor rövid ideig világít, majd hibátlan rendszer esetén kialszik. Ha hiba van a rendszerben, az ellenőrző lámpa folyamatosan világít. A felszerelt diagnosztikai csatlakozó lehetővé teszi az interaktív szerviz-készülék használatát.
További előny, hogy a teljesen elektronikus szabályozású retarderek fékező hatása kis sebességnél (1200 1/perc fordulatszám alatt) is lényegesen jobb, mint a korábbi változatoknál volt tapasztalható.
A retarder hőcserélőjének hűtőfolyadék kilépő csonkjába beépített hőmérséklet érzékelő jele alapján az elektronika korlátozhatja a fékező nyomatékot, illetve kikapcsolhatja a működését.
16.3.4. Az ABS és a retarder együttműködése:
A hidrodinamikus retarder és az ABS rendszer egymással elektronikus adatátviteli kapcsolatban állnak. Erre azért van szükség, mert Az ABS elektronika tudja megállapítani, hogy a tartós lassító fékberendezés használata közben kis tapadási tényezőjű úton a fékezett kerekek esetleg megcsúsznak. Korábbi gyártású gépkocsiknál ekkor relék segítségével az ABS kikapcsolja a retardert. Ennek hatása különösen a hidrodinamikus retardereknél némi késlekedéssel okozza a fékező nyomaték csökkenését, majd megszűnését. Ahhoz ugyanis egy bizonyos idő szükséges, hogy a munkatérben a sűrített levegő befújásával csökkenjen az olaj sűrűsége, majd eltávozzon onnan a tároló térbe. Ennek hatása az alábbi lassulási diagramról jól látható. Az újabb haszonjárműveknél az ABS rendszer és a retarder közötti adatátviteli kapcsolat a CAN hálózaton keresztül valósul meg.
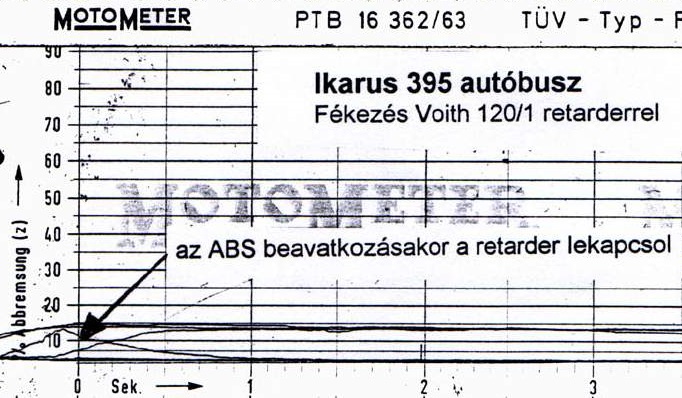
16.3.5. Szekunder beépítésű hidrodinamikus retarder
Ezt a típusváltozatot közvetlenül a sebességváltóra, vagy a sebességváltó és a hátsó futómű közé szereik. Az olaj/hűtőfolyadék hőcserélő is a részét képezi az egységnek. A képen látható változat az úgynevezett „in-line” kialakítás, mert a forgórész tengelye egybe esik a kardántengely forgástengelyével.
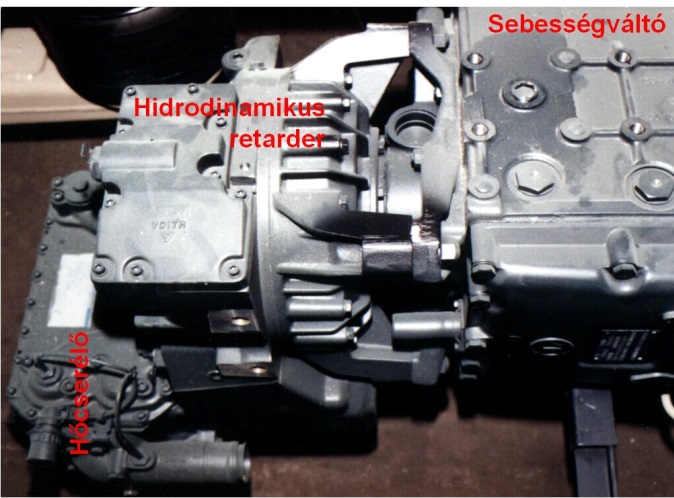
16.3.5.1. Voith 120 –as sorozatú hidrodinamikus retarder
Ez egy kompakt kivitelű, nagy teljesítményű, szekunder beépítésű változat, melyet közepes kategóriájú autóbuszokhoz, illetve teherautókhoz fejlesztettek ki. A 120/2 típusnál a kardántengely legnagyobb megengedett fordulatszáma 3000 1/perc, a 120/2 S típusnál pedig 4000 1/perc. Ezen kívül pedig csupán az állórész kivitelében különböznek egymástól, belső szerkezetük azonos .
Működés és nyomatékszabályozás
Öt fokozatú kézi kapcsolóval, illetve három fokozatú láb működtetésű szeleppel kombináltan használható. A fékező nyomaték szabályozása közvetett módon a sűrített levegő nyomásának változtatásával történik. Ennek hatására fog változni a munkatérbe kerülő olaj mennyisége. A retarder kapcsoló jelét a működtető elektronika fogadja, mely alapján egy meghatározott nagyságú vezérlő áramot juttat az arányos működésű szelephez. Ez állítja be a sűrített levegővel megvalósított szabályozó nyomást. Ez hat az olajtérre, mely a kardántengely fordulatszámával arányos olajmennyiséget juttat a lapátozással ellátott álló és forgórészből álló munkatérbe. Az elektronika a CAN hálózaton keresztül kapcsolatot tart a gépkocsi többi elektronikus rendszerével.
Fékezés közben az olaj részecskék a forgó részben felgyorsulnak, az álló részben pedig lelassulnak. Mozgásuk pályája egy önmagába visszagörbített spirállal jellemezhető. A mozgásállapot változása fejti ki a fékező hatást, melynek következtében a kinetikus energia hővé alakul. Ez a hőcserélőn keresztül adódik át a motor hűtőfolyadék rendszerének.
A kilépő csonkba szerelt hőmérséklet érzékelő folyamatosan jelet ad az elektronikának. A legnagyobb megengedett érték 98˚C, melynek elérésekor a szabályozó nyomás fokozatosan csökkenni kezd. Ez a folyamat addig tart, amíg a fékező nyomaték és az azzal arányos elvezetendő hőmennyiség a hűtőrendszer teljesítő képességével egyensúlyba kerül.
Amikor a retarder nem fékez, a ventillációs veszteséget az állórész csapokkal csökkentik.
A zavarmentes működés szempontjából fontos az olajszint rendszeres ellenőrzése. A legnagyobb fékező nyomaték az elektronikán elhelyezett kapcsolókkal állítható be a gyári adatoknak megfelelően. Ez a szabályozó nyomást fogja korlátozni.
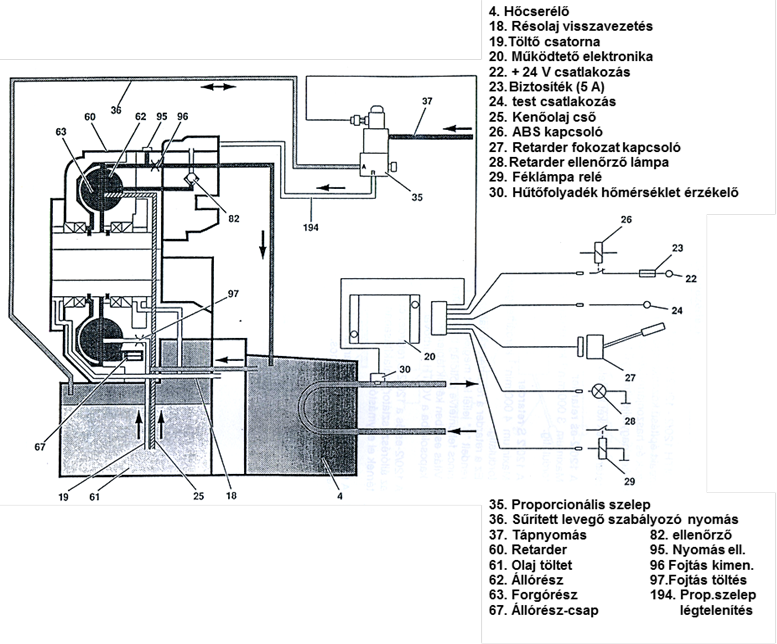
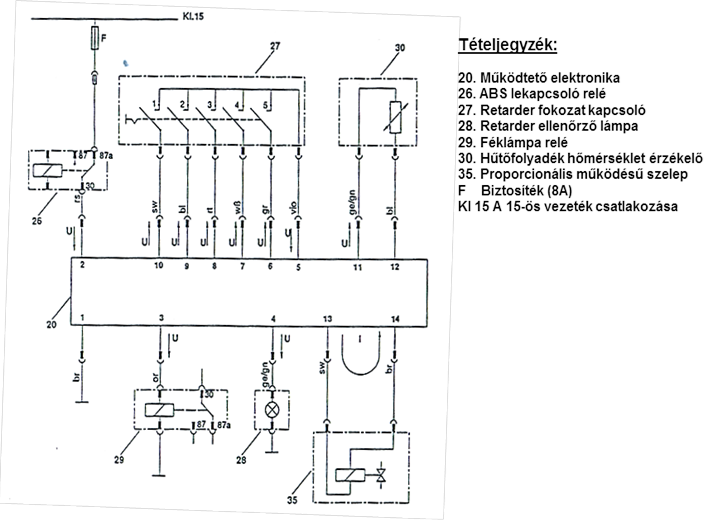
16.3.5.2. Scania hidrodinamikus retarder
Ez egy speciális, a Scania által kifejlesztett és gyártott hidrodinamikus retarder, mely szekunder beépítésű és közvetlenül a sebességváltóra szerelik. Működtetése lehet kézi kapcsolású, vagy automatikus is. A bolygóműves automatikus sebességváltóra szerelt változatát autóbuszokba szerelik. Más típusoktól abban különbözik, hogy kettős forgó lapátkoszorút szerelnek be, melyet két álló lapátkoszorú vesz közre. A fékező nyomaték szabályozása hidraulikusan történik, de ehhez sűrített levegőt is igénybe vesznek. Mikroprocesszoros működtető elektronikát alkalmaznak, mely CAN hálózaton keresztül kapcsolatban áll a gépkocsi többi elektronikus rendszerével is. Együttműködik az elektronikus légfék rendszerrel és az elektronikus dízelmotor menedzsmenttel. Valamennyi haszonjármű változatba ugyanazt az elektronikát szerelik, melyet az adott típusnak megfelelően a beszerelést követően konfigurálni kell.
A teherautóba és az autóbuszba szerelt változat elektromos hálózata azonban eltér egymástól.
A legnagyobb fékező teljesítménye folyamatos üzemben 400 kW. Rövid idejű igénybevételnél elérheti a 650 kW –ot is. A retarderes változatok motorjait nagyobb hűtő teljesítménnyel kell ellátni, ezért nagyobb átömlési keresztmetszetű, hűtőfolyadék csatornákat alakítanak ki és kettős termosztátot szerelnek be.
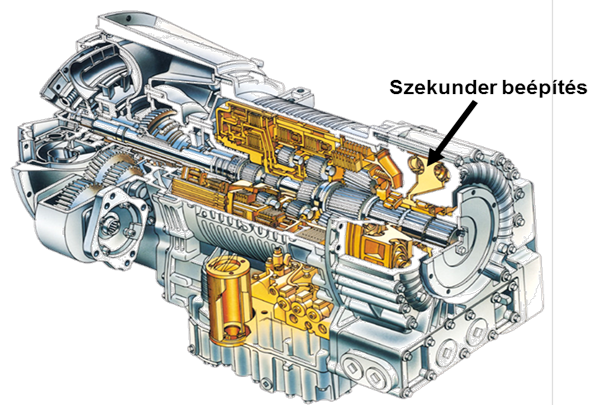
16.3.6. Intarder
Az Intarder kezdetben a Voith vállalat termékeinek védett típusneve volt. Azoknál a tartós lassító fékező berendezéseknél alkalmazták ezt a megnevezést, melyeket közvetlenül a sebességváltóra szereltek, off-line elrendezésben. Ez azt jelenti, hogy a lapátkoszorúk szimmetriatengelye a kardántengely mellett van. Jelenleg már a többi gyártó is alkalmazza ezt a megnevezést. Közös jellegzetességük, hogy a sebességváltó kimeneti tengelyről gyorsító áttételen keresztül kapja a lapátkoszorú a hajtást. Ennek az előnye, hogy a nagyobb fordulatszám miatt, kisebb lehet a retarder lapátkoszorújának átmérője, és így az intarder tömege és helyigénye is kisebb. A munkatérbe szerelt lapátozott forgórész rendszerint a kardántengely fordulatszámának kétszeresével forog. Kikapcsolt állapotban a lapátkoszorúk között a munkatérben nincs olaj, de van ventillációs veszteség. Ezt a gyártók különböző konstrukciós megoldásokkal igyekeznek csökkenteni.
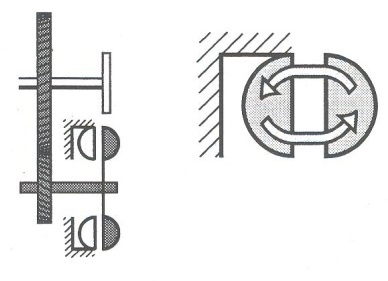
16.3.6.1. ZF intarder
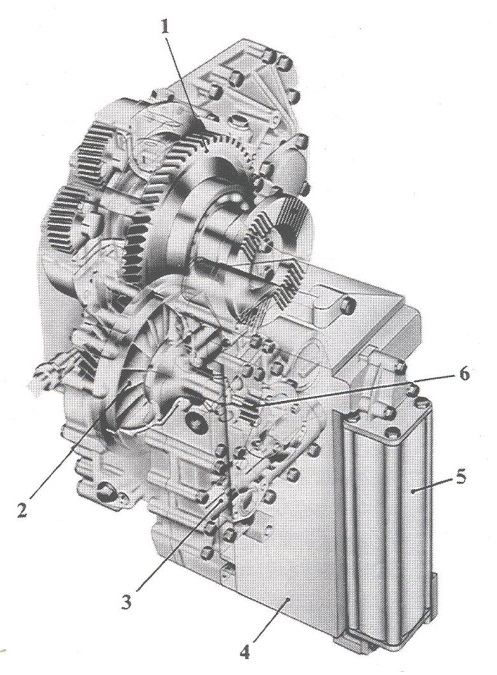
1.- sebességváltó kihajtó tengelyén a nagy átmérőjű fogaskerék; 2.- retarder lapátkoszorúi; 3.- sebességváltó; 4.- hőcserélő; 5.- nyomástároló; 6.- olajszivattyú
Az intarder bekapcsolásakor a hidraulikus szabályozóegységbe szerelt proporcionális (arányos működésű) szelep és a nyomástároló szelepe olajat enged a munkatérbe. A fékezés közben fejlődő hőt az olaj – hűtőfolyadék hőcserélő adja át a belsőégésű motor hűtőrendszerének. Ezt a rendszert is ellátják túlmelegedés elleni védelemmel.
Ilyen Intardert szerelnek egyebek között a haszonjárművekben alkalmazott ZF – Ecosplit 3 típusú sebességváltóra. Ennek a sebességváltónak a sorozatgyártása 1992 –ben kezdődött. Ennél a változatnál az Intardernek és a sebességváltónak közös az olajtere. Olyan az elrendezés, mely lehetővé teszi mellékhajtások felszerelését is a sebességváltóra. Az olaj/hűtőfolyadék hőcserélőt közvetlenül az Intarderre szerelik. A nyomástárolóval igyekeznek kiegyenlíteni az olaj felhasználási csúcsokat és egyúttal ezzel rövid reakcióidőt megvalósítani. Fékezéskor az olaj jelentősebb része az Intarderből a hőcserélőbe áramlik és ilyenkor megkerüli a sebességváltót. Amikor az Intardert kikapcsolják, más a sebességváltóból is a hőcserélő felé áramlik az olaj. Ezt az olajszivattyú biztosítja.
Normál fékezés az Intarderrel
Ebben az üzemmódban az elektronika egy arányos működésű elektromágneses szelep segítségével 6 különböző lassítási fokozatot tud megvalósítani. A fékező nyomaték az adott fokozatban állandó értékű. A működést az elektronika felügyeli.
„Bremsomat” üzemmód
Ebben az üzemmódban a gépkocsi sebességét az elektronika állandó értéken tartja. Ezt a fokozat kapcsolóval tudja a gépkocsi vezető beállítani. A sebesség egy előre megadott határértéken belül állandó marad. A hőcserélőt hőmérséklet érzékelővel látják el. Így még mielőtt a hűtőfolyadék túlmelegedne, az elektronika csökkenti a fékező nyomatékot. Az elektronika által beállított legnagyobb fékező nyomaték 420 kW.
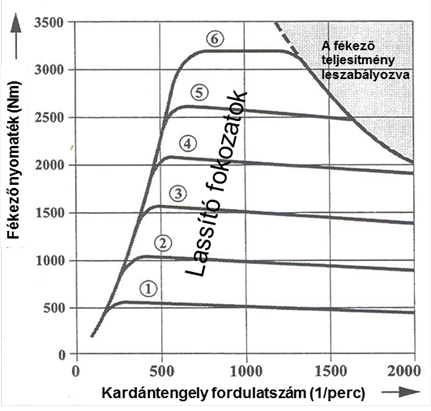
16.3.6.2. Voith VR 115 HV típusú intarder
Ilyen lassító fékberendezést szerelnek egyebek között a Mercedes Actrosba. Annál a típusnál működését a gépkocsi CAN hálózatán keresztül a Telligent ® fékmenedzsment rendszer irányítja. Előnyös a lassító berendezés kis tömege és a kompakt építési módja. Ez a változat lehetőséget és megfelelő helyet is biztosít a mellékhajtások felszerelésére is.
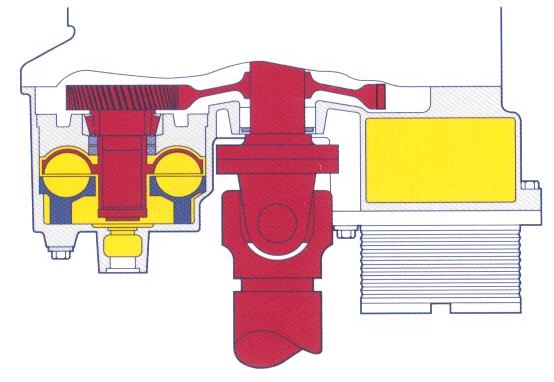

A számítások szerint ennek a fékező berendezésnek a felszerelési költsége kb. két éven belül megtérül. A mérések azt igazolták, hogy ugyanolyan körülmények között az intarderes gépkocsinál 70%-al kevesebb a súrlódásos fék használata, 36%-al kevesebb a sebességfokozat kapcsolása és 6%-al nagyobb átlagsebesség valósult meg.
Ez az intarder a sebességváltóhoz egy úgynevezett „csapágyharanggal” csatlakozik. A kenéshez szükséges olajat a sebességváltó biztosítja. Ez nem keveredik a más célra szolgáló retarder olajjal. Ennél a konstrukciónál az intardernek a sebességváltó házához pontosan kell illeszkedni. A gyorsító fogaskerék áttétel alkalmazása révén a gépkocsi teljes sebességtartományban, a sebességfokozatok visszakapcsolása közben, hatásosan lassít. A lapátkoszorúk kisebb átmérőjűek, mint a szekunder beépítésű retardereknél. A legnagyobb fékező nyomaték 3500 Nm.
A ventillációs veszteség csökkentése miatt, amikor nem fékez, a forgórészt axiális irányban elmozdítják. Ekkor a lapátkoszorúk között a szokásosnál nagyobb lesz a távolság. Egy előfeszített rugó tartja ebben a helyzetben a forgórészt. Ha fékez az intarder, a munkatérbe áramló olaj a forgórészre nyomatékot fejt ki, és a nagy emelkedésű menet közelíti a forgórészt az állórészhez.
A VR 115 HV típusú intardernél az alkalmazott két munkaközeget, az olajat, és a sűrített levegőt membrán választja el egymástól. Ez gátolja meg fékezés közben a habképződést. Továbbá így kisebb lesz a sűrített levegő felhasználás, és környezetkímélőbb lesz az üzemeltetés. Ennél a típusnál a sűrített levegő nyomása a membránon keresztül kifejtett erő révén nyomja a munkatérbe az olajat.
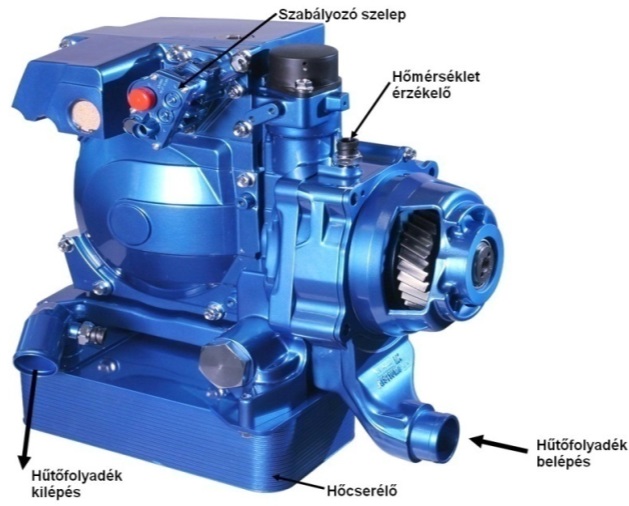
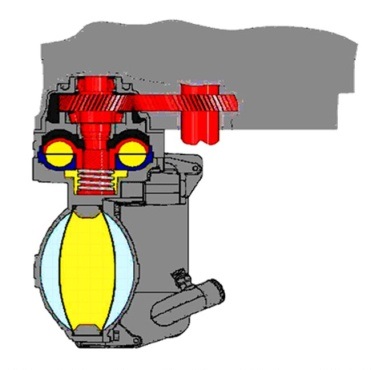
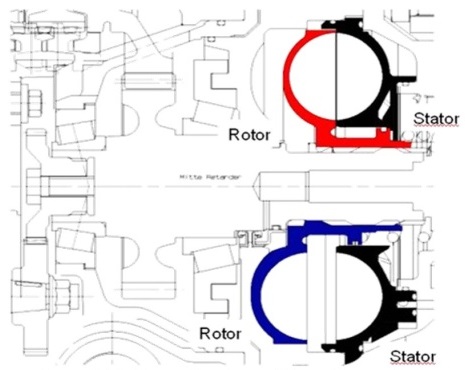
16.3.6.3. A Scania intarder és speciális működési jellemzői
Ezt az intardert számos érdekes működési megoldással látják el. A következőben ezeket foglaljuk össze.
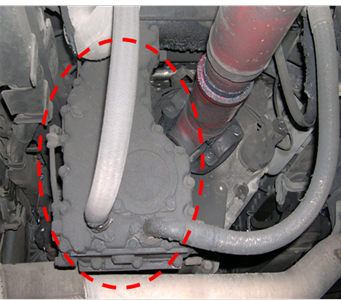
A fékpedálra szerelt érzékelő jelére bekapcsol a retarder működés. Ezzel párhuzamosan automatikusan bekapcsol a völgymeneti szabályozási program is. Ez az érzékelő egy potenciométer, mely a pedálszelep integrális részét képezi. Az elektronika tápfeszültséggel látja el, melynek hatására a pedál helyzetével arányos analóg feszültség jelet ad. Ez megfelel a vezető által igényelt fékező nyomatéknak. Fékoldáskor a kimeneti feszültség 0,5 V, így az elektronika meg tudja különböztetni a vezeték szakadástól. Teljes fékezéskor pedig a kimeneti jel 4,5 V.
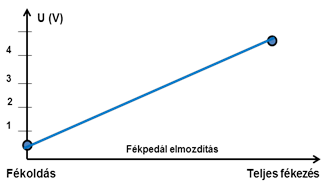
A gázpedálra szerelt érzékelő jelére (PWM jel). A gázpedál lenyomásakor az elektronika ezen jel alapján automatikusan kikapcsolja a retarder működést és a völgymeneti szabályozást is.
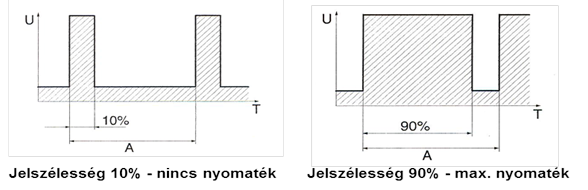
A tengelykapcsoló pedálra felszerelt kapcsoló jelet ad az elektronikának, melynek hatására a sebességfokozat visszakapcsolásakor automatikusan növeli a motor fordulatszámát. Ez anélkül történik, hogy a retarder-, vagy a völgymeneti szabályozás kikapcsolna.
A műszerfalon elhelyezett retarder kapcsolónak a kikapcsolt helyzeten kívül öt fokozata van. Ezek 500, 1000, 1500, 2000, 3000 Nm fékező nyomatékoknak felelnek meg. A kapcsoló kimenetén a fokozatoknak megfelelő lépcsőzetes feszültség jel jelenik meg. A legnagyobb fokozatban bekapcsol a kipufogófék is. A kipufogóféket tehát nem a gépkocsivezető, hanem az elektronika kapcsolja.
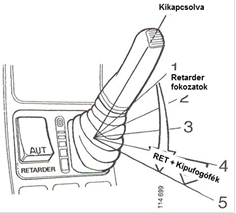
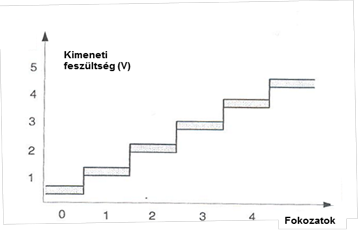
A retarder működésekor világít a féklámpa. Függetlenül attól, hogy a fékpedállal, a kézi kapcsolóval, vagy automatikusan történt a retarder bekapcsolása, amikor a fékező nyomaték nagyobb 450 Nm –nél bekapcsol a féklámpa.
A műszerfalon elhelyezett ellenőrző lámpa (RET) felirattal. A gyújtás bekapcsolásakor rövid időre felvillan, majd kialszik, ha a rendszer hibamentes. Meghibásodás esetén folyamatosan világít. Ha közben a hiba megszűnik, az ellenőrző lámpa kialszik.
Két hőmérséklet észékelőt szerelnek be a hőcserélő kimeneti csonkjához. A működtető elektronikának adnak jelet és ennek hatására túlmelegedéskor az elektronika kezdeményezheti a fékező nyomaték csökkentését. A retarder által létrehozott hő jól hasznosítható például az autóbusz utasterének, illetve a vezető fülke belső terének fűtésére.
Az EDC (Elektronic Diesel Control) és a retarder együttműködik egymással. Például a fékpedál lenyomásakor automatikusan kikapcsol az EDC sebességszabályozása. A gázpedál lenyomásakor viszont kikapcsolja a retarder működését.
A retarder automatikusan kikapcsol, amikor a kerék megcsúszása miatt beavatkozik a blokkolásgátló (ABS). Ez általában 0,2 másodpercen belül bekövetkezik. Ha befejeződött az ABS működés, a retarder fokozatosan visszakapcsol. Ha az ABS rendszer hibát jelez, kikapcsol a fékpedállal történő retarder működtetés és a sebességszabályozás.
A kipufogófék kikapcsol ha:
A tengelykapcsoló pedál, vagy
a gázpedál működtetésekor.
Amikor a motor fordulatszáma 800 – 900 1/perc érték alá csökken,
Amikor valamelyik kerék megcsúszásakor az ABS működésbe lép.
ABS, illetve EBS meghibásodás esetén.
Arányos működésű szelep szabályozza a fékező nyomatékot a bekapcsolt fokozatnak megfelelően. Az elektronikától kapja a tápfeszültséget. Az áramerősség megfelel az elérni kívánt fékező nyomatéknak. A szelep a sűrített levegő nyomását állítja be, mely a hidraulikus szabályozó tolattyút fogja ennek megfelelően egy rugó ellenében elmozdítani. Ha a gépkocsi gyorsul, növeli az olajnyomást és a mennyiséget. A retarder 20 km/h sebességig tudja hatásosan fékezni a gépkocsit.
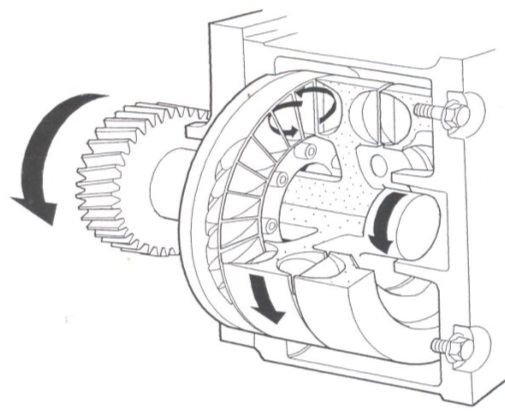
A retarder működtetéséhez szükséges szelepeket egy közös egységbe szerelik be. Ez a rendszer hidraulikus vázlatának elkülönülten a bal felső részén ábrázolták. A részegységek:
a hidraulika olaj arányos működésű szelepe,
sűrített levegő elektromágneses szelepe,
olajgyűjtő tér és elektromágneses szelepe.
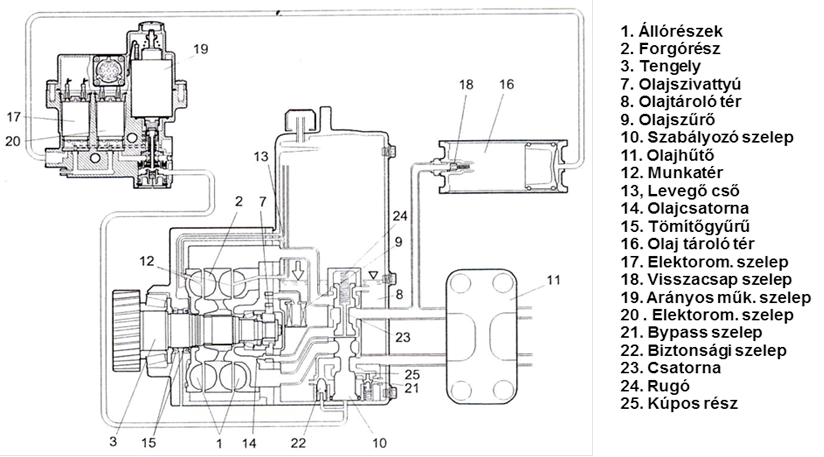
A Scania haszonjárműveknél a sebességváltó és a retarder olajtere egymástól el van választva.
A motor fordulatszám az elektronikának folyamatosan rendelkezésre álló, fontos információja. Ezzel lesz arányos a pillanatnyilag rendelkezésre álló hűtő teljesítmény. A túlmelegedés elhárítására az elektronika időszakosan csökkentheti a retarder fékező nyomatékát, vagy ki is kapcsolhatja azt.
Gépkocsi sebesség jel folyamatosan érkezik a sebességváltóra szerelt jeladótól.
Fordulatszám jel a generátortól (W+), mely alapján az elektronika a hűtőfolyadék szivattyú fordulatszámát, és a hűtőfolyadék áramlását tudja folyamatosan ellenőrizni, mert mindkét egységet azonos ékszíj hajtja.
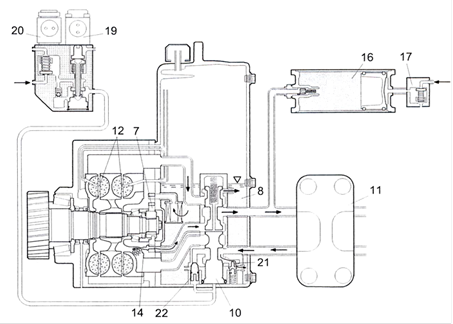
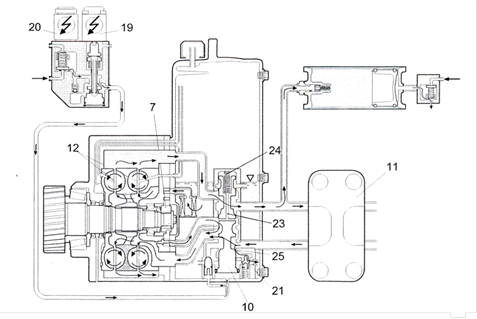
Kikapcsolt állapotban a sűrített levegőt (20) és az olajmennyiséget szabályozó arányos működésű elektromágneses szelepek (19) árammentesek. Az olajszivattyú egy bizonyos mennyiségű olajat keringet, mely átáramlik a hőcserélőn is és ellátja a kenés feladatát.
Fékezés közben az arányos működésű elektromágneses szelep (19) a sűrített levegő nyomásának változtatásával beállítja a kívánt nyomatéknak megfelelő olajmennyiséget a szabályozó szelep (10) elmozdításával.
Fékező nyomaték csökkentésekor a 19 –es szelep csökkenti a sűrített levegő nyomását a szabályozó szelepnél, ezért a rugó (24) kicsit lejjebb mozdítja a szabályozó szelepet (10), ezért kevesebb olaj áramlik a munkatérbe. Csökken a nyomaték.
Fékező nyomaték megszűntetése a 19 –es szelep megszűnteti a sűrített levegő nyomását, a szabályozó szelep (10) a rugó (24) segítségével az alsó helyzetbe kerül.
A retarder együttműködése más elektronikus rendszerekkel a CAN hálózaton keresztül történik.
A retarder elektronika és az elektronikus légfék elektronika között az adatátvitel 1999 –óta a CAN hálózaton keresztül történik. A SCANIA „Bremsomat” működésmód is a CAN –en keresztül konfigurálható. Ilyenkor az EBS -nek van prioritása a retarder felett. A fékező nyomaték a fékpedál pillanatnyi helyzetével lesz arányos. Ez az információ is a CAN –en keresztül érkezik.
A retarder a CAN hálózaton keresztül a következő információkat kapja az EBS –től:
a szükséges fékező nyomaték nagysága,
ABS működés,
EBS és ABS hiba információ.
A retarder a CAN hálózaton keresztül a következő információkat küldi az EBS –nek:
a megvalósított fékező nyomaték,
a konfigurált legnagyobb retarder fékező nyomaték.
Az EDC –vel is van folyamatosan CAN kommunikáció. Ennek alapján a hűtőfolyadék aktuális hőmérsékletétől függő hűtőventilátor fokozat aktiválása valósul meg.
16.3.6.4. Scania tehergépkocsi retarderével végrehajtott lassító fékezések
A következőkben üres és terhelt gépkocsival végrehatott mérések diagramjai láthatók, melyek egy gyorsítási és egy fékezési szakaszból állnak.
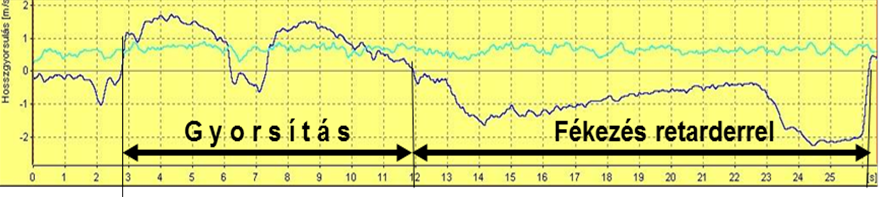

16.3.7. DIWA sebességváltó, fékező hidrodinamikus nyomatékváltóval
A sebességváltó "DIWA®" elnevezése mozaik szó. A német Differential-Wandler szavak két kezdőbetűjének összeírásából származik. Ez egy olyan hidrodinamikus nyomatékváltó, mely nem vesz részt folyamatosan a nyomatékmódosításban. Az elé és mögé szerelt bolygóműves fokozatok lehetővé teszi a nyomaték elágaztatását.
Az autóbusz indulásakor kedvezően nagy nyomatékmódosítást ad. Nagyobb sebességnél, amikor leromlik a hidrodinamikus nyomatékváltó hatásfoka, a hajtó nyomaték megkerüli ezt az egységet és csak a mechanikus fokozatok vesznek részt a nyomatékmódosításban. A tartós lassító fékezés feladatát a hidrodinamikus nyomatékváltó látja el.
A német szakirodalom "Wandlerbremse"-nek nevezi, az itt alkalmazott retarder működést, mely 4 km/ó sebességig hatásos. A fékpedálra városi és elővárosi buszoknál 3 db kapcsolót szerelnek, melyek három lassító fokozatot kapcsolnak a fékpedál helyzetétől függően. A retarder harmadik fokozata akkor kezd működni, amikor az üzemi fékhez kivezérelt fékező nyomás eléri a 0,5 bar értéket.
A DIWA 5 típusú négy fokozatú automatikus sebességváltót az E300 –as elektronikával látták el, mely a sebességváltó vezérlés új generációját képviseli. Ennél a sebességváltónál alkalmazzák a Voith FMS (Fleet Management Support) rendszert, mely értékes üzemeltetési adatokat szolgáltat.
A jelenleg gyártásban lévő, a DIWA 6 típusváltozat. Az előző generációhoz képest 5% tüzelőanyag megtakarítást tesz lehetővé. Az elektronika által megvalósított automatikus semleges helyzetbe kapcsolás (ANS) révén. Intelligens diagnosztikai rendszerrel is ellátták, mely menet közben is használható.
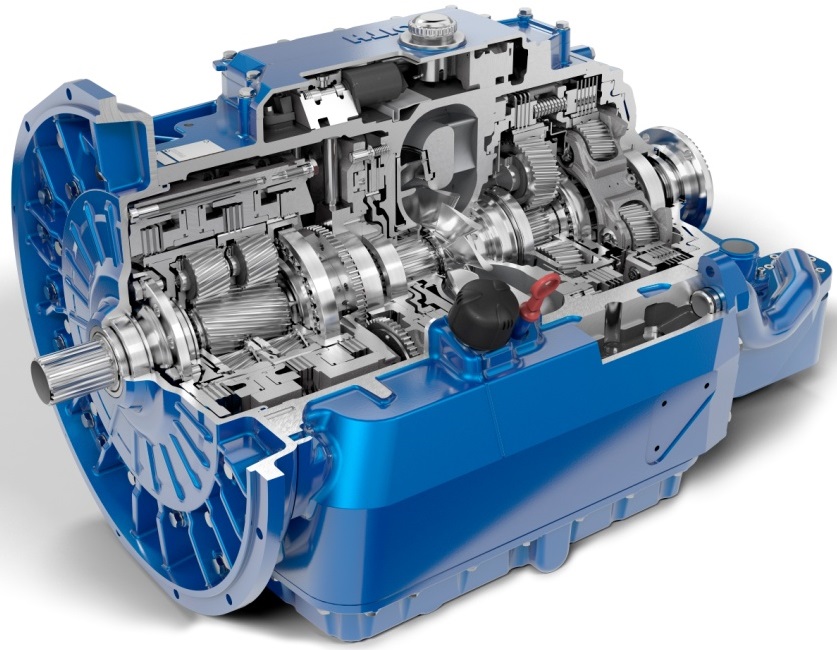
Ha a gépkocsivezető a fékpedálra lép, vagy a retarder kapcsolót működteti, az elektronika bekapcsolja a sebességváltó hátrameneti fokozatát. Hatására a turbinakereket a kardántengely ellentétesen irányban forgatja, méghozzá az áttétel miatt nagy fordulatszámmal. Emiatt elkezdődik az olaj áramlása a vezetőkeréken keresztül a szivattyúkerék felé és azon lefékeződik az olaj. Ez adja a fékező nyomatékot. Így a hidrodinamikus nyomatékváltóban a gépkocsi mozgási energiája hővé alakul. Ez a hőcserén keresztül átadódik át a motor hűtőrendszerének. Viszonylag kis sebességnél is nagy lassító hatás érhető el a különböző sebességfokozatok kapcsolásával. Nagy sebességnél, a hajtáslánc jelentősen túlterhelődne, de ennek elkerülésére az elektronika sűrített levegő befújással csökkenti az olaj sűrűségét és ezzel korlátozza a fékező nyomatékot. A másik lehetőség az, hogy a hidrodinamikus fokozat előtti áttételt csökkeni, ha az a rész több fokozatú.
16.3.8. Primer retarder
A hidrodinamikus primer retarder működési elve megegyezik a szekunder változatéval, de ezt a sebességváltó és a motor közé szerelik be. Így a működési fordulatszáma nagyobb, mint a szekunder változaté, mert a sebességváltó pillanatnyilag bekapcsolt fokozata gyorsítja. Ennek megfelelően a primer retarder tömege és helyigénye is kisebb, mint a szekunder változaté. A lassító nyomatékot a munkatérbe kerülő olaj térfogatán kívül a sebességváltó bekapcsolt fokozata is befolyásolja.
Hátrányos tulajdonságként meg kell említeni, hogy a primer retardernél a sebességfokozat kapcsolása közben a retarder lassító nyomatéka nem érvényesül. A szabadalmaztatott un. ZF rács jó hatásfokot biztosít. A retarder működtetésekor az olajtöltet impulzusa automatikusan a rugó ellenében elfordítja a rácsot és ezzel érik el a fékező nyomatékot.
Az alábbi képen látható ZF - Ecosplit sebességváltóba is primer retardert szerelnek. Itt a hidrodinamikus nyomatékváltó és a bolygóműves fokozatok közé szerelik be. A sebességváltót és a retardert is ugyan az elektronika működteti.
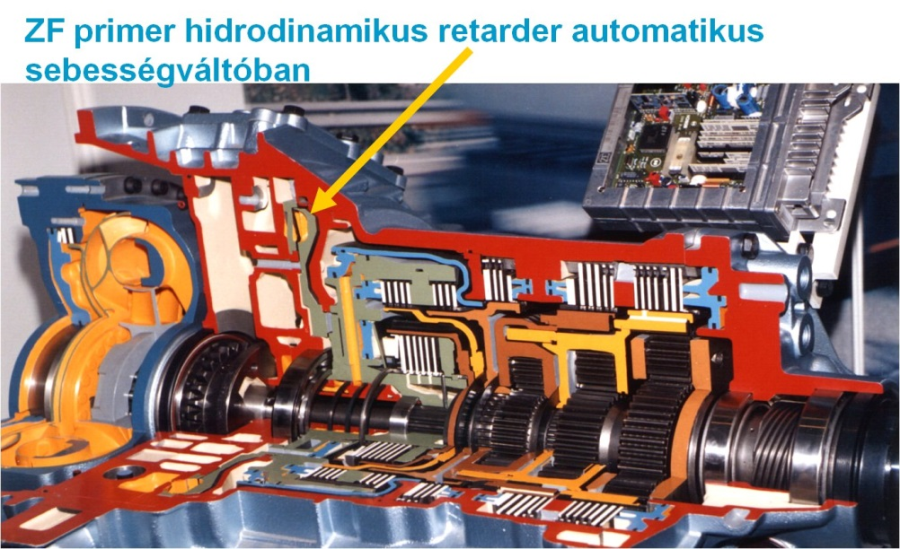
ZF EcoLife városi busz
Bolygóműves automatikus működésű sebességváltóval és primer retarderrel szerelve.
A fékező nyomaték 2 650 Nm.
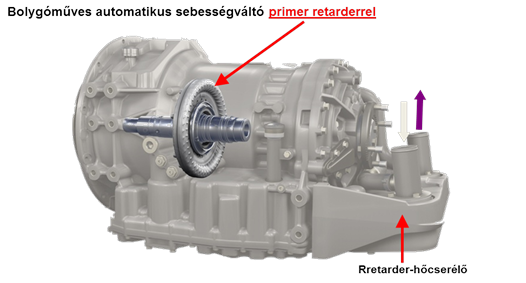
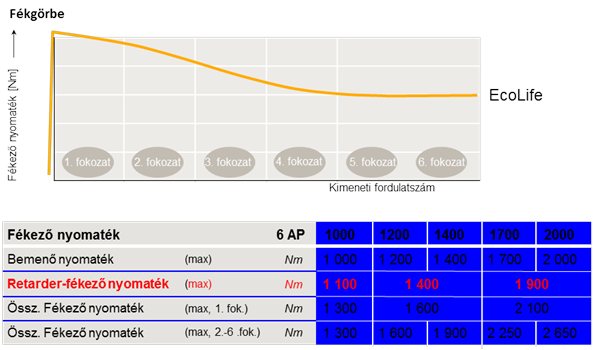
16.4. Hűtőfolyadékkal működő hidrodinamikus retarderek
Herrmann Föttinger professzor által, több mint száz éve kidolgozott hidrodinamikus működési elvnek megfelelően az eddig alkalmazott, álló és forgó lapátkoszorúval ellátott retarderek olajjal működnek. A fékező teljesítmény a töltési fokkal arányos. Ezt az elektronika által működtetett szelep állítja be. Az energia átadáshoz megfelelően méretezett olaj/ hűtőfolyadék hőcsrélő szükség. A közvetlenül hűtőfolyadékkal működő, újabb fejlesztésű lassító fék változatok azért előnyösek, mert szükségtelenné válik a hőcserélő, hiszen az energia átalakításban közvetlenül a belsőégésű motor hűtőfolyadéka vesz részt. Így tömege és helyigénye kisebb és olcsóbb, viszont a motoron lényeges átalakításokat kell végezni. Feleslegessé válik a retarder méretétől függően szükséges 6 l – 12 l olaj is ami nem csak olcsóbbá, hanem környezetkímélőbbé is teszi az üzemeltetést. Először a primer változatot (PWR) és évekkel később (2012) a szekundert (SWR) fejlesztette ki a Voith. A munkaközegre utaló aquatarder elnevezés is használatos.
A hűtőfolyadékkal működő retarder változat előnyei:
A hűtőfolyadéknak nagyobb a sűrűsége, mint az olajé, így a retarderben alkalmazva nagyobb fékező nyomaték valósítható meg vele.
A hűtőfolyadék specifikus hő kapacitása szinte a kétszerese az olajénak.
A viszkozitása pedig kisebb, és csaknem független a hőmérséklettől. Ezért hideg időben is jobb fékhatást képes elérni, mint az olajjal működő retarder.
A hűtőfolyadékkal működő retarder kisebb hőmérsékletkülönbséggel működik. Nagyobb specifikus energia elvezetés valósítható meg vele.
Például 42 kg tömegű retarderrel 520 kW fékező teljesítmény érhető el. Ha ezt még kombinálják a növelt hatású motorfékkel, a fékező teljesítmény már 750 kW. Ennek határát nem a hűtőfolyadékkal működő retarder szabja meg, hanem a belsőégésű motor hűtőrendszerének a teljesítménye. Az Aquatarder legfontosabb előnye, hogy az energia átalakítás folyamatából kimarad a rossz hőátadó képességű olaj, és hogy nem szükséges hőcserélő.
16.4.1. Primer beépítésű aquatarder PWR, vagy Pritarder
A világon az első, közvetlenül hűtő folyadékkal működő primer retardert a „Pritardert” a Voith vállalat mutatta be. Ezt primer retarderként közvetlenül a motorra szerelik. A munkaközegre utaló elnevezését, az „Aquatardert” is használják. Az első alkalmazója az MAN volt. A német elnevezése alapján (Primär-Wasserretarder) PWR rövidítést is használják. Ez a motor elejére szerelt lassító fék a hűtőfolyadék szivattyú feladatát is ellátja. A nagyobb keringetett folyadék mennyiség miatt nagyobb keresztmetszetű hűtőfolyadék csatornákra van szükség.
Az MAN D 2876 típusú motornál a Pritarder a kipufogófékkel, az EVB (Exhaust Valve Brake) működik együtt.
A hűtőfolyadékkal működő retardernél is egy forgó szivattyúkerék és egy álló lapátozás végzi az energia átalakítást fékezés közben. A szivattyúkerék fordulatszáma arányos a motor fordulatszámával, vagyis a gépkocsi sebességével. Ez gyorsítja fel a hűtőfolyadék munkaközeget. Az álló, a házhoz rögzített lapátkoszorú irányváltozásra és lassulásra kényszeríti a folyadékrészecskéket. Ez hő képződéssel jár.


16.4.2. Szekunder beépítésű aquatarder SWR
A haszonjárművek menetbiztonságának további növelése érdekében az újabb fejlesztések révén a hűtőfolyadékkal működő retardernek elkészült a szekunder beépítésű változata is. Jelenleg a világon még ez az első ilyen működésű retarder, melyet a Voith mutatott be 2012 szeptemberében, az IAA –n Hannoverben. Az olajjal működő változathoz képest a helyigénye 50%-al kisebb és 35 kg –al könnyebb.
A fékezések 90% -a ezzel hajtható végre az üzemi fék helyett.
A Daimler AG és a Voith együttműködésében fejlesztették ki. A német Sekundär-Wasserretarder elnevezés alapján használatos az SWR rövidítés is. Az energia átalakításhoz és az elvezetéséhez is csak a hűtőfolyadékot veszi igénybe. Az új egység könnyebb és kisebb helyigényű elődeinél. Elsőként az új Actros -ba és az Antos –ba szerelte be a Mercedes-Benz.
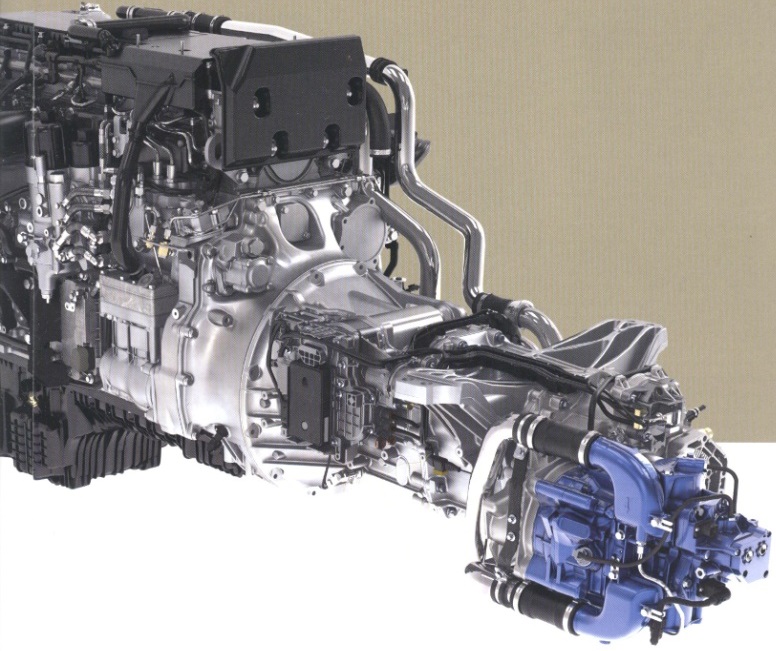
Hasonlóan az off line retarder változatokhoz, ezt is ellátták egy gyorsító fogaskerekes fokozattal, így a lapátozással ellátott szivattyúkerék a kardántengely kétszeresével forog. Így a munkaközeg áramlási sebessége eléri a 100 m/s sebességet. A kavitáció kialakulása a megfelelő nyomással, az alkalmazott anyagok megválasztásával és az áramlás helyes kialakításával válik elkerülhetővé. Ezzel a retarder a belsőégésű motor hűtő rendszerének integrális részévé vált. Jelentős módosításokra volt szükség. A retarder belsejében a forgó lapátkoszorúnál egy új fejlesztésű speciális tömítést alakítottak ki. Azért volt rá szükség, mert amikor nem fékez, a munkatér nincs feltöltve folyadékkal. A bekapcsoláskor a közelében kialakított kiegyenlítő tartályból kap egy bizonyos hűtőfolyadék mennyiséget. Kikapcsolásakor pedig oda visszaáramlik.
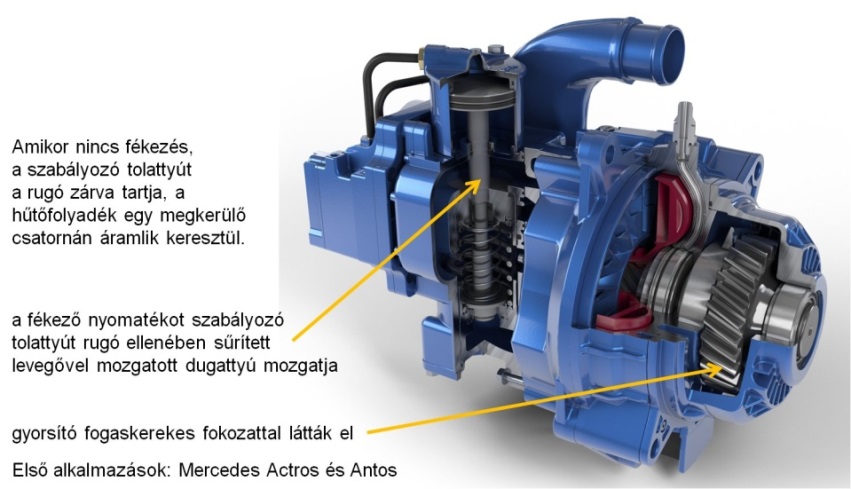
A retarder fékező nyomatéka a hűtőfolyadék mennyiségével szabályozható. Ehhez egy tolattyút építenek be, melyet sűrített levegővel működtetett dugattyú állít be a pillanatnyi lassítási igénynek megfelelően. Az elmozdítása egy rugó ellenében történik.
Amikor nincs szükség fékező nyomatékra a szabályozó tolattyút egy előfeszített rugó tartja zárva, így a hűtőfolyadék áramlása kikerüli a retardert, és egy megkerülő csatornán áramlik át. A lapátkoszorúkat amikor nincs fékezés a veszteség csökkentése miatt egymástól eltávolítják. Ehhez egy rugót szerelnek be, amely tengely irányban elmozdítja a szivattyúkereket. Fékezéskor a munkatérbe áramló folyadék tehetetlenségi nyomatéka a lapátkoszorút egy nagy emelkedésű csavarmenet segítségével vissza mozdítja közvetlenül az álló lapátkoszorú mellé. A szabályozó tolattyú nyitásával arányosan növelhető a fékező nyomaték.
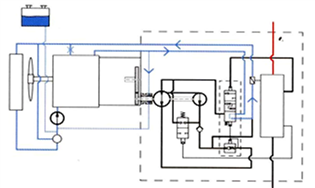
Működés kis fékezőnyomaték igénynél
Amikor a gépkocsiba szerelt tempomat kezdeményezi a retarder működését viszonylag kis fékező nyomatékot állít be. Ekkor a folyadék jelentősebb része a megkerülő csatornán áramlik keresztül és csak egy kis része kerül a retarderbe. Ezzel a szabályozási móddal a különböző üzemállapotokban nem alakul ki jelentősebb nyomáseltérés a rendszerben.
Nagy fékező nyomaték igény
Amikor nagy a fékező nyomaték igény, a nagyobb sűrített levegő nyomás teljesen kinyitja a szabályozó tolattyút, ennek megfelelően nagyobb hűtőfolyadék mennyiség áramlik a retarderbe. A szivattyúkerék ilyenkor egy második, párhuzamosan bekötött hűtőfolyadék szivattyúként működik. A lassításkor keletkező nagyobb hőmennyiséget a megnövelt áramlás révén így sikeresen átadja a környezetnek. Amikor nincs szükség fékező nyomatékra, a motorra szerelt hűtőfolyadék szivattyú kinyomja a retarderből a munkaközeget. Ez a retarder változat a motorra szerelt hűtőfolyadék szivattyúval nem sorba, hanem párhuzamosan van bekötve, ezért nem növeli a hűtőrendszer áramlási ellenállását. A csupán 42 kg tömegű szerkezettel 520 kW fékező teljesítmény érhető el. A növelt hatású motorfékkel kombinálva ez tovább növelhető 750 kW –ra.
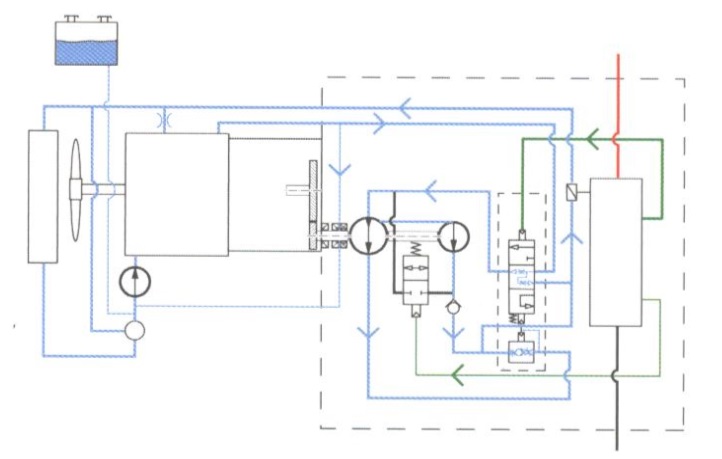
Elektronikus szabályozás
A retarder szabályozását a „Retarder-Control Modul (RCM) végzi, mely a gépkocsi CAN hálózatán keresztül kapcsolatban áll az elektronikus fékmenedzsment rendszerrel és ezen keresztül a gépkocsi többi elektronikus rendszerével is. Saját elektronikája minden üzemállapotban folyamatosan ellenőrzi a működést hőmérséklet-, és nyomás érzékelők segítségével. Megóvja a hajtáslánc elemeit a különböző túlterhelésektől. A retardert is a gépkocsi öndiagnosztikai rendszerének részét képezi. A megfelelő program és laptop segítségével lehetővé válik a retarder kódolása és a diagnosztikája is. A nagy vezetési komfortot biztosító automatikus működésen kívül a gépkocsivezető a műszerfalon elhelyezett karral is működtetheti a retardert, de lehetőség van a fékpedállal történő működtetésre is. A retarder hatásának köszönhetően völgymenetben is állandó marad a gépkocsi sebessége.
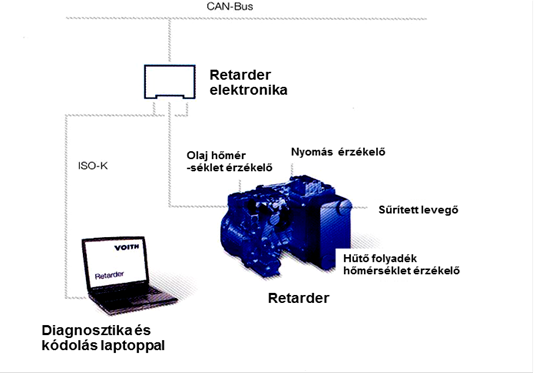
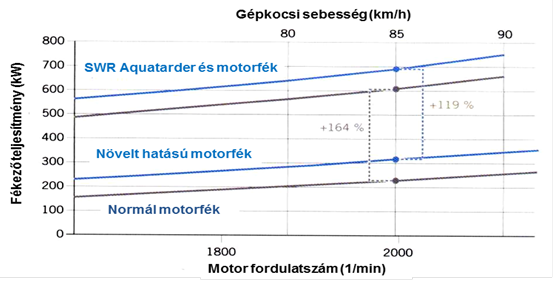
16.5. A különböző hidrodinamikus retarderek alkalmazási területei:
A felhasználó szempontjából fontos a gépkocsi sebességétől függően, a különböző retarderek nyomatékának összehasonlítása. Ez alapján állapítható meg, hogy melyiket hol célszerű alkalmazni.
A városi autóbuszok átlagos sebessége általában 25 - 30 km/h közötti. Az alábbi diagramból kitűnik, hogy ebben a sebességtartományban a primer beépítésű retarderek adnak kedvezően nagy nyomatékot. Így tehát ezeket célszerű beépíteni a városi autóbuszokba.
Nagyobb sebességnél viszont a szekunder retardereknek kedvezőbb a nyomatéka. Ezért a turista autóbuszokba és a kamionokba ezt a változatot alkalmazzák.
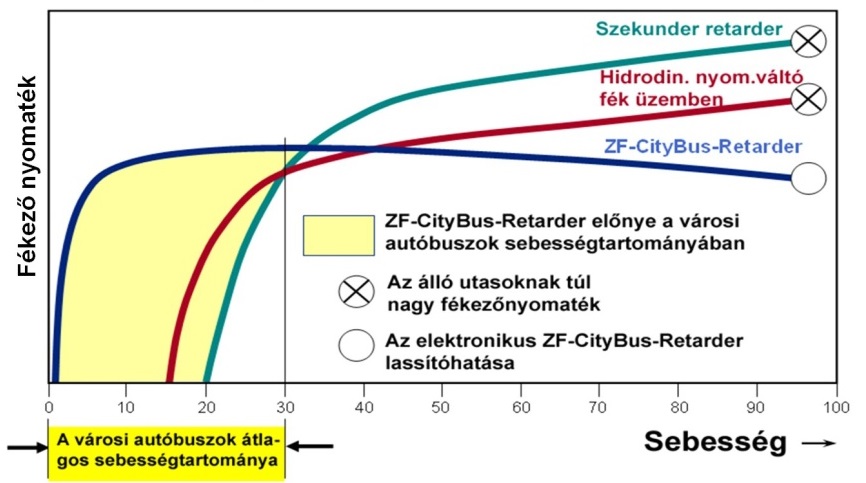
16.6. Örvényáramú retarderek
Ezt a tartós lassító fékberendezést a legegyszerűbb utólag felszerelni a haszonjárművekre, mert csupán az elektromos bekötésről kell gondoskodni. Működése nem igényel hűtő folyadékot, mert léghűtéses. Gyakran közvetlenül a sebességváltóra szerelik, de találkozni lehet a kardántengely két része közé beépített, úgynevezett szabad beépítéssel is. Ritkábban a hátsó futóműre is szerelik.
16.6.1. Örvényáramú retarder elektromágneses gerjesztéssel
Ez a leggyakrabban alkalmazott változat. Az álló rész keretére szerelik fel a 8 db. elektromágneses tekercset. Ezek közül a két egymással szemben lévő tartozik azonos retarder fokozathoz, ami azt jelenti, hogy ugyanaz a relé fogja be- és kikapcsolni. A négy lassító fokozathoz pedig összesen négy relé tartozik. A tekercsek elektromos bekötése olyan, hogy az egymás mellettiek ellentétes mágneses polaritásúak legyenek. Így a kerület mentén egymást váltják az É-i és a D-i pólusok.
A tekercsek előtt és mögött egy-egy belső hűtő lapátozású, lágyvasból készült öntött tárcsát forgat a kardántengely. Ezek a forgó tárcsák metszik az elektromágnesek erővonalait, ezért bennük áram indukálódik, ami a forgórészben rövidre záródik. Ezt nevezzük örvényáramnak, ami a retarder nevét is adja. Az örvényáram mágneses erőtere és az elektromágneseké egymással kölcsönhatásba kerül. Ez hozza létre a fékező nyomatékot. Az örvényáramú retardernél a fordulatszám csökkenésével arányosan egyre kisebb lesz a fékező nyomaték. Ennek ellenére a gépkocsi elektromos hálózatát ugyan akkora árammal terheli. Ezért kis sebességnél célszerű lekapcsolni. Ezt a menetírótól érkező úgynevezett „kis sebességi jel” segítségével végzi a retarder elektronika. A lekapcsolás a relék segítségével fog megtörténni. A retarder fékező nyomatéka egyenesen arányos a gerjesztő árammal és fordítottan arányos az álló és forgó rész közötti légréssel.

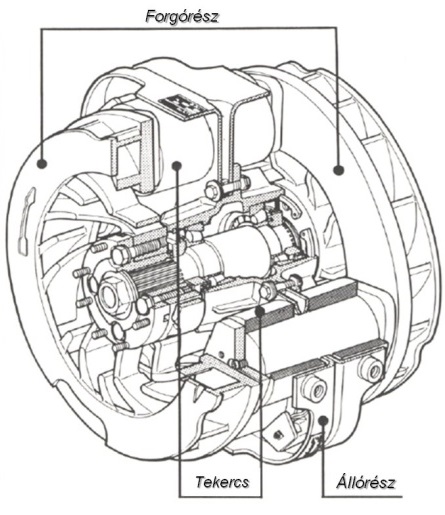
Az örvényáramú retarder forgó részei jelentősen felmelegszenek. A hozzá csatlakozó kardántengely zsír kenésű tűgörgős csapágyainál figyelembe kell venni, hogy a szokásosnál nagyobb lesz az üzemi hőmérséklete. Ennek megfelelő csapágyakat és kenőzsírt kell alkalmazni.
A szabad beépítésű változatnál az alvázhoz gumibakokkal rögzítik a retarder álló részének keretét. Ezért különös gonddal kell ellenőrizni a test csatlakozás megfelelő érintkezését.
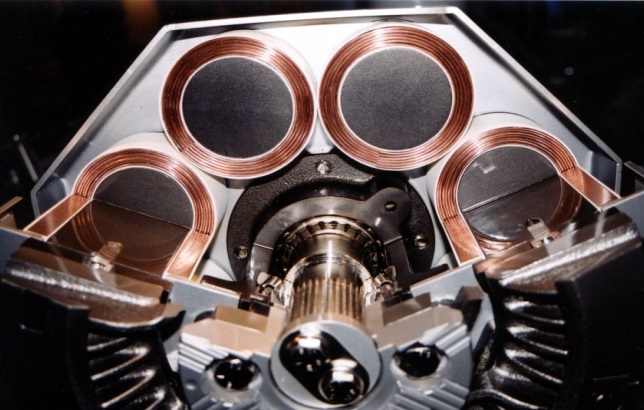
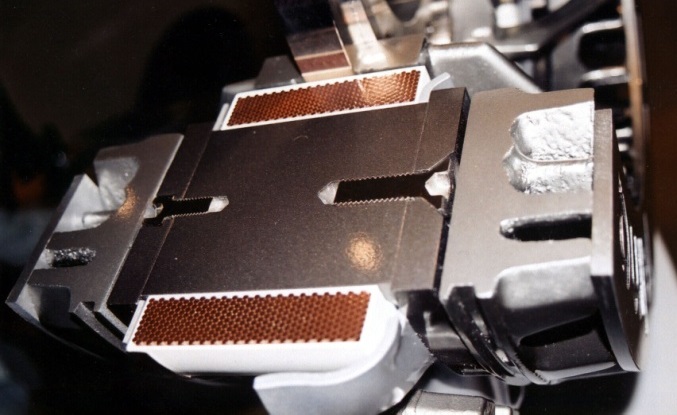
Főbb jellemzők:
relatíve egyszerű beszerelés, ezért utólagosan is beépíthető,
viszonylag nagy fajlagos tömeg.
a melegedéssel és a fordulatszám csökkenéssel arányosan csökkenő fékező nyomaték.
amikor nem fékez akkor is kell számolni egy ventillációs veszteséggel.
kis fordulatszámon nagyobb a fékező hatása, mint a hidrodinamikus retardernek.
A nagy hőterhelés károsító hatása kiküszöbölhető egy bimetal kapcsolóval, mely 250˚C állórész hőmérsékletnél lekapcsolja a gerjesztő áramot.
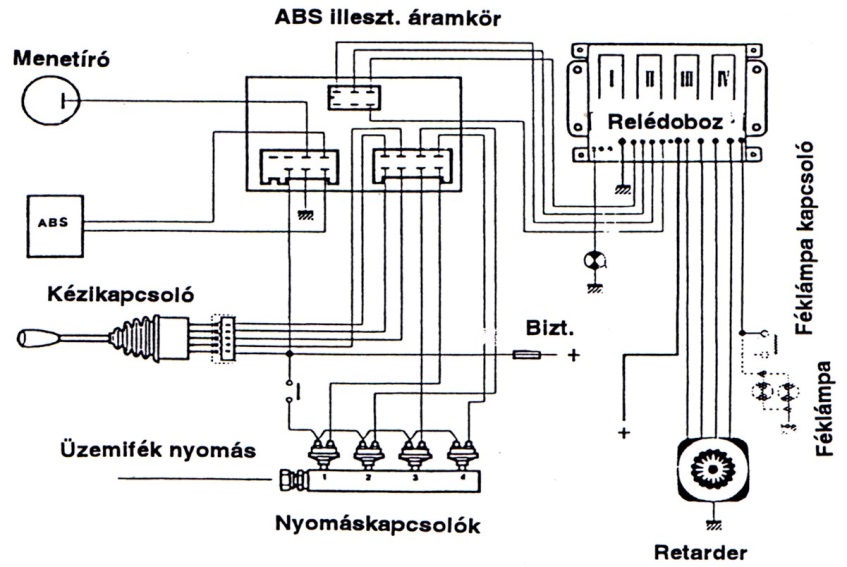
Retarderes gépkocsik görgős padi fék vizsgálata:
A görgős padi fék vizsgálatnál a hatósági előírás szerint a retardert ki kell kapcsolni. Ezért a nyomáskapcsolókkal is működő változatnál egy kapcsolóval meg kell szakítani ilyenkor az áramkört. Erre látunk példát az előző ábrán.
Az ABS és a retarder együttműködése:
Az örvényáramú változatnál is az ABS le tudja kapcsolni a retardert, amikor csúszós úton üres járműnél a fékező hatása nagy kerékcsúszást eredményez. Ezt az állapotot az ABS elektronika veszi észre és a retardert a relék segítségével kikapcsolja. Ha már nem csúszik a kerék a visszakapcsolás fokozatonként némi késleltetéssel történik a relékkel. Ha működik a retarder világít a féklámpa.
Üres járműnél a légrugó nyomás érzékelő jelére, vagy laprugós járműnél egy lassuláskapcsoló jelére az elektronika letilthatja az utolsó két fokozatot, hogy a hátsó kerekek ne legyenek túlfékezettek.
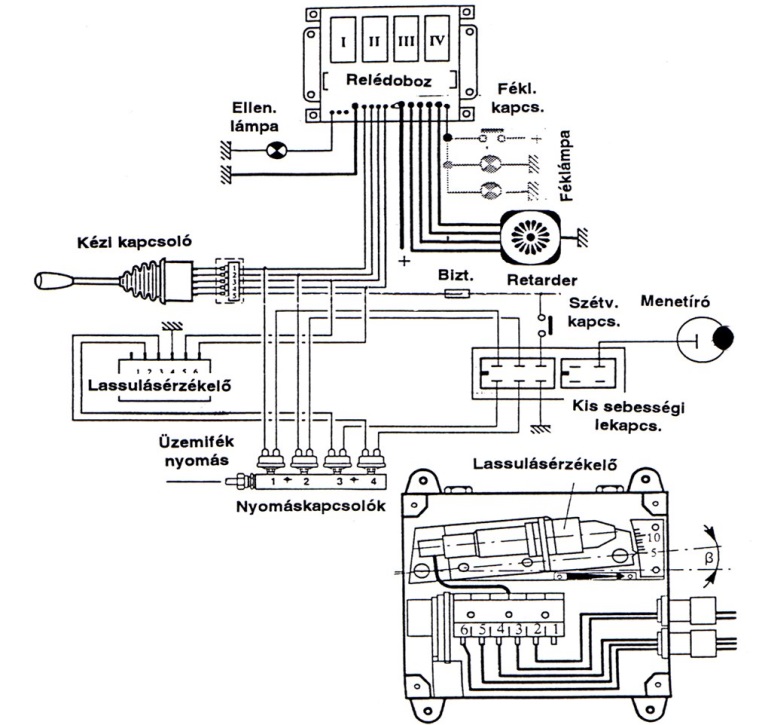
Az örvényáramú retarder vizsgálata:
Ha nem adja le az elvárható fékező teljesítményt az egyes tekercsek áramfelvételét célszerű megmérni. Ez elvégezhető árammérő fogóval, vagy egy ismert értékű előtét ellenálláson a feszültségesés mérésével. Az egyszerű ellenállás mérések nem mindig vezetnek eredményre, mert a bizonytalan csatlakozások csak üzemszerű áram esetén tárhatók fel.
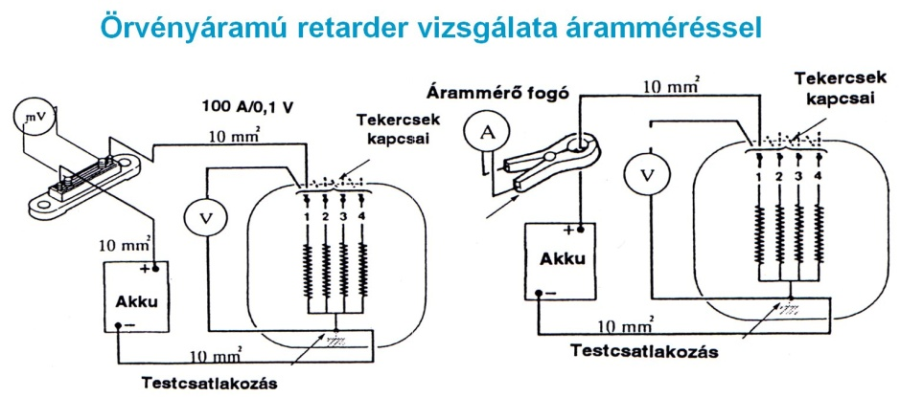
Hátsó futóműre szerelt örvényáramú retarder
A sebességváltóra szerelt és a „szabad beépítésű” megoldáson kívül az örvényáramú retardert szerelhetik a hátsó futóműre is. Ezt ritkábban alkalmazzák, mert növeli a rugózatlan tömeget. Ennek ellenére a következő kép egy ilyen beépítést ábrázol.
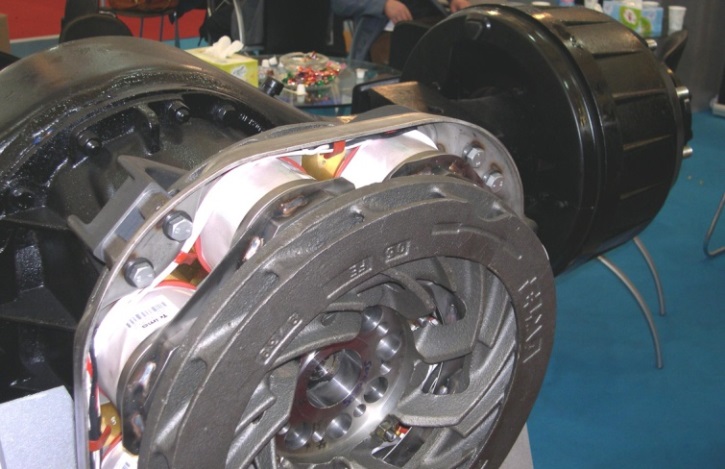
A legkisebb örvényáramú retarder
Az alábbi képen a legkisebb Telma gyártmányú örvényáramú retarder látható, melyet egyebek között a VW Crafterbe szerelnek be (gyári kódja: 1 H 5). Hatósági jóváhagyása 2006 –ban történt.

16.6.2. Örvényáramú retarder állandó mágneses gerjesztéssel
Japánban már rég óta sikeresen használják a haszonjárművek állandó mágnesekkel történő lassítását. A kompakt, csupán 43 Kilogramm tömegű állandó mágnessel működő retardernek már több mint 120 ezer példánya működik turista buszokban és 7 – 16 t közötti teherautókban, elsősorban Japánban. Évente 13 000 darabot gyártanak belőle a szigetországban.
A Voith Turbo együttműködve a japán retarder gyártóval, az SMI -vel (Sumitomo Metal Industries) kifejlesztette a Voith Magnetarder-t. A 2008 januárjában megalapított közös vállalat, a Voith Turbo Produktgruppe Retarder, a Japánon kívüli piacot látja el ezzel a termékkel. Ez a szerkezet a világ legerősebb állandó mágnesekkel működő tartós lassító fék. Elsősorban a 7 - 16 t közötti teherautókhoz és autóbuszokhoz ajánlják. A fékezéshez a forgó részben indukált örvényáram fékező nyomatékát használja. A működéshez szükséges energiát a beépített állandó mágnesek adják. Ezeket az állórészbe egymás mellé szerelik be úgy, hogy a szomszédok mágneses pólusai ellentétesek legyenek.
Kikapcsolt állapotban, amikor nem fékeznek, a mágnesek erővonalai a körülötte gyűrűként kialakított pólusvason keresztül záródnak.
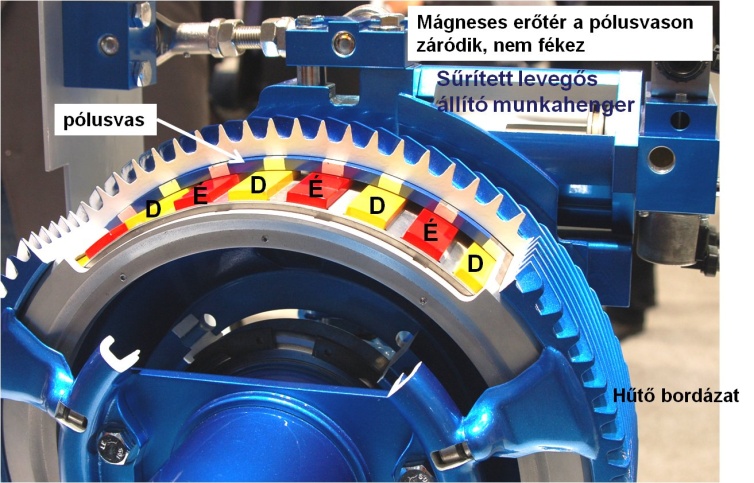
Fékezéskor a pólusvassal ellátott gyűrűt elfordítják az állórészhez képest, így azok pontosan az állandó mágnesek fölé kerülnek, és a forgórész felé vezetik a mágneses erővonalakat. Azok erőtere így a forgórészen keresztül záródik. Az erővonalak metszése a forgórészben örvényáramot indukál. Ennek visszahatása hozza létre a fékező nyomatékot.
A működtetés:
Ehhez a pólusvas gyűrűt kell elfordítani, amely különböző módon történhet:
mechanikus működtetés lehetséges például egy pedállal,
sűrített levegővel egy munkahengerrel és elektromágneses szelepekkel fordítható el.
A forgórészben indukált örvényáram melegíti azt, melyet a külső bordázattal keltett levegő áramlás ad át a környezetnek.
Ennek a retarder változatnak az előnye az, hogy használatakor nem terheli árammal a gépkocsi elektromos hálózatát és akkumulátorát. Lassítás közben az üzemi fék nem melegszik és nem kopik. A fékbetétek pora nem szennyezi a környezetet. Mivel azonban a fékező nyomatékot az állandó mágnesek erőssége korlátozza, jelenleg csak kisebb tömegű haszonjárműveknél használható eredménnyel ez a típusváltozat.
A gépkocsi gyártójának igénye szerint a Voith Magnetarder felszerelhető közvetlenül a sebességváltóra, vagy a kardántengelyre is, mint ahogy a mellékelt képeken látható.
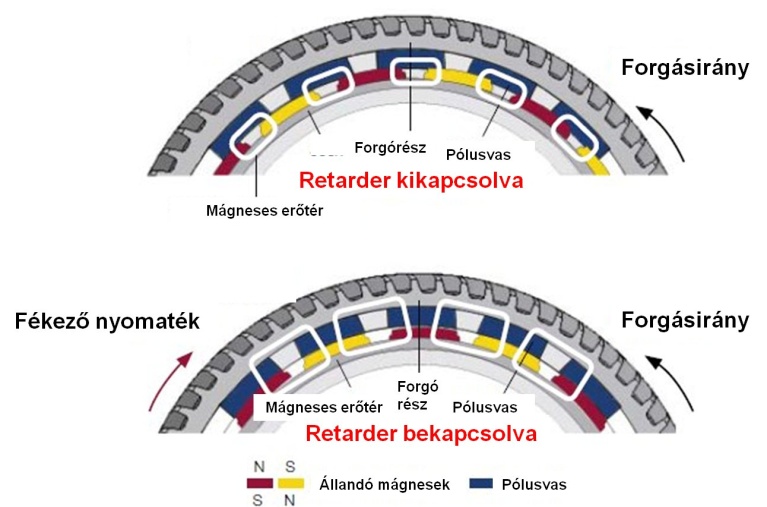


16.7. Tartós lassító fékezés energiatárolással
Ennek az előnye az, hogy a gépkocsi mozgási energiáját a lassító berendezés nem hővé alakítja át, amit aztán átad a környezetnek, hanem tárolja az energiát valamilyen formában, amely azután a gépkocsi következő gyorsításához ismét felhasználható.
Az energia tárolásának több lehetősége is van:
Mechanikus energia tárolás:
a mozgási energia tárolása lendítő kerék segítségével.
Hidraulikus energia tárolás:
Hidraulika szivattyú hajtására használják a gépkocsi mozgási energiáját. Az olajnyomás tárolható, majd hidro-motor gyorsítja a gépkocsit.
Elektromos energiává alakítás:
A mozgási energia generátorral elektromos árammá alakítható, majd akkumulátor telepben tárolható.
16.7.1. A mozgási energia átalakítása hidraulikus nyomássá és nyomástároló alkalmazása
2012 szeptemberében a Rexroth vállalat, a Bosch csoport tagja, mutatott be haszonjárművekhez kifejlesztett hidraulikus nyomástárolóval működő hidrosztatikus regeneratív fékrendszert. Német elnevezése alapján HRB –nek (Hidrostatisch Regeneratives Bremssystem) –nek nevezik.
Ugyanez a vállalat kerékagyba szerelt hidro-motort is bemutatott, mint kiegészítő hajtást. A két rendszer kombinálása révén megvalósítható az energia visszatáplálásos fékezés.

A gépkocsi mozgási energiája a hajtáslánc elemeit felhasználva egy hidraulika szivattyút hajt meg, mely az olajat nyomástárolóba továbbítja. Ezt aztán a kerékagyba beszerelt radiális dugattyúkkal ellátott hidromotorok tudnak hasznosítani a gépkocsi következő elindulásakor, illetve felgyorsításakor. A rendszer működtetését erre a célra kifejlesztett elektronika végzi, mely a hidraulikus vezérlést működteti. Az energia újra hasznosításához jól alkalmazhatók azok a hidrosztatikus hajtások, melyeket több kiállító is bemutatott. Ilyet lehet beszerelni például a kormányzott első futóművek kerékagyába. Pótkocsikra felszelve pedig azok telephelyen belüli mozgatását teszi lehetővé vontató jármű nélkül.
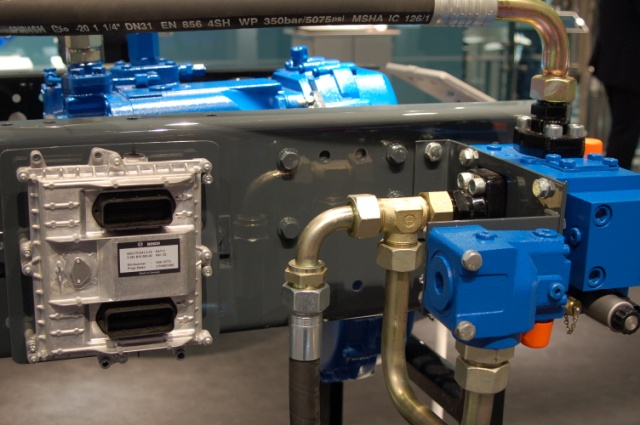
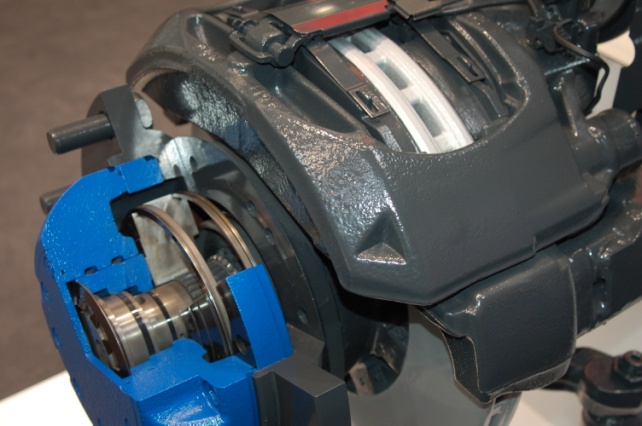
A Rexroth vállalat a kummunális járművekhez kínál olyan automatikusan bekapcsolódó összkerékhajtést, amelyet hidrosztatikus hajtással valósítanak meg. Ezt a rendszert High Efficiency Traction Control –nak neveztek el, melyet HET –ként rövidítenek. Ez a Rexroth MRC radiáldugattyús motor kerékagyba szerelésével valósul meg. A hajtott kerekek csúszásakor automatikusan kapcsolódik be. Ez a megoldás lényegesen könnyebb és olcsóbb, mint amikor a feladat ellátásra összkerék hajtású gépkocsit használnának. A hidrosztatikus működésű kerékagy motor 50 kW teljesítmély leadására képes és 6000 Nm a forgató nyomatéka.
16.7.2. A hibrid hajtás, gyorsít és lassít is
A hibrid hajtás a személygépkocsik után hamarosan a haszonjárműveknél is megjelent. Különösen előnyös ez a belvárosban áruterítési feladatot végző gépkocsiknál, ahol így a kipufogógázzal nem szennyezi a környezete. A hibrid autóknál a fék elektronika, amikor csak lehetséges és nincs szükség pánik szerű fékezésre az energia visszatáplálásos fékezést működteti. Ilyenkor az elektromos hajtó motor generátorként üzemel, mely természetesen csak a hajtott kerekek fékezésére képes. Az így létrehozott, rendszerint három fázisú nagy feszültségű (300 V) váltakozó áramot a konverter alakítja egyenárammá és transzformálja. Ezt az akkumulátor telep töltésére lehet használni. Gyakran kondenzátorból összeállított telepet is beépítenek, melyek töltőáram csúcsokat hivatott kissé kisimítani. A regeneratív fékezés akkor valósul meg, amikor a fékpedált a gépkocsivezető nem hirtelen nyomja le. Az akkumulátor töltésére csak egy meghatározott energia fordítható. Amikor ennél nagyobb elektromos energia keletkezik a gépkocsi lassításakor, akkor szükségessé válik a súrlódásos fék működtetése. A két fékrendszer működését az elektronika hangolja össze. Ha a regeneratív fékezés meghibásodik, csak a súrlódásos fék lassítja a gépkocsit.
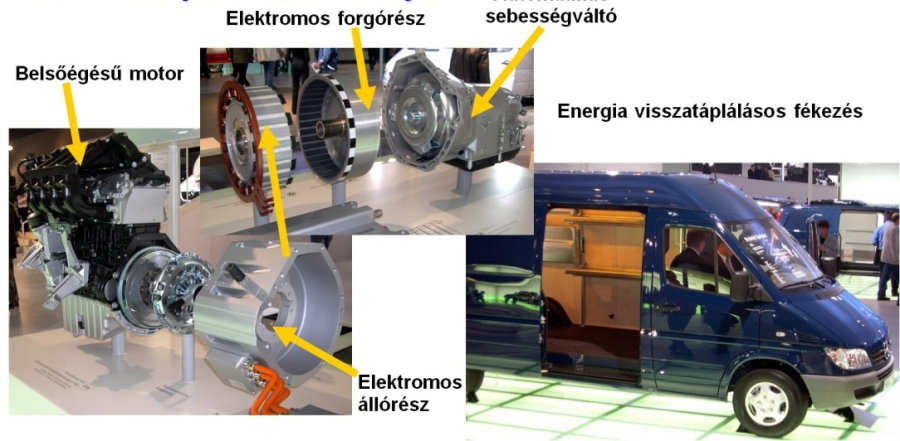
Haszonjárművek hibrid hajtása, mint tartós lassító fékezés
Miután a párhuzamos hibrid hajtásokat a személygépkocsiknál és a kis haszonjárműveknél is sikeresen alkalmazzák, jelenleg a hibrid hajtást már a közepesen nehéz és a nehéz haszonjárművek egészen 40 t –ig sem nélkülözik. 20% körüli tüzelőanyag megtakarítás és jelentős széndioxid kibocsátás csökkenés érhető el vele. A villanymotorral történő elindulás nagy nyomatékkal történik. A közlekedés pedig környezetkímélő és csendes. A Bosch fejlesztésű párhuzamos hibrid hajtásnál a villanymotort a tengelykapcsoló és a sebességváltó közé szerelik a hajtásláncba. Fékezéskor és lejtmenetben de gyakori indulást és megállást követelő városi forgalomban különösen előnyös, hogy a 120 kW teljesítményű villanymotor generátorként tud működni és az általa létrehozott elektromos energia a nagy feszültségű telepben tárolható. A villanymotor táplálásához invertert kell beszerelni, amely az akkumulátor telep egyenáramát három fázisú váltakozó árammá alakítja.
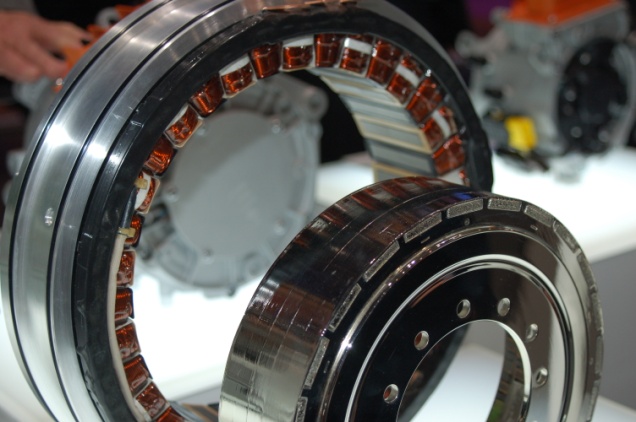
16.7.3. Az ElvoDrive nem csak hajt, hanem ha kell fékez
A Voith emisszió mentes, moduláris hajtási koncepciója, az ElvoDrive egy soros hibrid hajtás. Azt a lehetőséget biztosítja, hogy a belsőégésű motor a legkedvezőbb működésének megfelelő fordulatszámon forgassa a generátort. Az autóbusz hajtása környezetkímélő módon, az eddigieknél mérsékeltebb zajszinten villanymotorral történik. Működtethető a belvárosban akkumulátortelepről, vagy tüzelőanyag celláról közvetlenül elektromos hajtással is. Egyébként pedig a belvároson kívüli részeken dízel-elektromos üzemű ez az autóbusz. Ez a rendszer azt is lehetővé teszi, hogy fékezéskor a gépkocsi mozgási energiáját elektromos árammá lehessen alakítani és az akkumulátor telepben tárolható legyen. Az ismételt elinduláskor pedig hasznosítható.
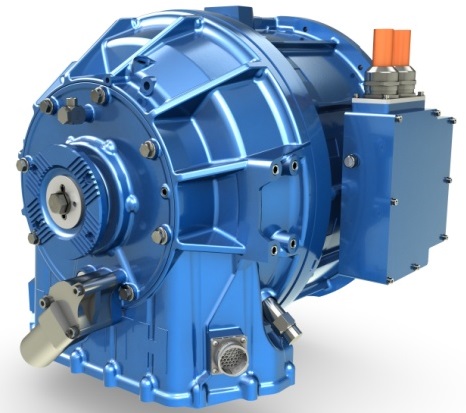
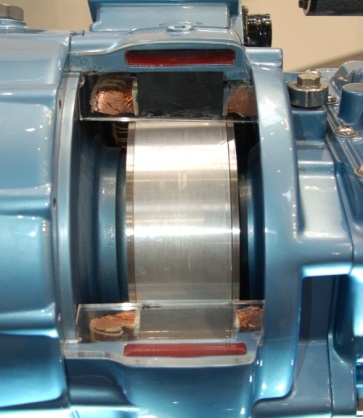
16.7.4. ZF TraXon
A ZF világújdonsága volt 2012 –ben a moduláris felépítésű TraXon hajtómű rendszere, amellyel öt egymáshoz csatlakoztatható egységből állítható össze a nehéz haszonjárművek hajtáslánca. A rendszer legfontosabb eleme az automatikus sebességváltó, melyhez egy és kéttárcsás, vagy akár kettős tengelykapcsoló, illetve hidrodinamikus nyomatékváltó is csatlakoztatható. De ezek között megtalálható a hibrid hajtású változat is. Különösen az teszi gazdaságossá az áruszállítást, hogy ezzel a rendszerrel fékezéskor az energia visszanyerhető. A villanymotor 120 kW teljesítményű a nyomatéka 1000 Nm. Fékezéskor a motor generátoros üzemmódba kapcsol át. Különösen előnyös ez a városi forgalom start-stop üzemmódjában.

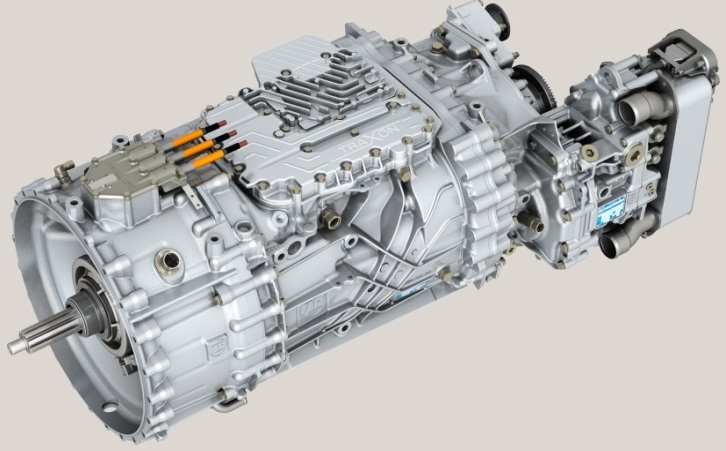
17. fejezet - Elektronikus asszisztens rendszerek
- 17.1. A közlekedési balesetek elemzése és a célkitűzések
- 17.2. A gépkocsivezető munkáját támogató elő asszisztens renszerek
- 17.3. Ember-gép kapcsolat (Human-Machine-Interface) (HMI)
- 17.4. Önálló modulokból közös rendszer
- 17.4.1. A forgalmi sáv tartása Line Departure Warning (LDW)
- 17.4.2. Az ütközés elkerülése kis sebességnél (Closing Velocity System)
- 17.4.3. A forgalmi táblák felismerése
- 17.4.4. A forgalmi torlódás asszisztens
- 17.4.5. A visszapillantó tükrök holt terének figyelése (Blind Spot Detektion) és a sávváltási asszisztens (Lane Change Assist)
- 17.4.6. Kiszállási asszisztens (Safety-Get-OFF-Assistant)
- 17.4.7. Éjszaka látó berendezés (Nightvision)
- 17.4.8. Sensitive Gudance
- 17.4.9. Elektronikus horizont
- 17.4.10. Az ultrahangos érzékelő
- 17.4.11. Adaptive Cruise Control (ACC)
- 17.4.12. Közeli radar érzékelő (SLR radar)
- 17.4.13. Az UWB technológia
- 17.4.14. Lidar érzékelő
- 17.4.15. Laser-scanner
- 17.4.16. Predektív biztonsági rendszer „Predictive Safety System” (PSS)
- 17.4.17. Video rendszerek
- 17.5. Haszonjárművek asszisztens rendszerei
17.1. A közlekedési balesetek elemzése és a célkitűzések
A baleseti statisztikai adatokat elemezve, megállapítható, hogy minden percben meghal egy ember valahol a világon közlekedési baleset következtében. Európában, az USA-ban, és Japánban 1998-ban például 93000 ember vesztette így életét. Ezt a szakemberek több, mint 400 milliárd Euro káreseményre értékelték. Az Európai Unió „eSafety-Program” azt a célt tűzte ki, hogy 2010-re a közlekedés halálos áldozatainak számát felére kell csökkenteni. A fejlesztőmérnökök különböző műszaki fejlesztésekkel egyrészt a balesetek gyakoriságát, másrészt pedig a kimenetek súlyosságát igyekszenek mérsékelni. Ezek tehát egyaránt érintik a gépkocsik aktív és passzív biztonságát.
A kutatások szerint az utoléréses balesetek 65%, a frontális ütközések harmad része, a kereszteződésben bekövetkező balesetek fele nem következett volna be, ha csupán fél másodperccel előbb figyelmeztették volna a vezetőt. A balesetek több, mint harmad része sávváltáskor, vagy figyelmetlenség miatti sávelhagyáskor következik be.
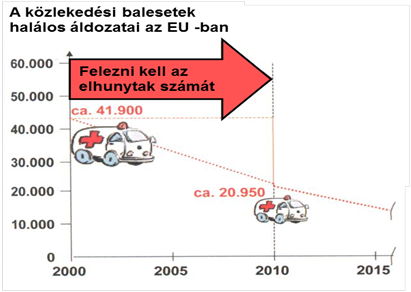
Az eddigi eredmények:
A németországi statisztikai hivatal közleménye szerint az ESP-vel ellátott gépkocsiknál a baleseti gyakoriság jelentősen csökkent. A szakemberek hasonló javulást várnak a PRE-SAFE rendszerektől, melyek a preventív (megelőző) védelmi működéseket jelentik. Ilyen például az ütközés előtti biztonsági-öv villanymotoros felcsévélése, az ülések megfelelő helyzetbe állítása, a tető- és az oldalablakok becsukása. Ezekhez különböző érzékelők kombinációit használják és az elektronika által működtetett beavatkozó egységeket. A légzsákok, a biztonsági öv feszítők akkor lépnek működésbe, amikor az összeütközés már megtörtént.
A magyarországi baleseti statisztikai adatok szerint 2001és 2009 között 1239-ről 822-re csökkent a halálos áldozatok száma.
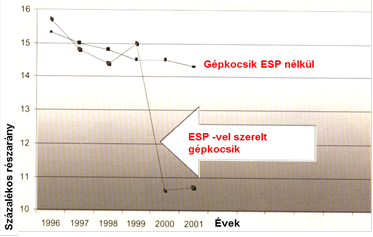
A baleset elkerülhető válik a gépkocsi menetdinamikájának kellő időben történő gyors megváltoztatásával. Ehhez a vezetőnek azonnal fel kell ismernie a veszélyhelyzetet, a gépkocsi pillanatnyi viselkedését és szintén gyorsan cselekednie kell. Az erre vonatkozó lehetőségek attól függően, hogy a kereszt- vagy a hossz- irányú dinamikába kíván beavatkozni kormányzás vagy a fékezés, illetve a gyorsítás lehet. A folyamat leggyengébb eleme maga az ember, akár az érzékelés, a döntéshozás és a gyors cselekvés vonatkozásából nézzük. Ezt a folyamatot a megszerzett rutin is alaposan befolyásolja. A vezetőnek kell tehát segíteni, a nála sokkal fürgébb elektronika és a mechatronika bevonásával.
Az asszisztens rendszerek valójában nem a vezetés automatizálását jelentik, hanem segítséget a vezető munkájához úgy, hogy minél kevesebb legyen a baleset.
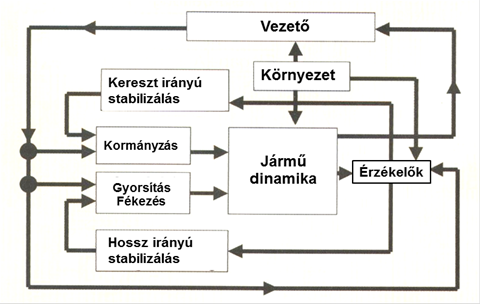
Menet közben a vezető elsődleges feladatai:
útvonaltervezés, navigáció
a gépkocsi kormányzása, pl. előzéskor
a gépkocsi stabil állapotban tartása, kanyarodáskor, sávtartáskor.
A másodlagos feladatok:
a gépkocsi kifogástalan működésének felügyelete, továbbá más egyéb, például forgalmi információk gyűjtése, feldolgozása és alkalmazása.
Ezeknek a feladatoknak a teljesítése egymással párhuzamosan futnak és nagy figyelmet igényel. Ennek hatékonyságát a kifáradás hátrányosan befolyásolja.
Segítséget jelent, ha a gépkocsi közvetlen környezetét figyelő egyre több és összetettebb érzékelők jelei az elektronikában feldolgozásra kerülnek. Kiértékelésük során például tárolt adatokkal, küszöbértékekkel hasonlítja össze a mért értékeket és ez alapján adja ki a beavatkozó egységeknek az utasításokat. Így az elektronika alkalmazásával hatékonyabb működésűvé tehetők az asszisztens rendszerek.
Különböző elektronikus, a vezetőt támogató asszisztens rendszerek érzékelőivel és kiértékelő rendszereivel továbbá a beavatkozó egységekkel a veszélyes helyzeteket igyekeznek előre felismerhetővé és elkerülhetővé tenni. Ezek a kritikus helyzetek a másodperc töredéke alatt következnek be.
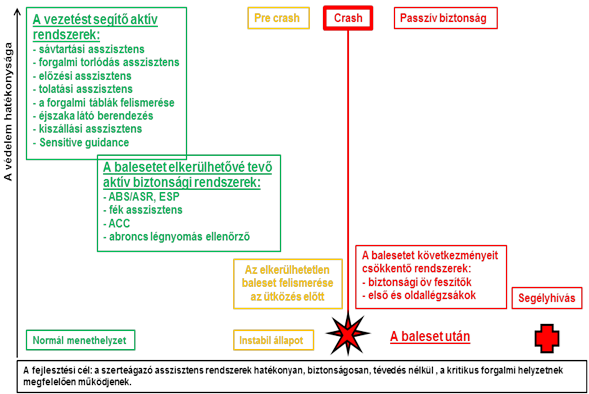
17.2. A gépkocsivezető munkáját támogató elő asszisztens renszerek
Évtizedekkel korábban az első, a gépkocsivezető munkáját támogató asszisztens a személyautóknál a vákuumos fékrásegítő volt. A haszonjárműveknél pedig az idegen erővel működtetett fékrendszer. A cél azóta is változatlan maradt, a környezet, vezető, gépkocsi láncolat leggyengébb elemének a gépkocsi-vezető tevékenységének támogatása. Az első asszisztensek még mechanikus egységek voltak, a mostaniak már nem nélkülözik az elektronikát. A menetdinamikai szabályozó rendszerek, az ABS/ASR, az ESP, a fékasszisztens segítenek a vezetőnek a kritikus menethelyzetekben és ezzel növelik az aktív biztonságot. Csökkentik a gépkocsivezető terhelését. A menetkomfortot és a biztonságot növelik. A légzsákok és az övfeszítők az ütközést, vagy a felborulást követően nyújtanak védelmet és ezzel hatékonyan javítják a gépkocsik passzív biztonságát.
Minél hamarabb felismerhető egy baleset, akár még közvetlenül a bekövetkezése előtt, annál hatékonyabb lehet a segítség.
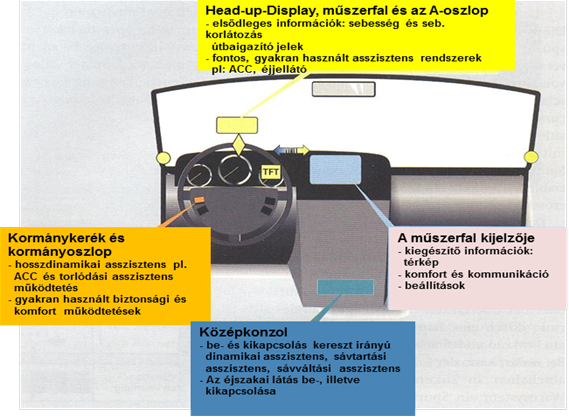
A tipikus reakcióidő 5 ms, amely a védelem lehetőségeit korlátozza. Itt kínálnak újabb lehetőségeket a predektív védelmi rendszerek, melyek a veszélyes helyzetekre reagálnak. Különböző érzékelőikkel kiterjesztik a gépkocsi érzékelési horizontját. Lehetőséget kínálnak még az ütközés bekövetkezte előtt a védelmi rendszer elemeinek működtetésére.
A gépkocsivezetőket támogató asszisztens rendszerek csökkentik a vezetők terhelését későbbre tolják ki az elfáradást, így elkerülhetővé válnak balesetek. Ezek az asszisztens rendszerek egyenként egyszerűnek tűnnek mégis jelentős feladatokkal kell megbirkózni a fejlesztőknek. Feladatukat tekintve vannak olyanok, melyek a tájékozódást segítik, vannak amelyek áttekintést adnak a közvetlen környezet közlekedési eseményeiről, illetve a biztonságosabb közúti közlekedést szolgálják. A nagyobb komfort mellett a gépkocsi gazdaságosabb üzemeltetéséhez is hozzájárulhatnak. Mindezt persze úgy kell megvalósítani, hogy ne vegyék el az autózás élményét. A döntések lehetősét meg kell hagyni a vezetőnek és természetesen a felelősség is nála marad. Az elmúlt években több különböző elektronikus asszisztens rendszert fejlesztettek ki, melyek többsége radar és video érzékelőkkel a gépkocsi közvetlen környezetét érzékeli. A gépkocsi körüli érzékelést több asszisztens rendszer is hasznosítani tudja. Az utóbbi években rendkívül érzékeny érzékelőket és nagyon gyorsan működő elektronikákat továbbá kiértékelő algoritmusokat fejlesztettek ki, melyek a gépkocsi közvetlen környezetét figyelik. Felismeri az objektumokat, azok helyzetét, távolságát és relatív sebességét.
17.3. Ember-gép kapcsolat (Human-Machine-Interface) (HMI)
Nem szabad azonban az ember-gép kapcsolatról (Human-Machine-Interface) (HMI)-ről sem megfeledkezi, mely a vezető tájékoztatása szempontjából nagyon fontos. Az információ világos, jól érthető és egyértelmű kell legyen, továbbá a megfelelő időpontban kell érkezzen. A vezetőt nem szabad azonban túl sok információval sem terhelni, csak a legfontosabbakra kell koncentrálni. Soha sem szabad megijeszteni. Ezen kívül az asszisztens rendszer használata a lehető legegyszerűbb és magától értetődő kell legyen. A fejlesztők ezen a területen is jelentős eredményeket értek el. Nem elégséges azonban, hogy csak az elektronika szakemberei vegyenek részt a fejlesztő munkában, hanem az ergonómiai szakértők bevonására is szükség van. Head Up Display- ként használható az első szélvédő is. A két párhuzamos üvegréteg és a közötte lévő fólia azonban kettős képet ad. Ha az üvegrétegek nem párhuzamosak, jól látható éles képet kapunk. A vetítő egységet a műszerfalba szerelik be. Hatékonyabban működhetnek azonban, illetve bizonyos elemeket akár több rendszer is használhat, ha az egyes modulokat egy egységes, közös rendszerré állítják össze.
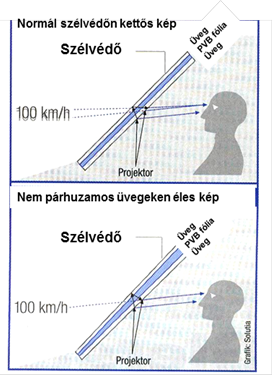
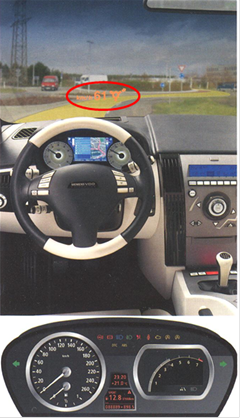
17.4. Önálló modulokból közös rendszer
Ilyet fejlesztett ki a Siemens VDO. 2005-ben mutatták be a demonstrációs autót, mely tartalmazta ezt az összetett rendszert. A felületes szemlélő jelentős eltérést nem észlelt a széria változathoz képest, hiszen számos érzékelőt a belső visszapillantó tükör rögzítő talpába szereltek, a működtető kapcsolókat a középkonzolon helyezték el, a kiegészítő információk a „Head-up-Display”-n jelennek meg, mely a vezető látóterébe a szélvédőre vetíti az üzeneteket. Az önállóan és megbízhatóan működő modulok által szerzett információkat a teljes rendszer közösen tudja rendkívül hatékonyan hasznosítani.
A Head-up-Display csak egy része a HMI-nek.
A másik lehetőség a szabadon konfigurálható TFT kijelző a műszerfalon, vagy a középső konzolon, de alkalmazhatók figyelmeztető lámpák is a megfelelő helyeken. Mivel azonban az ember felfogó képessége korlátozott, valamennyi asszisztens rendszer egy időben nem küldhet információkat. Ezért egy egészséges egyensúlyt kell megteremteni az asszisztens rendszerek információi és az emberi agy felfogóképessége között. Döntést kell hozni arról, hogy az adott forgalmi helyzetben mely információnak kell elsőbbséget biztosítani. Ez éjjel és nappal egymástól eltérő is lehet. Ráadásul a fontosságától függően ott kell az információkat megjeleníteni, ahol azt a vezető várja. Gondoljunk például arra az esetre, amikor a Head-up-Display-t a NightVision System éppen lefoglalja. Az „information management” rendszer gondoskodik arról, hogy képernyőnként maximum két információ jelenhessen meg. Ennek az előnye, hogy a vezető gyorsan és biztonságosan képes feldolgozni az információkat. Azért, hogy a kijelzőket ne terheljék túl az előzést támogató rendszer (Lane Change Assistant) a visszapillantó tükör közelében elhelyezett LED diódával jelez, hiszen előzéskor ez a látótérben van. A középkonzolon elhelyezett kapcsolókkal bizonyos információk be-, illetve kikapcsolhatók.
A radar érzékelők jeleit is több asszisztens rendszer tudja hasznosítani. Információt ad például a külső visszapillantó tükrökből nem látható részekről, de ugyanazokat az információkat hasznosítja a sávváltási asszisztens is, vagy a kiszállási asszisztens is. Ez utóbbi például letiltja az ajtó kinyitását, ha a gépkocsi mellett halad egy kerékpáros.
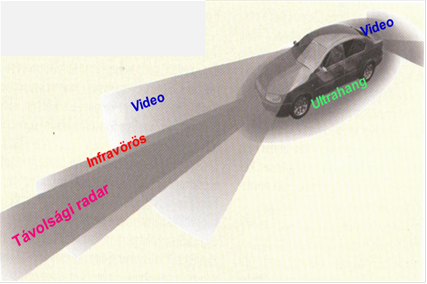
17.4.1. A forgalmi sáv tartása Line Departure Warning (LDW)
A vezető fáradtsága, vagy figyelmének elterelődése miatt bekövetkezhetnek akaratlan sávelhagyások, melyek balesethez vezethetnek. A forgalmi sáv felfestésének átlépésekor a figyelmeztető jelzés elkerülhetővé teszi a baleseteket. Ehhez fel kell ismerni a sáv optikai jelölését és meg kell állapítani ehhez képest a gépkocsi helyzetét. A video érzékelő jelének használatára egy tipikus példa a forgalmi sáv elhagyásakor figyelmeztető asszisztensnél. A szélvédő mögött a visszapillantó tükör talpában elhelyezett kamera a forgalmi sáv felfestett széleit figyeli. Az algoritmus az időjárási és a látási viszonyoktól függetlenül meghatározza a gépkocsi helyzetét, menetirányát, és a sávon belül referencia pontokat. Ehhez figyelembe veszi a sávszélességet, illetve az ívek sugarát. Az asszisztens működéséhez azonban még további információkra is szükség van. Például a vezető működtette –e az irányjelzőt, esetleg fékezett –e, illetve volt –e kormánymozdulat? Vagyis a sávelhagyás akarattal, vagy akaratlanul történt –e? Ha a vezető eltér a referencia pontoktól figyelmeztető jelzést ad a rendszer. Beállítható a sebességküszöb, amelytől ez a rendszer működésbe lép. A kormánykerék rezgetésével még azelőtt figyelmeztet, hogy a gépkocsi átlépné a forgalmi sávot jelölő felfestést. Ha szükséges végrehajt egy enyhe kormánykorrekciót is. Ez könnyen továbbfejleszthető sávtartó rendszerré, mely automatikusan a sávban vezeti a gépkocsit. Ennek használata közben a vezető bár mikor beavatkozhat. A vezető a többihez hasonlóan természetesen kikapcsolhatja ezt az asszisztenst is.

17.4.2. Az ütközés elkerülése kis sebességnél (Closing Velocity System)
A városi forgalomban gyakran előforduló kisebb koccanásos baleseteket teszi elkerülhetővé a Continental Automotive Systems által kifejlesztett új rendszer. A fejlesztés az európai autógyártókkal közösen történt és 2008-tól van sorozatgyártásban. Ezt az új rendszert valójában egy optikai precrash érzékelővel látják el. A belső visszapillantó tükör rögzítő talpába szerelik be az érzékelőt. Az autó előtti 10 m-es részt figyeli méghozzá három irányban. Közvetlen a gépkocsi előtt, továbbá ballról és jobbról. Valamely objektum felbukkanásakor ad jelet. A fékrendszer aktiválásával gyorsan csökkenti a távolságot az objektum és a gépkocsi között. Ha gépkocsivezető visszaengedi a gázpedált a fékrendszer azonnal kivezérel egy kis nyomást (Prefill) ennek hatására 0,5 g lassulás jön létre (Prebrake) amikor a vezető a fékpedált lenyomja fékasszisztens segítségével az elérhető legnagyobb lassulás fog megvalósulni. Az érzékelő jelét a villanymotoros csévélésű biztonsági öv feszítésére is fel lehet használni, de információ továbbítható a légzsák rendszer elektronikájának is. Ezzel felkészülhet egy esetleg bekövetkező ütközésre. . A rendszer hatásosságára az jellemző, hogy ha például a gépkocsi 35 km/h sebességgel egy álló akadály felé közelít az ütközés elkerülhetővé válik. A városi forgalomban a gyalogosok felismerésére is alkalmas. A rendszer működése annyira stabil, hogy a gyártó adatai szerint egynyomú járművekbe is beépíthető.
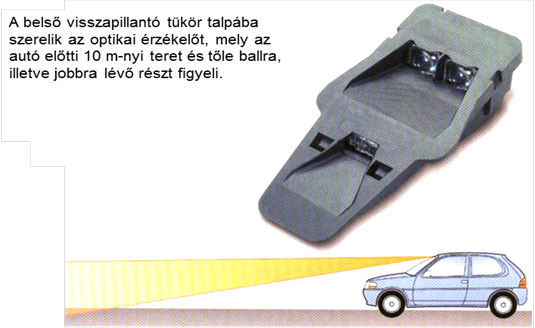
17.4.3. A forgalmi táblák felismerése
Erre a célra ugyan azt a kamerát használják, amelyik az LDW rendszernek is adja az információkat. A legfontosabb a sebességkorlátozó táblák felismerése. Ha a vezető gyorsabban halad, mint arra a szakaszra megengedett volna optikai figyelmeztetés fog látszani. Nem tervezik a Siemens VDO-nál ilyen esetekben az automatikus sebességcsökkentési beavatkozás megvalósítását. Ezt a rendszert is ki lehet kapcsolni.
A szöveges táblák, mint például a sárga hátterű helyiség névtáblák elolvasása még nem minden esetben sikeres. Ez a rendszer kombinálható a digitális térképpel és a GPS-es helymeghatározással és így a lakott terület felismerhető és az arra vonatkozó sebességkorlátozás egyértelműen betartható. A Stop-tábla és az elsőbbség adás kötelező tábla is felismerhető.
17.4.4. A forgalmi torlódás asszisztens
Ehhez a rendszerhez is CMOS technológiás kamerát használnak. A video adatok feldolgozása révén az előtte haladó gépkocsit folyamatosan követi, még egy úgynevezett „Stop and Go” forgalomban is. Az objektum felismerő algoritmus 50 m-en belül működik és a sebesség tartomány az ACC rendszeré alatt van.
17.4.5. A visszapillantó tükrök holt terének figyelése (Blind Spot Detektion) és a sávváltási asszisztens (Lane Change Assist)
Ezek a rendszerek hasonlóak egymáshoz és a gépkocsi körüli különböző zónákat figyelnek. Nagy látószögű, 24 GHz-es radar érzékelők figyelik a gépkocsi melletti, visszapillantó tükörből nem látható holt tereket, továbbá a gépkocsi mögötti 12 m-es részt.
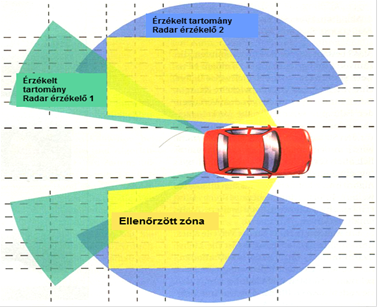
A sávváltási asszisztens 60 km/h sebesség felett kapcsol be, mivel a városi forgalomban kisebb a követési távolság is elegendő. 24 GHz-es kis látószögű radarral a gépkocsi mögötti 100 m-es szakaszt figyeli. Az érzékelőket a hátsó lökhárító széleibe szerelik be. Ha egy potenciálisan veszélyes objektum van az ellenőrzött zónában, egy piros LED dióda világít az A-oszlopon a külső visszapillantó tükör közelében. Veszély esetén hasonlóan az LDW rendszerhez a kormánykerék rezgetésével figyelmezteti a vezetőt. Ez egy rendkívül hatékony jelzés. A vezető nyomógombbal kikapcsolhatja ezt a működést.
17.4.6. Kiszállási asszisztens (Safety-Get-OFF-Assistant)
Hasonló a Blind-Spot-Detection-hoz. Akkor figyelmeztet amikor kerékpáros halad el az ajtó kinyílási szögében. Ilyenkor a központi zár automatikusan reteszeli az ajtókat. Az ajtónak csak a második nyitása lesz sikeres.
17.4.7. Éjszaka látó berendezés (Nightvision)
Bár az éjszakai forgalom 70 – 80%-al kisebb mint a nappali, de sokkal nagyobb kockázattal jár. A közlekedési balesetek minden harmadik áldozata éjszaka veszti életét.
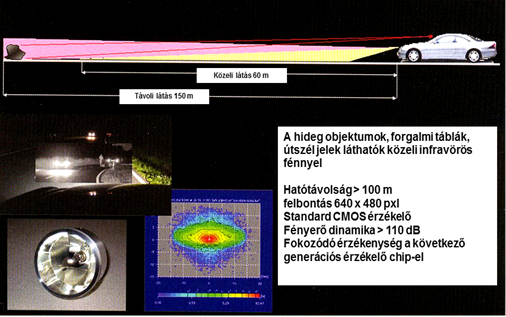
Az éjszakai látást segítő rendszerek a gépkocsi vezetést támogató asszisztensek közül a legújabb. „Night-Vision”-nak is szoktak nevezni. Felszerelésének az a célja, hogy a gépkocsi előtt azt a részt mutassa, melyet a tompított fényszóró nem világít meg. Kibővíti az emberi észlelés lehetőségeit és ezzel csökkenti a balesetveszélyt. Az első ilyen rendszer az élőlények saját infravörös, vagyis hő-sugárzását érzékeli. Ezt passzív rendszernek is szokták nevezni, vagy „termo kamera”-nak. Az érzékelő, által közvetített képet a vezető előtt elhelyezett monitoron jelenítik meg.
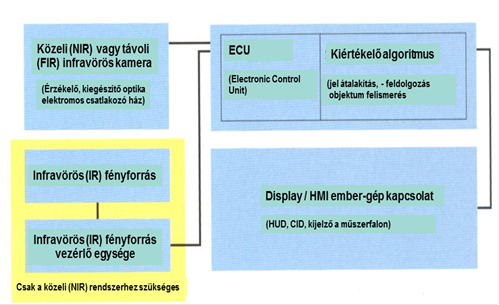
Emellett aktív éjjellátó kamerákat is kifejlesztettek. Ennél az emberi szem számára láthatatlan infravörös fénnyel világítják meg a gépkocsi előtti részt hasonlóan egy távolsági fényszóróhoz. Ez nem zavarja a szemből jövőket. A 0,9 mm hullámhosszú úgynevezett közeli infravörös sugarakat (Near Infrared NIR), melyek az objektumokról visszaverődtek CMOS kamera érzékeli.
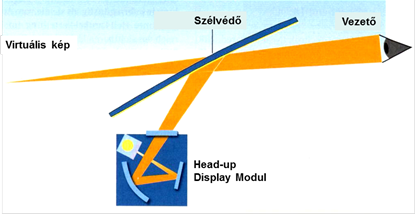
Az infra kamera képét a Sensor-Chip dolgozza fel és a CID (Central Information Display) vagy a HUD (Head-Up-Display) fekete-fehér képként jeleníti meg. A Hella egy aktív, Adilis (Advanced Infrared Lighting System) nevű rendszert fejlesztett ki. Ez homogén és a távolságtól független fényerejű képet ad. Ennél is a meleg felületek, mint például a gumiabroncs, a féktárcsa, vagy a kipufogó rendszer, illetve a szemből jövő gépkocsik hűtője világosabbnak látszik. Ezekkel a berendezésekkel éjszaka is az egyes objektumok könnyebben felismerhetők és hatékonyan megnöveli a vezető látótávolságát.
A Siemens VDO Automotive két éjszaka látó berendezést fejlesztett ki. Egyet távolra, egyet pedig közelre. A közeli egy az emberi szem számára láthatatlan infravörös fényt bocsát ki, melynek hullámhossza 0,9 µm. Az érzékelő egy infravörös tartományban működő video kamera. Egy processzor dolgozza fel valós időben a képet és egy valósághű látható fekete-fehér képet állít elő.
Az előnye az, hogy hideg objektumok is jól felismerhetők, mint például a közlekedési táblák, vagy más tárgyak. A vezető kijelzőn, vagy fejmozdulatok nélkül a Head-Up-Display-n (HUD) látja a közlekedési eseményeket ugyan úgy, mint rendes fényben. A Siemens VDO ennek az új megjelenítési módnak a sorozatgyártását 2003-ban kezdte el.
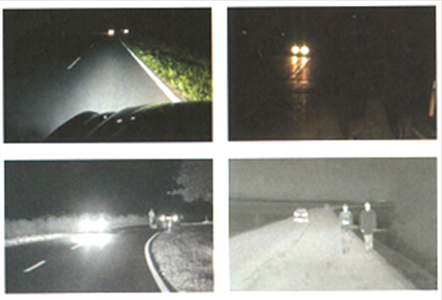
A HUD virtuális képének fényerejét automatikusan a külső fényviszonyokhoz igazítják. A HUD technológia egy TFT display-nek megfelelő. 150 m távolságban kb. kétszer akkora terület látható jól a vezető, mint amit a fényszóró megvilágít.
A másik változat egy úgynevezett „hő-kamerás” rendszer, mely nem bocsát ki saját fényt. Több száz méterre lát úgy, hogy a testek saját hősugárzását érzékeli. Ez az úgynevezett hosszú hullámú spektrum tartományban (6 -12 mm) működik. Far Infrared, (FIR) vagyis távoli infravörös sugárzásnak nevezik. Ezt a sugárzást a szélvédő nem engedi át. Ezért ennek kameráját a gépkocsik hűtőrácsa mögé szerelik. Az ehhez szükséges kamera költségesebb, mint amit közeli infravörös sugárzásnál használatos. Az út szélén futók az esti sötétedésben, vagy a hajnalban az iskolabuszra várakozó gyerekek is jól észlelhetők így.
A Robert Bosch GmbH. is az éjszakai látás támogatására infravörös érzékelőt alkalmaz. Hatótávolsága 120 m, vízszintes látószöge ±10˚.
17.4.8. Sensitive Gudance
A jól működő önálló rendszereken kívül sikeresen alkalmazzák azok kombinációit. A Sensitive Guidanc például a navigációs rendszer és a sávváltási asszisztens kombinációja. Ha navigációs rendszer sávváltást, vagy lekanyarodást javasol párhuzamosan ellenőrzi a sávváltási asszisztens és a Blind Spot Detection system, hogy ez veszélytelenül lehetséges –e. Ha veszélyhelyzet áll fenn figyelmezteti a vezetőt és ezzel egy időben elkezdődik az útvonal újratervezése is, hiszen az előzetesen tervezett nem tartható.
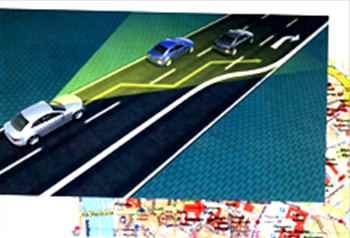
17.4.9. Elektronikus horizont
Amikor a gépkocaival letérnek az autópályáról, az ACC rendszer elveszíti az előtte haladó gépkocsit és a korábban beállított sebességre akarna gyorsítani. A digitalizált térkép és a navigációs rendszer működése alapján felismeri a rendszer, hogy az utópályáról lehajtásról van szó és ezúttal elmarad a gyorsítás.
17.4.10. Az ultrahangos érzékelő
Az ultrahangos érzékelő általában a parkoláshoz használatos, a lökhárítóba építenek be akár 4 – 5 érzékelőt is. Hatótávolsága 3 m vízszintes látószöge ±60˚. Jelenleg a Bosch GmbH-nál a negyedik generáció van gyártásban. A sugárzó fej és a kiértékelő elektronika is az érzékelőbe van beszerelve. Az akadály megközelítésekor hang és fényjelzéssel figyelmeztet. Ennek frekvenciája arányos az objektum távolságával. Az autótulajdonosok körében nagyon népszerű. Továbbfejlesztett változata 20 km/h-nál kisebb sebességgel haladva megbecsüli, hogy a parkolási hely elegendő –e a gépkocsi számára. További fejlesztések révén alkalmassá válhat az automatikus beparkolásra is.
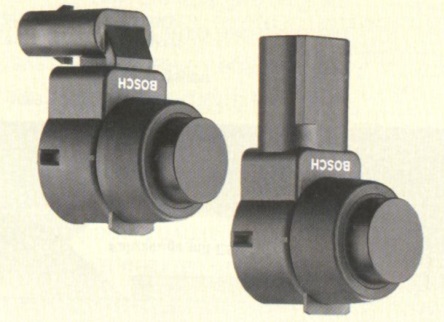
A gépkocsivezetőt támogató asszisztens rendszerek növelik a közlekedésbiztonságot. Az autótulajdonosok elégedettségét az is igazolja, hogy bizonyos rendszerek gyártása már több generációt is megért. Az érzékelők jeleit pedig több célra is használják a gépkocsikba szerelt elektronikus hálózatok révén.
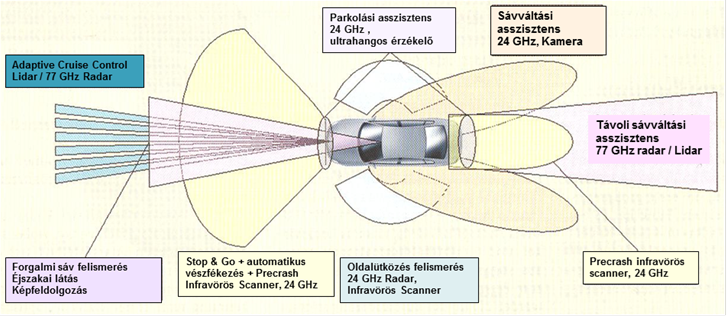
17.4.11. Adaptive Cruise Control (ACC)
Ez volt az első jelentősebb elektronikus működésű, a gépkocsivezetőt támogató asszisztens rendszer, melyet több, mint tizenöt éve szereltek be a felsőbb géposztályba. Például az Audi A8, A6, A5, A4, Q7, Q5 típusaiban is széria felszereltséghez tartozik. 30 – 200 km/h közötti sebességtartományban a sportos és a komfortos között több beállítási fokozatban is használható.
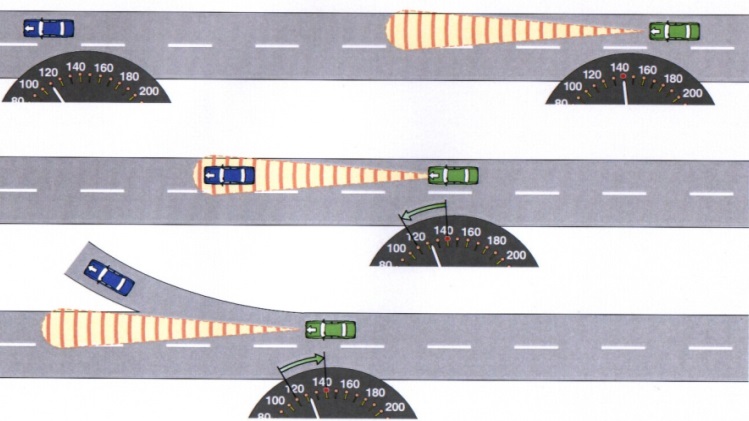
A gépkocsi elejébe szerelt távolsági radar, lidar érzékelővel, vagy újabban már lézer szkennerrel is működhet. Az előttünk haladó járműig tartó követési távolságot érzékeli. A vezetőt fény és hangjelzéssel figyelmezteti, ha nagyon megközelítette az előtte haladót. Ha szükséges automatikusan beavatkozik a fékrendszernek és a motorelektronikának illetve az automatikus sebességváltónak adott parancsokkal. Működése biztonságos. Ha szabad az út a tempomat működése révén az annál előzetesen beállított sebességgel halad tovább a gépkocsi. Ha utolér egy előtte lassabban haladót, az ACC automatikusan annak tempójához igazítja a haladást és követi azt egy biztonságos távolság megtartásával. Ha szükséges eközben fékezéssel vagy gázadással avatkozik be. Ha túl nagy a közelítő sebesség figyelmezteti a vezetőt, de ha nem reagál be is avatkozik. Ha a lassabban haladó gépkocsi elhagyja a sávot, a követő gépkocsi az előtte beállított sebességre gyorsít.
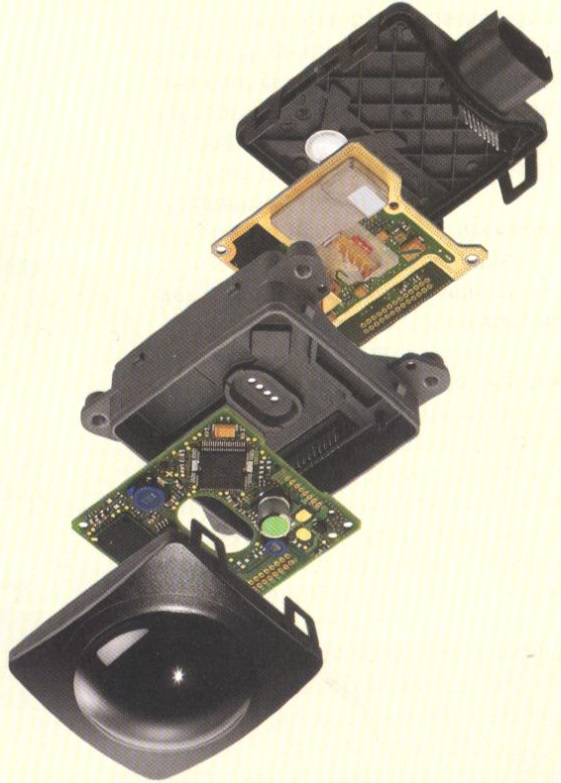
Az előzési szándékot a vezető rövid idejű gázadással jelezheti, ami a követési távolság tartását felfüggeszti. Túl gyors kanyarvételnél az ESP jelét (kereszt irányú gyorsulás) is figyelembe veszi az ACC rendszer és automatikusan csökkenti a sebességet. A vezető bármely pillanatban gázadással, vagy fékezéssel beavatkozhat. A jelenleg használatban lévő első generációs rendszer 30 km/h-nál nagyobb sebesség esetén működik. Autópályán történő használatra tervezték. A következő ACCplusz változatnál más a megállásig történő fékezés is a lehetséges beavatkozások közé tartozik. A tovább haladás a gázpedál lenyomásakor lehetséges és eközben az ACC továbbra is működik. Az ACC FSR (Full Speed Range) változatnál kiegészül egy video érzékelővel is. Az ACC-t mint komfort növelő asszisztens egységet szerelik be a gépkocsikba, hiszen a vezető munkáját teszi könnyebbé. A különböző beállításokat a vezető a kormányoszlopon az irányjelzőt működtető kar alatt elhelyezett kapcsolóval végezheti el. A beállítások a műszerfal kijelzőjén, illetve a sebességmérőn jelennek meg.
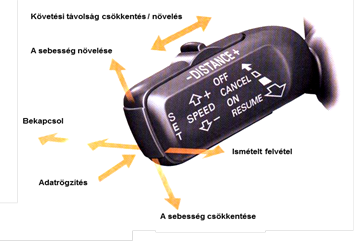
Távolsági radar érzékelő 76 - 77 GHz frekvenciával működik, hatótávolsága 150 m, vízszintes látószöge ±8˚. (RADAR = Radio Detection And Ranging) A gépkocsi előtt haladó másik jármű távolságát és relatív sebességét méri. A kiértékelő elektronika az érzékelőbe van beépítve. Négy radar sugarat bocsát ki az érzékelő.
Follow-to-Stop és Front Assist működések
Ez egy olyan továbbfejlesztett, radar érzékelős, ACC rendszer, mely a gépkocsit egészen a megállásig képes lassítani. Ezzel egy jelentős komfort növekedést értek el. A vezető beállíthatja például a számára megfelelő követési távolságot. Ezeket az egyéni ACC beállításokat a gyújtáskulcs tárolja és a gépkocsi ismételt használatakor ugyanezek állítódnak be.

A Radar érzékelő és a kiértékelő elektronika egy közös műanyag háza van beépítve és a hűtőrács mögött található a gépkocsi elején. Az érzékelő látószöge 8˚, hatótávolsága pedig 180 m. A négy adó és vevő egység a hatóságilag engedélyezett 76,5 GHz frekvencián működik. A frekvencia FMCW eljárással modulált. A jel futásideje és a doppler effektus alkalmazása révén a gépkocsi előtt haladó jármű távolsága és sebessége is meghatározható.
A Follow-to-Stop működésnél az ACC rendszer kis sebességtartományban is működik.
A Front Assist kikapcsolt ACC-nél is működőképes, méghozzá két fokozatban is. Kritikus forgalmi viszonyok között felkészül a vészfékezésre úgy, hogy a fékasszisztenst átkapcsolja egy érzékenyebb fokozatba és egy kis fékező nyomás kivezérlésével felfekteti a fékbetéteket a féktárcsára. Továbbá ezzel egy időben optikai és akusztikai figyelmeztetést ad a vezetőnek. Ha erre nem reagál, miközben még mindig fennáll az ütközés veszélye, a második fokozatban aktiválja a fékasszisztenst és vészfékezést hajt végre.
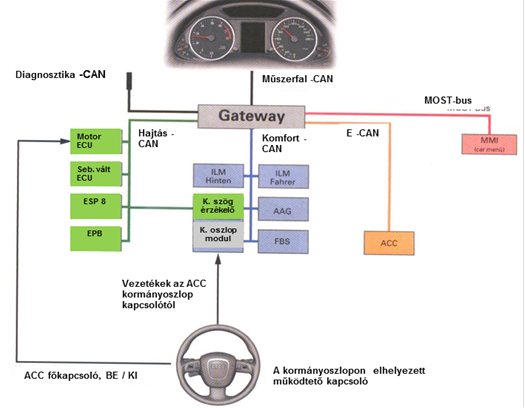
17.4.12. Közeli radar érzékelő (SLR radar)
A nemzetközileg is engedélyezett közeli radar érzékelők 24 GHz frekvenciával működnek. Ez jó kompromisszumot jelent a költségek és az antenna méret között. Ez az alkalmazás az időjárási viszonyokra nem érzékeny és robosztus lehet a kivitele. A távolság megállapítása az egyes impulzusok futásidejének mérése alapján lehetséges. Az objektumok helyzetének megállapítása a háromszögelési módszerrel történik, melyhez legalább két érzékelő szükséges. Ez a technika alkalmazható a sávváltási asszisztensnél is. Az első generációs változat fény-, és hangjelzéssel figyelmezteti a vezetőt a veszélyre, de a második generációs változatnál az elektronikus szervokormánynál változtatja meg a rásegítést, így a kormánykerék rendkívül nehezen mozdítható. Amikor egy másik gépkocsi 50 m-re megközelített, megtörténik annak érzékelése.
Tyco Electronics által kifejlesztett radar érzékelő hatótávolsága 30 m és az érzékelési szögtartomány ± 65˚. Ebbe a közel-téri radar érzékelőbe minden szükséges elektronikus egységet beépítettek, mint például a MMICs-t (Monolitic Microwave Integated Circuit), mely egy költségoptimalizált változatban készül. A jelfeldolgozás eredménye maximum 10 objektum észlelése, az objektum fontosabb paraméterei távolság, szöghelyzet, relatív sebesség, továbbá lágy, vagy kemény objektum. Ezeket a CAN- hálózaton keresztül elérhetővé teszi. Az érzékelés szempontjából fontos a radar antenna felületének nagysága. A gépkocsi körül 8 érzékelőt alkalmaznak egy a vezetőt támogató asszisztens rendszerhez. Ez még továbbfejleszthető, illetve kiegészíthető további érzékelőkkel, például távoli radar-, video-, vagy infravörös érzékelővel. A Tyco Electronics által kifejlesztett „Sequential Lobing” koncepció szerint működő radar érzékelő, mely antennájának két iránykarakterisztikája van. A két irány-karakterisztika közötti váltás, 20 ms-onként oda-vissza következik be. Ezzel nem csak egy második vevő és ennek a költsége takarítható meg, hanem hatékonyan használható a nagyfrekvenciás panel is. A jelfeldolgozás és a kiértékelés a hagyományos amplitúdó modulált módszerrel működik.
17.4.13. Az UWB technológia
Az Ultra Wide Band (UWB) nagy sávszélességű adó spektrumot jelent, mellyel a nagy felbontás érhető el. (Úgy Európában, mint az USA-ban elő van írva a frekvencia és a sávszélesség is.) Nagyon rövid impulzusok követik egymást így cm-es felbontást tudnak elérni.
17.4.14. Lidar érzékelő
Az ACC rendszerénél sem a Siemens VDO, sem a Hella nem távolsági radar érzékelőt alkalmaz, mint más gyártók, hanem egy, annál nagyobb teljesítő képességű, infravörös fénnyel működő, új fejlesztésű „lidar” érzékelőt és a hozzá tartozó gyors kiértékelő elektronikus egységet. (lidar = Light Detection And Ranging)
Az érzékelő 15 ns-nyi infravörös impulzusokat bocsát ki az egyes csatornákon és méri a visszaverődésig eltelt időt. Ebből határozza meg a távolságot és a relatív sebességet. Az ára a radar technikánál kedvezőbb.
Öt infravörös fénykúp méri az előtte haladó gépkocsi távolságát. Hatótávolsága 250 m pontossága pedig 10 cm. A sebességet pedig 0,1 m/s pontossággal méri. 8,4 m-ig pontosan befogja az előző gépkocsit 27,6 ˚-os látószöggel. Egy nagyon hatékony szűrő küszöböli ki az eső és más zavaró körülmények hatását. A radar és a lidar érzékelő funkcionálisan egyenértékű, de meg kell jegyezni, hogy a lidar érzékelő olcsóbb és ennek ellenére jobb a felbontása. Ezért jobb az objektum felismerő képessége.
Ez nem csak a biztonságot szolgálja például az úgynevezett „holt tér” csökkentése révén, hanem asszisztens rendszerként megkönnyíti a gépkocsivezető munkáját tolatáskor, beparkoláskor vagy a városi „stop and go” üzemmódban.
A radar kedvezőtlen környezeti viszonyok között is megbízhatóan működik (sötét, csapadék, köd). Az akadályokat és a különböző objektumokat ilyen esetekben is biztonsággal felismerhetővé teszi. Különbség tehető a folyamatosan- és az impulzus szerűen működő változatok között. Ez utóbbinál rövid periodikus működések követik egymást. Ennél az impulzus kibocsátása és visszaverődés között eltelt idő mérésével az objektum távolsága és sebessége is meghatározható. A folyamatos működésű radar lineárisan modulált frekvenciájú jelet bocsát ki. A mérési pontosság a sávszélességtől függ. Az intelligens radar érzékelők, mint például az SLR (Sequential Lobing Radar) érzékelő az objektum felismerésen kívül alkalmas az objektum követésre is.
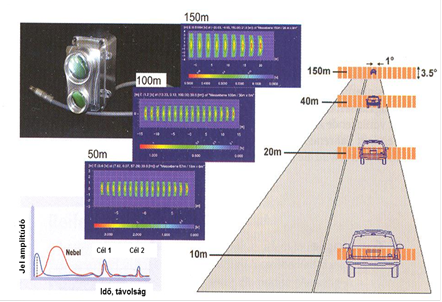
17.4.15. Laser-scanner
Az egyre sűrűsödő városi forgalomban a feszültségektől és a balesetektől mentes közlekedés egyik záloga az Optikai elven működik az Automotive Laserscanner (Alasca). Ez az infravörös fény eljutási és visszaverődési útját méri. Kifejlesztője az Ibeo Automobile Sensor GmbH. volt. Alkalmazási területe az ACC rendszer, a Stop & Go üzemmód, nagy látószögű gyalogosvédelem, a forgalmi sáv tartó asszisztens rendszer, de használható Pre-Crash érzékelőként is. Parkolási segítségként felismeri a szabad parkolóhelyet és segít a beparkolásnál. Bizonyos körülmények között vészfékezést is képes kezdeményezni. Rossz időjárási viszonyok között is megbízhatóan működik. Hatótávolsága 0,3 - 200 m közötti. A szkennelési frekvenciája 40 Hz. A vízszintes látószöge 240˚. Felbontása 0,25˚ Alkalmazási területe eredetileg a robotok munkaterének védelme illetve a vezető nélküli szállító eszközök haladási útvonalának biztosítása volt. Ebből fejlesztették ki a gépkocsiknál használatos Alasca XT változatot. A lézervédelmi 1-es fokozathoz tartozik, így a közúti forgalomban is alkalmazható. Ha a szemből jövő gépkocsi is hasonló technikával van felszerelve nem befolyásolja az érzékelést.

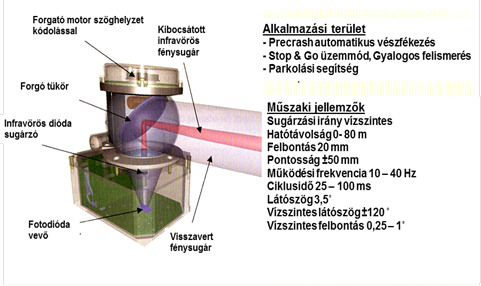
Működési elve:
Az érzékelőbe beépített dióda bocsátja ki a programozható infravörös fény impulzusokat, melyek hossza nano-szekundumnyi. Egy forgó tükör sugározza szét. Ennek forgási sebessége a fény terjedési sebességéhez képest kicsi. Ezzel az érzékelő teljes környezetét képes „letapogatni”. A vevő dióda a visszaverődött infravörös fény futási idejét meg tudja mérni. Ehhez egy rendkívül érzékeny opto-elektronikai áramkört alkalmaznak. Az elektronika így ki tudja számítani az objektum távolságát és a relatív sebességét, amelyről a fény visszaverődött. Négy egymással párhuzamosan működő mérő csatornája van, így négy különböző objektumot képes egymástól megkülönböztetni. A kiértékelt információk alapján beavatkozási parancs adható ki a motornak és a fékrendszernek. Már csak az a kérdés, hogy az aktív vákuumos rásegítő milyen állapotban van és megfelelő gyorsasággal képes –e a szükséges fékezőnyomást megvalósítani. Ez az új lézer szkenner valamennyi jelenlegi gyártásban lévő gépkocsi platform elejébe beszerelhető. A függőleges irányú látószöge olyan, hogy a személyautók szokásos bólintási szöge esetén sem veszíti el például az előtte haladó gépkocsit a látótérből. A jelenleg használatban lévő vizualizációs eszközökön madártávlati kép jelenik meg az észlelt objektumról. Már jelenleg is az irányban folynak fejlesztések, hogy az érzékelt környezetet video rendszerrel összekombinálva tegyék láthatóvá. Jól alkalmazható az utóbbi időben az EU különböző bizottságai által szorgalmazott gyalogosvédelem területén is, hiszen kellő időben felismeri a gépkocsi felé közelítő személyeket. További alkalmazási lehetőség a forgalmi sáv akaratlan elhagyásakor figyelmeztető rendszernél van. A lézerszkenner felismeri a forgalmi sáv szélét jelző felfestéseket és ehhez képest a gépkocsi helyzetét.
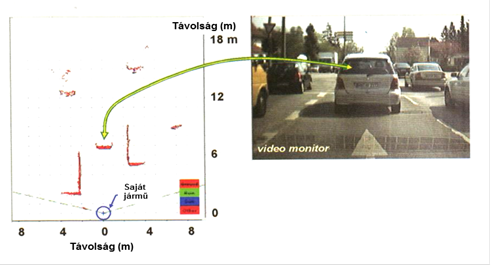
17.4.16. Predektív biztonsági rendszer „Predictive Safety System” (PSS)
2005 után a Bosch ACC rendszert a „Predictive Safety System” (PSS) részeként szerelik be a gépkocsikba. A balesetek 25%-a utoléréses eseményként következik be, melyek java része figyelmetlenségre vezethető vissza. bizonyos esetekben fékezés nélkül következik be az ütközés. Ilyen esetekben hatékony megelőző eszköznek bizonyul az ACC rendszer, melynek továbbfejlesztése lépcsőzetesen folytatódik.
Az első a PSS1, melynél egy optimalizált vészfékezés is bekövetkezik az ütközés kritikus esetben, melyet a hidraulikus fékasszisztens hajt végre. Ez a lehető legrövidebb fékutat valósítja meg. Ha ennek ellenére mégis bekövetkezik az ütközés, az lényegesen kisebb energiával történik, ami életeket menthet.
A PSS2 rendszernél a vészfékezési beavatkozás tovább bővül a vezetőt figyelmeztető rendszerrel, mely minden veszélyes helyzetben kellő időben aktiválódik. Ez elkerülhetővé tesz számos balesetet. A kutatások szerint a leghatékonyabban egy rövid fékezési impulzus hívja fel a vezető figyelmét a veszélyhelyzetre. Ezzel párhuzamosan fény és hangjelzés is kiadható, illetve a biztonsági öv is megfeszíthető a reverzálható, villanymotoros csévélő berendezéssel. ezzel a rendszerrel a 2006 után gyártott gépkocsikban lehet találkozni.
A PSS3 rendszernél további érzékelőket építenek be, mint például radar és optikai érzékelők, melyekkel kellő időben felismerhetők a következő pillanatban bekövetkező ütközések. Előtte automatikus vészfékezés következik be.
17.4.17. Video rendszerek
A gépjárművekbe szerelt optikai érzékelők alkalmazása az eső- és a fény érzékelőkkel kezdődött, melyben a Hella kivette a részét.
A video érzékelő CMOS-rendszerű kamera. A Bosch változat hatótávolsága 80 m vízszintes látószöge ±22˚. A kamerába van beszerelve az azt vezérlő elektronika és a nagy sebességű képfeldolgozó chip is. Egy adapterrel szerelik az első szélvédőre.
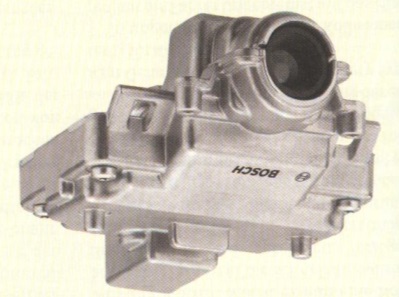
A video érzékelők a felbontás, az érzékenység, a fényerő dinamikája szempontjából az emberi szem teljesítőképességétől még elmaradnak, de a dinamikus kép érzékelők és a nagy sebességű képfeldolgozás alkalmassá tesz a vezetőt segítő asszisztens rendszereknél történő alkalmazásra.
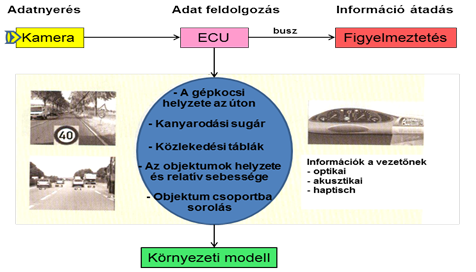
Az előre figyelő kamera jól alkalmazható a forgalmi sáv felismerésére, illetve a sáv elhagyásakor figyelmeztető jelzés kiadására, vagy akár a KRESZ táblák felismerésére. Alkalmazzák az ACC rendszer kiegészítő érzékelőjeként is. A távolság mérésen kívül támogatja az objektum felismerést is.
Tolató kamera
A hátra elhelyezett egyszerűbb kivitelű video kamera a tolatást, beparkolást segítheti.
Ugyanaz a kamera adhat információt a forgalmi sáv elhagyásáról, a közlekedési jelzőtábláról, és ezt használja a forgalmi torlódás asszisztens rendszer is. Más optikával az éjszaka látó rendszerhez is felhasználható.
A képadatokból az objektum felismerő algoritmus további információkat képes kinyerni, mely más asszisztens rendszereknél használható fel. Ez a kamera a nagy érzékenysége ellenére a körülményeknek megfelelően rezgésálló kivitelű és elviseli a napsütés okozta hőmérséklet növekedést is egészen +105˚C-ig. 32 bites elektronikát használnak kiértékelő egységként, mely 330 MHz frekvenciával működik. Közvetlenül a kamera mellé szerelik fel és ugyanannak a hőmérsékletnek ellenáll.

A Bosch hátsó video érzékelő vízszintes látószöge ±60˚. Úgy szerelik fel a gépkocsi hátuljára, hogy azt a részt lássa, amit a gépkocsivezető hátra fordulva a válla felett sem lát és a visszapillantó tükörből sem észlelhető. Észleli a közvetlenül a lökhárító mögötti akadályokat és objektumokat. A gépkocsi mögötti rész képe a fényviszonyoktól függetlenül akkor jelenik meg jól láthatóan a monitoron, amikor a gépkocsivezető a hátrameneti fokozatot bekapcsolta.
VW Passat CC tolató kamerás asszisztens
A csomagtartó mechanikus kézi nyitása a hátsó embléma elbillentésével lehetséges. E mögé az embléma mögé rejtik a tolatást segítő video kamerát, így az védett az időjárási behatásokkal, illetve a szennyeződéssel szemben. A hátrameneti fokozat bekapcsolásakor a beépített elektromechanika elbillenti az emblémát és kijjebb mozdítja a nagy látószögű kamerát, mely közvetlenül a lökhárító mögötti résztől a horizont széléig mutatja a képet. Az elektronika által feldolgozott és beállított kép a navigációs rendszer (RSN 510), vagy ha az nincs, a rádió (RDC 510) kijelzőjén jelenik meg.
17.5. Haszonjárművek asszisztens rendszerei
A haszonjárművek és a személygépkocsik között lényeges eltérések vannak, amiket az asszisztens rendszereknél is figyelembe kell venni.
Menetdinamikai szempontból például nem szabad figyelmen kívül hagyni:
A haszonjárművek magasabb tömegközéppontját.
A tömegeloszlás vonatkozásában a lényegesen nagyobb változatosságot (üres vagy rakott állapot, pótkocsival vagy szólóban történő közlekedés.
A haszonjárművek kisebb átlagsebességét és a kevésbé dinamikus sebességváltozást.
A hosszabb fékutat.
A haszonjárművek jelenleg gyártott változatait elektronikus szabályozással ellátott idegen erővel működtetett fékrendszerrel látják el.
A forgalmi viszonyok áttekintése a haszonjárművekből sokkal korlátozottabb (például a közvetlen hátratekintés lehetősége hiányzik).
A haszonjárműveknél viszont vannak olyan rendszerek, melyek a személygépkocsiknál nem állnak rendelkezésre, mint például a tartós lassító fék berendezés, a légrugózás, a tachográf, a kiegészítő hűtés, hidraulika rendszer.
A haszonjárművek nem a vezető tulajdonát képezik, hogy közvetlenül érdekeltek lennének a gazdaságos üzemeltetés vonatkozásában. A haszonjármű egy vállalkozás befektetése azért, hogy vele pénzt lehessen keresni.
Az ABS alkalmazása csak törvényes előírása után került alkalmazásra (Az EU tagországaiban az új haszonjárművekben 3,5 t össz-gördülőtömeg felett kötelező.) . Az ESP, bár kedvező hatású a balesetek elkerülése területén, ennek ellenére, mivel beszerelése jelenleg még nem kötelező, alkalmazási rátája csekély. 2003-ban például 5%-nál kisebb volt. Az asszisztens rendszerek a haszonjármű teljes élettartamra vonatkozó költségei bár csekélyek, ennek ellenére kevésbé széles körű az alkalmazásuk. A kisebb darabszám és a nagyobb megbízhatóság, robosztusabb kivitel, és a hosszabb élettartam igénye miatt az asszisztens rendszerek bekerülési költségei jelentősebbek, mint a személygépkocsiknál.
A haszonjárműveknél a vezetőt támogató asszisztens rendszerek három csoportba sorolhatók be:
Információ közlés: forgalmi hírek, közlekedési információk, navigáció
Figyelmeztetés: közlekedés sáv tartása
Beavatkozást is végző rendszerek: ABS/ASR, ESP, ACC, EDC, ASG, EBS.
A fejlesztések exponenciálisan összetettebb mechatronikus egységeket eredményeznek, melyeket aztán rendszerekké fűznek össze. Amíg például az ABS-nél 32 Kbyte ROM-ot alkalmaztak, az ESP-nél ez már 2 Mbyte.
Ezen a területen a közeljövőben várható fejlesztések a közlekedési környezet és a pillanatnyi menetállapot érzékelőinek és a kiértékelők elektronikák területén várhatók. Az egyes önálló rendszereket a CAN, Flexray, Bluetooth hálózatok kötik össze. Ez megkönnyítik az érzékelőkbe beépített elektronikák, mely lehetővé teszi az információk szélesebb körű alkalmazását. Egy másik fontos kulcsa ennek a területnek a vezeték nélküli adatátvitel megvalósítása. Az várható, hogy a vezetéssel kapcsolatos feladatok 95%-át a különböző asszisztens rendszerek fogják végezni és csupán 5%-marad a gépkocsivezetőnek. A szélesebb körű alkalmazás az egyes rendszerek árát csökkenteni fogja.
Éjszaka látó berendezés (Nightvision) és HUD (Head-up Display) a haszonjárművekben
A haszonjárművek vezetőfülkéje a csaknem függőleges szélvédőjével a személygépkocsikétól eltérő elrendezést igényel az éjszaka látó berendezéstől. Nem lehet a műszerfalba beszerelni a TFT kijelzőt. A vezetőülés helyzete azt eredményezné, hogy a HUD bele takarna a nagyon fontos közvetlen látótérbe, ami a biztonságot hátrányosan érintené. Ezért egy fej feletti beszerelést és tükröt alkalmaznak. A HUD képe a szélvédő felső részén látható. Ettől a 2008 –óta sorozatgyártásban lévő rendszertől az éjszaka bekövetkező balesetek számának csökkenését várják. További lehetőségek a más asszisztens rendszerekkel megvalósított kombináció. Például navigációs-, vagy forgalmi sáv tartó rendszerrel.
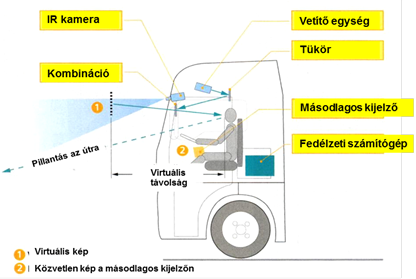
Radar érzékelő a haszonjárművekben
Egyre több olyan haszonjármű baleset következik be, amely intelligens rendszerek alkalmazásával elkerülhető lenne. Ugyanakkor a személygépkocsiknál egyre több közel-téri radar érzékelőt alkalmaznak. A Tyco Electronics közeli radar érzékelőket gyárt, melyek 24 GHz frekvenciával működnek.

A közúti forgalomban a haszonjárművek egyre nagyobb részaránnyal vesznek részt. A közlekedési szakemberek hangoztatják az igényt olyan automatikusan befékező rendszerekre, melyek veszélyhelyzetekben automatikusan működésbe lépnek. Ezekkel például sok olyan utoléréses baleset lenne elkerülhető, melyek gyakorta halálos kimenetelűek. Olykor személygépkocsik ütköznek neki fékezetlenül hátulról a haszonjárműveknek úgy, hogy semmi esély a túlélésre. Még dramatikusabbak a gyalogosgázolások. Európa útjain a halálos áldozatok 30%-a védtelen gyalogos. A balesetek 2/3 része frontálisan következik be.
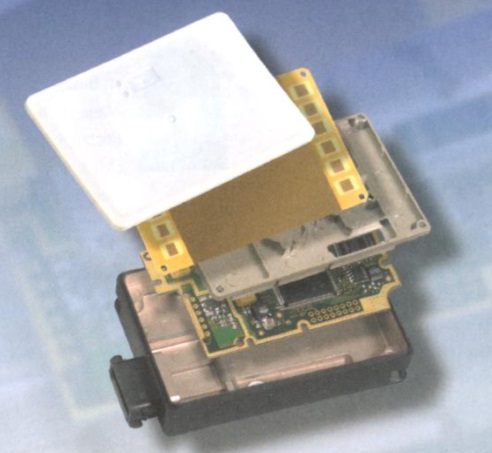
1. ACC; 2. Start Inhibit Area; 3. holt tér; 4. pótkocsira szerelt érzékelők; 5. Cut a Corner Control; 6. Reverze Aid
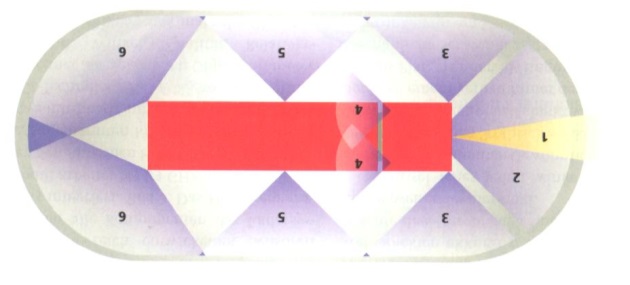
1. ACC; 2. Start Inhibit Area; 3. holt tér; 4. pótkocsira szerelt érzékelők; 5. Cut a Corner Control; 6. Reverze Aid
Az Európában futó, a megelőzést célul kitöltő projektek feltárják a lehetőségeket, amelyeket az új műszaki megoldások kínálnak, hogy a vezető figyelmét felhívják a veszélyes helyzetekre. Ennek egy speciális területe a haszonjármű vezetők figyelmeztetése olyan esetekre, amikor valaki, vagy valami közvetlenül a gépkocsijuk elé került, méghozzá úgy hogy a látótéren kívül van. Az elmúlt évtizedben a fejlesztők az ABS és az ESP sorozatos beépítése révén sokat tettek a súlyos balesetek csökkentése érdekében. A nagy ablakok és a visszapillantó tükrök kombinációi sokat tettek a halálosan takart tartományok csökkentése érdekében.
A radar előnyei
A közeli radar érzékelők alkalmazása észlelhetővé teszi az első lökhárító előtti 10 cm-től a 30 m-ig terjedő tartományt. Ezeknek az érzékelőknek a legnagyobb látószöge 130˚. Így viszonylag kevés érzékelővel észlelhetővé válik, méghozzá villámgyorsan a haszonjárművek teljes hossza és szélessége. A Tyco Electronics 24 GHz frekvenciával működő, úgynevezett Ultra-Wide-Band (UWB) technológiával működő érzékelőket gyárt. Ez lehetővé teszi az érzékelőhöz képest néhány centiméterre lévő objektumok észlelését. Ennek a másik előnye, hogy az egymástól 15 cm-re lévő objektumokat külön-külön objektumnak ismeri fel. Így például a garázs ajtó és a közelében játszó gyermek között különbséget tud tenni.