Gépjármű irányítás
Szerzői jog © 2014 Dr. Bokor József, Dr. Gáspár Péter, Dr. Szabó Zoltán

A tananyag a TÁMOP-4.1.2.A/1-11/1-2011-0042 azonosító számú „ Mechatronikai mérnök MSc tananyagfejlesztés ” projekt keretében készült. A tananyagfejlesztés az Európai Unió támogatásával és az Európai Szociális Alap társfinanszírozásával valósult meg.

A kiadásért felel a(z): BME MOGI
Felelős szerkesztő: BME MOGI
ISBN 978-963-313-174-9
2014
- 1. Bevezetés
- 2. Modellezés mért jelek alapján
- 3. Bizonytalanságok modellezése
- 3.1. Bizonytalansági modellek
- 3.2. M-
 struktúra
struktúra - 3.3. Robusztus stabilitás, robusztus performancia
- 3.4. Robusztus stabilitás vizsgálat
- 3.5. Kis erősítések tétele
- 3.6. Robusztus performancia analízis
- 3.7. Struktúrált bizonytalanság
- 3.8. Struktúrált szinguláris érték
- 3.9. Struktúrált szinguláris érték analízise
- 3.10. Struktúrált szinguláris érték: szintézis
- 4. Hosszirányú modellezés és irányítás
- 5. Keresztirányú modellezés és irányítás
- 6. Vertikális modellezés és irányítás
- 7. Integrált irányítások tervezése
- 1.1. Időtartományi jellemzők
- 1.2. Időtartományi jellemzők
- 1.3. Időtartományi jellemzők
- 2.1. Negyedjármű modell
- 3.1. P-K-Delta struktúra
- 3.2. Kis erősités kapcsolat
- 3.3. Súlyozott kis erősités kapcsolat
- 3.4. Robusztus performancia es stabilitás
- 3.5. Robust performance analysis
- 3.6. Egy lengőrendszer dinamikájának modellezése
- 3.7. A parametrikus bizonytalanságok modellezése
- 3.8. Lengőrendszer modellezése parametrikus bizonytalanságokkal
- 3.9. Lengőrendszer modellje
- 3.10. Lengőrendszer modellje a bizonytalanságokkal
- 3.11. Parametrikus bizonytalanságok hatása a Bode diagramra
- 3.12. D-K iteráció
- 4.1. Gördülési ellenállás
- 4.2. Erőhatások
- 4.3. Gördülési ellenállási tényező
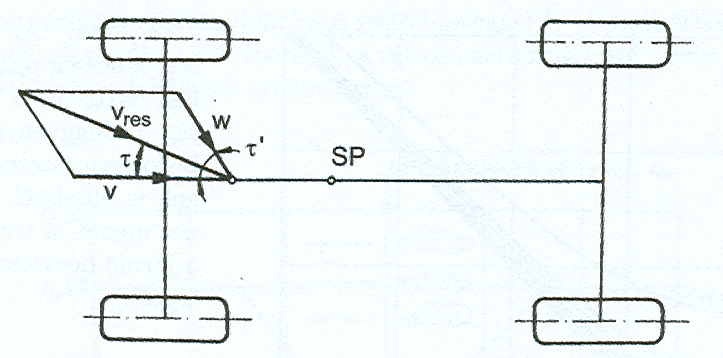
- 4.4. Kerékösszetartás
- 4.5. Kanyarellenállás
- 4.6. Áramlási sebesség
- 4.7. Koordináta rendszerek és kerék erők
- 4.8. Kerékdőlési szög
- 4.9. Kontakt pont sebessége
- 4.10. Kerék kinematikája
- 4.11. Komplex kerék modell
- 4.12. Valós és modellezett adhéziós görbe
- 4.13. Szimuláció:
- 4.14. Szimuláció: jelek
- 4.15. Összetett szabályozási séma
- 4.16. Követési feladat
- 4.17. Oszlopban haladó járművek
- 4.18. Adaptív string
- 4.19. A megoldás szimulációja
- 4.20. Struktúra modosítása
- 4.21. Az 5.2 példa megoldása
- 5.1. Szimulációs jelek
- 5.2. split
- 5.3. Kanyarodás közbeni fékezés
- 5.4. Legyezési stabilitás
- 5.5. Keresztirányú szabályozási séma
- 5.6. Differenciális fékezés
- 5.7. Kormányszög
- 5.8. Keresztirányú dinamika modellje
- 5.9. Keresztirányú stabilitás
- 5.10. Kanyarodási manőver
- 5.11. Kikerülési manőver
- 5.12. Előzési manőver
- 5.13. Kanyarodási manőver
- 5.14. Előzési manőver
- 5.15. Kritikus helyzet
- 5.16. Kritikus helyzet
- 5.17. Kritikus helyzet
- 5.18. Kritikus helyzet
- 5.19. Bicikli modell
- 6.1. Felfüggesztési modellek
- 6.2. Negyedjármű modell
- 6.3. Teljes jármű modellje
- 6.4. A teljes jármű rugózott tömegének az útgerjesztésre adott frekvencia válasza
- 6.5. A teljes jármű rugózott tömegének a bemenőjelre adott frekvencia válasza
- 6.6. Busz vázszerkezetének modellje
- 6.7. Végeselem modell
- 6.8. A teljes jármű rugózott tömegének az útgerjesztésre adott frekvencia válasza
- 6.9. rugóállandójának hatása
- 6.10. A rugóállandójának hatása
- 6.11. A rugóállandójának hatása
- 6.12. A nemlinearitás hatása
- 6.13. Lineáris és nemlineáris rendszerek összehasonlítása
- 6.14. Bukkanó modellezése
- 6.15. Egy tipikus modell harmonikus gerjesztéssel
- 6.16. Gerjesztőjel a szimulációkban
- 6.17. Gyorsulás és relatív elmozdulás
- 6.18. Spektrális sűrűségfüggvény közelítése
- 6.19. Példák útgerjesztés szimulálására / km/h
- 6.20. Felfüggesztés passzív, félaktív és aktív csillapítással
- 6.21. Aktív felfüggesztés hatása
- 6.22. Aktív felfüggesztés megvalósítása a BME laboratóriumban
- 6.23. Felfüggesztési rendszer működése rossz minőségű úton
- 6.24. A beavatkozóra kiadott irányítás és a szelep elmozdulás közötti kapcsolat
- 6.25. Az optimalizációs feladatban a lengéskényelmet javítjuk a többi minőségi jellemző rovására.
- 6.26. Az optimalizációs feladatban minden minőségi jellemzőt figyelembe vesszük
- 6.27. Az optimalizációs feladatban az úttartás minőségét javítjuk.
- 6.28. Az irányitás tervezése során a feladat a minőségi tulajdonságok közötti összhang megteremtése
- 6.29. Az irányitás tervezése során a feladat a minőségi tulajdonságok közötti összhang megteremtése
- 6.30. Az irányitás tervezése során a feladat a minőségi tulajdonságok közötti összhang megteremtése
- 6.31. Időtartományi vizsgálat végeselem modell alapján. Szimmetrikus bemenőjel esete
- 6.32. Időtartományi vizsgálat végeselem modell alapján. Aszimmetrikus bemenőjel esete
- 6.33. Időtartományi vizsgálat végeselem modell és véletlenszerű útprofil alapján
- 6.34. Félaktív felfüggesztés beavatkozói
- 6.35. Félaktív felfüggesztési modell
- 6.36. Félaktív felfüggesztés: erők
- 6.37. függése a relatív sebességtől
- 6.38. A teljes jármű modell
- 6.39. A zárt kör szerkezete
- 6.40. A zárt hurok részletes felépítése
- 6.41. Az irányított rendszer válaszfüggvényei felső szintű vezérlőt használva (folytonos:integrált, szaggatott:független)
- 6.42. Az irányított rendszer válasza felső szintű vezérlőt használva (folytonos:LPV, szaggatott:lineáris, pontozott:passzív)
- 6.43. Az irányított rendszer válasza felső szintű vezérlőt használva aszfalton (folytonos:LPV, szaggatott:lineáris, pontozott:passzív)
- 6.44. Az irányított rendszer empírikus frekvencia tartományi válaszfüggvényei felső szintű vezérlőt használva aszfalton (folytonos:LPV, szaggatott:lineáris, pontozott:passzív)
- 6.45. A nemlineáris jelkövető tervezés tulajdonságainak analízise (folytonos:backstepping módszer, szaggatott:feedback-linearizációs módszer)
- 6.46. A beavatkozó modell paraméterének hatása a backstepping módszerben (folytonos: , szaggatott: )
- 7.1. Legyező, dőlési és bólintó mozgások
- 7.2. A zárt kör kapcsolási struktúrája
- 7.3. A zárt kör szerkezete
- 7.4. Paraméter-függő erősítés a fékvezérlés tervezéséhez
- 7.5. A fékrendszer paraméter-függő súlyozása
- 7.6. Paraméter-függő erősítés a felfüggesztéshez
- 7.7. Példa a beavatkozók megválasztására
- 7.8. FDI szűrő tervezése
- 7.9. Az FDI szűrő működése
- 7.10. Beavatkozók megválasztásának hatása
- 7.11. Beavatkozók megválasztásának hatása
- 7.12. Kanyarodáskor adott válaszok
- 7.13. Az újrakonfigurálható rendszer viselkedése
- 7.14. A hibarűrő rendszer működése
- 7.15. Beavatkozók megválasztásának hatása
1. fejezet - Bevezetés
1.1. A rendszer modellezés általános elvei
A modell jellege a modellezésnél használt módszerek és eszközök függvénye. Ezzel összefüggésben a modellezés kiindulási pontjai szerint a valós fizikai rendszerről szerzett információk forrásai lehetnek elméleti ismeretek illetve gyakorlati ismeretek és feltevések. Az elméleti ismeretek sorába tartoznak az egyes jelenségekről alkotott fizikai elméletek által szolgáltatott leírások, amelyek általában (közönséges/parciális) differenciálegyenletek formájában öltenek testet. A gyakorlati ismeretek a rendszerről megfigyelések és mérések által gyűjtött adatok összességét, az elméleti modellekben szereplő egyes paraméterek mért értékeinek ismeretét jelentik. A feltevések sorába tartozik az alkalmazott modell megbízhatóságáról, érvényességi tartományáról alkotott vélemény.
Szimulációs cél esetén a modellezés célja rendszer viselkedésének minél pontosabb reprodukálása, amikor is a bonyolultságnak csak a futtatási idővel szemben támasztott követelmények szabnak határt. Irányítási cél esetén azonban csak azok a rendszertulajdonságok érdekesek, amik az irányítási célt befolyásolják, és a bonyolultságnak az elérhető irányítástervezési eljárások lehetőségei szabnak gátat.
A lehetséges modellosztályokat tekintve megkülönböztethetünk statikus és dinamikus modelleket: statikus modell időben nem változó állapotot ír le: a rendszer állapotát algebrai egyenletekkel, vagy idő szerinti deriváltakat nem tartalmazó (parciális) differenciál-egyenletekkel írható le. Elterjedt még a stacionárius, állandósult, illetve egyensúlyi modell kifejezés is. A dinamikus modell a vizsgált rendszer, folyamat jellemzőinek időbeni változását írja le, ami legtöbbször egy közönséges vagy parciális differenciálegyenlet, vagy egyenletrendszer. Lehetséges, hogy a tárgyalás nem az időtartományában, hanem valamely célszerűen megválasztott transzformált tartományában (frekvencia tartomány) valósul meg.
Az egyik legfontosabb osztályozó elv a lineáris illetve nemlineáris viselkedés megkülönböztetése: lineáris modell esetén a folyamatot leíró egyenletrendszer kielégíti a szuperpozíció elvét. A szuperpozíció elvéből következik, hogy lineáris matematikai modellek alakja csak homogén, lineáris egyenlet, illetve egyenletrendszer lehet. Egy nemlineáris modell használatakor a rendszerben lejátszódó folyamatot leíró egyenletek legalább egyike nemlineáris függvényt is tartalmaz. A nemlineáris modellek az egyszerűbb vizsgálat és tervezés érdekében valamilyen linearizálási eljárással lineáris modellekké alakíthatók át.
A modellben szereplő jelek természete szerint modellezhetünk folytonos illetve diszkrét időben: folytonos idejű modell esetén a modellezett rendszert vagy folyamatot leíró jellemzők, független és függő változók a vizsgált idő alatt bármelyik pillanatban vehetnek fel valamilyen értéket: a bemeneti és kimeneti jelei egyaránt folytonos idejű jelek. A folytonos paraméterű/folytonos állapotterű modellekben a változók egy adott tartományon, értékhatáron belül bármilyen értéket felvehetnek. A diszkrét idejű modellben a jellemzők csak adott, konkrét időpillanatokban vehetnek fel értékeket. Diszkrét paraméterű/diszkrét állapotterű modellek esetén a változók csak meghatározott diszkrét értékeket vehetnek fel.
1.2. Newton-Lagrange modellezés
A Lagrange módszer a rendszer modelljét általánosított elmozdulás és sebesség komponensekkel fogalmazza meg:
| (1) |

ahol  a kinetikai (mozgási) energia,
a kinetikai (mozgási) energia,  a potenciális (helyzeti) energia,
a potenciális (helyzeti) energia,  a disszipációs (csillapítás által elnyelt) energia és
a disszipációs (csillapítás által elnyelt) energia és  egy külső erő. A kinetikus energia a sebességvektoron kívül a helyzetvektortól is függhet, míg a potenciális energia egyedül a helyzetvektortól függ. A kinetikus energia és a potenciális energia különbsége az úgynevezett Lagrange állapotfüggvényt adja meg:
egy külső erő. A kinetikus energia a sebességvektoron kívül a helyzetvektortól is függhet, míg a potenciális energia egyedül a helyzetvektortól függ. A kinetikus energia és a potenciális energia különbsége az úgynevezett Lagrange állapotfüggvényt adja meg:
| (2) |

A Lagrange egyenlet felírható az egyes komponensekre bontott alakban is, azaz  komponensre felírva:
komponensre felírva:
| (3) |

Megjegyezzük, hogy a Newtoni mechanikában a rendszer modelljét erő és nyomaték egyensúlyi egyenletekkel fogalmazzuk Newton törvényeinek felhasználásával.
1.3. Átviteli függvény
Egy lineáris időinvariáns rendszer modelljének leírása lineáris, állandó együtthatós közönséges differenciál egyenlettel történik:

| (4) |

ahol  és
és  együtthatók konstansok, nem függnek az időtől. Tekintsük a differenciálegyenlet Laplace transzformáltját (
együtthatók konstansok, nem függnek az időtől. Tekintsük a differenciálegyenlet Laplace transzformáltját ( - transzformált) zérus kezdeti feltételekkel. Ekkor a következő egyenlethez jutunk:
- transzformált) zérus kezdeti feltételekkel. Ekkor a következő egyenlethez jutunk:

| (5) |

ahol  .
.
A  racionális törtfüggvényt a rendszer átviteli függvényének nevezzük. Az átviteli függvény tehát a kimenőjel és a bemenőjel zérus kezdeti feltételekkel vett
racionális törtfüggvényt a rendszer átviteli függvényének nevezzük. Az átviteli függvény tehát a kimenőjel és a bemenőjel zérus kezdeti feltételekkel vett  - transzformáltjainak hányadosa.
- transzformáltjainak hányadosa.
| (6) |

1.4. Az állapottér elmélet alapjai
A rendszer állapota egy  időpontbeli információ (olyan jelek ismerete), amelyből az
időpontbeli információ (olyan jelek ismerete), amelyből az  ,
,  bemenőjel ismeretében a rendszer válasza minden
bemenőjel ismeretében a rendszer válasza minden  időpontra meghatározható. A rendszer válasza a jövőbeli,
időpontra meghatározható. A rendszer válasza a jövőbeli,  időpontra vonatkozó állapotokat és a kimenőjeleket jelenti. A rendszer állapotait leíró jeleket, illetve ezek függvényeit, a rendszer állapotváltozóinak nevezzük.
időpontra vonatkozó állapotokat és a kimenőjeleket jelenti. A rendszer állapotait leíró jeleket, illetve ezek függvényeit, a rendszer állapotváltozóinak nevezzük.
Általánosan egy lineáris dinamikus rendszer állapottér reprezentációját a következő alakban írhatjuk:
| (7) |

| (8) |
ahol  a rendszermátrixok,
a rendszermátrixok,  az állapotvektor,
az állapotvektor,  az irányító bemenetek vektora és
az irányító bemenetek vektora és  a mért kimenetek vektora. A mátrixok méretei a jelek méreteihez illeszkednek.
a mért kimenetek vektora. A mátrixok méretei a jelek méreteihez illeszkednek.
Az állapotegyenlet, mint egy elsőrendű differenciálegyenlet megoldása két lépésben történik. Előbb megoldjuk a homogén egyenletet, majd megkeressük az inhomogén egyenlet egy partikuláris megoldását. A homogén egyenlet alakja:
| (9) |

az  kezdeti feltétellel és megoldása:
kezdeti feltétellel és megoldása:
| (10) |

ahol az  mátrix-exponenciális függvényt a következőképpen értelmezzük:
mátrix-exponenciális függvényt a következőképpen értelmezzük:
| (11) |
Például diagonál reprezentációk esetén, azaz  (
( ) választással ennek alakja:
) választással ennek alakja:
Az inhomogén egyenlet alakja:
| (12) |

ahol  egyenlet megoldása a következő:
egyenlet megoldása a következő:
| (13) |
A fentiek alapján az elsőrendű differenciálegyenlettel leírt állapotegyenlet megoldása:
| (14) |
| (15) |

Az állapottér reprezentáció alapján a rendszer átviteli függvényét a Laplace transzformáció alkalmazásával kapjuk meg:
| (16) |

ebből az állapot Laplace transzformáltja:
| (17) |

ahol  a kezdő állapot a
a kezdő állapot a  időpontban. Az
időpontban. Az  feltétel mellett
feltétel mellett
| (18) |

A  átviteli függvény:
átviteli függvény:
| (19) |
Az átviteli függvény pólusai tehát az
| (20) |
egyenlet gyökei.
1.5. Minőségi tulajdonságok elemzése
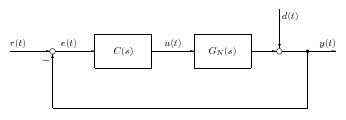
A minőségi kritériumok vizsgálata mindig a szabályozott rendszer (zárt kör) vizsgálatával történik: A zárt rendszer átviteli függvénye:
| (21) |

ahol  a hurokátviteli függvény és
a hurokátviteli függvény és  az előrevezető ág eredő átviteli függvénye. Az alábbiakban az időtartományi és frekvencia tartományi jellemzőket soroljuk fel.
az előrevezető ág eredő átviteli függvénye. Az alábbiakban az időtartományi és frekvencia tartományi jellemzőket soroljuk fel.
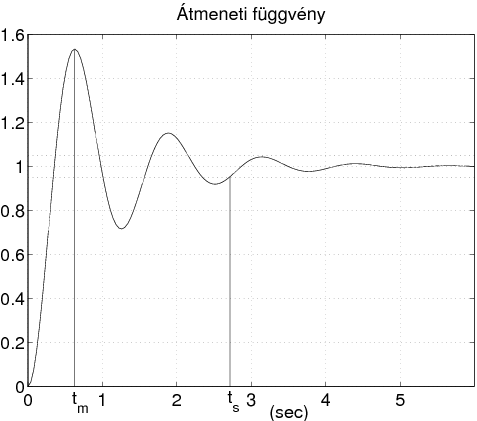
1.5.1. Időtartományi jellemzők
A rendszer állandósult állapotban felvett értékét beállási értéknek nevezzük, amit
 -sel jelölünk.
-sel jelölünk. A szabályozási idő (
 ) annak időtartama, amely eltelte után a rendszer kimenete a beállási értéktől
) annak időtartama, amely eltelte után a rendszer kimenete a beállási értéktől  -nál nagyobb mértékben nem tér el.
-nál nagyobb mértékben nem tér el. A szabályozási eltérés a megkívánt érték és az állandósult állapotbeli érték különbsége:
 .
.Túllendülési idő (
 ): a kimeneti jel maximális értékének időpontja.
): a kimeneti jel maximális értékének időpontja.A túllendülés mértéke (
 ): százalékban kifejezett viszonyszám, ami a maximális és beállási érték közötti különbség beállási értékhez való viszonyát fejezi ki:
): százalékban kifejezett viszonyszám, ami a maximális és beállási érték közötti különbség beállási értékhez való viszonyát fejezi ki:  .
.
1.5.1.1. Frekvencia tartományi jellemzők
rezonancia csúcs
 : az amplitúdó görbe maximális értéke;
: az amplitúdó görbe maximális értéke;rezonancia frekvencia
 : a rezonancia csúcshoz tartozó frekvencia érték;
: a rezonancia csúcshoz tartozó frekvencia érték;
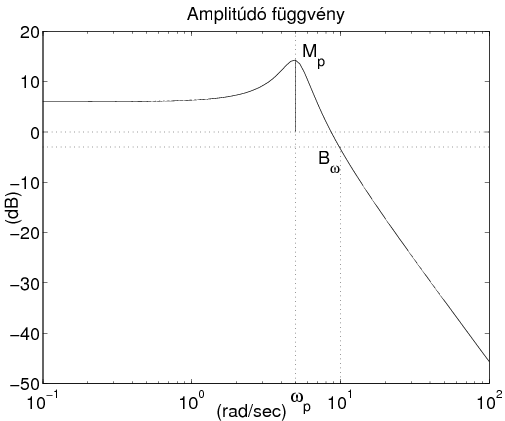
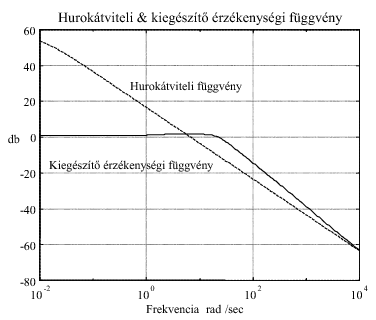
A sávszélesség fogalmát a kiegészítő érzékenységi függvény segítségével a következőképp adhatjuk meg. A rendszer sávszélessége az a
 frekvencia tartomány, amelyben a
frekvencia tartomány, amelyben a  kiegészítő érzékenységi függvény Bode diagramja
kiegészítő érzékenységi függvény Bode diagramja  -re csökken.
-re csökken.
1.6. Érzékenységfüggvény
Vizsgáljuk a zárt rendszer kimenetét különböző bemenetek esetén:
| (22) |

| (23) |

ahol  .
.
Bevezetjük a szabályozási körben értelmezett  érzékenységi függvényt és a
érzékenységi függvényt és a  kiegészítő érzékenységi függvényt:
kiegészítő érzékenységi függvényt:
| (24) |
| (25) |
Az érzékenységi függvény azt mutatja meg, hogy a zavaró jellemző hogyan befolyásolja a zárt rendszer kimenetét.
| (26) |
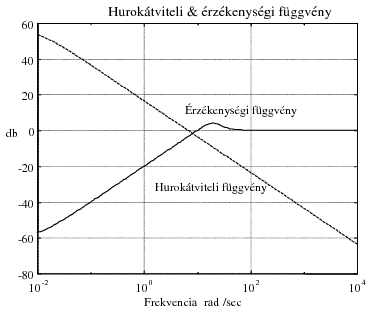
Az  érzékenységi függvény közelítő ábrázolását Bode-diagramon a felnyitott hurok
érzékenységi függvény közelítő ábrázolását Bode-diagramon a felnyitott hurok  frekvenciafüggvénye alapján a következőképp végezhetjük el.
frekvenciafüggvénye alapján a következőképp végezhetjük el.
Az érzékenységi függvény definíció szerint:
| (27) |
Kis és nagy körfrekvenciákra a következő közelítést használhatjuk:
| (28) |

A kiegészítő érzékenységi függvény a referencia jel és a kimenő jel közötti átviteli függvény.
| (29) |
A  kiegészítő érzékenységi függvény közelítő ábrázolását Bode-diagramon a felnyitott hurok
kiegészítő érzékenységi függvény közelítő ábrázolását Bode-diagramon a felnyitott hurok  frekvenciafüggvénye alapján a következőképp végezhetjük el. A kiegészítő érzékenység függvény definíció szerint:
frekvenciafüggvénye alapján a következőképp végezhetjük el. A kiegészítő érzékenység függvény definíció szerint:
| (30) |
Kis és nagy körfrekvenciákra a következő közelítést használhatjuk:
| (31) |
Az érzékenységi és kiegészítő érzékenységi függvények közötti összefüggés az alábbi:
| (32) |
1.7. Aszimptotikus jelkövetés
Követő szabályozásoknál a kimenőjelnek a referencia jeltől való eltérését követési hibának nevezzük:
| (33) |
Vizsgáljuk meg, hogy adott  referencia jelre aszimptotikusan mekkora lesz az eltérés, azaz a követési hiba. A követési hiba jel és a referencia jel Laplace-transzformáltjai közötti kapcsolatot az
referencia jelre aszimptotikusan mekkora lesz az eltérés, azaz a követési hiba. A követési hiba jel és a referencia jel Laplace-transzformáltjai közötti kapcsolatot az  érzékenységi függvény írja le. Alkalmazva a határérték tételeket:
érzékenységi függvény írja le. Alkalmazva a határérték tételeket:
| (34) |

Vizsgálhatjuk a tipikus referencia jelek, mint egységugrás vagy egység sebesség ugrás jelek aszimptikus követését.
1.7.1. Egységugrás bemenetre adott válaszfüggvény
Vizsgáljuk meg a válaszfüggvényt  ,
,  bemenetre. Ekkor
bemenetre. Ekkor
| (35) |

Ha  arányos jellegű, azaz ha
arányos jellegű, azaz ha  , akkor
, akkor
| (36) |
ahol  a hurokerősítési tényező. A követési hiba értéke függ a hurokerősítési tényező értékétől.
a hurokerősítési tényező. A követési hiba értéke függ a hurokerősítési tényező értékétől.
Ha  integráló jellegű, azaz ha
integráló jellegű, azaz ha  ,
,  alakú, akkor
alakú, akkor
| (37) |

tehát a követési hiba aszimptotikusan zérus.
Ha  2 típusú (kétszeres integrátort tartalmaz), azaz ha
2 típusú (kétszeres integrátort tartalmaz), azaz ha  ,
,  alakú, akkor
alakú, akkor
| (38) |

tehát a követési hiba aszimptotikusan zérus.







1.8. Zavarkompenzálás
Az aszimptotikus zavarkompenzálást az aszimptotikus alap- vagy referencia jelkövetéshez hasonlóan vizsgálhatjuk. Tipikus zavaró jelek, mint egységugrás, egység sebességugrás jelek, a zavaró jel hatását a kimenő jelben zérus referencia jel feltételezése mellett vizsgáljuk. Ehhez felírjuk a kimenő jel és a zavaró jel Laplace - transzformáltjai közötti összefüggéseket és alkalmazzuk a határérték tételeket.
A kimenő és a zavaró jel közötti átviteli függvény az  érzkenységi függvény. Ennek alapján a kimenőjel Laplace – transzformáltja
érzkenységi függvény. Ennek alapján a kimenőjel Laplace – transzformáltja
| (42) |

Alkalmazva a határérték tételt:
| (43) |
Legyen például  ,
,  .
.
Arányos rendszer vizsgálata: vizsgáljuk meg az arányos rendszer viselkedését. A hurokátviteli függvény alakja  . Ekkor
. Ekkor
| (44) |
ahol  a hurokerősítés tényező. Tehát a zavaró jel hatása megjelenik a kimeneten.
a hurokerősítés tényező. Tehát a zavaró jel hatása megjelenik a kimeneten.
Integráló rendszer vizsgálata: legyen például  ,
,  és tegyük fel, hogy a hurokátviteli függvény integráló alakú, azaz
és tegyük fel, hogy a hurokátviteli függvény integráló alakú, azaz  . Ekkor
. Ekkor
| (45) |
tehát a zavaró jel hatását a rendszer aszimptotikusan teljesen elnyomja, kompenzálja. Megjegyezzük, hogy a 2-típusú integráló tulajdonságú rendszer is kompenzálja a hibajelet.
2. fejezet - Modellezés mért jelek alapján
A modell rendszerint egy differenciálegyenlet formájában ölt testet. Irányításelméleti alkalmazásokban ezek közönséges differenciálegyenletek, vagy darabonként közönséges differenciálegyenletek (kapcsolt rendszerek, impulzív rendszerek).
Amikor a teljes modellt a priori ismeretek alapján állítjuk fel, amik lehetnek fizikai elvek (Hamilton, Lagrange formalizmus, megmaradási elvek, mérlegegyenletek), akkor fehér doboz (white-box) modellezésről beszélünk. A módszer előnye, hogy a modell fizikai paramétereinek valós tartalma, jelentése van, hátránya viszont, hogy a modell felépítése általában rendkívül bonyolult. Ezen túlmenően a modell-bizonytalanságok kezelése is eléggé problematikus.
Ennek ellenpontja a fekete doboz (black-box) modellezés, amikor is a modell felállításához csak kísérletekkel, mérésekkel lehet információkat szerezni. Ilyen információ forrása lehet például a vizsgálójelekre adott rendszerválaszok (például az átmeneti függvény) elemzése. Elsősorban lineáris időinvariáns (LTI) rendszermodellek esetén használatos. Ha nincs más alapinformáció, akkor kiindulásként, mint matematikai modell, például polinommal történő közelítést biztosító egyenleteket lehet felhasználni. Az black-box modellek lényeges előnye a viszonylagos egyszerűségük; hátrányuk viszont, hogy a paramétereknek általában nincs valós fizikai jelentése.
E két véglet között helyezkedik el a szürke doboz (grey-box) modellezés, ami az előző két módszer kombinációja. Főleg nemlineáris jelenségek modellezésére használatos. Ekkor a struktúra adott -- de nem feltétlenül valamiféle egzakt levezetés eredménye. A (sztatikus) nemlinearitások leírásakor gyakran heurisztikus ismeretek épülnek be a modellbe. A műszaki gyakorlatban legtöbbször ez az eset fordul elő. Hátránya az, hogy a struktúra és a parametrizálás általában nem örződik meg a szokásos diszkretizálási eljárásokban.
2.1. Grey-box modellezés
Példa 3.1 Írjuk fel az alábbi negyedjármű modellt a nemlinearitások figyelembe vételével.
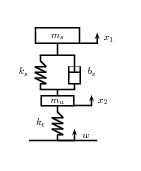
Erők, egyensúlyi egyenletek, nemlinearitások


ahol az egyes komponensek alakja:




Az állapottér reprezentáció
Ha az állapotvektor elemeit az alábbi formában vesszük fel:
akkor a komponensek:
A qLPV állapottér modell
ahol  és
és 
Nemlinearitások virtuális linearizálása:


Mért ütemezési változók:


Fiktív input:

Grey-box qLPV modell:
ahol

2.2. Identifikálhatóság
Legyen  az
az  kezdeti értékű és
kezdeti értékű és


rendszer input/output leképezése (  vektor paraméter).
vektor paraméter).
A  paraméter globálisan identifikálható az input/output adatokból, ha létezik legalább egy
paraméter globálisan identifikálható az input/output adatokból, ha létezik legalább egy  bemenő jel, hogy
bemenő jel, hogy  egyértelműen megoldható legyen minden
egyértelműen megoldható legyen minden  kezdeti értékre.
kezdeti értékre.
A lineáris rendszer:

A  input/output leképezés (alapmátrix) ismerete nem szükséges az identifikálhatóság eldöntéséhez. Helyette egy implicit
input/output leképezés (alapmátrix) ismerete nem szükséges az identifikálhatóság eldöntéséhez. Helyette egy implicit  identifikálhatósági kifejezést használhatunk.
identifikálhatósági kifejezést használhatunk.

kiszámítása: legyen  és
és

Ekkor
ahol  és
és


kiszámítása: legyen  vektor sorai:
vektor sorai:



Ekkor  sorai a
sorai a  vektorok.
vektorok.
Identifikálhatósági feltétel: egy analitikus dinamikus rendszer megfigyelhető az  intervallum minden nemtriviális részintervallumán akkor és csak akkor, ha
intervallum minden nemtriviális részintervallumán akkor és csak akkor, ha  .
.

ahol  az
az  egy általánosított inverze.
egy általánosított inverze.
Ez az egyenlet egy implicit leképezés  ahol a kezdeti érték
ahol a kezdeti érték

Átparaméterezés: az egyenleteket átparaméterezve ( ):
):

ha
 injektív akkor a rendszer identifikálható;
injektív akkor a rendszer identifikálható;az input/output jeleknek perszisztensnek kell lenni;
ha az
 kezdeti feltételek ismertek, akkor az identifikálhatósághoz a
kezdeti feltételek ismertek, akkor az identifikálhatósághoz a  leképezésnek injektívnek kell lenni.
leképezésnek injektívnek kell lenni.
Példa 3.2 Vizsgáljuk meg a rugózott tömeg identifikálhatóságát. Átparaméterezett modell: legyen  .
.
| (46) |
ahol  és
és  ismert paraméterek. Mivel
ismert paraméterek. Mivel  változhat,
változhat,  ismeretlen.
ismeretlen.  jelöléssel a dinamikai egyenlet
jelöléssel a dinamikai egyenlet
| (47) |

Ekkor
| (48) |
| (49) |
és
| (50) |

Ha  nem azonosan zéró és a bemenetek perszisztensek akkor a
nem azonosan zéró és a bemenetek perszisztensek akkor a  paraméter, legalább is elméletben, identifikálható.
paraméter, legalább is elméletben, identifikálható.
A modell ellenőrzése a mért eredményekkel való összevetést modell validációnak nevezzük. A vizsgált rendszer viselkedésének leírására felállított matematikai modell jósága igazolásának legegyszerűbb módja az, hogy az eredeti rendszerben méréseket végzünk, és azok eredményeit összevetjük a modell által szolgáltatott eredményekkel. A modellalkotás során a modell és a mérések által szolgáltatott eredmények eltéréseit kell minimalizálni (identifikáció): a feladat megoldására leggyakrabban az legkisebb négyzetek módszerét alkalmazzuk.
Iteratív séma: ha az ellenőrzés során kiderül, hogy a feltételezett modell nem teljesíti a megkövetelt pontossági előírásokat, akkor egy iterációs feladatot kell megoldanunk: vissza kell térnünk a modellalkotási algoritmus elejére, és esetleg újabb paraméterek bevonásával, figyelembevételével egy újabb, javított felépítéssel kell elvégezni a modell azonosítását majd végre kell hajtanunk a modell validálásához leírt feladatokat.
Szimuláció során a matematikai modellel a rendszer kimenő változóit a bemenetek különböző értékéi függvényében határozzuk meg. Fontos, hogy gondot fordítsunk azon paraméterek azonosítására, amelyek a rendszer viselkedését döntően befolyásolják, amelyekre a rendszer a legérzékenyebben reagál. Paraméter-érzékenységi vizsgálat alkalmával a kapott eredményekből vonhatunk le következtetéseket a rendszer viselkedésére.
3. fejezet - Bizonytalanságok modellezése
- 3.1. Bizonytalansági modellek
- 3.2. M- struktúra
- 3.3. Robusztus stabilitás, robusztus performancia
- 3.4. Robusztus stabilitás vizsgálat
- 3.5. Kis erősítések tétele
- 3.6. Robusztus performancia analízis
- 3.7. Struktúrált bizonytalanság
- 3.8. Struktúrált szinguláris érték
- 3.9. Struktúrált szinguláris érték analízise
- 3.10. Struktúrált szinguláris érték: szintézis
A dinamikus jelenségek leírására közönséges vagy parciális differenciál-egyenleteket használunk. Az egyenletek alakja és struktúrája, a bennük szereplő paraméterek általában nem ismertek teljesen pontosan vagy ha azok időben változnak, a változásuk általában nem ismert.
Mivel a valódi rendszer modelljének pontos alakja a gyakorlati feladatokban nem ismert, s emiatt helyette annak közelítő, úgynevezett névleges (nominális) modelljét használjuk. A modell és a valós rendszer közötti eltérést okozzó hatások modellezésekor célszerű megkülönböztetni az állandóan jelen levő modell bizonytalanságot a külső zavarástól. Zavarások (disturbances) körébe tartozik tipikusan a rendszerre ható külső zavarás, az irányítójel hibája, a mérési zaj. Az irányítás célja, hogy a zavarások hatását csökkentse a mérnöki szempontból érdekes (esetleg fiktív) kimenő jelekre -- ez egy tipikus performancia követelmény.
Modell bizonytalanság (uncertainty) a modellben meglevő parametrikus bizonytalanságok és a nem modellezett dinamika hatása. Egy speciális eset a qLPV modellek ütemezési változói, amik ismertek a végrehajtás során de nem ismertek tervezéskor: a tervezés számára bizonyos szempontból bizonytalan paraméterként viselkednek. Az irányítás célja stabilitás és performancia garantálása adott nagyságú feltételezett modell bizonytalanság mellett.
Kétféle modell-bizonytalanságot különböztethetünk meg: strukturális és strukturálatlan modell-bizonytalanságot. A struktúrált bizonytalanság modellezésekor a bizonytalansági blokk struktúrálása (például blokk-diagonális) növelheti a modell pontosságát és használhatóságát az irányítás-tervezés szempontjából. Tipikusan struktúrált a grey-box modellezés során kapott modellben előforduló paramétereknek a bizonytalansága: a paraméter értéke pontosan nem ismert, de a bizonytalanság mértéke általában jól becsülhető.
3.1. Bizonytalansági modellek
Nemmodellezett dinamika
A mechanikai rendszerek irányítására alkalmazott lineáris vagy folytonos nemlineáris irányítási algoritmusokkal megvalósított szabályozási rendszer tulajdonságait nagymértékben leronthatják a mechanikai rendszerben jelenlevő (nemfolytonos) nemlinearitások. Tipikus nemlinearitások a szaturáció, surlódás,holtsáv, kotyogás, hiszterézis.
Számos irányítási alkalmazásnál az irányított rendszerben a nemlinearitás pontatlanul ismert vagy akár ismeretlen. Ha a linearizáláson alapuló technika kevésbé alkalmazható, a nemlinearitás hatásának kompenzálásához a szabályozót módosítani kell. Az alkalmazott technika alapján ez lehet robusztus szabályozás, amikor a szabályozót úgy tervezzük meg, hogy pontatlanul ismert nemlinearitás esetén is garantálja a zárt rendszer stabilitását és a szabályozási pontosságot, performanciát, vagy adaptív szabályozás, amikor a szabályozót kibővítjük olyan formában, hogy irányítás közben becsülje meg az ismeretlen nemlinearitást, paramétert.
A modell és a rendszer közötti hiba meghatározására általános megoldás nincs, különböző szerkezetű lehetőségek közül az additív, illetve a multiplikatív hiba struktúra a legismertebb.
A  aktuális rendszer és a
aktuális rendszer és a  névleges rendszer közötti eltérést additív hiba struktúrának nevezzük, ha a következő összefüggés teljesül:
névleges rendszer közötti eltérést additív hiba struktúrának nevezzük, ha a következő összefüggés teljesül:
| (51) |

ahol  az additív hiba átviteli függvénye. Az additív hiba ismeretlen.
az additív hiba átviteli függvénye. Az additív hiba ismeretlen.
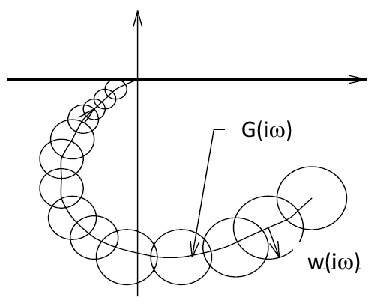
A  ismeretlen méretű additív hiba átviteli függvényt egy ismert korláttal rendelkező
ismeretlen méretű additív hiba átviteli függvényt egy ismert korláttal rendelkező  bizonytalansággal kifejezhetjük és frekvencia függvényét Nyquist diagramon ábrázolhatjuk:
bizonytalansággal kifejezhetjük és frekvencia függvényét Nyquist diagramon ábrázolhatjuk:
| (52) |

ahol  skalár függvény. Az aktuális
skalár függvény. Az aktuális  rendszer Nyquist diagramja a névleges
rendszer Nyquist diagramja a névleges  rendszer Nyquist diagramjával és a bizonytalanságot leíró
rendszer Nyquist diagramjával és a bizonytalanságot leíró  függvénynyel illusztrálható.
függvénynyel illusztrálható.
A  aktuális rendszer és a
aktuális rendszer és a  névleges rendszer közötti eltérést multiplikatív hiba struktúrájúnak nevezzük, ha a következő összefüggés teljesül:
névleges rendszer közötti eltérést multiplikatív hiba struktúrájúnak nevezzük, ha a következő összefüggés teljesül:

ahol  a multiplikatív hiba átviteli függvénye.
a multiplikatív hiba átviteli függvénye.
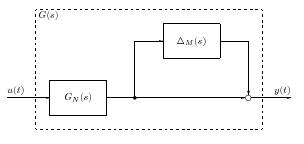
A  ismeretlen méretű additív hiba átviteli függvényt egy ismert korláttal rendelkező
ismeretlen méretű additív hiba átviteli függvényt egy ismert korláttal rendelkező  bizonytalansággal kifejezhetjük és frekvencia függvényét Bode diagramon ábrázolhatjuk:
bizonytalansággal kifejezhetjük és frekvencia függvényét Bode diagramon ábrázolhatjuk:
| (53) |

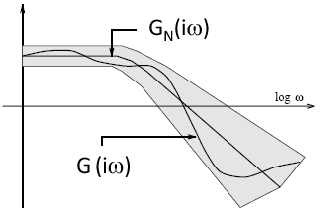
ahol  skalár függvény. Az aktuális
skalár függvény. Az aktuális  rendszer Bode diagramja a névleges
rendszer Bode diagramja a névleges  rendszer Bode diagramjával és a bizonytalanságot leíró
rendszer Bode diagramjával és a bizonytalanságot leíró  függvénnyel illusztrálható.
függvénnyel illusztrálható.
Parametrikus bizonytalanság
Gyakran a bizonytalanságok egy része a rendszert leíró modell paramétereinek változásával is megfogalmazható.
Például az  rendszermátrixban lévő
rendszermátrixban lévő  rugóállandó és
rugóállandó és  csillapítási együtthatók változnak. Ezek a paraméterek a mátrix több elemében is előfordulhatnak.
csillapítási együtthatók változnak. Ezek a paraméterek a mátrix több elemében is előfordulhatnak.
A bizonytalan rugóállandó paramétere a következőképpen modellezhető:
| (54) |
ahol  a névleges rugóállandó,
a névleges rugóállandó,  a névleges értéktől való eltérést mutatja, míg
a névleges értéktől való eltérést mutatja, míg  paraméterről azt tudjuk, hogy a
paraméterről azt tudjuk, hogy a  intervallumba esik. A bizonytalan rugóállandó
intervallumba esik. A bizonytalan rugóállandó  struktúrája a 11. ábrán látható.
struktúrája a 11. ábrán látható.

A jelek közötti kapcsolatok:
| (55) |
ahol  . Emiatt
. Emiatt  . Az ismert komponenseket tartalmazó blokk:
. Az ismert komponenseket tartalmazó blokk: 
Ha egy bizonytalan paraméter a nevezőben van, akkor a következőképpen járunk el.
| (56) |
ahol  a névleges tömeg,
a névleges tömeg,  a névleges értéktől való eltérést mutatja, míg
a névleges értéktől való eltérést mutatja, míg  paraméterről azt tudjuk, hogy a
paraméterről azt tudjuk, hogy a  intervallumba esik. A bizonytalan rugóállandó
intervallumba esik. A bizonytalan rugóállandó  struktúrája a 12. ábrán látható.
struktúrája a 12. ábrán látható.
| (57) |

A jelek közötti kapcsolatok:
| (58) |
ahol  . Mivel
. Mivel  , ezért
, ezért  .
.
Emiatt  . Az ismert komponenseket tartalmazó blokk:
. Az ismert komponenseket tartalmazó blokk:  .
.
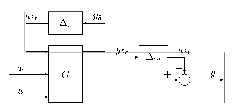
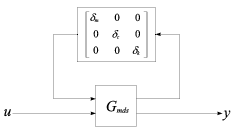
3.2. M- struktúra
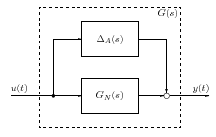
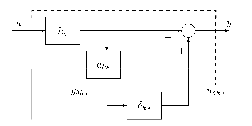
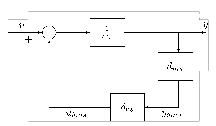
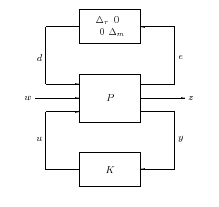
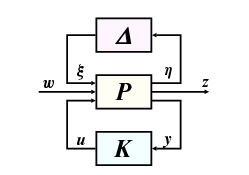
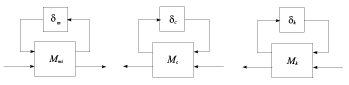
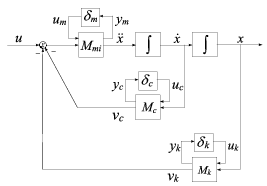
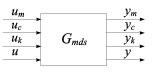
A szabályozott rendszer komponensei az előzőek alapján a modell és a szabályozó, valamint a minőségi specifikációkkal és bizonytalanságokkal kapcsolatos információk. A 13. ábrán látható úgynevezett  struktúrájú modellt használjuk a szabályozó tervezéséhez.
struktúrájú modellt használjuk a szabályozó tervezéséhez.
| (59) |
Ha figyelembe vesszük a szabályozó hatását, azaz az irányítójel és a mért jel közötti kapcsolatot  , akkor az úgynevezett M-
, akkor az úgynevezett M- struktúrához jutunk.
struktúrához jutunk.
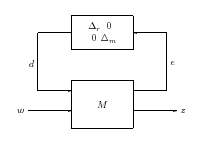
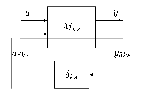
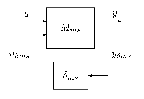
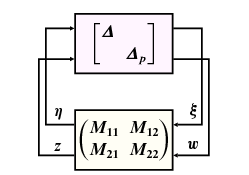
A 14 ábrán látható  modellt a szabályozott rendszer elemzéséhez használjuk.
modellt a szabályozott rendszer elemzéséhez használjuk.
| (60) |
3.3. Robusztus stabilitás, robusztus performancia
Mivel a rendszerre ható külső körülmények változhatnak, valamint az érzékelők és beavatkozó szervek tulajdonságai is módosulhatnak, kisebb hibák léphetnek fel, stb. szükség van rekonfiguráló és hibatűrő irányítások tervezése. Ezen a tulajdonságok az elérésének egy módja lehet növelni a szabályozó robusztusságát ezekre a tényezőkre és a modellezési hibákra. Az alábbiakban a feladat megoldásának ezt a stratégiáját fejtjük ki részletesebben.
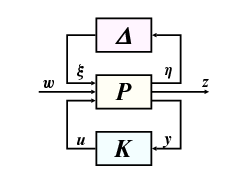
A szabályozási feladatot az 15 ábrán bemutatott  struktúrában fogalmazzuk meg amit az alábbi egyenletek írnak le
struktúrában fogalmazzuk meg amit az alábbi egyenletek írnak le
| (61) |
ahol  jelek a bizonytalanságok leírására szolgálnak,
jelek a bizonytalanságok leírására szolgálnak,  az általánosított rendszerstruktúra zavarás és performancia jelei,
az általánosított rendszerstruktúra zavarás és performancia jelei,  a szabályozó bemenet és a mért kimenet.
a szabályozó bemenet és a mért kimenet.
A bizonytalansági halmaz,  , stabil átmenetfüggvényekből áll. A perturbált kör a
, stabil átmenetfüggvényekből áll. A perturbált kör a
| (62) |

bizonytalanság hatására lakul ki, ahol  és alakja a következő:
és alakja a következő:
| (63) |
| (64) |

Az  szabályozót a nominális (perturbálatlan) rendszerre kötve kapjuk, hogy
szabályozót a nominális (perturbálatlan) rendszerre kötve kapjuk, hogy
| (65) |
| (66) |

A szabályozott,  , és perturbált,
, és perturbált,  , kör alakja
, kör alakja
| (67) |

Mivel a zárt körök jól definiáltak kell, hogy legyenek és nem függhetnek  és
és  sorrendjétől, néhány feltételezéssel kell élnünk:
sorrendjétől, néhány feltételezéssel kell élnünk:
1. Létezik  szabályozó, ami stabilizálja a nominális (
szabályozó, ami stabilizálja a nominális ( ) rendszert (
) rendszert ( ).
).
2. A bizonytalansági halmaz
| (68) |

ahol  komplex mátrixok egy halmaza, ami tartalmazza
komplex mátrixok egy halmaza, ami tartalmazza  -t, ami meghatározza a bizonytalanságok méretét és struktúráját. Feltesszük, hogy ez a halmaz csillag alakú, vagyis
-t, ami meghatározza a bizonytalanságok méretét és struktúráját. Feltesszük, hogy ez a halmaz csillag alakú, vagyis  minden
minden  esetén.
esetén.
3. A bizonytalanságok és az általánosított rendszerstruktúra kötése jól definiált, vagyis  invertálható minden
invertálható minden  esetén.
esetén.
Ezek a feltételek jórészt automatikusan teljesülnek a szokásos, intervallum, gömb, stb. típusú bizonytalansági halmazokra.
Általában normalizáló súlyozásokat alkalmazunk, amit azután figyelembe veszünk  összeállításánál: ha
összeállításánál: ha  bizonytalansággal akarunk dolgozni, ahol
bizonytalansággal akarunk dolgozni, ahol  valós racionális
valós racionális  és
és  súlyokkal, akkor
súlyokkal, akkor  helyett
helyett  rendszert kell tekintenünk, ahol
rendszert kell tekintenünk, ahol
| (69) |
3.4. Robusztus stabilitás vizsgálat
Vezessük be a
| (70) |
jelölést, ahol  a bizonytalanság által látott átviteli függvény.
a bizonytalanság által látott átviteli függvény.
Tétel 4.1 Ha  stabilizálja
stabilizálja  -t és ha
-t és ha  minden
minden  esetén stabilan invertálható akkor
esetén stabilan invertálható akkor  robusztusan stabilizálja
robusztusan stabilizálja  -t a
-t a  bizonytalanságra nézve.
bizonytalanságra nézve.
A gyakorlatban azt kell leelenőrizni, hogy  stabilisan invertálható, vagyis
stabilisan invertálható, vagyis  minden
minden  esetén. Ez a feladat bonyolult, mivel az egész jobb fél síkon kell a feltételt ellenőrizni.
esetén. Ez a feladat bonyolult, mivel az egész jobb fél síkon kell a feltételt ellenőrizni.
A következő állítás megmutatja, hogy általában elég  invertálhatóságát a komplex tengelyen (
invertálhatóságát a komplex tengelyen ( , ahol
, ahol  ) ellenőrizni és elegendő csak a
) ellenőrizni és elegendő csak a  halmazra.
halmazra.
Tétel 4.2 Tegyük fel, hogy  egy stabil átviteli mátrix.
egy stabil átviteli mátrix.
Ha  minden
minden  esetén, akkor
esetén, akkor  stabilisan invertálható minden
stabilisan invertálható minden  esetén.
esetén.
A fenti két állítást összegezve kapjuk a következő robusztus stabilitási eredményt:
Következmény 4.1 Ha  stabilizálja
stabilizálja  -t és
-t és  minden
minden  és minden
és minden  esetén, akkor
esetén, akkor  robusztusan stabilizálja
robusztusan stabilizálja  -t a
-t a  bizonytalansági halmazra nézve.
bizonytalansági halmazra nézve.
A fordított állítás általában nem igaz. Egy konkrét esetben a teszt nem konzervatív voltát megpróbálhatjuk úgy igazolni, hogy egy destabilizáló  perturbációt keresünk.
perturbációt keresünk.
3.5. Kis erősítések tétele
A robusztus stabilitási analízis egy alapvető eszköze a kis erősítések tétele, ami kimondja, hogy ha a hurokátviteli szorzat normája egynél kisebb, akkor a visszacsatolás stabilis. Ez az eredmény a fixpont tétel egy következménye.
Egy  rendszert, ahol
rendszert, ahol  egy Banach tér (például
egy Banach tér (például  vagy
vagy  )) kontraktív, ha a (Lipschitz) indukált normája
)) kontraktív, ha a (Lipschitz) indukált normája  -nél kisebb, azaz létezik
-nél kisebb, azaz létezik  úgy, hogy
úgy, hogy
| (71) |

minden  esetén. A fixpont tétel alapján egy kontraktív
esetén. A fixpont tétel alapján egy kontraktív  rendszerhez létezik és egyértelmű
rendszerhez létezik és egyértelmű  amire
amire  .
.
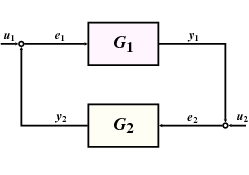
Tétel 4.3 (Kis erősítések tétele) Tegyük fel, hogy a  valamint a
valamint a  rendszereknek véges erősítése van, amire
rendszereknek véges erősítése van, amire  .
.
Ekkor a visszacsatolt kapcsolat stabilis, azaz minden  esetén létezik es egyértelmű
esetén létezik es egyértelmű  , lásd a 16 ábrát.
, lásd a 16 ábrát.
A gyakorlatban sokszor az eredeti visszacsatolás nem teljesíti a tétel feltételeit. Ilyenkor a zárt kör stabilitását megkaphatjuk a kis erősítések tételének alkalmazásával egy módosított elrendezésre, aminek a stabilitási tulajdonságai viszont azonosak az eredeti rendszerével.
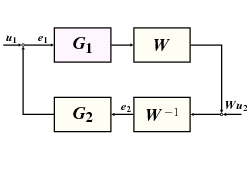
A leggyakrabban alkalmazott transzformáció stabilan invertálható súlyfüggvényeket alkalmazva módosítja a kapcsolást az 17 ábrán látható módon.
Következmény 4.2 Legyen  stabil rendszer. Ekkor a visszacsatolt rendszer stabilis ha létezik egy
stabil rendszer. Ekkor a visszacsatolt rendszer stabilis ha létezik egy  ,
,  stabilis rendszer úgy, hogy
stabilis rendszer úgy, hogy  .
.
3.6. Robusztus performancia analízis
Definiáljuk a
| (72) |
halmazt. A kis erősítések tételét alkalmazva megkaphatjuk a  -ra vonatkozó robusztus performancia eredményt:
-ra vonatkozó robusztus performancia eredményt:
•  invertálható és
invertálható és  minden
minden  esetén,
esetén,
akkor és csak akkor ha a robusztus stabilitási feltétel minden  -ra fennáll, ahol
-ra fennáll, ahol  és
és  , lásd az 17 ábrát, azaz
, lásd az 17 ábrát, azaz
•  invertálható minden
invertálható minden  esetén,
esetén,
ahol  .
.
Megvizsgálva, hogy
| (73) |

adódik, hogy
| (74) |

 invertálható ha
invertálható ha  invertálható. Feltevéseink szerint
invertálható. Feltevéseink szerint  .
.
válasszuk  -t. Ekkor
-t. Ekkor
| (75) |
invertálható, tehát  invertálható minden
invertálható minden  esetén.
esetén.
Mivel  invertálható, a kis erősítések tételéből következik, hogy
invertálható, a kis erősítések tételéből következik, hogy  minden
minden  esetén.
esetén.
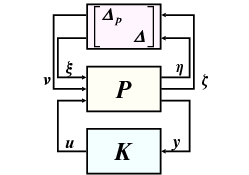
Összefoglalva: a robusztus performancia ekvivalens egy robusztus stabilitási feladattal, ami egy nomináis  zárt körre és struktúrált bizonytalanságra vonatkozik, lásd a 19, ábrát. Mivel a bizonytalansági halmaz struktúrált, a kis erősítések tételénél kevésbé konzervatív eredmények keresése válik szükségessé.
zárt körre és struktúrált bizonytalanságra vonatkozik, lásd a 19, ábrát. Mivel a bizonytalansági halmaz struktúrált, a kis erősítések tételénél kevésbé konzervatív eredmények keresése válik szükségessé.
3.7. Struktúrált bizonytalanság
A bizonytalan rendszereket egy nominális LTI rendszer és egy visszacsatolt bizonytalan blokk együttesével modellezzük, ahol először a  bizonytalansági halmazra az operátor egységgömböt választottuk. Ez az eset jól kezelhető a kis erősítések tételével. A továbbiakban ezt a technikát terjesztjük ki más szerkezetű bizonytalansági halmazok esetére.
bizonytalansági halmazra az operátor egységgömböt választottuk. Ez az eset jól kezelhető a kis erősítések tételével. A továbbiakban ezt a technikát terjesztjük ki más szerkezetű bizonytalansági halmazok esetére.
Egy igen fontos struktúrált bizonytalansági osztály a blokk diagonális bizonytalanságok halmaza. Blokk diagonális bizonytalansági struktúrák létrehozásának egyik módja az egyes  bizonytalanságok kiemelése a rendszerből és az így kapott összekötés LFT alakra való hozása.
bizonytalanságok kiemelése a rendszerből és az így kapott összekötés LFT alakra való hozása.
A továbbiakban azt az elvet illusztráljuk egy néhány konkrét példán keresztül.
Példa 4.1 Input-output multiplikatív bizonytalanság:
| (76) |
| (77) |
A  kiemelésének menete:
kiemelésének menete:
•  elkülönítése:
elkülönítése:
| (78) |

| (79) |

•  elkülönítése:
elkülönítése:
| (80) |

| (81) |

Példa 4.2: Faktorizált bizonytalanság ( invertálható):
invertálható):
| (82) |

| (83) |

Az alábbi relációk
| (84) |

felírhatók mint
| (85) |

amiből  -t eliminálva és figyelembe véve, hogy
-t eliminálva és figyelembe véve, hogy  adódik
adódik
| (86) |

Parametrikus bizonytalanságokra tekintsük az alábbi példákat:
Példa 4.3: Tekintsük a rugózott tömeg moddeljét:  .
.
| (87) |
A bizonytalan rugóállandó  (additív bizonytalansági modell).
(additív bizonytalansági modell).
Ekkor az állapotegyenletek
| (88) |

| (89) |
| (90) |

| (91) |

| (92) |

Példa 4.4: Tekintsük az 4.4 ábrán látható tömeg-csillapító-rugó rendszert ( tömeg,
tömeg,  csillapítási együttható,
csillapítási együttható,  rugóállandó).
rugóállandó).
Differenciálegyenlete:
| (93) |
ahol  a tömeg elmozdulása,
a tömeg elmozdulása,  erő a rendszer gerjesztése.
erő a rendszer gerjesztése.
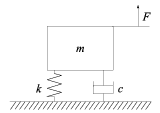
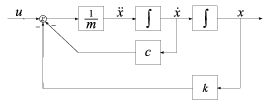
A blokkdiagram a rendszer névleges modelljét illusztrálja. A valós rendszerben a fizikai paraméterek egyrészt nem ismertek pontosan, másrészt üzem közben változnak. Ismerjük viszont ezek átlagos értékét és becslésünk van az átlagos értéktől való eltérésükre.
| (94) |
| (95) |
| (96) |
A példában legyenek  ,
,  ,
,  a névleges értékek,
a névleges értékek,  ,
,  ,
,  és
és  reprezentálja, hogy a rendszer modellje, csillapítása és rugóállandója rendre
reprezentálja, hogy a rendszer modellje, csillapítása és rugóállandója rendre  ,
,  ,
,  bizonytalanságú.
bizonytalanságú.
A parametrikus bizonytalanságok a következőképpen írhatók fel:
| (97) |

| (98) |

| (99) |

ahol  ,
,  ,
,  Megjegyzés: A kapcsolatokat felső bizonytalanság blokkal vettük figyelembe. A rendszer jelei közötti összefüggések ezek szerint a következőképpen alakulnak:
Megjegyzés: A kapcsolatokat felső bizonytalanság blokkal vettük figyelembe. A rendszer jelei közötti összefüggések ezek szerint a következőképpen alakulnak:
| (100) |
ahol
| (101) |
| (102) |
| (103) |

| (104) |

| (105) |

továbbá  és
és  .
.
Válasszuk az állapotokat a következőképpen:

,  ,
,  , azaz
, azaz  .
.
| (106) |

| (107) |
| (108) |

Ezek után felírhatjuk a parametrikus bizonytalanságokat tartalmazó rendszer modelljét:
| (109) |
A lengőrendszer modellje  kizárólag az ismert
kizárólag az ismert  ,
,  ,
,  névleges paraméterektől és az ismert
névleges paraméterektől és az ismert  ,
,  ,
,  bizonytalnsági felső becslésektől függ. Így
bizonytalnsági felső becslésektől függ. Így  ismert és nem tartalmaz bizonytalanságokat.
ismert és nem tartalmaz bizonytalanságokat.
| (110) |
ahol  ,
,  ,
,  ,
,
,  ,
,  ,
,

,  ,
,  .
.
A bizonytalanságokat tartalmazó  paramétereket egy külön blokk tartalmazza.
paramétereket egy külön blokk tartalmazza.
| (111) |
A bizonytalan paraméterek hatása a 4.4 ábrán látható Bode diagramokon jól láthatók.
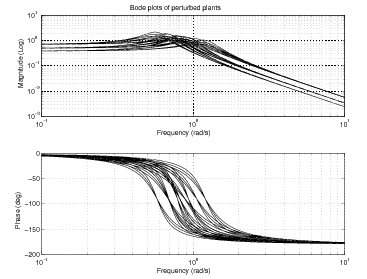
A modellezés célja, hogy megkapjuk az általánosított rendszer struktúrát, ahol az összes súlyfüggvény a  általánosított rendszerbe van beillesztve, míg a bizonytalanságokat a blokk-diagonális
általánosított rendszerbe van beillesztve, míg a bizonytalanságokat a blokk-diagonális  tartalmazza, ami egy
tartalmazza, ami egy  halmaz eleme, ahol:
halmaz eleme, ahol:
| (112) |

és ahol minden bokk normalizált.
3.8. Struktúrált szinguláris érték
Az  mátrixok esetén a
mátrixok esetén a  struktúrált szinguláris érték definíciójában figyelembe veszünk egy feladatfüggő
struktúrált szinguláris érték definíciójában figyelembe veszünk egy feladatfüggő  bizonytalansági struktúrát, ami az adott probléma sajátosságaitól és performancia követelményeitől függ. A vizsgált struktúrák az egységgömb megszorítását jelentik valamely
bizonytalansági struktúrát, ami az adott probléma sajátosságaitól és performancia követelményeitől függ. A vizsgált struktúrák az egységgömb megszorítását jelentik valamely  tulajdonságok mentén, amikre feltesszük, hogy ha
tulajdonságok mentén, amikre feltesszük, hogy ha  -ra teljesül
-ra teljesül  , akkor
, akkor  -ra is teljesülni fog minden
-ra is teljesülni fog minden  esetén, azaz
esetén, azaz  csillag szerkezetű (kúp).
csillag szerkezetű (kúp).
Tipikus példa a  tulajdonságra a blokk-diagonális struktúra, aminek két típusát tekintjük át: az ismédlődő skalár és teljes blokkú,
tulajdonságra a blokk-diagonális struktúra, aminek két típusát tekintjük át: az ismédlődő skalár és teljes blokkú,
vagyis
| (113) |

| (114) |

ahol a nemnegatív  és
és  egészek az ismétlődő skalár blokkok számát illetve a teljes blokkok számát jelentik.
egészek az ismétlődő skalár blokkok számát illetve a teljes blokkok számát jelentik.
Értelemszerűen fenn kell állnia az  összefüggésnek. Az egyszerűség kedvéért a jelölésből elhagyjuk
összefüggésnek. Az egyszerűség kedvéért a jelölésből elhagyjuk  -t.
-t.
Gyakran normakorlátos  halmazzal van dolgunk
halmazzal van dolgunk
| (115) |

Definíció 4.1 Az  LTI operátorhoz rendelt és a
LTI operátorhoz rendelt és a  halmazra vonatkoztatott
halmazra vonatkoztatott  struktúrált szinguláris érték
struktúrált szinguláris érték
| (116) |

ahol

| (117) |

A definíció jelentése a  visszacsatolt kör esetén kézenfekvő:
visszacsatolt kör esetén kézenfekvő:  annak a struktúrált
annak a struktúrált  bizonytalanságnak a normája ami destabilizálja a zárt kört.
bizonytalanságnak a normája ami destabilizálja a zárt kört.
A definíció egyenes következménye, hogy minden  és
és  esetén
esetén  valamint
valamint  . Azonban, ha a blokkstruktúra nem triviális akkor
. Azonban, ha a blokkstruktúra nem triviális akkor  nem normája
nem normája  -nek, mivel a háromszög egyenlőtlenség nem teljesül.
-nek, mivel a háromszög egyenlőtlenség nem teljesül.
Bebizonyítható az alábbi egyenlőség:
| (118) |
Valóban, minden  esetén
esetén  , így csak két esetet kell vizsgálnunk:
, így csak két esetet kell vizsgálnunk:  akkor és csak akkor, ha
akkor és csak akkor, ha  valamint
valamint  akkor és csak akkor, ha
akkor és csak akkor, ha  . Ezek az esetek a definíció egyszerű következményei.
. Ezek az esetek a definíció egyszerű következményei.
Ebből az egyenlőségből, a spektrálsugár és a  függvények folytonosságából valamint
függvények folytonosságából valamint  kompaktságából következik, hogy a
kompaktságából következik, hogy a  függvény folytonos.
függvény folytonos.
Általában nem könnyű a  értékét kiszámítani. A továbbiakban a
értékét kiszámítani. A továbbiakban a  függvény néhány olyan tulajdonságát soroljuk fel, amit haszonnal lehet a számításokban és becslésekben felhasználni.
függvény néhány olyan tulajdonságát soroljuk fel, amit haszonnal lehet a számításokban és becslésekben felhasználni.
ha
 , általában
, általában  .
. ha
 akkor
akkor  .
. 
. (
 az
az  spektrál sugara)
spektrál sugara)
Valóban, ha  akkor
akkor  és
és  esetén
esetén  , míg tetszőleges
, míg tetszőleges  esetén
esetén  .
.
Sajnos ezek a becslések általában nagyon durvák,mivel  valamint
valamint  közti különbség tetszőlegesen nagy lehet. A becsléseket szűkíteni lehet
közti különbség tetszőlegesen nagy lehet. A becsléseket szűkíteni lehet  olyan transzformációinak a felhasználásával amik nem befolyásolják
olyan transzformációinak a felhasználásával amik nem befolyásolják  értékét, azonban hatással vannak
értékét, azonban hatással vannak  és
és  értékére.
értékére.

ahol
| (119) |


| (120) |

Valóban: mivel  ahol
ahol  adódik, hogy
adódik, hogy  minden
minden  -ra. Másrészt
-ra. Másrészt  ha
ha  így
így  .
.
Ezért  , vagyis
, vagyis  invariáns a diagonális skálázásra.
invariáns a diagonális skálázásra.

esetén a
| (121) |
halmaz konvex.
Valóban:

| (122) |

Az utolsó feltétel egy lineáris mátrixegyenlőtlenség (LMI), ami egy konvex feltétel  -ben.
-ben.
azon
 struktúrák esetén, amikre
struktúrák esetén, amikre  :
:  .
.
Ha  akkor az egyenlőség általában nem teljesül.
akkor az egyenlőség általában nem teljesül.
A leírtakat az alábbi példa szemlélteti: legyen  és tekintsünk egy
és tekintsünk egy
| (123) |
bizonytalansági halmazt. Mivel  és
és  akkor
akkor  valamint
valamint  .
.
Mivel  és
és  :
:
| (124) |

Így  .
.
Másrészt:
| (125) |

ezért
| (126) |

| (127) |

ami ebben a speciális esetben igazolja az állítás helyességét.
Eddig komplex skaláris blokkokat tekintettünk. Azonban a parametrikus bizonytalanságok tipikusan valós értékűek, amit figyelembe kell vennünk.
| (128) |

Ez a struktúra elvezet a kevert (valós/komplex)  fogalmához. Ekkor a
fogalmához. Ekkor a  skálázás alkalmazása helyett felső becslést kaphatunk a kevert
skálázás alkalmazása helyett felső becslést kaphatunk a kevert  -re, ha az úgynevezett
-re, ha az úgynevezett  skálázást használjuk:
skálázást használjuk:

(129)
ahol

| (130) |

| (131) |

és  .
.
Ez általában egy kvázi-konvex problémára vezet. Ha  egy-rangú mátrix, akkor
egy-rangú mátrix, akkor  megegyezik a felső becslésével.
megegyezik a felső becslésével.
3.9. Struktúrált szinguláris érték analízise
A következő állítás alapvető szerepet játszik a  alapú robusztussági analízisben. Tekintsük a
alapú robusztussági analízisben. Tekintsük a  és
és  bizonytalanságokat valamint a következő blokk-diagonális
bizonytalanságokat valamint a következő blokk-diagonális  struktúrát:
struktúrát:
| (132) |
Tétel 4.4 (Fő hurok tétel)
| (133) |
Tekintsünk most egy általánosított  rendszerstruktúrát és egy stabilizáló
rendszerstruktúrát és egy stabilizáló  szabályozót, azaz
szabályozót, azaz
| (134) |
és  ahol
ahol  stabil bizonytalanság, amire
stabil bizonytalanság, amire  minden
minden  esetén.
esetén.
Ekkor a  robusztusan stabilizál, ha
robusztusan stabilizál, ha
| (135) |
minden  esetén.
esetén.
A  szabályozó teljesíti a nominális performancia kritériumot,ha
szabályozó teljesíti a nominális performancia kritériumot,ha
| (136) |

minden  esetén.
esetén.
A Fő hurok tétel alapján a performancia robusztus, ha
| (137) |
minden  esetén, ahol
esetén, ahol  .
.
3.10. Struktúrált szinguláris érték: szintézis
Az analízis feltételek fényében egy robusztus stabilitást és performanciát garantáló szabályozó tervezéséhez minimalizálni kell egy struktúrált szinguláris értéket egy adott struktúrált bizonytalansági halmazon és minden frekvencián. Ez egy nemkonvex nemlineáris feladat, amire még nem született minden igényt kielégítő megoldó algoritmus. Egy, a gyakorlatban számos feladat esetében hatékonynak bizonyult heurisztikus algoritmus az úgynevezett  -iteráció (vagy
-iteráció (vagy  iteráció, valós bizonytalanságok kezelése esetén).
iteráció, valós bizonytalanságok kezelése esetén).
Tekintsük az alábbi bizonytalansági struktúrát:
| (138) |

| (139) |

A  -nek megfelelő
-nek megfelelő  skálázó mátrixok halmaza
skálázó mátrixok halmaza

| (140) |

Ekkor a  -hoz rendelt skálázó mátrixok halmaza
-hoz rendelt skálázó mátrixok halmaza
Ezekkel a skálázó szűrőkkel
| (141) |

így minden stabilizáló szabályozóra, ami teljesíti a
| (142) |

feltételt minden  esetén, garantált a robusztus performancia. Ezért a
esetén, garantált a robusztus performancia. Ezért a  -t direktbe optimalizáló szabályozó tervezése helyett a felső becslést minimalizáljuk a
-t direktbe optimalizáló szabályozó tervezése helyett a felső becslést minimalizáljuk a  segítségével.
segítségével.
Ezt a feladatot az alábbi kritérium fogalmazza meg: minimizáljuk
| (143) |

minden  -t stabilizáló
-t stabilizáló  szabályozóra, és minden frekvencián a
szabályozóra, és minden frekvencián a  -beli
-beli  skálázó mátrixokra. Ha ez a minimum kisebb mint egy, akkor a tervezés sikeres.
skálázó mátrixokra. Ha ez a minimum kisebb mint egy, akkor a tervezés sikeres.
3.10.1. A  iteráció
iteráció
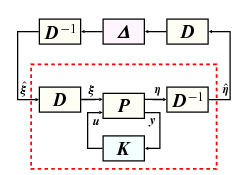
Sajnos az (143) feladatban nem tudunk egyszerre minimalizálni a  szabályozó és frekvenciafüggő
szabályozó és frekvenciafüggő  skálázó mátrixok függvényében. Ezért egy iterációt alkalmazunk: fixen tartjuk a
skálázó mátrixok függvényében. Ezért egy iterációt alkalmazunk: fixen tartjuk a  skálát és (143) minimumát keressük a stabilizáló szabályozók halmazán. A második lépésben a
skálát és (143) minimumát keressük a stabilizáló szabályozók halmazán. A második lépésben a  szabályozót tratjuk fixen és (143) minimumát keressük a
szabályozót tratjuk fixen és (143) minimumát keressük a  skálák függvényében. Ezt az eljárást nevezzük
skálák függvényében. Ezt az eljárást nevezzük  -iterációnak, lásd még a 26 ábrát.
-iterációnak, lásd még a 26 ábrát.

-iteráció algoritmusa:
Rögzítjük az iterációk maximális számát, MAXIT, és egy  tolerancia szintet. Választunk egy
tolerancia szintet. Választunk egy  skálafüggvényt.
skálafüggvényt.
A rögzített  -vel megkeressük
-vel megkeressük  -t, az optimális
-t, az optimális  szabályozót amire
szabályozót amire  úgy, hogy fennáll a
úgy, hogy fennáll a 
 becslés. Ha
becslés. Ha  a keresett robusztus szabályozó, ha nem, akkor tovább megyünk a
a keresett robusztus szabályozó, ha nem, akkor tovább megyünk a  . lépésre.
. lépésre.
Rögzített  szabályozóval egy új
szabályozóval egy új  skálázó szűrőt számolunk ki, minimalizálva
skálázó szűrőt számolunk ki, minimalizálva  értékét
értékét  függvényében.
függvényében.
Amennyiben minden  frekvencián
frekvencián  akkor
akkor  a keresett robusztus szabályozó, ha nem, tovább megyünk a
a keresett robusztus szabályozó, ha nem, tovább megyünk a  . lépésre.
. lépésre.
Ha elértük MAXIT-et, akkor az algoritmus nem szolgáltatott megoldást. Ellenkező esetben tovább megyünk az  . lépésre.
. lépésre.
Az első lépés egy standard  optimális szabályozási feladat megoldása. A második lépésben minimalizálni kell
optimális szabályozási feladat megoldása. A második lépésben minimalizálni kell  értékét, amit egy numerikus optimalizálással érünk el egy
értékét, amit egy numerikus optimalizálással érünk el egy  rácson, ahol a racionális
rácson, ahol a racionális  skálázó szűrőt közelítjük. A közelítés pontossága általában növeli a szűrő rendjét, így a keletkező szabályozó rendjét is. Ezért gyakran szükséges a
skálázó szűrőt közelítjük. A közelítés pontossága általában növeli a szűrő rendjét, így a keletkező szabályozó rendjét is. Ezért gyakran szükséges a  -optimális szabályozókat helyettesíteni egy redukált rendű szub-optimális szabályozóval.
-optimális szabályozókat helyettesíteni egy redukált rendű szub-optimális szabályozóval.
4. fejezet - Hosszirányú modellezés és irányítás
A hosszirányú járműdinamikai modellezés két fő témaköre a következő: egyrészt a menetellenállások, mint például a gördülési ellenállás, kanyarellenállás, légellenállás, emelkedési ellenállás, gyorsítási ellenállás, vizsgálata. Másrészt, mivel a gumiabroncsnak kitüntetett szerepe van a hajtóerők és fékerők átvitele szempontjából, a modellezés célja a gumiabroncs és a talaj közötti erőátvitel leírása.
A dinamikai hatások jó része a jármű és környezet kölcsönhatásaként jön létre, például súrlódás, légellenállás, út és kerék kontaktus. Szimulációk során cél ezeknek a hatásoknak minél élethűbb modellezése és reprodukálása. A járműirányítás tervezése során azonban a cél ezeknek a hatásoknak minél egyszerűbb, de a tervezési célok tekintetében releváns modellezése.
Amíg az útmodellek célja az útgerjesztés leírása, addig a kerékmodellek az út-kerék kölcsönhatás leírását adják meg. A vízszintes úton gördülő járműkerékre ható erők lehetnek egyrészt aktív erők, másrészt passzív erők.
Az aktív erők közül a kerék középpontján halad keresztül a függőleges terhelőerő, ami a kerék együttes tömegéből és a gépjármű tömegének a kerékre eső részéből tevődik össze. Aktív erő a vízszintes vonóerő, amivel a gépjármű tengelye tolja vagy húzza a kereket (valójában a kerék és az út érintkezési pontján ébred). A kereket a középpontja körül igyekszik elforgatni a forgató/fékező-nyomaték
Vízszintes úton gördülő járműkerékre ható passzív erők csak akkor ébrednek, ha valamilyen aktív erő hat. Így például a reakcióerő, a kerék és a talaj felfekvési felületén ébred: mivel a kerék nem pontban, hanem felületen érintkezik a talajjal, a reakcióerő egy elosztott erőként jelentkezik, amelyet azonban a számításokban egy koncentrált erővel helyettesítenek. A reakcióerő támadáspontja a függőleges szimmetriatengelyhez viszonyítva a haladás irányában eltolódik.
Passzív erőként jelentkezik a légellenállás: a levegő ellenállást fejt ki a kerék haladásával szemben, valamint a vonóerő reakcióereje, azaz a tapadási erő.
Egyenletes sebességet feltételezve a kerék szempontjából az alábbi tipikus eseteket különböztethetjük meg:
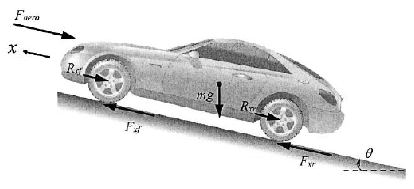
Forgatott (hajtott) vontató kerék, emelkedőn felfele: ilyenkor a motornak nyomatékot kell kifejtenie a kerékre, hogy a jármű meg ne álljon. A hajtott kerék toló/vonóerőt fejt ki a tengelyen keresztül a járműre.A reakcióerő eredője a kerék talppontjától a menetirányban eltolva hat, s függőleges komponense a súlyerővel tart egyensúlyt. A reakcióerő vízszintes komponense előre mutat és a vonóerővel tart egyensúlyt.
Csak forgatott (hajtott) kerék, vízszintes úton: ekkor a motornak nyomatékot kell kifejtenie a kerékre az egyenletes haladás érdekében. Ebben az esetben nincs vonóerő, s a reakcióerő eredője a függőleges terhelőerővel tart egyensúlyt, nyomatéka pedig a forgatónyomatékkal.
Forgatott (hajtott) és vontatott kerék enyhe lejtőn: ebben az esetben a jármű súlyából adódik egy haladás irányú vonóerő, de ez még nem akkora, hogy a motornak ne kelljen nyomatékot kifejtenie a kerékre. A reakcióerő függőleges komponense a terhelőerővel tart egyensúlyt a vízszintes komponense a haladással ellentétes irányba mutat és a vonóerővel tart egyensúlyt.
Csak vontatott kerék, lejtőn: ilyenkor a jármű súlyából adódó vonóerő éppen legyőzi a gördülési ellenállást, azaz ekkor nincs forgatónyomaték.
Fékezett és vontatott kerék meredek lejtőn: ebben az esetben a jármű motornyomaték kifejtése nélkül is gyorsulna. Az egyenletes sebesség biztosításához tehát a járművet fékezni kell. Ez eredményezi a keréken a fékező nyomatékot. Ekkor ugyan van forgatónyomaték, de most a kerék forgásirányával ellentétes irányban hat.
Mint azt már láttuk, a gumiabroncs biztosítja az erőátvitelt a jármű és az út között. A jármű súlya képviseli a függőleges irányú (útra merőleges) erőket, a gyorsulás/lassulás a hosszirányúakat, a kanyarodáskor pedig oldalirányú erők hatnak. Ezeket az erőket az abroncs egy igen kis helyen adja út illetve veszi fel, ezért a gumiabroncsnak olyannak kell lennie, hogy mindezeket az intenzív erőhatásokat elviselje.
4.1. Tapadás és csúszás modellezése
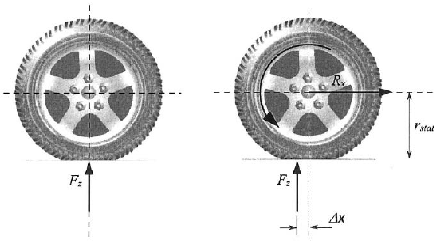
A kerék és útfelület kölcsönhatását tekintve általában az jellemző, hogy csak a gumiabroncs nyomódik be, az útfelület nem deformálódik. A kerék és a pálya érintkezése nem egy pont, hanem ellipszis és a nyomás egy ellipszoid mentén oszlik el. Ha a kerék áll és a függőleges terhelőerőn kívül más aktív erő nem hat, a reakcióerő a kerék talppontjánál szimmetrikusan hat, eredője függőleges és átmegy a kerék középpontján.
A függőleges terhelés következtében a gumiabroncs deformálódik: egy adott része hol összenyomódik, hogy megnyúlik és a talajon egy felfekvő felületet alkot. Ha a kerék gördül, akkor a gördülés alatt a nyomás eloszlása a felfekvő felületen nem egyenletes. Így a fellépő erő már nem szimmetrikus a függőleges terhelőerőhöz képest, az eredő vertikális erő nem a kerék talppontjában, a felület középpontjánál, hanem attól a haladás irányában eltolva, előtte hat. Ez lesz a gördülési ellenállás karja. Ennek az eltolódásnak a következtében a reakcióerő nyomatékot fejt ki a kerékre, ezért kell egy aktív forgatónyomaték a kerék forgásban tartásához: ez nem más, mint a gördülési ellenállás.
A deformáció során a befektetett mechanikai energia egy része elnyelődik, azaz hővé alakul. Ennyivel több energiát kell befektetni a gumiabroncs mozgásban tartásához, gördüléséhez. Ezért ha nem fektetnünk be folyamatosan energiát, akkor a gördülési ellenállástól egy idő után megállna a gördülő kerék, ugyanúgy, mint a súrlódástól. A gördülő ellenállás általában sokkal kisebb, mint a száraz csúszó súrlódás. A gumiabroncs deformációja miatt a befektetett energia nem nyerhető vissza teljesen, egy része elvész. A gumiabroncs deformációja a normál kerékterhelés aszimmetrikus eloszlását is eredményezi.
A mechanikából ismeretes a tiszta csúszósúrlódás valamint a tiszta nyugvósúrlódás. Mindkettőt azzal a fajlagos erővel jellemezhetjük, amely szükséges a csúszás fenntartásához, illetve megindításához. A kerék gördülésekor fellépő tapadás nem egyszerűen a nyugvósúrlódáson alapszik. Vannak gumiabroncsszemcsék, amelyek pillanatnyilag mozdulatlanok, de vannak olyan szemcsék is az abroncs és az út érintkezési felületén, amelyek csúsznak. A talaj és a gumiabroncs között fellép egy vákuumos szívóhatás is, ami az abroncsfelület elválását nehezíti meg. Így a gördülő kerék tapadását nem jellemzi egyértelműen sem a csúszó-, sem a nyugvósúrlódási tényező. Erre a célra külön tényező, tapadási tényező bevezetése szükséges, mely alatt azt a maximális vonóerőt értjük, amelynél a gördülés éppen tiszta csúszásba megy át.
Az így bevezetett tapadási tényező értéke több elemtől függ: például az út minőségétől és állapotától, a gumiabroncs minőségétől és állapotától, bizonyos mértékig függ a jármű sebességétől valamint kisebb mértékben függ a gumiabroncs légnyomásától. Ugyancsak kismértékben függ a függőleges terhelőerőtől.
Csúszó súrlódásról akkor beszélünk, ha a kerekek nem gördülnek, hanem csúsznak a felületen. A csúszó súrlódási tényező értéke mindig kisebb, mint a tapadási tényezőé. A két érték közötti átmenet folytonos, amit az úgynevezett szlippel lehet kifejezni.
A tapadási és súrlódási tényezők a hosszirányú és oldalirányú komponensek vektoriális eredőjeként foghatók fel, amelyek segítségével a hosszirányú gyorsulások (gyorsítás, fékezés) és az oldalirányú mozgások leírhatók.
Ennek megfelelően a jármű mozgásához szükséges hajtóerő összességében az alábbi ellenállás komponenseket győzi le:
| (144) |

ahol

: gördülési ellenállások az első és hátsó kerekeken,

: a légellenállás,

: az emelkedési ellenállás,

: a kanyarellenállás,

: pedig a gyorsítási ellenállás.
A gördülés során a terhelés eloszlása nem egyenletes, az  eredő vertikális erő a felület középpontja előtt
eredő vertikális erő a felület középpontja előtt  távolságban hat.
távolságban hat.
| (145) |

ahol  a gördülés ellenállási tényező.
a gördülés ellenállási tényező.
A gyorsulás nélkül gördülő keréken a nyomatékok egyensúlya alapján:  , ahol
, ahol  a statikailag terhelt kerék sugara. Ebből a gördülési ellenállás:
a statikailag terhelt kerék sugara. Ebből a gördülési ellenállás:  , ahol
, ahol  . Mivel
. Mivel  változó nem mért, ezért
változó nem mért, ezért  ellenállást az
ellenállást az  normálerővel arányosan modellezzük.
normálerővel arányosan modellezzük.
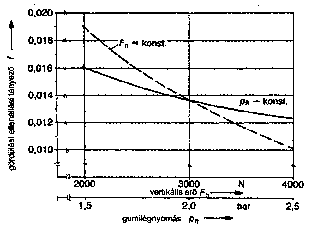
A gördülési ellenállás tényezője a gumi légnyomásától, a gumiabroncs típusától (összetételétől) és a kerékterhelésétől függ. Ezeken a gumi összetétele van rá hatással. Terepen a talaj minősége játszik fontos szerepet. A gördülési ellenállási tényező egy a sebességtől független állandóból és a sebességtől függő tagokból tevődik össze:
| (146) |

Normális (150  ) sebességig az összefüggés lineáris (
) sebességig az összefüggés lineáris ( . Nagy sebességnél a tapasztalati összefüggés:
. Nagy sebességnél a tapasztalati összefüggés:
| (147) |
Nedves talajon, bizonyos vízrétegvastagság felett a gördülési ellenállást növeli a lökéshullámból adódó ellenállás, amely a talaj és a gumiabroncs közé ékszerűen benyomuló víz kiszorítása miatt lép fel. A lökéshullám ellenállása a sebességtől, az abroncs szélességétől és a vízréteg vastagságától függ. magasabb vízréteg és nagyobb sebesség esetén a kerék felúszhat és vízen csúszás keletkezhet.
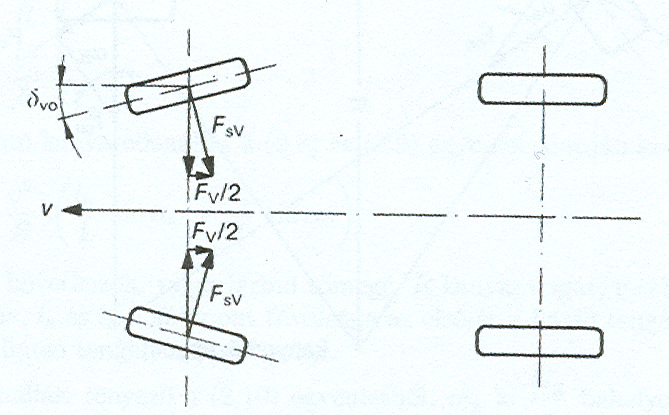
A gördülési ellenállást növeli a kerékösszetartásból eredő ellenállás is. A kerékösszetartási ellenállás ( ) a gumi felfekvő felületének oldalirányú deformációja miatt keletkezik.
) a gumi felfekvő felületének oldalirányú deformációja miatt keletkezik.
A kerékösszetartási szögből ( ) eredő oldalerő (
) eredő oldalerő ( ) hosszirányú komponense a menetiránnyal ellentétesen hat, ezért növeli a kerékellenállást:
) hosszirányú komponense a menetiránnyal ellentétesen hat, ezért növeli a kerékellenállást:
| (148) |
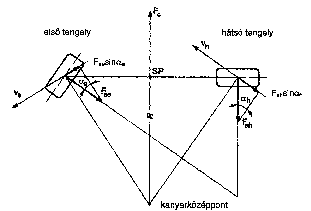
A kanyarellenállás ívmenetben a gumiabroncs oldalirányú deformációja következtében keletkezik. A kanyarellenállás a kerekeken ívmenetben fellépő oldalerők ( ) mozgással ellentétes irányban ható komponenseiből számítható.
) mozgással ellentétes irányban ható komponenseiből számítható.
A kerékoldalerő mozgással ellentétes irányú komponense  a jármű mozgását fékezi. A kanyarellenállás ekkor
a jármű mozgását fékezi. A kanyarellenállás ekkor
| (149) |

ahol  az első és hátsó tengely kúszási szöge.
az első és hátsó tengely kúszási szöge.
A kanyarmenetben fellépő centrifugális erő ( ) által generált nyomaték egyensúlyban van a tengely oldalerők (
) által generált nyomaték egyensúlyban van a tengely oldalerők ( ) által generált nyomatékkal.
) által generált nyomatékkal.
| (150) |

ahol a centrifugális erő közelítése:  , ahol
, ahol  a jármű tömege,
a jármű tömege,  a kanyarsugár,
a kanyarsugár,  sebesség,
sebesség,  tengelytáv,
tengelytáv,  a súlypont távolsága az első és hátsó tengelytől.
a súlypont távolsága az első és hátsó tengelytől.
A járműre ható kanyarellenállás:
| (151) |

azaz
| (152) |

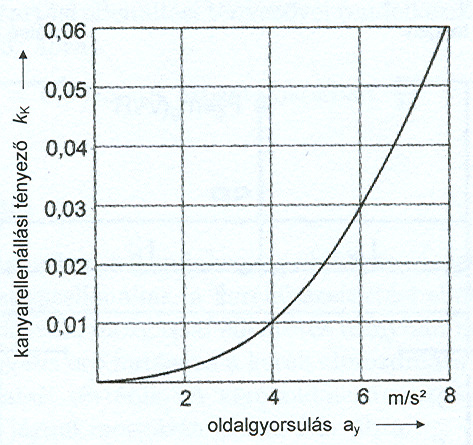
ahol  kanyarellenállási tényező:
kanyarellenállási tényező:
| (153) |
A 31. ábra a kanyarellenállási tényező változását mutatja az oldalgyorsulás függvényében.
A mozgásban lévő járművön a menetszél következtében a mozgás irányával ellentétesen ható erő,  légellenállás keletkezik. A légellenállás nagysága a jármű alakján kívül elsősorban az áramlási sebességtől függ. Az eredő áramlási sebesség a menetszélből (
légellenállás keletkezik. A légellenállás nagysága a jármű alakján kívül elsősorban az áramlási sebességtől függ. Az eredő áramlási sebesség a menetszélből ( ) és a természetes szélből (
) és a természetes szélből ( ) tevődik össze:
) tevődik össze:  .
.
Ha a természetes szél iránya nem egyezik meg a menetszél irányával, az eredő erő háromszögeléssel számolható:
| (154) |

ahol  a természetes szélsebesség iránya és a jármű hossztengelye közötti szög.
a természetes szélsebesség iránya és a jármű hossztengelye közötti szög.
Oldalszél esetén az eredő áramlási sebesség és az áramlási szög:
| (155) |
A természetben az áramlási szög állandóan változik, mert a szélsebesség és az útirány is változik. Az áramlási veszteségek az áramlási sebesség négyzetével nőnek. A légellenállás a következő összefüggésből számítható:
| (156) |
ahol  a levegő sűrűsége,
a levegő sűrűsége,  a légellenállási tényező,
a légellenállási tényező,  a jármű homlokfelülete,
a jármű homlokfelülete,  az áramlási szélsebesség. Megjegyzés:
az áramlási szélsebesség. Megjegyzés:  értéke a jármű hosszirányába ható szélsebességgel egy szélcsatornában határozható meg.
értéke a jármű hosszirányába ható szélsebességgel egy szélcsatornában határozható meg.
Az emelkedési ellenállás a jármű tömegéből és a lejtő szögéből számítható.
| (157) |
Gyorsításkor a jármű transzlációs és rotációs mozgást végző tömegeinek tehetetlenségi ellenállását kell leküzdeni. Ezek alapján a gyorsítási ellenállás két részből tevődik össze:
| (158) |
ahol  a jármű tömege,
a jármű tömege,  a gyorsulás,
a gyorsulás,  a forgó tömegeknek a kerékre redukált tehetetlenségi nyomatéka,
a forgó tömegeknek a kerékre redukált tehetetlenségi nyomatéka,  a kerék szöggyorsulása és
a kerék szöggyorsulása és  a dinamikus keréksugár. A kerék szöggyorsulását átszámíthatjuk transzlációs gyorsulássá:
a dinamikus keréksugár. A kerék szöggyorsulását átszámíthatjuk transzlációs gyorsulássá:  . A gyorsítási ellenállás:
. A gyorsítási ellenállás:
| (159) |
ahol  forgási tömegtényező a rotációs és transzlációs tömegek viszonyát fejezi ki.
forgási tömegtényező a rotációs és transzlációs tömegek viszonyát fejezi ki.

meghatározásához a forgó tömegek tehetetlenségi nyomatékát az  szögsebességgel forgó kerékre kell redukálni.
szögsebességgel forgó kerékre kell redukálni.
A hajtótengely  és a motor
és a motor  szögsebességét a differenciálmű áttételével (
szögsebességét a differenciálmű áttételével ( ) és a hajtóműáttétellel (
) és a hajtóműáttétellel ( ) kell a kerékre átszámítani:
) kell a kerékre átszámítani: 

A kerékre redukálandó tehetetlenségi nyomatékok összege ennek megfelelően
| (160) |

ahol  a hajtótengely kerékre redukált tehetetlenségi nyomatéka és
a hajtótengely kerékre redukált tehetetlenségi nyomatéka és  a motor forgó részeinek kerékre redukált tehetetlenségi nyomatéka.
a motor forgó részeinek kerékre redukált tehetetlenségi nyomatéka.
4.2. Kerék és út
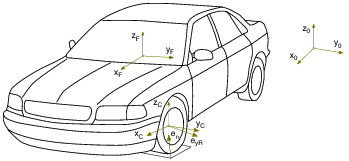
A kerék erők leírása során több koordináta rendszert használhatunk. Ezek lehetnek például földhöz rögzített  , a járműhöz rögzített
, a járműhöz rögzített  , kerék hordozóhoz rögzített
, kerék hordozóhoz rögzített  , kerék forgéstengelyhez rögzített
, kerék forgéstengelyhez rögzített  , valamint a lokális útfelület dőléséhez rögzített
, valamint a lokális útfelület dőléséhez rögzített  koordináta rendszerek.
koordináta rendszerek.
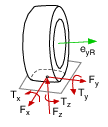
Minden ponton, ahol a gumiabroncs érintkezik az út felületével merőleges (normális) erők és súrlódási erők ébrednek. Az abroncs profiljának kialakítása miatt azonban a felfekvő felület nem feltétlenül alkot összefüggő területet. A kontakterők hatása leírható egyetlen eredő erővel ami az érintkezési felület egy rögzített pontján hat és egy nyomaték vektorral. Mivel egyenetlen úton a  kontakt pont meghatározása nem egyszerű, ezért a kontakt pont geometriáját úgy kaphatjuk meg, hogy egy becsült
kontakt pont meghatározása nem egyszerű, ezért a kontakt pont geometriáját úgy kaphatjuk meg, hogy egy becsült  pontot a tényleges útra vetítve kapunk egy
pontot a tényleges útra vetítve kapunk egy  közelítést a kontakt pontra, ahol a kerékre ható erőket tételezzük.
közelítést a kontakt pontra, ahol a kerékre ható erőket tételezzük.
4.2.1. Kerékre ható erők és nyomatékok
A vektorok komponenseit egy, a pályához rögzített, koordináta rendszerben fejezhetjük ki, ahol a  tengely merőleges a pályára, az
tengely merőleges a pályára, az  tengely merőleges a
tengely merőleges a  tengelyre és a kerekek
tengelyre és a kerekek  forgási tengelyére. Az
forgási tengelyére. Az  tengely irányát a jobbkezes rendszer szerint rögzítjük.
tengely irányát a jobbkezes rendszer szerint rögzítjük.
Ebben a koordináta rendszerben a kerék erő és nyomaték komponensei a következőek:

hosszirányú, síkbeli longitudinális (fék, hajtás) erő,

oldalirányú, síkbeli laterális (kanyarodás) erő

függőleges (kerék-terhelés) erő,

dőlési/billenő, (kerék dőlését létrehozó) nyomaték,

gördülő nyomaték

nyomaték, ami a síkbeli erőkből jön létre azáltal, hogy azok támadáspontja nem közvetlenül a kerék középpontja alatt van.
A függőleges (kerék-terhelés) erőnek van egy statikus és egy dinamikus komponense:
| (161) |

ahol a statikus komponens a kerék elhajlás (tire deflection,  ) és a kerék elhajlás változási sebességének (
) és a kerék elhajlás változási sebességének ( ) nemlineáris függvénye, míg a dinamikus komponens kifejezése
) nemlineáris függvénye, míg a dinamikus komponens kifejezése  .
.
A kerék síkja általában nem merőleges az útra. A kerékdőlési szög ( ) a kerék síkjának oldalirányú kitérését méri. Ez főleg motorkerékároknál jelentős, de bizonyos felfüggesztési megoldások hatására is jelentkezhet, amikor a tengelyterhelés változik. A rugalmas kapcsolatok eredményeképp kanyarodáskor is jelentkezik oldalirányú kitérés.
) a kerék síkjának oldalirányú kitérését méri. Ez főleg motorkerékároknál jelentős, de bizonyos felfüggesztési megoldások hatására is jelentkezhet, amikor a tengelyterhelés változik. A rugalmas kapcsolatok eredményeképp kanyarodáskor is jelentkezik oldalirányú kitérés.
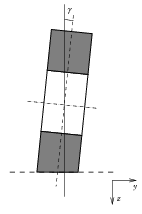

dőlési/billenő, (kerék dőlését létrehozó) nyomaték kifejezése
| (162) |

A dőlés hatására akkor is lesznek oldalirányú erők, ha nincs csúszás. Kis dőlési szögekre ennek közelítése
| (163) |

ahol  dőlési együttható (tipping stiffness).
dőlési együttható (tipping stiffness).
Az  gördülő nyomatékot általában lineáris tagként modellezzük:
gördülő nyomatékot általában lineáris tagként modellezzük:
| (164) |

Pontosabb modelleknél a kerékspecifikus  faktor a jármű sebességétől is függ. Egy további veszteségforrás lehet a hosszirányú erő nyomatéka:
faktor a jármű sebességétől is függ. Egy további veszteségforrás lehet a hosszirányú erő nyomatéka:
| (165) |

ahol  az effektív gördülési sugár.
az effektív gördülési sugár.
4.2.2. A kerék kinematikája
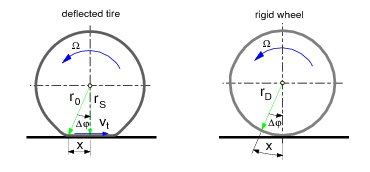
A gumiabroncs kerületén ébredő hosszirányú erők a következő tényezőktől függnek: hosszirányú szlip, a függőleges kerékterhelés és a tapadási tényező. Hajtónyomaték vagy fékező nyomaték hatása alatt a gumiabroncs felfekvő felületén lévő gumirészecskék parciális csúszása miatt sebességkülönbség keletkezik a jármű sebessége és a kerék gördülési sebessége között. Emiatt kerék által megtett távolság nem egyezik meg a kerék forgási szögéből számítható távolsággal, úgynevezett hosszirányú szlip keletkezik.
A hosszirányú szlip ( ) a
) a  menetsebesség és a kerék/talaj közötti
menetsebesség és a kerék/talaj közötti  relatív sebesség különbségéből határozható meg. A dinamikus keréksugár
relatív sebesség különbségéből határozható meg. A dinamikus keréksugár  a gumiabroncs legördülési kerületéből adódik. A legördülési kerület egyenlő a szabadon gördülő kerék által egy fordulat alatt megtett úttal. Így a kerék dinamikus gördülési sugarát a következő definíció alapján határozhatjuk meg:
a gumiabroncs legördülési kerületéből adódik. A legördülési kerület egyenlő a szabadon gördülő kerék által egy fordulat alatt megtett úttal. Így a kerék dinamikus gördülési sugarát a következő definíció alapján határozhatjuk meg:
| (166) |

ahol  a kerék fordulatszáma. Tehát a dinamikus keréksugár az az effektív
a kerék fordulatszáma. Tehát a dinamikus keréksugár az az effektív  keréksugár, amivel az
keréksugár, amivel az  fordulatszámmal a kerék által elért sebesség adódna.
fordulatszámmal a kerék által elért sebesség adódna.
A dinamikus keréksugár összefüggése alapján:
| (167) |
ahol  a terheletlen kerék sugara és
a terheletlen kerék sugara és  a terhelt kerék sugara. Ennek egy közelítő értékét az alábbiak szerint kaphatjuk meg:
a terhelt kerék sugara. Ennek egy közelítő értékét az alábbiak szerint kaphatjuk meg:
| (168) |
Látható, hogy
| (169) |

Egy meghajtó kerék esetén (elsőkerék hajtású jármű első kereke) a forgásból számított sebesség nagyobb a jármű sebességénél, azaz  . Egy meghajtott kerék esetén a jármű sebessége nagyobb a kerék forgásából számított sebességénél, tehát
. Egy meghajtott kerék esetén a jármű sebessége nagyobb a kerék forgásából számított sebességénél, tehát  . Hajtás esetén a következő sebességkülönbség adódik:
. Hajtás esetén a következő sebességkülönbség adódik:  .
.
A dinamikai jármű modellekben szereplő egyik legfontosabb paraméter a  longitudinális csúszási együttható (szlip), ahol:
longitudinális csúszási együttható (szlip), ahol:
| (170) |
A hosszirányú szlip hajtás és fékezés esetén a következőképpen definiálható: a fékezési szlip
| (171) |
míg a hajtási szlip
| (172) |
Az álló járművön kipörgő kerék, illetve a fékezéskor blokkoló kerék egyaránt  szlipet jelent.
szlipet jelent.
Összefoglalva, a kerék kinematikáját meghatározó legfontosabb tényezők az alábbiak: a jármű  sebessége, a
sebessége, a  kerék kerületi sebessége valamint a
kerék kerületi sebessége valamint a  csúszási sebesség. Az
csúszási sebesség. Az  effektív gördülési sugár értékét a szabadon futó (fék/hajtás=
effektív gördülési sugár értékét a szabadon futó (fék/hajtás= ) kerék
) kerék  szögsebessége határozza meg. Bevezetjük még az
szögsebessége határozza meg. Bevezetjük még az  a csúszási szöget valamint a csúszási sebesség
a csúszási szöget valamint a csúszási sebesség  irányát.
irányát.

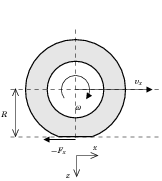
A kerékerők a tapadási és csúszási együtthatók függvényei. A különböző együtthatók definíciói és a köztük levő kapcsolatok az alábbiak:
| (173) |
| (174) |
| (175) |

Mivel  a csúszási együttható (slip ratio):
a csúszási együttható (slip ratio):
| (176) |
| (177) |
| (178) |

Az ISO és SAE szabványok szerint a hosszirányú csúszás kifejezése  [%] míg az oldalirányú csúszás
[%] míg az oldalirányú csúszás  [deg].
[deg].
A gyakorlatban használt irányítási célú járműmodellek linearizált erőkkel és nyomatékokkal számolnak:
| (179) |
| (180) |
azaz
| (181) |

| (182) |
| (183) |

ahol például  longitudinális merevség (szlip) és
longitudinális merevség (szlip) és  pedig a kanyarodási (cornering) merevség.
pedig a kanyarodási (cornering) merevség.
4.3. Erőátvitel modellezés
A kerékre ható, úttartást és menetstabilitást befolyásoló tényezők a csúszási szög az oldalerő és az általa generált nyomaték. Amennyiben a jármű a tapadási viszonyokhoz képest nagy sebességgel halad az ívben, a tapadás jelentős részét felemészti az íven tartás biztosítása: a tapadási tényező oldalirányú komponense megközelíti az útpálya és gumiabroncs közötti tapadási tényező értékét. Ha a két komponenst összegezzük, előfordulhat, hogy nincs akkora tapadás, mint amekkorára az adott manővernél szükség lenne: a jármű kicsúszik a kanyarban.
A horizontális síkban maximálisan átvihető erőt az abroncs és a talaj érintkezési síkjában ható súrlódási viszonyok határozzák meg. A jármű hosszirányú mozgásához szükséges erők:
| (184) |
ahol  a leküzdendő menetellenállások összege,
a leküzdendő menetellenállások összege,  és
és  a hosszirányú erő az első és hátsó kerekeken.
a hosszirányú erő az első és hátsó kerekeken.
Mint azt már láttuk, a maximális hosszirányú erő ( ) arányos a függőleges erővel (
) arányos a függőleges erővel ( ):
):
| (185) |

ahol  arányossági tényező a gumiabroncs és az út közötti tapadási tényező. Ha a keréken ennél nagyobb hajtó vagy fékerő lép fel, akkor a gumiabroncs nem tud a talajon tapadni és kipörög vagy blokkol. Ebben az állapotban átvihető erő a
arányossági tényező a gumiabroncs és az út közötti tapadási tényező. Ha a keréken ennél nagyobb hajtó vagy fékerő lép fel, akkor a gumiabroncs nem tud a talajon tapadni és kipörög vagy blokkol. Ebben az állapotban átvihető erő a  csúszási tényező nagyságától függ:
csúszási tényező nagyságától függ:
| (186) |

Egy tipikus  szlip görbe maximuma a
szlip görbe maximuma a  tapadási tényező, ami a maximális erőkapcsolat kihasználást jelenti. Fékezéskor a tapadási tényező növekvő kerékcsúszás esetén intenzíven, kezdetben lineárisan majd kevésbé növekedve éri el maximális értékét. Ezt stabil tartománynak tekintjük.
tapadási tényező, ami a maximális erőkapcsolat kihasználást jelenti. Fékezéskor a tapadási tényező növekvő kerékcsúszás esetén intenzíven, kezdetben lineárisan majd kevésbé növekedve éri el maximális értékét. Ezt stabil tartománynak tekintjük.
Ha a szlip görbe maximumán túl növekszik, akkor a súrlódási tényező leesik a  csúszási tényező értékére. A görbének ez a szakasza az instabil tartomány, ami azt jelenti, hogy a szlip a görbe maximumának átlépésekor növekszik és a kerék a csúszás állapotába megy. Ez egy önmagát gerjesztő folyamat, melynél ha nem csökkentik a fékező nyomást, a kerék hamarosan blokkolni fog.
csúszási tényező értékére. A görbének ez a szakasza az instabil tartomány, ami azt jelenti, hogy a szlip a görbe maximumának átlépésekor növekszik és a kerék a csúszás állapotába megy. Ez egy önmagát gerjesztő folyamat, melynél ha nem csökkentik a fékező nyomást, a kerék hamarosan blokkolni fog.
A jármű iránytartása szempontjából a gumiabroncs oldalvezetési tulajdonságai jelentősek. A kormány működtetésével a kerék elfordul eredeti síkjától. Ekkor a gumiabroncs felfekvő felületében a talajon tapadó gumirészecskék rugalmas deformációja lép fel.
A kerék emiatt nem a középsíkja irányában, hanem az úgynevezett  kúszási szög alatt gördül le. A kerék sebességvektora a kerék középsík tengelyével
kúszási szög alatt gördül le. A kerék sebességvektora a kerék középsík tengelyével  szöget zár be. A felfekvő felületen fellépő
szöget zár be. A felfekvő felületen fellépő  oldalcsúszási sebesség oldalirányú szlipet okoz.
oldalcsúszási sebesség oldalirányú szlipet okoz.
| (187) |

A kúszási szög az első és hátsó kerekeken a következő:
| (188) |

| (189) |

ahol  a kormányszög. Kis szögek esetén a kúszási szögek a következő módon közelíthetők:
a kormányszög. Kis szögek esetén a kúszási szögek a következő módon közelíthetők:
| (190) |

| (191) |

ahol  a hosszirányú és oldalirányú sebességek,
a hosszirányú és oldalirányú sebességek,  a perdülés szöge.
a perdülés szöge.
Az oldalirányú erő a függőleges normál erőtől függ:
| (192) |

ahol  az arányossági oldalsúrlódási tényező. Az oldalerő kis szögek esetén arányos a kúszási szöggel
az arányossági oldalsúrlódási tényező. Az oldalerő kis szögek esetén arányos a kúszási szöggel
| (193) |

Az oldalvezető erő nem a gumiabroncs talajérintkezési felületének közepén hat, hanem  távolságban mögötte. Emiatt egy visszatérítő kúszási nyomaték keletkezik, ami a kúszási szöget csökkenteni akarja:
távolságban mögötte. Emiatt egy visszatérítő kúszási nyomaték keletkezik, ami a kúszási szöget csökkenteni akarja:
| (194) |

A  kerékdőlés is oldalerőt generál, amely irányától függően kanyarban növeli vagy csökkenti a centrifugális erőből adódó oldalerőt. Kis dőlésszögek esetén jó közelítéssel
kerékdőlés is oldalerőt generál, amely irányától függően kanyarban növeli vagy csökkenti a centrifugális erőből adódó oldalerőt. Kis dőlésszögek esetén jó közelítéssel
| (195) |

4.4. Kerékmodellek
Szimulációs célból a keréknek különböző bonyolultságú modelljeit használhatjuk. Vannak strukturális, komplex kerék modellek, mint például a végeselem modellek, ahol a kerék kis elemekre van bontva, az egyes elemekre és kölcsönhatásaira felírt (parciális) differenciálegyenletekkel. Ezeknek a modelleknek azonban igen nagy a számítási igényük.
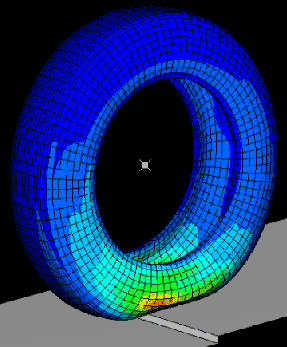
Az ennél valamivel egyszerűbb dinamikus kerék modellek közül megemlíthetők a kefe modellek, ahol a gumiabroncs szeletekre van bontva, és ezeknek a szeleteknek a mozgása, mintha egy kefe sörtéi lennének, van modellezve. Ebben a modellben az egyes cellákra vonatkoztatott erők és a szlip alakja:
| (196) |

| (197) |
| (198) |

| (199) |
| (200) |

A dinamikus szemi-empirikus modellek figyelembe veszik, hogy a manőverezés során a kerékerők kialakulásához idő kell, azaz
| (201) |
ahol  a kerékerőket meghatórozó slip,
a kerékerőket meghatórozó slip,  a tényleges (mért) slip, míg
a tényleges (mért) slip, míg  az úgynevezett relaxációs hossz. Az
az úgynevezett relaxációs hossz. Az  oldalirányú relaxációs hossz az
oldalirányú relaxációs hossz az  kerékerő és az oldalirányú szlip függvénye.
kerékerő és az oldalirányú szlip függvénye.
Egy egyszerüsített kefe modell a LuGre modell, ahol
| (202) |
| (203) |
A dinamikus kerék modellek általában túl bonyolultak ahhoz, hogy irányítási célú modellekben használjuk őket. Ilyen célokra megfelelőbbek a stacionárius kerék modellek, ahol a szlip egy stacionárius nemlineáris kifejezésként van modellezve. Ilyen például a Pacejka féle "mágikus" formula:
| (204) |

ahol  a
a  ,
, ,
, párok valamelyike és
párok valamelyike és
merevségi faktor;

alak faktor;
csúcs faktor;

görbületi faktor.
A teljes szimulációs célú modell jóval több (kb.  ) paramétert tartalmaz amit mért adatokkal való összevetéssel kalibráltak be. Tervezés során természetesen a paraméterek számának csökkentése a kívánatos.
) paramétert tartalmaz amit mért adatokkal való összevetéssel kalibráltak be. Tervezés során természetesen a paraméterek számának csökkentése a kívánatos.
4.5. Egyszerű hosszirányú jármű modell
Egy egészen egyszerű longitudinális jármű modell egyenletei
| (205) |

| (206) |

ahol  a jármű tömege,
a jármű tömege,  a jármű sebessége,
a jármű sebessége,  az inercia együttható és
az inercia együttható és  a kerék sugara. Ebben az egyszerű modellben a kerék felfüggesztését és a gumiabroncs összenyomódási mértékét nem vesszük figyelembe.
a kerék sugara. Ebben az egyszerű modellben a kerék felfüggesztését és a gumiabroncs összenyomódási mértékét nem vesszük figyelembe.  a hajtási vagy fékezési nyomaték.
a hajtási vagy fékezési nyomaték.
Az állandósult állapotban a keletkezett kerék erők és nyomatékok a hosszirányú és oldalirányú csúszás függvényei. Ennek megfelelően az  hosszirányú erő a hosszirányú
hosszirányú erő a hosszirányú  csúszási együttható függvénye, ahol
csúszási együttható függvénye, ahol
| (207) |

és ahol  szolgál, ebben ez az egyszerű megközelítésben, dinamikus gördülési sugárként is.
szolgál, ebben ez az egyszerű megközelítésben, dinamikus gördülési sugárként is.
Normál vezetési körülmények között  igen kicsi, és a kerék közel áll a
igen kicsi, és a kerék közel áll a
| (208) |

szabadon gördülési feltételhez. Ekkor a  és
és  állapottól való eltérés
állapottól való eltérés
| (209) |

és
| (210) |

Kis eltérések esetén a hosszirányú csúszási együttható alakja
| (211) |

A már látott módon a linearizált longitudinális erő  így a kapott longitudinális modell
így a kapott longitudinális modell
| (212) |

4.5.1. Példa: vasúti kerék szimulált fékezése
Ennek az egyszerű longitudinális modellnek az alkalmazására álljon itt a vasúti kerék csúszásának vizsgálata fékezéskor. Láttuk, hogy a  szlip értékei
szlip értékei  (szabadon futó kerék) és
(szabadon futó kerék) és  (blokkolt kerék) között lehetnek. A valós és a modellezett
(blokkolt kerék) között lehetnek. A valós és a modellezett  adhéziós görbát, ahol a tribológiai környezet a
adhéziós görbát, ahol a tribológiai környezet a  paraméterekkel van modellezve, a 38. ábra szemlélteti.
paraméterekkel van modellezve, a 38. ábra szemlélteti.
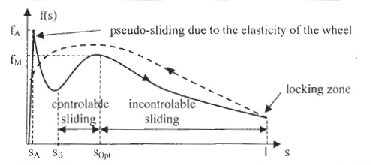
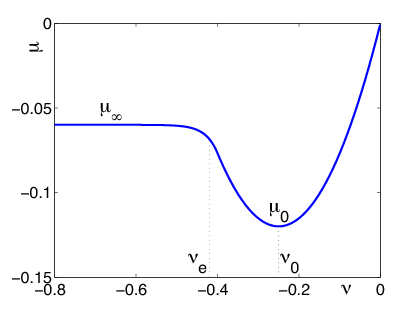
A szimulációhoz használt modell alakja
| (213) |
ahol
| (214) |
| (215) |
A modell alapján egy blokkolásgátló fékezés lett tervezve. Ennek a fékezésnek a működését szemlélteik az 40 és 41 ábrák. A szimuláció során beállított tribológiai paraméterek értékei az alábbiak voltak:



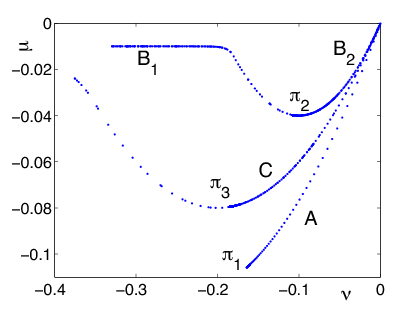
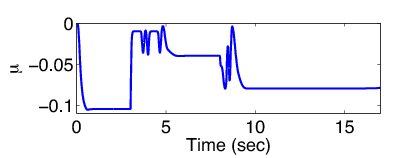
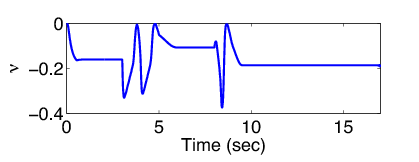
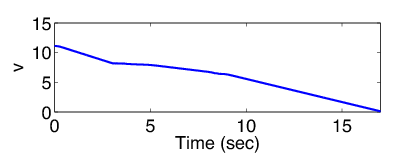
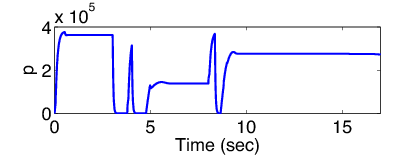
4.6. Sebesség és távolságtartó irányítások
Egy hagyományos sebességtartó irányítás a vezető által megadott sebességérték tartására képes. Az adaptív sebességszabályozás feladata a hagyományos menetsebesség szabályozáson nyugszik, ami tartja a megadott sebességet. A szabályozás képes váltakozó forgalmi körülményekhez automatikusan igazodni: gyorsítani, gázadást csökkenteni, fékezni. Ezáltal képes egy előtte haladó jármű sebességéhez is igazodni egy hosszirányú követési távolság figyelembe vételével.
A szabályozási feladat az igényelt sebesség ( ) és az aktuális sebesség (
) és az aktuális sebesség ( ) közötti különbség csökkentéséhez kiszámítja a szükséges gyorsulás (lassulás) értékét és azt realizálja:
) közötti különbség csökkentéséhez kiszámítja a szükséges gyorsulás (lassulás) értékét és azt realizálja:
| (216) |
A jármű mozgásához szükséges hajtóerő komponensei:
| (217) |

ahol  a gyorsítási ellenállás és
a gyorsítási ellenállás és  a zavaró tényezők eredője (gördülési ellenállás, légellenállás, kanyarellenállás, emelkedési ellenállás). Az
a zavaró tényezők eredője (gördülési ellenállás, légellenállás, kanyarellenállás, emelkedési ellenállás). Az  hosszirányú erő egyszerűsített összefüggése:
hosszirányú erő egyszerűsített összefüggése:
| (218) |

ahol  a jármű tömege,
a jármű tömege,  pedig a jármű gyorsulása.
pedig a jármű gyorsulása.
Az irányítási feladatot például egy PI típusú szabályozóval oldhatjuk meg. A szabályozó struktúrája ekkor
| (219) |

A szabályozó bemenete a megkívánt sebesség ( ) és az elért sebesség (
) és az elért sebesség ( ) közötti különbség: A szabályozó komponenseinek hatása a sebességekre:
) közötti különbség: A szabályozó komponenseinek hatása a sebességekre:
| (220) |

Definiáljuk a referencia pozíciót: (folyt.)
ahol  az igényelt referencia sebességhez tartozó pozíció. Az
az igényelt referencia sebességhez tartozó pozíció. Az  aktuális pozíció hasonlóan felírható.
aktuális pozíció hasonlóan felírható.
Az igényelt gyorsulás és a szabályozó komponenseinek hatása:
| (221) |

A felsőszintű szabályozás tervezése rutinfeladat. Ha az irányítójel nagyságát meg akarjuk szorítani, akkor az elérendő minőségi tulajdonságokat bővítjük:
megfelelő referenciajel-követést kell biztosítania;
azaz az előírt sebesség és a tényleges sebesség közötti különbség legyen minimális,
minél kisebb hosszirányú erőt használjon a rendszer.

A szabályozótervezés kritériuma a következőképpen fogalmazható meg:
| (222) |
ahol  és
és  a skalár tervezési súlyok.
a skalár tervezési súlyok.
A hosszirányú erőt a hajtási vagy a fékezési rendszerekkel kell létrehozni. Hajtáskor a motor fojtószelep beállításával állítjuk elő a hajtáshoz szükséges nyomatékot (táblázat). A sebességváltásról a fordulatszám és az optimális fogyasztás alapján döntünk. Fékezéskor a féknyomásokat állítjuk be ( például táblázat alapján).
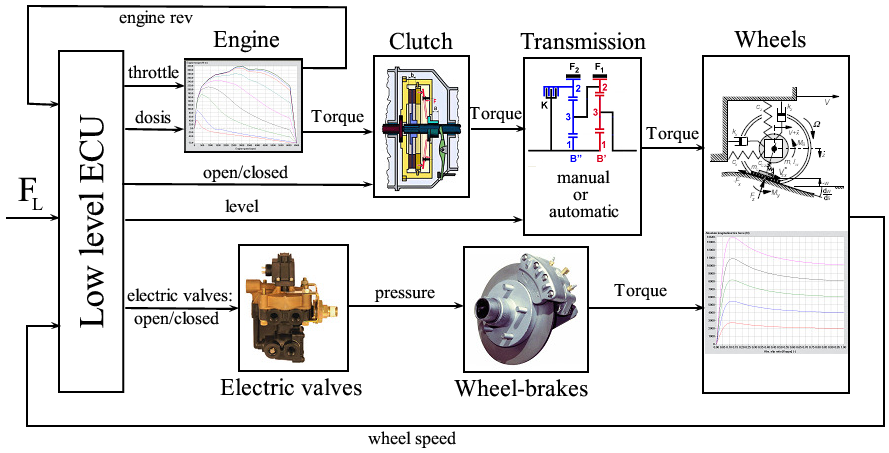
Ha a jármű előtt nem halad másik jármű, akkor standard sebességtartó irányítási feladatot kell megoldani. Ha a jármű előtt egy másik jármű jelenik meg, akkor döntési feladatot kell először megoldani. Ha az előttünk lévő jármű távolsága és sebessége alapján nincs szükség a sebesség változtatására, akkor továbbra is sebességtartó irányítást kell megoldani. Ha az aktuális sebesség nem tartható, akkor a továbbiakban egy távolságtartó irányítási feladatot kell megoldani.
Az irányítási feladatban közúti járműhöz tervezünk szabályozót, amely képes a járművet egy előző járműtől előre megadott távolságban vezetni. Az irányítástervezés feladata a szükséges hosszirányú erő (hajtáslánc és fékrendszer) meghatározása. A szabályozási feladat a két jármű közötti relatív távolság minimalizálása:
| (223) |

ahol  és
és  az egyes járművek elmozdulásai.
az egyes járművek elmozdulásai.
A járművek  hosszirányú erőinek összefüggése:
hosszirányú erőinek összefüggése:
| (224) |

| (225) |

ahol  a jármű tömege,
a jármű tömege,  a járművek elmozdulása. Az egyenleteket a következő alakban célszerű megfogalmazni:
a járművek elmozdulása. Az egyenleteket a következő alakban célszerű megfogalmazni:
| (226) |

| (227) |
ahol  relatív távolság.
relatív távolság.
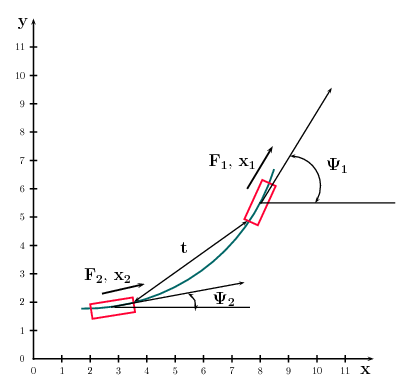
A szabályozott rendszernek a következő minőségi tulajdonságokat kell kielégítenie:
megfelelő referenciajel-követést kell biztosítania
| (228) |
azaz az előírt relatív távolság és a tényleges közötti különbség legyen minimális
minél kisebb hosszirányú erőt használjon a rendszer

(229)
A szabályozótervezés kritériuma a következőképpen fogalmazható meg:
| (230) |
ahol  és
és  a skalár tervezési súlyok.
a skalár tervezési súlyok.
Az adaptív távolságtartó irányítási feladatban a járműnek egy előre megadott követési távolságot kell tartania.

Az oszlopban haladó járművek irányítása azt a jellegzetes forgalmi szituációt kísérli meg automatizálás által biztonságosabbá és költséghatékonyabbá tenni, amikor több jármű, hosszú távon, azonos útszakaszon halad. Emellett a környező járművek aktuális pozíciójának pontos ismerete segítheti a ráfutásos balesetek kiküszöbölését is. Az oszlopban haladó járművek esetén a cél a minél kisebb követési távolság megvalósítása. Az oszlopban haladó járművek közötti kommunikáció kihasználásával a követési távolságot a normál követési távolságnál lényegesen kisebbre választjuk.
Normál működési körülmények esetén a követőjárművek irányítása szétcsatolható egy sebességszabályozási feladatra (hosszirányú irányítás) és a sávon belüli pozícionálásra (oldalirányú irányítás). A sebességszabályozó kimenete a féknyomás vagy a pillangószelep-állás, amelyek a jármű gyorsulásának beállítására szolgálnak. A szabályozó bemenetei az alkalmazott irányítási módszertől függően változhatnak, de a vezető vagy közvetlenül a vizsgált jármű előtt haladó jármű gyorsulás, sebesség és pozíció (távolság) adatai rendszerint szükségesek.
Ebben a feladatban alapvető szerepet játszanak a szenzorfúziós eljárások és a járművek közötti kommunikációs módszerek. A szokásos pozíciómeghatározási módszereket (GPS) a járművön megtalálható egyéb érzékelők (sebesség, oldalgyorsulás, radar) adataival kiegészítve kezeljük. Az oszlopban haladó járművek közötti kommunikáció kihasználásával a követési távolságot a normál követési távolságnál lényegesen kisebbre csökkentjük.
Kétféle stabilizálási feladatot kell megoldani: az egyedi járműveknek meg kell oldaniuk, hogy az őt megelőző járműtől való távolság minél kisebb (illetve az előírt értékű) legyen. Meg kell oldani a teljes járműoszlop stabilitását, az úgynevezett string stabilitási feladatot. A string stabilitás biztosítja, hogy az egyes járművek elérjék a számukra előírt pozíciót a járműoszlopon belül, továbbá garantálja, hogy a konvoj elején - például a vezető jármű hirtelen fékezése miatt - keletkező követési hiba folyamatosan csökkenő hibát okozzon a járműoszlop mentén. Ezzel elkerülhető, hogy egy hirtelen fékezés ráfutásos ütközést váltson ki a konvoj végén.
Az egyedi járműveknek meg kell oldaniuk, hogy az őt megelőző járműtől való távolság minél kisebb (illetve az előírt értékű) legyen. Legyen  az
az  -edik jármű aktuális pozíciója. A járművek között
-edik jármű aktuális pozíciója. A járművek között  távolságot akarunk tartani, melynek meghatározása során figyelembe vettük a járművek hosszát is. A követő járművek közötti távolság hibája
távolságot akarunk tartani, melynek meghatározása során figyelembe vettük a járművek hosszát is. A követő járművek közötti távolság hibája
| (231) |

Az egyedi irányítás biztosítja a stabilitást, ha a következő követelmény teljesül:
| (232) |
Az irányítási feladat a megadott távolság tartása az előző jármű mozgását figyelembe véve.
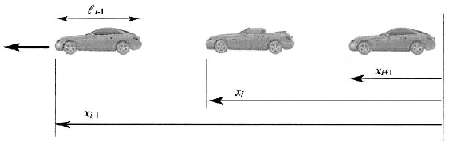
Meg kell oldani a teljes járműoszlop stabilitását, az úgynevezett string stabilitási feladatot. A string stabilitási feladat azt jelenti hogy a konvoj elején keletkező követési hiba ne növekedjen a járműoszlop mentén a később érkező járművek irányában. A string stabilitásra többféle megoldás létezik: állandó távolság tartása vagy állandó időköz tartása, amikor a távolság nem állandó, hanem a sebességgel arányosan változik.
A szabályozó bemenetei az alkalmazott irányítási módszertől függően változhatnak, de a vezető vagy közvetlenül a vizsgált jármű előtt haladó jármű gyorsulás, sebesség és pozíció (távolság) adatai rendszerint szükségesek. Ha az irányítási stratégia a vezető jármű alapján (1. módszer) történik, akkor
| (233) |
ahol  a vezető jármű pozíciója. Ekkor a követési hiba dinamikája:
a vezető jármű pozíciója. Ekkor a követési hiba dinamikája:  azaz
azaz  . String stabilitás szempontjából ez biztosítja a leghatékonyabb megoldást, hiszen hibamentes megoldást ad. A stratégia nem biztonságos, mivel nem veszi figyelembe a vizsgált jármű előtt haladó jármű adatait.
. String stabilitás szempontjából ez biztosítja a leghatékonyabb megoldást, hiszen hibamentes megoldást ad. A stratégia nem biztonságos, mivel nem veszi figyelembe a vizsgált jármű előtt haladó jármű adatait.
Ha az irányítási stratégia csak a vizsgált jármű előtt haladó jármű adatai alapján (2. módszer) történik, akkor a módszer a vizsgált jármű előtt haladó jármű pozíció és sebesség adatai alapján dolgozik:
| (234) |
Ekkor a követési hiba dinamikája  alapján
alapján
| (235) |

Az első járműre
| (236) |
ahol  az első jármű gyorsulása. Az átviteli és a frekvencia függvény:
az első jármű gyorsulása. Az átviteli és a frekvencia függvény:
| (237) |

Azokon a frekvenciákon, ahol  a hiba erősítve terjed tovább a járművek mentén. Ilyenkor a string stabilitás nem teljesül.
a hiba erősítve terjed tovább a járművek mentén. Ilyenkor a string stabilitás nem teljesül.
Ha az irányítási stratégia csak a vizsgált jármű előtt haladó jármű adatai alapján (3. módszer) történik, és a módszer a vizsgált jármű előtt haladó jármű pozíció és sebesség adatain kívül a vizsgált jármű előtt haladó jármű gyorsulás adatát is figyelembe veszi, akkor:
| (238) |
A követési hiba dinamikája ekkor  alapján
alapján
| (239) |

Az első járműre  , i=1, ahol
, i=1, ahol  az első jármű gyorsulása. Az átviteli függvény:
az első jármű gyorsulása. Az átviteli függvény:
| (240) |
Ha  , akkor lehetnek frekvenciák, amelyeknél a hiba erősítve terjed tovább a járművek mentén. Ezért
, akkor lehetnek frekvenciák, amelyeknél a hiba erősítve terjed tovább a járművek mentén. Ezért  (
( ) választás célszerű a string stabilitáshoz.
) választás célszerű a string stabilitáshoz.
Ha az irányítási stratégia a vezető jármű és a közvetlenül a vizsgált jármű előtt haladó jármű adatait egyaránt felhasználja. (4. módszer), akkor
| (241) |

A módszer nagyszámú információt használ, azonban ebben az esetben a string stabilitás garantálható.
A változó távolságot biztosító irányítási stratégiában minden jármű a közvetlenül előtte haladó jármű pozíció, sebesség és gyorsulás adatából dolgozik (5. módszer).
Ekkor
| (242) |

Ez a módszer is nagyszámú információt használ, azonban ebben az esetben is a string stabilitás garantálható.
A továbbiakban az ezekben a feladatokban felmerülő jelkövető irányítástervezésre adunk néhány módszer.
4.6.1. Állapot szeparálás módszere
Induljunk ki az alábbi integráló tulajdonságú rendszerből, melynek állapottér reprezentációja a következő:
| (243) |

| (244) |

Integráló tulajdonságú rendszerhez jelkövetést biztosító szabályozó struktúra egy output visszacsatolt soros kompenzátort kombinál az állapot-visszacsatolással.
Ha a rendszer maga integráló tulajdonságú, és a rendszer kimenetét is visszacsatoljuk, akkor ez a struktúra automatikusan biztosítja a referencia jelkövetést és az állapot-visszacsatolás a pólusok megfelelő elhelyezését.
Válasszuk meg az állapotvektort úgy, hogy az első komponense éppen a rendszer kimenete legyen. Ebben a rendszerben az  állapotjelet nem csatoljuk vissza, helyette a rendszer kimenőjelét csatoljuk vissza negatívan és az így képzett különbséget erősítjük a
állapotjelet nem csatoljuk vissza, helyette a rendszer kimenőjelét csatoljuk vissza negatívan és az így képzett különbséget erősítjük a  értékkel.
értékkel.
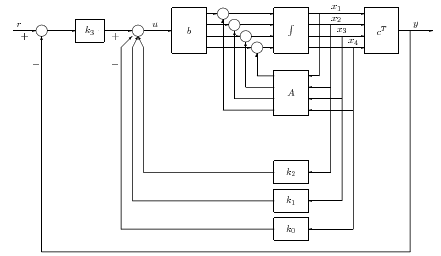
Ekkor a bemenőjel és a kimenőjel az állapotvektor elemeivel a következőképpen írható fel:


| (245) |

| (246) |

ahol
| (247) |

az állapotvisszacsatolás komponensei.
Az input jelet az állapotegyenletbe helyettesítve a következő egyenletet kapjuk:

| (248) |
A követési hiba:
A szabályozott rendszer pólusai az
 mátrix sajátértékei, ami azt jelenti, hogy a fenti struktúra alkalmazásával a pólus allokációs technika gyakorlatilag változtatás nélkül használható.
mátrix sajátértékei, ami azt jelenti, hogy a fenti struktúra alkalmazásával a pólus allokációs technika gyakorlatilag változtatás nélkül használható. A szabályozott rendszer állapotmátrixa:
 és input vektora:
és input vektora:  .
.
Példa 5.1: Tekintsük példaként a következő integráló tulajdonságú rendszert:
| (249) |
| (250) |
Az első állapot azonos a rendszer kimenetével. Tervezzünk jelkövető szabályozást LQ módszerrel. Az LQ tervezés súlyozó tényezői:
| (251) |
Az LQ tervezés eredménye:
| (252) |
A zárt rendszer állapottér reprezentációja:
| (253) |
| (254) |
A megoldás szimulációját az alábbi ábrasor illusztrálja:
Megjegyzés: állapottér átalakítása
A megoldásban feltételeztük, hogy az állapotváltozókat sikerült úgy összeállítani, hogy a rendszer kimenete azonos az első állapotváltozóval.
Ha ez nincs így, akkor egy transzformációt kell végrehajtani.
Tegyük fel, hogy a rendszer átviteli függvénye a következő:
| (255) |

Az első állapotváltozót úgy választjuk meg, hogy az azonos legyen a rendszer kimenetével:  . A többi állapotváltozó megválasztása a következőképpen történik:
. A többi állapotváltozó megválasztása a következőképpen történik:



| (256) |
ahol  ,
,  ,
,  , ...,
, ...,  .
.
Végül az  elsőrendű deriváltjára a következő alakot kapjuk:
elsőrendű deriváltjára a következő alakot kapjuk:
| (257) |

ahol  .
.
A fentiek alapján az állapottér reprezentáció a következő alakot kapjuk:
| (258) |
| (259) |

A hasonlósági transzformációval kapott állapottérben az első állapotváltozó a kimenőjellel azonos.
4.6.1.1. Struktúra módosítás
Egy integrátort nem tartalmazó rendszer esetén a jelkövetést úgy kell megoldani, hogy integráló típusú soros kompenzátort alkalmazunk a visszacsatolásban.
Ez állapot-visszacsatolást tartalmazó rendszerben azt jelenti, hogy az állapot-visszacsatolt struktúrát egy olyan output visszacsatolással kombináljuk, amely integráló tulajdonságú. Ebben a struktúrában valamennyi állapot vektort visszacsatoljuk a rendszer bemenetére. Ezen túlmenően egy integráló elemet építünk a rendszer előrevető ágába és ezt  -vel erősítjük. Fentiek miatt ebben a struktúrában
-vel erősítjük. Fentiek miatt ebben a struktúrában  számú erősítést alkalmazunk.
számú erősítést alkalmazunk.
Egy új állapotváltozót definiálunk:
| (260) |

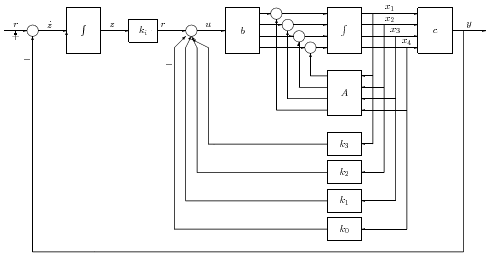
Az állapot-visszacsatolt struktúrával a rendszer állapottér reprezentációja a következő:
| (261) |

| (262) |

| (263) |

| (264) |
Az állapot-visszacsatolt struktúrában a bemenőjelet az  ,
,  ,
,  komponenseken kívül az
komponenseken kívül az  hibajel figyelembe vételével állítjuk elő. A rendszer állapottér struktúráját a
hibajel figyelembe vételével állítjuk elő. A rendszer állapottér struktúráját a  komponenssel bővítjük és ebben a bővített rendszerben végezzük el a tervezést.
komponenssel bővítjük és ebben a bővített rendszerben végezzük el a tervezést.
Az állapotegyenletek a következők:
| (265) |

| (266) |
A kimeneti egyenlet:
| (267) |

A bővített rendszer állapottér reprezentációja:
| (268) |

| (269) |
Az irányítójel összefüggése:
| (270) |

Az állapottér reprezentáció:

| (271) |
| (272) |
A követési hiba:
Ezzel a struktúrával automatikusan elérjük, hogy a szabályozott rendszer jelkövetést biztosítson. A pólus allokációt a bővített rendszerben végezzük el. A továbbiakban a hagyományos pólus allokációs technika használható.
Az állapotvisszacsatoilt erősítés  komponensű:
komponensű:
| (273) |

Az állapotvisszacsatolás tervezésének feltétele, hogy az irányíthatósági mátrix teljes rangú legyen:
.
Példa 5.2:
Tekintsük példaként a rendszert:
| (274) |
| (275) |
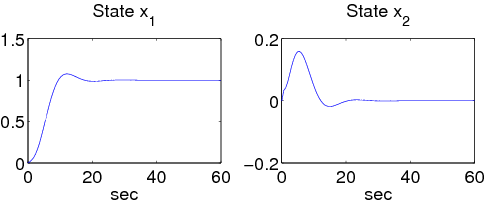
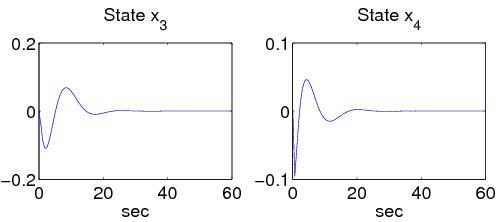
A bővített rendszer állapottér reprezentációja:
| (276) |
| (277) |
Az LQ tervezés súlyozó tényezői:
| (278) |
Az LQ tervezés eredménye:
| (279) |

A zárt rendszer állapottér reprezentációja:
| (280) |
| (281) |
A megoldás szimulációját az 5.2 ábrasor illusztrálja.
5. fejezet - Keresztirányú modellezés és irányítás
5.1. ABS (Anti-lock Braking System) rendszerek
A kerék és aszfalt közötti súrlódási tényező, amíg a kerék nem csúszik meg, hanem gördül, nagyobb, mint megcsúszás esetén. Ha erősen fékezünk, a kerék megcsúszhat és hosszabb lesz a fékútja. Indításnál hasonló jelenég léphet fel: ha túlságosan nagy forgatónyomaték hat a kerekekre, azok megcsúszhatnak (kipörgés), ezzel a vonóerő lecsökken: a fronthajtásos jármű ilyenkor kormányozhatatlanná, a hátsókerék-hajtásos instabillá válik.
Már az 1920-as években szabadalmaztattak fékezési kerékcsúszási eljárásokat. 1936-ban a Bosch nyújtott be ABS szabadalmat. Az első blokkolásgátló fejlesztések a Teldix-nél kezdődtek (Bosch leányvállalat) 1964-ben. A kísérleti jármű fékútját hatékonyan csökkentették, de ez a rendszer a sorozatgyártásra még alkalmatlan volt mivel a szabályozó elektronika nagyon megbízhatatlan volt (1000 analóg áramköri elem). A Daimler és a Teldix készítette el az első, maihoz hasonló kerékfordulatszám érzékelőt 1969-ben. A blokkolásgátlók sorozatgyártása a Boschnál csak 1978-ban kezdődött el (Mercedes S-osztály, 7-es BMW). 1987-ben az ABS szabályozást az elinduláskor és gyorsításkor a kerekek kipörgését megakadályozó ASR rendszer egészítette ki. 1995-től elkezdődött az Elektronikus Stabilitás Program, az ESP sorozatgyártása. Ez a gépkocsi hosszanti dinamikáján kívül a stabilitás növelése érdekében a keresztirányú dinamikába is beavatkozik.
A blokkolásgátló fékrendszer (ABS) egy olyan aktív biztonsági eszköz, amely megakadályozza az autó megcsúszását erőteljes fékezés esetén, továbbá segít a fékezendő gépjármű egyenesen tartásában. A rendszer lényege, hogy érzékelve a kerekek blokkolását, a másodperc töredékére kiiktassa a fékezést. Az ABS fő célja, hogy vészfékezés esetén is megmaradjon az irányíthatáság, azaz csúszós úton segítsen meggátolni az autó megpördülését fékezés közben. Csúszás úton gépkocsival kis gázzal kell elindulni: így a kisebb nyomaték következtében elkerülhető a kerekek kipörgése. A kipörgésgátló a kerék megcsúszásakor leterheli a hajtómotort.
Az Anti-Slip Regulation (ASR) vagy Traction Control System (TRC) gyorsítás alatt az ABS szenzoroktól kapott adatok alapján figyeli a kerekek forgási sebességét. Amennyiben érzékeli valamelyik kerék gyors fordulatszám-növekedését (megcsúszás, kipörgés), csökkenti a motor teljesítményét és megakadályozza a kipörgést. Kis sebességnél (40 km/h alatti) az ASR a fékek segítségével is fékezi a túl gyorsan forgó kereket.
A blokkolásgátló rendszereknek az a feladatuk, hogy a kerék forgási irányában fellépő szlipet fékezés közben úgy szabályozzák, hogy a tapadási tényező maximálisan ki legyen használva. Az ABS rendszereket eredetileg azért fejlesztették, hogy erős fékezés során esetlegesen bekövetkező kerékcsúszást megakadályozzák. Később az ABS rendszereket úgy fejlesztették, hogy maximális fékerőt biztosítsanak.
Az ABS működése során különböző problémák merülhetnek fel: a kerekek fékezésének rövid idejű kiiktatása miatt a fékezés ideje és hossza megnő. A legnagyobb tapadási tényező elérése után a jármű attól függően viselkedik, hogy az első vagy a hátsó kerekek blokkolnak-e először. A két veszélyes állapot közül a kedvezőbb, ha előbb az első kerekek csúsznak meg. Ekkor megszűnik a kormányozhatóság és növekszik a féktávolság, a jármű a kanyart kiegyenesíti, de nem farol meg (alulkormányzott viselkedés). Ha a hátsó kerekek csúsznának meg előbb, oldalerő (oldalszél, ívmenetben centrifugális erő) hatására az autó megfarol, ami különösen veszélyes helyzetet teremt (túlkormányzott viselkedés). A problémák kiküszöbölésére az egyese megoldások más más stratégiákat igényelnek.
Néhány lehetséges ABS megoldás elve:
Egykerék szabályozás. Egyedi szabályozás esetén mindegyik keréknek saját fordulatszám mérő érzékelője van, amely függetlenül a több kerék állapotától, csak a szóbanforgó kerék féknyomását szabályozza. A négy kerék individuális szabályozhatósága lehetővé teszi különféle szabályozási módszerek kidolgozását.
Select-low szabályozás. Ezt az elvet a tengely két kerekének közös féknyomással való szabályozásához alkalmazzák. Ebben az esetben az alacsonyabb súrlódási tényező oldalán fékezett kerék szabja meg a közös féknyomás nagyságát. Ezáltal a magasabb súrlódási oldalon fékezett kerék lehetséges lefékezettsége nincs egészen kihasználva. A fékút valamivel hosszabb, de nem keletkezik perdülési nyomaték, mert a fékerők a tengely két oldalán közel egyformák.
Select-high szabályozás. Egy tengelyen a két kerék közös féknyomását a magasabb súrlódási oldalon futó kerék határozza meg. Ebben az esetben az alacsonyabb tapadási tényezőjű oldalon futó kerék blokkolhat és az egyenetlen fékerők miatt perdülési nyomaték keletkezik. A fékút rövidebb, de a jármű elveszítheti a stabilitását.
Az ABS szabályozás szempontjából fontos paraméterek: a  tapadási tényező, a
tapadási tényező, a  csúszási tényező, a
csúszási tényező, a  oldalsúrlódási tényező és
oldalsúrlódási tényező és  fékezési szlip a hozzátartozó tapadási tényezővel.
fékezési szlip a hozzátartozó tapadási tényezővel.
Az ABS szabályozáshoz szükséges kerékgyorsulási értékeket a kerék forulatszám mérővel mért kerületi sebességének differenciálásával nyerjük. Az ABS szabályozáshoz egy referencia sebességre van szükség, amely a jármű haladási sebességét optimális lefékezés esetére szimulálja. A referencia sebességet a kerekek fordulatszámából logikai kapcsolatok segítségével lehet levezetni.
Típusuk szerint különböző érzékelők láthatják el ezt a feladatot. Az induktív elven működő érzékelő esetén a futóműhöz rögzített kerékfordulatszám érzékelő belsejében állandó mágnest helyeznek el, melynek erőterét a kerékkel együtt forgó póluskerék módosítja. A póluskerék forgása miatt az érzékelő elé váltakozva fog, illetve fogárok kerül. Emiatt a mágneses fluxus intenzitása periodikusan váltakozik. A kerék fordulatszáma viszont arányos az indukált feszültség értékével. Hall effektus elvén alapuló aktív kerékfordulatszám érzékelő esetén egy vezetőre, melyre feszültséget kapcsolunk és rá merőleges irányú mágneses erőtérbe helyezzük az áram irányra és a mágneses erővonalakra merőlegesen Hall feszültség jön létre. Ha az érzékelő közelében a mágneses tér periodikusan változik, ezzel arányos lesz a feszültség is.
Az ideális blokkolásgátlónak a féknyomást úgy kell szabályoznia, hogy a fékezési szlip a kerekeken mindig a  -szlip görbe maximumán maradjon. A görbe formája a gumiabroncs típusán kívül még több tényezőtől függ. A tipikus maximális szlip hányados értéke
-szlip görbe maximumán maradjon. A görbe formája a gumiabroncs típusán kívül még több tényezőtől függ. A tipikus maximális szlip hányados értéke  és
és  közötti. A görbe alakja akkor is változik, ha fékezés közben kúszási szög lép fel. Növekvő kúszási szöggel csökken a tapadási tényező. A kúszási szögnek jelentős hatása van az oldalirányú súrlódási tényezőre is.
közötti. A görbe alakja akkor is változik, ha fékezés közben kúszási szög lép fel. Növekvő kúszási szöggel csökken a tapadási tényező. A kúszási szögnek jelentős hatása van az oldalirányú súrlódási tényezőre is.
Egy elvi algoritmus a következő lehet: ha fékezés során a kerék lassulása kisebb  küszöbértéknél (azaz
küszöbértéknél (azaz  ), akkor a fékezés végrehajtódik. Ha a kerék lassulása meghaladja az
), akkor a fékezés végrehajtódik. Ha a kerék lassulása meghaladja az  küszöbértéket, (azaz
küszöbértéket, (azaz  ), akkor a féknyomást állandó értéken tartja (a kerékhez tartozó mágnesszelep nyomástartás pozícióba kerül). Ha a kerék lassulása folytatódik és meghaladja az
), akkor a féknyomást állandó értéken tartja (a kerékhez tartozó mágnesszelep nyomástartás pozícióba kerül). Ha a kerék lassulása folytatódik és meghaladja az  küszöbértéket, (azaz
küszöbértéket, (azaz  ), akkor a kerékhez tartozó féknyomást csökkenti (a szelep a nyomáscsökkenés állapotába tolódik). A kerék el kezd gyorsulni. Ha a kerék lassulása csökken az
), akkor a kerékhez tartozó féknyomást csökkenti (a szelep a nyomáscsökkenés állapotába tolódik). A kerék el kezd gyorsulni. Ha a kerék lassulása csökken az  küszöbérték fölé, (azaz
küszöbérték fölé, (azaz  ), akkor a szelep a nyomástartás pozícióba megy vissza.
), akkor a szelep a nyomástartás pozícióba megy vissza.
Ha a keréklassulás csökken és az  küszöbérték fölé kerül (azaz
küszöbérték fölé kerül (azaz  ), akkor a a fékezés ismét aktiválódik, azaz a kerékhez tartozó féknyomás növekedni fog (a szelep a nyomásnövelés pozícióba jut). A kerék gyorsulását mindaddig növelni kell, amíg a gyorsulás meghalad egy viszonylag nagy küszöbértéket (
), akkor a a fékezés ismét aktiválódik, azaz a kerékhez tartozó féknyomás növekedni fog (a szelep a nyomásnövelés pozícióba jut). A kerék gyorsulását mindaddig növelni kell, amíg a gyorsulás meghalad egy viszonylag nagy küszöbértéket ( ). Ekkor a szelep ismét nyomástartás pozícióba kerül. Amikor a kerék gyorsulása az
). Ekkor a szelep ismét nyomástartás pozícióba kerül. Amikor a kerék gyorsulása az  küszöbérték alá kerül (azaz
küszöbérték alá kerül (azaz  ), akkor a kerék a
), akkor a kerék a  -szlip görbe stabil tartományába fut be és ezzel a fékerő az optimális érték alá süllyed. Ha a kerék lassulása az
-szlip görbe stabil tartományába fut be és ezzel a fékerő az optimális érték alá süllyed. Ha a kerék lassulása az  küszöbérték alá kerül (azaz
küszöbérték alá kerül (azaz  ) akkor a folyamat megismétlődik az első ciklushoz hasonlóan.
) akkor a folyamat megismétlődik az első ciklushoz hasonlóan.
Ezzel az eljárással megakadályozzuk, hogy a kerék blokkoljon és a kerék forgási sebességét abban a tartományban tartsuk, ahol a szlip a biztonsági tartományban, az optimális értékhez közel marad.
Az ABS működésére számos tényező hat.
Az ABS szabályozás szempontjából fontos paraméterek: a kerék és az út közötti tapadási tényező, az oldalsúrlódási tényező és a fékezési szlip a hozzátartozó tapadási tényezővel. Például más az ABS lefutása óvatos fékezés esetén vagy kanyarfékezésnél. A jármű kezdeti sebessége a fékút hosszát is meghatározza.
Manőverek során (pl. ívmenetben) gondot okoz, hogy a belső hátsó kerék lassulásának értéke jelentősen átlépheti az alsó küszöb értékét és a kerék blokkolhat a többi keréktől függetlenül.
Az ABS szabályozási frekvenciája függ a vezető által kifejtett fékpedál nyomástól. Minél nagyobb a különbség a blokkolás eléréséhez szükséges féknyomástól, annál nagyobb a frekvencia.
A szabályozási feladat megoldása során a kerék pillanatnyi csúszását hasonlítjuk az optimális csúszás értékhez:
Két küszöbérték alapján dolgozik a módszer. Az első küszöbérték fentről lefelé történő átlépésekor nyomásnövelés fog bekövetkezni. A másik küszöbérték lentről felfelé történő átlépésekor nyomáscsökkenés fog bekövetkezni. A két küszöbérték között nyomástartás van.
A gyakorlatban a lassulást és a kerék csúszást egyaránt monitorozzák és az ABS logikához mindkét információt felhasználják.
Az első szimulációs példa a jeges úton való fékezést illusztrálja  érték esetén, lásd a 47. ábrát. A szimulációs jelek a féknyomások, hosszirányú keréksebességek, bólintás, főtengely fordulatszám és afékút.
érték esetén, lásd a 47. ábrát. A szimulációs jelek a féknyomások, hosszirányú keréksebességek, bólintás, főtengely fordulatszám és afékút.
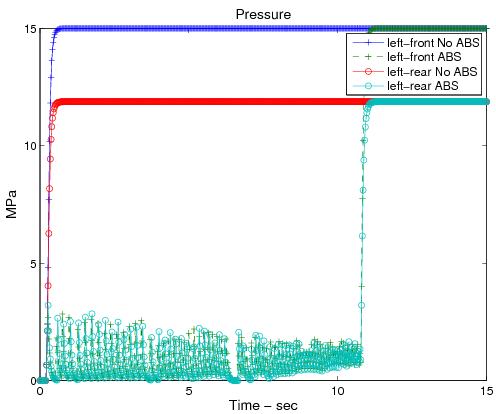
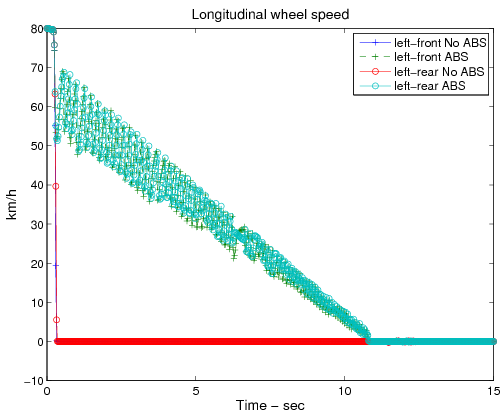
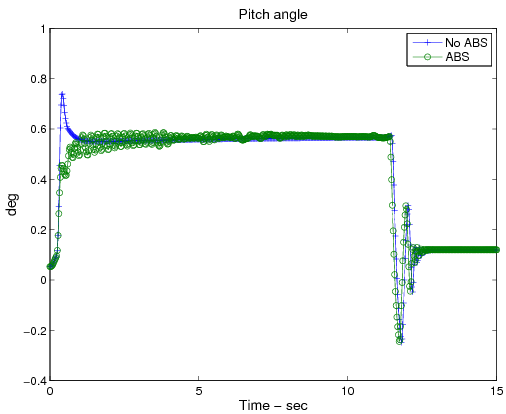
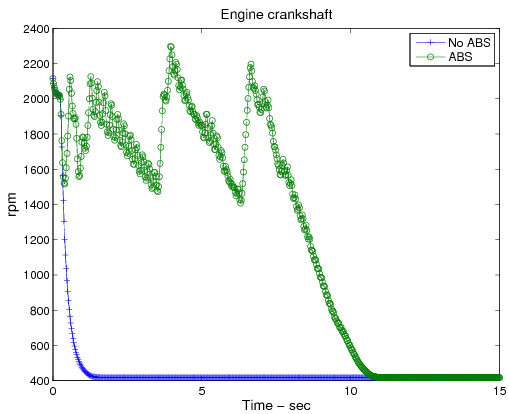
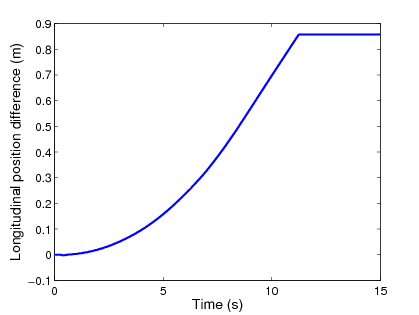
ABS fékezés eltérő  tapadási tényező esetén a jármű kipörgését eredményezi. Ennek illusztrálása látható a 48. ábrán. Szimuláció jelek a féknyomások, bólintás, a kormányszög és a hosszirányú keréksebességek.
tapadási tényező esetén a jármű kipörgését eredményezi. Ennek illusztrálása látható a 48. ábrán. Szimuláció jelek a féknyomások, bólintás, a kormányszög és a hosszirányú keréksebességek.
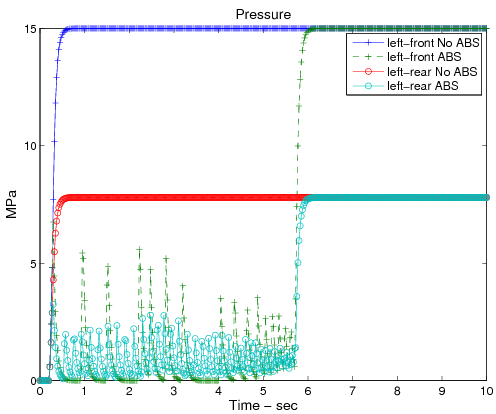
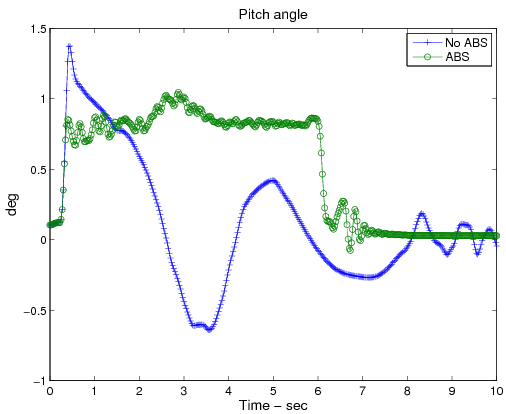
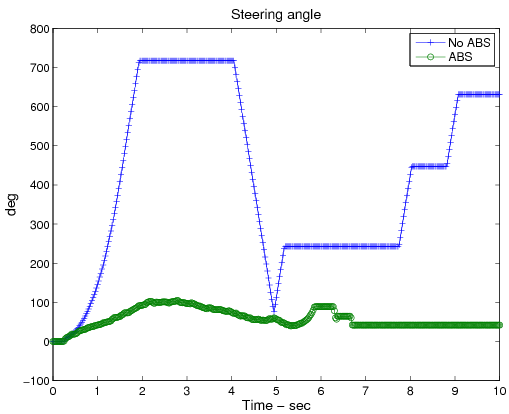
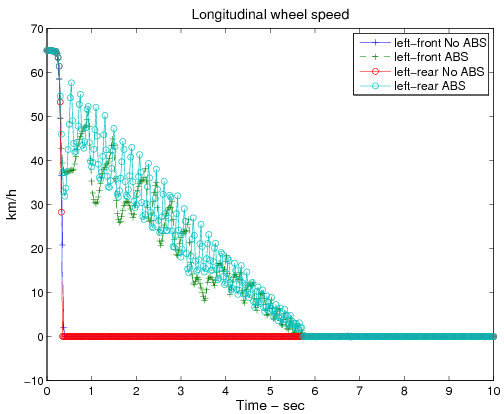
Kanyarodás közbeni fékezés illusztrációja látható a 49. ábrán.
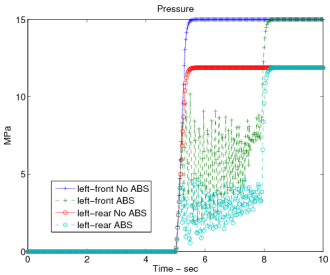
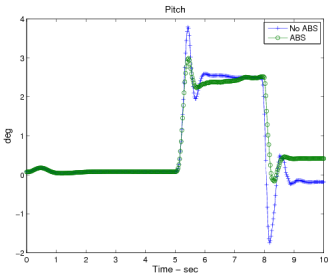
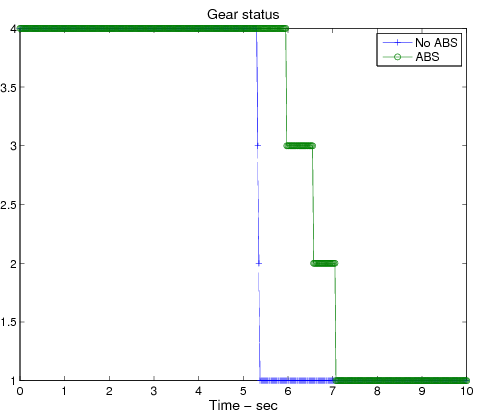
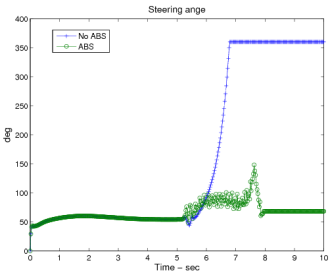
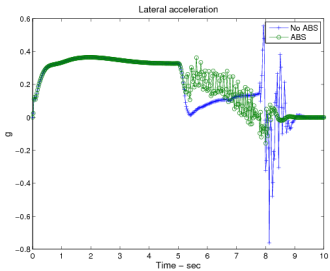
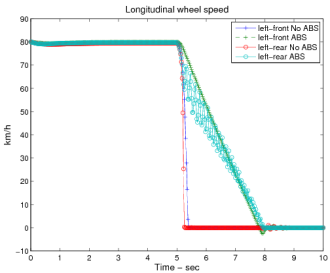
5.2. ESP irányítás
Az ESP rendszer nemcsak az ABS/ASR beavatkozásával támogatja a gépjárművezetőt és szabályozza a gépkocsi menetirányú dinamikáját fékezéskor és gyorsításkor, hanem kritikus keresztirányú menetdinamikai körülmények között is segíti a vezetőt. csökkenti az extrém kormányzási manőverek következményeit.
Például, alulkormányzás esetén a gépkocsi nem megfelelő módon reagál a kormányzásra, az első kerekek elvesztik az úttal való kapcsolatot, és az autó a hossztengelye körül kismértékben kifelé fordul a kanyarban és egyenesen haladna. Túlkormányzás esetén a kanyarodás során kapaszkodás-vesztés lép fel a hátsó kerekeken, azok elvesztik az úttal való kapcsolatot, és az autó a hossztengelye körül befelé fordul a kanyarban.
Egyedi szabályozás esetén mindegyik keréknek saját fordulatszám mérő érzékelője van, amely függetlenül a több kerék állapotától, csak a szóbanforgó kerék féknyomását szabályozza. A négy kerék individuális szabályozhatósága lehetővé teszi különféle szabályozási módszerek kidolgozására. Egy perdülési sebességmérő szenzor hozzáadásával a menetviselkedés befolyásolható. Megfelelő logikával csökkenthető a kerekek megcsúszásakor, vagy a hajtott kerekek kipörgésekor keletkező perdülési nyomaték hatása.
Mind a négy keréken individuálisan beállítható a menetirányú és az arra merőleges erő a kerék kerületi csúszásának szabályozásával. Az erők segítségével és a motornyomaték elektronikus befolyásolásával a kritikus helyzetekben fellépő perdülési nyomaték hatása csökkenthető.
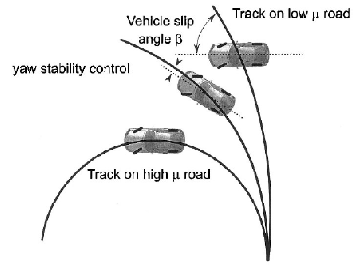
A jármű kívánatosnak tartott pályáját alapvetően a kormánykerék elfordítási szöge alapján határozzák meg. Ez kiegészül a főfékhengerbe beépített nyomásérzékelő segítségével meghatározott fékezőnyomással. A jármű tényleges mozgása alapvetően az ABS/ASR kerékfordulatszám érzékelők jeleiből dolgozik. A keresztirányú mozgást a oldalgyorsulás érzékelő jeléből számítják.
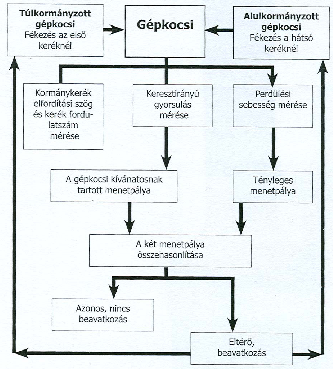
A perdület szabályozására alkalmazott tervezési módszer a differenciális fékezésen alapszik. Az ABS irányitást egy differenciális fékezéssel egészítik ki. A szabályozási perdülési nyomatékot a bal és jobboldali kerekekre alkalmazott eltérő fékerőkkel állitja elő.
Hátsókerék meghajtású gépkocsi túlkormányzott viselkedésének kezdetén a motorelektronika csökkenti a nyomatékot, hogy a kerekeken növekedjék az oldalvezető erő. Ha ez nem elegendő a stabilitás megtartásához, akkor a kanyar külső első keréknél fékezőnyomást vezérelnek ki. Emiatt a gépkocsi kissé lassul és egy perdítő nyomaték keletkezik, ami a gépkocsit a megfelelő irányba tereli.
Alulkormányzott gépkocsinál az elektronika a kanyarbelső hátsó keréknél végez szabályozott fékezést. Az így megvalósított kerékcsúszásnál csökken a gépkocsi sebessége és az adott keréknél csökken az oldalvezető erő és emiatt a gépkocsi perdülési reakciója növekszik. A differenciálművön keresztül gyorsul a másik hátsó kerék.
5.2.1. Differenciális fékezés
Differenciális fékezés a négy kerékre kiadott féknyomásokkal hozható létre. Ha a bal oldali kerékre nagyobb nyomást adunk, mint a jobboldali kerékre, akkor az óramutató járásával ellentétes perdület jön létre.
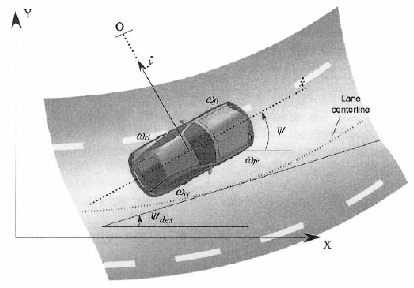
A differenciális fékezéshez használt modell hét szabadságfokú: tartalmazza az oldalirányú és hosszirányú járműsebességeket, a perdület szögsebességet ( ), valamint a négy keréksebességet (
), valamint a négy keréksebességet ( ).
).
Bevezetjük a hosszirányú kerékerőket:  ,
,  ,
,  ,
,  és az oldalirányú kerékerőket:
és az oldalirányú kerékerőket:  ,
,  ,
,  ,
,  .
.
A járműtest mozgésegyenletei  a kormányszög segítségével a következők:
a kormányszög segítségével a következők:
| (282) |

| (283) |

| (284) |

| (285) |

| (286) |

| (287) |

| (288) |

A kerekek forgási dinamikája a következő nyomatéki egyenletek alapján számolható:
| (289) |

| (290) |

| (291) |

| (292) |

ahol  hajtási nyomaték és
hajtási nyomaték és  a féknyomaték.
a féknyomaték.
A hosszirányú és oldalirányú kerékerők az oldalirányú és hosszirányú rugalmassági együtthatók ( ,
,  ), valamint
), valamint  hosszirányú szlipek segítségével felírhatók.
hosszirányú szlipek segítségével felírhatók.
| (293) |
| (294) |
ahol  az oldalkúszás szöge,
az oldalkúszás szöge,  függvény a következőképpen fejezhető ki
függvény a következőképpen fejezhető ki
| (295) |
ahol  függőleges kerékerő és
függőleges kerékerő és  az út és kerék közötti súrlódási együttható felhasználásával
az út és kerék közötti súrlódási együttható felhasználásával
| (296) |
A perdület szabályozására a gyakorlatban hierarchikus irányítást alkalmaznak. A felsőszintű irányítás a szükséges perdületi nyomatékot a következő mért jelek alapján számítja ki: perdületi szögsebesség, keréksebesség, oldalgyorsulás, kormányszög. Az alsószintű szabályozás a perdületi nyomatékot a kerekekre ható nyomásokból állítja elő.
A kormányszög állandósult állapotú értéke bicikli modell alapján a következő:
| (297) |
ahol  a kanyar sugara,
a kanyar sugara,  a keréktávolság,
a keréktávolság,  és
és  az első és hátsó oldalkúszás szöge.
az első és hátsó oldalkúszás szöge.
Az oldalkúszási szögek az oldalirányú rugalmassági együtthatókkal ( ):
):
| (298) |
Az oldalerőkre és nyomatékokra a következő egyensúlyt fogalmazzuk meg:
amiből


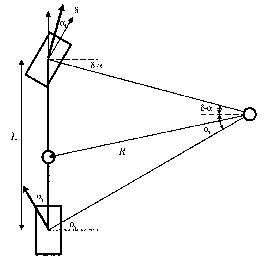
A kormányszög állandósult állapotú értéke a következőképpen adódik:
| (299) |

ahol  és
és  . A perdületi szögsebesség
. A perdületi szögsebesség
| (300) |

ahol  kifejezhető a kormányszöggel.
kifejezhető a kormányszöggel.
A szükséges perdületi szögsebesség a kormányszög segítségével a következőképpen kapható:
| (301) |
A kormányszög és az oldalkúszás szöge közötti összefüggés:
| (302) |

| (303) |

azaz lineáris közelítéssel  és
és  . Az állandósult állapotú oldalkúszás értéke az állandósult értékű perdületi szöggel kifejezhető:
. Az állandósult állapotú oldalkúszás értéke az állandósult értékű perdületi szöggel kifejezhető:
Az igényelt oldalkúszásra a kormányszög segítségével a következő alakot kapjuk:
| (304) |
A kifejezés feltételezi a kerekek kanyarodási rugalmassági tényezőjének ismeretét ( ).
).
A szabályozási feladat célja perdületi nyomaték meghatározása olymódon, hogy a jármű kövesse a perdületi szögsebességet ( ) és az oldalkúszás szögét (
) és az oldalkúszás szögét ( ).
).
A feladat az, hogy minimalizáljuk az aktuális és az igényelt perdületi szögsebesség közötti eltérést ( ), másrészt minimalizáljuk az aktuális és az igényelt oldalkúszás szög közötti eltérést (
), másrészt minimalizáljuk az aktuális és az igényelt oldalkúszás szög közötti eltérést ( ). A szabályozási feladat célja perdületi nyomaték meghatározása olymódon, hogy a jármű kövesse a perdületi szögsebességet (
). A szabályozási feladat célja perdületi nyomaték meghatározása olymódon, hogy a jármű kövesse a perdületi szögsebességet ( ) és az oldalkúszás szögét (
) és az oldalkúszás szögét ( ).
).
Bevezetjük az igényelt és az elért értékek közötti eltérésre az  értéket:
értéket:
| (305) |

Az eltérés dinamikájára a következő adódik:
| (306) |
ahol  aktuális perdületi szöggyorsulás.
aktuális perdületi szöggyorsulás.
A perdületi szöggyorsulás:
| (307) |

| (308) |

| (309) |

Feltételezve, hogy  kis értékű, elhanyagoljuk a
kis értékű, elhanyagoljuk a  -t tartalmazó tagokat.
-t tartalmazó tagokat.
Feltesszük, hogy az első és hátső féknyomatékok közötti eloszlás ismert és a közöttük lévő arányt jelöljük  -val. Legyen
-val. Legyen  az első és hátsó fékhatás aránya:
az első és hátsó fékhatás aránya:  és
és  . Az irányítójel a differenciális féknyomaték:
. Az irányítójel a differenciális féknyomaték:
| (310) |
Ekkor a szöggyorsulás összefüggése a következőképpen alakul:
| (311) |

Helyettesítsük  az
az  dinamikai egyenletbe.
dinamikai egyenletbe.
| (312) |
| (313) |

| (314) |
Írjuk fel a hibadinamikát a következőképpen:  . Ebből a szabályozási feladat:
. Ebből a szabályozási feladat:
| (315) |

| (316) |
| (317) |

Az irányítási feladat megoldása a következő jelek visszacsatolását teszi szükségessé: az oldalkúszás szöge, a kúszási szögsebesség és az első és hátsó kerekek oldalirányú kerékterhelése. A gyakorlatban ezeket a jeleket nem mérjük, ezért mért jelek alapján becsülni kell őket.
A jármű menetstabilitásának növelését az aktív kormányzással is megoldhatjuk. Az elektronika villanymotor segítségével, egy csigahajtáson és a beépített bolygóművön, vagy hullámhajtóművön keresztül pillanatnyi menethelyzetnek megfelelően a kerekeket jobban vagy kevésbé kormányozza el, mint a vezető.
Az aktív kormányzás vezetőtől független beavatkozását a beépített bolygómű teszi lehetővé melyet a kormányoszlopba építenek be. Ez lehetővé teszi a kormánymű folyamatos és pillanatnyi menetállapottól függően változó áttételét.
A kormányrendszer segítségével egy addicionális kormányszöget hoz létre, amivel a járművezető által megválasztott kormányszöget módosítja és ezt adja ki a kerekekre. Vezetés közben a járművezető a pályakövetési feladatot oldja meg, miközben a különféle zavarások hatását igyekszik kiküszöbölni. Zavarást okozhat például az aszimmetrikus súrlódási együttható. A jármű perdületi szögsebességét két tényező határozza meg: a vezető által igényelt oldalgyorsulás  és ugyanakkor a zavarások által gerjesztett nyomaték
és ugyanakkor a zavarások által gerjesztett nyomaték  . A zavarások hatását a vezető a kormányszög módosításával éri el, ami azért nehéz, mert a zavarások nem ismertek.
. A zavarások hatását a vezető a kormányszög módosításával éri el, ami azért nehéz, mert a zavarások nem ismertek.
Az elektronikus kormányrendszer elsődleges feladata a pályakövetés. A zavarás dinamikáját úgy kell leválasztani, hogy ez ne legyen hatással az elsődleges feladatra. Bármely zavarás által gerjesztett perdületi szögsebesség ( ) nem hathat az oldalgyorsulásra (
) nem hathat az oldalgyorsulásra ( ). Bármely P pontban a jármű oldalgyorsulása a következő alakban írható fel:
). Bármely P pontban a jármű oldalgyorsulása a következő alakban írható fel:
| (318) |
ahol  a jármű középpontjának oldalgyorsulása,
a jármű középpontjának oldalgyorsulása,  a zavarás által gerjesztett perdületi szögsebesség és
a zavarás által gerjesztett perdületi szögsebesség és  a P pont hosszirányban vett távolsága a tömegközépponttól.
a P pont hosszirányban vett távolsága a tömegközépponttól.
A tömegközéppont oldalgyorsulása  , valamint a perdületi szöggyorsulás
, valamint a perdületi szöggyorsulás  . Ekkor az oldalgyorsulás
. Ekkor az oldalgyorsulás
| (319) |

Az elektronikus kormányzásnak két komponense van: az egyik komponenst közvetlenül a vezető határozza meg a kormányszög jelével. A másik komponenst a szabályozó határozza meg ( ) a zavarások hatásának kiküszöbölése érdekében. A teljes kormányszög értéke:
) a zavarások hatásának kiküszöbölése érdekében. A teljes kormányszög értéke:
| (320) |
Az első kerékre ható oldalerő az oldalkúszás szögétől ( ) függ. Mivel a perdületi szögsebesség nem hat az oldalgyorsulásra (
) függ. Mivel a perdületi szögsebesség nem hat az oldalgyorsulásra ( ), ezért az irányítást úgy kell megtervezni, hogy az oldalkúszás szöge ne függjön a perdületi szögsebességtől.
), ezért az irányítást úgy kell megtervezni, hogy az oldalkúszás szöge ne függjön a perdületi szögsebességtől.
Legyen az első kerekek szögelfordulása  . Ekkor az első kerekek szöge
. Ekkor az első kerekek szöge
| (321) |

Az irányítási feladatban  váasztás célszerű, de
váasztás célszerű, de  nem ismert. A
nem ismert. A  dinamikája a következő (Ackermann):
dinamikája a következő (Ackermann):
| (322) |
ahol  és
és  a hosszirányú gyorsulás.
a hosszirányú gyorsulás.
Az első kerekek szögelfordulásának dinamikája:
| (323) |

Ha az addicionális kormányszög dinamikáját az alábbiak szerint választjuk meg:
| (324) |

akkor az első kerékre vonatkozó kúszási szög dinamikája
| (325) |
Az  értéke kizárólag a vezető által kiadott jel függvénye, ami a vezető által kiadott kormányszög (
értéke kizárólag a vezető által kiadott jel függvénye, ami a vezető által kiadott kormányszög ( ) által létrehozott perdületi szögsebességként interpretálható. Emiatt a perdületi szögsebesség hibáját (
) által létrehozott perdületi szögsebességként interpretálható. Emiatt a perdületi szögsebesség hibáját ( ) használják az elektronikus kormányrendszer korrekciós értékének meghatározására (
) használják az elektronikus kormányrendszer korrekciós értékének meghatározására ( ).
).
Kis szögsebességeket feltételezve az első kerék szögsebessége a következőképpen írható fel:
| (326) |
Az első kerék szögsebességének dinamikája csak a vezető jelétől függ ( ) és független a perdületi szögsebességtől (
) és független a perdületi szögsebességtől ( ).
).
5.3. ROP irányítás
A gépjármű keresztirányú stabilitásának növelésére, azaz borulási kockázatának csökkentésére többféle módszer áll rendelkezésre: például aktív keresztstabilizátor alkalmazása esetén egy hidraulikus elven működő beavatkozó pár stabilizáló nyomatékot generál annak érdekében, hogy a manőverek során keletkező destabilizáló nyomatékot semlegesítse. Aktív kormányzás esetén egy addicionális kormányszöget ad a vezető által létrehozott kormányszöghöz annak érdekében, hogy a jármű perdületi szögsebességét módosítsa. Aktív fékezés alkalmazásakor a rendszer differenciális fékezéssel módosítja a jármű perdületi szögsebességét.
Az oldalerők által hatására állandósult oldalgyorsulás jön létre a járművön. Három nyomaték hat a járműre: az oldalgyorsulásból származó borító oldalirányú nyomaték ( ), a belső kerékről a külső kerékre adódó visszatérítő nyomaték (
), a belső kerékről a külső kerékre adódó visszatérítő nyomaték ( ) és a súlypont oldalirányú elmozdulásából származó nyomaték (
) és a súlypont oldalirányú elmozdulásából származó nyomaték ( ).
).
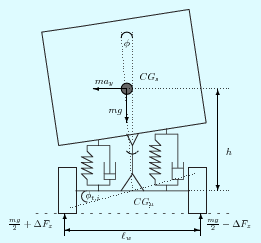
A nyomatéki egyenlet linearizált alakja (kis szögek feltételezésével):
| (327) |

A kerék és talaj közötti kontaktus akkor garantálható, ha  mindkét tengelyen.
mindkét tengelyen.
A keresztirányú stabilitás elérhető, ha az oldalirányú kerékterheléseket mindkét tengelynél ( ) limitáljuk.
) limitáljuk.
| (328) |

ahol  rugalmassági együtthatók a tengelyeken,
rugalmassági együtthatók a tengelyeken,  dőlési szög and
dőlési szög and  a jármű szélessége. Ezt az erőt kell korlátozni a keresztirányú stabilitás növelése érdekében. Emiatt bevezetjük a normalizált oldalirányú kerékterhelés hányadost a
a jármű szélessége. Ezt az erőt kell korlátozni a keresztirányú stabilitás növelése érdekében. Emiatt bevezetjük a normalizált oldalirányú kerékterhelés hányadost a  és a tengelyre eső tömegek alapján:
és a tengelyre eső tömegek alapján:
| (329) |

A keresztirányú stabilitás elérése érdekében a járműmodellben az oldalirányú dinamikát figyelembe kell venni.
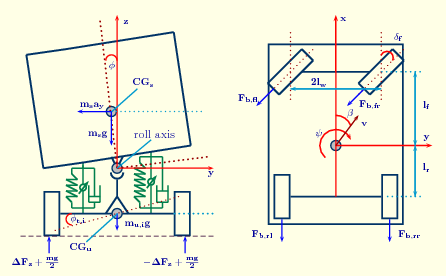
A keresztirányú és legyezési dinamikát figyelembe vevő egyenletek a következő formára hozhatók. Az első három egyenlet a rugalmas járműtestre, míg a többi egyenletek a rugózatlan tömegekre vonatkoznak.
A keresztirányú dinamikát figyelembe vevő egyenletek a következő formára hozhatók. Az első három egyenlet a rugalmas járműtestre, vonatkozik:
| (330) |

| (331) |

| (332) |

| (333) |

| (334) |

ahol  a kúszási szög,
a kúszási szög,  a perdületi szögsebesség.
a perdületi szögsebesség.
Az  és
és  oldalerők az első és hátsó tengelynél, melyek az
oldalerők az első és hátsó tengelynél, melyek az  és
és  szögsebességgel arányosak:
szögsebességgel arányosak:
| (335) |

| (336) |

ahol  a tapadási tényező,
a tapadási tényező,  és
és  oldalkúszási konstansok és a kormányszögek
oldalkúszási konstansok és a kormányszögek
és  .
.
A keresztirányú dinamikát figyelembe vevő következő egyenletek a rugózatlan tömegekre vonatkoznak:

| (337) |


| (338) |

Két szabályozó bemenet van:  a fékek által generált nyomaték (perdületi nyomaték egyenletben), mig
a fékek által generált nyomaték (perdületi nyomaték egyenletben), mig  és
és  a keresztstabilizátorok által kifejtett nyomaték (dőlési szögre vonatkozó egyenlet).
a keresztstabilizátorok által kifejtett nyomaték (dőlési szögre vonatkozó egyenlet).
Két szabályozó bemenet van:

a fékek által generált nyomaték (perdületi nyomaték egyenletben), míg

és
 a keresztstabilizátorok által kifejtett nyomaték (dőlési szögre vonatkozó egyenlet).
a keresztstabilizátorok által kifejtett nyomaték (dőlési szögre vonatkozó egyenlet).
A felső szinű szabályozó  -t tervez, amit az egyes kerekekre szét kell osztani. A fékerők különbsége
-t tervez, amit az egyes kerekekre szét kell osztani. A fékerők különbsége
| (339) |

ahol  ,
,  és
és  geometriai adatok. A fékerők eredője
geometriai adatok. A fékerők eredője  sugáron hat.
sugáron hat.
A következőkben szimulációs példákat mutatunk a keresztirányú stabilizálás megvalósítására fékrendszer és keresztstabilizátor önálló, vagy együttes alkalmazásával.
A kanyarodási manőver során a szabályozás nélküli jármű keresztirányú stabilitása elvész, ami az  (normalizált oldalirányú kerékterhelés) jel 1-nél nagyobb értékre növekedése jelez. Az
(normalizált oldalirányú kerékterhelés) jel 1-nél nagyobb értékre növekedése jelez. Az  kritikus értékénél a szabályozás a féket aktiválja a menetstabilitás elérése érdekében. Lásd az 56. ábrát.
kritikus értékénél a szabályozás a féket aktiválja a menetstabilitás elérése érdekében. Lásd az 56. ábrát.
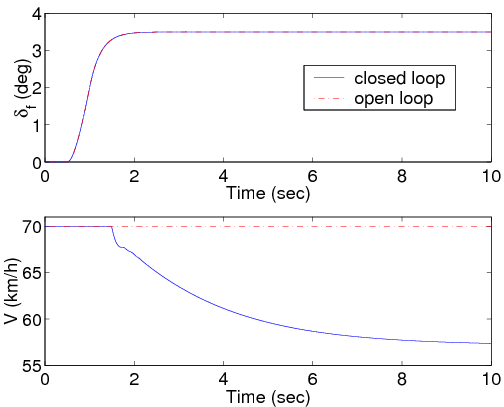
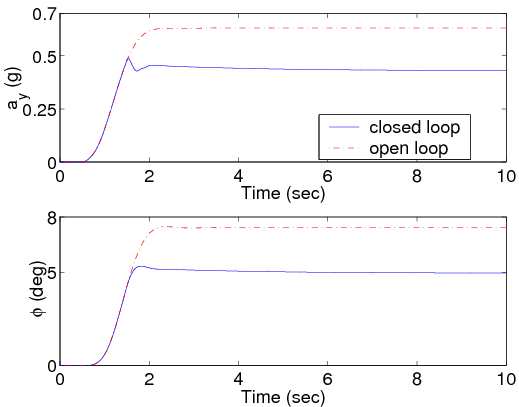
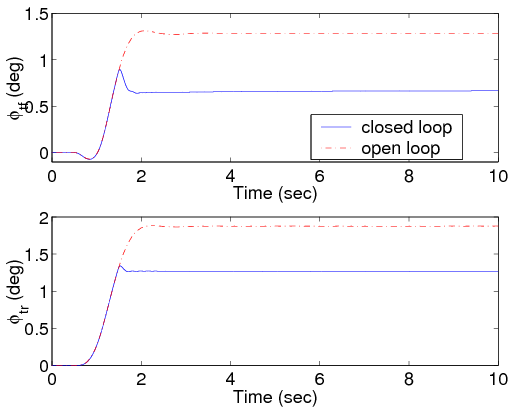
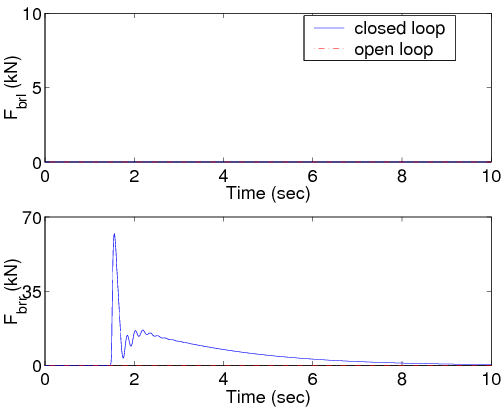
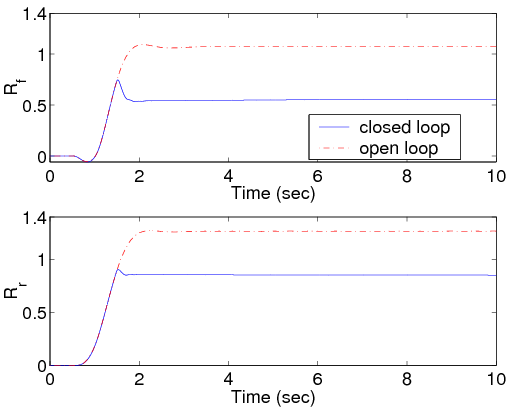
Az előzési (kikerülési) manőver során - lásd az 57. ábrát -, a szabályozás nélküli jármű keresztirányban instabillá válik. A szabályozás a féket aktiválja a menetstabilitás elérése érdekében.
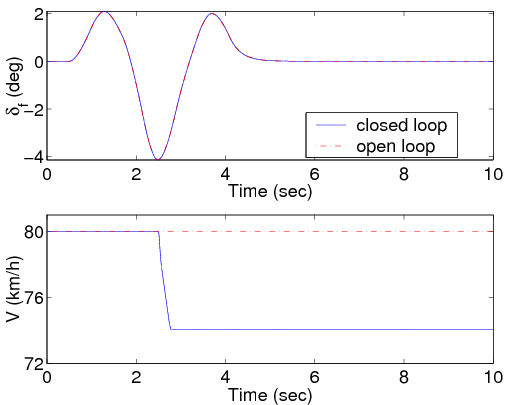
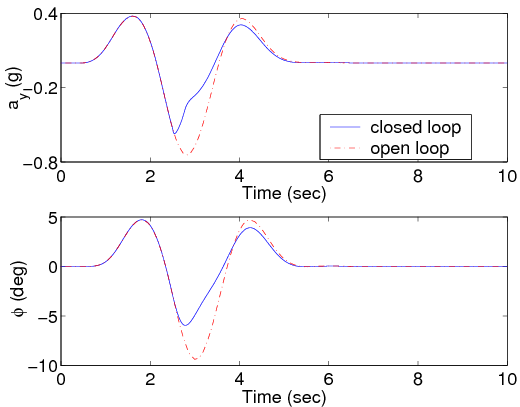
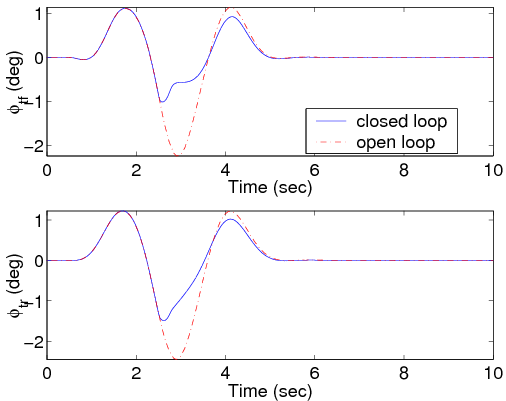
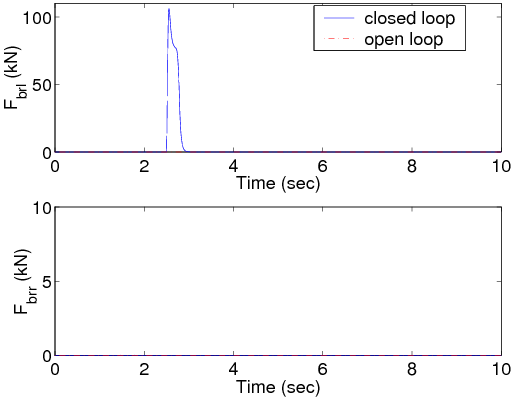
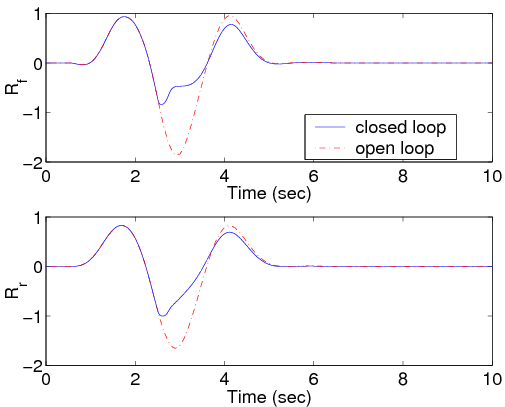
Az előzési (kikerülési) manőver során a szabályozás nélküli jármű keresztirányú dinamikája (támolygási szög a rugózott és a rugózatlan tömegeken) jelentősen megnő. Az  kritikus értékénél a szabályozás a keresztstabilizátort aktiválja, ami egy ellennyomatékot generál a menetstabilitás elérése érdekében. Lásd az 58 ábrát.
kritikus értékénél a szabályozás a keresztstabilizátort aktiválja, ami egy ellennyomatékot generál a menetstabilitás elérése érdekében. Lásd az 58 ábrát.
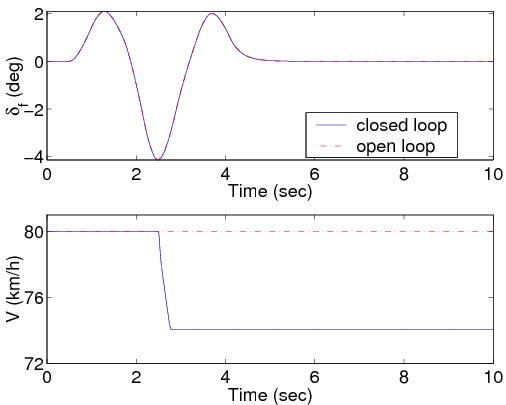
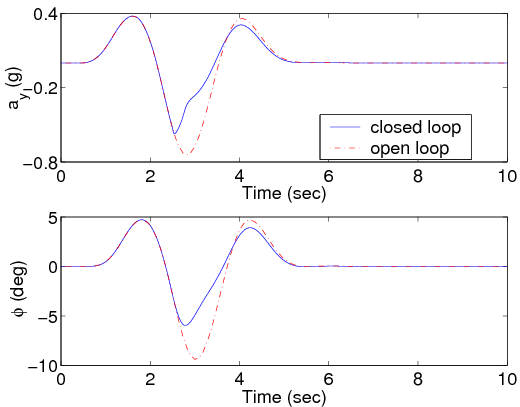
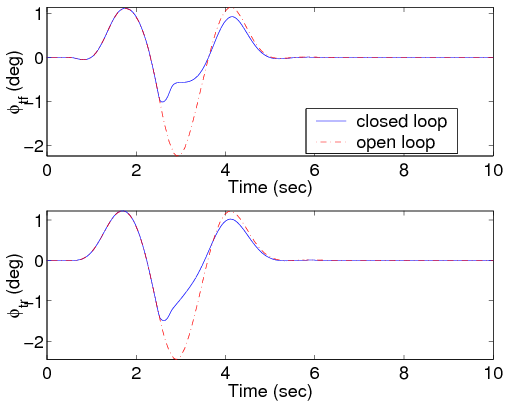
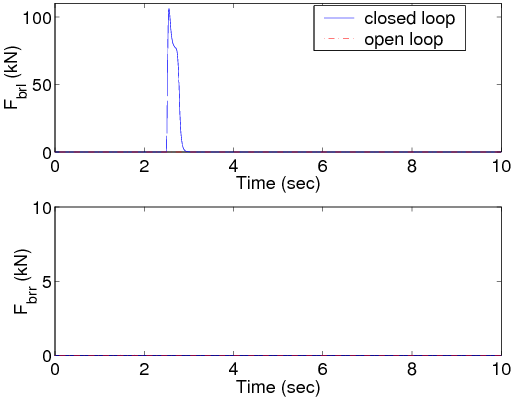
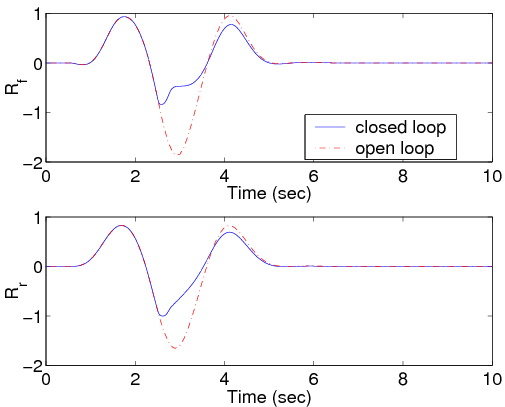
A kanyarodási manőver során a menetstabilitást vagy a differenciális fékezéssel, vagy keresztstabilizátorral is megoldhatjuk. Lásd az 59. ábrát.
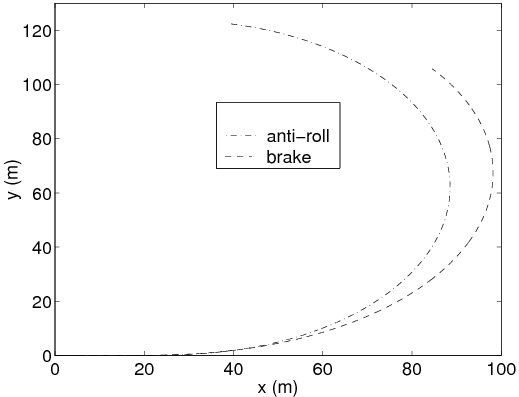
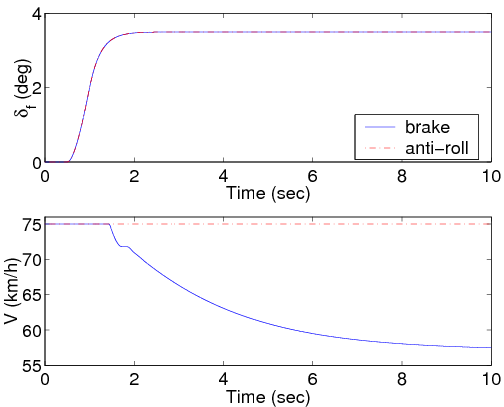
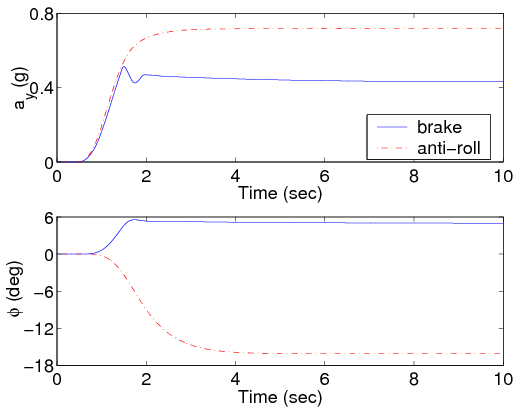
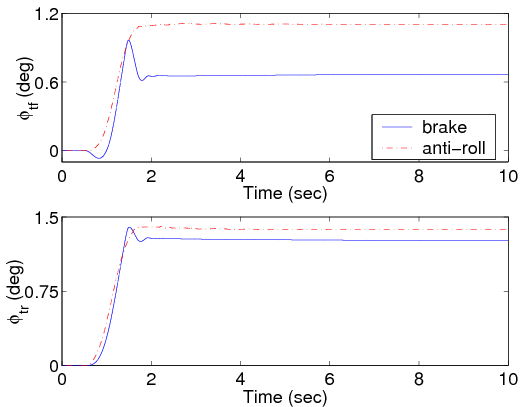
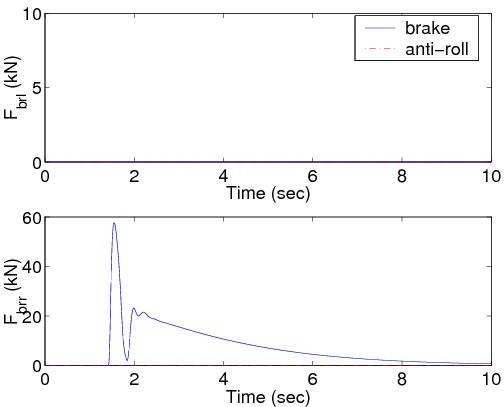
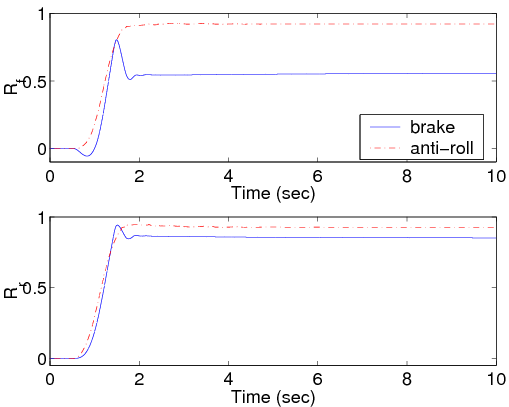
Az előzési manőver során a menetstabilitást vagy a differenciális fékezéssel, vagy keresztstabilizátorral is megoldhatjuk. Lásd a 60. ábrát.
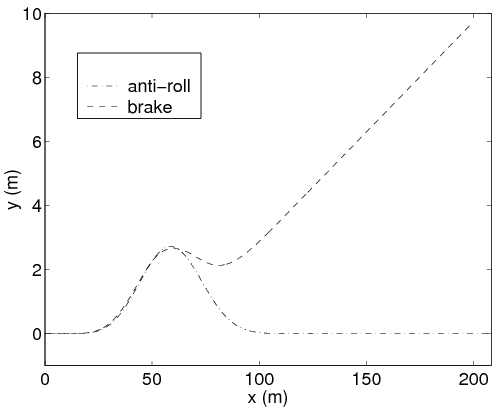
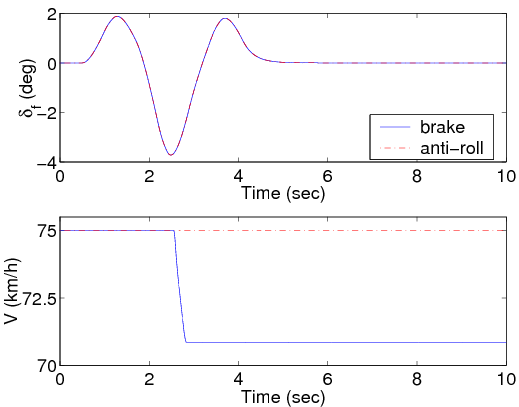
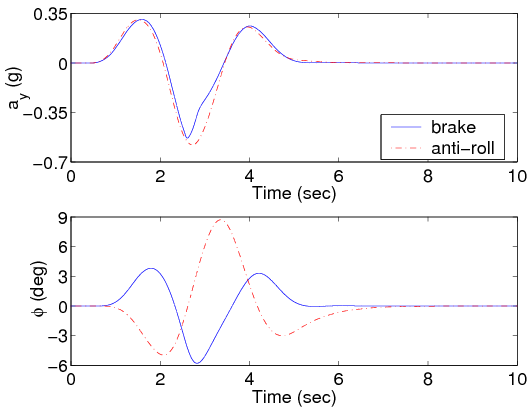
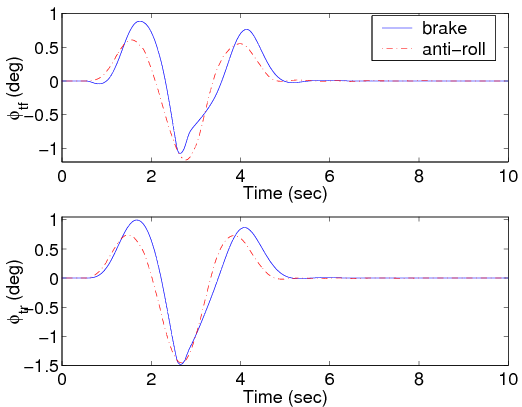
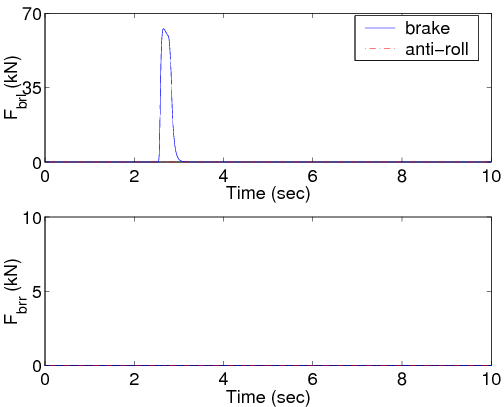
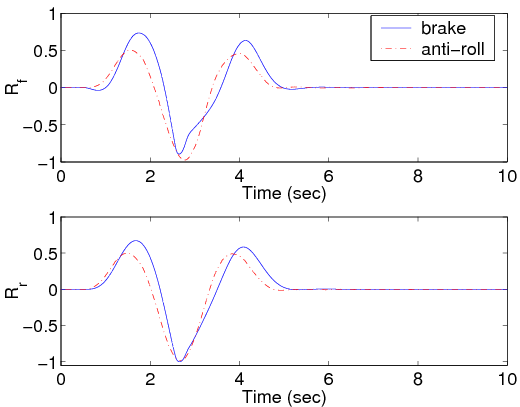
A fék és a keresztstabilizátor szimultán alkalmazására is mód, ha beavatkozásukat együttesen tervezzük meg. A megoldás előnye, hogy a féket csak a valóban kritikus pillanatban aktiváljuk. Lásd a 61. és 62. ábrát.
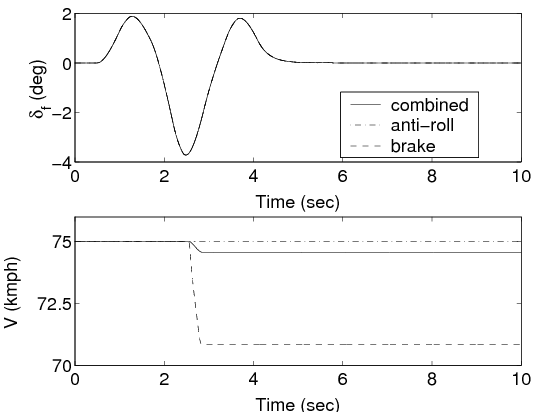
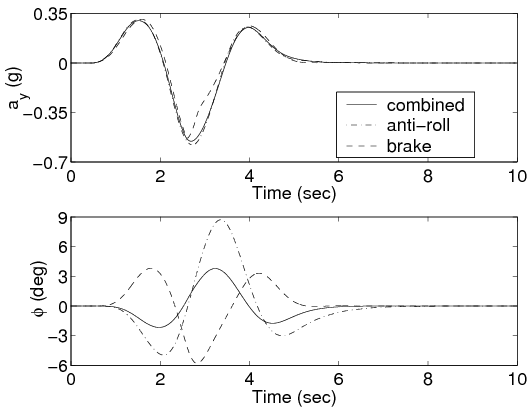
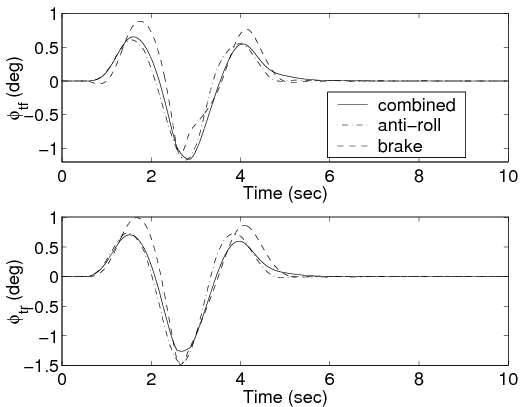
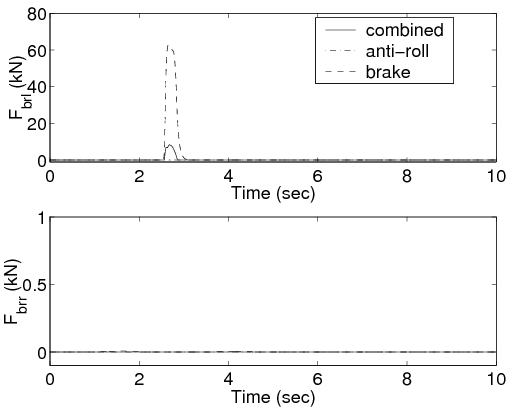
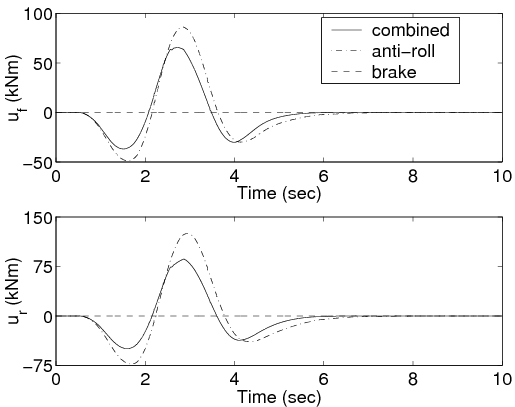
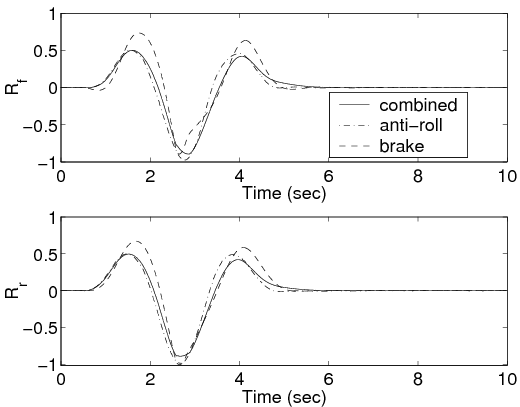
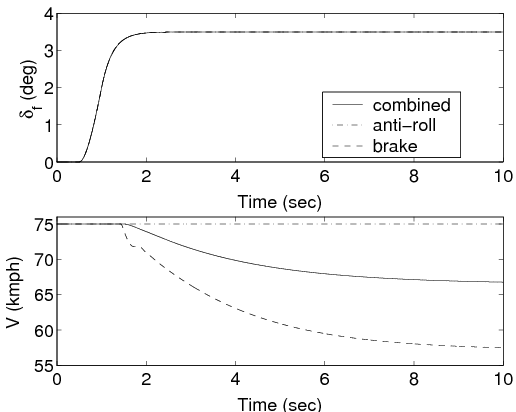
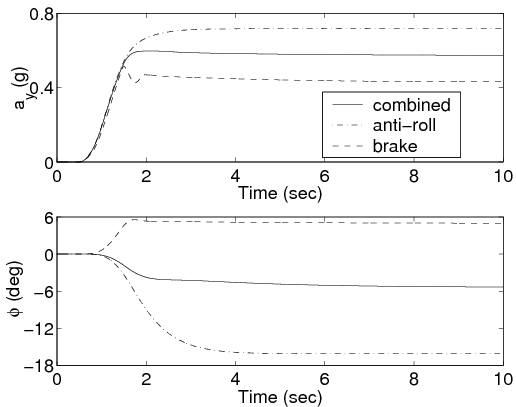
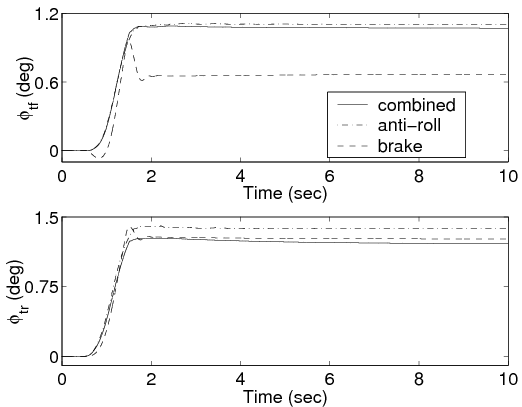
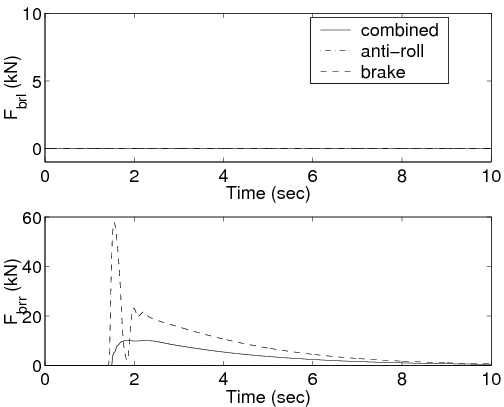
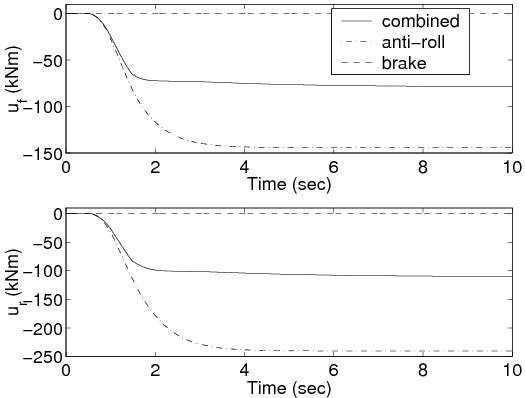
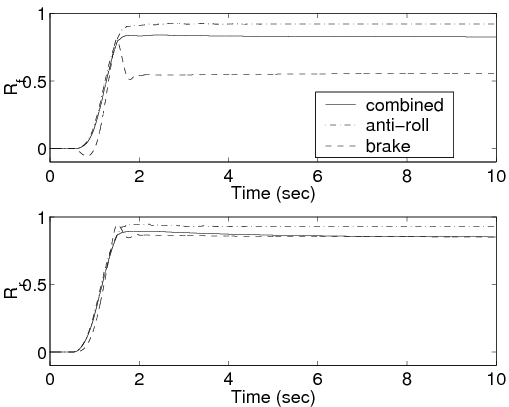
Ha a szabályozó tervezésébe a kerék és az út közötti tapadási tényezőt beépítjük, akkor a szabályozás minősége javítható. A beavatkozási igény ilyenkor összhangban áll a szabályozási paranccsal. Lásd a 63. ábrát.
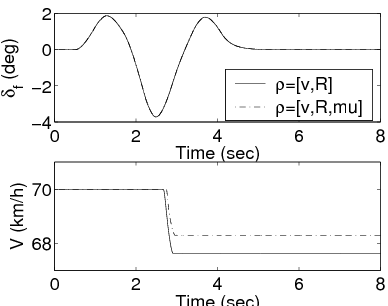
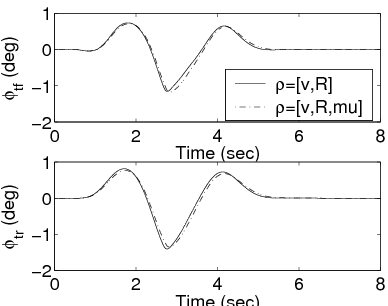
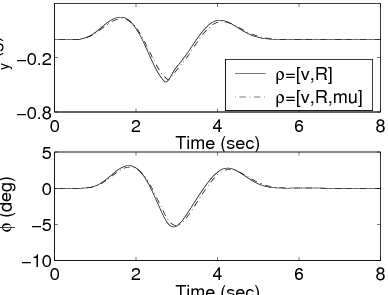
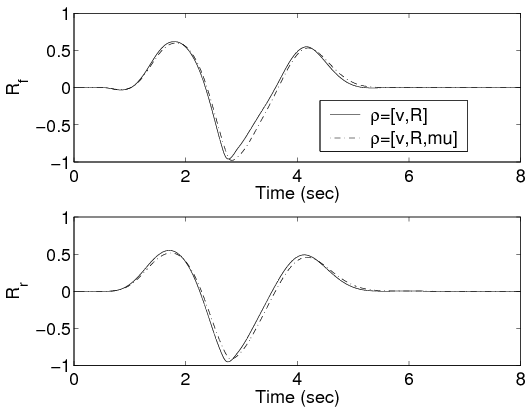
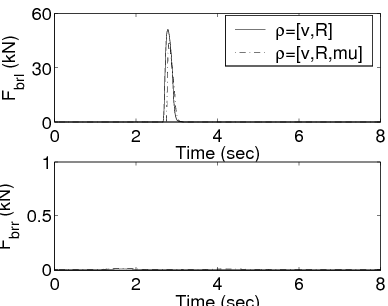
Esetenként kisebb beavatkozás elegendő a menetstabilitás fenntartásához. Lásd a 64 ábrát.
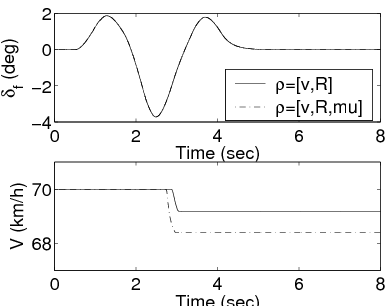
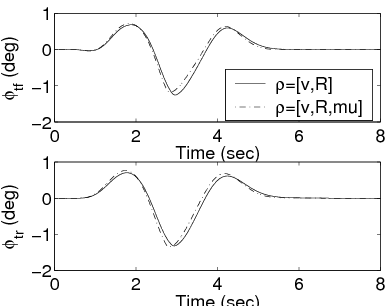
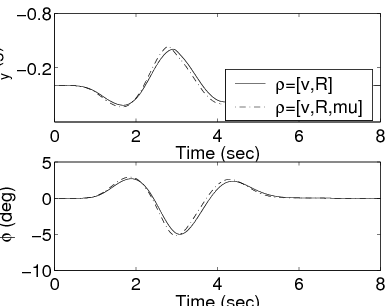
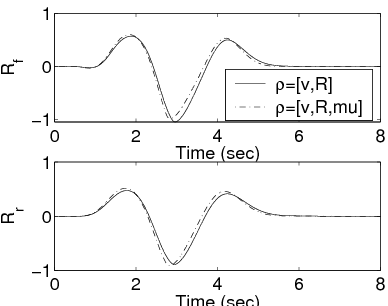
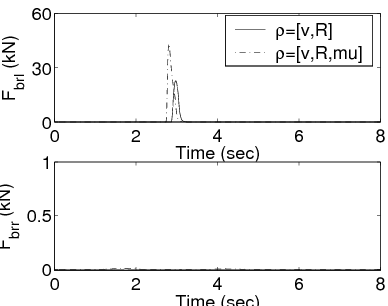
Az irányítási feladatban egy közúti jármű előírt egy pályán való vezetését fogjuk biztosítani. Az egyszerűség kedvéért a pályát legyezési szögsebességgel definiáljuk.
A járművet lineáris egynyomú járműmodellként modellezzük a következő egyszerűsítések feltételezésével:
állandó sebesség
állandó kerékterhelés
elhanyagolt légellenállás
kis kúszási szög érték
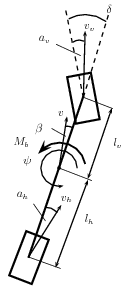
Az oldalirányú dinamikát is figyelembe vevő dinamikai egyenletek a keresztirányú erők egyensúlyára és a síkra merőleges nyomatékok egyensúlyára vonatkoznak:
| (340) |
| (341) |

ahol  a kúszási szög,
a kúszási szög,  a perdületi szögsebesség,
a perdületi szögsebesség,  a fékek által generált nyomaték. Az
a fékek által generált nyomaték. Az  és
és  oldalerők az első és hátsó tengelynél, melyek az
oldalerők az első és hátsó tengelynél, melyek az  és
és  szögsebességgel arányosak:
szögsebességgel arányosak:
| (342) |

| (343) |

ahol  a tapadási tényező,
a tapadási tényező,  és
és  oldalkúszási konstansok és a kormányszögek
oldalkúszási konstansok és a kormányszögek  és
és  . Az irányítási feladatban
. Az irányítási feladatban  nyomatékot tervezzük meg.
nyomatékot tervezzük meg.
A szabályozott rendszernek a következő minőségi tulajdonságokat kell kielégítenie:
megfelelő referenciajel-követést kell biztosítania:
azaz az előírt legyezési szögsebesség és a tényleges közötti különbség legyen minimális
minél kisebb irányítóerőt használjon a rendszer

A jelkövetéshez a  jelet mérni kell majd visszacsatolni.
jelet mérni kell majd visszacsatolni.
A megfelelő LQ szabályozótervezés költségfüggvénye a feladat alapján a következőképpen fogalmazható meg:
| (344) |
ahol  és
és  a skalár tervezési súlyok.
a skalár tervezési súlyok.
6. fejezet - Vertikális modellezés és irányítás
A felfüggesztési alrendszer célja az úttartás garantálása és az utazási kényelem növelése a káros rezgések által okozott közúti egyenetlenségek és a fedélzeti gerjesztési források következményeként előálló zavarások közepette. A felfüggesztés rendszerekkel szemben támasztott minőségi követelményeket különböző paraméterek figyelembe vételével tudjuk számszerűen meghatározni: ilyenek az utasok komfortja, a felfüggesztési elmozdulás, a gumiabroncs terhelésének változása és az energiafelhasználás, lásd például [40], [109].
Az irányítástervezés egyik nehézsége az, hogy a különböző szabályozási célok általában konfliktusban állnak egymással, ezért ezek között egy alkalmas egyensúlyt kell elérni. A járműtest gyorsulásának szórása csökken, amikor a felfüggesztés vagy a gumiabroncs alakváltozása növekszik, így a gyorsulás minimalizálása egyúttal a maximálisan megengedett alakváltozás mérséklését is jelenti. Általában a felfüggesztési alakváltozás korlátozása maga után vonja a gumiabroncs összenyomódási mértékének egyidejű csökkenését, és fordítva, lásd például [52], [60]. A tervezés másik nehézsége az, hogy a tervezés alapjául szolgáló modell egyes elemei bizonytalanok. A bizonytalanság okai az elhanyagolt vagy nem modellezett dinamika, magasrendű rezgő módusok elhanyagolása, a nem megfelelő vagy nem teljeskörű ismeretek az egyes komponensek viselkedésének időbeni megváltoztatása miatt. Az felfüggesztés alpvető modellezési és tervezési feladatát elemzi például [27], [53], [61].
Több módszert javasoltak már a tervezett aktív felfüggesztési rendszerek modellezésére és tervezésére. Ezen munkák túlnyomó többsége azt feltételezi, hogy a felfüggesztési rendszer egy lineáris modellel közelíthető, így a szabályozás tervezése is lineáris módszerekre épül. A lineáris kvadratikus (LQ) módszerre alapozott tervezés eredménye egy optimális állapot-visszacsatolt vezérlő, amely garantálja az egyes performanciák közötti egyensúlyt, lásd például [61], [117]. A  tervezési módszer egy, a struktúrálatlan destabilizáló bizonytalanságok hatására nézve robusztus szabályozót eredményez. A módszer alkalmazása során frekvencia függő súlyozó függvényeket alkalmazunk mind a performancia kimenetre, mind pedig a bizonytalanságokra olyan módon, hogy egy kívánt hurokátviteli alakot érjünk el (loop-shape), lásd például [94], [131]. A
tervezési módszer egy, a struktúrálatlan destabilizáló bizonytalanságok hatására nézve robusztus szabályozót eredményez. A módszer alkalmazása során frekvencia függő súlyozó függvényeket alkalmazunk mind a performancia kimenetre, mind pedig a bizonytalanságokra olyan módon, hogy egy kívánt hurokátviteli alakot érjünk el (loop-shape), lásd például [94], [131]. A  tervezési módszer során a parametrikus bizonytalanság szerkezetének ismeretét is kihasználjuk annak érdekében, hogy csökkentsük a tervezett
tervezési módszer során a parametrikus bizonytalanság szerkezetének ismeretét is kihasználjuk annak érdekében, hogy csökkentsük a tervezett  szabályozó konzervativizmusát, lásd például [49].
szabályozó konzervativizmusát, lásd például [49].
A területtel foglalkozó munkák egy másik -- és lényegesen kisebb része tételezi fel, hogy a felfüggesztési rendszer nemlinearitása hangsúlyos, és a linearitás feltevése nem érvényes a teljes működési tartományban. A felfüggesztés elemeinek dinamikus jellemzői, karakterisztikája, azaz a lengéscsillapítók és a rugók, nemlineáris tulajdonságokkal bírnak, és ezek nem időinvariánsok, hanem változnak a jármű életciklusa alatt. Jelentős módszerek léteznek az aktív felfüggesztés nemlineáris modellek alapján történő kezelésére, lásd például [36], [74], [105]. Egy A feedback linearizáción alapuló nemlineáris tervezési módszert javasolt [18]. A technikai problémákon túl, amelyek a a nemlineáris modelleken alapuló tervezést jellemzik, nehéz kezelni és figyelembe venni a modellezési hibák és pontatlanságok hatását.
Ezen nehézségek leküzdésére egyesek feltételezik, hogy a felfüggesztési rendszer nemlinearitása elrejthető alkalmas ütemezési jelek megválasztásával, melyekről feltételezik, hogy a végrehajtás során rendelkezésre állnak, és egy lineáris változó paraméterű (LPV) modell alapú irányítás kialakítására tesznek javaslatot. Az LPV modellezési megközelítés lehetővé teszi számunkra, hogy figyelembe vegyük a nemlineáris hatásokat az állapotteres leírásban oly módon, hogy a modell szerkezete nemlineáris a paraméterekben, de lineáris az állapotokban. Ezen túlmenően az LPV modell állapotteres leírása érvényes a teljes működési tartományban. A LPV módszer alapján történő korai alkalmazások egy konstans Lyapunov mátrixot használó megközelítésre epültek, amely az ütemezési jelek tetszőlegesen gyors változását is megengedik, lásd például [37], [103]. A későbbi alkalmazások paraméter változó Lyapunov mátrixot használva csökkentették a szabályozó konzervativizmusát, lásd például [10], [12], [24]. Az LPV módszer előnye az, hogy a szabályzó megfelel a robusztus stabilitás és a névleges performancia garantálás igényeknek a teljes működési tartományban, mivel a szabályzó képes alkalmazkodni az aktuális működési feltételekhez, lásd például [130]. Egy negyed--jármű modellre épülő és nemlineáris felfüggesztési elemeket tartalmazó LPV tervezésre lásd [34].
Ezekben a tervezési eljárásokban a nemlineáris beavatkozó hatását egy további, addicionális lépés során lehet figyelembe venni azáltal, hogy a felfüggesztési erőre vonatkozó jelkövetési feladatot tűzünk ki, lásd például [3], [4], [135]. Az ilyen rendszerek alkalmazása során további késedelem bevezetése a hurokban komoly performanciacsökkenéshez vezethet. A probléma megoldására egy robusztus állapotvisszacsatolást alkalmazó módszert javasolt [33], míg [17] egy statikus kimenet visszacsatolásos eljárásra ad példát.
Egy másik megközelítést javasolt [35], ahol az elválasztó réteg a beavatkozóba került, a negyed-jármű modellhez egy lineáris egyenlet adva a hidraulikus dugattyúban levő nyomás leírására. A beavatkozó modelljének fennmaradó részét, vagyis a szelep dinamikus egyenleteit, ezzel a résszel egy fiktív bemenet hozza kapcsolatba, ami az összes nemlinearitást egy statikus kifejezésben tartalmazza. Míg az egyes alrendszerek LTI modellek, egy alkalmas performancia súly a teljes tervezés LPV. Ezzel a két-szintű megközelítéssel szemben [48] egy közös rendszert javasolt az LPV negyed-jármű és a hidraulikus beavatkozó kezelésére, ahol az összes nemlinearitást alkalmas ütemezési változókkal egyetlen LPV modellel írta le. Ezt a megközelítést nem lehet közvetlenül a teljes jármű modellre alkalmazni a probléma jelentősen megnövekedett összetettsége miatt.
6.1. Vertikális dinamika modellezése
A felfüggesztési rendszernek különféle egyszerűsített modelljei léteznek. Ezek a modellek a járműdinamika egy részét figyelembe veszik, más részét viszont elhanyagolják.
A járműtest egy rugózott tömeggel van reprezentálva, míg a tengely és a kerekek négy rugózatlan tömeggel. A rugózott és rugózatlan tömegek közötti rugó és csillapító a felfüggesztést reprezentálja. A kerekek és az út közötti kapcsolatot rugó közelíti. A hét-szabadságfokú jármű-modell mozgásai:
a járműtest
 függőleges elmozdulása,
függőleges elmozdulása, 
bólintási szöge,

dőlési szöge, valamint
rugózatlan tömegek
 függőleges elmozdulásai.
függőleges elmozdulásai.
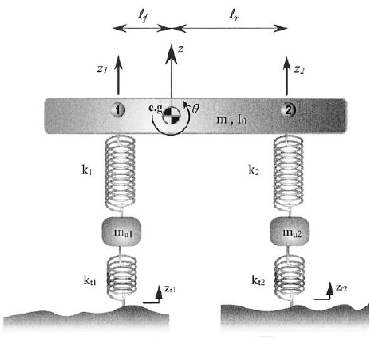
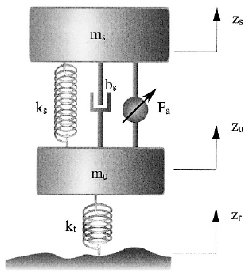
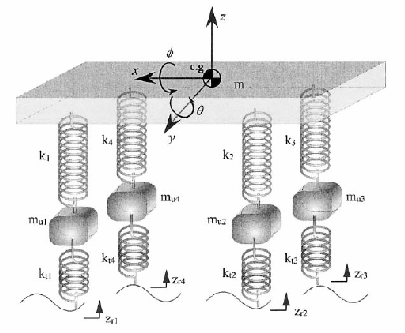
Az útfelület által generált  elmozdulások a gerjesztések.
elmozdulások a gerjesztések.
Írjuk fel egy negyedjármű modell egyenleteit. A negyedjármű modellt a 68. ábra illusztrálja.
A mozgásegyenletek felírása a Lagrange egyenleten keresztül történik.
| (345) |

ahol  ,
,  ,
,  a kinetikai, potenciális és disszipatív energiák, mig
a kinetikai, potenciális és disszipatív energiák, mig  külső erők vektora.
külső erők vektora.
Az egyenlet az  koordináták irányában felbontható:
koordináták irányában felbontható:
| (346) |

A példában  ,
,  jelöléssel:
jelöléssel:
| (347) |
| (348) |
| (349) |
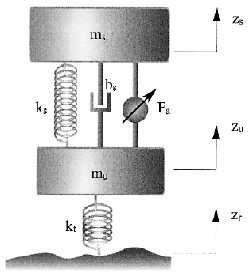
Egy két-szabadságfokú negyedjármű modell mozgásegyenletei a következők:
| (350) |

| (351) |

| (352) |

Mátrixos alakban:
| (353) |

ahol
| (354) |
| (355) |
| (356) |
Egy negyedjármű modell állapottér reprezentációja a következő:

ahol az állapotvektor: 

: felfüggesztés relatív elmozdulása,

: rugózott tömeg sebessége,

: kerék elmozdulás,

: rugózatlan tömeg sebessége,
azaz az állapotmátrixok alakja a következő:
| (357) |
A csillapítás nélküli negyedjármű modell ( ) alapján két sajátfrekvenciát határozhatunk meg (
) alapján két sajátfrekvenciát határozhatunk meg ( és
és  ):
):
| (358) |
ahol  és
és  , azaz
, azaz
Megoldás:
| (359) |

A sajátfrekvenciák közelítő értékei:
| (360) |

A teljes jármű vertikális dinamikájának modellje egy hétszabadságfokú modellhez vezet. A mozgásegyenletek:
| (361) |

| (362) |

ahol  a rugózott tömeg,
a rugózott tömeg,  a rugózatlan tömegek,
a rugózatlan tömegek,  a felfüggesztési rugóállandó,
a felfüggesztési rugóállandó,  a kerék rugóállandó,
a kerék rugóállandó,  a felfüggesztési csillapitás,
a felfüggesztési csillapitás,  a geometria mátrix. A jelek az alábbi vektorokba vannak gyűjtve:
a geometria mátrix. A jelek az alábbi vektorokba vannak gyűjtve:
,

,

,

,

.
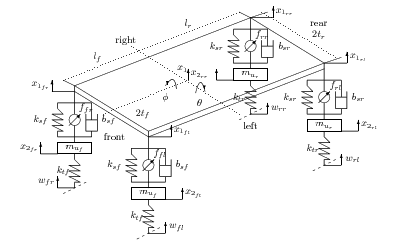
Ezután a teljes jármű mozgásegyenlete:
| (363) |

ami állapotegyenlet alakban felírva:
| (364) |

ahol  ,
,  ,
,  , és a mátrixok a következők:
, és a mátrixok a következők:
| (365) |

| (366) |
| (367) |
Az állapotegyenlet komponensei a következők:
| (368) |
| (369) |
| (370) |

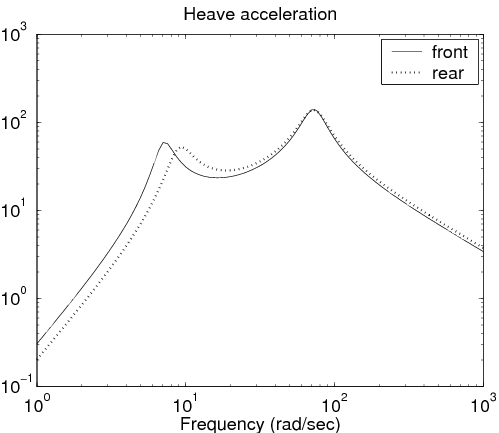
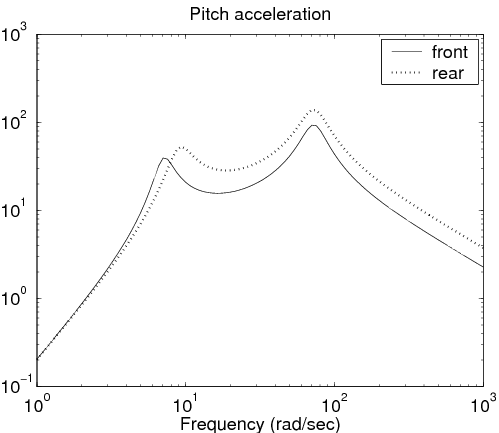
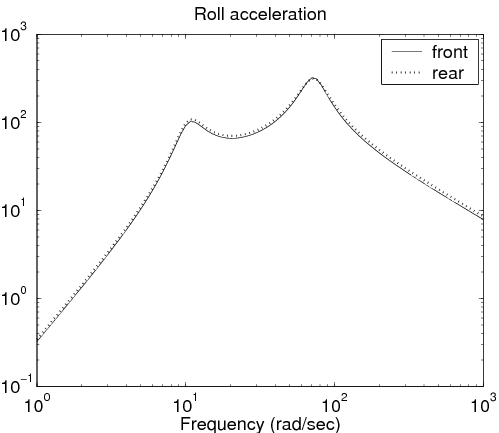
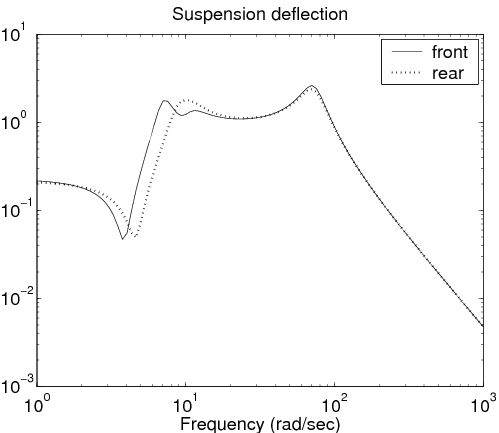
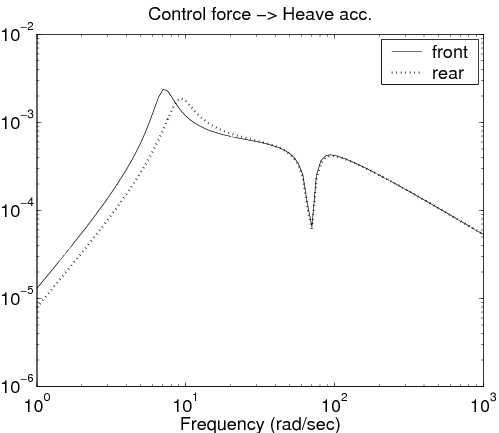
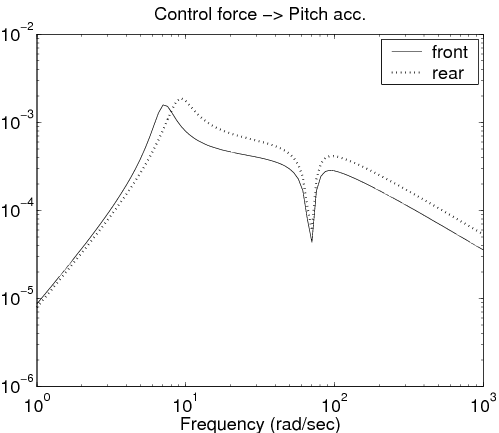
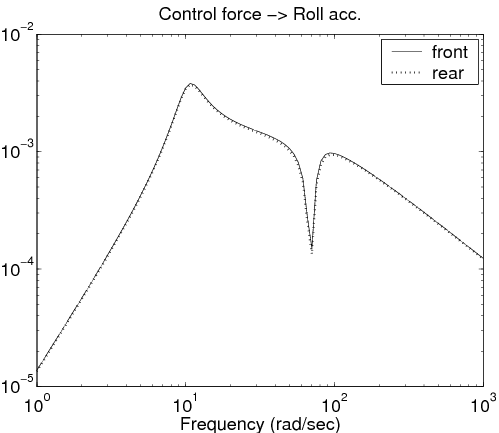
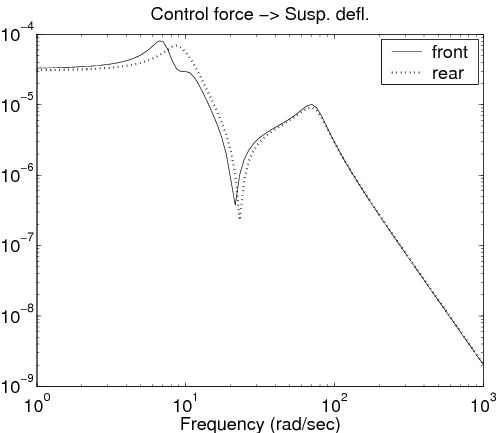
A felfüggesztési rendszer végeselem módszerrel is modellezhető. A végeselem modell célja elemzések elvégzése. Például egy busz vázszerkezetének modellje  szabadságfokú. A modell adatai:
szabadságfokú. A modell adatai:  csomópont,
csomópont,  gerenda elem,
gerenda elem,  héj elem,
héj elem,  tömegpont,
tömegpont,  rugó és
rugó és  csillapító. A modellelemzésekhez jól alkalmazható, irányítási feladat esetén modell redukcióra van szükség.
csillapító. A modellelemzésekhez jól alkalmazható, irányítási feladat esetén modell redukcióra van szükség.
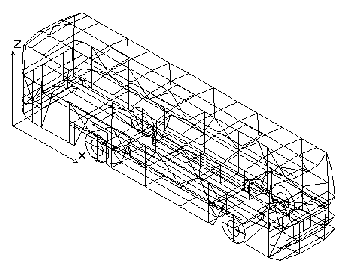

A teljes jármű vertikális dinamikájának modellje a végeselem modell alapján a következő:
| (371) |

ahol  tömegmátrix,
tömegmátrix,  csillapítás mátrix,
csillapítás mátrix,  rugóállandók mátrixa,
rugóállandók mátrixa,  kerék rugóállandók,
kerék rugóállandók,  ,
,  általánosított elmozdulás,
általánosított elmozdulás,  és
és  általánosított sebesség és gyorsulás,
általánosított sebesség és gyorsulás,  aktuátor erők és
aktuátor erők és  az útpálya felülete. Bevezetjük a következő modális transzformációt:
az útpálya felülete. Bevezetjük a következő modális transzformációt:  , ahol
, ahol  elmozdulásokat tartalmaz, mig
elmozdulásokat tartalmaz, mig  a sajátvektorokat tartalmazza és normalizálja a tömegmátrixot:
a sajátvektorokat tartalmazza és normalizálja a tömegmátrixot:  .
.
| (372) |

Az  állapotvektor választással az állapotegyenlet alakja:
állapotvektor választással az állapotegyenlet alakja:
| (373) |

ahol  ,
,  ,
,  .
.
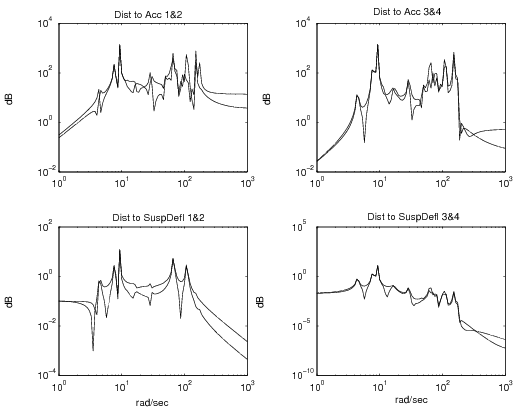
Az útgerjesztés hatása a rugózott tömegre (utazási kényelemre) és a tömegek közötti munkatérre a következő:
| (374) |
| (375) |
A felfüggesztés  rugóállandójának redukálása csökkenti az
rugóállandójának redukálása csökkenti az  sajátfrekvencia értékét. Ennek az utazási kényelemre való hatása, hogy magasabb frekvenciákon a rugózott tömeg gyorsulására vonatkozó frekvencia függvény javul (ez előnyös). A munkatérre való hatás azonban az, hogy alacsony frekvenciákon a felfüggesztés munkatérre vonatkozó frekvencia függvény növekszik (ez hátrányos).
sajátfrekvencia értékét. Ennek az utazási kényelemre való hatása, hogy magasabb frekvenciákon a rugózott tömeg gyorsulására vonatkozó frekvencia függvény javul (ez előnyös). A munkatérre való hatás azonban az, hogy alacsony frekvenciákon a felfüggesztés munkatérre vonatkozó frekvencia függvény növekszik (ez hátrányos).
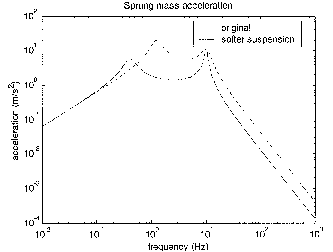
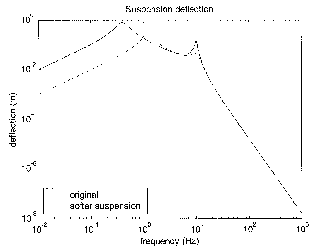
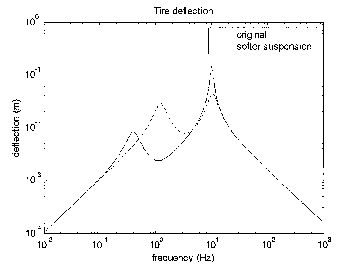
A felfüggesztés  csillapítási tényezőjének növelése az első sajátfrekvencián (
csillapítási tényezőjének növelése az első sajátfrekvencián ( ) jobb csillapítást ad. Ennek az utazási kényelemre való hatása, hogy az első rezonancia csúcs értékét redukálja, ami azt eredményezi, hogy jelentősen növeli az első sajátfrekvencián az utazási kényelmet (előnyös). Ugyanakkor magasabb frekvenciákon a keményebb rendszer rontja az utazási kényelmet (hátrányos). A munkatérre való hatás az, hogy az első sajátfrekvencián a felfüggesztési munkatérre vonatkozó átviteli függvény kisebb (előnyös).
) jobb csillapítást ad. Ennek az utazási kényelemre való hatása, hogy az első rezonancia csúcs értékét redukálja, ami azt eredményezi, hogy jelentősen növeli az első sajátfrekvencián az utazási kényelmet (előnyös). Ugyanakkor magasabb frekvenciákon a keményebb rendszer rontja az utazási kényelmet (hátrányos). A munkatérre való hatás az, hogy az első sajátfrekvencián a felfüggesztési munkatérre vonatkozó átviteli függvény kisebb (előnyös).
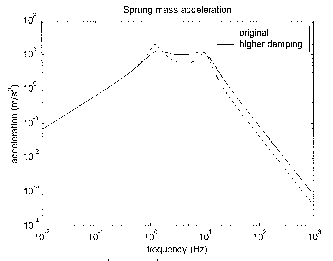
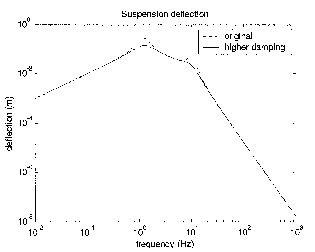
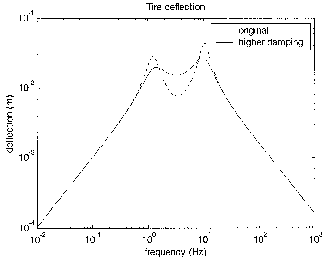
A kerék rugóállandójának ( ) növelése javítja a frekvencia képet a második sajátfrekvencia (
) növelése javítja a frekvencia képet a második sajátfrekvencia ( ) tartományában. Ennek hatása az, hogy redukálja a kerékelmozdulásra vonatkozó frekvencia függvényt az alacsonyabb frekvencia tartományban.
) tartományában. Ennek hatása az, hogy redukálja a kerékelmozdulásra vonatkozó frekvencia függvényt az alacsonyabb frekvencia tartományban.
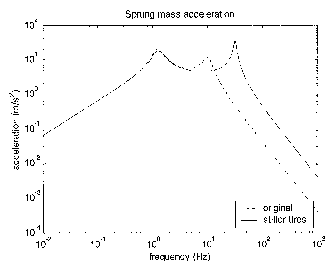
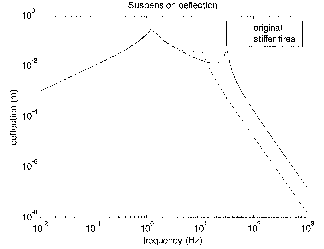
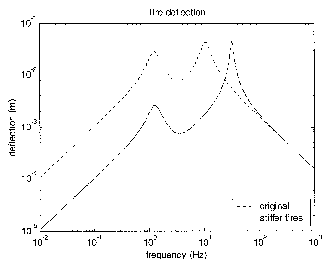
6.1.1. Modellbizonytalanság
A valódi rendszer modelljének pontos alakja a gyakorlati feladatokban nem ismert, s emiatt helyette annak közelítő, névleges modelljét használjuk. Az eltérés okai:
egyrészt modellezési eljárás következménye (pl. a felharmonikusokat, illetve a magasabb fokszámú együtthatókat elhanyagoljuk, merev test alapú modellezés flexibilis modellezés helyett, munkapont körüli linearizálás);
másrészt a rendszer működése során bekövetkező változások (pl. a normál üzem során a modell paraméterei változnak, az anyag kifáradás során változnak a rendszer paraméterei, sőt akár a struktúrája);
rugózott tömeg változik az utasok tömegének módosulásával;
a felfüggesztés rugó vagy csillapítás karakterisztikája módosul (pl. nemlineáris hatások vannak);
kerékabroncs dinamikája változik.
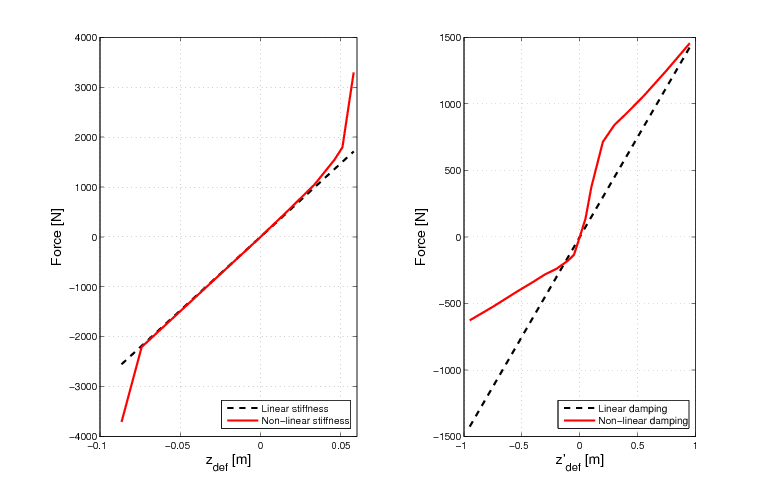
A felfüggesztés rendszerben a rugóerő és a csillapítóerő egy lehetséges közelítő összefüggése:



ahol a rugóerő komponensei ( ) és a csillapítóerő komponensei (
) és a csillapítóerő komponensei ( ) együtthatókkal írhatók fel.
) együtthatókkal írhatók fel.
A negyedjármű modellt impulzus függvény gerjesztéssel vizsgálva jól látható a nemlineáris és a linearizált modell közötti különbség.
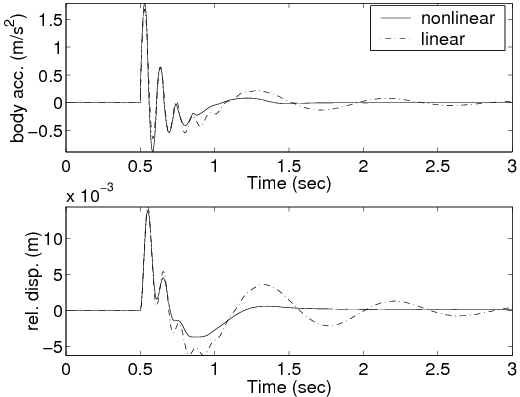
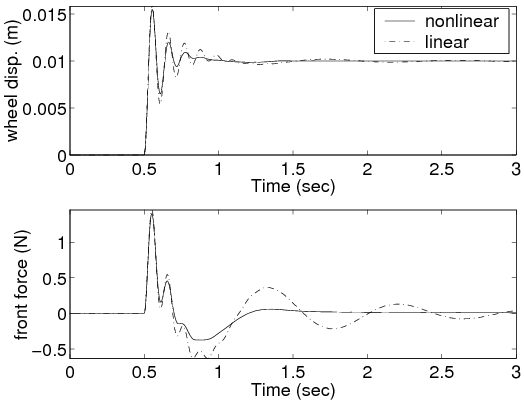
6.2. Útgerjesztés modellezése
6.2.1. Determinisztikus útgerjesztés
Az útgerjesztés determinisztikus modellezése tipikus időtartományi analízisek során. Ilyenkor egy adott útprofillal jellemezzük az útgerjesztést, például:
| (376) |
 (377)
(377)
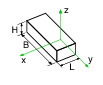
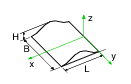
Egy kicsit összetettebb útgerjesztési modellt kaphatunk elemi komponensek összegzésével, ahol egy elemi harmonikus komponens például:
| (378) |
| (379) |

Lásd még a 80.ábrát.
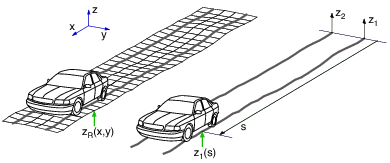
Ezekben az összefüggésekben:

ívhossz (
 )
) 
hullámszám (wave number)

hullámhossz

a jobb és baloldali keréknyom közötti fáziseltolódás.
Lényeges elem a modellben a gerjesztési frekvencia:
| (380) |
ahol  a gerjesztési frekvencia. A legtöbb jármű esetén az
a gerjesztési frekvencia. A legtöbb jármű esetén az  választás alkalmas lehet.
választás alkalmas lehet.
Például: ha  m, akkor az ehhez tartozó sebességnek
m, akkor az ehhez tartozó sebességnek  és
és  között kellene változni.
között kellene változni.
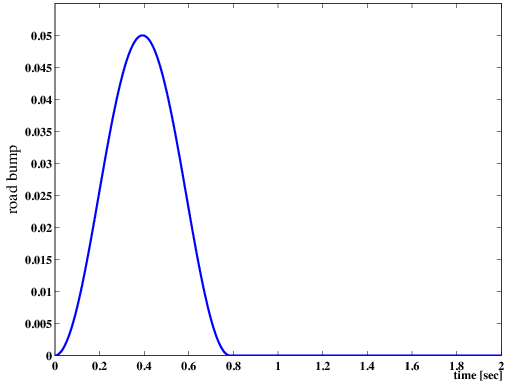
Megjegyzendő, hogy a teljes tartományban való gerjesztéshez változó hullámhossz szükséges kis sebességeknél!
Determinisztikus gerjesztés analízis vizsgálatokban való felhasználására mutat példát a 81. és 82. ábra, ahol egy bukkanó jellel gerjesztünk meg egy felfüggesztési rendszert, aminek azután az időtartományi válaszait vizsgáljuk.
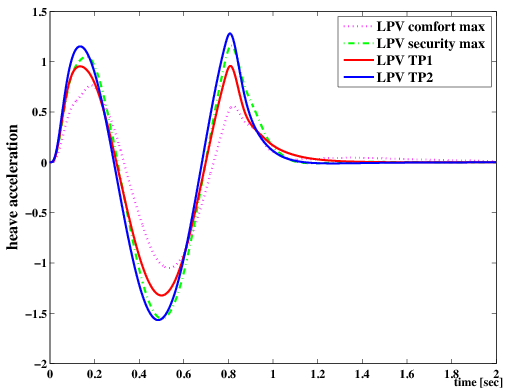
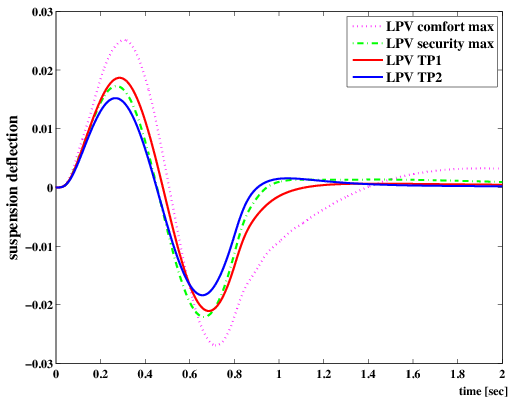
6.2.1.1. Sztochasztikus útgerjesztés
Frekvencia tartományi analízisek során tipikus, hogy sztochasztikus útgerjesztési modelleket használunk.
Emlékeztetőül, egy stacioner Gauss folyamat jellemző paraméteri a zérus átlag és  szórás, azaz
szórás, azaz
| (381) |
és
| (382) |
A sűrűség függvény alakja ilyenkor:
| (383) |
| (384) |
ahol  . A megfelelő kovarianciafüggvények pedig az alábbiak szerint számolhatók:
. A megfelelő kovarianciafüggvények pedig az alábbiak szerint számolhatók:
| (385) |
| (386) |

Megjegyzendő, hogy ha a folyamat tartalmaz egy periodikus komponenst, akkor az megmutatkozik  értékében.
értékében.
Az útprofilokat frekvencia tartományban általában a spektrális sűrűségfüggvény (teljesítménysűrűség spektrum) segítségével jellemzik:
| (387) |

Az egyoldali spektrális sűrűségfüggvény főbb jellemzői:
| (388) |
| (389) |
| (390) |
Gyakran élünk a
| (391) |
közelítéssel.
Ezt felhasználva a spektrális sűrűségfüggvény közelítése:
| (392) |
Például az ISO 8608 szabvány szerint ezek a paraméterek:
| (393) |

és  sima út esetén, valamint
sima út esetén, valamint  göröngyös, rázós út esetén.
göröngyös, rázós út esetén.
Véletlenszerű szinuszos profilok szuperpoziciójával kaphatunk komplex útgerjesztéseket:
| (394) |
| (395) |

| (396) |

6.2.1.2. Útprofilok szimulációja
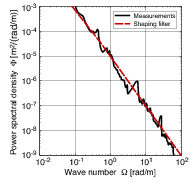
Szimulációk során célszerűbb az útgerjesztés valamilyen dinamikus modell segítségével előállítani, amit például fehér zaj gerjeszt.
Útgerjesztés egytárolós modell segítségével:
| (397) |
| (398) |

| (399) |

Útgerjesztés harmadrendű modellre alapozva:
| (400) |
Az  paraméterek ekkor a jármű sebességének és az út minőségének függvényei (Hack modellek).
paraméterek ekkor a jármű sebességének és az út minőségének függvényei (Hack modellek).
Illusztráció gyanánt a 83. ábrán szimulációs példák láthatók amik aszfaltnak, földútnak és köves útnak felelnek meg  km/h illetve
km/h illetve  km/h sebességgel szimulálva.
km/h sebességgel szimulálva.
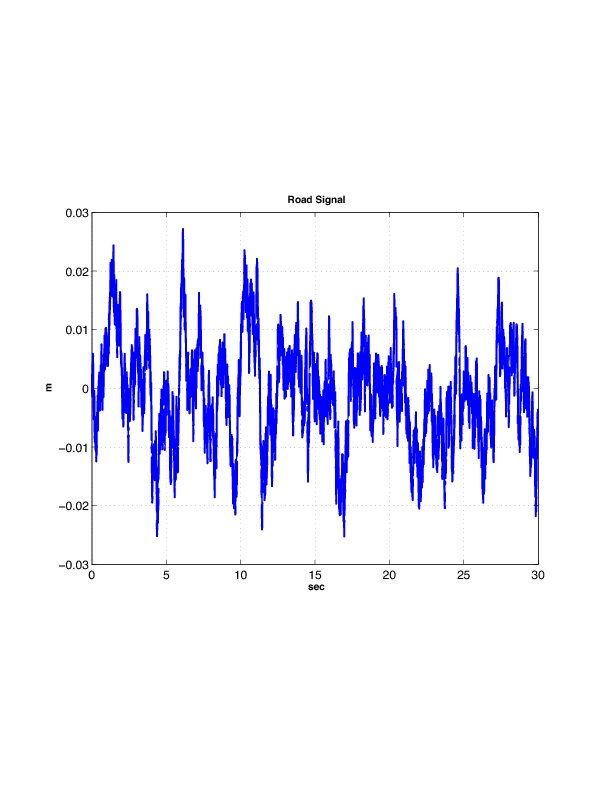
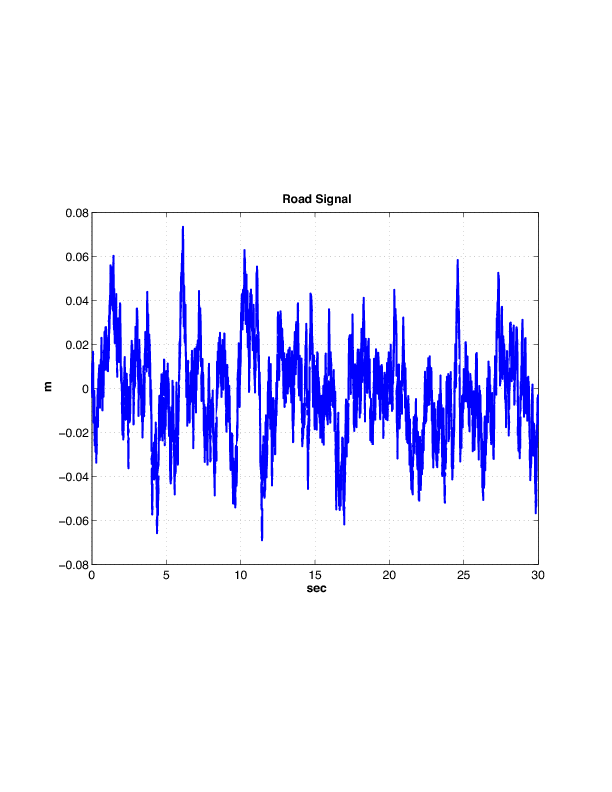
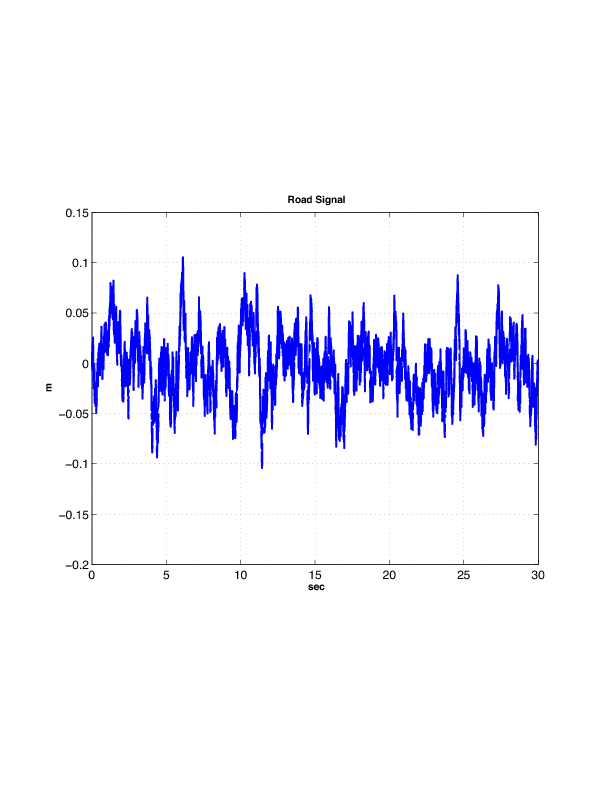

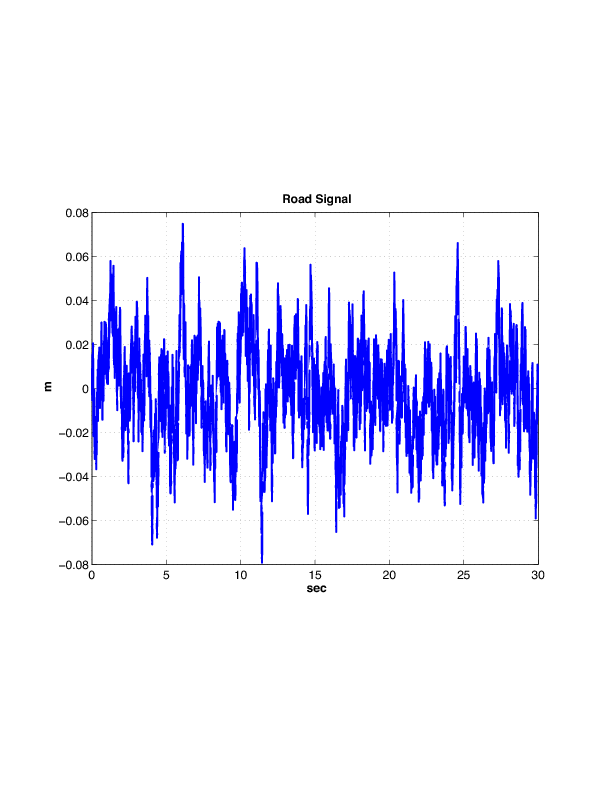
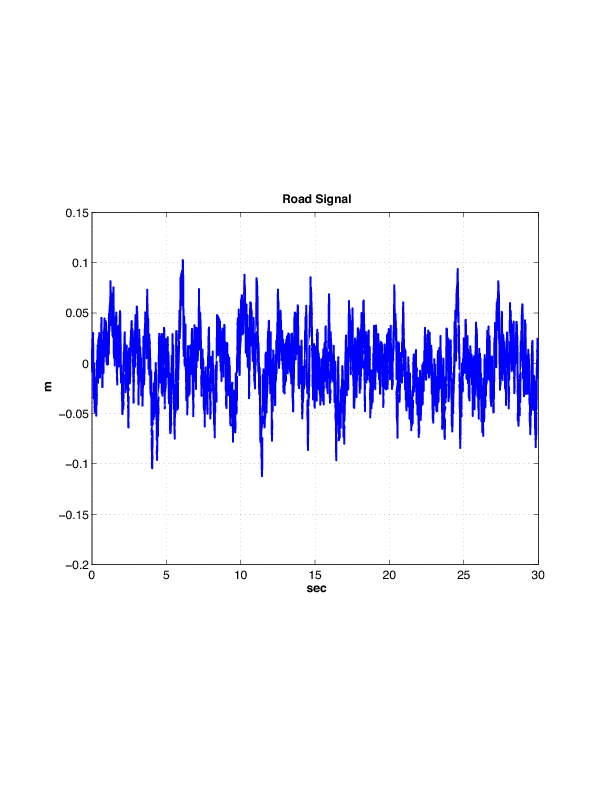
6.3. Aktív felfüggesztés
Egy járműfelfüggesztési rendszernek a következő feladatokat kell megoldania:
Utazási kényelem
Az utazási kényelem az utasokra ható függőleges lengésgyorsulással minősíthető. Egy jól tervezett felfüggesztési rendszer a tengely és a járműtest között izolációt biztosít, aminek hatására a tengely felől keletkező lengések nem adódnak tovább a járműtest felé. Ez a következő egyszerűsített követelményként fogalmazható meg: a járműtest  függőleges gyorsulása minimális legyen.
függőleges gyorsulása minimális legyen.
Dinamikus kerékterhelés
A kanyarodás, fékezés és hajtás minősége javítható, ha a kerékre ható normálerők minimálisak. Ennek az oka, hogy a hosszirányú és oldalirányú erők jelentősen függnek a kerekeken keresztül a normálerőktől. Emiatt a felfüggesztési rendszernek a függőleges irányú  kerékelmozdulást redukálnia kell.
kerékelmozdulást redukálnia kell.
Bólintási és dőlési dinamika
A manőverek során keletkező bólintási és dőlési gyorsulások a jó vezethetőséggel összefüggnek. Egy felfüggesztési rendszernek biztosítania kell, hogy a dőlési és bólintási szögek minimálisak legyenek.
Felfüggesztési munkatér
A járműre ható statikus terhelés hatása csökkenthető, ha a rugózott és rugózatlan tömegek közötti  munkatér közötti relatív elmozdulás minimális.
munkatér közötti relatív elmozdulás minimális.
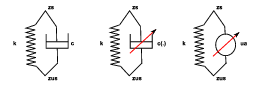
A felfüggesztési rendszereket a rugózott és rugózatlan tömegek között erő generálásának módja szerint megkülönböztetjük:
passzív felfüggesztési rendszer: az erő arányos a relatív sebességgel
félaktív felfüggesztési rendszer: az erő függ a relatív sebességtől
aktív felfüggesztési rendszer: az erő az aktív beavatkozótól függ.
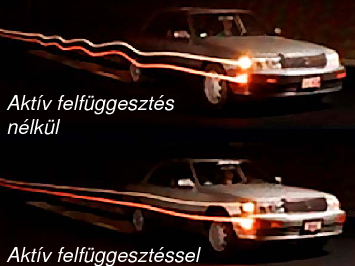
A felfügesztési rendszert a következő átviteli függvényekkel jellemezhetjük.
• Rugózott tömeg gyorsulása:
| (401) |

• Felfüggesztési munkatér:
| (402) |
• Kerékelmozdulás:
| (403) |
Az aktív felfüggesztési rendszerben a rugózott és rugózatlan tömegek között erőt generálunk. A hidraulikus rendszer által előállított erő

ahol  a dugattyú felülete,
a dugattyú felülete,  pedig a hidraulikus rendszerben kialakuló nyomás.
pedig a hidraulikus rendszerben kialakuló nyomás.
A hidraulikus rendszer dinamikai egyenlete:

ahol  a két végpont közötti relatív sebesség,
a két végpont közötti relatív sebesség,  a hidraulikus áramlás
a hidraulikus áramlás
| (404) |
ahol  a tápnyomás,
a tápnyomás,  a szelep elmozdulása.
a szelep elmozdulása.
A szelep elmozdulása az irányítójelhez képest késleltetéssel ( ) válaszol:
) válaszol:
| (405) |
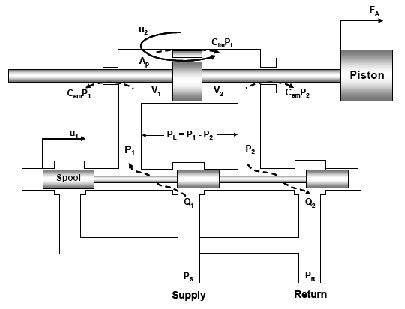

Aktív felfüggesztés felsőszintű tervezésekor a jármű megfelelő működése szempontjából szükséges erőt ( ) tervezzük meg. Az alsó-szintű irányítás tervezésekor az elektrohidraulikus beavatkozószelep irányítását tervezzük meg. A szelep elmozdításával a hidraulikus beavatkozóval generált erő (
) tervezzük meg. Az alsó-szintű irányítás tervezésekor az elektrohidraulikus beavatkozószelep irányítását tervezzük meg. A szelep elmozdításával a hidraulikus beavatkozóval generált erő ( ) kövesse a felsőszintű irányítás által igényelt erőt.
) kövesse a felsőszintű irányítás által igényelt erőt.
A 89. ábrán egy felfüggesztési rendszer működését vizsgáljuk rossz minőségű úton. Az úthibák különböző nagyságú lengéseket okoznak. Az alsószintű irányítás 
 pontossággal képes az igényelt erő követésére. A beavatkozóra kiadott irányítás és a szelep elmozdulás közötti kapcsolat időfüggvényeit a 90. ábra szemlélteti.
pontossággal képes az igényelt erő követésére. A beavatkozóra kiadott irányítás és a szelep elmozdulás közötti kapcsolat időfüggvényeit a 90. ábra szemlélteti.
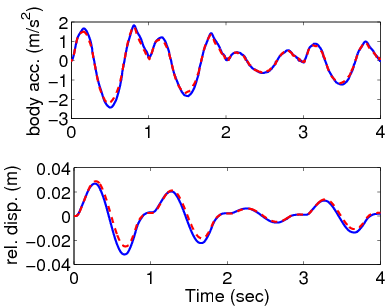
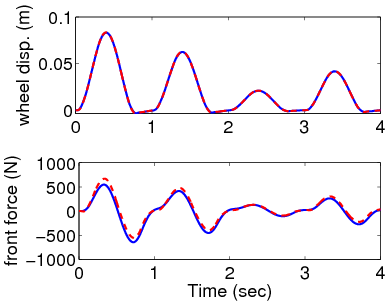
 : igényelt erő;
: igényelt erő;  : realizált erő
: realizált erő
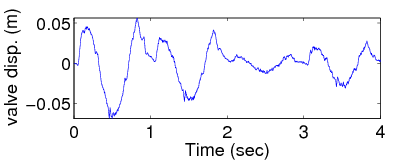
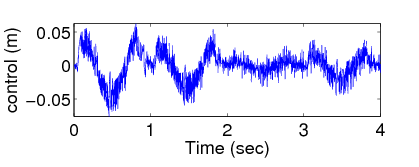
6.3.1. LQ optimális tervezés
Az optimális (LQ) irányítás általános alakja a következő:
| (406) |
ahol  alkalmasan választott súlymátrixok.
alkalmasan választott súlymátrixok.
Ennek megfelelően a minőségi tulajdonságok alapján az aktív felfüggesztési rendszerre következő lineáris kvadratikus optimális kritériumot foglamazzuk meg:
| (407) |

ahol  súlyok.
súlyok.
Mivel a rugózott tömeg gyorsulása


| (408) |

ezért a kvadratikus alak első komponense alapján az LQ kritérium súlymátrixai a következők:

A költségfüggvényben szereplő további tagok alakja:


így az LQ kritérium súlymátrixai a következők:
| (409) |
| (410) |

Az optimális irányítási feladatban a minőségi kritériumok alapján felírt költségfüggvényt kívánjuk minimalizálni. Az optimális állapotvisszacsatolás  megoldása a következőképpen értelmezhető:
megoldása a következőképpen értelmezhető:
| (411) |

Ismeretes, hogy az optimalizációs feladat a következő Riccati egyenlethez vezet:
| (412) |

és az optimális erősítés ( ) összefüggése
) összefüggése
| (413) |
Az optimális erősítés két komponenst tartalmaz:  és
és  .
.
Az első tag a kritériumban megválasztott súlyoktól (
 ) függ.
) függ. A második tag viszont nem függ a Riccati egyenlet megoldásától. Ennek a tagnak az a szerepe, hogy kioltsa a passzív rugó és csillapító hatását:
| (414) |

ahol  és
és  .
.
Emiatt a szabályozáshoz szükséges erő független a rendszer passzív komponenseitől ( és
és  ).
).
Ha a lengéskényelmet akarjuk javítani úgy, hogy közben nem rontjuk a munkatérre és a kerékelmozdulásra vonatkozó minőségi tulajdonságokat a következőképpen kell eljárnunk:
Az útgerjesztésnek a rugózott tömeg gyorsulására való hatását csökkenteni kell.
A rugózott tömeg sajátfrekvenciáján a felfüggesztési munkatér és a kerékelmozdulás minőségét javítani kell.
A rugózatlan tömeg sajátfrekvenciáján mindhárom minőségi jellemző tulajdonságait javítani kell.
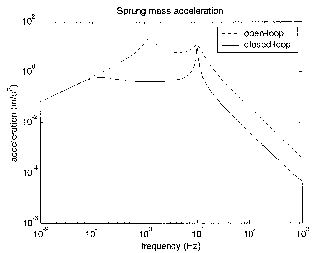
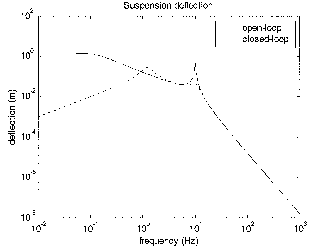
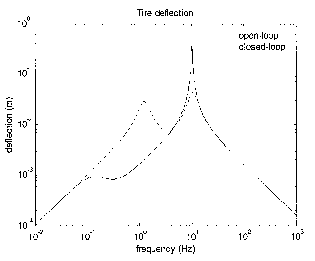
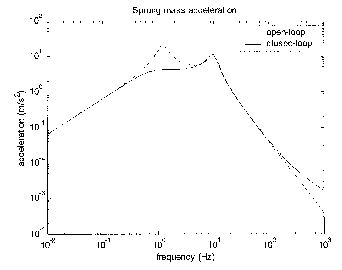
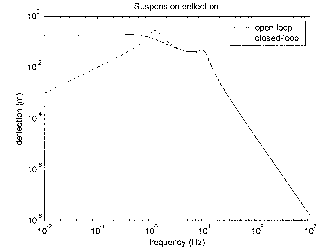
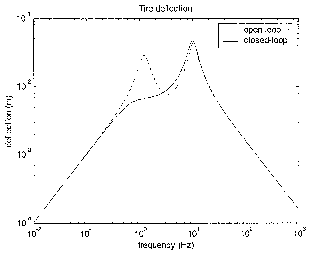
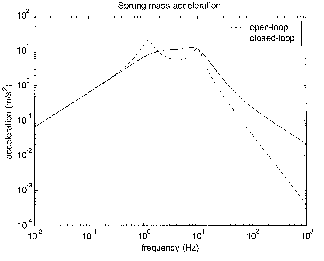
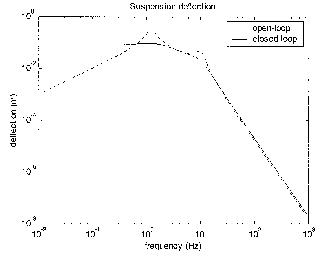
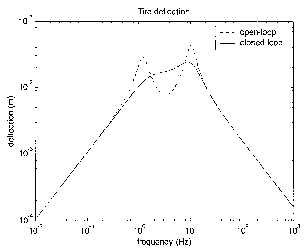
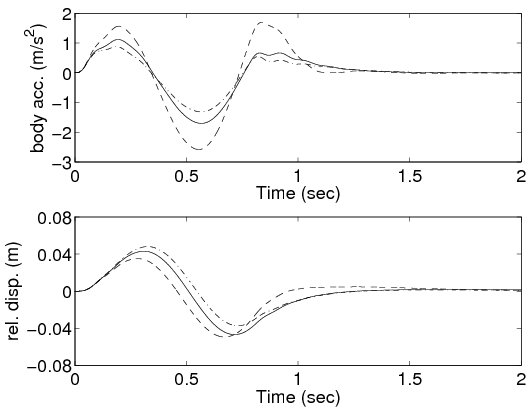
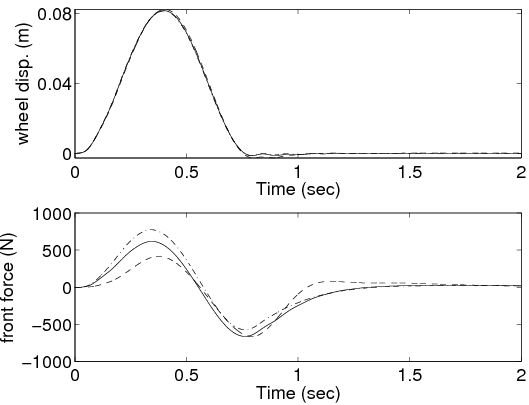
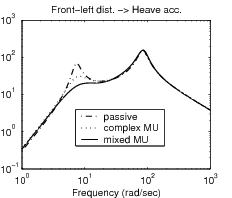
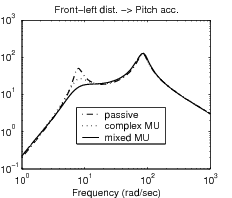
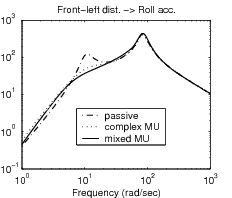
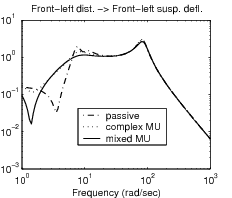
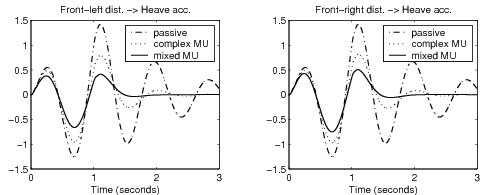
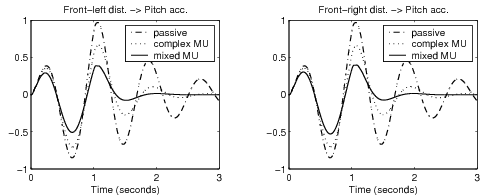
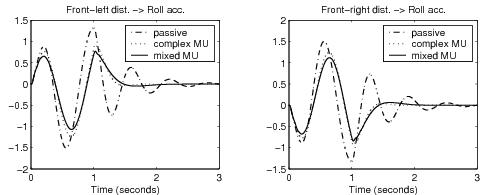
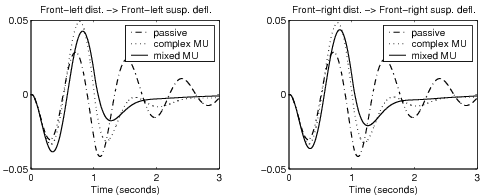
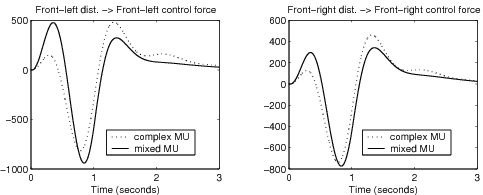
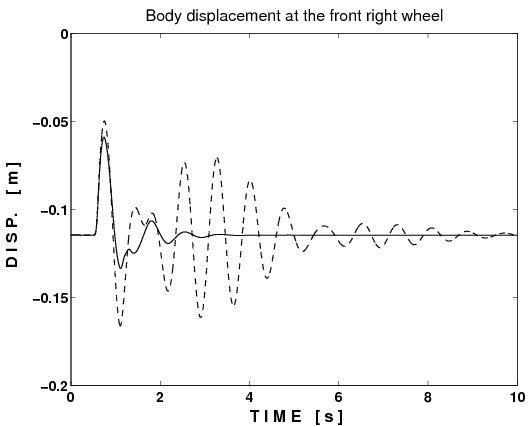
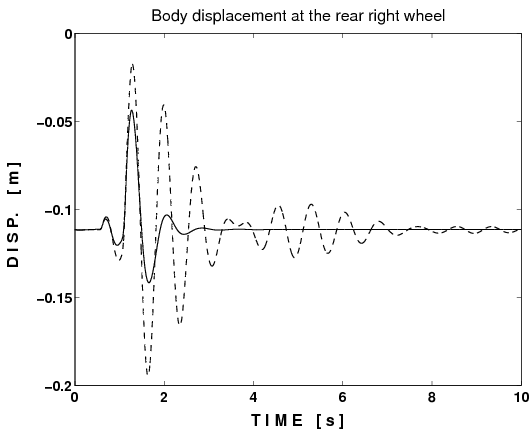
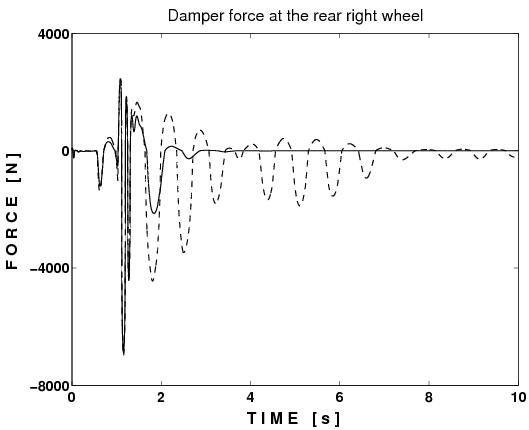
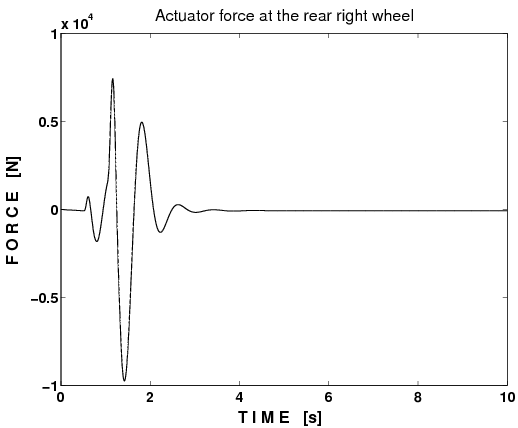
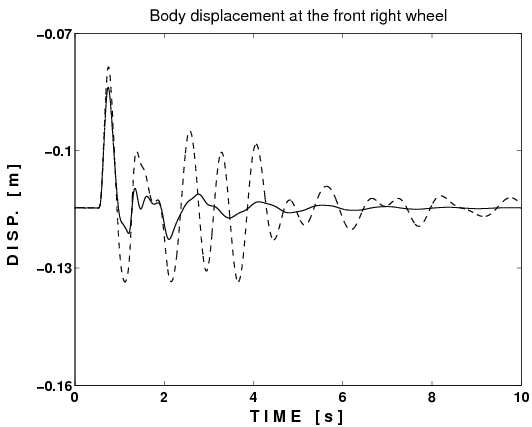
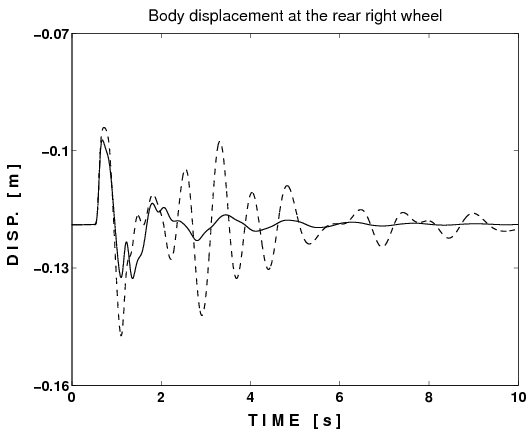
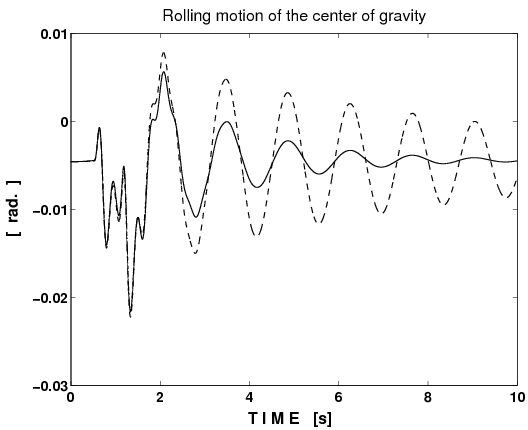
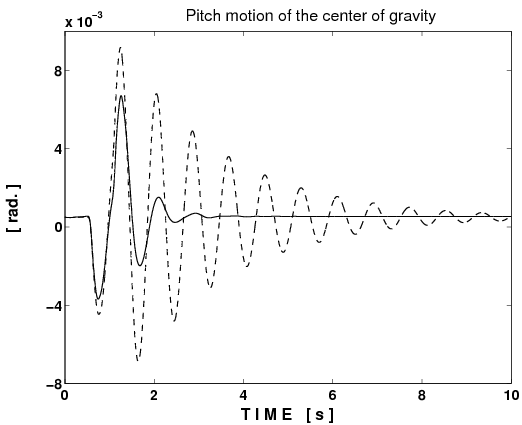
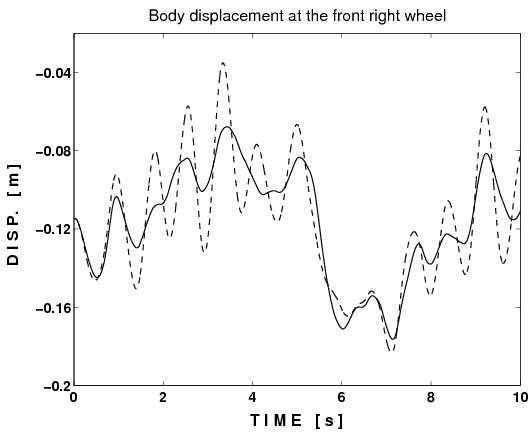
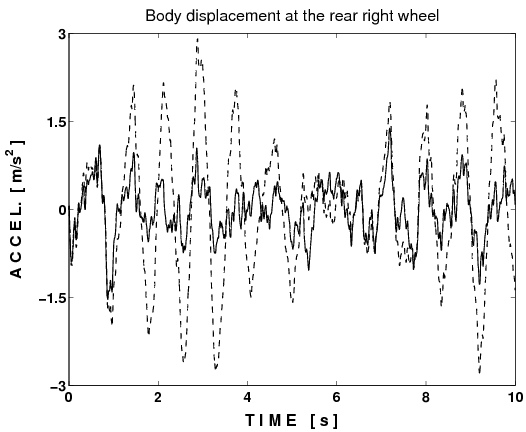
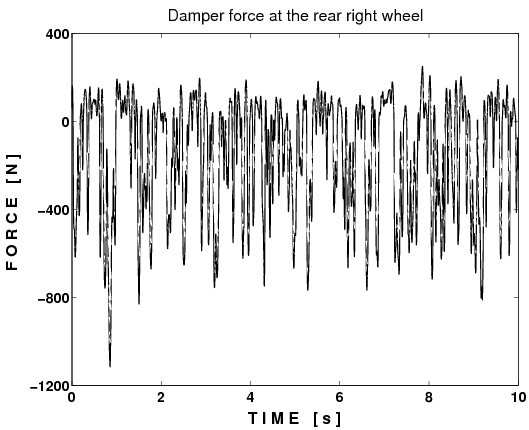
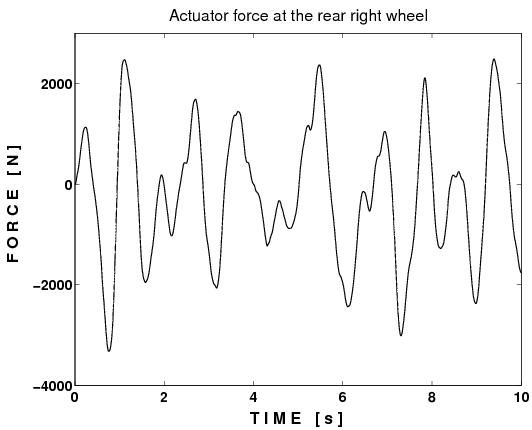
6.4. Félaktív felfüggesztés
A félaktív felfüggesztési rendszerben változtatható csillapítást alkalmazunk.
Többféle megoldás létezik:
Mágneses csillapitás elvű (MR): folyadék viszkozitását változtatják mágneses tér változtatásával (Audi),
Elektrohidraulikus (ER): elektromos teret változtatják (Volvo, BMW),

Egy félaktív felfüggesztési rendszerben a  csillapítás egy intervallumon belül változik:
csillapítás egy intervallumon belül változik:  .
.
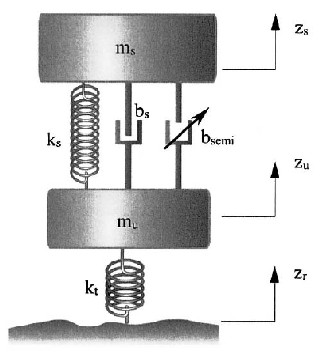
A kétszabadságfokú negyedjármű modell mozgásegyenletei a következők:
| (415) |

| (416) |

| (417) |

A negyedjármű modell mozgásegyenleteiből levezethető állapottér reprezentációja a következő:
| (418) |

ahol az állapotvektor komponensei:
| (419) |

ahol

: munkatér közötti relatív elmozdulás,

: rugózott tömeg sebessége,

: kerékelmozdulás,

: rugózatlan tömeg sebessége,
a rendszermátrixok alakja pedig
| (420) |
7.4.1 LQ irányítás tervezése
A minőségi jellemzőket tartalmazó kritérium kvadratikus alakja:
| (421) |

ahol  súlyozó tényezők. Az integrál két tagra szeparálható: az egyik
súlyozó tényezők. Az integrál két tagra szeparálható: az egyik  -től függ mig a másik
-től függ mig a másik  -től függetle:
-től függetle:
| (422) |
A kvadratikus alak súlyozó mátrixait a következőképpen kell megválasztani:
| (423) |
| (424) |
Így a félaktív felfüggesztés költségfüggvénye a következő:
| (425) |

Itt az egyes  -től függő komponensek:
-től függő komponensek:
| (426) |
| (427) |

ahol  és
és  .
.
Keressünk egy optimális irányítást  megválasztásával olymódon, hogy a következő korlátozás teljesüljön:
megválasztásával olymódon, hogy a következő korlátozás teljesüljön:
| (428) |
ahol  és a kezdeti érték:
és a kezdeti érték:  .
.
Ha a félaktív csillapításra nem lenne korlátozás, akkor az a következőképpen fejezhető ki
| (429) |

ahol  és
és
| (430) |

Itt  a következő Riccati egyenletből számítható:
a következő Riccati egyenletből számítható:
| (431) |

ahol  and
and  .
.
Végül
| (432) |

ahol az irányitásnak két komponense van
az állapotvisszacsatolás erő:
| (433) |

a passzív rugó és csillapítás hatását kioltó komponens:
| (434) |

A két rendszer, azaz az aktív komponens és a modulált csillapítás ekvivalens amennyiben a csillapító ( ) valamennyi valós értéket képes figyelembe venni.
) valamennyi valós értéket képes figyelembe venni.
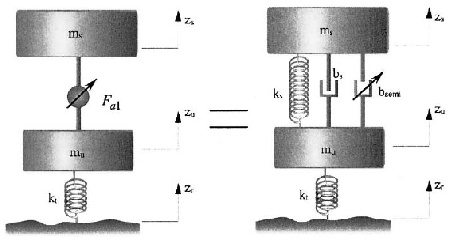
Ha a csillapításra vonatkozó  korlátozást kifejezzük:
korlátozást kifejezzük:
| (435) |
akkor a szabályozó erő
| (436) |

Félaktív felfüggesztés esetén a szabályozó erő  a következőképpen függ a relatív sebességtől
a következőképpen függ a relatív sebességtől
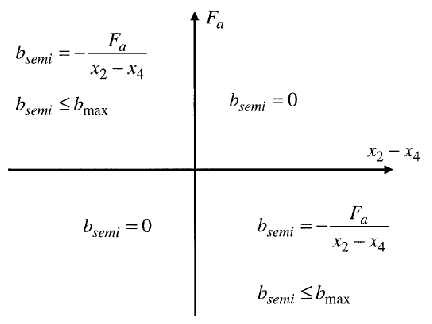
6.5. Kétszintű tervezés
Az alábbiakban egy részletes esettanulmányt mutatunk be a felfüggesztési rendszer irányításának kétszintű tervezésére. A magas szintű szabályozó tervezésekor a teljes jármű egy modelljét vesszük figyelembe, ami tartalmazza a felfüggesztési dinamikát és performanciaként az úttartásra, utaskényelemre és a kerékelmozdulás minimalizálására koncentrál. Ebben a lépésben a modell bizonytalanságokat is figyelembe vesszük. Az egyes performanciák közötti prioritásokat megfelelő súlyfüggvények választásával írjuk elő.
A tervezett irányítás egy erő, amit elő kell állítani egy hidraulikus beavatkozó segítségével. Az alacsony szintű irányítás egy jelkövető szabályozó, ami a szelepet vezérli. A teljesség kedvéért mind a backsteeping módszerrel kezelt nemlineáris tervezést, mind pedig egy feedback linearizálást közvetlenül használó módszert ismertetünk az alacsony szintű szabályozó tervezésére.
A bemutatott eljárás előnye, hogy a hidraulikus beavatkozó dinamikája és a felfüggesztés dinamikája két, egymástól független tervezési lépésben van kezelve. A javasolt elválasztó rétegek követik a különböző alrendszerek felépítését és a problémák összetettsége ezalatt ésszerű határok között marad. Ellentétben a [35] által közölt módszerrel, ez a megoldás lehetővé teszi a moduláris tervezést: a beavatkozó nem befolyásolja a felső szintű tervezés eredményét.
6.5.1. A felfüggesztés szabályozás-orientált modellezése
A tervezés alapja a felfüggesztési rendszer teljes jármű modellje. A teljes jármű, amely a 103. ábrán látható öt részből áll, ami leírja rugózott tömeg és a négy rugózatlan tömeg dinamikáját.
Jelölje  ,
,  és
és  a rugózott és rugózatlan tömegeket. Minden felfüggesztés egy rugóból, csillapítóból és egy aktív beavatkozóból áll, ami létrehozza a szükséges tolóerőt a járműtest és a tengely között. A rugóállandót és a gumiabroncsot jellemző merevséget jelölje
a rugózott és rugózatlan tömegeket. Minden felfüggesztés egy rugóból, csillapítóból és egy aktív beavatkozóból áll, ami létrehozza a szükséges tolóerőt a járműtest és a tengely között. A rugóállandót és a gumiabroncsot jellemző merevséget jelölje  és
és  . Az első és a hátsó felfüggesztés csillapításait jelölje
. Az első és a hátsó felfüggesztés csillapításait jelölje  , a bólintó és dőlési inerciákat pedig
, a bólintó és dőlési inerciákat pedig  és
és  . A bal és jobb oldalon az első és a hátsó felfüggesztés rugózott tömegeinek relatív elmozdulása legyen
. A bal és jobb oldalon az első és a hátsó felfüggesztés rugózott tömegeinek relatív elmozdulása legyen  ,
,  és
és  ,
,  . A bal és jobb oldalon az első és a hátsó felfüggesztés rugózatlan tömegeinek relatív elmozdulása legyen
. A bal és jobb oldalon az első és a hátsó felfüggesztés rugózatlan tömegeinek relatív elmozdulása legyen  ,
,  ,
,  és
és  . A teljes jármű modellben
. A teljes jármű modellben  ,
,  ,
,  ,
,  jelöli az útgerjesztést, míg a bemeneti (irányító) jelek az
jelöli az útgerjesztést, míg a bemeneti (irányító) jelek az  ,
,  ,
,  ,
,  erők, amiket a beavatkozók hoznak létre.
erők, amiket a beavatkozók hoznak létre.
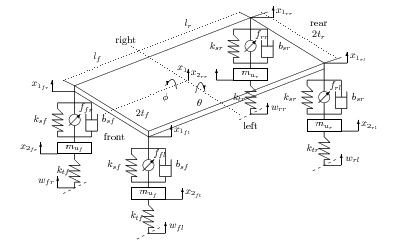
Az egyenletek a hét szabadságfokú teljes jármű modellnek felelnek meg. Azt feltételezzük, hogy a rugózott tömeg egy merev test és mozgási szabadság a függőleges, legyező és dőlési irányban van.  egy függőleges elmozdulás a súlypontban,
egy függőleges elmozdulás a súlypontban,  és
és  a rugózott tömeg bólintási és dőlési szöge. A rugózatlan tömeg függőleges irányban mozdulhat el: ezek
a rugózott tömeg bólintási és dőlési szöge. A rugózatlan tömeg függőleges irányban mozdulhat el: ezek  ,
,  ,
,  ,
,  . A dinamikus jármű modell a következő:
. A dinamikus jármű modell a következő:

| (437) |



| (438) |



| (439) |

| (440) |

| (441) |

| (442) |

| (443) |

ahol a következő lineáris közelítéseket alkalmaztuk:  ,
,  ,
,  , és
, és  .
.
Ekkor a csillapítási erők és a felfüggesztési rugó erők a következők:

| (444) |

| (445) |

ahol  a beavatkozó által létrehozott erők, és ahol
a beavatkozó által létrehozott erők, és ahol  .
.
Itt  ,
,  ,
,  és
és  a nemlineáris csillapítások. A
a nemlineáris csillapítások. A  tényező a csillapító erőt lineárisan befolyásolja, míg
tényező a csillapító erőt lineárisan befolyásolja, míg  nemlineáris hatást fejt ki a csillapítási jellemzőkre.
nemlineáris hatást fejt ki a csillapítási jellemzőkre.  írja le a karakterisztikák aszimmetrikus viselkedését. A
írja le a karakterisztikák aszimmetrikus viselkedését. A  rugóállandó lineáris része
rugóállandó lineáris része  míg
míg  a nemlineáris rész. Az kerékerő egy lineáris közelítése:
a nemlineáris rész. Az kerékerő egy lineáris közelítése:
| (446) |
Jegyezzük meg, hogy ha a nemlineáris hatásokat figyelmen kívül hagyva a modellt linearizáljuk, akkor az  és
és  közelítéseket alkalmazzuk (444) és (445) helyett.
közelítéseket alkalmazzuk (444) és (445) helyett.
Az  állapotvektor alakja az alábbi:
állapotvektor alakja az alábbi:
| (447) |
ahol  és
és
| (448) |

A LPV modellezés ütemezési változóit, melyek közvetlenül mért vagy számított és a mért jelek, meg kell megválasztani: a bal és jobb oldalon az első és a hátsó felfüggesztés relatív elmozdulása és annak sebessége választható ütemezési jelnek:
| (449) |

ahol  . A
. A  ütemezési változók a relatív sebességtől függnek, míg
ütemezési változók a relatív sebességtől függnek, míg  a relatív elmozdulástól függ. A gyakorlatban a relatív elmozdulás a mért jel. A relatív sebességet ekkor numerikus differenciálással határozzuk meg a mért relatív elmozdulásból. Így az aktív felfüggesztési rendszer LPV modelljében nyolc paraméterek kerül kiválasztásra ütemezési változóként.
a relatív elmozdulástól függ. A gyakorlatban a relatív elmozdulás a mért jel. A relatív sebességet ekkor numerikus differenciálással határozzuk meg a mért relatív elmozdulásból. Így az aktív felfüggesztési rendszer LPV modelljében nyolc paraméterek kerül kiválasztásra ütemezési változóként.
A magas szintű szabályozástervezés alapja a paraméter-függő LPV módszer. A modell állapotteres alakja a következő:
| (450) |

ahol  .
.
6.5.2. A hidraulikus beavatkozó modellezése
Az aktív felfüggesztés felsőszintű tervezésekor a jármű megfelelő működése szempontjából szükséges erőket tervezzük meg az első és a hátsó, a jobb és a bal oldalon. Az alsó-szintű irányítás tervezésekor az elektrohidraulikus beavatkozószelep irányítását tervezzük meg. A szelep elmozdításával a hidraulikus beavatkozóval generált erőnek kell követni a felsőszintű irányítás által igényelt erőt. Az elektronikus hidraulikus rendszer leírására egy klasszikus nemlineáris modellt használunk, a részletekért lásd még [3], [35], [89].
A beavatkozó hidraulikus rendszer által előállított erők az alábbi módon fejezhetők ki:
| (451) |

ahol  a dugattyú felületének területe és
a dugattyú felületének területe és  (
( ,
,  ) pedig az egyes hidraulikus rendszerben kialakuló nyomások, lásd például [89].
) pedig az egyes hidraulikus rendszerben kialakuló nyomások, lásd például [89].
A  nyomások változása
nyomások változása
| (452) |

ahol  az egyes hidraulikus áramlások,
az egyes hidraulikus áramlások,  pedig a két végpont közötti relatív sebesség, a csillapítók sebessége, és
pedig a két végpont közötti relatív sebesség, a csillapítók sebessége, és  ,
,  ,
,  állandó paraméterek.
állandó paraméterek.
A hidraulikus áramlás kifejezhető mint
| (453) |

ahol
| (454) |
| (455) |
ahol  a tápnyomás, és
a tápnyomás, és  az egyes szelepek elmozdulása.
az egyes szelepek elmozdulása.
A csillapító sebesség egy visszacsatolásként jelenik meg, amit [4] tanulmányozott részletesen. Feltételezzük, hogy a működés során  . Ennek megfelelően ((453)) alapján
. Ennek megfelelően ((453)) alapján  , amely egy bimodális kapcsolási rendszert határoz meg a beavatkozó dinamikájára. Annak érdekében, hogy elkerüljük a technikai nehézségeket, az előjelfüggvényt egy sima
, amely egy bimodális kapcsolási rendszert határoz meg a beavatkozó dinamikájára. Annak érdekében, hogy elkerüljük a technikai nehézségeket, az előjelfüggvényt egy sima  függvényre cseréljük, ahol
függvényre cseréljük, ahol  megfelelően kicsire van választva.
megfelelően kicsire van választva.
A szelep elmozdulását szabályozza az  szervo szelep:
szervo szelep:
| (456) |
ahol  időben állandó.
időben állandó.
Az egyes beavatkozó modellek, amik a tervezés alapját képezik, ennek a generikus modellnek alapján vannak megfogalmazva:
| (457) |

| (458) |
az  -edik beavatkozóra ahol
-edik beavatkozóra ahol  és
és  jelöli
jelöli  és
és  jeleket, míg
jeleket, míg 
 és
és  .
.
6.6. A magas szintű szabályozási feladat
A robusztus szabályozó tervezésének alapja a 104 ábrán látható zárt kör kapcsolás modellje, ahol a  általánosított rendszer ami tartalmazza a névleges rendszert, az összes performancia kimenetet, zavarásokat és a bizonytalanságot. Itt
általánosított rendszer ami tartalmazza a névleges rendszert, az összes performancia kimenetet, zavarásokat és a bizonytalanságot. Itt  jelöli a zavarásokat míg
jelöli a zavarásokat míg  a normalizált blokk diagonális bizonytalansági blokkot, a részletekért lásd például [128], [136].
a normalizált blokk diagonális bizonytalansági blokkot, a részletekért lásd például [128], [136].
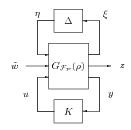
A robusztus szabályozó tervezése a  LPV rendszer zérus kezdeti feltételeknek megfelelő indukált
LPV rendszer zérus kezdeti feltételeknek megfelelő indukált  -normáját használja, ami az alábbiak szerint van definiálva:
-normáját használja, ami az alábbiak szerint van definiálva:
| (459) |
A  értékhez tartozó
értékhez tartozó  norma jelenti az LPV rendszer legnagyobb performancia/zavar arányát feltételezve az összes kauzális lineáris operátort ami az LPV rendszerhez tartozhat, így ez a szint a végső performancia index. A performancia és zavar súlyok megfelelő kiválasztásával a sikeres tervezés feltétele
norma jelenti az LPV rendszer legnagyobb performancia/zavar arányát feltételezve az összes kauzális lineáris operátort ami az LPV rendszerhez tartozhat, így ez a szint a végső performancia index. A performancia és zavar súlyok megfelelő kiválasztásával a sikeres tervezés feltétele  . Meg kell jegyezni, hogy céljainak eléréséhez a súlyokat az adott feladatok függvényében kell kiválasztani.
. Meg kell jegyezni, hogy céljainak eléréséhez a súlyokat az adott feladatok függvényében kell kiválasztani.
Az LPV probléma megoldásának alapja az, hogy a felírt LMI-knek teljesülni kell minden  esetén. A gyakorlatban ezt a problémát a paraméter tér alkalmas felosztásával (gridding) és az LMI-knek egy véges
esetén. A gyakorlatban ezt a problémát a paraméter tér alkalmas felosztásával (gridding) és az LMI-knek egy véges  részhalmazon való megoldásával kezeljük. A szükséges rácspontok száma függ a rendszer nemlineáris viselkedésétől az adott működési tartományon. A részletekért lásd például [10], [103], [130].
részhalmazon való megoldásával kezeljük. A szükséges rácspontok száma függ a rendszer nemlineáris viselkedésétől az adott működési tartományon. A részletekért lásd például [10], [103], [130].
A felfüggesztési rendszer vizsgálatához tekintsük a 105 ábrán látható zárt rendszert. A visszacsatolt struktúra tartalmazza a  nominális modellt és a
nominális modellt és a  szabályozót, valamint olyan elemeket amik a bizonytalanság modellekhez és a célul kitűzött performancia eléréséhez tartoznak. A kapcsolási rajzon
szabályozót, valamint olyan elemeket amik a bizonytalanság modellekhez és a célul kitűzött performancia eléréséhez tartoznak. A kapcsolási rajzon  az aktuátorok éltal előállított vezérlő bemenet,
az aktuátorok éltal előállított vezérlő bemenet,  a mért szenzorok által mért jel,
a mért szenzorok által mért jel,  a mérési zaj. A mért kimenetek az első és a hátsó, bal és jobb oldali rugózott tömeg és rugózatlan tömeg közti elmozdulások:
a mérési zaj. A mért kimenetek az első és a hátsó, bal és jobb oldali rugózott tömeg és rugózatlan tömeg közti elmozdulások:
| (460) |

Az ábrán látható  jelek zavarások, amelyek az útgerjesztést foglalják magukba. A
jelek zavarások, amelyek az útgerjesztést foglalják magukba. A  performancia kimenetek: az utaskényelem
performancia kimenetek: az utaskényelem  (vertikális gyorsulás/heave acceleration) , a
(vertikális gyorsulás/heave acceleration) , a  relatív elmozdulás (suspension deflection), a
relatív elmozdulás (suspension deflection), a  kerékelmozdulás (wheel relative displacement) és a
kerékelmozdulás (wheel relative displacement) és a  ) kontroll jel. Így a performancia vektor-kimenet a következő:
) kontroll jel. Így a performancia vektor-kimenet a következő:
| (461) |

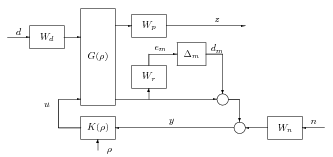
A visszacsatolt struktúra magában foglalja a elhanyagolt dinamika által okozott bizonytalanságokat, a bizonytalanul ismert vagy az időbeni viselkedésük miatt bizonytalan komponenseket. Annak érdekében, hogy a tervezés komplexitása kezelhető mértékű maradjon, a bizonytalanságokat ebben a struktúrában egy  multiplikatív LTI block és egy
multiplikatív LTI block és egy  súlyfüggvény képviseli. Feltételezzük, hogy a
súlyfüggvény képviseli. Feltételezzük, hogy a  átviteli függvény ismert és a bizonytalanság nagyságát tükrözi. Feltételezzük, hogy
átviteli függvény ismert és a bizonytalanság nagyságát tükrözi. Feltételezzük, hogy  egy ismeretlen stabil normakorlátos rendszer, azaz
egy ismeretlen stabil normakorlátos rendszer, azaz  ..
..
A tervezés célja, hogy meghatározza négy vezérlő erőt,
| (462) |

oly módon, hogy a vertikális gyorsulások, a relatív elmozdulások, a kerékelmozdulások a lehető legkisebbek legyenek a kívánt tartományon.
Ezt az irányítási struktúrát az 104 ábrán látható általánosított séma keretei közé lehet tenni, ahol  a zavarás,
a zavarás,  a bizonytalansági blokk és
a bizonytalansági blokk és  a vezérlés. A felfüggesztési rendszer performanciáját négy paraméter függvényében lehet meghatározni: ezek az utaskényelem, relatív elmozdulás, a kerékelmozdulás és az energiafelhasználás, lásd [40]. Az útgerjesztés által keltett rezgések vezetnek a vezető és az utasok fáradásához valamint a jármű és a hasznos teher sérüléséhez. Széles körben elfogadott, hogy korreláció van az az utaskényelem (vagy utazási komfort) és a rugózott tömeg vertikális, bólintó és dőlési gyorsulása között. Az egyszerűség kedvéért itt csak a vertikális gyorsulást vesszük figyelembe.
a vezérlés. A felfüggesztési rendszer performanciáját négy paraméter függvényében lehet meghatározni: ezek az utaskényelem, relatív elmozdulás, a kerékelmozdulás és az energiafelhasználás, lásd [40]. Az útgerjesztés által keltett rezgések vezetnek a vezető és az utasok fáradásához valamint a jármű és a hasznos teher sérüléséhez. Széles körben elfogadott, hogy korreláció van az az utaskényelem (vagy utazási komfort) és a rugózott tömeg vertikális, bólintó és dőlési gyorsulása között. Az egyszerűség kedvéért itt csak a vertikális gyorsulást vesszük figyelembe.
A felfüggesztési rendszer munkatere, amelyet a rugózott és rugózatlan tömeg relatív elmozdulása határol be, más néven relatív elmozdulás, a felfüggesztés geometriája által befolyásolja a dinamikus menetstabilitást. Ezért a relatív elmozdulásnak minimálisnak kell lenni. A felfüggesztési rendszernek garantálni kell, hogy a jármű minden manőver során az előírt pályán maradjon. A kerékelmozdulás egy a gravitáció hatására létrejövő statikus összetevőből és egy, az útgerjesztés által létrehozott dinamikus komponensből áll. Annak érdekében, hogy a manőver ideje alatt csökkentsük a járműre ható oldalirányú erőket, szükség van arra, hogy a kerékelmozdulás a lehető legkisebb mértékű legyen. A működtető erő korlátozását annak érdekében építjük be a tervezési eljárásba, hogy elkerüljük a nagy vezérlési energiákat.
A  ,
,  ,
,  és
és  súlyfüggvények célja, hogy vertikális gyorsulások, a relatív elmozdulások, a kerékelmozdulások a lehető legkisebbek legyenek a teljes működési tartományon. Az adott funkciók súlyozása a performancia kimenetek normájának büntetéseként tekinthető, azaz a súlynak nagynak kell lenni azokon a frekvencia tartományokon, ahol kis jeleket kívánunk és kicsinek, ha nagyobb performancia kimenet is megengedett. Így
súlyfüggvények célja, hogy vertikális gyorsulások, a relatív elmozdulások, a kerékelmozdulások a lehető legkisebbek legyenek a teljes működési tartományon. Az adott funkciók súlyozása a performancia kimenetek normájának büntetéseként tekinthető, azaz a súlynak nagynak kell lenni azokon a frekvencia tartományokon, ahol kis jeleket kívánunk és kicsinek, ha nagyobb performancia kimenet is megengedett. Így  és
és  kiválasztása az alábbiak szerint történik:
kiválasztása az alábbiak szerint történik:
| (463) |
| (464) |
Az  ,
,  és
és  szűrőállandók tényleges értékei az adott probléma során felhalmozott mérnöki tudás alapján választhatók meg. Itt azt kell látni, hogy az alacsony frekvenciájú tartományban a testre ható vertikális gyorsulásokat befolyásoló zavarásokat kell elnyomni a paraméter-függő
szűrőállandók tényleges értékei az adott probléma során felhalmozott mérnöki tudás alapján választhatók meg. Itt azt kell látni, hogy az alacsony frekvenciájú tartományban a testre ható vertikális gyorsulásokat befolyásoló zavarásokat kell elnyomni a paraméter-függő  tényezővel, valamint a relatív elmozdulásokat. A tervezés során állandó
tényezővel, valamint a relatív elmozdulásokat. A tervezés során állandó  és
és  súlyozási tényezőket választunk a fennmaradó jelekre. Megjegyzendő, hogy bár ezeket a sályokat frekvencia tartományban választjuk, a tervezés során az állapotteres leírásukat használjuk.
súlyozási tényezőket választunk a fennmaradó jelekre. Megjegyzendő, hogy bár ezeket a sályokat frekvencia tartományban választjuk, a tervezés során az állapotteres leírásukat használjuk.
A tervezési céloknak egy  performancia jel segítségével történő megfogalmazásának nehézsége abban áll, hogy a különböző jelek közötti igények kielégítése konfliktusos: például a felfüggesztési rendszerrel az utaskényelem és a relatív elmozdulás egyszerre nem javítható. Így a különböző igények között egy alkalmas egyensúlyt kell megvalósítani a performancia súlyok megfelelő választásával: a (463) illetve (464) formulákban a nagy
performancia jel segítségével történő megfogalmazásának nehézsége abban áll, hogy a különböző jelek közötti igények kielégítése konfliktusos: például a felfüggesztési rendszerrel az utaskényelem és a relatív elmozdulás egyszerre nem javítható. Így a különböző igények között egy alkalmas egyensúlyt kell megvalósítani a performancia súlyok megfelelő választásával: a (463) illetve (464) formulákban a nagy  erősítés és kis
erősítés és kis  erősítés az az utaskényelem hangsúlyozásának felel meg. Másrészt kicsinek választva
erősítés az az utaskényelem hangsúlyozásának felel meg. Másrészt kicsinek választva  -t és nagynak
-t és nagynak  -t a tervezés a biztonságra (a relatív elmozdulás) fókuszál.
-t a tervezés a biztonságra (a relatív elmozdulás) fókuszál.
Az LPV irányításban (449) alapján  a rugózott és rugózatlan tömeg közti
a rugózott és rugózatlan tömeg közti  relatív elmozdulást befolyásolja. A (449) formulában a
relatív elmozdulást befolyásolja. A (449) formulában a  változó célja, hogy csökkentse a függőleges gyorsulást vagy a relatív elmozdulást, annak nagyságától függően.
változó célja, hogy csökkentse a függőleges gyorsulást vagy a relatív elmozdulást, annak nagyságától függően.
Az erősítések paramétertől való függését a  és
és  állandók jellemzik a következő módon:
állandók jellemzik a következő módon:
| (465) |
| (466) |
A zavarás  súlyát a szenzor zaj
súlyát a szenzor zaj  súlyát általában egy normalizáló konstans értékként választjuk. Mivel a késést szenzor zajként lehet modellezni, az irányítési stratégia szempontjából fontos
súlyát általában egy normalizáló konstans értékként választjuk. Mivel a késést szenzor zajként lehet modellezni, az irányítési stratégia szempontjából fontos  megfelelő választása. Ha azonban fölöslegesen nagy értékre állítjuk be ezeket a súlyokat, akkor a szabályozás konzervatív lehet, azaz a performancia csak egy alacsonyabb szinten biztosítható. A tervezéskor használt névleges modellek általában alacsonyabb frekvenciákon pontosabbak, míg magasabb frekvencián a pontosság csökken. Ezért a
megfelelő választása. Ha azonban fölöslegesen nagy értékre állítjuk be ezeket a súlyokat, akkor a szabályozás konzervatív lehet, azaz a performancia csak egy alacsonyabb szinten biztosítható. A tervezéskor használt névleges modellek általában alacsonyabb frekvenciákon pontosabbak, míg magasabb frekvencián a pontosság csökken. Ezért a  bizonytalansági súlyt a következőképp választjuk:
bizonytalansági súlyt a következőképp választjuk:
| (467) |
A magas szintű irányítás által előírt jelet a vezérlő szelep beállítását működtető alacsony szintű vezérlőnek kell nyomon követni. Annak érdekében, hogy a megtervezett szabályozási séma minőségét globális szinten vizsgálhassuk, a feladatot globális szinten kell megfogalmazni. Miután a helyi szabályozókat megterveztük, elvileg lehetséges, hogy az irányítás elemzését globális szinten hajtsuk végre, a részletekért lásd például [79]. Ez azonban általában nem kivitelezhető, nagy számítási kapacitást igénylő eljárás. Ezért a gyakorlatban ezt a lépést kihagyva a szabályozás minőségi tulajdonságait a teljes rendszer vizsgálatát szimulációs kísérletek keresztül végezzük.
A következő részben a jelkövetési problémát kezeljük a nemlineáris beavatkozó dinamikai tulajdonságai alapján.
6.7. Az alacsony szintű vezérlő tervezése nemlineáris módszerekkel
Feltételezzük, hogy az erő igényt, ami  egy lineáris függvénye, egy LPV irányítás állítja elő. A cél az, hogy a hidraulikus aktuátor asszimptotikusan kövesse ezt a jelet. Mivel a hidraulikus beavatkozó és a felfüggesztés alrendszer egy nemlineáris és egy LPV rendszer kaszkád kapcsolása, a backstepping módszertanon alapuló megközelítés, vagy egy, a nemlineáris dinamika egzakt linearizálásán alapuló eljárás, megfelelő választás az irányítási cél elérésére. A teljesség kedvéért a következőkben mindkét módszert bemutatjuk.
egy lineáris függvénye, egy LPV irányítás állítja elő. A cél az, hogy a hidraulikus aktuátor asszimptotikusan kövesse ezt a jelet. Mivel a hidraulikus beavatkozó és a felfüggesztés alrendszer egy nemlineáris és egy LPV rendszer kaszkád kapcsolása, a backstepping módszertanon alapuló megközelítés, vagy egy, a nemlineáris dinamika egzakt linearizálásán alapuló eljárás, megfelelő választás az irányítási cél elérésére. A teljesség kedvéért a következőkben mindkét módszert bemutatjuk.
6.7.1. A beavatkozó backstepping alapú tervezése
A LPV rendszert négy (457) és (458) alrendszerrel kiegészítve a kapott lépcsős rendszer alakja:
| (468) |

| (469) |

| (470) |
amit, alkalmazva a  állapottér transzformációt, egy szigorú visszacsatolásos alakban lehet felírni, lásd például [108] hatodik fejezetét:
állapottér transzformációt, egy szigorú visszacsatolásos alakban lehet felírni, lásd például [108] hatodik fejezetét:
| (471) |

| (472) |
| (473) |
Az így kapott rendszerre egy standard rekurzív backstepping módszer alkalmazható, lásd [108], [119]. Mivel a nominális (471) rendszer a konstrukció miatt globálisan asszimptotikusan stabil, jelkövető szabályozást tartalmazó zárt rendszer is stabil lesz, lásd például [119] ötödik fejezetét.
A következőkben nyomon követjük azokat a legfontosabb lépéseket, amelyek az egyes beavatkozó elemek jelkövető irányítását fogják bemutatni. Ahhoz, hogy a módszer lényegét bemutassuk, [119] jelöléseit vesszük át. A magas szintű szabályozás által előírt  nyomásigényt amit a
nyomásigényt amit a  visszacsatolás kap meg
visszacsatolás kap meg  jelöli, míg
jelöli, míg  az igényelt
az igényelt  szelep elmozdulást. Az állpot transzformációra, ami a a szigorú visszacsatolási alakhoz vezet, csak azért van szükség, hogy az eredeti rendszert kapcsolatba hozzuk a kaszkád rendszerek már kidolgozott, passzivitás alapú tervezésével. A tényleges számításokat azonban az eredeti rendszeren is el lehet végezni.
szelep elmozdulást. Az állpot transzformációra, ami a a szigorú visszacsatolási alakhoz vezet, csak azért van szükség, hogy az eredeti rendszert kapcsolatba hozzuk a kaszkád rendszerek már kidolgozott, passzivitás alapú tervezésével. A tényleges számításokat azonban az eredeti rendszeren is el lehet végezni.
A beavatkozó alrendszer backstepping alapú tervezése két lépésben történik. Az első lépésben tekintsük  jelet mint egy virtuális bemenetet és
jelet mint egy virtuális bemenetet és  jelet mint egy virtuális kimenetet. Mivel
jelet mint egy virtuális kimenetet. Mivel  nem egy közvetlenül manipulálható bemenet, szeretnénk, ha a visszacsatolás biztosítaná
nem egy közvetlenül manipulálható bemenet, szeretnénk, ha a visszacsatolás biztosítaná  nyomon követését
nyomon követését  segítségével. Célszerű ezért a követési hibától megkövetelni, hogy lineáris és stabil legyen, azaz
segítségével. Célszerű ezért a követési hibától megkövetelni, hogy lineáris és stabil legyen, azaz  ,
,  . Felhasználva a ((468))--((469)) formulákat
. Felhasználva a ((468))--((469)) formulákat  jel lefutására a kívánt refrencia kiszámítása a nemlineáris visszacsatolás felhasználásával a következőképpen történik:
jel lefutására a kívánt refrencia kiszámítása a nemlineáris visszacsatolás felhasználásával a következőképpen történik:
| (474) |

A második lépésben a kívánt bemenet  míg a (virtuális) kimenet alakja
míg a (virtuális) kimenet alakja  . A jelkövetési hibára egy stabil lineáris dinamika van előírva:
. A jelkövetési hibára egy stabil lineáris dinamika van előírva:
| (475) |

A ((468))--((470)) formulák felhasználásával fejezzük ki az fizikailag manipulálható  beavatkozó bmenetet
beavatkozó bmenetet  ,
,  és
és  függvényében a következő alakban:
függvényében a következő alakban:
| (476) |
A fenti lépésben a zárt kör asszimptotikusan stabil lesz, aminek egy Lyapunov függvénye
| (477) |

lásd például [108], ahol  egy, a magas szintű tervezési lépéshez tartozó Lyapunov függvény.
egy, a magas szintű tervezési lépéshez tartozó Lyapunov függvény.
Mivel  és
és  azt kapjuk, hogy
azt kapjuk, hogy
| (478) |

Az  jelre vonatkozó követési dinamika úgy írható mint
jelre vonatkozó követési dinamika úgy írható mint
| (479) |

ahol  egy alkalmasan választott konstans paraméter. Ebből következik, hogy
egy alkalmasan választott konstans paraméter. Ebből következik, hogy
| (480) |

ahonnan az  fizikai bemenetekre az alábbi kifejezés vezethető le:
fizikai bemenetekre az alábbi kifejezés vezethető le:
| (481) |

Ebben a módszerben a paraméterek meghatározzák az  és
és  virtuális kimenetek konvergencia sebességét. Következtetésként: a backstepping módszer két paramétert,
virtuális kimenetek konvergencia sebességét. Következtetésként: a backstepping módszer két paramétert,  és
és  , választunk, hogy a jelkövető dinamika tulajdonságait előírjuk. Megfelelő paraméter választással a jelkövetés pontosságát javítani lehet, azonban az aktuátor fizikai korlátait figyelembe kell venni. Ennek elmulasztása vezet a követési hiba, azaz a tervezett és a tényleges jel, eltérésének növekedéséhez.
, választunk, hogy a jelkövető dinamika tulajdonságait előírjuk. Megfelelő paraméter választással a jelkövetés pontosságát javítani lehet, azonban az aktuátor fizikai korlátait figyelembe kell venni. Ennek elmulasztása vezet a követési hiba, azaz a tervezett és a tényleges jel, eltérésének növekedéséhez.
Az algoritmus  és
és  jeleket egyarány használja, amik viszont nem mért jelek. Annak érdekében, hogy a szabályozást végrehajtsuk, a gyakorlatban szükségünk van a
jeleket egyarány használja, amik viszont nem mért jelek. Annak érdekében, hogy a szabályozást végrehajtsuk, a gyakorlatban szükségünk van a  és
és  jelek deriváltjainak kiszámítására, ami a mérési zaj és a szükséges pontosság ismeretében számos módon végezhető el. [32], [81], [120] lehetséges stratégiákat mutat be a numerikus differenciálásra.
jelek deriváltjainak kiszámítására, ami a mérési zaj és a szükséges pontosság ismeretében számos módon végezhető el. [32], [81], [120] lehetséges stratégiákat mutat be a numerikus differenciálásra.
Ezt a fejezet azzal zárjuk, hogy kimutassuk, hogy az előjelfüggvény regularizálása során bevezetett  választása nem befolyásolja a gyakorlati megvalósítást. A backstepping algoritmus második lépésében
választása nem befolyásolja a gyakorlati megvalósítást. A backstepping algoritmus második lépésében  deriváltját kell meghatározni, azaz
deriváltját kell meghatározni, azaz
| (482) |

| (483) |

A számításokat elvégezve kapjuk, hogy
| (484) |
Mivel a  függvény konvergenciája igen gyors ahogy
függvény konvergenciája igen gyors ahogy  , eléggé kicsi
, eléggé kicsi  értékek esetén
értékek esetén
| (485) |
azaz,  úgy számítható, mintha az előjelfüggvény szakadását nem vennénk figyelembe.
úgy számítható, mintha az előjelfüggvény szakadását nem vennénk figyelembe.
6.7.2. Visszacsatolásos linearizálás módszere a beavatkozó alrendszerben
A visszacsatolásos linearizálás célja, hogy egy nemlineáris koordináta transzformáció keresztül és egy nemlineáris állapot visszacsatolás segítségével átalakítsa a nemlineáris input-affin rendszert egy lineáris és szabályozható rendszerré. Jól látható a (457)-(458) formulákból, hogy minden munkapont környezetében a beavatkozó alrendszerben az  bemenet és
bemenet és  kimenet relatív foka kettő minthogy
kimenet relatív foka kettő minthogy  csak
csak  második deriváltjában jelenik meg explicit módon. Ezért a rendszer ténylegesen egzakt módon linearizálható egy alkalmas nemlineáris állapot visszacsatolás alkalmazásával, lásd például [63].
második deriváltjában jelenik meg explicit módon. Ezért a rendszer ténylegesen egzakt módon linearizálható egy alkalmas nemlineáris állapot visszacsatolás alkalmazásával, lásd például [63].
Valóban , a nemlineáris koordináta transzformációt
| (486) |
alkalmazva, amit  és
és  határoz meg, a (468)-(470) rendszer átmegy a következő alakba:
határoz meg, a (468)-(470) rendszer átmegy a következő alakba:
| (487) |

| (488) |

| (489) |

ahol
| (490) |
és
| (491) |

Ennek alapján a linearizáló visszacsatolás alakja
| (492) |
Ezzel a linearizáló visszacsatolással az aktuátor dinamikája egy kettős integrátorrá egyszerűsödik:
| (493) |

| (494) |
A (492) kifejezésben  jel értéke egy
jel értéke egy  -re vonatkozó, a kapott rendszerre vonatkoztatott referencia követési probléma megoldásaként számítható ki. Ekkor a lineáris visszacsatolása alakja
-re vonatkozó, a kapott rendszerre vonatkoztatott referencia követési probléma megoldásaként számítható ki. Ekkor a lineáris visszacsatolása alakja
| (495) |

ahol  alkalmas paraméterek. Ez megoldja a követési feladatot és a zárt rendszert is stabilizálja, a részletekért lásd [64] tizenkettedik fejezetét.
alkalmas paraméterek. Ez megoldja a követési feladatot és a zárt rendszert is stabilizálja, a részletekért lásd [64] tizenkettedik fejezetét.
Meg kell jegyezni, hogy a  és
és  paramétereket a jelkövetés dinamikáját figyelembe véve kell megválasztani. Mivel az algoritmus a
paramétereket a jelkövetés dinamikáját figyelembe véve kell megválasztani. Mivel az algoritmus a  és
és  deriváltakat is használja, amelyek nem mért jelek, azokat numerikus differenciálás útján kell meghatározni.
deriváltakat is használja, amelyek nem mért jelek, azokat numerikus differenciálás útján kell meghatározni.
Az alábbi ábra az irányított rendszer válaszfüggvényeit mutatja felső szintű vezérlőt használva (folytonos:integrált, szaggatott:független).
6.8. Szimulációs példák
Egy bevezető példa rávilágít a globális vezérlési séma lehetséges előnyeire. A teljes jármű jármű modell alapján készített felfüggesztési szabályozás van összevetve azzal az esettel, amikor a felfüggesztés szabályozására tervezett négy külön szabályozó van kombinálva. Mivel a felfüggesztési pontokon csatolás van, várható, hogy a globális együttes tervezés felülmúlja az egyedileg tervezett vezérlést az olyan esetekben, amikor a csatolás megnyilvánulhat, például manőverezéskor. A tervezés részleteit nem ismertetjük, csak a megfelelő szimulációs ábrákat.
Ebben a példában a jármű egy kikerülési manővert végez 
 sebességgel. A 107(a) ábra mutatja a manőver pályáját. A manőver közben a dőlési szög változása hasonló mindkét esetben, lásd a 107(b) ábrát. A két irányítás elemzése során a függőleges gyorsulást, relatív elmozdulást és a szükséges erőket vizsgáljuk. A globális megoldásnál a rugózott tömeg függőleges gyorsulása kisebb, ami tükröződik a kis RMS értékben, lásd a 107(c) ábrát.
sebességgel. A 107(a) ábra mutatja a manőver pályáját. A manőver közben a dőlési szög változása hasonló mindkét esetben, lásd a 107(b) ábrát. A két irányítás elemzése során a függőleges gyorsulást, relatív elmozdulást és a szükséges erőket vizsgáljuk. A globális megoldásnál a rugózott tömeg függőleges gyorsulása kisebb, ami tükröződik a kis RMS értékben, lásd a 107(c) ábrát.
A különállóan tervezett szabályozástól eltérően az integrált megoldás esetén, bár a relatív elmozdulás értékei hasonlóak, de az RMS érték jelentősen kisebbek, a 107(d) ábrán látható módon. Jelentős különbségek figyelhetőek meg az erőkben. A globálisan tervezett felfüggesztés esetén kisebb erőkkel történik a manőver, mint az az RMS értékből is kitűnik: lásd a 107(e) ábrát. Az önállóan tervezett vezérlő esetén az erők a 107(f) ábrán láthatóak. Következésképpen a performancia jellemzők a globális vezérlés esetén jobbak, azaz mind a függőleges gyorsulás és a relatív elmozdulások jobb válaszokat adnak, és ezzel egy időben a szükséges szabályozó erők is kisebbek.
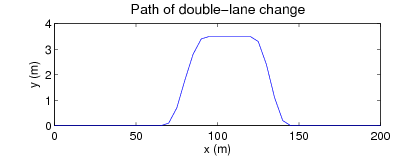
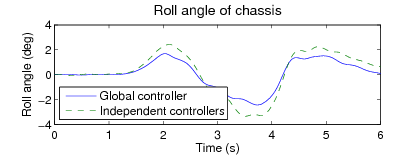
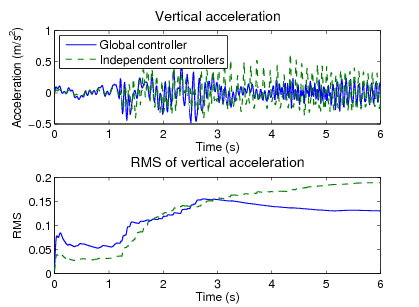
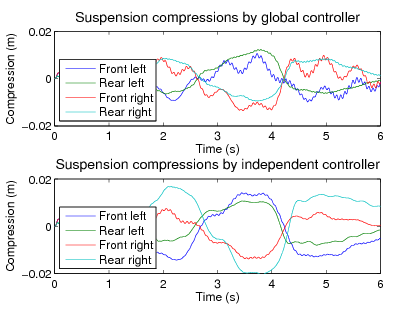
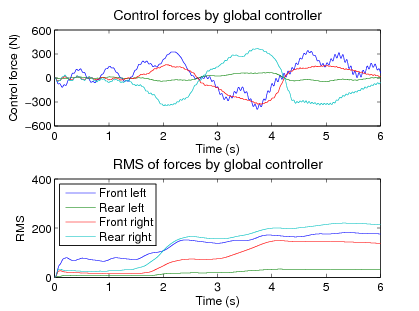
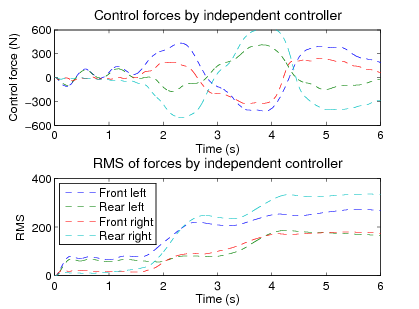
A következőkben a két-szintű szabályozót mutatjuk be részletesen. Először egy felső szintű irányítást tervezünk  modellen alapuló módszerrel, amely a szükséges beavatkozó erőt generálja. Ezután egy alacsony szintű szabályozást alkalmazunk annak érdekében, hogy a tervezett erőt előállítsuk.
modellen alapuló módszerrel, amely a szükséges beavatkozó erőt generálja. Ezután egy alacsony szintű szabályozást alkalmazunk annak érdekében, hogy a tervezett erőt előállítsuk.
A tervezés formalizált alapját képezik az (463)--(467) egyenletek. A szimulációs példákban egy nemlineáris jármű modell használunk és három esetet tekintünk: egy passzív és két aktív rendszert, ahol az egyik egy lineáris-tervezéssel adódik míg a másik LPV módszerrel. A passzív rendszer  csillapítása úgy lett megválasztva, hogy a csillapító erők nagyságát tekintve összehasonlítható legyen az aktív rendszerrel.
csillapítása úgy lett megválasztva, hogy a csillapító erők nagyságát tekintve összehasonlítható legyen az aktív rendszerrel.
A tervezés előkészítése során, a bizonytalanságot súlyozó  és a performanciát súlyozó
és a performanciát súlyozó  függvényeket kell meghatározni. A bizonytalanságot egy, a kimeneten jelentkező teljes komplex multiplikatív bizonytalansági blokként kezeljük. A szabályozás tervezésben alkalmazott modellek jellemzően alacsonyabb frekvenciákon pontosabbak (
függvényeket kell meghatározni. A bizonytalanságot egy, a kimeneten jelentkező teljes komplex multiplikatív bizonytalansági blokként kezeljük. A szabályozás tervezésben alkalmazott modellek jellemzően alacsonyabb frekvenciákon pontosabbak ( Hz), de nagyobb frekvenciákon a pontosság gyorsan romlik köszönhetően a rosszul modellezett vagy elhanyagolt dinamikáknak. Ennek megfelelően az elhanyagolt dinamikára vonatkozó súlyozás a következő:
Hz), de nagyobb frekvenciákon a pontosság gyorsan romlik köszönhetően a rosszul modellezett vagy elhanyagolt dinamikáknak. Ennek megfelelően az elhanyagolt dinamikára vonatkozó súlyozás a következő:
| (496) |
ahol  -os bizonytalanság tükröződik az alacsony frekvenciájú tartományban.
-os bizonytalanság tükröződik az alacsony frekvenciájú tartományban.
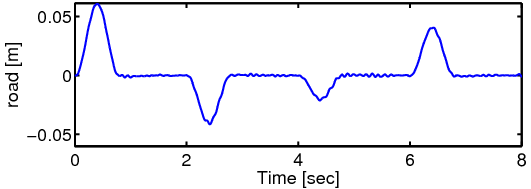
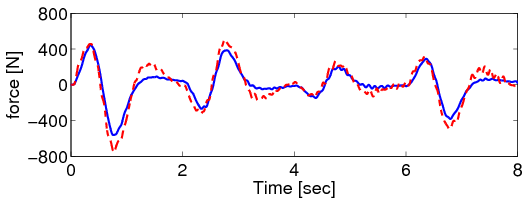
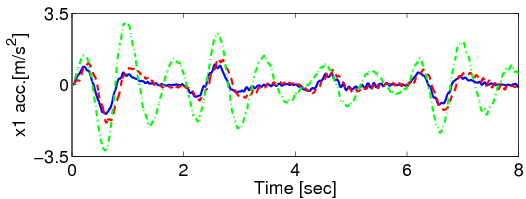
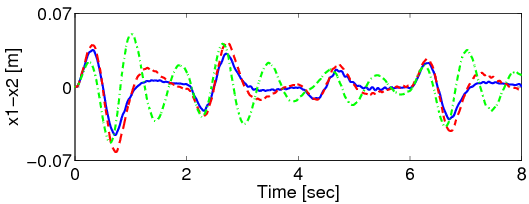
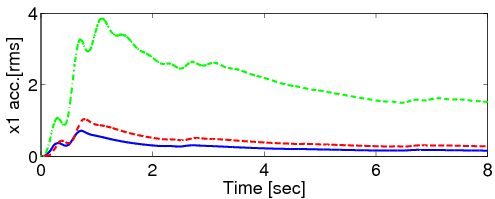
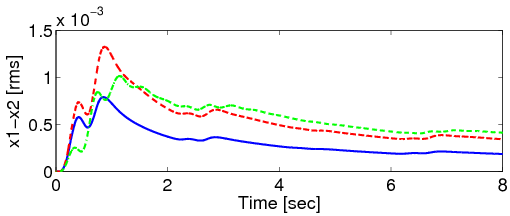
A  ,
,  ,
,  és
és  súlyok megválasztásának célja az, hogy a függőleges gyorsulást, a relatív elmozdulást, a kerékelmozdulást és a bemenő irányító jeleket a kívánt működési tartományon belül kis értékeken tartsuk. A súlyfüggvények meghatározása az ISO a nemzetközi szabványoknak és a mérnöki ismereteknek megfelelően történik. Ennek alapján
súlyok megválasztásának célja az, hogy a függőleges gyorsulást, a relatív elmozdulást, a kerékelmozdulást és a bemenő irányító jeleket a kívánt működési tartományon belül kis értékeken tartsuk. A súlyfüggvények meghatározása az ISO a nemzetközi szabványoknak és a mérnöki ismereteknek megfelelően történik. Ennek alapján
| (497) |
és
| (498) |
választással éltünk. Abból indultunk ki, hogy az alacsony frekvenciájú tartományban a függőleges gyorsulást egy  -ös tényezővel, míg a relatív elmozdulást egy
-ös tényezővel, míg a relatív elmozdulást egy  -es-es faktorral nyomjuk el. A
-es-es faktorral nyomjuk el. A  és
és  erősítések paraméter függőségét a
erősítések paraméter függőségét a  és
és  választás tükrözi. Ez egy olyan LPV irányításnak felel meg ahol a függőleges gyorsulást csak akkor csökkentjük, ha a relatív elmozdulás kisebb, mint
választás tükrözi. Ez egy olyan LPV irányításnak felel meg ahol a függőleges gyorsulást csak akkor csökkentjük, ha a relatív elmozdulás kisebb, mint 
 és amely lassan el kezd fókuszálni a relatív elmozdulás csökkentésére, ha az nagyobb, mint
és amely lassan el kezd fókuszálni a relatív elmozdulás csökkentésére, ha az nagyobb, mint 
 . Ezután
. Ezután 
 felett kizárólag csak a relatív elmozdulást veszi figyelembe. A kerékelmozdulás súlyai, azaz
felett kizárólag csak a relatív elmozdulást veszi figyelembe. A kerékelmozdulás súlyai, azaz  , és a szabályozó bemenetének
, és a szabályozó bemenetének  súlyozása a megfelelő aktuátorok szaturációját hivatott elkerülni. A
súlyozása a megfelelő aktuátorok szaturációját hivatott elkerülni. A  súly az útgerjesztés hatásait befolyásolja. Feltesszük, hogy az útgerjesztés amplitudója
súly az útgerjesztés hatásait befolyásolja. Feltesszük, hogy az útgerjesztés amplitudója 
 , ennek megfelelően
, ennek megfelelően  . A
. A  választással feltételezzük, hogy a legnagyobb szenzor zaj nagysága
választással feltételezzük, hogy a legnagyobb szenzor zaj nagysága 
 az első és a hátsó relatív elmozdulás mérésekor a jobb és bal oldalon, valamint a teljes frekvencia tartományban.
az első és a hátsó relatív elmozdulás mérésekor a jobb és bal oldalon, valamint a teljes frekvencia tartományban.
Először is, a felfüggesztési rendszert egy fiktív rossz minőségű úton teszteljük, amelyen négy különböző magasságú bukkanó zavarja meg a rendszert: a bukkanók magassága 
 ,
, 
 , illetve
, illetve 
 . A bukkanók közötti egyenetlenségek sztochasztikus sebesség függő zavarások. A vizsgálat célja az idő-tartománybeli magatartás tesztelése és a tranziens tulajdonságai a vezérelt rendszernek. Az útgerjesztésre adott performancia válaszokat válaszokat az 106 ábra mutatja, ahol az LPV irányítás a zavarok hatásának jobb lecsengését illetve kisebb túllövéseket eredményez. A elek RMS-ének vizsgálatával ugyanerre a következtetésre jutunk.
. A bukkanók közötti egyenetlenségek sztochasztikus sebesség függő zavarások. A vizsgálat célja az idő-tartománybeli magatartás tesztelése és a tranziens tulajdonságai a vezérelt rendszernek. Az útgerjesztésre adott performancia válaszokat válaszokat az 106 ábra mutatja, ahol az LPV irányítás a zavarok hatásának jobb lecsengését illetve kisebb túllövéseket eredményez. A elek RMS-ének vizsgálatával ugyanerre a következtetésre jutunk.
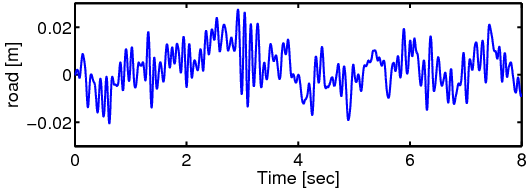
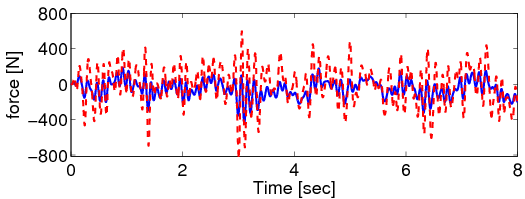
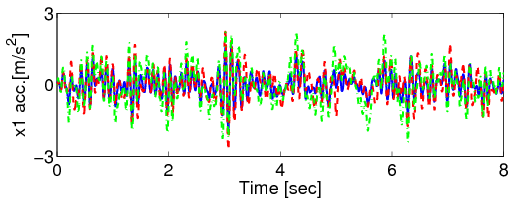
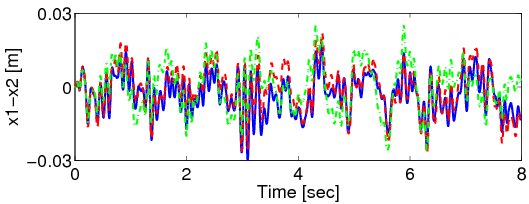
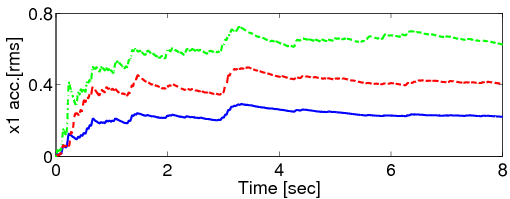
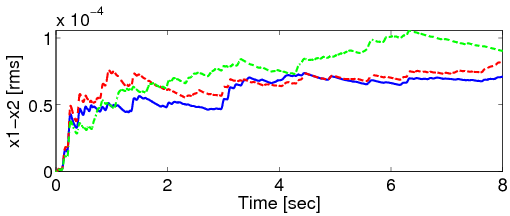
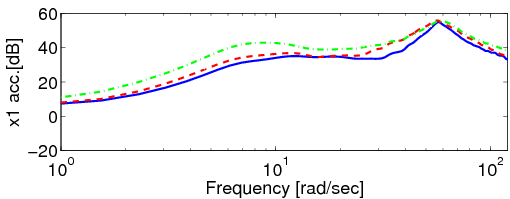
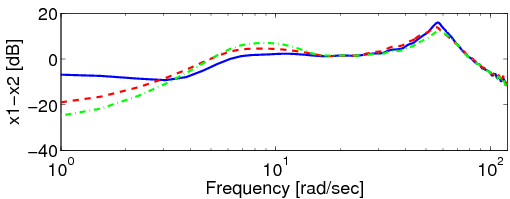
A második esetben sokkal reálisabb útgerjesztést alkalmazunk. Hasonló következtetések vonhatók le az időtartománybeli analízis eredményeit szemlélve, lásd a 107 ábrát. A különböző irányítások összehasonlítása időtartománybeli jelek alapján már nagyon egyszerű realisztikus esetekben. A hagyományos szabályozó kiértékelési módszerek szorosan kapcsolódnak a frekvencia-tartománybeli vizsgálatokhoz, mely módszerek a lineáris időinvariáns elképzeléseket tükrözik. Ennek ellenére ezeket széles körben használják a nemlineáris esetben is, amikor az eljárások nem rendelkeznek egy megalapozott elméleti háttérrel a frekvencia tartományi elemzéshez. Szemléltetés céljából az 108 ábra bemutatja a megfelelő empirikus átvitel függvényeket. Kiértékelési célból más performancia indexek is bevezetésre kerülnek, például a leggyakrabban használt mérce a jel RMS értékét mutatja.
Az alacsony szintű irányítás eredményei az 109 ábrán láthatóak. A tervezési paraméterek értékei:  a backstepping módszer esetén és
a backstepping módszer esetén és  a feedback linearizálás és a visszacsatolás esetén (
a feedback linearizálás és a visszacsatolás esetén ( ). A szimuláció során a mintavételi idő értékét
). A szimuláció során a mintavételi idő értékét 
 -ra választottuk, ami megfelel a gyakorlatban használt esetnek. Az illusztrált jelek nyomásesés a dugattyún, a vezérlő szelep elmozdulása, az irányító bemenet, az elért erő és a jelkövetés RMS hibája. Mindkét esetben az elért beavatkozó erő a szükséges pontossággal követi a referencia jelet. A szimulációk azt mutatják, hogy a backstepping módszer valamivel jobban teljesít.
-ra választottuk, ami megfelel a gyakorlatban használt esetnek. Az illusztrált jelek nyomásesés a dugattyún, a vezérlő szelep elmozdulása, az irányító bemenet, az elért erő és a jelkövetés RMS hibája. Mindkét esetben az elért beavatkozó erő a szükséges pontossággal követi a referencia jelet. A szimulációk azt mutatják, hogy a backstepping módszer valamivel jobban teljesít.
A backstepping jelkövetés tulajdonságai bizonytalan rendszer esetén is tesztelése kerültek. Az alacsony szintű vezérlő tervezés alapja egy névleges nemlineáris rendszer, ezért bizonytalanságokkal szembeni robusztusságát- ellentétben a magas szintű vezérlővel -- nem garantálja a tervezési folyamat. Itt a bizonytalansági paraméterként  -t kell figyelembe venni. Ez (458) alapján megadja a bemenet és a szelepelmozdulás közti dinamikát. Az elemzés során a névleges
-t kell figyelembe venni. Ez (458) alapján megadja a bemenet és a szelepelmozdulás közti dinamikát. Az elemzés során a névleges 
 érték mellett a bizonytalan
érték mellett a bizonytalan 
 értéket vettük figyelembe. A vezérlő bemenet, az RMS a hiba, az elért erő és a hiba RMS látható az 110 ábrán. A kapott eredmények mutatják az irányítási rendszer robusztusságát a parametrikus bizonytalansággal szemben.
értéket vettük figyelembe. A vezérlő bemenet, az RMS a hiba, az elért erő és a hiba RMS látható az 110 ábrán. A kapott eredmények mutatják az irányítási rendszer robusztusságát a parametrikus bizonytalansággal szemben.
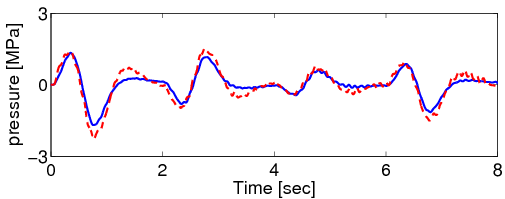
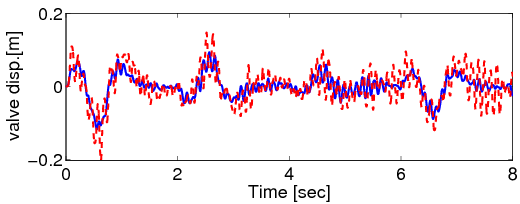
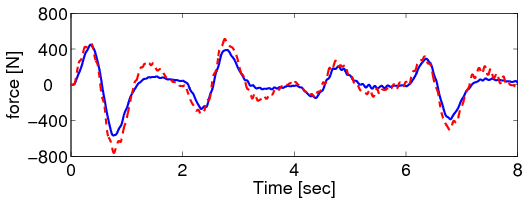
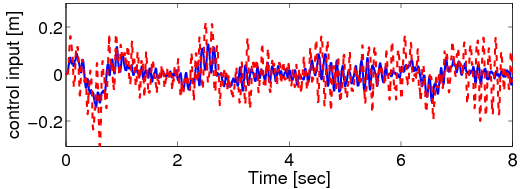
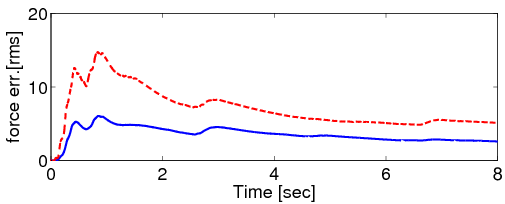
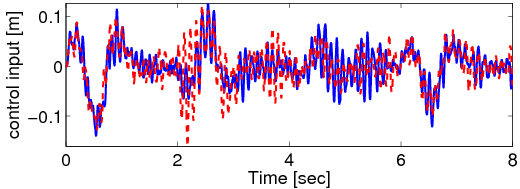
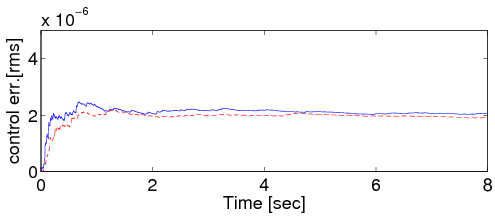
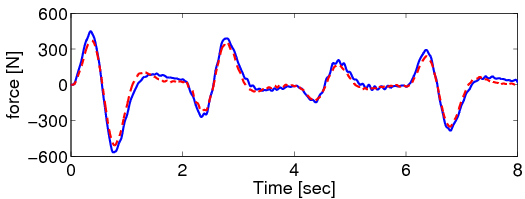
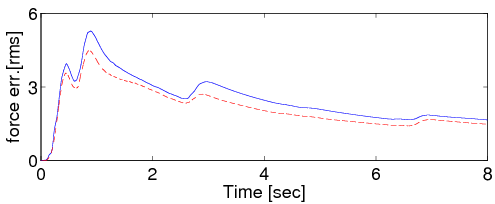
A felfüggesztési rendszer tervezés során használt névleges paramétereit tartalmazza a 0 táblázat. A szabályozók Matlab/Simulink környezetben lettek kifejlesztve, implementálva és tesztelve. vezérlők segítségével tervezték meg és hajtották végre a stílust Matlabra állítja/Simulink szoftver. Az szabályozás tesztelésére a nagypontosságú CarSim jármű szimulációs szoftvert is felhasználtuk.
Parameters | Value | Unit |
| 1400 |
|
| 2100 |
|
| 460 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|











































7. fejezet - Integrált irányítások tervezése
7.1. Bevezetés és motiváció
A hagyományos eljárások során a jármű különböző funkcióinak vezérlését és irányítását külön tervezik. Ezzel a stratégiával az egyik probléma az, hogy a különböző, de egymással kapcsolatban álló, minőségi követelmények független irányításokkal való kielégítése néha nem lehetséges konfliktusok nélkül. Például a fékezési művelet befolyásolja a hosszirányú dinamikát, a sebességet és a dőlési szöget. A jármű geometriai adottságai miatt azonban a fékezés hatására megváltozik a legyezési sebesség és a dőlési dinamika. Hasonlóképpen, a kormányzási szög is hatással van a legyezési szögre. Mivel a súlypont magasan helyezkedik el, a kormányzási manőver következtében a dőlési szög és a rugózott tömeg bólintási szöge szintén megváltozik. A független tervezési stratégia egy másik problémája az, hogy az egyes szabályozók különálló implementálása felesleges hardver redundanciához vezethet.
Az integrált járműirányítás legfőbb célja, hogy ötvözze és felügyelje a gépjármű dinamikáját befolyásoló alrendszerek működését. Ez azt jelenti, hogy a különálló performanciákat javítani kell, a rendelkezésre álló érzékelőket és beavatkozókat több irányítási feladatban kell használni, a független szabályozási körök számát csökkenteni kell, ugyanakkor az irányítási rendszerek rugalmasságát növelni kell. A beépített irányítási rendszer úgy van kialakítva, hogy az egyes vezérlő rendszereknek a jármű egyéb funkcióira való hatását is figyelembe veszik a tervezés során a különböző irányítási jellemzők, performanciák segítségével. A járműipar elvárásainak megfelelően számos irányítási kritérium áll a kutatás középpontjában: például az úttartás, az utazási kényelem javítása, a dőlési és bólintási stabilitás fejlesztése, hibatűrő ás rekonfiguráló megoldások, lásd [42], [99].
Az itt bemutatott megoldásban a decentralizált irányítási rendszert még kiegészíti egy felügyelő (supervisor) szabályozási séma. A felügyelő séma szerepe az előírt performancia garantálása és az egyes komponensek közötti áthallások és konfliktusok kiküszöbölése. A felügyelő alrendszer információval rendelkezik a jármű aktuális működési módjáról, azaz a jármű különböző manővereiről, vagy a különböző komponensek megfigyelése során gyűjtött információkról, amiket például a hibadetektáló (FDI) szűrők szolgáltatnak. A felügyelő képes a jármű alrendszereibe történő szükséges beavatkozások elvégzésére és garantálja az újrakonfigurálható és hibatűrő működést. Ezek a döntések az alacsonyabb szintek felé megfelelően választott ütemezési változók révén, előre definiált interfészeken keresztül, terjednek.
7.2. A járműdinamika irányítás-orientált modellezése
A járműirányítás tervezésének célja egy előre meghatározott útvonal követése, az úttartás és a menetstabilitás növelése. Több szabályozót alkalmazunk a rendszerben: az aktív fék, kormány és a felfüggesztési rendszert. A pályakövetési feladatot aktív kormányzással oldjuk meg, míg az úttartás és az utaskényelem érdekében aktív felfüggesztést használunk. Ha közvetlen a borulás veszélye akkor a biztonság növelése érdekében működésbe lép a fékrendszer. A fék alkalmazása viszont befolyásolja a legyező mozgást és így a valós útvonal jelentősen eltérhet a kívánt útvonaltól. Annak érdekében, hogy kiegyenlítse a legyező mozgás fékezés által okozott változását, a kormányzást szabályozó alrendszernek módosítani kell a követési parancsot, hogy elkerüljük a jármű alul- vagy túlkormányzottságát.
7.2.1. Jármű modellezés
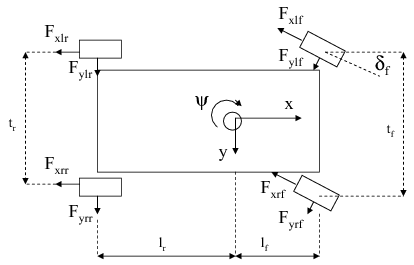
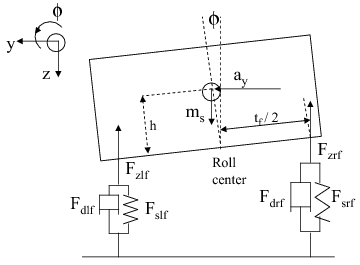
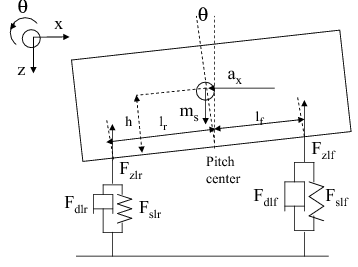
Az egyes gumiabroncsok által létrehozott hosszirányú és oldalirányú  erők az egyes kerekek normális irányú terhelésének és a kerék csúszási szögének következményei. A jármű az első kerekeknél van kormányozva, ahol a kormánykerék szöghelyzete (kormányszög)
erők az egyes kerekek normális irányú terhelésének és a kerék csúszási szögének következményei. A jármű az első kerekeknél van kormányozva, ahol a kormánykerék szöghelyzete (kormányszög)  . Az aktív felfüggesztés által keltett bal és a jobb oldali első és hátsó erőket
. Az aktív felfüggesztés által keltett bal és a jobb oldali első és hátsó erőket  jelöli.
jelöli.
A váz (chassis) függőleges ( ), longitudinális (
), longitudinális ( ), oldalirányú (
), oldalirányú ( ), dőlési (
), dőlési ( ), bólintási (
), bólintási ( ) és legyezési (
) és legyezési ( ) dinamikája a következő egyenletek segítségével van megadva:
) dinamikája a következő egyenletek segítségével van megadva:
| (499) |

| (500) |

| (501) |

| (502) |
| (503) |

| (504) |

| (505) |



Itt  és
és  a váz sebessége az
a váz sebessége az  és
és  -irányban,
-irányban,  és
és  a rugózott tömeg és a rugózatlan tömeg elmozdulása a
a rugózott tömeg és a rugózatlan tömeg elmozdulása a  -irányban
-irányban
A  legyezési dinamika és a súlypont oldalkúszási szögének
legyezési dinamika és a súlypont oldalkúszási szögének  dinamikája közötti kapcsolat
dinamikája közötti kapcsolat
| (506) |

Kis kormányzási szögek mellett a következő közelítésekkel élünk:  és
és  .
.
A lokális szabályozók a különböző összetettségű jármű modellek alapján vannak megtervezve. Az 111 ábra egy komplex járműmodell hosszirányú, keresztirányú és függőleges irányú dinamikáját szemlélteti. A tervezés alapjául az alábbi állpottér-modell áll:
| (507) |

ahol  ,
,  és
és  az állapot, a zavaró bemenet és az irányító bemenet. A
az állapot, a zavaró bemenet és az irányító bemenet. A  vektor tartalmazza az ütemezési változókat. Először az állapot változót határozzuk meg, majd a performancia változók és a mért kimenetek a feladatot figyelembe véve kerülnek megválasztásra.
vektor tartalmazza az ütemezési változókat. Először az állapot változót határozzuk meg, majd a performancia változók és a mért kimenetek a feladatot figyelembe véve kerülnek megválasztásra.
A fékrendszer elsődleges szerepe, hogy csökkentse a jármű haladási sebességét illetve, hogy megállítsa azt. Ugyanakkor egyoldalú  fékerőt is tud generálni az első és a hátsó kerekeken mindkét oldalon. Így a fékrendszer képes arra, hogy kanyarodáskor módosítsa a jármű legyezési szögét és csökkentse az oldalirányú gyorsulás hatását. Így a fék képes helyettesíteni egyéb más komponenseket, ha azok meghibásodnak illetve csökken a hatásosságuk. A kormányzást a kívánt pálya követésére használjuk. A vezérlő bemenet a
fékerőt is tud generálni az első és a hátsó kerekeken mindkét oldalon. Így a fékrendszer képes arra, hogy kanyarodáskor módosítsa a jármű legyezési szögét és csökkentse az oldalirányú gyorsulás hatását. Így a fék képes helyettesíteni egyéb más komponenseket, ha azok meghibásodnak illetve csökken a hatásosságuk. A kormányzást a kívánt pálya követésére használjuk. A vezérlő bemenet a  kormányzási szög. A gyakorlatban a mért jelek ezeknél a feladatoknál az oldalirányú gyorsulás és a legyezési sebesség.
kormányzási szög. A gyakorlatban a mért jelek ezeknél a feladatoknál az oldalirányú gyorsulás és a legyezési sebesség.
Az aktív felfüggesztés biztosítja a menetstabilitást és a megfelelő kényelmet mialatt a közúti egyenetlenségek által okozott káros rezgések hatnak a járműre. A felfüggesztési rendszer képes javítani a bólintási és dőlési stabilitást, bólintó nyomatékot generálva hirtelen fékezés alkalmával vagy forgató nyomatékot hirtelen manőverek során. A
| (508) |
vezérlő bemenetek a felfüggesztési beavatkozók által vannak létrehozva. Általában a mért jelek a rugózott és rugózatlan tömeg közötti relatív elmozdulások.
A sebesség, az oldalirányú tapadási együttható, a felfüggesztési rugók és csillapító elemek nemlineáris hatásait a
| (509) |
ütemezési változók segítségével vesszük figyelembe, ahol  és
és  relatív elmozdulások és a hozzátartozó sebességek. A feltételezés az, hogy a megfelelően kiválasztott
relatív elmozdulások és a hozzátartozó sebességek. A feltételezés az, hogy a megfelelően kiválasztott  ütemezés változók segítségével a nemlineárisokat át lehet alakítani affin paraméter-függő elemekké. A nemlineáris modellek így átalakíthatók lineáris változó paraméterű (LPV) modellekké, ahol a nemlineáris kifejezések alkalmasan kiválasztott ütemezési változókba lesznek elrejtve. Az átalakítás feltétele, hogy a
ütemezés változók segítségével a nemlineárisokat át lehet alakítani affin paraméter-függő elemekké. A nemlineáris modellek így átalakíthatók lineáris változó paraméterű (LPV) modellekké, ahol a nemlineáris kifejezések alkalmasan kiválasztott ütemezési változókba lesznek elrejtve. Az átalakítás feltétele, hogy a  vektort mérni, illetve becsülni lehessen, lásd például [39].
vektort mérni, illetve becsülni lehessen, lásd például [39].
7.2.2. Performancia specifikációk és szabályozótervezés
A lokális komponenseknek is tartalmazniuk kell olyan egységeket amik felügyelik és monitorozzák a jármű működését valamint FDI szűrőket. Ezek az alkatrészek képesek érzékelni a jármű kritikus manővereit, különböző hibajelenségeket vagy performancia degradációkat. Ezek az egységek üzeneteket küldenek a felügyelő rendszerhez. A lokális komponensek újrakonfigurálható és hibatűrő szabályozása során számos jelet kell monitorozni, és új ütemezési változókat kell az ütemezési vektorhoz adni annak érdekében, hogy javuljon a jármű biztonsága (pl. változók kellenek a borulási veszélyét jelzésére, a hirtelen fékezés káros hatásainak észlelésére, az aktív komponensek esetleges meghibásodásának figyelembe vételére.
A hatékony működéshez a felügyelő rendszernek és a helyi vezérlőknek megbízható és pontos információkra van szüksége. Ennek a követelménynek a kielégítésére redundáns érzékelőkre, különböző számítások elvégzésére és hiba észlelésére alkalmas szűrőkre van szükség. A hatékony és optimális beavatkozás érdekében nagyon fontos a hibás érzékelők detektálása, mivel ezeket, az általuk szolgáltatott információt, helyettesíteni kell azokban a műveletekben ahol szerepet játszanak. A jármű ipar az alacsony költségű megoldásokat részesíti előnyben, így egyszerű érzékelőket és lehetőleg szoftver alapú redundanciát kell alkalmazni.
A helyi vezérlés tervezése során kidolgozott zárt rendszer magában foglalja a  modellt, a szabályozót és a minőségi követelményekkel kapcsolatos tényezők visszacsatolási struktúráját:
modellt, a szabályozót és a minőségi követelményekkel kapcsolatos tényezők visszacsatolási struktúráját:
| (510) |

ahol  magában foglalja mind a külső zavarokat, mind a zajokat. Egy tipikus összekapcsolási struktúra látható a 112 ábrán. Ezekből a tényezőkből áll össze a paraméterfüggő
magában foglalja mind a külső zavarokat, mind a zajokat. Egy tipikus összekapcsolási struktúra látható a 112 ábrán. Ezekből a tényezőkből áll össze a paraméterfüggő  általánosított rendszer. A
általánosított rendszer. A  szabályozó alkalmazásával kapjuk az
szabályozó alkalmazásával kapjuk az  zárt rendszert egy lineáris tört transzformáció (LFT) által leírt struktúrában.
zárt rendszert egy lineáris tört transzformáció (LFT) által leírt struktúrában.
A javasolt eljárás keretében a minőségi követelmények a  súlyozások megfelelő választása által specifikálódnak a tervezési folyamat során. A
súlyozások megfelelő választása által specifikálódnak a tervezési folyamat során. A  súlyozás célja általában büntető függvények meghatározása, például a súly nagy ha kis jeleket akarunk és kisebb ha nagyobb performancia kimenetek megengedettek. A bemutatott megközelítés a performanciák rekonfigurációját a súlyozás megfelelő változtatásával, ütemezésével oldja meg.
súlyozás célja általában büntető függvények meghatározása, például a súly nagy ha kis jeleket akarunk és kisebb ha nagyobb performancia kimenetek megengedettek. A bemutatott megközelítés a performanciák rekonfigurációját a súlyozás megfelelő változtatásával, ütemezésével oldja meg.
A  blokk tartalmazza a rendszerben jelenlevő bizonytalanságot, mint például a nem modellezett bizonytalanságot és a parametrikus bizonytalanságokat. Ebben a kiegészített rendszermodellben a nem modellezett bizonytalanság egy
blokk tartalmazza a rendszerben jelenlevő bizonytalanságot, mint például a nem modellezett bizonytalanságot és a parametrikus bizonytalanságokat. Ebben a kiegészített rendszermodellben a nem modellezett bizonytalanság egy  súllyal és egy
súllyal és egy  normált bizonytalansági blokkal van jelen. A
normált bizonytalansági blokkal van jelen. A  és
és  súlyok célja a zavarások és a szenzor zajok megjelenítése a modellben.
súlyok célja a zavarások és a szenzor zajok megjelenítése a modellben.
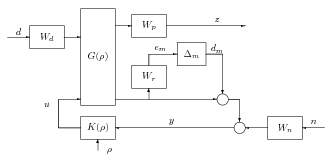
A javasolt megoldásban a lokális irányítási algoritmusok tervezése az LPV módszer segítségével történik. Az LPV tervezési módszerek jól kidolgozott és sikeresen alkalmazott eljárások a különböző ipari problémák megoldására. Az LPV megközelítés teszi lehetővé számunkra, hogy figyelembe tudjuk venni a nemlineáris hatásokat az állapotteres leírás során. A javasolt megközelítés kulcsfontosságú eleme az, hogy a lokális komponensek tervezésében a felügyelőtől származó ütemezési változókat használjuk az integráció kikényszerítésére. Ezen a módon a lokális irányítást ki lehet bővíteni újrakonfigurálható és hibatűrő funkciókkal.
A kvadratikus LPV performancia probléma célja,hogy egy  paraméter-változós vezérlést tervezzünk úgy, hogy az
paraméter-változós vezérlést tervezzünk úgy, hogy az  zárt rendszer kvadratikus stabilis legyen és a
zárt rendszer kvadratikus stabilis legyen és a  -ről
-ről  -re vett indukált
-re vett indukált  norma (erősítés) legyen
norma (erősítés) legyen  -nál kisebb, azaz
-nál kisebb, azaz
| (511) |

Strukturálatlan bizonytalanságot feltételezve és a súlyozott kis erősítések tételét alkalmazva az LPV  -performancia probléma megoldása visszavezethető egy lineáris mátrix egyenlőtlenségeket (LMI) tartalmazó feladatra, ami numerikusan kezelhető, lásd például [128]. A stabilitás és az elvárt performancia megléte a tervezési folyamat által garantált, lásd [10], [130].
-performancia probléma megoldása visszavezethető egy lineáris mátrix egyenlőtlenségeket (LMI) tartalmazó feladatra, ami numerikusan kezelhető, lásd például [128]. A stabilitás és az elvárt performancia megléte a tervezési folyamat által garantált, lásd [10], [130].
Ha a paraméter-függő Lyapunov függvényt használunk, a tervezett szabályozó általában explicit módon függ a  deriváltaktól. Ezek nem mérhetek a gyakorlatban, így megfelelően közelítő numerikus algoritmust kell használni ezeknek a paramétereknek a becslésére. A
deriváltaktól. Ezek nem mérhetek a gyakorlatban, így megfelelően közelítő numerikus algoritmust kell használni ezeknek a paramétereknek a becslésére. A  -tól való függés kiküszöbölésére egy
-tól való függés kiküszöbölésére egy  függő változócserét javasolt [10].
függő változócserét javasolt [10].
7.3. A lokális irányítási rendszerek trervezése
7.3.1. A fékrendszer
A járműre ható nyomatékokat leíró egyensúlyi kifejezés:
| (512) |

A dőlési (roll) stabilitás azáltal érhető el, hogy mindkét tengelyen csökkentjük az oldalirányú kerékterhelést egy olyan szint alá, ami biztosítja a jármű úttartását a különböző manőverek során. Az oldalirányú kerékterhelést tengelyenként megadó kifejezés:  . A kerekek elemelkedését megakadályozó feltétel
. A kerekek elemelkedését megakadályozó feltétel  a jármű mindkét oldalán. Az oldalirányú kerékterhelés normalizált értékeit
a jármű mindkét oldalán. Az oldalirányú kerékterhelés normalizált értékeit  és a tengelyeket terhelő a tömegek aránya:
és a tengelyeket terhelő a tömegek aránya:
| (513) |

A tervezés célja, hogy csökkentse a normalizált oldalirányú kerékterhelés maximális értékét, ha az meghalad egy előre meghatározott kritikus értéket.
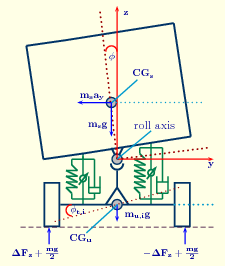
A fékrendszer tervezésekor az irányító jel a fékerők különbsége, míg a performancia jel az oldalirányú gyorsulás:
| (514) |

Az oldalirányú gyorsulás súlyozására
lett választva, ahol  alkalmasan választott időállandók. Itt
alkalmasan választott időállandók. Itt  az az erősítés, amely tükrözi az oldalirányú gyorsulás relatív fontosságát és amit paraméter-függőnek választunk, azaz
az az erősítés, amely tükrözi az oldalirányú gyorsulás relatív fontosságát és amit paraméter-függőnek választunk, azaz  függvényének.
függvényének.
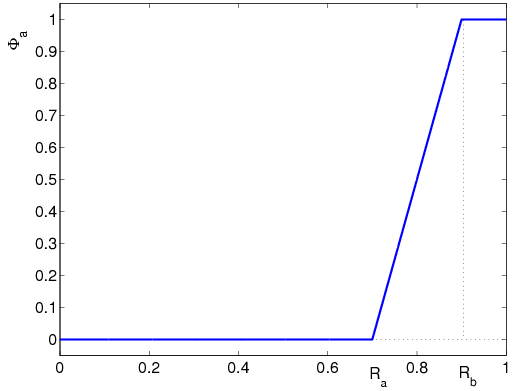
Amikor  kicsi (
kicsi ( ), vagyis a jármű nincs vészhelyzetben, akkor
), vagyis a jármű nincs vészhelyzetben, akkor  is kicsi, ami azt jelzi, hogy a LPV irányításnak nem kell csökkenteni a gyorsulást. Amikor
is kicsi, ami azt jelzi, hogy a LPV irányításnak nem kell csökkenteni a gyorsulást. Amikor  megközelíti a kritikus értéket, azaz, amikor
megközelíti a kritikus értéket, azaz, amikor  , akkor
, akkor  nagy. Ez azt jelenti, hogy a szabályozás arra összpontosít, hogy a borulást megelőzze. Itt
nagy. Ez azt jelenti, hogy a szabályozás arra összpontosít, hogy a borulást megelőzze. Itt  határozza meg azt a kritikus állapotot amikor a jármű vészhelyzetben, azaz borulás közeli helyzetben, van. Megjegyezzük, hogy a használt súlyok PD (arányos/differnciáló) tipusúak. Az időállandók és az erősítések értékei a különböző performancia jelek elvárt egyensúlyi helyzetét, valamint tranziens viselkedését tükrözik.
határozza meg azt a kritikus állapotot amikor a jármű vészhelyzetben, azaz borulás közeli helyzetben, van. Megjegyezzük, hogy a használt súlyok PD (arányos/differnciáló) tipusúak. Az időállandók és az erősítések értékei a különböző performancia jelek elvárt egyensúlyi helyzetét, valamint tranziens viselkedését tükrözik.
Ha a felfüggesztési rendszer rendszer hibát észlel, a dőlési stabilitási szerepét a fék rendszer fogja helyettesíteni. A fékrendszer egy kisebb kritikus értéken aktiválódik, mint a hibamentes esetben, azaz, ha  . Ebből következően, a fékrendszer viselkedése módosul és a fékezés által gerjesztett nyomaték átveszi a meghibásodott felfüggesztés szerepét. A módosított kritikus érték az alábbi:
. Ebből következően, a fékrendszer viselkedése módosul és a fékezés által gerjesztett nyomaték átveszi a meghibásodott felfüggesztés szerepét. A módosított kritikus érték az alábbi:
| (515) |

ahol  egy előre meghatározott állandó.
egy előre meghatározott állandó.
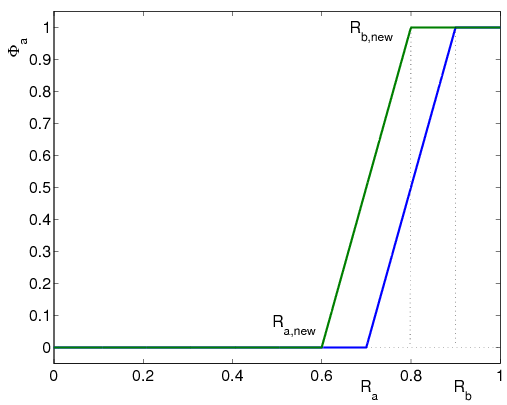
A kormány rendszer hibája esetén ( ) a fékrendszernek a jármű legyezési dinamikájára kell koncentrálni annak érdekében, hogy csökkentse a követési hibát. Így a fékrendszer szabályozásának tervezése során a kormány rendszerre vonatkozó performancia specifikációt is figyelembe kell venni:
) a fékrendszernek a jármű legyezési dinamikájára kell koncentrálni annak érdekében, hogy csökkentse a követési hibát. Így a fékrendszer szabályozásának tervezése során a kormány rendszerre vonatkozó performancia specifikációt is figyelembe kell venni:
| (516) |

ahol  választása
választása
| (517) |
szerint történik.
A fékrendszer performancia csökkenése esetén az nem tud megfelelő nyomatékot generálni a dőlési stabilitás növelése érdekében. Ebben az esetben a helyébe lép a kormány rendszer, ami megkapja a hiba üzenetet és módosítja a működését oly módon, hogy az oldalirányú terhelést csökkentse. Ennek a megoldásnak a nehézsége az, hogy a követési feladat performancia romlása elkerülhetetlen, ezért a kormány rendszer feladata egyensúlyt keresni a követési feladat és a borulásgátlás között.
7.3.2. A kormányzó rendszer tervezése
A keresztirányú stabilitás azáltal érhető el, hogy csökkentjük az oldalirányú kerék terhelést. A tervezés célja, hogy a szabályozó minimalizálja a keresztirányú gyorsulást, amit egy  performancia jellel monitoroz. Az egyik megoldás az egyoldalú fékezés, mely fékerőket generál annak érdekében, hogy stabilizáló legyezési nyomatékot hozzon létre. A másik megoldás során további kormányzási szög keletkezik annak érdekében, hogy csökkentsük a keresztirányú kerék terhelést. Ez a megoldás azonban aktív vezetői beavatkozást feltételez a járművezető részéről, annak érdekében, hogy a járművet a szándékolt pályán tartsa.
performancia jellel monitoroz. Az egyik megoldás az egyoldalú fékezés, mely fékerőket generál annak érdekében, hogy stabilizáló legyezési nyomatékot hozzon létre. A másik megoldás során további kormányzási szög keletkezik annak érdekében, hogy csökkentsük a keresztirányú kerék terhelést. Ez a megoldás azonban aktív vezetői beavatkozást feltételez a járművezető részéről, annak érdekében, hogy a járművet a szándékolt pályán tartsa.
Egy másik irányítási feladat, hogy kövessünk egy előre megadott legyezési dinamikát (sebesség, szög). Ebben az esetben az aktuális legyezési szögsebességet folyamatosan ellenőrizni kell és a referencia- és az aktuális sebesség közötti különbséget meg kell határozni. A cél a lehető legkisebbre csökkentik a  követési hibát.
követési hibát.
Annak érdekében, hogy a kormányrendszer szabályozója megoldja a legyezési szögsebesség követését, a  vezérlő jelet át kell adni a szabályozónak. A vezérlő jel egy előre meghatározott referencia elmozdulás és a performancia jel pedig a
vezérlő jelet át kell adni a szabályozónak. A vezérlő jel egy előre meghatározott referencia elmozdulás és a performancia jel pedig a  követési hiba, ami a tényleges legyezési szögsebesség és a referencia jel közötti különbség. A nyomkövetési hibát súlyozó függvény alakja
követési hiba, ami a tényleges legyezési szögsebesség és a referencia jel közötti különbség. A nyomkövetési hibát súlyozó függvény alakja
| (518) |
ahol  időállandók és ahol a követési hiba állandósult értékét kell az
időállandók és ahol a követési hiba állandósult értékét kell az  szint alatt tartani.
szint alatt tartani.
7.3.3. A felfüggesztési rendszer tervezése
Road holding is achieved by reducing the normalized suspension deflections  between the sprung and unsprung masses at the four corner points of the vehicle. Since increasing road holding reduces the passenger comfort in the design of the suspension system its desired level is subject of a design decision.
between the sprung and unsprung masses at the four corner points of the vehicle. Since increasing road holding reduces the passenger comfort in the design of the suspension system its desired level is subject of a design decision.
Az úttartást a felfüggesztés a négy sarkokpontján levő rugózott és rugózatlan tömegek közötti  normalizált relatív elmozdulásának csökkentésével érjük el. Mivel az úttartás növelése egy szint után csökkenti az utaskényelmet, a felfüggesztési rendszer tervezésekor a kívánt szintek meghatározása egy tervezési döntés eredménye.
normalizált relatív elmozdulásának csökkentésével érjük el. Mivel az úttartás növelése egy szint után csökkenti az utaskényelmet, a felfüggesztési rendszer tervezésekor a kívánt szintek meghatározása egy tervezési döntés eredménye.
A felfüggesztési szabályozás alapjául szolgáló jelek:
| (519) |

A cél az, hogy a  vertikális gyorsulások, az
vertikális gyorsulások, az  relatív elmozdulások, a
relatív elmozdulások, a  kerékelmozdulások és a szabályozó jelek a teljes működési tartományon kicsik legyenek. A megfelelő performancia súlyokat az alábbi módon választjuk meg:
kerékelmozdulások és a szabályozó jelek a teljes működési tartományon kicsik legyenek. A megfelelő performancia súlyokat az alábbi módon választjuk meg:
| (520) |

| (521) |

| (522) |

ahol  és
és  időállandók, míg
időállandók, míg  paraméterfüggő erősítések, amik a
paraméterfüggő erősítések, amik a  relatív elmozdulások függvényei.
relatív elmozdulások függvényei.
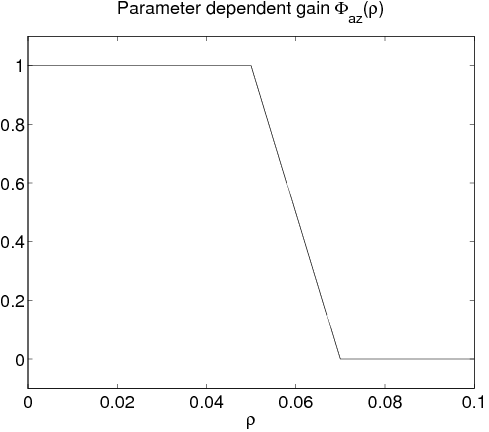
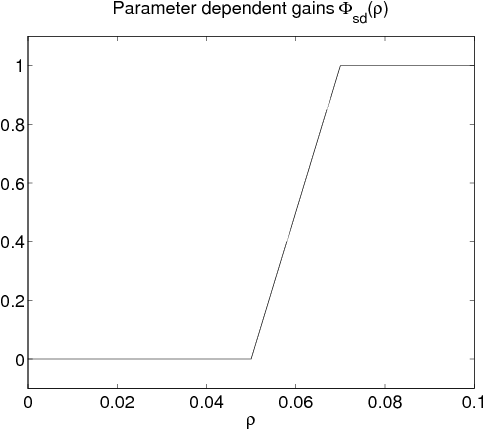
Normális körülmények közt a felfüggesztési rendszer a hagyományos performanciák szerint működik a paraméter-függő erősítések szerint, amelyek a relatív elmozdulások függvényei. Az utaskényelem és úttartás közötti konfliktus annak köszönhető, hogy nem lehet őket egyszerre kielégíteni. Egy nagy  és egy kis
és egy kis  erősítés felel meg egy olyan konfigurációnak, amely hangsúlyozza az utasok kényelmét, míg kis
erősítés felel meg egy olyan konfigurációnak, amely hangsúlyozza az utasok kényelmét, míg kis  és nagy
és nagy  az úttartásra koncentrál.
az úttartásra koncentrál.
Az újrakonfigurálható felfüggesztési rendszer tervezésének alapja az a tény, hogy az aktív felfüggesztés rendszer nem csak az út egyenetlenségei által okozott hatás kiküszöbölésére alkalmas, hanem dőlési nyomatékokat is létrehozhat a dőlési stabilitás javítása érdekében illetve bólintó nyomatékot a bólintó stabilitás javítása érdekében. Az újrakonfigurálható rendszer
| (523) |

| (524) |

paraméter függő súlyait a  normalizált oldalirányú kerék terhelés és a
normalizált oldalirányú kerék terhelés és a  normalizált bólintási szög függvényeként választjuk. Ha
normalizált bólintási szög függvényeként választjuk. Ha  meghalad egy előre meghatározott kritikus értéket, azaz amikor
meghalad egy előre meghatározott kritikus értéket, azaz amikor  , akkor a szabályozónak a bólintási stabilitásra kell fókuszálni. Vészhelyzet esetén azonban, azaz, ha
, akkor a szabályozónak a bólintási stabilitásra kell fókuszálni. Vészhelyzet esetén azonban, azaz, ha  , akkor a felfüggesztési rendszernek csökkentenie kell a dőlési kockázatot, azonban ezzel egy időben az utasokkényelem és előírt bólintási szögtartás már nem prioritás.
, akkor a felfüggesztési rendszernek csökkentenie kell a dőlési kockázatot, azonban ezzel egy időben az utasokkényelem és előírt bólintási szögtartás már nem prioritás.
7.3.4. Beavatkozók megválasztása
A tervezés során a kerék erőket is figyelembe kell venni. Elsőkerék-hajtású jármű esetén a vonóerő a differenciálmű segítségével oszlik meg az első kerekek között. A  maximális kormányzási szögnek konstrukciós korlátozása van, tehát ha elértük a maximális kormányzási szöget akkor kívánt keresztirányú jármű dinamikát fékezéssel kell elérni. Fékezés közben a kerékterhelés módosul jármű bólintási dinamikája miatt. Az első kerekek erősebb fékezése közben a hátsó kereken csökkenteni kell a fékerőt. A megcsúszás elkerülése végett folyamatosan figyelni kell a pillanatnyi fékerőket. Ehhez a
maximális kormányzási szögnek konstrukciós korlátozása van, tehát ha elértük a maximális kormányzási szöget akkor kívánt keresztirányú jármű dinamikát fékezéssel kell elérni. Fékezés közben a kerékterhelés módosul jármű bólintási dinamikája miatt. Az első kerekek erősebb fékezése közben a hátsó kereken csökkenteni kell a fékerőt. A megcsúszás elkerülése végett folyamatosan figyelni kell a pillanatnyi fékerőket. Ehhez a  súrlódási együttható becslése szükséges ami szintén kell a maximális kanyarodási sebesség kiszámításához.
súrlódási együttható becslése szükséges ami szintén kell a maximális kanyarodási sebesség kiszámításához.
A kerekeken ható maximális  hosszirányú erőket meg kell határozni és összehasonlítani az
hosszirányú erőket meg kell határozni és összehasonlítani az  pillanatnyi hosszanti erőkkel. Fontos megjegyezni, hogy a maximális hosszirányú erő függ a maximális tapadási együtthatótól és a kerék erő függőleges statikus és a dinamikus komponensétől, vagyis a kereszt és hosszirányú dinamikától.
pillanatnyi hosszanti erőkkel. Fontos megjegyezni, hogy a maximális hosszirányú erő függ a maximális tapadási együtthatótól és a kerék erő függőleges statikus és a dinamikus komponensétől, vagyis a kereszt és hosszirányú dinamikától.  az erők arányainak maximális értéke az összes kereket igyelembe véve,
az erők arányainak maximális értéke az összes kereket igyelembe véve,  pedig egy tervezési paraméter.
pedig egy tervezési paraméter.
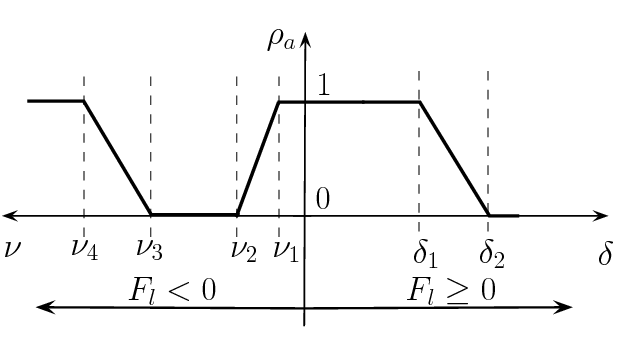
A tervezési stratégiában a  súlyozási paraméter, ami a jármű állapotától függ, vagyis a vonóerőtől és a fékerőktől, kapő fontos szerepet, lásd az 118 ábrát.
súlyozási paraméter, ami a jármű állapotától függ, vagyis a vonóerőtől és a fékerőktől, kapő fontos szerepet, lásd az 118 ábrát.
7.4. Hibatűrő rendszer tervezése
A lokális hibatűrő szabályozásoknak szükségük van a detektált hiba információra. Itt egy adott szűrő FDI által szolgáltatott normalizált hibajel
| (525) |

ahol  az aktuális hiba nagyságának becsült értéke (az FDI szűrő kimenete) és
az aktuális hiba nagyságának becsült értéke (az FDI szűrő kimenete) és  a potenciális hibahatás várható maximális értéke (végzetes hiba).
a potenciális hibahatás várható maximális értéke (végzetes hiba).  egy aktív komponens performanciájának romlását becsli.
egy aktív komponens performanciájának romlását becsli.
A kapcsolási struktúra magában foglalja a  függőleges járműmodellt, az
függőleges járműmodellt, az  FDI szűrőt és a performancia célokkal összefüggő elemeket (súlyokat).
FDI szűrőt és a performancia célokkal összefüggő elemeket (súlyokat).
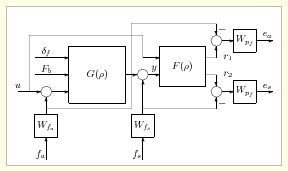
A  súly a hiba jel relatív fontosságát tükrözi. Ez a súly nagy ahol kicsi hibák és kisebb ahol nagyobb hibák megengedettek. A
súly a hiba jel relatív fontosságát tükrözi. Ez a súly nagy ahol kicsi hibák és kisebb ahol nagyobb hibák megengedettek. A  súly meghatározza a lehetséges hiba mértékét az adott beavatkozó csatornában, míg a
súly meghatározza a lehetséges hiba mértékét az adott beavatkozó csatornában, míg a  súly meghatározza a lehetséges hiba mértékét az adott érzékelő csatornában.
súly meghatározza a lehetséges hiba mértékét az adott érzékelő csatornában.
A hibajelre vonatkozó  tervezési követelmény a lehető legnagyobb hiba hatást elérni a szűrő kimenetén és ezzel egy időben minimálisra csökkenteni az exogén jelek (
tervezési követelmény a lehető legnagyobb hiba hatást elérni a szűrő kimenetén és ezzel egy időben minimálisra csökkenteni az exogén jelek ( ) hatását, azaz
) hatását, azaz
| (526) |
A nyitott hurokban tervezett szűrő FDI használható a zárt rendszerben is. A szűrő megkapja a mért kimeneteket és a vezérlő bemenetek és ennek alapján szolgáltatja a hibajelet.
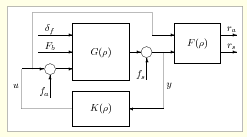
The fault-tolerant control requires fault information in order to guarantee performances and modify its operation. Thus, FDI filters are also designed for the operation of the actuators. As an example the fault information provided by a fault detection filter is given by  , where
, where  is an estimation of the failure (output of the FDI filter) and
is an estimation of the failure (output of the FDI filter) and  is an estimation of the maximum value of the potential failure (fatal error). The value of a possible fault is normalized into the interval
is an estimation of the maximum value of the potential failure (fatal error). The value of a possible fault is normalized into the interval  . The estimated value
. The estimated value  means the rate of the performance degradation of an active component.
means the rate of the performance degradation of an active component.
A hibatűrő szabályozónak szüksége van a hibainformációra annak érdekében, hogy módosítsa a működését és garantáljon egy előírt performanciát. Így FDI szűrőket kell tervezni a beavatkozó elemekhez is. Az érzékelő meghibásodását a lehető legpontosabban kell detektálni, mert a szabályozás mérések alapján történik. Szenzor hiba megakadályozhatja egyes beavatkozók felhasználását; így az érzékelő meghibásodása beavatkozó rekonfigurációt eredményezhet.
7.5. Szimulációs példák
7.5.1. A hibadetektálás illusztrálása
Az FDI szűrő működését egy manőver során mutatjuk be. Az a szimulációban alkalmazott kormányzási szög egy egységugrás, a jármű sebessége 
 . A manőver közben a fékrendszert a jármű lassítására használjuk.
. A manőver közben a fékrendszert a jármű lassítására használjuk.
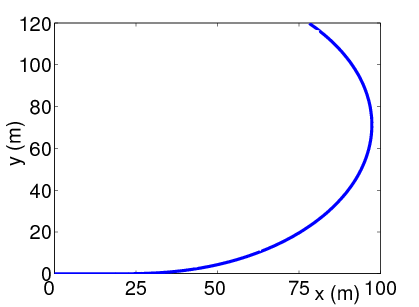
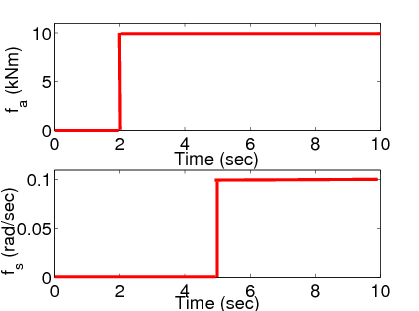
A zárt kör szimulációs forgatókönyvének adatai: 
 destabilizáló nyomaték a második másodperctől és
destabilizáló nyomaték a második másodperctől és 
 szenzorhiba az ötödik másodperctől. Az érzékelő hibája azt jelenti, hogy a
szenzorhiba az ötödik másodperctől. Az érzékelő hibája azt jelenti, hogy a  érzékelő egy állandó additív hibával terhelt jelet mér.
érzékelő egy állandó additív hibával terhelt jelet mér.
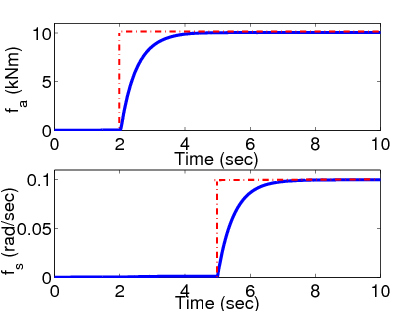
Az első hibajelek az aktuátor hibát míg a többi az érzékelő hibát mutatja. A a két hiba hatása szétcsatolódik és a becsült hibajelek elfogadható információt adnak a ténylegesen bekövetkező hibákról.
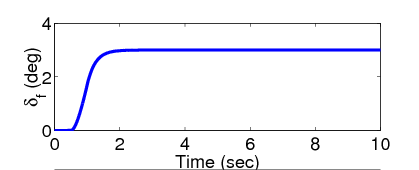
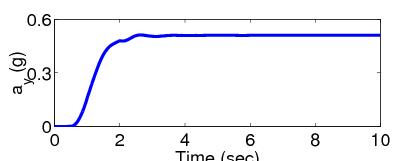
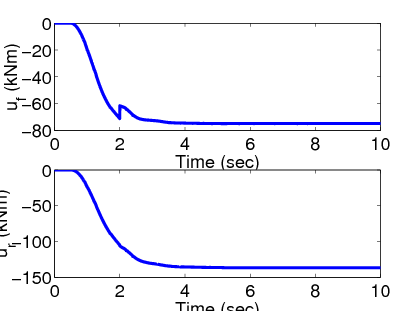
7.5.2. Hibatűrő szabályozás illusztrálása
A kanyarodási manőver az első másodpercben indul és a negyedik másodpercben egy hatalmas bukkanó zavarja meg a jármű mozgását.
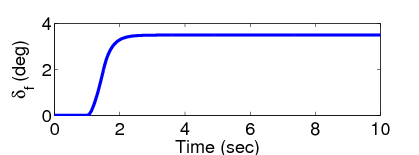
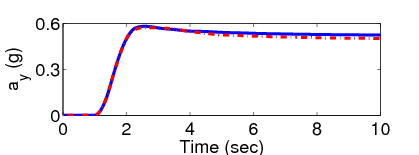
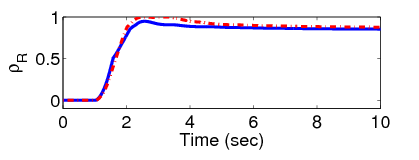
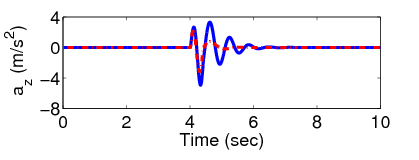
Az újrakonfigurálható manőver során a jármű potenciális felborulása kritikus helyzetet hoz létre és a felfüggesztési rendszer nyomatékot generál a dőlési nyomatékok kiegyensúlyozásának érdekében, így a szabályozó csak a normalizált oldalirányú kerék terhelés csökkentésére fókuszál.
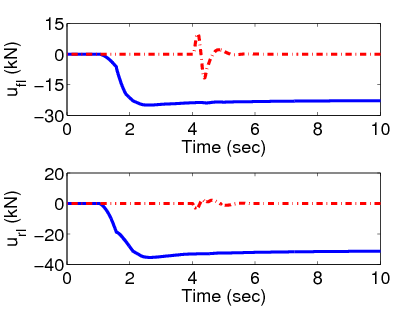
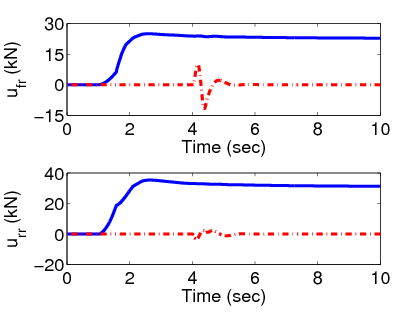
Azt feltételezzük, hogy a felfüggesztési beavatkozó hibáját már detektáltuk. Az észlelt hibának megfelelően a fékrendszer a kritikus normalizált oldalirányú terhelés kisebb értéke esetén lép működésbe. Sőt, a felfüggesztés hibája esetén a szükséges fékerőt hosszabb ideig működtetjük.
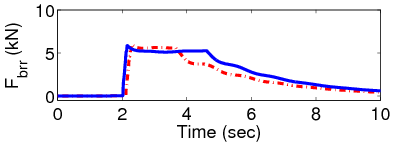
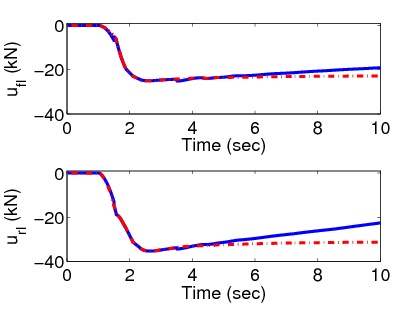
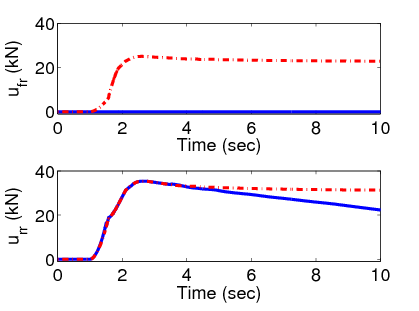
7.5.3. A beavatkozók kiválasztásának szemléltetése
A kanyarodási manőver során a sebességkövetés és az oldalirányú elmozdulás minimalizálása nagy fékerőt igényel a kerekeken. A  értéke csökken a nagyobb sebesség miatt. Ez azt jelenti, hogy a gyorsítás során a differenciális fékezést kell előnyben részesíteni, mivel az gyorsabb dinamikájú.
értéke csökken a nagyobb sebesség miatt. Ez azt jelenti, hogy a gyorsítás során a differenciális fékezést kell előnyben részesíteni, mivel az gyorsabb dinamikájú.
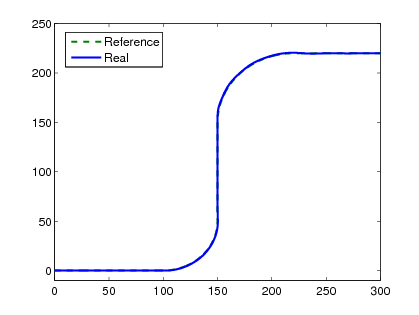
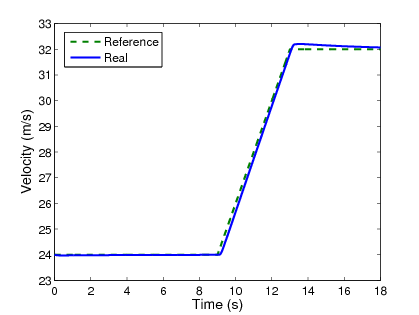
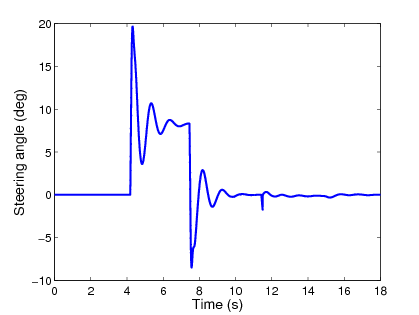
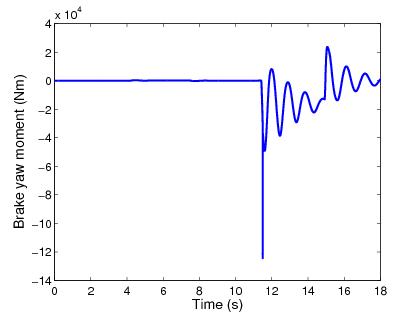
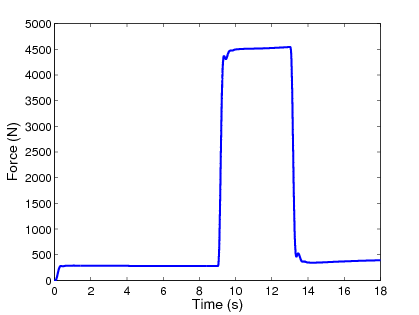
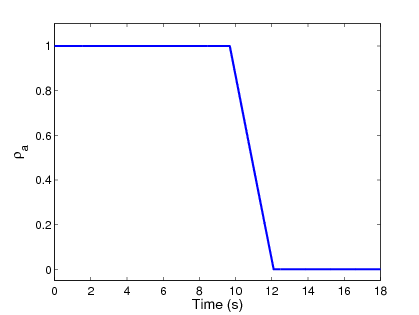
Irodalomjegyzék
[1] E. Abdellahi, D. Mehdi, and M. M'Saad. On the design of active suspension system by  and mixed
and mixed  : An LMI approach. Proc. of the American Control Conference, 1:21--25, 1992.
: An LMI approach. Proc. of the American Control Conference, 1:21--25, 1992.
[2] A. Alleyne and J.K. Hedrick. Nonlinear control of a quarter car active suspension. Proc. of the American Control Conference, 1:21--25, 1992.
[3] A. Alleyne and J.K. Hedrick. Nonlinear adaptive control of active suspensions. IEEE Transactions on Control Systems Technology, pages 94--101, 1995.
[4] A. Alleyne and R. Liu. A simplified approach to force control for electro-hydraulic systems. Control Engineering Practice, 8:1347--1356, 2000.
[5] A. A. Alonso, J. R. Banga, and I. Sanchez. Passive control design for distributed process systems: Theory and applications. AIChE Journal, 46:1593--1606, 2000.
[6] V. I. Arnold. Ordinary Differential Equations (in Russian). Nauka, Moscow, 1984.
[7] V.I. Arnold. Mathematical methods of classical mechanics. Springer-Verlag, 1988.
[8] Karl J. Aström and Björn Wittenmark. Computer Controlled Systems. Prentice Hall, New Jersey, 1990.
[9] G. Balas, J.C. Doyle, K. Glover, A. Packard, and R. Smith.  -analysis and synthesis toolbox. The Mathworks Inc., 1993.
-analysis and synthesis toolbox. The Mathworks Inc., 1993.
[10] G. Balas, I. Fialho, L. Lee, V. Nalbantoglu, A. Packard, W. Tan, G. Wolodkin, and F. Wu. Theory and application of linear parameter varying control techniques. Proc. of the American Control Conference, 1997.
[11] M. Basseville and I.V. Nikiforov. Detection of Abrupt Changes. Theory and Practice. Prentice Hall, London, 1993.
[12] G. Becker and A. Packard. Robust performance of linear parametrically varying systems using parametrically-dependent linear feedback. System Control Letters, 23:205--215, 1994.
[13] Ludwig Bieberbach. Theorie der differentialgleichungen. Springer Verlag, Berlin, 1930.
[14] M. Blanke, M. Kinnaert, J. Lunze, and M. Staroswiecki. Diagnosis and fault-tolerant control. Springer, 2003.
[15] J. Bokor and G. Balas. Linear parameter varying systems: A geometric theory and applications. 16th IFAC World Congress, Prague, 2005.
[16] J. Bokor and P. Gáspár. Irányítástechnika járműdinamikai alkalmazásokkal. TypoTex Kiadó, 2008.
[17] C. Briat, O. Sename, and J.F. Lafay. Delay-scheduled state-feedback design for time-delay systems with time-varying delays: A LPV approach. Systems and Control Letters, 58:664--671, 2009.
[18] G.D. Buckner, K.T. Schuetze, and J.H. Beno. Active vehicle suspension control using intelligent feedback linearization. Proc. of the American Control Conference, pages 4014--4018, 2000.
[19] C. I. Byrnes and A. Isidori. A frequency domain philosophy for nonlinear systems. IEEE Conf. Dec. Contr., 23:1569--1573, 1984.
[20] C. I. Byrnes and A. Isidori. Local stabilization of minimum-phase nonlinear systems. Syst. Contr. Lett., 11:9--17, 1988.
[21] C. I. Byrnes and A. Isidori. Asymptotic stabilization of minimum-phase nonlinear systems. IEEE Trans. Aut. Contr., AC-36:1122--1137, 1991.
[22] C. I. Byrnes, A. Isidori, and J. C. Willems. Passivity, feedback equivalence and the global stabilization of minimum-phase nonlinear systems. IEEE Trans. Aut. Contr., AC-36:1228--1240, 1991.
[23] M. Canale, M. Milanese, C. Novara, and Z. Ahmad. Semi-active suspension control using fast model predictive techniques. IEEE, Control System Technology, 2006.
[24] Y.Y. Cao and K. Fang. Parameter-dependent Lyapunov function approach to stability analysis and design for polytopic systems with input saturation. Asian Journal of Control, 9(1):1--10, 2007.
[25] D. Cebon. Interaction between heavy vehicles and roads. SAE-SP 951, 1993.
[26] D.J. Cole. Fundamental issues in suspension design for heavy road vehicles. Vehicle System Dynamics, 35:319--360, 2001.
[27] D.A. Crolla. Active suspension control algorithms for a four-wheel vehicle model. International Journal of Vehicle Design, 13(2):144--158, 1992.
[28] F. J. D'Amato and D.E. Viassolo. Fuzzy control for active suspensions. Mechatronics, 10:897--920, 2000.
[29] B. de Jager. Multiobjective suspension control problem. Proc. of the Conference on Decision and Control, New Orleans, 4:3652--3657, 1995.
[30] H. Nijmeijer A. J. Van der Schaft. Nonlinear dynamical control systems. Springer, New York, Berlin, 1990.
[31] C. A. Desoer and M. Vidyasagar. Feed-back systems: Input-output properties. Academic Press, New York, 1975.
[32] S. Diop, J. W. Grizzle, and F. Chaplais. On numerical differentiation algorithms for nonlinear estimation. In Proceedings of the 39th IEEE Conference on Decision and Control, Sydney, Australia, pages 1133--1138. 2000.
[33] H. Du and N. Zhang.  control of active vehicle suspensions with actuator time delay. Journal of Sound and Vibration, 301:236--252, 2007.
control of active vehicle suspensions with actuator time delay. Journal of Sound and Vibration, 301:236--252, 2007.
[34] I.J. Fialho and G.J. Balas. Design of nonlinear controllers for active vehicle suspensions using parameter-varying control synthesis. Vehicle System Dynamics, 33:351--370, 2000.
[35] I.J. Fialho and G.J. Balas. Road adaptive active suspension design using linear parameter-varying gain-scheduling. IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY,, 10(1):43--54, 2002.
[36] T. Fukao, A. Yamawaki, and N. Adachi. Adaptive control of partially known systems and application to active suspensions. Asian Journal of Control, 4(2):199--205, 2002.
[37] P. Gahinet and P. Apkarian. A linear matrix inequality approach to  control. International Journal of Robust and Nonlinear Control, 4:421--448, 1994.
control. International Journal of Robust and Nonlinear Control, 4:421--448, 1994.
[38] P. Gahinet and P. Apkarian. Explicit controller formulas for LMI-based  synthesis. Automatica, 32:1007--1014, 1996.
synthesis. Automatica, 32:1007--1014, 1996.
[39] P. Gaspar, Z. Szabo, and J. Bokor. Estimation of the friction coefficient for road vehicles. American Control Conference, 2005.
[40] T.D. Gillespie. Fundamentals of vehicle dynamics. Society of Automotive Engineers Inc., 1992.
[41] T. Gordon. An integrated strategy for the control of a full vehicle active suspension system. Vehicle System Dynamics, 25:229--242, 1996.
[42] T. Gordon, M. Howell, and F. Brandao. Integrated control methodologies for road vehicles. Vehicle System Dynamics, 40:157--190, 2003.
[43] V.E. Gough and G.R. Shearer. Front suspension and tyre wear. The Institution of Mechanical Engineers, Proceedings of the Automobile Division, pages 171--216, 1955-1956.
[44] E. Guglielmino, T. Sireteanu, C. W. Stammers., G. Ghita, and M.Giuclea. Semi-active suspension control. Springer, 2008.
[45] P. Gáspár, Z. Szabó, and J. Bokor. Design of reconfigurable and fault-tolerant suspension systems based on lpv methods. Conference on Decision and Control, Cancun, Mexico, 2008.
[46] P. Gáspár, Z. Szabó, and J. Bokor. LPV design of reconfigurable and integrated control for road vehicles. Proc. of the Conference on Decision and Control, Orlando, Fl, 2011.
[47] P. Gáspár, Z. Szabó, and J. Bokor. LPV design of fault-tolerant control for road vehicles. International Journal of Applied Mathematics and Computer Science, 22(1), 2012.
[48] P. Gáspár, I. Szászi, and J. Bokor. Active suspension design using linear parameter varying control. International Journal of Vehicle Autonomous Systems, 1(2):206--221, 2003.
[49] P. Gáspár, I. Szászi, and J. Bokor. Active suspension design using the mixed  synthesis. Vehicle System Dynamics, 40(4):193--228, 2003.
synthesis. Vehicle System Dynamics, 40(4):193--228, 2003.
[50] P. Gáspár, I. Szászi, and J. Bokor. Design of robust controllers for active vehicle suspension using the mixed  synthesis. Vehicle System Dynamics, 40:193--228, 2003.
synthesis. Vehicle System Dynamics, 40:193--228, 2003.
[51] P. Gáspár, I. Szászi, and J. Bokor. Active suspension design using linear parameter varying control. IFAC Symposium on Advances in Automotive Control, Salerno, 2004.
[52] A. Hac. Adaptive control of vehicle suspension. Vehicle System Dynamics, 16:57--74, 1987.
[53] J.K. Hedrick and T. Butsuen. Invariant properties of automotive suspensions. Proc. of the Institution of Mechanical Engineers, 204:21--27, 1990.
[54] R. Hermann and A. J. Krener. Nonlinear controllability and observability. IEEE Trans. Aut. Cont., 22:728--740, 1977.
[55] D. Hill and P. Moylan. Connections between finite gain and asymptotic stability. IEEE Tr. Aut. Cont., AC-25:931--936, 1980.
[56] D. J. Hill and P. J. Moylan. Stability results for nonlinear feedback-systems. Automatica, 13:377--382, 1977.
[57] D. J. Hill and P. J. Moylan. Connections between finite-gain and asymptotic stability. IEEE Transactions On Automatic Control, 25:931--936, 1980.
[58] D. J. Hill and P. J. Moylan. General instability results for interconnected systems. Siam Journal On Control And Optimization, 21:256--279, 1983.
[59] D. Hrovat. A class of active LQG optimal actuators. Automatica, 18(1):117--119, 1982.
[60] D. Hrovat. Optimal active suspension structures for quarter car vehicle models. Automatica, 26(5):845--860, 1990.
[61] D. Hrovat. Survey of advanced suspension developments and related optimal control applications. Automatica, 33:1781--1817, 1997.
[62] Rolf Isermann. Process Fault Diagnosis Based On Dynamic Models and Parameter Estimation Methods. Prentice Hall, 1989.
[63] A. Isidori. Nonlinear Control Systems. Springer, Berlin, 1995.
[64] A. Isidori. Nonlinear control systems II. Springer, 1999.
[65] A. Isidori, A. J. Krener, C. Gori Giorgi, and S. Monaco. Nonlinear decoupling via feedback: a differential geometric approach. IEEE Trans. Aut. Contr., AC-26:331--345, 1981.
[66] T. Iwasaki and R.E. Skelton. All controllers for the general  control problem: LMI existence conditions and state space formulas. Automatica, 30:1307--1317, 1994.
control problem: LMI existence conditions and state space formulas. Automatica, 30:1307--1317, 1994.
[67] T. Iwasaki and R.E. Skelton. Parametrization of all stabilizing controllers via quadratic Lyapunov functions. Journal of Optimization Theory and Applications, 85:291--307, 1995.
[68] Z. P. Jiang and D. J. Hill. Passivity and disturbance attenuation via output feedback for uncertain nonlinear systems. IEEE Transactions On Automatic Control, 43:992--997, 1998.
[69] Z. P. Jiang, D. J. Hill, and A. L. Fradkov. A passification approach to adaptive nonlinear stabilization. Systems & Control Letters, 28:73--84, 1996.
[70] S.M. Joshi. Control of flexible space structures. Lecture Notes in Control and Information Sciences, Springer-Verlag, 1990.
[71] V. Jurdjevic and J. P. Quinn. Controllability and stability. J. Diff. Eqs., 28:381--389, 1978.
[72] V. Jurdjevic and G. Sallet. Controllability properties of affine systems. SIAM Journal On Control And Optimization, 22:501--508, 1984.
[73] T. Kailath. Linear Systems. Prentice Hall, Englewood Cliffs, 1980.
[74] N. Karlsson, M. Ricci, D. Hrovat, and M. Dahleh. A suboptimal nonlinear active suspension. Proc. of the American Control Conference, 3:4036--4040, 2000.
[75] L. Keviczky, R. Bars, J. Hetthéssy, and Cs. Bányász. Szabályozástechnika. Műegyetemi Kiadó, Budapest, 2006.
[76] U. Kiencke. A view of automotive control systems. IEEE Control Systems, 8, 1988.
[77] U. Kiencke and L. Nielsen. Automotive control systems. For engine, driveline and vehicle. Springer, 2000.
[78] A. J. Krener. Decomposition theory for differentiable systems. SIAM J. Control Optim., 15:813--829, 1977.
[79] C. Langbort, R. S. Chandra, and R. D'Andrea. Distributed control design for systems interconnected over an arbitrary graph. IEEE Transactions on Automatic Control, 49(9):1502--1519, 2004.
[80] D.J. Leith and W.E. Leithead. Survey of gain-scheduling analysis and design. International Journal of Control, 73:1001--1025, 2000.
[81] A. Levant. Higher-order sliding modes, differentiation and output feedback control. International Journal of Control, 76(9/10):924--941, 2003.
[82] J.S. Lin and T. Kanellakopoulos. Nonlinear design of active suspensions. Proc. of the Conference on Decision and Control, New Orleans, 3:3567--3569, 1995.
[83] Y. Lin and W. Kortüm. Identification of system physical parameters for vehicle systems with nonlinear components. Vehicle System Dynamics, 20:354--365, 1991.
[84] L. Ljung. System identification: Theory for the user. Prentice-Hall, Inc., Englewood Cliffs, New Jersey, 1987.
[85] L. Ljung and T. Söderström. Theory and Practice of Recursive Identification. The MIT Press, Massachusetts, 1983.
[86] X.Y. Lu and J.K. Hedrick. Impact of combined longitudinal, lateral and vertical control of autonomous road vehicle design. Int. J. Vehicle Autonomous Systems, 2(1/2):40--70, 2004.
[87] R. G. L. Luus. Application of iterative dynamic-programming to state constrained optimal-control problems. Hungarian Journal Of Industrial Chemistry, 19:245--254, 1991.
[88] Mohammad-Ali Massoumnia, George C. Verghese, and Alan S. Willsky. Failure detection and identification. IEEE Transactions on Automatic Control, 34:316--321, 1989.
[89] H.E. Merritt. Hydraulic control systems. Wiley and Sons, 1967.
[90] P. Michelberger, J. Bokor, A. Keresztes, and P. Várlaki. Design of active suspension system for road vehicles: An eigenstructure assignment approach. Proc. of the 23th Fisita Congress, pages 213--218, 1990.
[91] P. Michelberger, J. Bokor, and L. Palkovics. Robust design of active suspension system. International Journal of Vehicle Design, 14:145--165, 1994.
[92] R.H. Middleton and G.C. Goodwin. Digital Control and Estimation. A Unified Approach. Prentice Hall, London, 1990.
[93] M. Mitschke. Dynamik der kraftfahrzeuge. Springer Verlag, Berlin, 1995.
[94] A. Moran and M. Nagai. Performance analysis of vehicle active suspension with  robust control. Proc. of the International Conference on Motion and Vibration Control, Yokohama, pages 756--761, 1992.
robust control. Proc. of the International Conference on Motion and Vibration Control, Yokohama, pages 756--761, 1992.
[95] P. J. Moylan and D. J. Hill. Tests for stability and instability of interconnected systems. IEEE Transactions On Automatic Control, 24:574--575, 1979.
[96] P. J. Moylan, A. J. Vannelli, and M. J. Vidyasagar. On the stability and well-posedness of interconnected non- linear dynamical-systems. IEEE Transactions On Circuits And Systems, 27:1097--1101, 1980.
[97] Alan V. Oppenheim and Ronald W. Schafer. Digital Signal Processing. Prentice Hall, New Jersey, 1975.
[98] R. Ortega and M. W. Spong. Adaptive motion control of rigid robots: A tutorial. Automatica, 25:877--888, 1989.
[99] L. Palkovics and Fries. Intelligent electronic systems in commercial vehicles for enhanced traffic safety. Vehicle System Dynamics, 35:227--289, 2001.
[100] I. G. Polushin, A. L. Fradkov, and D. J. Hill. Passivity and passification of nonlinear systems. Automation And Remote Control, 61:355--388, 2000.
[101] R. Rajamani. Vehicle dynamics and control. Springer, 2005.
[102] R. Rajamani and J.K. Hedrick. Adaptive observer for active automotive suspensons: theory and experiment. IEEE Trans. on Control Systems Technology, 3(1):86--93, 1995.
[103] W.J. Rough and J.S. Shamma. Research on gain scheduling. Automatica, 36:1401--1425, 2000.
[104] J. La Salle and S. Lefschetz. Stability by Liapunov's direct method. Academic Press, New York, London, 1961.
[105] Y.M. Sam and J.H. Shah. Modeling and control of the active suspension system using proportional integral sliding mode approach. Asian Journal of Control, 7(2):91--98, 2005.
[106] C. Scherer and S. Weiland. Linear Matrix Inequalities in Control. Lecture notes on DISC course, 2000.
[107] László Schnell. Jelek ées rendszerek Méréstechnikája. Tankönyvkiadó, Budapest, 1991.
[108] R. Sepulchre, M. Jankovic, and P. Kokotovic. Constructive Nonlinear Control. Springer-Verlag, 1997.
[109] R.S. Sharp and D.A. Crolla. Road vehicle suspension system design: A review. Vehicle System Dynamics, 16:167--192, 1987.
[110] S. L. Shishkin, R. L. Ortega, D. L. Hill, and A. L. Loria. On output feedback stabilization of Euler-Lagrange systems with nondissipative forces. Systems & Control Letters, 27:315--324, 1996.
[111] S. Skogestad and I. Postlethwaite. Multivariable Feedback Control. John Wiley & Sons, Chichester, New York, Toronto, Singapore, 1996.
[112] G. Stépán. Chaotic motion of wheels. Vehicle System Dynamics, 20:341--351, 1991.
[113] D.J. Stilwell and W.J. Rugh. Stability and l2 gain properties of LPV systems. Automatica, 38:1601--1606, 2002.
[114] M.R. Stone and A. Demetriou. Modeling and simulation of vehicle ride and handling performance. Proc. of the 15th IEEE Int. Symposium on Intelligent Control, 2000.
[115] H. Sussmann and V. Jurdjevic. Controllability of nonlinear systems. J. Diff. Eqs., 12:95--116, 1972.
[116] I. Szászi, P. Gáspár, and J. Bokor. Nonlinear active suspension modelling using linear parameter varying approach. Proc. of the 10th Mediterranean Conference on Control and Automation, Lisbon, Portugal, 2002.
[117] A.G. Thompson and B.R. Davis. Optimal linear active suspensions with derivative constraints and output feedback control. Vehicle System Dynamics, 17:179--192, 1988.
[118] R. Tuschák. Szabályozástechnika. Műegyetemi KiadŰ, Budapest, 1994.
[119] A. J. van der Schaft. L2-Gain and Passivity Techniques in Nonlinear Control. Springer-Verlag, Berlin, 2000.
[120] L. K. Vasiljevic and H.K. Khalil. Differentiation with high-gain oservers the presence of measurement noise. In Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, CA, USA, pages 4717--4722. 2006.
[121] M. A. Vidyasagar. New directions of research in nonlinear-system theory. Proceedings Of The IEEE, 74:1060--1091, 1986.
[122] M. A. Vidyasagar, H. A. Schneider, and B. A. Francis. Algebraic and topological aspects of feedback stabilization. IEEE Transactions On Automatic Control, 27:880--894, 1982.
[123] M. A. Vidyasagar and A. A. Vannelli. New relationships between input-output and Lyapunov stability. IEEE Transactions On Automatic Control, 27:481--483, 1982.
[124] H. Wang, M. Krstic, and G. Bastin. Optimizing bioreactors by extremum seeking. International Journal of Adaptive Control and Signal Processing, 13:651--669, 1999.
[125] J. Wang, N. Chen, and G. Yin. Multi-agent based vehicle integrated control framework for coordination of active steering, driveline and braking systems. International Conference on Computer Science and Software Engineering, 2008.
[126] J. Wang and M. Xin. Multi-agent consensus algorithm with obstacle avoidance via optimal control approach. International Journal of Control, 83:2606--2621, 2010.
[127] A.S. Willsky. A survey of design methods for failure detection in dynamic systems. Automatica, 12:601--611, 1976.
[128] F. Wu. A generalized LPV system analysis and control synthesis framework. International Journal of Control, 74:745--759, 2001.
[129] F. Wu, X. H. Yang, A. Packard, and G. Becker. Induced  -norm control for LPV systems with bounded parameter variation rates. International Journal of Nonlinear and Robust Control, 6:983--998, 1996.
-norm control for LPV systems with bounded parameter variation rates. International Journal of Nonlinear and Robust Control, 6:983--998, 1996.
[130] F. Wu, X.H. Yang, A. Packard, and G. Becker. Induced  norm controller for LPV systems with bounded parameter variation rates. International Journal of Robust and Nonlinear Control, 6:983--988, 1996.
norm controller for LPV systems with bounded parameter variation rates. International Journal of Robust and Nonlinear Control, 6:983--988, 1996.
[131] M. Yamashita, K. Fujimori, K. Hayakawa, and H. Kimura. Application of  control to active suspension system. Automatica, 30:1717--1729, 1994.
control to active suspension system. Automatica, 30:1717--1729, 1994.
[132] MATLAB (V4.2c1) User's Guide, 1994.
[133] SIMULINK (V1.3c) User's Guide, 1994.
[134] Documentation for The Fault Detection and Isolation Matlab Toolbox, EU-Copernicus Project CT94-0237, 1998.
[135] Y. Zhang and A. Alleyne. A practical and effective approach to active suspension control. Proc. of the International Symposium on Advanced Vehicle Control, Hiroshima, 2002.
[136] K. Zhou, J.C. Doyle, and K. Glover. Robust and Optimal Control. Prentice Hall, 1996.