6. fejezet - Vertikális modellezés és irányítás
A felfüggesztési alrendszer célja az úttartás garantálása és az utazási kényelem növelése a káros rezgések által okozott közúti egyenetlenségek és a fedélzeti gerjesztési források következményeként előálló zavarások közepette. A felfüggesztés rendszerekkel szemben támasztott minőségi követelményeket különböző paraméterek figyelembe vételével tudjuk számszerűen meghatározni: ilyenek az utasok komfortja, a felfüggesztési elmozdulás, a gumiabroncs terhelésének változása és az energiafelhasználás, lásd például [40], [109].
Az irányítástervezés egyik nehézsége az, hogy a különböző szabályozási célok általában konfliktusban állnak egymással, ezért ezek között egy alkalmas egyensúlyt kell elérni. A járműtest gyorsulásának szórása csökken, amikor a felfüggesztés vagy a gumiabroncs alakváltozása növekszik, így a gyorsulás minimalizálása egyúttal a maximálisan megengedett alakváltozás mérséklését is jelenti. Általában a felfüggesztési alakváltozás korlátozása maga után vonja a gumiabroncs összenyomódási mértékének egyidejű csökkenését, és fordítva, lásd például [52], [60]. A tervezés másik nehézsége az, hogy a tervezés alapjául szolgáló modell egyes elemei bizonytalanok. A bizonytalanság okai az elhanyagolt vagy nem modellezett dinamika, magasrendű rezgő módusok elhanyagolása, a nem megfelelő vagy nem teljeskörű ismeretek az egyes komponensek viselkedésének időbeni megváltoztatása miatt. Az felfüggesztés alpvető modellezési és tervezési feladatát elemzi például [27], [53], [61].
Több módszert javasoltak már a tervezett aktív felfüggesztési rendszerek modellezésére és tervezésére. Ezen munkák túlnyomó többsége azt feltételezi, hogy a felfüggesztési rendszer egy lineáris modellel közelíthető, így a szabályozás tervezése is lineáris módszerekre épül. A lineáris kvadratikus (LQ) módszerre alapozott tervezés eredménye egy optimális állapot-visszacsatolt vezérlő, amely garantálja az egyes performanciák közötti egyensúlyt, lásd például [61], [117]. A  tervezési módszer egy, a struktúrálatlan destabilizáló bizonytalanságok hatására nézve robusztus szabályozót eredményez. A módszer alkalmazása során frekvencia függő súlyozó függvényeket alkalmazunk mind a performancia kimenetre, mind pedig a bizonytalanságokra olyan módon, hogy egy kívánt hurokátviteli alakot érjünk el (loop-shape), lásd például [94], [131]. A
tervezési módszer egy, a struktúrálatlan destabilizáló bizonytalanságok hatására nézve robusztus szabályozót eredményez. A módszer alkalmazása során frekvencia függő súlyozó függvényeket alkalmazunk mind a performancia kimenetre, mind pedig a bizonytalanságokra olyan módon, hogy egy kívánt hurokátviteli alakot érjünk el (loop-shape), lásd például [94], [131]. A  tervezési módszer során a parametrikus bizonytalanság szerkezetének ismeretét is kihasználjuk annak érdekében, hogy csökkentsük a tervezett
tervezési módszer során a parametrikus bizonytalanság szerkezetének ismeretét is kihasználjuk annak érdekében, hogy csökkentsük a tervezett  szabályozó konzervativizmusát, lásd például [49].
szabályozó konzervativizmusát, lásd például [49].
A területtel foglalkozó munkák egy másik -- és lényegesen kisebb része tételezi fel, hogy a felfüggesztési rendszer nemlinearitása hangsúlyos, és a linearitás feltevése nem érvényes a teljes működési tartományban. A felfüggesztés elemeinek dinamikus jellemzői, karakterisztikája, azaz a lengéscsillapítók és a rugók, nemlineáris tulajdonságokkal bírnak, és ezek nem időinvariánsok, hanem változnak a jármű életciklusa alatt. Jelentős módszerek léteznek az aktív felfüggesztés nemlineáris modellek alapján történő kezelésére, lásd például [36], [74], [105]. Egy A feedback linearizáción alapuló nemlineáris tervezési módszert javasolt [18]. A technikai problémákon túl, amelyek a a nemlineáris modelleken alapuló tervezést jellemzik, nehéz kezelni és figyelembe venni a modellezési hibák és pontatlanságok hatását.
Ezen nehézségek leküzdésére egyesek feltételezik, hogy a felfüggesztési rendszer nemlinearitása elrejthető alkalmas ütemezési jelek megválasztásával, melyekről feltételezik, hogy a végrehajtás során rendelkezésre állnak, és egy lineáris változó paraméterű (LPV) modell alapú irányítás kialakítására tesznek javaslatot. Az LPV modellezési megközelítés lehetővé teszi számunkra, hogy figyelembe vegyük a nemlineáris hatásokat az állapotteres leírásban oly módon, hogy a modell szerkezete nemlineáris a paraméterekben, de lineáris az állapotokban. Ezen túlmenően az LPV modell állapotteres leírása érvényes a teljes működési tartományban. A LPV módszer alapján történő korai alkalmazások egy konstans Lyapunov mátrixot használó megközelítésre epültek, amely az ütemezési jelek tetszőlegesen gyors változását is megengedik, lásd például [37], [103]. A későbbi alkalmazások paraméter változó Lyapunov mátrixot használva csökkentették a szabályozó konzervativizmusát, lásd például [10], [12], [24]. Az LPV módszer előnye az, hogy a szabályzó megfelel a robusztus stabilitás és a névleges performancia garantálás igényeknek a teljes működési tartományban, mivel a szabályzó képes alkalmazkodni az aktuális működési feltételekhez, lásd például [130]. Egy negyed--jármű modellre épülő és nemlineáris felfüggesztési elemeket tartalmazó LPV tervezésre lásd [34].
Ezekben a tervezési eljárásokban a nemlineáris beavatkozó hatását egy további, addicionális lépés során lehet figyelembe venni azáltal, hogy a felfüggesztési erőre vonatkozó jelkövetési feladatot tűzünk ki, lásd például [3], [4], [135]. Az ilyen rendszerek alkalmazása során további késedelem bevezetése a hurokban komoly performanciacsökkenéshez vezethet. A probléma megoldására egy robusztus állapotvisszacsatolást alkalmazó módszert javasolt [33], míg [17] egy statikus kimenet visszacsatolásos eljárásra ad példát.
Egy másik megközelítést javasolt [35], ahol az elválasztó réteg a beavatkozóba került, a negyed-jármű modellhez egy lineáris egyenlet adva a hidraulikus dugattyúban levő nyomás leírására. A beavatkozó modelljének fennmaradó részét, vagyis a szelep dinamikus egyenleteit, ezzel a résszel egy fiktív bemenet hozza kapcsolatba, ami az összes nemlinearitást egy statikus kifejezésben tartalmazza. Míg az egyes alrendszerek LTI modellek, egy alkalmas performancia súly a teljes tervezés LPV. Ezzel a két-szintű megközelítéssel szemben [48] egy közös rendszert javasolt az LPV negyed-jármű és a hidraulikus beavatkozó kezelésére, ahol az összes nemlinearitást alkalmas ütemezési változókkal egyetlen LPV modellel írta le. Ezt a megközelítést nem lehet közvetlenül a teljes jármű modellre alkalmazni a probléma jelentősen megnövekedett összetettsége miatt.
6.1. Vertikális dinamika modellezése
A felfüggesztési rendszernek különféle egyszerűsített modelljei léteznek. Ezek a modellek a járműdinamika egy részét figyelembe veszik, más részét viszont elhanyagolják.
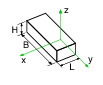
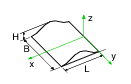
A járműtest egy rugózott tömeggel van reprezentálva, míg a tengely és a kerekek négy rugózatlan tömeggel. A rugózott és rugózatlan tömegek közötti rugó és csillapító a felfüggesztést reprezentálja. A kerekek és az út közötti kapcsolatot rugó közelíti. A hét-szabadságfokú jármű-modell mozgásai:
-
a járműtest
 függőleges elmozdulása,
függőleges elmozdulása, -

bólintási szöge,
-

dőlési szöge, valamint
-
rugózatlan tömegek
 függőleges elmozdulásai.
függőleges elmozdulásai.
Az útfelület által generált  elmozdulások a gerjesztések.
elmozdulások a gerjesztések.
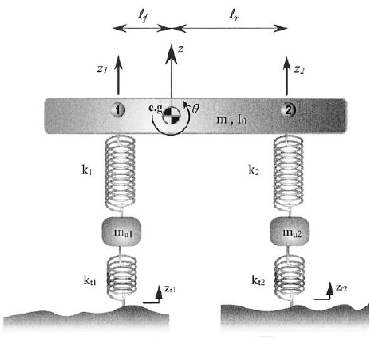
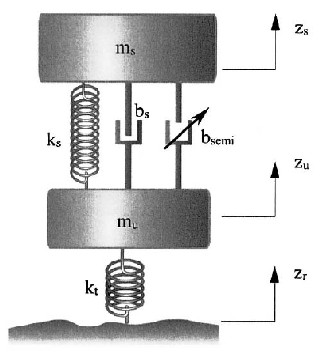
Írjuk fel egy negyedjármű modell egyenleteit. A negyedjármű modellt a 68. ábra illusztrálja.
A mozgásegyenletek felírása a Lagrange egyenleten keresztül történik.
|
|
(345) |

ahol  ,
,  ,
,  a kinetikai, potenciális és disszipatív energiák, mig
a kinetikai, potenciális és disszipatív energiák, mig  külső erők vektora.
külső erők vektora.
Az egyenlet az  koordináták irányában felbontható:
koordináták irányában felbontható:
|
|
(346) |

A példában  ,
,  jelöléssel:
jelöléssel:
|
|
(347) |
|
|
(348) |
|
|
(349) |
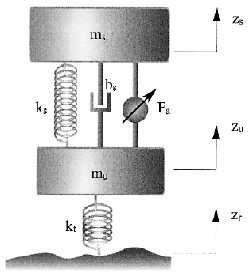
Egy két-szabadságfokú negyedjármű modell mozgásegyenletei a következők:
|
|
(350) |

|
|
(351) |

|
|
(352) |

Mátrixos alakban:
|
|
(353) |

ahol
|
|
(354) |
|
|
(355) |
|
|
(356) |
Egy negyedjármű modell állapottér reprezentációja a következő:

ahol az állapotvektor: 
-

: felfüggesztés relatív elmozdulása,
-

: rugózott tömeg sebessége,
-

: kerék elmozdulás,
-

: rugózatlan tömeg sebessége,
azaz az állapotmátrixok alakja a következő:
|
|
(357) |
A csillapítás nélküli negyedjármű modell ( ) alapján két sajátfrekvenciát határozhatunk meg (
) alapján két sajátfrekvenciát határozhatunk meg ( és
és  ):
):
|
|
(358) |
ahol  és
és  , azaz
, azaz
Megoldás:
|
|
(359) |

A sajátfrekvenciák közelítő értékei:
|
|
(360) |

A teljes jármű vertikális dinamikájának modellje egy hétszabadságfokú modellhez vezet. A mozgásegyenletek:
|
|
(361) |

|
|
(362) |

ahol  a rugózott tömeg,
a rugózott tömeg,  a rugózatlan tömegek,
a rugózatlan tömegek,  a felfüggesztési rugóállandó,
a felfüggesztési rugóállandó,  a kerék rugóállandó,
a kerék rugóállandó,  a felfüggesztési csillapitás,
a felfüggesztési csillapitás,  a geometria mátrix. A jelek az alábbi vektorokba vannak gyűjtve:
a geometria mátrix. A jelek az alábbi vektorokba vannak gyűjtve:
-
,
-

,
-

,
-

,
-

.
Ezután a teljes jármű mozgásegyenlete:
|
|
(363) |

ami állapotegyenlet alakban felírva:
|
|
(364) |

ahol  ,
,  ,
,  , és a mátrixok a következők:
, és a mátrixok a következők:
|
|
(365) |

|
|
(366) |
|
|
(367) |
Az állapotegyenlet komponensei a következők:
|
|
(368) |
|
|
(369) |
|
|
(370) |

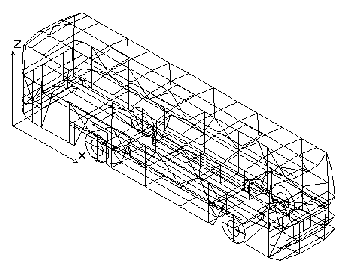
A felfüggesztési rendszer végeselem módszerrel is modellezhető. A végeselem modell célja elemzések elvégzése. Például egy busz vázszerkezetének modellje  szabadságfokú. A modell adatai:
szabadságfokú. A modell adatai:  csomópont,
csomópont,  gerenda elem,
gerenda elem,  héj elem,
héj elem,  tömegpont,
tömegpont,  rugó és
rugó és  csillapító. A modellelemzésekhez jól alkalmazható, irányítási feladat esetén modell redukcióra van szükség.
csillapító. A modellelemzésekhez jól alkalmazható, irányítási feladat esetén modell redukcióra van szükség.

A teljes jármű vertikális dinamikájának modellje a végeselem modell alapján a következő:
|
|
(371) |

ahol  tömegmátrix,
tömegmátrix,  csillapítás mátrix,
csillapítás mátrix,  rugóállandók mátrixa,
rugóállandók mátrixa,  kerék rugóállandók,
kerék rugóállandók,  ,
,  általánosított elmozdulás,
általánosított elmozdulás,  és
és  általánosított sebesség és gyorsulás,
általánosított sebesség és gyorsulás,  aktuátor erők és
aktuátor erők és  az útpálya felülete. Bevezetjük a következő modális transzformációt:
az útpálya felülete. Bevezetjük a következő modális transzformációt:  , ahol
, ahol  elmozdulásokat tartalmaz, mig
elmozdulásokat tartalmaz, mig  a sajátvektorokat tartalmazza és normalizálja a tömegmátrixot:
a sajátvektorokat tartalmazza és normalizálja a tömegmátrixot:  .
.
|
|
(372) |

Az  állapotvektor választással az állapotegyenlet alakja:
állapotvektor választással az állapotegyenlet alakja:
|
|
(373) |

ahol  ,
,  ,
,  .
.
Az útgerjesztés hatása a rugózott tömegre (utazási kényelemre) és a tömegek közötti munkatérre a következő:
|
|
(374) |
|
|
(375) |
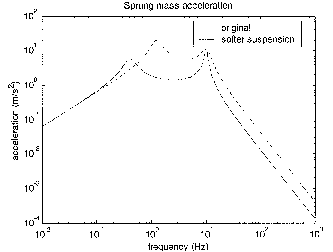
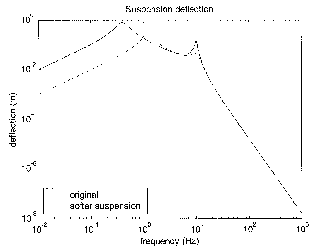
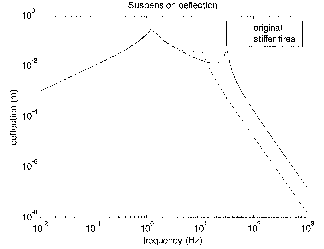
A felfüggesztés  rugóállandójának redukálása csökkenti az
rugóállandójának redukálása csökkenti az  sajátfrekvencia értékét. Ennek az utazási kényelemre való hatása, hogy magasabb frekvenciákon a rugózott tömeg gyorsulására vonatkozó frekvencia függvény javul (ez előnyös). A munkatérre való hatás azonban az, hogy alacsony frekvenciákon a felfüggesztés munkatérre vonatkozó frekvencia függvény növekszik (ez hátrányos).
sajátfrekvencia értékét. Ennek az utazási kényelemre való hatása, hogy magasabb frekvenciákon a rugózott tömeg gyorsulására vonatkozó frekvencia függvény javul (ez előnyös). A munkatérre való hatás azonban az, hogy alacsony frekvenciákon a felfüggesztés munkatérre vonatkozó frekvencia függvény növekszik (ez hátrányos).
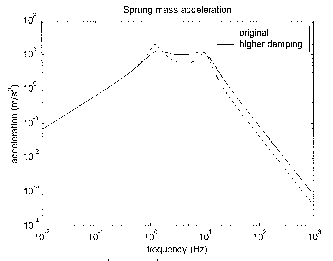
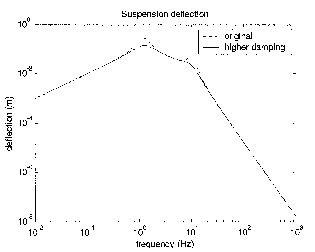
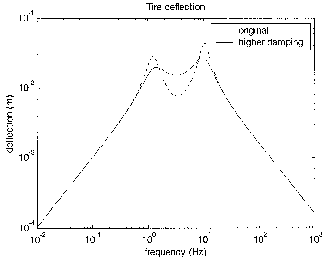
A felfüggesztés  csillapítási tényezőjének növelése az első sajátfrekvencián (
csillapítási tényezőjének növelése az első sajátfrekvencián ( ) jobb csillapítást ad. Ennek az utazási kényelemre való hatása, hogy az első rezonancia csúcs értékét redukálja, ami azt eredményezi, hogy jelentősen növeli az első sajátfrekvencián az utazási kényelmet (előnyös). Ugyanakkor magasabb frekvenciákon a keményebb rendszer rontja az utazási kényelmet (hátrányos). A munkatérre való hatás az, hogy az első sajátfrekvencián a felfüggesztési munkatérre vonatkozó átviteli függvény kisebb (előnyös).
) jobb csillapítást ad. Ennek az utazási kényelemre való hatása, hogy az első rezonancia csúcs értékét redukálja, ami azt eredményezi, hogy jelentősen növeli az első sajátfrekvencián az utazási kényelmet (előnyös). Ugyanakkor magasabb frekvenciákon a keményebb rendszer rontja az utazási kényelmet (hátrányos). A munkatérre való hatás az, hogy az első sajátfrekvencián a felfüggesztési munkatérre vonatkozó átviteli függvény kisebb (előnyös).
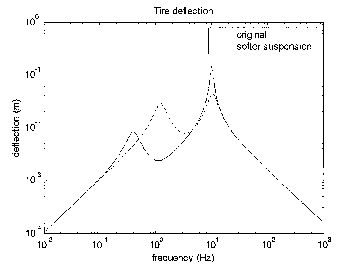
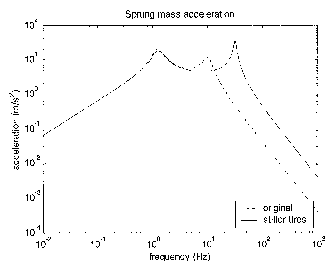
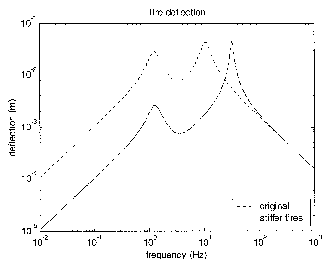
A kerék rugóállandójának ( ) növelése javítja a frekvencia képet a második sajátfrekvencia (
) növelése javítja a frekvencia képet a második sajátfrekvencia ( ) tartományában. Ennek hatása az, hogy redukálja a kerékelmozdulásra vonatkozó frekvencia függvényt az alacsonyabb frekvencia tartományban.
) tartományában. Ennek hatása az, hogy redukálja a kerékelmozdulásra vonatkozó frekvencia függvényt az alacsonyabb frekvencia tartományban.
6.1.1. Modellbizonytalanság
A valódi rendszer modelljének pontos alakja a gyakorlati feladatokban nem ismert, s emiatt helyette annak közelítő, névleges modelljét használjuk. Az eltérés okai:
-
egyrészt modellezési eljárás következménye (pl. a felharmonikusokat, illetve a magasabb fokszámú együtthatókat elhanyagoljuk, merev test alapú modellezés flexibilis modellezés helyett, munkapont körüli linearizálás);
-
másrészt a rendszer működése során bekövetkező változások (pl. a normál üzem során a modell paraméterei változnak, az anyag kifáradás során változnak a rendszer paraméterei, sőt akár a struktúrája);
-
rugózott tömeg változik az utasok tömegének módosulásával;
-
a felfüggesztés rugó vagy csillapítás karakterisztikája módosul (pl. nemlineáris hatások vannak);
-
kerékabroncs dinamikája változik.
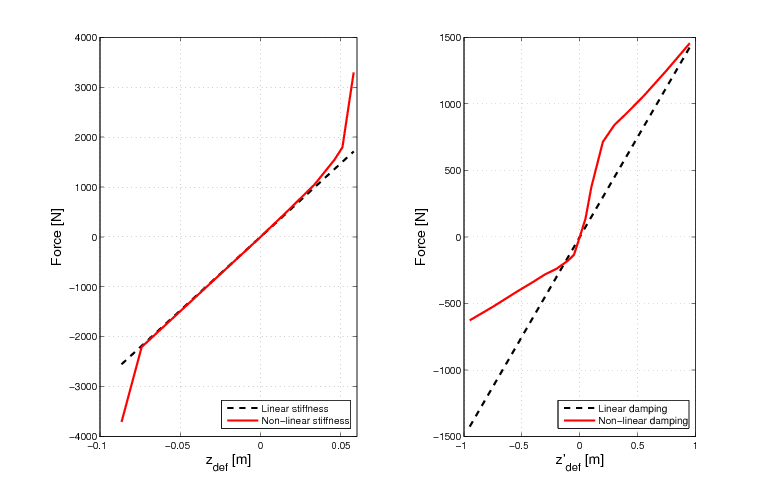
A felfüggesztés rendszerben a rugóerő és a csillapítóerő egy lehetséges közelítő összefüggése:



ahol a rugóerő komponensei ( ) és a csillapítóerő komponensei (
) és a csillapítóerő komponensei ( ) együtthatókkal írhatók fel.
) együtthatókkal írhatók fel.
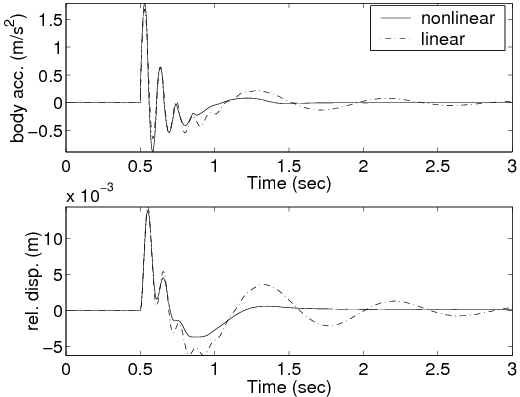
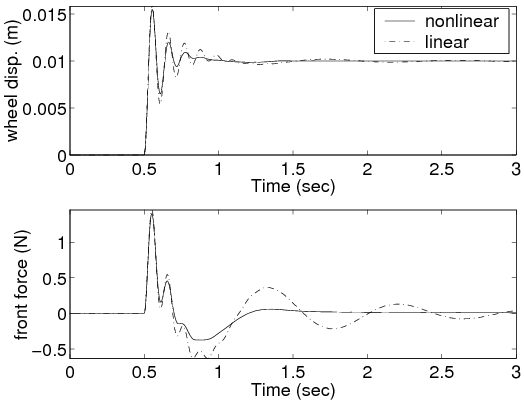
A negyedjármű modellt impulzus függvény gerjesztéssel vizsgálva jól látható a nemlineáris és a linearizált modell közötti különbség.
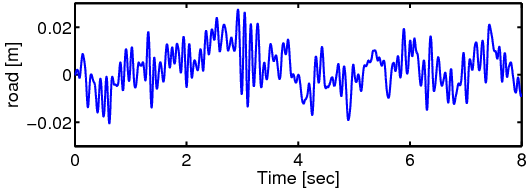
6.2. Útgerjesztés modellezése
6.2.1. Determinisztikus útgerjesztés
Az útgerjesztés determinisztikus modellezése tipikus időtartományi analízisek során. Ilyenkor egy adott útprofillal jellemezzük az útgerjesztést, például:
|
|
(376) |
 (377)
(377)
Egy kicsit összetettebb útgerjesztési modellt kaphatunk elemi komponensek összegzésével, ahol egy elemi harmonikus komponens például:
|
|
(378) |
|
|
(379) |

Lásd még a 80.ábrát.
Ezekben az összefüggésekben:
-

ívhossz (
 )
) -

hullámszám (wave number)
-

hullámhossz
-

a jobb és baloldali keréknyom közötti fáziseltolódás.
Lényeges elem a modellben a gerjesztési frekvencia:
|
|
(380) |
ahol  a gerjesztési frekvencia. A legtöbb jármű esetén az
a gerjesztési frekvencia. A legtöbb jármű esetén az  választás alkalmas lehet.
választás alkalmas lehet.
Például: ha  m, akkor az ehhez tartozó sebességnek
m, akkor az ehhez tartozó sebességnek  és
és  között kellene változni.
között kellene változni.
Megjegyzendő, hogy a teljes tartományban való gerjesztéshez változó hullámhossz szükséges kis sebességeknél!
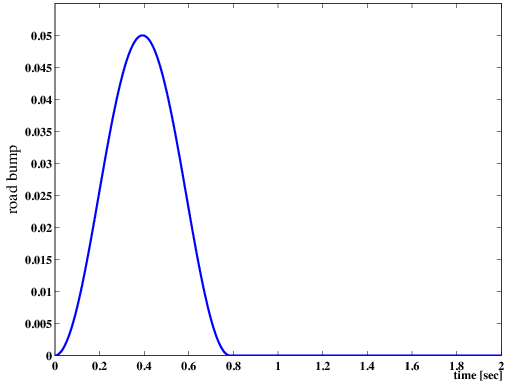
Determinisztikus gerjesztés analízis vizsgálatokban való felhasználására mutat példát a 81. és 82. ábra, ahol egy bukkanó jellel gerjesztünk meg egy felfüggesztési rendszert, aminek azután az időtartományi válaszait vizsgáljuk.
6.2.1.1. Sztochasztikus útgerjesztés
Frekvencia tartományi analízisek során tipikus, hogy sztochasztikus útgerjesztési modelleket használunk.
Emlékeztetőül, egy stacioner Gauss folyamat jellemző paraméteri a zérus átlag és  szórás, azaz
szórás, azaz
|
|
(381) |
és
|
|
(382) |
A sűrűség függvény alakja ilyenkor:
|
|
(383) |
|
|
(384) |
ahol  . A megfelelő kovarianciafüggvények pedig az alábbiak szerint számolhatók:
. A megfelelő kovarianciafüggvények pedig az alábbiak szerint számolhatók:
|
|
(385) |
|
|
(386) |

Megjegyzendő, hogy ha a folyamat tartalmaz egy periodikus komponenst, akkor az megmutatkozik  értékében.
értékében.
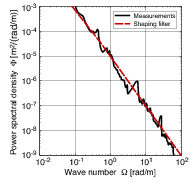
Az útprofilokat frekvencia tartományban általában a spektrális sűrűségfüggvény (teljesítménysűrűség spektrum) segítségével jellemzik:
|
|
(387) |

Az egyoldali spektrális sűrűségfüggvény főbb jellemzői:
|
|
(388) |
|
|
(389) |
|
|
(390) |
Gyakran élünk a
|
|
(391) |
közelítéssel.
Ezt felhasználva a spektrális sűrűségfüggvény közelítése:
|
|
(392) |
Például az ISO 8608 szabvány szerint ezek a paraméterek:
|
|
(393) |

és  sima út esetén, valamint
sima út esetén, valamint  göröngyös, rázós út esetén.
göröngyös, rázós út esetén.
Véletlenszerű szinuszos profilok szuperpoziciójával kaphatunk komplex útgerjesztéseket:
|
|
(394) |
|
|
(395) |

|
|
(396) |

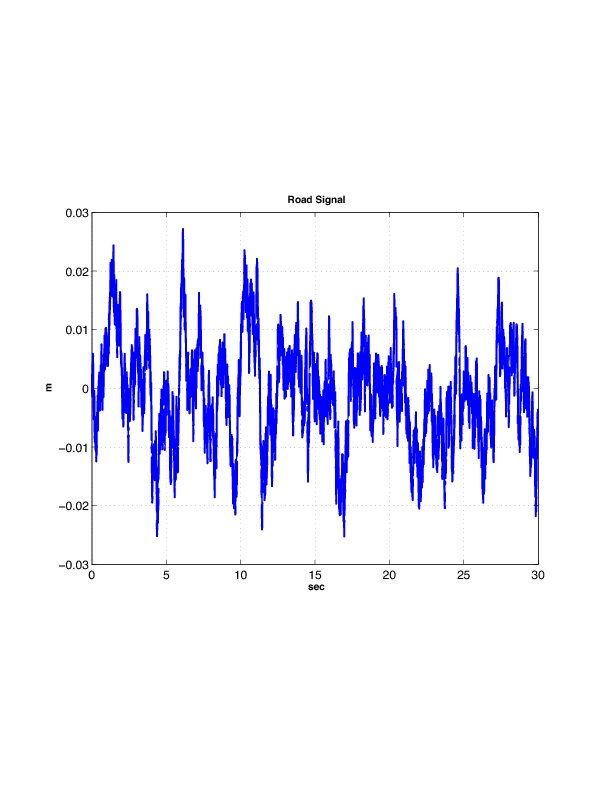
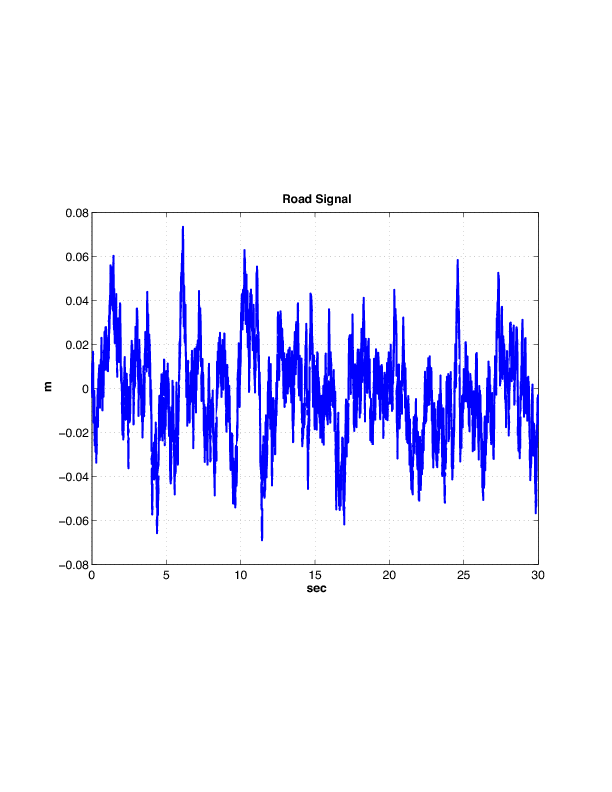
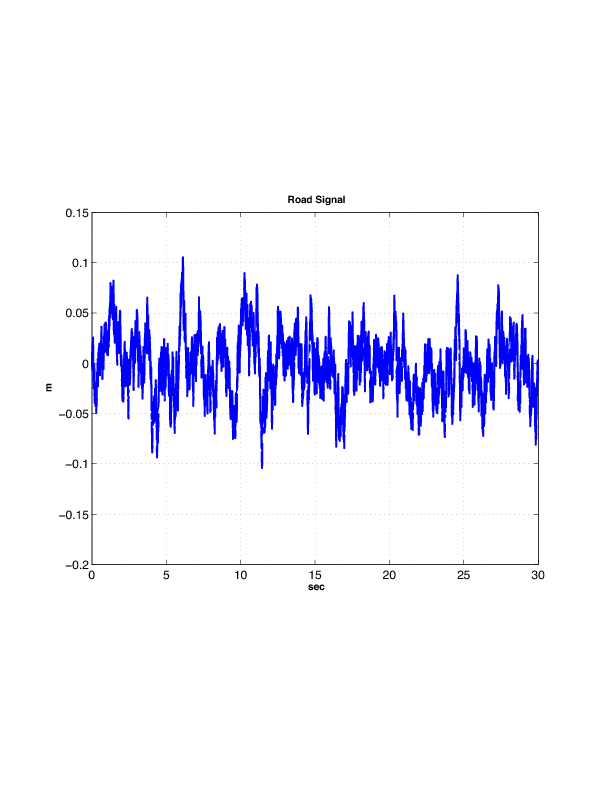
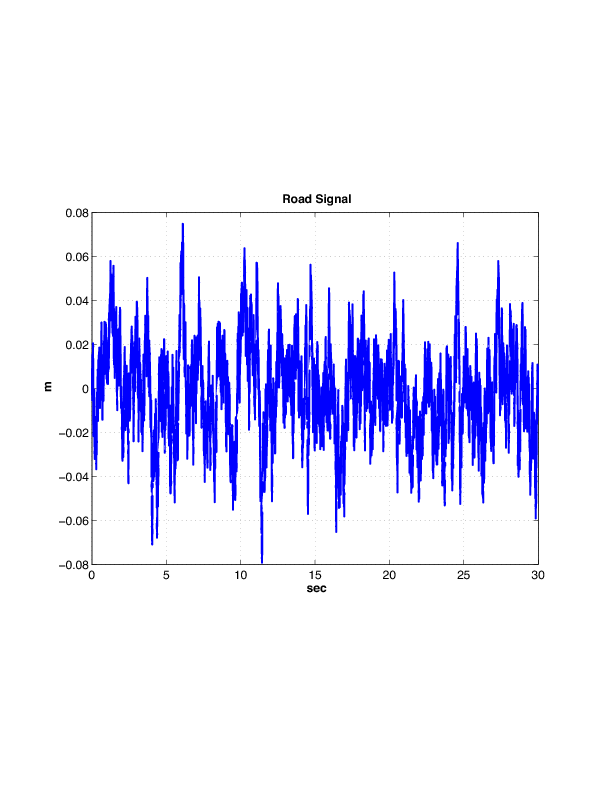
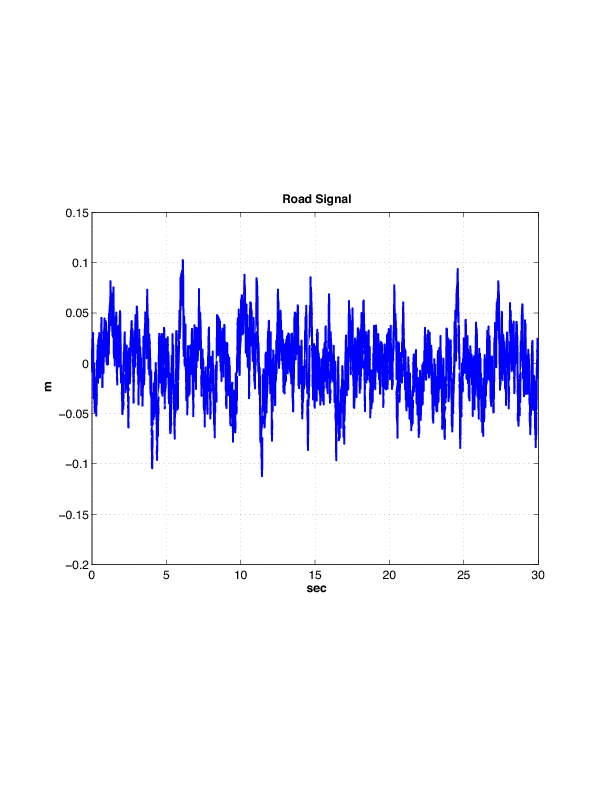
6.2.1.2. Útprofilok szimulációja
Szimulációk során célszerűbb az útgerjesztés valamilyen dinamikus modell segítségével előállítani, amit például fehér zaj gerjeszt.
Útgerjesztés egytárolós modell segítségével:
|
|
(397) |
|
|
(398) |

|
|
(399) |

Útgerjesztés harmadrendű modellre alapozva:
|
|
(400) |
Az  paraméterek ekkor a jármű sebességének és az út minőségének függvényei (Hack modellek).
paraméterek ekkor a jármű sebességének és az út minőségének függvényei (Hack modellek).
Illusztráció gyanánt a 83. ábrán szimulációs példák láthatók amik aszfaltnak, földútnak és köves útnak felelnek meg  km/h illetve
km/h illetve  km/h sebességgel szimulálva.
km/h sebességgel szimulálva.

6.3. Aktív felfüggesztés
Egy járműfelfüggesztési rendszernek a következő feladatokat kell megoldania:
-
Utazási kényelem
Az utazási kényelem az utasokra ható függőleges lengésgyorsulással minősíthető. Egy jól tervezett felfüggesztési rendszer a tengely és a járműtest között izolációt biztosít, aminek hatására a tengely felől keletkező lengések nem adódnak tovább a járműtest felé. Ez a következő egyszerűsített követelményként fogalmazható meg: a járműtest  függőleges gyorsulása minimális legyen.
függőleges gyorsulása minimális legyen.
-
Dinamikus kerékterhelés
A kanyarodás, fékezés és hajtás minősége javítható, ha a kerékre ható normálerők minimálisak. Ennek az oka, hogy a hosszirányú és oldalirányú erők jelentősen függnek a kerekeken keresztül a normálerőktől. Emiatt a felfüggesztési rendszernek a függőleges irányú  kerékelmozdulást redukálnia kell.
kerékelmozdulást redukálnia kell.
-
Bólintási és dőlési dinamika
A manőverek során keletkező bólintási és dőlési gyorsulások a jó vezethetőséggel összefüggnek. Egy felfüggesztési rendszernek biztosítania kell, hogy a dőlési és bólintási szögek minimálisak legyenek.
-
Felfüggesztési munkatér
A járműre ható statikus terhelés hatása csökkenthető, ha a rugózott és rugózatlan tömegek közötti  munkatér közötti relatív elmozdulás minimális.
munkatér közötti relatív elmozdulás minimális.
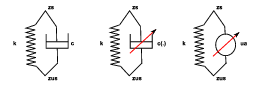
A felfüggesztési rendszereket a rugózott és rugózatlan tömegek között erő generálásának módja szerint megkülönböztetjük:
-
passzív felfüggesztési rendszer: az erő arányos a relatív sebességgel
-
félaktív felfüggesztési rendszer: az erő függ a relatív sebességtől
-
aktív felfüggesztési rendszer: az erő az aktív beavatkozótól függ.
A felfügesztési rendszert a következő átviteli függvényekkel jellemezhetjük.
• Rugózott tömeg gyorsulása:
|
|
(401) |

• Felfüggesztési munkatér:
|
|
(402) |
• Kerékelmozdulás:
|
|
(403) |
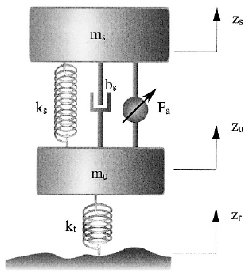
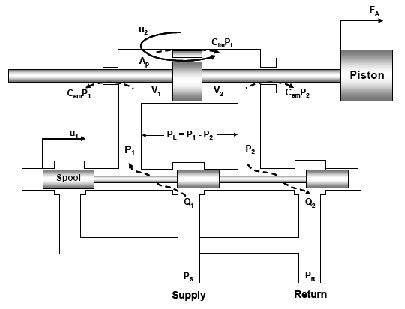
Az aktív felfüggesztési rendszerben a rugózott és rugózatlan tömegek között erőt generálunk. A hidraulikus rendszer által előállított erő

ahol  a dugattyú felülete,
a dugattyú felülete,  pedig a hidraulikus rendszerben kialakuló nyomás.
pedig a hidraulikus rendszerben kialakuló nyomás.
A hidraulikus rendszer dinamikai egyenlete:

ahol  a két végpont közötti relatív sebesség,
a két végpont közötti relatív sebesség,  a hidraulikus áramlás
a hidraulikus áramlás
|
|
(404) |
ahol  a tápnyomás,
a tápnyomás,  a szelep elmozdulása.
a szelep elmozdulása.
A szelep elmozdulása az irányítójelhez képest késleltetéssel ( ) válaszol:
) válaszol:
|
|
(405) |

Aktív felfüggesztés felsőszintű tervezésekor a jármű megfelelő működése szempontjából szükséges erőt ( ) tervezzük meg. Az alsó-szintű irányítás tervezésekor az elektrohidraulikus beavatkozószelep irányítását tervezzük meg. A szelep elmozdításával a hidraulikus beavatkozóval generált erő (
) tervezzük meg. Az alsó-szintű irányítás tervezésekor az elektrohidraulikus beavatkozószelep irányítását tervezzük meg. A szelep elmozdításával a hidraulikus beavatkozóval generált erő ( ) kövesse a felsőszintű irányítás által igényelt erőt.
) kövesse a felsőszintű irányítás által igényelt erőt.
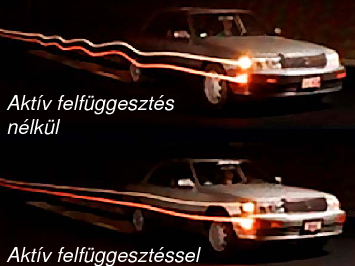
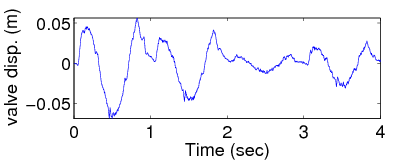
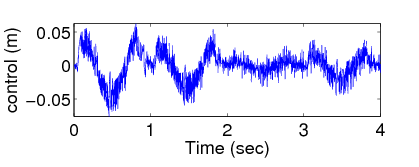
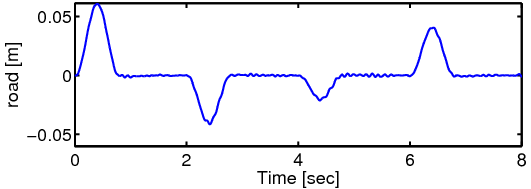
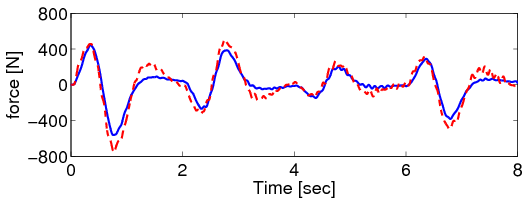
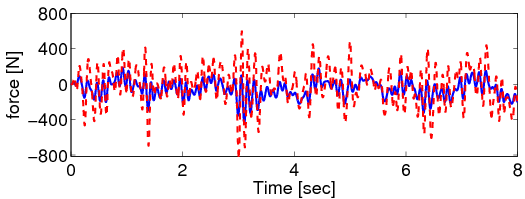
A 89. ábrán egy felfüggesztési rendszer működését vizsgáljuk rossz minőségű úton. Az úthibák különböző nagyságú lengéseket okoznak. Az alsószintű irányítás 
 pontossággal képes az igényelt erő követésére. A beavatkozóra kiadott irányítás és a szelep elmozdulás közötti kapcsolat időfüggvényeit a 90. ábra szemlélteti.
pontossággal képes az igényelt erő követésére. A beavatkozóra kiadott irányítás és a szelep elmozdulás közötti kapcsolat időfüggvényeit a 90. ábra szemlélteti.
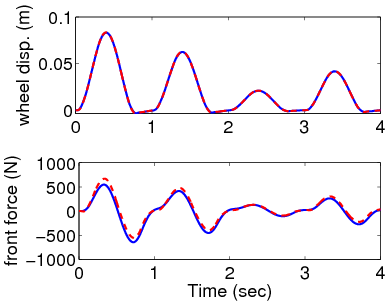
 : igényelt erő;
: igényelt erő;  : realizált erő
: realizált erő
6.3.1. LQ optimális tervezés
Az optimális (LQ) irányítás általános alakja a következő:
|
|
(406) |
ahol  alkalmasan választott súlymátrixok.
alkalmasan választott súlymátrixok.
Ennek megfelelően a minőségi tulajdonságok alapján az aktív felfüggesztési rendszerre következő lineáris kvadratikus optimális kritériumot foglamazzuk meg:
|
|
(407) |

ahol  súlyok.
súlyok.
Mivel a rugózott tömeg gyorsulása


|
|
(408) |

ezért a kvadratikus alak első komponense alapján az LQ kritérium súlymátrixai a következők:

A költségfüggvényben szereplő további tagok alakja:


így az LQ kritérium súlymátrixai a következők:
|
|
(409) |
|
|
(410) |

Az optimális irányítási feladatban a minőségi kritériumok alapján felírt költségfüggvényt kívánjuk minimalizálni. Az optimális állapotvisszacsatolás  megoldása a következőképpen értelmezhető:
megoldása a következőképpen értelmezhető:
|
|
(411) |

Ismeretes, hogy az optimalizációs feladat a következő Riccati egyenlethez vezet:
|
|
(412) |

és az optimális erősítés ( ) összefüggése
) összefüggése
|
|
(413) |
Az optimális erősítés két komponenst tartalmaz:  és
és  .
.
-
Az első tag a kritériumban megválasztott súlyoktól (
 ) függ.
) függ. -
A második tag viszont nem függ a Riccati egyenlet megoldásától. Ennek a tagnak az a szerepe, hogy kioltsa a passzív rugó és csillapító hatását:
|
|
(414) |

ahol  és
és  .
.
Emiatt a szabályozáshoz szükséges erő független a rendszer passzív komponenseitől ( és
és  ).
).
Ha a lengéskényelmet akarjuk javítani úgy, hogy közben nem rontjuk a munkatérre és a kerékelmozdulásra vonatkozó minőségi tulajdonságokat a következőképpen kell eljárnunk:
-
Az útgerjesztésnek a rugózott tömeg gyorsulására való hatását csökkenteni kell.
-
A rugózott tömeg sajátfrekvenciáján a felfüggesztési munkatér és a kerékelmozdulás minőségét javítani kell.
-
A rugózatlan tömeg sajátfrekvenciáján mindhárom minőségi jellemző tulajdonságait javítani kell.
6.4. Félaktív felfüggesztés
A félaktív felfüggesztési rendszerben változtatható csillapítást alkalmazunk.
Többféle megoldás létezik:
-
Mágneses csillapitás elvű (MR): folyadék viszkozitását változtatják mágneses tér változtatásával (Audi),
-
Elektrohidraulikus (ER): elektromos teret változtatják (Volvo, BMW),

Egy félaktív felfüggesztési rendszerben a  csillapítás egy intervallumon belül változik:
csillapítás egy intervallumon belül változik:  .
.
A kétszabadságfokú negyedjármű modell mozgásegyenletei a következők:
|
|
(415) |

|
|
(416) |

|
|
(417) |

A negyedjármű modell mozgásegyenleteiből levezethető állapottér reprezentációja a következő:
|
|
(418) |

ahol az állapotvektor komponensei:
|
|
(419) |

ahol
-

: munkatér közötti relatív elmozdulás,
-

: rugózott tömeg sebessége,
-

: kerékelmozdulás,
-

: rugózatlan tömeg sebessége,
a rendszermátrixok alakja pedig
|
|
(420) |
7.4.1 LQ irányítás tervezése
A minőségi jellemzőket tartalmazó kritérium kvadratikus alakja:
|
|
(421) |

ahol  súlyozó tényezők. Az integrál két tagra szeparálható: az egyik
súlyozó tényezők. Az integrál két tagra szeparálható: az egyik  -től függ mig a másik
-től függ mig a másik  -től függetle:
-től függetle:
|
|
(422) |
A kvadratikus alak súlyozó mátrixait a következőképpen kell megválasztani:
|
|
(423) |
|
|
(424) |
Így a félaktív felfüggesztés költségfüggvénye a következő:
|
|
(425) |

Itt az egyes  -től függő komponensek:
-től függő komponensek:
|
|
(426) |
|
|
(427) |

ahol  és
és  .
.
Keressünk egy optimális irányítást  megválasztásával olymódon, hogy a következő korlátozás teljesüljön:
megválasztásával olymódon, hogy a következő korlátozás teljesüljön:
|
|
(428) |
ahol  és a kezdeti érték:
és a kezdeti érték:  .
.
Ha a félaktív csillapításra nem lenne korlátozás, akkor az a következőképpen fejezhető ki
|
|
(429) |

ahol  és
és
|
|
(430) |

Itt  a következő Riccati egyenletből számítható:
a következő Riccati egyenletből számítható:
|
|
(431) |

ahol  and
and  .
.
Végül
|
|
(432) |

ahol az irányitásnak két komponense van
-
az állapotvisszacsatolás erő:
|
|
(433) |

-
a passzív rugó és csillapítás hatását kioltó komponens:
|
|
(434) |

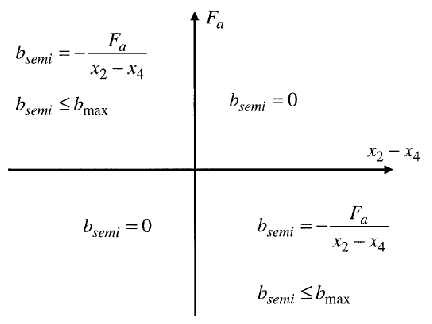
A két rendszer, azaz az aktív komponens és a modulált csillapítás ekvivalens amennyiben a csillapító ( ) valamennyi valós értéket képes figyelembe venni.
) valamennyi valós értéket képes figyelembe venni.
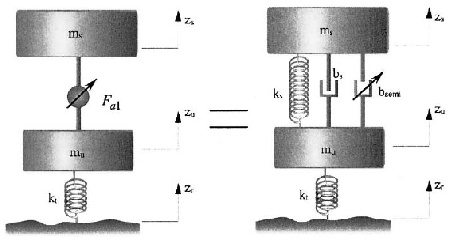
Ha a csillapításra vonatkozó  korlátozást kifejezzük:
korlátozást kifejezzük:
|
|
(435) |
akkor a szabályozó erő
|
|
(436) |

Félaktív felfüggesztés esetén a szabályozó erő  a következőképpen függ a relatív sebességtől
a következőképpen függ a relatív sebességtől
6.5. Kétszintű tervezés
Az alábbiakban egy részletes esettanulmányt mutatunk be a felfüggesztési rendszer irányításának kétszintű tervezésére. A magas szintű szabályozó tervezésekor a teljes jármű egy modelljét vesszük figyelembe, ami tartalmazza a felfüggesztési dinamikát és performanciaként az úttartásra, utaskényelemre és a kerékelmozdulás minimalizálására koncentrál. Ebben a lépésben a modell bizonytalanságokat is figyelembe vesszük. Az egyes performanciák közötti prioritásokat megfelelő súlyfüggvények választásával írjuk elő.
A tervezett irányítás egy erő, amit elő kell állítani egy hidraulikus beavatkozó segítségével. Az alacsony szintű irányítás egy jelkövető szabályozó, ami a szelepet vezérli. A teljesség kedvéért mind a backsteeping módszerrel kezelt nemlineáris tervezést, mind pedig egy feedback linearizálást közvetlenül használó módszert ismertetünk az alacsony szintű szabályozó tervezésére.
A bemutatott eljárás előnye, hogy a hidraulikus beavatkozó dinamikája és a felfüggesztés dinamikája két, egymástól független tervezési lépésben van kezelve. A javasolt elválasztó rétegek követik a különböző alrendszerek felépítését és a problémák összetettsége ezalatt ésszerű határok között marad. Ellentétben a [35] által közölt módszerrel, ez a megoldás lehetővé teszi a moduláris tervezést: a beavatkozó nem befolyásolja a felső szintű tervezés eredményét.
6.5.1. A felfüggesztés szabályozás-orientált modellezése
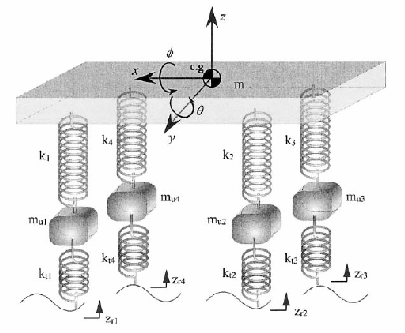
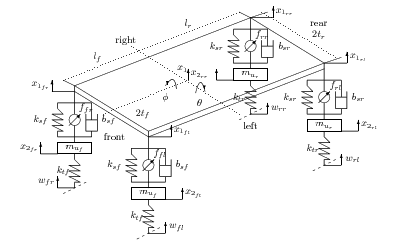
A tervezés alapja a felfüggesztési rendszer teljes jármű modellje. A teljes jármű, amely a 103. ábrán látható öt részből áll, ami leírja rugózott tömeg és a négy rugózatlan tömeg dinamikáját.
Jelölje  ,
,  és
és  a rugózott és rugózatlan tömegeket. Minden felfüggesztés egy rugóból, csillapítóból és egy aktív beavatkozóból áll, ami létrehozza a szükséges tolóerőt a járműtest és a tengely között. A rugóállandót és a gumiabroncsot jellemző merevséget jelölje
a rugózott és rugózatlan tömegeket. Minden felfüggesztés egy rugóból, csillapítóból és egy aktív beavatkozóból áll, ami létrehozza a szükséges tolóerőt a járműtest és a tengely között. A rugóállandót és a gumiabroncsot jellemző merevséget jelölje  és
és  . Az első és a hátsó felfüggesztés csillapításait jelölje
. Az első és a hátsó felfüggesztés csillapításait jelölje  , a bólintó és dőlési inerciákat pedig
, a bólintó és dőlési inerciákat pedig  és
és  . A bal és jobb oldalon az első és a hátsó felfüggesztés rugózott tömegeinek relatív elmozdulása legyen
. A bal és jobb oldalon az első és a hátsó felfüggesztés rugózott tömegeinek relatív elmozdulása legyen  ,
,  és
és  ,
,  . A bal és jobb oldalon az első és a hátsó felfüggesztés rugózatlan tömegeinek relatív elmozdulása legyen
. A bal és jobb oldalon az első és a hátsó felfüggesztés rugózatlan tömegeinek relatív elmozdulása legyen  ,
,  ,
,  és
és  . A teljes jármű modellben
. A teljes jármű modellben  ,
,  ,
,  ,
,  jelöli az útgerjesztést, míg a bemeneti (irányító) jelek az
jelöli az útgerjesztést, míg a bemeneti (irányító) jelek az  ,
,  ,
,  ,
,  erők, amiket a beavatkozók hoznak létre.
erők, amiket a beavatkozók hoznak létre.
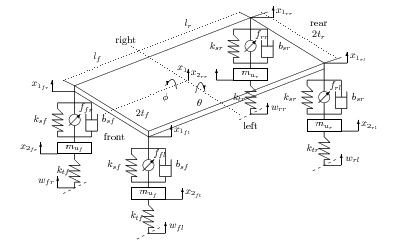
Az egyenletek a hét szabadságfokú teljes jármű modellnek felelnek meg. Azt feltételezzük, hogy a rugózott tömeg egy merev test és mozgási szabadság a függőleges, legyező és dőlési irányban van.  egy függőleges elmozdulás a súlypontban,
egy függőleges elmozdulás a súlypontban,  és
és  a rugózott tömeg bólintási és dőlési szöge. A rugózatlan tömeg függőleges irányban mozdulhat el: ezek
a rugózott tömeg bólintási és dőlési szöge. A rugózatlan tömeg függőleges irányban mozdulhat el: ezek  ,
,  ,
,  ,
,  . A dinamikus jármű modell a következő:
. A dinamikus jármű modell a következő:

|
|
(437) |



|
|
(438) |



|
|
(439) |

|
|
(440) |

|
|
(441) |

|
|
(442) |

|
|
(443) |

ahol a következő lineáris közelítéseket alkalmaztuk:  ,
,  ,
,  , és
, és  .
.
Ekkor a csillapítási erők és a felfüggesztési rugó erők a következők:

|
|
(444) |

|
|
(445) |

ahol  a beavatkozó által létrehozott erők, és ahol
a beavatkozó által létrehozott erők, és ahol  .
.
Itt  ,
,  ,
,  és
és  a nemlineáris csillapítások. A
a nemlineáris csillapítások. A  tényező a csillapító erőt lineárisan befolyásolja, míg
tényező a csillapító erőt lineárisan befolyásolja, míg  nemlineáris hatást fejt ki a csillapítási jellemzőkre.
nemlineáris hatást fejt ki a csillapítási jellemzőkre.  írja le a karakterisztikák aszimmetrikus viselkedését. A
írja le a karakterisztikák aszimmetrikus viselkedését. A  rugóállandó lineáris része
rugóállandó lineáris része  míg
míg  a nemlineáris rész. Az kerékerő egy lineáris közelítése:
a nemlineáris rész. Az kerékerő egy lineáris közelítése:
|
|
(446) |
Jegyezzük meg, hogy ha a nemlineáris hatásokat figyelmen kívül hagyva a modellt linearizáljuk, akkor az  és
és  közelítéseket alkalmazzuk (444) és (445) helyett.
közelítéseket alkalmazzuk (444) és (445) helyett.
Az  állapotvektor alakja az alábbi:
állapotvektor alakja az alábbi:
|
|
(447) |
ahol  és
és
|
|
(448) |

A LPV modellezés ütemezési változóit, melyek közvetlenül mért vagy számított és a mért jelek, meg kell megválasztani: a bal és jobb oldalon az első és a hátsó felfüggesztés relatív elmozdulása és annak sebessége választható ütemezési jelnek:
|
|
(449) |

ahol  . A
. A  ütemezési változók a relatív sebességtől függnek, míg
ütemezési változók a relatív sebességtől függnek, míg  a relatív elmozdulástól függ. A gyakorlatban a relatív elmozdulás a mért jel. A relatív sebességet ekkor numerikus differenciálással határozzuk meg a mért relatív elmozdulásból. Így az aktív felfüggesztési rendszer LPV modelljében nyolc paraméterek kerül kiválasztásra ütemezési változóként.
a relatív elmozdulástól függ. A gyakorlatban a relatív elmozdulás a mért jel. A relatív sebességet ekkor numerikus differenciálással határozzuk meg a mért relatív elmozdulásból. Így az aktív felfüggesztési rendszer LPV modelljében nyolc paraméterek kerül kiválasztásra ütemezési változóként.
A magas szintű szabályozástervezés alapja a paraméter-függő LPV módszer. A modell állapotteres alakja a következő:
|
|
(450) |

ahol  .
.
6.5.2. A hidraulikus beavatkozó modellezése
Az aktív felfüggesztés felsőszintű tervezésekor a jármű megfelelő működése szempontjából szükséges erőket tervezzük meg az első és a hátsó, a jobb és a bal oldalon. Az alsó-szintű irányítás tervezésekor az elektrohidraulikus beavatkozószelep irányítását tervezzük meg. A szelep elmozdításával a hidraulikus beavatkozóval generált erőnek kell követni a felsőszintű irányítás által igényelt erőt. Az elektronikus hidraulikus rendszer leírására egy klasszikus nemlineáris modellt használunk, a részletekért lásd még [3], [35], [89].
A beavatkozó hidraulikus rendszer által előállított erők az alábbi módon fejezhetők ki:
|
|
(451) |

ahol  a dugattyú felületének területe és
a dugattyú felületének területe és  (
( ,
,  ) pedig az egyes hidraulikus rendszerben kialakuló nyomások, lásd például [89].
) pedig az egyes hidraulikus rendszerben kialakuló nyomások, lásd például [89].
A  nyomások változása
nyomások változása
|
|
(452) |

ahol  az egyes hidraulikus áramlások,
az egyes hidraulikus áramlások,  pedig a két végpont közötti relatív sebesség, a csillapítók sebessége, és
pedig a két végpont közötti relatív sebesség, a csillapítók sebessége, és  ,
,  ,
,  állandó paraméterek.
állandó paraméterek.
A hidraulikus áramlás kifejezhető mint
|
|
(453) |

ahol
|
|
(454) |
|
|
(455) |
ahol  a tápnyomás, és
a tápnyomás, és  az egyes szelepek elmozdulása.
az egyes szelepek elmozdulása.
A csillapító sebesség egy visszacsatolásként jelenik meg, amit [4] tanulmányozott részletesen. Feltételezzük, hogy a működés során  . Ennek megfelelően ((453)) alapján
. Ennek megfelelően ((453)) alapján  , amely egy bimodális kapcsolási rendszert határoz meg a beavatkozó dinamikájára. Annak érdekében, hogy elkerüljük a technikai nehézségeket, az előjelfüggvényt egy sima
, amely egy bimodális kapcsolási rendszert határoz meg a beavatkozó dinamikájára. Annak érdekében, hogy elkerüljük a technikai nehézségeket, az előjelfüggvényt egy sima  függvényre cseréljük, ahol
függvényre cseréljük, ahol  megfelelően kicsire van választva.
megfelelően kicsire van választva.
A szelep elmozdulását szabályozza az  szervo szelep:
szervo szelep:
|
|
(456) |
ahol  időben állandó.
időben állandó.
Az egyes beavatkozó modellek, amik a tervezés alapját képezik, ennek a generikus modellnek alapján vannak megfogalmazva:
|
|
(457) |

|
|
(458) |
az  -edik beavatkozóra ahol
-edik beavatkozóra ahol  és
és  jelöli
jelöli  és
és  jeleket, míg
jeleket, míg 
 és
és  .
.
6.6. A magas szintű szabályozási feladat
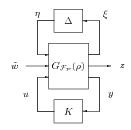
A robusztus szabályozó tervezésének alapja a 104 ábrán látható zárt kör kapcsolás modellje, ahol a  általánosított rendszer ami tartalmazza a névleges rendszert, az összes performancia kimenetet, zavarásokat és a bizonytalanságot. Itt
általánosított rendszer ami tartalmazza a névleges rendszert, az összes performancia kimenetet, zavarásokat és a bizonytalanságot. Itt  jelöli a zavarásokat míg
jelöli a zavarásokat míg  a normalizált blokk diagonális bizonytalansági blokkot, a részletekért lásd például [128], [136].
a normalizált blokk diagonális bizonytalansági blokkot, a részletekért lásd például [128], [136].
A robusztus szabályozó tervezése a  LPV rendszer zérus kezdeti feltételeknek megfelelő indukált
LPV rendszer zérus kezdeti feltételeknek megfelelő indukált  -normáját használja, ami az alábbiak szerint van definiálva:
-normáját használja, ami az alábbiak szerint van definiálva:
|
|
(459) |
A  értékhez tartozó
értékhez tartozó  norma jelenti az LPV rendszer legnagyobb performancia/zavar arányát feltételezve az összes kauzális lineáris operátort ami az LPV rendszerhez tartozhat, így ez a szint a végső performancia index. A performancia és zavar súlyok megfelelő kiválasztásával a sikeres tervezés feltétele
norma jelenti az LPV rendszer legnagyobb performancia/zavar arányát feltételezve az összes kauzális lineáris operátort ami az LPV rendszerhez tartozhat, így ez a szint a végső performancia index. A performancia és zavar súlyok megfelelő kiválasztásával a sikeres tervezés feltétele  . Meg kell jegyezni, hogy céljainak eléréséhez a súlyokat az adott feladatok függvényében kell kiválasztani.
. Meg kell jegyezni, hogy céljainak eléréséhez a súlyokat az adott feladatok függvényében kell kiválasztani.
Az LPV probléma megoldásának alapja az, hogy a felírt LMI-knek teljesülni kell minden  esetén. A gyakorlatban ezt a problémát a paraméter tér alkalmas felosztásával (gridding) és az LMI-knek egy véges
esetén. A gyakorlatban ezt a problémát a paraméter tér alkalmas felosztásával (gridding) és az LMI-knek egy véges  részhalmazon való megoldásával kezeljük. A szükséges rácspontok száma függ a rendszer nemlineáris viselkedésétől az adott működési tartományon. A részletekért lásd például [10], [103], [130].
részhalmazon való megoldásával kezeljük. A szükséges rácspontok száma függ a rendszer nemlineáris viselkedésétől az adott működési tartományon. A részletekért lásd például [10], [103], [130].
A felfüggesztési rendszer vizsgálatához tekintsük a 105 ábrán látható zárt rendszert. A visszacsatolt struktúra tartalmazza a  nominális modellt és a
nominális modellt és a  szabályozót, valamint olyan elemeket amik a bizonytalanság modellekhez és a célul kitűzött performancia eléréséhez tartoznak. A kapcsolási rajzon
szabályozót, valamint olyan elemeket amik a bizonytalanság modellekhez és a célul kitűzött performancia eléréséhez tartoznak. A kapcsolási rajzon  az aktuátorok éltal előállított vezérlő bemenet,
az aktuátorok éltal előállított vezérlő bemenet,  a mért szenzorok által mért jel,
a mért szenzorok által mért jel,  a mérési zaj. A mért kimenetek az első és a hátsó, bal és jobb oldali rugózott tömeg és rugózatlan tömeg közti elmozdulások:
a mérési zaj. A mért kimenetek az első és a hátsó, bal és jobb oldali rugózott tömeg és rugózatlan tömeg közti elmozdulások:
|
|
(460) |

Az ábrán látható  jelek zavarások, amelyek az útgerjesztést foglalják magukba. A
jelek zavarások, amelyek az útgerjesztést foglalják magukba. A  performancia kimenetek: az utaskényelem
performancia kimenetek: az utaskényelem  (vertikális gyorsulás/heave acceleration) , a
(vertikális gyorsulás/heave acceleration) , a  relatív elmozdulás (suspension deflection), a
relatív elmozdulás (suspension deflection), a  kerékelmozdulás (wheel relative displacement) és a
kerékelmozdulás (wheel relative displacement) és a  ) kontroll jel. Így a performancia vektor-kimenet a következő:
) kontroll jel. Így a performancia vektor-kimenet a következő:
|
|
(461) |

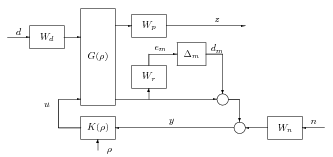
A visszacsatolt struktúra magában foglalja a elhanyagolt dinamika által okozott bizonytalanságokat, a bizonytalanul ismert vagy az időbeni viselkedésük miatt bizonytalan komponenseket. Annak érdekében, hogy a tervezés komplexitása kezelhető mértékű maradjon, a bizonytalanságokat ebben a struktúrában egy  multiplikatív LTI block és egy
multiplikatív LTI block és egy  súlyfüggvény képviseli. Feltételezzük, hogy a
súlyfüggvény képviseli. Feltételezzük, hogy a  átviteli függvény ismert és a bizonytalanság nagyságát tükrözi. Feltételezzük, hogy
átviteli függvény ismert és a bizonytalanság nagyságát tükrözi. Feltételezzük, hogy  egy ismeretlen stabil normakorlátos rendszer, azaz
egy ismeretlen stabil normakorlátos rendszer, azaz  ..
..
A tervezés célja, hogy meghatározza négy vezérlő erőt,
|
|
(462) |

oly módon, hogy a vertikális gyorsulások, a relatív elmozdulások, a kerékelmozdulások a lehető legkisebbek legyenek a kívánt tartományon.
Ezt az irányítási struktúrát az 104 ábrán látható általánosított séma keretei közé lehet tenni, ahol  a zavarás,
a zavarás,  a bizonytalansági blokk és
a bizonytalansági blokk és  a vezérlés. A felfüggesztési rendszer performanciáját négy paraméter függvényében lehet meghatározni: ezek az utaskényelem, relatív elmozdulás, a kerékelmozdulás és az energiafelhasználás, lásd [40]. Az útgerjesztés által keltett rezgések vezetnek a vezető és az utasok fáradásához valamint a jármű és a hasznos teher sérüléséhez. Széles körben elfogadott, hogy korreláció van az az utaskényelem (vagy utazási komfort) és a rugózott tömeg vertikális, bólintó és dőlési gyorsulása között. Az egyszerűség kedvéért itt csak a vertikális gyorsulást vesszük figyelembe.
a vezérlés. A felfüggesztési rendszer performanciáját négy paraméter függvényében lehet meghatározni: ezek az utaskényelem, relatív elmozdulás, a kerékelmozdulás és az energiafelhasználás, lásd [40]. Az útgerjesztés által keltett rezgések vezetnek a vezető és az utasok fáradásához valamint a jármű és a hasznos teher sérüléséhez. Széles körben elfogadott, hogy korreláció van az az utaskényelem (vagy utazási komfort) és a rugózott tömeg vertikális, bólintó és dőlési gyorsulása között. Az egyszerűség kedvéért itt csak a vertikális gyorsulást vesszük figyelembe.
A felfüggesztési rendszer munkatere, amelyet a rugózott és rugózatlan tömeg relatív elmozdulása határol be, más néven relatív elmozdulás, a felfüggesztés geometriája által befolyásolja a dinamikus menetstabilitást. Ezért a relatív elmozdulásnak minimálisnak kell lenni. A felfüggesztési rendszernek garantálni kell, hogy a jármű minden manőver során az előírt pályán maradjon. A kerékelmozdulás egy a gravitáció hatására létrejövő statikus összetevőből és egy, az útgerjesztés által létrehozott dinamikus komponensből áll. Annak érdekében, hogy a manőver ideje alatt csökkentsük a járműre ható oldalirányú erőket, szükség van arra, hogy a kerékelmozdulás a lehető legkisebb mértékű legyen. A működtető erő korlátozását annak érdekében építjük be a tervezési eljárásba, hogy elkerüljük a nagy vezérlési energiákat.
A  ,
,  ,
,  és
és  súlyfüggvények célja, hogy vertikális gyorsulások, a relatív elmozdulások, a kerékelmozdulások a lehető legkisebbek legyenek a teljes működési tartományon. Az adott funkciók súlyozása a performancia kimenetek normájának büntetéseként tekinthető, azaz a súlynak nagynak kell lenni azokon a frekvencia tartományokon, ahol kis jeleket kívánunk és kicsinek, ha nagyobb performancia kimenet is megengedett. Így
súlyfüggvények célja, hogy vertikális gyorsulások, a relatív elmozdulások, a kerékelmozdulások a lehető legkisebbek legyenek a teljes működési tartományon. Az adott funkciók súlyozása a performancia kimenetek normájának büntetéseként tekinthető, azaz a súlynak nagynak kell lenni azokon a frekvencia tartományokon, ahol kis jeleket kívánunk és kicsinek, ha nagyobb performancia kimenet is megengedett. Így  és
és  kiválasztása az alábbiak szerint történik:
kiválasztása az alábbiak szerint történik:
|
|
(463) |
|
|
(464) |
Az  ,
,  és
és  szűrőállandók tényleges értékei az adott probléma során felhalmozott mérnöki tudás alapján választhatók meg. Itt azt kell látni, hogy az alacsony frekvenciájú tartományban a testre ható vertikális gyorsulásokat befolyásoló zavarásokat kell elnyomni a paraméter-függő
szűrőállandók tényleges értékei az adott probléma során felhalmozott mérnöki tudás alapján választhatók meg. Itt azt kell látni, hogy az alacsony frekvenciájú tartományban a testre ható vertikális gyorsulásokat befolyásoló zavarásokat kell elnyomni a paraméter-függő  tényezővel, valamint a relatív elmozdulásokat. A tervezés során állandó
tényezővel, valamint a relatív elmozdulásokat. A tervezés során állandó  és
és  súlyozási tényezőket választunk a fennmaradó jelekre. Megjegyzendő, hogy bár ezeket a sályokat frekvencia tartományban választjuk, a tervezés során az állapotteres leírásukat használjuk.
súlyozási tényezőket választunk a fennmaradó jelekre. Megjegyzendő, hogy bár ezeket a sályokat frekvencia tartományban választjuk, a tervezés során az állapotteres leírásukat használjuk.
A tervezési céloknak egy  performancia jel segítségével történő megfogalmazásának nehézsége abban áll, hogy a különböző jelek közötti igények kielégítése konfliktusos: például a felfüggesztési rendszerrel az utaskényelem és a relatív elmozdulás egyszerre nem javítható. Így a különböző igények között egy alkalmas egyensúlyt kell megvalósítani a performancia súlyok megfelelő választásával: a (463) illetve (464) formulákban a nagy
performancia jel segítségével történő megfogalmazásának nehézsége abban áll, hogy a különböző jelek közötti igények kielégítése konfliktusos: például a felfüggesztési rendszerrel az utaskényelem és a relatív elmozdulás egyszerre nem javítható. Így a különböző igények között egy alkalmas egyensúlyt kell megvalósítani a performancia súlyok megfelelő választásával: a (463) illetve (464) formulákban a nagy  erősítés és kis
erősítés és kis  erősítés az az utaskényelem hangsúlyozásának felel meg. Másrészt kicsinek választva
erősítés az az utaskényelem hangsúlyozásának felel meg. Másrészt kicsinek választva  -t és nagynak
-t és nagynak  -t a tervezés a biztonságra (a relatív elmozdulás) fókuszál.
-t a tervezés a biztonságra (a relatív elmozdulás) fókuszál.
Az LPV irányításban (449) alapján  a rugózott és rugózatlan tömeg közti
a rugózott és rugózatlan tömeg közti  relatív elmozdulást befolyásolja. A (449) formulában a
relatív elmozdulást befolyásolja. A (449) formulában a  változó célja, hogy csökkentse a függőleges gyorsulást vagy a relatív elmozdulást, annak nagyságától függően.
változó célja, hogy csökkentse a függőleges gyorsulást vagy a relatív elmozdulást, annak nagyságától függően.
Az erősítések paramétertől való függését a  és
és  állandók jellemzik a következő módon:
állandók jellemzik a következő módon:
|
|
(465) |
|
|
(466) |
A zavarás  súlyát a szenzor zaj
súlyát a szenzor zaj  súlyát általában egy normalizáló konstans értékként választjuk. Mivel a késést szenzor zajként lehet modellezni, az irányítési stratégia szempontjából fontos
súlyát általában egy normalizáló konstans értékként választjuk. Mivel a késést szenzor zajként lehet modellezni, az irányítési stratégia szempontjából fontos  megfelelő választása. Ha azonban fölöslegesen nagy értékre állítjuk be ezeket a súlyokat, akkor a szabályozás konzervatív lehet, azaz a performancia csak egy alacsonyabb szinten biztosítható. A tervezéskor használt névleges modellek általában alacsonyabb frekvenciákon pontosabbak, míg magasabb frekvencián a pontosság csökken. Ezért a
megfelelő választása. Ha azonban fölöslegesen nagy értékre állítjuk be ezeket a súlyokat, akkor a szabályozás konzervatív lehet, azaz a performancia csak egy alacsonyabb szinten biztosítható. A tervezéskor használt névleges modellek általában alacsonyabb frekvenciákon pontosabbak, míg magasabb frekvencián a pontosság csökken. Ezért a  bizonytalansági súlyt a következőképp választjuk:
bizonytalansági súlyt a következőképp választjuk:
|
|
(467) |
A magas szintű irányítás által előírt jelet a vezérlő szelep beállítását működtető alacsony szintű vezérlőnek kell nyomon követni. Annak érdekében, hogy a megtervezett szabályozási séma minőségét globális szinten vizsgálhassuk, a feladatot globális szinten kell megfogalmazni. Miután a helyi szabályozókat megterveztük, elvileg lehetséges, hogy az irányítás elemzését globális szinten hajtsuk végre, a részletekért lásd például [79]. Ez azonban általában nem kivitelezhető, nagy számítási kapacitást igénylő eljárás. Ezért a gyakorlatban ezt a lépést kihagyva a szabályozás minőségi tulajdonságait a teljes rendszer vizsgálatát szimulációs kísérletek keresztül végezzük.
A következő részben a jelkövetési problémát kezeljük a nemlineáris beavatkozó dinamikai tulajdonságai alapján.
6.7. Az alacsony szintű vezérlő tervezése nemlineáris módszerekkel
Feltételezzük, hogy az erő igényt, ami  egy lineáris függvénye, egy LPV irányítás állítja elő. A cél az, hogy a hidraulikus aktuátor asszimptotikusan kövesse ezt a jelet. Mivel a hidraulikus beavatkozó és a felfüggesztés alrendszer egy nemlineáris és egy LPV rendszer kaszkád kapcsolása, a backstepping módszertanon alapuló megközelítés, vagy egy, a nemlineáris dinamika egzakt linearizálásán alapuló eljárás, megfelelő választás az irányítási cél elérésére. A teljesség kedvéért a következőkben mindkét módszert bemutatjuk.
egy lineáris függvénye, egy LPV irányítás állítja elő. A cél az, hogy a hidraulikus aktuátor asszimptotikusan kövesse ezt a jelet. Mivel a hidraulikus beavatkozó és a felfüggesztés alrendszer egy nemlineáris és egy LPV rendszer kaszkád kapcsolása, a backstepping módszertanon alapuló megközelítés, vagy egy, a nemlineáris dinamika egzakt linearizálásán alapuló eljárás, megfelelő választás az irányítási cél elérésére. A teljesség kedvéért a következőkben mindkét módszert bemutatjuk.
6.7.1. A beavatkozó backstepping alapú tervezése
A LPV rendszert négy (457) és (458) alrendszerrel kiegészítve a kapott lépcsős rendszer alakja:
|
|
(468) |

|
|
(469) |

|
|
(470) |
amit, alkalmazva a  állapottér transzformációt, egy szigorú visszacsatolásos alakban lehet felírni, lásd például [108] hatodik fejezetét:
állapottér transzformációt, egy szigorú visszacsatolásos alakban lehet felírni, lásd például [108] hatodik fejezetét:
|
|
(471) |

|
|
(472) |
|
|
(473) |
Az így kapott rendszerre egy standard rekurzív backstepping módszer alkalmazható, lásd [108], [119]. Mivel a nominális (471) rendszer a konstrukció miatt globálisan asszimptotikusan stabil, jelkövető szabályozást tartalmazó zárt rendszer is stabil lesz, lásd például [119] ötödik fejezetét.
A következőkben nyomon követjük azokat a legfontosabb lépéseket, amelyek az egyes beavatkozó elemek jelkövető irányítását fogják bemutatni. Ahhoz, hogy a módszer lényegét bemutassuk, [119] jelöléseit vesszük át. A magas szintű szabályozás által előírt  nyomásigényt amit a
nyomásigényt amit a  visszacsatolás kap meg
visszacsatolás kap meg  jelöli, míg
jelöli, míg  az igényelt
az igényelt  szelep elmozdulást. Az állpot transzformációra, ami a a szigorú visszacsatolási alakhoz vezet, csak azért van szükség, hogy az eredeti rendszert kapcsolatba hozzuk a kaszkád rendszerek már kidolgozott, passzivitás alapú tervezésével. A tényleges számításokat azonban az eredeti rendszeren is el lehet végezni.
szelep elmozdulást. Az állpot transzformációra, ami a a szigorú visszacsatolási alakhoz vezet, csak azért van szükség, hogy az eredeti rendszert kapcsolatba hozzuk a kaszkád rendszerek már kidolgozott, passzivitás alapú tervezésével. A tényleges számításokat azonban az eredeti rendszeren is el lehet végezni.
A beavatkozó alrendszer backstepping alapú tervezése két lépésben történik. Az első lépésben tekintsük  jelet mint egy virtuális bemenetet és
jelet mint egy virtuális bemenetet és  jelet mint egy virtuális kimenetet. Mivel
jelet mint egy virtuális kimenetet. Mivel  nem egy közvetlenül manipulálható bemenet, szeretnénk, ha a visszacsatolás biztosítaná
nem egy közvetlenül manipulálható bemenet, szeretnénk, ha a visszacsatolás biztosítaná  nyomon követését
nyomon követését  segítségével. Célszerű ezért a követési hibától megkövetelni, hogy lineáris és stabil legyen, azaz
segítségével. Célszerű ezért a követési hibától megkövetelni, hogy lineáris és stabil legyen, azaz  ,
,  . Felhasználva a ((468))--((469)) formulákat
. Felhasználva a ((468))--((469)) formulákat  jel lefutására a kívánt refrencia kiszámítása a nemlineáris visszacsatolás felhasználásával a következőképpen történik:
jel lefutására a kívánt refrencia kiszámítása a nemlineáris visszacsatolás felhasználásával a következőképpen történik:
|
|
(474) |

A második lépésben a kívánt bemenet  míg a (virtuális) kimenet alakja
míg a (virtuális) kimenet alakja  . A jelkövetési hibára egy stabil lineáris dinamika van előírva:
. A jelkövetési hibára egy stabil lineáris dinamika van előírva:
|
|
(475) |

A ((468))--((470)) formulák felhasználásával fejezzük ki az fizikailag manipulálható  beavatkozó bmenetet
beavatkozó bmenetet  ,
,  és
és  függvényében a következő alakban:
függvényében a következő alakban:
|
|
(476) |
A fenti lépésben a zárt kör asszimptotikusan stabil lesz, aminek egy Lyapunov függvénye
|
|
(477) |

lásd például [108], ahol  egy, a magas szintű tervezési lépéshez tartozó Lyapunov függvény.
egy, a magas szintű tervezési lépéshez tartozó Lyapunov függvény.
Mivel  és
és  azt kapjuk, hogy
azt kapjuk, hogy
|
|
(478) |

Az  jelre vonatkozó követési dinamika úgy írható mint
jelre vonatkozó követési dinamika úgy írható mint
|
|
(479) |

ahol  egy alkalmasan választott konstans paraméter. Ebből következik, hogy
egy alkalmasan választott konstans paraméter. Ebből következik, hogy
|
|
(480) |

ahonnan az  fizikai bemenetekre az alábbi kifejezés vezethető le:
fizikai bemenetekre az alábbi kifejezés vezethető le:
|
|
(481) |

Ebben a módszerben a paraméterek meghatározzák az  és
és  virtuális kimenetek konvergencia sebességét. Következtetésként: a backstepping módszer két paramétert,
virtuális kimenetek konvergencia sebességét. Következtetésként: a backstepping módszer két paramétert,  és
és  , választunk, hogy a jelkövető dinamika tulajdonságait előírjuk. Megfelelő paraméter választással a jelkövetés pontosságát javítani lehet, azonban az aktuátor fizikai korlátait figyelembe kell venni. Ennek elmulasztása vezet a követési hiba, azaz a tervezett és a tényleges jel, eltérésének növekedéséhez.
, választunk, hogy a jelkövető dinamika tulajdonságait előírjuk. Megfelelő paraméter választással a jelkövetés pontosságát javítani lehet, azonban az aktuátor fizikai korlátait figyelembe kell venni. Ennek elmulasztása vezet a követési hiba, azaz a tervezett és a tényleges jel, eltérésének növekedéséhez.
Az algoritmus  és
és  jeleket egyarány használja, amik viszont nem mért jelek. Annak érdekében, hogy a szabályozást végrehajtsuk, a gyakorlatban szükségünk van a
jeleket egyarány használja, amik viszont nem mért jelek. Annak érdekében, hogy a szabályozást végrehajtsuk, a gyakorlatban szükségünk van a  és
és  jelek deriváltjainak kiszámítására, ami a mérési zaj és a szükséges pontosság ismeretében számos módon végezhető el. [32], [81], [120] lehetséges stratégiákat mutat be a numerikus differenciálásra.
jelek deriváltjainak kiszámítására, ami a mérési zaj és a szükséges pontosság ismeretében számos módon végezhető el. [32], [81], [120] lehetséges stratégiákat mutat be a numerikus differenciálásra.
Ezt a fejezet azzal zárjuk, hogy kimutassuk, hogy az előjelfüggvény regularizálása során bevezetett  választása nem befolyásolja a gyakorlati megvalósítást. A backstepping algoritmus második lépésében
választása nem befolyásolja a gyakorlati megvalósítást. A backstepping algoritmus második lépésében  deriváltját kell meghatározni, azaz
deriváltját kell meghatározni, azaz
|
|
(482) |

|
|
(483) |

A számításokat elvégezve kapjuk, hogy
|
|
(484) |
Mivel a  függvény konvergenciája igen gyors ahogy
függvény konvergenciája igen gyors ahogy  , eléggé kicsi
, eléggé kicsi  értékek esetén
értékek esetén
|
|
(485) |
azaz,  úgy számítható, mintha az előjelfüggvény szakadását nem vennénk figyelembe.
úgy számítható, mintha az előjelfüggvény szakadását nem vennénk figyelembe.
6.7.2. Visszacsatolásos linearizálás módszere a beavatkozó alrendszerben
A visszacsatolásos linearizálás célja, hogy egy nemlineáris koordináta transzformáció keresztül és egy nemlineáris állapot visszacsatolás segítségével átalakítsa a nemlineáris input-affin rendszert egy lineáris és szabályozható rendszerré. Jól látható a (457)-(458) formulákból, hogy minden munkapont környezetében a beavatkozó alrendszerben az  bemenet és
bemenet és  kimenet relatív foka kettő minthogy
kimenet relatív foka kettő minthogy  csak
csak  második deriváltjában jelenik meg explicit módon. Ezért a rendszer ténylegesen egzakt módon linearizálható egy alkalmas nemlineáris állapot visszacsatolás alkalmazásával, lásd például [63].
második deriváltjában jelenik meg explicit módon. Ezért a rendszer ténylegesen egzakt módon linearizálható egy alkalmas nemlineáris állapot visszacsatolás alkalmazásával, lásd például [63].
Valóban , a nemlineáris koordináta transzformációt
|
|
(486) |
alkalmazva, amit  és
és  határoz meg, a (468)-(470) rendszer átmegy a következő alakba:
határoz meg, a (468)-(470) rendszer átmegy a következő alakba:
|
|
(487) |

|
|
(488) |

|
|
(489) |

ahol
|
|
(490) |
és
|
|
(491) |

Ennek alapján a linearizáló visszacsatolás alakja
|
|
(492) |
Ezzel a linearizáló visszacsatolással az aktuátor dinamikája egy kettős integrátorrá egyszerűsödik:
|
|
(493) |

|
|
(494) |
A (492) kifejezésben  jel értéke egy
jel értéke egy  -re vonatkozó, a kapott rendszerre vonatkoztatott referencia követési probléma megoldásaként számítható ki. Ekkor a lineáris visszacsatolása alakja
-re vonatkozó, a kapott rendszerre vonatkoztatott referencia követési probléma megoldásaként számítható ki. Ekkor a lineáris visszacsatolása alakja
|
|
(495) |

ahol  alkalmas paraméterek. Ez megoldja a követési feladatot és a zárt rendszert is stabilizálja, a részletekért lásd [64] tizenkettedik fejezetét.
alkalmas paraméterek. Ez megoldja a követési feladatot és a zárt rendszert is stabilizálja, a részletekért lásd [64] tizenkettedik fejezetét.
Meg kell jegyezni, hogy a  és
és  paramétereket a jelkövetés dinamikáját figyelembe véve kell megválasztani. Mivel az algoritmus a
paramétereket a jelkövetés dinamikáját figyelembe véve kell megválasztani. Mivel az algoritmus a  és
és  deriváltakat is használja, amelyek nem mért jelek, azokat numerikus differenciálás útján kell meghatározni.
deriváltakat is használja, amelyek nem mért jelek, azokat numerikus differenciálás útján kell meghatározni.
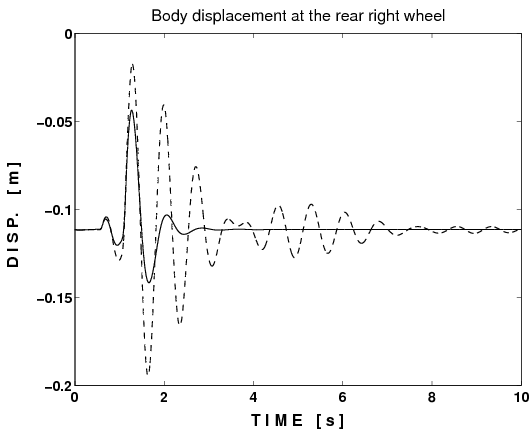
Az alábbi ábra az irányított rendszer válaszfüggvényeit mutatja felső szintű vezérlőt használva (folytonos:integrált, szaggatott:független).
6.8. Szimulációs példák
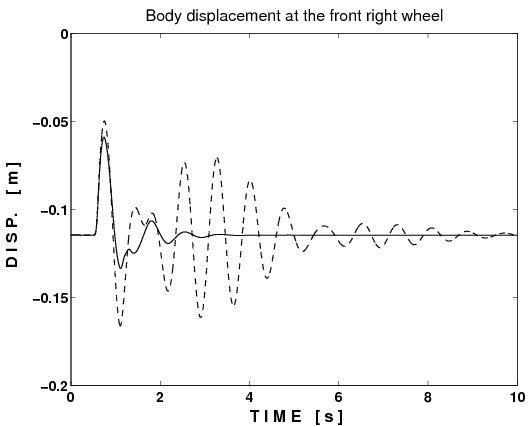
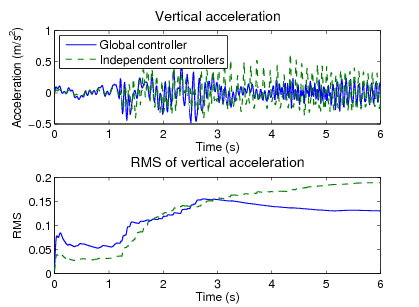
Egy bevezető példa rávilágít a globális vezérlési séma lehetséges előnyeire. A teljes jármű jármű modell alapján készített felfüggesztési szabályozás van összevetve azzal az esettel, amikor a felfüggesztés szabályozására tervezett négy külön szabályozó van kombinálva. Mivel a felfüggesztési pontokon csatolás van, várható, hogy a globális együttes tervezés felülmúlja az egyedileg tervezett vezérlést az olyan esetekben, amikor a csatolás megnyilvánulhat, például manőverezéskor. A tervezés részleteit nem ismertetjük, csak a megfelelő szimulációs ábrákat.
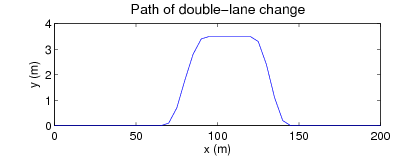
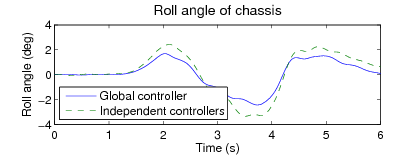
Ebben a példában a jármű egy kikerülési manővert végez 
 sebességgel. A 107(a) ábra mutatja a manőver pályáját. A manőver közben a dőlési szög változása hasonló mindkét esetben, lásd a 107(b) ábrát. A két irányítás elemzése során a függőleges gyorsulást, relatív elmozdulást és a szükséges erőket vizsgáljuk. A globális megoldásnál a rugózott tömeg függőleges gyorsulása kisebb, ami tükröződik a kis RMS értékben, lásd a 107(c) ábrát.
sebességgel. A 107(a) ábra mutatja a manőver pályáját. A manőver közben a dőlési szög változása hasonló mindkét esetben, lásd a 107(b) ábrát. A két irányítás elemzése során a függőleges gyorsulást, relatív elmozdulást és a szükséges erőket vizsgáljuk. A globális megoldásnál a rugózott tömeg függőleges gyorsulása kisebb, ami tükröződik a kis RMS értékben, lásd a 107(c) ábrát.
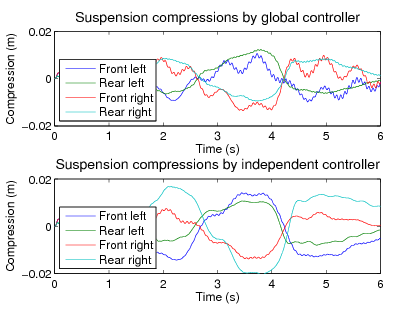
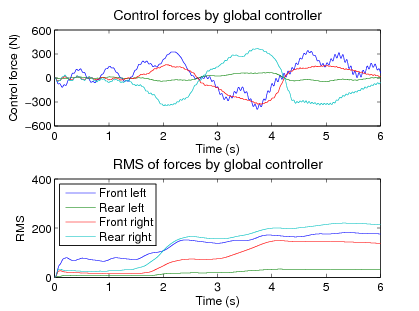
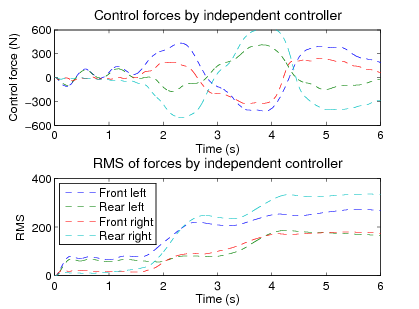
A különállóan tervezett szabályozástól eltérően az integrált megoldás esetén, bár a relatív elmozdulás értékei hasonlóak, de az RMS érték jelentősen kisebbek, a 107(d) ábrán látható módon. Jelentős különbségek figyelhetőek meg az erőkben. A globálisan tervezett felfüggesztés esetén kisebb erőkkel történik a manőver, mint az az RMS értékből is kitűnik: lásd a 107(e) ábrát. Az önállóan tervezett vezérlő esetén az erők a 107(f) ábrán láthatóak. Következésképpen a performancia jellemzők a globális vezérlés esetén jobbak, azaz mind a függőleges gyorsulás és a relatív elmozdulások jobb válaszokat adnak, és ezzel egy időben a szükséges szabályozó erők is kisebbek.
A következőkben a két-szintű szabályozót mutatjuk be részletesen. Először egy felső szintű irányítást tervezünk  modellen alapuló módszerrel, amely a szükséges beavatkozó erőt generálja. Ezután egy alacsony szintű szabályozást alkalmazunk annak érdekében, hogy a tervezett erőt előállítsuk.
modellen alapuló módszerrel, amely a szükséges beavatkozó erőt generálja. Ezután egy alacsony szintű szabályozást alkalmazunk annak érdekében, hogy a tervezett erőt előállítsuk.
A tervezés formalizált alapját képezik az (463)--(467) egyenletek. A szimulációs példákban egy nemlineáris jármű modell használunk és három esetet tekintünk: egy passzív és két aktív rendszert, ahol az egyik egy lineáris-tervezéssel adódik míg a másik LPV módszerrel. A passzív rendszer  csillapítása úgy lett megválasztva, hogy a csillapító erők nagyságát tekintve összehasonlítható legyen az aktív rendszerrel.
csillapítása úgy lett megválasztva, hogy a csillapító erők nagyságát tekintve összehasonlítható legyen az aktív rendszerrel.
A tervezés előkészítése során, a bizonytalanságot súlyozó  és a performanciát súlyozó
és a performanciát súlyozó  függvényeket kell meghatározni. A bizonytalanságot egy, a kimeneten jelentkező teljes komplex multiplikatív bizonytalansági blokként kezeljük. A szabályozás tervezésben alkalmazott modellek jellemzően alacsonyabb frekvenciákon pontosabbak (
függvényeket kell meghatározni. A bizonytalanságot egy, a kimeneten jelentkező teljes komplex multiplikatív bizonytalansági blokként kezeljük. A szabályozás tervezésben alkalmazott modellek jellemzően alacsonyabb frekvenciákon pontosabbak ( Hz), de nagyobb frekvenciákon a pontosság gyorsan romlik köszönhetően a rosszul modellezett vagy elhanyagolt dinamikáknak. Ennek megfelelően az elhanyagolt dinamikára vonatkozó súlyozás a következő:
Hz), de nagyobb frekvenciákon a pontosság gyorsan romlik köszönhetően a rosszul modellezett vagy elhanyagolt dinamikáknak. Ennek megfelelően az elhanyagolt dinamikára vonatkozó súlyozás a következő:
|
|
(496) |
ahol  -os bizonytalanság tükröződik az alacsony frekvenciájú tartományban.
-os bizonytalanság tükröződik az alacsony frekvenciájú tartományban.
A  ,
,  ,
,  és
és  súlyok megválasztásának célja az, hogy a függőleges gyorsulást, a relatív elmozdulást, a kerékelmozdulást és a bemenő irányító jeleket a kívánt működési tartományon belül kis értékeken tartsuk. A súlyfüggvények meghatározása az ISO a nemzetközi szabványoknak és a mérnöki ismereteknek megfelelően történik. Ennek alapján
súlyok megválasztásának célja az, hogy a függőleges gyorsulást, a relatív elmozdulást, a kerékelmozdulást és a bemenő irányító jeleket a kívánt működési tartományon belül kis értékeken tartsuk. A súlyfüggvények meghatározása az ISO a nemzetközi szabványoknak és a mérnöki ismereteknek megfelelően történik. Ennek alapján
|
|
(497) |
és
|
|
(498) |
választással éltünk. Abból indultunk ki, hogy az alacsony frekvenciájú tartományban a függőleges gyorsulást egy  -ös tényezővel, míg a relatív elmozdulást egy
-ös tényezővel, míg a relatív elmozdulást egy  -es-es faktorral nyomjuk el. A
-es-es faktorral nyomjuk el. A  és
és  erősítések paraméter függőségét a
erősítések paraméter függőségét a  és
és  választás tükrözi. Ez egy olyan LPV irányításnak felel meg ahol a függőleges gyorsulást csak akkor csökkentjük, ha a relatív elmozdulás kisebb, mint
választás tükrözi. Ez egy olyan LPV irányításnak felel meg ahol a függőleges gyorsulást csak akkor csökkentjük, ha a relatív elmozdulás kisebb, mint 
 és amely lassan el kezd fókuszálni a relatív elmozdulás csökkentésére, ha az nagyobb, mint
és amely lassan el kezd fókuszálni a relatív elmozdulás csökkentésére, ha az nagyobb, mint 
 . Ezután
. Ezután 
 felett kizárólag csak a relatív elmozdulást veszi figyelembe. A kerékelmozdulás súlyai, azaz
felett kizárólag csak a relatív elmozdulást veszi figyelembe. A kerékelmozdulás súlyai, azaz  , és a szabályozó bemenetének
, és a szabályozó bemenetének  súlyozása a megfelelő aktuátorok szaturációját hivatott elkerülni. A
súlyozása a megfelelő aktuátorok szaturációját hivatott elkerülni. A  súly az útgerjesztés hatásait befolyásolja. Feltesszük, hogy az útgerjesztés amplitudója
súly az útgerjesztés hatásait befolyásolja. Feltesszük, hogy az útgerjesztés amplitudója 
 , ennek megfelelően
, ennek megfelelően  . A
. A  választással feltételezzük, hogy a legnagyobb szenzor zaj nagysága
választással feltételezzük, hogy a legnagyobb szenzor zaj nagysága 
 az első és a hátsó relatív elmozdulás mérésekor a jobb és bal oldalon, valamint a teljes frekvencia tartományban.
az első és a hátsó relatív elmozdulás mérésekor a jobb és bal oldalon, valamint a teljes frekvencia tartományban.
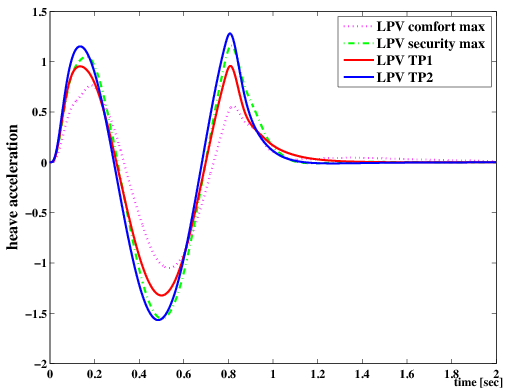
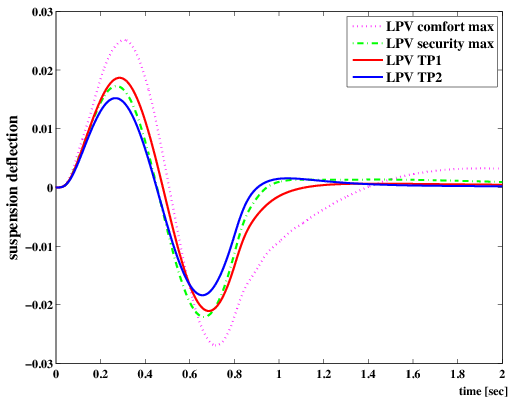
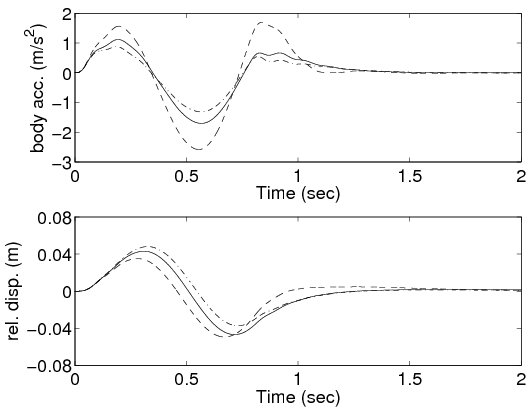
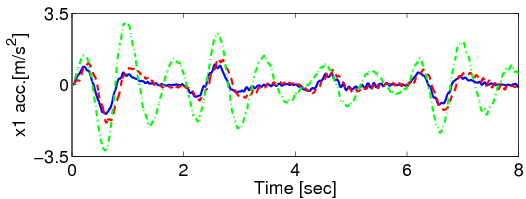
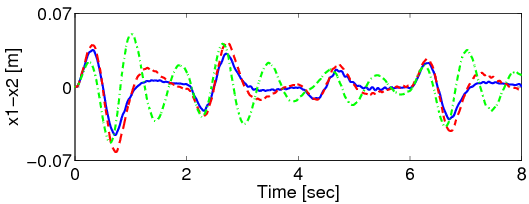
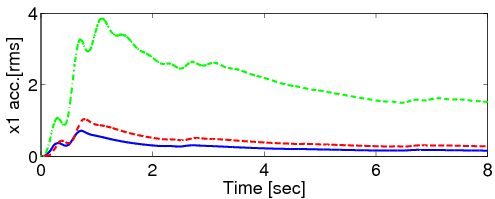
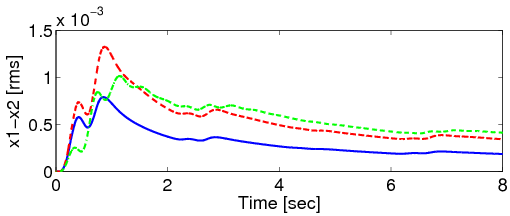
Először is, a felfüggesztési rendszert egy fiktív rossz minőségű úton teszteljük, amelyen négy különböző magasságú bukkanó zavarja meg a rendszert: a bukkanók magassága 
 ,
, 
 , illetve
, illetve 
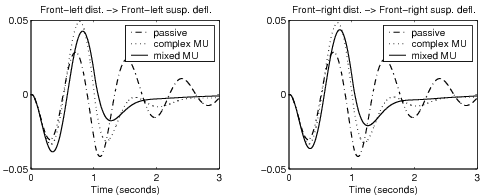
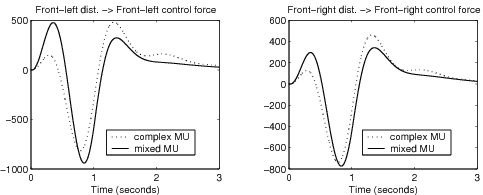
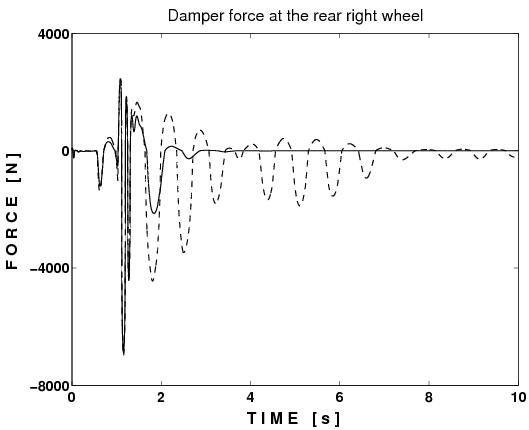
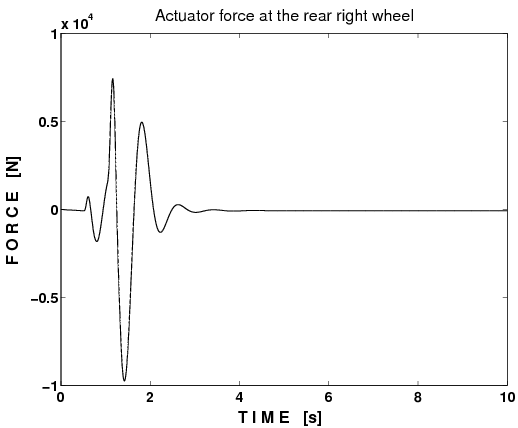
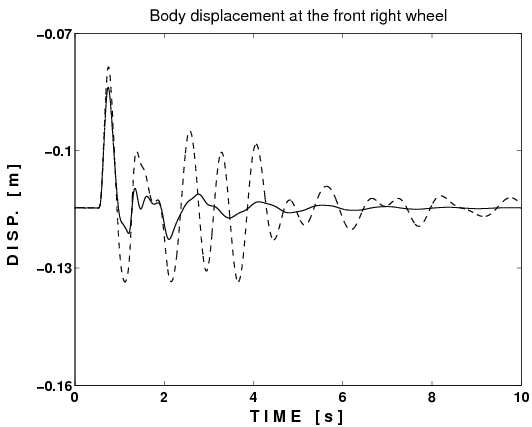
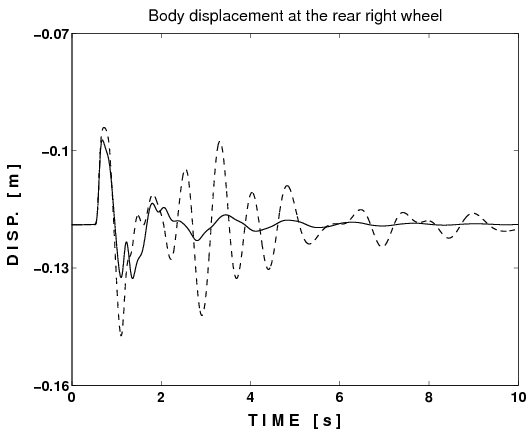
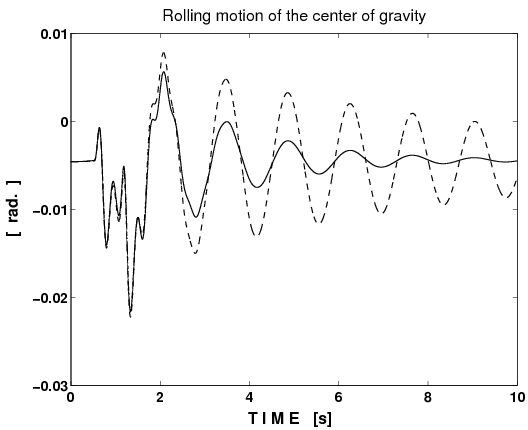
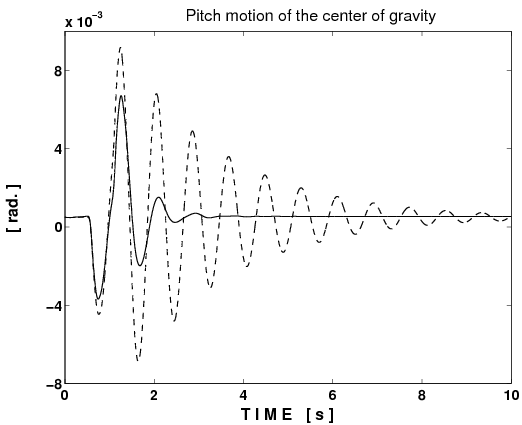
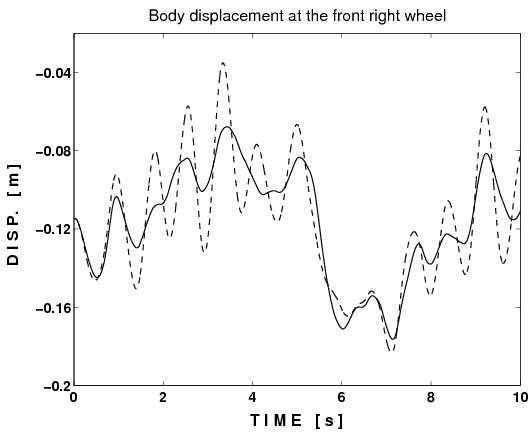
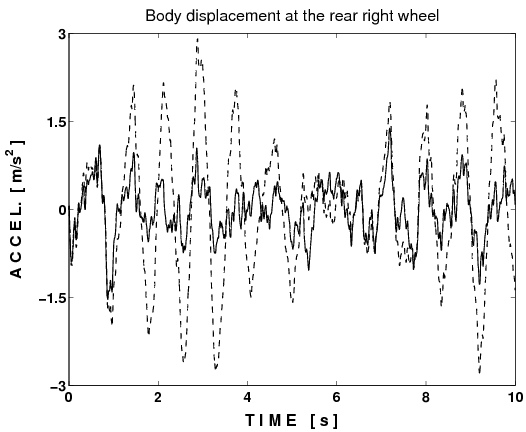
 . A bukkanók közötti egyenetlenségek sztochasztikus sebesség függő zavarások. A vizsgálat célja az idő-tartománybeli magatartás tesztelése és a tranziens tulajdonságai a vezérelt rendszernek. Az útgerjesztésre adott performancia válaszokat válaszokat az 106 ábra mutatja, ahol az LPV irányítás a zavarok hatásának jobb lecsengését illetve kisebb túllövéseket eredményez. A elek RMS-ének vizsgálatával ugyanerre a következtetésre jutunk.
. A bukkanók közötti egyenetlenségek sztochasztikus sebesség függő zavarások. A vizsgálat célja az idő-tartománybeli magatartás tesztelése és a tranziens tulajdonságai a vezérelt rendszernek. Az útgerjesztésre adott performancia válaszokat válaszokat az 106 ábra mutatja, ahol az LPV irányítás a zavarok hatásának jobb lecsengését illetve kisebb túllövéseket eredményez. A elek RMS-ének vizsgálatával ugyanerre a következtetésre jutunk.
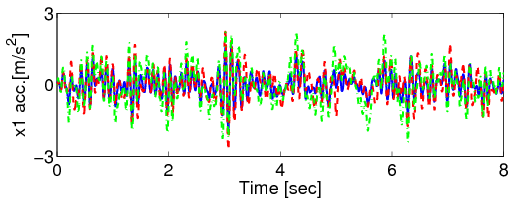
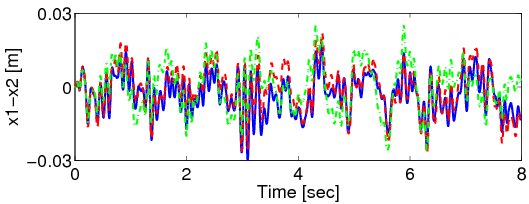
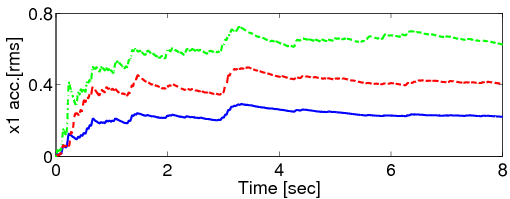
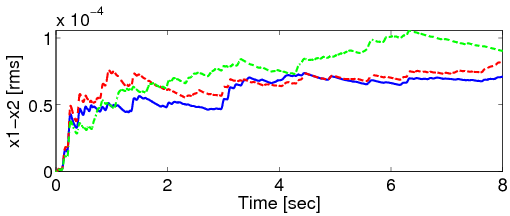
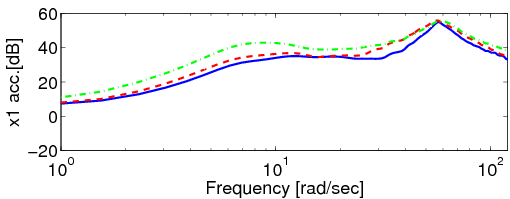
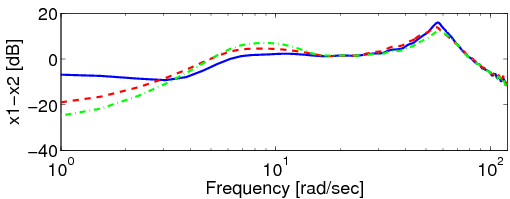
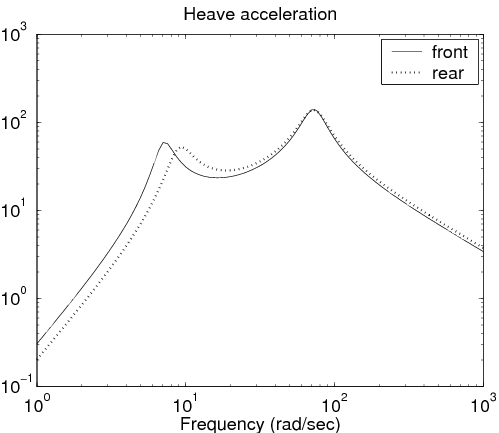
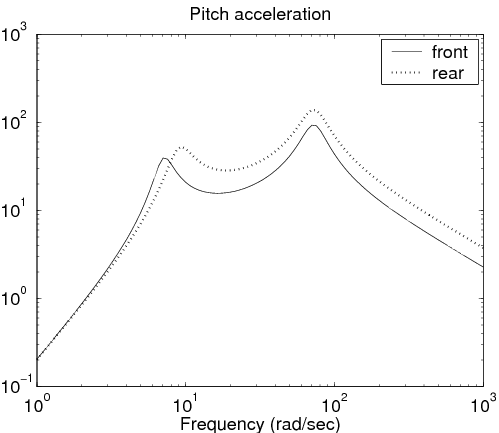
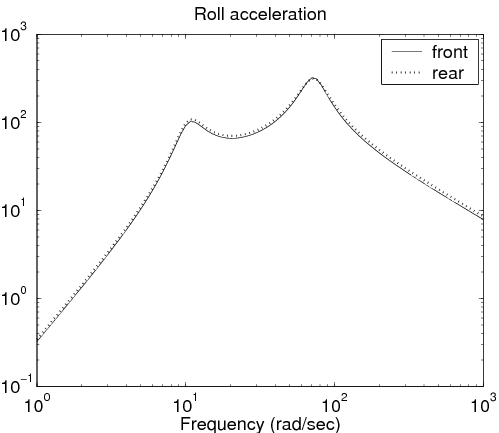
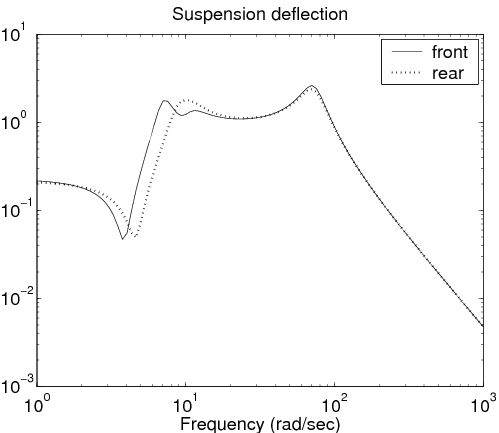
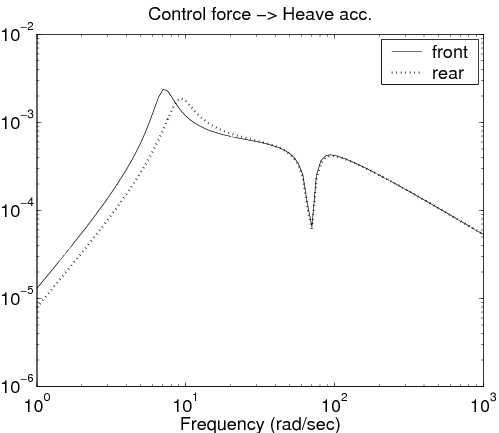
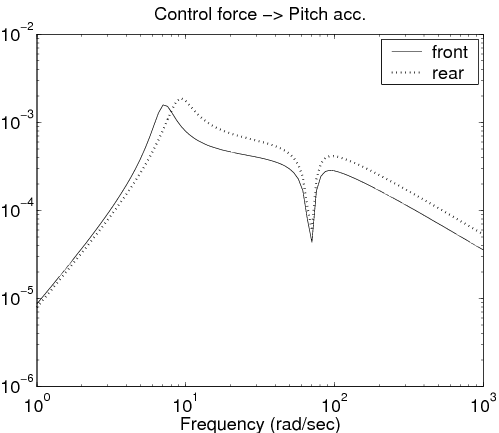
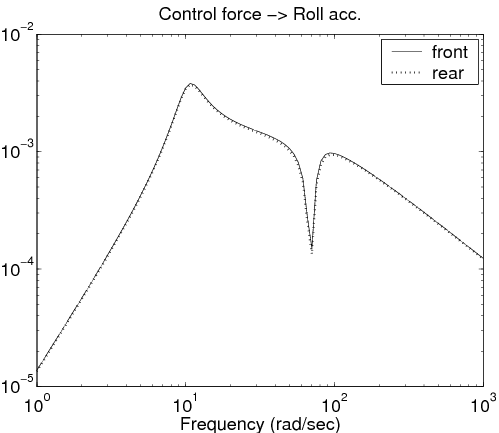
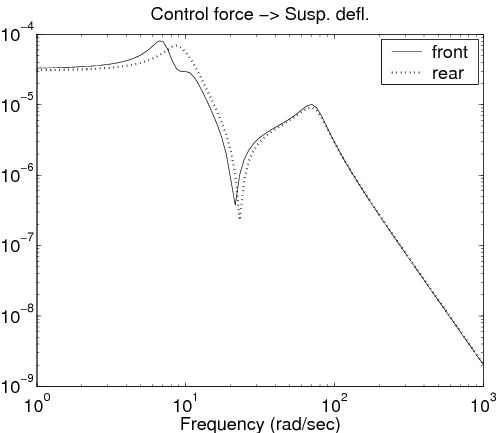
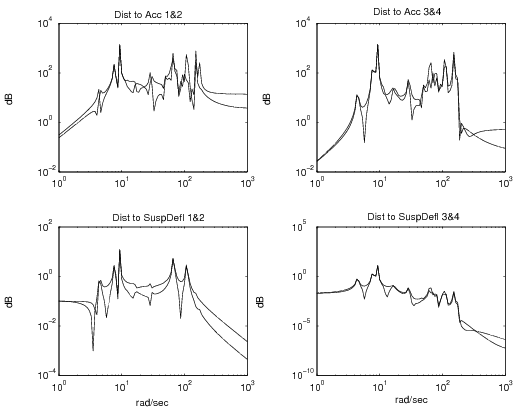
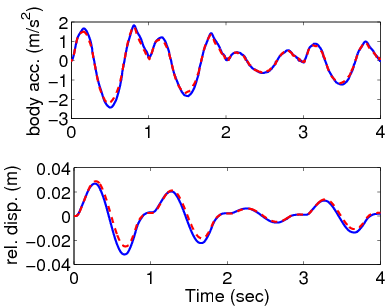
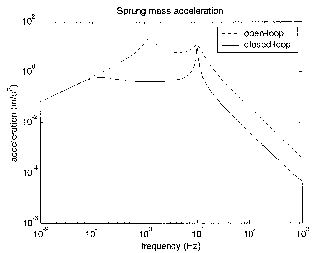
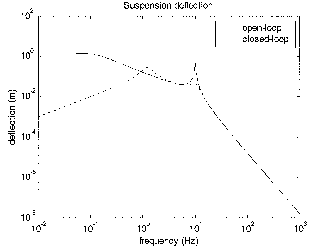
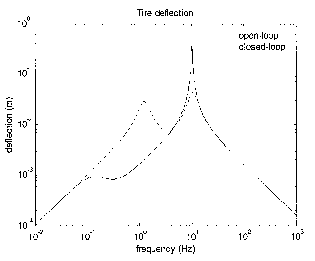
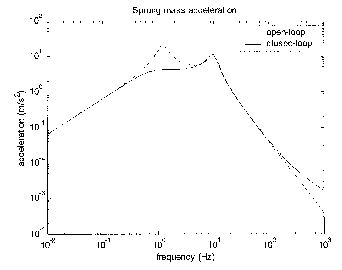
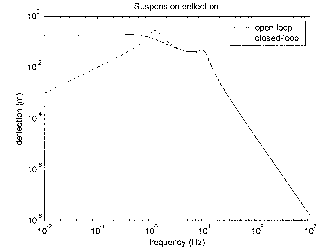
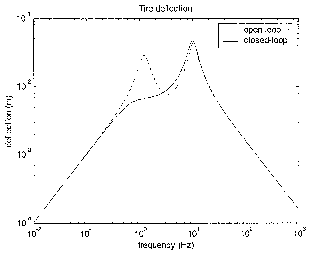
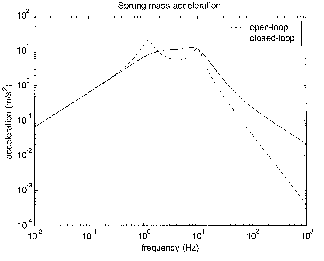
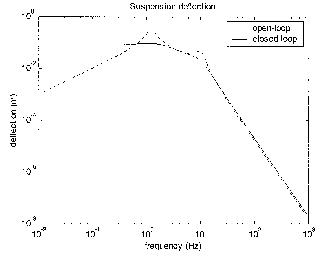
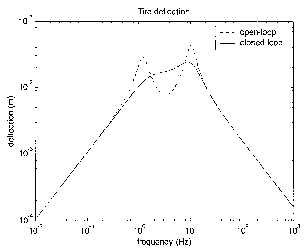
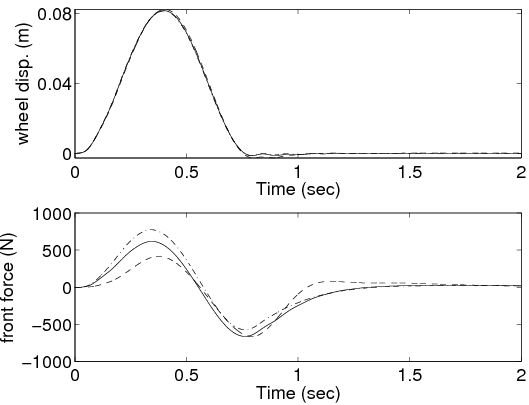
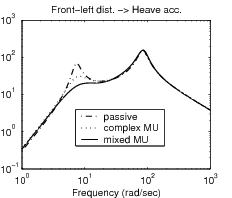
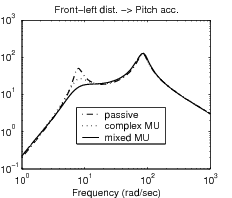
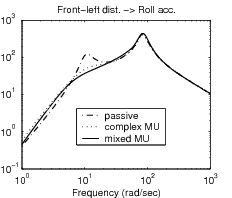
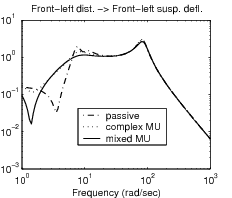
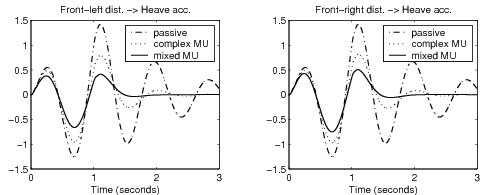
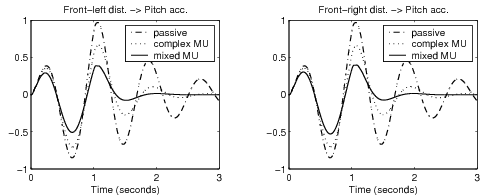
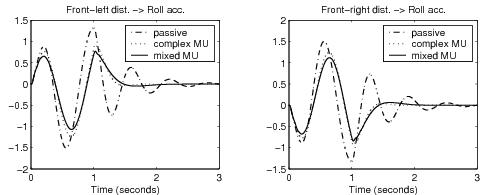
A második esetben sokkal reálisabb útgerjesztést alkalmazunk. Hasonló következtetések vonhatók le az időtartománybeli analízis eredményeit szemlélve, lásd a 107 ábrát. A különböző irányítások összehasonlítása időtartománybeli jelek alapján már nagyon egyszerű realisztikus esetekben. A hagyományos szabályozó kiértékelési módszerek szorosan kapcsolódnak a frekvencia-tartománybeli vizsgálatokhoz, mely módszerek a lineáris időinvariáns elképzeléseket tükrözik. Ennek ellenére ezeket széles körben használják a nemlineáris esetben is, amikor az eljárások nem rendelkeznek egy megalapozott elméleti háttérrel a frekvencia tartományi elemzéshez. Szemléltetés céljából az 108 ábra bemutatja a megfelelő empirikus átvitel függvényeket. Kiértékelési célból más performancia indexek is bevezetésre kerülnek, például a leggyakrabban használt mérce a jel RMS értékét mutatja.
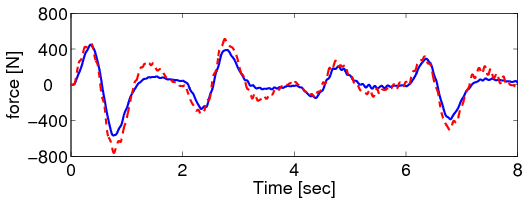
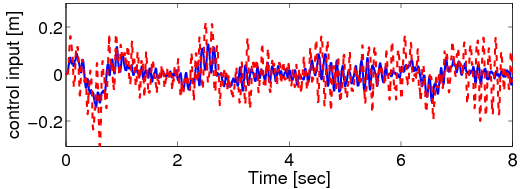
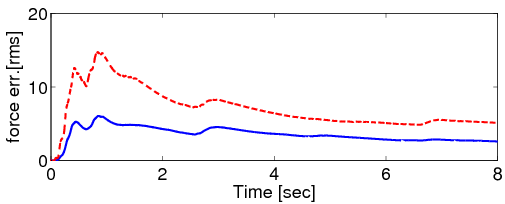
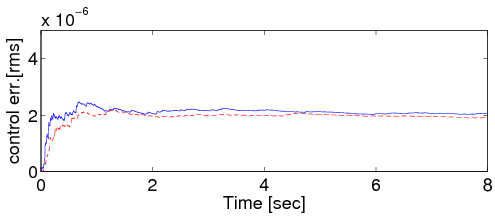
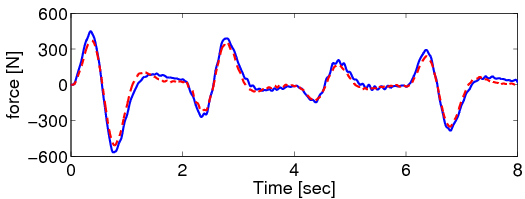
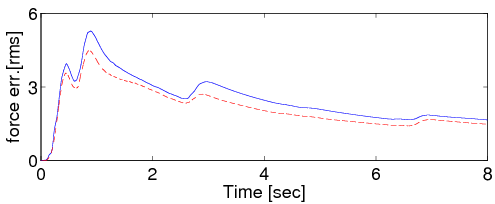
Az alacsony szintű irányítás eredményei az 109 ábrán láthatóak. A tervezési paraméterek értékei:  a backstepping módszer esetén és
a backstepping módszer esetén és  a feedback linearizálás és a visszacsatolás esetén (
a feedback linearizálás és a visszacsatolás esetén ( ). A szimuláció során a mintavételi idő értékét
). A szimuláció során a mintavételi idő értékét 
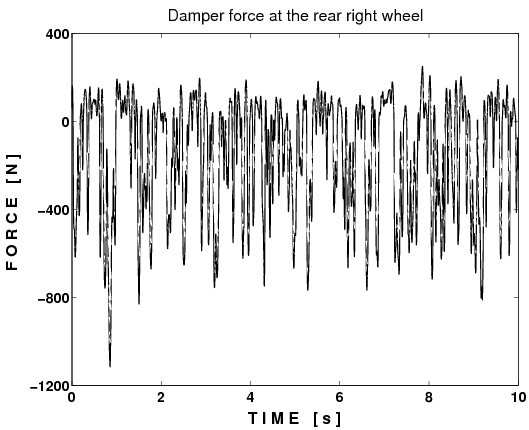
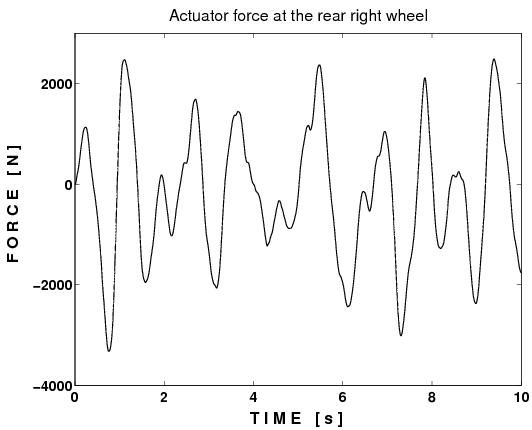
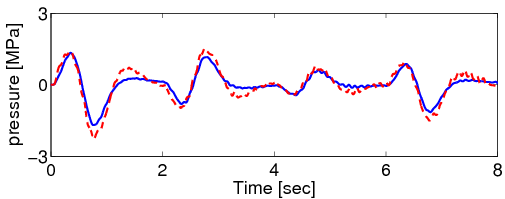
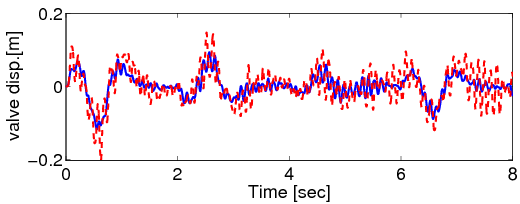
 -ra választottuk, ami megfelel a gyakorlatban használt esetnek. Az illusztrált jelek nyomásesés a dugattyún, a vezérlő szelep elmozdulása, az irányító bemenet, az elért erő és a jelkövetés RMS hibája. Mindkét esetben az elért beavatkozó erő a szükséges pontossággal követi a referencia jelet. A szimulációk azt mutatják, hogy a backstepping módszer valamivel jobban teljesít.
-ra választottuk, ami megfelel a gyakorlatban használt esetnek. Az illusztrált jelek nyomásesés a dugattyún, a vezérlő szelep elmozdulása, az irányító bemenet, az elért erő és a jelkövetés RMS hibája. Mindkét esetben az elért beavatkozó erő a szükséges pontossággal követi a referencia jelet. A szimulációk azt mutatják, hogy a backstepping módszer valamivel jobban teljesít.
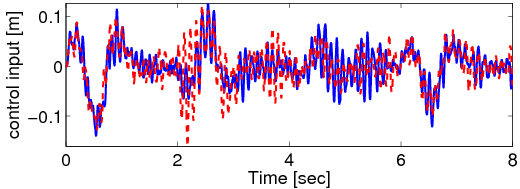
A backstepping jelkövetés tulajdonságai bizonytalan rendszer esetén is tesztelése kerültek. Az alacsony szintű vezérlő tervezés alapja egy névleges nemlineáris rendszer, ezért bizonytalanságokkal szembeni robusztusságát- ellentétben a magas szintű vezérlővel -- nem garantálja a tervezési folyamat. Itt a bizonytalansági paraméterként  -t kell figyelembe venni. Ez (458) alapján megadja a bemenet és a szelepelmozdulás közti dinamikát. Az elemzés során a névleges
-t kell figyelembe venni. Ez (458) alapján megadja a bemenet és a szelepelmozdulás közti dinamikát. Az elemzés során a névleges 
 érték mellett a bizonytalan
érték mellett a bizonytalan 
 értéket vettük figyelembe. A vezérlő bemenet, az RMS a hiba, az elért erő és a hiba RMS látható az 110 ábrán. A kapott eredmények mutatják az irányítási rendszer robusztusságát a parametrikus bizonytalansággal szemben.
értéket vettük figyelembe. A vezérlő bemenet, az RMS a hiba, az elért erő és a hiba RMS látható az 110 ábrán. A kapott eredmények mutatják az irányítási rendszer robusztusságát a parametrikus bizonytalansággal szemben.
A felfüggesztési rendszer tervezés során használt névleges paramétereit tartalmazza a 0 táblázat. A szabályozók Matlab/Simulink környezetben lettek kifejlesztve, implementálva és tesztelve. vezérlők segítségével tervezték meg és hajtották végre a stílust Matlabra állítja/Simulink szoftver. Az szabályozás tesztelésére a nagypontosságú CarSim jármű szimulációs szoftvert is felhasználtuk.
|
Parameters |
Value |
Unit |
|
|
1400 |
|
|
|
2100 |
|
|
|
460 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|










































