2. fejezet - Modellezés mért jelek alapján
A modell rendszerint egy differenciálegyenlet formájában ölt testet. Irányításelméleti alkalmazásokban ezek közönséges differenciálegyenletek, vagy darabonként közönséges differenciálegyenletek (kapcsolt rendszerek, impulzív rendszerek).
Amikor a teljes modellt a priori ismeretek alapján állítjuk fel, amik lehetnek fizikai elvek (Hamilton, Lagrange formalizmus, megmaradási elvek, mérlegegyenletek), akkor fehér doboz (white-box) modellezésről beszélünk. A módszer előnye, hogy a modell fizikai paramétereinek valós tartalma, jelentése van, hátránya viszont, hogy a modell felépítése általában rendkívül bonyolult. Ezen túlmenően a modell-bizonytalanságok kezelése is eléggé problematikus.
Ennek ellenpontja a fekete doboz (black-box) modellezés, amikor is a modell felállításához csak kísérletekkel, mérésekkel lehet információkat szerezni. Ilyen információ forrása lehet például a vizsgálójelekre adott rendszerválaszok (például az átmeneti függvény) elemzése. Elsősorban lineáris időinvariáns (LTI) rendszermodellek esetén használatos. Ha nincs más alapinformáció, akkor kiindulásként, mint matematikai modell, például polinommal történő közelítést biztosító egyenleteket lehet felhasználni. Az black-box modellek lényeges előnye a viszonylagos egyszerűségük; hátrányuk viszont, hogy a paramétereknek általában nincs valós fizikai jelentése.
E két véglet között helyezkedik el a szürke doboz (grey-box) modellezés, ami az előző két módszer kombinációja. Főleg nemlineáris jelenségek modellezésére használatos. Ekkor a struktúra adott -- de nem feltétlenül valamiféle egzakt levezetés eredménye. A (sztatikus) nemlinearitások leírásakor gyakran heurisztikus ismeretek épülnek be a modellbe. A műszaki gyakorlatban legtöbbször ez az eset fordul elő. Hátránya az, hogy a struktúra és a parametrizálás általában nem örződik meg a szokásos diszkretizálási eljárásokban.
2.1. Grey-box modellezés
Példa 3.1 Írjuk fel az alábbi negyedjármű modellt a nemlinearitások figyelembe vételével.
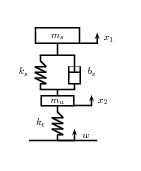
Erők, egyensúlyi egyenletek, nemlinearitások
ahol az egyes komponensek alakja:
Az állapottér reprezentáció
Ha az állapotvektor elemeit az alábbi formában vesszük fel:
akkor a komponensek:
A qLPV állapottér modell
ahol és
Nemlinearitások virtuális linearizálása:
Mért ütemezési változók:
Fiktív input:
Grey-box qLPV modell:
ahol
2.2. Identifikálhatóság
Legyen az kezdeti értékű és
rendszer input/output leképezése ( vektor paraméter).
A paraméter globálisan identifikálható az input/output adatokból, ha létezik legalább egy bemenő jel, hogy egyértelműen megoldható legyen minden kezdeti értékre.
A lineáris rendszer:
A input/output leképezés (alapmátrix) ismerete nem szükséges az identifikálhatóság eldöntéséhez. Helyette egy implicit identifikálhatósági kifejezést használhatunk.
kiszámítása: legyen és
Ekkor
ahol és
kiszámítása: legyen vektor sorai:
Ekkor sorai a vektorok.
Identifikálhatósági feltétel: egy analitikus dinamikus rendszer megfigyelhető az intervallum minden nemtriviális részintervallumán akkor és csak akkor, ha .
ahol az egy általánosított inverze.
Ez az egyenlet egy implicit leképezés ahol a kezdeti érték
Átparaméterezés: az egyenleteket átparaméterezve ():
-
ha injektív akkor a rendszer identifikálható;
-
az input/output jeleknek perszisztensnek kell lenni;
-
ha az kezdeti feltételek ismertek, akkor az identifikálhatósághoz a leképezésnek injektívnek kell lenni.
Példa 3.2 Vizsgáljuk meg a rugózott tömeg identifikálhatóságát. Átparaméterezett modell: legyen .
|
|
(46) |
ahol és ismert paraméterek. Mivel változhat, ismeretlen. jelöléssel a dinamikai egyenlet
|
|
(47) |
Ekkor
|
|
(48) |
|
(49) |
és
|
|
(50) |
Ha nem azonosan zéró és a bemenetek perszisztensek akkor a paraméter, legalább is elméletben, identifikálható.
A modell ellenőrzése a mért eredményekkel való összevetést modell validációnak nevezzük. A vizsgált rendszer viselkedésének leírására felállított matematikai modell jósága igazolásának legegyszerűbb módja az, hogy az eredeti rendszerben méréseket végzünk, és azok eredményeit összevetjük a modell által szolgáltatott eredményekkel. A modellalkotás során a modell és a mérések által szolgáltatott eredmények eltéréseit kell minimalizálni (identifikáció): a feladat megoldására leggyakrabban az legkisebb négyzetek módszerét alkalmazzuk.
Iteratív séma: ha az ellenőrzés során kiderül, hogy a feltételezett modell nem teljesíti a megkövetelt pontossági előírásokat, akkor egy iterációs feladatot kell megoldanunk: vissza kell térnünk a modellalkotási algoritmus elejére, és esetleg újabb paraméterek bevonásával, figyelembevételével egy újabb, javított felépítéssel kell elvégezni a modell azonosítását majd végre kell hajtanunk a modell validálásához leírt feladatokat.
Szimuláció során a matematikai modellel a rendszer kimenő változóit a bemenetek különböző értékéi függvényében határozzuk meg. Fontos, hogy gondot fordítsunk azon paraméterek azonosítására, amelyek a rendszer viselkedését döntően befolyásolják, amelyekre a rendszer a legérzékenyebben reagál. Paraméter-érzékenységi vizsgálat alkalmával a kapott eredményekből vonhatunk le következtetéseket a rendszer viselkedésére.