5. fejezet - Stabilitásvizsgálat
5.1. Rendszer stabilitása
Tekintsünk egy lineáris időinvariáns dinamikus rendszert, amelynek bemenőjele , , kimenőjele pedig , . Adott a rendszer súlyfüggvénye, illetve ennek -transzformáltja: . A bemenet/kimenet kapcsolatot zérus kezdeti feltétele mellett az alábbi konvolúciós integrál adja meg:
|
|
(234) |
Feltettük, hogy a rendszer a kezdeti időpontban nyugalmi állapotban van. Ezután feltehetjük a kérdést, hogy mi a feltétele annak, hogy ha gerjesztés éri a rendszert, és az valamilyen tulajdonsággal rendelkezik, milyen feltételek esetén rendelkezik a kimenőjel is ugyanilyen tulajdonsággal.
Tétel 4.1 Egy lineáris időinvariáns dinamikus rendszer stabilis akkor és csak akkor, ha
(a) A rendszer súlyfüggvénye abszolút integrálható,
|
|
(235) |
(b) A rendszer átviteli függvényének pólusai a baloldali komplex félsíkon helyezkednek el, azaz
|
|
(236) |
ahol a pólusa.
(c) A súlyfüggvény határértéke zérus, azaz
|
|
(237) |
Példa 4.1
Az inverz inga egy tömegű kocsira rögzített csapágyon szabadon elforgó rúd, amelynek tömege a rúd felső végére van redukálva.
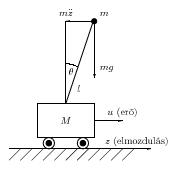
A feladat megoldása: A rúd szögelfordulása a következőképpen függ az gerjesztő erőtől:
|
|
(238) |
Az átviteli függvény pólusai:
|
|
(239) |
A pólus a jobboldali komplex félsíkra esik, tehát az inverz inga labilis.
Példa 4.2
A p paraméter milyen értékei esetén lesz stabil az alábbi állapottér reprezentáció:
|
|
(240) |
|
|
(241) |
A feladat megoldása:
|
|
(242) |
|
|
(243) |
Stabil, ha mindkét pólus negatív valós értékű.
|
|
(244) |
|
|
(245) |
ami mindig teljesül, azaz bármely értékére negatív értékű.
1. eset 2. eset
2. eset
|
|
(246) |
|
|
(247) |
A negatív valós érték feltétele, hogy legyen.
5.1.1. Zárt rendszer stabilitása
A szabályozó tervezésénél mindig biztosítani kell, hogy akár stabilis, akár labilis a szabályozott folyamat, a zárt rendszer stabilis legyen. A zárt rendszer átviteli függvénye:
|
|
(248) |
ahol az előrevezető ág átviteli függvénye és a hurokátviteli függvény.
A zárt rendszer stabilis akkor és csak akkor, ha pólusai a baloldali komplex számsíkon helyezkednek el, tehát az
|
|
(249) |
egyenlet gyökereire teljesül a , feltétel, ahol a pólusainak száma.
A a hurokátviteli függvény pólusai alapján vizsgálhatjuk a zárt rendszer stabilitását. Pólusok és a stabilitás kapcsolata:
- ha , akkor a zárt rendszer stabilis,
- ha , határeset,
- ha , akkor a zárt rendszer labilis,
ahol a zárt rendszer pólusa.
A Nyquist szabályozási kritérium a hurokátviteli frekvencia függvény alapján képes a zárt rendszer stabilitásáról képet adni.
Rajzoljuk meg a frekvencia függvényt a tartományra. A negatív frekvenciákra a függvény a pozitív frekvenciákra ismert függvénynek a valós tengelyre vett tükörképe lesz.
Tétel 4.2 (Nyquist kritérium) Ha a ( ) felnyitott hurok frekvencia függvénye a növekvő frekvenciák irányába haladva
- nem veszi körül a pontot, akkor a rendszer stabilis,
- átmegy a ponton, akkor a rendszer a stabilitás határán van,
- körülveszi a pontot, akkor a rendszer labilis.
Ha a frekvencia függvény a növekvő frekvenciák irányába haladva nem veszi körül a pontot, akkor a zárt rendszer rendszer stabilis. Ha a frekvencia függvény épp átmegy a komplex számsík pontján, akkor a frekvencia függvénynek körfrekvencián a zárt rendszerben csillapítatlan lengések keletkeznek. Ekkor a zárt rendszer a stabilitás határán van.
5.1.2. Bode-stabilitási kritérium
A stabilitás analízist a Bode diagram alapján is elvégezhetjük, ezek az ún. Bode-stabilitási kritériumok.
- Ha -20 dB/dek-dal metszi a tengelyt, akkor a zárt rendszer stabilis.
- Ha -40 dB/dek-dal metszi a tengelyt, akkor a vágási frekvencián érvényes fázisszög értéke dönt a zárt rendszer stabilitásáról. Ha , akkor a zárt rendszer stabilis, míg ha , akkor a zárt rendszer labilis.
- Ha -60 dB/dek-dal metszi a tengelyt, akkor a zárt rendszer labilis.
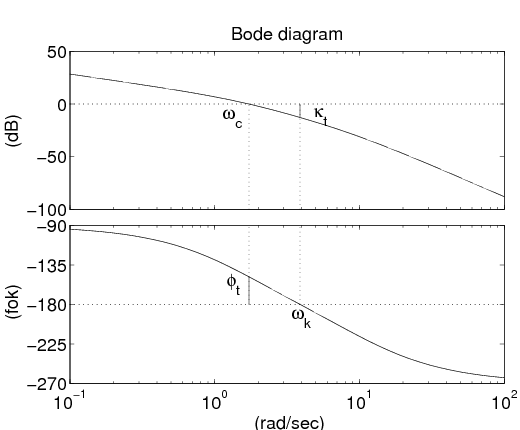
A zárt szabályozási körök stabilitásával kapcsolatban bevezetjük a fázistartalék fogalmát:
- Ha , akkor a zárt rendszer stabilis.
- Ha , határeset.
- Ha , akkor a zárt rendszer labilis.
A zárt szabályozási körök stabilitásával kapcsolatban bevezetjük a erősítési tartalék fogalmát. Azt mutatja, hogy mennyivel tudjuk még növelni a statikus körerősítést, úgy, hogy épp a stabilitás határára kerüljön a rendszer. Erősítési tartalék és a stabilitás kapcsolata:
- Ha , akkor a zárt rendszer stabilis.
- Ha , határeset.
- Ha , akkor a zárt rendszer labilis.