7. fejezet - Bizonytalanságok modellezése

7.1. Bizonytalanságok modellezése
A dinamikus jelenségek leírására közönséges vagy parciális differenciál-egyenleteket használunk. Az egyenletek alakja és struktúrája, a bennük szereplő paraméterek általában nem ismertek teljesen pontosan vagy ha azok időben változnak, a változásuk általában nem ismert.
Mivel a valódi rendszer modelljének pontos alakja a gyakorlati feladatokban nem ismert, s emiatt helyette annak közelítő, úgynevezett névleges (nominális) modelljét használjuk. A modell és a valós rendszer közötti eltérést több tényező okozza:
-
Az eltérés oka egyrészt modellezési eljárás következménye (pl. a felharmonikusokat, illetve a magasabb fokszámú együtthatókat elhanyagoljuk),
-
másrészt a rendszer működése során bekövetkező változások (pl. a normál üzem során a modell paraméterei változnak, az anyag kifáradás során változnak a rendszer paraméterei, sőt akár a struktúrája).
-
A fizikai rendszerekre külső zavarás hat. Még ha tudjuk is a hatásmechanizmust, a zavarás maga, annak nagysága, előre nem ismert és nem a mi irányításunk alatt van.
-
Nem mindig tudjuk kiadni azt az irányítójelet, amit szeretnénk.
-
A mérések sem pontosak (mérési zaj hatása).
Ezen hatások modellezésekor célszerű megkülönböztetni az állandóan jelen levő modell bizonytalanságot a külső zavarástól. Zavarások (disturbances) körébe tartozik tipikusan a rendszerre ható külső zavarás, az irányítójel hibája, a mérési zaj. Az irányítás célja, hogy a zavarások hatását csökkentse a mérnöki szempontból érdekes (esetleg fiktív) kimenő jelekre -- ez egy tipikus performancia követelmény.
Modell bizonytalanság (uncertainty) a modellben meglevő parametrikus bizonytalanságok és a nem modellezett dinamika hatása. Egy speciális eset a qLPV modellek ütemezési változói, amik ismertek a végrehajtás során de nem ismertek tervezéskor: a tervezés számára bizonyos szempontból bizonytalan paraméterként viselkednek. Az irányítás célja stabilitás és performancia garantálása adott nagyságú feltételezett modell bizonytalanság mellett.
Kétféle modell-bizonytalanságot különböztethetünk meg: strukturális és strukturálatlan modell-bizonytalanságot. A struktúrált bizonytalanság modellezésekor a bizonytalansági blokk struktúrálása (például blokk-diagonális) növelheti a modell pontosságát és használhatóságát az irányítás-tervezés szempontjából. Tipikusan struktúrált a grey-box modellezés során kapott modellben előforduló paramétereknek a bizonytalansága: a paraméter értéke pontosan nem ismert, de a bizonytalanság mértéke általában jól becsülhető.
Példa 6.1
Egy gépjármű felfüggesztési modelljének megkonstruálásakor több tényezőt kell figyelembe venni.
-
a rugózott tömeg változik az utasok tömegének módosulásával,
-
a felfüggesztés rugó vagy csillapítás karakterisztikája módosul,
-
kerékabroncs dinamikája változik.
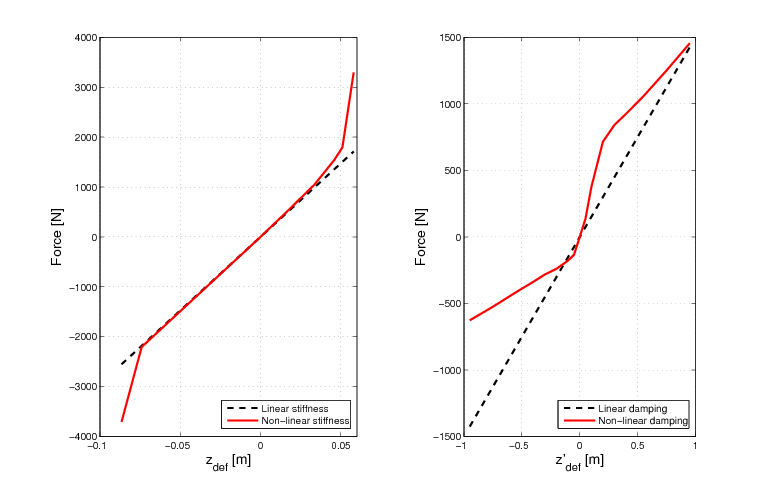
Példa 6.2
A modellezés során a nemlinearitások hatásait célszerű figyelembe venni. A mechanikai rendszerek irányítására alkalmazott lineáris irányítási algoritmusokkal megvalósított szabályozási rendszer tulajdonságait nagymértékben leronthatják a mechanikai rendszerben jelenlevő (nemfolytonos) nemlinearitások. Néhány jellemző példa: szaturáció, surlódás, holtsáv, kotyogás, hiszterézis.
7.2. Bizonytalansági modellek
7.2.1. Nemmodellezett dinamika
A mechanikai rendszerek irányítására alkalmazott lineáris vagy folytonos nemlineáris irányítási algoritmusokkal megvalósított szabályozási rendszer tulajdonságait nagymértékben leronthatják a mechanikai rendszerben jelenlevő (nemfolytonos) nemlinearitások. Tipikus nemlinearitások a szaturáció, surlódás,holtsáv, kotyogás, hiszterézis.
Számos irányítási alkalmazásnál az irányított rendszerben a nemlinearitás pontatlanul ismert vagy akár ismeretlen. Ha a linearizáláson alapuló technika kevésbé alkalmazható, a nemlinearitás hatásának kompenzálásához a szabályozót módosítani kell. Az alkalmazott technika alapján ez lehet robusztus szabályozás, amikor a szabályozót úgy tervezzük meg, hogy pontatlanul ismert nemlinearitás esetén is garantálja a zárt rendszer stabilitását és a szabályozási pontosságot, performanciát, vagy adaptív szabályozás, amikor a szabályozót kibővítjük olyan formában, hogy irányítás közben becsülje meg az ismeretlen nemlinearitást, paramétert.
A modell és a rendszer közötti hiba meghatározására általános megoldás nincs, különböző szerkezetű lehetőségek közül az additív, illetve a multiplikatív hiba struktúra a legismertebb.
A aktuális rendszer és a névleges rendszer közötti eltérést additív hiba struktúrának nevezzük, ha a következő összefüggés teljesül:
|
|
(275) |
ahol az additív hiba átviteli függvénye. Az additív hiba ismeretlen.
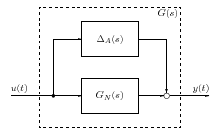
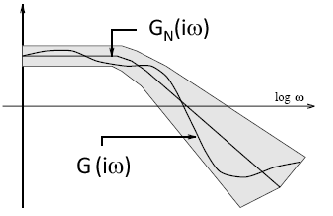
A ismeretlen méretű additív hiba átviteli függvényt egy ismert korláttal rendelkező bizonytalansággal kifejezhetjük és frekvencia függvényét Nyquist diagramon ábrázolhatjuk:
|
|
(276) |
ahol skalár függvény. Az aktuális rendszer Nyquist diagramja a névleges rendszer Nyquist diagramjával és a bizonytalanságot leíró függvénnyel illusztrálható.
A aktuális rendszer és a névleges rendszer közötti eltérést multiplikatív hiba struktúrájúnak nevezzük, ha a következő összefüggés teljesül:
ahol a multiplikatív hiba átviteli függvénye.
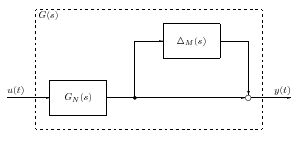
A ismeretlen méretű additív hiba átviteli függvényt egy ismert korláttal rendelkező bizonytalansággal kifejezhetjük és frekvencia függvényét Bode diagramon ábrázolhatjuk:
|
|
(277) |
ahol skalár függvény. Az aktuális rendszer Bode diagramja a névleges rendszer Bode diagramjával és a bizonytalanságot leíró függvénnyel illusztrálható.
7.2.2. Parametrikus bizonytalanság
Gyakran a bizonytalanságok egy része a rendszert leíró modell paramétereinek változásával is megfogalmazható.
Például az rendszermátrixban lévő rugóállandó és csillapítási együtthatók változnak. Ezek a paraméterek a mátrix több elemében is előfordulhatnak.
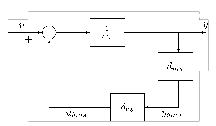
A bizonytalan rugóállandó paramétere a következőképpen modellezhető:
|
|
(278) |
ahol a névleges rugóállandó, a névleges értéktől való eltérést mutatja, míg paraméterről azt tudjuk, hogy a intervallumba esik. A bizonytalan rugóállandó struktúrája a 33 ábrán látható.
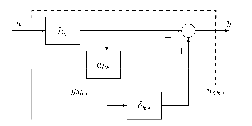
A jelek közötti kapcsolatok:
|
|
(279) |
ahol .Emiatt . Az ismert komponenseket tartalmazó blokk:
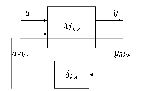
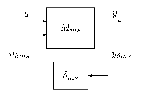
Ha egy bizonytalan paraméter a nevezőben van, akkor a következőképpen járunk el.
|
|
(280) |
ahol a névleges tömeg, a névleges értéktől való eltérést mutatja, míg paraméterről azt tudjuk, hogy a intervallumba esik. A bizonytalan rugóállandó struktúrája a 34 ábrán látható.
|
|
(281) |
A jelek közötti kapcsolatok:
|
|
(282) |
ahol .Mivel , ezért .
Emiatt . Az ismert komponenseket tartalmazó blokk: .
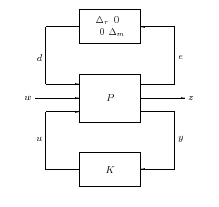
7.3. M- struktúra
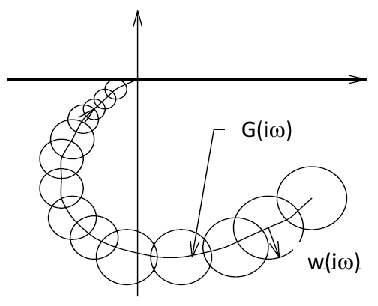
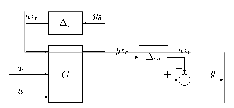
A szabályozott rendszer komponensei az előzőek alapján a modell és a szabályozó, valamint a minőségi specifikációkkal és bizonytalanságokkal kapcsolatos információk. A 35 ábrán látható úgynevezett struktúrájú modellt használjuk a szabályozó tervezéséhez.
|
|
(283) |
Ha figyelembe vesszük a szabályozó hatását, azaz az irányítójel és a mért jel közötti kapcsolatot , akkor az úgynevezett M- struktúrához jutunk.
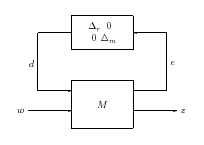
A 36. ábrán látható modellt a szabályozott rendszer elemzéséhez használjuk.
|
|
(284) |