3. fejezet - Elektronikus asszisztens rendszerek
- 3.1. A közlekedési balesetek elemzése és a célkitűzések
- 3.2. A gépkocsivezető munkáját támogató elő asszisztens renszerek
- 3.3. Ember-gép kapcsolat (Human-Machine-Interface) (HMI)
- 3.4. Önálló modulokból közös rendszer
-
- 3.4.1. A forgalmi sáv tartása – Line Departure Warning (LDW)
- 3.4.2. Az ütközés elkerülése kis sebességnél (Closing Velocity System)
- 3.4.3. A forgalmi táblák felismerése:
- 3.4.4. A forgalmi torlódás asszisztens
- 3.4.5. A visszapillantó tükrök holt terének figyelése (Blind Spot Detektion) és a sávváltási asszisztens (Lane Change Assist)
- 3.4.6. Kiszállási asszisztens (Safety-Get-OFF-Assistant)
- 3.4.7. Éjszaka látó berendezés (Nightvision)
- 3.4.8. Sensitive Gudance
- 3.4.9. Elektronikus horizont
- 3.4.10. Ultrahangos érzékelő
- 3.4.11. Adaptive Cruise Control (ACC)
- 3.4.12. Távolsági radar érzékelő
- 3.4.13. Follow-to-Stop és Front Assist működések
- 3.4.14. Közeli radar érzékelő (SLR radar)
- 3.4.15. Az UWB technológia
- 3.4.16. Lidar érzékelő
- 3.4.17. Laser-scanner
- 3.4.18. Predektív biztonsági rendszer „Predictive Safety System” (PSS)
- 3.4.19. Video rendszerek
- 3.5. Haszonjárművek asszisztens rendszerei
3.1. A közlekedési balesetek elemzése és a célkitűzések
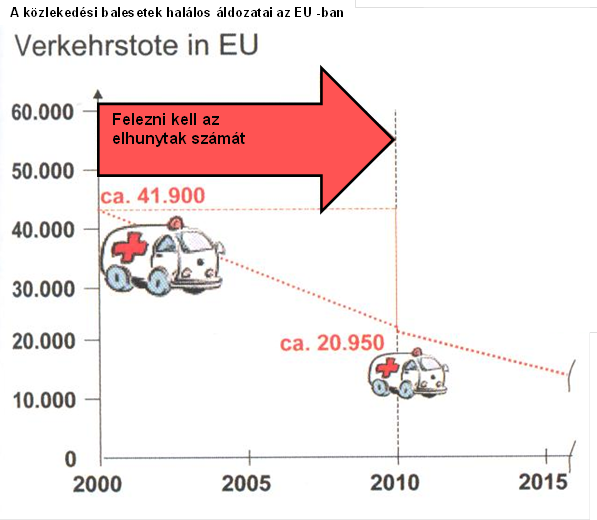
A baleseti statisztikai adatokat elemezve, megállapítható, hogy minden percben meghal egy ember valahol a világon közlekedési baleset következtében. Európában, az USA-ban, és Japánban 1998-ban például 93000 ember vesztette így életét. Ezt a szakemberek több, mint 400 milliárd Euro káreseményre értékelték. Az Európai Unió „eSafety-Program” azt a célt tűzte ki, hogy 2010-re a közlekedés halálos áldozatainak számát felére kell csökkenteni. A fejlesztőmérnökök különböző műszaki fejlesztésekkel egyrészt a balesetek gyakoriságát, másrészt pedig a kimenetek súlyosságát igyekszenek mérsékelni. Ezek tehát egyaránt érintik a gépkocsik aktív és passzív biztonságát.
A kutatások szerint az utoléréses balesetek 65%, a frontális ütközések harmad része, a kereszteződésben bekövetkező balesetek fele nem következett volna be, ha csupán fél másodperccel előbb figyelmeztették volna a vezetőt. A balesetek több, mint harmad része sávváltáskor, vagy figyelmetlenség miatti sávelhagyáskor következik be.
3.1.1. Az eddigi eredmények:
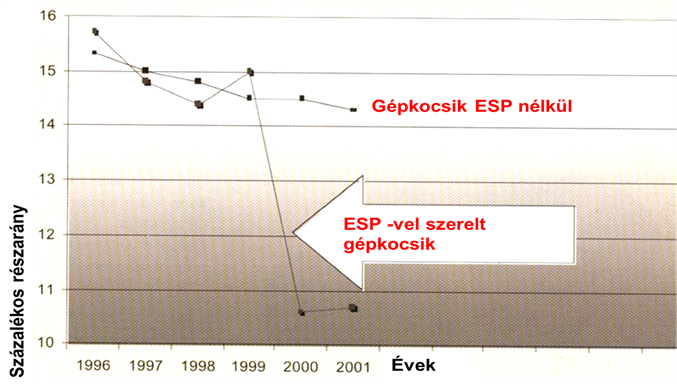
A németországi statisztikai hivatal közleménye szerint az ESP-vel ellátott gépkocsiknál a baleseti gyakoriság jelentősen csökkent. A szakemberek hasonló javulást várnak a PRE-SAFE rendszerektől, melyek a preventív (megelőző) védelmi működéseket jelentik. Ilyen például az ütközés előtti biztonsági-öv villanymotoros felcsévélése, az ülések megfelelő helyzetbe állítása, a tető- és az oldalablakok becsukása. Ezekhez különböző érzékelők kombinációit használják és az elektronika által működtetett beavatkozó egységeket. A légzsákok, a biztonsági öv feszítők akkor lépnek működésbe, amikor az összeütközés már megtörtént.
A magyarországi baleseti statisztikai adatok szerint 2001és 2009 között 1239-ről 822-re csökkent a halálos áldozatok száma.
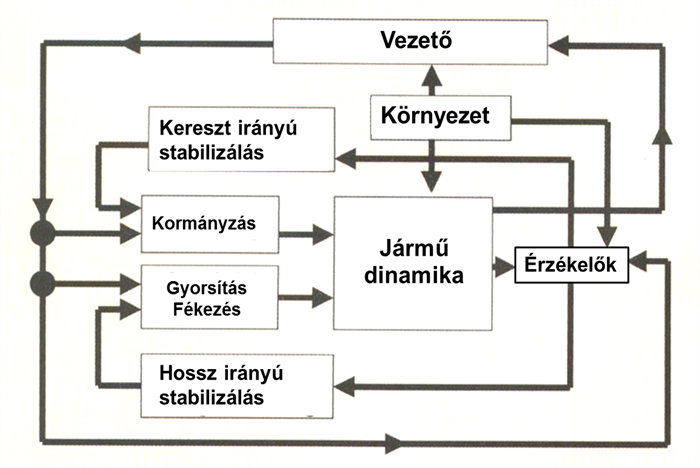
A baleset elkerülhető válik a gépkocsi menetdinamikájának kellő időben történő gyors megváltoztatásával. Ehhez a vezetőnek azonnal fel kell ismernie a veszélyhelyzetet, a gépkocsi pillanatnyi viselkedését és szintén gyorsan cselekednie kell. Az erre vonatkozó lehetőségek attól függően, hogy a kereszt- vagy a hossz- irányú dinamikába kíván beavatkozni kormányzás vagy a fékezés, illetve a gyorsítás lehet. A folyamat leggyengébb eleme maga az ember, akár az érzékelés, a döntéshozás és a gyors cselekvés vonatkozásából nézzük. Ezt a folyamatot a megszerzett rutin is alaposan befolyásolja. A vezetőnek kell tehát segíteni, a nála sokkal fürgébb elektronika és a mechatronika bevonásával.
Az asszisztens rendszerek valójában nem a vezetés automatizálását jelentik, hanem segítséget a vezető munkájához úgy, hogy minél kevesebb legyen a baleset.
Menet közben a vezető elsődleges feladatai:
-
útvonaltervezés, navigáció
-
a gépkocsi kormányzása, pl. előzéskor
-
a gépkocsi stabil állapotban tartása, kanyarodáskor, sávtartáskor.
A másodlagos feladatok:
-
a gépkocsi kifogástalan működésének felügyelete, továbbá más egyéb, például forgalmi információk gyűjtése, feldolgozása és alkalmazása.
Ezeknek a feladatoknak a teljesítése egymással párhuzamosan futnak és nagy figyelmet igényel. Ennek hatékonyságát a kifáradás hátrányosan befolyásolja.
Segítséget jelent, ha a gépkocsi közvetlen környezetét figyelő egyre több és összetettebb érzékelők jelei az elektronikában feldolgozásra kerülnek. Kiértékelésük során például tárolt adatokkal, küszöbértékekkel hasonlítja össze a mért értékeket és ez alapján adja ki a beavatkozó egységeknek az utasításokat. Így az elektronika alkalmazásával hatékonyabb működésűvé tehetők az asszisztens rendszerek.
Különböző elektronikus, a vezetőt támogató asszisztens rendszerek érzékelőivel és kiértékelő rendszereivel továbbá a beavatkozó egységekkel a veszélyes helyzeteket igyekeznek előre felismerhetővé és elkerülhetővé tenni. Ezek a kritikus helyzetek a másodperc töredéke alatt következnek be.
3.2. A gépkocsivezető munkáját támogató elő asszisztens renszerek
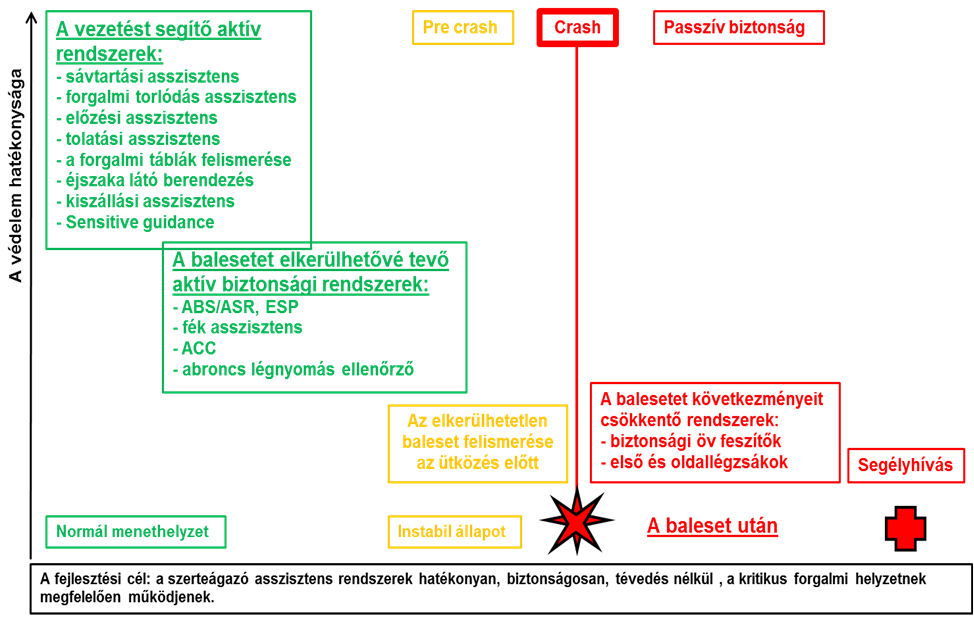
Évtizedekkel korábban az első, a gépkocsivezető munkáját támogató asszisztens a személyautóknál a vákuumos fékrásegítő volt. A haszonjárműveknél pedig az idegen erővel működtetett fékrendszer. A cél azóta is változatlan maradt, a környezet, vezető, gépkocsi láncolat leggyengébb elemének a gépkocsi-vezető tevékenységének támogatása. Az első asszisztensek még mechanikus egységek voltak, a mostaniak már nem nélkülözik az elektronikát. A menetdinamikai szabályozó rendszerek, az ABS/ASR, az ESP, a fékasszisztens segítenek a vezetőnek a kritikus menethelyzetekben és ezzel növelik az aktív biztonságot. Csökkentik a gépkocsivezető terhelését. A menetkomfortot és a biztonságot növelik. A légzsákok és az övfeszítők az ütközést, vagy a felborulást követően nyújtanak védelmet és ezzel hatékonyan javítják a gépkocsik passzív biztonságát.
Minél hamarabb felismerhető egy baleset, akár még közvetlenül a bekövetkezése előtt, annál hatékonyabb lehet a segítség.
A tipikus reakcióidő 5 ms, amely a védelem lehetőségeit korlátozza. Itt kínálnak újabb lehetőségeket a predektív védelmi rendszerek, melyek a veszélyes helyzetekre reagálnak. Különböző érzékelőikkel kiterjesztik a gépkocsi érzékelési horizontját. Lehetőséget kínálnak még az ütközés bekövetkezte előtt a védelmi rendszer elemeinek működtetésére.
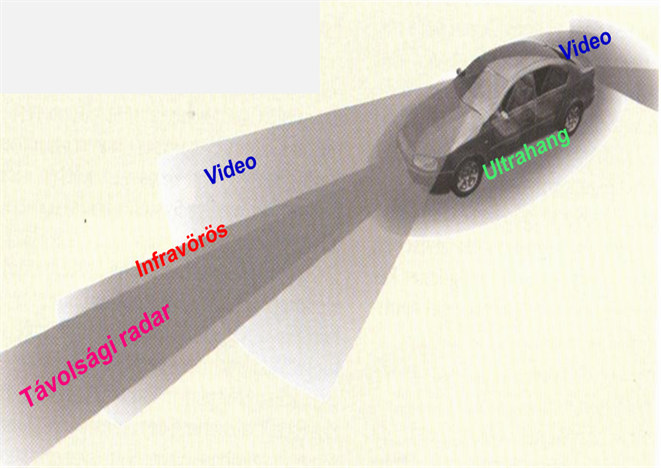
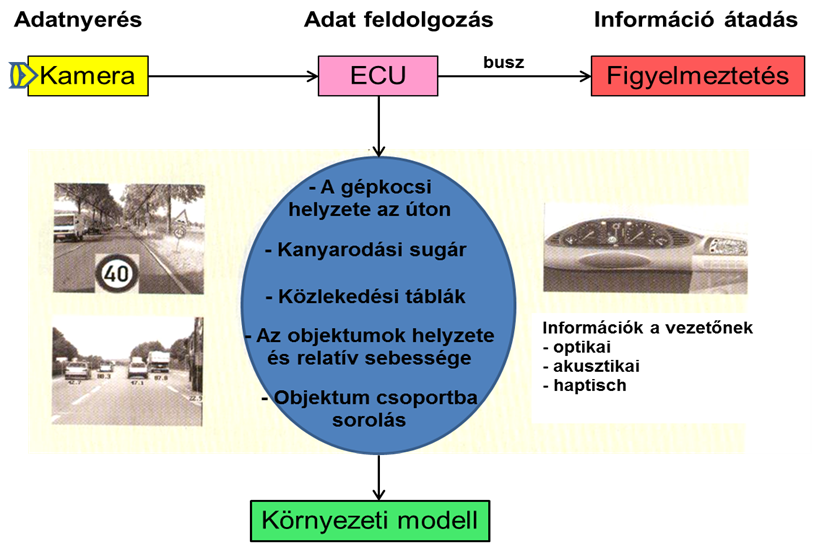
A gépkocsivezetőket támogató asszisztens rendszerek csökkentik a vezetők terhelését későbbre tolják ki az elfáradást, így elkerülhetővé válnak balesetek. Ezek az asszisztens rendszerek egyenként egyszerűnek tűnnek mégis jelentős feladatokkal kell megbirkózni a fejlesztőknek. Feladatukat tekintve vannak olyanok, melyek a tájékozódást segítik, vannak amelyek áttekintést adnak a közvetlen környezet közlekedési eseményeiről, illetve a biztonságosabb közúti közlekedést szolgálják. A nagyobb komfort mellett a gépkocsi gazdaságosabb üzemeltetéséhez is hozzájárulhatnak. Mindezt persze úgy kell megvalósítani, hogy ne vegyék el az autózás élményét. A döntések lehetősét meg kell hagyni a vezetőnek és természetesen a felelősség is nála marad. Az elmúlt években több különböző elektronikus asszisztens rendszert fejlesztettek ki, melyek többsége radar és video érzékelőkkel a gépkocsi közvetlen környezetét érzékeli. A gépkocsi körüli érzékelést több asszisztens rendszer is hasznosítani tudja. Az utóbbi években rendkívül érzékeny érzékelőket és nagyon gyorsan működő elektronikákat továbbá kiértékelő algoritmusokat fejlesztettek ki, melyek a gépkocsi közvetlen környezetét figyelik. Felismeri az objektumokat, azok helyzetét, távolságát és relatív sebességét.
3.3. Ember-gép kapcsolat (Human-Machine-Interface) (HMI)
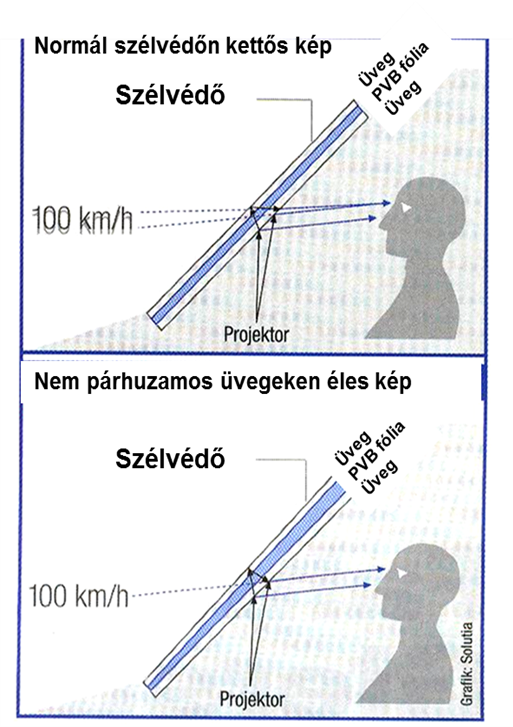
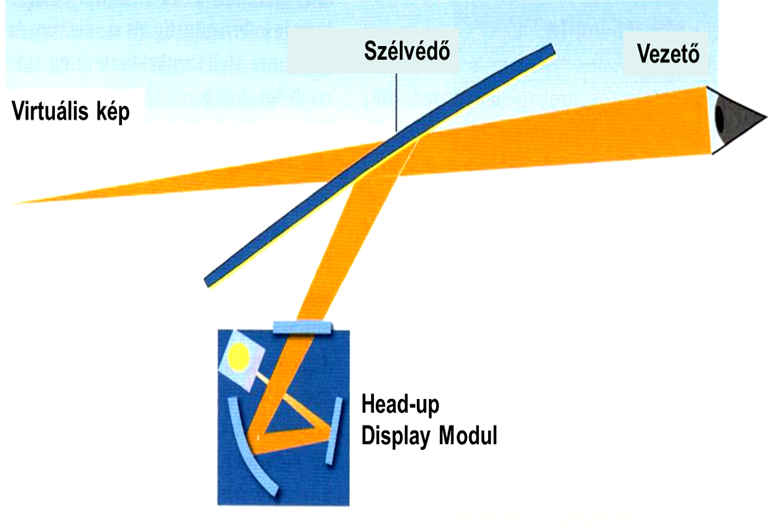
Nem szabad azonban az ember-gép kapcsolatról (Human-Machine-Interface) (HMI)-ről sem megfeledkezi, mely a vezető tájékoztatása szempontjából nagyon fontos. Az információ világos, jól érthető és egyértelmű kell legyen, továbbá a megfelelő időpontban kell érkezzen. A vezetőt nem szabad azonban túl sok információval sem terhelni, csak a legfontosabbakra kell koncentrálni. Soha sem szabad megijeszteni. Ezen kívül az asszisztens rendszer használata a lehető legegyszerűbb és magától értetődő kell legyen. A fejlesztők ezen a területen is jelentős eredményeket értek el. Nem elégséges azonban, hogy csak az elektronika szakemberei vegyenek részt a fejlesztő munkában, hanem az ergonómiai szakértők bevonására is szükség van. Head Up Display- ként használható az első szélvédő is. A két párhuzamos üvegréteg és a közötte lévő fólia azonban kettős képet ad. Ha az üvegrétegek nem párhuzamosak, jól látható éles képet kapunk. A vetítő egységet a műszerfalba szerelik be. Hatékonyabban működhetnek azonban, illetve bizonyos elemeket akár több rendszer is használhat, ha az egyes modulokat egy egységes, közös rendszerré állítják össze.
3.4. Önálló modulokból közös rendszer
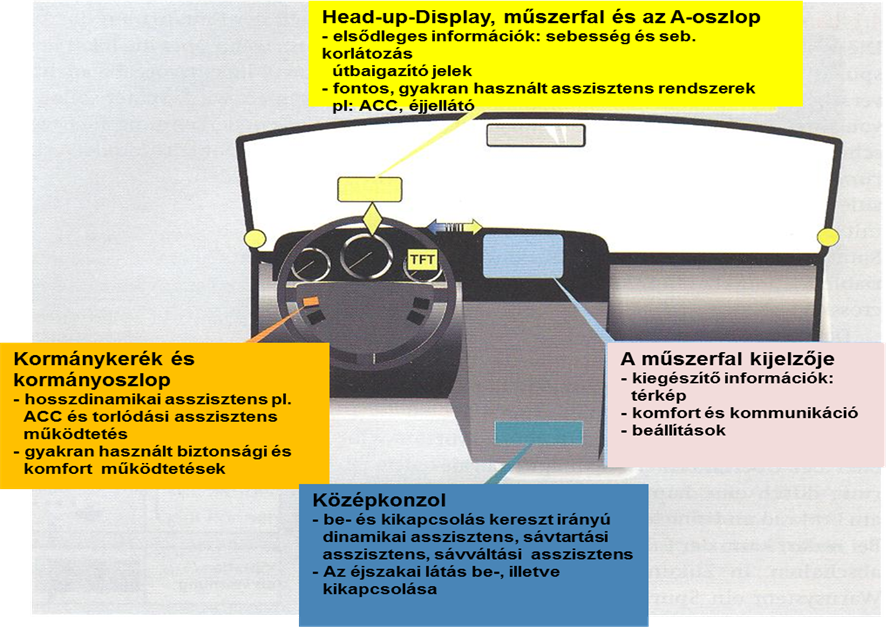
Ilyet fejlesztett ki a Siemens VDO. 2005-ben mutatták be a demonstrációs autót, mely tartalmazta ezt az összetett rendszert. A felületes szemlélő jelentős eltérést nem észlelt a széria változathoz képest, hiszen számos érzékelőt a belső visszapillantó tükör rögzítő talpába szereltek, a működtető kapcsolókat a középkonzolon helyezték el, a kiegészítő információk a „Head-up-Display”-n jelennek meg, mely a vezető látóterébe a szélvédőre vetíti az üzeneteket. Az önállóan és megbízhatóan működő modulok által szerzett információkat a teljes rendszer közösen tudja rendkívül hatékonyan hasznosítani.
A Head-up-Display csak egy része a HMI-nek.
A másik lehetőség a szabadon konfigurálható TFT kijelző a műszerfalon, vagy a középső konzolon, de alkalmazhatók figyelmeztető lámpák is a megfelelő helyeken. Mivel azonban az ember felfogó képessége korlátozott, valamennyi asszisztens rendszer egy időben nem küldhet információkat. Ezért egy egészséges egyensúlyt kell megteremteni az asszisztens rendszerek információi és az emberi agy felfogóképessége között. Döntést kell hozni arról, hogy az adott forgalmi helyzetben mely információnak kell elsőbbséget biztosítani. Ez éjjel és nappal egymástól eltérő is lehet. Ráadásul a fontosságától függően ott kell az információkat megjeleníteni, ahol azt a vezető várja. Gondoljunk például arra az esetre, amikor a Head-up-Display-t a NightVision System éppen lefoglalja. Az „information management” rendszer gondoskodik arról, hogy képernyőnként maximum két információ jelenhessen meg. Ennek az előnye, hogy a vezető gyorsan és biztonságosan képes feldolgozni az információkat. Azért, hogy a kijelzőket ne terheljék túl az előzést támogató rendszer (Lane Change Assistant) a visszapillantó tükör közelében elhelyezett LED diódával jelez, hiszen előzéskor ez a látótérben van. A középkonzolon elhelyezett kapcsolókkal bizonyos információk be-, illetve kikapcsolhatók.
A radar érzékelők jeleit is több asszisztens rendszer tudja hasznosítani. Információt ad például a külső visszapillantó tükrökből nem látható részekről, de ugyanazokat az információkat hasznosítja a sávváltási asszisztens is, vagy a kiszállási asszisztens is. Ez utóbbi például letiltja az ajtó kinyitását, ha a gépkocsi mellett halad egy kerékpáros.
3.4.1. A forgalmi sáv tartása – Line Departure Warning (LDW)
A vezető fáradtsága, vagy figyelmének elterelődése miatt bekövetkezhetnek akaratlan sávelhagyások, melyek balesethez vezethetnek. A forgalmi sáv felfestésének átlépésekor a figyelmeztető jelzés elkerülhetővé teszi a baleseteket. Ehhez fel kell ismerni a sáv optikai jelölését és meg kell állapítani ehhez képest a gépkocsi helyzetét. A video érzékelő jelének használatára egy tipikus példa a forgalmi sáv elhagyásakor figyelmeztető asszisztensnél. A szélvédő mögött a visszapillantó tükör talpában elhelyezett kamera a forgalmi sáv felfestett széleit figyeli. Az algoritmus az időjárási és a látási viszonyoktól függetlenül meghatározza a gépkocsi helyzetét, menetirányát, és a sávon belül referencia pontokat. Ehhez figyelembe veszi a sávszélességet, illetve az ívek sugarát. Az asszisztens működéséhez azonban még további információkra is szükség van. Például a vezető működtette –e az irányjelzőt, esetleg fékezett –e, illetve volt –e kormánymozdulat? Vagyis a sávelhagyás akarattal, vagy akaratlanul történt –e? Ha a vezető eltér a referencia pontoktól figyelmeztető jelzést ad a rendszer. Beállítható a sebességküszöb, amelytől ez a rendszer működésbe lép. A kormánykerék rezgetésével még azelőtt figyelmeztet, hogy a gépkocsi átlépné a forgalmi sávot jelölő felfestést. Ha szükséges végrehajt egy enyhe kormánykorrekciót is. Ez könnyen továbbfejleszthető sávtartó rendszerré, mely automatikusan a sávban vezeti a gépkocsit. Ennek használata közben a vezető bár mikor beavatkozhat. A vezető a többihez hasonlóan természetesen kikapcsolhatja ezt az asszisztenst is.
3.4.2. Az ütközés elkerülése kis sebességnél (Closing Velocity System)
A városi forgalomban gyakran előforduló kisebb koccanásos baleseteket teszi elkerülhetővé a Continental Automotive Systems által kifejlesztett új rendszer. A fejlesztés az európai autógyártókkal közösen történt és 2008-tól van sorozatgyártásban. Ezt az új rendszert valójában egy optikai precrash érzékelővel látják el. A belső visszapillantó tükör rögzítő talpába szerelik be az érzékelőt. Az autó előtti 10 m-es részt figyeli méghozzá három irányban. Közvetlen a gépkocsi előtt, továbbá ballról és jobbról. Valamely objektum felbukkanásakor ad jelet. A fékrendszer aktiválásával gyorsan csökkenti a távolságot az objektum és a gépkocsi között. Ha gépkocsivezető visszaengedi a gázpedált a fékrendszer azonnal kivezérel egy kis nyomást (Prefill) ennek hatására 0,5 g lassulás jön létre (Prebrake) amikor a vezető a fékpedált lenyomja fékasszisztens segítségével az elérhető legnagyobb lassulás fog megvalósulni. Az érzékelő jelét a villanymotoros csévélésű biztonsági öv feszítésére is fel lehet használni, de információ továbbítható a légzsák rendszer elektronikájának is. Ezzel felkészülhet egy esetleg bekövetkező ütközésre. . A rendszer hatásosságára az jellemző, hogy ha például a gépkocsi 35 km/h sebességgel egy álló akadály felé közelít az ütközés elkerülhetővé válik. A városi forgalomban a gyalogosok felismerésére is alkalmas. A rendszer működése annyira stabil, hogy a gyártó adatai szerint egynyomú járművekbe is beépíthető.

3.4.3. A forgalmi táblák felismerése:
Erre a célra ugyan azt a kamerát használják, amelyik az LDW rendszernek is adja az információkat. A legfontosabb a sebességkorlátozó táblák felismerése. Ha a vezető gyorsabban halad, mint arra a szakaszra megengedett volna optikai figyelmeztetés fog látszani. Nem tervezik a Siemens VDO-nál ilyen esetekben az automatikus sebességcsökkentési beavatkozás megvalósítását. Ezt a rendszert is ki lehet kapcsolni.
A szöveges táblák, mint például a sárga hátterű helyiség névtáblák elolvasása még nem minden esetben sikeres. Ez a rendszer kombinálható a digitális térképpel és a GPS-es helymeghatározással és így a lakott terület felismerhető és az arra vonatkozó sebességkorlátozás egyértelműen betartható. A Stop-tábla és az elsőbbség adás kötelező tábla is felismerhető.
3.4.4. A forgalmi torlódás asszisztens
Ehhez a rendszerhez is CMOS technológiás kamerát használnak. A video adatok feldolgozása révén az előtte haladó gépkocsit folyamatosan követi, még egy úgynevezett „Stop and Go” forgalomban is. Az objektum felismerő algoritmus 50 m-en belül működik és a sebesség tartomány az ACC rendszeré alatt van.
A visszapillantó tükrök holt terének figyelése (Blind Spot Detektion) és a sávváltási asszisztens (Lane Change Assist)
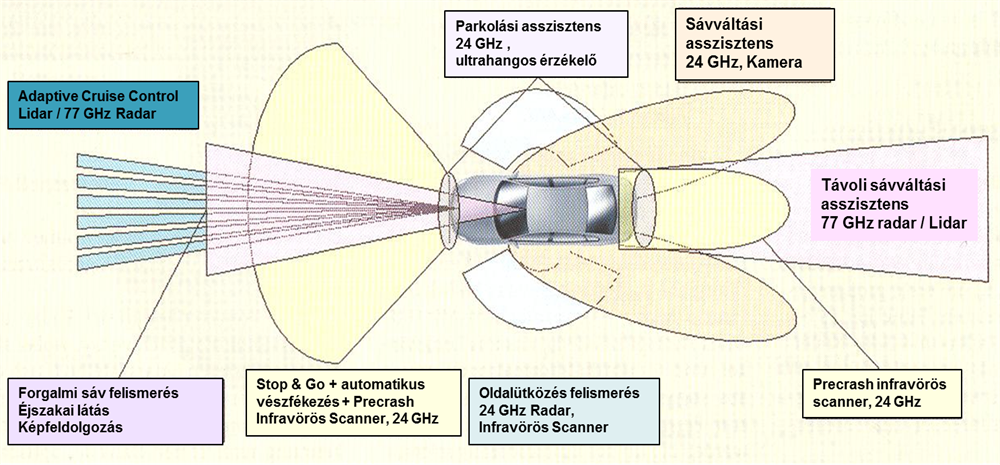
Ezek a rendszerek hasonlóak egymáshoz és a gépkocsi körüli különböző zónákat figyelnek. Nagy látószögű, 24 GHz-es radar érzékelők figyelik a gépkocsi melletti, visszapillantó tükörből nem látható holt tereket, továbbá a gépkocsi mögötti 12 m-es részt.
3.4.5. A visszapillantó tükrök holt terének figyelése (Blind Spot Detektion) és a sávváltási asszisztens (Lane Change Assist)
Ezek a rendszerek hasonlóak egymáshoz és a gépkocsi körüli különböző zónákat figyelnek. Nagy látószögű, 24 GHz-es radar érzékelők figyelik a gépkocsi melletti, visszapillantó tükörből nem látható holt tereket, továbbá a gépkocsi mögötti 12 m-es részt.
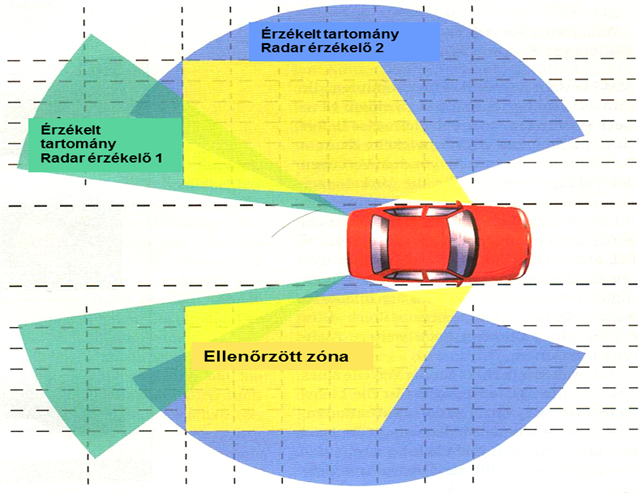
A sávváltási asszisztens 60 km/h sebesség felett kapcsol be, mivel a városi forgalomban kisebb a követési távolság is elegendő. 24 GHz-es kis látószögű radarral a gépkocsi mögötti 100 m-es szakaszt figyeli. Az érzékelőket a hátsó lökhárító széleibe szerelik be. Ha egy potenciálisan veszélyes objektum van az ellenőrzött zónában, egy piros LED dióda világít az A-oszlopon a külső visszapillantó tükör közelében. Veszély esetén hasonlóan az LDW rendszerhez a kormánykerék rezgetésével figyelmezteti a vezetőt. Ez egy rendkívül hatékony jelzés. A vezető nyomógombbal kikapcsolhatja ezt a működést.
3.4.6. Kiszállási asszisztens (Safety-Get-OFF-Assistant)
Hasonló a Blind-Spot-Detection-hoz. Akkor figyelmeztet amikor kerékpáros halad el az ajtó kinyílási szögében. Ilyenkor a központi zár automatikusan reteszeli az ajtókat. Az ajtónak csak a második nyitása lesz sikeres.
3.4.7. Éjszaka látó berendezés (Nightvision)
Bár az éjszakai forgalom 70 – 80%-al kisebb mint a nappali, de sokkal nagyobb kockázattal jár. A közlekedési balesetek minden harmadik áldozata éjszaka veszti életét.
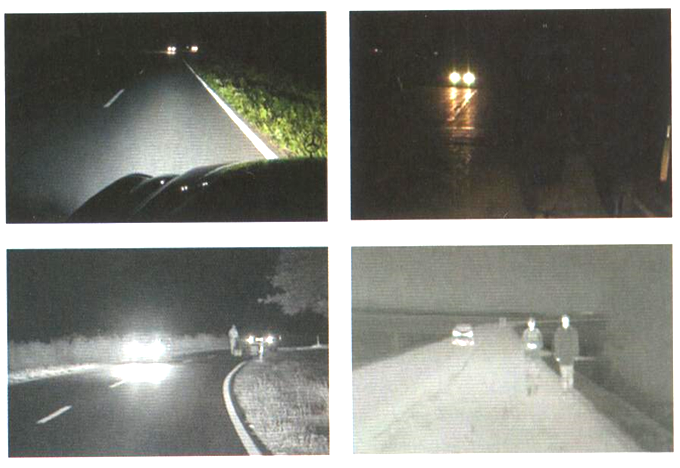
Az éjszakai látást segítő rendszerek a gépkocsi vezetést támogató asszisztensek közül a legújabb. „Night-Vision”-nak is szoktak nevezni. Felszerelésének az a célja, hogy a gépkocsi előtt azt a részt mutassa, melyet a tompított fényszóró nem világít meg. Kibővíti az emberi észlelés lehetőségeit és ezzel csökkenti a balesetveszélyt. Az első ilyen rendszer az élőlények saját infravörös, vagyis hő-sugárzását érzékeli. Ezt passzív rendszernek is szokták nevezni, vagy „termo kamera”-nak. Az érzékelő, által közvetített képet a vezető előtt elhelyezett monitoron jelenítik meg.
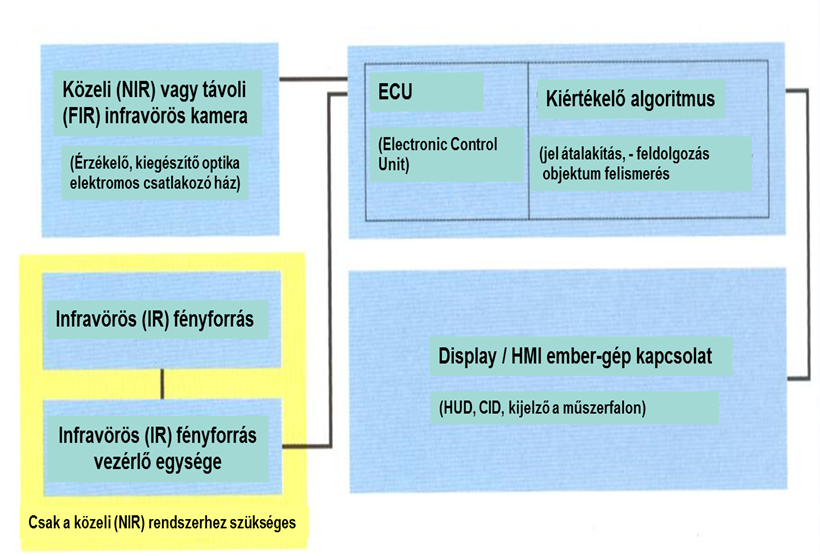
Emellett aktív éjjellátó kamerákat is kifejlesztettek. Ennél az emberi szem számára láthatatlan infravörös fénnyel világítják meg a gépkocsi előtti részt hasonlóan egy távolsági fényszóróhoz. Ez nem zavarja a szemből jövőket. A 0,9 mm hullámhosszú úgynevezett közeli infravörös sugarakat (Near Infrared NIR), melyek az objektumokról visszaverődtek CMOS kamera érzékeli.
Az infra kamera képét a Sensor-Chip dolgozza fel és a CID (Central Information Display) vagy a HUD (Head-Up-Display) fekete-fehér képként jeleníti meg. A Hella egy aktív, Adilis (Advanced Infrared Lighting System) nevű rendszert fejlesztett ki. Ez homogén és a távolságtól független fényerejű képet ad. Ennél is a meleg felületek, mint például a gumiabroncs, a féktárcsa, vagy a kipufogó rendszer, illetve a szemből jövő gépkocsik hűtője világosabbnak látszik. Ezekkel a berendezésekkel éjszaka is az egyes objektumok könnyebben felismerhetők és hatékonyan megnöveli a vezető látótávolságát.
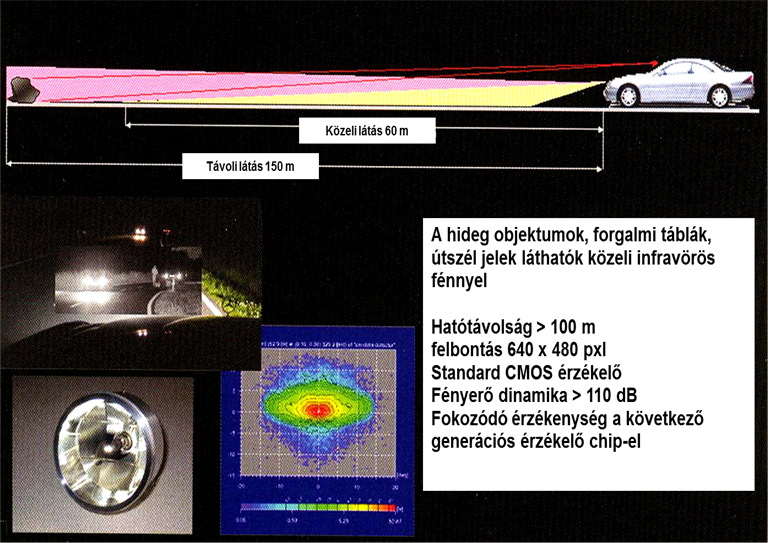
A Siemens VDO Automotive két éjszaka látó berendezést fejlesztett ki. Egyet távolra, egyet pedig közelre. A közeli egy az emberi szem számára láthatatlan infravörös fényt bocsát ki, melynek hullámhossza 0,9 µm. Az érzékelő egy infravörös tartományban működő video kamera. Egy processzor dolgozza fel valós időben a képet és egy valósághű látható fekete-fehér képet állít elő.
Az előnye az, hogy hideg objektumok is jól felismerhetők, mint például a közlekedési táblák, vagy más tárgyak. A vezető kijelzőn, vagy fejmozdulatok nélkül a Head-Up-Display-n (HUD) látja a közlekedési eseményeket ugyan úgy, mint rendes fényben. A Siemens VDO ennek az új megjelenítési módnak a sorozatgyártását 2003-ban kezdte el.
A HUD virtuális képének fényerejét automatikusan a külső fényviszonyokhoz igazítják. A HUD technológia egy TFT display-nek megfelelő. 150 m távolságban kb. kétszer akkora terület látható jól a vezető, mint amit a fényszóró megvilágít.
A másik változat egy úgynevezett „hő-kamerás” rendszer, mely nem bocsát ki saját fényt. Több száz méterre lát úgy, hogy a testek saját hősugárzását érzékeli. Ez az úgynevezett hosszú hullámú spektrum tartományban (6 -12 mm) működik. Far Infrared, (FIR) vagyis távoli infravörös sugárzásnak nevezik. Ezt a sugárzást a szélvédő nem engedi át. Ezért ennek kameráját a gépkocsik hűtőrácsa mögé szerelik. Az ehhez szükséges kamera költségesebb, mint amit közeli infravörös sugárzásnál használatos. Az út szélén futók az esti sötétedésben, vagy a hajnalban az iskolabuszra várakozó gyerekek is jól észlelhetők így.
A Robert Bosch GmbH. is az éjszakai látás támogatására infravörös érzékelőt alkalmaz. Hatótávolsága 120 m, vízszintes látószöge ±10˚.
3.4.8. Sensitive Gudance
A jól működő önálló rendszereken kívül sikeresen alkalmazzák azok kombinációit. A Sensitive Guidanc például a navigációs rendszer és a sávváltási asszisztens kombinációja. Ha navigációs rendszer sávváltást, vagy lekanyarodást javasol párhuzamosan ellenőrzi a sávváltási asszisztens és a Blind Spot Detection system, hogy ez veszélytelenül lehetséges –e. Ha veszélyhelyzet áll fenn figyelmezteti a vezetőt és ezzel egy időben elkezdődik az útvonal újratervezése is, hiszen az előzetesen tervezett nem tartható.

3.4.9. Elektronikus horizont
Amikor a gépkocaival letérnek az autópályáról, az ACC rendszer elveszíti az előtte haladó gépkocsit és a korábban beállított sebességre akarna gyorsítani. A digitalizált térkép és a navigációs rendszer működése alapján felismeri a rendszer, hogy az utópályáról lehajtásról van szó és ezúttal elmarad a gyorsítás.
3.4.10. Ultrahangos érzékelő
Az ultrahangos érzékelő általában a parkoláshoz használatos, a lökhárítóba építenek be akár 4 – 5 érzékelőt is. Hatótávolsága 3 m vízszintes látószöge ±60˚. Jelenleg a Bosch GmbH-nál a negyedik generáció van gyártásban. A sugárzó fej és a kiértékelő elektronika is az érzékelőbe van beszerelve. Az akadály megközelítésekor hang és fényjelzéssel figyelmeztet. Ennek frekvenciája arányos az objektum távolságával. Az autótulajdonosok körében nagyon népszerű. Továbbfejlesztett változata 20 km/h-nál kisebb sebességgel haladva megbecsüli, hogy a parkolási hely elegendő –e a gépkocsi számára. További fejlesztések révén alkalmassá válhat az automatikus beparkolásra is.

A gépkocsivezetőt támogató asszisztens rendszerek növelik a közlekedésbiztonságot. Az autótulajdonosok elégedettségét az is igazolja, hogy bizonyos rendszerek gyártása már több generációt is megért. Az érzékelők jeleit pedig több célra is használják a gépkocsikba szerelt elektronikus hálózatok révén.
3.4.11. Adaptive Cruise Control (ACC)
Ez volt az első jelentősebb elektronikus működésű, a gépkocsivezetőt támogató asszisztens rendszer, melyet több, mint tizenöt éve szereltek be a felsőbb géposztályba. Például az Audi A8, A6, A5, A4, Q7, Q5 típusaiban is széria felszereltséghez tartozik. 30 – 200 km/h közötti sebességtartományban a sportos és a komfortos között több beállítási fokozatban is használható.
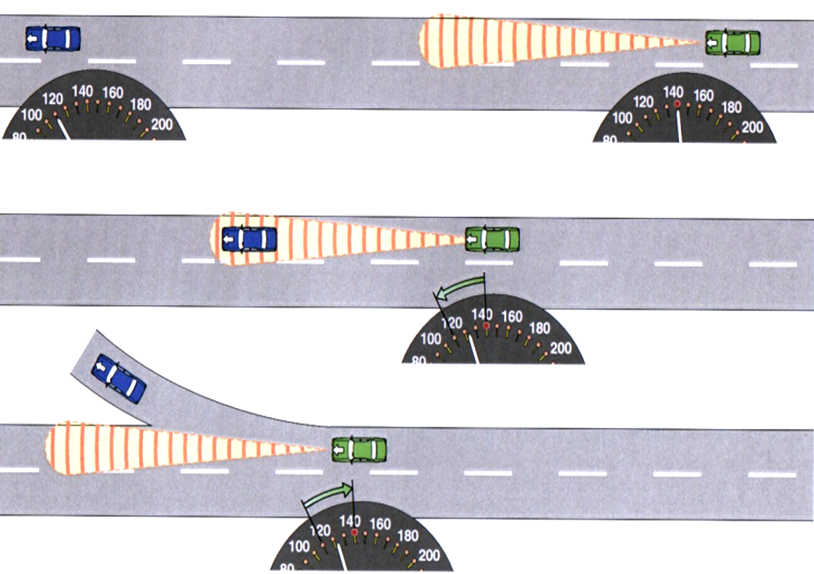
A gépkocsi elejébe szerelt távolsági radar, lidar érzékelővel, vagy újabban már lézer szkennerrel is működhet. Az előttünk haladó járműig tartó követési távolságot érzékeli. A vezetőt fény és hangjelzéssel figyelmezteti, ha nagyon megközelítette az előtte haladót. Ha szükséges automatikusan beavatkozik a fékrendszernek és a motorelektronikának illetve az automatikus sebességváltónak adott parancsokkal. Működése biztonságos. Ha szabad az út a tempomat működése révén az annál előzetesen beállított sebességgel halad tovább a gépkocsi. Ha utolér egy előtte lassabban haladót, az ACC automatikusan annak tempójához igazítja a haladást és követi azt egy biztonságos távolság megtartásával. Ha szükséges eközben fékezéssel vagy gázadással avatkozik be. Ha túl nagy a közelítő sebesség figyelmezteti a vezetőt, de ha nem reagál be is avatkozik. Ha a lassabban haladó gépkocsi elhagyja a sávot, a követő gépkocsi az előtte beállított sebességre gyorsít.
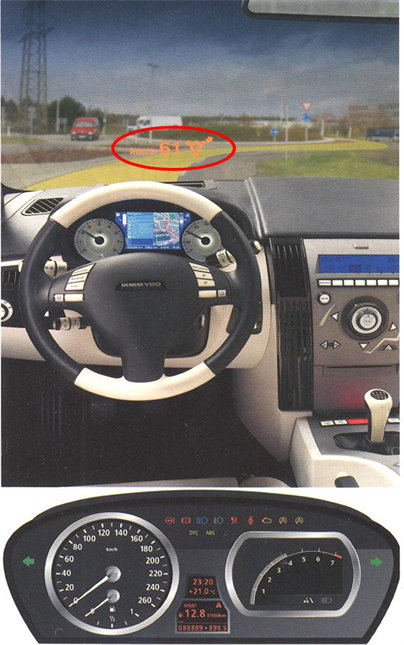
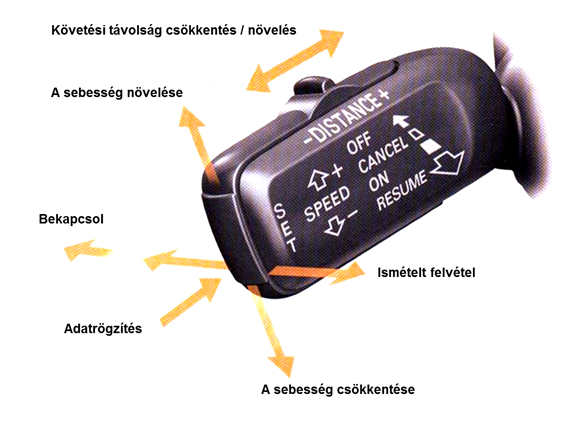
Az előzési szándékot a vezető rövid idejű gázadással jelezheti, ami a követési távolság tartását felfüggeszti. Túl gyors kanyarvételnél az ESP jelét (kereszt irányú gyorsulás) is figyelembe veszi az ACC rendszer és automatikusan csökkenti a sebességet. A vezető bármely pillanatban gázadással, vagy fékezéssel beavatkozhat. A jelenleg használatban lévő első generációs rendszer 30 km/h-nál nagyobb sebesség esetén működik. Autópályán történő használatra tervezték. A következő ACCplusz változatnál más a megállásig történő fékezés is a lehetséges beavatkozások közé tartozik. A tovább haladás a gázpedál lenyomásakor lehetséges és eközben az ACC továbbra is működik. Az ACC FSR (Full Speed Range) változatnál kiegészül egy video érzékelővel is. Az ACC-t mint komfort növelő asszisztens egységet szerelik be a gépkocsikba, hiszen a vezető munkáját teszi könnyebbé. A különböző beállításokat a vezető a kormányoszlopon az irányjelzőt működtető kar alatt elhelyezett kapcsolóval végezheti el. A beállítások a műszerfal kijelzőjén, illetve a sebességmérőn jelennek meg.
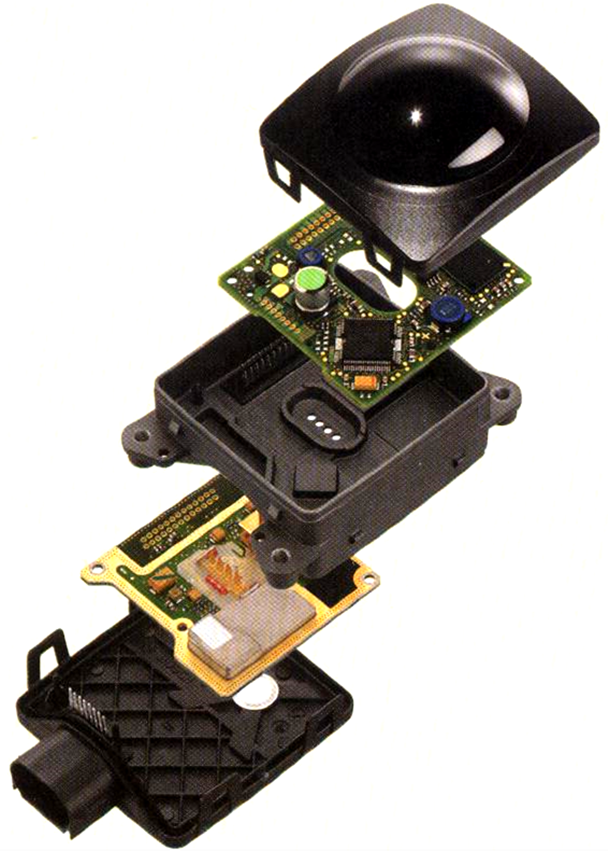
3.4.12. Távolsági radar érzékelő
76 - 77 GHz frekvenciával működik, hatótávolsága 150 m, vízszintes látószöge ±8˚. (RADAR = Radio Detection And Ranging) A gépkocsi előtt haladó másik jármű távolságát és relatív sebességét méri. A kiértékelő elektronika az érzékelőbe van beépítve. Négy radar sugarat bocsát ki az érzékelő.
3.4.13. Follow-to-Stop és Front Assist működések
Ez egy olyan továbbfejlesztett, radar érzékelős, ACC rendszer, mely a gépkocsit egészen a megállásig képes lassítani. Ezzel egy jelentős komfort növekedést értek el. A vezető beállíthatja például a számára megfelelő követési távolságot. Ezeket az egyéni ACC beállításokat a gyújtáskulcs tárolja és a gépkocsi ismételt használatakor ugyanezek állítódnak be.

A Radar érzékelő és a kiértékelő elektronika egy közös műanyag háza van beépítve és a hűtőrács mögött található a gépkocsi elején. Az érzékelő látószöge 8˚, hatótávolsága pedig 180 m. A négy adó és vevő egység a hatóságilag engedélyezett 76,5 GHz frekvencián működik. A frekvencia FMCW eljárással modulált. A jel futásideje és a doppler effektus alkalmazása révén a gépkocsi előtt haladó jármű távolsága és sebessége is meghatározható.
A Follow-to-Stop működésnél az ACC rendszer kis sebességtartományban is működik.
A Front Assist kikapcsolt ACC-nél is működőképes, méghozzá két fokozatban is. Kritikus forgalmi viszonyok között felkészül a vészfékezésre úgy, hogy a fékasszisztenst átkapcsolja egy érzékenyebb fokozatba és egy kis fékező nyomás kivezérlésével felfekteti a fékbetéteket a féktárcsára. Továbbá ezzel egy időben optikai és akusztikai figyelmeztetést ad a vezetőnek. Ha erre nem reagál, miközben még mindig fennáll az ütközés veszélye, a második fokozatban aktiválja a fékasszisztenst és vészfékezést hajt végre.
3.4.14. Közeli radar érzékelő (SLR radar)
A nemzetközileg is engedélyezett közeli radar érzékelők 24 GHz frekvenciával működnek. Ez jó kompromisszumot jelent a költségek és az antenna méret között. Ez az alkalmazás az időjárási viszonyokra nem érzékeny és robosztus lehet a kivitele. A távolság megállapítása az egyes impulzusok futásidejének mérése alapján lehetséges. Az objektumok helyzetének megállapítása a háromszögelési módszerrel történik, melyhez legalább két érzékelő szükséges. Ez a technika alkalmazható a sávváltási asszisztensnél is. Az első generációs változat fény-, és hangjelzéssel figyelmezteti a vezetőt a veszélyre, de a második generációs változatnál az elektronikus szervokormánynál változtatja meg a rásegítést, így a kormánykerék rendkívül nehezen mozdítható. Amikor egy másik gépkocsi 50 m-re megközelített, megtörténik annak érzékelése.
Tyco Electronics által kifejlesztett radar érzékelő hatótávolsága 30 m és az érzékelési szögtartomány ± 65˚. Ebbe a közel-téri radar érzékelőbe minden szükséges elektronikus egységet beépítettek, mint például a MMICs-t (Monolitic Microwave Integated Circuit), mely egy költségoptimalizált változatban készül. A jelfeldolgozás eredménye maximum 10 objektum észlelése, az objektum fontosabb paraméterei távolság, szöghelyzet, relatív sebesség, továbbá lágy, vagy kemény objektum. Ezeket a CAN- hálózaton keresztül elérhetővé teszi. Az érzékelés szempontjából fontos a radar antenna felületének nagysága. A gépkocsi körül 8 érzékelőt alkalmaznak egy a vezetőt támogató asszisztens rendszerhez. Ez még továbbfejleszthető, illetve kiegészíthető további érzékelőkkel, például távoli radar-, video-, vagy infravörös érzékelővel. A Tyco Electronics által kifejlesztett „Sequential Lobing” koncepció szerint működő radar érzékelő, mely antennájának két iránykarakterisztikája van. A két irány-karakterisztika közötti váltás, 20 ms-onként oda-vissza következik be. Ezzel nem csak egy második vevő és ennek a költsége takarítható meg, hanem hatékonyan használható a nagyfrekvenciás panel is. A jelfeldolgozás és a kiértékelés a hagyományos amplitúdó modulált módszerrel működik.
3.4.15. Az UWB technológia
Az Ultra Wide Band (UWB) nagy sávszélességű adó spektrumot jelent, mellyel a nagy felbontás érhető el. (Úgy Európában, mint az USA-ban elő van írva a frekvencia és a sávszélesség is.) Nagyon rövid impulzusok követik egymást így cm-es felbontást tudnak elérni.
3.4.16. Lidar érzékelő
Az ACC rendszerénél sem a Siemens VDO, sem a Hella nem távolsági radar érzékelőt alkalmaz, mint más gyártók, hanem egy, annál nagyobb teljesítő képességű, infravörös fénnyel működő, új fejlesztésű „lidar” érzékelőt és a hozzá tartozó gyors kiértékelő elektronikus egységet. (lidar = Light Detection And Ranging)
Az érzékelő 15 ns-nyi infravörös impulzusokat bocsát ki az egyes csatornákon és méri a visszaverődésig eltelt időt. Ebből határozza meg a távolságot és a relatív sebességet. Az ára a radar technikánál kedvezőbb.
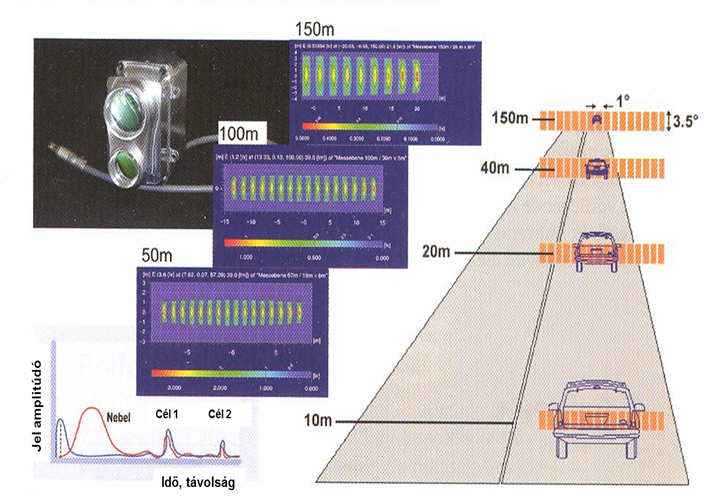
Öt infravörös fénykúp méri az előtte haladó gépkocsi távolságát. Hatótávolsága 250 m pontossága pedig 10 cm. A sebességet pedig 0,1 m/s pontossággal méri. 8,4 m-ig pontosan befogja az előző gépkocsit 27,6 ˚-os látószöggel. Egy nagyon hatékony szűrő küszöböli ki az eső és más zavaró körülmények hatását. A radar és a lidar érzékelő funkcionálisan egyenértékű, de meg kell jegyezni, hogy a lidar érzékelő olcsóbb és ennek ellenére jobb a felbontása. Ezért jobb az objektum felismerő képessége.
Ez nem csak a biztonságot szolgálja például az úgynevezett „holt tér” csökkentése révén, hanem asszisztens rendszerként megkönnyíti a gépkocsivezető munkáját tolatáskor, beparkoláskor vagy a városi „stop and go” üzemmódban.
A radar kedvezőtlen környezeti viszonyok között is megbízhatóan működik (sötét, csapadék, köd). Az akadályokat és a különböző objektumokat ilyen esetekben is biztonsággal felismerhetővé teszi. Különbség tehető a folyamatosan- és az impulzus szerűen működő változatok között. Ez utóbbinál rövid periodikus működések követik egymást. Ennél az impulzus kibocsátása és visszaverődés között eltelt idő mérésével az objektum távolsága és sebessége is meghatározható. A folyamatos működésű radar lineárisan modulált frekvenciájú jelet bocsát ki. A mérési pontosság a sávszélességtől függ. Az intelligens radar érzékelők, mint például az SLR (Sequential Lobing Radar) érzékelő az objektum felismerésen kívül alkalmas az objektum követésre is.
3.4.17. Laser-scanner
Az egyre sűrűsödő városi forgalomban a feszültségektől és a balesetektől mentes közlekedés egyik záloga az Optikai elven működik az Automotive Laserscanner (Alasca). Ez az infravörös fény eljutási és visszaverődési útját méri. Kifejlesztője az Ibeo Automobile Sensor GmbH. volt. Alkalmazási területe az ACC rendszer, a Stop & Go üzemmód, nagy látószögű gyalogosvédelem, a forgalmi sáv tartó asszisztens rendszer, de használható Pre-Crash érzékelőként is. Parkolási segítségként felismeri a szabad parkolóhelyet és segít a beparkolásnál. Bizonyos körülmények között vészfékezést is képes kezdeményezni. Rossz időjárási viszonyok között is megbízhatóan működik. Hatótávolsága 0,3 - 200 m közötti. A szkennelési frekvenciája 40 Hz. A vízszintes látószöge 240˚. Felbontása 0,25˚ Alkalmazási területe eredetileg a robotok munkaterének védelme illetve a vezető nélküli szállító eszközök haladási útvonalának biztosítása volt. Ebből fejlesztették ki a gépkocsiknál használatos Alasca XT változatot. A lézervédelmi 1-es fokozathoz tartozik, így a közúti forgalomban is alkalmazható. Ha a szemből jövő gépkocsi is hasonló technikával van felszerelve nem befolyásolja az érzékelést.
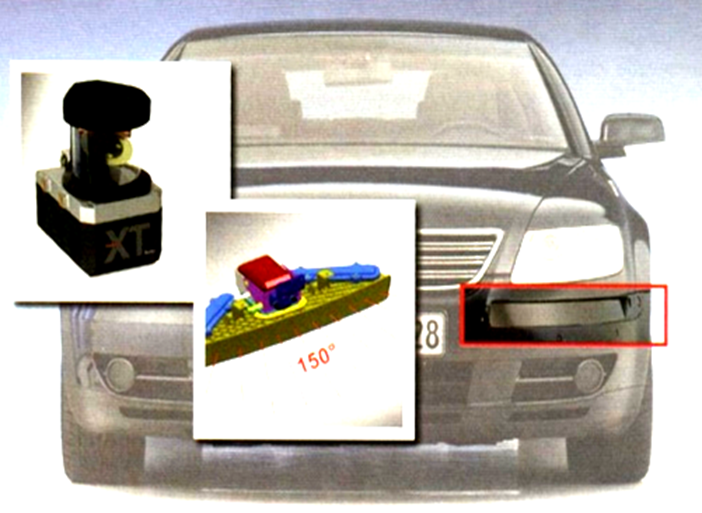
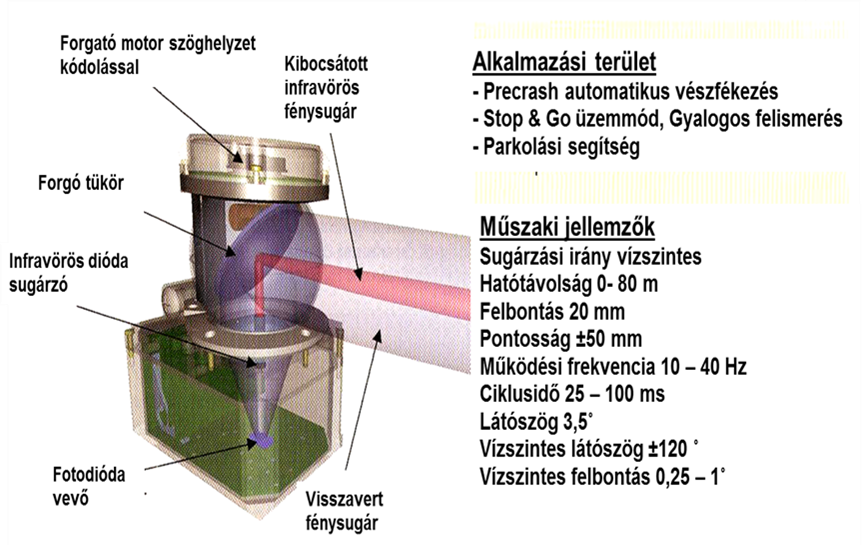
3.4.17.1. Működési elve
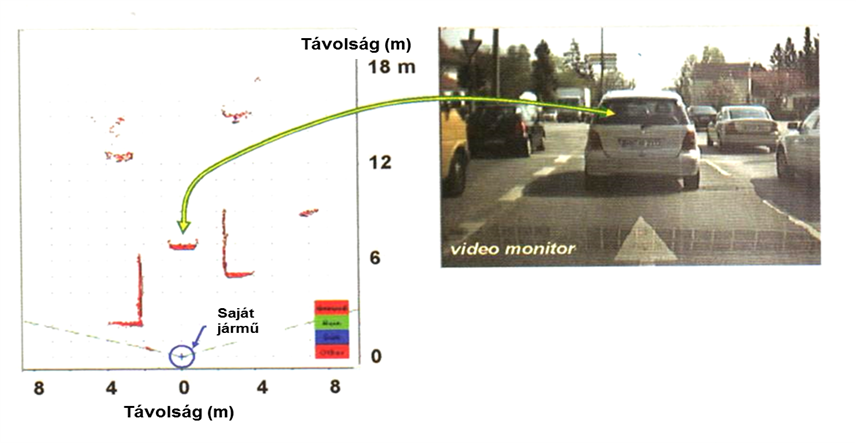
Az érzékelőbe beépített dióda bocsátja ki a programozható infravörös fény impulzusokat, melyek hossza nano-szekundumnyi. Egy forgó tükör sugározza szét. Ennek forgási sebessége a fény terjedési sebességéhez képest kicsi. Ezzel az érzékelő teljes környezetét képes „letapogatni”. A vevő dióda a visszaverődött infravörös fény futási idejét meg tudja mérni. Ehhez egy rendkívül érzékeny opto-elektronikai áramkört alkalmaznak. Az elektronika így ki tudja számítani az objektum távolságát és a relatív sebességét, amelyről a fény visszaverődött. Négy egymással párhuzamosan működő mérő csatornája van, így négy különböző objektumot képes egymástól megkülönböztetni. A kiértékelt információk alapján beavatkozási parancs adható ki a motornak és a fékrendszernek. Már csak az a kérdés, hogy az aktív vákuumos rásegítő milyen állapotban van és megfelelő gyorsasággal képes –e a szükséges fékezőnyomást megvalósítani. Ez az új lézer szkenner valamennyi jelenlegi gyártásban lévő gépkocsi platform elejébe beszerelhető. A függőleges irányú látószöge olyan, hogy a személyautók szokásos bólintási szöge esetén sem veszíti el például az előtte haladó gépkocsit a látótérből. A jelenleg használatban lévő vizualizációs eszközökön madártávlati kép jelenik meg az észlelt objektumról. Már jelenleg is az irányban folynak fejlesztések, hogy az érzékelt környezetet video rendszerrel összekombinálva tegyék láthatóvá. Jól alkalmazható az utóbbi időben az EU különböző bizottságai által szorgalmazott gyalogosvédelem területén is, hiszen kellő időben felismeri a gépkocsi felé közelítő személyeket. További alkalmazási lehetőség a forgalmi sáv akaratlan elhagyásakor figyelmeztető rendszernél van. A lézerszkenner felismeri a forgalmi sáv szélét jelző felfestéseket és ehhez képest a gépkocsi helyzetét.
3.4.18. Predektív biztonsági rendszer „Predictive Safety System” (PSS)
2005 után a Bosch ACC rendszert a „Predictive Safety System” (PSS) részeként szerelik be a gépkocsikba. A balesetek 25%-a utoléréses eseményként következik be, melyek java része figyelmetlenségre vezethető vissza. bizonyos esetekben fékezés nélkül következik be az ütközés. Ilyen esetekben hatékony megelőző eszköznek bizonyul az ACC rendszer, melynek továbbfejlesztése lépcsőzetesen folytatódik.
Az első a PSS1, melynél egy optimalizált vészfékezés is bekövetkezik az ütközés kritikus esetben, melyet a hidraulikus fékasszisztens hajt végre. Ez a lehető legrövidebb fékutat valósítja meg. Ha ennek ellenére mégis bekövetkezik az ütközés, az lényegesen kisebb energiával történik, ami életeket menthet.
A PSS2 rendszernél a vészfékezési beavatkozás tovább bővül a vezetőt figyelmeztető rendszerrel, mely minden veszélyes helyzetben kellő időben aktiválódik. Ez elkerülhetővé tesz számos balesetet. A kutatások szerint a leghatékonyabban egy rövid fékezési impulzus hívja fel a vezető figyelmét a veszélyhelyzetre. Ezzel párhuzamosan fény és hangjelzés is kiadható, illetve a biztonsági öv is megfeszíthető a reverzálható, villanymotoros csévélő berendezéssel. ezzel a rendszerrel a 2006 után gyártott gépkocsikban lehet találkozni.
A PSS3 rendszernél további érzékelőket építenek be, mint például radar és optikai érzékelők, melyekkel kellő időben felismerhetők a következő pillanatban bekövetkező ütközések. Előtte automatikus vészfékezés következik be.
3.4.19. Video rendszerek
A gépjárművekbe szerelt optikai érzékelők alkalmazása az eső- és a fény érzékelőkkel kezdődött, melyben a Hella kivette a részét.
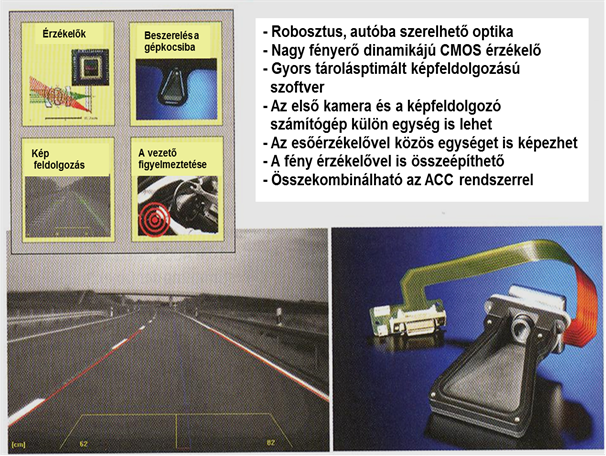
A video érzékelő CMOS-rendszerű kamera. A Bosch változat hatótávolsága 80 m vízszintes látószöge ±22˚. A kamerába van beszerelve az azt vezérlő elektronika és a nagy sebességű képfeldolgozó chip is. Egy adapterrel szerelik az első szélvédőre.
A video érzékelők a felbontás, az érzékenység, a fényerő dinamikája szempontjából az emberi szem teljesítőképességétől még elmaradnak, de a dinamikus kép érzékelők és a nagy sebességű képfeldolgozás alkalmassá tesz a vezetőt segítő asszisztens rendszereknél történő alkalmazásra.
Az előre figyelő kamera jól alkalmazható a forgalmi sáv felismerésére, illetve a sáv elhagyásakor figyelmeztető jelzés kiadására, vagy akár a KRESZ táblák felismerésére. Alkalmazzák az ACC rendszer kiegészítő érzékelőjeként is. A távolság mérésen kívül támogatja az objektum felismerést is.
3.4.19.1. Tolató kamera
A hátra elhelyezett egyszerűbb kivitelű video kamera a tolatást, beparkolást segítheti.
Ugyanaz a kamera adhat információt a forgalmi sáv elhagyásáról, a közlekedési jelzőtábláról, és ezt használja a forgalmi torlódás asszisztens rendszer is. Más optikával az éjszaka látó rendszerhez is felhasználható.
A képadatokból az objektum felismerő algoritmus további információkat képes kinyerni, mely más asszisztens rendszereknél használható fel. Ez a kamera a nagy érzékenysége ellenére a körülményeknek megfelelően rezgésálló kivitelű és elviseli a napsütés okozta hőmérséklet növekedést is egészen +105˚C-ig. 32 bites elektronikát használnak kiértékelő egységként, mely 330 MHz frekvenciával működik. Közvetlenül a kamera mellé szerelik fel és ugyanannak a hőmérsékletnek ellenáll.
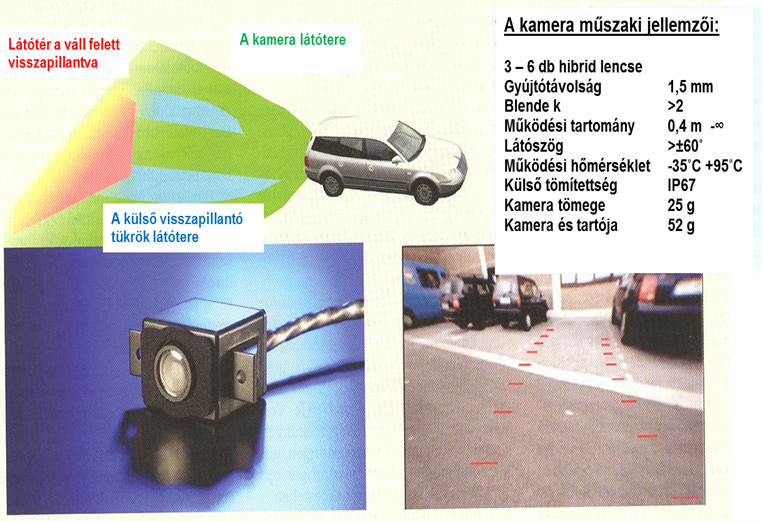
A Bosch hátsó video érzékelő vízszintes látószöge ±60˚. Úgy szerelik fel a gépkocsi hátuljára, hogy azt a részt lássa, amit a gépkocsivezető hátra fordulva a válla felett sem lát és a visszapillantó tükörből sem észlelhető. Észleli a közvetlenül a lökhárító mögötti akadályokat és objektumokat. A gépkocsi mögötti rész képe a fényviszonyoktól függetlenül akkor jelenik meg jól láthatóan a monitoron, amikor a gépkocsivezető a hátrameneti fokozatot bekapcsolta.
3.4.19.2. VW Passat CC tolató kamerás asszisztens
A csomagtartó mechanikus kézi nyitása a hátsó embléma elbillentésével lehetséges. E mögé az embléma mögé rejtik a tolatást segítő video kamerát, így az védett az időjárási behatásokkal, illetve a szennyeződéssel szemben. A hátrameneti fokozat bekapcsolásakor a beépített elektromechanika elbillenti az emblémát és kijjebb mozdítja a nagy látószögű kamerát, mely közvetlenül a lökhárító mögötti résztől a horizont széléig mutatja a képet. Az elektronika által feldolgozott és beállított kép a navigációs rendszer (RSN 510), vagy ha az nincs, a rádió (RDC 510) kijelzőjén jelenik meg.
3.5. Haszonjárművek asszisztens rendszerei
A haszonjárművek és a személygépkocsik között lényeges eltérések vannak, amiket az asszisztens rendszereknél is figyelembe kell venni.
-
Menetdinamikai szempontból például nem szabad figyelmen kívül hagyni:
-
A haszonjárművek magasabb tömegközéppontját.
-
A tömegeloszlás vonatkozásában a lényegesen nagyobb változatosságot (üres vagy rakott állapot, pótkocsival vagy szólóban történő közlekedés.
-
A haszonjárművek kisebb átlagsebességét és a kevésbé dinamikus sebességváltozást.
-
A hosszabb fékutat.
-
A haszonjárművek jelenleg gyártott változatait elektronikus szabályozással ellátott idegen erővel működtetett fékrendszerrel látják el.
-
A forgalmi viszonyok áttekintése a haszonjárművekből sokkal korlátozottabb (például a közvetlen hátratekintés lehetősége hiányzik).
-
A haszonjárműveknél viszont vannak olyan rendszerek, melyek a személygépkocsiknál nem állnak rendelkezésre, mint például a tartós lassító fék berendezés, a légrugózás, a tachográf, a kiegészítő hűtés, hidraulika rendszer.
-
A haszonjárművek nem a vezető tulajdonát képezik, hogy közvetlenül érdekeltek lennének a gazdaságos üzemeltetés vonatkozásában. A haszonjármű egy vállalkozás befektetése azért, hogy vele pénzt lehessen keresni.
-
Az ABS alkalmazása csak törvényes előírása után került alkalmazásra (Az EU tagországaiban az új haszonjárművekben 3,5 t össz-gördülőtömeg felett kötelező.) . Az ESP, bár kedvező hatású a balesetek elkerülése területén, ennek ellenére, mivel beszerelése jelenleg még nem kötelező, alkalmazási rátája csekély. 2003-ban például 5%-nál kisebb volt. Az asszisztens rendszerek a haszonjármű teljes élettartamra vonatkozó költségei bár csekélyek, ennek ellenére kevésbé széles körű az alkalmazásuk. A kisebb darabszám és a nagyobb megbízhatóság, robosztusabb kivitel, és a hosszabb élettartam igénye miatt az asszisztens rendszerek bekerülési költségei jelentősebbek, mint a személygépkocsiknál.
A haszonjárműveknél a vezetőt támogató asszisztens rendszerek három csoportba sorolhatók be:
-
Információ közlés: forgalmi hírek, közlekedési információk, navigáció
-
Figyelmeztetés: közlekedés sáv tartása
-
Beavatkozást is végző rendszerek: ABS/ASR, ESP, ACC, EDC, ASG, EBS.
A fejlesztések exponenciálisan összetettebb mechatronikus egységeket eredményeznek, melyeket aztán rendszerekké fűznek össze. Amíg például az ABS-nél 32 Kbyte ROM-ot alkalmaztak, az ESP-nél ez már 2 Mbyte.
Ezen a területen a közeljövőben várható fejlesztések a közlekedési környezet és a pillanatnyi menetállapot érzékelőinek és a kiértékelők elektronikák területén várhatók. Az egyes önálló rendszereket a CAN, Flexray, Bluetooth hálózatok kötik össze. Ez megkönnyítik az érzékelőkbe beépített elektronikák, mely lehetővé teszi az információk szélesebb körű alkalmazását. Egy másik fontos kulcsa ennek a területnek a vezeték nélküli adatátvitel megvalósítása. Az várható, hogy a vezetéssel kapcsolatos feladatok 95%-át a különböző asszisztens rendszerek fogják végezni és csupán 5%-marad a gépkocsivezetőnek. A szélesebb körű alkalmazás az egyes rendszerek árát csökkenteni fogja
3.5.1. Éjszaka látó berendezés (Nightvision) és HUD (Head-up Display) a haszonjárművekben
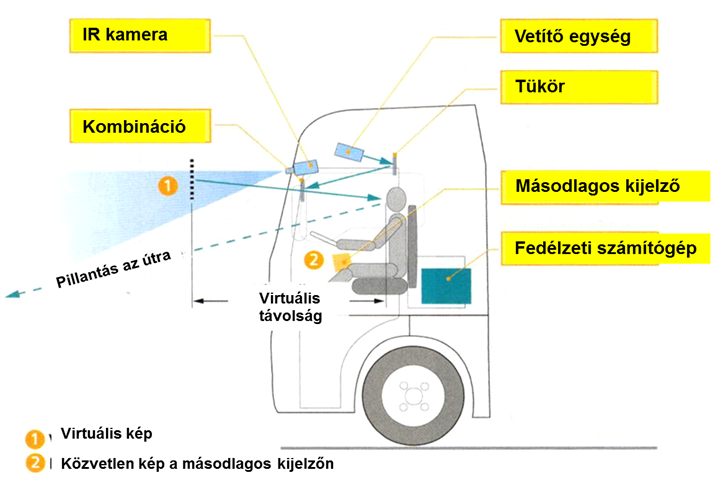
A haszonjárművek vezetőfülkéje a csaknem függőleges szélvédőjével a személygépkocsikétól eltérő elrendezést igényel az éjszaka látó berendezéstől. Nem lehet a műszerfalba beszerelni a TFT kijelzőt. A vezetőülés helyzete azt eredményezné, hogy a HUD bele takarna a nagyon fontos közvetlen látótérbe, ami a biztonságot hátrányosan érintené. Ezért egy fej feletti beszerelést és tükröt alkalmaznak. A HUD képe a szélvédő felső részén látható. Ettől a 2008 –óta sorozatgyártásban lévő rendszertől az éjszaka bekövetkező balesetek számának csökkenését várják. További lehetőségek a más asszisztens rendszerekkel megvalósított kombináció. Például navigációs-, vagy forgalmi sáv tartó rendszerrel.
3.5.2. Radar érzékelő a haszonjárművekben
Egyre több olyan haszonjármű baleset következik be, amely intelligens rendszerek alkalmazásával elkerülhető lenne. Ugyanakkor a személygépkocsiknál egyre több közel-téri radar érzékelőt alkalmaznak. A Tyco Electronics közeli radar érzékelőket gyárt, melyek 24 GHz frekvenciával működnek.

A közúti forgalomban a haszonjárművek egyre nagyobb részaránnyal vesznek részt. A közlekedési szakemberek hangoztatják az igényt olyan automatikusan befékező rendszerekre, melyek veszélyhelyzetekben automatikusan működésbe lépnek. Ezekkel például sok olyan utoléréses baleset lenne elkerülhető, melyek gyakorta halálos kimenetelűek. Olykor személygépkocsik ütköznek neki fékezetlenül hátulról a haszonjárműveknek úgy, hogy semmi esély a túlélésre. Még dramatikusabbak a gyalogosgázolások. Európa útjain a halálos áldozatok 30%-a védtelen gyalogos. A balesetek 2/3 része frontálisan következik be.
Az Európában futó, a megelőzést célul kitöltő projektek feltárják a lehetőségeket, amelyeket az új műszaki megoldások kínálnak, hogy a vezető figyelmét felhívják a veszélyes helyzetekre. Ennek egy speciális területe a haszonjármű vezetők figyelmeztetése olyan esetekre, amikor valaki, vagy valami közvetlenül a gépkocsijuk elé került, méghozzá úgy hogy a látótéren kívül van. Az elmúlt évtizedben a fejlesztők az ABS és az ESP sorozatos beépítése révén sokat tettek a súlyos balesetek csökkentése érdekében. A nagy ablakok és a visszapillantó tükrök kombinációi sokat tettek a halálosan takart tartományok csökkentése érdekében.
3.5.2.1. A radar előnyei
A közeli radar érzékelők alkalmazása észlelhetővé teszi az első lökhárító előtti 10 cm-től a 30 m-ig terjedő tartományt. Ezeknek az érzékelőknek a legnagyobb látószöge 130˚. Így viszonylag kevés érzékelővel észlelhetővé válik, méghozzá villámgyorsan a haszonjárművek teljes hossza és szélessége. A Tyco Electronics 24 GHz frekvenciával működő, úgynevezett Ultra-Wide-Band (UWB) technológiával működő érzékelőket gyárt. Ez lehetővé teszi az érzékelőhöz képest néhány centiméterre lévő objektumok észlelését. Ennek a másik előnye, hogy az egymástól 15 cm-re lévő objektumokat külön-külön objektumnak ismeri fel. Így például a garázs ajtó és a közelében játszó gyermek között különbséget tud tenni.