10. fejezet - Vonóelemes átalakító és dinamikai modelljei és tervezése
10.1. Vonóelemes hajtások rendszerezése
Bevezetőként rendszerezzük azokat vonóelemes hajtásokat, amelyek a gépészet területén dominánsan előfordulnak. Ezek közül nem mindegyik alkalmas arra, hogy szabályozott szakasz részeként, a mechatronikában is alkalmazást nyerjenek.
A következő ábrán látható egy lehetséges rendszerezés:
![A vonóelemes hajtások áttekintése [10.1.]](images/image_X_1.png)
A mechatronikai szerkezetekben csak három változatot, az
-
acélszalagos (pl.: merevlemezes adattároló)
-
acélsodronyos, acélhuzalos (pl.: vegyi analizátorok)
-
fogazott szíjas (nyomtatók, robotok, szerszámgépek, felületszerelő automaták)
mozgásátalakítókat alkalmazzák a szabályozott szakaszokban.
A három vonóelem típus közül természetesen a fogazott szíj (vagy fogasszíj) a mechatronikában csaknem egyeduralkodó, a másik két változat speciális konstrukciókban fordul elő. Ilyen szerkezet a merevlemezes egység, amelyben acélszalag biztosítja a fej ultraprecíziós szögelfordulását. A szalag vastagsága és a körülfogási rádiusz úgy vannak összehangolva, hogy a szalag hajlításából eredő rugalmasság a pontosságot ne befolyásolja. A finommechanikai konstrukció területén ismert fogalom a fémszalagos mozgásátalakító körülfogási ívre történő méretezése. A másik vonóelemet, a sodrott acélhuzalt, főként kisebb méretű berendezésekben, analitikai műszerekben alkalmazzák, ott, ahol a környezeti feltételek miatt a természetes gumi illetve műanyag mátrixú fogazott szíjat nem lehet beépíteni. A sodrott acélhuzal alatt természetesen kis átmérőket kell érteni, jellemzően a 0.5 – 1.5 mm tartományt. W. Krause munkáiban számos speciális finommechanikai konstrukció méretezési útmutatóját megtaláljuk, ilyen pl. a Konstruktionselemente der Feinmechanik [10.2.].
A következő ábrán azt mutatjuk be, hogy a fogazott szíj milyen sokféle konstrukciós elrendezést tesz lehetővé. Vannak ezek között olyan elrendezések, amelyek más vonóelemmel is működőképesek, kivételt képeznek természetesen az olyan eszközök, amelyeknél külső és belső fogazás a működés feltétele. Mint ahogy más esetben is, a fogazott szíjas átalakító sem „tud mindent”, hiszen számtalan előnyös tulajdonsága mellett a golyósorsóhoz képest kisebb a terhelhetősége és a pozícionálási pontossága.
![Fogazott szíjas hajtás sokoldalú kialakítása [10.1.]](images/image_X_2.png)
10.2. Fogazott szíjas átalakító szerepe a mechatronikában
A fogazott szíjas mozgásátalakító mechatronikában betöltött szerepe miatt az alábbiakban gyűjtöttük össze mindazokat a tulajdonságokat, amelyek előnyösek és amelyek az alkalmazhatóságot valamilyen mértékben korlátozzák.
Előnyös tulajdonságok:
-
nagy teljesítménysűrűség,
-
szinkron és csúszásmentes mozgásátvitel,
-
kis zaj,
-
kis tömeg,
-
kedvező árfekvés,
-
nagy szíjsebességek lehetségesek (kb. 80 m/s határig),
-
rezgéscsillapító hatás,
-
hatásfok névleges terhelésnél 98%-ot érhet el,
-
helyes szíjfeszítésnél alacsony tengelyterhelés,
-
karbantartási igény kevés (nincs kenés, esetenként szíjfeszesség állítás),
-
erőátvitel kitérő tengelyeknél lehetséges,
-
részlegesen szabványosított [ISO 5296; DIN 7721; ISO 13050; stb.].
Hátrányos tulajdonságok:
-
szíjanyagtól függően olajok, savak, lúgok, víz és zsírok ellen korlátozott ellenálló képesség (főként standard típusok esetében),
-
Korlátozott a hőmérséklet tartomány (pl.: NBR: -40°C-tól +130°C-ig),
-
érzékeny homokkal, porral és hasonló szemcsés anyagokkal szemben
10.3. Ideális vonóelemes átalakító
Az ideális vonóelemes váltó nem tartalmaz passzív modell elemeket (tehetetlenségek, rugómerevség, csillapítás). Ilyen helyzet a valóságos mozgató szerkezetekben nem fordul elő. Ha elhagyjuk a modell paramétereket, akkor a váltó a hajtóműre hasonlít, és a kimeneti-bemeneti szögsebességeket csupán az „i” módosítás köti össze:
Általános esetben a gépszerkezeteknél szokásos maximális módosítás (lassítás) és áttétel (gyorsítás) is megvalósítható, a két tárcsa aránya azonban nem lehet nagyobb, mint 10. A mechatronikában főként robotok esetében találkozunk ilyen megoldással, ld. következő kép.
Érdekes megfigyelni, hogy a nagy nyomatékátvitel ellenére a robot fogazott szíja az arányokat figyelembe véve keskenyebb, mint egy lineáris mozgató elemé. Ennek okáról részletesen lesz szó a vonóelemes szakasz méretezésénél, itt előzetesen csak annyit, hogy a fogazott szíjas vonóelem rúgómerevségének, és egyben a pozícionálás pontosságának a növelése elsősorban a szélesség növelésével érhető el.

10.4. Valós vonóelemes átalakító
A valós vonóelemes átalakító (váltó) szerkezeti vázlata általános formában az alábbi:
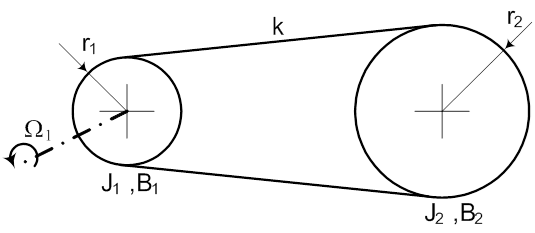
A modell paraméterek láthatók az ábrán. Ezek a tárcsák tehetetlenségi nyomatékai, a csapágyazások csillapítási tényezői és a vonóelem rugómerevsége. Ez utóbbi transzlációs mechanikai elem, ezért a rendszerben két váltót kell elképzelnünk, ahogy azt a 10.5. ábra gráfon ábrázoltuk. A módosítás a mechatronikában szokásos formában i=r2/r1, és ez az érték természetesen lehet egy is. A gráfon már megkülönböztettük a terhelt (húzott) ág kT rugómerevségét a terheletlentől (szabadtól) kSZ.
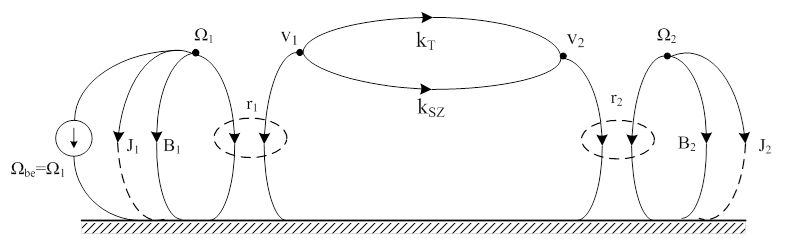
A gráf tovább egyszerűsíthető, és a váltó valós esetben az alábbi formájú lesz. A két párhuzamos rugómerevség eredőjét egyszerű összeadással kapjuk.
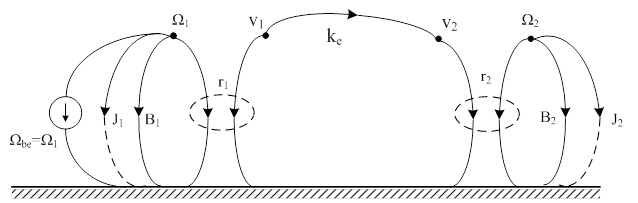
A váltó másodrendű, a forrással párhuzamosan kapcsolt elemeket nem kell figyelembe venni. A két energia tárló ke és J2, amelyek egymással természetesen lengéshajlamú rendszert képeznek. A matematikai modellt a gráf alapján szerkesztett impedancia hálózatból írjuk fel. A vonóelem transzlációs rugómerevségét rotációssá számítjuk át, és felrajzoljuk az impedancia kapcsolást:
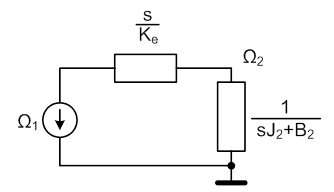
A kapcsolásban az átszámítás eredménye:
Ennek felhasználásával az átviteli függvény az alábbi lesz:
10.5. Vonóelemes lineáris mozgató
A mechatronikában igen gyakran lehet találkozni különféle módon felépített lineáris mozgatókkal. Ezek a robottechnikában és az automatizált szerelésben nélkülözhetetlen építőelemek. A lineáris mozgatók alapvetően négy változatban készülnek. Van olyan gyártó cég, amely arra törekszik, hogy a különböző elven működő lineáris egységei a beszerelés szempontjából csereszabatosak legyenek. Ezért pl. egy pneumatikus munkahenger kiváltható egy más műszaki paraméterekkel rendelkező golyósorsós lineáris egységgel, egy vonóelemessel, vagy egy fogaslécessel úgy hogy az egységek felfogó furatai azonos helyen találhatóak. Tolóerő és pozícionálási pontosság tekintetében eltérőek, mint ahogy egy rugalmas gyártócellában eltérőek lehetnek a feladatok is.
A vonóelemes (fogazott szíjas) pozícionálóval, mint szabályozott szakasszal a 12. fejezet fejezetben részletesen foglalkozunk. Az ipari gyakorlatban ezt a rendszert és a golyósorsós mozgásátalakítót „lineáris elemnek”, vagy „lineáris mozgatónak” is nevezik. A legfontosabb építőelemek a motorral egybeépített hajtómű, a tengelykapcsoló, a hajtó és a hajtott fogazott tárcsa (kerék) és a fogazott szíj, mint vonóelem a hozzá kapcsolt, mozgatott tömeggel. Ez az esetek többségében egy tárgyasztal, vagy keret.
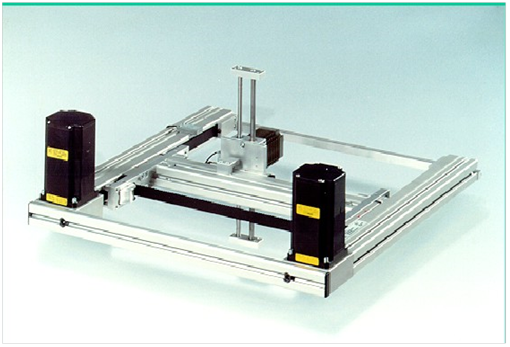
A következő képen egy háromkoordinátás pozicionáló látható. A vonóelemes mozgatás lehetővé teszi, hogy a vízszintes síkban egyszerű módon lehessen a függőleges irányú lineáris elemet pozícionálni. A vonóelemmel ez az összetett mozgás megoldható, golyósorsó alkalmazása esetén két külön egymásra merőleges mozgatóra lenne szükség, nagyobb a mozgatott tömeg. Előny, hogy a koordináták függetlenek egymástól. A képen látható rendszerben a két koordináta mentén történő mozgatás nem független, de kisebb a mozgatott tömeg, mert a vízszintes síkon mozgató két motor-hajtómű egység az álló részen (fix kereten) helyezkedik el. Ugyanakkor hátrány, hogy a két motor összehangolt szabályozása szükséges ahhoz, hogy a függőleges szerelő fej valamelyik tengellyel párhuzamosan tudjon mozogni.
A vonóelemes átalakítót leválasztjuk a motor-hajtómű egységről, és részletes vizsgálat tárgyává tesszük. A bemenő jel célszerűen a hajtómű Ω2 kimenő fordulatszáma lesz. A hajtómű és a hajtó fogazott tárcsa között a konstrukció követelményeinek megfelelően lehet tengelykapcsoló, de a fogazott tárcsa elhelyezhető közvetlenül a hajtómű kimenő tengelyén is.
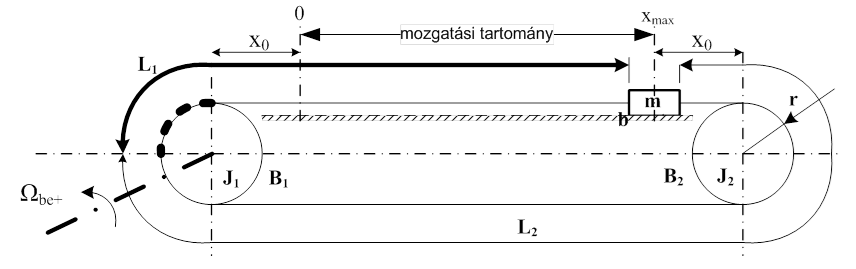
A mechanikai váltó szerkezeti modellje a következő ábrán látható:
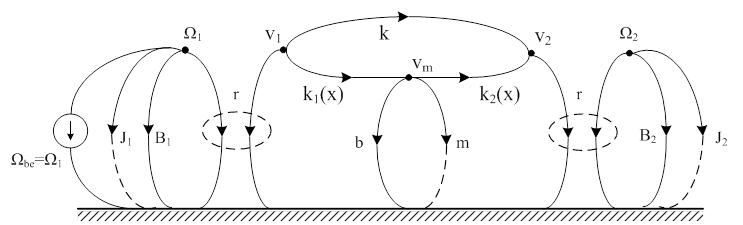
A szerkezeti modell alapján a következő gráf rajzolható fel:
A szíj ágak egyik végpontja a mozgatott tömegen van, a másik a rugómerevség miatt lényegesebb. Ha az ábrán látható módon azonos a két tárcsa sugara, akkor a fogazott szíj a forgató tárcsa 1/4 kerületén van a legnagyobb erőhatásnak kitéve, ezen a szakaszon a legnagyobb a fogak deformációja. Ezt a körívet szaggatott vonallal jelöltük. Az un. kifutó íven, az alsó 1/4 kerületen a terhelés lényegesen kisebb.
![A forgató tárcsa fogai által okozott feszültség a fogazott szíjban (VEM) [10.1.]](images/image_X_11.png)
A gráf forrása szögsebesség, feltételezve a hajtómű visszahatás mentességét. Ha a hajtómű nem visszahatásmentes, akkor a motor-hajtómű-vonóelemes átalakító egység csak egyetlen gráfban szerepeltethető, szétválasztás nem lehetséges. A keresztváltozó forrás első hatása, hogy a vele párhuzamosan kapcsolt elemek kiiktathatók, hiszen a forrás értéke rajtuk elő van írva. Gyakorlati szempontból célszerű lehet azonban a J1 és B1 értékeket a hajtómű megegyező típusú kimeneti paramétereihez hozzáadni, mert kritikusabb esetekben ebből a rezonancia frekvencia módosulása származhat. A vonóelemes átalakítók jellegzetes eleme az „r” sugarú tárcsa, amely a forgó mozgást egyenes vonalúvá alakítja. Már jeleztük korábban, hogy a fogazott szíj rugómerevségét a szíj szélességével lehet beállítani. A lineáris mozgatók szíjai azért tűnnek aránytalanul szélesnek, mert ezek esetében a pozícionálási pontosság érdekében növelték a szíj rugómerevségét. A lineáris pozícionálónál a pozícionálási tűrés elsőrangú szempont.

A visszatérítő tárcsa J2 és B2 paramétereit megjelenítettük. Szerepük a méreteken és a dinamikával szemben támasztott követelményeken múlik. A két tárcsa kerületi sebességét v1 és v2 jelöli. A mozgatott tömeg sebessége vm, és ehhez a csomóponthoz tartozik maga a tömeg és az egyenes vezetésből származó csillapítási tényező. Az identifikált keresztváltozókat kötjük össze az átalakító többi fontos és jellemző paraméterével, a vonóelem (szíj) ágak rugómerevségével. A gráfon k1(x) és k2(x) nemlineáris voltát azért hangsúlyozzuk, mert a tananyagban a nemlineáris vonóelemes pozícionáló állapotszabályozásával külön, a 12. fejezet fejezetben foglalkozunk. Természetes, hogy lehet olyan konstrukció, amelyben a mozgatott tömeg hajtótárcsától való távolsága erőteljesen befolyásolja a vonóelem (szíj) ágak rugómerevségét. A gyakorlatban előforduló vonóelemes rendszerek nagyobb részében elegendő az a linearizált modell, amelyet majd a következőkben fogunk bemutatni.
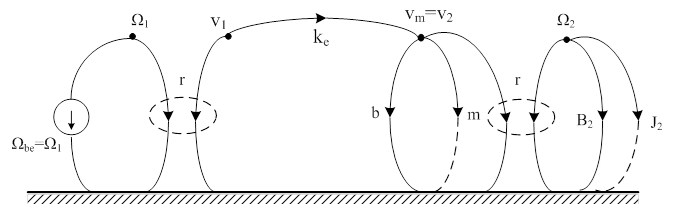
Az egyszerűsített gráfon szereplő ke eredő rugómerevséget a katalógusok által megadott módon kell meghatározni. Dinamikai szempontból számunkra az fontos, hogy a linearizált rendszer másodrendű. Tekintettel arra, hogy a későbbiekben a nemlineáris változat állapottér modelljével még részletesen foglalkozni fogunk, a továbbiakban az egyszerű szabályozás megtervezéséhez elegendő az átviteli függvény ismerete. Ehhez a legegyszerűbben az impedancia módszer alkalmazásával jutunk.
Első lépésben felrajzoltuk a gráfot.
A gráfból impedancia hálózatot hozunk létre, ha a matematikai modell felírásához választott módszer az impedancia módszer.
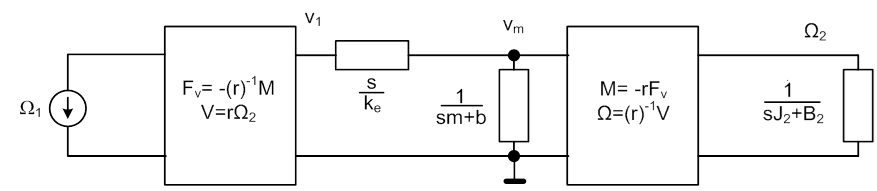
A megszokott módon átszámítjuk a forrást egyenes vonalúvá, és redukáljuk a visszatérítő tárcsa impedanciáit az egyenes vonalú rendszerrészre. Ezekkel egy igen egyszerű kapcsoláshoz jutunk, amelyre további átformálások nélkül felírható a keresztváltozó osztó, a keresett átviteli függvény implicit formája.
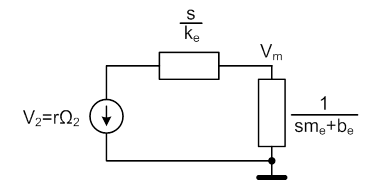
Az új forrás értéke a kapcsoláson látható, az eredő tömeg és csillapítási tényező értéke pedig a következők:
Az eredő vonóelem rugómerevség (főként fogazott szíjaknál) a katalógusok ajánlása szerint a következőképpen határozható meg:
Ahol
|
kSP [N/mm] |
specifikus rugómerevség, a vonóelem (szíj) egy milliméter szélességére vonatkoztatva |
|
|
h [mm] |
vonóelem szélessége |
|
|
L1 [mm] |
húzott (terhelt) ág hossza |
|
|
L2 [mm] |
terheletlen ág hossza |
A képlet nem rejtélyes, ha a következőket meggondoljuk. Osszuk el a két hosszúság összetevőt a nevezővel, és azonnal látszik, hogy két rugómerevség összegéről van szó. Ezek a képlet alapján kizárólag párhuzamosan lehetnek kapcsolva:
A párhuzamos kapcsolás felismerhető a működési vázlaton is. Jól kivehető, hogy az L1 és L2 hosszúságú vonóelem mindkét vége azonos helyen van rögzítve. Az egyik rögzítési pont a mozgatott tömeg, a másik a hajtó tárcsa kerületén van, azon a ponton, amelyik felezi a vonóelem által létrejövő körülfogási ívet. Ez a körülfogási ív lehet kisebb is, mint a kerület fele, ha a két tárcsa közül a hajtó a kisebb sugarú.
Az impedancia kapcsolás alapján felírható az átviteli függvény:
Az eredeti bemenő mennyiség szögsebesség volt, ezért a keresztváltozó osztó felírása után egy további lépésre még szükség van:
Lényegét tekintve a linearizált vonóelemes mozgató ugyanolyan másodrendű rendszer, mint a valós vonóelemes átalakító, ahogy ezt korábban már annak tárgyalásakor is említettük.
Szakirodalom
[10.1.] Zahnriemengetriebe. Hanser Verlag. München-Wien . 2008.
[10.2.] Konstruktionselemente der Feinmechanik. Hanser Verlag. München . 2004.