6. fejezet - Hibrid-, hibrid-elektromos járművek, hajtásrendszerek architektúrája, szabályozása, menedzsmentje és energiaforrások
6.1. Hibridhajtás története
A gépkocsi történelmében mindig is jelen voltak a hibridjárművek. A XX. század derekán már jelentős szerepet töltött be a villamos hajtás. Ebben az időben több villamos hajtású járművet gyártottak, mint belsőégésű motorral ellátottat. A törekvés már akkor is megvolt a két meghajtás kombinálására.
A hagyományos belső égésű motorral (ICE) szerelt járművek jó teljesítményt és hosszú hatótávolságot biztosítanak, az üzemanyagaik nagy energiasűrűségének kihasználásával. Ugyanakkor, ezeknek a járművek a hátránya, hogy nem üzemanyag takarékosak, valamint környezetszennyezők is. A nagy fogyasztás fő okai, hogy
-
a motor hatásfoka alacsony és üzemi tartománya nem a legjobb hatásfok mezőben van
-
a fékezésnél keletkező kinetikus energiát nem nyerik vissza, ami főleg városi környezetben fontos,
-
a sebességváltók alacsony részterhelési hatásfokkal üzemelnek
Az akkumulátorokkal hajtott elektromos járművek (EV) azonban olyan előnyökkel bírnak a hagyományos belső égésű motoros járművekkel szemben, mint a jobb energia-hatékonyság és az üzem közbeni nagyon alacsony károsanyag-kibocsátás. Mindazonáltal a teljesítménymutatóik, főleg a töltésenkénti hatótávolság, jelentősen elmaradnak a belső égésű motoros járművekétől, az akkumulátorok üzemanyagokhoz képest kisebb energisűrűsége miatt. A hibrid elektromos járművek (HEV), melyek két erőforrást használnak egy elsődleges és egy másodlagos erőforrást- elvileg ötvözik a belső égésű és az elektromos hajtás jó tulajdonságait, és kiküszöbölik a hátrányaikat. Ebben a fejezetben a hibrid elektromos járművek hajtásláncának felépítését és működését tárgyaljuk.
6.2. Üzemmódok a hibridhajtásban
Az üzemmódtól és a nyomatékigénytől függően különbözőképpen járul hozzá a belsőégésű motor és a villamos gép a jármű hajtásához. A motorvezérlő egység dönti el a nyomatékelosztást a két hajtóegység között.
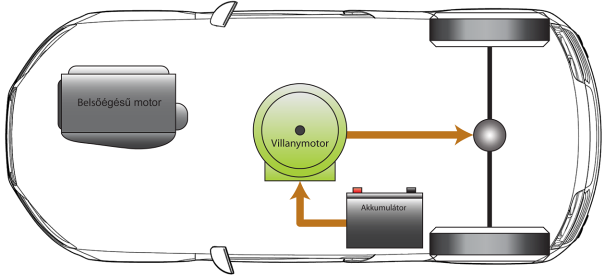
6.2.1. Tisztán villamos hajtás
Ez a funkció a fullhibrid járműveknél lehetséges. Ilyenkor csak a villamos gép hajtja meg a járművet, a belsőégésű motor leválasztásra kerül. A jármű csöndben, szinte hangtalanul és lokális emisszió nélkül közlekedik
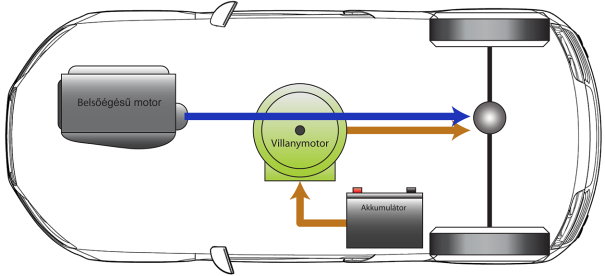
6.2.2. Hibrid üzemmód
A hibrid üzemmódba tartozik a belsőégés motor és a villamos gép közösen szolgáltatja a szükséges forgatónyomatékot a jármű hajtására (6.2. ábra). A nyomatékelosztáson kívül a vezérlőegység figyeli a káros anyag kibocsátást, az akkumulátor töltöttségi szintjét és az üzemanyag-fogyasztást is.
6.2.3. Villamos rásegítés
Villamos rásegítéskor a belsőégésű motor és a villamos gép forgatónyomatékot szolgáltat a jármű megfelelő hajtásához. Ha hirtelen megnő a nyomatékigény a hibridvezérlő utasítást ad a villamos gépnek, hogy támogassa a belsőégésű motort pozitív nyomatékkal. Gyorsításkor a belsőégésű motor alacsonyabb fordulatszámánál kevesebb nyomatékot szolgáltat, ilyenkor a villamos gép szolgáltatja a nagyobb nyomatékot (6.2. ábra).
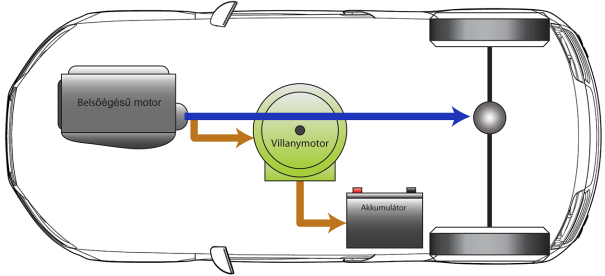
6.2.4. Generátor üzemmód
Az energiatároló egység töltése a következőképpen történhet. A belsőégésű motor a kerekek hajtása mellet, a villamos gépet is meghajtja, így generátor üzembe helyeződik. Másik lehetőség a fékezés során villamos visszatöltés a kerekek felől. A visszatöltés során a belsőégésű motor több forgatónyomatékot szolgáltat, mint amennyi szükséges a jármű hajtásához. A többlet teljesítményt a villamos gép felhasználja az akkumulátorok töltésére (6.3. ábra).
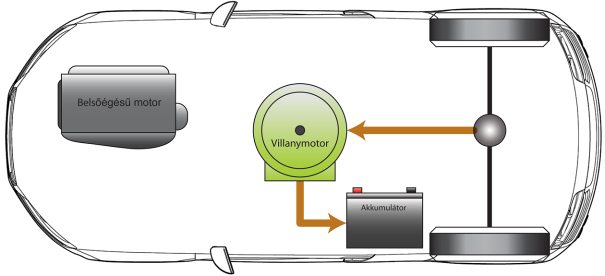
A fékenergia visszatöltésnél nem vagy csak részben fékeződig az üzemi fékek hatására, ilyenkor a villamos gép fékezőnyomatéka lassítja a járművet. A villamos gép generátor üzembe kapcsol és a jármű mozgási energiáját villamos energiává alakítja, amivel tölti az akkumulátorokat (6.4. ábra). A visszatápláló fékezést rekuperáló fékezésnek is nevezik.
6.3. Hibridizálás
6.3.1. Start/Stop rendszer
A hibrid járművekben alkalmazzák főként a Start/stop funkciót, de csak belsőégésű motorral ellátott járművek is rendelkezhetnek ilyen rendszerrel. Feladata, hogy álló járműnél a belsőégésű motort automatikusan leállítsa. A leállítás létrejön, ha:
-
a sebességváltó üres állapotban van,
-
az ABS jeladó zérót jelez,
-
az akkumulátor töltöttsége megfelelő szinten van.
Amint a járművezető a tengelykapcsolót benyomja, a megerősített indítómotor megforgatja a belsőégésű motor főtengelyét.
6.3.2. Mildhibrid
A mildhibridek az alábbi funkciókkal rendelkeznek:
-
Start/stop
-
villamos gép által biztosított rekuperációs fékezés
-
villamos rásegítés lehetőségével.
A villamos gép és a belsőégésű motor forgatónyomatéka összeadódik. Maximálisan 20kW kimenő teljesítményt tud biztosítani a villamos gép. Ezt a járműindulásnál és gyorsításnál használja.
A belsőégésű motor és a villamos gép együtt forognak mivel nem kapcsolható szét a két egység.
6.3.3. Fullhibrid
A fullhibrid tisztán villamos hajtásra is képes és ezekkel hosszabb távolságok megtételére is képes. Ilyenkor csak a villamos gép hajt, a belsőégésű motor nem működik. A villamos hajtás rendszer 200-350V-os feszültségen működik.
6.3.4. Plug-in hibrid
Plug-in, azaz a tölthető fullhibrid. Az akkumulátor pakk nem csak visszatáplálás révén belső hálózatról tölthető, hanem külső forrásból (például: hálózati csatlakozóból) is. A külső töltés speciális csatlakozón keresztül történik.
6.4. Hibrid-elektromos hajtásrendszerek architektúrái és szabályzásai
Alapvető követelmény egy erőátviteli berendezéssel kapcsolatban, hogy
-
biztosítsa a jármű hajtásához szükséges vonóerőt,
-
lehetővé tegye a jármű kívánt sebességgel való meghajtását
Lényegében egy járműnek lehet egynél több energiaforrása és energia-átalakítója úgy, mint benzin vagy dízelüzemű motor, hidrogén-üzemanyagcellás motor, akkumulátoros elektromos motor stb. Azt a járművet mely kettő vagy több energiaforrással és energia-átalakítóval rendelkezik, hibrid járműnek nevezzük. Az elektromos erőforrással rendelkező hibrid járművet nevezzük HEV-nek, azaz Hybrid Electric Vehicle-nek.
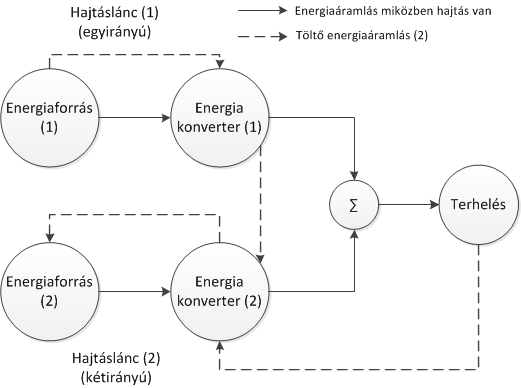
Egy hibrid jármű hajtáslánca általában két erőforrással rendelkezik. Ennél több alkalmazása túlságosan bonyolítaná a rendszert. A fékezésnél keletkező energia visszanyerésének érdekében, mely a hagyományos belső égésű motoroknál hő formájában elvész, a hibrid hajtásláncoknál általában egy kétirányú energiaforrást és energia-átalakítót alkalmaznak. A másik lehet egy vagy kétirányú is. A 6.5. ábra mutatja a hibrid hajtáslánc koncepcióját és az energia áramlásának lehetséges útvonalait.
A hibrid hajtásláncok a hajtó nyomatékot egy illesztett erőátviteli berendezés segítségével biztosítják. Sok lehetséges módja van az energia áramlás kombinálásának:
-
Az 1-es berendezés biztosítja a hajtóerőt
-
Az 2-es berendezés biztosítja a hajtóerőt
-
Az 1-es és 2-es berendezés együtt biztosítja a hajtóerőt
-
A 2-es rendszer energiát nyer fékezéskor
-
A 2-es rendszer energiát nyer az 1-es erőforrástól
-
A 2-es rendszer energiát nyer fékezéskor és az 1-es erőátviteli berendezéstől is
-
Az 1-es rendszer biztosítja a vonóerőt és energiával látja el a 2-es erőforrást
-
Az 1-es berendezés energiája a 2-es rendszerbe jut, ami pedig a vonóerőt biztosítja
-
Az 1-es berendezés biztosítja a vonóerőt, a 2-es pedig a mozgási energiát hasznosítja
Abban az esetben, ha a hibrid járműben egy folyékony üzemanyagú belső égésű motor (1-es berendezés) és egy akkumulátoros-elektromos motor (2-es berendezés) van, akkor az
-
egyik mód, hogy a jármű kizárólag a belsőégésű motor által hajtott. Ez akkor használatos, ha az akkumulátorok teljesen lemerültek, és a motornak nincs elegendő teljesítménye a feltöltésükhöz, vagy ha az akkumulátorok teljesen fel vannak töltve és a belsőégésű motor egyedül képes elegendő erőt biztosítani a jármű számára.
-
A második mód, a tisztán elektromos hajtású mód, melyben a belső égésű motor le van állítva. Ez akkor használatos, ha a belsőégésű motor nem képes hatékonyan működni, például nagyon kis sebességeknél, vagy olyan helyeken ahol a káros anyagok kibocsátása szigorúan tiltott.
-
A harmadik mód a hibrid hajtású mód, mely akkor használható mikor nagy teljesítményre van szükség, például hirtelen gyorsításokkor vagy meredek hegyen való haladáskor.
-
A negyedik mód a „visszatápláló” fékezési mód, melynél a kinetikus energiát az elektromos motor generátorként működve nyeri vissza. A visszanyert energia az akkumulátorokban tárolódik a későbbi felhasználásig.
-
Az ötödik módban a belsőégésű motor tölti az akkumulátorokat miközben a jármű egyhelyben áll, völgymenetben halad vagy ereszkedik, mely esetekben nincs szükség vonóerőre.
-
A hatodik módnál a kinetikus energia visszanyerése és a belső égésű motor egyaránt töltik az akkumulátorokat.
-
A hetedik módban a belsőégésű motor egyszerre hajtja a járművet és tölti az akkumulátorokat.
-
A nyolcadik módnál a belsőégésű motor tölti az akkumulátorokat, az elektromos motor pedig hajtja a járművet.
-
A kilencedik módban az belsőégésű motor hajtja a járművet, a fékezést pedig a villamos gép végzi. Ennél a módnál legtöbbször a két hajtómű külön van szerelve az első és hátsó tengelyekre.
A változtatható üzemelési módok miatt a hibrid járművek nagyobb rugalmasságot tesznek lehetővé, mint az egy erőforrással rendelkező járművek. Pontos beállítással és irányítással, és minden üzemi szituációra a megfelelő mód alkalmazásával optimalizálható a teljesítmény, a hatékonyság és a károsanyag-kibocsátás. Mindazonáltal a gyakorlatban, a megfelelő mód kiválasztásánál sok tényezőt kell figyelembe venni, mint például a hajtáslánc fizikai összeállítását, az erőátvitel hatékonyságát stb.
Mindkét erőforrás optimális hatékonysággal való üzemeltetése elengedhetetlen a jármű hatékonyságának maximalizálásához. A belső égésű motor a legnagyobb hatékonysággal teljesen nyitott fojtószelepállásnál működik. Más beállítás esetén sokat romlik a hatékonysága. Ezzel szemben az elektromos motorok esetén nem olyan nagy a visszaesés, mint a belső égésű motoroknál.

A jármű vonóereje üzem közben változik a gyorsulástól, lassulástól, kapaszkodástól vagy ereszkedéstől függően (6.6. ábra). A vonóerő két komponensből áll: az egyik változatlan (átlagos) erő, melynek állandó értéke van, és a másik a dinamikus erő, melynek átlaga nulla. A hibrid járműveknél az átlagos erőt egy olyan erőforrással lehet biztosítani, mely előnyben részesíti a folyamatos működést, mint a belső égésű motorok. Ezzel párhuzamosan más erőforrások, mint az elektromos motorok jól használhatóak a dinamikus erőszükségletek kielégítésére. Összességében a dinamikus energiaforrásnak az energia-kibocsátása nulla lesz egy ciklusban. Ez azt jelenti, hogy a dinamikus erőátvitel energiaforrása nem veszít energiakapacitásából a ciklus végére. Tulajdonképpen csak energiatárolóként szolgál.
Egy hibrid járműben a változatlan teljesítményt biztosíthatja egy belső égésű motor, Stirling motor, üzemanyagcella stb. A belső égésű motor vagy az üzemanyagcella sokkal kisebb méretű lehet, mint egy-egy motorral szerelt jármű esetében, mert a dinamikus erőket a dinamikus erőforrás szolgáltatja, így folyamatosan üzemelhet a leghatékonyabb tartományban. A dinamikus erőket szolgáltathatják elektrokémikus akkumulátorok által táplált elektromos motorok, ultrakapacitorok, lendkerekek (mechanikus akkumulátorok), valamint ezek kombinációi.
6.4.1. A Hibrid Elektromos hajtásláncok felépítése
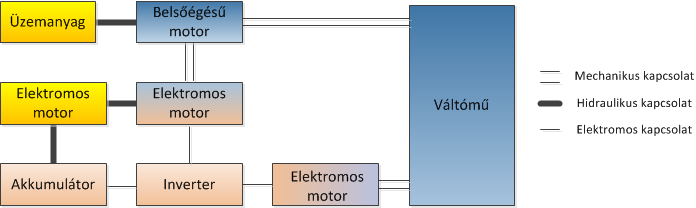
Egy hibrid jármű felépítése nagy vonalakban meghatározza a kapcsolat az energia áramlásának irányait meghatározó komponensek és az irányító portok között. Hagyományosan a „HEV”-ek két fő típusra bonthatóak: soros és párhuzamos. Érdekes lehet megjegyezni, hogy 2000-ben néhány újonnan bemutatott HEV egyik csoportba sem volt sorolható. Ezért a hibrid elektromos járműveket manapság négy csoportba sorolhatjuk: soros hibrid, párhuzamos hibrid, soros-párhuzamos hibrid illetve komplex hibrid (a következő ábrák mutatják be ezeket). Az ábrákon az üzemanyagtartály, belsőégésű motor, valamint az akkumulátor-elektromos motor párok adottak, mint példák az elsődleges (állandó) erőforrásra és a másodlagos (dinamikus) erőforrásra. Természetesen a belső égésű motor kicserélhető más típusú erőforrásra is, mint például üzemanyagcellára. Ugyanígy az akkumulátorok is kicserélhetőek ultrakapacitásokra, vagy lendkerekekre, esetleg ezek kombinációjára, melyeket részletesen tárgyalunk a következő fejezetekben.
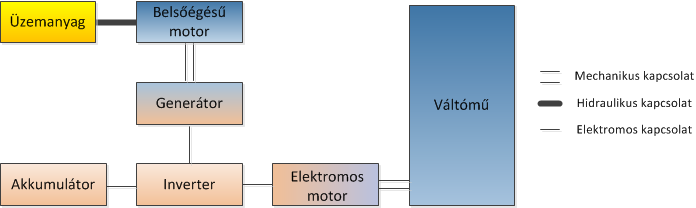
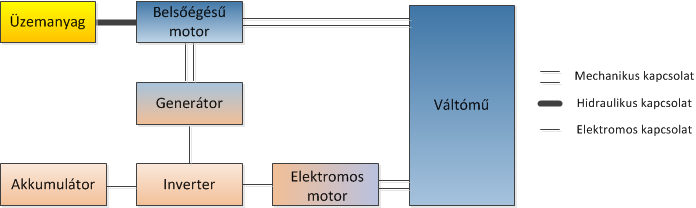
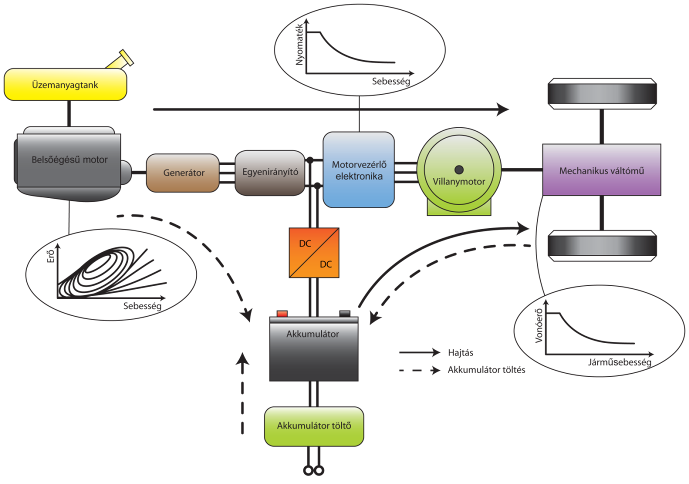
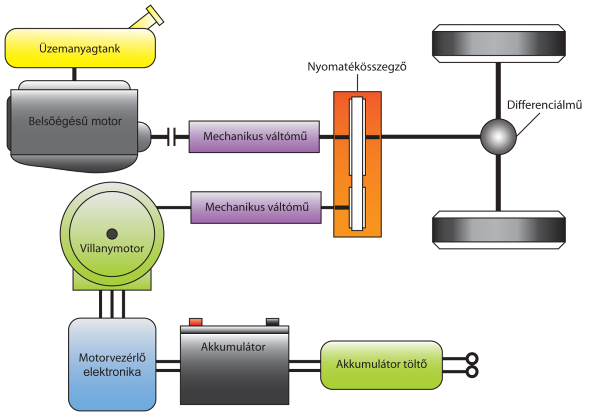
6.4.2. Soros hibrid-elektromos hajtásrendszer
A soros hibrid hajtáslánc egy olyan hajtáslánc melynél a két erőforrás egy hajtóművet táplálnak (villamos gép) mely a járművet hajtja. A legelterjedtebb soros hibrid hajtáslánc a 6.11. ábra látható. Az egyirányú energiaforrás az üzemanyagtartály, az energia-átalakító pedig egy belsőégésű motor, egy elektromos generátorhoz csatlakoztatva. A generátor kimenete egy elektromos-átalakítón átmenő buszhoz csatlakozik (egyenirányító). A kétirányú energiaforrás egy akkumulátor, mely egy elektronikus átalakítón (DC/DC konverter) keresztülcsatlakozik a buszhoz. A busz ezen kívül csatlakozik még az elektromos motorvezérlő elektronika egységéhez is. A villamos gép használható erőforrásként vagy generátorként is, kétirányú nyomatékkal. Ehhez a hajtáslánchoz kellhet egy akkumulátortöltő is, mely az elektromos hálózatról tölti az akkumulátorokat, tehát Plug-in üzeme is van.
A soros hibrid elektromos hajtásláncnak a következő üzemi módjai lehetségesek:
-
Tiszta villamos hajtás: A belsőégésű motor le van állítva, a járművet csak az villamos gép hajtja.
-
Tiszta motorikus mód: A vonóerő kizárólag a belsőégésű motorból és a generátorból érkezik, míg az akkumulátorok nem biztosítanak számára, és nem is vesznek fel energiát a hajtáslánc felől. Az elektromos berendezések elektromos váltóként működnek a motortól a hajtott kerekekig.
-
Hibrid mód: A vonóerő mind a motorból, mind pedig az akkumulátorokból egyaránt érkezik.
-
Motorikus és akkumulátortöltő mód: A belsőégésű motor és a generátor szolgáltatja a vonóerőt, és közben tölti az akkumulátorokat is.
-
„Visszatápláló” fékezési mód: A belsőégésű motor és a generátor le van állítva, és a vontatómotor generátorként üzemel. Az így keletkező erő tölti az akkumulátorokat.
-
Akkumulátortöltő mód: A vontatómotor nem kap szerepet, a belsőégéű motor és a generátor tölti az akkumulátorokat.
-
Hibrid akkumulátortöltő mód: A vontatómotor és a generátor is az akkumulátorokat tölti.
A soros hibrid hajtáslánc előnyei:
-
A belsőégésű motor a jármű hajtásigényétől függetenül működik. Ezáltal a fordulatszám-nyomaték karakterisztikájának bármely tartományában üzemeltethető, és akár kizárólag a legnagyobb hatásfok közelében tartható. A motor hatásfoka és emissziója tovább javítható optimális tervezéssel és irányítással ebben a szűk tartományban. Ezen kívül a motor a hajtott kerekektől való elválasztása révén nagy fordulatszámú motorok használatát teszi lehetővé. Ez megnehezíti a kerekek mechanikus direkt hajtását, mint például a gázturbinák vagy hasonló hajtóművek esetében, illetve a Stirling motoroknál, ahol a vezérlési dinamika lassabb.
-
Mivel az elektromos motorok jármű hajtás szempontjából kedvező fordulatszám nyomaték karakterisztikával rendelkeznek, ezért nincs szükség több fokozatú sebességváltókra. Emiatt felépítésük egyszerűbb és olcsóbak. Ezen kívül ahelyett, hogy egy motort és egy differenciálművet használnánk, két motort használhatunk úgy, hogy mindkettő egy kereket hajt. Ez sebességszétválasztást jelent a két kerék között, mint egy differenciálműnél, de korlátozott csúszású differenciálműként is működik, a kerekek kipörgésének megakadályozására. A legjobb verzió négy motort használna, így minden kerék hajtva lenne, differenciálművek és kardántengelyek bonyolultsága és költségessége nélkül.
-
Egyszerű irányítás használható, az elektromos váltómű által végzett, mechanikus szétválasztás miatt.
A soros hibrid hajtásláncoknak vannak hátrányai is:
-
A motorból érkező energia kétszer is átalakításra kerül, (mechanikusról elektromosra a generátorban és villamosból mechanikusra a vontatómotorban). A generátor és a vontatómotor hatásfoka szorzódik és a veszteség akár jelentős is lehet.
-
A generátor plusz súly és költség.
-
A vontatómotort úgy kell méretezni, hogy a maximális követelményeknek is megfeleljen, mert ez az egyetlen erőforrás mely a járművet hajtja.
6.4.2.1. Párhuzamos hibrid-elektromos hajtásrendszer
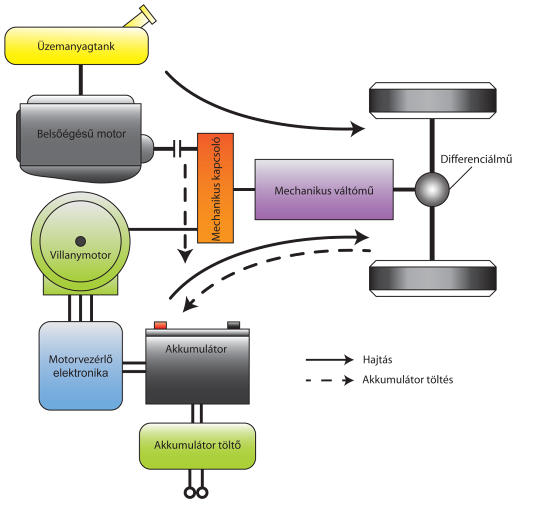
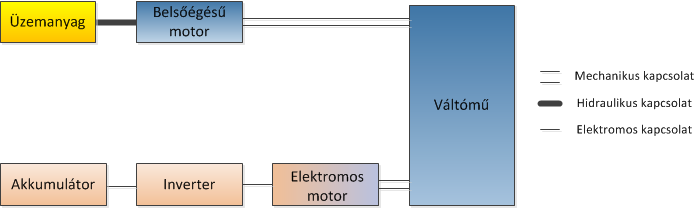
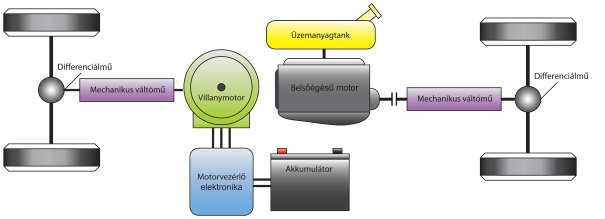
A párhuzamos hibrid elektromos hajtáslánc olyan hajtáslánc, amely a motor nyomatékot mechanikus módon juttatja el a kerekekhez úgy, mint egy hagyományos belső égésű motoros járműnél. Egy elektromos motor segíti, mely mechanikusan kapcsolódik a váltóműhöz. A belsőégésű motor és az villamos gép nyomatékát egy mechanikus csatolás egyesíti (6.12. ábra). A belsőégésű motor és a villamos gép mechanikai csatolása sok különböző beállításnak ad teret, melyeket később részletesebben tárgyalunk.
6.4.2.1.1. Nyomatékösszegző hibrid-elektromos hajtásrendszer
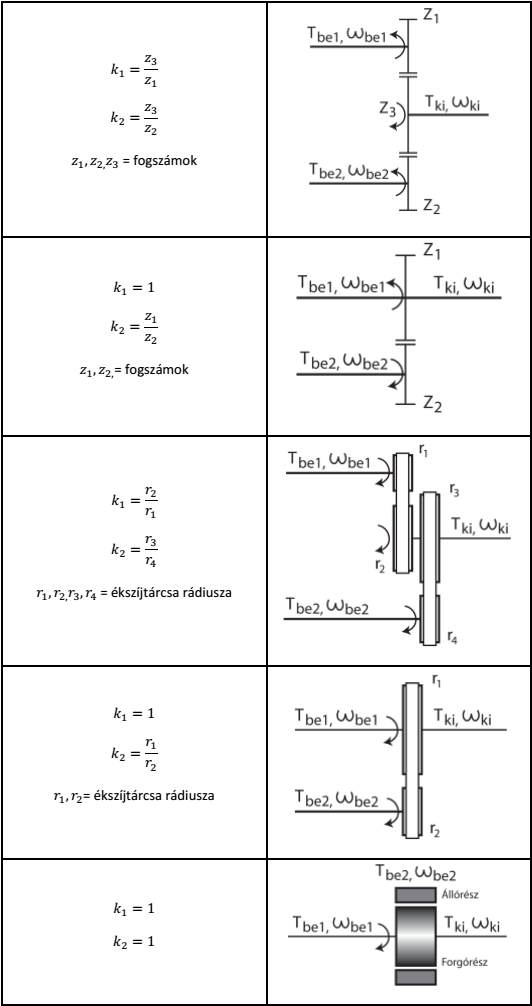
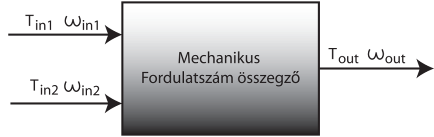
6.12. ábra látható mechanikus csatolás lehet nyomaték vagy sebesség-összegzéses. A nyomaték-összegzés a motor és az elektromos motor nyomatékát összeadja, vagy a motor nyomatékát két részre bontja: meghajtás és akkumulátortöltés. A 6.13. ábra elméletben mutatja be a nyomaték-összegzést, melynek két bemenete van. Egyik a motorból a másik pedig az elektromos motorból. A mechanikus nyomaték-összegző kimenete a mechanikus váltóműbe megy.
Ha elhanyagoljuk a veszteséget, a kimeneti nyomaték és szögsebesség leírható:
|
|
és
ahol k 1 és k 2 konstansok, a nyomaték-összegzés paraméterei által meghatározva. A (6.14. ábra) ábrán a leginkább használatos mechanikus nyomaték-összegzők listája látható.
Többféle változata van a nyomaték-összegzéses hibrid hajtásláncoknak. Két csoportra bonthatók, egy, illetve kéttengelyes típusokra. Mindkét kategóriában a váltómű különböző helyekre tehető, és más áttételekkel tervezhető, mely eltérő vonókarakterisztikát eredményez. Az optimális tervezés nagyrészt az elvárásoktól függ, például a motor mérete és karakterisztikája, vagy az villamos gép mérete és karakterisztikája stb.

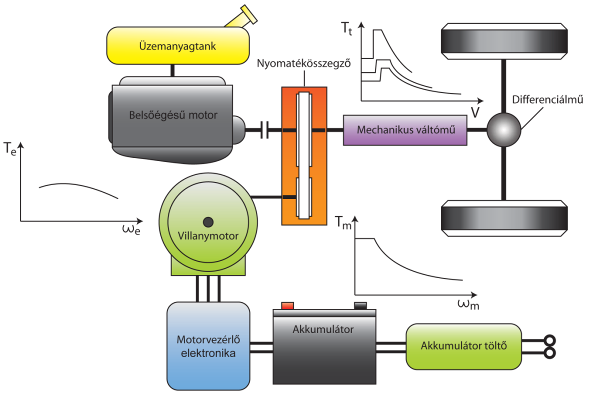
A 6.15. ábra a két-tengelyes változatot mutatja be, ahol két váltóművet használunk: az egyik a belsőégésű motor és a nyomaték-összegző között helyezkedik el, a másik pedig a nyomatékösszegző és az villamos gép között kap helyet. Mindkét váltómű egy vagy többfokozatú. Egyértelmű, hogy a két váltó sok vonóerő profilt hoz létre. A hajtáslánc kihajtó nyomatéka sok féle és a hatékonysága kiemelkedő lehet, mert a két többsebességű váltó több lehetőséget teremt mind a motor mind az elektromos vontatórendszer (villamos gép és akkumulátor) számára, hogy az optimális tartományukban üzemeljenek. Ez a tervezés nagyobb rugalmasságot is biztosít a motor és az elektromos motor karakterisztikájának tervezésekor. Ugyanakkor két többsebességes váltómű nagyban megbonyolítja a hajtásláncot.
A 6.15. ábra alapján hajtóműként használható egy vagy több sebességes váltómű. Alapvetően a többfokozatú hajtómű a belsőégésű motorhoz az egyfokozatú a villamos motorhoz van kötve.
A sebességváltóként üzemelő hajtómű a belsőégésű motort illeszti a jármű hajtáshoz. Az általában lassító áttételű konstans áttételű hajtás a villamos motor méreteinek és leadott áramának a csökkentését teszi lehetővé, növelve a villamos hajtás hatásfokát.
A párhuzamos hibrid hajtásláncok egy másik fajtáját láthatjuk az 6.16. ábra, ahol a váltómű a nyomatékösszegző és a kardántengely között helyezkedik el. A váltó így a belsőégésű motor és az elektromos motor nyomatékát egyszerre viszi át. A nyomatékösszegzőbe tervezett áttétel biztosítja az elektromos motor számára, hogy más fordulatszámtartományban üzemeljen, mint a belső égésű motor; így egy nagy fordulatszámú motor használható. Ez az összeállítás akkor használható, ha relatív kis belsőégésű motor és elektromos motor van használatban, és egy többsebességes váltó szükséges a vonóerő létrehozásához alacsony sebességeknél.
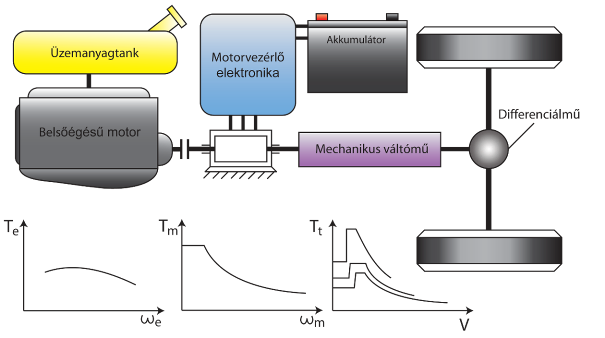
A nyomaték-összegzős párhuzamos hibrid egyszerű és kicsi verziója az egy tengelyes konfiguráció, ahol az elektromos motor rotorja működik nyomaték-összegzőként (k1=1 és k2=1), ahogy a 6.17. ábra és 6.18. ábra látható. A váltó lehet az villamos gép után, mely így egy tengelykapcsolón keresztül csatlakozik a belsőégésű motorhoz, vagy lehet a belsőégésű motor és a villamos gép között. Az első az úgynevezett „pretransmission” (a motor a váltó előtt van, 6.17. ábra), utóbbi pedig ún. „posttransmission” (a belsőégésű motor a váltó után van, 6.18. ábra).
A „pretransmission” konfigurációban, a váltó mind a motor nyomatékát mind pedig az elektromos motor nyomatékát átalakítja. A két erőforrásnak azonos fordulatszám tartományban van. Legtöbbször kis belsőégésű motor esetén használják, úgynevezett gyenge hibrid hajtásláncként, ahol az elektromos motor a motor beindítására, elektromos generátorként, motor erő segédként és a fékezési energia visszanyerésére szolgál.
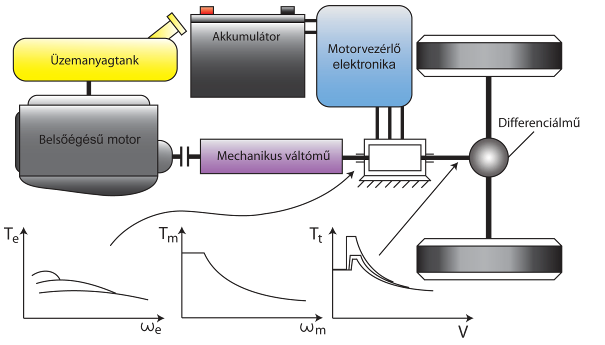
A „posttransmission” konfiguráció esetén (lásd 6.18. ábra) a váltómű csak a belsőégésű motor nyomatékát tudja átalakítani, míg az elektromos motor nyomatéka egyből a hajtott kerekekhez megy. Ez a hajtáslánc akkor használatos, ha egy nagy elektromos motor sokáig egy tartományban üzemel. A váltó feladata csak az, hogy változtassa a motor használatát, ezzel növelve a jármű teljesítményét és hatékonyságát. Fontos megjegyezni, hogy az akkumulátorok nem tölthetőek a motor által az elektromos motor generátorként való használatával, amikor a jármű egyhelyben áll és az elektromos motor közvetlenül a hajtott kerekekkel csatlakozik.
Az elválasztott tengelyes felépítés magában hordozza a hagyományos járművek néhány előnyét. A motort és a váltót változatlanul hagyja, és a másik tengelyre helyez egy elektromos rendszert. Ezen kívül négy kerék meghajtású lehet, mely csúszós úton nagyobb tapadást biztosít, és egy kerékre kevesebb vonóerőt juttat.
Hátránya, hogy az elektromos berendezések és az esetleges differenciálmű nagy helyet foglalnak, és így csökkentik az utasok és csomagok számára fenntartott helyet. Ez a probléma megoldható, ha a váltó egysebességes, és az elektromos motor helyét két kisebb elektromos motor veszi át, melyek két kerékhez külön helyezhetőek el. Megjegyzendő, hogy az akkumulátorok nem tölthetők a motor által álló helyzetben.
6.4.2.1.2. Fordulatszám összegző hibrid-elektromos hajtásrendszer
Két erőforrás ereje a sebességük összevonásával is egyesíthető (lásd: 6.20. ábra). A sebesség-összegzés karakterisztikája leírható:
|
ω out =k 1 ω in1 +k 2 ω in2 |
és
|
T out =T in1 /k 1 =T in2 /k 2 |
Ahol k1 és k2 konstansok, az aktuális tervezéstől függőek.
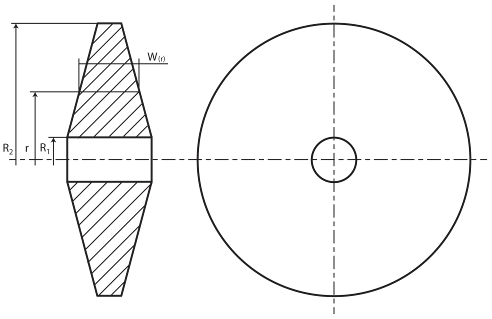
A 6.21. ábra két jellegzetes sebesség-összegző berendezést mutat be: az egyik egy bolygómű a másik pedig egy elektromos motor egy állórésszel, melyet ez a könyv csak „transmotor”-nak nevez. A bolygómű egy három részes egység, mely egy napkerékből (1), egy külső gyűrűből (2) és egy kengyelből (3) áll. Az elemek közötti nyomaték és sebességrelációk jelzik, hogy ez egy sebesség-összegző berendezés, melyben a sebesség, a napkerék és a külső gyűrű adódnak össze és a kengyelen át adják le az energiát. A k 1 és k 2 konstansokat a fogaskerekek mérete és fogainak száma határozzák meg.
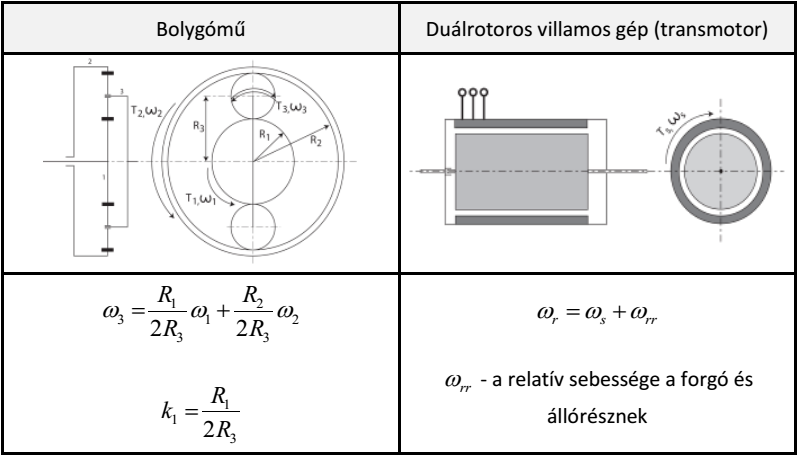
Egy másik érdekes berendezés a transmotor, melynél az állórész, mely általában a kerethez rögzített, egy kimeneti port. Másik két része a rotor és a légnyílás melyeknél az elektromos energia mechanikus energiává alakul át. A motor sebessége, a rotornak az állórészhez viszonyított sebessége. Az akció-reakció törvény miatt, a rotoron és állórészen lévő nyomaték mindig ugyanakkora, és konstansként: k 1 =1 és k 2 =1.
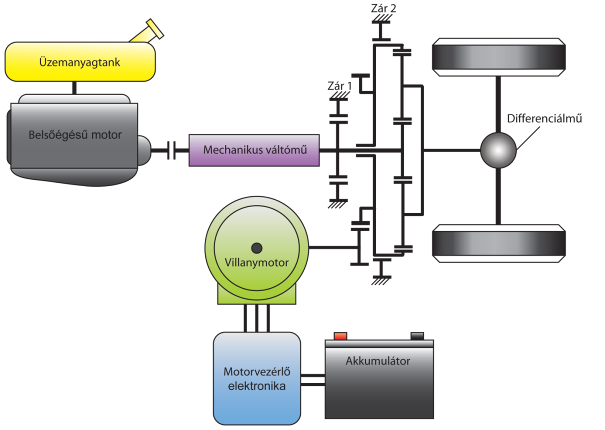
Ugyan úgy, mint a nyomaték-összegzéses berendezésekkel, a sebesség-összegző berendezésekkel is többféle hajtáslánc hozható létre. A motor nyomatékát a napkerékig egy tengelykapcsoló és egy sebességváltó közvetíti.(lásd 6.22. ábra). A váltó átalakítja a belsőégésű motor sebesség-nyomaték karakterisztikáját a kívánalmaknak megfelelően. Az elektromos motor nyomatékát egy fogaskerék adja át a bolygómű-külsőgyűrűéhez. Különböző üzemi módok eléréséhez az 1-es és a 2-es fékkel ( zárral ) rögzíthető a napkerék és a külső gyűrű a jármű fix keretéhez. A következő módok lehetségesek:
-
Hibrid hajtás: mindkét fék nyitott állapotban van, akkor a motor és az elektromos motor is pozitív sebességet és nyomatékot szolgáltat a hajtott kerekeknek.
-
Belsőégésű motorikus mód: a 2-es zár a kerethez zárja a külső gyűrűt, az 1-es zár nyitva van, csak a motor szolgáltat nyomatékot a hajtott kerekeknek.
-
Elektromos mód: az 1-es zár a kerethez zárja a napkereket, (a motor le van állítva vagy a kuplung kikapcsolt állapotban van), a 2-es zár nyitva van és csak az elektromos motor szolgáltatja vonóerőt.
-
Az 1-es zár zárva van, a belsőégésű motor leállt vagy a kuplung leválasztja, az elektromos motor pedig energia visszanyerő módban van (negatív nyomaték). A jármű kinetikus energiája az elektromos rendszer által tárolható.
-
Akkumulátortöltő mód: ha az irányítás negatív sebességet ad meg az elektromos motornak, akkor az a motorból szerez energiát.
A sebesség-összegzéses hibrid hajtáslánc előnye, hogy a két erőforrás szétválasztott, így mindkettő szabadon választható. Ez az előny olyan erőforrásoknál fontos mint a Stirling motor vagy a gázturbinás motor, ahol a hatékonyság sokkal inkább a fordulatszámon múlik és nem a nyomatékon.
6.5. Energiaforrások
6.5.1. Elektrokémiai akkumulátorok
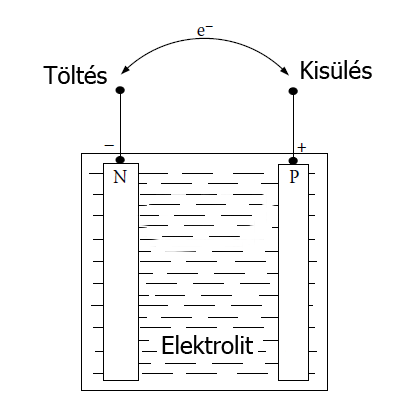
Elektrokémiai akkumulátorok, olyan elektrokémiai eszközök, amelyek kémiai úton elektromos energiát állítanak elő. Az akkumulátor több energia cellából épül fel.
A cella egy független és teljes egység, amely elektrokémiai tulajdonságokkal rendelkezik.
Alapvetően egy akkumulátor cella három főbb részből áll: két elektródát (pozitív és negatív) és az elektrolit, amibe az elektróda el van belemerítve.
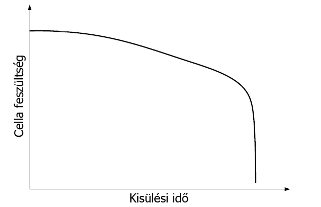
Az akkumulátorgyártók meghatározzák az akkumulátor kapacitását (coulometriás, amper-óra), és a kisütési diagramot (6.24. ábra).
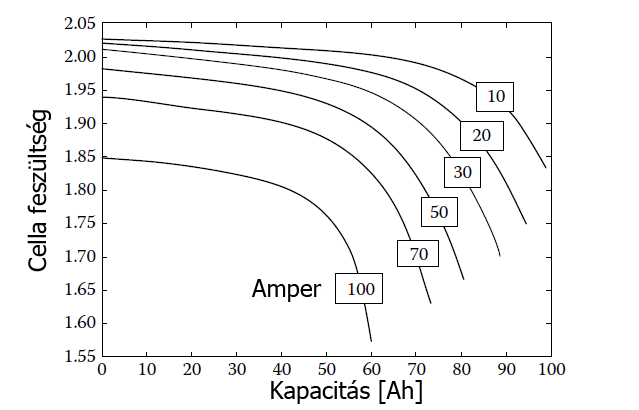
Általában, kisebb kapacitásnál, nagy kisülési áram arány, amint a 6.25. ábra is mutat. Az akkumulátorgyártók ezt az arányt adják meg a termékein.
Például egy akkumulátor címéjén 100Ah a C/5 kisütési sebesség van feltüntetve.
-
100Ah kapacitás 5h kiáramlási sebességét (kisütési áram = 100/5 = 20A).
Egy másik fontos paramétere az akkumulátornak a SOC (State Of Charge=töltöttségi fok). Az SOC a teljesen feltöltött kapacitáshoz viszonyított fennmaradó kapacitás aránya.
Ezáltal egy teljesen feltöltött akkumulátort SOC értéke 100%-os, és egy teljesen lemerült akkumulátor SOC értéke 0%-os. Azonban, a "teljesen lemerült" akkumulátor néha okoz zavart, mert a különböző kapacitásoknak eltérő a kibocsátási aránya, és eltérő a kisütési cut-off feszültség (6.24. ábra).
Az SOC változás egy időbenintervallum, dt, a kisütés és töltés áram „i” lehet kifejezni
|
ΔSOC = idt/Q(i), |
ha Q (i) az amper órás akkumulátor kapacitása a jelenlegi ütemben i.
A kisütés, i pozitív, és a töltés, i negatív. Így, a SOC az akkumulátor lehet kifejezni, ha SOC0 a kezdeti értéke SOC.
|
SOC = SOC0 − ∫idt/Q(i), |
A EV és HEVjárműveknél az energia kapacitást fontosabbnak tartják, mint a coulometriás kapacitás (amper-óra), mivel az közvetlenül a jármű működését befolyásolja.
|
Akkumulátor technológia |
Energiasűrűség [Wh/kg] |
Teljesítmény sűrűség [W/kg] |
Hatásfok [%] |
Ciklusszám |
Önkisülés [%/48 óra] |
Költség [USD/kWh] |
|---|---|---|---|---|---|---|
|
Savas akkumulátor |
35-50 |
150-400 |
>80 |
500-1000 |
0,6 |
120-150 |
|
Nikkel-kadmium |
50-60 |
80-150 |
75 |
800 |
1 |
250-350 |
|
Nikkel-vas |
50-60 |
80-150 |
75 |
1500-2000 |
3 |
200-400 |
|
Nikkel-cink |
55-75 |
170-260 |
65 |
300 |
1,6 |
100-300 |
|
Nikkel-metal hidrid |
75-95 |
200-300 |
70 |
750-1200+ |
6 |
200-350 |
|
Alumínium-levegő |
200-300 |
160 |
<50 |
Nincs adat |
Nincs adat |
Nincs adat |
|
Vas-levegő |
80-120 |
90 |
60 |
500+ |
Nincs adat |
50 |
|
Cink levegő |
100-220 |
30-80 |
60 |
600+ |
Nincs adat |
90-120 |
|
Cink-bromid |
70-85 |
90-110 |
65-70 |
500-2000 |
Nincs adat |
200-250 |
|
Vanádium redox |
20-30 |
110 |
75-85 |
Nincs adat |
Nincs adat |
400-450 |
|
Nátrium-kén |
150-240 |
230 |
80 |
800+ |
Nincs adat |
250-450 |
|
Nátrium-nikkel- klorid |
90-120 |
130-160 |
80 |
1200+ |
Nincs adat |
230-345 |
|
Lítium-vas- szulfid |
100-130 |
150-250 |
80 |
1000+ |
Nincs adat |
110 |
|
Lítium- ion |
80-130 |
200-300 |
>95 |
1000+ |
0,7 |
200 |
A táblázat bemutatja az elektrokémiai akkumulátorok tulajdonságait.
6.5.2. Ultrakapacitások
Az EV és a HEV járművek gyakori start/stop műveletei miatt, az energiatároló kisütés és a töltés profilja igen változatos. Az energiatároló átlagos energiafelhasználásánál energiacsúcsok jelentkeznek, mint például gyorsítás, vagy hegymenet, viszont vannak olyan helyzetek mikor visszatölthetünk az akkumulátorokba. Hogy megfelelő mennyiségű töltést használjunk, fel ultrakapacitásokat alkalmazunk. Az akkumulátorok egy lejtőn visszatáplált energiamennyiségének csupán egy részét képesek befogadni, míg a kapacitások nagy töltésmennyiséget tudnak raktározni rövid idő alatt. Természetesen ezt a töltésmennyiséget az energiacsúcsoknál használjuk fel. Így képesek vagyunk a csúcsokat „kisimítani”.
6.5.3. Nagysebességű lendkerekek
Nem újdonság kinetikai energiát hasznosítani energiatárolásra. 25 éve a svájci Oerlikon Engineering Company készítette el az első személyszállító busz energiatároló lendkereket. A lendkerék 1500kg tömegű és 3000 percenkénti fordulatű volt és az elektromos hálózatot táplálta, ha állt a jármű.
6.5.3.1. Lendkerekek működési elve
A forgó lendkerék kinetikus energiát tárol
|
, |
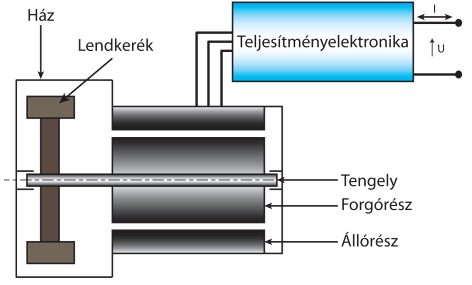
ahol a J f a lendkerék pillanatnyi tehetetlensége [kgm2/sec], az ω f a lendkerék szögsebessége [rad/sec]. Az egyenlet azt mutatja, hogy a lendkerék szögsebességével, geometriájával és tömegével növelhető az energiakapacitás. Jelenleg egyes prototípusok 60,000 fordulat/perces fordulatszámmal forognak. A technika mai állása szerint, nehéz közvetlenül mechanikai energiát tárolni. A lendkerék meghajtásához szükséges egy fokozatmentesen változtatható váltómű, azaz CVT (continuous variation transmission) széles áttétel aránnyal. Általában használt megoldás, ha a villamos gép közvetlenül vagy áttétellel forgatja meg a lendkereket, vagy táplálja vissza, ez az úgynevezett mechanikus energiatároló. A villamos gép, úgy működik, mint energia bemenet és kimenet, Átalakítja a mechanikai energiát villamos energiává vagy fordítva, ahogy a 6.26. ábra is mutatja.
Irodalmak
[8.1.] Bosch Automotive Handbook. 2004. ISBN 0-8379-1243-8.
[8.2.] Benzinbefecskendező és motorirányító rendszerek. 2004. ISBN 963-9005-64-9.
[8.3.] Robert Bosch GmbH. Automative Sensors. 2007. ISBN 3-528-03877-2.
[8.4.] Robert Bosch GmbH. Ottomotor-Management. 1998. ISBN 3-528-03877-2.
[8.5.] Belsőégésű motorok. Dabocsi, Lajos. 1990. ISBN 963-9005-64-9.
[8.6.] Internal combustion engine fundamentals. 1989. ISBN 0-07-028637-X.
[8.7.] Benzin-befecskendezők (vizsgálat és beállítás). 1994. ISBN 963-16-0450-0.