Rendszertechnika
Szerzői jog © 2014 Dr. Korondi Péter, Dr. Huba Antal, Graff József, Dr. Aradi Petra, Czmerk András, Bojtos Attila, Dr. Fekete Róbert, Dr. Lakatos Béla

A tananyag a TÁMOP-4.1.2.A/1-11/1-2011-0042 azonosító számú „ Mechatronikai mérnök MSc tananyagfejlesztés ” projekt keretében készült. A tananyagfejlesztés az Európai Unió támogatásával és az Európai Szociális Alap társfinanszírozásával valósult meg.

Lektorálta: Dr. Bars Ruth
A kiadásért felel a(z): BME MOGI
Felelős szerkesztő: BME MOGI
2014
- 1. Bevezetés
- 2. Alapfogalmak, a fizikai jelenségek matematikai leírása
- 2.1. Valós fizikai rendszer fogalma
- 2.2. A jel fogalma
- 2.3. A be- és kimenetek fogalma
- 2.4. Az absztrakt rendszer fogalma
- 2.5. Lineáris és nemlineáris rendszerek fogalma
- 2.6. Determinisztikus, sztochasztikus és kaotikus rendszerek fogalma
- 2.7. Kauzalitás fogalma
- 2.8. Paraméter és változó fogalma
- 2.9. Elosztott és koncentrált paraméterű leírás fogalma
- 2.9.1. Vektormezővel leírható rendszerek koncentráltparaméterű modellje
- 2.9.2. Villamos jelenségek elosztott paraméterű leírása a Maxwell egyenletekkel
- 2.9.3. Kirchhoff egyenletek származtatása (koncentrált paraméterű modellekhez)
- 2.9.4. Kétpólusokkal modellezett stacioner állapotú villamos és mágneses áramkörök
- 2.9.5. Hálózatszámítási analógiák
- 2.10. Lineárisan független egyenletek kiválasztása
- 2.11. Koncentrált paraméterű determinisztikus leírás
- 2.11.1. Statikus rendszerek fogalma
- 2.11.2. Dinamikus rendszerek fogalma
- 2.11.3. Rendszerek simasága
- 2.11.4. Időinvariáns és autonóm rendszerek fogalma
- 2.12. Dinamikus rendszerek általános összefüggései
- 2.12.1. Állapot, állapotjelző, állapotváltozó és állapotegyenletek fogalma
- 2.12.2. Lineáris, egy bemenetű egy kimenetű diszkrét idejű rendszer
- 2.12.3. Állapottér-reprezentáció
- 2.12.4. Változó struktúrájú rendszerek
- 2.12.5. Lineáris, egy bemenetű egy kimenetű folytonos idejű rendszer
- 2.12.6. Általánosított derivált
- 2.12.7. Differenciálegyenletek megoldása analóg számítógépes megközelítéssel
- 2.13. A stabilitás fogalma
- 2.14. Kidolgozott feladatok koncentrált paraméterű rendszerekhez kapcsolódóan
- 2.15. Alapvető vizsgálati módszerek
- 3. Matematikai eszközök SISO LTI rendszerek vizsgálatához
- 3.1. Vizsgálat (komponensekre bontás) az időtartományban
- 3.2. Vizsgálat a frekvencia-, illetve Laplace-operátoros tartományban
- 3.2.1. Fourier-sorfejtés
- 3.2.2. Kidolgozott feladatok Fourier sorokhoz kapcsolódóan
- 3.2.3. Fourier-transzformáció
- 3.2.4. Laplace-transzformáció
- 3.2.5. Fourier-sorfejtés, Fourier- és Laplace-transzformáció áttekintő táblázat
- 3.2.6. Laplace-transzformáció alkalmazása
- 3.2.7. Kifejtési (reziduum) tétel (s-re nézve valós együtthatójú racionális törtfüggvények inverz Laplace-transzformációja)
- 3.2.8. Időállandó
- 3.2.9. Kidolgozott feladatok Laplace-transzformáció alkalmazására
- 3.3. Közönséges állandó együtthatós elsőrendű differenciálegyenletek megoldása Laplace-transzformációval
- 3.4. Kapcsoló üzemmód
- 4. SISO LTI rendszerek vizsgálata a Laplace-operátoros tartományban
- 4.1. Átviteli függvény
- 4.2. Átviteli függvény meghatározása hatásvázlat segítségével
- 4.3. Átviteli függvény alkalmazása
- 4.4. Lineáris rendszerek stabilitás vizsgálata
- 4.5. Frekvencia átviteli függvény megjelenítése
- 4.6. Alaptagok átviteli függvénye, Nyquist és Bode diagramja
- 4.7. Holtidős tagok
- 4.8. Alaptagokból előállítható összetett tagok
- 4.9. Kidolgozott feladatok Bode és Nyquist diagram megrajzolására
- 4.10. Szűrő típusok Bode diagramja
- 5. Komplex számok
- 5.1. Komplex számok bevezetése
- 5.2. Műveletek komplex számokkal
- 5.3. A komplex szám ábrázolása
- 5.4. Néhány a komplex számokra vonatkozó azonosság
- 5.5. Műveletek a trigonometrikus alakkal
- 5.6. A matematikai műveletek geometriai szemléltetése
- 5.7. A komplex számok exponenciális alakja
- 5.8. Gyökvonás komplex számok esetén
- 5.9. Néhány komplex függvény ábrázolása
- 5.10. Javasolt feladatok
- 5.11. Megoldások
- 6. A közönséges differenciálegyenlet
- 7. Rendszerek és modellezési analógiák
- 7.1. Energia reprezentáció, extenzív és intenzív mennyiségek
- 7.2. Rendszermodellezés teljesítmény-konjugált változókkal
- 7.3. Konzervatív rendszerelemek és karakterisztikáik
- 7.4. Disszipatív rendszerelemek és karakterisztikáik
- 7.5. Transzformátorok, zsirátorok, hajtóerő- és áramforrások
- 7.6. Elektromechanikai Lagrange függvény
- 8. Véletlen hatások és sztochasztikus folyamatok
- 8.1. Valószínűség, valószínűségi változók és valószínűségi eloszlások
- 8.1.1. Eseményalgebra és a valószínűség definíciója
- 8.1.2. Valószínűségi változók és valószínűségi eloszlások
- 8.1.3. A valószínűségi változók jellemző paraméterei
- 8.1.4. Többdimenziós valószínűségi vektor-változók és eloszlások
- 8.1.5. A többdimenziós valószínűségi vektor-változók jellemző paraméterei
- 8.1.6. Gyakran használt diszkrét és folytonos eloszlások
- 8.1.7. Valószínűségi változók függvényei
- 8.1.8. Valószínűségi változók entrópiája és információ-tartalma
- 8.2. Sztochasztikus folyamatok
- 9. Laplace-transzformációhoz kapcsolódó levezetések
- 10. Ellenőrző kérdések
- Irodalmi hivatkozások
- 1.1. A rendszertechnika tantárgy helye a mérnöki tantárgyak között
- 1.2. Az erők komponensekre bontása
- 2.1. Valós fizikai rendszer
- 2.2. A rendszer általános grafikai jele
- 2.3. Rendszerek csoportosítása a be- és kimenetek száma szerint
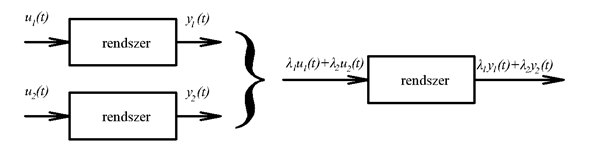
- 2.4. Szuperpozíció elve SISO rendszer esetén
- 2.5. Homogén elektromos tér
- 2.6. Homogén stacionárius áramlási tér
- 2.7. Villamos helyettesítő kapcsolás
- 2.8. Homogén mágneses tér
- 2.9. Mágneses kör villamos helyettesítő kapcsolása
- 2.10. Gráfok grafikai megjelenítése
- 2.11. Irányított gráf
- 2.12. Hurokél
- 2.13. Gráf és részgráfja
- 2.14. Gráf és egy út
- 2.15. Gráf és egy kör
- 2.16. Gráf és egy fája
- 2.17. Gráf és egy feszítőfája
- 2.18. Gráf és egy vágata
- 2.19. Lineárisan független hurkok generálása
- 2.20. Lineárisan független vágatok generálása
- 2.21. A k-adik ág feszültségeinek és áramainak jelölései
- 2.22. Hurokáramok
- 2.23. Áramkör és hálózat gráfja a kijelölt feszítőfával (feszítőfa ágai 4, 5 és 6)
- 2.24. Áramkör és hálózat gráfja a kijelölt feszítőfával (feszítőfa ágai 1 és 2)
- 2.25. Áramkör
- 2.26. Időinvariáns rendszer
- 2.27. Fűtésszabályozó diszkrét állapotai
- 2.28. Jegykiadó automata diszkrét állapotai
- 2.29. Jegykiadó automata bővített diszkrét állapotai
- 2.30. Egy nyerő automata diszkrét állapotai
- 2.31. Diszkrét állapotok és folytonos értékű állapotváltozó
- 2.32. Dinamikus rendszer általános állapotváltozós ábrázolása időtartományban
- 2.33. ARMA rendszer
- 2.34. ARMA rendszer MATLAB Simulink megfelelője és esetén
- 2.35. grafikus megjelenítése
- 2.36. Analóg számítógép modell MATLAB Simulink megfelelője és esetén
- 2.37. Hőátadás
- 2.38. Vezető melegedése
- 2.39. Hőátadás
- 2.40. Ideális transzlációs telemanipulációs rendszer
- 2.41. Diszkrét idejű modell
- 2.42. Folytonos idejű modell
- 2.43. Szimulációs eredmények
- 2.44. Szimulációs eredmények
- 2.45. feladat analóg számítógépes modellje
- 2.46. feladat analóg számítógépes modellje
- 2.47. Egy tamagoccsi (たまごっち) érzelmi állapotai
- 2.48. Egy tamagoccsi (たまごっち) viselkedés állapotai
- 2.49. Egy lifthívó-rendszer diszkrét állapotai
- 2.50. Egy kombinált (fűtés. melegvíz) kazán szabályozójának diszkrét állapotai
- 3.1. Jelek felbontása az időtartományban
- 3.2. Diszkrét idejű egységugrás
- 3.3. Diszkrét idejű egységimpulzus
- 3.4. Diszkrét idejű jelek komponensekre bontása
- 3.5. Diszkrét idejű súlyfüggvény (impulzusválasz)
- 3.6. A kimenőjel meghatározása diszkrét idejű konvolúcióval
- 3.7. Folytonos idejű súlyfüggvény (impulzusválasz)
- 3.8. A kimenőjel meghatározása folytonos idejű konvolúcióval
- 3.9. idejű átmeneti függvény
- 3.10. Folytonos idejű átmeneti függvény
- 3.11. Folytonos idejű átmeneti (ugrásválasz)
- 3.12. Lineáris rendszerek válasza szinuszos gerjesztésre
- 3.13. Egy síkvektor felbontása merőleges komponensekre
- 3.14. Egy periodikus függvény
- 3.15. Egy négyszögjel alapharmonikusának és felharmonikusainak amplitúdói
- 3.16. Négyszögjel
- 3.17. Szünetmentes áramforrás
- 3.18. Szimmetrikus impulzus jel
- 3.19. Amplitúdó arányok a nagyság függvényében
- 3.20. Impulzus jel
- 3.21. Egy lecsengő függvény
- 3.22. értelmezése
- 3.23. t=0, T és 2T időpontban (látható, hogy minden érintő az időtengelyt idő elteltével metszi)
- 3.24. Inverz-Laplace-transzformált komplex konjugált póluspár esetén a) esetben
- 3.25. Inverz-Laplace-transzformált komplex konjugált póluspár esetén b) esetben
- 3.26. Azonos domináns pólussal renndelkező rendszerek
- 3.27. RL kör átkapcsolása
- 3.28. Időfüggvények az RL kör átkapcsolása után
- 3.29. Szinuszos gerjesztés bekapcsolása
- 3.30. Szinuszos gerjesztés bekapcsolása, ha az időállandó összemérhető a periódus idővel
- 3.31. Szinuszos gerjesztés bekapcsolása, ha az időállandó kisebb a periódus időnél
- 4.1. Exponenciálisan lecsngő jel
- 4.2. Tömeg-rugó rendszer
- 4.3. Átviteli függvény meghatározásának két módja
- 4.4. A legfontosabb hatásvázlat elemek
- 4.5. Hat bemenet összegzése klasszikusan és egyetlen négyszög összegzővel
- 4.6. Soros kapcsolás
- 4.7. Párhuzamos kapcsolás
- 4.8. Visszacsatolás
- 4.9. Elágazás áthelyezése a tag mögé
- 4.10. Elágazás áthelyezése a tag elé
- 4.11. Összegzési pont áthelyezése tag mögé
- 4.12. Összegzési pont áthelyezése tag elé
- 4.13. Összegzési pont elé kerülő elágazási pont
- 4.14. Elágazási pont elé kerülő összegzési pont
- 4.15. A 4-8. feladat hatásvázlata
- 4.16. A 4-8. feladat megoldása
- 4.17. A 4-9. feladat
- 4.18. A 4-9. feladat megoldása
- 4.19. A 4-10. feladat
- 4.20. A 4-10. feladat megoldása
- 4.21. A 4-11. feladat
- 4.22. A 4-11. feladat megoldása
- 4.23. A 4-12. feladat
- 4.24. A 4-12. feladat megoldása
- 4.25. A 4-13. feladat
- 4.26. A 4-13. feladat megoldása csomópont áthelyezéssel
- 4.27. A 4-13. feladat megoldása összegzési pont áthelyezéssel
- 4.28. A 4-14. feladat megoldása összegzési pont áthelyezéssel
- 4.29. A 4-14. feladat megoldása hatásvázlat átalakítással
- 4.30. 4-14. feladat megoldása algebrai egyenletekkel
- 4.31. A külső gerjesztésű egyenáramú motor helyettesítő vázlata
- 4.32. Egyenáramú motor hatásvázlata
- 4.33. Átmeneti és súlyfüggvény
- 4.34. 4-24. feladat
- 4.35. Frekvencia átviteli függvény értelmezése
- 4.36. Frekvencia átviteli függvény mérésének szimulációja MATLAB Simulink programmal
- 4.37. (ω=0.01/T1)
- 4.38. (ω=0.1/T1)
- 4.39. (ω=1/T1)
- 4.40. (ω=10/T1)
- 4.41. (ω=100/T1)
- 4.42. Frekvencia átviteli függvény meghatározása
- 4.43. n>m esetben
- 4.44. Nyquist diagram
- 4.45. Nyquist diagram
- 4.46. Nyquist diagram
- 4.47. Bode diagram
- 4.48. Bode diagram
- 4.49. Nyquist diagramja
- 4.50. Bode diagramja
- 4.51. Példa arányos tagra
- 4.52. Nyquist diagramja
- 4.53. Bode diagramja
- 4.54. Nyquist diagramja
- 4.55. Bode diagramja
- 4.56. Példa integráló tagra
- 4.57. Nyquist diagramja
- 4.58. Bode diagramja
- 4.59. Bode diagram
- 4.60. Nyquist diagramja
- 4.61. Bode diagramja
- 4.62. -energiatárolós tag átmeneti és súlyfüggvénye
- 4.63. Nyquist diagram
- 4.64. Két-energiatárolós tag Nyquist diagramja
- 4.65. -energiatárolós tag Nyquist diagramja, ha alacsony frekvenciákon az abszolút érték a frekvenciával fordítottan arányos
- 4.66. Két-energiatárolós tag Bode diagramja, ha két különböző töréspont van
- 4.67. Két-energiatárolós tag Bode diagramja, ha két azonos töréspont van
- 4.68. -energiatárolós tag valóságos (nem közelítő) Bode diagramja, ha 0<D≤1
- 4.69. Két tartály
- 4.70. Csillapított rugó tömeg rendszer
- 4.71. Nyquist diagramja
- 4.72. Bode diagramja
- 4.73. Nyquist diagramja
- 4.74. Bode diagramja
- 4.75. tag egy tárolóval (PHT1), Nyquist diagram
- 4.76. tag egy tárolóval (PHT1), Bode diagram
- 4.77. Arányos, integráló tag (PI)
- 4.78. diagramja
- 4.79. Arányos, integráló tag (PI) Bode diagramja
- 4.80. Arányos integráló differenciáló tag (PID)
- 4.81. diagramja
- 4.82. diagramja
- 4.83. rányos differenciáló tag (PD)
- 4.84. Valóságos arányos differenciáló tag (PD) Nyquist diagramja
- 4.85. diagramja
- 4.86. Bode diagram
- 4.87. Bode diagram
- 4.88. Bode diagram
- 4.89. Bode diagram
- 4.90. Bode diagram
- 4.91. Nyquist diagram
- 4.92. Bode diagram
- 4.93. Nyquist diagram
- 4.94. Bode diagram
- 4.95. Párhuzamosan kapcsolt rendszerek
- 4.96. Nyquist diagram
- 4.97. Nyquist diagram
- 4.98. Bode diagram
- 4.99. Sorosan kapcsolt rendszerek
- 4.100. Nyquist diagram
- 4.101. Nyquist diagram
- 4.102. Nyquist diagram
- 4.103. Bode diagram
- 4.104. Bode diagram
- 4.105. Bode diagram
- 4.106. Bode diagram
- 4.107. Bode diagram
- 4.108. Bode diagram
- 4.109. Bode diagram
- 4.110. Bode diagram
- 4.111. Bode diagram
- 4.112. Bode diagram
- 4.113. Bode diagram
- 4.114. Bode diagram
- 4.115. Bode diagram
- 4.116. Bode diagram
- 4.117. Bode diagram
- 4.118. Bode diagram
- 4.119. Pontos és közelítő megoldás u1 esetén
- 4.120. Pontos és közelítő megoldás u2 esetén
- 4.121. Pontos és közelítő megoldás u3 esetén
- 4.122. Bode diagram
- 4.123. Bode diagram
- 4.124. Bode diagram
- 4.125. Ideális passzív szűrők amplitúdó Bode diagramja
- 4.126. Ideális aluláteresztő szűrő súlyfüggvényének Fourier spektruma
- 4.127. Különböző fokszámú szűrők közelítő amplitúdó Bode diagramja
- 4.128. Alapvető passzív szűrő struktúra
- 4.129. Aluláteresztő szűrő
- 4.130. Aluláteresztő szűrő átmeneti függvénye
- 4.131. Felüláteresztő szűrő
- 4.132. Felüláteresztő szűrő átmeneti függvénye
- 5.1. Összeadás
- 5.2. Kivonás
- 5.3. Gyökök
- 7.1. Egy rendszer energiájának eloszlása
- 7.2. A rendszer koncentrált paraméterű hálózata
- 7.3. A teljesítmény-konjugált változók ok-okozati kapcsolatai egy rendszerelemen
- 7.4. Energia és koenergia lineáris és nemlineáris karakterisztikájú rendszerekben
- 7.5. Disszipatív elemek karakterisztikái lineáris és nemlineáris esetben
- 7.6. Villamos hálózat a) hurokáramai és b) csomóponti feszültségei
- 8.1. A geometriai valószínűség magyarázatához
- 8.2. Nem-negatív, szakadással rendelkező folytonos változók a) sűrűségfüggvénye és b) eloszlásfüggvénye
- 8.3. A a) valószínűségi sűrűségfüggvénye és b) elsoszlásfüggvénye
- 8.4. Két-dimenziós egyenletes eloszlás egy ellipszisen
- 8.5. A degenerált valószínűségi eloszlás a) sűrűségfüggvénye és b) eloszlásfüggvénye
- 8.6. Bináris valószínűségi változó a) sűrűségfüggvénye és b) elsoszlásfüggvénye
- 8.7. A valószínűségi változók Y=g(Y) leképezésének magyarázatához
- 8.8. Három sztochasztikus folyamat realizációi
- 8.9. . Határozzuk meg az
- 8.10. Folytonos és diszkrét idejű a) idővariáns és b) időinvariáns dinamikus rendszerek súlyfüggvényeikkel ábrázolva
- 8.11. Mérési elrendezés egy lineáris dinamikus rendszer kovariancia-függvényeinek meghatározásához
- 8.12. Aluláteresztő RC-szűrő ()
- 9.1. Laplace transzformáció eredménye
1. fejezet - Bevezetés
A rendszertechnika tananyag célja az, hogy különböző fizikai jelenségeket, műszaki objektumok működését egy egységesített matematikai eszköztárral írja le, hogy feltárhatóvá tegye a teljesen különböző fizikai jelenségek és műszaki objektumok működésbeli hasonlóságát. E működésbeli hasonlóságok alapján a fizikai jelenségek és a műszaki objektumok a konkrét megjelenésüktől függetlenül kategorizálhatók. Ez azzal az előnnyel jár, hogy az azonos kategóriába tartozó, egymástól teljesen eltérő fizikai jelenségeknek, műszaki objektumok működésének akár passzív elemzésekor vagy akár a működés aktív szabályozásakor a konkrét objektumtól független, általános matematikai módszerek lesznek alkalmazhatók. Gyakori eset, hogy egy műszaki részterületen pl. a villamos áramkörök számítására kidolgoznak egy matematikai eljárást és azt egy más területen. pl. mágneses körök számítására, csőhálózatokban folyadékáramok leírására vagy hőtani problémákra alkalmazzák. Az impedancia fogalma leginkább az áramkörök számításánál fordul elő, de használatos a robotok erőszabályozásánál is. Ezek a példák bizonyítják legjobban a rendszertechnika létjogosultságát. E tananyagban olyan matematikai technikákat kívánunk bemutatni, amelyek a mérnöki gyakorlatban előforduló bizonyos típusú problémák megoldását segítik.
A világ folyamatosan változik. Volt olyan időszak, amikor a tömegtermelés kicsit elnyomta a mérnökök matematika iránti igényét. A 21. században ismét olyan időket élünk, amikor a matematikatudás a mérnöki munkában felértékelődik. Az ún. hightech (repülőgép, robot, alakfelismerés stb.) matematika igénye talán közismert. Ahhoz, hogy a humanoid robotok most még furcsa járásán csiszoljunk, és pl. megtanítsuk őket balettozni, az irányítási algoritmusok matematikai mélységeit kell növelni. De a matematikai algoritmusok továbbfejlesztése kell ahhoz, hogy a robot a képi információ alapján fel tudja ismerni, hogy mi történik körülötte. De ki gondolná, hogy a liftekben a hangtalan és gyors működés érdekében egy egyszerű behúzó mágnes (amelyiknek az a feladata, hogy a liftszekrényt rögzítse, ha megáll egy emeleten) mellé is néha odatesznek egy mikroprocesszort, amelyik a mágnes differenciálegyenletét folyamatosan számítva gondoskodik az optimális működésről. Régen a tekercsre rákapcsolták a feszültséget, és az áram által keltett mágneses tér végezte a dolgát, persze közben mi hallottunk egy csattanást, amikor a liftszekrényt rögzítő fémpofák felütköztek a tartókeretre. Most tranzisztorok kapcsolgatásával az áramot és ezen keresztül a rögzítő fémpofák mozgását folyamatosan kézben tartjuk és nincs ütközési hang, de ehhez folyamatosan számolni kell a szerkezet differenciálegyenletét. Ez nem lenne bonyolult, ha minden paramétert pontosan tudnánk, de valamilyen mértékű paraméter bizonytalanság mindig van, ráadásul több paraméter változik a működés közben, ezért mérésekből a differenciálegyenlet paramétereit is folyamatosan becsülni kell, és korábban nagyon egyszerűnek számító tervezési rutinfeladatból egy egész komoly matematikai probléma kerekedett. Az elektronika és a mikroprocesszorok ára annyira lecsökkent, hogy egészen hétköznapi olcsó (tömegtermeléssel gyártott) eszközökben is megjelenhetnek a bonyolultabb matematikai algoritmusok. A differenciálegyenletekre a mindennapos mérnöki gyakorlatban is szükség lehet, és megszűnőben van az a helyzet, amikor matematikára igazán csak a mérnök társadalom elitrétegének volt szüksége. Hidat kell építeni a matematika és a mérnöki tudományok között, és ennek a hídnak a legfontosabb eleme a rendszertechnika tárgy.
A fentiekből következően e tananyag felépítése a következő. Először a mérnöki gyakorlatban előforduló fizikai jelenségek matematikai leírásának lehetséges módjait tekintjük át röviden, majd ezt követi annak a matematikai eszköztárnak a számbavétele, amellyel az absztrakt modellek viselkedése elemezhető, általános érvényű összefüggései kimutathatók. A mérnöki munkának sokszor kulcseleme a fizikai valóság és az elvont matematika közötti kapcsolat megteremtése. A tananyag törekszik arra, hogy mind a két oldalról rávilágítson erre a kapcsolatra. Pl. ha egy matematikai képletben mód van egyfajta egyszerűsítésre, akkor annak mi lehet a fizikai háttere, és fordítva, a fizikai modell megváltoztatása milyen matematikai következménnyel járhat. Mivel a célunk az, hogy a mérnökök kezébe a mérnöki gyakorlatban használható matematikai eszközöket adjunk, ezért a matematikai tárgyalásban olyan mélységig ásunk le, amely mélység szükséges az adott eszköz pontos használatához, az alkalmazás feltételeinek és korlátainak megértéséhez. Ahogy egy lézeres távolságmérő használati útmutatójában sem mellékelik a teljes lézerfizikai hátteret, úgy terjedelmi okokból itt sincs mód arra, hogy minden érintett matematikai területet (pl. lineáris algebra, valós és komplex függvénytan, közönséges és parciális differenciálegyenletek elmélete, funkcionálanalízis, mértékelmélet, disztribúcióelmélet, gráfelmélet, stb.) az alapoktól kezdve részletesen leírjunk. Ha ezt megtennénk, akkor ez a tananyag sok ezer oldalasra duzzadna, és azért válna kezelhetetlenné. Általában azt feltételezzük, hogy az olvasó ismeri a mérnöki alapképzésben oktatott matematikát. Az ezen túlmutató matematikai ismereteket megpróbáljuk egzakt, de egyszerűsített formában, a lényeget kiemelve leírni és a részletes bizonyításokat és levezetéseket mellőzzük.
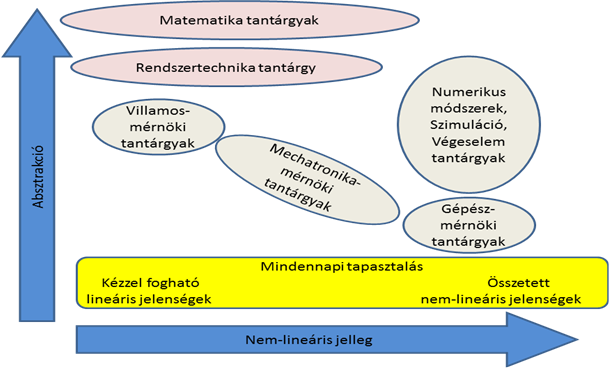
A rendszertechnika tantárgy a mérnöki tantárgyak közé tartozik, de nagyon közel áll a matematika tantárgyakhoz, mivel a legtöbb mérnöki tantárgynál jelentősebb absztrakciót igényel, és bizonyos értelemben közelebb áll sok villamosmérnöki tantárgyhoz, mivel a villamosmérnöki tantárgyak is több absztrakciót igényelnek, mint a gépészmérnöki tantárgyak. Egy másik megközelítésben a gépészmérnöki tantárgyakban a nem lineáris jelenségek nagyobb szerepet játszanak, kevésbé lehet azokat lineáris megkötések mellett tárgyalni, mint ahogy ezt a villamosmérnöki tárgyakban megtesszük (ld. 1-1. ábra). Tipikus példa lehet villamos feszültségek és áramok, valamint a csőhálózatban kialakuló nyomások és a keringő víz összehasonlítása. Egy akkumulátor által táplált zseblámpa izzón áthaladó áram nem annyira kézzel fogható, mint a csőhálózatban szivattyúval keringtetett folyadék. Viszont az ellenállás hálózat számításához lineáris egyenletek általában elegendőek, ezzel szemben a csőhálózatok esetén a legegyszerűbb esetben is számolni kell nem-lineáris jelenségekkel.
A rendszerek vizsgálatában nagyon fontos szerepet tölt be a frekvencia- és Laplace-operátoros tartomány. Korábbi tanulmányainkból megszokott lehet, hogy bizonyos fizikai mennyiségeket (jeleket) a számítás megkönnyítése érdekében komponensekre bontunk (ld. 1-2. ábra)
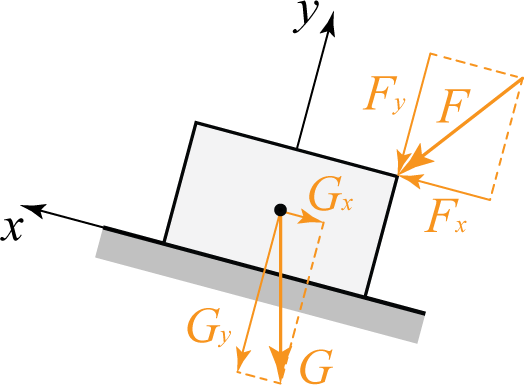
Ezzel szemben egy általános időfüggvény komponensekre bontása a frekvencia- és Laplace-operátoros tartományban egy olyan absztrakciót igényel, ami nehezen építhető a korábbi mindennapi tapasztalatokra.
Egy komoly szemléletváltásnak lehetünk tanúi. Korábban egy probléma egzakt megoldásának azt tekintettük, ha matematikailag zárt alakú megoldást tudtunk előállítani. Napjainkban a mérnöki területen egyre nagyobb szerepet játszanak a numerikus módszerek és egyre kevésbé törekszünk az analitikus megoldásokra. Egyre inkább elfogadott, hogy egy rendszer működőképességét numerikus szimuláció igazolja. Teljesen természetes, hogy egy összetett új berendezés tervezése a szimulációs modell elkészítésével kezdődik. Bármiféle hardver megépítésére csak akkor gondolunk, ha a szimuláció biztató eredményeket mutat. A szimulációs modell elkészítését a rendszertechnikai elemzés előzi meg.
1.1. Jelölési és rövidítési jegyzék
Különböző tudományterületen a jelölésekre különböző konvenciók léteznek, e tananyag több területet fog át és így szinte lehetetlen tekintettel lenni minden, időnként egymásnak ellentmondó konvencióra, így előfordul, hogy egy betű különböző fejezetekben mást és mást jelent. Ahol lehetséges, ott indexeléssel próbáljuk feloldani ezt az ellentmondást. Igyekszünk azt a konvenciót tartani, hogy a változókat kisbetűvel, a konstansokat nagybetűvel, a skaláris mennyiségeket dőlt betűvel és a vektorokat vastag betűvel jelöljük. Kivételt olyan esetekben teszünk, ahol a szakirodalom is többé-kevésbé egységesen eltér ettől a konvenciótól. A numerikus példákban számítógéppel számított eredményeket közlünk, melyek tizedespontot és nem tizedes vesszőt használnak.
A rövidítéseknél mindig az angol megfelelőt használjuk, mert ezeket önálló jelentéssel bíró magyarrá váló jövevény szakszavaknak tekintjük, így a magyar kiejtés és magyar ragozás szabályai szerint használjuk.

rendszerre jellemző mátrix
állapottér-modellben rendszermátrix
gráfelméletben csomóponti (vagy adjacencia) mátrix

Fourier-sorokban a fázistolás nélküli i-edik szinuszos felharmonikus amplitúdója

polinom együtthatója

mágneses indukció vektor

rendszerre jellemző mátrix
állapottér-modellben bemeneti mátrix
gráfelméletben hurokmátrix

Fourier-sorokban a fázistolás nélküli i-edik koszinuszos felharmonikus amplitúdója

polinom együtthatója

rendszerre jellemző mátrix
állapottér-modellben kimeneti mátrix

Fourier-sorokban a fázistolásos i-edik koszinuszos felharmonikus amplitúdója

eltolási vektor

rendszerre jellemző mátrix
állapottér modellben a bemenet követlen hatása a kimenetre

egy rendszer zavaró jele (disturbance) folytonos időben

indexben: diszkrét idejű rendszerre utal

Elektromos térerősség vektor

folytonos idejű skalár időfüggvény

az  függvény baloldali határértéke
függvény baloldali határértéke  helyen
helyen

az  függvény jobboldali határértéke
függvény jobboldali határértéke  helyen
helyen

olyan folytonos idejű skalár időfüggvény, amelynek az értelmezési tartománya 

folytonos idejű skalár időfüggvény értéke a  időpillanatban
időpillanatban

folytonos idejű skalár időfüggvény Fourier-transzformáltja

folytonos idejű skalár időfüggvény Fourier-transzformáltjának értéke az  frekvencia esetén
frekvencia esetén

folytonos idejű skalár időfüggvény Laplace-transzformáltja

folytonos idejű skalár időfüggvény Laplace-transzformáltjának értéke  helyettesítéssel
helyettesítéssel

diszkrét idejű skalár időfüggvény

olyan diszkrét idejű skalár időfüggvény, amelynek az értelmezési tartománya 

diszkrét idejű skalár időfüggvény értéke a K-adik lépésben

frekvencia

mágneses térerősség vektor
i
indexben és index nélkül: a futó sorszám,
indexszel: áramerősség
jképzetes egység 

diszkrét időlépések

természetes számok halmaza

egy racionális törtfüggvény i-edik pólusa

valós számok halmaza

Laplace operátor
taz idő
T0a vizsgálat kezdő időpontja, általában T0=0
TKa K-dik időlépés
Tsa mintavételezési időlépés
Thaz időkéseltetés nagysága
Tpiracionális törtfüggvénnyel leírható rendszer i-dik pólusához tartozó töréspont reciproka
Tziracionális törtfüggvénnyel leírható rendszer i-dik zérusához tartozó töréspont reciproka

index nélkül, vagy sorszámra utaló indexszel: egy rendszer beavatkozó jele folytonos időben

index nélkül, vagy sorszámra utaló indexszel: egy rendszer beavatkozó jele diszkrét időben

egy nem sorszámra utaló indexszel: egy feszültség

egy rendszer átmeneti függvénye (ugrásválasza)

egy rendszer súlyfüggvénye (impulzusválasza) folytonos időben

egy rendszer súlyfüggvénye (impulzusválasza) diszkrét időben

egy rendszer állapotváltozója folytonos időben

egy rendszer állapotváltozója diszkrét időben
X0az állapotváltozó kezdeti értéke, ha az állapot
X-0az állapotváltozó kezdeti értékének baloldali határértéke
X+0az állapotváltozó kezdeti értékének jobboldali határértéke

egy rendszer kimenőjele folytonos időben

egy rendszer kimenőjele diszkrét időben

egy racionális törtfüggvény i-edik zérusa

egész számok halmaza

pozitív egész számok halmaza

negatív egész számok halmaza

0 vagy 1 értéket felvevő változó

diszkrét idejű egységimpulzus

folytonos idejű egységimpulzus (Dirac-impulzus)

permittivitás

diszkrét idejű egységugrás

folytonos idejű egységugrás

mátrixok sajátértéke

permeabilitás

körfrekvencia

egy motor szögsebességeánek folytonos idejű időfüggvénye
ARMAautoregresszív mozgó átlag (AutoRegressive Moving Average)
BIBO(Bounded Input Bounded Output)
EMFelektromotoros erő (Electro Motive Force)
FIRvéges impulzusválaszú (Finite Impulse Response)
IIRvégtelen impulzusválaszú (Infinite Impulse Response)
MIMO több bemenetű több kimenetű rendszer (Multiple Input Multiple Output)
MISO több bemenetű egy kimenetű rendszer (Multiple Input Single Output)
MMFmagnetomotoros erő (Magneto Motive Force)
LPVlineáris változó paraméterű rendszer (Linear Parameter Varying)
LTI lineáris időinvariáns rendszer (Linear Time Invariant).
LTVlineáris idő variáns (időben változó) rendszerek (Linear Time Varying).
SIMOegy bemenetű több kimenetű rendszer (Single Input Multiple Output)
SISOegy bemenetű egy kimenetű rendszer (Single Input Single Output)
2. fejezet - Alapfogalmak, a fizikai jelenségek matematikai leírása
- 2.1. Valós fizikai rendszer fogalma
- 2.2. A jel fogalma
- 2.3. A be- és kimenetek fogalma
- 2.4. Az absztrakt rendszer fogalma
- 2.5. Lineáris és nemlineáris rendszerek fogalma
- 2.6. Determinisztikus, sztochasztikus és kaotikus rendszerek fogalma
- 2.7. Kauzalitás fogalma
- 2.8. Paraméter és változó fogalma
- 2.9. Elosztott és koncentrált paraméterű leírás fogalma
- 2.9.1. Vektormezővel leírható rendszerek koncentráltparaméterű modellje
- 2.9.2. Villamos jelenségek elosztott paraméterű leírása a Maxwell egyenletekkel
- 2.9.3. Kirchhoff egyenletek származtatása (koncentrált paraméterű modellekhez)
- 2.9.4. Kétpólusokkal modellezett stacioner állapotú villamos és mágneses áramkörök
- 2.9.5. Hálózatszámítási analógiák
- 2.10. Lineárisan független egyenletek kiválasztása
- 2.11. Koncentrált paraméterű determinisztikus leírás
- 2.11.1. Statikus rendszerek fogalma
- 2.11.2. Dinamikus rendszerek fogalma
- 2.11.3. Rendszerek simasága
- 2.11.4. Időinvariáns és autonóm rendszerek fogalma
- 2.12. Dinamikus rendszerek általános összefüggései
- 2.12.1. Állapot, állapotjelző, állapotváltozó és állapotegyenletek fogalma
- 2.12.2. Lineáris, egy bemenetű egy kimenetű diszkrét idejű rendszer
- 2.12.3. Állapottér-reprezentáció
- 2.12.4. Változó struktúrájú rendszerek
- 2.12.5. Lineáris, egy bemenetű egy kimenetű folytonos idejű rendszer
- 2.12.6. Általánosított derivált
- 2.12.7. Differenciálegyenletek megoldása analóg számítógépes megközelítéssel
- 2.13. A stabilitás fogalma
- 2.14. Kidolgozott feladatok koncentrált paraméterű rendszerekhez kapcsolódóan
- 2.15. Alapvető vizsgálati módszerek
2.1. Valós fizikai rendszer fogalma
Definíció
Valós fizikai rendszer egy olyan fizikai objektum, amely mérhető külső kényszer hatására mérhető módon megváltozik.
Értelmezés
Számos esetben találkozunk olyan műszaki problémával, ahol van valamilyen külső kényszer és ennek hatására valami megváltozik. A későbbi szóhasználat egyszerűsítésére bevezetjük a „valós fizikai rendszer” fogalmát: ez egy olyan fizikai objektum, amely mérhető külső kényszer hatására mérhető módon megváltozik (ld. 2-1. ábra). E tananyag fókuszában az áll, hogy miként lehet a valós fizikai rendszereket matematikailag leírni.

A műszaki életben előforduló valós fizikai rendszereket többféle szempont szerint lehet kategóriákba sorolni és egy valós fizikai rendszernek többféle matematikai leírása létezhet. A megfelelő leírási mód nemcsak magán a valós fizikai rendszeren múlik, hanem függ a vizsgálat tárgyától is. Például nem mindegy, hogy a valós fizikai rendszer változási folyamataira (tranziens viselkedésére) vagy csak a végállapotára (állandósult állapotára) vagyunk kíváncsiak. Ugyanazon valós fizikai rendszer esetén más-más matematikai eszközt használhatunk e két különböző vizsgálatra. Ezért nagyon fontos, hogy a mérnöki munkában először a vizsgálat tárgyát és célját pontosan definiáljuk, és csak utána válasszunk alkalmas matematikai eszközt a probléma elemzésére és megoldására.
2.2. A jel fogalma
Definíció
A jel egy változó fizikai mennyiség absztrakt információ tartalma.
Értelmezés
A jel egy változó fizikai mennyiség absztrakt információtartalma, jellemzően egy időfüggvény, de mint később a 2.11.2 fejezetben látni fogjuk, bizonyos jelek értelmezéséhez a függvény fogalom általánosítását is meg kell engednünk. Ebből következik, hogy a jel elveszíti az eredeti fizikai mennyiség mértékegységét, sőt még az abszolút nagyságát is elveszítheti, ha áttérünk az ún. relatív egységre. A relatív egységet úgy kapjuk, ha a jelet elosztjuk egy jellemző értékével (általában a névleges értékével), így az értékét százalékosan tudjuk kifejezni. Azonos funkciójú, de különböző fizikai kapacitású, illetve teljesítményű rendszerek ilyen módon válhatnak összehasonlíthatóvá. Ha van például két motorom és mindegyikre 100V feszültséget kapcsolok, akkor ez így nem mond semmit, nem sokat tudok a motor üzemállapotáról, mert lehet, hogy az egyik motor tönkremegy (mert egy eredetileg 10 voltra tervezett kis motor), a másik el sem tud indulni (mert több kV-ra tervezett hatalmas motor). Két motor túlterhelhetősége annak alapján hasonlítható össze, hogy a névleges értékük hányszorosát viselik el. A relatív egység használata számos előnnyel jár a mérnöki gyakorlatban.
A jeleket különböző szempontok szerint szokás osztályozni. Jelen tananyag a nevéből adódóan a rendszerekre fókuszál, ezért a jelek osztályozását a rendszerek osztályozásához kapcsolódóan végezzük el.
2.3. A be- és kimenetek fogalma
Definíció
A valós fizikai rendszerre ható és időben változni képes kényszereket nevezzük fizikai bemeneteknek.
A valós fizikai rendszernek a fizikai kényszerek hatására bekövetkező bármely változása lehet fizikai kimenet, ezek közül azt tekintjük fizikai kimenetnek, amelyet az adott vizsgálatban közvetlenül vagy közvetve mérünk.
Értelmezés
A valós fizikai rendszerre ható és időben változni képes kényszereket nevezzük fizikai bemeneteknek, ezek közül megkülönböztetjük az irányított (mesterségesen változtatható) és a környezet által meghatározott (ezért sokszor nem ismert) fizikai bemenetet. A fizikai bemenetekhez tartozó jelet (a bemenőjelet) gerjesztésnek is nevezzük. Az előbbi felosztásnak megfelelően a gerjesztéseken belül megkülönböztethetünk beavatkozó és zavaró jelet. Ez utóbbiról sokszor nincs pontos információnk, de valós fizikai rendszereknél ezzel mindig számolni kell. A zavaró jeleket is két nagy csoportra bonthatjuk, nevezetesen a zaj- és terhelésjellegű jelekre. Ha a terhelést ismerjük, akkor azt bemenőjelnek is tekinthetjük. Szokásosan a beavatkozó jelet az u, míg a zavaró jelet (az angol disturbance után) a d betű jelöli.
A valós fizikai rendszernek a fizikai kényszerek hatására bekövetkező bármely változása lehet fizikai kimenet, ezek közül azt tekintjük fizikai kimenetnek, amelyet az adott vizsgálatban közvetlenül vagy közvetve mérünk. A fizikai kimenethez tartozó kimenőjelet sokszor válaszjelnek nevezzük, és szokásosan y betűvel jelöljük. Meg kell jegyeznünk, hogy a fizikai kimenet definíciójában semmilyen megkötés vagy útmutatás nincs arra vonatkozóan, hogy miként válasszuk ki a mérendő fizikai mennyiséget, ezért azzal később külön kell foglalkozni, hogy a mérésekből a valós fizikai rendszer teljes (vagy az adott vizsgálat szempontjából érdekes részleges) működése rekonstruálható-e. Más szavakkal a mérés tartalmazza-e a számunkra érdekes információt.
A valós fizikai rendszer vizsgálatának az első lépése a fizikai be- és kimenetek meghatározása. Egy rendszernek az adott használattól vagy a vizsgálat tárgyától függően más és más fizikai bemenetei, illetve kimenetei lehetnek. Csak egy nagyon egyszerű példát alapul véve: egy kerékpár kanyarodását első közelítésben a kormány elforgatásával tudjuk elérni. Már abban is van különbség, hogy hol van a kezünk a kormányon, minél szélesebben fogjuk, annál kisebb erővel (kényszerrel) tudjuk elforgatni. Kis sebességeknél biztosan elegendő a kormányra koncentrálni, de aki nagy sebességnél pusztán a kormányt forgatja, az hamar rájön, hogy kanyarodáshoz a súlypontáthelyezés is elengedhetetlen. Vannak, akik úgy is tudnak kanyarodni, hogy közben nem fogják a kormányt. Az ő esetükben a kerékpár haladási iránya szempontjából a súlypontáthelyezést lehet bemeneti kényszernek tekinteni, ugyanakkor a kormány elfordulása a kiadódó mennyiségek közé sorolandó, így lehet fizikai kimenet. Azt is sok kerékpáros tapasztalhatta, hogy egy kavics, vagy az útpadka ugyancsak eltérítheti a kerékpárt eredeti irányából. Így ha nem sima úton haladunk, akkor a talaj egyenetlenségeit is bemeneti kényszernek (zavarójelnek) kell tekinteni. Ismét más kényszert és kiadódó változó mennyiséget kapunk, ha pl. a kerékpár által megtett utat vizsgáljuk.
A mechatronikában gyakran egyenáramú szervomotort alkalmazunk mozgatásra. Gyakori ipari előfordulása és egyszerűsége miatt e tananyagban is több példában alkalmazzuk az egyenáramú motort. A motort, mint valós fizikai rendszert vizsgálva az egyértelmű, hogy a motor működését az armatúra tekercsen keresztül tudjuk befolyásolni, de nem mindegy, hogy az armatúra tekercs áramát vagy feszültségét írjuk-e elő. Az áramvezérlés esetén az armatúra-áram a kikényszerített mennyiség és az armatúra-feszültség a motor fordulatszámától függően kiadódik. A feszültségvezérlés esetén az armatúra-feszültség a kikényszerített mennyiség, és az armatúraáram a terheléstől függően fog kiadódni. Ugyancsak a motornak kiadódó mennyisége lehet a nyomatéka, fordulatszáma és szögelfordulása. Az is világos, hogy ezek a kiadódó mennyiségek egymástól nem függetlenek. A motor enkóder jeléből a szögelfordulásást közvetlenül a szögsebességet közvetve ki tudjuk számítani, és fordítva.
A fenti példák annak szemléltetésére szolgálnak, hogy a fizikai be- és kimenetek meghatározása nem mindig triviális, ezért bármilyen vizsgálatot ezek pontos elemzésével kell kezdeni.
2.4. Az absztrakt rendszer fogalma
Definíció
A rendszer egy valós fizikai rendszer valamilyen pontosságú és meghatározott működési tartományra érvényes absztrakt modellje, amely a bemenőjelek és a kimenőjelek között teremt matematikai kapcsolatot
Értelmezés
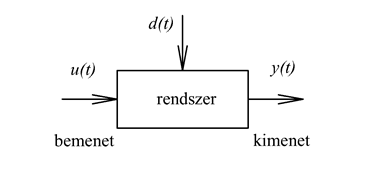
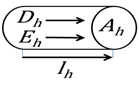
A rendszer egy valós fizikai rendszer valamilyen pontosságú és meghatározott működési tartományra érvényes absztrakt modellje, amely a bemenőjelek és a kimenőjelek között teremt matematikai kapcsolatot (ld. 2-2. ábra). Megjegyezzük, hogy a rendszerhez választhatunk olyan bemenőjelet, amely a valós fizikai rendszert tönkretenné, és a rendszer matematikailag kiszámíthat olyan kimenőjelet, amelynek kiadására a valós fizikai rendszer fizikailag képtelen. Ezért fontos, hogy egy rendszer vizsgálatakor meggyőződjünk annak érvényes működési tartományáról.
Az előző fejezetben leírtaknak megfelelően a bemenőjelek közül a 2-2. ábran megkülönböztettük a zavaró és a beavatkozó jelet. A zavaró jelet sok esetben elhanyagoljuk. Ha erről külön nem teszünk említést, akkor a beavatkozó jel megegyezik a bemenőjellel. A be- és a kimenőjeleken kívül a rendszernek lehetnek további belső jelei. Ha a későbbiekben a rendszer, be- és kimenet szavakat a „fizikai” jelző nélkül használjuk, akkor mindig az absztrakt matematikai értelmükre gondolunk.
A mérnöki munkában valós fizikai rendszereket kell alkotnunk, és ehhez ismernünk kell azok működését, valahogy le kell tudni írni a belső változásokat. A valós fizikai folyamatok lezajlásáról részben a korábbi tapasztalatunk (fogalmazhatunk úgy, hogy a mérnöki ösztön) alapján, részben a folyamatokat leíró egyenletek alapján nyilatkozunk. Tisztán matematikai egyenletekkel sohasem tudjuk teljes pontossággal leírni a körülöttünk lévő világot, mindig szükség lesz a mérnöki tapasztalatra. A mérnöki munka szépsége e két megközelítés összhangjának megteremtésében rejlik. A Rendszertechnika tárgy pusztán a matematikai megközelítéssel foglalkozik.
A továbbiakban azt vizsgáljuk, hogy milyen matematikai kapcsolat adható meg a bemenetek és a kimenetek között.
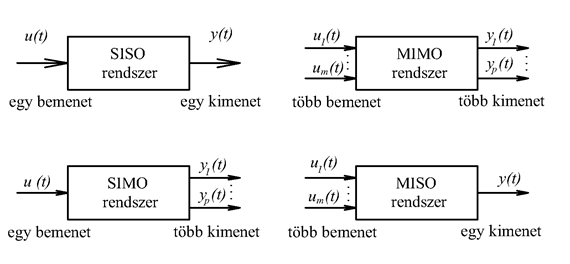
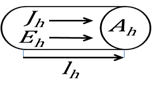
A rendszereket szokás a be- és kimenetek száma szerint csoportosítani (ld. 2-3. ábra). A klasszikus szabályozástechnikában elsősorban egy bemenetű egy kimenetű rendszerekkel (angolul Single Input Single Output SISO) találkozunk. A modern szabályozáselmélet foglalkozik több bemenetű több kimenetű rendszerekkel (angolul Multiple Input Multiple Output MIMO). Természetesen beszélhetünk egy bemenetű több kimenetű (SIMO) és több bemenetű egy kimenetű (MISO) rendszerekről is.
2.5. Lineáris és nemlineáris rendszerek fogalma
Definíció
A lineáris rendszerek legfontosabb tulajdonsága, amely egyben definícióként is használható, hogy érvényes rájuk a szuperpozíció elve.
Értelmezés
Ez az egyik legfontosabb tulajdonság, amelyet minden vizsgált rendszerről el kell dönteni. A lineáris rendszerek matematikailag sokkal könnyebben kezelhetők, mint a nemlineáris rendszerek. Kézenfekvő, hogy a lineáris rendszereket lineáris egyenletekkel (algebrai, közönséges és parciális differenciálegyenletekkel) írhatunk le. A lineáris rendszerek leggyakrabban kihasznált tulajdonsága a bemeneti hatások szuperponálhatósága (ld. 2-4. ábra). Ezt használhatjuk ki, ha méréssel kell eldönteni egy valós fizikai rendszerről, hogy lineáris-e. Pl. egy ellenállás esetén rákapcsolunk egy feszültséget (mint bemenőjelet), és megmérjük az ennek hatására kialakuló áramot (mint kimenő jelet). Ha az adott feszültséget felére, illetve kétszeresére változtatjuk, és azt tapasztaljuk, hogy ekkor az áram is felére, illetve kétszeresére nő, akkor az ellenállás az adott működési tartományban lineáris. Hasonlóan, ha egy rugót megterhelünk egy erővel, és az erőt felére vagy kétszeresére változtatjuk, akkor a rugó megnyúlása is a fele, illetve a kétszerese lesz. Gyakori, hogy egy rendszer csak egy adott működési tartományban lineáris (csak egy adott működési tartományban érvényes rá a szuperpozíció elve.) Pl. ha a rugót teljesen összenyomtuk, vagy teljesen kinyújtottuk, akkor az erő további növelése nem okoz változást.
Könnyen belátható, hogy két lineáris rendszer soros vagy párhuzamos kapcsolásából keletkező eredő rendszer is lineáris. Ezt a tulajdonságot is gyakran kihasználjuk.
Azok a rendszerek, amelyek nem írhatók le lineáris egyenletekkel, nemlineárisak. A nemlineáris rendszerek is osztályozhatók annak függvényében, hogy miben rejlik a nemlineáris jelleg. A továbbiakban elsősorban lineáris rendszerekkel foglalkozunk.
MIMO rendszerek esetén a 2-4. ábraán látható bemeneti és kimeneti mennyiségek általános esetben vektorosan értendők. A vizsgálati módszer gyakran az, hogy csak az egyik bemenetre adunk gerjesztést és megvizsgáljuk a rendszer válaszát, majd egy másik bemenetre adunk gerjesztést annak a válaszát is megvizsgáljuk, végül a két bemenetre együttesen adunk gerjesztést. Ha a rendszer lineáris, akkor a két benetet együttesen gerjesztve a rendszer válasza a két külön válasz összege.
A valós fizikai rendszerek működésében valahol biztosan jelentkezik a nemlineáris jelleg. Elég arra gondolnunk, hogy mindig található olyan nagy fizikai bemenőjel, amely tönkre tudja tenni a valós fizikai rendszert, és ekkor a linearitás értelemszerűen megszűnik. Így a linearitás egy működési tartományra és pontossági követelményre jellemző tulajdonság. Fordított megközelítésben, a nemlineáris valós fizikai rendszert vizsgálva a legtöbb esetben egy munkapont körül kijelölhető egy olyan tartomány, ahol a működés lineárisnak tekinthető. Legyen a munkaponti egyenlet, amely az  munkaponti bemenőjel és az
munkaponti bemenőjel és az  munkaponti kimenőjel között adja meg a kapcsolatot:
munkaponti kimenőjel között adja meg a kapcsolatot:
| (2.1) |
Módosítsuk a bemenőjelet a munkapont körül
| (2.2) |

| (2.3) |

A rendszer az adott munkapontban lineáris, ha
| (2.4) |

Sok esetben a rendszer a munkapontban sem lineáris, de lineárisan közelítjük. Ezt nevezik munkaponti linearizálásnak, és gyakran élünk ezzel a lehetőséggel. Megjegyezzük, hogy léteznek más linearizálási módszerek is. Mechanikai rendszereknél általában az egyesúlyi helyzetet keressük meg, és e körül linearizálunk. A Rezgéstanban számos ilyen feladattal találkozhattak.
Néhány gyakori oka a nemlineáris viselkedésnek: mágneses köröknél a telítődés és a hiszterézis, mechanikai rendszereknél a súrlódás, kotyogás és a mozgás korlátozása, teljesítményelektronikai berendezések esetén a kapcsoló üzemmód, elektronikai áramkörökben az offszet, valamint bármely irreverzibilis változás.
2.6. Determinisztikus, sztochasztikus és kaotikus rendszerek fogalma
Definíció
Determinisztikus rendszerről akkor beszélünk, ha egy konkrét bemenőjelre a rendszer teljes ismeretében mindig egy konkrét kimenőjel analitikusan kiszámítható.
Definíció
Sztochasztikus rendszer egy konkrét bemenőjelre adott válaszát nem tudjuk pontosan meghatározni, csak annak a valószínűségi eloszlását. A rendszer tartalmaz valamilyen véletlenszerűségen alapuló elemet.
Definíció
Olyan nemlineáris dinamikával rendelkező determinisztikus rendszereket nevezünk kaotikusnak, amelyek hosszú távú viselkedése csak statisztikailag írható le.
Értelmezés
Kihangsúlyozzuk, hogy sokszor nem az a kérdés, hogy maga a valós fizikai rendszer determinisztikus vagy sztochasztikus, sokkal inkább a leírási mód a kérdés. Számos esetben egy valójában determinisztikus, de összefüggéseiben nagyon bonyolult folyamatot egyszerűbb sztochasztikus szabályokkal leírni. A véletlen számok generálásának egy tipikus eszköze a dobókocka. Ha egy geometriailag pontosan megmunkált, homogén anyag kitöltésű dobókockát elgurítunk, akkor az azonos valószínűséggel áll meg bármely oldalán. Ez így egy tipikus sztochasztikus folyamat. Kisgyerekek gyakran azzal próbálják a „hatos” dobásának az esélyét megnövelni, hogy a dobókockát úgy fogják a kezükbe, hogy a „hatos” felfelé legyen. Ez nem sokat szokott segíteni, ha csak azt a dobást tekintjük érvényesnek, amikor a dobókocka ténylegesen gurul egy keveset. Az eldobás erejét nem tudjuk olyan pontosan szabályozni, hogy a dobókocka mindig ugyanúgy álljon meg. A folyamatot a kezünk pontatlansága teszi sztochasztikussá. Ezzel szemben, ha pontosan tudjuk, hogy egy robot miként fogta meg a dobókockát (vagyis tudjuk a kezdeti állapotot) és pontosan tudjuk, hogy milyen irányba, milyen erővel az asztaltól milyen távolságban dobta el a dobókockát (vagyis pontosan tudjuk a rendszer bemenőjelét), továbbá ismerjük a dobókocka fizikai paramétereit (vagyis ismerjük a rendszeregyenleteket), akkor a folyamat determinisztikussá válik. Meg van az elvi esély, hogy előre ki tudjuk számítani, hogy mit fog egy robot dobni. Hasonlítsuk össze egy labda és egy dobókocka elgurítását. Egy labda és egy nagy síkfelület esetén, ha egy kicsivel megváltoztatjuk a labda kezdeti helyzetét a gurítás pillanatában, akkor mindig ugyanennyivel fog megváltozni a végállapot. Ezzel szemben, ha egy dobókockának kicsivel megváltoztatjuk a kiindulási állapotát, akkor ez lehet, hogy nincs hatással a végső állapotra, de előfordulhat, hogy a kezdeti feltételek apró megváltoztatása miatt a dobókocka eggyel többször billen át, vagy elmarad az utolsó átbillenése. Lineáris rendszerek esetén a szuperpozíció elvéből következően, a bemenőjel megváltoztatásával arányos lesz a kimenőjel megváltozása. Egy periodikusan működő nemlineáris rendszer esetén is tetszőleges időtávra pontosan meg tudjuk mondani a kimenőjel értékét. Vannak olyan rendszerek, ahol a kezdeti érték minimális megváltozása is teljesen megváltoztatja a jel későbbi alakulását. Ilyen rendszerek válhatnak kaotikus működésűvé. A kaotikus jelenségek tipikus példája az időjárás. Ahogy az időjárást befolyásoló változókat egyre pontosabban tudjuk mérni, és egyre bonyolultabb számításokat tudunk végezni, úgy egyre pontosabb rövidtávú prognózisokat tudunk készíteni (ebből látszik a rendszer determinisztikus volta), de minél hosszabb távra próbálunk előretekinteni, úgy a prognózis egyre bizonytalanabbá válik.
Valós fizikai rendszerek esetén mindig szükség van valamilyen mérésre és a méréshez mindig társul zaj. Tipikusan a zajok és azok hatása tekinthető sztochasztikusnak. Vagyis sok esetben a determinisztikus és sztochasztikus jel együtt jelenik meg. Fontos feladat lehet ezek szétválasztása. Ennek egyik módja a jel szűrése. A szűrést elvégző szűrőre úgy tekinthetünk, mint matematikai eljárást megvalósító rendszerre, ahol a bemenet a zajos jel, a kimenet a szűrt jel. A mérnöki gyakorlatban sokszor előbb készül el az absztrakt matematikai modell, és ahhoz keresünk valós fizikai rendszert. Ennek kapcsán egy újabb fontos fogalmat kell tisztázni. Külön megkell említeni a kaotikus rendszereket, amelyek valójában deteminisztikusak, de bizonyos szempontból sztochasztikusnak látszanak.
2.7. Kauzalitás fogalma
Definíció
Egy rendszert akkor nevezünk kauzálisnak, ha a rendszer kimenőjele bármely  időpillanatban nem függ az adott
időpillanatban nem függ az adott  időpont utáni bemenőjelektől (gerjesztésektől), vagyis a jövőbeni események nem hatnak a jelenre.
időpont utáni bemenőjelektől (gerjesztésektől), vagyis a jövőbeni események nem hatnak a jelenre.
Értelmezés
Természetesen minden valós fizikai rendszer és minden a méréssel azonos időben működő jelfeldolgozó algoritmus kauzális. A kauzalitás lehet a kritériuma annak, hogy egy adott matematikai algoritmus megvalósítható-e a vizsgálattal, vagy a méréssel egy időben (valós időben) pl. később látni fogjuk, hogy egy ideális aluláteresztő szűrő nem kauzális, ezért elvileg lehetetlen, hogy a méréssel egy időben működve megvalósítsuk. Egy mérési adatsoron elvégzett utólagos jelfeldolgozó algoritmus esetén a kauzalitás nem feltétlenül szükséges, mivel ezeket az algoritmusokat egy múltbeli időpontban úgy alkalmazzuk, hogy ahhoz a múltbeli időponthoz képest a vizsgálandó jövő ismert. Példaként könnyen beláthatjuk, hogy ha különböző frekvenciájú és különböző amplitúdójú szinuszos jeleket kívánunk szűrni egy ideális aluláteresztő szűrővel, és egy nullátmenet után azt tapasztaljuk, hogy a jel meredeken nő, akkor ez lehet egy nagy amplitúdójú kis frekvenciájú jel, amelyet át kell engedni, vagy lehet egy nagy frekvenciájú kis amplitúdójú jel, amelyet el kell nyomni. A nullátmenetnél nem tudjuk, hogy mit kell tennünk, de a jel egészét áttekintve könnyen eldönthetjük, hogy az adott jelet átengedni, vagy elnyomni kell.
Sociális, illetve társadalmi rendszerek lehetnek jövőbelátók (anticipatívak), pl. a jelen tőzsdei folyamatait a jövő vélt vagy valós ismerete befolyásolja.
2.8. Paraméter és változó fogalma
Definíció
A valós fizikai rendszert leíró egyenletek együtthatói a paraméterek.
Értelmezés
Első közelítésben azt mondhatjuk, hogy egy valós fizikai rendszer matematikai leírásában szereplő állandókat paraméternek, az időben változni képes mennyiségeket változóknak nevezzük. Az előbbire példa az ellenállás (első közelítésben), az utóbbira a feszültség és az áram.
| (2.5) |

Sokan ragaszkodnak ehhez a szigorú megkülönböztetéshez, azonban a szakirodalomban találkozunk időben változó paraméter kifejezéssel is. A paramétert abban az értelemben használjuk, hogy azok a valós fizikai rendszert leíró egyenletek együtthatói. A változó paraméterű rendszer változó együtthatójú egyenletekkel leírható rendszert jelent.
Gyakran előfordul, hogy egy valós fizikai rendszernek létezik egy közmegegyezésen alapuló paraméteres leírása, amely bizonyos pontossággal, bizonyos működési tartományban jól használható (ld. Ohm törvény (2.5)). Ha a pontosságot vagy a működési tartományt növelni kívánjuk, akkor előfordulhat, hogy az egyszerűbb leírásban állandónak tekintett és állandó értékű paraméterként viselkedő mennyiség változásait is figyelembe kell venni, pl. egy áramkörben a hőmérséklettől függően változhat az ellenállás értéke. Tegyük fel, hogy (2.5) egy aszinkronmotor forgórészköri tekercs ellenállásán eső feszültséget írja le. Ez az ellenállás üzemi hőmérsékleten akár 50%-kal is megnövekedhet a szobahőmérsékleten mért értékhez képest. Ha a számításainkat pontosítani akarjuk, akkor a  hőmérsékletet tekinthetjük egy új változónak, amelynek értékét egy meglehetősen bonyolult f hőtani függvény segítségével számíthatjuk ki. A
hőmérsékletet tekinthetjük egy új változónak, amelynek értékét egy meglehetősen bonyolult f hőtani függvény segítségével számíthatjuk ki. A  hőmérsékletet megadó f függvény függ az
hőmérsékletet megadó f függvény függ az  áramtól, a
áramtól, a  külső hőmérséklettől, a motor
külső hőmérséklettől, a motor  fordulatszámától és számos egyéb körülménytől.
fordulatszámától és számos egyéb körülménytől.
| (2.6) |

A  hőmérséklet meghatározása nagy számítási kapacitást igényel, különösen, ha arra is tekintettel kívánunk lenni, hogy a hőmérséklet nem egyenletes eloszlású a tekercsen belül. Ugyanakkor a (2.5) egyenletre nem önmagában van szükség, ez beépül egy nagyobb, a motor működését leíró rendszerbe. Általában törekszünk lineáris rendszerek használatára. Ha a (2.6) egyenletet alkalmazzuk, akkor a motor működését leíró rendszer biztosan elveszíti a linearitását. E rendszert felhasználhatjuk a motor működésének szabályozásakor. Pl. mérjük a motor aktuális áramait és fordulatszámát, majd ezekből a mérési eredményekből és a motor működését leíró rendszer segítségével kell kiszámítanunk, hogy mekkora feszültségeket kell a motor kapcsaira kapcsolni a kívánt működés elérése érdekében. Ha bonyolult a rendszer, sokat kell számolni, akkor mire kiszámítjuk a motorra kapcsolandó feszültséget, a mérési eredmények érvényüket vesztik. Pl. ha egy autóban van ez a motor, akkor rég nekimentünk a falnak, mire kiszámítjuk, hogy fékezni kellene. Természetesen, ahogy egyre olcsóbban, egyre nagyobb kapacitású számítástechnikai eszközöket tudunk vásárolni, úgy egyre bonyolultabb modelleket tudunk a méréssel egy időben számolni. De a rendszer bonyolultságának mindig lesz egy határa, és elképzelhető, hogy a méréssel egy időben számítható modell még mindig nem ad kellő pontosságú eredményt.
hőmérséklet meghatározása nagy számítási kapacitást igényel, különösen, ha arra is tekintettel kívánunk lenni, hogy a hőmérséklet nem egyenletes eloszlású a tekercsen belül. Ugyanakkor a (2.5) egyenletre nem önmagában van szükség, ez beépül egy nagyobb, a motor működését leíró rendszerbe. Általában törekszünk lineáris rendszerek használatára. Ha a (2.6) egyenletet alkalmazzuk, akkor a motor működését leíró rendszer biztosan elveszíti a linearitását. E rendszert felhasználhatjuk a motor működésének szabályozásakor. Pl. mérjük a motor aktuális áramait és fordulatszámát, majd ezekből a mérési eredményekből és a motor működését leíró rendszer segítségével kell kiszámítanunk, hogy mekkora feszültségeket kell a motor kapcsaira kapcsolni a kívánt működés elérése érdekében. Ha bonyolult a rendszer, sokat kell számolni, akkor mire kiszámítjuk a motorra kapcsolandó feszültséget, a mérési eredmények érvényüket vesztik. Pl. ha egy autóban van ez a motor, akkor rég nekimentünk a falnak, mire kiszámítjuk, hogy fékezni kellene. Természetesen, ahogy egyre olcsóbban, egyre nagyobb kapacitású számítástechnikai eszközöket tudunk vásárolni, úgy egyre bonyolultabb modelleket tudunk a méréssel egy időben számolni. De a rendszer bonyolultságának mindig lesz egy határa, és elképzelhető, hogy a méréssel egy időben számítható modell még mindig nem ad kellő pontosságú eredményt.
Egy kompromisszumos megoldás lehet, hogy egy tipikus működést feltételezve offline módon kiszámítjuk, hogy az R ellenállás az időben miként változik, azaz egyszerűen időben változó paraméterként kezelhetjük.
| (2.7) |
A pontosságot úgy tudtuk megnövelni a (2.5) összefüggéshez képest, hogy nem veszítettük el a linearitást, a számítási igényt sem növeltük meg jelentősen, de (2.7) csak akkor ad jobb eredmény, ha a tipikus működéstől nem térünk el jelentősen.
Az időben változó paraméter használatának van egy másik fontos előnye, miszerint megőrizhető a rendszer linearitása. A példánkban (2.6) egy pontosabb, mindig érvényes, de nemlineáris modell, (2.7) csak egy tipikus működés esetén érvényes, de lineáris modell.
2.9. Elosztott és koncentrált paraméterű leírás fogalma
Definíció
Az elosztott paraméterű leírás esetén a tér minden pontjában meghatározunk valamilyen matematikai összefüggést, leginkább parciális differenciálegyenletek formájában.
Koncentrált paraméterű leírás esetén a vizsgált valós fizikai rendszer összefüggéseit egy adott térrészben kiátlagoljuk, és egyetlen egyenlettel helyettesítjük.
Értelmezés
Talán ez az első és legnagyobb elágazás, de addig nem foglalkozhattunk ezzel, amíg a paraméter fogalmát nem tisztáztuk. Az elosztott szó itt a térbeli eloszlásra utal. Az elosztott paraméterű leírás esetén a tér minden pontjában meghatározunk valamilyen matematikai összefüggést, leginkább parciális differenciálegyenletek formájában. Tipikusan a hullámjelenségek (akár elektromágneses, akár mechanikai), anyagon belüli hő- és belsőfeszültség-eloszlások tartoznak ide. Ezeket az egyenleteket leginkább végeselem módszerrel oldjuk meg. Ez a témakör más tananyagokba tartozik.
Koncentrált paraméterű leírást akkor alkalmazhatunk, ha a vizsgált valós fizikai rendszer összefüggései egy adott térrészben kiátlagolhatók és összevont egyenlettel helyettesíthetők. Ezzel az egyszerűsítéssel a mérnöki gyakorlatban nagyon gyakran élünk. Pl. Ha egy rúd tartó szerepet tölt be, akkor egy térfogattal és tömeggel jellemezhető merev test. Ha hangvillaként használjuk, akkor a hullámok vizsgálatához minden pontját külön kell számítani, ezért az elosztott paraméterű modellre van szükség. Akkor is elosztott paraméterű modell szükséges, ha azt számítjuk ki, hogy erő hatására hol törik el a rúd.
Ebben a tananyagban - a továbbiakban - csak koncentrált paraméterű leírást alkalmazunk. Ettől függetlenül néhány később tárgyalt kategória alkalmazható elosztott paraméterű leírás esetén is. A koncentrált paraméterű leírásnak oka lehet, hogy rövidebb számítási időt igényel. Pl. egy robot tervezésekor azt szeretnénk tudni, hogy akár statikus, akár dinamikus terhelés esetén hol lépnek fel a legnagyobb belső feszültségek, ezért hol kell erősíteni, vagy hol lehet még biztonsággal gyengíteni a mechanizmust, akkor biztosan elosztott paraméterű leírást kell alkalmazni, és előfordulhat, hogy egy dinamikai vizsgálatnál egy 10 perces mozgás közben ébredő erők kiszámítása egy órán keresztül tart. A tervezési fázisban ez megengedhető. Ezzel szemben, a robot szabályozásánál, mérünk valamit és a lehető legrövidebb időn belül valahogy be kell avatkoznunk a robot mozgására vonatkozó céljaink elérése érdekében. Nem engedhető meg, hogy percekkel később számítsuk ki, hogy valamikor a múltban hogy kellett volna beavatkozni. A gyorsabb beavatkozás érdekében kénytelenek vagyunk lemondani a pontosságról.
2.9.1. Vektormezővel leírható rendszerek koncentráltparaméterű modellje
Ebben a fejezetben koncentrált paraméterű rendszert leíró egyenletek strukturális hasonlóságát, pontosabban hálózatok számítási módszereit vizsgáljuk. A koncentrált paraméterű leírás mindig valamilyen közelítést, illetve elhanyagolásokat jelent. Az elhanyagolások a villamos áramkörök számításánál (ott is inkább az alacsony frekvenciás gerjesztések esetén) a legkisebbek. Talán ez az oka, hogy a villamos áramkörök számítása van a legjobban kidolgozva, így más fizikai jelenségek leírására sokszor villamos analógiát használunk. E jegyzetben is a villamos áramkörök számítását vizsgáljuk meg részleteiben és a kapott eredményeket általánosítjuk.
Sok fizikai jelenséget egy vektormező divergenciájával és rotációjával lehet a legtömörebben leírni. Ezekből az egyenletekből koncentrált paraméterű modelleket alkothatunk, és ehhez kapcsolódóan származtathatunk fizikai mennyiségeket, létrehozhatunk hálózatokat.
Definíció
A megmaradási törvényekből származtatott koncentrált paraméterű fizikai mennyiségeket extenzív fizikai mennyiségeknek nevezzük. Sok esetben az extenzív fizikai mennyiségek egy vektormező divergenciájából származtathatók. Tipikusan extenzív fizikai mennyiségek a különböző típusú energiák és anyagmennyiségek, de ide tartozik a térfogat (hidrosztatika), az impulzus és impulzus momentum is.
Értelmezés
Elosztott paraméterű modellekben a megmaradási törvények divergencia egyenletek formájában írhatók fel, amelyek a forrásokra és a nyelőkre vonatkoznak, és azt fejezik ki, hogy a tér egy adott pontjában a legkülönbözőbb típusú anyag és energiákhoz köthető áramok átfolynak (befolynak és/vagy kifolynak), vagyis a tér minden pontjához a forrás értékére vonatkozó skalár értéket rendelünk, így a tér forrás sűrűségét kapjuk. Szokásos még az a megközelítés, hogy ha két térrészt egyesítünk, akkor (linearitást feltételezve) az eredő térrészben az extenzív fizikai változót jellemző érték a két térrész extenzív fizikai változói értékének az összege. Ezt úgy is megfogalmazhatjuk, hogy a térrészek egyesítésekor a extenzív fizikai változók additívak (linearitást feltételezve). A forrás sűrűségből összegzéssel számíthatjuk egy adott térrészre az összesített forrásokat (nyelőket). Az így kapott érték csak egy adott pillanatra vonatkozik, és ebből adódik, hogy egy újabb típusú fizikai változót definiáljunk.
Definíció
Extenzív fizikai mennyiségek rátájának nevezzük az adott extenzív fizikai mennyiség egy adott felületen mérhető időegység alatti változását.
Értelmezés
A jelenségek leírásánál általában a változásokra, pontosabban áramlására vagyunk kiváncsiak. Pl. töltésáram, térfogatáram, hőáram stb.
Az extenzív fizikai mennyiségek változásának két oka lehet, az egyik egy forrás vagy nyelő jelenléte, a másik a fizikai mennyiség vándorlása, illetve áramlása. Ez utóbbinak oka a vektormező örvényességében (illetve örvénymentességében) keresendő. Az extenzív fizikai mennyiségekhez találhatunk egy másik fizikai mennyiséget, amely az extenzív fizikai mennyiségek áramlását okozza.
Definíció
A vektormező örvényességi tulajdonságából származtatott fizikai mennyiségeket nevezzük intenzív fizikai mennyiségnek. Tipikusan intenzív fizikai mennyiség a nyomás, villamos feszültség és hőmérséklet.
Értelmezés
A rotáció a vektormező örvényességére, vagyis az áramlások okára vonatkozik. A tér minden pontjához egy vektor rendelhető, amely tekinthető egy általánosított erőnek, vagyis az egységnyi nagyságú extenzív mennyiségre gyakorolt hatásnak az adott pontban. Szokásos az a megfogalmazás, hogy a térrészek egyesítésekor az eredő térrészben az intenzív fizikai változó kiegyenlítődik, ez az egyesített térrészek súlyozott átlaga. Természetesen az örvényesség okára nézve az intenzív fizikai változók is additívak, vagyis, ha egy újabb örvényességi forrást iktatunk be, akkor a két forrás hatása valamely intenzív fizikai változók esetén is összegződnek (linearitást feltételezve). Az analóg mennyiségeket a 2.2 táblázat első felében foglaltuk össze.
Az extenzív és intenzív fizikai mennyiség fogalma erősen kötődik ahhoz, hogy két térfogatot egymás mellé helyezve egyesítünk, és ekkor igaz az, hogy az intenzív mennyiségek összeadódnak és az extenzív mennyiségek kiegyenlítődnek. Az absztrakt mezőket nem csak egymás mellé tehetjük, hanem egymásba is helyezhetjük (ennek elképzelése sok esetben nem egyszerű). Egy ilyen absztrakt mező egyesítés megvalósítható úgy, hogy az extenzív fizikai mennyiségek egyenlítődnek ki, és az intenzív fizikai mennyiségek adódnak össze. Tipikus koncentrált paraméterű példaként említhetjük az áramköri elemek soros és párhuzamos kapcsolását. Párhuzamos kapcsolásnál a feszültség egyenlítődik ki, és az áramok adódnak össze, soros kapcsolódásnál megfordítva, az áramok egyenlítődnek ki és a feszültségek adódnak össze. Később a 2.2 táblázatban is látni fogjuk, hogy értelmezéstől függően bizonyos fizikai mennyiségek szerepe felcserélhető.
2.9.2. Villamos jelenségek elosztott paraméterű leírása a Maxwell egyenletekkel
(elsősöknek nem ajánlott)
E pontban az elektromágneses mezőt, mint egy elosztott paraméterű modellt mutatjuk be. A (2.8), (2.9), (2.10) és (2.11) egyenleteket szokás differenciális Maxwell egyenleteknek nevezni.
| (2.8) |

ahol H a mágneses térerősség és J a vezetési áramsűrűség vektora, valamint D az eltolási vektor. ( tag az ún. eltolási áram). Az üzenet a következő: A mágneses tér mindig örvényes és ennek forrása valamilyen áram: vezetési vagy eltolási.
tag az ún. eltolási áram). Az üzenet a következő: A mágneses tér mindig örvényes és ennek forrása valamilyen áram: vezetési vagy eltolási.
| (2.9) |

ahol E az elektromos térerősség és B a mágneses indukció vektora.
| (2.10) |

| (2.11) |

ahol  a töltéssűrűség.
a töltéssűrűség.
Lineáris, homogén és izotróp közeget feltételezve
| (2.12) |

| (2.13) |

| (2.14) |
ahol  és
és  a közeg permittivitása és permeabilitása (az index nélküli érték az egy adott közegre vonatkozik, amely felbontható a vákuumra vonatkozó értékre (0 indexszel jelölve) és annak szorzójaként megjelenő relatív értékre.),
a közeg permittivitása és permeabilitása (az index nélküli érték az egy adott közegre vonatkozik, amely felbontható a vákuumra vonatkozó értékre (0 indexszel jelölve) és annak szorzójaként megjelenő relatív értékre.),  a nem villamos eredetű elektromotoros-erő, amely szintén oka lehet az elektronok áramlásának, pl. egy akkumulátorban kémiai hatások tartják fent a villamos áramot.
a nem villamos eredetű elektromotoros-erő, amely szintén oka lehet az elektronok áramlásának, pl. egy akkumulátorban kémiai hatások tartják fent a villamos áramot.
2.1 Táblázat Időben állandó elosztott paraméterű elektromos jelenségek formális analógiája
Elektrosztatika
| Stacionárius (rezisztív) áramlási tér
| Stacionárius mágneses tér
|








* Származtatott egyenlet: 
Stacionárius jelenségek statikai egyenletekkel írhatók le, és ilyen esetben rendszertechnikai értelemben nem beszélhetünk állapotváltozóról. A rendszertechnikában az állapotváltozó mindig valamilyen dinamikai tulajdonsághoz (tároló elemhez) köthető és az állapotváltozókra mindig valamilyen differenciálegyenlet írható fel. Ugyanakkor a stacioner állapot leírására is szükségünk van valamilyen fizikai mennyiségekre és ezeknek megfelelő matematikai változókra. A 2.1 táblázat kiegészíthető nem villamos jelenségekkel is.
2.9.3. Kirchhoff egyenletek származtatása (koncentrált paraméterű modellekhez)
(elsősöknek nem ajánlott)
Ebben a pontban időben állandó jelenségekkel foglalkozunk. A cél az, hogy a 2.1 táblázatban megadott differenciális törvényekből (elosztott paraméterű modellből), koncentrált paraméterű modellt alkossunk.
Csomóponti egyenletek
A divergencia egyenleteket a Gauss–Osztrogradszkij-tétel (divergenciatétel) segítségével a vektor felületi integráljává alakítjuk át. A zárt felületet részekre bonthatjuk és az adott felületen a vektort egyszerűen kiátlagolhatjuk. Így jutunk el a koncentrált paraméterű Kirchhoff I. (csomóponti) törvényhez.
Elektrosztatika
| (2.15) |

Stacionárius (rezisztív) áramlási tér
| (2.16) |
Stacionárius mágneses tér
| (2.17) |
Hurokegyenletek
A rotáció egyenleteket a Stokes tétel segítségével a vektor vonal integráljává alakítjuk át. A zárt görbét görbeszakaszokra bonthatjuk és az adott görbeszakaszok mentén a vektort egyszerűen kiátlagolhatjuk. Így jutunk el a koncentrált paraméterű Kirchhoff II. (hurok) törvényhez.
Elektrosztatika
| (2.18) |
Stacionárius (rezisztív) áramlási tér
Mivel  nem villamos eredetű, így nem szokás szerepeltetni a (2.9) Maxwell egyenletben. Ugyanakkor
nem villamos eredetű, így nem szokás szerepeltetni a (2.9) Maxwell egyenletben. Ugyanakkor  oka az elektronok áramlásának az áramkörben, vagyis oka az örvényességnek, ahogy egy szivattyú is keringetni tudja a folyadékot egy zárt csőhálózatban. Így célszerű figyelembe venni az örvényességre vonatkozó egyenletben. A szuperpozíció elvét kihasználva
oka az elektronok áramlásának az áramkörben, vagyis oka az örvényességnek, ahogy egy szivattyú is keringetni tudja a folyadékot egy zárt csőhálózatban. Így célszerű figyelembe venni az örvényességre vonatkozó egyenletben. A szuperpozíció elvét kihasználva
| (2.19) |

Értelmezés
A szummában szereplő  egy adott
egy adott  hosszegység végpontjai között mérhető feszültségkülönbség, ugyanakkor az
hosszegység végpontjai között mérhető feszültségkülönbség, ugyanakkor az  értékhez tartozó
értékhez tartozó  távolságot nullának kell tekintenünk. Vagyis a szummában szereplő nullától különböző
távolságot nullának kell tekintenünk. Vagyis a szummában szereplő nullától különböző  , illetve
, illetve  értékek mind villamos jellegűek, ezért azt mondhatjuk, hogy a külső elektromotoros erőből származó
értékek mind villamos jellegűek, ezért azt mondhatjuk, hogy a külső elektromotoros erőből származó  feszültséggel az áramkör villamos jellegű feszültségei tartanak egyensúlyt. Az ideális vezetőn belül az
feszültséggel az áramkör villamos jellegű feszültségei tartanak egyensúlyt. Az ideális vezetőn belül az  elektromos térerősség ugyancsak nulla.
elektromos térerősség ugyancsak nulla.  tipikusan egy akkumulátor (szárazelem) sarkai között üresjárásban mérhető feszültség különbség. Ha a szárazelemet terheljük, akkor a sarkain mérhető feszültség csökken a szárazelem belső villamos ellenállásán eső feszültség miatt.
tipikusan egy akkumulátor (szárazelem) sarkai között üresjárásban mérhető feszültség különbség. Ha a szárazelemet terheljük, akkor a sarkain mérhető feszültség csökken a szárazelem belső villamos ellenállásán eső feszültség miatt.  az összegzés jobb oldalán található, ezért általában ténylegesen az iránya ellentétes az áramkörben folyó áram irányával. Ezért tud az akkumulátoron belül az elektron a pozitív kimenettől a negatív kimenet felé vándorolni. Váltakozó áramú körökben az indukált feszültség
az összegzés jobb oldalán található, ezért általában ténylegesen az iránya ellentétes az áramkörben folyó áram irányával. Ezért tud az akkumulátoron belül az elektron a pozitív kimenettől a negatív kimenet felé vándorolni. Váltakozó áramú körökben az indukált feszültség  -hez hasonló szerepet tölt be.
-hez hasonló szerepet tölt be.
Stacionárius mágneses tér
| (2.20) |


-hez hasonlóan, úgy tekinthetjük, hogy az  , magneses motoros erőt is egy nulla hosszúságú szakaszon iktatjuk be a mágneses körbe.
, magneses motoros erőt is egy nulla hosszúságú szakaszon iktatjuk be a mágneses körbe.
2.9.4. Kétpólusokkal modellezett stacioner állapotú villamos és mágneses áramkörök
Ebben a pontban időben állandó jelenségekkel foglalkozunk, így a tároló elemek kívül esnek e pont tárgykörén. Az előző pontban egy adott felület részre, illetve görbeszakasz mentén kiátlagoltuk az aktuális vektoriális mennyiséget, ebben a pontban a kiátlagolás után egy adott térrészben mind a keresztmetszet mentén, mind egy hosszúság mentén homogén eloszlást feltételezünk, továbbá az anyagminőséget is azonosnak tekuntjük a tér minden pontjában, és ezért az adott térrészt egyetlen koncentrált paraméterel jellemezzük.
2.9.4.1. Elektrosztatika
Tegyük fel, hogy egy adott henger alakú térrészben minden pontjában az  és
és  vektorok a henger palástjával párhuzamosan azonos irányba mutatnak, nagyságuk a henger minden pontjában azonos,
vektorok a henger palástjával párhuzamosan azonos irányba mutatnak, nagyságuk a henger minden pontjában azonos,  és
és  , továbbá a henger anyaga homogén,
, továbbá a henger anyaga homogén,  permittivitása a tér minden pontjában azonos. Legyen a henger hossza
permittivitása a tér minden pontjában azonos. Legyen a henger hossza  , egy merőleges keresztmetszetének területe
, egy merőleges keresztmetszetének területe  . Egy ilyen homogén elektrosztatikus tér csak egy kondenzátor fegyverzetei között alakítható ki.
. Egy ilyen homogén elektrosztatikus tér csak egy kondenzátor fegyverzetei között alakítható ki.
A homogén elektromos tér esetén (2.13) alapján:
| (2.21) |

A hengeren áthaladó  villamos (eltolási) fluxus (2.15) és a hengeren eső
villamos (eltolási) fluxus (2.15) és a hengeren eső  feszültség (2.19) alapján
feszültség (2.19) alapján
| (2.22) |


(2.21) egyenletet átalakítva kapjuk a kondenzátorokra vonatkozó ismert összefüggéseket
| (2.23) |

2.9.4.2. Stacionárius (rezisztív) áramlási tér
Tegyük fel, hogy egy adott henger alakú térrészben minden pontjában az  és
és  vektorok a henger palástjával párhuzamosan azonos irányba mutatnak, nagyságuk a henger minden pontjában azonos,
vektorok a henger palástjával párhuzamosan azonos irányba mutatnak, nagyságuk a henger minden pontjában azonos,  és
és  , továbbá a henger anyaga homogén és vezetőképessége
, továbbá a henger anyaga homogén és vezetőképessége  . Legyen a henger hossza
. Legyen a henger hossza  , egy merőleges keresztmetszetének területe
, egy merőleges keresztmetszetének területe  .
.
Az elektromotoros erő hatását különválasztva, tisztán az elektromos térerősség hatására kialakuló áramsűrűség nagysága (2.14) alapján:
| (2.24) |

A hengeren átfolyó  áram (2.16) és a hengeren eső
áram (2.16) és a hengeren eső  feszültség (2.19) alapján
feszültség (2.19) alapján
| (2.25) |


(2.24) egyenletet átalakítva kapjuk az ismert Ohm törvényt
| (2.26) |

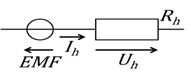
Külön kell figyelembe venni az adott szakaszon esetlegesen megjelenő elektromotoros erő hatását, ennek megfelelően a henger általános helyettesítő kapcsolása a 2-7. ábraán látható.
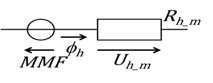
2.9.4.3. Stacionárius mágneses tér
Hasonló egyenletek írhatók fel mágneses tér esetén is
Tegyük fel, hogy egy adott henger alakú térrész minden pontjában az  és
és  vektorok a henger palástjával párhuzamosan azonos irányba mutatnak, nagyságuk a henger minden pontjában azonos,
vektorok a henger palástjával párhuzamosan azonos irányba mutatnak, nagyságuk a henger minden pontjában azonos,  és
és  , továbbá a henger anyaga homogén és mágneses permeabilitása
, továbbá a henger anyaga homogén és mágneses permeabilitása  . Legyen a henger hossza
. Legyen a henger hossza  , egy merőleges keresztmetszetének területe
, egy merőleges keresztmetszetének területe  .
.
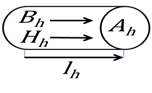
A gerjesztés (mágneses motoros erő) hatását különválasztva, tisztán az elektromos térerősség hatására kialakuló áramsűrűség nagysága (2.13) alapján
| (2.27) |

A hengeren áthaladó  fluxus (2.17) és a hengeren eső
fluxus (2.17) és a hengeren eső  gerjesztés (2.20) alapján
gerjesztés (2.20) alapján
| (2.28) |


(2.27) egyenletet átalakítva kapjuk a mágneses Ohm törvényt
| (2.29) |

Külön kell figyelembe venni az adott szakaszon esetlegesen megjelenő gerjesztés (mágnesesmotoros erő) hatását, ennek megfelelően a henger helyettesítő kapcsolása a 2-9. ábraán látható.
2.9.5. Hálózatszámítási analógiák
Két rendszer közötti analógia abból a tényből származtatható, hogy a rendszer működése hasonló alakú egyenletek segítségével írható le. Rendszerek közötti átjárhatóságról, analógiáról Harry F. Olson írt először (Dynamical Analogies, 2. kiadás, Van Nostrand, pp. 27–29, 1958) azzal a céllal, hogy segítséget nyújtson a mérnökök számára különböző rendszerek elemzéséhez és teljesítményeinek meghatározásához. Sok esetben a vizsgált rendszert kétpólusú, koncentrált paraméterű elemekből álló hálózatként írhatjuk le. Minden elemet egy paraméterrel, valamint az átmenő és keresztváltozó kapcsolatát leíró egyenlettel adhatunk meg. Az átmenő változó értéke a kétpólus két kivezetésén azonos, a keresztváltozó a két kivezetés különbségi értéke.
Definíció
Átmenő változó: Egy extenzív fizikai mennyiség rátája egy kétpólusra vonatkoztatva, ahol a kétpólusnak van egy belépő és egy kilépő felülete. Tipikus példa az elektronok, mint extenzív fizikai mennyiség áramlását leíró villamos áram,  .
.
Értelmezés
A megmaradási tételből logikailag is levezethető, hogy ha egy adott térrészben nem változik egy adott extenzív fizikai mennyiség értéke, akkor a térrészt határoló felületen a be- és kiáramló extenzív fizikai mennyiség előjeles összegzése nullát ad. Elosztott paraméterű rendszerek esetén a divergencia egyenletből Gauss–Osztrogradszkij-tétel segítségével jutunk hasonló eredményre. Ebből vezethető le Kirchhoff I. (csomóponti) törvénye. Általánosságban kimondhatjuk: a koncentrált paraméterű modellek esetén az átmenő változók számítására a Kirchhoff I. törvényével analóg csomóponti egyenletet használhatjuk.
Definíció
Keresztváltozó: Az intenzív fizikai mennyiségnek egy kétpólus sarkain mérhető különbségét nevezzük keresztváltozónak. Tipikus példa a villamos feszültség,  .
.
Értelmezés
Az elosztott paraméterű rotációs egyenletből a Stokes tétellel kaphatunk vonalintegrállal számított mennyiséget. A rotációból származtatott koncentrált paraméterű keresztváltozók közös jellemzője, hogy Kirchhoff II. törvényével analóg hurokegyenlet írható fel rájuk. Külön kell tárgyalni az örvénymentes mezőket, ezeket szokás potenciálos vagy konzervatív mezőnek nevezni.
2.9.5.1. A kétpólusú elemeknek
A kétpólusú elemeknek három típusát különböztethetjük meg
Definíció
Á-típusú tároló: olyan tároló, amely átmenő változó révén tárolja az energiát (általánosított értelmű energiát). A kétpólus két kivezetésén az átmenő változó időszerinti deriváltja arányos a két kivezetésen mért keresztváltozó különbségével. Tipikus példa az
 induktivitás. A tárolt
induktivitás. A tárolt  energia és a kétpólusra felírható egyenlet
energia és a kétpólusra felírható egyenlet
| (2.30) |
K-típusú tároló: olyan tároló, amely keresztváltozó révén tárolja az energiát (általánosított értelmű energiát). A kétpólus két kivezetésen mért keresztváltozó különbségének deriváltja arányos az átmenő változóval. Tipikus példa a
 kapacitás. A tárolt
kapacitás. A tárolt  energia és a kétpólusra felírható egyenlet:
energia és a kétpólusra felírható egyenlet:
| (2.31) |

P-típusú elem: olyan elem, amely esetén a kétpólus két kivezetésen mért keresztváltozó különbsége arányos az átmenő változóval (Proporcionális-elem). Általában nem tárol energiát, hanem általában épp ellenkezőleg, elnyeli azt, más szavakkal hatására energia disszipálódik a rendszerből. De az elektrosztatikus és mágneses körök esetén pont ez az elem tárolja az energiát. Tipikus példa az
 ellenállás. Az energiára (ellenállás esetén a disszipált energiát jelent), és a kétpólusra felírható egyenlet:
ellenállás. Az energiára (ellenállás esetén a disszipált energiát jelent), és a kétpólusra felírható egyenlet:
| (2.32) |
2.2 Táblázat analógiák
Extenzív mennyiség | Intenzív mennyiség | Koncentrált paraméterű leírás kétpólus elemekkel (az | |||||||
vektormező
| koncentrált forrás | vektormező
| koncentrált örvényesség | átmenő változó
| keresztváltozó | P-típusú elem | K-típusú tároló | Á-típusú tároló | |
|
| extenzív mennyiségből származtatva
|
(eredő mennyiség) |
|
|
| |||
Elektrosztatika | eltolási vektor | elektromos töltés | elektromos térerősség | nulla potenciálos | villamos fluxus nem töltés rátája!!! | feszültség különbség | kondenzátor, | nem definiált | nem definiált |
Elektromos áramkör | eltolási vektor | elektromos töltés | elektromos térerősség | elektro-motoros erő | elemen átfolyó elektromos áram | feszültség esés | ellenállás | kondenzátor | önindukciós tekercs |
Mágneses kör* | mágneses indukció | nulla, forrásmentes | mágneses térerősség | gerjesztés (magneto-motoros erő) | elemen áthaladó mágneses fluxus | elemre jutó gerjesztés | mágneses ellenállás | nem definiált | hiszterézises és örvényáramú veszteséges vasmag |
Hidraulikai rendszer Összenyomhat-atlan folyadék | sebesség mező | nulla forrásmentes | sebesség mező | szivattyú hatása | térfogatáram | nyomás esés | csővezeték elem (nem lineáris) | térfogat tartály | hidraulikus tömeg |
Pneumatikus rsz. összenyomható közeg | sebesség mező | sebesség mező | szivattyú hatása | levegő térfogatáram | nyomás esés | csővezeték (fojtó) elem (nem lineáris) | térfogat tartály | nem definiált | |
Lineáris mechanikai rsz. | nem használt | távolság nem divergenciából származtatott | erő gradiens | nulla, (potenciálos) | relatív sebesség | eredő erő | csillapított mozgású elem | rugó | két ponton kapcsolódó tömeg |
Forgó mechanikai rsz. | nem használt | szögelfordulás nem divergenciából származtatott | nyomaték gradiens | nulla, (potenciálos) | szögsebesség | eredő nyomaték | csillapított mozgású elem | rugó | két ponton kapcsolódó inercia |
Lineáris mechanikai rsz. | normált Dirac impulzus | impulzus | gyorsulás mező | nulla, (potenciálos) | erő | relatív sebesség | csillapított egyenes mozgású elem** | két ponton kapcsolódó tömeg | rugó |
Forgó mechanikai rsz. | normált Dirac impulzus momentum | impulzus momentum | szög-gyorsulás mező | nulla, (potenciálos) | nyomaték | relatív szögsebesség | csillapított forgó mozgású elem** | két ponton kapcsolódó forgó tömeg | rugó |
Tisztán termikus | hőmennyiség | hőmérséklet gradiens | hő-áram | hőmérséklet esés | hővezető elem | hő-kapacitás | nem definiált | ||















* A mágneses kör esetén a többi példával ellentétben a D disszipatív elem tárolja és a K-típusú tároló disszipálja az energiát
**értéke a fenti elemek értékének reciproka
Megjegyzés: látható, hogy az elektromos és a mágneses jelenségek esetén az extenzív és intenzív fizikai változókat két-két különböző vektormezőből származtatjuk, ezzel szemben az áramlási problémáknál ugyanannak a vektortérnek vesszük a divergenciáját és a rotációját. Matematikailag az elektromos, illetve a mágneses jelenségek leírásakor elegendő lenne egy-egy vektormezőt definiálni. Vákuum jelenlétében nincs értelme ennek a szétválasztásnak. Ezt a szétválasztást az anyag tulajdonságai indokolják. Az elektromos tér forrása a töltés, de az anyagon belül több különböző módon létrejöhet töltés szétválasztás. Az eltolási vektor és az elektromos térerősség megkülönböztetésének pont az az alapja, hogy az előbbi figyelembe veszi, az utóbbi figyelmen kívül hagyja az anyagon belül az elektromos tér hatására kialakult töltésszétválasztás hatását. Hasonlóan, az anyagon belül az atomi szinten található párosítatlan elektronoknak (az adott elektronpályákon csak egy-egy elektron kering, a részletek a kvantum fizika tárgykörébe tartoznak) van egy állandó mágneses momentuma, amely erősítheti a küldő mágneses tér hatását. Ez modellezhető az anyagon belüli elemi köráramokkal (pl. ahogy az elektron kering az atommag körül), s ez a hatás a mágneses indukcióban megjelenik, de a mágneses térerősségben nem. Ez azt jelenti, hogy a mágneses indukció a teljes mágneses teret (a külső és belső áramok hatását együttesen) írja le, ezzel szemben a mágneses térerősséget kizárólag a külső áramokból számítjuk a gerjesztési törvény alapján, vagyis a külső áramok hatását írjuk le.
További analógiák Függelék Rendszerek és modellezési analógiák című fejezetében találhatók.
2.10. Lineárisan független egyenletek kiválasztása
Összetett rendszereknél, ahol az egyenleteket többféle módon lehet felírni, gondot jelenthet a lineárisan független egyenletek kiválasztása. Tipikusan ilyen rendszerek a különböző hálózatok, beleértve a mágneses és áramköröket, a víz, gáz és egyéb csőhálózatokat, de ide tartozik több koncentrált paraméterű hővezetési probléma is. Ezekre jellemző, hogy csomóponti és hurokegyenletet írhatunk fel. Elsősorban a lineárisan független hurkok kiválasztása okoz gondot, melyhez a gráfelmélet nyújthat segítséget.
2.10.1. Gráfelméleti alapok:
A gráfelmélet a kombinatorika egy fontos ága, amelynek létezik tisztán halmazelméleti megközelítése. A műszaki életben azért népszerű, mert a gráfelméleti fogalmak szemléletesen megjeleníthetők, és a gráfokkal könnyen leírható az áramkörök, csőhálózatok topológiája. A gráfelméleti terminológiák csekély mértékben eltérnek a műszaki életben használt terminológiáktól, ezért a gráfelméleti tárgyalásnál mindkettőt megadjuk, a későbbi alkalmazási példáknál csak a műszaki terminológiákat használjuk. Ebben a megközelítésben a következő definíciókat vezethetjük be:
Gráfelméleti definíciók
2.10.1.1. Gráf:
Csúcsok (műszaki megfelelője: csomópontok) és élek (műszaki megfelelője: ágak) halmazának egymáshoz rendelése oly módon, hogy egy él két csúcsot köt össze és egy csúcshoz több él is csatlakozhat. A csúcsokat pontokkal, az éleket vonalakkal jelöljük (ld. 2-10. ábra). Rajztechnikailag előfordulhat, hogy két él a kétdimenziós papíron keresztezi egymás, valójában az élek csak egy csúcsban találkozhatnak.
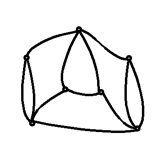
2.10.1.2. Irányított gráf:
Olyan gráf, amelyben az élekhez irányt rendelünk, vagyis megkülönböztetjük az élek kezdő- és végpontját. (ld. 2-11. ábra). A továbbiakban csak irányított gráfokkal foglalkozunk.
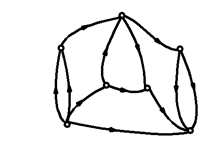
2.10.1.3. Egyszerű gráf:
Olyan gráf, amelyben bármely két csúcsot legfeljebb egy él köt össze, továbbá nem tartalmaz olyan élt, amelynek a kezdete és vége is ugyanahhoz a csúcshoz csatlakozik (ld. 2-12. ábra). A továbbiakban az első eset előfordulását megengedjük, de kizárjuk a második esetet.

2.10.1.4. Részgráf:
Olyan gráf, amelyet úgy kapunk, hogy egy gráfból kiemelünk csúcsokat és éleket. (ld. 2-13. ábra).
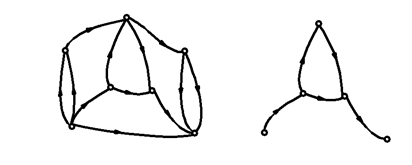
2.10.1.5. Út:
Olyan részgráf, amelyet úgy kapunk, hogy első lépésben a gráfból kiválasztunk egy élt és annak két végén található két csúcsot. Így egy út legalább egy élből és két csúcsból áll. Ezt tovább bővíthetjük úgy, hogy minden lépésben az utat bővítjük egy éllel és egy ahhoz csatlakozó csúccsal. Az élnek olyan csúcsból kell indulnia, amelyhez csatlakozó élek közül e lépést megelőzően csak egy szerepelt az út részgráfban, és az újonnan kiválasztott él másik vége egy olyan csúcs, amely korábban nem szerepelt az útban (ld. 2-14. ábra). Ebből következik, hogy ha egy gráfnak m db csúcsa van, akkor egy olyan útnak, amely tartalmazza a gráf minden csúcsát m-1 db éle van.
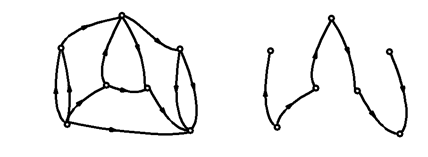
2.10.1.6. Összefüggő gráf:
Olyan gráf, amelynek bármely két csúcsa között található legalább egy út. Az út fenti definíciójából következik, hogy az út is mindig összefüggő gráf.
2.10.1.7. Kör (műszaki megfelelője: hurok):
Olyan összefüggő részgráf, amelyben minden csúcshoz pontosan két él csatlakozik (ld. 2-15. ábra). Látható, hogy egy körből bármely élt elhagyva utat kapunk.
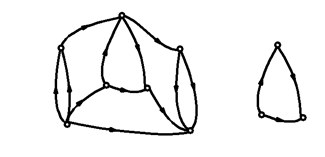
2.10.1.8. Fa:
Olyan összefüggő részgráf, amelyikben nincs kör, azaz bármely két csúcsa között csak egy út található (ld. 2-16. ábra). Az út a fának egy speciális este. A fa hasonlóan generálható, mint az út, az egyetlen különbség az, hogy amikor egy új éllel és csúccsal bővítjük a fát, akkor annak a feltételnek nem kell teljesülnie, hogy az élnek olyan csúcsból kell indulnia, amelyhez csatlakozó élek közül e lépést megelőzően csak egy szerepelt a fa részgráfban. Vagyis egy csúcsból tetszőleges számú él indulhat ki, ahogy az élő fatörzs is több felé ágazhat el.

2.10.1.9. Feszítőfa:
Egy összefüggő gráfban egy olyan fa, amely a gráf minden csúcsát tartalmazza (ld. 2-17. ábra). A feszítőfára is igaz, hogy ha egy összefüggő gráfnak m db csúcsa van, akkor egy feszítőfának m-1 db éle van. Lineárisan független egyenletek generálásában fontos szerepe van a feszítőfának.
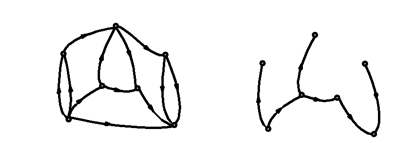
2.10.1.10. Vágat
Egy összefüggő gráfban az élek olyan halmaza, amelyet ha kiveszünk egy összefüggő gráfból az 2 független, de magában összefüggő gráfra esik szét (ld. 2-18. ábra). Más megközelítésben az összefüggő gráf csúcsait két részre osztjuk, és vesszük azokat az éleket, amelyek a két részt kötik össze. Speciális eset, amikor a csúcsokat úgy osztjuk szét, hogy az egyik részbe egy csúcs kerül, a másik részbe az összes többi.
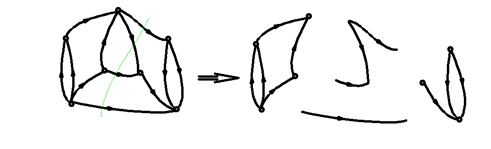
2.10.2. Áramköri hálózatok leírása gráfokkal
Ahogy a bevezetőben is említettük az itt leírt módszer a műszaki élet számos más területén is használható. A továbbiakban áttérünk a műszaki szóhasználatra.
Az első lépés a formális analógia alapján a hálózatgráf felrajzolása. Ehhez a csomópontokat és az azokat összekötő ágakat kell meghatároznunk. Az 2-1 és 2-2 feladatban találunk példát villamos áramkörök és hálózat gráfjára (ld. 2-23. ábra és 2-24. ábra).
2.10.3. Hálózatot jellemző mátrixok
Ha ismerjük a hálózat struktúráját, definiálhatjuk a hálózatot jellemző mátrixokat:
Hurokmátrix (Körmátrix): lineárisan független hurkokra vonatkozó információt tartalmazza. Többféleképpen felírható. Első lépésben kijelölünk egy feszítőfát. Ha a feszítőfához bármely fennmaradó ágat hozzávesszük, akkor garantáltan keletkezik egy hurok. A nem feszítőfa ágak kapják az alacsonyabb sorszámokat és a hurkokat úgy generáljuk, hogy veszünk egy nem feszítőfa ágat és megnézzük, hogy ez a faágakkal hogyan képez egy hurkot úgy, hogy a hurok irányítása egyezzen meg a hurokban szereplő nem faág irányításával. Ezt mátrixosan is felírjuk, úgy, hogy a mátrix oszlopai az egyes ágakat jelölik, a sorai a hurkokat. Az egyes hurkokban az ágakra vonatkozóan a következő értékeket írjuk
0, ha az adott ág nincs benne a hurokban
-1, ha az adott ág szerepel a hurokban, a hurokkal ellentétes irányítással
1, ha az adott ág szerepel a hurokban, a hurokkal megegyező irányítással
példa az 2-19. ábra alapján, ahol a kiválasztott feszítőfa élei pirosak :
| (2.33) |

Itt: Az 1, 2 és 3 ágak nem részei a feszítőfának. Egy adott sorban a nem feszítőfa ágak közül mindig egynek lesz az értéke 1, a másik kettőé pedig 0, így a hurokmátrixban kialakul esetünkben egy 3x3-as egységmátrix.
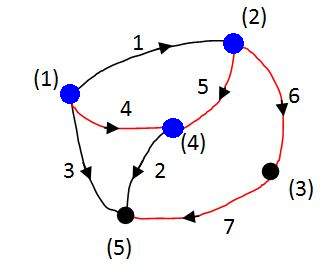
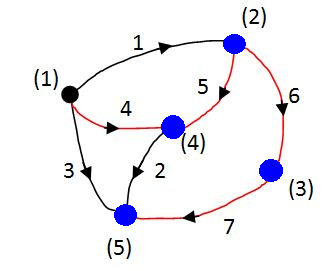
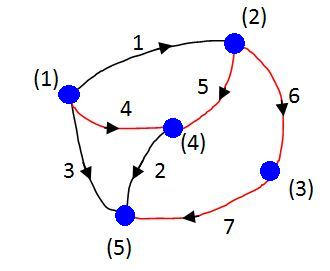



Vágatmátrix: azt az információt tartalmazza, hogy az összefüggő mátrixot milyen ághalmazok kihagyásával lehet két részre osztani. Egy gráfot általában többféleképpen lehet két részre bontani, de ezek a felbontások nem mindig függetlenek egymástól. Lineárisan független vágatokat is a feszítőfa segítségével lehet generálni. A feszítőfa bármely ágát elvágva, két egymástól független, de külön-külön összefüggő részgráfot kapunk. A feszítőfával együtt az összes többi ágat is elvágjuk, amelyek összekötik a kialakuló két részgráfot. A vágatmátrixban az elvágott ágakat szerepeltetjük.
A vágatmátrixnak n-1 sora van (feszítőfa ágainak száma) és m oszlopa (ágak száma). A mátrixba írt értékek a következőképpen értelmezhetőek az elvágott ág iránya szerint:
0 – nincs elvágva (nem tartozik a vágathoz)
(-1) – ellenkező irányú az elvágott feszítőfa ágával
1 – egyirányú az elvágott feszítőfa ágával
példa az 2-20. ábra alapján, ahol a kiválasztott feszítőfa élei pirosak:
| (2.34) |

Itt: 4-5-6-7 a feszítőfa ágai. Az ezek közül éppen elvágott ág viseli az 1-es értéket közöttük, így egy egységmátrix alakul ki.
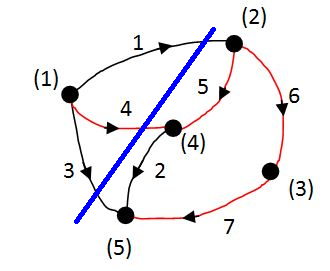
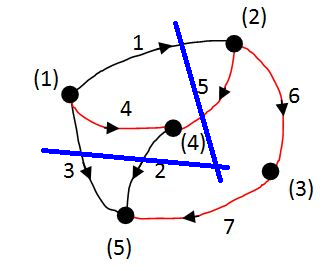
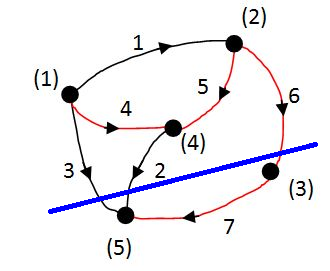
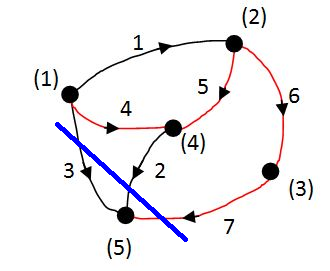




Csomóponti mátrix: A vágatmátrix speciális esete. A lineárisan független vágatokat nem a feszítőfa segítségével generáljuk. Helyette az összefüggő gráfot úgy osztjuk két részletre, hogy a csomópontokat egyenként kiemeljük a gráfból, és az adott csomóponthoz tartozó ágakat vágjuk el.
| (2.35) |

2.10.4. Áramkörök számítása
A hurok és csomóponti egyenleteket szeretnénk felírni, a csomóponti mátrix és hurok mátrix segítségével. Legyen az ágak száma  és a csomópontok száma
és a csomópontok száma  , így a feszítőfa ágak (egyben a lineárisan független csomópontok, illetve vágatok) száma
, így a feszítőfa ágak (egyben a lineárisan független csomópontok, illetve vágatok) száma  és a nem feszítőfa ágak (egyben a lineárisan független hurkok) száma
és a nem feszítőfa ágak (egyben a lineárisan független hurkok) száma  .
.
Minden ágban van egy ellenállás (általános esetben impedancia) és azzal lehet sorba kapcsolva egy feszültség generátor vagy párhuzamosan egy áramgenerátor (ld. 2-21 ábra).
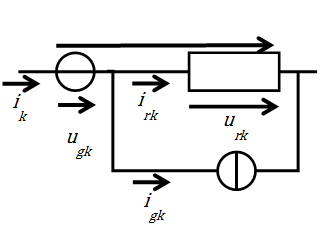
Az ágak, illetve az ellenállások áramát valamint feszültségét rendezzük egy-egy oszlopvektorba:

és  , illetve
, illetve  és
és 
Hasonlóan rendezzük egy-egy oszlopvektorba a generátor-feszültségeket és generátor-áramokat: 

Az ellenállásokat rendezzük egy négyzetes mátrix átlójába: 
Csomóponti mátrixot jelölje:  ,
,
A hurokmátrixot jelölje: 
Tegyük fel, hogy  valamint
valamint  ismert, és kiszámítandó
ismert, és kiszámítandó  és
és  , így összesen
, így összesen  ismeretlenünk van, vagyis
ismeretlenünk van, vagyis  egyenletre van szükség. Ohm törvény alapján
egyenletre van szükség. Ohm törvény alapján  egyenletet írhatunk fel. A csomóponti és hurok egyenletek száma
egyenletet írhatunk fel. A csomóponti és hurok egyenletek száma  , illetve
, illetve  . Ez összesen
. Ez összesen  egyenlet.
egyenlet.
A csomóponti és hurok egyenleteket mátrixos alakba rendezhetjük:
| (2.36) |

| (2.37) |

Az Ohm törvény mátrixos alakban:
| (2.38) |

(2.36) egyenletet átalakítva:
| (2.39) |

(2.37) egyenletet átalakítva és (2.38) behelyettesítéssel :
| (2.40) |

Mind (2.39), mind (2.40) egyenlet bal oldalán  egy mátrixszal van megszorozva. Formálisan a mátrix inverzével kell balról beszorozni, hogy megkapjuk
egy mátrixszal van megszorozva. Formálisan a mátrix inverzével kell balról beszorozni, hogy megkapjuk  értékét. Ez a művelet akkor ad egyértelmű eredményt, ha a mátrix négyzetes. Az
értékét. Ez a művelet akkor ad egyértelmű eredményt, ha a mátrix négyzetes. Az  mátrix szorzóját úgy tehetjük négyzetessé, ha a (2.39) és (2.40) egyenleteket egymás alá írjuk
mátrix szorzóját úgy tehetjük négyzetessé, ha a (2.39) és (2.40) egyenleteket egymás alá írjuk
| (2.41) |

| (2.42) |

| (2.43) |
Most már nincs akadálya a mátrixinverziónak.
| (2.44) |

ismeretéeben a (2.38) Ohm törvény segítségével  könnyen megkapható, de a fenti levezetéshez hasonlóan
könnyen megkapható, de a fenti levezetéshez hasonlóan  közvetlenül felírható. Ebben a kifejezésben megjelenik az
közvetlenül felírható. Ebben a kifejezésben megjelenik az  ellenállás mátrix inverze. Mivel
ellenállás mátrix inverze. Mivel  diagonális, így elemenként invertálható. Az impedancia reciproka az admittancia, amelynek a jele
diagonális, így elemenként invertálható. Az impedancia reciproka az admittancia, amelynek a jele  , ezért az
, ezért az  ellenállás mátrix inverzét szokás admittancia mátrixnak nevezni és
ellenállás mátrix inverzét szokás admittancia mátrixnak nevezni és  betűvel jelölni.
betűvel jelölni.
| (2.45) |

Felmerül a kérdés:mi a feltétele annak, hogy a (2.44) illetve (2.45) egyenletben található mátrixinverzió elvégezhető legyen. A mérnöki válasz: Ha egyetlen ellenállás, illetve admittancia értéke sem nulla, akkor az áramkör minden ágában kialakul egy áram és feszültség, a feladatnak egyértelműen megoldhatónak kell lennie. Így fizikai megfontolások alapján állítjuk, hogy az adott mátrixnak invertálhatónak kell lennie. Ezzel szemben, ha van két párhuzamosan kapcsolt olyan ág, amelyek különböző értékű feszültséggenerátort tartalmaznak és a velük sorba kapcsolt ellenállás értéke nulla, illetve van két sorban kapcsolt különböző értékű áramgenerátor és a velük páruzamosan kapcsolt ellenállás admittanciájának értéke nulla, akkor egy fizikailag értelmezhetetlen állapot alakul ki. Ezért a feladatnak matematikailag is megoldhatatlannak kell lennie.
Matematikailag az szükséges, hogy az invertálandó mátrix rangja legyen  . Ha a csomóponti egyenletek helyett vágat egyenleteket írunk fel és a 2.10.3 pontban leírtak szerint sorszámozzuk az ágakat, akkor könnyen belátható, hogy az
. Ha a csomóponti egyenletek helyett vágat egyenleteket írunk fel és a 2.10.3 pontban leírtak szerint sorszámozzuk az ágakat, akkor könnyen belátható, hogy az  mátrixnak a második felében a
mátrixnak a második felében a  mátrixnak az első felében van egy-egy egységmátrix (példaként ld. (2.33) és (2.34)). Ha a
mátrixnak az első felében van egy-egy egységmátrix (példaként ld. (2.33) és (2.34)). Ha a  mátrixot meg szorozzuk az
mátrixot meg szorozzuk az  diagonális mátrixszal, akkor a
diagonális mátrixszal, akkor a  mátrixban található 1-esek helyére az adott ág ellenállásának értéke kerül (természetesen a megfelelő előjellel), hasonlóan ha a
mátrixban található 1-esek helyére az adott ág ellenállásának értéke kerül (természetesen a megfelelő előjellel), hasonlóan ha a  mátrixot meg szorozzuk az
mátrixot meg szorozzuk az  diagonális mátrixszal, akkor a
diagonális mátrixszal, akkor a  mátrixban található 1-esek helyére az adott ág admittanciájának értéke kerül (természetesen a megfelelő előjellel). Mindez nem befolyásolja a mátrix alapvető struktúráját, így ha az
mátrixban található 1-esek helyére az adott ág admittanciájának értéke kerül (természetesen a megfelelő előjellel). Mindez nem befolyásolja a mátrix alapvető struktúráját, így ha az  , illetve
, illetve  mátrix diagonáljában nincsenek nullák, akkor az invertálandó mátrix sorai garantáltan lineárisan függetlenek. Ha egy-két ellenállás értéke nulla, az nem jelenti automatikusan azt, hogy a mátrix nem invertálható. Az áramkörbe elhelyezhető néhány új ideális feszültséggenerátor, illetve áramgenerátor úgy, hogy az ne okozzon gondot. Az állítás csupán annyi, ha vannak olyan ágak, amelyekben nincs a feszültséggenerátorral sora kapcsolt nem nulla értékű ellenállás, illetve az áramgenerátorral nincs párhuzamosan kapcsolt nem nulla értékű admittancia, akkor tetszőleges elrendezésnél nem garantálható, hogy van egyértelmű megoldás. Így az adott mátrixok sem invertálhatóak.
mátrix diagonáljában nincsenek nullák, akkor az invertálandó mátrix sorai garantáltan lineárisan függetlenek. Ha egy-két ellenállás értéke nulla, az nem jelenti automatikusan azt, hogy a mátrix nem invertálható. Az áramkörbe elhelyezhető néhány új ideális feszültséggenerátor, illetve áramgenerátor úgy, hogy az ne okozzon gondot. Az állítás csupán annyi, ha vannak olyan ágak, amelyekben nincs a feszültséggenerátorral sora kapcsolt nem nulla értékű ellenállás, illetve az áramgenerátorral nincs párhuzamosan kapcsolt nem nulla értékű admittancia, akkor tetszőleges elrendezésnél nem garantálható, hogy van egyértelmű megoldás. Így az adott mátrixok sem invertálhatóak.
2.10.5. Módszerek az invertálandó mátrix méretének lecsökkentésére:
2.10.5.1. Hurokáramok módszere
A 2-22. ábrán két hurok található. A hurokban keringő áramot nevezzük hurokáramnak. Az 2-22. ábráról leolvasható, hogy az 1. hurok árama megegyezik az 1. ellenállás áramával. A 2. hurok árama ellentétes a 3. ellenállás áramával, továbbá a 2. ellenállás áram a két hurokáram összege.
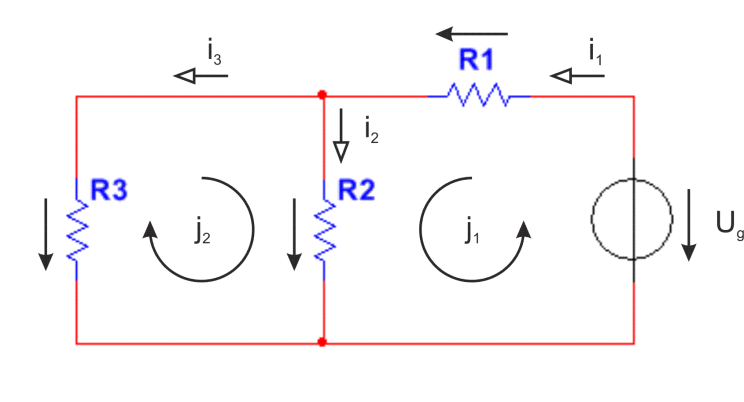
Általánosságban a hurokáramok és az ágáramok között a hurokmátrix segítségével teremthetünk kapcsolatot. A hurok mátrix oszlopai azt az információt tartalmazzák, hogy az adott ág melyik hurokban és milyen irányítással szerepel. Ha a hurokmátrix egy oszlopát összeszorozzuk a hurokáramok oszlopával, akkor megkapjuk az adott oszlopnak megfelelő ág áramát. Természetesen ehhez a mátrix művelethez a hurokmátrixot transzponálni kell.
| (2.46) |
| (2.47) |
ahol

a hurokmátrix transzponáltja

- az adott hurokban keringő áramok vektora
A hurokmátrix transzponálására azért van szükség, mert az ágakban akarunk összegezni.
A csomóponti egyenletből tudjuk, hogy:
| (2.48) |

ezt felhasználva, és behelyettesítve  (2.47) alakját:
(2.47) alakját:
| (2.49) |

| (2.50) |

(2.50) mindig teljesül, mert  a kiválasztott csomópontokról és
a kiválasztott csomópontokról és  a kiválasztott hurkokról tartalmaz információt. Az
a kiválasztott hurkokról tartalmaz információt. Az  mátrix egy sora egy csomópontra, a
mátrix egy sora egy csomópontra, a  mátrix egy oszlopa egy hurokra vonatkozik. A mátrixszorzásnál egy csomópontot egy hurokkal szorzunk össze áganként. Ha az adott csomópont nem szerepel az adott hurokban, akkor biztosan nullát kapunk. Ha az adott csomópont szerepel az adott hurokban, akkor a csomóponthoz tarozó ágak közül pontosan 2 található meg a hurokban. Ha ennek a két ágnak a csomópont szerint azonos az irányítása (mindkettő a csomópontba mutat, vagy mindkettő kifelé mutat), vagyis a két ághoz tartozó érték az
mátrix egy oszlopa egy hurokra vonatkozik. A mátrixszorzásnál egy csomópontot egy hurokkal szorzunk össze áganként. Ha az adott csomópont nem szerepel az adott hurokban, akkor biztosan nullát kapunk. Ha az adott csomópont szerepel az adott hurokban, akkor a csomóponthoz tarozó ágak közül pontosan 2 található meg a hurokban. Ha ennek a két ágnak a csomópont szerint azonos az irányítása (mindkettő a csomópontba mutat, vagy mindkettő kifelé mutat), vagyis a két ághoz tartozó érték az  mátrixban azonos előjelű, akkor az egyik ág irányítása megegyezik a hurokirányítással, a másik pedig garantáltan nem. Vagyis az adott sor és oszlop összeszorzásakor garantáltan
mátrixban azonos előjelű, akkor az egyik ág irányítása megegyezik a hurokirányítással, a másik pedig garantáltan nem. Vagyis az adott sor és oszlop összeszorzásakor garantáltan  értéket kapunk. Ha a két ág a hurokban kap azonos előjelet (irányítást), akkor a csomópontnál lesz ellentétes az előjelük. Tehát ebben az esetben is nullát kapunk.
értéket kapunk. Ha a két ág a hurokban kap azonos előjelet (irányítást), akkor a csomópontnál lesz ellentétes az előjelük. Tehát ebben az esetben is nullát kapunk.
Hurokegyenletek:
| (2.51) |

Nekünk a hurokáramokra van szükségünk, ezért helyettesítsük (2.51) egyenletbe először  értékét (2.38) Ohm törvény alapján, majd
értékét (2.38) Ohm törvény alapján, majd  értékét (2.47) alapján, végül az egyenletet átrendezve fejezzük ki a hurokáramok
értékét (2.47) alapján, végül az egyenletet átrendezve fejezzük ki a hurokáramok  oszlopvektorát:
oszlopvektorát:
| (2.52) |

| (2.53) |

| (2.54) |

Végül kifejezhetjük az ellenállások áramát:
| (2.55) |

Hurokellenállás mátrix:
– ez közvetlenül felírható (számításnál hasznos), az átlóban lévő elemek az egyes hurkokban lévő ellenállások összegei. Az adott sorban és oszlopban lévő elemek pedig az adott hurkok közös ágakhoz tartozó ellenállások előjeles összegei. Az előjel a hurkok irányításától függ, ha a két hurok irányítása ellentétes, akkor negatív, ha megegyező, akkor pozitív (ld. (2.56)).
Megjegyzés
A hurkok köszös ágai csak a feszítőfa ágak közül kerülhetnek ki. A hurokáramok módszerének nem csak az az előnye, hogy kisebb mátrixot kell invertálnunk, hanem a hurkok megfelelő kiválasztásával befolyásolni tudjuk az invertálandó mátrix kondícióját, és ezzel numerikus problémákat kerülhetünk el. Pl. van néhány ág, amelynek az ellenállása nagyságrendekkel kisebb a többi ág ellenállásánál, akkor azokat az ágakat nem választjuk be a feszítőfába.
| (2.56) |
2.10.5.2. Vágatfeszültségek módszere
A vágatfeszültségek módszere hasonlít a hurokáramokéhoz, de itt nem egyes hurkokhoz rendeljük a bennük keringő áram értékét, hanem az egyes vágatokhoz a bennük fellépő feszültséget. Ezekből feszültségekből képezünk egy vágatfeszültség-vektort (vQ). Ha ezzel megszorozzuk a vágatmátrix transzponáltját (QT) megkapjuk az ágfeszültségek vektorát.
| (2.57) |

A hurok egyenletből tudjuk, hogy:
| (2.58) |

ezt felhasználva, és behelyettesítve  alakját (2.57) alapján
alakját (2.57) alapján
| (2.59) |
| (2.60) |

(2.60) mindig teljesül, ennek belátását az olvasóra bízzuk.
Vágategyenletek:
| (2.61) |
Nekünk a vágatfeszültségekre van szükségünk, ezért helyettesítsük (2.61) egyenletbe először  értékét (2.38) Ohm törvény alapján, majd
értékét (2.38) Ohm törvény alapján, majd  értékét (2.59) alapján, végül az egyenletet átrendezve fejezzük ki a vágatfeszültségek
értékét (2.59) alapján, végül az egyenletet átrendezve fejezzük ki a vágatfeszültségek  oszlopvektorát:
oszlopvektorát:
| (2.62) |

| (2.63) |

| (2.64) |

Végül kifejezhetjük az ellenállások feszültségét:
| (2.65) |

2.10.5.3. Csomóponti potenciálok módszere
A vágatfeszültségek módszeréhez hasonlóan alkotunk egy csomóponti potenciálvektort (φ) oly módon, hogy egy tetszőleges csomópontot zérusnak választva, az összes többinek az ehhez viszonyított potenciálját összeírjuk. Mivel sorba haladunk a csomópontokon, a vektorban szomszédos értékek a rendszerben is szomszédos csomópontokhoz tartoznak, így ha bármelyik két szomszédos értéket kivonjuk egymásból, akkor a hozzájuk tartozó két csomópont közötti potenciálkülönbséget (feszültséget) kapjuk.
| (2.66) |

A kapott csomóponti potenciálvektorral megszorozva a rendszer csomóponti mátrixát megkapjuk a rendszer ágfeszültség vektorát.
| (2.67) |

A vágatfeszültségek módszeréhez hasonlóan, formálisan a  vágatmátrix helyére az
vágatmátrix helyére az  csopóponti mátrixot helyettesítve kapjuk:
csopóponti mátrixot helyettesítve kapjuk:
| (2.68) |

| (2.69) |

2.10.6. Kidolgozott feladatok áramkörök számítására
2-1 feladat
Adott a 2-23. ábrán látható áramkör. Tegyük fel, hogy az összes ellenállás, valamint a feszültség generátor értéke ismert. (  , az ággal ellentétes irányítású). Számítsuk ki az összes ág áramát.
, az ággal ellentétes irányítású). Számítsuk ki az összes ág áramát.
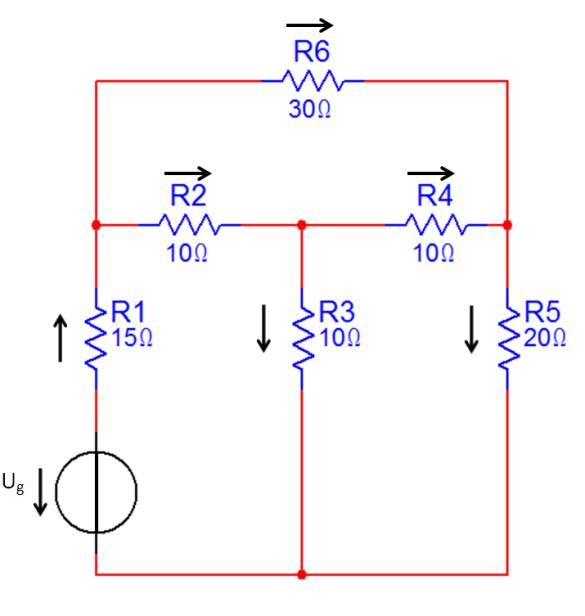
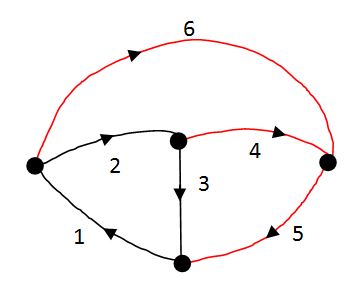
Írjuk fel a hurok- és csomóponti mátrixot a 2-23. ábrán látható hálózatgráf alapján.
| (2.70) |
| (2.71) |
| (2.72) |
A feszültség generátorok oszlopvektora és az ellenállások diagonál mátrixa
| (2.73) |
| (2.74) |
A hurokellenállás mátrix
| (2.75) |

| (2.76) |
A hurokellenállás mátrixot invertálva
| (2.77) |
| (2.78) |
| (2.79) |
Mivel nincs áramforrásunk, ig (a generátoráram) kiesik a (2.55) képletből.
| (2.80) |

Megoldás:
| (2.81) |
2-2 feladat
Adott a 2-24. ábrán látható R-L-C áramkör. Tegyük fel, hogy az összes ellenállás, kondenzátor, induktivitás, valamint a váltakozó áramú feszültség és áramgenerátor értéke ismert. ( ,
, 
 ). Számítsuk ki az összes ág áramát.
). Számítsuk ki az összes ág áramát.
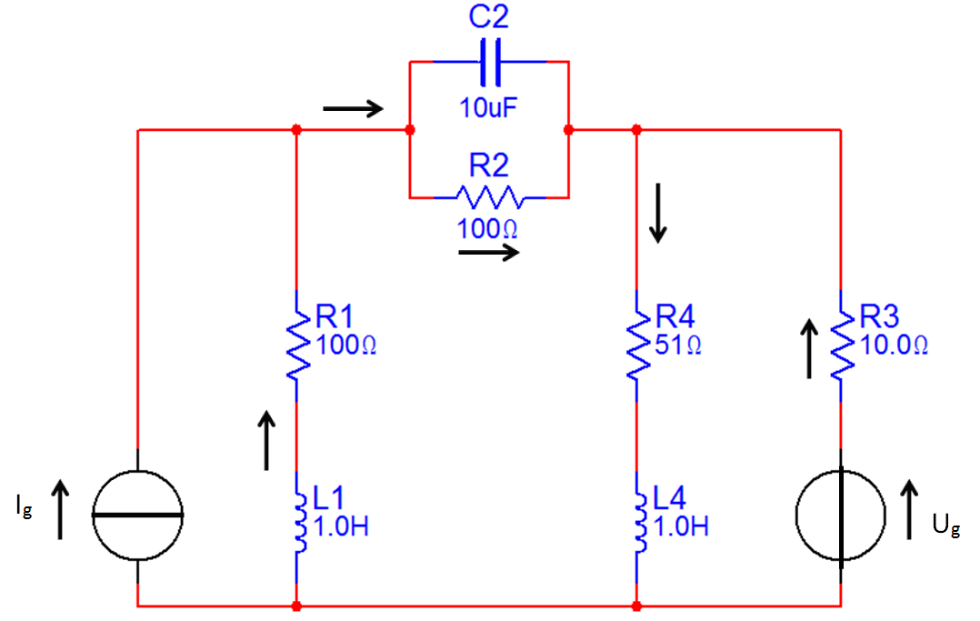
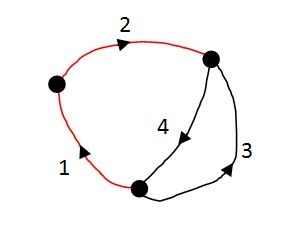
Az egyes ágak impedanciái
| (2.82) |

| (2.83) |
| (2.84) |

| (2.85) |

Írjuk fel a hurok- és csomóponti mátrixot a 2-24. ábrán látható hálózatgráf alapján. A feszítőfa két ága az 1. és 2. ág.
| (2.86) |
| (2.87) |
A feszültség és áramgenerátorok oszlopvektora valamint az impedancia diagonál mátrixa
| (2.88) |
| (2.89) |
| (2.90) |
A hurokimpedancia mátrix
| (2.91) |
| (2.92) |

Ebben az esetben komplex értékű mátrixot kell invertálni. A hurokáramok
| (2.93) |

Az ágáramok
| (2.94) |
2-3 feladat (Házi feladat, megoldását nem közöljük)
Az ábrán látható ellenállás hálózat tartalmaz még egy állandó értékű ideális Ug feszültség- és egy Ig áramgenerátort. A generátorok helyzete az Ön sorszámától függ, ezért ezeket csak az ellenállás hálózat mellé rajzoltuk le.
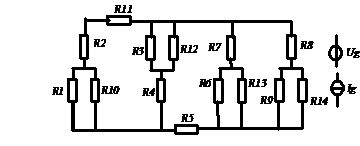
Feladatok:
Rajzolja fel az áramkör hálózat-gráfját (jelölje ki a pozitív irányokat).
A gráfban jelöljön ki egy feszítőfát, és ennek segítségével írjon fel egy-egy lehetséges csomóponti és hurokmátrixot.
Írja fel a hurokellenállás mátrixot
Írja fel a feszültég- és áramgenerátor oszlopvektorát.
Hurokáramok módszerét alkalmazva határozza meg az ágáramokat.
Adatok
Rk=k Ohm
Ug= sorszám*10 V Helye: sorba kapcsolva az Rn ellenállással, ahol n=1+Mod14(sorszám).
Ig= sorszám*10 A Helye: párhuzamosan kapcsolva az Rn ellenállással, ahol n=1+Mod14(sorszám).
2.11. Koncentrált paraméterű determinisztikus leírás
A továbbiakban koncentrált paraméterű determinisztikus rendszereket feltételezve azt vizsgáljuk, hogy a bemenetek és a kimenetek közötti kapcsolat milyen típusú egyenletekkel írható le. A rendszereket az őket leíró egyenletek szerint csoportosítjuk.
2.11.1. Statikus rendszerek fogalma
Definíció
Ha bármely pillanatban a bemenőjelek pillanatnyi értékei egyértelműen meghatározzák az adott pillanatban a kimenőjelek értékeit, akkor statikus rendszerről beszélünk.
Értelmezés
A statikus rendszernek nincs memória jellege, nincs szükség a bemenőjelektől eltérő belső állapotok definiálására, sem a múltbéli, sem a jövőbeni történések nem befolyásolják a jelent. Ezekben a rendszerekben az idő nem jelenik meg. Lineáris statikus rendszerek esetében a bemenetek és kimenetek között algebrai egyenletek írhatók fel.
Idetartoznak az ellenállás hálózatok, ha a feszültség- és áramgenerátorok ismeretében az egyes ellenállások feszültségét és áramait számítjuk, a robotok kinematikai vizsgálatai, a digitális technikában a kombinációs hálózatok. Nem véletlen az elnevezés, idetartoznak a mechanika statikai problémái. Az erők, mint bemenetek hatására ellenerők, mint kimenetek alakulnak ki. Kicsit más a helyzet, ha lehajlásokat is kell számolni, mint pl. a szilárdságtanban. A lehajlások kialakulásához idő kell, de sok esetben bennünket csak a végállapot érdekel, és abban értelemszerűen az idő már nem játszik szerepet.
2.11.2. Dinamikus rendszerek fogalma
Definíció
A dinamikus rendszerek a valós fizikai rendszerek működésének időbeni lefolyását is leírják, jellemzően idő szerinti differenciálegyenletek segítségével. Memória jelleggel rendelkeznek és ennek különböző formái lehetnek.
Értelmezés
Példaként könnyen beláthatjuk, hogy ha egy autót, mint rendszert vizsgálunk úgy, hogy bemeneteinek a gáz és fékpedál helyzetét tekintjük, akkor e bemeneti értékek egy adott pillanatbeli értékéből (az autó további paramétereinek ismeretében) az autó gyorsulása az adott pillanatban kiszámítható. Vagyis ha a fék és gázpedál a rendszer bemenete, valamint a gyorsulás a kimenet, akkor statikai egyenletet kapunk. Ezzel szemben, ha a kimenetnek a gyorsulás helyett a sebességet, vagy az elmozdulást választjuk, akkor ismernünk kell a múltbeli történéseket. Pusztán pl. a fékpedál egy pillanatbeli helyzetéből nem tudjuk kiszámítani az aktuális sebességet, illetve helyzetet. Tudnunk kell, hogy milyen sebességről indultunk, és mennyi ideje nyomjuk a féket. Külön kell kezelni az időkésleltetett dinamikus rendszereket. Legegyszerűbb esetben  , ahol
, ahol  az időkéseltetés nagysága. Az időkésleltetett rendszerekkel külön fejezetben foglalkozunk. A dinamikai egyenletek felírása előtt további fogalmakat kell bevezetnünk
az időkéseltetés nagysága. Az időkésleltetett rendszerekkel külön fejezetben foglalkozunk. A dinamikai egyenletek felírása előtt további fogalmakat kell bevezetnünk
2.11.2.1. A rendszer jeleinek értelmezési tartománya, illetve a folytonos és diszkrét idejű rendszerek fogalma
Definíció
2.11.2.1.1. Folytonos idejű rendszerek
Folytonos idejű rendszerek esetén a be- és kimenőjel, és
és  a vizsgált
a vizsgált  időintervallum minden időpontjában értelmezve van,
időintervallum minden időpontjában értelmezve van,  .
.
2.11.2.1.2. Diszkrét idejű rendszerek
Diszkrét idejű rendszerek esetén a be- és kimenőjel  és
és  a vizsgált
a vizsgált  időintervallumon csak diszkrét
időintervallumon csak diszkrét  időpontok sorozatában van értelmezve
időpontok sorozatában van értelmezve  , ahol
, ahol  és
és  .
.
Értelmezés
Általában a jelfeldolgozó algoritmusok olyan esetekre vonatkoznak, ahol  , vagyis a rendszerről csak meghatározott
, vagyis a rendszerről csak meghatározott  időlépésenként van információnk. A
időlépésenként van információnk. A  időlépést mintavételezési időnek is nevezzük, ugyanakkor a méréseknél nem mindig biztosítható az állandó és pontos mintavételezési idő. Gyakran számítógépes rendszerrel mérünk, és pl. a Windows operációs rendszer nincs felkészítve arra, hogy bármelyik taszkot (esetünkben a mintavételező taszkot) egy jól meghatározott időben futtassa le (megjegyezzük, hogy drágább kártyák a pontos mintavételezést hardware szinten meg tudják oldani). Azokat az operációs rendszereket, amelyek lehetővé teszik a taszkok időzített lefutását, valós-idejű (real-time) operációs rendszernek nevezzük. Alapbeállításban a legtöbb szimulációs program is változó nagyságú időlépést használ. Erre tekintettel kell lennünk az utólagos digitális jelfeldolgozásnál. Az egyszerűbb leírási mód kedvéért a diszkrét idejű rendszerekre bevezetjük a következő jelöléseket: az
időlépést mintavételezési időnek is nevezzük, ugyanakkor a méréseknél nem mindig biztosítható az állandó és pontos mintavételezési idő. Gyakran számítógépes rendszerrel mérünk, és pl. a Windows operációs rendszer nincs felkészítve arra, hogy bármelyik taszkot (esetünkben a mintavételező taszkot) egy jól meghatározott időben futtassa le (megjegyezzük, hogy drágább kártyák a pontos mintavételezést hardware szinten meg tudják oldani). Azokat az operációs rendszereket, amelyek lehetővé teszik a taszkok időzített lefutását, valós-idejű (real-time) operációs rendszernek nevezzük. Alapbeállításban a legtöbb szimulációs program is változó nagyságú időlépést használ. Erre tekintettel kell lennünk az utólagos digitális jelfeldolgozásnál. Az egyszerűbb leírási mód kedvéért a diszkrét idejű rendszerekre bevezetjük a következő jelöléseket: az  és
és  időfüggvények értékeit
időfüggvények értékeit  diszkrét időben
diszkrét időben  és
és  jelöli. Az időfüggvény
jelöli. Az időfüggvény  időpontbeli értékére az alábbi jelölést használjuk:
időpontbeli értékére az alábbi jelölést használjuk:  és
és  . A diszkrét idejű rendszerek leírásában a differenciálegyenletek helyett differencia egyenleteket kapunk. Ezek matematikai kezelése egyszerűbb, az egyenleteket lépésről lépésre meg lehet oldani. Sokszor didaktikailag hatékonyabb, ha először diszkrét idejű rendszert vizsgálunk, és ezt általánosítva jutunk el a folytonos idejű rendszerekhez.
. A diszkrét idejű rendszerek leírásában a differenciálegyenletek helyett differencia egyenleteket kapunk. Ezek matematikai kezelése egyszerűbb, az egyenleteket lépésről lépésre meg lehet oldani. Sokszor didaktikailag hatékonyabb, ha először diszkrét idejű rendszert vizsgálunk, és ezt általánosítva jutunk el a folytonos idejű rendszerekhez.
2.11.2.1.3. A rendszerek jeleinek ablakozása
Egy ideális rendszer az idők kezdete óta az idők végezetéig működik, így jelei a teljes  tartományban értelmezve vannak. Mi méréssel vagy szimulációval csak egy
tartományban értelmezve vannak. Mi méréssel vagy szimulációval csak egy  tartományban tudunk információt szerezni a jel változásáról, e tartományon kívül a jelről nem tudunk semmit. Az elnevezés onnan ered, hogy van egy az idők kezdetétől az idők végezetéig tartó jel, és ezt mi egy ablakon át csak egy
tartományban tudunk információt szerezni a jel változásáról, e tartományon kívül a jelről nem tudunk semmit. Az elnevezés onnan ered, hogy van egy az idők kezdetétől az idők végezetéig tartó jel, és ezt mi egy ablakon át csak egy  tartományban látjuk. Sok esetben e tartományon kívül a jel számunkra érdektelen, de vannak olyan esetek, amikor az ablakozás hatását is valamilyen módon figyelembe kell venni.
tartományban látjuk. Sok esetben e tartományon kívül a jel számunkra érdektelen, de vannak olyan esetek, amikor az ablakozás hatását is valamilyen módon figyelembe kell venni.
2.11.2.2. A rendszer jeleinek értékkészlete, folytonos és kvantált értékű rendszerek
Definíció
2.11.2.2.1. Folytonos értékű rendszerek
Ha a rendszer jeleinek értéke egy tartományban folytonosan változhat  , és
, és  , akkor folytonos értékű rendszerről beszélünk.
, akkor folytonos értékű rendszerről beszélünk.
Diszkrét értékű (kvantált) rendszerek
Ha a rendszer jelei csak diszkrét értékeket vehetnek fel  és
és  , akkor diszkrét értékű (kvantált) rendszerről beszélünk.
, akkor diszkrét értékű (kvantált) rendszerről beszélünk.
Értelmezés
2.11.2.3. A rendszer csoportosítása a jeleinek értelmezési tartománya és értékkészlete alapján
Mind a folytonos idejű, mind a diszkrét idejű rendszer lehet folytonos értékű és kvantált. Ennek megfelelően a négy lehetőség
Folytonos idejű és folytonos értékű rendszer
Folytonos idejű és diszkrét értékű rendszer
Diszkrét idejű és folytonos értékű rendszer
Diszkrét idejű és diszkrét értékű rendszer.
Egy egyenletekkel felírt ideális rendszer lehet folytonos idejű és folytonos értékű, de akár mérjük, akár szimuláljuk a rendszer működését, pusztán a számábrázolás korlátossága miatt van egy olyan elvi határ, amelyen belül a változást már nem tudjuk kifejezni, így szigorúan nézve a rendszer diszkrét idejűvé és diszkrét értékűvé válik. Ha a jel változási sebességéhez és a változás mértékéhez képest sokkal kisebb az időlépés és sokkal kisebb a számábrázolásból eredő korlát, akkor a rendszert tekinthetjük folytonos idejű folytonos értékű rendszernek.
Diszkrét idejű és kvantált rendszereket inkább akkor használunk, ha mérésből nyerjük a rendszerről az információt.
2.11.3. Rendszerek simasága
Mind a mintavételezési idő, mind a kvantálási határok megválasztásánál tekintettel kell lennünk arra, hogy a rendszer jelei milyen gyorsan és milyen mértékben változnak.
2.11.4. Időinvariáns és autonóm rendszerek fogalma
Definíció
Az időinvariáns rendszer esetén, ha a rendszer egy  gerjesztésre adott válasza
gerjesztésre adott válasza  , akkor az időben eltolt
, akkor az időben eltolt  gerjesztésre adott
gerjesztésre adott  válasz is egyszerű időbeni eltolással megkapható (ld. 2-26. ábra).
válasz is egyszerű időbeni eltolással megkapható (ld. 2-26. ábra).
Értelmezés
Más megközelítésben az időinvariancia azt jelenti, hogy a rendszer válasza nem függ attól, hogy mikor adtuk a rendszerre a gerjesztést. Ez természetesen nem mondható el egy változó paraméterű rendszerről, amelyet időben változó (idővariáns) rendszernek nevezünk.

Az időinvarianciával rokon fogalom az autonómia.
Definíció
Matematikai értelemben akkor beszélünk autonóm rendszerről, ha a rendszer működését ún. autonóm differenciálegyenlet-rendszerrel lehet leírni. A  alakú közönséges differenciálegyenlet-rendszert akkor nevezzük autonómnak, ha jobb oldala nem függ közvetlenül az időtől (azaz a
alakú közönséges differenciálegyenlet-rendszert akkor nevezzük autonómnak, ha jobb oldala nem függ közvetlenül az időtől (azaz a  változótól), vagyis átírható a következő alakúra:
változótól), vagyis átírható a következő alakúra:  .
.
Értelmezés
Az autonóm differenciálegyenletek számos olyan tulajdonsággal rendelkeznek, ami miatt érdemes ezt a megkülönböztetést megtenni. A fenti megfogalmazásban nincs szó a bemenetről, e fogalom a rendszer aktuális működésére vonatkozik, amelynek a bemenőjel is része. Műszaki nyelvre lefordítva az autonóm rendszer azt jelenti, hogy sem maga a rendszer, sem a külső hatások nem változnak az időben. A rendszertechnikában a rendszert úgy definiáltuk, mint a bemenő- és kimenőjel közötti matematikai kapcsolatot, és ez ilyen formában független a gerjesztés minőségétől. Vagyis az időinvariancia magára a rendszerre vonatkozó és a bemenőjeltől független fogalom, az autonómia a működésre vonatkozik, és ezért függ a bemenőjeltől. Csak egy időinvariáns rendszer működhet autonóm üzemmódban, ennek az a feltétele, hogy a bemenőjel konstans legyen. Pl. egy magára hagyott időinvariáns rendszert leíró differenciálegyenlet lehet autonóm. Ha a bemenőjel időben változik, akkor a rendszer működése nem lehet autonóm.
Ismételten nem az a kérdés, hogy maga a valós fizikai rendszer időinvariáns-e/autonóm-e vagy sem, kérdés az, hogy miként írjuk le. Szigorúan véve a legtöbb valós fizikai rendszer idővariáns, mert az öregedés, kopás és végül a tönkremenetel idővariánssá teszi azt.
Itt visszautalunk a 2.6. fejezetre. Ha az áramot bemenőjelnek, a feszültséget kimenőjelnek tekintjük, akkor a (2.6) által definiált rendszer nemlineáris, de autonóm, a (2.7) által definiált rendszer lineáris, de nem autonóm.
Tegyük fel, hogy R(t) kiszámításakor azt feltételeztük, hogy a motort a t=0 időpillanatban kapcsoltuk be, és ehhez tartozik egy i(t) áram, mint bemenőjel és  , mint kimenőjel, valamint R(t), mint a rendszer egyetlen paramétere. Ha a motort nem a t=0 időpillanatban kapcsoljuk be, akkor ez az áramnak, mint bemenőjelnek az időbeni eltolását eredményezi (feltételezve, hogy az egyéb működési körülmények nem változnak). Ha ehhez az időben eltolt i(t-τ) bemenőjelhez az eredeti (időben nem eltolt) rendszert, nevezetesen az R(t) együtthatót használjuk, akkor triviális, hogy a rendszer válaszát nem kaphatjuk meg egyszerű időeltolással. Röviden, ha
, mint kimenőjel, valamint R(t), mint a rendszer egyetlen paramétere. Ha a motort nem a t=0 időpillanatban kapcsoljuk be, akkor ez az áramnak, mint bemenőjelnek az időbeni eltolását eredményezi (feltételezve, hogy az egyéb működési körülmények nem változnak). Ha ehhez az időben eltolt i(t-τ) bemenőjelhez az eredeti (időben nem eltolt) rendszert, nevezetesen az R(t) együtthatót használjuk, akkor triviális, hogy a rendszer válaszát nem kaphatjuk meg egyszerű időeltolással. Röviden, ha  , akkor a speciális esetektől eltekintve
, akkor a speciális esetektől eltekintve  .
.
2.12. Dinamikus rendszerek általános összefüggései
Először az egyenletek szintjén egy egyszerű példából kiindulva jutunk el az általános rendszeregyenletekhez, és áttekintő képet adunk a kapcsolódó mérnöki feladatokról. Amikor az átfogó kép után a konkrétumokat tárgyaljuk, akkor természetesen ismét vissza kell térnünk az egyszerűbb esetekhez. Először a diszkrét idejű rendszereket vizsgáljuk, és ezt terjesztjük ki folytonos idejű rendszerekre. (Az időkésleltetett rendszerekkel nem foglalkozunk ebben a fejezetben.)
2.12.1. Állapot, állapotjelző, állapotváltozó és állapotegyenletek fogalma
Az állapot szót köznapi értelemben is gyakran használjuk és megjelenik több különböző tudományterületen is, így az állapot szónak több különböző értelmezése létezik. Az állapot rendszerelméleti megközelítésénél a dinamikus rendszerek definíciójából indulunk ki, miszerint azok memória jelleggel rendelkeznek, ezt a memóriát többféleképpen meg lehet valósítani, általánosságban a következőt lehet kimondani.
Definíció
Az állapot a múlt összesített hatása. A rendszer állapotának a következő két tulajdonsággal kell rendelkeznie
Bármely T időpillanatban a kimenőjel az adott pillanatbeli állapot és bemenőjel együttes ismeretében egyértelműen meghatározható legyen.
Az állapot egy adott T időpillanatban egyértelműen meghatározható legyen a bemenőjel a t≤T időtartománybeli értékének ismeretében.
Az állapotváltozók az állapot egyértelmű leírására szolgálnak.
Értelmezés
Különösen a német szakirodalom megkülönbözteti az állapotjelző és állapotváltozó fogalmát. Az állapotjelző mindig valamilyen energiához tartozó valós fizikai változó, amely közvetlenül vagy közvetve az adott energia nagyságát írja le. Az extenzív és intenzív fizikai változók egyaránt lehetnek állapotjelzők, ha valamilyen tárolóelemhez köthető mennységet írnak le, ezért maga az állapotjelzővel leírt tárolt mennyiség mindenképp additív, vagyis az állapotjelzőkre vonatkozó összegződés és kiegyenlítődés említése zavaró lehet, ez a két kifejezés maradjon meg magára a fizikai változóra. Az állapotváltozókat tágabb értelemben használjuk. Megválasztásában viszonylag nagy szabadságunk van, az egyetlen feltétel, hogy a definícióban megadott két feltételt teljesítsük. A német rendszertechnika könyvekben minden állapotjelző egyben állapotváltozó, de nem minden állapotváltozó állapotjelző. Ezért az állapot fogalma széles körben alkalmazható. Az állapotváltozókat nem kell konkrét fizikai mennyiséghez, illetve energiához kötni, de a definícióból következően mindenképp valamilyen általánosított tároló elemhez kötjük. Ezért felmerül a következő kérdés: minimálisan hány állapotváltozóra van szükség egy rendszer állapotának leírására?
Definíció
Egy rendszer állapotának egyértelmű leírásához minimálisan szükséges állapotváltozók számát a rendszer dimenziójának szokás nevezni.
Véges dimenziójú: véges számú állapotváltozóval leírható rendszer. Az állapotváltozók szokásos jelölése:
 .
.
Végtelen dimenziójú: végtelen számú állapotváltozóval leírható rendszer.
Diszkrét állapotú rendszerek: Ha egy véges dimenziójú rendszer állapotváltozói véges számú értéket vehetnek fel, akkor a rendszer lehetséges állapotainak száma is véges.
Értelmezés
Az állapotváltozók valamilyen általánosított értelmű tárolóelemekhez köthetők, és az állapot a diszkrét idejű rendszereknél valamilyen összegzés, a folytonos idejű rendszereknél integrálás eredménye. Egy dinamikai rendszerben az elmozdulás is lehet állapotváltozó, itt a tároló jelleg abból adódik, hogy a nulla ponttól mért távolságot tároljuk és az is világosan látszik, hogy a nulla ponttól mért távolság kis elmozdulások összegzéséből határozható meg. Tovább gondolva, ebből következik, hogy a rendszeregyenleteket a diszkrét időben differencia, a folytonos időben differenciálegyenletekkel írjuk le. A differenciálegyenletek rendszáma megegyezik a tárolóelemek számával. A véges dimenziójú rendszereknél véges számú tároló elem van. Szokás a rendszer dimenzióját a tároló elemek számával megadni. Pl. a későbbiekben külön foglalkozunk egy- és kéttárolós rendszerekkel. A továbbiakban csak véges dimenziójú rendszereket tárgyalunk.
Sokszor olyan fizikai változókat leíró jeleket választunk állapotváltozónak, amelyek valamilyen energiával, vagy annak változásával hozhatók kapcsolatba, ezek az állapotjelzők. Számtalanszor az állapotváltozónak nincs semmilyen fizikai megfelelője, ezek az állapotváltozók. A 2.9.1 pontban definiált Á-típusú tárolók átmenő változóját, a K-típusú tárolók keresztváltozóját célszerű állapotváltozónak választani. A P-típusú elem nem tárol, így ehhez kapcsolódóan nem tudunk állapotváltozót definiálni. Természetesen mindig a valós fizikai rendszerből indulunk ki, és először a valós fizikai rendszer egyenleteit írjuk fel, de sok esetben az így természetes módon felírt egyenletek rendszertechnikai szempontból nem elég rendszerezettek. A természetes módon felírt egyenletek általában magukra a jelenségre koncentrálnak. A rendszertechnikai szemléletben a konkrét beavatkozás és annak hatása, vagyis a bemenőjel és a kimenőjel áll a fókuszban és e két jel között kívánunk matematikai kapcsolatot teremteni. Amikor az alapjelenségből felírjuk az adott problémában szereplő be- és kimenőjel közötti matematikai kapcsolatot, akkor a matematikai egyszerűsítések miatt a fizikai tartalom a konkrét leírásból elveszhet, de pont az a cél, hogy a fizikai jelenségtől független, egységesen használható matematikai eszköztárat alapozzunk meg.
2.12.1.1. Diszkrét állapotú rendszerek
A diszkrét állapotú rendszerek esetén az állapotbeli változások nem az időben folytonosan, hanem egy-egy esemény hatására ugrásszerűen mennek végbe. A digitális technikában a szekvenciális hálózatok tipikusan idetartoznak, ahol minden logikai változó csak két különböző érték egyikét veheti fel.
A legegyszerűbb példa egy olyan fűtésszabályozás lehet, ahol két állapot (fűtés bekapcsolva és fűtés kikapcsolva) között a szerint váltunk, hogy a szoba  hőmérséklete nagyobb-e a
hőmérséklete nagyobb-e a  felső hőmérsékleti korlátnál, vagy kisebb-e a
felső hőmérsékleti korlátnál, vagy kisebb-e a  alsó hőmérsékleti korlátnál (ld. 2-27. ábra). (Természetesen
alsó hőmérsékleti korlátnál (ld. 2-27. ábra). (Természetesen  )
)
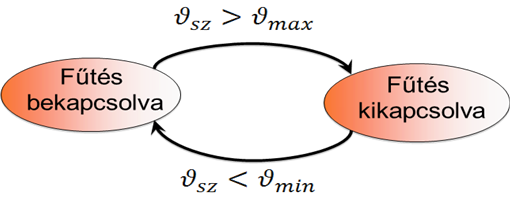
Kicsit összetettebb példa lehet egy jegykiadó automata. Be kell dobni a pénzt, majd meg kell nyomni egy gombot és az automata kiadja a jegyet. A legegyszerűbb esetben csak egyfajta pénzt fogad el az automata (legyen ez a 100 Ft-os), minden más pénzérme átesik az automatán és azokkal az esetekkel nem foglalkozunk, továbbá a jegy ára 100 Ft, vagyis a 100 Ft bedobása után jár a jegy. Az automatának két állapota van, és kétféle esemény következhet be mindkét állapotban (ld. 2-28. ábra).
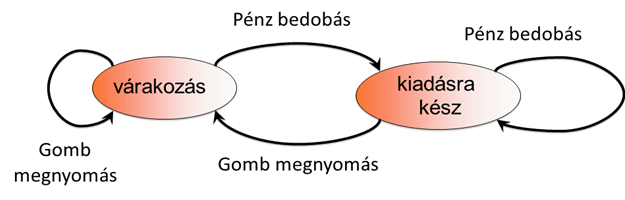
A „várakozás” állapotban hiába nyomkodjuk a gombot, nem történik semmi. Ha bedobunk egy 100 Ft-os érmét, akkor átkerülünk a „kiadásra kész” állapotba. A „kiadásra kész” állapotban, ha megnyomjuk a gombot, akkor az automata kiadja a jegyet és visszakerülünk a „várakozás” állapotba. A „kiadásra kész” állapotban maradunk, ha újabb pénzt dobunk be. Ez a pénz így elveszett. Nyilvántarthatjuk, hogy hány pénzt dobtak be, de ahhoz egy számláló kell, amely további állapotok bevezetését igényelné. Pl. bevezethetnénk a „kétjegy kiadására kész” állapotot, de ekkor a „kiadására kész” állapot nevét is célszerű pontosítani (ld. 2-29. ábra), és ez a sor folytatható.
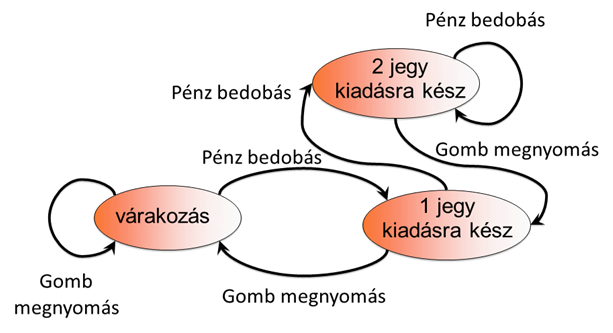
Egy más jellegű bővítést jelent, hogy ha azt is figyelembe akarjuk venni, hogy időnként a jegy kiadása nem sikerül. Visszatérve a 2-28. ábrahoz, ha a „kiadásra kész” állapotban megnyomjuk a gombot, akkor az automata megpróbálja kiadni a jegyet. Ha sikerül a jegykiadás, akkor visszakerülünk a „várakozás” állapotba, ha nem, akkor „kiadásra kész” állapotban maradunk. Így egy eseménynek bizonyos valószínűséggel két kimenetele lehet. Ebben a példában a valószínűséget a hibás működés hozza be, de bizonyos esetekben a működés lényeges tulajdonsága, hogy egy esemény kimenetele véletlenszerűen alakul.
A 2-28. ábraához nagyon hasonlóan írhatunk le egy nyerő automatát. Első lépésben a jegyet a nyereménnyel helyettesítjük (ld. 2-30. ábra).
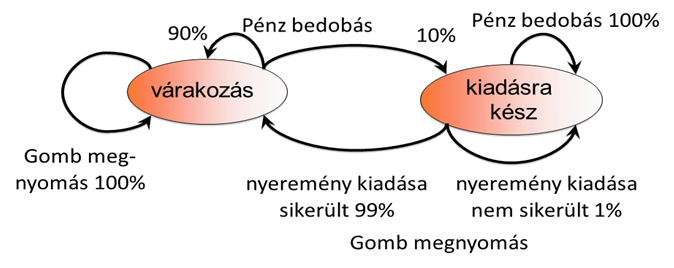
A legnagyobb különbség abban rejlik, hogy a pénz bedobásával nem minden esetben kerülünk át a nyeremény „kiadásra kész” állapotba. Ennek van valamekkora valószínűsége (esetünkben 10%), de a pénz bedobása nem determinálja az állapotváltást, vagyis ez nem egy determinisztikus rendszer. Ebben a példában a nyeremény összege fix. A 2-30. ábraán figyelembe vettük azt is, hogy a nyeremény kiadását valami megakadályozhatja (az esetek 1%-ában), de ekkor nem akarjuk elvenni a nyereményt.
2.12.1.2. A modellek kategorizálásának néhány problémája
Az előző példában a sztochasztikus jelleget megvalósíthatjuk úgy, hogy minden pénzbedobás után generálunk egy egyenletes eloszlású véletlen számot 0 és 1 között. Ha azt szeretnénk, hogy a nyerési esély 10% legyen, akkor 0 és 1 között kijelölünk egy 0.1 hosszúságú intervallumot. Ha a generált véletlenszám ebbe az intervallumba esik, akkor a „várakozás” állapotból átlépünk a „kiadásra kész” állapotba. Ha nem az adott intervallumba esik a generált szám, akkor nem változik az állapot. Az ilyen rendszereket joggal nevezzük sztochasztikusnak. Vannak olyan esetek, amikor nem teljesen egyértelmű, hogy a rendszer determinisztikus vagy sztochasztikus-e. Az előző példában számlálhatjuk, hogy eddig hányszor dobtak be pénzt az automatába, és egy előre meghatározott számsor szerint döntjük el, hogy hányadik pénzbedobó fog nyerni. Ekkor a rendszerünk determinisztikus, de a felhasználó számára sztochasztikusnak tűnik. Itt meg kell jegyezni, hogy maga a számláló is egy végesállapotú rendszer. Ha előre eldöntjük, hogy pl. az első 1000 pénzbedobás közül, melyik fog nyerni, akkor ezzel 1000 állapotot definiálunk. Sok esetben egy bonyolult determinisztikus rendszert egy lényegesen egyszerűbb struktúrájú sztochasztikus rendszerrel írunk le. Bizonyos bonyolult és összetett részek pontos működését statisztikákkal modellezzük.
Sok esetben ugyanazt a fizikai rendszert leírhatjuk néhány diszkrét állapottal, vagy folytonos értékű állapotváltozóval. Példaként egy gyomor állapotát leírhatjuk a két legfontosabb állapottal, jóllakottsággal és éhséggel. Az egyik állapotból a másikba egy-egy esemény bekövetkeztével jut a rendszer. Az éhes állapotból az evéssel lehet a jóllakott állapotba kerülni, és elegendő idejű nem evéssel vissza az éhségbe. Más megközelítésben, a gyomor telítettségére bevezethetünk egy folytonos állapotváltozót, amely értékét a bevitt és a megemésztett táplálék különbségének integráljával számíthatjuk (ld. 2-31. ábra).
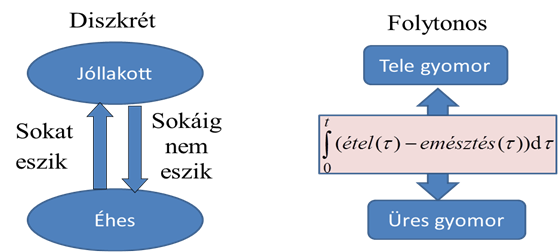
2.12.1.3. Véges dimenziójú rendszerek
Az állapotváltozós leírás nagy előnye az, hogy használható nemlineáris, idővariáns (nem autonóm) MIMO rendszerek esetén is


ahol  az állapotváltozók vektora,
az állapotváltozók vektora,  a beavatkozó jelek vektora,
a beavatkozó jelek vektora,  a zavaró jelek vektora,
a zavaró jelek vektora,  a kimenőjelek vektora,
a kimenőjelek vektora,  a rendszer működését leíró függvény,
a rendszer működését leíró függvény,  kimenőjelet leképező függvény.
kimenőjelet leképező függvény.
A rendszer általános definíciójában (ld. 2.1 pont) a rendszerre vonatkozóan nem szerepelt az idő, a 2.1 pontban megadott definíció nem nyilatkozik arról, hogy maga a rendszer időben változó-e vagy változatlan. Természetesen a be- és kimenőjelek a rendszertől függetlenül időben változhatnak. Ezzel szemben a dinamikai rendszereknél az idő a rendszerre vonatkozóan is fontos szerepet tölt be. Akár közvetlenül is megjelenhet a rendszeregyenletben (ld. változó paraméterű rendszerek), de a memória jelleg csak egy időintervallumban értelmezhető. A memória jelleg miatt a rendszert elvileg az idők kezdetétől meg kellene figyelni, de pont ennek elkerülésére vezettük be az állapot fogalmát. Általában a rendszereket csak egy meghatározott T0 időponttól kezdődően ( tartományban) vizsgáljuk. A legtöbb esetben az egyszerűség kedvért T0=0. A múlt hatását az állapotváltozók kezdeti értékében összegezzük. Ennek fényében a rendszer általános egyszerűsített ábráját (ld. 2-2. ábra) is ki kell egészíteni és a (2.95)-(2.96) rendszer is kiegészítendő az
tartományban) vizsgáljuk. A legtöbb esetben az egyszerűség kedvért T0=0. A múlt hatását az állapotváltozók kezdeti értékében összegezzük. Ennek fényében a rendszer általános egyszerűsített ábráját (ld. 2-2. ábra) is ki kell egészíteni és a (2.95)-(2.96) rendszer is kiegészítendő az  kezdeti értékkel. Tekintettel kell lenni az időre (ld. 2-32. ábra).
kezdeti értékkel. Tekintettel kell lenni az időre (ld. 2-32. ábra).
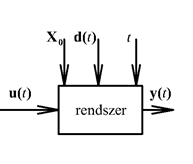
Megjegyzések:
Sok esetben a rendszer minden állapotváltozóját mérni tudjuk, ekkor

Sok esetben ún. energiamentes kezdeti állapotból indulunk ki, vagyis az állapotváltozók kezdeti értéke nulla. Ha az
 bemenetet külön nem jelöljük, illetve nem adjuk meg, akkor az azt jelenti, hogy energiamentes állapotban kezdődik a rendszer vizsgálata. Időinvariáns rendszerek esetén nincs szükség a
bemenetet külön nem jelöljük, illetve nem adjuk meg, akkor az azt jelenti, hogy energiamentes állapotban kezdődik a rendszer vizsgálata. Időinvariáns rendszerek esetén nincs szükség a  bemenetre. Sokszor a
bemenetre. Sokszor a  zavaró jelet is elhanyagoljuk, és nem rajzoljuk fel az ábrára.
zavaró jelet is elhanyagoljuk, és nem rajzoljuk fel az ábrára. 
is lehet nulla, ekkor a magára hagyott rendszerről beszélünk.
2.9.1. pont alapján sok fizikai jelenség leírásában nagy szerepet játszik egy vektormező divergenciája és rotációja.
A divergenciából származtatott (általános értelmű áramlással kapcsolatos) változók esetén Kirchhoff I. törvényével analóg csomóponti egyenletet kapunk.
A rotáció a vektormező örvényességére, vagyis az áramlások okára vonatkozik. A tér minden pontjához egy vektor rendelhető. A rotációból származtatott fizikai változók közös jellemzője, hogy Kirchhoff II. törvényével analóg hurokegyenlet írható fel rájuk. A csomóponti és hurok egyenletek általában nem tekinthetők állapotegyenletnek, de alapjai lehetnek egy analóg számítási módszer leírásának. Ezzel a 2.9.1. pontban foglalkozunk.
A termodinamikában nem szokás a (2.95) alakú állapotegyenleteket felírni, továbbá állapotváltozó helyett az állapotjelző fogalmát használják, mert az egyenleteikben mindig valamilyen energiához tartozó valós fizikai változó jelenik meg. A termodinamikában definiált állapot az adott fizikai jelenség egy pillanatfelvétele, amelyet az intenzív és extenzív állapotjelzőkkel írnak le. Az előbbiek homogén eloszlása sok esetben a termodinamikai rendszer stabil egyensúlyát jelentik. Ezt úgy is meg szokták fogalmazni, hogy az intenzív változók kiegyenlítődésre törekednek és ez kiváltója valamilyen anyag, illetve energiaáramlásnak. Az extenzív mennyiségek általában a rendszer anyag-, illetve energiamennyiségével arányosak.
Ha f folytonos és az állapotváltozók értéke egy T0 időpillanatban ismert, akkor a (2.95) egyenlet  állapotváltozóra vonatkozó megoldása a következő alakot ölti.
állapotváltozóra vonatkozó megoldása a következő alakot ölti.
| (2.97) |
Az egyszerűség kedvéért  . Ha relé típusú bemenőjelet is megengedünk, akkor
. Ha relé típusú bemenőjelet is megengedünk, akkor  -re nézve nem lesz mindenütt folytonos (
-re nézve nem lesz mindenütt folytonos ( –re nézve megmarad a folytonosság). A legtöbb gyakorlati esetben a (2.95) egyenletből
–re nézve megmarad a folytonosság). A legtöbb gyakorlati esetben a (2.95) egyenletből  kifejezhető (2.97) alakban, ennek feltétele az, hogy
kifejezhető (2.97) alakban, ennek feltétele az, hogy  teljesítse az ún. Carathéodory-feltételeket (
teljesítse az ún. Carathéodory-feltételeket ( -nek integrálhatónak kell lennie). Ez a feltétel változó struktúrájú rendszerek esetén nem mindig teljesül. A későbbiekben
-nek integrálhatónak kell lennie). Ez a feltétel változó struktúrájú rendszerek esetén nem mindig teljesül. A későbbiekben  folytonosságát nem követeljük meg.
folytonosságát nem követeljük meg.
2.12.2. Lineáris, egy bemenetű egy kimenetű diszkrét idejű rendszer
A dinamikus rendszerekre jellemző memória jelleg legközvetlenebbül a diszkrét idejű ún. ARMA rendszereknél figyelhető meg.
Definíció
Azt feltételezzük, hogy a kimenőjel a k-adik időlépésben függ a kimenőjel utolsó n értékének lineáris kombinációjától (autoregressziójától (AR)), valamint a bemenőjel utolsó r értékből számított mozgó átlagától (MA). (ld. 2-33. ábra). A mindkét típusú emlékezettel rendelkező rendszereket szokás ARMA rendszereknek nevezni.
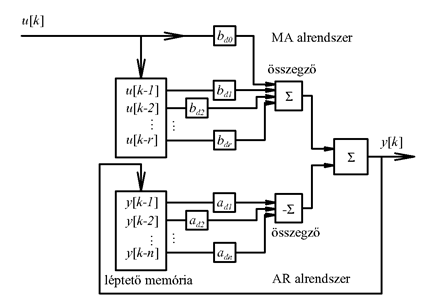
A 2-33. ábrak megfelelő ARMA rendszert a (2.98) alakú egyenlettel írhatjuk le.
| (2.98) |
Ebben a formában a rendszernek n+r számú belső tároló elemmel kell rendelkeznie (ld. 2-33. ábra). Egy-egy tároló elem tartalmát matematikai értelemben változónak, rendszertechnikai értelemben jelnek kell tekinteni. Ennek megfelelően a múlt összesített hatását  db értékkel tudjuk megadni. Így, ha ismerjük a kimenőjel
db értékkel tudjuk megadni. Így, ha ismerjük a kimenőjel  db egymás utáni (kezdeti) értékét, valamint ugyanezen időpontok közül az utolsó
db egymás utáni (kezdeti) értékét, valamint ugyanezen időpontok közül az utolsó  db időponthoz tartozó és jelenlegi bemenőjel értékét, akkor az
db időponthoz tartozó és jelenlegi bemenőjel értékét, akkor az  kimenőjel (2.98) segítségével lépésről lépésre kiszámítható.
kimenőjel (2.98) segítségével lépésről lépésre kiszámítható.
Megjegyzések:
1. Ha  , az azt jelenti, hogy a bemenőjel a dinamikus rendszert megkerülve közvetlenül is hat a kimenőjelre,
, az azt jelenti, hogy a bemenőjel a dinamikus rendszert megkerülve közvetlenül is hat a kimenőjelre,
2. A fizikai megvalósíthatóság feltétele  .
.
3. Matematikai átalakításokkal (2.98) átrendezhető úgy, hogy elegendő legyen legfeljebb n db belső tároló elem.
A későbbiekben a MATLAB Simulink szimulációs szoftvert használjuk. A 2-33. ábra ARMA rendszerének MATLAB Simulink megfelelője a 2-34. ábran látható.
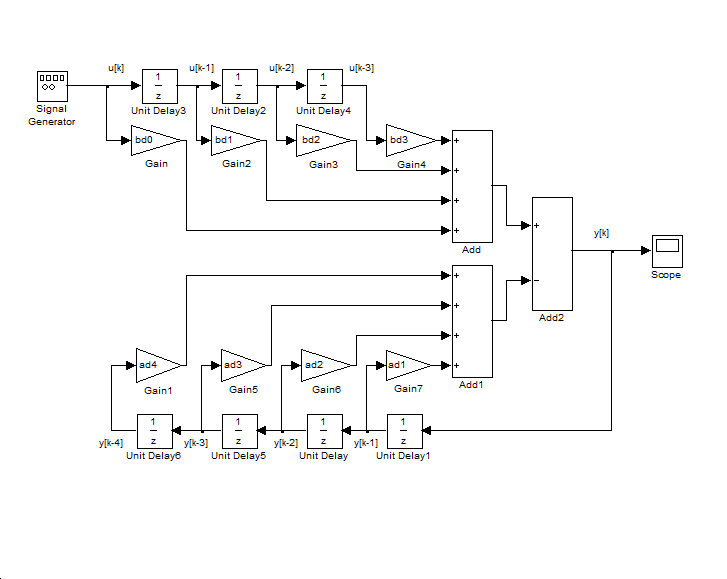
2.12.3. Állapottér-reprezentáció
Az irányításelméletben az időtartománybeli vizsgálatok esetén a (2.95) és (2.96) forma helyett a mátrixos formalizmuson alapuló az ún. állapottér-leírás a legelterjedtebb. Lineáris és időinvariáns (ún. LTI) rendszerek esetén ez az átalakítás könnyen megtehető. Az állapotváltozókat, a be- és kimenőjeleket egy-egy oszlopvektorba rendezzük, így (2.95) és (2.96) helyett két mátrixegyenletet kapunk. Egy LTI rendszer állapottér-egyenletei a következő alakúak.


ahol  az állapotváltozók oszlopvektora,
az állapotváltozók oszlopvektora,  a bemenetek oszlopvektora,
a bemenetek oszlopvektora,  a kimenetek oszlopvektora
a kimenetek oszlopvektora  ,
,  és
és  a rendszert leíró konstans elemű mátrixok. A (2.99) és (2.100) egyenletek szokásos grafikai megjelenítése a 2-35. ábrán látható.
a rendszert leíró konstans elemű mátrixok. A (2.99) és (2.100) egyenletek szokásos grafikai megjelenítése a 2-35. ábrán látható.
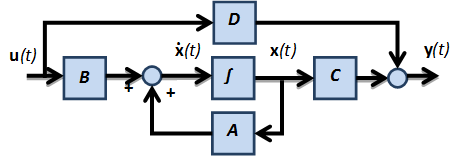
A mátrixos formalizmus nagymértékben megkönnyíti a rendszerrel kapcsolatos számításokat és tervezési feladatok megoldását, azok lineáris időinvariáns esetre nagyon jól kidolgozottak. A 2.6 fejezetben láttuk, hogy a nemlineáris rendszerek is valamilyen kompromisszummal és megkötésekkel (illetve a működéssel kapcsolatos további ismeretek beépítésével a modellbe) kezelhetők lineárisként. Ilyen kompromisszum eredménye a lineáris időben változó rendszerek. Az általános rövidítése, az angol név alapján LTV (Linear Time Varying).


ahol  az állapotváltozók oszlopvektora,
az állapotváltozók oszlopvektora,  a bemenetek oszlopvektora,
a bemenetek oszlopvektora,  a kimenetek oszlopvektora
a kimenetek oszlopvektora  ,
,  és
és  a rendszert leíró mátrixok, amelyek elemei között van olyan, amelyik időben változik .
a rendszert leíró mátrixok, amelyek elemei között van olyan, amelyik időben változik .
A kilencvenes években került a kutatók érdeklődésének középpontjába a lineáris változó paraméterű rendszerek. A rövidítés itt is az angol névből származik LPV (Linear Parameter Varying)


ahol  az állapotváltozók oszlopvektora,
az állapotváltozók oszlopvektora,  a bemenetek oszlopvektora,
a bemenetek oszlopvektora,  a kimenetek oszlopvektora
a kimenetek oszlopvektora  ,
,  és
és  a rendszert leíró mátrixok, amelyek elemei között olyan, amelyik értéke egy
a rendszert leíró mátrixok, amelyek elemei között olyan, amelyik értéke egy  paramétertől függ.
paramétertől függ.
Az állapottér reprezentáció egyre szélesebb körben használható.
2.12.4. Változó struktúrájú rendszerek
A teljesítményelektronikai berendezések tipikusan a változó struktúrájú rendszerek (Variable Structure System: VSS) csoportjába tartoznak. A teljesítményelektronikai berendezések egyik legjellemzőbb közös tulajdonsága a kapcsoló üzemmód, vagyis a teljesítményelektronikai berendezésekben található félvezető elemeket ki- vagy bekapcsolhatjuk a veszteségek csökkentése érdekében, hiszen ha a kapcsolóelemnek vagy a feszültsége vagy az árama közel nulla, akkor a vesztesége is közel nulla. A változó struktúrájú rendszerek néhány érdekes szabályozástechnikai tulajdonsággal rendelkeznek. Ezt azért kell kiemelnünk, mert a változó struktúrájú rendszerek bizonyos eseteiben a (2.95) egyenletből  nem fejezhető ki (2.97) alakban. A problémát az okozza, hogy létezik olyan szabályozási stratégia, amikor a félvezetőelemekkel előállított
nem fejezhető ki (2.97) alakban. A problémát az okozza, hogy létezik olyan szabályozási stratégia, amikor a félvezetőelemekkel előállított  bemenőjel minden időpillanatban átkapcsol, ezért
bemenőjel minden időpillanatban átkapcsol, ezért  , ebből következően
, ebből következően  sehol sem lesz folytonos és
sehol sem lesz folytonos és  nem integrálható, így (2.97) sem létezhet. Természetesen egy valóságos rendszernél ez nem fordulhat elő, ennek ellenére ez az idealizált állapot fontos szerepet játszik a szabályozáselméletben. Gondoljunk arra, hogy a teljesítményelektronikai eszközök mindig kapcsoló üzemmódban működnek. Ilyen esetekkel későbbi tananyagokban külön foglalkozunk. Ekkor a differenciálegyenletek klasszikus elmélete helyett az ún. jobb oldalán nem folytonos differenciálegyenletek elméletét kell alkalmazni.
nem integrálható, így (2.97) sem létezhet. Természetesen egy valóságos rendszernél ez nem fordulhat elő, ennek ellenére ez az idealizált állapot fontos szerepet játszik a szabályozáselméletben. Gondoljunk arra, hogy a teljesítményelektronikai eszközök mindig kapcsoló üzemmódban működnek. Ilyen esetekkel későbbi tananyagokban külön foglalkozunk. Ekkor a differenciálegyenletek klasszikus elmélete helyett az ún. jobb oldalán nem folytonos differenciálegyenletek elméletét kell alkalmazni.
Egy VSS akkor is lehet aszimptotikusan stabilis, ha a VSS –t alkotó valamennyi struktúra önmagában instabil. A VSS további fontos tulajdonsága, hogy – megfelelő szabályozással ellátva – olyan állapotba kerülhet, amikor a rendszer dinamikája az eredetihez képest csökkentett szabadságfokú differenciálegyenlettel írható le. Ebben az állapotban a rendszer elméletileg teljesen független bizonyos típusú paraméterek változásától és bizonyos típusú külső zavarok (pl. nemlineáris terhelés) hatásától. Ezt az állapotot csúszómódnak (sliding mode) és az erre alapozott szabályozást csúszómód-szabályozásnak nevezik, ami kiemelten fontos szerepet játszik a teljesítményelektronikai eszközök szabályozása területén.
2.12.5. Lineáris, egy bemenetű egy kimenetű folytonos idejű rendszer
Diszkrét időből folytonos időbe kétféle megközelítéssel lehet átlépni. A diszkrét időben lépésről lépésre végzett számítás helyett folytonos időben az integrálás műveletére van szükség. Ez elvezethet az integrális alakhoz, amely a (2.98) egyenlethez hasonlóan közvetlenül megadja az y(t) időfüggvényt. Általában az integrális alakot az időtartományban nem használjuk. Írjuk át a (2.98) egyetletet a következő alakra
| (2.105) |
Egy másik megközelítésben, ha ismerjük egy változó két egymást követő értékét és az időlépést, akkor ismerjük a differenciahányadost, ha egy harmadik értéket is ismerünk, akkor két egymást követő differenciát is ismerünk, és ebből eggyel magasabbrendű differenciahányadost is kiszámíthatunk. A (2.105) egyenletben az  kimenőjelnek összesen n+1 számú és az
kimenőjelnek összesen n+1 számú és az  bemenőjelnek összesen r+1 számú egymás utáni értéke szerepel.
bemenőjelnek összesen r+1 számú egymás utáni értéke szerepel.  esetre: van 3+1 db értékünk, 3 db differenciahányadosunk, 2 db differenciahányadosok differenciahányadosa és végül 1 db differenciahányados, melyet differenciahányadosok differenciahányadosából kapunk (ld. (2.106)).
esetre: van 3+1 db értékünk, 3 db differenciahányadosunk, 2 db differenciahányadosok differenciahányadosa és végül 1 db differenciahányados, melyet differenciahányadosok differenciahányadosából kapunk (ld. (2.106)).
| (2.106) |




Ha  , akkor (2.105) helyett (2.106) alapján egy harmadrendű differenciálegyenletet írhatunk fel. Ha az előbbi elvet követjük, akkor általános esetben a kimenőjelnek n-ed és a bemenőjelnek r-ed rendű differenciahányadosát tudjuk felírni. A folytonos időben a differenciahányados megfelelője a differenciálhányados, így (2.98) (pontosabban (2.105)) megfelelője a folytonos időben az alábbi típusú differenciálegyenlet:
, akkor (2.105) helyett (2.106) alapján egy harmadrendű differenciálegyenletet írhatunk fel. Ha az előbbi elvet követjük, akkor általános esetben a kimenőjelnek n-ed és a bemenőjelnek r-ed rendű differenciahányadosát tudjuk felírni. A folytonos időben a differenciahányados megfelelője a differenciálhányados, így (2.98) (pontosabban (2.105)) megfelelője a folytonos időben az alábbi típusú differenciálegyenlet:
| (2.107) |
ahol  az idő szerinti i-edik deriváltat jelöli. Az általánosságot nem csökkenti, ha az
az idő szerinti i-edik deriváltat jelöli. Az általánosságot nem csökkenti, ha az  feltételezéssel élünk. A fizikai megvalósíthatóság feltétele folytonos időben is
feltételezéssel élünk. A fizikai megvalósíthatóság feltétele folytonos időben is  . Bármely lineáris állandó együtthatós differenciálegyenlet-rendszer átírható (2.107) alakúra.
. Bármely lineáris állandó együtthatós differenciálegyenlet-rendszer átírható (2.107) alakúra.
Később látni fogjuk a (2.107) alakú felírás előnyét, de a mögöttes fizikai tartalom értelmezése ebben a formában nehézkes. Ismert, hogyha egy valós fizikai rendszer működését a fizikai törvényekből kiindulva n db lineáris, állandó együtthatójú elsőrendű differenciálegyenletből álló egyenletrendszerrel írhatjuk le, akkor az átírható egyetlen n-ed rendű differenciálegyenletté. Ebben az átírásban a közvetlen fizikai tartalom általában elvész. Képzeljük el, hogy van egy motor, az egy rugalmas tengelyen keresztül mozgat egy terhet, és bennünket a teher fordulatszáma érdekel, azt választjuk kimenőjelnek. A fizikából kiindulva a motor tekercsének áramára, a motor forgórészének mozgására, a tengely deformálódására és a deformációból a teher mozgására (ld. 2-16-2-19 feladatok). Ha az egyenleteket átírjuk (2.107) formára, akkor nyilvánvalóan a teher fordulatszámának n-edik deriváltja nem lesz azonos pl. a motor áramával.
Még két alapvető problémáról kell szólni (2.107) kapcsán.
A (2.107) egyenletből kiolvasható, hogy elő kell írnunk
 n-szeres és
n-szeres és  r-szeres differenciálhatóságát, főleg az utóbbi túlzottan szigorú megkötés (a megoldást ld. a 2.12.5 pontban).
r-szeres differenciálhatóságát, főleg az utóbbi túlzottan szigorú megkötés (a megoldást ld. a 2.12.5 pontban).Továbbá n+r db
 (i=0,1, … , n-1) és
(i=0,1, … , n-1) és  (i=1, … , r) változót kell definiálni, és ugyanennyi
(i=1, … , r) változót kell definiálni, és ugyanennyi  (i=1, … , n) és
(i=1, … , n) és  (i=1, … , r) kezdeti értéket kell megadnunk. Később a kezdeti érték fogalmát is pontosítanunk kell. Kérdés, hogy a változók és a kezdeti értékek számát nem csökkenthetjük-e. Később látni fogjuk, hogy (2.107) többféleképpen átrendezhető úgy, hogy elegendő legyen legfeljebb n db változó és n db kezdeti érték bevezetése. (A megoldást ld. 2.12.1. pontban az állapotváltozókra és kimenőjelre vonatkozó egyenletek szétválasztása, (2.95) és (2.96))
(i=1, … , r) kezdeti értéket kell megadnunk. Később a kezdeti érték fogalmát is pontosítanunk kell. Kérdés, hogy a változók és a kezdeti értékek számát nem csökkenthetjük-e. Később látni fogjuk, hogy (2.107) többféleképpen átrendezhető úgy, hogy elegendő legyen legfeljebb n db változó és n db kezdeti érték bevezetése. (A megoldást ld. 2.12.1. pontban az állapotváltozókra és kimenőjelre vonatkozó egyenletek szétválasztása, (2.95) és (2.96))
2.12.6. Általánosított derivált
A továbbiakban a (2.107) alakú differenciálegyenletekkel leírható rendszerekkel fogunk foglalkozni. Ha  r-szeres differenciálhatóságát szigorúan vesszük, és nem akarjuk a rendszereinket túlzottan elbonyolítani, akkor olyan egyszerű működést sem tudunk vizsgálni, hogy valamit be- és kikapcsolunk, vagy a valós fizikai rendszerben valamire kalapáccsal ráütünk. Egy pontosabb modellel ezek a problémák elvileg megoldhatók, figyelembe vehetjük, hogy egy motor bekapcsolásakor a tekercsben az áram hullámként kb. fél fénysebességgel terjed, a kalapács és megütött anyag az ütéskor egy kicsit deformálódik és valójában nem pillanatszerűen csökken a kalapács sebessége nullára. Ha a rendszert nem akarjuk szükségtelenül elbonyolítani, de az alapvető működések vizsgálatáról sem akarunk lemondani, akkor a matematikához kell fordulnunk. Ahhoz, hogy egy nem folytonos függvényt deriválni tudjunk, a függvény fogalmát ki kell terjeszteni. A kiterjesztett értelmű függvény neve disztribúció, amely a hagyományos függvényfogalommal szemben szingularitásokat is megenged (pontos definíciót ld. később).
r-szeres differenciálhatóságát szigorúan vesszük, és nem akarjuk a rendszereinket túlzottan elbonyolítani, akkor olyan egyszerű működést sem tudunk vizsgálni, hogy valamit be- és kikapcsolunk, vagy a valós fizikai rendszerben valamire kalapáccsal ráütünk. Egy pontosabb modellel ezek a problémák elvileg megoldhatók, figyelembe vehetjük, hogy egy motor bekapcsolásakor a tekercsben az áram hullámként kb. fél fénysebességgel terjed, a kalapács és megütött anyag az ütéskor egy kicsit deformálódik és valójában nem pillanatszerűen csökken a kalapács sebessége nullára. Ha a rendszert nem akarjuk szükségtelenül elbonyolítani, de az alapvető működések vizsgálatáról sem akarunk lemondani, akkor a matematikához kell fordulnunk. Ahhoz, hogy egy nem folytonos függvényt deriválni tudjunk, a függvény fogalmát ki kell terjeszteni. A kiterjesztett értelmű függvény neve disztribúció, amely a hagyományos függvényfogalommal szemben szingularitásokat is megenged (pontos definíciót ld. később).
Definíció
Ha  majdnem mindenütt folytonos, akkor az általános értelmű deriváltja az az
majdnem mindenütt folytonos, akkor az általános értelmű deriváltja az az  disztribúció, amely kielégíti a (2.108) egyenletet.
disztribúció, amely kielégíti a (2.108) egyenletet.
| (2.108) |
ahol az integrálás alsó határánál a  azt fejezi ki, hogy az integrálást úgy kell elvégezni, hogy
azt fejezi ki, hogy az integrálást úgy kell elvégezni, hogy  esetleges szakadását a
esetleges szakadását a  időpillanatban figyelembe tudjuk venni. Ez egyben azt is jelenti, hogy meg kell különböztetni a kezdeti érték
időpillanatban figyelembe tudjuk venni. Ez egyben azt is jelenti, hogy meg kell különböztetni a kezdeti érték  jobb és
jobb és  baloldali határértékét.
baloldali határértékét.
Értelmezés
Tegyük fel, hogy az  időfüggvény folytonos, az idő szerint differenciálható és felírható a következő alakban
időfüggvény folytonos, az idő szerint differenciálható és felírható a következő alakban
| (2.109) |

Ha  folytonos és
folytonos és  függvény kezdeti értéke a T0 időpillanatban az ismert
függvény kezdeti értéke a T0 időpillanatban az ismert  érték (a múltbeli változások összesített hatása), akkor (2.108) megoldása a (2.108) alakot ölti. és az a cél, hogy (2.108) akkor is megoldása legyen a (2.108) differenciálegyenletnek, ha sem
érték (a múltbeli változások összesített hatása), akkor (2.108) megoldása a (2.108) alakot ölti. és az a cél, hogy (2.108) akkor is megoldása legyen a (2.108) differenciálegyenletnek, ha sem  sem
sem  folytonosságát nem írjuk elő. Ha megengedjük, hogy az
folytonosságát nem írjuk elő. Ha megengedjük, hogy az  időfüggvénynek szakadása legyen, akkor ez a szakadás a T0 időpillanatban is lehet. Ez azt jelenti, hogy a kezdeti érték fogalmát is pontosítanunk kell.
időfüggvénynek szakadása legyen, akkor ez a szakadás a T0 időpillanatban is lehet. Ez azt jelenti, hogy a kezdeti érték fogalmát is pontosítanunk kell.
Definíció
Az  nem folytonos függvény T0 időpillanatbeli kezdeti értékén az
nem folytonos függvény T0 időpillanatbeli kezdeti értékén az  függvény T0 időpillanatbeli baloldali határértékét értjük.
függvény T0 időpillanatbeli baloldali határértékét értjük.
Értelmezés
Mérnöki terminológiával ez  bekapcsolás előtti értéke. Megjegyezzük, hogy minden olyan függvény, amely bármely véges szakaszon integrálható, értelmezhető disztribúcióként, és akkor deriválható is, mint disztribúció. Akkor van gond, ha
bekapcsolás előtti értéke. Megjegyezzük, hogy minden olyan függvény, amely bármely véges szakaszon integrálható, értelmezhető disztribúcióként, és akkor deriválható is, mint disztribúció. Akkor van gond, ha  nem integrálható, mert pl. minden pontjában szakadása van. Természetesen a valóságban ilyen nem fordulhat elő, de egy amúgy jól használható egyszerűsített rendszer produkálhat ilyet. Ebben az esetben ismét két út áll előttünk, vagy a valósághoz közelítve elbonyolítjuk a rendszert, hogy egy ilyen eset ne következhessen be, vagy újabb matematikai eszközöket keresünk, hogy ezt a furcsa esetet is kezelni tudjuk. Mindkét útnak megvan a maga előnye és hátránya. Ezzel a problémakörrel később foglalkozunk, most maradjon itt az a konklúzió, hogy vannak olyan függvények, amelyek a disztribúciók körében sem deriválhatók, és a mérnöki gyakorlatban is találunk olyan rendszereket, amelyeknél (2.108) sem vezet eredményre. Az általános értelmű deriváltra is használjuk a szokásos jelölést (ld. (2.109)). Egy disztribúció is deriválható, és a disztribúció deriváltja is disztribúció. A disztribúcióelmélet túlmutat e tananyag keretein. Bizonyítás nélkül fogadjuk el, hogy e tananyagban a disztribúciókkal elvégzett műveletek hasonló eredményt adnak, mintha az adott műveletet hagyományos függvényeken végeznénk el. Az esetleges eltérésekre mindig külön megjegyzést teszünk.
nem integrálható, mert pl. minden pontjában szakadása van. Természetesen a valóságban ilyen nem fordulhat elő, de egy amúgy jól használható egyszerűsített rendszer produkálhat ilyet. Ebben az esetben ismét két út áll előttünk, vagy a valósághoz közelítve elbonyolítjuk a rendszert, hogy egy ilyen eset ne következhessen be, vagy újabb matematikai eszközöket keresünk, hogy ezt a furcsa esetet is kezelni tudjuk. Mindkét útnak megvan a maga előnye és hátránya. Ezzel a problémakörrel később foglalkozunk, most maradjon itt az a konklúzió, hogy vannak olyan függvények, amelyek a disztribúciók körében sem deriválhatók, és a mérnöki gyakorlatban is találunk olyan rendszereket, amelyeknél (2.108) sem vezet eredményre. Az általános értelmű deriváltra is használjuk a szokásos jelölést (ld. (2.109)). Egy disztribúció is deriválható, és a disztribúció deriváltja is disztribúció. A disztribúcióelmélet túlmutat e tananyag keretein. Bizonyítás nélkül fogadjuk el, hogy e tananyagban a disztribúciókkal elvégzett műveletek hasonló eredményt adnak, mintha az adott műveletet hagyományos függvényeken végeznénk el. Az esetleges eltérésekre mindig külön megjegyzést teszünk.
2.12.6.1. A disztribúció elmélet alapjai
(elsősöknek nem ajánlott)
A disztribúció pontos definíciójához be kell vezetni a  próbafüggvényt, amelynek értéke csak egy véges intervallumon különbözik nullától és létezik tetszőleges számú hagyományos értelmű deriváltja (ebből következik, hogy
próbafüggvényt, amelynek értéke csak egy véges intervallumon különbözik nullától és létezik tetszőleges számú hagyományos értelmű deriváltja (ebből következik, hogy  folytonos és korlátos, de még a negatív végtelentől a pozitív végtelenig vett integrálja is véges).
folytonos és korlátos, de még a negatív végtelentől a pozitív végtelenig vett integrálja is véges).
Egy tipikus  próbafüggvény
próbafüggvény
| (2.110) |
Fogalmazhatunk úgy, hogy  matematikai értelemben nagyon jól viselkedő függvény (a szokásos függvény műveletet nehézség nélkül el tudjuk végezni
matematikai értelemben nagyon jól viselkedő függvény (a szokásos függvény műveletet nehézség nélkül el tudjuk végezni  függvényen). Az
függvényen). Az  disztribúció, mint általánosított értelmű (ezért matematikailag nehezen kezelhető) függvény definícióját és számunkra legfontosabb tulajdonságait ehhez a matematikailag jól kezelhető
disztribúció, mint általánosított értelmű (ezért matematikailag nehezen kezelhető) függvény definícióját és számunkra legfontosabb tulajdonságait ehhez a matematikailag jól kezelhető  függvényhez kötjük. Az
függvényhez kötjük. Az  disztribúciót a következő integrál segítségével definiáljuk
disztribúciót a következő integrál segítségével definiáljuk
| (2.111) |
ahol egy tetszőleges  disztribúció segítségével a
disztribúció segítségével a  függvényhez hozzárendelünk egy konkrét
függvényhez hozzárendelünk egy konkrét  számértéket. (Megjegyezzük, hogy azt a matematikai műveletet, amikor egy függvényhez egy számértéket rendelünk, funkcionálnak nevezzük.) Bizonyos esetekben bármely t időponthoz hozzárendelhetünk egy konkrét
számértéket. (Megjegyezzük, hogy azt a matematikai műveletet, amikor egy függvényhez egy számértéket rendelünk, funkcionálnak nevezzük.) Bizonyos esetekben bármely t időponthoz hozzárendelhetünk egy konkrét  értéket, ezt nevezzük reguláris disztribúciónak. Pl. ha bármely
értéket, ezt nevezzük reguláris disztribúciónak. Pl. ha bármely  függvényhez hozzárendeljük egy adott intervallumon vett határozott integráljának értékét (hangsúlyozottan egy konkrét számértéket)
függvényhez hozzárendeljük egy adott intervallumon vett határozott integráljának értékét (hangsúlyozottan egy konkrét számértéket)
| (2.112) |
akkor könnyen beláthatjuk, hogy
| (2.113) |
Ezzel szemben léteznek olyan disztribúciók, amelyeknél bizonyos t időpontokhoz nem rendelhetünk egy konkrét értéket, ezeket nevezzük szinguláris disztribúciónak. Igazán csak ez utóbbiak miatt van értelme bevezetni a disztribúció fogalmát. Legyen erre példa a következő
| (2.114) |
Azt beláthatjuk, hogy (2.114) esetén  , ha
, ha  , de nem tudjuk egy konkrét számmal megadni
, de nem tudjuk egy konkrét számmal megadni  értékét. A (2.114) által definiált disztribúció fontos szerepet tölt be a rendszertechnikában, ezzel a 3.1.1 pontban fogunk foglalkozni.
értékét. A (2.114) által definiált disztribúció fontos szerepet tölt be a rendszertechnikában, ezzel a 3.1.1 pontban fogunk foglalkozni.
A definíció után térjünk vissza a deriváláshoz. Ha (2.111) mindkét oldalát deriváljuk, akkor a jobb oldal nulla, így
| (2.115) |
(2.115) legfontosabb üzenete: Ha  egy lehetséges próbafüggvény, akkor
egy lehetséges próbafüggvény, akkor  is az, ezért ha (2.111) leír egy
is az, ezért ha (2.111) leír egy  disztribúciót, akkor (2.115) annak deriváltját írja le. Konklúzióként megállapíthatjuk, hogy minden olyan függvény, amely bármely véges szakaszon integrálható, értelmezhető disztribúcióként, és akkor deriválható is, mint disztribúció. A fenti definíció és konklúzió birtokában már közvetlenül is megadhatjuk egy függvény általánosított deriváltját.
disztribúciót, akkor (2.115) annak deriváltját írja le. Konklúzióként megállapíthatjuk, hogy minden olyan függvény, amely bármely véges szakaszon integrálható, értelmezhető disztribúcióként, és akkor deriválható is, mint disztribúció. A fenti definíció és konklúzió birtokában már közvetlenül is megadhatjuk egy függvény általánosított deriváltját.
2-4 feladat Disztribúció deriváltjának meghatározása
Határozza meg a (2.112) segítségével definiált (2.113) disztribúció deriváltjára vonatkozó összefüggést.
Megoldás
| (2.116) |

Látható, hogy a keresett  disztribúció szinguláris. Ennél fontosabb megállapítás: Az egység-ugrás függvény általánosított deriváltja alkalmas mintavételezésre.
disztribúció szinguláris. Ennél fontosabb megállapítás: Az egység-ugrás függvény általánosított deriváltja alkalmas mintavételezésre.
2-5 feladat Egységugrás jel deriváltjának meghatározása
Határozza meg az  egységugrásnak, mint disztribúciónak a deriváltját. Kiindulva a disztribúció definíciójából
egységugrásnak, mint disztribúciónak a deriváltját. Kiindulva a disztribúció definíciójából
| (2.117) |
Megjegyezzük, hogy a próbafüggvényre tett kikötésünk miatt  garantáltan egy véges számérték. A disztribúció deriváltjára vonatkozó (2.115) összefüggés alapján és figyelembe véve, hogy a próbafüggvény definíciója értelmében
garantáltan egy véges számérték. A disztribúció deriváltjára vonatkozó (2.115) összefüggés alapján és figyelembe véve, hogy a próbafüggvény definíciója értelmében 
| (2.118) |

2.12.7. Differenciálegyenletek megoldása analóg számítógépes megközelítéssel
Napjainkban klasszikus analóg számítógépeket nem használunk, de a szemlélet formálásában fontos szerepet játszhat azok felépítésének megismerése. Diszkrét időben a (2.98) egyenlet grafikus megjelenítésének tekinthető a 2-33. ábra. Folytonos időben a (2.107) differenciálegyenlet átírható a (2.98) egyenletnek megfelelő alakúra (az általánosságot nem csökkenti az  feltételezés)
feltételezés)
| (2.119) |
Az első ötletünk lehet az, hogy  kimenőjelet
kimenőjelet  -szer és az
-szer és az  bemenőjelet
bemenőjelet  -szer deriválva majd a kapott deriváltak (2.119) egyenletnek megfelelő lineáris kombinációját képezve
-szer deriválva majd a kapott deriváltak (2.119) egyenletnek megfelelő lineáris kombinációját képezve  kimenőjelet előállítjuk és így 2-33. ábraához teljesen hasonló grafikai megoldást kapunk, ahol a léptetések helyére deriváló tagokat kell tennünk, de sajnos ez így nem működik. A
kimenőjelet előállítjuk és így 2-33. ábraához teljesen hasonló grafikai megoldást kapunk, ahol a léptetések helyére deriváló tagokat kell tennünk, de sajnos ez így nem működik. A  helyett az
helyett az  jelet kell kifejeznünk (az általánosságot nem csökkenti az
jelet kell kifejeznünk (az általánosságot nem csökkenti az  feltételezés)
feltételezés)
| (2.120) |
A deriváló tagok helyett integrátorokat kell alkalmaznunk. Az  jelet
jelet  -szer integrálva kapjuk meg az
-szer integrálva kapjuk meg az  jelet. Közben
jelet. Közben  tagok is előállnak, így azok lineáris kombinációját is képezhetjük (2.120) második összegzésének megfelelően. De ez a módszer is csak
tagok is előállnak, így azok lineáris kombinációját is képezhetjük (2.120) második összegzésének megfelelően. De ez a módszer is csak  esetben működik, mert a bemenőjel
esetben működik, mert a bemenőjel  deriváltját nem tudjuk megkapni. Ha
deriváltját nem tudjuk megkapni. Ha  , akkor valamilyen módon segédváltozókat kell bevezetni. A segédváltozókról belátható, hogy állapotváltozónak tekinthetők. Legyen
, akkor valamilyen módon segédváltozókat kell bevezetni. A segédváltozókról belátható, hogy állapotváltozónak tekinthetők. Legyen  , és vezessük be a következő jelölést
, és vezessük be a következő jelölést
| (2.121) |
Ha  , akkor
, akkor
| (2.122) |
A (2.121) és (2.122) egyenletet megvalósító MATLAB Simulink program:
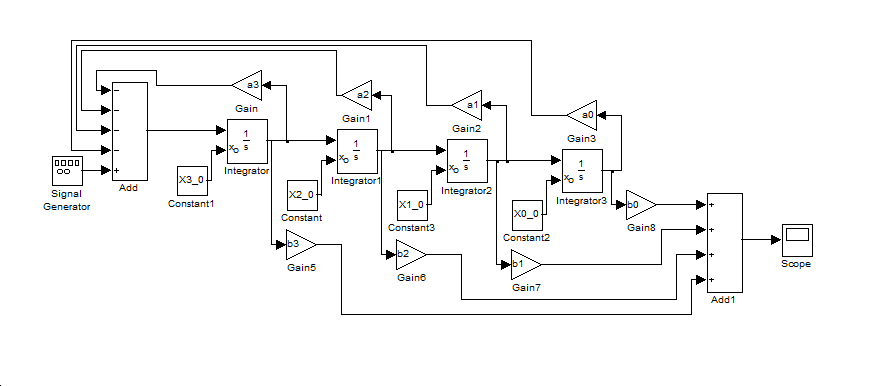
2.13. A stabilitás fogalma
Rendszerek vizsgálata során kulcsfontosságú feladat a stabilitás eldöntése. A későbbi fejezetekben több olyan konkrét módszert mutatunk be, amelyek segítségével a stabilitás eldönthető. Ebben az alfejezetben csak a legfontosabb definíciókat adjuk meg. A stabilitás megítélésében apró szemléletbeli különbségek tapasztalhatók akár annak függvényében is, hogy milyen jellegű feladatot kell megoldani. Ebben a tárgyban a végső cél a szintézis, egy szabályozó tervezése. Az elvárás az, hogy az elkészült rendszer minden üzemállapota stabilis legyen, így a rendszer stabilitásáról beszélünk. Ha analízis a feladatunk, akkor a rendszernek a különböző üzemállapotait néha csak külön-külön vizsgáljuk, ekkor azt hangsúlyozzuk, hogy a stabilitás nem a rendszer, hanem az adott üzemállapot tulajdonsága. Az irányítási feladatok fontos sajátossága, hogy e tárgykörben általában visszacsatolt rendszerekkel találkozunk, ezért legtöbbször a visszacsatolt rendszer stabilitását kell vizsgálnunk. Az a kérdés, hogy a visszacsatolás miként befolyásolja a visszacsatolt rendszer stabilitását.
A stabilitás mérnöki értelemben alapvetően két megközelítésben vizsgálható. Az irodalomban találkozhatunk a gerjesztetlen rendszer, illetve a gerjesztett rendszer stabilitásával. Matematikai értelemben pontosabb az a megfogalmazás, ha autonóm működésű és nem autonóm működésű rendszerek stabilitásáról beszélünk, vagyis matematikai értelemben a ténylegesen gerjesztetlen (az összes bemenet nulla értékű) és konstans gerjesztésű rendszereket azonos módon lehet kezelni. Az időben változó rendszerek a stabilitás szempontjából matematikailag az ún. „gerjesztett” kategóriába sorolandók, még akkor is, ha a bemenetre effektíven nulla értéket kapcsolunk. Talán ezért terjedt el a paraméteresen gerjesztett rendszer kifejezés, amely egyszerűen időben változó, vagyis nem autonóm működésű rendszert jelent. Természetesen autonóm működésű és nem autonóm működésű rendszerek egyaránt lehetnek lineárisak és nemlineárisak, ez a problémakör teljesen más megközelítése.
Lineáris, invariáns rendszerek esetén viszonylag egyszerűbb a helyzet, de nemlineáris rendszerek esetén a stabilitás egy összetett fogalom, és többféle definíció létezik rá. Az is előfordulhat, hogy egy rendszer az egyik definíció szerint stabil, a másik szerint pedig nem. Nemlineáris rendszerek esetén a stabilitás lehet gerjesztés és munkapont függő is.
A stabilitással rokon fogalom az egyensúlyi állapot. A gerjesztetlen és konstans gerjesztésű rendszer stabilitása az egyensúlyi állapot segítségével egyszerűen definiálható, így ezzel gyakran élünk. A gerjesztett, pontosabban a nem autonóm működésű rendszer egyensúlyi állapota összetettebb definíciót igényel, ezért a gerjesztett rendszer stabilitását általában a korlátos működésre alapozva definiáljuk.
2.13.1. Statikus egyensúlyi állapot
Definíció
Egy autonóm rendszer akkor van statikus egyensúlyi állapotban, ha az állapotváltozók értéke konstans.
Értelmezés
Megjegyzés. Ez a definíció kizárja a statikus rendszereket (amelyeknek nincs állapotváltozójuk), ugyanakkor a konstans gerjesztést megengedi. Egy lineáris időinvariáns dinamikus rendszernek egy adott konstans gerjesztés mellett csak egyetlen egyensúlyi állapota létezhet (ellenkező esetben nem lenne érvényes a szuperpozíció elve). Egy nemlineáris rendszernek adott konstans gerjesztés mellett lehet több egyensúlyi állapota is.
Példaként, ha van egy golyónk és egy kanalunk, akkor a kanál helyzetétől függően a golyót többféle módon tudjuk a kanálra helyezni úgy, hogy a golyó ne mozduljon el, vagyis statikus egyensúlyi állapotba kerüljön. Alapvető különbség van két eset között
A kanalat szokásosan fogjuk és a golyót a kanál mélyedésébe helyezzük.
A kanalat fordítva fogjuk, és a golyót a kanál domborulata tetejére helyezzük.
A különbséget azonnal észrevesszük, ha egy kicsit remeg a kezünk. Az első esetben a golyó kicsit ide-oda gurul, de ismét megáll, ha a kéz remegése megszűnik. A második esetben a golyó legurul a kanálról és sohasem gurul vissza a kanál tetejére. E gondolatkísérlet alapján fogalmazhatjuk meg az első stabilitási definíciót.
2.13.2. Aszimptotikus stabilitás
Definíció
Egy autonóm lineáris differenciálegyenlettel leírható rendszert tetszőlegesen kitérítjük az egyensúlyi állapotából. Az egyensúlyi állapotban ható esetleges konstans gerjesztést nem változtatjuk meg, és magára hagyjuk a rendszert. Ha a rendszer állapotváltozói konvergálnak az egyensúlyi állapotban felvett értékekhez, akkor a rendszert aszimptotikusan stabilisnak nevezzük.
Értelmezés
Ha egy rugóval függőlegesen felfüggesztünk egy tömeget, akkor a tömegre a gravitáció állandó gerjesztésként hat, és kialakul egy egyensúlyi állapot. Ha ebből az állapotból kimozdítjuk a tömeget és elengedjük, akkor a csillapítás miatt egyre csökkenő amplitúdójú lengések után beáll egy új egyensúlyi állapotba. Ha a rendszer lineáris, akkor az új egyensúlyi állapot megegyezik az eredeti egyensúlyi állapottal. Lineáris rendszerek esetén az egyensúlyi állapotra alapozott stabilitás vizsgálata egyszerű, mert csak egy egyensúlyi állapota lehet, és ha az stabilis, akkor aszimptotikusan is stabilis. Nemlineáris rendszerek esetén a fenti definíción enyhíteni kell. Mivel a nemlineáris rendszernek több egyensúlyi állapota is lehetséges, ezért nem követelhetjük meg, hogy tetszőlegesen nagy kitérítés után is mindig az eredeti egyensúlyi állapothoz konvergáljon a rendszer, vagyis az aszimptotikus stabilitás csak egy tartományon belül érvényes. Általában magát az „aszimptotikusságot” sem írhatjuk elő egy nemlineáris rendszer esetén, vagyis nem követelhetjük meg azt, hogy a kitérített rendszer konvergáljon az eredeti egyensúlyi állapothoz. Az egyik tipikus nemlinearítás a súrlódás. Ha a fenti példa tömeg-rugó rendszerében a tömeg pl. egy fal mellett mozog és mozgás közben a tömegre a faltól származó súrlódási erő is hat, akkor a tapadási súrlódás miatt a tömeg általában az eredeti egyensúlyi állapot előtt vagy után beragad.
Így a rendszer szigorúan nézve nem elégíti ki az aszimptotikus stabilitás kritériumát, de műszaki értelemben valahol ezt is stabilisnak érezzük, ezért szükséges az aszimptotikusnál megengedőbb definíció.
2.13.3. Ljapunov stabilitás
Definíció
Egy nemlineáris autonóm működésű rendszert akkor mondunk Ljapunov érelemben stabilisnak, ha az egyensúlyi állapot bármely környezetéhez találunk egy olyan nullánál nagyobb maximális kitérítést, amelynél kisebb kitérítések esetén a rendszer garantáltan visszatér az eredetileg meghatározott környezetbe.
Értelmezés
Ez a definíció egyrészt feltételezi, hogy az állapotváltozóknak van normája, vagyis értelmezhető az egyensúlyi állapot környezete, másrészt nem követeli meg, hogy a rendszer visszatérjen a kiindulási állapotba, csak annak környezetébe. A nemlineáris súrlódással terhelt tömeg-rugó rendszer Ljapunov értelemben stabilis, de nem aszimptotikusan stabilis.
2.13.4. Dinamikus egyensúlyi, illetve állandósult állapot
A statikus egyensúlyi állapot fogalma kiterjeszthető az egyensúlyi mozgásállapotra, tipikusan állandó amplitúdójú, állandó frekvenciájú periodikus lengésekre, ilyen esetben dinamikus egyensúlyi állapotról beszélünk. A mérnöki gyakorlatban az általános értelemben vett egyensúlyi állapotot szokás állandósult állapotnak nevezni.
Hasonlóan nem az eredeti egyensúlyi állapotba tér vissza a tömeg, ha időközben megváltozik a rugó rugalmassági együtthatója.
2.13.5. BIBO stabilitás
Definíció
Korlátos bemenőjelre minden esetben korlátos kimenőjel a válasz. Ezt a feltételt teljesítő rendszert ismételten az angol név után BIBO (Bounded Input Bounded Output) stabilis rendszernek hívjuk.
Ha egy lineáris rendszer valamilyen értelemben stabilis, akkor a többi értelemben is az.
2.14. Kidolgozott feladatok koncentrált paraméterű rendszerekhez kapcsolódóan
2-6 feladat Rendszerek csoportosítása
A definícióból kiindulva adja meg, hogy az alábbi rendszerek közül, melyek lineárisak, kauzálisak, statikusak vagy dinamikusak, továbbá időinvariánsak, illetve autonómak. Ahol ez nem dönthető el egyértelműen, ott adja meg a feltételét annak, hogy a rendszer az adott osztályba tartozzon, ahol 
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|












Az első 12 rendszerre vonatkozó megoldások
rendszer sorszáma | lineáris | statikus | kauzális | időinvariáns |
1. | igen | igen | igen | igen |
2. | igen | nem | igen | igen |
3. | igen | nem | nem | igen |
4. | nem | igen | igen | igen |
5. | nem | igen | igen | igen |
6. | nem | igen | igen | igen |
7. | nem | igen | igen | igen |
8. | igen | nem | igen | igen |
9. | igen | nem | nem | igen |
10. | igen | igen | igen | igen |
11. | nem | igen | igen | nem |
12. | igen | igen | igen | nem |
Rövid magyarázatok
Ha  és
és  , akkor ebből következik, hogy
, akkor ebből következik, hogy
| (2.123) |

Vagyis a szuperpozíció elve érvényes, ezért a  rendszer lineáris.
rendszer lineáris.
A linearitás hasonlóan belátható a 2., 3., 8. és 12. rendszer esetén.
Legyen  és
és  , mivel
, mivel
| (2.124) |

Vagyis a szuperpozíció elve nem érvényes, ezért a  rendszer nemlineáris.
rendszer nemlineáris.
A kétbemenetű rendszer esetén:
Ha  és
és  , akkor ebből következik, hogy
, akkor ebből következik, hogy
| (2.125) |

Vagyis a szuperpozíció elve érvényes, ezért a  rendszer lineáris.
rendszer lineáris.
Ha  és
és , akkor a speciális esetet leszámítva
, akkor a speciális esetet leszámítva
| (2.126) |

Vagyis a szuperpozíció elve nem érvényes, ezért a  rendszer nem lineáris.
rendszer nem lineáris.
Az  és
és  rendszer nem kauzális, mert e két rendszer esetén a kimenet tetszőleges
rendszer nem kauzális, mert e két rendszer esetén a kimenet tetszőleges  időponthoz tartozó értéke függ a bemenet
időponthoz tartozó értéke függ a bemenet  értékétől. Az első 12 rendszer közül az összes többi rendszer kauzális.
értékétől. Az első 12 rendszer közül az összes többi rendszer kauzális.
| (2.127) |

A 12-nél nagyobb sorszámú rendszerek: Házi feladat, megoldását nem közöljük
2-7 feladat RL kör bekapcsolása
Írja fel egy soros RL kör differenciálegyenletét, ha a bemenőjel az  feszültség (
feszültség ( az ellenálláson és
az ellenálláson és  az induktivitáson eső feszültség), a kimenőjel az induktivitás
az induktivitáson eső feszültség), a kimenőjel az induktivitás  árama.
árama.
Megoldás
Az áramkörre felírható Kirchhoff hurokegyenlet:


,  ,
,  és
és 
| (2.130) |

2-8 feladat Hőátadás
Egy  tömegű,
tömegű,  felületű testre
felületű testre  hőáramot kapcsolunk. A tömeg intenzív hőcserében van a környezetével (mint például a radiátor). Tegyük fel, hogy a hőmérséklet kezdeti értéke nulla (
hőáramot kapcsolunk. A tömeg intenzív hőcserében van a környezetével (mint például a radiátor). Tegyük fel, hogy a hőmérséklet kezdeti értéke nulla ( ) Írjuk fel a tömeg hőmérsékletváltozását leíró egyenletet. Legyen a bemenőjel a
) Írjuk fel a tömeg hőmérsékletváltozását leíró egyenletet. Legyen a bemenőjel a  (t) hőáram és a kimenőjel a radiátor
(t) hőáram és a kimenőjel a radiátor  hőmérséklete. További paraméterek: α hőátadási tényező, c fajhő.
hőmérséklete. További paraméterek: α hőátadási tényező, c fajhő.
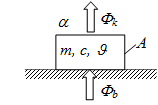
Megoldás
A kilépő hőáram:
| (2.131) |

A be- és kilépő hőáram különbsége a test hőmérsékletét változtatja:
| (2.132) |
2-9 feladat Vezető melegedése
Egy  tömegű,
tömegű,  hosszúságú
hosszúságú  keresztmetszetű és
keresztmetszetű és  felületű vezetőn
felületű vezetőn  áram folyik. A vezető anyaga legyen réz. Az áram hatására a vezetőben hő keletkezik, amely a felületen hősugárzással, hővezetéssel és hőáramlással távozik. Tegyük fel, hogy a hőmérséklet kezdeti értéke nulla (
áram folyik. A vezető anyaga legyen réz. Az áram hatására a vezetőben hő keletkezik, amely a felületen hősugárzással, hővezetéssel és hőáramlással távozik. Tegyük fel, hogy a hőmérséklet kezdeti értéke nulla ( ) Írjuk fel a vezető hőmérsékletváltozását leíró egyenletet. Legyen a bemenőjel a vezető áramának négyzete és a kimenőjel a vezető
) Írjuk fel a vezető hőmérsékletváltozását leíró egyenletet. Legyen a bemenőjel a vezető áramának négyzete és a kimenőjel a vezető  hőmérséklete. További paraméterek:
hőmérséklete. További paraméterek: az anyag fajlagos vezetőképessége, α hőátadási tényező, c fajhő.
az anyag fajlagos vezetőképessége, α hőátadási tényező, c fajhő.
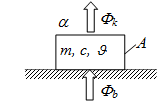
Megoldás
A kilépő hőáram:
| (2.133) |

A be- és kilépő hőáram különbsége a test hőmérsékletét változtatja:
| (2.134) |

| (2.135) |
2-10 feladat Folyadéktartály
Határozza meg a 2-39. ábrán látható tartály folyadékszintjének változását leíró egyenletet veszteségmentes kifolyást feltételezve, és egy adott vízszintmagasságból kiindulva. Legyen a bemenőjel a  beáramló térfogatáram és a kimenőjel a
beáramló térfogatáram és a kimenőjel a  folyadékszint.
folyadékszint.
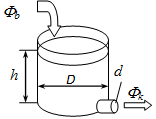
Megoldás
A kilépő térfogatáramot a kiáramlási sebesség felhasználásával tudjuk meghatározni:
| (2.136) |
A be- és kiáramlás különbsége a tartályban lévő folyadék térfogatát változtatja:
| (2.137) |
Mint látható, az egyenlet nemlineáris. Tegyük fel, hogy a tartályban a folyadékszint csak kismértékben ingadozik (h0 körül). Ekkor  értéke jól közelíthető lineáris függvénnyel (linearizálás). Kétféleképpen is próbálkozhatunk:
értéke jól közelíthető lineáris függvénnyel (linearizálás). Kétféleképpen is próbálkozhatunk:
felírhatjuk a
 függvény h0 pontbeli érintőjének egyenletét, vagy
függvény h0 pontbeli érintőjének egyenletét, vagyvehetjük
 h0 pont körül felírt Taylor sorának első két tagját.
h0 pont körül felírt Taylor sorának első két tagját.
Az eredmény természetesen mindkét esetben ugyanaz lesz:
| (2.138) |
Ennek felhasználásával a differenciálegyenlet:
| (2.139) |
Megjegyzés: tartályos feladatra az integráló tagnál is láthatunk példát (4.6.3). A kettő közti lényegi különbség az, hogy míg ott a kiáramló térfogatáram az időtől függ, itt a tartályban lévő folyadékszinttől.
2-11 feladat ARMA rendszer paraméterei (Házi feladat, megoldását nem közöljük)
Adja meg a 2-7, 2-8 és 2-10 feladatban ismertetett rendszer diszkrétidejű ARMA modelljének paramétereit.
2-12 feladat Rendszerekegyenletek felírása (Ideális transzlációs telemanipulációs rendszer)
Írja fel a 2-40. ábraán látható ideális transzlációs telemanipulációs rendszer egyenletét a következő esetekben, mind diszkrét, mind folytonos időben:
Legyen a rendszer bemenete a mester oldalon a fogantyú
 elmozdulása, és a rendszer kimenete a szolga oldali fogantyú
elmozdulása, és a rendszer kimenete a szolga oldali fogantyú  elmozdulása. A mester és szolga oldali fogantyút egy merev rúd kapcsolja össze. Ebben a megközelítésben ez egy statikai rendszer. A bemenet egyértelműen meghatározza a kimenetet.
elmozdulása. A mester és szolga oldali fogantyút egy merev rúd kapcsolja össze. Ebben a megközelítésben ez egy statikai rendszer. A bemenet egyértelműen meghatározza a kimenetet. Hogy módosul az a) eset, ha az
 pozícióban eltörik a rúd?
pozícióban eltörik a rúd?Más a helyzet, ha az
 erőhatást tekintjük a bemenetnek, a szolga oldali erőhatást elhanyagoljuk, és először legyen a kimenet a rúd sebesssége a szolga oldalon. Ekkor egy dinamikai rendszerhez jutunk. Legyen a rendszer tömege
erőhatást tekintjük a bemenetnek, a szolga oldali erőhatást elhanyagoljuk, és először legyen a kimenet a rúd sebesssége a szolga oldalon. Ekkor egy dinamikai rendszerhez jutunk. Legyen a rendszer tömege  és tudjuk, hogy
és tudjuk, hogy  és rúd kezdeti sebessége szintén nulla, továbbá
és rúd kezdeti sebessége szintén nulla, továbbá 
Tovább bővítve, ha az
 erőhatást tekintjük a bemenetnek, a szolga oldali erőhatás nulla, és a kimenet a rúd pozíciója a szolga oldalon. Ekkor egy másodrendű dinamikai rendszerhez jutunk. A súrlódást elhanyagoljuk. Legyen a rendszer tömege
erőhatást tekintjük a bemenetnek, a szolga oldali erőhatás nulla, és a kimenet a rúd pozíciója a szolga oldalon. Ekkor egy másodrendű dinamikai rendszerhez jutunk. A súrlódást elhanyagoljuk. Legyen a rendszer tömege  és tudjuk, hogy
és tudjuk, hogy  és a rúd kezdeti sebessége szintén nulla, továbbá
és a rúd kezdeti sebessége szintén nulla, továbbá 
Továbbra is az
 erőhatást tekintjük a bemenetnek, a szolga oldali erőhatás nulla, és a kimenet a rúd pozíciója a szolga oldalon. Ekkor egy másodrendű dinamikai rendszerhez jutunk. A súrlódást vegyük figyelembe egy sebességtől függő erőhatással (ezt nevezik viszkózus súrlódásnak). A viszkózus súrlódási együtthatót jelöljük
erőhatást tekintjük a bemenetnek, a szolga oldali erőhatás nulla, és a kimenet a rúd pozíciója a szolga oldalon. Ekkor egy másodrendű dinamikai rendszerhez jutunk. A súrlódást vegyük figyelembe egy sebességtől függő erőhatással (ezt nevezik viszkózus súrlódásnak). A viszkózus súrlódási együtthatót jelöljük  -vel. Legyen a rendszer tömege
-vel. Legyen a rendszer tömege  és tudjuk, hogy
és tudjuk, hogy  és a rúd kezdeti sebessége szintén nulla, továbbá
és a rúd kezdeti sebessége szintén nulla, továbbá 
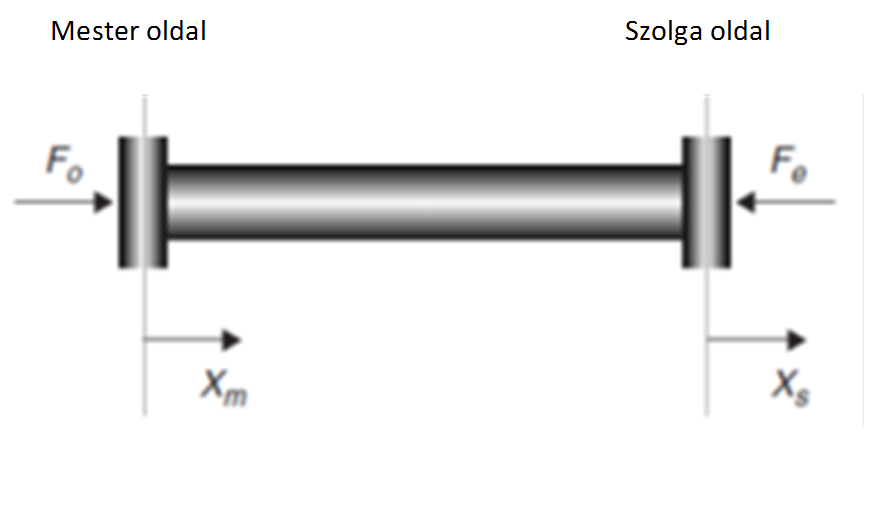
Megoldás
Bemenet | Kimenet | Diszkrét idejű rendszeregyenletek |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|















Bemenet | Kimenet | Folytonos idejű rendszeregyenletek |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|













Az a) és b) eset nem szorul további magyarázatra. A c) esetben abból indulhatunk ki, hogy állandó  erőt és
erőt és  tömeget feltételezve, a középiskolában tanultak alapján,
tömeget feltételezve, a középiskolában tanultak alapján,
| (2.140) |

ahol  a szolga oldal gyorsulása. A manipulátor kar sebességét az idő függvényében a következőképp számíthatjuk, ha
a szolga oldal gyorsulása. A manipulátor kar sebességét az idő függvényében a következőképp számíthatjuk, ha  és
és  .
.
| (2.141) |
(2.140) minden időpillanatban érvényben marad akkor is, ha az  erő meváltozik. Tegyük fel, hogy az
erő meváltozik. Tegyük fel, hogy az  erő diszkrét
erő diszkrét  időlépésenként lépcsősen változik. Tegyük fel, hogy egy adott t
időlépésenként lépcsősen változik. Tegyük fel, hogy egy adott t időpillanatban vizsgáljuk a rendszer viselkedését. Ehhez az időponthoz
időpillanatban vizsgáljuk a rendszer viselkedését. Ehhez az időponthoz  db
db  nagyságú időlépéssel jutunk el
nagyságú időlépéssel jutunk el
| (2.142) |

Térjünk át a diszkrét idejű felírásra
| (2.143) |
Ha az erő adott egy  időpontban adott, akkor az
időpontban adott, akkor az  időlépésben a sebesség megváltozása
időlépésben a sebesség megváltozása
| (2.144) |
Ezt a  változást hozzá kell adnunk a sebesség
változást hozzá kell adnunk a sebesség  pontbeni
pontbeni  értékéhez, így megkapjuk a sebesség
értékéhez, így megkapjuk a sebesség  pontbeni értékét
pontbeni értékét
| (2.145) |

A sebesség bármely  időpontban összegzéssel számítható ki (a sebesség kezdeti értéke
időpontban összegzéssel számítható ki (a sebesség kezdeti értéke  )
)
| (2.146) |

Ha a sebesség egy adott  időpontban ismert, akkor az adott időlépésben a pozíció megváltozása a (2.144) kifejezéshez hasonló gondolatmenettel számítható.
időpontban ismert, akkor az adott időlépésben a pozíció megváltozása a (2.144) kifejezéshez hasonló gondolatmenettel számítható.
| (2.147) |

Itt is elmondható, hogy a  változást hozzá kell adnunk a pozíció
változást hozzá kell adnunk a pozíció  pontbeli
pontbeli  értékéhez, így megkapjuk a pozíció
értékéhez, így megkapjuk a pozíció  pontbeli értékét
pontbeli értékét
| (2.148) |

Ismert, hogy a sebességből a pozíció ugyancsak összegzéssel állítható elő, a pozíció kezdeti értéke  . Ha egy
. Ha egy  időpontban vagyunk kíváncsiak
időpontban vagyunk kíváncsiak  értékére, akkor a (2.147) kifejezésben leírt változásokat kell összegezni, de
értékére, akkor a (2.147) kifejezésben leírt változásokat kell összegezni, de  értéket helyettesítsük (2.146) alakjával. Így kettős szummát kapunk
értéket helyettesítsük (2.146) alakjával. Így kettős szummát kapunk
| (2.149) |



Az  erő hatására az első időlépésben csak a sebesség változik meg, és csak a második lépésben jelenik meg az erő hatása a pozíciójelben. Ugyanakkor a kezdeti értékek hatását az első két lépésben is figyelembe kell venni. Ez azt jelenti, hogy a (2.149) kifejezés csak a
erő hatására az első időlépésben csak a sebesség változik meg, és csak a második lépésben jelenik meg az erő hatása a pozíciójelben. Ugyanakkor a kezdeti értékek hatását az első két lépésben is figyelembe kell venni. Ez azt jelenti, hogy a (2.149) kifejezés csak a  tartományban értelmezhető. Ezzel kapcsolatban egy kérdés merül fel. Honnan kezdjük számolni az időt. Mondhatjuk azt, hogy legyen az idő kezdőpontja az, ahonnan a (2.149) kifejezés él, ekkor néhány negatív időpontban is ismernünk kell az erő, pozíció és a sebesség értékét.
tartományban értelmezhető. Ezzel kapcsolatban egy kérdés merül fel. Honnan kezdjük számolni az időt. Mondhatjuk azt, hogy legyen az idő kezdőpontja az, ahonnan a (2.149) kifejezés él, ekkor néhány negatív időpontban is ismernünk kell az erő, pozíció és a sebesség értékét.
| (2.150) |



Adott esetben mindkét megközelítés lehet helyes. Ez a konkrét esettől és szituációtól függ. A fenti példa legfontosabb üzenete az, hogy attól az időponttól, ahonnan (2.149), illetve (2.150) érvényes,  jelnek visszamenőleg két értékét ismernünk kell. Természetesen ez a két érték lehet nulla, de akkor azt kell tudnunk, hogy nulla. Ha
jelnek visszamenőleg két értékét ismernünk kell. Természetesen ez a két érték lehet nulla, de akkor azt kell tudnunk, hogy nulla. Ha  nullához tart, akkor e két megközelítéssel számított
nullához tart, akkor e két megközelítéssel számított  sorozat különbsége is nullához tart, és ekkor az összegzés helyett integrálni kell, továbbá (2.149), illetve (2.150) azonossá válik, és az egyértelmű számításhoz
sorozat különbsége is nullához tart, és ekkor az összegzés helyett integrálni kell, továbbá (2.149), illetve (2.150) azonossá válik, és az egyértelmű számításhoz  és
és  ) értékét kell ismerünk.
) értékét kell ismerünk.
A (2.149) kifejezést kiszámító matlab program a következő, ahol az idő 10 egység, az erő nagysága 1. A  időlépés nagyságát DT jelöli.
időlépés nagyságát DT jelöli.
K=10/DT;
for i = 1:K-1
F(i)=1;
end
sum=0;
for k1 = 1:K-1
sum=sum+F0*DT*DT;
for i = 1:k1-1
sum= sum+ F(i)*DT*DT;
end
end
sum=sum/mHa viszkózus (sebességgel arányos)
| (2.151) |

súrlódás fékezi a mozgást, akkor e súrlódási erővel csökkenteni kell a tömegre ható gyorsító erőt
| (2.152) |

(2.152) alapján (2.145) és (2.146) is módosítandó
| (2.153) |

| (2.154) |

Súrlódás esetén (2.149) is módosul
| (2.155) |

Mivel a (2.155) képletben szerepel a sebesség is, ezért a (2.154) és (2.155) képletben párhuzamosan kell számolnunk. A kettőt egy képletbe összevonni nehézkes. Ugyanakkor a sebesség implicite szerepel a (2.155) képletben is, így célszerűbbnek látszik egy rekurzív formula felírása. Helyettesítsük a (2.148) kifejezésbe (2.153) megfelelően eltolt változatát.
| (2.156) |

Használjuk ki, hogy
| (2.157) |

| (2.158) |

A (2.158) kifejezésből világosan látszik, hogy a kimenőjel egy új értékének kiszámítáhához mind a kimenőjelnek, mind a bemenőjelnek két visszamenő értékét kell ismerni. Ehhez a megállapításhoz logikai úton is eljuthatunk, ha az erő egy tetszőleges  -edik időpontban megváltozik, akkor a következő
-edik időpontban megváltozik, akkor a következő  -adik időlépésben a sebesség változik meg, és csak a rákövetkező
-adik időlépésben a sebesség változik meg, és csak a rákövetkező  -dik lépésben jelenik meg az erőváltozás hatása a pozíciójelben. A (2.158) kifejezést megvalósító MATLAB Simulink program a 2-41. ábran látható.
-dik lépésben jelenik meg az erőváltozás hatása a pozíciójelben. A (2.158) kifejezést megvalósító MATLAB Simulink program a 2-41. ábran látható.
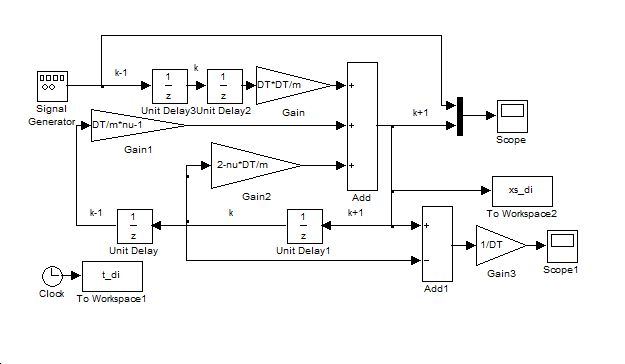
(2.140) minden időpillanatban érvényben marad akkor is, ha az  erő folyamatosra változik
erő folyamatosra változik
| (2.159) |
Ebben az esetben bármely  időpontban az összegzés helyett integrálással lehet
időpontban az összegzés helyett integrálással lehet  értékét kiszámítani, ha
értékét kiszámítani, ha  és
és  .
.
| (2.160) |
Ismert, hogy a sebességből a pozíció ugyancsak integrálással állítható elő, ismét zérus kezdeti feltétellel  és
és  .
.
| (2.161) |
| (2.162) |
Ha viszkózus (sebességgel arányos)
| (2.163) |

súrlódás fékezi a mozgást, akkor e súrlódási erővel csökkenteni kell a tömegre ható gyorsító erőt
| (2.164) |

(2.164) alapján (2.160) is módosítandó.
| (2.165) |
Súrlódás esetén (2.162) is módosul
| (2.166) |

A kezdeti értékeket is figyelembe véve legyen  és
és 
| (2.167) |

A nehézséget az okozza, hogy a sebesség kiszámításához ismernünk kell a sebességet. Az integrál alaknál sok esetben célszerűbb a differenciális alakot használni. Induljunk ki a (2.164) összefüggésből és helyettesítsük a gyorsítás és a sebesség helyére a pozíció első illetve második deriváltját
| (2.168) |
A (2.168) kifejezés csak a kezdeti értékek megadásával válik egyértelművé. A (2.168) kifejezés kétszeres integrálásával a (2.167) kifejezéshez jutunk. Az eredményt a 2-42. ábraán látható analóg számítógéppel is megkaphatjuk.
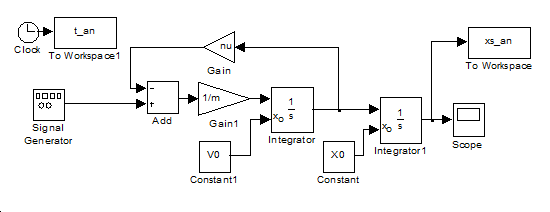
Válasszuk a következő paramétereket:
Tmax=0; DT=1; K=Tmax/DT; nu=0; X0=0; V0=0; F0=1; m=1;
Az erő egy egység és a szimuláció időtartama Tmax=10 egység. Könnyen kiszámítható, hogy az elmozdulás
| (2.169) |
A 2-43. ábran a folytonos idejű modell (kék folytonos görbe) és a diszkrét idejű modell (lépcsős görbék) szimulációs eredményeit hasonlítottuk össze. Látható, hogy (2.149) és (2.150) összefüggés ez alsó és egy felső becslését adja a folytonos idejű eredménynek. (2.149) és (2.150) összefüggés között két időlépésnyi eltérés van, ha a kettő között egy időlépés eltolással számítjuk a diszkrét idejű rendszert, akkor az a folytonos idejű megoldás körül oszcillál.
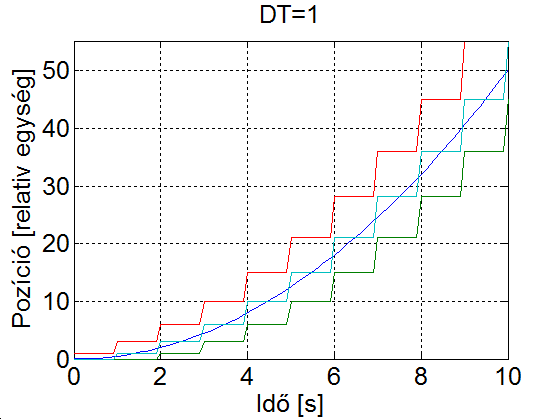
Ahogy az időlépés nagyságát csökkentjük, úgy a diszkrét idejű és folytonos idejű megoldás különbsége egyre kisebb lesz (ld. 2-44. ábra). Ha  , akkor a három változat határértékben ugyanahhoz a függvényhez tart. Itt emlékeztetünk arra, hogy egy függvény integrálhatóságának feltétele az, hogy az alsó és felső becslés ugyanahhoz a határértékhez tartson.
, akkor a három változat határértékben ugyanahhoz a függvényhez tart. Itt emlékeztetünk arra, hogy egy függvény integrálhatóságának feltétele az, hogy az alsó és felső becslés ugyanahhoz a határértékhez tartson.
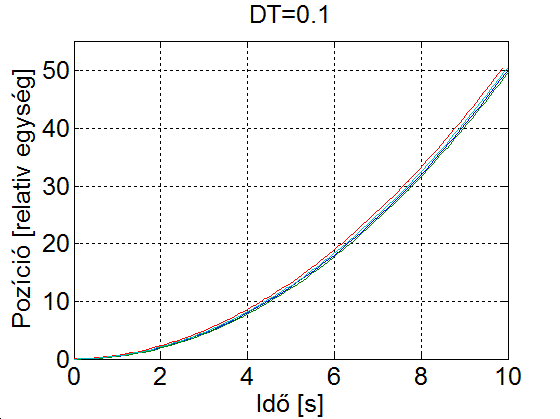
2-13 feladat Rendszeregyenletek felírása (Kerékpár) (Házi feladat, megoldását nem közöljük)
Adott egy direkt hajtású (a hátsó agyban nem racsnis) kerékpár, nyúlás és kotyogás mentes lánccal (válasszon valóságos adatokat a kerékméretre, az első és hátsó fogaskerékre és a pedál kar hosszára). A kerékpár egyenesen halad.
Írja fel a kerékpár rendszeregyenletét. Legyen a rendszer bemenete a pedál elfordulása. Legyen a kimenet a megtett út.
Írja fel a kerékpár rendszeregyenletét. Legyen a rendszer bemenete a kerékpáros által a pedálra kifejtett nyomaték. Legyen a kimenet a megtett út. Ismert a kerékpáros és a kerékpár tömege.
Hogy módosul a rendszeregyenlet, ha a hátsóagy racsnis a b) esetben
2-14 feladat Ideális transzlációs telemanipulációs rendszer ARMA alakja
Adja meg a
2-12 feladat c), d) és e) pontjában ismertetett rendszer diszkrét idejű ARMA modelljének paramétereit.
c) pont
A (2.153) alapján
| (2.170) |

A 2-33. ábra és (2.170) alapján
| (2.171) |

d) pont
A (2.158) kifejezés alapján  helyettesítéssel
helyettesítéssel
| (2.172) |

A 2-33. ábra és (2.172) alapján
| (2.173) |

e) pont
A (2.158) kifejezés alapján
| (2.174) |

A 2-33. ábra és (2.174) alapján
| (2.175) |

2-15 feladat Kerékpár rendszeregyenleteinek ARMA alakja (Házi feladat, megoldását nem közöljük)
Írja fel a
2-13 feladat b) pont esetében a rendszer ARMA modelljét 0.1s-os mintavétellel.
2-16 feladat Egyenáramú motor és merev tengellyel forgatott tömeg
Adott egy külsőgerjesztésű egyenáramú motor, amely egy merev tengelyen keresztül egy terhelést mozgat. A motor villamos áramának dinamikáját elhanyagoljuk, más szavakkal az időállandóját (definíciót ld. 161. oldal) nullának tekintjük. Jelölések:  a motor szögsebessége és
a motor szögsebessége és  az elfordulása,
az elfordulása,  ,
,  ,
,  ,
,  , pedig értelemszerűen a motor illetve a teher másodrendű nyomatéka, illetve a viszkózus súrlódást figyelembe vevő paramétere.
, pedig értelemszerűen a motor illetve a teher másodrendű nyomatéka, illetve a viszkózus súrlódást figyelembe vevő paramétere.  a motor kapocsfeszültsége,
a motor kapocsfeszültsége,  a motor paramétere, Ra az armatúra ellenállása. A rendszer egyenletei:
a motor paramétere, Ra az armatúra ellenállása. A rendszer egyenletei:
| (2.176) |









Megoldás
a) feladat
A 2-17 feladat speciális esete.
b) feladat
Fejezzük ki a deriváltakat
| (2.177) |


Vezessük be a következő jelölést
| (2.178) |

Az analóg számítógépes modell a 2-45. ábran látható.
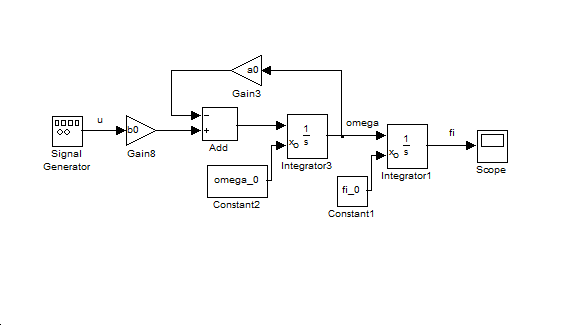
2-17 feladat Egyenáramú motor és terhelő nyomaték
Adott egy külsőgerjesztésű egyenáramú motor, amelyet  nyomaték terhel. Jelölések:
nyomaték terhel. Jelölések:  a motor szögsebessége és
a motor szögsebessége és  az elfordulása,
az elfordulása,  és
és  pedig a motor másodrendű nyomatéka, illetve a viszkózus súrlódást figyelembe vevő paramétere.
pedig a motor másodrendű nyomatéka, illetve a viszkózus súrlódást figyelembe vevő paramétere.  a motor kapocsfeszültsége,
a motor kapocsfeszültsége,  a motor paramétere,
a motor paramétere,  az armatúra ellenállása,
az armatúra ellenállása,  az armatúra tekercs induktivitása. A rendszer egyenletei:
az armatúra tekercs induktivitása. A rendszer egyenletei:
| (2.179) |




Írja át a differenciálegyenlet-rendszert (2.107) alakúra,
Legyen az
 bemenet a motor
bemenet a motor  kapocsfeszültsége és az
kapocsfeszültsége és az  kimenet a motor
kimenet a motor  fordulatszáma. Az
fordulatszáma. Az  terhelőnyomatékot ebben az esetben tekintsük nullának.
terhelőnyomatékot ebben az esetben tekintsük nullának.Legyen az
 bemenet a motor
bemenet a motor  kapocsfeszültsége és az
kapocsfeszültsége és az  kimenet a motor
kimenet a motor  elfordulása. Az
elfordulása. Az  terhelőnyomatékot ebben az esetben tekintsük nullának.
terhelőnyomatékot ebben az esetben tekintsük nullának.Legyen az
 bemenet a motor
bemenet a motor  terhelőnyomatéka és az
terhelőnyomatéka és az  kimenet a motor
kimenet a motor  fordulatszáma. A motor kapocsfeszültségét ebben az esetben tekintsük nullának.
fordulatszáma. A motor kapocsfeszültségét ebben az esetben tekintsük nullának.Legyen az
 bemenet a motor
bemenet a motor  terhelőnyomatéka és az
terhelőnyomatéka és az  kimenet a motor
kimenet a motor  elfordulása. A motor kapocsfeszültségét ebben az esetben tekintsük nullának.
elfordulása. A motor kapocsfeszültségét ebben az esetben tekintsük nullának.
Rajzolja fel (2.179) egyenlettel leírt rendszer analóg számítógépes vázlatát integrátorok segítségével.
Megoldás
e) feladat
Fejezzük ki a deriváltakat
| (2.180) |
| (2.181) |
Vezessük be a következő jelöléseket
| (2.182) |
| (2.183) |

Az analóg számítógépes modell a 2-46. ábran látható.
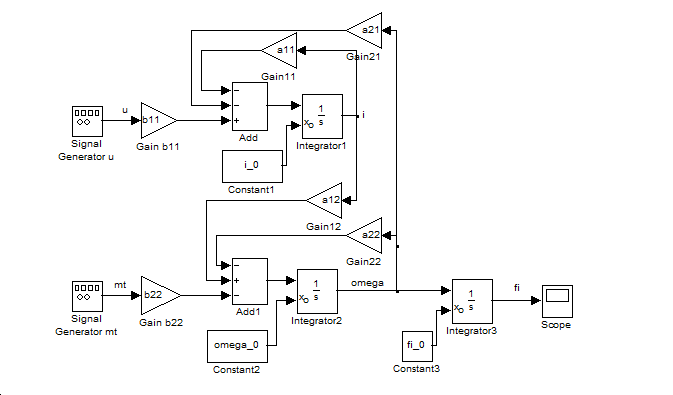
2-18 feladat Egyenáramú motor és rugalmas tengellyel forgatott tömeg
Egy külsőgerjesztésű egyenáramú motor egy rugalmas tengelyen keresztül egy terhelést mozgat. A motor villamos áramának dinamikáját elhanyagoljuk, más szavakkal az időállandóját (definíciót ld. 161. oldal) nullának tekintjük. A jelölések: a motor szögsebessége és
a motor szögsebessége és  az elfordulása,
az elfordulása,  és
és  a teher szögsebessége és elfordulása.
a teher szögsebessége és elfordulása.  a tengely torziós rugómerevsége,
a tengely torziós rugómerevsége,  a tengely elcsavarodása (
a tengely elcsavarodása ( ,
,  ,
,  ,
,  ,
,  , pedig értelemszerűen a motor illetve a teher másodrendű nyomatéka, illetve a viszkózus súrlódást figyelembe vevő paraméter.
, pedig értelemszerűen a motor illetve a teher másodrendű nyomatéka, illetve a viszkózus súrlódást figyelembe vevő paraméter.  a motor kapocsfeszültsége,
a motor kapocsfeszültsége,  a motor paramétere, Ra az armatúra ellenállása
a motor paramétere, Ra az armatúra ellenállása  a villamos nyomaték. A rendszer egyenletei:
a villamos nyomaték. A rendszer egyenletei:
| (2.184) |





Írjuk át a differenciálegyenlet-rendszert (2.107) alakúra.
Legyen az
 bemenet a motor
bemenet a motor  kapocsfeszültsége és az
kapocsfeszültsége és az  kimenet a teher
kimenet a teher  fordulatszáma.
fordulatszáma. Legyen az
 bemenet a motor
bemenet a motor kapocsfeszültsége és az
kapocsfeszültsége és az  kimenet a teher
kimenet a teher  elfordulása.
elfordulása.
Megoldás
A 2-19 feladat speciális esete.
2-19 feladat Egyenáramú motor és terhelő nyomaték rugalmas tengelyen keresztül
Egy külsőgerjesztésű egyenáramú motor egy rugalmas tengelyen keresztül egy terhelést mozgat és a terheléshez további  terhelő nyomaték kapcsolódik. A motor villamos áramának dinamikáját elhanyagoljuk, más szavakkal az időállandóját (definíciót ld. 161. oldal) nullának tekintjük. A jelölések:
terhelő nyomaték kapcsolódik. A motor villamos áramának dinamikáját elhanyagoljuk, más szavakkal az időállandóját (definíciót ld. 161. oldal) nullának tekintjük. A jelölések: a motor szögsebessége és
a motor szögsebessége és  az elfordulása,
az elfordulása,  és
és  a teher szögsebessége és elfordulása.
a teher szögsebessége és elfordulása.  a tengely torziós rugómerevsége,
a tengely torziós rugómerevsége,  a tengely elcsavarodása (
a tengely elcsavarodása ( ,
,  ,
,  ,
,  ,
,  , pedig értelemszerűen a motor, illetve a teher másodrendű nyomatéka, illetve a viszkózus súrlódást figyelembe vevő paraméter.
, pedig értelemszerűen a motor, illetve a teher másodrendű nyomatéka, illetve a viszkózus súrlódást figyelembe vevő paraméter.  a motor kapocsfeszültsége,
a motor kapocsfeszültsége,  a motor paramétere, Ra az armatúra ellenállása, valamint
a motor paramétere, Ra az armatúra ellenállása, valamint  a villamos nyomaték. A rendszer egyenletei:
a villamos nyomaték. A rendszer egyenletei:
| (2.185) |
| (2.186) |

| (2.187) |

| (2.188) |

| (2.189) |

Írjuk át a differenciálegyenlet-rendszert (2.107) alakúra.
Legyen az
 bemenet a motor
bemenet a motor  kapocsfeszültsége és az
kapocsfeszültsége és az  kimenet a motor
kimenet a motor  fordulatszáma. Az
fordulatszáma. Az  terhelőnyomatékot ebben az esetben tekintsük nullának.
terhelőnyomatékot ebben az esetben tekintsük nullának.Legyen az
 bemenet a motor
bemenet a motor  kapocsfeszültsége és az
kapocsfeszültsége és az  kimenet a motor
kimenet a motor  elfordulása. Az
elfordulása. Az  terhelőnyomatékot ebben az esetben tekintsük nullának.
terhelőnyomatékot ebben az esetben tekintsük nullának.Legyen az
 bemenet a motor
bemenet a motor  terhelőnyomatéka és az
terhelőnyomatéka és az  kimenet a motor
kimenet a motor  fordulatszáma. A motor kapocsfeszültségét ebben az esetben tekintsük nullának.
fordulatszáma. A motor kapocsfeszültségét ebben az esetben tekintsük nullának.Legyen az
 bemenet a motor
bemenet a motor  terhelőnyomatéka és az
terhelőnyomatéka és az  kimenet a motor
kimenet a motor  elfordulása. A motor kapocsfeszültségét ebben az esetben tekintsük nullának.
elfordulása. A motor kapocsfeszültségét ebben az esetben tekintsük nullának.
Megoldás
a) feladat
Ebben az esetben  . A (2.185) egyenletből az
. A (2.185) egyenletből az  áramot kifejezve és behelyettesítve a (2.186) egyenletbe:
áramot kifejezve és behelyettesítve a (2.186) egyenletbe:
| (2.190) |

Az így kapott  kifejezését helyettesítsük a (2.187) egyenletbe:
kifejezését helyettesítsük a (2.187) egyenletbe:
| (2.191) |

A (2.188) egyenletből következik
| (2.192) |

A motor fordulatszámára és gyorsulására vonatkozó (2.192) kifejezéseket a (2.191) egyenletbe helyettesítve:
| (2.193) |


kifejezhető a (2.189) egyenletből
| (2.194) |

A (2.194) összefüggéseket felhasználva (2.193) alapján (2.107) alakú kifejezést kapunk
| ||||
|
|
| ||
|
| (2.195) | ||



b) feladat
Mivel  , így (2.195) alapján
, így (2.195) alapján
| ||||
|
|
| ||
|
| (2.196) | ||



c) feladat
Ha  , akkor (2.190) a következőképp módosítható
, akkor (2.190) a következőképp módosítható
| (2.197) |

Hasonlóan (2.191) helyett a következőt írhatjuk
| (2.198) |

értékét (2.189) egyenletből kifejezve ( ) és behelyettesítve a (2.198) egyenletbe
) és behelyettesítve a (2.198) egyenletbe
| (2.199) |

A motor fordulatszámát ismét a (2.192) alapján küszöböljük ki
| (2.200) |

Mivel ebben az esetben  , így a (2.194) kifejezést is módosítani kell
, így a (2.194) kifejezést is módosítani kell
| (2.201) |
A (2.201) összefüggéseket felhasználva (2.200) alapján (2.107) alakú kifejezést kapunk
| ||||
|
|
| ||
| (2.202) | |||



d) feladat
Mivel  , így (2.202) alapján
, így (2.202) alapján
| ||||
|
|
| ||
| (2.203) | |||



2-20 feladat Diszkrét állapotú érzelmi modell
Tegyük fel, hogy egy tamagoccsi (たまごっち) a teljes életét egy szobában tölti, ahová csak a gazdája és egy idegen léphet be és távozhat (egymástól függetlenül). A tamagoccsinak alapvetően négyféle érzelmi állapota lehet. Szomorú, ha egyedül van a szobában, boldog, ha a gazdájával ketten vannak a szobában, ideges, ha az idegennel ketten vannak a szobában, végül nyugodt, ha az idegen és a gazdája is a szobában van.
Rajzolja le a tamagoccsi diszkrét állapotú érzelmi modelljét.
Megoldás
A feladat kiírása szerint négy állapotunk van, és négy eseményt definiálhatunk (a gazda is és az idegen is érkezhet és távozhat). Ezek az események nem függetlenek egymástól: egy adott szereplő esetében az érkezés után csak távozás következhet, a távozást érkezés követi.
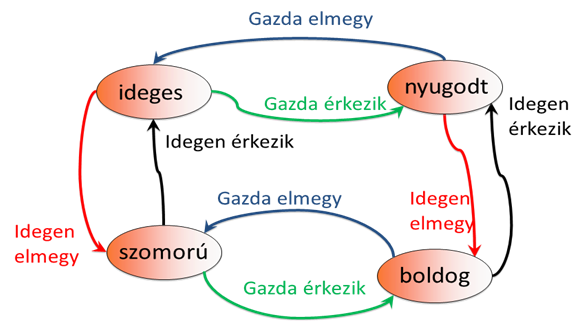
2-21 feladat Diszkrét állapotú viselkedésmodell
Tegyük fel, hogy egy tamagoccsi (たまごっち) négyféle tevékenységet folytathat: étkezik, alszik, játszik és unatkozik. A viselkedés szabályai
Az étkezés és alvás ideje kötött (ez alatt az idő alatt más tevékenység nem folytatható)
Az étkezés és alvás ideje nem követi egymást (alvás után nem következhet étkezés és fordítva)
Ha nem alszik és nem étkezik, akkor vagy játszik, vagy unatkozik attól függően, hogy a gazda jelen van-e, vagy sem.
Rajzolja le a tamagoccsi diszkrét állapotú viselkedés modelljét.
Megoldás
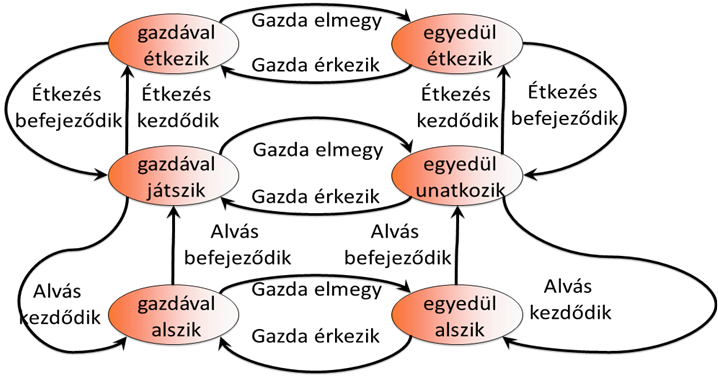
2-22 feladat Lifthívó-rendszer diszkrét állapotú modellje
Tegyük fel, hogy három szint és három nyomógomb van. Ha pl. megnyomjuk a 3. gombot, akkor a lift a 3. szintre megy.
Rajzolja le a lifthívó-rendszer diszkrét állapotú modelljét.
Megoldás
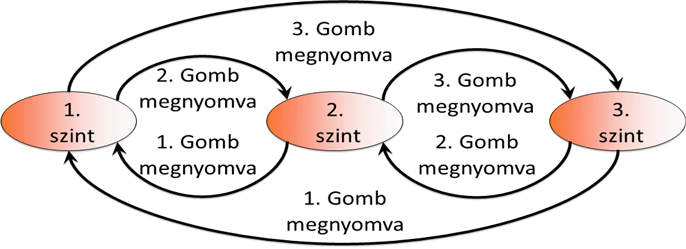
2-23 feladat Kombinált (fűtés. melegvíz) kazán szabályozójának diszkrét állapotú modellje
Tegyük fel, hogy a fűtésszabályozó alrendszernek két állapota (fűtés bekapcsolva és fűtés kikapcsolva) van, amelyek között a szerint vált, hogy a szoba  hőmérséklete nagyobb-e a
hőmérséklete nagyobb-e a  felső hőmérsékleti korlátnál, vagy kisebb-e a
felső hőmérsékleti korlátnál, vagy kisebb-e a  alsó hőmérsékleti korlátnál. (Természetesen
alsó hőmérsékleti korlátnál. (Természetesen  ). A vízcsapok megnyitásakor a melegvíz szolgáltatásnak nagyobb prioritása van.
). A vízcsapok megnyitásakor a melegvíz szolgáltatásnak nagyobb prioritása van.
Rajzolja le a kombinált (fűtés. melegvíz) kazán szabályozójának diszkrét állapotú modelljét.
Megoldás
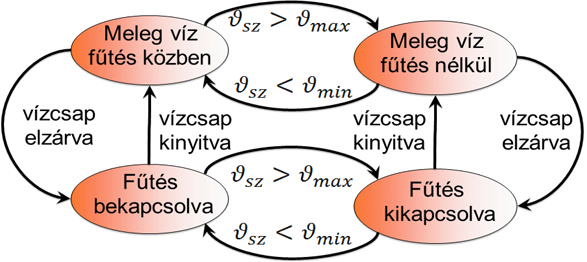
2.15. Alapvető vizsgálati módszerek
Megismerkedtünk a rendszer fogalmával, és annak típusaival. Fel tudjuk írni a rendszer egyenleteket, megismertük az alapvető matematikai műveleteket a rendszeregyenletek megoldására. Áttekintettük a legfontosabb problémaköröket. A következő fejezetben olyan matematikai módszereket ismerünk meg, amelyek leegyszerűsítik a rendszer differenciálegyenleteinek megoldását, illetve amelyek segítségével a rendszer differenciálegyenleteinek megoldásnélkül is következtetni tudunk a rendszer viselkedésére.
A két legfontosabb megközelítés
A bemenőjel komponensekre bontása és a kimenőjel kiszámítása konvolúció alkalmazásával (Klasszikus szabályozáselmélet alapja) (ld. 3. és 4. fejezet). A bemenőjel komponensekre bontása történhet az időtartományban is és a frekvencia-, illetve Laplace-operátoros tartományban is. Mivel a konvolúció a frekvencia-, illetve Laplace-operátoros tartományban számítható könnyebben, ezért ezt a megközelítést általában a frekvencia-, illetve Laplace-operátoros tartományban használjuk.
Mátrixos formalizmus (Ennek speciális és széles körben elterjedt esete az állapottér-módsze. (A mátrixos formalizmus az idő- és frekvencia-, illetve Laplace-operátoros tartományban egyaránt alkalmazható)
3. fejezet - Matematikai eszközök SISO LTI rendszerek vizsgálatához
- 3.1. Vizsgálat (komponensekre bontás) az időtartományban
- 3.2. Vizsgálat a frekvencia-, illetve Laplace-operátoros tartományban
- 3.2.1. Fourier-sorfejtés
- 3.2.2. Kidolgozott feladatok Fourier sorokhoz kapcsolódóan
- 3.2.3. Fourier-transzformáció
- 3.2.4. Laplace-transzformáció
- 3.2.5. Fourier-sorfejtés, Fourier- és Laplace-transzformáció áttekintő táblázat
- 3.2.6. Laplace-transzformáció alkalmazása
- 3.2.7. Kifejtési (reziduum) tétel (s-re nézve valós együtthatójú racionális törtfüggvények inverz Laplace-transzformációja)
- 3.2.8. Időállandó
- 3.2.9. Kidolgozott feladatok Laplace-transzformáció alkalmazására
- 3.3. Közönséges állandó együtthatós elsőrendű differenciálegyenletek megoldása Laplace-transzformációval
- 3.4. Kapcsoló üzemmód
Adottnak tekintjük a rendszer differenciálegyenletét, amelyről azt feltételezzük, hogy az (2.107) alakú. A differenciálegyenletből (az együtthatók értékéből) kiindulva kívánunk következtetni a rendszer általános tulajdonságaira.
Vizsgálati módszer: A bemenőjelet komponensekre bontjuk, az elemi komponensek elemi hatását meghatározzuk, majd az időinvariancia és szuperpozíció elvének kihasználásával az elemi hatásokat összegezzük.
Világosan kitűnik, hogy a jelen fejezetben leírtak csak lineáris, időinvariáns rendszerek esetén alkalmazhatók.
A bemenőjelet mind az idő-, mind a frekvencia-, illetve Laplace-operátoros tartományban komponensekre lehet bontani.
3.1. Vizsgálat (komponensekre bontás) az időtartományban
Ebben a fejezetben a 2.12.4 fejezetben leírt lineáris, időinvariáns, kauzális egy bemenetű egy kimenetű rendszerekkel találkozunk. A felbontás alapvetően két módon történhet. A jeleket az időben függőleges impulzusokra bonthatjuk az időtengely mentén, vagy vízszintes ugrások sorozatára bonthatjuk a függőleges tengely mentén (ld. 3-1. ábra). A felbontáshoz az impulzus és ugrás függvényeket kell definiálnunk.
Impulzusokra és lépésekre bontás
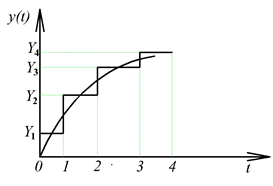
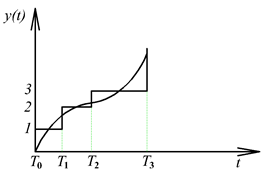
3.1.1. Dirac-impulzus és egységugrás
(2.107) megoldása tetszőleges  mellett meglehetősen nehézkes. Ehelyett az
mellett meglehetősen nehézkes. Ehelyett az  jelet megpróbáljuk komponensekre bontani, majd a szuperpozíció elvét kihasználva a komponensek hatását összegezzük. Az
jelet megpróbáljuk komponensekre bontani, majd a szuperpozíció elvét kihasználva a komponensek hatását összegezzük. Az  jel impulzusok sorozatára bontható. Először diszkrét időben adjuk meg a definíciókat, mert diszkrét időben sok olyan tulajdonság egyszerűen belátható, amelyek folytonos időben komoly matematikai nehézségek elé állítanak bennünket. Természetesen folytonos időben is törekszünk a matematikai egzaktságra, de a diszkrét idejű összefüggés összegzését a folytonos időben integrálra cserélve megsejthetjük, hogy folytonos időben milyen összefüggéseket kell belátnunk.
jel impulzusok sorozatára bontható. Először diszkrét időben adjuk meg a definíciókat, mert diszkrét időben sok olyan tulajdonság egyszerűen belátható, amelyek folytonos időben komoly matematikai nehézségek elé állítanak bennünket. Természetesen folytonos időben is törekszünk a matematikai egzaktságra, de a diszkrét idejű összefüggés összegzését a folytonos időben integrálra cserélve megsejthetjük, hogy folytonos időben milyen összefüggéseket kell belátnunk.
Diszkrét időben
A rendszerek bekapcsolásának modellezéséhez szükséges a diszkrét idejű egységugrás fogalma, amelynek a definíciója (ld. 3-2. ábra):
| (3.1) |
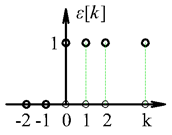
A (3.1) definícióból következik
| (3.2) |

A diszkrét idejű egységimpulzus definíciója (ld. 3-3. ábra):
| (3.3) |
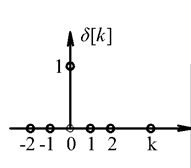
Az eltolást a diszkrét idejű egységimpulzus esetén is értelmezhetjük
| (3.4) |
továbbá
| (3.5) |


(3.3) definíciójából triviálisan következik, de később fontos szerepe lesz:
| (3.6) |

Könnyen belátható, hogy egy diszkrét idejű függvény konvolúciója az egységimpulzussal egy adott K érték mellett a függvény K helyen felvett értékét adja vissza.
| (3.7) |

A diszkrét idejű egységugrás és egységimpulzus kapcsolatát kétféleképpen adhatjuk meg:
Az egységugrás értéke a k helyen kiszámítható az egységimpulzus függvényből.
| (3.8) |
Az egységugrás két szomszédos helyen felvett értékének különbsége megegyezik az egységimpulzus függvény megfelelő helyen felvett értékével
| (3.9) |

Folytonos időben
Az egységugrás definíciója
| (3.10) |
Az eltolást a folytonos időben is értelmezhetjük
| (3.11) |

A definícióból látható, hogy az  függvénynek nincs határozott értéke a
függvénynek nincs határozott értéke a  helyen. Vannak szerzők, akik 0, 0.5 vagy 1 értéket adnak neki. Ennek nincs jelentősége, mert az egységugrás általában a bemeneten jelenik meg, bennünket általában a kimenet érdekel, és valós rendszereknél a kettő között integráló hatás van, így a kimenőjelre matematikai értelemben nincs hatása annak, hogy a
helyen. Vannak szerzők, akik 0, 0.5 vagy 1 értéket adnak neki. Ennek nincs jelentősége, mert az egységugrás általában a bemeneten jelenik meg, bennünket általában a kimenet érdekel, és valós rendszereknél a kettő között integráló hatás van, így a kimenőjelre matematikai értelemben nincs hatása annak, hogy a  időpontban
időpontban  -nak milyen véges értéket választunk. Azért érdemes a 0.5 értéket választani, mert pl. az ugrásokból álló négyszögjel Fourier-sora a szakadásnál a kétoldali határérték számtani középértékét adja vissza. Mérnöki megközelítésben nincs ennek jelentősége. Célunk a valós fizikai rendszer működésének leírása. A valós fizikai rendszer bekapcsolásakor lezajló fizikai jelenségeket az egyszerűség kedvéért nem modelleztük, így a rendszer
-nak milyen véges értéket választunk. Azért érdemes a 0.5 értéket választani, mert pl. az ugrásokból álló négyszögjel Fourier-sora a szakadásnál a kétoldali határérték számtani középértékét adja vissza. Mérnöki megközelítésben nincs ennek jelentősége. Célunk a valós fizikai rendszer működésének leírása. A valós fizikai rendszer bekapcsolásakor lezajló fizikai jelenségeket az egyszerűség kedvéért nem modelleztük, így a rendszer  időpontbeli matematikai viselkedése intuíciókat adhat, hogy a fizikai rendszer bekapcsolási jelenségeit hogyan képzelhetjük el, de ez inkább csak egy szellemi kaland lehet. Amennyiben a matematikai egzaktságot úgy is meg tudjuk tartani, hogy
időpontbeli matematikai viselkedése intuíciókat adhat, hogy a fizikai rendszer bekapcsolási jelenségeit hogyan képzelhetjük el, de ez inkább csak egy szellemi kaland lehet. Amennyiben a matematikai egzaktságot úgy is meg tudjuk tartani, hogy  értékét nem definiáljuk a
értékét nem definiáljuk a  helyen, akkor a legjobb, ha azzal is kifejezzük a bekapcsolási folyamatokkal kapcsolatos bizonytalanságot, hogy erre vonatkozóan nem adunk esetlegesen félrevezető információt.
helyen, akkor a legjobb, ha azzal is kifejezzük a bekapcsolási folyamatokkal kapcsolatos bizonytalanságot, hogy erre vonatkozóan nem adunk esetlegesen félrevezető információt.
A diszkrét idejű egységimpulzus megfelelőjének matematikai értelmezése a folytonos időben még ennél is nehezebb. A mechanikában az impulzus definíciója egyértelmű. A tömegre ható erő integrálja. Állandó tömeget feltételezve ugyanazt az impulzust érhetjük el, ha kisebb az erő, de tovább hat, vagy ha nagyobb erővel, de rövidebb ideig hatva. Ezt általánosítva definiáljunk egy egységimpulzus függvényt:
| (3.12) |
(3.12) azért egységimpulzus, mert idő szerint integrálja 1 lesz az eredmény, hasonlóan, mint (3.6) diszkrét időben.
| (3.13) |
Formálisan a  helyettesítéssel:
helyettesítéssel:
| (3.14) |
(3.14) hagyományos értelemben nem tekinthető függvénynek, mert 1/0 nem egy valós számérték. Az sem elegendő, ha azt mondjuk rá, hogy végtelen, mert pl. a 7/0 és a 0.2/0 is végtelen. Fordítsuk meg a dolgot és használjuk fel (3.13)-at és (3.14)-et definícióként: egységimpulzusnak (további elnevezések: Dirac-delta, Dirac-impulzus) nevezzük azt a  kiterjesztett értelmű függvényt (disztribúciót), amely a
kiterjesztett értelmű függvényt (disztribúciót), amely a  pont kivételével mindenütt nulla. A
pont kivételével mindenütt nulla. A  pontban pedig olyan értéket vesz fel, hogy
pontban pedig olyan értéket vesz fel, hogy
| (3.15) |

teljesüljön. Az egységugráshoz hasonlóan a Dirac-impulzus hatását is általában egy integrálási művelet után vizsgáljuk, így a fenti definíció egy jó gyakorlati megközelítés. Azt fejezi ki, hogy a Dirac-impulzus mechanikai rendszereknél egy kalapácsütést jelent. E definíciót (2.108) segítségével kiterjeszthetjük az egységimpulzus  deriváltjára:
deriváltjára:  egy olyan kiterjesztett értelmű függvény (disztribúció), amely a
egy olyan kiterjesztett értelmű függvény (disztribúció), amely a  pont kivételével mindenütt nulla. A
pont kivételével mindenütt nulla. A  pontban pedig olyan értéket vesz fel, hogy
pontban pedig olyan értéket vesz fel, hogy  teljesüljön. Hasonló módon magasabb rendű deriváltakat is definiálhatunk.
teljesüljön. Hasonló módon magasabb rendű deriváltakat is definiálhatunk.

definíciójából következik (vö. (3.8)):
| (3.16) |
A (3.16) integrál értéke a  időpontban nincs meghatározva, hasonlóan a (3.10) definícióhoz. Így kijelenthetjük, hogy a
időpontban nincs meghatározva, hasonlóan a (3.10) definícióhoz. Így kijelenthetjük, hogy a  disztribúciót értelmezhetjük úgy, mint
disztribúciót értelmezhetjük úgy, mint  általános értelemben vett deriváltja.
általános értelemben vett deriváltja.
A (3.4) és (3.5) is könnyen általánosítható folytonos időben. A  egy olyan kiterjesztett értelmű függvény (disztribúció), amely a
egy olyan kiterjesztett értelmű függvény (disztribúció), amely a  pont kivételével mindenütt nulla. A
pont kivételével mindenütt nulla. A  pontban egy olyan értéket vesz fel, hogy
pontban egy olyan értéket vesz fel, hogy  teljesüljön.
teljesüljön.
A  pedig olyan kiterjesztett értelmű függvény (disztribúció), amely a
pedig olyan kiterjesztett értelmű függvény (disztribúció), amely a  pont kivételével mindenütt nulla. A
pont kivételével mindenütt nulla. A  pontban pedig olyan értéket vesz fel, hogy
pontban pedig olyan értéket vesz fel, hogy  teljesüljön.
teljesüljön.
A (3.7) formális általánosítása is egyszerű a folytonos időben. A folytonos  függvény konvolúciója
függvény konvolúciója  kiterjesztett értelmű függvény (disztribúció)
kiterjesztett értelmű függvény (disztribúció)  -val vett eltoltjával a függvény
-val vett eltoltjával a függvény  pontbeli értékével egyezik meg. Mivel
pontbeli értékével egyezik meg. Mivel  páros függvény, ezért a konvolúció számításában az argumentumának előjelét megcserélhetjük.
páros függvény, ezért a konvolúció számításában az argumentumának előjelét megcserélhetjük.
| (3.17) |

Számunkra (3.17) azért kiemelt jelentőségű, mert (3.17) segítségével egy folytonos függvényhez hozzá tudjuk rendelni egy adott pontbeli értékét. A mérnöki gyakorlatban ezt nevezzük (mérésnek) mintavételezésnek. Ha (3.17)-t elvégezzük a  (ahol
(ahol  és
és  rögzített szám) mintavételi pontok sorozatára, akkor egy folytonos idejű
rögzített szám) mintavételi pontok sorozatára, akkor egy folytonos idejű  jelnek előállíthatjuk a diszkrét idejű
jelnek előállíthatjuk a diszkrét idejű  megfelelőjét.
megfelelőjét.
| (3.18) |

A fentiekből következik, hogy a Dirac-impulzus nem tekinthető hagyományos értelemben vett függvénynek, de a Dirac-impulzusnak a fenti származtatása az egységimpulzusból fizikailag könnyen értelmezhető, a mérnöki gyakorlatban ezt az értelmezést alkalmazzuk. Ugyanakkor a (3.15) definíció nem ad támpontot több alapvető matematikai művelet elvégzésére. A Dirac-impulzus egzakt matematikai kezelésére vezettük be a 2.12.5 pontban a disztribúció fogalmát. A Dirac-impulzussal kapcsolatos intuitív megállapításaink egzakt matematikai eszközökkel is bizonyíthatók, a további elemzést az olvasóra bízzuk.
A diszkrét idejű jelek felbontása a 3-4. ábra látható
Impulzusokra és lépésekre bontás
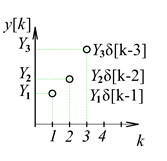
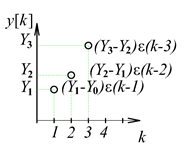
3.1.2. Impulzusokra bontott bemenőjel hatásának összegzése
Először a diszkrét idejű rendszereket vizsgáljuk, majd ezt kiterjesztjük folytonos idejű rendszerekre. A továbbiakban általában a bemenőjel egy ún. belépő függvény. Ez azt jelenti, hogy létezik egy olyan K, illetve  érték, amelyre
érték, amelyre  , illetve
, illetve  . Az egyszerűség kedvéért azt feltételezzük, hogy ha egyéb megjegyzést nem teszünk, akkor
. Az egyszerűség kedvéért azt feltételezzük, hogy ha egyéb megjegyzést nem teszünk, akkor  , illetve
, illetve  . A legtöbb esetben mindez formálisan csak annyit jelent, hogy az időre vonatkozó összegzésben és integrálok számításában a
. A legtöbb esetben mindez formálisan csak annyit jelent, hogy az időre vonatkozó összegzésben és integrálok számításában a  helyett a 0 az alsó határ. A kauzalitás miatt a rendszer válasza is csak a bekapcsolás után indulhat, de az állapotváltozó jellegű változóknak lehet nullától eltérő kezdeti értéke. Ebben a 3.1.2 pontban matematikai szempontból nincs szükség a belépő jelekre tett kikötésre, de a frekvencia-, illetve Laplace-operátoros tartományban (Laplace-transzformált jelek esetén, ld. 3.2.4, 3.2.6, 3.2.7, 3.2.8 pontok) élnünk kell ezzel a feltételezéssel.
helyett a 0 az alsó határ. A kauzalitás miatt a rendszer válasza is csak a bekapcsolás után indulhat, de az állapotváltozó jellegű változóknak lehet nullától eltérő kezdeti értéke. Ebben a 3.1.2 pontban matematikai szempontból nincs szükség a belépő jelekre tett kikötésre, de a frekvencia-, illetve Laplace-operátoros tartományban (Laplace-transzformált jelek esetén, ld. 3.2.4, 3.2.6, 3.2.7, 3.2.8 pontok) élnünk kell ezzel a feltételezéssel.
Diszkrét időben
A 2.1.11. fejezetben leírt (2.98) alakú ARMA rendszerekkel foglalkozunk.
| (3.19) |

A (2.98) jobb oldalán az összegzés r-ig tart.  (i=r+1, …, n) bevezetésével egyszerűbbé tehetjük a későbbi tárgyalást, megjegyezzük, hogy a i<r sorszámú
(i=r+1, …, n) bevezetésével egyszerűbbé tehetjük a későbbi tárgyalást, megjegyezzük, hogy a i<r sorszámú  együtthatók között is lehet nulla. Ha
együtthatók között is lehet nulla. Ha  első n számú (
első n számú ( ) és
) és  r számú (
r számú ( ) értéke ismert, akkor (3.19) segítségével a további
) értéke ismert, akkor (3.19) segítségével a további  kimenőjel kiszámítható.
kimenőjel kiszámítható.
A lépésről lépésre számítás helyett kiszámoljuk, hogy a rendszer miként reagál egyetlen  bemenőjelre, vagyis egyetlen „ütésre”. Amikor a diszkrét idejű rendszerek bemenőjele egy diszkrét idejű egységimpulzus, akkor a kimenőjelet súlyfüggvénynek vagy impulzusválasznak nevezzük (az irodalomban mindkét elnevezés elterjedt) és
bemenőjelre, vagyis egyetlen „ütésre”. Amikor a diszkrét idejű rendszerek bemenőjele egy diszkrét idejű egységimpulzus, akkor a kimenőjelet súlyfüggvénynek vagy impulzusválasznak nevezzük (az irodalomban mindkét elnevezés elterjedt) és  -val jelöljük (ld. 3-5. ábra) (megjegyezzük, hogy az irodalomban használják még a
-val jelöljük (ld. 3-5. ábra) (megjegyezzük, hogy az irodalomban használják még a  jelölést is).
jelölést is).
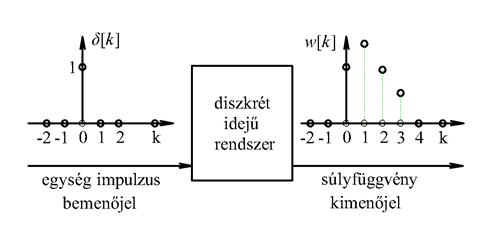
Tegyük fel, hogy  és
és  ismert. Kihasználjuk azt, hogy
ismert. Kihasználjuk azt, hogy
| (3.20) |

Ez azt jelenti, hogy egy adott i –edik időpontban egy  nagyságú és i lépéssel eltolt
nagyságú és i lépéssel eltolt  impulzussal gerjesztjük a rendszert. E bemenőjelre a rendszer válasza egy arányosan megnövelt és időben eltolt súlyfüggvény:
impulzussal gerjesztjük a rendszert. E bemenőjelre a rendszer válasza egy arányosan megnövelt és időben eltolt súlyfüggvény:  (ld. 3-6. ábra).
(ld. 3-6. ábra).
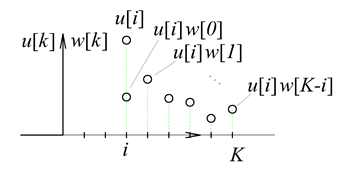
Bármely k-adik időlépésben az időinvarianciát és a szuperpozíció elvét kihasználva időeltolással összegezzük ezeket a hatásokat
| (3.21) |
A (3.21) úgy is értelmezhető, hogy a kimenőjel értéke egy k-adik időpillanatban a rendszerre az összes múltbeli időpontban ható bemenőjel súlyozott átlaga, innen a súlyfüggvény elnevezés. A (3.21) kifejezésben nincsenek állapotváltozók, így kezdeti értékek sem adhatók meg, csak a rendszer  tulajdonsága és az
tulajdonsága és az  bemenőjel határozza meg az
bemenőjel határozza meg az  kimenőjelet. Itt az összegzés csak az
kimenőjelet. Itt az összegzés csak az  tartományra szorítkozik, de nincs elvi akadálya, hogy akár
tartományra szorítkozik, de nincs elvi akadálya, hogy akár  -ből induljon.
-ből induljon.
Az impulzusnak véges energiája van, így egy valós fizikai rendszernél  a kauzalitás miatt csak belépő függvény lehet (a bemenő jel csak a jövőre hathat), a linearitás miatt nem lehet irreverzibilis változás, minden valós rendszer működése közben van valamilyen energiaveszteség, így valós rendszer esetén
a kauzalitás miatt csak belépő függvény lehet (a bemenő jel csak a jövőre hathat), a linearitás miatt nem lehet irreverzibilis változás, minden valós rendszer működése közben van valamilyen energiaveszteség, így valós rendszer esetén  biztosan lecsengő, értékei nullához tartanak.
biztosan lecsengő, értékei nullához tartanak.
Ha létezik olyan K időpont, amelyre igaz az, hogy  , akkor a rendszert „véges impulzus válaszú” rendszernek nevezzük, és ezekre a rendszerekre az angol név alapján a FIR (Finite Impulse Response) rövidítést használjuk. Értelemszerűen definiálhatjuk az IIR végtelen impulzusválaszú (Infinite Impulse Response) rendszereket is.
, akkor a rendszert „véges impulzus válaszú” rendszernek nevezzük, és ezekre a rendszerekre az angol név alapján a FIR (Finite Impulse Response) rövidítést használjuk. Értelemszerűen definiálhatjuk az IIR végtelen impulzusválaszú (Infinite Impulse Response) rendszereket is.
Folytonos időben
(2.107) alakú differenciálegyenlettel leírható rendszerekkel foglalkozunk. A (2.107) egyenletben alkalmazott jelölésekkel n=r ( (i=r+1, …, n)) és
(i=r+1, …, n)) és 
| (3.22) |

A (3.22) megoldása tetszőleges  mellett meglehetősen nehézkes. Ehelyett az
mellett meglehetősen nehézkes. Ehelyett az  jelet a diszkrét idejű rendszereknél alkalmazott eljáráshoz hasonlóan komponensekre (impulzusok sorozatára) bontjuk, majd a szuperpozíció elvét kihasználva a komponensek hatását összegezzük. A diszkrét idejű rendszerhez hasonlóan bevezethetjük a
jelet a diszkrét idejű rendszereknél alkalmazott eljáráshoz hasonlóan komponensekre (impulzusok sorozatára) bontjuk, majd a szuperpozíció elvét kihasználva a komponensek hatását összegezzük. A diszkrét idejű rendszerhez hasonlóan bevezethetjük a  súlyfüggvényt (impulzusválaszt) ld. 3-7. ábra. (Az irodalomban használatos még a
súlyfüggvényt (impulzusválaszt) ld. 3-7. ábra. (Az irodalomban használatos még a  jelölés is)
jelölés is)
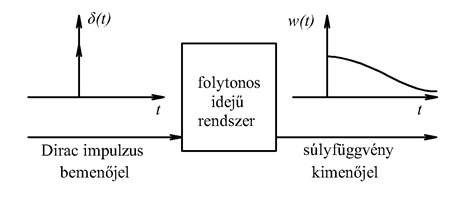
Valós fizikai rendszer esetén w(t) lecsengő belépő időfüggvény (ezt a tulajdonságát később kihasználjuk)
Tegyük fel, hogy w(t) ismert (például mérés alapján). Formálisan (3.21) összegzést kell átírni folytonos időbe, k helyére t kerül és az összegzés helyett integrált kell írnunk, továbbá tekintettel kell lenni arra, hogy  akár Dirac-impulzus is lehet, így az összegzésben, illetve integrálszámításban a t=0 pontot is figyelembe kell venni, ahol
akár Dirac-impulzus is lehet, így az összegzésben, illetve integrálszámításban a t=0 pontot is figyelembe kell venni, ahol  nem folytonos és az értékét csak az integrálja határozza meg. Ebből következik, hogy az integrál alsó határának a 0 bal oldali közelítését kell választani, ezt jelöljük 0-val.
nem folytonos és az értékét csak az integrálja határozza meg. Ebből következik, hogy az integrál alsó határának a 0 bal oldali közelítését kell választani, ezt jelöljük 0-val.
| (3.23) |
A (3.23) úgy is értelmezhető, hogy az u(t) bemenőjel értelmezési tartományát  nagyságú időintervallumokra osztjuk, minden időintervallumot egy impulzusnak tekintjük, amelynek a nagysága
nagyságú időintervallumokra osztjuk, minden időintervallumot egy impulzusnak tekintjük, amelynek a nagysága  . Ezt az impulzust egy, az impulzussal megegyező nagyságú Dirac-impulzussal helyettesítjük. Ennek megfelelően a τ időpillanatban a rendszer bemenőjele
. Ezt az impulzust egy, az impulzussal megegyező nagyságú Dirac-impulzussal helyettesítjük. Ennek megfelelően a τ időpillanatban a rendszer bemenőjele  lesz. Erre a
lesz. Erre a  -val eltolt és
-val eltolt és  nagyságú impulzusra a válasz egy eltolt és arányosan lecsökkentett
nagyságú impulzusra a válasz egy eltolt és arányosan lecsökkentett  súlyfüggvény (ld. 3-8. ábra). Meg kell jegyezni, hogy ha
súlyfüggvény (ld. 3-8. ábra). Meg kell jegyezni, hogy ha  tart nullához, akkor a
tart nullához, akkor a  nagyságú impulzus is tart nullához, így a rendszer válasza végtelen sok végtelenül kicsi impulzus hatásából adódik össze.
nagyságú impulzus is tart nullához, így a rendszer válasza végtelen sok végtelenül kicsi impulzus hatásából adódik össze.
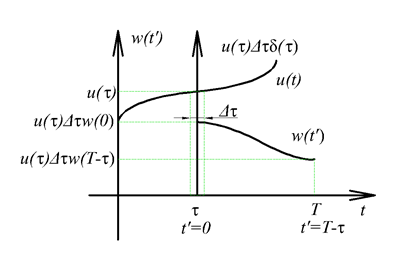
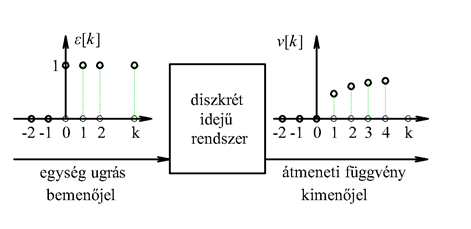
| (3.24) |

Az u(t) bemenőjelet nem csak függőlegesen, hanem vízszintesen is feloszthatjuk, ekkor elemi ugrásfüggvényeket kapunk. A rendszer válaszát az egységugrás bemenőjelre átmeneti függvénynek nevezzük és  -vel jelöljük (ld. 3-10. ábra). Valós fizikai rendszerek esetén
-vel jelöljük (ld. 3-10. ábra). Valós fizikai rendszerek esetén  .
.
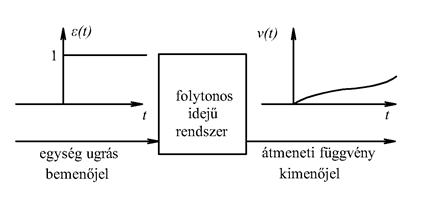
Formálisan, ha a bemenőjelet integráljuk, akkor a kimenő jelet is integrálni kell, így az egységugrás bemenőjelre adott válasz a súlyfüggvény integrálja lesz.
| (3.25) |
Természetesen a (3.25) átfogalmazható úgy, hogy az átmeneti függvény időszerinti deriváltja a súlyfüggvény. A kimenőjel az átmeneti függvény és a bemenőjel ismeretében is meghatározható. A  időpillanatban a bemenőjel
időpillanatban a bemenőjel  mértékben változik meg. Ezt a változást
mértékben változik meg. Ezt a változást  nagyságú ugrásfüggvénnyel, vagyis
nagyságú ugrásfüggvénnyel, vagyis  bemenőjellel modellezzük. E bemenőjelre a rendszer válasza egy olyan átmeneti függvény, amelynek a nagysága meg van szorozva
bemenőjellel modellezzük. E bemenőjelre a rendszer válasza egy olyan átmeneti függvény, amelynek a nagysága meg van szorozva  -val és az időben el van tolva
-val és az időben el van tolva  -val. Ennek az átmeneti függvénynek az értéke egy adott T időpontban
-val. Ennek az átmeneti függvénynek az értéke egy adott T időpontban  . Ezeket az elemi átmeneti függvényeket kell összegezni, de figyelembe kell venni, hogy u(t)-nek lehetett egy
. Ezeket az elemi átmeneti függvényeket kell összegezni, de figyelembe kell venni, hogy u(t)-nek lehetett egy  kezdeti ugrása is a t=0 időpontban. Az összegzés eredménye:
kezdeti ugrása is a t=0 időpontban. Az összegzés eredménye:
| (3.26) |

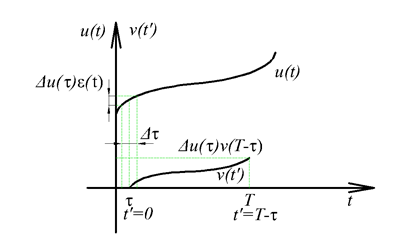
Összefoglalásul megállapíthatjuk, hogy folytonos idejű modell esetén az u(t) bemenőjel az időtartományban felbontható impulzusok vagy ugrások sorozatára, továbbá definiálhatók a rendszer működését általánosan leíró időfüggvények (súly- és átmeneti függvény). Az időtartományban a bemenőjel felbontásával és az időtartománybeli rendszerfüggvények segítségével egy konvolúciós integrállal ((3.23), illetve (3.26)) a rendszer kimenőjele kiszámítható. A probléma az, hogy a konvolúciós integrál számítása folytonos időben továbbra is bonyolult, ez a matematikai művelet lényegesen leegyszerűsödik a frekvencia-, illetve Laplace-operátoros tartományban, és részben ez az oka (de nem az egyetlen), hogy folytonos idejű rendszerek esetén áttérünk a frekvencia-, illetve Laplace-operátoros tartományra.
3-1 feladat Diszkrét idejű konvolúció
Egy diszkrét idejű rendszer diszkrét idejű impulzusválasza (súlyfüggvénye) legyen

,  ,
,  és
és  , ha
, ha 
Számítsa ki a rendszer válaszát, ha a bemenőjel diszkrét idejű egységugrás.
Mekkora a rendszer erősítése?
Megoldás
A diszkrét idejű az egységugrásra úgy tekintünk mint diszkrét idejű az egységimpulzusok sorozatára. Jelölje  az egységugrás
az egységugrás  -edik időpillanatbeli értékére adott impulzusválasz függvényének
-edik időpillanatbeli értékére adott impulzusválasz függvényének  -adik időlépésbeli értékét. Írjuk be egy táblázatba
-adik időlépésbeli értékét. Írjuk be egy táblázatba  és
és  első öt értékét.
első öt értékét.
k |
|
|
|
|
|
|
0 | 1 | 1 | ||||
1 | 3 | 1 | 4 | |||
2 | 2 | 3 | 1 | 6 | ||
3 | 0 | 2 | 3 | 1 | 6 | |
4 | 0 | 0 | 2 | 3 | 1 | 6 |






Látható, hogy  túllendülés nélkül a
túllendülés nélkül a  lépésben beáll az állandósult értékre. Így a táblázatból kiolvasható, hogy a rendszer erősítése 6.
lépésben beáll az állandósult értékre. Így a táblázatból kiolvasható, hogy a rendszer erősítése 6.
3-2 feladat (Házi feladat, megoldását nem közöljük)
Egy diszkrét idejű rendszer diszkrét idejű impulzusválasza (súlyfüggvénye) legyen

,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
, 

,  ,
,  ,
,  ,
,  ,
,  és
és  , ha
, ha 
Számítsa ki a rendszer válaszát, ha a bemenőjel diszkrét idejű egységugrás.
Számítsa ki a rendszer válaszát, ha a diszkrét idejű bemenőjel a következő:

,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
, 

,  ,
,  ,
,  ,
,  ,
,  és
és  , ha
, ha 
Mekkora a rendszer erősítése?
3-3 feladat (Házi feladat, megoldását nem közöljük)
Egy diszkrétidejű rendszer diszkrétidejű ugrásválasza (átmenetifüggvénye) legyen

,  ,
,  és
és  , ha
, ha 
Számítsa ki a rendszer válaszát, ha a diszkrét idejű bemenőjel a következő:

és
 , ha
, ha 
Mekkora a rendszer erősítése?
3-4 feladat (Házi feladat, megoldását nem közöljük)
Egy diszkrét idejű rendszer diszkrét idejű ugrásválasza (átmeneti függvénye) legyen

,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
, 

,  ,
,  ,
,  ,
,  ,
,  és
és  , ha
, ha 
Számítsa ki a rendszer válaszát, ha a bemenőjel diszkrét idejű egységugrás.
Számítsa ki a rendszer válaszát, ha a diszkrét idejű bemenőjel a következő:

,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
, 

,  ,
,  ,
,  ,
,  ,
,  és
és  , ha
, ha 
Mekkora a rendszer erősítése?
3.2. Vizsgálat a frekvencia-, illetve Laplace-operátoros tartományban
Tapasztalat:
Ha egy függőleges helyzetű rugó alsó végére egy tömeget akasztunk és a rugót ugyancsak függőlegesen szinuszosan mozgatjuk a felső végénél fogva, akkor a tömeg is szinuszosan fog lengeni a gerjesztéssel azonos frekvenciával, de a gerjesztéstől eltérő fázisban és amplitúdóval. Azt is érezzük, hogy ha a gerjesztés amplitúdója állandó marad, de a frekvenciáját növeljük, akkor a tömeg mozgásának amplitúdója fokozatosan csökken, és a fáziskésése növekszik. Tendenciájában ez a legtöbb valós rendszerre igaz.
E tapasztalat indít arra, hogy a jeleket nem az időben, hanem a frekvencia-, illetve Laplace-operátoros tartományban bontjuk komponensekre. A frekvencia-, illetve Laplace-operátoros tartományban a felbontás matematikai alapja az, hogy szinuszos gerjesztés esetén egy lineáris differenciálegyenlet inhomogén megoldása a gerjesztő függvénnyel azonos frekvenciájú szinuszos függvény (ld. 3-12. ábra). Ez egyben rámutat az alkalmazás korlátaira, az itt leírtak nemlineáris rendszerekre általában nem (vagy csak nagyon körülményesen) alkalmazhatók. Meg kell jegyezni, hogy mérnöki szemmel a differenciálegyenletek infomogén megoldása egy gerjesztés hatására kialakuló állandósult állapot. A 3-12. ábra úgy értelmezhető, hogy ha a lineáris rendszert szinuszosan gerjesztjük, akkor a tranziens lezajlása után, az állandósult állapotban a kimenőjel szinuszosan fog változni.
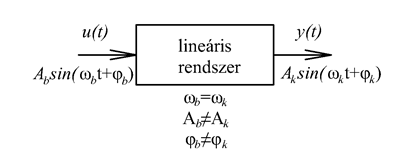
Kihasználjuk még, hogy a periodikus függvények Fourier-sorba fejthetők. A Fourier-sorba fejtés általánosítható első lépésben véges energiájú nem periodikus, majd belépő függvényekre. A függvényeknek e három típusú felbontása különböző frekvenciájú komponensekre formális analógiát mutat a sík és térvektorok merőleges (ortogonális) komponensekre bontásával. E formális analógia mélyebb matematikai összefüggéseinek a feltárása olyan matematikai hátteret igényelne, amely messze túlmutatna e tananyag keretein. Ennek ellenére didaktikai szempontból építünk erre a formális hasonlóságra, mert a vektorok felbontásának szemléletessége nagymértékben segítheti a frekvencia-, illetve Laplace-operátoros tartománybeli összefüggések könnyebb megértését és tán a képletek megjegyzését is. A frekvencia-, illetve Laplace-operátoros tartománybeli gondolkodás képessége számos villamosmérnöki és szabályozástechnikai probléma megoldását segítheti.
Idézzük fel, amit a síkvektorok komponensekre bontásáról tudunk.
A síkvektorok esetén definiálva van a skaláris szorzás.
Egy v síkvektor abszolút értékének (hosszának) négyzete egyenlő a vektor önmagával vett skaláris szorzatával (3.27), itt megjegyezzük, hogy ha a síkvektort komplex számokkal írjuk le, akkor a vektor (komplex szám) abszolút értékét úgy kapjuk, hogy a komplex számot a komplex konjugáltjával szorozzuk.
| (3.27) |

Legyen v egy síkvektor, valamint  és
és  két egymásra merőleges egységvektor.
két egymásra merőleges egységvektor.  és
és  a sík ortonormált bázisa, mivel bármely v vektor egyértelműen kifejezhető
a sík ortonormált bázisa, mivel bármely v vektor egyértelműen kifejezhető  és
és  segítségével a következő alakban (ld. 3-13. ábra)
segítségével a következő alakban (ld. 3-13. ábra)
| (3.28) |

ahol az együtthatókat skaláris szorzással számíthatjuk ki.
| (3.29) |
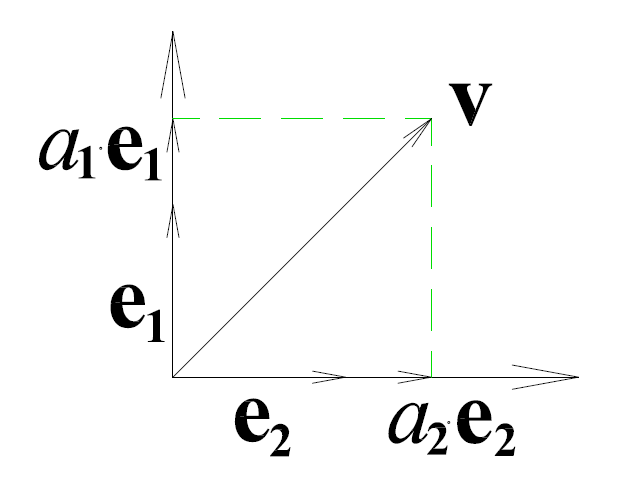
Az ortogonalitás feltétele, hogy  és
és  vektorok skaláris szorzata 0,
vektorok skaláris szorzata 0,  . A normáltsághoz az kell, hogy
. A normáltsághoz az kell, hogy  és
és  vektorok egységvektorok legyenek, vagyis az önmagukkal vett skaláris szorzatuk 1 legyen,
vektorok egységvektorok legyenek, vagyis az önmagukkal vett skaláris szorzatuk 1 legyen,  . A sík, mint a síkvektorok tere teljes, ha tetszőleges
. A sík, mint a síkvektorok tere teljes, ha tetszőleges  és
és  értékekkel (3.28) egy síkban létező vektort ír le.
értékekkel (3.28) egy síkban létező vektort ír le.
További fontos és jól ismert összefüggés, hogy a vektor hosszának (a vektor abszolút értékének) négyzetét az együtthatók négyzetösszegével is kiszámíthatjuk (a keresztszorzatok az ortogonalitás miatt kiesnek).
| (3.30) |

A fenti állítások triviálisnak hatnak és könnyen általánosíthatjuk 3D térvektorokra. Azt szeretnénk, ha hasonló könnyedséggel tudnánk a függvények felbontását is kezelni.
A fentiekből látható, hogy a kulcselem a skaláris szorzás, ennek segítségével definiálhatjuk a vektorok nagyságát (hosszát, mértékét), az ortogonalitást, továbbá a komponensek együtthatóit is skaláris szorzással számíthatjuk ki.
Általános értelemben vett vektorok lineáris terét Hilbert-térnek nevezzük, ha a térben értelmezve van a skaláris szorzás, és a tér teljes a skaláris szorzásból származó normára nézve.
Egy tér teljes, ha minden benne haladó Cauchy-sorozat konvergens. A tér pontjaiból álló sorozatot akkor nevezzük Cauchy-sorozatnak, ha minden pozitív valóstávolság értékhez találunk olyan N egész számot, hogy az N-nél nagyobb indexű elemek közül bármely kettő közti távolság kisebb, mint a megadott távolság.
Ha tekintettel szeretnénk arra lenni, hogy egy komplex függvény normája is valós szám legyen (ld. (3.27) egyenlettel kapcsolatos megjegyzést), akkor a  intervallumon értelmezett
intervallumon értelmezett  és
és  abszolút integrálható valós vagy komplex függvények skaláris szorzatát a következő módon definiálhatjuk
abszolút integrálható valós vagy komplex függvények skaláris szorzatát a következő módon definiálhatjuk
| (3.31) |

ahol a felülvonás a komplex konjugáltat jelöli (a valós függvényeket (3.31) speciális esetének tekintjük). Folytonos függvények esetén (3.31) minden további megkötés nélkül kielégíti a skaláris szorzás definícióját, de részben a mérnöki gyakorlat miatt, részben azért, hogy a vizsgált függvénytér teljes legyen, meg kell engednünk nem folytonos függvényeket is. Ebben az esetben (3.31) csak akkor elégíti ki a skaláris szorzás minden feltételét, ha az olyan függvényeket, amelyek csak nullamértékű halmazon különbözőek, más megfogalmazásban majdnem mindenütt megegyező értékűek, azonosnak tekintjük. A mérnöki gyakorlatban mindig élhetünk ezzel a megkötéssel és az integrál értékére sincs hatása, ha a függvényértékek nulla mértékű halmazon különböznek (az integrálszámításra a skaláris szorzásban betöltött szerepe miatt kell tekintettel lennünk). A függvények értelmezési tartománya nem csak véges zárt intervallum lehet, hanem nyílt vagy akár végtelen intervallum. Az abszolút integrálhatóságot azért kell kikötni, hogy (3.31) véges értéket adjon.
A (3.31) skaláris szorzatból számított norma (ezt szokás  -normának is nevezni)
-normának is nevezni)
| (3.32) |

Azokat a függvényeket, amelyekre a (3.32) norma véges értéket ad, szokás az  osztályba tartozó függvényeknek nevezni, amelyekről belátható, hogy Hilbert-teret alkotnak.
osztályba tartozó függvényeknek nevezni, amelyekről belátható, hogy Hilbert-teret alkotnak.
Az  függvény (3.28) kiterjesztéseként értelmezett felbontásához szükség van a (3.28)-ban szereplő
függvény (3.28) kiterjesztéseként értelmezett felbontásához szükség van a (3.28)-ban szereplő  és
és  vektorok megfelelőjére a
vektorok megfelelőjére a  függvényosztályban. Matematikai megfogalmazásban szükségünk van egy ortonormált bázisra. Ehhez intuícióul szolgálhat a Fourier-sorfejtés, ezért idézzük fel az erről tanultakat.
függvényosztályban. Matematikai megfogalmazásban szükségünk van egy ortonormált bázisra. Ehhez intuícióul szolgálhat a Fourier-sorfejtés, ezért idézzük fel az erről tanultakat.
3.2.1. Fourier-sorfejtés
Az olyan periodikus  függvényeket (ld. 3-14. ábra) lehet Fourier-sorba fejteni, amelyek abszolút integrálja egy
függvényeket (ld. 3-14. ábra) lehet Fourier-sorba fejteni, amelyek abszolút integrálja egy  hosszúságú periódusra véges (A gyakorlatban előforduló esetekben ezzel egyenértékű feltétel, hogy (3.32) szerinti normája legyen véges).
hosszúságú periódusra véges (A gyakorlatban előforduló esetekben ezzel egyenértékű feltétel, hogy (3.32) szerinti normája legyen véges).
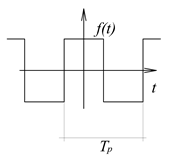
| (3.33) |

Ismertnek tekintjük a Fourier-sorok első szokásos, inkább csak matematikusok által használt alakját
| (3.34) |

Ha  folytonos és véges sok differenciálható darabból áll, akkor (3.34) rekonstruálja az eredeti függvényt. Olyan eseteket is megengedünk, amikor
folytonos és véges sok differenciálható darabból áll, akkor (3.34) rekonstruálja az eredeti függvényt. Olyan eseteket is megengedünk, amikor  szakaszosan folytonos (
szakaszosan folytonos ( -nek véges számú ugrása van, (példaként ld. 3-14. ábra)), ilyen
-nek véges számú ugrása van, (példaként ld. 3-14. ábra)), ilyen  függvények esetén (3.34) a szakadás helyén a kétoldali határérték számtani közepét adja vissza. Ez a megjegyzés a matematikai korrektség miatt fontos, de a mérnöki gyakorlatban nincs jelentősége, mert valós fizikai folyamatot leíró jelnek akkor van ugrása, ha rövid tranziensű jelenségeket elhanyagolva idealizáljuk a rendszer működését. Ez a tulajdonság öröklődik a később tárgyalandó inverz Fourier és Laplace-transzformáltakra is.
függvények esetén (3.34) a szakadás helyén a kétoldali határérték számtani közepét adja vissza. Ez a megjegyzés a matematikai korrektség miatt fontos, de a mérnöki gyakorlatban nincs jelentősége, mert valós fizikai folyamatot leíró jelnek akkor van ugrása, ha rövid tranziensű jelenségeket elhanyagolva idealizáljuk a rendszer működését. Ez a tulajdonság öröklődik a később tárgyalandó inverz Fourier és Laplace-transzformáltakra is.
Megjegyezzük, hogy  az ún. alapharmonikus körfrekvenciája, az alapharmonikus frekvenciája értelem szerűen adódik:
az ún. alapharmonikus körfrekvenciája, az alapharmonikus frekvenciája értelem szerűen adódik:  .
.
(3.34) könnyen átírható arra az alakra, amely a mérnöki gyakorlatban a legelterjedtebb.
| (3.35) |

A későbbiek szempontjából fontos kitérni a (3.35) fizikai értelmezésére. Egy periodikus függvény, amely kielégíti a (3.33) feltételt előállítható úgy, hogy először vesszük a függvény átlagát, majd ehhez hozzáadjuk  amplitúdójú és
amplitúdójú és  körfrekvenciájú koszinuszos alapharmonikust a
körfrekvenciájú koszinuszos alapharmonikust a  fáziseltolással, majd sorra a koszinuszos felharmonikusokat
fáziseltolással, majd sorra a koszinuszos felharmonikusokat  amplitúdóval,
amplitúdóval,  felharmonikus körfrekvenciával és
felharmonikus körfrekvenciával és  fáziseltolással. Így a periodikus jelet megszámlálhatóan végtelen koszinuszos függvényből állítjuk elő. Hogy az alap- és felharmonikusok a jelben jelen vannak, azt onnan is láthatjuk, hogy ezek megfelelő szűrővel kinyerhetők a jelből, rezonanciára hajlamos rendszereknél rezonanciát okozhatnak. Villamos áramkörök esetén az
fáziseltolással. Így a periodikus jelet megszámlálhatóan végtelen koszinuszos függvényből állítjuk elő. Hogy az alap- és felharmonikusok a jelben jelen vannak, azt onnan is láthatjuk, hogy ezek megfelelő szűrővel kinyerhetők a jelből, rezonanciára hajlamos rendszereknél rezonanciát okozhatnak. Villamos áramkörök esetén az  értéket egyenáramú összetevőnek is szokás nevezni. A (3.35)-ból kiolvasható, hogy egy periodikus jelben az alapharmonikus és a felharmonikusok milyen amplitúdóval és fázisszöggel szerepelnek. Az amplitúdóértékeket szokás a frekvencia (esetenként a körfrekvencia) függvényében ábrázolni. A 3-15. ábra példaként egy négyszögjel alap- és felharmonikusainak az amplitúdóit ábrázoljuk (A periódusidő 10s, a négyszögjel nagysága 1, a számítás részleteit ld. 3-5 mintafeladatban)
értéket egyenáramú összetevőnek is szokás nevezni. A (3.35)-ból kiolvasható, hogy egy periodikus jelben az alapharmonikus és a felharmonikusok milyen amplitúdóval és fázisszöggel szerepelnek. Az amplitúdóértékeket szokás a frekvencia (esetenként a körfrekvencia) függvényében ábrázolni. A 3-15. ábra példaként egy négyszögjel alap- és felharmonikusainak az amplitúdóit ábrázoljuk (A periódusidő 10s, a négyszögjel nagysága 1, a számítás részleteit ld. 3-5 mintafeladatban)
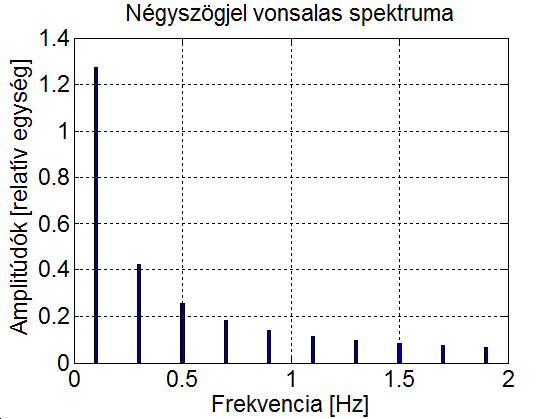
Bár a fizikai tartalmat (3.35) mutatja a legjobban, az általánosításhoz át kell térni a Fourier-sorok komplex alakjához. Abból indulunk ki, hogy
| (3.36) |
A (3.36) segítségével (kihasználva, hogy  =1) (3.35) a következő komplex alakra írható
=1) (3.35) a következő komplex alakra írható
| (3.37) |

ahol az  komplex együtthatók és a
komplex együtthatók és a  amplitúdók összefüggése a következő
amplitúdók összefüggése a következő
| (3.38) |
Látható, hogy egy valós függvényt komplex függvények összegével állítunk elő, így a komplex komponensek fizikailag önmagukban nehezen értelmezhetők, különösen a negatív előjellel szereplő körfrekvenciát nem tudjuk megmagyarázni, de az azonos abszolút értékű pozitív és negatív sorszámú komponensek egymástól függetlenül nem léteznek, egymástól függetlenül nem változnak, az információt együtt hordozzák. A (3.38)-ből kitűnik, hogy  és
és  egymásnak komplex konjugáltja, az
egymásnak komplex konjugáltja, az  komplex együtthatók abszolút értéke és fázisszöge szoros kapcsolatban van az adott komponens amplitúdójával és fáziseltolásával. Hangsúlyozzuk, nincs negatív körfrekvencia, csak a (3.36) felbontás miatt a mindig pozitív értékű körfrekvencia negatív előjellel is szerepel a függvény komplex felbontásában. A negatív frekvenciáknak az Euler forma miatt matematikailag van jelentőségük. A (3.37) előnye az, hogy formális hasonlóságot mutat a (3.28) kifejezéssel.
komplex együtthatók abszolút értéke és fázisszöge szoros kapcsolatban van az adott komponens amplitúdójával és fáziseltolásával. Hangsúlyozzuk, nincs negatív körfrekvencia, csak a (3.36) felbontás miatt a mindig pozitív értékű körfrekvencia negatív előjellel is szerepel a függvény komplex felbontásában. A negatív frekvenciáknak az Euler forma miatt matematikailag van jelentőségük. A (3.37) előnye az, hogy formális hasonlóságot mutat a (3.28) kifejezéssel.
Így már kimondhatjuk: az  függvényosztálynak az
függvényosztálynak az  komplex függvények (ahol
komplex függvények (ahol  és
és  ) ortonormált bázisát alkotják, ha ezen osztályba tartozó két függvény (jelölje ezeket
) ortonormált bázisát alkotják, ha ezen osztályba tartozó két függvény (jelölje ezeket  és
és  ) skaláris szorzatát a következő módon definiáljuk:
) skaláris szorzatát a következő módon definiáljuk:
| (3.39) |
Az  együttható azért kell, hogy a bázis ne csak ortogonális legyen, hanem normált is.
együttható azért kell, hogy a bázis ne csak ortogonális legyen, hanem normált is.
| (3.40) |
Az ortogonalitás azt jelenti:
| (3.41) |
(3.29) általánosításaként (3.39) alapján az  komplex együtthatók közvetlenül számíthatók
komplex együtthatók közvetlenül számíthatók
| (3.42) |

A későbbiek miatt hangsúlyozzuk ki, hogy az  komplex együttható függvénye
komplex együttható függvénye  -nak.
-nak.
Ha az  függvényosztályról beszélünk, akkor (3.36) szigorúan véve csak a
függvényosztályról beszélünk, akkor (3.36) szigorúan véve csak a  intervallumra vonatkozik,
intervallumra vonatkozik,
| (3.43) |

Természetesen (3.43) ezen az intervallumon kívül is visszaadja a periodikus függvényt.
A (3.27) és (3.30) általánosítása is fontos szerepet játszik a mérnöki gyakorlatban. A fizikai összefüggések feltárásához alkalmazzuk a (3.35) alakot
| (3.44) |

Periodikus jelek leginkább a villamosmérnöki gyakorlatban fordulnak elő. A (3.44) fizikai tartalmára egy nagyon egyszerű villamos áramköri példán keresztül világítunk rá. A példa megértéséhez elegendő az Ohm törvényt ismerni és azt tudni, hogy a feszültség és áram szorzata a teljesítmény. Legyen  és
és  az
az  ellenállás feszültsége, árama és pillanatnyi teljesítménye. Ismert:
ellenállás feszültsége, árama és pillanatnyi teljesítménye. Ismert:
| (3.45) |

Tegyük fel, hogy az ellenállást fűtésre használjuk. A feszültség és az áram időfüggvényét egyetlen számmal (normával) szeretnénk jelölni. A szoba hőmérsékletére az átlagteljesítménynek van hatása, így célszerű olyan normát választani, hogy abból az átlagteljesítmény könnyen számítható legyen, ezt a normát a villamos mérnökök effektív értéknek hívják. A (3.45) helyébe a következő egyszerűsített formát szeretnénk felírni:
| (3.46) |

A (3.45) és (3.46)-ból az következik, hogy a feszültség és áram esetén az effektív értéket a következőképpen kell definiálni:
| (3.47) |
ahol  lehet
lehet  vagy
vagy  . Azt feltételezzük, hogy
. Azt feltételezzük, hogy  és
és  periodikus, a periódusidő
periodikus, a periódusidő  . Vegyük észre, ha a skaláris szorzás definíciója (3.39) alakú, akkor a
. Vegyük észre, ha a skaláris szorzás definíciója (3.39) alakú, akkor a  villamos jeleknél bevezetett effektív érték megegyezik a jel
villamos jeleknél bevezetett effektív érték megegyezik a jel  normájával. Az effektív értéket az átlagteljesítményből származtattuk, így egy villamos jel átlagteljesítménye
normájával. Az effektív értéket az átlagteljesítményből származtattuk, így egy villamos jel átlagteljesítménye  normájának négyzetével arányos (kiemeljük, hogy ez nem jelent egyenlőséget). (3.44)-ből következik, hogy egy villamos jel effektív értékének négyzete megegyezik az összetevők effektív értékének négyzetösszegével, vagyis (3.44) üzenete az, hogy a jel átlagteljesítménye a komponensek átlagteljesítményének összege. Szokás a jelösszetevők amplitúdónégyzetét is ábrázolni a frekvencia függvényében, ezt szokás teljesítményspektrumnak is nevezni (ismét hangsúlyozzuk, bizonyos jelek esetén ez csupán arányosságra utal, bizonyos jeleknél ez fizikailag nem értelmezhető), periodikus függvényeknek az amplitúdóérték spektrumához hasonlóan a teljesítményérték-spektrumuk is vonalas.
normájának négyzetével arányos (kiemeljük, hogy ez nem jelent egyenlőséget). (3.44)-ből következik, hogy egy villamos jel effektív értékének négyzete megegyezik az összetevők effektív értékének négyzetösszegével, vagyis (3.44) üzenete az, hogy a jel átlagteljesítménye a komponensek átlagteljesítményének összege. Szokás a jelösszetevők amplitúdónégyzetét is ábrázolni a frekvencia függvényében, ezt szokás teljesítményspektrumnak is nevezni (ismét hangsúlyozzuk, bizonyos jelek esetén ez csupán arányosságra utal, bizonyos jeleknél ez fizikailag nem értelmezhető), periodikus függvényeknek az amplitúdóérték spektrumához hasonlóan a teljesítményérték-spektrumuk is vonalas.
A (3.35) alakú felbontásban a koszinuszos komponensek ortogonálisak, de nem normáltak, ezért kell az ½ szorzó a  összegzésénél. Ezzel szemben a (3.43) felbontás ortonormált, így
összegzésénél. Ezzel szemben a (3.43) felbontás ortonormált, így
| (3.48) |

3.2.2. Kidolgozott feladatok Fourier sorokhoz kapcsolódóan
3-5 feladat négyszögjel Fourier sora
Határozza meg a 3-16. ábraán látható négyszögjel Fourier sorát
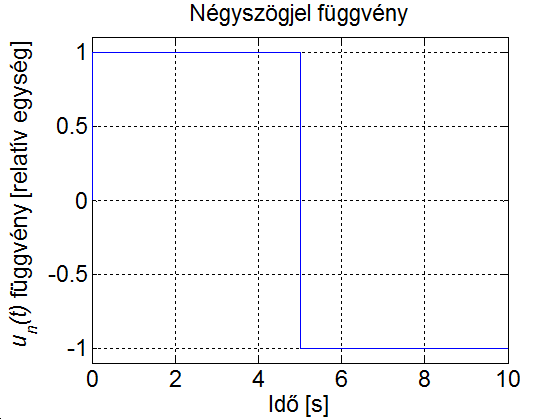
Megoldás
A jel szimmetriájából következik, hogy a Fourier-sor csak páratlan szinuszos tagokat tartalmaz, ezért célszerű a Fourier sor (3.34) alakját használni a következő formában:
| (3.49) |
ahol  és a bázis
és a bázis  függvényekből áll. Az ábráról leolvasható a
függvényekből áll. Az ábráról leolvasható a  periódus idő és az alapharmonikus értéke
periódus idő és az alapharmonikus értéke
| (3.50) |

Az  együtthatókat ebben az esetben is skaláris szorzással határozhatjuk meg. A villamosmérnöki gyakorlatban a periodikus függvényeket általában a
együtthatókat ebben az esetben is skaláris szorzással határozhatjuk meg. A villamosmérnöki gyakorlatban a periodikus függvényeket általában a  idő helyett
idő helyett  szög függvényében ábrázoljuk és a Fourier sor együtthatóinak kiszámítása is egyszerűbb, ha
szög függvényében ábrázoljuk és a Fourier sor együtthatóinak kiszámítása is egyszerűbb, ha  helyett
helyett  szerint integrálunk.
szerint integrálunk.
| (3.51) |

Rajzoljuk meg a következő függvényt, különböző számú felharmonikust figyelembe véve
| (3.52) |

Alap-harmonikus |
Alap- és az első felharmonikus |
Alap- és az első két felharmonikus |
Alap- és az első kilenc felharmonikus |
Alap- és az első száz felharmonikus |
Alap- és az első ezer felharmonikus |
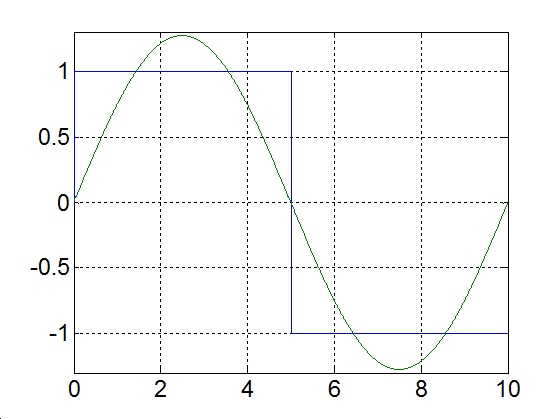
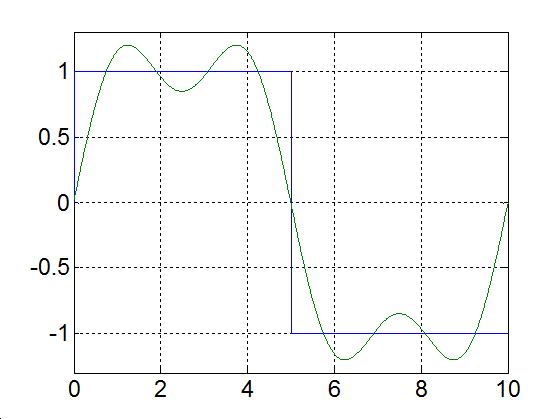
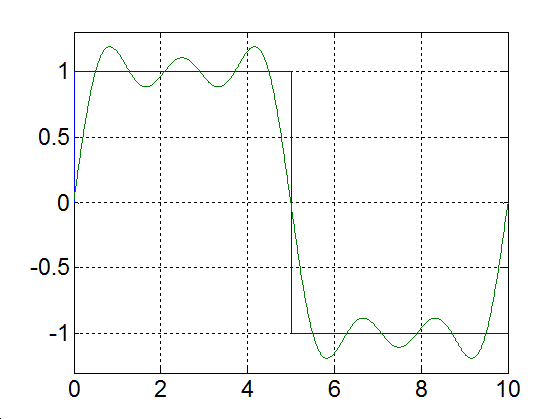
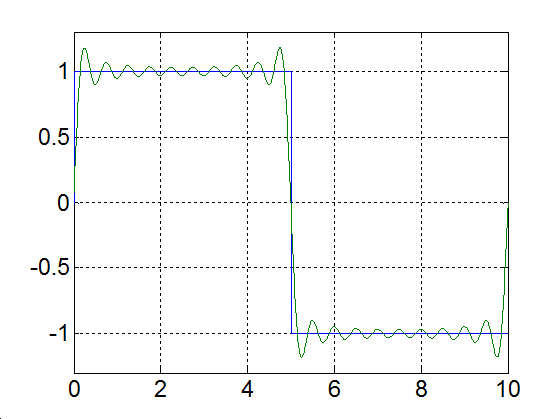
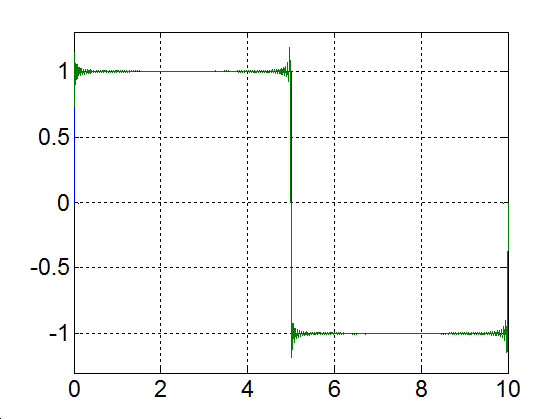
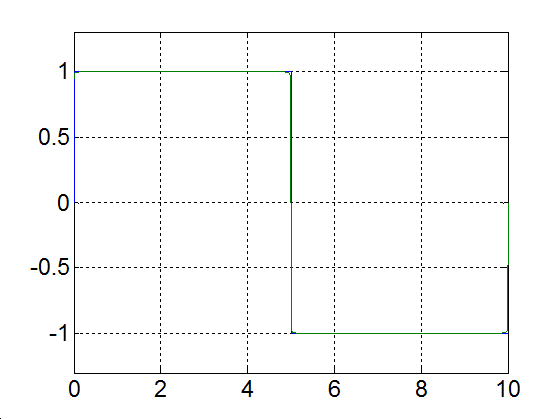
3-17. ábra Négyszögjel Fourier sorfejtése
A fenti számítások a következő MATLAB program segítségével végezhetők el.
t=0:0.01:10;
max=size(t);
max=max(2);
for i=1:max
f(i)=sign(sin(t(i)/5*pi));
end
plot(t,f)
set(gca, 'fontsize', 17);
ylabel('{\it u_n(t)} függvény [relatív egység]');
xlabel('Idő [s]');
title('Négyszögjel függvény');
axis([0 10 -1.1 1.1]);
grid
pause
for ib=1:10
ii=2*ib-1;
af(ib)=4/pi/ii;
end
for is=1:max
fi(is)=0;
for l=1:10
ii=2*l-1;
fi(is)=fi(is)+af(l)*sin(is/max*2*pi*ii);
end
end
plot(t,f,t,fi)
axis([0 10 -1.3 1.3]);
grid
pause
bar( [0.1 0.3 0.5 0.7 0.9 1.1 1.3 1.5 1.7 1.9],af, 0.07)
set(gca, 'fontsize', 17);
ylabel('Amplitúdók [relatív egység]');
xlabel('Frekvencia [Hz]');
title('Négyszögjel vonsalas spektruma')
grid3-6 feladat Fourier sorfejtés gyakorlati alkalmazása
A 3-18. ábra egy szünetmentes áramforrás egyszerűsített rajzát szemlélteti.
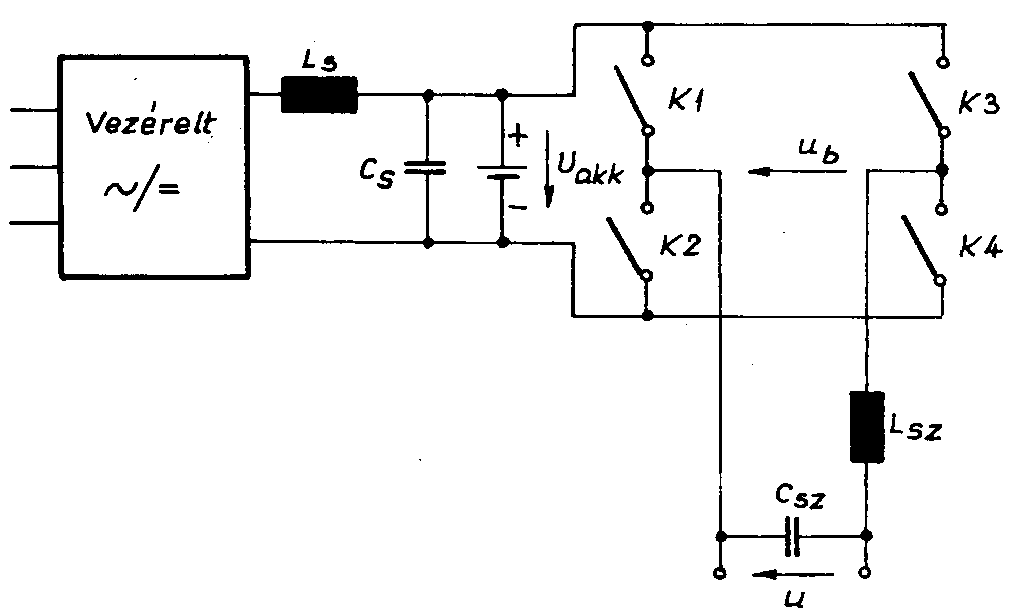
A szünetmentes áramforrás részei:
vezérelt egyenirányító
simító szűrő

akkumulátor

inverter (K1…K4)
kimeneti szűrő
 .
.
Mindaddig, míg van hálózati feszültség, a vezérelt egyenirányító táplálja az invertert, és gondoskodik arról, hogy az akkumulátor feltöltött állapotban legyen. Hálózati feszültség kimaradásakor az akkumulátor a benne tárolt energia révén szünetmentesen tudja tartani az inverter, illetve a fogyasztó táplálását.
Az inverter – működési elvéből adódóan – csak különböző előjelű négyszög alakú impulzusok kiadására képes. Tegyük fel, hogy mindkét fél-periódusban szimmetrikusan kiadunk egy  szélességű impulzust. Az egyszerűség kedvéért az impulzust relatív egységben, az
szélességű impulzust. Az egyszerűség kedvéért az impulzust relatív egységben, az  függvényében ábrázoljuk (az időt radiánban mérjük, ld. 3-19. ábra)
függvényében ábrázoljuk (az időt radiánban mérjük, ld. 3-19. ábra)
A fogyasztók többsége azonban szinuszos feszültséget igényel, ezért szükséges a kimeneti szűrőkör.
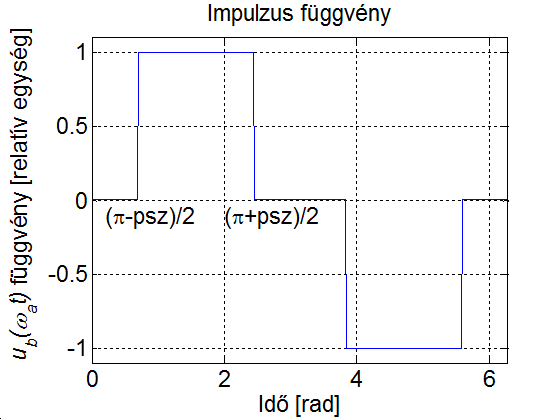
Az alapharmonikus feszültség szabályozása, de nem utolsó sorban a szűrőkör árának és méretének csökkentése érdekében is, úgynevezett PWM (Pulse Width Modulation = impulzus szélesség moduláció) eljárást szokás alkalmazni. Az egyik legegyszerűbb PWM-módszer a 3-19. ábra látható. Az áramforrás kimenő feszültségének effektív értékét az inverter által előállított  szimmetrikus impulzus jel
szimmetrikus impulzus jel  szélességének változtatásával lehet módosítani. Ha egy félperióduson belül az impulzusok számát növeljük, akkor egyidejűleg változtathatjuk a kimenő feszültség effektív értékét és felharmonikus tartalmát. A PWM lényege a szűrés szempontjából bban áll, hogy változatlan effektív érték mellett az alapharmonikushoz képest az alacsony rendszámú felharmonikusok nagyságát lecsökkentjük vagy teljesen megszüntetjük azon az áron, hogy közben a nagyobb rendszámú felharmonikusokat relatívan megnöveljük; a nagyobb rendszámú felharmonikusok pedig kisebb méretű, és ezért olcsóbb szűrőkörrel csökkenthetők, mint az alacsony rendszámúak.
szélességének változtatásával lehet módosítani. Ha egy félperióduson belül az impulzusok számát növeljük, akkor egyidejűleg változtathatjuk a kimenő feszültség effektív értékét és felharmonikus tartalmát. A PWM lényege a szűrés szempontjából bban áll, hogy változatlan effektív érték mellett az alapharmonikushoz képest az alacsony rendszámú felharmonikusok nagyságát lecsökkentjük vagy teljesen megszüntetjük azon az áron, hogy közben a nagyobb rendszámú felharmonikusokat relatívan megnöveljük; a nagyobb rendszámú felharmonikusok pedig kisebb méretű, és ezért olcsóbb szűrőkörrel csökkenthetők, mint az alacsony rendszámúak.
Határozza meg a feszültség jel effektív értékét az impulzus időben kifejezett
 szélességének függvényében.
szélességének függvényében.
Ábrázolja
 függvényében az első három felharmonikus nagyságának alakulását!
függvényében az első három felharmonikus nagyságának alakulását!Mekkorára kell
 -t választani, ha az
-t választani, ha az  rendszámú felharmonikust meg akarjuk szüntetni?
rendszámú felharmonikust meg akarjuk szüntetni?
Megoldás
Az effektív érték (3.47) definíciója alapján
| (3.53) |

A jel szimmetriájából következik, hogy a Fourier-sor csak páratlan szinuszos tagokat tartalmaz, ezért célszerű a Fourier sor (3.34) alakját használni a következő formában:
| (3.54) |
ahol  és a bázis
és a bázis  függvényekből áll. Az
függvényekből áll. Az  együtthatókat ebben az esetben is skaláris szorzással határozhatjuk meg.
együtthatókat ebben az esetben is skaláris szorzással határozhatjuk meg.
| (3.55) |

Felhasználva a
| (3.56) |

azonosságot:
| (3.57) |
| (3.58) |

A 3-20. ábra az  és
és  együtthatók
együtthatók  vonatkoztatott abszolút értékét mutatja
vonatkoztatott abszolút értékét mutatja  nagyság függvényében. Az
nagyság függvényében. Az  a teljes kitöltésű négyszög alakú jel alapharmonikusa. Az
a teljes kitöltésű négyszög alakú jel alapharmonikusa. Az  előjele a
előjele a  -edik felharmonikus fázisával van kapcsolatban.
-edik felharmonikus fázisával van kapcsolatban.
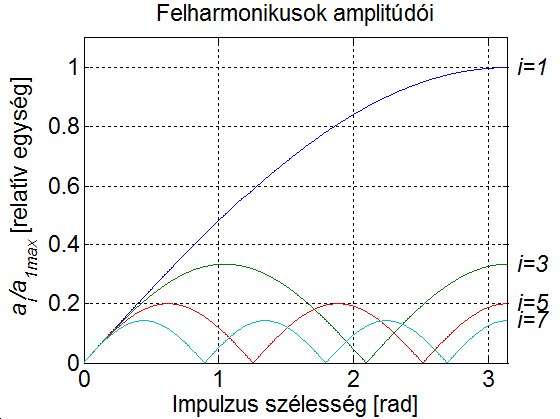
Az
 kifejezéséből látható, hogy
kifejezéséből látható, hogy  megfelelő választásával tetszőleges rendszámú felharmonikus megszüntethető. A
megfelelő választásával tetszőleges rendszámú felharmonikus megszüntethető. A  rendszámú felharmonikus megszűnését jelentő
rendszámú felharmonikus megszűnését jelentő

egyenlőség akkor teljesül, ha

Mivel  , ezért
, ezért
impulzus szükséges.
Megjegyezzük, hogy ha egy félperiódusban több impulzust adunk ki, akkor az impulzusokat egyenként Fourier-sorba fejthetjük és ezeket a sorokat tagonként összegezhetjük. Belátható, hogy az impulzusok helyének megfelelő választásával annyi felharmonikus küszöbölhető ki, ahány impulzus esik egy félperiódusra. Ugyanakkor nem szabad megfeledkezni arról, hogy az impulzusszélesség moduláció közben az alapharmonikus értéke is csökken, így néhány felharmonikus értéke relatívan növekedhet.
3-7 feladat Fourier sorfejtés MATLAB programmal
Készítse el az előző feladat számításait MATLAB programmal a következő adatokkal

és 
Megoldás
t=0:0.01:2*pi;
max=size(t);
max=max(2);
for i=1:max
if abs(sin(t(i)))>0.64
f(i)=sign(sin(t(i)));
else
f(i)=0;
end
end
plot(t,f)
set(gca, 'fontsize', 17);
ylabel('{\it u_b(\omega_at)} függvény [relatív egység]');
xlabel('Idő [rad]');
title('Impulzus függvény');
axis([0 2*pi -1.1 1.1]);
text(0.2,-0.1,['{\fontsize{17}(\pi-psz)/2}'])
text(2,-0.1,['{\fontsize{17}(\pi+psz)/2}'])
grid
a1max=4/pi*sin(pi/2);
for i=1:max
a1(i)=abs(4/pi*sin(pi/2)*sin(i/max*pi/2))/a1max;
a3(i)=abs(4/pi/3*sin(pi/2*3)*sin(i/max*pi*3/2))/a1max;
a5(i)=abs(4/pi/5*sin(pi/2*5)*sin(i/max*pi*5/2))/a1max;
a7(i)=abs(4/pi/7*sin(pi/2*7)*sin(i/max*pi*7/2))/a1max;
end
pause
plot(t/2,a1,t/2,a3,t/2,a5,t/2,a7)
set(gca, 'fontsize', 17);
ylabel('{\it a_i/a_{1max}} [relatív egység]');
xlabel('Impulzus szélesség [rad]');
title('Felharmonikusok amplitúdói');
axis([0 pi 0 1.1]);
grid
text(pi,1,['{\it \fontsize{17} i=1}'])
text(pi,a3(max),['{\it \fontsize{17} i=3}'])
text(pi,a5(max),['{\it \fontsize{17} i=5}'])
text(pi,a7(max),['{\it \fontsize{17} i=7}'])
pause
psz=pi-2*asin(0.64);
for ib=1:10
ii=2*ib-1;
af(ib)=4/pi/ii*sin(ii*psz/2)*sin(pi/2*ii);
end
for is=1:max
fi(is)=0;
for l=1:10
ii=2*l-1;
fi(is)=fi(is)+af(l)*sin(is/max*pi*2*ii);
end
end
plot(t,f,t,fi)
axis([0 2*pi -1.3 1.3]);
grid
Alap-harmonikus |
Alap- és az első felharmonikus |
Alap- és az első két felharmonikus |
Alap- és az első kilenc felharmonikus |
Alap- és az első száz felharmonikus |
Alap- és az első ezer felharmonikus |
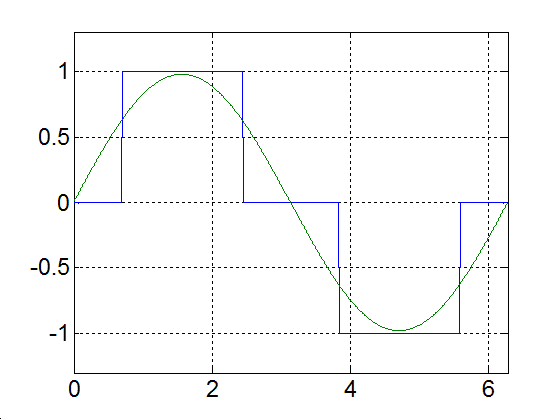
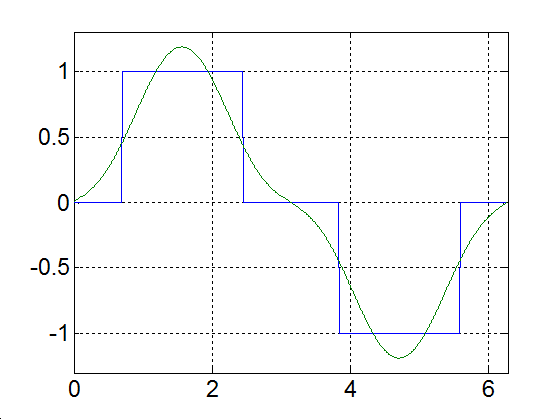
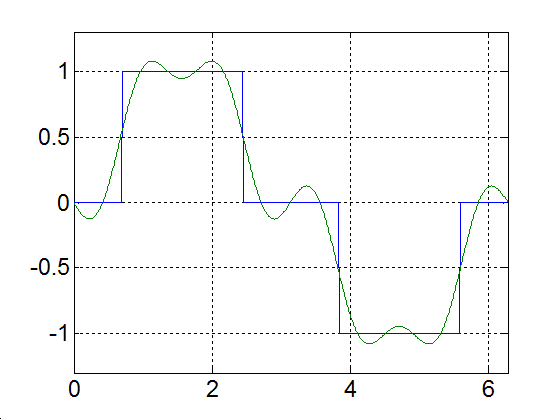
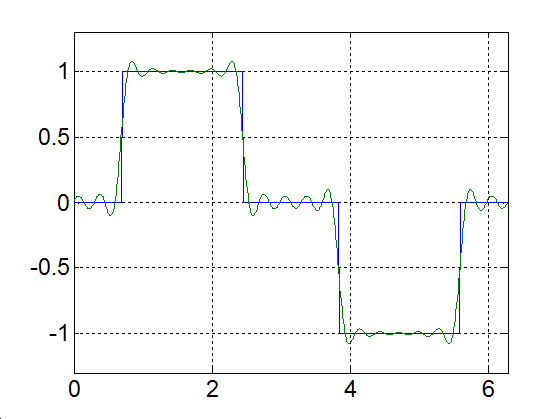
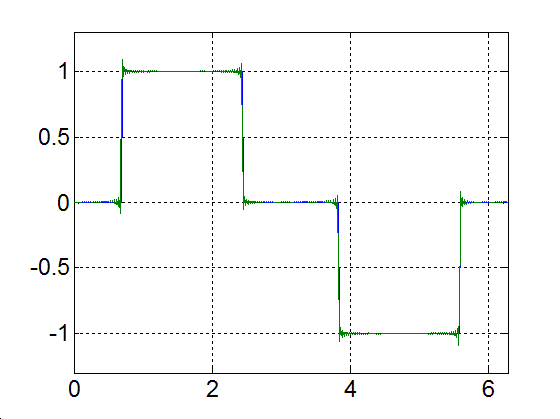
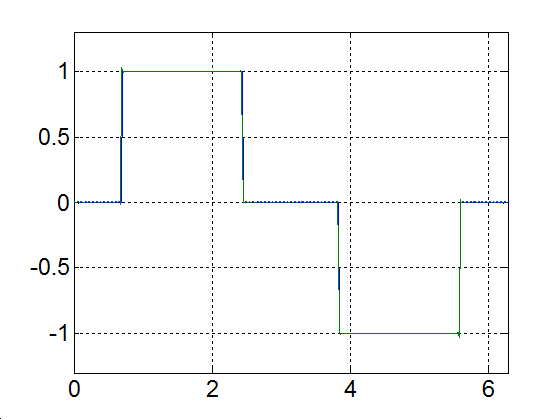
3-21. ábra Szimmetrikus impulzus Fourier sorfejtése
3-8 feladat Egy impulzusjel Fourier sora (komplex együtthatókkal)
Határozza meg a 3-22. ábraán látható impulzus jel Fourier sorát. Legyen  a periódus idő, és
a periódus idő, és  az impulzus szélessége, az impulzus nagysága az egyszerűség kedvéért legyen 1. Az ábráról leolvasható a periódus idő és az impulzus szélessége (
az impulzus szélessége, az impulzus nagysága az egyszerűség kedvéért legyen 1. Az ábráról leolvasható a periódus idő és az impulzus szélessége ( és
és  ). Az alapharmonikus értéke:
). Az alapharmonikus értéke:
| (3.59) |

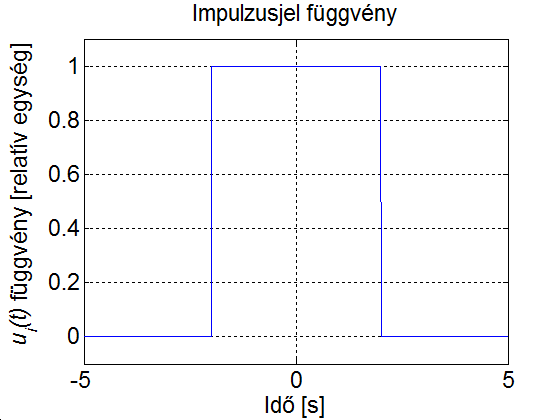
Megoldás
Használjuk a Fourier sorok (3.37) komplex alakját, az együtthatók (3.42) alapján számítva, és kihasználva a sorfejtendő függvény 0 vagy 1 értéket vehet fel.
| (3.60) |

ahol  .
.  , -a jel egy periódusra vonatkozó átlagértéke- a 3-22. ábraáról közvetlenül kiolvasható, de (3.60) összefüggésből l'Hopital szabállyal is ugyanazt az eredményt kapjuk
, -a jel egy periódusra vonatkozó átlagértéke- a 3-22. ábraáról közvetlenül kiolvasható, de (3.60) összefüggésből l'Hopital szabállyal is ugyanazt az eredményt kapjuk
| (3.61) |
Látható, hogy az összes  együttható valós, ez (3.37) és (3.38) alapján azt jelenti, hogy a Fourier sorok (3.35) alakja esetén a koszinuszos tagok fáziseltolása nulla.
együttható valós, ez (3.37) és (3.38) alapján azt jelenti, hogy a Fourier sorok (3.35) alakja esetén a koszinuszos tagok fáziseltolása nulla.
| (3.62) |

Alap-harmonikus |
Alap- és az első felharmonikus |
Alap- és az első két felharmonikus |
Alap- és az első kilenc felharmonikus |
Alap- és az első száz felharmonikus |
Alap- és az első ezer felharmonikus |
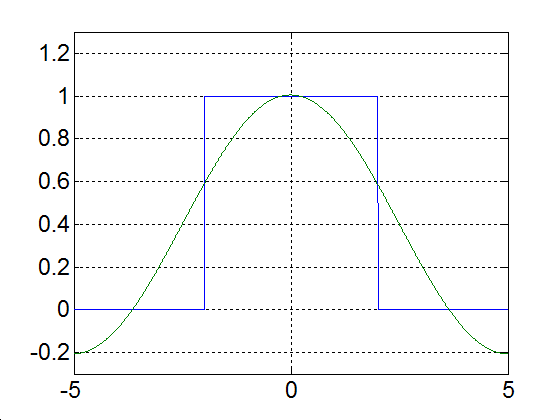
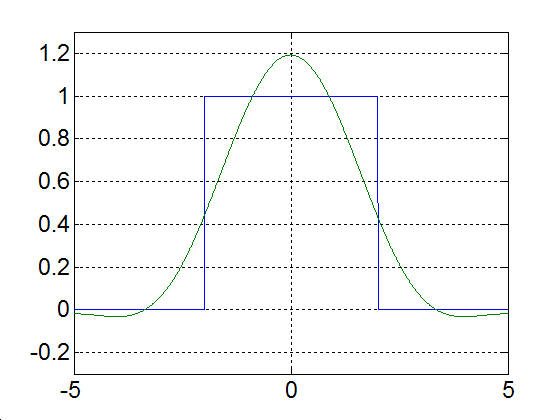
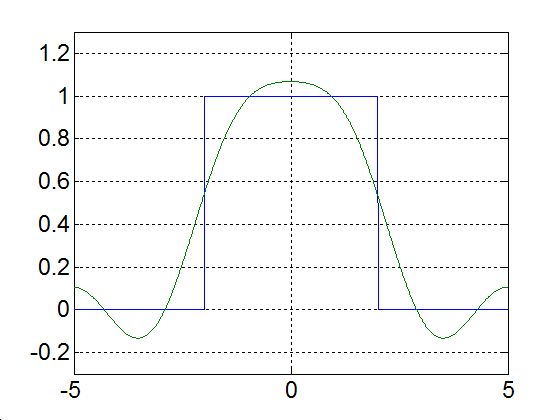
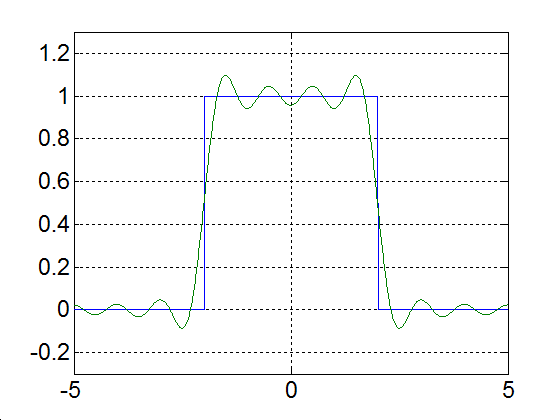
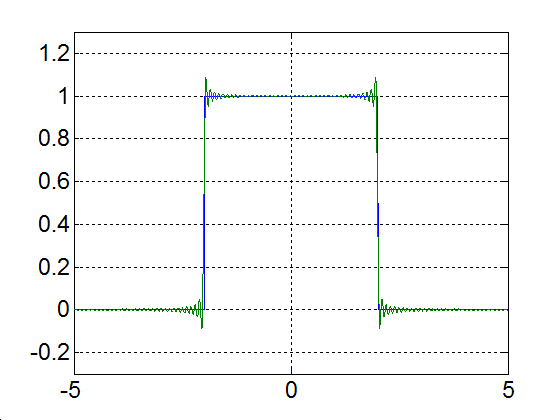
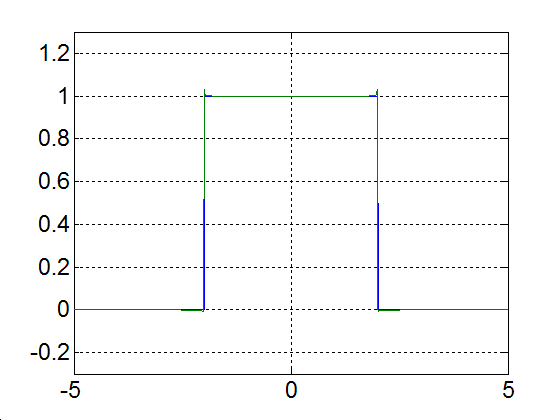
3-23. ábra Egy impulzus Fourier sorfejtése
A MATLAB fájl
t=-5:0.01:5;
max=size(t);
max=max(2);
Tsz=4;
Tp=10;
dr=Tsz/Tp;
for i=1:max
f(i)=0;
if t(i)>-(dr)*5
f(i)=1;
end
if t(i)>(dr)*5
f(i)=0;
end
end
plot(t,f)
set(gca, 'fontsize', 17);
ylabel('{\it u_i(t)} függvény [relatív egység]');
xlabel('Idő [s]');
title('Impulzusjel függvény');
axis([-5 5 -0.1 1.1]);
grid
pause
nn=1001;
for ib=1:nn
af(ib)=sin(ib*pi*dr)/ib/pi;
end
for is=1:max
fi(is)=dr;
for l=1:nn
fi(is)=fi(is)+af(l)*2*cos((-max/2+is/max)*2*pi*l);
end
end
plot(t,f,t,fi)
axis([-5 5 -0.3 1.3]);
grid3-9 feladat Egy impulzusjel vonalas spektruma
Vizsgáljuk meg, hogy miként változik az impulzus jel spektruma, ha az impulzus szélessége állandó ( ), ugyanakkor a
), ugyanakkor a  periódusidő növekszik. Csak a pozitív tartományt ábrázoljuk (a negatív tartomány ennek tükörképe).
periódusidő növekszik. Csak a pozitív tartományt ábrázoljuk (a negatív tartomány ennek tükörképe).
Megoldás
Tsz=1;
Tp=4;
dr=Tsz/Tp;
nn=15/4*Tp;
fr(1)=0;
af(1)=dr;
for ib=2:nn
fr(ib)=(ib-1)/Tp;
af(ib)=sin((ib-1)*pi*dr)/(ib-1)/pi;
end
bar( fr,af, 0.2)
set(gca, 'fontsize', 17);
ylabel('Amplitúdók [relatív egység]');
xlabel('Frekvencia [Hz]');
title(['{\it T_{sz}}=1 és {\it T_p}=' int2str(Tp)])
grid
axis([-0.1 3.8 -0.1 0.26]);
|
|
|
|
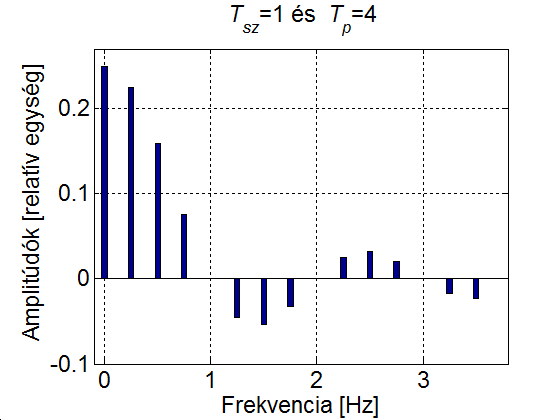
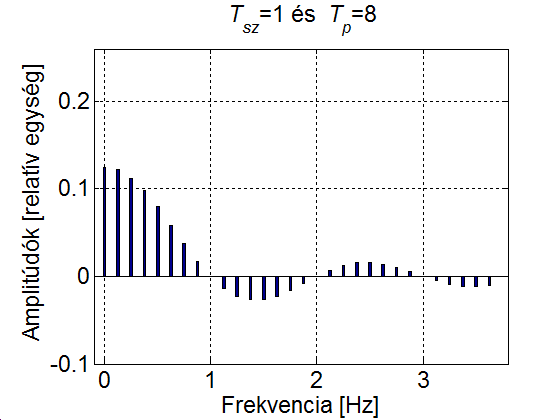
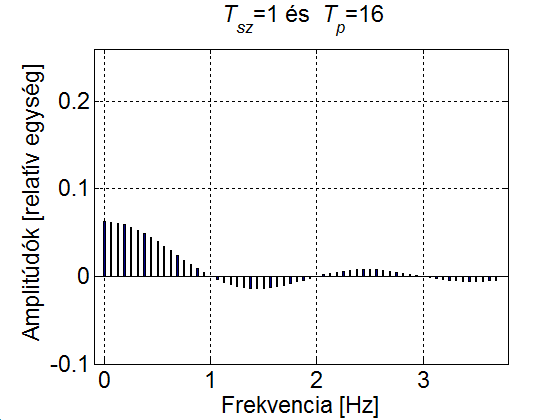
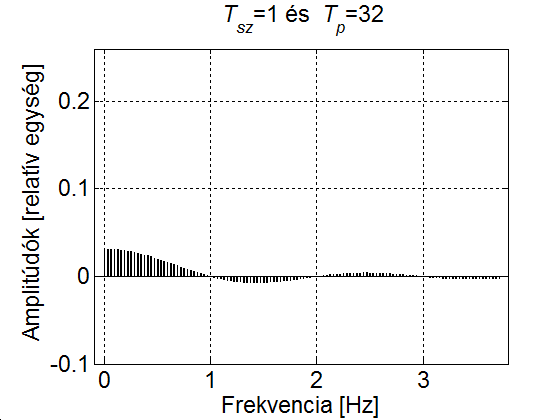
3-24. ábra Egy impulzus jel vonalas amplitúdó spektruma
A 3-24. ábra szemléletesen mutatja, hogy a  növelésével az amplitúdók egyre csökkennek és a vonalak (a felharmonikusok) egyre sűrűbben lesznek. Ez természetesen a (3.60) képletből is kiolvasható, ahol az is látszik, hogy ha az amplitúdó értékeket megszorozzuk
növelésével az amplitúdók egyre csökkennek és a vonalak (a felharmonikusok) egyre sűrűbben lesznek. Ez természetesen a (3.60) képletből is kiolvasható, ahol az is látszik, hogy ha az amplitúdó értékeket megszorozzuk  -vel, akkor az aktuális
-vel, akkor az aktuális  értéktől függetlenül az amplitúdó spektrum burkológörbéje egy
értéktől függetlenül az amplitúdó spektrum burkológörbéje egy  függvény.
függvény.
| (3.63) |
Más szavakkal, a  vonalas amplitúdó spektrum nem más, mint a
vonalas amplitúdó spektrum nem más, mint a  mintavételezése, ahol a mintavételezés sűrűsége növekszik, ha a
mintavételezése, ahol a mintavételezés sűrűsége növekszik, ha a  periódus időt növeljük.
periódus időt növeljük.
3.2.3. Fourier-transzformáció
A Fourier-transzformáció megértéséhez célszerű a 3-9 feladatot tanulmányozni, ahol egy állandó nagyságú impulzus periodikusan ismétlődött. Minél nagyobb a periodusidő, annál távolabb kerülnek egymástól az impulzusok. Ha azt akarjuk, hogy egyetlen impulzusunk legyen, akkor a periódus időt végtelenre kell növelni. Ezt általánosítva, nem periodikus jelek esetén szokás azzal a szemléletes képpel élni, miszerint tegyük fel, hogy a jel periodikus, csak a periódus ideje végtelen, amikor a végtelenben befejeződött egy periódus, akkor kezdődik a következő, ugyancsak végtelen hosszú periódus. Vegyük észre, hogy (3.43) és (3.40) sehol sem használja ki a jel periodikusságát, így formálisan kiterjeszthető olyan abszolút integrálható (lecsengő) nem periodikus  jelekre (ld. 3-25. ábra), ahol
jelekre (ld. 3-25. ábra), ahol  , de itt kell tennünk néhány megjegyzést.
, de itt kell tennünk néhány megjegyzést.
Ha
 , akkor az alapharmonikus nulla,
, akkor az alapharmonikus nulla, 
Az 1. megjegyzésből az következik, hogy az
 kitevőjében
kitevőjében  alakban tetszőleges
alakban tetszőleges  körfrekvencia megjelenik, ezért a (3.43) összegzés nem mehet sorszám szerint formálisan, a (3.43) összegzésben megszámlálhatatlanul sok összeget kellene figyelembe venni, ami ilyen formában nem működik. Így nem az
körfrekvencia megjelenik, ezért a (3.43) összegzés nem mehet sorszám szerint formálisan, a (3.43) összegzésben megszámlálhatatlanul sok összeget kellene figyelembe venni, ami ilyen formában nem működik. Így nem az  -t léptetjük, helyette
-t léptetjük, helyette  lépésekben kell az összegzést elvégezni, a (3.43) összegzés helyett egy
lépésekben kell az összegzést elvégezni, a (3.43) összegzés helyett egy  szerinti integrált kell felírni.
szerinti integrált kell felírni. Ha
 és
és  abszolút integrálható, akkor (3.42) minden
abszolút integrálható, akkor (3.42) minden  -ra nullát ad, ezért a formálisan az így kiszámított
-ra nullát ad, ezért a formálisan az így kiszámított  értékeknek önmagukban nincs semmilyen információtartalma. Fizikailag ezt úgy magyarázhatjuk, hogy a nem periodikus jel megszámlálhatatlanul végtelen, nulla amplitúdójú koszinuszos összetevőből áll. Mivel megszámlálhatatlanul sok nullaértékű tagot összegezünk, ezért az összeg lehet nem nulla. Az információt nem az amplitúdóban kell keresnünk. Ezért az amplitúdóérték helyett bevezetjük az amplitúdósűrűség fogalmát. Ha pusztán formálisan nézzük, akkor a (3.42) összefüggésben kiszámított nulla nagyságú amplitúdókat elosztjuk az alapharmonikus frekvenciájával, vagyis megszorozzuk a végtelen nagyságú
értékeknek önmagukban nincs semmilyen információtartalma. Fizikailag ezt úgy magyarázhatjuk, hogy a nem periodikus jel megszámlálhatatlanul végtelen, nulla amplitúdójú koszinuszos összetevőből áll. Mivel megszámlálhatatlanul sok nullaértékű tagot összegezünk, ezért az összeg lehet nem nulla. Az információt nem az amplitúdóban kell keresnünk. Ezért az amplitúdóérték helyett bevezetjük az amplitúdósűrűség fogalmát. Ha pusztán formálisan nézzük, akkor a (3.42) összefüggésben kiszámított nulla nagyságú amplitúdókat elosztjuk az alapharmonikus frekvenciájával, vagyis megszorozzuk a végtelen nagyságú  periódus idővel és így
periódus idővel és így  alakban véges értékeket kapunk. Az amplitúdósűrűséget is ábrázolhatjuk akár a frekvencia, akár a körfrekvencia függvényében. Ekkor egy folytonos amplitúdósűrűség spektrumot kapunk. De itt ennél sokkal több van, így egy alapvetően más művelethez jutunk. Ahelyett, hogy egy függvényt komponensek összegére bontanánk, a függvényt leképezzük egy másik függvényre. Más megfogalmazásban egy függvény transzformációt végezünk el.
alakban véges értékeket kapunk. Az amplitúdósűrűséget is ábrázolhatjuk akár a frekvencia, akár a körfrekvencia függvényében. Ekkor egy folytonos amplitúdósűrűség spektrumot kapunk. De itt ennél sokkal több van, így egy alapvetően más művelethez jutunk. Ahelyett, hogy egy függvényt komponensek összegére bontanánk, a függvényt leképezzük egy másik függvényre. Más megfogalmazásban egy függvény transzformációt végezünk el.
E megjegyzésekre tekintettel (3.42) és (3.43) általánosítását abszolút integrálható nem periodikus  jelek esetén Fourier-transzformációnak és inverz transzformációnak nevezzük. Ezekk a következő alakban írhatók fel:
jelek esetén Fourier-transzformációnak és inverz transzformációnak nevezzük. Ezekk a következő alakban írhatók fel:
Pusztán jelöléstechnikai kérdés, (3.64) és (3.65) helyett szokásos a következő jelölés
Megjegyezzük, hogy bizonyos szerzők a körfrekvencia helyett a frekvenciát használják, ekkor
Mivel a Fourier-transzformációt a Fourier-sorokból származtattuk, ezért a komplex  amplitúdósűrűség függvénynek a fizikai tartalmát is a Fourier-sorokból érthetjük meg.
amplitúdósűrűség függvénynek a fizikai tartalmát is a Fourier-sorokból érthetjük meg.
Ugyan minden frekvenciához tartozó komponens önmagában nézve nulla amplitúdóval szerepel az összegzésben, de ha sávokat nézünk, akkor az egyes frekvenciasávok súlya már mérhető. Ha összehasonlítjuk két értékét, Pl. az
két értékét, Pl. az  és
és  helyettesítési értéket, és azt találjuk, hogy
helyettesítési értéket, és azt találjuk, hogy  , akkor azt mondjuk, hogy ugyan mind az
, akkor azt mondjuk, hogy ugyan mind az  és mind az
és mind az  körfrekvenciájú összetevő nulla amplitúdójú, de az
körfrekvenciájú összetevő nulla amplitúdójú, de az  körfrekvenciájú összetevő súlya még is kétszerese az
körfrekvenciájú összetevő súlya még is kétszerese az  körfrekvenciájú összetevő súlyának az
körfrekvenciájú összetevő súlyának az  jelben. Az
jelben. Az  komplex szám argumentuma az adott frekvenciájú összetevő fáziseltolását adja meg. Hogy ezek az összetevők jelen vannak a jelben azt onnan is tapasztalhatjuk, hogy lengésre hajlamos rendszereknél rezonanciajelenséget is megfigyelhetünk. Ezt az alkalmazástól függően vagy ki akarjuk használni, vagy el akarjuk kerülni, pl. szabályozásnál instabilitást nem engedünk meg.
komplex szám argumentuma az adott frekvenciájú összetevő fáziseltolását adja meg. Hogy ezek az összetevők jelen vannak a jelben azt onnan is tapasztalhatjuk, hogy lengésre hajlamos rendszereknél rezonanciajelenséget is megfigyelhetünk. Ezt az alkalmazástól függően vagy ki akarjuk használni, vagy el akarjuk kerülni, pl. szabályozásnál instabilitást nem engedünk meg.
3.2.3.1. Teljesítmény spektrum
Az amplitúdósűrűséghez hasonlóan bevezethetjük a teljesítménysűrűséget, talán ez az, ami fizikailag legjobban értelmezhető és mérhető. Ennek segítségével meghatározhatjuk, hogy egy frekvencia sávra a jel teljes átlagteljesítményéből mennyi jut. Csak arra kell ügyelnünk, hogy formálisan a negatív előjelű frekvencia tartományban is integrálni kell, különben a komplex  függvény integrálásakor nem kaphatunk valós teljesítmény értéket (ld. (3.36) ). Egy jel effektív értékének négyzete a Fourier-transzformált jelből közvetlenül kiszámítható. xxxxxx
függvény integrálásakor nem kaphatunk valós teljesítmény értéket (ld. (3.36) ). Egy jel effektív értékének négyzete a Fourier-transzformált jelből közvetlenül kiszámítható. xxxxxx
| (3.70) |
3.2.3.2. Frekvenciaátviteli függvény (frekvenciakarakterisztika)
A Fourier-transzformációt széles körben alkalmazzuk, egyrészt ennek segítségével határozhatjuk meg a jelek spektrumát, másrészt a rendszerek leírására is használhatjuk. A 3-12. ábraból kiindulva kiszámíthatjuk, hogy egy konkrét frekvenciájú gerjesztés válasza (az inhomogén differenciálegyenlet megoldása) mi lesz, hogyan változik meg az amplitúdó és a fázisszög a gerjesztés frekvenciája (pontosabban körfrekvenciája) függvényében. Sok esetben ezt nem direktben számítjuk, mert bizonyos közbenső számításoknál a Fourier-transzformált nem értelmezhető. Fourier-transzformációnak van egy fontos korlátja. A gyakorlatban előforduló olyan egyszerű jelek esetén sem alkalmazható, mint az egységugrás jel. A megoldás a következő fejezetben olvasható.
3.2.4. Laplace-transzformáció
A Fourier-transzformáció alkalmazásakor akkor ütközünk akadályba, ha olyan nem periodikus jelekre is ki akarjuk terjeszteni a frekvencia tartománybeli vizsgálatot, amelyek nem abszolút integrálhatóak. Ennek az a módja, hogy ezeket a függvényeket is abszolút integrálhatóvá tesszük, ezt azzal érjük el, hogy egyszerűen beszorozzuk az  függvényt egy
függvényt egy  függvénnyel (ahol
függvénnyel (ahol  egy megfelelően megválasztott érték és csak úgynevezett belépő függvényeket engedünk meg. Szemléletesen a
egy megfelelően megválasztott érték és csak úgynevezett belépő függvényeket engedünk meg. Szemléletesen a  tartományban lenullázzuk a függvényt és a
tartományban lenullázzuk a függvényt és a  tartományban lekalapáljuk, hogy lecsengő legyen. A Laplace-transzformálhatóság feltétele így:
tartományban lekalapáljuk, hogy lecsengő legyen. A Laplace-transzformálhatóság feltétele így:
| (3.71) |

Ezt követően már az  függvényt formálisan Fourier-transzformálhatjuk és visszatranszformálhatjuk azzal a kikötéssel, hogy a
függvényt formálisan Fourier-transzformálhatjuk és visszatranszformálhatjuk azzal a kikötéssel, hogy a  tartományban a függvény nulla:
tartományban a függvény nulla:


Az eredeti függvényt is könnyen visszakaphatjuk
| (3.74) |

A  tartományban a függvény nulla, ezért (3.64)-ban az alsó integrálási határ is nulla, továbbá az
tartományban a függvény nulla, ezért (3.64)-ban az alsó integrálási határ is nulla, továbbá az  helyettesítéssel élünk
helyettesítéssel élünk
| (3.75) |

A -0 azt fejezi ki, hogy az integrálást úgy kell elvégezni, hogy az esetlegesen a  időpillanatban fellépő Dirac-impulzus hatását figyelembe tudjuk venni. Alkalmazzuk formálisan az inverz Fourier-transzformációt, ekkor az
időpillanatban fellépő Dirac-impulzus hatását figyelembe tudjuk venni. Alkalmazzuk formálisan az inverz Fourier-transzformációt, ekkor az  függvényt kapjuk vissza, amelyet az
függvényt kapjuk vissza, amelyet az  függvénnyel meg kell szorozni, hogy az eredeti függvényt kapjuk. Mivel
függvénnyel meg kell szorozni, hogy az eredeti függvényt kapjuk. Mivel  nem függ a körfrekvenciától, így bevihető az integráljel alá. Kihangsúlyozzuk, hogy a (3.75) képletben csak a 0≤t tartomány szerepel, így az inverz Laplace-transzformációval is csak ezt a tartományt tudjuk visszaállítani.
nem függ a körfrekvenciától, így bevihető az integráljel alá. Kihangsúlyozzuk, hogy a (3.75) képletben csak a 0≤t tartomány szerepel, így az inverz Laplace-transzformációval is csak ezt a tartományt tudjuk visszaállítani.
| (3.76) |

A Laplace- és az inverz Laplace-transzformáció szokásos jelölése még:

A Laplace-transzformált  függvény fizikai tartalmát nehéz lenne megmagyarázni, ugyanakkor ez egy nagyon jól használható matematikai eszköz. Gyakran előfordul, hogy olyan jelekkel végzünk műveletet, amelyeknek nem létezik a Fourier-transzformáltja, ezért kénytelenek vagyunk a Laplace-transzformációhoz folyamodni. De a végeredményről egyéb fizikai megfontolásokból tudjuk, hogy Fourier-transzformálható, így a végső lépésben a
függvény fizikai tartalmát nehéz lenne megmagyarázni, ugyanakkor ez egy nagyon jól használható matematikai eszköz. Gyakran előfordul, hogy olyan jelekkel végzünk műveletet, amelyeknek nem létezik a Fourier-transzformáltja, ezért kénytelenek vagyunk a Laplace-transzformációhoz folyamodni. De a végeredményről egyéb fizikai megfontolásokból tudjuk, hogy Fourier-transzformálható, így a végső lépésben a  helyettesítéssel megkapjuk a jel spektrumát (Fourier-transzformáltját). Nagyon fontos, hogy a mérnöki gyakorlatban sokszor a jel fizikai tulajdonságai alapján mondjuk ki, hogy a jel matematikai értelemben eleget tesz-e a Fourier-, illetve Laplace-transzformálhatóság feltételének.
helyettesítéssel megkapjuk a jel spektrumát (Fourier-transzformáltját). Nagyon fontos, hogy a mérnöki gyakorlatban sokszor a jel fizikai tulajdonságai alapján mondjuk ki, hogy a jel matematikai értelemben eleget tesz-e a Fourier-, illetve Laplace-transzformálhatóság feltételének.
3.2.5. Fourier-sorfejtés, Fourier- és Laplace-transzformáció áttekintő táblázat
3.1 Táblázat
Függvény típusok | |||
Periodikus függvények | Lecsengő függvények | Belépő függvények | |
|
|
| |
Feltétel | |||
|
|
| |
Komponensre bontás (skaláris szorzással) | |||
|
|
| |
Jel visszaállítása a komponensekből | |||
|
|
| |
„Pütagorász-tétel” általánosítása Parseval-tétel | |||
|
| ||
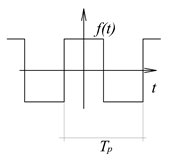

3.2.6. Laplace-transzformáció alkalmazása
E fejezetben közölt szabályok, állítások bizonyítása a függelékben található.
3.2.6.1. Azonosságok összefoglalása
Tegyük fel, hogy

akkor érvényesek a következő szabályok
Hasonlósági szabály 
Csillapítási szabály 
Eltolási szabály 
Konvolúciós szabály
Szorzás idővel
Integrálási szabály
Differenciálási szabály  ,
,
ahol  baloldali határértéke
baloldali határértéke  helyen
helyen
Többszörös differenciálási szabály: 
ahol  az
az  függvény
függvény  -dik deriváltjának baloldali határértéke a
-dik deriváltjának baloldali határértéke a  helyen
helyen
Megjegyzések
Ha van egy
 függvény, amely folytonos és hagyományos értelemben deriválható a teljes
függvény, amely folytonos és hagyományos értelemben deriválható a teljes  tartományban, és ezt a függvényt Laplace-transzformáljuk, akkor az csak a
tartományban, és ezt a függvényt Laplace-transzformáljuk, akkor az csak a  tartományra vonatkozik, vagyis formálisan a
tartományra vonatkozik, vagyis formálisan a  tartományban a függvényt lenullázzuk és a
tartományban a függvényt lenullázzuk és a  tartományról miden információt elveszítünk, így pl. nem tudunk különbséget tenni a konstans 1 és az egységugrás függvény között. Mindkettőnek
tartományról miden információt elveszítünk, így pl. nem tudunk különbséget tenni a konstans 1 és az egységugrás függvény között. Mindkettőnek  a Laplace-transzformáltja. Általában, ha
a Laplace-transzformáltja. Általában, ha  , akkor a Laplace-transzformácó alkalmazásával az
, akkor a Laplace-transzformácó alkalmazásával az  függvényt
függvényt  belépő függvénnyé alakítjuk, vagyis a Laplace-transzformáció szempontjából figyelembe vett függvénynek ugrása van a
belépő függvénnyé alakítjuk, vagyis a Laplace-transzformáció szempontjából figyelembe vett függvénynek ugrása van a  helyen. (ld. 3-26. ábra) Ez az ugrás kihat
helyen. (ld. 3-26. ábra) Ez az ugrás kihat  Laplace-transzformáltjának értékére, hiszen a Laplace-transzformáció a
Laplace-transzformáltjának értékére, hiszen a Laplace-transzformáció a  esetre vonatkozik. Szemléletesen azt is mondhatjuk, hogy a Laplace-transzformációból hiányzó
esetre vonatkozik. Szemléletesen azt is mondhatjuk, hogy a Laplace-transzformációból hiányzó  értékre vonatkozó információt kell pótolni a deriválási szabálynál.
értékre vonatkozó információt kell pótolni a deriválási szabálynál.
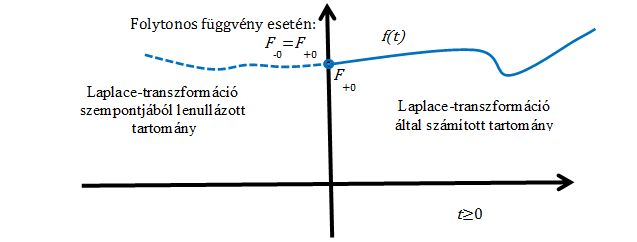
Ha a deriválási szabályból kapott eredményt inverz Laplace-transzformáljuk,
| (3.79) |

A Laplace-transzformáció kizárólag belépő függvényekre vonatkozik, ha egy nem nulla értékből induló belépő függvényt deriválunk, akkor az mindenképp generál egy Dirac-impulzust. Ha a függvény mégsem belépő, hanem folytonos, akkor ez a Dirac-impulzus felesleges és le kell vonnunk.
Visszatérve a példánkhoz, a konstans 1 függvénynek és az egységugrás függvény Laplace-transzformáltja egyaránt  . Mindkettő esetén
. Mindkettő esetén  , de
, de  értéke különbözik, ahogy a két függvény deriváltja sem azonos.
értéke különbözik, ahogy a két függvény deriváltja sem azonos.
| (3.80) |

Az első esetben a derivált azonosan nulla, a második esetben egy Dirac-impulzus és ez megfelel az előzetes elvárásainknak. További példák a deriválási szabály alkalmazására folytonos és ugrásfüggvény esetén a 3.2.9 pontban kidolgozott feladatok között találhatók.
A mérnöki gyakorlatban a Laplace-transzformációt bekapcsolási jelenségek vizsgálatára használjuk. Mérnöki szempontból fontos, hogy a fenti matematikai megfontolások gyakorlati alkalmazásakor a fizikai hátteret is tisztázzuk. Ha (2.107) alakú differenciálegyenlettel leírható rendszerek megoldását keressük Laplace-transzformáció segítségével, akkor a gerjesztés általában egy ugrás függvény, ahol
 . Ha véletlenül olyan esettel találkozunk, ahol
. Ha véletlenül olyan esettel találkozunk, ahol  , akkor valószínűsíthetően célszerű átgondolni a rendszermodellt, és új állapotváltozót bevezetni. Hasonlóan a gerjesztés magasabb rendű deriváltjainak baloldali határértéke a 0 pontban általában 0. Ezzel szemben
, akkor valószínűsíthetően célszerű átgondolni a rendszermodellt, és új állapotváltozót bevezetni. Hasonlóan a gerjesztés magasabb rendű deriváltjainak baloldali határértéke a 0 pontban általában 0. Ezzel szemben  és az idő szerint az első
és az idő szerint az első  derviáltja, pontosabban az állapotvállozók, általánosított értelembe vett energia jellegű mennyiséget írnak le, így valóságos esetben (véges gerjesztés mellett) folytonosak. Ha egy rendszer
derviáltja, pontosabban az állapotvállozók, általánosított értelembe vett energia jellegű mennyiséget írnak le, így valóságos esetben (véges gerjesztés mellett) folytonosak. Ha egy rendszer  alakú differenciálegyenletének mindkét oldalát Laplace-transzformáljuk és feltételezzük, hogy
alakú differenciálegyenletének mindkét oldalát Laplace-transzformáljuk és feltételezzük, hogy  folytonos és
folytonos és  , akkor
, akkor
| (3.81) |

Ha ezt követően a kapott eredményt inverz Laplace-transzformáljuk, akkor  -t csak a
-t csak a  tartományban belépő függvényként kapnánk vissza. A folytonosságot úgy tudjuk visszaállítani, ha visszacsempésszük az
tartományban belépő függvényként kapnánk vissza. A folytonosságot úgy tudjuk visszaállítani, ha visszacsempésszük az  értéket
értéket
| (3.82) |

Ilyen formában a kezdeti értéket expliciten is megjeleníthetjük a rendszer differenciálegyenletében. Ezt később kihasználjuk a hatásvázlat készítésekor is.
A fenti matematikai fejtegetés fizikai háttere a következő. Laplace-transzformációval mindig bekapcsolási jelenségeket vizsgálunk, és mindig energiamentes
| (3.83) |

kezdeti állapotból indulunk ki. Ha a rendszer mégsem energiamentes a vizsgálódásunk kezdetén, akkor egy pillanatszerű energiaközléssel (végtelenül nagy teljesítményű beavatkozással), vagyis egy Dirac-impulzussal beállítjuk a megfelelő kezdeti értéket. Pl. egy motor fordulatszámát egy olyan esetben vizsgáljuk, amikor a motor üresjárásban elérte az üresjárási fordulatszámot, majd ugrásszerűen megváltoztatjuk a terhelést, és arra vagyunk kíváncsiak, hogy a terhelésrádobás hatására miként változik a fordulatszám, akkor úgy kell eljárnunk, hogy először egy pillanatszerű mozgási energiaközléssel, vagyis egy Dirac-impulzussal beállítjuk az üresjárási fordulatszámot, és ezt követően jöhet a terhelésrádobás. További magyarázat található a 3.3 alfejezetben.
Különbséget kell tenni a következő három eset között
 ,
,  , és
, és  az eltolási szabály csak az utolsó esetre vonatkozik. Az első két esetben valamilyen trükkre van szükség, hogy a Laplace-transzformálandó függvényt az első esetben
az eltolási szabály csak az utolsó esetre vonatkozik. Az első két esetben valamilyen trükkre van szükség, hogy a Laplace-transzformálandó függvényt az első esetben  (ld. 3-11 feladat
(ld. 3-11 feladat  függvény), a második esetben
függvény), a második esetben  alakúra alakítsuk át (ld. 3-12 feladat)
alakúra alakítsuk át (ld. 3-12 feladat)
Az eltolási szabály határeseteként
 , ekkor
, ekkor 
3.2.6.2. Végérték-tételek:
A kezdetiérték-tétel alkalmazhatóságának feltétele az, hogy az  függvénynek létezzen a nulla körüli Taylor-sora
függvénynek létezzen a nulla körüli Taylor-sora
| (3.84) |
Ha  Taylor-sorának első tagja nulla
Taylor-sorának első tagja nulla  , akkor a kezdeti érték tétel segítségével a kezdeti meredekség meghatározható
, akkor a kezdeti érték tétel segítségével a kezdeti meredekség meghatározható
| (3.85) |
Az állandósult érték tétel alkalmazhatóságának feltétele az, hogy létezzen az állandósult érték
| (3.86) |
Pl. ha  valós együtthatójú racionális törtfüggvény és részlettörtre bontható, akkor (3.86) tétel a következő esetekben alkalmazható:
valós együtthatójú racionális törtfüggvény és részlettörtre bontható, akkor (3.86) tétel a következő esetekben alkalmazható:

Ha van legalább két olyan pólus, amelynek az értéke nulla, akkor a többi pólustól függetlenül (3.86) mindkét oldala a végtelenhez tart.
3.2.6.3. Néhány függvény Laplace-transzformáltja


Megjegyzés: a fenti Laplace-transzformáltak a 0≤t tartományra vonatkoznak, így az időfüggvények elé ε(t) szorzótényező írható. Erre az inverz Laplace-transzformációnál is tekintettel kell lennünk. Hangsúlyozzuk, a Laplace-transzformáció a bekapcsolási jelenségek vizsgálatára szolgál.
3.2.7. Kifejtési (reziduum) tétel (s-re nézve valós együtthatójú racionális törtfüggvények inverz Laplace-transzformációja)
A legtöbb gyakorlati esetben egy s-re nézve valós együtthatójú racionális törtfüggvényt kell inverz Laplace-transzformálni és ehhez nem szükséges a (3.76) egyenletet közvetlenül felhasználni. Legyen  alakú és azt is feltételezzük, hogy a számlálóban lévő polinom fokszáma kisebb a nevezőben lévő polinom fokszámánál (ha ez nem teljesülne, akkor polinom osztással valódi törteket kell kapnunk).
alakú és azt is feltételezzük, hogy a számlálóban lévő polinom fokszáma kisebb a nevezőben lévő polinom fokszámánál (ha ez nem teljesülne, akkor polinom osztással valódi törteket kell kapnunk).
3.2.7.1. Egyszeres gyökök esetén
Ha Den(s)-nek csak egyszeres gyökei vannak és a pólusok száma n, akkor az  függvény felírható a következő alakban:
függvény felírható a következő alakban:
| (3.93) |
ahol pi a nevező polinomjának i-dik gyöke (az átviteli függvény pólusa). A gyökök között lehet nulla, és komplex konjugált pár is. Szorozzuk meg (3.93) mindkét oldalát  -vel, és végezzük el az
-vel, és végezzük el az  határátmenetet.
határátmenetet.
| (3.94) |

Mivel az összeg minden tagja – kivéve az L-ediket- zérushoz tart. (3.94) alapján:
| (3.95) |

Általánosan felírhatjuk
| (3.96) |
Így exponenciális időfüggvények összegét kapjuk. Ha  valós, akkor
valós, akkor
| (3.97) |

és  lehet komplex konjugált pár, ebből következően
lehet komplex konjugált pár, ebből következően  és
és  is komplex konjugált párt alkot, így (3.97) összegzésben megjelennek komplex tag párok, amelyek összevonhatók valós függvénnyé. Vezessük be a következő jelölést:
is komplex konjugált párt alkot, így (3.97) összegzésben megjelennek komplex tag párok, amelyek összevonhatók valós függvénnyé. Vezessük be a következő jelölést:
| (3.98) |


Ebben az esetben az inverz Laplace-transzformáció eredménye:
| (3.99) |


3.2.7.2. Többszörös pólusok esetén
A részlettörtek számának meg kell egyeznie a pólusok számával. Ha a  pólus Lm -szeres, akkor a következő részlettörteknek is szerepelniük kell:
pólus Lm -szeres, akkor a következő részlettörteknek is szerepelniük kell:
| (3.100) |

A (3.100) inverz Laplace-transzformáltja
| (3.101) |

Az egyszeres gyökök  együtthatóinak kiszámítását nem befolyásolja, hogy vannak többszörös gyökök.
együtthatóinak kiszámítását nem befolyásolja, hogy vannak többszörös gyökök.
Többszörös gyökök esetén általában valamilyen trükkre van szükség. Ha csak egy többszörös gyökünk van, akkor (3.100) összeg közös nevezőre hozásával a számláló  -ed fokú polinom lesz, amelynek
-ed fokú polinom lesz, amelynek  együtthatója van, így az
együtthatója van, így az  számú
számú  együttható kiszámításához
együttható kiszámításához  számú egyenletet lehet felírni.
számú egyenletet lehet felírni.
Az egyszeres gyökökre bevezetett ötlet többszörös gyökök esetén csak a legnagyobb sorszámú együtthatóra alkalmazható. Ezt célszerű kiszámítani, mert ezzel csökkenthető a közös nevezőre hozáskor a megoldandó egyenletrendszer egyenleteinek száma.
| (3.102) |
3.2.8. Időállandó
A fentiek alapján az  -re nézve valós együtthatójú racionális törtfüggvények inverz Laplace-transzformációjának eredményeként (ld. (3.97), (3.99) és (3.101)) exponenciális tagokat kapunk. A kitevőben a
-re nézve valós együtthatójú racionális törtfüggvények inverz Laplace-transzformációjának eredményeként (ld. (3.97), (3.99) és (3.101)) exponenciális tagokat kapunk. A kitevőben a  idő együtthatója a pólus, pontosabban az összevonás után (ld. (3.99)) a pólus valós része. Az
idő együtthatója a pólus, pontosabban az összevonás után (ld. (3.99)) a pólus valós része. Az  alakú függvény esetén, ahol
alakú függvény esetén, ahol  a
a  értéket nevezzük az
értéket nevezzük az  függvény időállandójának (ld. 3-16 feladat).
függvény időállandójának (ld. 3-16 feladat).
Az  függvény néhány tulajdonsága (ha
függvény néhány tulajdonsága (ha  ):
):
A függvény bármely
 pontjában felrajzoljuk az érintőt, az az időtengelyt a
pontjában felrajzoljuk az érintőt, az az időtengelyt a  időpontban metszi.
időpontban metszi. A függvény bármely
 pontjában felvett értékének kb. 37%-a lesz a függvény értéke egy időállandónyi idő elteltével a
pontjában felvett értékének kb. 37%-a lesz a függvény értéke egy időállandónyi idő elteltével a  időpontban.
időpontban. A függvény bármely
 pontjában felvett értékének kb. 5%-a lesz a függvény értéke három időállandónyi idő elteltével a
pontjában felvett értékének kb. 5%-a lesz a függvény értéke három időállandónyi idő elteltével a  időpontban.
időpontban. A függvény bármely
 pontjában felvett értékének kb. 1%-a lesz a függvény értéke öt időállandónyi idő elteltével a
pontjában felvett értékének kb. 1%-a lesz a függvény értéke öt időállandónyi idő elteltével a  időpontban.
időpontban.
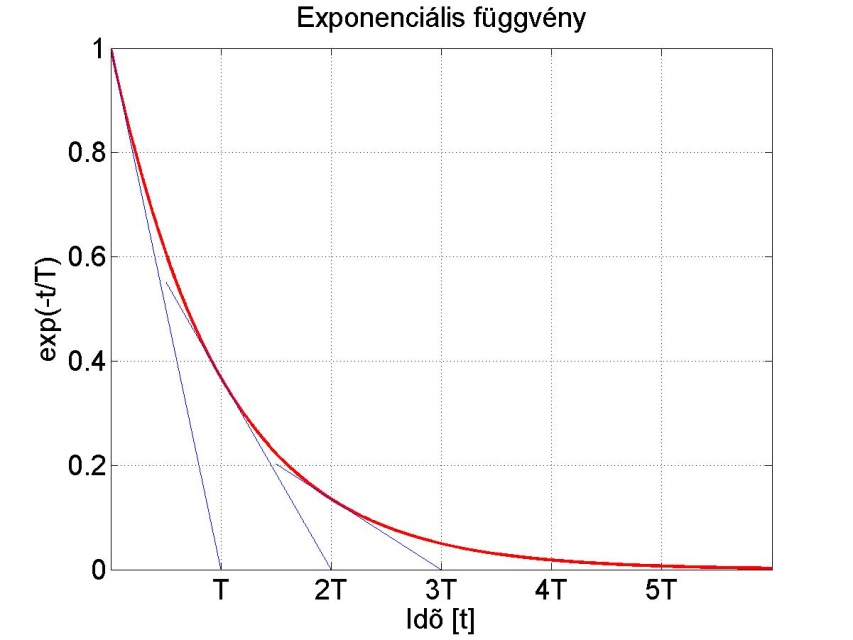
Geometriailag könnyen értelmezhetjük a negatív időállandót. A függvény bármely  pontjában felrajzoljuk az érintőt, akkor az az időtengelyt a
pontjában felrajzoljuk az érintőt, akkor az az időtengelyt a  időpontban metszi, ha
időpontban metszi, ha  (exponenciálisan növekszik, mert
(exponenciálisan növekszik, mert  ). Ha a függvény érték konstans, akkor az időállandót tekinthetjük végtelennek.
). Ha a függvény érték konstans, akkor az időállandót tekinthetjük végtelennek.  (konstans érték) alapján.
(konstans érték) alapján.
Komplex konjugált pólusok esetén (ld. (3.99) és 3-28. ábra) a szinuszosok lengések amplitúdója csökken, ha a pólus valós része negatív (illetve az amplitúdók exponenciálisan növekednek, ha a pólus valós része pozitív).
Definíció
Összegezve kijelenthetjük, hogy a (2.107) alakú differenciálegyenlettel leírható rendszerek kimenő jelének változására, illetve olyan jelek esetén, amelynek a Laplace-transzformáltját egy  -re nézve valós együtthatójú racionális törtfüggvény ír le, bevezethetjük az időállandó fogalmát, amelyet úgy definiálunk, mint a jel Laplace-transzformáltját leíró,
-re nézve valós együtthatójú racionális törtfüggvény ír le, bevezethetjük az időállandó fogalmát, amelyet úgy definiálunk, mint a jel Laplace-transzformáltját leíró,  -re nézve valós együtthatójú racionális törtfüggvény pólusai valós része reciprokának mínusz egyszerese. Ebből következik, hogy egy jelnek több időállandója is lehet, ha több pólusa van, és ahogy létezhetnek többszörös pólusok, így létezhetnek többszörös időállandók. Mivel egy rendszer kimenőjelének változása a rendszert leíró differenciálegyenlettől függ, így az időállandókat is a rendszerhez kötjük.
-re nézve valós együtthatójú racionális törtfüggvény pólusai valós része reciprokának mínusz egyszerese. Ebből következik, hogy egy jelnek több időállandója is lehet, ha több pólusa van, és ahogy létezhetnek többszörös pólusok, így létezhetnek többszörös időállandók. Mivel egy rendszer kimenőjelének változása a rendszert leíró differenciálegyenlettől függ, így az időállandókat is a rendszerhez kötjük.
A (3.97), (3.99) és (3.101) kifejezéseket átírhatjuk úgy, hogy e kifejezésekben a pólus helyett az időállandó szerepeljen az  -edik pólus, az
-edik pólus, az  és
és  -edik komplex konjugált, illetve többszörös pólus esetén az adott pólushoz (pólusokhoz) tartozó exponenciális időfüggvény az időállandóval a következő alakot öltik:
-edik komplex konjugált, illetve többszörös pólus esetén az adott pólushoz (pólusokhoz) tartozó exponenciális időfüggvény az időállandóval a következő alakot öltik:
| (3.103) |

| (3.104) |
| (3.105) |
Be kell vezetnünk a domináns időállandó fogalmát.
Definícó
Domináns időállandónak nevezzük a rendszer legnagyobb időállandóját, ha a rendszernek vagy csak egy időállandója van, vagy a legnagyobb időállandója legalább háromszor akkora, mint a második legnagyobb időállandó. Hasonlóan a beszélhetünk domináns pólusról, ha a második legkisebb pólus legalább háromszor akkora, mint a legkisebb pólus.
Sok esetben elegendő, ha csak a domináns időállandóval számolunk és a többi időállandót elhanyagoljuk. Értelemszerűen, ha a legnagyobb időállandó egy többszörös pólushoz, vagy komplex konjugált póluspárhoz tartozik, akkor nem beszélhetünk domináns időállandóról. Ilyen esetben használatos a domináns póluspár kifejezés.
A (3.145) rendszeregyenletet átírhatjuk a következő alakúra
| (3.106) |

ahol  és
és 
A (3.106) formának az az előnye, hogy a rendszer  időállandója és
időállandója és  erősítése közvetlenül megjelenik a differenciálegyenletben. Ha
erősítése közvetlenül megjelenik a differenciálegyenletben. Ha  , akkor
, akkor  az adott kezdeti értékéről indulva
az adott kezdeti értékéről indulva  időállandóval éri el a
időállandóval éri el a  állandósult értéket.
állandósult értéket.
3.2.9. Kidolgozott feladatok Laplace-transzformáció alkalmazására
3-10 feladat Függvényábrázolás
Készítsen egy Matlab programot, amely ábrázolja a következő két időfüggvényt. Határozza meg mindkét esetben a kezdeti értéket.
a) eset
| (3.107) |
b) eset
| (3.108) |

Megoldás
(3.99) alapján
a) eset
| (3.109) |

A kezdetiérték törvény alapján
| (3.110) |

b) eset
| (3.111) |

A kezdetiérték törvény alapján az előzővel azonos értéket kapunk
| (3.112) |

(3.109) és (3.111) alapján a MATLAB program
t=0:0.05:30;
% a) esetben
f=4*exp(-0.2*t).*cos(5*t+pi/4);
% b) esetben
f=4*exp(-0.2*t).*cos(0.2*t+pi/4);
plot(t,f)
set(gca, 'fontsize', 17);
ylabel('f(t) függvény [relatív egység]');
xlabel('Idő [s]');
title('Komplex konjugált póluspár esete');
axis([0 30 -4 4]);
gridMindkét esetben az időállandó  , ebből következően a lengések amplitúdója kb. 25 időegység alatt csökken az eredeti érték kb. 1%-ára. Az első esetben a lengések periódus ideje
, ebből következően a lengések amplitúdója kb. 25 időegység alatt csökken az eredeti érték kb. 1%-ára. Az első esetben a lengések periódus ideje  egység, ez kisebb az időállandónál, így jól látható, hogy több perióduson zajlik le, amíg az amplitúdó jelentősen csökken (ld 3-28. ábra). A második esetben
egység, ez kisebb az időállandónál, így jól látható, hogy több perióduson zajlik le, amíg az amplitúdó jelentősen csökken (ld 3-28. ábra). A második esetben  nagyobb az időállandónál, így gyakorlatilag egy periódus alatt a lengések amplitúdója 1% alá csökken (ld. 3-29. ábra).
nagyobb az időállandónál, így gyakorlatilag egy periódus alatt a lengések amplitúdója 1% alá csökken (ld. 3-29. ábra).
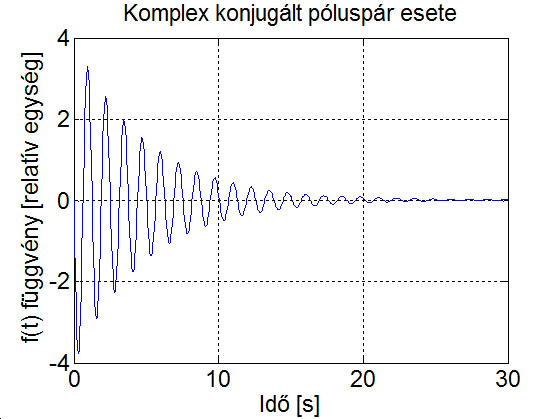
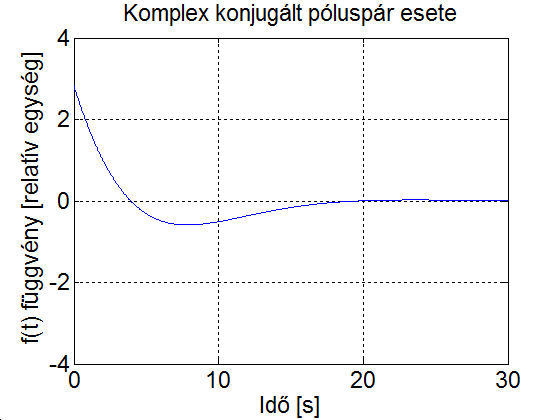
3-11 feladat a csillapítási tétel alkalmazására
Határozza meg az alábbi  függvények Laplace-transzformáltját, ahol
függvények Laplace-transzformáltját, ahol  ezt kihangsúlyozandó a
ezt kihangsúlyozandó a  szorzót odaírtuk.
szorzót odaírtuk.




, emlékeztetőül: 

Megoldás
A csillapítási tétel alapján:






esetén az idővel szorzás szabálya is alkalmazható


3-12 feladat az eltolási tétel alkalmazására
Vázolja fel az alábbi függvényeket és határozza meg a Laplace-transzformáltjukat.




Megoldás
Azonos átalakítással és az eltolási tétel alkalmazásával:





3-13 feladat az inverz Laplace-transzformáció alkalmazására
(ha a Laplace-operátoros tartományban nincs exponenciális tag)
Határozza meg az alábbi  függvények inverz Laplace-transzformáltjait. Az összefüggések a
függvények inverz Laplace-transzformáltjait. Az összefüggések a  intervallumban érvényesek.
intervallumban érvényesek.
Megoldás
Az inverz transzformáció részlettörtekre bontással, illetve a kifejtési tétel alkalmazásával végezhető el. Az összefüggések a  intervallumban érvényesek.
intervallumban érvényesek.





3-14 feladat az inverz Laplace-transzformáció alkalmazására
(ha a Laplace-operátoros tartományban van exponenciális tag)
Határozza meg az alábbi, exponenciális tagot is tartalmazó  függvények inverz Laplace-transzformáltját.
függvények inverz Laplace-transzformáltját.

Megoldás
Az inverz transzformáció az eltolási tétel alkalmazásával, illetve a periodikus függvényre vonatkozó formula alapján végezhető el. Az összefüggések a  intervallumban érvényesek.
intervallumban érvényesek.


3-15 feladat Végérték tétel alkalmazása
Határozza meg az alábbi Laplace-transzformált függvények kezdeti és állandósult értékét a végérték tételek alapján.
Megoldás
Kezdeti értékek



Állandósult értékek


az állandósult érték tétel alkalmazásának feltétele nem teljesül, ld. (3.86) tétel utáni megjegyzés.

az állandósult érték tétel alkalmazásának feltétele nem teljesül, ld. (3.86) tétel utáni megjegyzés.
3-16 feladat Kezdeti meredekség
A kezdeti érték tétel segítségével határozza meg  meredekségét a
meredekségét a  időpontban.
időpontban.
Megoldás
Abból kell kiindulni, hogy a Laplace-transzformáció csak a  tartományra érvényes, ezért szigorúan nézve csak a
tartományra érvényes, ezért szigorúan nézve csak a  függvényt tudjuk Laplace-transzformálni, amelynek szakadása van a
függvényt tudjuk Laplace-transzformálni, amelynek szakadása van a  időpontban, ezt felfoghatjuk úgy, hogy a kezdeti meredekség végtelen.
időpontban, ezt felfoghatjuk úgy, hogy a kezdeti meredekség végtelen.
Ha a tényleges meredekséget kívánjuk meghatározni, akkor a függvény eltolásával kell gondoskodni arról, hogy a  időpontban a kezdeti érték nulla legyen. A
időpontban a kezdeti érték nulla legyen. A  és
és  függvény kezdeti meredeksége megegyezik, ugyanakkor az utóbbi függvény folytonos és a kezdeti értéke nulla, ezért
függvény kezdeti meredeksége megegyezik, ugyanakkor az utóbbi függvény folytonos és a kezdeti értéke nulla, ezért
| (3.113) |

A (3.113) összefüggésből az olvasható ki, hogy a  függvény a
függvény a  időpontban 2 értékről indul és a
időpontban 2 értékről indul és a  időpontban berajzolt érintő 0.25 időegység után éri el az időtengelyt. Vagyis az időállandója
időpontban berajzolt érintő 0.25 időegység után éri el az időtengelyt. Vagyis az időállandója  .
.
3-17 feladat Deriválási szabály alakalmazhatóságának illusztrálása
Kiindulva a szinusz és koszinusz függvény Laplace transzformáltjából (ld. táblázat). A Laplace-transzformált függvények idő szerinti deriválására vonatkozó szabály felhasználásával határozza meg a következő két függvény deriváltjának Laplace-transzformáltját
| (3.114) |

Megoldás
A koszinusz függvény Laplace-transzformáltja
| (3.115) |

Ha ezt az időszerint deriváljuk, akkor ezt meg kell szorozni  -sel és le kell vonni a kezdeti értéket, az
-sel és le kell vonni a kezdeti értéket, az  függvény esetben 1-et, az
függvény esetben 1-et, az  függvény esetben 0-át
függvény esetben 0-át
| (3.116) |

| (3.117) |

Inverz Laplace-transzformálva a táblázat alapján
| (3.118) |
| (3.119) |

3-18 feladat Deriválási szabály alakalmazhatóságának illusztrálása
Kiindulva a szinusz és koszinusz függvény Laplace transzformáltjából (ld. táblázat). A Laplace-transzformált függvények idő szerinti deriválására vonatkozó szabály felhasználásával határozza meg a következő két függvény deriváltjának Laplace-transzformáltját
| (3.120) |

Megoldás
A szinusz függvény Laplace-transzformáltja
| (3.121) |

Ha ezt az időszerint deriváljuk, akkor ezt meg kell szorozni  -sel és le kell vonni a kezdeti értéket, amely mindkét függvény esetében 0-át
-sel és le kell vonni a kezdeti értéket, amely mindkét függvény esetében 0-át
| (3.122) |

Inverz Laplace-transzformálva a táblázat alapján
| (3.123) |
3-19 feladat Deriválási szabály alakalmazhatóságának illusztrálása
Kiindulva a szinusz és koszinusz függvény Laplace transzformáltjából (ld. táblázat). A Laplace-transzformált függvények idő szerinti deriválására vonatkozó szabály felhasználásával határozza meg a következő két függvény deriváltjának Laplace-transzformáltját
| (3.124) |

Megoldás
Trigonometrikus azonosságok alpján
| (3.125) |

| (3.126) |

| (3.127) |

Inverz Laplace-transzformálva a táblázat és ismert trigonometrikus azonosság alapján
| (3.128) |

| (3.129) |

3-20 feladat Deriválási szabály alakalmazása egység sebeségugrás Laplace-transzformáltjának meghatározására
Kiindulva az egységugrás függvény Laplace transzformáltjából (ld. táblázat). A Laplace-transzformált függvények idő szerinti deriválására vonatkozó szabály felhasználásával határozza meg az  egység sebesség ugrás függvény
egység sebesség ugrás függvény  Laplace-transzformáltját.
Laplace-transzformáltját.
Megoldás
Induljunk ki, a következő ismertnek tekintett öszefüggésből
| (3.130) |
A deriválási szabályt alkalmazva  helyettesítéssel
helyettesítéssel
| (3.131) |

könnyen kifejezhető:
| (3.132) |
3-21 feladat Deriválási szabály alakalmazása koszinusz négyzet függvény Laplace-transzformáltjának meghatározására
Kiindulva a szinusz függvény Laplace-transzformáltjából (ld. táblázat) határozza meg a következő  Laplace-transzformált függvényt
Laplace-transzformált függvényt
| (3.133) |
Megoldás
Először határozzuk meg  függvény deriváltját
függvény deriváltját
| (3.134) |


Laplace-transzformáltját ismertnek tekintjük továbbá tudjuk, hogy  ,
,
| (3.135) |


könnyen kifejezhető:
| (3.136) |

3-22 feladat Deriválási szabály alakalmazása szinusz négyzet függvény Laplace-transzformáltjának meghatározására
Kiindulva a szinusz függvény Laplace-transzformáltjából (ld. táblázat) határozza meg a következő  Laplace-transzformált függvényt
Laplace-transzformált függvényt
| (3.137) |
Megoldás
Először határozzuk meg  függvény deriváltját
függvény deriváltját
| (3.138) |


Laplace-transzformáltját ismertnek tekintjük továbbá tudjuk, hogy  ,
,
| (3.139) |


könnyen kifejezhető:
| (3.140) |

3-23 feladat Idővel megszorzott függvény Laplace-transzformáltjának meghatározására
Kiindulva a szinusz függvény Laplace-transzformáltjából (ld. táblázat) határozza meg a következő  Laplace-transzformált függvényt
Laplace-transzformált függvényt
| (3.141) |
Megoldás
Bevezetve a következő jelölést
| (3.142) |

Alkalmazva az idővel szorzás szabályt
| (3.143) |

3-24 feladat Domináns időállandó vizsgálata
Ábrázoljuk  függvényt, és határozzuk meg a függvények kezdeti meredekségét (mind a négy esetben
függvényt, és határozzuk meg a függvények kezdeti meredekségét (mind a négy esetben  ). A feladatban egy-, két- és három-energiatárolós tagokra kapcsolt egységugrás válaszainak (átmeneti függvények) Laplace-transzformáltja szerepel.
). A feladatban egy-, két- és három-energiatárolós tagokra kapcsolt egységugrás válaszainak (átmeneti függvények) Laplace-transzformáltja szerepel.
Megoldás
Látható, hogy a négy esetben minimális eltérés van a felfutásban, és a beállási idő praktikusan nem különbözik. pl. ha megvizsgáljuk, hogy mennyi idő alatt csökken az eltérés az állandósult értéktől 1% alá, akkor ebben alig van különbség. A 3-30. ábra nem látszik a különbség  és
és  között, mivel
között, mivel  esetén a legkisebb 0.01 értékű időállandó hatása hamar megszűnik. A különbségek közvetlenül a bekapcsolás után vannak. Jól megfigyelhető, hogy az egy-energiatárolós tag egy határozott meredekséggel indul, és ha az időállandónál sokkal kisebb tartományt vizsgálunk, akkor a változás jól közelíthető egy egyenessel. A kettő vagy több energiatárolós tagok nulla meredekséggel indulnak, ezt a végérték tétellel könnyen beláthatjuk.
esetén a legkisebb 0.01 értékű időállandó hatása hamar megszűnik. A különbségek közvetlenül a bekapcsolás után vannak. Jól megfigyelhető, hogy az egy-energiatárolós tag egy határozott meredekséggel indul, és ha az időállandónál sokkal kisebb tartományt vizsgálunk, akkor a változás jól közelíthető egy egyenessel. A kettő vagy több energiatárolós tagok nulla meredekséggel indulnak, ezt a végérték tétellel könnyen beláthatjuk.
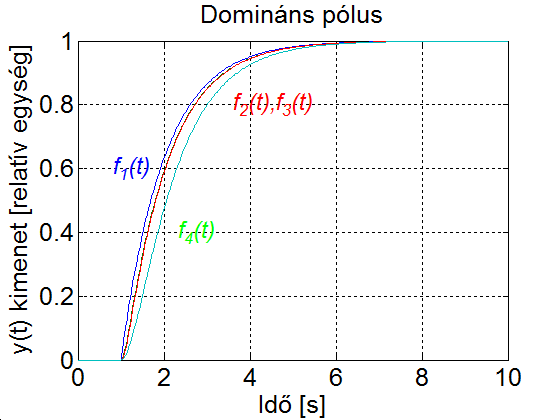
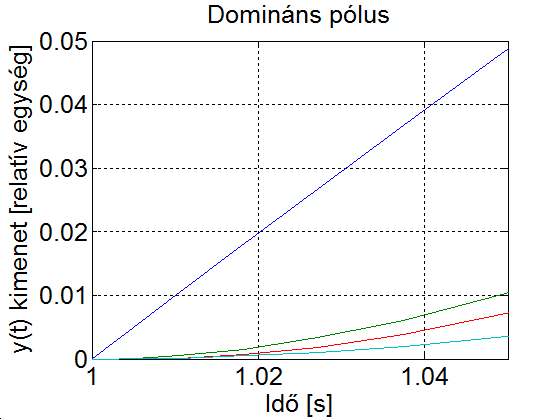
Kezdeti meredekségek meghatározása
| (3.144) |
behelyettesítve

3-25 feladat (Házi feladat, megoldását nem közöljük)
Ábrázolja és határozza meg az alábbi  függvények Laplace-transzformáltját, ahol
függvények Laplace-transzformáltját, ahol  .
.




3.3. Közönséges állandó együtthatós elsőrendű differenciálegyenletek megoldása Laplace-transzformációval
A deriválási szabály miatt a differenciálegyenlet a Laplace-transzformációval algebrai egyenletté alakul.
Bevezető példaként adott egy (2.107) alakú elsőrendű differenciálegyenlet
| (3.145) |

ahol  az
az  állapotváltozó kezdeti értéke
állapotváltozó kezdeti értéke . Itt utalnunk kell a derivált függvény Laplace transzformálásának szabályára, továbbá (3.81) és (3.82) értelmezésére. Ha a (3.145) egyenletet Laplace-transzformáljuk, akkor azt feltételezzük, hogy
. Itt utalnunk kell a derivált függvény Laplace transzformálásának szabályára, továbbá (3.81) és (3.82) értelmezésére. Ha a (3.145) egyenletet Laplace-transzformáljuk, akkor azt feltételezzük, hogy  folytonos és hagyományos értelemben deriválható,
folytonos és hagyományos értelemben deriválható,  belépő-függvény.
belépő-függvény.  és
és  értéke egyaránt nulla a
értéke egyaránt nulla a  tartományban.
tartományban.  folytonosságáról úgy gondoskodhatunk, ha kielégítjük az
folytonosságáról úgy gondoskodhatunk, ha kielégítjük az  kezdeti érték feltételt. A deriválási szabályt figyelembe véve :
kezdeti érték feltételt. A deriválási szabályt figyelembe véve :
| (3.146) |

Érdekes, és fizikailag értelmezhető eredményre jutunk, ha a (3.146) egyenletet inverz Laplace-transzformáljuk
| (3.147) |


Értelmezés
A (3.147) egyenletet elemezve arra a következtetésre juthatunk, hogy gondolkozhatunk úgy, hogy a Laplace-transzformáció energiamentes kezdeti állapottal foglalkozik, ezért egy  impulzus segítségével tudjuk beállítani a szükséges kezdeti értéket, vagyis gondoskodni arról, hogy
impulzus segítségével tudjuk beállítani a szükséges kezdeti értéket, vagyis gondoskodni arról, hogy  teljesüljön. Ez egy ugrást jelent a tárolt energia (állapotváltozó) értékében, szemléletesen azt mondhatjuk, hogy a Laplace-transzformáció a
teljesüljön. Ez egy ugrást jelent a tárolt energia (állapotváltozó) értékében, szemléletesen azt mondhatjuk, hogy a Laplace-transzformáció a  tartománnyal foglalkozik. A múlt
tartománnyal foglalkozik. A múlt  hatását (az állapotváltozóban felhalmozott energiát) egy
hatását (az állapotváltozóban felhalmozott energiát) egy  impulzusnyi ütéssel koncentráltan közöljük a rendszerrel, és ennek hatására alakul ki a szükséges kezdeti érték, hogy onnan folytatódjon a folyamat. Ha
impulzusnyi ütéssel koncentráltan közöljük a rendszerrel, és ennek hatására alakul ki a szükséges kezdeti érték, hogy onnan folytatódjon a folyamat. Ha  , akkor az egy újabb -
, akkor az egy újabb -  nagyságú - kalapácsütés, így a két Dirac-impulzus közül az elős a múlt összegzése, a második egy a
nagyságú - kalapácsütés, így a két Dirac-impulzus közül az elős a múlt összegzése, a második egy a  tartományban érkező új hatás, ezért
tartományban érkező új hatás, ezért  . Ezzel megszüntetjük
. Ezzel megszüntetjük  folytonosságát, de azért mert a múlt hatása mellett a
folytonosságát, de azért mert a múlt hatása mellett a  tartományban érkezett egy új impulzusszerű hatás. Szemléletesen két részből álló kalapácsütéssel súlytunk a rendszerre. Az egyik rész a múltat jeleníti meg a
tartományban érkezett egy új impulzusszerű hatás. Szemléletesen két részből álló kalapácsütéssel súlytunk a rendszerre. Az egyik rész a múltat jeleníti meg a  tartományban, és a kezdeti értéket állítja be, a másik rész a
tartományban, és a kezdeti értéket állítja be, a másik rész a  tartományban érkező új külső gerjesztés. Természetesen, ha később érkezik a bemenetre egy időben eltolt
tartományban érkező új külső gerjesztés. Természetesen, ha később érkezik a bemenetre egy időben eltolt  Dirac-impulzus, akkor a
Dirac-impulzus, akkor a időpillanatban jelent egy kalapácsütést és ugrást az állapotváltozó értékében. Ez a gondolatmenet kiterjeszthető magasabb rendű differenciálegyenletekre is.
időpillanatban jelent egy kalapácsütést és ugrást az állapotváltozó értékében. Ez a gondolatmenet kiterjeszthető magasabb rendű differenciálegyenletekre is.

kifejezhető a (3.146) egyenletből
| (3.148) |
Az  állapotváltozó a (3.148) kifejezésében az első tag a kezdeti értéktől, a második tag a nulla kezdeti értékről indulva csak a gerjesztéstől függ. A (3.148) kifejezésből az is kiolvasható, hogy a (3.145) alakú, elsőrendű differenciálegyenletet esetén az
állapotváltozó a (3.148) kifejezésében az első tag a kezdeti értéktől, a második tag a nulla kezdeti értékről indulva csak a gerjesztéstől függ. A (3.148) kifejezésből az is kiolvasható, hogy a (3.145) alakú, elsőrendű differenciálegyenletet esetén az  együttható az állapotváltozó
együttható az állapotváltozó  Laplace-transzformált kifejezésében a
Laplace-transzformált kifejezésében a  pólus mínusz egyszerese
pólus mínusz egyszerese  . A (3.148) kifejezés inverz Laplace-transzformációját elvégezve
. A (3.148) kifejezés inverz Laplace-transzformációját elvégezve
| (3.149) |

Ha a (3.149) kifejezést összevetjük a (3.23) egyenlettel, akkor beláthatjuk, hogy a (3.145) differenciálegyenlettel leírt rendszernek a súlyfüggvénye (impulzusválasza) a következő
| (3.150) |

A (3.23) egyenlet kapcsán tett megjegyzésünk, (miszerint a (3.23) egyenlettel a rendszer válaszát csak energiamentes kezdeti állapotból kiindulva számíthatjuk ki), összhangban van azzal, hogy a (3.149) kifejezés második tagja nulla kezdeti értékről indulva csak a gerjesztéstől függ. Így a (3.145) differenciálegyenlet megoldását két részre bontottuk egy kezdeti érték és egy gerjesztés függő tagra. Ez egy teljesen más felbontás, mint ami általános a differenciálegyenletek elméletében, ahol homogén (mérnöki terminológiával tranziens) és inhomogén (mérnöki terminológiával állandósult) tagokat szokás megkülönböztetni. Ebben a megközelítésben (3.148) és (3.149) első tagja a múlt (a  tartomány) hatására, a második tagja a
tartomány) hatására, a második tagja a  tartományban érkező hatásokra adott választ tartalmazza, a homogén és inhomogén megoldás szétválasztása nélkül.
tartományban érkező hatásokra adott választ tartalmazza, a homogén és inhomogén megoldás szétválasztása nélkül.
Néhány konkrét esetet megvizsgálva:
Ha  , akkor a (3.148) helyett a következőt írhatjuk
, akkor a (3.148) helyett a következőt írhatjuk
| (3.151) |

Így az inverz Laplace-transzformált.
| (3.152) |

(3.152) úgy értelmezhető, hogy a  időpillanatban az állapotváltozó értéke a Dirac-impulzus hatására az
időpillanatban az állapotváltozó értéke a Dirac-impulzus hatására az  értékről
értékről  értékre ugrik, majd
értékre ugrik, majd  időállandóval exponenciálisan lecseng.
időállandóval exponenciálisan lecseng.
Ha  , akkor (3.148) helyett a következőt írhatjuk
, akkor (3.148) helyett a következőt írhatjuk
| (3.153) |
Így az inverz Laplace-transzformált
| (3.154) |

Könnyen belátható, hogy  , és ez egyben a (3.145) differenciálegyenlet inhomogén megoldása. A
, és ez egyben a (3.145) differenciálegyenlet inhomogén megoldása. A  tag a homogén megoldás
tag a homogén megoldás  esetén, a
esetén, a  tag a homogén megoldás kiegészítése
tag a homogén megoldás kiegészítése  esetben. Ennek megfelelően (3.154) úgy értelmezhető, hogy a kezdeti és állandósult érték különbsége
esetben. Ennek megfelelően (3.154) úgy értelmezhető, hogy a kezdeti és állandósult érték különbsége  időállandóval exponenciálisan tart a nullához. Más szavakkal, egy-energiatárolós rendszer esetén a rendszer bármilyen átkapcsolása után
időállandóval exponenciálisan tart a nullához. Más szavakkal, egy-energiatárolós rendszer esetén a rendszer bármilyen átkapcsolása után  exponenciális időfüggvényt követve jut át az egyik állandósult állapotból a másikba. Például egy meleg nyári napon a hűtőszekrényből kiveszünk egy üveg sört, és ott felejtjük a konyhaasztalon, akkor annak a hőmérséklete jó közelítéssel exponenciálisan éri el a konyha levegőjének hőmérsékletét. Szintén exponenciálisan változik a szoba hőmérséklete, ha a fűtést be- illetve kikapcsoljuk. Hasonló mondható el, ha szinuszosan kezdjük el gerjeszteni a rendszert, akkor a szinuszos gerjesztéshez is tartozik egy szinuszos állandósult állapot (a differenciálegyenlet inhomogén megoldása), akkor a bármely kezdeti értékből kiindulva az aktuális és állandósult szinusz függvény különbsége exponenciálisan tart nullához. Mindez matematikailag következő módon vezethető le:
exponenciális időfüggvényt követve jut át az egyik állandósult állapotból a másikba. Például egy meleg nyári napon a hűtőszekrényből kiveszünk egy üveg sört, és ott felejtjük a konyhaasztalon, akkor annak a hőmérséklete jó közelítéssel exponenciálisan éri el a konyha levegőjének hőmérsékletét. Szintén exponenciálisan változik a szoba hőmérséklete, ha a fűtést be- illetve kikapcsoljuk. Hasonló mondható el, ha szinuszosan kezdjük el gerjeszteni a rendszert, akkor a szinuszos gerjesztéshez is tartozik egy szinuszos állandósult állapot (a differenciálegyenlet inhomogén megoldása), akkor a bármely kezdeti értékből kiindulva az aktuális és állandósult szinusz függvény különbsége exponenciálisan tart nullához. Mindez matematikailag következő módon vezethető le:
Ha az  , akkor (3.148) helyett a következőt írhatjuk
, akkor (3.148) helyett a következőt írhatjuk
| (3.155) |
A második tagot gyöktényezős alakra kell hozni
| (3.156) |

Így az inverz Laplace-transzformált felírásához a második tagot is részlettörtekre kell bontani. Maradva a komplex alaknál a második tag három pólusa:
| (3.157) |

A kifejtési tételt alkalmazva a második tagra
| (3.158) |

A komplex együtthatókat Euler formára átírva
| (3.159) |

| (3.160) |

Az időfüggvényt átalakítva
| (3.161) |

(3.161) valós alakban is felírható
| (3.162) |

Jobban látható az első, exponenciális tag szerepe, ha átírjuk a következő alakúra
| (3.163) |

A (3.163) második tagja az inhomogén (állandósult) megoldás. A  időpillanatban tényleges
időpillanatban tényleges  és az állandósult érték különbsége
és az állandósult érték különbsége
| (3.164) |
Ez a különbség tűnik el  időállandóval exponenciálisan. Más szavakkal
időállandóval exponenciálisan. Más szavakkal  exponenciálisan simul az állandósult értékhez.
exponenciálisan simul az állandósult értékhez.
3.3.1. Kidolgozott felagatok közönséges állandó együtthatós elsőrendű differenciálegyenletekkel kapcsolatban
3-26 feladat elsőrendű differenciálegyenlet megoldására konkrét numerikus értékekkel
Adott a következő differenciálegyenlet
| (3.165) |

ahol az  állapotváltozó kezdeti értéke
állapotváltozó kezdeti értéke  . Legyen
. Legyen 
Megoldás
(3.165) egyenletet Laplace-transzformálva, és figyelembe véve a kezdeti értékre vonatkozó deriválási szabályt
| (3.166) |


kifejezhető
| (3.167) |


állapotváltozó (3.167) kifejezésében az első tag a kezdeti értéktől függ, a második a gerjesztéstől. Az inverz Laplace-transzformációt elvégezve
| (3.168) |

3-27 feladat soros RL kör egyenáramú gerjesztésének megváltoztatása
Van egy soros RL áramkörünk és egy kapcsolónk (ld. 3-31. ábra). A kapcsolóval az egyik ellenállást rövidre tudjuk zárni. Tegyük fel, hogy a kapcsolót periodikusan kapcsolgatjuk és 0.2 időegységig nyitva, majd ugyanennyi ideig zárva tartjuk. Határozza meg az induktivitás áramát.
Legyen R1=5Ω, R2=5Ω, és L=0.1H, a generátor feszültsége  V.
V.
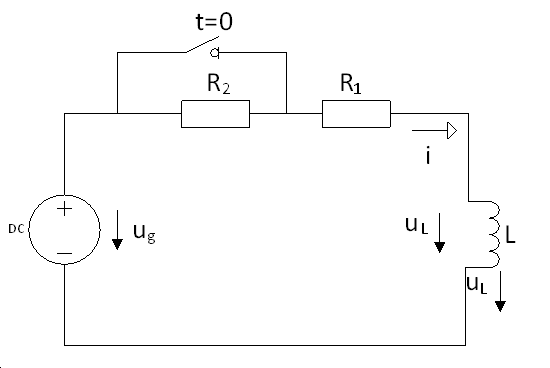
Megoldás
Jelülje  az áramkörben található ellenállások eredő értékét
az áramkörben található ellenállások eredő értékét
| (3.169) |
Legyen  az áramkör eredő ellenállásán eső feszültség. Az áramkörre felírható Kirchhoff hurokegyenlet:
az áramkör eredő ellenállásán eső feszültség. Az áramkörre felírható Kirchhoff hurokegyenlet:

A (3.165) egyenletet Laplace transzformálva:
| (3.172) |

(3.166) átrendezése után (tetszőleges gerjesztés mellett):
| (3.173) |
Inverz Laplace-transzformálva
| (3.174) |
Ha a kapcsoló zárva van, akkor az áram állandósult értéke  és az időállandója
és az időállandója  . Ha a kapcsoló nyitva van, akkor az áram állandósult értéke:
. Ha a kapcsoló nyitva van, akkor az áram állandósult értéke:  és az időállandója
és az időállandója  . Van egy-egy állandósult érték a kapcsoló két állapotának megfelelően, és a kapcsoló minden egyes átkapcsolásakor a megfelelő időállandóval térhetünk át az egyik értékről a másikra (ld. 3-32. ábra).
. Van egy-egy állandósult érték a kapcsoló két állapotának megfelelően, és a kapcsoló minden egyes átkapcsolásakor a megfelelő időállandóval térhetünk át az egyik értékről a másikra (ld. 3-32. ábra).
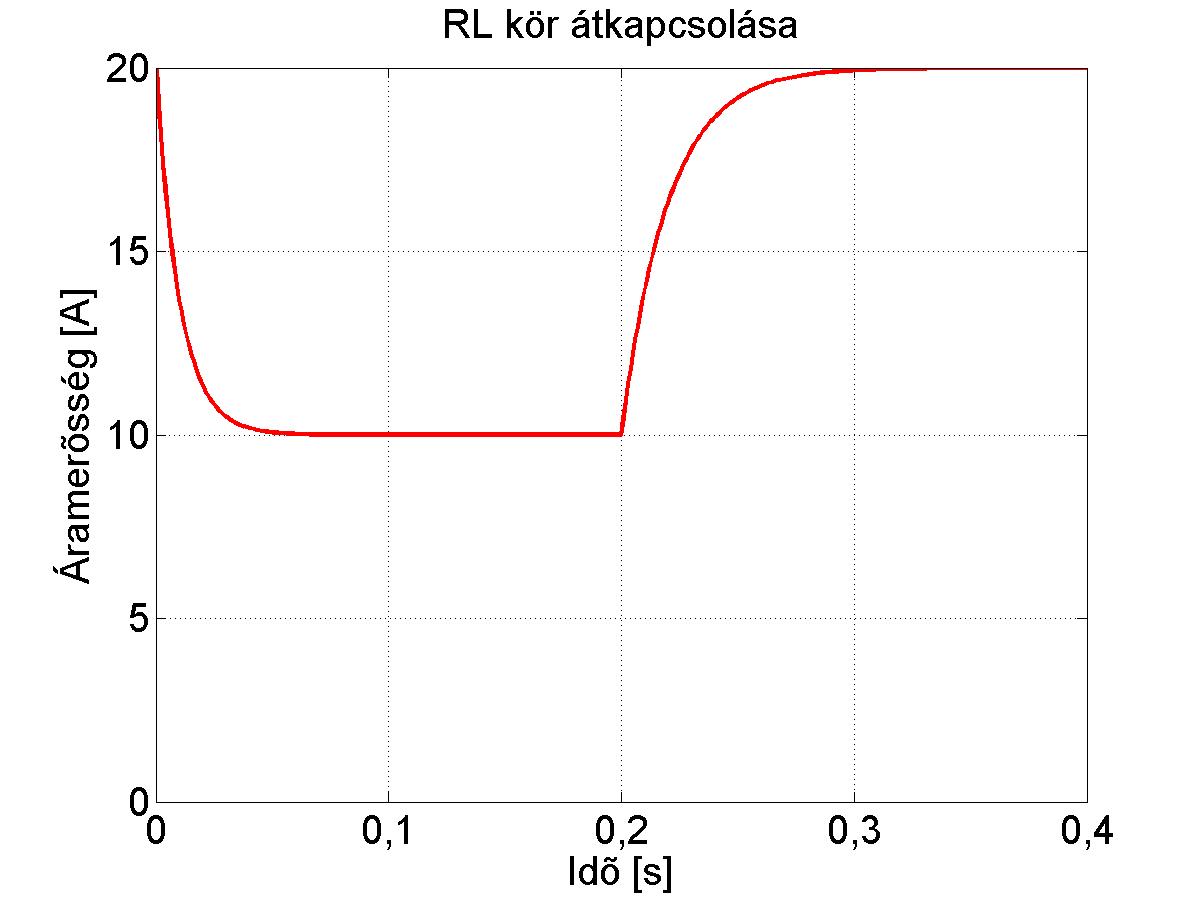
3-28 feladat soros RL kör szinuszos gerjesztéssel
Adott a 3-33. ábrán látható soros RL kör.
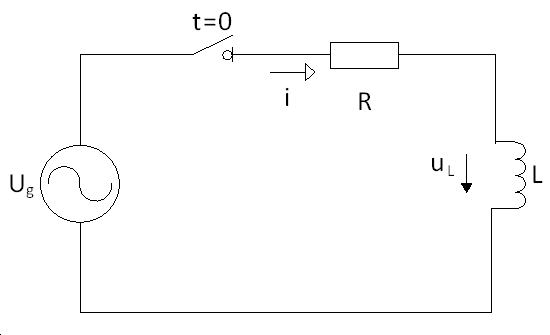
Legyen R=5Ω és L=0.1H. A generátor feszültsége  csúcsértékű 50Hz frekvenciájú váltakozó feszültség, a bekapcsolás pillanatában a kezdő fázishelyzet pedig 0 fok. Fizikai megfontolások alapján az induktivitás áramának kezdeti értéke nulla. Írja fel az induktivitás áramának időfüggvényét.
csúcsértékű 50Hz frekvenciájú váltakozó feszültség, a bekapcsolás pillanatában a kezdő fázishelyzet pedig 0 fok. Fizikai megfontolások alapján az induktivitás áramának kezdeti értéke nulla. Írja fel az induktivitás áramának időfüggvényét.
Megoldás
Az áramkörre felírható Kirchhoff hurokegyenlet:

A (3.176) egyenletet Laplace transzformálva:
| (3.177) |

(3.177) átrendezése után (tetszőleges gerjesztés mellett):
| (3.178) |
Legyen az RL kör gerjesztése szinuszos feszültség. A t=0 időpillanatban bekapcsoljuk a kapcsolót. A valóságban kicsi az esély arra, hogy pont egy nulla átmenetnél zárjuk a kapcsolót. Ezért legyen az RL körre kapcsolt feszültség alakú. Megjegyezzük, hogy az áramkör kikapcsolása fizikailag nem egyszerű, mert az induktivitásban tárolt energia fenntartja az áramot és egy egyszerű kapcsoló esetén az érintkezők eltávolításakor egy ív alakul ki, de e jelenség vizsgálata nem e tantárgy kereteibe tartozik.
alakú. Megjegyezzük, hogy az áramkör kikapcsolása fizikailag nem egyszerű, mert az induktivitásban tárolt energia fenntartja az áramot és egy egyszerű kapcsoló esetén az érintkezők eltávolításakor egy ív alakul ki, de e jelenség vizsgálata nem e tantárgy kereteibe tartozik.
Mivel a t=-0 időpillanatban a kapcsoló nyitott volt, ezért  , a gerjesztő feszültség pedig
, a gerjesztő feszültség pedig
| (3.179) |

| (3.180) |
| (3.181) |

Behelyettesítve
| (3.182) |
|

Az első tag a tranziens összetevő, a második az állandósult megoldás
| (3.183) |

Szinuszos gerjesztés bekapcsolása esetén exponenciálisan tűnik el a különbség az aktuális érték és az állandósult érték között. (ld. 3-34. ábra). Esetünkben a gerjesztés periódus ideje  megegyezik az RL kör
megegyezik az RL kör  időállandójával, ezért 5 periódus elteltével csökken a tranziens összetevő a kezdeti értékének kb. 1%-ára.
időállandójával, ezért 5 periódus elteltével csökken a tranziens összetevő a kezdeti értékének kb. 1%-ára.
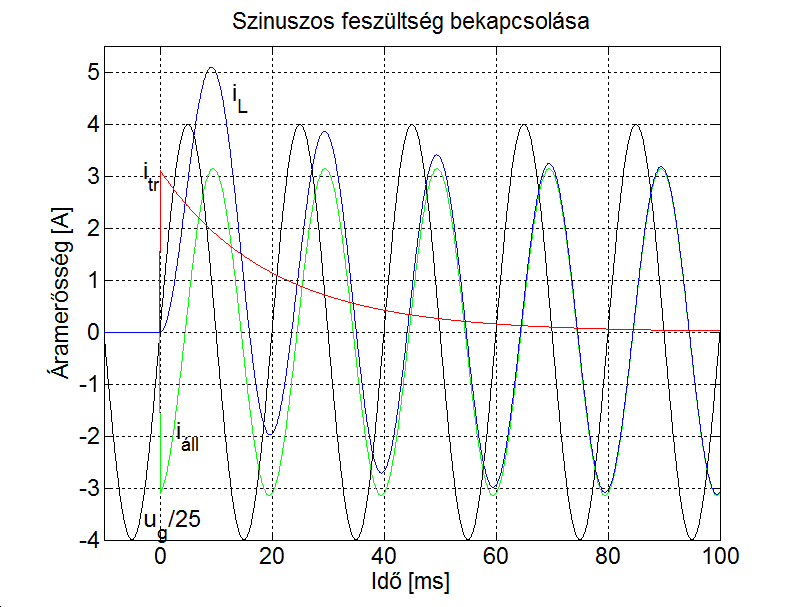
A feladatot megoldó MATLAB kód
t=-10/1000:0.05/1000:100/1000;
tm=t*1000;
R=5; L=0.1; Ug=100; omega=100*pi;
max=size(t); max=max(2);
Iall=Ug/(L*sqrt((R/L)^2+(omega)^2));
fi=atan(omega/(R/L));
f1=Ug*sin(100*pi*t)/25;
f2=Iall*sin(100*pi*t-fi);
f3=-Iall*sin(-fi)*exp(-t*R/L);
for I = 1:max
if t(I) <0
f2(I)=0;
f3(I)=0;
end
end
f4=f2+f3;
plot(tm,f1,'k',tm,f2,'g',tm,f3,'r',tm,f4,'b')
set(gca, 'fontsize', 17);
ylabel('Áramerősség [A]');
xlabel('Idő [ms]');
title('Szinuszos feszültség bekapcsolása');
text(-3,3,'i_{tr}','FontSize',18)
text(-3,-3.7,'u_g/25','FontSize',18)
text(3,-2,'i_{áll}','FontSize',18)
text(13,4.5,'i_L','FontSize',18)
axis([-10 100 -4 5.5]);
gridTermészetesen, ha pl. az ellenállás értékét ötszörösére növelve ötödére csökkenmtjük az RL kör időállandóját, akkor  egy perióduson belül hozzá simul az állandósult értékhez (ld. 3-35. ábra).
egy perióduson belül hozzá simul az állandósult értékhez (ld. 3-35. ábra).
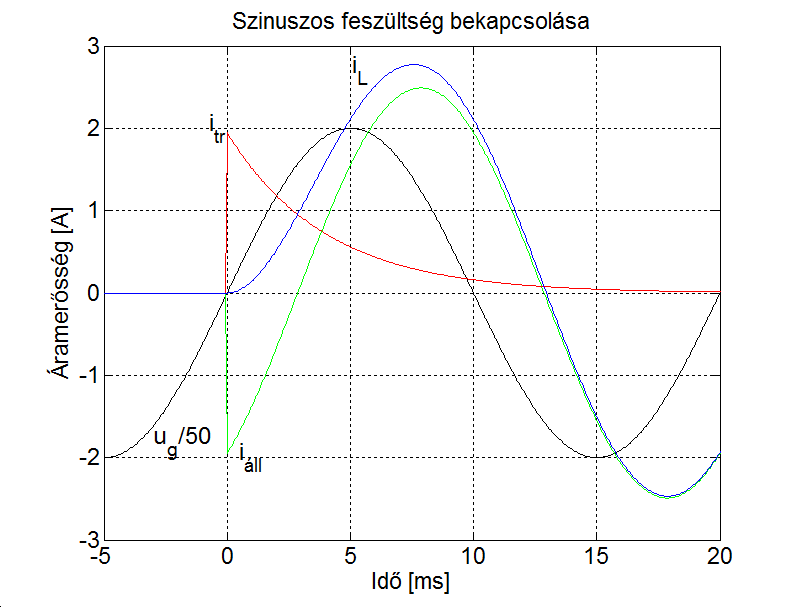
3.4. Kapcsoló üzemmód
A mérnöki gyakorlatban többször előfordul, hogy a rendszer kimenőjelének az értékét a bemenőjel folyamatos kapcsolgatásával tartjuk egy előírt értéktartományban. Tipikusan ilyen a legtöbb fűtésrendszer, továbbá a teljesítményelektronikai rendszerek Impulzus Szélesség Szabályozása (Pulse Width Modulation) idetartozik. A működés legfontosabb feltétele, hogy a kapcsolások ciklusideje lényegesen kisebb legyen a rendszer domináns időállandójánál.
3-29 feladat Kapcsoló üzemmód
Adott a következő differenciálegyenlet
| (3.184) |
ahol  és
és  egy 50% kitöltésű négyszög impulzus, amely értéke 0 és 2 lehet. Rajzolja fel az állapotváltozó időfüggvényét, ha a rendszer időállandója kisebb, illetve nagyobb, mint a négyszög impulzus periódusideje.
egy 50% kitöltésű négyszög impulzus, amely értéke 0 és 2 lehet. Rajzolja fel az állapotváltozó időfüggvényét, ha a rendszer időállandója kisebb, illetve nagyobb, mint a négyszög impulzus periódusideje.
Megoldás
3-36. ábra A periódusidő ötszöröse az időállandónak |
3-37. ábra A periódusidő megegyezik az időállandóval |
3-38. ábra A periódusidő ötöde az időállandónak (a négyszög impulzus nincs kirajzolva) |
3-39. ábra A periódusidő ötvenede az időállandónak (a négyszög impulzus nincs kirajzolva) |
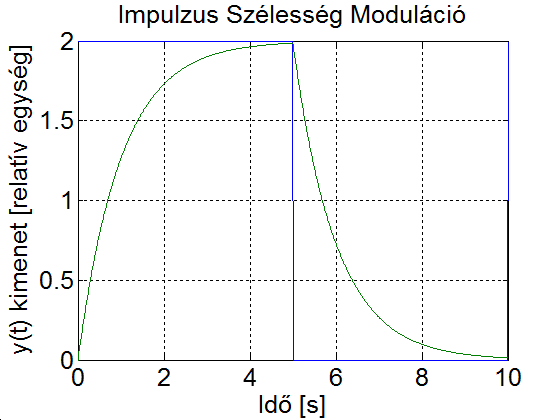
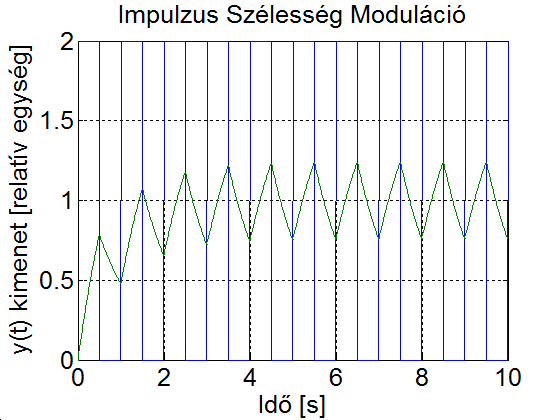
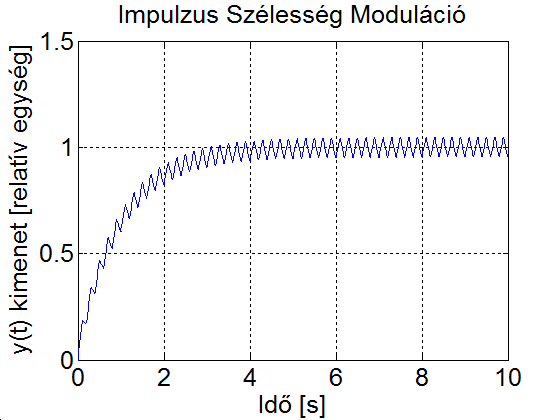
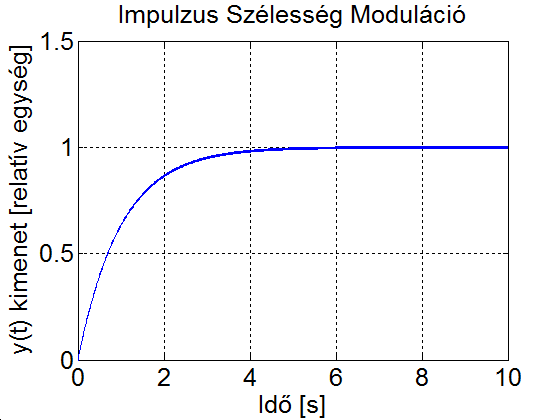
4. fejezet - SISO LTI rendszerek vizsgálata a Laplace-operátoros tartományban
- 4.1. Átviteli függvény
- 4.2. Átviteli függvény meghatározása hatásvázlat segítségével
- 4.3. Átviteli függvény alkalmazása
- 4.4. Lineáris rendszerek stabilitás vizsgálata
- 4.5. Frekvencia átviteli függvény megjelenítése
- 4.6. Alaptagok átviteli függvénye, Nyquist és Bode diagramja
- 4.7. Holtidős tagok
- 4.8. Alaptagokból előállítható összetett tagok
- 4.9. Kidolgozott feladatok Bode és Nyquist diagram megrajzolására
- 4.10. Szűrő típusok Bode diagramja
Az előző fejezetben a matematikai eszköztár volt a fókuszban, ebben a fejezetben magát a rendszert vizsgáljuk.
4.1. Átviteli függvény
Definíció
Az átviteli függvény a ki- és a bemenőjel  és
és  Laplace-transzformáltjának hányadosa, ha a bemenőjel (gerjesztés) egy ugrásfüggvény és a rendszer (állapotváltozók) energiamentes kezdeti állapotából indulunk ki (ez nem zárja ki azt, hogy
Laplace-transzformáltjának hányadosa, ha a bemenőjel (gerjesztés) egy ugrásfüggvény és a rendszer (állapotváltozók) energiamentes kezdeti állapotából indulunk ki (ez nem zárja ki azt, hogy  ), szokásos jelölése:
), szokásos jelölése: és
és  , de előfordul a szakirodalomban
, de előfordul a szakirodalomban  és
és  jelölés is. A továbbiakban a
jelölés is. A továbbiakban a  jelölést használjuk.
jelölést használjuk.
| (4.1) |

Értelmezés
Mivel a Dirac-impulzus Laplace-transzformáltja 1, ezért a Dirac-impulzusra adott válasz ( súlyfüggvény) Laplace-transzformáltja megegyezik az átviteli függvénnyel.
súlyfüggvény) Laplace-transzformáltja megegyezik az átviteli függvénnyel.
| (4.2) |
Ha a rendszer energiamentes kezdeti állapotból indul, valamint (2.107) alakú differenciálegyenlettel írható le, továbbá a gerjesztés ugrás függvény, akkor az átviteli függvény s-re nézve valós együtthatójú racionális törtfüggvény.
| (4.3) |

A megvalósíthatóság feltétele, hogy  . Ha az egyenlőség áll fent, akkor (4.3) nem valódi tört, és polinom osztással átalakítható egy
. Ha az egyenlőség áll fent, akkor (4.3) nem valódi tört, és polinom osztással átalakítható egy  konstans plusz
konstans plusz  -re nézve valódi tört polinommá (kizárva azt a triviális esetet, amikor a számláló egyszerűen
-re nézve valódi tört polinommá (kizárva azt a triviális esetet, amikor a számláló egyszerűen  -szerese a nevezőnek, mert ebben az esetben nincs dinamikai összefüggés a kimenőjel és az bemenőjel között).
-szerese a nevezőnek, mert ebben az esetben nincs dinamikai összefüggés a kimenőjel és az bemenőjel között).
| (4.4) |
Felhasználva az átviteli függvény definícióját
| (4.5) |
Látható, hogy  azt jelenti, hogy a bemenőjel közvetlenül (a dinamikát megkerülve) is megjelenik a kimeneten.
azt jelenti, hogy a bemenőjel közvetlenül (a dinamikát megkerülve) is megjelenik a kimeneten.
Mind a számláló, mind a nevező valós együtthatójú polinom, ezért az átviteli függvény zérusai, illetve pólusai vagy valósak, vagy komplex konjugált párok. Többszörös zérusok és pólusok is előfordulhatnak. Az átviteli függvény számlálóját és nevezőjét szokás gyöktényezős alakban felírni, mert ekkor a zérusok és pólusok közvetlenül látszanak,
| (4.6) |
Az átviteli függvény (4.6) alakja minden esetben felírható, egy másik szokásos alak leginkább akkor használatos, ha az összes pólus és zérus valós, továbbá nullától különböző.
| (4.7) |

A (4.7) alak előnye, hogy a rendszer  erősítése és a
erősítése és a  időállandói közvetlenül látszanak. Ha egy (4.7) alakú átviteli függvénnyel rendelkező rendszerre egységugrás bemenőjelet kapcsolunk, akkor az állandósult érték a következő módon határozható meg
időállandói közvetlenül látszanak. Ha egy (4.7) alakú átviteli függvénnyel rendelkező rendszerre egységugrás bemenőjelet kapcsolunk, akkor az állandósult érték a következő módon határozható meg
| (4.8) |

Irányítástechnikai problémák esetén sokat segít a közelítő Bode diagram, ennek felrajzolásához célszerű a zérusokat és a pólusokat három csoportra osztani
nulla értékűek
nullától különböző valós értékűek
komplex konjugált párok
A nullától különböző valós értékű pólusok és zérusok esetén vezessük be a következő jelölést
| (4.9) |


Látható, hogy ebben az esetben is a  értékek a rendszer időállandói. A komplex konjugált pár értékű pólusok és zérusok esetén vezessük be a következő jelölést
értékek a rendszer időállandói. A komplex konjugált pár értékű pólusok és zérusok esetén vezessük be a következő jelölést
| (4.10) |

ahol
| (4.11) |
| (4.12) |

ahol
| (4.13) |
A  paramétert csillapítási tényezónek nevezzük. A valós értékű pólusok esetén
paramétert csillapítási tényezónek nevezzük. A valós értékű pólusok esetén  megegyezik az időállandóval, de komplex konjugált pár esetén
megegyezik az időállandóval, de komplex konjugált pár esetén  nem azonos az időállandóval, hanem a közelítő Bode diagram töréspontjának a helyét jelöli ki körfrekvencia értékben kifejezve
nem azonos az időállandóval, hanem a közelítő Bode diagram töréspontjának a helyét jelöli ki körfrekvencia értékben kifejezve
| (4.14) |
Felhívjuk a figyelmet, hogy (4.14) kifejezésben kapott érték mértékegysége rad/sec és nem Hz.
A nem nulla értékű pólusokat és zérusokat kiemeljük, tegyük fel, hogy a számlálónak  számú 0 értékű zérusa és
számú 0 értékű zérusa és  számú 0 értékű pólusa van és ezek a zérusok és pólusok kapják a nagyobb sorszámot. Először a komplex konjugált pár értékű zérusok és pólusok kapnak sorszámot, ezekből
számú 0 értékű pólusa van és ezek a zérusok és pólusok kapják a nagyobb sorszámot. Először a komplex konjugált pár értékű zérusok és pólusok kapnak sorszámot, ezekből  , illetve
, illetve  pár van. Egy (2.107) alakú differenciálegyenlettel leírható rendszer átviteli függvénye felírható az alábbi általános alakban
pár van. Egy (2.107) alakú differenciálegyenlettel leírható rendszer átviteli függvénye felírható az alábbi általános alakban
| (4.15) |
Természetesen előfordulhat, hogy a számláló és a nevező gyökei megegyeznek és a  kifejezésében szereplő racionális törtfüggvény egyszerűsíthető. Egy ilyen matematikai egyszerűsítés hátterében fizikai okokat is kell keresnünk. Később látni fogjuk, hogy bizonyos esetekben a nem megfigyelhető alrendszerekhez tartozó pólusok esnek ki ilyen egyszerűsítéssel.
kifejezésében szereplő racionális törtfüggvény egyszerűsíthető. Egy ilyen matematikai egyszerűsítés hátterében fizikai okokat is kell keresnünk. Később látni fogjuk, hogy bizonyos esetekben a nem megfigyelhető alrendszerekhez tartozó pólusok esnek ki ilyen egyszerűsítéssel.
4.1.1. Közönséges állandó együtthatós differenciálegyenletek megoldása átviteli függvény segítségével
Korábban láttuk, hogy bármely lineáris állandó együtthatós differenciálegyenlet-rendszer átírható (2.107) alakúra.
| (4.16) |
ahol  az idő szerinti i-edik deriváltat jelöli. Az általánosságot nem csökkenti, ha az
az idő szerinti i-edik deriváltat jelöli. Az általánosságot nem csökkenti, ha az  feltételezéssel élünk. A fizikai megvalósíthatóság feltétele
feltételezéssel élünk. A fizikai megvalósíthatóság feltétele  .
.
A gerjesztés fizikailag mindig csak belépő függvényként értelmezhető ezért
| (4.17) |

ahol  . Ennek megfelelően minden gyakorlati esetben
. Ennek megfelelően minden gyakorlati esetben
| (4.18) |
Ugyancsak fizikai megfontolások alapján: véges gerjesztés esetén  folytonos és hagyományos értelemben
folytonos és hagyományos értelemben  -szer deriválható.
-szer deriválható.
| (4.19) |

ahol  az
az  függvény
függvény  -edik deriváltjának baloldali határértéke a
-edik deriváltjának baloldali határértéke a  helyen.
helyen.
Általános esetben  átviteli függvények segítségével is felírható
átviteli függvények segítségével is felírható
| (4.20) |

ahol  az
az  függvény
függvény  -edik deriváltjának
-edik deriváltjának  helyen vett baloldali határértékétől a kimenetre vonatkozó átviteli függvénye.
helyen vett baloldali határértékétől a kimenetre vonatkozó átviteli függvénye.  bevezetése elsősorban akkor célszerű, ha a rendszer differenciálegyenletét blokkdiagrammal szemléltetjük, ebben az esetben az átviteli függvények felírása sok esetben jelentősen leegyszerűsödik.
bevezetése elsősorban akkor célszerű, ha a rendszer differenciálegyenletét blokkdiagrammal szemléltetjük, ebben az esetben az átviteli függvények felírása sok esetben jelentősen leegyszerűsödik.
Energiamentes kezdeti állapot esetén
| (4.21) |

inverz Laplace-transzformációjával  kifejezhető.
kifejezhető.
4.1.2. Kidolgozott feladatok átviteli függvény alkalmazására
4-1 feladat átviteli függvény
Írja fel az átviteli függvényt
a 2-7 feladat alapján, ha
 a bemenőjel és
a bemenőjel és  a kimenőjel.
a kimenőjel.
Megoldás
Mindhárom feladatban egy-energiatárolós tag szerepel, amelynek az átviteli függvénye általános alakban a (4.7) legegyszerűbb esete
| (4.22) |

4-2 feladat (2.107) alakú differenciálegyenlet megoldása
A 2-16-2-17 feladatokban bemutattuk, hogy különböző rendszerek differenciálegyenletei átírhatók (2.107) alakúra. Tegyük fel, hogy egy rendszert az alábbi (2.107) alakú lineáris differenciálegyenlet ír le:
| (4.23) |

A rendszert az u(t) ugrás időfüggvény gerjeszti, és keressük az y(t) függvényt  és
és kezdeti feltételekkel
kezdeti feltételekkel


Megoldás
Laplace-transzformáljuk a rendszeregyenletet:
| (4.24) |

Fejezzük ki a kimenőjel Laplace-transzformáltját
| (4.25) |

eset
Helyettesítsük be a megadott gerjesztés Laplace-transzformáltját
| (4.26) |
| (4.27) |

A nevező gyökei ( pólusai):
pólusai):  .
.
A megoldás  alakú lesz. A negatív hatványkitevőkből látszik, hogy
alakú lesz. A negatív hatványkitevőkből látszik, hogy  „lecsengő” függvény. A pólus reciprokának valós részét időállandónak nevezzük. Esetünkben a rendszernek két időállandója van.
„lecsengő” függvény. A pólus reciprokának valós részét időállandónak nevezzük. Esetünkben a rendszernek két időállandója van.
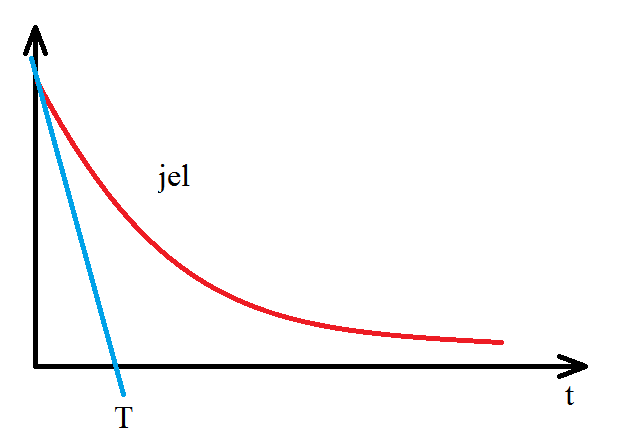
Egy-energiatároló esetén a T időállandó értékét a kezdeti érintő metszi ki. (ld. 4-2. ábra)
A feladatban keresett  és
és  együtthatók kiszámítása (egyszeres pólusokat feltételezve):
együtthatók kiszámítása (egyszeres pólusokat feltételezve):
| (4.28) |

takarjuk le (s+2) kifejezést a nevezőből majd a letakart kifejezésben szereplő pólust helyettesítjük be a megmaradó egyenletbe. Így megkapjuk  értékét
értékét
| (4.29) |

Hasonlóan megkapjuk  értékét is, csak most (s+4)-et takarjuk le és
értékét is, csak most (s+4)-et takarjuk le és  –et helyettesítünk be.
–et helyettesítünk be.
| (4.30) |

tehát a keresett megoldás:
| (4.31) |

Ellenőrzés a végérték tételek segítségével:
| (4.32) |

| (4.33) |
| (4.34) |

| (4.35) |

eset
Helyettesítsük be az adott gerjesztést! Hasonlóan a fentiekhez, a megoldás:
| (4.36) |

| (4.37) |

4-3 feladat Folytonos érzelmi modell pillanatszerű eseménnyel
Képzeljük el, hogy létezik egy olyan különleges állatfaj, amelynek minden puskalövés után a félelemérzését egy lineárisdifferenciál egyenlettel írhatunk le. Minden puskalövés után két elkülöníthető hatás tapasztalható. Az első, rövidtávú hatás esetében a puskalövés eldördülése után a félelemérzet ugrásszerűen 0.9 relatív egységre nő, majd a 0.9 relatív egységről  időállandóval exponenciálisan csökken nullára. A második, hosszú távú hatás esetében a puskalövés eldördülése után a félelemérzet ugrásszerűen 0.1 relatív egységre nő, majd a 0.1 relatív egységről
időállandóval exponenciálisan csökken nullára. A második, hosszú távú hatás esetében a puskalövés eldördülése után a félelemérzet ugrásszerűen 0.1 relatív egységre nő, majd a 0.1 relatív egységről  időállandóval exponenciálisan csökken nullára. Az állat félelemérzése a két hatás összege. Ha egy puskalövés után újabb puskalövés dörren, akkor annak hatása ismét hozzáadódik az előző hatáshoz (a hozzászokás jelenséget nem modellezzük).
időállandóval exponenciálisan csökken nullára. Az állat félelemérzése a két hatás összege. Ha egy puskalövés után újabb puskalövés dörren, akkor annak hatása ismét hozzáadódik az előző hatáshoz (a hozzászokás jelenséget nem modellezzük).
Írja fel a rendszert leíró lineáris differenciálegyenleteket.
A bemeneten milyen függvénnyel (disztribúcióval) modellezhető a puskalövés (figyelembe véve a két hatásról leírtakat)?
Hány állapotváltozóra van szükség a jelenség leírásához? (válaszát indokolja)
Írja fel a félelem alakulásának időfüggvényét egy puskalövés után.
Írja fel a félelemérzésre vonatkozó átviteli függvényt.
Milyen értékre nő az állat félelemérzete, ha periodikusan,
 időnként eldördül egy puskalövés?
időnként eldördül egy puskalövés?
Megoldás
Adatok:
| (4.38) |

Definíció alapján (ld. 161. oldal) az időállandó a pólus valós részének mínusz egyszeresének reciproka, esetünkben a két pólus értéke
| (4.39) |

1.
A puskalövés Dirac-delta (impulzus) disztribúcióval modellezhető, minthogy egyszeri kiugró értékű bemenetet (jelen esetben egy hangos durranást) jelent, előtte is és utána is az értéke nulla.
| (4.40) |

2.
Minthogy a puskalövés az állatból két különböző dinamikájú hatást vált ki, így ennek a két hatásnak a leírására két állapotváltozó bevezetésére van szükség:
| (4.41) |

3. A félelem alakulásának időfüggvénye a rendszer kimenőjele. A rövid és a hosszú távú hatást összegezni kell.
| (4.42) |

4.
A rendszer átviteli függvénye megegyezik a Dirac-impulzusra adott válasz Laplace-transzformáltjával:
| (4.43) |

| (4.44) |

A kezdeti és az állandósult értéket meghatározhatjuk az átviteli függvényből (a várakozásainknak megfelelő eredményt kapunk)
| (4.45) |

| (4.46) |

5.
Könnyen belátható, hogy a bemenőjel egy Dirac impulzusokból álló végtelen sor
| (4.47) |

A bemenőjel Laplace-transzformáltja
| (4.48) |

A (4.48) sor akkor ad véges értéket, ha a sor kvóciensének abszolút értéke egynél kisebb, ez tetszőleges frekvencián és tetszőleges  érték mellett biztosan teljesül, ha
érték mellett biztosan teljesül, ha  valós része pozitív
valós része pozitív
| (4.49) |

Ezzel a feltétellel a bemenőjel Laplace transzformáltja zárt alakban is megadható.
| (4.50) |
Az is megállapítható, hogy a félelemérzet nem válik végtelenné, de ebben az esetben a végérték tétel nem alkalmazható. Az állandósult állapotra jellemző középértéket a következő gondolatmenettel számíthatjuk ki. A Dirac impulzust az egységterületű impulzusból származtattuk, most az ellenkezőjét kell tenni, vagyis a Dirac-impulzust átlagoljuk egy periódusra és egy  nagyságú
nagyságú  hosszúságú impulzussal helyettesítjük, amelyek folyamatosan érkeznek egymás után, vagyis a bemenőjel a következő átlag értékkel helyettesíthető
hosszúságú impulzussal helyettesítjük, amelyek folyamatosan érkeznek egymás után, vagyis a bemenőjel a következő átlag értékkel helyettesíthető
| (4.51) |
Ennek alapján a kimenőjel átlagértéke
| (4.52) |

4-4 feladat Folytonos érzelmi modell nem pillanatszerű eseménnyel
Tegyük fel, hogy van egy különleges állatfaj, amelyiknek az érzelmi állapotát egyetlen változóval lehet leírni, ha e változó értéke pozitív, akkor jókedvű, ha ez negatív, akkor rosszkedvű. Ez az állat egy olyan állatkertben él, ahol csak 3 különböző esemény történhet vele. Természetesen az itt leírt minta alapján több fajta érzelem (pl, öröm, bánat, félelem és düh), továbbá több esemény is megadható. Minden eseménynek van egy kezdete és egy vége, továbbá minden esemény hat az érzelmi állapotra, amelyben két elkülöníthető hatás tapasztalható. Az első - rövidtávú érzelem- az esemény kezdetekor gyors felfutási idővel, pontosabban rövid  időállandóval a táblázatban megadott
időállandóval a táblázatban megadott  értékkel növeli meg az érzelmet leíró változó értékét, majd ez az érték az esemény befejezésekor
értékkel növeli meg az érzelmet leíró változó értékét, majd ez az érték az esemény befejezésekor  időállandóval lecseng. A második, hosszú távú hatás jellegre hasonló, de a felfutás és lecsengés
időállandóval lecseng. A második, hosszú távú hatás jellegre hasonló, de a felfutás és lecsengés  időállandója nagyobb a rövid távú hatásénál, továbbá a hosszú távú érzelem csak a táblázatban megadott érték ötödére fut fel. Az események hatásai szuperponálódnak (nincs telítődés és hozzászokási jelenség). Megengedett az is, hogy egy esemény hamarabb befejeződjön, mint ahogy az eseményhez tartozó érzelmi felfutás gyakorlatilag befejeződne (elvileg minden felfutás a végtelenben fejeződik be).
időállandója nagyobb a rövid távú hatásénál, továbbá a hosszú távú érzelem csak a táblázatban megadott érték ötödére fut fel. Az események hatásai szuperponálódnak (nincs telítődés és hozzászokási jelenség). Megengedett az is, hogy egy esemény hamarabb befejeződjön, mint ahogy az eseményhez tartozó érzelmi felfutás gyakorlatilag befejeződne (elvileg minden felfutás a végtelenben fejeződik be).
esemény sorszáma | esemény leírása | állandósult |
1. | egyedül unatkozik | -1 |
2. | gondozó közelében van | 1 |
3. | a gondozóval játszik | 3 |
4. | a gondozó megbünteti | -3 |
5. | látogatók kedveskednek vele | 2 |
6. | látogatók bosszantják | -2 |

A bemeneten milyen függvénnyel modellezhető az esemény kezdete és vége?
Hány állapotváltozóra van szükség a jelenség leírásához? (válaszát indokolja)
Írja fel az érzésre vonatkozó átviteli függvényt.
Tegyük fel, hogy csak egyetlen
 állandósult értékű esemény történik, és annak
állandósult értékű esemény történik, és annak  kezdete és
kezdete és  vége ismert. Írja fel az érzelem alakulásának időfüggvényét.
vége ismert. Írja fel az érzelem alakulásának időfüggvényét.
Megoldás
1.
Az esemény kezdete és vége is egy-egy ugrásfüggvénnyel modellezhető. Jelölje az  -dik esemény kezdetét
-dik esemény kezdetét  és végét
és végét  , valamint az eseményhez tartozó állandósult értéket
, valamint az eseményhez tartozó állandósult értéket  . Célszerű az esemény kezdetét és végét mindig párban megadni, így az
. Célszerű az esemény kezdetét és végét mindig párban megadni, így az  -dik eseményhez tartozó bemenőjel időfüggvénye és Laplace-transzformáltja
-dik eseményhez tartozó bemenőjel időfüggvénye és Laplace-transzformáltja
| (4.53) |

2.
Minthogy minden esemény az állatból két különböző dinamikájú hatást vált ki, így ennek a két hatásnak a leírására két állapotváltozó bevezetésére van szükség, amelyek hatását összegezni kell:
3.
A rövid és hosszú távú hatást egy-egy párhuzamosan kapcsolt egységnyi, illetve 0.2 erősítésű energiatárolóval modellezhetjük
| (4.54) |

4.
Az előző pontból ismert a rendszer átviteli függvénye és adott a bemenőjel
| (4.55) |

| (4.56) |


4-5 feladat Tömeg-rugó rendszer
Adott a 4-3. ábra látható tömeg-rugó rendszer, ahol a kimenőjel a tömeg elmozdulása, amelynek a nyugalmi állapotához rögzítjük a nulla elmozdulási szintet. A bemenőjel a második rugó végének az elmozdulása.
Írja fel a rendszer átviteli függvényét, és oldja meg a differenciálegyenletet egységugrás gerjesztéssel.
Végérték tétellel határozza meg az állandósult elmozdulás értéket.
Vizsgáljuk meg, hogy milyen gyorsan kell a rugó végét mozgatni, hogy az egységugrással lehessen közelíteni.
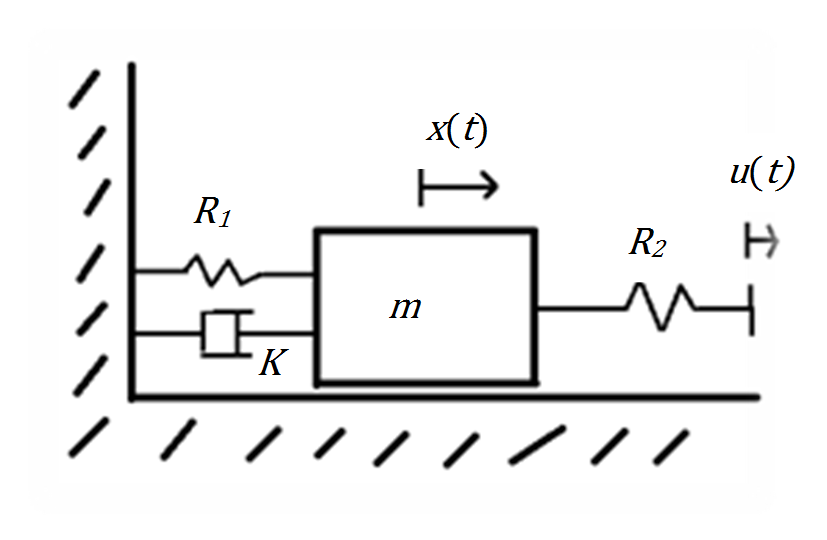
Adatok: m=10 [kg] ; R1=1000 [N/m]; R2=500 [N/m]; K=600 [Ns/m]
Megoldás
A mozgásegyenlet:
| (4.57) |


ahol  a gerjesztés és
a gerjesztés és  a kimenőjel. Nyugalmi állapotban az állapotváltozók kezdeti értéke nulla. Laplace-transzformáljuk az egyenletet:
a kimenőjel. Nyugalmi állapotban az állapotváltozók kezdeti értéke nulla. Laplace-transzformáljuk az egyenletet:
| (4.58) |

A kimenőjel Laplace-transzformáltja:
| (4.59) |
A rendszer átviteli függvénye:
| (4.60) |
Adatokat behelyettesítve:
| (4.61) |

| (4.62) |

| (4.63) |
Vizsgáljuk meg a rendszer viselkedését egységugrás bemenetre.
Egységugrás függvénnyel gerjesztett rendszer
A bemenet legyen  egységugrás
egységugrás  függvény. Ez fizikailag azt jelenti, hogy nagyon gyorsan megrántjuk a második rugó végét. Fontos kérdés az is, hogy mikor tekinthetjük a rugó mozgatását nagyon gyorsnak (erre később visszatérünk).
függvény. Ez fizikailag azt jelenti, hogy nagyon gyorsan megrántjuk a második rugó végét. Fontos kérdés az is, hogy mikor tekinthetjük a rugó mozgatását nagyon gyorsnak (erre később visszatérünk).
| (4.64) |
Az átviteli függvény nevezőjének szorzattá alakítása:
| (4.65) |

Az elmozdulás függvény pólusai:
| (4.66) |

| (4.67) |

A rendszer időállandói, a pólusok valós részének reciprokának mínusz egyszerese:


| (4.68) |

Az elmozdulás függvénye az időtartományban a következő alakot fogja felvenni:
| (4.69) |

A konstans szorzókat meghatározzuk a letakarásos módszerrel (ld. 3.2.7 pont):
| (4.70) |

| (4.71) |

| (4.72) |

A tömeg elmozdulásának (kimenőjelnek) időfüggvénye:
| (4.73) |

Elemezzük a kapott eredményt! A két rugó együttes hosszát egy egységnyivel növeltük meg. Mivel a két rugóállandó nem egyenlő, konkrétan az 1. rugó kétszer olyan erős, mint a 2. rugó, ezért állandósult állapotban a 2. rugó megnyúlása kétszerese lesz az 1. rugó megnyúlásának. Vagyis az egységnyi megnyúlás 1/3-2/3 arányban oszlik meg a két rugó között. A tömeg elmozdulása megegyezik az első rugó megnyúlásával. Ez kiolvasható a (4.60) átviteli függvényből. Egységugrás bemenőjelre a végérték tételt alkalmazva kapjuk
| (4.74) |
A tömeget a rugóerők eredője mozgatja, ebből következik, hogy a beállási időt a rugóállandók határozzák meg. Minél merevebb a rugó, a rugó végének adott elmozdulás annál nagyobb rugóerőt eredményez és annál gyorsabb lesz a beállás. A beállás idejét egy gyors fejszámolással is megbecsülhetjük. Esetünkben a kisebb pólus kb. két és fél körül van, annak reciproka kb. 0.4. Az állandósult érték 99% körüli megközelítéséhez kb. 0.4∙5=2s szükséges. Ha mindkét rugóállandót tizedére csökkentjük, akkor az átviteli függvény két pólusa  . Látható, hogy a kisebb pólus kb. egy nagyságrenddel lecsökkent, így a beállási idő egy nagyságrenddel megnő.
. Látható, hogy a kisebb pólus kb. egy nagyságrenddel lecsökkent, így a beállási idő egy nagyságrenddel megnő.
A jelen adatok mellett a tömeg lengések nélkül áll be. Ez a kellően nagy csillapításnak köszönhető. Ha a csillapítást pl. tizedére csökkentjük, akkor az átviteli függvény pólusai konjugált komplex párrá válnak  . Ez (3.99) alapján azt jelenti, hogy a tömeg 1/3s időállandóval lecsengő kb. 12 rad/sec körfrekvenciájú lengésekkel áll be az állandósult értékre. A lengések amplitúdója 5∙1/3≈1.7s környékén csökken 1% alá, ez alatt az idő alatt a periódusok száma 3-nál több, 4-nél kevesebb. Ismét csak fejben számolva a π értékét 3-mal közelítve a lengések periódusideje kb. 0.5s. Összefoglalva: a tömeg kb. három lengés (három jól kivehető lokális csúcs) után kb. 1.7s alatt áll be. A pontos számítást az olvasóra bízzuk.
. Ez (3.99) alapján azt jelenti, hogy a tömeg 1/3s időállandóval lecsengő kb. 12 rad/sec körfrekvenciájú lengésekkel áll be az állandósult értékre. A lengések amplitúdója 5∙1/3≈1.7s környékén csökken 1% alá, ez alatt az idő alatt a periódusok száma 3-nál több, 4-nél kevesebb. Ismét csak fejben számolva a π értékét 3-mal közelítve a lengések periódusideje kb. 0.5s. Összefoglalva: a tömeg kb. három lengés (három jól kivehető lokális csúcs) után kb. 1.7s alatt áll be. A pontos számítást az olvasóra bízzuk.
Vizsgáljuk meg, hogy milyen gyorsan kell a rugó végét mozgatni, hogy az egységugrással lehessen közelíteni. Tegyük fel, hogy a rugó végét állandó sebességgel  idő alatt mozgatjuk egységnyi távolságra. A rugó végének mozgását leíró egyenlet
idő alatt mozgatjuk egységnyi távolságra. A rugó végének mozgását leíró egyenlet
| (4.75) |
A (4.75) gerjesztés Laplace-transzformáltja
| (4.76) |
| (4.77) |

Az elmozdulás függvénye az időtartományban a következő alakot fogja ölteni:
| (4.78) |



csak a  tartományban jelenik meg, a
tartományban jelenik meg, a  tartományban nem játszik szerepet.
tartományban nem játszik szerepet.  kivételével a konstans szorzókat meghatározhatjuk a letakarásos módszerrel (ld. 3.2.7 pont):
kivételével a konstans szorzókat meghatározhatjuk a letakarásos módszerrel (ld. 3.2.7 pont):



Látható, hogy (4.78) a következő (4.79) egyenlet differenciahányadosa a  tartományban
tartományban
| (4.79) |

A fentiekből következik, hogy határátmenetben, ha  , akkor a (4.78) egyenlet tart a (4.69) egyenlethez. Vagyis ha a rugó végét állandó sebességgel
, akkor a (4.78) egyenlet tart a (4.69) egyenlethez. Vagyis ha a rugó végét állandó sebességgel  idő alatt mozgatjuk egységnyi távolságra, akkor ez a mozgás annyira tekinthető egységugrásnak, amennyire a (4.79) egyenlet
idő alatt mozgatjuk egységnyi távolságra, akkor ez a mozgás annyira tekinthető egységugrásnak, amennyire a (4.79) egyenlet  lépéssel felírt differenciahányadosa a differenciálhányadosának tekinthető.
lépéssel felírt differenciahányadosa a differenciálhányadosának tekinthető.
4-6 feladat Differenciálegyenlet megoldása szinuszos gerjesztés esetén
Ha egy csillapítatlan rezgőmozgást végző  tömegpontra periodikus erő hat, a pont kényszerrezgést végez. Legyen a periodikus gerjesztő erő
tömegpontra periodikus erő hat, a pont kényszerrezgést végez. Legyen a periodikus gerjesztő erő  , ekkor a mozgást leíró differenciálegyenlet:
, ekkor a mozgást leíró differenciálegyenlet:
| (4.80) |

Legyenek a kezdeti feltételek:  . Határozzuk meg a kitérést, mint az idő függvényét.
. Határozzuk meg a kitérést, mint az idő függvényét.
A feladatot oldjuk meg az operátoros tartományban az átviteli függvény felírásával és az időtartományban is. Hasonlítsuk össze a két megoldási módszert!
Megoldás az operátoros tartományban
A rendszer átviteli függvénye
| (4.81) |
Az első derivált  kezdeti értékre vonatkozó átviteli függvény
kezdeti értékre vonatkozó átviteli függvény
| (4.82) |
Az operátoros tartományban a gerjesztés
| (4.83) |
A szuperpozíció elvének kihasználásával és a két átviteli függvény segítségével Y(s) kifejezhető:
| (4.84) |

A Laplace-transzformáció tulajdonságait figyelembe véve az inverz transzformációt tagonként végezhetjük el. A második tag egyszerűen inverz Laplace-transzformálható (3.91) alapján.
| (4.85) |
Az első tagot gyöktényezőkre bontva
| (4.86) |

Az első tag visszatranszformálását részlettörtekre bontással is elvégezhetjük, az együtthatók legyenek sorra  ,
,  ,
,  és
és  , amelyeket
, amelyeket  ,
,  ,
,  és
és  helyettesítéssel kapunk
helyettesítéssel kapunk




Az első tag inverz Laplace-transzformáltja komplex formában
| (4.91) |

Behelyettesítve
| (4.92) |


(4.92) átírható
| (4.93) |


Másképpen is eljárhatunk, hogy meghatározzuk a (4.86) inverz Laplace-transzformáltját. Felhasználhatjuk a következő kiegészítő összefüggést:
| (4.94) |

amellyel az első tag inverz transzformáltja a  tartományban:
tartományban:
| (4.95) |

a differenciálegyenlet megoldása (továbbra is csak a a  tartományban) tehát:
tartományban) tehát:
| (4.96) |

Megoldás az idő tartományban
A kapott differenciálegyenlet állandó együtthatós, inhomogén, másodrendű, közönséges, lineáris egyenlet. Általános megoldását a homogén rész általános megoldása és az inhomogén egyenlet egy partikuláris megoldása összegeként kaphatjuk meg. A megfelelő homogén egyenlet  megoldását keressük
megoldását keressük  alakban,
alakban,
A homogén rész megoldása két egymástól lineárisan független partikuláris megoldás összegeként kapható. A differenciálegyenlet partikuláris megoldását  alakban keressük, mert ez az egyetlen függvény, amely arányos deriváltjaival. Behelyettesítve a differenciálegyenletbe:
alakban keressük, mert ez az egyetlen függvény, amely arányos deriváltjaival. Behelyettesítve a differenciálegyenletbe:
| (4.97) |



Ez két lineárisan független megoldás, hiszen  csak akkor áll fenn, ha
csak akkor áll fenn, ha  . A homogén rész általános megoldása tehát:
. A homogén rész általános megoldása tehát: 
Alkalmazva az EULER-féle formulát:  .
.
A kezdeti feltételeket ugyan később kell csak figyelembe venni, de célszerűségi okokból ettől most eltérünk. Kihasználjuk, hogy  , ezért a megoldásban cos-os tag biztosan nem lesz, így
, ezért a megoldásban cos-os tag biztosan nem lesz, így
| (4.98) |

azaz B=0. Ellenőrizzük most, hogy yh valóban megoldása-e a homogén egyenletnek:
| (4.99) |

Behelyettesítve:
| (4.100) |

Látható tehát, hogy yh valóban a homogén egyenlet megoldása. Az inhomogén egyenlet egy partikuláris megoldását keressük
| (4.101) |
próbafüggvény felhasználásával. Az  kezdeti feltétel miatt most is megállapítható, hogy
kezdeti feltétel miatt most is megállapítható, hogy  . Helyettesítsük be a próbafüggvényt a differenciálegyenletbe és rendezzük:
. Helyettesítsük be a próbafüggvényt a differenciálegyenletbe és rendezzük:
| (4.102) |



Ahogy az várható is volt, a megoldás egy része (a homogén egyenlet megoldása) kiesett, így az egyik paramétert meg lehetett határozni. Az egyik (y(0)=0) kezdeti feltételt már felhasználtuk, vegyük most a másikat A meghatározásához:
| (4.103) |

Behelyettesítés után nyerjük a differenciálegyenlet megoldását:
| (4.104) |

Látható, hogy ezzel a módszerrel is ugyanazt az eredményt kaptuk.
4-7 feladat Domináns pólus
Adott egy olyan rendszer, amelynek nincs integráló és deriváló tagja, és az átviteli függvénye a következő alakú
| (4.105) |

Az egyszerűség kedvéért tegyük fel, hogy az összes pólus negatív valós szám, nincsenek többszörös pólusok. Ugyancsak a könnyebb tárgyalási mód kedvéért tegyük fel, hogy
| (4.106) |

Továbbá feltételezzük azt is, hogy az egyik pólus abszolút értéke sokkal kisebb a többi pólusnál. Ezt nevezzük domináns pólusnak, és legyen a sorszáma 1. Kapcsoljunk egységugrást a bemenetre. Lássuk be, hogy a rendszer válaszát alapvetően a domináns pólus hatása határozza meg.
Megoldás
A kimenőjel Laplace-transzformáltja a következő alakú lesz
| (4.107) |
Ezt úgy is felfoghatjuk, hogy az eredeti átviteli függvényt kibővítjük egy  -edik sorszámú
-edik sorszámú  értékű pólussal, ezért az inverz Laplace-transzformált alakja a következő
értékű pólussal, ezért az inverz Laplace-transzformált alakja a következő
| (4.108) |
A kifejtési tétel alapján és (4.106) alapján az  pólushoz tartozó
pólushoz tartozó  konstans értéke 1. Ugyancsak közelítőleg 1 az értéke
konstans értéke 1. Ugyancsak közelítőleg 1 az értéke  konstansnak. Mivel a feltételezésünk szerint
konstansnak. Mivel a feltételezésünk szerint
| (4.109) |

A többi együttható abszolút értéke  -nél sokkal kisebb, mert azok kiszámításánál
-nél sokkal kisebb, mert azok kiszámításánál  –hez képest a nevezőbe sokkal nagyobb abszolút értékű számokat helyettesítünk.
–hez képest a nevezőbe sokkal nagyobb abszolút értékű számokat helyettesítünk.
Konkrét példaként legyen az átviteli függvény
| (4.110) |
A rendszer válasza egységugrás bemenőjelre
| (4.111) |
Inverz Laplace-transzformálva  tartományban
tartományban
| (4.112) |

4.2. Átviteli függvény meghatározása hatásvázlat segítségével
Az átviteli függvény felírásához alapvetően a rendszert leíró differenciálegyenletekből kell kiindulni. Az átviteli függvény meghatározásához szükség van az egyenletek Laplace-transzformálására, és megfelelő átrendezésére. Az átrendezés történhet a Laplace-transzformálás előtt vagy után a szokásos matematikai átalakításokkal (erre láttunk példát a 2-16-2-19 feladatok kapcsán). A mérnökök sokszor törekednek arra, hogy a problémákat szemléletesen, ábrák segítségével jelenítsék meg. Az átalakítást segíti az ún. hatásvázlat, amelyet tekinthetünk a rendszer differenciálegyenleteinek grafikus megjelenítésének, amelyből jól látható az egyenletek struktúrája és útmutatóként is használható a differenciálegyenletek elvi megoldására. (ld. 4-4. ábra).
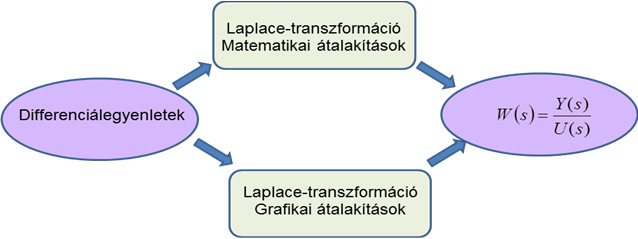
Ennek különös jelentősége volt az analóg számítógépek idején. Egy kellően részletes hatásvázlat egyben egy analóg számítógépes program. A személyi számítógépek megjelenésével (azok számítási kapacitásának növekedésével) az analóg számítógépek eltűntek, de a hatásvázlat továbbra is fontos szerepet játszik a differenciálegyenletek elvi megoldásában.
A be- és kimenőjel között kell matematikai kapcsolatot teremteni. Ebből következően a jelnek van terjedési iránya, alapvetően balról haladunk jobbra, ezt nevezzük előrevezető iránynak. Gyakran szükséges a kimenet visszacsatolása, általában a jobbról balra haladva visszacsatoló ágról beszélünk. A jelekkel végzendő matematikai műveletek: összegzés (előjelesen), szorzás egy konstans értékkel, integrálás, deriválás és konvolúció. Mivel egy jellel párhuzamosan is lehet műveletet végezni, így szükség van elágazásra is. A MATLAB Simulink legfontosabb szimbólumai a 4-5. ábran láthatók. Megjegyezzük, hogy az ábrán kétféle összegzőt látunk. Az első a klasszikus jelölésnek megfelelően egy kör, amelynek egy kimenete és legfeljebb három egymásra merőleges bemenete van. A második típusú összegző négyszögletes, ennek igazán akkor van jelentősége, ha több jelet kívánunk összegezni. Klasszikus jelöléssel több egymásután kapcsolt kör alakú összegzőt kell alkalmazni, a négyszögletes összegzőhöz könnyebb több bemenetet rajzolni (ld. 4-6. ábra).
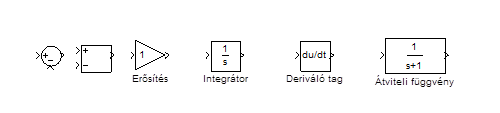
4.2.1. Hatásvázlatok
Az eddigiekben a rendszert egy egységként kezeltük, és különböző módszereket mutattunk be arra, hogyan határozható meg a rendszer válasza (Laplace transzformáció, Köz.diff egy melléklet), azaz mi lesz a hatása annak, ha a bemenetre valamilyen jelet kapcsolunk:
Időtartomány | Operátoros tartomány | Frekvenciatartomány |
vagy rendszer jellemző függvénnyel:
|
|
|
(konvolúciós integrál) |
|
|
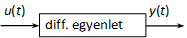
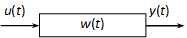

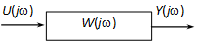



Mint látható, a kimenet mindhárom esetben valamilyen szorzással állítható elő. Bonyolultabb esetekben célszerű a rendszert részrendszerekre bontani. Lineáris rendszerek esetén alkalmazható a szuperpozíció, de a felbontás ezt nem mindig teszi lehetővé. A következő fejezetekben azzal foglalkozunk, hogy hogyan lehet a részrendszerekből előállítani a teljes rendszert egyben leíró kapcsolatot. Ennek leírására az operátoros tartománybeli legegyszerűbb írásmódot választjuk.
4.2.2. Jelölések
A részrendszerek között a jel haladását egy irányított szakasz jelzi, amelynek minden pontjában állandó a jel értéke. A jel értékét a szakasz fölé (mellé, alá, stb.) írhatjuk, de ha értéke egyértelmű, akkor nem kötelező kiírni. A részrendszereket téglalappal jelezzük, amelybe a rá jellemző átviteli függvényt írjuk. Ha a jel valamely pontban elágazik, akkor minden irányban gyengítetlenül terjed, azaz minden irányban azonos lesz. Az előjeles összegzés jelölésére két módszer terjedt el. Az egyik esetben kiírjuk az előjelet, a másikban pedig a negatív előjelet feketítéssel jelöljük. Mindkét esetben az összegzést körrel jelöljük.
jel haladása
| elágazás
|
összegzés előjel kiírással
| összegzés feketítéssel
|
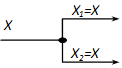
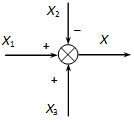

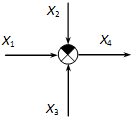

4.2.3. Soros kapcsolás
Tegyük fel, hogy a rendszerünket két alrendszerre bontottuk úgy, hogy az első kimenete egyben a második bemenete:

Határozzuk meg az eredő átviteli függvényt.
A számítás lépései
Az eredmény
| (4.113) |
Két sorba kapcsolt, átviteli függvénnyel adott rendszer eredő átviteli függvénye tehát a két átviteli függvény szorzataként állítható elő.
4.2.4. Párhuzamos kapcsolás
Párhuzamos kapcsolás esetén a két alrendszer ugyanazt a bemenőjelet kapja, kimenetük pedig összeadódik:
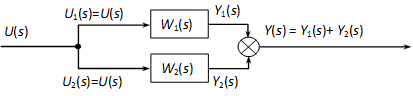
Határozzuk meg az eredő átviteli függvényt Y(s) és U(s) között.
A számítás lépései
| (4.114) |

Az eredmény
| (4.115) |
Két párhuzamosan kapcsolt, átviteli függvénnyel adott rendszer eredő átviteli függvénye tehát a két átviteli függvény összegeként állítható elő. Mint látható, ebben az esetben alkalmazható a szuperpozíció.
4.2.5. Visszacsatolás
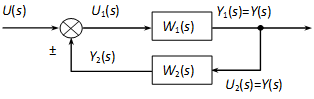
Határozzuk meg az eredő átviteli függvényt Y(s) és U(s) között.
A számítás lépései
| (4.116) |
Az eredmény
| (4.117) |
A  szorzatot a felnyitott kör átviteli függvényének nevezzük, szokásos jelölése
szorzatot a felnyitott kör átviteli függvényének nevezzük, szokásos jelölése  . A nevezőben a felnyitott kör átviteli függvénye előtt az előjel negatív visszacsatolás esetén pozitív, pozitív visszacsatolás esetén negatív.
. A nevezőben a felnyitott kör átviteli függvénye előtt az előjel negatív visszacsatolás esetén pozitív, pozitív visszacsatolás esetén negatív.
4.2.6. Hatásvázlat átalakítása
Egy bonyolultabb rendszer hatásvázlata nagyon „ágas-bogas” lehet. A következőkben megnézzük, milyen átalakításokkal lehet egyszerűbb, az előző fejezetben ismertetett részeket tartalmazó blokkokra bontani. Az átalakítások során csak olyan műveleteket lehet végezni, amelyek az eredőt nem befolyásolják, de lehet például új taggal bővíteni, vagy tagokat összevonni.
4.2.6.1. Elágazási pont áthelyezése tag elől tag mögé
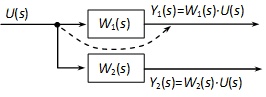
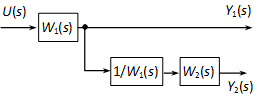
4.2.6.2. Elágazási pont áthelyezése tag elé
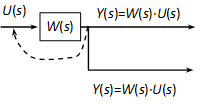
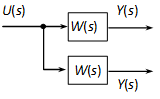
4.2.6.3. Összegzési pont áthelyezése tag mögé
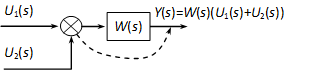
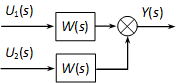
4.2.6.4. Összegzési pont áthelyezése tag elé
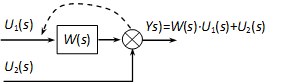
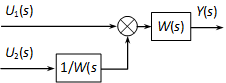
4.2.6.5. Összegzési pont és elágazási pont felcserélése
Ha lehet, ne alkalmazzuk, mert általában bonyolultabb hatásvázlatot kapunk, mint amilyenből kiindultunk!
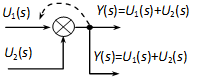
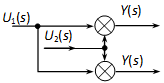
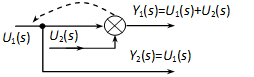
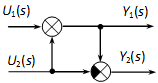
Megjegyezzük, hogy az analóg számítógépek programozása hasonló feladat, mint a hatásvázlat felírása. Általános célú analóg számítógépek használata a személyi számítógépek megjelenésekor erőteljesen háttérbe szorult. Ezt követően sokáig megmaradtak a (műveleti erősítőkre alapozott) analóg elektronikai szabályozók. Ezeket lehet célorientált analóg számítógépeknek tekinteni.
4.2.7. Kidolgozott feladatok hatásvázlat átalakításra
Az egyszerűség kedvéért a függvények s független változóját mindenhol elhagyjuk. Az átviteli függvények minden feladatban:  . A megoldások eleinte minden lépést megmutatnak, a későbbiekben azonban azok, amelyek már szerepeltek, egy lépésben kerülnek végrehajtásra.
. A megoldások eleinte minden lépést megmutatnak, a későbbiekben azonban azok, amelyek már szerepeltek, egy lépésben kerülnek végrehajtásra.
4-8. feladat Hatásvázlat átalakítása
Határozzuk meg az eredő átviteli függvényt a következő ábrán látható hatásvázlat alapján:
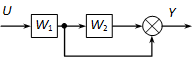
Megoldás:
Ha egy ágra semmilyen átviteli függvény sincs megadva, akkor úgy értelmezhetjük, mintha W=1 lenne. A 4-17. ábrán szaggatottal körülhatárolt rész két tag párhuzamos kapcsolását tartalmazza, ennek eredője a két átviteli függvény összege.

Az átalakítás után a két tag soros kapcsolása marad, így az eredő:
| (4.118) |

4-9. feladat Hatásvázlat átalakítása
Határozzuk meg az eredő átviteli függvényt a következő ábrán látható hatásvázlat alapján:
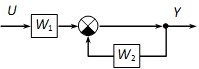
Megoldás:
A 4-19. ábrán szaggatottal körülhatárolt rész negatív visszacsatolást tartalmaz, ennek eredője (4.117) alapján meghatározható.

Az átalakítás után az két tag soros kapcsolása marad, így az eredő:
| (4.119) |

4-10. feladat Hatásvázlat átalakítása
Határozzuk meg az eredő átviteli függvényt a következő ábrán látható hatásvázlat alapján:
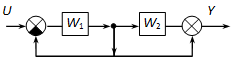
Megoldás:
A középen lévő ágat rajzoljuk két külön ágként, ekkor sorba kapcsolva egy negatív visszacsatolást és egy párhuzamos kapcsolást kapunk. Ezután az eredő az eddigiek alapján már könnyen meghatározható.

Az átalakítás után két tag soros kapcsolása marad, így az eredő:
| (4.120) |

4-11. feladat Hatásvázlat átalakítása
Határozzuk meg az eredő átviteli függvényt a következő ábrán látható hatásvázlat alapján:
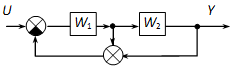
Megoldás:
A két összegzési pontot össze lehet vonni, az előjelekre azonban figyelni kell. Kis betűkkel (a, b) az ágakon levő jel értékét jelöltük.
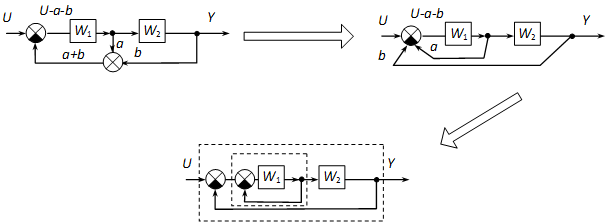
Az eredő meghatározása közben emeletes törteket kapunk. A következő eljárás javasolható ebben az esetben: határozzuk meg a számlálóban és a nevezőben levő törtek nevezőinek legkisebb közös többszörösét, majd ebből képezzünk 1/1 alakú törtet, amellyel megszorozzuk a törtet. A feladatban ezek a törtek  és
és  .
.
| (4.121) |
4-12. feladat Hatásvázlat átalakítása
Határozzuk meg az eredő átviteli függvényt a következő ábrán látható hatásvázlat alapján:
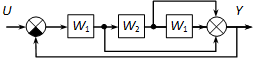
Megoldás:
Az jobboldali összegzési pontot bontsuk szét, így egymásba ágyazott párhuzamos kapcsolású részeket kapunk.
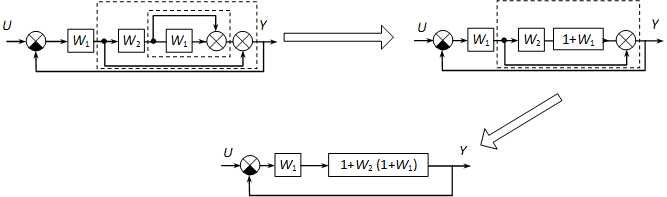
| (4.122) |
4-13. feladat Hatásvázlat átalakítása
Határozzuk meg az eredő átviteli függvényt a következő ábrán látható hatásvázlat alapján
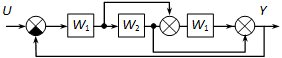
Megoldás:
Ahhoz, hogy számolható alrendszerekre váljon szét, át kell alakítani. Több lehetőségünk is van, az egyik például egy elágazási pont áthelyezés, a másik pedig egy összegzési pont áthelyezés. Mindkét módszerrel megoldjuk a feladatot, a közös bennük – ami általában célszerű is – hogy „nyújtani” fogják a hurkot. Ennek hatása látszik a következő ábra felső sorának jobb oldalán, ahol a szaggatott rész eredője könnyen számíthatóvá vált.
Csomópont áthelyezéssel:
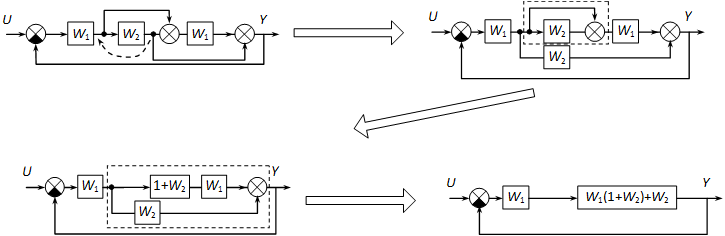
| (4.123) |
Összegzési pont áthelyezéssel:
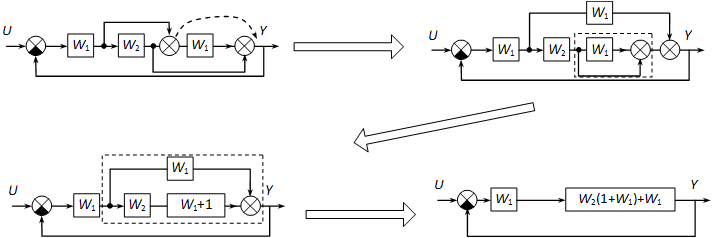
| (4.124) |

Mint látható, a két eredmény megegyezik.
4-14. feladat Hatásvázlat átalakítása
Határozzuk meg az eredő átviteli függvényt a következő ábrán látható hatásvázlat alapján:
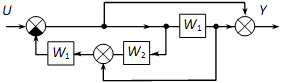
Megoldás:
Két eltérő módszerrel is megoldjuk a feladatot.
Hatásvázlat átalakítással:
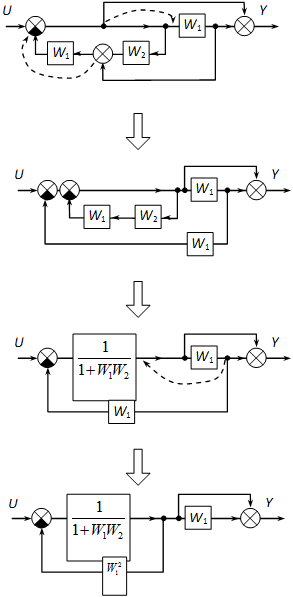
| (4.125) |
Algebrai egyenletekkel:
Az ábrán kis betűkkel (a,b,c,d,e) jelöltük a jelek értékét. Írjuk fel az ezeket előállító egyenleteket:
| (4.126) |
| (4.127) |
4.3. Átviteli függvény alkalmazása
Az átviteli függvény alkalmas egy lineáris időinvariáns rendszer legfontosabb tulajdonságainak leírására, de a fizikai hátterét azért nehéz közvetlenül elemezni, mert egy komplex változós komplex függvény. (4.2) alapján az átviteli függvény megegyezik a súlyfüggvény Laplace-transzformáltjával. Ez azért egy fontos megállapítás, mert a (2.107) alakú differenciálegyenlettel leírható rendszerek impulzus válasza (súlyfüggvénye) garantáltan lecsengő, ezért létezik Fourier-transzformáltja, vagyis a frekvencia átviteli függvénye (frekvencia karakterisztikája) az átviteli függvényből egyszerű  helyettesítéssel megkapható. A frekvencia átviteli függvény fizikailag értelmezhető.
helyettesítéssel megkapható. A frekvencia átviteli függvény fizikailag értelmezhető.
4.3.1. Kidolgozott feladatok átviteli függvények felírására
4-15 feladat Külsőgerjesztésű egyenáramú motor átviteli függvényei
Az hogy mit tekintünk bemenetnek és kimenetnek egy motor esetében, az a motor használatától is függ. A szabályozott bemenet lehet a motor armatúra feszültsége vagy lehet az armatúra árama is. Értelemszerűen, ha az egyiket szabályozzuk, akkor a másik kiadódik, vagyis az kimenetként kezelendő. Az  terhelőnyomatékot a motor szempontjából minden esetben bemenetnek kell tekintenünk. (A terhelés szempontjából az természetesen kimenet). Válasszuk mellé először bemenetnek a motor
terhelőnyomatékot a motor szempontjából minden esetben bemenetnek kell tekintenünk. (A terhelés szempontjából az természetesen kimenet). Válasszuk mellé először bemenetnek a motor  armatúra feszültségét, és vizsgáljuk meg azt, hogy ezek a bemenetek miként hatnak a motor
armatúra feszültségét, és vizsgáljuk meg azt, hogy ezek a bemenetek miként hatnak a motor  szögsebességére.
szögsebességére.
Írja fel egy külső gerjesztésű egyenáramú motor átviteli függvényét az
 bemenet és
bemenet és  kimenet között
kimenet közöttÍrja fel egy külső gerjesztésű egyenáramú motor átviteli függvényét az
 bemenet és
bemenet és  kimenet között.
kimenet között. Írja fel egy külső gerjesztésű egyenáramú motor átviteli függvényét az
 bemenet és
bemenet és  kimenet között.
kimenet között. Írja fel egy külső gerjesztésű egyenáramú motor átviteli függvényét az
 bemenet és
bemenet és  kimenet között.
kimenet között. Az átviteli függvények segítségével írja fel az
 szögsebesség időfüggvényét az armatúra feszültség bekapcsolása, illetve terhelésrádobás után.
szögsebesség időfüggvényét az armatúra feszültség bekapcsolása, illetve terhelésrádobás után.
A végérték tétel segítségével mindkét esetben adja meg az állandósult értéket (szuperpozíció elvét kihasználva, a két hatás egymástól függrtlenül számítható).
Megoldás:
A külső gerjesztésű egyenáramú motor helyettesítő vázlata két fő részre tagolódik, az armatúra körre és a gerjesztő körre (ld. 4-32. ábra).
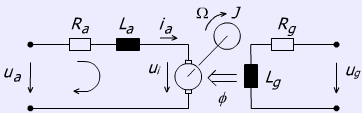
A gerjesztő tekercs egy Rg és Lg paraméterekkel jellemzett R-L körként modellezhető. Az armatúra kör egy soros R-L impedancia és  indukált feszültség sorba kapcsolásával modellezhető. Az egyenáramú gép armatúra körének egyenlete:
indukált feszültség sorba kapcsolásával modellezhető. Az egyenáramú gép armatúra körének egyenlete:
| (4.128) |

nyomatékegyenlet:
| (4.129) |
a mozgásegyenlet:
| (4.130) |
ahol,  a motor armatúra feszültsége,
a motor armatúra feszültsége,  a motor armatúra árama,
a motor armatúra árama,  az armatúra kör ellenállása,
az armatúra kör ellenállása,  az armatúra kör induktivitása,
az armatúra kör induktivitása,  : a motor fordulatszáma,
: a motor fordulatszáma,  a motor indukált feszültsége,
a motor indukált feszültsége,  a motor villamos nyomatéka,
a motor villamos nyomatéka,  a motor terhelő nyomatéka,
a motor terhelő nyomatéka,  a motor fluxusa,
a motor fluxusa,  a forgórész inerciája és
a forgórész inerciája és  : a motor gyorsító nyomatéka.
: a motor gyorsító nyomatéka.
A differenciál egyenleteteket átírjuk a Laplace operátoros tartományba:
| (4.131) |


A (4.131) egyenletek alapján felrajzolhatjuk a motor hatásvázlatát (ld. 4-33. ábra).
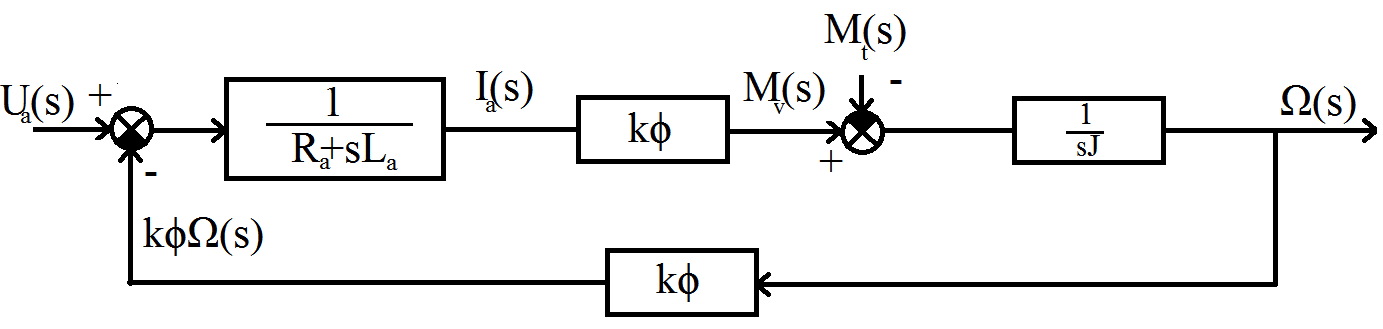
A 4-33. ábraán egy visszacsatolt kört látunk, ezért átviteli függvény felírásakor a 4.2.5 pont alapján először fel kell írnunk a teljes felnyitott kör átviteli függvényét.
| (4.132) |
A negatív visszacsatolás miatt tetszőlegesen választott bemenet és kimenet esetén az átviteli függvény nevezője és ezzel együtt az átviteli függvény pólusai mindig azonosak lesznek. A nevező így a következő alakot ölti
| (4.133) |
Ez azt plauzibilis állítást fejezik ki, hogy egy rendszer időállandói nem függnek a nézőponttól (a ki- és bemenet megválasztásától). Mivel a legtöbb motor esetén teljesül a következő egyenlőtlenség (Megjegyezzük, hogy léteznek olyan kis inerciájú szervomotorok, ahol ez nem teljesül)
| (4.134) |

A  villamos és a
villamos és a  mechanikai időállandó definíciója
mechanikai időállandó definíciója
| (4.135) |
Leegyszerűsítve  a motoron belül a mágneses tér felépítéséhez (más megközelítésben az áram kialakulásához),
a motoron belül a mágneses tér felépítéséhez (más megközelítésben az áram kialakulásához),  a motor forgórészének felpörgetéséhez szükséges időhöz köthető. Természetesen ez a két folyamat egy visszacsatolt körben szoros kölcsönhatásban zajlik le, ezért ez a leegyszerűsítés csak értelmezhető, ha (4.134) teljesül. Jelölje
a motor forgórészének felpörgetéséhez szükséges időhöz köthető. Természetesen ez a két folyamat egy visszacsatolt körben szoros kölcsönhatásban zajlik le, ezért ez a leegyszerűsítés csak értelmezhető, ha (4.134) teljesül. Jelölje  és
és  a motor két tényleges időállandóját. Ha (4.134) telesül, akkor
a motor két tényleges időállandóját. Ha (4.134) telesül, akkor
| (4.136) |

Ha (4.134) nem telesül, akkor is használjuk a (4.135) definíciót, ebben az esetben akár az is előfordulhat, hogy
| (4.137) |

Ez fizikailag nem jelenti azt, hogy a motoron belül a mágneses tér felépítéséhez több idő kellene, mint a motor forgórészének felpörgetéséhez. Ilyen esetekben  és
és  a motor két jól definiált paramétere, amelyek fizikai tartalma nehezen értelmezhető.
a motor két jól definiált paramétere, amelyek fizikai tartalma nehezen értelmezhető.
Elsőként írjuk fel az átviteli függvényt az  bemenet és
bemenet és  kimenet között. Ekkor az előrevezető ág átviteli függvénye csak abban különbözik felnyitott kör átviteli függvényétől, hogy az előbbiben a visszacsatoló ágban található
kimenet között. Ekkor az előrevezető ág átviteli függvénye csak abban különbözik felnyitott kör átviteli függvényétől, hogy az előbbiben a visszacsatoló ágban található  tag nem szerepel
tag nem szerepel
| (4.138) |
(4.138) átrendezése után jobban látszik az erősítés és kiolvashatók az időállandók is.
| (4.139) |


Látható, hogy  és
és  akkor lehetne a motor két időállandója, ha a nevezőben
akkor lehetne a motor két időállandója, ha a nevezőben  együtthatója
együtthatója  lenne. Ha (4.134) telesül, akkor igaz a következő is
lenne. Ha (4.134) telesül, akkor igaz a következő is
| (4.140) |

Vagyis élhetünk (4.136) közelítéssel.
Kapcsoljunk  ugrás feszültséget az armatúra körre és legyen
ugrás feszültséget az armatúra körre és legyen  . Az átviteli függvény segítségével
. Az átviteli függvény segítségével  könnyen felírható a részlet törtekre bontáshoz célszerű alakban
könnyen felírható a részlet törtekre bontáshoz célszerű alakban
| (4.141) |

Látható, hogy (4.141) kifejezésnek három pólusa van. A kifejtési tétel alapján
| (4.142) |
Átrendezve
| (4.143) |
(4.143) kifejezésből az is kiolvasható, ha (4.134) teljesül, akkor élve a (4.136) közelítéssel a fordulatszám időfüggvénye jól közelíthető úgy, hogy csak a domináns pólus hatását vesszük figyelembe.
| (4.144) |
Az  egységugrás feszültségjel hatására a kialakuló fordulatszám állandósult értéke.
egységugrás feszültségjel hatására a kialakuló fordulatszám állandósult értéke.
| (4.145) |

(4.145) az ún. üresjárási fordulatszámot adja meg.
Írjuk fel az átviteli függvényt az  bemenet és
bemenet és  kimenet között, ekkor az előrevezető ágban figyelembe kell venni
kimenet között, ekkor az előrevezető ágban figyelembe kell venni  negatív előjelét
negatív előjelét
| (4.146) |
(4.146) nevezője megegyzik (4.138) nevezőjével. (4.146) is átírható olyan formára, ahol az időállandók jobban láthatók
| (4.147) |
Az  ugrás alakú terhelésrádobás hatására a kialakuló fordulatszám Laplace operátoros alakja
ugrás alakú terhelésrádobás hatására a kialakuló fordulatszám Laplace operátoros alakja
| (4.148) |

Az inverz Laplace-transzformációt elvégezve
| (4.149) |
Az állandósult érték létezik, ezért a végérték tétel alkalmazható.
| (4.150) |

Ha a két hatást a szuperpozíció elvének megfelelően összegezzük, akkor megkapjuk a jól ismert statikus fordulatszám nyomaték összefüggést
| (4.151) |

(4.146) alapján könnyen megkapjuk az  áram és
áram és  fordulatszám között felírható átviteli függvényt. Az előrevezető ág egy negatív előjellel és egy
fordulatszám között felírható átviteli függvényt. Az előrevezető ág egy negatív előjellel és egy  szorzóvel különbözik.
szorzóvel különbözik.
| (4.152) |
A motor terhelése növeli a motor aramatúra áramát. Ennek dinamikai összefüggéseit leíró átviteli függvény esetén az előrevezető ágban két -1-es szorzó szerepel. A  nyomaték negatív előjele mellett figyelembe kell venni a negatív visszacsatolás negatív előjelét, így végül terhelőnyomaték és annak hatására kialakuló áram előjele megegyezik. A következő átviteli függvény írható fel
nyomaték negatív előjele mellett figyelembe kell venni a negatív visszacsatolás negatív előjelét, így végül terhelőnyomaték és annak hatására kialakuló áram előjele megegyezik. A következő átviteli függvény írható fel
| (4.153) |
4-16 feladat Egyenáramú motor és terhelő nyomaték rugalmas tengelyen keresztül (Házi feladat megoldását nem közöljük)
A 2-16-től 2-19-ig terjedő feladatokban leírt esetre rajzolja fel a rendszer hatásvázlatát és írja fel a megfelelő átviteli függvényeket.
4.4. Lineáris rendszerek stabilitás vizsgálata
Ebben a fejezetben vizsgálatainkat kizárólag lineáris, koncentrált paraméterű, folytonos rendszereken végezzük, melyek általános matematikai modellje (2.107) alakú:
| (4.154) |

ahol  a rendszert érő hatást írja le,
a rendszert érő hatást írja le,  pedig a rendszer válasza. A 2.13 alfejezet definíciója alapján látható, hogy a stabilitás nem függ az
pedig a rendszer válasza. A 2.13 alfejezet definíciója alapján látható, hogy a stabilitás nem függ az  gerjesztéstől, ezért elegendő lesz az egyenlet homogén részét vizsgálni.
gerjesztéstől, ezért elegendő lesz az egyenlet homogén részét vizsgálni.
Más gondolatmenettel is ugyanerre a következtetésre juthatunk: az  kitérítő hatás rövid idejű (2.13 alfejezet, aszimptotikus stabilitás), tehát
kitérítő hatás rövid idejű (2.13 alfejezet, aszimptotikus stabilitás), tehát  -nek gyorsan nullához kell tartania. Viszont a differenciálegyenlet megoldásánál – ha a próbafüggvény módszert alkalmazzuk (lásd melléklet) – a homogén általános megoldást kiegészítő partikuláris megoldást az
-nek gyorsan nullához kell tartania. Viszont a differenciálegyenlet megoldásánál – ha a próbafüggvény módszert alkalmazzuk (lásd melléklet) – a homogén általános megoldást kiegészítő partikuláris megoldást az  -hez hasonló alakban keressük. Ennek megfelelően ez is nullához tart, így a teljes megoldásban ez a rész az idő előre haladtával eltűnik. A stabilitás meglétének megállapításához elegendő csak a homogén általános megoldást vizsgálni.
-hez hasonló alakban keressük. Ennek megfelelően ez is nullához tart, így a teljes megoldásban ez a rész az idő előre haladtával eltűnik. A stabilitás meglétének megállapításához elegendő csak a homogén általános megoldást vizsgálni.
Legyen a rendszer nullpontja az egyensúlyi állapot, itt tehát az  kimenet értéke zérus. Ez azt jelenti, hogy stabil rendszer esetén a differenciálegyenlet homogén részének megoldása nullához tart. Az állandó együtthatós, homogén lineáris differenciálegyenletek megoldását
kimenet értéke zérus. Ez azt jelenti, hogy stabil rendszer esetén a differenciálegyenlet homogén részének megoldása nullához tart. Az állandó együtthatós, homogén lineáris differenciálegyenletek megoldását  alakban keressük. Behelyettesítve a differenciálegyenletbe és
alakban keressük. Behelyettesítve a differenciálegyenletbe és  -vel egyszerűsítve a rendszer karakterisztikus egyenletét kapjuk (A karakterisztikus polinomot megtaláljuk az átviteli függvények nevezőjében is):
-vel egyszerűsítve a rendszer karakterisztikus egyenletét kapjuk (A karakterisztikus polinomot megtaláljuk az átviteli függvények nevezőjében is):
| (4.155) |

Megjegyezzük, hogy a rendszer karakterisztikus polinomja alakra megegyezik az átviteli függvény nevezőjében található polinommal, ha  helyére
helyére  -et írunk.
-et írunk.
Ezen egyenlet gyökei szolgáltatják a homogén egyenlet partikuláris megoldásait. A polinom gyökei négyfélék lehetnek, ennek megfelelően a homogén partikuláris megoldások is eltérőek:
gyök típusa (száma) | partikuláris megoldás |
egyszeres valós (K) |
|
többszörös (m) valós (L) |
|
egyszeres konjugált komplex (M) |
|
többszörös (m) konjugált komplex (N) |
|




A homogén általános megoldás ezen partikuláris megoldások lineáris kombinációja lesz:
| (4.156) |

Mint már láttuk, a rendszer akkor lesz stabil, ha:
| (4.157) |

Ez a határérték csak akkor lesz biztosan zérus, ha az összeg minden tagja nullához tart. Ennek megfelelően a négy esetet külön-külön vizsgáljuk:
egyszeres valós | egy exponenciális függvény végtelenhez tart, ha a kitevője pozitív, de nullához, ha negatív. Ebből következik, hogy minden -nak negatívnak kell lennie |
többszörös valós | az előzőekből következik, hogy csak negatív gyökök jöhetnek szóba. Kérdés, hogy
|
egyszeres konjugált komplex | a szorzat trigonometrikus része korlátos, az exponenciális rész viszont nullához tart, ha α<0, azaz Re()<0 |
többszörös konjugált komplex | az előzőekből már következik. hogy tmeαt–nek kell nullához tartani, ez viszont αRe()<0 esetén fennáll |




Összefoglalva elmondhatjuk, hogy stabil a rendszer, ha karakterisztikus polinomjának gyökei negatívak vagy negatív valós részűek.
Napjainkban egy n-edfokú polinom gyökeinek meghatározása általában nem okoz gondot, köszönhetően a számítástechnika fejlődésének. Régebben több olyan eljárást is kifejlesztettek, amelyek segítségével a gyökök meghatározása nélkül is el lehetett dönteni egy rendszerről, hogy stabil-e. A következő fejezetben az egyik legelterjedtebb olyen módszert ismertetjük, amelyet napjainkban is használunk a tervezéshez. Az adott kritériumot paraméteresen írjuk fel, és azt vizsgáljuk, hogy az adott szabályozóköri paraméter mely értékei mellett stabilis a rendszer.
Térjünk vissza a stabilitás definíciójához és vizsgáljuk meg milyen gerjesztést alkalmazhatunk! A definíció szerint a rendszert kitérítjük, majd magára hagyjuk. Ilyen hatást például a δ(t) egységimpulzussal érhetünk el. Az erre adott válasz a w(t) súlyfüggvény, így tehát stabil rendszer súlyfüggvényének nullához kell tartania. Mivel a gyakorlatban az egységimpulzus csak pontatlan közelítéssel állítható elő, ezért helyette a következő módszer alkalmazható:
állítsuk elő az átmeneti függvényt, mivel az ehhez szükséges egységugrás ( ) jel előállítása általában pontosabban megtehető,
) jel előállítása általában pontosabban megtehető,
mérjük meg a rendszer válaszát, ez lesz a közelítő átmeneti függvény,
amennyiben az átmeneti függvény állandósult értéket vesz fel, a rendszer stabil. Ennek oka az, hogy a súlyfüggvény az átmeneti függvény deriváltja, és az állandósult részen a függvény jó közelítéssel állandó, aminek a deriváltja zérus. Így tehát ebben az esetben a súlyfüggvény zérushoz fog tartani, és mint láttuk ez a stabilitás feltétele.
Jól szemlélteti ezt a 4-34. ábra, amelyen a súlyfüggvénynek csak azt a részét rajzoltuk meg, ahol az átmeneti függvény már közel állandó.
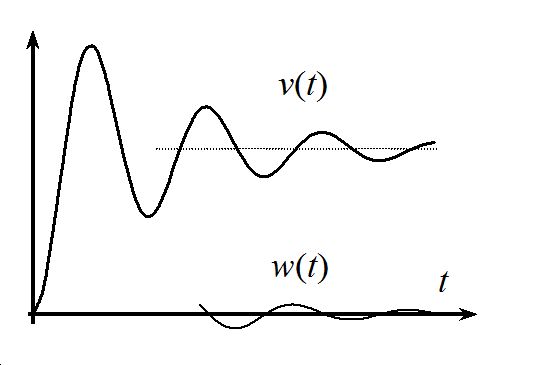
4.4.1. Routh-Hurwitz stabilitási kritérium
Ezen kritériumot két matematikus (Routh és Hurwitz) dolgozta ki. Tételük a (2.107) alakú differenciálegyenlettel leírható rendszerekre vonatkozik. Lineáris rendszerek akkor stabilisak, ha a karakterisztikus polinomjának csak negatív- vagy negatív valós részű gyökük van. Az ilyen feltételt kielégítő polinomokat Hurwitz polinomoknak nevezzük. Feladatunk ezek szerint az, hogy egy karakterisztikus polinomról a gyökök kiszámítása nélkül megállapítsuk, hogy Hurwitz polinom-e.
A kritérium két részből áll:
a polinom minden együtthatója vagy negatív, vagy pozitív. Másképpen megfogalmazva: az együtthatók azonos előjelűek és nem lehet közöttük zérus értékű
az együtthatókból képzett Hurwitz determináns és annak a főátlóra támaszkodó minden aldeterminánsa pozitív.
A Hurwitz determináns:
| (4.158) |
A determinánsból kiolvasható, hogy egy n-ed fokú polinomhoz n × n-es determináns tartozik.
4.4.2. Kidolgozott feladatok stabilitásvizsgálatra nem visszacsatolt rendszerek esetén
4-17. feladat
Adott a rendszer differenciálegyenletével:  , ahol A>0. Határozzuk meg, hogy milyen A paraméterek esetén lesz stabil a rendszer.
, ahol A>0. Határozzuk meg, hogy milyen A paraméterek esetén lesz stabil a rendszer.
A rendszer karakterisztikus egyenlete, és annak megoldása:
| (4.159) |

Mivel A>0, így <0, tehát a rendszer minden pozitív A-ra stabil.
Az olyan rendszereket, amelyek tetszőleges paraméterértékek esetén stabilak, strukturálisan stabil rendszereknek nevezzük.
4-18. feladat
Adott a rendszer differenciálegyenletével:  , ahol T>0 és D>0. Határozzuk meg, hogy milyen T és D paraméterek esetén lesz stabil a rendszer.
, ahol T>0 és D>0. Határozzuk meg, hogy milyen T és D paraméterek esetén lesz stabil a rendszer.
A rendszer karakterisztikus egyenlete:

mivel T is és D is pozitív, 2TD is pozitív, tehát minden együttható pozitív,
n=2, tehát an=a2=T2, a1=2TD, a0=1, tehát a Hurwitz determináns, és aldeterminánsai:
Mivel minden aldetermináns pozitív minden pozitív paraméterre, így ez is strukturálisan stabil rendszer.
Ugyanerre az eredményre jutunk, ha a karakterisztikus egyenlet gyökeit vizsgáljuk:

Ha a diszkrimináns negatív (azaz D<1), a gyökök valós része  , ami nyilvánvalóan negatív, hiszen D is és T is pozitív. Abban az esetben, ha
, ami nyilvánvalóan negatív, hiszen D is és T is pozitív. Abban az esetben, ha  , akkor
, akkor  . Ebből következően
. Ebből következően  , így a pozitív T miatt a gyökök negatívak.
, így a pozitív T miatt a gyökök negatívak.
4-19. feladat
Adott a rendszer differenciálegyenletével:  Vizsgáljuk meg vajon stabil-e.
Vizsgáljuk meg vajon stabil-e.
A rendszer nem stabil, mert a második derivált együtthatója zérus.
4-20. feladat
Adott a rendszer differenciálegyenletével:  Vizsgáljuk meg vajon stabil-e.
Vizsgáljuk meg vajon stabil-e.
A rendszer karakterisztikus egyenlete:


minden együttható pozitív
a Hurwitz determináns és aldeterminánsai:

A harmadik aldetermináns meghatározására nincs is szükség, hiszen a második negatív, tehát a rendszer nem lehet stabil.
4-21. feladat
Adott a rendszer differenciálegyenletével:  Vizsgáljuk meg vajon stabil-e.
Vizsgáljuk meg vajon stabil-e.
A rendszer karakterisztikus egyenlete:

minden együttható pozitív
a Hurwitz determináns és aldeterminánsai:

Mivel minden feltétel teljesül, a rendszer stabil.
4-22. feladat
Adott a rendszer a  átviteli függvényével. Vizsgáljuk meg vajon stabil-e.
átviteli függvényével. Vizsgáljuk meg vajon stabil-e.
A rendszer karakterisztikus polinomja az átviteli függvény nevezőjében található:


Mivel ez megegyezik az előző feladat karakterisztikus egyenletével, a rendszer stabil.
4-23. feladat
Adott a rendszer a  átviteli függvényével. Vizsgáljuk meg vajon stabil-e.
átviteli függvényével. Vizsgáljuk meg vajon stabil-e.
A rendszer karakterisztikus polinomja az átviteli függvény nevezőjében található:


ha T>0, akkor minden együttható pozitív
a Hurwitz determináns és aldeterminánsai:
Mivel az együtthatók vizsgálata alapján T>0 kell legyen, az aldeterminánsok alapján pedig T>2 szükséges, a mindkét feltételt kielégítő megoldás: T>2.
4-24. feladat
A rendszer hatásvázlata az alábbi ábrán látható. Az átviteli függvények:  és
és  . Határozzuk meg, hogy milyen T értékek esetén stabil a rendszer.
. Határozzuk meg, hogy milyen T értékek esetén stabil a rendszer.

Először meg kell határoznunk az eredő átviteli függvényt:

Ebből a karakterisztikus egyenlet:

az együtthatók akkor pozitívak, ha rendre T>-2, T>-0.5 és T>0. Ebből következően T>0 esetén lesz minden együttható pozitív,
a Hurwitz determináns és aldeterminánsai:
A minden feltételt kielégítő megoldás tehát: T>0.
4.5. Frekvencia átviteli függvény megjelenítése
A frekvencia átviteli függvénynek fontos fizikai tartalma van. Vissza kell utalnunk a 3-12. ábrara. A frekvenciatartománybeli vizsgálat alapja, hogy a jelek felbonthatók különböző frekvenciájú komponensekre, a komponensek hatása külön számítható, majd a hatások összegezhetőek. A frekvencia átviteli függvény azt mondja meg, hogy a rendszer miként reagál a különböző frekvenciájú szinuszos gerjesztésekre, pontosabban, ha a bemenőjel egy adott frekvenciájú szinuszos jel, akkor a bemenőjelhez képest miként változik meg a kimenőjel amplitúdója és fázisa. Így minden frekvenciához két értéket rendelünk
a kimenő- és bemenőjel amplitúdójának arányát
a kimenőjel fáziseltolódását a bemenőjelhez képest.
Ez a meghatározás egyben útmutató a frekvencia átviteli függvény mérésére is. Mivel minden frekvenciához két értéket rendelünk, egy amplitúdó és egy fázisszög értéket, így kézenfekvő, hogy a frekvencia függvényt komplex számként ábrázoljuk. Így összefoglalva a frekvencia átviteli függvény egy olyan komplex függvény, amely a nem negatív körfrekvenciákhoz egy olyan komplex számot rendel hozzá, amelynek az abszolút értéke a kimenőjel állandósult állapotbeli amplitúdójának és bemenőjel amplitúdójának aránya, a szöge megegyezik a kimenőjel állandósult állapotbeli fáziseltolódásával a bemenőjelhez képest (az adott körfrekvencián).
A fenti definíció értelmezéseként, tegyük fel, hogy egy rendszer bemenetére  szinuszos jelet kapcsolunk, akkor a kimenőjel állandósult állapotban
szinuszos jelet kapcsolunk, akkor a kimenőjel állandósult állapotban  (ld. 4-36. ábra)
(ld. 4-36. ábra)

A 4-36. ábra jelöléseivel:
| (4.160) |
| (4.161) |

A fenti definícióból adódik, hogy miként mérhetjük meg a frekvencia átviteli függvényt. A bemenetre szinuszos gerjesztést kapcsolunk, megvárjuk a tranziensek lezajlását, és kvázi stacioner állapotban mérjük a kimenőjelet. Ezt a mérést több frekvencián elvégezzük.
4-25 feladat
Egy MATLAB program segítségével mutassa be a frekvencia átviteli függvény értelmezését.
Megoldás
A 4-37. ábra egy absztrakt elrendezést mutat. Szinuszos mechanikai gerjesztés előállítása és mechanikai lengések mérése, regisztrálása nehézkesebb, de több módon megvalósítható. A 2-8 és 2-10 feladatban vázolt probléma esetén még nehézkesebb lenne a szinuszos gerjesztést előállítani, de egy áramkör esetén ténylegesen használhatunk elektronikus jelgenerátort és oszcilloszkópot, így a 4-37. ábran látható elrendezés könnyen megvalósítható a gyakorlatban. Nem szabad megfeledkezni arról, hogy a 4-37. ábra látható elrendezés esetén a mérés megkezdése előtt el kell jutnunk az állandósult állapothoz.
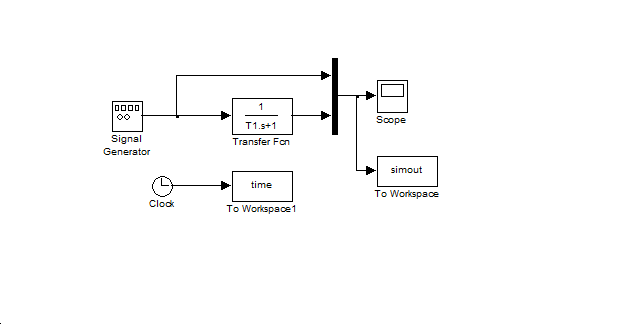
A következő szimulációkban a paramétereket úgy állítjuk be, hogy a gerjesztésnek pont 5 periódusa legyen látható, és minden periódusban legalább 100 mintát vegyünk. A mérésben szereplő egy-energiatárolós rendszer időállandója legyen 1. A gerjesztés körfrekvenciáját az időállandóhoz viszonyítva számítjuk ki. A számításhoz használt MATLAB fájl
% Adatok
T1=1;
omega=0.01*1/T1; % 1/T1 együtthatója: 0.01, 0.1, 1, 10 és 100
% Frekvencia átviteli függvény kiszámítása
abs(1/(1+omega*i))
angle(1/(1+omega*i))
% Szimulációs paraméterek, a maximális lépésközt
% és a szimuláció hosszát állítják be.
Tmax_step=2*pi/omega/100;
Tmax=5.0/omega*2*pi;
% Eredmények kirajzolása
plot(time,simout)
set(gca, 'fontsize', 19);
ylabel('y(t) u(t) [relatív egység]');
xlabel('Idő [s]');
title('Frekvencia átmeneti függvény mérése');
axis([0 Tmax -1 1]);
gridElőször egy nagyon kicsi körfrekvenciájú, más megközelítésben nagyon nagy periódus idejű gerjesztést kapcsolunk a rendszerre. A lassú változás miatt a kimenet szinte pontosan követi a gerjesztést. A 4-38. ábran a kimenő- és bemenőjelet nem lehet megkülönböztetni. A frekvencia átviteli függvény gyakorlatilag 1-nek vehető, a fáziseltolás alig fél fok.
| (4.162) |

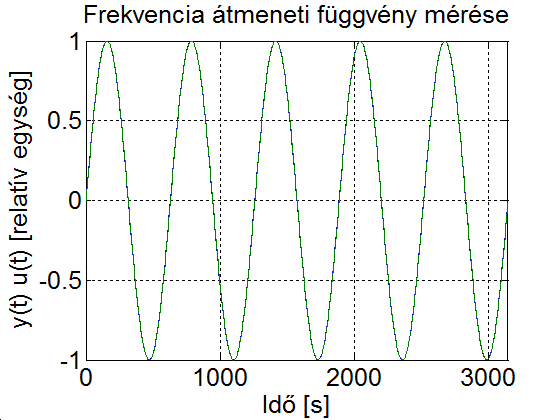
Ha egy nagyságrenddel növeljük a gerjesztés frekvenciáját, akkor a ki- és bemeneti jel között egy nagyon pici különbség van, a fázistolás -5.7̊.
| (4.163) |

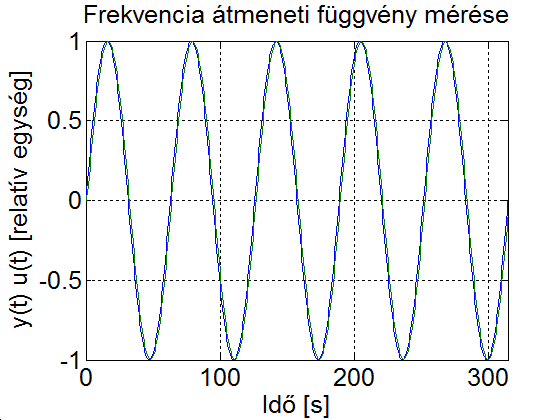
Ha ismét egy nagyságrenddel növeljük a gerjesztés frekvenciáját, akkor a ki- és bemeneti jel között már látható különbség van. A 4-40. ábra jól látható, hogy a kimenőjel amplitúdója kb. 0.7 (a pontos érték  ). Az állandósult állapot kb. az első periódus után kialakul. A
). Az állandósult állapot kb. az első periódus után kialakul. A  nagyságú fáziseltolás is kiolvasható.
nagyságú fáziseltolás is kiolvasható.
| (4.164) |


Ha ismét egy nagyságrenddel növeljük a gerjesztés frekvenciáját, akkor a kimenőjel amplitúdója alig egy tizede a bemenőjel amplitúdójának és a fázistolás -84.2894̊. Úgy látszik, hogy az állandósult állapot kb. az ötödik periódus után kialakul. Pontos számítás alapján az ötödik periódus után a tranziens összetevő a kezdeti értékének kb. 5%-ra csökken.
| (4.165) |

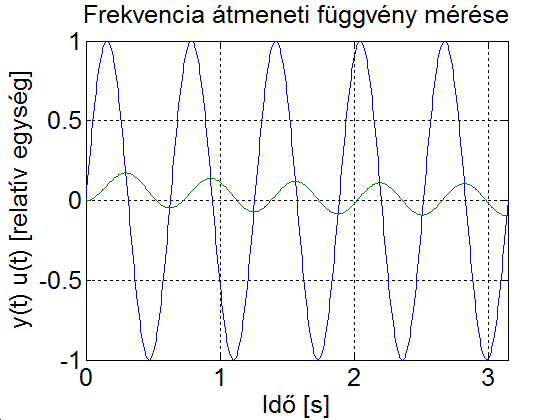
Ha ismét egy nagyságrenddel növeljük gerjesztés frekvenciáját, akkor öt periódus alatt közelítőleg sem érjük el az állandósult állapotot, de az jól látható, hogy a kimenőjel amplitúdója alig egy százaléka a bemenőjel amplitúdójának és a fázistolás közel  .
.
| (4.166) |

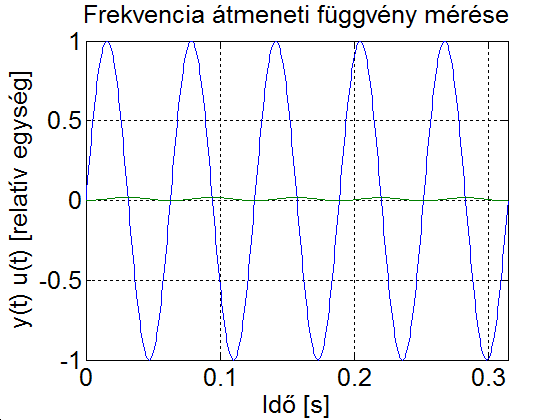
4.5.1. Az átviteli és a frekvencia átviteli függvény kapcsolata
A frekvencia átviteli függvényt gyakran az átviteli függvényből számítjuk  helyettesítéssel, így a frekvencia átviteli függvény
helyettesítéssel, így a frekvencia átviteli függvény  -ra nézve racionális törtfüggvény, ezért a szokásos jelölése:
-ra nézve racionális törtfüggvény, ezért a szokásos jelölése: 

Itt fontos megjegyezni, hogy az átviteli függvény a súlyfüggvény Laplace-transzformáltja. Valóságos (veszteséges) rendszerek esetén a súlyfüggvény lecsengő, ezért általában van Fourier transzformáltja, és ezért fizikai megfontolások alapján állítjuk azt, hogy teljesül a matematikai feltétele annak, amikor az  helyettesítéssel élhetünk
helyettesítéssel élhetünk
Kétféle grafikus ábrázolási mód terjedt el a helygörbe vagy Nyquist-diagram és a Bode-diagramok (amplitúdó és fázis).
4.5.2. Nyquist-diagram
Legyen a frekvenciaátviteli függvény a következő alakú:
| (4.167) |
Az =0 paraméterrel a frekvenciafüggvényt ábrázoljuk a komplex számsíkon.
Nézzük meg, hogyan fog viselkedni a függvény a két szélső helyzetben, tehát =0 és = esetben.
A, =0
Tegyük fel, hogy  értéke nem zérus. Ekkor
értéke nem zérus. Ekkor  -t kapunk, tehát a diagram a valós tengelytől indul.
-t kapunk, tehát a diagram a valós tengelytől indul.
Ha  , akkor a vizsgálatot 0 esetre végezzük el. Ekkor a számlálóban is és a nevezőben is a legkisebb kitevőjű tag lesz a domináns, tehát
, akkor a vizsgálatot 0 esetre végezzük el. Ekkor a számlálóban is és a nevezőben is a legkisebb kitevőjű tag lesz a domináns, tehát
| (4.168) |

Ez azt jelenti, hogy a diagram a „lap aljától” indul.
B, =
Ekkor a legnagyobb fokszámú tag lesz a domináns, tehát elegendő a
| (4.169) |
kifejezést vizsgálni.
Tegyük fel, hogy  , tehát a nevező fokszáma nagyobb, mint a számlálóé. Mivel ebben az esetben a kitevő negatív, a kifejezés értéke zérushoz tart. Látszik azonban, hogy
, tehát a nevező fokszáma nagyobb, mint a számlálóé. Mivel ebben az esetben a kitevő negatív, a kifejezés értéke zérushoz tart. Látszik azonban, hogy  páros vagy páratlan voltának megfelelően a görbe vagy a valós, vagy a képzetes tengely mellett simul be az origóba:
páros vagy páratlan voltának megfelelően a görbe vagy a valós, vagy a képzetes tengely mellett simul be az origóba:
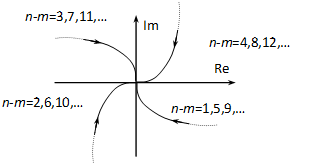
Amennyiben  , a diagram a valós tengely
, a diagram a valós tengely  pontjában végződik.
pontjában végződik.
Ha  , akkor u.n. differenciáló hatás érvényesül, és a kifejezés értéke a végtelenhez tart. Meg kell azonban jegyezni, hogy fizikai rendszerek esetében ez az eset nem valósítható meg!
, akkor u.n. differenciáló hatás érvényesül, és a kifejezés értéke a végtelenhez tart. Meg kell azonban jegyezni, hogy fizikai rendszerek esetében ez az eset nem valósítható meg!
4-26. feladat
Legyen  . Rajzoljuk meg a Nyquist diagramját.
. Rajzoljuk meg a Nyquist diagramját.
Esetünkben  . Mivel
. Mivel  , ezért a diagram a
, ezért a diagram a  pontból indul. A végpont meghatározásához szükséges a
pontból indul. A végpont meghatározásához szükséges a  határérték vizsgálata. Most
határérték vizsgálata. Most  és
és  , valamint
, valamint  és
és  így
így
| (4.170) |

ami láthatóan zérushoz tartó negatív képzetes érték. Most már csak a közbenső értékeket kell meghatározni. Ehhez állítsuk elő a valós- és a képzetes részt:

Nem negatív esetén a valós rész mindig pozitív, a képzetes pedig mindig negatív lesz, tehát a görbe egy síknegyedben marad:
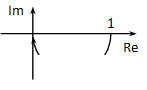
A teljes ábrázoláshoz készítsünk értéktáblázatot:
| 0 | 0.5 | 1 | 2 | ∞ |
Im | 0 | -0.4 | -0.5 | -0.4 | 0 |
Re | 1 | 0.8 | 0.5 | 0.2 | 0 |
A későbbiekben igazolni fogjuk, hogy a diagram egy félkör, amelynek középpontja a valós tengelyen van 0.5-nél és a sugara is 0.5.
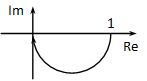
4.5.3. Bode-diagram
Tulajdonképpen két diagramról van szó, hiszen az amplitúdót és a fázisszöget külön diagramban ábrázoljuk pozitív függvényében.
A 4-47. ábraán láthatjuk a kapcsolatot a Nyquist diagrammal. A vektorok hossza jelenti az amplitúdót, a pozitív valós tengellyel bezárt előjeles szögük pedig a fázisszöget.
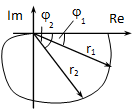
Az amplitúdó diagramon a függőleges tengelyen decibel ( ), a vízszintesen pedig lg skálát használunk. Ennek megfelelően a szokásos skála értékek 0.1; 1; 10 stb. Egy-egy ilyen a szokásos skálaértékekkel határolt szakaszt (ahol a frekvencia 10-szeresére nő) nevezünk 1 dekádnak. Mivel a diagramokat általában csak a tendenciákat pontosan mutató, aszimptotákkal közelítő diagramokkal szoktuk megrajzolni, a meredekség értékét is jelezzük, pl. -20 dB/dek, ami azt jelenti, hogy egy dekádon a csökkenés 20 decibelnyi.
), a vízszintesen pedig lg skálát használunk. Ennek megfelelően a szokásos skála értékek 0.1; 1; 10 stb. Egy-egy ilyen a szokásos skálaértékekkel határolt szakaszt (ahol a frekvencia 10-szeresére nő) nevezünk 1 dekádnak. Mivel a diagramokat általában csak a tendenciákat pontosan mutató, aszimptotákkal közelítő diagramokkal szoktuk megrajzolni, a meredekség értékét is jelezzük, pl. -20 dB/dek, ami azt jelenti, hogy egy dekádon a csökkenés 20 decibelnyi.
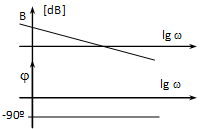
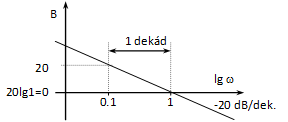
A függőleges tengely helyzete esetleges, hiszen a vízszintes tengelynek nincs zérus pontja, mivel a logaritmikus léptékezés miatt nem lehet zérus. Jelentősége van azonban annak, hogy az amplitúdó diagram hol metszi a vízszintes tengelyt. Ezt a  egyenletből határozhatjuk meg. Ebből az következik (mint ahogy az a 4-48. ábrán is látszik), hogy a tengelymetszésnél az amplitúdó viszony éppen egységnyi.
egyenletből határozhatjuk meg. Ebből az következik (mint ahogy az a 4-48. ábrán is látszik), hogy a tengelymetszésnél az amplitúdó viszony éppen egységnyi.
A fázis diagramnál csak a vízszintes tengely esetében térünk el a megszokottól, itt is lg-t alkalmazunk.
Amplitúdó Bode diagramok esetében az ábrázolás során általában aszimptotikus közelítést alkalmazunk, ami nagymértékben megkönnyíti a dolgunkat. Gyakran előfordul, hogy az aszimptota egyik pontját ismerjük, és szükségünk lenne egy másik pont koordinátáira is. Mivel egyenesekről van szó, ez nem okozhat problémát, nehézséget csak az okozhat, hogy logaritmikus léptéket használunk. A következőkben meghatározunk egy minden, a gyakorlatban előforduló meredekségű aszimptóta esetén jól használható összefüggést.
Legyen az ismert pont (1,A1) az ismeretlen pedig (2,A2), valamint a meredekség n∙20 dekád, ahol n=0,±1,±2,…. Vegyük fel az (,A) pontot úgy, hogy 1=10 legyen, azaz a távolság éppen 1 dekád. Ekkor:

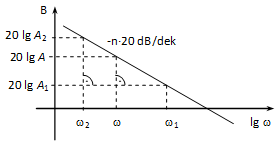
A 4-49. ábrán két hasonló derékszögű háromszög látható. A befogók arányaira felírhatjuk a következő egyenletet, amit rendezve a keresett összefüggést kapjuk:

| (4.171) |

Mint már tudjuk, sorba kapcsolt rendszerelemek eredő átviteli függvényét a tagok átviteli függvényének szorzataként állíthatjuk elő. Ebből következik, hogy sorba kapcsolt tagok eredő Bode diagramját a tagok diagramjainak összegzéseként kaphatjuk. Ezen állítás az amplitúdó diagram esetén nyilvánvaló, hiszen a decibel tulajdonképpen logaritmikus skálát jelent, és a szorzás logaritmusa az elemek összeadása. Nem szabad azonban elfelejtenünk, hogy itt tulajdonképpen két komplex érték szorzatáról van szó. Mint tudjuk ekkor az abszolút értékek összeszorzódnak, a szögek pedig összeadódnak (gondoljunk csak a komplex számok trigonometrikus alakjára!).
Ha nem tudjuk az eredő diagramot egyszerű, sorba kapcsolt tagok diagramjainak felhasználásával megrajzolni, akkor határozzuk meg a valós- és képzetes részeket. Ezek ismeretében az amplitúdó  és a fázisszög
és a fázisszög  meghatározható. Az így kapott függvények vizsgálata segítségével rajzolhatunk közelítő Bode diagramokat.
meghatározható. Az így kapott függvények vizsgálata segítségével rajzolhatunk közelítő Bode diagramokat.
A Nyquist diagramból a minőségi tulajdonságok, a Bode diagramból a mennyiségi összefüggések olvashatók ki.
4.6. Alaptagok átviteli függvénye, Nyquist és Bode diagramja
Az alaptagok tulajdonképpen a frekvenciaátviteli függvény szorzattá bontott alakjában előforduló tagok. Legtöbbjüknek fizikai jelentése is van.
4.6.1. Arányos tag (P)
Leíró differenciálegyenlet:  .
.
Átmeneti függvény: 
Súlyfüggvény: 
Átviteli függvény: W(s)=P
Frekvenciafüggvény: W(j)=P
Nyquist diagram: a frekvenciafüggvény -tól független konstans, így a komplex síkon egy a valós tengelyen lévő pontként ábrázoljuk.
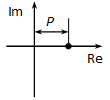
Bode diagram: az amplitúdó diagram egy 20 lg(P) ordinátájú vízszintes egyenes, a fázis pedig zérus.
Amennyiben 0<P<1 az egyenes a vízszintes tengely alatt halad, hiszen ekkor a logaritmus értéke negatív.
Abban az esetben, ha P negatív az amplitúdó diagramon az abszolút értékét ábrázoljuk, fázisszöge pedig -180°.
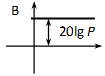
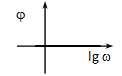
Példa: kétkarú emelő.
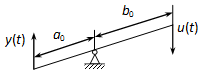
4.6.2. Differenciáló tag (D)
Leíró differenciálegyenlet:  .
.
Átmeneti függvény: 
Súlyfüggvény: függvényként nem értelmezhető és olyan egyszerű közelítése sincs, mint a Dirac impulzusnak
Átviteli függvény: 
Frekvenciafüggvény: 
Nyquist diagram: az origóból induló, a pozitív imaginárius tengelyen végigfutó félegyenes.
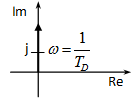
Bode diagram:
Amplitúdó:  , ami lg -re egy 20 egység meredekségű egyenes egyenlete. A vízszintes tengelyt
, ami lg -re egy 20 egység meredekségű egyenes egyenlete. A vízszintes tengelyt  -nél metszi, hiszen a függvényérték itt 1, de a függőleges tengely decibelben (azaz logaritmikus léptékben) van skálázva.
-nél metszi, hiszen a függvényérték itt 1, de a függőleges tengely decibelben (azaz logaritmikus léptékben) van skálázva.
Fázis: a Nyquist diagramról leolvasható, hogy a valós tengellyel +90°-ot zár be, tehát a fázistolás: 90°.
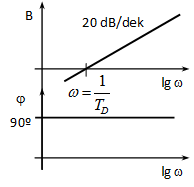
Példa: fizikailag nem megvalósítható.
4.6.3. Integráló tag (I)
Leíró differenciálegyenlet:
| (4.172) |
Átmeneti függvény: 
Súlyfüggvény:. 
Átviteli függvény:
Frekvenciafüggvény:
Nyquist diagram: az origóba tartó, a negatív imaginárius tengelyen végigfutó félegyenes, hiszen a frekvenciafüggvény algebrai alakja: 
Bode diagram:
Amplitúdó:  , ami lg -ra egy 20 egység meredekségű egyenes egyenlete. A vízszintes tengelyt
, ami lg -ra egy 20 egység meredekségű egyenes egyenlete. A vízszintes tengelyt  -nél metszi, hiszen a függvényérték itt 1, és a függőleges tengely decibelben (azaz logaritmikus léptékben) van skálázva.
-nél metszi, hiszen a függvényérték itt 1, és a függőleges tengely decibelben (azaz logaritmikus léptékben) van skálázva.
Fázis: a Nyquist diagramról leolvasható, hogy a valós tengellyel -90°-ot zár be, tehát a fázistolás: -90º.
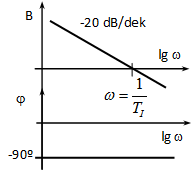
Példa:
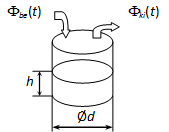
A tartályban lévő folyadék térfogatának megváltozása t időegység alatt:
| (4.173) |
Ezek után a rendszert leíró differenciálegyenlet:
| (4.174) |

4.6.4. Arányos differenciáló tag (PD)
Leíró differenciálegyenlet:
| (4.175) |

Átmeneti függvény: 
Súlyfüggvény: függvényként nem értelmezhető és olyan egyszerű közelítése sincs, mint a Dirac impulzusnak
Átviteli függvény: W(s)=P(1+sTD)
Frekvenciafüggvény: W(j)= P(1+jTD)
Nyquist diagram: a valós tengelyről induló, a pozitív imaginárius tengellyel párhuzamosan végigfutó félegyenes.
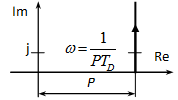
Bode diagram: Nem a valódi, hanem az aszimptotákkal közelített diagramokat határozunk meg.
Amplitúdó:
| (4.176) |

amely
0 esetén  , tehát a vízszintes tengellyel párhuzamos egyenes,
, tehát a vízszintes tengellyel párhuzamos egyenes,
esetén  , lg -ra egy 20 dB/dekád meredekségű egyenes egyenlete.
, lg -ra egy 20 dB/dekád meredekségű egyenes egyenlete.
A két egyenes metszéspontja:
| (4.177) |
Fázis:  , ami 0 esetén 0, esetén 90º, és =1/TD esetén arctg 1 =45º.
, ami 0 esetén 0, esetén 90º, és =1/TD esetén arctg 1 =45º.
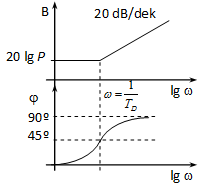
Más gondolatmenettel is ugyanerre az eredményre juthatunk! A frekvenciafüggvény  alakjából látszik, hogy egy arányos (P) és egy erősítés nélküli arányos, differenciáló (PD) tag sorba kapcsolása, tehát az eredő Bode diagram a két diagram összegeként előállítható.
alakjából látszik, hogy egy arányos (P) és egy erősítés nélküli arányos, differenciáló (PD) tag sorba kapcsolása, tehát az eredő Bode diagram a két diagram összegeként előállítható.
Legyen W1(j)=P és W2(j)=1+jTD. W1(j)-val az arányos tagnál már foglalkoztunk. W2(j) kis esetén (0) W2(j)=1-hez , azaz egy egységnyi erősítésű P taghoz tart, így a diagramjai az elején úgy néznek ki, mint az arányos tagé. Amplitúdó: lg1=0 egyenes a valós tengelyen, fázis: =0 (ld. 4-60. ábra). Nagy esetén () W2(j)=jTD, tehát egy differenciáló taghoz tart (ld. 4-60. ábra).
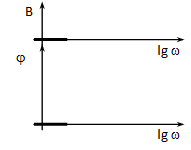
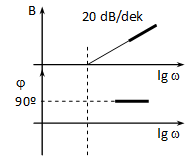
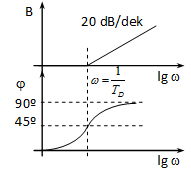
Ha ehhez még hozzávesszük W1(j)-et, akkor az amplitúdó diagram 20lgP értékkel feljebb tolódik, a fázis pedig változatlan marad, hiszen az arányos tag fázisa (amit hozzá kell adni) 0.
Nézzük meg, hogy mekkora az eltérés a pontos és a közelítő diagramok között! A legnagyobb eltérés nyilvánvalóan a két aszimptota metszéspontjánál lesz. Az ehhez a ponthoz tartozó frekvencia értéket, sarok-körfrekvenciának nevezzük és mint láttuk értéke  . Az egyszerűség kedvéért tegyük fel, hogy P=1, hiszen az előzőekben megmutattuk, hogy P csak egy függőleges eltolást okoz, a közelítés mértékét nem befolyásolja, és ekkor a sarokpont a vízszintes tengelyen van. Ezután a (4.212)-be való behelyettesítéssel kapjuk az eltérést:
. Az egyszerűség kedvéért tegyük fel, hogy P=1, hiszen az előzőekben megmutattuk, hogy P csak egy függőleges eltolást okoz, a közelítés mértékét nem befolyásolja, és ekkor a sarokpont a vízszintes tengelyen van. Ezután a (4.212)-be való behelyettesítéssel kapjuk az eltérést:
| (4.178) |

Érdemes meghatározni még a fázisgörbe érintőjének meredekségét az inflexiós pontban. A fázisgörbe egyenlete ismert, a meredekséget a differenciálhányados ismeretében tudjuk felírni. Gondot csak az okoz, hogy a vízszintes tengelyen logaritmikus léptéket alkalmaztunk. A problémát helyettesítéssel oldjuk meg:
| (4.179) |
Az inflexiós pont az  helyen van, ezért a meredekség:
helyen van, ezért a meredekség:
| (4.180) |

Ez az érték az érintő vízszintes tengellyel bezárt szögének a tangense, így a szög  . A gyakorlatban elterjedt a 45º/dekádos közelítés.
. A gyakorlatban elterjedt a 45º/dekádos közelítés.
Példa: fizikailag nem valósítható meg
4.6.5. Arányos tag egy tárolóval (PT1)
Leíró differenciálegyenlet:  .
.
Átmeneti függvény: 
Súlyfüggvény: 
Átviteli függvény: 
Frekvenciafüggvény: 
Nyquist diagram: egy  középpontú
középpontú  sugarú félkör. Nézzük a továbbiakban ezen állítás igazolását. A koordinátageometriában tanultak szerint
sugarú félkör. Nézzük a továbbiakban ezen állítás igazolását. A koordinátageometriában tanultak szerint  a kör egyenlete, ahol x=Re W, y=Im W.
a kör egyenlete, ahol x=Re W, y=Im W.
Hozzuk a frekvenciafüggvényt algebrai alakra:
| (4.181) |

majd helyettesítsük be a kör egyenletének bal oldalába a kiszámított valós és képzetes részt:
| (4.182) |
Ezzel állításunkat részben igazoltuk. Hátra van még annak bizonyítása, hogy a diagram csak félkör. Mivel  esetén a képzetes rész mindig negatív, így a diagramot csak a kör alsó fele alkotja (4-61. ábra). Keressük meg még a kör
esetén a képzetes rész mindig negatív, így a diagramot csak a kör alsó fele alkotja (4-61. ábra). Keressük meg még a kör  -hez tartozó pontját (az előzőekben már láttuk, hogy ennek a Bode diagramoknál kitüntetett szerepe van!).
-hez tartozó pontját (az előzőekben már láttuk, hogy ennek a Bode diagramoknál kitüntetett szerepe van!).
| (4.183) |

Ez a pont tehát a körív felezőpontja.
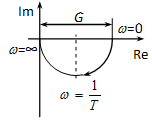
Bode diagram: A közelítő diagram meghatározásához használjuk a PD tagnál ismertetett gondolatmenetet:
ha 0  , tehát arányos viselkedésű,
, tehát arányos viselkedésű,
ha  , tehát integráló jellegű.
, tehát integráló jellegű.
A két aszimptota metszéspontja:
sarokfrekvencia.
A legnagyobb eltérés (G=1 esetén) a már ismertetett módon határozható meg (értéke itt is 3 dB).
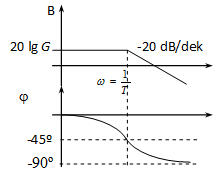
4.6.6. Arányos tag két tárolóval (PT2)
Leíró differenciálegyenlet:  .
.
Átmeneti függvény: az átmeneti függvény a tag paramétereitől függően különböző alakú.
A differenciálegyenlet egy partikuláris megoldása G. A homogén egyenletet a próbafüggvények módszerével oldjuk meg (lásd melléklet), ekkor:
| (4.184) |

egyenlet adódik. Az egyenlet megoldása:
| (4.185) |

A gyökök típusa D értékétől függ.
a, D>1, aperiodikus eset
Ekkor két valós gyök van, ennek megfelelően a megoldás:
| (4.186) |

Amennyiben a kezdeti feltételek ismertek, a c1, c2 konstansok meghatározhatók. Legyen most minden kezdeti feltétel zérus. Ekkor:
| (4.187) |
b, D=1, aperiodikus határhelyzet
Ekkor kettősgyök van, tehát:
| (4.188) |

Zérus kezdeti feltételek esetén:
| (4.189) |
c, 0<D<1, periodikus eset
A gyökök ebben az esetben konjugált komplex értékek. Az Euler formula alkalmazásával juthatunk a megoldás elterjedten használt alakjához:
| (4.190) |
Zérus kezdeti feltételek esetén:
| (4.191) |
Súlyfüggvény: itt is három különböző eset van. Mivel a súlyfüggvény az átmeneti függvény deriváltja, ezért mindhármat könnyen előállíthatjuk.
a, D>1, aperiodikus eset
| (4.192) |
b, D=1, aperiodikus határhelyzet esete
| (4.193) |
c, D<1, periodikus eset
| (4.194) |
Átviteli függvény: 
Frekvenciafüggvény: 
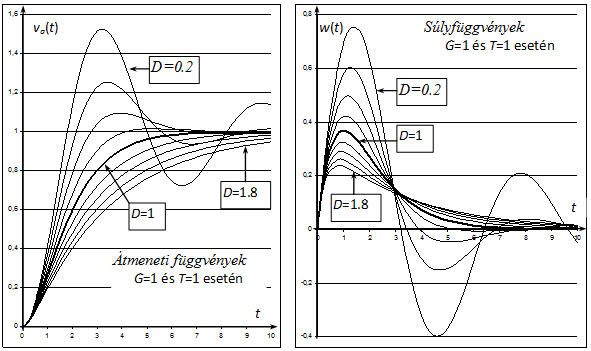
Nyquist diagram: az általános leírásnál megfogalmazottaknak megfelelően megállapítható, hogy a valós tengely G pontjából indul, és a valós tengely negatív része mellett fut be az origóba, mivel a nevező és a számláló fokszám különbsége kettő. Határozzuk meg a frekvenciaátviteli függvény valós és képzetes részét:
| (4.195) |

Ebből kiolvasható, hogy a képzetes rész pozitív paraméterek esetén mindig negatív, a valós rész viszont pozitív és negatív is lehet.  fázisszöge
fázisszöge  esetén 0,
esetén 0,  esetén -180°. Ennek megfelelően a diagram kezdete és vége megrajzolható (ld. 4-64. ábra).
esetén -180°. Ennek megfelelően a diagram kezdete és vége megrajzolható (ld. 4-64. ábra).
A teljes diagramot például értéktáblázat felhasználásával tudjuk elkészíteni (ld. 4-65. ábra):
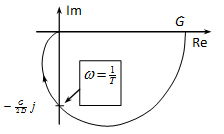
A görbe nevezetes pontja a képzetes tengellyel való metszéspontja. Ekkor a valós rész zérus, ebből viszont  következik. A képzetes rész értéke:
következik. A képzetes rész értéke:  .
.
Vajon előfordulhat-e olyan eset, amikor növekvő frekvenciához növekvő amplitúdó tartozik?
Ez csak akkor lehet, ha:
| (4.196) |

Mivel T22 tetszőlegesen kicsi lehet, ezért 2 > 4D2-nek kell igaznak lennie. Ebből azonban  következik. A 4-66. ábrán egy ilyen esethez tartozó Nyquist diagramot látunk.
következik. A 4-66. ábrán egy ilyen esethez tartozó Nyquist diagramot látunk.
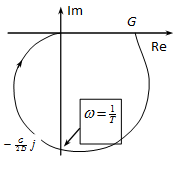
Bode diagram: három esetet kell megkülönböztetnünk, ugyanúgy, ahogy az átmeneti függvénynél tettük.
a,  , aperiodikus eset
, aperiodikus eset
| (4.197) |

Mint láthatjuk, most egy arányos és két egytárolós tag frekvenciaátviteli függvényének szorzatát kaptuk. A Bode diagramot a szokásos módon szerkeszthetjük meg (ld. ???
4-67. ábra):
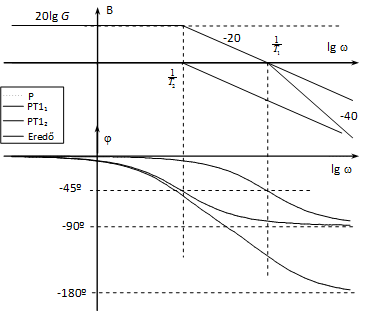
b,  , aperiodikus határhelyzet eset
, aperiodikus határhelyzet eset
Tulajdonképpen az előző speciális esete, ugyanis ekkor T1=T2=T, tehát a két töréspont egybeesik. (ld.???
4-68. ábra)
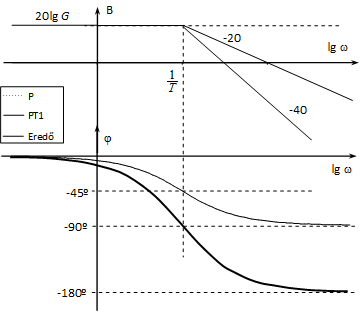
c,  , periodikus eset
, periodikus eset
Ebben az esetben a rendszert nem lehet felbontani két sorba kapcsolt egytárolós arányos tagra, mert a karakterisztikus polinomnak nincsenek valós gyökei. A közelítő diagram meghatározásához alkalmazzuk itt is a jól bevált módszert:
ha 0  , tehát arányos viselkedésű,
, tehát arányos viselkedésű,
ha  , tehát kétszeresen integráló jellegű.
, tehát kétszeresen integráló jellegű.
A két aszimptóta metszéspontja:
| (4.198) |
Vizsgáljuk meg, mekkora lesz a közelítés hibája. Természetesen ennek maximuma a töréspontnál lesz:
| (4.199) |
Mint látható, most a hiba nem állandó, hanem függ D –től.
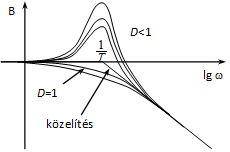
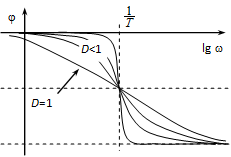
4-27 feladat
Határozzuk meg a 4-70. ábra látható második tartályban levő folyadék szintváltozását leíró egyenletet. Jelölések:  ,
,  , ahol
, ahol  a tartály,
a tartály,  pedig a kiömlési cső átmérője. A kezdeti folyadékszintek legyenek
pedig a kiömlési cső átmérője. A kezdeti folyadékszintek legyenek  és
és  .
.
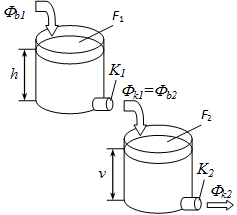
Megoldás:
A 2-10 feladatban már vizsgáltunk ehhez hasonló rendszert, igaz ott csak egy tartály volt, de az ott kapott részeredményeket itt is felhasználhatjuk:
| (4.200) |




ezekkel:
| (4.201) |
Az így kapott egyenletrendszer is leírja a rendszert, de most egy egyenletet szeretnénk vizsgálni. A második egyenletből fejezzük ki h-t, majd helyettesítsük be az elsőbe:
| (4.202) |
A kapott egyenlet egy kéttárolós tag differenciálegyenlete.
4-28 feladat
Írjuk fel az ábrán látható tömeg mozgását leíró egyenletet.
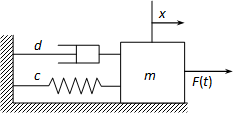
Az egyenlet a külső- és belső erők egyensúlya alapján írható fel:
Külső erő: 
Belső erők: rugóerő
rugóerő
 csillapító erő
csillapító erő
 tömeg erő.
tömeg erő.
Mint látható, most is a kéttárolós tag differenciálegyenletét kaptuk eredményül. Az előző feladatnál egyértelmű volt, hogy mi a két tároló. Itt a tömeg és a rugó lesz, hiszen mindkettő képes energia tárolásra (mozgási- illetve rugóenergia).
További műszaki jellegű példák:
az egytárolós tagnál ismertetett melegítési feladat tovább fejlesztve úgy, hogy a tömeget hőkapacitással és tömeggel rendelkező szigetelőanyag veszi körül, feltételezve, hogy a hőáram mindig csak a szigetelés felé terjed;
az elektrotechnikából ismert rezgőkörök.
Ezzel végére értünk az alaptagok ismertetésének. Szinte minden alaptagnak van egy  paramétere, amely betűvel az időt szokás jelölni. Megvizsgálva a – műszaki élet különböző területeiről származó – példákat azt tapasztaljuk, hogy minden esetben idő dimenziójú értéket jelöl a
paramétere, amely betűvel az időt szokás jelölni. Megvizsgálva a – műszaki élet különböző területeiről származó – példákat azt tapasztaljuk, hogy minden esetben idő dimenziójú értéket jelöl a  .
.
4.7. Holtidős tagok
A holtidős tagok bizonyos szempontból nem illeszkednek az eddig tárgyalt tagokhoz, mivel átviteli függvényük nem tört alakú. Az időtartományban tulajdonképpen egy időbeli eltolást jelentenek.
Tipikus formájuk a szállításból adódó időkésés. Legegyszerűbb formája talán a futószalag, vagy egy termikus rendszer esetén a hőt szállító közeg áramlási sebességéből adódó időkésés.
4.7.1. Arányos holtidős tag (PH)
Leíró differenciálegyenlet:  .
.
Átmeneti függvény: 
Súlyfüggvény: 
Átviteli függvény:
Frekvenciafüggvény: 
Nyquist diagram: a frekvenciaátviteli függvényt trigonometrikus alakja:

A trigonometria egyik legfontosabb azonossága alapján (sin2α+cos2α=1) a valós rész négyzetének és a képzetes rész négyzetének összege állandó, pontosan  . Ebből következik, hogy a diagram egy origó középpontú,
. Ebből következik, hogy a diagram egy origó középpontú,  sugarú kör:
sugarú kör:
Bode diagram: az előzőekből látszik, hogy a komplex vektorok hossza mindig  , tehát az amplitúdó diagram vízszintes egyenes, a fázis pedig lineárisan változik:
, tehát az amplitúdó diagram vízszintes egyenes, a fázis pedig lineárisan változik:

4.7.2. Holtidős integráló tag (HI)
Leíró differenciálegyenlet:  .
.
Átmeneti függvény: 
Súlyfüggvény: 
Átviteli függvény: (a Laplace transzformáció eltolási szabályát alkalmazva).
(a Laplace transzformáció eltolási szabályát alkalmazva).
Frekvenciafüggvény: 
Nyquist diagram: két, már ismert tag szorzatának diagramját kell ábrázolni. Komplex számok esetén szorzáskor a szögek összeadódnak. Mivel az integráló tag fázisa mindig -90º, így a – a holtidős tag miatt – az origó körül forgó vektorokat kapunk. A vektorok hosszát (az amplitúdót) a két tag abszolút értékének szorzataként kapjuk, itt viszont a holtidősé mindig egy lesz. Ennek megfelelően az integráló tag helygörbéjének hosszváltozásával megegyező, azaz végtelenről nullára csökkenő hosszúságú vektorok lesznek:
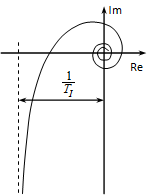
Bode diagram: mivel két, már ismert tag szorzatának diagramját kell meghatározni, egyszerűen csak össze kell adni a résztagok diagramját:
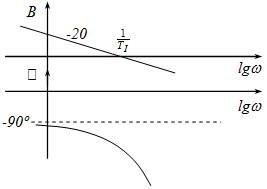
4.7.3. Holtidős tag egy tárolóval (PHT1)
Leíró differenciálegyenlet: 
Átmeneti függvény: 
Súlyfüggvény: 
Átviteli függvény: (a Laplace transzformáció eltolási szabályát alkalmazva)
(a Laplace transzformáció eltolási szabályát alkalmazva)
Frekvenciafüggvény: 
Nyquist diagram: a holtidős tag miatt az origó körül forgó, egyre csökkenő hosszúságú vektorok végpontjai alkotják. Az első vektor hossza A.
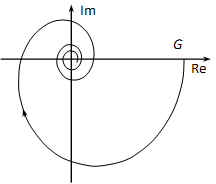
Bode diagram: két ismert tag soros eredőjét kell meghatározni:
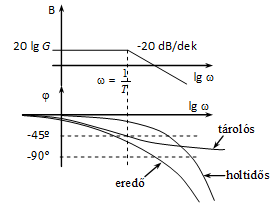
Példa: Az egytárolós tagnál közölt feladatot bővítsük ki úgy, hogy a b hőáram egy  hosszúságú csövön keresztül érkezyen. Ebben a csőben az áramlás sebessége legyen w. Ekkor a holtidő:
hosszúságú csövön keresztül érkezyen. Ebben a csőben az áramlás sebessége legyen w. Ekkor a holtidő:  . Ennek megfelelően:
. Ennek megfelelően:
4.8. Alaptagokból előállítható összetett tagok
4.8.1. Arányos, integráló tag (PI)
A tag kapcsolása:
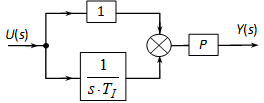
Leíró differenciálegyenlet:  .
.
Átmeneti függvény: 
Súlyfüggvény: 
Átviteli függvény: 
Frekvenciafüggvény: 
Nyquist diagram: a valós tengelyhez tartó, az imaginárius tengellyel párhuzamosan futó félegyenes.
Bode diagram: hozzuk a frekvenciafüggvényt  alakra. Felismerhetjük, hogy a kifejezés három már ismertetett tag (P, I, PD) szorzatából áll. Az eredőt a logaritmikus skála miatt három tag összegzéseként kapjuk a keresett Bode diagramon (ld.4-80. ábra):
alakra. Felismerhetjük, hogy a kifejezés három már ismertetett tag (P, I, PD) szorzatából áll. Az eredőt a logaritmikus skála miatt három tag összegzéseként kapjuk a keresett Bode diagramon (ld.4-80. ábra):
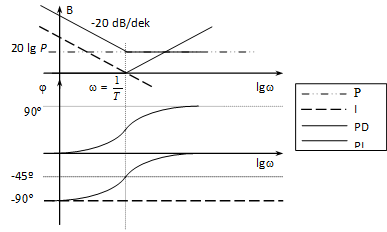
A PD tagnál leírt gondolatmenet itt is alkalmazható. Kis -nál integráló típusú, nagynál pedig arányos jellegű lesz a tag viselkedése.
4.8.2. Ideális arányos integráló differenciáló tag (PID)
A tag kapcsolása:
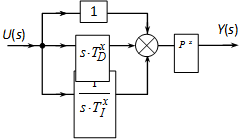
Leíró differenciálegyenlet:  .
.
Átmeneti függvény: 
Súlyfüggvény: függvényként nem értelmezhető és olyan egyszerű közelítése sincs, mint a Dirac impulzusnak
Átviteli függvény:  .
.
Frekvenciafüggvény:  .
.
Nyquist diagram: a valós rész minden esetben  , a képzetes rész mínusz végtelentől plusz végtelen felé tart:
, a képzetes rész mínusz végtelentől plusz végtelen felé tart:
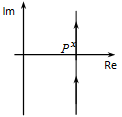
Bode diagram: állítsuk elő az átviteli függvényt tört alakban, majd írjuk fel az alaptagok szorzataként:

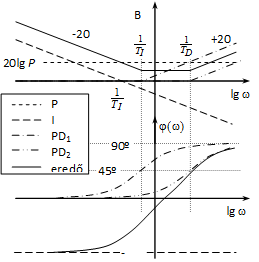
Az ideális PID tag fizikailag nem valósítható meg.
4.8.3. Arányos differenciáló tag egy tárolóval (valóságos PD)
A tag kapcsolása:
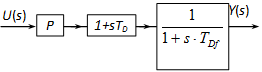
Leíró differenciálegyenlet:  .
.
Átmeneti függvény: 
Súlyfüggvény: nincs értelme
Átviteli függvény: 
Frekvenciafüggvény: 
Nyquist diagram: igazolható, hogy a diagram a valós tengelyről induló, és ott végződő félkör lesz. Határozzuk meg a paramétereit.
Az =0 helyen a függvény értéke P, →∞ esetén pedig  . Ebből adódik, hogy a kör középpontja a valós tengely
. Ebből adódik, hogy a kör középpontja a valós tengely  pontjában van, a sugár pedig
pontjában van, a sugár pedig  . Azt kell még eldönteni, hogy a félkör a pozitív, vagy a negatív képzetes félsíkon van-e. Ehhez állítsuk elő a frekvenciaátviteli függvény algebrai alakját:
. Azt kell még eldönteni, hogy a félkör a pozitív, vagy a negatív képzetes félsíkon van-e. Ehhez állítsuk elő a frekvenciaátviteli függvény algebrai alakját:

A képzetes részből kiolvasható, hogy TD> TDf esetén a pozitív félsíkon (ld. 4-85. ábra), ellenkező esetben pedig a negatív félsíkon (ld. 4-85. ábra) halad a félkör.
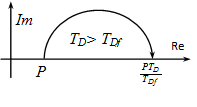
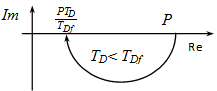
Bode diagram: a frekvenciaátviteli függvény felírható alaptagok soros eredőjeként, így nem okozhat gondot az ábrázolás.
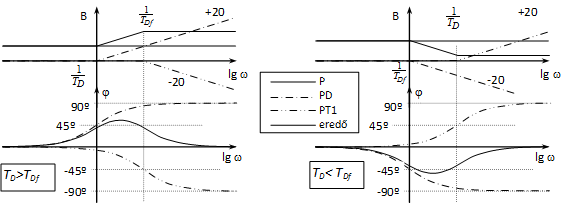
4.9. Kidolgozott feladatok Bode és Nyquist diagram megrajzolására
4-29. feladat
Legyen  . Rajzoljuk fel a Bode diagramját.
. Rajzoljuk fel a Bode diagramját.
A feladatot kétféle módszerrel is megoldjuk. Először egyben, majd két tag soros kapcsolásaként értelmezzük.


Ez egy y=20-20x jellegű egyenes, mely a vízszintes tengelyt =10-nél metszi. Nézzük a fázist:
.
Tehát +90º vagy -90º, ha azonban egy tetszőleges -t behelyettesítünk a frekvenciaátviteli függ-vénybe, majd megvizsgáljuk a kapott értéket, a kérdés könnyen eldönthető. Legyen =1, ekkor W=-j, amiből =-90º következik.
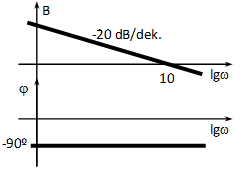
Értelmezzük most az átviteli függvényt két tag soros kapcsolásaként:
Határozzuk meg külön-külön a két tag Bode diagramját. Látható, hogy W1 esetén sem az amplitúdó, sem a fázis nem függ -tól, így mindkettő vízszintes egyenes lesz. A fázis azonosan zérus, hiszen képzetes része zérus. Mivel az amplitúdó mindig 10, ezért 20lg10=20. W2 fázisdiagramja itt is -90º lesz, hiszen () most is -∞. Az amplitúdó diagram kissé módosul:

ami szintén –20dB/dekádos meredekségű egyenes, viszont a vízszintes tengelyt =1-nél metszi. Most már csak összegezni kell a diagramokat. A fázissal semmi gondunk, hiszen az egyik azonosan zérus. Az amplitúdó diagram esetén W2 egyenese 20 decibellel feljebb tolódik, de mivel meredeksége éppen -20dB/dekád, ezért a tengely metszéspontja egy dekádnyival jobbra tolódik, azaz 1 helyett 10 lesz. Megfigyelhetjük, hogy ezzel a módszerrel is az előzővel megegyező eredményt kaptunk.
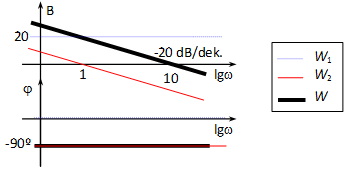
4-30. feladat
Határozzuk meg, milyen értéknél metszi a vízszintes tengelyt a következő diagram:
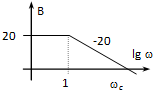
A megoldáshoz használjuk a (4.172) összefüggést. Az ábráról leolvasható, hogy: B1=20; 1=1; n=+1; B2=0. Ezek után:
Megjegyzések:
2-t nem véletlenül jelöltük c-vel. Azt a frekvenciát, amelynél az amplitúdó egységnyi, vágási körfrekvenciának hívjuk és a jele: c.
az eredményt mindenféle számítás nélkül is megkaphattuk volna, hiszen: az egyenes 20 decibelről 0 decibelre csökken az adott körfrekvencia értékek között, meredeksége -20 dB/dekád, azaz a frekvencia éppen a tízszeresére nő.
4-31. feladat
Határozzuk meg, milyen értéknél metszi a vízszintes tengelyt a következő diagram:
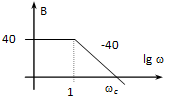
Az előző feladathoz képest annyi a változás, hogy B1=40 és n=+2. Ennek megfelelően A1=102=100, és

A megoldást most is megkaphattuk volna számítás nélkül, lásd az előző feladat második megjegyzését.
4-32. feladat
Határozzuk meg a következő Bode diagram alapján a számozott pontoknál a hiányzó amplitúdó értékeket:
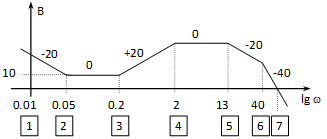
Az első dolgunk olyan pontot keresni, ahol minden értéket ismerünk. Ilyen kettő is van, a kettes és a hármas. Innen kiindulva, a megfelelő aránypárokat alkalmazva meghatározhatjuk a keresett értékeket:

4-33 feladat
Ábrázoljuk a  (PIT1 típusú) frekvenciaátvitelifüggvényt.
(PIT1 típusú) frekvenciaátvitelifüggvényt.
4.9.1. Nyquist diagram
Állítsuk elő a frekveciafüggvény algebrai alakját:

Készítsünk értéktáblázatot néhány -hoz:
| 0 | 0.1 | 0.3 | 0.5 | 0.7 | 1 | |
Re | -6 | -5.77 | -4.412 | -3 | -2.027 | -1.2 | 0 |
Im | - | -28.84 | -7.353 | -3 | -1.448 | -0.6 | 0 |
Ábrázolva:
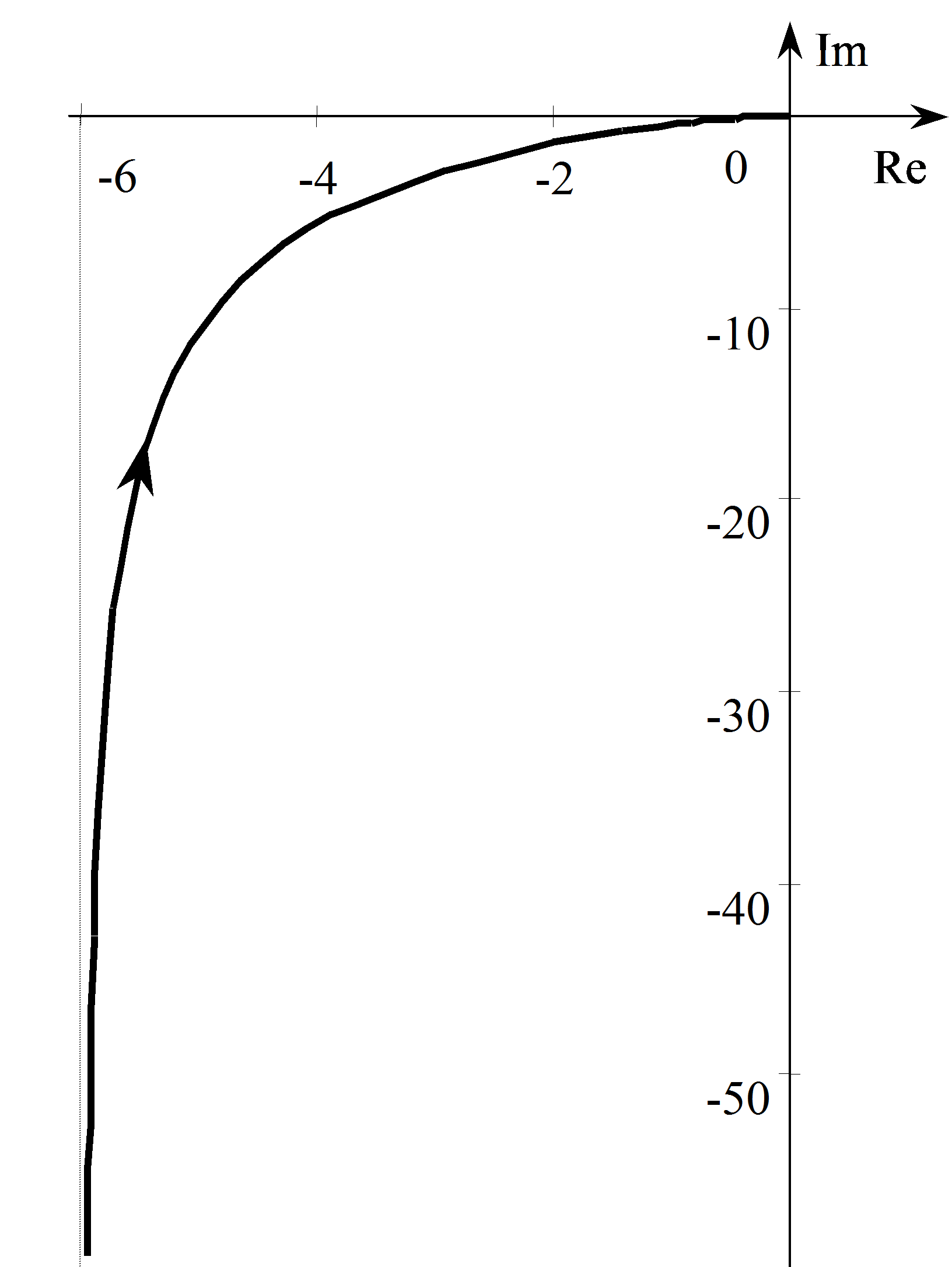
A másik (egyszerűbb esetekben alkalmazható) lehetőség kevesebb számítást, több gondolkodást igényel. Ekkor megpróbáljuk a függvény menetét kikövetkeztetni. Először meghatározzuk a függvény értékét 0 és esetén, majd megvizsgáljuk, hogy a görbe melyik síknegyedeken haladhat keresztül. Ezen számítások eredményeit tartalmazza a következő táblázat:
| 0 | 0< | |
Re | -6 | 0 | negatív |
Im | - | 0 | negatív |
Látható, hogy -6-nál aszimptota van, és a görbe végig egy síknegyedben marad (Holtidő mentes egytárolós rendszer esetén mindig egy síknegyedben marad!) Azt kell már csak eldönteni, hogy hogyan fut be az origóba. A 248. oldalon közölteknek megfelelően:
,
tehát tisztán (negatív) valós, ezért a valós tengely mellett halad.
4.9.1.1. Bode diagram
Ehhez célszerű a frekvenciafüggvényt a sorba kapcsolt alaptagoknak megfelelő szorzattá bontani:
We=W1W2W3, ahol W1=3,  ,
,  .
.
Az eredő Bode diagram ezen elemi tagok ábrázolásának összegzéseként adódik.
W1: P tag, amplitúdója 20lg39.5 [dB] magasságú egyenes, fázisa 0.
W2: PT1 tag, amplitúdója eleinte a vízszintes tengelyen fut (20lg1=0), az  -nél levő törésponttól kezdve -20dB/dekád meredekségű egyenes. A fázisdiagram inflexiós pontja ugyanott van, ahol az amplitúdó diagram töréspontja.
-nél levő törésponttól kezdve -20dB/dekád meredekségű egyenes. A fázisdiagram inflexiós pontja ugyanott van, ahol az amplitúdó diagram töréspontja.
W3: I tag, amplitúdója -20dB/dekád meredekségű egyenes, amely 1-nél metszi a vízszintes tengelyt. Fázisa -90 függetlenül a frekvenciánál.
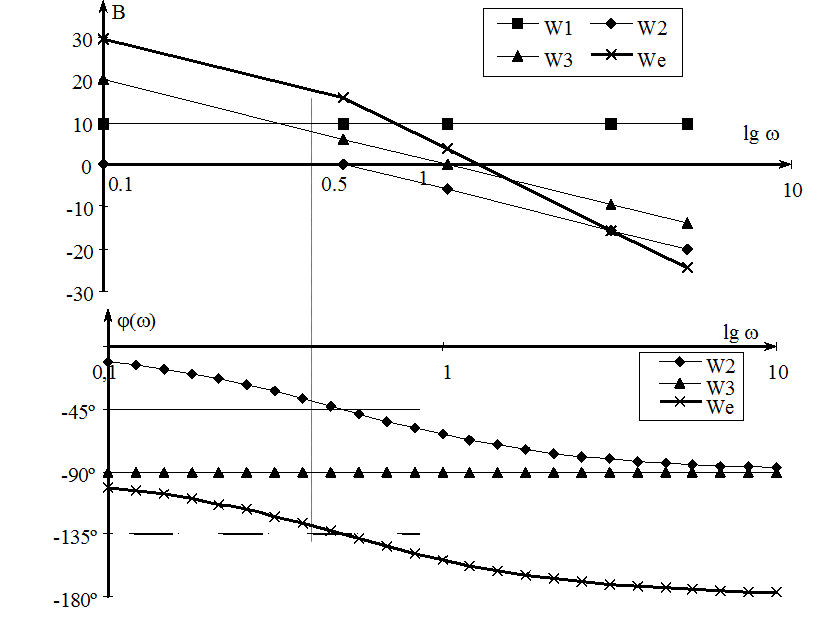
4-34 feladat
Ábrázoljuk az  (PT2 típusú) frekvenciaátviteli függvényt.
(PT2 típusú) frekvenciaátviteli függvényt.
4.9.1.2. Nyquist diagram
Állítsuk elő a frekveciaátviteli függvény algebrai alakját:
Készítsünk értéktáblázatot néhány esetén:
| 0 | 0.01 | 0.03 | 0.06 | 0.1 | 0.3 | 0.5 | 0.8 | 1 | 2 | 3 | 5 |
Re | 5 | 4.99 | 4.91 | 4.64 | 4.1 | 1.2 | 0 | -0.42 | -0.44 | -0.23 | -0.12 | -0.05 |
Im | 0 | -0.2 | -0.74 | -1.41 | -2.13 | -2.82 | -2 | -1.08 | -0.74 | -0.15 | -0.05 | -0.01 |
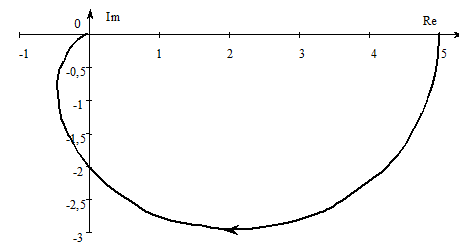
A 4-94. ábrából is látszik, hogy a görbe két síknegyeden halad keresztül, ami természetes, hiszen kéttárolós rendszerről van szó. Az origóba a negatív valós tengely mellett fut be.
Határozzuk meg, hol metszi a görbe az imaginárius tengelyt (természetesen ott, ahol Re(W(j))=0).

A táblázatból látható, hogy itt Im(W(j))=-2.
4.9.1.3. Bode diagram
Célszerű a frekvenciafüggvényt az alaptagoknak megfelelő szorzattá bontani. Esetünkben a nevezőt kell felírni gyöktényezős alakban:

Így a frekvenciafüggvény:
,
tehát egy P és két PT1 tag szorzataként írható fel, ahol a töréspontok helye 1 és 0.25.
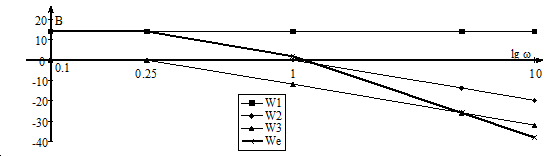
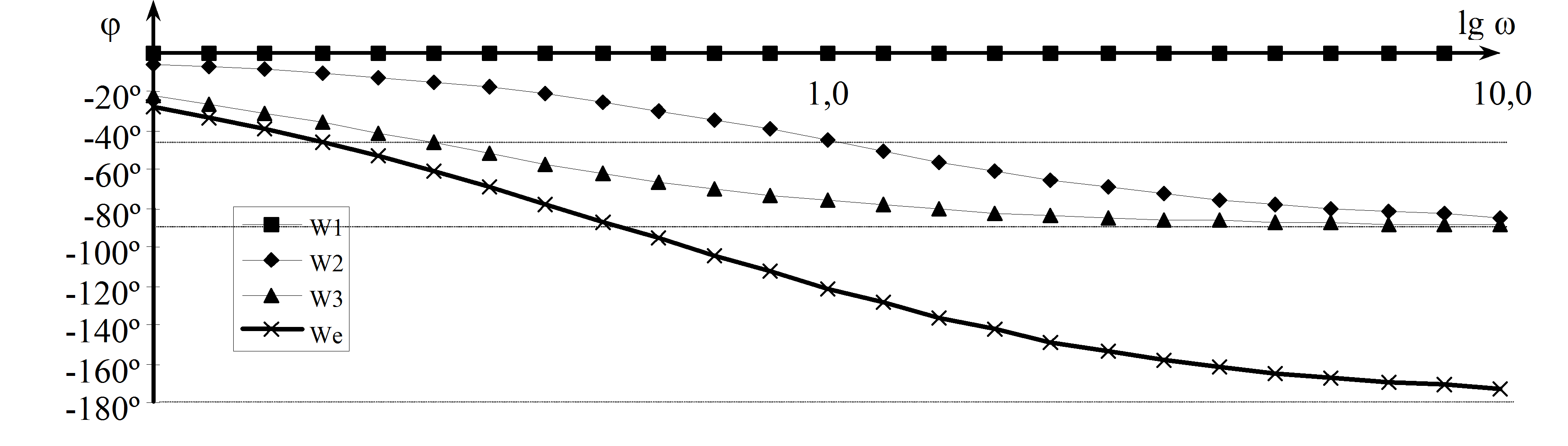
4-35. feladat
Tekintsünk most egy olyan rendszert, ahol az előző két példában szereplő tagok párhuzamosan vannak kapcsolva:
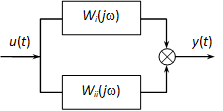
Az eredő frekvenciafüggvény:

4.9.1.4. Nyquist diagram
Állítsuk elő a frekveciafüggvény algebrai alakját (a részletszámításokat mellőzve):

Meglehetősen bonyolult. A továbbiakban két út közül választhatunk:
a, értéktáblázat és rajz (pl. valamilyen táblázatkezelő szoftverrel könnyen elvégeztethető)
b, az előző két példában kapott diagramokat vektoriálisan összegezzük (a pontos eredményhez meglehetősen sokat kell dolgozni).
a, megoldás:
Az algebrai alakból nehéz következtetéseket levonni a rendszer összetevőire nézve. Erre sokkal jobban használható a Bode diagram elkészítését segítő alak, ahol a frekvenciafüggvény számlálója és nevezője polinomok szorzataként van felírva. Az azonban most is látszik, hogy a rendszer integráló jellege megmaradt, hiszen az imaginárius rész nevezőjéből a rendezések után is ki lehetett emelni -t.
Az értéktáblázat:
| 0.051 | 0.06 | 0.1 | 0.15 | 0.3 | 0.35 | 0.4 | 0.5 | 0.65 | 0.8 | 1 | 5 |
Re | -1.2 | -1.27 | -1.67 | -2.23 | -3.21 | -3.26 | -3.22 | -3 | -2.54 | -2.11 | -1.64 | -0.11 |
Im | -59.49 | -50.7 | -30.98 | -21.05 | -10.17 | -8.39 | -6.99 | -5 | -3.19 | -2.14 | -1.34 | -0.02 |
A Nyquist diagram:
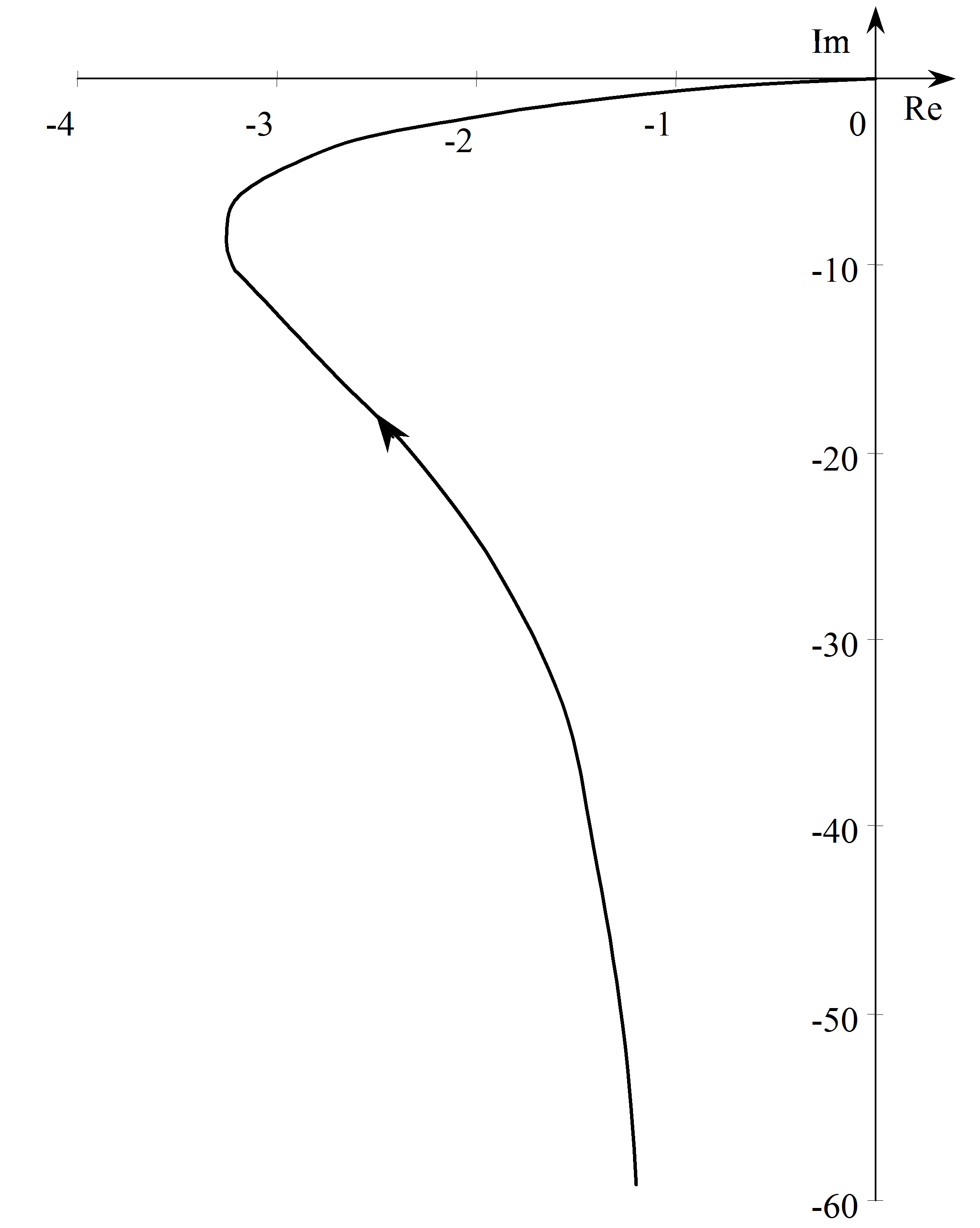
b, megoldás:
A 4-98. ábrán két különböző értékhez tartozó vektoriális összegzést láthatunk. A szaggatott vonal az =0.3 a folytonos pedig az =0.5 értékekhez tartozik. Természetesen ennyi nem elegendő a teljes diagram elkészítéséhez!
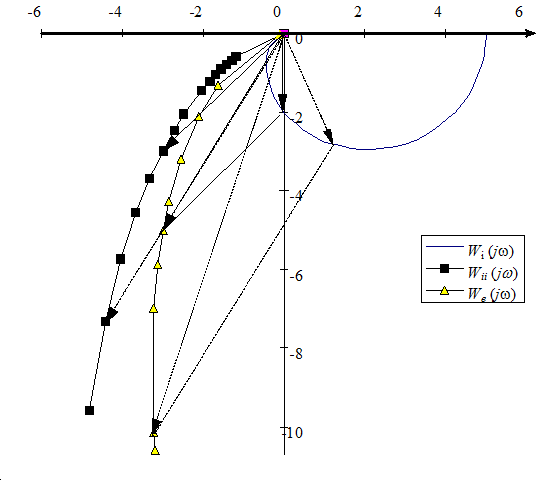
4.9.1.5. Bode diagram
A Bode diagram elkészítéséhez úgy kell átalakítani a frekvenciafüggvényt, hogy a számláló és a nevező is a lehető legalacsonyabb fokszámú polinomok szorzata legyen. Ehhez a következő alakból indulunk ki:

Rendezés után kapjuk a következő alakot:

Ebből leolvasható, hogy milyen alaptagokból tevődik össze a rendszer:

,
tehát egy P, egy I, három PT1 és két PD tagból.
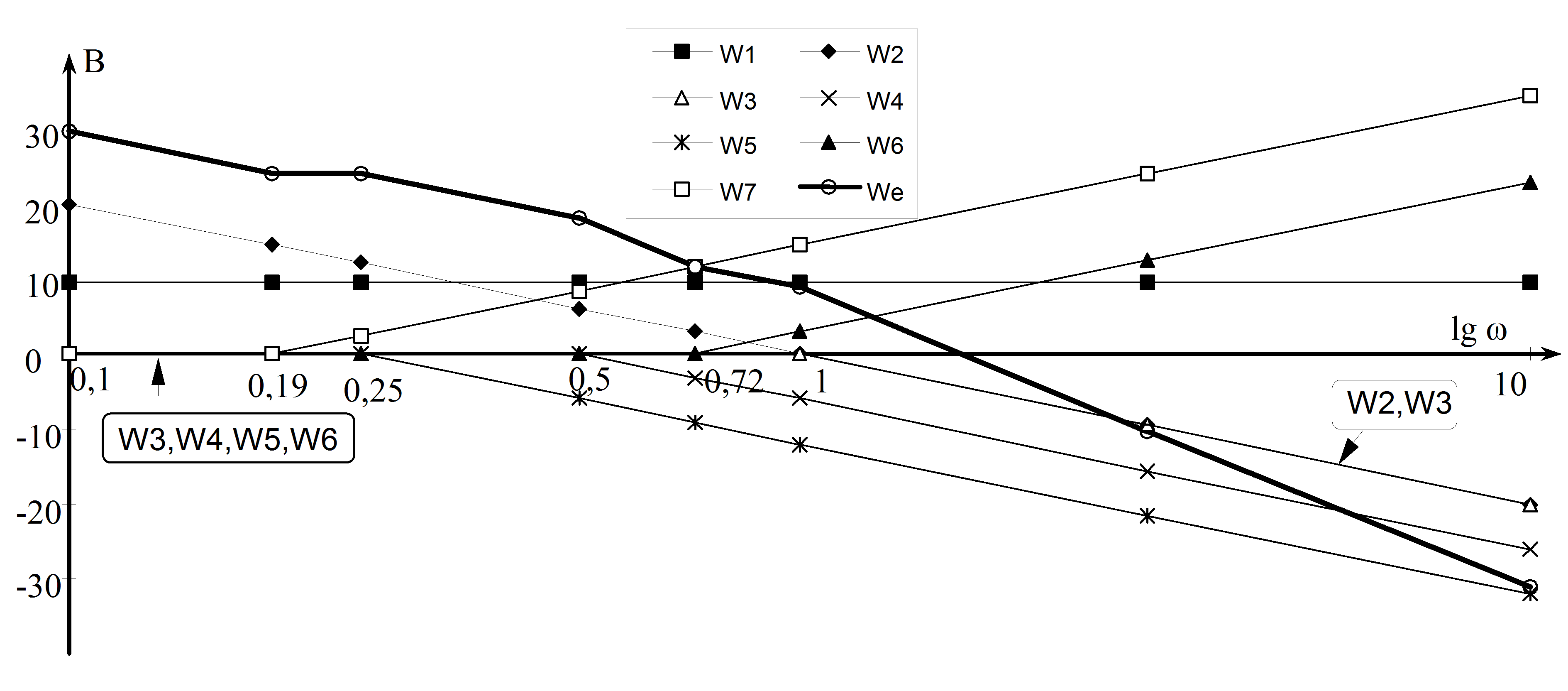
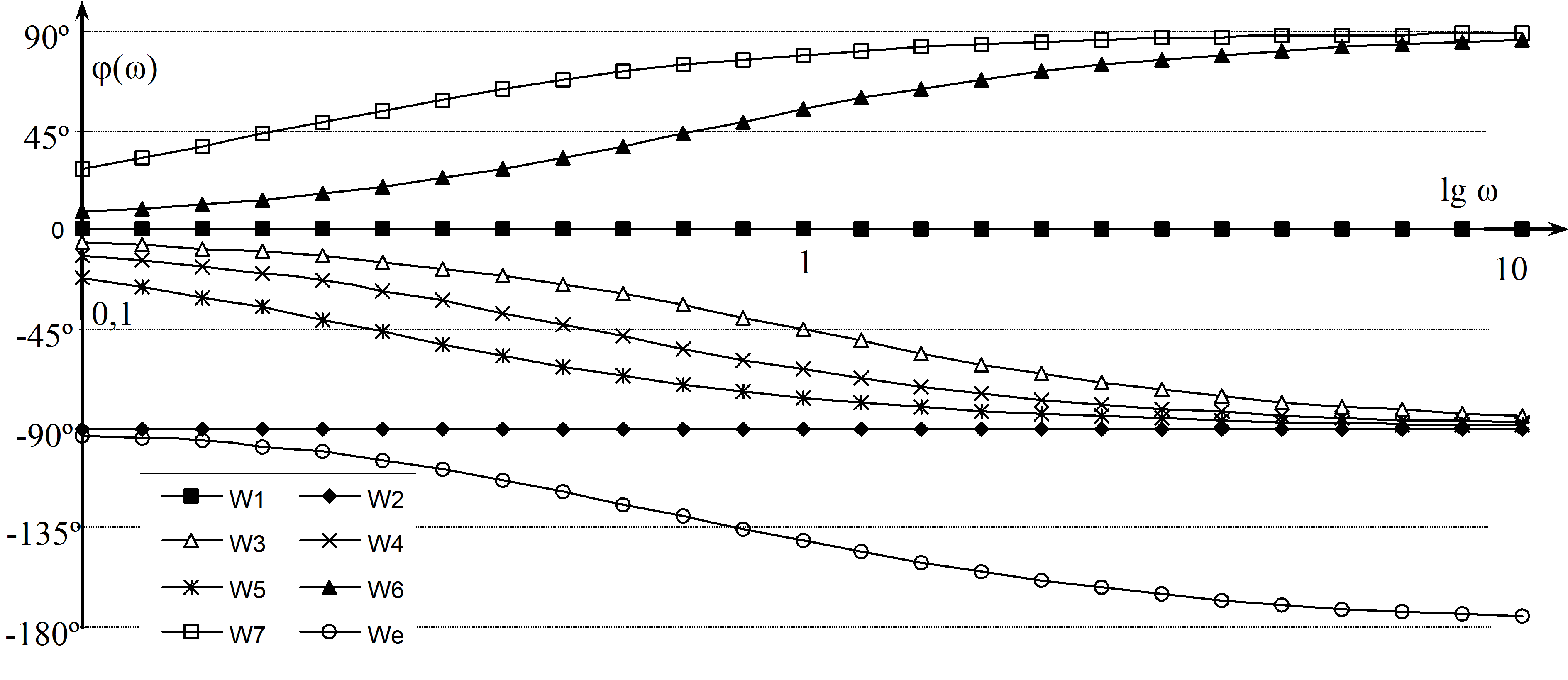
4-36. feladat
Feladatunk megegyezik az előzővel, csak most a tagok sorba vannak kapcsolva.

Az eredő frekvenciafüggvény:

4.9.1.6. Nyquist diagram
Állítsuk elő a frekveciafüggvény algebrai alakját (a részletszámításokat mellőzve):

Ha valaki ezt a rendezést el akarja kerülni, akkor másik utat is választhat: az azonos paraméterű helyvektorok, mint komplex vektorok összeszorzását, azaz a fázisszögek összeadását és az abszolút értékek összeszorzását. Nem biztos, hogy ez az egyszerűbb megoldás!
Maradjunk az értéktáblázatos módszernél (ld.4-101. ábra):
| 0.01 | 0.02 | 0.05 | 0.1 | 0.2 | 7 |
Re | -104.76 | -104.08 | -99.43 | -85.19 | -50.64 | 0.00075 |
Im | -1494.76 | -739.58 | -274.92 | -105.87 | -16.68 | 0.0002 |
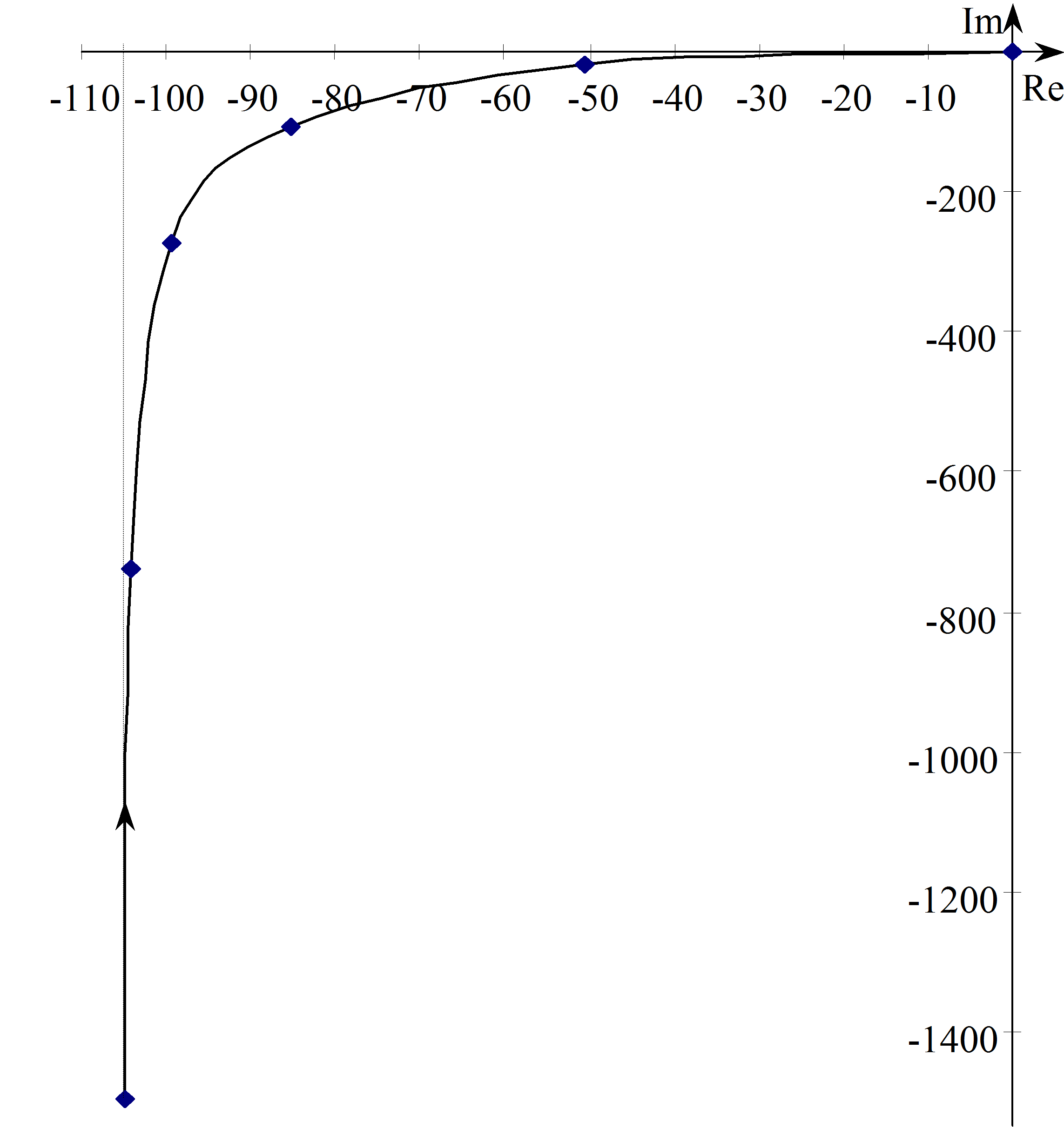
A 4-101. ábraából látszik, hogy a diagramnak 0 helyen aszimptótája van -105-nél. Az azonban nem látszik, hogy metszi-e a valós tengelyt, ezért a diagram ezen részét nagyítsuk ki (4-102. ábra):
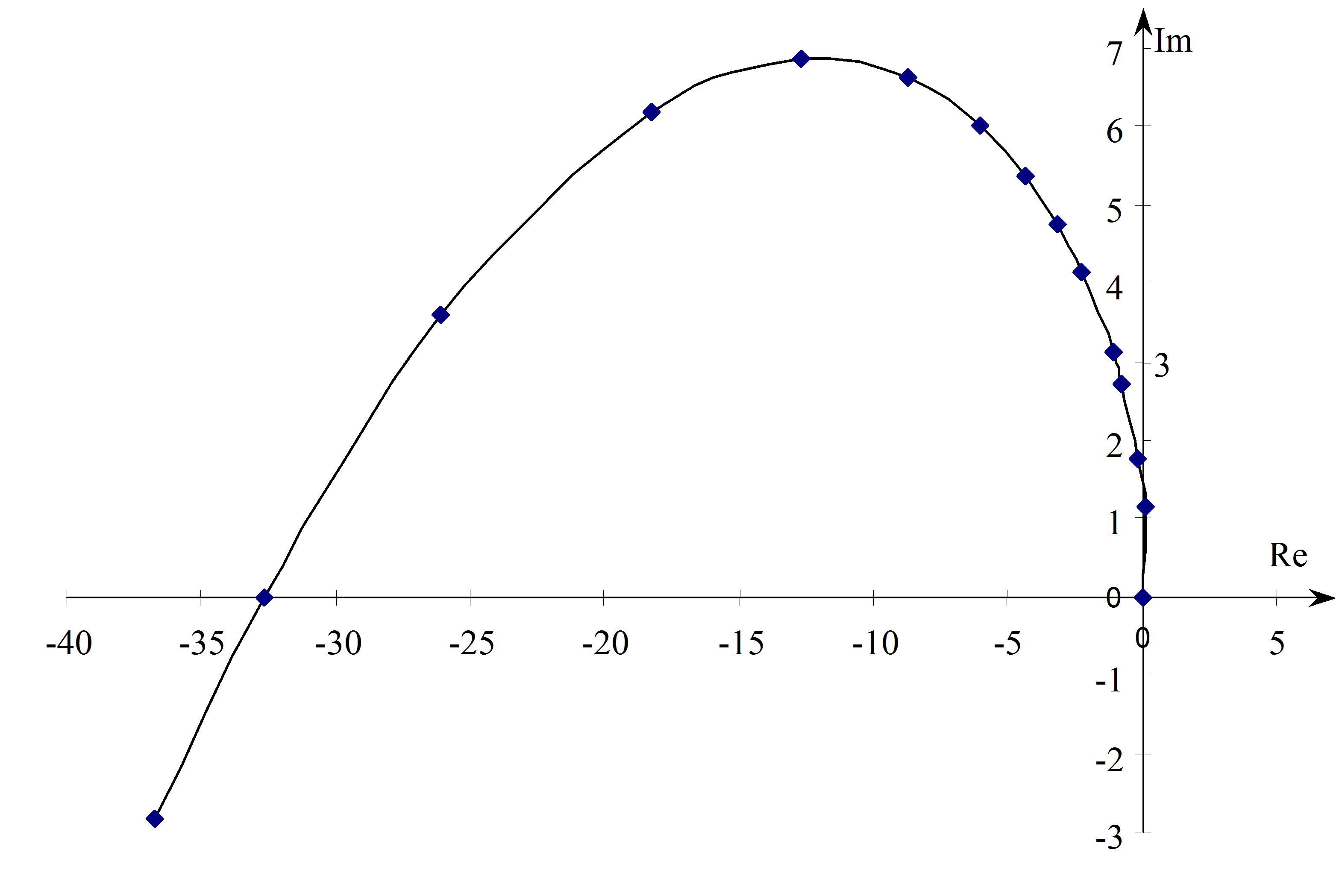
Ezek szerint a görbe metszi a valós tengelyt, de azt még mindig nem látjuk jól, hogyan fut be az origóba. Nagyítsuk ki ezt a részt is (4-103. ábra):
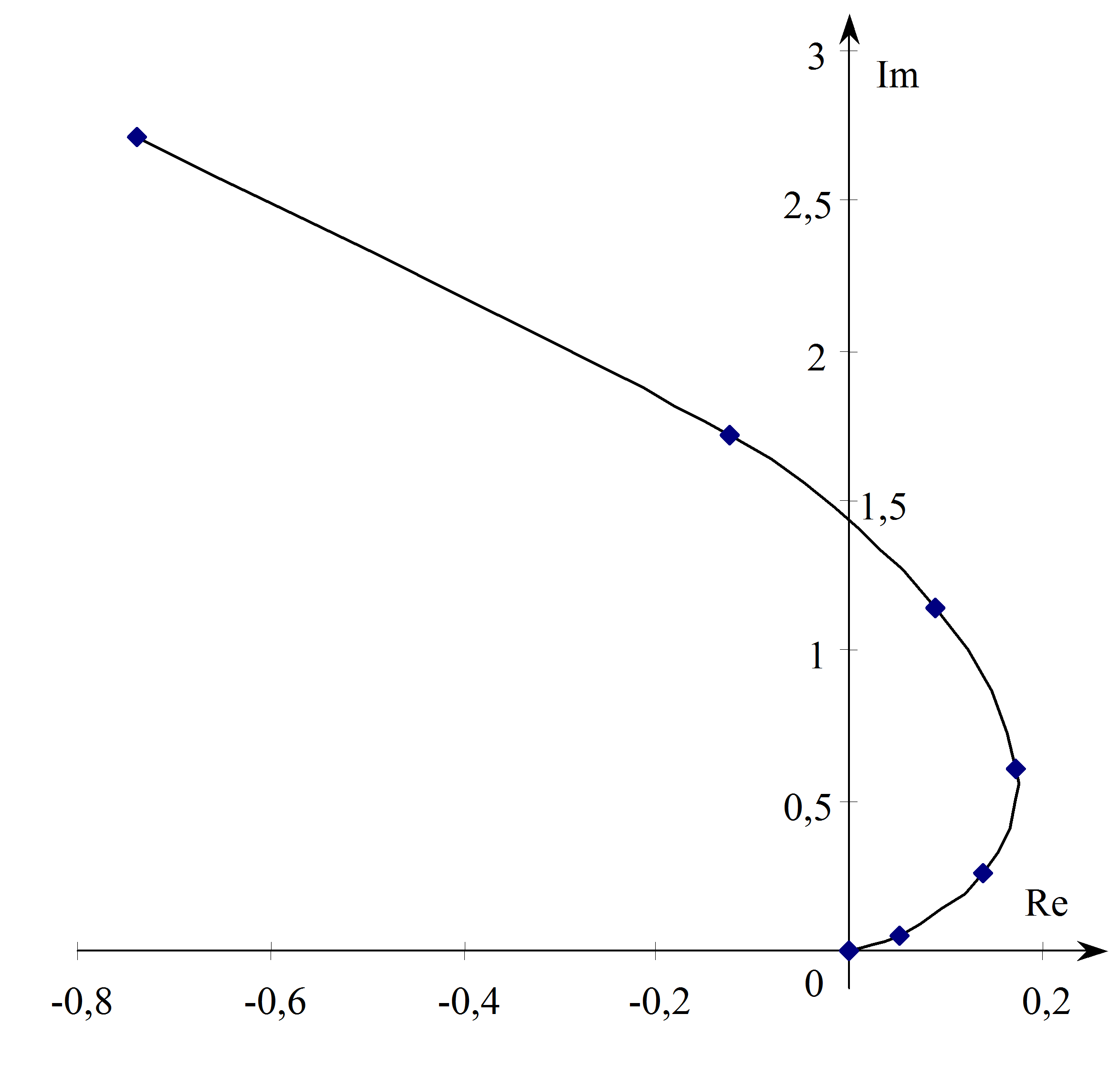
Most már azt is látjuk, hogy metszi a képzetes tengelyt is és a pozitív valós tengely mellett simul be az origóba.
Az átviteli függvényből is kiolvasható, amit a diagram is igazol (három síknegyeden halad keresztül), hogy a rendszer háromtárolós (PIT3). Az integráló jelleg pedig abból látszik, hogy Im=--ből indul.
A teljesség kedvéért határozzuk még meg a tengelymetszési értékeket.
A valós tengelyt Im=0-nál metszi, tehát a felírható egyenlet:

Ebből a megoldás  , hiszen minket csak a pozitív frekvencia értékek érdekelnek! Behelyettesítve kapjuk, hogy a valós rész értéke ekkor: -32.667.
, hiszen minket csak a pozitív frekvencia értékek érdekelnek! Behelyettesítve kapjuk, hogy a valós rész értéke ekkor: -32.667.
A képzetes tengely metszéspontja Re=0-nál van. Ekkor az egyenlet:
Ebből a megoldás  . Behelyettesítve Im=1.425.
. Behelyettesítve Im=1.425.
4.9.1.7. Bode diagram
A Bode diagram elkészítéséhez úgy kell átalakítani a frekvenciafüggvényt, hogy a számláló és a nevező is a lehető legalacsonyabb fokszámú polinomok szorzata legyen. Ehhez a következő alakból indulunk ki:

A Nyquist diagramnál már láttuk, hogy a rendszer milyen tagokból épül fel (3 tároló, integráló). A diagram elkészítésénél felhasználhatjuk, hogy két már ábrázolt elem soros kapcsolásáról van szó, tehát az eredőt grafikus összegzéssel kaphatjuk:
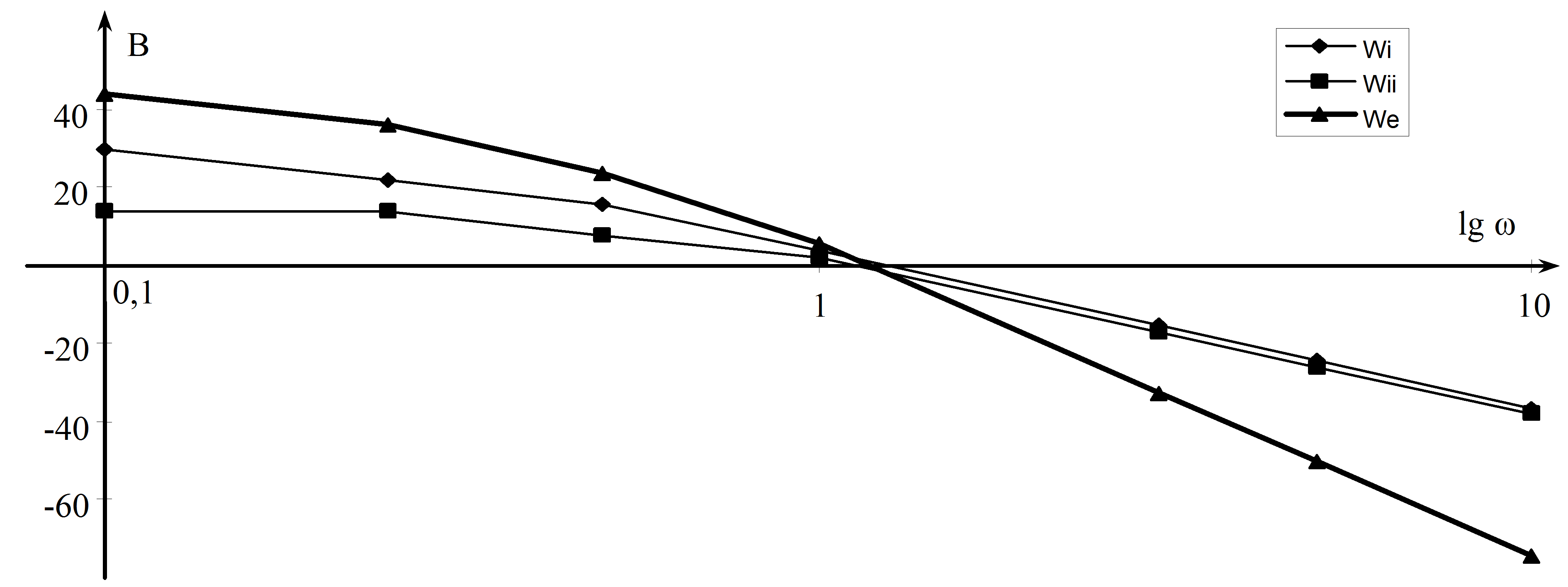
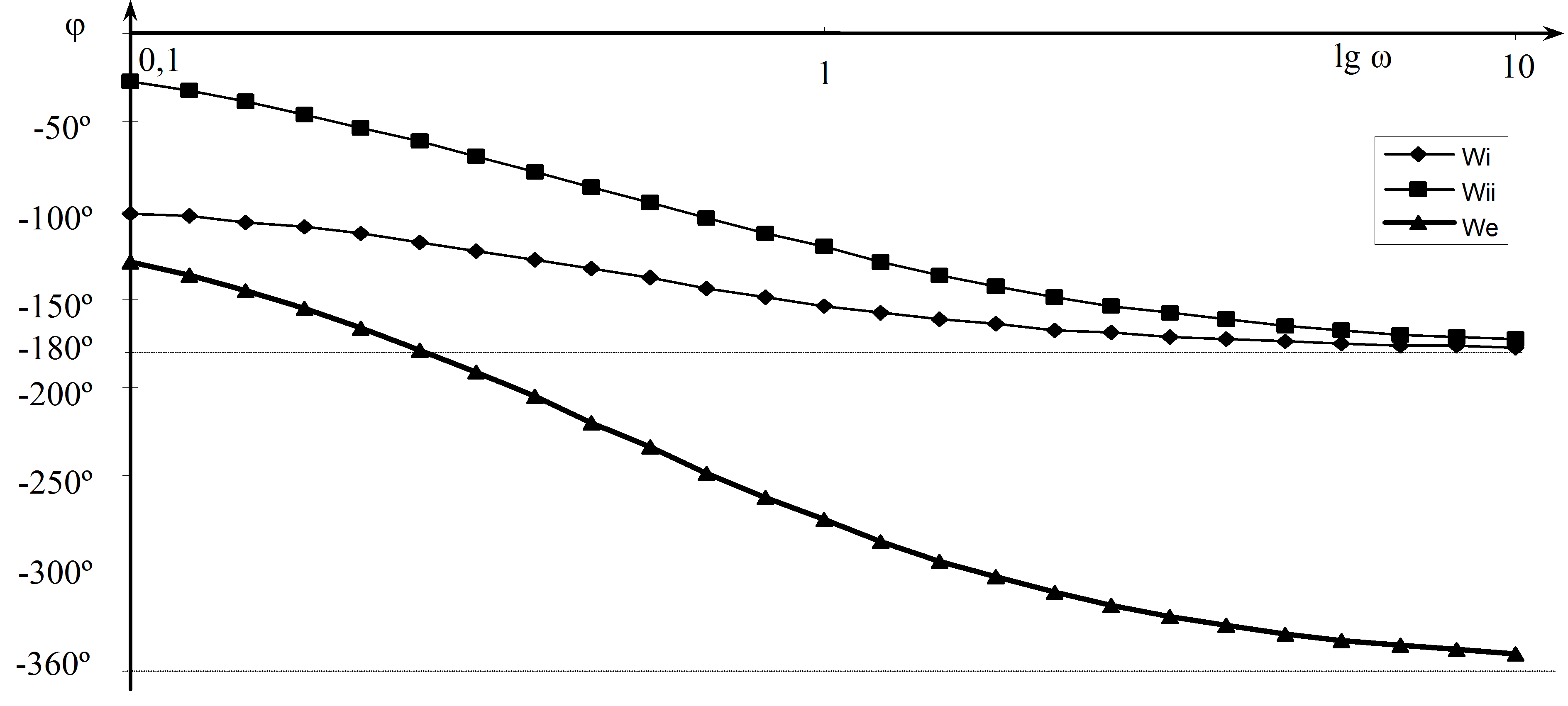
4-37. feladat
Határozzuk meg az eredő Bode diagramot, ha a következő elemek vannak sorba kapcsolva:

Soros kapcsolás esetén a tagok Bode diagramjának összegzésével kapjuk az eredőt (érdemes megfigyelni, hogy mivel az arányos tag kisebb 1-nél, ezért egyenese a vízszintes tengely alatt fut):
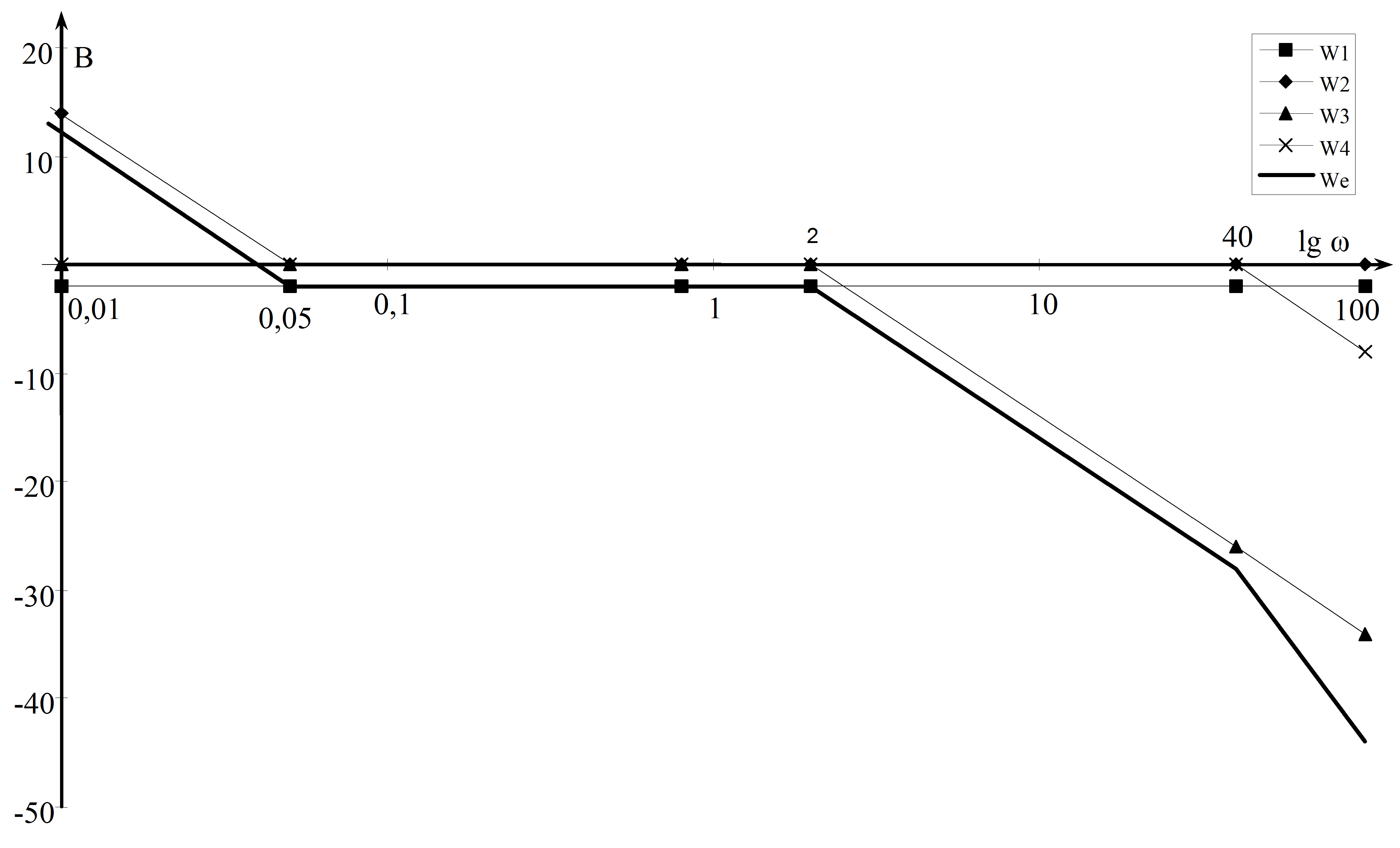
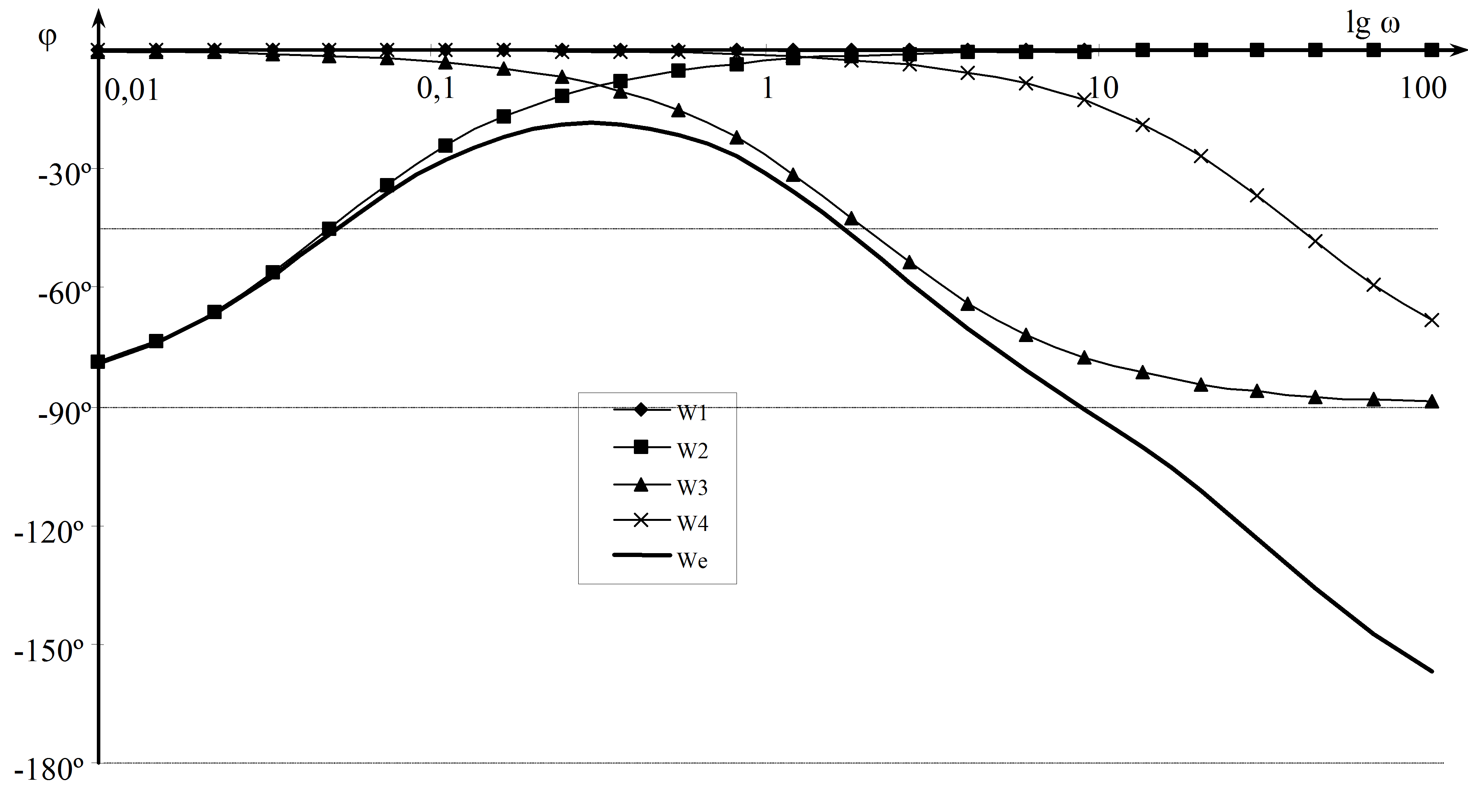
4-38. feladat
Adott a következő aszimptotikus amplitúdó Bode diagram. Határozzuk meg a frekvenciaátviteli függvényt.
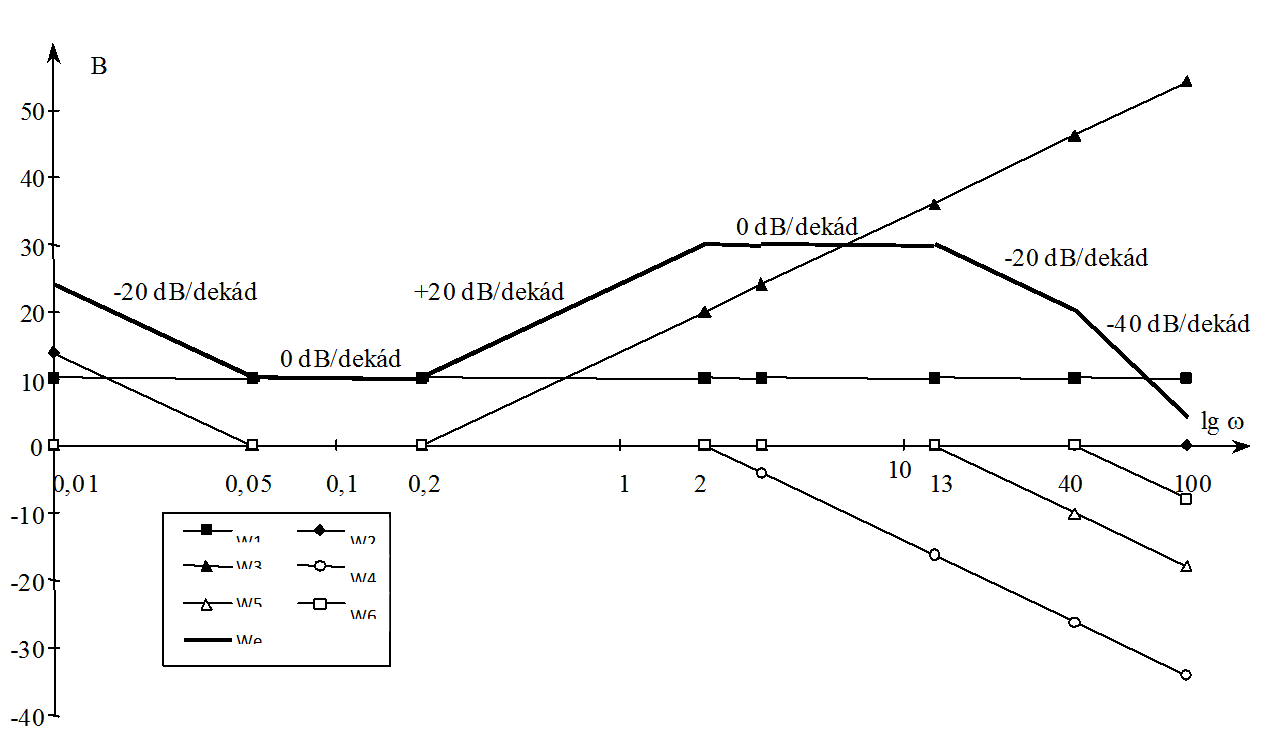
Próbáljuk az átviteli függvényt néhány egyszerűbb tag szorzataként előállítani, ugyanis ezen tagok grafikus összegzése a diagram. Ilyen tagok a következők: P, PI, PD és PT1. Az ábrában a vastag vonal mutatja az eredőt.
Először mindig megkeressük az első vízszintes szakaszt. Esetünkben ez az első és a második töréspont között van. Ez az egyenes szakasz egy arányos tag diagramjának a része:
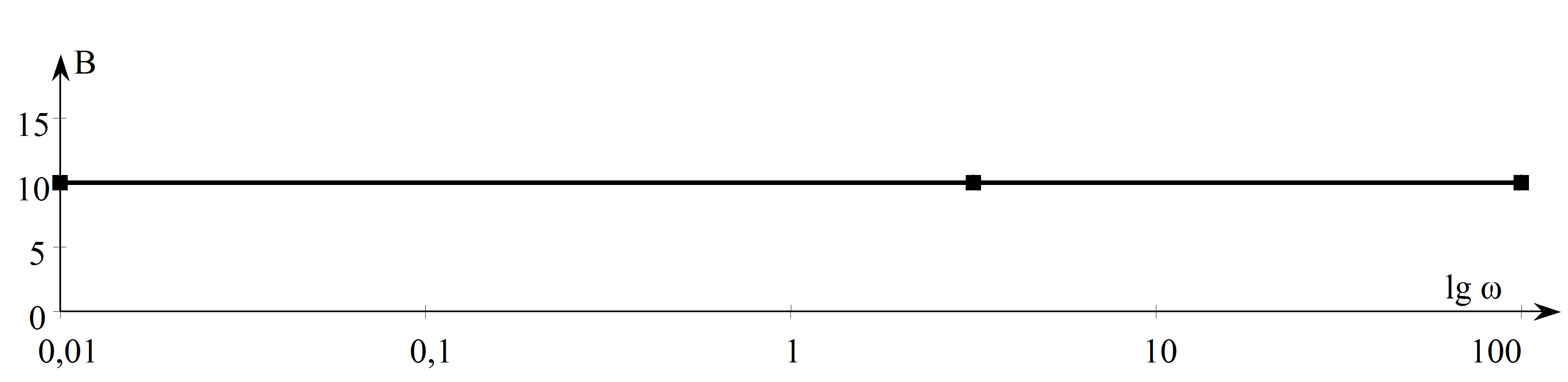
A 4-107. ábraáról leolvashatjuk, hogy 10-nél metszi a függőleges tengelyt. Figyelembe véve, hogy a skála dB,  Tehát az első tag: W1=3.15.
Tehát az első tag: W1=3.15.
Ezután balról jobbra haladva végigmegyünk az összes törésponton. Minden töréspontnál egy-egy újabb taggal bővül a függvények listája. Ha az első töréspont előtt a meredekség negatív, akkor az PI tagot jelent. Ilyenkor a PI tag arányos része mindig egy. Ennek két oka van. Egyrészt ekkor diagramjának vízszintes része a tengelyen halad, hiszen 20lg1=0, tehát nem szól bele az eredő további menetébe. Másrészt az összes arányos részt már összevontuk az előzőekben leírt arányos tagban.
Ha a meredekség eltér -20 dB/dekádtól, akkor annyi PI tagot veszünk ahányszoros az eltérés (pl. -40-nél 2 PI tag van). TI értékét a törésponti frekvencia reciproka adja.
A 4-108. ábra mutatja, hogy esetünkben ez hogy néz ki. Itt a meredekség -20, a töréspont 0.05-nél van, tehát a tag átviteli függvénye:  .
.
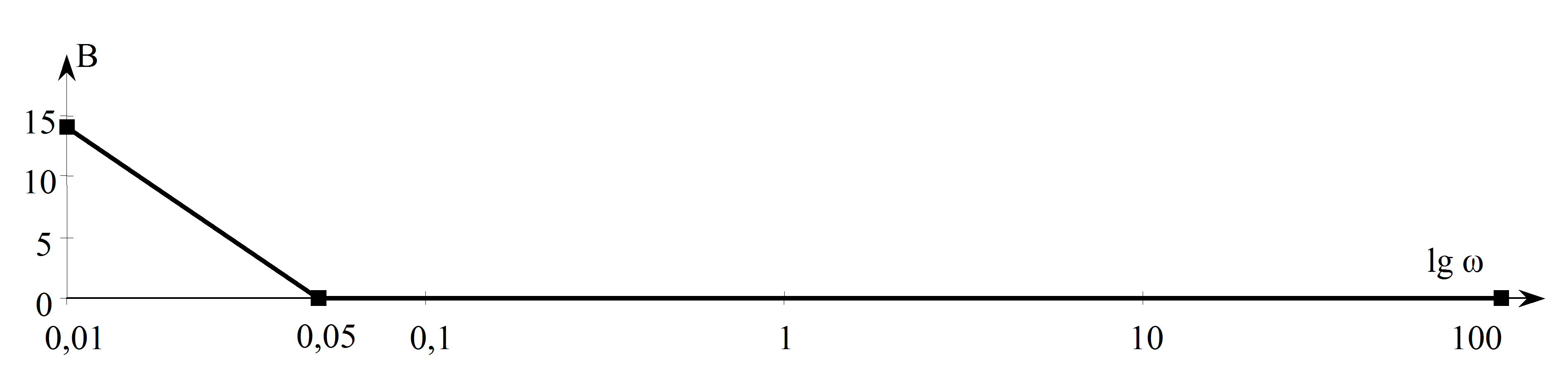
Ezt követően már csak 2 tag fordulhat elő: PD és PT1. Ha a töréspont után a meredekség változása +20 dB/dekád akkor PD, ha -20 akkor PT1 tagot kell figyelembe vennünk. Mindkét esetben az arányos rész értéke 1, az előző lábjegyzetben leírtak miatt. Ha a meredekség változása nagyobb, akkor a megfelelő tagból többet kell venni, az előzőekben a PI tagnál leírtak szerint. A függvények T paraméterét itt is a körfrekvencia reciproka adja.
A következő két ábra (4-109, 4-110) a fent leírtakat szemlélteti a példa adataival. Ennek megfelelően látszik, hogy egy PD tag és három PT1 tag van még a rendszerben. Ezek függvényei rendre a következők:

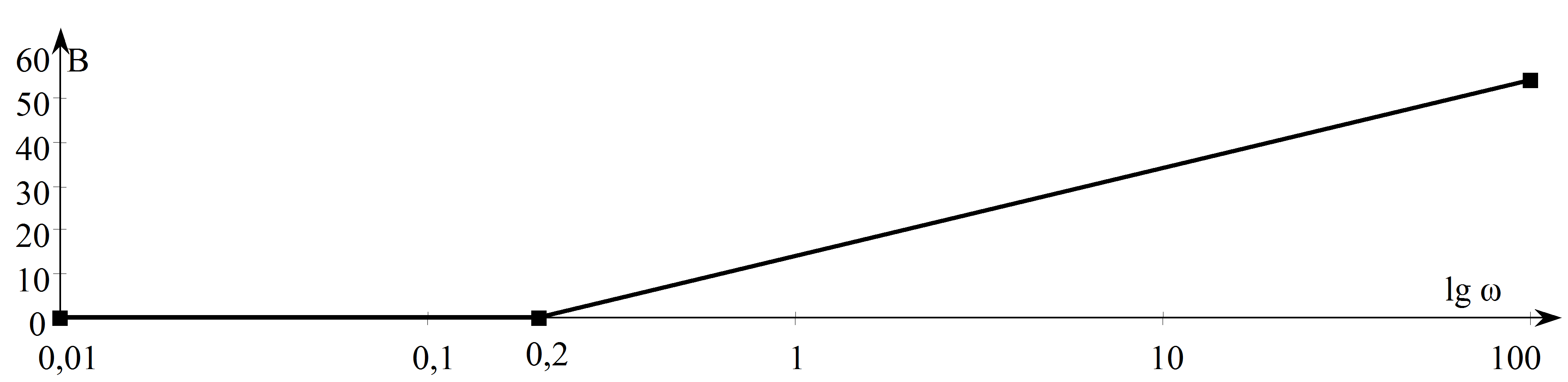
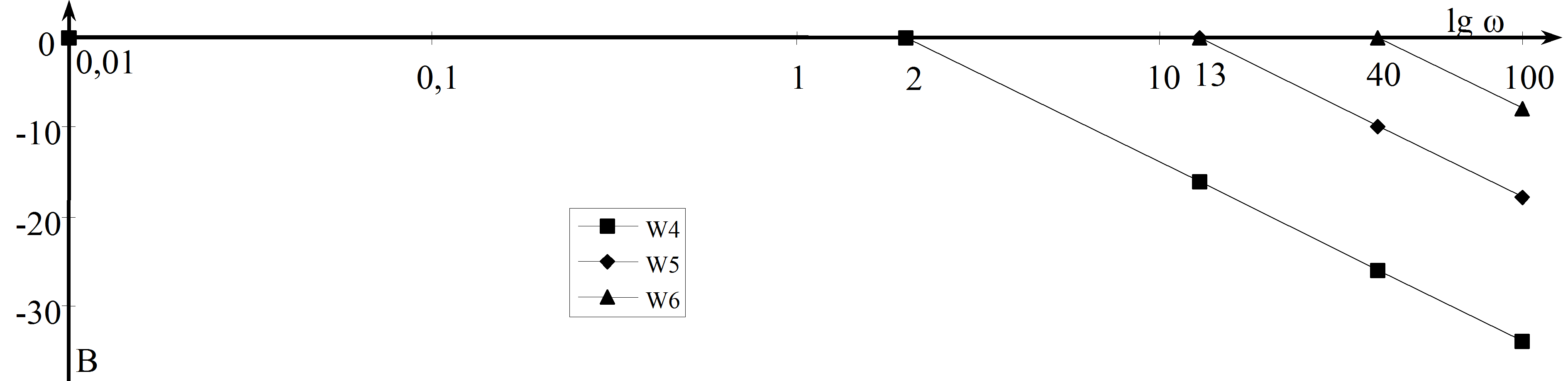
Ezek után az eredő átviteli függvény már egyszerűen előállítható, hiszen a tagok összeszorzásával kapjuk.
Figyelem: a kérdés az átviteli függvény volt, és nem a frekvenciafüggvény. Ennek megfelelően W(s)-t kell felírni. Ez azonban nem okoz nehézséget, hiszen tudjuk, hogy az s=j formális helyettesítésével megkaphatjuk.
Amennyiben a feladat kiírása külön nem tartalmazza, akkor a tagok összeszorzását nem kell elvégezni, így a megoldás:
4-39. feladat
Adott a következő közelítő amplitúdó Bode diagram. Határozzuk meg az átviteli függvényt és rajzoljuk meg a fázismenetet.
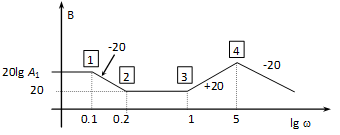
Az első vízszintes szakasz a diagram elején van, de magassága nem ismert. A következő 2 pont minden adata ismert, így A1 értékét kiszámíthatjuk:
Az első tag tehát: Y1=20. A diagram ezek után a következőképpen néz ki:
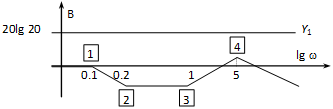
Most már csak sorra végig kell menni a töréspontokon, ahol a változás +20 decibel/dekádos ott egy PD, ahol –20 decibel/dekádos ott egy PT1 tagot kell elhelyezni:
Az utolsó tag esetén a változás –40 decibel, ezért két azonos időállandójú egytárolós taggal kell figyelembe venni. Az eredő átviteli függvény ezen tagok szorzataként állítható elő:
A frekvenciamenetet megrajzolhatjuk úgy is, hogy a tagok frekvenciamenetét összegezzük. Nézzünk azonban egy ugyan nem pontos, de jellegre helyes eredményt adó gyorsabb, közelítő módszert.
Induljunk ki az alaptagok ismert tulajdonságaiból. Arányos tag esetén a fázis zérus, jelöljük ezt az intervallumok közepén:
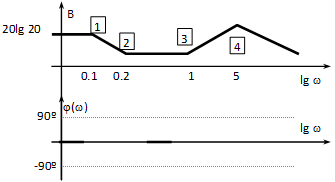
A töréspontoknál a fázismenetben inflexiós pontok vannak. Ha a változás értéke ±20 decibel/dekád, a fázis értéke ±45º, illetve többszörös meredekségnél ±45º többszöröse:
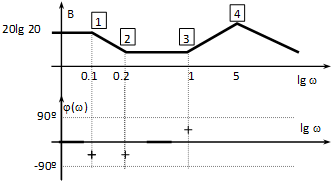
Az egytárolós, illetve az arányos-differenciáló tagok mínusz, illetve plusz 90º-hoz tartanak. Jelöljük a megfelelő intervallumok közepét egy vízszintes szakasszal:
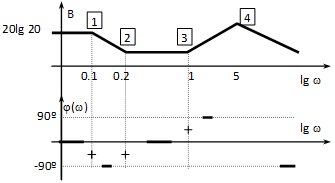
A 4 pontnál is töréspont van, de ott a változás nagyobb mértékű. A fázis ezen a részen +90º-ról -90º-ra csökken. A két szög középértéke nulla:
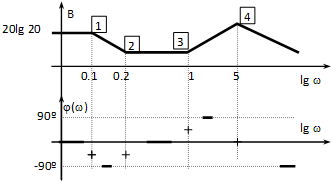
Most próbáljuk meg folytonos vonallal összekötni az így kapott jellegzetes fázisszög értékeket:
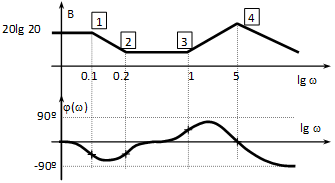
Ügyeljünk arra, hogy ahol a töréspontok közel vannak egymáshoz, ott a görbe nem fogja elérni az aszimptotát. Esetünkben ez történik az 1 és 2 , valamint a 3 és 4 pontok között.
Jól látható, hogy a görbének lokális minimum helye van =0.1 és =0.2 között, körülbelül középen. Határozzuk meg ezt a frekvencia értéket. Mivel a tengelyen logaritmikus lépték van, ezért a számtani közép számítás közvetlenül nem alkalmazható, de:

,
amiből az következik, hogy a mértani közepet kell meghatározni:

.
4-40. feladat
Adott egy rendszer az amplitúdó Bode diagramjával. Határozzuk meg a rendszer válaszát, ha u1(t)=sin(0.1t); u2(t)=sin(t), u3(t) =sin(10t) és a kezdeti feltétel zérus.
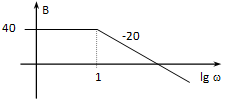
a, megoldás
Oldjuk meg a feladatot analitikusan. Állítsuk elő a rendszer átviteli függvényét. A diagram alapján megállapíthatjuk, hogy a rendszer arányos egytárolós, átviteli függvénye általános alakban:  . Tudjuk, hogy a töréspont
. Tudjuk, hogy a töréspont  -nél van, így T értéke egy. G értékét a diagram vízszintes része adja, így:
-nél van, így T értéke egy. G értékét a diagram vízszintes része adja, így:  -ből G=100 adódik:
-ből G=100 adódik:
A differenciálegyenletet az átviteli függvény inverz Laplace transzformációjával állíthatjuk elő:
Természetesen egy állandó együtthatós, homogén, lineáris differenciálegyenletet kaptunk. Először állítsuk elő a homogén rész megoldását. A karakterisztikus egyenletből:
.
A partikuláris megoldást próbafüggvény módszerrel határozzuk meg. Mivel mindhárom függvényünk szinuszos és csak a körfrekvenciában tér el, ezért keressük a megoldást:

alakban. Helyettesítsünk be a differenciálegyenletbe:

A trigonometrikus függvényeket szétválogatva kapjuk a következő egyenletrendszert:

Megoldva az egyenletrendszert:

A c paramétert a kezdeti feltételből kapjuk:
a,α eset: =0.1

a, eset: =1

,
mivel azonban  , így
, így

a, eset: =10

b, megoldás
Induljunk ki a frekvenciaátviteli függvény definíciójából:
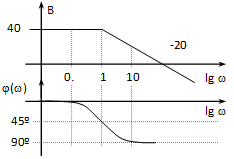
Vegyük észre, hogy U0 minden esetben egy, mivel megegyezik az ui gerjesztő függvények amplitúdójával.
b.α eset: =0.1
Láthatóan az analitikus megoldás domináns tagját kaptuk. Mint a 4-120. ábrán is látszik, az exponenciális tag hatása nagyon hamar eltűnik. A két függvény közötti különbség oka, hogy a fázist nem pontosan olvastuk le a Bode diagramról.
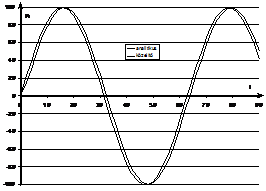
b. eset: =1

Most is az analitikus megoldás domináns tagja jelenik meg, de nem elég pontosan. Tudjuk azonban, hogy az aszimptotikus Bode diagram közelítő diagram, és a legnagyobb eltérés a pontos és a közelítő diagram között éppen a töréspontnál van. A hiba kb. 3dB, ami pontosan  . Nézzük meg, mennyi lesz a pontos érték:
. Nézzük meg, mennyi lesz a pontos érték:

Ezek után a megoldás már megegyezik a domináns taggal:

A fázis leolvasása most pontos volt, ezt láthatjuk a 4-121. ábrán is. Kezdetben az eltérés jelentős, ennek oka az exponenciális tag, amit a közelítés nem vesz figyelembe.
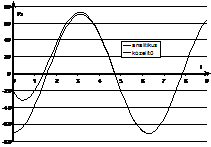
b. eset: =10

Az erősítés azért 10, mert éppen egy dekádnyira van a törésponttól. Itt is az analitikus megoldás domináns tagját kaptuk eredményül. A 4-122. ábrán látható kezdeti eltérést itt is az exponenciális rész okozza.
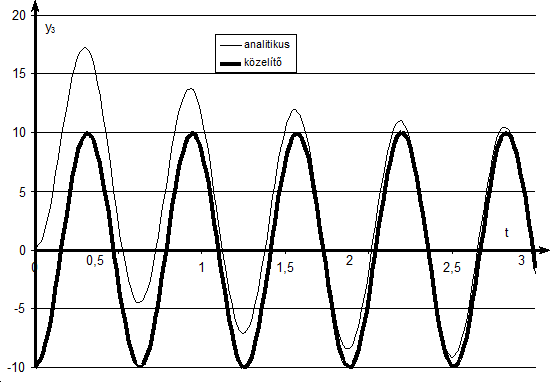
Összefoglalóan megállapíthatjuk, hogy a közelítés az indítási (tranziens) folyamatot figyelmen kívül hagyja, állandósult állapotban viszont (amikor a rendszer már a gerjesztésnek megfelelően változik) kielégítő pontosságú eredményt ad.
4-41. feladat
Adott egy rendszer matematikai modellje:
.
Keressük a közelítő megoldást u1(t)=sin(0.01t) és u2(t)=sin(t) esetén, ha minden kezdeti feltétel zérus.
Első lépésként állítsuk elő az átviteli függvényt, majd rajzoljuk fel a Bode diagramot:
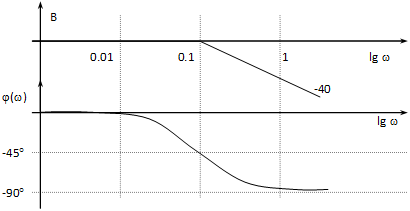
A közelítő megoldás u1(t)=sin(0.01t) esetén
a pontos megoldás:

A közelítő megoldás u2(t)=sin(t) esetén

és a pontos megoldás:

4-42. feladat
Adott egy rendszer amplitúdó Bode diagramja. Keressük a közelítő megoldást u1(t)=sin(0.1t) és u2(10t)=sin(t) esetén, ha minden kezdeti feltétel zérus.
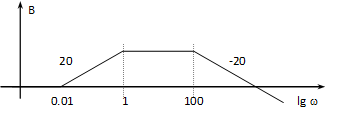
Mint már láttuk, a közelítő megoldáshoz szükségünk lesz a fázisdiagramra is. Ennek megszerkesztéséhez alkalmazhatjuk a már megismert közelítő módszert. Mivel a töréspontok messze (2 dekádnyira) vannak egymástól, a közelítés hibája elenyésző lesz.
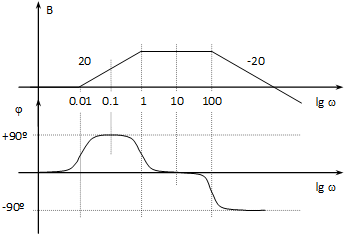
A közelítő megoldás u1(t)=sin(0.1t) esetén

a pontos megoldás:

A közelítő megoldás u2(t)=sin(10t) esetén
a pontos megoldás:

4-43 feladat
Adott egy többfrekvenciás feszültségforrás valamint ehhez sorban kapcsolódó  ellenállás és
ellenállás és  induktivitás. A feszültségforrás feszültségét tekintjük bemeneti jelnek, és az ellenállás feszültségét tekintjük kimeneti jelnek. A feszültségforrás feszültségének az időfüggvénye:
induktivitás. A feszültségforrás feszültségét tekintjük bemeneti jelnek, és az ellenállás feszültségét tekintjük kimeneti jelnek. A feszültségforrás feszültségének az időfüggvénye:  V,
V,  kΩ
kΩ
Mekkora az alap és a felharmonikus (
 első és második tagjának) frekvenciája?
első és második tagjának) frekvenciája?Írja fel a fenti áramkör jel átviteli függvényét.
Válassza meg az induktivitás értékét, ha az a célunk, hogy a kimeneti feszültség felharmonikusának amplitúdója kb. ötödére csökkenjen a bemeneti felharmonikus értékhez képest (nem kell pontosan ötödére, csak közelítőleg).
Mennyire csökken ekkor az alapharmonikus?
Mekkora az alap és a felharmonikus fáziskésése?
Rajzolja fel az átviteli függvény közelítő Bode diagramját közelítőleg léptékhelyesen, közelítőleg a skálát is tüntesse fel.
4.9.2. MATLAB feladatok
4-44 feladat
A MATLAB program segítségével rajzolja fel a következő frekvencia átviteli függvények Nyquist diagramját
|
| (4.203) |
|
| (4.204) |
|
| (4.205) |

| (4.206) |

Megoldás:
% Időállandó adatok T11=1; T21=1; T22=0.2; T31=1; T32=0.01; T41=1; T42=1/1.5; T43=0.5; T51=1; T61=1; T62=0.2; T71=1; T72=0.2; T73=0.125; % A frekvencia átviteli függvény számláló és nevező polinomja szamlalo= 1; nevezo1=T11*poly([-1/T11]); nevezo2=T21*T22*poly([-1/T21 -1/T22]); nevezo3=T31*T32*poly([-1/T31 -1/T32]); nevezo4=T41*T42*T43*poly([-1/T41 -1/T42 -1/T43]); nevezo5=T51*poly([0]); nevezo6=T61*T62*poly([0 -1/T62]); nevezo7=T71*T72*T73*poly([0 -1/T72 -1/T73]); % A Nyquist diagram kirajzolása nyquist(szamlalo,nevezo1) axis([0 1 -0.5 0.5]) grid print -djpeg W1_Nyquist pause nyquist(szamlalo,nevezo2) axis([-0.2 1 -0.6 0.6]) grid print -djpeg W2_Nyquist pause nyquist(szamlalo,nevezo3) axis([-0.2 1 -0.6 0.6]) grid print -djpeg W3_Nyquist pause nyquist(szamlalo,nevezo4) axis([-0.3 1 -0.8 0.8]) grid print -djpeg W4_Nyquist pause nyquist(szamlalo,nevezo5) axis([-0.1 0.1 -6 6]) grid print -djpeg W5_Nyquist pause nyquist(szamlalo,nevezo6) axis([-0.3 0.1 -6 6]) grid print -djpeg W6_Nyquist pause nyquist(szamlalo,nevezo7) axis([-0.4 0.1 -6 6]) grid print -djpeg W7_Nyquist pause axis([-0.15 0.01 -0.025 0.025]) print -djpeg W7b_Nyquist
|
|
|
|
|
|
|
|
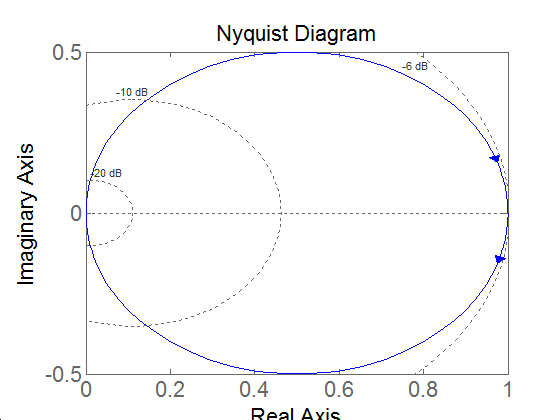

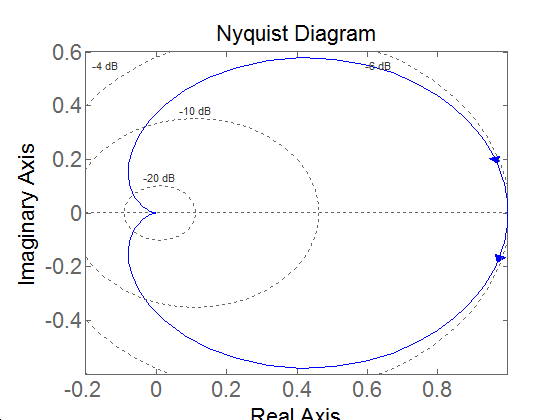

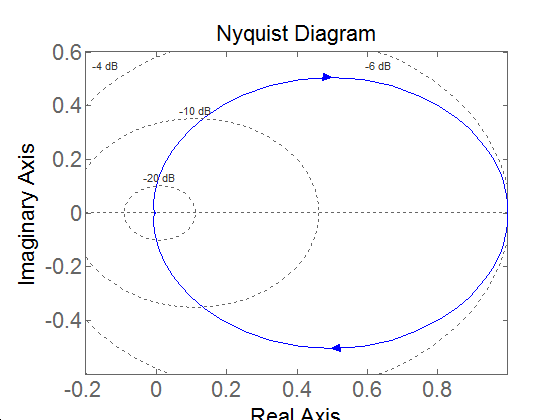

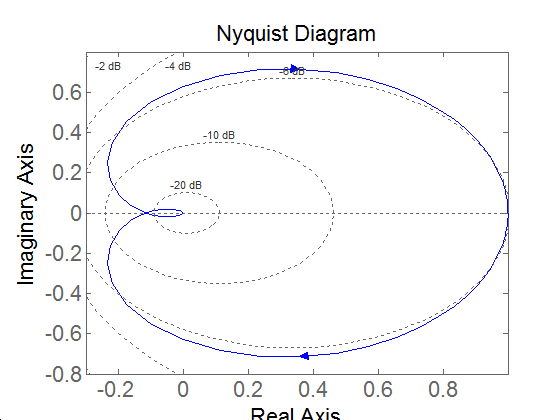

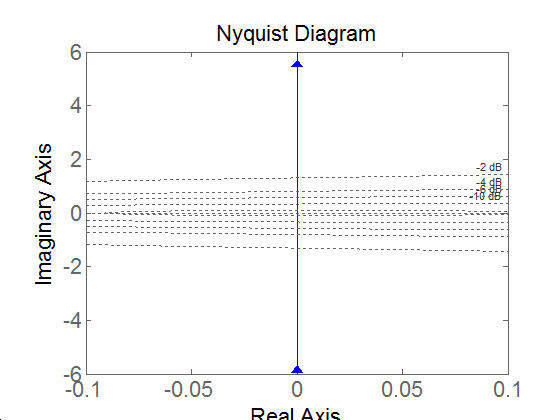

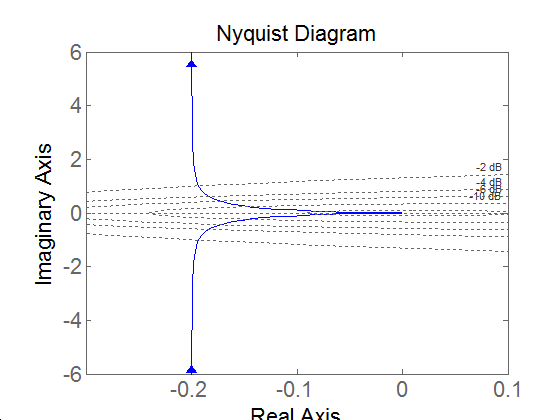

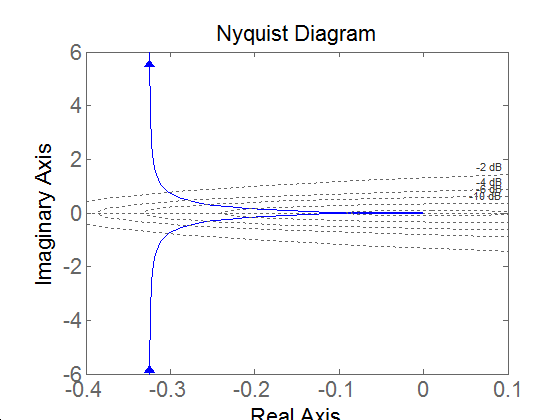

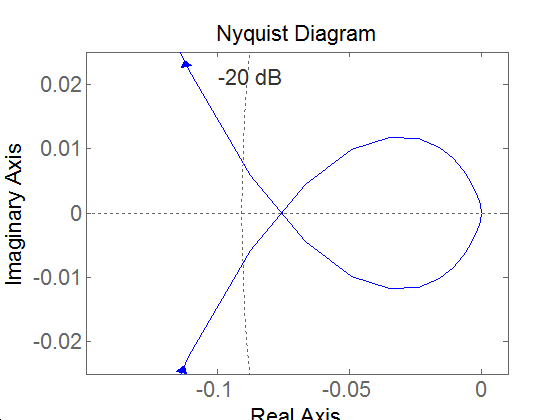

4-126. ábra MATLAB Nyquist diagramok
4-45 feladat
A MATLAB program segítségével rajzolja fel a következő frekvencia átviteli függvények Bode diagramját
|
| (4.207) |
|
| (4.208) |
|
| (4.209) |

|
| (4.210) |
(4.211) | ||


Megoldás:
% Időállandó adatok T11=1; T21=1; T22=0.2; T31=1; T32=0.01; T41=1; T42=1/1.5; T43=0.5; T51=1; T61=1; T62=0.2; T71=1; T72=0.2; T73=0.125; % A frekvencia átviteli függvény számláló és nevező polinomja szamlalo= 1; nevezo1=T11*poly([-1/T11]); nevezo2=T21*T22*poly([-1/T21 -1/T22]); nevezo3=T31*T32*poly([-1/T31 -1/T32]); nevezo4=T41*T42*T43*poly([-1/T41 -1/T42 -1/T43]); nevezo5=T51*poly([0]); nevezo6=T61*T62*poly([0 -1/T62]); nevezo7=T71*T72*T73*poly([0 -1/T72 -1/T73]); % A Bode diagram kirajzolása Bode(szamlalo,nevezo1) grid print -djpeg W1_Bode pause Bode(szamlalo,nevezo2) grid print -djpeg W2_Bode pause Bode(szamlalo,nevezo3) grid print -djpeg W3_Bode pause Bode(szamlalo,nevezo4) grid print -djpeg W4_Bode pause Bode(szamlalo,nevezo5) grid print -djpeg W5_Bode pause Bode(szamlalo,nevezo6) grid print -djpeg W6_Bode pause Bode(szamlalo,nevezo7) grid print -djpeg W7_Bode pause Bode(szamlalo,nevezo8) grid print -djpeg W8_Bode
|
|
|
|
|
|
|
|
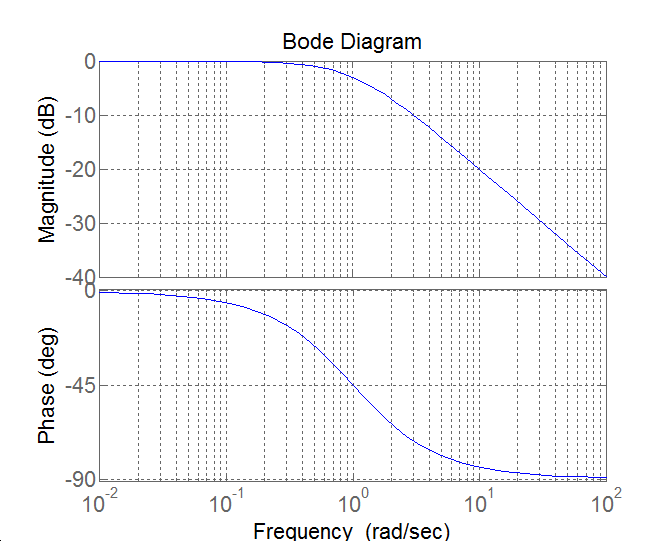

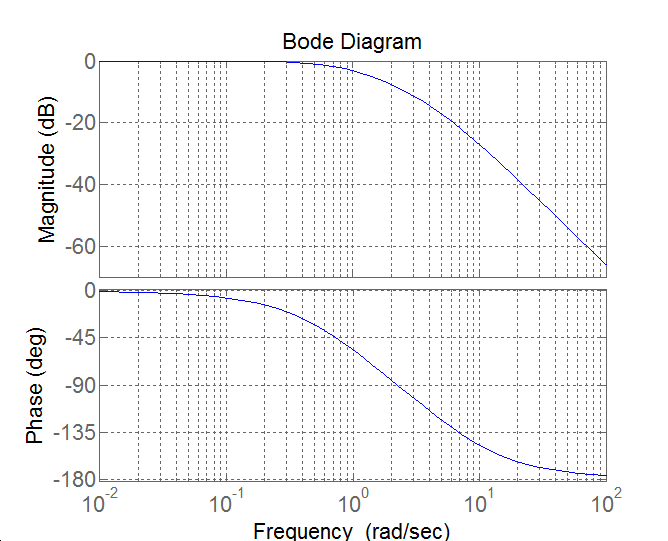

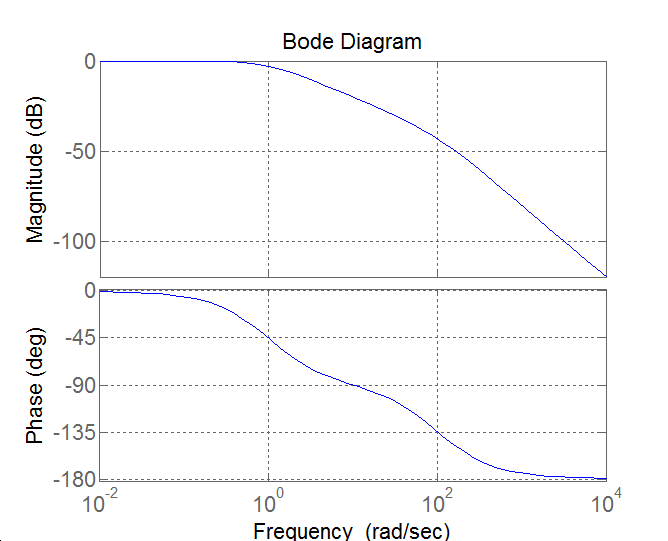

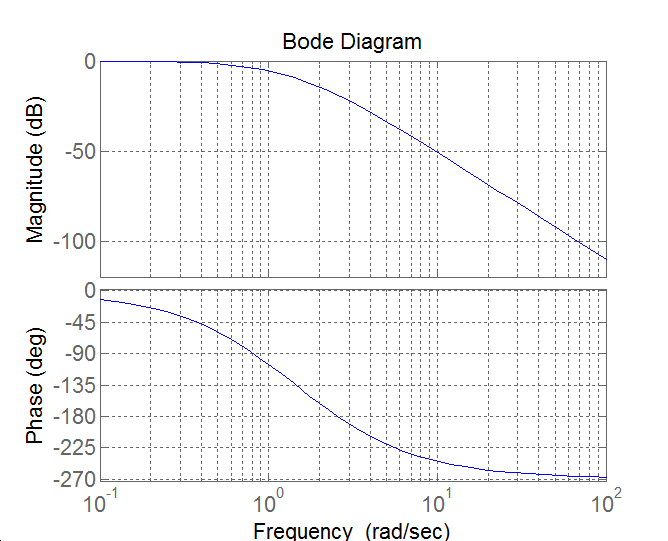

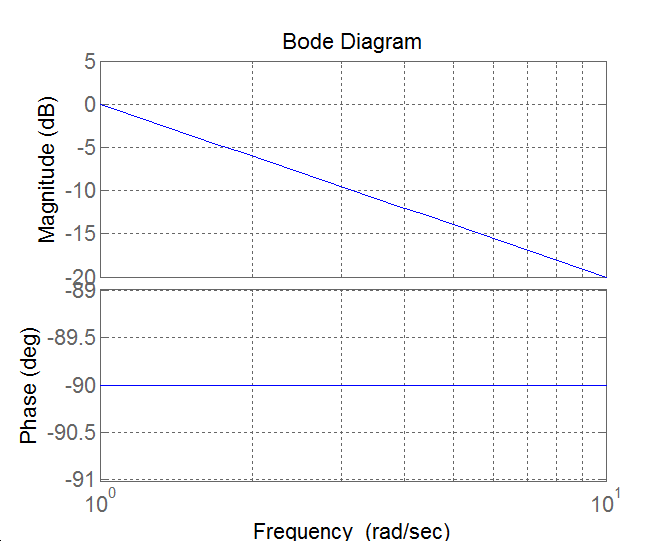

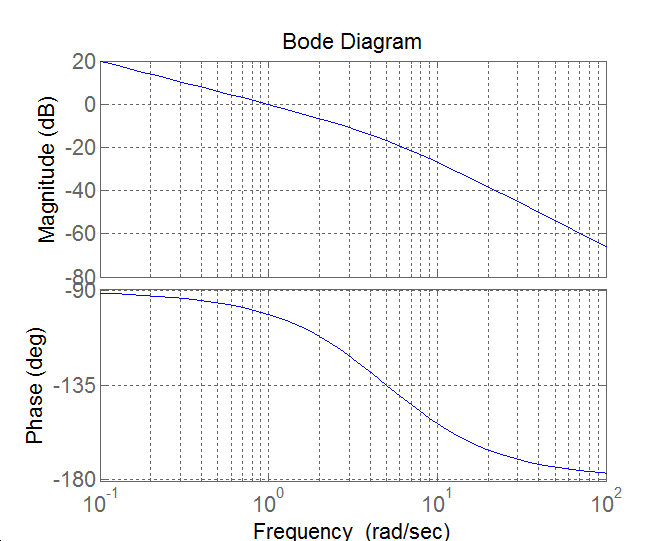

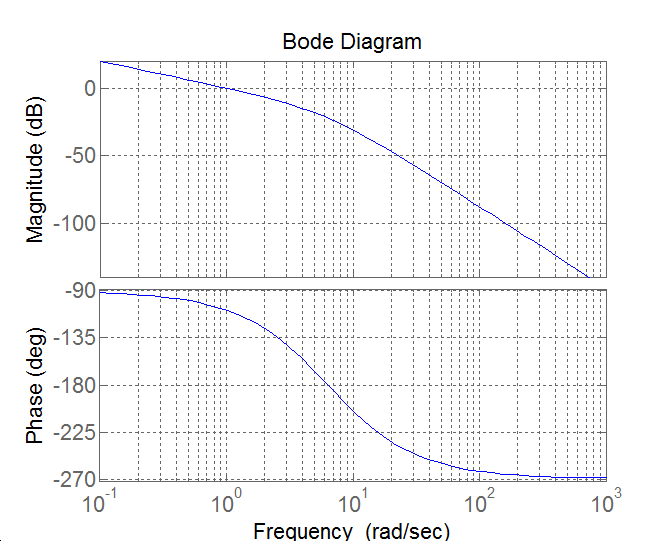

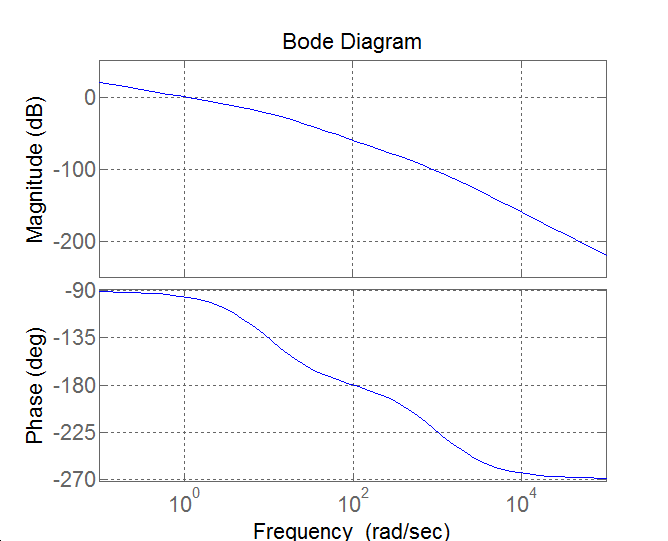

4-127. ábra MATLAB Bode diagramok
4.10. Szűrő típusok Bode diagramja
A mért jelek (legyenek akár analógok, akár digitálisak) általában zajosak, ezért a jelfeldolgozásban az egyik legfontosabb művelet a szűrés. Olyan is előfordul, hogy egy jelre rászuperponálunk további információt és ezt az információt a fogadó oldalon szűréssel nyerjük vissza. A teljesítményelektronikában csak négyszög feszültségjeleket tudunk előállítani, ugyanakkor a berendezéseink szinuszos feszültséget igényelnek. A négyszög feszültségjelből szűréssel állítjuk elő a szinuszos feszültségjelet. Nem csak villamos jeleket szűrhetünk. Szűrőnek kell tekinteni a lengéscsillapítókat, a fényképezőgépek kézremegés csillapítóját. Rendszertechnikai megközelítésben a szűrők a jelek spektrumát módosítják. A szűrőket többféleképpen lehet csoportosítani.
A jel típusa szerint
analóg
digitális
A szűrő energia felvétele szerint
passzív
aktív
A jelformálás szerint
aluláteresztő (felülzáró)
felüláteresztő (alulzáró)
sáváteresztő (egy felül- és egy aluláteresztő részből áll)
sávzáró (egy alul- és egy felüláteresztő részből áll)
A szűrők további csoportosítása is lehetséges (pl. korábban említettük a kauzális és nem kauzális szűrőket). Ebben a jegyzetben elsősorban passzív analóg szűrők jelformáló tulajdonságait (frekvencia átviteli függvényét, illetve Bode diagramját) vizsgáljuk. Az ideális passzív szűrők Bode diagramja vízszintes és függőleges egyenes szakaszokból áll (ld. 4-128. ábra). Bizonyos frekvenciájú jelek áthaladnak a szűrőn, bizonyos frekvenciájú jeleket teljesen elnyel. Az aktív szűrők karakterisztikái annyiban térnek el a 4-128. ábra látottaktól, hogy a vízszintes szakasz nem az egységnyi erősítésnek megfelelő 0dB-nél van, hanem feljebb.
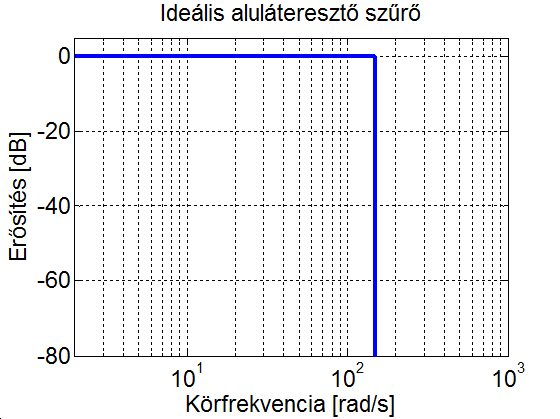
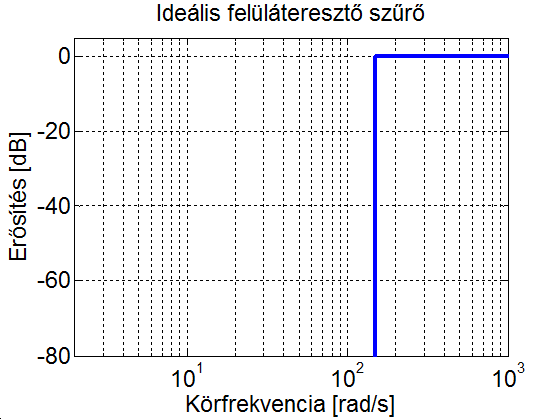


A valóságban olyan nem létezik, hogy egy bizonyos frekvenciájú bemenőjel változatlanul megjelenik a kimeneten, és pl. egy tized Hz-cel nagyobb vagy kisebb frekvenciájú bemenőjel teljesen elnyelődik. Ez a kauzalitásnak is ellentmond. Pl. egy szinuszos jel kezdeti meredeksége a nulla-átmenetnél függ a frekvenciától és a jel amplitúdójától. Ugyanolyan kezdeti meredekségű bemenőjel lehet egy kisebb frekvenciájú nagyobb amplitúdójú, vagy nagyobb frekvenciájú kisebb amplitúdójú jel. A jelnek egy bizonyos szakaszát végig kell várni, hogy utólag eldönthető legyen, hogy az adott bemenőjelet szűrni kell, vagy át kell engedni. Ez matematikailag is könnyen belátható, ha kiszámítjuk az ideális aluláteresztő szűrő súlyfüggvényét (impulzus válaszát). A Dirac-impulzus Fourier transzformáltja minden frekvencia értéknél 1. Legyen az aluláteresztő szűrő vágási körfrekvenciája  . Ennek megfelelően a kimenőjel spektruma (pontosabban annak pozitív tartománya) a 4-129. ábra látható.
. Ennek megfelelően a kimenőjel spektruma (pontosabban annak pozitív tartománya) a 4-129. ábra látható.
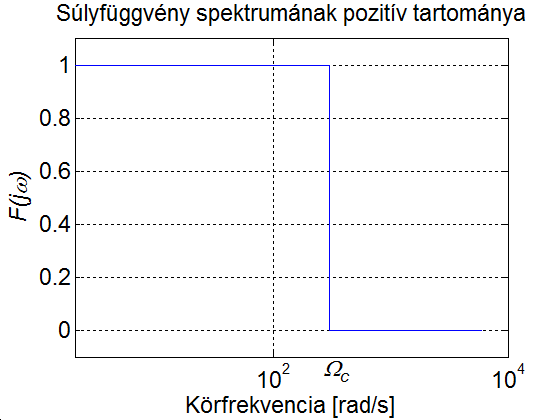
A súlyfüggvényt az időtartományban inverz Fourier-transzformációval kaphatjuk meg
| (4.212) |

Az ideális aluláteresztő szűrő súlyfüggvényének (4.212) alakja  tartományban nem nulla, vagyis ha az ideális aluláteresztő bemenetére a
tartományban nem nulla, vagyis ha az ideális aluláteresztő bemenetére a  időpillanatban egy Dirac-impulzust kapcsolunk, akkor az erre adott válasz már korábban megkezdődik, mint ahogy az impulzust a bemenetre kapcsoljuk. Ez nyilvánvalóan ellentmond a kauzalitásnak.
időpillanatban egy Dirac-impulzust kapcsolunk, akkor az erre adott válasz már korábban megkezdődik, mint ahogy az impulzust a bemenetre kapcsoljuk. Ez nyilvánvalóan ellentmond a kauzalitásnak.
A valóságos szűrők közelítő amplitúdó Bode diagramján a függőleges szakaszok helyett meghatározott meredekségű egyenes szakaszokat találunk. A meredekség  lehet (ld. 4-130. ábra), ahol
lehet (ld. 4-130. ábra), ahol  pozitív egész szám felüláteresztő jellegnél és negatív egész szám aluláteresztő jellegnél. Az
pozitív egész szám felüláteresztő jellegnél és negatív egész szám aluláteresztő jellegnél. Az  abszolút értékét szokás a szűrő fokszámának nevezni.
abszolút értékét szokás a szűrő fokszámának nevezni.
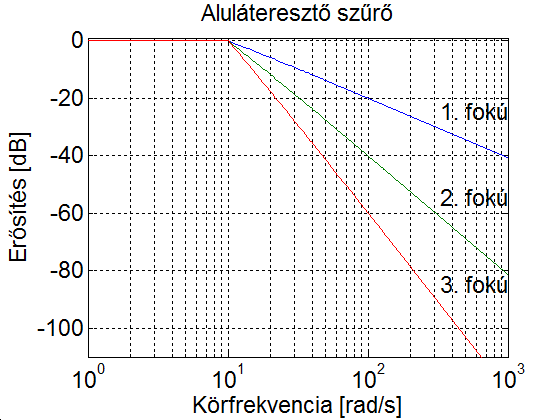
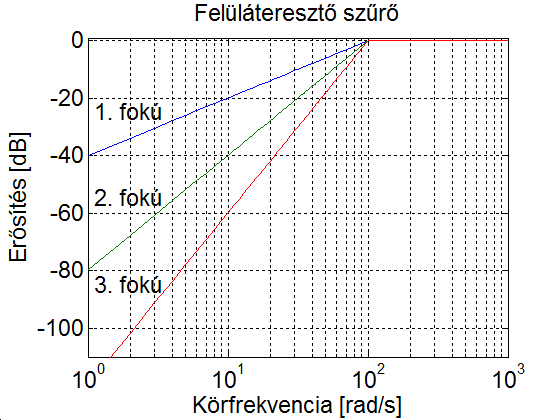
A legegyszerűbb passzív szűrő elrendezés a 4-131. ábraán látható. A szűrő jelformáló tulajdonsága a  és
és  impedancia segítségével állítható be.
impedancia segítségével állítható be.
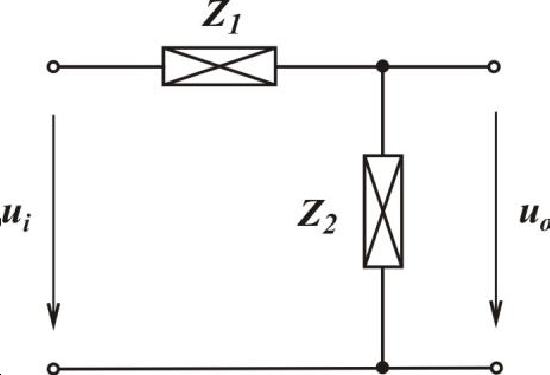
4.10.1. Aluláteresztő szűrő
Az aluláteresztő szűrők olyan rendszerek, amelyek bemenetére szinuszos gerjesztést kapcsolva a kimenetén is szinuszos jel alakul ki (lineáris rendszerek). Ha a bemenőjel frekvenciája kicsi, akkor (passzív szűrőt feltételezve) a be- és kimenőjel amplitúdója, illetve fázisa közel azonos (ideális esetben azonos). Ha a bemenőjel frekvenciája nagy, akkor a kimenőjel amplitúdója kicsi (ideális esetben nulla). Valóságos esetben minél nagyobb a bemenőjel frekvenciája, annál kisebb a kimenőjel amplitúdója és annál nagyobb a fáziskésése.
A teljesítményelektronikában a  és
és  impedancia helyén induktivitás és kapacitás található. Ha a veszteségeket is modellezni kívánjuk, akkor az induktivitással sorban, a kondenzátorral párhuzamosan szokásos egy-egy ellenállást kapcsolni. Ennek megfelelően a két operátoros impedancia
impedancia helyén induktivitás és kapacitás található. Ha a veszteségeket is modellezni kívánjuk, akkor az induktivitással sorban, a kondenzátorral párhuzamosan szokásos egy-egy ellenállást kapcsolni. Ennek megfelelően a két operátoros impedancia
| (4.213) |
| (4.214) |
Az átviteli függvény operátoros feszültség osztással határozható meg
| (4.215) |

| (4.216) |

Adatok (A 3-6 feladat 3-18. ábraáján látható szünetmentes áramforrás szűrőjének ideális, vagyis veszteséges  és
és  induktivitását és kondenzátorát valóságos, vagyis veszteséges impedanciákkal modellezzük)
induktivitását és kondenzátorát valóságos, vagyis veszteséges impedanciákkal modellezzük)

, 


Behelyettesítve
| (4.217) |

A két pólus
| (4.218) |

Mivel a két pólus komplex konjugált párt alkot, a közelítő Bode diagramnak egy töréspontja van, ahol a -40 dB/dekád meredekségű szakasz kezdődik.
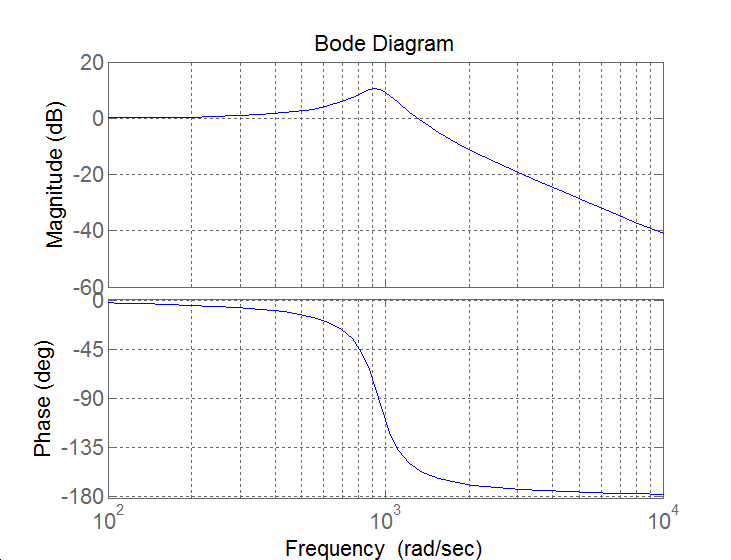
A töréspont helye (4.14) alapján

A 3-6 feladatban a 3-18. ábraán látható szünetmentes áramforrás szűrőjének az a feladata, hogy a tranzisztorkapcsolgatással előállított impulzus szélesség modulált jelből kiszűrje a szinuszos 50 Hz-es alapharmonikust. A 3-6 feladatban láttuk, hogy jól választott impulzus mintával elérhető, hogy az impulzus szélesség modulált jel spektrumában ne szerepeljenek az alacsony rendszámú felharmonikusok. Ezért lehetett a szűrő vágási frekvenciáját 150Hz-re beállítani. Egyszerű négyszögjel esetén, ahol a 150Hz-es harmadik felharmonikus amplitúdója nem hanyagolható el, e feladatban szereplő szűrő nem ad kielégítő eredményt, mivel kiemeli a harmadik felharmonikust.
Bár a szűrők esetén kevésbé van jelentősége, de vizsgáljuk meg, hogy egységugrás bemenőjel hatására miként alakul a kimenőjel.
| (4.219) |

A részlettörtekre bontáshoz a MATLAB residue utasítását felhasználva (a MATLAB programot ld. később)
| (4.220) |

Megjegyezzük, hogy az utolsó tag együtthatójának pontos értéke  ezt egy numerikus számításnál 1-nek vehetjük.
ezt egy numerikus számításnál 1-nek vehetjük.
Az inverz Laplace-transzformációhoz szükségünk van a komplex együtthatójú részlettörtek Euler alakjára (MATLAB program segítségével)
| (4.221) |

(3.99) alapján
| (4.222) |

Az időfüggvényt ugyancsak MATLAB segítségével lehet kirajzolni
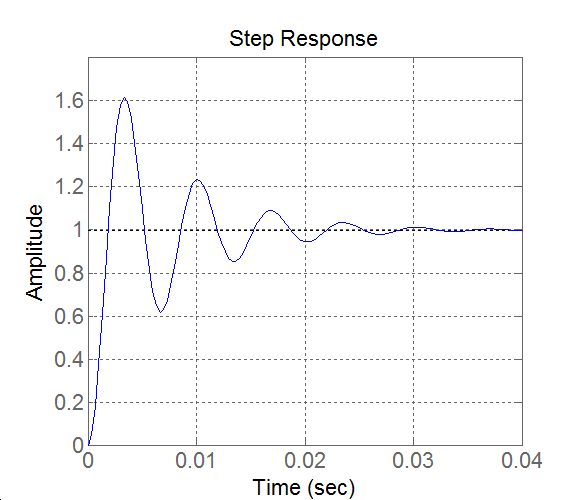
Az átmeneti függvény esetén a kezdeti és végérték tétel alkalmazható
| (4.223) |

| (4.224) |

Fizikai megfontolások alapján:
Ökölszabály: az induktivitás árama és a kondenzátor feszültsége ugrásszerűen nem változhat, ha mindkettő értéke bekapcsolás előtt nulla volt, akkor utána is nulla marad. Tehát a bekapcsolás pillanatában a kondenzátor feszültsége nulla, ezért a vele párhuzamosan kapcsolt ellenálláson is nulla feszültség eshet. Vagyis a kimeneten megjelenő feszültség nulla (ld. (4.223)). Ha az induktivitás árama nulla, akkor minden sorba kapcsolt elem árama is nulla, így Ohm törvény értelmében az induktivitással sorba kapcsolt ellenálláson is nulla feszültség esik. A Kirchhoff huroktörvény miatt a bemeneti feszültséget valahol egy feszültségnek ki kell egyensúlyoznia, de a körben csak az induktivitás tud feszültséget magára venni, vagyis a bekapcsolás pillanatában a teljes bemeneti feszültség az induktivitáson esik. Állandósult állapotban (konstans gerjesztés estén) az induktivitás rövidzárral, a kondenzátor szakadással helyettesíthető. Ennek megfelelően a szűrő állandósult állapotban két ellenállásból álló feszültségosztóként működik, ahol a két ellenállás értéke között nyolc nagyságrend van. Gyakorlati szempontból azt mondhatjuk, hogy állandósult állapotban a teljes bemeneti feszültség a kondenzátoron, illetve a vele párhuzamos ellenálláson esik.
A fenti számításhoz tartozó MATLAB fájl
% Adatok C2=3200e-6; R2=10e+6; R1=0.1; L1=0.35e-3; % Az átviteli függvény számláló és nevező polinomja szamlalo=[R2]; nevezo= [L1*C2*R2 C2*R2*R1+L1 R1+R2]; % A Nyquist diagram kirajzolása nyquist(szamlalo, nevezo) grid %print -djpeg AASZ_Nyguist pause % A Bode diagram kirajzolása bode(szamlalo, nevezo) grid %print -djpeg AASZ_Bode pause % A nevező gyökei roots(nevezo) % A nevező polinom megszorzása 1/s-sel nevezo_s= [L1*C2*R2 C2*R2*R1+L1 R1+R2 0]; % Részlettörtekre bontás [G, P, k]=residue(szamlalo,nevezo_s) % A komplex együttható Euler alakja abs(G(1)) angle(G(1)) % Az aluláteresztő szűrő átviteli függvénye nyitott=tf(szamlalo, nevezo) % Átmeneti függvény step(nyitott) set(gca, 'fontsize', 18); grid %print -djpeg AASZ_step
4.10.2. Felüláteresztő szűrő
Felüláteresztő szűrőt úgy kaphatunk, ha az előző példában a  és
és  impedancia szerepét felcseréljük
impedancia szerepét felcseréljük
| (4.225) |
| (4.226) |
Az átviteli függvény operátoros feszültségosztással határozható meg
| (4.227) |

| (4.228) |

Adatok

, 


Behelyettesítve
| (4.229) |

A két pólus ugyanaz, mint az előző esetben. Ez azt jelenti, hogy a töréspont helye sem változott meg.
| (4.230) |

Mivel a két pólus komplex konjugált párt alkot, a közelítő Bode diagramnak egy töréspontja van, ahol a +40 dB/dekád meredekségű szakasz befejeződik.
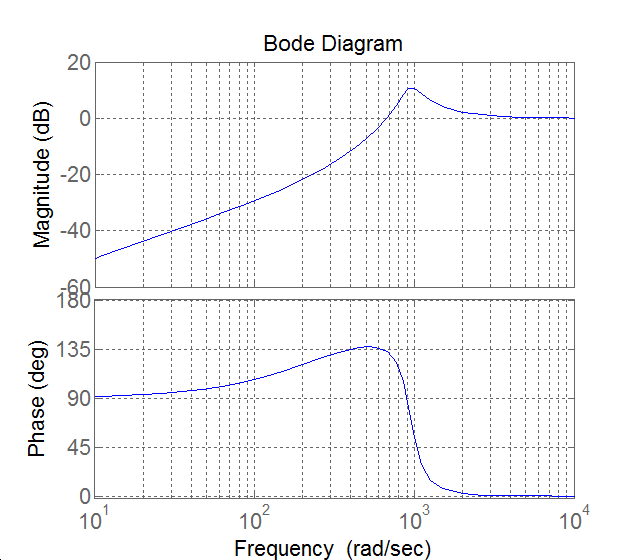
Ebben az esetben is vizsgáljuk meg, hogy egységugrás bemenőjel hatására miként alakul a kimenőjel.
| (4.231) |

A részlettörtekre bontáshoz a MATLAB residue utasítását felhasználva
| (4.232) |

Az inverz Laplace-transzformáció (3.99) alapján
| (4.233) |

Az időfüggvényt ugyancsak MATLAB segítségével lehet kirajzolni
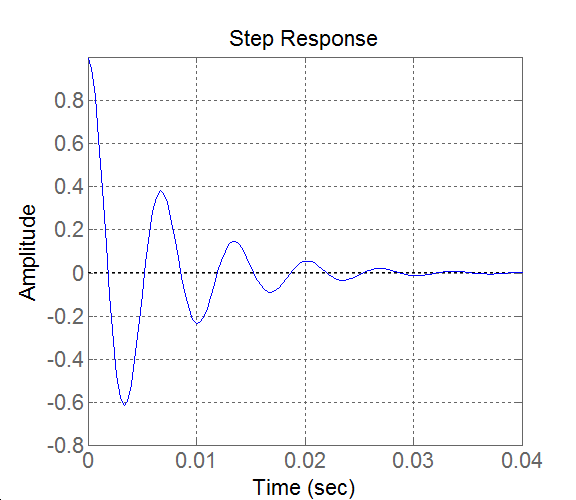
A kezdeti és végérték tétel ebben az esetben is alkalmazható
| (4.234) |

| (4.235) |

Fizikai megfontolásként ugyanaz mondható el, mint az első esetben, csak a szűrő belső és kimeneti feszültsége esése felcserélődik.
A fenti számításhoz tartozó MATLAB fájl
% Adatok C1=3200e-6; R1=10e+6; R2=0.1; L2=0.35e-3; % Az átviteli függvény számláló és nevező polinomja szamlalo=[L2*C1*R1 C1*R1*R2+L2 R2]; nevezo= [L2*C1*R1 C1*R1*R2+L2 R1+R2]; % A Nyquist diagram kirajzolása nyquist(szamlalo, nevezo) grid pause % A Bode diagram kirajzolása bode(szamlalo, nevezo) grid pause roots(szamlalo) roots(nevezo) nevezo_s= [L2*C1*R1 C1*R1*R2+L2 R1+R2 0]; [G, P, k]=residue(szamlalo,nevezo_s) abs(G(1)) angle(G(1)) nyitott=tf(szamlalo, nevezo) step(nyitott) set(gca, 'fontsize', 18); grid
Függelék
5. fejezet - Komplex számok
- 5.1. Komplex számok bevezetése
- 5.2. Műveletek komplex számokkal
- 5.3. A komplex szám ábrázolása
- 5.4. Néhány a komplex számokra vonatkozó azonosság
- 5.5. Műveletek a trigonometrikus alakkal
- 5.6. A matematikai műveletek geometriai szemléltetése
- 5.7. A komplex számok exponenciális alakja
- 5.8. Gyökvonás komplex számok esetén
- 5.9. Néhány komplex függvény ábrázolása
- 5.10. Javasolt feladatok
- 5.11. Megoldások
5.1. Komplex számok bevezetése
A  nincs értelmezve a valós számok halmazán. Bővítsük a szám fogalmát úgy, hogy
nincs értelmezve a valós számok halmazán. Bővítsük a szám fogalmát úgy, hogy  és többszörösei is legyen része. Az egyszerűség kedvéért jelöljük j-vel.
és többszörösei is legyen része. Az egyszerűség kedvéért jelöljük j-vel.
Legyenek rá érvényesek a számok között definiált műveletek és az azokra vonatkozó szabályok:
Leírás | Példák | ||||
Valós | Valós és komplex | ||||
1. | Minden a, b esetén összegük is szám: a+b=c | 1+2=3 | j+2j=3j | ||
2. | Az összeadás asszociatív: (a+b)+c=a+(b+c) | (1+2)+3=1+(2+3) | (j+2j)+3j=j+(2j+3j) | ||
3. | Az összeadás kommutatív: a+b=b+a | 1+2=2+1 | j+2j=2j+j | ||
4. | Minden a, b esetén csak egy x van, amelyre a+x=b | 1+x=3x=2 | 1j+x=3jx=2j | ||
5. | Minden a, b esetén szorzatuk is szám: a•b=c | 1•2=2 | j•2j=-2 | ||
6. | A szorzat asszociatív: (a•b)•c=a•(b•c) | (1•2)•3=1•(2•3) | (j•2j)•3j=j•(2j•3j) | ||
7. | A szorzás kommutatív: a•b=b•a | 1•2=2•1 | j•2j=2j•j | ||
8. | Minden a, b esetén, ha a≠0 csak egy x van, amelyre ax=b | 1•x=2x=2 | j•x=-2x=2j | ||
9. | Minden a, b és c esetén fennáll a disztributivitás: a•(b+c)=a•b+a•c | 2•(1+3)=2•1+2•3 | j•(2j+3j)=j•2j+j•3j | ||
A komplex szám általánosan két – egy valós és egy képzetes – részből áll. Jelölése: a+bj, ahol a és b valós számok, és a a valós, bj pedig a képzetes rész. Ez utóbbi azt jelenti, hogy a képzetes egységből  b db van a számban (tehát bj=b•j). Szokás még a z=a+bj jelölés is. Erre az „összetett” z számra is igazak a táblázatban leírt szabályok. Meg kell azonban jegyezni, hogy a komplex számok halmaza nem rendezett, tehát nem mondhatjuk azt, hogy az egyik komplex szám nagyobb, mint a másik (azaz z1>z2 értelmetlen).
b db van a számban (tehát bj=b•j). Szokás még a z=a+bj jelölés is. Erre az „összetett” z számra is igazak a táblázatban leírt szabályok. Meg kell azonban jegyezni, hogy a komplex számok halmaza nem rendezett, tehát nem mondhatjuk azt, hogy az egyik komplex szám nagyobb, mint a másik (azaz z1>z2 értelmetlen).
5.2. Műveletek komplex számokkal
A számítások során j-t ugyanúgy használjuk, mintha valós szám lenne, de ha előfordulnak a hatványai, akkor kihasználhatjuk, hogy j•j=j2=-1. Érdemes megfigyelni, hogy j hatványai négyes periódussal rendelkeznek:
j1=j
j2=j•j=-1
j3=j•j2=-j
j4=j•j3=1
j5=j•j4=jstb.
A fent említett jelölés (a+bj) a komplex szám algebrai, vagy kanonikus alakja. A későbbiekben az algebrai alak elnevezést fogjuk használni. A következőkben nézzünk néhány példát a négy alapművelet alkalmazására.
5.2.1. Összeadás
Általánosan:
z1=a+bj; z2=c+dj; z3=z1+z2=?
z3=a+bj+c+dj=(a+c)+(b+d)j=e+fj
(1+2j)+(0+j)=(1+0)+(2+1)j=1+3j
(5+2j)+(3+0j)=(5+3)+(2+0)j=8+2j
(1+0j)+(2+0j)=(1+2)+(0+0)j=3+0j=3
(2+j)+(3+2j)=(2+3)+(1+2)j=5+3j
(2+(-j))+(3+2j)=(2+3)+(-1+2)j=5+j
(1-2j)+(-1-3j)=(1-1)+(-2-3)j=-5j
5.2.1.1. Kivonás
Általánosan:
z1=a+bj; z2=c+dj; z3=z1-z2=?
z3=(a+bj)-(c+dj)=(a-c)+(b-d)j=e+fj
(1+2j)-(0+j)=(1-0)+(2-1)j=1+j
(5+2j)-(3+0j)=(5-3)+(2-0)j=2+2j
(1+0j)-(2+0j)=(1-2)+(0-0)j=-1+0j=-1
(2+j)-(3+2j)=(2-3)+(1-2)j=-1-j
(2+(-j))-(3+2j)=(2-3)+(-1-2)j=-1-3j
(1-2j)-(-1-3j)=(1+1)+(-2+3)j=2+j
5.2.1.2. Szorzás
Általánosan:
z1=a+bj; z2=c+dj; z3=z1•z2=?
z3=(a+bj)•(c+dj)=a•c+a•dj+bj•c+b•dj2=ac+ j• (ad+bc)+ j•bd•(-1)=(ac-bd)+(ad+bc)=e+fj
5.2.1.3. Osztás
(1+2j)•(0+j)=(1+2j)•j=j+2j2=j-2=-2+j vagy =(1•0-2•1)+(1•1+2•0)j=-2+j
(5+2j)•(3+0j)=(5+2j)•3=15+6j vagy =(5•3-2•0)+(5•0+2•3)j=15+6j
(1+0j)•(2+0j)=1•2=2 vagy =(1•2-0•0)+(1•0+0•2)j=2+0j=2
(2+j)•(3+2j)=(2•3-1•2)+(2•2+1•3)j=(6-2)+(4+3)=4+7j
(2+(-j))•(3+2j)=(2•3+1•2)+(2•2-1•3)j=(6+2)+(4-3)=8+j
(1-2j)•(-1-3j)=(-1•1-2•3)+(-1•3+2•1)j=(-1-6)+(-3+2)=-7-j vagy =-(1-2j)•(1+3j)=-(1•1+2•3)-(1•3-2•1)j=-(1+6)-(3-2)=-7-j
Általánosan:
z1=a+bj; z2=c+dj; z3=z1/z2=?
Kihasználjuk a következő – a valós számok köréből ismert – azonosságot:
x2-y2=(x+y)(x-y).

5.2.1.4. További szokásos jelölések





Re(z) jelenti valamely komplex szám valós, Im(z) pedig képzetes részét. Ha z=a+bj, akkor Re(z)=a és Im(z)=b. Fontos: mind a valós, mind a képzetes rész valós szám!
Valamely z komplex szám konjugáltja  . Ha z=a+bj, akkor
. Ha z=a+bj, akkor  . Vegyük észre, hogy az osztáskor a nevező konjugáltjából álló törttel szoroztunk. Az ott látottak alapján megállapíthatjuk, hogy egy komplex számot megszorozva a konjugáltjával valós számot kapunk: (a+bj)•(a-bj)=a2+b2.
. Vegyük észre, hogy az osztáskor a nevező konjugáltjából álló törttel szoroztunk. Az ott látottak alapján megállapíthatjuk, hogy egy komplex számot megszorozva a konjugáltjával valós számot kapunk: (a+bj)•(a-bj)=a2+b2.
5.3. A komplex szám ábrázolása
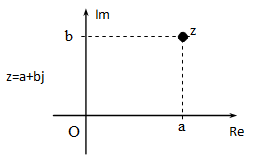
A valós számokat számegyenesen ábrázoljuk. Egy egyenes a komplex számok ábrázolására nem elegendő, mivel valós és képzetes részből állnak. Ki kell tehát lépnünk az egyenesből a síkba. Ezt a síkot komplex számsíknak nevezzük. Vegyünk fel egy derékszögű koordinátarendszert és a vízszintes tengelyen a komplex szám valós, a függőleges tengelyen pedig képzetes részét jelöljük.
Példák:
z1=0+jz2=1+0jz3=1+j
z4=-1+jz5=-2-jz6=2-2j
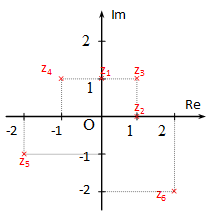
Az ábrázolás már sugallja, hogy a komplex számot vektorként is értelmezhetjük. Ebben az estben az OP vektor jelenti a z komplex számot. A vektor koordinátái rendre a komplex szám valós- és képzetes részei. Mint minden vektort, ezt is megadhatjuk a hosszával és a valós tengellyel bezárt szögével is. Ez utóbbit azonban pontosan definiálni kell, mivel a szög kétféle módon is értelmezhető. Pozitív az a szög, amelyet úgy kapunk, hogy a valós tengelyt az óramutató járásával ellentétes irányban az OP vektorra forgatjuk. A pozitív szög jelölése: arg z.
A vektor geometriai adatait könnyen felírhatjuk a komplex szám algebrai alakjának segítségével, ha felhasználjuk a derékszögű háromszögekről tanult összefüggéseket. A vektor hosszát a komplex szám abszolút értékének hívjuk. Ez a Pitagorasz tétel segítségével:

, a szög pedig:  .
.
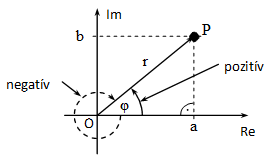
Érdemes az algebrai alak paramétereit (a és b) is kifejezni a geometriai alak paramétereivel:
Ez utóbbit a komplex szám trigonometrikus alakjának hívjuk, és gyakran használjuk, mert segítségével néhány művelet sokkal könnyebben elvégezhető, mint az algebrai alakkal.
5.4. Néhány a komplex számokra vonatkozó azonosság
Azonosság | Bizonyítás | |||
a, |
|
| ||
b, |
|
| ||
c, |
|
| ||
d, |
|
| ||
e, |
|
b, illetve d, felhasználásával | ||
f, | e, általánosítható:
| teljes indukcióval bizonyítható | ||
g, |
| f, alapján, ha minden zi azonos (i=1,2,…,n) | ||
h, |
|
| ||
i, |
|
|
| |










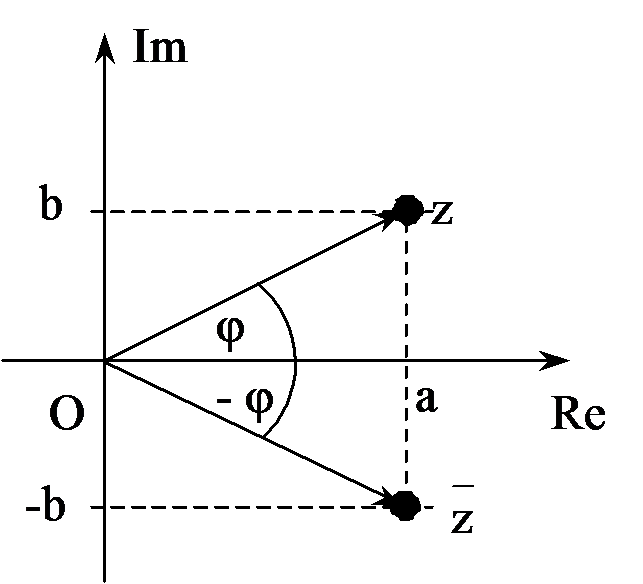

5.5. Műveletek a trigonometrikus alakkal
5.5.1. Szorzás


A szükséges trigonometriai azonosságok:

Az abszolút értékeket tehát összeszorozzuk, a szögeket összeadjuk. Az, hogy az abszolút értékeket össze kell szorozni e,-ből is látható. A szögekre vonatkozó összefüggés (f,-hez hasonlóan) általánosítható:
arg(z1 z2 … zn)=arg z1+arg z2+…arg zn.
Ha azonban minden zi=z (ahol i=1,2,…,n), akkor arg zn=n arg z. Ennek és g,-nek a felhasználásával felírható zn összefüggése:

Ez az összefüggés Moivre tétele.
5.5.1.1. Osztás

Első lépésként nézzük meg, hogy mi lesz egy komplex szám reciproka:
a számláló z konjugáltja, a nevező pedig az abszolút értéke, így  . Ebből
. Ebből  . Ezzel az osztást visszavezettük szorzássá, már csak a konjugált abszolút értékét és szögét kell kifejezni z2 paramétereivel:
. Ezzel az osztást visszavezettük szorzássá, már csak a konjugált abszolút értékét és szögét kell kifejezni z2 paramétereivel:
c, alapján  és i, alapján
és i, alapján  .
.

. Tehát az abszolút értékeket osztjuk, a szögeket pedig kivonjuk egymásból!
Példák:






a,-ból


 .
.
Tehát z az x3=1 egyenlet egyik gyöke.

5.6. A matematikai műveletek geometriai szemléltetése
z1=a+bjz2=c+dj
Összeadás Kivonás
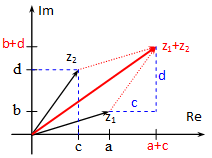
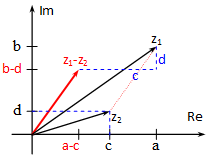
A geometriában tanult vektorösszegzési és kivonási szabályok itt is érvényesek, mint ahogy az ábrából is látszik.
5.6.1. Szorzás
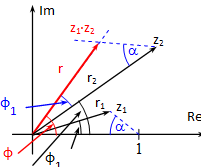
A következőkben a szorzat vektor megszerkesztésének módját ismerjük meg. Ehhez felhasználjuk a komplex számok szorzásáról tanultakat, azaz a szögek összeadódnak, az abszolút értékek összeszorzódnak.

amiből a szorzatvektor egyenese már megszerkeszthető.
Bizonyítsuk be, hogy az origó, 1, z1 és az origó, z2, z1z2 háromszögek hasonlóak. Elegendő azt belátni, hogy egy szöge, és ezen szögek szárainak aránya megegyezik. Az origónál levő szög mindkét háromszögben φ1 , tehát az egyik feltétel teljesül. Az oldalak aránya pedig:  , ami igaz, hiszen a komplex számok abszolút értékeit össze kell szorozni. Ezek szerint a két háromszög tényleg hasonló, amiből viszont az következik, hogy minden szögük – tehát a z2-nél és 1-nél jelölt α szögek is – egyenlők. Így a szorzat már megszerkeszthető.
, ami igaz, hiszen a komplex számok abszolút értékeit össze kell szorozni. Ezek szerint a két háromszög tényleg hasonló, amiből viszont az következik, hogy minden szögük – tehát a z2-nél és 1-nél jelölt α szögek is – egyenlők. Így a szorzat már megszerkeszthető.
5.6.1.1. Osztás
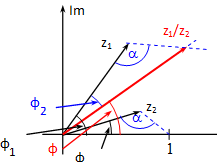
Nagymértékben építhetünk a szorzásnál tapasztaltakra, hiszen az osztás a szorzás ellentett művelete.
A hányados egyenesét úgy kaphatjuk, hogy z1 vektorát elforgatjuk –φ szöggel, mivel  . Az előzőek alapján az origó, 1, z2 és az origó, z1/z2, z1 háromszögek hasonlóak, így az α szöget z1-nél felmérve a két egyenes metszéseként megkapjuk a keresett hányados vektort.
. Az előzőek alapján az origó, 1, z2 és az origó, z1/z2, z1 háromszögek hasonlóak, így az α szöget z1-nél felmérve a két egyenes metszéseként megkapjuk a keresett hányados vektort.
5.7. A komplex számok exponenciális alakja
Az áttérést az ún. Euler formula biztosítja. Ez a következő:

,
ahol e a természetes logaritmus alapszáma (≈2.718281828),  -t pedig hatványnak tekintjük, ahol e az alap jφ pedig a kitevő.
-t pedig hatványnak tekintjük, ahol e az alap jφ pedig a kitevő.
A következőkben nem matematikai egzaktságú bizonyítással, hanem csak egy levezetéssel érzékeltetjük, hogy ami a valós számok között elképzelhetetlennek tűnik (egy hatvány függvény egyenlő a korlátos szinusz és koszinusz összegével), az a komplex számok körében valóság lehet.
A levezetéshez Maclaurin (nulla körüli Taylor) sorokat használunk fel. Bizonyítható, hogy az exponenciális függvény Maclaurin sora komplex változókkal is konvergens. Írjuk fel  Maclaurin sorát, bontsuk ki:
Maclaurin sorát, bontsuk ki:

A számlálóba írjuk be j hatványait, majd csoportosítsuk külön a valós, és külön a képzetes tagokat:


A két szummában sorban a koszinusz és a szinusz Maclaurin sorát kaptuk.
Az Euler formula tulajdonképpen egy egységnyi abszolút értékű komplex számot jelent, melynél az argumentum φ. Vizsgáljuk meg, hogy ez az egyezés fennáll-e a művelet végzés esetén is.
Szorzás:

Osztás:
Egész kitevős hatványozás:

Könnyen belátható, hogy az egyezés nem csak egységnyi abszolút értékű komplex számok esetén áll fenn. Egy komplex szám trigonometrikus alakból könnyen átírható exponenciális alakra az Euler formula alkalmazásával:

.
Példák:
Az előző feladatsor a, és e, feladatát oldjuk meg.

5.8. Gyökvonás komplex számok esetén
A problémát az jelenti, hogy egy komplex számnak több gyöke van. Tudjuk, hogy a hatványozás a gyökvonás ellentett művelete. Mivel hatványozni a legkényelmesebben a trigonometrikus alak segítségével lehet, ezért itt is azt használjuk.
Legyen  és
és  , valamint
, valamint  .
.
Ekkor a Moivre formula alapján:

.
Ez az egyenlőség csak akkor teljesül, ha az abszolút értékek és a szögek megegyeznek:

.
A gyökvonás összefüggése tehát:

ahol 
Ez azt jelenti, hogy a komplex számok halmazán minden számnak n db n-edik gyöke van, hiszen mind a szinusz, mind a koszinusz 2π szerint periodikus.
Megvizsgálva a gyököket látjuk, hogy mindegyikük abszolút értéke azonos  , és egymással bezárt szögük
, és egymással bezárt szögük  többszöröse. Ez azt jelenti, hogy a komplex számsíkon egy origó középpontú
többszöröse. Ez azt jelenti, hogy a komplex számsíkon egy origó középpontú  sugarú körön egyenletesen helyezkednek el. Ha ezen pontokat összekötjük, akkor egy n oldalú szabályos sokszöget kapunk.
sugarú körön egyenletesen helyezkednek el. Ha ezen pontokat összekötjük, akkor egy n oldalú szabályos sokszöget kapunk.

Példák:

A következő k-ra a szög 2π, ami a periodicitás miatt annyi mintha zérus lenne. Ekkor azonban ugyanazt az értéket kapjuk, mint k=0 esetén, Innentől kezdve tehát a gyökök ismétlődnek, így összesen három különböző gyök van.
Ábrázolva:
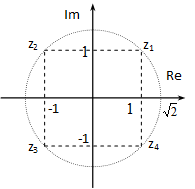

 Ábrázolva:
Ábrázolva: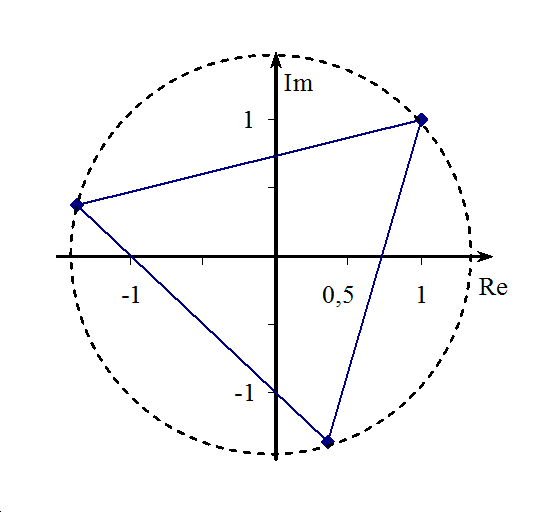
5-4. ábra Ábrázolás

5-5. ábra

 Az eredmények meghatározásához a következőket vegyük figyelembe:
Az eredmények meghatározásához a következőket vegyük figyelembe:
5.9. Néhány komplex függvény ábrázolása
A következő feladatokban az ω valós paramétertől függő komplex függvényeket ábrázolunk. Az ω a [0,∞] zárt intervallumba eső értékeket vesz fel.
1.Legyen Y(ω)=ejω.
Ekkor Y(ω)=cos ω+jsin ω és Re(Y(ω))=cos ω; Im(Y(ω))=sin ω.

, tehát a függvény minden pontja azonos távolságra van az origótól, azaz a függvény képe kör, melynek sugara 1.
A körön a nyíl az ω növekedésének irányát jelzi.
2.Legyen Y(ω)=2ejω.
Ekkor Y(ω)=2(cos ω+jsin ω) és Re(Y(ω))=2cos ω; Im(Y(ω))=2sin ω.

, tehát a függvény minden pontja azonos távolságra van az origótól, azaz a függvény képe kör, melynek sugara 2.
3.Legyen Y(ω)=ej2ω.
Ekkor Y(ω)=cos 2ω+jsin 2ω és Re(Y(ω))=cos 2ω; Im(Y(ω))=sin 2ω.

, tehát ez is kör – mint az 1, feladatban – de az ω növekedésével „gyorsabban haladnak” a függvény pontjai a körön.
4.Legyen Y(ω)=1+j ω.
Ekkor Re(Y(ω))=1; Im(Y(ω))=ω, tehát valós része mindig 1.

.
A komplex vektor hossza szigorúan monoton nő, legkisebb értéke egységnyi; szöge szintén szigorúan monoton nő, legkisebb értéke 0°, a legnagyobb pedig 90°. Ezek alapján megállapítható, hogy a függvény képe egyenes, mely a valós tengely 1 pontjából indul, és függőlegesen tart a végtelenbe.
5. Legyen 
Az ábrázolás előkészítéseként célszerű a függvényt az algebrai alaknak megfelelő formájúvá rendezni.

. Ebből az alakból könnyen kifejezhetjük az abszolút értéket és a szöget:
Ebből csak azt tudjuk megállapítani, hogy a szög 0°-tól –90°-ig nő, de az abszolút érték nem ad segítséget a függvény alakjának megállapításához. Vizsgáljuk inkább az Y1(ω)=Y(ω)-1 függvényt. Ha ezt sikerül ábrázolni, akkor az eredeti függvényünk képét egy egyszerű eltolással megkapjuk.
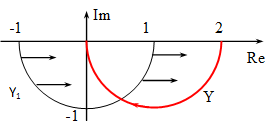
Megállapítható tehát, hogy az ω paramétertől függetlenül minden pont egységnyi távolságra van az origótól, azaz a függvény pontjai egy egységsugarú körön vannak. Mivel Im(Y1(ω)) minden pozitív ω esetén negatív, ezért a függvény képe egy origó középpontú egységsugarú félkör, amely a negatív képzetes félsíkon helyezkedik el.
Az eredeti függvényünk ennek +1-el való eltolásával adódik, így a félkör középpontja az 1+0j pont.
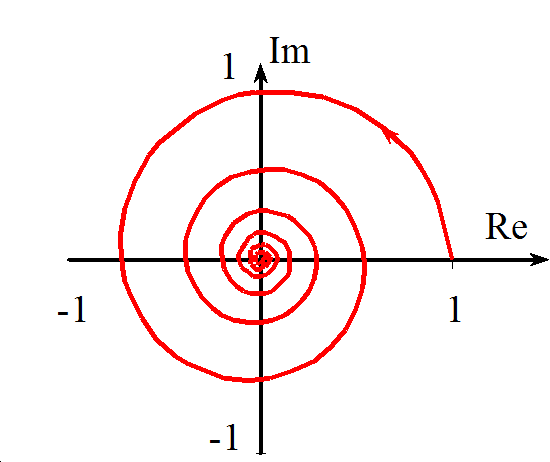
Javasolt feladat:  vizsgálata. (Ez is egy félkör, de sugara: A/2, középpontja: A/2+0j. Érdekes még, hogy a függvény minimuma az ω=1/T helyen van, és itt a függvény értéke: A/2-jA/2.
vizsgálata. (Ez is egy félkör, de sugara: A/2, középpontja: A/2+0j. Érdekes még, hogy a függvény minimuma az ω=1/T helyen van, és itt a függvény értéke: A/2-jA/2.
6.Legyen Y(ω)=e -0.1ω+jω.
Ekkor Y(ω)=e -0.1ω e jω = e -0.1ω (cos ω+jsin ω) és Re(Y(ω))= e -0.1ω cos ω; Im(Y(ω))= e -0.1ω sin ω.
A szög megegyezik az 1. feladat szögével, tehát a komplex vektor itt is az origó körül fog forogni. Az abszolút értéket egy szigorúan monoton csökkenő, nullához tartó függvény írja le. Ebből arra lehet következtetni, hogy a függvény képe spirális, mely egyre jobban „rászorul” az origóra. Legtávolabb az origótól az ω =0 esetén lesz: 1+0j.
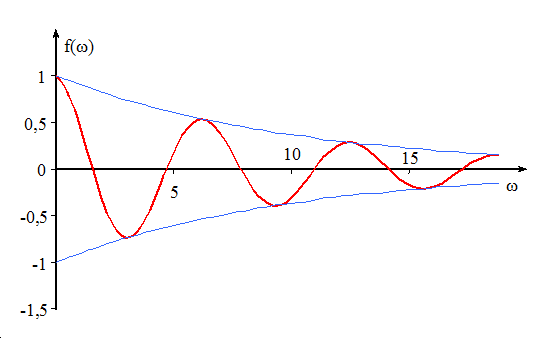
A későbbi tanulmányok miatt célszerű megvizsgálni a Re(Y(ω)) függvényt.
Legyen f(ω)= Re(Y(ω))=e -0.1ω cos ω, ez tehát egy valós függvény, amely két részből áll. Az egyik egy koszinusz, amely 1 és –1 között periodikusan „hullámzik”, a másik egy e-ad, amely negatív kitevője miatt szigorúan monoton tart nullához. Ez utóbbi alulról és felülről korlátok közé szorítja a koszinusz függvényt.
5.10. Javasolt feladatok
Rendezze algebrai alakra a következő komplex függvényeket:
Ábrázolja a következő komplex függvényeket pozitív ω esetén:





5.11. Megoldások



6. |
5-6. ábra | 7. |
5-7. ábra |
8. |
5-8. ábra | 9. |
5-9. ábra |
10. |
5-10. ábra | 11. |
5-11. ábra Megoldás |
12. |
5-12. ábra | 13. |
5-13. ábra |
14. |
5-14. ábra | 15. |
5-15. ábra |
16. |
5-16. ábra | 17. |
5-17. ábra |
18. |
5-18. ábra | 19. |
5-19. ábra |
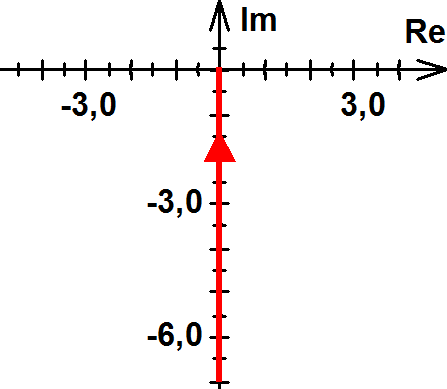
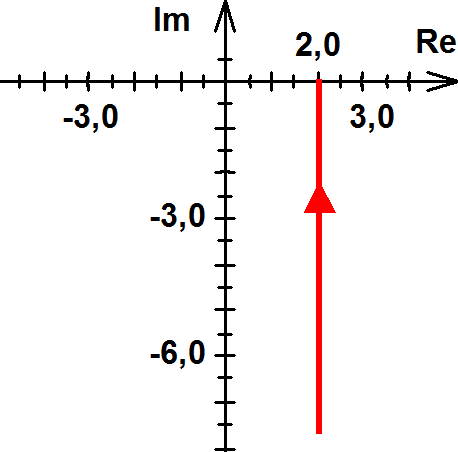
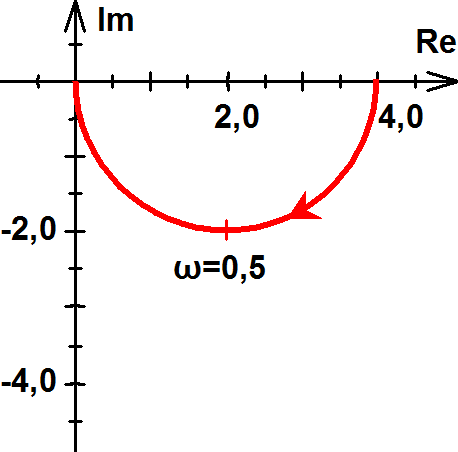
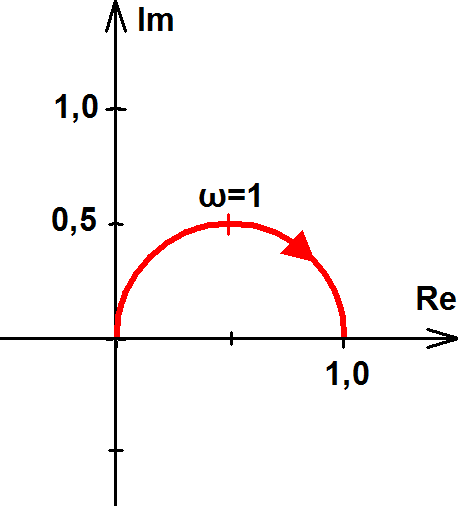
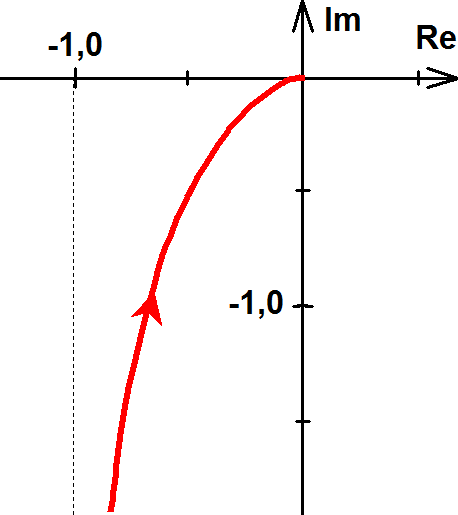
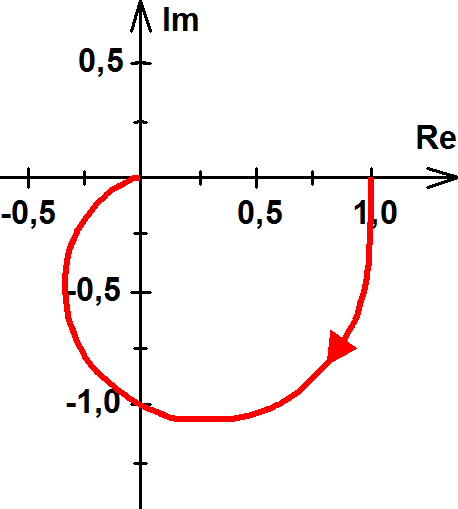
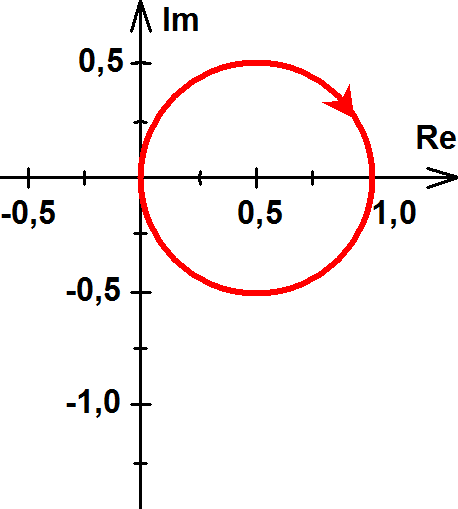
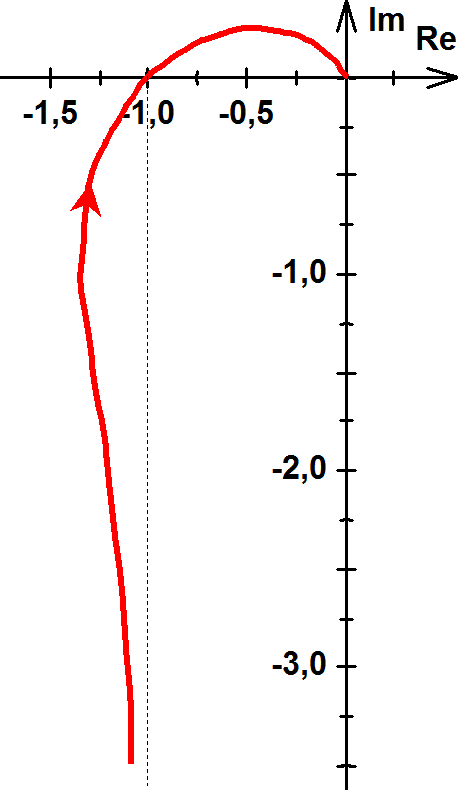
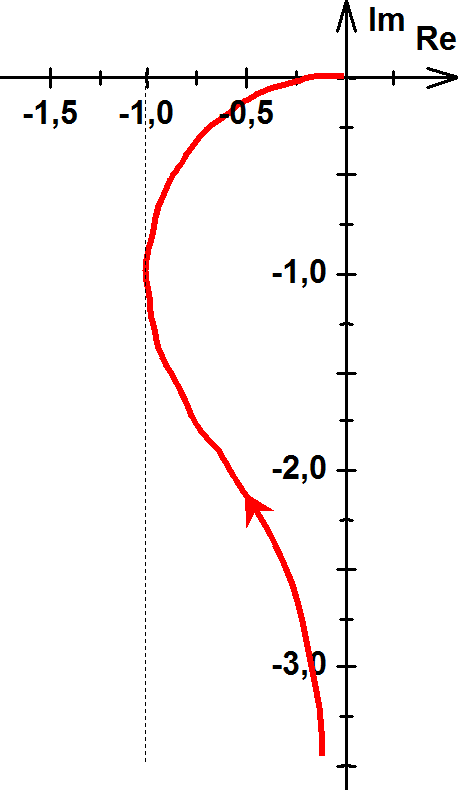
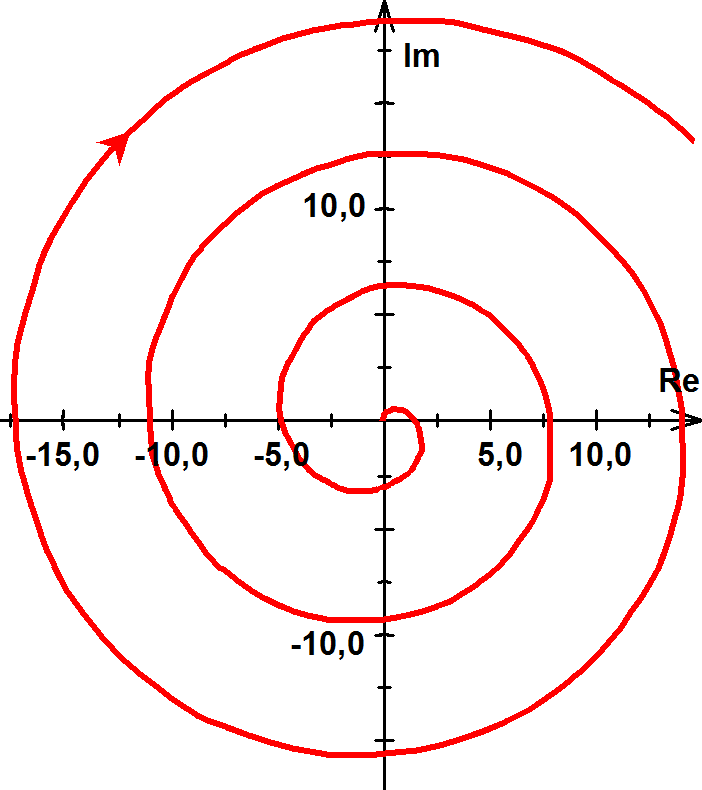
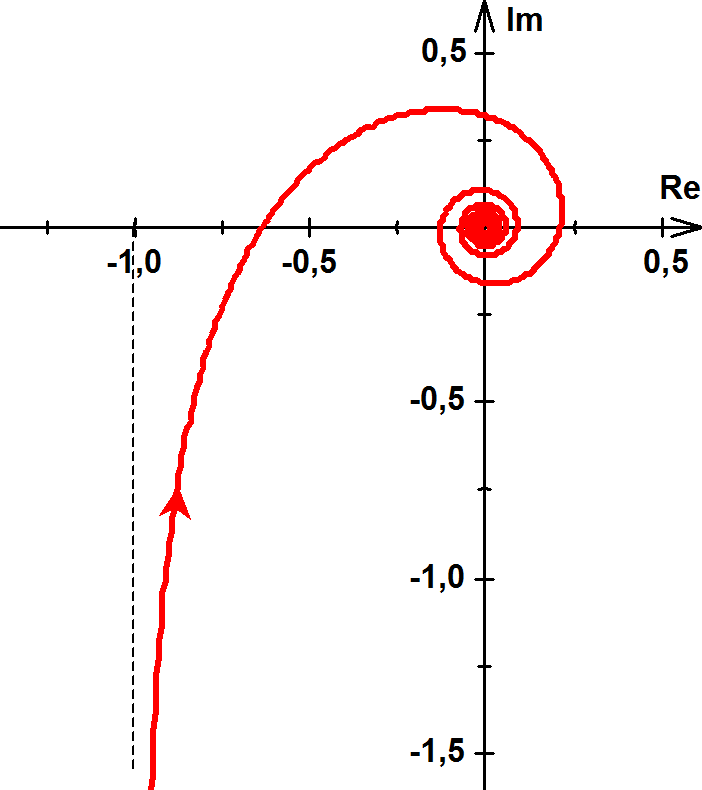
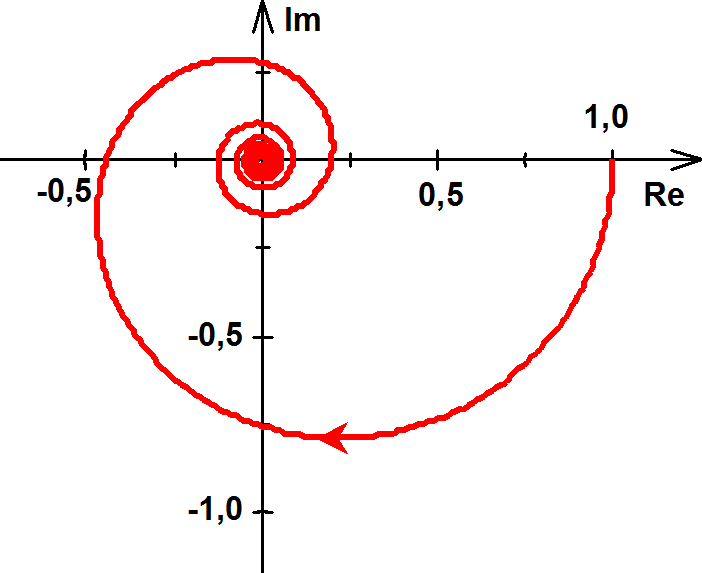
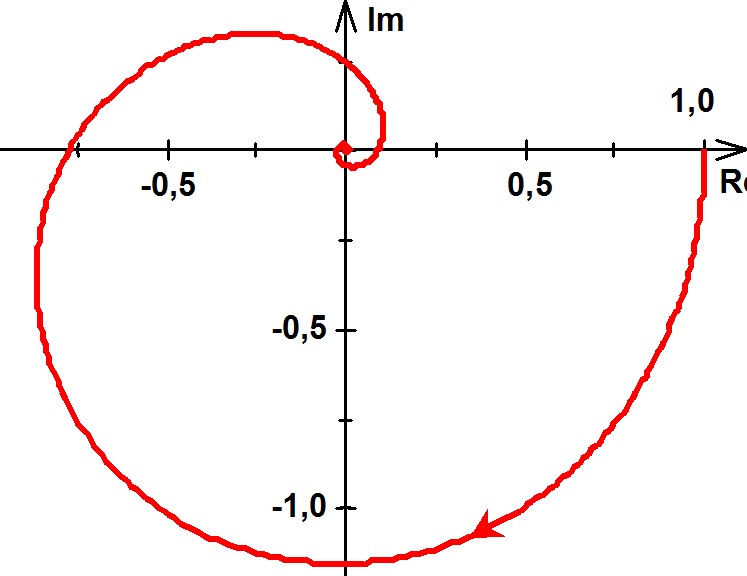
6. fejezet - A közönséges differenciálegyenlet
Az olyan egyenleteket nevezzük differenciálegyenleteknek, amelyekben deriváltak szerepelnek. Ha a differenciálegyenletben csak egy független változó van, akkor közönséges differenciálegyenletről beszélünk. Differenciálegyenlet-rendszerről van szó akkor, ha az egyenletek száma egynél több, és ugyanennyi ismeretlen függvényt kell meghatároznunk a megoldás során.
6.1. A közönséges differenciálegyenletek osztályozása
A közönséges differenciálegyenletek osztályozása rendkívül fontos, ugyanis a különböző típusokhoz kidolgozott megoldási módszerek közül csak ennek ismeretében lehet választani.
Definíciók:
A differenciálegyenlet rendje egyenlő a benne szereplő legmagasabb rendű derivált rendszámával.
Lineáris az a differenciálegyenlet, amelyben az ismeretlen függvény és annak deriváltjai csak első hatványon szerepelnek, valamint az ismeretlen függvénynek és deriváltjainak szorzata semmilyen kombinációban sem fordul elő.
Inhomogén az a differenciálegyenlet, amelynek van olyan tagja, amelyben az ismeretlen függvény, vagy annak valahányadik deriváltja nem szerepel. Ellenkező esetben a differenciálegyenlet homogén.
Állandó együtthatós az a differenciálegyenlet, amelyben a függvényt, és annak deriváltjait tartalmazó tagok együtthatói állandók. Ellenkező esetben a differenciálegyenlet függvényegyütthatós.
Példák:

elsőrendű (mert y első deriváltja a legmagasabb rendű derivált), lineáris (mert y és deriváltja csak első hatványon szerepel, és nincs a szorzatukat tartalmazó tag sem), inhomogén (mert van olyan tagja – az x –, amelyben nem szerepel y, vagy annak deriváltja), állandó együtthatós (mert 5 és 3 állandó).
elsőrendű (mert y első deriváltja a legmagasabb rendű derivált), lineáris (mert y és deriváltja csak első hatványon szerepel, és nincs a szorzatukat tartalmazó tag sem), inhomogén (mert van olyan tagja – a sin x –, amelyben nem szerepel y, vagy annak deriváltja), állandó együtthatós (mert 5 és 3 állandó).

elsőrendű (mert y első deriváltja a legmagasabb rendű derivált), lineáris (mert y és deriváltja csak első hatványon szerepel, és nincs a szorzatukat tartalmazó tag sem), homogén (mert minden tagjában szerepel y, vagy annak deriváltja), állandó együtthatós (mert 5 és 3 állandó).

elsőrendű (mert y első deriváltja a legmagasabb rendű derivált), nemlineáris (mert van x és y szorzatát tartalmazó tag), inhomogén (mert van olyan tagja – az x –, amelyben nem szerepel y, vagy annak deriváltja), függvényegyütthatós (mert y sin(x) -ben sin(x) nem állandó).

másodrendű (mert y második deriváltja a legmagasabb rendű derivált), lineáris (mert y és deriváltjai csak első hatványon szerepelnek, és nincs a szorzatukat tartalmazó tag sem), inhomogén (mert van olyan tagja – a 3x –, amelyben nem szerepel y, vagy annak deriváltja), állandó együtthatós (mert 1, 4 és 3 állandó).

másodrendű (mert y második deriváltja a legmagasabb rendű derivált), nemlineáris (mert van benne y2), inhomogén (mert van olyan tagja – a 2x –, amelyben nem szerepel y, vagy annak deriváltja), állandó együtthatós (mert 1, 5 és 3 állandó).
A Rendszertechnikában általában állandó együtthatós-, inhomogén-, lineáris differenciálegyenletekkel fogunk foglalkozni.
6.2. A differenciálegyenletek megoldásai
A differenciálegyenlet megoldásai azok a függvények, amelyek deriváltjaikkal együtt azonosan kielégítik az adott differenciálegyenletet.
Megkülönböztetünk általános és partikuláris megoldást. Egy n-ed rendű differenciál-egyenlet általános megoldása olyan függvény, amely n számú egymástól független paramétert tartalmaz és deriváltjaival együtt azonosan kielégíti az adott differenciálegyenletet. Partikuláris megoldás esetén a paraméterek száma legfeljebb n-1. Partikuláris megoldást előállítani rendkívül egyszerű, csak valamely paraméternek (lehet többnek is) kell értéket adni. Általában az általános megoldás tartalmazza az összes partikuláris megoldást.
Példák:
Az
 egyenlet általános megoldása
egyenlet általános megoldása  , mivel azonosan kielégíti a differenciálegyenletet, hiszen
, mivel azonosan kielégíti a differenciálegyenletet, hiszen
Ennek egy partikuláris megoldása c=0 esetén: 
Az
 egyenlet általános megoldása
egyenlet általános megoldása  , mivel azonosan kielégíti a differenciálegyenletet, hiszen
, mivel azonosan kielégíti a differenciálegyenletet, hiszen

Ennek egy partikuláris megoldása c=0 esetén: 
Az
 egyenlet általános megoldása
egyenlet általános megoldása  , mivel azonosan kielégíti a differenciálegyenletet, hiszen
, mivel azonosan kielégíti a differenciálegyenletet, hiszen
Ennek egy partikuláris megoldása c1=0 esetén:  , c1=c2=0 esetén pedig:
, c1=c2=0 esetén pedig:  .
.
6.3. Megoldás keresése próbafüggvény módszerével
Az n-ed rendű állandó együtthatós-, inhomogén-, lineáris differenciálegyenletek általános alakja:

,
vagy tömörebb formában:
.
A differenciálegyenlet homogén részéhez úgy jutunk, hogy f(x) helyére nullát írunk.
A megoldás menetének ismertetése előtt két tételt kell megemlíteni.
Ha egy n-ed rendű homogén lineáris differenciálegyenletnek yn(x), yn-1(x),… y1(x) lineárisan független partikuláris megoldásai, akkor az általános megoldás:

.
Lineárisan függetlennek akkor nevezzünk két függvényt, ha a:

egyenlőség akkor és csak akkor teljesül, ha mindkét c paraméter zérus. Másképpen megfogalmazva: a két függvény hányadosa nem lehet állandó.
Ha egy n-ed rendű inhomogén differenciálegyenlet homogén részének általános megoldása Y(x), és az inhomogén egyenlet egy partikuláris megoldása y0(x), akkor az inhomogén egyenlet általános megoldása:

.
Ez a két tétel már sugallja a megoldás menetét. Először a differenciálegyenlet homogén részének általános megoldását keressük meg, majd a teljes differenciálegyenlet egy partikuláris megoldását fogjuk meghatározni.
6.3.1. Állandó együtthatós, homogén, n-ed rendű lineáris differenciálegyenletek megoldása
Az állandó együtthatós, homogén, n-ed rendű lineáris differenciálegyenlet általános alakja a következő:

.
Keressük a differenciálegyenlet egy partikuláris megoldását

alakban, mivel az exponenciális függvény az egyetlen függvény, amely arányos a saját deriváltjaival. Behelyettesítve a differenciálegyenletbe:

.
Mivel  sosem lehet zérus, ezért vele végigoszthatjuk az egyenletet. Így egy n-ed fokú polinomhoz jutunk, amelynek n darab gyöke van. A gyökök tulajdonságai alapján három esetet különböztethetünk meg:
sosem lehet zérus, ezért vele végigoszthatjuk az egyenletet. Így egy n-ed fokú polinomhoz jutunk, amelynek n darab gyöke van. A gyökök tulajdonságai alapján három esetet különböztethetünk meg:
egyszeres valós gyökök (K darab),
többszörös valós gyökök (P darab a multiplicitásukkal együtt),
komplex gyökök (Q darab).
Nyilvánvaló (mivel másmilyen gyökök nem lehetnek), hogy a különböző gyökök darabszámainak összege n, azaz n=K+P+Q.
6.3.1.1. Egyszeres valós gyökök
A K darab gyök mindegyike ad egy partikuláris megoldást. Kérdés már csak az, hogy ezek függetlenek-e.
Legyen K1 és K2 két ilyen gyök. Ekkor a két partikuláris megoldás hányadosa:
,
mivel a két gyök különböző. Így tehát K egymástól független partikuláris megoldásunk van.
Példa:
Oldjuk meg az  differenciálegyenletet. Az
differenciálegyenletet. Az  helyettesítés elvégzése után a
helyettesítés elvégzése után a

egyenlethez jutunk. Ebből a karakterisztikus polinomot  -vel való osztás után kapjuk:
-vel való osztás után kapjuk:

.
Vegyük észre, hogy ha a differenciálegyenletben y, illetve deriváltjai helyére annyiadik hatványát írjuk, ahányadik deriváltja szerepel y-nak, akkor éppen a karakterisztikus polinomot kapjuk. Megoldva a másodfokú karakterisztikus polinomot, 1=-1 és 2=-3 gyökökhöz jutunk. A differenciálegyenlet általános megoldása tehát:

Visszahelyettesítve a differenciálegyenletbe:

6.3.1.2. Többszörös valós gyökök
Többszörös gyökök esetén az előző módszer nem megfelelő, hiszen a gyökök között vannak azonosak. Legyen a különböző gyökök száma p, és ezek multiplicitása rendre m1, m2, …mp. Az előzőek alapján nyilvánvaló, hogy:

Bizonyítható, hogy ekkor a differenciálegyenlet partikuláris megoldásai az
függvények. Ezen függvények páronként lineárisan függetlenek is, hiszen bármely kettő hányadosára igaz, hogy értéke nem állandó. A teljes függvényrendszer is független, de ennek igazolásával itt nem foglalkozunk. Így tehát újabb, ezúttal P egymástól független partikuláris megoldáshoz jutottunk.
Példa:
Oldjuk meg az  differenciálegyenletet.
differenciálegyenletet.
A karakterisztikus polinom:
Látható, hogy az egyenlet bal oldala 2-re teljes négyzet, amiből 2=1 adódik. Ebből már könnyű meghatározni a gyököket:

.
Az általános leírásban alkalmazott jelöléseket alkalmazva:
P=4, mert összesen 4 többszörös gyök van; p=2, mert kétféle gyök van (1 és –1); m1=2 és m2=2, mert mindegyik gyök kétszeres gyök. Ennek megfelelően a partikuláris megoldások:

és az általános megoldás:

6.3.1.3. Komplex gyökök
Bizonyítható, hogy ha egy z komplex szám gyöke egy polinomnak, akkor a konjugáltja is gyök (tehát Q páros szám). Ennek megfelelően, ha  is gyök. Az ezek segítségével felírható két partikuláris megoldás:
is gyök. Az ezek segítségével felírható két partikuláris megoldás:

.
Alkalmazva a komplex számok exponenciális és trigonometrikus alakjai közötti Euler-féle összefüggést, a mindkét gyököt felhasználó partikuláris megoldás:

.
Így tehát újabb, ezúttal Q/2 egymástól független partikuláris megoldáshoz jutottunk, amelyek azonban darabonként 2-2 paramétert tartalmaznak.
Ha a komplex gyökök között van többszörös is, akkor a többszörös valós gyököknél ismertetett módszert kell alkalmazni.
Példák:
Oldjuk meg az
 differenciálegyenletet.
differenciálegyenletet.
A karakterisztikus polinom:
.
Ennek gyökei komplexek:  . Alkalmazva az általános leírásban használt jelöléseket: α=3 és =2. Így az általános megoldás:
. Alkalmazva az általános leírásban használt jelöléseket: α=3 és =2. Így az általános megoldás:

Oldjuk meg az
 differenciálegyenletet.
differenciálegyenletet.
A karakterisztikus polinom:
.
Látható, hogy az egyenlet bal oldala 2-re teljes négyzet, amiből 2=-1 adódik. Ebből már könnyű meghatározni a gyököket:

.
Most α=0 és =1. Mivel e0=1, így a megoldásból az e-ados rész hiányzik. Az egyik partikuláris megoldás:

,
a másik pedig ennek x-el való szorzata (természetesen más c paraméterekkel). A teljes megoldás tehát:

6.3.2. Állandó együtthatós, inhomogén, n-ed rendű lineáris differenciál-egyenletek megoldása próbafüggvény módszerrel
A 6.3 fejezet 2. tétele szerint a differenciálegyenlet homogén részének általános megoldását kell kiegészíteni a teljes egyenlet egy partikuláris megoldásával. Az előző pontban részletesen taglaltuk a homogén rész általános megoldásának meghatározására rendelkezésre álló legegyszerűbb módszert, így most csak a teljes egyenlet egy partikuláris megoldását kell megtalálnunk.
A következő módszer akkor alkalmazható, ha az inhomogén tag (f(x) függvény) csak olyan tagokból áll, amelyeknek csak véges számú lineárisan független deriváltjuk van. Ez másképpen azt jelenti, hogy e függvények deriváltjai egy idő után vagy arányosak lesznek az eredeti függvénnyel, vagy nullává válnak. Az első feltételnek megfelelő függvények:

.
Hiperbolikus függvények esetén azok e-ados alakját kell használni.
A második feltételnek a polinomok felelnek meg.
Természetesen nem csak a felsorolt függvények megfelelőek, hanem tetszőleges lineáris kombinációjuk – azaz szorzataik, és ezek összegei – is.
Ha az f(x) függvény a fent leírtak szerinti, akkor a partikuláris megoldás hasonló lesz hozzá, azzal a kiegészítéssel, hogy minden olyan deriváltját szerepeltetni kell, amely eltér tőle:
e-ad esetén nincs ilyen, hiszen ez a függvény arányos a saját deriváltjával,
szinusz, vagy koszinusz esetén mindkettőnek szerepelni kell,
hiperbolikus függvényeknél az e-adnál leírtak szerint kell eljárni, mivel az e-ados alakjukat kell használni,
polinomoknál pedig az összes a legnagyobb kitevőnél kisebb kitevőjű tagot.
Abban az esetben, ha valamelyik tag szerepel a homogén általános megoldásban (rezonancia), ugyan úgy kell eljárni, mintha a homogén megoldásban többszörös gyök lenne, azaz x legkisebb még nem szereplő hatványával kell szorozni.
6.4. Mintapéldák
Oldjuk meg az
 egyenletet. Ennek homogén része
egyenletet. Ennek homogén része  , amiből a karakterisztikus polinom:
, amiből a karakterisztikus polinom:

.
A megoldása -0.6, tehát a homogén rész általános megoldása:

A partikuláris megoldást keressük  alakban. Így a teljes megoldás, és annak első deriváltja:
alakban. Így a teljes megoldás, és annak első deriváltja:
Ezt behelyettesítve a differenciálegyenletbe, majd rendezve:

egyenletet kapjuk. Vegyük észre, hogy a homogén megoldás kiesett a rendezés során. Ez természetes is, hiszen a homogén egyenlet egyenlő nullával, ebből következően mindig ki kell esnie! A későbbi feladatoknál már csak a partikuláris részt fogjuk behelyettesíteni.
Visszatérve a rendezés után kapott egyenlethez, ez csak akkor teljesülhet, ha a jobb- és baloldalon álló x azonos fokszámú tagjait tartalmazó tagok együtthatói megegyeznek. Ennek megfelelően két egyenletet írhatunk fel a két ismeretlen meghatározására:

A megoldás után a differenciálegyenlet teljes megoldása:
Ellenőrzés:
Oldjuk meg az
 egyenletet. Ennek homogén része megegyezik az előző feladat egyenletével. A partikuláris megoldást keressük
egyenletet. Ennek homogén része megegyezik az előző feladat egyenletével. A partikuláris megoldást keressük  alakban. Helyettesítsük be a differenciálegyenletbe, rendezzük, majd a jobb- és bal oldalak összevetésével írjuk fel az egyenleteket a paraméterek meghatározásához:
alakban. Helyettesítsük be a differenciálegyenletbe, rendezzük, majd a jobb- és bal oldalak összevetésével írjuk fel az egyenleteket a paraméterek meghatározásához:
Az egyenletrendszer megoldása után az általános megoldás:

Oldjuk meg az
 egyenletet. Ennek homogén része megegyezik az előző feladat egyenletével. A partikuláris megoldást keressük
egyenletet. Ennek homogén része megegyezik az előző feladat egyenletével. A partikuláris megoldást keressük  alakban. Helyettesítsük be a differenciálegyenletbe, rendezzük, majd a jobb- és bal oldalak összevetésével írjuk fel az egyenletet a paraméterek meghatározásához:
alakban. Helyettesítsük be a differenciálegyenletbe, rendezzük, majd a jobb- és bal oldalak összevetésével írjuk fel az egyenletet a paraméterek meghatározásához:
Ez után az általános megoldás:
Oldjuk meg az
 egyenletet. Ennek homogén része megegyezik az előző feladat egyenletével. Most a partikuláris megoldást nem kereshetjük
egyenletet. Ennek homogén része megegyezik az előző feladat egyenletével. Most a partikuláris megoldást nem kereshetjük  alakban, mert az rezonál a homogén megoldással, így – x-el szorozva – a helyes alak:
alakban, mert az rezonál a homogén megoldással, így – x-el szorozva – a helyes alak: . Helyettesítsük be a differenciálegyenletbe, rendezzük, majd a jobb- és bal oldalak összevetésével írjuk fel az egyenletet a paraméterek meghatározásához:
. Helyettesítsük be a differenciálegyenletbe, rendezzük, majd a jobb- és bal oldalak összevetésével írjuk fel az egyenletet a paraméterek meghatározásához:
Ez után az általános megoldás:
Oldjuk meg az
 egyenletet. Ennek homogén része megegyezik az előző feladat egyenletével. Ezt követően a partikuláris megoldást keressük
egyenletet. Ennek homogén része megegyezik az előző feladat egyenletével. Ezt követően a partikuláris megoldást keressük  alakban. Helyettesítsük be a differenciálegyenletbe, rendezzük, majd a jobb- és bal oldalak összevetésével írjuk fel az egyenleteket a paraméterek meghatározásához:
alakban. Helyettesítsük be a differenciálegyenletbe, rendezzük, majd a jobb- és bal oldalak összevetésével írjuk fel az egyenleteket a paraméterek meghatározásához:
Az egyenletrendszer megoldása után az általános megoldás:

Oldjuk meg az
 egyenletet. Ennek homogén része megegyezik az előző feladat egyenletével. Ezt követően a partikuláris megoldást keressük
egyenletet. Ennek homogén része megegyezik az előző feladat egyenletével. Ezt követően a partikuláris megoldást keressük  alakban. Helyettesítsük be a differenciálegyenletbe, rendezzük, majd a jobb- és bal oldalak összevetésével írjuk fel az egyenleteket a paraméterek meghatározásához:
alakban. Helyettesítsük be a differenciálegyenletbe, rendezzük, majd a jobb- és bal oldalak összevetésével írjuk fel az egyenleteket a paraméterek meghatározásához:

Az egyenletrendszer megoldása után az általános megoldás:

Oldjuk meg a
 egyenletet. A karakterisztikus polinom 4=0, amiből =0. Így a homogén általános megoldás Y(x)=c. Az inhomogén partikuláris megoldást keressük yp(x)=a alakban, de ez ugyan úgy konstans, mint Y(x), tehát rezonancia van. A partikuláris megoldást ezért x-el szorozva yp(x)=ax alakban kell keresnünk. Behelyettesítve a differenciálegyenletbe 4a=1 egyenlethez jutunk, amelynek megoldása:
egyenletet. A karakterisztikus polinom 4=0, amiből =0. Így a homogén általános megoldás Y(x)=c. Az inhomogén partikuláris megoldást keressük yp(x)=a alakban, de ez ugyan úgy konstans, mint Y(x), tehát rezonancia van. A partikuláris megoldást ezért x-el szorozva yp(x)=ax alakban kell keresnünk. Behelyettesítve a differenciálegyenletbe 4a=1 egyenlethez jutunk, amelynek megoldása:  . Az általános megoldás ezek után:
. Az általános megoldás ezek után:

.
Oldjuk meg a
 egyenletet. A karakterisztikus polinom 4=0, amiből =0. Így a homogén általános megoldás Y(x)=c. Az inhomogén partikuláris megoldást keressük yp(x)=ax+b alakban, de ennek konstans része (b) rezonál Y(x)-el. A partikuláris megoldást ezért x-el szorozva yp(x)=ax2+bx alakban kell keresnünk. Behelyettesítve a differenciálegyenletbe 8ax+4b=3x egyenlethez jutunk. A paraméterek meghatározására szolgáló egyenletrendszer:
egyenletet. A karakterisztikus polinom 4=0, amiből =0. Így a homogén általános megoldás Y(x)=c. Az inhomogén partikuláris megoldást keressük yp(x)=ax+b alakban, de ennek konstans része (b) rezonál Y(x)-el. A partikuláris megoldást ezért x-el szorozva yp(x)=ax2+bx alakban kell keresnünk. Behelyettesítve a differenciálegyenletbe 8ax+4b=3x egyenlethez jutunk. A paraméterek meghatározására szolgáló egyenletrendszer:

Ennek megoldása  . Az általános megoldás ezek után:
. Az általános megoldás ezek után:

.
Oldjuk meg a
 egyenletet. A karakterisztikus polinom 4=0, amiből =0. Így a homogén általános megoldás Y(x)=c1e0x+c2 xe0x= c1+c2 x , mivel a 0 kétszeres gyök. Az inhomogén partikuláris megoldást keressük yp(x)=ax+b alakban, de ennek mindkét része rezonál Y(x)-el. Ha megszorozzuk x-el, akkor a bx még mindig rezonál c2 x –el, így x2-el kell szorozni. A helyes próbafüggvény tehát: yp(x)=ax3+bx2. Behelyettesítve a differenciálegyenletbe 24ax+8b=x egyenlethez jutunk. A paraméterek meghatározására szolgáló egyenletrendszer:
egyenletet. A karakterisztikus polinom 4=0, amiből =0. Így a homogén általános megoldás Y(x)=c1e0x+c2 xe0x= c1+c2 x , mivel a 0 kétszeres gyök. Az inhomogén partikuláris megoldást keressük yp(x)=ax+b alakban, de ennek mindkét része rezonál Y(x)-el. Ha megszorozzuk x-el, akkor a bx még mindig rezonál c2 x –el, így x2-el kell szorozni. A helyes próbafüggvény tehát: yp(x)=ax3+bx2. Behelyettesítve a differenciálegyenletbe 24ax+8b=x egyenlethez jutunk. A paraméterek meghatározására szolgáló egyenletrendszer:

Ennek megoldása  . Az általános megoldás ezek után:
. Az általános megoldás ezek után:
.
Oldjuk meg az
 egyenletet. A karakterisztikus polinom megoldásával megkapjuk a homogén általános megoldást:
egyenletet. A karakterisztikus polinom megoldásával megkapjuk a homogén általános megoldást:


,
mert kettős gyökök vannak. Mivel nincs rezonancia, a próbafüggvény alakja:

.
Behelyettesítve a differenciálegyenletbe, majd rendezve:

Az inhomogén egyenlet általános megoldása tehát:

Oldjuk meg az
 egyenletet. A karakterisztikus polinom megegyezik az előző feladatéval, így a homogén általános megoldás:
egyenletet. A karakterisztikus polinom megegyezik az előző feladatéval, így a homogén általános megoldás:

.
Mivel kétszeres rezonancia van, a próbafüggvény alakja:
.
Behelyettesítve a differenciálegyenletbe, majd rendezve:

Az inhomogén egyenlet általános megoldása tehát:

Oldjuk meg az
 egyenletet. A karakterisztikus polinom megoldásával megkapjuk a homogén általános megoldást:
egyenletet. A karakterisztikus polinom megoldásával megkapjuk a homogén általános megoldást:


Mivel rezonancia van, a próbafüggvény alakja:

.
Behelyettesítve a differenciálegyenletbe, majd rendezve:

Az inhomogén egyenlet általános megoldása tehát:

6.5. Műszaki példák
A műszaki feladatokban a független változó általában az idő (t). Ilyen esetekben a deriváltakat nem vesszővel, hanem ponttal jelöljük. A függő változó(k) pedig a fizikai jelentésüknek megfelelő megszokott jelölésüket kapják.
Határozzuk meg a folyadékszint változásának időfüggvényét egy töltés alatt álló kifolyás nélküli tartály esetében. Legyen a tartály keresztmetszete A, a kezdeti folyadékszint magasság h0, a töltő térfogatáram pedig b. t idő alatt a folyadékszint h-val változik, így a tartályban a folyadék térfogatának változása Ah. Ugyanezen idő alatt a beáramló folyadék mennyisége: bt. Az anyagmegmaradás törvénye alapján ez a két térfogat megegyezik. Az így nyert differenciaegyenlet felhasználásával felírható a rendszert leíró differenciálegyenlet (matematikai modell):
A homogén rész megoldását keressük et alakban. Behelyettesítve:

Ennek megoldása =0, így a homogén általános megoldás H(t)=c állandó.
Az inhomogén partikuláris megoldáshoz a differenciálegyenlet jobboldala alapján választott próbafüggvény hp(t)=a állandó lenne (mivel b állandó, tehát nulladfokú polinomnak tekinthetjük), de ez rezonál a homogén általános megoldással, így t-szeresét kell választani ( ). Behelyettesítve a differenciálegyenletbe:
). Behelyettesítve a differenciálegyenletbe:
A differenciálegyenlet teljes megoldása ennek megfelelően:

A c konstans meghatározásához használjuk fel a kezdeti feltételt, miszerint h(0)=h0. Ebből c=h0 adódik. A feladat – kezdeti feltételt is kielégítő – megoldása tehát:
Egy m tömegű, c fajhőjű, a környezetétől hőáramlás szempontjából elzárt testtel h hőáramot közlünk. Határozzuk meg a test hőmérséklet változásának függvényét, ha a test kezdeti hőmérséklete 0.
7. fejezet - Rendszerek és modellezési analógiák
- 7.1. Energia reprezentáció, extenzív és intenzív mennyiségek
- 7.2. Rendszermodellezés teljesítmény-konjugált változókkal
- 7.3. Konzervatív rendszerelemek és karakterisztikáik
- 7.4. Disszipatív rendszerelemek és karakterisztikáik
- 7.5. Transzformátorok, zsirátorok, hajtóerő- és áramforrások
- 7.6. Elektromechanikai Lagrange függvény
7.1. Energia reprezentáció, extenzív és intenzív mennyiségek
A mechatronikai eszközök és berendezések több fizikai-mérnöki diszciplína, így a mechanika, elektrotechnika és elektronika, pneumatika és hidraulika, irányítástechnika és informatika elemeiből felépített alrendszerek és szinergikus együttese. Ezért – mind elemzési, irányítási, de elsősorban tervezési szempontból – célszerű a különböző fizikai területek elemeinek modellezési analógiákat felhasználó értelmezése és leírása, és ezeknek a modelleknek a segítségével történő egységes kezelése. Ezt alapjában véve a műszaki rendszerek energetikai megközelítésével lehet elérni, amely lehetővé teszi a mérnöki termodinamika koherens módon történő bekapcsolását is.
A mechanikai rendszereknek a Lagrange-egyenletekkel történő leírása és a villamos rendszerek matematikai leírásában fellépő analógiákat már Maxwell észrevette, melyek aztán az elektromechanikai energia-átalakítók egységes matematikai leírását készítették elő. Ezzel a kezelésmóddal hasonló módon származtathatók a mechanikai rendszerek Newton-egyenletei és a villamos hálózatok Kirchoff-egyenletei.
Egy mechatronikai rendszer általános energetikai reprezentációját az 7-1. ábra mutatja be, melyet a környezetével energia-csatolásban lévő rendszerként jelenítettünk meg.
| (7.1) |

A rendszerbe bevitt energiát alapvetően három fő részre oszthatjuk a (7.1) módon, ahol a jobb oldalon az egyes tagok a rendszer üzemelésére fordított energiát, a környezet számára végzett munkát és a rendszer által disszipált energiát jelenti. A rendszerben mindig elkülöníthetünk egy termodinamikai alrendszert, amely a reverzibilis termikus effektusokat reprezentálja.
Erre az alrendszerre felírhatjuk a Gibbs-egyenletet
| (7.2) |
ahol az U, V, S, ni, p, T, μi jelölik, sorban, a belső energiát, térfogatot. entrópiát, a kémiai komponensek mol számait, a nyomást, hőmérsékletet és a komponensek kémiai potenciáljait. Ez a formula a termodinamikai alrendszer belső energia-megváltozását reprezentálja a kölcsönhatásban lévő energiaformák, azaz a hő-, hidraulikus-pneumatikus és kémiai energiák kölcsönös megváltozásával.
A (7.2) energia-formulának az egész rendszerre történő kiterjesztését az általánosított Gibbs egyenletben fogalmazzuk meg
| (7.3) |

ahol a  az
az  állapotváltozók valós értékű energia-állapot függvénye.
állapotváltozók valós értékű energia-állapot függvénye.
A  energia-állapot függvény a rendszer teljes energiáját reprezentálja a rendszerben előforduló, egymással kölcsön-hatásban lévő és átalakuló energia-formákkal és az azokat jellemző állapotváltozókkal. A rendszer időbeli viselkedését meg-határozó dinamikus leírást a Gibbs-egyenlet alapján kapjuk meg a (7.3) összefüggésben az időbeli differenciálhányadosok bevezetésével
energia-állapot függvény a rendszer teljes energiáját reprezentálja a rendszerben előforduló, egymással kölcsön-hatásban lévő és átalakuló energia-formákkal és az azokat jellemző állapotváltozókkal. A rendszer időbeli viselkedését meg-határozó dinamikus leírást a Gibbs-egyenlet alapján kapjuk meg a (7.3) összefüggésben az időbeli differenciálhányadosok bevezetésével
| (7.4) |
Mivel a (7.4) egyenletben a  teljesítménydimenziójú (W), ezért a baloldalon található szorzatok egyenként szintén teljesítmény dimenziót adnak, ezért a (7.4) egyenlettel a
teljesítménydimenziójú (W), ezért a baloldalon található szorzatok egyenként szintén teljesítmény dimenziót adnak, ezért a (7.4) egyenlettel a  jelölés bevezetésével az
jelölés bevezetésével az
| (7.5) |
az un. teljesítmény-konjugált változókat, illetve teljesítmény-konjugált változó-párokat definiáljuk. Figyelembe véve az egyes időpontokra megadott (7.4) teljesítmény kifejezéseket az egyes energiaformákra az azokat jellemző állapotváltozókkal a (0,t) időintervallumban a teljes energia-mennyiségeket a (7.6) integrálok adják meg.
| (7.6) |

A különböző fizikai területeknek a (7.3) és (7.4) általánosított összefüggésekben megjelenő teljesítmény-konjugált mennyiségeit a (7.2) Gibbs-egyenlet alapján értelmezzük. Így az xk változók az adott fizikai területek extenzív mennyiségeit – a (7.2) egyenletben az S entrópiát, a V fluidum térfogatot és az ni anyagmennyiséget (tömeget) –, a  deriváltak az extenzívek áramait, míg az ek változók az ezen extenzíveknek megfelelő intenzív mennyiségeket – a (7.2) egyenletben a hőmérsékletet, a nyomást és a kémiai potenciált – jelölik. Ezeknek a mennyiségeknek az általános meghatározását az alábbi definíciókkal adjuk meg.
deriváltak az extenzívek áramait, míg az ek változók az ezen extenzíveknek megfelelő intenzív mennyiségeket – a (7.2) egyenletben a hőmérsékletet, a nyomást és a kémiai potenciált – jelölik. Ezeknek a mennyiségeknek az általános meghatározását az alábbi definíciókkal adjuk meg.
Definíciók
Ha a V térfogatot a Vn, n=1,2…N, részekre osztjuk, akkor a részek térfogatából additíve a V térfogat adódik, azaz

.
Extenzív mennyiség: azon fizikai mennyiségeket, amelyek részekre osztásnál (illetve összerakásnál) a térfogathoz hasonlóan transzformálódnak, extenzív mennyiségeknek nevezzük.

- legyen egy extenzív mennyiség modellje, és legyen

Akkor
Másként:
Ha  és
és  , akkor
, akkor 

Intenzív mennyiség: azon fizikai mennyiségeket, amelyek részekre osztásnál (illetve összetevésnél) az értéküket nem változtatják, intenzív mennyiségeknek nevezzük.
 - legyen egy intenzív mennyiség modellje, és legyen
- legyen egy intenzív mennyiség modellje, és legyen

Akkor

Másként:
Ha  ,
,  és
és  , akkor
, akkor 
Az egyes fizikai – és mérnöki – diszciplínák extenzív és intenzív mennyiségeit az 7-1. táblázat foglalja össze. Ezek az adott fizikai területeken jól ismert mennyiségek, de ebben az általánosított kontextusban hasonló – analóg – jellemzőkként kezelhetjük azokat. A táblázat azt is tartalmazza, hogy az egyes fizikai területek mely mennyiségei alkotják azok jellemző teljesítmény-konjugált párjait. Lényegében ezeknek a mennyiségnek a modelljei és a közöttük fennálló függvénykapcsolatok adják meg a mechatronikai rendszerek egységes kezeléséhez szükséges analógiák alapjait.
Az extenzív mennyiségek tárolhatók, akár statikus, akár dinamikus formában, míg az intenzívekben fellépő különbségek – inhomogenitások – képezik azokat az e hajtóerőket (effort), melyek az extenzívek f áramlását (flow) hozzák létre. Az 7-1. táblázat által megadott bármely mennyiségpár esetén könnyen ellenőrizhetjük ezt az állítást, mivel – csak példaszerűen felsorolva – feszültségkülönbség töltésáramot hoz létre, nyomáskülönbség fluidumok térfogatáramát generálja, vagy az eltérő hőmérsékletek entrópia áramot hoznak létre. Azt is könnyen ellenőrizhetjük, hogy a táblázat egyes soraiban megadott intenzívek és extenzív áramok szorzatai valóban teljesítmény dimenziójú mennyiségek.
Fizikai terület | Intenzív mennyiség, ek | Extenzív mennyiség, xk | Extenzív áram dxk/dt=fk | Teljesítmény Pk= ek fk [W] |
Villamos | Feszültség u [V] | Töltés q [C] | Elektromos áram, i [A] | u i |
Mágneses | Magnemotoros erő uM [A] | Fluxus Φ [Wb] | Fluxus áram φ [V] | uM φ |
Mechanikai: transzlációs | Erő F [N] | Elmozdulás x [m] | Sebesség v [m s-1] | F v |
Mechanikai: rotációs | Forgatónyomaték T [N m] | Szögelfordulás [rad] | Szögsebesség [rad s-1] | T |
Hidraulikus, pneumatikus | Nyomás p [N m-2] | Térfogat V [m3] | Térfogatáram q [m3 s-1] | p q |
Fizikai-kémiai | Felületi feszültség [N m-2] | Felület A [m2] | Deformáció [m3 s-1] | Γ |
Kémiai | Kémiai potenciál [J mol-1] | Anyagmennyiség N [mol] | Moláris áram n [mol s-1] | n |
Termo-dinamikai | Hőmérséklet T [K] | Entrópia S [J K-1] | Entrópia áram s [W K-1] | T s |
7.2. Rendszermodellezés teljesítmény-konjugált változókkal
A rendszer modellezéséhez annak struktúráját térben elkülönített, koncentrált paraméterű, csatolt rendszerelemek egyszintű hálózataként írjuk le a 7-2. ábra által vázolt módon, mely elemek az 7-1. táblázatnak megfelelően elektromos, mágneses, mechanikai – transzlációs és rotációs –, hidraulikus és pneumatikus, fizikai kémiai, kémiai és termikus jellegűek lehetnek, akkor a rendszer (7.3) teljes energiáját – annak extenzív jellege következtében – eloszthatjuk a hálózat egyes elemeire a (7.7) módon, ahol Jk jelöli a k-adik energia-formához tartozó rendszerelemek számát.
| (7.7) |
Innen az (7.4) felhasználásával az egyes rendszerelemeken átáramló teljesítmények pillanatnyi összegét kapjuk a
| (7.8) |

formában.
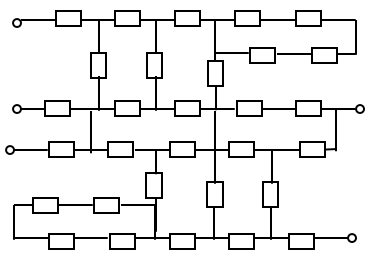
A hálózat egyértelmű leírásához az (7.8) összegen túl az egyes rendszerelemek közötti ok-okozati kapcsolatokat is meg kell adni, ami az extenzív áramok irányainak, azaz az elemek közötti energiaközvetítés irányainak a rögzítését jelenti. Ez egyúttal az egyes elemeken megjelenő (7.8) teljesítményáramlások irányait is meghatározza.
Ugyanakkor azt is figyeljük meg, hogy az egyes elemeken megjelenő teljesítmény, vagy a (7.6) kifejezés alapján az adott elemen átáramló energia ismerete önmagában nem határozza meg a teljesítmény-konjugált változókat, mivel egy egyenletünk van két változóval. A teljes meghatározáshoz a rendszerelemek karakterisztikáit kell még megadni, amely függ az elem jellegétől. Itt a továbbiakban csak az 7-1. táblázat első 5 sorában felsorolt villamos, mágneses, mechanikai és hidraulikus-pneumatikus elemek jellemzőit tekintjük át és összegezzük – természetesen a termikus kapcsolatokkal együtt –, mivel a mechatronikai rendszerek felépítésében az ilyen elemek a dominánsak.
Egy rendszerelem karakterisztikája az intenzív és extenzív jellemzők közötti függvénykapcsolatot jelenti. A rendszerelemeket bemenet-kimenet modellekkel leírva az intenzívek bemenet-kimenet különbségei az elemeken kialakuló e hajtóerők, melyeknek az elemeken átáramló f extenzív áramokkal való összefüggései alkotják az elemek karakterisztikáit. Mivel az e·f=f·e szorzat nem határozza meg az elemekre vonatkozó ok-okozati kapcsolatokat, ezért azokat – a hálózat előzőekben említett irányultságát felhasználva – kell specifikálnunk. Ha egy rendszer-elem bemenetén megjelenő f áram az elsődleges, azaz az ok, akkor az okozat az elemen kialakuló e(f) hajtóerő, ahogy ezt a 7-3. ábra a) része illusztrálja. Ha azonban a rendszerelemre az e hajtóerő hat elsődlegesen mint ok, akkor az okozat az elemen áthajtott f(e) áram. Ezt a 7-3. ábra b) része illusztrálja.
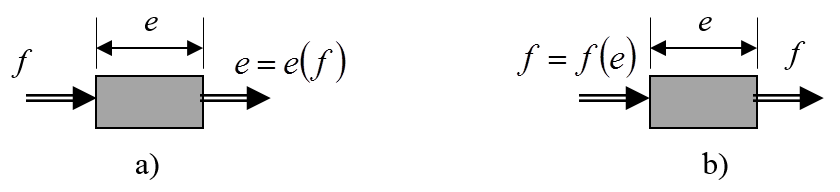
A rendszerelemek közötti energiaközvetítés teljesítmény-kapukon keresztül történik, így a mechatronikai rendszerek egyes részei és elemei közötti fizikai csatolásokat egységesen a teljesítmény kapcsolatokkal tudjuk megadni.
A teljesítmény-átvitellel jellemzett fizikai kapcsolatok mellett az egyes rendszerelemek között információ-átvitellel jellemzett kölcsönhatásokat is definiálnunk kell.
Definíciók
Egy fizikai terület azon intenzív és extenzív-áram jellemzőit, melyek szorzata teljesítmény dimenziójú, teljesítmény-konjugált mennyiségeknek nevezzük.
Teljesítmény-kapu (power port): egy rendszerelem két teljesítmény-konjugált változójával jellemzett bemenete vagy kimenete.
Információ-kapu: egy rendszerelem valamely változóval jellemzett bemenete vagy kimenete.
Két rendszerelem teljesítmény-kapukon keresztüli kölcsönhatását teljesítmény-kötésnek (power bond) nevezzük.
Két rendszerelem információ-kapukon keresztüli kölcsönhatását információ-kötésnek (information bond) nevezzük.
7.3. Konzervatív rendszerelemek és karakterisztikáik
A rendszerelemeket energetikai szempontból feloszthatjuk energiát tároló, azaz konzervatív, energiát disszipáló, azaz disszipatív, és energiát transzformáló elemekre, valamint energiaforrásokra.
Egy energiatároló, azaz konzervatív rendszerelem karakterisztikáját a 7-4. ábra mutatja be a) lineáris és b) nemlineáris esetben. Ez alapjában véve az  függvénykapcsolatot jelenti, amely a konzervatív elemen felhalmozott x extenzív mennyiségét adja meg az elemre eső e hajtóerő függvényében, vagy éppen fordítva: a felhalmozott x függvényében adja meg a rendszerelemen kialakuló e hajtóerőt az
függvénykapcsolatot jelenti, amely a konzervatív elemen felhalmozott x extenzív mennyiségét adja meg az elemre eső e hajtóerő függvényében, vagy éppen fordítva: a felhalmozott x függvényében adja meg a rendszerelemen kialakuló e hajtóerőt az  függvénykapcsolat formájában.
függvénykapcsolat formájában.
A (7.9) és (7.10) integrálok geometriai képét a 7-4. ábra karakterisztika feletti területe adja meg. Ha a 7-4. ábra által ábrázolt – akár lineáris, akár nemlineáris – karakterisztikán kijelöljük az S pontot, akkor ezzel egyértelműen meghatározzuk az x és e állapotváltozókat.
A konzervatív rendszerelemmel társított energiát a (7.6) egyenletből kiindulva határozhatjuk meg behelyettesítve az  összefüggést és ezzel a
összefüggést és ezzel a
| (7.9) |

összefüggéshez jutunk. A  =0 és
=0 és  választás esetén a
választás esetén a
| (7.10) |
integrál fejezi ki az elem energia-állapotát az e és x állapotváltozókkal az üres állapothoz viszonyítva. Ezt a területet az xS koordinátáig számítva a konzervatív elemnek a karakterisztika S pontjával kijelölt energia-állapotát azzal egyenértékűen adjuk meg. Ezzel az is jól látható, hogy a konzervatív elem aktuális állapota nem függ attól, hogy a t0 és t időpontok között mely állapotokban volt, azaz milyen folyamatban érte el a végső energia-állapotot. Ez a dinamikus rendszerek egyik fontos tulajdonsága, ezért mindig feltételezzük, hogy a konzervatív elem karakterisztikája a 7-4. ábra által bemutatott módon a változók kölcsönösen egyértelmű függvénye, amit a dielektrikus vagy ferromágneses hiszterézis jelensége esetén a hiszterézis görbe közép-vonalával történő közelítéssel érünk el. Ekkor a hiszterézis veszteséget egy disszipatív tag hozzáadásával lehet pótolni.
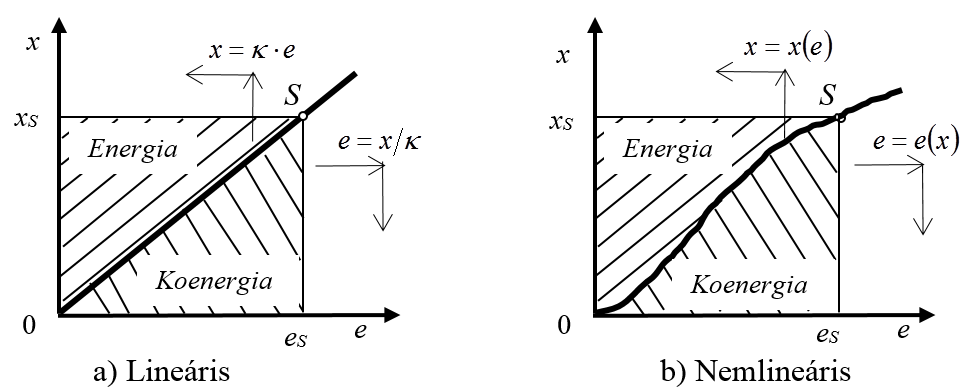
Természetesen az lényeges, hogy a hálózat dinamikus folyamatai a karakterisztikán melyik irányban mozdítják el az állapotváltozókat. Ugyanis – az ok-okozati kapcsolatokat és a kölcsönösen egyértelmű leképezéseket figyelembe véve – bármelyik állapotváltozó növekménye a másik növekményét, és egyúttal az elemen tárolt energia mennyiségének növekményét idézi elő, míg a fordított irányú elmozdulás a tárolt energia csökkenését. Mivel azonban mind az energia-felvétel, mind pedig annak leadása veszteségmentes, azért az ideális konzervatív elemeken ez a folyamat reverzibilis.
Figyelembe véve, hogy a 0eSSxS0 téglalap területe a 7-4. ábra mindkét változatán az (eS·xS) szorzattal egyenlő jól látható, hogy a karakterisztika alatti terület az eS pontig a rendszerelem energiájával egyértelmű kapcsolatban van. Ezt a karakterisztika alatti területet a
| (7.11) |
integrál adja meg és koenergiának (coenergy) nevezzük. Az energia és koenergia összege az elem karakterisztikájának tetszőleges pontjában az (x·e) szorzattal egyenlő, azaz
| (7.12) |

A koenergia fogalmát alapvetően csak az energiával összefüggésben értelmezhetjük, bár lineáris karakterisztika esetén, ahogy ez a 7-4. ábra a) részén jól látható, a két mennyiség egyenlő, így bármelyik – a 7-2. táblázat és a 7-3. táblázat által megadott – kifejezést használhatjuk a számításokban. Ugyanakkor azt is érdemes megjegyezni, hogy a koenergia fogalom – és analitikus formulája – az elektromechanikai rendszerek Lagrange-egyenletekkel történő modellezésében és számításában játszik fontos szerepet, mivel az elektromechanikai Lagrange-függvény meghatározásához szükség van a koenergia fogalmára, ahogy ezt a későbbiekben látni fogjuk, de – többek között – a villamos hálózatok számításában Kirchhoff hurokegyenleteit valamint csomóponti egyenleteit lehet az energia-koenergia páros felhasználásával származtatni.
A 7-4. ábra által ábrázolt karakterisztikákat, illetve az azokkal leírt rendszerelemeket egyszerűbben, egyetlen paraméterrel is jellemezhetjük, mégpedig a függvények meredekségének tetszőleges pontban történő megadásával a
| (7.13) |

módon, amely lineáris esetben a
| (7.14) |
formát ölti. A κ paraméter lényegében az adott rendszerelem valamely állapotában az extenzív mennyiség, azaz végső soron az energia felhalmozási képességét jelenti. Lineáris esetben tehát a rendszerelem meghatározásához elégséges a konstans értékű κ paraméter megadása.
A konzervatív rendszerelemek energiatárolása két, jellegükben különböző módon történik. Statikus módon, a villamos rendszerek elnevezését általánosítva kapacitív elemekkel (jelölésük összefoglalva: C), és dinamikus módon, melyeket – ugyancsak a villamos rendszer-elemek elnevezését használva – általánosított induktív elemeknek nevezzük (jelölésük I). Az 7-1. táblázat által megadott fizikai területek konzervatív rendszerelemeinek konstitutív paramétereit, karakterisztikáit, energia és koenergia kifejezéseit a 7-2. táblázat és a 7-3. táblázat foglalja össze.
Rendszerelem | Paraméter | Karakterisztika | Energia | Koenergia |
Villamos - kondenzátor | κ=C kapacitás | q=C·u |
|
|
Mágneses kondenzátor | κ=CM Mágneses kapacitás | Φ=CM∙uM |
|
|
Mechanikai - rugó | κ=k rugóállandó |
|
|
|
Mechanikai - torziós rugó | κ=K rugóállandó |
|
|
|
Hidraulikus, pneumatikus |
kapacitás |
|
|
|











Rendszerelem | Paraméter | Karakterisztika | Energia | Koenergia |
Villamos - légtekercs | κ=L induktivitás | ψ=L·i |
|
|
Mágneses tekercs | Mágneses induktivitás κ=LM | Φ=LM·φ |
|
|
Mechanikai - mozgó tömeg | κ=m tömeg | p=m·v |
|
|
Mechanikai - forgó tömeg | κ=J impulzus-momentum | T=J·ω |
|
|
Hidraulikus, pneumatikus | κ=Lh induktivitás | ψh=Lh·q |
|
|








7.4. Disszipatív rendszerelemek és karakterisztikáik
Az energiatároló rendszerelemek ideális objektumok, melyek veszteség nélkül tárolják és adják vissza a tárolt energiát. Ez valós rendszerek modellezése esetén természetesen nem ad megfelelő leírást, mert bármelyik valós rendszer működése energiaveszteséggel jár. Ezt a termodinamika második főtétele értelmében, amely úgy is fogalmazható, hogy minden valós fizikai rendszer disszipatív, azaz a folyamatokban az energia egy része hő formájában veszteségként "szétszóródik". Ezt az ideális elemekhez megfelelően csatolt disszipatív elemek alkalmazásával modellezhetjük. Hasonló módon pótolhatjuk a rendszerelemeket hálózatba foglaló teljesítmény-kötések általi veszteségeket. Ugyanakkor a disszipatív elemek, mint az extenzív áramlásokkal szembeni ellenállások, vagy a hálózat egyes ágaira eső teljes intenzív különbségeket megfelelően megosztó objektumok fontos elemei az energetikai hálózatoknak.
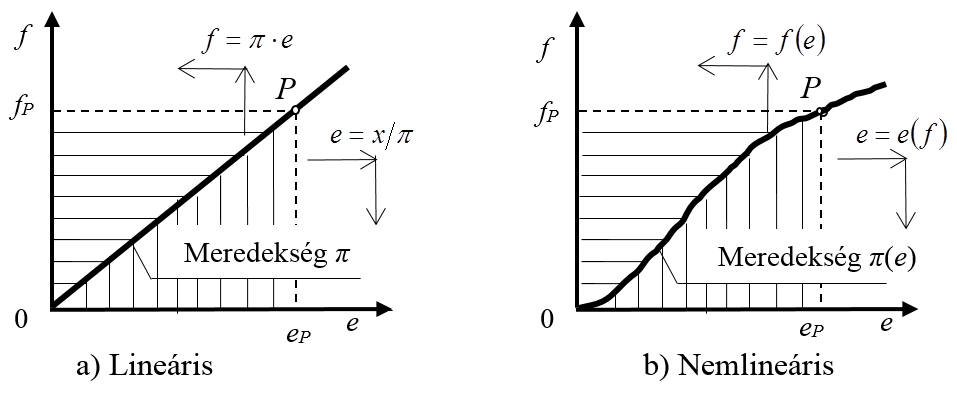
A disszipatív elemek karakterisztikájának általános képét mutatja be az 7-5. ábra mind a) lineáris, mind b) nemlineáris rendszerelemek esetében. Egy elem karakterisztikája az f=f(e) és az inverz e=e(f) függvénykapcsolatokat jelenti, melyeket – kölcsönösen egyértelmű leképezések lévén – szintén egy paraméterrel jellemezhetünk: a függvények meredekségének tetszőleges pontban történő megadásával a
| (7.15) |

módon, amely lineáris esetben a
| (7.16) |

formát ölti.
Ha az 7-5. ábra által ábrázolt – akár lineáris, akár nemlineáris – karakterisztikán kijelöljük a P pontot, akkor ezzel egyértelműen meghatározzuk a disszipatív elemen kialakuló f és e állapot-változókat. Ugyanakkor itt is megtaláljuk – a konzervatív elemekhez hasonlóan – karakterisztika feletti terület energetikai értelmezését. Képezve ugyanis az elemen átáramló teljesítmény integrálját az f=f(e) inverz karakterisztikát felhasználva az
| (7.17) |

összefüggéshez jutunk, amely a  =0 és
=0 és  választás esetén a
választás esetén a
| (7.18) |
egyenletet szolgáltatja.
Az (7.18) integrál definiálja a Rayleigh-disszipáció függvényt, melynek a disszipatív rendszerek Lagrange-egyenletekkel való kezelésében van alapvető szerepe. A disszipatív elemek konstitutív paramétereit a 7-4. táblázat mutatja be.
Rendszerelem | Paraméter | Karakterisztika | Rayleigh-függvény | Rayleigh-kofüggvény |
Villamos – ellenállás | κ=G G=1/R | u=R·i |
|
|
Mágneses tekercs | Reluktancia κ=RM | uM =RM∙iM |
|
|
Mechanikai - transzlációs | κ=D csillapítási tényező | F=D·v |
|
|
Mechanikai - rotációs | κ=B csillapítási tényező | T=B·ω |
|
|
Hidraulikus, pneumatikus | κ=Gh vezető-képesség | p=Rh·q |
|
|






7.5. Transzformátorok, zsirátorok, hajtóerő- és áramforrások
7.5.1. Transzformátorok és zsirátorok.
Jelölésük: T és G
A mechatronikai rendszerek elemei és alrendszerei közötti kapcsolatokat csatoló elemek biztosítják, amelyeket – az energia tárolókhoz hasonlóan – ugyancsak ideálisnak, azaz veszteség-mentesnek tételezünk fel. A hulladék-hővé alakuló veszteségeket ezekben a rendszerelemekben is megfelelő disszipatív elemek hozzáadásával tudjuk figyelembe venni.
A csatoló elemek a mechatronikai rendszerek elemei és alrendszerei közötti kapcsolatokat teljesítmény-transzferrel biztosítják, ahol
a bemeneti és kimeneti teljesítmények lehetnek azonos fizikai jellegűek az azonos teljesítmény-konjugált változók – hajtóerők és áramok – transzformációjával, míg
történhet különböző fizikai jellegű teljesítmények egymásba történő átalakításával a megfelelő teljesítmény-konjugált változók – azaz a különböző fizikai jellegű hajtóerők és extenzív áramok – egyidejű transzformációjával.
Az első csoportot transzformátoroknak nevezzük az
| (7.19) |
transzformációs relációkkal, ahol p a primer oldali és s a szekunder oldali változókat jelöli, és m a dimenziómentes transzformátor modulus, míg a második csoportot zsirátoroknak nevezzük az
| (7.20) |

zsirátor relációkkal, ahol ismét p a primer oldali és s a szekunder oldali változókat jelöli. Itt az rs és a rp a zsirátor modulusok, melyekre érvényes az rs=rp egyenlőség, bár a dimenzióik különbözőek.
A primer és szekunder mennyiségek közötti relációkat a transzformátorok esetében az 7-5. táblázat foglalja össze, míg a zsirátorokra vonatkozó relációkat a 7-6. táblázat tartalmazza. Jegyezzük meg, hogy a modulusok értékei a zsirátorok esetében is azonosak, de mégis különböző módon jelöltük azokat, mivel dimenzióik különböznek a transzformált mennyiségek aktuális dimenzióitól függően.
Rendszerelem | Csatolás jellege | Intenzív reláció | Extenzív áram-reláció |
Elektromos | Mágneses indukció |
|
|
Mechanikai –transzlációs | Erőmérleg |
|
|
Mechanikai – rotációs | Áttétel |
|
|
Hidraulikus | Csőszűkület |
|
|








7.5.2. Ideális hajtóerők és áramforrások
Jelölésük: e és f
Az 7-1. ábra jól illusztrálja, hogy a mechatronikai rendszer működése megfelelő energiaellátással biztosítható, és a bevitt energia a rendszerelemek hálózatában a teljesítménykapukon keresztül kerül szétosztásra és felhasználásra. Ezt az energiaellátást a teljesítmény-konjugált változókat alkalmazó modellben ideális hajtóerő- és áramforrások felhasználásával tudjuk modellezni:
Villamos: egyen- vagy váltakozó áramú hálózat, generátor,
Mechanikai: robbanómotor,
Hidraulikus: kompresszor.
Rendszerelem | Primer oldal | Szekunder oldal | Zsirátor relációk |
Elektromos-mechanikai rotációs |
|
|
|
Mechanikai: transzlációs- rotációs |
|
|
|
Mechanikai transzlációs- elektromos- |
|
|
|
Mechanikai-hidraulikus |
|
|
|
















7.6. Elektromechanikai Lagrange függvény
A különböző fizikai és mérnöki területek rendszereinek modellezési analógiái azt mutatják, hogy az analógiák a mechanikai és elektromos rendszerek között a legjobbak, így a mechanikai rendszerekre kidolgozott Lagrange-módszert a villamos rendszerekre. illetve ennek alapján az elektromechanikai rendszerekre közvetlenül ki lehetett terjeszteni.
A Lagrange-módszer lényege, hogy az egész modellezendő rendszert általánosított koordinátákkal és azok deriváltjaival tudjuk leírni, kiindulva a pontmechanika általánosított fogalmaiból. Ez az  általánosított koordináták és deriváltjaik
általánosított koordináták és deriváltjaik  meghatározását jelenti, melyekkel a mechanikai Lagrange-egyenleteket a
meghatározását jelenti, melyekkel a mechanikai Lagrange-egyenleteket a
| (7.21) |

formában írjuk fel, ahol a Lagrange-függvény a
| (7.22) |

alakú. Itt a  a mechanikai rendszer teljes kinetikus energiáját,
a mechanikai rendszer teljes kinetikus energiáját,  a teljes potenciális energiát,
a teljes potenciális energiát,  az energia-veszteséget leíró Rayleigh-féle disszipáció függvényt, míg
az energia-veszteséget leíró Rayleigh-féle disszipáció függvényt, míg  a rendszerre ható külső erőket jelenti. A két energiaforma különbségéből álló Lagrange-függvényre vonatkozó (7.21) Lagrange-egyenletek rendszere megadja a rendszer erőhatásainak a Newton-módszerrel előállítható mérlegegyenleteit.
a rendszerre ható külső erőket jelenti. A két energiaforma különbségéből álló Lagrange-függvényre vonatkozó (7.21) Lagrange-egyenletek rendszere megadja a rendszer erőhatásainak a Newton-módszerrel előállítható mérlegegyenleteit.
A bemutatott analógiák alapján villamos hálózatok esetében hasonló fogalmakat tudunk definiálni, ezért a Lagrange-módszert közvetlenül ki lehetett terjeszteni az elektromos, és ezen túl az elektromechanikai rendszerekre is.
Villamos hálózatok esetén két eljárás is lehetővé teszi a megfelelő általánosított koordinátákkal történő jellemzést: a  hurokáramokkal és
hurokáramokkal és  huroktöltésekkel, illetve a
huroktöltésekkel, illetve a  csomóponti potenciálokkal és
csomóponti potenciálokkal és  csomóponti fluxusokkal, ahogy ezt a 7-6. ábra illusztrálja. A 7-6. ábra a) részén látható hurokáramok nyilván teljesítik a csomóponti áramösszegekre vonatkozó Kirchhoff-törvényt, míg a csomóponti potenciálok összege – figyelembe véve az
csomóponti fluxusokkal, ahogy ezt a 7-6. ábra illusztrálja. A 7-6. ábra a) részén látható hurokáramok nyilván teljesítik a csomóponti áramösszegekre vonatkozó Kirchhoff-törvényt, míg a csomóponti potenciálok összege – figyelembe véve az  ,
,  ,
,  ,
,  , azaz
, azaz  egyenleteket – kiadja Kirchhoff huroktörvényét. Jegyezzük meg tehát előzetesen, hogy az általánosított koordináták ily módon történő definíciójával a Lagrange-módszer a jól ismert Kirchoff-egyenleteket állítja elő.
egyenleteket – kiadja Kirchhoff huroktörvényét. Jegyezzük meg tehát előzetesen, hogy az általánosított koordináták ily módon történő definíciójával a Lagrange-módszer a jól ismert Kirchoff-egyenleteket állítja elő.
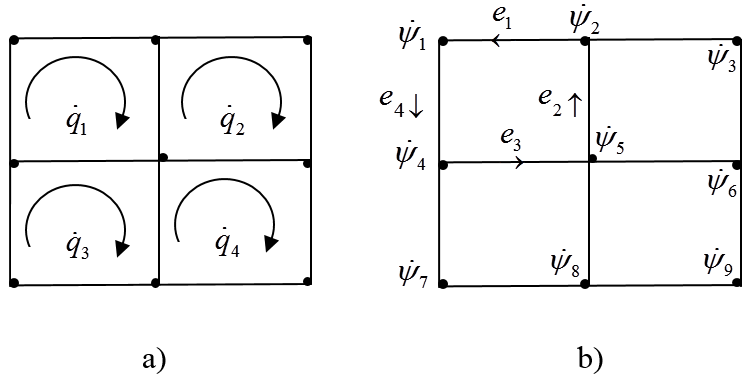
A villamos-mechanikai analógiák alapján intuitíve belátható, hogy, mivel – a 7-2. táblázat és a 7-3. táblázat alapján – a kinetikus energia a mechanikai rendszer  változóival jellemzett dinamikájában jelenik meg, így ennek villamos megfelelőjét a
változóival jellemzett dinamikájában jelenik meg, így ennek villamos megfelelőjét a  hurokáramokkal adott
hurokáramokkal adott  koenergiával lehet kifejezni. Hasonló analógia alapján a statikus jellegű potenciális energiának a töltésekkel kifejezett
koenergiával lehet kifejezni. Hasonló analógia alapján a statikus jellegű potenciális energiának a töltésekkel kifejezett  villamos energia a megfelelője, így az elektromos Lagrange-függvényt az
villamos energia a megfelelője, így az elektromos Lagrange-függvényt az
| (7.23) |

kifejezés alkotja.
Hasonló módon az elektromos Lagrange-függvényt a csomóponti feszültségekkel is ki tudjuk fejezni a
| (7.24) |

módon. A (7.23) függvény alkalmazása esetén a Lagrange-egyenlet a villamos hálózat hurokáramokkal történő leírását adja, míg a (7.24) függvény alkalmazása a csomóponti feszültségekkel írja le a hálózatot. Az első esetben az általános erőket ideális feszültségforrások, a második esetben pedig ideális áramforrásokkal adjuk meg.
Összekötve most a mechanikai és elektromos komponenseket az elektromechanikai kinetikus – dinamikus – energiát a
| (7.25) |
függvény adja meg, míg a potenciális – statikus – energiának a kifejezése
| (7.26) |
alakú. Mindezek alapján a elektromechanikai Lagrange-függvényt az
| (7.27) |

formában írhatjuk fel, ahol a  mennyiségekkel kifejezett tagok esetén a villamos alrendszert hurokáramokkal írjuk le, míg a
mennyiségekkel kifejezett tagok esetén a villamos alrendszert hurokáramokkal írjuk le, míg a  mennyiségek alkalmazása a csomóponti feszültségekkel modellezett villamos alrendszer-modellt jelent.
mennyiségek alkalmazása a csomóponti feszültségekkel modellezett villamos alrendszer-modellt jelent.
Végül az elektromechanikai Rayleigh-függvényt
| (7.28) |
formában adjuk meg, így a teljes elektromechanikai Lagrange-egyenletrendszert
Mindezen függvényeket felhasználva az elektromechanikai Lagrange-függvénnyel a mechanikai egyenleteket a
| (7.29) |

míg a villamos Lagrange-egyenletet a
| (7.30) |

vagy
| (7.31) |

formában kapjuk meg.
A Lagrange-módszer alkalmazása különösen a nemlineáris rendszerelemeket is tartalmazó rendszerekben lehet eredményes, amire egy példát mutatunk be egy elektromechanikai (lineáris) erőgép tervezése kapcsán.
8. fejezet - Véletlen hatások és sztochasztikus folyamatok
- 8.1. Valószínűség, valószínűségi változók és valószínűségi eloszlások
- 8.1.1. Eseményalgebra és a valószínűség definíciója
- 8.1.2. Valószínűségi változók és valószínűségi eloszlások
- 8.1.3. A valószínűségi változók jellemző paraméterei
- 8.1.4. Többdimenziós valószínűségi vektor-változók és eloszlások
- 8.1.5. A többdimenziós valószínűségi vektor-változók jellemző paraméterei
- 8.1.6. Gyakran használt diszkrét és folytonos eloszlások
- 8.1.7. Valószínűségi változók függvényei
- 8.1.8. Valószínűségi változók entrópiája és információ-tartalma
- 8.2. Sztochasztikus folyamatok
8.1. Valószínűség, valószínűségi változók és valószínűségi eloszlások
8.1.1. Eseményalgebra és a valószínűség definíciója
A mérnöki gyakorlatban többnyire determinisztikus rendszerekkel és folyamatokkal dolgozunk, melyekben minden hatás, elem és kapcsolat jól meghatározott, és adott körülmények között az azoktól függő változások és események szükségszerűen be is következnek. Az ilyen eseményeket pontosan előre lehet jelezni, matematikai modelljeik segítségével pontosan számolhatjuk – természetesen a számítások hibahatárain belül – az események és folyamatok bekövetkezési idejét és értékét. Ettől lényegileg eltérőek azok a hatások, események és folyamatok, amelyek megadott, jól meghatározott körülmények között is csak bekövetkezhetnek, azaz: vagy bekövetkeznek, vagy nem következnek be. Ha bekövetkeznek, akkor értékük nem adható meg előre. Az ilyen hatások kialakulásának, az események bekövetkezésének ideje és/vagy értéke tehát bizonytalan meghatározottságú, amit úgy szoktunk jellemezni, hogy valószínűleg ekkor és/vagy ilyen értékben fordulnak elő és következnek be. Ezeket az eseményeket és folyamatokat véletlen eseményeknek és folyamatoknak nevezzük.
A véletlenség és valószínűség intuitív fogalma általában induktív értelmezésen és véleményeken alapul, amit olyan kijelentésekkel illusztrálhatunk, mint: „Ez a mérőeszköz várhatólag jól fog működni”; „Az elképzelés valószínűleg hibás”; „A zaj valószínűleg nem lesz elég erős”. Ezek a vélemények adott szituációban érdekesek lehetnek, de csak valamiféle kvalitatív értékelést és jóslást jelentenek. Azonban a véletlen eseményekben és folyamatokban rejlő bizonytalanságot sok esetben kvantitatíve is jellemezni tudjuk, amihez a véletlenség matematikai modelljét az egyes véletlen hatások „bizonytalan” következményeinek megvalósulását jellemző mértékekkel kell megfelelően megfogalmazni.
A valószínűség fizikai hátterű, modell-alapú precíz megfogalmazásához valamely fizikai kísérlet modelljét, az idealizált gondolatkísérlet és e gondolatkísérlet összes lehetséges eredményének fogalmát kell bevezetnünk. A valószínűség fogalmát kizárólag ezekhez a jól definiált modell-objektumokhoz kapcsolhatjuk. Itt analóg módon járunk el azokhoz a modellezési eljárásokhoz, mint pl. a mechanikában a tömegpontok fogalmának, vagy a villamosságban a hurokáramok fogalmának bevezetése és alkalmazása a determinisztikusként modellezett jelenségek vizsgálatában.
Egy gondolatkísérlet – melyet többnyire véletlen kísérletnek nevezünk – bármelyik lehetséges eredményét elemi eseménynek nevezzük, és az elemi események halmaza alkotja az elemi eseményteret. Az elemi eseményeket kockajáték esetén, melyet a valószínűséggel foglalkozó klasszikus megközelítés egyik leggyakrabban alkalmazott illusztrációjaként használhatunk, könnyen azonosíthatjuk az egy dobással megvalósítható 1,2,3,4,5,6 számok valamelyikének megjelenésével. Ekkor az elemi eseményteret az {1,2,3,4,5,6} halmaz alkotja. Ha azonban egy kockadobással, mint fizikai kísérlettel társított gondolatkísérlet összes lehetséges eredményét nézzük, akkor beszélhetünk – többek között – a „páros szám” {2,4,6} eseményről, vagy az {5,6} „legalább öt” eseményről, amelyek a hatelemű eseménytér összes részhalmazából választott, összetett eseményekként értelmezett részhalmazok.
A kockadobás eseményei diszkrét halmazokat alkotnak. Vegyünk azonban egy másik példát, amelyben az események megszámlálhatatlan végtelen számú ponttal jellemezhetők. Legyen ugyanis egy különböző elemekből álló villamos négypólus, amelyben két nem ismert kapacitású kondenzátor található. A négypólus viselkedése – nem tekintve annak struktúráját – természetesen függ a kondenzátorok kapacitásától. A nem ismert kondenzátorok kapacitásának kimérése véletlen kísérletnek tekinthető, amely kontinuum számosságú valós, véletlen értékeket adna, így, feltételezve a C1>0 és C2>0 egyenlőtlenségeket, a (C1,C2) értékpárok elvileg az egész pozitív siknegyedet, azaz egy kontinuum számosságú folytonos halmazt jelölnek ki. Ebben az esetben az elemi eseményeket a (C1,C2) valós értékpároknak megfelelő síkpontok alkotják, míg az összetett eseményeket a síknegyed megfelelő ponthalmazaiként jelölhetjük ki. A C1>C2 eseményt, például, a síknegyed szögfelező alatti pontjaiból álló ponthalmaz adja meg, míg a C2>C1-10 eseményt a C2=C1-10 egyenes feletti pontokból álló halmaz jelöli ki. A két esemény összege a teljes pozitív síknegyedet jelenti, míg a szorzatuk a C2=C1 és C2=C1-10 egyenesek közötti pontok halmazát adják meg.
Ezek a példák tehát jól illusztrálják, hogy mind a kockadobás, mind pedig az ismeretlen kondenzátorok mérése által értelmezett véletlen események a halmazokkal analóg tulajdonságokkal jellemezhetők, és az eseményekhez rendelt esélyek meghatározásával értelmezhetjük a valószínűség fogalmát.
Az γ szimbólummal jelölt, egymást kölcsönösen kizáró elemi események Γ tere lehet megszámlálhatóan véges vagy végtelen diszkrét, korlátos vagy nemkorlátos kontinuum számosságú halmaz, amikor is egy tetszőleges  eseményt az elemi események részhalmazaként határozzuk meg. Az
eseményt az elemi események részhalmazaként határozzuk meg. Az  -t biztos eseménynek nevezzük, mivel ezzel a véletlen kísérlet végrehajtása biztosan valamelyik elemi eseményt adó eredményre vezet. Az
-t biztos eseménynek nevezzük, mivel ezzel a véletlen kísérlet végrehajtása biztosan valamelyik elemi eseményt adó eredményre vezet. Az  -n kívüli, ahhoz nem tartozó bármely eseményt nevezhetjük a véletlen kísérlet lehetetlen eseményének; egyértelműen az
-n kívüli, ahhoz nem tartozó bármely eseményt nevezhetjük a véletlen kísérlet lehetetlen eseményének; egyértelműen az  -ba nem tartozó Θ üres halmazzal azonosítjuk a lehetetlen eseményt.
-ba nem tartozó Θ üres halmazzal azonosítjuk a lehetetlen eseményt.
Az A és B események  összege az az esemény, amely mindazon elemi eseményekből áll, melyek legalább az egyiknek az elemei. Az események
összege az az esemény, amely mindazon elemi eseményekből áll, melyek legalább az egyiknek az elemei. Az események  szorzatát azon elemi események alkotják, melyeket egyidejűleg mindkét esemény tartalmazza, míg az
szorzatát azon elemi események alkotják, melyeket egyidejűleg mindkét esemény tartalmazza, míg az  különbség az A azon elemi eseményeiből áll, melyek egyidejűleg nem elemei a B-nek. Ha a B esemény tartalmazza az A eseményt, azaz
különbség az A azon elemi eseményeiből áll, melyek egyidejűleg nem elemei a B-nek. Ha a B esemény tartalmazza az A eseményt, azaz  , akkor az A esemény maga után vonja a B esemény bekövetkezését. Ezt az implikáció relációjának nevezzük.
, akkor az A esemény maga után vonja a B esemény bekövetkezését. Ezt az implikáció relációjának nevezzük.
Mindezen előkészítés alapján bevezethetjük az eseményalgebra általános, precíz fogalmát.
8.1 definíció. Legyen Γ nem üres halmaz és jelölje A az Γ részhalmazaiból álló halmazt, amelyre teljesülnek az alábbi feltételek.

Ha
 és
és  , akkor
, akkor  .
.Ha
 , akkor az
, akkor az  események megszámlálható összege is az
események megszámlálható összege is az  eleme, azaz
eleme, azaz  .
.
Akkor az A halmazrendszert eseményalgebrának, illetve pontosabban esemény σ-algebrának nevezzük.
Ha most feltételezzük, hogy az A eseményalgebra eseményei valamely véletlen kísérletek eredményeként jönnek létre, ahogy ezt a kockadobás és a négypólus kondenzátorainak mérései esetén láttuk, akkor e véletlen kísérletekhez szorosan hozzátartozik az egyes események esélyeivel kapcsolatos spekuláció. Például, mekkora az esélye annak, hogy éppen a hármas vagy a páros esemény jön ki, vagy mekkora az esélye annak, hogy a C1>C2 esemény valósul meg a mérések során? Egyetlen véletlen kísérlet eredményének megfigyelése nem ad megfelelő információt erről az esélyről, azonban a kísérlet egymástól független sokszoros megismétlése érdekes tulajdonságot mutat: valamely A esemény bekövetkezésének a száma az összes kísérlet számához viszonyítva, azaz relatív gyakorisága elég nagyszámú kísérlet esetén az eseményre jellemző tört érték körül állandósul. Így például, kockadobás esetén bármely elemi esemény, azaz az 1, 2, 3, 4, 5, és 6 számok kijöttének az összes dobás számához viszonyított aránya elég nagyszámú kísérlet esetén közel kerül az 1/6-hoz és tartósan ott is marad. Azt mondjuk, hogy a 3-as szám kijöttének gyakorisága elég nagyszámú dobás esetén 1/6, és ez a gyakorlatban megfigyelhető érték teremti meg a kapcsolatot a valószínűség absztrakt fogalmához.
8.2 definíció. Legyen A egy esemény σ-algebra, és annak tetszőleges  eseményéhez rendeljünk hozzá egy
eseményéhez rendeljünk hozzá egy  valós számot az alábbi módon:
valós számot az alábbi módon:


Tetszőleges, páronként diszjunkt
 eseményekre
eseményekre 
.
Ekkor az  függvényt valószínűségi függvénynek nevezzük, míg a
függvényt valószínűségi függvénynek nevezzük, míg a  , szám az A esemény valószínűsége. Általánosabban: az
, szám az A esemény valószínűsége. Általánosabban: az  hármast Kolmogorov-féle valószínűségi mezőnek nevezzük, míg az a), b) és c) feltételek a valószínűség axiómiái.
hármast Kolmogorov-féle valószínűségi mezőnek nevezzük, míg az a), b) és c) feltételek a valószínűség axiómiái.
Vezessük most be a feltételes valószínűség fogalmát: Az  eseménynek egy
eseménynek egy  feltételre vonatkozó feltételes valószínűségét a
feltételre vonatkozó feltételes valószínűségét a  formulával értelmezzük. Ebből a feltételből kiindulva az előzővel analóg módon egy feltételes valószínűségi mezőt tudunk felépíteni, amely az előbbiekben meghatározottnak egy szűrését jelenti. Ez azt jelenti, hogy a feltétel nélküli valószínűségre levezetett összefüggések analóg módon érvényesek a feltételes valószínűségekre is.
formulával értelmezzük. Ebből a feltételből kiindulva az előzővel analóg módon egy feltételes valószínűségi mezőt tudunk felépíteni, amely az előbbiekben meghatározottnak egy szűrését jelenti. Ez azt jelenti, hogy a feltétel nélküli valószínűségre levezetett összefüggések analóg módon érvényesek a feltételes valószínűségekre is.
A feltételes valószínűséggel az események függetlenségét is könnyen meghatározhatjuk: Az  esemény független a
esemény független a  eseménytől, ha
eseménytől, ha  . De akkor fennáll a
. De akkor fennáll a  reláció is, így
reláció is, így  , azaz az események egymástól független eseményeket alkotnak.
, azaz az események egymástól független eseményeket alkotnak.
8.1 példa. A valószínűség klasszikus meghatározása. Kockadobás esetén az elemi eseményeket az {γk=k, k=1,2,3,4,5,6} számok megvalósulásai alkotják. Mivel bármelyik megvalósulásának az esélye azonos, ezért az elemi események valószínűségei:  . Minden esemény – a lehetetlen eseménnyel együtt összesen 64 esemény lehetséges –, az elemi események halmaz-összegeiként alakulnak ki, ezért az összetett események valószínűségeit az alkotó elemi valószínűségek algebrai összegeiként kapjuk meg.
. Minden esemény – a lehetetlen eseménnyel együtt összesen 64 esemény lehetséges –, az elemi események halmaz-összegeiként alakulnak ki, ezért az összetett események valószínűségeit az alkotó elemi valószínűségek algebrai összegeiként kapjuk meg.
Ez azt jelenti, hogy ha az A eseményt m elemi esemény alkotja az  módon, akkor az A esemény valószínűségét a
módon, akkor az A esemény valószínűségét a  . Így annak a valószínűségét, hogy a „páratlan” esemény valósul meg, azaz a következő dobásban egy páratlan szám jön ki, a
. Így annak a valószínűségét, hogy a „páratlan” esemény valósul meg, azaz a következő dobásban egy páratlan szám jön ki, a

eredmény adja meg. Másik példaként a „legalább 3” esemény valószínűségét, azaz annak esélyét számolva, hogy a következő dobás eredménye három vagy annál nagyobb lesz, a

eredményt szolgáltatja. □
8.2 példa. Geometriai valószínűség. Tekintsük az 8-1. ábra (a,b) egyenes szakaszát, és jelöljük ki a belsejében az a≤c≤d≤b feltételeknek megfelelő (c,d) szakaszt. Tegyük fel, hogy teljesen véletlenül, találomra akarunk kijelölni egy pontot az (a,b) szakaszon. Mekkora a valószínűsége annak, hogy ez a pont a (c,d) szakaszra kerül?
Mindenek előtt vegyük észre, hogy mivel az (a,b) szakaszon belül minden véges hosszúságú szakasz pontjai megszámlálhatatlanul végtelen számosságú halmazt alkotnak, ezért egyetlen pontnak, ebben a feladatban lényegében egy elemi eseménynek a valószínűségére nincs értelme rákérdezni, ezért csak intervallumokkal lehet a feladatot kezelni.
A feladat kiírásában a teljesen véletlenül, találomra történő pont kijelölése azt jelenti, hogy az (a,b) szakasz bármelyik pontját ugyanolyan eséllyel találhatjuk el, azaz az (a,b) szakaszon belül nincs kitüntetett rész: bármelyik, bármekkora belső szakaszra történő találat csak attól függ, hogy az relatíve milyen hosszúságú, azaz az esély a szakaszok hosszával arányos. Ezt figyelembe véve azt mondhatjuk, hogy a (c,d) szakaszra történő találat valószínűségét a
módon fejezhetjük ki, ahol r>0 az arányossági tényező. Mivel ebben az esetben az (a,b) szakaszra történő találat a biztos eseményt jelenti, ezért írhatjuk, hogy annak valószínűsége
.
Innen az r értékét az  kifejezés adja meg, ezért a (c,d) szakaszra történő találat valószínűségét a
kifejezés adja meg, ezért a (c,d) szakaszra történő találat valószínűségét a

aránnyal tudjuk kifejezni. □

8.1.2. Valószínűségi változók és valószínűségi eloszlások
A valószínűség precíz meghatározása az eseménytér és a véletlen kísérletek értelmezésén, azaz a valószínűségi mező fogalmán keresztül történik, azaz a rendszerek véletlen jelenségeinek elemzése során háttérként mindig megfelelő eseményteret és valószínűségi mezőt kell felvázolni. A véletlen jelenségek matematikai kezelésében azonban az eseménytéren értelmezett függvényekként definiált valószínűségi változók a valószínűségszámítás alapvető fogalmai közé tartoznak, ugyanakkor lehetővé teszik a véletlen hatások és folyamatok meglehetősen általános kezelését.
Az elemi események Γ halmazától függően folytonos és diszkrét valószínűségi változókat különböztetünk meg, és ezeket az alábbi módon határozhatjuk meg.
8.3 definíció. Legyen az elemi események Γ halmaza megszámlálhatlan, azaz kontinuum számosságú. Ekkor az  , kontinuum számosságú értékkésszlettel rendelkező valós függvényt folytonos valószínűségi változónak nevezzük, ha minden
, kontinuum számosságú értékkésszlettel rendelkező valós függvényt folytonos valószínűségi változónak nevezzük, ha minden  valós számhoz létezik egy P
valós számhoz létezik egy P valószínűséggel rendelkező esemény.
valószínűséggel rendelkező esemény.
A folytonos valószínűségi változót meghatározó X függvény Ε értékkészletét alkothatják intervallumok, félegyenesek vagy akár a teljes egyenes pontjai. Ekkor minden A eseményt valamilyen φ feltétellel határozunk meg, melynek valószínűségét a P(φ) módon fejezzük ki. Itt a φ:X<α feltétel valószínűségét a P(φ)=P(X<α) kifejezéssel adjuk meg. Ezt a jelölést alkalmazva bevezethetjük a valószínűségi változók eloszlásfüggvényének fogalmát is az alábbi módon.
8.4 definíció. Az  függvényt az X folytonos valószínűségi változó eloszlásfüggvényének nevezzük.
függvényt az X folytonos valószínűségi változó eloszlásfüggvényének nevezzük.
Egy folytonos változó eloszlásfüggvénye balról folytonos, monoton nemcsökkenő függvény. Ha az FX eloszlásfüggvény is folytonos, akkor létezik olyan nemnegatív fX(.) függvény, hogy
| (8.1) |
és ha az eloszlásfüggvény differenciálható, akkor az
| (8.2) |
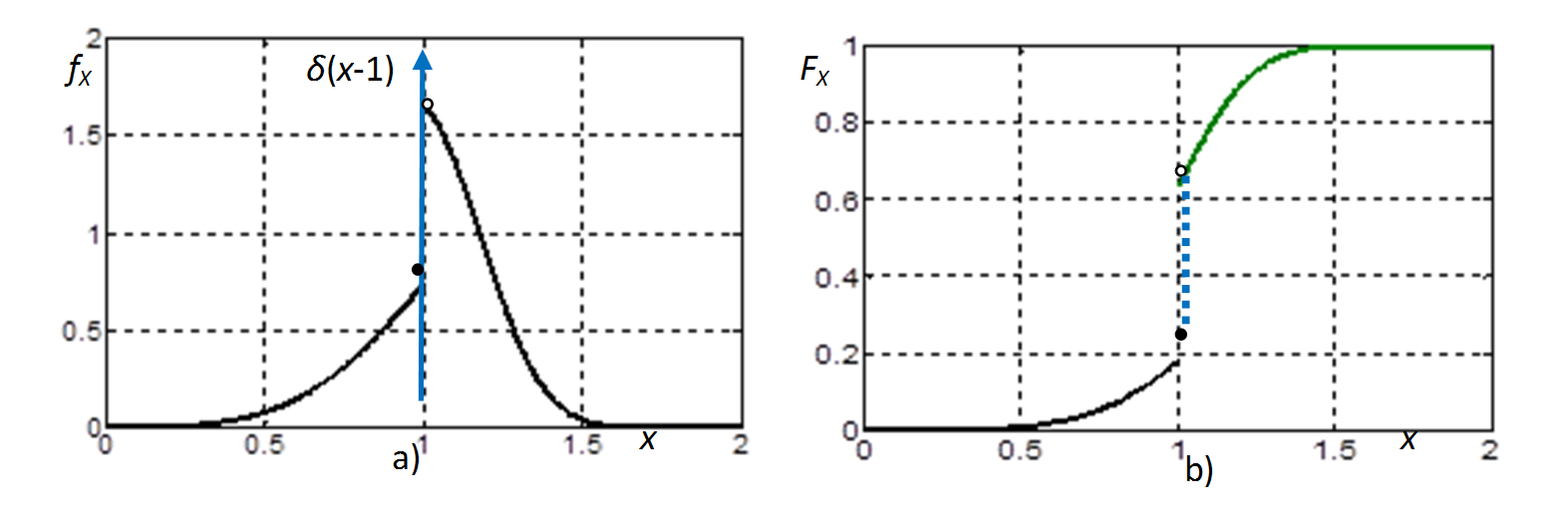
függvényt az X valószínűségi változó sűrűségfüggvényének nevezzük. A sűrűségfüggvénnyel a normalizációs feltételt a
| (8.3) |

formában írhatjuk.
Az fX(.) sűrűségfüggvény nemnegativitása következik az FX(.) monotonitásából, de a (8.1) egyenletből is következik, mivel tetszőleges a<b értékekre teljesülnie kell a
| (8.4) |

egyenlőségnek. Ugyanakkor a (8.4)-ból azonban azt is látjuk, hogy folytonos valószínűségi változó esetén

azaz annak valószínűsége, hogy az X folytonos valószínűségi változó valamely c konkrét értéket vesz fel zérus. Ez azonban nem jelent lehetetlen eseményt, hanem csak nagyon kis valószinűségű eseményt, amit tetszőleges x=c esetén a
| (8.5) |

formulával lehet kifejezni.
8.3 példa. Végezzük el a következő kísérletet. Vegyünk két azonos frekvenciájú szinuszjel feszültség-generátort, kapcsoljuk be azokat függetlenül egymást követően, és határozzuk meg a két színuszjel fáziskülönbségének valószínűségi sűrűségfüggvényét!
Mivel a bekapcsolások egymástól teljesen függetlenül történtek, ezért nincs fizikai alapja annak, hogy a két fázis közötti értékek közül bármelyiket vagy bármelyik intervallumot kiemeljük. Tehát azt kell feltételeznünk, hogy a fáziskülönbséget reprezentáló Φ véletlen változó  sűrűségfüggvénye a (0,2π) intervallumban konstans értékű.
sűrűségfüggvénye a (0,2π) intervallumban konstans értékű.
Felhasználva a

feltételt azt kapjuk, hogy  a (0,2π) intervallumban. Ezt egyenletes eloszlásnak nevezzük.
a (0,2π) intervallumban. Ezt egyenletes eloszlásnak nevezzük.
Felhasználva a (8.1) összefüggést megkapjuk a véletlen fáziskülönbség eloszlásfüggvényét is
. □
8.5 definíció. Legyen az elemi események Γ halmaza megszámlálható számosságú. Ekkor az  megszámlálható értékkésszlettel rendelkező valós függvényt diszkrét valószínűségi változónak nevezzük, ha minden
megszámlálható értékkésszlettel rendelkező valós függvényt diszkrét valószínűségi változónak nevezzük, ha minden  valós számhoz létezik egy
valós számhoz létezik egy  valószinűségű esemény.
valószinűségű esemény.
Mivel most az elemi események teljes rendszert alkotnak, ezért a valószínűségekre érvényesek a  és
és  relációk, ahol a felső határra érvényes a
relációk, ahol a felső határra érvényes a  feltétel, azaz a diszkrét események alkothatnak megszámlálhatóan véges vagy végtelen halmazt.
feltétel, azaz a diszkrét események alkothatnak megszámlálhatóan véges vagy végtelen halmazt.
8.6 definíció. Az  függvényt az X diszkrét valószínűségi változó eloszlásfüggvényének nevezzük.
függvényt az X diszkrét valószínűségi változó eloszlásfüggvényének nevezzük.
A diszkrét valószínűségi változók eloszlásfüggvényei lépcsős függvények, melyekben az ugrások a valószínűségi változók xk értékeiben következnek be. Ezen ugrásokat a  értékek adják meg, míg most a normalizációs feltételt a
értékek adják meg, míg most a normalizációs feltételt a
| (8.6) |
egyenlet szolgáltatja,.
8.4 példa. Tegyük fel, hogy két azonos mérőeszközt használunk a laborban, melyeknek egy adott időszakra vonatkozó meghibásodási valószínűségei 0.25 értékűek. Határozzuk meg azon X diszkrét valószínűségi változó eloszlásfüggvényét, amellyel az esetlegesen meghibásodó mérőeszközöket jellemezhetjük.
Az X valószinűségi változó három értéket vehet fel: x1=0, x2=1, x2=2, azaz az adott időszakban előfordulhat 1 vagy két eszköz meghibásodása, de az is lehet, hogy mindkét eszköz hibátlanul dolgozik.
A rendszer elemi eseményei az következők:
A1 – az első mérőeszköz meghibásodik
A2 – az első mérőeszköz hibátlanul működik
B1 – a második mérőeszköz meghibásodik
B2 – a második mérőeszköz hibátlanul működik
Ekkor az X valószínűségi változó egyes értékeinek a valószínűségei a következők (kihasználva, hogy az egyes elemi események között fennállnak az  és
és  relációk):
relációk):



.
Összefoglalva, diszkrét valószínűségi változó értékei és valószínűségei:
xk | 0 | 1 | 2 |
P(xk) | 0.5625 | 0.375 | 0.0625 |
Ekkor az FX eloszlásfüggvény formája:
melyet a 8-3. ábra illusztrál.
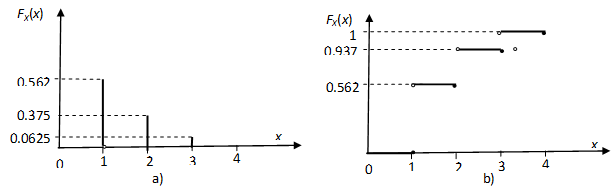
8.1.3. A valószínűségi változók jellemző paraméterei
A valószínűségi változók teljes leírását, akár diszkrét, akár folytonos változókról beszélünk, eloszlásaik, azaz eloszlásfüggvényeik és – ha léteznek – sűrűségfüggvényeik adják meg. Azonban mind a diszkrét, mind a folytonos függvényekkel történő munka meglehetősen összetett műveleket igényel, de sok esetben nem is szükséges e függvények által tartalmazott összes információ, mivel bizonyos gyakorlati feladatokban az is elégséges, ha az eloszlások egyes jellemző paramétereit ismerjük és használjuk fel. Ezek a jellemző paraméterek az eloszlásfüggvények különböző módon képzett funkcionáljai és azok kombinációi, amelyek közül a valószínűségi változók egyes függvényeinek várható értékei játszák a legfontosabb szerepet. Ehhez először valamely általános függvény várható értékét definiáljuk:
8.7 definíció. Az X valószínűségi változó g:X→R valós függvénye várható értékének nevezzük folytonos esetben az
| (8.7) |

integrált, míg diszkrét esetben az
| (8.8) |

összeget.
A g függvény formájától függően nagyon sok jellemző paramétert tudunk előállítani az (8.7) és (8.8) várható értékek alkalmazásával, minden esetben feltételezve, hogy az integrálok és összegzések véges értékeket adnak:

: az X változó α konstans szerinti n-ed rendű momentuma.

: az X változó n-ed rendű közönséges momentuma a μn jelöléssel.

: az X változó várható (átlagos) értéke (elsőrendű közönséges momentuma) a μ1=μX jelöléssel.

az X változó várható érték szerinti n-ed rendű centrális momentuma a
 jelöléssel.
jelöléssel.
: az X változó varianciája (szórásnégyzete) (a várható érték szerinti másodrendű centrális momentuma) a
 jelöléssel.
jelöléssel.
A felsorolt jellemzők közül a μX várható érték alapvető szerepét az adja, hogy egy véletlen kísérletsorozat esetén a megfigyelt értékek a várható (átlagos) érték körül ingadoznak. Ezen ingadozások mértékének legfontosabb jellemzője a  variancia (szórásnégyzet) vagy a
variancia (szórásnégyzet) vagy a  négyzetgyökkel kifejezett szórás. E két jellemző alkalmazásával a
négyzetgyökkel kifejezett szórás. E két jellemző alkalmazásával a
| (8.9) |

aránnyal az ingadozások relatív mértékét fogalmazzuk meg. Ugyanakkor e két jellemzővel végezhetjük el az X változó normálását is, ami az

művelettel az Y normált változót jelenti: az Y zérus várható értékű és egységnyi varianciájú valószínűségi változót jelöl.
Az elsőrendű közönséges momentum – várható érték –, valamint a másodrendű centrális momentum – szórásnégyzet – említett szerepei mellett azt mondhatjuk, hogy a valószínűségi eloszlások tulajdonságait az alacsonyrendű momentumokkal jellemezhetjük a legjobban. Így az eloszlások egyik fontos tulajdonságát, a szimmetrikusságot, azaz az eloszlás aszimetriájának mértékét jellemzi
| (8.10) |

ferdeségi tényező. Ugyancsak két alacsonyrendű momentum felhasználásával képezzük a
| (8.11) |

lapultsági tényezőnek nevezett mutatót.
A (8.10)-(8.11) aggregált jellemzők mind folytonos, mind diszkrét valószínűségi változók esetében értelmezhetők és használhatók. Az
| (8.12) |

egyenlet xp megoldásával definiált p-ed rendű kvantilis azonban csak folytonos valószínűségi változók esetében adott egyértelműen. Ennek értelmezését a  összefüggés adja meg. Jegyezzük meg, hogy a p=1/2-ed rendű kvantilisnek külön neve van: ezt az X valószínűségi változó mediánjának nevezzük.
összefüggés adja meg. Jegyezzük meg, hogy a p=1/2-ed rendű kvantilisnek külön neve van: ezt az X valószínűségi változó mediánjának nevezzük.
A valószínűségi eloszlások modellezési alkalmazásaiban nagyon hasznos relációk a következő abszolút értékekre vonatkozó egyenlőtlenségek:
| (8.13) |
Markov-egyenlőtlenség tetszőleges n esetén:
| (8.14) |
Csebisev-egyenlőtlenség:
| (8.15) |
8.8 definíció. Az X valószínűségi változó karakterisztikus függvényének nevezzük folytonos esetben az
| (8.16) |

integrált, míg diszkrét esetben az
| (8.17) |

összeget, ahol j az imaginárius egység.
Innen már látható, hogy a karakterisztikus függvény és a valószínűségi sűrűségfüvény Fourier-transzformációval összekötött függvény-párost alkotnak. Inverz irányban kapjuk a rendszertechnikából jól ismert Fourier-transzformációkat:
| (8.18) |
és
 .(8.19)
.(8.19)
A karakterisztikus függvény tulajdonságai:


ahol  a konjugált függvényt jelenti.
a konjugált függvényt jelenti.
A karakterisztikus függvény fontos alkalmazásbeli tulajdonsága, hogy az ω változó szerinti n-edik differrenciálhányadossal generálni tudjuk az X valószínűségi változó n-edik közönséges momentumát a
| (8.20) |

módon.
A karakterisztikus függvény alkalmazásával az X valószínűségi változó fontos jellemző-
inek egy másik fontos halmazát, a kumulánsokat is generálni tudjuk a
| (8.21) |
módon. A momentumok és kumulánsok között jól meghatározott kapcsolatok vannak, amelyek lehetővé teszik közöttük az egyértelmű átszámításokat.
8.1.4. Többdimenziós valószínűségi vektor-változók és eloszlások
A gyakorlatban sok esetben találkozunk olyan problémával, amikor egyidejűleg több, különböző valószínűségi változóval modellezhető hatással és eseménnyel kell a vizsgálatot, elemzést végezni. Ha ezek a valószínűségi változók függetlenek egymástól, akkor önállóan kezelhetjük és vizsgálhatjuk azokat, és ha ugyanazon objektumokra fejtik ki hatásaikat, akkor az együttes hatást a problémától függően lineáris vagy nemlineáris szuperpozíciókkal összegezhetjük. Azonban gyakran előfordul, hogy már maguk a valószínűségi változókkal jellemzett tényezők között is erős kölcsönhatások vannak, így azokat nem lehet külön-külön kezelni, hanem egyetlen, de többdimenziós valószínűségi változóval tudjuk csak a problémát megfogalmazni. A rendszertechnikában többek között ilyen problémák, amikor a rendszerekre és rendszerelemekre történő hatásokat vizsgáljuk: a bemeneti és kimeneti valószínűségi változók között – éppen a rendszerre jellemző – szoros kapcsolatok vannak. Ekkor – mind folytonos, mind diszkrét esetben – az egydimenziós valószínűségi változók általánosításával kaphatjuk meg azokat az eszközöket, amelyeket fel tudunk használni az ilyen valószínűségi problémák vizsgálatára és elemzésére.
8.9 definíció. Az elemi események Γ halmazán értelmezett  , n-változós valós függvényt n-dimenziós valószínűségi változónak nevezzük, ha minden
, n-változós valós függvényt n-dimenziós valószínűségi változónak nevezzük, ha minden  valós számhoz létezik egy
valós számhoz létezik egy  valószinűséggel rendelkező esemény.
valószinűséggel rendelkező esemény.
Ha az elemi eseménytér és a függvény értékkészlete megszámlálható halmazokat alkotnak, akkor diszkrét valószínűségi változóról beszélünk, míg kontinuum számosságú halmazok folytonos változót jelentenek, Ehhez a vonatkozó valószínűségi eloszlásfüggvényt is specifikálhatjuk az alábbi módon.
8.10 definíció. Az  , n-változós valós függvényt az
, n-változós valós függvényt az  valószínűségi vektor-változó együttes eloszlásfüggvényének nevezzük.
valószínűségi vektor-változó együttes eloszlásfüggvényének nevezzük.
Az  folytonos valószínűségi vektor-változó együttes sűrűségfüggvényét az
folytonos valószínűségi vektor-változó együttes sűrűségfüggvényét az
| (8.22) |
módon lehet megadni, és a normalizációs feltételt az alábbi formában írhatjuk fel:
| (8.23) |
Az együttes eloszlásfüggvényekből az egyes változók un. perem-eloszlásfüggvényeit a többi változó kiintergálásával kaphatjuk meg. Így az n-dimenziós esetben egy (n-1)-dimenziós perem-eloszlásfüggvényt és perem-sűrűségfüggvényt az
| (8.24) |

és
| (8.25) |

integrálokkal képezzük. Természetesen a többi változó peremeloszlását hasonló módon nyerjük. Ugyakkor az egyes változók szekvenciális kiintegrálásával sorban kapjuk az (n-2)-, (n-3)-,… -dimenziós eloszlás- és sűrűségfüggvényeket egészen a komponensek egydimenziós függvényeinek előállításáig. Jegyezzük meg, hogy a perem-eloszlásfüggvényekből nem tudjuk az együttes eloszlásfüggvényeket előállítani, mivel a perem-eloszlásfüggvények nem tartalmazzák az ehhez szükséges információkat. Természetesen ugyanilyen állítás érvényes a perem-sűrűségfüggvényekre.
Az n-dimenziós eloszlásfüggvények meghatározásából és a (8.24) relációból következnek az alábbi fontos tulajdonságok is:

mivel az xl<∞ feltétel mindig fennáll, ezért ezt a változót el is lehet hagyni. Ezzel szemben az xl<-∞ reláció lehetetlen eseményt reprezentál, ezért

.
Ugyanakkor az xi<∞ feltétel érvényes mindegyik változóra, ezért az

egyenlőség lényegében a biztos eseményt reprezentálja.
8.5 példa. Vegyük az (X,Y) folytonos valószínűségi vektor-változót, amely legyen un. egyenletes eloszlású a 8-4. ábra által bemutatott ellipszisen, azaz az együttes sűrűségfüggvény legyen konstans értékű az
módon. Határozzuk meg az X és Y változók perem-eloszlásainak sűrűségfüggvényeit!
Az együttes sűrűségfüggvényből jól látható, hogy az X változó értéktartománya a (-a,a) intervallum, ezért kifejezve az y értékét az

egyenletből az  értékekhez jutunk, ezért az X változó perem-
értékekhez jutunk, ezért az X változó perem-
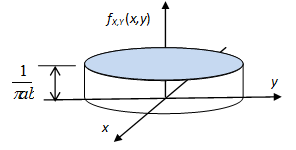
sűrűségfüggvényét az alábbi számításokkal kapjuk meg:

.
Hasonló meggondolással kaphatjuk meg az Y változó perem-sűrűségfüggvényét:
. □
8.6 példa. Tételezzük fel, hogy a kockadobást két azonos, de különböző színű – mondjuk piros és fehér – kocka egyidejű dobásával végezzük, amikor is a színek a véletlen kísérletek eredményeinek rendezett számpárosokként történő értékeléséhez kell. A két kocka egyidejű dobásával – tartva állandóan az „első szám piros kocka, második szám fehér kocka” sorrendben történő elszámolást – az (1;1), (1;2) … (6;5), (6,6) elemi eseményeket kaptuk. Egy ilyen kettős dobás eredményének a valószínűségét a
| (8.26) |

módon számolhatjuk, mivel mind a 36 azonos valószínűségű esemény.
Ezzel lényegében egy diszkrét kétdimenziós valószínűségi vektor-változót határoztunk meg, melynek eloszlásfüggvényét az XPiros=X1 és XFehér=X2 általánosabb jelöléssel az
| (8.27) |

formában írhatjuk fel.
Az egyes változók szerinti perem-sűrűségfüggvények:

és

. □
Több valószínűségi változó esetén természetszerűleg vetődik fel azok egymástól való függésének a vizsgálata is. Így az (X1,X2) folytonos két-dimenziós valószínűségi változó esetén a az X2 változónak az X1 változótól való feltételes valószínűségét az
| (8.28) |

módon határozzuk meg, ahol az  a két változó együttes sűrűségfüggvénye az
a két változó együttes sűrűségfüggvénye az  pedig az abból előállítható perem-sűrűségfüggvény. Az (8.28) egyenletből rögtön következik a két valószínűségi változó függetlenségének a feltétele is. Ugyanis, ha az X2 változó független az X1 valószínűségi változótól, akkor
pedig az abból előállítható perem-sűrűségfüggvény. Az (8.28) egyenletből rögtön következik a két valószínűségi változó függetlenségének a feltétele is. Ugyanis, ha az X2 változó független az X1 valószínűségi változótól, akkor  , és így a (8.28) egyenletből a függetlenségre az
, és így a (8.28) egyenletből a függetlenségre az
| (8.29) |

feltételt kapjuk.
8.1.5. A többdimenziós valószínűségi vektor-változók jellemző paraméterei
A többdimenziós vektor-változók jellemző paramétereinek a tárgyalását is a két-dimenziós változókkal folytatjuk, mivel az összefüggések nyilván ezekben az esetekben a legegyszerűbbek, miközben a nagyobb dimenziókra történő általánosítások kézzelfoghatók.
8.11 definíció. A  n-változós valós függvény várható értékének nevezzük folytonos valószínűségi változók esetében az
n-változós valós függvény várható értékének nevezzük folytonos valószínűségi változók esetében az
| (8.30) |

integrált, míg diszkrét valószínűségi változókra az
| (8.31) |

összeget.
Ha  , akkor a
, akkor a
| (8.32) |

számot az  valószínűségi változók m1+m2+…+mn=m-ed rendű vegyes közönséges momentumának nevezzük.
valószínűségi változók m1+m2+…+mn=m-ed rendű vegyes közönséges momentumának nevezzük.
A (8.32) n-dimenziós vegyes momentum-forma egyidejűleg ad meg kapcsolatokat n különböző valószínűségi változó között, amely így meglehetősen általános fogalom és a gyakorlatban kevésbé használatos. Viszont annál gyakrabban használjuk a (8.32) vegyes momentumok redukált változatait, amelyek többnyire két-két valószínűségi változó közötti, két-dimenziós momentumokkal kifejezett kapcsolatokat jelentik.
Ha speciális esetben az  változók közül a
változók közül a  két-változós függvényt vesszük, akkor, figyelembe véve az (8.30) összefüggést, ennek a függvénvnek a várható értékét az
két-változós függvényt vesszük, akkor, figyelembe véve az (8.30) összefüggést, ennek a függvénvnek a várható értékét az
| (8.33) |
integrál fejezi ki. Ekkor a g függvény formájától függően az  valószínűségi változók közötti kapcsolatok sok jellemzőjét és jellemző paraméterét tudjuk meghatározni mind az (8.31) folytonos, mind pedig az (8.31) diszkrét változók esetében:
valószínűségi változók közötti kapcsolatok sok jellemzőjét és jellemző paraméterét tudjuk meghatározni mind az (8.31) folytonos, mind pedig az (8.31) diszkrét változók esetében:

: az Xk és Xl valószínűségi változók mk és ml, azaz mk+ml=m-ed rendű
 vegyes közönséges momentumai.
vegyes közönséges momentumai. A
 függvény az Xk valószínűségi változó
függvény az Xk valószínűségi változó  momentumát jelenti, melynek speciális esete az Xk változó
momentumát jelenti, melynek speciális esete az Xk változó  várható értéke. Hasonlóan nyerjük a vegyes momentumok másik, az Xl valószínűségi változóra vonatkozó határeseteit.
várható értéke. Hasonlóan nyerjük a vegyes momentumok másik, az Xl valószínűségi változóra vonatkozó határeseteit. 
: az Xk és Xl valószínűségi változók
 vegyes másodrendű közönséges momentumai.
vegyes másodrendű közönséges momentumai.
: az Xk és Xl valószínűségi változók mk és ml, azaz mk+ml=m-ed rendű
 vegyes centrális momentumai. A vegyes centrális momentumok definíciójából következnek az alábbi egyenlőségek: a)
vegyes centrális momentumai. A vegyes centrális momentumok definíciójából következnek az alábbi egyenlőségek: a)  ; b)
; b)  ; c)
; c)  .
.
: az Xk és Xl valószínűségi változók közötti kovariancia-együttható:
 ,. Rövidebb jelöléssel
,. Rövidebb jelöléssel  .
.
Független valószínűségi változók esetén  , de rögtön hangsúlyozzuk ki, hogy a kovariancia-együttható zérus értékéből általában nem következik a valószínűségi változók függetlensége.
, de rögtön hangsúlyozzuk ki, hogy a kovariancia-együttható zérus értékéből általában nem következik a valószínűségi változók függetlensége.
Az  n-dimenziós valószínűségi vektor-változó bármelyik két változója között meghatározva a kovariancia-együtthatót a teljes kapcsolatrendszert a kovariancia-mátrixba tudjuk összefoglalni, melynek főátlójában sorban az egyes valószínűségi változók
n-dimenziós valószínűségi vektor-változó bármelyik két változója között meghatározva a kovariancia-együtthatót a teljes kapcsolatrendszert a kovariancia-mátrixba tudjuk összefoglalni, melynek főátlójában sorban az egyes valószínűségi változók  szórás-négyzetei (varianciái) jelennek meg az alábbi módon:
szórás-négyzetei (varianciái) jelennek meg az alábbi módon:
| (.8.34) |
Mivel  , így a
, így a  kovariancia-mátrix szimmetrikus, de egyúttal pozitív szemidefinit, ami azt jelenti, hogy bármely
kovariancia-mátrix szimmetrikus, de egyúttal pozitív szemidefinit, ami azt jelenti, hogy bármely  vektor esetében teljesül a
vektor esetében teljesül a
| (8.35) |
kvadratikus formára vonatkozó egyenlőtlenség. Ez természetesen az n=2 választás esetében is érvényes, amit a

formában írhatunk, és amelyből némi átalakítással – a  és
és  feltételek teljesülése esetén – a kovariancia-együtthatókra megkaphatjuk a
feltételek teljesülése esetén – a kovariancia-együtthatókra megkaphatjuk a
| (8.36) |

Schvarz-egyenlőtlenséget. Erre támaszkodva definiáljuk a
| (8.37) |
mennyiséget, melyet az Xk és Xl valószínűségi változók korreláció-együtthatójának nevezünk. A korreláció-együttható teljesíti a  relációkat. Független valószínűségi változók esetén nyilván erre is teljesül a
relációkat. Független valószínűségi változók esetén nyilván erre is teljesül a  egyenlőség is.
egyenlőség is.
Mind a kovariancia-, mind a korreláció-együttható fontos szerepet játszik a valószínűségi változók közötti összefüggések mérésében. A korreláció-együttható normált mennyiség, így ezzel tudjuk statisztikai jellegű kapcsolatoka jellemezni. A  érték a két változó között közvetlen lineáris összefüggést jelent, míg – ahogy ezt már jeleztük – a
érték a két változó között közvetlen lineáris összefüggést jelent, míg – ahogy ezt már jeleztük – a  zérus korrelációból a függetlenség csak akkor következik, ha egy kétdimenziós normális eloszlásről van szó. A negative értékek ellenkező irányú kapcsolatokat jelentenek.
zérus korrelációból a függetlenség csak akkor következik, ha egy kétdimenziós normális eloszlásről van szó. A negative értékek ellenkező irányú kapcsolatokat jelentenek.
8.12 definíció. Az  n-dimenziós valószínűségi vektor-változó karakterisztikus függvényének nevezzük folytonos esetben a
n-dimenziós valószínűségi vektor-változó karakterisztikus függvényének nevezzük folytonos esetben a
| (8.38) |

integrált, míg diszkrét esetben a
| (8.39) |
összeget, ahol j az imaginárius egység.
Az n-dimenziós karakterisztikus függvény több, az egydimenzióshoz hasonló tualdonsággal rendelkezik:
a) 
b) 
c) 
ahol  a konjugált függvény jelenti.
a konjugált függvény jelenti.
Ha az  n-dimenziós valószínűségi vektor-változó egyes komponensei függetlenek egymástól, akkor a (8.29) általánosításának megfelelően felírhatjuk az
n-dimenziós valószínűségi vektor-változó egyes komponensei függetlenek egymástól, akkor a (8.29) általánosításának megfelelően felírhatjuk az
| (8.40) |

és
| (8.41) |

feltételeket.
8.1.6. Gyakran használt diszkrét és folytonos eloszlások
A diszkrét és folytonos valószínűségi változók eloszlás- és sűrűségfüggvényei jól meghatározott tulajdonságokkal rendelkeznek, azonban általános függvény-formájukban meglehetősen nezézkesen kezelhetők. Azonban sok olyan konkrét, lényegében néhány paraméterrel meghatározott függvényt lehet használni, melyek rendelkeznek a valószínűségi eloszlás- és sűrűségfüggvények megadott tulajdonságaival, de paramétereik ismeretében könnyen előállíthatók és felhasználhatók a felmerülő gyakorlati problémák megoldásában. Ugyanakkor ezek a paraméterek kifejezhetők az eloszlások momentumaival is, ami sokat segíthet az eloszlás- és sűrűségfüggvények mérési adatokhoz való illesztésében.
Elfajult eloszlás. Az elfajult (vagy unáris) eloszlású X valószínűségi változó egyetlen, x1 értékkel (elemi eseménnyel) rendelkezik a  valószínűséggel. Ennek sűrűség-függvénye a disztribúciók (általánosított függvények) körében értelmezett δ(x-x0) Dirac-delta függvény, míg az eloszlásfüggvényt az 1(x-x0) Heaviside (egységugrás) függvény adja meg, ahogy ezt az 8-5. ábra illusztrálja.
valószínűséggel. Ennek sűrűség-függvénye a disztribúciók (általánosított függvények) körében értelmezett δ(x-x0) Dirac-delta függvény, míg az eloszlásfüggvényt az 1(x-x0) Heaviside (egységugrás) függvény adja meg, ahogy ezt az 8-5. ábra illusztrálja.
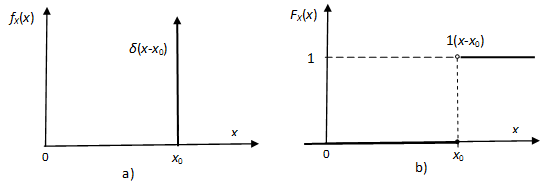
A karakterisztikus függvény a  alakú, míg a momentumok:
alakú, míg a momentumok:

.
Bináris eloszlás. A bináris X valószínűségi változó két, x1 és x2 értékkel (elemi eseménnyel) rendelkezik  és
és  , 0<p<1 valószínűségekkel.
, 0<p<1 valószínűségekkel.
A bináris valószínűségi változók fontos szerepet töltenek be a két stabilis állapottal jellemezhető multivibrátorok, mágneses vagy relés rendszerek, vagy akár a bináris számrendszert használó numerikus számítások statisztikai elemzéseiben. Itt a leggyakrabban az x1=0 és x2=1 jelöléseket használjuk.
Karakterisztikus függvény:

Momentumok:

.
Binomiális eloszlás. Vegyünk n független Xk, k=1,2…n, azonos bináris eloszlású valószínűségi változót a  és
és  , 0<p<1 valószínűségekkel. Jelölje Yn az Xn valószínűségi változók
, 0<p<1 valószínűségekkel. Jelölje Yn az Xn valószínűségi változók
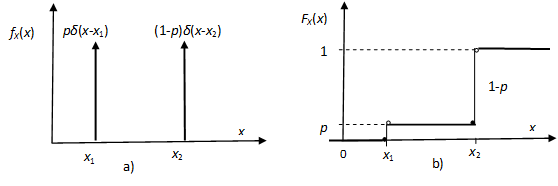

összegét. Mivel az Xk valószínűségi változók a 0 és 1 értékeket vehetik fel, így az Yn a 0 és n közötti egész értékeket vehet fel. Ekkor annak a valószínűsége, hogy az Yn az m, 0≤m≤n értéket veszi fel a
kifejezés adja meg, melynek magyarázata a következő: annak valószínűsége, hogy egy kísérletben éppen m egyes jön ki  . Ez azonban
. Ez azonban  különböző módon lehetséges, és mivel az összes konfiguráció egymástól független eseményt alkot, így az m db egyes esemény valószínűsége a két tényező szorzataként alakul ki.
különböző módon lehetséges, és mivel az összes konfiguráció egymástól független eseményt alkot, így az m db egyes esemény valószínűsége a két tényező szorzataként alakul ki.
Az eloszlás karakterisztikus függvénye a

Momentumok:

.
Poisson-eloszlás. A gyakorlatban nagyon sok probléma modellezéséhez használható fel a Poisson eloszlás, melynek meghatározása a következő: a λ>0 paraméterű, 0,1,2,…n,… értékeket felvevő valószínűségi eloszlást Poisson eloszlásnak nevezzük, ha a valószínűségi sűrűségfüggvény a
alakú.
Karakterisztikus függvény:

Momentumok:

.
Egyenletes eloszlás. Az X valószínűségi változó egyenletes eloszlású az (a,b) intervallumon, ha a sűrűségfüggvénye
.
Karakterisztikus függvény:

Momentumok:

.
Gauss-(normális) eloszlás. A másik, nagyon sok probléma modellezésére felhasználható valószínűségi eloszlás a normális, vagy Gauss-eloszlás. Az

valószínűségi sűrűségfüggvényű X valószínűségi változót normális eloszlásúnak nevezzük.
Könnyen ellenőrizhető, hogy a normális eloszlás sűrűségfüggvényében a μX az X valószínűségű változó várható értéke, míg σX a szórását jelenti.
Karakterisztikus függvény:
A normális eloszlás szimmetrikus eloszlás, melynek szimmetria centruma a μX várható érték. Érdekes tulajdonsága, hogy az összes páratlan rendű centrális momentuma zérus értékű, míg a páros rendű centrális momentumait a

képlettel lehet számolni.
A normális eloszlás egy fontos tulajdonsága, hogy a  várható értékkel és varianciával jellemzett X1, X2,…Xn független normális eloszlású valószínűségi változók
várható értékkel és varianciával jellemzett X1, X2,…Xn független normális eloszlású valószínűségi változók  összege is normális eloszlású, melynek várható értékét és varianciáját a
összege is normális eloszlású, melynek várható értékét és varianciáját a  és
és  összegek adják meg.
összegek adják meg.
A normális eloszlás egy másik fontos tulajdonsága, hogy egy n-dimenziós (X1,X2,…Xn) normális eloszlású valószínűségi változó együttes sűrűségfüggvényét általános esetben is meg tudjuk adni analitikusan formában:

ahol  az egyes komponensek vérható értékei, míg a
az egyes komponensek vérható értékei, míg a  mátrix az (8.34) kovariancia-mátrix inverze.
mátrix az (8.34) kovariancia-mátrix inverze.
Gamma és exponenciális eloszlás. Az X valószínűségi változót gamma eloszlásúnak nevezzük, ha a sűrűségfüggvénye az
alakú. Ez két-paraméteres – a λ és p paraméterekkel rendelkező – eloszlás, melynek speciális esete az exponenciális eloszlás, melyet a p=1 paraméterérték esetén kapjuk az
Karakterisztikus függvény:

Momentumok:

.
Az exponenciális eloszlás karakerisztikes függvényét és momentumait is megkaphatjuk a p=1 behelyettesítéssel.
Weibull eloszlás. Ha az X valószínűségi változó exponenciális eloszlású, akkor az
valószínűségi változót Weibull eloszlásúnak nevezzük, melynek aűrűségfüggvénye

Momentumok:

.
8.1.7. Valószínűségi változók függvényei
A rendszertechnikában elsősorban a rendszerekre és rendszerelemekre történő hatásokat és az azokra reacióként kapott válaszokat vizsgáljuk. Ez a statikus vagy statikusként modellezhető rendszerek esetében a véletlen hatások modelljeit jelentő valószínűségi változókra kapott rendszerválaszokat jelenti. Mivel a statikus rendszerek gyakorlatilag időváltozó nélküli egy vagy többváltozós függvényekkel írhatók le, ezért a bemeneti és kimeneti valószínűségi változók között éppen ezek a – természetesen a rendszerre jellemző – függvénykapcsolatok adják meg. Most a valószínűségi változók egíüttes hatásait, valamint statikus jellegű a függvény-kapcsolataik tulajdonságait vizsgájuk meg.
Független valószínűségi változók összege. Két, egymástól független X és Y valószínűségi változó Z=X+Y összegének az eloszlását az alábbi módon határozhatjuk meg:

azaz az
| (8.42) |
A (8.42) integrál a rendszertechnikában jól ismert függvény-konvolúció kifejezése, amely diszkrét valószínűségi változók esetén a
| (8.43) |

kifejezéssel adott.
Független valószínűségi változók szorzata. Két egymástól független X és Y valószínűségi változó Z=XY szorzatának az eloszlását a feltételes valószínűségből közvetlenül kapjuk a változók függetlenségére vonatkozó
| (8.44) |

feltételt, amit az
| (8.45) |

formában is írhatunk.
Valószínűségi változók nemlineáris  függvénykapcsolata.
függvénykapcsolata.

Differenciálva ennek az egyenletnek jobbszélső elemét a  esetben
esetben

összefüggéshez jutunk.
Azonban a 8-4. ábra alapján: ha  , akkor
, akkor

melyet differenciálva
azaz végeredményül az
| (8.46) |
összefüggést kapjuk.
A (8.46) függvénykapcsolat az  karakterisztikájú statikus rendszereknek az X valószínűségi változóval jellemzett véletlen hatásra történő reakcióját írja le, ami a rendszertechnikában a dinamika nélküli rendszerek vizsgálatában jól felhasználható összefüggés.
karakterisztikájú statikus rendszereknek az X valószínűségi változóval jellemzett véletlen hatásra történő reakcióját írja le, ami a rendszertechnikában a dinamika nélküli rendszerek vizsgálatában jól felhasználható összefüggés.

kifejezéssel adott, ahol U0 konstans érték, míg a Φ fázis valószínűségi változó.
Tételezzük fel, hogy a Φ valószínűségi változó egyenletes eloszlású, melynek sűrűségfüggvénye a korábban (8.3 példa) tárgyalt módon
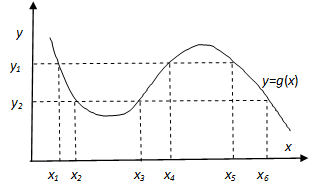
.
Határozzuk meg az U valószínűségi változó sűrűséggvényét!
A feszültségfüggvény inverze
amely a (0,2π) intervallumban két-értékű függvéy. Írjuk ezt fel két tényleges függvény összegeként, azaz legyen a

és

össege, melynek így első differenciálhányadosai
Ekkor az U feszültség valószínűségi sűrűségfüggvénye az (8.46) alapján
.□
Többdimenziós valószínűségi változó függvényei. Legyen az  n-dimenziós valószínűségi vektor-változó vegyes-sűrűségfüggvénye
n-dimenziós valószínűségi vektor-változó vegyes-sűrűségfüggvénye  , és tekintsük e változók
, és tekintsük e változók  differenciálható függvényeit. Ha most az
differenciálható függvényeit. Ha most az
| (8.47) |

leképezésekkel meghatározott  n-dimenziós valószínűségi vektor-változó sűrűségfüggvényét keressük, akkor ezt – az (8.46) összefüggés általánosításával – az
n-dimenziós valószínűségi vektor-változó sűrűségfüggvényét keressük, akkor ezt – az (8.46) összefüggés általánosításával – az
| (8.48) |

összefüggés adja meg, ahol J az (8.47) leképezések Jacobi-mátrixa.

alakú. Határozzuk meg az R és Φ valószínűségi változók együttes sűrűségfüggvényét, ha a változók között a derékszögű koordináta-polárkoordináta

transzformáció teremt kapcsolatot.
Az alkalmazott transzformáció Jacobi mátrixa
így az R és Φ valószínűségi változók együttes sűrűségfüggvényét az

alakban kapjuk. Ez azt mutatja, hogy R és Φ valószínűségi változók egymástól függetlenek:

.
8.1.8. Valószínűségi változók entrópiája és információ-tartalma
A véletlen kísérletek lényege a bizonytalanság, melyek eredményeit esetenként meg lehet „saccolni” a helyzetre vonatkozó bizonyos tapasztalatok bírtokában, de a műszaki rendszerek esetében szükséges az ilyen bizonytalanságok mennyiségi értékelése is. E bizonytalanság kitünően használható mértéke az entrópia, amely a valószínűségi változók egyik legfontosabb leképezése, és a véletlen kísérletek eredményeinek bizonytalanságát (véletlenségét) a priori jellemzi.
8.13 definíció. Ha az X diszkrét valószínűségi változó a  valószínűségekkel, akkor a
valószínűségekkel, akkor a
| (8.49) |

függvényt az X valószínűségi változó entrópiájának nevezzük.
Jegyezzük meg, hogy a (8.49) függvényben tetszőleges a>1 alapú logaritmust használhatunk, mivel ez csak a mértékegységet befolyásolja. A leggyakrabban használt 2-es alap azért célszerű, mivel ekkor a két azonos valószínűségű változó entrópiája éppen
=1 bit értékű.
Könnyen belátható, hogy  , és zérus csak abban az esetben lehet, ha egy esemény 1 valószínűségű, míg az összes többi valószínűsége zérus értékű. Ez éppen az az eset, amikor nincs semmi bizonytalanság abban, hogy milyen eredménye lesz a kísérletnek. Azonban az a kérdés is rögtön felvetődik, hogy az (8.49) entrópia mikor éri el a maximális értéket? A válasz egyértelmű: a maximális értéket az a valószínűségi változó adja, melyben az összes valószínűség azonos:
, és zérus csak abban az esetben lehet, ha egy esemény 1 valószínűségű, míg az összes többi valószínűsége zérus értékű. Ez éppen az az eset, amikor nincs semmi bizonytalanság abban, hogy milyen eredménye lesz a kísérletnek. Azonban az a kérdés is rögtön felvetődik, hogy az (8.49) entrópia mikor éri el a maximális értéket? A válasz egyértelmű: a maximális értéket az a valószínűségi változó adja, melyben az összes valószínűség azonos:  .
.
Két, X1 és X2 diszkrét valószínűségi változó együttes entrópiája a
| (8.50) |

kifejezéssel adott, amiből a feltételes valószínűség képletét felhasználva az X2 valószínűségi változónak az  feltétel melletti entrópiáját kapjuk meg
feltétel melletti entrópiáját kapjuk meg
| (8.51) |

Innen az X2 valószínűségi változónak adott X1 feltétel melletti átlagos feltételes entrópiáját a
| (8.52) |

formában írhatjuk. Összevetve az előbbi kifejezéseket azt látjuk, hogy
| (8.53) |

amely természetesen a változók felcserélésével is igaz marad. Ugyanakkor, ha a szóban forgó változók függetlenek egymástól, akkor
| (8.54) |

azaz az együttes entrópia a két entrópia összegeként adódik. Ha viszont a átlagos feltételes entrópiát hasonlítjuk össze az adott változó entrópiájával, a
| (8.55) |
egyenlőtlenséghez jutunk. És mivel egyik változó sem kitüntetett, ezért itt is felcserélhetjük a változókat.
Vegyük most az X és Y diszkrét változók között a  leképezést. Ekkor a két változó entrópiája között a
leképezést. Ekkor a két változó entrópiája között a
| (8.56) |
egyenlőtlenség áll fenn. Ugyanis, ha a gk,l kölcsönösen egyértelmű leképezés, akkor, de csak akkor az egyenlőség érvényes. Viszont ha L<K, akkor a leképezés az entrópia csökkenésével jár együtt, mivel a teljes bizonyosság ekkor kevesebb elemen kerül elosztásra.
A kétdimenziós valószínűségi változóra vonatkozó (8.55) összefüggés természetesen hasonló módon általánosítható n-dimenziós változókra is, és ezt az általánosítást az ezekből következő többi összefüggésre is átvihetjük.
Így a (8.56) összefüggésből az egyenlőtlenségből eredő eltérést kiegészítve az
| (8.57) |

egyenlőséghez jutunk, melyet az X1 változónak az X2 változóra vonatkozó információ menynyiségének nevezünk. Ezt az összefüggést úgy interpretálhatjuk, hogy az X1 valószínűségi változóval jellemzett kísérlet végrehajtása által kapott, az X2 változóra vonatkozó információ a (8.57) kifejezéssel csökkenti az X2 valószínűségi változó által tartalmazott bizonytalanságot. Ennek az összefüggésnek a tetszőleges n-dimenziós valószínűségi változókra való általánosítása alkotja az információs csatornák jellemzésének az alapját. Az előző összefüggésekből az is látható, hogy  , azaz az információ pozítív mennyiség kivéve, ha a két változó független egymástól.
, azaz az információ pozítív mennyiség kivéve, ha a két változó független egymástól.
8.14 definíció. Ha az X folytonos valószínűségi változó az fX(x) valószínűségi sűrűségfügg-
vénnyel, akkor a
| (8.58) |
függvényt a valószínűségi változó entrópiájának nevezzük.
A folytonos változókra a diszkrét változók összefüggéseihez hasonló összefüggéseket lehet értelmezni, bár meg kell jegyezni, hogy a folytonos változók entrópiája negatív értékeket is felvehet, ahogy ezt a Gauss-eloszlás esetében könnyen ellenőrizhetjük.
8.2. Sztochasztikus folyamatok
8.2.1. A sztochasztikus folyamatok fogalma
A valószínűségi jelenségeknek valószínűségi változókkal történő tárgyalásában minden hatást és eseményt időbeli megvalósításától függetlenűl vizsgáltunk és modelleztünk, még akkor is, ha azok valamilyen szekvenciában következtek be. Így a binomiális eloszlás ismertetésében nem vizsgáltuk, hogy azok egyidejűleg, egymástól független, bináris véletlen kísérletek révén alakulnak-e ki, vagy pedig időben egymást követően, egyazon véletlen kísérletet ismételjük-e meg n-szer. Ez az eljárás a gondolatkísérletek megfogalmazásán és alkalmazásán alapult, ami a statikus vagy statikusként modellezhető rendszerek esetében a véletlen hatások modelljeit jelentő valószínűségi változókra kapott rendszerválaszok vizsgálatában is használható volt.
Azonban a műszaki rendszerek jelentős része nem modellezhető statikus rendszerekként, mivel többnyire nem elhanyagolható dinamikával rendelkeznek, ezért sok esetben csak az időben, időbeli folyamatok keretében lehet azokat vizsgálni és értékelni. Ez természetesen a véletlen jelenségek esetében is érvényes, ezért a továbbiakban a valószínűségi jelenségek időbeli folyamatait és azoknak a rendszerekre való hatásait elemezzük.
8.15 definíció. Sztochasztikus folyamatnak nevezzük az x(ξ,γ) valós, kétváltozós függvényt, melyben ξ lehet időváltozó, térbeli változó vagy jelentheti azok együttesét, míg a γ valamely valószínűségi mező elemi eseményeit reprezentálja. Egy konkrét γ0 esemény esetén x(ξ,γ0) az x(ξ,γ) sztochasztikus folyamat egy realizációját jelenti.
Az ξ változó jellegétől függően az x(ξ,γ) sztochasztikus folyamat különböző fizikai jelenségek modelljeiként értelmezhető. Így a fizikából jól ismert Brown-mozgás leírásában a ξ változó időben változó térbeli koordinátát jelent, míg az elektroncsövekben és félvezető eszközökben kialakuló sörétzajnak, bár nyilván ennek is fontosak a térbeli eloszlásai, az eszközöket koncentrált paraméterű elemekként modellezve elsősorban időbeli változásait vizsgáljuk. A továbbiakban a véletlen folyamatok t időbeli változásaival foglalkozunk, mivel a rendszertechnikában elsősorban az időfüggvényekkel modellezett jelek hatásait vizsgáljuk, amikor is a folyamatok jövőbeli értékei függhetnek a múltbeli értékektől és más véletlen tényezőktől.
Az x(t,γ) sztochasztikus folyamatot – a valószínűségi változókhoz hasonlóan – X(t)-vel je-
löljük, ami azt jelzi, hogy tetszőleges, adott t’ időpontban az X(t’) mennyiség valószínűségi változó. Ha a t argumentum adott korlátos vagy nem-korlátos intervallumokban tetszőleges értékeket vehet fel, akkor folytonos idejű folyamatról beszélünk, ha azonban az értelmezési tartomány bármely korlátos intervallumában csak véges számú időpontban vesz fel értékeket, akkor diszkrét idejű sztochasztikus folyamatról van szó.
Sztochasztikus folyamatok  együttesét n-dimenziós sztochasztikus folyamatnak nevezzük, míg az
együttesét n-dimenziós sztochasztikus folyamatnak nevezzük, míg az  párost komplex változós folyamatként értelmezzük.
párost komplex változós folyamatként értelmezzük.
Vegyünk egy X(t) időben folytonos sztochasztikus folyamatot, melynek értékeit valamely adott valószínűségi mező határozza meg. Ha most n független véletlen kísérletet hajtunk végre, akkor azok eredményeként az X(t) sztochasztikus folyamat
x(t,γ1), x(t,γ2), x(t,γ3), … x(t,γn)
egyes realizációit generáljuk, ahogy ezt a 8. ábra illusztrálja három különböző folyamat 3-3 realizációját mutatva. A 8-8. ábra/a realizációi azonos jellegű fluktuációkat mutatnak, a 8-8. ábra/b realizációi azonos szinten idővel növekvő amplitudójú kilengéseket mutatnak, míg a 8-8. ábra/c által bemutatott realizációk egy idővel növekvő szint körül állandósult amplitudóval fluktuálnak.
Mivel az X(t) folyamat tetszőleges t1 időpontban valószínűségi változó, ezért realizációinak a t1 időpontban megfigyelt értékei meghatározzák az X(t1) valószínűségi változó  sűrűségfüggvénnyel jellemzett statisztikai tulajdonságait. Általában véve azonban, ez még kevés magának a sztochasztikus folyamatnak a statisztikai jellemzéséhez. Több információt nyerünk magáról a folyamatról, ha egy másik időpontban is kiértékeljük az X(t2) valószínűségi változót képezve az
sűrűségfüggvénnyel jellemzett statisztikai tulajdonságait. Általában véve azonban, ez még kevés magának a sztochasztikus folyamatnak a statisztikai jellemzéséhez. Több információt nyerünk magáról a folyamatról, ha egy másik időpontban is kiértékeljük az X(t2) valószínűségi változót képezve az  kétdimenziós vegyes sűrűség-függvényt. Folytatva ezt a kiértékelést az előzőektől különböző t3, …tN időpontokban az
kétdimenziós vegyes sűrűség-függvényt. Folytatva ezt a kiértékelést az előzőektől különböző t3, …tN időpontokban az  N-dimenziós valószínűségi változóhoz jutunk, melynek az
N-dimenziós valószínűségi változóhoz jutunk, melynek az  vegyes sűrűségfüggvényét az X(t) sztochasztikus folyamat N-ed rendű sűrűségfüggvényének nevezzük. Jegyezzük meg, hogy ha az
vegyes sűrűségfüggvényét az X(t) sztochasztikus folyamat N-ed rendű sűrűségfüggvényének nevezzük. Jegyezzük meg, hogy ha az  változók N-dimenziós normális eloszlásúak, akkor a sztochasztikus folyamatot normális vagy Gauss-folyamatnak nevezzük.
változók N-dimenziós normális eloszlásúak, akkor a sztochasztikus folyamatot normális vagy Gauss-folyamatnak nevezzük.
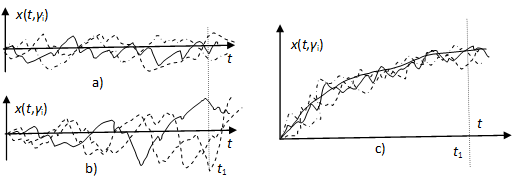
8.2.2. Momentumok és korreláció függvények
Egy sztochasztikus folyamatot akkor tekinthetünk statisztikusan meghatározottnak, ha a folyamat N-ed rendű sűrűségfüggvénye tetszőleges t1,t2,…tN időpontokra ismert. Ez a meghatározási általános esetben azonban nagyon nehéz alkalmazni, de többnyire nem is szükséges, mivel sok esetben, a valószínűségi változókhoz hasonlóan, kielégítő lehet a jellemző paraméterekkel, így a különböző a momentum-függvényekkel történő jellemzés is.
Az X(t) sztochasztikus folyamat átlagos értékének nevezzük a
| (8.59) |

elsőrendű momentumfüggvényt. Ahogy ez látható, az átlagos érték változhat az időben. Ilyen esetet illusztrál a 8-8. ábra/c, amikor is a bemutatott realizációk az időben növekvő átlagérték körül ingadoznak, míg a 8-8. ábra/a és 8-8. ábra/b esetén az átlagértékek a konstans  értékek.
értékek.
Jegyezzük meg, hogy a továbbiakban, ha ez nem vezet félreértésre, az egyszerűbb képletek kedvéért az x(tk)=xk jelöléseket használjuk.
Sztochasztikus folyamatok esetében két, különféle közönséges másodrendű momentum-függvényt definiálunk: a
| (8.60) |

másodrendű közönséges momentum-függvényt és a
| (8.61) |

vegyes momentum-függvényt, ahol  a t1 és t2 időpontokhoz tartozó másodrendű vegyes sűrűségfüggvény. A (8.61) típusú másodrendű momentum-függvény lényegében ugyanazon folyamat két különböző időpontban megjelenő valószínűségi változói közötti vegyes momentum.
a t1 és t2 időpontokhoz tartozó másodrendű vegyes sűrűségfüggvény. A (8.61) típusú másodrendű momentum-függvény lényegében ugyanazon folyamat két különböző időpontban megjelenő valószínűségi változói közötti vegyes momentum.
A közönséges momentumok mellett a másodrendű centrális momentumok is fontos szerepet játszanak a sztochasztikus folyamatok jellemzésében: a
| (8.62) |

a folyamat variancia-függvénye, míg a
| (8.63) |

kétváltozós függvényt a folyamat kovariancia-függvényének nevezzük.
A kovariancia-függvények alapvető tulajdonságai:


, azaz szimmetrikus függvény

8.16 definíció. Az  n-dimenziós sztochasztikus folyamat
n-dimenziós sztochasztikus folyamat  kovarianciamátrix-függvényének nevezzük a
kovarianciamátrix-függvényének nevezzük a
| (8.64) |

elemekből álló négyzetes mátrixot. A főátlóban lévő  elemeket auto- kovariancia-, míg
elemeket auto- kovariancia-, míg  függvényeket keresztkovariancia-függvényeknek nevezzük.
függvényeket keresztkovariancia-függvényeknek nevezzük.
A továbbiakban az autokovariancia-függvényeket – ha ez nem okoz félreértést – egyszerűen kovariancia-függvényeknek fogjuk nevezni.
8.2.3. Stacionárius folyamatok
Az előző szakaszban már említettük, hogy a sztochasztikus folyamatoknak az N-ed rendű sűrűségfüggvényekkel történő meghatározása általános esetben nagyon nehéz. Azonban a folyamatoknak vannak olyan speciális osztályai, melyek tulajdonságai lehetővé teszik a könnyebb meghatározást és ez által az alkalmazási lehetőségeik is jelentősen megnőnek.
8.17 definíció. Az X(t) sztochasztikus folyamatot stacionáriusnak nevezzük, ha tetszőleges τ esetén az  valószínűségi változók valószínűségi eloszlása ugyanaz, mint az
valószínűségi változók valószínűségi eloszlása ugyanaz, mint az  változók eloszlása.
változók eloszlása.
Ez más szavakkal azt jelenti, hogy a stacionárius sztochasztikus folyamat tulajdonságai nem változnak az időtranszláció hatására, ami az
| (8.65) |

feltétel teljesülését is jelenti.
A (8.65) összefüggés felhasználásával könnyen megmutatható, hogy egy stacionárius folyamat átlagértéke és varianciája időben konstans értékű. A (8.63) egyenlet alapján az is könnyen kimutatható, hogy ha τ=-t1 akkor
| (8.66) |

azaz egy stacionárius folyamat kovariancia-függvénye csak az időpontok különbségétől, azaz az időtranszláció értékétől függ. A kovariancis-függvények általános tulajdonságaiból azt kapjuk, hogy stacionárius folyamat esetén  , azaz a közvetlenül egymás közelében lévő időpontok értékei közötti korrelációs kapcsolatok a legerősebbek. Ekkor az egyenlőséget felhasználva értelmezhetjük a
, azaz a közvetlenül egymás közelében lévő időpontok értékei közötti korrelációs kapcsolatok a legerősebbek. Ekkor az egyenlőséget felhasználva értelmezhetjük a
| (8.67) |
normált kovariancia-függvényt, amit a stacionárius folyamatok korreláció-függvényének nevezünk. Hasonlóan a valószínűségi változók analóg módon meghatározott jellemzőihez, a kovariancia- és korreláció-függvények a szochasztikus folyamatok esetében is fontos szerepet játszanak az egyes időpontokban megjelenő értékek közötti összefüggések mérésében.
Azonban a sztochasztikus folyamatok egy fontos osztálya, amikor is a t1 és t2 időpontokban felvett értékei függetlenek egymástól még a  , ε nagyon kis pozitív szám, esetben is. Az ilyen folyamatok modelljét a független növekményű, azaz teljesen független folyamatok alkotják, melyek közül a rendszertechnikában fontos szerepet játszó fehérzajt emeljük ki.
, ε nagyon kis pozitív szám, esetben is. Az ilyen folyamatok modelljét a független növekményű, azaz teljesen független folyamatok alkotják, melyek közül a rendszertechnikában fontos szerepet játszó fehérzajt emeljük ki.
8.18 definíció. Az X(t) Gauss-féle stacionárius sztochasztikus folyamatot fehérzajnak nevezzük, ha

,
ahol az Sf konstans a fehérzaj intenzitása.
A fehérzaj tehát zérus átlagértékű folyamat, amelyben az  infinitezimális távolságban megjelenő értékek sem korreláltak, és mivel Gauss-folyamatról van, így egymástól függetlenek is. Ez a folyamat a Dirac-delta funkcionál miatt – az általánosított függvények osztályához hasonlóan – az általánosított sztochasztikus folyamatok körében kerül pontos meghatározásra. Egyszerűbben: egy normális stacionárius folyamatból, melynek korreláció-függvénye
infinitezimális távolságban megjelenő értékek sem korreláltak, és mivel Gauss-folyamatról van, így egymástól függetlenek is. Ez a folyamat a Dirac-delta funkcionál miatt – az általánosított függvények osztályához hasonlóan – az általánosított sztochasztikus folyamatok körében kerül pontos meghatározásra. Egyszerűbben: egy normális stacionárius folyamatból, melynek korreláció-függvénye  alakú, az α→ω határátmenettel lehet értelmezni.
alakú, az α→ω határátmenettel lehet értelmezni.
Ahhoz, hogy a sztochasztikus folyamatokat alkalmazni tudjuk a fizikai jelenségek és műszaki rendszerek modellezésében, természetesen szükségesek módszerek, melyek lehetővé teszik a folyamatok olyan valószínűségi jellemzőinek megfigyelések és mérések alapján történő meghatározását, mint az átlegértékek, korreláció-függvények, valószínűségi eloszlások. Ebben az irányban jelentős lépés a stacionaritás feltétele, amely azt mutatja, hogy egy stacionárius folyamat átlagértéke, warianciája, általában a momentumai konstans értékűek, míg a kovariancia- és korreláció-függvények, azaz a momentum-függvények csak a két megfigyelési időpont távolságától függnek. Azonban még ebben az esetben is: az  momentumok megbízható meghatározásához elég nagyszámú kísérletből származó x(t,γi) realizáció ugyanabban a t1 időpontban történő méréséből nyert statisztikai minta szükséges. Ezt a sokaság szerinti meghatározásnak nevezzük. Azonban egyes stacionárius folyamatok ergodicitási tulajdonsága jelentősen megkönnyíti a sztochasztikus folyamatokkal történő modellezési munkát.
momentumok megbízható meghatározásához elég nagyszámú kísérletből származó x(t,γi) realizáció ugyanabban a t1 időpontban történő méréséből nyert statisztikai minta szükséges. Ezt a sokaság szerinti meghatározásnak nevezzük. Azonban egyes stacionárius folyamatok ergodicitási tulajdonsága jelentősen megkönnyíti a sztochasztikus folyamatokkal történő modellezési munkát.
8.19 definíció. Ha az X(t) stacionárius sztochasztikus folyamat  kovariancia-függvényére érvényes az
kovariancia-függvényére érvényes az
| (8.68) |
akkor a folyamat majdnem mindegyik realizációjára érvényes az
| (8.69) |
egyenlőség.
Itt a „majdnem mindegyik” azt jelenti, hogy a realizációk (8.69) időintegrálja „1 valószínűséggel” megadja a folyamat átlagos értékét, amit valójában úgy értelmezhetünk, hogy tetszőleges realizáció (8.69) integráljával számolhatjuk ki a folyamat átlagértékét.
Figyelembe véve, hogy ha X(t) stacionárius sztochasztikus folyamat, akkor az X(t)∙X(t+τ) szorzat szintén stacionárius sztochasztikus folyamat, amelyre alkalmazhatjuk a (8.68) feltételt. Ez azt jelenti, hogy az X(t)∙X(t+τ) stacionárius folyamatra vonatkoztatva a (8.68) feltétel a
| (8.70) |
alakot ölti, és ebben az esetben a (8.69) integrálkifejezés megfelelője az
| (8.71) |

egyenlőség, amely a kovariancia- és korreláció-függvények időbeli realizációkkal történő számítási lehetőségét szolgáltatja.
A (8.71) összefüggés egyszerű sémát ad a korreláció függvény számítására, melyet korrelátor blokkdiagramjaként a 8-9. ábra mutat be.


sztochasztikus folyamat korreláció-függvényét, melynek φ fázisa egyenletes eloszlású az
.
A folyamat átlagos értéke:

ahonnan  , azaz a folyamat átlagértéke zérus értékű. Hasonló módon felhasználva a trigonometrikus függvények azonosságait a második momentumra az
, azaz a folyamat átlagértéke zérus értékű. Hasonló módon felhasználva a trigonometrikus függvények azonosságait a második momentumra az

eredményt kapjuk. Végül a kovariancia-függvényt a
számítások adják, amiből a  miatt rögtön következik a korreláció-függvényre a
miatt rögtön következik a korreláció-függvényre a 
Azonban – nyilván a periodicitás következtében – a kovariancia-függvényre ezt az eredményt megkapjuk az időátlag képzésével is:
amely megegyezik az előzővel. □
Jegyezzük meg, hogy bár a  függvény nem elégíti ki a (8.70) feltételt, a kovariancia-függvény mégis számolható az időátlagból is. Ennek az a magyarázata, hogy a (8.70) feltétel csak elégséges feltétel, így a szükségességről nem mond semmit.
függvény nem elégíti ki a (8.70) feltételt, a kovariancia-függvény mégis számolható az időátlagból is. Ennek az a magyarázata, hogy a (8.70) feltétel csak elégséges feltétel, így a szükségességről nem mond semmit.
Az adott feltételek mellett a folyamat sűrűségfüggvénye nem függ az időtől, azaz az

formában írható, ahol az effektív feszültség értéke  . A valószínűségek alapján a kritikus feszültség túllépésének a valószínűségét a
. A valószínűségek alapján a kritikus feszültség túllépésének a valószínűségét a

módon számolhatjuk.
8.2.4. Harmonikus analízis és teljesítménysűrűség spektrum
A frekvenciafüggvényeket és frekvenciatartományt a valószínűségi eloszlás- és sűrűségfügg-vények Fourier-transzformációja, azaz a karakterisztikus függvények révén a valószínűségi változók vizsgálatában a valós tartománnyal egyenértékűen lehet felhasználni. Sőt, a frekvenciatartománybeli vizsgálat sok esetben egyszerűbb műveletekkel történik. Így a momentumokat a sűrűségfüggvények esetében integrálással kell számolnunk, míg a karakterisztikus függvények ismeretében azokat differenciálással és a zérus érték behelyettesítésével nyerhetjük.
A stacionárius sztochasztikus folyamatok esetében – a determinisztikus időfüggvények transzfomációja révén kapott időtartomány-frekvenciatartomány párosításnak megfelelően – a frekvenciatartománybeli vizsgálat az alábbi meghatározáson alapul:
8.20 definíció. Ha az X(t) stacionárius sztochasztikus folyamat folytonos  kovariancia-függvénnyel rendelkezik, akkor a kovariancia-függvény előállítható a
kovariancia-függvénnyel rendelkezik, akkor a kovariancia-függvény előállítható a
| (8.72) |
formában, amely transzformációnak az
| (8.73) |
inverze is létezik.
Ez a definíció a sztochasztikus folyamatok egy nagyon fontos tételén, a Wiener-Hincsin tételen alapul, ahol az  függvényt a folyamat spektrális sűrűségfüggvényének, sok esetben teljesítménysűrűség-függvényének nevezzük. A (8.72) és (8.73) összefüggések a kovariancia-függvény és a spektrális sűrűségfüggvény közötti kölcsönösen egyértelmű Fourier-transzformációját jelentik.
függvényt a folyamat spektrális sűrűségfüggvényének, sok esetben teljesítménysűrűség-függvényének nevezzük. A (8.72) és (8.73) összefüggések a kovariancia-függvény és a spektrális sűrűségfüggvény közötti kölcsönösen egyértelmű Fourier-transzformációját jelentik.
Jegyezzük meg, hogy a 8.20 definíció feltételei mellett az X(t) folyamat előállítható az
| (8.74) |
formában, ahol a  valós argumentumú folyamat, és amellyel az SXX spektrális sűrűségfüggvény szoros kapcsolatban van.
valós argumentumú folyamat, és amellyel az SXX spektrális sűrűségfüggvény szoros kapcsolatban van.
A spektrális sűrűségfüggvény alapvető tulajdonságai:

,

Mivel mind a kovariancia-függvény, mind a spektrális sűrűségfüggvény páros függvények, ezért a (8.72) és (8.73) transzformációk a
| (8.75) |
és
| (8.76) |
formában is írhatók.
A (8.71) tulajdonság a spektrális sűrűségfüggyvénynek a folyamat energetikai tulajdonságaival való kapcsolatát mutatja meg, mivel ergodikus folyamatok esetén (8.75) alapján valamely realizációra írhatjuk, hogy
| (.8.77) |

azaz a folyamat időben átlagos teljesítményét szolgáltatja. A spektrális sűrűségfüggvényt ezért is nevezzük teljesítménysűrűség-függvénynek. Így, ha x(t) egy egységnyi ellenálláson átáramló villamos áramot jelöl, akkor (8.77) az ellenálláson kiváló átlagos teljesítményt adja meg. Összevetve a (8.71) és (8.77) kifejezéseket azt mondhatjuk, hogy a stochasztikus folyamat átlagos teljesítménye a harmonikus összetevők – a spektrum egyes összetevői – által reprezentált teljesítmények összegével egyenlő.
Ha most a speciális tulajdonságokkal rendelkező fehérzajt nézzük, akkor a  kifejezést behelyettesítve a (8.72) kifejezésbe az
kifejezést behelyettesítve a (8.72) kifejezésbe az
| (8.78) |
eredményt kapjuk, ami azt jelenti, hogy a fehérzaj spektrális sűrűségfüggvénye a teljes (-∞,∞) intervallimban konstans értékű, és figyelembe véve a kovariancia-függvény szimmetria tulajdonságát az
| (8.79) |

értékű. Így a fehérzaj átlagos teljesítménye végtelen nagy, tehát ez is azt jelzi, hogy fizikailag nem relizálható, de a modellezésben nagyon jól használható. Alkalmazása a rendszerelemzésben és tervezésben azzal (is) indokolható, hogy a fehérzaj a legnehezebben eliminálható zaj, azaz alkalmazása olyan zavart rendszert jelent, amelynél bármely valós zavaroknak kitett rendszer csak jobb lehet. Ráadásul a fehérzaj speciális tulajdonságai viszonylag könnyű számításokat jelent.
A modellezésben gyakran használjuk az
| (8.80) |
korlátos spektrumú fehérzajt, melynek kovariancia-függvénye
| (8.81) |
míg átlagos teljesítménye  .
.
Az ergodikus stacionárius folyamatok időbeli realizációkat tartalmazó kifejezései minden-
hol a T→∞ határátmenettel adják meg az elméleti értékeket. Azonban bármelyik mérés csak véges időpontig tarthat, azért a kovariancia-függvényt a gyakorlatban a
| (8.82) |
összefüggés segítségével kell megbecsülni. Természetesen a mérés idejét úgy kell megválasztani, hogy a (8.82) közelítés elégséges kis hibával teljesüljön.
Ergodikus folyamatok esetében a kovariancia-függvényt (8.82) alapján direkt úton becsülhetjük meg az időbeli realizációkból. Ugyanakkor figyelembe véve, hogy a (-T/2, T/2) véges intervallumon bármely realizáció Fourier-sorba fejthető, és ezt általánosítva azt mondhatjuk, hogy ezzel a (-T/2, T/2) intervallumon az X(t) sztochasztikus folyamat
| (8.83) |

sorfejtéséhez jutunk, ahol a harmonikusok
| (.8.84) |

komplex amplitudói véletlen változók. Ha az X(t) sztochasztikus folyamat átlagos értéke zérus, akkor mindegyik Uk zérus várható értékű valószínűségi változó. Figyelembe véve, hogy az amplitudók komplex mennyiségek, és felhasználva a (8.84) összefüggést, a k-adik amplitudóval az
| (8.85) |

kifejezéshez jutunk. Mivel a T→∞ határértékkel a (8.85) jobboldala az SXX(ω)-hez tart, így a baloldal a kovariancia-függvény egy jó közelítését adja.

Határozzuk meg a folyamat spektrális sűrűségfüggvényét és idöben átlagos teljesítményét!
Alkalmazzuk a (8.73) definiáló egyenletet:
.
Jegyezzük meg, hogy az a→ω határátmenet a σ2 értékű konstans spektrális sűrűségfügg-vényhez vezet, amely természetesen a fehérzaj spektrális sűrűségfüggvényével azonos.
A folyamat átlagos teljesítménye pedig:

.
8.2.5. Folytonos idejű lineáris dinamikus rendszerek
Egy folytonos idejű lineáris dinamikus rendszer súlyfüggvénnyel képzett modelljét az X(s) sztochasztikus folyamat hatása alatt, idővariáns esetben az
| (8.86) |

egyenlet írja le, ahol  az X(s) folyamat realizációja, míg a súlyfüggvényre érvényes a
az X(s) folyamat realizációja, míg a súlyfüggvényre érvényes a
| (8.87) |

feltétel. Ez a (8.87) feltétel a lineáris dinamikus rendszerek fizikai realizálhatóságát biztosítja, mivel azok nem lehetnek anticipatívek, azaz nem lehetnek jövőbelátók. Ha a rendszer idő-invariáns, melyet gyakran szintén stacionáriusnak nevezünk, akkor (8.86) az
| (8.88) |

formába megy át. Az idővariáns és időinvariáns dinamikus rendszereket a 8-10. ábra mutatja be. Itt – az analógiák miatt – mind a folytonos idejű, mind a későbbiekben tárgyalandó diszkrét idejű rendszereket is illusztráltuk.
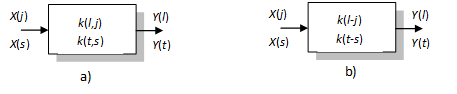
Szimbolikusan felírva a (8.86) egyenletet az X(t) bemeneti és Y(t) kimeneti sztochasztikus folyamatokra
| (8.89) |
és képezve mindkét oldal várható értékét, az átlagértékekre a
| (8.90) |
egyenlethez jutunk. Ha az X(t) stacionárius sztochasztikus folyamat, akkor  =konstans, míg a kimeneti folyamat átlagértékét a
=konstans, míg a kimeneti folyamat átlagértékét a
| (8.91) |
összefüggés határozza meg, azaz a kimeneti folyamat átlagos értéke változik az időben: a kimenet nem stacionárius folyamat. Ha viszont maga a rendszer a (8.88) konvolúcióval van leírva, azaz a rendszer is stacionárius, akkor kimeneti átlagérték is konstans a
| (.8.92) |

összefüggés szerint.
Felírva a (8.90) egyenletet a t’≠t időpontra is, összeszorozva az egyenletek mindkét oldalát és képezve a két oldal várható értékét az eredményt a
| (8.93) |

egyenlet adja. Ismét feltételezve mind a bemeneti folyamat, mind a rendszer stacionárius mivoltát, a
| (8.94) |

egyenletet kapjuk. Alkalmazva az integrálban a t-s=s1 és t’-s’=s2 változó-helyettesítéseket, a
| (8.95) |

egyenletet adja. Mivel a (8.95) jobboldala csak a t-t’=τ különbségtől függ, ez a
| (8.96) |

összefüggést eredményezi, azaz a kimeneti folyamat kovariancia-függvénye is csak a megfigyelési időpontok távolságától függ. Ez azt jelenti, hogy a kimeneti Y(t) folyamat szintén stacionárius.
Képezve a (8.96) egyenlet mindkét oldalának Fourier-transzformációját, a spektrális sűrűségfüggvényekre egyszerű számításokkal kapjuk az
| (8.97) |

összefüggést, ahol a  a
a  konjugáltja, és amelyet az
konjugáltja, és amelyet az
| (8.98) |

formában írhatunk. Itt a  a lineáris rendszer frekvenciafüggvénye, amely lényegében a k(t-s) súlyfüggvény Fourier-transzformáltja. Ezt felhasználva a kimeneti folyamat teljesítményét a bemenet spektrális sűrűségfüggvényéből közevetlenül számolhatjuk:
a lineáris rendszer frekvenciafüggvénye, amely lényegében a k(t-s) súlyfüggvény Fourier-transzformáltja. Ezt felhasználva a kimeneti folyamat teljesítményét a bemenet spektrális sűrűségfüggvényéből közevetlenül számolhatjuk:
| (8.99) |

A (8.98) összefüggés egyszerűbb számítási lehetőséget jelent mint az időtartományban értelmezett kettős integral-kapcsolat, bár a jelenlegi numerikus számítási lehetőségek mellett ez már nem igazán fontos. Ugyanakkor a (8.98) és (8.99) egyenletek szemléletesebb képet adnak a jelenségekről, és a frekvenciamódszerek alkalmazásában sok esetben hasznos közelítő vázlatok segítségével könnyen értelmezhetők.
Ismét, az előzőekben bemutatott levezetések alapján, időinvariáns rendszerekben a bemeneti folyamatok kovariancia- (autokovariancia-) függvényeiből a kimenetek-bemenetek keresztkovariancia-függvényeit számolhatjuk a
| (8.100) |
összefüggés segítségével. Ennek megfelelője a spektrális sűrűségüggvények körében az
| (8.101) |

formában írható. Ezeket az összefüggéseket jól fel lehet használni a rendszerek átviteli tulajdoságainak a vizsgálatában, amihez kitünő eszköz a 8-11. ábra mérési elrendezése.
A lineáris dinamikus rendszerek átviteli tulajdonságainak vizsgálata azt mutatta, hogy a bemeneti és kimeneti kovariancia-függvények között, ahogy ezt a (8.93) és (8.96) egyenletek mutatják, mind az idővariáns, mind pedig az időinvariáns rendszerek esetében találunk direkt összefüggéseket. Nemlineáris rendszerekben ez már egyáltalán nincs így, még az olyan egyszerű esetben sem, amit az (8.46) nemlineáris leképezéssel reprezentálható statikus rendszer képvisel.
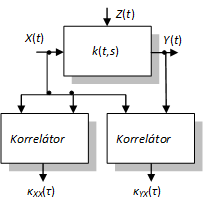
Itt a  karakterisztikával jellemzett statikus rendszer az X(t) sztochasztikus folyamat
karakterisztikával jellemzett statikus rendszer az X(t) sztochasztikus folyamat  realizációjának hatására pillanatszerűen reagál az
realizációjának hatására pillanatszerűen reagál az
| (8.102) |
módon, és így az Y(t) sztochasztikus reakció tulajdonságait tetszőleges időpontban az (8.102) összefüggés írja le.
Ha az X(t) folyamat stacionárius, akkor a kimenet átlagfüggvénye is konstans a
| (8.103) |
összefüggésnek megfelelően. Ugyanakkor a kimenet kovariancia-függvényét – a nem-linearitás miatt – nem lehet a bemenet kovariancia-függvényével összekapcsolni, mivel általában csak a
| (8.104) |

összefüggést tudjuk felírni, ahol  a bemeneti folyamat másodrendű együttes sűrűségfüggvénye. Így tehát nemlineáris leképezések esetén általában nem találunk egyértelmű kapcsolatokat a bemeneti és kimeneti folyamatok kovariancia-függvényei között. Ha azonban a bemenet egyúttal Gauss-folyamat is, akkor a kovariancia-függvény ismeretében kifejezhető a másodrendű együttes sűrűségfüggvény is, így ekkor megadható a két kovariancia-függvény közötti direkt összefüggés is.
a bemeneti folyamat másodrendű együttes sűrűségfüggvénye. Így tehát nemlineáris leképezések esetén általában nem találunk egyértelmű kapcsolatokat a bemeneti és kimeneti folyamatok kovariancia-függvényei között. Ha azonban a bemenet egyúttal Gauss-folyamat is, akkor a kovariancia-függvény ismeretében kifejezhető a másodrendű együttes sűrűségfüggvény is, így ekkor megadható a két kovariancia-függvény közötti direkt összefüggés is.
A 8-12. ábra által ábrázolt RC-szűrő frekvenciafüggvénye a T=RC időállandóval a
képlettel adott, ahonnan az abszolutérték négyzete
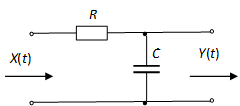
Aluláteresztő RC-szűrő (8.11 példa)
.
Felhasználva a (8.98) összefüggést a kimenet spektrális sürüségfüggvénye a

alakban írható. Ebből inverz Fourier-transzformációval kapjuk meg a kovariancia-függvényt
.
Ezt az integrált egy integráltáblázatból tudjuk meghatározni. Az eredmény :
így ebből a szűrő kimenet teljesítménye:
.
8.2.6. Diszkrét idejű sztochasztikus folyamatok és lineáris rendszerek
A műszaki gyakorlatban gyakran találkozunk időben diszkrét sztochasztikus folyamatokkal is. Ezek származhatnak időben folytonos folyamatok mintavételezéséből, véletlen jelenségek ismétlődő megfigyeléseiből, de vannak események és folyamatok, melyeknek inherens tulajdonsága az időben diszkrét jelleg. Ugyanakkor a digitális technika lényegében ilyen jellegű, azaz diszkrét idejű folyamatokkal, más néven sztochasztikus idősorokkal dolgozik.
Az időben diszkrét sztochasztikus folyamatok tulajdonságai és kezelése alapjában véve azonosak a folytonos idejű folyamatokéval, ezért az ott megismert értelmezések és összefüggések általában itt is érvényesek azzal, hogy az összefüggéseket és számításokat diszkrét változókkal kell felírni.
Egy időben diszkrét sztochasztikus folyamatot az  módon jelölünk, melynek értelmezési tartományát alkotó időpontok között a
módon jelölünk, melynek értelmezési tartományát alkotó időpontok között a  véges, általában azonos időközök találhatók. A továbbiakban az egyszerűség kedvéért a
véges, általában azonos időközök találhatók. A továbbiakban az egyszerűség kedvéért a  jelölések helyett a
jelölések helyett a  jelöléseket használjuk.
jelöléseket használjuk.
Ha az  folyamat stacionárius, akkor ebben az esetben is érvényesek az időben folytonos stacionárius folyamatokra bemutatott tulajdonságok. Így a
folyamat stacionárius, akkor ebben az esetben is érvényesek az időben folytonos stacionárius folyamatokra bemutatott tulajdonságok. Így a
| (8.105) |

átlagos (várható) érték időben konstans függvény, míg a
| (8.106) |

kovariancia-függvény csak a megfigyelési időpontok távolságától függ, azaz
| (8.107) |

Ez természetesen a
| (8.108) |

képlettel definiált korreláció-függvényre is igaz, amit a
| (8.109) |

formában írhatunk.
Vizsgáljuk most egy diszkrét idejű lineáris dinamikus rendszer viselkedését, melynek bemenet-kimenet modelljét idővariáns esetben az
| (8.110) |
egyenlet írja le, ahol
| (8.111) |

a rendszer diszkrét idejű súlyfüggvénye. Ha a rendszer időinvariáns, akkor (127) a
| (8.112) |

formában írható.
Felírva a (8.112) egyenletet egy m≠l időpontra is, összeszorozva a két egyenletet és alkalmazva a (8.106) operációt mind a két oldalra, átalakítások után a kovariancia-függvényekre a
| (8.113) |

egyenletet kapjuk, amely a (8.96) egyenlet megfelelője a diszkrét idejű stacionárius folyamatokra
Definiálva a diszkrét idejű stacionárius folyamatok diszkrét spektrális sűrűségfüggvényét (diszkrét teljesítménysűrűség spektrumát) az
| (8.114) |

Fourier-transzformációval, melynek inverze a
| (8.115) |
alakú, könnyen előállíthatjuk a spektrális sűrűségfüggvények közötti (8.101) összefüggést.
A lineáris dinamikus rendszerek bemeneti és kimeneti stacionárius folyamatai közötti (8.100) összefüggést most a
| (8.116) |

egyenlet alkotja, ahol  és
és  a bemenet és kimenet kovariancia-(autokovariancia)- és keresztkovariancia-függvényei.
a bemenet és kimenet kovariancia-(autokovariancia)- és keresztkovariancia-függvényei.
Ha a diszkrét idejű folyamatok egyben az ergodicitás tulajdonságával is rendelkeznek, akkor a jellemző paramétereket az időbeli realizációk határértékeiből számolhatjuk a folytonos idejű folyamatokra megadott (8.69) és (8.71) kifejezéseknek megfelelően. Végtelen nagy értékek természetesen most sem realizálhatók, ezért most is a (8.82) összefüggéshez hasonló, véges intervallumokon végzett becsléseket kell alkalmaznunk: a kovariancia függvény
| (8.117) |
és keresztkovariancia-függvény
| (8.118) |
ahol az átlagos értékek becslései:

és  .
.
Egy lineáris dinamikus rendszer autokovariancia- és keresztkovariancia-függvényeinek a kapcsolatát a (8.116) egyenlet mutatja be. Felírva ezt az egyenletet az n véges felső határig

és elvégezve a kísérletet sorban a 0,1,2…n értékekre, és figyelembe véve az autokovariancia-függvény

szimmetria tulajdonságát a
egyenlethez jutunk, ahonnan a lineáris rendszer súlyfüggvényének egyes értékeit a
inverz egyenletrendszer határozza meg. □
9. fejezet - Laplace-transzformációhoz kapcsolódó levezetések
9.1. Néhány egyszerű függvény Laplace-transzformáltja
9.1.1. Az egységugrás Laplace-transzformáltja
f(t)=ε(t) 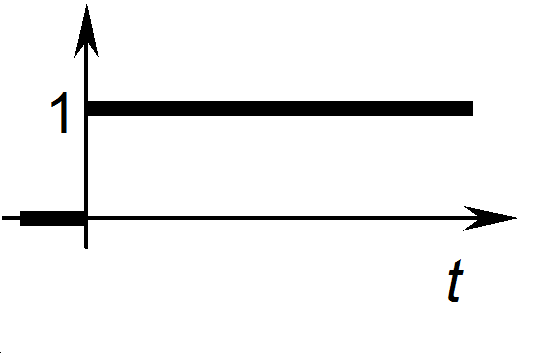 F(s)=?
F(s)=?
| (9.1) |

miután feltételünk volt, hogy Re{s}= > 0.
9.1.2. Az egységnyi sebességugrás Laplace-transzformáltja
f(t)=ε(t)t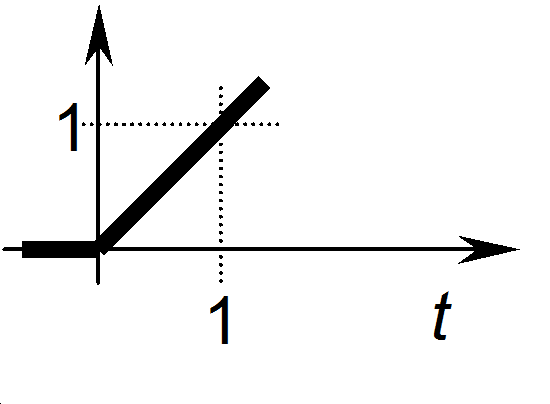 F(s)=?
F(s)=?
| (9.2) |
Az alábbi parciális integrálási szabályt alkalmazva:
| (9.3) |
Behelyettesítve:
| (9.4) |

9.1.3. Az exponenciális függvény Laplace-transzformáltja
Az  időfüggvény Laplace transzformáltja:
időfüggvény Laplace transzformáltja:
| (9.5) |

tehát az exponenciális függvénynek is algebrai függvény felel meg!
9.2. Fontosabb alkalmazási szabályok (műveletek)
A Laplace transzformáció tehát az f(t) valós változójú függvényhez a transzformációs összefüggés szerint az s komplex változójú függvényt rendeli.
Kérdés: az f(t) függvényen végzett alapvető műveletek miként érvényesülnek a transzformált tartományban?
9.2.1. LINEARITÁSI szabály
Adott f(t), amelynek Laplace transzformáltja {f(t)}=F(s)akkor {Kf(t)}=K{f(t)}=KF(s).
Adott f1(t), f2(t), amelyeknek Laplace transzformáltjai F1(s), F2(s)akkor {f1(t)+f2(t)}= {f1(t)}+ {f2(t)}=F1(s)+F2(s).
Mindkét törvényszerűség azzal igazolható, hogy a Laplace-transzformáció tulajdonképpen határozott integrál.
9.2.2. ELTOLÁSI szabály
Adott f(t), amelynek Laplace transzformáltja {f(t)}=F(s), ekkor f(t-) esetén a Laplace-transzformáció eredménye:
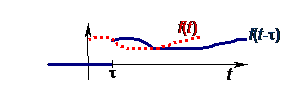
Legyen t-=z, ekkor t=z+, amiből dt=dz következik.
| (9.6) |
9.2.3. HASONLÓSÁGI szabály
Adott f(t), amelynek Laplace transzformáltja {f(t)}=F(s), ekkor f(at) esetén a Laplace-transzformáció eredménye:
Legyen  , ekkor
, ekkor  és
és  .
.
| (9.7) |

9.2.4. DIFFERENCIÁLÁS az időtartományban
Adott  , amelynek deriváltja
, amelynek deriváltja  , és
, és  . Első lépésként, a már bemutatott, parciális integrálást alkalmaztuk a következő helyettesítéssel:
. Első lépésként, a már bemutatott, parciális integrálást alkalmaztuk a következő helyettesítéssel:  és
és  , továbbá feltételezzük, hogy
, továbbá feltételezzük, hogy  értékét megfelelően választjuk meg.
értékét megfelelően választjuk meg.
| (9.8) |

Vizsgáljuk meg (9.8) jobboldalának első tagját. Mivel létezik  Laplace-transzformáltja, ezért
Laplace-transzformáltja, ezért  . (9.8) második integráljából
. (9.8) második integráljából  kiemelhető, ami marad az pedig
kiemelhető, ami marad az pedig  Laplace-transzformáltja.
Laplace-transzformáltja.
| (9.9) |

Általánosan:
| (9.10) |

ahol  az
az  függvény
függvény  -dik deriváltjának baloldali határértéke a
-dik deriváltjának baloldali határértéke a  helyen.
helyen.
9.2.5. INTEGRÁLÁS az időtartományban
Adott f(t), amelynek létezik a primitív függvénye, és  {f(t)}=F(s).
{f(t)}=F(s).
Mi lesz az időtartománybeli integrál Laplace-transzformáltja?
| (9.11) |

A feladatot parciális integrálással oldottuk meg, a következő helyettesítéseket alkalmazva:  ,
,  . A kapott eredmény általánosítható, akkor
. A kapott eredmény általánosítható, akkor  lesz az eredmény.
lesz az eredmény.
Fontos következtetés: mivel a differenciálásnak illetve integrálásnak az s-el való szorzás illetve osztás felel meg, a differenciálegyenletek helyébe a transzformált tartományban algebrai egyenletek lépnek. Így a feladatok megoldása lényegesen egyszerűsödik.
9.2.6. Végérték tételek
A végérték tételek segítségével lehetőségünk van meghatározni a kezdeti és az állandósult állapotbeli értékeket anélkül, hogy az inverz transzformációt elvégeznénk. Elsőként határozzuk meg a kezdeti értéket. A tétel alkalmazható, ha a függvénynek létezik a nulla körüli Taylor sora:
| (9.12) |

Végezzük el az inverz transzformációt
| (9.13) |
A két sor összevetéséből kapjuk a következő összefüggést:
| (9.14) |

A tétel megfordítása  csak akkor igaz, ha F(s) si pólusaira teljesül a
csak akkor igaz, ha F(s) si pólusaira teljesül a  feltétel. A legegyszerűbb a tételt akkor belátni, ha a pólusok egyszeresek. Ekkor a kifejtési tétel alapján:
feltétel. A legegyszerűbb a tételt akkor belátni, ha a pólusok egyszeresek. Ekkor a kifejtési tétel alapján:
| (9.15) |
mivel az exponenciális függvény negatív valósrész esetén zérushoz tart. Az egyenlőség jobb oldala:
| (9.16) |
szintén zérushoz tart. Igaz a tétel akkor is, ha valamely pólus valósrésze zérus, hiszen ekkor mindkét oldal Kk-hoz tart, ahol k a zérus valósrészű pólus indexe.
A többi eset számunkra nem túl érdekes, hiszen – mint a későbbiekben majd látni fogjuk – csak ekkor  stabil a rendszer.
stabil a rendszer.
10. fejezet - Ellenőrző kérdések
Ismertesse a következő fogalmakat (adja meg a definícióját és rövid értelmezését)
Valós fizikai rendszer
A jel
A be- és kimenetek
A rendszer
Lineáris és nemlineáris rendszerek
Paraméter és változó
Elosztott és koncentrált paraméterű leírás
irányított gráf, feszítőfa, vágat
Determinisztikus és sztochasztikus rendszerek
Kauzalitás
Időinvariáns és autonóm rendszerek
Statikus és dinamikus rendszerek
Állapot, állapotváltozó és állapotegyenletek
Miért van szükség az általánosított derivált bevezetésére? Adja meg az általánosított derivált definícióját.
Egy összefüggő irányított gráf esetén maximálisan hány lineárisan független hurok-, illetve vágategyenleteket leíró részgráf választható ki? Egy példa segítségével mutassa be a kiválasztás módját.
Adott egy áramkör, amely n csomópontból és m ágból áll. Minden ágban található egy ellenállás, egy vele sorosan kapcsolt feszültségforrás és egy párhuzamosan kapcsolt áramgenerátor. Ismert az összes ellenállás értéke (ezek között nem lehet nulla), valamint minden feszültség- és áramgenerátor értéke (ezek között lehet nulla). A hurok és csomóponti mátrix segítségével írja fel a Kirchhoff egyenleteket. Meghatározandó az ellenállások árama és feszültsége, mutassa meg, hogy a megoldáshoz szükséges számú egyenlet felírható.
Ismertesse a hurokáramok módszerét.
Egy magyarázó ábra segítségével ismertesse, hogy a diszkrét idejű súlyfüggvény (diszkrét idejű impulzus válasz) ismeretében miként számítható ki egy tetszőleges diszkrét idejű bemenő jelre adott diszkrét idejű válasz (diszkrét idejű konvolúció).
Egy magyarázó ábra segítségével ismertesse, hogy a diszkrét idejű átmeneti (diszkrét idejű ugrás válasz) ismeretében miként számítható ki egy tetszőleges diszkrét idejű bemenő jelre adott diszkrét idejű válasz.
Egy magyarázó ábra segítségével ismertesse, hogy a súlyfüggvény (impulzus válasz) ismeretében miként számítható ki egy tetszőleges bemenő jelre adott válasz a folytonos időtartományban (konvolúció).
Egy magyarázó ábra segítségével ismertesse, hogy az átmeneti (ugrás válasz) ismeretében miként számítható ki egy tetszőleges bemenő jelre adott válasz a folytonos időtartományban.
A periodikus (valós és komplex) függvények Hilbert terében adjon meg ortonormált bázisokat (valós és komplex függvényeket), e bázisokhoz adja meg a skaláris szorzás definícióját, és azok segítségével adja meg a periodikus függvények Fourier sorfejtésének módjait (együtthatók kiszámításának képletét és a függvény rekonstrukcióját komponensekből).
A Fourier sorfejtés miként általánosítható nem periodikus lecsengő függvényekre? (Fourier transzformáció) Ismertesse a Fourier sorfejtés és transzformáció alapvető különbségeit (milyen nehézségekkel kell szembenéznünk, ha formálisan próbálnák alkalmazni a Fourier sorfejtés szabályait egy nem periodikus lecsengő függvényre).
Tartalmilag mi a különbség a periodikus jelek vonalas amplitúdó spektruma és az általános jel frekvencia és teljesítmény sűrűség spektruma között.
Mutassa be, hogy a Fourier transzformáció miként általánosítható, hogy eljussunk a Laplace transzformációhoz. Milyen feltételeknek megfelelő időfüggvények esetén alkalmazható a Fourier, illetve a Laplace transzformáció.
Ha egy differenciálegyenletet Laplace transzformáció segítségével oldunk meg, akkor miként tudjuk figyelembe venni, illetve értelmezni a kezdeti értéket?
Ismertesse a kezdeti és végérték tételt. Mi az alkalmazásuk feltétele?
Mit értünk az átmeneti (ugrás válasz), súly (impulzus válasz), átviteli és frekvencia-átviteli függvény alatt?
Adja meg az egytárolós tag átmeneti függvényét (ugrásválaszát). Hol metszi a kezdeti érintő az állandósult érték egyenesét? Mit nevezünk időállandónak?
Mit nevezünk domináns időállandónak? Mit nevezünk domináns pólusnak, illetve domináns póluspárnak?
Ismertesse a kifejtési tételt. Térjen ki a többszörös pólusok esetére.
Milyen összefüggés van az átviteli és frekvencia-átviteli függvény között? Valóságos rendszerek esetén milyen fizikai feltétele van annak, hogy az átviteli függvényt egyszerű helyettesítéssel átírjuk frekvencia átviteli függvénnyé.
Ismertesse, hogy mit ábrázol a Bode és Nyquist diagram. Méréssel hogyan állítható elő?
Rajzolja fel az egy-, két- és háromtárolós, valamint integráló és a holtidős tag Bode és Nyquist diagramját
Melyek a szűrők legfontosabb csoportosítási szempontjai? Mit jelent a szűrők típusszáma?
Bizonyítsa be, hogy az ideális aluláteresztő szűrő nem lehet kauzális.
Irodalmi hivatkozások
[1] A proposed approach to mechatronics design education: Integrating design methodology, simulation with projects. http://dx.doi.org/10.1016/j.mechatronics.2012.10.002. 2012. Mechatronics.
[2] McGraw-Hill. New York. Design with Microprocessors for Mechanical Engineers. . 1992.
[3] Kluwer Academic Publishers. Amsterdam. Stochastic Differential Equations with Applications to Physics and Eng-ineering. 1991.
[4] Akadémiai Kiadó. Budapest. Villamosságtan. 1973.
[5] Tankönyvkiadó. Budapest. Elméleti villamosságtan. 1967.
[6] On conceptual design of intelligent mechatronic systems. 13. 1029–1044.. 2003. Mechatronics.
[7] Elsevier Butterworth-Heinemann. Amstredam.. Mechatronics. Principles and Applications. 2005.
[8] Typotex Kiadó. Budapest.. Alkalmazott folyamatstatisztika és idősor-analízis. 2001.
[9] McGraw Hill. New York. Principles of Electromechanical Energy Conversion. 1966.
[10] . Műszaki Könyvkiadó. Budapest.. Funkcionálanalízis műszakiaknak. 1976.
[11] Műszaki Könyvkiadó. Budapest.. Matematikai kézikönyv műszakiaknak. 1975.
[12] Vieweg+Teubner Verlag. Wiesbaden. , Eick, R., Quendt, P., Elektromagnete: Grundlagen, Berechnung, Entwurf und Anwendung. 2011.
[13] Vieweg+Teubner Verlag. Wiesbaden. Elektromagnete: Grundlagen, Berechnung, Entwurf und Anwendung. 2011.
[14] Mechatronic systems—Innovative products with embedded control. 16, 14–29.. 2008. Control Engineering Practice.
[15] LSI Oktatóközpont. Budapest.. Bevezetés az operációkutatásba.. 1994.
[16] McGraw-Hill. New York. Nonlinear Automatic Control. 1963.
[17] Cambridge University Press. Cambridge, UK. The Nature of Mathematical Modeling. 1999.
[18] Springer-Verlag. Berlin. Handbook of Stochastic Methods for Ohysics, Chemistry and Natural Sciences. 1983.
[19] Műszaki Könyvkiadó. Budapest.. Matematika villamosmérnököknek. Műszaki Könyvkiadó, Budapest.. 1964.
[20] John Wiley. New York. An Introduction to Probability Theory and its Applications, Vol. I.. 1961.
[21] John Wiley. New York. An Introduction to Probability Theory and its Applications, Vol. II... 1966.
[22] Nauka.. Moskva.. Metody teorii avtomaticheskogo upravlenia. 1971.
[23] A design paradigm for mechatronic systems. http://dx.doi.org/10.1016/j.mechatronics.2012.08.004. 2012. Mechatronics.
[24] Springer-Verlag. Berlin. Mechatronics by Bond Graphs. An Object-Oriented Approach to Modelling and Simulation. 2003.
[25] Akadémiai Kiadó. Budapest.. Szabályozások dinamikája. 1966.
[26] Holistic system modeling in mechatronics. 21, 166–175.. 2011. Mechatronics.
[27] Springer-Verlag. New York. Continuous System Modeling. 1991.
[28] TypoTEX Kiadó. Budapest. Matematikai kézikönyv. 2000.
[29] Springer-Verlag. New York. A Guide to Simulation. 1984.
[30] Bond graph modelling and simulation of multidisciplinary systems – An intr-duction. 17, 3–21.. 2009. Simulation Modelling Practice and Theory.
[31] Prentice Hall. Upper Saddle River, New Jersey. Systems Engineering and Analysis. (3rd Edition). 1998.
[32] McGraw-Hill, Inc.. Boston. Introduction to Mechatronics and Measurement Systems. 2003..
[33] CRC Press. Boca Raton, Washington. The Mechatronics Handbook. CRC Press, Boca Raton, Washington, . 2011.
[34] Műszaki Könyvkiadó. Budapest. . A szabályozástechnika kézikönyve. 1970.
[35] CRC Press. Boca Raton, Washington. Control Handbook (2nd Edition). Control System Fundamentals. 2011.
[36] Kluwer Academic Publishers. Amsterdam. Stochastic Differential Equations with Applications to Physics and Engineering. 1991.
[37] Bond graph modelling and simulation of multidisciplinary systems – An introduction. 17, 3–21.. 2009. Simulation Modelling Practice and Theory.