7. fejezet - Rendszerek és modellezési analógiák
- 7.1. Energia reprezentáció, extenzív és intenzív mennyiségek
- 7.2. Rendszermodellezés teljesítmény-konjugált változókkal
- 7.3. Konzervatív rendszerelemek és karakterisztikáik
- 7.4. Disszipatív rendszerelemek és karakterisztikáik
- 7.5. Transzformátorok, zsirátorok, hajtóerő- és áramforrások
- 7.6. Elektromechanikai Lagrange függvény
7.1. Energia reprezentáció, extenzív és intenzív mennyiségek
A mechatronikai eszközök és berendezések több fizikai-mérnöki diszciplína, így a mechanika, elektrotechnika és elektronika, pneumatika és hidraulika, irányítástechnika és informatika elemeiből felépített alrendszerek és szinergikus együttese. Ezért – mind elemzési, irányítási, de elsősorban tervezési szempontból – célszerű a különböző fizikai területek elemeinek modellezési analógiákat felhasználó értelmezése és leírása, és ezeknek a modelleknek a segítségével történő egységes kezelése. Ezt alapjában véve a műszaki rendszerek energetikai megközelítésével lehet elérni, amely lehetővé teszi a mérnöki termodinamika koherens módon történő bekapcsolását is.
A mechanikai rendszereknek a Lagrange-egyenletekkel történő leírása és a villamos rendszerek matematikai leírásában fellépő analógiákat már Maxwell észrevette, melyek aztán az elektromechanikai energia-átalakítók egységes matematikai leírását készítették elő. Ezzel a kezelésmóddal hasonló módon származtathatók a mechanikai rendszerek Newton-egyenletei és a villamos hálózatok Kirchoff-egyenletei.
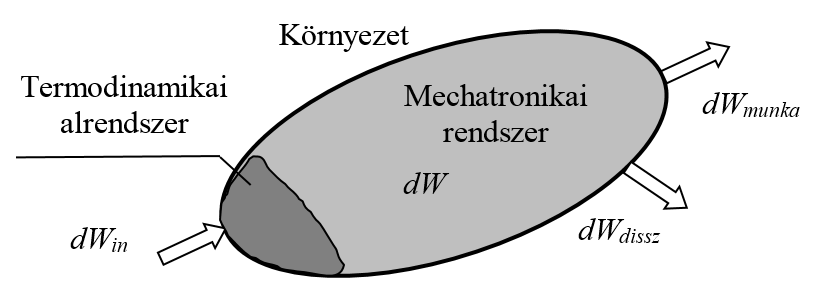
Egy mechatronikai rendszer általános energetikai reprezentációját az 7-1. ábra mutatja be, melyet a környezetével energia-csatolásban lévő rendszerként jelenítettünk meg.
|
|
(7.1) |
A rendszerbe bevitt energiát alapvetően három fő részre oszthatjuk a (7.1) módon, ahol a jobb oldalon az egyes tagok a rendszer üzemelésére fordított energiát, a környezet számára végzett munkát és a rendszer által disszipált energiát jelenti. A rendszerben mindig elkülöníthetünk egy termodinamikai alrendszert, amely a reverzibilis termikus effektusokat reprezentálja.
Erre az alrendszerre felírhatjuk a Gibbs-egyenletet
|
|
(7.2) |
ahol az U, V, S, ni, p, T, μi jelölik, sorban, a belső energiát, térfogatot. entrópiát, a kémiai komponensek mol számait, a nyomást, hőmérsékletet és a komponensek kémiai potenciáljait. Ez a formula a termodinamikai alrendszer belső energia-megváltozását reprezentálja a kölcsönhatásban lévő energiaformák, azaz a hő-, hidraulikus-pneumatikus és kémiai energiák kölcsönös megváltozásával.
A (7.2) energia-formulának az egész rendszerre történő kiterjesztését az általánosított Gibbs egyenletben fogalmazzuk meg
|
|
(7.3) |
ahol a az állapotváltozók valós értékű energia-állapot függvénye.
A energia-állapot függvény a rendszer teljes energiáját reprezentálja a rendszerben előforduló, egymással kölcsön-hatásban lévő és átalakuló energia-formákkal és az azokat jellemző állapotváltozókkal. A rendszer időbeli viselkedését meg-határozó dinamikus leírást a Gibbs-egyenlet alapján kapjuk meg a (7.3) összefüggésben az időbeli differenciálhányadosok bevezetésével
|
|
(7.4) |
Mivel a (7.4) egyenletben a teljesítménydimenziójú (W), ezért a baloldalon található szorzatok egyenként szintén teljesítmény dimenziót adnak, ezért a (7.4) egyenlettel a jelölés bevezetésével az
|
|
(7.5) |
az un. teljesítmény-konjugált változókat, illetve teljesítmény-konjugált változó-párokat definiáljuk. Figyelembe véve az egyes időpontokra megadott (7.4) teljesítmény kifejezéseket az egyes energiaformákra az azokat jellemző állapotváltozókkal a (0,t) időintervallumban a teljes energia-mennyiségeket a (7.6) integrálok adják meg.
|
|
(7.6) |
A különböző fizikai területeknek a (7.3) és (7.4) általánosított összefüggésekben megjelenő teljesítmény-konjugált mennyiségeit a (7.2) Gibbs-egyenlet alapján értelmezzük. Így az xk változók az adott fizikai területek extenzív mennyiségeit – a (7.2) egyenletben az S entrópiát, a V fluidum térfogatot és az ni anyagmennyiséget (tömeget) –, a deriváltak az extenzívek áramait, míg az ek változók az ezen extenzíveknek megfelelő intenzív mennyiségeket – a (7.2) egyenletben a hőmérsékletet, a nyomást és a kémiai potenciált – jelölik. Ezeknek a mennyiségeknek az általános meghatározását az alábbi definíciókkal adjuk meg.
Definíciók
Ha a V térfogatot a Vn, n=1,2…N, részekre osztjuk, akkor a részek térfogatából additíve a V térfogat adódik, azaz
.
Extenzív mennyiség: azon fizikai mennyiségeket, amelyek részekre osztásnál (illetve összerakásnál) a térfogathoz hasonlóan transzformálódnak, extenzív mennyiségeknek nevezzük.
- legyen egy extenzív mennyiség modellje, és legyen
Akkor
Másként:
Ha és , akkor
Intenzív mennyiség: azon fizikai mennyiségeket, amelyek részekre osztásnál (illetve összetevésnél) az értéküket nem változtatják, intenzív mennyiségeknek nevezzük.
- legyen egy intenzív mennyiség modellje, és legyen
Akkor
Másként:
Ha , és , akkor
Az egyes fizikai – és mérnöki – diszciplínák extenzív és intenzív mennyiségeit az 7-1. táblázat foglalja össze. Ezek az adott fizikai területeken jól ismert mennyiségek, de ebben az általánosított kontextusban hasonló – analóg – jellemzőkként kezelhetjük azokat. A táblázat azt is tartalmazza, hogy az egyes fizikai területek mely mennyiségei alkotják azok jellemző teljesítmény-konjugált párjait. Lényegében ezeknek a mennyiségnek a modelljei és a közöttük fennálló függvénykapcsolatok adják meg a mechatronikai rendszerek egységes kezeléséhez szükséges analógiák alapjait.
Az extenzív mennyiségek tárolhatók, akár statikus, akár dinamikus formában, míg az intenzívekben fellépő különbségek – inhomogenitások – képezik azokat az e hajtóerőket (effort), melyek az extenzívek f áramlását (flow) hozzák létre. Az 7-1. táblázat által megadott bármely mennyiségpár esetén könnyen ellenőrizhetjük ezt az állítást, mivel – csak példaszerűen felsorolva – feszültségkülönbség töltésáramot hoz létre, nyomáskülönbség fluidumok térfogatáramát generálja, vagy az eltérő hőmérsékletek entrópia áramot hoznak létre. Azt is könnyen ellenőrizhetjük, hogy a táblázat egyes soraiban megadott intenzívek és extenzív áramok szorzatai valóban teljesítmény dimenziójú mennyiségek.
|
Fizikai terület |
Intenzív mennyiség, ek |
Extenzív mennyiség, xk |
Extenzív áram dxk/dt=fk |
Teljesítmény Pk= ek fk [W] |
|
Villamos |
Feszültség u [V] |
Töltés q [C] |
Elektromos áram, i [A] |
u i |
|
Mágneses |
Magnemotoros erő uM [A] |
Fluxus Φ [Wb] |
Fluxus áram φ [V] |
uM φ |
|
Mechanikai: transzlációs |
Erő F [N] |
Elmozdulás x [m] |
Sebesség v [m s-1] |
F v |
|
Mechanikai: rotációs |
Forgatónyomaték T [N m] |
Szögelfordulás [rad] |
Szögsebesség [rad s-1] |
T |
|
Hidraulikus, pneumatikus |
Nyomás p [N m-2] |
Térfogat V [m3] |
Térfogatáram q [m3 s-1] |
p q |
|
Fizikai-kémiai |
Felületi feszültség [N m-2] |
Felület A [m2] |
Deformáció [m3 s-1] |
Γ |
|
Kémiai |
Kémiai potenciál [J mol-1] |
Anyagmennyiség N [mol] |
Moláris áram n [mol s-1] |
n |
|
Termo-dinamikai |
Hőmérséklet T [K] |
Entrópia S [J K-1] |
Entrópia áram s [W K-1] |
T s |
7.2. Rendszermodellezés teljesítmény-konjugált változókkal
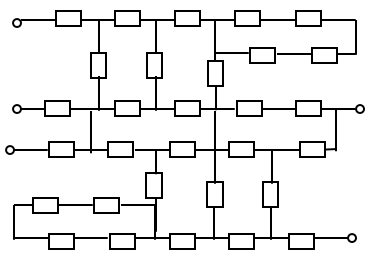
A rendszer modellezéséhez annak struktúráját térben elkülönített, koncentrált paraméterű, csatolt rendszerelemek egyszintű hálózataként írjuk le a 7-2. ábra által vázolt módon, mely elemek az 7-1. táblázatnak megfelelően elektromos, mágneses, mechanikai – transzlációs és rotációs –, hidraulikus és pneumatikus, fizikai kémiai, kémiai és termikus jellegűek lehetnek, akkor a rendszer (7.3) teljes energiáját – annak extenzív jellege következtében – eloszthatjuk a hálózat egyes elemeire a (7.7) módon, ahol Jk jelöli a k-adik energia-formához tartozó rendszerelemek számát.
|
|
(7.7) |
Innen az (7.4) felhasználásával az egyes rendszerelemeken átáramló teljesítmények pillanatnyi összegét kapjuk a
|
|
(7.8) |
formában.
A hálózat egyértelmű leírásához az (7.8) összegen túl az egyes rendszerelemek közötti ok-okozati kapcsolatokat is meg kell adni, ami az extenzív áramok irányainak, azaz az elemek közötti energiaközvetítés irányainak a rögzítését jelenti. Ez egyúttal az egyes elemeken megjelenő (7.8) teljesítményáramlások irányait is meghatározza.
Ugyanakkor azt is figyeljük meg, hogy az egyes elemeken megjelenő teljesítmény, vagy a (7.6) kifejezés alapján az adott elemen átáramló energia ismerete önmagában nem határozza meg a teljesítmény-konjugált változókat, mivel egy egyenletünk van két változóval. A teljes meghatározáshoz a rendszerelemek karakterisztikáit kell még megadni, amely függ az elem jellegétől. Itt a továbbiakban csak az 7-1. táblázat első 5 sorában felsorolt villamos, mágneses, mechanikai és hidraulikus-pneumatikus elemek jellemzőit tekintjük át és összegezzük – természetesen a termikus kapcsolatokkal együtt –, mivel a mechatronikai rendszerek felépítésében az ilyen elemek a dominánsak.
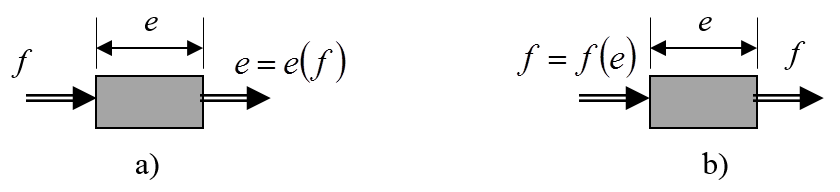
Egy rendszerelem karakterisztikája az intenzív és extenzív jellemzők közötti függvénykapcsolatot jelenti. A rendszerelemeket bemenet-kimenet modellekkel leírva az intenzívek bemenet-kimenet különbségei az elemeken kialakuló e hajtóerők, melyeknek az elemeken átáramló f extenzív áramokkal való összefüggései alkotják az elemek karakterisztikáit. Mivel az e·f=f·e szorzat nem határozza meg az elemekre vonatkozó ok-okozati kapcsolatokat, ezért azokat – a hálózat előzőekben említett irányultságát felhasználva – kell specifikálnunk. Ha egy rendszer-elem bemenetén megjelenő f áram az elsődleges, azaz az ok, akkor az okozat az elemen kialakuló e(f) hajtóerő, ahogy ezt a 7-3. ábra a) része illusztrálja. Ha azonban a rendszerelemre az e hajtóerő hat elsődlegesen mint ok, akkor az okozat az elemen áthajtott f(e) áram. Ezt a 7-3. ábra b) része illusztrálja.
A rendszerelemek közötti energiaközvetítés teljesítmény-kapukon keresztül történik, így a mechatronikai rendszerek egyes részei és elemei közötti fizikai csatolásokat egységesen a teljesítmény kapcsolatokkal tudjuk megadni.
A teljesítmény-átvitellel jellemzett fizikai kapcsolatok mellett az egyes rendszerelemek között információ-átvitellel jellemzett kölcsönhatásokat is definiálnunk kell.
Definíciók
Egy fizikai terület azon intenzív és extenzív-áram jellemzőit, melyek szorzata teljesítmény dimenz i ójú, teljesítmény-konjugált mennyiségeknek nevezzük.
Teljesítmény-kapu (power port): egy rendszerelem két teljesítmény-konjugált változójával jellemzett bemenete vagy kimenete.
Információ-kapu: egy rendszerelem valamely változóval jellemzett bemenete vagy kimenete.
Két rendszerelem teljesítmény-kapukon keresztüli kölcsönhatását teljesítmény-kötésnek (power bond) nevezzük.
Két rendszerelem információ -kapukon keresztüli kölcsönhatását információ -kötésnek ( information bond) nevezzük.
7.3. Konzervatív rendszerelemek és karakterisztikáik
A rendszerelemeket energetikai szempontból feloszthatjuk energiát tároló, azaz konzervatív, energiát disszipáló, azaz disszipatív, és energiát transzformáló elemekre, valamint energiaforrásokra.
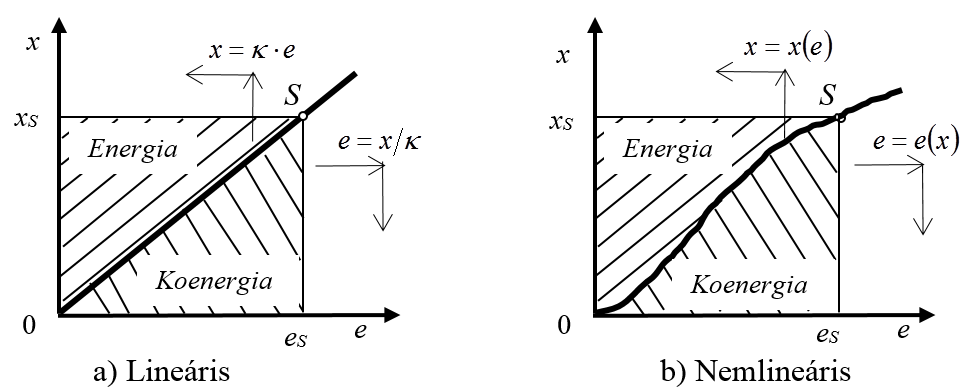
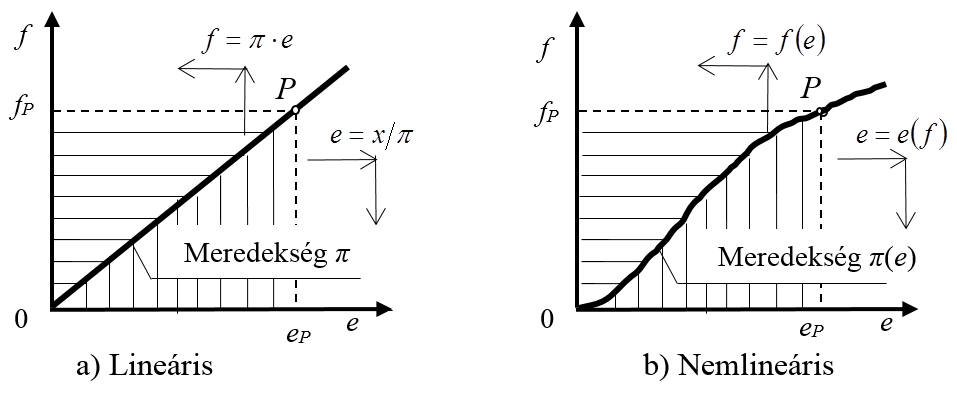
Egy energiatároló, azaz konzervatív rendszerelem karakterisztikáját a 7-4. ábra mutatja be a) lineáris és b) nemlineáris esetben. Ez alapjában véve az függvénykapcsolatot jelenti, amely a konzervatív elemen felhalmozott x extenzív mennyiségét adja meg az elemre eső e hajtóerő függvényében, vagy éppen fordítva: a felhalmozott x függvényében adja meg a rendszerelemen kialakuló e hajtóerőt az függvénykapcsolat formájában.
A (7.9) és (7.10) integrálok geometriai képét a 7-4. ábra karakterisztika feletti területe adja meg. Ha a 7-4. ábra által ábrázolt – akár lineáris, akár nemlineáris – karakterisztikán kijelöljük az S pontot, akkor ezzel egyértelműen meghatározzuk az x és e állapotváltozókat.
A konzervatív rendszerelemmel társított energiát a (7.6) egyenletből kiindulva határozhatjuk meg behelyettesítve az összefüggést és ezzel a
|
|
(7.9) |
összefüggéshez jutunk. A =0 és választás esetén a
|
|
(7.10) |
integrál fejezi ki az elem energia-állapotát az e és x állapotváltozókkal az üres állapothoz viszonyítva. Ezt a területet az xS koordinátáig számítva a konzervatív elemnek a karakterisztika S pontjával kijelölt energia-állapotát azzal egyenértékűen adjuk meg. Ezzel az is jól látható, hogy a konzervatív elem aktuális állapota nem függ attól, hogy a t0 és t időpontok között mely állapotokban volt, azaz milyen folyamatban érte el a végső energia-állapotot. Ez a dinamikus rendszerek egyik fontos tulajdonsága, ezért mindig feltételezzük, hogy a konzervatív elem karakterisztikája a 7-4. ábra által bemutatott módon a változók kölcsönösen egyértelmű függvénye, amit a dielektrikus vagy ferromágneses hiszterézis jelensége esetén a hiszterézis görbe közép-vonalával történő közelítéssel érünk el. Ekkor a hiszterézis veszteséget egy disszipatív tag hozzáadásával lehet pótolni.
Természetesen az lényeges, hogy a hálózat dinamikus folyamatai a karakterisztikán melyik irányban mozdítják el az állapotváltozókat. Ugyanis – az ok-okozati kapcsolatokat és a kölcsönösen egyértelmű leképezéseket figyelembe véve – bármelyik állapotváltozó növekménye a másik növekményét, és egyúttal az elemen tárolt energia mennyiségének növekményét idézi elő, míg a fordított irányú elmozdulás a tárolt energia csökkenését. Mivel azonban mind az energia-felvétel, mind pedig annak leadása veszteségmentes, azért az ideális konzervatív elemeken ez a folyamat reverzibilis.
Figyelembe véve, hogy a 0eSSxS0 téglalap területe a 7-4. ábra mindkét változatán az (eS·xS) szorzattal egyenlő jól látható, hogy a karakterisztika alatti terület az eS pontig a rendszerelem energiájával egyértelmű kapcsolatban van. Ezt a karakterisztika alatti területet a
|
|
(7.11) |
integrál adja meg és koenergiának (coenergy) nevezzük. Az energia és koenergia összege az elem karakterisztikájának tetszőleges pontjában az (x·e) szorzattal egyenlő, azaz
|
|
(7.12) |
A koenergia fogalmát alapvetően csak az energiával összefüggésben értelmezhetjük, bár lineáris karakterisztika esetén, ahogy ez a 7-4. ábra a) részén jól látható, a két mennyiség egyenlő, így bármelyik – a 7-2. táblázat és a 7-3. táblázat által megadott – kifejezést használhatjuk a számításokban. Ugyanakkor azt is érdemes megjegyezni, hogy a koenergia fogalom – és analitikus formulája – az elektromechanikai rendszerek Lagrange-egyenletekkel történő modellezésében és számításában játszik fontos szerepet, mivel az elektromechanikai Lagrange-függvény meghatározásához szükség van a koenergia fogalmára, ahogy ezt a későbbiekben látni fogjuk, de – többek között – a villamos hálózatok számításában Kirchhoff hurokegyenleteit valamint csomóponti egyenleteit lehet az energia-koenergia páros felhasználásával származtatni.
A 7-4. ábra által ábrázolt karakterisztikákat, illetve az azokkal leírt rendszerelemeket egyszerűbben, egyetlen paraméterrel is jellemezhetjük, mégpedig a függvények meredekségének tetszőleges pontban történő megadásával a
|
|
(7.13) |
módon, amely lineáris esetben a
|
|
(7.14) |
formát ölti. A κ paraméter lényegében az adott rendszerelem valamely állapotában az extenzív mennyiség, azaz végső soron az energia felhalmozási képességét jelenti. Lineáris esetben tehát a rendszerelem meghatározásához elégséges a konstans értékű κ paraméter megadása.
A konzervatív rendszerelemek energiatárolása két, jellegükben különböző módon történik. Statikus módon, a villamos rendszerek elnevezését általánosítva kapacitív elemekkel (jelölésük összefoglalva: C), és dinamikus módon, melyeket – ugyancsak a villamos rendszer-elemek elnevezését használva – általánosított induktív elemeknek nevezzük (jelölésük I). Az 7-1. táblázat által megadott fizikai területek konzervatív rendszerelemeinek konstitutív paramétereit, karakterisztikáit, energia és koenergia kifejezéseit a 7-2. táblázat és a 7-3. táblázat foglalja össze.
|
Rendszerelem |
Paraméter |
Karakterisztika |
Energia |
Koenergia |
|
Villamos - kondenzátor |
κ=C kapacitás |
q=C·u |
|
|
|
Mágneses kondenzátor |
κ=CM Mágneses kapacitás |
Φ=CM∙uM |
|
|
|
Mechanikai - rugó |
κ=k rugóállandó |
|
|
|
|
Mechanikai - torziós rugó |
κ=K rugóállandó |
|
|
|
|
Hidraulikus, pneumatikus |
kapacitás |
|
|
|
|
Rendszerelem |
Paraméter |
Karakterisztika |
Energia |
Koenergia |
|
Villamos - légtekercs |
κ=L induktivitás |
ψ=L·i |
|
|
|
Mágneses tekercs |
Mágneses induktivitás κ=LM |
Φ=LM·φ |
|
|
|
Mechanikai - mozgó tömeg |
κ=m tömeg |
p=m·v |
|
|
|
Mechanikai - forgó tömeg |
κ=J impulzus-momentum |
T=J·ω |
|
|
|
Hidraulikus, pneumatikus |
κ=Lh induktivitás |
ψh=Lh·q |
|
|
7.4. Disszipatív rendszerelemek és karakterisztikáik
Az energiatároló rendszerelemek ideális objektumok, melyek veszteség nélkül tárolják és adják vissza a tárolt energiát. Ez valós rendszerek modellezése esetén természetesen nem ad megfelelő leírást, mert bármelyik valós rendszer működése energiaveszteséggel jár. Ezt a termodinamika második főtétele értelmében, amely úgy is fogalmazható, hogy minden valós fizikai rendszer disszipatív, azaz a folyamatokban az energia egy része hő formájában veszteségként "szétszóródik". Ezt az ideális elemekhez megfelelően csatolt disszipatív elemek alkalmazásával modellezhetjük. Hasonló módon pótolhatjuk a rendszerelemeket hálózatba foglaló teljesítmény-kötések általi veszteségeket. Ugyanakkor a disszipatív elemek, mint az extenzív áramlásokkal szembeni ellenállások, vagy a hálózat egyes ágaira eső teljes intenzív különbségeket megfelelően megosztó objektumok fontos elemei az energetikai hálózatoknak.
A disszipatív elemek karakterisztikájának általános képét mutatja be az 7-5. ábra mind a) lineáris, mind b) nemlineáris rendszerelemek esetében. Egy elem karakterisztikája az f=f(e) és az inverz e=e(f) függvénykapcsolatokat jelenti, melyeket – kölcsönösen egyértelmű leképezések lévén – szintén egy paraméterrel jellemezhetünk: a függvények meredekségének tetszőleges pontban történő megadásával a
|
|
(7.15) |
módon, amely lineáris esetben a
|
|
(7.16) |
formát ölti.
Ha az 7-5. ábra által ábrázolt – akár lineáris, akár nemlineáris – karakterisztikán kijelöljük a P pontot, akkor ezzel egyértelműen meghatározzuk a disszipatív elemen kialakuló f és e állapot-változókat. Ugyanakkor itt is megtaláljuk – a konzervatív elemekhez hasonlóan – karakterisztika feletti terület energetikai értelmezését. Képezve ugyanis az elemen átáramló teljesítmény integrálját az f=f(e) inverz karakterisztikát felhasználva az
|
|
(7.17) |
összefüggéshez jutunk, amely a =0 és választás esetén a
|
|
(7.18) |
egyenletet szolgáltatja.
Az (7.18) integrál definiálja a Rayleigh-disszipáció függvényt, melynek a disszipatív rendszerek Lagrange-egyenletekkel való kezelésében van alapvető szerepe. A disszipatív elemek konstitutív paramétereit a 7-4. táblázat mutatja be.
|
Rendszerelem |
Paraméter |
Karakterisztika |
Rayleigh-függvény |
Rayleigh-kofüggvény |
|
Villamos – ellenállás |
κ=G G= 1 /R |
u=R·i |
|
|
|
Mágneses tekercs |
Reluktancia κ=RM |
uM =RM∙iM |
|
|
|
Mechanikai - transzlációs |
κ=D csillapítási tényező |
F=D·v |
|
|
|
Mechanikai - rotációs |
κ=B csillapítási tényező |
T=B·ω |
|
|
|
Hidraulikus, pneumatikus |
κ=Gh vezető-képesség |
p=Rh·q |
|
|
7.5. Transzformátorok, zsirátorok, hajtóerő- és áramforrások
7.5.1. Transzformátorok és zsirátorok.
Jelölésük: T és G
A mechatronikai rendszerek elemei és alrendszerei közötti kapcsolatokat csatoló elemek biztosítják, amelyeket – az energia tárolókhoz hasonlóan – ugyancsak ideálisnak, azaz veszteség-mentesnek tételezünk fel. A hulladék-hővé alakuló veszteségeket ezekben a rendszerelemekben is megfelelő disszipatív elemek hozzáadásával tudjuk figyelembe venni.
A csatoló elemek a mechatronikai rendszerek elemei és alrendszerei közötti kapcsolatokat teljesítmény-transzferrel biztosítják, ahol
-
a bemeneti és kimeneti teljesítmények lehetnek azonos fizikai jellegűek az azonos teljesítmény-konjugált változók – hajtóerők és áramok – transzformációjával, míg
-
történhet különböző fizikai jellegű teljesítmények egymásba történő átalakításával a megfelelő teljesítmény-konjugált változók – azaz a különböző fizikai jellegű hajtóerők és extenzív áramok – egyidejű transzformációjával.
Az első csoportot transzformátoroknak nevezzük az
|
|
(7.19) |
transzformációs relációkkal, ahol p a primer oldali és s a szekunder oldali változókat jelöli, és m a dimenziómentes transzformátor modulus, míg a második csoportot zsirátoroknak nevezzük az
|
|
(7.20) |
zsirátor relációkkal, ahol ismét p a primer oldali és s a szekunder oldali változókat jelöli. Itt az rs és a rp a zsirátor modulusok, melyekre érvényes az rs=rp egyenlőség, bár a dimenzióik különbözőek.
A primer és szekunder mennyiségek közötti relációkat a transzformátorok esetében az 7-5. táblázat foglalja össze, míg a zsirátorokra vonatkozó relációkat a 7-6. táblázat tartalmazza. Jegyezzük meg, hogy a modulusok értékei a zsirátorok esetében is azonosak, de mégis különböző módon jelöltük azokat, mivel dimenzióik különböznek a transzformált mennyiségek aktuális dimenzióitól függően.
|
Rendszerelem |
Csatolás jellege |
Intenzív reláció |
Extenzív áram- reláció |
|
Elektromos |
Mágneses indukció |
|
|
|
Mechanikai –transzlációs |
Erőmérleg |
|
|
|
Mechanikai – rotációs |
Áttétel |
|
|
|
Hidraulikus |
Csőszűkület |
|
|
7.5.2. Ideális hajtóerők és áramforrások
Jelölésük: e és f
Az 7-1. ábra jól illusztrálja, hogy a mechatronikai rendszer működése megfelelő energiaellátással biztosítható, és a bevitt energia a rendszerelemek hálózatában a teljesítménykapukon keresztül kerül szétosztásra és felhasználásra. Ezt az energiaellátást a teljesítmény-konjugált változókat alkalmazó modellben ideális hajtóerő- és áramforrások felhasználásával tudjuk modellezni:
-
Villamos: egyen- vagy váltakozó áramú hálózat, generátor,
-
Mechanikai: robbanómotor,
-
Hidraulikus: kompresszor.
|
Rendszerelem |
Primer oldal |
Szekunder oldal |
Zsirátor relációk |
|
Elektromos-mechanikai rotációs |
|
|
|
|
Mechanikai: transzlációs- rotációs |
|
|
|
|
Mechanikai transzlációs- elektromos- |
|
|
|
|
Mechanikai-hidraulikus |
|
|
|
7.6. Elektromechanikai Lagrange függvény
A különböző fizikai és mérnöki területek rendszereinek modellezési analógiái azt mutatják, hogy az analógiák a mechanikai és elektromos rendszerek között a legjobbak, így a mechanikai rendszerekre kidolgozott Lagrange-módszert a villamos rendszerekre. illetve ennek alapján az elektromechanikai rendszerekre közvetlenül ki lehetett terjeszteni.
A Lagrange-módszer lényege, hogy az egész modellezendő rendszert általánosított koordinátákkal és azok deriváltjaival tudjuk leírni, kiindulva a pontmechanika általánosított fogalmaiból. Ez az általánosított koordináták és deriváltjaik meghatározását jelenti, melyekkel a mechanikai Lagrange-egyenleteket a
|
|
(7.21) |
formában írjuk fel, ahol a Lagrange-függvény a
|
|
(7.22) |
alakú. Itt a a mechanikai rendszer teljes kinetikus energiáját, a teljes potenciális energiát, az energia-veszteséget leíró Rayleigh-féle disszipáció függvényt, míg a rendszerre ható külső erőket jelenti. A két energiaforma különbségéből álló Lagrange-függvényre vonatkozó (7.21) Lagrange-egyenletek rendszere megadja a rendszer erőhatásainak a Newton-módszerrel előállítható mérlegegyenleteit.
A bemutatott analógiák alapján villamos hálózatok esetében hasonló fogalmakat tudunk definiálni, ezért a Lagrange-módszert közvetlenül ki lehetett terjeszteni az elektromos, és ezen túl az elektromechanikai rendszerekre is.
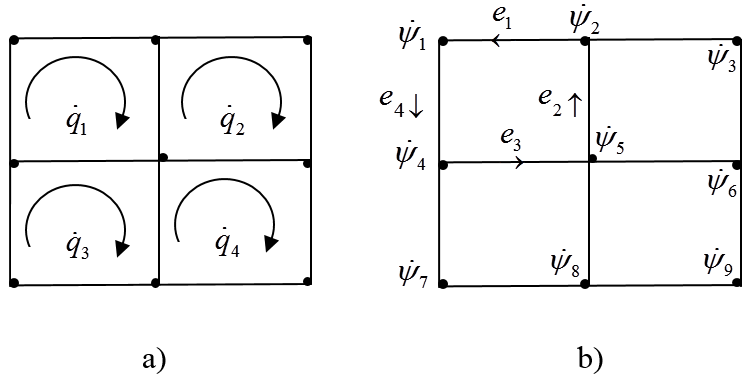
Villamos hálózatok esetén két eljárás is lehetővé teszi a megfelelő általánosított koordinátákkal történő jellemzést: a hurokáramokkal és huroktöltésekkel, illetve a csomóponti potenciálokkal és csomóponti fluxusokkal, ahogy ezt a 7-6. ábra illusztrálja. A 7-6. ábra a) részén látható hurokáramok nyilván teljesítik a csomóponti áramösszegekre vonatkozó Kirchhoff-törvényt, míg a csomóponti potenciálok összege – figyelembe véve az , , , , azaz egyenleteket – kiadja Kirchhoff huroktörvényét. Jegyezzük meg tehát előzetesen, hogy az általánosított koordináták ily módon történő definíciójával a Lagrange-módszer a jól ismert Kirchoff-egyenleteket állítja elő.
A villamos-mechanikai analógiák alapján intuitíve belátható, hogy, mivel – a 7-2. táblázat és a 7-3. táblázat alapján – a kinetikus energia a mechanikai rendszer változóival jellemzett dinamikájában jelenik meg, így ennek villamos megfelelőjét a hurokáramokkal adott koenergiával lehet kifejezni. Hasonló analógia alapján a statikus jellegű potenciális energiának a töltésekkel kifejezett villamos energia a megfelelője, így az elektromos Lagrange-függvényt az
|
|
(7.23) |
kifejezés alkotja.
Hasonló módon az elektromos Lagrange-függvényt a csomóponti feszültségekkel is ki tudjuk fejezni a
|
|
(7.24) |
módon. A (7.23) függvény alkalmazása esetén a Lagrange-egyenlet a villamos hálózat hurokáramokkal történő leírását adja, míg a (7.24) függvény alkalmazása a csomóponti feszültségekkel írja le a hálózatot. Az első esetben az általános erőket ideális feszültségforrások, a második esetben pedig ideális áramforrásokkal adjuk meg.
Összekötve most a mechanikai és elektromos komponenseket az elektromechanikai kinetikus – dinamikus – energiát a
|
|
(7.25) |
függvény adja meg, míg a potenciális – statikus – energiának a kifejezése
|
|
(7.26) |
alakú. Mindezek alapján a elektromechanikai Lagrange-függvényt az
|
|
(7.27) |
formában írhatjuk fel, ahol a mennyiségekkel kifejezett tagok esetén a villamos alrendszert hurokáramokkal írjuk le, míg a mennyiségek alkalmazása a csomóponti feszültségekkel modellezett villamos alrendszer-modellt jelent.
Végül az elektromechanikai Rayleigh-függvényt
|
|
(7.28) |
formában adjuk meg, így a teljes elektromechanikai Lagrange-egyenletrendszert
Mindezen függvényeket felhasználva az elektromechanikai Lagrange-függvénnyel a mechanikai egyenleteket a
|
|
(7.29) |
míg a villamos Lagrange-egyenletet a
|
|
(7.30) |
vagy
|
|
(7.31) |
formában kapjuk meg.
A Lagrange-módszer alkalmazása különösen a nemlineáris rendszerelemeket is tartalmazó rendszerekben lehet eredményes, amire egy példát mutatunk be egy elektromechanikai (lineáris) erőgép tervezése kapcsán.