20. fejezet - RS485 modulok
- 20.1. Elérhető modul típusok
- 20.2. Automatikus csomópont felismerés
- 20.3. Hibakezelés
- 20.4. Rendszer leírás
- 20.5. Modulok
- 20.6. Digitális szervóhajtások házi feladat (minta)
Ezekat a modulakt azért fejlesztették ki, hogy kibővítsék a ki- és bemeneti lehetőségeket és növeljék a funkciók számát az RS485 vonal PCI mozgásvezérlő kártyához való csatlakoztatásával.
20.1. Elérhető modul típusok
8-csatornás relés kimenti (output) modul
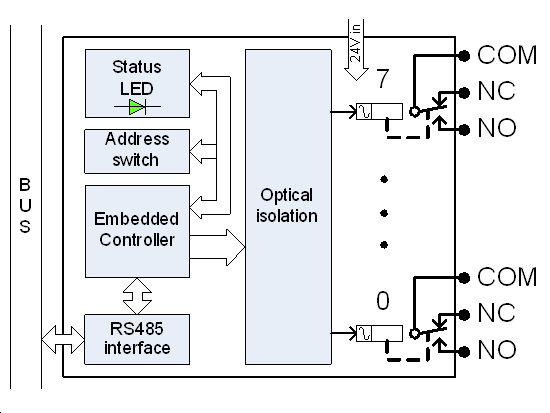
A relés kimenetű modul 8 db NO-NC relés kimenetet ad egy 3 polusú csatlakozó terminálon minden egyes csatornához.

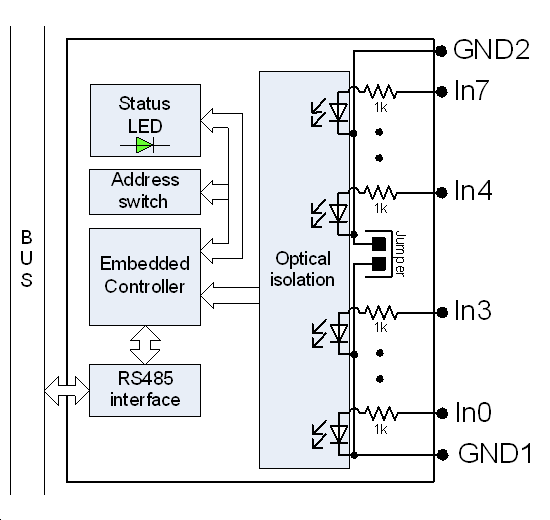
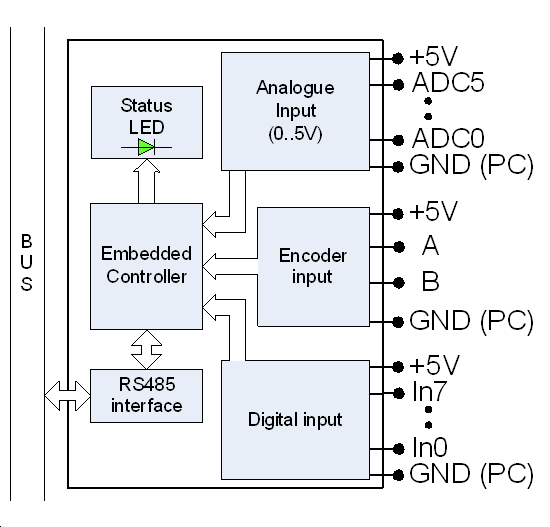
8-csatornás digitális bementi (input) modul
A digitális input modul nyolc optikailag leválasztott digitális bemeneti pin-t ad.

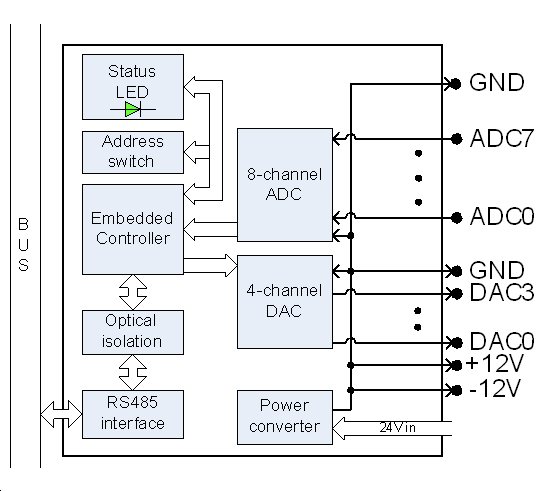
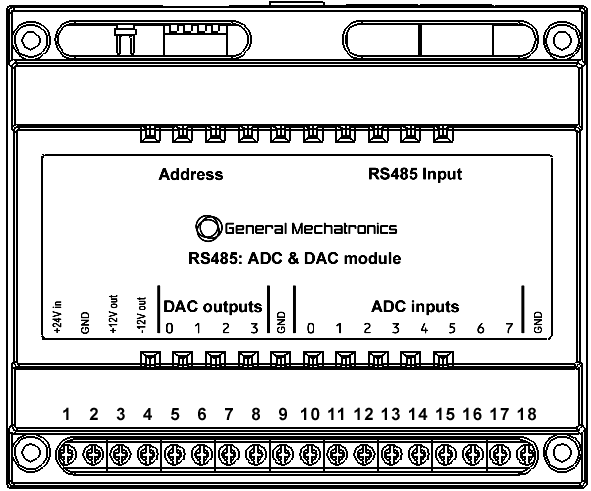
8-csatornás ADC és 4-csatornás DAC modul
Az ADC és DAC modul négy digitálisból analóggá átalakító (D/A) kimenetet és nyolc analógból digitálissá átalakító (A/D) bemenetet ad. Ez a modul is optikailag el van választva a PCI kártyától.

Teach Pendant modul
A teach pendant modul 8 digitális bemeneti csatornát biztosít nyomógombok számára, 6 ADC bemenő csatornát joystick vagy potenciométerek számára és 1 encoder bemenetet kézi beállító kerék számára.
20.2. Automatikus csomópont felismerés
Minden egyes a buszhoz csatlakozott csomópontot (node) a PCI kártya autómatikusan felismer. A LinuxCNC indításakor a driver automatikusan exportál minden pint és paramétert az összes elérhető modulról.
20.3. Hibakezelés
Ha egy modul nem válaszol rendszeresen, akkor a PCI kártya lekapcsolja azt a modult.
Ha egy kimenettel rendelkező modul nem kap rendszeresen adatot megfelelő CRC-vel, akkor a modul átkapcsol hiba állapotba (a zöld LED villogni kezd), és minden kimenet hiba állapotra állít.
20.4. Rendszer leírás
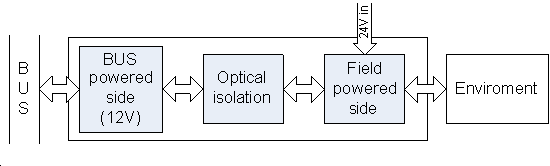
20.4.1. A csomópontok (node) áramellátása
Minden egyes modul elektronikusan leválasztott, ezért megkülönböztetünk busz felőli (bus powered side) és környezet felőli (field powered side) táplálású villamos oldalt.

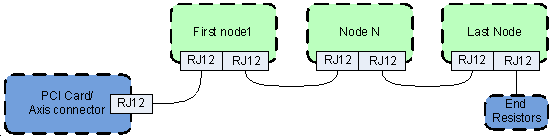
20.4.2. Node-ok csatlakoztatása
A moduloknak soros topológia szerint kell kapcsolódniuk a busra, a végén lezáró ellenállásokkal. A PCI kártya az első a topológiában és a végén az utolsó modul van.
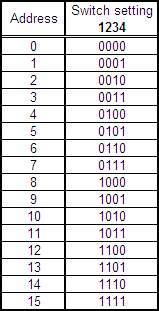
20.4.3. Címzés
Minden csomópontnak 4 bites egyedi kódolású címe van, ami a piros DIP kapcsolóval állítható.
20.4.4. Állapotjelző LED
A zöld LED a modul állapotait jelzi:
Villog, amikor a modul már be van kapcsolva, de még nincs azonosítva, vagy amikor a modul lekapcsol (hiba miatt).
Nem világít (OFF) az azonosítás alatt (computer be van kapcsolva, de a LinuxCNC még nem indult el)
Világít (ON), amikor folyamatosan kommunikál.
20.5. Modulok
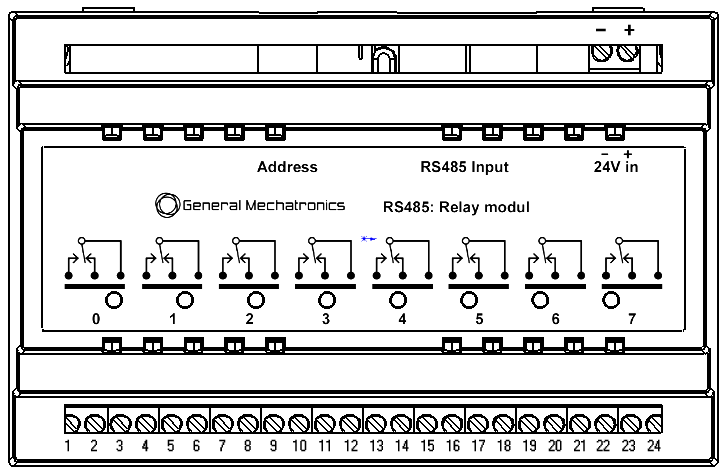
20.5.1. Relés kimeneti/output modul
20.5.1.1. Block diagram
20.5.1.2. Elektromos karakterisztikák
Power:
Bus feszültség:

Maximális bus energia felhasználás:

Környezeti feszültség:

Maximális környezeti energia felhasználás (minden relé bekapcsolva):

Szigetelés:
Optikai leválasztás áthúzási feszültsége:

Relé karakterisztikák:
Maximális kapcsoló áram:

Maximális kapcsoló AC feszültség:

Maximális kapcsoló DC feszültség:

Dielektromos áthúzási feszültség:

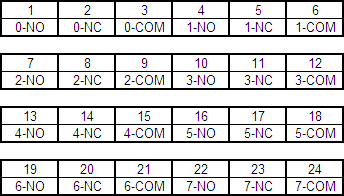
20.5.1.3. Csatlakozás

20.5.1.4. Hiba állapot
Ha hiba történik a buson, a modul hiba állapotra vált (a zöld LED villog). Minden kimeneti relét lekapcsol.
20.5.1.5. HAL konfiguráció/beállítás
Minden pin és paraméter az alábbi függvénnyel frissíthető:
gm.<nr. of card>.rs485
A CPU túlterhelését megelőzendően javasolt a szervó körhöz vagy nagyobb periódusidejű ciklushoz hozzáadni.
Minden RS485 modul pin és paraméter neve a következő képpen kezdődik:
gm.<nr. of card>.rs485.<modul ID> ,ahol <modul ID> 00-tól 15-ig lehetséges.
Pin:
.relay-<0-7>(bit, Out)--A relé kimeneti pin
Paraméter:
.invert-relay-<0-7>(bit, R/W)--A negatív logikájú kimeneti relé pin
Például:
gm.0.rs485.0.relay-0– A csomópont első reléjére.
gm.0– Az első PCI mozgató kártyát jelenti (PCI kártya név=0)
.rs485.0– Csomópont kiválasztása a 0 címmel az R
.relay-0– Az első relé kiválasztása
20.5.2. Digitális bemeneti (input) modul
20.5.2.1. Block diagram
20.5.2.2. Elektromos karakterisztikák
Power :
Bus feszültség:

Bus energia felhasználás:

Szigetelés:
Optikai leválasztás áthúzási feszültsége:

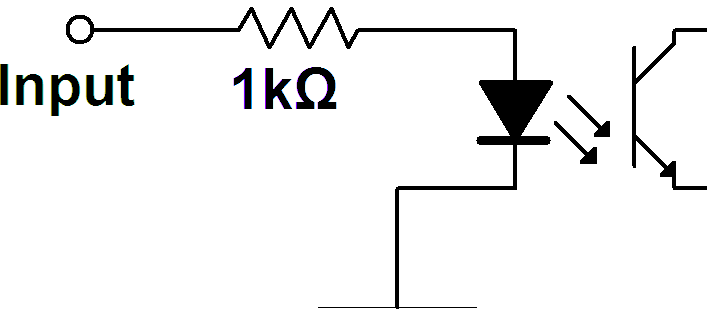
Bemeneti karakterisztikák:
Legnagyobb megengedhető értékek:
Maximális bemenő feszültség: 

Minimális bemenő feszültség: 

Maximális bemenő áram

Logikai szintek
Minimális magas bemeneti jelszint feszültsége: 

Maximális alacsony bemeneti jelszint feszültsége:

További információkért olvasd el a Toshiba TLP281 optocsatolókról szóló adatlapját.
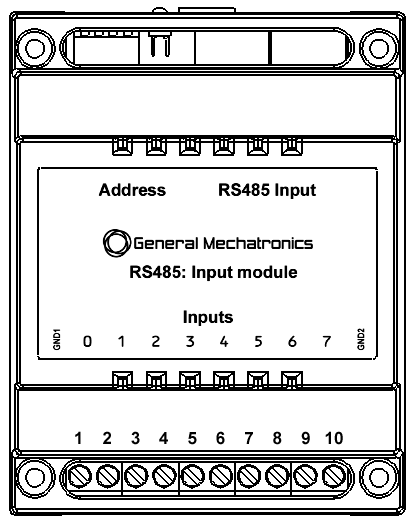
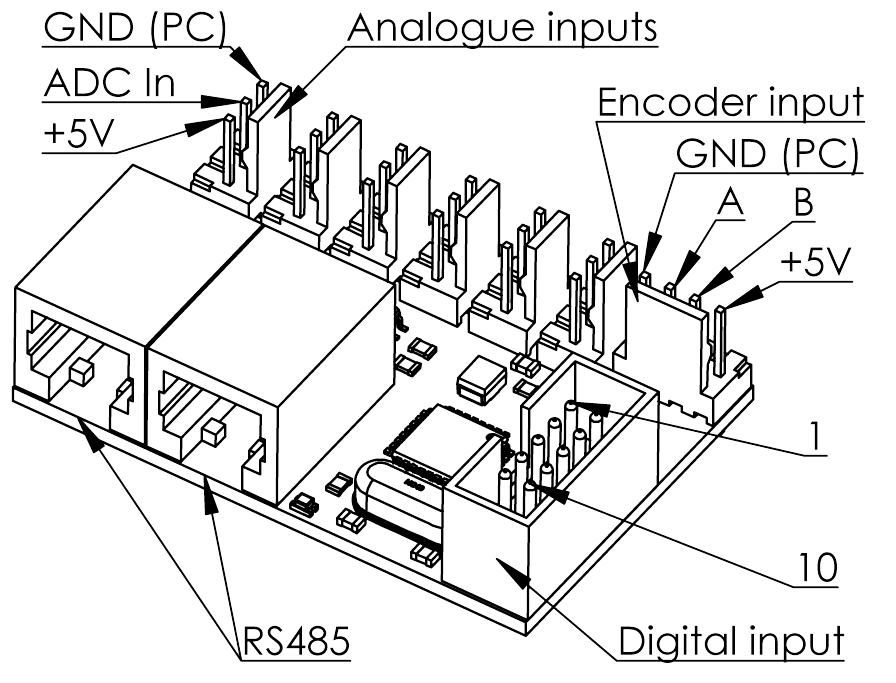
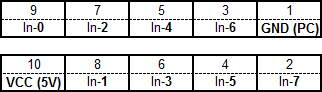
20.5.2.3. Csatlakozás

20.5.2.4. LinuxCNC HAL beállítás
Minden pin-t és paramétert az alábbi módon frissíthetünk:
gm.<nr. of card>.rs485
A CPU túlterhelését megelőzendően javasolt a szervó körhöz vagy nagyobb periódusidejű ciklushoz hozzáadni.
Minden RS485 modul pin és paraméter neve a következő képpen kezdődik:
gm.<nr. of card>.rs485.<modul ID> ,ahol <modul ID> 00-tól 15-ig lehetséges.
Pin:
.in-<0-7>(bit, Out)--Bemenet
.in-not-<0-7>(bit, Out)--Negált bemenet
Például:
gm.0.rs485.0.relay-0– A csomópont első bemenete
gm.0– Az első PCI mozgató kártyát jelenti (PCI kártya név=0)
.rs485.0– Az RS485 buszon kiválasztott csomópont 0 címmel.
.in-0– Az első digitális input kiválasztása
20.5.3. ADC &DAC modul
20.5.3.1. Block diagram
20.5.3.2. Elektromos karakterisztikák
Power :
Bus feszültség:

Bus energia felhasználás:

Környezeti feszültség:

Maximális környezeti energia felhasználás:

Szigetelés:
Optikai leválasztás áthúzási feszültsége:

AD converter :
Bemenő feszültség tartománya:

Bemenő ellenállás:

Bemenő kapacitás:

DA converter :
Kimenő feszültség tartománya:

Maximális kimenő áram:

20.5.3.3. Csatlakozás

20.5.3.4. LinuxCNC HAL konfiguráció
Minden pint és parmétert az itt látható módon frissíthetünk:
gm.<nr. of card>.rs485
A CPU túlterhelését megelőzendően javasolt a szervó körhöz vagy nagyobb periódusidejű ciklushoz hozzáadni.
Minden RS485 modul pin és paraméter neve a következő képpen kezdődik:
gm.<nr. of card>.rs485.<modul ID> ,ahol <modul ID> 00-tól 15-ig lehetséges.
Pin:
|
.adc-<0-7>(float, Out) |
-- ADC bemenet értéke Voltban. |
|
.dac-enable-<0-3>(bit. IN) |
-- Engedélyezett DAC kimenet. Amikor a DAC enable értéke hamis, akkor a kimenet 0.0 V. |
|
.dac-<0-3>(float, In |
--DAC kimenet értéke Voltban |
Paraméter:
|
.adc-scale-<0-7> |
(float, R/W) |
--A bemeneti feszültséget beszorozzuk a skála léptékével, mielőtt megjelenne az ADC kimeneti pin-jén |
|
|
.adc-offset-<0-7> |
(float, R/W) |
--Az offset-et kivonjuk a hardver bemeneti feszültségéből, miután a skála szorzást elvégeztük |
|
|
.dac-offset-<0-3> |
(float, R/W) |
--Hardverfrissítés (update-elés) előtt hozzáadjuk az offset-et |
|
|
.dac-high-limit-<0-3> |
(float, R/W) |
--Maximális hardware kimeneti feszültség Voltban. |
|
|
.dac-low-limit-<0-3> |
(float, R/W) |
--Minimális hardware kimeneti feszültség Voltban. |
Például:
gm.0.rs485.0.adc-0 – A csomópont első analóg csatornája.
gm.0– Az első PCI mozgató kártyát jelenti (PCI kártya név=0)
.rs485.0– A 0 címzésű csomópont kiválasztása az RS485 buszon.
.adc-0– Az első analóg bemenet kiválasztása a modulon.
20.5.4. Teach pendant modul
20.5.4.1. Elektromos karakterisztikák
Power:
Bus feszültség:

Bus energia felhasználás:

Maximális terhelés 5 V-os kimenetnél:

AD converter:
Bemeneti feszültség skála:

Bemeneti szivárgási áram:

Analóg bemenet ellenállása:

Bemenő pin karakterisztikák (Digitális és encoder bemenetek):
Ezek általános célra felhasználható, előre meg nem határozott I/O portok. Minden feszültségi szint a PC földhöz van viszonyítva.
Abszolut Minimális bemeneti feszültség:

Abszolut Maximális bemeneti feszültség:

Maximális alacsony szintű bemeti feszültség:

Minimális magas szintű bementi feszültség:

Bemenő szivárgási áram:

20.5.4.2. Csatlakozók
20.5.4.3. LinuxCNC HAL konfiguráció
Minden pin-t és paramétert az itt látható módon frissíthetünk:
gm.<nr. of card>.rs485
A CPU túlterhelését megelőzendően javasolt a szervó körhöz vagy nagyobb periódusidejű ciklushoz hozzáadni.
Minden RS485 modul pin és paraméter neve a következő képpen kezdődik:
gm.<nr. of card>.rs485.<modul ID> ,ahol <modul ID> 00-tól 15-ig lehetséges.
Pinek:
|
.adc-<0-7> |
-- ADC bemenet értéke Voltban. |
|
.dac-enable-<0-3> |
--DAC kimenet elérhető. Amikor a DAC enable értéke hamis, akkor a kimenet 0.0 V. |
|
.dac-<0-3> |
--DAC kimenet értéke Voltban |
Paraméter:
|
.adc-scale-<0-7> |
(float, R/W) |
--A bemeneti feszültséget beszorozzuk a skála léptékével, mielőtt megjelenne az ADC kimeneti pin-én |
|
|
.adc-offset-<0-7> |
(float, R/W) |
--Az offset-et kivonjuk a hardver bemeneti feszültségéből, miután a skála szorzást elvégeztük. |
|
|
.dac-offset-<0-3> |
(float, R/W) |
--Hardver frissítés/update-elés előtt hozzáadjuk az offset-et |
|
|
.dac-high-limit-<0-3> |
(float, R/W) |
--Maximális hardware kimeneti feszültség Voltban. |
|
|
.dac-low-limit-<0-3> |
(float, R/W) |
--Minimális hardware kimeneti feszültség Voltban. |
|
Például:
gm.0.rs485.0.adc-0 – A csomópont első anaóg csatornájának kiválasztása.
gm.0– Az első PCI mozgató kártyát jelenti (PCI kártya név=0)
.rs485.0– A 0 címzésű csomópont kiválasztása az RS485 buszon.
.adc-0– Az első analóg bemenet kiválasztása a modulon.
20.5.5. Mechanikai méretek
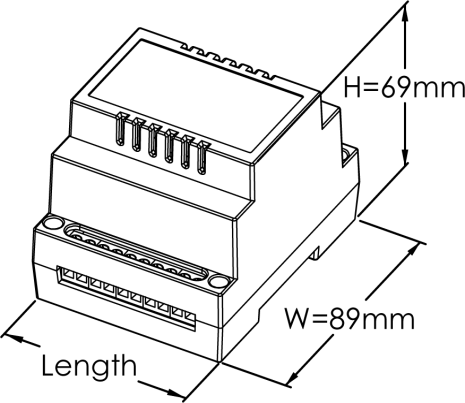
Minden modul hossza:
Relés kimenetű modul:

Bemeneti modul:

ADC & DAC modul:

Digitális szervohajtások (BMEGEMIMM25)
Házi feladat kiírás
A feladat során válasszanak egy ipari szerszámgépet (pl.: CNC gép, CNC eszterga, ipari robot). Készítsenek rövid irodalomkutatást a választott géppel kapcsolatban (használati útmutató, gépkönyv, stb.). Készítsék el a választott gép vezérlésének blokkvázlatát (vészleállító kör, teljesítmény táp, szenzorok, aktuátorok, központi vezérlés stb.) és a blokkvázlat rövid működési leírását. A feladat beadható, amennyiben nem tartalmaz a működést befolyásoló elvi hibát.Egy feladatot 2 vagy 3 hallgató dolgozhat ki. A létszám a feladat nehézségének függvénye. 3 fő esetén a végberendezésen kívül minimum egy kiegészítést tartalmazzon a gép (pl.: szerszámtár, hűtőkör, automata ajtó, stb.).
(Ettől eltérő egyéni feladat esetén egyeztessen az oktatóval.)
Aláírás: 7. oktatási hét konzultáció, Beadási határidő: 14. oktatási hét konzultáció
A feladatot átvette:
|
Olvasható név |
Neptun kód |
Aláírás |
|
|
1. |
|||
|
2. |
|||
|
3. |
Választott feladat:
|
Gép típusa (pl.: SCARA robotkar) |
Gyártó (pl.: SEIKO) |
Típusszám (pl.: D-TRAN TT 4000 SC) |
Szabadságfokok száma (pl.: 4) |
Végberendezés (pl.: megfogó) |
Feladatleírás (csak egyéni feladat esetén):
…………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………
A feladatot (oktató tölti ki)
Kiadta: Név: ………………………………..... Dátum: .……………………...
Aláírta: Név: ………………………………..... Dátum: ………………………
Elfogadta: Név: ……………………………… Dátum: ………………………
Osztályzat: …………..
20.6. Digitális szervóhajtások házi feladat (minta)
20.6.1. Feladat kidolgozói
Baranyai Zsolt GLQGOA
Simó Andor Szabolcs E38HQK
20.6.2. Feladatkiírás
Egy szabadon választott ipari robot, cnc berendezés vezérlésének megismerése. A vezérlés átgondolása és áttervezése, majd megjelenítése blokkdiagramon. Konkrét elemek kiválasztása és a megvalósítás huzaláozásszintű dokumentálása.
20.6.3. Választott berendezés
Az általunk választott berendezés tulajdonképpen a „robotika állatorvosi lova”. A robot 6 szabadságfokú, 6 darab rotációs csuklóval rendelkezik, ahol az utolsó 3 speciálisan kézcsukló. A csuklókat egyenáramú motorok aktuálják. A pozíciót inkrementális enkóderek mérik csuklónként, melyek indexjellel is rendelkeznek. Az abszolút érték inicializálását abszolút pozíciót mérő potencióméterekkel végzi.

A robot végberendezéseként egy univerzális megfogó manipulátort választottunk, melyet open és close logikai értékekkel lehet aktuálni. A robot brake funckiójáról sem feledkeztünk meg, mely aktív alacsony logikájával bármilyen zavar esetén fékezi a robotot. Ezt az E-Stop kör kialakításánál is figyelembe vettük.
20.6.4. A kidolgozás összefoglalva
A berendezés eredeti összeállításából megtartottuk az aktuátorokat, a szenzorokat, a teljesítményerősítőket tengelyenként. Továbbá az analóg szervot, ami miatt a PC által adott referenciajelünk nyomaték kell, hogy legyen.
A kommunikációt a robot által használt TTL határozza meg a robot oldalon. A vezérlés oldalon a modulok adta komminukációs lehetőségekkel éltünk.
Elképzelésünk szerint a robot közvetlen közelébe egy vezérlőszekrénybe helyeznénk el az összes elemet, beleértve a PC-t is. Emiatt egyetlen közös földelést (GND) alkalmazunk.
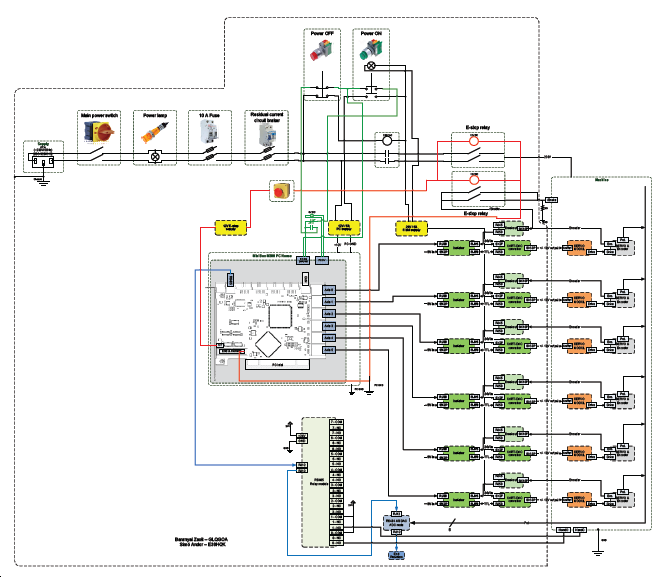
Az általunk felépített vezérlés elemeit és a felépített blokkdiagramot lásd a mellékletben. A break és túlmelegedés fault eseményeket, illetve azok bekötését külön kirészleteztük egy sematikus kapcsolási rajzon.
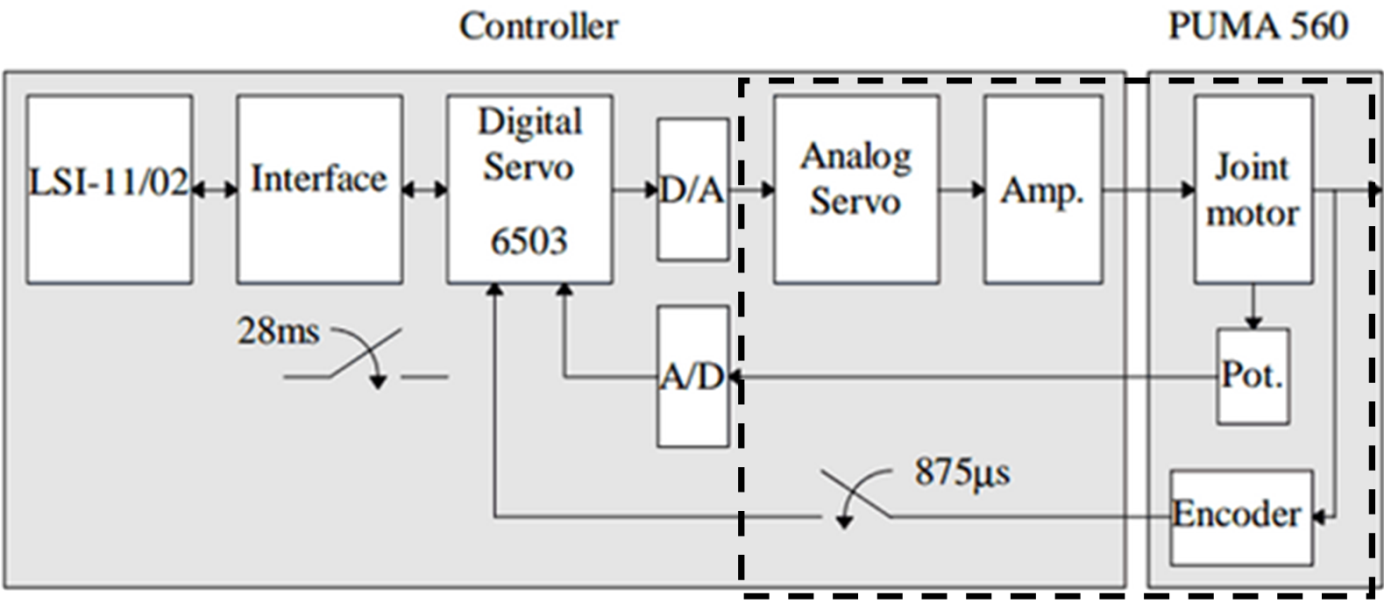
A PUMA 560 alap eredeti szabályozási köre a 20-23. ábrán látható, melyből a bekeretezett részt tartottuk meg.
|
|
|
20-23. ábra A PUMA 560 eredeti vezérlése a megtartott rész bekeretezésével |
|
http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.56.815Letöltve: 2013. november 2. Nuno Moreira et al [1996]: First Steps Towards an Open Control Architecture for a PUMA 560 |
20.6.5. Csatolt dokumentumok
-
Blokkdiagram a vezérlésről
-
Breakout és DAC modulok bekötése kirészletezve
-
Táblázat a robot és vezérlés oldali összekötésekről
Az enkóder breakout és DAC modul bekötései egy tengelyre részletezve. A pontos bekötés a mellékelt táblázatban található.
20.6.6. Blokkdiagram a vezérlésről
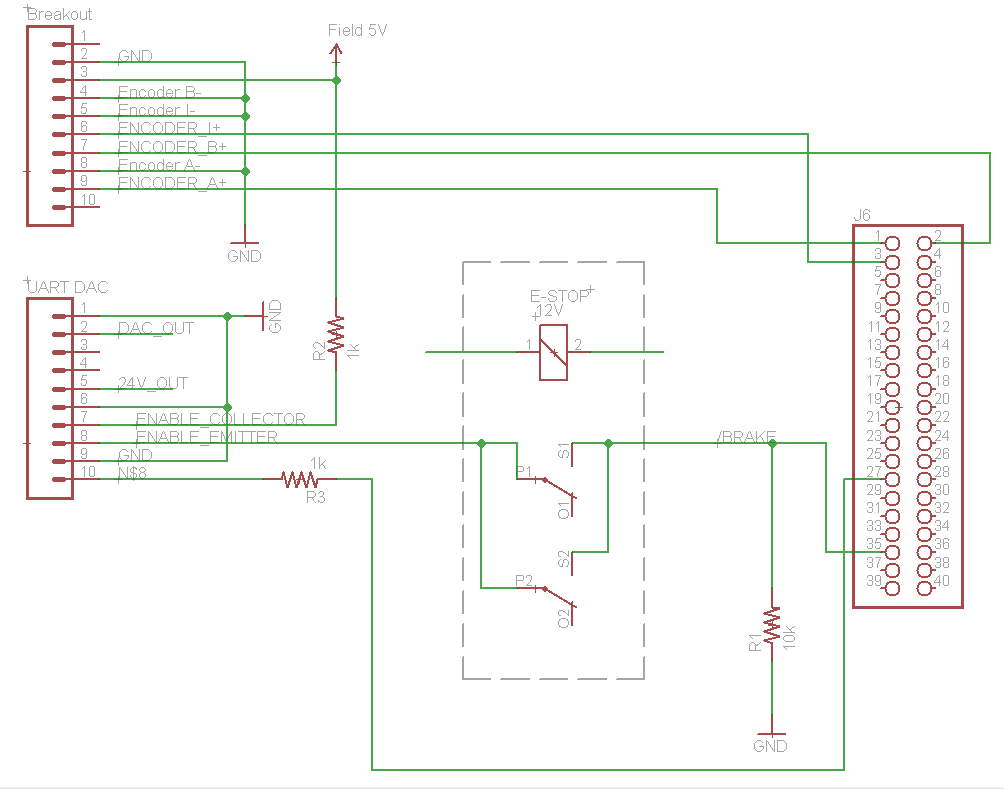
Breakout és DAC modulok bekötése kirészletezve
|
Robot csatlakozók |
||||||
|
J5 |
|
Bekötés helye |
|
|||
|
Pin |
Név |
Modul |
Pin |
Név |
Megjegyzés |
|
|
1 |
POT_J1 |
|
RS485 ADC/DAC |
10 |
ADC-0 |
|
|
2 |
POT_J2 |
|
RS485 ADC/DAC |
11 |
ADC-1 |
|
|
3 |
POT_J3 |
|
RS485 ADC/DAC |
12 |
ADC-2 |
|
|
4 |
POT_J4 |
|
RS485 ADC/DAC |
13 |
ADC-3 |
|
|
5 |
POT_J5 |
|
RS485 ADC/DAC |
14 |
ADC-4 |
|
|
6 |
POT_J6 |
|
RS485 ADC/DAC |
15 |
ADC-5 |
|
|
7 |
POT_J7 |
|
|
NC |
|
|
|
8 |
POT_J8 |
|
|
NC |
|
|
|
9 |
ADGND |
|
|
GND |
GND |
|
|
10 |
AD+5V |
|
|
Field 5V |
Field 5V |
|
|
11 |
NC |
|
|
NC |
|
|
|
12 |
NC |
|
|
NC |
|
|
|
13 |
+12V |
|
RS485 ADC/DAC |
4 |
+12V |
|
|
14 |
+12V |
|
RS485 ADC/DAC |
4 |
+12V |
|
|
15 |
DAGND |
|
|
GND |
|
|
|
16 |
DAGND |
|
|
GND |
|
|
|
17 |
-12V |
|
RS485 ADC/DAC |
3 |
-12V |
|
|
18 |
-12V |
|
RS485 ADC/DAC |
3 |
-12V |
|
|
19 |
DAC+J1 |
|
UART/DAC 0 |
2 |
Analog out |
|
|
20 |
DAC-J1 |
|
|
GND |
GND |
|
|
21 |
DAC+J2 |
|
UART/DAC 1 |
2 |
Analog out |
|
|
22 |
DAC-J2 |
|
|
GND |
GND |
|
|
23 |
DAC+J3 |
|
UART/DAC 2 |
2 |
Analog out |
|
|
24 |
DAC-J3 |
|
|
GND |
GND |
|
|
25 |
DAC+J4 |
|
UART/DAC 3 |
2 |
Analog out |
|
|
26 |
DAC-J4 |
|
|
GND |
GND |
|
|
27 |
DAC+J5 |
|
UART/DAC 4 |
2 |
Analog out |
|
|
28 |
DAC-J5 |
|
|
GND |
GND |
|
|
29 |
DAC+J6 |
|
UART/DAC 5 |
2 |
Analog out |
|
|
30 |
DAC-J6 |
|
|
GND |
GND |
|
|
31 |
DAC+J7 |
|
|
GND |
GND |
|
|
32 |
DAC-J7 |
|
|
GND |
GND |
|
|
33 |
DAC+J8 |
|
|
GND |
GND |
|
|
34 |
DAC-J8 |
|
|
GND |
GND |
|
|
|
|
|
|
|
|
|
|
J6 |
|
|
|
|
|
|
|
1 |
ENCA1 |
|
Breakout 0 |
9 |
Encoder A+ |
|
|
2 |
ENCB1 |
|
Breakout 0 |
7 |
Encoder B+ |
|
|
3 |
ENCI1 |
|
Breakout 0 |
6 |
Encoder I+ |
|
|
4 |
ENCA2 |
|
Breakout 1 |
9 |
Encoder A+ |
|
|
5 |
ENCB2 |
|
Breakout 1 |
7 |
Encoder B+ |
|
|
6 |
ENCI2 |
|
Breakout 1 |
6 |
Encoder I+ |
|
|
7 |
ENCA3 |
|
Breakout 2 |
9 |
Encoder A+ |
|
|
8 |
ENCB3 |
|
Breakout 2 |
7 |
Encoder B+ |
|
|
9 |
ENCI3 |
|
Breakout 2 |
6 |
Encoder I+ |
|
|
10 |
ENCA4 |
|
Breakout 3 |
9 |
Encoder A+ |
|
|
11 |
ENCB4 |
|
Breakout 3 |
7 |
Encoder B+ |
|
|
12 |
ENCI4 |
|
Breakout 3 |
6 |
Encoder I+ |
|
|
13 |
ENCA5 |
|
Breakout 4 |
9 |
Encoder A+ |
|
|
14 |
ENCB5 |
|
Breakout 4 |
7 |
Encoder B+ |
|
|
15 |
ENCI5 |
|
Breakout 4 |
6 |
Encoder I+ |
|
|
16 |
ENCA6 |
|
Breakout 5 |
9 |
Encoder A+ |
|
|
17 |
ENCB6 |
|
Breakout 5 |
7 |
Encoder B+ |
|
|
18 |
ENCI6 |
|
Breakout 5 |
6 |
Encoder I+ |
|
|
19 |
GND |
|
|
GND |
GND |
|
|
20 |
GND |
|
|
GND |
GND |
|
|
21 |
Vcc |
|
|
Field 5V |
Field 5V |
|
|
22 |
Vcc |
|
|
Field 5V |
Field 5V |
|
|
23 |
NC |
|
|
NC |
NC |
|
|
24 |
NC |
|
|
NC |
NC |
|
|
25 |
NC |
|
|
NC |
NC |
|
|
26 |
/STOP |
|
|
NC |
NC |
Van helyette saját E-Stop gombunk |
|
27 |
THERM1 |
|
UART/DAC 0 |
10 |
Fault Anode |
1kOhm ellenállson keresztül |
|
28 |
THERM2 |
|
UART/DAC 1 |
10 |
Fault Anode |
1kOhm ellenállson keresztül |
|
29 |
THERM3 |
|
UART/DAC 2 |
10 |
Fault Anode |
1kOhm ellenállson keresztül |
|
30 |
THERM4 |
|
UART/DAC 3 |
10 |
Fault Anode |
1kOhm ellenállson keresztül |
|
31 |
THERM5 |
|
UART/DAC 4 |
10 |
Fault Anode |
1kOhm ellenállson keresztül |
|
32 |
THERM6 |
|
UART/DAC 5 |
10 |
Fault Anode |
1kOhm ellenállson keresztül |
|
33 |
NC |
|
|
NC |
NC |
|
|
34 |
NC |
|
|
NC |
NC |
|
|
35 |
/BRAKE |
|
E-Stop Relé |
2 |
E-Stop Relé |
NO |
|
36 |
HANDO |
|
RS-485 Relay |
1 |
0-NO |
|
|
37 |
HANDC |
|
RS-485 Relay |
4 |
1-NO |
|
|
38 |
UTIL4 |
|
|
NC |
NC |
|
|
39 |
UTIL5 |
|
|
NC |
NC |
|
|
40 |
UTIL6 |
|
|
NC |
NC |
|
20.6.7. Táblázat: A robot és vezérlés oldali összekötésekről
|
Pin |
Signal |
Backplane |
Pin |
Signal |
Backplane |
|
|
# |
Name |
Location |
# |
Name |
Location |
|
|
1 |
POT_J1 |
J56A-F1 |
18 |
-12V |
TB5-4 |
|
|
2 |
POT_J2 |
J56A-N1 |
19 |
DAC+J1 |
J103-11 |
|
|
3 |
POT_J3 |
J56A-V1 |
20 |
DAC-J1 |
J103-12 |
|
|
4 |
POT_J4 |
J56B-F1 |
21 |
DAC+J2 |
J103-13 |
|
|
5 |
POT_J5 |
J56B-N1 |
22 |
DAC-J2 |
J103-14 |
|
|
6 |
POT_J6 |
J56B-V1 |
23 |
DAC+J3 |
J103-15 |
|
|
7 |
POT_J7 |
J56B-H2 |
24 |
DAC-J3 |
J103-16 |
|
|
8 |
POT_J8 |
J56A-R2 |
25 |
DAC+J4 |
J103-17 |
|
|
9 |
ADGND |
J56A-E2 |
26 |
DAC-J4 |
J103-18 |
|
|
10 |
AD+5V |
J56A-F2 |
27 |
DAC+J5 |
J103-19 |
|
|
11 |
NC |
28 |
DAC-J5 |
J103-20 |
||
|
12 |
NC |
29 |
DAC+J6 |
J103-21 |
||
|
13 |
+12V |
TB5-3 |
30 |
DAC-J6 |
J103-22 |
|
|
14 |
+12V |
TB5-3 |
31 |
DAC+J7 |
J103-23 |
|
|
15 |
DAGND |
TB5-2 |
32 |
DAC-J7 |
J103-24 |
|
|
16 |
DAGND |
TB5-2 |
33 |
DAC+J8 |
J103-25 |
|
|
17 |
-12V |
TB5-4 |
34 |
DAC-J8 |
J103-26 |
|
|
1 |
ENCA1 |
J56A-A1 |
21 |
Vcc |
TB5-1 |
|
|
2 |
ENCB1 |
J56A-C1 |
22 |
Vcc |
TB5-1 |
|
|
3 |
ENCI1 |
J56A-E1 |
23 |
NC |
||
|
4 |
ENCA2 |
J56A-H1 |
24 |
NC |
||
|
5 |
ENCB2 |
J56A-K1 |
25 |
NC |
||
|
6 |
ENCI2 |
J56A-M1 |
26 |
/STOP |
J69-12c |
|
|
7 |
ENCA3 |
J56A-P1 |
27 |
THERM1 |
J56A-B1 |
|
|
8 |
ENCB3 |
J56A-S1 |
28 |
THERM2 |
J56A-J1 |
|
|
9 |
ENCI3 |
J56A-U1 |
29 |
THERM3 |
J56A-R1 |
|
|
10 |
ENCA4 |
J56B-A1 |
30 |
THERM4 |
J56B-B1 |
|
|
11 |
ENCB4 |
J56B-C1 |
31 |
THERM5 |
J56B-J1 |
|
|
12 |
ENCI4 |
J56B-E1 |
32 |
THERM6 |
J56B-R1 |
|
|
13 |
ENCA5 |
J56B-H1 |
33 |
NC |
||
|
14 |
ENCB5 |
J56B-K1 |
34 |
NC |
||
|
15 |
ENCI5 |
J56B-M1 |
35 |
UTIL1 |
J103-5 |
/BRAKE |
|
16 |
ENCA6 |
J56B-P1 |
36 |
UTIL2 |
J44A-M2 |
HANDO |
|
17 |
ENCB6 |
J56B-S1 |
37 |
UTIL3 |
J44A-L2 |
HANDC |
|
18 |
ENCI6 |
J56B-U1 |
38 |
UTIL4 |
SPARE1 |
|
|
19 |
GND |
TB5-2 |
39 |
UTIL5 |
SPARE2 |
|
|
20 |
GND |
TB5-2 |
40 |
UTIL6 |
SPARE3 |
|