2. fejezet - Robot keretrendszerek
Elsődleges célja ezen fejezetnek, hogy bemutassa a manapság elérhető robot keretrendszereket, összehasonlítsa azokat. Elsődleges összehasonlítási alap az egyszerű használat, a biztonságos üzemeltetés és a kiterjesztés lehetősége lesz. A különböző koncepciók ismertetése után a két legnépszerűbbet részletesebben összehasonlítjuk.
2.1. Bevezetés
Az RT-middleware (Robot Technology Middleware) egy olyan technológia, amely implementálja a komplex robot rendszerek készítéséhez szükséges elemeket. Segítségével egyszerűen készíthetünk, majd később üzemeltethetünk térben elosztott rendszereket. Mindezeket újrahasznosítható, szabványosított komponensekkel, kommunikációs csatornákkal, programozói API-kal, automatizmusokkal és eszközökkel teszi lehetővé.
A robotika területén a robot rendszerek feladata gyakran változhat. Ha ez a cél vagy maga a környezet gyakran változik, akkor újrahasznosítható, újra konfigurálható komponensek szükségesek, valamint egy azokat üzemeltető keretrendszer, amely tudja ezen változásokat kezelni. Az ilyen komponensek és a keretrendszer fejlesztése speciális programozói ismereteket, tapasztalatot igényel. Ezen implementáció során használhatunk már meglévő általános célú keretrendszereket (pl. CORBA), továbbá számos programozói nyelvet használhatunk, melyek döntően befolyásolják ezen munka nehézségét, idejét. Egy teljesen új robot keretrendszer implementálása az alapoktól bonyolult feladat, és több verzió szükséges a megfelelő eléréséhez. Egy létező keretrendszer alkalmazása, és annak a testre szabása jelentősen lerövidíti a fejlesztés idejét, bonyolultságát.
A keretrendszerek (framework) és a köztes rétegek (middleware) népszerűsége egyre nő, ez gazdag funkció készletüknek köszönhető, azaz a gazdag funkció készletének, így használatukkal könnyedén és gyorsan tudunk komplex rendszereket létrehozni. Robot meghajtókat használva robot keretrendszerből egy komplex és hatékony robot rendszert tudunk létrehozni viszonylag kevés munkával. Legtöbb esetben a robot rendszerek létrehozása valójában csak egy általános robot keretrendszer paramétereinek beállítása az adott célra.
Amennyiben egy létező kertrendszerhez csupán néhány funkció szükséges egyszerűen kiterjeszthetjük azt. Ezen kiegészítése a létező rendszernek sokkal könnyebb feladat, mint egy új implementálása a kezdetektől, mert az ilyen jellegű rendszerek tervezése, és implementálása speciális ismereteket és tapasztalatot igényel. Legtöbb esetben a hiányzó funkciók könnyen beágyazhatóak, ha a létező keretrendszert erre felkészítették, készítésénél gondoltak erre.
A robotika területén számos olyan elem van, amely hasonló tulajdonságú, azonos csoportba sorolható. Ezért a robot keretrendszer koncepció - mint egy általános keretrendszer, mely testre szabható, vagy kiterjeszthető – helyénvaló, sőt célszerű. Valószínűleg nem létezik és nem is lehet olyan robot keretrendszer készíteni, amely mindet igény maradéktalanul kielégít
2.2. Meglévő robot keretrendszer
Ebben az alfejezetben először felderítjük a robot rendszerekkel szemben támasztott követelményeket, majd megvizsgáljuk a jelenleg elérhetőeket (YARP, OpenRDK, OpenRTM-aist és ROS), hogy mennyire elégítik ki a támasztott követelményeinket. Végül ezen fejezet végén egy táblázatban foglaljuk össze a ROS és Openrtm-aist tulajdonságait.
Robot middleware egy olyan szoftver köztes réteg, egy olyan keretrendszer, amely kiterjesztik az általános célú kommunikáció middleware-eket, mint a CORBA vagy ICE. Számos eszközt, könyvtárat, API-t, és leírást biztosítanak a robot komponensek és robot rendszerek létrehozásához és üzemeltetéséhez. A robot köztes rétegek, mint a ragasztó fogják össze a robot részeket, megteremtik a kapcsolatot közöttük transzparens módon.
Definiáljuk először a követelményeket a robot rendszerekkel szemben, és azok aktorait. Általában a robot rendszerek felhasználói két nagy csoportba oszthatóak: a vég-felhasználók, és a komponensek fejlesztői. Minden robot keretrendszernek ezen két csoport munkáját kell támogatniuk eszközökkel és mechanizmusokkal.
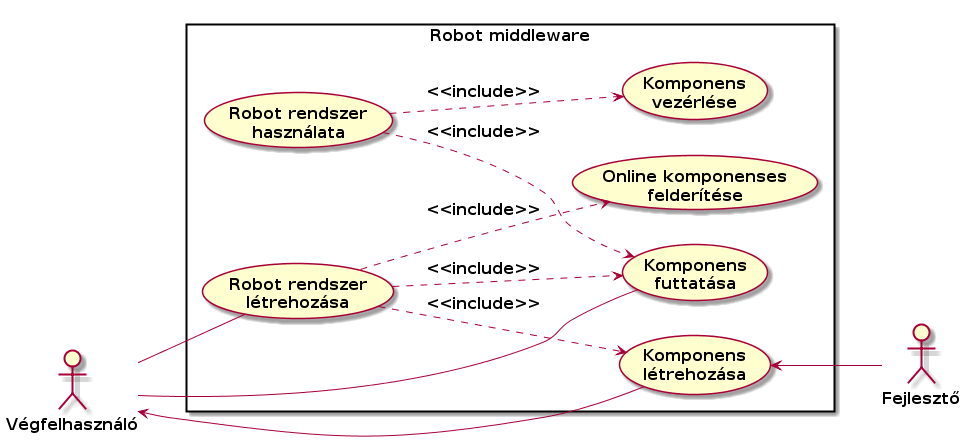
A Robot keretrendszerek főbb használati eseteit a 21. ábra szemlélteti. Ezeket a használati eseteket megvizsgálva azonosíthatunk néhány funkcionális követelményt. A komponens fejlesztő megtervezi a robot komponens szerkezetét, kapcsolódásait más komponensekhez, majd implementálja azokat. A megvalósításhoz különböző operációs rendszer, és programozói nyelv támogatása célravezető. Olyan eszközök szükségesek továbbá, melyekkel a komponensek váza vagy akár félkész komponensek generálhatóak a gyorsabb fejlesztés érdekében. A fejlesztők fő tevékenysége az osztály vázak generálása, üzleti logika implementálása, fordítás, majd végül a tesztesetek futtatása. Természetesen a fejlesztők, mint végfelhasználó tesztelik is az általuk készített komponenseket, de ekkor a másik szerepkörben tevékenykednek. Összefoglalva a fejlesztő szemszögéből a következő lényeges igények azonosíthatóak:
-
Minél több programozó nyelv támogatása. Egy valós fejlesztés alkalmával a kutató vagy fejlesztő csoport tagjai, melyek a robot rendszer részeit külön-külön implementálják, más-más programozói nyelvet ismernek, szeretnek. Átképzésük egy nyelvre idő és költség igényes. Olyan keretrendszer, amely támogatja a különböző nyelven megírt komponensek kommunikációját több fejlesztőt és döntéshozó szimpátiáját elnyerheti.
-
Támogasson több operációs rendszert is. Manapság a Windows és Linux operációs rendszerek támogatása kötelező, nem szabad a kutató/fejlesztőt a megszokott környezetéből kiragadni. Másik, folyton előtérbe kerülő igény a régi rendszerek támogatása. Ha a leendő rendszer más már meglévő rendszerekkel kell, hogy együttműködjön, ami már egy adott operációs rendszeren fut, könnyebb az integráció, ha azonos operációs rendszeren fut az új rendszer is.
-
Szkeleton generáló és egyéb eszközök a komponensekhez. A fejlesztés gyorsításának érdekében a kód generáló varázslók nagyon fontosak. Sablonok és eszközök (grafikus, és parancssori is) megléte jelentősen könnyíti a fejlesztő munkáját. Bár az eszközöket és azok paramétereit meg kell ismerni/tanulni, de ez biztosan kevesebb időt igényel, mint a komponensek elkészítése az alapoktól.
A fejlesztő aktorral ellentétben a végfelhasználónak nincs (és nem is kell, hogy legyen) semmilyen programozói ismerete. Ez a felhasználó csoport csak használni akarja a komponenseket a munkájához. A lehető legkevesebb komponens és rendszer paramétert kell, hogy ismerje. A robot rendszerével szép grafikus felületen és vizuális segédekkel keresztül kapcsolódik. Két fő célja van: saját, komplex robot rendszerek kialakítása az elérhető komponensek felhasználásával (azok mentése) és az előzőleg létrehozott saját robot rendszerének üzemeltetése. A saját robot rendszer létrehozása gyakran magában foglalja az elérhető robot komponensek felkutatását is, amely során információkat szerez arról (hozzáférés, név, leírás, verzió, ...). Ezek a hozzáférési információk erősen függenek a robot keretrendszertől. Általában szimbolikus nevekkel hivatkozhatnak a felhasználók az elemekre, de valójában a hoszt IP címe és TCP/UDP portja azonosítja azokat. Sajnos a legtöbb keretrendszer csak az online komponenseket támogatja, így azoknak futniuk kell, és regisztráltnak kell lennie a saját rendszer szerkesztésének időpontjában.
A végfelhasználó regisztrálja (elérhetővé teszi) a komponensét, így elérhetővé teszi azt saját maga és más végfelhasználók számára. Regisztráció után az már elérhető lesz a saját robot rendszer kialakítása során. A robot rendszer futtatása közben szeretné ezt vezérelni, paramétereit változtatni.
Összegezve a végfelhasználó a következő követelmények támasztja a robot keretrendszerekkel szemben:
-
Bevezetésével a szoftver környezet ne változzon meg nagymértékben. A fejlesztő csoport már használ technológiákat egy operációs rendszeren, kialakította a megfelelő szoftver környezetét a mindennapokra. Új szoftverek telepítése időigényes feladat lehet, és szolgáltatások kiesését eredményezheti.
-
Felhasználó barát grafikus felület szüksége. Amennyire csak lehet automatizálni kell a folyamatokat, a rendszer paramétereihez a hozzáférést grafikus felületen kell lehetővé tenni.
-
Ugyanúgy, ahogy a fejlesztő is a végfelhasználó is igényli a heterogén rendszereket, és azt, hogy a megszokott operációs rendszerét használja ezután is. A Windows és Linux operációs rendszerek használata itt is javasolt.
Összefoglalva egy robot keretrendszernek egy hatékony API-n keresztül kell a szolgáltatásait nyújtania, lehető legtöbb automatizmust kell elvégezni lehetőleg transzparens módon, minél több operációs rendszert, és programozó nyelvet kell támogatnia. Egyszerűnek kell lennie továbbá, hogy elterjedjen, népszerűvé váljon.
2.3. Robot keretrendszerek
Az egyik osztott rendszer a robot rendszerek fejlesztésére az OpenRDK (információ, és a robot rendszer elérhető a [1] helyen található, a koncepciót Calisi et al vezette be [2] ). Ágensekből építhetjük fel a komplex rendszerünket, ami valójában egy egyszerű processz. Ezen ágenseken belül modulok futhatnak, melyek egy fonálban futnak. Minden modul rendelkezik egy tárolóval (repository), melyben a belső tulajdonságait menedzselheti. Ágensek közötti ( inter-agent = inter-process) kommunikációnak két fajtáját támogatja: a tulajdonságok megosztását, és az üzenet küldést.
Rendelkezik egy RConsole nevű grafikus eszközzel, amely a távoli modulok felderítését és vezérlését segíti. Ez az eszköz segítségére lehet mind a fejlesztőnek hibakeresésnél, mind a végfelhasználónak az üzemeltetés során. Valójában ez egy speciális ágens, melynek grafikus felülete van.
Másik robot platform a YARP (Yet Another Robot Platform, hivatalos információ oldala [3]). Itt a kommunikáció Observer tervezési mintán alapszik. Minden kapcsolatnak típusa van, melyek a következők lehetnek: TCP, UDP, MCAST, osztott memória. A portokon forgalmazott adatok SHA256 alapú titkosítással védettek lehetnek. Ebben a rendszerben a portokat kell egy központi név szerverbe regisztrálni egyedi névvel. A YARP név szerver, ami maga is egy speciális YARP port, nyilvántartja az összes többi YARP port kulcs mezőit string formátumban.
A harmadik fontos robot keretrendszer az OpenRTM-aist (információs oldala [4]). Koncepcióját a [5], [6], [7] vezették be Ando et al. Itt is a komponenseket használhatjuk osztott módon, melyeket regisztrálni kell egy közös név szolgáltatóba (CORBA eszköze). A komponensek modulokból állhatnak, melyeket bármikor betölthetünk. A keretrendszer egy tervezési mintákat használó, robosztus rendszer, mely tudása kiemelkedik a többiekhez viszonyítva. A rendszerünk komponensei azonos jogokkal rendelkeznek, nincs központi logika (CORBA név szolgáltatás van csak). A komponensek egymással a portokon keresztül kommunikálhatnak, melynek két fajtája van.
Az adatportok aszinkron kommunikációt biztosítanak, míg a szerviz portok segítségével a másik port szolgáltatásait érhetjük el. a szerviz portok használatát nehezíti, hogy az elavult Corba technológia ismerete szükséges hozzá. A komponensek összekapcsolását a végfelhasználónak kell elvégeznie a grafikus felület segítségével. A fejlesztőknek ez egy kényelmes állapot, mely gépi modellt kínál, csupán felül kell definiálni a megfelelő metódust. Számos operációs rendszert és programozó nyelvet támogat. Véleményem szerint a világon a második legnépszerűbb robot keretrendszer (Japánban az első).
Az utolsó robot keretrendszer a ROS (Robot Operating System), amelyet a készítői operációs rendszernek neveznek, de hasonló szolgáltatásokat biztosít, mint az eddig vizsgáltak (fórum, dokumentáció a [8] oldalon található, felépítését, és működését Quigley et al vezették be [9]). Itt is a robot rendszerünk elemeit kell egy központi szerverre regisztrálni, de itt ROS node-nak nevezik. Maga a rendszer nem engedi tovább osztani a node-okat, de a mások által fejlesztett nodelet csomag lehetővé teszi "csomópontocskák" létrehozását, azaz algoritmusok, melyek egy processzen belül futnak. Saját központi processze van (roscore file, amely a ros master, és a rosout node-okat hozza létre), amely biztosítja a központi loggolást, és egy osztott, közös paraméter készletet. Ennek a központi logikának folyamatosan futni kell, a rendszerünk üzeme alatt. A csomópontok egymással kommunikálni aszinkron módon üzenet küldéssel, vagy szinkron módon szerviz hívással tudnak. A csomópontok kapcsolódása automatikus, azaz ha elérhető az a folyamat, amely meghirdette a topic-ot, és amelyik érdeklődik az iránt, úgy azok összekapcsolónak a roscore API-ját használva. A fejlesztők munkáját maximálisan támogatják, a végfelhasználókét kevésbé. A legnépszerűbb mind a robotgyártók, mind a robot komponenseket fejlesztők körében.
Mind a négy keretrendszer esetében valamilyen fogalmat használnak osztottan, ami vagy ágens, vagy port, vagy komponens, vagy node. Bár a YARP a kommunikációra több lehetőséget biztosít, addig az eszköz készlete sajnos csekély. Míg az OpenRDK és YARP fejlesztése leállt, addig az OpenRTM-aist és ROS rendszerek hódítanak szerte a világban. A továbbiakban ezen két robot keretrendszert állítjuk egymás mellé, és hasonlítjuk össze részletesebben.
2.4. Robot rendszerek összehasonlítása a fejlesztő szemszögéből
A fejlesztő szemszögéből a komponens programozását segítő eszközök meglétét és a szükséges ismereteket vizsgáljuk meg. Megnézzük, hogy a két rendszer esetében mi jellemzi egy új projekt, majd a projektben egy új komponens létrehozását.
2.4.1. Új projekt létrehozása
ROS esetén egy új csomag a catkin_create_package eszközzel generálható, amely eredményeképpen egy mappa jön létre, ami tartalmaz egy CMakeLists.txt-t és egy package.xml-t. Ezeket a file-okat kell később módosítanunk, ha más csomagot használunk, vagy új futtatható állományt szeretnénk készíteni. Ha csak üzenetet szeretnénk fogadni, vagy használni, akkor a hivatalos tutorial-t könnyen átírhatjuk, és a saját logikát egy általunk létrehozott metódusba tehetjük. Nem generál osztály vázat, de nincs is szükség a használatához osztályra, valamint a kezdő mappa tartalma egyszerű. Az alap szolgáltatások elérése 3 osztály használatával már lehetséges, a komponens logikájának implementálása nem igényel nagyfokú rendszer ismeretet. A rendszer C++ és Python nyelvet támogat. A fordításhoz saját catkin_make eszközt biztosít, amely a platform független CMake rendszert használja. Programozói fejlesztő felületekből azokat használhatjuk, amelyeket a CMake ismer, és képes a projekt file-okat generálni (jelen pillanatban: CodeBlocks, Eclipse, Xcode, KDevelop, Visual Studio).
OpenRTM-aist rendszerben a projekt létrehozása az RTCBuiler vagy egy karakteres eszköz rtc-template-el lehetséges. Az RTC Builder az Eclipse-en belül fut, felületét a 22. ábra mutatja.
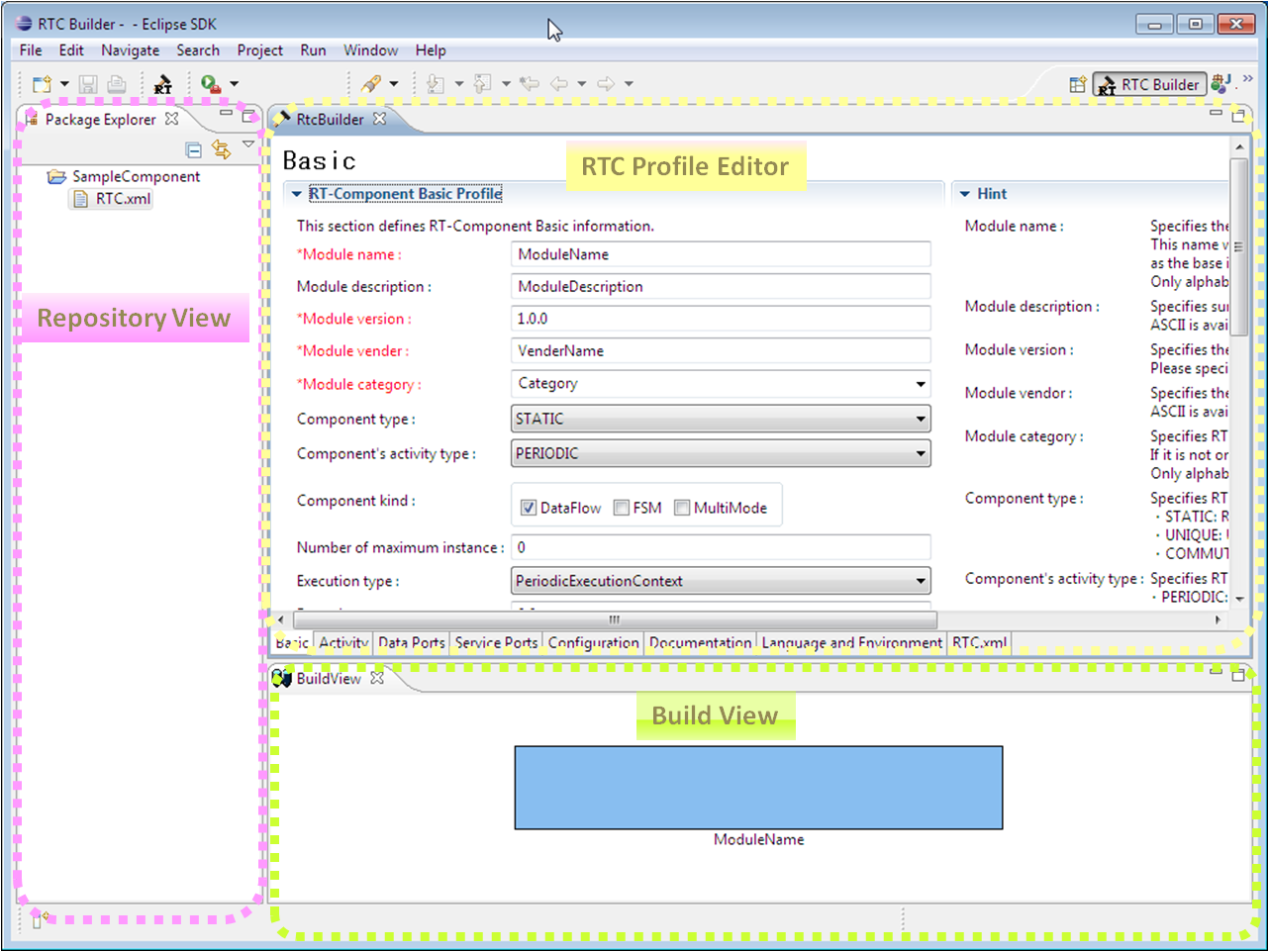
Ezek az eszközök létrehoznak négy szöveges file-t: makefile-t, a komponens osztály header-t és cpp forrást, valamint egy main-t tartalmazó cpp file-t. Ezek a generált állományok már működnek, azonban tartalmuk nehezen érthető, módosításukhoz nagy rendszer ismeret szükséges (már alapból egy származtatott osztályunk van, ami felüldefiniál metódusokat, valamint a Factory tervezési minta kódjai is léteznek). 5-10 osztály ismerete szükséges a kezdő lépésekhez is. A kezdő projekt létrehozásához is sok paraméter ismerete szükséges 20-30, aminek angol nyelvű dokumentációja szegényes, így riasztó lehet. A C++, Java, Phyton nyelveket támogatja, valamint Eclipse és Visual Studio környezeteket.
2.4.2. Komponens fejlesztése
ROS esetében több mint 2000 kisebb nagyobb mások által készített komponens használható fel. Ez esetben, mivel vannak kész komponensek egy új alkalmazás építése gyors és egyszerű. Ha a robotrendszerünket jól terveztük meg, azaz pontosan definiáltuk a komponenseket, és azok között interfészeket, akkor fejlesztés történhet párhuzamosan és gyorsan, köszönhetően a rendelkezésre álló eszközöknek. Egy topic-ba egyszerűen lehet üzenetet küldeni a rostopic eszköz segítségével, vagy akár figyelni, hogy megérkezett-e a megfelelő üzenet. Nem kell tehát a másik komponens-re várni, amelyik fogadja vagy küldi az üzenetet. Egy új funkció kiexportálása csupán egy új metódus, egy új változó definiálását és egy függvény hívását igényli.
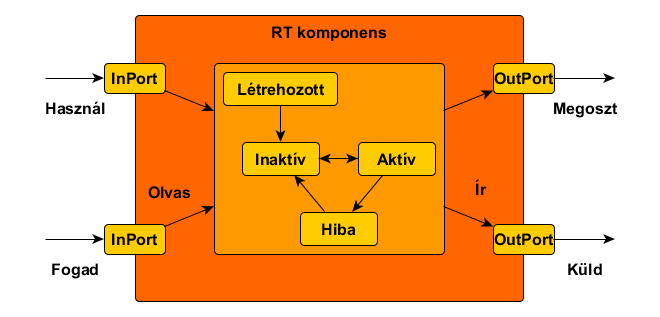
OpenRTM-aist rendszerben 500-1000 komponens érhető el, amelyek egy része csak Windows-on vagy csak Linux-on fut. Ezek dokumentációja legtöbb esetben csak japánul található meg, ezért használatuk nehézkes. A fejlesztőt debug, teszt eszközök nem segítik, nekünk kell megírni a teszt komponenseket is. A rendszer szolgáltatásainak használatához sok esetben CORBA ismerete szükséges, ami újabb tanulni való a fejlesztőnek. A fejlesztőnek egy osztályt kell létrehoznia, ami komponens logikáját kell, hogy tartalmazza. Ez a komponens portokon keresztül kapcsolódhat más komponensekkel, valamint egy állapot gépként kell implementálni. A komponens teljes architektúráját a 23. ábra láthatjuk.
2.5. Végfelhasználóknak biztosított szolgáltatások
Az OpenRTM-aist a végfelhasználónak mindenképpen több lehetőséget ad, mint más robot rendszerek. Biztosítja a komponensek cseréjét a robot rendszer struktúrájának kialakítására, az egyes komponensek paramétereinek beállítását és annak vezérlését. A rendszerhez mellékelnek parancssori eszközöket rtc_shell csomagban, amelyek Phyton scriptek, valamint egy Eclipse plugint egy rendszer szerkesztőt. A 24. ábra szemlélteti a képernyő képét.
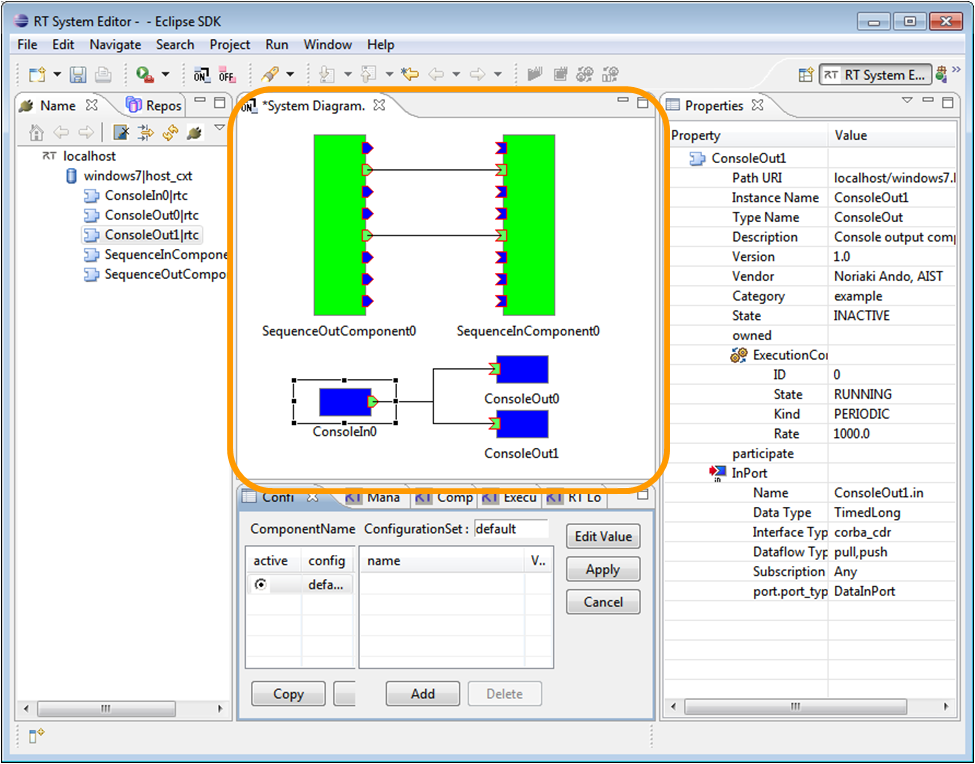
Az ábrán bal oldalt az elérhető komponenseket, mellette középen a robot rendszerünk topológiáját, jobb szélen pedig a komponens fontosabb tulajdonságát láthatjuk ez - bár mérete elég nagy, és grafika képességei limitáltak - mindenképpen egy hatékony rendszer felügyeleti eszköz. A végfelhasználó bármikor el tudja indítani vagy leállítani a robot rendszerét, vagy annak bármelyik komponensét. Ha ez a felület nem volna elegendő, akkor lehet újat fejleszteni, de rendszer ilyen mélyen nincs dokumentálva, így a forrás kódokat kell elemezni.
ROS esetében kevés eszköz áll a végfelhasználó rendelkezésére, sőt valójában a fejlesztő eszközöket használhatjuk csak. Van ugyan néhány grafikus felületű eszköz, amelyek qt-ben implementáltak, de ezzel csak a log üzeneteket tudjuk megjeleníteni, a rendszer felépítését tudjuk megjeleníteni. Létezik egy külső komponens család a Robot Web Tools, amely egy Java script gyűjtemény és egy Python szerver alkalmazás, mellyel egy böngészőből lehet a robotokat megfigyelni, de ehhez még saját fejlesztés szükséges.
2.6. Összegzés
Az OpenRTM-aist a végfelhasználónak több lehetőséget biztosít grafikus felületeken keresztül, de a fejlesztéséhez több ismeret szükséges. Olyan esetekben, amikor a kutató személy több lehetőséget, megoldást szeretne használni, optimálisabb megoldás a ROS-nál. A több programozói nyelv, és operációs rendszer miatt szélesebb körben alkalmazható. Sajnos a dokumentáció hiánya, és a meglévő komponensek részleges japán nyelvű dokumentációja miatt nem tud igazán elterjedni. A több operációs rendszer támogatását előnyként említettük, azonban hátrányt is jelent, hiszen ha olyan rendszert szeretnénk építeni, amely komponenseit megtaláltuk, de azok nem képesek azonos rendszeren futni, akkor csak ezért kell több számítógépet üzemben tartani. A fejlesztők számára több lehetőséget biztosít, azonban sokkal több ismeret és tapasztalat szükséges a kihasználásához. Az OpenRTM-aist példa projektjeiben sok hasznos dolgot találhatunk, de mivel nincs leírva, nekünk kell megkeresni. A rendszernek aktív japán közössége van, de a kérdések és a válaszok sok esetben csak japánul érhetőek el.
A ROS használata javasolt autonóm rendszerek esetén, amikor a komponensek automatikus kapcsolódása törvényszerű. Ilyenkor nem kell grafikus felület. A meglévő komponensek között megtaláljuk a szükségeset, mivel általában kis méretűek, ezért megismerésük, kiterjesztésük nem okoz nagyobb problémát. Kezdő fejlesztőként a ROS komponens létrehozása lényegesen egyszerűbb, hiszen nem is szükséges osztályt létrehoznunk, elég csak használni a meglévőket. Itt is igaz a kevesebb, sokszor több elv. Folyamatosan fejleszti egy aktív közösség, melynek köszönhetően a hetedik verziót számlálja. Aktív fórum oldala van, ahol kérdéseinkre gyorsan kapunk válaszokat.