8. fejezet - Robot navigáció
A fő cél megtanítani egy kezelő közlekedési viselkedését (az akadály elkerülés módját) egy távirányítású mobil robotnak. A robot követni tudja a megtanult közlekedési stílust addig, amíg a parancs késik az internetes kommunikáció késleltetéséből adódóan. Először az alapvető közlekedési stílusok, majd a modellezés és a matematikai leírások tárgyalására kerül sor. Végül egy szimulációs eredményt mutatunk be.
8.1. Közlekedési jellegek definiálása
A közlekedési stílus lényege az akadályoknak megfelelő mozgási irány meghatározása [26]. Képzeljünk el két szélsőséges stílust. Ha egy illető veszélyes anyagot visz, célja az akadályoktól “a lehető legnagyobb távolság” tartása (659. ábra/a). Észrevétlennek maradni egy bűnöző keresése közben ellenkező magatartáshoz vezet, azaz “az akadályokhoz a lehető legközelebb” kell maradni (659. ábra/b). Ezek egyszerű kombinációjával leírható egy közlekedési rendszer alapszabálya: “közel maradni a job vagy bal oldalhoz”.
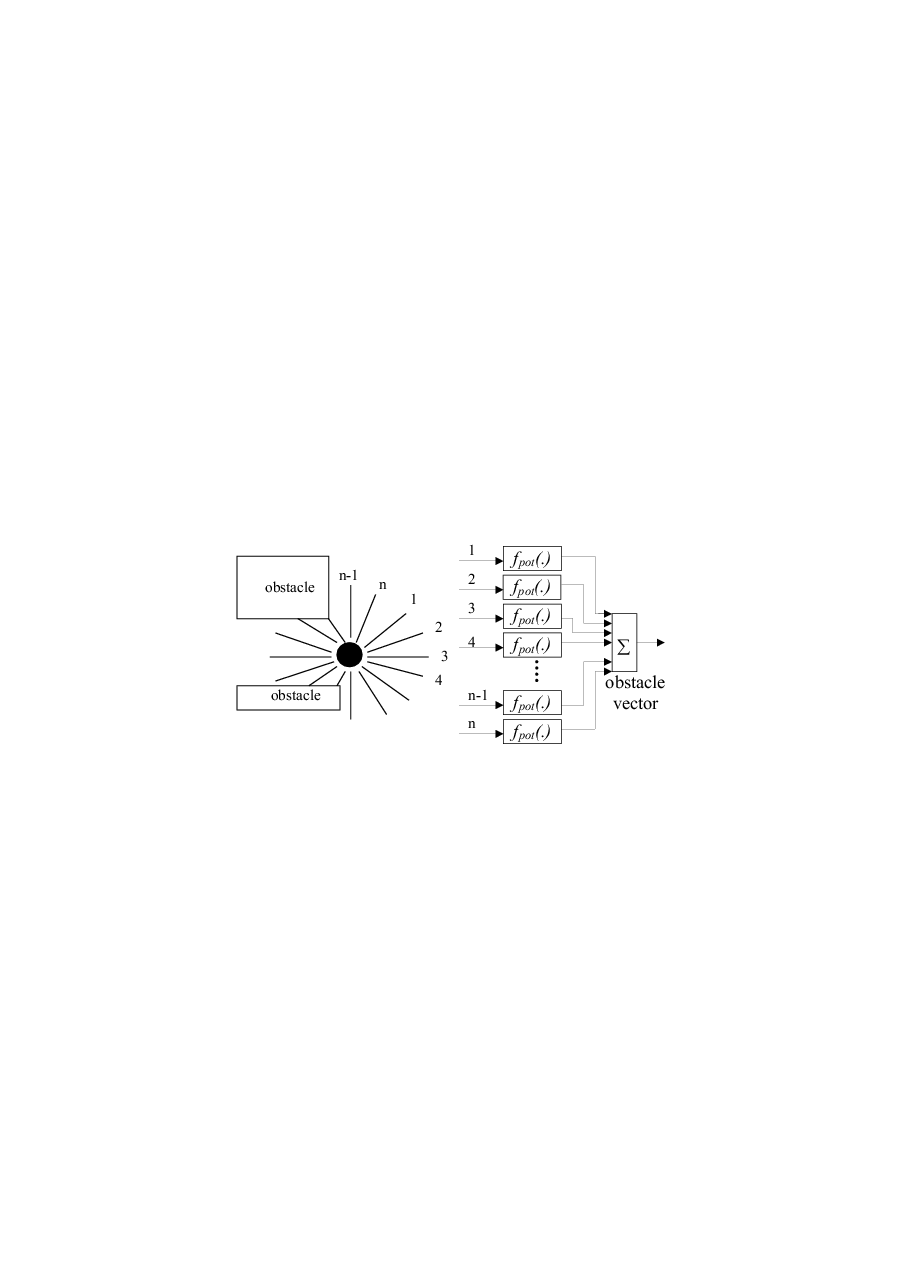
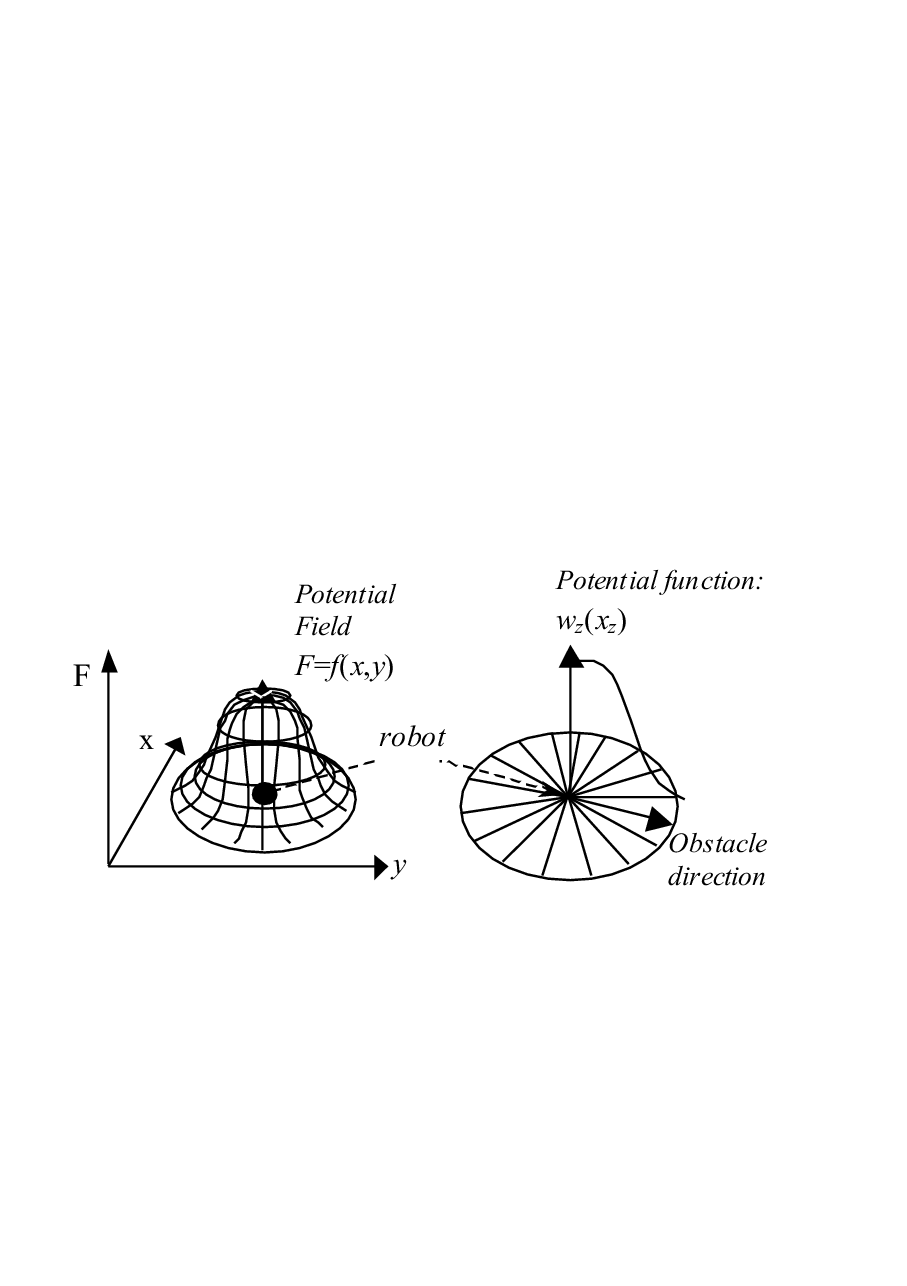
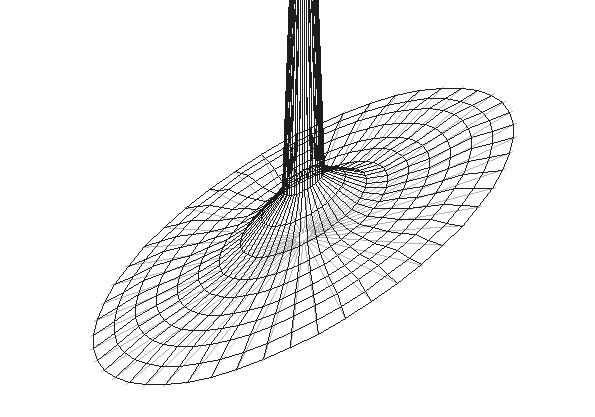
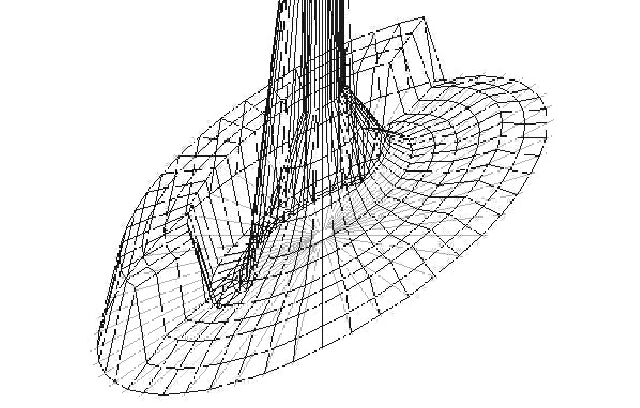
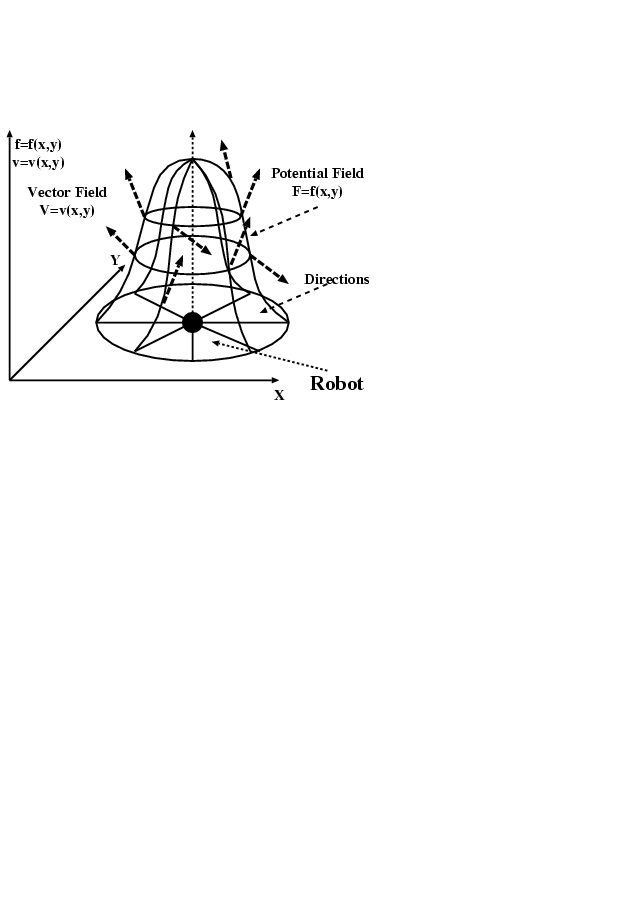
A közlekedési viselkedésmódok leírásának egyik legnépszerűbb módszere a potenciális tér alapú (potential field based, PFB) modell [27]. A robot érzékeli a pásztázott területen elhelyezkető tárgyakat (660. ábra). A pásztázott terület n pásztázott vonalra van osztva, amelyek (vektorok, ahol z=1...n) irányokba mutatnak. A potenciális tér alapú modell alapgondolata, hogy taszítsa a robotot az akadályoktól (vagy vonzza az akadályokhoz). Az objektumok és a célpont képzeletbeli erőket működtet a robotra. Az útvonalat a taszító erők összege határozza meg. A taszító erők nagysága, F, különböző irányokban a potenciális mezővel írhatók le (661. ábra), amelyek általában fordítottan arányosak a robot és az akadályok közti távolsággal, de bármilyen nemlineáris függvénnyel leírhatók. Ez a potenciális mező információt tartalmaz a közlekedési viselkedéről (akadály elkerülési módról). Számos alkalmazás esetén ugyanazt a képletet használják minden irányban, ami szimmetrikus potenciális teret eredményez (662. ábra/a), ahol “a lehető legnagyobb távolság” tartása valósul meg. A “közel a bal oldalhoz” stílus esetén (662. ábra/b), a taszító erőnek nagyobbnak kell lennie a mozgó objektum jobb oldalán, mint bal oldalon. Vonzó erő alkalmazható a bal oldalon az akadályhoz való közeledés érdekében, ha az objektum távol van tőle.
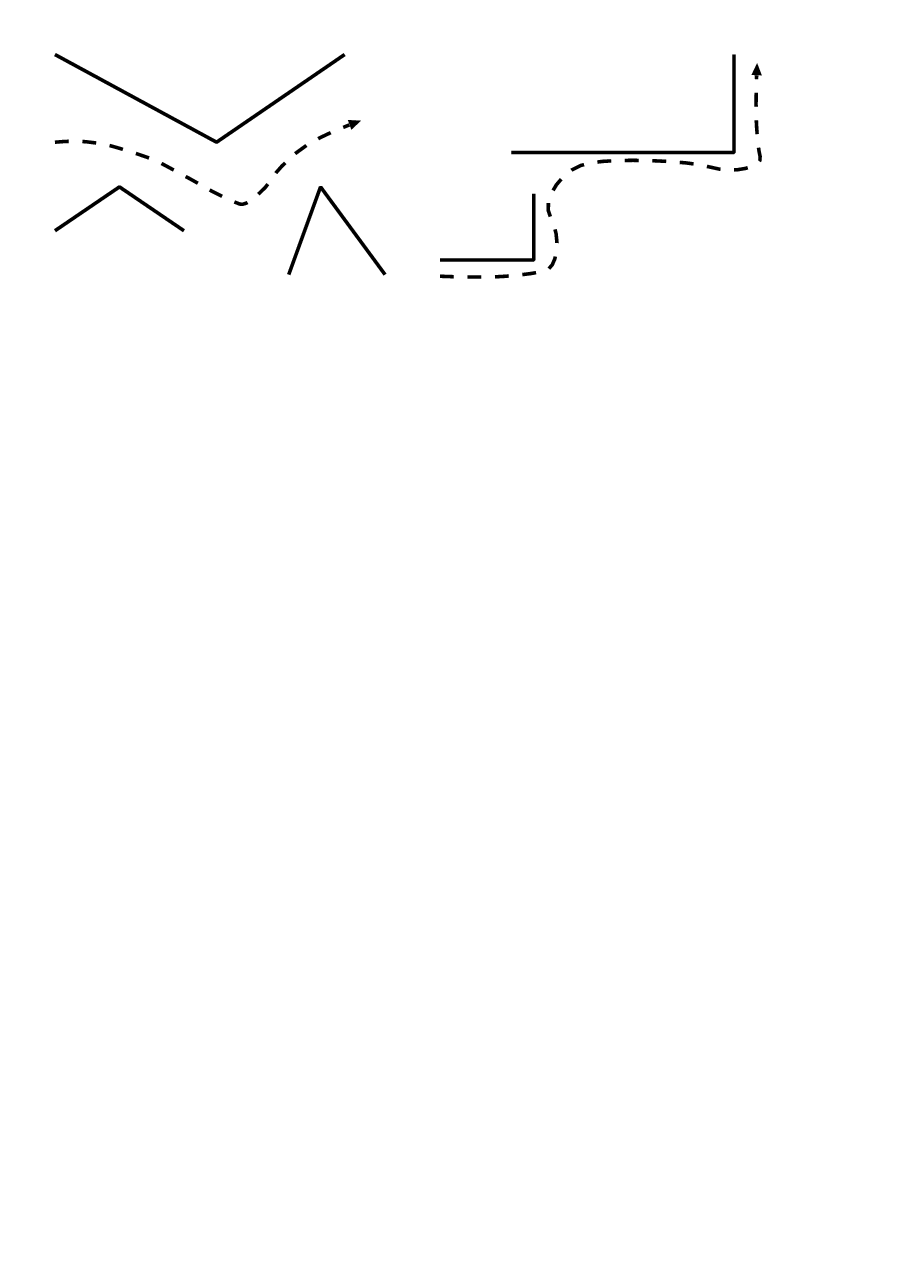
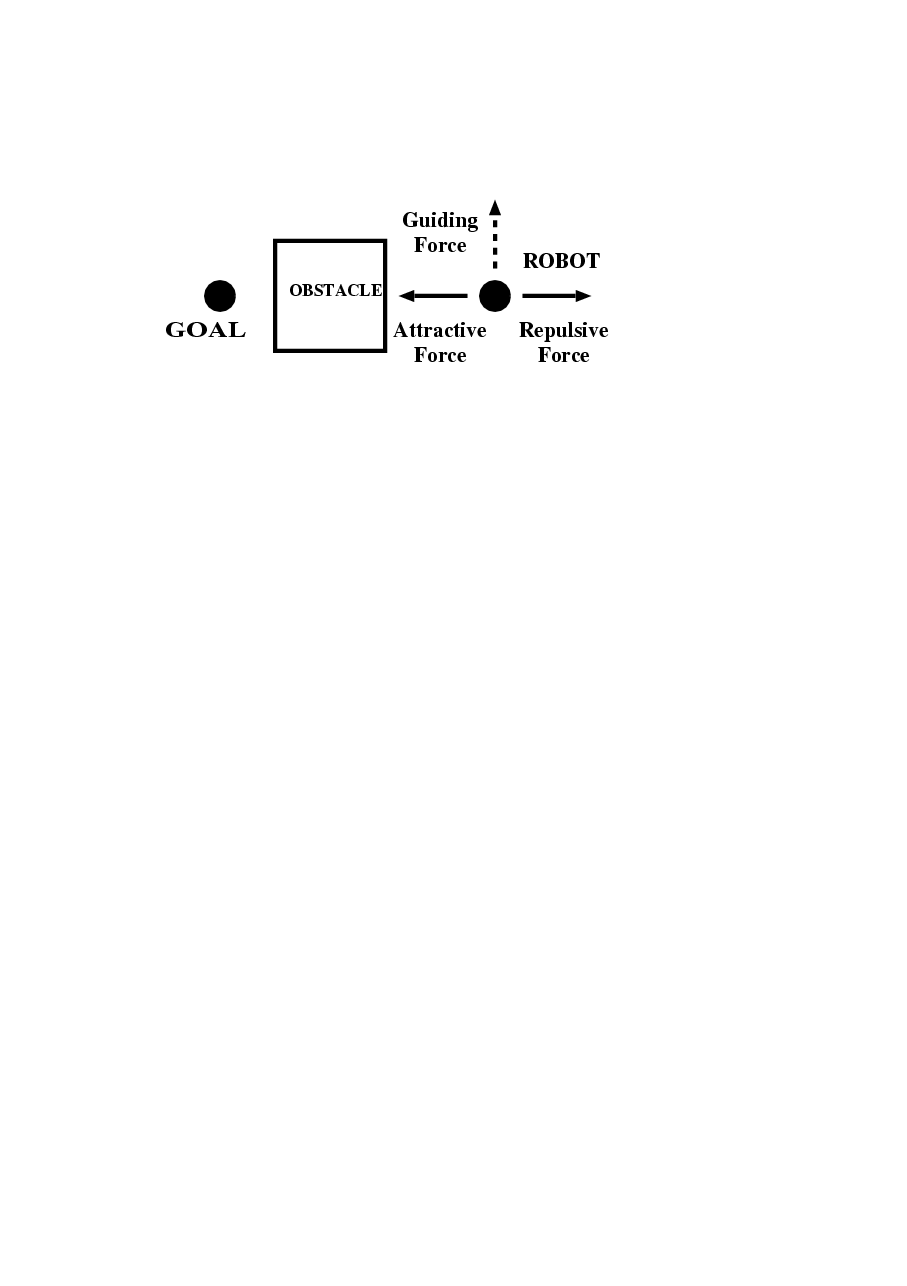
Az előnyök ellenére a potenciális tér alapú modell alkalmazhatósága behatárolt. Például ha a cél egy akadály mögött helyezkedik el, a robot beragad egy pozícióba, mert a cél vonzza, az akadály pedig taszítja. (663. ábra). A PFB modell nem alkalmas olyan irányító vektor létrehozására, ami szükséges az ilyen jellegű akadály kikerüléséhez.
|
a) ”A lehető legnagyobb távolság” módhoz tartozó potenciális tér |
b) “A z akadályokhoz a lehető legközelebb”módhoz tartozó potenciális tér |
A PFB modell kiterjeszthető vektor tér modellé (Vector field based, VFB) [26]. A VFB modell alkalmas arra, hogy a pásztázott vonalon mért távolság minden értékéhez tetszőleges irányok legyenek definiálva (664. ábra). Ezért ez a modell képes olyan kimeneti vektorokat generálni, amelyek párhuzamosak egy, a vonal mellett lévő hosszú fallal. A különbség megértéséhez feltételezzük, hogy egy robot észlel adott irányban egy akadályt. A PFB modell esetében csak egy taszító/vonzó erő generálódik ebben az irányban. VFB modell esetén a taszító/vonzó erő bármely más irányban létrejöhet. Ezért a robot az akadály körül el tud haladni, ha a cél az mögött van.
Szimuláció eredmény
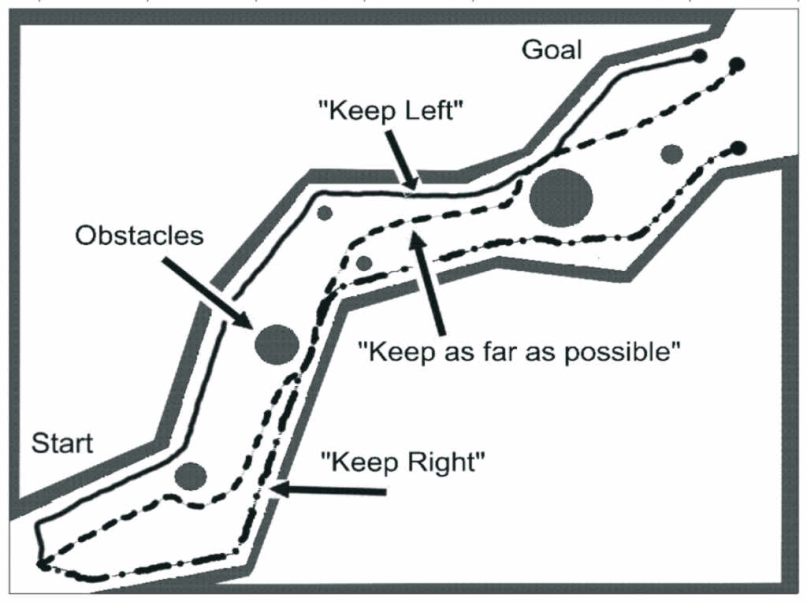
A számítás összetettségének csökkentése érdekében Ruspini-típusú felosztásban definiált egyszerűsített háromszög alakú fuzzy készleteket használnak. Minden bemeneti iránynál 7 készlet van, amely magába foglalja a nyers approximációt, azonban a kezelő és a “tanuló” robot vezetési jellegét tekintve nincs jelentős különbség. Néhány robotot kezelő irányít különböző, már említett közlekedési módokon. A betanítás eredményeként a “tanuló” robotok potenciális tere a vezetési jellegnek megfelelően aszimmetrikus annak ellenére, hogy előzőleg szimmetrikus volt. Az eredmények közül három szélsőséges esetet mutatunk be (6-65. ábra). A manuális vezérlés alapvető vezetési módjai a következők voltak: 1) maradj bal oldalon. 2) maradj jobb oldalon. 3) tarts a lehető legnagyobb távolságot. A képen (6-65. ábra) a három “tanuló” robot útvonala látható új akadályok közt. Azt a következtetést vontuk le, hogy a robot képes elsajátítani a fő emberi közlekedési módokat.
8.2. Konklúziók
Az internet alapú telemanipuláció egy viszonylag új és előnyös kutatási terület. Lehetőséget nyújt új és kifinomult irányítási módszerek alkalmazására, melyeknek célja az időkésleltetés kiküszöbölése, ami az egyik fő kihívás ezen a téren. Természetesen a teljes kiküszöbölés lehetetlen, de stabil működést el lehet érni. A tanulmányban bemutattunk egy ígéretes módszert (virtuális impedancia pozíció hiba korrekcióval). A módszer hatékonysága a tele-kézfogó ezköz mérési eredményei által bizonyított.
Egy másik érdekes kihívás az intelligencia elosztása. A potenciális tér alapú modell egy kiterjesztése került bemutatásra, amely az eredeti módszer behatároltságát némileg javítja. Egy egyszerűsített neuro-fuzzy algoritmust is bemutattunk a VFB modell közelítésére. A tanulási algoritmus is adott a bamutatott modellhez. Egy példa kapcsán bemutattuk, hogy a robot képes megtanulni bizonyos emberi viselkedésmódokat.