15. fejezet - Felhasznált irodalom
[1]Kovács Bence: „Development of motion controllers: Control units design for CNC milling maschines, and industrial robots”, Diplomamunka, 2011
[2]Szayer Géza: „Decelopment of motion controllers: Hardware development, design and implementing motion control algorithms”, Dimplomamunka, 2011
[3]Bilal Akin, Manish Bhardwaj: „Sensored FOC of PMSM”, Texas Instruments útmutató, 2010
[4]Texas Instruments: „TMS320F28035 user’s guide”, Texas Instruments adatlap, 2010
[5]Texas Instruments: „HVMotorCTRL+PFC_HWGuide”, Motor control útmutató, 2010
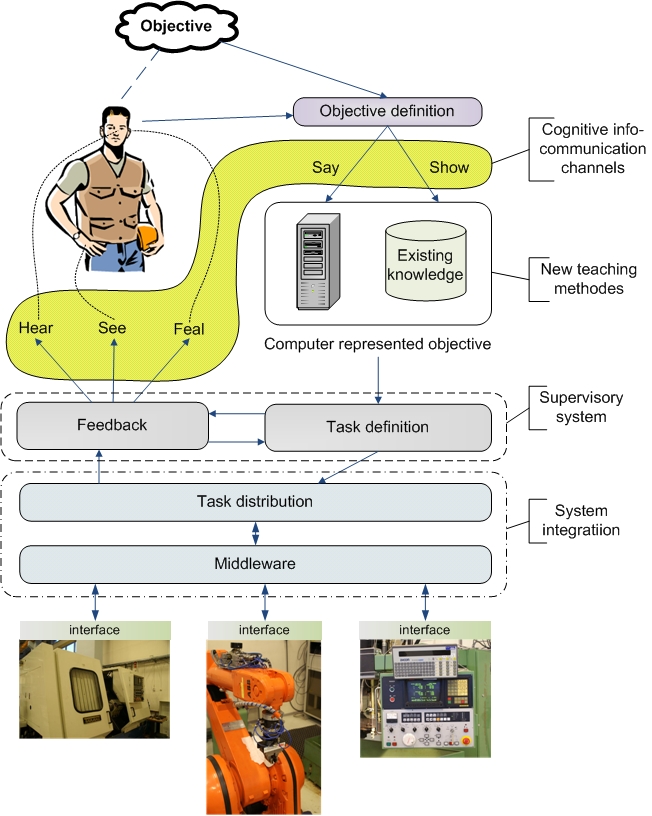
A szokványostól eltérő kognitív info-kommunikációs csatornákat felhasználva a robotok programozásának és betanításának egy új paradigmáját fejlesszük ki. Mindezzel egy új dimenziót nyissunk a robotizációban, nevezetesen a kis és a közepes vállalatok számára is elérhetővé tegyük a robotos alkalmazásokat. A robotot egy erős, a jól definiált feladatot precízen megoldó, korlátozott intelligenciával rendelkező, de ugyanakkor több tekintetben fogyatékos betanított munkásnak tekintjük. Ezért speciális törődést igényel. Ha megtanuljuk, hogy miként adhatunk ki feladatot, és hogyan kell felügyelni azok végrehajtását, akkor egy nagyon hasznos új „kollégát” nyerhetünk. A távlati cél az, hogy a műhelyfőnök úgy adhasson ki feladatokat a robotoknak is, mint ahogy a betanított munkásoknak szokott. Pl. átadja a munkadarab dokumentációit (CAD rajzát), majd elmondja vagy megmutatja, hogy mi a feladat, közben ellenőrzi, hogy a robot jól értelmezte-e a feladatot (lásd 1. ábra )
A robotizáció terjedését elsősorban a következő problémák gátolják a kis és közepes vállalatok körében.
-
A robotok szokványos programozása speciális tudást igényel.
-
A robotok szokványos programozása általában 400-szor annyi időt igényel, mint az adott feladat elvégzése, így csak nagy ismétlési gyakoriságú feladatokat érdemes robotizálni.
-
A nagy vállalatokkal szemben a KKV-k nem teljes gépsorokat vásárolnak, hanem apránként fejlesztik a gépparkjukat, esetenként más és más gyártótól vásárolva, így nehézséget jelent a meglévő gépek integrálás.
-
A munkafolyamatok 100%-os automatizálása nagyon drága, de általában az utolsó 10% okozza aránytalanul a legnagyobb nehézségeket. Optimális megoldást jelenthet egy 90%-os automatizálás.
-
Ha a robotot manipulátorként használjuk, akkor a robot és munkadarab között ébredő erők pontos fizikai visszacsatolásához (amely sok esetben fontos lehet a szerszámtörések elkerülésében), bonyolult és drága eszközökre van szükség.
Mindezekre a problémákra adhat megoldást a kognitív info-kommunikációs csatornák alkalmazása.
Koncepció
Kognitív infokommunikációs csatornák koncepciója
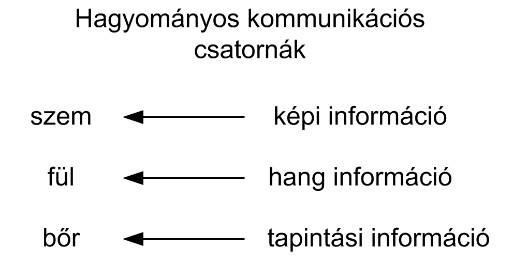
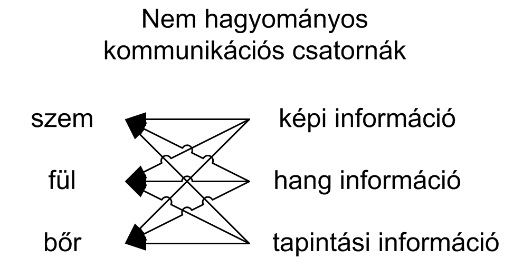
Az operátor és a telemanipulációs robot között a mechanikai kapcsolat helyett - mai szemmel már természetesnek vehetően - informatikai kapcsolat van, de ennél is fontosabb az, hogy az anatómiai kapcsolatot az agy plasztikusságát kihasználva kognitív jellegű kapcsolatokká alakítjuk. Ez tuljadonképen új kognitív alapú kommunikációt jelent, melynek lényege az, hogy más és más érzeteket nem a megszokott, hanem újabb vagy más csatornákon jelzünk. Ezeket az agy képes megfelelő keretek között feldolgozni ld. 2 ábra.
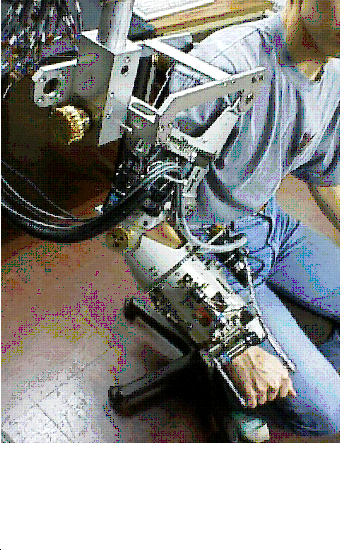
Vegyük például azt az esetet, amikor az irányító erővisszacsatolás révén érezni szeretné a kezelő a robot által megfogott tárgy súlyát vagy puhaságát. Ehhez alkalmazható egy bonyolult szerkezetekkel ellátott mechatronikai kesztyű ld. 3. kép. De sokkal olcsóbban és feladattól függően elfogadhatóan jól lehet ezeket az információkat mély hangokkal vagy egyszerű kézre szerelt virbrátorokkal is visszaadni. Rövid gyakorlat után az emberek jól tudják ezt használni. A természetes példája az agy plasztikusságának, amikor a vakok az ujjukkal „látnak” vagy olvasnak.

A rendszerintegráció koncepciója
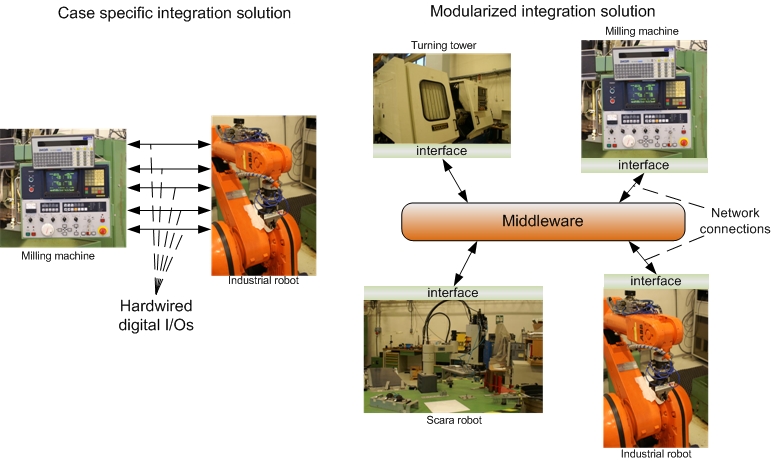
Egy munkás be és ki tud kapcsolni gépeket. Ha azt akarjuk, hogy a robot is kezelni tudja a munkafolyamathoz szükséges egyéb eszközöket, akkor azokat valamilyen módon össze kell kapcsolni. A gépek egyedi összekapcsolása helyett minden géphez egy egységesített interface felületet (middlewaret) alakítunk ki (ld. 4. ábra). Az alkalmazott middleware technológiát Japánban fejlesztették ki hatalmas állami támogatással, és ennek a japánok által kifejlesztett technológiának ez a projekt lenne az első európai alkalmazása, haszonélvezője. A japán fejlesztőkkel állandó és szoros kapcsolatban állunk.
A felügyeleti rendszer koncepciója
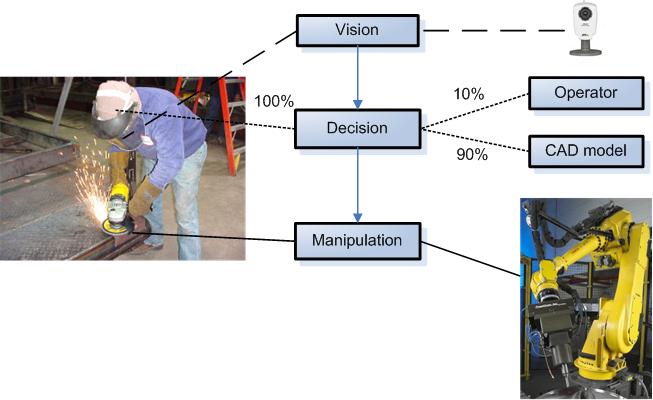
Tradicionálisan a csiszoló munkás megnézi a munkadarabot, eldönti, hogy mit kell csinálnia, majd végrehatja a feladatot. A munkás szeme helyettesíthető egy kamerával, de pusztán képfeldolgozással 100% biztonsággal eldönteni, hogy mit kell csiszolni, ma még aránytalanul drága. Ezért szükség van az operátor beavatkozására. Az operátor a kamera képén felismeri és bejelöli, hogy hol kell csiszolni, a robot a képet összeveti a munkadarab CAD rajzával és automatikusan megtervezi a csiszolófej mozgását (ld. 5. ábra). Ez lehetővé teszi, hogy mozgáskorlátozottak is nehéz fizikai munkát végezhessenek.
A betanítás koncepciója
Ennek alapja a mozgáskövetés és kiterjesztett valóság. Hagyományosan a robotot szokás végigvezetni azon a pályán, amelyet a munkafolyamat során követnie kell. A javasolt módszerhez egy erővisszacsatolás nélküli adatkesztyű elegendő (ez lényegesen olcsóbb az erővisszacsatolásos kesztyűnél). Az operátor vagy a tényleges munkadarabon, vagy annak 3D modelljén egy kiterjesztett valóságot felhasználva mutatja meg az elvégzendő feladatot.
|
|
|
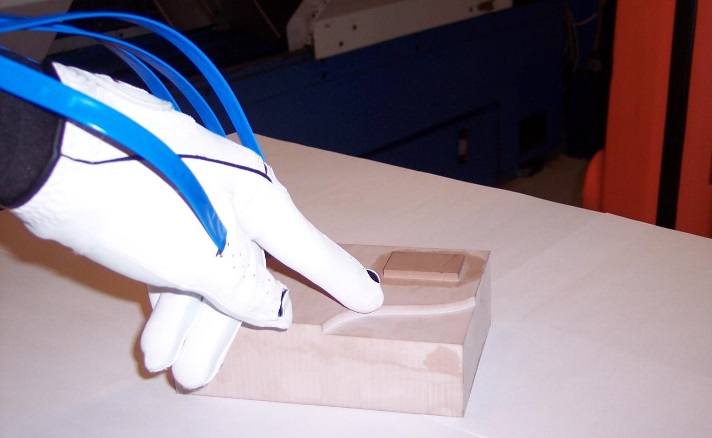
6. ábra Mozgáskövetésen alapuló betanítás koncepciója
A tervezett részfeladatok az alapkutatás, ipari (alkalmazott) kutatás és kísérleti fejlesztés indoklása, egymásra épülése. A feladatok szakmai és tudományos tartalma, lépései, időbeni megvalósítása és várható eredménye. A tervezett feladatokat az 1. táblázatnak megfelelő módon összesítse. Gantt-táblázaton is mutassa be a projekt megvalósítási folyamatát! (2. táblázat) A Gantt-táblázaton minden feladatot egy időtartamával arányos hosszúságú sáv jelöl, a köztük fennálló logikai kapcsolatokat pedig nyilakkal szokás ábrázolni. (Az alábbi mintatáblázaton található A, B, C betűzés helyett a részfeladat sorszámát használja!)
Az eredmények terjesztésére szolgáló tájékoztatási terv. A terv tartalmazza (ipari kutatás keretében) a projekt eredményeinek széles körben történő terjesztését technikai és tudományos konferenciák keretében, és/vagy tudományos és műszaki szaklapokban, és/vagy szabadon hozzáférhető adattárakban, és/vagy nyílt és szabad felhasználású szoftvereken keresztül. A terv elkészítése kötelező, és a következőket kell tartalmaznia:
1. a projekt céljának rövid, közérthető leírását,
2. a tájékoztatási terv célját, célcsoportját, valamint
3. az alkalmazandó eszközöket, tevékenységet,
4. ütemezést
5. költségtervet.
Hasznosítási terv. A várható gazdasági eredmények, a projekt egyéb várható közvetlen és közvetett hatásainak részletes bemutatása. A fejlesztési eredmények felhasználásával nyert termék, eljárás vagy szolgáltatás piacra kerülésének várható eredményei nemzetközi és hazai szinten (példányszám, életciklus időtartama, a bekerülést meghaladó gazdasági eredmény, stb.). Készítsen szakszerű üzleti tervet a projekt végrehatására vonatkozóan, valamint a projekt eredményeire vonatkozó hasznosítási tervet.
A hasznosítási tervben az alábbi pontokat fejtse ki:
1. A projekt eredményeként létrejövő termék marketingje (piacelemzés, termékpozicionálás és a „value proposition” meghatározása, versenytársak bemutatása és a verseny elemzése, értékesítési csatornák, reklám)
2. Kockázatelemzés
(a fontosabb kockázatok és mérséklésük lehetőségei)
3. A projekt időtartalmán túli tőkeigény
(a fejlesztésekhez szükséges tőke mennyisége, időbeni eloszlása, a befektetők biztosítékai, kiszállási stratégiák)
4. Projekt eredményeinek hasznosítását bemutató pénzügyi terv (bevételi-kiadási terv, költségszerkezet bemutatása, eredményterv)
Internet alapú Telemanipuláció
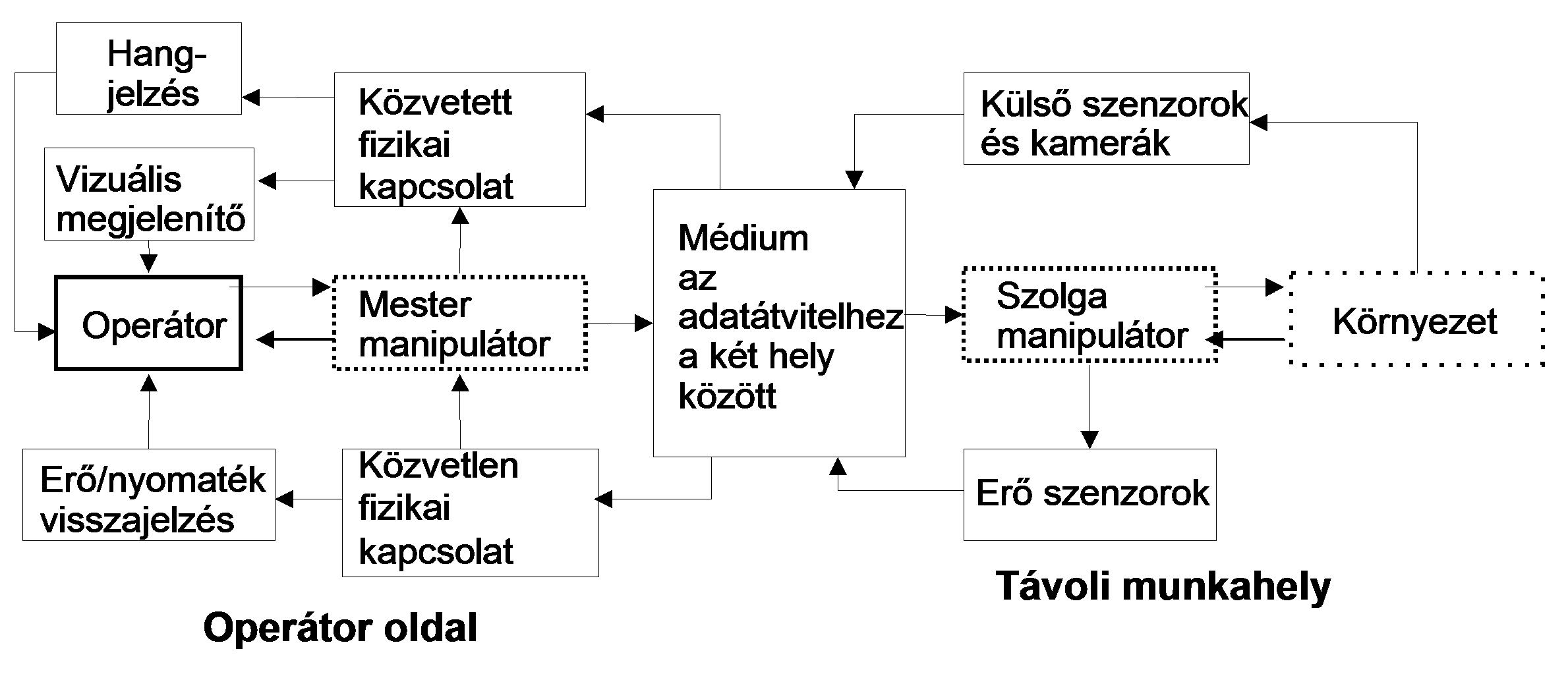
A telemanipuláció az ember (operátor) érzékelési és cselekvési képességének kiterjesztése egy távoli helyre, ahol valamilyen oknál fogva nem lehet jelen, de ahol valamilyen manipulatív feladatot kell elvégeznie. A telemanipulációs folyamatot és ezzel együtt a telemanipulációt megvalósító berendezést alapvetően három részre oszthatjuk. Tekintsük a 15-1. ábrat
Az ember és a gép közötti kapcsolatot a mester eszköz teremti meg, amely fogadja az operátor parancsait, és egyben közvetíti a távoli környezet reakcióit az operátor felé.
A távoli környezetben az operátor utasításait a szolga egység hajtja végre, és egyben érzékeli a környezet reakcióját.
Külön egységként kell kezelni a mester és a szolga egység közötti információ közvetítő csatornát, amely napjainkban egy számítógépes hálózat vagy akár az Internet is lehet. Az Internet alapú telemaniuláció napjainkban az egyik legvonzóbb kutatási irány a hallgatók számára.
15.1. Tele jelenlét leírása távvezeték modell segítségével, időkésleltetés hatásának kompenzációja
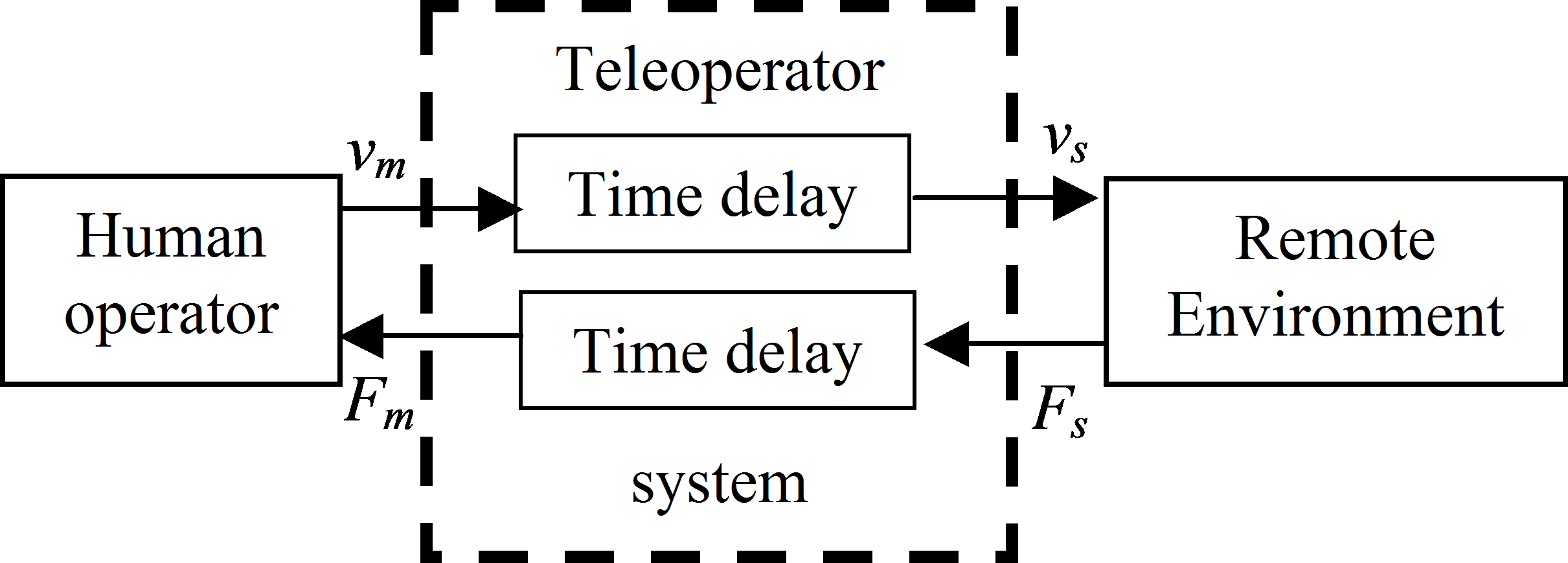
E megközelítés a passzivitás elméleten alapszik, amelyik közeli rokonságban van a Lyapunov stabilitás elmélettel. A passzivitás egy olyan elvont matematikai leírási mód, amelynek a teljesítmény és energiaáramlás fizikai leírásához hasonlítható. Passzív rendszerekben a betáplált teljesítmény nem haladhatja meg a kimeneten kinyert teljesítményt, ha a kettő megegyezik, akkor beszélhetünk veszteségmentes rendszerről. A telemanipuláció esetén (15-2. ábra) az operátor mozgatja a mester eszközt és a sebesség vm információt közvetítjük a szolga eszközhöz, amely a mester eszközt próbálja követni, ideális esetben vs= vm. A szolga eszköz kapcsolatba kerül a környezettel, amely visszahat egy Fs erővel és ezt kell visszajuttatni az operátorhoz a mester eszközön keresztül ideális esetben Fm=Fs. Időkésleltetés esetén vs(t)=vm(t-Td), Fm(t)=Fs(t-Td).
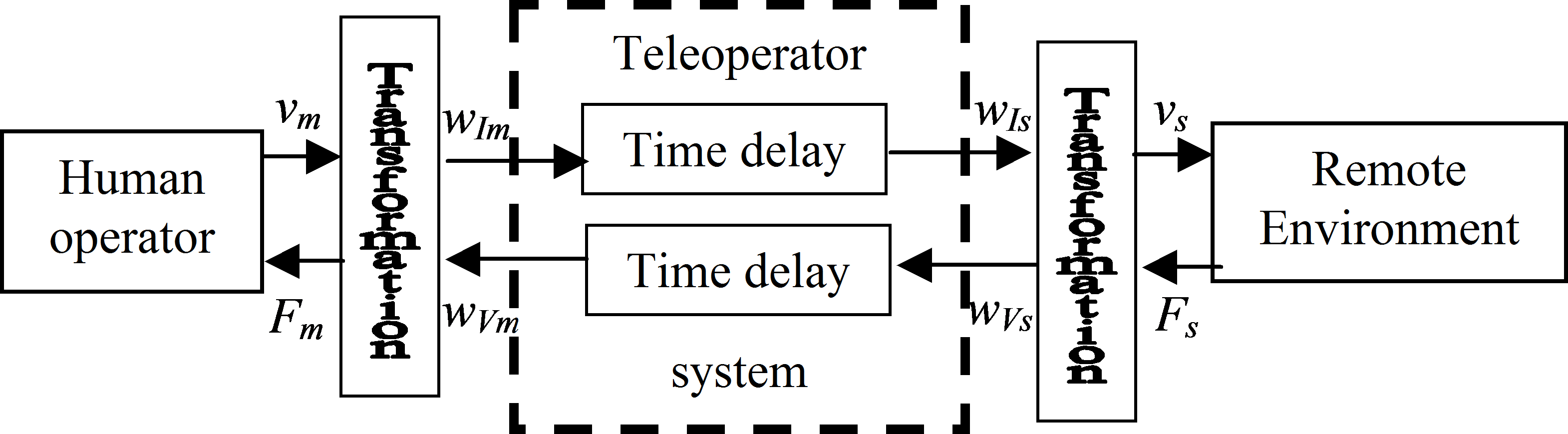
Az időkésleltetés okozta stabilitási problémák kezelésére e rendszert egy távvezeték hálózatnak tekinthetjük, ahol egy wV(t) feszültség, illetve wI(t) áram típusú változót vezetünk be, így a teljesítmény tér és időbeni eloszlása felírható: P(x,t)= wV(x,t)wI(x,t), ahol x távolságot jelöli. Egy stabil teleamipulációnak passzívnak kell lennie. , ahol Pdiss a teljesítmény disszipáció.
A hullám egy triviális választása (wI= vm és wV= Fs) nem vezet passzív rendszerhez, mindez megerősíti azt a tapasztalatunkat, hogy az időkésleltetési rendszernél stabilitási problémák jelentkeznek. Egy stabil rendszer eléréséhez a távvezeték modellünkbe szivárgást kell beépítenünk. Vezessük be a következő transzformációt: , ekkor az átvitel passzív veszteség mentessé válik.
A hullám impedanciához hasonló fogalmat is bevezethetünk. Ideális telemanipulációról akkor beszélhetünk, ha nincs visszaverődő hullám, ehhez a „lezáró impedanciának” a hullámimpedanciával kellene megegyeznie minden frekvencián. Ilyen illesztés természetesen nem létezik, de bizonyos frekvencia tartományban „átláthatóvá” tehető a telemanipulációs eszköz.
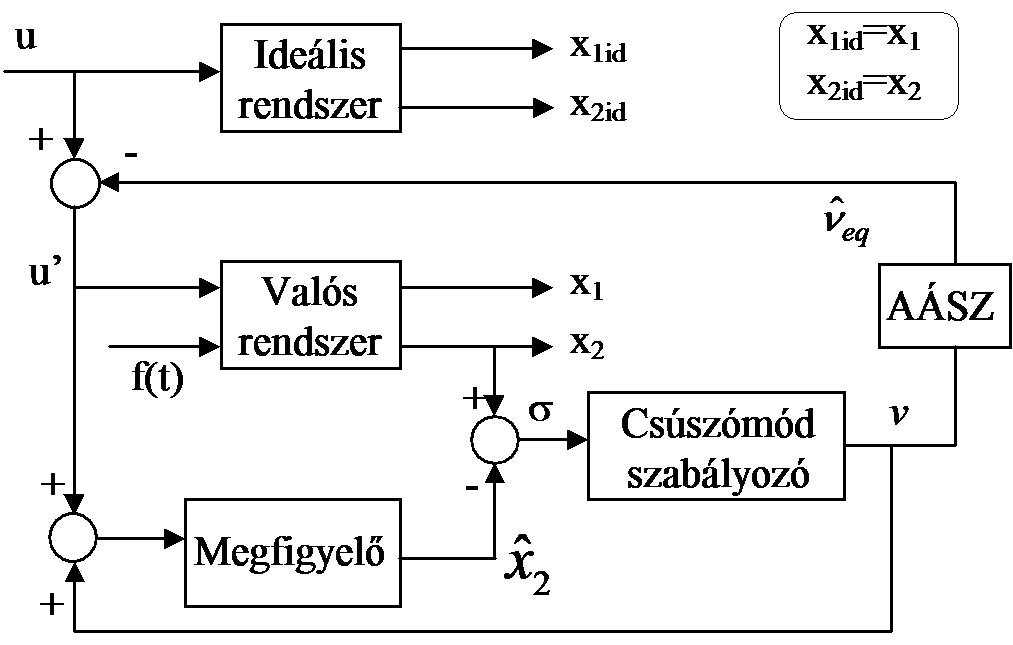
Nemlineáris karakterisztikájú súrlódással terhelt mester eszközök szabályozása, (zavarkompenzációja)
Az időkésleltetéstől eltekintve sem lehet a teleoperátor rendszer teljesen átlátható, az operátor szemszögéből a teleoperátor rendszer mozgatásához szükséges mindenfajta erő (beleértve a súrlódás legyőzéséhez és a mechanika mozgatásához, gyorsításához felhasznált erők) zavarásnak tekinthető. Nyilvánvaló, hogy a teleoperátor teljes dinamikáját csak végtelenül nagy teljesítménnyel lehetne kikompenzálni, ezért szükségszerű, hogy az operátor valamilyen minimális addicionális erőt érzékeljen a teleoperátor felöl, annak mozgatása érdekében, de lehetőség szerint ennek az erőnek olyan csekélynek kell lennie, amelyet az operátor már gyakorlatilag nem érzékel. E problémára korábbi kutatásainkban egy csúszómód alapú kompenzálási eljárást javasoltunk (ld. 15-4. ábra). A matematikai részletek mellőzésével: egy csúszómód alapú zavarbecslő eljárással előállítjuk az eq jelet, amely információt tartalmaz a rendszer paramétereinek bizonytalanságáról és a külső zavarásról, ezért visszacsatolva felhasználható azok kompenzálására, így a valós rendszer a modellként előírt ideális rendszerrel megegyezően viselkedik, vagyis ilyen módón (szabályozással, motorok mozgató erejének felhasználásával) meg tudjuk változtatni a telemanipulációs rendszerünk dinamikáját (bizonyos korlátok között). Ezt az eljárást egy érzékelő kesztyű (ld. 15-5. ábra) súrlódás kompenzációjára használtuk.