A. függelék - Léptető motoros robothajtás logikai áramköreinek vizsgálata
A mérés célja:
A tanszékünk egy léptető motoros hajtással ellátott robot manipulátorral rendelkezik. E robot manipulátorral több hallgatói mérés foglalkozik. Jelen mérés során a hallgatók magával a léptető motorral, annak működési tartományával, a léptető motoros hajtás logikai áramköreivel és számítógépes illesztésével ismerkednek meg.
A.1. A Léptető motorok
A léptető motorok felépítésük szerint többféleképpen csoportosíthatók:
A forgórész lehet:
-
kiváló pólusú, lágyvasas
-
állandó mágneses
-
hibrid
A mágneses mező lehet:
-
radiális
-
axiális (tárcsamotorok)
A gerjesztés lehet:
-
unipoláris
-
bipoláris
A léptető motorok működésének lényegét a kiváló pólusú, lágyvasas forgórészű ún. változó reluktanciájú, radiális mezejű unipoláris motorok példáján mutatjuk be.
Tekintsük a 9-1. ábrán vázolt léptető motort:
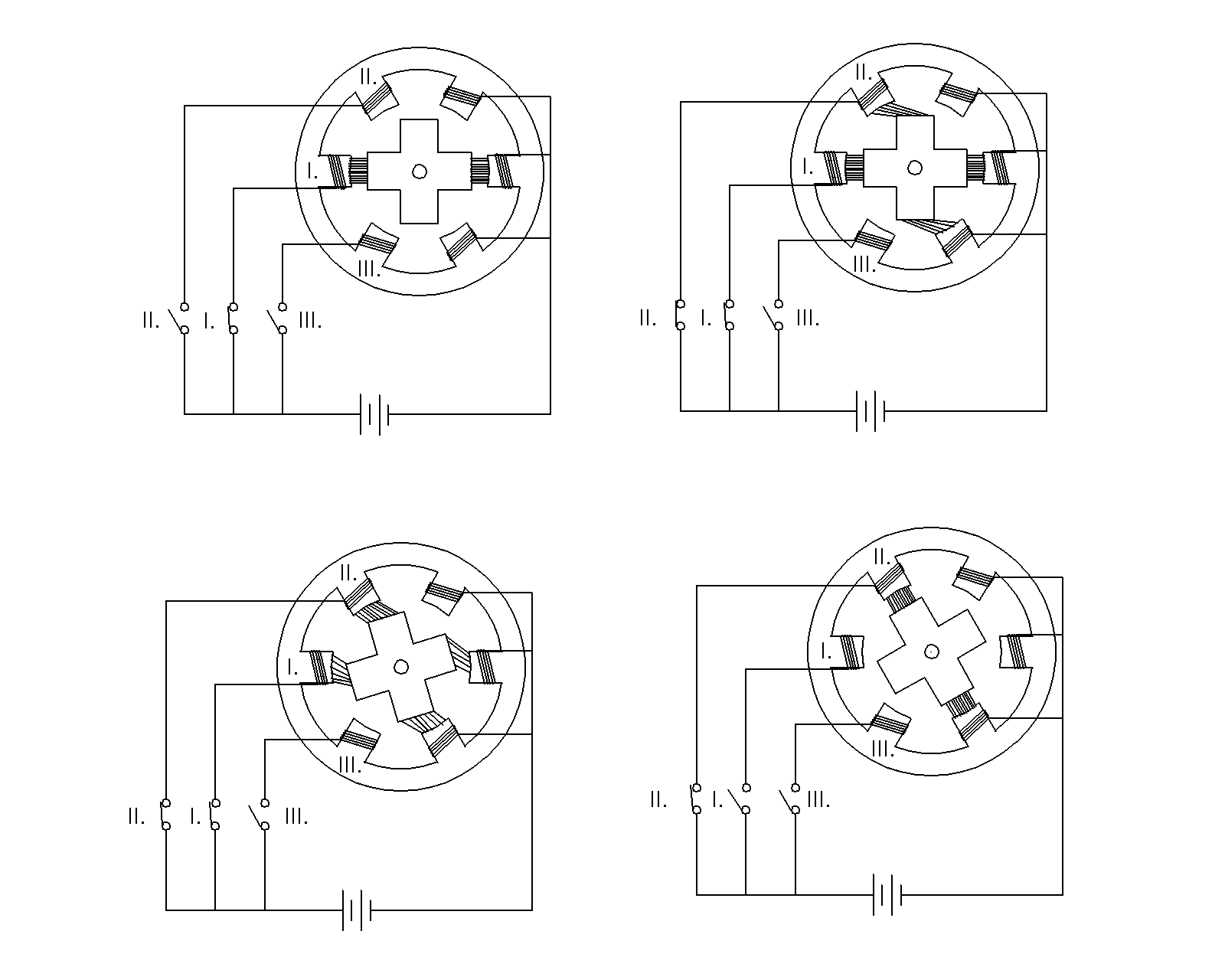
Az állórészen a kerület mentén egyenletesen kiosztott póluson  (m=3) számú fázistekercs helyezkedik el. Egy fázistekercs kettő, egymással átlósan szemben lévő póluson elhelyezett részből áll. A tekercsek egyik kivezetése közösítve van. E közös pont potenciáljához képest kapcsoljuk a tápfeszültséget ki és be a fázistekercs másik kivezetésén. A fázistekercsekben mindig csak egy irányban folyhat az áram, így az állórész egy-egy pólusában a fluxus ki-be kapcsolható, de iránya nem változtatható meg. Ezért nevezzük ezt a kapcsolást unipolárisnak.
(m=3) számú fázistekercs helyezkedik el. Egy fázistekercs kettő, egymással átlósan szemben lévő póluson elhelyezett részből áll. A tekercsek egyik kivezetése közösítve van. E közös pont potenciáljához képest kapcsoljuk a tápfeszültséget ki és be a fázistekercs másik kivezetésén. A fázistekercsekben mindig csak egy irányban folyhat az áram, így az állórész egy-egy pólusában a fluxus ki-be kapcsolható, de iránya nem változtatható meg. Ezért nevezzük ezt a kapcsolást unipolárisnak.
Az egymás mellett lévő fázistekercsek mágneses tengelyei által bezárt szög  . A lágyvasból készült forgórészen
. A lágyvasból készült forgórészen 
 számú kiálló pólus található. Az állórész fázisok és a forgórész pólusainak száma különböző, azaz
számú kiálló pólus található. Az állórész fázisok és a forgórész pólusainak száma különböző, azaz
|
|
( 9.1 ) |

Kapcsoljunk egyenfeszültséget az I-es fázistekercsre, azaz a léptető motorok terminológiáját használva gerjesszük az I-es fázistekercset. Ha ekkor a rotor az 9-1. ábrán feltüntetett (1)-es pozícióban van, azaz a rotor 1. pólusa az I-es fázistekercs mágneses tengelyének irányában áll, a kialakuló mágneses mező az ábrán feltüntetett radiális irányú lesz. (Az erővonal képet csak a légrésben tüntettük fel, és a 2. és 4. póluson keresztül záródó szórt fluxusokat elhanyagoltuk.) A forgórészre ható nyomaték zérus, a forgórész egyensúlyi helyzetben van.
Gerjesszük ezután egyidejűleg az I-es és II-es fázis tekercseket. (9-1. ábra_b és 9-1. ábra_c) A II-es kapcsoló zárása után, feltételezve, hogy a villamos tranziensek igen rövid idő alatt lezajlanak, a fluxus kép az 9-1. ábra_b ábrának megfelelően alakul. A forgórészre az óramutató járásával ellentétes irányú nyomaték hat, aminek következtében a forgórész mozogni kezd, és az elektromechanikai tranziensek lezajlása után az 9-1. ábra_c ábrának megfelelő egyensúlyi helyzetet veszi fel. (Az erővonalakat rugalmas szálaknak tekintve, érzékelhető a nyomaték keletkezése.) Az I-es fázistekercset kikapcsolva az új egyensúlyi helyzet az 9-1. ábra_d ábrának megfelelően alakul. A továbbiakban a III-as fázis tekercsgerjesztésével, és a II-es fázistekercs kikapcsolásával a forgórész tovább mozgatható.
Fentiek alapján könnyen belátható, hogy a gerjesztések folyamatos és ciklikus változtatásával a forgórész meghatározott nagyságú szögelfordulás kvantumokból összetevődő mozgásba kezd. A szögelfordulás egysége, a lépésszög: az 1-es és 3-as állapotokhoz tartozó egyensúlyi rotor pozíció szögkülönbsége.
A gerjesztést a sorrendben következő fázistekercsre átkapcsolva a rotor egy lépést tesz meg. A közbülső, a két fázistekercs együttes gerjesztéséhez tartozó elmozdulás szokásos elnevezése: fél lépés. (nagyobb nyomaték érdekében számos alkalmazásban egyidejűleg mindig két fázistekercsre kapcsolnak gerjesztést.) Az egy körülforduláshoz szükséges lépések száma:
|
|
( 9.2 ) |
ahol  a lépésszög.
a lépésszög.
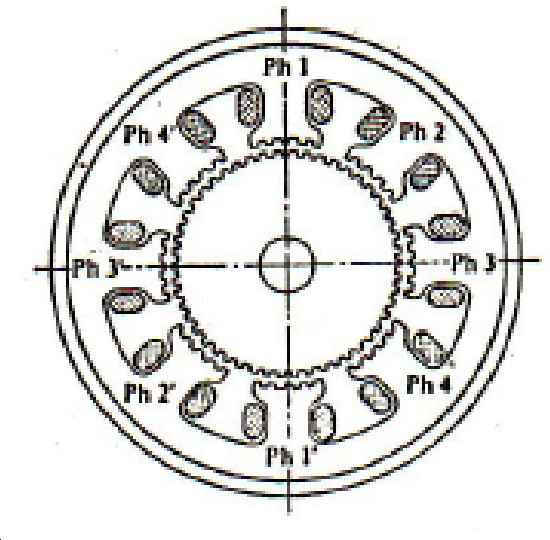
A pólusok száma konstrukciós okok miatt nem növelhető tetszőleges mértékben. Kis lépésszögű léptető motorok alakíthatók ki az állórész pólusok és a forgórész fogazásával. (ld. 9-2. ábra) A hullámhajtóművekhez hasonlóan a működési elv lényege abban áll, hogy az állórészen és a forgórészen a fogak száma eltér egymástól. Mindig az éppen gerjesztett pólus alatt kerülnek a fogak közelítőleg fedésbe. A fogszám különbözőségéből adódóan a gerjesztetlen pólusok alatt a szemben lévő fogak egymáshoz képest elcsúsznak, így a lépésszög nagyságát a forgó- és az állórész fogszám viszonya határozza meg.
Tipikus lépésszög értékek, illetve a hozzájuk tartozó lépésszámok láthatók a Hiba! A hivatkozási forrás nem található.ban.
|
lépésszög |
1,8° |
2,5° |
7,5° |
15° |
30° |
|
lépésszám |
200 |
144 |
48 |
24 |
12 |
A forgórészen lágyvas helyett állandó mágnest alkalmazva egyrészt a léptető motorok nyomatéka megnövelhető, másrészt a motor léptethetővé válik a gerjesztés polaritásának cseréjével.
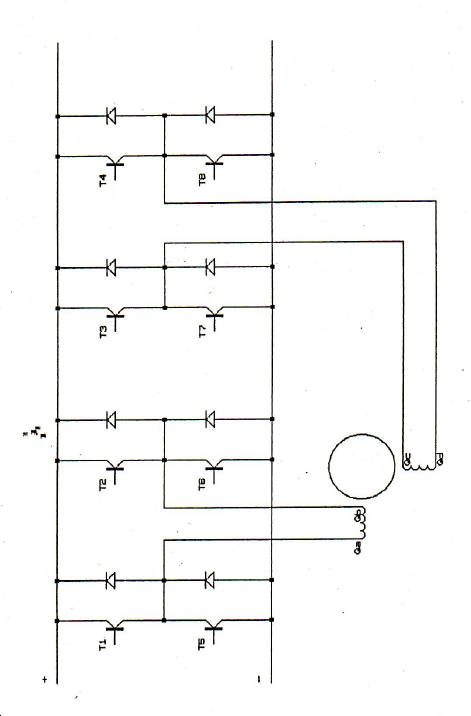
Bipoláris léptető motort a gerjesztő tekercsek polaritásának ciklikus cseréjével késztetünk mozgásra. Tekintsük az ábrát, ahol egy kétfázisú léptető motor táplálását látjuk. Tegyük fel, hogy  és
és  tranzisztor vezet. Egy lépés megtételéhez a
tranzisztor vezet. Egy lépés megtételéhez a  és
és  tranzisztorokat kell kikapcsolni, és helyettük a
tranzisztorokat kell kikapcsolni, és helyettük a  és
és  tranzisztorokat kell bekapcsolni. A következő lépéshez
tranzisztorokat kell bekapcsolni. A következő lépéshez  és
és  tranzisztorokat kapcsoljuk ki, majd a
tranzisztorokat kapcsoljuk ki, majd a  és
és  tranzisztorokat kapcsoljuk be. A ciklust folytatva a negyedik lépés után jutunk vissza az eredeti gerjesztési állapotba.
tranzisztorokat kapcsoljuk be. A ciklust folytatva a negyedik lépés után jutunk vissza az eredeti gerjesztési állapotba.
A léptető motorok alkalmazásával visszacsatolás nélküli, egyszerű pozíciószabályozó körök építhetők. A forgó rész adott számú lépés-parancsra az alaphelyzetéhez képest adott mértékben fordul el.
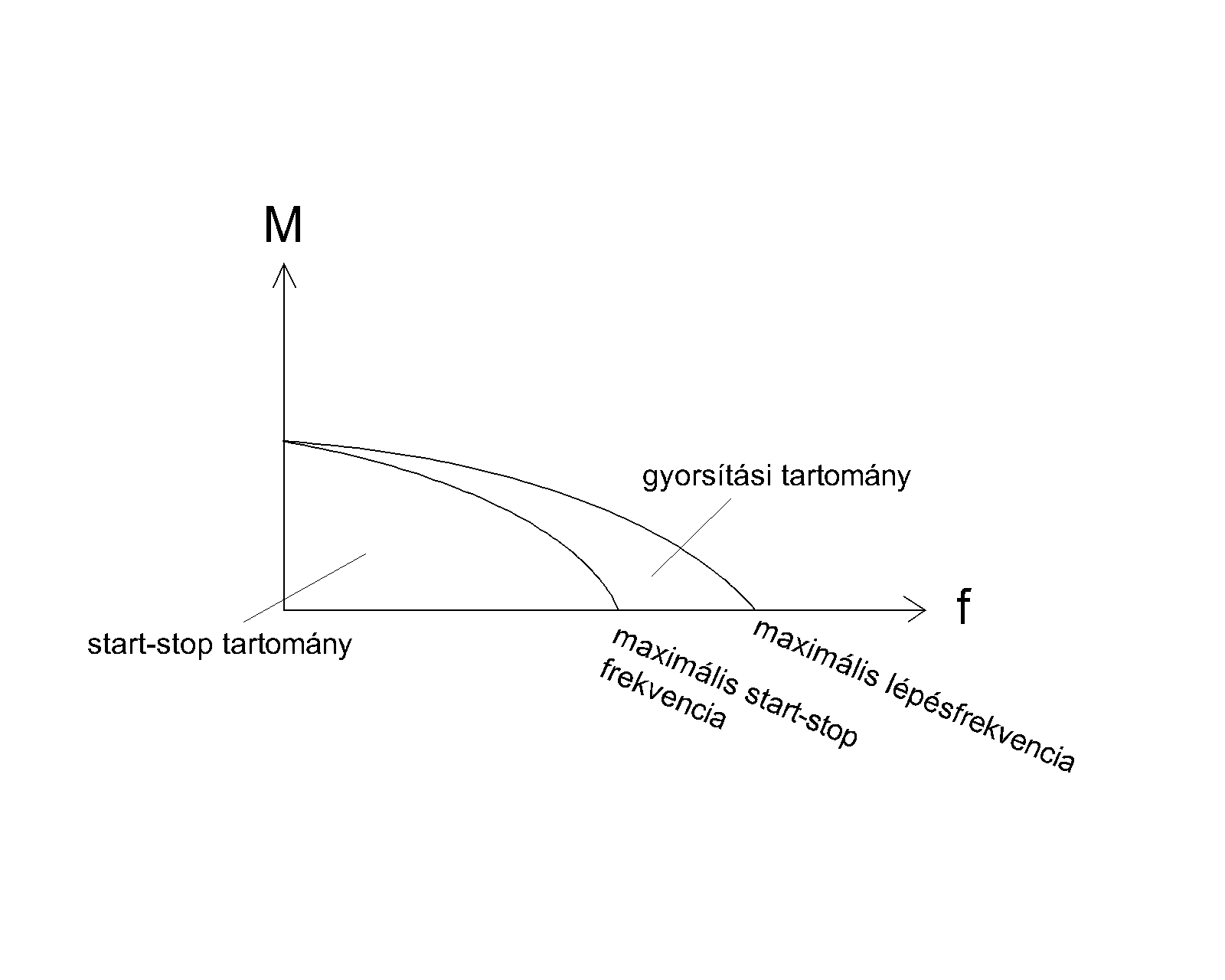
A maximálisan megengedhető lépés-frekvenciát a motor forgó részének (és a terhelésnek) a forgási tehetetlensége, a motor villamos nyomatéke és a terhelő nyomaték együttesen határozzák meg. A maximális lépésfrekvencia túllépése esetén a motor lépést téveszt. A terhelő nyomaték és a lépés-frekvencia közti kapcsolatot a motor dinamikus jelleggörbéjével adják meg (ld. 9-4. ábra). A jelleggörbe két tartományból áll:
-
A start-stop tartományon belül a motor forgó része álló állapotból
 terhelő nyomaték ellenében
terhelő nyomaték ellenében  frekvenciájú, adott számú lépést képes megtenni lépés tévesztés nélkül.
frekvenciájú, adott számú lépést képes megtenni lépés tévesztés nélkül. -
A gyorsítási tartomány a már forgó, stacionárius üzemben dolgozó motorra adja meg a megengedhető terhelő nyomaték – lépés – frekvencia értékpárok halmazát.
A.2. A manipulátor felépítése
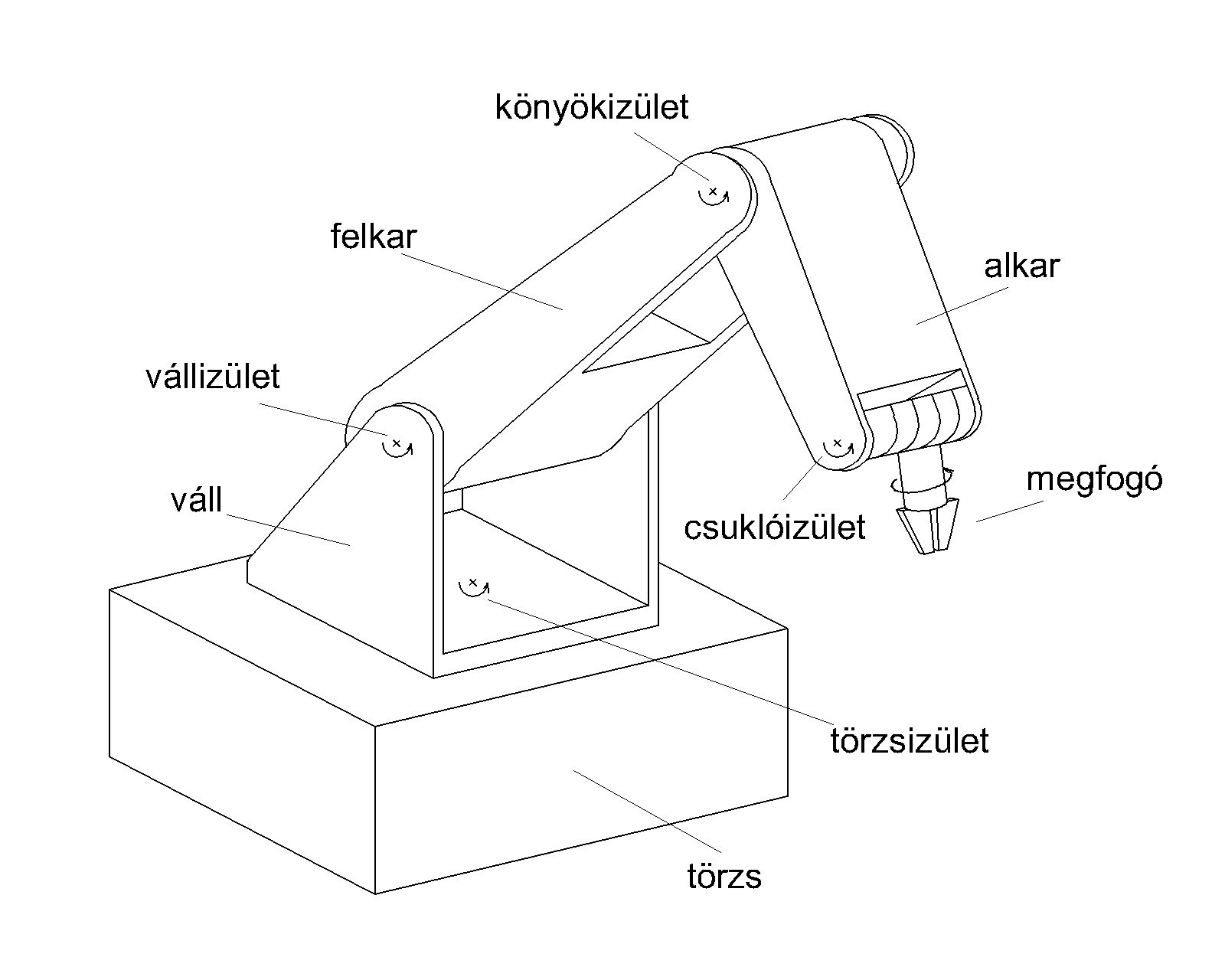
A manipulátor mechanikája öt részre tagolható (lásd. 9-5. ábra). A manipulátor mozdulatlan része a törzs. A törzshöz a törzsízülettel kapcsolódik a váll. A vállhoz a vállízülettel a felkar, a felkarhoz a könyökízülettel az alkar csatlakozik. Az alkarhoz a csuklóízület kapcsolja a megfogót. A csuklóízületet két független kúpkerék alkotja. A két kúpkerék egyidejű és megfelelő irányú mozgatása a megfogó egymástól független billenő és csavaró mozgását teszi lehetővé. A megfogó három nyitható-zárható rugalmas ujjból áll.
A mozgatást hat négyfázisú unipoláris léptető motor végzi. Egy lépés során a motor tengelye 7,5°-ot fordul el. Az áttételek miatt egy lépés a manipulátoron a következő elmozdulásokat eredményezi:
törzsízület:0,2314°/lépés
vállízület:0,162°/lépés
könyökízület:0,162°/lépés
csuklóízület:0,2314°/lépés
ujjízület:0,0655°/lépés
A fenti sorrendben jelöljük ízületi változókat  -vel és az ízületek távolságát
-vel és az ízületek távolságát  -vel! (A csuklóízülethez két változó tartozik). A robotmanipulátor Denavit-Hartenberg féle leírási mód szerinti geometriai paramétereit a 9.2. táblázatban közöljük.
-vel! (A csuklóízülethez két változó tartozik). A robotmanipulátor Denavit-Hartenberg féle leírási mód szerinti geometriai paramétereit a 9.2. táblázatban közöljük.
|
tag |
0 |
1 |
2 |
3 |
4 |
5 |
|
|
- |
0 |
|
|
|
0 |
|
|
- |
|
0 |
0 |
0 |
|
|
|
0 |
0 |
0 |
0 |
0 |
0 |
|
|
160 |
80 |
190 |
190 |
0 |
80 |









A geometriára illetve az inverz geometriai feladatra vonatkozó részletek a [3]-ban találhatók.
A.3. Manipulátor logikai áramkörei
A manipulátor mozgatását négyfázisú unipoláris léptető motorok végzik. A motor katalógusadatai szerint e léptető motorok minden lépésénél két-két fázistekercsre kell gerjesztést kapcsolni. Jelöljük a fázistekercseket  ,
,  ,
,  , és
, és  betűkkel továbbá jelentse az 1 logikai szint azt, hogy az adott tekercsre gerjesztést kapcsolunk és a
betűkkel továbbá jelentse az 1 logikai szint azt, hogy az adott tekercsre gerjesztést kapcsolunk és a  logikai szint azt, hogy az adott tekercsre nem kerül gerjesztés. A léptető motorok előre- illetve hátraforgatásához szükséges gerjesztési állapotokat a 9.3. táblázat foglaltuk össze.
logikai szint azt, hogy az adott tekercsre nem kerül gerjesztés. A léptető motorok előre- illetve hátraforgatásához szükséges gerjesztési állapotokat a 9.3. táblázat foglaltuk össze.
|
Előreforgás |
||||||
|
|
|
|
|
|||
|
1. állapot |
1 |
0 |
1 |
0 |
||
|
2. állapot |
1 |
0 |
0 |
1 |
||
|
3. állapot |
0 |
1 |
0 |
1 |
||
|
4. állapot |
0 |
1 |
1 |
0 |
||
|
Hátraforgás |
Ha egy motort előre akarunk forgatni, akkor 9.3. táblázatban az egymás alatt elhelyezkedő soroknak megfelelő gerjesztéseket kell a léptető motorok fázistekercseire kapcsolni. A forgásirány-váltás a táblázat fordított sorrendű kiolvasásával érhető el.
Megjegyzés:
-
Az adott léptető motor is vezérelhető fél lépésekkel (lásd 9.4. táblázat). A robottal szerzett tapasztalataink szerint egy lépésen belül a két fél lépés nagysága nem azonos, mivel a motor nyomatéka kisebb akkor, amikor csak egy fázistekercsre kapcsolunk gerjesztést. Kisebb terhelés (könnyebb szerkezet) illetve nagyobb nyomatékú léptető motor mellett a két fél lépés nagysága megegyezne.
|
Előreforgás |
|||||||
|
|
|
|
|
||||
|
1. állapot |
1 |
0 |
1 |
0 |
|||
|
2. állapot |
1 |
0 |
0 |
0 |
|||
|
3. állapot |
1 |
0 |
0 |
1 |
|||
|
4. állapot |
0 |
0 |
0 |
1 |
|||
|
5. állapot |
0 |
1 |
0 |
1 |
|||
|
6. állapot |
0 |
1 |
0 |
0 |
|||
|
7. állapot |
0 |
1 |
1 |
0 |
|||
|
8. állapot |
0 |
0 |
0 |
0 |
|||
|
Hátraforgás |
-
A mérések során kétfázisú bipoláris léptető motorral is találkozunk. A négyfázisú unipoláris és a kétfázisú bipoláris léptető motort vezérlő logikai áramkör azonos, csak a 9.3. táblázat értelmezése a következő:

és  jelentése: az egyik fázistekercs két kivezetése
jelentése: az egyik fázistekercs két kivezetése

és  jelentése: a másik fázistekercs két kivezetése (ld. 9-3 ábra)
jelentése: a másik fázistekercs két kivezetése (ld. 9-3 ábra)
Az 1 jelentése: az adott kivezetést a pozitív sínhez kell kapcsolni
A 0 jelentése: az adott kivezetést a negatív sínhez kell kapcsolni.
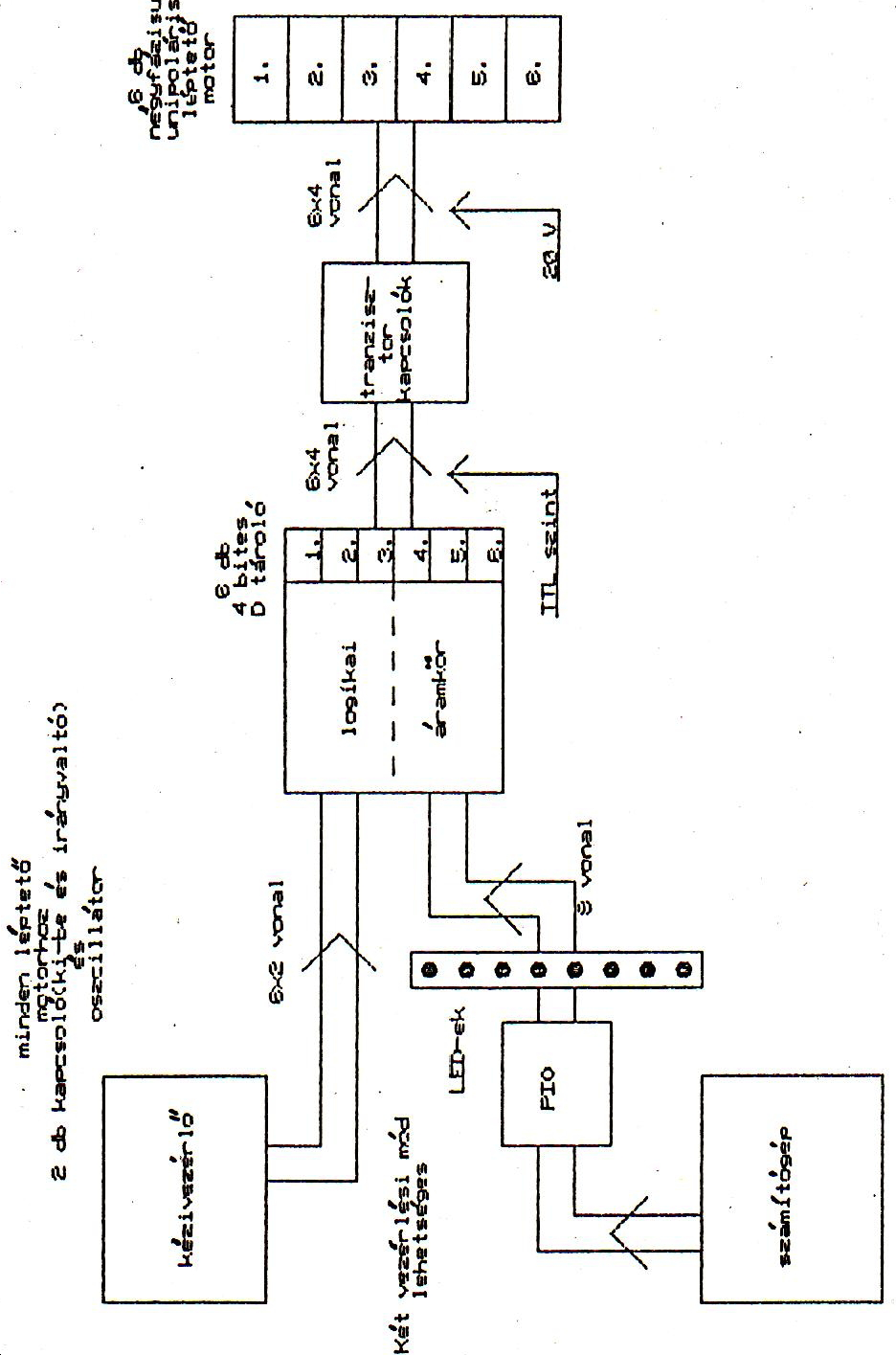
Az elektronika feladata a léptető motorok táplálása, megfelelő sorrendű gerjesztések kapcsolása a fázistekercsekre. Mindez két szinten valósul meg. Először egy logikai áramkör kimenetei TTL szintű jelekkel írják elő azt, hogy melyik motor, melyik tekercseire kerüljön gerjesztés, majd a TTL szintű jeleket mind feszültségben, mind teljesítményben felerősítve kapcsoljuk a léptető motorok fázistekercseire. (lásd 9-6. ábra) Bár az ábrán külön nem tüntettük fel, a logikai áramkörök működtetéséhez 5V, a léptető motor működtetéséhez 12-20V tápfeszültség szükséges.
A léptető motorok nyílt-hurkú vezérlést tesznek lehetővé. Tapasztalataink szerint csak külső akadályokkal való ütközéskor történik lépéstévesztés.
A robotmanipulátor mozgása alapvetően két módon történhet:
-
a kézivezérlő dobozban található kapcsolók segítségével
-
egy számítógépes programmal
A.4. Kézi vezérlési mód
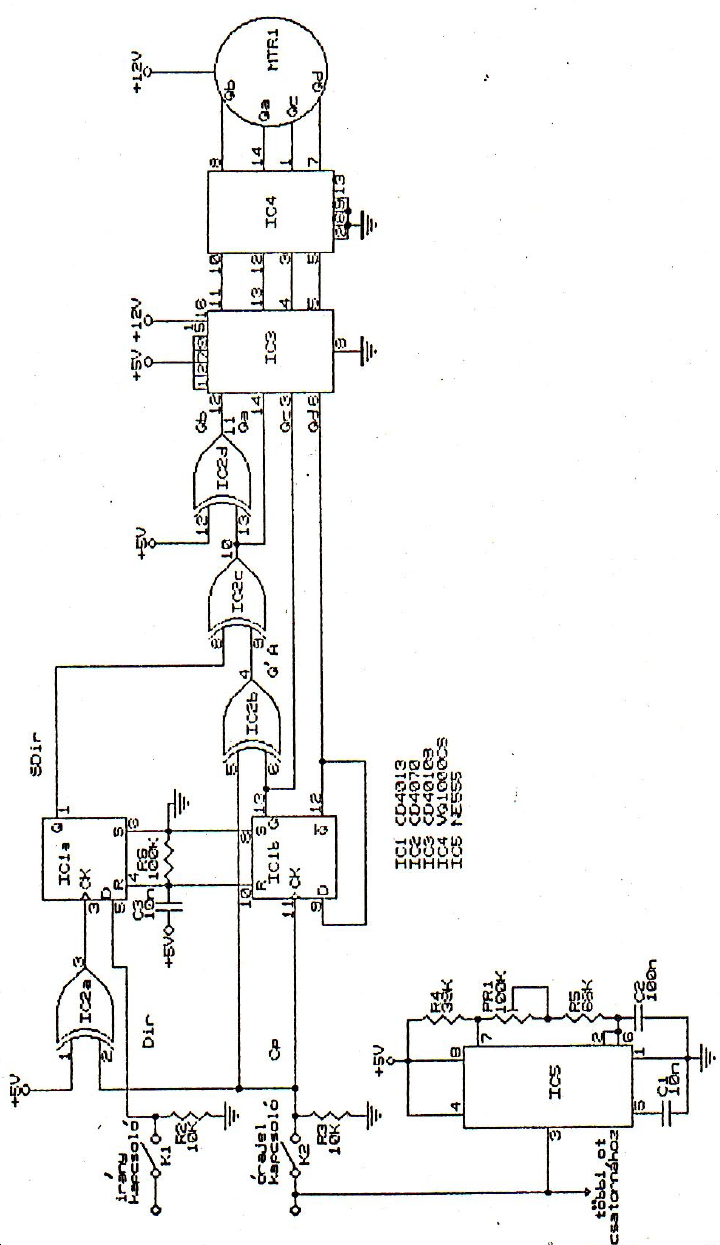
Ebben az üzemmódban a robotmanipulátor nem programozható, csak manipulátorként működtethető. Minden motorhoz két kapcsolót rendelünk, az egyik az órajelet kapcsolja, a másik a forgásirányt írja elő. E kapcsolók az ún. kézivezérlő dobozban helyezkednek el. A kézivezérlési módban minden motort a 9-7. ábran látható kapcsolás működteti.
A működési elv magyarázatához a 9.3. táblázatból indulhatunk ki. A 9.3. táblázatot tanulmányozva a következőket figyelhetjük meg:
-
minden jel periódikusan változik;
-

és
 valamint
valamint  és
és  jelek egymásnak inverzei;
jelek egymásnak inverzei; -

-hoz képest a
 jel egy negyed periódussal marad el vagy siet a forgásiránytól függően.
jel egy negyed periódussal marad el vagy siet a forgásiránytól függően.
Mivel egy ciklus négy állapotból áll, ezért az órajel frekvenciáját a ciklus frekvenciájának legalább kétszeresére kell választani.
Tekintsük a 9-7. ábrat. Az órajelet az ICS jelű áramkör állítja elő. Az órajel a  kapcsolón keresztül jut az IC1b jelű felfutóél által vezérelt D tároló órajel bemenetére. Az órajelből a D tároló frekvencia felezéssel állítja elő a
kapcsolón keresztül jut az IC1b jelű felfutóél által vezérelt D tároló órajel bemenetére. Az órajelből a D tároló frekvencia felezéssel állítja elő a  és
és  jeleket.
jeleket.
Ha egymás mellé írjuk az órajelet és a  értékeit, akkor észre vehetjük, hogy e két jel kizáró vagy művelettel összekapcsolva egy a
értékeit, akkor észre vehetjük, hogy e két jel kizáró vagy művelettel összekapcsolva egy a  -hez képest negyed periódussal időben késő
-hez képest negyed periódussal időben késő  jelet ad eredményül.
jelet ad eredményül.
(ld. 9.5. táblázat) A könnyebb megértés kedvéért a 9.5. táblázat jeleinek időfüggvényét is megrajzoltuk.
|
|
|
|
|
1 |
0 |
1 |
|
0 |
1 |
1 |
|
0 |
0 |
0 |
|
1 |
1 |
0 |
|
1 |
0 |
1 |
|
0 |
1 |
1 |
|
0 |
0 |
0 |




Ha a motor előreforog, akkor  megegyezik
megegyezik  -val, ha hátraforog, akkor
-val, ha hátraforog, akkor  -t invertálva nyerjük
-t invertálva nyerjük  -t. Az előreforgásnak a logikai nulla, a hátraforgásnak a logikai egy szintet feleltetjük meg, így ha az irányjel (a 9-7. ábran SDIR) értéke nulla, akkor az
-t. Az előreforgásnak a logikai nulla, a hátraforgásnak a logikai egy szintet feleltetjük meg, így ha az irányjel (a 9-7. ábran SDIR) értéke nulla, akkor az  jelű XOR kapu egyszerűen átengedi a
jelű XOR kapu egyszerűen átengedi a  jelet, ha az irányjel értéke logikai egy, akkor XOR kapu invertálja a
jelet, ha az irányjel értéke logikai egy, akkor XOR kapu invertálja a  jelet.
jelet.

jelet az  XOR kapu segítségével invertálva kapjuk a
XOR kapu segítségével invertálva kapjuk a  jelet.
jelet.
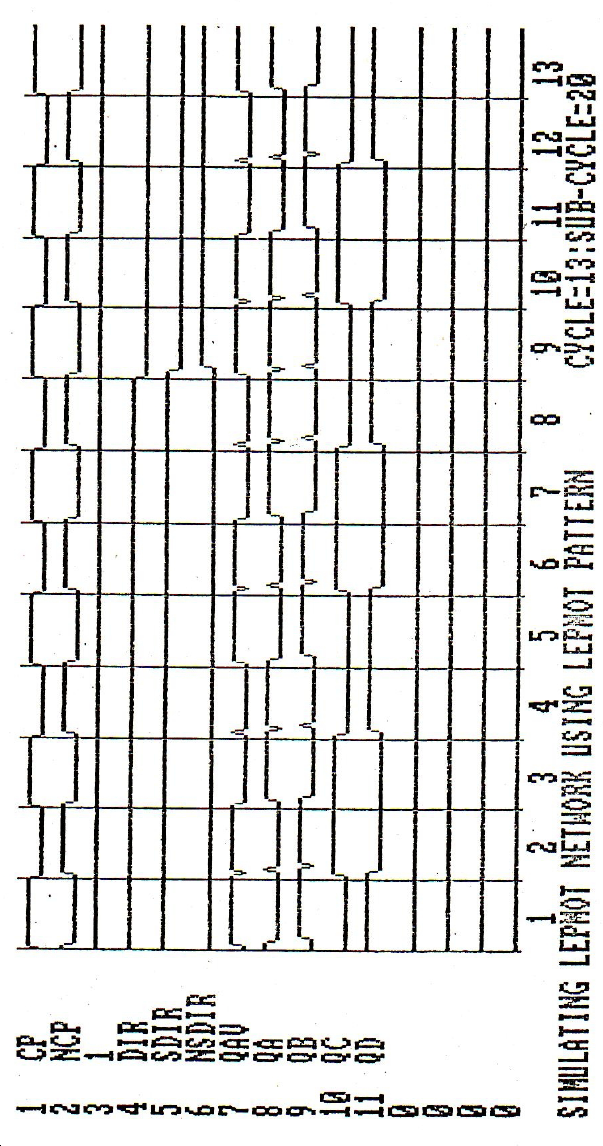
Az irányváltást szinkronizálni kell. (ld. 9-7. ábran) DIR az irányváltó kapcsoló jele és SDIR a szinkronizált irányjel). A 9-7. és a 9-8. ábraból kitűnik, hogy a  jel mindig csak az órajel lefutó élére változhat, ezért az iránykapcsoló jelét lefutóél által vezérelt D tárolón vezetjük keresztül.
jel mindig csak az órajel lefutó élére változhat, ezért az iránykapcsoló jelét lefutóél által vezérelt D tárolón vezetjük keresztül.
Egy IC tokban általában két db egybites tároló illetve négy db kétbemenetű kapu van. Ez magyarázza az  és az
és az  használatát. Az
használatát. Az  XOR kapu invertálja az órajelet, ezért az
XOR kapu invertálja az órajelet, ezért az  D tároló az eredeti órajel élére ír be.
D tároló az eredeti órajel élére ír be.
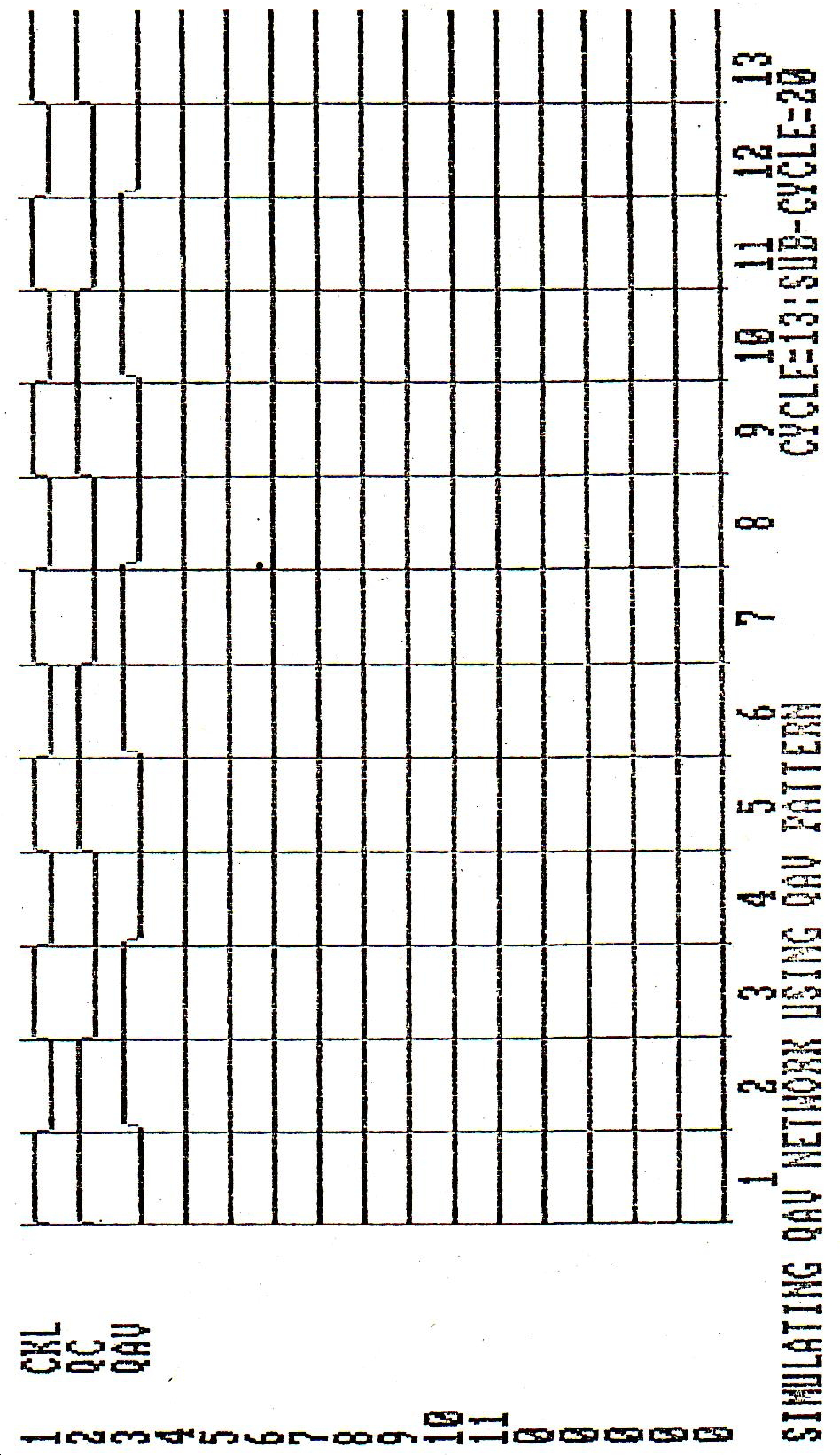
Összefoglalásként a
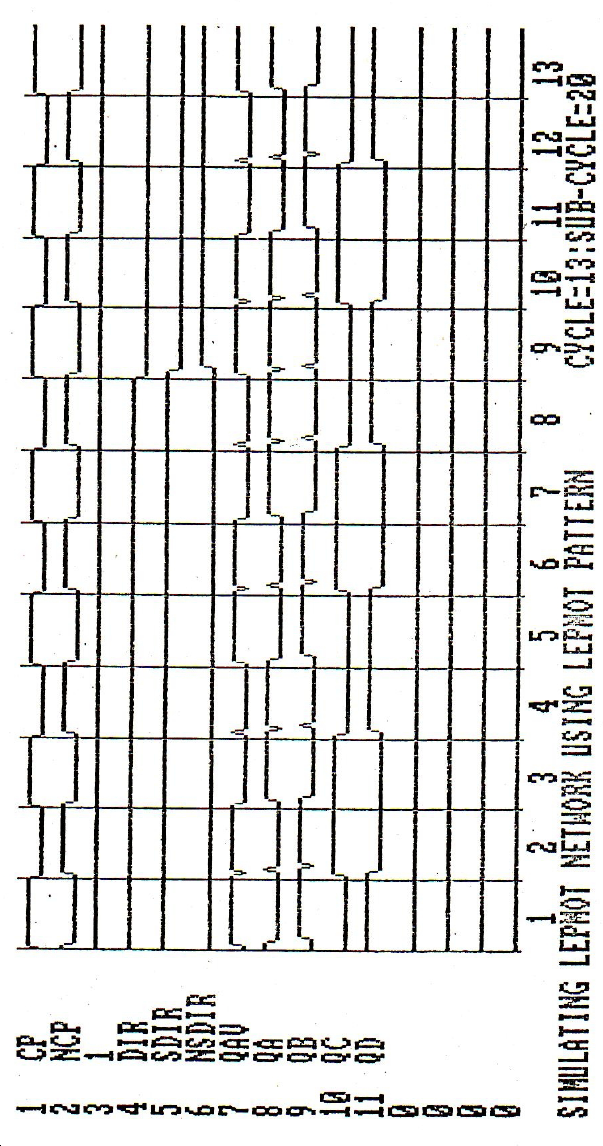
9-9. ábra az idő függvényében ábrázoltuk a fent említett jeleket. Az ábrán feltüntetett esetben a léptető motor hét lépést halad előre, majd irányt vált és három lépést hátraforog. Figyeljük meg, hogy az irányváltáskor egy lépés kimarad, csökkentve ezzel a lépéstévesztés veszélyét!
A C kondenzátor és az R ellenállás a kezdeti érték beállítására szolgálnak. A bekapcsolást követően a C kondenzátor feszültsége ugrásszerűen nem változhat, és amíg a kondenzátor az R ellenálláson keresztül fel nem töltődik, addig az a D tároló RESET bemenetére törlő jelet kapcsol. Tehát a bekapcsolást követően

A feszültség illetve a teljesítmény illesztését az IC3 és IC4 áramkör végzi. (Beszerzési nehézségek miatt a léptető motoros méréseknél az IC3 és IC4 áramköröket tranzisztor kapcsolókkal váltottuk ki, ennek természetesen lényegesen nagyobb a helyigénye.)
A.5. Számítógépes vezérlési mód
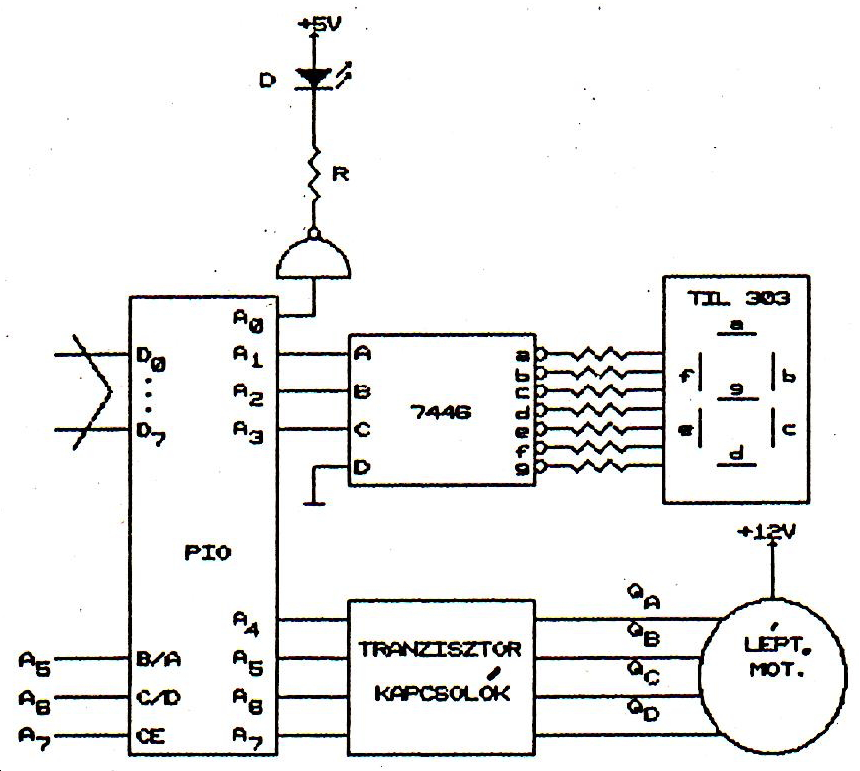
A jelen mérésben a robotmanipulátort egy PIO-n keresztül egy ZX Sinclair Spectrum számítógéphez csatlakoztatjuk. A számítógép egyidejűleg 8 bitnyi információ kiadására képes, ezért egyetlen OUTPUT utasítással csak egyetlen motor léptetésére adhatunk ki parancsot. Az illesztő áramkör (ld. 9-10. ábra) dekódoló feladatot lát el.
Tekintsük a 9-10. ábrat, ahol a nyolc adatvonal közül a felső négy helyiérték  közeli a motor következő lépésének megfelelő gerjesztési állapotot jelent. E négy vezeték 6 db párhuzamosan kapcsolt négybites D tároló memória elemhez csatlakozik (ld. 9-10. ábra
közeli a motor következő lépésének megfelelő gerjesztési állapotot jelent. E négy vezeték 6 db párhuzamosan kapcsolt négybites D tároló memória elemhez csatlakozik (ld. 9-10. ábra
IC5…IC10). Az  vezetékek tartalma határozza meg azt, hogy az
vezetékek tartalma határozza meg azt, hogy az  vezetéken érkezett információ melyik D tárolóba íródjon be. Az
vezetéken érkezett információ melyik D tárolóba íródjon be. Az  adatok 1/8-as demultiplexer (9-10. ábra IC4) cím bemeneteire kerülnek. A demultiplexer kimenetei szolgálnak a D tárolók órajeléül. Az
adatok 1/8-as demultiplexer (9-10. ábra IC4) cím bemeneteire kerülnek. A demultiplexer kimenetei szolgálnak a D tárolók órajeléül. Az  adatbit gondoskodik az illesztőáramkör engedélyezéséről. Alaphelyzetben
adatbit gondoskodik az illesztőáramkör engedélyezéséről. Alaphelyzetben  értéke 1 és akkor vált nullára, amikor érvényes adat érkezett a számítógép felől a PIO kimenetére. Ez egyrészt engedélyezi az IC1 és IC2 háromállapotú meghajtó áramkörökön az
értéke 1 és akkor vált nullára, amikor érvényes adat érkezett a számítógép felől a PIO kimenetére. Ez egyrészt engedélyezi az IC1 és IC2 háromállapotú meghajtó áramkörökön az  adatok áthaladását, másrészt ez a lefutóél az
adatok áthaladását, másrészt ez a lefutóél az  monostabil multivibrátor 1 jelű bemenetére kerülve azt a 4 jelű kimenetén egy 500 ns nagyságú impulzus kiadására kényszeríti, amely impulzus a demultiplexer működését engedélyezi az 500 ns alatt. Ki kell hangsúlyozni, hogy a monostabil multivibrátor az
monostabil multivibrátor 1 jelű bemenetére kerülve azt a 4 jelű kimenetén egy 500 ns nagyságú impulzus kiadására kényszeríti, amely impulzus a demultiplexer működését engedélyezi az 500 ns alatt. Ki kell hangsúlyozni, hogy a monostabil multivibrátor az  adat lefutó élének hatására ad engedélyező impulzust a demultiplexer számára, ezért a manipulátor felé küldött minden érvényes adat előtt az
adat lefutó élének hatására ad engedélyező impulzust a demultiplexer számára, ezért a manipulátor felé küldött minden érvényes adat előtt az  vonal értékét logikai egyre kell állítani.
vonal értékét logikai egyre kell állítani.

A manipulátor mozgatásához a számítógép által kiadott kódot a következő módon kell meghatározni. A számítógépnek nyilván kell tartania minden léptető motor pillanatnyi gerjesztési állapotát, ami egy táblázat segítségével történik. Mivel a  ,
,  ,
,  és
és  értékét a felső négy helyiértéken adjuk meg, ezért a számítógép nem a korábban közölt 9.2. táblázatot őrzi, hanem helyette a 9.6. táblázatban megadott értékeket. (a % jel szokásosan a bináris számokat jelöli, a decimális számoknál nem használunk megkülönböztető jelzést).
értékét a felső négy helyiértéken adjuk meg, ezért a számítógép nem a korábban közölt 9.2. táblázatot őrzi, hanem helyette a 9.6. táblázatban megadott értékeket. (a % jel szokásosan a bináris számokat jelöli, a decimális számoknál nem használunk megkülönböztető jelzést).
|
Lépés |
Bináris |
Decimális |
|
1. |
1010 0000 |
160 |
|
2. |
1001 0000 |
144 |
|
3. |
0101 0000 |
80 |
|
4. |
0110 0000 |
96 |
A vezérlő program rendelkezik egy hat elemű vektorral. E vektor egy-egy eleme egy-egy léptető motorhoz van hozzárendelve és értéke a gerjesztési állapotnak megfelelően egy és négy között változhat. Például, ha e vektorból kiolvastuk, hogy a 3. léptető motor az 1. lépésnek megfelelő gerjesztési állapotban van és előre akarjuk forgatni azt egy lépéssel, akkor két output utasítást kell kiadni. Az output utasítással kiadandó két értéket a következőképpen kell meghatározni:
% xxxxxxx1: tetszőleges páratlan szám, amely  értékét 1-re állítja be
értékét 1-re állítja be
% 1001 011 0 = 144 + 2*3 = 150
Ha ugyanezt a léptető motort hátra kívánjuk forgatni, akkor a másodiknak kiadandó érték a következő lenne:
% 0110 011 0 = 96 + 2*3 = 102
A PIO működésének részleteire nem tértünk ki, erre vonatkozó információ a 2. ajánlott irodalomban található. Feltétlenül meg kell azonban jegyeznünk hogy a PIO B/A C/D és CE és  bemeneteit rendre a Z80 címbusz
bemeneteit rendre a Z80 címbusz  ,
,  és
és  jelű vonalára kötöttük és a PIO-nak az
jelű vonalára kötöttük és a PIO-nak az  jelű portját használjuk a harmadik üzemmódban, minden bitet kimenetbe állítva. Ennek megfelelően - a bekapcsolást követően - két értéket kell küldeni a PIO inicializálása érdekében a
jelű portját használjuk a harmadik üzemmódban, minden bitet kimenetbe állítva. Ennek megfelelően - a bekapcsolást követően - két értéket kell küldeni a PIO inicializálása érdekében a  parancscímre, először 255-öt majd 0-t, továbbá a léptető motorok mozgatásához a fent említett kódokat a
parancscímre, először 255-öt majd 0-t, továbbá a léptető motorok mozgatásához a fent említett kódokat a  adatcímre kell küldeni.
adatcímre kell küldeni.
A.6. Használati utasítás a számítógépes vezérlési módhoz
A program Z80 assembly nyelven íródott és a ROBOT 1 cartrige-on található. Az indításhoz elegendő a cartrige-t a drive-ba helyezni és kiadni a RUN parancsot. Az indítást követően a képernyőn megjelenik a főmenü, ami a következő választási lehetőséget nyújtja a számunkra:
Alaphelyzet definiálás
Mozgatás alaphelyzetbe
Kézi vezérlés
Pályatanítás
Tanult mozgás ismétlése
A főmenüben valamely menüpont kezdő betűjének leütésével közölhetjük a programmal választásunkat.
A.6.1. Alaphelyzet definiálás
A léptető motorok használata szükségtelenné teszi a robotmanipulátorról történő visszacsatolást. A számítógép a kiadott lépéseket számlálva állandóan jegyzi a robotmanipulátor relatív pozícióját a bekapcsolást követő illetve e menüponttal definiált helyzetéhez képest.
Az alaphelyzet definiálása úgy történik, hogy a főmenüben az ’a’ betűt nyomjuk le, ekkor a program lekapcsolja a gerjesztést valamennyi gerjesztő tekercsről, így a robotmanipulátor kézzel mozgathatóvá válik. A robotmanipulátort célszerű a fehér fogaskerekeinek forgatásával az alaphelyzetbe hozni. A beállítás végét a ’space’ billentyű leütésével jelezzük a program számára. Ekkor a program visszakapcsolja a megfelelő tekercsekre a gerjesztést, (ami egy kis elmozdulást eredményezhet) és visszatér a főmenühöz. Ha e menüponttal külön nem definiálunk alaphelyzetet, akkor a program a robotmanipulátornak a bekapcsolás pillanatában elfoglalt helyzetét tekinti alaphelyzetnek.
A.6.2. Mozgatás alaphelyzetbe
E parancs visszatéríti a robotmanipulátort az előző paranccsal definiált pozícióba.
A.6.3. Kézi vezérlés
E menüpont lehetőséget nyújt a felhasználó számára a robotmanipulátor mozgatásának begyakorlására. Minden léptető motorhoz két-két billentyű van rendelve. Az 1 … 6 számokat jelölő billentyűkkel előre, az alattuk levő Q … Y billentyűkkel hátra mozgathatjuk az egyes léptető motorokat a következő táblázat szerint:
|
előre |
hátra |
|
|
törzs |
1 |
Q |
|
váll |
2 |
W |
|
könyök |
3 |
E |
|
bal csukló |
4 |
R |
|
jobb csukló |
5 |
T |
|
nyitás |
zárás |
|
|
megfogó |
6 |
Y |
Egyszerre több léptető motort is mozgathatunk és a mozgás mindaddig tart, amíg az adott billentyűt lenyomva tartjuk.
A számítógép ekkor a robotmanipulátornak csak a pillanatnyi pozícióját őrzi meg, de azt nem, hogy az adott pozícióba milyen pályán haladva jutott el.
Visszatérés a főmenühöz a „0” billentyű leütésével történik.
A.6.4. Pályatanítás
A főmenüből a „P” billentyű leütésével jutunk e menüpontba. A bejelentkezés után a következő kérdésre kell válaszolni:
új pálya (U) folytatás (F)
Ha új pálya tanítását kezdjük (U betű leütése), akkor a program az alaphelyzetbe viszi a robotmanipulátort, ellenkező esetben (F betű leütése) a robotmanipulátor a memóriában mozgássorozat utolsó pontjának megfelelő pozíciót veszi fel.
Ezt követően a mozgatás a kézivezérléshez hasonlóan az 9.7. táblázatban felsorolt billentyűk leütésével történik, de a kézivezérléssel szemben a program a robotmanipulátor pillanatnyi pozíciója mellett a pálya bizonyos (ld. később) pontjainak a koordinátáit is eltárolja, így a mozgássorozat ismételhetővé válik.
A program akkor tárolja el egy pont koordinátáit, ha:
-
valamelyik léptető motor mozgásirányt változtat (önmagában az nem irányváltás, ha egy léptető motor leáll és újra elindul, csak akkor, ha ezt az ellenkező irányba teszi);
-
valamelyik léptető motor
 100 lépésnél többet tett meg az utolsó tárolt pályaponthoz képest;
100 lépésnél többet tett meg az utolsó tárolt pályaponthoz képest; -
az M betű leütésével erre külön parancsot adunk.
-
Visszatérés a főmenühöz a ’0’ billentyű leütésével történik.
A.6.5. Tanult pálya ismétlése
A főmenüben a T leütését követően a program először az alaphelyzetbe juttatja a robotmanipulátort, majd végigviszi a pálya tanítás során eltárolt pályapontokon. E művelet befejeztével ismét a főmenü jelenik meg a képernyőn.
Ellenőrző kérdések
-
Ismertesse a léptető motorok működési elvét!
-
Mi a különbség az unipoláris és a bipoláris léptető motorok között?
-
Hogyan alakítható ki kislépésszögű léptető motor? Soroljon fel néhány tipikus lépésszöget!
-
A léptető motorok dinamikus jelleggörbéi milyen tartományokra bonthatók?
-
A kézivezérlés üzemmódban hogyan gondoskodunk a kezdeti értékek beállításáról?
-
Miért van szükség az irányjel szinkronizálására?
-
A számítógépes vezérlési módban milyen kódot kell kiadni, ha az 5. léptető motort a 3. gerjesztési állapotból előre szeretnénk forgatni egy lépéssel?
A.7. Mérési feladatok
9 . 8 feladat A léptető motor vezérlésére motor vezérlésére használt logikai áramkörök működésének vizsgálata
Az SN 7486 XOR és az SN 7474 D tároló felhasználásával állítsa össze a léptető motor 9.4 fejezetben megismert vezérlő áramkörét! Az áramkör  ,
,  ,
,  és
és  kimeneteit a kapcsoló panelon található egyszerű kétállású kapcsolók egyikét! (Az irányjel prellmentesítésről a vezérlő áramkör gondoskodik ld. 9.4 fejezet.) Az órajel előállításához használja az SN 7476 J K tárolóelemet, amelyből alakítson ki T tárolót! Az így kialakított T tároló órajelbemenetét kösse össze a kapcsoló panelon található monostabil multivibrátor kimenetével!
kimeneteit a kapcsoló panelon található egyszerű kétállású kapcsolók egyikét! (Az irányjel prellmentesítésről a vezérlő áramkör gondoskodik ld. 9.4 fejezet.) Az órajel előállításához használja az SN 7476 J K tárolóelemet, amelyből alakítson ki T tárolót! Az így kialakított T tároló órajelbemenetét kösse össze a kapcsoló panelon található monostabil multivibrátor kimenetével!
Figyelje meg az áramkör működését különös tekintettel az irányváltásokra! Rajzolja le a  , DIR és SDIR jelek időfüggvényét, ha a léptető motor két lépést halad előre és három lépést hátra!
, DIR és SDIR jelek időfüggvényét, ha a léptető motor két lépést halad előre és három lépést hátra!
9 . 9 feladat A léptető motor határfrekvenciájának kimérése
Az előző feladatban összeállított vezérlőáramkört ki kell egészíteni egy számláló és egy komparátor áramkörrel (ld. 9-11. ábra). A 9-11. ábran látható áramkör használata a következő: először a kapcsolók segítségével beállítjuk a kívánt lépésszámot, majd a  kapcsolóval töröljük a számláló értékét végül beíró jelet adunk a D tárolónak a
kapcsolóval töröljük a számláló értékét végül beíró jelet adunk a D tárolónak a  kapcsoló segítségével. Így a D tároló kimenetén logikai 1 jelenik meg, ezért az órajel áthalad az ÉS kapun. Az ÉS kapun áthaladó órajel egyrészt a léptető motort, másrészt a számlálót működteti. Amikor a számláló regiszter értéke eléri a beállított lépésszámot, akkor a komparátor áramkör egy felfutóélt generál, amely él hatására a D tároló törlődik, ezért az
kapcsoló segítségével. Így a D tároló kimenetén logikai 1 jelenik meg, ezért az órajel áthalad az ÉS kapun. Az ÉS kapun áthaladó órajel egyrészt a léptető motort, másrészt a számlálót működteti. Amikor a számláló regiszter értéke eléri a beállított lépésszámot, akkor a komparátor áramkör egy felfutóélt generál, amely él hatására a D tároló törlődik, ezért az
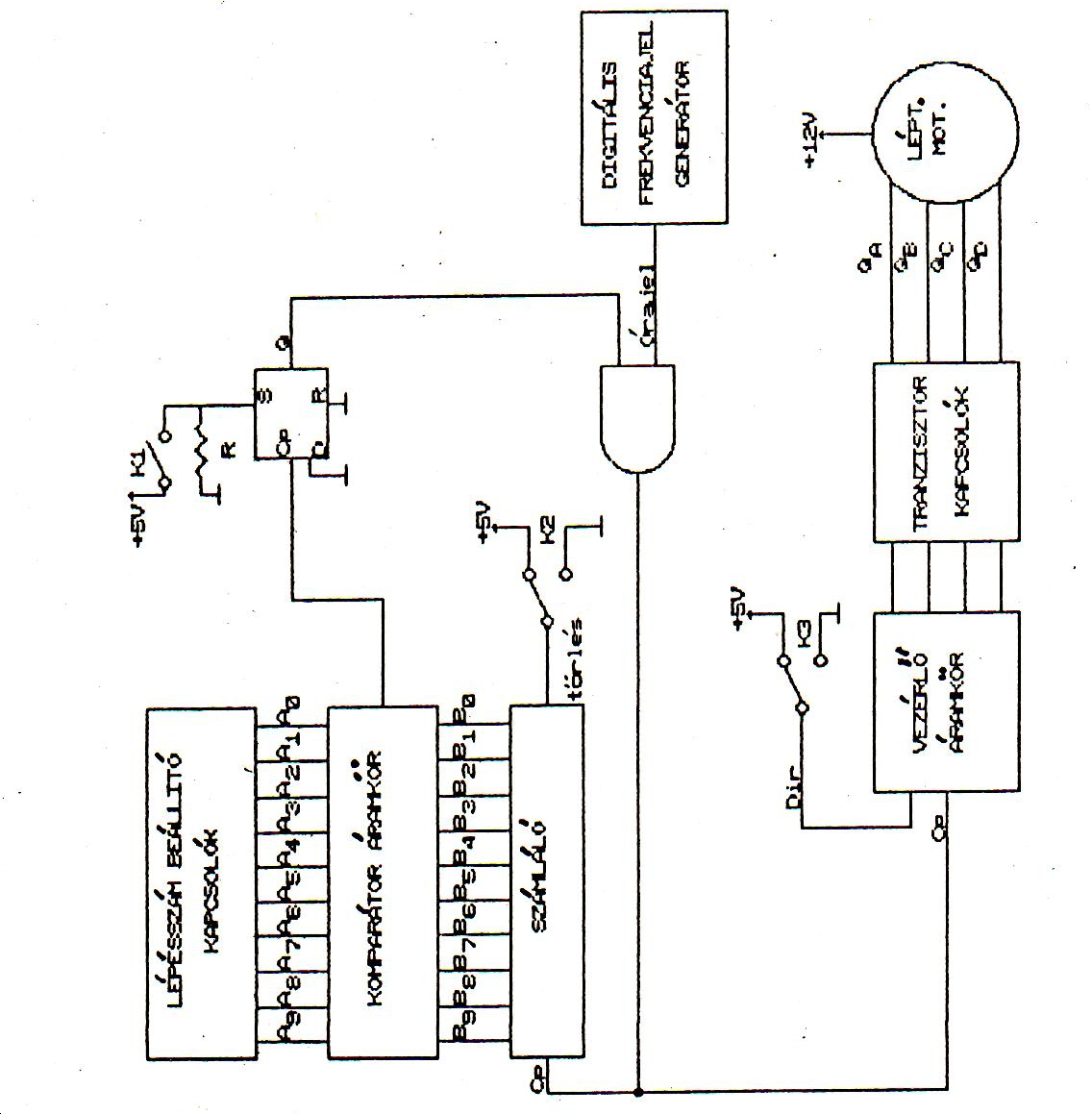
Az ÉS kapu nem enged át magán több órajelet.
A léptető motor kikapcsolt állapotában állítsa a tengelyen elhelyezett mutatót a bejelölt pozícióba, kapcsolja be a léptető motor tápfeszültségét és állítsa be a léptető motor egy körülfordulásának megfelelő lépésszámot! Az órajel frekvenciáját 100 – 400 Hz között változtatva keresse meg azt a legkisebb értéket, amelynél a léptető motor lépést téveszt! Az előző mérést ismételje meg a léptető motor tengelyét különböző (0 – 16 Ncm tartományba eső) nyomatékkal terhelve! A mérési eredményeket ábrázolja megfelelő koordinátarendszerben!
9 . 10 feladat A számítógép és a léptető motoros hajtás illesztésének vizsgálata
Kapcsolja össze a számítógépet a PIO egységgel! A méréshez használja a PIO A portját! A PIO TTL szintű jelet ad ki, így az A port négy legnagyobb helyiértékű bitje ( ) átveszi az előző mérésekben használt vezérlő áramkör kimeneteinek szerepét (ld. 9-12. ábra). Az
) átveszi az előző mérésekben használt vezérlő áramkör kimeneteinek szerepét (ld. 9-12. ábra). Az  ,
,  és
és  kivezetést kapcsolja össze a hétszegmenses kijelző alsó három helyiértékű bemenetével! Az
kivezetést kapcsolja össze a hétszegmenses kijelző alsó három helyiértékű bemenetével! Az  kivezetést a kapcsoló panel egyik LED-jével jelenítse meg! Inicializálja a PIO-t a következő paranccsal:
kivezetést a kapcsoló panel egyik LED-jével jelenítse meg! Inicializálja a PIO-t a következő paranccsal:
OUT 95,255
OUT 95,0
Adja ki a következő parancsokat és figyelje meg a léptető motor mozgását:
OUT 31,160
OUT31,144
OUT 31,80
OUT 31,96
OUT 31,160
Írjon BASIC nyelvű programot, amely tetszőleges sorszámú léptető motort tetszőleges számú lépéssel előre- illetve hátraforgat!
Megjegyzés:
-
Ebben a mérésben az engedélyező bitnek nincs szerepe.
-
A léptető motor sorszámát a hétszegmenses kijelző mutatja.
9 . 9 feladat
Kapcsolja össze a robotmanipulátor a számítógéppel! Indítsa el a robotvezérlő programot és a robotmanipulátort vezesse végig a mérésvezető által meghatározott pályán!
A mozgás többszöri ismétlésével figyelje meg a robotmanipulátor ismétlési pontosságát!
Ajánlott irodalom:

Tahaski Kenjo:Stepping motors and their microprocessor controls (Oxford 1983.)

Korondi Péter: Microprocesszorok I. (Előadási segédlet 1988.)

Korondi Péter: Robotvezérlő program ismertetése (Oktatási segédlet 1988.)