Robotirányítások
Szerzői jog © 2014 Dr. Korondi Péter, Décsei-Paróczi Annamária, Knopp Ferenc, Dr. Antal Ákos, Halas János, Dr. Vass József, Dr. Lakatos Béla

A tananyag a TÁMOP-4.1.2.A/1-11/1-2011-0042 azonosító számú „ Mechatronikai mérnök MSc tananyagfejlesztés ” projekt keretében készült. A tananyagfejlesztés az Európai Unió támogatásával és az Európai Szociális Alap társfinanszírozásával valósult meg.

Lektorálta: Dr. Husi Géza
A kiadásért felel a(z): BME MOGI
Felelős szerkesztő: BME MOGI
2014
- 1. Bevezetés
- 2. SISO LTI rendszerek klasszikus szabályozása
- 2.1. A klasszikus irányítási feladat megfogalmazása
- 2.2. A szabályozási körök fizikai megvalósítása
- 2.3. A tervezés főbb lépései és a szabályozási kör minőségi követelményei
- 2.4. A legfontosabb alapfeladatok
- 2.5. Minimálfázisú felnyitott körrel rendelkező szabályozási körök analízise
- 2.6. A stabilitás fogalma
- 2.7. A visszacsatolt rendszer stabilitása
- 3. Kvalitatív rendszerdinamika és rendszerek stabilitása
- 4. Feladatok a visszacsatolt rendszer stabilitásával kapcsolatban
- 5. Adaptív szabályozás
- 6. Állapottér reprezentáció
- 6.1. Lineáris időinvariáns rendszerek állapottér egyenletei
- 6.2. Állapotirányítás
- 6.2.1. Állapotvisszacsatolás és hatása a rendszer időállandóira
- 6.2.2. Irányíthatósági mátrix
- 6.2.3. Konstans referenciajel előírása és referenciajel kompenzáció
- 6.2.4. Állapotvisszacsatolás integráló taggal kiegészítve
- 6.2.5. Megfigyelő (állapotbecslő)
- 6.2.6. Megfigyelhetőségi mátrix
- 6.2.7. LTI rendszerek Kálmán-féle felbontása
- 6.2.8. Megfigyelőre alapozott állapotvisszacsatolás
- 6.2.9. Kanonikus (diagonális, illetve pszeudo-diagonális) alak
- 6.2.10. Kidolgozott feladatok az állapotirányításra
- 6.3. SISO rendszerek állapotirányítása
- 6.3.1. Állapotvisszacsatolás kanonikus alakban
- 6.3.2. SISO rendszerek irányíthatósági kanonikus alakja
- 6.3.3. Pólus áthelyezés irányíthatósági kanonikus alak esetén
- 6.3.4. Pólus áthelyezés általános alakú LTI SISO rendszer esetén (Ackermann formula)
- 6.3.5. Megfigyelhetőségi kanonikus alak és a megfigyelőre alapozott állapotvisszacsatolás
- 6.3.6. Irányíthatósági kanonikus alakban adott SISO rendszer állapotvisszacsatolása integrátorral kiegészítve
- 6.3.7. Kidolgozott feladatok SISO rendszerek állapotvisszacsatolására
- 6.4. Lineáris időben változó rendszerek állapottér egyenletei
- 6.5. Lineáris változó paraméterű rendszerek állapottér egyenletei
- 7. Dinamikus rendszerek identifikációja
- 7.1. Z - transzformáció
- 7.2. Tipikus diszkrét idejű rendszermodellek
- 7.3. Az identifikáció gyakorlati alkalmazásai
- 7.4. Esettanulmány az identifikáció + szabályozó tervezés alkalmazására
- 8. A robotirányítás mint pályakövetési feladat
- 8.1. A csuklónként önálló PID szabályozás
- 8.2. A számított nyomaték módszere
- 8.3. Robosztus irányító tervezése
- 8.4. A compliance-re alapozott robotirányítás
- 8.5. A mechanikai impedanciaszabályozás (impedance control)
- 8.6. A korrigált csuklóerő-szabályozás módszere
- 8.7. Az additív hibrid szabályozás módszere
- 8.8. Kidolgozott feladat a Hibrid (pozíció-erő) irányítással kapcsolatban
- A. Léptető motoros robothajtás logikai áramköreinek vizsgálata
- Irodalmi hivatkozások
- 2.1. SISO LTI
- 2.2. Ideális soros kompenzálás
- 2.3. Visszacsatolt rendszer
- 2.4. Szabályozási kör
- 2.5. Szabályozás minőségi jellemzői
- 2.6. Dinamikus rendszer általános állapotváltozós ábrázolása időtartományban
- 2.7. Szimuláció
- 2.8. Kimenet beállásos vezérlése
- 2.9. Kimenet beállásos szabályozása
- 2.10. Állapotváltozók beállásos vezérlése
- 2.11. Kimenet jelkövető vezérlése
- 2.12. Kimenet jelkövető szabályozása
- 2.13. Állapotváltozók jelkövető vezérlése
- 2.14. Állapotváltozó megfigyelő (becslő)
- 2.15. Zavarójel-megfigyelő (becslő)
- 2.16. Paraméter identifikáció
- 2.17. Ideális transzlációs telemanipulációs rendszer
- 2.18. Szabályozás előrecsatolással
- 2.19. Megfigyelőn (állapotbecslésen) alapuló állapot szabályozás
- 2.20. Adaptív szabályozás
- 2.21. MATLAB Simulink hatásvázlat
- 2.22. Szimulációs eredmények
- 2.23. A telítődés hatásának vizsgálata
- 2.24. Szimuláció eredménye (pozíció)
- 2.25. Szimuláció eredménye (beavatkozójel)
- 2.26. Zavarójel kompenzáció
- 2.27. Zavarelhárítás vizsgálata
- 3.1. Változók közötti pozitív és negatív hatások
- 3.2. Elágazó nyílt hatásláncok
- 3.3. Elágazó hatásláncok negatív polaritású hurokkal
- 3.4. Elágazó hatásláncok negatív polaritású hurokkal
- 3.5. Hatásláncok erősítési tényezőkkel
- 3.6. Változók erősítési tényezőjének modulálása
- 3.7. Az 3.2 példa hatásgráfja egy pozitív és egy negatív visszacstolással
- 3.8. A Lotka-Volterra modell hatásgráfja
- 3.9. A Lotka-Volterra modell változóinak lengései
- 3.10. A Lotka-Volterra modell változóinak lengéseiben mutatkozó fáziseltérés
- 3.11. Lineáris dinamikus rendszer függvénytereinek hatásgráfja
- 3.12. Az egyenáramú motor hatásgráfja
- 3.13. lehetőségei
- 3.14. Az 3.5 példa Mihajlov-kritériumának magyarázatához
- 3.15. A3.6 példa Mihajlov-kritériumának magyarázatához
- 3.16. Alagút dióda karakterisztikája negatív ellenállással
- 3.17. Egyszerű villamos kapcsolás alagút diódával
- 3.18. A Van der Pol egyenlet hatásgráfja
- 3.19. A Van der Pol egyenlet állandósult lengései a μ=10.0 paraméterérték esetén: a) Relaxációs lengések, b) Állandósult lengések a fázissíkon
- 3.20. A Van der Pol egyenlet állandósult lengései a μ=0.1 paraméterérték esetén: a) Relaxációs lengések, b) Állandósult lengések a fázissíkon
- 4.1. 4.1 feladat
- 4.2. Szabályozási kör
- 4.3. Szabályozási kör
- 4.4. Szabályozási kör
- 4.5. PID szabályozó hangolásának magyarázata
- 4.6. PI szabályozó felnyitott körének Bode-diagramja egységnyi körerősítéssel
- 4.7. PI szabályozó körerősítésének behangolása
- 4.8. PI szabályozó időállandójának behangolása
- 4.9. PI szabályozó felnyitott körének Bode-diagramja egységnyi körerősítéssel
- 4.10. PD szabályozó körerősítésének behangolása
- 4.11. Szimuláció
- 4.12. P, PI, PD és PID szabályozók összehasonlítása
- 4.13. paraméter meghatározása ()
- 4.14. Ziegler- Nichols módszerrel behangolt P szabályozó működése
- 4.15. Ziegler- Nichols módszerrel behangolt PI szabályozó működése
- 4.16. A nyomaték időfüggvénye PI szabályozás esetén
- 4.17. A hibaintegrál időfüggvénye PI szabályozás esetén
- 4.18. PI szabályozó telítődése
- 4.19. A hibaintegrál időfüggvénye PI szabályozás esetén
- 4.20. PID szabályozók telítődése
- 4.21. Stick-slip jelenség
- 4.22. Egyenáramú motor szabályozóköre
- 4.23. Külső, fordulatszám szabályozási kör
- 4.24. A frekvencia átviteli függvény Bode diagramja
- 4.25. Ziegler-Nichols módszer alkalmazása
- 4.26. Stabilitás határa
- 4.27. P szabályozó
- 4.28. PI szabályozó
- 4.29. PI szabályozó
- 4.30. PI szabályozó 60 fok fázistartalék
- 4.31. A Smith Predictros konfigurációja
- 4.32. Smith prediktor
- 5.1. Modell referenciás adaptív szabályozó
- 5.2. Self-tuning szabályozási rendszer
- 5.3. Adaptív szabályozás gradiens módszerrel
- 5.4. Szimulációs eredmény ()
- 5.5. Szimulációs eredmény ()
- 5.6. Szimulációs eredmény ()
- 5.7. Szimulációs eredmény ()
- 5.8. Adaptív szabályozás Ljapunov módszerrel
- 5.9. Szimulációs eredmény ()
- 5.10. Szimulációs eredmény ()
- 5.11. Kéttagú robotkar ismeretlen terheléssel
- 6.1. Állapottér egyenletek
- 6.2. R-L-C kör
- 6.3. Hatásvázlat
- 6.4. 3DOF rendszer
- 6.5. Állapotvisszacsatolás nulla referencia jellel
- 6.6. Állapotvisszacsatolás alapjel kompenzációval
- 6.7. Visszacsatolástól független alapjel korrekció
- 6.8. Integrátorral kiegészített állapotvisszacsatolás
- 6.9. Póluspont áthelyezés visszacsatolással
- 6.10. Felnyitott kör
- 6.11. Áthelyezett összegzési pont
- 6.12. Összevont átviteli függvényekkel
- 6.13. Irányíthatósági kanonikus alak hatásvázlata
- 6.14. Állapotvisszacsatolás irányíthatósági kanonikus alak esetén
- 6.15. Állapotvisszacsatolás irányíthatósági kanonikus alak esetén integrátorral kiegészítve
- 6.16. 6.15 feladat Simulink programja
- 6.17. 6.15 feladat szimulációs eredménye a) eset
- 6.18. 6.15 feladat szimulációs eredménye b) eset
- 6.19. 6.15 feladat szimulációs eredménye c) eset
- 6.20. 6.15 feladat szimulációs eredménye d) eset
- 6.21. visszacsatolás
- 6.22. visszacsatolás szimulációja
- 6.23. lapotvisszacsatolás szimulációja
- 6.24. lapotvisszacsatolás szimulációja
- 6.25. A valós és becsült áram különböző kezdeti értékből indulva
- 6.26. A megfigyelő Simulink modellje
- 6.27. Állapottér diagram
- 6.28. Állapotvisszacsatolás
- 6.29. Állapotvisszacsatolás
- 6.30. Állapotvisszacsatolás
- 6.31. Modellek összehasonlítása, szimulációs eredmény
- 6.32. Modellek összehasonlítása
- 7.1. Az OE modell struktúrája
- 7.2. Az ARX modell struktúrája
- 7.3. Az ARMAX modell struktúrája
- 7.4. A hőcserélő – az identifikáció objektuma
- 7.5. A BJ modell struktúrája
- 7.6. Az állandósult állapot vizsgálata
- 7.7. Trend figyelés
- 7.8. Kiugró értékek figyelése
- 7.9. Az érzékelő kikapcsol
- 7.10. A mintavételezési idő meghatározása önbeálló rendszer esetén
- 7.11. A legnagyobb frekvenciájú rész kiválasztása
- 7.12. A mintavételezési idő meghatározása zajjal terhelt rendszer esetén
- 7.13. A folytonos rendszer átmeneti függvénye és közelítése egyidőállandós, holtidős rendszerrel
- 7.14. Az identifikáció előkészítése SIMULINK felületen
- 7.15. Az objektum folytonos modellje
- 7.16. Az adatgyűjtő Workspace blokk
- 7.17. A mintavételezett adatpárok
- 7.18. A stacionárius be- kimeneti adatpárok
- 7.19. Az identifikációs algoritmus bemenetének nulla átlagértékű adatpárjai
- 7.20. A vizsgált rendszer közelítő súlyfüggvénye
- 7.21. A vizsgált rendszer közelítő átmeneti függvénye (korrelációs analízissel)
- 7.22. A modell és a tényleges rendszer kimenetének összehasonlítása (e(k)=0)
- 7.23. A modell pólusai és zérusai
- 7.24. A folytonos rendszer és az identifikált modell frekvencia függvénye
- 7.25. A SIMULINK identifikációs blokkjai
- 7.26. Az ARX blokk behelyezése
- 7.27. Az ARX blokk paraméterezése
- 7.28. Az identifikáció minősége e(k)=0 esetén
- 7.29. Az identifikáció minősége mérési zaj esetén
- 7.30. Az ARMAX modell SIMULINK felületen
- 7.31. Az identifikátor paraméterezése
- 7.32. Az identifikáció minősége
- 7.33. Box-Jenkins modell SIMULINK felületen
- 7.34. Az identifikátor paraméterezése
- 7.35. Az identifikáció minősége
- 7.36. Gőzös hőcserélő
- 7.37. Gőzös hőcserélő nemlineáris viselkedése
- 7.38. Nemlineáris rendszer szabályozásának minősége állandó struktúrájú és paraméterű szabályozóval
- 7.39. A QANSER DC motor Kit felépítése
- 7.40. A QUANSER DC motor rugó-tömeg kiegészítő mechanikával
- 7.41. A rugó-tömeg ráépítés
- 7.42. Az adatgyűjtő QICii szoftver kezelői felülete
- 7.43. Az identifikáció adatsora 0.01s mintavételezési idő mellett
- 7.44. Az OE modell struktúrája
- 7.45. Az objektum átmeneti függvénye
- 7.46. A mérési adatok és az identifikált modell összehasonlítása időtartományban
- 7.47. A zárt szabályozási kör hatásvázlata
- 7.48. A zárt kör tervezett viselkedése
- 7.49. A diszkrét DAHLIN szabályozó algoritmus átmeneti függvénye
- 7.50. Az objektum (Go), a Dahlin algoritmus (Gc) és a nyitott kör (Gc*Go) Bode diagrammjai
- 7.51. Az objektum és a diszkrét Dahlin algoritmus pólus-zérus helyei
- 7.52. A zárt kör SIMULINK diagramja
- 7.53. Zártköri viselkedés ugrásfüggvény alapjel váltás esetén
- 7.54. Zártköri viselkedés sztochasztikus zavarójel esetében
- 7.55. A zárt rendszer viselkedése változó alapjel esetén
- 8.1. A táblára írás compliance (engedékenység) koordinátarendszere
- 8.2. Csapillesztés
- 8.3. Csavar és csavarhúzó compliance (engedékenység) koordinátarendszere
- 8.4. korrigált csuklóerők szabályozásának módszere
- 8.5. A hibrid szabályozás elve
- 8.6. A hibrid szabályozó
- 8.7. Robotkar
- 8.8. MATLAB (simulink)-ban előállított folyamatábra jellegű program
- 8.9. A q1 kifejezése. A (8.34) egyenlet megfelelője
- 8.10. A q2 kifejezése. A (8.35) egyenlet megfelelője
- 8.11. Az erő kifejezése w1 és w2 segítségével
- 8.12. A w1 illetve w2 kifejezése. A (8.36) illetve (8.37) egyenletek megfelelője
- 8.13. J pozíció transzformációk az engedékenységi keretbe
- 8.14. J-1 pozíció transzformáció az engedékenységi keretből
- 8.15. JT erő transzformáció az engedékenységi keretből
- 8.16. Az erő T transzformációja H-ból C-be
- 8.17. A pozíció-szabályozó
- 8.18. Erő-szabályozó
- 8.19. A bemenő jel (Xd pozíció) az idő függvényében
- 8.20. A bemenőjel deriváltja (Xdp) az idő függvényében
- 8.21. A q1 szög (radiánban) változása idő függvényében
- 8.22. A q1 idő szerinti deriváltjának változása
- 8.23. A q2 hossz (m) változása az időben
- 8.24. A q2 deriváltja az idő függvényében
- 8.25. A bemenő erő meghatározása az egységlépés segítségével (N)
- 8.26. A robotkar fx erő-visszajelzése (N)
- 8.27. Az erő-visszacsatolás a C keretben (N)
- 8.28. t1 időbeli változása
- 8.29. t2 időbeli változása
- A.1. A léptető motor működési elve
- A.2. Kis lépésszögű léptető motor
- A.3. Léptetőmotoros hajtás elektronikája
- A.4. Működési tartományok
- A.5. Robotkar felépítése
- A.6. Vezérlőáramkör
- A.7. Léptető motor logikai áramköre
- A.8. A XOR kapu működése
- A.9. Logikai áramkör működése
- A.10. Logikai áramkör működése
- A.11. A robot illesztése a számítógéphez
- A.12. Határfrekvencia mérésére szolgáló áramkör
- A.13. Léptetőmotoros hajtás illesztése számítógéphez
- 8.1. A táblára írás kényszerei
- 8.2. Csapillesztés
- 8.3. Csavar és csavarhúzó kényszerei
- A.1.
- A.2.
1. fejezet - Bevezetés
A jegyzet először áttekintést ad az irányítási alapokról, ez az áttekintés szerves folytatása a Rendszertechnika jegyzetnek, és jelölései megegyeznek azzal. Ugyancsak előzménynek tekinthető a Robotmechanizmusok és Digitális szervohajtások jegyzet.
1.1. Jelölési és rövidítési jegyzék
Különböző tudományterületen a jelölésekre különböző konvenciók léteznek, e tananyag több területet fog át és így szinte lehetetlen tekintettel lenni minden, időnként egymásnak ellentmondó konvencióra, így előfordul, hogy egy betű különböző fejezetekben mást és mást jelent. Ahol lehetséges, ott indexeléssel próbáljuk feloldani ezt az ellentmondást. Igyekszünk azt a konvenciót tartani, hogy a változókat kisbetűvel, a konstansokat nagybetűvel, a skaláris mennyiségeket dőlt betűvel és a vektorokat vastag betűvel jelöljük. Kivételt olyan esetekben teszünk, ahol a szakirodalom is többé-kevésbé egységesen eltér ettől a konvenciótól. A numerikus példákban számítógéppel számított eredményeket közlünk, amelyek a tizedespont és nem tizedes vesszőt használnak.
A rövidítéseknél mindig az angol megfelelőt használjuk, mert ezeket önálló jelentéssel bíró magyarrá váló jövevény szakszavaknak tekintjük, így a magyar kiejtés és magyar ragozás szabályai szerint használjuk.

rendszerre jellemző mátrix
állapottér-modellben rendszermátrix
gráfelméletben csomóponti (vagy adjacencia) mátrix

Fourier-sorokban a fázis tolás nélküli i-edik szinuszos felharmonikus amplitúdója

polinom együtthatója

mágneses indukció vektor

rendszerre jellemző mátrix
állapottér-modellben bemeneti mátrix
gráfelméletben hurokmátrix

Fourier-sorokban a fázis tolás nélküli i-edik koszinuszos felharmonikus amplitúdója

polinom együtthatója

rendszerre jellemző mátrix
állapottér-modellben kimeneti mátrix

Fourier-sorokban a fázis tolásos i-edik koszinuszos felharmonikus amplitúdója

eltolási vektor

rendszerre jellemző mátrix
állapottér modellben a bemenet követlen hatása a kimenetre

egy rendszer zavaró jele (disturbance) folytonos időben

indexben: diszkrét idejű rendszerre utal

Elektromos térerősség vektor

folytonos idejű skalár időfüggvény

olyan folytonos idejű skalár időfüggvény, amelynek az Értelmezési tartománya 

folytonos idejű skalár időfüggvény értéke  időpillanatban
időpillanatban

folytonos idejű skalár időfüggvény Fourier-transzformáltja

folytonos idejű skalár időfüggvény Fourier-transzformáltjának értéke  frekvencia esetén
frekvencia esetén

folytonos idejű skalár időfüggvény Laplace-transzformáltja

folytonos idejű skalár időfüggvény Laplace-transzformáltjának értéke  helzettesítéssel
helzettesítéssel

diszkrét idejű skalár időfüggvény

olyan diszkrét idejű skalár időfüggvény, amelynek az Értelmezési tartománya 

diszkrét idejű skalár időfüggvény értéke a K-adik lépésben

frekvencia

mágneses térerősség vektor
i
indexben és index nélkül: a futó sorszám,
indexszel: áramerősség
jképzetes egység 

diszkrét időlépések

természetes számok halmaza

egy racionális törtfüggvény i-edik pólusa

valós számok halmaza

Laplace operátor
taz idő
T0a vizsgálat kezdő időpontja, általában T0=0
TKa K-dik időlépés
Tsa mintavételezési időlépés
Thaz időkéseltetés nagysága
Tpiracionális törtfüggvénnyel leírható rendszer i-dik pólusához tartozó töréspont reciproka
Tziracionális törtfüggvénnyel leírható rendszer i-dik zérusához tartozó töréspont reciproka

index nélkül, vagy sorszámra utaló indexszel: egy rendszer beavatkozó jele folytonos időben

index nélkül, vagy sorszámra utaló indexszel: egy rendszer beavatkozó jele diszkrét időben

egy nem sorszámra utaló indexszel: egy feszültség

egy rendszer átmeneti függvénye (ugrásválasza)

egy rendszer súly függvénye (impulzusválasza) folytonos időben

egy rendszer súly függvénye (impulzusválasza) diszkrét időben

egy rendszer állapotváltozója folytonos időben

egy rendszer állapotváltozója diszkrét időben
X0az állapotváltozó kezdeti értéke, ha az állapot
X-0az állapotváltozó kezdeti értékének baloldali határértéke, ha az állapotváltozónak szakadása van a  időpillanatban
időpillanatban
X+0az állapotváltozó kezdeti értékének jobboldali határértéke, ha az állapotváltozónak szakadása van a  időpillanatban
időpillanatban

egy rendszer kimenőjele folytonos időben

egy rendszer kimenőjele diszkrét időben

egy racionális törtfüggvény i-edik zérusa

egészszámok halmaza

pozitív egészszámok halmaza

negatív egészszámok halmaza

0 vagy 1 értéket felvevő változó

diszkrét idejű egységimpulzus

folytonos idejű egységimpulzus (Dirac-impulzus)

permittivitás

diszkrét idejű egységugrás

folytonos idejű egységugrás

mátrixok sajátértéke

permeabilitás

körfrekvencia

egy motor szögsebességeánek folytonos idejű időfüggvénye
ARMAautoregresszív mozgó átlag
BIBO(Bounded Input Bounded Output)
EMFelektromotoros erő (Elektric Motive Force)
FIRvéges impulzusválaszú (Finite Impulse Response)
IIRvégtelen impulzusválaszú (Infinite Impulse Response)
MIMO több bemenetű több kimenetű rendszer (Multiple Input Multiple Output)
MISO több bemenetű egy kimenetű rendszer (Multiple Input Single Output)
MMFmagnetomotoros erő (Magneto Motive Force)
LPVlineáris változó paraméterű rendszer (Linear Parameter Varying)
LTI lineáris időinvariáns rendszer (Linear Time Invariant).
LTVlineáris idő variáns (időben változó) rendszerek (Linear Time Varying).
SIMOegy bemenetű több kimenetű rendszer (Single Input Multiple Output)
SISOegy bemenetű egy kimenetű rendszer (Single Input Single Output)
2. fejezet - SISO LTI rendszerek klasszikus szabályozása
- 2.1. A klasszikus irányítási feladat megfogalmazása
- 2.2. A szabályozási körök fizikai megvalósítása
- 2.3. A tervezés főbb lépései és a szabályozási kör minőségi követelményei
- 2.4. A legfontosabb alapfeladatok
- 2.5. Minimálfázisú felnyitott körrel rendelkező szabályozási körök analízise
- 2.6. A stabilitás fogalma
- 2.7. A visszacsatolt rendszer stabilitása
A mikroprocesszorok, mikrovezérlők megjelenése előtt elsősorban csak analóg szabályozók álltak rendelkezésünkre és analóg eszközökkel a legkönnyebben az ún. PID típusú szabályozók (Arányos, Integráló és Deriváló) valósíthatók meg. Ezek nagyon sok feladatra kellően hatékonyak, és ezért kb. a nyolcvanas évekig az iparban szinte egyeduralkodók voltak. A mikroprocesszorok megjelenése alapvetően új helyzetet teremtett az irányítástechnikában is, utat nyitott az egyre bonyolultabb szabályozási algoritmusok megvalósítására. Az új évezredben szinte minden hallgató táskájában ott lapul egy nemlineáris szabályozó egy notebook merevlemezes meghajtójában. Ugyanis a merevlemezekre írható információ mennyiségét jelenleg nem az adathordozó tulajdonságai, hanem az olvasófej pozicionálási pontossága korlátozza. Ahogy a nemlineáris szabályozással egyre pontosabban lehet pozícionálni az olvasófejet, úgy egyre nagyobb információ sűrűség érhető el a lemezen. Feltételezhető, hogy amire elérik a mágneses adathordozó korlátait, addigra meg fog jelenni egy alapvetően új adattárolási mechanizmus. Napjainkban a leghétköznapibb helyeken is szükség lehet bonyolult rendszermodellekre, számításokra. Sokszor nem is gondolnánk, látszólag mennyire egyszerű feladatra is bonyolult szabályozást használnak. Pl. mikor egy liftszekrény megáll egy emeletnél, akkor elektromágnesek behúzásával rögzítik a pozícióját. Látszólag nem okoz gondot egy ilyen behúzó mágnes megtervezése. Ezzel szemben, ha előírjuk, hogy a behúzás legyen extrém gyors, de az ütközés előtt fékeződjön le, hogy az ütközési zaj az emberi fül számára hallhatatlan maradjon, akkor kénytelenek vagyunk egy nemlineáris megfigyelőn alapuló nemlineáris szabályozót készíteni.
A másik oldalon ott vannak a robotok, mint valóban bonyolult szerkezetek, különösen a két lábon járó robotok ilyenek. Ezek még nagyon lassan mozognak, természetesen a mozgató motorok nagyobb sebességet is elbírnának, de a szabályozó képtelen gyorsabban számolni és küldeni a mozgatási parancsokat. A másik hatalmas számításigényű művelet a képfeldolgozás és az alakfelismerés. A robotikában a nagy áttörés még várat magára.
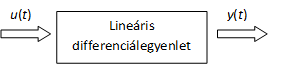
2.1. A klasszikus irányítási feladat megfogalmazása
Adott: egy lineáris differenciálegyenlettel leírható SISO LTI rendszer (ezt sokszor szabályozott szakasznak hívjuk, ha már beépült egy szabályozási körbe)
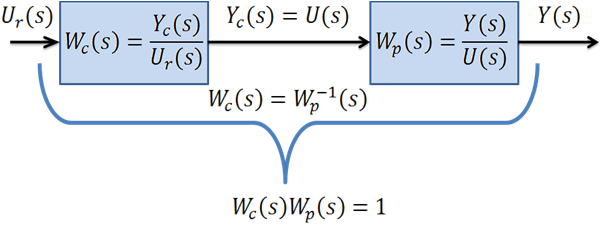
Cél: A kimenet beállásos szabályozása (ld. 2-12. ábra) vagyis  , azaz adott
, azaz adott  szabályozási idő elteltével az
szabályozási idő elteltével az  kimenőjel értéke legyen közelítőleg azonos egy előírt
kimenőjel értéke legyen közelítőleg azonos egy előírt  konstans referencia értékkel. Megjegyzés: felmerülhet, hogy a legjobb megoldás az lenne, ha a szabályozott szakasz átviteli függvényének reciprokát, azzal sorbakapcsolva használnánk szabályozóként (ld. 2-2. ábra). Így a rendszer és a szabályozó eredő átviteli függvénye 1 lenne. Ezzel több probléma van. Ha a szabályozott szakaszban időkésleltetés van, akkor annak inverze a jóslás, ami elvileg lehetetlen. Ha nincs időkésleltetés, akkor is egy dinamikai rendszer inverze végtelenül nagy bemenőjelet generálna. A végtelenül nagy bemenőjel egycsapásra helyére pofozná a kimenőjelet, de ennek fizikai korlátai vannak. Ezért kell azt a kompromisszumot kötni, hogy a kimenőjel csak egy
konstans referencia értékkel. Megjegyzés: felmerülhet, hogy a legjobb megoldás az lenne, ha a szabályozott szakasz átviteli függvényének reciprokát, azzal sorbakapcsolva használnánk szabályozóként (ld. 2-2. ábra). Így a rendszer és a szabályozó eredő átviteli függvénye 1 lenne. Ezzel több probléma van. Ha a szabályozott szakaszban időkésleltetés van, akkor annak inverze a jóslás, ami elvileg lehetetlen. Ha nincs időkésleltetés, akkor is egy dinamikai rendszer inverze végtelenül nagy bemenőjelet generálna. A végtelenül nagy bemenőjel egycsapásra helyére pofozná a kimenőjelet, de ennek fizikai korlátai vannak. Ezért kell azt a kompromisszumot kötni, hogy a kimenőjel csak egy  szabályozási idő elteltével veszi fel az
szabályozási idő elteltével veszi fel az  referencia értéket. Végül, sohasem tudjuk pontosan a rendszer paramétereit, továbbá a legtöbb esetben a zavaró jeleket sem tudjuk kizárni, így célszerű ellenörző méréssel meggyőződni arról, hogy a kimenőjel tényleg az-e mint amit szeretnénk. Ezért van szükség negatív visszacsatolásra.
referencia értéket. Végül, sohasem tudjuk pontosan a rendszer paramétereit, továbbá a legtöbb esetben a zavaró jeleket sem tudjuk kizárni, így célszerű ellenörző méréssel meggyőződni arról, hogy a kimenőjel tényleg az-e mint amit szeretnénk. Ezért van szükség negatív visszacsatolásra.
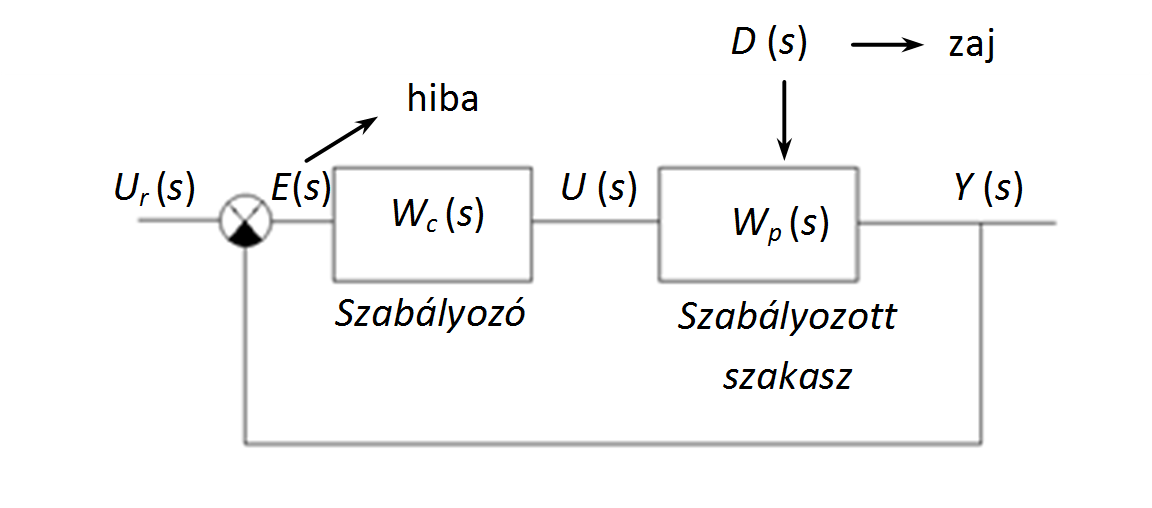
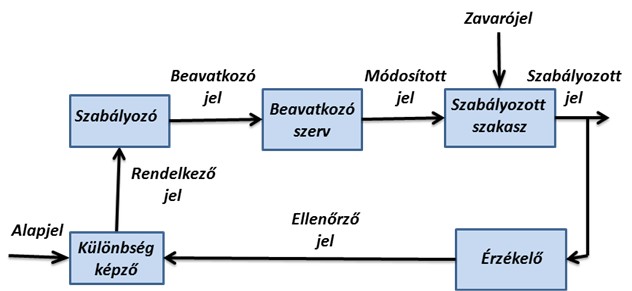
Megvalósítható módszer: soros kompenzáció + negatív visszacsatolás (ld. 2-3. ábra). A referenciajel és az aktuális kimenőjel különbségéből egy hibajelet képzünk (ezt nevezzük negatív visszacsatolásnak), és a hibajel értékétől függően egy a szabályozott szakasszal sorbakapcsolt szabályozó egységen keresztül hatunk a rendszerre. A hibajel:
| (2.1) |
Az 2-3. ábraán mind a szabályozott szakaszt, mind a sorosan kapcsolt szabályozót az átviteli függvényével modelleztük.
Triviális megoldás: Ha a hibajel pozitív, akkor a szabályozni kívánt rendszer kimenőjele kisebb az előírtnál és minél nagyobb a hibajel, annál erőteljesebb beavatkozást igényel a rendszer. Ha a hibajel negatív, akkor a kimenőjel nagyobb az előírtnál, így a szabályozni kívánt rendszert vissza kell fogni. E gondolatmenetet követve az első ötletünk, hogy a hibajellel arányosan kell előállítani a rendszer bemenőjelét. Ezt később majd pontosítjuk. Megjegyezzük, hogy van más megoldás is.
Problémák:
A negatív visszacsatolás magában hordozza annak veszélyét, hogy túlreagáljuk a hibát. Bármilyen beavatkozás után valamennyi idő mindig kell, hogy a beavatkozás hatása megjelenjen. Ha akkor is növeljük a beavatkozás erősségét, amikor a rendszerben a változások megindultak, csak még a kimeneten nem jelent meg a változás, akkor túlreagáltuk a hibát. Kezdő búvárokkal fordul elő, hogy beugranak a vízbe és nincs a mellényükben elegendő levegő, akkor a felcsatolt ólom miatt elkezdenek nagyon gyorsan süllyedni, ezért a palackból elkezdenek levegőt engedni a mellénybe. Idő kell, amíg a süllyedés megáll, így a búvár még egy darabig akkor is süllyed, amikor már a mellényében elegendő levegő van. Ha a pánik miatt még ekkor is folyamatosan engedi a levegőt a mellényébe, akkor az annyira felfújódik, hogy elkezdi nagy sebességgel felfelé vinni a búvárt, aki ismét pánikba eshet, mert tudja, ha túl gyorsan emelkedik, akkor bekövetkezhet a keszonbetegség, amely akár halálos kimenetelű is lehet, így egy pillanat alatt kiengedi az összes levegőt a mellényéből. A folyamat kezdődik elölről, és addig tart, amíg a búvár rá nem jön, hogy a hibát nem szabad túlreagálni.
A jelenség matematikai magyarázata a következő lehet. A jeleket szinuszos összetevők összegére lehet bontani. Alapvetően igaz az, hogy a frekvencia növelésével tendenciájában nő a fáziseltolódás és csökken az erősítés a válaszjelben. Természetesen lokálisan lehetnek ellentétes irányú változások, de tendenciájában ez minden valós rendszernél megfigyelhető. A negatív visszacsatolás 180 fáziseltolásnál pozitív visszacsatolássá válik.
A működés elemzéséhez a rendszer differenciálegyenletét kell megoldani, ez az időtartományban bonyolult.
A fenti problémák miatt térünk át a frekvenciatartományba és az átviteli függvényre. Így már felrajzolhatjuk a szabályozási kör hatásvázlatát (ld. 2-3. ábra)
2.2. A szabályozási körök fizikai megvalósítása
A szabályozási kör kialakításához kell valamilyen érzékelő, amellyel a szabályozandó jelet mérni tudjuk. Maga a szabályozás egy absztrakt szinten történik, ezért szükséges egy ún. beavatkozó szerv, amelyek az absztrakt szabályozó jel alapján elvégzi a konkrét fizikai beavatkozást. Ez akár több lépcsőben is történhet. Pl. egy robot kartagját motor mozgathatja, így a motor nyomatékát tekinthetjük a konkrét fizikai beavatkozásnak, de a motor megfelelő nyomatékáról egy teljesítményelektronikai áramkör gondoskodik. A magyar terminológiák bizonyos tekintetben egy tudatos fordítás eredményeként bizonyos tekintetben átgondoltabbak, mint az angol nyelven spontán kialakult kifejezések. Ezeket mindenképp meg kell őriznünk, de ismerni kell az angol kifejezéseket is.
A szabályozók megvalósításának néhány lehetséges módja
Digitális egységben (számítógép, mikrokontroller, DSP, FPGA stb.) futó programkód
Műveleti erősítő segítségével analóg elektronikai áramkör
Pneumatikus kapcsolások
Mechanikai szerkezetek
Itt érdekességként meg kell említeni, hogy ugyan a mechanikai szerkezetek, mint szabályozók napjainkban egyre inkább visszaszorulnak, de az egykori fontosságukat jól mutatja, hogy a BME Gépészmérnöki kar logójában is megtalálható.
A szabályozók megvalósítása túlmutat e jegyzet keretein.
2.3. A tervezés főbb lépései és a szabályozási kör minőségi követelményei
Wp(s) felírása a rendszer differenciálegyenlete alapján. Ezzel kapcsolatban meg kell jegyezni, hogy mind a beavatkozó szervnek, mind a kimenetet mérő eszköznek lehet olyan dinamikája, amelyet nem hanyagolhatunk el, ezt a dinamikát Wp(s) részének tekintjük.
Wc(s) típusának kiválasztása és paramétereinek meghatározása a visszacsatolt szabályozási hurokkal szemben támasztott elvárások alapján történik.
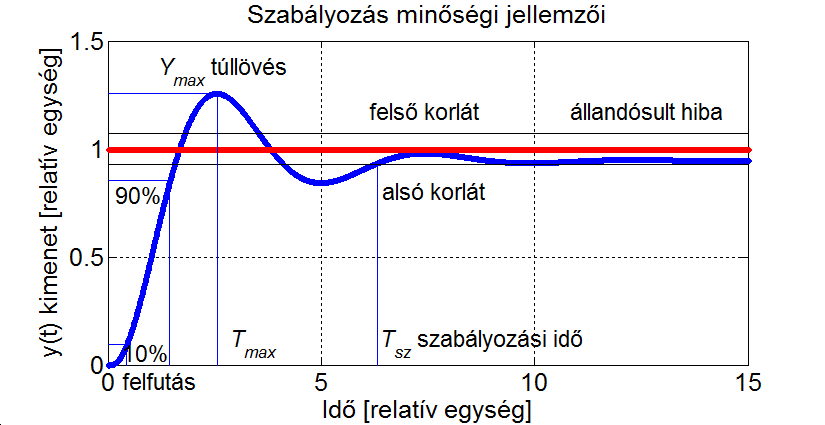
A visszacsatolt szabályozási körrel szemben támasztott elvárások (ld. 2-5. ábra)
stabilitás (ez a legfontosabb tulajdonság, ha a szabályozási kör nem satbilis, akkor az azt jelenti, hogy a szabályozási kör működésképtelen)
gyorsaság (előírás
 értékére)
értékére)  meghatározáshoz elő kell írnunk egy
meghatározáshoz elő kell írnunk egy  pontossági korlátot.
pontossági korlátot.  az a legkisebb érték, amelyre igaz az, hogy ha
az a legkisebb érték, amelyre igaz az, hogy ha  , akkor
, akkor 
statikus pontosság (előírás
 értékére), itt külön kell vizsgálnunk
értékére), itt külön kell vizsgálnunk alapjel követési hibát
zavarójelből eredő hibát
dinamikai (tranziens) tulajdonság
Túllövés: a kimenőjel maximális értéke, általában azt vizsgáljuk, hogy hány százalékkal haladja meg a kimenőjel maximális értéke a referenciajelet.
Felfutási idő (ez különbözik a szabályozási időtől). Az az idő, amennyi alatt a kimenőjel állandósult értékének 10%-áról a 90%-os értékére növekszik.
a beavatkozójel fizikai megvalósíthatósága (fizikai korlátok). A felfutás kezdetén megengedhető a beavatkozószerv telítődése, de telítődés idején a zárt szabályozási kör felnyílik, a szabályozás megszűnik.
Teljesítmény index (Költségfüggvény)
SISO rendszerek és konstans  referenciajel esetén
referenciajel esetén
| (2.2) |
A visszacsatolt szabályozási kör Wcl átviteli függvénye a definíció alapján

| (2.3) |
Az 2-3. ábra alapján:
| (2.4) |
Szokás külön jelölést bevezetni a teljes felnyitott kör átviteli függvényére
| (2.5) |

Mind  , mind
, mind  s-re nézve racionális törtfüggvény, így
s-re nézve racionális törtfüggvény, így  is az. Ha
is az. Ha  alakú, akkor
alakú, akkor
| (2.6) |
Mivel mind a számláló, mind a nevező s-nek valós együtthatós polinomja és a számláló fokszáma nem lehet nagyobb a nevező fokszámával, így kimondható, hogy a visszacsatolt szabályozási kör pólusainak száma megegyezik a felnyitott kör pólusainak számával. (Megjegyzés, ha  nem egyszerűsíthető, akkor
nem egyszerűsíthető, akkor  sem)
sem)
Definíció
Minimálfázisú rendszer: Olyan rendszer, amelynek a frekvencia átviteli függvényének amplitúdó diagramjához tartozó fáziseltolás (amely általában negatív előjelű) a lehető legkisebb értékű.
Értelmezés
Az amplitúdó diagramot a pólusok és zérusok abszolút értéke határozza meg, a fáziseltolást a pólusok és zérusok valós részének előjele, továbbá az időkésleltetés is befolyásolja. Egy minimálfázisú rendszer nem tartalmaz időkésleltetést, az átviteli függvénye racionális törtfüggvény, amelynek az összes pólusának és zérusának valós része nem pozitív. E hosszas leírás helyett elég a rendszerről kijelenteni, hogy minimálfázisú.
2.4. A legfontosabb alapfeladatok
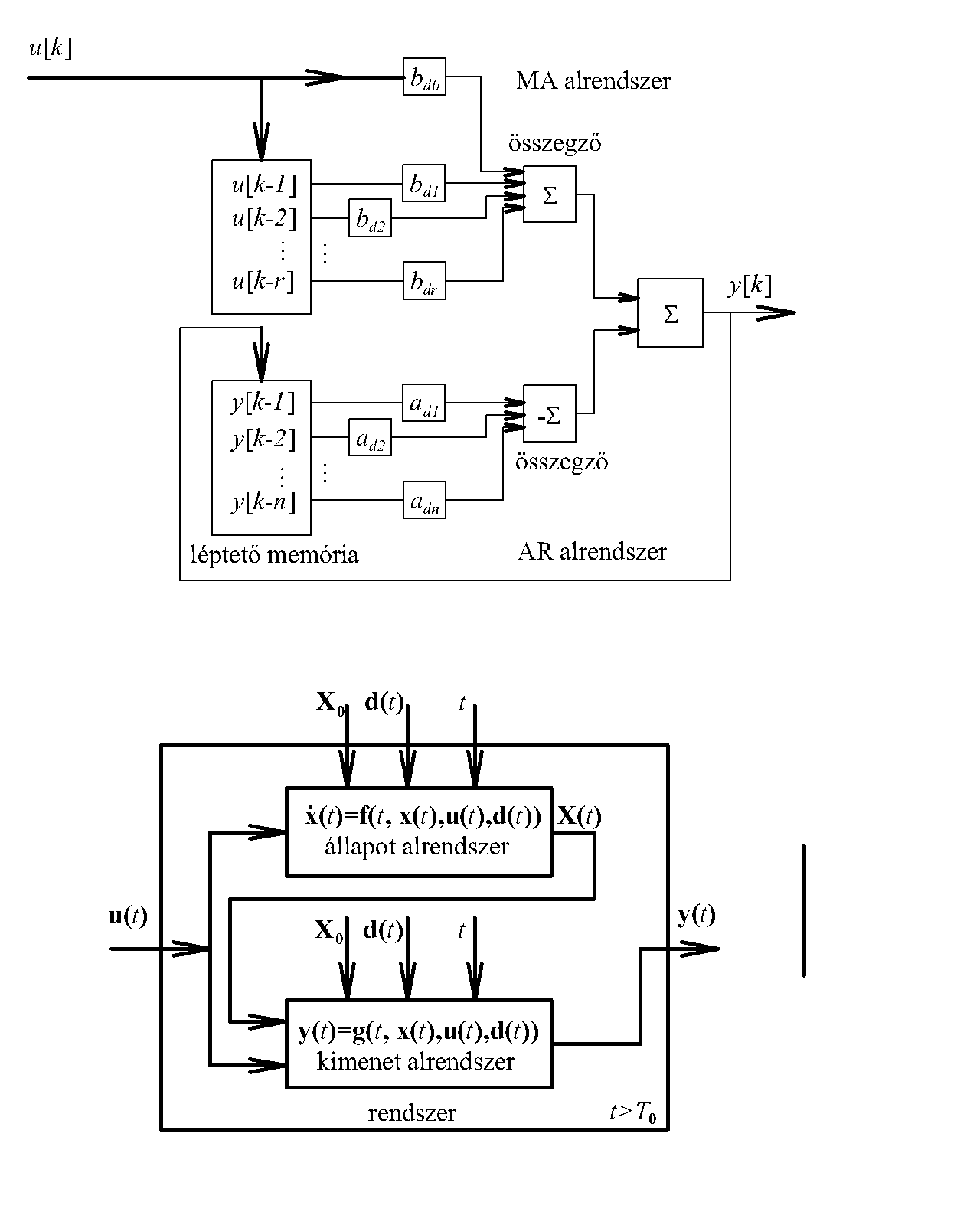
A rendszerrel kapcsolatos leggyakoribb feladatok különböző formában jelenhetnek meg. Ebben a fejezetben olyan véges dimenziójú rendszerekkel foglalkozunk, amelyek a következő alakú differenciálegyenletekkel írható le


ahol  az állapotváltozók vektora,
az állapotváltozók vektora,  a beavatkozó jelek vektora,
a beavatkozó jelek vektora,  a zavaró jelek vektora,
a zavaró jelek vektora,  a kimenőjelek vektora,
a kimenőjelek vektora,  a rendszer működését leíró függvény,
a rendszer működését leíró függvény,  kimenőjelet leképező függvény.
kimenőjelet leképező függvény.
Általában a rendszereket csak egy meghatározott T0 időponttól kezdődően ( tartományban) vizsgáljuk. A legtöbb esetben az egyszerűség kedvért T0=0. A múlt hatását az állapotváltozók kezdeti értékében összegezzük. Ennek fényében a rendszer általános egyszerűsített rajza a 2-6. ábrán látható.
tartományban) vizsgáljuk. A legtöbb esetben az egyszerűség kedvért T0=0. A múlt hatását az állapotváltozók kezdeti értékében összegezzük. Ennek fényében a rendszer általános egyszerűsített rajza a 2-6. ábrán látható.
Megjegyzések:
Sok esetben a rendszer minden állapotváltozóját mérni tudjuk, ekkor

Sok esetben ún. energiamentes állapotból indulunk ki, vagyis az állapotváltozók kezdeti értéke nulla. Ha az
 bemenetet külön nem jelöljük, illetve nem adjuk meg, akkor az azt jelenti, hogy energiamentes állapotban kezdődik a rendszer vizsgálata. Időinvariáns rendszerek esetén nincs szükség a
bemenetet külön nem jelöljük, illetve nem adjuk meg, akkor az azt jelenti, hogy energiamentes állapotban kezdődik a rendszer vizsgálata. Időinvariáns rendszerek esetén nincs szükség a  bemenetre. Sokszor a
bemenetre. Sokszor a  zavaró jelet is elhanyagoljuk, és nem rajzoljuk fel az ábrára.
zavaró jelet is elhanyagoljuk, és nem rajzoljuk fel az ábrára. 
is lehet nulla, ekkor a magára hagyott rendszerről beszélünk.
2.4.1. Szimuláció
Az  és
és  valamint f és g ismert. Meghatározandó
valamint f és g ismert. Meghatározandó  és
és  . (ld. 2-7. ábra)
. (ld. 2-7. ábra)
Általános értelemben vett szimulációnak lehet tekinteni, ha egy áramkörben a források ismeretében kiszámítjuk az ágfeszültségeket és -áramokat. Egy ág feszültsége és árama közül csak az egyik lehet állapotváltozó, de mindkettő lehet kimenőjel. Továbbá egy olyan ág esetén, amely csak ellenállásból áll, sem a feszültség, sem az áram nem állapotváltozó. Ezeket a mennyiségeket a bemenőjelből, vagy valamelyik állapotváltozóból egyszerű arányossággal számíthatjuk ki. Igy a kimenőjelek száma többszöröse lehet az állapotváltozók számának. Hasonló mondható el több mechanikai, áramlási és termodinamikai számításról.
2.4.1.1. Valósidejű (Realtime) és offline szimuláció fogalma
Definíció
Egy fizikai rendszer konkrét számítástechnikai szimulációját akkor nevezzük valósidejűnek, ha a szimulációs program egy adott bemenőjelre adott választ a valós rendszer válaszával szinkronban számítja ki. Az offline szimuláció esetén nincs meg a valós és szimulált jel egyidejűsége.
Értelmezés
Egy berendezés tervezése és a működésének szabályozása alapvetően más követelményeket támaszt. Pl. Ha egy repülőgép tervezési fázisában arra vagyunk kíváncsiak, hogy egy adott manőverben letörik-e a szárny, és azt károsodás nélkül túléli-e a repülőgép, akkor megengedhető, hogy a pontosabb számítás érdekében egy részletesebb modellt használva a szimuláció sokkal tovább tartson, mint maga a manőver. Vagyis megengedhető az offline szimuláció. A szabályozási feladatok esetén inkább egy kevésbé pontos, de valós időben működő szimulációt kell alkalmazni. A repülőgép esetén nem sok haszna van, ha a robotpilóta a gép lezuhanása után számítja ki, hogy 10 perccel korábban hogyan kellett volna a szárny letörését elkerülni.
Az absztrakt rendszer fogalom esetén a valósidejűség nem értelmezhető (egy absztrakt rendszer csak offline lehet). Ennek ellenére az irodalomban használatos a valósidejű rendszerek fogalma, ez olyan valós fizikai rendszerre vonatkozik, amely egy külső hatásra adott időn belül képes választ generálni.
2.4.2. Beállásos irányítás
2.4.2.1. Kimenet beállásos vezérlése

valamint f és g ismert ( vagy elhanyagolható, vagy ismert). A kimenőjel értékét egy későbbi
vagy elhanyagolható, vagy ismert). A kimenőjel értékét egy későbbi  időpontban előírjuk, tehát
időpontban előírjuk, tehát  ismert. Meghatározandó
ismert. Meghatározandó  . Offline módon is számítható, nincs visszacsatolás (zárt szabályozási hurok) (ld. 2-8. ábra).
. Offline módon is számítható, nincs visszacsatolás (zárt szabályozási hurok) (ld. 2-8. ábra).
2.4.2.2. Kimenet beállásos szabályozása
 ,
,  , f, g és
, f, g és  nem vagy csak részlegesen ismert. A kimenőjel értékét egy későbbi
nem vagy csak részlegesen ismert. A kimenőjel értékét egy későbbi  időpontban előírjuk, tehát
időpontban előírjuk, tehát  ismert. Minden
ismert. Minden  időpontban
időpontban  a be- és kimenőjelről begyűjtött
a be- és kimenőjelről begyűjtött és
és  korábbi ismeretek birtokában a kimenet aktuális
korábbi ismeretek birtokában a kimenet aktuális  pillanatnyi értékéből (a kimenőjel visszacsatolásával) meghatározandó
pillanatnyi értékéből (a kimenőjel visszacsatolásával) meghatározandó  . A szabályozási hurok zárt (ld. 2-9. ábra). Ki kell emelni, hogy a szabályozó tervezésére számos eljárást dolgoztak ki, ezzel a területtel külön tananyag foglalkozik. Ez a feladat elvileg pontosan megoldható.
. A szabályozási hurok zárt (ld. 2-9. ábra). Ki kell emelni, hogy a szabályozó tervezésére számos eljárást dolgoztak ki, ezzel a területtel külön tananyag foglalkozik. Ez a feladat elvileg pontosan megoldható.
2.4.2.3. Állapot beállásos vezérlése
 és f ismert (
és f ismert ( vagy elhanyagolható, vagy ismert). Az állapotváltozók értékét egy későbbi
vagy elhanyagolható, vagy ismert). Az állapotváltozók értékét egy későbbi  időpontban előírjuk, tehát
időpontban előírjuk, tehát  ismert. Meghatározandó
ismert. Meghatározandó  Offline módon is számítható, nincs visszacsatolás (zárt szabályozási hurok) (ld. 2-10. ábra).
Offline módon is számítható, nincs visszacsatolás (zárt szabályozási hurok) (ld. 2-10. ábra).
2.4.2.4. Állapot beállásos szabályozása:
Ha az összes állapotváltozó mérhető, akkor megegyezik a kimenet beállásos szabályozásával, ha az összes állapotváltozó nem mérhető, akkor ehhez a feladathoz állapotbecslő szükséges.
2.4.3. Jelkövető irányítás
2.4.3.1. Kimenet jelkövetéses vezérlése
 , f és g (
, f és g ( vagy elhanyagolható, vagy ismert). A kimenőjel időfüggvényét előírjuk, tehát
vagy elhanyagolható, vagy ismert). A kimenőjel időfüggvényét előírjuk, tehát  ismert. Meghatározandó
ismert. Meghatározandó  . Offline módon is számítható, nincs visszacsatolás (zárt szabályozási hurok) (ld. 2-11. ábra)
. Offline módon is számítható, nincs visszacsatolás (zárt szabályozási hurok) (ld. 2-11. ábra)
2.4.3.2. Kimenet jelkövetéses szabályozása
 ,
,  , f, g és
, f, g és  nem vagy csak részlegesen ismert). A kimenőjel időfüggvényét előírjuk, tehát
nem vagy csak részlegesen ismert). A kimenőjel időfüggvényét előírjuk, tehát  ismert. Minden későbbi
ismert. Minden későbbi  időpontban a be- és kimenőjelről begyűjtött
időpontban a be- és kimenőjelről begyűjtött és
és  korábbi ismeretek birtokában a kimenet aktuális
korábbi ismeretek birtokában a kimenet aktuális  pillanatnyi értékéből (a kimenőjel visszacsatolásával) meghatározandó
pillanatnyi értékéből (a kimenőjel visszacsatolásával) meghatározandó  . Van visszacsatolt szabályozási hurok (ld. 2-12. ábra). Ki kell emelni, hogy a szabályozó tervezésére számos eljárást dolgoztak ki, ezzel a területtel külön tananyag foglalkozik. Ez a feladat pontosan elvileg sem oldható meg.
. Van visszacsatolt szabályozási hurok (ld. 2-12. ábra). Ki kell emelni, hogy a szabályozó tervezésére számos eljárást dolgoztak ki, ezzel a területtel külön tananyag foglalkozik. Ez a feladat pontosan elvileg sem oldható meg.
2.4.3.3. Az állapot jelkövetéses vezérlés
 és f ismert (
és f ismert ( vagy ismert, vagy elhanyagoljuk). Az állapotváltozók időfüggvényét előírjuk, tehát
vagy ismert, vagy elhanyagoljuk). Az állapotváltozók időfüggvényét előírjuk, tehát  ismert. Meghatározandó
ismert. Meghatározandó  . Offline módon is számítható, nincs visszacsatolás (zárt szabályozási hurok) (ld. 2-13. ábra)
. Offline módon is számítható, nincs visszacsatolás (zárt szabályozási hurok) (ld. 2-13. ábra)
2.4.3.4. Az állapot jelkövetéses szabályozása:
Ha az összes állapotváltozó mérhető, akkor megegyezik a kimenet jelkövetéses szabályozásával, ha az összes állapotváltozó nem mérhető, akkor ehhez a feladathoz állapotbecslő szükséges.
2.4.4. Megfigyelés (állapotbecslés)
 és
és  valamint f és g ismert (
valamint f és g ismert ( vagy ismert, vagy elhanyagoljuk), meghatározandó
vagy ismert, vagy elhanyagoljuk), meghatározandó  és
és  . (ld. 2-14. ábra)
. (ld. 2-14. ábra)
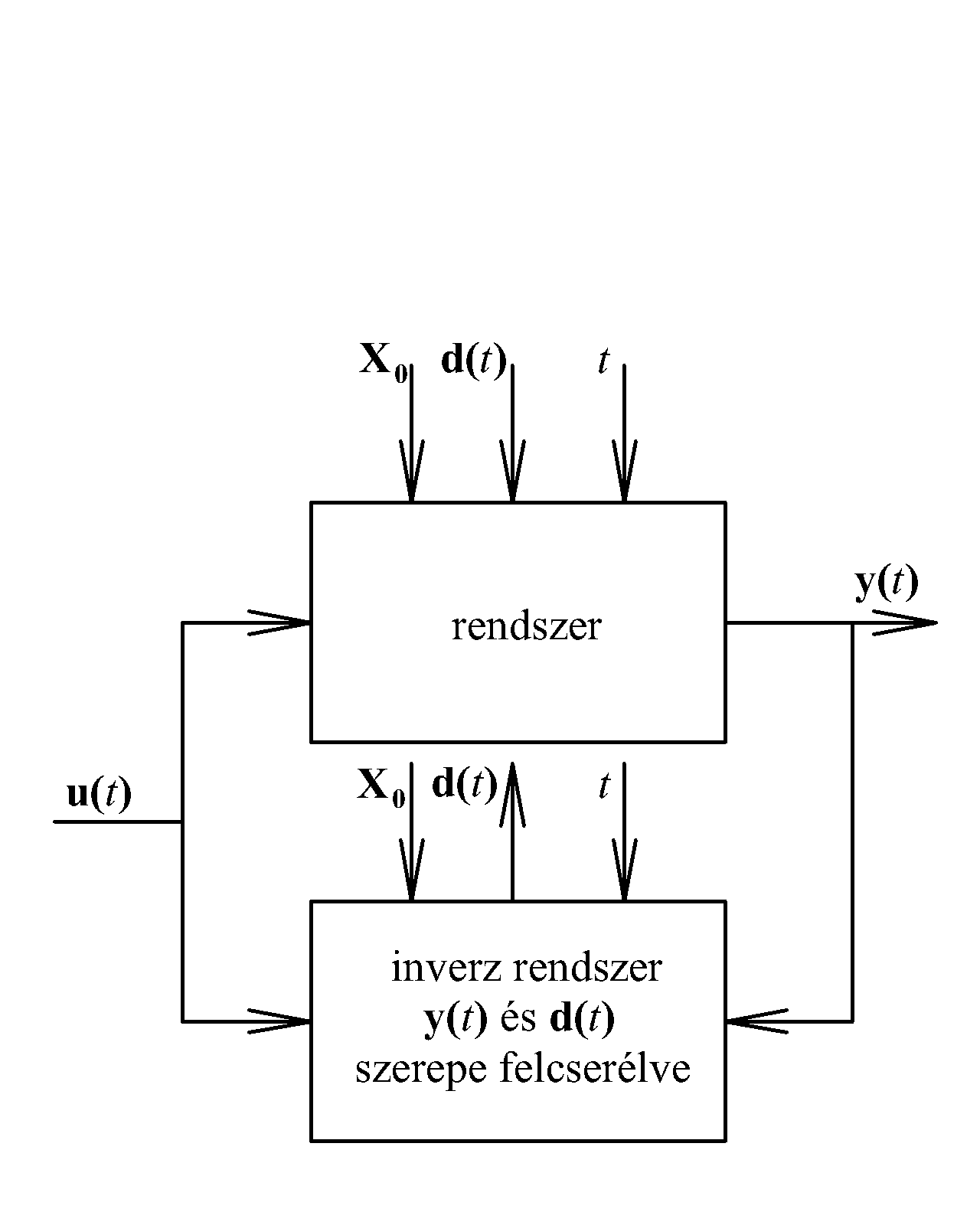
2.4.4.1. Zavarójelbecslés
 és
és  valamint f és g ismert, meghatározandó
valamint f és g ismert, meghatározandó  . (ld. 2-15. ábra)
. (ld. 2-15. ábra)
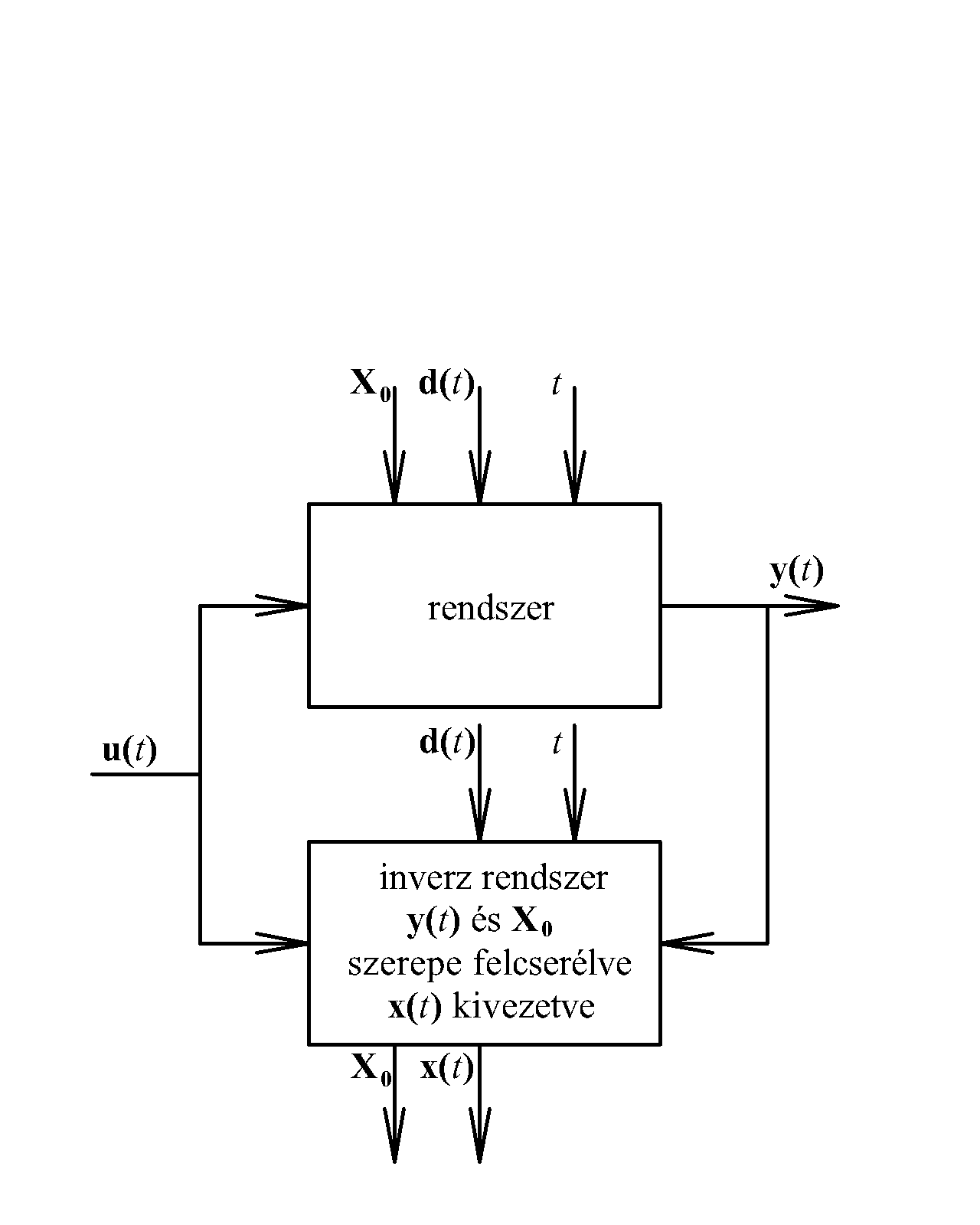
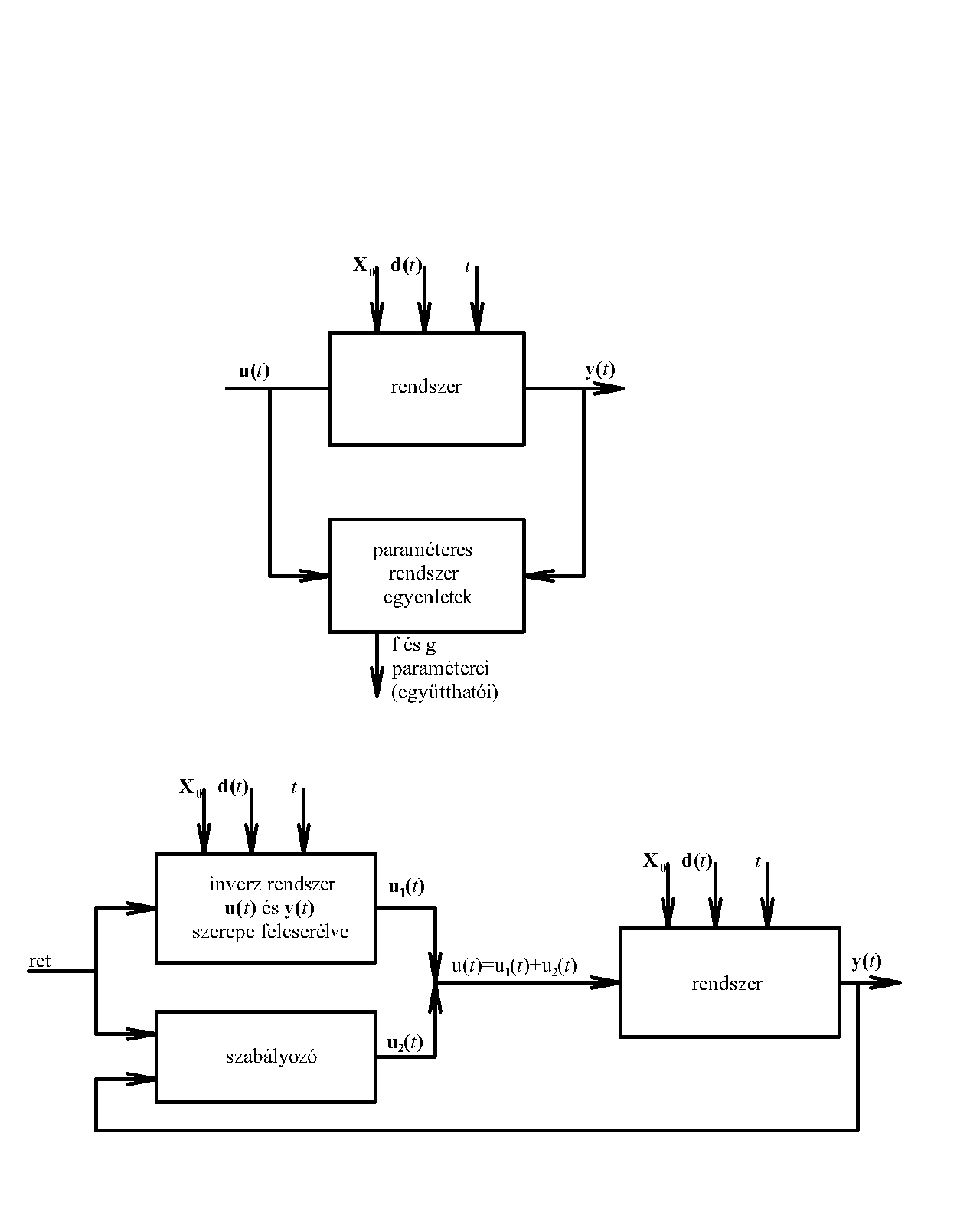
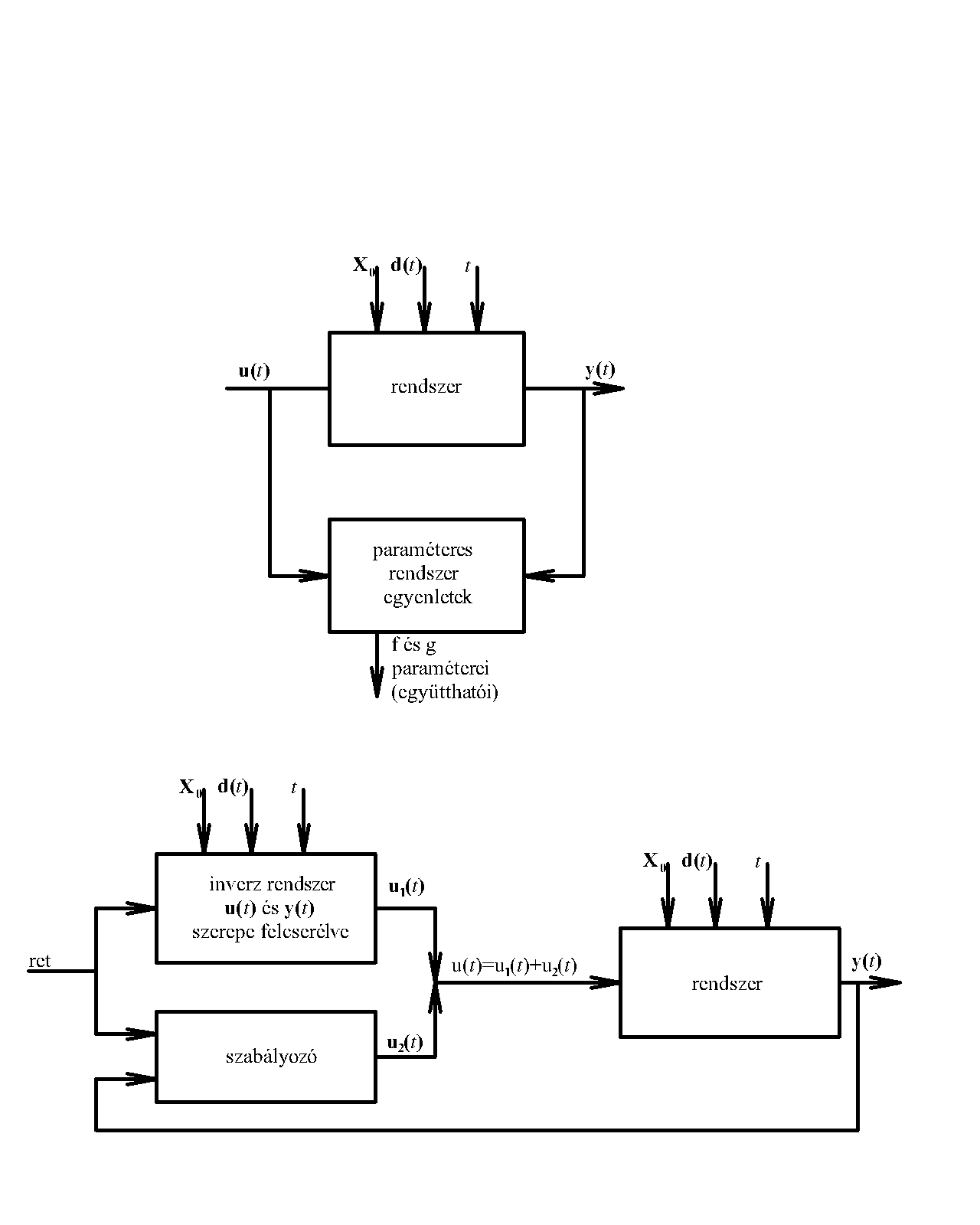
2.4.4.2. Paraméteridentifikáció
 és
és  valamint f és g alakja ismert, meghatározandók f és g paraméterei. (ld. 2-16. ábra)
valamint f és g alakja ismert, meghatározandók f és g paraméterei. (ld. 2-16. ábra)
2.4.4.3. Példák, magyarázatok, megjegyzések
A curling követ el kell juttatni a célterületre. Legyen
 a kő távolsága a célponttól, a követ egy megfelelő
a kő távolsága a célponttól, a követ egy megfelelő  erővel kell elindítani, hogy a kő éppen az
erővel kell elindítani, hogy a kő éppen az  ponton álljon meg. A csúszás közben a kőre a súrlódási erő hat, és ezt az erőt befolyásolja a súrlódási együtthatója, amelyet söpréssel lehet módosítani. E tevékenység eredményét tekinthetjük zavaró jelnek, ekkor a kimenet beállásos vezérléséről beszélhetünk. De tekinthetjük visszacsatolásnak, mert ha látjuk, hogy a kő nem érné el a célt, akkor a jeget melegítve csökkentjük a súrlódási erőt, hogy a kő messzebb jusson el.
ponton álljon meg. A csúszás közben a kőre a súrlódási erő hat, és ezt az erőt befolyásolja a súrlódási együtthatója, amelyet söpréssel lehet módosítani. E tevékenység eredményét tekinthetjük zavaró jelnek, ekkor a kimenet beállásos vezérléséről beszélhetünk. De tekinthetjük visszacsatolásnak, mert ha látjuk, hogy a kő nem érné el a célt, akkor a jeget melegítve csökkentjük a súrlódási erőt, hogy a kő messzebb jusson el. A kimenet vezérlése az is, amikor otthon kiszámoljuk, hogy a fűtést fél órával az óracsöngés előtt kell bekapcsolni és folyamatosan bekapcsolva tartani, hogy amikor kikelünk az ágyból, a hőmérséklet megfelelő legyen. Itt a bemenőjel a bekapcsolt állapot jele, a kimenőjel a hőmérséklet, a zavaró jel a külső hőmérséklet. Természetesen, az sem mindegy, hogy a fűtés bekapcsolásakor mekkora a kezdeti hőmérséklet. Ahhoz, hogy elvileg pontosan kiszámolhassuk a fűtés megfelelő bekapcsolási pillanatát, hogy egy adott időpontban a szoba hőmérséklete egy ideális érték legyen, pontosan tudnunk kell a külső hőmérsékletet, a szoba kezdeti hőmérsékletét, a falak hőszigetelését, a kazán teljesítményét, stb.. A vezérlés hátránya, hogy mindent előre pontosan kell tudni, de ezzel szemben nem kell folyamatosan a szoba hőmérsékletét mérni, ha jól számoltunk, akkor minden úgy alakul, ahogy elterveztük. Éppen addigra éri el a szoba hőmérséklete a kívánt értéket, amikor kiszállunk az ágyból, de ha rosszul számoltunk, mert pl. nyitva felejtettük az ablakot, akkor ez a rendszer nem tud korrigálni az eredményen. Ahhoz, hogy a fűtés esetén szabályozásról beszélhessünk, mindenképp szükség van a hőmérséklet folyamatos mérésére. Ha a hőmérséklet alacsonyabb a megkívánt értéknél, akkor bekapcsoljuk a fűtést, ha magasabb, akkor kikapcsoljuk (esetleg ablakot nyitunk). A szabályozás lényege, hogy mérnünk kell, és a méréstől függően valahogy be kell avatkoznunk. Ennek az lehet a hátránya, hogy esetleg túl vehemensen avatkozunk be, és túlreagáljuk az elérendő célt, de amikor rájövünk, hogy túlreagáltuk, akkor azt elkezdjük kompenzálni és megvan a veszélye annak, hogy túlkompenzálunk, a folyamat kezdődik előröl, akár egyre nagyobb kilengésekkel. Ez vezet a stabilitási kérdésekhez, amelyeknek kiemelt szerepe van a szabályozáselméletben.
Szokás a szabályozót és a rendszert együtt egy új rendszernek tekinteni. A beállásos és jelkövető irányítást azért érdemes megkülönböztetni, mert az utóbbi esetben az eredő rendszer kimenőjelét leíró differenciálegyenlet garantáltan nem autonóm, az első esetben viszont autonóm differenciálegyenleteket kapunk, ha maga a rendszer időinvariáns. Az is jelentős különbség, hogy a beállásos szabályozási feladat elvileg is és gyakorlatilag is megoldható. A jelkövető szabályozás általános esetben, amikor az előírt jel tetszőlegesen változhat, nem működhet hiba nélkül. Gondoljunk arra, ha
 hirtelen megváltozik, akkor a rendszernek idő kell, hogy
hirtelen megváltozik, akkor a rendszernek idő kell, hogy  is meg tudjon változni.
is meg tudjon változni.
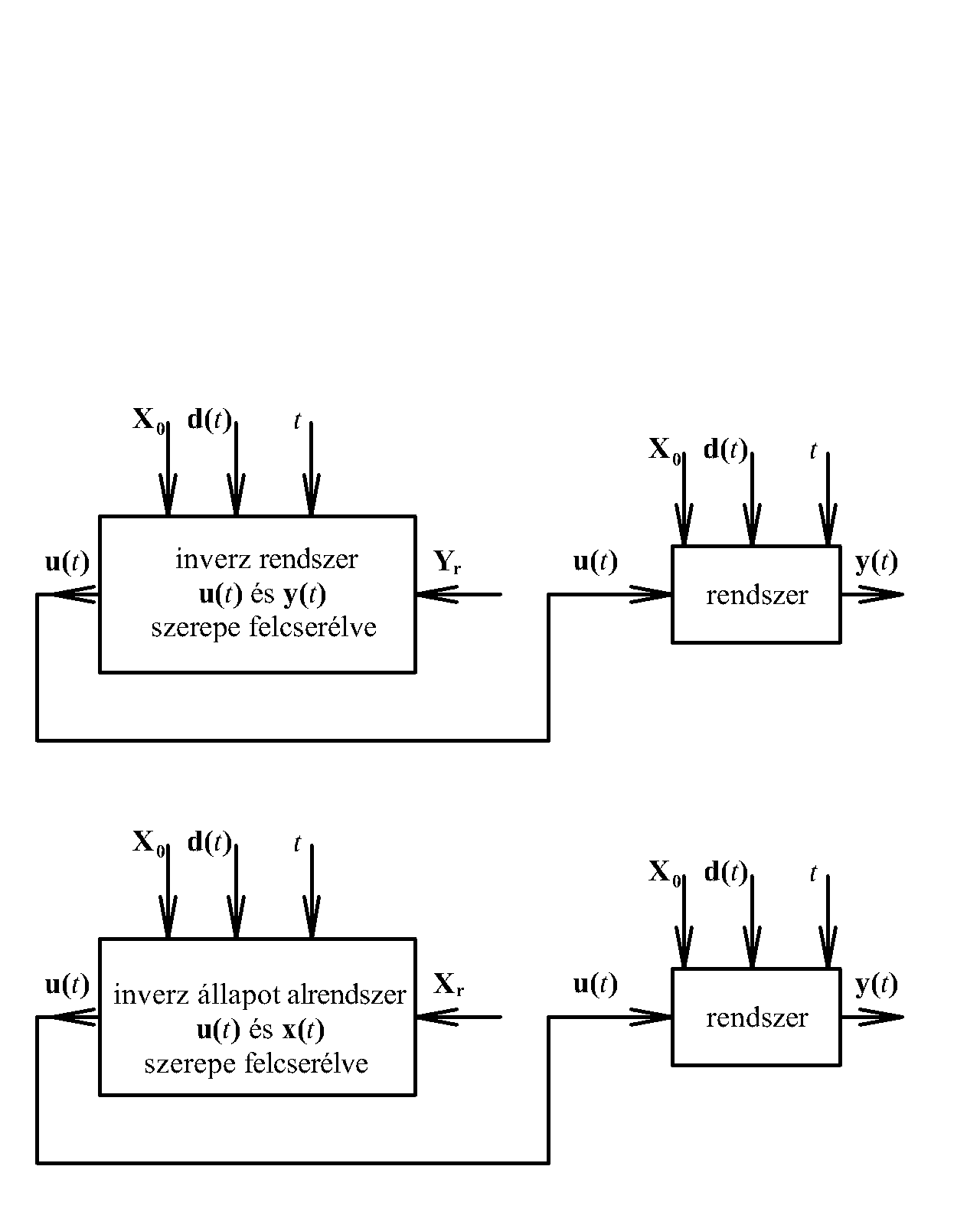
2.4.5. Irányítási és megfigyelési feladatok elvi megoldhatósága
Az első kérdés, hogy ezek az alapfeladatok elvileg mikor oldhatóak meg. Itt a megoldást mérnöki értelemben értjük, pl. a szimuláció a (2.7) és (2.8) egyenletek numerikus megoldását jelenti. A szimulációnak fontos szerepe van a mérnöki tervezésben. Mielőtt egy új berendezés kísérleti változatának megépítésébe fognánk, először szimuláljuk annak működését. Ugyancsak szimulációhoz fordulunk, ha komponensekből egy új, nagyobb egységet alkotnánk. Sok komponensnek a gyártó készíti el a szimulációs modelljét. Pl. áramkörök tervezéséhez a félvezető eszközök megfelelő típusának a szimulációs modellje az áramkörtervező programok része. A robotok modelljét is a robot gyártója készíti el, hogy a teljes gyártási folyamatot szimulálni lehessen. A szimulációval egy külön tantárgy foglalkozik.
2.4.5.1. Irányíthatóság fogalma
Definíció
A 2. pont alapján, egy rendszert akkor tekintünk teljes állapotirányíthatónak, ha  mellett az állapotváltozók tetszőleges
mellett az állapotváltozók tetszőleges  kezdeti értékéhez található egy olyan
kezdeti értékéhez található egy olyan  bemenőjel, amely hatására a rendszer állapotváltozói véges időn belül (jelöljük ezt
bemenőjel, amely hatására a rendszer állapotváltozói véges időn belül (jelöljük ezt  -gyel) felvesznek egy tetszőlegesen előírt
-gyel) felvesznek egy tetszőlegesen előírt  értéket.
értéket.
Értelmezés
Ebben a definícióban a 2. ponttal ellentétben nincs szó sem f és g ismeretéről, sem visszacsatolásról. Az irányíthatóság arra vonatkozik, hogy tetszőleges állapotból tetszőleges állapotba elvileg is eljuttatható a rendszer pusztán a bemenőjelek segítségével. Pl. egy autó esetén lehet a megtett távolság és a sebesség a két állapotváltozó. Ha az autón van gázpedál és fék, akkor az autót elvileg tetszőleges távolságra eljuttathatjuk, ahol egy tetszőleges sebességet is előírhatunk. Az autó rendszertechnikai szempontból irányítható. Ha az autónak elromlik a fékje, ezért az autó működését leíró rendszernek elvesszük az egyik bemenetét (és a súrlódást is elhanyagoljuk), akkor ez a csökkentett számú bemenettel rendelkező rendszer rendszertechnikai szempontból irányíthatatlanná válik (hasonlóan az autóhoz). Az irányíthatóságnak a mérnöki tervezésben is lehet szerepe. Ez alapján ellenőrizhetjük, hogy a valós fizikai rendszernél elegendő beavatkozási lehetőséget terveztünk-e, vagy éppen fordítva túl sok a beavatkozási lehetőség, néhányat takarékossági okokból elhagyhatunk.
Pl. ha az autóhoz elfelejtettünk féket tervezni, akkor egy rendszertechnikai vizsgálatból kitűnik, hogy a tervezett rendszerünk irányíthatatlan. Léteznek olyan összetettebb rendszerek, ahol az irányíthatóság csak úgy ránézésre nem állapítható meg, mint ahogy az autónál minden rendszertechnikai vizsgálat nélkül meg tudjuk mondani, hogy fék nélkül használhatatlan az autó. Megjegyezzük, hogy  előírása nem azonos azzal a feladattal, amikor a rendszert egy előírt állandósult állapotba kívánjuk juttatni. Az autó esetén előírhatjuk, hogy egy óra múlva legyen 100 km-re és ott legyen a sebessége pontosan 50 km/óra, de az elvileg lehetetlen, hogy az autó menjen el 100 km távolságra és maradjon ott, de közben a sebessége is maradjon 50 km/óra.
előírása nem azonos azzal a feladattal, amikor a rendszert egy előírt állandósult állapotba kívánjuk juttatni. Az autó esetén előírhatjuk, hogy egy óra múlva legyen 100 km-re és ott legyen a sebessége pontosan 50 km/óra, de az elvileg lehetetlen, hogy az autó menjen el 100 km távolságra és maradjon ott, de közben a sebessége is maradjon 50 km/óra.
A rendszer lehet részlegesen állapotirányítható. Ez utóbbi esetén az összes állapotváltozónak nem írhatjuk elő tetszőlegesen a  értékét, csak az állapotváltozók egy részét választhatjuk meg szabadon. Szokás még megkülönböztetni a kimeneti irányíthatóságot, ekkor értelem szerűen nem az állapotváltozóknak, hanem kimeneteknek írjuk elő a kívánt
értékét, csak az állapotváltozók egy részét választhatjuk meg szabadon. Szokás még megkülönböztetni a kimeneti irányíthatóságot, ekkor értelem szerűen nem az állapotváltozóknak, hanem kimeneteknek írjuk elő a kívánt  értékét. (Ekkor is beszélhetünk teljes és részleges kimeneti irányíthatóságról). Ha az irányíthatóságnak nincs jelzője, akkor mindig a teljes állapotirányíthatóságra gondolunk.
értékét. (Ekkor is beszélhetünk teljes és részleges kimeneti irányíthatóságról). Ha az irányíthatóságnak nincs jelzője, akkor mindig a teljes állapotirányíthatóságra gondolunk.
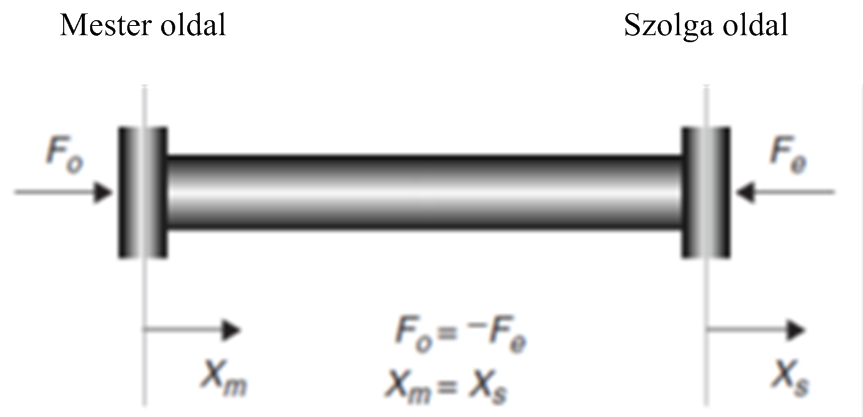
A Rendszertechnika jegyzetben tárgyalt és a 2-17. ábraán látható ideális transzlációs telemanipulációs rendszer esetében, ha a mester oldalon a fogantyú  elmozdulása a rendszer bemenete, valamint a rendszer kimenete a szolga oldali fogantyú
elmozdulása a rendszer bemenete, valamint a rendszer kimenete a szolga oldali fogantyú  elmozdulása, akkor nem beszélhetünk állapotirányíthatóságról, mert az egy statikus rendszer, ahol nincsenek állapotok, ezzel szemben beszélhetünk kimeneti irányíthatóságról. Triviális, hogy a bemeneti oldal megfelelő mozgatásával a kimeneten tetszőleges mozgásállapotot érhetünk el. Az is triviális, hogy ha a bemenetet és kimenetet összekötő rúd eltörik, akkor megszűnik a kimenet irányíthatósága.
elmozdulása, akkor nem beszélhetünk állapotirányíthatóságról, mert az egy statikus rendszer, ahol nincsenek állapotok, ezzel szemben beszélhetünk kimeneti irányíthatóságról. Triviális, hogy a bemeneti oldal megfelelő mozgatásával a kimeneten tetszőleges mozgásállapotot érhetünk el. Az is triviális, hogy ha a bemenetet és kimenetet összekötő rúd eltörik, akkor megszűnik a kimenet irányíthatósága.
Más a helyzet, ha az  erőhatást tekintjük a bemenetnek, a szolga oldali erőhatást elhanyagoljuk, és először legyen a kimenet a rúd sebesssége a szolga oldalon. Ekkor egy dinamikai rendszerhez jutunk, amely állapotirányítható.
erőhatást tekintjük a bemenetnek, a szolga oldali erőhatást elhanyagoljuk, és először legyen a kimenet a rúd sebesssége a szolga oldalon. Ekkor egy dinamikai rendszerhez jutunk, amely állapotirányítható.
2.4.5.2. Megfigyelhetőség fogalma
Definíció
A 4. pont alapján: egy rendszert akkor tekintünk teljes állapot megfigyelhetőnek, ha  és
és  ismeretében
ismeretében  mellett
mellett  és
és  matematikai eszközökkel elvileg kiszámítható.
matematikai eszközökkel elvileg kiszámítható.
Értelmezés
Ebből a definícióból is hiányzik bármilyen előírás f és g ismertére vagy a visszacsatolásra. A megfigyelhetőség arra vonatkozik, hogy a bemenő- és kimenőjelekből a rendszer állapota rekonstruálható-e tisztán matematikai eszközökkel. Gyakorlati szempontból ennek ott van jelentősége, hogy elegendő érzékelőt terveztünk-e a rendszerhez, kell-e több helyen mérni, vagy takarékossági okokból néhány érzékelő akár el is hagyható. A nyolcvanas években az aszinkron motoros hajtásoknál hatalmas áttörés volt az ún. mezőorientált szabályozás. Ennek lényege, hogy a motor forgórész mágneses mezejét kell kézben tartani, de ezt közvetlenül nagyon drága lenne mérni, e helyett mindenki rendszertechnikai értelemben vett megfigyelőt alkalmaz a mágneses tér kiszámítására. A kilencvenes években sokan foglalkoztak az ún. „sensorless” villamos hajtásokkal, itt az érzékelő mentesség a fordulatszám érzékelőre vonatkozik. A motor fordulatszámát a motor áramából és feszültségéből számolják ki. Az új évezredben mind mezőorientált, mind „sensorless” villamos hajtások széles kínálatban kaphatók.
A rendszer lehet részlegesen állapot megfigyelhető. Ez utóbbi esetben az összes állapotváltozó nem rekonstruálható, csak az állapotváltozók egy része számítható ki a mérésekből. Ha a megfigyelhetőségnek nincs jelzője, akkor mindig a teljes állapot megfigyelhetőségre gondolunk.
2.4.5.3. Lineáris időinvariáns rendszerek Kálmán-féle felbontási elve
Egy lineáris idő invariáns rendszer az irányíthatóság és megfigyelhetőség szempontjából négy típusú alrendszerre bontható (további részleteket ld. 6.2.7 pont 146 oldal)
Irányítható és megfigyelhető
Irányítható, de nem megfigyelhető
Nem irányítható, de megfigyelhető
Nem is irányítható és nem is megfigyelhető
Értelmezés
Látszólag értelmetlen olyan rendszert tervezni, amely nem irányítható és nem is megfigyelhető, de pl. egy rendszer biztonsági elemzésénél fontos azt ellenőrizni, hogy egy részegység tönkremenetele után mennyire marad irányítható és megfigyelhető a meghibásodott rendszer. Elképzelhető, hogy egy másodlagos biztonsági beavatkozási lehetőséggel (pl. rövidzárlat esetén a kézi vezérléssel) szemben már nem várjuk el a rendszer teljes irányítását, hanem csak a kulcsfontosságú alrendszer biztonságos leállítását.
2.4.6. Összetett feladatok
Ez elsősorban azokra a szabályozási feladatokra vonatkozik, amelyeknél azt feltételeztük, hogy  ,
,  , f, g és
, f, g és  nem vagy csak részlegesen ismert. Előfordulhat, hogy semmit sem tudunk magáról a rendszerről, de a rendszerről minél több ismeretet tudunk beépíteni a szabályozókörbe, a szabályozás minősége annál jobb lehet. Itt nem térünk ki minden lehetséges esetre, néhányat emelünk ki.
nem vagy csak részlegesen ismert. Előfordulhat, hogy semmit sem tudunk magáról a rendszerről, de a rendszerről minél több ismeretet tudunk beépíteni a szabályozókörbe, a szabályozás minősége annál jobb lehet. Itt nem térünk ki minden lehetséges esetre, néhányat emelünk ki.
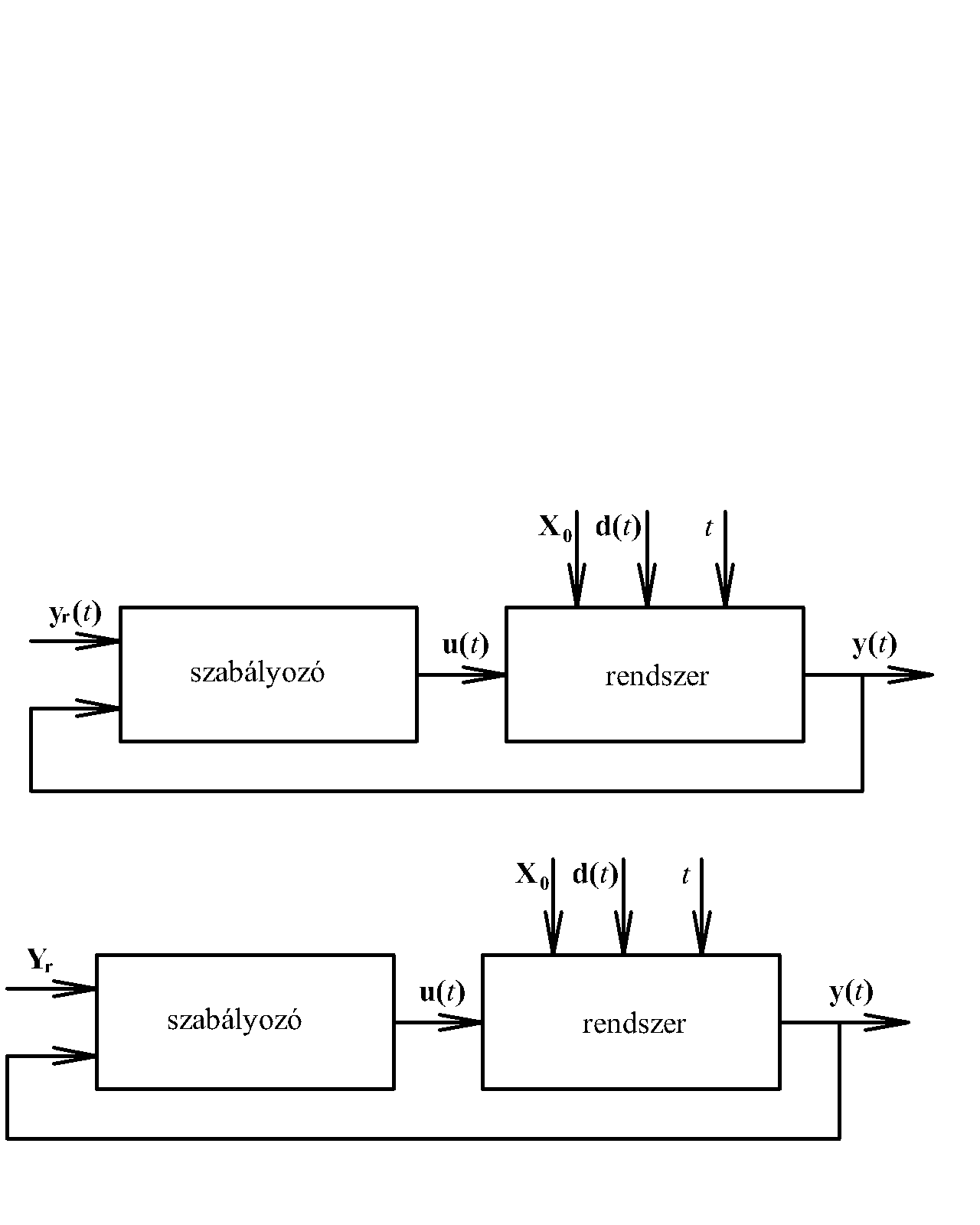
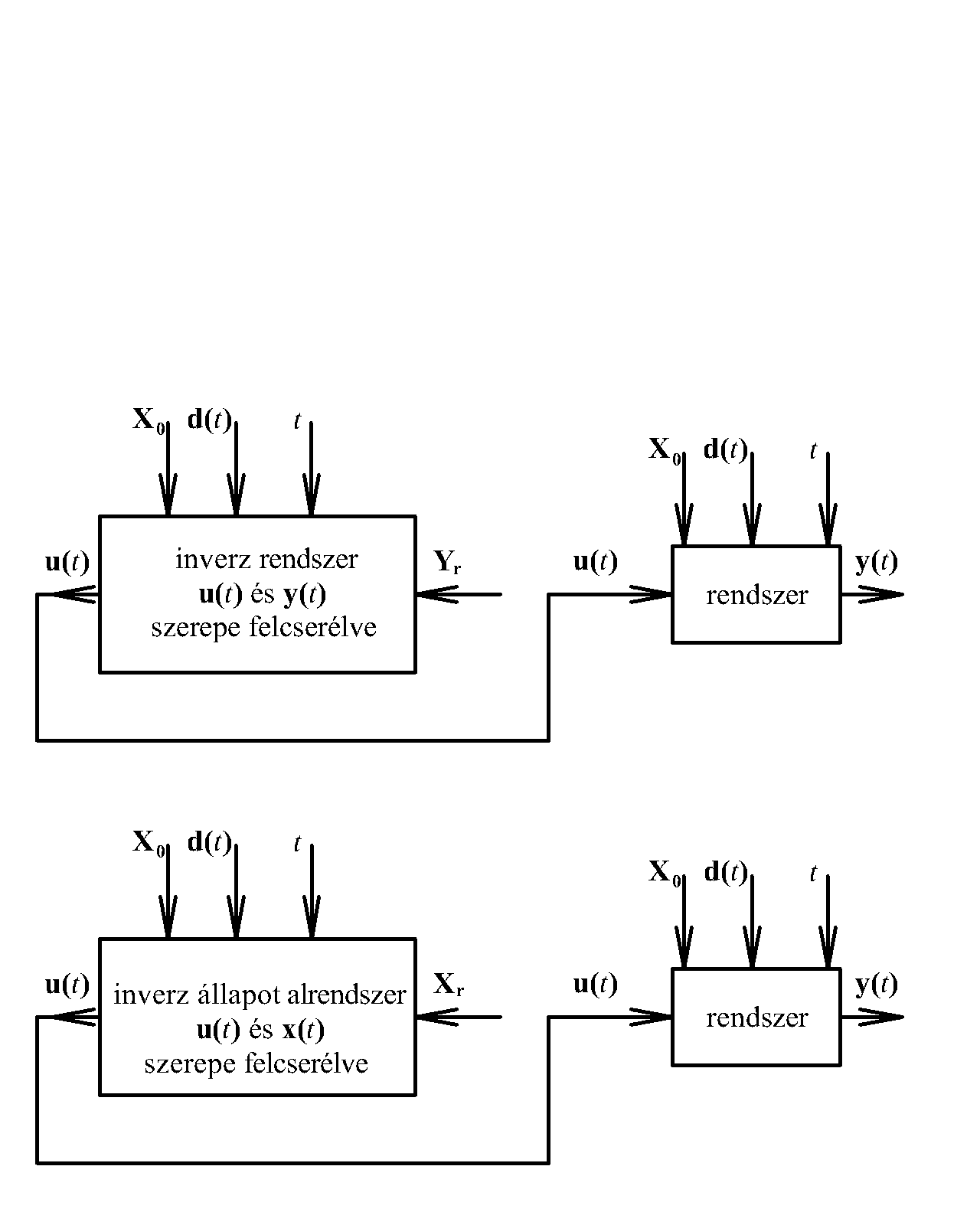
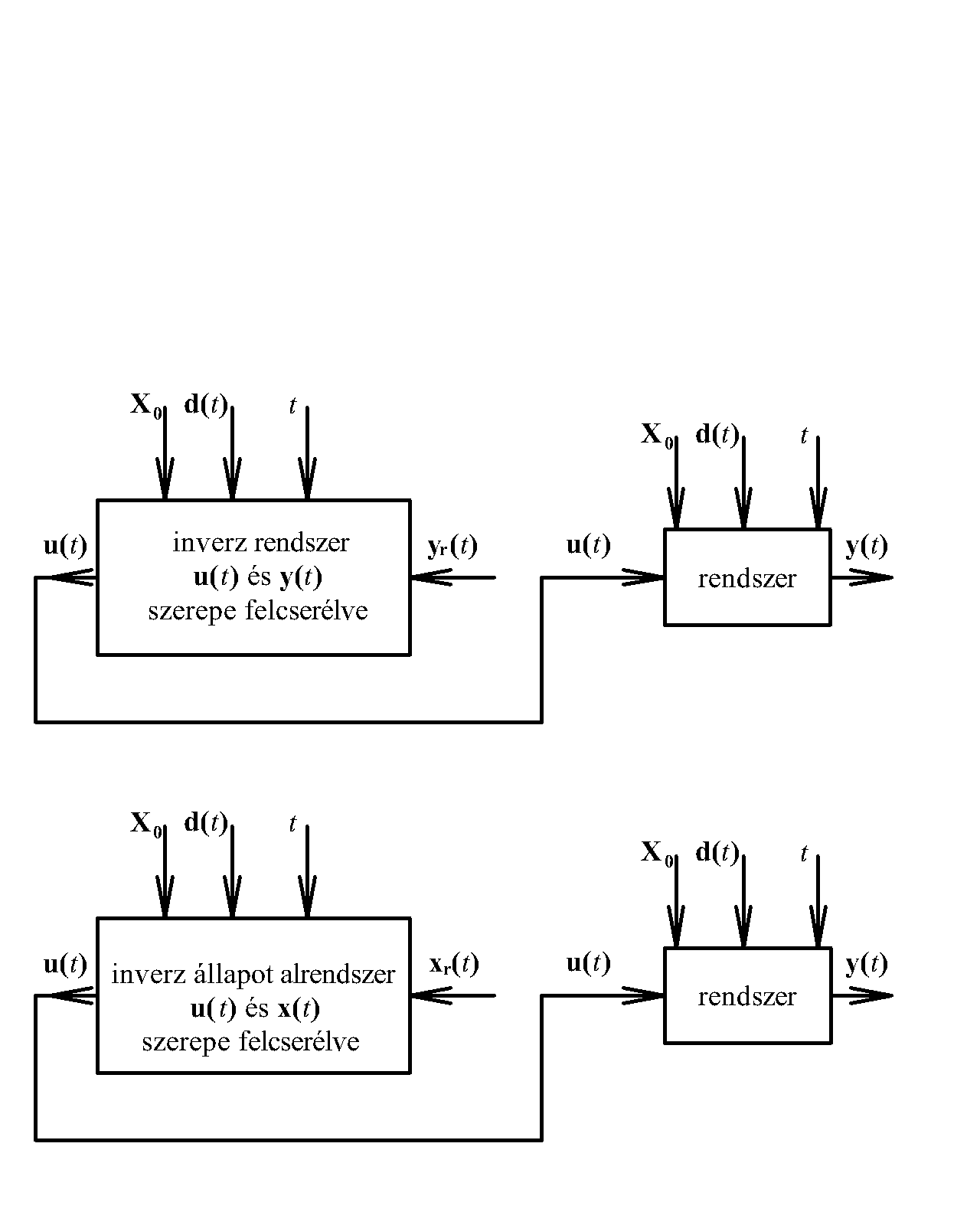
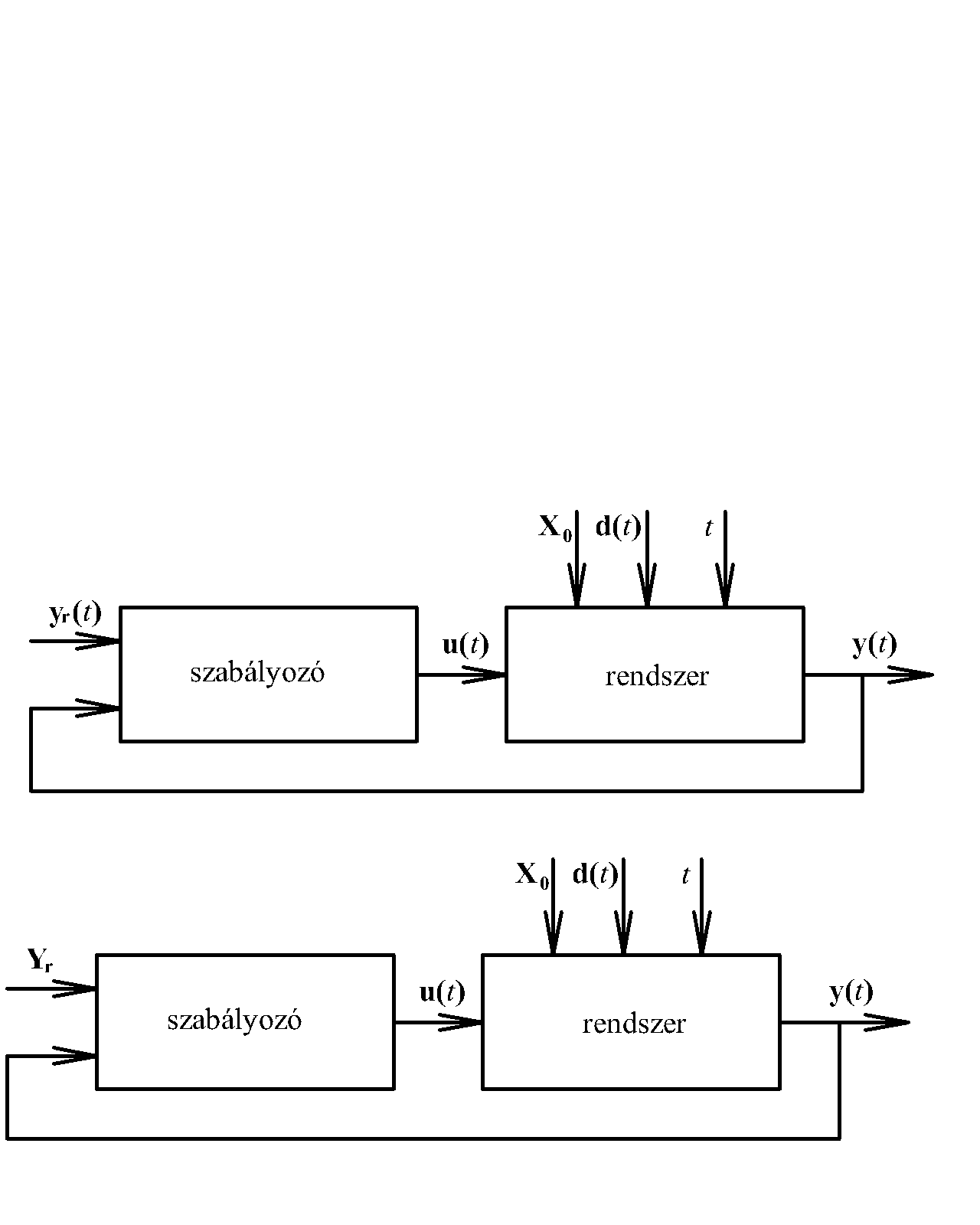
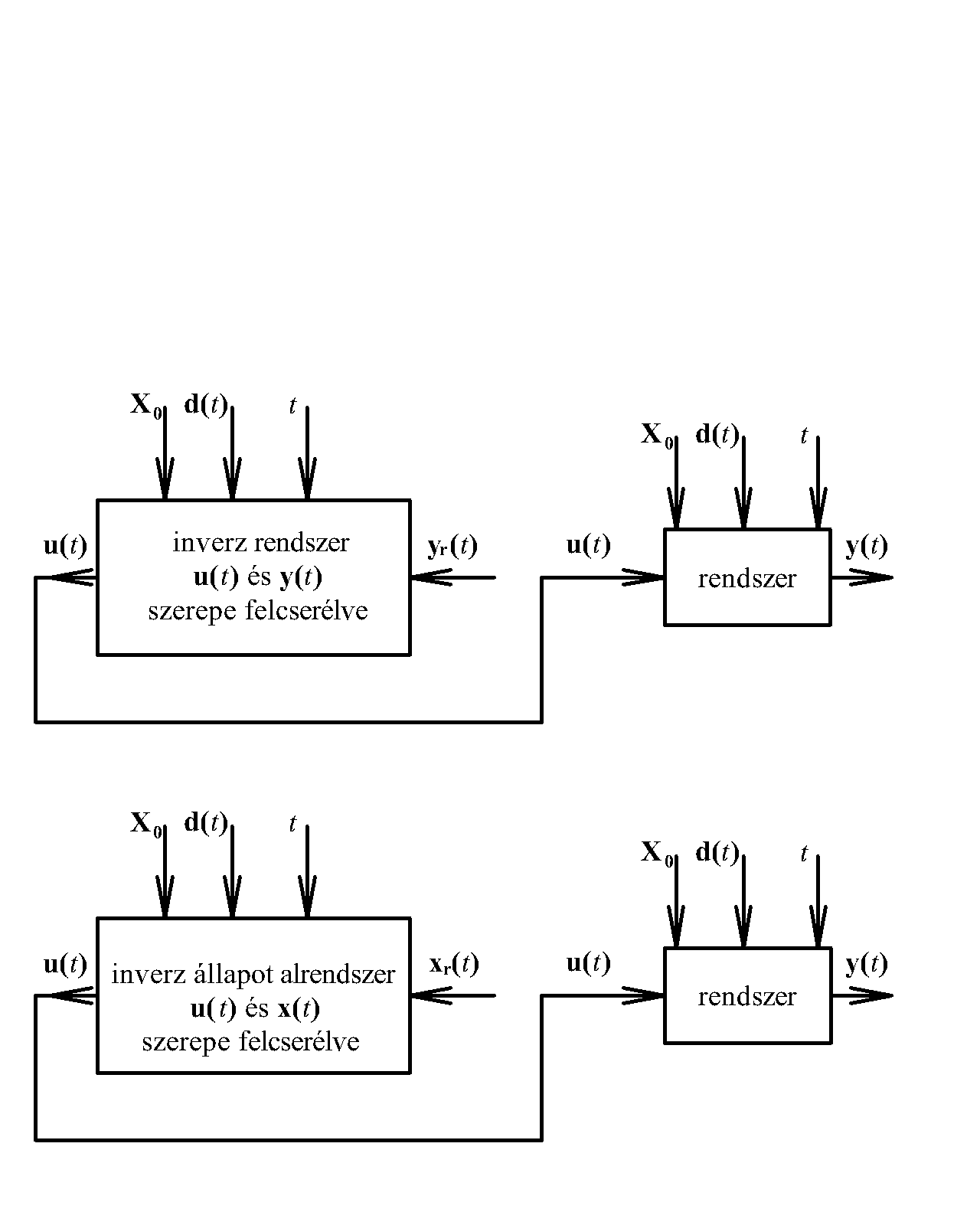
2.4.6.1. Vezérlés és a szabályozás kombinációja: előrecsatolás
Ha a rendszert és minden bemenetét pontosan ismerjük, akkor a vezérlés a legjobb megoldás, de általában sem a zavarójelet és a rendszer paramétereket nem ismerjük pontosan, ezért van szükség visszacsatolt hurkú szabályozásra (ld. 2-18. ábra). Az ábrán a ref. (referenciajel) lehet egy konstans  érték (beállásos szabályozás), vagy
érték (beállásos szabályozás), vagy  időfüggvény (jelkövető szabályozás).
időfüggvény (jelkövető szabályozás).
Megfigyelőn (állapotbecslésen) alapuló állapotszabályozás: (ld. 2-19. ábra). Az ábrán a ref. (referenciajel) lehet egy konstans  érték (beállásos szabályozás), vagy
érték (beállásos szabályozás), vagy  időfüggvény (jelkövető szabályozás).
időfüggvény (jelkövető szabályozás).
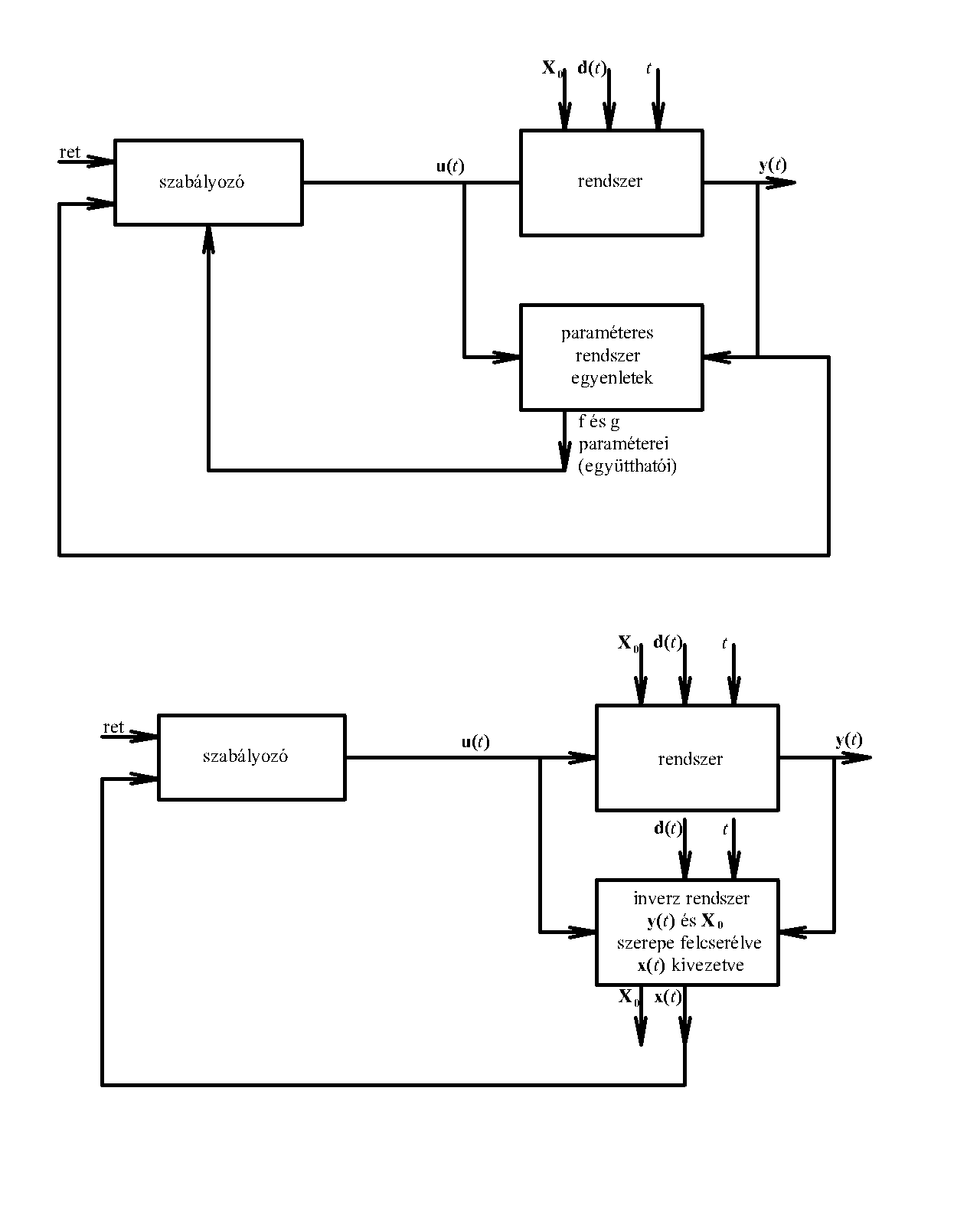
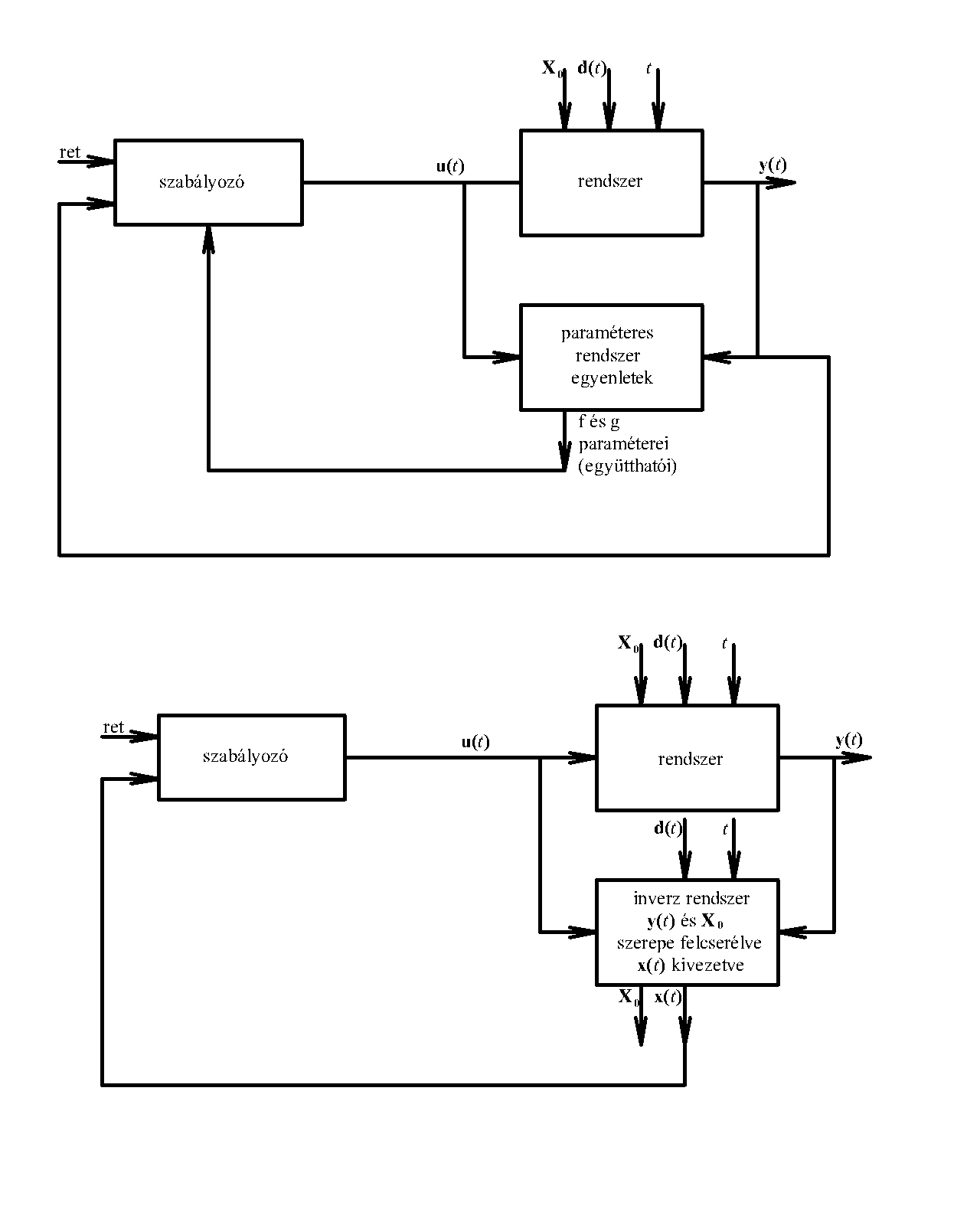
2.4.6.2. Paraméteridentifikáción alapuló irányítás (adaptív irányítás)
Ha rendszer paramétereit ismerjük, akkor egy jó szabályozót tervezhetünk. Ha a szabályozással együtt a rendszer paramétereit direkt módon vagy indirekt módon próbáljuk meghatározni és ezt az ismeretet folyamatosan beépítjük a szabályozónkba, akkor adaptív irányításról beszélünk. A 2-20. ábra a ref. (referenciajel) lehet konstans  érték (beállásos szabályozás), vagy
érték (beállásos szabályozás), vagy  időfüggvény (jelkövető szabályozás). A paraméterek indirekt becsélésén azt értjük, hogy
időfüggvény (jelkövető szabályozás). A paraméterek indirekt becsélésén azt értjük, hogy  és
és  ismeretében nem közvetlenül a modell paramétereket, hanem közvetlenül a szabályozó paramétereit határozzuk meg.
ismeretében nem közvetlenül a modell paramétereket, hanem közvetlenül a szabályozó paramétereit határozzuk meg.
2.5. Minimálfázisú felnyitott körrel rendelkező szabályozási körök analízise
Ebben a fejezetben a szabályozási körök különböző tulajdonságait vizsgáljuk, ebből vonunk le olyan következtetéseket, amelyek a szintézist segítik.
Fontos megjegyzés
Ebben a fejezetben többször használjuk a végérték tételt, amely csak akkor érvényes, ha létezik állandósult érték. Ezt most ebben a fejezetben külön nem vizsgáljuk.
2.5.1. Egy energia tárolós tag P szabályozóval
A rendszer válaszának gyorsaságát rendszerint a legnagyobb, más szavakkal a domináns időállandó határozza meg (domináns időállandóról akkor beszélünk, ha annak értéke legalább háromszor akkora, mint a második legnagyobb időállandó értéke), így a rendszert sok esetben egy energiatárolós taggal közelíthetjük.
Ekkor legyen a szabályozott szakasz átmeneti függvénye
| (2.9) |
A szabályozónk legyen egy egyszerű arányos tag
| (2.10) |

Számunkra igazán a körerősítés (a felnyitott kör eredő erősítése) érdekes. Most az egyszerűség kedvéért a szabályozott szakasz erősítése 1, így a körerősítés megegyezik a  értékével.
értékével.
Ezek alapján a visszacsatolt szabályozási kör átviteli függvénye:
| (2.11) |
A következőket olvashatjuk ki. Mivel  pozitív, ezért
pozitív, ezért
| (2.12) |

továbbá
| (2.13) |

Így a visszacsatolt szabályozási kör domináns időállandója lecsökkent. Az eredő erősítése egynél kisebb, ez azt jelenti, hogy a kimenőjel mindig kisebb lesz, mint a referenciajel (a negatív visszacsatolás csökkenti az eredő erősítést), tehát állandósult állapotban van hiba.

-t növelve a rendszert gyorsul, ami fizikailag annyit jelent, hogy  nagyobb beavatkozást okoz adott
nagyobb beavatkozást okoz adott  hiba esetén. Könnyen belátható, hogy ha a rendszer energiamentes (a kimenőjel értéke nulla), akkor egy arányos
hiba esetén. Könnyen belátható, hogy ha a rendszer energiamentes (a kimenőjel értéke nulla), akkor egy arányos  tag a referenciajel
tag a referenciajel  -szeresét kapcsolja a szabályozott szakasz bemenetére. Természetesen a szabályozott szakasz időállandója nem változik meg. A nagyobb beavatkozó jel miatt a rendszernek a
-szeresét kapcsolja a szabályozott szakasz bemenetére. Természetesen a szabályozott szakasz időállandója nem változik meg. A nagyobb beavatkozó jel miatt a rendszernek a  időállandóval egy nagyobb értékre kellene beállnia, ezért nagyobb kezdeti meredekséggel indul. Ahogy az
időállandóval egy nagyobb értékre kellene beállnia, ezért nagyobb kezdeti meredekséggel indul. Ahogy az  kimenőjel értéke kezd növekedni, úgy
kimenőjel értéke kezd növekedni, úgy  értéke kezd csökkenni, ennek hatására a beavatkozó jel is csökken.
értéke kezd csökkenni, ennek hatására a beavatkozó jel is csökken.
2.1 feladat
Legyen  s és
s és  , ekkor a visszacsatolt kör erősítése 5/6= 0.8333 lesz, és az időállandó hatodára csökken. Három esetet hasonlítunk össze
, ekkor a visszacsatolt kör erősítése 5/6= 0.8333 lesz, és az időállandó hatodára csökken. Három esetet hasonlítunk össze
a rendszer egységugrásra adott válasza
a rendszer egységugrásra adott válasza, ha a rendszer erősítését ötszörösére növeljük
a negatívan visszacsatolt rendszer egységugrásra adott válasza, ha a körerősítést 5-re választjuk.
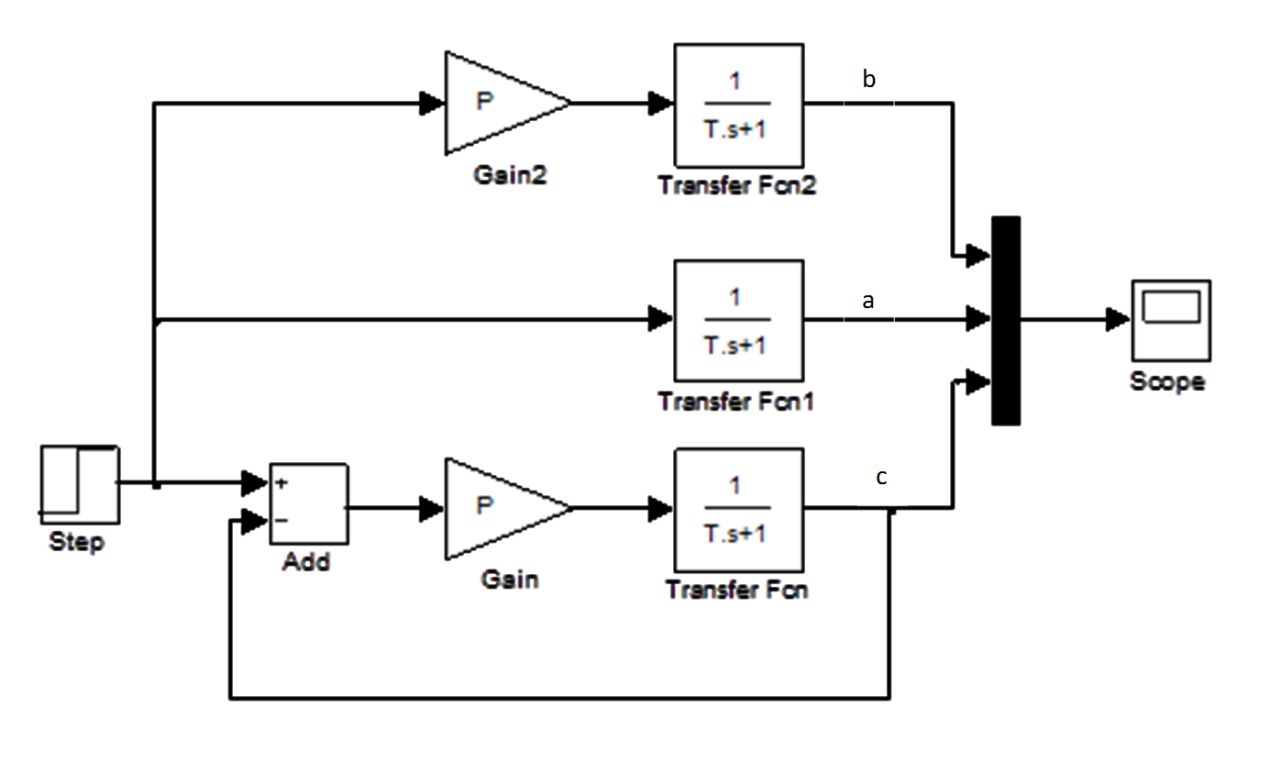
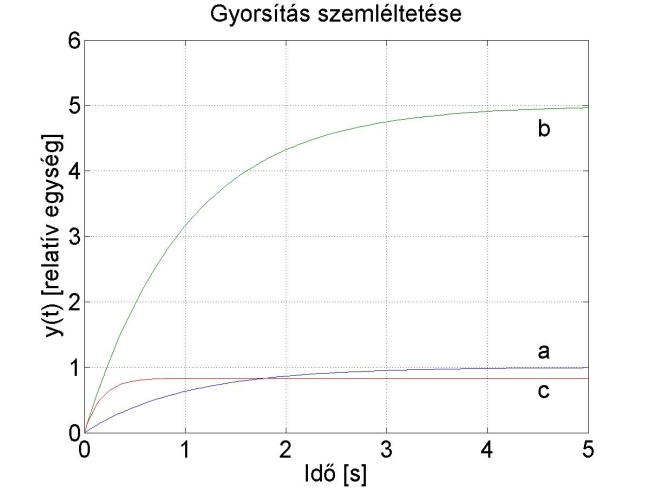
Az a) és b) esetben a rendszer ugyanazzal a  s időállandóval 1, illetve 5 értékre áll be. A c) esetben az
s időállandóval 1, illetve 5 értékre áll be. A c) esetben az  kimenőjel a b) esettel azonos meredekséggel indul el, de ahogy a hibajel csökken, úgy csökken az
kimenőjel a b) esettel azonos meredekséggel indul el, de ahogy a hibajel csökken, úgy csökken az  beavatkozó jel, így az
beavatkozó jel, így az  meredeksége mindkét korábbi esetnél gyorsabban csökken, így hamarabb (kisebb időállandóval) éri el az állandósult értéket.
meredeksége mindkét korábbi esetnél gyorsabban csökken, így hamarabb (kisebb időállandóval) éri el az állandósult értéket.
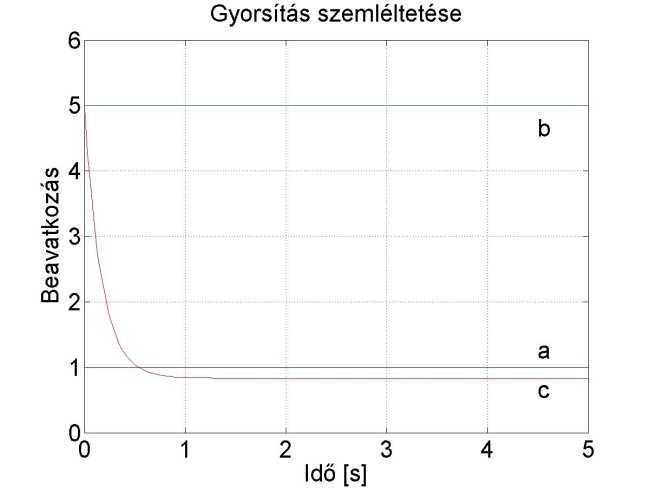
Összefoglalva: a negatívan visszacsatolt szabályozási körben a visszacsatolt kör válaszát a körerősítés növelésével gyorsíthatjuk. A gyorsítást túlvezérléssel érjük el, de a túlvezérlés sokszor a beavatkozó jel telítődéséhez vezethet. A beavatkozó jel telítődésekor nem beszélhetünk szabályozásról, mert a kimenőjel változása nem hat vissza a beavatkozó jelre (hiszen az állandó érték). Bizonyos mértékű telítődés általában megengedhető. Ezt úgy értelmezhetjük, hogy amikor a hibajel túl nagy (pl. amikor bekapcsoljuk a rendszerünket), akkor a maximális beavatkozással csökkentjük azt. A tényleges szabályozás akkor lép életbe, amikor a beavatkozó jel kilép a telítődésből, ezt az üzemi tartományt kell megfelelően megválasztani. Ha a körerősítés nagyon nagy (ideális esetben végtelen) és a beavatkozó jel korlátos, akkor ún. bang-bang típusú szabályozóhoz jutunk.
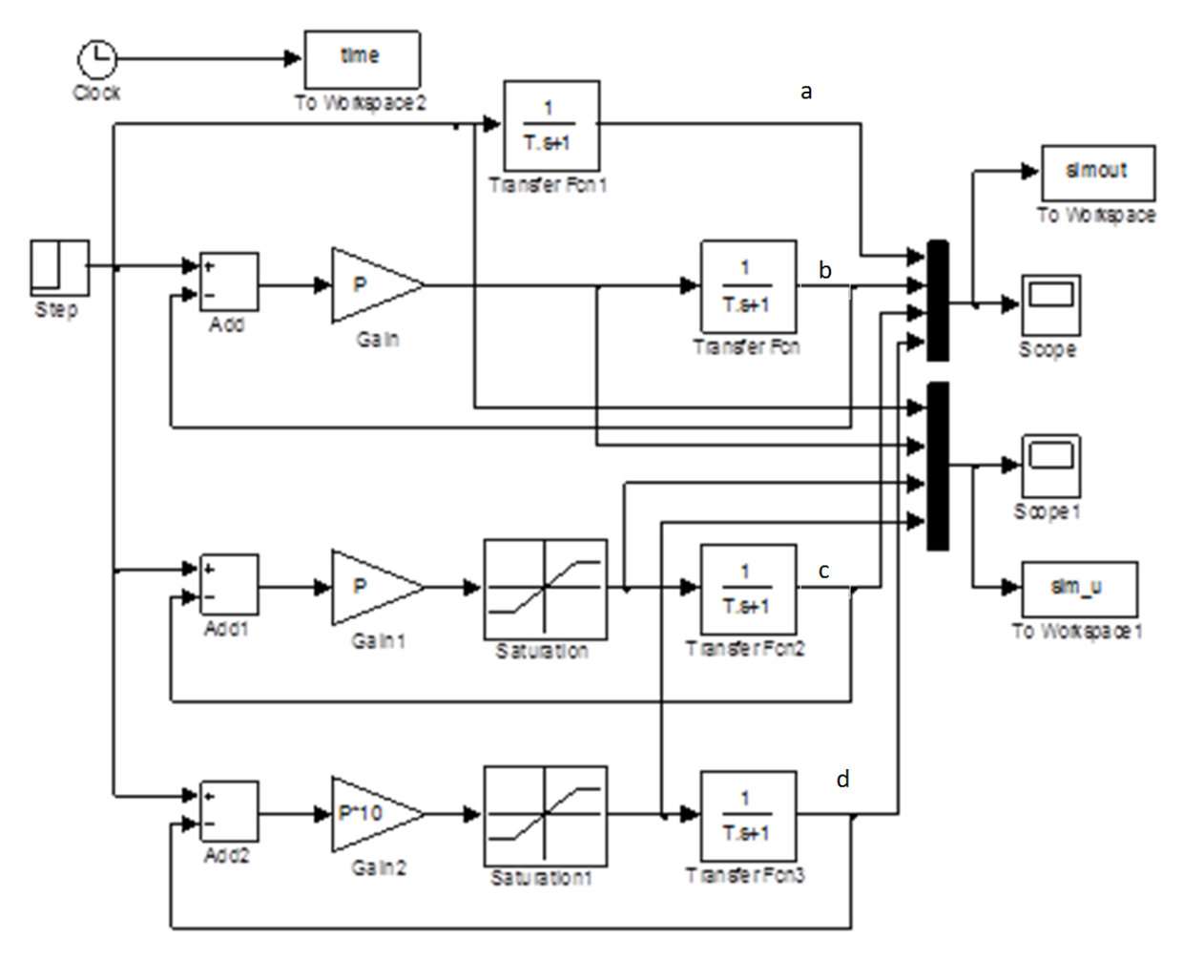
2.5.1.1. A telítődés hatásának vizsgálata
Az előző esethez képest egy telítődő tagot helyezünk a szabályozó és a szabályozott szakasz közé. A telítődés értéke (a maximális beavatkozójel) legyen 3. Az előző a) és c) esethez
a negatívan visszacsatolt rendszer egységugrásra adott válasza, ha a körerősítést 5-re választjuk, a telítődés értéke 3.
a negatívan visszacsatolt rendszer egységugrásra adott válasza, ha a körerősítést 10-re választjuk, a telítődés értéke 3.
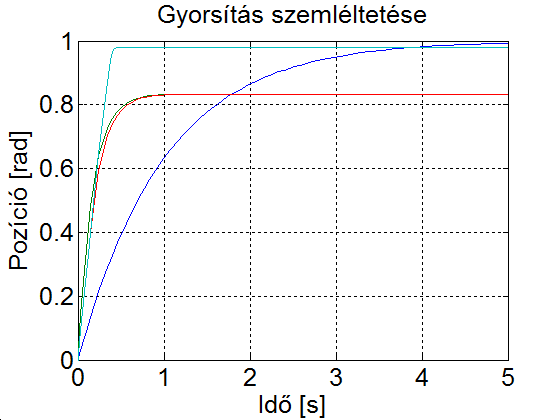
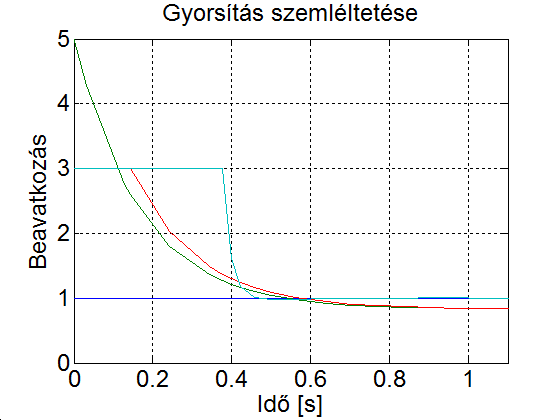
A c) és d) eset között nincs jelentős különbség (ld. 2-24. ábra és 2-25. ábra). A telítődés miatt a beavatkozójel nem tud 5 értékre ugrani, ezért a kimenőjel felfutása kicsit lasabb, de az állandósult érték megegyezik mindkét esetben. Az e) esetben kb. 1.7 s alatt a beavatkozójel a telítődés miatt megegyezik a d) esettel (ld. 2-25. ábra). A nagyobb körerősítés miatt az e) esetben a szabályozási kör tovább marad telítésben, ezért gyorsabban éri el az állandósult értéket.
A fenti számításhoz tartozó MATLAB fájl
% Adatok
T=1;
P=5;
Sat=P*0.6;
% Eredmények megjelenítése
plot(time,simout)
set(gca, 'fontsize', 19);
ylabel('Pozíció [rad]');
xlabel('Idő [s]');
title('Gyorsítás szemléltetése');
%axis([0 6 -0.52 0.52]);
grid
pause;
print -djpeg gy_poz
plot(time,sim_u)
set(gca, 'fontsize', 18);
ylabel('Beavatkozás');
xlabel('Idő [s]');
title('Gyorsítás szemléltetése');
grid
pause;
print -djpeg gy_u
plot(time,sim_u)
set(gca, 'fontsize', 18);
ylabel('Beavatkozás');
xlabel('Idő [s]');
title('Gyorsítás szemléltetése');
axis([0 1.1 -0 5]);
grid
print -djpeg gy_u2
2.5.1.2. A hibajel nagysága konstans referenciajel esetén
Az 2-3. ábra és alapján
| (2.14) |
Jelen esetben:
| (2.15) |
Legyen
| (2.16) |

A hibajel kezdeti értéke: természetesen megegyezik a referenciajellel
| (2.17) |

A hibajel állandósult értéke: annál kisebb, minél nagyobb a körerősítés
| (2.18) |

2.5.1.3. A beavatkozójel nagysága konstans referenciajel esetén
A 2-3. ábra és alapján
| (2.19) |
Jelen esetben:
| (2.20) |
A beavatkozójel kezdeti értéke:
| (2.21) |

Ez megegyezik a logikailag kikövetkeztethető értékkel. A  időpontban a referenciajel
időpontban a referenciajel  értékre ugrik. A kimenőjel értéke 0, így a különbség is
értékre ugrik. A kimenőjel értéke 0, így a különbség is  , és ezt az értéket kell megszorozni a
, és ezt az értéket kell megszorozni a  erősítéssel.
erősítéssel.
A beavatkozójel állandósult értéke:
| (2.22) |

2.5.2. Több energia tárolós tag P szabályozóval
Tételezzük fel, hogy a felnyitott kör átviteli függvénye nem tartalmaz nulla értékű pólust (integráló tagot) vagy zérust (deriváló tagot), továbbá a nevező n fokszáma nagyobb a számláló r fokszámánál ( ). Ez azt jelenti, hogy felnyitott körben nincs olyan ág, amelyik a dinamikát megkerüli. A felnyitott kör átviteli függvényét írjuk fel a közvetkező alakban
). Ez azt jelenti, hogy felnyitott körben nincs olyan ág, amelyik a dinamikát megkerüli. A felnyitott kör átviteli függvényét írjuk fel a közvetkező alakban
| (2.23) |

és  értékei lehetnek valósak, illetve mind a zérusok, mind a pólusok között találhatunk komplex konjugált párokat. A visszacsatolt szábályozási kör átviteli függvénye:
értékei lehetnek valósak, illetve mind a zérusok, mind a pólusok között találhatunk komplex konjugált párokat. A visszacsatolt szábályozási kör átviteli függvénye:
| (2.24) |
2.5.2.1. A hibajel nagysága konstans referenciajel esetén
| (2.25) |
A referenciajel legyen ugrásjel (2.16)
| (2.26) |
Ez megegyezik az (2.17) eredménnyel és a logikailag kikövetkeztethető értékkel. A  időpontban a referenciajel
időpontban a referenciajel  értékre ugrik. A kimenőjel értéke 0, így a különbség is
értékre ugrik. A kimenőjel értéke 0, így a különbség is  , ahogy ez matematikailag is levezethető (2.26) alapján.
, ahogy ez matematikailag is levezethető (2.26) alapján.
| (2.27) |

Ez megegyezik az (2.18) eredménnyel.
2.5.3. Integráló tag hatása
Legyen egy felnyitott körben egy integrátor. Ez lehet a szabályozott szakaszban, vagy a szabályozóban. ami ral oldjuk meg.
A felnyitott kör átviteli függvénye integráló jellegű (van egy 0 értékű pólusa), továbbá a nevező n fokszáma nagyobb a számláló r fokszámával ( ).
).
| (2.30) |
Ekkor:
| (2.31) |

Így:
| (2.32) |
Vagyis egységugrás referenciajel és integráló taggal rendelkező felnyitott kör esetén az állandósult hiba nullához tart.
A felnyitott körben található integrátorok számát szokás a szabályozási kör típusszámának is nevezni. Ha a felnyitott kör átviteli függvénye  db integrátort tartalmaz
db integrátort tartalmaz
| (2.33) |
| (2.34) |
| (2.35) |
| (2.36) |

A hibajel állandósult értéke az (2.36) alapján a felnyitott körben található integrátorok  számától függ. Legyen a referenciajel egységugrás, egység sebességugrás és egység gyorsulásugrás. Az állandósult hibajel értékét az alábbi táblázat foglalja össze. Felhívjuk a figyelmet, hogy az (2.36) határérték olyan esetben is létezik, amikor a hibajelnek nincs állandósult értéke. Ilyen esetekben a hibajel a (2.36) határérték körül oszcillál állandó vagy legtöbb esetben növekvő amplitúdóval. Ez a veszély különösen a többszörös integrátort tartalmazó szabályozási körök esetén fenyeget.
számától függ. Legyen a referenciajel egységugrás, egység sebességugrás és egység gyorsulásugrás. Az állandósult hibajel értékét az alábbi táblázat foglalja össze. Felhívjuk a figyelmet, hogy az (2.36) határérték olyan esetben is létezik, amikor a hibajelnek nincs állandósult értéke. Ilyen esetekben a hibajel a (2.36) határérték körül oszcillál állandó vagy legtöbb esetben növekvő amplitúdóval. Ez a veszély különösen a többszörös integrátort tartalmazó szabályozási körök esetén fenyeget.
Táblázat
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|


















Nulla típusú szabályozó kör (ha egyébként stabilis a visszacsatolt kör):
Egységugrás jelre az állandósult hiba egy konstans érték.
Első típusú szabályozó kör (ha egyébként stabilis a visszacsatolt kör):
1 integrátorelem a felnyitott körben
egységugrás jelre az állandósult hiba nulla
egység sebesség ugrás bemenőjelre az állandósult hiba egy konstans érték
Másod típusú szabályozó kör (ha egyébként stabilis a visszacsatolt kör):
2 integrátor elem a felnyitott körben
egységugrás jelre az állandósult hiba nulla
egység sebességugrás jelre az állandósult hiba nulla
egység gyorsulás ugrásra az állandósult hiba egy konstans érték
2.5.4. Zajelnyomás (zavarójel kompenzáció)
Tekintsük az 2-26. ábraát
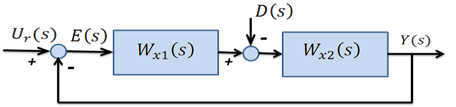
Az 2-26. ábra alapján a zavarójel hatása a hibajelre a következő:
| (2.37) |

Legyen
| (2.38) |
Megfelelő sorszámozással elérhető, hogy
| (2.39) |
(2.37), (2.38) és (2.39) alapján
| (2.40) |
| (2.41) |
A hibajel állandósult értéke felnyitott körben a zavarójel hatáspontja előtt található integrátorok  számától függ. Ha a zavarójelet tekintjük bemenőjelnek és a hibajelet a kimenőjelnek, akkor a visszacsatoló ágban található integrátorok számát kell vizsgálnunk. Felhívjuk a figyelmet, hogy (2.41) határérték olyan esetben is létezik, amikor a hibajelnek nincs állandósult értéke. Ilyen esetekben a hibajel a (2.41) határérték körül oszcillál állandó vagy legtöbb esetben növekvő amplitúdóval. Ez a veszély ebben az esetben is különösen a többszörös integrátort tartalmazó szabályozási körökben fenyeget
számától függ. Ha a zavarójelet tekintjük bemenőjelnek és a hibajelet a kimenőjelnek, akkor a visszacsatoló ágban található integrátorok számát kell vizsgálnunk. Felhívjuk a figyelmet, hogy (2.41) határérték olyan esetben is létezik, amikor a hibajelnek nincs állandósult értéke. Ilyen esetekben a hibajel a (2.41) határérték körül oszcillál állandó vagy legtöbb esetben növekvő amplitúdóval. Ez a veszély ebben az esetben is különösen a többszörös integrátort tartalmazó szabályozási körökben fenyeget
Táblázat
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|


















A szuperpozíció elve alapján a referenciajel és a zavarójel hatása összegezhető.
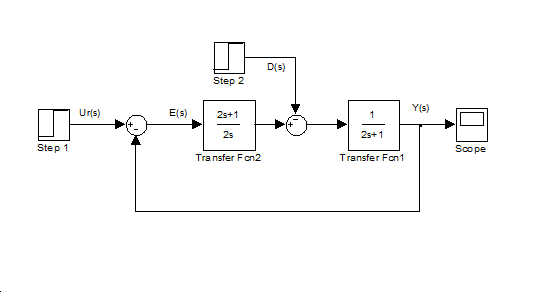
2.2 feladat
Az 2-27. ábraán látható szabályozási körnek két bemenőjele van:  referencia jel (Step 1) és
referencia jel (Step 1) és  zavarójel (Step 2). Írja fel az
zavarójel (Step 2). Írja fel az  kimenőjel és az
kimenőjel és az  hibajel időfüggvényét.
hibajel időfüggvényét.
a)
A 2. Step bemenetre  egységugrás jelet adunk és az 1. Step bemenetre kapcsolt jel értéke 0.
egységugrás jelet adunk és az 1. Step bemenetre kapcsolt jel értéke 0.
b)
Az 1. Step bemenetre  egységugrás jelet adunk és a 2. Step bemenetre kapcsolt jel értéke 0.
egységugrás jelet adunk és a 2. Step bemenetre kapcsolt jel értéke 0.
c)
Az 1. Step bemenetre  egységugrás jelet adunk és a 2. Step bemenetre egy időben 10 egységgel eltolt
egységugrás jelet adunk és a 2. Step bemenetre egy időben 10 egységgel eltolt  egységugrás jelet adunk.
egységugrás jelet adunk.








2.6. A stabilitás fogalma
Rendszerek vizsgálata során kulcsfontosságú feladat a stabilitás eldöntése. A későbbi fejezetekben több konkrét olyan módszert mutatunk be, amely segítségével a stabilitás eldönthető. Ebben az alfejezetben csak a legfontosabb definíciókat közöljük. A stabilitás megítélésében apró szemléletbeli különbség tapasztalhatók akár annak függvényében, hogy milyen jellegű feladatot kell megoldani. Ebben a tárgyban a végső cél a szintézis, egy szabályozó tervezése. Az elvárás az, hogy az elkészült rendszer minden üzemállapota stabilis legyen, így a rendszer stabilitásáról beszélünk. Ha analízis a feladatunk, akkor a rendszernek a különböző üzemállapotait, néha csak külön-külön vizsgáljuk, ekkor azt hangsúlyozzuk, hogy a stabilitás nem a rendszer, hanem az adott üzemállapot tulajdonsága. Az irányítási feladatok fontos sajátossága, hogy e tárgykörben általában visszacsatolt rendszerekkel találkozunk, ezért legtöbbször a visszacsatolt rendszer stabilitását kell vizsgálnunk. Az a kérdés, hogy a visszacsatolás miként befolyásolja a visszacsatolt rendszer stabilitását.
A stabilitás mérnöki értelemben alapvetően két megközelítésben vizsgálható. Az irodalomban találkozhatunk gerjesztetlen rendszer, illetve gerjesztett rendszer stabilitásával. Matematikai értelemben pontosabb az a megfogalmazás, ha autonóm működésű és nem autonóm működésű rendszerek stabilitásáról beszélünk, vagyis matematikai érdelemben a ténylegesen gerjesztetlen (az összes bemenet nullaértékű) és konstans gerjesztésű rendszereket azonos módon lehet kezelni. Az időben változó rendszerek a stabilitás szempontjából matematikailag az ún. „gerjesztett” kategóriába sorolandók, még akkor is, ha a bemenetre effektíven nulla értéket kapcsolunk. Talán ezért terjedt el a paraméteresen gerjesztett rendszer kifejezés, amely egyszerűen időben változó, vagyis nem autonóm működésű rendszert jelent. Természetesen autonóm működésű és nem autonóm működésű rendszerek egyaránt lehetnek lineárisak és nemlineárisak, ez a problémakör telesen más megközelítése.
Lineáris, invariáns rendszerek esetén viszonylag egyszerűbb a helyzet, de nem-lineáris rendszerek esetén a stabilitás egy összetett fogalom, és több féle definíció létezik. Az is előfordulhat, hogy egy rendszer az egyik definíció szerint stabil, a másik szerint pedig nem az. Nem-lineáris rendszerek esetén a stabilitás gerjesztés és munkapont függő is lehet.
A stabilitással rokon fogalom az egyensúlyi állapot. A gerjesztetlen és konstans gerjesztésű rendszer stabilitása az egyensúlyi állapot segítségével egyszerűen definiálható, így ezzel gyakran élünk. A gerjesztett, pontosabban a nem autonóm működésű rendszer egyensúlyi állapota összetettebb definíciót igényel, ezért a gerjesztett rendszer stabilitását általában a korlátos működésre alapozva definiáljuk.
2.6.1. Statikus egyensúlyi állapot
Definíció
Egy autonóm rendszer akkor van statikus egyensúlyi állapotban, ha az állapotváltozók értéke konstans.
Értelmezés
Megjegyzés, ez a definíció kizárja statikus rendszereket (amelyeknek nincs állapotváltozójuk), ugyanakkor a konstans gerjesztést megengedi. Egy lineáris időinvariáns dinamikus rendszernek egy adott konstans gerjesztés mellett csak egyetlen egyensúlyi állapota létezhet (ellenkező esetben nem lenne érvényes a szuperpozíció elve). A Egy nem-lineáris rendszernek adott konstans gerjesztés mellett lehet több egyensúlyi állapota is.
Példaként, ha van egy golyónk és egy kanalunk, akkor kanál helyzetétől függően a golyót többféle módon tudjuk a kanálra helyezni úgy, hogy a golyó ne mozduljon el, vagyis statikus egyensúlyi állapotba kerüljön. Alapvető különbség van két eset között
A kanalat szokásosan fogjuk és a golyót a kanál mélyedésébe helyezzük.
A kanalat fordítva fogjuk, és a golyót a kanál domborulata tetejére helyezzük.
A különbséget azonnal észrevesszük, ha egy kicsit remeg a kezünk. Az első esetben a golyó kicsit ide-oda gurul, de ismét megáll, ha a kézremegés megszűnik. A második esetben a golyó legurul a kanálról és sohasem gurul vissza a kanál tetejére. E gondolatkísérlet alapján fogalmazhatjuk meg az első stabilitási definíciót.
2.6.2. Aszimptotikus stabilitás
Definíció
Egy autonóm lineáris differenciál egyenlettel leírható rendszert tetszőlegesen kitérítjük az egyensúlyi állapotából. Az egyensúlyi állapotban ható esetleges konstans gerjesztést nem változtatjuk meg, és magára hagyjuk a rendszert. Ha a rendszer állapotváltozói konvergálnak az egyensúlyi állapotban felvett értékekhez, akkor a rendszert aszimptotikusan stabilitásnak nevezzük.
Értelmezés
Ha egy rugóval függőlegesen felfüggesztünk egy tömeget, akkor a tömegre a gravitáció állandó gerjesztésként hat, és kialakul egy egyensúlyi állapot. Ha ebből az állapotból kimozdítjuk a tömeget és elengedjük, akkor a csillapítás miatt egyre csökkenő amplitúdójú lengések után beáll egy új egyensúlyi állapotba. Ha a rendszer lineáris, akkor az új egyensúlyi állapot megegyezik az eredeti egyensúlyi állapottal. Lineáris rendszerek esetén az egyensúlyi állapotra alapozott stabilitás vizsgálata egyszerű, mert csak egy egyensúlyi állapota lehet, és ha az stabilis, akkor aszimptotikusan is stabilis. Nemlineáris rendszerek esetén, a fenti definíción enyhíteni kell. Mivel a nemlineáris rendszernek több egyensúlyi állapota is lehetséges, ezért nem követelhetjük meg, hogy tetszőlegesen nagy kitérítés után is mindig az eredeti egyensúlyi állapothoz konvergáljon a rendszer, vagyis az aszimptotikus stabilitás csak egy tartományon belül érvényes. Általában magát az „aszimptotikusságot” sem írhatjuk elő egy nemlineáris rendszer esetén, vagyis nem követelhetjük meg azt, hogy a kitérített rendszer konvergáljon az eredeti egyensúlyi állapothoz. Az egyik tipikus nemlinearítás a súrlódás. Ha a fenti példa tömeg-rugó rendszerében a tömeg pl. egy fal mellett mozog és mozgás közben a tömegre a faltól származó súrlódási erő is hat, akkor a tapadási súrlódás miatt a tömeg általában az eredeti egyensúlyi állapot előtt vagy után beragad.
Így szigorúan nézve nem elégíti ki az aszimptotikus stabilitás kritériumát, de műszaki értelemben valahol ezt is stabilisnak érezzük, ezért szükséges az aszimptotikusnál megengedőbb definíció.
2.6.3. Ljapunov stabilitás
Definíció
Egy nemlineáris autonóm működésű rendszert akkor mondunk Ljapunov érelemben stabilisnak, ha az egyensúlyi állapot bármely környezetéhez találunk egy olyan nullánál nagyobb maximális kitérítést, amelynél kisebb kitérítések esetén a rendszer garantáltan visszatér az eredetileg meghatározott környezetbe.
Értelmezés
Ez a definíció egyrészt feltételezi, hogy az állapotváltozóknak van normája, vagyis értelmezhető az egyensúlyi állapot környezete, másrészt nem követeli meg, hogy a rendszer visszatérjen a kiindulási állapotba, csak annak környezetébe. A nemlineáris súrlódással terhelt tömeg-rugó rendszer Ljapunov értelemben stabilis, de nem aszimptotikusan stabilis.
2.6.4. Dinamikus egyensúlyi, illetve állandósult állapot
A statikus egyensúlyi állapot fogalma kiterjeszthető az egyensúlyi mozgásállapotra, tipikusan állandó amplitúdójú, állandó frekvenciájú periodikus lengésekre, ilyen esetben dinamikus egyensúlyi állapotról beszélünk. A mérnöki gyakorlatban az általános értelemben vett egyensúlyi állapotot szokás állandósult állapotnak nevezni.
Hasonlóan nem az eredeti egyensúlyi állapotba tér vissza a tömeg, ha az időközben megváltozik a rugó rugalmassági együtthatója.
2.6.5. BIBO stabilitás
Definíció
Korlátos bemenőjelre minden esetben korlátos kimenőjel a válasz. Ezt a feltételt teljesítő rendszert ismételten az angol név után BIBO (Bounded Input Bounded Output) stabilis rendszernek hívjuk.
Ha egy lineáris rendszer valamilyen értelemben stabilis, akkor a többi értelemben is az.
2.7. A visszacsatolt rendszer stabilitása
A szabályozási körrel szemben támasztott legfontosabb elvárás a stabilitás. Lineáris rendszer esetén ennek feltételét könnyű megfogalmazni. Az 2-3. ábraán látható struktúrát feltételezünk. A zárt rendszer  átviteli függvényének pólusai legyenek a negatív félsíkon, vagyis a pólusok valós részei legyenek negatívak. Gondot az jelent, hogy csak
átviteli függvényének pólusai legyenek a negatív félsíkon, vagyis a pólusok valós részei legyenek negatívak. Gondot az jelent, hogy csak  paramétereinek meghatározásában van szabadságunk, és elég nehézkes azt felírni, hogy ezek miként hatnak
paramétereinek meghatározásában van szabadságunk, és elég nehézkes azt felírni, hogy ezek miként hatnak  pólusaira. Egy kicsivel jobb a helyzet
pólusaira. Egy kicsivel jobb a helyzet  esetén. A továbbiakban azt vizsgáljuk, hogy a felnyitott kör
esetén. A továbbiakban azt vizsgáljuk, hogy a felnyitott kör  átviteli függvénye milyen tulajdonságokkal rendelkezzen ahhoz, hogy a
átviteli függvénye milyen tulajdonságokkal rendelkezzen ahhoz, hogy a  átviteli függvény pólusai a negatív félsíkon legyenek, vagyis a pólusok valós részei negatívak legyenek.
átviteli függvény pólusai a negatív félsíkon legyenek, vagyis a pólusok valós részei negatívak legyenek.
Definíció
Strukturálisan stabilisnak nevezzük az olyan rendszereket, amelyek esetén a felnyitott kör  átviteli függvénye (pontosabban a pólusok és zérusok helye olyan), hogy tetszőlegesen növelve a felnyitott kör erősítését a visszacsatolt, a
átviteli függvénye (pontosabban a pólusok és zérusok helye olyan), hogy tetszőlegesen növelve a felnyitott kör erősítését a visszacsatolt, a  átviteli függvénnyel leírható rendszer garantáltan stabilis marad.
átviteli függvénnyel leírható rendszer garantáltan stabilis marad.
Értelmezés
A klasszikus szabályozási körök tervezésekor először a  szabályozó átviteli függvényének pólusait és zérusait határozzuk meg, és ezzel a felnyitott kör
szabályozó átviteli függvényének pólusait és zérusait határozzuk meg, és ezzel a felnyitott kör  átviteli függvényének pólusait és zérusait tesszük ismertté. A tervezés utolsó lépése, hogy a
átviteli függvényének pólusait és zérusait tesszük ismertté. A tervezés utolsó lépése, hogy a  átviteli függvény erősítését addig növeljük, ameddig túllendülési, illetve stabilitási problémába nem ütközünk. A strukturálisan stabilis rendszereknél a stabilitás szempontjából a körerősítést tetszőlegesen növelhetjük, vagyis a tervezés szempontjai között a stabilitásra nem kell tekintettel lennünk. A körerősítést pl. a beavatkozójel fizikai korlátaihoz igazítjuk.
átviteli függvény erősítését addig növeljük, ameddig túllendülési, illetve stabilitási problémába nem ütközünk. A strukturálisan stabilis rendszereknél a stabilitás szempontjából a körerősítést tetszőlegesen növelhetjük, vagyis a tervezés szempontjai között a stabilitásra nem kell tekintettel lennünk. A körerősítést pl. a beavatkozójel fizikai korlátaihoz igazítjuk.
2.7.1. Routh-Hurwitz stabilitási kritérium visszacsatolt szabályozási körre
A Routh-Hurwitz stabilitási kritériumot az (2.6) alapján könnyen alkalmazhatjuk a visszacsatolt szabályozási körre.
2.7.2. Bode-féle stabilitási kritérium
Minimálfázisú, időkésleltetés nélküli rendszerek esetén a stabilitás feltétele az, hogy amikor a negatív visszacsatolás a felnyitott kör 180-os fáziskésése miatt pozitív visszacsatolássá válik, akkor a körerősítés 1-nél kisebb legyen. E kritérium alkalmazásához szükséges az alábbi két definíció.
Definíciók
Vágási körfrekvencia ( ): Az a körfrekvencia érték, amelyet behelyettesítve a felnyitott kör
): Az a körfrekvencia érték, amelyet behelyettesítve a felnyitott kör  frekvencia átviteli függvényébe, annak abszolút értéke 1 lesz.
frekvencia átviteli függvényébe, annak abszolút értéke 1 lesz.
| (2.48) |

Fázistartalék ( ):
):  Nyquist-diagramjának fázisszöge mennyivel kisebb, mint 180°, annál a frekvencia értéknél, ahol a görbe belép az egység sugarú körbe, képlettel:
Nyquist-diagramjának fázisszöge mennyivel kisebb, mint 180°, annál a frekvencia értéknél, ahol a görbe belép az egység sugarú körbe, képlettel:
| (2.49) |

ahol arg( ) a
) a  komplex szám szögét jelöli.
komplex szám szögét jelöli.
Bode-féle stabilitási kritérium
Minimálfázisú, időkésleltetés nélküli rendszer garantáltan stabilis, ha a felnyitott kör  frekvencia átviteli függvényének
frekvencia átviteli függvényének  vágási körfrekvenciája a -20 dB/dec szakaszra és garantáltan instabil, ha -60 dB/dec, vagy annál nagyobb meredekségű szakaszra esik. Az előbbi esetben garantálhatóan
vágási körfrekvenciája a -20 dB/dec szakaszra és garantáltan instabil, ha -60 dB/dec, vagy annál nagyobb meredekségű szakaszra esik. Az előbbi esetben garantálhatóan  , az utóbbi esetben
, az utóbbi esetben  . Ha a
. Ha a  vágási körfrekvenciája a -40 dB/dec szakaszra esik, akkor a fázistartalékot külön meg kell vizsgálni.
vágási körfrekvenciája a -40 dB/dec szakaszra esik, akkor a fázistartalékot külön meg kell vizsgálni.
Mivel a szabályozási körök klasszikus tervezési módjánál az utolsó lépés az erősítés megválasztása, ezért szokás definiálni az erősítési tartalékot.
Definíció
Erősítési tartalék
A felnyitott kör  frekvencia átviteli függvényének abszolút értéke, akkor, amikor a fázisa
frekvencia átviteli függvényének abszolút értéke, akkor, amikor a fázisa
-180°.
| (2.50) |

2.7.3. Nyquist-féle stabilitási kritérium
Lineáris rendszerek stabilitása a felnyitott kör átviteli függvénye alapján eldönthető. Ha  -nek
-nek  db pozitív valósrészű – vagyis instabil – pólusa van, akkor a
db pozitív valósrészű – vagyis instabil – pólusa van, akkor a  Nyquist-diagram görbének
Nyquist-diagram görbének  -szer kell megkerülnie a (-1+0j) pontot az óramutató járásával ellentétes irányban, ahhoz, hogy stabil legyen a
-szer kell megkerülnie a (-1+0j) pontot az óramutató járásával ellentétes irányban, ahhoz, hogy stabil legyen a  . Megjegyzés:
. Megjegyzés:  a negatív
a negatív  értékekkel válik zárttá. Speciális esetben
értékekkel válik zárttá. Speciális esetben  , ekkor
, ekkor  zárt görbe nem veheti körbe a (-1+0j) pontot.
zárt görbe nem veheti körbe a (-1+0j) pontot.
3. fejezet - Kvalitatív rendszerdinamika és rendszerek stabilitása
3.1. Hatásalgebra és dinamikus rendszerek
3.1.1. Hatások és hatásgráfok
A mechatronikai rendszerek elemzésében, tervezésében és irányítási feladatainak megoldásában jelentős szerepet játszanak a rendszerek modelljei, melyek többnyire sok változót és a közöttük fellépő kölcsönhatásokat leíró algebrai és/vagy differenciálegyenleteket, valamint a rendszerekre vonatkozó korlátozásokat kifejező egyenlőtlenségeket tartalmaznak. A rendszerek kvantitatív vizsgálata, az egyenlet- és egyenlőtlenségrendszerek megoldásai adják meg a tervezési és irányítási problémák végső megoldásait, azonban a feladatok elemzésében, a rendszerek egyes minőségi tulajdonságainak és viselkedési formáinak vizsgálatában, valamint a többnyire meglehetősen összetett kvantitatív vizsgálatok előkészítésében a rendszerek kvalitatív analízise, kvalitatív tulajdonságainak és az azokat meghatározó körülmények felderítése sokszor alapvető a kedvező tervezési és üzemelési feltételek kimunkálásában
A rendszerben fellépő kölcsönhatások minőségi vizsgálatát a kvalitatív rendszerdinamika módszereivel végezhetjük, melynek célja annak meghatározása, hogy a rendszer változói, mint a rendszert alkotó fizikai objektumoknak és/vagy fizikai mennyiségeknek a modelljei milyen hatással vannak egymásra. Ez tehát a rendszerben fellépő hatások minőségi vizsgálatát jelenti, melynek feladata azon tényezők meghatározása, amelyek lényeges hatással lehetnek a rendszer viselkedésére.
A kvalitatív elemzés geometriai segédeszköze a hatásgráf, amely lényegében egy irányított geometriai gráf, amellyel egyrészt megadjuk a rendszer egyes változó-párjai közötti
ok-okozati kapcsolatokat, másrészt az
okok által az okozatokban előidézett változások értékbeli irányait.
A hatásgráf két példáját mutatja be az 3-1. ábra, ahol az ok és okozat értékbeli változásainak irányától függően a hatások előjelét is megadtuk.
3.1 definíció. Az x változó pozitív hatással van az y változóra, ha az x változó mint ok az y változóban mint okozatban azonos irányú értékbeli változást idéz elő: azaz ha x növekszik, akkor y növekedését idézi elő, míg ha x csökken, akkor az y csökkenését okozza.
3.2 definíció. Az x változó negatív hatással van az y változóra, ha az x változó mint ok az y változóban mint okozatban ellenkező irányú értékbeli változást idéz elő: azaz ha x növekszik, akkor y csökkenését idézi elő, míg ha x csökken, akkor az y növekedését okozza.

A továbbiakban a változók változási irányait a változókhoz csatolt nyilakkal jelöljük, azaz azx↑ jelölés növekvő x változót jelent, míg az x↓ jelölés csökkenőt. Ezt felhasználva a fenti definíciót tömörebben az
| (3.1) |

és
| (3.2) |

módon fogalmazhatjuk meg.
A kvalitatív rendszerdinamika változóinak és két alapműveletének meghatározása után definiáljuk a hatás-algebra műveleti szabályait az 1. táblázatban megadott módon: ha ismertek az  és
és  hatások, akkor milyen jellegű az eredő
hatások, akkor milyen jellegű az eredő  hatás?
hatás?
|
|
| |
1 | + | + | + |
2 | + | - | - |
3 | - | + | - |
4 | - | - | + |



táblázat. A hatás-algebra műveleti szabályai
Az 1. táblázatban megadott műveleti szabályokat az alábbi képletekkel is megfogalmazhatjuk könnyen ellenőrizhető formában:
1)  (3.3)
(3.3)
2)  (3.4)
(3.4)
3)  (3.5)
(3.5)
4)  (3.6)
(3.6)
Természetesen az 1. táblázatban bemutatott két-elemű kapcsolatot, amely gyakorlatilag a két hatás soros kapcsolását jelenti, tetszőleges elemszámú, különböző elágazásokkal rendelkező hatásláncra bővíthetjük az 3-1. ábra által bemutatott módon. Ennek értékelését az 1-4 műveleti szabályok szekvenciális alkalmazásával érhetjük el, és meghatározhatjuk az ok-okozati kapcsolatok következetes végigkövetésével bármely két rendszerelem közötti eredő hatás értékét. Így könnyen megállapíthatjuk, hogy a v1 változó a v10 és v13 változókra negatív hatással van, míg v17 és v22 változókra az eredő hatás pozitív. Ezek az értékelések egy nagyon egyszerű szabály megfogalmazását engedik meg:
3.3 definíció. Ha egy hatásláncban a két rendszerelem között páros számú negatív hatás van függetlenül a pozitív hatások számától, akkor az eredő hatás pozitív, míg ha a negatív hatások száma páratlan, akkor a hatáslánc eredője negatív.
A 3-2. ábra elágazó nyílt hatásláncokat tartalmaz. Ezt bővítve: a 3-3. ábra és 3-4. ábra a 3-2. ábra nyílt hatásláncait a  zárt hatásláncokkal egészítik ki. A zárt hatásláncokat a gráfok elméletéből ismerten irányított köröknek, vagy egyszerűen hurkoknak nevezzük. Ezek az apró bővítések azonban jelentős változást idéznek elő a rendszer viselkedésében, mivel a zárt hatásláncokbármelyik eleme visszahat önmagára. Így a
zárt hatásláncokkal egészítik ki. A zárt hatásláncokat a gráfok elméletéből ismerten irányított köröknek, vagy egyszerűen hurkoknak nevezzük. Ezek az apró bővítések azonban jelentős változást idéznek elő a rendszer viselkedésében, mivel a zárt hatásláncokbármelyik eleme visszahat önmagára. Így a  visszahatásnak jól meghatározott értéke van, ami természetesen függ a zárt hatásláncban szereplő egyes hatások értékeitől. Ahogy ezt a nyílt hatásláncok esetében láttuk, az eredő hatás értéke itt is lehet negatív és pozitív, amit a hurok polaritásának is nevezünk. A 3-3. ábra negatív polaritású hurkot mutat be, mivel páratlan számú negatív hatást lehet összeszámolni, míg a 3-4. ábra pozitív polaritású hurkot tartalmaz, ui. itt a negatív hatások száma páros.
visszahatásnak jól meghatározott értéke van, ami természetesen függ a zárt hatásláncban szereplő egyes hatások értékeitől. Ahogy ezt a nyílt hatásláncok esetében láttuk, az eredő hatás értéke itt is lehet negatív és pozitív, amit a hurok polaritásának is nevezünk. A 3-3. ábra negatív polaritású hurkot mutat be, mivel páratlan számú negatív hatást lehet összeszámolni, míg a 3-4. ábra pozitív polaritású hurkot tartalmaz, ui. itt a negatív hatások száma páros.
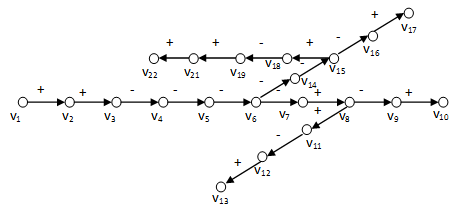
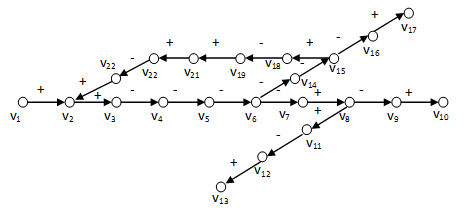
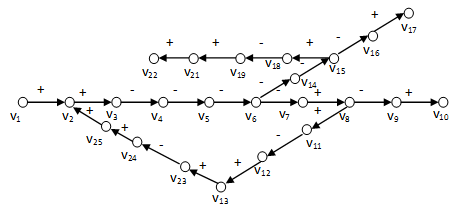
A zárt hatásláncok polaritásának azonban mélyebb értelme van: ugyanis a negatív polaritás lényegében a  negatív visszahatást jelenti, azaz a v2 bármilyen irányú megváltozása a zárt hatásláncon keresztül ellenkező irányú hatást generál, azaz gyengíti önmaga változását, amit negatív visszacsatolásként értelmezünk. Ugyanakkor a pozitív polaritás a
negatív visszahatást jelenti, azaz a v2 bármilyen irányú megváltozása a zárt hatásláncon keresztül ellenkező irányú hatást generál, azaz gyengíti önmaga változását, amit negatív visszacsatolásként értelmezünk. Ugyanakkor a pozitív polaritás a  pozitív visszahatásból ered, azaz a v2 bármilyen irányú megváltozása a zárt hatásláncon keresztül azonos irányú hatást generál, azaz erősíti önmaga változását, aminek értelmezése a pozitív visszacsatolás. Ennek az a következménye, hogy a pozitív visszacsatolás a rendszerben mindaddig erősíti valamely változó, azaz ezen változó által modellezett fizikai mennyiség azonos irányú változását, amíg valamely ettől független hatás meg nem gátolja ezt vagy ellen nem hat ennek. Ugyanakkor a negatív visszacsatolás a rendszerben gyengíti valamely változó, azaz ezen változó által modellezett fizikai mennyiség bármely irányú változását.
pozitív visszahatásból ered, azaz a v2 bármilyen irányú megváltozása a zárt hatásláncon keresztül azonos irányú hatást generál, azaz erősíti önmaga változását, aminek értelmezése a pozitív visszacsatolás. Ennek az a következménye, hogy a pozitív visszacsatolás a rendszerben mindaddig erősíti valamely változó, azaz ezen változó által modellezett fizikai mennyiség azonos irányú változását, amíg valamely ettől független hatás meg nem gátolja ezt vagy ellen nem hat ennek. Ugyanakkor a negatív visszacsatolás a rendszerben gyengíti valamely változó, azaz ezen változó által modellezett fizikai mennyiség bármely irányú változását.
3.4 definíció. A negatív visszacsatolás a rendszert stabilizáló zárt hatáslánc, míg a pozitív visszacsatolás a rendszerben destabilizáló hatást eredményez. A kvalitatív értékelés egyik lényeges célja a visszacsatolások felderítése a rendszer stabilitásának elemzése érdekében.
Jegyezzük meg, hogy egy zárt hatáslánc bármelyik változójára ugyanolyan jellegű visszahatás, azaz visszacsatolás érvényesül, mivel ezt a hurok polaritása határozza meg.
Ha most gondolatban összevonjuk a 3-3. ábra és 3-4. ábra rendszervázlatait, akkor a v2 változóra egyidejűleg egy negatív és pozitív visszacsatolás is hat, ami azonban bizonytalanná teszi az értékelést, mivel azonnal felvetődik a kérdés: milyen értékű  visszahatás? De ez a kérdés az 3-5. ábra rendszerében is felvetődik, ahol a v1 és v3 között az alsó kételemű lánc negatív eredő hatást ad, míg a felső háromelemű lánc eredője pozitív. Ismét: milyen értékű a
visszahatás? De ez a kérdés az 3-5. ábra rendszerében is felvetődik, ahol a v1 és v3 között az alsó kételemű lánc negatív eredő hatást ad, míg a felső háromelemű lánc eredője pozitív. Ismét: milyen értékű a  hatás? Ezekre a kérdésekre a választ a tiszta kvalitatív képhez egy kvantitatív adat hozzáadásával tudjuk megadni, ahogy ezt az 3-5. ábra b része jelöli, mégpedig egy-egy hatás értékéhez annak erősítésének, azaz erősítési tényezőjének megadásával. Ezzel a
hatás? Ezekre a kérdésekre a választ a tiszta kvalitatív képhez egy kvantitatív adat hozzáadásával tudjuk megadni, ahogy ezt az 3-5. ábra b része jelöli, mégpedig egy-egy hatás értékéhez annak erősítésének, azaz erősítési tényezőjének megadásával. Ezzel a  hatás eredő értéke attól függ, hogy a –(p·q)és +(a·b·c) szorzatok abszolút értékei közül melyik a nagyobb? Ezt úgy fejezzük ki, hogy a nagyobb abszolút értékkel rendelkező hatás a domináns. Ezzel természetesen már azt is meg tudjuk adni, hogy a 3-3. ábra. és 3-4. ábra sémáinak egyesítésével kapott rendszerben melyik visszacsatolás a domináns.
hatás eredő értéke attól függ, hogy a –(p·q)és +(a·b·c) szorzatok abszolút értékei közül melyik a nagyobb? Ezt úgy fejezzük ki, hogy a nagyobb abszolút értékkel rendelkező hatás a domináns. Ezzel természetesen már azt is meg tudjuk adni, hogy a 3-3. ábra. és 3-4. ábra sémáinak egyesítésével kapott rendszerben melyik visszacsatolás a domináns.

Az erősítési tényező értelmezésével egy további hatás-élt tudunk bevezetni a 3-6. ábraáltal bemutatott módon, amely az erősítési tényező modulálását jelenti a rendszer valamely változójának hatására. Ez alapjában véve a hatások szabályozását jelenti, amellyel egyes visszacsatolások erősítési tényezőit, sőt akár értékeit is meg tudjuk változtatni, azaz valamely pozitív visszacsatolást megszakítani vagy ellenkező értékűre változtatni a rendszer stabilitása érdekében.
Az eddigi vizsgálatok azt mutatják, hogy a hatásláncok elemzése során minden hatást egyidejűnek tételezünk fel. Azonban sok esetben szükséges lehet egy további elem explicit megfogalmazása, ami az egyes hatásokban előforduló időkésleltetéseket jelenti. Ezeket újabb változók és hatások bevezetésével eliminálhatjuk, de figyelembe kell vennünk, hogy jelentős hatásuk lehet a rendszer viselkedésére, ezért a kvantitatív vizsgálatok esetében figyelembe kell azokat venni.
A hatásgráfokkal történő elemzés által igényelt egyidejűség a dinamikus rendszerek esetében mind tranziens, mind állandósult állapotokban fennáll még abban az esetben is, ha a rendszer egyes hatásaiban jelentős időkésések fordulnak elő.
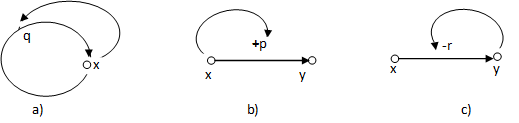
3.1.2. Hatásgráfok és elsőrendű közönséges differenciálegyenletek
A dinamikus rendszerek nagy csoportjának, ti. a koncentrált paraméterű dinamikus rendszereknek matematikai modelljeit elsőrendű közönséges differenciálegyenlet-rendszerek alkotják. Ez azt is jelenti, hogy tetszőleges rendű közönséges differenciálegyenlet átírható ekvivalens elsőrendű differenciálegyenlet-rendszer formába. Valóban, a
| (3.7) |

n-ed rendű – lineáris vagy nemlineáris – differenciálegyenlet esetén sorban új változókat bevezetve az
| (3.8) |

módon, és az új változókkal átírva az(3.7) egyenletet a
| (3.9) |

formában, az (3.8)-(3.9)elsőrendű differenciálegyenlet-rendszer az (3.7)n-ed rendű differenciálegyenlettel ekvivalens egyenletrendszert alkot.
Vegyük tehát – az egyszerűség kedvéért – a két
| (3.10) |

elsőrendű differenciálegyenletet, és vizsgáljuk meg annak viselkedését az  pont környezetében. E környezetben felírhatjuk az alábbi közelítő lineáris egyenleteket
pont környezetében. E környezetben felírhatjuk az alábbi közelítő lineáris egyenleteket
| (3.11) |

| (3.12) |

amelyből közvetlenül látszik, hogy az  pont környezetében az együtthatók előjelei határozzák meg az y1 és y2 változók közötti hatások minőségét. A
pont környezetében az együtthatók előjelei határozzák meg az y1 és y2 változók közötti hatások minőségét. A
| (3.13) |
egyenlőtlenségek például azt jelzik, hogy az  és
és  változók lokálisan az
változók lokálisan az  változóra pozitív, illetve negatív hatással vannak: az
változóra pozitív, illetve negatív hatással vannak: az  önmagára azonos irányú hatással van, ami
önmagára azonos irányú hatással van, ami  pozitív visszacsatolást jelent, míg az
pozitív visszacsatolást jelent, míg az  változásai az
változásai az  -ben éppen ellenkező irányú változásokat indukálnak, azaz
-ben éppen ellenkező irányú változásokat indukálnak, azaz  negatív hatást jelent. De hasonlóan értékelhetjük a szóban forgó változók hatásait az
negatív hatást jelent. De hasonlóan értékelhetjük a szóban forgó változók hatásait az  változóra is, így a
változóra is, így a
| (3.14) |
egyenlőtlenségek azt jelzik, hogy az  -re mind a két változó negatív hatással van, azaz
-re mind a két változó negatív hatással van, azaz
.
Természetesen a változók közötti hatásokat az (3.10) nemlineáris egyenletrendszer jobboldali tagjain keresztül globálisan is vizsgálhatjuk, ha azok a tagok konkrét formában adottak. Azonban a linearizálással kapott (3.11)-(3.12) egyenletrendszer csak lokálisan érvényes eredményekre vezet, de jobban érzékelteti a változók kölcsönhatásainak jellegét az egyes változók deriváltjainak előjelét vizsgálva.
3.1 példa. Vizsgáljuk meg az egyváltozós
| (3.15) |

Verhulst egyenletet, amelynek az  kezdeti feltétellel az
kezdeti feltétellel az
| (3.16) |
analitikus megoldása is ismert.
Az(3.15) egyenlet jobboldalának első tagja az a>0 esetén az x-re pozitív visszacsatolást jelent, és a b=0 feltétellel a megoldást az  függvény adja, azaz korlátlan növekedést mutat.
függvény adja, azaz korlátlan növekedést mutat.
Az(3.15) egyenlet jobboldalának második tagja a b>0 esetén az x-re negatív visszacsatolást jelent, és az a=0 feltétellel az egyenlet megoldását az  függvényként kapjuk meg. Ez a zérus értékhez történő aszimptotikus csökkenést mutatja.
függvényként kapjuk meg. Ez a zérus értékhez történő aszimptotikus csökkenést mutatja.
Az(3.15) egyenletet tehát két visszacsatolás, egy pozitív és egy negatív visszacsatolás kölcsönhatása határozza meg, ahogy ezt a 3-7. ábra illusztrálja. A két visszacsatolás kölcsönhatása eredményezi az egyensúlyra vezető (3.16) megoldást, amely a folyamat elején a pozitív visszacsatolás dominanciáját mutatja, de később a folyamat a negatív visszacsatolás dominanciájába csap át korlátos megoldáshoz vezetve.
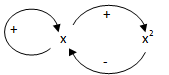
3.2 példa.Lotka-Volterra modell. Az ismert Lotka-Volterra modellt elsősorban biológiai populációk kölcsönhatásainak leírására használják. Ennek legegyszerűbb formájában az (x,y) változókat a
| (3.17) |
| (3.18) |
differenciálegyenletek határozzák meg az  kezdeti feltételek mellett.
kezdeti feltételek mellett.
Az (3.17)-(3.18) egyenletrendszer a jobboldalon egy kvázilineáris tagot is tartalmaz, amely természetesen az x és y változók függvénye, így a rendszer hatásgráfjában önálló csomópontként célszerű ábrázolni, ahogy ezt a 3-8. ábra mutatja. Az ábrán azt látjuk, hogy a rendszer csak zárt hatásláncokat tartalmaz: az x körül egy pozitív visszacsatolás van, míg az y és xy változókat pozitív polaritású hurok köti össze. Ugyanakkor az y-ra egy negatív visszacsatolás hat, miközben az x és xy változók között negatív polaritású hurok található. Ez a tény lényegében jól magyarázza, hogy a (3.17)-(3.18) egyenletrendszernek a triviális  megoldáson kívül csak periodikus megoldásai vannak, ugyanis a kvázilineáris, vagy másképpen a nemlineáris tag miatt a pozitív és negatív visszacsatolások dominanciája az időben változik: a rendszerben periodikus mozgások jelennek meg. Egy ilyen periodikus megoldást mutat a 3-9. ábra, melynek egy kinagyított részletét mutatja a 3-10. ábra jól illusztrálva a két változó folyamatai közötti fáziskülönbséget is. □
megoldáson kívül csak periodikus megoldásai vannak, ugyanis a kvázilineáris, vagy másképpen a nemlineáris tag miatt a pozitív és negatív visszacsatolások dominanciája az időben változik: a rendszerben periodikus mozgások jelennek meg. Egy ilyen periodikus megoldást mutat a 3-9. ábra, melynek egy kinagyított részletét mutatja a 3-10. ábra jól illusztrálva a két változó folyamatai közötti fáziskülönbséget is. □
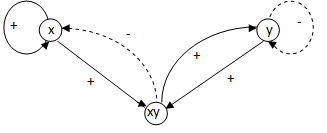
3.1.3. Dinamikus rendszerek elemzése hatásgráfokkal
A dinamikus rendszerek
| (3.19) |
| (3.20) |

lineáris állapottér modelljéből kiindulva az egyes változók, illetve általánosabban a  bemeneti változók,
bemeneti változók,  állapotváltozók,
állapotváltozók,  kimeneti változók és
kimeneti változók és  paraméterek függvényterei közötti strukturális kapcsolatokat a 3-11. ábra mutatja be. Itt A a rendszermátrix, B a bementi mátrix, C a kimeneti mátrix és D az előrecsatolás mátrix.
paraméterek függvényterei közötti strukturális kapcsolatokat a 3-11. ábra mutatja be. Itt A a rendszermátrix, B a bementi mátrix, C a kimeneti mátrix és D az előrecsatolás mátrix.
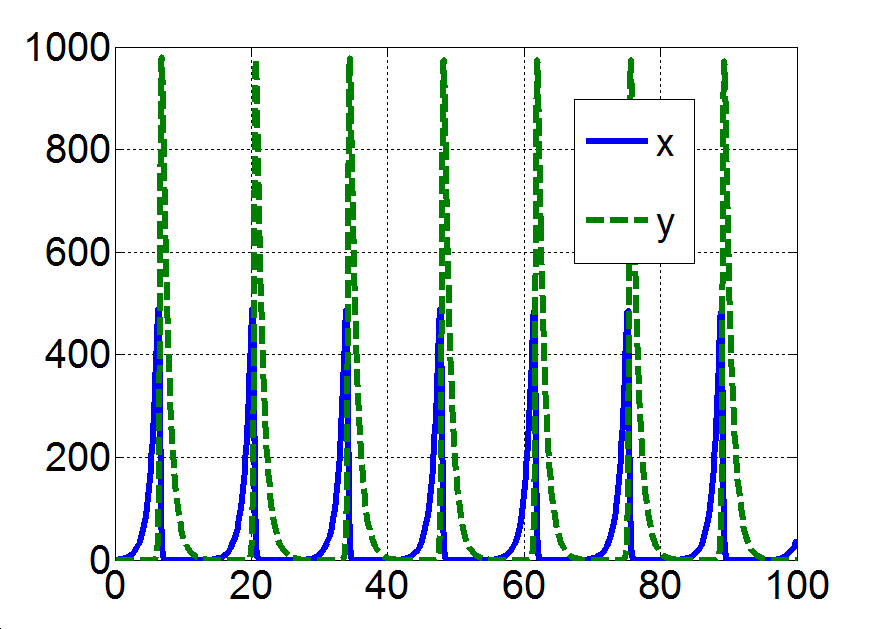
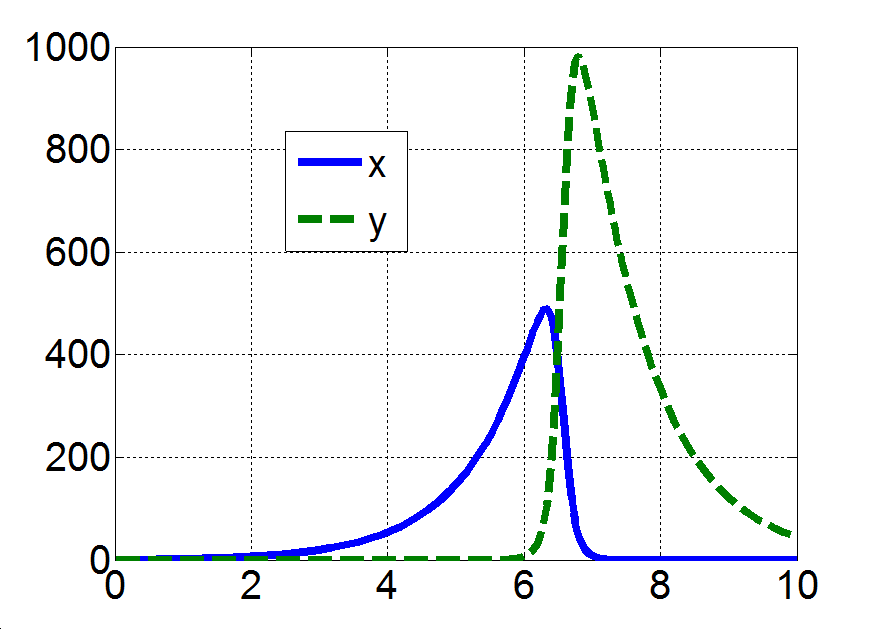
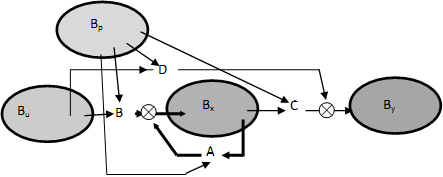
A 3-11. ábra jól illusztrálja, hogy az x állapotváltozók közötti kapcsolatok kivételével a többi változó között nyílt hatásláncokkal lehet a kapcsolatokat felvázolni, míg az állapotváltozók közötti közvetlen hatások lehetnek zárt hatásláncokkal jellemezhető visszacsatolások is. Ezeket alapjában véve az A rendszermátrix struktúrája és elemei határozzák meg és a rendszer belső változói – állapotváltozói – közötti belső visszacsatolásoknak nevezzük azokat. Ahogy ezt láttuk, ezek a zárt hatásláncok polaritásaitól függően lehetnek pozitív és negatív visszacsatolások is, és alapjában véve ezen visszacsatolások kölcsönhatásai határozzák meg a rendszer tulajdonságait és viselkedését, így többek között stabilitását is.
3.3 példa.Egy külső gerjesztésű egyenáramú motor matematikai modelljét az
lineáris differenciálegyenlet rendszer alkotja. Elemezzük a rendszert annak hatásgráfja segítségével!
Az egyenáramú motorállapotváltozóit, amely lényegében egy villamos-mechanikai zsirátor, az armatúra ia árama és az ω körsebesség alkotja, azaz x=(ia,ω), és így az állapottér formát a


differenciálegyenletek alkotják, ahonnan
| (3.21) |
és a kimeneti változót is az ω körsebességként kijelölve
.
A rendszer hatásgráfját, melyet az (3.21) kifejezések alapján szerkeszthetünk meg, a 3-12. ábra illusztrálja. Az ábra jól mutatja, hogy mindkét állapotváltozó körül negatív visszacsatolás van, míg közöttük egy negatív polaritású hurok teremt kapcsolatot. A hatásgráf kitűnően ábrázolja a változók közötti kölcsönhatások szimmetriáját is, ami a motor mechatronikai-villamos zsirátorként való alkalmazhatóságát illusztrálja. □
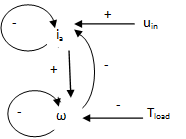
A 3-11. ábra jól illusztrálja, hogy a rendszer viselkedését a lényegileg meghatározó A rendszermátrix mellett az u bemeneti változók, valamint a Bu bemeneti hatások alkalmas megválasztásával tudjuk befolyásolni. Ez lehetővé teszi – többek között – az előző szakaszban említett szabályozott hatások megvalósítását, de sok esetben nem bizonyul elégségesnek ahhoz, hogy a rendszer viselkedését lényegileg is megváltoztassa. Így a rendszernek az A rendszermátrix struktúrájában meglévő belső visszacsatolások által okozott hatások kiküszöbölése sem igazán eredményes. Ezt – a rendszer belső világának átalakítása mellett – sok esetben további visszacsatolások létrehozásával lehet a legeredményesebben megvalósítani, ami viszont már a rendszeren kívül kialakítandó hatásláncok által történő visszacsatolásokat jelent.
A 3-12. ábra mutatja a lehetséges rendszeren kívüli visszacsatolásokat, amelyek közül elsősorban a belső tulajdonságokat, azaz az A rendszermátrix egyes komponenseit, tehát az előzőekben jelzett hatások erősítési tényezőit tudjuk megváltoztatni, viszont az A mátrix struktúráját, azaz a rendszer belső hatásláncainak szerkezetét nem. Ezek a rendszeren kívüli zárt hatásláncok a rendszer szabályozását jelentik, melyek többnyire nem csak teljesítmény-, hanem információkötéseket, azaz információcsatolásokat is tartalmazó hatásláncokon keresztül valósul meg.
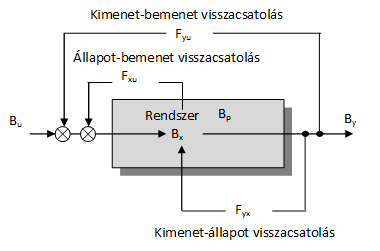
3.2. Dinamikus rendszerek stabilitása
3.2.1. A stabilitás fogalma
A kvalitatív rendszervizsgálat azt mutatja, hogy a zárt hatásláncok kialakulása felveti a rendszerek stabilitásának problémáját. Ez azt jelenti, hogy ha valamelyik rendszerváltozó pozitív polaritású hurokba kerül, azaz valamilyen irányú megváltozását a pozitív visszacsatolás állandóan csak erősíti, akkor mi történik? Egy pozitív polaritású hurok mindegyik változójára pozitív visszacsatolást jelent, azaz egy ilyen hurokban nincs olyan mechanizmus, amely ezt az állandó irányú változást megakasztaná. Ezt jól érzékelteti a (3.15) Verhulst egyenlet hatásalgebrai vizsgálata, melyben a negatív visszacsatolás megszűnése az x változó korlátlan változását jelentette. Ugyanakkor a negatív visszacsatolás ellenirányú hatása ezt semlegesítheti és ez a kölcsönhatás állandósult egyensúlyra vezethet. Hasonlóan, a Lotka-Volterra modell is jól mutatja a pozitív és negatív visszacsatolások kölcsönhatásait, amelyek azonban itt a dominancia időbeli változásainak következtében a rendszer periodikus változásait eredményezik. Ugyanakkor a kezdeti értékek megváltoztatása minőségileg eltérő, azaz itt a triviális megoldást eredményezheti. Ez tehát azt a kérdést veti fel, hogy a rendszer valamely változójának vagy változóinak aktuális értékükből történő megváltozása milyen következményekkel jár, ami viszont a rendszerek stabilitásának a fogalmához vezet.
3.5 definíció.Az xsállapot Ljapunov-értelemben stabilis, ha bármely ε>0-ra létezik olyan δ(ε)>0 szám, hogy bármely  kezdeti feltétel esetén
kezdeti feltétel esetén  tetszőleges
tetszőleges  időpontra.
időpontra.
3.6 definíció.A rendszer xs állapota aszimptotikusan stabilis, ha  .
.
E definíciók alapján egy rendszer állapotainak stabilitását azzal vizsgáljuk, hogy a vizsgált állapot kismértékű perturbációja milyen mozgást indít el: ha ez a perturbáció növekedni kezd, akkor a vizsgált állapot pozitív polaritású hurokban található, azaz instabilis, ha viszont csökkenni kezd a zérus érték felé, akkor valamely negatív hatás a domináns, azaz az állapot stabilis. Korlátos megváltozás pozitív és negatív hatások egyensúlyát jelzi, így a vizsgált állapot ekkor is stabilis. Tehát az előzőekben vázolt egyszerű intuitív képpel jól értelmezhető ez a definíció.
A tényleges vizsgálatot természetesen nem e definíció alapján végezzük, hanem az – alapvető stabilitási tulajdonságokat rejtő zárt hatásláncokat reprezentáló A rendszermátrix megfelelő vizsgálatával. Ugyanakkor azt is érdemes megjegyezni, hogy egy lineáris rendszer összes állapota stabilis vagy nem stabilis, ezért magát a rendszert nevezhetjük stabilnak vagy instabilnak.
Az eddigiek alapján a dinamikus rendszer stabilitását vizsgálandó a (3.19) egyenlet helyett elégséges a
| (3.22) |

homogén lineáris differenciálegyenlet vizsgálata.
3.7 tétel.Az(3.22)lineáris dinamikus rendszer Ljapunov-értelemben stabilis, ha minden megoldása korlátos.
3.8 tétel Az(3.22)lineáris dinamikus rendszer Ljapunov-értelemben aszimptotikusan stabilis, ha minden megoldása korlátos és nullához tart, ha t→∞.
E tétel k alapján a (3.19) lineáris dinamikus rendszer stabilitásának vizsgálatához a (3.22) egyenlet-rendszer megoldásait kell előállítanunk és azok korlátosságának a feltételeit kell megadni. Ehhez nézzük az A rendszermátrix sajátértékeit és sajátfüggvényeit, melyeket a
| (3.23) |
egyenletből kapjuk meg. Ennek az egyenletnek akkor létezik a triviálistól különböző megoldása, ha érvényes a
| (3.24) |
feltétel, amelynek megoldásai meg is adják a sajátértékeket.
A vl sajátfüggvények ismeretében létezik a kezdeti feltételnek olyan

felbontása, hogy a (3.22)megoldásának

általános formáját egyszeres sajátértékek esetén
| (3.25) |
alakban írhatjuk fel. A (3.25) már jól mutatja, hogy – mivel a  , sajátértékek komplex változók is lehetnek – az (3.25) forma akkor korlátos, ha
, sajátértékek komplex változók is lehetnek – az (3.25) forma akkor korlátos, ha  , és akkor tart zérushoz, ha
, és akkor tart zérushoz, ha  . Ha azonban létezik legalább egy
. Ha azonban létezik legalább egy  sajátérték, amelyre
sajátérték, amelyre  , akkor az (3.22) rendszer instabil.
, akkor az (3.22) rendszer instabil.
3.9 tétel .Az(3.22) lineáris dinamikus rendszer Ljapunov-értelemben stabilis, ha az A rendszermátrix összes  , sajátértékére érvényes a
, sajátértékére érvényes a  feltétel.
feltétel.
3.10 tétel .Az(3.22)lineáris dinamikus rendszer Ljapunov-értelemben aszimptotikusan stabilis, ha az A rendszermátrix összes  , sajátértékére érvényes a
, sajátértékére érvényes a  feltétel.
feltétel.
3.11 tétel .Az(3.22)lineáris dinamikus rendszer Ljapunov-értelemben instabilis, ha az A rendszermátrix  , sajátértékei között létezik legalábbegy
, sajátértékei között létezik legalábbegy  , amelyre fennáll a
, amelyre fennáll a  feltétel.
feltétel.
Ez tehát azt mutatja, hogy a (3.19) állapottér modellel adott lineáris dinamikus rendszer stabilitását az A rendszermátrix sajátértékeinek a vizsgálatából lehet levezetni. Azonban könnyen megmutatható, hogy az A rendszermátrix sajátértékei azonosak a rendszer karakterisztikus polinomjának gyökeivel. Képezve ugyanis (3.22) mindkét oldalának Laplace-transzformáltját

ahonnan az X(s)-t kifejezve az
| (3.26) |

eredményre jutunk.
Az x(t) időfüggvényt a (3.26) inverz transzformációjával kapjuk meg, melyben alapvető szerepet játszanak a nevező  gyökei, azaz a (3.26) racionális törtfüggvény pólusai. Ha a
gyökei, azaz a (3.26) racionális törtfüggvény pólusai. Ha a  polinomnak csak egyszeres sk, k=1,2…n, gyökei vannak, akkor létezik a
polinomnak csak egyszeres sk, k=1,2…n, gyökei vannak, akkor létezik a

résztörtekre bontás. Mivel a (3.26)-ban a számláló a nevezőnél alacsonyabb fokú polinom, ezért az időfüggvényt az
| (3.27) |
amely a (3.25) kifejezéssel ekvivalens forma, tehát alkalmazhatjuk az előző tétel kat.
Az(3.26) nevezőjében lévő  s-függvényt a rendszer karakterisztikus polinomjának nevezzük, míg annak gyökeit a
s-függvényt a rendszer karakterisztikus polinomjának nevezzük, míg annak gyökeit a
| (3.28) |
karakterisztikus egyenlet megoldásaként kapjuk. Jól látszik, hogy (3.28) azonos az(3.24) egyenlettel, így a
| (3.29) |

karakterisztikus polinom sk, k=1,2…n, gyökei azonosak az A rendszermátrix λj, j=1,2…n, sajátértékeivel.
3.2.2. Stabilitási kritériumok
A lineáris dinamikus rendszerek stabilitását kvalitatív értelemben a rendszer belső vissza-csatolásai, míg a kvantitatív vizsgálatban a rendszermátrix sajátértékeinek, vagy ezzel ekvivalens módon a karakterisztikus polinom gyökeinek valós részei határozzák meg, azaz a stabilitásvizsgálat alapesetben sajátértékek vagy gyökök meghatározását igényli. Ez egy n-ed rendű rendszer esetében n komplex érték kezelését igényli, ami megnehezíti a rendszerparaméterek hatásának szisztematikus vizsgálatát. Ha azonban ismert a karakterisztikus polinom, akkor a gyökök meghatározása nélkül, csak a polinom együtthatóinak ismeretében meg tudjuk határozni a rendszer stabilitásának mikéntjét. Erre itt egy algebrai és egy frekvenciamódszert mutatunk be, melyek tehát a (33) n-ed rendű, n≥1, karakterisztikus polinom ismeretében kerülnek meghatározásra.
Az algebrai módszert a Routh-Hurwitz kritérium szolgáltatja.
3.12 Tétel. Routh-Hurwitz kritérium. Az(3.19)dinamikus rendszer akkor és csak akkor aszimptotikusan stabilis, ha az(3.29) karakterisztikus polinomjának valamennyi együtthatója pozitív (azonos előjelű, ez a szükséges feltétel), és a Routh-tábla első oszlopának minden egyes eleme pozitív (ez az elégséges feltétel).
Az Routh-tábla első oszlopában az előjelváltások száma megadja a polinom pozitív valós részű gyökeinek számát.
Ha a rendszer instabilis, akkor a Routh-Hurwitz kritérium alkalmazásával megkaphatjuk azt is, hogy a polinomnak hány darab pozitív valós részű gyöke van, de azok értékeit természetesen csak a (3.28) karakterisztikus egyenlet megoldásával határozhatjuk meg.
A Routh-tábla első két sorát közvetlenül a karakterisztikus polinom együtthatóiból képezzük a legmagasabb rendű tag együtthatójával kezdve és alá helyezve a következő rendű tag együtthatóját, majd így folytatva a két sort a következő tagokkal egészen a konstans tagig. A tábla első két sora, ha az n=2u páros az alábbi formájú
míg ha az n=2u-1 páratlan, akkor az utolsó oszlopot egy zérussal zárjuk le
.
Ezt követően a következő sorokat a közvetlenül fölöttük lévő sorok tagjaiból képezzük sorban másodrendű determinánsokat alkotva az első oszloppal párosítva a következő oszlopokat és elosztva első oszlop alsó elemének negatív értékével. Ezeket a lépéseket folytatva a Routh-tábla a következő mátrix-formát eredményezi:
| (3.30) |
ahol


……………

míg a következő sorban már az i1 első elem is zérus lenne, mivel
.
Ezzel záródik a Routh-tábla.
A következő lépés az első oszlopban található (an, an-1, b1, c1…g1, h1) elemek előjelének vizsgálata és a Routh-Hurwitz feltétel ellenőrzése.
3.4 példa.Legyen valamely lineáris dinamikus rendszer karakterisztikus polinomja a

alakú. Megmutatjuk, hogy a rendszer stabilis.
A polinom teljes és mindegyik együtthatója pozitív, ezért a stabilitás szükséges feltétele teljesül. Az elégséges feltétel vizsgálatához létrehozzuk a Routh-táblát:
ahonnan az első oszlop elemei 1, 9, 17, 81 mind pozitívak, azaz az elégséges feltétel is teljesül, tehát a rendszer stabil. □
Előfordulhat, hogy az első oszlopban zérus jelenik meg, amely nem található a feltételek között. Ebben az esetben két módon léphetünk tovább:
Az első oszlop zérusa helyébe az ε≠0 kis mennyiséget helyettesítjük, ezzel végigszámoljuk a Routh-táblát és képezzük az ε→0 határértéket mind a pozitív és negatív értékek felöl. Ekkor ellenőrizhetjük az első oszlop előjeleit.
Behelyettesítve az (3.29)polinomba az 1/z változót és kiemelve az (1/z)n tényezőt a

polinomot kapjuk, melynek gyökei az eredeti ( polinom gyökeinek reciprok értékeivel egyezik meg, így azonos előjelű valós részekkel rendelkeznek, ami a rendszer stabilitásáról az előzővel ekvivalens információt szolgáltat.
A Routh-Hurwitz kritérium a lineáris dinamikus rendszerek stabilitás-vizsgálatának algebrai módszerei közé tartozik. Egy másik módszertani csoportot alkotnak a frekvencia tartományban végzendő módszerek, melyek közül itt a Mihajlov-kritérium alkalmazását vizsgáljuk meg.
Vegyük ehhez a karakterisztikus polinom
| (3.31) |

frekvencia-formáját, amelyet a

illetve

alakban is felírhatunk.
A  frekvenciafüggvényt ábrázolhatjuk a komplex változók síkján az körfrekvencia függvényében, és ezt a geometriai képet Mihajlov-hodográfnak nevezzük.
frekvenciafüggvényt ábrázolhatjuk a komplex változók síkján az körfrekvencia függvényében, és ezt a geometriai képet Mihajlov-hodográfnak nevezzük.
3.13 tétel. Mihajlov-kritérium. A (3.19) dinamikus rendszer aszimptotikus stabilitásának szükséges és elégséges feltétele, hogy a Mihajlov-hodográf az körfrekvenciát a 0≤<intervallumban változtatva pontosan n síknegyeden haladjon keresztül az óramutató járásával ellentétes irányban, azaz a  argumentumának változása legyen
argumentumának változása legyen
| (.3.32) |
3.5 példa. Vegyük a 4. példában vizsgált harmadrendű rendszer

karakterisztikus polinomját, melyről a Routh-Hurwitz kritérium alkalmazásával megmutattuk, hogy stabilis rendszert reprezentál. Ennek a polinomnak és részeinek Mihajlov-hodográfjait mutatja be a 3-14. ábra, amely jól illusztrálja, hogy mindegyik redukció stabil rendszert reprezentál.
Az a) egyenes a  elsőrendű rendszer hodográfja, amely csak az első sík-negyeden halad át, és az ω→ limitnél a végpont által bezárt szög eléri a π/2 értéket.
elsőrendű rendszer hodográfja, amely csak az első sík-negyeden halad át, és az ω→ limitnél a végpont által bezárt szög eléri a π/2 értéket.
A b) jelű görbe a  másodrendű rendszer hodográfja, míg a c) jelű görbe (hodográf) a
másodrendű rendszer hodográfja, míg a c) jelű görbe (hodográf) a  harmadrendű rendszert reprezentálja. □
harmadrendű rendszert reprezentálja. □
3.6 példa. Vizsgáljuk meg a

karakterisztikus polinommal adott harmadrendű rendszer stabilitását az α paraméter függvényében.
a) Alkalmazva a Routh-Hurwitz kritériumot az alábbi Routh-táblához jutunk
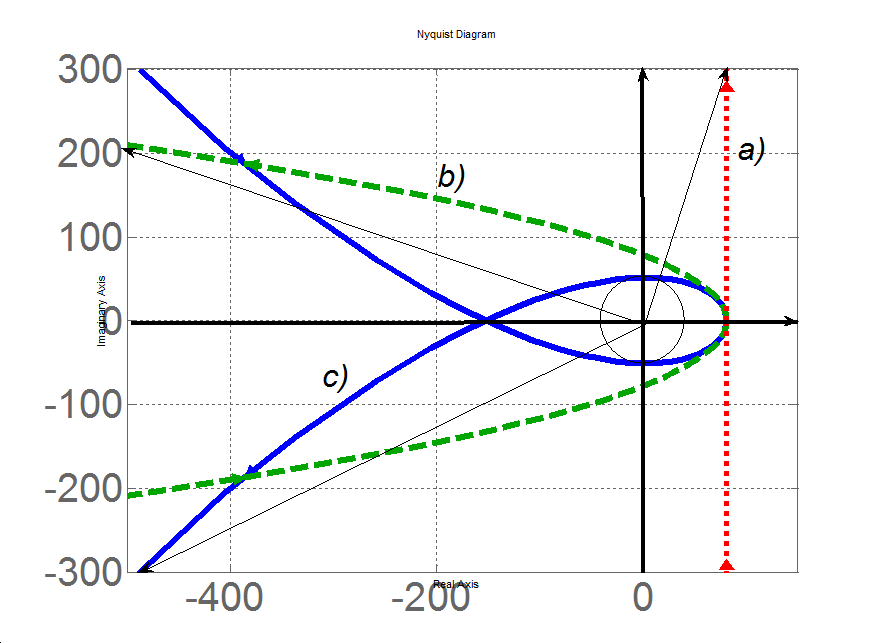
amelyből három esetet különböztetünk meg:
Ha a>750, akkor az első oszlopban csak az s1 sor első eleme negatív, azaz két előjelváltás van, ezért a rendszer instabil és a polinomnak két pozitív egész részű gyöke van.
Ha 0<a<750, akkor az első oszlop mindegyik eleme pozitív, azaz a rendszer stabil.
Ha a<0, akkor az első oszlop utolsó eleme negatív, azaz egy előjelváltást látunk, így a rendszer instabil és a polinomnak egy pozitív egész részű gyöke van.
b) Az egyes esetekhez tartozó Mihajlov-hodográfokat a 3-15. ábra mutatja be. Az 1) esetben a görbe úgy halad át az első negyedből a harmadikba, hogy kihagyja a sorrendben következőnek számító második negyedet, a 2) görbe a stabil rendszernek megfelelően halad át az első, második és harmadik síknegyeden, míg a 3) esetben a görbe eleve a második negyedből indul, így az első negyedbe el sem juthat.
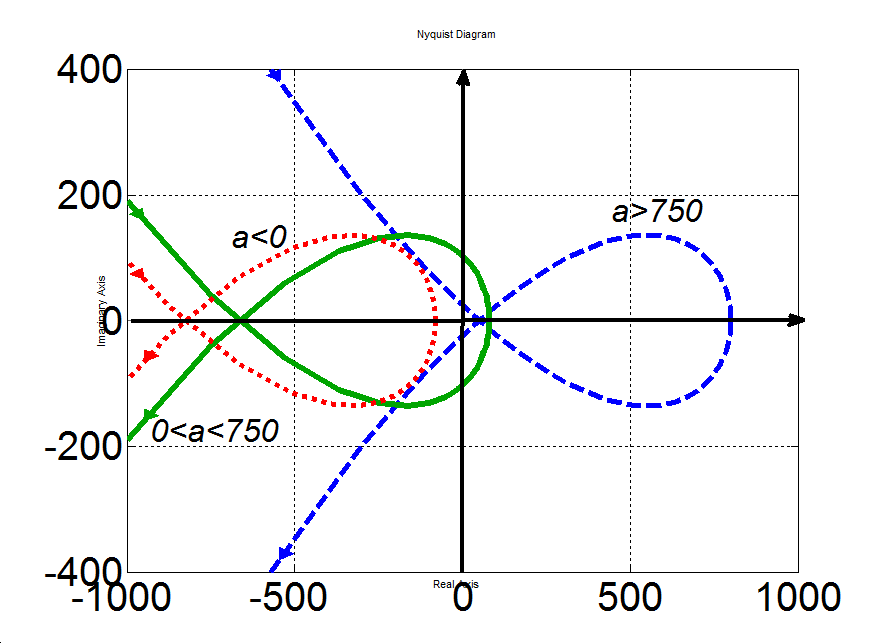
3.2.3. A nemlineáris rendszerek stabilitásáról
A dinamikus rendszerek stabilitásának Ljapunov-féle definíciója a vizsgált rendszer valamely állapotának a stabilitására vonatkozik, azaz általános és mind lineáris, mind nemlineáris rendszerekre érvényes. Lineáris rendszerekben az egy állapotra meghatározott stabilitási tulajdonság az egész rendszerre érvényes, amit természetesen a rendszerparaméterek változásai is befolyásolnak, míg nemlineáris rendszerek esetében a különböző állapotok eltérő stabilitási tulajdonságokkal rendelkezhetnek, ezért azokat önállóan kell megvizsgálni. Ezt Ljapunov-első módszerének alkalmazásával tehetjük meg, amely lehetővé teszi a lineáris rendszerek stabilitásának vizsgálatára kidolgozott módszerek felhasználását nemlineáris rendszerek esetében is.
Ljapunov első módszere a következő definíción alapul.
3.14 tétel. A
| (3.33) |

nemlineáris dinamikus rendszer  állapotának stabilitását a vizsgált állapot körül linearizált
állapotának stabilitását a vizsgált állapot körül linearizált
| (3.34) |
lineáris állapottér modell stabilitása határozza meg, ahol  az
az  állapot körüli elég kis változót jelöli és a
állapot körüli elég kis változót jelöli és a
| (3.35) |
Jacobi-mátrix a linearizált rendszer A rendszermátrixa.
Ljapunov első módszere tehát elvi alapot ad arra, hogy a nemlineáris rendszerek tetszőleges differenciálható állapotának stabilitási tulajdonságait meghatározzuk a lineáris rendszerekre kidolgozott módszerek alkalmazásával, ami az adott állapot infinitezimális környezetére érvényes. Itt természetesen erős hangsúly van a differenciálhatóságon, valamint azon, hogy ez a nemlineáris rendszerek csak egy-egy állapotára vonatkozik, azaz két egymástól véges távolságra található állapotot külön-külön kell megvizsgálni.
3.7 példa. Van der Pol egyenlet. Az alagút, vagy Esaki-dióda karakterisztikájának egy része – ahogy ezt a 3-16. ábra illusztrálja – negatív ellenállás jellegű, ami a karakterisztika nem-linearitásán túlmenően pozitív visszacsatolás forrása.
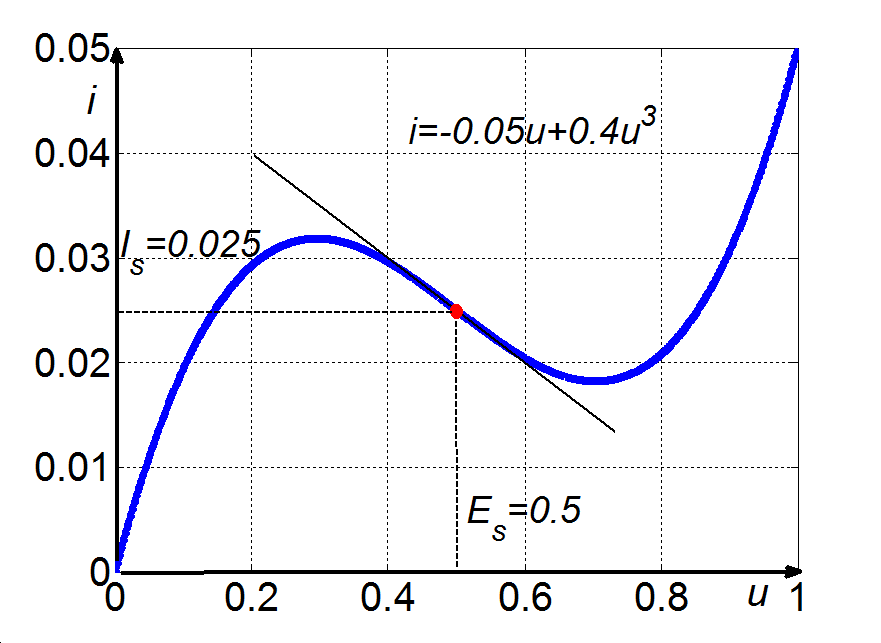
Vegyük tehát a 3-18. ábra által bemutatott egyszerű villamos kapcsolást, melynek modelljét – az alagút dióda  egyenlettel adott karakterisztikáját figyelembe véve – egyszerű számításokkal a 3-18. ábra jelöléseivel az u feszültségre
egyenlettel adott karakterisztikáját figyelembe véve – egyszerű számításokkal a 3-18. ábra jelöléseivel az u feszültségre
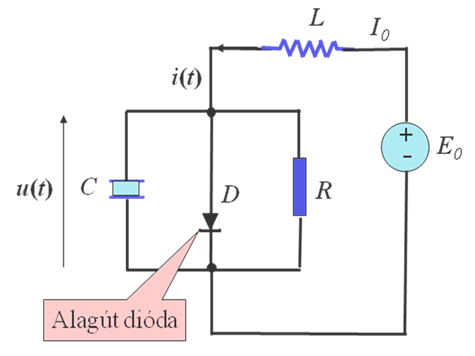
| (3.36) |
másodrendű differenciálegyenletet kapjuk meg.
Vezessük be az  ,
,  ,
,  ,
,  és
és  paramétereket és dimenziómentes változókat, akkor az(3.36) egyenlet a
paramétereket és dimenziómentes változókat, akkor az(3.36) egyenlet a
| (3.37) |
formában jelenik meg. Ez az egyenlet az irodalomban a Van der Pol egyenletként ismert.
A megoldáshoz a (3.37) egyenletet az  és
és  változók bevezetésével a
változók bevezetésével a
| (3.38) |
| (3.39) |

ekvivalens elsőrendű differenciálegyenlet-rendszerként írjuk át, melynek megoldását közvetlenül megkaphatjuk a Matlab alkalmazásával.
A (3.38)-(3.39) egyenletrendszer hatásgráfját mutatja be a 3-19. ábra, amely a különböző polaritású hurkokkal jelzi, hogy ez a nemlineáris egyenletrendszer, azaz a (3.36) másodrendű differenciálegyenlettel leírt villamos rendszer komplex dinamikus viselkedést mutathat.
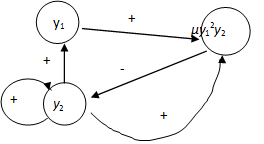
A (3.38)-(3.39) egyenletrendszer Jacobi-mátrixa a
| (3.40) |
alakú, így a rendszer stabilitását a következő lépésekben vizsgáljuk meg: először meghatározzuk a (3.38)-(3.39) egyenletrendszer állandósult megoldását az adott paraméterérték esetén, majd ezt a megoldást behelyettesítve a (3.40) Jacobi-mátrixba meghatározzuk a Jacobi-mátrix sajátértékeit. A nemlineáris rendszer viselkedését ebben az állandósult állapotban a (3.38)-(3.39) egyenletek megoldásával vizsgáljuk meg. Ehhez a Matlab fsolve, eig és ode függvényeit használhatjuk fel.
Illusztrációképpen két paraméterértékre mutatjuk be az eredményeket. A paraméter  értéke esetén az állandósult megoldásokra az y1s=2.3060e-9 és y2s=0.0 értékeket, míg a sajátértékekre a pozitív valós λ1=1.0102e-1 és λ2=9.8990 értékeket kaptuk. A (3.38)-(3.39) nemlineáris rendszernek ez az állapota instabil, és – ahogy ezt a 3-20. ábra illusztrálja – a rendszerben relaxációs oszcillációk keletkeznek.
értéke esetén az állandósult megoldásokra az y1s=2.3060e-9 és y2s=0.0 értékeket, míg a sajátértékekre a pozitív valós λ1=1.0102e-1 és λ2=9.8990 értékeket kaptuk. A (3.38)-(3.39) nemlineáris rendszernek ez az állapota instabil, és – ahogy ezt a 3-20. ábra illusztrálja – a rendszerben relaxációs oszcillációk keletkeznek.
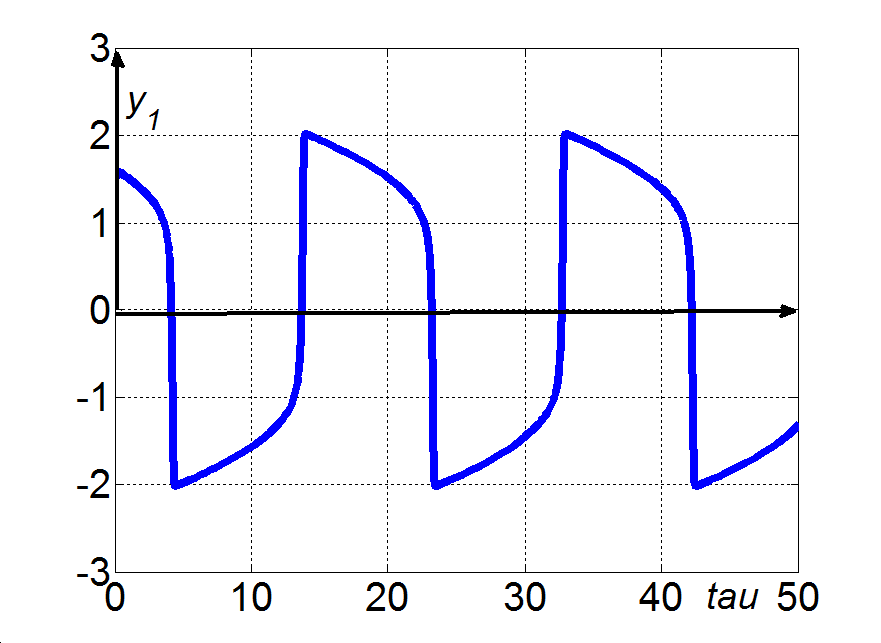
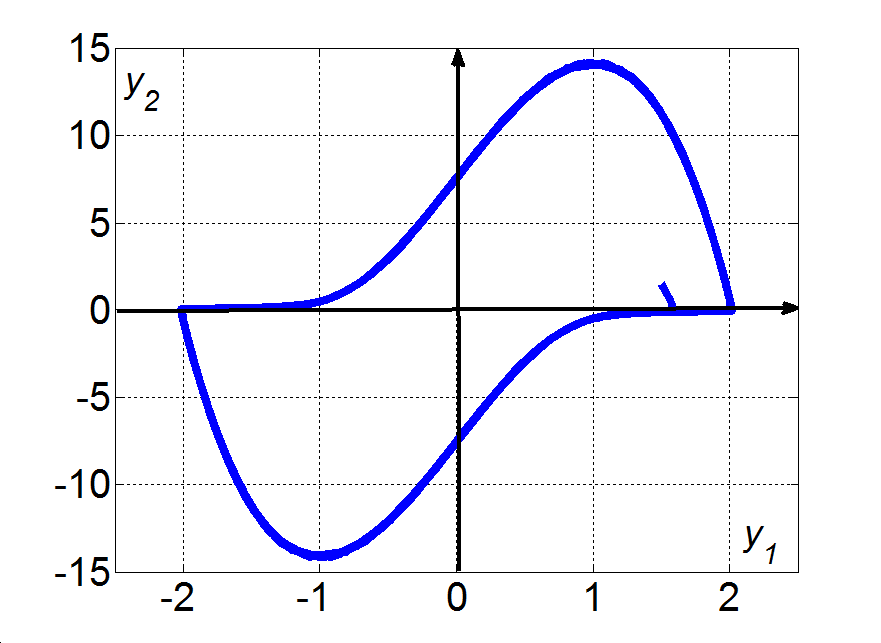
A paraméter  értéke esetén az állandósult megoldásokra az y1s=0.0 és y2s=0.0 érték-párt, míg a sajátértékekre a pozitív valós részű λ1=5.0e-2+j9.9875e-1 és λ2=5.0e-2-j9.9875e-1 konjugált komplex párt kapjuk. A (3.38)-(3.39) nemlineáris rendszernek ez az állapota is instabil. Ebben az esetben, ahogy ezt a 3-21. ábra illusztrálja, a rendszerben majdnem szinusz-jel alakú oszcillációk generálódtak.
értéke esetén az állandósult megoldásokra az y1s=0.0 és y2s=0.0 érték-párt, míg a sajátértékekre a pozitív valós részű λ1=5.0e-2+j9.9875e-1 és λ2=5.0e-2-j9.9875e-1 konjugált komplex párt kapjuk. A (3.38)-(3.39) nemlineáris rendszernek ez az állapota is instabil. Ebben az esetben, ahogy ezt a 3-21. ábra illusztrálja, a rendszerben majdnem szinusz-jel alakú oszcillációk generálódtak.
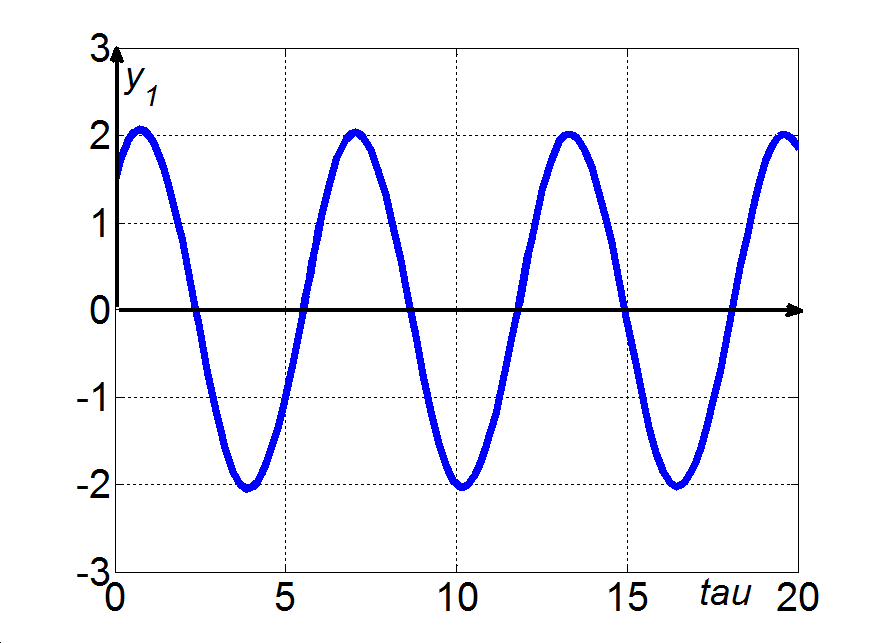
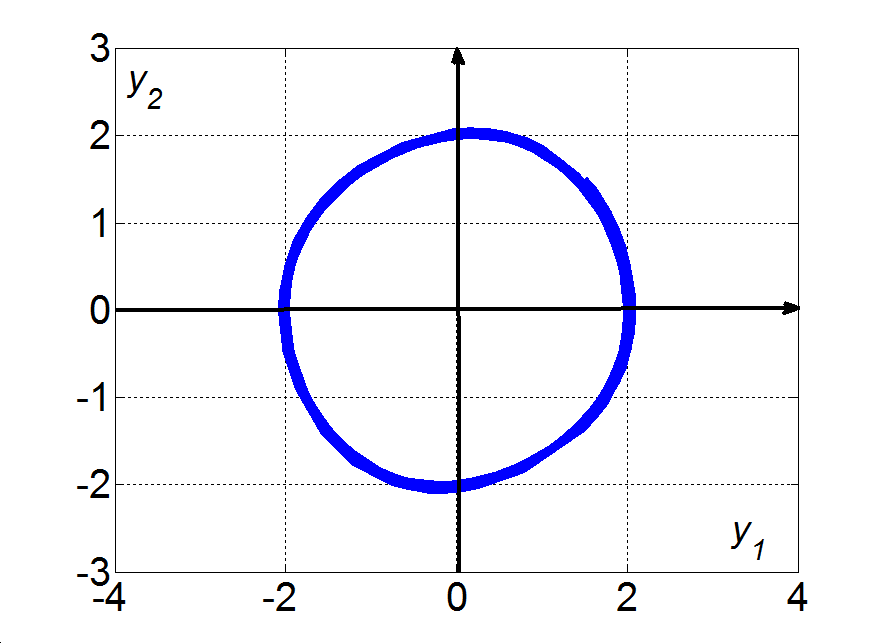
4. fejezet - Feladatok a visszacsatolt rendszer stabilitásával kapcsolatban
4.1 feladat
A rendszer hatásvázlata az alábbi ábrán látható. Az átviteli függvények:  és
és  . Határozzuk meg milyen
. Határozzuk meg milyen  értékek esetén stabil a rendszer.
értékek esetén stabil a rendszer.
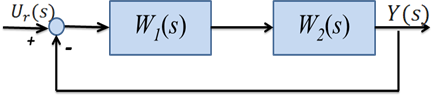
Megoldás
Először meg kell határoznunk a visszacsatolt eredő átviteli függvényt:
| (4.1) |

Ebből a karakterisztikus egyenlet:
| (4.2) |

| (4.3) |

ha
 , akkor minden együttható pozitív
, akkor minden együttható pozitíva Hurwitz determináns:
Mivel az együtthatók vizsgálatából azt kaptuk, hogy  , így a minden feltételt kielégítő megoldás:
, így a minden feltételt kielégítő megoldás:  .
.
4.2 feladat
Az 4-2. ábraán egy szabályozási kör látható, ahol a szabályozott szakasz átviteli függvénye
| (4.4) |

Legyen a szabályozó átviteli függvénye:
a)
| (4.5) |

b)
| (4.6) |
c)
| (4.7) |

d)
| (4.8) |
e)
| (4.9) |
A fenti esetekben határozzuk meg, hogy milyen  értékek esetén stabilis a rendszer.
értékek esetén stabilis a rendszer.
Megoldás
a)
A visszacsatolt rendszer eredő átviteli függvénye:
| (4.10) |
Behelyettesítve a szabályozó és a szabályozott szakasz átviteli függvényeit:
| (4.11) |
| (4.12) |
A felnyitott kör átviteli függvénye:
| (4.13) |

Ezáltal a karakterisztikus egyenlet a következő  , azaz
, azaz
| (4.14) |

Tehát a karakterisztikus polinom együtthatói:
| (4.15) |

Az együtthatók alapján a stabilitás szükséges feltétele, hogy minden egyes együttható legyen pozitív, így:
| (4.16) |

Harmadfokú polinom esetén a Hurwitz-mátrix a következő:
| (4.17) |
A Hurwitz-mátrix alapján a szükséges determináns értéke:
| (4.18) |


A stabilitásvesztés feltétele 
Karakterisztikus egyenlet:
A stabilitás feltétele:
b)
Karakterisztikus egyenlet:
A stabilitás feltétele:
c)
Karakterisztikus egyenlet:
A stabilitás feltétele:
d)
Karakterisztikus egyenlet:
A stabilitás feltétele:
e)
Karakterisztikus egyenlet:
A stabilitás feltétele:
Összefoglalva a táblázatból kiolvasható, hogy a D tag hozzáadásával a maximális körerősítés megnövelhető.
P tag | ideális PD tag | valóságos PD tag | PI tag | valóságos PID tag |
|
|
|
|
|
|
|
|
|
|







4.3 feladat
Az 4-2. ábraán egy szabályozási kör látható, ahol a szabályozott szakasz átviteli függvénye
| (4.19) |

A legyen a szabályozó átviteli függvénye:
a)
| (4.20) |

b)
| (4.21) |
c)
| (4.22) |

d)
| (4.23) |
e)
| (4.24) |
A fenti esetekben határozzuk meg  értékét úgy, hogy a fázistartalék kb. 50 legyen.
értékét úgy, hogy a fázistartalék kb. 50 legyen.
Megoldás
a)
A felnyitott kör átviteli függvénye
| (4.25) |
| (4.26) |


Behelyettesítve
| (4.27) |

b)
A felnyitott kör átviteli függvénye
| (4.28) |
| (4.29) |


Behelyettesítve
| (4.30) |

c)
A felnyitott kör átviteli függvénye
| (4.31) |
| (4.32) |


Behelyettesítve
| (4.33) |

d)
A felnyitott kör átviteli függvénye
| (4.34) |

| (4.35) |


Behelyettesítve
| (4.36) |

e)
A felnyitott kör átviteli függvénye
| (4.37) |
| (4.38) |


Behelyettesítve
| (4.39) |

MATLAB kód
T1=10; T2=1; T3=0.1; om=0.8811; ft=180-atand(om*T1)-atand(om*T2)-atand(om*T3); P=1/abs(1/(1+T1*om*i)/(1+i*T2*om)/(1+i*T3*om)); om=0.7221; ft=180-90-atand(om*T2)-atand(om*T3); P=1/abs(1/(T1*om*i)/(1+i*T2*om)/(1+i*T3*om)); om=8.591; ft=180-atand(om*T1)-atand(om*T3); P=1/abs(1/(1+i*T1*om)/(1+i*T3*om)); om=3.789; ft=180-atand(om*T1)-atand(om*T3)-atand(om*T2/10); P=1/abs(1/(1+i*T1*om)/(1+i*T3*om)/(1+i*T2/10*om)); om=3.639 ft=180-90-atand(om*T2/10)-atand(om*T3) P=1/abs(1/(T1*om*i)/(1+i*T2/10*om)/(1+i*T3*om))
Összefoglalva a táblázatból kiolvasható, hogy a D tag hozzáadásával a körerősítés megnövelhető.
P tag | ideális PD tag | valóságos PD tag | PI tag | valóságos PID tag |
|
|
|
|
|
|
|
|
|
|







4.1. Szabályozási körök szintézise I. - PID szabályozás tervezése
Ebben a fejezetben azt feltételezzük, hogy szabályozott szakasz  átviteli függvényének pólusai egyszeresek, és mind valós negatív számok és kellően távol vannak egymástól. A
átviteli függvényének pólusai egyszeresek, és mind valós negatív számok és kellően távol vannak egymástól. A  átviteli függvénnyel rendelkező szabályozó az
átviteli függvénnyel rendelkező szabályozó az  hibajelből számítja ki
hibajelből számítja ki  szabályozott szakasz
szabályozott szakasz  bemenőjelét (ld. 4-4. ábra). Feladatunk
bemenőjelét (ld. 4-4. ábra). Feladatunk  meghatározása.
meghatározása.

4.1.1. P szabályozó
A P szabályozó egyenlete az időtartományban
| (4.40) |

A szabályozó átviteli függvénye
| (4.41) |


választásának szempontjai (ez minden PID típusú szabályozóra igaz)
Ha feltételesen stabilis a rendszer, akkor a fázistartalék megválasztása
Ha strukturálisan stabilis a rendszer, akkor gyorsaság megválasztása, fizikai korlátok figyelembe vétele
A  szabályozó gyorsítja a rendszert (ld. 5.2.3 pont). Általában azt szeretnénk, ha
szabályozó gyorsítja a rendszert (ld. 5.2.3 pont). Általában azt szeretnénk, ha  minél nagyobb lenne, de ennek a stabilitás vagy a beavatkozó szerv fizikai korlátai szabnak határt. (Ha egy 10 V-os motorra 100000 V-ot kapcsolunk, akkor már nem beszélhetünk a motor gyorsaságáról, csak a tönkremeneteléről).
minél nagyobb lenne, de ennek a stabilitás vagy a beavatkozó szerv fizikai korlátai szabnak határt. (Ha egy 10 V-os motorra 100000 V-ot kapcsolunk, akkor már nem beszélhetünk a motor gyorsaságáról, csak a tönkremeneteléről).
4.1.2. PI szabályozó:
A PI szabályozó egyenlete az időtartományban
| (4.42) |
Laplace-transzformálva
| (4.43) |
A PI szabályozó tervezésére használt szokásos átviteli függvény alakja
| (4.44) |
Ha a ferekvenciatartományban megtervezzük a szabályozót, akkor az időtartományban használt paramétereket a következőképpen írhatjuk fel
| (4.45) |
Ahogy korábban láttuk (ld. xxx) a felnyitott körben található integráló tag az állandósult hibát szünteti meg konstans referenciajel esetén.
Általános szabályként komondható, hogy az integráló tag időállandóját a szabályozott szakasz legnagyobb időállandójával azonos nagyságúra kell választani.

legyen (ahol  a rendszer legnagyobb időállandója)ha
a rendszer legnagyobb időállandója)ha  stabilitási problémaha
stabilitási problémaha  feleslegesen lassítjuk a rendszert
feleslegesen lassítjuk a rendszert
4.1.3. PD szabályozó
Az ideális PD szabályozó egyenlete az időtartományban
| (4.46) |
Laplace-transzformálva
| (4.47) |

A szabályozó tervezéséhez használt átviteli függvény
| (4.48) |

(4.47) és (4.48) összevetéséből kiolvasható
| (4.49) |

Ideális deriváló tag nem valósítható meg. A deriválás a zajokat kiemeli (mérési zaj minden valós szabályozási körben jelen van). Ha akár analóg, akár digitális eszközzel deriválunk, akkor valamilyen módon gondoskodnunk kell a zajszűrésről. A szűrés egy újabb időállandót hoz be a rendszerbe. A legegyszerűbb alul-áteresztő szűrő átviteli függvénye:  , ennek megfelelően egy megvalósítható PD szabályozó átviteli függvénye
, ennek megfelelően egy megvalósítható PD szabályozó átviteli függvénye
| (4.50) |
A  szorzótényező a felnyitott kör átviteli függvényének számlálójában jelenik meg, ezért a D hatással a fázistartalékot növelhetjük, ezzel a szabályozó a beállás lengéseit csökkentheti.
szorzótényező a felnyitott kör átviteli függvényének számlálójában jelenik meg, ezért a D hatással a fázistartalékot növelhetjük, ezzel a szabályozó a beállás lengéseit csökkentheti.

A szűrő csökkenti a fázistartalékot. Hogy a D tag fáziscsökkentő hatását ne veszítsük el, legyen  (általában egy nagyságrend különbség van közöttük).
(általában egy nagyságrend különbség van közöttük).
PD szabályozót célszerű alkalmazni, ha maga a szabályozott szakasz integrátort tartalmaz. Tipikusan pozíció ígéret xxx
4.1.4. PID szabályozó
Az ideális PID tag kimenőjele az időtartományban
| (4.51) |

Laplace-transzformálva
| (4.52) |

A szabályozó átviteli függvénye:
| (4.53) |
Az ideális PID szabályozó tervezéshez annak átviteli függvényét a következő alakban szokás felírni
| (4.54) |
(4.53) és (4.54) összevetéséből
| (4.55) |

A valós PID szabályozó átviteli függvénye
| (4.56) |
A szokásos választás

és
 , valamint
, valamint 
Az időállandók kiválasztása után
 -t addig növeljük, amíg stabilitási vagy fizikai korlátba nem ütközünk
-t addig növeljük, amíg stabilitási vagy fizikai korlátba nem ütközünk
Szabályozó elemek szerepe:
P tag: gyorsít (túlvezérel)
I tag: egységugrás esetén az állandósult hibát eltünteti (ha a szabályozott szakasz nem tartalmaz integrátort)
D tag: fázistartalékot növel (túllendülést csökkent, illetve nagyobb gyorsítást enged meg)
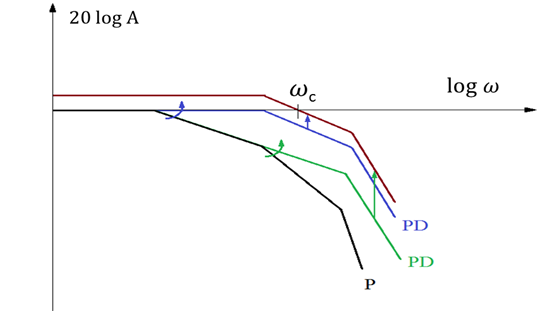
4.1.5. Kidolgozott feladatok PID szabályozók tervezésére
A szabályozott szakasz
| (4.57) |
4.4 feladat PI szabályozó tervezése:
| (4.58) |
Legyen
| (4.59) |

Ha  , akkor
, akkor
| (4.60) |
A felnyitott kör frekvencia átviteli függvénye:
| (4.61) |


Bode-diagramja
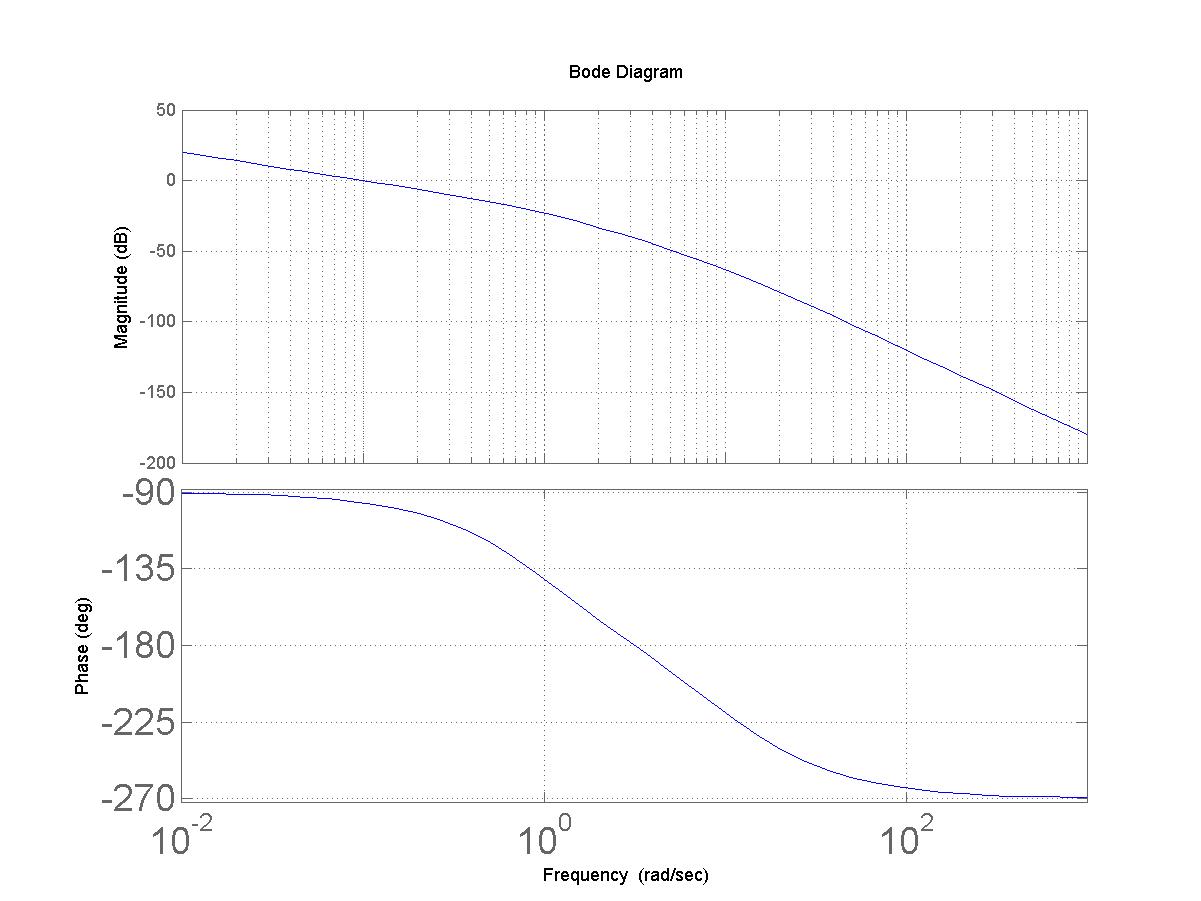
Az ábráról leolvashatjuk, hogy egy adott fázistartalékhoz közelítőleg mekkora vágási körfrekvencia és körerősítés tartozik. Ha pl. 45̊ fázistartalékot szeretnénk, akkor a Bode diagramból kiolvasható, hogy a fázis akkor éri el a -135̊-ot, amikor a körfrekvencia valamivel kisebb, mint 1 és ekkor az amplitúdó kb. -20dB, vagyis  értékét kb. 10-re kell beállítani ahhoz, hogy az amplitúdó diagram kb. ott metssze a 0dB tengelyt, ahol a fázisa kb. -135̊. Ez csak egy közelítő becslés. A konkrét számítás a következő.
értékét kb. 10-re kell beállítani ahhoz, hogy az amplitúdó diagram kb. ott metssze a 0dB tengelyt, ahol a fázisa kb. -135̊. Ez csak egy közelítő becslés. A konkrét számítás a következő.
A leolvasáshoz hasonlóan, először azt kell meghatározni, hogy milyen körfrekvencián éri el a frekvencia átviteli függvény azt a fázisszög értéket, amely a kiválasztott fázistartalékhoz tartozik (ez lesz a vágási körfrekvencia). pl. legyen kb. 45̊. Esetünkben a fázistartalék:
| (4.62) |

Legyen  [rad/sec], ekkor
[rad/sec], ekkor
| (4.63) |

Ez kellően közel van az előzetesen választott érékhez. A szükséges körerősítés, amely jelen esetben megegyezik  értékével.
értékével.
| (4.64) |

Fel kell hívni a figyelmet arra, hogy ez egy számpélda, ahol a zsebszámológépünk sokkal nagyobb pontossággal számol, mint amire szükségünk van és amilyen pontossággal ismerjük a vizsgált rendszer paramétereit. A gyakorlatban az így kapott eredményeket kerekíteni szokás.
Szimulációval vizsgáljuk meg, hogy miként viselkedik a visszacsatolt rendszer,  választással, illetve ezt az értéket ötszörösére és ötödére változtatjuk. A referencia jel legyen 1.
választással, illetve ezt az értéket ötszörösére és ötödére változtatjuk. A referencia jel legyen 1.
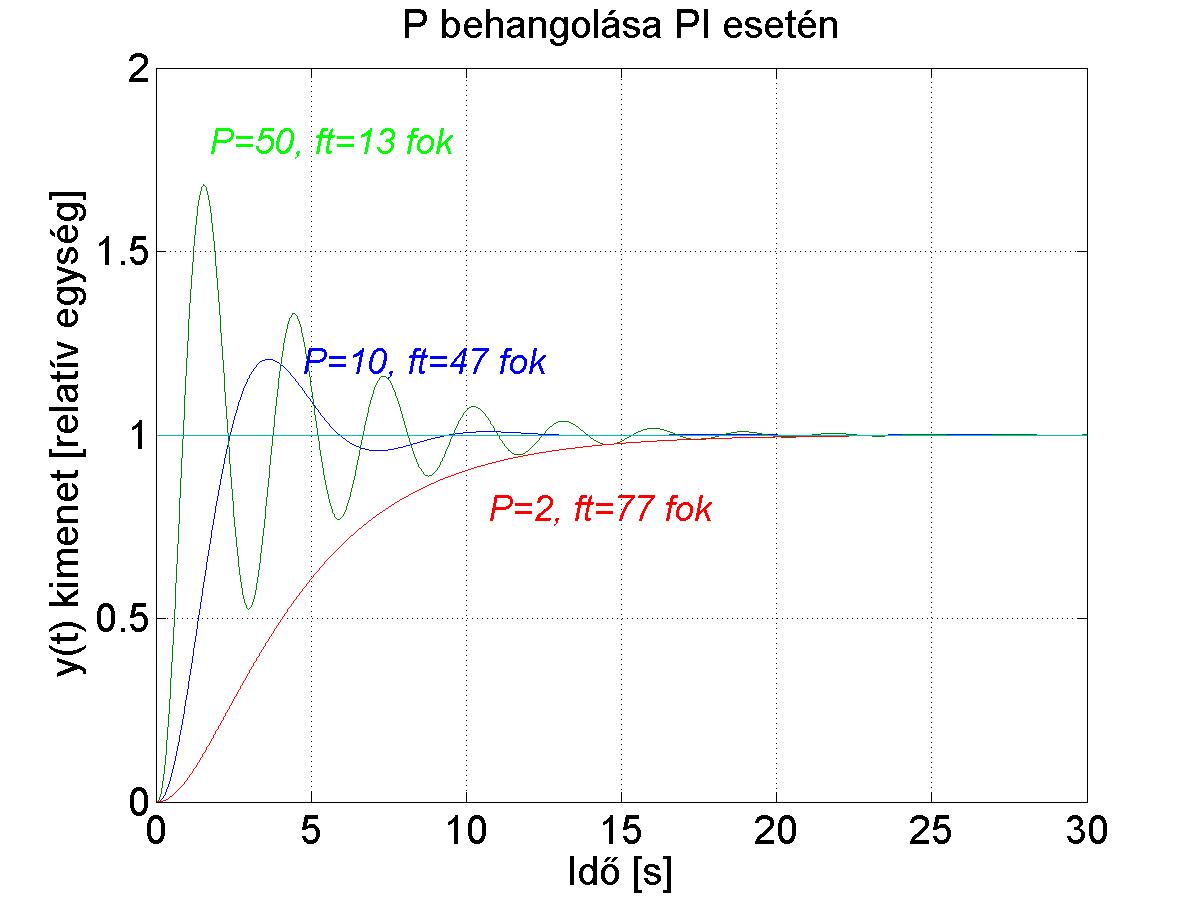
Látható, ha P=10, akkor a fázistartalék 45̊. Egy 20%-nál kisebb túllendüléssel áll be a rendszer az állandósult értékre. Ha a körerősítést ötödére csökkentjük, akkor a beállás lassabb és nincs túllendülés. Ha a körerősítést ötszörösére növeljük, akkor gyorsabban reagál a rendszer, de beállást mégsem tekinthetjük gyorsabbnak, mert a jelentős lengések miatt sokkal később csökken a hiba tartósan egy megadott korlát alá (ezeknél a szimulációknál  ).
).
Vizsgáljuk meg a  behangolásának hatását (ezeknél a szimulációknál
behangolásának hatását (ezeknél a szimulációknál  ). Alapértelmezésben
). Alapértelmezésben  , és ezt az értéket ötödére, illetve ötszörösére változtatjuk.
, és ezt az értéket ötödére, illetve ötszörösére változtatjuk.
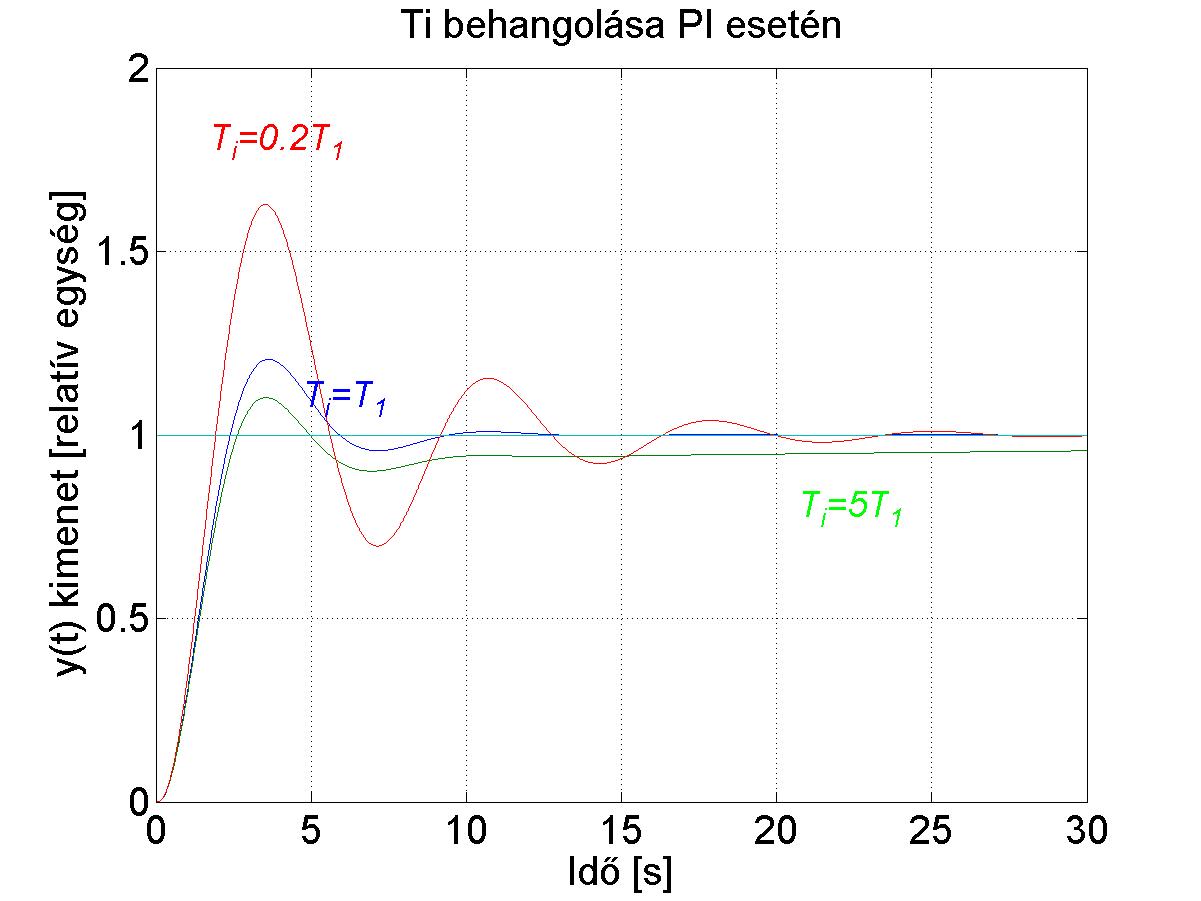
Látható, ha  értékét lecsökkentjük, akkor ezzel nem tudjuk gyorsítani a rendszert, mert ezt nem engedi a rendszer legnagyobb időállandója. Ha
értékét lecsökkentjük, akkor ezzel nem tudjuk gyorsítani a rendszert, mert ezt nem engedi a rendszer legnagyobb időállandója. Ha  értéke nagyon nagy, akkor kisebb a túllövés, de az állandósult hiba csak lassan szűnik meg (egy feleslegesen nagy időállandót vittünk a rendszerbe).
értéke nagyon nagy, akkor kisebb a túllövés, de az állandósult hiba csak lassan szűnik meg (egy feleslegesen nagy időállandót vittünk a rendszerbe).
4.5 feladat PD szabályozó:
| (4.65) |
Legyen

és 
Ha  , akkor
, akkor
| (4.66) |

A felnyitott kör frekvencia átviteli függvénye:
| (4.67) |


Bode-diagramja
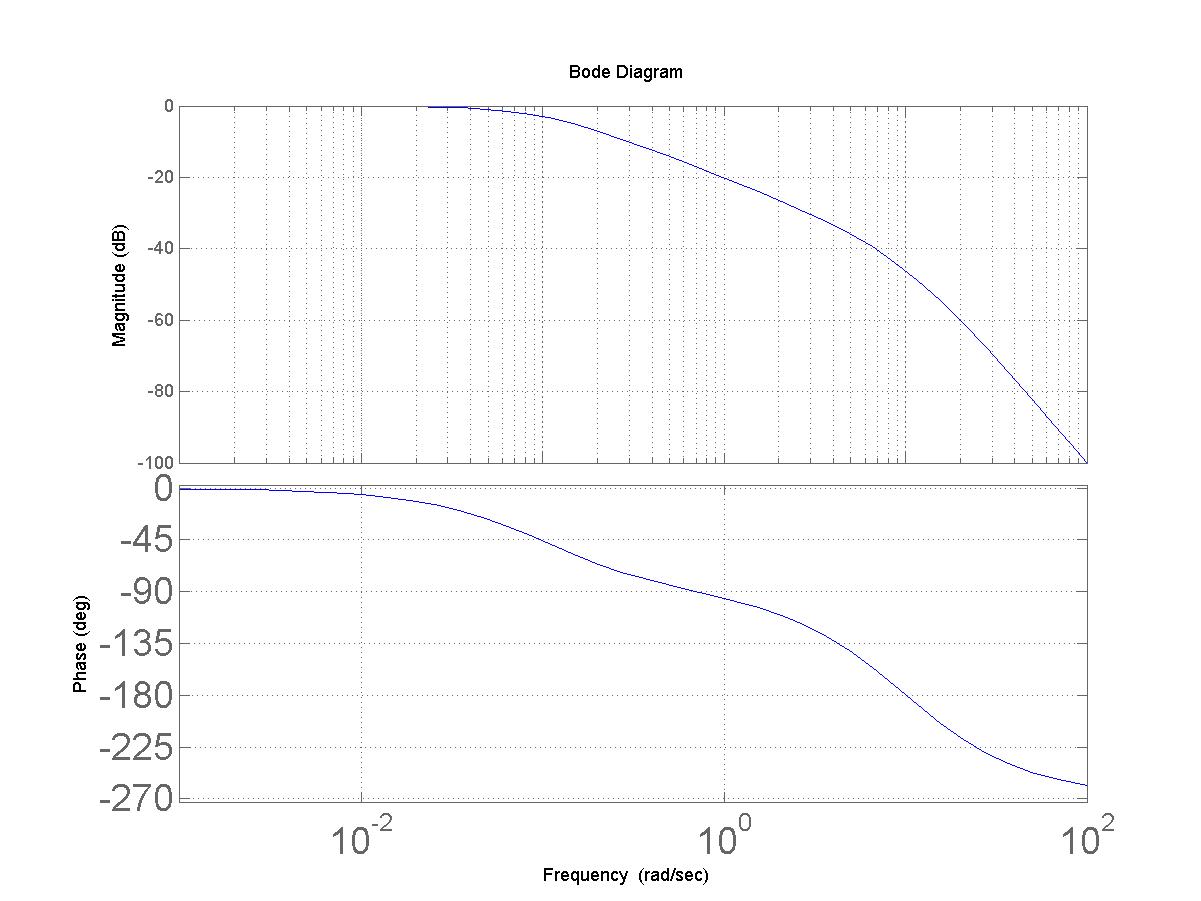
Az ábráról leolvashatjuk, hogy ha a körerősítést 10-re növeljük (az amplitúdó diagramot 20dB-lel toljuk feljebb), akkor a vágási körfrekvencia 1 rad/sec és a fázis tartalék közel 90̊. A konkrét számítás a következő.
| (4.68) |

Legyen  [rad/sec], ekkor
[rad/sec], ekkor
| (4.69) |

Ehhez tartozó körerősítés, amely jelen esetben megegyezik P értékével.
| (4.70) |

Szimulációval vizsgáljuk meg, hogy miként viselkedik a visszacsatolt rendszer,  választással, illetve ezt az értéket ötszörösére és ötödére változtatjuk. Az ábrán szerepel még egy tiszta P szabályozó szimulációs eredménye is. A referenciajel legyen 1.
választással, illetve ezt az értéket ötszörösére és ötödére változtatjuk. Az ábrán szerepel még egy tiszta P szabályozó szimulációs eredménye is. A referenciajel legyen 1.
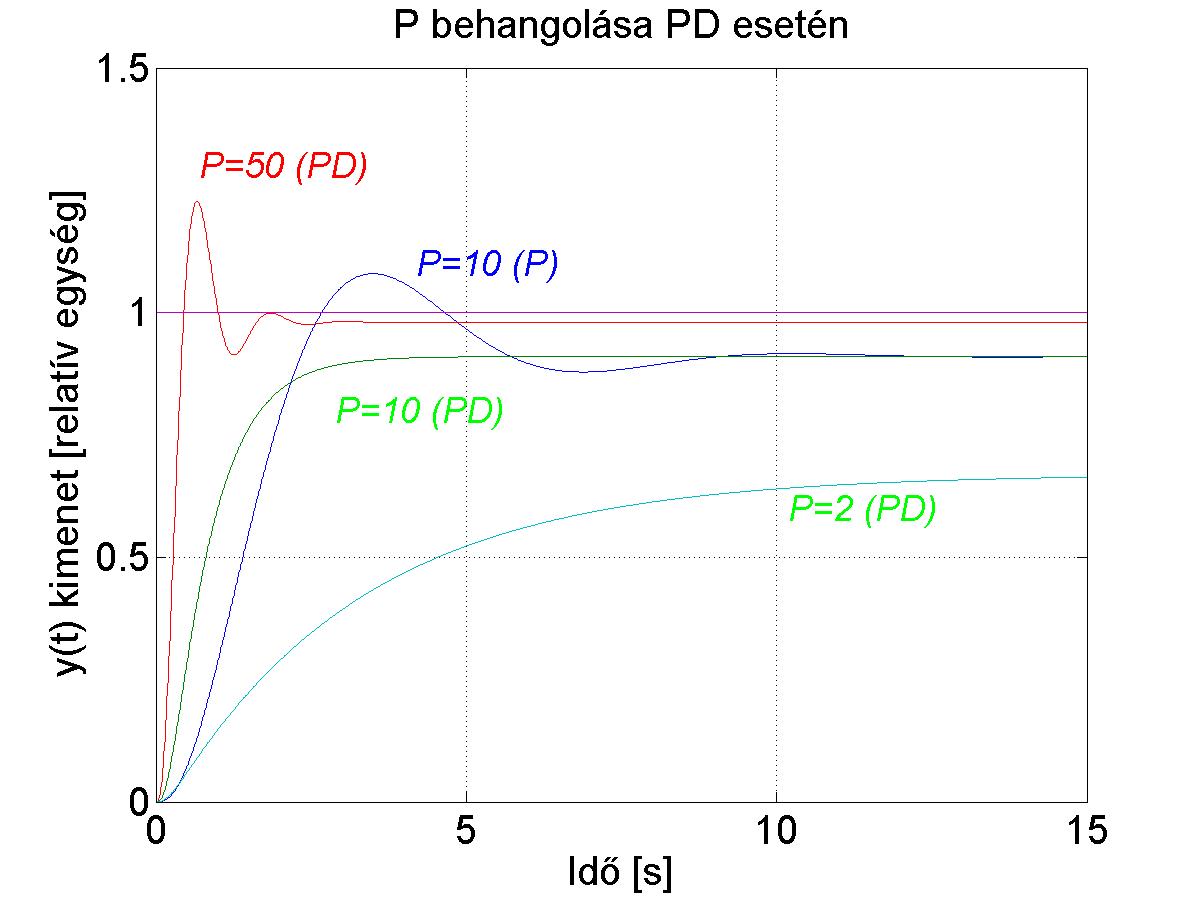
Látható, ha  , akkor a D tag nélkül a rendszer lengéssel áll be, a D taggal ezek a lengések eltűnnek, de az állandósult hiba megmarad és ez közel 10%. Ha a P értékét növeljük, akkor a D taggal együtt is megjelennek a lengések, a beállás gyorsabb és az állandósult hiba is kisebb. Ha csökkentjük a P értékét, akkor a beállás lassul, és az állandósult hiba megnő.
, akkor a D tag nélkül a rendszer lengéssel áll be, a D taggal ezek a lengések eltűnnek, de az állandósult hiba megmarad és ez közel 10%. Ha a P értékét növeljük, akkor a D taggal együtt is megjelennek a lengések, a beállás gyorsabb és az állandósult hiba is kisebb. Ha csökkentjük a P értékét, akkor a beállás lassul, és az állandósult hiba megnő.
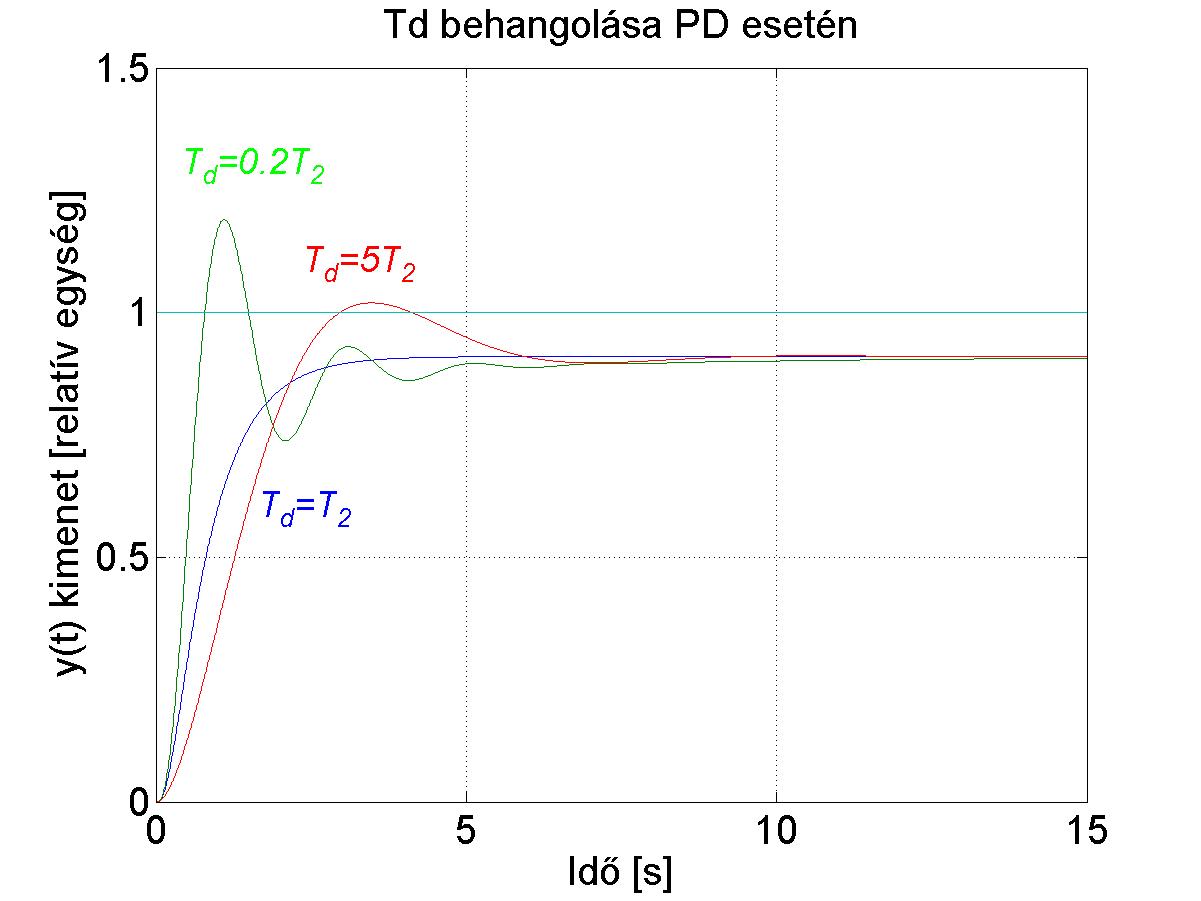
Látható, ha  értékét akár növeljük, akár csökkentjük a
értékét akár növeljük, akár csökkentjük a  beállításhoz képest, a beállás csak rosszabb lesz.
beállításhoz képest, a beállás csak rosszabb lesz.
P, PI, PD és PID összehasonlítása: Mind a négy esetben a referenciajel egy egységugrás, és  . PD és PID esetén
. PD és PID esetén  és
és  . PI és PID esetén
. PI és PID esetén  .
.
A P leng és állandósult hibája is van, a PI az állandósult hibát tünteti el, de leng. A PD a lengést csökkenti (esetünkben el is tünteti), de van állandósult hibája. A PID nem is leng és nincs állandósult hibája. Természetesen PID szabályozó esetén is lehetnek lengések, ha P értékét nagyobbra választjuk. Ekkor a beállás is gyorsabb lesz. A PD szabályozókat leginkább akkor alkalmazzuk, ha a szabályozott szakasz már eleve tartalmaz integrátort. Tipikusan ilyen eset a pozíció szabályozás pl. robotoknál.
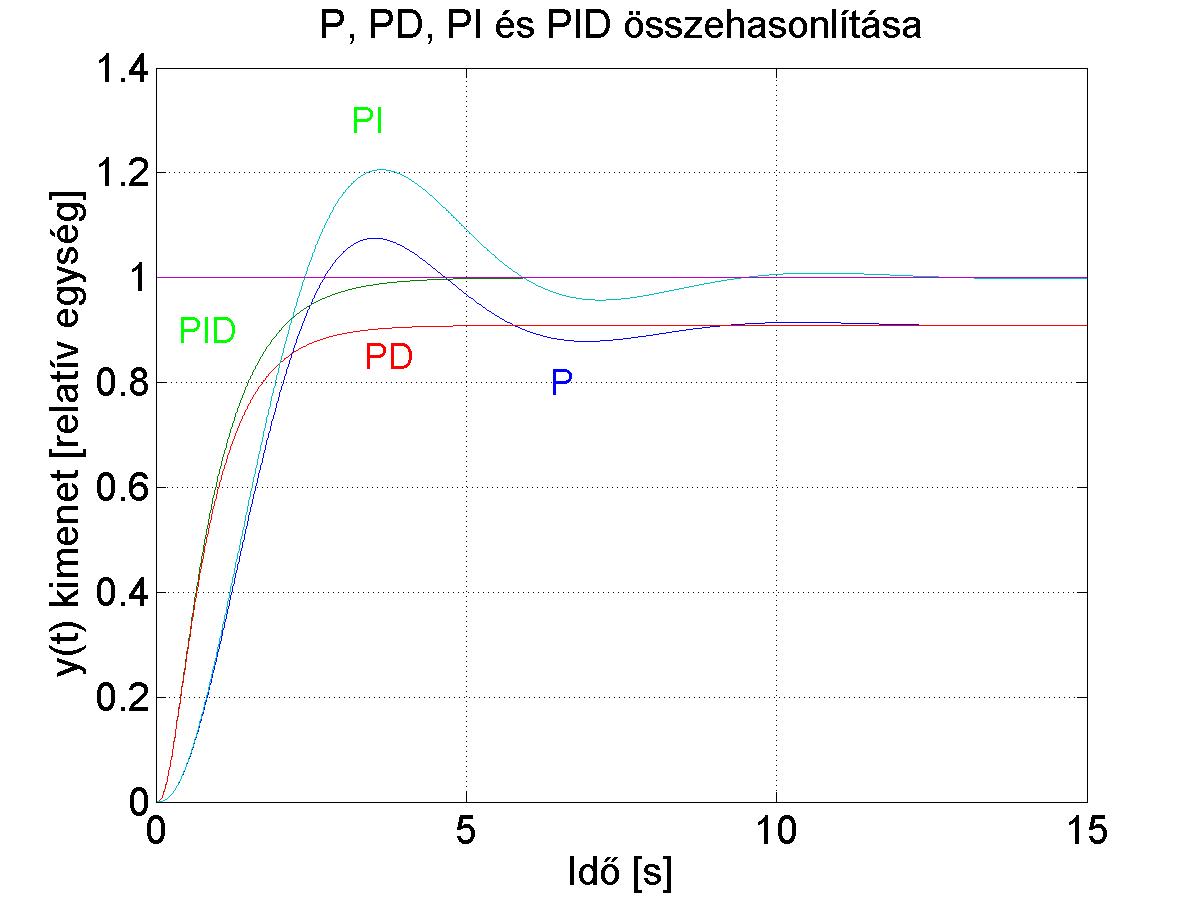
4.1.6. PID szabályozók kísérleti behangolása
Vannak esetek, amikor a szabályozott szakasz paraméterei nem ismertek, ezért a PID szabályozót próbálgatással, kísérletileg kell behangolni. Több olyan módszer ismert, amely a próbálgatások hatékonyságát növeli. Az egyik legnépszerűbb módszert Ziegler és Nichols dolgozta ki [13]. Elsősorban időkésleltetéssel rendelkező rendszerekhez alkalmazható, de gyakorlatilag minden szabályozógyártó használta a módszert kisebb módosításokkal beállítási ajánlásaik elkészítéséhez. Népszerűségének oka az, hogy egyszerű megtanulni és elmagyarázni. A módszert egy egyenáramú szervomotor fordulatszám szabályozó körének kísérleti behangolásán keresztül mutatjuk be. A példában egy fordulatszám szabályozó behangolását mutatjuk be. A szabályozó algoritmus a motor armatúra áramának az alapjelét határozza meg. A program kiszámítja és kiadja a motor áramreferencia jelét, a motor áramszabályozóhurkához (amely az áramkorlátozást is megvalósítja) biztonsági okokból nem férünk hozzá. A motor tényleges árama a szabályozási idő leteltével éri el a referencia értéket, maga a rendszer két energiatárolós szakasznak tekinthető, ezért a motor önmagában strukturálisan stabilis (így a Ziegler-Nichols módszer nem lenne alkalmazható), de a fordulatszám jelet digitális szűréssel állítjuk elő, így a motor az alkalmazott harmad fokú szűrő algoritmussal együtt már egy öt energiatárolós rendszernek tekinthető. Természetesen ez csak akkor igaz, ha a szűrt jelet használjuk fel a hiba előállításához. Itt a program kódot nem az eredeti formájában, hanem a megértéshez szükséges leegyszerűsített formában ismertetjük.
4.1.6.1. Ziegler-Nichols módszer
A Ziegler-Nichols módszer alkalmazásának feltétele, hogy a szabályozási kör a stabilitás határán is működtethető legyen, ebből következik, hogy strukturálisan stabilis rendszereknél nem alkalmazható, vagyis a szabályozott szakasznak vagy időkésleltetéssel vagy legalább három energiatárolóval kell rendelkeznie.
A behangolás lépései
Kapcsoljuk a szabályozót csak P módra, avagy kapcsoljuk ki az I és D funkciókat. Esetenként annak eldöntése is szükséges lehet, hogy melyik a pozitív irány (hogyan kell a szabályozót bekötni)
A szabályozó P paraméterét nulla értékről kezdjük óvatosan növelni addig, amíg a kimenőjel állandó amplitúdóval nem kezd lengeni.
Az állandó amplitúdójú lengésekhez vezető erősítést tekintjük a kritikus
 erősítésnek és a lengések
erősítésnek és a lengések  periódusidejét a kritikus periódusidőnek.
periódusidejét a kritikus periódusidőnek.
A különböző típusú PID szabályozók
 ,
,  és
és  paramétereinek javasolt értékét egy táblázatból olvashatjuk ki, pontosabban a táblázatnak több, kismértékben eltérő változata ismert az irodalomban. Természetesen a választás attól is függ, hogy milyen túllendülést engedünk meg.
paramétereinek javasolt értékét egy táblázatból olvashatjuk ki, pontosabban a táblázatnak több, kismértékben eltérő változata ismert az irodalomban. Természetesen a választás attól is függ, hogy milyen túllendülést engedünk meg.
P | TI | TD | |
P szabályozó |
| ||
PI szabályozó |
|
| |
PID szabályozó |
|
|
|






Alkalmazzuk a fenti lépéseket a kísérleti eszközünkre. A P szabályozó (4.40) formáját megvalósító programsor (megfelelő típus deklarációt feltételezve)
Ia_ref=P_par*error; | (4.71) |
Az 4-14. ábraán két mérés eredménye látható, a baloldali ábrán a P paraméter értéke nem érte el a kritikus értéket, a jobb oldali ábrán már igen. .
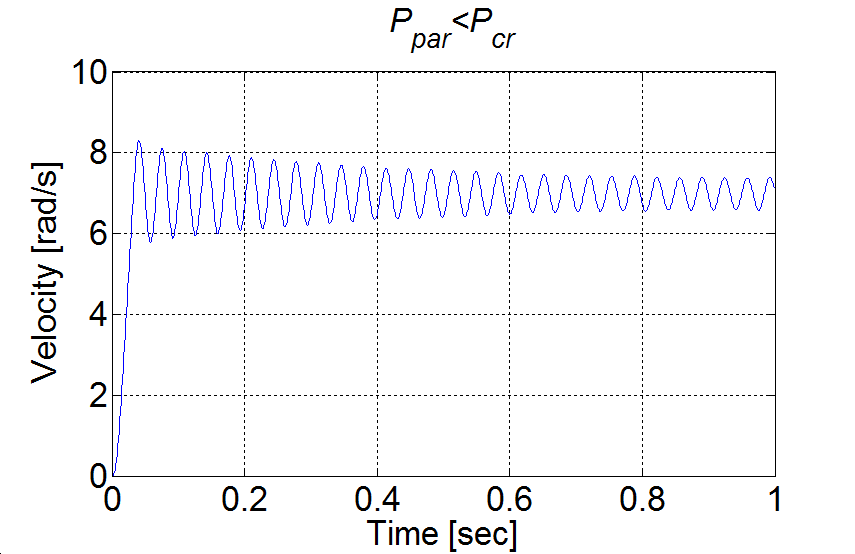
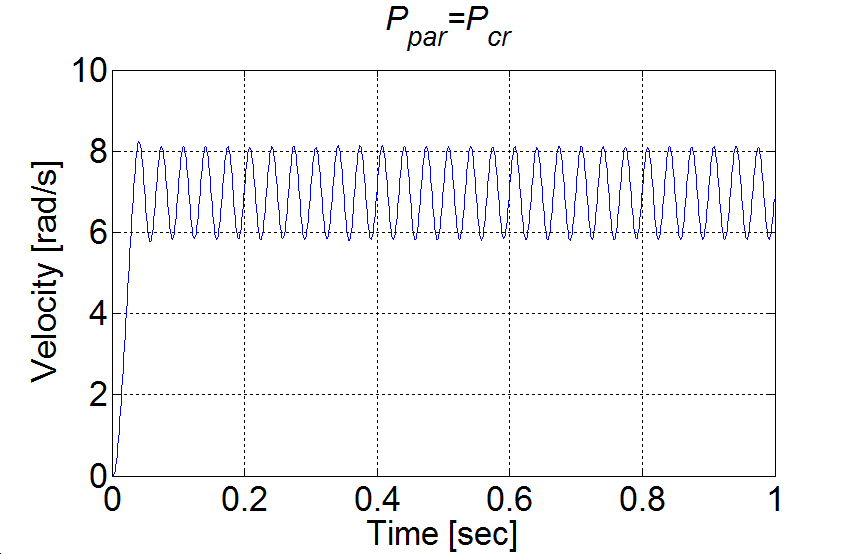
A  , így a táblázat alapján a P szabályozó erősítésének értéke legyen
, így a táblázat alapján a P szabályozó erősítésének értéke legyen  . E paraméterrel elvégzett mérés eredménye az 4-15. ábraán látható. Megfigyelhető, hogy a
. E paraméterrel elvégzett mérés eredménye az 4-15. ábraán látható. Megfigyelhető, hogy a  paraméter nem azonos a szakasz körerősítésével, az állandósult hiba 1% körül van.
paraméter nem azonos a szakasz körerősítésével, az állandósult hiba 1% körül van.
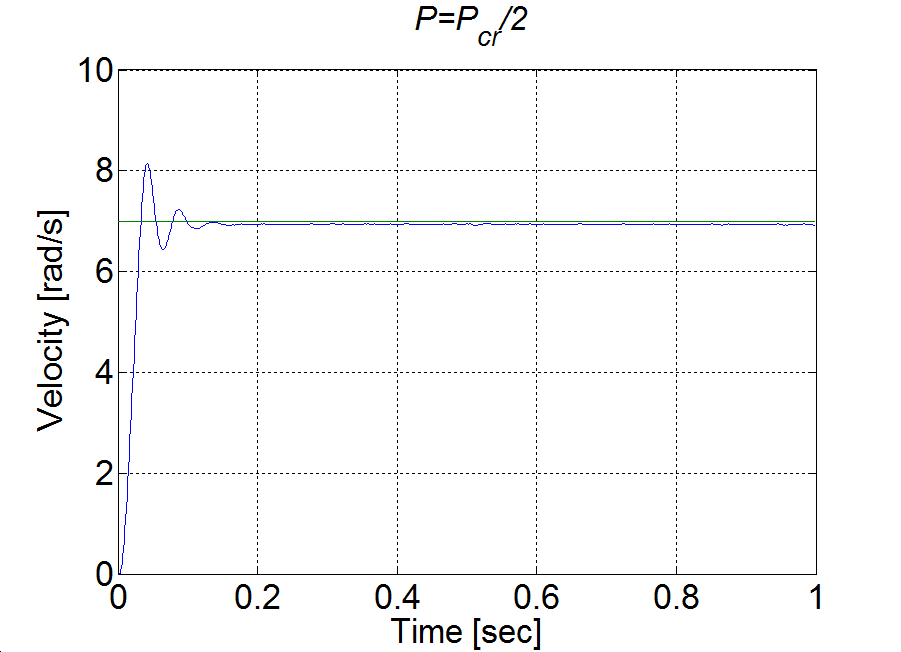
A PI szabályozó az (4.42) alakú egyenletét közelítőleg megvalósító két programsor (típus deklarálás és kezdeti értékadás nélkül)
error_int= error_int+error*T_s; Ia_ref=P_par*error+ I_par*error_int; | (4.72) |
A 4-14. ábraáról leolvasható, hogy 0.2 sec időtartamra kb. 6 periódus esik, ezért a periódusidő  . A PI szabályozó alkalmazásához a táblázatból kiolvasható értékek:
. A PI szabályozó alkalmazásához a táblázatból kiolvasható értékek:
| (4.73) |

A fenti paraméterekkel beállított PI szabályozóval elvégzett mérés eredménye az 4-16. ábraán látható.
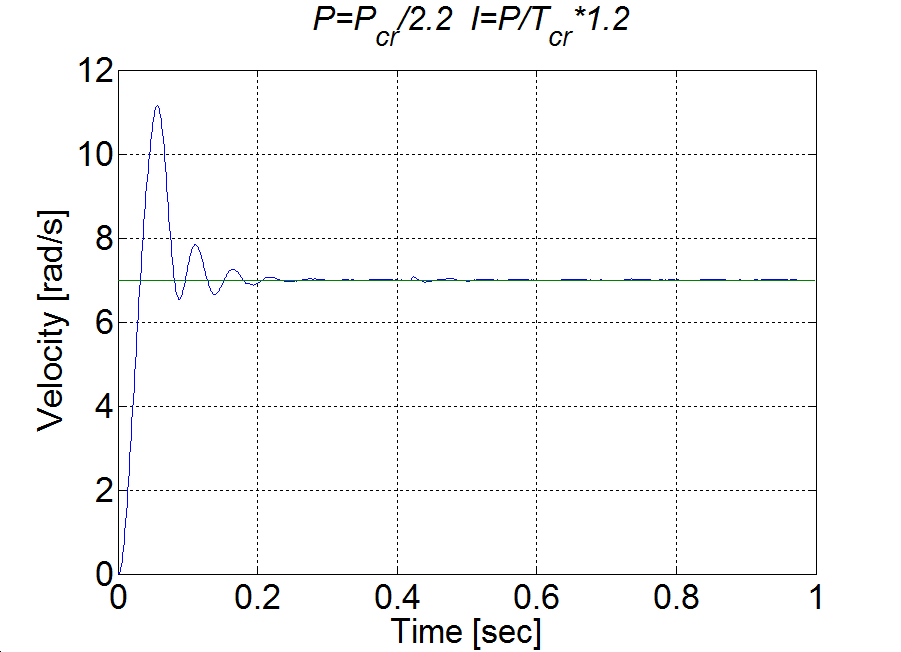
Jól látható, hogy a túllövés kb. 50% és a lengések amplitúdója nem az elvárt exponenciális burkológörbével csökken. Ennek oka nem magában a PI szalyozó működésében keresendő. Vizsgáljuk meg a a motor nyomatékát (ld. 4-17. ábra). A nyomaték a felfutási idő alatt telítődik. Ekkor a szabályozási kör felnyílik, de az integrátor az összegzést tovább folytatja a telítődés alatt is, más szavakkal akkor is, amikor a szabályozó működése szünetel. Ez alatt az idő alatt az integrátor értéke jelentősen megnövekdhet, amelyet csak ellentétes előjelű hibával lehet a kívánt értékre visszacsökkenteni, ezért jelentkezik egy jelentős túllövés.
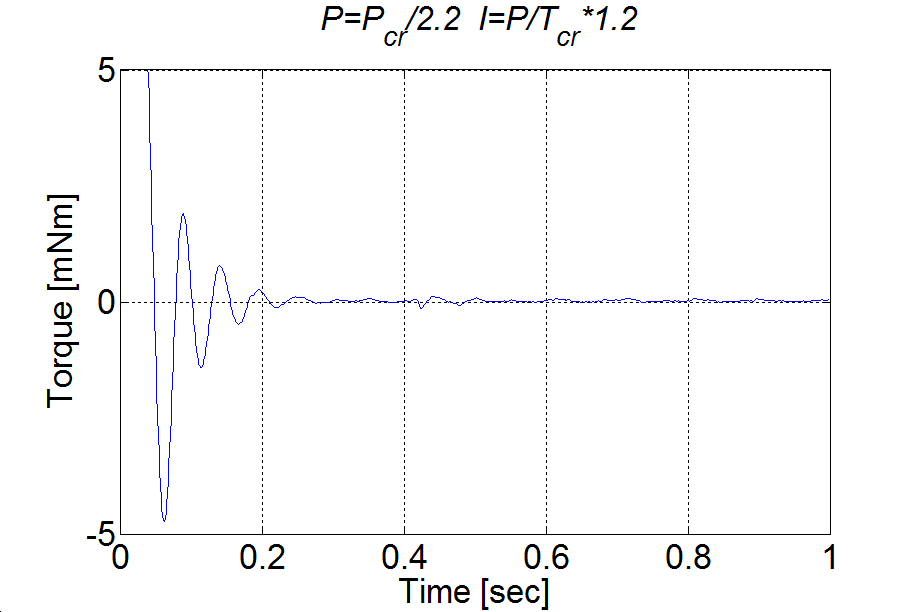
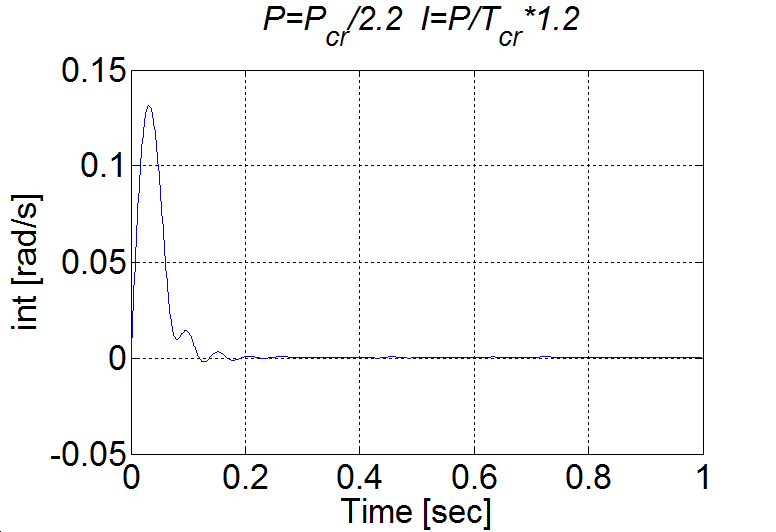
4.1.7. PID szabályozók telítődése
Az 4-16. ábraán látható túllövést csökkenthetjük azzal, ha az integrátort kikapcsoljuk a telítődés időtartamára.
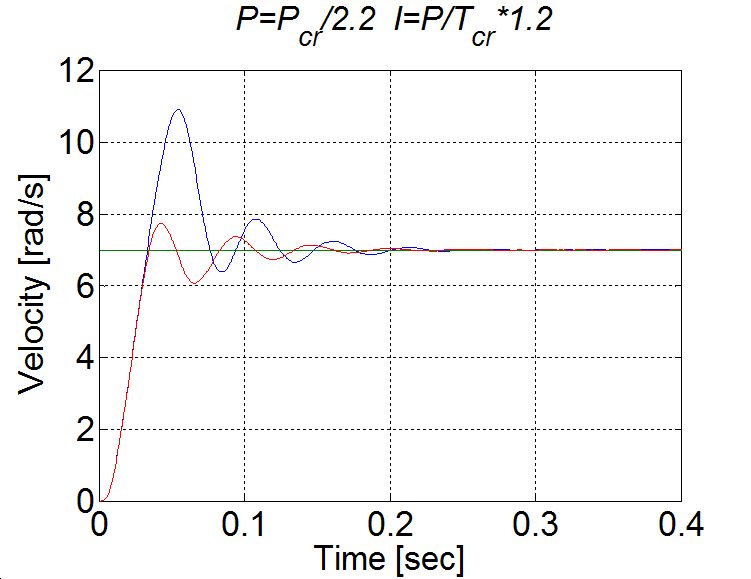
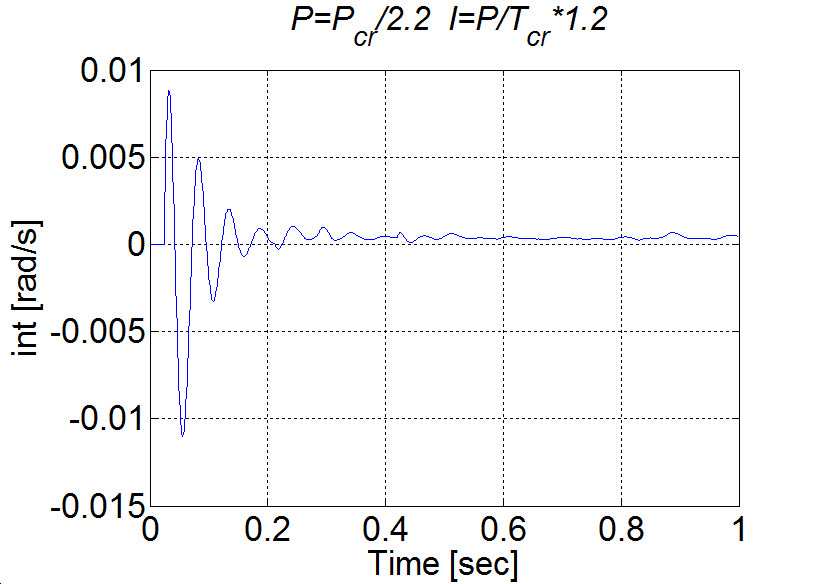
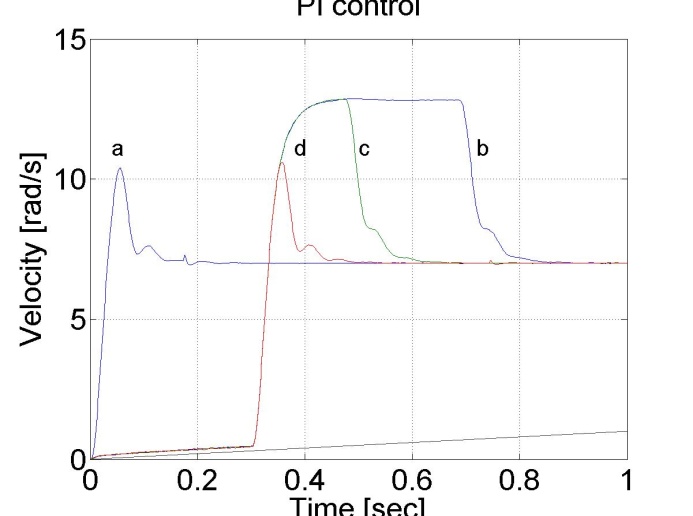
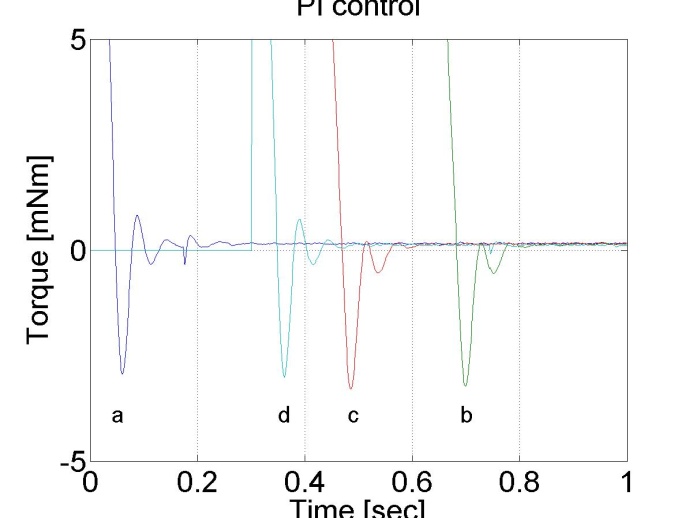
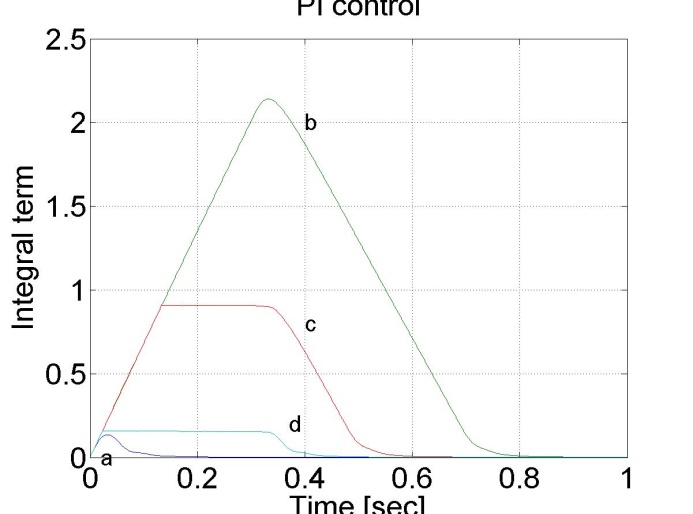
4.1.8. Stick-slip jelenség
A jelenség robotok pozíció szabályozásakor akkor fordul elő, ha a súrlódás miatt a mozgató mechanizmus referencia érték előtt vagy után beragad, különösen akkor fordul elő a referencia érték előtti beragadás, ha aszimptotikus beállás a cél és e miatt nincs túllövés. Így marad egy állandósult hibajel és az egy a mechanizmusra ható erőt eredményez. A mechanizmus azért nem tud elmozdulni, mert a relatívan kis hibából származó csekély beavatkozó erő kisebb, mint a tapadási surlódási erő maximuma. Ha a pozíciószabályozó körben van egy integrátor, akkor az folyamatosan integrálja a hibát és ez folyamatosan növeli a beavatkozás erejét. Egy idő elteltével az integrátor annyi hibát integrál össze, hogy az abból generált beavatkozó erő nagyobb lesz mint a maximális tapadási súrlódási erő, ekkor mechanizmus elmozdul, de a mozgás közben a súrlódási erő lecsökken a tapadási súrlódási erőhöz képest, így a mechanizmus garantáltan túllendül és a folyamat megismétlődik az ellentétes irányban. A jelenség jól mefigyelhető a 4-21. ábraán.
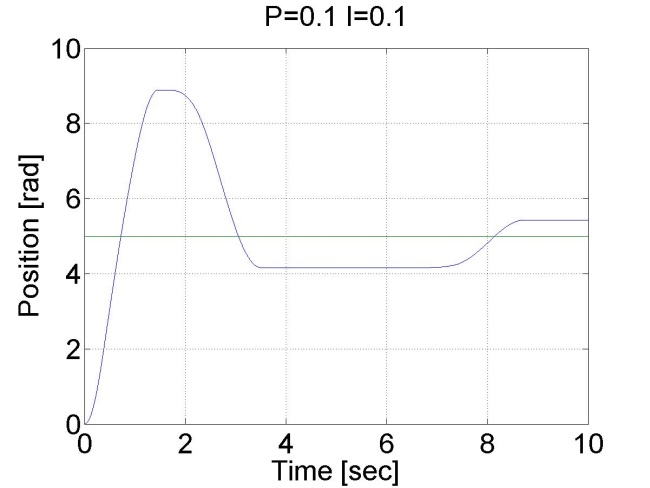
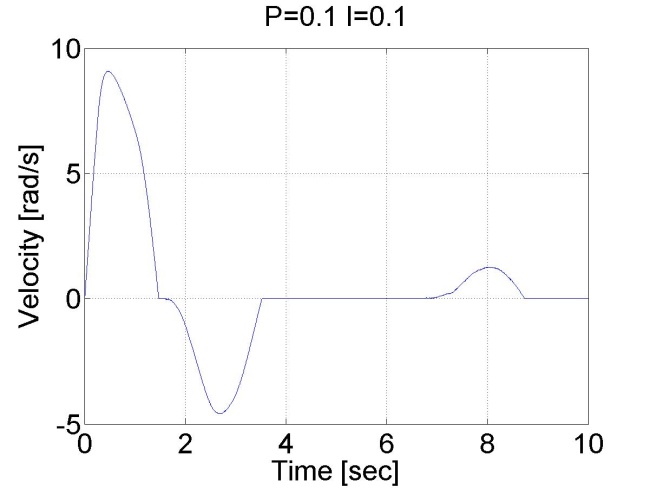
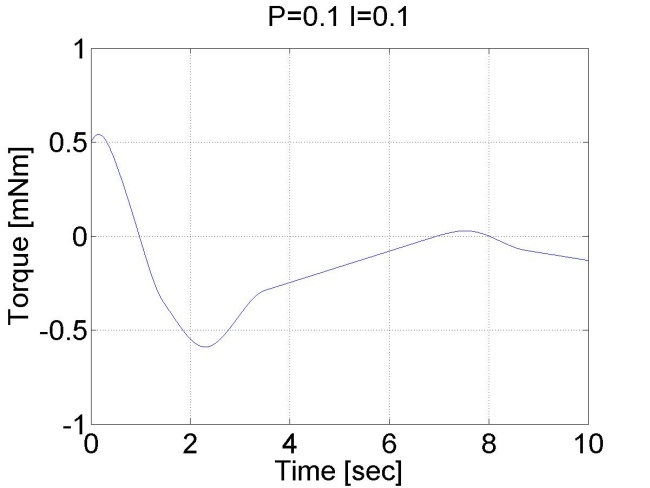
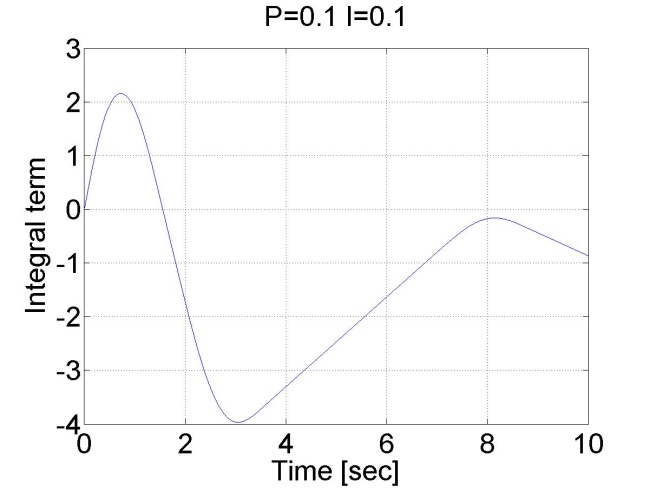
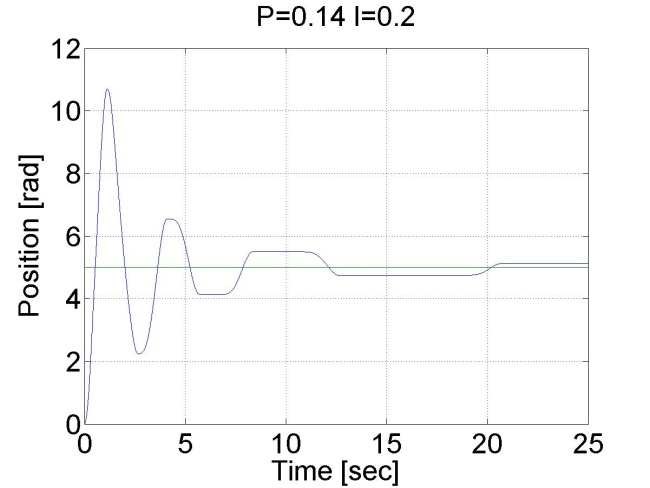
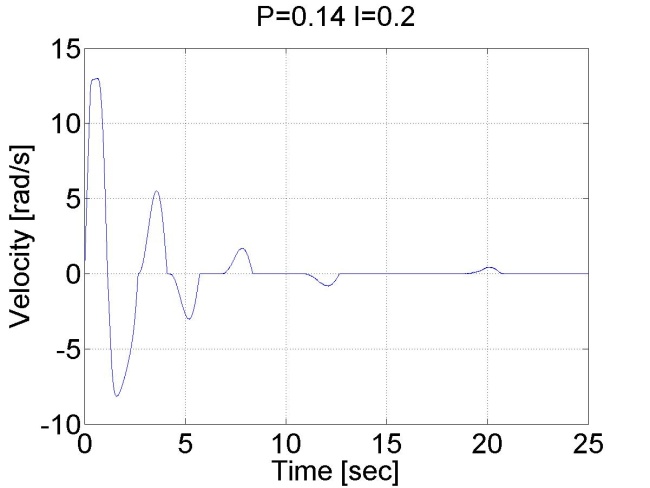
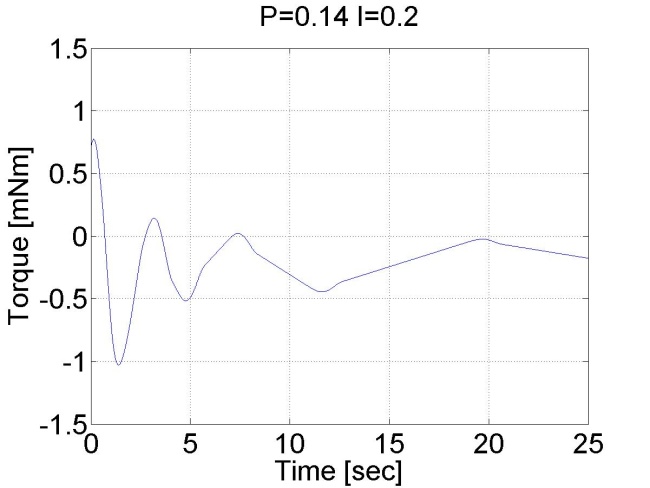
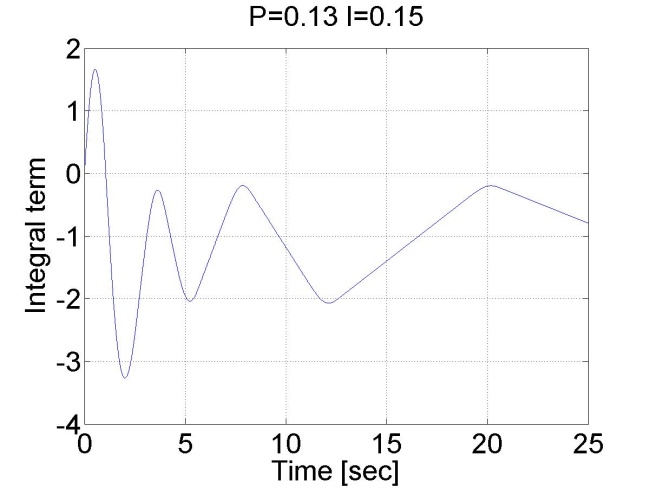
4.2. Szabályozási körök szintézise II.
4.2.1. Kaszkád szabályozás
4.6 feladat Az egyenáramú motor hagyományos fordulatszabályozása
Az 4-22. ábra az egyenáramú motor szabályozókörét mutatja, amelyben a belső hurok, a  szabályozóval az áramszabályozásról gondoskodik, míg a külső körben a
szabályozóval az áramszabályozásról gondoskodik, míg a külső körben a  szabályozó a fordulatszám-szabályozó. Az áramszabályozásra egyrészt azért van szükség, mert Tv kicsi, ezért i könnyen megszalad, másrészt azért, hogy indítás, fékezés vagy hírtelen terhelésváltozás esetén a motor túláram ellen védve legyen. Ez természetesen korlátozza a motor gyorsító- és lassítónyomatékát, ezért úgy kell beállítani a szabályozót, hogy a motor dinamikai tulajdonságai feleljenek meg a követelményeknek. Mivel az áramszabályozás gyorsabban megy végbe, mint a fordulatszám-szabályozás (Tm>Tv), ezért az ub indukált feszültség hatása, tehát a motor belső visszacsatolása (k) a továbbiakban elhanyagolható. Ez a közelítés olyan kis hibát okoz a végeredményben, ami nem számottevő. Így a szabályozás leegyszerűsödik egy kéthurkú kaszkád-szabályozásra.
szabályozó a fordulatszám-szabályozó. Az áramszabályozásra egyrészt azért van szükség, mert Tv kicsi, ezért i könnyen megszalad, másrészt azért, hogy indítás, fékezés vagy hírtelen terhelésváltozás esetén a motor túláram ellen védve legyen. Ez természetesen korlátozza a motor gyorsító- és lassítónyomatékát, ezért úgy kell beállítani a szabályozót, hogy a motor dinamikai tulajdonságai feleljenek meg a követelményeknek. Mivel az áramszabályozás gyorsabban megy végbe, mint a fordulatszám-szabályozás (Tm>Tv), ezért az ub indukált feszültség hatása, tehát a motor belső visszacsatolása (k) a továbbiakban elhanyagolható. Ez a közelítés olyan kis hibát okoz a végeredményben, ami nem számottevő. Így a szabályozás leegyszerűsödik egy kéthurkú kaszkád-szabályozásra.
Ezen szabályozók általában PID típusúak, mivel ennél a legegyszerűbb szabályozási esetnél ez biztosítja a gyors és pontos, statikus hiba mentes beállást. Egy P, azaz arányos típusú szabályozó csak állandó hibával tudja követni az alapjelet, az integráló, úgynevezett első rendű jelleg viszont biztosítja az első rendű statikus hiba megszűnését, a differenciáló jelleg pedig a szabályozás gyorsaságát adja. Külön problémát jelent az arányos erősítés (Ad), az integrálási és differenciálási időállandók (Ti, Td) terhelésfüggő beállítása. Az adott hajtáshoz úgy kell beállítani ezeket a paramétereket, hogy az alapjelet túllendülés-mentesen, optimálisan rövid idő alatt érje el a hajtás.
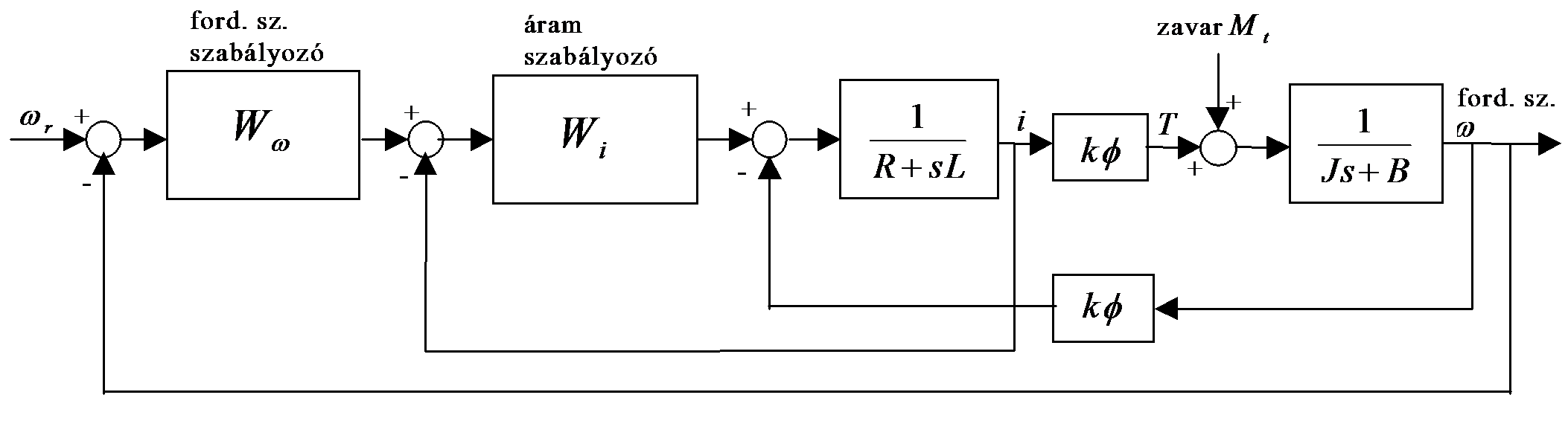
A  áramszabályozó:
áramszabályozó:

A szakirodalom ajánlása szerint a legcélszerűbben  értékeket érdemes választani időállandóknak.
értékeket érdemes választani időállandóknak.
A felnyitott áramszabályozó kör átviteli függvénye:

Ez egy ún. strukturálisan stabilis felnyitott kör. A fázistartalék mindig 90 fok. A körerősítést a visszacsatolt szabályozási kör tulajdonságai alapján választhatjuk meg. A visszacsatolt áramszabályozó kör átviteli függvénye:

ahol  . A tervezés TI megválasztását jelenti.
. A tervezés TI megválasztását jelenti.
A  fordulatszám-szabályozó is egy PI tag:
fordulatszám-szabályozó is egy PI tag:
Így a szabályozási kör a következőképpen is felrajzolható:
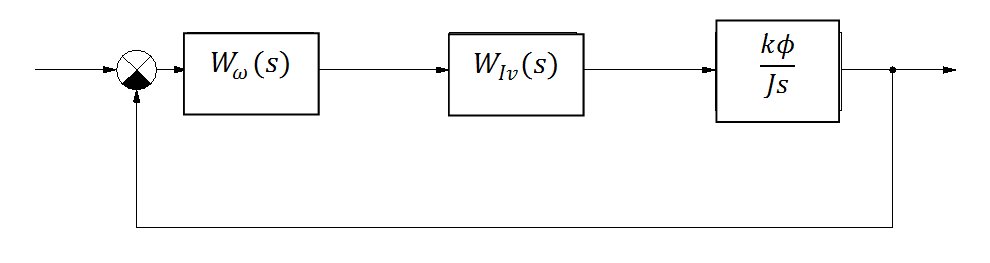
A viszkózus súrlódást elhanyagoljuk, ezért a felnyitott kör átviteli függvénye:
A szabályozás még hiányzó paramétereit: A, TI, Tω. A frekvencia átviteli függvény Bode diagramja:
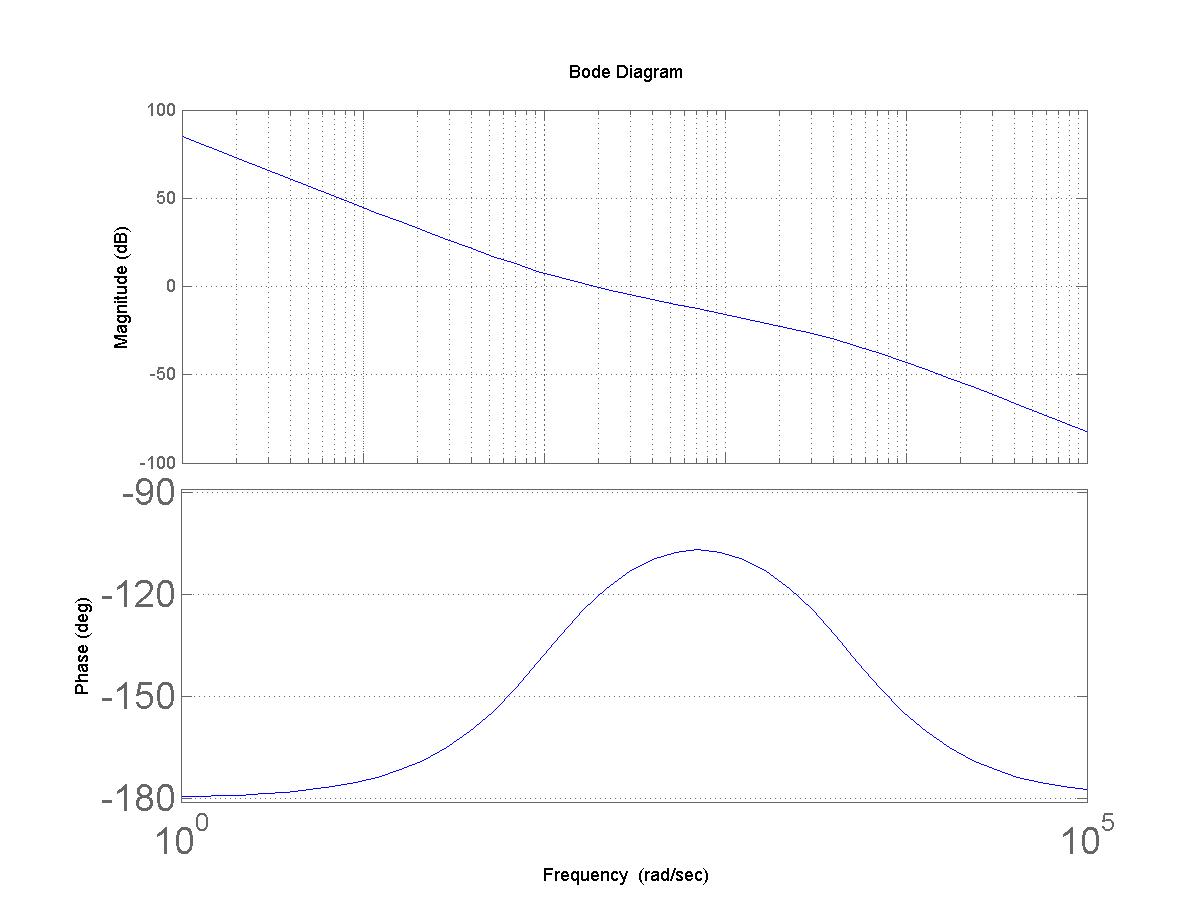
A frekvencia -180 fokról indul, és oda tér vissza. Optimális esetben a vágási körfrekvencia a fázis diagram csúcsához tartozik. TI és Tω. értékét célszerű Tv és Tm nagyságrendjében megválasztani. További megfontolások tehetők annak alapján is, hogy a rendszer válasza jellegre is különböző lehet, alapjel illetve terhelésugrás hatására.
4.2.2. Nem minimálfázisú rendszerek szabályozása
4.2.2.1. Időkésleltetett rendszerek szabályozása Ziegler-Nichols módszerrel
Legyen a szabályozott szakasz egyenergiatárolós, amelynek időállandója legyen  és a rendszer időkésleltetése legyen
és a rendszer időkésleltetése legyen  . Próbálgatással a 4-25. ábra felső szabályozási körében a körerősítést addig növeljük, ameddig el nem jutunk a stabilitás határára (ld. 4-26. ábra). A kritikus körerősítés
. Próbálgatással a 4-25. ábra felső szabályozási körében a körerősítést addig növeljük, ameddig el nem jutunk a stabilitás határára (ld. 4-26. ábra). A kritikus körerősítés  és kritikus körerősítéshez tartozó periódusidő az ábráról leolvasva
és kritikus körerősítéshez tartozó periódusidő az ábráról leolvasva  . A P, PI és PID szabályozót a Ziegler- Nichols hangoló táblázat szerint behangolva a szimulációs eredmények a 4-27. ábra, 4-28. ábra és 4-29. ábra mutatja. Összehasonlításul
. A P, PI és PID szabályozót a Ziegler- Nichols hangoló táblázat szerint behangolva a szimulációs eredmények a 4-27. ábra, 4-28. ábra és 4-29. ábra mutatja. Összehasonlításul  váéasztással 60 fokos fázistartalékkal végeztünk egy szimulációt (ld. 4-30. ábra)
váéasztással 60 fokos fázistartalékkal végeztünk egy szimulációt (ld. 4-30. ábra)
A kirajzolást végző MATLAB kód
plot(time,yout(:,1))
set(gca, 'fontsize', [18]);
xlabel('Idő [sec]');
ylabel('Kimenő jel [relativ egység]');
title('Stabilitás határa, Pcr=8.5, Tcr=7.5');
grid
pause
plot(time,yout(:,2))
set(gca, 'fontsize', [18]);
xlabel('Idő [sec]');
ylabel('Kimenő jel [relativ egység');
title('P=Pcr/2');
grid
pause
plot(time,yout(:,3))
set(gca, 'fontsize', [18]);
xlabel('Idő [sec]');
ylabel('Kimenő jel [relativ egység');
title('P=Pcr/2.2 Ti=Tcr/1.2');
grid
pause
plot(time,yout(:,4))
set(gca, 'fontsize', [18]);
xlabel('Idő [sec]');
ylabel('Kimenő jel [relativ egység');
title('P=Pcr/1.7 Ti=Tcr/2 Ti=Tcr/8');
grid
pause
plot(time,yout(:,5))
set(gca, 'fontsize', [18]);
xlabel('Idő [sec]');
ylabel('Kimenő jel [relativ egység');
title('P=2.6180 Ti=T1');
grid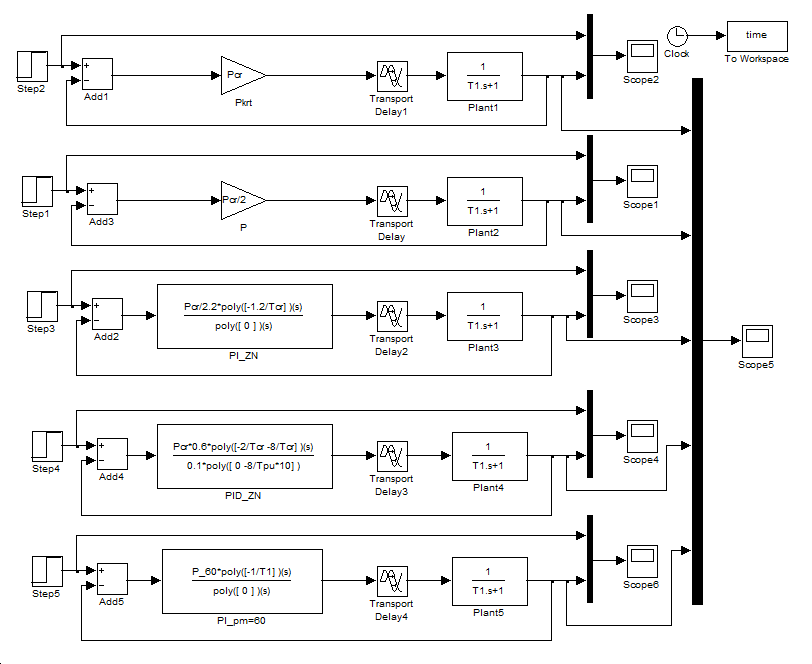
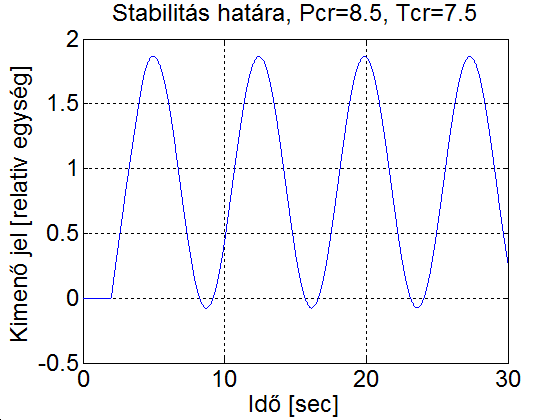
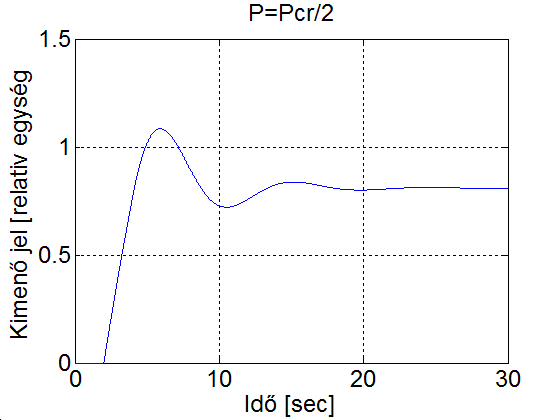
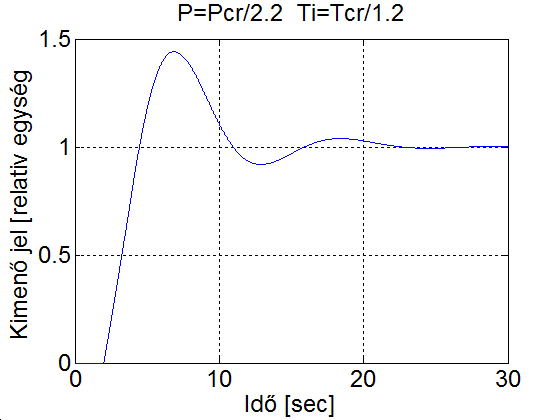
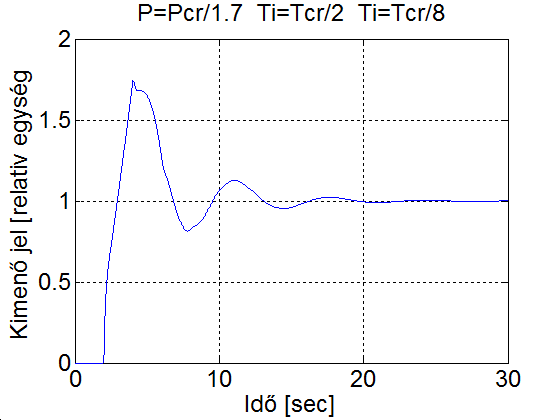
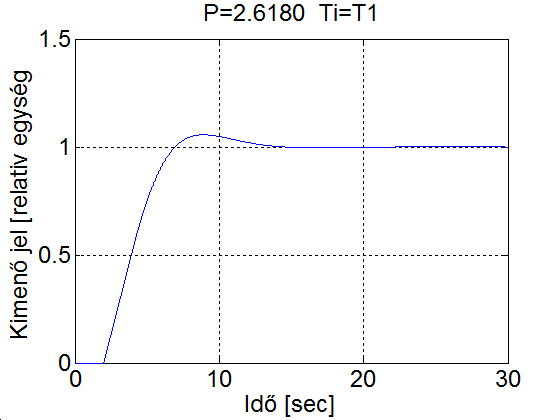
4.2.2.2. A holtidős tag átviteli függvényének közelítése racionális törtfüggvénnyel
Strejc féle módszer gondolatmenete a következő: a  holtidős tagot
holtidős tagot  db egyenergiatárolós taggal helyettesítjük úgy, hogy minden egyenergítárolós tag időállandója
db egyenergiatárolós taggal helyettesítjük úgy, hogy minden egyenergítárolós tag időállandója  nagyságú
nagyságú
| (4.74) |
Pade approximáció
| (4.75) |
4.2.2.3. Smith prediktor
A Smith Predictor egy klasszikus konfiguráció az időkésleltetés kompenzálására. Legyen a P(s) az elsőrendű szűrő Td időállandóval. A P0(s) a P(s) egy olyan modellje, amelyben az időkésleltetés kiesik
| (4.76) |


A lenti ábrán (4-31. ábra) két hurok látható: a belső hurokban a kompenzáló jel v(t) tartalmaz egy y(t) prediktort. C0(s) egy PID szabályozó.
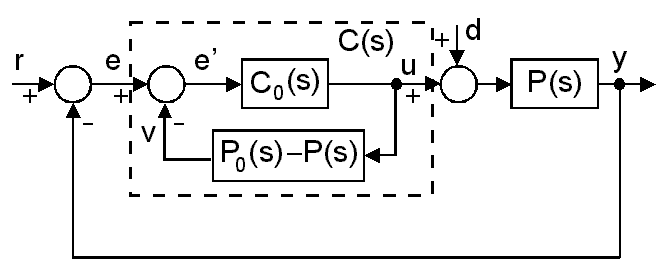
A zárt hurok átviteli függvénye a következő
| (4.77) |

Fontos megjegyezni, hogy a transzcendentális kifejezés eltűnik a zárt hurok átviteli függvényének karakterisztikus egyenletében. A gyakorlatban, a tökéletes model, P(s) nem ismert, tehát az időkésleltetés hatása teljes mértékben nem szüntethető meg, de a Smih Predictor redukálja annak hatását.
4.7 feladat szabályozó tervezése időkésleltetés esetén
Egy folytonos folyamat átviteli függvénye:
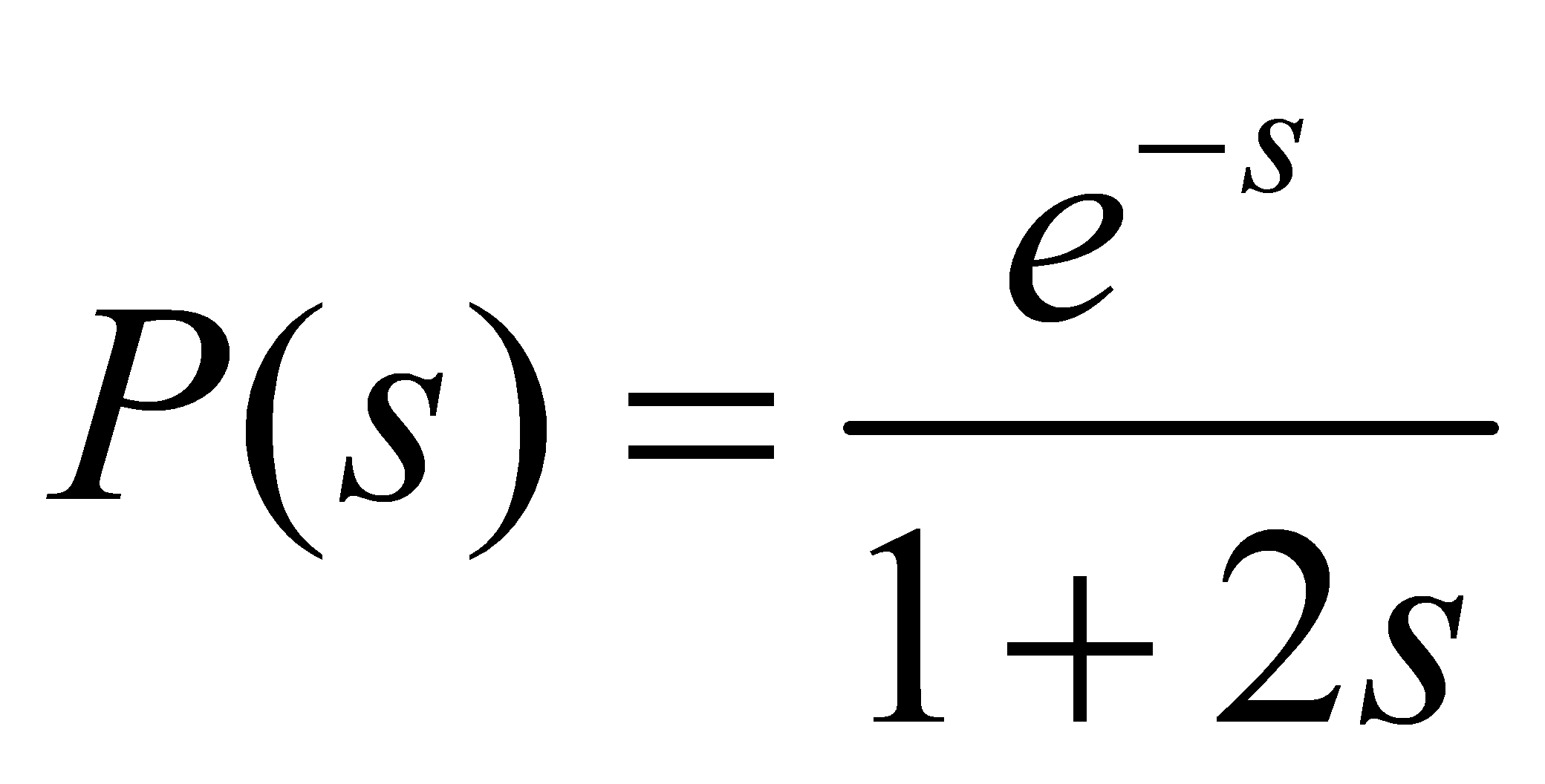
Soros szabályozási körben szabályozzuk a folyamatot.
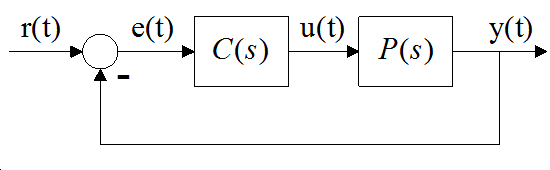
a.) P szabályozás alkalmazása esetén (C(s) = K) határozza meg K azon értékeit, melyekre a visszacsatolt kör stabilis.
b.) Tervezzen soros PI szabályozót úgy, hogy a visszacsatolt rendszer viselkedése tegyen eleget a következő feltételeknek:
egységugrás bemeneti jelet stacionárius állapotban hiba nélkül kövesse.
A fázistartalék 60̊ legyen.
5. fejezet - Adaptív szabályozás
5.1. Az adaptív szabalyozas rövid története
A mindennapi nyelvhasználatban az "adaptálni" szó jelentése: a viselkedést megváltoztatni, alkalmazkodni az új körülményekhez vagy új állapotokhoz. Ezen értelmezés szerint az a szabályozó tekinthető adaptív szabályozónak, amely képes a viselkedését módosítani, megváltoztatni, válaszolva a folyamat dinamikájának változására, valamint a zavarokra. Mivel a közönséges visszacsatolt rendszer is hasonló megfontolásokból bevezették be, ezért azonnal felmerül az adaptív szabályozás és a visszacsatolt szabályozás közötti különbség kérdése. Évekig sok próbálkozás történt az adaptív szabályozás definiálására. Ezek az erőfeszítések azonban széles körben nem váltak elfogadottá. Hiányzik tehát az adaptív szabályozásoknak egy olyan pontos definíciója, amely lehetővé tenné egy szabályozó hardverének és szoftverének vizsgálatát és eldöntené azt, hogy adaptív-e vagy sem.
Gyakorlatilag azonban mégis szükséges állást foglalni az adaptív szabályozásokról. Ezért az mondható, hogy az adaptív szabályozás a nemlineáris visszacsatolt szabályozások speciális fajtája, amelyben a folyamatok állapotát olyan két kategóriára lehet szétválasztani, amelyek különböző mértékben változnak. A lassú változási állapotok úgy tekintők, mint paraméterek. Mindez két időskála gondolatával bemutatható: a gyorsabb időskála a közönséges visszacsatolást jelképezi, a lassabb a szabályozó paramétereinek megváltoztatását mutatja.
Néhány szóban az adaptív szabályozás történetéről és létrejöttéről: az 1950-es évek elején az adaptív szabályozás széles körű kutatása folyt nagyteljesítményű repülőgépek robotpilótáinak tervezésével kapcsolatban. Az ilyen repülőgépek széles sebesség- és magasságtartományban üzemelnek. Úgy találták, hogy a konstans körerősítéses, lineáris, visszacsatolt szabályozók képesek voltak egy működési állapotban jól működni, de ahogy ezek a működési viszonyok megváltoztak, úgy már nem voltak képesek az előírt jellemzőket tartani. Ezért szükség volt egy olyan igényesebb szabályozóra, amely képes a változó működési viszonyok széles tartományában megfelelően üzemelni. A tárgyban azonban az érdeklődés egyre inkább csökkent, köszönhetően a kutatásokba való bepillantás hiányának, valamint a repülési teszteknél történt szerencsétlenségeknek.
Azonban az 1960-as években számos új közlemények jelentek meg a szabályozási elmélettel kapcsolatban, amelyek hozzájárultak az adaptív szabályozás fejlődéséhez. Ilyen közlemények jelentek meg az állapottér és a stabilitás elméletében. Fontos eredmény volt a sztochasztikus szabályozás elméletének megjelenése.
Az 1970-es években volt az adaptív szabályozások reneszánsza, amikor is a különböző becslési eljárásokat a különféle tervezési módszerekkel kombinálták. Sok felhasználásról jelent meg beszámoló, de az elméleti eredmények nagyon korlátozottak voltak.
Az 1980-as évek elején megjelentek az adaptív szabályozás stabilitásának megfelelő bizonyítékai, bár nagyon korlátozó feltételezések mellett. Ezek azonban ismét felkeltették az érdeklődést az adaptív szabályozás robosztusságának, kutatása, valamint az univerzálisan stabilis szabályozások kutatása iránt. A mikroelektronika gyors és forradalmi fejlődése megteremtette a lehetőségét annak, hogy adaptív szabályozókat egyszerűen és olcsón tudjunk megalkotni. A különböző elgondolásokon alapuló kommersz adaptív szabályozók már a piacon is megjelentek és ipari felhasználásuk is jelentősen növekedik, illetve várhatóan növekedni fog a jövőben is. A terület erőteljes fejlődése napjainkban is történik, mind az egyetemi kutatólaboratóriumokban, mind az iparban, de az adaptív szabályozás még közel sem jelent teljesen átgondolt és lezárt elméletet.
5.2. Adaptív szabályozók felépítése
Ebben a részben összefoglaló jelleggel az adaptív szabályozás néhány válfajával ismerkedünk meg.
Általában a tervezési cél az, hogy olyan szabályozót válasszunk, amely lehetővé teszi, hogy a szabályozott szakasz - azaz a folyamat - kimenete kövesse a bemeneti referenciajel által előírt jelet. Az általános bemenőjelen és beavatkozó jelen kívül vannak speciális bemenőjelek is, a zavarok. Ezeket nem mi szabályozzuk, mégis befolyásolják a kimenet viselkedését. Ezért a szabályozót úgy kell megtervezni - az előzőek figyelembevétele mellett -, hogy a zavaró hatások a szabályozott szakasz kimenetén már kompenzálódjanak. Tehát a két fő tervezési cél: a pályakövetés és a zavarkompenzáció megvalósítása. Ez minden szabályozási módszernek a központi kérdése [6].
A szabályozásnak eleget kell tennie a szabályozni kívánt műszaki folyamattal szemben támasztott minőségi követelményeknek. A minőségi követelmények egyrészt a szabályozás statikus pontosságát, azaz állandósult hibáját, másrészt dinamikus viselkedését, azaz szabályozási idejét, túllendülését írják elő. A valóságos és az előírt minőségi jellemzők összehasonlítása a szabályozási rendszer dinamikus viselkedésének vizsgálata alapján végezhető el.
A minőségi követelményeket egy modell segítségével is megfogalmazható, vagyis egy modell segítségével adható meg, hogy különböző alapjelre milyen válasz kívánatos a visszacsatolt rendszertől. Ha a szabályozott szakasz paraméterei állandóak és azokat pontosan ismerjük, akkor pontosan meghatározható, hogy milyen kompenzáló tagra van szükség a megkívánt viselkedés eléréséhez (feltéve, hogy nem támasztunk megvalósíthatatlan követelményeket a rendszerrel szemben). A gondolatsort folytatva eljutunk a modellreferenciás adaptív szabályozáshoz (a későbbiekben részletesen tárgyaljuk). A modellreferenciás szabályozóknál létezik egy szokásos visszacsatolt kört egy kompenzáló taggal. A visszacsatolt szakasz viselkedése egy referenciamodell segítségével definiálható. A modell és a visszacsatolt szakasz ugyanazt az alapjelet kapja meg.
A modell és a visszacsatolt szakasz kimenő jelét összehasonlítjuk, és a kompenzáló tag paramétereit úgy változtatjuk meg, hogy a folyamat kimenőjele minden esetben a referenciamodell kimenőjeléhez közelítsen. Azzal a kikötéssel, hogy stabilis rendszert kapjunk. A modellreferenciás adaptív szabályozás alapstruktúrája 5-1. ábran látható. A modellreferenciás adaptív szabályozási sémát direkt módszereknek nevezzük, hiszen a beállító szabályok közvetlenül adják meg a kompenzáló tag megfelelő paramétereinek értékét.
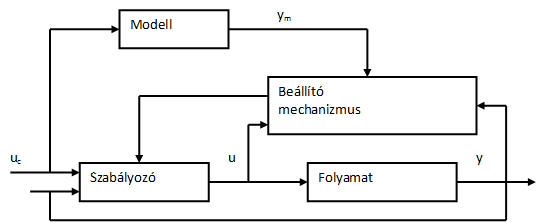
Másodikként az ún. self-tuning vagy önbeállító adaptív szabályozást kell megemlíteni. Ebben a sémában a szabályozott szakasz paramétereit folyamatosan megbecsüljük, a becsült paraméterek ismeretében folyamatosan újra tervezzük kompenzáló tag paramétereinek értékét. A self-tuning adaptív szabályozás alapstruktúrája a 5-2. ábran látható. A self-tuning szabályozási rendszer két hurkot tartalmaz. A belső hurok a folyamatból és egy közönséges lineáris visszacsatolásból áll. A szabályozási paraméterek a külső hurok által szabályozzuk, amely egy rekurzív paraméterbecslőből és egy ún. tervezőből áll. Sokféle self-tuning szabályozási sémát kaphatunk a különböző tervezési és becslési algoritmusok kombinálásával. A szabályozás további fontos tulajdonságai és példákon való alkalmazásának bemutatása a [1] irodalomban található.
Harmadikként a sztochasztikus adaptív szabályozásról szólunk tömören. A self-tuning szabályozásnál a kompenzáló tag paramétereinek tervezésekor a szabályozott szakasz becsült paramétereit már pontosnak tekintjük, nem vessztük számításba a becslés esetleges pontatlanságát. A sztochasztikus adaptív szabályozás ebben a tekintetben jelent továbblépést, a szabályozott szakasz paramétereit nem egy konkrét értékkel adjuk meg, hanem leképezzük a valószínűségi térbe, és itt vizsgáljuk a valószínűségi eloszlásukat, és ennek megfelelően avatkozhatunk be a szabályozási körbe. A sztochasztikus adaptív szabályozás részletes bemutatása a [1] irodalomban található.
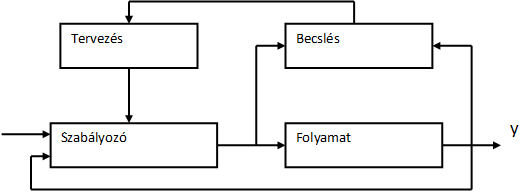
Az adaptív rendszerek nemlineárisak. A viselkedésük egészen összetett és ez igen nehézzé teszi az analízisüket. Az elmélet lassan fejlődött és sok munkába került, míg-egy meglehetősen teljes és összefüggő elmélet jött létre. Természetesen ez az elmélet azért ma sem lezárt. Az adaptív rendszereket komplex viselkedésük következtében különböző szempontokból szükséges figyelembe venni. A nemlineáris rendszerek elmélete, a stabilitás, a rendszer identifikáció, a rekurzív paraméterbecslés, az optimális szabályozás és a sztochasztikus szabályozás mind hozzájárulnak az adaptív rendszerek megértéséhez.
Az adaptív rendszerek elméletének sokféle célja van. Elvárható, sőt szükséges, hogy olyan eszközök álljanak a rendelkezésünkre, amelyekkel egy adott rendszert tervezési szempontból elemezni tudunk. Egy tipikusnak tekinthető problémamegfogalmazás: olyan paraméter beállítási szabályt kell alkotni, amely gondoskodik a kívánt eredményekről egy stabil, zárthurkú rendszerben.
Szokás szétválasztani a beállás és az adaptáció problémáját. A beállás problémájánál azt feltételezzük, hogy a folyamat szabályozásánál vannak konstans, de ismeretlen paraméterek. Az adaptáció problémájánál viszont azt feltételezzük, hogy a paraméterek változnak. Néhány kérdést könnyebb a beállás problémájával kapcsolatban kezelni. Így például a paraméter konvergencia kérdését is, ahol azt kell meghatározni, hogy a paraméter konvergál-e a valódi értékéhez. Ez a probléma azonban tovább bonyolódik, ha a tényleges paraméterértékek is változnak. Hasonló becslési algoritmus használható beállásra és adaptációra.
Az adaptív szabályozás alapvető kérdése még a stabilitás. Ennek elemzésére sok erőfeszítés történt. Például a modellreferenciás adaptív szabályozás alapgondolata a stabilitás elméletéből ered. De a többi adaptív szabályozásnak is döntő kérdése ez.
5.3. A modellreferenciás adaptív szabalyozás
A változó paraméter és/vagy nemlinearitást tartalmazó folyamatok irányítása klasszikus eszközökkel általában nehézségekbe ütközik. A hirtelen zavarások időnként hatnak a folyamat jellemzőire. Ezek kompenzálása megoldható adaptív irányítási rendszerek alkalmazásával. Számos különböző adaptív irányítási rendszert javasoltak az utóbbi időben. [1] A jelen fejezetben kiemeljük a modellreferenciás adaptív rendszereket, mint az egyik legígéretesebb irányt.
A modellreferenciás adaptív rendszerek különleges típusú, általában nemlineáris szabályozási rendszerek. Tervezésük és alkalmazásuk szoros kapcsolatban áll a számítástechnikai eszközökkel, célszerűen mikroprocesszoros változatban történhet.
A további részekben megpróbáljuk részletesen is megvilágítani e szabályozások lényeges vonásait, továbbá megpróbáljuk bemutatni a működésüket, viselkedésüket, valamint létrejöttük hátterét. Szó lesz még a főbb kapcsolódó problémákról, ezek megoldásáról, valamint utoljára néhány alkalmazási példáról, s az ezekből levonható tapasztalatokról.
5.3.1. A modellreferenciás adaptív szabályozás alapjai
A modellreferenciás adaptív rendszerek alkalmazásának gondolata egy gyakorlati feladat megvalósítása során vetődött fel. A mai napig számos rendszert valósítottak meg és ezek működése fényesen igazolta a várakozásokat.
A modellreferenciás adaptív szabályozás alapstruktúrája a 5-1. ábran látható, amely jól mutatja, hogy a folyamat megkívánt működését egy referencia modell segítségével írtuk elő. A referencia modell meghatározza az alapjelre adandó ideális választ. A rendszer még tartalmaz egy közönséges visszacsatoló hurkot is, amely a folyamatból és a szabályozó egységből épül fel. A rendszer kimenete és a referenciamodell kimenőjele közötti különbség az " " hiba
" hiba
| (5.1) |

A szabályozási paramétereket az e váltózásából számítjuk.
Így tehát egy modellreferenciás adaptív rendszerben két hurkot találhatunk: van egy belső hurok, amely egy közönséges szabályozási visszacsatolás és amely a folyamatot, valamint a szabályozó készüléket foglalja magába és van egy külső hurok, amely a belső hurokban a paraméterek beállítását végzi. Ez utóbbi úgy működik, azaz a paraméterek beállítása oly módon történik, hogy a folyamat " " kimenete és a modell "
" kimenete és a modell " " kimenete között fellépő "e" hiba kicsi legyen. A belső hurok működése sokkal gyorsabb, mint a külsőé. A modellreferenciás adaptív szabályozás kulcsproblémája: úgy szabályozni a beállító mechanizmust, hogy stabil rendszert kapjunk, azaz az "e" hiba közelítsen a zérushoz.
" kimenete között fellépő "e" hiba kicsi legyen. A belső hurok működése sokkal gyorsabb, mint a külsőé. A modellreferenciás adaptív szabályozás kulcsproblémája: úgy szabályozni a beállító mechanizmust, hogy stabil rendszert kapjunk, azaz az "e" hiba közelítsen a zérushoz.
Az eredeti modellreferenciás rendszert, - mint amilyen a 5-1. ábran is látható - Whitaker tervezte 1958-ban. E rendszer megalkotása két új gondolattal ismertette meg a szakembereket. Az első gondolat az volt, hogy a rendszer működését egy modell segítségével írta elő, a második gondolat pedig az volt, hogy a szabályozási paramétereket a referenciamodell és a rendszer kimenőjele közötti hiba alapján állította be. A modellreferenciás adaptív rendszerek eredetileg a determinisztikus, folyamatos idejű rendszerekben vizsgált szervo problémákból erednek. A gondolatot és az elméletet is később kiterjesztették a diszkrét idejű rendszerekre, valamint a sztochasztikus zavarokkal rendelkező rendszerekre is. E munkában azonban a szabályozás alapgondolatát helyeztük középpontba és a vizsgálatoknál, illetve az ismertetésnél is elsősorban a 5-1. ábran látható eredeti modellreferenciás adaptív rendszerre helyeztük a hangsúlyt. Ezt a rendszert szokás még ún. analóg modellreferenciás adaptív rendszernek is nevezni.
A szakirodalomban lényegében két fő megközelítése létezik a modellreferenciás adaptív rendszerek tervezésének és analízisének:
Gradiens módszer
Ljapunov módszer
A gradiens módszert Whitaker használta először, amikor az eredeti modellreferenciás adaptív rendszerekkel dolgozott. Ez a megközelítés azon a feltételezésen alapul, hogy a rendszer kiválasztott állapotváltozói - a paraméterek - sokkal lassabban változnak, mint a rendszer többi állapotváltozója. Ez a feltételezés, - amely megengedi a kvázi-stacionárius tárgyalást - lényegében az adaptációs eljáráshoz szükséges ún. érzékenységi deriváltak kiszámításában játszik fontos szerepet. A gradiens módszer nem fog szükségszerűen stabil eredményhez vezetni zárthurkú rendszerekben. Ez a megfigyelés ösztönözte a stabilitási elméletek felhasználását. A Ljapunov-féle stabilitási elméletet az adaptációs mechanizmus módosítására használták fel. A fentieken kívül még a modellkövetés is fontos része a modellreferenciás adaptív szabályozásnak, hasonlóan más adaptív szabályozásokhoz. A két fő megközelítésről még lesz szó, most a modellkövetés problémáját elemezzük röviden.
Ha egy beállítandó paraméterekkel rendelkező rendszerre a modellreferenciás adaptív szabályozást alkalmazzuk, akkor a paraméterek beállítására egy olyan módszert kapunk, ahol a zárt szabályozási hurok átviteli függvénye egy előírt modellhez fog közelíteni. Ezt hívják az ún. modellkövetés problémájának. Nagyon fontos kérdés, hogy milyen kicsire tudjuk csökkenteni az "e" hibát. Ez függ a modelltől, a rendszertől és az alapjeltől. Ha meg lehetne tenni azt, hogy a hiba minden alapjel esetén zérussal lesz egyenlő, akkor a legjobb modellkövetés valósul meg. A modellkövetés problémáját az ún. pólushely tervezést felhasználva tudjuk megoldani [11].
Egy szervo szabályozási probléma megfogalmazásának és megoldásának egy egyszerű és használatos módja a modellkövetés. Az alapgondolat nagyon egyszerű. A szervo működése közvetve van megadva úgy, hogy a kívánt rendszerválaszhoz egy matematikai modellt állítunk fel. Ez a modell lehet lineáris vagy nemlineáris. A paraméterek beállítása úgy történik, hogy a bemenőjelek egy adott osztályára, típusára nézve az " " kimenőjel a lehető legközelebb legyen az "
" kimenőjel a lehető legközelebb legyen az " " modell kimenőjelhez. Így látható, hogy a modellreferenciás adaptív rendszerekben az optimalizációs módszerek elengedhetetlenül fontos, de ugyanakkor természetes módszerek.
" modell kimenőjelhez. Így látható, hogy a modellreferenciás adaptív rendszerekben az optimalizációs módszerek elengedhetetlenül fontos, de ugyanakkor természetes módszerek.
5.3.2. A gradiens módszer
Ebben a részben a modellreferenciás adaptív szabályozásoknál alkalmazott gradiens módszert mutatjuk be. Ez tulajdonképpen az egyik alapgondolata a modellreferenciás adaptív rendszerek megközelítésének, s egy megfelelő eljárás a paraméterek beállítására.
Feltételezzük, hogy a szabályozó paramétereit úgy szándékozzuk megváltoztatni, hogy a folyamat kimenete és a referencia modell kimenete között fellépő hiba a zérushoz tartson. Jelöljük a kimenőjel hibát " "-vel, a rendszer paramétereit pedig "
"-vel, a rendszer paramétereit pedig " "-val. Bevezetjük a következő kritériumfüggvényt:
"-val. Bevezetjük a következő kritériumfüggvényt:
| (5.2) |
Ha a paramétereket a " " negatív gradiense irányában változtatjuk meg, akkor "
" negatív gradiense irányában változtatjuk meg, akkor " " a még elfogadható legkisebb értékre állítható be:
" a még elfogadható legkisebb értékre állítható be:
| (5.3) |
Ha feltételezzük azt, hogy a paraméterek sokkal lassabban változnak, mint a rendszer más állapotváltozói, akkor a,  deriválást azzal a feltételezéssel tehetjük, hogy a
deriválást azzal a feltételezéssel tehetjük, hogy a  konstans. A
konstans. A  deriváltat a rendszer érzékenységi deriváltjának nevezzük. A (5.3) egyenletben felirt beállítási szabályt adaptációs törvénynek nevezik. A "" tényező az ún. adaptációs paraméter.
deriváltat a rendszer érzékenységi deriváltjának nevezzük. A (5.3) egyenletben felirt beállítási szabályt adaptációs törvénynek nevezik. A "" tényező az ún. adaptációs paraméter.
A (5.2) egyenletben bevezetett kritériumfüggvény természetesen tetszőleges. Megemlítjük a legegyszerűbb adaptációs törvényt is, ahol semmi mást nem veszünk figyelembe, csak azt, hogy milyen irányú, azaz milyen előjelű a változás. Ennek alakja a következő:
| (5.4) |
Visszatérve a (5.3) adaptációs törvényhez, a kompenzáló tagban több beállítandó paraméter található, akkor a " " változó hetére egy oszlopvektort kell helyettesíteni, a
" változó hetére egy oszlopvektort kell helyettesíteni, a  derivált pedig a hiba gradiense a paraméterekre vonatkozóan.
derivált pedig a hiba gradiense a paraméterekre vonatkozóan.
A gradiens módszer néhány fontos tulajdonsága:
Nem szükséges a legjobb modellkövetést megkívánni. Az eljárás nemlineáris rendszereknél is felhasználható, valamint csak részben ismert rendszerek kezelésére is alkalmas.
Bizonyos közelítések szükségesek a tényleges paraméterbeállítási törvények, azaz az adaptációs törvények meghatározásához.
A
 paraméter konvergenciája leáll, ha
paraméter konvergenciája leáll, ha  Ekkor nincs megfelelő gerjesztés
Ekkor nincs megfelelő gerjesztés
Az adaptációs törvény megfelelően működik, ha a adaptációs paraméter kicsi. A megengedhető mértéke függ az alapjel nagyságától, valamint a folyamat körerősítésétől. Következésképpen nem adhatóak meg állandó határok rá, amivel a stabilitást garantálhatnánk. Az adaptációs törvény ekkor instabil zárthurkú rendszert eredményez.
5.3.3. A Ljapunov-módszer
Látható volt az előző részben, hogy a gradiens módszer önmagában nem ad megfelelő biztosítékot arra, hogy stabilis rendszert kapjunk, illetve arra, hogy a paraméterek a megfelelő paraméterekhez tartsanak. Mindez csak megfelelő gerjesztés esetén valósul meg, ha ez nem így van, a konvergencia azonnal leáll. Tehát a konvergencia alapjelfüggő, azaz fontos a gerjesztés szerepe.
Mi azonban szeretnénk egy olyan módszert, amely minden esetben stabilis rendszert eredményez és a paraméterek a megfelelő paraméterekhez tartanak. Azt tudjuk, hogy az  állapotot szeretnénk stabilis állapotnak, ezért olyan törvényre van szükség, amely a rendszert ez irányba viszi. A legalkalmasabb ötletnek a Ljapunov-féle stabilitás tűnik, amely nemlineáris rendszerek esetén is alkalmazható. E szerint egy rendszer stabilis, ha egy alkalmasan választott ún. Ljapunov-függvénye pozitív definit, míg e függvény idő szerinti első deriváltja negatív definit.
állapotot szeretnénk stabilis állapotnak, ezért olyan törvényre van szükség, amely a rendszert ez irányba viszi. A legalkalmasabb ötletnek a Ljapunov-féle stabilitás tűnik, amely nemlineáris rendszerek esetén is alkalmazható. E szerint egy rendszer stabilis, ha egy alkalmasan választott ún. Ljapunov-függvénye pozitív definit, míg e függvény idő szerinti első deriváltja negatív definit.
A szabályozási paraméterek beállítására egyszerű törvények kaphatóak, amelyek a Ljapunov-függvényből származnak. Ezek az adaptációs törvények, hasonlóan a gradiens módszernél megismertekhez. Az ily módon kapott törvények mindig stabilis rendszerhez vezetnek. Egyetlen nehézség a Ljapunov- függvény megválasztása, de ez a módszer egyszerűsége miatt hamar kamatozódik. A gradiens módszerről és a Ljapunov-módszerről további részleteket a [1] irodalomban olvashatunk.
5.4. Kidolgozott feladat a modell referenciás adaptív szabályozókkal kapcsolatban
5.1 feladat Egy-energiatárolós rendszer modell referenciás adaptív szabályozása (gradiens módszer)
Tegyük fel, hogy a szabályozott szakasz egyenergiatárolós, és a következő differenciálegyenlettel irható le.
| (5.5) |
ahol  a beavatkozó jel és
a beavatkozó jel és  a folyamat kimenő jele. Feltételezzük továbbá azt, hogy
a folyamat kimenő jele. Feltételezzük továbbá azt, hogy  és
és  paraméter nem ismert. Szabályozással az a célunk, hogy a visszacsatolt rendszer a következő differenciál egyenlet szerint viselkedjen
paraméter nem ismert. Szabályozással az a célunk, hogy a visszacsatolt rendszer a következő differenciál egyenlet szerint viselkedjen
| (5.6) |
ahol  és
és  a referencia modell paraméterei és
a referencia modell paraméterei és  a visszacsatolt rendszer alapjele.
a visszacsatolt rendszer alapjele.
A folyamat és a modell paramétereit a következő módon választottuk.
| (5.7) |




A MatLab kód
a=10; b=5; am=20; bm=20; g=100; ampl=10; fr=1;
E paraméterekkel az eredeti rendszer és a modell időállandója, valamint erősítése
| (5.8) |




Látható, hogy a modell kétszer olyan gyors, mint az eredeti rendszer, és az erősítése is kétszerese az eredeti rendszer erősítésének.
Megoldás
Először azt feltételezzük, hogy a szabályozó paraméterei konstansak. Válasszuk a következő szabályozási törvényt
| (5.9) |

Ha pontosan ismernénk a folyamat  és
és  paraméterét, akkor
paraméterét, akkor  és
és  konstans pontosan meghatározható lenne. Az (5.6) és (5.9) egyenletet összevetve
konstans pontosan meghatározható lenne. Az (5.6) és (5.9) egyenletet összevetve
| (5.10) |

| (5.11) |

Alkalmazzuk először a gradiens. módszert! Először az e hibát kell kifejezni az  és
és  paraméterek függvényében.
paraméterek függvényében.
| (5.12) |

A (5.5) és (5.9) egyenletek Laplace transzformálva
| (5.13) |
Az érzékenységi deriváltak (5.13)-ből kifejezhetőek.
| (5.14) |
| (5.15) |

Sem az  és
és  modell paraméter, sem a szabályozó
modell paraméter, sem a szabályozó  és
és  paramétere nem ismert. Innen meg kell engednünk az
paramétere nem ismert. Innen meg kell engednünk az  és
és  paraméter lassú változását így azokat jelöljük
paraméter lassú változását így azokat jelöljük  és
és  időfüggvénnyel. Ha ezek Laplace-transzformáltját behelyettesítjük (5.14) és (5.15) egyenletekbe, akkor olyan összefüggést kapunk, amelyet közvetlenül nem tudunk használni. Közelítéssel kell élnünk. Ha a szabályozási paraméterek közelítenek az ideálishoz, akkor igaz a következő
időfüggvénnyel. Ha ezek Laplace-transzformáltját behelyettesítjük (5.14) és (5.15) egyenletekbe, akkor olyan összefüggést kapunk, amelyet közvetlenül nem tudunk használni. Közelítéssel kell élnünk. Ha a szabályozási paraméterek közelítenek az ideálishoz, akkor igaz a következő
| (5.16) |

Szükségünk van az adaptáció mértékét (gyorsaságát) megadó paraméterre. Látható ez paraméter összevonható  paraméterrel. Visszatérve az időtartományban. Ennek megfelelően az adaptációs algoritmus a következő
paraméterrel. Visszatérve az időtartományban. Ennek megfelelően az adaptációs algoritmus a következő
| (5.17) |
| (5.18) |
(5.17) és (5.18) úgy értelmezhető, hogy a referemcia jelet és a kimenőjelet átvezetjük egy
| (5.19) |

átviteli függvénnyel rendelkező tagon, majd az eredményt összeszorozzuk a kimenőjel hibájával. E szorzatot a megfelelő előjelű adaptációs paraméterrel megszorozva és integrálva kapjuk meg a szabályozó két paraméterét. (a MATLAB programban az adaptációs paramétert  jelöli)
jelöli)
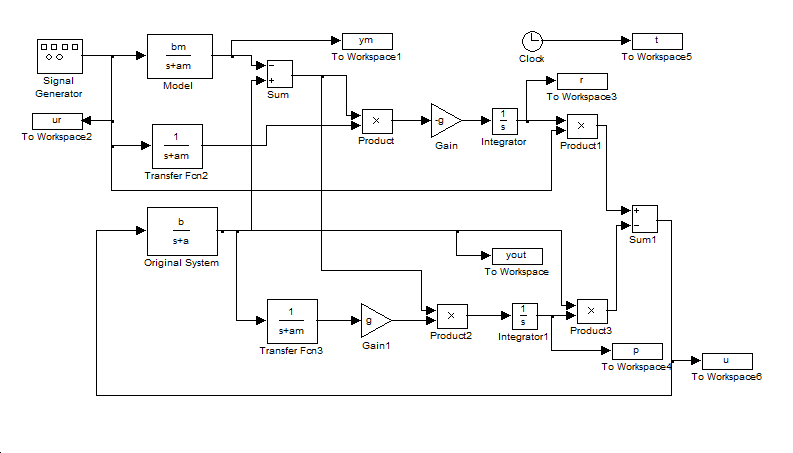
Az ideális szabályozási paraméterek
| (5.20) |

Legyen az  egy 1 amplitúdójú 1 Hz frekvenciájú négyszögjel és az adaptációs paraméter legyen 1. A szimulációs eredmény a 5-4. ábran látható. Mefigyaelhető, hogy az első néhány periódusban a modell (zöld) és a visszacsatolt rendszer (kék) viselkedése jelentősen eltér. Majd ahogy a szabályozási paraméterek közelítenek az ideális értékekhez, a modell (zöld) és a visszacsatolt rendszer (kék) görbéje közelít egymáshoz. Ha megnözeljük az adaptációs paraméter értékét a 10-szeresére, ekkor a szabályozási paraméterek jelentős lengések után az előző esetnél gyorsabban elérik el az ideális értéket (ld. 5-5. ábra). Ha a tanulási paramétert túl nagyra választjuk, akkor az a rendszer instabilitását jelentheti (ld. 5-6. ábra). Az is könnyen belátható, hogy a modell referenciás adaptív szabályozás nem lineáris, vagyis a szuperpozíció elve nem érvényes rá. Ehhez elegendő azt bemutatni, ha az
egy 1 amplitúdójú 1 Hz frekvenciájú négyszögjel és az adaptációs paraméter legyen 1. A szimulációs eredmény a 5-4. ábran látható. Mefigyaelhető, hogy az első néhány periódusban a modell (zöld) és a visszacsatolt rendszer (kék) viselkedése jelentősen eltér. Majd ahogy a szabályozási paraméterek közelítenek az ideális értékekhez, a modell (zöld) és a visszacsatolt rendszer (kék) görbéje közelít egymáshoz. Ha megnözeljük az adaptációs paraméter értékét a 10-szeresére, ekkor a szabályozási paraméterek jelentős lengések után az előző esetnél gyorsabban elérik el az ideális értéket (ld. 5-5. ábra). Ha a tanulási paramétert túl nagyra választjuk, akkor az a rendszer instabilitását jelentheti (ld. 5-6. ábra). Az is könnyen belátható, hogy a modell referenciás adaptív szabályozás nem lineáris, vagyis a szuperpozíció elve nem érvényes rá. Ehhez elegendő azt bemutatni, ha az  referencia jelet tizedére csökkentjük, akkor a választ nem kapjuk meg egyszerűen annak tizedésre csökkentésével. Az
referencia jelet tizedére csökkentjük, akkor a választ nem kapjuk meg egyszerűen annak tizedésre csökkentésével. Az  referencia jel csökkentésével a válasz jellege is megváltozik, mert a szabályozási paraméterek lassabban konvergálnak az ideális értékhez. (ld. 5-7. ábra)
referencia jel csökkentésével a válasz jellege is megváltozik, mert a szabályozási paraméterek lassabban konvergálnak az ideális értékhez. (ld. 5-7. ábra)
A nyomtatáshoz használt MATLAB kód
plot(t,yout,t,ym,t,ur)
set(gca, 'fontsize', [18]);
xlabel('Idő [sec]');
ylabel('Kimenő jel [relativ egység]');
title('Gradiens módszer');
% you can adjust your axis
%axis([0 1 -10 10]);
grid
pause
plot(t,p,t,r)
set(gca, 'fontsize', [18]);
xlabel('Idő [sec]');
ylabel('A két szabályozási paraméter');
title('Gradiens módszer');
% you can adjust your axis
%axis([0 1 0 5]);
grid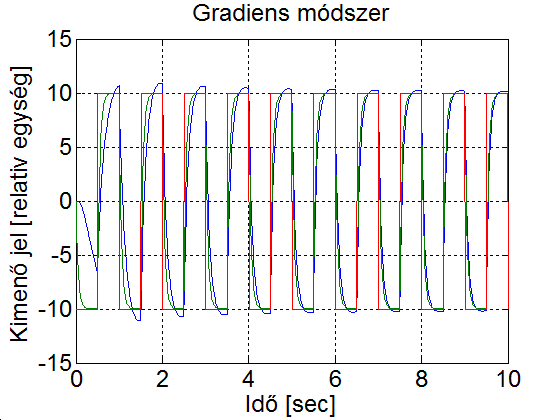

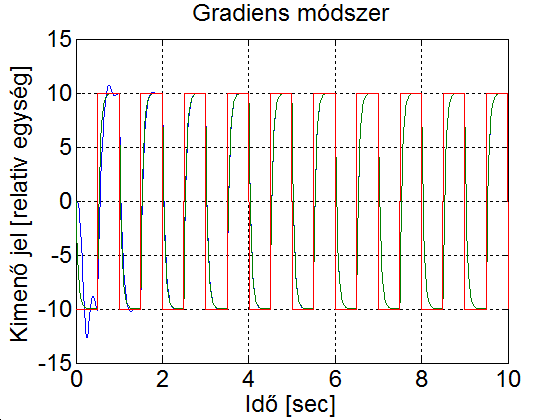
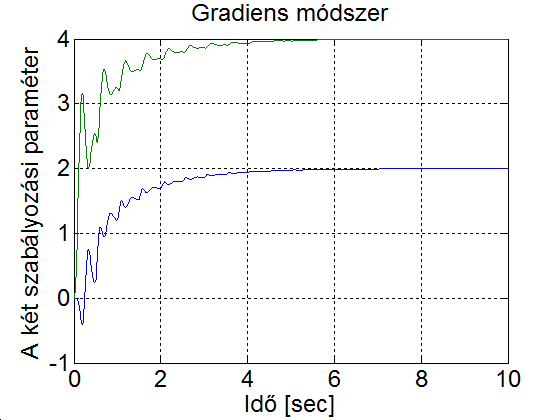
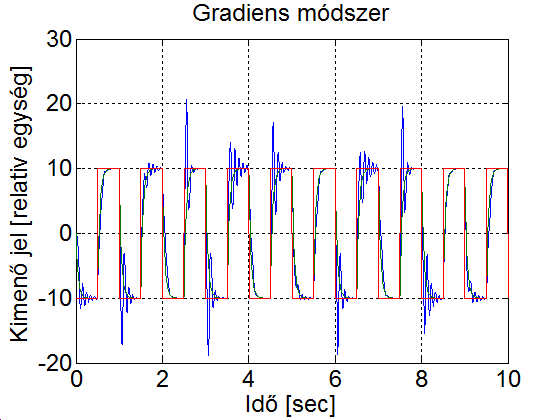
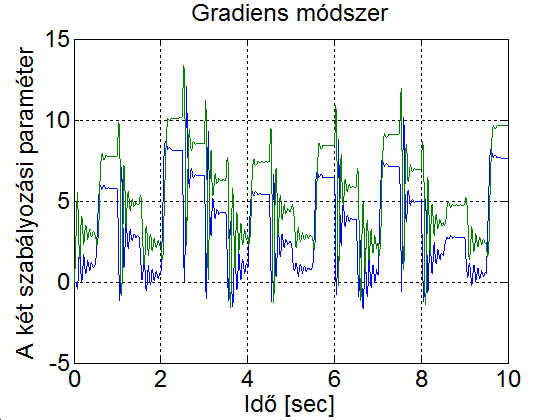
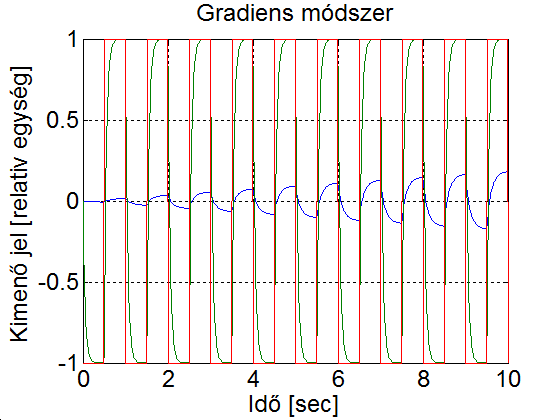
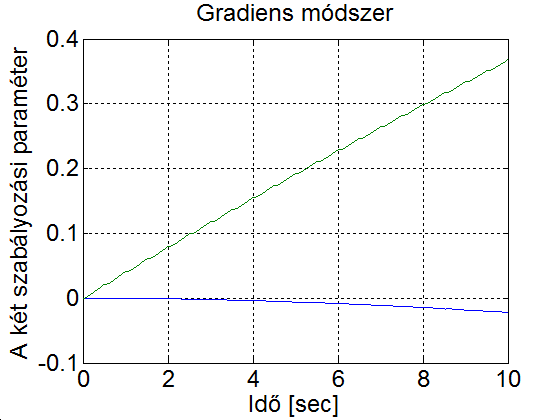
5.2 feladat Egy-energiatárolós rendszer modell referenciás adaptív szabályozása (Lajpunov módszer)
Oldjuk meg az előző feladatot a Ljapunov stabilitási kritériumon alapuló adaptációs törvényt alkalmazva.
Megoldás
Egy olyan Lyapunov függvényre van szükség, ami az általunk elérni kívánt állapotban zérus értékű (ez lesz a nemlineáris rendszer stabilis állapota), minden más állapotban pozitív. A célunk az, hogy a kimenőjel  hibája nulla legyen, a szabályozási paraméterek egyezzenek meg az ideális (5.10) és (5.11) összefüggéssel megadott értékekkel. Ennek megfelelő Lyapunov függvény
hibája nulla legyen, a szabályozási paraméterek egyezzenek meg az ideális (5.10) és (5.11) összefüggéssel megadott értékekkel. Ennek megfelelő Lyapunov függvény
| (5.21) |

Deriváljuk a  függvényt az idő szerint
függvényt az idő szerint
| (5.22) |

Fejezzük ki az  hiba idő szerinti első deriváltját
hiba idő szerinti első deriváltját
| (5.23) |

A (5.23) kifejezést (5.22)-ba helyettesítve
| (5.24) |

Ljapunov stabilitási kritérium értelmében  függvénynek az általunk elérni kívánt állapoton kívül negatívnak kell lennie. A (5.24) kifejezés jobb oldalán az első tag nem lehet pozitív, ezért ha az adaptációs törvényt úgy választjuk, hogy a többi tag zérus értékű legyen, akkor egy olyan stabilis rendszert kapunk, ahol az
függvénynek az általunk elérni kívánt állapoton kívül negatívnak kell lennie. A (5.24) kifejezés jobb oldalán az első tag nem lehet pozitív, ezért ha az adaptációs törvényt úgy választjuk, hogy a többi tag zérus értékű legyen, akkor egy olyan stabilis rendszert kapunk, ahol az  hiba zérushoz tart és a szabályozási paraméterek az ideális értékhez tartanak. Az adaptációs törvény
hiba zérushoz tart és a szabályozási paraméterek az ideális értékhez tartanak. Az adaptációs törvény
| (5.25) |
| (5.26) |
Ha (5.17) és (5.18) adaptációs törvényeket összevetjük (5.25) és (5.26) adaptációs törvényekkel, akkor azt tapasztaljuk, hogy a gradiens módszer esetén  és
és  egy aluláteresztő szűrőn halad keresztül, mielőtt összeszoroznánk
egy aluláteresztő szűrőn halad keresztül, mielőtt összeszoroznánk  hibajellel. Ezzel szemben a Lapunov módszer esetén ez az aluláteresztő szűrő hiányzik az
hibajellel. Ezzel szemben a Lapunov módszer esetén ez az aluláteresztő szűrő hiányzik az  és
és  jeleket közvetlenül szorozzuk meg
jeleket közvetlenül szorozzuk meg  hibajellel.
hibajellel.
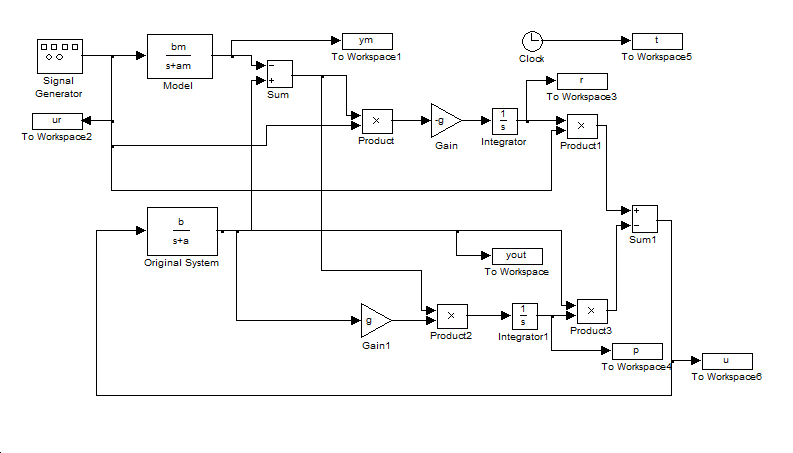
Ha 5-4. ábrat és 5-9. ábrat összevetjük, akkor megállapíthatjuk, hogy a Ljapunov módszerrel a szabályozási paraméterek gyorsabban konvergálnak az ideális értékhez, mint a gradiens módszerrel és kevésbé hajlamos az instabilitásra (ld. 5-6. ábra és 5-10. ábra)
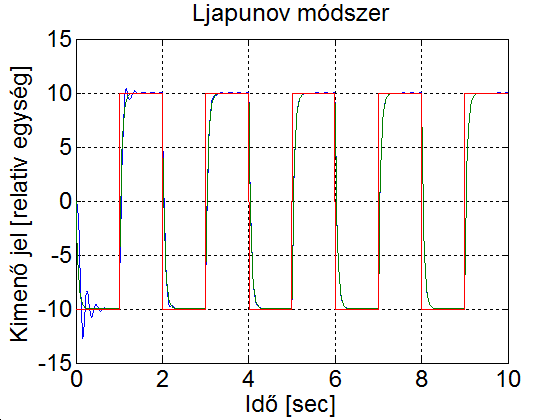
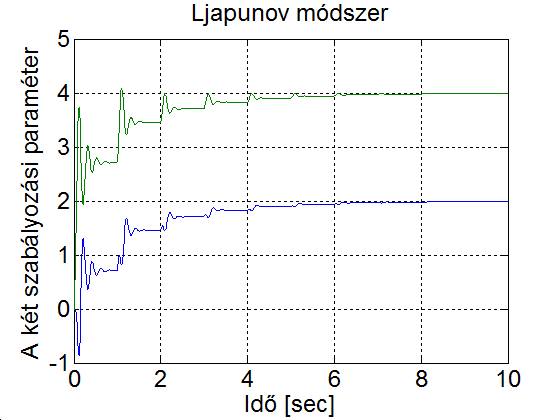
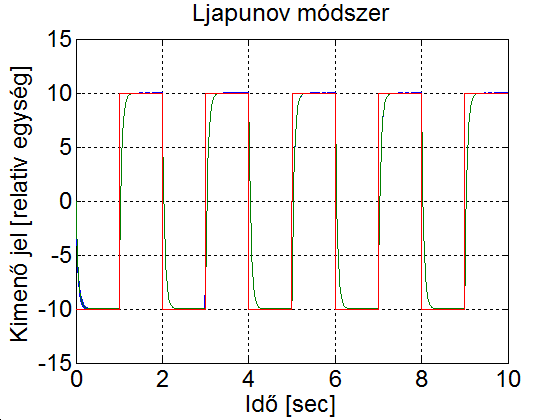
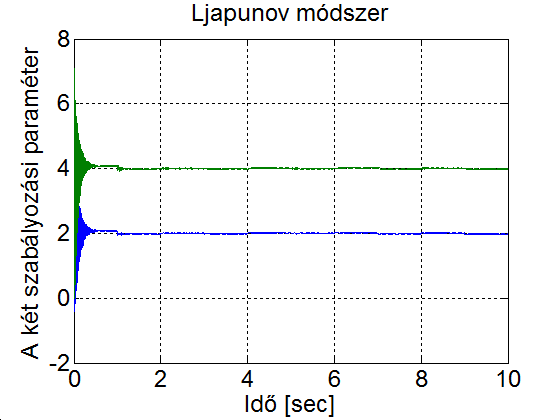
5.3 feladat Kéttagú robotkar modell referenciás adaptív szabályozása (Lajpunov módszer)
Feltéve, hogy az összes állapotváltozó mérve van, gyakran találunk olyan lineárisan változó hibát, amely megkönnyíti a stabil modellreferenciás adaptív irányítás megtervezését. Ez abban az esetben is magyarázatot ad a vezérlés hibájára, ha a dinamikai folyamat nemlineáris.
A módszert nézzük most meg egy példa segítségével, amelyben egy kéttagú robotkart fogunk vizsgálni (ld. 5-11. ábra). A második tagot az ismeretlen teherrel egy bővített tagként kezeljük, amely négy ismeretlen paraméterrel rendelkezik. Ezek a tömeg (me), az inercia (Ie), a tömegközéppont távolsága (le), valamint az eredeti taghoz képesti szögelfordulás (e).
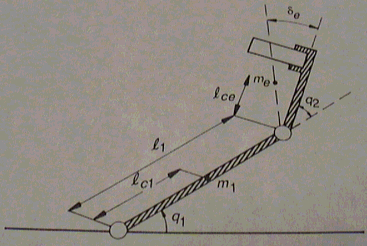
Megoldás
A modellnek megfelelően a közvetlen hajtást a következőképpen írhatjuk le:
| (5.27) |

ahol q az általános koordináta, H az inercia mátrix, C a csillapítás mátrixsza a G pedig a gravitációs tag.
A beavatkozó jel a nyomaték, amelyet például áramszabályozással lehet változtatni.
| (5.28) |

A fenti egyenletből kiolvasható, hogy a mozgási energia deriváltja azonos a betáplált erővel és a gravitációs nyomatékkal.
Folytatva a szerkezetet leíró egyenleteket:
| (5.29) |

| (5.30) |

ahol





Itt g a normális gyorsulás, 1…4 pedig a négy fizikai paraméter függvényei:


A rendszer
alakban írható fel, ahol T
| (5.31) |

alakban adható meg.
| (5.32) |
| (5.33) |
Az előbbi példát általánosíthatjuk is. Ekkor felírhatjuk a rendszert leíró egyenletet:
| (5.34) |

amelyben H', C', G' és ismertek vagy mérhetők. Ha a modell nemlineáris, paraméterekben megadva lineárissá válik, amely változtatható. Nagyon fontos, hogy a folyamat során a kezdeti ismereteket használjuk fel, és hogy a rendszer nem tekinthető úgy, mint egy "fekete doboz" modell az idő szerint változó paraméterekkel. A modell nem lesz megfelelő, amíg nem mérjük a gyorsulás, a helyzet és a sebesség értékeit.
Legyen a referencia trajektória a pozíció (qm) és a sebesség ( ). Ekkor felírhatjuk Lyapunov függvényét:
). Ekkor felírhatjuk Lyapunov függvényét:
| (5.35) |

ahol  ,
,  ,
,  , valamint Kp és pozitív definitű mátrixok. Differenciálva V-t:
, valamint Kp és pozitív definitű mátrixok. Differenciálva V-t:
| (5.36) |



A kapott eredményre alkalmazva a szabályozási-, illetve az adaptációs törvényeket:
| (5.37) |

| (5.38) |

ahol
| (5.39) |



Bevezetjük a
| (5.40) |

egyenletet. Ezt azért tehetjük meg, mivel a paraméterek függvényében a modellünk is lineáris. Ezen kívül  , ami azt jelenti, hogy csak a modell trajektóriájának gyorsulása ismert, nem pedig az eredeti gyorsulások. Így:
, ami azt jelenti, hogy csak a modell trajektóriájának gyorsulása ismert, nem pedig az eredeti gyorsulások. Így:
| (5.41) |

amely a paraméterek megváltozását eredményezi:
| (5.42) |

a Ljupanov-függvény tulajdonságából következik, hogy ez egy pozitív definit, és hogy a derivált
| (5.43) |

negatív szemidefinit. Ez azt jelenti, hogy a zártláncú rendszer stabil, illetve az állandósult sebesség hibája zérus. A szabályozó segítségével a pozíciók hibái is zérusra csökkenthetők.
6. fejezet - Állapottér reprezentáció
- 6.1. Lineáris időinvariáns rendszerek állapottér egyenletei
- 6.2. Állapotirányítás
- 6.2.1. Állapotvisszacsatolás és hatása a rendszer időállandóira
- 6.2.2. Irányíthatósági mátrix
- 6.2.3. Konstans referenciajel előírása és referenciajel kompenzáció
- 6.2.4. Állapotvisszacsatolás integráló taggal kiegészítve
- 6.2.5. Megfigyelő (állapotbecslő)
- 6.2.6. Megfigyelhetőségi mátrix
- 6.2.7. LTI rendszerek Kálmán-féle felbontása
- 6.2.8. Megfigyelőre alapozott állapotvisszacsatolás
- 6.2.9. Kanonikus (diagonális, illetve pszeudo-diagonális) alak
- 6.2.10. Kidolgozott feladatok az állapotirányításra
- 6.3. SISO rendszerek állapotirányítása
- 6.3.1. Állapotvisszacsatolás kanonikus alakban
- 6.3.2. SISO rendszerek irányíthatósági kanonikus alakja
- 6.3.3. Pólus áthelyezés irányíthatósági kanonikus alak esetén
- 6.3.4. Pólus áthelyezés általános alakú LTI SISO rendszer esetén (Ackermann formula)
- 6.3.5. Megfigyelhetőségi kanonikus alak és a megfigyelőre alapozott állapotvisszacsatolás
- 6.3.6. Irányíthatósági kanonikus alakban adott SISO rendszer állapotvisszacsatolása integrátorral kiegészítve
- 6.3.7. Kidolgozott feladatok SISO rendszerek állapotvisszacsatolására
- 6.4. Lineáris időben változó rendszerek állapottér egyenletei
- 6.5. Lineáris változó paraméterű rendszerek állapottér egyenletei
6.1. Lineáris időinvariáns rendszerek állapottér egyenletei
A lineáris időinvariáns rendszerek általános rövidítése, az angol név alapján LTI (Linear Time Invariant).
Diszkrét időben
Azt feltételezzük, hogy minden állapotváltozó a következő k+1. időlépésben függ az összes állapotváltozó aktuális (k.) értékeinek lineáris kombinációjától valamint a bemenőjelek aktuális (k.) értékeinek lineáris kombinációjától. Az aktuális kimenőjelet az aktuális állapotváltozók és bemenőjelek lineáris kombinációjaként írjuk fel.
Megjegyzések:
Két mátrixegyenletet írhatunk fel, egyet az állapotváltozókra és egyet a kimenőjelekre.
A bemenőjelek, kezdeti értékek és állapotváltozók hatása elkülönítve számolható.
Az ARMA modellel ellentétben nincs külön memóriánk a bemenetre és a kimenetre, a kettő összevonva jelentkezik, és így kevesebb memória cellára van szükség.
Ha egy jelnek az aktuálissal együtt n értékét kell figyelembe venni, akkor azt beírjuk n db cellába. Nem vizsgáljuk, hogy egy memória cellában egy jelnek ténylegesen hány időlépéssel korábbi értéke van, csak azt vizsgáljuk, hogy az aktuális időlépésben mi az adott memória cella tartalma.
Legyen  az állapotváltozók oszlopvektora a k-adik időlépésben,
az állapotváltozók oszlopvektora a k-adik időlépésben,  a bemenőjelek oszlopvektora a k-adik időlépésben,
a bemenőjelek oszlopvektora a k-adik időlépésben,  a kimenőjelek oszlopvektora a k-adik időlépésben Az LTI rendszer szokásos állapotváltozós alakja diszkrét időben:
a kimenőjelek oszlopvektora a k-adik időlépésben Az LTI rendszer szokásos állapotváltozós alakja diszkrét időben:


ahol  ,
,  és
és  a rendszert leíró konstans elemű mátrixok. Azonos valós fizikai rendszer feltételezve
a rendszert leíró konstans elemű mátrixok. Azonos valós fizikai rendszer feltételezve  és
és  függ az időlépéstől (ezt fejezi ki a diszkrét időre utaló d index), az állapotváltozók és bemenőjelek leképezése a kimenő jelre (6.2) az időlépéstől független (csak az aktuális értékektől függ).
függ az időlépéstől (ezt fejezi ki a diszkrét időre utaló d index), az állapotváltozók és bemenőjelek leképezése a kimenő jelre (6.2) az időlépéstől független (csak az aktuális értékektől függ).  mátrix a bemenőjel közvetlen (a dinamikai rendszert elkerülő) hatását írja le a kimenőjelre. A legtöbb esetben a
mátrix a bemenőjel közvetlen (a dinamikai rendszert elkerülő) hatását írja le a kimenőjelre. A legtöbb esetben a  mátrix minden eleme nulla.
mátrix minden eleme nulla.
Folytonos időben
(6.1) lényegét tekintve az állapotváltozókra felírt differenciaegyenlet, amelyet formálisan átírhatunk differenciálegyenletté. (6.2) átírása triviálisan adódik. Természetesen egy valós fizikai rendszernek először a differenciálegyenleteit szoktuk felírni és azt rendezzük át mátrixos formára. Ebben a tananyagban magával a rendszerrel foglalkozunk, így didaktikailag megengedhető, hogy a leírás szempontjából az egyszerűbb esetből haladjunk a bonyolultabb felé. (2.7) és (2.8) egyenletekből közvetlenül felírható zérus kezdeti feltétel mellett.


ahol  az állapotváltozók oszlopvektora,
az állapotváltozók oszlopvektora,  a bemenetek oszlopvektora,
a bemenetek oszlopvektora,  a kimenetek oszlopvektora
a kimenetek oszlopvektora  ,
,  és
és  a rendszert leíró konstans elemű mátrixok. A (6.3) és (6.4) szokásos grafikai megjelenítése
a rendszert leíró konstans elemű mátrixok. A (6.3) és (6.4) szokásos grafikai megjelenítése  esetben a 6-1. ábrán látható.
esetben a 6-1. ábrán látható.  és
és  átírását
átírását  és
és  formára később tárgyaljuk
formára később tárgyaljuk
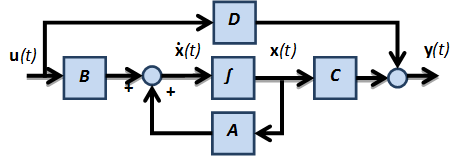
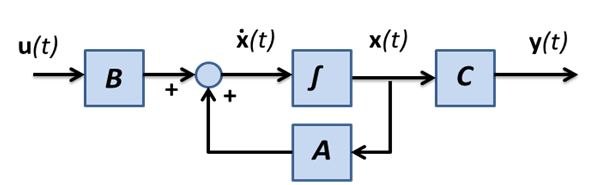
6.1.1. Az átviteli függvény pólusainak és a rendszermátrix sajátértékeinek kapcsolata
A (6.3) és (6.4) állapottér egyenletek Laplace-transzformálásával a következő egyenletek írhatók fel zérus kezdeti feltétel mellett



kifejezhető, így az  és
és  közötti összefüggés felírható
közötti összefüggés felírható


Vektorok hányadosa csak elemenként értelmezhető
| (6.9) |

A  mátrix minden eleme átviteli függvény az adott bemenet és kimenet között. Pl. az l-edik bemenet és i-edik kimenet között az átviteli függvény:
mátrix minden eleme átviteli függvény az adott bemenet és kimenet között. Pl. az l-edik bemenet és i-edik kimenet között az átviteli függvény:
| (6.10) |
Ismert, hogy egy  mátrix inverze a következőképpen írható fel
mátrix inverze a következőképpen írható fel
| (6.11) |
Ennek alapján
| (6.12) |
(6.9) átírható
| (6.13) |

A következőket olvashatjuk ki.

az s változóra nézve n-ed rendű polinom.

és ezzel együtt
 egy olyan mátrix, amelynek az elemei szintén polinomok s-re nézve, de a rendszámuk kisebb, mint n.
egy olyan mátrix, amelynek az elemei szintén polinomok s-re nézve, de a rendszámuk kisebb, mint n. SISO rendszer esetén
 egy sorvektor, és
egy sorvektor, és  egy oszlopvektor, így a számláló is egy polinom.
egy oszlopvektor, így a számláló is egy polinom.Ha
 , akkor
, akkor  minden mátrix eleme s-re nézve valódi racionális törtfüggvény.
minden mátrix eleme s-re nézve valódi racionális törtfüggvény.Ha
 , akkor a
, akkor a  mátrixnak van olyan eleme, amely s-re nézve olyan racionális törtfüggvény, ahol a számláló fokszáma megegyezik a nevező fokszámával
mátrixnak van olyan eleme, amely s-re nézve olyan racionális törtfüggvény, ahol a számláló fokszáma megegyezik a nevező fokszámávalA
 mátrix minden elemének a nevezője
mátrix minden elemének a nevezője  , így minden átviteli függvénynél azonosak a pólusok. Ez fizikailag azt jelenti, hogy a rendszer időállandói nem függnek attól, hogy mit választunk bemenetnek és kimenetnek.
, így minden átviteli függvénynél azonosak a pólusok. Ez fizikailag azt jelenti, hogy a rendszer időállandói nem függnek attól, hogy mit választunk bemenetnek és kimenetnek. Az matematikailag elképzelhető. hogy néhány pólus megegyezik néhány zérussal, és azokkal egyszerűsíteni lehet. Ez fizikailag azt jelenti, hogy az egyszerűsítéssel megszüntetett pólushoz tartozó állapotváltozó nem megfigyelhető, vagy irányítható az adott be- és kimenet felől.
Az átviteli függvény pólusai megegyeznek az
 mátrix sajátértékeivel
mátrix sajátértékeivel
| (6.14) |

6.1.2. Hasonlósági transzformáció
Az állapotváltozókat többfélekép választhatjuk meg, így (6.3) és (6.4) állapottér egyenleteket egy konkrét fizikai rendszer esetén is többfélekép írhatjuk fel. Bizonyos feladatok megoldása leegyszerűsíthető megfelelően megválasztott állapotváltozókkal. Így gyakran felmerül az igény, hogy az (6.3) és (6.4) állapottér egyenleteket átírjuk az adott feladat számára optimális formára az állapotváltozók átalakításával. Ezt a feladatot oldhatjuk meg a hasonlósági transzformációval. Ezzel sok esetben az a célunk, hogy a mátrixegyenleteket olyan formára hozzuk, amely megkönnyíti a szabályozó, illetve megfigyelő tervezését, ahogy ezt a későbbiekben látni fogjuk.
Bevezetjük az új  állapotváltozó vektort, ahol
állapotváltozó vektort, ahol  a hasonlósági transzformáció mátrixa.
a hasonlósági transzformáció mátrixa.  invertálhatóságát kell kikötnünk. Az állapotegyenletet
invertálhatóságát kell kikötnünk. Az állapotegyenletet  mátrixszal megszorozva
mátrixszal megszorozva



helyettesítéssel


A mátrixokat átnevezve


Az eredeti és a hasonlósági transzformáció után kapott mátrixok kapcsolata:
|
| (6.21) |
|
|




6.1.3. Az állapottér egyenletek megoldása
Bevezető példaként adott egy elsőrendű differenciálegyenlet
| (6.22) |

ahol az  állapotváltozó kezdeti értéke
állapotváltozó kezdeti értéke . Itt utalnunk kell a derivált függvény Laplace transzformálásának szabályára. Ha a (6.22) egyenletet Laplace-transzformáljuk, akkor azt feltételezzük, hogy mind
. Itt utalnunk kell a derivált függvény Laplace transzformálásának szabályára. Ha a (6.22) egyenletet Laplace-transzformáljuk, akkor azt feltételezzük, hogy mind  , mind
, mind  belépő-függvény, és értékük nulla a
belépő-függvény, és értékük nulla a  tartományban. Ennek megfelelően meg kell különböztetnünk a közvetlenül a bekapcsolás előtti
tartományban. Ennek megfelelően meg kell különböztetnünk a közvetlenül a bekapcsolás előtti  és közvetlenül a bekapcsolás utáni
és közvetlenül a bekapcsolás utáni  kezdeti értéket, más szavakkal
kezdeti értéket, más szavakkal  bal és jobb oldali határértéket. A Laplace-transzformáció
bal és jobb oldali határértéket. A Laplace-transzformáció  értékre vonatkozik. Ha
értékre vonatkozik. Ha  akkor ez a deriválási szabálynál figyelembe kell venni:
akkor ez a deriválási szabálynál figyelembe kell venni:
| (6.23) |

Érdekes, és fizikailag értelmezhető eredményre jutunk, ha a (6.23) egyenletet inverz Laplace-transzformáljuk
| (6.24) |

Értelmezés
A (6.24) egyenletet elemezve arra a következtetésre juthatunk, hogy gondolkozhatunk úgy, hogy a Laplace-transzformáció az energiamentes kezdő állapotra vonatkozik, ezért a múlt összesített hatását egy  nagyságú impulzus közvetíti a rendszer felé, és beállítja a szükséges kezdeti értéket. Ez egy ugrást jelent az állapotváltozó értékében, szemléletesen azt mondhatjuk, hogy a rendszert egy
nagyságú impulzus közvetíti a rendszer felé, és beállítja a szükséges kezdeti értéket. Ez egy ugrást jelent az állapotváltozó értékében, szemléletesen azt mondhatjuk, hogy a rendszert egy  impulzusnyi ütéssel a kezdeti állapotba kalapáljuk, hogy onnan folytatódjon a folyamat. Ha
impulzusnyi ütéssel a kezdeti állapotba kalapáljuk, hogy onnan folytatódjon a folyamat. Ha  , akkor az egy újabb -
, akkor az egy újabb -  nagyságú - kalapácsütés, így a két Dirac-impulzus hatását össze kell vonni, ezért
nagyságú - kalapácsütés, így a két Dirac-impulzus hatását össze kell vonni, ezért  . Ha a bemenőjel véges értékű, akkor az állapotváltozó folytonos és
. Ha a bemenőjel véges értékű, akkor az állapotváltozó folytonos és  . Természetesen, ha később érkezik a bemenetre egy időben eltolt
. Természetesen, ha később érkezik a bemenetre egy időben eltolt  Dirac-impulzus, akkor a
Dirac-impulzus, akkor a  időpillanatban jelent egy kalapácsütést és ugrást az állapotváltozó értékében. Ez a gondolatmenet kiterjeszthető magasabb rendű differenciálegyenletekre is.
időpillanatban jelent egy kalapácsütést és ugrást az állapotváltozó értékében. Ez a gondolatmenet kiterjeszthető magasabb rendű differenciálegyenletekre is.

kifejezhető a (6.23) egyenletből
| (6.25) |
Az  állapotváltozó a (6.25) kifejezésében az első tag a kezdeti értéktől, a második tag a nulla kezdeti értékről indulva csak a gerjesztéstől függ. A (6.25) kifejezésből az is kiolvasható, hogy a (6.22) alakú, elsőrendű differenciálegyenletet esetén az
állapotváltozó a (6.25) kifejezésében az első tag a kezdeti értéktől, a második tag a nulla kezdeti értékről indulva csak a gerjesztéstől függ. A (6.25) kifejezésből az is kiolvasható, hogy a (6.22) alakú, elsőrendű differenciálegyenletet esetén az  együttható az állapotváltozó
együttható az állapotváltozó  Laplace-transzformáltját kifejezésében a
Laplace-transzformáltját kifejezésében a  pólus mínusz egyszerese
pólus mínusz egyszerese  . A (6.25) kifejezés inverz Laplace-transzformációját elvégezve
. A (6.25) kifejezés inverz Laplace-transzformációját elvégezve
| (6.26) |

Több változós esetben (6.3) egyenletet Laplace-transzformálva és figyelembe véve a kezdeti értékre vonatkozó deriválási szabályt
| (6.27) |

(6.27)-t inverz Laplace-transzformálva látható, hogy a (6.3) állapottér egyenletben a kezdeti értékek a következő módon is figyelembe vehetők.
| (6.28) |

Ha esetleg  is tartalmaz Dirac-impulzust, az úgy értelmezhető, hogy az érintett állapotváltozó(k)nak van egy bekapcsolás előtti értéke és egy bekapcsolás utáni értéke, vagyis az érintett állapotváltozó(k)nak szakadása van a
is tartalmaz Dirac-impulzust, az úgy értelmezhető, hogy az érintett állapotváltozó(k)nak van egy bekapcsolás előtti értéke és egy bekapcsolás utáni értéke, vagyis az érintett állapotváltozó(k)nak szakadása van a  időpillanatban. Az érintett állapotváltozó(k)nak az ugrás előtti értékét kell az állapottér egyenlet megoldása szempontjából kezdeti értékének tekinteni. Az állapotváltozók Laplace-transzformáltjának vektora kifejezhető
időpillanatban. Az érintett állapotváltozó(k)nak az ugrás előtti értékét kell az állapottér egyenlet megoldása szempontjából kezdeti értékének tekinteni. Az állapotváltozók Laplace-transzformáltjának vektora kifejezhető
| (6.29) |


(6.29) alakú kifejezésében az első tag a gerjesztéstől, a második a kezdeti értéktől függ. Egyváltozós esethez formálisan hasonló (6.26) alakú megoldást keresünk. (6.29) első tagjában felismerhetjük a bemenet és az állapotváltozók között felírható átviteli függvényt energiamentes állapotból kiindulva.
(6.29) kifejezésében mind a kezdeti értéktől függő, mind a gerjesztéstől függő megoldásban szerepel az  tényező, amely kifejezhető (6.12) segítségével. Ugyanakkor tekinthetjük egy olyan mátrixnak, amelynek minden eleme egy végtelen sor összege a következő formában:
tényező, amely kifejezhető (6.12) segítségével. Ugyanakkor tekinthetjük egy olyan mátrixnak, amelynek minden eleme egy végtelen sor összege a következő formában:
| (6.30) |

(6.30) tagonként inverz Laplace-transzformálható, és így mátrixos formában jutunk az exponenciális függvény sorához, ezt tekinthetjük definíciónak is.
| (6.31) |

(6.31) alapján a kezdeti értéktől függő (a múlt hatását megjelenítő) tag az időtartományban.
| (6.32) |

A gerjesztéstől függő összetevő egy konvolúciós integrál lesz
| (6.33) |

(6.27) teljes megoldása a gerjesztéstől függő és független megoldás összege
| (6.34) |

Az egy-energiatárolós esethez hasonlóan, ha  , akkor
, akkor  tekinthető a több bemenetű rendszer súlyfüggvényének. Ha az
tekinthető a több bemenetű rendszer súlyfüggvényének. Ha az  mátrix diagonális, akkor a (6.31) összegzésben az
mátrix diagonális, akkor a (6.31) összegzésben az  hatványok kiszámíthatóak úgy, hogy a diagonálban található elemeket külön-külön emeljük az adott hatványra, ezért
hatványok kiszámíthatóak úgy, hogy a diagonálban található elemeket külön-külön emeljük az adott hatványra, ezért
| (6.35) |
Ha az  mátrix nem diagonális, akkor fontos kérdés, hogy mikor és miként diagonizálhatjuk, erre visszatérünk 6.2.9 pontban. Egy általános esetben
mátrix nem diagonális, akkor fontos kérdés, hogy mikor és miként diagonizálhatjuk, erre visszatérünk 6.2.9 pontban. Egy általános esetben  kiszámítása pl. (6.36) segítségével történhet
kiszámítása pl. (6.36) segítségével történhet
| (6.36) |
Így (6.34) inkább tekinthető a megoldás kompakt leírásának, mint egy útmutatónak a megoldás kiszámítási módjára.






6.1.4. Kidolgozott feladatok állapottér egyenletekre és megoldásaikra
6.1 feladat
Határozza meg
| (6.41) |

értékét.
6.1.4.1. Megoldás
(6.36) alapján
| (6.42) |
(6.40) alapján a MATLAB „eig” utasítás segítségével a kitevőben szereplő mátrix felbontható
| (6.43) |

| (6.44) |

6.2 feladat Egy RLC kör állapottér egyenletének felírása és megoldása
Tekintsük a 6-2. ábrán látható RLC áramkört
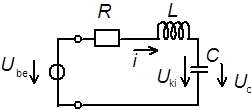
Az áramköri elemek:  . A t=0 időpillanatban bekapcsoljuk az
. A t=0 időpillanatban bekapcsoljuk az  tápfeszültséget. (A bemenetre egységugrás jelet kapcsolunk) A kondenzátor a bekapcsolás előtt 10V-ra van feltöltve. A kondenzátor feszültsége a kimenőjel.
tápfeszültséget. (A bemenetre egységugrás jelet kapcsolunk) A kondenzátor a bekapcsolás előtt 10V-ra van feltöltve. A kondenzátor feszültsége a kimenőjel.
Írja fel a rendszer átviteli függvényét.
Válasszon állapotváltozókat és írja fel a a rendszer állapottér egyenleteit, majd oldja meg azokat.
6.1.4.2. Megoldás
Átviteli függvény
Kirchhoff huroktörvény alapján
| (6.45) |
A kondenzátor alapegyenlete
| (6.46) |

Helyettesítéssel
| (6.47) |
Ha  a bemenőjel és a kondenzátor feszültsége a kimenőjel, akkor
a bemenőjel és a kondenzátor feszültsége a kimenőjel, akkor
| (6.48) |


A rendszer differenciálegyenletének Laplace transzformáltja a (6.48) helyettesítéssel
| (6.49) |

Az átviteli függvény
| (6.50) |
Állapottér reprezentáció
Az átviteli függvény egyedi, de az állapotteres leírás nem egyedi, például legyen
| (6.51) |


akkor
| (6.52) |

| (6.53) |
tehát
| (6.54) |
| (6.55) |
Másképpen is választhatjuk az állapotváltozókat, például lehet:
| (6.56) |
tehát
| (6.57) |
| (6.58) |
| (6.59) |
A (6.58) és (6.59) egyenletek megoldása
Behelyettesítve a valóságos értékeket:
| (6.60) |

| (6.61) |
Tehát az adott RLC kör állapotteres leírása:
| (6.62) |

| (6.63) |
ahol a kezdeti érték
| (6.64) |

A (6.62) és (6.63) megoldását keressük az időtartománybana (6.64) kezdeti értékkel (6.34) alakban.
Először a kezdeti értéktől függő  tagot számítjuk ki.
tagot számítjuk ki.
| (6.65) |

| (6.66) |

Részlettörtekre bontás után
| (6.67) |
| (6.68) |
| (6.69) |
A gerjesztéstől függő  tag kiszámításához szükség van a (6.66) összefüggésre
tag kiszámításához szükség van a (6.66) összefüggésre
| (6.70) |
Az inverz Laplace transzformációt elvégezve
| (6.71) |

A megoldás (6.69) és (6.71) alapján
| (6.72) |

| (6.73) |
Az eredményül kapott állapotvektor első eleme tulajdonképpen a kondenzátor feszültsége Voltban, a második tag a kapacitással megszorozva pedig az RLC körben folyó áram erősségét adja.
6.3 feladat Hatásvázlat átírása állapottér egyenletté
Írja fel az ábrán látható rendszer állapottér egyenletét és eredő átviteli függvényét. Az átviteli függvényt alakítsa át és válasszon álapotváltozókat úgy, hogy az állapottér egyenlet  mátrixa diagonális legyen.
mátrixa diagonális legyen.
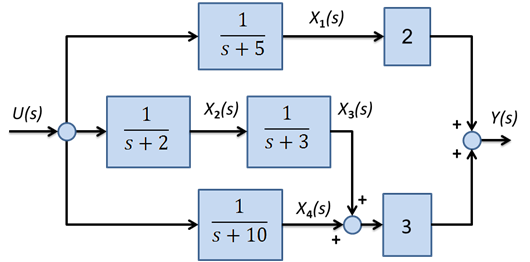
6.1.4.3. Megoldás
Először vizsgáljuk meg az
| (6.74) |
alakú elemeket, ahol  és
és  . Az időtartományban a következőt írhatjuk
. Az időtartományban a következőt írhatjuk
| (6.75) |


esetén
| (6.76) |

A fentiek és az ábra alapján
| (6.77) |
Az ábra alapján
| (6.78) |

Az állapottér egyenlet  mátrixa úgy tehető könnyen diagonálissá, ha a (6.78) kifejezést részlettörtekre bontjuk, ehhez a következő átalakítás szükséges
mátrixa úgy tehető könnyen diagonálissá, ha a (6.78) kifejezést részlettörtekre bontjuk, ehhez a következő átalakítás szükséges
| (6.79) |
Ennek alapján
| (6.80) |
Így a rendszermátrixok
| (6.81) |
6.4 feladat Egyenáramú motor és terhelő nyomaték
Adott egy külsőgerjesztésű egyenáramú motor, amelyet  nyomaték terhel. Jelölések:
nyomaték terhel. Jelölések:  a motor szögsebessége és
a motor szögsebessége és  az elfordulása,
az elfordulása,  ,
,  , pedig a motor másodrendű nyomatéka, illetve a viszkózus súrlódást figyelembe vevő paramétere.
, pedig a motor másodrendű nyomatéka, illetve a viszkózus súrlódást figyelembe vevő paramétere.  a motor kapocsfeszültsége,
a motor kapocsfeszültsége,  a motor paramétere, Ra az armatúra ellenállása, La az armatúra tekercs induktivitása. A rendszer egyenletei:
a motor paramétere, Ra az armatúra ellenállása, La az armatúra tekercs induktivitása. A rendszer egyenletei:
| (6.82) |




Írja fel a differenciálegyenlet-rendszert (6.3), (6.4) alakban.
Legyen a két bemenőjel a motor  kapocsfeszültsége és az
kapocsfeszültsége és az  terhelőnyomatéka az
terhelőnyomatéka az  kimenet a motor
kimenet a motor  fordulatszáma.
fordulatszáma.
6.1.4.4. Megoldás
Legyen az állapotváltozók és a bemenőjelek oszlopvektora
| (6.83) |
(6.82) átrendezésével az állapováltozók deriváltjának kifejezése
| (6.84) |
6.5 feladat
Adott a következő rendszer.
| (6.85) |
| (6.86) |
Minden állapotváltozó 0 kezdeti értékről indul. A bemenőjel egységugrás. Adja meg a kimenőjel időfüggvényét.
6.1.4.5. Megoldás
Ha 0 kezdeti értékről indul minden állapotváltozó, akkor  , mert sem a bemenőjel sem az
, mert sem a bemenőjel sem az  állapotváltozó nem hat rájuk. Ebben az esetben
állapotváltozó nem hat rájuk. Ebben az esetben  és a megoldandó differenciálegyenlet a következő alakra egyszerűsödik
és a megoldandó differenciálegyenlet a következő alakra egyszerűsödik
| (6.87) |

Laplace-transzformálva és átrendezve
| (6.88) |
Inverz Laplace-transzformálva
| (6.89) |
6.6 feladat Egy egyenáramú motor állapottér egyenletének felírása és megoldása
xxxxxxx
6.7 feladat 3-DOF gerjesztett rendszer
Tekintsük a 6-4. ábraán látható 3 szabadsági fokú gerjesztett lengőrendszert. A rendszer bemenete az egyes tömegre ható erők. Esetünkben legyen a bemenőjel, vagyis gerjesztés a következő
| (6.90) |
A rendszer kimenete legyen egyes tömegek elmozdukása.
Írja fel és oldja meg az ábrán látható rendszer egyenleteit.
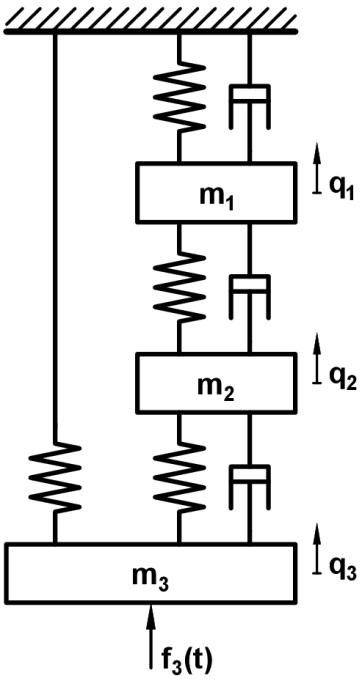
Egyenlet felírása Lagrange egyenlet segítségével


6.1.4.9. A mátrix együtthatós differenciálegyenlet
| (6.97) |


6.1.4.11. Megoldás Laplace transzformációval
A gerjesztés vektorának Laplace-transzformáltja:
| (6.99) |

Mátrix együtthatós differenciálegyenlet Laplace-transzformáció után:
| (6.100) |


ahol  az elmozdulás-válaszra vonatkozó átviteli mátrix.
az elmozdulás-válaszra vonatkozó átviteli mátrix.
| (6.101) |



Példaként az invertálás után az  elem számítása:
elem számítása:



Az inverz mátrix többi eleme hasonlóképpen számítható. Következő lépés a megoldás felírása operátortartományban:
| (6.104) |

első sora:
| (6.105) |


Innen inverz Laplace-transzformációval lehet visszatérni az időtartományba:
Az eddigiekhez hasonlóan csak az első elem:

=


A kifejezés végén lévő képzetes kitevőjű exponenciális tagok átalakíthatók. Az Euler formula szerint:



esetén a  kifejezésben a trigonometrikus tagokon kívül az összes többi tag elhal, így:
kifejezésben a trigonometrikus tagokon kívül az összes többi tag elhal, így:

Ez megfelel az időtartománybeli megoldás partikuláris megoldásának. A  és
és  elmozdulásfüggvények
elmozdulásfüggvények  -hez hasonlóan meghatározhatók.
-hez hasonlóan meghatározhatók.
6.1.4.12. Állapottér modell
Állapottér egyenletek:


Először állapotváltozókat kell választani. Legyenek az állapotváltozók a következő mennyiségek:
Gerjesztés vektor
Vegyük a mátrixegyütthatós differenciálegyenlet első egyenletét:

Az  helyettesítés után:
helyettesítés után:

Ezt és az  egyenleteket mátrixos formába írva:
egyenleteket mátrixos formába írva:
A mátrixegyütthatós differenciálegyenlet második és harmadik egyenletével a fentiekhez hasonló módon megkaphatjuk az  –ra vonatkozó egyenleteket. Így előállnak az állapottér-egyenletben szereplő együttható mátrixok:
–ra vonatkozó egyenleteket. Így előállnak az állapottér-egyenletben szereplő együttható mátrixok:
Mivel most egybemenetű a rendszer, ezért  sorvektorrá fajul:
sorvektorrá fajul:
Az állapottér egyenlet Laplace transzformáltja:

Ebből az  operátortartománybeli megoldás kifejezhető:
operátortartománybeli megoldás kifejezhető:


inverze a Laplace-os feladatban látottakhoz hasonlóan meghatározható. Példaként megmutatjuk a számítást az  mátrix
mátrix  -os elemére:
-os elemére:

Ezekből az inverz mátrix  eleme:
eleme:

Az állapotváltozók időtartománybeli megoldását inverz Laplace-transzformációval kaphatjuk meg:

Kimenetet a másik állapottér egyenlet segítségével kaphatunk:

Ezt Laplace-transzformálva:

Válasszuk kimenetnek a  elmozdulást! Mivel
elmozdulást! Mivel  állapotváltozó, a megoldása megtalálható
állapotváltozó, a megoldása megtalálható  vektorban. Ezért C egy olyan mátrix, amivel
vektorban. Ezért C egy olyan mátrix, amivel  -t megszorozva annak első sorát kapjuk,
-t megszorozva annak első sorát kapjuk,  pedig nulla mátrix.
pedig nulla mátrix.

Mivel csak egy kimenetünk van, ezért az vektorból
vektorból  skalár lesz.
skalár lesz.
Így a kimenet:
A lecsengő tagokat elhagyva (állandósult állapotban):

A Laplace-transzformált megoldással megegyező eredményre jutottunk.
6.2. Állapotirányítás
A 6.2 alfejezet az állapotirányítás általános eseteit ismerteti, amelyek elvi szempontból fontosak, de konkrét végig számításuk nehézkes, illetve a MATLAB használatát feltételezi. Papíron akár egyszerű zsebszámológéppel megoldható feladatok a 6.3 alfejezetben találhatók.
6.2.1. Állapotvisszacsatolás és hatása a rendszer időállandóira
Induljunk ki a (6.3) differenciálegyenletből. Tekintsük a mátrixos formában felírt (6.106) homogén differenciálegyenletrendszert.
| (6.106) |

(6.106) triviális megoldása  . Tegyük fel, hogy az állapotváltozók
. Tegyük fel, hogy az állapotváltozók  kezdeti értéke nem nulla (pontosabban az
kezdeti értéke nem nulla (pontosabban az  vektornak van olyan eleme, amelynek az értéke nem nulla). Célunk az, hogy bámely
vektornak van olyan eleme, amelynek az értéke nem nulla). Célunk az, hogy bámely  kezdeti értéktől az állapotváltozók tartsanak nullához
kezdeti értéktől az állapotváltozók tartsanak nullához  . (6.14) alapján ennek az a feltétele, hogy az
. (6.14) alapján ennek az a feltétele, hogy az  mátrix összes sajátértékének valós része negatív legyen. Térjünk vissza a (6.3) differenciálegyenlethez, és változtassuk meg a rendszer viselkedését állapotvisszacsatolással. Legyen
mátrix összes sajátértékének valós része negatív legyen. Térjünk vissza a (6.3) differenciálegyenlethez, és változtassuk meg a rendszer viselkedését állapotvisszacsatolással. Legyen
| (6.107) |

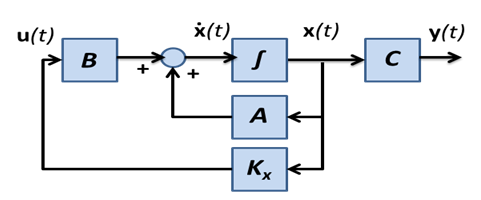
Behelyettesítve a (6.3) differenciálegyenletbe
| (6.108) |


| (6.109) |

A (6.106) és (6.109) összevetéséből látszik, hogy a visszacsatolt rendszernél az  mátrix szerepét
mátrix szerepét  veszi át. Az állapotvisszacsatolással megváltoztathatjuk a rendszer dinamikai tulajdonságait. Ha a
veszi át. Az állapotvisszacsatolással megváltoztathatjuk a rendszer dinamikai tulajdonságait. Ha a  mátrix megfelelő választásával az
mátrix megfelelő választásával az  mátrix sajátértékeit tetszőlegesen beállíthatjuk, akkor a rendszer irányítható. Teljesen ellentétes eset, ha
mátrix sajátértékeit tetszőlegesen beállíthatjuk, akkor a rendszer irányítható. Teljesen ellentétes eset, ha  mátrix minden eleme 0, akkor állapotvisszacsatolással nem tudjuk befolyásolni a rendszer dinamikai tulajdonságait. Az irányíthatóság az
mátrix minden eleme 0, akkor állapotvisszacsatolással nem tudjuk befolyásolni a rendszer dinamikai tulajdonságait. Az irányíthatóság az  és
és  mátrixpárhoz kötődő fogalom.
mátrixpárhoz kötődő fogalom.
6.2.2. Irányíthatósági mátrix
Definiáljuk az  hipermátrixot, mint irányíthatósági mátrixot!
hipermátrixot, mint irányíthatósági mátrixot!
| (6.110) |

megjegyzés: ha  és
és  akkor
akkor Az irányíthatóság feltétele, hogy
Az irányíthatóság feltétele, hogy  mátrix rangja egyezzen meg az állapotváltozók számával. A hasonlósági transzformáció nem érinti az irányíthatóságot.
mátrix rangja egyezzen meg az állapotváltozók számával. A hasonlósági transzformáció nem érinti az irányíthatóságot.
| (6.111) |

| (6.112) |

| (6.113) |

6.2.3. Konstans referenciajel előírása és referenciajel kompenzáció
Eddig minden állapotváltozóra vonatkozóan a referenciajel nulla volt. Ha ettől el akarunk térni, akkor két problémával kell szembenéznünk.
Az állapotváltozók nem függetlenek egymástól, így a referenciajelet sem határozhatjuk meg egymástól függetlenül. Pl. egy robot megfogójának a pozíciója és sebessége lehet állapotváltozó. Nyilvánvaló, ezeket nem lehet egymástól függetlenül előírni, a sebesség és a pozíció egyszerre nem lehet nullától különböző konstans.
Ismert, hogy a negatív visszacsatolás esetén a visszacsatolt rendszer erősítése kisebb, mint az eredeti rendszeré, ezért a visszacsatolás értékétől függő kompenzációra van szükség.
6.2.3.1. A visszacsatolás hatásának kompenzálása MIMO esetben
Az állapotvisszacsatolással azt tudjuk elérni, hogy a rendszer tetszőleges kezdeti értékből kiindulva a  visszacsatoló tag által beállított időállandóval tartson a nullához, vagyis a
visszacsatoló tag által beállított időállandóval tartson a nullához, vagyis a  visszacsatoló taggal a rendszer tranziens viselkedését tudjuk beállítani. Ha azt akarjuk, hogy a kimenőjel valamilyen konstans érték legyen, pontosabban a visszacsatolt rendszer állandósult értéke azonos legyen az
visszacsatoló taggal a rendszer tranziens viselkedését tudjuk beállítani. Ha azt akarjuk, hogy a kimenőjel valamilyen konstans érték legyen, pontosabban a visszacsatolt rendszer állandósult értéke azonos legyen az  referencia jellel (feltételezve, hogy
referencia jellel (feltételezve, hogy  =0).
=0).  és
és  között kell kapcsolatot teremteni. A célt úgy fogalmazhatjuk meg, hogy
között kell kapcsolatot teremteni. A célt úgy fogalmazhatjuk meg, hogy
| (6.114) |

és a kimenőjel az  referencia értéket az általunk előírt időállandóval érje el. Ekkor a szuperpozíció elvét alkalmazhatjuk (ld. 6-6. ábra).
referencia értéket az általunk előírt időállandóval érje el. Ekkor a szuperpozíció elvét alkalmazhatjuk (ld. 6-6. ábra).
| (6.115) |

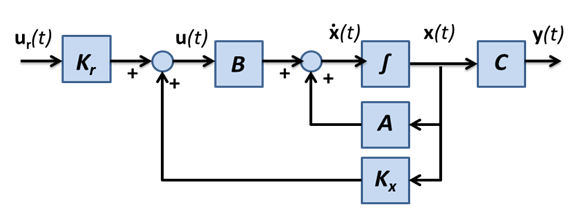
A benenőjel (6.115) összefüggését behelyettesítve az állapotegyenletbe
| (6.116) |

(6.116) egyenletből kitűnik, hogy az állapotvisszacsatolással az  állapotmátrix helyébe az
állapotmátrix helyébe az  mátrix került, vagyis a tranziens viselkedést tudjuk ezzel megváltoztatni. A negatív visszacsatolás az erősítést csökkenti, ezt kompenzálhatjuk. Abból indulhatunk ki, hogy állandósult esetben az állapotváltozó értéke konstans, ezért a deriváltja nulla, továbbá
mátrix került, vagyis a tranziens viselkedést tudjuk ezzel megváltoztatni. A negatív visszacsatolás az erősítést csökkenti, ezt kompenzálhatjuk. Abból indulhatunk ki, hogy állandósult esetben az állapotváltozó értéke konstans, ezért a deriváltja nulla, továbbá  .
.
| (6.117) |

Áttérve a kimenőjelre
| (6.118) |

| (6.119) |

6.2.3.2. Visszacsatolástól független referenciajel kompenzáció
A (6.119) alakú korrekcióval az a gond, hogy az értéke függ a visszacsatoló  mátrixtól. Létezik egy olyan megoldás, amelyben a
mátrixtól. Létezik egy olyan megoldás, amelyben a  korrekció függetleníthető
korrekció függetleníthető  értékétől. Egy ilyen megközelítés látható a 6-7. ábraán, ahol a cél:
értékétől. Egy ilyen megközelítés látható a 6-7. ábraán, ahol a cél:  . Megjegyzés: általában nem igaz, hogy minden kimenőjel egyidejűleg tetszőleges nullától különböző konstans értékű lehet. Pl. legyen a kimenőjel egy mechanikai rendszer pozoíciója és sebessége. Ha a pozíció állandó, akkor a sebesség csak nulla lehet, ha a sebesség állandó, akkor a pozíció nem lehet konstans.
. Megjegyzés: általában nem igaz, hogy minden kimenőjel egyidejűleg tetszőleges nullától különböző konstans értékű lehet. Pl. legyen a kimenőjel egy mechanikai rendszer pozoíciója és sebessége. Ha a pozíció állandó, akkor a sebesség csak nulla lehet, ha a sebesség állandó, akkor a pozíció nem lehet konstans.
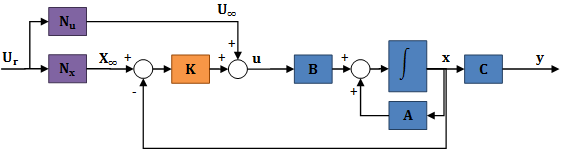













| (6.120) |


| (6.121) |

| (6.122) |

6.2.4. Állapotvisszacsatolás integráló taggal kiegészítve
Az alapjel kompenzáláshoz pontosan ismerni kell a rendszer paramétereit. Az így kiegészített állapotvisszacsatolás azonban a zavarójel hatását nem tudja kompenzálni. A paraméterbizonytalanság és a zavarójel hatásának kiküszöbölésére integrátort iktathatunk be a szabályozási körbe. Legyen a szabályozás célja, hogy minden kimenőjel egy konstans értéket vegyen fel
| (6.123) |

Azt feltételezzük, hogy ez a cél nem ütközik elvi akadályokba (pl. nem írjuk elő, hogy egy jel és deriváltja egyszerre legyen nullától különböző konstans értékű). A kiindulási egyenlet
| (6.124) |


Az integrátorok állapotát egy-egy dinamikus elemként  állapotváltozó oszlopvektorral vehetjük figyelembe. Az integrátorokat tartalmazó alrendszer bemenőjele az előírt
állapotváltozó oszlopvektorral vehetjük figyelembe. Az integrátorokat tartalmazó alrendszer bemenőjele az előírt  referencia jel lesz.
referencia jel lesz.
| (6.125) |

Ha az eredeti és az integrátorokhoz tartozó állapotváltozókat egyetlen oszlopvektorba összevonjuk, de különállóan meghagyjuk az  és
és  bemeneteket, akkor a következőt írhatjuk
bemeneteket, akkor a következőt írhatjuk
| (6.126) |

Tekintsük a 6-8. ábraát. A rendszer eredeti bemenőjelét az állapotvisszacsatolással a következő módon határozzuk meg:
| (6.127) |

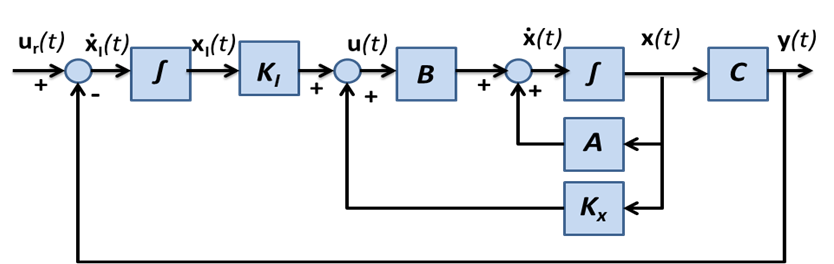
6-8. ábra és (6.127) alapján az állapotvisszacsatolást a következő kiterjesztett rendszerhez kell megtervezni,
| (6.128) |

ahol
| (6.129) |

Látható, hogy ha  irányíthatósági kanonikus alakú, akkor
irányíthatósági kanonikus alakú, akkor  biztosan nem az. Visszacsatolás után a rendszer állapotegyenlete a következő lesz
biztosan nem az. Visszacsatolás után a rendszer állapotegyenlete a következő lesz
| (6.130) |

6.2.5. Megfigyelő (állapotbecslő)
A legtöbb gyakorlati esetben nem tudjuk az összes állapotváltozót mérni, így az állapot visszacsatolás közvetlenül nem alkalmazható. Felmerül a kérdés, hogy a mért jelekből rekonstruálható-e az összes állapotváltozó. Korábban ezért vezettük be a megfigyelhetőség fogalmát, miszerint, ha egy rendszer teljesen megfigyelhető, akkor a mért jelekből, az összes állapotváltozó előállítható. Most arra keressük a választ, hogy hogyan.
Tegyük fel, hogy a rendszermátrixok ismertek és  , de nem tudjuk az állapotváltozók értékét. Feladat a bemenőjel és kimenőjel megfigyeléséből az állapotváltozók rekonstruálása. Az állapotváltozók becsült értékét jelölje
, de nem tudjuk az állapotváltozók értékét. Feladat a bemenőjel és kimenőjel megfigyeléséből az állapotváltozók rekonstruálása. Az állapotváltozók becsült értékét jelölje  vektor.
vektor.


Fontos megjegyezni, hogy az eredeti rendszernek a bemenetei adottak, az eredeti rendszerre a definícióból adódóan csak az  bemenőjelen keresztül hathatunk. Ezzel szemben az állapotbecslőt mi alkotjuk meg, így az eredetitől különböző bemenetet is alkothatunk. Ismét a definíció alapján az eredeti rendszerről csak a kimenőjelen keresztül kaphatunk információt. Ezt kell felhasználnunk az állapotbecslő működésének hangolására.
bemenőjelen keresztül hathatunk. Ezzel szemben az állapotbecslőt mi alkotjuk meg, így az eredetitől különböző bemenetet is alkothatunk. Ismét a definíció alapján az eredeti rendszerről csak a kimenőjelen keresztül kaphatunk információt. Ezt kell felhasználnunk az állapotbecslő működésének hangolására.


Legyen a tényleges és a becsült vektor különbsége
| (6.135) |

A hibára vonatkozó differenciálegyenlet a (6.133) és (6.131) különbsége
| (6.136) |

(6.132) és (6.134) felhasználásával
| (6.137) |

| (6.138) |


(6.138) és (6.109) hasonlósága alapján az állapotvisszacsatolás és a megfigyelő tervezése formálisan hasonló feladat. Ha  és
és  megfigyelhető mátrixpárt alkotnak, akkor
megfigyelhető mátrixpárt alkotnak, akkor  megfelelő megválasztásával beállíthatjuk az
megfelelő megválasztásával beállíthatjuk az  mátrix sajátértékeit és ezzel azt tudjuk meghatározni, hogy a becslési hiba milyen időállandóval tartson a nullához.
mátrix sajátértékeit és ezzel azt tudjuk meghatározni, hogy a becslési hiba milyen időállandóval tartson a nullához.
6.2.6. Megfigyelhetőségi mátrix
| (6.139) |

6.2.7. LTI rendszerek Kálmán-féle felbontása
Egy lineáris rendszer az irányíthatóság és megfigyelhetőség szempontjából négy típusú alrendszerre bontható, az alrendszerekhez tartozó állapotváltozók

: Irányítható és megfigyelhető

: Irányítható, de nem megfigyelhető

: Nem irányítható, de megfigyelhető

: Nem is irányítható és nem is megfigyelhető.
A felbontott rendszer állapottér egyenlete
Írjuk fel az átviteli függvényt  esetén
esetén
| (6.142) |

Látható, hogy a második egyenlőségjel után mind a nevező, mind a számláló fokszáma lecsökkent. Ez csak úgy valósulhat meg, ha néhány zésrus és pólus megegyezik, ezért a törtfüggvényből leegyszerűsíthető.
6.2.8. Megfigyelőre alapozott állapotvisszacsatolás
Amennyiben a közvetlenül nem mérhető állapotváltozókat egy megfigyelővel előállítottuk, akkor nincs akadálya az állapotvisszacsatolásnak. A tervezésnél arra kell ügyelnünk, hogy a megfigyelő sokkal gyorsabb legyen, mint maga a rendszer.
6.2.9. Kanonikus (diagonális, illetve pszeudo-diagonális) alak
Feltételezzük, hogy a rendszer állandó együtthatós közönséges differenciálegyenlettel írható le. Többféle (többféle jelzővel ellátott) kanonikus alak létezik. A kanonikus alakokhoz a természetes módon (az egyenletekből közvetlenül) felírt állapotegyenletekből hasonlósági transzformációval juthatunk el.
6.2.9.1. Szétcsatolás
A jelző nélküli kanonikus alak alapja az  mátrix kanonikus diagonális alakja, ahol a diagonáljában a mátrix sajátértékei szerepelnek. Ezzel a felbontással az eredeti rendszer több, egymástól független alrendszerre esik szét. Ha ez megtehető, akkor sok előnnyel jár, hogy az alrendszerek egymástól függetlenül kezelhetők. Ezt fejezi ki a (6.35) összefüggés, és ennek alapján az állapottér egyenlet minden állapotváltozóra a többitől függetlenül oldható meg. A problémát az okozza, hogy a diagonizálásra alapozva nem lehet általános érvényű algoritmust kidolgozni, mert egyszerű hasonlósági transzformációval az
mátrix kanonikus diagonális alakja, ahol a diagonáljában a mátrix sajátértékei szerepelnek. Ezzel a felbontással az eredeti rendszer több, egymástól független alrendszerre esik szét. Ha ez megtehető, akkor sok előnnyel jár, hogy az alrendszerek egymástól függetlenül kezelhetők. Ezt fejezi ki a (6.35) összefüggés, és ennek alapján az állapottér egyenlet minden állapotváltozóra a többitől függetlenül oldható meg. A problémát az okozza, hogy a diagonizálásra alapozva nem lehet általános érvényű algoritmust kidolgozni, mert egyszerű hasonlósági transzformációval az  mátrix nem minden esetben tehető diagonálissá. Elégséges feltétel, hogy minden sajátérték egyszeres legyen. Ha az
mátrix nem minden esetben tehető diagonálissá. Elégséges feltétel, hogy minden sajátérték egyszeres legyen. Ha az  mátrix szimmetrikus, akkor többszörös sajátértékek esetén is diagonizálható hasonlósági transzformációval. Ha az
mátrix szimmetrikus, akkor többszörös sajátértékek esetén is diagonizálható hasonlósági transzformációval. Ha az  mátrix aszimmetrikus és többszörös sajátértékei vannak, akkor előfordulhat olyan speciális eset, amikor hasonlósági transzformációval az
mátrix aszimmetrikus és többszörös sajátértékei vannak, akkor előfordulhat olyan speciális eset, amikor hasonlósági transzformációval az  mátrix diagonálissá tehető, de általában az ún. Jordan-féle kanonikus mátrixszá alakítható. Tegyük fel, hogy ha az
mátrix diagonálissá tehető, de általában az ún. Jordan-féle kanonikus mátrixszá alakítható. Tegyük fel, hogy ha az  mátrixnak
mátrixnak  különböző sajátértéke van, akkor a Jordan-féle kanonikus pszeudo-diagonális mátrix alakja a következő:
különböző sajátértéke van, akkor a Jordan-féle kanonikus pszeudo-diagonális mátrix alakja a következő:
| (6.143) |

ahol  az i-edik sajátértékhez tartozó elemi Jordan-mátrix. Ha az i-edik sajátérték egyszeres, akkor
az i-edik sajátértékhez tartozó elemi Jordan-mátrix. Ha az i-edik sajátérték egyszeres, akkor
| (6.144) |

Ha az i-edik sajátérték  -szeres, akkor
-szeres, akkor 
| (6.145) |
ahol  az i-edik sajátérték és
az i-edik sajátérték és  értéke általában 1, speciális esetekben lehet 0 is. Jelöljük
értéke általában 1, speciális esetekben lehet 0 is. Jelöljük  indexszel a transzformált rendszermátrixokat és állapotváltozót, ha hasonlósági transzformációval az A mátrixot Jordan-féle kanonikus pszeudo-diagonális alakra hozzuk
indexszel a transzformált rendszermátrixokat és állapotváltozót, ha hasonlósági transzformációval az A mátrixot Jordan-féle kanonikus pszeudo-diagonális alakra hozzuk


Ebben az esetben két különböző elemi Jordan-mátrixhoz tartozó két állapotváltozó egymástól mindig független. A  mátrix legalsó sorához tartozó állapotváltozó sem függ semelyik másik állapotváltozótól. Ha
mátrix legalsó sorához tartozó állapotváltozó sem függ semelyik másik állapotváltozótól. Ha  , akkor az adott sorhoz tartozó állapotváltozó függ az eggyel nagyobb sorszámú állapotváltozótól, vagyis azon keresztül irányítható. Általános esetben, amikor az összes
, akkor az adott sorhoz tartozó állapotváltozó függ az eggyel nagyobb sorszámú állapotváltozótól, vagyis azon keresztül irányítható. Általános esetben, amikor az összes  , akkor a többszörös sajátértékhez tartozó állapotváltozók nem csatolhatók szét, nem lehet azokat egymástól függetleníteni. Ez az alak alkalmas az irányíthatóság és a megfigyelhetőség egyszerű ellenőrzésére. Az egyszeres sajátértékhez tartozó állapotváltozókat és a többszörös sajátértékhez tartozó olyan állapotváltozókat, amelyekhez tartozó (mellette lévő)
, akkor a többszörös sajátértékhez tartozó állapotváltozók nem csatolhatók szét, nem lehet azokat egymástól függetleníteni. Ez az alak alkalmas az irányíthatóság és a megfigyelhetőség egyszerű ellenőrzésére. Az egyszeres sajátértékhez tartozó állapotváltozókat és a többszörös sajátértékhez tartozó olyan állapotváltozókat, amelyekhez tartozó (mellette lévő)  értéke 0, csak közvetlenül a bemenőjellel lehet befolyásolni, ezért csak akkor irányíthatók, ha a
értéke 0, csak közvetlenül a bemenőjellel lehet befolyásolni, ezért csak akkor irányíthatók, ha a  mátrix adott sorában van legalább egy nem nulla elem.
mátrix adott sorában van legalább egy nem nulla elem.
Hasonlóan, az egyszeres sajátértékhez tartozó állapotváltozók és a többszörös sajátértékhez tartozó olyan állapotváltozók, amely felett lévő  értéke 0, csak akkor megfigyelhető, ha a
értéke 0, csak akkor megfigyelhető, ha a  mátrix megfelelő sorszámú oszlopában van legalább egy nem nulla elem.
mátrix megfelelő sorszámú oszlopában van legalább egy nem nulla elem.
Azok az állapotváltozók, amelyek sajátértéke mellett az  mátrixban található egy 1-es, azok befolyásolhatók az eggyel nagyobb sorszámú állapotváltozón keresztül, de ezzel együtt információt is tartalmaz arról. Ha az
mátrixban található egy 1-es, azok befolyásolhatók az eggyel nagyobb sorszámú állapotváltozón keresztül, de ezzel együtt információt is tartalmaz arról. Ha az  mátrixban található egy következő alakú blokk
mátrixban található egy következő alakú blokk
| (6.148) |
akkor e blokkhoz tartozó minden állapotváltozó irányítható a legalsó sorhoz tartozó állapotváltozón keresztül, és minden állapotváltozó megfigyelhető (rekonstruálható) a legfelső sorhoz tartozó állapotváltozóból.
xxxxx
6.2.10. Kidolgozott feladatok az állapotirányításra
6.8 feladat
Adott a következő rendszer. Írja fel az irányíthatósági mátrixot és döntse el, hogy irányítható-e a rendszer.
| (6.149) |
6.2.10.1. Megoldás
| (6.150) |
A determináns nem 0, ezért a rendszer irányítható.
6.9 feladat
Adott a következő rendszer. Írja fel az irányíthatósági mátrixot és döntse el, hogy irányítható-e a rendszer.
| (6.151) |
6.2.10.2. Megoldás
Látható, hogy az  állapotváltozóra sem egy másik állapotváltozó, sem a bemenőjel nem hat, így az irányíthatósági mátrix felírása nélkül is kimondható, hogy a rendszer nem irányítható. Ugyanerre következtetésre juthatunk az irányíthatósági mátrix alapján is.
állapotváltozóra sem egy másik állapotváltozó, sem a bemenőjel nem hat, így az irányíthatósági mátrix felírása nélkül is kimondható, hogy a rendszer nem irányítható. Ugyanerre következtetésre juthatunk az irányíthatósági mátrix alapján is.
| (6.152) |
Ha a determinánst az első sor alapján fejtjük ki, akkor minden tagban szerepel egy nulla tényező. Mivel  , az első tag előjele pozitív (bár ennek esetünkben nincs jelentősége).
, az első tag előjele pozitív (bár ennek esetünkben nincs jelentősége).
| (6.153) |

6.10 feladat
Adott a következő rendszer. Írja fel a megfigyelhetőségi mátrixot és döntse el, hogy megfigyelhető-e a rendszer.
| (6.154) |
| (6.155) |
6.2.10.3. Megoldás
| (6.156) |
A determináns nem 0, ezért a rendszer megfigyelhető.
6.11 feladat
Adott a következő rendszer. Írja fel a megfigyelhetőségi mátrixot és döntse el, hogy megfigyelhető-e a rendszer.
| (6.157) |
6.2.10.4. Megoldás
Látható, hogy az  állapotváltozóról sem közvetlenül (ld. C mátrix első oszlopa), sem közvetve, más állapotváltozón keresztül (ld. A mátrix első oszlopa) nem szerzünk információt. Így a rendszer nem megfigyelhető.
állapotváltozóról sem közvetlenül (ld. C mátrix első oszlopa), sem közvetve, más állapotváltozón keresztül (ld. A mátrix első oszlopa) nem szerzünk információt. Így a rendszer nem megfigyelhető.
6.12 feladat
Adott egy rendszer átviteli függvénye
| (6.158) |
Irjuk fel a rendszer állapottér egyenletét kanonikus alakban
6.2.10.5. Megoldás
A kimenőjel Laplace-transzformáltja
| (6.159) |
Részlettörtekre bontva
| (6.160) |

Három állapotváltozót bevezetve
| (6.161) |

Az állapotváltozókra felírható egyenletek
|
|
| (6.162) |





Átrendezve mátrixos formára:
| (6.163) |
| (6.164) |
6.13 feladat (pólus áthelyezés)
Egy lineáris rendszer állapottér egyenletei a következő alakban írhatóak fel.
| (6.165) |


Állapotvisszacsatolással a visszacsatolt szabályozási kör pólusait kívánjuk áthelyezni az ábrán látható módon.
A rendszer „mátrixok” értékei a következők: A = -2, B = 4, C = 1, D = 0.
Számítsa ki a rendszer időállandóját. Számítsa ki a K értékét úgy, hogy a visszacsatolt szabályozási kör időállandója a felére csökkenjen. Indokolja, hogy miért van szükség az Nx és Nu kompenzációra, adja meg azok számításának módját, és numerikusan is számolja ki!
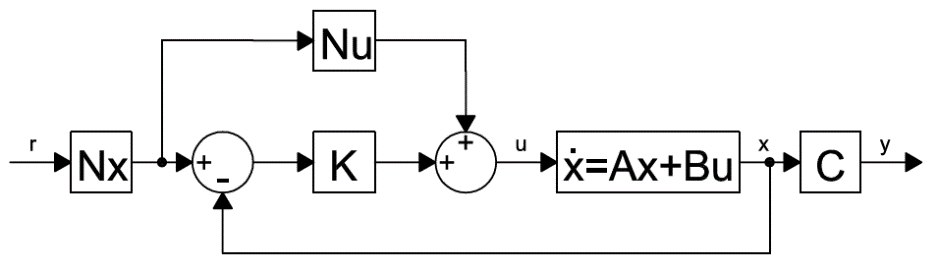
Megoldás
Ez a rendszer egy állapotváltozós, SISO rendszer, mivel a rendszermátrixok skalárok. Ez a számolás során könnyebbséget jelent.

Első lépésben az eredeti rendszerrel foglalkozunk:
Az állapottér egyenleteket átírjuk a frekvenciatartományba, és a D=0 miatt egyszerűsítjük a második egyenletet. Kifejezzük az állapotváltozót (X), majd ezt behelyettesítve, a kimenetet (Y) kifejezzük a bemenet (U) függvényeként. Végül felírjuk a rendszer átviteli függvényét, megadva a póluspontot és az időállandót.



(Ez az átalakítás csak akkor tehető meg, ha az A ”rendszermátrix” skalár, tehát egyetlen állapotváltozó van. Az egyenletben szereplő I az egységmátrix.)
A póluspontban a nevező nulla: ,tehát
,tehát 
A rendszer időállandója (valós értékű pólus esetén):
A póluspontot az alapok ismeretében egy lépésben is megkaphatjuk. Minden


alakban felírható lineáris rendszer átviteli függvénye:

Ebből az egyenletből egyértelműen látszik, hogy az ilyen rendszerek póluspontjai az A mátrix sajtértékei. Esetünkben az A mátrix skalár, tehát sajátértéke önmaga, vagyis a pólus: 
Teljes rendszer a visszacsatolt szabályozási körrel:
A kikötés:  legyen.
legyen.
Az új póluspont így: 
A szabályozási kör átviteli függvényét hatásvázlat átalakítás segítségével kapjuk meg. Először az időtartománybeli hatásvázlatot a frekvenciatartománybelivel helyettesítjük, és áthelyezzük az összegzési pontot, majd felírjuk az így keletkező előre-, és visszacsatolás eredő átviteli függvényét.
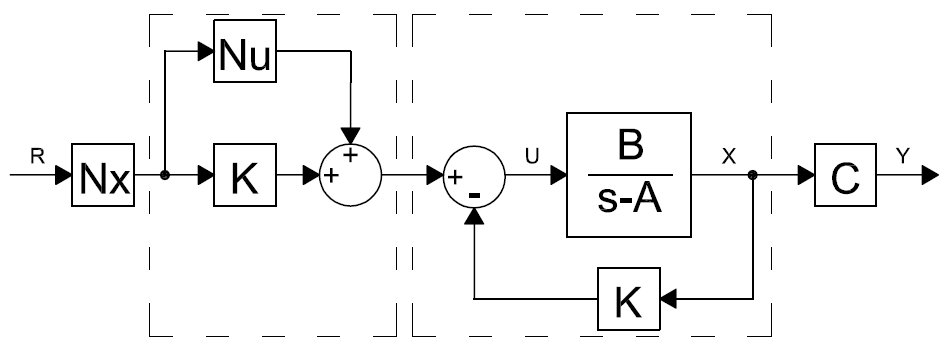
Az előrecsatolás eredő átviteli függvénye:
A visszacsatolásé:

A visszacsatolt szabályozási kör kimenetének függvénye:
A visszacsatolt szabályozási kör bemenete: r(t); R(s)
Így az átviteli függvény:
Az időállandóra tett kikötés miatt a pólus értéke:

A kívánt eredményhez a K visszacsatoló mátrix értékét  -nek kell választani.
-nek kell választani.
Az Nx, Nu kompenzációra azért van szükség, mert a visszacsatolással történő pólus áthelyezés a rendszer erősítését is megváltoztatja. Ezekkel a kompenzáló tagokkal lehet az eredő erősítést beállítani. Az általános elvárás, hogy a teljes rendszer erősítése egy legyen. A kompenzáló tagok számításához állandósult állapotot, azaz az elvárt értékre beállt rendszert feltételezünk.
A megadott hatásvázlattal jellemezhető feladatoknál, ha az elvárt eredő erősítés egy, akkor a bemenőjel (r(t)) valójában a kimenőjel elvárt értéke, amire be kell állnia (y(∞)). A frekvenciatartományban ekkor:

Állandósult állapotban a régi és az új állapot azonos, tehát az állapotváltozók vektora állandó, deriváltja pedig zérus, míg a különbségképző utáni különbségi jeltől (hibajeltől) pedig elvárjuk, hogy szintén zérus legyen:


A különbségi jel: tehát
tehát 
Az adott szabályozásnál, ha a különbségi jel zérus:
Az így meghatározott X(s) és U(s) értékeket visszahelyettesítjük az állapottér egyenletekbe, majd a szabályozott jellemző minden értékét egynek választjuk. (Mivel a jelenlegi feltételezésünk szerint a rendszer állandósult állapotban van, így Y(s) értékét bármilyen konstans értéknek választhatjuk, és az állandósult állapot miatt ez a szabályozó jel értéke is.)


Az így kapott két ismeretlenes egyenletrendszert mátrixos alakban nem tudjuk felírni, mert az ismeretlenek nem függetlenek. Azonban nincs nehéz dolgunk, mert a feladatban skalár értékekkel számolunk.
A második egyenlettel kezdve: 
Így az első egyenlet:
Tehát:  , és
, és  a kompenzáló tagok értékei.
a kompenzáló tagok értékei.
6.3. SISO rendszerek állapotirányítása
A 6.3 alfejezet célja a 6.2 alfejezetben szereplő ismeretek elmélyítése papíron könnyebben kiszámítható példákon keresztül.
6.3.1. Állapotvisszacsatolás kanonikus alakban
Tegyük fel, hogy az állapottér egyenletünk kanonikus alakban adott. Vizsgájuk meg, hogy az állapotvisszacsatolás hogyan hat a kanonikus alakra. Az egyszerűség kedvéért induljunk ki a 6.12 feladatban bemutatott rendszerből. Legyen
| (6.166) |
A (6.166) összefüggést behelyettesítve (6.163) állapotegyenletbe.
| (6.167) |
Jól látható, hogy az állapotvisszacsatolással elveszítjük a diagonális struktúrát. Célszerűnek látszik, hogy keressünk egy olyan más mátrixstruktúrát, amely az állapotvisszacsatolás után is megmarad.
6.3.2. SISO rendszerek irányíthatósági kanonikus alakja
Tegyük fel, hogy a rendszer állandó együtthatós közönséges differenciálegyenlettel írható le, amelyet Laplace-transzformálva a közvetkezőt kapjuk:
| (6.168) |

Vezessük be a következő jelölést:
A (6.169) egyenletet kifejtve
| (6.171) |

Inverz Laplace-transzformálva:
| (6.172) |

átrendezve:
| (6.173) |

legyen
Az állapottér egyenlet
| (6.174) |
A kimenetre vonatkozó egyenlet


Két esetet kell különválasztani.
Ha n>r, akkor (6.176) alapján  az állapotváltozók lineáris kombinációja
az állapotváltozók lineáris kombinációja
| (6.177) |
A könnyebb ábrázolhatóság kedvéért vezessük be a következő jelölést
| (6.178) |
ahol  , ha
, ha  . Legyen továbbá
. Legyen továbbá  . Ezzel a jelöléssel az ún. irányíthatósági kanonikus alak blokkvázlatát a 6-13. ábra mutatja.
. Ezzel a jelöléssel az ún. irányíthatósági kanonikus alak blokkvázlatát a 6-13. ábra mutatja.
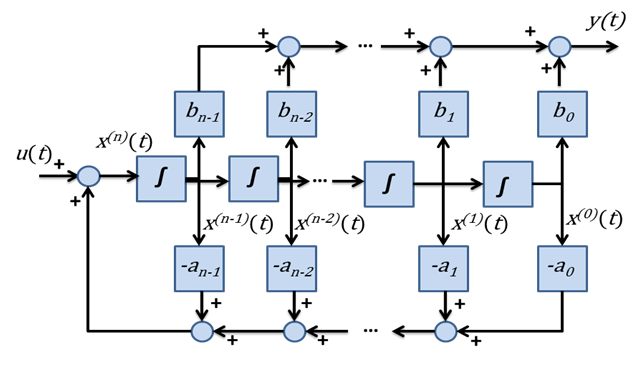
Ha n=r, akkor (6.176) mellett (6.173), illetve (6.174) utolsó sorára is tekintettel kell lennünk.
| (6.179) |
6.3.3. Pólus áthelyezés irányíthatósági kanonikus alak esetén
Tegyük fel, hogy  , D=0 és n>r, továbbá induljunk ki a következő átviteli függvényből
, D=0 és n>r, továbbá induljunk ki a következő átviteli függvényből
| (6.180) |
Az első lépésben az a célunk, hogy a megváltoztassük az átviteli függvény pólusait, vagyis (6.180) vevezőjének gyökeit. Jelöljük a bevezetni kívánt (desired) pólusokat  -vel és legyen
-vel és legyen  az állapotvisszacsatolással nyert rendszer átviteli függvénye, amely
az állapotvisszacsatolással nyert rendszer átviteli függvénye, amely  pólusokkal rendelkezik.
pólusokkal rendelkezik.
| (6.181) |
ahol  az állapotvisszacsatolással elérni kívánt rendszer átviteli függvényének nevezőjében található polinom együtthatói, más szavakkal a visszacsatolt rendszer karakterisztikus egyenletének együtthatói. Vizsgáljuk meg, hogy mit eredményez az állapotvisszacsatolás egy tetszőleges
az állapotvisszacsatolással elérni kívánt rendszer átviteli függvényének nevezőjében található polinom együtthatói, más szavakkal a visszacsatolt rendszer karakterisztikus egyenletének együtthatói. Vizsgáljuk meg, hogy mit eredményez az állapotvisszacsatolás egy tetszőleges  sorvektoron keresztül.
sorvektoron keresztül.
| (6.182) |
A bemeneti  mátrix speciális struktúrája miatt
mátrix speciális struktúrája miatt
| (6.183) |
Az állapotvisszacsatolás után a rendszert leíró egyenlet a következő lesz
| (6.184) |
Így egy magára hagyott rendszert kapunk (az utolsó sor egy homogén differenciálegyenlet), amelynek az együtthatóit tetszőlegesen beállíthatjuk a  visszacsatoló tag helyes megválasztásával. Ha azt kívánjuk, hogy a (6.184) rendszer átviteli függvénye (6.181) legyen, akkor
visszacsatoló tag helyes megválasztásával. Ha azt kívánjuk, hogy a (6.184) rendszer átviteli függvénye (6.181) legyen, akkor  elemeit a következő módon kell megválasztani:
elemeit a következő módon kell megválasztani:
| (6.185) |

Az állapotvisszacsatolással azt tudjuk elérni, hogy a rendszer tetszőleges kezdeti értékből kiindulva a  visszacsatoló tag által beállított időállandóval tartson a nullához, vagyis a
visszacsatoló tag által beállított időállandóval tartson a nullához, vagyis a  visszacsatoló taggal a rendszer tranziens viselkedését tudjuk beállítani. Ha azt akarjuk, hogy a kimenőjel valamilyen konstans érték legyen, akkor a szuperpozíció elvét alkalmazhatjuk (ld. 6-6. ábra)
visszacsatoló taggal a rendszer tranziens viselkedését tudjuk beállítani. Ha azt akarjuk, hogy a kimenőjel valamilyen konstans érték legyen, akkor a szuperpozíció elvét alkalmazhatjuk (ld. 6-6. ábra)
| (6.186) |

A (6.116) egyenletből kitűnik, hogy az állapotvisszacsatolással az  állapot mátrix helyébe
állapot mátrix helyébe  mátrix került, vagyis a tranziens viselkedést tudjuk ezzel megváltoztatni.
mátrix került, vagyis a tranziens viselkedést tudjuk ezzel megváltoztatni.
| (6.187) |

Ha az a célunk, hogy legyen  , akkor ehhez
, akkor ehhez  értékét megfelelően kell megválasztanunk. Írjuk fel a kimenőjel Laplace-transzformáltját.
értékét megfelelően kell megválasztanunk. Írjuk fel a kimenőjel Laplace-transzformáltját.
| (6.188) |
A végérték tétel alapján
| (6.189) |


úgy érhető el, ha
| (6.190) |

Az állapotvisszacsatolás blokk diagramját irányíthatósági kanonikus alak esetén a 6-14. ábra mutatja.
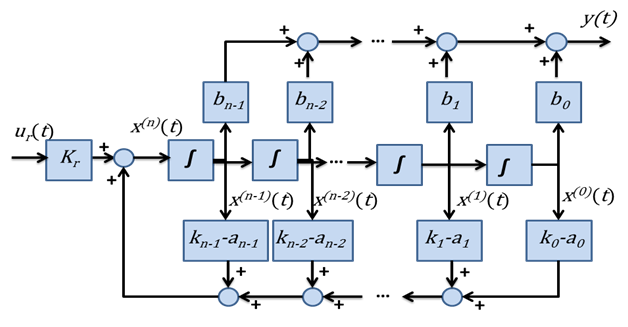
6.3.4. Pólus áthelyezés általános alakú LTI SISO rendszer esetén (Ackermann formula)
A 6.3.3 pontban leírt módszer elméletben nagyon hatékonynak bizonyult, de a gyakorlatban legtöbbször közvetlenül még akkor sem alkalmazható, ha minden állapotváltozót mérni tudunk, mivel a rendszer fizikai felépítése eltér az irányíthatósági kanonikus alaktól. Ezért először a mért állapotváltozókat transzformálni kell az irányíthatósági kanonikus alakara, ahol az állapotvisszacsatolás megtervezhető a 6.3.3 pontban leírt módszerrel. Az állapottranszformáció és a visszacsatoló mátrix (pontosabban esetünkben sorvektor) közvetlenül megtervezhető az Ackermann formula segítségével.
Először vizsgáljuk meg, hogy miként hat a hasonlósági transzformáció az állapotvisszacsatolásra.
Adott egy (6.3) alakú differenciálegyenlettel leírható rendszer, amelyet egy megfelelő hasonlósági transzformációval átalakítunk.


Tegyük fel, hogy a transzformált rendszerhez valamilyen szempont szerint megterveztük a szükséges  állapotvisszacsatoló mátrixot. Ha ugyanezt a hatást (értsd ugyanezt a bemenőjelet) az eredeti rendszer állapotváltozóiból szeretnénk elérni.
állapotvisszacsatoló mátrixot. Ha ugyanezt a hatást (értsd ugyanezt a bemenőjelet) az eredeti rendszer állapotváltozóiból szeretnénk elérni.
| (6.193) |

A (6.193) összefüggésből kiolvasható, hogy ha ismerjük a hasonlósági transzformációs mátrixot és a transzformált rendszerhez megterveztük az állapotvisszacsatolást, akkor kiszámíthatjuk az eredeti rendszerhez szükséges állapotvisszacsatolást.
| (6.194) |

Adottakegy SISO rendszer állapottér egyenletei, ahol az  ,
,  és
és  rendszermátrix általános alakúak (azt feltételezzük, hogy
rendszermátrix általános alakúak (azt feltételezzük, hogy  ). Keressük azt a
). Keressük azt a  hasonlósági transzformációs mátrixot, amellyel az eredeti egyenletet transzformálhatjuk az
hasonlósági transzformációs mátrixot, amellyel az eredeti egyenletet transzformálhatjuk az  ,
,  és
és  irányíthatósági kanonikus alakra. (6.21) alapján
irányíthatósági kanonikus alakra. (6.21) alapján
| (6.195) |

Használjuk ki  speciális struktúráját. Tegyük fel, hogy az
speciális struktúráját. Tegyük fel, hogy az  mátrix alakja megegyezik a (6.174) egyenletben található rendszermátrix alakjával, azzal a kiegészítéssel, hogy legyen
mátrix alakja megegyezik a (6.174) egyenletben található rendszermátrix alakjával, azzal a kiegészítéssel, hogy legyen  . Jelölje a
. Jelölje a  mátrix i-edik sorát a
mátrix i-edik sorát a  . Ennek megfelelően (6.195) a következőképp írható fel
. Ennek megfelelően (6.195) a következőképp írható fel
| (6.196) |
| (6.197) |
Látható, hogy ha  ismert, akkor egy rekurzív formulával a
ismert, akkor egy rekurzív formulával a  mátrix többi sora is kiszámítható. A következőkben a
mátrix többi sora is kiszámítható. A következőkben a  sort határozzuk meg, ehhez felhasználjuk
sort határozzuk meg, ehhez felhasználjuk  ismert struktúráját. Ugyancsak(6.21) alapján
ismert struktúráját. Ugyancsak(6.21) alapján
| (6.198) |

A rekurziót kihasználva (6.197) összefüggésből kiolvasható, hogy
| (6.199) |

| (6.200) |
Vegyük észre, hogy (6.200) jobboldalán megjelent az irányíthatósági  mátrix.
mátrix.
| (6.201) |
| (6.202) |
A (6.202) és (6.199) segítségével a  hasonlósági transzformációs mátrix soronként kiszámítható.
hasonlósági transzformációs mátrix soronként kiszámítható.
Így már van egy algoritmusunk általános alakú LTI SISO rendszer pólusáthelyezésre alapuló állapotvisszacsatolásának megtervezésére.

hasonlósági transzformációs mátrix felírása (6.202) és (6.199) segítségével

,
 és
és  felírása
felírása  és (6.21) segítségével (itt feltételezzük, hogy
és (6.21) segítségével (itt feltételezzük, hogy  és
és  )
)Az állapotvisszacsatolással elérni kívánt
 átviteli függvény felírása
átviteli függvény felírása
alapján az elérni kívánt
 felírása (6.174) segítségével.
felírása (6.174) segítségével.
és
 utolsó sorainak összehasonlításával
utolsó sorainak összehasonlításával  meghatározása
meghatározása
meghatározása (6.194) segítségével

közvetlenül is kiszámítható az Ackermann formula segítségével. Először kiválasztjuk a visszacsatolt rendszer pólusait, vagyis az  mátrix
mátrix  sajátértékeit. Ebből a karakterisztikus polinom
sajátértékeit. Ebből a karakterisztikus polinom  együtthatóit meghatározhatjuk. Abból indulhatunk ki, hogy minden mátrix kielégíti a saját karakterisztikus polinomját (Cayley-Hamilton tétel).
együtthatóit meghatározhatjuk. Abból indulhatunk ki, hogy minden mátrix kielégíti a saját karakterisztikus polinomját (Cayley-Hamilton tétel).
| (6.203) |


választással és algebrai átalakításokkal
| (6.204) |
ebből már adódik
| (6.205) |

6.3.5. Megfigyelhetőségi kanonikus alak és a megfigyelőre alapozott állapotvisszacsatolás
Az Ackermann formula egy fontos lépés a gyakorlati alkalmazhatóság felé, de a legtöbb gyakorlati esetben egy megfigyelőre is szükség van, hogy a nem mérhető állapotváltozókat előállítsuk. Ahogy létezik egy olyan mátrix struktúra, amely esetén az állapotvisszacsatolás könnyen megtervezhető, úgy létezik egy olyan mátrix struktúra, amely a megfigyelő tervezését teszi egyszerűbbé, ezt nevezzük megfigyelhetőségi kanonikus alaknak. Az irányíthatósági kanonikus alakból úgy kapjuk a megfigyelhetőségi kanonikus alakot, ha az A mátrixot transzponáljuk, továbbá a B és C mátrix szerepét felcseréljük (D mátrix változatlan).
6.3.6. Irányíthatósági kanonikus alakban adott SISO rendszer állapotvisszacsatolása integrátorral kiegészítve
Jelöljük  alsó indexszel az irányíthatósági kanonikus formában felírt változókat és mátrixokat és tegyük fel, hogy az eredeti rendszer irányíthatósági kanonikus alakban adott, továbbá figyelembe vesszük, hogy esetünkben a rendszer egy bemenetű és ezért egy integrátorra van szükségünk. (6.126) helyett a következőt írhatjuk
alsó indexszel az irányíthatósági kanonikus formában felírt változókat és mátrixokat és tegyük fel, hogy az eredeti rendszer irányíthatósági kanonikus alakban adott, továbbá figyelembe vesszük, hogy esetünkben a rendszer egy bemenetű és ezért egy integrátorra van szükségünk. (6.126) helyett a következőt írhatjuk
| (6.206) |

Hasonlósági transzformációval a kiterjesztett egyenletet átírjuk irányíthatósági kanonikus alakra
| (6.207) |

A transzformált mátrixokat mechanikus számítással megkaphatjuk, de logikailag is belátható, hogy a 6-14. ábraán látható visszacsatolt rendszer csak úgy terjeszthető ki egy integrátorral úgy, hogy közben az irányíthatósági kanonikus alakot megtartsuk, hogy az  állapotváltozót tovább integráljuk (ld. 6-15. ábra). Állandósult állapotban az összes integrátor bemenetén nullának kell lennie, így az ábráról az is leolvasható, hogy állandósult állapot csak úgy lehetséges, ha
állapotváltozót tovább integráljuk (ld. 6-15. ábra). Állandósult állapotban az összes integrátor bemenetén nullának kell lennie, így az ábráról az is leolvasható, hogy állandósult állapot csak úgy lehetséges, ha
| (6.208) |

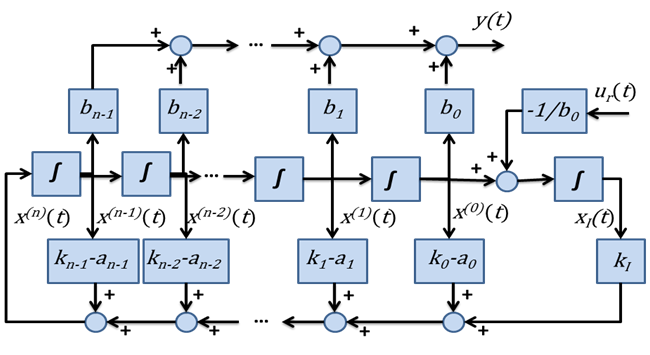
A kiterjesztett rendszer transzformált mátrixai a következő alakúak lesznek
| (6.209) |
6.3.7. Kidolgozott feladatok SISO rendszerek állapotvisszacsatolására
6.14 feladat Irányíthatósági kanonikus alak blokk diagram alapján
Írja fel a 6.3 feladatban bemutatott rendszer állapottér egyenletét irányíthatósági kanonikus alakban.
6.3.7.1. Megoldás
A 6-3. ábra alapján
| (6.210) |

| (6.211) |
6.15 feladat Állapotvisszacsatolás (két állapotváltozó)
Egy szabályozott szakasz két időállandóval rendelkezik ( és
és  ). Az átviteli függvénye:
). Az átviteli függvénye:
| (6.212) |
Írja fel a MATLAB zp2ss paranccsal a rendszer állapottér egyenletét. Állapotvisszacsatolással és „place” parancsa segítségével változtassa meg a visszacsatolt rendszer pólusait
a)
A legnagyobb időállandót csökkentsük ötödére
b)
Visszacsatolással alakítsuk lengővé a rendszert. A lengések amplitúdója csökkenjen a legnagyobb időállandóval leírható burkológörbével. és a lengések frekvenciája legyen 1 Hz.
c)
Visszacsatolással alakítsuk lengővé a rendszert. A lengések amplitúdója csökkenjen a legnagyobb időállandó ötödével leírható burkológörbével. és a lengések frekvenciája legyen akkora, hogy kb. egy túllendülés után álljon be a rendszer. Ezt azzal érjük el, hogy a lengések periódusideje legyen azonos a burkoló görbe időállandójának ötszörösével, vagyis az eredeti legnagyobb időállandóval.
d)
A póluspárt a csillapítás ( ) és a Bode diagramon a
) és a Bode diagramon a  töréspont helyének segítségével is megadhatjuk. Tekintsük a következő kéttárolós lengőtagot:
töréspont helyének segítségével is megadhatjuk. Tekintsük a következő kéttárolós lengőtagot:
| (6.213) |
Ha  , akkor az átviteli függvény pólusai:
, akkor az átviteli függvény pólusai:
| (6.214) |

ahol:
| (6.215) |
| (6.216) |

Az ugrásválasz burkológörbéjéből levezethető, hogy a  százalékos szabályozási idő:
százalékos szabályozási idő:
| (6.217) |

Ha tehát megadjuk  ,
,  és
és  értékét, akkor:
értékét, akkor:
| (6.218) |

6.3.7.2. Megoldás
T1=1; T2=0.1; Tsim=T1*10; %Átviteli függvény TFzeros= []; TFpoles= [-1/T1 -1/T2]; TFgain= 1/T1/T2; %Állapot-tér modell [A,B,C,D]=zp2ss(TFzeros,TFpoles,TFgain) B=B*C(2); %normaizálás C(2)=1; %a) eset newpoles=[-1/T1*5 -1/T2]; %A legnagyobb időállandót ötödére csökkentjük %b) eset newpoles =[-1/T1 +2*pi*i -1/T1-2*pi*i]; %Lengést eredményező pólusok %c) eset newpoles =[-1/T1*5+2*pi/T1*i -1/T1*5-2*pi/T1*i]; %aperiodikus beallás %d) eset Tsz=1; %szabályozási idő kr=2; %szabályozási időhöz tartozó korlát xi=0.75; %csillapítás w0=log(100/kr)/Tsz/xi; %sajátfrekvencia p1=-w0*xi+i*w0*sqrt(1-xi^2); %pólusok p2=-w0*xi-i*w0*sqrt(1-xi^2); newpoles =[p1 p2]; K1=place(A,B,newpoles) % Statikus hiba korrekció s = size(A,1); Z = [zeros([1,s]) 1]; N = inv([A,B;C,D])*Z'; Nx = N(1:s); Nu = N(1+s); comp=Nu + K1*Nx;
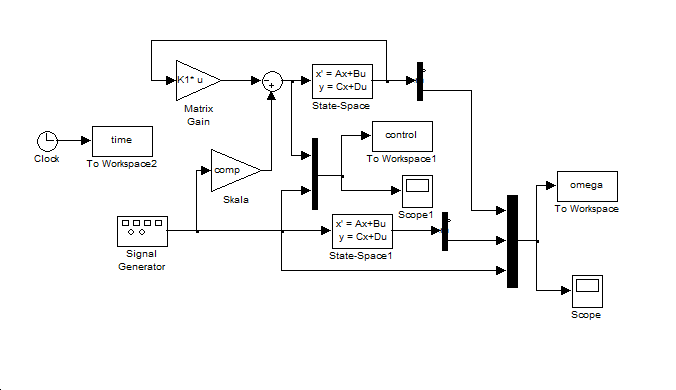
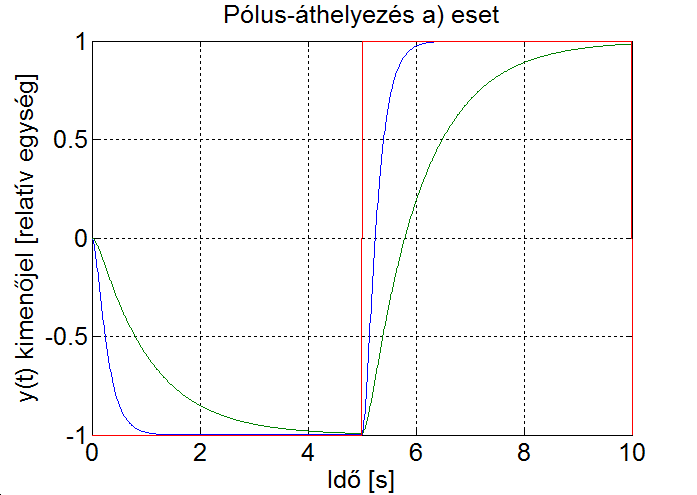
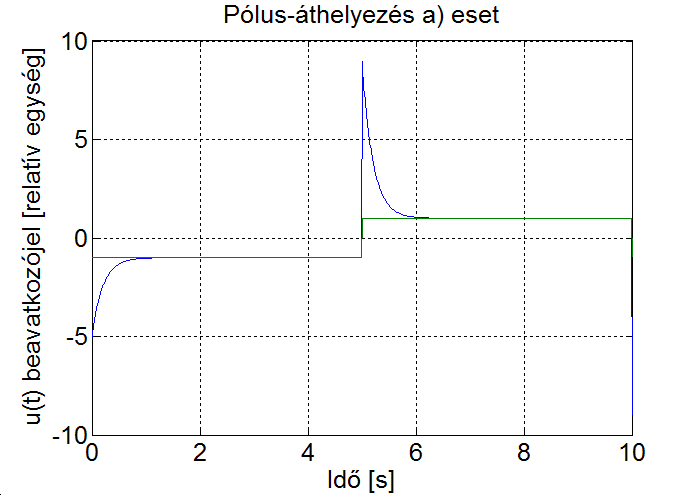
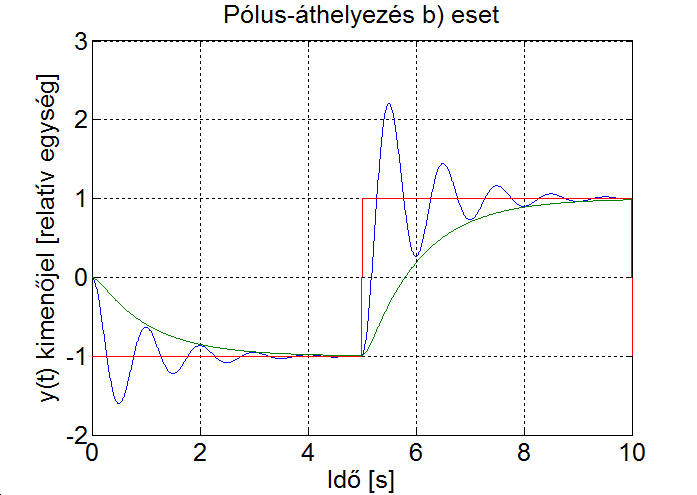
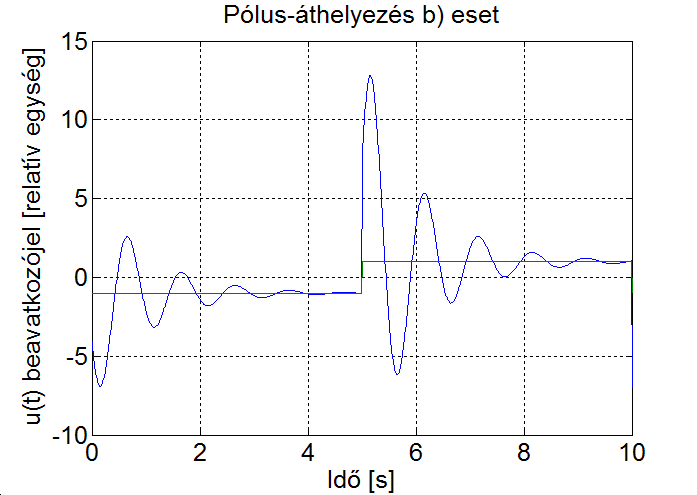
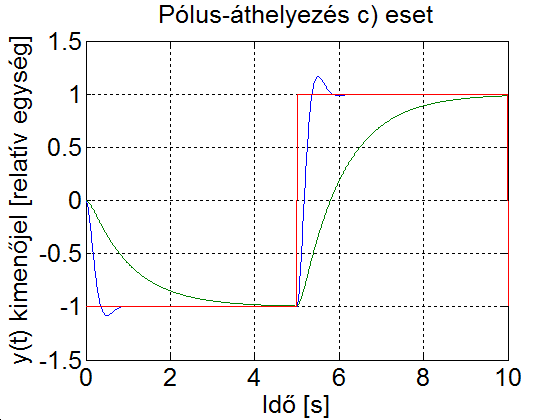
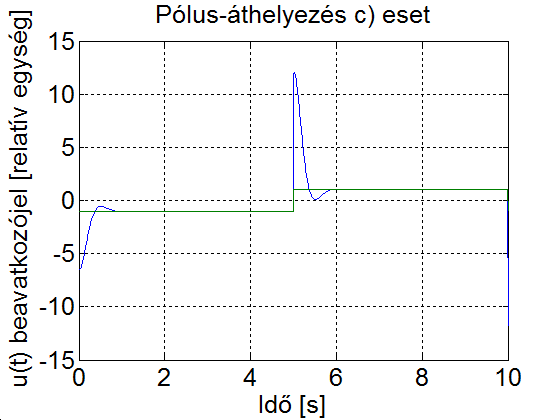
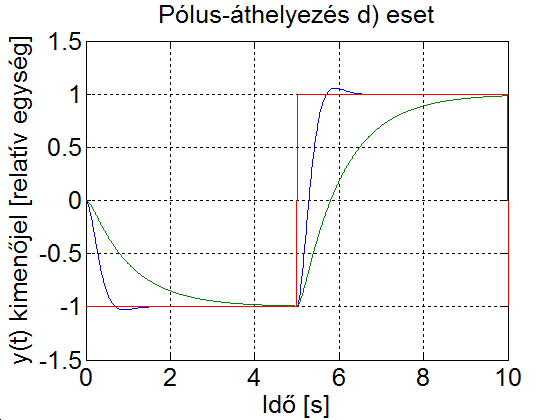
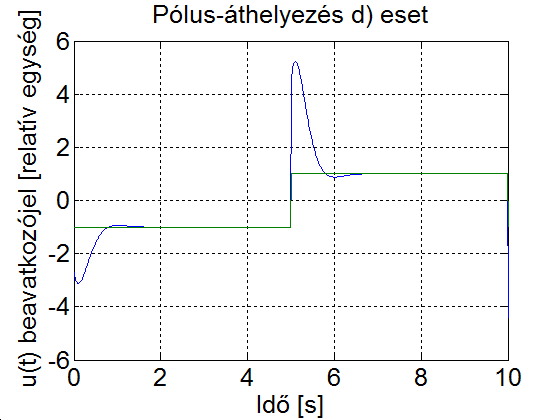
A szimulációs eredményből kitűnik, hogy az állapotvisszacsatolással a visszacsatolt rendszer tulajdonságait viszonylag szabadon tudjuk befolyásolni, a kívánt beállás jellegét a beavatkozójel segítségével tudjuk elérni.
6.16 feladat Állapotvisszacsatolás (három állapotváltozó)
Ismét a (6.158) átviteli függvényből indulunk ki és felírjuk a kimenőjel Laplace-transzformáltját
| (6.219) |
a)
Írjuk fel az állapotegyenleteket irányíthatósági kanonikus formában. Vezessük be az  állapotváltozót (ez még nem írja le teljesen a rendszer állapotát, később további állapotváltozókat vezetünk be).
állapotváltozót (ez még nem írja le teljesen a rendszer állapotát, később további állapotváltozókat vezetünk be).
| (6.220) |
|
|




| (6.221) |
Az eredeti rendszer pólusai: -1, -2 és -4
| (6.222) |

a) eset
Helyezzük át a legkisebb abszolút értékű (legnagyobb időállandóhoz tartozó) pólust -1-ről -3-ra.
| (6.223) |

Látható, hogy a nevező polinom együtthatói megváltoznak: 1, 9, 26 és 24. Az állapotvisszacsatolás megtartja az eredeti struktúrát, így a visszacsatolt rendszer eredő átviteli függvénye a következő lesz
| (6.224) |
(6.222) és (6.223) összehasonlításából kitűnik, hogy
| (6.225) |


Az eredeti (6.158) és a visszacsatolt (6.224) rendszer átmeneti függvényének állandósult értékének reciprokával kell a referenciajelet megszorozni, hogy egységnyi erősítést kapjunk.
Látható, hogy a negatív visszacsatolás csökkenti a rendszer erősítését.
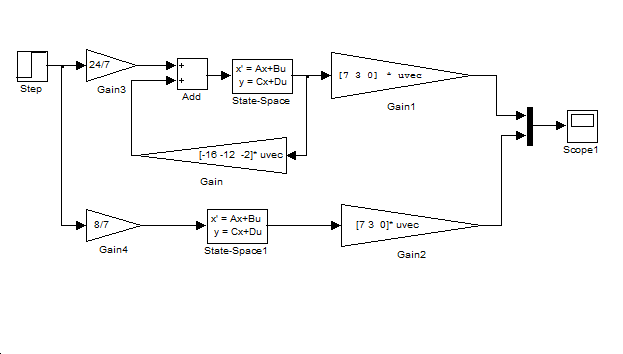
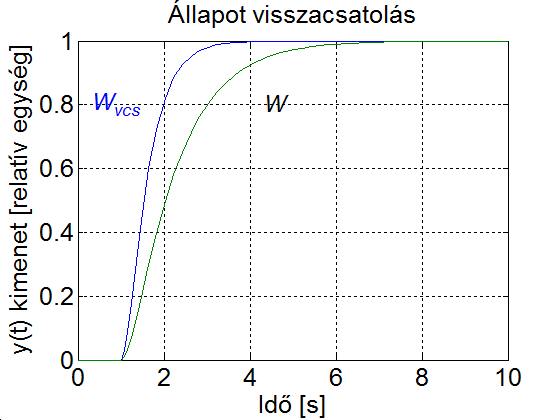
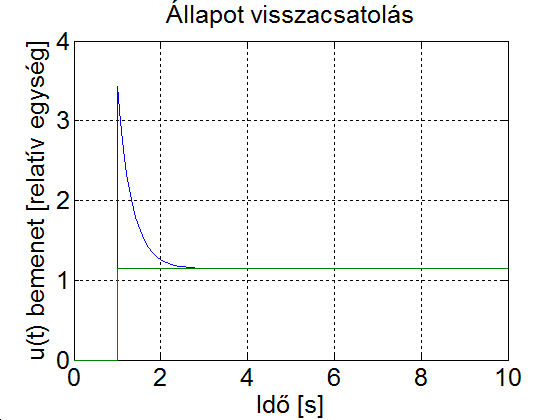
További lehetőségek
b) eset
Visszacsatolással alakítsuk lengővé a rendszert. A lengések amplitúdója csökkenjen 0.5 időállandóval leírható burkológörbével, és a lengések frekvenciája legyen akkora, hogy kb. egy túllendülés után álljon be a rendszer. Ezt azzal érjük el, hogy a lengések periódusideje legyen azonos a burkoló görbe időállandójának ötszörösével, vagyis a periódusidő legyen 2.5. A harmadik (legkisebb) időállandó legyen 0.2. Ennek megfelelően a visszacsatolt rendszer pólusai legyenek a következők
| (6.228) |

A (6.228) alapján a visszacsatolt rendszer átviteli függvényének nevezője a következő alakot ölti
| (6.229) |

(6.222) és (6.229) összehasonlításából a visszacsatolás sorvektora felírható
| (6.230) |

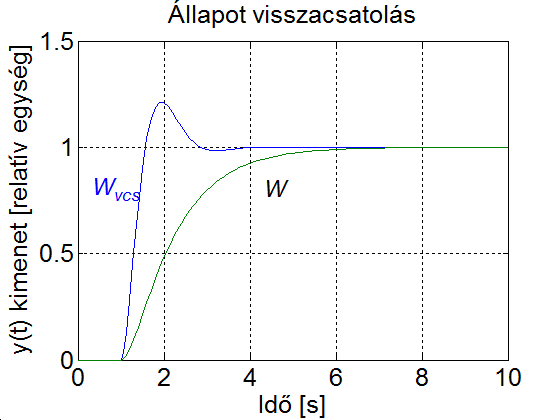
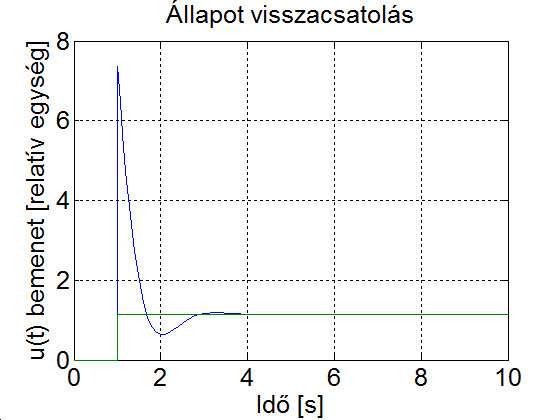
c) eset
A póluspárt a csillapítás ( ) és a Bode diagramon a
) és a Bode diagramon a  töréspont helyének segítségével is megadhatjuk. Tekintsük a következő kéttárolós lengőtagot:
töréspont helyének segítségével is megadhatjuk. Tekintsük a következő kéttárolós lengőtagot:
| (6.231) |
Ha  , akkor az átviteli függvény pólusai:
, akkor az átviteli függvény pólusai:
| (6.232) |

ahol:
| (6.233) |
| (6.234) |

Az ugrásválasz burkológörbéjéből levezethető, hogy a  százalékos szabályozási idő:
százalékos szabályozási idő:
| (6.235) |

Ha tehát megadjuk  ,
,  és
és  értékét, akkor:
értékét, akkor:
| (6.236) |

(6.213) és (6.218) alapján a póluspár kiszámítható.
| (6.237) |

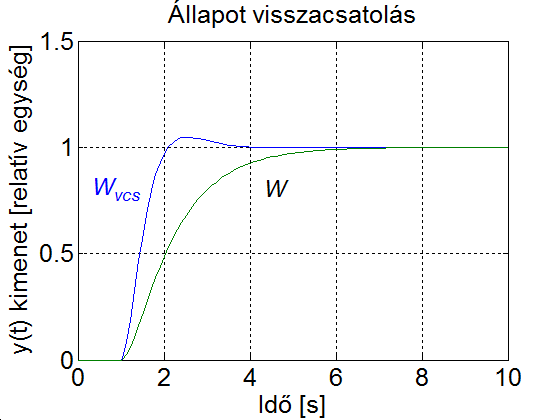
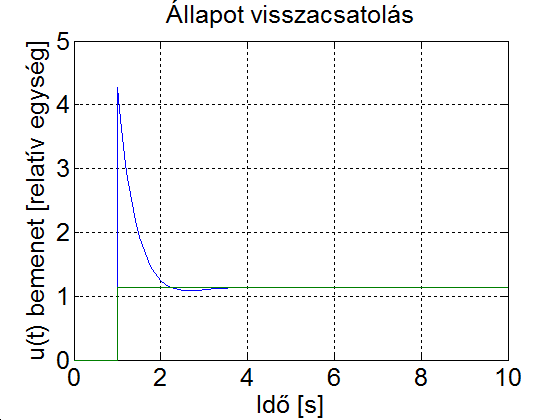
A Matlab értékadás
A=[0 1 0; 0 0 1; -8 -14 -7]; B=[0 0 1]'; C=[1 0 0; 0 1 0; 0 0 1]; D=[0; 0; 0]; Cv=[7 3 0]; %a) eset newpoles=[-2 -3 -4]; %b) eset newpoles=[-2+i*2*pi*2/5 -2-i*2*pi*2/5 -5]; %c) eset Tsz=2; %szabályozási idő kr=2; %szabályozási időhöz tartozó korlát xi=0.8; %csillapítás w0=log(100/kr)/Tsz/xi; %sajátfrekvencia p1=-w0*xi+i*w0*sqrt(1-xi^2); %pólusok p2=-w0*xi-i*w0*sqrt(1-xi^2); newpoles =[p1 p2 -5]; K2=-poly(newpoles)+poly([-1 -2 -4]); Kx=[K2(4) K2(3) K2(2)] ko_v=(-Kx(1)+8)/7 ko=8/7
6.17 feladat Megfigyelő tervezése
Adott egy külsőgerjesztésű egyenáramú motor a következő jelölésekkel  a motor szögsebessége. A motor paraméterei relatív egységben: a motor másodrendű nyomatéka
a motor szögsebessége. A motor paraméterei relatív egységben: a motor másodrendű nyomatéka  . nyomaték konstansa
. nyomaték konstansa  , az armatúra ellenállása
, az armatúra ellenállása  , az armatúra tekercs induktivitása
, az armatúra tekercs induktivitása  . Tegyük fel, hogy a terhelés lineáris (a terhelő nyomaték arányos a fordulatszámmal), az arányossági tényező
. Tegyük fel, hogy a terhelés lineáris (a terhelő nyomaték arányos a fordulatszámmal), az arányossági tényező  . A motor kapocsfeszültsége ugrásszerűen változik
. A motor kapocsfeszültsége ugrásszerűen változik  . A motor egyenletei:
. A motor egyenletei:
| (6.238) |

Tekintsük a rendszer bemenő jelének a motor kapocsfeszültségét és tegyük fel, hogy csak a fordulatszám mérhető. Írja fel a motor állapottér egyenletét és tervezzen teljes állapotmegfigyelőt a MATLAB place parancs segítségével..
6.3.7.3. Megoldás
A motor állapottér egyenlete
| (6.239) |
Behelyettesítve a paraméterek értékeit
| (6.240) |

A rendszer pólusai
| (6.241) |

Válasszuk meg a megfigyelő két pólusát úgy, hogy a megfigyelő működése gyorsabb legyen, mint a rendszeré (vagyis a megfigyelő mindkét pólusa nagyobb abszolút értékű, mint a rendszer legkisebb pólusa).
Legyen
| (6.242) |

Ez azt jelenti, hogy a valós és becsült állapotváltozók különbsége kb. 2 ms időállandóval szűnik meg. A megfigyelő visszacsatoló vektora
| (6.243) |
Látható, hogy a kezdeti érték gyors megszüntetése nagy abszolút értékű visszacsatolással lehetséges, ami zajos mérés esetén gondot okozhat. Legyen a valós és a becsült áram kezdeti értéke -1 és 0. A szimulációs eredmények a 6-25. ábraán láthatók.
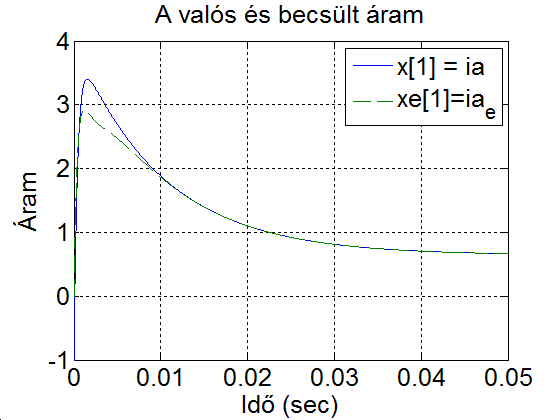
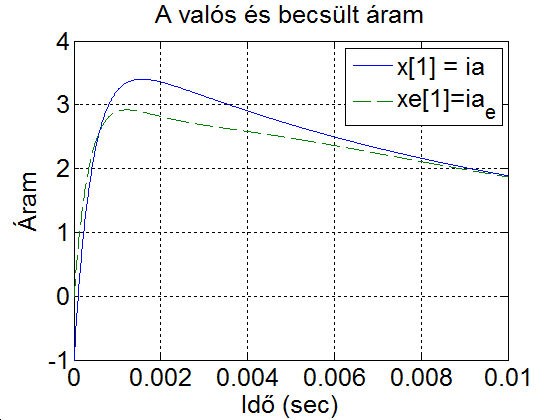
A számításnál használt MATLAB program
clear all; close all;
% Motor paraméterek
La = 1.1e-3; Ra = 2.7; Jm = 0.12; nu = 2; Kfi = 5.07;
Ua=10;
Ts=0;
Tsim=0.01;
% Motor állapottér mátrixai
A = [-nu/Jm Kfi/Jm; -Kfi/La -Ra/La];
B = [0; 1/La];
C = [1 0];
D = [0];
% Állapotváltozók: x=[omega; ia]
% Megfigyelhetőség ellenőrzése
O = obsv(A,C);
rank(O);
% Megfigyelhetőség ellenőrzése
syst_poles=eig(A);
obs_polse=[-500 -1000];
% A megfigyelő pólusai:
Lt = acker(A',C',obs_polse);
Lo = Lt';
% C és D mátrix átalakítása
C = [1, 0; 0, 1];
D = [0; 0];
% A valós rendszer áramának kezdeti értéke
x0 = [0, -1];
% A megfigyelő modell
Ah = A;
Bh = [B, Lo];
Ch = eye(2);
Dh = [0, 0; 0, 0];
xh0 = [0, 0];
% Szimuláció simulink modell segítségével
sim('DCmotor_simu_open.mdl')
%Kirajzolás
plot(tout, yout(:,1), tout, yout(:,2), '--');
set(gca, 'fontsize', 19);
xlabel('Idő (sec)'); legend('x[1] = ia', 'xe[1]=ia_e'), ylabel('Áram'),grid,shg
title('A valós és becsült áram');
figure('Name', 'velocity')
plot(tout, yout(:,3), tout, yout(:,4), '--');
set(gca, 'fontsize', 19);
xlabel('Idő (sec)'); legend('om[1] = om', 'ome[1]=om_e'),
ylabel('Sebesség'),grid,shg
title('A valós és becsült sebesség');A fenti programban használt Simulink modell a 6-26. ábraán látható
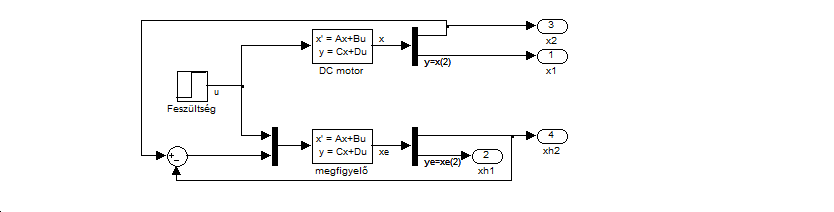
6.18 feladat Pólus áthelyezés (papíron kiszámítva)
Adott a következő rendszer:
| (6.244) |
Transzformálja a rendszert az irányíthatósági kanonikus lakra. Határozza meg a szükséges állapotvisszacsatolás értékét úgy, hogy a visszacsatolt rendszer pólusai a komplex számsíkon átkerüljenek a  és
és  pontokba. (Megjegyzés, a MATLAB (R2009a verzió) pólusáthelyezésre szolgáló „place” parancsával ez a feladat a kétszeres pólus miatt nem oldható meg).
pontokba. (Megjegyzés, a MATLAB (R2009a verzió) pólusáthelyezésre szolgáló „place” parancsával ez a feladat a kétszeres pólus miatt nem oldható meg).
6.3.7.4. Megoldás
Először írjuk fel az irányíthatósági mátrixot és invertáljuk azt
| (6.245) |

A  transzformációs mátrix első sorát (6.202), majd a második sorát (6.199) alapján írhatjuk fel
transzformációs mátrix első sorát (6.202), majd a második sorát (6.199) alapján írhatjuk fel
| (6.246) |
Szükségünk van a  transzformációs mátrix inverzére is
transzformációs mátrix inverzére is
| (6.247) |
Végül felírhatjuk az állapotmátrixokat irányíthatósági kanonikus alakban
| (6.248) |
A visszacsatolatlan rendszer átviteli függvénye
| (6.249) |
A két pólus 
 . A pólusokat szeretnénk áthelyezni a
. A pólusokat szeretnénk áthelyezni a  és
és  értékekre.
értékekre.
| (6.250) |
A két átviteli függvény összehasonlításából kiderül:
| (6.251) |
Visszatérve az eredeti rendszerhez (6.194) alapján.
| (6.252) |
Az alapjel kompenzáló tagok értéke
6.19 feladat Ackermann formula (papíron kiszámítva)
a)
A 6.18 feladatot oldjuk meg az Ackermann formulával.
b)
A 6.15 feladat a) alkérdését oldjuk meg az Ackermann formulával.
6.3.7.5. Megoldás
a)
| (6.255) |

b)
A feladatban nem volt megkötés, hogy az állapottér egyenletet milyen formában írjuk fel, így válasszuk a kanonikus alakot
| (6.256) |

Ebből az állapotmátrixok kiolvashatók
| (6.257) |

Először írjuk fel az irányíthatósági mátrixot és invertáljuk azt
| (6.258) |

A feladat szerint a visszacsatolt rendszer két időállandója  és
és  , így a karakterisztikus egyenlet
, így a karakterisztikus egyenlet
| (6.259) |

A kanonikus alak előnye, hogy könnyű a karakterisztikus egyenletbe helyettesíteni
| (6.260) |

Ez az eredmény nem meglepő. Ezt az eredményt klasszikus, blokkdiagramra alapozott ismeretekkel is megkaphatjuk. Az állapottér modell belső összefüggései a (6.257) mátrix értékekkel a 6-27. ábra
segítségével szemléltethető.
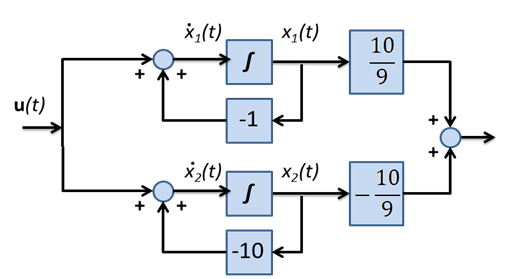
A  pólushoz tartozó időállandót kívánjuk ötödére csökkenteni, vagyis az
pólushoz tartozó időállandót kívánjuk ötödére csökkenteni, vagyis az  állapotváltozót nem -1, hanem -5 értékkel megszorozva kell visszacsatolni. Mivel a visszacsatolás párhuzamos lesz az eredeti visszacsatoló ággal, a visszacsatolt ágak értékei összeadódnak, vagyis -4 értékkel kell az
állapotváltozót nem -1, hanem -5 értékkel megszorozva kell visszacsatolni. Mivel a visszacsatolás párhuzamos lesz az eredeti visszacsatoló ággal, a visszacsatolt ágak értékei összeadódnak, vagyis -4 értékkel kell az  állapotváltozót visszacsatolni (ld. 6-28. ábra).
állapotváltozót visszacsatolni (ld. 6-28. ábra).
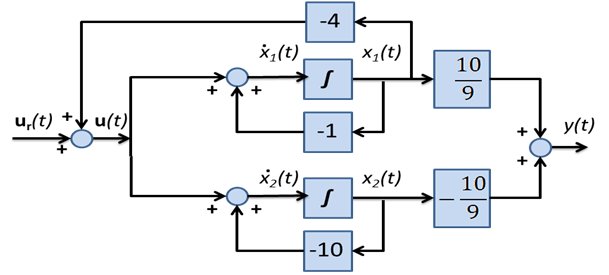
A 6-28. ábra hatáspont áthelyezésekkel átrajzolható.
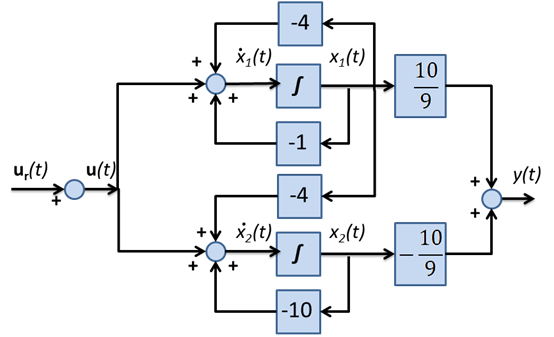
Mind a kezdő, mind a végpontját áthelyezve az  állapotváltozó visszacsatolásának az
állapotváltozó visszacsatolásának az  állapotváltozóhoz. Továbbá áttérve a Laplace-transzformált jelekhez kapjuk a 6-30. ábraát.
állapotváltozóhoz. Továbbá áttérve a Laplace-transzformált jelekhez kapjuk a 6-30. ábraát.
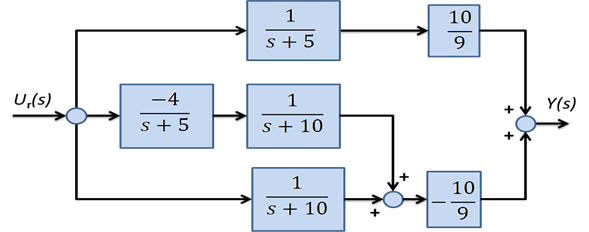
A 6-30. ábra alapján a visszacsatolt rendszer átviteli függvénye.
| (6.261) |

Ismét megfigyelhető, hogy a negatív visszacsatolás csökkenti a rendszer erősítését, ez egy megfelelő erősítő taggal kompenzálható.
6.20 feladat Transzformálás irányíthatósági kanonikus alakra
MATLAB formában adott egy LTI SISO rendszer három rendszermátrixa (A, B és C). Az állapotváltozók száma 4. Írjon MATLAB programot, amely a rendszermátrixokat irányíthatósági kanonikus alakra transzformálja.
Alkalmazza a programot a 6.3 feladatban leírt rendszerre.
6.3.7.6. Megoldás
Mc=[B A*B A*A*B A*A*A*B] Bc=[0 0 0 1]' Tc1=Bc'*inv(Mc) Tc=[Tc1; Tc1*A; Tc1*A*A; Tc1*A*A*A] Tci=inv(Tc) Ac=Tc*A*Tci Cc=C*Tci
| (6.262) |

| (6.263) |
6.21 feladat Integrátorral kiegészített állapotvisszacsatolás
A 6.16 feladat b) esetében megismert rendszert egészítsük ki egy integrátorral.
| (6.264) |
Az integrátor miatt eggyel megnöveltük az állapotváltozók számát, így a pólusok számát is meg kell növelni. Legyen a negyedik pólus értéke -10, és használjuk a MATLAB place parancsát. A bemenetre kapcsoljunk 1 egységnyi terhelésrádobást modellező zavarójelet az 5s időpontban. Hasonlítsuk össze a visszacsatolás nélkül, a visszacsatolt és az integrátorral kiegészített visszacsatolt rendszer működését a 6.16 feladat b) esetében.
| (6.265) |

A 6-31. ábraán látható, hogy a visszacsatolás nélkül a rendszer nem tudja kiküszöbölni a terhelésrádobás hatását. A visszacsatolással a rendszer válasza egyrészt gyorsítható, másrészt a terhelésrádobás hatása is csökkenthető, de teljesen nem küszöbölhető ki. Ha a visszacsatolás mellett még egy integrátort is alkalmazunk, akkor azzal a beavatkozójel hirtelen ugrásait is simíthatjuk. Ez minimális késleltetést jelent az integrátor nélkül visszacsatolt rendszerhez képest, ugyanakkor az integrátor a konstans értékű terhelés hatását teljesen ki tudja küszöbölni. A késleltetésnek az az oka, hogy az eredeti rendszer  bemenőjele az integrátor nélküli rendszerrel szemben az integrátor miatt nem tud ugrásszerűen megváltozni (idő kell az integrátor feltöltődéséhez), ez jól megfigyelhető 6-31. ábra jobb oldali rajzán.
bemenőjele az integrátor nélküli rendszerrel szemben az integrátor miatt nem tud ugrásszerűen megváltozni (idő kell az integrátor feltöltődéséhez), ez jól megfigyelhető 6-31. ábra jobb oldali rajzán.
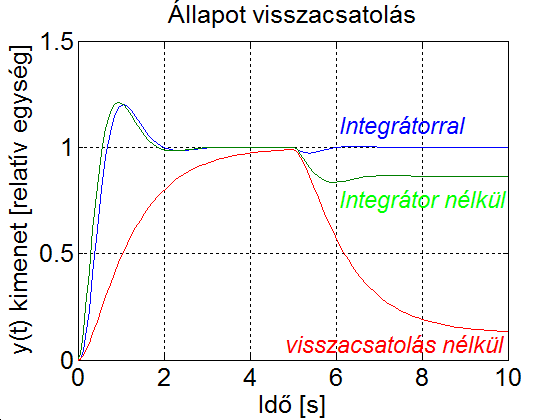
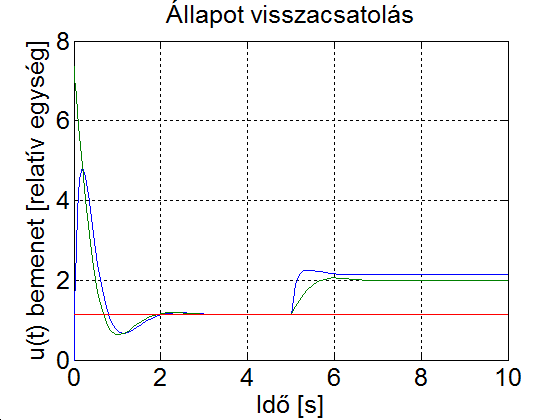
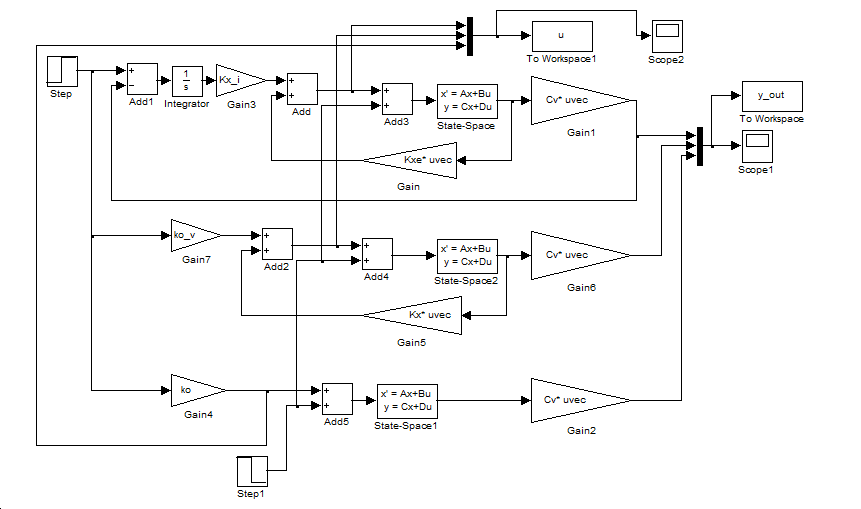
6.16 feladat b) esetének folytatásaként (newpolese meghatározása ott történt)
Ae=[0 1 0 0; 0 0 1 0; -8 -14 -7 0; -7 -3 0 0]; Be=[0 0 1 0]'; Ce=[1 0 0 0; 0 1 0 0; 0 0 1 0; 0 0 0 1]; De=[0; 0; 0; 0]; C1e=[7 3 0 0]; newpolese =[newpoles -10]; K4=place(Ae,Be,newpolese); Kx_i=-K4(4) Kxe=-K4(1:3)
6.20 feladatban leírtak szerint írja át (6.264) állapottér egyenletet irányíthatósági kanonikus alakra
| (6.266) |
| (6.267) |
Látható, hogy a kibővített rendszer könnyen átírható irányítható kanonikus alakra. Ebben az alakban visszacsatolás mértéke könnyen kiszámítható. A karakterisztikus egyenlet együtthatói
| (6.268) |


| (6.269) |

Ellenőrzésképpen kiszámíthatjuk, hogy a (6.194) összefüggésnek megfelelően teljesül a következő egyenlőség
| (6.270) |

6.4. Lineáris időben változó rendszerek állapottér egyenletei
A lineáris idő variáns rendszerek általános rövidítése, az angol név alapján LTV (Linear Time Varying).
Diszkrét időben
Az előző esethez képest annyi a különbség, hogy a rendszer mátrixok minden időlépésben megváltoznak (sok esetben ez a változás a mátrixoknak csak néhány elemét érintik)
| (6.271) |


ahol  az állapotváltozók oszlopvektora a k –adik időlépésben,
az állapotváltozók oszlopvektora a k –adik időlépésben,  a bemenetek oszlopvektora a k –adik időlépésben,
a bemenetek oszlopvektora a k –adik időlépésben,  a kimenetek oszlopvektora a k –adik időlépésben
a kimenetek oszlopvektora a k –adik időlépésben  ,
,  és
és  a rendszert leíró mátrixok, amelyek elemei között van olyan, amelyik az egyes időlépésekben megváltozik.
a rendszert leíró mátrixok, amelyek elemei között van olyan, amelyik az egyes időlépésekben megváltozik.
Folytonos időben
| (6.272) |


ahol  az állapotváltozók oszlopvektora,
az állapotváltozók oszlopvektora,  a bemenetek oszlopvektora,
a bemenetek oszlopvektora,  a kimenetek oszlopvektora
a kimenetek oszlopvektora  ,
,  és
és  a rendszert leíró mátrixok, amelyek elemei között van olyan, amelyik időben változik.
a rendszert leíró mátrixok, amelyek elemei között van olyan, amelyik időben változik.
6.5. Lineáris változó paraméterű rendszerek állapottér egyenletei
A kilencvenes években került a kutatók érdeklődésének középpontjába a lineáris változó paraméterű rendszerek. A rövidítés itt is az angol névből származik LPV (Linear Parameter Varying)
Diszkrét időben
Az előző esethez képest annyi a különbség, hogy a rendszer mátrixok minden időlépésben egy paramétertől függően változnak (sok esetben ez a változás a mátrixoknak csak néhány elemét érinti)
| (6.273) |


ahol  az állapotváltozók oszlopvektora a k –adik időlépésben,
az állapotváltozók oszlopvektora a k –adik időlépésben,  a bemenetek oszlopvektora k –adik időlépésben,
a bemenetek oszlopvektora k –adik időlépésben,  a kimenetek oszlopvektora a k –adik időlépésben
a kimenetek oszlopvektora a k –adik időlépésben  ,
,  és
és  a rendszert leíró mátrixok, amelyek elemei között van olyan, amelyik az egyes időlépésekben megváltozik.
a rendszert leíró mátrixok, amelyek elemei között van olyan, amelyik az egyes időlépésekben megváltozik.
Folytonos időben
| (6.274) |


ahol  az állapotváltozók oszlopvektora,
az állapotváltozók oszlopvektora,  a bemenetek oszlopvektora,
a bemenetek oszlopvektora,  a kimenetek oszlopvektora
a kimenetek oszlopvektora  ,
,  és
és  a rendszert leíró mátrixok, amelyek elemei között olyan, amelyik értéke egy
a rendszert leíró mátrixok, amelyek elemei között olyan, amelyik értéke egy  paramétertől függ.
paramétertől függ.
7. fejezet - Dinamikus rendszerek identifikációja
- 7.1. Z - transzformáció
- 7.2. Tipikus diszkrét idejű rendszermodellek
- 7.3. Az identifikáció gyakorlati alkalmazásai
- 7.4. Esettanulmány az identifikáció + szabályozó tervezés alkalmazására
Szabályozási rendszerek tervezésének megvalósításához szükségünk van a szabályozott objektum dinamikai tulajdonságainak ismeretére. Valamilyen leírási mód segítségével rendelkeznünk kell az objektum matematikai modelljével, hisz a tervezőrendszerünk kérni fogja a szabályozandó objektum matematikai modelljét. Szerencsés esetben az objektum matematikai modellje – fizikai, kémiai, biológiai paraméterekkel ismert, de a legtöbb esetben nem, így valamilyen közelítő munkaponti modellekkel kell a tervezést megkezdeni.
Egy teljesen új technológiai rendszer felépítésénél a beruházási terv természetesen tartalmazza a gépészeti, technológiai, műszerezési terveket, azonban a szabályozási rendszerek tervezését nem, illetve csak a szabályozási körök elképzelt struktúráját adják meg a tervezők. A számítógépben elhelyezendő szabályozási algoritmusok struktúrája és paraméterei ezekben a kiviteli tervekben csak közelítőleg szerepelnek, hisz a tervező a visszacsatolt rendszerek pontos dinamikai tulajdonságait nem ismerik, ezeket a megépített rendszeren végzett vizsgálatokkal lehet csak pontosítani. A technológiai rendszer felépítésével, a műszerezés megvalósításával egy próbaüzemeltetés kapcsán elvégezhető a technológiai rendszer objektumainak ún. identifikációja, azaz meghatározhatjuk azt a matematikai modellt, amely az adott munkapontban visszatükrözi a rendszer időbeli viselkedését. Ezen modell bázisán a tervező képes lesz a visszacsatolások, előrecsatolások, vezérlések algoritmusainak megtervezésére.
A technológiai rendszerek irányítását, szabályozását, vezérlését folyamatirányító számítógépek végzik. A számítógép számára tervezendő szabályozási algoritmusokat a folyamatirányító számítógép differencia egyenlet formájában kéri, valamilyen tervezett T0 mintavételezési idő mellett, azaz az algoritmus egy diszkrét algoritmus, így a számítógép is egy diszkrét rendszert „szeretne látni” szabályozott objektumként, amely a valóságban természetesen időben folytonos rendszer.
Az időben folytonos rendszerek identifikációjával a szakirodalom több évtizede foglalkozik [1] és letisztultak azok az identifikációs eljárások, amelyeket a gyakorlat is közvetlenül alkalmazhat. Kialakultak azok a diszkrét rendszermodellek, melyek a gyakorlati problémák legtöbbjének leírására megfelelnek, melyek felhasználásával olyan matematikai modelleket kapunk, amelyek közvetlenül felhasználhatók digitális szabályozási algoritmusok tervezéséhez, adaptív rendszerek megalkotásához (pld. identifikációt alkalmazó adaptív rendszerek [2]).
7.1. Z - transzformáció
Ez a leképezés egy valós értékű, időben diszkrét sorozathoz rendel egy komplex függvényt. (Ugyanezt a Laplace transzformáció időben folytonos függvényre végzi.) A transzformáció szabályai alapján levezethető egy impulzus-átviteli függvény, mely a diszkrét dinamikai rendszer transzformált bemenő és kimenő jeleit algebrailag (szorzással) kapcsolja össze. Összetett rendszer (pl. egy zárt szabályozási kör) eredő átviteli függ-vényei algebrai módszerekkel fejezhetők ki (akárcsak a folytonos esetben).
7.1.1. Lépcsős függvény Laplace transzformáltja
Egyik lehetséges motiváció a szakaszonként állandó (lépcsös) függvényből (ábra) indul ki, mely egy nulladrendű tartószerv (ZOH) kimeneteként jöhet létre és a digitális szabályozás megvalósításában is fontos szerepe van. A téglalap-függvényeket két-két eltolt ugrás-függvényből építjük föl és transzformálásukhoz az eltolási tételt alkalmazzuk.
| (7.1) |


A végtelen sor előtt álló komplex törtfüggvény a tartóra (itt ZOH) jellemző átviteli függvény. Magát a Z-transzformáltat az  és
és  helyettesítésekkel definiáljuk az alábbi formális végtelen sorral. Ez már csak az időben diszkrét függvénysorozatot (pálcikák) tartalmazza, melyek származ-hatnak valamely folytonos jel mintavételezéséből (is).
helyettesítésekkel definiáljuk az alábbi formális végtelen sorral. Ez már csak az időben diszkrét függvénysorozatot (pálcikák) tartalmazza, melyek származ-hatnak valamely folytonos jel mintavételezéséből (is).
| (7.2) |

7.1 feladat
Diszkrét egységugrás (ábra). Képletben:  és
és  . Végtelen mértani sort kapunk, mely csak akkor konvergens, ha hányadosára teljesül, hogy
. Végtelen mértani sort kapunk, mely csak akkor konvergens, ha hányadosára teljesül, hogy 
| (7.3) |

7.1.2. A Z-transzformáció legfontosabb tételei
Eltolás időben. A diszkrét dinamikai modellek (ARMA, állapottér) kezelésében lesz fontos szerepük. A levezetéseket zárójelezéssel igyekeztünk követhetőbbé tenni, a  értékből már látszik az általános eset.
értékből már látszik az általános eset.
| (7.4) |


| (7.5) |


Késleltetéskor a függvény jobbra csúszik és a nulla időponttól balra eső értékek “beúsznak” a transzfor-mációba és ott additív tagokat generálnak. “Belépő” függvényekre ezek zérusok.
| (7.6) |



Siettetéskor a függvény balra csúszik és a nulla időponttól jobbra eső értékek “kiúsznak” a transzfor-mációból emiatt szubtraktív (kivonandó) tagokat generálnak az általános szorzási szabály után.
| (7.7) |



| (7.8) |
| (7.9) |


7.2. Tipikus diszkrét idejű rendszermodellek
A tipikus diszkrét idejű modelleket tárgyalva a jelölésrendszerünkkel figyelembe vesszük a MATLAB/System IdentificationToolbox jelölésrendszerét, amelyet a következő fejezetekben másként fogunk használni. A két jelölésrendszer megfelelése a következő:
Polinomok
| (7.10) |
Diszkrét holtidő d helyett nk-t fogunk használni a MATLAB reprezentációkban. Még egy fontos kitétel az, hogy a zajcsatorna tárgyalásánál a MATLAB System IndentificationToolbox szerzője [ www.mathworks.com ] a
| (7.11) |
diszkrét idejű átviteli függvényt használja, az algoritmus tervezési fejezetükben azonban Gov(z) csatorna diszkrét idejű átviteli függvényét a
| (7.12) |
diszkrét idejű átviteli függvény formában fogjuk használni.
7.2.1. OE modell
Az OE (Output Error) modelle(k) mérési zajt tartalmazó modell a következő hatásvázlattal rendelkezik:
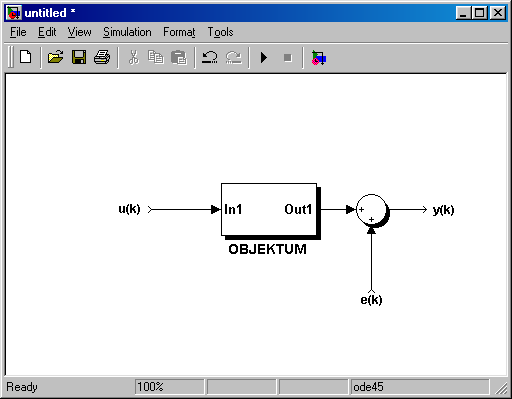
melynek impulzus-átviteli függvénye
| (7.13) |
ahol e(z) a mérési zaj z-transzformáltja.
Az impulzus-átviteli függvényt sok esetben a következő formális felírási móddal is írják:
| (7.14) |
vagy a MATLAB szerzői pedig a következő formát használják:
| (7.15) |
azaz a d diszkrét holtidő jelölése nk.
Ezen modell olyan stacionárius folyamatok leírására szolgál, melyek külső zavaró jelcsatornákat nem tartalmaznak, azonban az e(t) mérési zaj jelen van. A modell differencia egyenlete MATLAB jelölés szerint a következő:
| (7.16) |

7.2.2. ARX modell
Az ARX modell (AutoRegressive with eXternal input) a kimeneten színes zajt feltételez, aminek a következő modell felel meg.
| (7.17) |

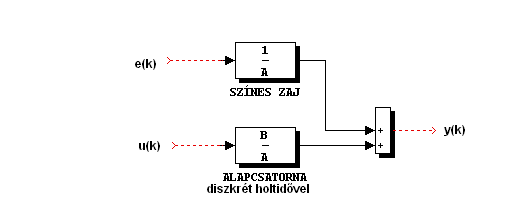
7.2.3. ARMAX modell
Az ARMAX modell (AutoRegressive Moving Average modell with eXogenous signal) struktúrája a következő:
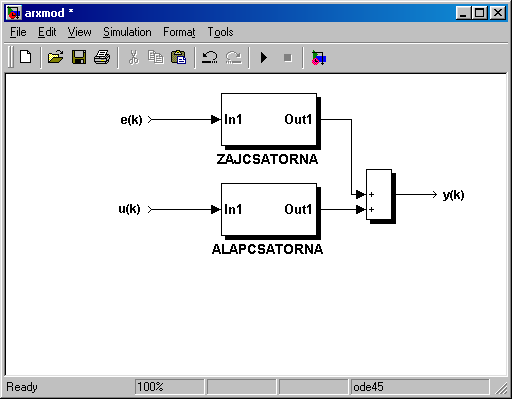
ahol a zajcsatorna és az alapcsatorna impulzus-átviteli függvénye
| (7.18) |
a megfelelő polinomok pedig:
| (7.19) |
Az ARMAX modell olyan esetben alkalmazható, ha a zajmodell – Gov – és az alapcsatorna karakterisztikus egyenlete megegyezik.
Ezt az egyezést a rendszer részletes analízisével tudjuk meghatározni.
Nézzük a következő példát. Legyen az identifikáló rendszer egy hőcserélő berendezés (7-4. ábra).
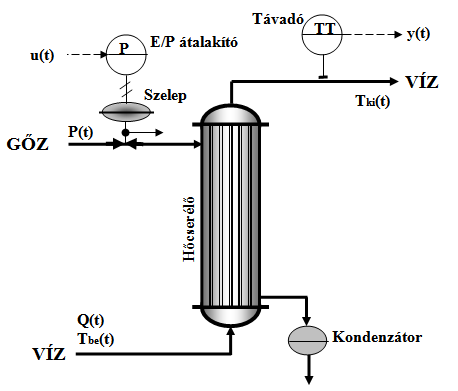
A gőzzel fűtött hőcserélő feladata az, hogy a kilépő folyadék Tki hőmérsékletét adott értékre állítsa egy számítógépes digitális szabályozási algoritmus segítségével. A TT hőmérséklet távadó mA-es kimenete y(t). A gőzágat több fogyasztó is terhelheti, ezért a P(t) gőznyomást stabilizáljuk. A gőzágba építik be a szabályozó szelepet, amely a mi esetünkben pneumatikus segédenergiával működik. A számítógép folyamatperifériájánál kapott mA-es u(t) végrehajtó jel egy elektro-pneumatikus jelátalakítón keresztül működteti a végrehajtó szervet. Tételezzük fel, hogy a belépő folyadék mennyisége és hőmérséklete állandó és az y(t)-re csak a mérési zaj szuperponálódik.
Ebben az esetben az objektum jó közelítéssel modellezhető egy OE struktúrával (7-1. ábra).
Ha gőz gerincvezetékének nyomását nem tudjuk stabilizálni és az egyéb fogyasztók véletlenszerűen terhelik a gőzrendszert, akkor a P(t) gőznyomás ingadozik, amely a kilépő y(t) hőmérséklet véletlenszerű változását vonja maga után. A hőmérséklet aktuális értékét a szelepre eső nyomásesés (bevitt hőenergia) határozza meg, mely nyomásesést vagy a gőznyomásváltozás, vagy a szabályozó szelep pozíciója befolyásolják. Így feltételezhető, hogy a zajcsatorna (gőznyomás-hőmérséklet) és az alapcsatorna (szeleppozíció-hőmérséklet) karakterisztikus egyenletei megegyeznek, azaz A(z-1)=D(z-1). Ilyen esetben az objektum munkapontban egy ARMAX modellel közelíthető.
A harmadik esetként tételezzük fel, hogy a P(t) gőznyomás stabilizált, de a hőcserélőn átmenő Q(t) mennyiség sztochasztikusan változik, amely a kilépő y(t) hőmérsékletet befolyásolja. Ebben az esetben az alapcsatorna és a zavarójel csatorna (belépő folyadékáram - hőmérséklet) karakterisztikus egyenletei nem fognak megegyezni, így a fent említett modellek helyett Box-Jenkins modellt ajánlott használni.
7.2.4. Box-Jenkins (BJ) modell
A BJ modell a következő hatásvázlattal rendelkezik
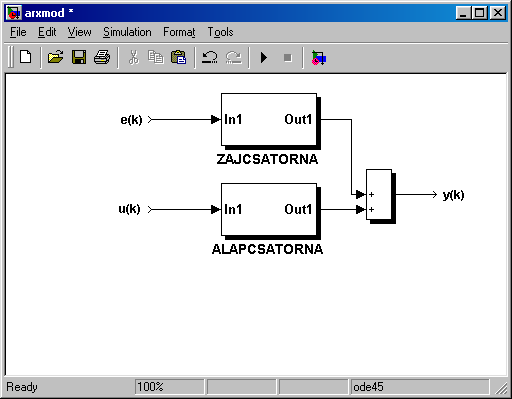
A BJ struktúra impulzus-átviteli függvénye:
| (7.20) |

vagy MATLAB reprezentációja
| (7.21) |

ahol
| (7.22) |

A bemutatott OE, ARX, ARMAX, BJ modellek azok, amelyeket a gyakorlatban legtöbbször alkalmazni kell, azonban a MATLAB kezelni tudja az AR, PEM modelleket (ld.MATLAB kézikönyv) is.
Ismeretlen rendszer identifikációja esetén mérjük az u(t) bemenet és a zajos y(t) kimenet értékeit, ezeket összegyűjtjük az u és y oszlopvektorokban, felépítjük a megfigyelésekből álló és két oszloppal jelentkező z=[y u] mátrixot, megválasztjuk a rendszermodellt és az abban szereplő polinomok fokszámait, megválasztjuk a holtidő értékét és elvégezzük az identifikációt az IDENT szolgáltatásaival. Az identifikációs módszerek feladata, hogy meghatározza a polinomok valamilyen értelemben optimális paramétereit, miközben az e(t) zaj értékei ismeretlenek. Erre a célra a legkisebb négyzetek módszere (LS, leastsquaresmethod) vagy ennél általánosabb paraméterbecslési technikák, a zaj fehérítését megcélzó segédváltozós (I.V., instrumentalvariables) módszer, numerikus optimum-keresés, vagy esetleg ezek kombinációja alkalmazható. Az IDENT a rendszermodell típusától függően választja meg az identifikációhoz használt numerikus módszert. A segédváltozós módszer (IV) csak ARX modell esetén alkalmazható [3]
Megjegyezzük, hogy több itt szereplő függvénynek létezik általánosabb paraméterezése is IDENT-ben, továbbá többváltozós (MIMO) rendszerek identifikációja is lehetséges.
Az IDENT toolbox a továbbiakban algoritmus szinten is részletesen tárgyalt diszkrétidejű paraméter identifikációs módszereken kívül lehetővé teszi még folytonos idejű lineáris állapotegyenletek paramétereinek becslését is speciális zajstruktúrák esetén. Szolgáltatásai között szerepelnek a paraméterbecslés rekurzív realizációi is , amelyek adaptív irányításoknál jelentősek. Ezeken túlmenően lehetőség van nemparaméteres identifikációra, valamint a korrelációs függvények és a spektrumok számítására is. Ez utóbbi számítások algoritmusai gyors Fourier-transzformáción (FFT, Fast-Fourier-Transformation) és az FFT periodicitása miatt alkalmasan választott ablakozási technikán alapulnak [4]
7.3. Az identifikáció gyakorlati alkalmazásai
Az identifikáció előkészítése nagyon körültekintő munkát igényel. A következőkben megnézzük a legfontosabb – identifikáció előtti – feladatokat, melyeket el kell végezni.
7.3.1. Általános feladatok
7.3.1.1. Az állandósult állapot vizsgálata (a)
Nagyon gyakran a technológiai rendszerek különböző munkapontokon dolgoznak. Ezek a technológiai rendszerek nemlineárisak, pld. az erősítési tényezőjük jelentősen változhat a különböző működési tartományokban. Az erősítési tényező mellett változhatnak az időállandók, változhatnak egyéb modell paraméterek is, vagy a modell struktúra is más lesz. A vizsgált identifikációs eljárások eredménye egy impulzus átviteli függvény állandó paraméterekkel és struktúrával. Ezért fontos, hogy elérjünk egy állandósult állapotot – 7-6. ábra – és a bemenet-kimenet pont párokat innen gyűjtsük össze.
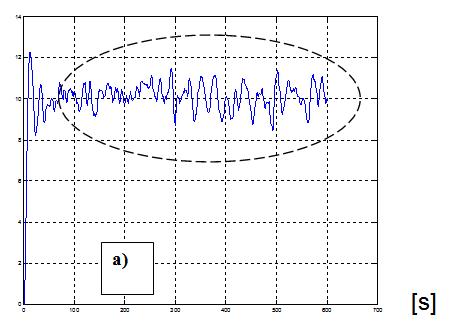
7.3.1.2. Trend figyelés (b)
A gyakorlatban előfordulhat az átlagérték lassú kúszása pld. a távadók lassú driftje miatt,
az objektum elemeinek kopása, vagy pld. az aktuális hőcserélő vízkövesedése folytán, esetleg műszakváltás, időközi leállások miatt. Ebben az esetben a kúszást – 7-7. ábra- trendfigyeléssel meg kell szüntetni, hisz a nemlineáris objektum tulajdonságok az identifikáció eredményét meghamisíthatják.
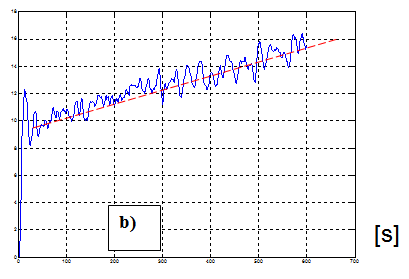
7.3.1.3. Kiugró értékek figyelése (c)
Az állandósult állapot megfigyelésekor találkozhatunk szokatlan kiugró értékek megjelenésével a mért jeleken. Ennek több oka lehet: a távadó vagy a kábelezés érzékeny az elektromágneses tér változásaira, amikor be/kikapcsolnak villamos berendezéseket, villámlás történt., stb. Az ilyen adatok nem alkalmasak az identifikációhoz.
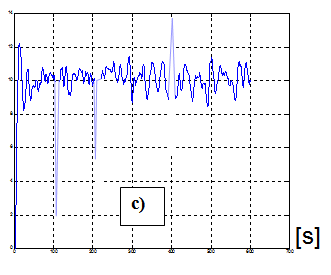
7.3.1.4. Az érzékelő kikapcsol (d)
Abban az esetben, ha az érzékelő, távadó, vagy a mérőlánc valamelyik tagja jelkimaradást okoz, akkor a mért jel identifikációra nem alkalmas (7-9. ábra)
7.3.1.5. A mintavételezési idő meghatározása (e)
A T0 mintavételezési idő meghatározása abban az esetben, ha ismerjük a vizsgált objektum átmeneti függvényét az 7-10. ábra alapján történik. Az inflexiós pontban húzott érintő segítségével meghatározható a T időállandó, s ennek 1/10 része, vagy annál kisebb legyen a mintavételezési idő.
Abban az esetben, ha egy működő technológia – 7-11. ábra - jeleit akarjuk mintázni, érdemes a mért jeleket kinagyítani – 7-12. ábra – és kiválasztani azt a legnagyobb frekvenciát, mely még befolyásolja a modellalkotást.
A T0 mintavételezési idő a legnagyobb frekvenciájú összetevő periódusidejének 1/20 része legyen.
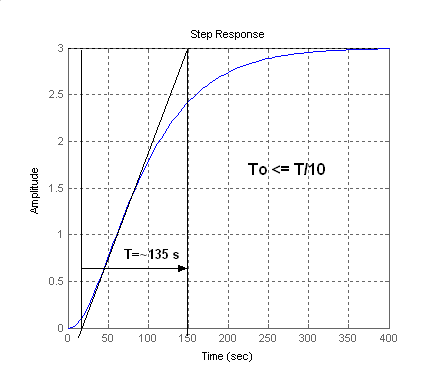
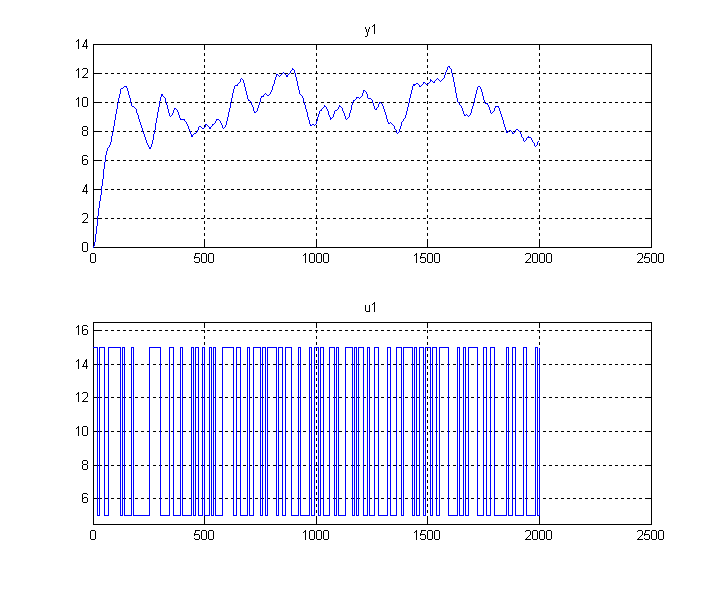
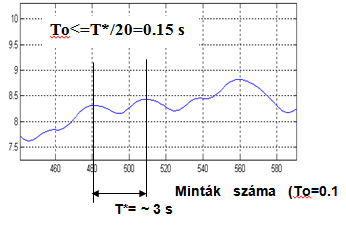
7.3.2. MATLAB System IdentificationToolbox és SIMULINK alkalmazása
Az identifikációs technikák alkalmazásának tanulmányozására a MATLAB/SIMULINK modellező rendszert fogjuk használni és az identifikálandó objektumot is szimulációval állítjuk elő, természetesen folytonos rendszerként modellezzük azt. A 7-13. ábra segítségével egy másodrendű rendszer átmeneti függvénye alapján meghatározhatjuk a diszkrét modell mintavételezési idejét. A T0 mintavételezési időt lengésmentes önbeálló rendszer esetén kiválaszthatjuk úgy, hogy megkeressük az egy időállandós, holtidős közelítő modelljét és ezen modell T időállandójának tizedét fogadjuk el mintavételezési időnek. Példaként legyen a folytonos rendszer modellje:
| (7.23) |
a közelítő egyidőállandós, holtidős modellje pedig
| (7.24) |
ahol az időállandó T=50s, így a mintavételezési időt választhatjuk T0=T/10=50/10=5 s-ra.
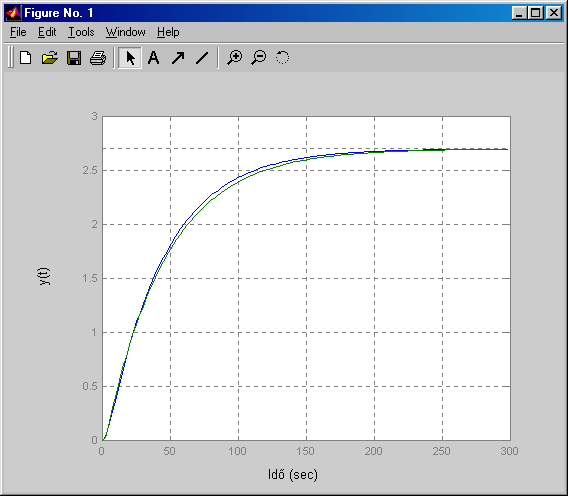
A 7-14. ábra azt a SIMULINK felületet mutatja be, ahol az identifikálandó objektum u(t) bemenetét állítjuk elő, ahol u(t)=us(t)+u*(t). A munkaponti identifikáció első fontos feladata a vizsgálat munkapontjának meghatározása, majd beállítása. Gyakori eset, hogy a folytonos technológiai rendszer különböző terheléssel működik és a rendszer nemlineáris volta miatt több munkaponti identifikáció szükséges. Ezen munkapontok meghatározásánál a technológusok segítségét, szakértelmét kell felhasználni.
Az identifikáció tesztjelének megválasztása is fontos kérdés. A vizsgáló tesztjel frekvencia spektrumát és amplitúdóját úgy kell megváltoztatni, hogy az u(t) tesztjel hatása az y(t) kimeneten mérhető és értékelhető legyen.
Off-line identifikáció esetén a leggyakoribb tesztjel forma a sávkorlátozott fehér zaj (Band-Limited White Noise a SIMULINK könyvtárból), vagy az álvéletlen kétállapotú jelsorozat (Psendo Random Binare Signal, PRBS). Ezek a jelalakok tartalmazzák a legtöbb frekvenciát, a frekvencia spektrumuk a legszélesebb a mesterségesen előállított jelsorozatok között. A PRBS egyik előállítási módját látjuk (7-15. ábra), ahol a mérési zaj modellezésére használjuk.
Az us(t) folytonos jel segítségével állítjuk be a rendszert a kívánt munkapontba, az u*(t) jel pedig az identifikáció bemeneti tesztjele.
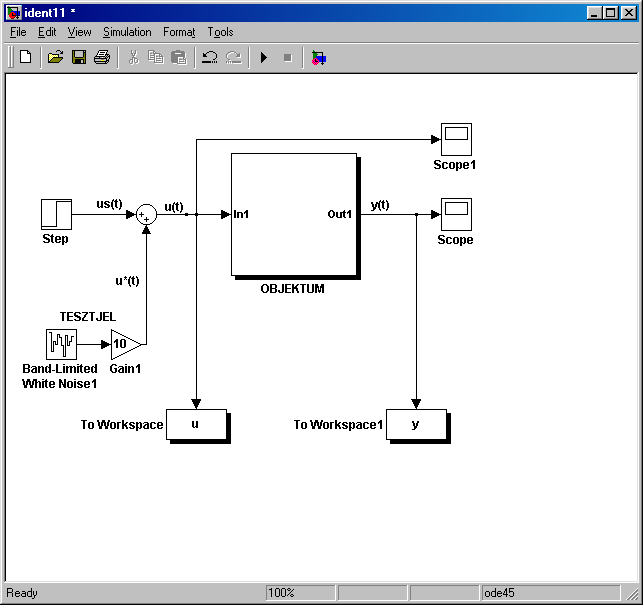
Az objektum folytonos SIMULINK modellje a kimenetre szuperponálódó mérési zajjal alább (7-15. ábra) látható:
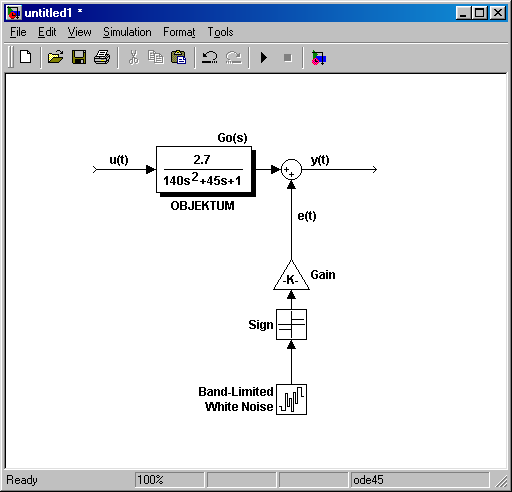
Az u(t) bemenőjel és az y(t) kimenőjel (7-14. ábra) adatgyűjtését T0=5s-os mintavételezési idővel a ToWorkspace blokkal végzik, mely paraméterezését mutatja a 7-16. ábra, s ennek segítségével mátrix formában mentjük el a gyűjtött adatot.
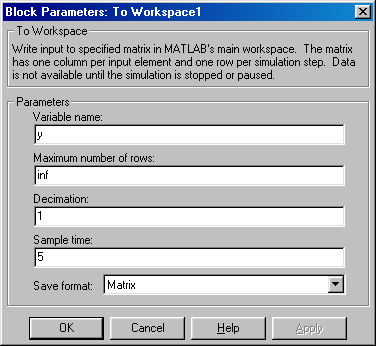
Állítsuk elő a bemenet-kimenet párok vektorát, és vizsgáljuk meg mérési eredményeinket a következő parancsok segítségével:
z= [ y u ]
idplot( z )
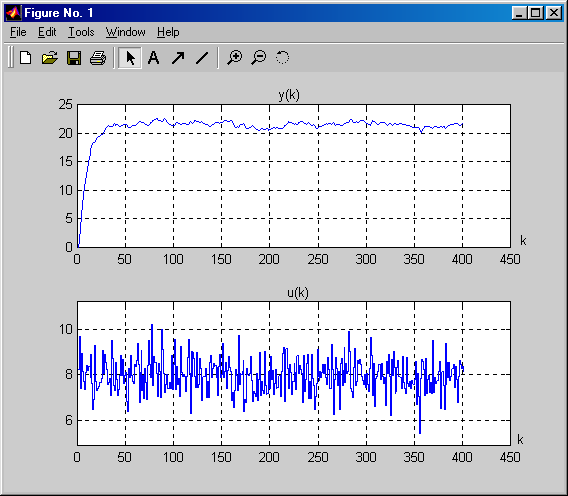
Az identifikációs algoritmusok nemlineáris rendszerek esetében csak akkor hoznak helyes eredményeket, ha a bemenőjel és a kimenőjel átlagértéke állandó, ezért a mi esetünkben az első 50 mintavételezett adatpárt eltávolítjuk a következő paranccsal (7-18. ábra):
z1=[ y(50:400) u(50:400)]
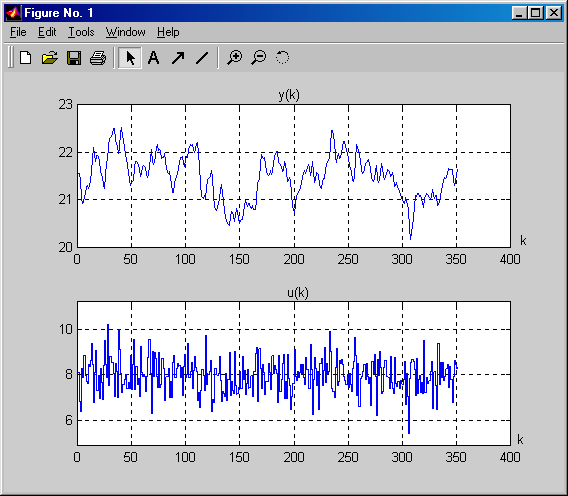
Az identifikációs algoritmusok másik megkötése lehet az, hogy a bemeneti-kimeneti adatpárok nulla átlagértékűek legyenek, ezt pedig a
z2 = dtrend(z1)
paranccsal végezhetjük el. (7-19. ábra).
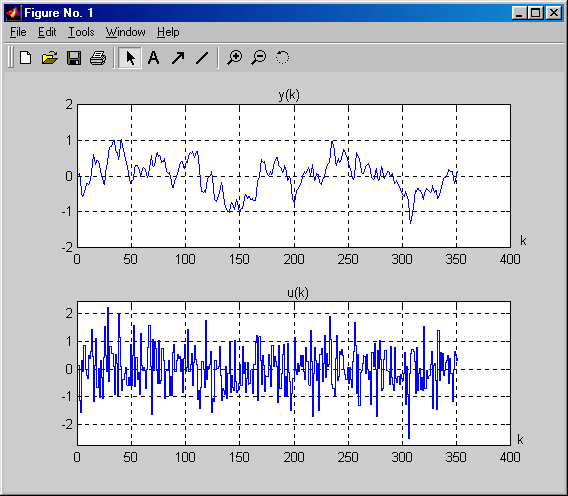
A véglegesnek tekinthető adatpárok meghatározása után az identifikáció számára meg kell határozni az illesztendő modell (impulzus-átviteli függvény) számlálójának (nb) és nevezőjének (na) fokszámait, valamint a d diszkrét holtidőt, melyet nk-val jelöl a használt modellező rendszer. Ha az adatpárokból ezeket a paramétereket nem vagyunk képesek meghatározni, ezért egy egyszerű paranccsal
ir = cra(z2) ,
azaz korrelációs analízis segítségével meghatározhatjuk a rendszer közelítő súlyfüggvényét, melyet alább (7-20. ábra) mutatunk be.
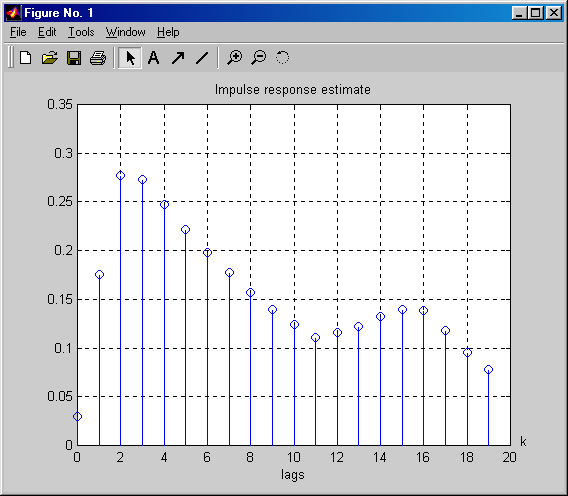
A közelítő súlyfüggvény szerint a vizsgált rendszer minimum másodrendű modellel jellemezhető, diszkrét holtideje d=0, mely a MATLAB realizációban nk=1-et jelent. A következő parancsokkal megvizsgálhatjuk a vizsgált rendszerközelítő átmeneti függvényét is (7-21. ábra):
stepr = cumsum (ir)
plot (stepr)
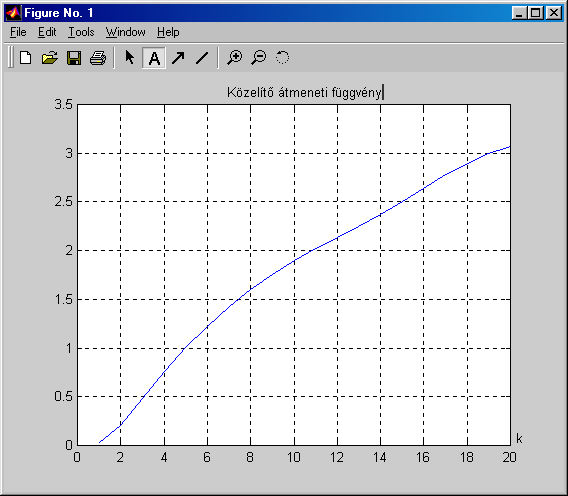
A korrelációs analízis eredménye alapján másodrendű (d=0) rendszert javasolhatunk, amely számára előállítjuk a th vektort. Ez tartalmazni fogja az identifikálandó OE modell
B(z-1),A(z-1) polinomjainak együtthatóit: =[ a0 a1a2 …ana b1 b2 … bnb] a th = oe (z2, [2 2 1]) parancs segítségével.
A present(th) parancs hatására megkapjuk a B(z-1) és A(z-1) polinomok együtthatóit:
B = 0 0.1488 0.0877
A = 1.0000 -1.1129 0.2005
majd elvégezhetjük a modellünk és a tényleges mérési adatsorunk által szolgáltatott eredményeket ugyanarra a bemeneti jelre:
compare (z2, th).
A vizsgált rendszer esetén a mérési zaj e(k)=0 amplitúdóval rendelkezett és a modell kimenete ugyanazon vizsgáló jel esetén megegyezik a fizikai objektum kimenetével (7-22. ábra).
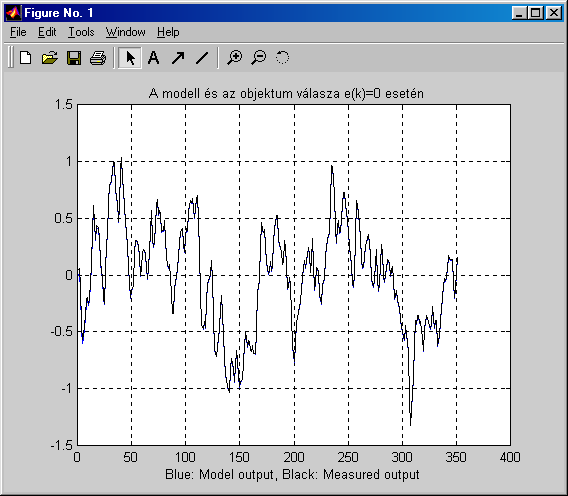
Az OE modell impulzus-átviteli függvénye tehát
| (7.25) |

melynek pólusait és zérusait mutatja a 7-23. ábra. Ezek az e(k)=0 esetre megegyeznek a tényleges értékekkel. A tényleges rendszer és a modell frekvencia függvényének összehasonlítását mutatja be az 7-24. ábra.
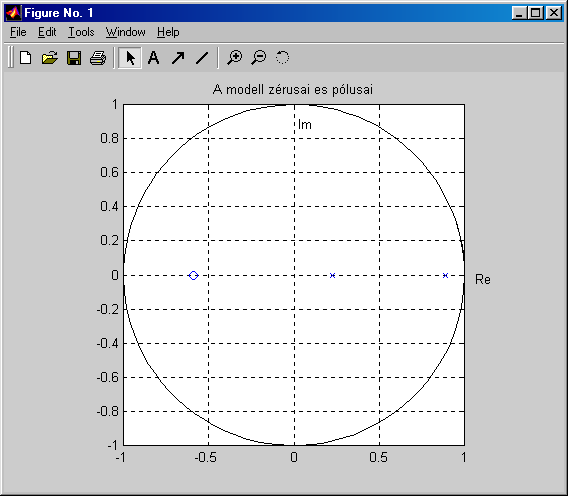
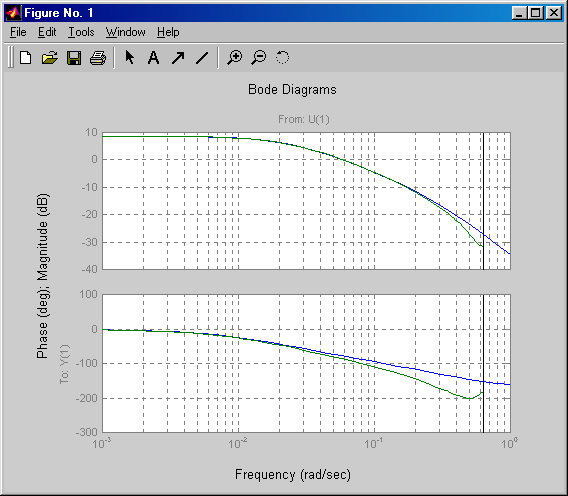
A modellező rendszer SIMULINK felülete is rendelkezik identifikációs számítási blokkokkal (7-25. ábra), melyet a 7-26. ábra szerint helyezhetünk be az identifikációs rendszerbe, és a lentebb (7-27. ábra) bemutatott paraméter beviteli felülettel rendelkezik.
Az így beillesztett ARX vagy más blokk az identifikációs eredményeket a MATLAB ablakban jeleníti meg a következő alakban:
Transferfunction:
| (7.26) |

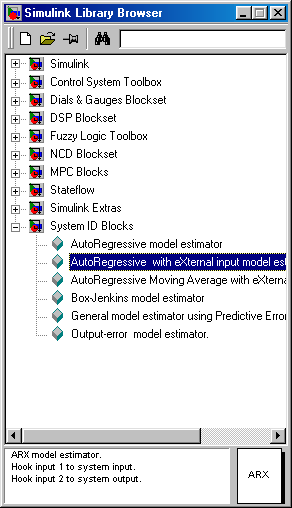
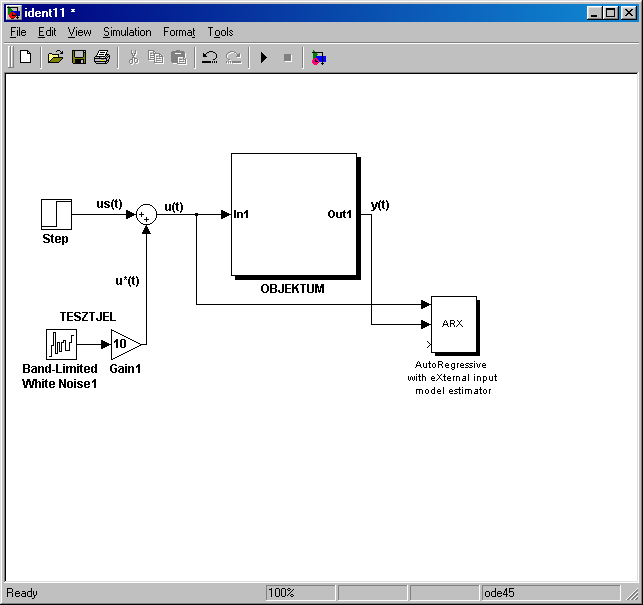
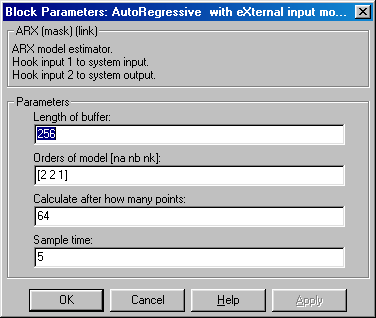
A 7-28. ábra és 7-29. ábra mutatja be az identifikáció összehasonlító eredményeit e(k)=0 és 0,2 amplitúdójú álvéletlen (PRBS) mérési zaj esetén. Az ábrák alapján levonhatjuk azt a következtetést, hogy az e(k) mérési zaj amplitúdója az identifikáció pontosságát nagyban befolyásolja, tehát törekednie kell a mérési zajok amplitúdójának csökkentésére pl. úgy, hogy az y(t) kimenetet, vagy a már mintázott y(k) kimenetet megszűrjük. Természetesen a szűrő dinamikája is az identifikált modellünkbe integrálódik.
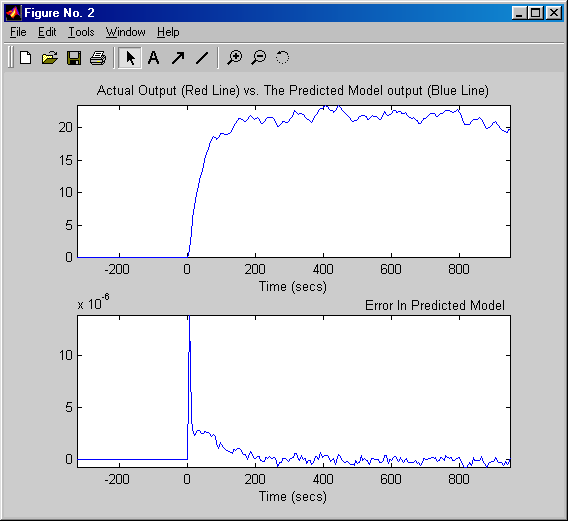
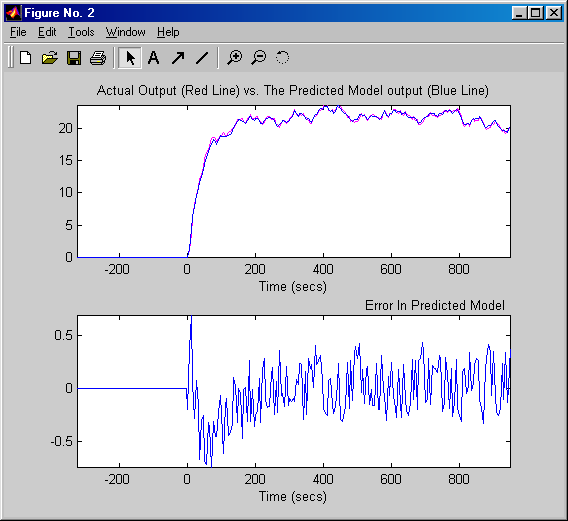
A 7-30. ábra egy ARMAX modell identifikációját illusztrálja. Az alapcsatorna folytonos átviteli függvénye:
| (7.27) |
a zajcsatorna folytonos átviteli függvénye pedig
| (7.28) |

A mintavételezési időt, T0=6 s-ra választottuk.
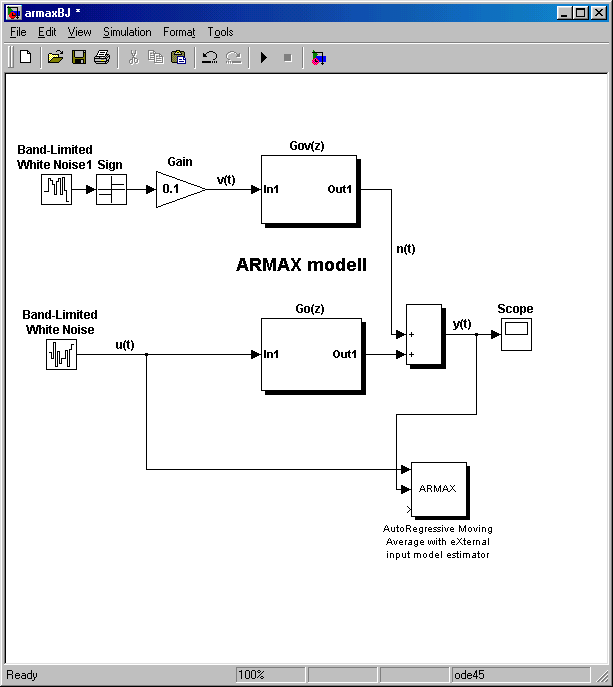
A SIMULINK ARMAX blokkjának paraméterezését láthatjuk alább (7-31. ábra).
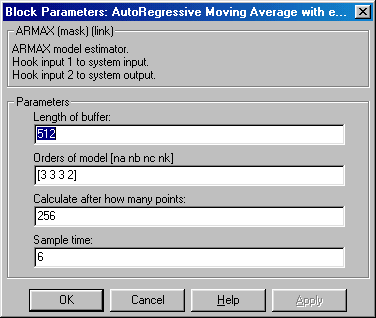
Az identifikáció minőségét mutatjuk be alább (7-32. ábra).
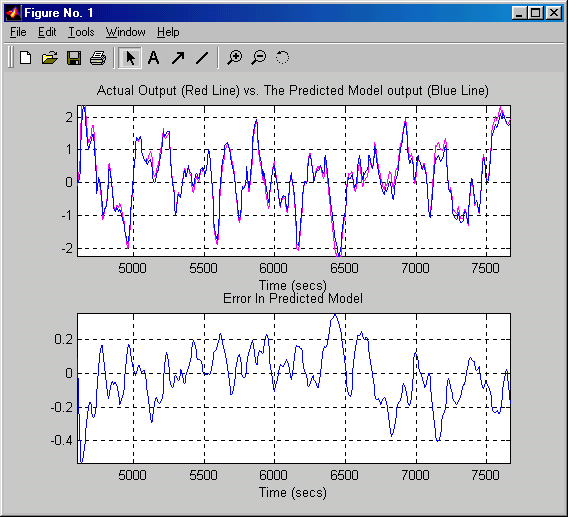
A MATLAB felületen hozzáférhetünk az identifikált alapcsatorna és a zajcsatorna impulzus-átviteli függvényeihez, melyek a következők lettek:
| (7.29) |

| (7.30) |

A Box-Jenkins modell bemutatására a következő folytonos zajcsatorna modellt használtuk:
| (7.31) |
az alapcsatorna G0(s) modellje megegyezik az ARMAX modellével. A SIMULINK felületet láthatjuk alább (7-33. ábra), valamint alatta a BJ-modell paraméterezését (7-34. ábra).
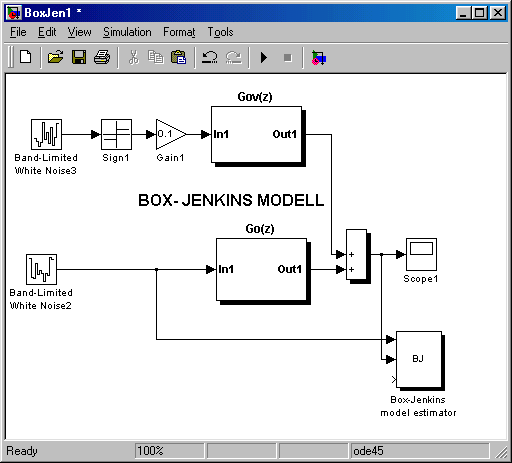
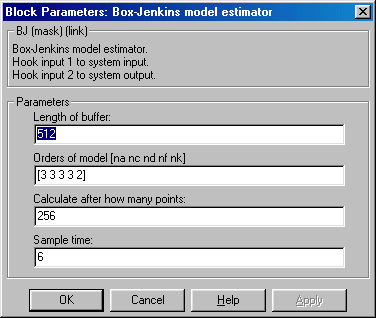
A Box-Jenkins modell alapján történt identifikáció minőségét mutatja a 7-35. ábra.
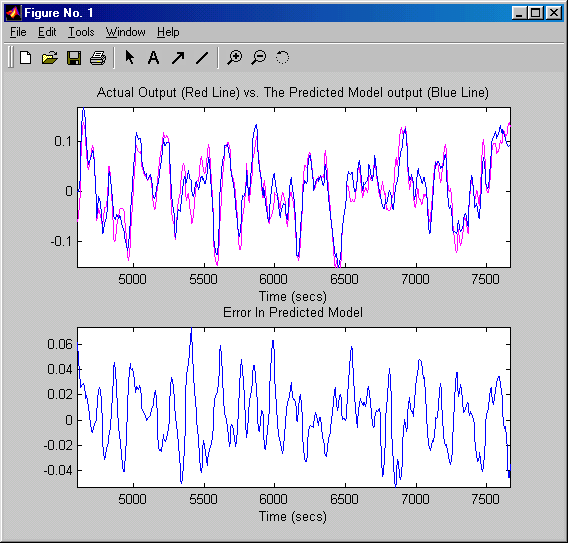
7.3.3. Nemlineáris rendszerek identifikációja
A technológiai rendszerünk egy gőzös hőcserélő (7-36. ábra), gőzágba épített nemlineáris karakterisztikájú szabályozó szeleppel. Feladatunk megtervezni a visszacsatolásba építendő szabályozási algoritmust.
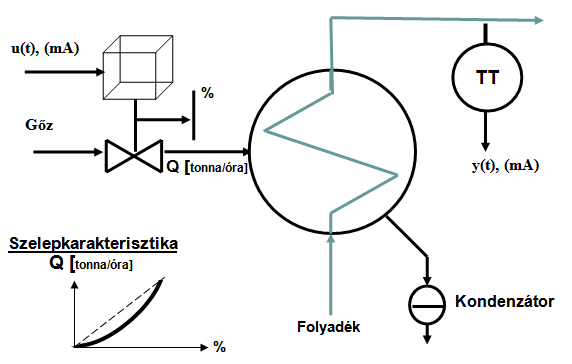
A technológiai rendszer nemlineáris viselkedését láthatjuk alább (7-37. ábra). A szelep bemenetét változtatva különböző munkapontokon vizsgáltuk a hőcserélőből kilépő folyadék hőmérséklet változásait. A mintavételezési időt T0=2 s-ra választottuk és az u(k) végrehajtó jelre +/- 1 mA PRBS jelet szuperponáltunk.
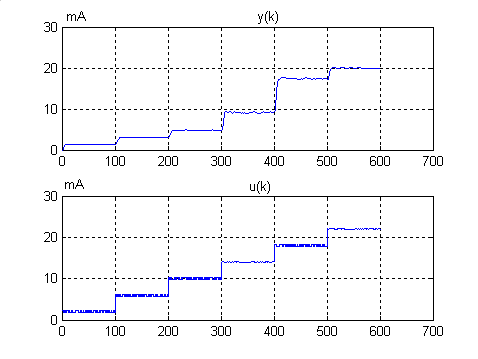
Vizsgáljunk meg egy tartományt, melynél az u(k) bemenet 10 mA-ről 14 mA-re változik. Ez a k=300-400 minta közötti részminta párjai. OE modellt használva a következő diszkrét idejű átviteli függvény polinomokat kapjuk:
B(z) = 0.06827 z-1 + 0.1446 z-2 - 0.2139 z-3 A(q) = 1 - 2.306 z-1 + 1.775 z-2 - 0.4706 z-3 | (7.32) |
Az identifikációt elvégezve a k=200-300 intervallumban a diszkrét idejű átviteli függvény polinomjai:
B(z) = 0.02024 z-1 + 0.06032 z-2 - 0.06966 z-3 A(z) = 1 - 2.179 z-1 + 1.623 z-2 - 0.4214 z-3 | (7.33) |
Ez azt jelenti, hogy több munkapont környékén el kell végezni az identifikációt és a más-más munkapont környékén a szabályozó algoritmus paramétereit újra kell hangolni. Az alábbi 7-38. ábra a nemlineáris rendszer szabályozását szemlélteti állandó paraméterű és struktúrájú szabályozó esetén különböző munkapontokban (ahol: r(k) – parancsolt érték)
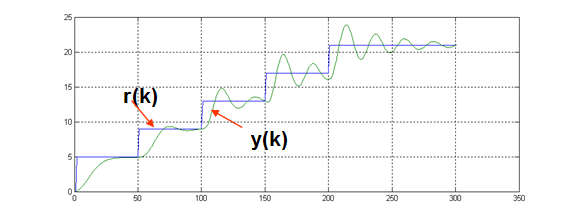
(A MATLAB >>ident parancsára nem térünk ki, lásd a System Identification Toolbox-ot)
7.4. Esettanulmány az identifikáció + szabályozó tervezés alkalmazására
Bevezetés
A Pannon Egyetemen üzembe helyeztünk egy DCMCT (DC Motor ControlTrainer) rendszert.
A rendszer folyamatirányítási felülete PC bázisú, mely USB felületen kapcsolódik egy PIC18F4550 mikrokontroller alapú egységhez, az pedig egy MAXON DC motorhoz (GraphiteBrushless, 18 Watt, 26 mm).
A DCMCT dinamikus viselkedését egy rúgó-tömeg mechanikus egység segítségével megváltoztattuk és a beépített PID algoritmus helyett diszkrét Dahlin algoritmust használunk. Az analitikusan megtervezett Dahlin algoritmus tartalmaz egy notch szűrőt/szabályozót, ill. egy PI algoritmust.
7.4.1. A kísérleti rendszer felépítése
Az QUANSER rendszer [5] rendszertechnikai felépítése az alábbi ábrán (7-39. ábra) látható.
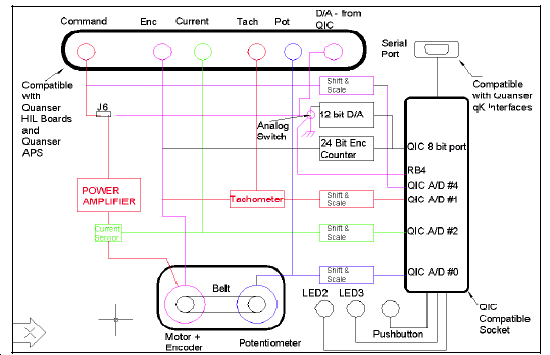
A rendszer USB vonalon keresztül kapcsolódik a számítógéphez, melyen fut egy real-time folyamatkezelő szoftver. A mintavételezési idő T0=0.01 s. A gyakorló eszköz a rugó-tömeg kiegészítéssel alább látható (7-40. ábra, 7-41. ábra).

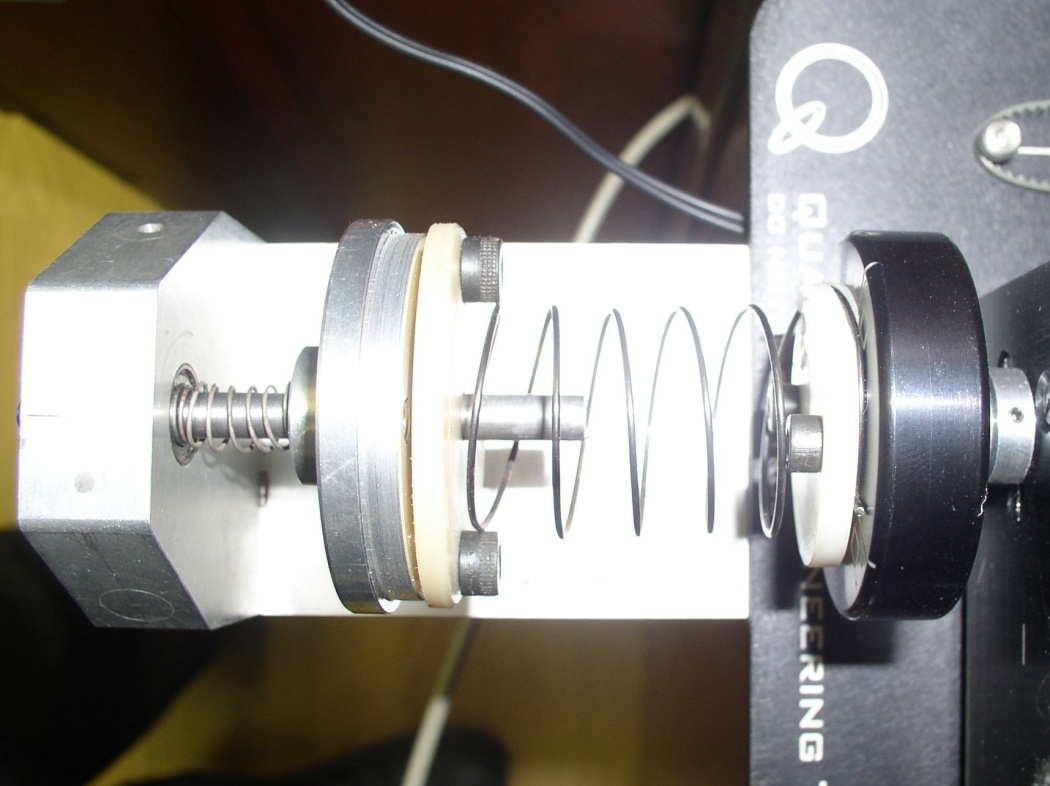
A QUANSER USB QICii szoftver kezelői felülete (7-42. ábra) pozíció és fordulatszám szabályozást enged meg, valamint rendelkezik egy egyszerű modellezési lehetőséggel is. Ez utóbbit használtuk fel a mechanikailag átalakított rendszer identifikációjánál az adatgyűjtéshez. Alább (7-42. ábra) látható, hogy a rendszer keskenysávú lengéseket végez az átmeneti állapotokban. E viselkedés notch-szűrő alkalmazását indokolhatja, melyet az algoritmus tervezés figyelembe fog venni.
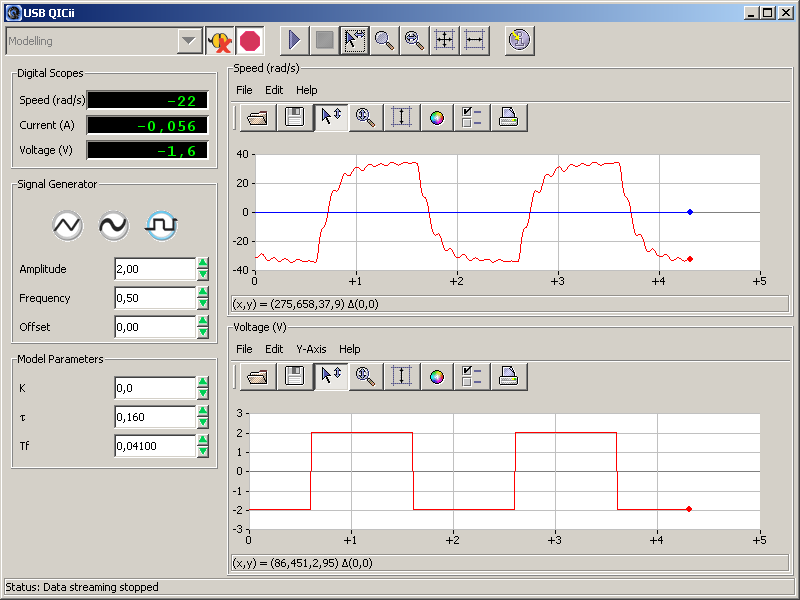
7.4.2. Az identifikáció
7.4.2.1. Modell kiválasztás
Szabályozási rendszerek tervezésének megvalósításához szükségünk van a szabályozott objektum dinamikai tulajdonságainak ismeretére. Valamilyen leírási mód segítségével rendelkeznünk kell az objektum matematikai modelljével, hisz a tervezőrendszerünk kérni fogja a szabályozandó objektum matematikai modelljét. Szerencsés esetben az objektum matematikai modellje – fizikai, kémiai, biológiai paraméterekkel ismert, de a legtöbb esetben nem, így valamilyen közelítő munkaponti modellekkel kell a tervezést megkezdeni.
A technológiai rendszerek irányítását, szabályozását, vezérlését számítógépek végzik. A számítógép számára tervezendő szabályozási algoritmusokat a folyamatirányító számítógép differencia egyenlet formájában kéri, valamilyen tervezett T0 mintavételezési idő mellett, azaz az algoritmus egy diszkrét algoritmus, így a számítógép is egy diszkrét rendszert „szeretne látni” szabályozott objektumként, amely a valóságban természetesen időben folytonos rendszer.
Az időben folytonos rendszerek identifikációjával a szakirodalom több évtizede foglalkozik [4] és letisztultak azok az identifikációs eljárások, amelyeket a gyakorlat is közvetlenül alkalmazhat. Kialakultak azok a diszkrét rendszermodellek, melyek a gyakorlati problémák legtöbbjének leírására megfelelnek, melyek felhasználásával olyan matematikai modelleket kapunk, amelyek közvetlenül felhasználhatók digitális szabályozási algoritmusok tervezéséhez, adaptív rendszerek megalkotásához [2].
Az QICii rendszerből származtatott mérési adatok formátuma olyan, hogy a MATLAB System Identification Toolbox-a ezeket értelmezni tudja. Az 7-43. ábra mutatja a feldolgozandó be-kimeneti jelsorozatot.
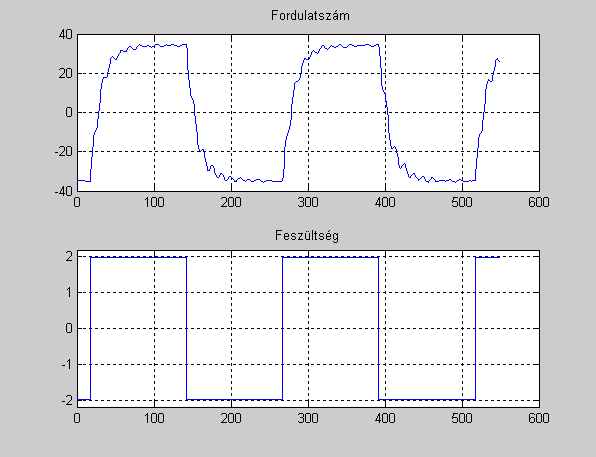
A rendszerhez illesztett OE (Output Error) modell, mely mérési zajt tartalmazó modell - a következő hatásvázlattal jellemezhető:
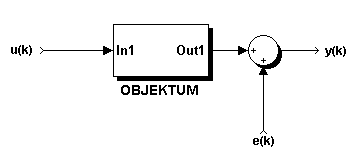
7-44. ábra Az OE modell struktúrája
A modell impulzus-átviteli függvénye:
| (7.34) |
ahol e(z) a mérési zaj z-transzformáltja.
7.4.2.2. A szabályozási kör mintavételezési idejének megválasztása
A szabályozandó objektum átmeneti függvényének viselkedése (7-45. ábra) alapján a szabályozó kör mintavételezési idejét a lengési periódusidő tized részére állítjuk be, azaz
legyen T0 = 0.01 s. Ezzel a mintavételezési idővel fogjuk üzemeltetni a megtervezendő szabályozási kört.
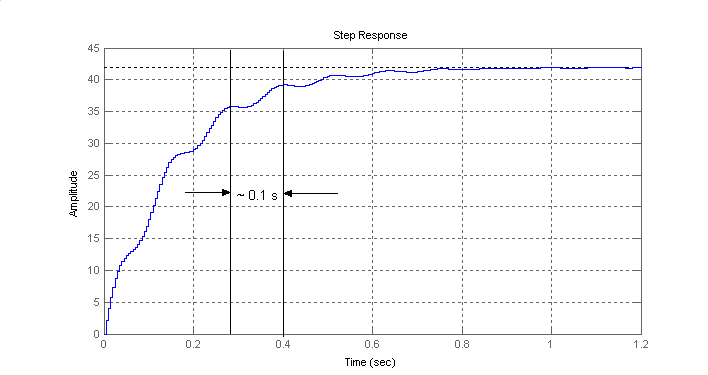
7.4.2.3. Identifikáció MATLAB/System IdentificationToolbox segítségével
A kísérleti rendszer adatsorozatát (7-43. ábra) egy z=[y u] vektorban tároltuk el, majd felhasználva a Toolbox parancsát megkapjuk az identifikált rendszer OE modelljének B(z), A(z) polinomjait. Minkét polinom fokszáma három, a diszkrét holtidő pedig egy (d=1).
th=oe(z,[3 3 2])
Discrete-time IDPOLY model: y(t) = [B(q)/A(q)]u(t) + e(t)
B(q) = 2.009 q-2 - 3.575 q-3 + 1.897 q-4
A(q) = 1 - 2.603 q-1 + 2.489 q-2 - 0.8666 q-3
A compare(z,th) paranccsal az identifikáció minőségére kapunk választ (7-46. ábra)
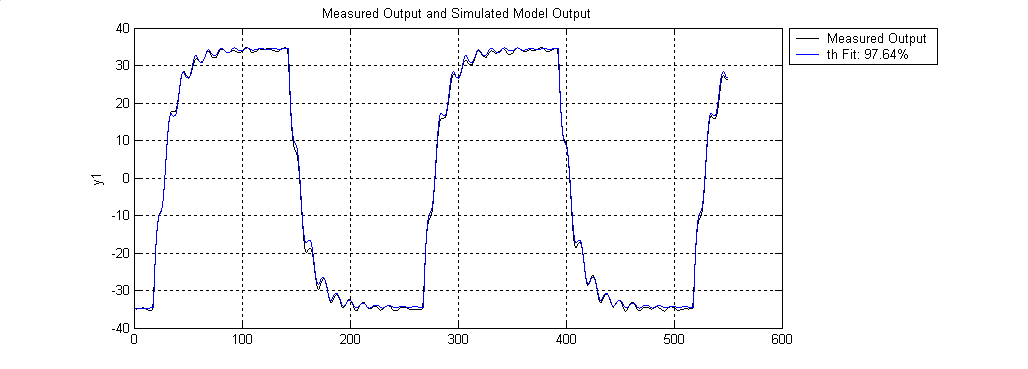
7.4.3. Diszkrét algoritmus analitikus tervezése
A számítógépes folyamatirányítás területén, az ipari rendszerekben olyan folyamatokkal találkozunk, melynek tranziens viselkedését a zárt szabályozási körökben egyszerű átmenetekre kell megterveznünk. Az ilyen egyszerű viselkedésű zárt köröknek a folytonos átviteli függvénye - holtidőt feltételezve - legyen:
| (7.35) |
ahol:TE – a zárt szabályozási kör időállandója, s
TH – holtidő, s
Szeretnénk megvalósítani egy olyan szabályozási kört, amelynek a viselkedése egy elsőrendű holtidős (vagy holtidő nélküli) rendszert képvisel.
Az analitikusan tervezett [6][7] algoritmus levezetéséhez induljunk ki a zárt digitális szabályozási kör összefüggéseiből. A zárt szabályozási kör diszkrét idejű átviteli függvénye:
| (7.36) |
ahol:G0(z)- a szabályozott objektum diszkrét modellje a tartószervvel együtt
Gc(z) - a tervezendő algoritmus diszkrét átviteli függvénye
Gr(z) - a zárt szabályozási kör viselkedése
A zárt rendszer szabályozási kör hatásvázlata látható a 7-47. ábra.
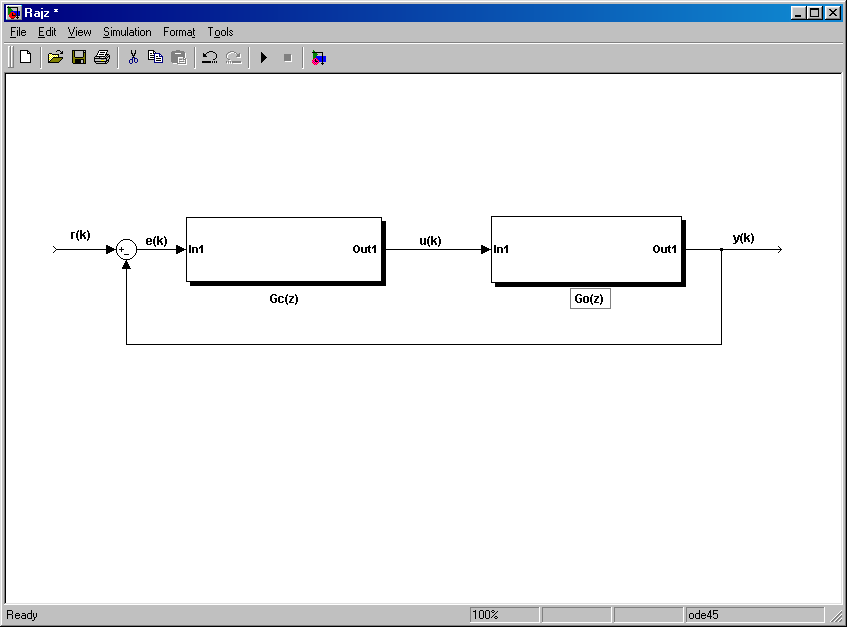
Fejezzük ki a GC(z) impulzus-átviteli függvényt, és megkapjuk a digitális szabályozó algoritmus impulzus-átviteli függvényét [8]:
| (7.37) |
7.4.3.1. A zártköri viselkedés tervezése
A zártköri viselkedés megadásakor figyelembe kell venni a diszkrét holtidőt, mely esetünkben egy mintavételezési idő, így a zártköri folytonos modell 0,3 s-os időállandóval
| (7.38) |

A c2d(Grf,0.01) parancs segítségével T0 = 0.01s mintavételezési idő mellett megkapjuk a Grd(z) zártköri viselkedés impulzus-átviteli függvényét. Az ehhez tartozó átmeneti függvényt ábrázolja a 7-48. ábra.
| (7.39) |
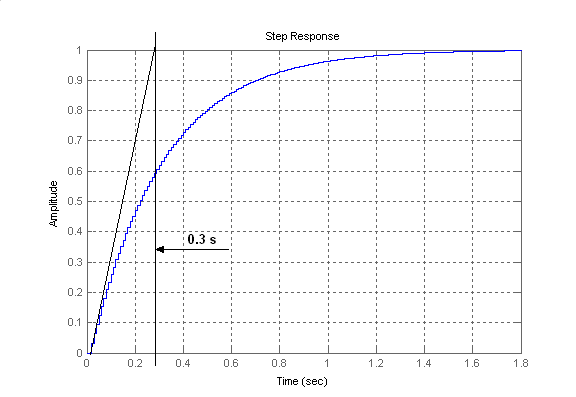
7.4.3.2. A szabályozási algoritmus
Az ismert összefüggést felhasználva a Gc=1/Go * (Grd/(1-Grd) MATLAB paranccsal megkapjuk a diszkrét algoritmus impulzus-átviteli függvényét

és a 7-49. ábra mutatja a diszkrét algoritmus átmeneti függvényét.
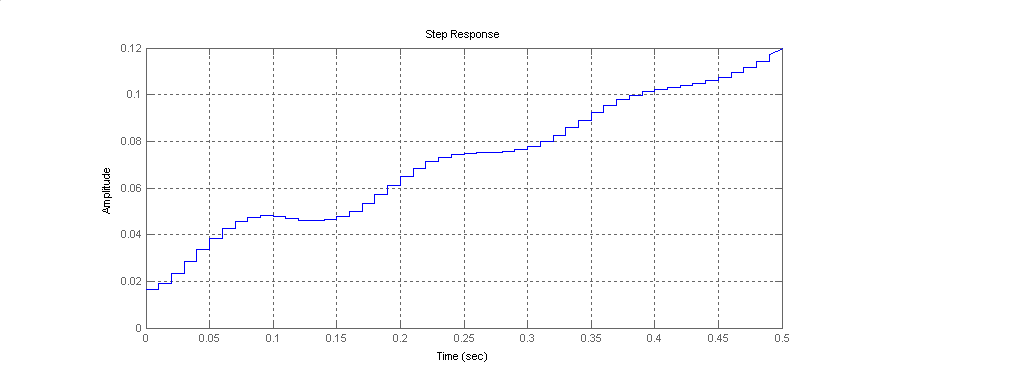
Abban az esetben, ha a zpk(Gc) paranccsal megvizsgáljuk a megtervezett algoritmus zérus és pólus helyeit:
| (7.40) |

azt tapasztaljuk, hogy a megtervezett algoritmus tartalmaz egy diszkrét PI algoritmust és egy sorba kötött Notch-szűrőt, mely a keskenysávú lengéseket fogja kikompenzálni [7]
| (7.41) |
A nyitott köri Bode- (7-50. ábra) és a zérus-pólus (7-51. ábra) diagram is ezt reprezentálja.
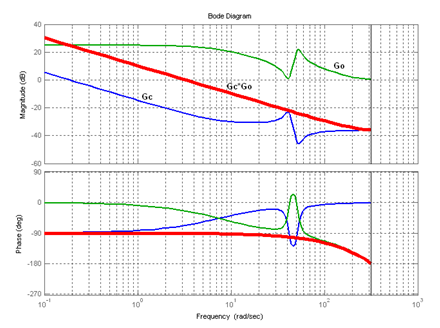
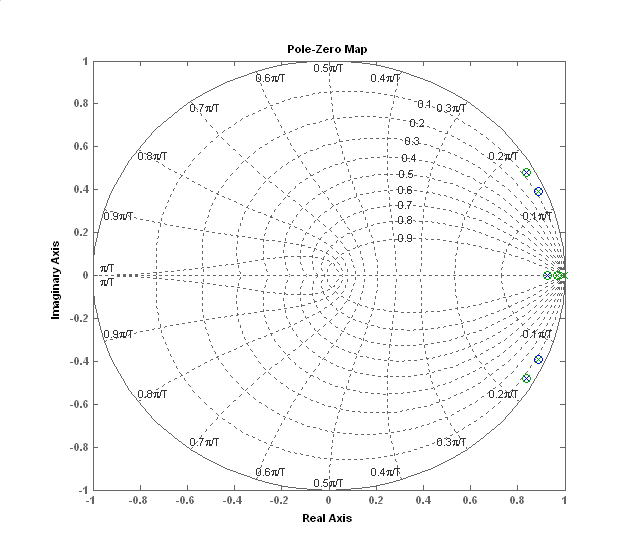
7.4.4. A zártköri viselkedés vizsgálata
A zárt szabályozási kör SIMULINK diagramjában a szabályozási algoritmust felbontottuk egy diszkrét PI és egy diszkrét notch-szűrő/szabályozó részre.
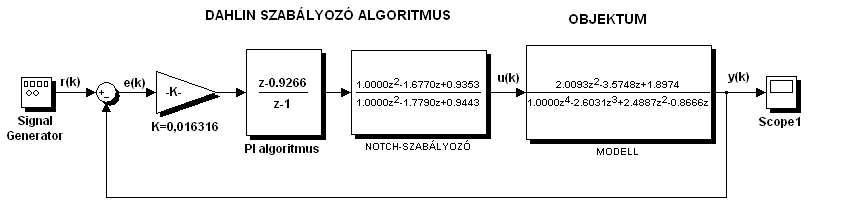
Alább (7-53. ábra) az y(k) ellenőrző jel és az u(k) végrehajtó jel viselkedését láthatjuk. A zárt kör lengésmentes, a zárt kör időállandója 0,3 s. A sztochasztikus zavarásnak kitett rendszer viselkedését a 7-54. ábra, változó alapjel esetében pedig a 7-55. ábra mutatja be a rendszer viselkedéseit.
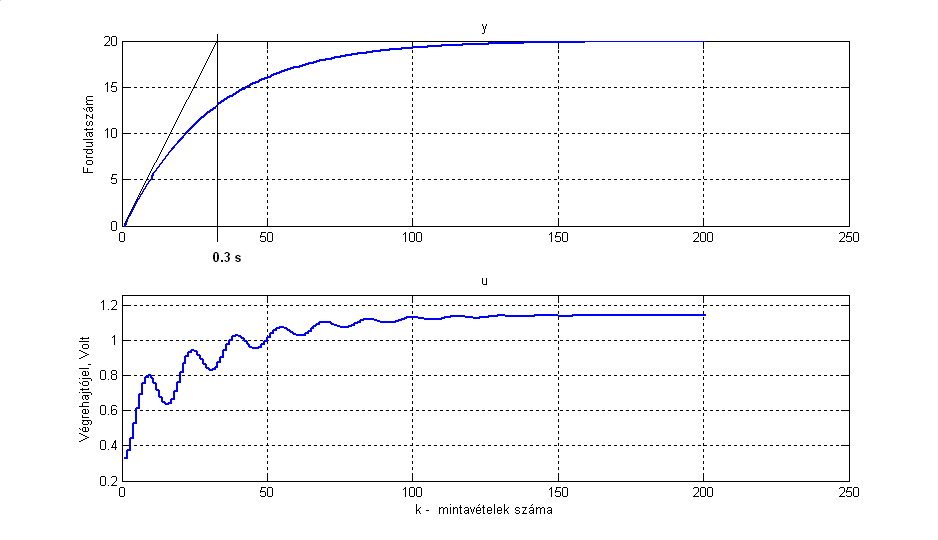
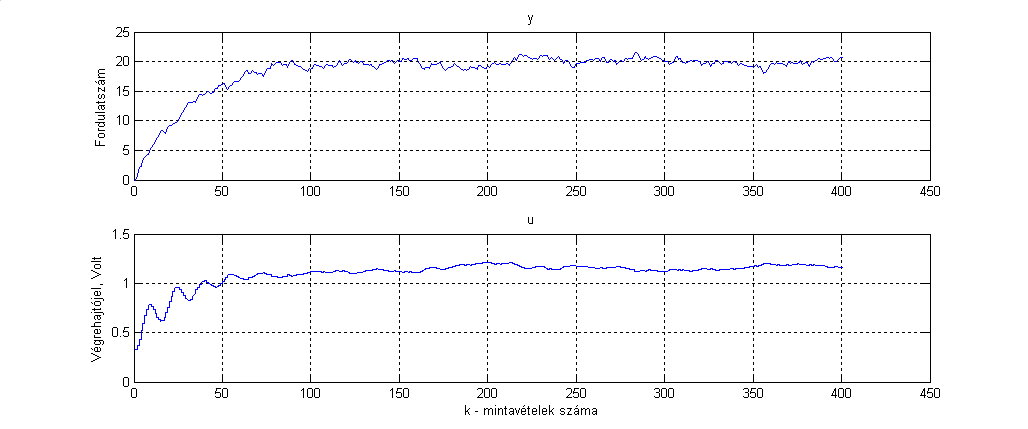
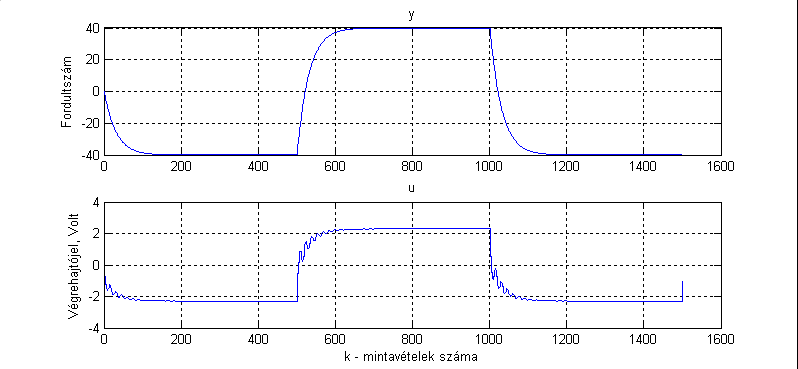
Az esettanulmány bemutatja az identifikáció és szabályozó tervezés minden lépését, így felhasználható az irányításelmélet gyakorlati oktatásában, tervezési segédeszköze lehet a gyakorló mérnöki munkának.
8. fejezet - A robotirányítás mint pályakövetési feladat
- 8.1. A csuklónként önálló PID szabályozás
- 8.2. A számított nyomaték módszere
- 8.3. Robosztus irányító tervezése
- 8.4. A compliance-re alapozott robotirányítás
- 8.5. A mechanikai impedanciaszabályozás (impedance control)
- 8.6. A korrigált csuklóerő-szabályozás módszere
- 8.7. Az additív hibrid szabályozás módszere
- 8.8. Kidolgozott feladat a Hibrid (pozíció-erő) irányítással kapcsolatban
A mechanikai lapok összefoglalása után ebben a fejezetben már irányítástechnikai szemszögből fogjuk az ipari robotokat vizsgálni; mindazonáltal egyelőre még nem foglalkozunk legáltalánosabban az egyes robotirányítási feladatokkal, csupán azokkal, amelyeknél elegendő a robotkéz előírt pálya (trajektória) mentén történő mozgatása, és nem szükséges figyelembe venni a robotkéz és a környezet között fellépő erőket illetve forgatónyomatékokat. Az utóbbi típusú feladatok a 3. fejezet tárgyát képezik.
Amint azt az 1. fejezetben már láttuk, a robotmozgások dinamikája – talán a legtömörebb, még ésszerűnek mondható módon – az alábbi alakban írható fel:
| (8.1) |

ahol  a csuklókoordináták vektora,
a csuklókoordináták vektora,  az egész robot tehetetlenségi tenzora,
az egész robot tehetetlenségi tenzora,  az ekvivalens csuklónyomatékok vektora, a
az ekvivalens csuklónyomatékok vektora, a  vektor pedig a korábban már részletezett nemlineáris tagokat foglalja magában, így a (8.1) egyenlet lényegében az
vektor pedig a korábban már részletezett nemlineáris tagokat foglalja magában, így a (8.1) egyenlet lényegében az  egyenlet tömörített és általánosított alakja.
egyenlet tömörített és általánosított alakja.
Maga az irányítástechnikai feladat lényege az, hogy a fenti egyenlet  vektorának egyes elemei szabályozott módon, a
vektorának egyes elemei szabályozott módon, a  ,
,  ,
,  vektorelemek mért (aktuális) és előírt értéki közötti eltérések függvényében változzanak.
vektorelemek mért (aktuális) és előírt értéki közötti eltérések függvényében változzanak.
A robotirányítási feladatok megvalósítására különböző módszerek terjedtek el, ezek közül az irodalomban a következő hárommal találkozhatunk a leggyakrabban:
csuklónként önálló PID szabályozás
a számított nyomatékok módszere
robusztus irányítóegység tervezése
8.1. A csuklónként önálló PID szabályozás
Az a) esetet az egyik irodalom szellemesen „struccpolitika”- módszernek nevezi, ez a módszer ugyanis a (8.1) egyenlettel megadott dinamikai összefüggést egyszerűen figyelmen kívül hagyja, vagyis nem számol azzal, hogy a valóságban az egyes kartagok dinamikai szempontból is kölcsönösen befolyásolják egymás mozgását. Ehelyett ez a módszer a lehető legegyszerűbb módon minden egyes csukló mozgását egy-egy önálló, közönséges analóg PID szabályozóval befolyásolja, amelyek ezáltal teljesen független rendszert alkotnak. Ez az egyszerű és kevéssé költséges módszer szinte minden olyan esetben eredményesen alkalmazható, amikor elegendő pozícióvezérlés, vagyis nem merül fel a pontos pályakövetés igénye. Ebben az esetben a szabályozó az egyes  ekvivalens csuklónyomatékokat mint beavatkozó jeleket a következő alakú képlet szerint számítja:
ekvivalens csuklónyomatékokat mint beavatkozó jeleket a következő alakú képlet szerint számítja:
| (8.2) |

ahol  a j-edik csuklókoordináta aktuális és előírt értékének (az előbbit egyszerűen
a j-edik csuklókoordináta aktuális és előírt értékének (az előbbit egyszerűen  -vel, az utóbbit
-vel, az utóbbit  -vel fogjuk jelölni) különbsége; a
-vel fogjuk jelölni) különbsége; a  mennyiségek a PID szabályozóra jellemző (beállítható) pozitív konstansok,
mennyiségek a PID szabályozóra jellemző (beállítható) pozitív konstansok,  pedig az idő mint integrálási változó.
pedig az idő mint integrálási változó.
A továbbiakban egy viszonylag elvont és az olvasótól az eddigieknél nagyobb elmélyülést igénylő levezetéssel belátjuk, hogy az (8.2) szerinti csuklónként önálló szabályozás stabilis, azaz a rendszer (a robot) véges idő alatt eléri a munkaterén belül előírt tetszőleges pozíciót/orientációt (mint egyensúlyi helyzetet), és abból kimozdítva ugyancsak véges idő alatt ugyanoda visszaáll. A bizonyítás a Robotmechanizmusok című jegyzetben tárgyalt Lagrange-formalizmuson alapul.
A PID szabályozások elméletéből ismeretes, hogy az integrális szabályozás alkalmazásának elsődleges célja a különböző nemlineáris hatásokból (mechanikai rendszereknél pl. a Coulomb-súrlódásból) eredő véges beállási hiba kiküszöbölése. Első közelítésként tegyük fel, hogy a vizsgálandó robotnál a gravitációs és súrlódási effektusok az egyéb hatások mellett elhanyagolhatók; a fentiek értelmében ekkor elegendő csupán PD szabályozókat alkalmazni. Az (8.2) összefüggés integrális tagját elhagyva és az egyenlőségét a robot valamennyi szabadságfokára kiterjesztve a következő vektor-mátrix-}
| (8.3) |
ahol  és
és  szimmetrikus, pozitív definit mátrixok, továbbá
szimmetrikus, pozitív definit mátrixok, továbbá
| (8.4) |

ahol a  vektorok egyes elemei a (8.2) egyenletben szereplő illetve annak felírását követően definiált
vektorok egyes elemei a (8.2) egyenletben szereplő illetve annak felírását követően definiált  ,
,  és
és  mennyiségek. (Mivel
mennyiségek. (Mivel  konstans elemekből álló vektor, fennáll még a
konstans elemekből álló vektor, fennáll még a  összefüggés is. )
összefüggés is. )
Bizonyításunk során abból indulunk ki, hogy súrlódás és gravitáció hiányában a egyenlet – könnyen belátható módon – az alábbi alakúra írható át:
| (8.5) |
ahol  egy olyan
egy olyan  -es mátrix, amellyel kapcsolatban teljesül, hogy a
-es mátrix, amellyel kapcsolatban teljesül, hogy a
| (8.6) |

mátrix antiszimmetrikus. A bizonyításhoz Lyapunov ún. közvetlen stabilitásvizsgálati módszerét fogjuk felhasználni, amelynek lényegét az alábbiakban összefoglaljuk.
Lyapunov közvetlen módszere mind lineáris, mind nemlineáris módszerekre alkalmazható, és elégséges feltételt ad a rendszer stabilitására vonatkozóan. Tegyük fel, hogy az adott nemlineáris rendszer időbeni viselkedését  -edrendű nemlineáris differenciálegyenlet írja le. Minden
-edrendű nemlineáris differenciálegyenlet írja le. Minden  -edrendű differenciálegyenlet átírható az ún. Cauchy-féle alakba, ami azt jelenti, hogy az eredetileg
-edrendű differenciálegyenlet átírható az ún. Cauchy-féle alakba, ami azt jelenti, hogy az eredetileg  -edrendű differenciálegyenletből álló differenciálegyenlet rendszert. Ez utóbbit vektoros alakban a következőképpen írhatjuk fel:
-edrendű differenciálegyenletből álló differenciálegyenlet rendszert. Ez utóbbit vektoros alakban a következőképpen írhatjuk fel:
| (8.7) |

ahol  a rendszer jellemző állapotváltozójából és annak idő szerinti deriváltjaiból képzett
a rendszer jellemző állapotváltozójából és annak idő szerinti deriváltjaiból képzett  dimenziós vektor. (Ld. még a matematikában tanultakat!)
dimenziós vektor. (Ld. még a matematikában tanultakat!)
Lyapunov szerint a rendszer stabilitásának elégséges feltétele az, hogy létezzék egy olyan  skalár vektor, függvény, (az ún. Lyapunov-függvény), mely az alábbi tulajdonságokkal rendelkezik:
skalár vektor, függvény, (az ún. Lyapunov-függvény), mely az alábbi tulajdonságokkal rendelkezik:
|

a
 függvény változója a rendszer (8.7) egyenlete szerint, Caunchy-féle alakban felírt differenciálegyenletének állapotvektora
függvény változója a rendszer (8.7) egyenlete szerint, Caunchy-féle alakban felírt differenciálegyenletének állapotvektora 

pozitív vagy negatív definit a teljes állapottérben


idő szerint folytonosan deriválható a teljes állapottérben, és
 -re teljesül, hogy
-re teljesül, hogy  -szel ellentétes értelemben legalábbis szemidefinit
-szel ellentétes értelemben legalábbis szemidefinit
Ha mindezeken túlmenően  valamilyen értelemben határozottan difinit (tehát az egész állapottérre nézve
valamilyen értelemben határozottan difinit (tehát az egész állapottérre nézve  , akkor a rendszer aszimptotikusan stabilis.
, akkor a rendszer aszimptotikusan stabilis.
A módszer alkalmazásának nehézsége éppen a megfelelő  Lyapunov-függvény megtalálásában rejlik, ami általában intuíciót igényel. A
Lyapunov-függvény megtalálásában rejlik, ami általában intuíciót igényel. A  Lyapunov-függvény többnyire a rendszer valamiféle általánosított energiafüggvényével azonosítható.
Lyapunov-függvény többnyire a rendszer valamiféle általánosított energiafüggvényével azonosítható.
Visszatérve konkrét példánkhoz, a csuklóként önálló PD szabályozáshoz, éljünk a következő választással:
| (8.8) |
Az (8.8) egyenlet második tagja a korábbiak értelmében a robot mint mechanikai rendszer teljes kinetikus energiája, az első tag pedig, mint egy egyensúlyi helyzetéből kimozdított lineáris rugó által tárolt rugalmas energia. (Gondoljunk arra, hogy egy lineáris rugó felfogható úgy is, mint arányos típusú mechanikai szabályozó!)
Az (8.8) egyenlettel definiált  Lyapunov-függvény tehát tulajdonképpen nem más, mint a rendszer összenergiája.
Lyapunov-függvény tehát tulajdonképpen nem más, mint a rendszer összenergiája.
Mivel  és
és
 szimmetrikus, pozitív definit mátrixok, a
szimmetrikus, pozitív definit mátrixok, a
| (8.9) |

egyensúlyi helyzet kivételével mindig teljesül a  reláció, tehát a választott függvény pozitív definit.
reláció, tehát a választott függvény pozitív definit.
Képezzük ezek után  idő szerinti deriváltját! A tömörség kedvéért mellőzük a levezetés minden mozzanatának részletes magyarázatát, amiket az olvasó némi gondolkodás után maga is megtalálhat. Felírhatjuk tehát, hogy
idő szerinti deriváltját! A tömörség kedvéért mellőzük a levezetés minden mozzanatának részletes magyarázatát, amiket az olvasó némi gondolkodás után maga is megtalálhat. Felírhatjuk tehát, hogy
| (8.10) |
Ha a szabályozási törvényt (jobb kifejezés híján ezt fogjuk használni mint a <control law> angol kifejezés tükörfordítását) a (8.3) szerint fogalmazzuk meg, akkor a (8.10) levezetés folytatásaként a következőt írhatjuk:
| (8.11) |
mivel a  mátrixot úgy választottuk meg, hogy
mátrixot úgy választottuk meg, hogy  aszimmetrikus legyen.
aszimmetrikus legyen.
Az (8.11) szerinti  reláció teljesülése annyit jelent, hogy az (8.8) összefüggéssel definiált
reláció teljesülése annyit jelent, hogy az (8.8) összefüggéssel definiált  függvény a rendszer Lyapunov-függvénye, így a rendszer valóban stabilis a
függvény a rendszer Lyapunov-függvénye, így a rendszer valóban stabilis a  egyensúlyi helyzetben. Már csak azt kell belátnunk, hogy a rendszer nem „ragadhat be” egy
egyensúlyi helyzetben. Már csak azt kell belátnunk, hogy a rendszer nem „ragadhat be” egy  helyzetbe annak ellenére, hogy integrális szabályozást nem alkalmaztunk. Ehhez azt szükséges bizonyítanunk, hogy a
helyzetbe annak ellenére, hogy integrális szabályozást nem alkalmaztunk. Ehhez azt szükséges bizonyítanunk, hogy a  (azaz a
(azaz a  ) eset csak a
) eset csak a  állapotban állhat fenn.
állapotban állhat fenn.
Képezzük a  vektor második deriváltját!
vektor második deriváltját!
| (8.12) |

ami valóban minden  állapotban zérustól különböző, tehát a rendszer mindig a
állapotban zérustól különböző, tehát a rendszer mindig a  állapot felé konvergál, vagyis asszimptotikusan stabilis.
állapot felé konvergál, vagyis asszimptotikusan stabilis.
Itt jegyezzük meg, hogy a fenti eredmény különlegesen „robosztus”, vagyis érzéketlen a robot tömegviszonyainak bizonytalanságaival szemben, minthogy a tömegre vonatkozóan semmiféle becslést nem tartalmaz.
Az (8.3) egyenlet (szabályozási törvény) speciális esete a lokális (csuklónként önálló) szabályozás:
| (8.13) |

amely összefüggés tulajdonképpen csak imitálja egy rugókból álló rendszer viselkedésének leírását.
Ha a valóságos viszonyokat jobban megközelítő modellt választunk, akkor az eddig elhanyagolt nemlineáris – gravitációs és súrlódási – effektusokat is figyelembe kell vennünk. Ekkor a rendszer dinamikai viselkedését (8.5) helyett az alábbi alakú egyenlet írja le:
| (8.14) |

ahol  vektor egyelőre még csak a gravitációs effektust veszi figyelembe. Ez esetben a következő alakú szabályozási törvényt kell választanunk:
vektor egyelőre még csak a gravitációs effektust veszi figyelembe. Ez esetben a következő alakú szabályozási törvényt kell választanunk:
| (8.15) |

Sajnálatos módon azonban ez a szabályozási törvény sem tekinthető igazán jónak, mivel a  vektor egzaktul általában nem adható meg a tömegviszonyok nem kellően pontos (bizonytalan) ismerete következtében. További problémát okoz a Coulomb-súrlódás, aminek hatása valóban csak úgy küszöbölhető ki, ha eddigi rendszerünket integrális típusú szabályozó taggal is kiegészítjük (a viszkózus súrlódás hatását a puszta PD szabályozás is kiküszöböli).
vektor egzaktul általában nem adható meg a tömegviszonyok nem kellően pontos (bizonytalan) ismerete következtében. További problémát okoz a Coulomb-súrlódás, aminek hatása valóban csak úgy küszöbölhető ki, ha eddigi rendszerünket integrális típusú szabályozó taggal is kiegészítjük (a viszkózus súrlódás hatását a puszta PD szabályozás is kiküszöböli).
Végül is tehát a lokális szabályozás minden lényeges határt figyelembe vevő, általános a lakja a következő lesz.
| (8.16) |

ahol  a gravitációs hatásokat figyelembe vevő tag becsült értéke, a többi jelölés pedig a korábbiakkal megegyezik.
a gravitációs hatásokat figyelembe vevő tag becsült értéke, a többi jelölés pedig a korábbiakkal megegyezik.
8.2. A számított nyomaték módszere
Ennek a módszernek az alapötlete az, hogy egy, az (8.1) egyenlethez hasonló struktúrájú szabályozási törvényt definiálunk:
| (8.17) |

úgyhogy a probléma (8.17) –ot (8.1) -be helyettesítve – ideális esetben a
| (8.18) |

differenciálegyenlet megoldására redukálódna ( pozitív definit mátrix, ennél fogva invertálható).
pozitív definit mátrix, ennél fogva invertálható).
Ha ismét lokális szabályozásra törekszünk, akkor az egyes  beavatkozó jelek a következőképpen számíthatók:
beavatkozó jelek a következőképpen számíthatók:
| (8.19) |

ahol  a
a  -edik csukló előírt gyorsulása.
-edik csukló előírt gyorsulása.
E módszer alkalmazásának legfőbb korlátja, hogy a (8.17) egyenletben szereplő  és
és  mennyiségek általában nem egzaktul ismert, hanem csupán becsülhető mennyiségek, a valóságban mindig fennálló paraméterbizonytalanságok miatt. Ha az említett mennyiségek becsült értékeit
mennyiségek általában nem egzaktul ismert, hanem csupán becsülhető mennyiségek, a valóságban mindig fennálló paraméterbizonytalanságok miatt. Ha az említett mennyiségek becsült értékeit  -csal illetve
-csal illetve  -csal jelöljük, akkor (8.17) helyett csupán a következő összefüggést írhatjuk fel:
-csal jelöljük, akkor (8.17) helyett csupán a következő összefüggést írhatjuk fel:
| (8.20) |

amit megint csak az eredeti (8.1) dinamikai egyenletbe helyettesítve a következő differenciálegyenletet nyerjük:
| (8.21) |

Az (8.21) összefüggésből láthatjuk, hogy a probléma valójában távolról sem olyan egyszerű, mint amilyennek azt az ideális esetre vonatkozó (8.18) kifejezés sejttette, ennél fogva nem is kezelhető megfelelően a megszokott lineáris szabályozástechnikai módszerekkel. Lényeges szempont a rendszer egészének robosztusságára való törekvés, ami annyit jelent, hogy minden lehetséges módon igyekszünk a rendszer modellezetlen effektusokkal szembeni érzékenységét a minimálisra csökkenti (annak érdekében, hogy a bizonytalanságok minél kisebbek legyenek, más szóval a becsült értékek minél kevésbé térjenek el a ténylegesektől).
Ezekre a kérdésekre a robusztus szabályozók tervezése kapcsán a későbbiekben még visszatérünk, előbb azonban megismerkedünk egy korszerű elmélet (az ún. „csúszásfelületek elmélete”, <theory of sliding surfaces>) alapjaival, amely robotirányítási célokra is eredményesen alkalmazható.
8.3. Robosztus irányító tervezése
Szerte a világon sok erőfeszítés történt és történik manapság is annak érdekében, hogy hatékony real-time eljárásokat fejlesszenek ki robotirányítási célokra. Amint azt a Robotmechanizmusok című jegyzetben említettük, az eljárások hatékonysága jelentősen növelhető, ha azonban rekurzív algoritmusokat alkalmazunk, pl. egy előírt mozgás megvalósításához szükséges ekvivalens csuklónyomatékok kiszámítására. Azonban az inverz dinamikai feladat eképpen történő megoldása még a nemlineáris hatások számításba vételekor is abból a feltételezésből indul ki, hogy a vizsgálat alapjául szolgáló modell minden részletében egzaktul ismert.
Ezzel szemben jól tudjuk, hogy vannak bizonyos jelenségek, amelyek hatása „a priori” nem jósolható meg pontosan, mégpedig előfordulnak különféle zavarok (mint pl. a Coulomb- és a viszkózus súrlódás), továbbá modellezési hibák, így pl. a geometriai és tömegviszonyokban fellépő bizonytalanságok (mondjuk, a terhelés tömege és a robot kézben való pontos elhelyezkedése stb.), figyelembe nem vett nagyfrekvenciás rezonanciajelenségek; elhanyagolt, de a valóságban mérhető hatású késleltetéssel, és így tovább. Ezért célszerű a robotból és az irányítóegységből álló teljes rendszert minél robosztusabban tervezni, ti. hogy az minél kevésbé legyen érzékeny a fentiekben csak kiragadott példaként felsorolt és azokhoz hasonló, előre ki nem számítható hatású, de a valóságban több-kevesebb valószínűséggel fellépő jelenségekre.
A Robotmechanizmusok című jegyzetben az inverz kinematikai feladat megoldhatóságának vizsgálatakor már utaltunk rá, hogy sokszor célszerű egy hatszabadságfokú robot első három szabadságfokát „kar”-nak, második három szabadságfokát pedig „kéz”-nek tekinteni, melyek közül az előbbi a pozícionálást, az utóbbi a kívánt orientáció beállítását végzi el. Dinamikai téren is lehetséges, sőt szokásos az ilyesfajta szétcsatolás, „kar-kéz-szemlélet” alkalmazása, ami általában az egész rendszert robosztusabbá teszi. Ilyen esetekben a kar és a kéz dinamikai szempontból is egymástól viszonylag független „életet él”, a ténylegesen fennálló egymásra hatásukat pedig egyszerűen egymás kölcsönös „zavarásaként” fogják fel. Ez a szemlélet tehát jelentősen leegyszerűsíti az irányítási feladatot mint dinamikai problémát is.
8.4. A compliance-re alapozott robotirányítás
A mai ipari robotok jelentős részét „pick and place”-típusú feladatokra, ponthegesztésre, festékszórásra stb. használják. Ezek a feladatok minden további nélkül megvalósíthatók az eddigiekben tárgyalt pont- illetve pályavezérléssel (az utóbbiakra jó példa a plazmahegesztés vagy lézersugaras vágás illetve megmunkálás). Ezzel szemben viszonylag kevés ipari robot képes olyan, látszólag egyszerű feladatok elvégzésére, mint pl. egy csavar behajtása vagy egy forgattyús mechanizmus hajtása.
Többször találkozunk tehát olyan feladattal, amikor a robot helyes, célirányos mozgásának kritériumát a robotkéz által valamilyen adott irányban kifejtett erővel illetve nyomatékkal egyszerűen (esetleg csak ilyen módon) fejezhetjük ki. A fent említetteken túlmenően ilyen feladat lehet például két munkadarab illesztése, valamilyen felület vagy él követése, sík felület csiszolása, öntvények sorjátlanítása stb. Ha a pozíció- vagy pályavezérelt robot a környezetében lévő tárgyakkal érintkezésbe kerül, akkor általában mindig számolhatunk reakcióidők keletkezésével a szabályozási kör hibája, a robot szerkezetének deformációja, a pozícióadatok pontatlan megadása és egyéb geometriai pontatlanságok miatt. Ezeket a hatásokat azonban a robotkonstrukció rugalmassága általában mindig képes kompenzálni. A robotnak ezt a tulajdonságát strukturális compliance-nek (engedékenységnek) nevezzük. A fent felsorolt feladatok eredményes megvalósítása érdekében azonban meg kell teremtenünk annak a lehetőségét, hogy a compliance-t programozás útján befolyásolni tudjuk.
Ezért a továbbiakban compliance alatt mindig a robot és környezete között létrejövő kölcsönhatásra a robot pozíció- illetve pályavezérlésében bekövetkező programozható (vagy legalábbis hardver eszközökkel előre megtervezhetően lejátszódó) változást fogjuk érteni.
A compliance-t a robotprogram nyelvi eszközeivel írjuk elő a robot részére (robotok programozásával a jelen tárgyon belül nem foglalkozunk). Ez utóbbiakkal adjuk meg az ún. compliance feltételeket. A compliance fogalmi meghatározásakor láttuk, hogy viszonylag általános módszerről van szó. A compliance gyakorlati megvalósítására több különböző is elterjedt, ezek közül a legfontosabbak alapvonásait a következőkben ismertetni fogjuk. Valamennyi módszer közös vonása, hogy a feladatot egy alkalmasan választott ún. compliance középpont (<compliance center>). A compliance középpont definíciója: az ebben a pontban ható erő csak vele megegyező irányú lineáris elmozdulást (transzlációt), míg az e pontban ható forgatónyomaték csak vele megegyező értelmű szögelfordulást (rotációt) okoz. Az esetek többségében a compliance középpont egybeesik a compliance koordinátarendszer origójával.
A compliance tervezésének fő lépései:
a compliance koordinátarendszer kiválasztása
a szabadságfokok felosztása pozíció- (pálya) illetőleg erőszabályozás szerint
a pozíció- (pálya) és erőszabályozások céljának és mozgás közbeni stratégiájának meghatározása.
A compliance koordinátarendszer elhelyezkedése és a compliance feltételek természetszerűleg feladatról feladatra változnak. A compliance feltételek között megkülönböztetünk ún. természetes és mesterséges kényszereket: az előbbiek a geometriai és kinematikai viszonyok által meghatározottak, míg az utóbbiakat maga a robotalkalmazó írja elő a feladat célirányos megvalósítása érdekében.
Az eddigiek könnyebb megértésére nézzük meg egy tipikusnak ugyan nem, ám annál szemléletesebbnek tekinthető konkrét példát. Legyen a robot feladata az, hogy a táblára krétával fölírja a „compliance” szót (lásd az 8-1. ábra). Ha a feladat kezdetén a kréta még nincs a robotmegfogóban, akkor a kréta megfogása kapcsán máris erőszabályozási problémával találjuk szemben magunkat: a robotkéz által a krétára kifejtett erő ugyanis sem túl kicsi nem lehet (ekkor a robot elejtheti a krétát), sem pedig túl nagy (ti. akkor összetörhet a kréta). Tegyük fel ezek után, hogy a megfogóerő megfelelő, és a továbbiakban csak a kréta és a tábla közötti kapcsolatot vizsgáljuk.
Mindaddig, amíg a kréta el nem éri a táblát, tehát a tábla megközelítésének során a kréta és a tábla között még nem lép fel kölcsönhatás, így a mozgásnak ez a szakasza tiszta háromszabadságfokú pályavezérléssel (helyesebben szabályozással) megoldható. (A kréta orientációját állandónak tekintjük). Mihelyt azonban a kréta eléri a tábla síkját, megváltozik a helyzet. Célszerű mindenekelőtt felvenni egy compliance koordinátarendszert úgy, ahogy az az 8-1. ábrán látható. A tábla megérintésének pillanatában elveszítünk egy pozíciószabályozási szabadságfokot (nevezetesen a tábla síkjában az arra merőleges  természetes kényszer), ezzel szemben lehetővé, sőt szükségessé válik a
természetes kényszer), ezzel szemben lehetővé, sőt szükségessé válik a  tengely menti erőszabályozás.
tengely menti erőszabályozás.
Ha a táblát első közelítésben súrlódásmentesnek tekintjük, akkor az  és
és  irányú erők – ugyancsak természetes kényszerként – zérusnak adódnak:
irányú erők – ugyancsak természetes kényszerként – zérusnak adódnak:  és
és  . Az orientáció kötöttsége miatt természetes kényszerként adódik az is, hogy valamennyi szabadságfok mentén zérus forgatónyomaték lép fel.
. Az orientáció kötöttsége miatt természetes kényszerként adódik az is, hogy valamennyi szabadságfok mentén zérus forgatónyomaték lép fel.
A legfontosabb mesterséges kényszer az írás megkezdésének pillanatától az  és
és  irányú pozíció lesz, hiszen ezekkel adható meg a táblára felírandó szöveg, jelen esetben a „végpont” szó. Ugyancsak mesterséges kényszerként, további három szabadságfokot igénybe véve megadhatjuk a krétának a táblához viszonyított orientációját is, bár ennek az adott esetben nincs túl nagy jelentősége. Az eddigieket összefoglalva megállapíthatjuk, hogy mind a természetes, mind a mesterséges kényszerekből – külön-külön – annyi van, amennyi a szabadságfokok száma (általában hat).
irányú pozíció lesz, hiszen ezekkel adható meg a táblára felírandó szöveg, jelen esetben a „végpont” szó. Ugyancsak mesterséges kényszerként, további három szabadságfokot igénybe véve megadhatjuk a krétának a táblához viszonyított orientációját is, bár ennek az adott esetben nincs túl nagy jelentősége. Az eddigieket összefoglalva megállapíthatjuk, hogy mind a természetes, mind a mesterséges kényszerekből – külön-külön – annyi van, amennyi a szabadságfokok száma (általában hat).
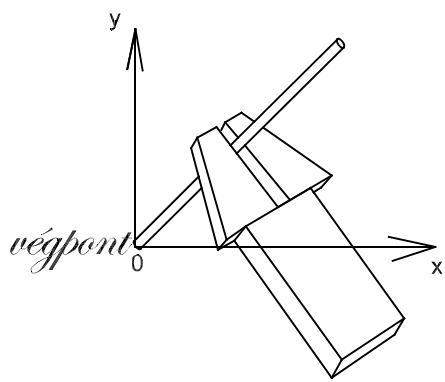
Mesterséges kényszerek | Természetes kényszerek ideális esetben | Természetes kényszerek valóságos esetben |
|
|
|
|
|
|
|
|
|






Megjegyezzük, hogy a természetes és mesterséges kényszerek időnként összefüggenek egymással (ha pl. a tábla és a kréta között a valóságban jelenlévő Coulomb-súrlódást figyelembe vesszük, akkor a  irányú erő mint mesterséges kényszer meghatározza az
irányú erő mint mesterséges kényszer meghatározza az  és
és  irányú erőket) A tábla egyenetlensége
irányú erőket) A tábla egyenetlensége  irányú mozgást is eredményezhet.
irányú mozgást is eredményezhet.
További – két egyszerűnek mondható, mégis compliance-re alapozott irányítást igénylő – feladat a csapillesztés és a csavarbehajtás. Az előbbi az egyszerűbb, ekkor joggal hnyagolhatjuk el a súrlódást. Az utóbbi esetén ideális (súrlódásmentes) esetben csak a csavarhúzó elfordulását írhatjuk elő. De ha nincs súrlódás, akkor nincs csavarkötés. Ha egy csavar behajtásakor a csavarhúzót állandó erővel nyomjuk és állandó nyomatékot fejtünk ki. A két feladathoz legcélszerűbb módon hozzárendelhető compliance koordinátarendszerek a 8-2. ábraról és a 8-3. ábraról leolvashatók, míg a compliance-feltételeket (a természetes és a mesterséges kényszereket) a 8.2. táblázat és a 8.3 táblázat tartalmazza.
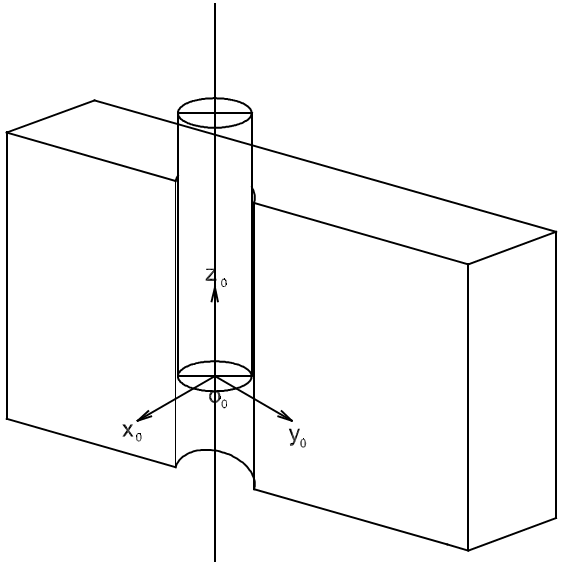
Természetes kényszerek surlódásmentes eset | Mesterséges kényszerek surlódásmentes eset |
|
|
|
|
|
|
|
|
|
|
|
|












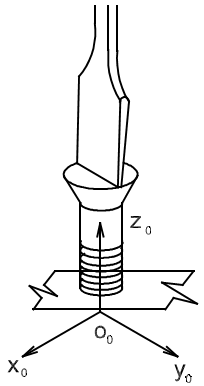
Természetes kényszerek surlódásmentes eset | Mesterséges kényszerek surlódásmentes eset | Természetes kényszerek surlódás jelenlétével | Mesterséges kényszerek surlódás jelenlétével |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|




















Ahol: p - a csavar menet emelkedése
8.5. A mechanikai impedanciaszabályozás (impedance control)
Ez a módszer a compliance-re alapozott irányítások egyik válfaja. Az „impedancia” kifejezés alatt itt most természetesen nem az elektrotechnikából ismert fogalmat kell érteni, hanem egyfajta rugóállandó jellegű merevségi tényezőt, amely lineáris kapcsolatot teremt erő és elmozdulás, illetőleg forgatónyomaték és szögelfordulás között.
Az impedancia szabályozás lényege – viszonylagos egyszerűsége is éppen ebben rejlik -, hogy egy-egy szabadságfok mentén nem közvetlen pozíció-/orientáció vagy erő-/nyomatékszabályozást valósítunk meg, hanem csupán ennek kapcsolatát írjuk elő.
A passzív impedancia szabályozás egyik lehetséges módja az ún. RCC eszköz alkalmazása (a <remote center compliance> kifejezésnek nincs jó magyar megfelelője, ezért használjuk – jobb híján – az „RCC eszköz” megnevezést). Ez az eszköz nem más, mint egy, rugókból és csillapítókból felépített és a robotkézben elhelyezett mechanikai elem, mely bizonyos szabadságfokok irányában viszkózusan csillapított rugóként viselkedik. A compliance megtervezése ez esetben az egyes rugóállandók és csillapítási tényezők megfelelő értékűre történő megválasztására korlátozódik, ennél fogva egy-egy ilyen RCC eszköz általában csak egy adott célfeladat megoldására használható.
Az egyes izületekre vonatkozóan felírhatunk egy merevségi egyenletet
| (8.22) |

A bevezetjük a robot merevségi mátrixát, amely diagonális és  elemeket tartalmazza.
elemeket tartalmazza.
| (8.23) |
Első közelítésben megállapítothatjuk, hogy  csak diagonális elemeket tartalmaz. Egy adott RCC eszköz megtervezése – kissé elvontan – úgyis megfogalmazható, hogy ha az
csak diagonális elemeket tartalmaz. Egy adott RCC eszköz megtervezése – kissé elvontan – úgyis megfogalmazható, hogy ha az  -edik szabadságfok mentén pozíció- (pálya) szabályozást kell megvalósítani, akkor a megfelelő
-edik szabadságfok mentén pozíció- (pálya) szabályozást kell megvalósítani, akkor a megfelelő  mátrixelemet igen nagy (elméletileg végtelen nagy) értékűnek kell választani, míg pl. az erőszabályozást igénylő
mátrixelemet igen nagy (elméletileg végtelen nagy) értékűnek kell választani, míg pl. az erőszabályozást igénylő  -edik szabadságfokhoz rendelhető
-edik szabadságfokhoz rendelhető  mátrixelemet a kívánt értékűre kell beállítani.
mátrixelemet a kívánt értékűre kell beállítani.
A most ismertetett módszer általánosítása illetőleg kiterjesztése az ún. aktív impedancia szabályozás, amely már programozás útján, tehát szoftver eszközökkel teszi lehetővé a compliance-viszonyok beállítását. Tekintsük ugyanis a következő szabályozási törvényt:
| (8.24) |

ahol  az ekvivalens csuklónyomatékok vektora,
az ekvivalens csuklónyomatékok vektora,  a gravitációs hatásokat kifejező vektor becsült értéke,
a gravitációs hatásokat kifejező vektor becsült értéke,  a robot Jakobi-mátrixa,
a robot Jakobi-mátrixa,
| (8.25) |

végpontok az  előírt pozíciótól/orientációtól való eltérésének vektora, a
előírt pozíciótól/orientációtól való eltérésének vektora, a  és
és  (arányos illetve differenciális hatást reprezentáló) mátrixok elemei pedig a megfelelő szoftver eszközökkel a kívánt értékűre beállíthatók, így „aktív”, programozható compliance-t valósíthatunk meg.
(arányos illetve differenciális hatást reprezentáló) mátrixok elemei pedig a megfelelő szoftver eszközökkel a kívánt értékűre beállíthatók, így „aktív”, programozható compliance-t valósíthatunk meg.
8.6. A korrigált csuklóerő-szabályozás módszere
A comlpiance-feladatokban – mint ahogy azt az előzőekben láttuk – a cél a robotkar célirányos mozgatása úgy, hogy néhány kitüntetett irányban a robotra ható reakcióerők és –nyomatékok a programozott érték szerint változzanak. Ez a feladat megköveteli, hogy a robotkéz állandó kontaktusban legyen a környezettel, a robot mozgása és erőkifejtési programja (azaz a compliance-feltételek) között ne legyen ellentmondás, a kitűzött programok a robotkonstrukcióval végrehajthatók legyenek (pl. ne legyen az aktuális robotkonfiguráció szinguláris állapotban vagy mozgási tartományának határán stb.). A módszer lényege abban áll, hogy a kívánt szintre szabályozzuk azokat a csuklókat, amelyek a legnagyobb mértékben járulnak hozzá a compliance-feltételek által megadott irányokba eső reakcióerők illetve nyomatékok keletkezéséhez. Ezalatt a robotkézhez rendelt referencia-koordinátarendszer megváltoztatja helyzetét, ezért a compliance-feltételek által ki nem jelölt irányokban is változás következik be, amit a következő szabályozási ciklusban pozíciószabályozással korrigálunk úgy, hogy az első szabályozási ciklus alatt beállított compliance-erő-(nyomaték-) értékek változatlanok maradjanak. A fenti szabályozási elv blokkdiagramja a 8-4. ábra látható.
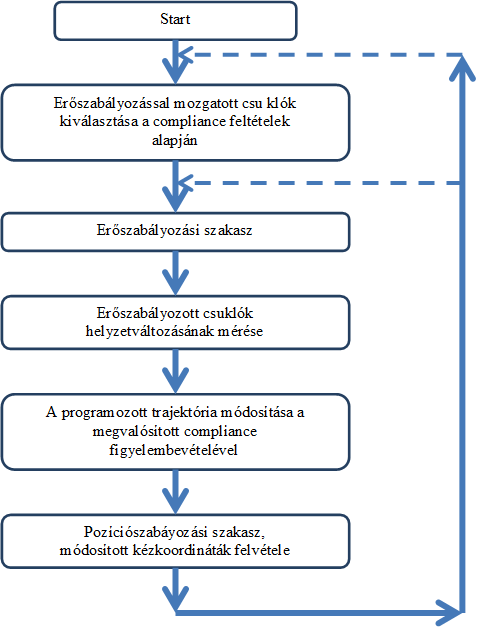
A módszer lényegéből következik, hogy nem általánosítható, így alkalmazási területe korlátozott. A feladat kitűzésekor az alábbi két megkötést szokás tenni:
Az erő- és nyomaték-compliance irányát a referencia-koordinátarendszer egyik fő tengelyével megegyezőnek választjuk. Ez megkönnyíti a programozó munkáját, de a szükséges számítások is jelentősen leegyszerűsödnek.
A comliance-feltételek számát kettőben vagy háromban maximáljuk. (A választott referncia-koordinátarendszer tetszőleges orientációjú lehet, és rögzíthető akár a robot törzséhez, akár a manipulált tárgyhoz is).
8.7. Az additív hibrid szabályozás módszere
A címben említett szabályozási módszer algoritmusának lényege, hogy a pozíció- és erőszabályozásban mindegyik csukló részt vesz. Az algoritmus működésének alapelve az, hogy a compliance-koordinátarendszer egyes koordinátatengelyei mentén mért hibajeleket egy ún. szelekciós mátrix alapján vagy a pozíciószabályozási, vagy erőszabályozási körben használjuk fel. A hibajelek csuklókoordinátákra transzformált és a megfelelő erősítési tényezővel szorzott komponenseinek összege adja meg az egyes csuklókban elhelyezett aktuátorok beavatkozó jelét. Általában a robotnak a compliance-koordinátarendszerben értelmezett valamely állapotát megkaphatjuk úgy is, mint
| (8.26) |
ahol  az
az  -edik csuklókoordináta,
-edik csuklókoordináta,  az inverz kinematika valamilyen függvénye,
az inverz kinematika valamilyen függvénye,  pedig
pedig  a compliance-koordinátarendszerben értelmezett
a compliance-koordinátarendszerben értelmezett  -edik koordináta.
-edik koordináta.
Az (8.26) összefüggésből látható, hogy egy-egy csukló helyzetének meghatározásához általában mindegyik Descartes-koordinátára szükség van. Az additív hibrid szabályozásban is – hasonlóan a (8.26) szerinti inverz kinematikai problémához – mindegyik koordinátát felhasználjuk, de a  compliance-koordinátarendszer kijelölése szerint annak egyes koordinátái mentén vagy az erő-, vagy a pozíciókoordináták hibáit használjuk fel az egyes ekvivalens csuklónyomatékok kiszámításához, éspedig a következő összefüggés szerint:
compliance-koordinátarendszer kijelölése szerint annak egyes koordinátái mentén vagy az erő-, vagy a pozíciókoordináták hibáit használjuk fel az egyes ekvivalens csuklónyomatékok kiszámításához, éspedig a következő összefüggés szerint:
| (8.27) |


ahol  az
az  -edik ekvivalens csuklónyomaték,
-edik ekvivalens csuklónyomaték,  a C koordinátarendszer
a C koordinátarendszer  -edik koordinátája mentén mért erőhiba,
-edik koordinátája mentén mért erőhiba,  a C koordinátarendszer
a C koordinátarendszer  -edik koordinátája mentén mért pozícióhiba;
-edik koordinátája mentén mért pozícióhiba;  illetve
illetve  az erő- illetve a pozíció-visszacsatolási mátrix (
az erő- illetve a pozíció-visszacsatolási mátrix ( -edik eleme;
-edik eleme;  pedig az ún. compliance szelekciós vektor
pedig az ún. compliance szelekciós vektor  -edik eleme. Ez utóbbi értéke 0 illetve 1 lehet, attól függően, hogy a
-edik eleme. Ez utóbbi értéke 0 illetve 1 lehet, attól függően, hogy a  koordinátarendszer
koordinátarendszer  -edik koordinátája mentén pozíció- vagy erőszabályozást alkalmazunk.
-edik koordinátája mentén pozíció- vagy erőszabályozást alkalmazunk.
| (8.28) |
akkor
| (8.29) |

Az  szelekciós vektor elemeiből képezhetünk egy – csak diagonális elemeket tartalmazó -
szelekciós vektor elemeiből képezhetünk egy – csak diagonális elemeket tartalmazó -  szelekciós mátrixot:
szelekciós mátrixot:
| (8.30) |
A 8-5. ábrán látható a hibrid szabályozó blokk diagramja. Itt láthatók a szükséges visszacsatolások: a felső részen látható a pozíció-visszacsatolás, az ábra alsó fele pedig az erő-visszacsatolást mutatja.
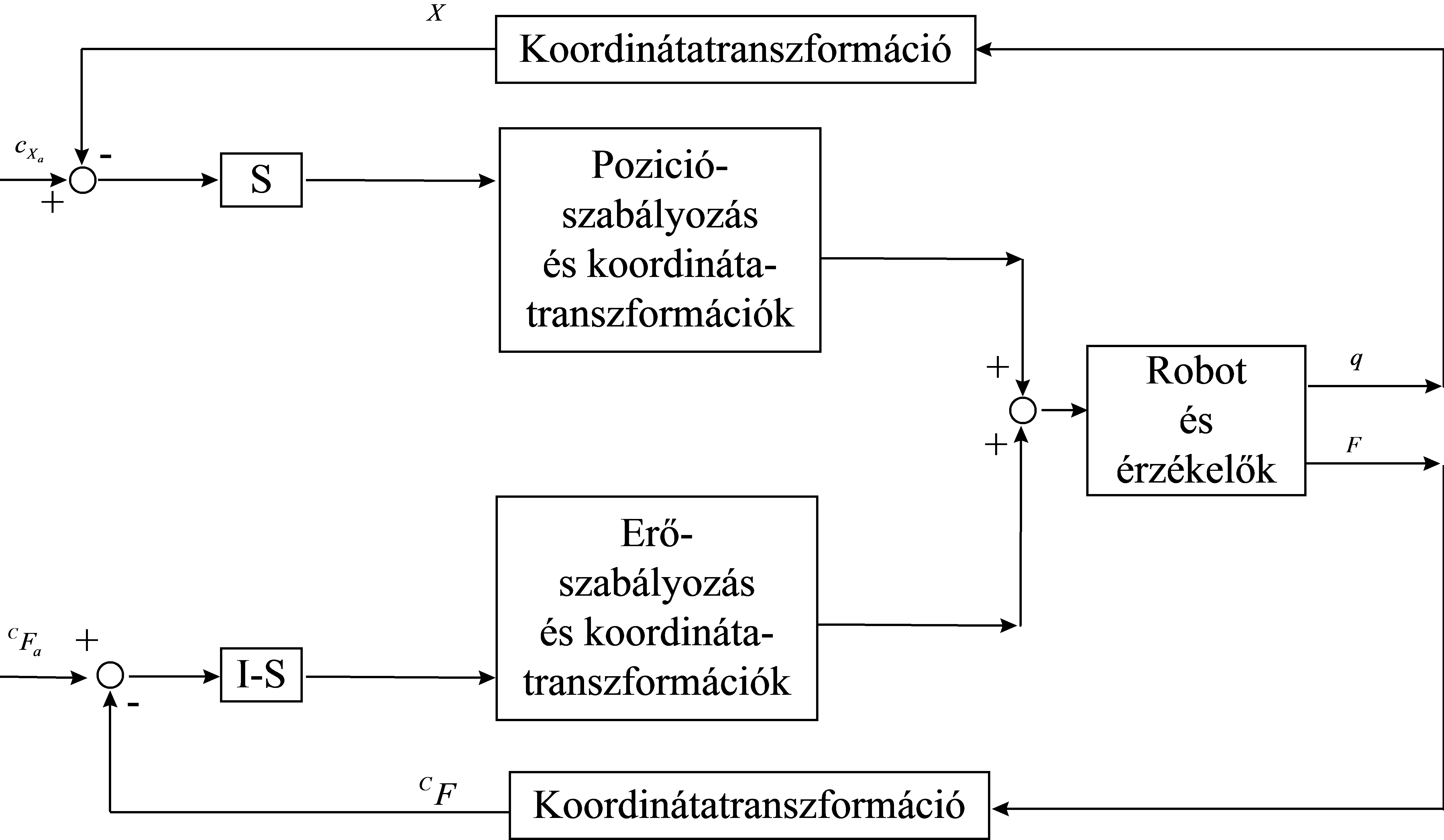
A 8-6. ábra bővebben tünteti fel a hibrid szabályozó működési elvét, ahol már fel vannak tüntetve a PID szabályozók is, valamint a transzformációkhoz használt mátrixok.
| (8.31) |
(10)
| (8.32) |
A robotkarba bevezetett jel a következő összetevőkből adódik:
| (8.33) |

A pozíció- szabályozásból adódó rész:
A erő-szabályozásból adódó rész:
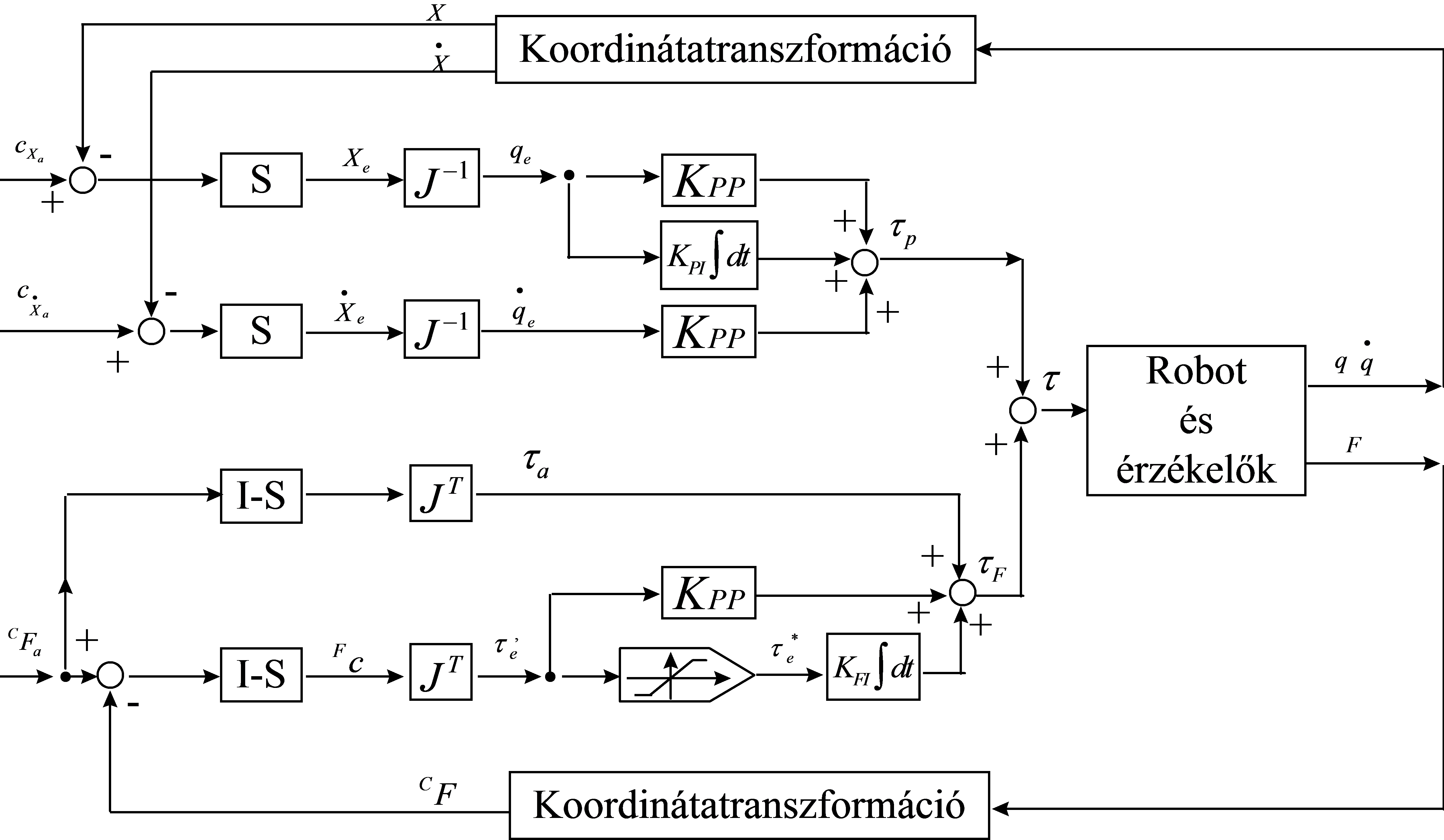
8.8. Kidolgozott feladat a Hibrid (pozíció-erő) irányítással kapcsolatban
8.4 feladat egy robotkar modellezése
Legyen a 8-7. ábrán feltüntetett robotkar, amely q2 hosszú és q1 szöggel fordulhat el az engedékenységi keretben. Ez a robotkar egy bizonyos tömegű test fenntartását biztosítja függőleges (Cx) irányban. A robotkarra ható erő fx, amely w1 illetve w2 , a rugók által kifejtett erőkből tevődik össze.
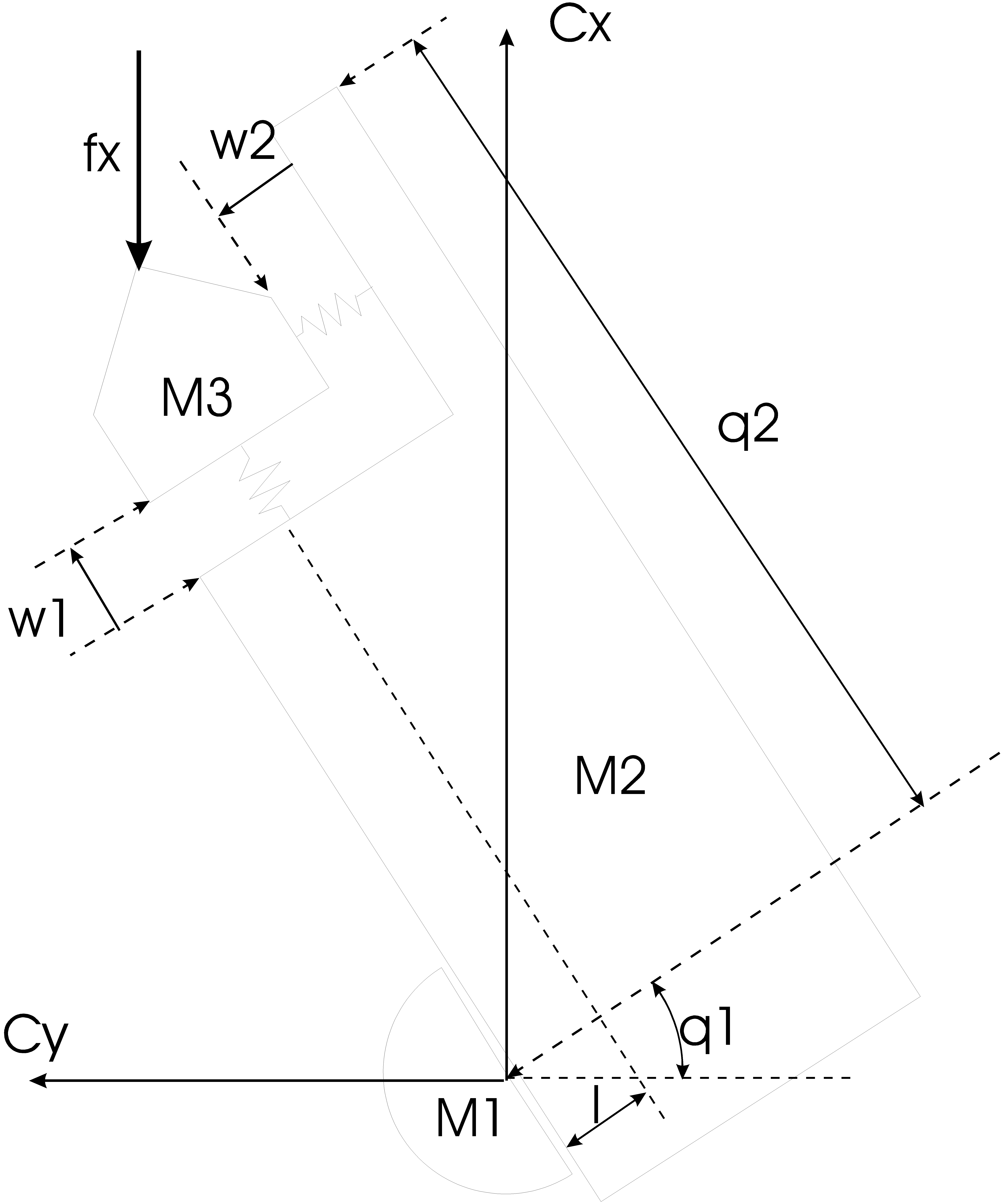
A robotkart a következő egyenletek jellemzik:



A hibrid szabályozót egy MATLAB programmal szimuláltam. A MATLAB “simulink”-ja lehetővé tette a szabályozó folyamatábra jellegű feltüntetését, a 8-6. ábrához hasonló formában:
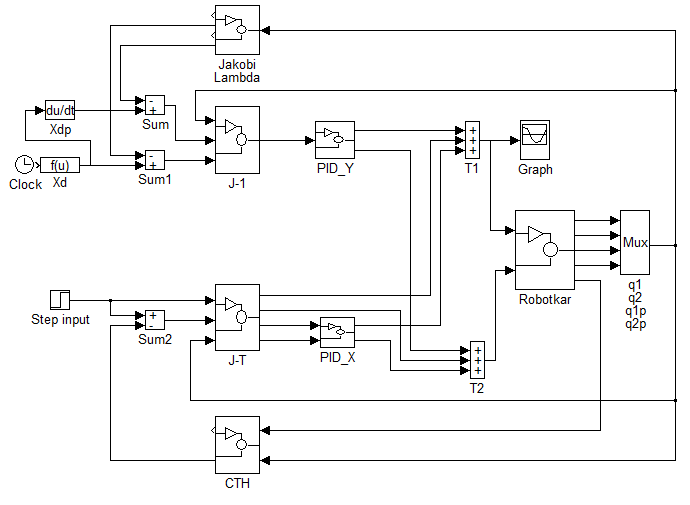
A robotkar egyenletei MATLAB-ba átírva a következőképpen néznek ki:
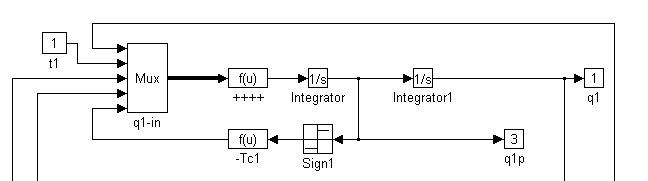
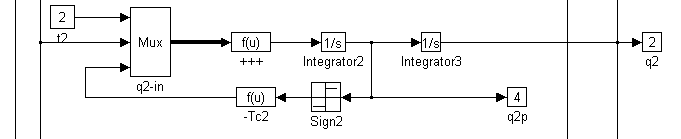


Amint a fenti ábrákból kivehető, a t1 és t2 bemenő értékekből kiszámolható q1, q2, w1, w2 és fx . Ezek lesznek a robotkar “kimenő értékei”.
A transzformációk a következőképpen írhatók át MATLAB-ba:
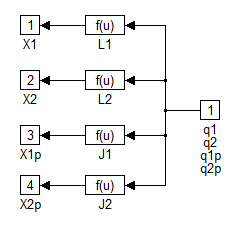
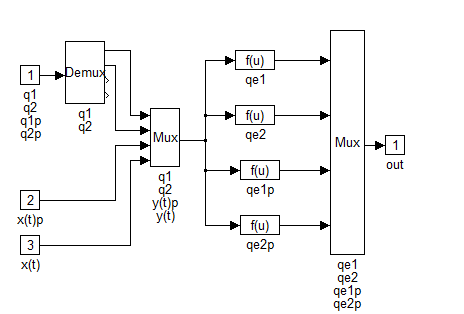
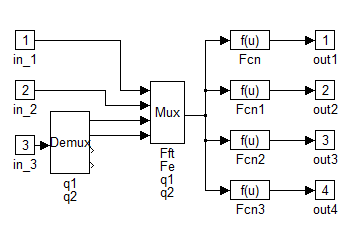
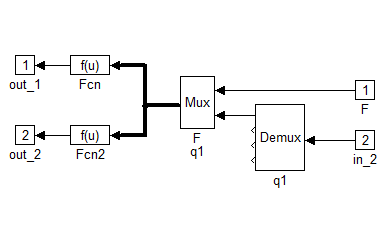
A következőkben a PID szabályozók feltüntetésére kerül sor:
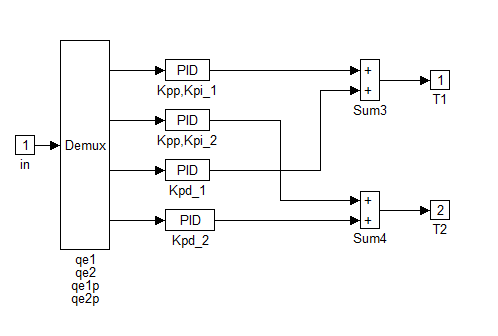
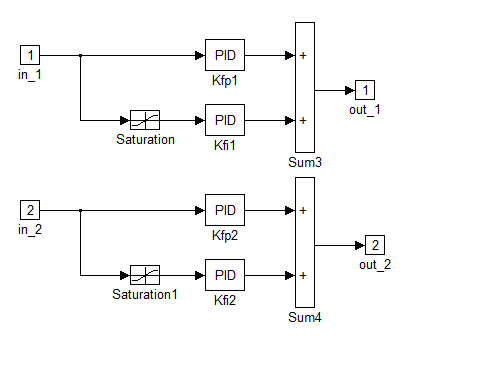
Az eredmények tárgyalása
A megadott Xd illetve ennek deriváltjának időbeli változását a 8-19. illetve a 8-20. ábra mutatja.
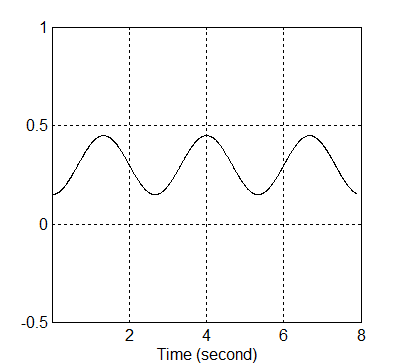
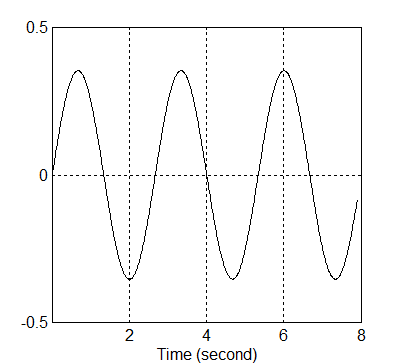
A 8-21. ábra a q1 elfordulást mutatja, amint ez a robotkar egyenleteiből adódik. Látható, hogy q1 kétszer áll rá a megfelelő értékre. Először a kezdeti egyensúly beálltát biztosítja, amikor meg nincs erő, utána pedig az erőviszonyok változásából adódó új egyensúlyi helyzet áll be.
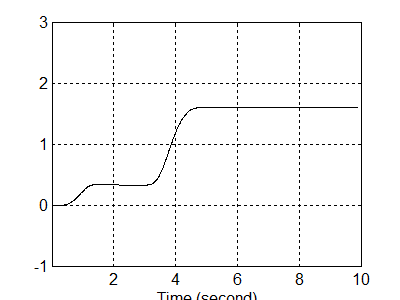
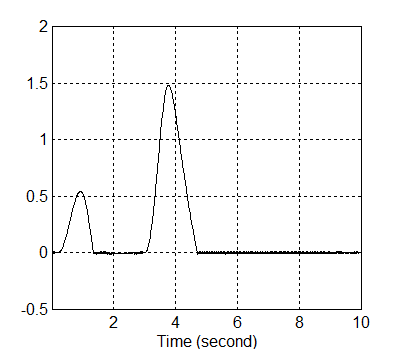
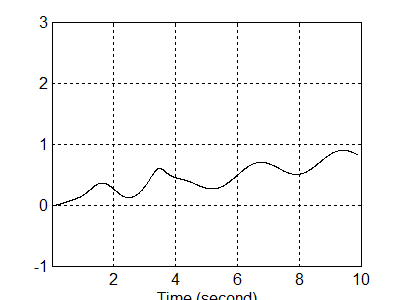
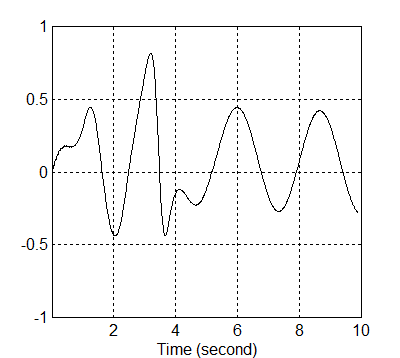
Az erő-bemenet (Fd) az egységlépés segítségével van megadva (8-25. ábra). Az erő kezdetleges értéke 1N, és 1s múlva 2N értékre ugrik fel. A hibrid szabályozó feladata az, hogy mindvégig ráálljon az erő és pozíció egyensúlyi helyzetnek megfelelő értékekre.
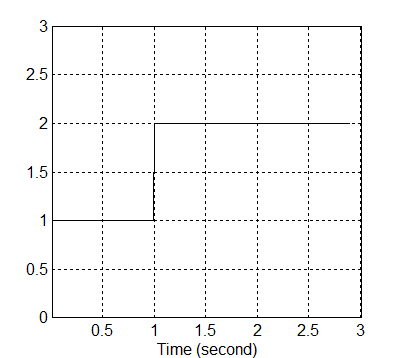
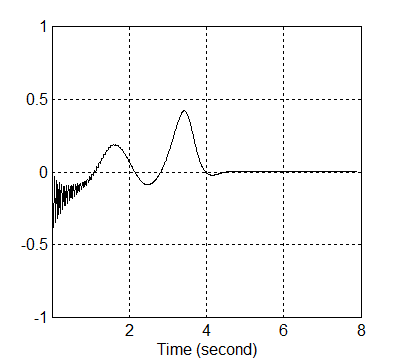
A 8-26. ábra az fx visszajelzést jeleníti meg. Észrevehető, hogy a folyamat elején az erő nagysága tág intervallumban változik. Ez a kezdeti feltételeknek megfelelő ingadozás (káosz). Ez függ az integrálási módszer megválasztásától, a mintavételi időtől, az integrátorok kezdeti értékeinek megválasztásától és más olyan paraméterektől, amiket többszöri próbálgatás során optimizálni lehet.
A T transzformáció után, ami az fx jelet a H keretből a C-be alakítja át, az erő a következőképpen változik az időben:
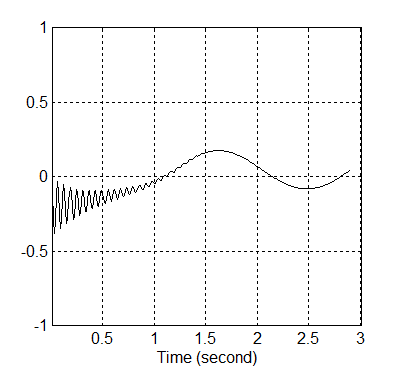
A robotkarba bevezető kompenzált t1 illetve t2 változása a 8-28. illetve 8-29. ábrán követhető.
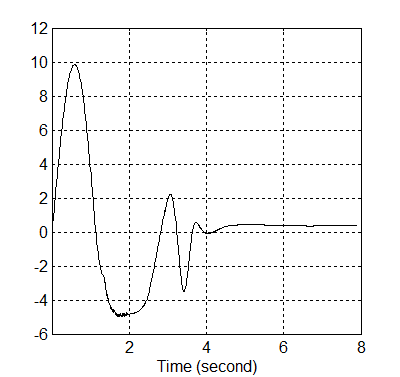
8-28. ábra t1 időbeli változása
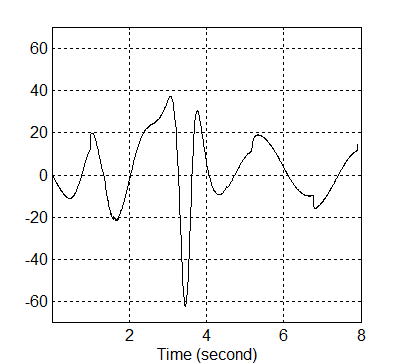
IRODALOMJEGYZÉK
[1] Brady, Hollerbach: Robot motion planning and control, MIT, 1982, pp 419-438
[2] Lantos: Robotok irányítása, AK, 1991, pp 226-230
A. függelék - Léptető motoros robothajtás logikai áramköreinek vizsgálata
A mérés célja:
A tanszékünk egy léptető motoros hajtással ellátott robot manipulátorral rendelkezik. E robot manipulátorral több hallgatói mérés foglalkozik. Jelen mérés során a hallgatók magával a léptető motorral, annak működési tartományával, a léptető motoros hajtás logikai áramköreivel és számítógépes illesztésével ismerkednek meg.
A.1. A Léptető motorok
A léptető motorok felépítésük szerint többféleképpen csoportosíthatók:
A forgórész lehet:
kiváló pólusú, lágyvasas
állandó mágneses
hibrid
A mágneses mező lehet:
radiális
axiális (tárcsamotorok)
A gerjesztés lehet:
unipoláris
bipoláris
A léptető motorok működésének lényegét a kiváló pólusú, lágyvasas forgórészű ún. változó reluktanciájú, radiális mezejű unipoláris motorok példáján mutatjuk be.
Tekintsük a 9-1. ábrán vázolt léptető motort:
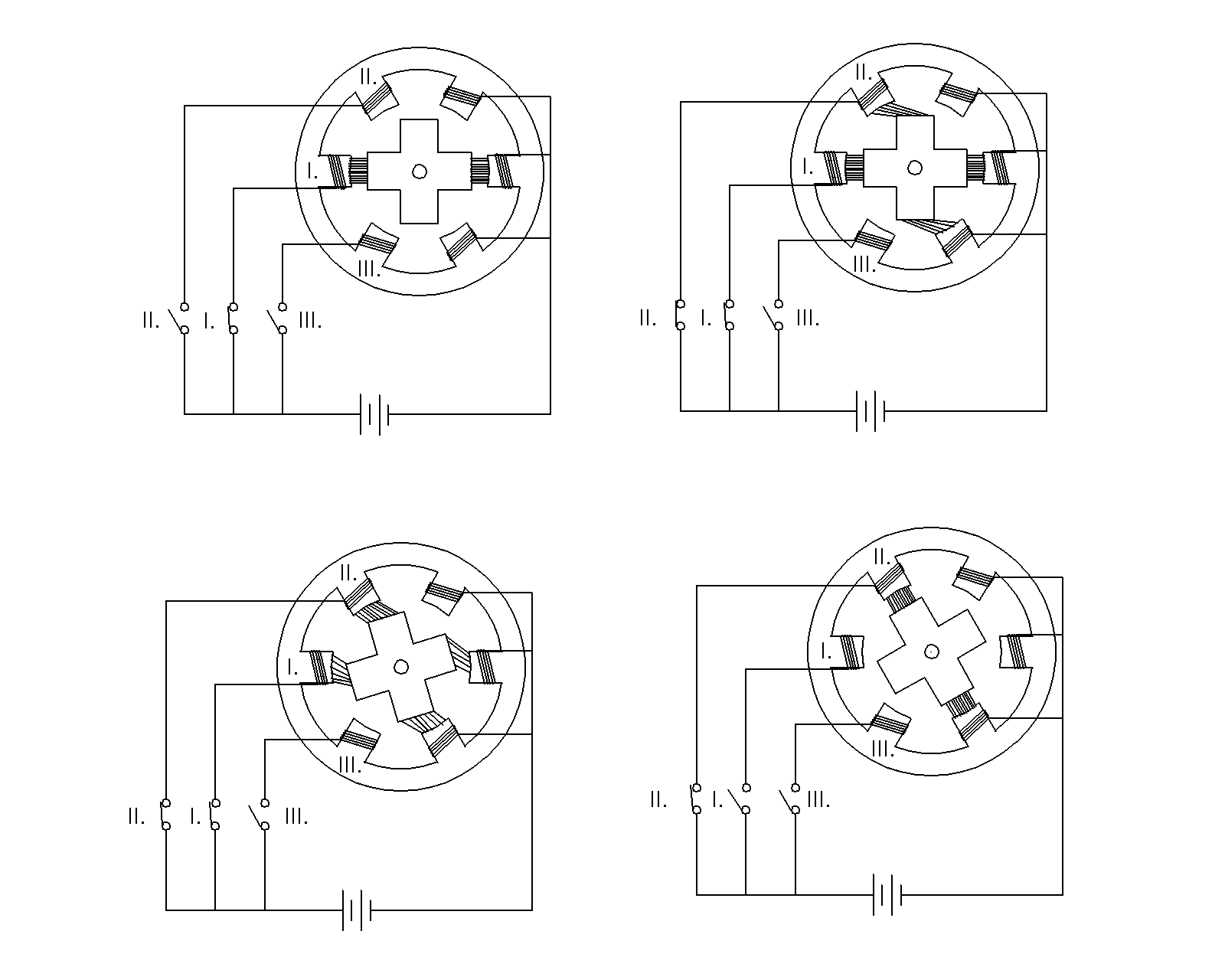
Az állórészen a kerület mentén egyenletesen kiosztott póluson  (m=3) számú fázistekercs helyezkedik el. Egy fázistekercs kettő, egymással átlósan szemben lévő póluson elhelyezett részből áll. A tekercsek egyik kivezetése közösítve van. E közös pont potenciáljához képest kapcsoljuk a tápfeszültséget ki és be a fázistekercs másik kivezetésén. A fázistekercsekben mindig csak egy irányban folyhat az áram, így az állórész egy-egy pólusában a fluxus ki-be kapcsolható, de iránya nem változtatható meg. Ezért nevezzük ezt a kapcsolást unipolárisnak.
(m=3) számú fázistekercs helyezkedik el. Egy fázistekercs kettő, egymással átlósan szemben lévő póluson elhelyezett részből áll. A tekercsek egyik kivezetése közösítve van. E közös pont potenciáljához képest kapcsoljuk a tápfeszültséget ki és be a fázistekercs másik kivezetésén. A fázistekercsekben mindig csak egy irányban folyhat az áram, így az állórész egy-egy pólusában a fluxus ki-be kapcsolható, de iránya nem változtatható meg. Ezért nevezzük ezt a kapcsolást unipolárisnak.
Az egymás mellett lévő fázistekercsek mágneses tengelyei által bezárt szög  . A lágyvasból készült forgórészen
. A lágyvasból készült forgórészen 
 számú kiálló pólus található. Az állórész fázisok és a forgórész pólusainak száma különböző, azaz
számú kiálló pólus található. Az állórész fázisok és a forgórész pólusainak száma különböző, azaz
| (9.1) |

Kapcsoljunk egyenfeszültséget az I-es fázistekercsre, azaz a léptető motorok terminológiáját használva gerjesszük az I-es fázistekercset. Ha ekkor a rotor az 9-1. ábrán feltüntetett (1)-es pozícióban van, azaz a rotor 1. pólusa az I-es fázistekercs mágneses tengelyének irányában áll, a kialakuló mágneses mező az ábrán feltüntetett radiális irányú lesz. (Az erővonal képet csak a légrésben tüntettük fel, és a 2. és 4. póluson keresztül záródó szórt fluxusokat elhanyagoltuk.) A forgórészre ható nyomaték zérus, a forgórész egyensúlyi helyzetben van.
Gerjesszük ezután egyidejűleg az I-es és II-es fázis tekercseket. (9-1. ábra_b és 9-1. ábra_c) A II-es kapcsoló zárása után, feltételezve, hogy a villamos tranziensek igen rövid idő alatt lezajlanak, a fluxus kép az 9-1. ábra_b ábrának megfelelően alakul. A forgórészre az óramutató járásával ellentétes irányú nyomaték hat, aminek következtében a forgórész mozogni kezd, és az elektromechanikai tranziensek lezajlása után az 9-1. ábra_c ábrának megfelelő egyensúlyi helyzetet veszi fel. (Az erővonalakat rugalmas szálaknak tekintve, érzékelhető a nyomaték keletkezése.) Az I-es fázistekercset kikapcsolva az új egyensúlyi helyzet az 9-1. ábra_d ábrának megfelelően alakul. A továbbiakban a III-as fázis tekercsgerjesztésével, és a II-es fázistekercs kikapcsolásával a forgórész tovább mozgatható.
Fentiek alapján könnyen belátható, hogy a gerjesztések folyamatos és ciklikus változtatásával a forgórész meghatározott nagyságú szögelfordulás kvantumokból összetevődő mozgásba kezd. A szögelfordulás egysége, a lépésszög: az 1-es és 3-as állapotokhoz tartozó egyensúlyi rotor pozíció szögkülönbsége.
A gerjesztést a sorrendben következő fázistekercsre átkapcsolva a rotor egy lépést tesz meg. A közbülső, a két fázistekercs együttes gerjesztéséhez tartozó elmozdulás szokásos elnevezése: fél lépés. (nagyobb nyomaték érdekében számos alkalmazásban egyidejűleg mindig két fázistekercsre kapcsolnak gerjesztést.) Az egy körülforduláshoz szükséges lépések száma:
| (9.2) |
ahol  a lépésszög.
a lépésszög.
A pólusok száma konstrukciós okok miatt nem növelhető tetszőleges mértékben. Kis lépésszögű léptető motorok alakíthatók ki az állórész pólusok és a forgórész fogazásával. (ld. 9-2. ábra) A hullámhajtóművekhez hasonlóan a működési elv lényege abban áll, hogy az állórészen és a forgórészen a fogak száma eltér egymástól. Mindig az éppen gerjesztett pólus alatt kerülnek a fogak közelítőleg fedésbe. A fogszám különbözőségéből adódóan a gerjesztetlen pólusok alatt a szemben lévő fogak egymáshoz képest elcsúsznak, így a lépésszög nagyságát a forgó- és az állórész fogszám viszonya határozza meg.
Tipikus lépésszög értékek, illetve a hozzájuk tartozó lépésszámok láthatók a Hiba! A hivatkozási forrás nem található.ban.
lépésszög | 1,8° | 2,5° | 7,5° | 15° | 30° |
lépésszám | 200 | 144 | 48 | 24 | 12 |
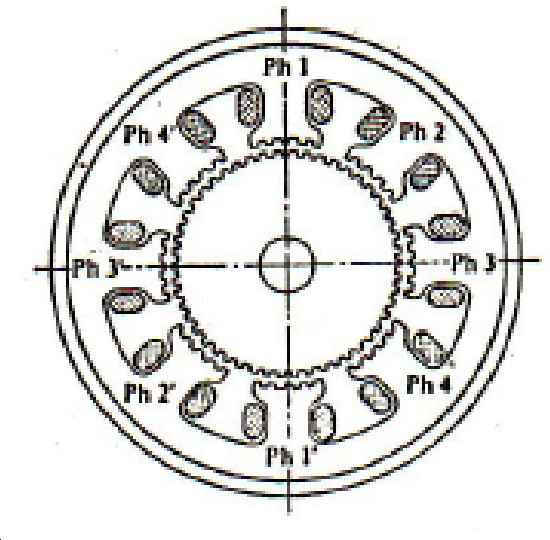
A forgórészen lágyvas helyett állandó mágnest alkalmazva egyrészt a léptető motorok nyomatéka megnövelhető, másrészt a motor léptethetővé válik a gerjesztés polaritásának cseréjével.
Bipoláris léptető motort a gerjesztő tekercsek polaritásának ciklikus cseréjével késztetünk mozgásra. Tekintsük az ábrát, ahol egy kétfázisú léptető motor táplálását látjuk. Tegyük fel, hogy  és
és  tranzisztor vezet. Egy lépés megtételéhez a
tranzisztor vezet. Egy lépés megtételéhez a  és
és  tranzisztorokat kell kikapcsolni, és helyettük a
tranzisztorokat kell kikapcsolni, és helyettük a  és
és  tranzisztorokat kell bekapcsolni. A következő lépéshez
tranzisztorokat kell bekapcsolni. A következő lépéshez  és
és  tranzisztorokat kapcsoljuk ki, majd a
tranzisztorokat kapcsoljuk ki, majd a  és
és  tranzisztorokat kapcsoljuk be. A ciklust folytatva a negyedik lépés után jutunk vissza az eredeti gerjesztési állapotba.
tranzisztorokat kapcsoljuk be. A ciklust folytatva a negyedik lépés után jutunk vissza az eredeti gerjesztési állapotba.
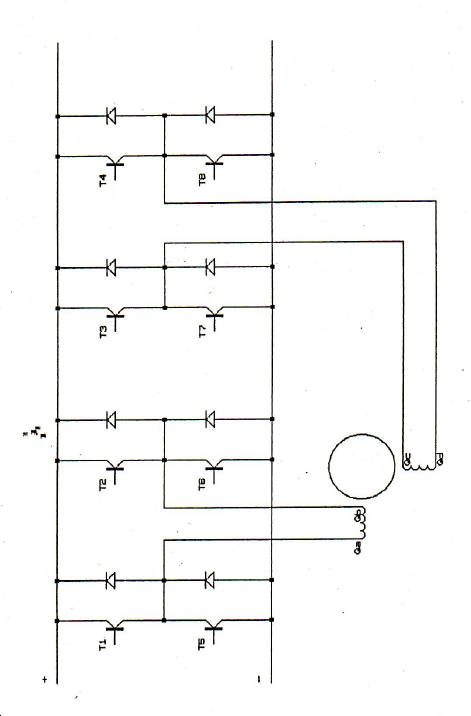
A léptető motorok alkalmazásával visszacsatolás nélküli, egyszerű pozíciószabályozó körök építhetők. A forgó rész adott számú lépés-parancsra az alaphelyzetéhez képest adott mértékben fordul el.
A maximálisan megengedhető lépés-frekvenciát a motor forgó részének (és a terhelésnek) a forgási tehetetlensége, a motor villamos nyomatéke és a terhelő nyomaték együttesen határozzák meg. A maximális lépésfrekvencia túllépése esetén a motor lépést téveszt. A terhelő nyomaték és a lépés-frekvencia közti kapcsolatot a motor dinamikus jelleggörbéjével adják meg (ld. 9-4. ábra). A jelleggörbe két tartományból áll:
A start-stop tartományon belül a motor forgó része álló állapotból
 terhelő nyomaték ellenében
terhelő nyomaték ellenében  frekvenciájú, adott számú lépést képes megtenni lépés tévesztés nélkül.
frekvenciájú, adott számú lépést képes megtenni lépés tévesztés nélkül.A gyorsítási tartomány a már forgó, stacionárius üzemben dolgozó motorra adja meg a megengedhető terhelő nyomaték – lépés – frekvencia értékpárok halmazát.
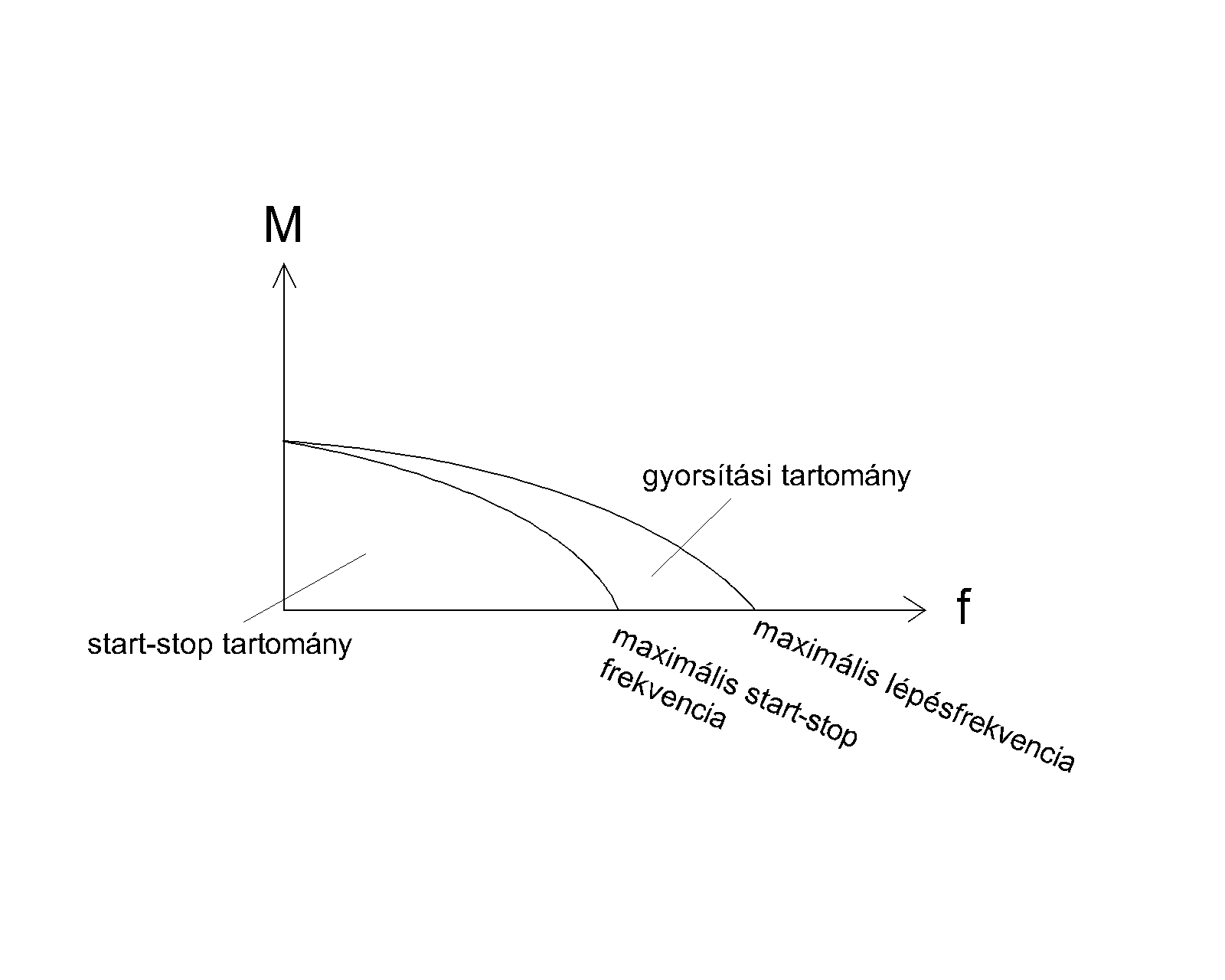
A.2. A manipulátor felépítése
A manipulátor mechanikája öt részre tagolható (lásd. 9-5. ábra). A manipulátor mozdulatlan része a törzs. A törzshöz a törzsízülettel kapcsolódik a váll. A vállhoz a vállízülettel a felkar, a felkarhoz a könyökízülettel az alkar csatlakozik. Az alkarhoz a csuklóízület kapcsolja a megfogót. A csuklóízületet két független kúpkerék alkotja. A két kúpkerék egyidejű és megfelelő irányú mozgatása a megfogó egymástól független billenő és csavaró mozgását teszi lehetővé. A megfogó három nyitható-zárható rugalmas ujjból áll.
A mozgatást hat négyfázisú unipoláris léptető motor végzi. Egy lépés során a motor tengelye 7,5°-ot fordul el. Az áttételek miatt egy lépés a manipulátoron a következő elmozdulásokat eredményezi:
törzsízület:0,2314°/lépés
vállízület:0,162°/lépés
könyökízület:0,162°/lépés
csuklóízület:0,2314°/lépés
ujjízület:0,0655°/lépés
A fenti sorrendben jelöljük ízületi változókat  -vel és az ízületek távolságát
-vel és az ízületek távolságát  -vel! (A csuklóízülethez két változó tartozik). A robotmanipulátor Denavit-Hartenberg féle leírási mód szerinti geometriai paramétereit a 9.2. táblázatban közöljük.
-vel! (A csuklóízülethez két változó tartozik). A robotmanipulátor Denavit-Hartenberg féle leírási mód szerinti geometriai paramétereit a 9.2. táblázatban közöljük.
tag | 0 | 1 | 2 | 3 | 4 | 5 |
| - | 0 |
|
|
| 0 |
| - |
| 0 | 0 | 0 |
|
| 0 | 0 | 0 | 0 | 0 | 0 |
| 160 | 80 | 190 | 190 | 0 | 80 |









A geometriára illetve az inverz geometriai feladatra vonatkozó részletek a [3]-ban találhatók.
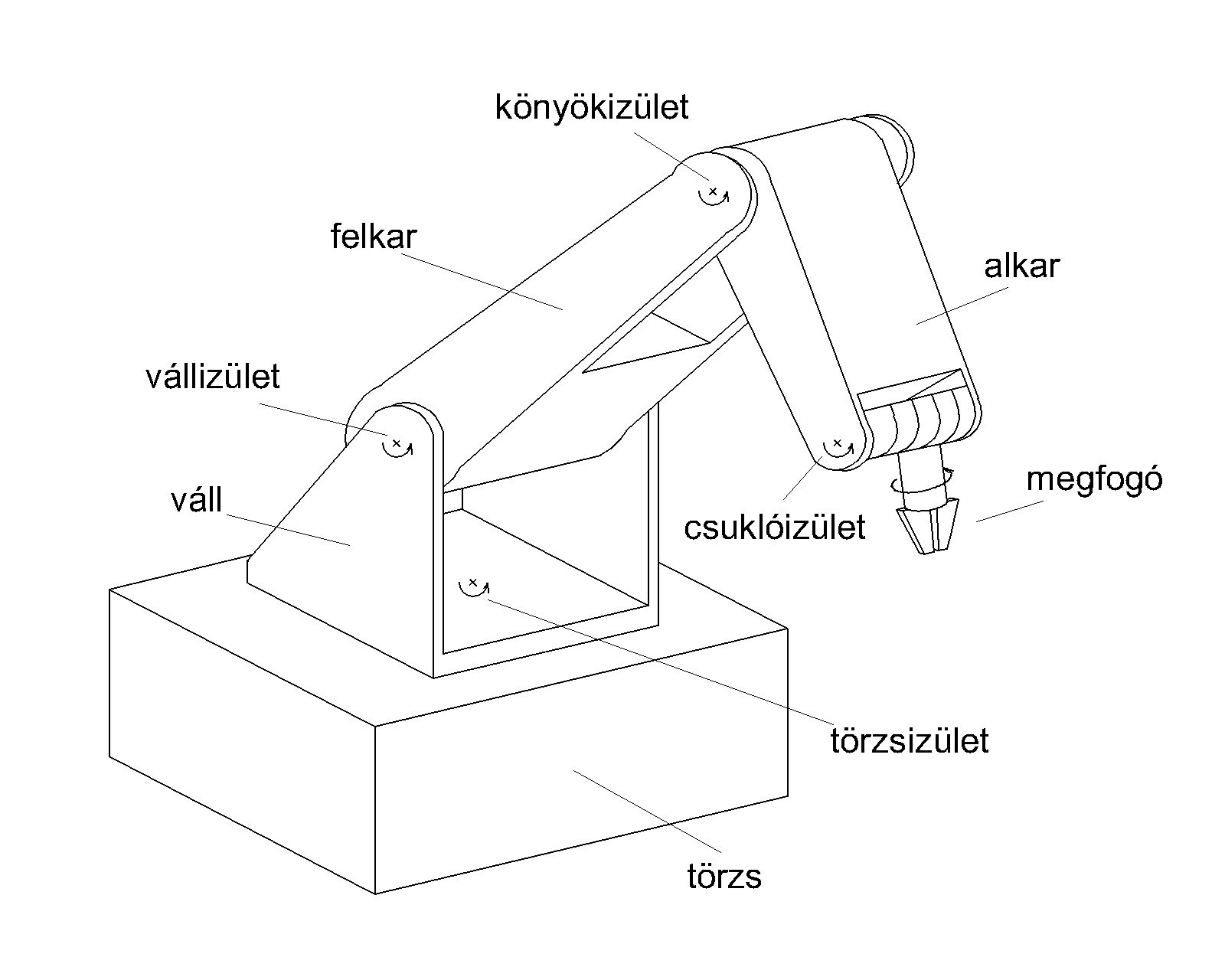
A.3. Manipulátor logikai áramkörei
A manipulátor mozgatását négyfázisú unipoláris léptető motorok végzik. A motor katalógusadatai szerint e léptető motorok minden lépésénél két-két fázistekercsre kell gerjesztést kapcsolni. Jelöljük a fázistekercseket  ,
,  ,
,  , és
, és  betűkkel továbbá jelentse az 1 logikai szint azt, hogy az adott tekercsre gerjesztést kapcsolunk és a
betűkkel továbbá jelentse az 1 logikai szint azt, hogy az adott tekercsre gerjesztést kapcsolunk és a  logikai szint azt, hogy az adott tekercsre nem kerül gerjesztés. A léptető motorok előre- illetve hátraforgatásához szükséges gerjesztési állapotokat a 9.3. táblázat foglaltuk össze.
logikai szint azt, hogy az adott tekercsre nem kerül gerjesztés. A léptető motorok előre- illetve hátraforgatásához szükséges gerjesztési állapotokat a 9.3. táblázat foglaltuk össze.
Előreforgás | ||||||
|
|
|
| |||
1. állapot | 1 | 0 | 1 | 0 | ||
2. állapot | 1 | 0 | 0 | 1 | ||
3. állapot | 0 | 1 | 0 | 1 | ||
4. állapot | 0 | 1 | 1 | 0 | ||
Hátraforgás |
Ha egy motort előre akarunk forgatni, akkor 9.3. táblázatban az egymás alatt elhelyezkedő soroknak megfelelő gerjesztéseket kell a léptető motorok fázistekercseire kapcsolni. A forgásirány-váltás a táblázat fordított sorrendű kiolvasásával érhető el.
Megjegyzés:
Az adott léptető motor is vezérelhető fél lépésekkel (lásd 9.4. táblázat). A robottal szerzett tapasztalataink szerint egy lépésen belül a két fél lépés nagysága nem azonos, mivel a motor nyomatéka kisebb akkor, amikor csak egy fázistekercsre kapcsolunk gerjesztést. Kisebb terhelés (könnyebb szerkezet) illetve nagyobb nyomatékú léptető motor mellett a két fél lépés nagysága megegyezne.
Előreforgás | |||||||
|
|
|
| ||||
1. állapot | 1 | 0 | 1 | 0 | |||
2. állapot | 1 | 0 | 0 | 0 | |||
3. állapot | 1 | 0 | 0 | 1 | |||
4. állapot | 0 | 0 | 0 | 1 | |||
5. állapot | 0 | 1 | 0 | 1 | |||
6. állapot | 0 | 1 | 0 | 0 | |||
7. állapot | 0 | 1 | 1 | 0 | |||
8. állapot | 0 | 0 | 0 | 0 | |||
Hátraforgás |
A mérések során kétfázisú bipoláris léptető motorral is találkozunk. A négyfázisú unipoláris és a kétfázisú bipoláris léptető motort vezérlő logikai áramkör azonos, csak a 9.3. táblázat értelmezése a következő:

és  jelentése: az egyik fázistekercs két kivezetése
jelentése: az egyik fázistekercs két kivezetése

és  jelentése: a másik fázistekercs két kivezetése (ld. 9-3 ábra)
jelentése: a másik fázistekercs két kivezetése (ld. 9-3 ábra)
Az 1 jelentése: az adott kivezetést a pozitív sínhez kell kapcsolni
A 0 jelentése: az adott kivezetést a negatív sínhez kell kapcsolni.
Az elektronika feladata a léptető motorok táplálása, megfelelő sorrendű gerjesztések kapcsolása a fázistekercsekre. Mindez két szinten valósul meg. Először egy logikai áramkör kimenetei TTL szintű jelekkel írják elő azt, hogy melyik motor, melyik tekercseire kerüljön gerjesztés, majd a TTL szintű jeleket mind feszültségben, mind teljesítményben felerősítve kapcsoljuk a léptető motorok fázistekercseire. (lásd 9-6. ábra) Bár az ábrán külön nem tüntettük fel, a logikai áramkörök működtetéséhez 5V, a léptető motor működtetéséhez 12-20V tápfeszültség szükséges.
A léptető motorok nyílt-hurkú vezérlést tesznek lehetővé. Tapasztalataink szerint csak külső akadályokkal való ütközéskor történik lépéstévesztés.
A robotmanipulátor mozgása alapvetően két módon történhet:
a kézivezérlő dobozban található kapcsolók segítségével
egy számítógépes programmal
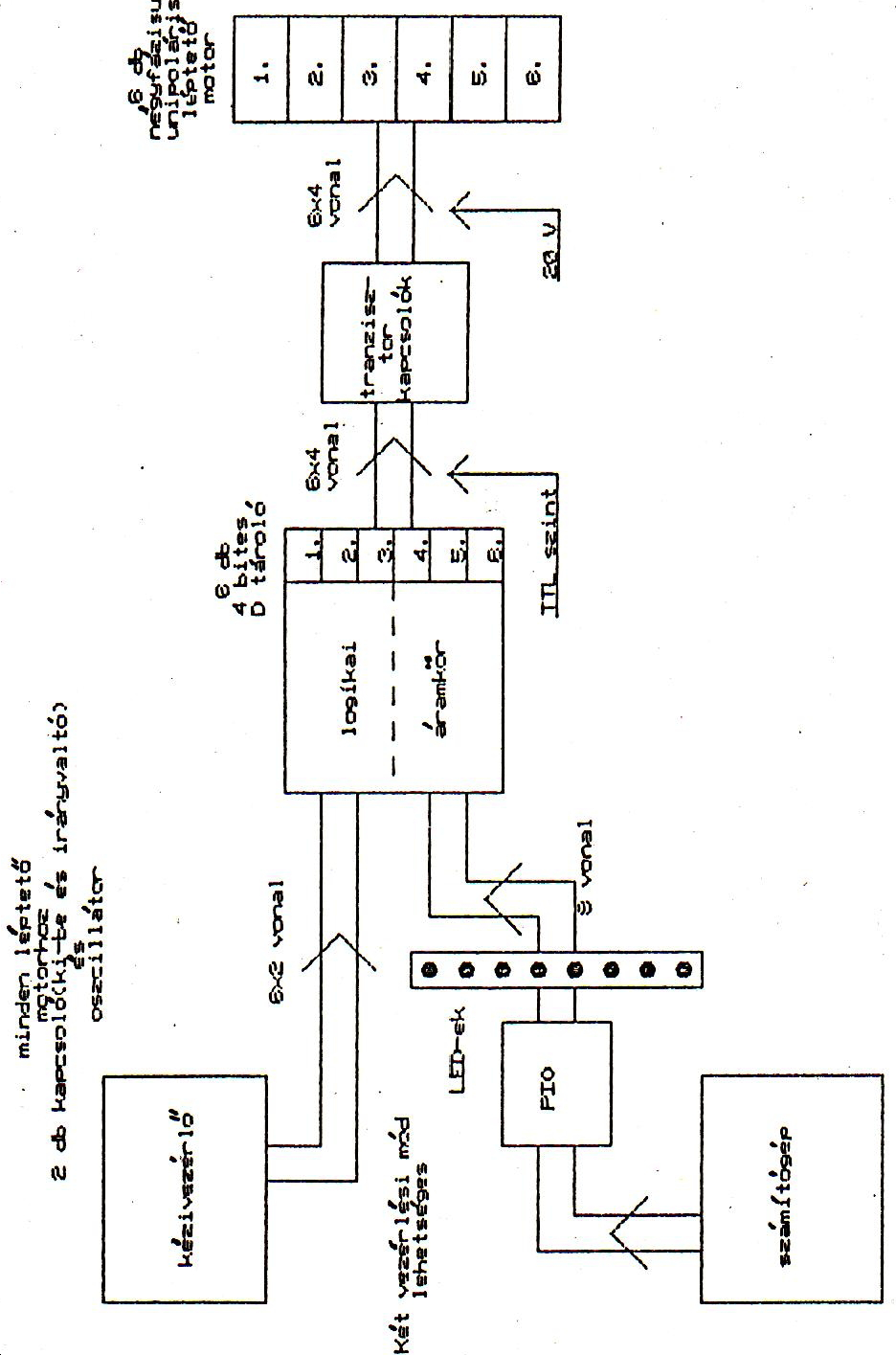
A.4. Kézi vezérlési mód
Ebben az üzemmódban a robotmanipulátor nem programozható, csak manipulátorként működtethető. Minden motorhoz két kapcsolót rendelünk, az egyik az órajelet kapcsolja, a másik a forgásirányt írja elő. E kapcsolók az ún. kézivezérlő dobozban helyezkednek el. A kézivezérlési módban minden motort a 9-7. ábran látható kapcsolás működteti.
A működési elv magyarázatához a 9.3. táblázatból indulhatunk ki. A 9.3. táblázatot tanulmányozva a következőket figyelhetjük meg:
minden jel periódikusan változik;

és
 valamint
valamint  és
és  jelek egymásnak inverzei;
jelek egymásnak inverzei;
-hoz képest a
 jel egy negyed periódussal marad el vagy siet a forgásiránytól függően.
jel egy negyed periódussal marad el vagy siet a forgásiránytól függően.
Mivel egy ciklus négy állapotból áll, ezért az órajel frekvenciáját a ciklus frekvenciájának legalább kétszeresére kell választani.
Tekintsük a 9-7. ábrat. Az órajelet az ICS jelű áramkör állítja elő. Az órajel a  kapcsolón keresztül jut az IC1b jelű felfutóél által vezérelt D tároló órajel bemenetére. Az órajelből a D tároló frekvencia felezéssel állítja elő a
kapcsolón keresztül jut az IC1b jelű felfutóél által vezérelt D tároló órajel bemenetére. Az órajelből a D tároló frekvencia felezéssel állítja elő a  és
és  jeleket.
jeleket.
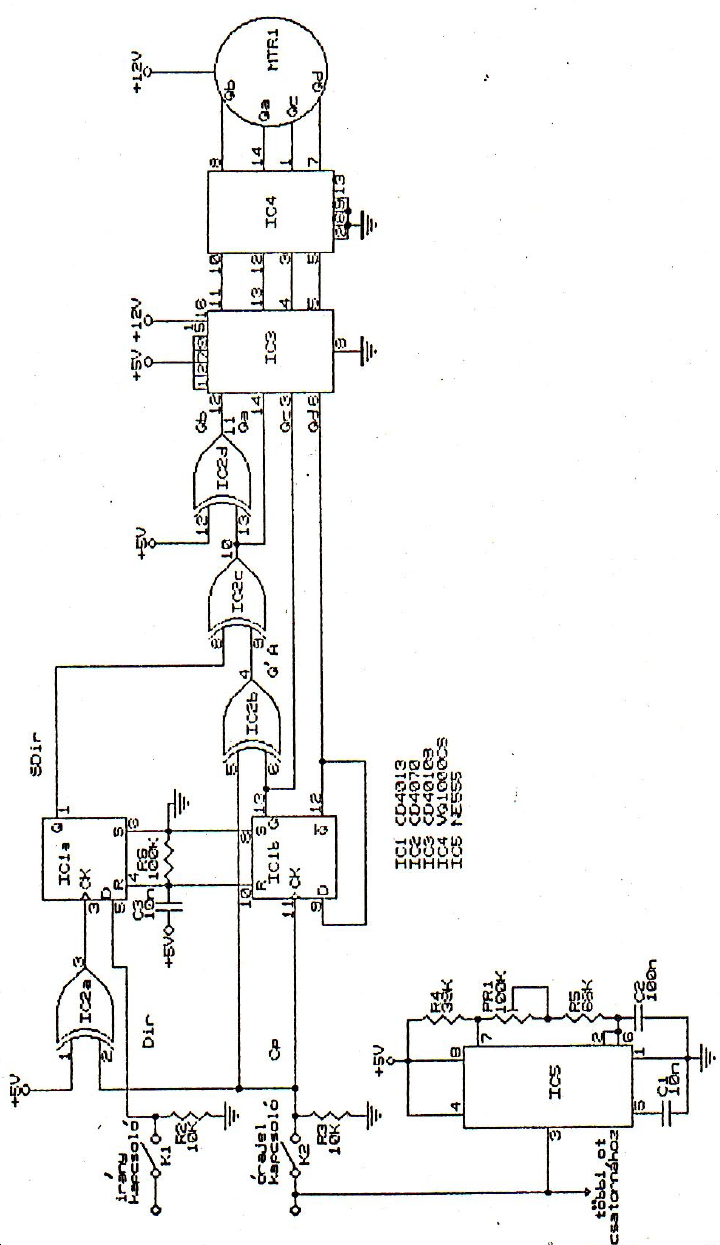
Ha egymás mellé írjuk az órajelet és a  értékeit, akkor észre vehetjük, hogy e két jel kizáró vagy művelettel összekapcsolva egy a
értékeit, akkor észre vehetjük, hogy e két jel kizáró vagy művelettel összekapcsolva egy a  -hez képest negyed periódussal időben késő
-hez képest negyed periódussal időben késő  jelet ad eredményül.
jelet ad eredményül.
(ld. 9.5. táblázat) A könnyebb megértés kedvéért a 9.5. táblázat jeleinek időfüggvényét is megrajzoltuk.
|
|
|
1 | 0 | 1 |
0 | 1 | 1 |
0 | 0 | 0 |
1 | 1 | 0 |
1 | 0 | 1 |
0 | 1 | 1 |
0 | 0 | 0 |




Ha a motor előreforog, akkor  megegyezik
megegyezik  -val, ha hátraforog, akkor
-val, ha hátraforog, akkor  -t invertálva nyerjük
-t invertálva nyerjük  -t. Az előreforgásnak a logikai nulla, a hátraforgásnak a logikai egy szintet feleltetjük meg, így ha az irányjel (a 9-7. ábran SDIR) értéke nulla, akkor az
-t. Az előreforgásnak a logikai nulla, a hátraforgásnak a logikai egy szintet feleltetjük meg, így ha az irányjel (a 9-7. ábran SDIR) értéke nulla, akkor az  jelű XOR kapu egyszerűen átengedi a
jelű XOR kapu egyszerűen átengedi a  jelet, ha az irányjel értéke logikai egy, akkor XOR kapu invertálja a
jelet, ha az irányjel értéke logikai egy, akkor XOR kapu invertálja a  jelet.
jelet.

jelet az  XOR kapu segítségével invertálva kapjuk a
XOR kapu segítségével invertálva kapjuk a  jelet.
jelet.
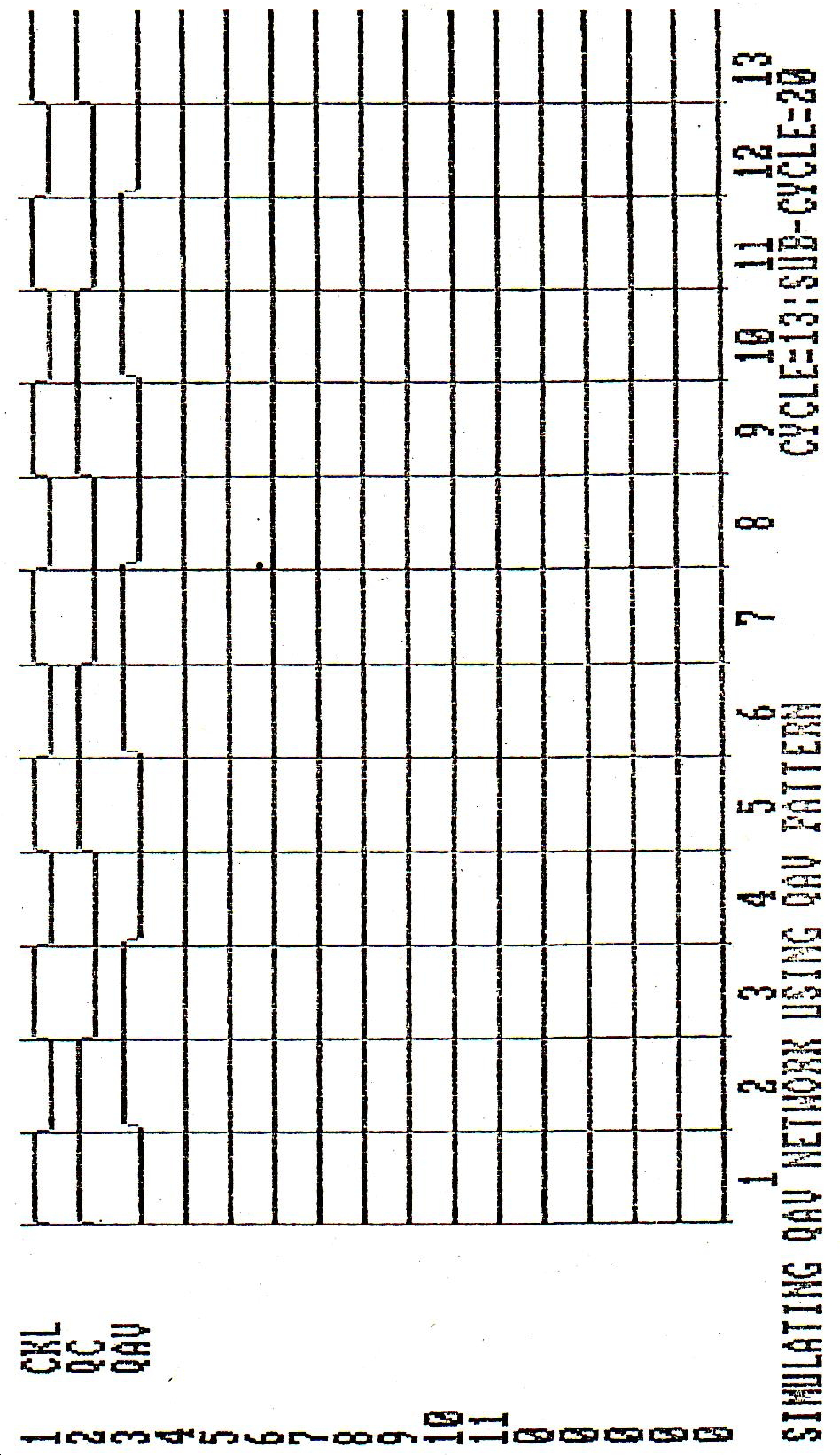
Az irányváltást szinkronizálni kell. (ld. 9-7. ábran) DIR az irányváltó kapcsoló jele és SDIR a szinkronizált irányjel). A 9-7. és a 9-8. ábraból kitűnik, hogy a  jel mindig csak az órajel lefutó élére változhat, ezért az iránykapcsoló jelét lefutóél által vezérelt D tárolón vezetjük keresztül.
jel mindig csak az órajel lefutó élére változhat, ezért az iránykapcsoló jelét lefutóél által vezérelt D tárolón vezetjük keresztül.
Egy IC tokban általában két db egybites tároló illetve négy db kétbemenetű kapu van. Ez magyarázza az  és az
és az  használatát. Az
használatát. Az  XOR kapu invertálja az órajelet, ezért az
XOR kapu invertálja az órajelet, ezért az  D tároló az eredeti órajel élére ír be.
D tároló az eredeti órajel élére ír be.
Összefoglalásként a
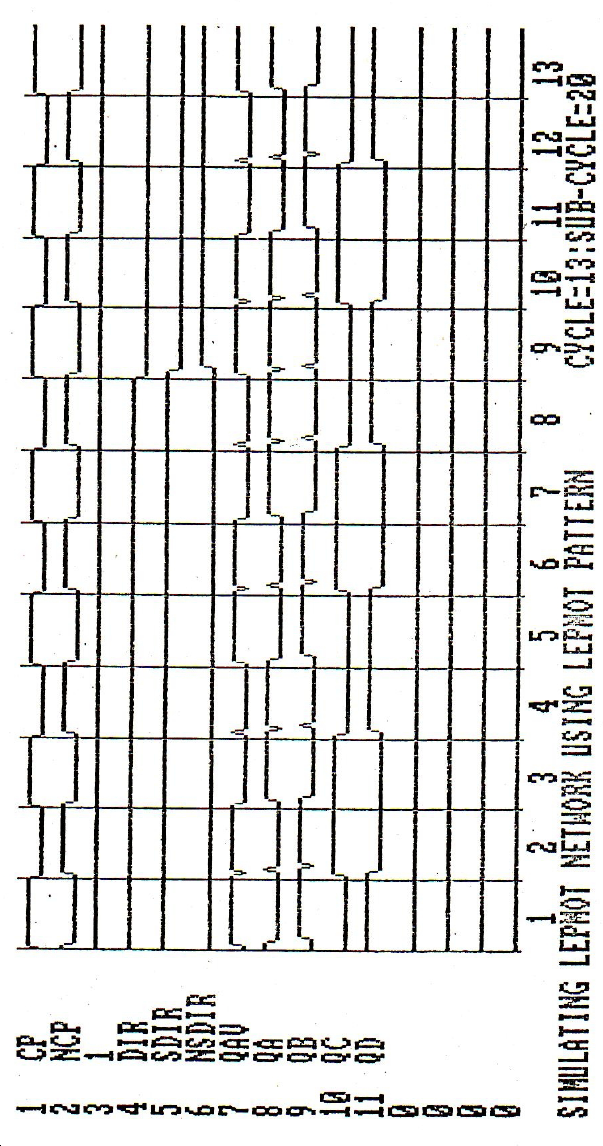
9-9. ábra az idő függvényében ábrázoltuk a fent említett jeleket. Az ábrán feltüntetett esetben a léptető motor hét lépést halad előre, majd irányt vált és három lépést hátraforog. Figyeljük meg, hogy az irányváltáskor egy lépés kimarad, csökkentve ezzel a lépéstévesztés veszélyét!
A C kondenzátor és az R ellenállás a kezdeti érték beállítására szolgálnak. A bekapcsolást követően a C kondenzátor feszültsége ugrásszerűen nem változhat, és amíg a kondenzátor az R ellenálláson keresztül fel nem töltődik, addig az a D tároló RESET bemenetére törlő jelet kapcsol. Tehát a bekapcsolást követően

A feszültség illetve a teljesítmény illesztését az IC3 és IC4 áramkör végzi. (Beszerzési nehézségek miatt a léptető motoros méréseknél az IC3 és IC4 áramköröket tranzisztor kapcsolókkal váltottuk ki, ennek természetesen lényegesen nagyobb a helyigénye.)
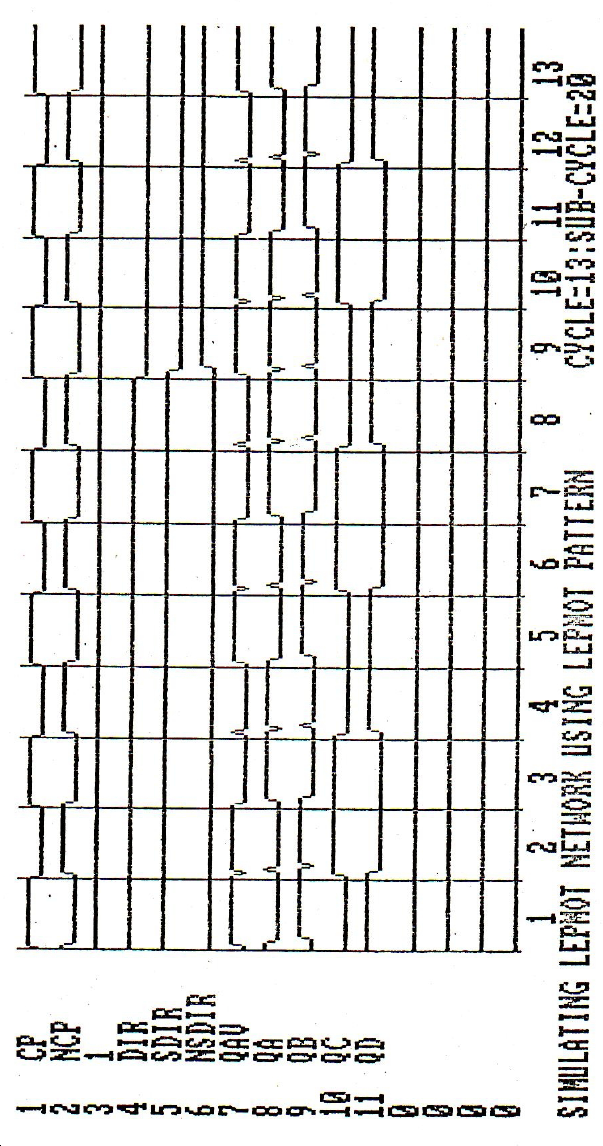
A.5. Számítógépes vezérlési mód
A jelen mérésben a robotmanipulátort egy PIO-n keresztül egy ZX Sinclair Spectrum számítógéphez csatlakoztatjuk. A számítógép egyidejűleg 8 bitnyi információ kiadására képes, ezért egyetlen OUTPUT utasítással csak egyetlen motor léptetésére adhatunk ki parancsot. Az illesztő áramkör (ld. 9-10. ábra) dekódoló feladatot lát el.
Tekintsük a 9-10. ábrat, ahol a nyolc adatvonal közül a felső négy helyiérték  közeli a motor következő lépésének megfelelő gerjesztési állapotot jelent. E négy vezeték 6 db párhuzamosan kapcsolt négybites D tároló memória elemhez csatlakozik (ld. 9-10. ábra
közeli a motor következő lépésének megfelelő gerjesztési állapotot jelent. E négy vezeték 6 db párhuzamosan kapcsolt négybites D tároló memória elemhez csatlakozik (ld. 9-10. ábra
IC5…IC10). Az  vezetékek tartalma határozza meg azt, hogy az
vezetékek tartalma határozza meg azt, hogy az  vezetéken érkezett információ melyik D tárolóba íródjon be. Az
vezetéken érkezett információ melyik D tárolóba íródjon be. Az  adatok 1/8-as demultiplexer (9-10. ábra IC4) cím bemeneteire kerülnek. A demultiplexer kimenetei szolgálnak a D tárolók órajeléül. Az
adatok 1/8-as demultiplexer (9-10. ábra IC4) cím bemeneteire kerülnek. A demultiplexer kimenetei szolgálnak a D tárolók órajeléül. Az  adatbit gondoskodik az illesztőáramkör engedélyezéséről. Alaphelyzetben
adatbit gondoskodik az illesztőáramkör engedélyezéséről. Alaphelyzetben  értéke 1 és akkor vált nullára, amikor érvényes adat érkezett a számítógép felől a PIO kimenetére. Ez egyrészt engedélyezi az IC1 és IC2 háromállapotú meghajtó áramkörökön az
értéke 1 és akkor vált nullára, amikor érvényes adat érkezett a számítógép felől a PIO kimenetére. Ez egyrészt engedélyezi az IC1 és IC2 háromállapotú meghajtó áramkörökön az  adatok áthaladását, másrészt ez a lefutóél az
adatok áthaladását, másrészt ez a lefutóél az  monostabil multivibrátor 1 jelű bemenetére kerülve azt a 4 jelű kimenetén egy 500 ns nagyságú impulzus kiadására kényszeríti, amely impulzus a demultiplexer működését engedélyezi az 500 ns alatt. Ki kell hangsúlyozni, hogy a monostabil multivibrátor az
monostabil multivibrátor 1 jelű bemenetére kerülve azt a 4 jelű kimenetén egy 500 ns nagyságú impulzus kiadására kényszeríti, amely impulzus a demultiplexer működését engedélyezi az 500 ns alatt. Ki kell hangsúlyozni, hogy a monostabil multivibrátor az  adat lefutó élének hatására ad engedélyező impulzust a demultiplexer számára, ezért a manipulátor felé küldött minden érvényes adat előtt az
adat lefutó élének hatására ad engedélyező impulzust a demultiplexer számára, ezért a manipulátor felé küldött minden érvényes adat előtt az  vonal értékét logikai egyre kell állítani.
vonal értékét logikai egyre kell állítani.

A manipulátor mozgatásához a számítógép által kiadott kódot a következő módon kell meghatározni. A számítógépnek nyilván kell tartania minden léptető motor pillanatnyi gerjesztési állapotát, ami egy táblázat segítségével történik. Mivel a  ,
,  ,
,  és
és  értékét a felső négy helyiértéken adjuk meg, ezért a számítógép nem a korábban közölt 9.2. táblázatot őrzi, hanem helyette a 9.6. táblázatban megadott értékeket. (a % jel szokásosan a bináris számokat jelöli, a decimális számoknál nem használunk megkülönböztető jelzést).
értékét a felső négy helyiértéken adjuk meg, ezért a számítógép nem a korábban közölt 9.2. táblázatot őrzi, hanem helyette a 9.6. táblázatban megadott értékeket. (a % jel szokásosan a bináris számokat jelöli, a decimális számoknál nem használunk megkülönböztető jelzést).
Lépés | Bináris | Decimális |
1. | 1010 0000 | 160 |
2. | 1001 0000 | 144 |
3. | 0101 0000 | 80 |
4. | 0110 0000 | 96 |
A vezérlő program rendelkezik egy hat elemű vektorral. E vektor egy-egy eleme egy-egy léptető motorhoz van hozzárendelve és értéke a gerjesztési állapotnak megfelelően egy és négy között változhat. Például, ha e vektorból kiolvastuk, hogy a 3. léptető motor az 1. lépésnek megfelelő gerjesztési állapotban van és előre akarjuk forgatni azt egy lépéssel, akkor két output utasítást kell kiadni. Az output utasítással kiadandó két értéket a következőképpen kell meghatározni:
% xxxxxxx1: tetszőleges páratlan szám, amely  értékét 1-re állítja be
értékét 1-re állítja be
% 1001 011 0 = 144 + 2*3 = 150
Ha ugyanezt a léptető motort hátra kívánjuk forgatni, akkor a másodiknak kiadandó érték a következő lenne:
% 0110 011 0 = 96 + 2*3 = 102
A PIO működésének részleteire nem tértünk ki, erre vonatkozó információ a 2. ajánlott irodalomban található. Feltétlenül meg kell azonban jegyeznünk hogy a PIO B/A C/D és CE és  bemeneteit rendre a Z80 címbusz
bemeneteit rendre a Z80 címbusz  ,
,  és
és  jelű vonalára kötöttük és a PIO-nak az
jelű vonalára kötöttük és a PIO-nak az  jelű portját használjuk a harmadik üzemmódban, minden bitet kimenetbe állítva. Ennek megfelelően - a bekapcsolást követően - két értéket kell küldeni a PIO inicializálása érdekében a
jelű portját használjuk a harmadik üzemmódban, minden bitet kimenetbe állítva. Ennek megfelelően - a bekapcsolást követően - két értéket kell küldeni a PIO inicializálása érdekében a  parancscímre, először 255-öt majd 0-t, továbbá a léptető motorok mozgatásához a fent említett kódokat a
parancscímre, először 255-öt majd 0-t, továbbá a léptető motorok mozgatásához a fent említett kódokat a  adatcímre kell küldeni.
adatcímre kell küldeni.
A.6. Használati utasítás a számítógépes vezérlési módhoz
A program Z80 assembly nyelven íródott és a ROBOT 1 cartrige-on található. Az indításhoz elegendő a cartrige-t a drive-ba helyezni és kiadni a RUN parancsot. Az indítást követően a képernyőn megjelenik a főmenü, ami a következő választási lehetőséget nyújtja a számunkra:
Alaphelyzet definiálás
Mozgatás alaphelyzetbe
Kézi vezérlés
Pályatanítás
Tanult mozgás ismétlése
A főmenüben valamely menüpont kezdő betűjének leütésével közölhetjük a programmal választásunkat.
A.6.1. Alaphelyzet definiálás
A léptető motorok használata szükségtelenné teszi a robotmanipulátorról történő visszacsatolást. A számítógép a kiadott lépéseket számlálva állandóan jegyzi a robotmanipulátor relatív pozícióját a bekapcsolást követő illetve e menüponttal definiált helyzetéhez képest.
Az alaphelyzet definiálása úgy történik, hogy a főmenüben az ’a’ betűt nyomjuk le, ekkor a program lekapcsolja a gerjesztést valamennyi gerjesztő tekercsről, így a robotmanipulátor kézzel mozgathatóvá válik. A robotmanipulátort célszerű a fehér fogaskerekeinek forgatásával az alaphelyzetbe hozni. A beállítás végét a ’space’ billentyű leütésével jelezzük a program számára. Ekkor a program visszakapcsolja a megfelelő tekercsekre a gerjesztést, (ami egy kis elmozdulást eredményezhet) és visszatér a főmenühöz. Ha e menüponttal külön nem definiálunk alaphelyzetet, akkor a program a robotmanipulátornak a bekapcsolás pillanatában elfoglalt helyzetét tekinti alaphelyzetnek.
A.6.2. Mozgatás alaphelyzetbe
E parancs visszatéríti a robotmanipulátort az előző paranccsal definiált pozícióba.
A.6.3. Kézi vezérlés
E menüpont lehetőséget nyújt a felhasználó számára a robotmanipulátor mozgatásának begyakorlására. Minden léptető motorhoz két-két billentyű van rendelve. Az 1 … 6 számokat jelölő billentyűkkel előre, az alattuk levő Q … Y billentyűkkel hátra mozgathatjuk az egyes léptető motorokat a következő táblázat szerint:
előre | hátra | |
törzs | 1 | Q |
váll | 2 | W |
könyök | 3 | E |
bal csukló | 4 | R |
jobb csukló | 5 | T |
nyitás | zárás | |
megfogó | 6 | Y |
Egyszerre több léptető motort is mozgathatunk és a mozgás mindaddig tart, amíg az adott billentyűt lenyomva tartjuk.
A számítógép ekkor a robotmanipulátornak csak a pillanatnyi pozícióját őrzi meg, de azt nem, hogy az adott pozícióba milyen pályán haladva jutott el.
Visszatérés a főmenühöz a „0” billentyű leütésével történik.
A.6.4. Pályatanítás
A főmenüből a „P” billentyű leütésével jutunk e menüpontba. A bejelentkezés után a következő kérdésre kell válaszolni:
új pálya (U) folytatás (F)
Ha új pálya tanítását kezdjük (U betű leütése), akkor a program az alaphelyzetbe viszi a robotmanipulátort, ellenkező esetben (F betű leütése) a robotmanipulátor a memóriában mozgássorozat utolsó pontjának megfelelő pozíciót veszi fel.
Ezt követően a mozgatás a kézivezérléshez hasonlóan az 9.7. táblázatban felsorolt billentyűk leütésével történik, de a kézivezérléssel szemben a program a robotmanipulátor pillanatnyi pozíciója mellett a pálya bizonyos (ld. később) pontjainak a koordinátáit is eltárolja, így a mozgássorozat ismételhetővé válik.
A program akkor tárolja el egy pont koordinátáit, ha:
valamelyik léptető motor mozgásirányt változtat (önmagában az nem irányváltás, ha egy léptető motor leáll és újra elindul, csak akkor, ha ezt az ellenkező irányba teszi);
valamelyik léptető motor
 100 lépésnél többet tett meg az utolsó tárolt pályaponthoz képest;
100 lépésnél többet tett meg az utolsó tárolt pályaponthoz képest;az M betű leütésével erre külön parancsot adunk.
Visszatérés a főmenühöz a ’0’ billentyű leütésével történik.
A.6.5. Tanult pálya ismétlése
A főmenüben a T leütését követően a program először az alaphelyzetbe juttatja a robotmanipulátort, majd végigviszi a pálya tanítás során eltárolt pályapontokon. E művelet befejeztével ismét a főmenü jelenik meg a képernyőn.
Ellenőrző kérdések
Ismertesse a léptető motorok működési elvét!
Mi a különbség az unipoláris és a bipoláris léptető motorok között?
Hogyan alakítható ki kislépésszögű léptető motor? Soroljon fel néhány tipikus lépésszöget!
A léptető motorok dinamikus jelleggörbéi milyen tartományokra bonthatók?
A kézivezérlés üzemmódban hogyan gondoskodunk a kezdeti értékek beállításáról?
Miért van szükség az irányjel szinkronizálására?
A számítógépes vezérlési módban milyen kódot kell kiadni, ha az 5. léptető motort a 3. gerjesztési állapotból előre szeretnénk forgatni egy lépéssel?
A.7. Mérési feladatok
9.8 feladat A léptető motor vezérlésére motor vezérlésére használt logikai áramkörök működésének vizsgálata
Az SN 7486 XOR és az SN 7474 D tároló felhasználásával állítsa össze a léptető motor 9.4 fejezetben megismert vezérlő áramkörét! Az áramkör  ,
,  ,
,  és
és  kimeneteit a kapcsoló panelon található egyszerű kétállású kapcsolók egyikét! (Az irányjel prellmentesítésről a vezérlő áramkör gondoskodik ld. 9.4 fejezet.) Az órajel előállításához használja az SN 7476 J K tárolóelemet, amelyből alakítson ki T tárolót! Az így kialakított T tároló órajelbemenetét kösse össze a kapcsoló panelon található monostabil multivibrátor kimenetével!
kimeneteit a kapcsoló panelon található egyszerű kétállású kapcsolók egyikét! (Az irányjel prellmentesítésről a vezérlő áramkör gondoskodik ld. 9.4 fejezet.) Az órajel előállításához használja az SN 7476 J K tárolóelemet, amelyből alakítson ki T tárolót! Az így kialakított T tároló órajelbemenetét kösse össze a kapcsoló panelon található monostabil multivibrátor kimenetével!
Figyelje meg az áramkör működését különös tekintettel az irányváltásokra! Rajzolja le a  , DIR és SDIR jelek időfüggvényét, ha a léptető motor két lépést halad előre és három lépést hátra!
, DIR és SDIR jelek időfüggvényét, ha a léptető motor két lépést halad előre és három lépést hátra!
9.9 feladat A léptető motor határfrekvenciájának kimérése
Az előző feladatban összeállított vezérlőáramkört ki kell egészíteni egy számláló és egy komparátor áramkörrel (ld. 9-11. ábra). A 9-11. ábran látható áramkör használata a következő: először a kapcsolók segítségével beállítjuk a kívánt lépésszámot, majd a  kapcsolóval töröljük a számláló értékét végül beíró jelet adunk a D tárolónak a
kapcsolóval töröljük a számláló értékét végül beíró jelet adunk a D tárolónak a  kapcsoló segítségével. Így a D tároló kimenetén logikai 1 jelenik meg, ezért az órajel áthalad az ÉS kapun. Az ÉS kapun áthaladó órajel egyrészt a léptető motort, másrészt a számlálót működteti. Amikor a számláló regiszter értéke eléri a beállított lépésszámot, akkor a komparátor áramkör egy felfutóélt generál, amely él hatására a D tároló törlődik, ezért az
kapcsoló segítségével. Így a D tároló kimenetén logikai 1 jelenik meg, ezért az órajel áthalad az ÉS kapun. Az ÉS kapun áthaladó órajel egyrészt a léptető motort, másrészt a számlálót működteti. Amikor a számláló regiszter értéke eléri a beállított lépésszámot, akkor a komparátor áramkör egy felfutóélt generál, amely él hatására a D tároló törlődik, ezért az
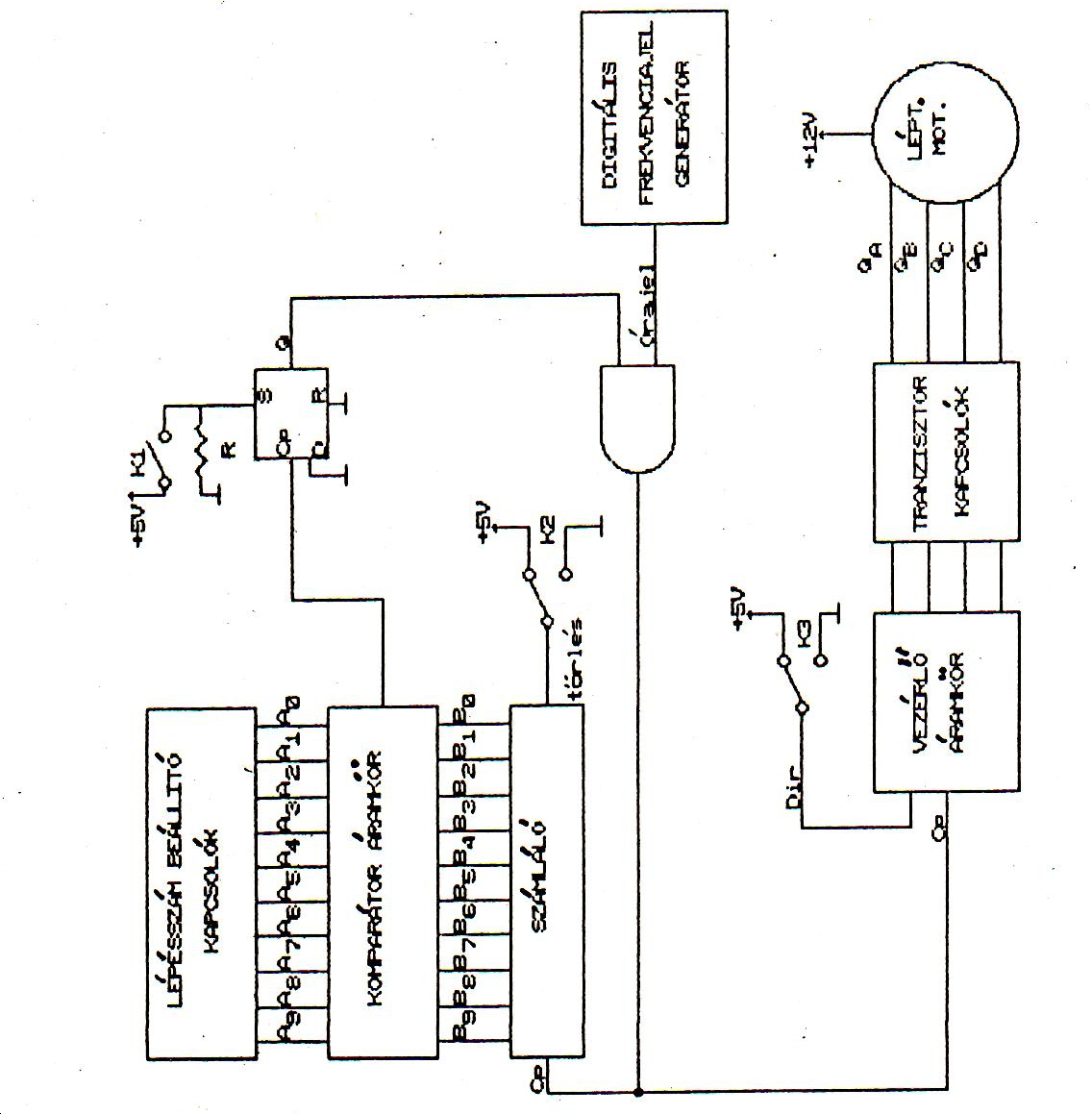
Az ÉS kapu nem enged át magán több órajelet.
A léptető motor kikapcsolt állapotában állítsa a tengelyen elhelyezett mutatót a bejelölt pozícióba, kapcsolja be a léptető motor tápfeszültségét és állítsa be a léptető motor egy körülfordulásának megfelelő lépésszámot! Az órajel frekvenciáját 100 – 400 Hz között változtatva keresse meg azt a legkisebb értéket, amelynél a léptető motor lépést téveszt! Az előző mérést ismételje meg a léptető motor tengelyét különböző (0 – 16 Ncm tartományba eső) nyomatékkal terhelve! A mérési eredményeket ábrázolja megfelelő koordinátarendszerben!
9.10 feladat A számítógép és a léptető motoros hajtás illesztésének vizsgálata
Kapcsolja össze a számítógépet a PIO egységgel! A méréshez használja a PIO A portját! A PIO TTL szintű jelet ad ki, így az A port négy legnagyobb helyiértékű bitje ( ) átveszi az előző mérésekben használt vezérlő áramkör kimeneteinek szerepét (ld. 9-12. ábra). Az
) átveszi az előző mérésekben használt vezérlő áramkör kimeneteinek szerepét (ld. 9-12. ábra). Az  ,
,  és
és  kivezetést kapcsolja össze a hétszegmenses kijelző alsó három helyiértékű bemenetével! Az
kivezetést kapcsolja össze a hétszegmenses kijelző alsó három helyiértékű bemenetével! Az  kivezetést a kapcsoló panel egyik LED-jével jelenítse meg! Inicializálja a PIO-t a következő paranccsal:
kivezetést a kapcsoló panel egyik LED-jével jelenítse meg! Inicializálja a PIO-t a következő paranccsal:
OUT 95,255
OUT 95,0
Adja ki a következő parancsokat és figyelje meg a léptető motor mozgását:
OUT 31,160
OUT31,144
OUT 31,80
OUT 31,96
OUT 31,160
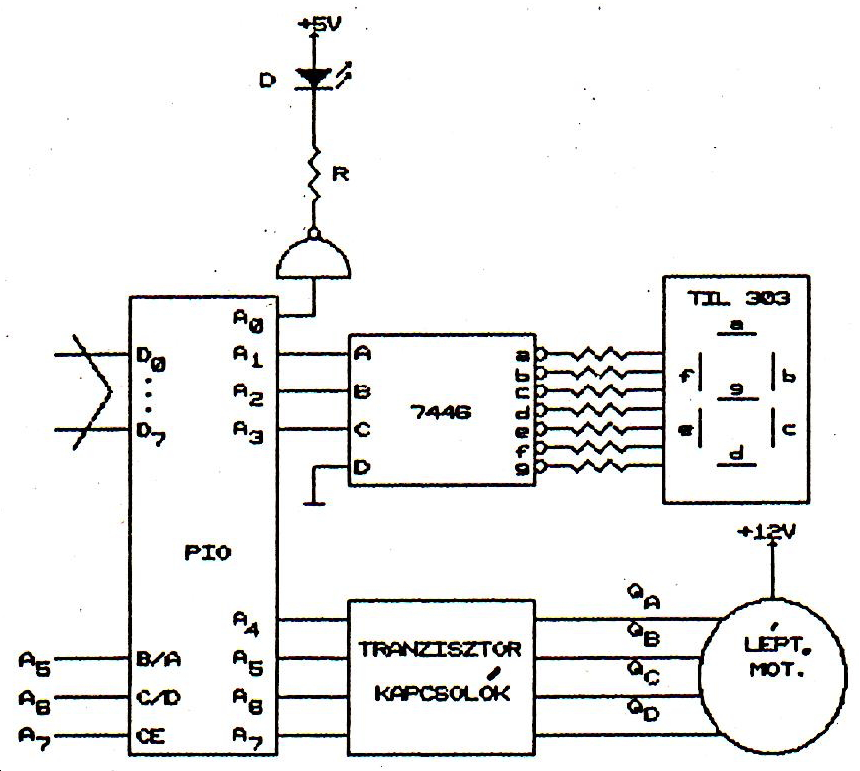
Írjon BASIC nyelvű programot, amely tetszőleges sorszámú léptető motort tetszőleges számú lépéssel előre- illetve hátraforgat!
Megjegyzés:
Ebben a mérésben az engedélyező bitnek nincs szerepe.
A léptető motor sorszámát a hétszegmenses kijelző mutatja.
9.9 feladat
Kapcsolja össze a robotmanipulátor a számítógéppel! Indítsa el a robotvezérlő programot és a robotmanipulátort vezesse végig a mérésvezető által meghatározott pályán!
A mozgás többszöri ismétlésével figyelje meg a robotmanipulátor ismétlési pontosságát!
Ajánlott irodalom:

Tahaski Kenjo:Stepping motors and their microprocessor controls (Oxford 1983.)

Korondi Péter: Microprocesszorok I. (Előadási segédlet 1988.)

Korondi Péter: Robotvezérlő program ismertetése (Oktatási segédlet 1988.)
Irodalmi hivatkozások
[1] John Wiley and SonsLtd. System identification. 1974.
[2] Springer-Verlag. Digital Control Systems. 1989.
[3] Akadémiai Kiadó. Irányítási rendszerek elmélete és tervezése. 2001.
[4] Prentice Hall. System Identification.Theory for theUser.. 1987.
[5] QUANSEREngineering. Canada. DC Motor Trainer (DCMCT) Instructor Workbook. 2008.
[6] Addison-Wesley. The Art of Control Engineering. 1997.
[7] Sounders College Publishing. Digital Control Systems. 1992.
[8] Designing and Tuning Digital Control Systems. 1968. Instr.Cont.Syst..