Robotmechanizmusok
Szerzői jog © 2014 Dr. Szabó Zsolt, Budai Csaba, Dr. Kovács László, Dr. Lipovszki György

A tananyag a TÁMOP-4.1.2.A/1-11/1-2011-0042 azonosító számú „ Mechatronikai mérnök MSc tananyagfejlesztés ” projekt keretében készült. A tananyagfejlesztés az Európai Unió támogatásával és az Európai Szociális Alap társfinanszírozásával valósult meg.

Kézirat lezárva: 2014 február
Lektorálta: Dr. Somló János
A kiadásért felel a(z): BME MOGI
Felelős szerkesztő: BME MOGI
ISBN 978-963-313-170-1
2014
- I. rész
- 2. rész
- 1. A mozgásvizsgálat elemei
- 2. Merev test rendszerek dinamikája
- 2.1. A mozgásegyenletek szintetikus leírása
- 2.2. Holonom rendszerek analitikus leírása
- 2.2.1. Általános koordináták
- 2.2.2. Virtuális sebesség
- 2.2.3. A másodfajú Lagrange-egyenletek
- 2.2.4. A kinetikus energia függése az általános koordinátáktól
- 2.2.5. A mozgásegyenletek potenciálos erők esetén
- 2.2.6. A mechanikai összenergia változása
- 2.2.7. Nem potenciálos általános erők
- 2.2.8. Az általános potenciál
- 2.2.9. A Hamilton-féle kanonikus mozgásegyenletek
- 2.2.10. Routh-egyenletek
- 3. Mozgások jellemzése és stabilitása
- 4. Mechanizmusok vizsgálati módszerei
- 5. Robotok kinematikai és dinamikai alapegyenletei
- 3. Melléklet
- 1. Példa – Robot manipulátor vezérlésére
- 2. Példa – A manipulátor illesztése IBM AT kompatibilis számítógéphez
- 3. Példa – A robotvezérlő program használati utasítása
- 4. Példák – Tipikus nyíltláncú robotkarok
- 5. Példák – robotok csoportosítása
- 5.1. A robot definíciója
- 5.2. Robotok csoportosítása
- 5.3. Felhasználás szerinti csoportosítás
- 5.4. Ipari és szolgáltató robotok néhány különbsége
- 5.5. Szolgáltató robotok csoportosítása
- 5.6. Autonómia definíciója
- 5.7. Az ETO robot bemutatása
- 5.8. A robot fő jellemzői
- 5.9. A robot egységeinek részletes bemutatása
- 5.10. A szociális robotok típusai
- 5.10.1. Kompai
- 5.10.2. Biron
- 5.10.3. Hospi-Rimo
- 5.10.4. iRobiQ
- 5.10.5. Wakamaru
- 5.10.6. RoboVie R3
- 5.10.7. HAR (Home Assistant Robot)
- 5.10.8. PaPeRo
- 5.10.9. Cubo
- 5.10.10. Mamoru
- 5.10.11. Nao
- 5.10.12. iCat
- 5.10.13. Paro
- 5.10.14. Kobie
- 5.10.15. Rabie
- 5.10.16. Pomi
- 5.10.17. Beszéd
- 5.10.18. Gesztikuláció
- 5.10.19. Közvetlen betáplált információ
- Irodalomjegyzék
- 2.1.
- 2.2.
- 2.3.
- 3.1.
- 4.1.
- 4.2.
- 4.3.
- 4.4.
- 4.5.
- 4.6.
- 3.1.
- 1.1. A robot manipulátor felépítése
- 1.2. A robot manipulátor referenciahelyzete
- 1.3. Az ízületi koordinátarendszerek
- 1.4. Euler‑féle szögek
- 1.5. A q 1 elmozdulás meghatározása
- 2.1. Az illesztő áramkör
- 3.1. főmenü
- 3.2. Kezelési útmutató
- 3.3. Pályatanítás
- 3.4. Editálás
- 3.5. off-line menü
- 3.6. Adatbevitel
- 3.7. Hibás koordináták számítása
- 3.8. Pályapontok megjelenítése
- 4.1. Síkbeli könyök manipulátor [1.]
- 4.2. Hengeres robot [1.]
- 4.3. Euler csukló [1.]
- 5.1. ETO robot emberi viszonylatban
- 5.2. Holonomikus kerék (omnidirekcionális kerék)
- 5.3. A robot hajtása (DC motor)
- 5.4. Vészleállító gomb
- 5.5. A robot váza
- 5.6. Kinect kamera
- 5.7. Hajtómű
- 5.8. PC (Számítógép)
- 5.9. Akkumulátor
- 5.10. Hangszórók
- 5.11. Kompai
- 5.12. Biron
- 5.13. Hospi-Rimo
- 5.14. iRobiQ
- 5.15. Wakamaru
- 5.16. Wakamaru
- 5.17. RoboVie R3
- 5.18. HAR
- 5.19. PaPeRo
- 5.20. Cubo
- 5.21. Mamoru
- 5.22. Nao
- 5.23. iCat
- 5.24. Paro I.
- 5.25. Paro II.
- 5.26. Kobie
- 5.27. Rabie
- 5.28. Pomi
- 5.29. Beszéd
- 5.30. Gesztikuláció
- 5.31. Közvetlen betáplált információ
I. rész - rész
1. fejezet - Bevezetés
Az elmúlt évek során egyre nagyobb igény volt az ipar részéről, hogy olyan gépeket, berendezéseket alkalmazzanak, amelyek segítségével meggyorsíthatják és automatizálják a termelést, képesek több, akár komplex feladatot pontosan és rövid idő alatt elvégezni. Ez az igény a mai napig átjárja a robotikai fejlesztéseket, a cél, hogy univerzális robotokat fejlesszünk, amelyek gyorsabbak és pontosabbak, mint a korábbi modelljeik.
A mai ipari robotok összetett mechanikai‑elektronikai rendszerek, amelyek a legkülönbözőbb ipari folyamatokban kapnak helyet, mint embert helyettesítő munkaerő. Tekintettel arra, hogy az ipari robotok komplex műszaki alkotások, a korábban egymástól viszonylag függetlenül fejlődő egyes műszaki tudományágak az ipari robotok megjelenésével és elterjedésével igen szorosan összefonódtak.
Ez a folyamat oda vezetett, hogy egy‑két évtizeddel ezelőtt a legfejlettebb ipari országokban deklarálták egy új műszaki tudományág, a robotika megszületését. Eszerint a robotika olyan interdiszciplináris tudományág, melyben a mechanika, hidraulika, pneumatika, elektrotechnika, irányítástechnika, elektronika, számítástechnika egyes részterületei ötvöződnek. Az eddigiekből az is következik, hogy minden olyan szakember, aki ipari robotok tervezésével, gyártásával, üzembeállításával, alkalmazásával, programozásával, illetve vizsgálatával kíván foglalkozni, meghatározott szintű ismeretekkel kell, hogy rendelkeznie a korábban felsorolt tudományterületek közül, azaz valamennyiről, hanem is egyenlő mértékben.
Jelen jegyzet célkitűzései között szerepel, hogy előkészítse a robotok irányításával és szabályozásával foglalkozó tantárgyakat. A jegyzet tematikáját illetően a robotok mechanikai leírásához szükséges eszközöket tárgyalja, hogy alaposan megismerjük az ipari robotok működését, és modellezésük lehetőségeit. A jegyzet megírása során igyekeztünk mindvégig azonosulni a robotika többé‑kevésbé már kialakult szemléletmódjával. Tekintsük most át röviden, milyen főbb részegységekből épül fel egy korszerű ipari robot.
1.1. A robotok fontosabb részegységei és feladatai
Alapvetően minden ipari robot feladata, hogy meghatározott munkafolyamatok elvégzése érdekében bizonyos mozgásokat végezzen a térben, szükség van egy (többé-kevésbé bonyolult) mechanizmusra, amelyet a legkülönbözőbb irányokba lehet mozgatni, és amely jelentősebb deformáció nélkül elviseli az üzemelés közben fellépő erőhatásokat. Ez a mechanikai váz funkcióját tekintve leginkább az emberi törzs, kar és kéz csontrendszeréhez hasonlítható.
Természetesen bonyolult térbeli mozgásokra csak akkor van lehetőség, ha a mechanikai váz egyes elemeinek egymáshoz viszonyított elmozdulása biztosított. Az elmozdulást az embernél ízületek, a robotoknál csuklók teszik lehetővé. Például a robot mechanikai vázának egyes elemeit kartagnak (angolul: link), illetőleg a kartagok közti elmozdulást lehetővé tevő elemet egységesen csuklónak nevezzük (angolul: joint), tekintet nélkül arra, hogy az elcsúszást vagy elfordulást tesz lehetővé.
Logikusan tovább gondolkozva a következő szerkezeti egység a csuklókban (esetleg másutt) elhelyezett meghajtó, vagy beavatkozó egység (angolul: actuator), amelyet fonetikusan írva a magyar terminus technikus is aktuátornak nevez. Működési mód szerint osztályozva megkülönböztetünk hidraulikus, pneumatikus és villamos hajtású robotokat. Az utóbbiak nagy előnye a tisztaság, egyszerűség, könnyű irányíthatóság és gazdaságos energiaátalakítás, azonban a nagy üzemi terheléssel dolgozó robotoknál a hidraulikus hajtási mód dominál. A beavatkozó szerveket leginkább az emberi izomrendszeréhez hasonlíthatók.
A következő fontos részegység az irányítóegység (angolul: control unit), amely a robot egyes csuklóinak (ezáltal kartagjainak) célirányosan összerendezett mozgását teszi lehetővé. Ezt az egységet az emberi agy mozgásközpontjához hasonlíthatjuk. A műszaki gyakorlatban a megoldások a csuklónként önálló egyszerű analóg szabályozóktól a legbonyolultabb számítógépes megoldásokig terjednek.
Az eddig felsorolt részegységek lényegében minden ipari robotnál megtalálhatók. A legfejlettebb robotok a fentieken túlmenően még különböző bonyolultsági fokú érzékelő (angolul: sensor, hasonlóan a beavatkozó szerv angol megfelelőjéhez, az érzékelőt is szoktuk szenzornak nevezni) rendszerekkel is rendelkeznek, melyek képessé teszik a robotot arra, hogy a külvilágból érkező információkat érzékeljék, feldolgozzák, és – egyes esetekben valamilyen döntési folyamat eredményeként – működésüket, vagy akár mozgásukat is korrigálják.
A most felvázolt négy fő terület közül (mechanizmusok, hajtások, irányítások, érzékelők) alapvetően a robotmechanizmusok témakörével fogunk foglalkozni, azonban egyes estekben utalva a többi területtel való kapcsolatra is. A továbbiakban tekintsük át, milyen főbb feladattípusokkal találkozhatunk a robotok alkalmazási területein.
A legegyszerűbb közé tartoznak a különböző rakodási, palettázási feladatok (angolul: pick and place, azaz „fogd meg és rakd le valahova”). Ilyenkor a cél többnyire csupán az, hogy bizonyos alkotórészeket, munkadarabokat a robot valahonnan valahová átrakjon egy a feladatra alkalmas robotkéz vagy megfogó (angolul: hand, gripper, end effector) segítségével.
Ezen feladat során elegendő csupán a kiindulási és a véghelyzetet definiálni, egyébként érdektelen, hogy e két pont között milyen pályán mozgatja a robot a munkadarabot, sőt sok esetben még annak sincs jelentősége, hogy a tárgy egy adott helyen (pl. szállítószalagon) milyen helyzetet vesz fel, vagyis egyes esetekben a munkadarab orientációja is tetszőleges lehet. (Az előtanulmányokból ismert, hogy egy merev test térbeli elhelyezkedésének egyértelmű megadásához általános esetben hat független paraméterre van szükség, ezek közül három a pozíciót, három pedig az orientációt írja le.)
A következő feladattípus az, amikor a robot valamilyen munkadarabot vagy szerszámot szakaszosan mozgat úgy, hogy közben több, esetleg igen nagyszámú térbeli pontot feltétlenül érintenie kell (pl. ponthegesztés), míg az egyes pontok közötti mozgás pályája csupán másodlagos jelentésű. A magyar szakirodalom ezt a robotirányítási módot – talán nem a legszerencsésebb – pontvezérlésnek nevezi, az angol terminológia point‑to‑point control‑nak, amit igen elterjedten PTP‑nek rövidítenek.
A minőségileg legmagasabb követelmény akkor adódik, ha a robot mozgása során valamilyen (esetleg előre nem is ismert) tér- vagy síkgörbe mentén kell, hogy haladjon, azaz az előírt pályát a robotnak követnie kell. Természetesen a pályakövetés igénye nemcsak a pozíció, hanem az orientáció vonatkozásában is fennállhat. Az irányításnak ezt a módját pályavezérlésnek szokás nevezni (angolul: continous path control, CP). Pusztán vezérlési megoldásról ilyenkor nyilvánvalóan szó sem lehet, hiszen a pályakövetési feladat csak az aktuális pozíció és orientáció (sőt számos esetben erők és nyomatékok) folyamatos érzékelésével és visszacsatolásával, vagyis zárt szabályozási hurkok kialakításával valósítható meg.
A mai ipari robotok elsősorban két, korábban is már művelt technikai ágból nőttek ki. A robotika egyik „őse” a számjegyvezérlésű (angolul: numerical control, NC) szerszámgépek technikája volt. Ez teremtette meg az alapot egyrészt a nagy pontosságú, precíz mozgások megvalósításához, másrészt a robotok programvezérléséhez (irányításához). A mai robotok másik elődje a már évtizedekkel korábban alkalmazott távirányítású manipulátor, vagy más néven teleoperátor volt, amely emberi kar-és kézmozdulatokat imitálva, közvetlen emberi irányítással és megfigyeléssel végzett olyan feladatokat, melyek vagy jelentős erőkifejtést igényeltek, vagy pedig ember számára veszélyesek vagy nehezen hozzáférhetőek voltak. E két technika előnyeit egyesítve születtek meg az ötvenes évek közepe táján az első olyan szerkezetek, amelyekre már ráillik az „ipari robot” elnevezés. Ezek egyszerű (pl. pick and place feladatok) feladatatok elvégzésére alkalmas, mai szemmel nézve primitív (ún. mátrix‑steckdugó) módszerrel programozható, önműködő manipulátorok voltak.
Itt kell említést tenni arról, hogy az ipari robot fogalmának meghatározása az egyes országokban ma sem teljesen egységes. Japánban például sokáig a legegyszerűbb célmanipulátorok is robotnak nevezték, ami azt eredményezte, hogy a statisztikák kiugróan nagy számokat közöltek a Japánban üzemelő robotok mennyiségére vonatkozóan. A legáltalánosabb felfogás szerint ipari robotnak nevezünk minden olyan több (általában hat) szabadságfokú manipulátort, amely egy meghatározott munkatéren belül tetszőleges pozíciót és orientációt felvehet, (hardver és/vagy szoftver eszközökkel) tetszés szerint bármikor újraprogramozható, a beprogramozott műveletsort elvben tetszés szerinti számban egymás után önműködően képes végrehajtani, ezáltal a legkülönfélébb munkafolyamatok elvégzésére alkalmas.
1.2. A robotirányítás mechanikai alapjai
Már a bevezetőben is utaltunk arra, hogy a robotok – bármennyire is komplex műszaki alkotásnak tekinthetőek – elsődlegesen gépek, vagyis mechanikai szerkezetek. Ezért a felmerülő különféle irányítástechnikai feladatok kivitelezéséhez alapvetően az ipari robotok konstrukcióinak mechanikai modelljére van szükségünk.
A legalapvetőbb feladat az, hogy a robotkezet egy folytonos (vagy diszkrét) térbeli pontsorozaton végigvezessük, miközben az orientációt kifejező koordináták folytonosan (vagy diszkrét értékeket felvéve) változhatnak. A pozíció és orientáció időpillanatról időpillanatra történő előírása azonban még távolról sem jelenti a feladat (mechanikai szempontból vett) teljes értékű leírását, hiszen ugyanilyen lényeges a sebességek és szögsebességek, valamint a gyorsulások és szöggyorsulások figyelembe vétele is.
Az ipari robotok működését többféle paraméter is befolyásolja, legyen az pl. a beavatkozó szervek teljesítménye, vagy a geometriai kialakítása, mégis egy ipari robot felhasználhatóságát leginkább a szabadságfokainak száma korlátozza. Hiszen minél több az adott robot szabadsági fokainak a száma, annál több féle feladat ellátására alkalmas.
Az univerzális robotok általában hat szabadságfokúak, így egy adott munkatéren belül tetszőleges pozíció és orientáció megvalósítására alkalmasak. Léteznek hatnál több szabadságfokú, ún. redundáns robotok is, ezek egy adott pozíciót és orientációt végtelen sokféle konfigurációban meg tudnak valósítani (az emberi kar is ilyen „redundáns manipulátor”‑nak tekinthető). A redundáns robotokat rendkívül jó lehet alkalmazni pl. olyan pályakövetési feladatokban, amelynek során a valamilyen akadályt kell kikerülni a robotnak.
2. fejezet - Robotok geometriai és kinematikai jellemzése
A bevezetőben elmondottak alapján a robotok csuklókkal összekapcsolódó kartagokból álló mechanikai rendszerek. Jelen jegyzeten belül csak olyan robotstruktúrákkal foglalkozunk, melyekben minden csukló csakis két kartagot kapcsol össze, vagyis a kartagok egymásutánja ún. nyílt kinematikai láncot alkot. Ellenkező esetben zárt kinematikai láncú, vagy párhuzamos működésű robotokról beszélhetünk.
A továbbiakban feltesszük, hogy hogy a kartagok ideális merev testek, a csuklók pedig holtjáték-, kotyogás-, és súrlódásmentesek. A fentieken túlmenően azzal a kikötéssel is élünk, hogy minden egyes csukló vagy csak lineáris, egyenes menti elmozdulás (transzlációt), vagy csak tengerkörüli elfordulást (rotációt) tesz lehetővé. Az előbbi P típusú (angolul: prismatic joint, P), az utóbbit R típusú (angolul: revolute joint, R) csuklónak is fogjuk nevezni. Egészen speciális estektől eltekintve a valóságos robotokban is csak ez a két csuklófajta fordul elő.
Ha egy robot kartagjairól és csuklóiról beszélünk, célszerű azokra valamilyen sorszámmal hivatkozni. Csaknem teljesen egységesen a robot (rögzített) törzsét 0. kartagnak szokás nevezni, a hozzá kapcsolódó kartag az 1. kartag, és az ezeket összekötő csukló az 1. csukló. Mind a kartagok, mind a csuklók sorszáma a törzstől a robotkéz felé haladva, és általánosságban az i. és az (i+1). kartagot az (i+1). csukló köti össze.
Mivel a robotok kinematikai jellemzésekor mozgásokat írunk le, be kell vezetnünk különböző vonatkoztatási rendszereket. Az egyik legkézenfekvőbb lehetőség a robottörzséhez (vagy a környezethez) rögzített koordináta rendszer felvétele. Ezen rendszerhez viszonyított adatokat leggyakrabban világkoordinátáknak (angolul: world coordinates) nevezzük.
Továbbá minden kartaghoz ugyancsak hozzárendelhetünk egy‑egy koordinátarendszert. Az így definiált Descartes-koordinátarendszerek tulajdonképpen már elegendőek lennének mindenfajta robotmozgatás leírására, azonban az esetek többségében rendkívüli számítástechnikai nehézségekkel járna, ha mindenáron a jól megszokott Descartes-koordinátákhoz ragaszkodnánk. Célszerű ezért bevezetni az ún. csuklókoordinátákat (angolul: joint coordinates), melyeket úgy értelmezünk, hogy a robot egy önkényesen megállapított konfigurációjában minden csuklóhoz zérus értéket rendelünk hozzá, majd a robotot ebből az alaphelyzetből (angolul: home position) kimozdítva minden csukló elmozdítását egy előjeles számmal fejezik ki. Ez a szám fizikailag P típusú csukló esetén a lineáris elmozdulás mértéke (pl. mm-ben), R típusú csukló esetén a szögelfordulás mértéke (pl. fokban).
Az eddigiekből kitűnik, hogy a robot bármely konfigurációja kifejezhető akár a csuklókoordináták aktuális értékeivel, akár a robotkéz pozícióját és orientációját jellemző (a világ-koordinátarendszerben értelmezett) adatokkal. A két fajta adathalmaz közötti kapcsolat megtalálása az egyik legbonyolultabb matematika probléma a robotikában. Egy hat csuklóval felszerelt, hat szabadságfokú robot egyes csuklóinak  ‑vel jelölt csuklókoordinátáiból egy hat dimenziós vektort képezhetünk
‑vel jelölt csuklókoordinátáiból egy hat dimenziós vektort képezhetünk
|
|

Ugyancsak hatdimenziós vektorral adható meg a robotkéz pozíciója és orientációja is, ezt a vektort p‑vel jelöljük. A p vektor meghatározása a q ismeretében az ún. direkt kinematikai feladat, míg az ezzel ellentétes irányú transzformációt inverz kinematikai feladatnak nevezzük. Az utóbbi probléma megoldását súlyosbítja az a körülmény is, hogy a robotkéz egy adott pozíciója és orientációja általában több különböző csuklószög helyzettel is megvalósítható, ilyenkor az inverz kinematikai feladat megoldása matematikailag nem egyértelmű.
Vizsgáljuk most meg kissé részletesebben két Descartes-koordinátarendszer egymáshoz viszonyított kölcsönös helyzetének leírását.
2.1. Homogén transzformációs mátrixok
Vegyünk fel térben tetszőleges helyen egy derékszögű koordinátarendszert az (2.1. ábra) ábrán látható módon!
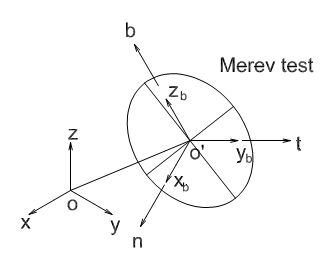
Legyen az  koordinátarendszer a világ koordinátarendszer, melynek O az origója, tengelyei pedig rendre x, y és z. Helyezzünk el a tér tetszőleges helyén egy merev testet, ehhez az
koordinátarendszer a világ koordinátarendszer, melynek O az origója, tengelyei pedig rendre x, y és z. Helyezzünk el a tér tetszőleges helyén egy merev testet, ehhez az  koordinátarendszert rendeljük (a merevtesthez rögzített koordináta rendszert body frame‑nek nevezi az angol terminológia). Az
koordinátarendszert rendeljük (a merevtesthez rögzített koordináta rendszert body frame‑nek nevezi az angol terminológia). Az  tengelyek irányába mutató egységvektorokat jelöljük rendre n‑, t‑ és b‑ vektorokkal jelöljük, továbbá az O világ koordináta rendszer origójából az
tengelyek irányába mutató egységvektorokat jelöljük rendre n‑, t‑ és b‑ vektorokkal jelöljük, továbbá az O világ koordináta rendszer origójából az  merev testhez rögzített koordináta rendszer origójába az
merev testhez rögzített koordináta rendszer origójába az
|
|
vektor mutat. Az  vektor a két koordinátarendszer egymáshoz képes kölcsönös pozícióját írja le.
vektor a két koordinátarendszer egymáshoz képes kölcsönös pozícióját írja le.
Vezessük be az R-rel jelölt 3×3-as mátrixot, amelynek oszlopvektorai rendre az n, t, b vektorok, ezáltal
|
|

Fontos megjegyezni, hogy az n, t, b vektorok ortonormált bázist alkotnak, azaz a vektorok egymásra merőlegesek (ortogonalitás), valamint egységnyi hosszúak. Ezáltal az R mátrix inverze megegyezik a mátrix transzponáltjával
|
|

ezáltal  , ahol E a 3×3-as egységmátrixot jelöli.
, ahol E a 3×3-as egységmátrixot jelöli.
Válasszuk ki a tér egy tetszőleges P pontját, és keressük ennek koordinátáit az előzőekben definiált két koordinátarendszerben kifejezve. Legyen a P pont pozícióvektora a világ koordinátarendszerben
|
|
valamint a merevtesthez rögzített koordináta rendszerben
|
|
Célunk, hogy kölcsönösen egyértelmű kapcsolatokat találjunk x és  vektorok között. Az eddigiek alapján írhatjuk
vektorok között. Az eddigiek alapján írhatjuk
|
|
(2.1) |

továbbá
|
|
(2.2) |

Szorozzuk meg mindkét oldalát balról  ‑tal, ezáltal az (2.2) egyenlet a következő formát ölti
‑tal, ezáltal az (2.2) egyenlet a következő formát ölti
|
|
(2.3) |

Az (2.3) egyenletből kifejezve  vektort
vektort
|
|
(2.4) |
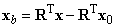
Mivel az  vektor a két koordinátarendszerben kölcsönös pozícióját, R mátrix pedig ezek kölcsönös orientációját fejezi ki, ezáltal az (2.4) egyenlet alkalmas két derékszögű koordinátarendszer közötti legáltalánosabb transzformáció leírására.
vektor a két koordinátarendszerben kölcsönös pozícióját, R mátrix pedig ezek kölcsönös orientációját fejezi ki, ezáltal az (2.4) egyenlet alkalmas két derékszögű koordinátarendszer közötti legáltalánosabb transzformáció leírására.
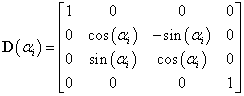
Speciális példaként tekintsük azt az esetet, amikor az  koordinátarendszert az
koordinátarendszert az  koordinátarendszerből úgy kapjuk, hogy azt annak z tengelye körül
koordinátarendszerből úgy kapjuk, hogy azt annak z tengelye körül  szöggel elforgatjuk. A puszta forgatás miatt O pont egybeesik
szöggel elforgatjuk. A puszta forgatás miatt O pont egybeesik  ‑vel, ezért
‑vel, ezért  , az R mátrix pedig a következőképpen írható fel (bizonyítás nélkül)
, az R mátrix pedig a következőképpen írható fel (bizonyítás nélkül)
|
|
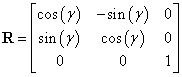
Míg az  vektort az origók közötti transzlációt írja le, az R mátrix pedig kizárólag a forgatási transzformációt fejezi ki, ezért is nevezik rotációs mátrixnak. Az R mátrix elemeinek ismerete egyértelműen, de redundáns módon írja le két derékszögű koordinátarendszer kölcsönös orientációját, hiszen a mátrix kilenc elemet tartalmaz, az orientáció eltérés megadásához pedig, mint tudjuk, három független adat elegendő. Ezért érdemes megjegyezni, hogy az R mátrix elemei között csak három lineárison független elemet találhatunk.
vektort az origók közötti transzlációt írja le, az R mátrix pedig kizárólag a forgatási transzformációt fejezi ki, ezért is nevezik rotációs mátrixnak. Az R mátrix elemeinek ismerete egyértelműen, de redundáns módon írja le két derékszögű koordinátarendszer kölcsönös orientációját, hiszen a mátrix kilenc elemet tartalmaz, az orientáció eltérés megadásához pedig, mint tudjuk, három független adat elegendő. Ezért érdemes megjegyezni, hogy az R mátrix elemei között csak három lineárison független elemet találhatunk.
A kölcsönös orientáció megadása három független (szög-) adattal többféleképpen is lehetséges. Az egyik lehetőség az orientáció megadása az ún. Euler-szögekkel. A 2.2. ábra és az alábbi gondolatmenet alapján belátható, hogy három alkalmasan megválasztott, egymást követő forgatással előállítható olyan koordinátarendszer, mely az eredetihez képest a lehető legáltalánosabb orientációjú.
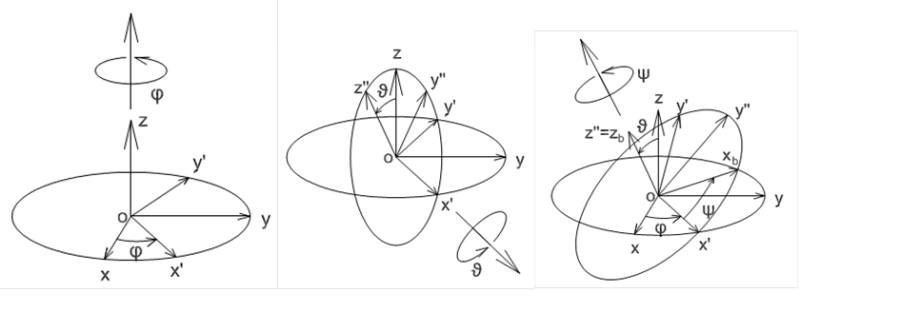
Az eredeti  koordinátarendszert rendre a következő forgatási transzformációknak vetjük alá
koordinátarendszert rendre a következő forgatási transzformációknak vetjük alá
Forgatás z tengely körül
 szöggel, a forgatás után kapott koordináta rendszer
szöggel, a forgatás után kapott koordináta rendszer  , ahol
, ahol  .
.Forgatás
 tengely körül
tengely körül  szöggel, a forgatás után kapott koordináta rendszer
szöggel, a forgatás után kapott koordináta rendszer  , ahol
, ahol  .
.Forgatás
 tengely körül
tengely körül  szöggel, a forgatás után kapott koordináta rendszer
szöggel, a forgatás után kapott koordináta rendszer  .
.
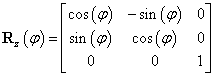
A fenti módon definiált  szögeket nevezzük Euler-szögeknek. Természetesen a fenti forgatások mindegyikéhez hozzárendelhető egy-egy rotációs mátrix, melyek rendre
szögeket nevezzük Euler-szögeknek. Természetesen a fenti forgatások mindegyikéhez hozzárendelhető egy-egy rotációs mátrix, melyek rendre
|
|
(2.5) | |
|
|
(2.6) | |
|
|
(2.7) |
A három forgatás egymásutánja az  eredő transzformációs mátrixszal írható le. Elvégezve a számításokat a következő formát kaphatjuk meg
eredő transzformációs mátrixszal írható le. Elvégezve a számításokat a következő formát kaphatjuk meg
|
|
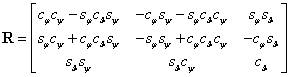
ahol  ,
,  ,
,  ,
,  ,
,  , valamint
, valamint  jelöléseket alkalmaztuk.
jelöléseket alkalmaztuk.
További lehetőséget az ún. hajómozgási szögekkel, vagy másképpen RPY szögekkel (Roll, Pitch, Yaw) való leírásmód ad
Az eredeti  koordinátarendszert rendre a következő forgatási transzformációknak vetjük alá
koordinátarendszert rendre a következő forgatási transzformációknak vetjük alá
Forgatás z tengely körül
 szöggel, a forgatás után kapott koordináta rendszer
szöggel, a forgatás után kapott koordináta rendszer  .
.Forgatás y tengely körül
 szöggel, a forgatás után kapott koordináta rendszer
szöggel, a forgatás után kapott koordináta rendszer  .
.Forgatás x tengely körül
 szöggel, a forgatás után kapott koordináta rendszer
szöggel, a forgatás után kapott koordináta rendszer  .
.
A fenti módon definiált  szögeket nevezzük RPY-szögeknek. Természetesen a fenti forgatások mindegyikéhez hozzárendelhető egy-egy rotációs mátrix, melyek rendre
szögeket nevezzük RPY-szögeknek. Természetesen a fenti forgatások mindegyikéhez hozzárendelhető egy-egy rotációs mátrix, melyek rendre
|
|
(2.8) | |
|
|
(2.9) | |
|
|
(2.10) |
A három forgatás egymásutánja az  eredő transzformációs mátrixszal írható le. A számítások hasonló módon történnek, mint a korábban bemutatott Euler-féle szögekkel történő reprezentáció során.
eredő transzformációs mátrixszal írható le. A számítások hasonló módon történnek, mint a korábban bemutatott Euler-féle szögekkel történő reprezentáció során.
A térbeli orientáció leírására további lehetőséget ad az ún. Tait‑Briant szögek alkalmazása is, miszerint az eredeti  koordinátarendszert rendre a következő forgatási transzformációknak vetjük alá
koordinátarendszert rendre a következő forgatási transzformációknak vetjük alá
Forgatás x tengely körül
 szöggel, a forgatás után kapott koordináta rendszer
szöggel, a forgatás után kapott koordináta rendszer  , ahol
, ahol  .
.Forgatás
 tengely körül
tengely körül  szöggel, a forgatás után kapott koordináta rendszer
szöggel, a forgatás után kapott koordináta rendszer  , ahol
, ahol  .
.Forgatás
 tengely körül
tengely körül  szöggel, a forgatás után kapott koordináta rendszer
szöggel, a forgatás után kapott koordináta rendszer  .
.
|
|
(2.11) | |
|
|
(2.12) | |
|
|
(2.13) |
A három forgatás egymásutánja az  eredő transzformációs mátrixszal írható le.
eredő transzformációs mátrixszal írható le.
Az összetett transzformációk (transzláció és rotáció) tömör, kompakt leírására a robotikában is kiterjedten alkalmazzák a 4×4‑es ún. homogén transzformációs mátrixokat.
|
|

ahol R a 3×3‑as forgatási mátrix, T a 3×1‑as transzlációs vektor, valamint 0 az 1×3‑as nullvektor. Fontos megjegyezni, hogy a homogén transzformációs mátrixok alkalmazása során a korábban 3 elemű vektorokat ki kell bővíteni egy 1-es elemmel, máskülönben a számítások nem végezhetőek el.
Általánosan elterjedt továbbá az egyes kartagok saját koordinátarendszerének felvételére, valamint ezek kölcsönös helyzetének leírására az ún. Denavit‑Hartenberg‑féle reprezentáció.
2.2. Denavit‑Hartenberg paraméterek
A robotok geometriájának általános leírására Denavit és Hartenberg 1955‑ben publikáltak egy módszert. A módszer alkalmazásával a csuklókoordináták transzformálása a világkoordináta rendszerbe az un. Denavit‑Hartenberg féle transzformációs mátrixszal történik. A Denavit‑Hartenberg koordináta transzformáció során egy koordináta rendszer egy tetszőleges koordináta rendszerben átvihető, ha két eltolást és két elforgatást a megfelelő sorrendben alkalmazunk. A robotok leírása során a két távolságot d‑vel és a‑val, valamint a két elforgatást leíró paramétert  ‑val, illetve q‑val jelöljük.
‑val, illetve q‑val jelöljük.
A konvencionális paraméterek bevezetéséhez első lépésként definiálnunk kell a robotok csuklóihoz rendelt koordináta rendszereket. Első lépésként az i‑edik és (i+1)‑edik csuklókra egy-egy derékszögű koordinátarendszert illesztünk, tehát a koordináta rendszerek origója a csukló középpontokba illeszkednek. A csuklókba illesztett koordináta rendszerek z tengelyei a csuklók irányába mutatnak.
A szabályrendszer értelmében az (i+1)‑edik csuklóba az  koordináta rendszert rögzítjük. A korábbiak alapján a
koordináta rendszert rögzítjük. A korábbiak alapján a  tengelyt az (i+1)‑edik csukló irányába helyezzük. Az
tengelyt az (i+1)‑edik csukló irányába helyezzük. Az  tengelyt az (i+1)‑edik és i‑edik csuklók (z irányú) tengelyeinek közös normálisába (normál transzverzális) esik, és az (i+1)‑edik csukló felé mutat. Az
tengelyt az (i+1)‑edik és i‑edik csuklók (z irányú) tengelyeinek közös normálisába (normál transzverzális) esik, és az (i+1)‑edik csukló felé mutat. Az  tengelyt pedig úgy választjuk meg, hogy az
tengelyt pedig úgy választjuk meg, hogy az  koordináta rendszer jobbsodrású koordináta rendszert alkosson.
koordináta rendszer jobbsodrású koordináta rendszert alkosson.
Továbbá az i‑edik csuklóba az  koordináta rendszert rögzítjük. A korábbiak alapján a
koordináta rendszert rögzítjük. A korábbiak alapján a  tengelyt az i‑edik csukló irányába helyezzük. Az
tengelyt az i‑edik csukló irányába helyezzük. Az  tengelyt az (i‑1)‑edik és i‑edik csuklók (z irányú) tengelyeinek közös normálisába esik, és az i‑edik csukló felé mutat. Az
tengelyt az (i‑1)‑edik és i‑edik csuklók (z irányú) tengelyeinek közös normálisába esik, és az i‑edik csukló felé mutat. Az  tengelyt pedig úgy választjuk meg, hogy az
tengelyt pedig úgy választjuk meg, hogy az  koordináta rendszer jobbsodrású koordináta rendszert alkosson. A robot többi tengely esetén hasonló módon járunk el.
koordináta rendszer jobbsodrású koordináta rendszert alkosson. A robot többi tengely esetén hasonló módon járunk el.
A konvencionális paraméterek a következőek. Első paraméterként definiáljuk a  paramétert rotációs csukló esetén az
paramétert rotációs csukló esetén az  tengely és az
tengely és az  tengely között bezárt jobbcsavar irányú szög nagysága.
tengely között bezárt jobbcsavar irányú szög nagysága.
Második paraméterként vezessük be a  paramétert, amely a korábban kijelölt csuklók normál transzverzálisainak távolságát jelöli, azaz a két normális közötti, az i‑edik csukló
paramétert, amely a korábban kijelölt csuklók normál transzverzálisainak távolságát jelöli, azaz a két normális közötti, az i‑edik csukló  tengelye mentén mért távolság.
tengelye mentén mért távolság.
Harmadik paraméterként az  távolságot vezetjük be, miszerint az i‑edik és (i+1)‑edik csuklótengelyek közös normálisának a hossza, amelyet az
távolságot vezetjük be, miszerint az i‑edik és (i+1)‑edik csuklótengelyek közös normálisának a hossza, amelyet az  tengely mentén mérünk.
tengely mentén mérünk.
Negyedik paraméterként a  paramétert vezetjük be, amely az i‑edik csukló
paramétert vezetjük be, amely az i‑edik csukló  tengelye, valamint az (i+1)‑edik
tengelye, valamint az (i+1)‑edik  tengelye között mért jobbcsavar irányú szög, az
tengelye között mért jobbcsavar irányú szög, az  paraméterre merőleges síkban.
paraméterre merőleges síkban.
A Denavit‑Hartenberg transzformációs eljárás során két szomszédos koordináta rendszer, az átvihető egymásba a két transzlációs és két rotációs transzformáció megfelelő sorrendben történő végrehajtása segítségével. Általános esetben az  koordináta rendszer átvihető az
koordináta rendszer átvihető az  koordináta rendszerbe a következőképp
koordináta rendszerbe a következőképp
|
|
(2.14) |

Első lépésben az 
 szöggel a
szöggel a  tengely körül, egészen addig, amíg az
tengely körül, egészen addig, amíg az  tengely az
tengely az  tengellyel párhuzamos nem lesz. A
tengellyel párhuzamos nem lesz. A  szöggel történő forgatás a következő homogén koordináta transzformációs mátrixszal írható le
szöggel történő forgatás a következő homogén koordináta transzformációs mátrixszal írható le
|
|
(2.15) |
Második lépésként a  tengely mentén
tengely mentén  nagysággal eltoljuk a koordináta rendszert, amíg a
nagysággal eltoljuk a koordináta rendszert, amíg a  tengely és az
tengely és az  tengely nem metszi egymást. A
tengely nem metszi egymást. A  paraméterrel történő eltolást a következő homogén koordináta transzformációs mátrixszal írható le
paraméterrel történő eltolást a következő homogén koordináta transzformációs mátrixszal írható le
|
|
(2.16) |
Harmadik lépésként eltoljuk a koordináta rendszert  nagysággal az
nagysággal az  tengely mentén, amíg a két koordináta rendszer origója nem metszi egymást, azaz az eltolást az
tengely mentén, amíg a két koordináta rendszer origója nem metszi egymást, azaz az eltolást az  origóig hajtjuk végre. Az
origóig hajtjuk végre. Az  paraméterrel történő eltolást a következő homogén koordináta transzformációs mátrixszal írható le
paraméterrel történő eltolást a következő homogén koordináta transzformációs mátrixszal írható le
|
|
(2.17) |
Végezetül negyedik lépésként elforgatjuk a koordináta rendszert  tengely körül
tengely körül  szöggel, amíg a két koordináta rendszer fedésbe nem jön, azaz az
szöggel, amíg a két koordináta rendszer fedésbe nem jön, azaz az  és
és  tengelyek, valamint a
tengelyek, valamint a  és
és  tengelyek nem fedik egymást. Az
tengelyek nem fedik egymást. Az  szöggel történő forgatás a következő homogén koordináta transzformációs mátrixszal írható le
szöggel történő forgatás a következő homogén koordináta transzformációs mátrixszal írható le
|
|
(2.18) |
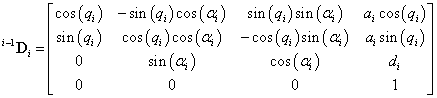
Tehát két egymást követő rotációs csukló közötti transzformáció (általános esetben az (i‑1)‑edik csuklóból az i‑edik csuklóba), elvégezve a (2.14) egyenletben szereplő számításokat a következő rotációs csuklóhoz rögzített koordináta rendszer esetén a Denavit‑Hartenberg féle transzformáció mátrix a következő
|
|
(2.19) |
Amennyiben transzlációs csuklóra alkalmazzuk a Denavit‑Hartenberg féle konvenciókat, a következő változócseréket kell végrehajtanunk, miszerint az  paraméter értéke zérus, a
paraméter értéke zérus, a  paraméter
paraméter  lesz, végezetül a rotációs csuklók leírásához használt szög pedig
lesz, végezetül a rotációs csuklók leírásához használt szög pedig  paraméter lesz, azaz
paraméter lesz, azaz  ,
,  ,
,  .
.
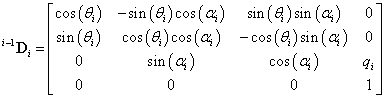
Felhasználva a bevezetett paraméter cseréket a (2.19) egyenlegben írt transzformációs mátrix transzlációs csuklók esetén a következő alakra módosul
|
|
(2.20) |
Ami után a korábban leírtak alapján minden csukló esetén meghatároztuk a Denavit‑Hartenberg féle transzformációs mátrixokat, azaz felírtuk minden (i‑1)‑edik csuklóból az i‑edik csuklóba meghatározhatjuk a robot álló (azaz a talajhoz rögzített pontjához rögzített koordináta rendszer) koordinátarendszere, valamint a végberendezés koordináta rendszere közötti transzformációs mátrixot. A transzformációs mátrixot az egymást követő csuklók Denavit‑Hartenberg féle mátrixok szorzata adja, azaz
|
|
(2.21) |

Az így kapott T mátrix a robot végberendezés szerszámközepének pozícióját és orientációját adja meg az álló koordináta rendszerben.
2.3. Robotok kinematikai leírása
A koordináta transzformációk áttekintése után rátérhetünk a robotok kinematikai leírásának kérdésére, vagyis a robotmozgások olyan jellegzetességével fogunk foglalkozni, amely a robotok mozgásának sebességeit írja le. A kinematikai jellemzést legegyszerűbb formában úgy fogalmazhatjuk meg, hogy keressük a kapcsolatot a robotkéz sebességének, illetve szögsebességének kapcsolatát a robot egyes csuklóinak sebessége illetve szögsebessége között.
A robotok kinematikai jellemzésének egyszerűbb tárgyalási módjának érdekében a (2.3. ábra) ábrán látható két szabadsági-fokú síkbeli manipulátort vizsgáljuk.
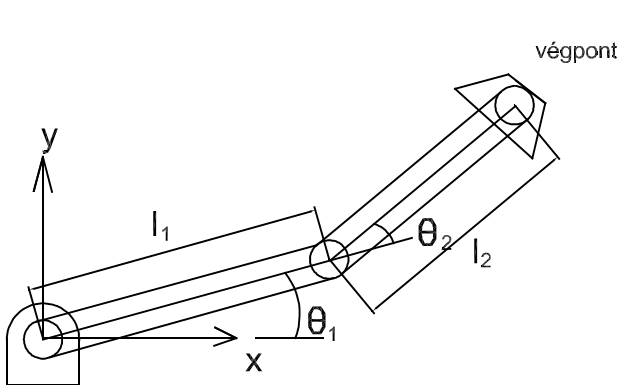
A manipulátor végpontjának koordinátája legyen x, y. Az ábra alapján az x, y koordinátákra vonatkozóan a következő egyenleteket írhatjuk fel, azaz
|
|
(2.22) | |
|
|
(2.23) |


Mivel célunk a mozgások időbeni lefolyásának vizsgálata, elő kell állítanunk a végpont sebességvektorát és a csukló szögsebességek vektorát. Ezért képezzük a fenti két egyenlet idő szerinti teljes deriváltját, miszerint
|
|
(2.24) | |
|
|
(2.25) |


Vegyük a korábbi két egyenletet, amelyet vektor‑mátrix formalizmussal is felírhatunk
|
|
(2.26) |
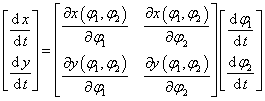
amelyet a következő tömör alakban adhatjuk meg,
|
|
(2.27) |

ahol J jelöli az un. Jacobi‑mátrixot.
Az így definiált J mátrixot a manipulátor adott konfigurációjára érvényes Jacobi-mátrixnak nevezzük. A példánkban szereplő egyszerű manipulátorra nézve –könnyen belátható módon- a következő Jacobi-mátrix adódik
|
|
(2.28) |

A mozgások vizsgálata megköveteli, hogy az elemi (infinitezimális) elmozdulások sajátosságaival is megismerkedjünk. Figyelmünket a következőkben az elemi elforgatások vizsgálatára összpontosítjuk, mert – amint később látni fogjuk – ezek bizonyos mértékben eltérő tulajdonságokkal rendelkeznek a véges szögű elforgatáshoz képest.
Elemi elforgatásokat bármely térbeli tengely mentén végezhető, ezért célszerű azokat vektormennyiségeknek tekinteni. Ha definiálunk egy  derékszögű koordinátarendszert, akkor abban bármely elemi elforgatás
derékszögű koordinátarendszert, akkor abban bármely elemi elforgatás  vektora három merőleges összetevőre bontható a következő alakban
vektora három merőleges összetevőre bontható a következő alakban
|
|
Végezzük el a  szögű elemi elforgatást előállítani a
szögű elemi elforgatást előállítani a  elforgatás összetevők egymás utáni végrehajtásaként!
elforgatás összetevők egymás utáni végrehajtásaként!
Vegyük sorra először az x tengelykörüli elforgatást, azaz végezzük el az elemi forgatást  elemi szöggel. A
elemi szöggel. A  szöggel történő forgatási mátrix
szöggel történő forgatási mátrix
|
|
(2.29) |

A közelítő megoldás meghatározásakor kihasználtuk, hogy kis szögelfordulások esetén  , valamint
, valamint  .
.
az y tengelykörüli elforgatást, azaz végezzük el az elemi forgatást  elemi szöggel. A
elemi szöggel. A  szöggel történő forgatási mátrix
szöggel történő forgatási mátrix
|
|
(2.30) |
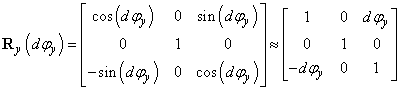
Hasonlóan az x tengely körüli forgatás kapcsán írt kis szögekre vonatkozó összefüggéseket az y tengely körüli forgatásnál is felhasználtuk.
Végül a z tengelykörüli elforgatást vizsgáljuk, azaz végezzük el az elemi forgatást  elemi szöggel. A
elemi szöggel. A  szöggel történő forgatási mátrix
szöggel történő forgatási mátrix
|
|
(2.31) |

Hasonlóan az x tengely körüli forgatás kapcsán bemutatott kis szögekre vonatkozó összefüggéseket a z tengely körüli forgatásnál is felhasználtuk.
Nézzük meg a két egymásra merőleges tengely körüli forgatást, példaképpen vizsgáljuk meg az x tengely, illetve y tengely körüli forgatást, miszerint
|
| ||
|
|


Elemi forgatást alkalmazva két elemi szög szorzata „kellőképpen kicsi”, azaz  , ezért a vegyes tagokat elhanyagoljuk, ezáltal az elemi forgatási mátrix a következő
, ezért a vegyes tagokat elhanyagoljuk, ezáltal az elemi forgatási mátrix a következő
|
|
(2.32) |
Vizsgáljuk meg, hogy mi történik akkor, ha a fordított sorrendben forgatunk tengelyek körül, azaz
|
|

|
|
(2.33) |

Tehát, ha a két elemi elforgatást fordított sorrendben végezzük el, akkor a forgatás sorrendjétől függetlenül az elemi forgatási mátrixok megegyeznek, tehát a jelen példa esetén
|
|

Ebből tehát az következik, hogy két, egymásra merőleges tengelyek körüli elemi elforgatás tetszőleges sorrendben elvégezhető.
Ugyancsak könnyű belátni, hogy három, egymásra merőleges tengely körüli elemi elforgatás eredője is független attól, hogy az egyes elforgatásokat milyen sorrendben végeztük el. A fentiekkel ellentétben ugyanez nem mondható el a véges szögű elforgatásokkal kapcsolatban. Ha azonos alaphelyzetből kiindulva ugyanazon két tengely körül 90 – 90 fokos elforgatásokat végzünk, az eredmény forgatások sorrendjétől eltérő lesz a két lehetséges esetben.
A továbbiakban egy általános, hat szabadságfokú robot kinematikai leírásával foglalkozunk. Amint már a bevezetőben utaltunk rá, a robotkéz (end effector) pozícióját és orientációját tömören egy hatelemű vektorral fejezhetjük ki.
|
|
(2.34) |

A robotkéz sebességét, és szögsebességét kifejező, ugyancsak hatelemű vektor a p vektor időszerinti deriválja lesz
|
|
(2.35) |
Tudjuk továbbá, hogy egy hat szabadságfokú robot  csuklókoordinátái ugyancsak egy hat elemű vektorban foglalhatóak össze.
csuklókoordinátái ugyancsak egy hat elemű vektorban foglalhatóak össze.
|
|
(2.36) |

Fölmerülhet az a kérdés, hogy milyen kapcsolat van a végpont, az a robotkéz sebességének és szögsebességének  és a csukló sebességek
és a csukló sebességek  vektora között. A kapcsolat általános esetben is a (kétdimenziós esetre már bevezetett) J Jacobi-mátrix írja le az alábbi módon
vektora között. A kapcsolat általános esetben is a (kétdimenziós esetre már bevezetett) J Jacobi-mátrix írja le az alábbi módon
|
|
(2.37) |

Annak érdekében, hogy a rendkívül tömör (2.37) összefüggés mögött rejlő fizikai tartalmat világosan lássuk, fel kell bontanunk az (2.37) egyenletben szereplő 6×6‑os Jakobi-mátrixot az alábbi módon
|
|
(2.38) |
Az (2.38) egyenlet szerinti szétbontás (ahol a  ‑k és
‑k és  ‑k háromelemű oszlopvektorokat jelentenek) lehetővé számunkra, hogy az egyes csuklómozgásoknak a robotkéz mozgására kifejtett hatását különválasszuk aszerint, hogy az transzlációban, vagy rotációban nyilvánul meg. A
‑k háromelemű oszlopvektorokat jelentenek) lehetővé számunkra, hogy az egyes csuklómozgásoknak a robotkéz mozgására kifejtett hatását különválasszuk aszerint, hogy az transzlációban, vagy rotációban nyilvánul meg. A  vektorok a transzlációt okozó hatást reprezentálják (az L betű az angol linear velocity kifejezésből adódik) a következő összefüggés szerint
vektorok a transzlációt okozó hatást reprezentálják (az L betű az angol linear velocity kifejezésből adódik) a következő összefüggés szerint
|
|
(2.39) |

A korábbiakban leírt Denavit‑Hatenberg paraméterek alfejezet alapján ismeretes, hogy az i‑edik csukló tengelye az (i-1)‑edik  tengelyével esik egybe a Denavit‑Hartenberg‑féle jelölésrendszer szerint. Jelöljük a
tengelyével esik egybe a Denavit‑Hartenberg‑féle jelölésrendszer szerint. Jelöljük a  pozitív irányában mutató egységvektort
pozitív irányában mutató egységvektort  ‑gyel! Ekkor P típusú (prizmatikus) csukló esetén a következő összefüggés lesz érvényes (az i‑edik csuklóra nézve)
‑gyel! Ekkor P típusú (prizmatikus) csukló esetén a következő összefüggés lesz érvényes (az i‑edik csuklóra nézve)
|
|
(2.40) |

ahol  az i‑edik prizmatikus csukló változó Denavit-Hartenberg paraméterének idő szerinti deriváltja. Továbbá, ha az i‑edik csukló R típusú (rotációs), akkor a
az i‑edik prizmatikus csukló változó Denavit-Hartenberg paraméterének idő szerinti deriváltja. Továbbá, ha az i‑edik csukló R típusú (rotációs), akkor a  tengely körüli forgás szögsebessége a következőképpen fejezhető ki
tengely körüli forgás szögsebessége a következőképpen fejezhető ki
|
|
(2.41) |

ahol  az i‑edik csukló R típusú (rotációs) csukló idő szerinti deriváltja. (2.41) egyenletben felírt
az i‑edik csukló R típusú (rotációs) csukló idő szerinti deriváltja. (2.41) egyenletben felírt  szögsebesség a robotkéz lineáris elmozdulásához is hozzájárul. Jelöljük
szögsebesség a robotkéz lineáris elmozdulásához is hozzájárul. Jelöljük  ‑vel azt a helyvektort, amely az (i-1)‑edik kartag koordinátarendszerének origójából,
‑vel azt a helyvektort, amely az (i-1)‑edik kartag koordinátarendszerének origójából,  ‑ből (a
‑ből (a  vektor kezdőpontjából) a robotkéz, vagy végberendezés koordinátarendszerének origójába mutat. Ekkor a következőt írhatjuk
vektor kezdőpontjából) a robotkéz, vagy végberendezés koordinátarendszerének origójába mutat. Ekkor a következőt írhatjuk
|
|
(2.42) |

Az előzőekben említett „hatásszétválasztás” második lépéseként most a robotkéz szögsebességével fogunk foglalkozni, melyet az alábbi összefüggéssel fejezünk ki
|
|
(2.43) |

Az A betű most az angol angular velocity kifejezésből származik. Az (2.43) összefüggés fizikailag azt fejezi ki, milyen mértékben járulnak hozzá az egyes csuklósebességek a robotkéz szögsebességének kialakulásához.
Ha az i‑edik csukló prizmatikus, akkor a megfelelő  vektor minden eleme értelemszerűen zérus lesz, hiszen egyenes menti elmozdulás nem okoz elfordulást a robotkézen. Rotációs csuklóra ezzel szemben a következő összefüggés lesz érvényes
vektor minden eleme értelemszerűen zérus lesz, hiszen egyenes menti elmozdulás nem okoz elfordulást a robotkézen. Rotációs csuklóra ezzel szemben a következő összefüggés lesz érvényes
|
|
(2.44) |

Az eddigieket összefoglalva megállapíthatjuk, hogy az (2.38) egyenlettel definiált Jacobi‑mátrix i‑edik teljes (hatelemű) oszlopvektora
Prizmatikus csukló esetén

(2.45)
rotáció csuklóra esetén
 .
.(2.46)
Ha ezek után feltesszük magunknak a kérdést, hogy mi az a legfontosabb, eredmény, amit az eddigiek során elértük, azt mondhatjuk, hogy a robot csuklókoordinátáinak és azok deriváltjának ismeretében meg tudjuk határozni a végpont pozícióját és orientációját, valamint a sebesség és szögsebesség vektorát. Ezt az ún. direkt kinematikai feladat.
A korábbiak tükrében felmerülhet az a kérdés, hogy képesek vagyunk-e az inverz kinematikai feladat megoldása is. A válasz az, hogy bizonyos esetekben, elvben képesek vagyunk megtalálni a megoldást. Ha ugyanis az (2.37) egyenlet mindkét oldalát balról formálisan megszorozzuk  ‑vel, az inverz Jacobi mátrixszal, a következő összefüggést kapjuk
‑vel, az inverz Jacobi mátrixszal, a következő összefüggést kapjuk
|
|
(2.47) |

A fenti, látszólag egyszerű összefüggés azonban a következő problémákat veti fel
A J Jacobi-mátrix függ a robot konfigurációjától. Minden robot karnál találunk olyan szinguláris konfigurációkat (pl: valamelyik kartag teljesen kinyújtott állapotban van), amikor a robotkar csupán öt szabadságfokú mozgás végzésére képes. Ilyen szinguláris esetben a Jacobi-mátrix nem invertálható.
Ha vizsgált eset nem szinguláris, akkor az (2.47) egyenlet matematikailag hatod fokú polinomhoz vezet, ezt a gyakorlatban a hatod fokú egyenlet gyökeinek megkeresését jelenti. Egy hatod fokú egyenlet gyökeinek meghatározására általános algebrai módszer nem létezik (nincs zárt alakú megoldó képlet), csak numerikusan tudjuk közelíteni.
Ha valamilyen speciális esetben találunk is algebrai megoldást, az sem lesz mindig egyértelmű, hanem általában véges sok (1…3) különböző megoldást kapunk.
A másodikként említett probléma feloldására D.L. PIEPER adott 1968-ban egy elégséges feltételt, amelynek teljesülése esetén az inverz kinematikai feladat algebrai úton megoldható. Amely szerint, ha egy robot rendelkezik három olyan egymást követő rotációs csuklóval, melyek tengelyei egy pontban metszik egymást, akkor az inverz kinematikai feladatnak létezik algebrai megoldása.
Ez esetben ugyanis az eredetileg hatod rendű probléma szeparálható (szétválasztható), azaz lebontható két harmadrendű polinom gyökeinek megkeresésére. Egy harmadfokú polinom gyökei pedig mindig meghatározhatok algebrai úton. A gyakorlatban alkalmazott ipari robotokat általában úgy konstruálják, hogy a három utolsó rotációs csukló tengelye egy pontban messe egymást (pl. a PUMA típusú robotok).
3. fejezet - Robotok statikai jellemzése
A robotok mechanikai szempontból történő leírásának következő fontos eleme a statikai jellemzés, amelynek során a nyugalomban lévő robotokban ébredő erőkkel és forgatónyomatékokkal foglalkozunk. Ezt az indokolja, hogy sok esetben ismernünk kell, mekkora csuklóerők illetve nyomatékok szükségesek ahhoz, hogy a robot egy adott munkadarabot nyugalmi helyzetben meg tudjon tartani. A statikai leírást a 3.1. ábra segítségével követhetjük nyomon.
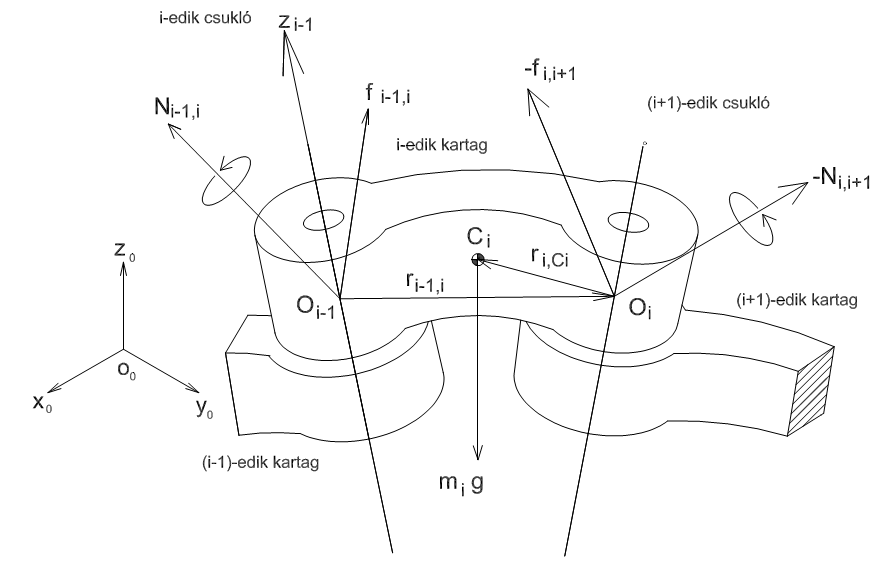
A kartagok, csuklók és koordináta rendszerek sorszámozása illetve indexelése az eddigi konvencióknak megfelelő. Írjuk fel először a nyugalomban lévő i‑edik kartagra az erők egyensúlyát kifejező egyenletet! Legyen az i‑edik kartag tömege  , jelöljük továbbá az i‑edik kartag által az i‑edik kartagra kifejtett erőt
, jelöljük továbbá az i‑edik kartag által az i‑edik kartagra kifejtett erőt  ‑vel az i‑edik kartag által az (i+1)‑edikre kifejtett erőt pedig
‑vel az i‑edik kartag által az (i+1)‑edikre kifejtett erőt pedig  ‑gyel. Ekkor a következő egyenletet írhatjuk fel
‑gyel. Ekkor a következő egyenletet írhatjuk fel
|
|
(3.1) |


Ha a csuklókban ébredő forgatónyomatékokat (az erők leírásához hasonló indexelést alkalmazva)  ‑vel illetve
‑vel illetve  ‑gyel jelöljük, továbbá az 5. ábrán látható irányvektorokat figyelembe vesszük, akkor a forgatónyomatékok egyensúlyát az alábbi egyenlet fejezi ki
‑gyel jelöljük, továbbá az 5. ábrán látható irányvektorokat figyelembe vesszük, akkor a forgatónyomatékok egyensúlyát az alábbi egyenlet fejezi ki
|
|
(3.2) |


Ha a kiszemelt i‑edik kartag a legutolsó vagyis az n‑edik, akkor is alkalmazhatjuk a fenti két egyenletet, azzal a kikötéssel, hogy a környezetet formálisan (n+1)‑edik kartagként vesszük számításba. Az utolsó kartag által a környezetre kifejtett erőket és forgatónyomatékokat együttesen a továbbiakban egy hatelemű F vektorral fejezzük ki, azaz
|
|
(3.3) |

Bevezetjük továbbá az ún. ekvivalens csuklónyomatékok (angolul: equivalent joint torques) fogalmát. Az i‑edik csukló ekvivalens csuklónyomatéka erő, vagy nyomaték dimenziójú leehet. Nagysága egyenlő annak az erőnek vagy nyomatéknak a nagyságával, amelyet az i‑edik csukló aktuátora fejt ki a csuklótengely irányában, illetve a tengely körül. Az egyes csuklok ekvivalens csuklónyomatékaiból egy n (általában hat) elemű vektort képezhetünk
|
|
(3.4) |
A  vektor egyes elemei a korábbi jelölésekkel a következőképpen fejezhető ki
vektor egyes elemei a korábbi jelölésekkel a következőképpen fejezhető ki
prizmatikus csukló esetén
 .
.(3.5)
rotációs csukló esetén
 .
.(3.6)
Keressünk kapcsolatot a (3.3) egyenlettel definiált F és a (3.4) egyenlettel definiált  vektor között! Állításunk a következő
vektor között! Állításunk a következő
|
|
(3.7) |

ahol  a korábbiakban bevezetett Jacobi‑mátrix.
a korábbiakban bevezetett Jacobi‑mátrix.
A bizonyításhoz a virtuális munka elvét fogjuk felhasználni. Ha a rendszer eredetileg egyensúlyban van, akkor az egyensúlyhelyzetből az adott geometriai kényszereknek eleget tevő virtuális elmozdulásokkal kimozdítva a rendszeren végzett eredő munka zérus.
Tegyük fel ezek után, hogy a robotot valamekkora virtuális elmozdulásoknak vetjük alá, amit kifejezhetünk egyrészt a végpont
|
|
(3.8) |

másrészt a csuklókoordináták
|
|
(3.9) |

elmozdulás vektorával.
Valamennyi erő és forgatónyomaték hatását figyelembe véve a végzett virtuális munka a következőképpen írható fel, azaz
|
|

amelyből
|
|

továbbá
|
|
(3.10) |

A levezetés során figyelembe vettük, hogy  . Mivel az (3.10)‑ben felírt
. Mivel az (3.10)‑ben felírt  virtuális munka tetszőleges
virtuális munka tetszőleges  virtuális elmozdulásra zérus kell, hogy legyen, ez csak akkor teljesülhet, ha
virtuális elmozdulásra zérus kell, hogy legyen, ez csak akkor teljesülhet, ha
|
|
(3.11) |

A (3.11) összefüggést átrendezve valóban a bizonyítani kívánt (3.7) összefüggéshez jutunk.
A továbbiakban tovább fejlesztjük eredeti robotmodellünket. Mindeddig ugyanis – első közelítésként – feltételeztük, hogy a robot kartagjai ideális merev testek, csuklói és beavatkozó szervezi, azaz aktuátorai pedig kotyogásmentesek (holtjáték), továbbá feltételeztük azt is, hogy súrlódásmentesek. E feltételezések egyike sem külön teljesül igazából a valóságos robotoknál.
Modellünk pontosítása során elsőként a csuklókban elhelyezett aktuátorok korlátozott merevségének hatását fogjuk figyelembe venni. Szabályozástechnikai szempontból ugyanis döntő jelentőségű, hogy ha valamelyik  csuklókoordináta az előírt értéktől valamekkora
csuklókoordináta az előírt értéktől valamekkora  értékkel eltér, akkor erre a szabályozóval ellátott aktuátor egy megfelelő
értékkel eltér, akkor erre a szabályozóval ellátott aktuátor egy megfelelő  csuklónyomaték változással reagáljon. Egyelőre lineáris közelítést fogunk alkalmazni, ami az esetek többségében elfogadható eredményt ad.
csuklónyomaték változással reagáljon. Egyelőre lineáris közelítést fogunk alkalmazni, ami az esetek többségében elfogadható eredményt ad.
Minden egyes csuklóra tehát egy
|
|
(3.12) |

alakú lineáris összefüggést írunk fel, ahol  tényezők egyfajta „rugóállandókként” értelmezhetők. A
tényezők egyfajta „rugóállandókként” értelmezhetők. A  tényezőkből képezhetünk egy
tényezőkből képezhetünk egy
|
|
(3.13) |

diagonális mátrixot, amelyet csuklómerevségi mátrixnak nevezünk.
Most arra a kérdésre keressük a választ, hogyan érvényesül az ekvivalens csuklónyomatékok megváltozásának ( ‑nak) a hatása a robot és a környezet közötti kölcsönhatást kifejező F vektor megváltozásában. Az (3.7) összefüggés most értelemszerűen
‑nak) a hatása a robot és a környezet közötti kölcsönhatást kifejező F vektor megváltozásában. Az (3.7) összefüggés most értelemszerűen
|
|
(3.14) |

alakban lesz érvényes. Másfelől a (3.12) és (3.13) egyenletek alapján írhatjuk, hogy
|
|
(3.15) |

ha kihasználjuk, továbbá a jól ismert összefüggést. Ha a (3.12) egyenlettel definiált
összefüggést. Ha a (3.12) egyenlettel definiált  együtthatók egyike sem zérus (ami működésképes, szabályozott hajtásokkal ellátott robotoknál nyílván valóan fönnáll), akkor a K diagonális mátrix invertálható. A (3.12) - (3.15) egyenletek felhasználásával végül is a következő eredményt írhatjuk fel
együtthatók egyike sem zérus (ami működésképes, szabályozott hajtásokkal ellátott robotoknál nyílván valóan fönnáll), akkor a K diagonális mátrix invertálható. A (3.12) - (3.15) egyenletek felhasználásával végül is a következő eredményt írhatjuk fel
|
|
(3.16) |

ahol
|
|
(3.17) |

a robot úgynevezett végpontra vonatkoztatott engedékenységi (angolul: compliance) mátrixa.
A C engedékenységi mátrixról jegyezzük meg, hogy az – K csuklómerevségi mátrixszal ellentétben – általában nem diagonális mátrix. Ez abból adódik, hogy a robot egyetlen csuklójának mozgása is a végpont több szabadságfokú mozgását eredményezheti.
4. fejezet - Robotok dinamikai jellemzése
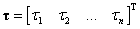
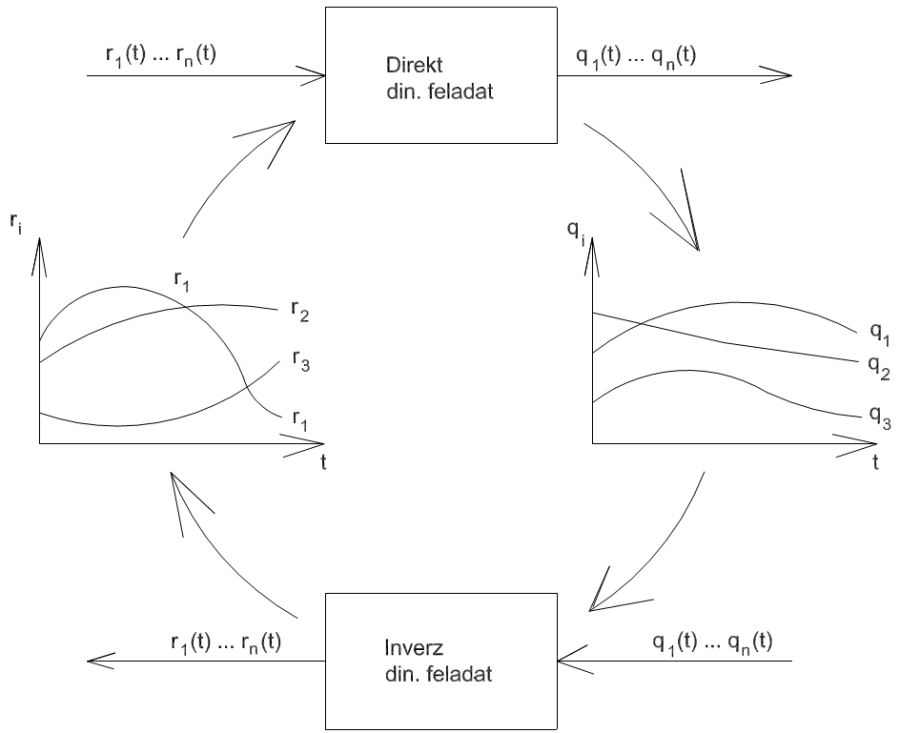
A korábban bemutatottak alapján kijelenhető, hogy robotok kinematikai jellemzése során kizárólag a robot mozgások leírásának lehetőségeire szorítkoztunk, a mozgást létrehozó okok figyelmen kívül hagyásával. A robotmozgások mechanikai jellemzése a jelen alfejezetben teljesedik ki, amelynek során eljutunk a robot irányítás legalapvetőbb egyenletének felállításához és megismerkedünk egy elterjedt és hatékony számítási algoritmus elvi alapjaival, mely algoritmus számos robot irányítási feladat megvalósításakor igen eredményesen alkalmazható. A robotmozgások dinamikai tárgyalását egy tetszőlegesen megválasztott, i‑edik kartag mozgásának vizsgálatával kezdjük, az 4.1. ábra segítségével, amely a 3.1. ábra némileg módosított változata.
Elöljáróban megjegyezzük, hogy – akárcsak a kinematikai feladatok esetében – beszélhetünk direkt és inverz dinamikai feladatról. Az előbbinél adott ekvivalens csukló nyomatékok esetén vizsgáljuk a robot mozgását, az utóbbinál azt keressük, hogy az általunk megkövetelt robotmozgás az ekvivalens csuklónyomatékok milyen értékeivel valósítható meg.
A dinamikai egyenleteket először az ún. Newton–Euler- formalizmus szerint fogjuk felírni. Ez az eljárás lényegében a Newton axiómákon nyugvó mechanikai szemléletmódot követi.
Jelöljük az (4.1. ábra) ábrán látható módon  ‑vel az i‑edik kartag tömegközéppontjának sebességvektorát és
‑vel az i‑edik kartag tömegközéppontjának sebességvektorát és  ‑vel a tömegközéppontja körüli forgásának szögsebesség vektorát! Az 4.1. ábra összes többi vektorának értelmezése megtalálható a 3.1. ábra leírásánál.
‑vel a tömegközéppontja körüli forgásának szögsebesség vektorát! Az 4.1. ábra összes többi vektorának értelmezése megtalálható a 3.1. ábra leírásánál.
Ha az i‑edik kartagot gyorsuló vonatkoztatási rendszerként fogjuk fel, akkor az erőkre vonatkozó dinamikai egyenletet úgy nyerjük, hogy az (3.1) egyenlet jobb oldalát kiegészítjük a  tehetetlenségi erővel (az idő szerinti deriváltakat a szokásoknak megfelelően, ahol csak lehetséges, az illető mennyiség betűjele fölé írt ponttal, illetve pontokkal fogjuk jelölni)
tehetetlenségi erővel (az idő szerinti deriváltakat a szokásoknak megfelelően, ahol csak lehetséges, az illető mennyiség betűjele fölé írt ponttal, illetve pontokkal fogjuk jelölni)
|
|
(4.1) |

Kissé bonyolultabb úton juthatunk el a forgatónyomatékokra vonatkozó egyenlet az ún. Newton‑Euler‑egyenlet felírásához. Ehhez mindenekelőtt definiálnunk kell a robot kartagjainak tehetetlenségi tenzorát. Tetszőleges merev test tenzora alatt a következő 3×3‑as kvadratikus mátrixot értjük
|
|
(4.2) |
ahol
|
| ||
|
| ||
|
| ||
|
| ||
|
| ||
|
|






ahol  a test anyagának sűrűsége;
a test anyagának sűrűsége;  a test tömegközpontjának koordinátái ( abban a koordinátarendszerben, amelyben a tehetetlenségi nyomatékot meg akarjuk határozni); x, y és z a test egyes anyagi pontjainak koordinátái (mint futókoordináták), dV pedig az elemi térfogat, mint integrálási változó. Természetesen valamennyi szereplő integrált a test teljes térfogatára ki kell terjeszteni.
a test tömegközpontjának koordinátái ( abban a koordinátarendszerben, amelyben a tehetetlenségi nyomatékot meg akarjuk határozni); x, y és z a test egyes anyagi pontjainak koordinátái (mint futókoordináták), dV pedig az elemi térfogat, mint integrálási változó. Természetesen valamennyi szereplő integrált a test teljes térfogatára ki kell terjeszteni.
Egy kis kitérőként emlékeztetünk arra, hogy egy rögzített tengely körül forgó merevtest forgási tehetetlensége egyetlen állandó skaláris adattal, az I tehetetlenségi nyomatékkal jellemezhető, továbbá ha a forgás  ‑val jelölt szögsebessége nem állandó, a forgó mozgás fenntartásához szükséges N forgatónyomaték az alábbi egyenletből határozható meg
‑val jelölt szögsebessége nem állandó, a forgó mozgás fenntartásához szükséges N forgatónyomaték az alábbi egyenletből határozható meg
|
|
(4.3) |

Bonyolultabbá akkor válik a helyzet (így a robotmozgások esetében is), ha a forgástengely, illetve forgáspont nem rögzített, hanem változó helyzetű. Ilyen esetben az (4.3)‑gyel felírt perdület tétel (impulzusmomentum‑tétel) csak olyan formában érvényes, ha a perdület teljes idő szerinti deriváltját képezzük, ami a következőképpen írható fel
|
|
(4.4) |

A fenti összefüggés a mechanikai előtanulmányokból feltehetően ismert, hogy ha egy forgó koordinátarendszerben felírt vektor idő szerinti deriváltját képezzük egy rögzített koordinátarendszerben, akkor az így nyert derivált két tagból fog állni. Ezek közül az egyiknél a  differenciáloperátor szerepét lényegében a szögsebesség vektorral balról történő vektoriális szorzás
differenciáloperátor szerepét lényegében a szögsebesség vektorral balról történő vektoriális szorzás  tölti be.
tölti be.
Ennyi előismeret birtokában felírhatjuk a forgatónyomatékokra vonatkozó dinamikai egyenletet
|
|
(4.5) |


A fenti egyenletben magyarázatra lényegében csak a baloldal utolsó tagja szorul. Ez a tag nem más, mint az előbbiekben ismertetett effektusokból adódó ún. giroszkopikus nyomaték.
A (4.1) és (4.5) egyenletekből álló Newton‑Euler formalizmus rendelkezik mind előnyös, mind hátrányos tulajdonságokkal. A módszer javára írható, hogy az egyenletekben szereplő tagok mindegyikéhez jól körülhatárolható, szemléletes fizikai jelentés rendelhető hozzá. Számítástechnikai szempontból további előny, hogy ezen egyenletek alapján viszonylag egyszerű az adott feladat algoritmizálhatósága. Ugyanakkor hátrányként kell elkönyvelni azt a tényt, hogy az egyenletekben szereplő  sebesség és
sebesség és  szögsebesség vektorok nem alkotnak független rendszert, hiszen valamennyi kartag mozgása hatást gyakorol az összes további kartag mozgására.
szögsebesség vektorok nem alkotnak független rendszert, hiszen valamennyi kartag mozgása hatást gyakorol az összes további kartag mozgására.
Az említett hátrány kiküszöbölésére a robotikában is használatos az ún. Euler‑Lagrange formalizmus, mely a Newton‑Euler formalizmussal fizikailag teljesen egyenértékű dinamikai leírást tesz lehetővé.
A korábbi tanulmányokból ismert, hogy a Newton‑Euler formalizmus a dinamikai problémák energetikai megközelítésén alapul, és egyenleteiben ún. általánosított erők és általánosított koordináták, valamint az utóbbiak idő szerinti deriváltjai szerepelnek. Mind az általánosított erők, mind az általánosított koordináták független (nem csatolt) rendszert alkotnak, s lehetőség nyílik ún. zárt alakú dinamika egyenletek felállítására.
Ha a Lagrange-formalizmust robotokra kívánjuk alkalmazni, általánosított koordinátáknak a  csuklókoordinátákat, általánosított erőknek pedig a
csuklókoordinátákat, általánosított erőknek pedig a  ekvivalens csuklónyomatékokat választjuk, amikhez egyes esetekben még egy járulékos tag hozzáadódhat. A járulékos tagot jelöljük
ekvivalens csuklónyomatékokat választjuk, amikhez egyes esetekben még egy járulékos tag hozzáadódhat. A járulékos tagot jelöljük  ‑vel.
‑vel.
Ha egy adott állapotban lévő mechanikai rendszer, pl. robot teljes kinetikus energiáját T‑vel, teljes potenciális energiáját pedig U‑val jelöljük, akkor a rendszer Lagrange függvénye definíciószerűen
|
|
(4.6) |
A robot minden egyes szabadságfokára felírhatjuk, az alábbi alakú, igen tömör Lagrange-féle mozgásegyenletet
|
|
(4.7) |
ahol  az i‑edik általánosított erő.
az i‑edik általánosított erő.
Fejtsük ki ezek után kissé részletesebben a fenti egyenlet egyes tagjait! Az i‑edik kartag kinetikus energiája
|
|
(4.8) |
ahol minden szereplő mennyiség azonos jelentésű a korábban definiáltakkal. A robot teljes kinetikus energiája tehát
|
|
(4.9) |

Az i‑edik kartag kinetikus energiájára felírt (4.8) összefüggés azonban az előbbiek értelmében nem zárt alakú egyenlet, hiszen az egyes  ‑k és
‑k és  ‑k nem függetlenek egymástól. Célunk tehát most az, hogy a kartagok kinetikus energiájára (majd pedig potenciális energiájukra is) zárt alakú, a csuklókoordinátákat illetve azok deriváltjait tartalmazó összefüggéseket nyerjük.
‑k nem függetlenek egymástól. Célunk tehát most az, hogy a kartagok kinetikus energiájára (majd pedig potenciális energiájukra is) zárt alakú, a csuklókoordinátákat illetve azok deriváltjait tartalmazó összefüggéseket nyerjük.
A korábbi (2.39) és (2.43) egyenletekkel megteremtettük annak lehetőségét, hogy a végpont sebességének illetve szögsebességének vektorát az egyes csuklósebességekkel fejezzük ki, felhasználva a (2.38) szerint szétbontott Jacobi‑mátrixot.
Semmi akadálya nincs annak, hogy hasonló összefüggéseket írjunk fel bármely  -edik kartag
-edik kartag  sebesség- illetve
sebesség- illetve  szögsebesség vektorára. Természetesen
szögsebesség vektorára. Természetesen 
 esetben az i‑edik kartag mozgását csak az azt megelőző csuklók mozgása befolyásolja, így az i‑edik kartagig bezárólag
esetben az i‑edik kartag mozgását csak az azt megelőző csuklók mozgása befolyásolja, így az i‑edik kartagig bezárólag  értelmezett Jacobi-mátrix – amit a továbbiakban
értelmezett Jacobi-mátrix – amit a továbbiakban  ‑vel jelölünk – mindenképpen eltér az (2.38) szerintitől annyiban, hogy az utolsó (n+1) darab oszlopvektora nullvektor lesz, vagyis
‑vel jelölünk – mindenképpen eltér az (2.38) szerintitől annyiban, hogy az utolsó (n+1) darab oszlopvektora nullvektor lesz, vagyis
|
|
(4.10) |
Az (2.39) és (2.43) egyenletek analógiájára most már felírhatjuk, hogy
|
|
(4.11) |

valamint
|
|
(4.12) |

Továbbá a (4.11) és a (4.12) egyenleteket megadhatjuk ennél tömörebb alakban is
|
|
(4.13) |


A  mátrix egyes elemeire felírhatjuk továbbá
mátrix egyes elemeire felírhatjuk továbbá
|
|
(4.14) |

illetve
|
|
(4.15) |

Megjegyezzük, hogy a  vektor a (j-1)‑edik csuklótengely pozitív irányba mutató egységvektor; az
vektor a (j-1)‑edik csuklótengely pozitív irányba mutató egységvektor; az  vektor értelmezését.
vektor értelmezését.
Felhasználva az (4.8) – (4.15) összefüggéseket, a robot teljes kinetikus energiájára az alábbi kifejezés kapjuk
|
|
(4.16) |

ahol
|
|
(4.17) |
a robot egészének tehetetlenségi nyomatéki tenzora, mely az egyes kartagok  tehetetlenségi nyomatéki tenzoraihoz hasonlóan ugyancsak konfigurációfüggőek.
tehetetlenségi nyomatéki tenzoraihoz hasonlóan ugyancsak konfigurációfüggőek.
Ha  -vel jelöljük a H mátrix
-vel jelöljük a H mátrix  ‑edik elmélet. Akkor az (4.16) egyenletet átírhatjuk a következő alakba
‑edik elmélet. Akkor az (4.16) egyenletet átírhatjuk a következő alakba
|
|
(4.18) |
Egy kicsit egyszerűbb dolgunk van, ha a robot potenciális energiáját akarjuk kifejezni, ez ugyanis egyszerűbben alakban írható
|
|
(4.19) |
Továbbiakban azt a kérdést vizsgáljuk meg, mikor azonosíthatjuk az általánosított erőket az ekvivalens csukló nyomatékokkal, és mikor kell az utóbbiakat még egy, a korábbiakban már említett járulékos taggal kiegészíteni. A válasz az, hogy ha a robot végpontja a környezettel kölcsönhatásban van és a környezettet  erővel (
erővel ( hatelemű, erőket és nyomatékokat is magában foglaló vektor) hat a robot végpontjára, akkor állításunk szerint az általánosított erők
hatelemű, erőket és nyomatékokat is magában foglaló vektor) hat a robot végpontjára, akkor állításunk szerint az általánosított erők
|
|
(4.20) |

alakban fejezhetők ki.
Állításunkat ismét a virtuális munka elvének felhasználásával bizonyítjuk be. Fejtsük ki, ugyanis az aktuátorok  ekvivalens csuklónyomatékokat, a környezet pedig
ekvivalens csuklónyomatékokat, a környezet pedig  erőhatást, s tegyük fel, hogy a robot nyugalomban van! Ekkor bármely virtuális elmozdulás a csuklókoordináták térben
erőhatást, s tegyük fel, hogy a robot nyugalomban van! Ekkor bármely virtuális elmozdulás a csuklókoordináták térben  ‑val, a végpont világkoordinátában
‑val, a végpont világkoordinátában  ‑vel jelölhető. A végzett virtuális munka
‑vel jelölhető. A végzett virtuális munka
|
|
(4.21) |

Másfelől a virtuális munka az általánosított erők és a csuklókoordinátákban kifejezett virtuális elmozdulások szorzatának összegével egyenlő
|
|
(4.22) |

Az (4.21) és (4.22) egyenletek jobb oldalának összevetésével az (4.20) állítás, bizonyítást nyert.
Most már minden szükséges részeredmény (a tejesség igénye nélkül, a robot teljes kinetikus és teljes potenciális energiájának kifejezése) rendelkezésünkre áll ahhoz, hogy felírhassuk a robot Euler‑Lagrange‑féle dinamikai egyenletét. Az (4.18) alapján az (4.7) egyenlet első tagja a következőképpen írható fel
|
|
(4.23) |

A  elemek a
elemek a  csuklókoordináták függvényei, ezért idő szerinti deriváltjuk a következőképpen is kiszámítható
csuklókoordináták függvényei, ezért idő szerinti deriváltjuk a következőképpen is kiszámítható
|
|
(4.24) |
Ami a robot potenciális energiáját illeti, az a csuklósebességektől független, vagyis értelemszerűen
|
|
(4.25) |


Az (4.7) egyenlet második tagjában a kinetikus és a potenciális energia csuklókoordináták szerinti parciális deriváltjai jelennek meg, és pedig
|
|
(4.26) |

illetve
|
|
(4.27) |
mivel az  helyvektor
helyvektor  szerinti parciális deriváltja könnyen belátható módon az (4.10)‑gyel definiált
szerinti parciális deriváltja könnyen belátható módon az (4.10)‑gyel definiált  Jacobi‑mátrix
Jacobi‑mátrix  oszlopvektorával egyenlő. Az (4.23) – (4.27) egyenleteket (4.7)‑ba helyettesítve végül is a következő egyenletet kapjuk
oszlopvektorával egyenlő. Az (4.23) – (4.27) egyenleteket (4.7)‑ba helyettesítve végül is a következő egyenletet kapjuk
|
|
(4.28) |

ahol
|
|
(4.29) |
Az egész eddigi tananyag legfontosabb eredményének az (4.28) egyenletet tekinthetjük, amit joggal nevezhetünk a robotirányítás alapegyenletének is. Az egyenlet egyenes tagjaihoz a következő fizikai jelentést rendelhetjük hozzá:
a baloldal első tagja tartalmazza a kartag lineáris gyorsulásához szükséges erőt, illetve szöggyorsuláshoz szükséges forgatónyomatékot.
 esetben a baloldal második tagja fejezi ki a kartag forgásakor fellépő centrifugális erőt
esetben a baloldal második tagja fejezi ki a kartag forgásakor fellépő centrifugális erőt esetben a baloldal második tagja azt a Coriolis‑erőt fejezi ki, amely akkor lép fel, ha valamely kartag egy másik kartaghoz rögzített forgó koordinátarendszerhez képest haladó mozgást végez.
esetben a baloldal második tagja azt a Coriolis‑erőt fejezi ki, amely akkor lép fel, ha valamely kartag egy másik kartaghoz rögzített forgó koordinátarendszerhez képest haladó mozgást végez.a baloldal harmadik tagja a kartagok saját súlyát, illetve az azokból adódó forgatónyomatékokat reprezentálja.
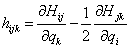
Az ábra felső részén látható téglalap az irányítóegységgel (esetleg számítógéppel) összekapcsolt robotot, mint komplex rendszert jelképezi. Ennek bemenő jeleit a  mennyiségek, vagyis az ekvivalens csuklónyomatékok időfüggvényei alkotják, míg a kimenetek csuklókoordináták
mennyiségek, vagyis az ekvivalens csuklónyomatékok időfüggvényei alkotják, míg a kimenetek csuklókoordináták  időfüggvények. Az alsó téglalap ugyanazt a rendszert jelképezi, mint a felső, azonban a ki- és bemenetek szerepet cseréltek. Az inverz dinamikai feladat megoldását tehát a következőképpen is megfogalmazhatjuk.
időfüggvények. Az alsó téglalap ugyanazt a rendszert jelképezi, mint a felső, azonban a ki- és bemenetek szerepet cseréltek. Az inverz dinamikai feladat megoldását tehát a következőképpen is megfogalmazhatjuk.
A robot használatának célja többnyire az, hogy a végpont (a robotkéz) egy általunk megkívánt, az elvégzendő feladat által meghatározott térbeli mozgást valósítson meg. Ennél fogva bemenőjelként az egyes csuklókoordináták  időfüggvényeit írhatjuk fel. Az irányítórendszer (számítógép) feladata lényegében az egyes ekvivalens csuklónyomatékok
időfüggvényeit írhatjuk fel. Az irányítórendszer (számítógép) feladata lényegében az egyes ekvivalens csuklónyomatékok  időfüggvényeinek előállítása, vagyis az egyes
időfüggvényeinek előállítása, vagyis az egyes  értékek időpillanatról időpillanatra történő kiszámítása.
értékek időpillanatról időpillanatra történő kiszámítása.
Az inverz dinamikai feladat megoldása általában sok számítástechnikai nehézséget rejt magában. Mint láttuk, az Euler‑Lagrange‑féle dinamikai egyenletek (4.28) szerinti alakja rendkívül tömör, kompakt módon írja le a robotmozgások dinamikáját.
Ha azonban valósidejű (angolul: real-time) számítógépes robotirányítást kívánunk megvalósítani, az Euler‑Lagrange formalizmus alkalmazása meglehetősen előnytelen, tekintettel arra, hogy az Euler‑Lagrange-egyenletekre alapozott algoritmusok számításigénye igen nagy. Ez esetben egy-egy feladat megvalósításához elvégzendő aritmetikai műveletek száma nagyjából a szabadságfokok számának harmadik-negyedik hatványával arányos. Ezért jóval célszerűbb a Newton‑Euler formalizmuson alapuló algoritmusok alkalmazása, ahol a számításigény csupán a szabadságfokok számának első hatványával arányos.
A 4.3. ábra egy Newton‑Euler formalizmuson alapuló rekurzív algoritmust szemléltet, ami tulajdonképpen a direkt kinematikai és az inverz dinamikai feladat kombinációjának tekinthető.
Az eljárás abból indul ki, hogy (mint teljesítendő követelményt) ismerjük, valamennyi csuklókoordináta  időfüggvényét, így azok idő szerinti első és második deriváltját is –
időfüggvényét, így azok idő szerinti első és második deriváltját is –  és a
és a  függvénynek – meghatározhatók, tehát ismertnek feltételezhetők.
függvénynek – meghatározhatók, tehát ismertnek feltételezhetők.
Az eljárás első részében rendre meghatározzuk az (4.11), (4.12) és (4.13) egyenletekben szereplő kinetikai változókat. Például első lépésként  ismeretében meghatározzuk az első kartagra jellemző
ismeretében meghatározzuk az első kartagra jellemző  , és így tovább. Az eljárás ezen első fázisát mindig folytatjuk, míg el nem jutunk az utolsó kartag kinetikai jellemzőinek értékeiig.
, és így tovább. Az eljárás ezen első fázisát mindig folytatjuk, míg el nem jutunk az utolsó kartag kinetikai jellemzőinek értékeiig.
Ezután kerül sor az algoritmus dinamikai részének megvalósítására. Az (4.1) egyenletet  helyettesítéssel a következő alakra hozhatjuk
helyettesítéssel a következő alakra hozhatjuk
|
|
(4.30) |

ahol
|
|
(4.31) |

Az eljárás rekurzív jellege most már világosan látható, hiszen az (4.30)‑hez teljesen hasonló módon megkaphatjuk  ‑t ugyanis ismerjük
‑t ugyanis ismerjük  értékét. A rekurzív eljárás dinamikai szakaszát tehát – most a forgatónyomatékot figyelembe vevő Newton‑Euler‑egyenleteket is felírva – a következő egyenletekkel jellemezhetjük.
értékét. A rekurzív eljárás dinamikai szakaszát tehát – most a forgatónyomatékot figyelembe vevő Newton‑Euler‑egyenleteket is felírva – a következő egyenletekkel jellemezhetjük.
|
|
(4.32) | |
|
|
(4.33) |


A jelen fejezet befejezéseként egy konkrét, jól bevált számítási algoritmust fogunk ismertetni, ennek előkészítéseként azonban meg kell ismerkednünk néhány olyan jelenséggel, melyek akkor lépnek fel, ha valamilyen mozgást két, egymáshoz képest forgó mozgást végző koordinátarendszerben is le akarunk írni.
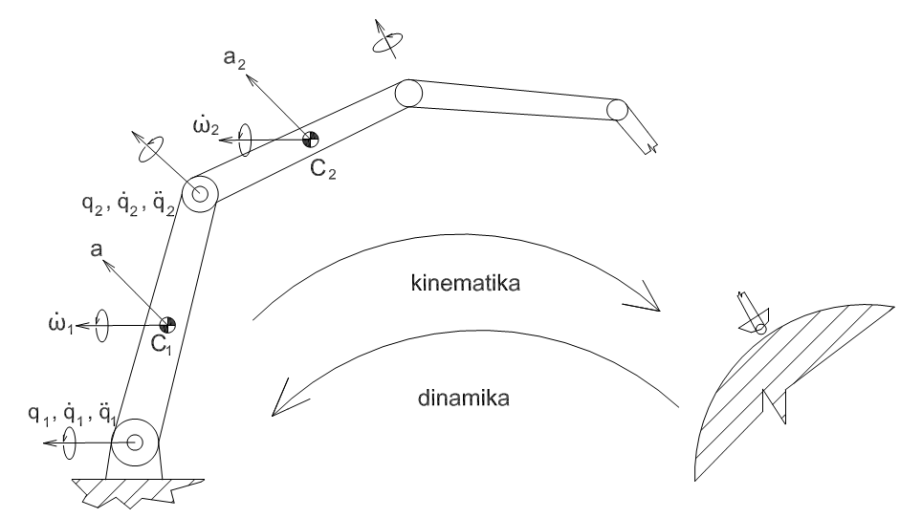
Vegyük fel a 4.4. ábra szerint egy, a környezethez képest nyugalomban lévő  világ‑koordinátarendszert, valamint egy, az előbbihez képest
világ‑koordinátarendszert, valamint egy, az előbbihez képest  szögsebességgel puszta forgó mozgást végző
szögsebességgel puszta forgó mozgást végző  koordinátarendszert! Tekintsünk egy, az
koordinátarendszert! Tekintsünk egy, az  vonatkozási rendszerhez képest nyugvó (ezáltal a világ‑koordinátarendszerből szemlélve ugyancsak
vonatkozási rendszerhez képest nyugvó (ezáltal a világ‑koordinátarendszerből szemlélve ugyancsak  szögsebességgel forgó) tetszőleges s vektort! Keressük ezen s vektor idő szerinti deriváltját a világ‑koordinátarendszerben! Egy rövid
szögsebességgel forgó) tetszőleges s vektort! Keressük ezen s vektor idő szerinti deriváltját a világ‑koordinátarendszerben! Egy rövid  időintervallumban az s vektor az
időintervallumban az s vektor az  koordinátarendszer
koordinátarendszer
|
|
(4.34) |

szöggel fordul el.
Ha a (4.4. ábra) ábrán látható AOC szöget  ‑vel jelöljük, akkor az
‑vel jelöljük, akkor az  vektor megváltozásának nagysága az ábra alapján
vektor megváltozásának nagysága az ábra alapján
|
|
(4.35) |

Az  vektor merőleges mind a forgástengelyre, mind az
vektor merőleges mind a forgástengelyre, mind az  vektorra, ennél fogva párhuzamos az
vektorra, ennél fogva párhuzamos az  vektorral. A
vektorral. A  határátmenetet képezve ezért kimondhatjuk, hogy az
határátmenetet képezve ezért kimondhatjuk, hogy az  vektor idő szerinti deriváltja a világ‑koordinátarendszerből szemlélve
vektor idő szerinti deriváltja a világ‑koordinátarendszerből szemlélve
|
|
(4.36) |

A (4.5. ábra) ábrán három koordinátarendszert láthatunk, melyeket egy képzeletbeli robot nulladik, i‑edik illetve (i+1)‑edik kartagjához rögzítettnek feltételezünk.
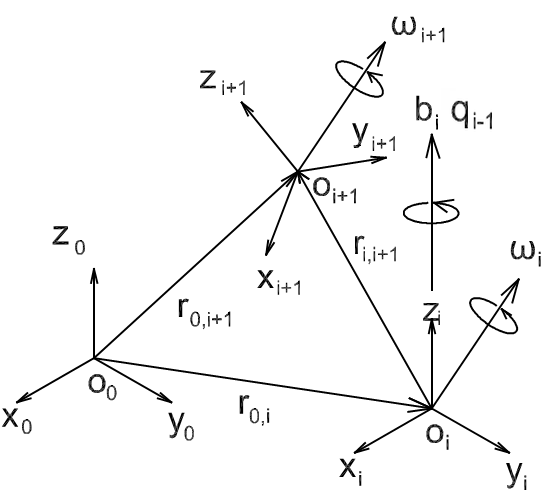
Az ábra alapján írhatjuk
|
|
(4.37) |
Célunk az, hogy az (4.37) egyenlet jobb oldalának idő szerinti deriváltját előállítsuk (világkoordinátákban), feltételezve, hogy az  koordinátarendszer
koordinátarendszer  szögsebességgel forog az
szögsebességgel forog az  ‑hoz képest. A (4.37) egyenlet mindkét oldalának idő szerinti deriváltját képezve
‑hoz képest. A (4.37) egyenlet mindkét oldalának idő szerinti deriváltját képezve
|
|
(4.38) |
Az  és
és  vektorok kezdőpontja a világ‑koordinátarendszer
vektorok kezdőpontja a világ‑koordinátarendszer  origója; jelöljük ezek idő szerinti deriváltjait
origója; jelöljük ezek idő szerinti deriváltjait  ‑gyel illetve
‑gyel illetve  ‑vel. Az
‑vel. Az  vektor ellenben az i‑edik koordinátarendszer origóját köti össze, ezért a világ‑koordinátarendszerben értelmezett időderiváltját nem képezhetjük a fenti egyszerű módon. Jelöljük
vektor ellenben az i‑edik koordinátarendszer origóját köti össze, ezért a világ‑koordinátarendszerben értelmezett időderiváltját nem képezhetjük a fenti egyszerű módon. Jelöljük  -nel,
-nel,  -vel és
-vel és  -vel rendre azokat az egységvektorokat, amelyek az adott időpillanatban az i‑edik koordinátarendszer
-vel rendre azokat az egységvektorokat, amelyek az adott időpillanatban az i‑edik koordinátarendszer  illetve
illetve  tengelyeinek pozitív irányába mutatnak! Jelölje x, y, és z az
tengelyeinek pozitív irányába mutatnak! Jelölje x, y, és z az  vektornak a forgó koordinátarendszerben vett komponenseit! Ekkor a következő összefüggést írhatjuk fel
vektornak a forgó koordinátarendszerben vett komponenseit! Ekkor a következő összefüggést írhatjuk fel
|
|
(4.39) |

az  pont
pont  ‑hez képesti mozgásából adódó sebességre vezessük be a következő jelölést
‑hez képesti mozgásából adódó sebességre vezessük be a következő jelölést
|
|
(4.40) |
ahol a „rel” rövidítés a „relatív” szóra utal. A (4.39) egyenlet jobb oldalán a zárójelek közé tett második három tag a forgó koordinátarendszer forgásából származó sebességként értelmezhető.
Mivel az  vektorok a forgó koordinátarendszerrel együtt forognak, a világkoordináták szerint értelmezett időderiváltjuk, a (4.36) összefüggés alapján számítható. Így a (4.36) egyenlet, valamint a (4.38) – (4.40) egyenletek figyelembevételével a következő összefüggésre juthatunk
vektorok a forgó koordinátarendszerrel együtt forognak, a világkoordináták szerint értelmezett időderiváltjuk, a (4.36) összefüggés alapján számítható. Így a (4.36) egyenlet, valamint a (4.38) – (4.40) egyenletek figyelembevételével a következő összefüggésre juthatunk
|
|
(4.41) |
A fenti eredmény általánosításaként megállapíthatjuk, hogy a rögzített és mozgó (forgó) koordinátarendszerekben érvényes differenciáloperátorok között formálisan a következő kapcsolat áll fenn
|
|
(4.42) |
Képezhetjük ezek után az  vektor második deriváltját is a (4.42) differenciáloperátor ismételt alkalmazásával
vektor második deriváltját is a (4.42) differenciáloperátor ismételt alkalmazásával
|
|
(4.43) |

A fenti egyenlet bal oldala az (i+1)‑edik, jobb oldalának első tagja pedig az i‑edik kartag világkoordinátákban értelmezett lineáris gyorsulása; jelöljük ezeket rendre  illetve
illetve  . Ekkor némi átalakítással a (4.43) egyenletet a következő formába írhatjuk át
. Ekkor némi átalakítással a (4.43) egyenletet a következő formába írhatjuk át
|
|
(4.44) |

amely tehát magában foglalja az (i+1)‑edik kartag valamennyi (lineáris, Coriolis és centrifugális) gyorsulás összetevőjét.
4.1. Luh-Walker-Paul algoritmus
A mechanikai alapokat összefoglalása után megismerkedünk az ún. Luh‑Walker‑Paul‑féle algoritmussal, amely egy 1986‑ban kiadott amerikai szakkönyv szerint (akkoriban) a leghatékonyabbnak számított a robotdinamikai feladatok megoldása során.
Az algoritmus első részeként rekurzív kinematikai összefüggéseket fogunk felírni, amelyek különböző alakúak lesznek attól függően, hogy a vizsgált csukló prizmatikus (P), vagy rotációs (R).
Eszerint, ha az (i+1)‑edik csukló prizmatikus, akkor az (i+1)‑edik kartag szögsebessége illetve szöggyorsulása
|
|
(4.45) | |
|
|
(4.46) |


Ha ellenben az (i+1)‑edik csukló rotációs, akkor az (i+1)‑edik kartag szögsebessége illetve szöggyorsulása
|
|
(4.47) | |
|
|
(4.48) |

A lineáris sebességek és gyorsulások prizmatikus csukló esetén
|
|
(4.49) | |
|
|
(4.50) |
Ha (4.49) és (4.50) egyenleteket visszahelyettesítjük a (4.41) illetve a (4.44) egyenletekbe a következő összefüggéseket kapjuk
|
|
(4.51) | |
|
|
(4.52) |


Az ezeknek megfelelő összefüggések rotációs csukló esetén a következő alakban lesznek érvényesek
|
|
(4.53) | |
|
|
(4.54) |

illetőleg a szükséges helyettesítések elvégzése után
|
|
(4.55) | |
|
|
(4.56) |


Ezzel az algoritmus kinematikai részét illetően minden szükséges összefüggés rendelkezésünkre áll. Mielőtt rátérnénk a dinamikai szakasz ismertetésére, némi figyelmet kell, hogy szenteljünk annak a körülménynek, hogy a Newton‑Euler egyenletekben szereplő változók mind tömegközéppontra vonatkozó mennyiségekkel, ezzel szemben a jelen algoritmus csuklókra vonatkozó mennyiségekkel számol.
A két különböző reprezentáció közötti kapcsolatot az alábbi egyenletek adják meg
|
|
(4.57) | |
|
|
(4.58) |
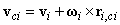

Az egyenletek értelmezését a 4.6. ábra segíti.
Tisztázásra szorul még az a kérdés, hogyan módosul a (4.5) egyenletben szereplő  perdület (impulzusmomentum), ha azt nem tömegközéppontra vonatkoztatjuk. Mint ismeretes, minden kartag
perdület (impulzusmomentum), ha azt nem tömegközéppontra vonatkoztatjuk. Mint ismeretes, minden kartag  tehetetlenségi tenzora a kartag orientációjától függő mennyiség.
tehetetlenségi tenzora a kartag orientációjától függő mennyiség.
Jelöljük  ‑val azt a 3×3‑as rotációs mátrixot, amelyik az i‑edik kartag koordinátarendszeréből a világ‑koordinátarendszerbe történő transzformálását valósítja meg, jelöljük továbbá az i‑edik kartag saját koordinátarendszerének origóján (tehát nem a tömegközéppontjára) értelmezett tehetetlenségi tenzorát
‑val azt a 3×3‑as rotációs mátrixot, amelyik az i‑edik kartag koordinátarendszeréből a világ‑koordinátarendszerbe történő transzformálását valósítja meg, jelöljük továbbá az i‑edik kartag saját koordinátarendszerének origóján (tehát nem a tömegközéppontjára) értelmezett tehetetlenségi tenzorát  ‑sal.
‑sal.
Energetikai megfontolásokkal (a forgásból adódó kinetikus energiák elemzésével) belátható, hogy a tehetetlenségi tenzor két fajta reprezentációja között az alábbi összefüggés érvényes
|
|
(4.59) |
Most már valóban minden összefüggés rendelkezésünkre áll ahhoz, hogy a Luh‑Walker‑Paul‑algoritmust teljes egészében átlássuk.
2. rész - rész
- 1. A mozgásvizsgálat elemei
- 2. Merev test rendszerek dinamikája
- 2.1. A mozgásegyenletek szintetikus leírása
- 2.2. Holonom rendszerek analitikus leírása
- 2.2.1. Általános koordináták
- 2.2.2. Virtuális sebesség
- 2.2.3. A másodfajú Lagrange-egyenletek
- 2.2.4. A kinetikus energia függése az általános koordinátáktól
- 2.2.5. A mozgásegyenletek potenciálos erők esetén
- 2.2.6. A mechanikai összenergia változása
- 2.2.7. Nem potenciálos általános erők
- 2.2.8. Az általános potenciál
- 2.2.9. A Hamilton-féle kanonikus mozgásegyenletek
- 2.2.10. Routh-egyenletek
- 3. Mozgások jellemzése és stabilitása
- 4. Mechanizmusok vizsgálati módszerei
- 5. Robotok kinematikai és dinamikai alapegyenletei
1. fejezet - A mozgásvizsgálat elemei
1.1. Az anyagi pont mozgása
1.1.1. Anyagi pont kinematikája
A háromdimenziós térben mozgó anyagi pont mindenkori helyzetét három skalárfüggvénnyel adhatjuk meg, melyeket a pont koordinátáinak nevezünk. Derékszögű Descartes-féle koordinátarendszerben (DDKR) ezek az  ,
,  és
és  függvények. Ezekkel megadható az anyagi pont időtől függő helyvektora, mozgásának törvénye:
függvények. Ezekkel megadható az anyagi pont időtől függő helyvektora, mozgásának törvénye:
|
|
(1.1) |
A helyvektorok végpontjait összekötve kapjuk meg az anyagi pont mozgásának pályáját.
Az anyagi pont sebességvektora, mint a helyvektor változási gyorsasága, megegyezik a helyvektor idő szerinti deriváltjával:
|
|
(1.2) |

A deriválás természetéből adódóan ez érintőleges a pályára az adott pillanatban:
|
|
(1.3) |
ahol  a sebesség vektor nagysága, az ún. pályasebesség és
a sebesség vektor nagysága, az ún. pályasebesség és  a pálya érintőegységvektora. A
a pálya érintőegységvektora. A  pályasebesség idő szerinti integrálásával kapjuk az anyagi pont által megtett utat vagy pályabefutás törvényét:
pályasebesség idő szerinti integrálásával kapjuk az anyagi pont által megtett utat vagy pályabefutás törvényét:
|
|
(1.4) |
A sebességvektor idő szerinti deriváltja az  gyorsulásvektor, amely felbontható egy pálya menti
gyorsulásvektor, amely felbontható egy pálya menti  tangenciális gyorsulásra és egy pályára merőleges
tangenciális gyorsulásra és egy pályára merőleges  normális gyorsulásra:
normális gyorsulásra:
|
|
(1.5) |
ahol  az ún. pályagyorsulás,
az ún. pályagyorsulás,  a pályagörbe görbületi sugara az adott pontban és
a pályagörbe görbületi sugara az adott pontban és  a főnormális irányú egységvektor. Tehát a tangenciális gyorsulás a sebességvektor nagyságának változását adja meg, míg a normális gyorsulás komponens a sebességvektor irányának változásával van összefüggésben.
a főnormális irányú egységvektor. Tehát a tangenciális gyorsulás a sebességvektor nagyságának változását adja meg, míg a normális gyorsulás komponens a sebességvektor irányának változásával van összefüggésben.
Példa – Anyagi pont mozgása csavarvonalon:
|
|



1.1.2. Az anyagi pont mozgásegyenletei
Dinamikai alapfogalmak (emlékeztető): merev test, vonatkoztatási rendszer, koordináta rendszer, szabadsági fok. Newtoni axiómák: inerciarendszer, dinamika alaptörvénye, akció-reakció elve, (erőösszeg).
A dinamika alaptörvénye
Ismerjük az  pontszerű tömegre, anyagi pontra ható erők eredőjét, az
pontszerű tömegre, anyagi pontra ható erők eredőjét, az
|
|
(1.6) |

vektorfüggvényt (egy inerciarendszerben). Meghatározandó az anyagi pont  mozgástörvénye. Megoldás a
mozgástörvénye. Megoldás a
|
|
(1.7) |

dinamikai alapegyenlet segítségével: másodrendű vektori differenciálegyenlet integrálása. Az (1.7) egyenlet három vetületi komponense adja meg az anyagi pont mozgásegyenleteit. Az általános megoldás 6 integrálási állandót tartalmaz, melyeket a kezdeti (indítási) feltételek határoznak meg.
Bizonyos esetekben felírható a mozgásegyenletek egy vagy több első integrálja, egy  alakú, elsőrendű differenciálegyenlet.
alakú, elsőrendű differenciálegyenlet.
Elemi munka, munkatétel, teljesítménytétel
Az (1.7) egyenletet  -tal megszorozva a következőt kapjuk:
-tal megszorozva a következőt kapjuk:
|
|

ahol  az anyagi pont kinetikus energiájának idő szerinti deriváltja,
az anyagi pont kinetikus energiájának idő szerinti deriváltja,  pedig az anyagi pontra ható
pedig az anyagi pontra ható  erő teljesítménye, azaz a teljesítménytétel:
erő teljesítménye, azaz a teljesítménytétel:
|
|
(1.8) |

Ezt az idő szerint integrálva kapjuk a munkatételt:
|
|
(1.9) |

ahol  az
az  erő ún. elemi munkája. A munka tehát az erő út szerinti integrálja (Poncelet, 1829), amely általában a kezdő és végpontokon túl függ az ezeket összekötő görbétől is. Több erő munkája algebrailag adódik össze, az erők vektori összeadásából következően.
erő ún. elemi munkája. A munka tehát az erő út szerinti integrálja (Poncelet, 1829), amely általában a kezdő és végpontokon túl függ az ezeket összekötő görbétől is. Több erő munkája algebrailag adódik össze, az erők vektori összeadásából következően.
1.1.3. Erőterek, konzervatív erőtér, potenciális energia
Speciális esetben:  vektortér. Az időben állandó
vektortér. Az időben állandó  erőteret konzervatív erőtérnek hívjuk, ha van olyan
erőteret konzervatív erőtérnek hívjuk, ha van olyan  skaláris függvény — potenciál, vagy potenciális energia (Lagrange, 1736 – 1813) —, amelynek negatív gradiense az erő:
skaláris függvény — potenciál, vagy potenciális energia (Lagrange, 1736 – 1813) —, amelynek negatív gradiense az erő:
|
|
(1.10) |
Konzervatív erőtérben bármely zárt görbe mentén végzett munka zérus, azaz a végzett munka független az úttól, és egyenlő a kezdő- és végpontokban felvett potenciálértékek különbségével:
|
|
(1.11) |
Konzervatív erőtérben az elemi munka teljes differenciál. A potenciálos erőtér[1] örvénymentes (rotációja zérus): 
A  egyenlettel meghatározott felületet ekvipotenciális felület (nívófelület). A potenciálos erő mindig merőleges a nívófelületre.
egyenlettel meghatározott felületet ekvipotenciális felület (nívófelület). A potenciálos erő mindig merőleges a nívófelületre.
Példák:
Földi nehézségi erőtér:

Gravitációs erőtér:
Lineáris rugó potenciálja:
 (ahol
(ahol  az
az  merevségű rugó deformációja).
merevségű rugó deformációja).
A  (teljes) mechanikai energia megmaradásának tétele. Konzervatív erőtérben a munkatétel:
(teljes) mechanikai energia megmaradásának tétele. Konzervatív erőtérben a munkatétel:
|
|
(1.12) |


tehát a mozgásegyenletek egy első integrálja.
Nem-konzervatív erők: az  erő függ az időtől, vagy az anyagi pont sebességétől, vagy nem örvénymentes erőtérhez tartozik.
erő függ az időtől, vagy az anyagi pont sebességétől, vagy nem örvénymentes erőtérhez tartozik.
1.1.4. Centrális erők, felületi tétel
Azt az anyagi pontra ható erőt, melynek hatásvonala mindig a vonatkoztatási rendszer egy rögzített pontján (legyen ez az  origó) megy keresztül centrális erőnek nevezzük
origó) megy keresztül centrális erőnek nevezzük  . Ilyen például az egyenletes körmozgást vagy elliptikus rezgést létrehozó erő, de a gravitációs erő is.
. Ilyen például az egyenletes körmozgást vagy elliptikus rezgést létrehozó erő, de a gravitációs erő is.
Szorozzuk meg az (1.7) egyenletet vektoriálisan  -ral:
-ral:
|
|
(1.13) |

a párhuzamosság miatt, másrészt
|
|
(1.14) |


ahol  a rádiuszvektor által az időegység alatt súrolt terület kétszerese. Tehát bármilyen centrális erő hatása esetén az anyagi pont felületi sebessége állandó, azaz a pálya síkgörbe, és a rádiuszvektor egyenlő időközök alatt egyenlő területet súrol (Kepler második törvénye).
a rádiuszvektor által az időegység alatt súrolt terület kétszerese. Tehát bármilyen centrális erő hatása esetén az anyagi pont felületi sebessége állandó, azaz a pálya síkgörbe, és a rádiuszvektor egyenlő időközök alatt egyenlő területet súrol (Kepler második törvénye).
Az (1.14) egyenletben a három integrálási állandó által alkotott  vektor a pálya síkjának normálisának irányát valamint a felületi sebesség nagyságát rögzíti. Ez utóbbi a pálya síkjában felvett polárkoordinátákkal:
vektor a pálya síkjának normálisának irányát valamint a felületi sebesség nagyságát rögzíti. Ez utóbbi a pálya síkjában felvett polárkoordinátákkal:
|
|

tehát
|
|

1.2. Kényszerített mozgások
Ha az anyagi pont mozgását előírt geometriai feltételek korlátozzák, kényszermozgásról beszélünk. A kényszerfeltételek általában egy adott, merevnek tekinthető és nyugvó felületen vagy görbén történő mozgást írnak elő a felület illetve görbe egyenleteinek formájában:
|
|
A felületen való áthatolást, illetve az attól való elválást rendszerint egy felületre merőleges (ideális)  kényszererő gátolja meg:
kényszererő gátolja meg:
|
|
(1.15) |

Nyugalomban levő anyagi pont esetén a  kényszererő az anyagi pontra ható
kényszererő az anyagi pontra ható  aktív vagy szabaderő felületre merőleges
aktív vagy szabaderő felületre merőleges  összetevőjének ellentetjével egyenlő:
összetevőjének ellentetjével egyenlő: 
1.2.1. Az elsőfajú Lagrange-féle egyenletek
A  kényszererő tehát a felület illetve a görbe gradienseinek lineáris kombinációjaként is előállítható:
kényszererő tehát a felület illetve a görbe gradienseinek lineáris kombinációjaként is előállítható:
|
|
(1.16) |

|
|
(1.17) |
Ezekkel kapjuk az elsőfajú Lagrange-féle mozgásegyenleteket: az (1.15) mozgásegyenletben 4 (illetve 5) skalár ismeretlen (függvény) lesz ( és
és  illetve
illetve  és
és  ), de a megoldáshoz szükséges egyenletet illetve egyenleteket éppen a geometriai kényszer, az előírt felület (illetve görbe) egyenletei szolgáltatják:
), de a megoldáshoz szükséges egyenletet illetve egyenleteket éppen a geometriai kényszer, az előírt felület (illetve görbe) egyenletei szolgáltatják:
|
|
(1.18) |

|
|

Az (ideális) kényszererő munkája nyugvó felület vagy görbe esetén zérus, hiszen az elmozdulás a felület vagy görbe mentén, érintőlegesen történik, azaz a kényszererőre merőlegesen. A munka kiszámításánál elegendő a szabaderőket figyelembe venni, és így érvényes az energiamegmaradás tétele (ld. szabadon eső anyagi pont, vagy tetszőleges görbe mentén mozgó anyagi pont).
Példák:
Mozgás lejtőn: lejtő irányú koordinátákkal —
 ,
,  Megoldás:
Megoldás:  a normális irányú kényszererő nagysága,
a normális irányú kényszererő nagysága,  A mozgástörvény:
A mozgástörvény: 
Mozgás csavarvonalon: a
 tengelyű csavarvonal paraméteres egyenlete
tengelyű csavarvonal paraméteres egyenlete
amiből a görbe egyenletei
 behelyettesítéssel:
behelyettesítéssel:
a mozgásegyenlet pedig:
1.2.2. Időtől függő kényszerfeltételek
Mozgó felület (vagy görbe) esetén  , vagy az idő szerint differenciálva:
, vagy az idő szerint differenciálva:
|
|
(1.19) |

Viszont elképzelhető  alakra nem hozható, nem integrálható, ún. kinematikai kényszerfeltétel is,
alakra nem hozható, nem integrálható, ún. kinematikai kényszerfeltétel is,  , mely sok esetben az (1.19) egyenlethez hasonlóan lineáris függvénye az
, mely sok esetben az (1.19) egyenlethez hasonlóan lineáris függvénye az  sebességvektornak:
sebességvektornak:
|
|
(1.20) |

Ez alapján a kényszerek az alábbiak szerint csoportosíthatók:
holonom, szkeloronom:

holonom, reonom:

anholonom, szkleronom:

anholonom, reonom:
 ,
, 
egyéb (pl. egyenlőtlenségekkel megadott kényszerfeltételek, ld. fonálinga)
A szabadsági fokok számát minden kényszeregyenlet eggyel csökkenti, azonban az anholonom kényszerfeltételek a kezdeti konfigurációs teret nem korlátozzák, csak az (induló) lehetséges pályákat.
1.2.3. Nem ideális kényszerek
A csúszási súrlódásra vonatkozó tapasztalati törvény (Coulomb, 1736 – 1806): az érintkező felületek között fellépő súrlódási erő
|
|
(1.21) |

ahol  a csúszási súrlódási együttható,
a csúszási súrlódási együttható,  a felületek között ébredő nyomóerő,
a felületek között ébredő nyomóerő,  pedig annak a testnek (érintkezési pontjának) a sebessége, amelyikre
pedig annak a testnek (érintkezési pontjának) a sebessége, amelyikre  hat (gátolja a test mozgását).
hat (gátolja a test mozgását).
A súrlódási erőnek ez a formája hibrid jelleget mutat, ui. egy olyan fizikai törvényszerűséget takar, amely az  kényszererőtől függ és így nyilván nem tekinthető egyértelműen szabad erőnek.
kényszererőtől függ és így nyilván nem tekinthető egyértelműen szabad erőnek.
Ezzel szemben nyugalmi vagy tapadási súrlódáskor, azaz amikor a sík felületen nyugvó test a rá ható érintőleges  húzóerő hatására mindaddig nyugalomban marad, míg
húzóerő hatására mindaddig nyugalomban marad, míg
|
|
(1.22) |

a felületen ébredő  erőkomponens valódi kényszererő, amit az
erőkomponens valódi kényszererő, amit az  szabaderő határoz meg.
szabaderő határoz meg.
1.3. Anyagi pont egyensúlya
Anyagi pont egyensúlya alatt annak tartós nyugalmi állapotát (vagy egyenesvonalú egyenletes mozgását) értjük, azaz amikor a gyorsulása zérus:  . Így az (1.18) egyenlet alapján:
. Így az (1.18) egyenlet alapján:
|
|
(1.23) |
azaz egyensúlyban levő anyagi pontra ható szabad- és kényszererők eredője zérus („egyensúlyban vannak”).
Példa Anyagi pont egyensúlyi helyei egy gömbfelszínen ( ,
,  ).
).
1.3.1. A virtuális munka elve
Tekintsük a szabad anyagi pontot, mely egyensúlyban van:  .
.
Vegyük ennek egy lehetséges kis, idő nélküli, képzelt elmozdulását. Ezt az elgondolt  elmozdulást virtuális elmozdulásnak nevezzük, mely végtelen rövid idő alatt megy végbe
elmozdulást virtuális elmozdulásnak nevezzük, mely végtelen rövid idő alatt megy végbe  . Így tehát az egyensúlyban levő szabad anyagi pontra ható erők virtuális munkája zérus:
. Így tehát az egyensúlyban levő szabad anyagi pontra ható erők virtuális munkája zérus:
|
|
(1.24) |

Ez a megfogalmazás kényszerekre is általánosítható, amennyiben ezentúl a  virtuális elmozduláson a kényszerfeltételek által megengedett elmozdulást értünk
virtuális elmozduláson a kényszerfeltételek által megengedett elmozdulást értünk  ekkor ugyanis az ideális
ekkor ugyanis az ideális  kényszererő virtuális munkája is zérus
kényszererő virtuális munkája is zérus  és így
és így
|
|
(1.25) |
A jobbról balra irány igazolása a Lagrange-féle multiplikátor módszer alkalmazásával történhet, a többváltozós függvények szélsőértékeinek mellékfeltételek esetén való kiszámításához hasonló módon:
|
|
1.3.2. A d'Alembert-elv
A mozgásegyenletek szabad és kényszermozgások esetén is összefoglalhatók a virtuális munka elvéhez hasonló alakban, amennyiben d'Alembert nyomán az  ellentettjét mint olyan inerciális erőt tekintjük, amellyel az
ellentettjét mint olyan inerciális erőt tekintjük, amellyel az  gyorsulású anyagi pont „egyensúlyban” van:
gyorsulású anyagi pont „egyensúlyban” van:
|
|
(1.26) |

ideális kényszerek és a kényszerfeltételeket kielégítő  virtuális elmozdulás esetén.
virtuális elmozdulás esetén.
Példa Anyagi pont mozgása gömbfelületen.
Mozgás előírt görbén. Ebben az esetben az
|
|

dinamikai alapegyenletet célszerű felbontani a görbe  érintő irányú,
érintő irányú,  főnormális irányú és
főnormális irányú és  binormális irányú összetevőinek irányába
binormális irányú összetevőinek irányába
|
|
ahol  a sebesség nagyságát megváltoztató gyorsulás, a (harmadik) egyenlet a szabaderők és kényszererők binormális irányú összetevőinek egyensúlyát fejezi ki, míg
a sebesség nagyságát megváltoztató gyorsulás, a (harmadik) egyenlet a szabaderők és kényszererők binormális irányú összetevőinek egyensúlyát fejezi ki, míg  a
a  sebességű anyagi pont
sebességű anyagi pont  görbületi sugarú pályán való mozgásához szükséges gyorsulás (centripetális gyorsulás), az ezt biztosító erők eredője pedig a centripetális erő. Amennyiben a
görbületi sugarú pályán való mozgásához szükséges gyorsulás (centripetális gyorsulás), az ezt biztosító erők eredője pedig a centripetális erő. Amennyiben a  tagot látszólagos, ún. tehetetlenségi erőként fogjuk fel, amely az anyagi pont normális irányú látszólagos egyensúlyát biztosítja, akkor ezt a tagot centrifugális erőnek nevezzük.
tagot látszólagos, ún. tehetetlenségi erőként fogjuk fel, amely az anyagi pont normális irányú látszólagos egyensúlyát biztosítja, akkor ezt a tagot centrifugális erőnek nevezzük.
1.4. Mozgó vonatkoztatási rendszerek
1.4.1. Merev testek kinematikai egyenletei
Egy merev test két tetszőleges,  és
és  pontja közötti távolság állandó:
pontja közötti távolság állandó:
|
|
(1.27) |

azaz  merőleges
merőleges  -re, mégpedig irányának változását az
-re, mégpedig irányának változását az  szögsebesség vektorral adhatjuk meg. Így az
szögsebesség vektorral adhatjuk meg. Így az  és
és  pontok sebessége:
pontok sebessége:
|
|
(1.28) |
Ez a merev test tetszőleges két pontjának sebessége közötti összefüggést leíró ún. redukciós képlet, ami a merev testek statikájában tanult, egy  erő
erő  illetve
illetve  pontokra számított nyomatékai között fennálló redukciós formulával analóg:
pontokra számított nyomatékai között fennálló redukciós formulával analóg:
|
|
(1.29) |

Ez azt jelenti, hogy a merev test tetszőleges pontjának sebességének megadásához elég ismernünk a  ún. kinematikai vektorkettőst, azaz a kinematikai vektorkettős jellemzi a merev test sebességállapotát.
ún. kinematikai vektorkettőst, azaz a kinematikai vektorkettős jellemzi a merev test sebességállapotát.
A (1.28) kifejezést tovább deriválva az idő szerint kapjuk az  és
és  pontok gyorsulása közötti összefüggést:
pontok gyorsulása közötti összefüggést:
|
|
(1.30) |

ahol  a merev test szöggyorsulása. Ez a képlet írja le tehát a merev test gyorsulásállapotát, azaz ehhez egy pont gyorsulásának, a merev test szöggyorsulásának és szögsebességének ismerete szükséges.
a merev test szöggyorsulása. Ez a képlet írja le tehát a merev test gyorsulásállapotát, azaz ehhez egy pont gyorsulásának, a merev test szöggyorsulásának és szögsebességének ismerete szükséges.
A továbbiakban vizsgáljuk az anyagi pont pillanatnyi mozgását egy ismert mozgásállapotú merev testhez rögzített koordinátarendszerben.
1.4.2. A dinamika alapegyenlete mozgó vonatkoztatási rendszerben
Ismerjük egy merev testhez mint „mozgó” vonatkoztatási rendszerhez (MVR) rögzített  koordinátarendszer
koordinátarendszer  origójának
origójának  sebességét és
sebességét és  gyorsulását, valamint a merev test
gyorsulását, valamint a merev test  szögsebességét és
szögsebességét és  szöggyorsulását.
szöggyorsulását.
Ezzel az éppen a  geometriai ponton áthaladó anyagi pont álló koordinátarendszerbeli
geometriai ponton áthaladó anyagi pont álló koordinátarendszerbeli  és mozgó koordinátarendszer szerinti
és mozgó koordinátarendszer szerinti  helyvektora között a kapcsolat:
helyvektora között a kapcsolat:
|
|
(1.31) |
ahol  a
a  sebességállapotú MVR
sebességállapotú MVR  origójának helyvektora az abszolút, „álló”
origójának helyvektora az abszolút, „álló”  koordinátarendszerben.
koordinátarendszerben.
Az anyagi pont álló rendszerben észlelt és a MVR-beli sebessége közötti kapcsolat (1.31) deriválásából:
|
|
(1.32) |

ahol  a
a  ponton áthaladó anyagi pont relatív sebessége a MVR-ben,
ponton áthaladó anyagi pont relatív sebessége a MVR-ben,  pedig a
pedig a  -nek mint a MVR-hez rögzített pontnak a sebessége, az álló rendszerből észlelt ún. szállító sebesség. A
-nek mint a MVR-hez rögzített pontnak a sebessége, az álló rendszerből észlelt ún. szállító sebesség. A  tehát a MVR-beli idő szerinti deriváltat jelöli, azaz csak a koordináták deriváltját, a MVR-ben állónak képzelt koordinátatengelyekét nem. Így egy tetszőlegesMVR-beli
tehát a MVR-beli idő szerinti deriváltat jelöli, azaz csak a koordináták deriváltját, a MVR-ben állónak képzelt koordinátatengelyekét nem. Így egy tetszőlegesMVR-beli  vektor tényleges idő szerinti deriváltja a következő:
vektor tényleges idő szerinti deriváltja a következő:
|
|

Az anyagi pont gyorsulása pedig az előzőeket újból idő szerint deriválva:
|
|
(1.33) |

azaz
|
|


ahol  az ún. Coriolis-gyorsulás (Coriolis, 1792 – 1843),
az ún. Coriolis-gyorsulás (Coriolis, 1792 – 1843),  az ún. relatív vagy látszólagos gyorsulás a MVR-ben,
az ún. relatív vagy látszólagos gyorsulás a MVR-ben,  pedig a MVR-hez rögzített
pedig a MVR-hez rögzített  pontnak az álló rendszerből észlelt gyorsulása az ún. szállító gyorsulás.
pontnak az álló rendszerből észlelt gyorsulása az ún. szállító gyorsulás.
Ezt beírva az  inerciarendszerben érvényes
inerciarendszerben érvényes  alapegyenletbe átrendezés után megkapjuk a mozgó rendszerben érvényes alapegyenletet:
alapegyenletbe átrendezés után megkapjuk a mozgó rendszerben érvényes alapegyenletet:
|
|
(1.34) |


ahol az  aktív erő melletti két tag az ún. tehetetlenségi erők: az
aktív erő melletti két tag az ún. tehetetlenségi erők: az  szállító erő, és a
szállító erő, és a  Coriolis-erő.
Coriolis-erő.
Példa
Az  egyenletű parabola pályán mozog egy
egyenletű parabola pályán mozog egy  tömegű anyagi pont.
tömegű anyagi pont.
Határozzuk meg a gyorsulásvektort az (3,0,3) helyen,
 m/s állandó sebesség esetén!
m/s állandó sebesség esetén!  ,
, 
 ,
,  így:
így:
Írjuk fel a pályán mozgó anyagi pont mozgásegyenleteit, ha a pálya a függőleges
 tengely körül
tengely körül  szögsebességgel egyenletesen forog!
szögsebességgel egyenletesen forog!A pályagörbén való mozgást reonom (időtől függő) kényszeregyenletek határozzák meg:

Így a d'Alembert-elv alapján, mivel
 a nehézségi erő az egyetlen aktív erő:
a nehézségi erő az egyetlen aktív erő:
amiből
 és
és  felhasználásával kapjuk, hogy
felhasználásával kapjuk, hogy
Mivel
 teljesen szabadon választható és az
teljesen szabadon választható és az  és
és  kényszerek által megengedett
kényszerek által megengedett  virtuális elmozdulás másik két koordinátája fentiek szerint
virtuális elmozdulás másik két koordinátája fentiek szerint  -szel már kifejezhető, ezért
-szel már kifejezhető, ezért
ahol
 ,
,  és
és  a kényszerfeltételekből illetve idő szerinti deriválással kaphatók meg.
a kényszerfeltételekből illetve idő szerinti deriválással kaphatók meg.Vizsgáljuk meg, hogy mi a feltétele a pályagörbén való relatív egyensúlynak, azaz amikor nincs függőleges elmozdulás, hanem az
 síkkal párhuzamos
síkkal párhuzamos  sugarú körpályán mozog az anyagi pont a forgó parabolapálya egy adott pontjával együtt!
sugarú körpályán mozog az anyagi pont a forgó parabolapálya egy adott pontjával együtt!Tehát
amit beírva a kapott differenciálegyenletbe adódik, hogy:

Ez a kifejezés csak
 vagy
vagy  esetén teljesül. Míg
esetén teljesül. Míg  esetén
esetén  tetszőleges, az utóbbi esetben pedig
tetszőleges, az utóbbi esetben pedig  , azaz bárhová helyezve a parabola pályán az anyagi pontot relatív nyugalomban marad, ha
, azaz bárhová helyezve a parabola pályán az anyagi pontot relatív nyugalomban marad, ha  .
.Nézzük meg a relatív egyensúly feltételét a forgó parabolapályához rögzített
 koordinátarendszerben felírt virtuális munka elvével
koordinátarendszerben felírt virtuális munka elvével
Így

amiből a
 és a
és a  összefüggésekkel adódik az egyensúly feltétele:
összefüggésekkel adódik az egyensúly feltétele:
Írjuk fel a forgó parabolapályához rögzített koordinátarendszerben a parabolapályán mozgó anyagi pont mozgásegyenleteit!
Az elsőfajú Lagrange-egyenletekkel:

azaz
Vagyis a mozgást meghatározó egyenletek rendszere:
amiből
 ,
,  valamint
valamint 
Ezzel a
 -t megadó differenciálegyenlet:
-t megadó differenciálegyenlet:
Ugyanez az
 ívhossz, és a
ívhossz, és a  kifejezéssel:
kifejezéssel:
amiből következik, hogy
 esetén a pályagyorsulás előjelét az
esetén a pályagyorsulás előjelét az  előjele adja meg.
előjele adja meg.Hogyan változik az (a) pontra adott válasz, ha a pálya a függőleges
 tengely körül
tengely körül  rad/s szögsebességgel egyenletesen forog? Határozzuk meg az
rad/s szögsebességgel egyenletesen forog? Határozzuk meg az  tömegpontot a pályán tartó kényszererő összetevőit ebben az esetben!(
tömegpontot a pályán tartó kényszererő összetevőit ebben az esetben!( ,
,  m/s,
m/s,  m/s2,
m/s2,  )
)Határozzuk meg a (3,0,3) pontból
 m/s elindított anyagi pont sebességét az origón való áthaladáskor (6.234 m/s)! Adjuk meg a mozgást meghatározó erőtér potenciálfüggvényét (ha van ilyen)!
m/s elindított anyagi pont sebességét az origón való áthaladáskor (6.234 m/s)! Adjuk meg a mozgást meghatározó erőtér potenciálfüggvényét (ha van ilyen)!



2. fejezet - Merev test rendszerek dinamikája
- 2.1. A mozgásegyenletek szintetikus leírása
- 2.2. Holonom rendszerek analitikus leírása
- 2.2.1. Általános koordináták
- 2.2.2. Virtuális sebesség
- 2.2.3. A másodfajú Lagrange-egyenletek
- 2.2.4. A kinetikus energia függése az általános koordinátáktól
- 2.2.5. A mozgásegyenletek potenciálos erők esetén
- 2.2.6. A mechanikai összenergia változása
- 2.2.7. Nem potenciálos általános erők
- 2.2.8. Az általános potenciál
- 2.2.9. A Hamilton-féle kanonikus mozgásegyenletek
- 2.2.10. Routh-egyenletek
A következőkben anyagi pontokból vagy tömegpontokból álló rendszerek mozgásegyenleteit vezetjük le, azonban később ezeket az egyenleteket merev testekből álló rendszerekre is érvényesnek tekintjük.
2.1. A mozgásegyenletek szintetikus leírása
2.1.1. Anyagi pontrendszer dinamikai alapegyenletei
Az  tagú anyagi pontrendszer
tagú anyagi pontrendszer  tömegű tagjának mozgását a rá ható külső, szabad- és reakcióerők
tömegű tagjának mozgását a rá ható külső, szabad- és reakcióerők  eredője és a többi anyagi ponttal való kölcsönhatásból származó belső erők
eredője és a többi anyagi ponttal való kölcsönhatásból származó belső erők  eredője határozza meg a dinamika alapegyenlete szerint:
eredője határozza meg a dinamika alapegyenlete szerint:
|
|
(2.1) |

ahol  a
a  -adik tömegpont gyorsulása. Továbbá nyilvánvaló, hogy
-adik tömegpont gyorsulása. Továbbá nyilvánvaló, hogy  és Newton III. axiómája miatt
és Newton III. axiómája miatt  valamint tegyük fel, hogy a belső erők centrális erők, azaz
valamint tegyük fel, hogy a belső erők centrális erők, azaz  .
.
Az anyagi pontok között működő  belső erők némelyike lehet az anyagi pontok között lévő geometriai vagy kinematikai kényszerkapcsolatból származó ideális belső kényszererő, melyeknek az
belső erők némelyike lehet az anyagi pontok között lévő geometriai vagy kinematikai kényszerkapcsolatból származó ideális belső kényszererő, melyeknek az  anyagi pontra ható eredőjét
anyagi pontra ható eredőjét  -val jelöljük, az egyéb belső erők eredőjét pedig
-val jelöljük, az egyéb belső erők eredőjét pedig  -val, azaz
-val, azaz
|
|
Az  anyagi pontra hathatnak tehát a geometriai vagy kinematikai kényszerfeltételek által meghatározott ideális kényszererők
anyagi pontra hathatnak tehát a geometriai vagy kinematikai kényszerfeltételek által meghatározott ideális kényszererők , illetve a kényszerfeltételektől független, de valamilyen módon előírt vagy fizikai törvényszerűség által meghatározott szabaderők
, illetve a kényszerfeltételektől független, de valamilyen módon előírt vagy fizikai törvényszerűség által meghatározott szabaderők
 .
.
Amennyiben az anyagi pontok  helyvektorai egymástól illetve a környezettől geometriailag illetve kinematikailag függetlenek, úgy szabad mechanikai rendszerről beszélünk, melynek állapotát egy tetszőleges
helyvektorai egymástól illetve a környezettől geometriailag illetve kinematikailag függetlenek, úgy szabad mechanikai rendszerről beszélünk, melynek állapotát egy tetszőleges  időpillanatban a (kinematikailag) független
időpillanatban a (kinematikailag) független  mozgástörvényeket alkotó
mozgástörvényeket alkotó  darab skalárfüggvénnyel adhatjuk meg. Ezeket a skalárfüggvényeket a fenti
darab skalárfüggvénnyel adhatjuk meg. Ezeket a skalárfüggvényeket a fenti  darab dinamikai skalár egyenlet határozza meg. Egy mechanikai rendszer szabadsági foka alatt állapotának egyértelmű leírásához szükséges független skaláregyenletek számát értjük, tehát egy
darab dinamikai skalár egyenlet határozza meg. Egy mechanikai rendszer szabadsági foka alatt állapotának egyértelmű leírásához szükséges független skaláregyenletek számát értjük, tehát egy  darab anyagi pontból álló szabad mechanikai rendszer szabadsági foka
darab anyagi pontból álló szabad mechanikai rendszer szabadsági foka  .
.
Az egyes anyagi pontokra felírható dinamikai egyenletek összegzésével, a belső erőket kiejtve, jutunk az impulzustételhez:
|
|
(2.2) |


ahol  a külső erők vektori összege,
a külső erők vektori összege,  ,
,  és
és  a pontrendszer impulzusa, tömege illetve súlypontjának (tömegközéppontjának) helyvektora. Az utóbbit a pontrendszernek az
a pontrendszer impulzusa, tömege illetve súlypontjának (tömegközéppontjának) helyvektora. Az utóbbit a pontrendszernek az  origóra számított statikai nyomatékából határozhatjuk meg:
origóra számított statikai nyomatékából határozhatjuk meg:
|
|
(2.3) |

azaz a pontrendszer statikai nyomatéka a saját súlypontjára nulla.
Felhasználva, hogy a belső erők centrálisak, az egyes anyagi pontok  impulzusderiváltjának origóra számított nyomatékait összegezve a perdülettételt kapjuk:
impulzusderiváltjának origóra számított nyomatékait összegezve a perdülettételt kapjuk:
|
|
(2.4) |


ahol  az
az  és
és  erők origóra számított nyomatékainak összege,
erők origóra számított nyomatékainak összege,  pedig a pontrendszer origóra számított kinetikai nyomatéka, ami a koordinátarendszer egy rögzített pontjára vonatkoztatva megegyezik a pontrendszer ugyanazon pontjára számított perdületének idő szerinti deriváltjával:
pedig a pontrendszer origóra számított kinetikai nyomatéka, ami a koordinátarendszer egy rögzített pontjára vonatkoztatva megegyezik a pontrendszer ugyanazon pontjára számított perdületének idő szerinti deriváltjával:
|
|
(2.5) |

A perdületvektor és a kinetikai nyomaték vektor definíciója alapján megmutatható, hogy a  ún. impulzus vektorkettősre és a
ún. impulzus vektorkettősre és a  ún. kinetikai vektorkettősre is érvényes a redukciós formula:
ún. kinetikai vektorkettősre is érvényes a redukciós formula:
|
|
(2.6) |

Általánosan a kinetikai nyomaték és a perdületderivált vektor közötti kapcsolat:
|
|
(2.7) |

tehát , ha például
, ha például  vagy
vagy .
.
A dinamika alapegyenletei anyagi pontrendszerre tehát a következő alakban foglalhatók össze:
|
|
(2.8) |


azaz az anyagi pontrendszer egy bizonyos pontra redukált kinetikai vektorkettőse egyenlő a pontrendszerre ható  külső erőknek ugyanarra pontra redukált vektorkettősével.
külső erőknek ugyanarra pontra redukált vektorkettősével.
A (2.1) egyenleteket skalárisan megszorozva az anyagi pontok  sebességvektoraival és összegezve kapjuk a teljesítménytételt:
sebességvektoraival és összegezve kapjuk a teljesítménytételt:
|
|
(2.9) |

azaz a pontrendszer  kinetikus energiájának idő szerinti deriváltja egyenlő a pontrendszerre ható külső és belső erők
kinetikus energiájának idő szerinti deriváltja egyenlő a pontrendszerre ható külső és belső erők  teljesítményével. Ennél több csak abban az esetben állítható, ha feltesszük, hogy a pontrendszer elemeinek mozgását csak holonom szkleronom ideális kényszerek korlátozzák, azaz
teljesítményével. Ennél több csak abban az esetben állítható, ha feltesszük, hogy a pontrendszer elemeinek mozgását csak holonom szkleronom ideális kényszerek korlátozzák, azaz
|
|
és így
|
|
(2.10) |

azaz a pontrendszer kinetikus energiájának megváltozása a  és
és  időpillanatok között egyenlő az egyes pontokra ható szabaderők által végzett munkák összegével.
időpillanatok között egyenlő az egyes pontokra ható szabaderők által végzett munkák összegével.
Az energiamegmaradás tétele csak konzervatív, azaz potenciálos szabaderők esetén igaz feltéve, hogy a — konzervatív erőkön kívüli — kényszererők teljes munkája zérus.
2.1.2. Merev testek dinamikai egyenletei
A merev testet olyan kontinuum pontrendszernek tekintve, mely egyes infinitezimális  tömegű elemei között csak ideális, geometriailag megfogalmazható kényszerkapcsolat van, a (2.2) – (2.5) alatti összegzéseket integrállá írhatjuk át és a következőket kapjuk.
tömegű elemei között csak ideális, geometriailag megfogalmazható kényszerkapcsolat van, a (2.2) – (2.5) alatti összegzéseket integrállá írhatjuk át és a következőket kapjuk.
2.1.2.1. Súlypont, impulzus, perdület, tehetetlenségi nyomaték
Egy merev testnek az  origóra számított
origóra számított  statikai nyomatékát illetve súlypontjának
statikai nyomatékát illetve súlypontjának  helyvektorát a következők szerint határozhatjuk meg (
helyvektorát a következők szerint határozhatjuk meg ( az
az  -ből az egyes
-ből az egyes  elemi tömegekhez húzott helyvektor):
elemi tömegekhez húzott helyvektor):
|
|
(2.11) |

A merev test  impulzusvektora és
impulzusvektora és  impulzusderiváltja:
impulzusderiváltja:
|
|
(2.12) |

az origóra illetve egy tetszőleges  pontra számított perdülete
pontra számított perdülete  :
:
|
|
(2.13) |

A merev test súlypontra számított perdülete (az  jelöléssel és az
jelöléssel és az  szögsebesség vektorral kifejezve):
szögsebesség vektorral kifejezve):
|
|
(2.14) |

ahol . Itt
. Itt  egy oszlopvektor és egy sorvektor mátrix jellegű szorzásával vagy másnéven diadikus szorzásával
egy oszlopvektor és egy sorvektor mátrix jellegű szorzásával vagy másnéven diadikus szorzásával  kapott
kapott  -as mátrix. Tehát a
-as mátrix. Tehát a  perdületvektor a
perdületvektor a  súlypontra számított tehetetlenségi nyomaték tenzor segítségével az alábbi módon határozható meg:
súlypontra számított tehetetlenségi nyomaték tenzor segítségével az alábbi módon határozható meg:
|
|
(2.15) |

továbbá
|
|
(2.16) |

és
|
|
(2.17) |

A perdület definíciója alapján egy tetszőleges, mozgó  pontra:
pontra:
|
|
(2.18) |

|
| ||
|
|


azaz
|
|

ahol  az
az  vektor koordinátáit jelöli. Tehát
vektor koordinátáit jelöli. Tehát  ha például
ha például  vagy
vagy .
.
A fentiekből következik a Steiner-tétel vagy párhuzamos tengelyek tétele: az  súlyponton és az
súlyponton és az  ponton átmenő párhuzamos
ponton átmenő párhuzamos  illetve
illetve  tengelyekre számított tehetetlenségi nyomatékok között a
tengelyekre számított tehetetlenségi nyomatékok között a
|
|
(2.19) |
összefüggés áll fenn ( az
az  és
és  tengelyek közötti távolság).
tengelyek közötti távolság).
2.1.2.2. Kinetikai nyomaték, perdületderivált, impulzus- és perdülettétel
A merev test  súlypontjára számított kinetikai nyomatéka
súlypontjára számított kinetikai nyomatéka  :
:
|
|

ahol az utolsó tagban a speciális forma miatt az első  és
és  formálisan felcserélhető, és így az
formálisan felcserélhető, és így az  kiemelésével az integrál a
kiemelésével az integrál a  perdületvektort adja. A
perdületvektort adja. A  vektor (2.14) alatti definíciójából, azt deriválva kapjuk, hogy
vektor (2.14) alatti definíciójából, azt deriválva kapjuk, hogy
|
|
(2.20) |
azaz az állandó nagyságú, de változó irányú vektorokból összeállított tehetetlenségi nyomatéki mátrix idő szerinti deriváltja , ahol
, ahol  az
az  lineáris operáció mátrixa. Ennél fogva a keresztszorzás a mátrixszorzással asszociatív:
lineáris operáció mátrixa. Ennél fogva a keresztszorzás a mátrixszorzással asszociatív: 
Mivel mind a (2.6)-ben közölt redukciós képletek, mind a pontrendszerre levezetett (2.7) szerinti eredmény érvényes merev testekre is, a kinetikai nyomaték vektor egy tetszőleges  pontra számítva:
pontra számítva:
|
|
(2.21) |
a  perdületvektor deriváltja pedig a (2.18) alatti levezetés eredményéből:
perdületvektor deriváltja pedig a (2.18) alatti levezetés eredményéből:
|
|
(2.22) |

Tehát, ha egy  pontra ismerjük a
pontra ismerjük a  tenzor mátrixát valamilyen koordinátarendszerben, akkor az
tenzor mátrixát valamilyen koordinátarendszerben, akkor az  pontra számított kinetikai nyomaték
pontra számított kinetikai nyomaték
|
|
(2.23) |

ha például  vagy
vagy  vagy
vagy . (Az
. (Az  pont
pont  sebességének nem kell ehhez nullának lennie, hacsak a
sebességének nem kell ehhez nullának lennie, hacsak a  perdületvektorra nincs szükségünk. Ekkor ugyanis
perdületvektorra nincs szükségünk. Ekkor ugyanis !)
!)
Ezzel a merev testre vonatkozó  és
és  dinamikai alapegyenletek, az impulzus- és a perdülettétel „használható” alakja:
dinamikai alapegyenletek, az impulzus- és a perdülettétel „használható” alakja:
|
|
(2.24) |

|
|
(2.25) |

(Fontos megjegyezni, hogy az  impulzusderivált vektor mindig a merev test vagy anyagi pontrendszer súlypontjának
impulzusderivált vektor mindig a merev test vagy anyagi pontrendszer súlypontjának  gyorsulásából számítandó, mivel a kinetikai nyomaték vektor mellett szabad vektornak tekintendő, akárcsak az
gyorsulásából számítandó, mivel a kinetikai nyomaték vektor mellett szabad vektornak tekintendő, akárcsak az  erő az
erő az  koncentrált erőpár mellett!)
koncentrált erőpár mellett!)
2.1.2.3. Kinetikus energia
A merev test kinetikus energiáját az alábbi integrál kiszámításával kapjuk meg:
|
|
(2.26) |

ahol az utolsó tag az  azonosságot felhasználva és
azonosságot felhasználva és  -t kiemelve:
-t kiemelve:
|
|
(2.27) |

Másképpen: .
.
Egy tetszőleges  pontot választva az egyes
pontot választva az egyes  elemi tömegek sebességeinek felírásához:
elemi tömegek sebességeinek felírásához:
|
|

|
|
(2.28) |

Látható, hogy a kinetikus energia (2.27) képletében az  index nem cserélhető le tetszőleges pontra. Azonban, ha
index nem cserélhető le tetszőleges pontra. Azonban, ha , akkor a kinetikus energia kifejezése egyszerűbb alakot ölt:
, akkor a kinetikus energia kifejezése egyszerűbb alakot ölt:
|
|
(2.29) |

2.1.3. Elsőfajú Lagrange-egyenletek
A külső és belső erők egyaránt lehetnek szabad- (vagy aktív) erők és a kényszerfeltételekkel kapcsolatos kényszererők. A kényszerfeltételek általában az anyagi pontok  helyvektorainak koordinátái között fennálló, a rendszer szabadsági fokát csökkentő valamilyen geometriai összefüggést írnak le:
helyvektorainak koordinátái között fennálló, a rendszer szabadsági fokát csökkentő valamilyen geometriai összefüggést írnak le:
|
|
(2.30) |

azaz ún. instacionárius geometriai kényszerek, de lehetnek
|
|
(2.31) |

alakú ún. (instacionárius) kinematikai kényszerek is. Ha a fenti kifejezésekben nincs explicit időfüggés , akkor stacionárius kényszerfeltételekről beszélünk.
, akkor stacionárius kényszerfeltételekről beszélünk.
Az idő szerinti teljes deriválással a geometriai kényszerek is megfogalmazhatók kinematikai kényszerként, és ezért valódi kinematikai kényszernek csak a nem kiintegrálható kényszereket nevezzük (azaz ha a  ún. Pfaff-féle kifejezések nem teljes differenciálok).
ún. Pfaff-féle kifejezések nem teljes differenciálok).
Mivel sok esetben a kinematikai kényszerek a geometriai kényszerek idő szerinti deriváltjához hasonlóan a sebességek lineáris függvényei, ezért a továbbiakban ilyen alakúnak feltételezzük őket:
|
|
(2.32) |

A korábbiakban bevezetett idő nélküli  virtuális elmozdulást felfoghatjuk két kinematikailag lehetséges, ugyanazon
virtuális elmozdulást felfoghatjuk két kinematikailag lehetséges, ugyanazon  idő alatt végbemenő
idő alatt végbemenő  és
és  elmozdulások különbségeként is, melyekkel a kényszeregyenletek differenciáljainak különbsége:
elmozdulások különbségeként is, melyekkel a kényszeregyenletek differenciáljainak különbsége:
|
|
(2.33) |
|
|
(2.34) |
ahol  . Ugyanennek megfelelő eredményt kapunk, ha virtuális elmozdulások helyett virtuális sebességekre gondolunk és az előbbi elemi elmozdulások különbségét a
. Ugyanennek megfelelő eredményt kapunk, ha virtuális elmozdulások helyett virtuális sebességekre gondolunk és az előbbi elemi elmozdulások különbségét a  időre vonatkoztatjuk:
időre vonatkoztatjuk:  .Ezzel pl. a kinematikai kényszerekre:
.Ezzel pl. a kinematikai kényszerekre:
|
|

A mechanikai rendszer szabadsági fokainak számát eggyel csökkenti minden egyes kényszerfeltétel:
|
|
(2.35) |
Az anyagi pontokra felírt (2.1) szerinti dinamikai alapegyenleteket a d'Alembert-elvnek megfelelően átrendezve és a  virtuális elmozdulásokkal vett skaláris szorzataikat összegezve a következőt kapjuk:
virtuális elmozdulásokkal vett skaláris szorzataikat összegezve a következőt kapjuk:
|
|
(2.36) |
ahol  az
az  anyagi pontra ható külső szabaderő,
anyagi pontra ható külső szabaderő,  egyéb belső erő, valamint a (külső és belső) kényszererők teljes virtuális munkája zérus:
egyéb belső erő, valamint a (külső és belső) kényszererők teljes virtuális munkája zérus: .
.
Innen visszafelé a Lagrange-féle multiplikátor módszer alkalmazásával jutunk meg az  darab anyagi pont mozgásegyenleteihez, vagyis adjuk hozzá a virtuális munka elvét kifejező egyenlethez a virtuális elmozdulások és a kényszerfeltételek közötti kapcsolatot előíró kifejezések
darab anyagi pont mozgásegyenleteihez, vagyis adjuk hozzá a virtuális munka elvét kifejező egyenlethez a virtuális elmozdulások és a kényszerfeltételek közötti kapcsolatot előíró kifejezések  - illetve
- illetve  -szorosait:
-szorosait:
|
|
(2.37) |

A szabadsági fokok alapján a  virtuális elmozdulások
virtuális elmozdulások  koordinátája közül eredetileg csak
koordinátája közül eredetileg csak  darab független, viszont a
darab független, viszont a  darab
darab  és
és  Lagrange-féle multiplikátor bevezetésével valamennyi
Lagrange-féle multiplikátor bevezetésével valamennyi  virtuális elmozdulást tetszőlegesen választhatjuk meg, és így éppen
virtuális elmozdulást tetszőlegesen választhatjuk meg, és így éppen  darab skalár egyenletet kapunk:
darab skalár egyenletet kapunk:
|
|
(2.38) |

bár az ismeretlenek számát  -val megnövelik a
-val megnövelik a  és
és  multiplikátorok. A hiányzó egyenleteket a kényszerfeltételek adják:
multiplikátorok. A hiányzó egyenleteket a kényszerfeltételek adják:
|
|
(2.39) |

|
|
(2.40) |

Ez a  egyenletből álló egyenletrendszer alkotja az elsőfajú Lagrange-egyenleteket, melyek általánosan anholonom rendszerek mozgásainak leírására is alkalmasak. Az egyenletrendszer megoldása megadja az egyes tömegpontok
egyenletből álló egyenletrendszer alkotja az elsőfajú Lagrange-egyenleteket, melyek általánosan anholonom rendszerek mozgásainak leírására is alkalmasak. Az egyenletrendszer megoldása megadja az egyes tömegpontok  mozgástörvényét, valamint a multiplikátorok
mozgástörvényét, valamint a multiplikátorok  és
és  időfüggvényét. Az utóbbiak ismeretében meghatározhatók az egyes anyagi pontokra ható kényszererők:
időfüggvényét. Az utóbbiak ismeretében meghatározhatók az egyes anyagi pontokra ható kényszererők:
|
|
(2.41) |
2.1.3.1. Példa:
Egy  hosszúságú elhanyagolható tömegű rúddal összekötött, két
hosszúságú elhanyagolható tömegű rúddal összekötött, két  tömegű anyagi pont súrlódásmentesen mozog a függőleges
tömegű anyagi pont súrlódásmentesen mozog a függőleges  síkban úgy, hogy a rendszer súlypontjának
síkban úgy, hogy a rendszer súlypontjának  sebessége mindig rúdirányú.
sebessége mindig rúdirányú.
A geometriai illetve kinematikai kényszerfeltételek:
|
|

és ezek gradiensei:
|
|

Mozgásegyenletek az elsőfajú Lagrange-egyenletek felírásával Most  helyett
helyett  -val és
-val és  helyett
helyett  -vel szorozzuk meg a kényszerek előbb képzett gradienseit:
-vel szorozzuk meg a kényszerek előbb képzett gradienseit:
|
| ||
|
|


Vezessük be a következő jelöléseket
|
|

és az  -mel való egyszerűsítés után írjuk fel a 4 skaláregyenletet:
-mel való egyszerűsítés után írjuk fel a 4 skaláregyenletet:
|
| ||
|
| ||
|
| ||
|
|



A  és
és  paraméterek eliminálásához fejezzük ki
paraméterek eliminálásához fejezzük ki  -t és
-t és  -t az első és a harmadik egyenletből:
-t az első és a harmadik egyenletből:
|
|
és helyettesítsük be ezeket a második és negyedik egyenlet alábbi lineáris kombinációiba:
|
| ||
|
|


A
|
|

paraméterek bevezetésével tovább egyszerűsödnek a mozgásegyenletek és így a kényszeregyenleteket is felsoroló differenciál-algebrai egyenletrendszer az alábbi alakot ölti:
|
| ||
|
| ||
|
| ||
|
|




A mozgásegyenletek levezetése d'Alembert-elvre felírt virtuális munkából Ha az
|
|

kifejezéséből kívánjuk levezetni a mozgásegyenleteket a kényszerfeltételeket kielégítő virtuális koordinátákkal, azaz
|
|
akkor a következő skaláregyenleteket kell megoldani:
|
| ||
|
| ||
|
|



Ha az utolsó két egyenletet megszorozzuk  -gyel illetve
-gyel illetve  -gyel és összeadjuk, valamint az
-gyel és összeadjuk, valamint az  -gyel illetve
-gyel illetve  -gyel vett szorzatukat kivonjuk egymásból, akkor az alábbi két egyenlethez jutunk:
-gyel vett szorzatukat kivonjuk egymásból, akkor az alábbi két egyenlethez jutunk:
|
| ||
|
|


Átrendezés után és az  illetve
illetve  jelölésekkel:
jelölésekkel:
|
| ||
|
|


melyeket beírva a virtuális munka fenti egyenletének  -szeresébe kapjuk, hogy
-szeresébe kapjuk, hogy
|
|

Ebben az egyenletben  és
és  tetszőlegesek, tehát az együtthatóiknak kell zérusnak lennie:
tetszőlegesek, tehát az együtthatóiknak kell zérusnak lennie:
|
| ||
|
|


ahol visszaírtuk  kifejezését. De ezt még tovább egyszerűsíthetjük
kifejezését. De ezt még tovább egyszerűsíthetjük  és
és  változókkal, valamint felhasználva, hogy
változókkal, valamint felhasználva, hogy
|
|

Tehát a mozgásegyenletek:
|
| ||
|
|


Ha most az első egyenletet leosztjuk  -val és a másodikat
-val és a másodikat  -vel és ezeket kivonjuk egymásból, akkor
-vel és ezeket kivonjuk egymásból, akkor
|
|

Továbbá, ha ebből  -ot visszahelyettesítünk az első vagy a második egyenletbe, akkor kapjuk, hogy
-ot visszahelyettesítünk az első vagy a második egyenletbe, akkor kapjuk, hogy
|
|

amivel megkaptuk a korábban levezetett mozgásegyenleteket.
Vizsgáljuk most a modellt adott helyzetben ismert sebességállapotban, tehát legyen
|
|

Ekkor a geometriai kényszer miatt ,
,  -ből következően
-ből következően , valamint
, valamint , azaz
, azaz
|
|

Az egyenletrendszerben szereplő ismeretlenek:  (10 darab), a levezetett 4 egyenlethez még hozzátehetjük a kinematikai kényszer időszerinti első deriváltját, a geometriai kényszernek pedig az első és második deriváltjait:
(10 darab), a levezetett 4 egyenlethez még hozzátehetjük a kinematikai kényszer időszerinti első deriváltját, a geometriai kényszernek pedig az első és második deriváltjait:
|
| ||
|
| ||
|
|



(Vegyük azonban észre, hogy a második egyenlettel egyenértékű egyenletet a két pont sebessége között felírt összefüggés során már felhasználtuk: . Ez nem véletlen, hiszen a két pontot összekötő, most
. Ez nem véletlen, hiszen a két pontot összekötő, most  irányú sebességek egyenlősége
irányú sebességek egyenlősége  szorosan összefügg a két pont közötti távolságát előíró kényszerfeltétellel.)
szorosan összefügg a két pont közötti távolságát előíró kényszerfeltétellel.)
A kényszerfeltételek alapján tehát a kiinduló feltevésekből ismert
|
|

és rendelkezésre áll az alábbi 5, még fel nem használt egyenlet
|
| ||
|
| ||
|
| ||
|
| ||
|
|





melyekből a további ismeretlen mennyiségek:
|
|

Az 1-es illetve a 2-es anyagi pontra ható kényszererők így már meghatározhatók a dinamikai alapegyenletekből:
|
|

mivel
|
|

A kényszererők eredője pont a súlyponton megy át, az impulzus tétel szerint pedig:
|
|

2.2. Holonom rendszerek analitikus leírása
Mivel a modellezett rendszerek jelentős részében csak geometriai kényszerek fordulnak elő, ezért érdemes megvizsgálni, hogy hogyan lehet az ilyen, holonom mechanikai rendszerek mozgását a szabadsági fokok számával megegyező minimális számú egyenlettel leírni.
2.2.1. Általános koordináták
Legyen adott az  anyagi pontból álló pontrendszer, melynek térbeli mozgását
anyagi pontból álló pontrendszer, melynek térbeli mozgását  darab geometriai kényszer korlátozza, azaz a rendszer szabadsági foka:
darab geometriai kényszer korlátozza, azaz a rendszer szabadsági foka:
|
|

Ez egyben azt is jelenti, hogy a rendszer állapotát (helyzetét az idő függvényében)  darab, egymástól független paraméterrel, pontosabban skalárfüggvénnyel lehet megadni. A kényszerek geometriájának ismeretében mindig választható
darab, egymástól független paraméterrel, pontosabban skalárfüggvénnyel lehet megadni. A kényszerek geometriájának ismeretében mindig választható  darab ilyen független változó, másnéven általános koordináta, melyekkel az anyagi pontok helyvektorai kifejezhetők úgy, hogy a geometriai kényszerek automatikusan teljesülnek:
darab ilyen független változó, másnéven általános koordináta, melyekkel az anyagi pontok helyvektorai kifejezhetők úgy, hogy a geometriai kényszerek automatikusan teljesülnek:
|
|

Az anyagi pontok sebességvektorai illetve a virtuális elmozdulások a fentiek alapján:
|
|
(2.42) |

ahol  az Einstein-féle konvenció szerinti összegző index. Az
az Einstein-féle konvenció szerinti összegző index. Az  sebességvektorok tehát a
sebességvektorok tehát a  általános (koordináta) sebességek lineáris kifejezései:
általános (koordináta) sebességek lineáris kifejezései:
|
|
(2.43) |

2.2.2. Virtuális sebesség
A virtuális elmozdulások helyett most használjuk a már korábban bevezetett virtuális sebesség fogalmát. Ez alatt tehát egy olyan képzelt sebességet értünk, ami két kinematikailag lehetséges, a kényszerek által megengedett sebesség különbsége:
|
|
(2.44) |

így az előzőek alapján:
|
|
(2.45) |

és a virtuális munka elvéhez hasonlóan kimondható a virtuális teljesítmény elve, valamint az ideális kényszerek esetében a virtuális teljesítmény zérus.
2.2.3. A másodfajú Lagrange-egyenletek
Vegyük az anyagi pontrendszerre felírt d'Alembert-egyenleteket és szorozzuk meg skalárisan az anyagi pontok virtuális sebességével és összegezzük az így kapott kifejezéseket:
|
|
(2.46) |
ahol  a
a  -adik anyagi pontra ható szabad (a kényszerfeltételektől független) erők eredője és
-adik anyagi pontra ható szabad (a kényszerfeltételektől független) erők eredője és  a
a  -adik anyagi pontra ható külső kényszererők (reakciók) eredője. Az anyagi pontok közötti kényszerekből származó
-adik anyagi pontra ható külső kényszererők (reakciók) eredője. Az anyagi pontok közötti kényszerekből származó  belső kényszerek eredőinek virtuális teljesítményeinek páronkénti összege belátható, hogy zérus, ezért ezeket az erőket már el is hagytuk.
belső kényszerek eredőinek virtuális teljesítményeinek páronkénti összege belátható, hogy zérus, ezért ezeket az erőket már el is hagytuk.
A (2.46) egyenletben a zárójelet felbontva az impulzusderiváltak virtuális teljesítményének összege a következő módon írható át:
|
|

|
|
(2.47) |
mivel az utolsó tagban
|
|
A (2.47) kifejezésben
|
|

ahol  a rendszer kinetikus energiája és ezzel a d'Alembert-elv:
a rendszer kinetikus energiája és ezzel a d'Alembert-elv:
|
|
(2.48) |
amennyiben az  reakcióerők a geometriai kényszerekkel összefüggő ideális kényszerek, vagyis a virtuális munkájuk illetve virtuális teljesítményük zérus:
reakcióerők a geometriai kényszerekkel összefüggő ideális kényszerek, vagyis a virtuális munkájuk illetve virtuális teljesítményük zérus: ,
, .
.
A  szabaderők virtuális teljesítménye alapján definiálhatjuka
szabaderők virtuális teljesítménye alapján definiálhatjuka  általános erőket:
általános erőket:
|
|
(2.49) |

Mivel a d'Alembert-elv virtuális teljesítményére vonatkozó kifejezésben a  virtuális sebességek függetlenek és tetszőlegesek, ezért az egyenlet csak akkor teljesülhet, ha az alábbi
virtuális sebességek függetlenek és tetszőlegesek, ezért az egyenlet csak akkor teljesülhet, ha az alábbi  darab ún. másodfajú Lagrange-egyenletek által meghatározott differenciálegyenlet-rendszer is érvényes:
darab ún. másodfajú Lagrange-egyenletek által meghatározott differenciálegyenlet-rendszer is érvényes:
|
|
(2.50) |
2.2.4. A kinetikus energia függése az általános koordinátáktól
Az  darab anyagi pontból álló holonom rendszer kinetikus energiája:
darab anyagi pontból álló holonom rendszer kinetikus energiája:
|
|
(2.51) |

ahol
|
|
(2.52) |
|
|
(2.53) |
|
|
(2.54) |
Látható, hogy holonom szkleronom rendszer esetében 
 ,
,  azaz
azaz
|
|
(2.55) |

 -nak homogén másodfokú kifejezése
-nak homogén másodfokú kifejezése  , és ezért
, és ezért
|
|
(2.56) |

Tétel:  pozitív definit kifejezés, azaz
pozitív definit kifejezés, azaz 
 esetén és
esetén és .
.
Bizonyítás: 
Következmény:  (Különben
(Különben  -nak lenne
-nak lenne  megoldása, azaz
megoldása, azaz
|
|

ami ellentmondás.)
2.2.5. A mozgásegyenletek potenciálos erők esetén
Tegyük fel, hogy az  anyagi pontokra ható
anyagi pontokra ható  erők potenciálosak, azaz
erők potenciálosak, azaz
|
|
(2.57) |

Ekkor a  általános erő felbontható potenciálos és nem potenciálos erőkből származó általános erők összegére:
általános erő felbontható potenciálos és nem potenciálos erőkből származó általános erők összegére:
|
|
(2.58) |

Általánosan, ha az  -edik anyagi pontra
-edik anyagi pontra  potenciálos és
potenciálos és  nem potenciálos erők hatnak, és
nem potenciálos erők hatnak, és
|
|
(2.59) |

Legyen
|
|
(2.60) |

az ún. Lagrange-függvény vagy kinetikus potenciál. Ezzel a másodfajú Lagrange-egyenletek potenciálos erők esetén:
|
|
(2.61) |
Példa:
2.2.5.1. A gömbi inga mozgásegyenletei
A következőkben vizsgáljuk az  hosszúságú fonálon függő
hosszúságú fonálon függő  tömeg mozgását. Az anyagi pont mozgástörvényét meghatározó vektoregyenlet:
tömeg mozgását. Az anyagi pont mozgástörvényét meghatározó vektoregyenlet:
|
|
(2.62) |

ahol  az
az  geometriai kényszert biztosító reakcióerő.
geometriai kényszert biztosító reakcióerő.
A virtuális elmozdulásokkal megfogalmazott d'Alembert-elvvel és a virtuális elmozdulásokat korlátozó kényszeregyenlettel:
|
|
(2.63) |

azaz  és
és  . Ezzel a mozgást meghatározó egyenletek:
. Ezzel a mozgást meghatározó egyenletek:
|
|
(2.64) |

|
|
(2.65) |

|
|
(2.66) |
Az utóbbi, a kényszert megfogalmazó, (2.66) egyenletből  kifejezhető és
kifejezhető és  meghatározható, amiket ha visszaírunk a (2.64) egyenletbe, akkor egy, már csak
meghatározható, amiket ha visszaírunk a (2.64) egyenletbe, akkor egy, már csak  -t és
-t és  -t (illetve deriváltjaikat) tartalmazó differenciál-egyenletrendszert kapunk.
-t (illetve deriváltjaikat) tartalmazó differenciál-egyenletrendszert kapunk.
2.2.5.2. Síkbeli inga mozgásegyenlete
Korlátozzuk a mozgást az  síkra, azaz
síkra, azaz , és így
, és így
|
|
(2.67) |

|
|

Átírva az  és
és  koordinátákkal kapjuk, hogy
koordinátákkal kapjuk, hogy
|
|
(2.68) |

Az utóbbi egyenletet  -tal megszorozva (majd felhasználva, hogy
-tal megszorozva (majd felhasználva, hogy  ) és az idő szerint integrálva kapjuk az energiamegmaradást kifejező elsőintegrált:
) és az idő szerint integrálva kapjuk az energiamegmaradást kifejező elsőintegrált:
|
|
(2.69) |

ahol  a legnagyobb szögkitérés
a legnagyobb szögkitérés . A (2.69) egyenletet egyszerűsítve és átrendezve
. A (2.69) egyenletet egyszerűsítve és átrendezve :
:
|
|
(2.70) |

Mivel az inga a  helyzeten való áthaladás után
helyzeten való áthaladás után  idő múlva éri el a szélső helyzetet, a
idő múlva éri el a szélső helyzetet, a
|
|

helyettesítéssel (2.70)-ből a következőt kapjuk:
|
|

hiszen  illetve
illetve . Így tehát a síkbeli matematikai inga lengésideje
. Így tehát a síkbeli matematikai inga lengésideje
|
|
(2.71) |
ahol  az elsőfajú elliptikus integrál Legendre-féle normálalakja.
az elsőfajú elliptikus integrál Legendre-féle normálalakja.
2.2.6. A mechanikai összenergia változása
A teljes mechanikai energia a fentebb bevezetett jelölésekkel:
|
|
(2.72) |

és ennek az idő szerinti első deriváltja:
|
|
(2.73) |
Ha felhasználjuk, hogy a második tag
|
|

és
|
|
akkor
|
|
(2.74) |
illetve átrendezés után kapjuk, hogy holonom rendszerek esetében
|
|
(2.75) |

Holonom szkleronom rendszereknél az utolsó két tag zérus, tehát
|
|
(2.76) |
és amennyiben a potenciálos erőtér konzervatív, vagyis  , akkor
, akkor
|
|
(2.77) |

illetve, ha az összes aktív erő időtől független potenciálfüggvényből származtatható, akkor
|
|
(2.78) |

és az ilyen rendszereket, ahol a teljes mechanikai energia állandó, konzervatív rendszereknek nevezzük.
2.2.7. Nem potenciálos általános erők
A  nem potenciálos általános erőket teljesítményük szerint osztályozhatjuk, vagyis annak alapján, hogy hogyan befolyásolják a rendszer teljes mechanikai energiáját:
nem potenciálos általános erőket teljesítményük szerint osztályozhatjuk, vagyis annak alapján, hogy hogyan befolyásolják a rendszer teljes mechanikai energiáját:
|
|

 esetén giroszkopikus erőkről beszélünk (ilyen általában giroszkópot, pörgettyűt tartalmazó mechanikai rendszerekben fordul elő).
esetén giroszkopikus erőkről beszélünk (ilyen általában giroszkópot, pörgettyűt tartalmazó mechanikai rendszerekben fordul elő). esetén disszipatív erőkről van szó, melyek a rendszer összenergiáját csökkentik.
esetén disszipatív erőkről van szó, melyek a rendszer összenergiáját csökkentik. esetén általában valamilyen külső forrásból származó gerjesztő erőkkel kapcsolatosak az általános erők, melyek az általános koordinátáknak, sebességeknek és az időnek (legtöbbször periodikus) függvényei.
esetén általában valamilyen külső forrásból származó gerjesztő erőkkel kapcsolatosak az általános erők, melyek az általános koordinátáknak, sebességeknek és az időnek (legtöbbször periodikus) függvényei.
Látszik tehát, hogy holonom szkleronom rendszerben a teljes mechanikai energia akkor is állandó marad, ha a konzervatív erőkön kívüli nem potenciálos erők vagy giroszkopikus erők, vagy a disszipatív erők és a gerjesztő erők teljesítményének összege zérus.
Bontsuk fel most az  -edik anyagi pontra ható erők
-edik anyagi pontra ható erők  erdőjét potenciálos, giroszkopikus, disszipatív és egyéb (gerjesztő) erők összegére:
erdőjét potenciálos, giroszkopikus, disszipatív és egyéb (gerjesztő) erők összegére:
|
|

és vizsgáljuk a továbbiakban a giroszkopikus és disszipatív erőket illetve az azokból származó általános erőkomponenseket.
2.2.7.1. Giroszkopikus erők
Amennyiben az  -edik anyagi pontra ható
-edik anyagi pontra ható  erő teljesítménye konstans nulla,
erő teljesítménye konstans nulla,
|
|
(2.79) |

az azt jelenti, hogy az  ún. giroszkopikus erő mindig merőleges az
ún. giroszkopikus erő mindig merőleges az  sebességvektorra, vagyis függ
sebességvektorra, vagyis függ  -től:
-től:
|
|
(2.80) |

Az ilyen erőkből származó  általános giroszkopikus erőre pedig igaz, hogy
általános giroszkopikus erőre pedig igaz, hogy
|
|
(2.81) |
azaz a  általános sebességeknek is függvénye. Legtöbb esetben a
általános sebességeknek is függvénye. Legtöbb esetben a  giroszkopikus erő a
giroszkopikus erő a  -nak homogén lineáris függvénye, azaz
-nak homogén lineáris függvénye, azaz
|
|
(2.82) |
így a giroszkopikus erők teljesítménye:
|
|
(2.83) |

Mivel a  általános sebességek függetlenek, belátható, hogy a giroszkopikus teljesítmény csak úgy lehet nulla, ha
általános sebességek függetlenek, belátható, hogy a giroszkopikus teljesítmény csak úgy lehet nulla, ha
|
|
(2.84) |

azaz  antiszimmetrikus mátrix. Ezzel a
antiszimmetrikus mátrix. Ezzel a  giroszkopikus erővektor és teljesítménye:
giroszkopikus erővektor és teljesítménye:
|
|
(2.85) |

Megjegyzés
Holonom reonom rendszer esetén, azaz ha (2.51) szerint  , a másodfajú Lagrange-egyenletek:
, a másodfajú Lagrange-egyenletek:
|
| ||
|
| ||
|
|

Vagyis az egyenletekben egy  giroszkopikus tag jelenik meg, ami nem valóságos, hanem a tehetetlenségi erőkből származó, de giroszkopikus látszólagos erő.
giroszkopikus tag jelenik meg, ami nem valóságos, hanem a tehetetlenségi erőkből származó, de giroszkopikus látszólagos erő.
2.2.7.2. Disszipatív erők
Disszipatív erők esetén a  feltevés is az erők sebességfüggését vonja maga után, azaz
feltevés is az erők sebességfüggését vonja maga után, azaz . Vizsgáljuk most azokat az eseteket, amikor ez a kapcsolat homogén lineáris kifejezés:
. Vizsgáljuk most azokat az eseteket, amikor ez a kapcsolat homogén lineáris kifejezés:
|
|
(2.86) |
azaz a disszipatív teljesítmény:
|
|
(2.87) |
A Rayleigh-féle
|
|
(2.88) |
disszipatív függvény bevezetésével az  sebességmezőn értelmezett „potenciálfüggvényt” kapunk:
sebességmezőn értelmezett „potenciálfüggvényt” kapunk:
|
|
(2.89) |

A  disszipatív függvény
disszipatív függvény  -ra vonatkoztatott negatív gradiense a
-ra vonatkoztatott negatív gradiense a  disszipatív általános erőt adja, mivel
disszipatív általános erőt adja, mivel
|
|
(2.90) |

A disszipatív függvényt előállíthatjuk az általános koordináták illetve azok sebességeinek függvényeként is (az egyszerűség kedvéért a  -kat elhagyva és ügyelve az összegző indexekre):
-kat elhagyva és ügyelve az összegző indexekre):
|
|

|
|
(2.91) |

ahol  -k az általános sebességeknek homogén
-k az általános sebességeknek homogén  -edfokú kifejezései.
-edfokú kifejezései.
Holonom szkleronom mechanikai rendszerekben
|
|
(2.92) |

mivel
|
|
(2.93) |
A  szimmetrikus mátrix bevezetésével:
szimmetrikus mátrix bevezetésével:
|
|
(2.94) |



Amennyiben , és minden
, és minden  és tetszőleges
és tetszőleges  esetén
esetén , akkor teljes disszipációról van szó, és ekkor
, akkor teljes disszipációról van szó, és ekkor  pozitív definit, vagyis:
pozitív definit, vagyis:  .
.
A potenciális, a giroszkopikus, valamint a disszipatív erők bevezetésével a másodfajú Lagrange-egyenlet:
|
|
(2.95) |

2.2.8. Az általános potenciál
Amennyiben a  általános erők egy
általános erők egy  függvényből a
függvényből a
|
|
(2.96) |

összefüggéssel származtathatók, akkor a
|
|
(2.97) |

függvényt általános potenciálfüggvénynek nevezzük.
Az
|
|
(2.98) |

általános Lagrange-függvény segítségével a Lagrange-egyenletek tehát:
|
|
(2.99) |
Igaz továbbá, hogy
|
|
(2.100) |

ahol  azokat a tagokat jelöli, melyekben nem fordul elő a
azokat a tagokat jelöli, melyekben nem fordul elő a  általános gyorsulás. Mivel a mechanikában általában olyan erők fordulnak elő, melyek csak az általános koordinátáktól, általános sebességektől és az időtől függenek, azonban az általános gyorsulásoktól nem, vagyis
általános gyorsulás. Mivel a mechanikában általában olyan erők fordulnak elő, melyek csak az általános koordinátáktól, általános sebességektől és az időtől függenek, azonban az általános gyorsulásoktól nem, vagyis
|
|
(2.101) |
vagyis az  általános potenciál az általános sebességeknek legfeljebb lineáris függvénye lehet:
általános potenciál az általános sebességeknek legfeljebb lineáris függvénye lehet:
|
|
(2.102) |
és így a Lagrange-függvény:
|
|
(2.103) |

Az általános erők tehát az előbbiek alapján:
|
|
(2.104) |

Ha , akkor az általános erők egy giroszkopikus és egy (közönséges) potenciálos erő összegeként állnak elő:
, akkor az általános erők egy giroszkopikus és egy (közönséges) potenciálos erő összegeként állnak elő:
|
|
(2.105) |

Azokat a mechanikai rendszereket, melyekben az erőknek közönséges  vagy általános
vagy általános  potenciáljuk van, természetes rendszereknek nevezzük. Ekkor a Lagrange-egyenleteket kifejtve a következőt kapjuk:
potenciáljuk van, természetes rendszereknek nevezzük. Ekkor a Lagrange-egyenleteket kifejtve a következőt kapjuk:
|
|
(2.106) |

A  általános gyorsulások együtthatói
általános gyorsulások együtthatói  miatt:
miatt:
|
|
(2.107) |
melynek determinánsa zérustól különböző, azaz az egyenletrendszer egyértelműen megoldható  -re:
-re:
|
|
(2.108) |
vagyis adott  és
és  kezdeti feltételek mellett egy és csak egy megoldás létezik (egzisztencia és unicitás teljesül), tehát a Lagrange-egyenletek egyértelműen meghatározzák a rendszer mozgását.
kezdeti feltételek mellett egy és csak egy megoldás létezik (egzisztencia és unicitás teljesül), tehát a Lagrange-egyenletek egyértelműen meghatározzák a rendszer mozgását.
2.2.9. A Hamilton-féle kanonikus mozgásegyenletek
2.2.9.1. Általános impulzus
Vezessük be Hamilton (1833) ötlete nyomán a potenciálos erőtérben mozgó holonom mechanikai rendszer  általános koordinátájához tartozó általános impulzust:
általános koordinátájához tartozó általános impulzust:
|
|
(2.109) |

Az elnevezés onnan ered, hogy a transzlációs mozgást végző anyagi pont esetében ez
|
|

az anyagi pont impulzusát adja (mivel ).
).
Természetes rendszerek esetén, azaz, ha az általános erők
|
|
(2.110) |
alakban felírhatók egy |általánosított potenciál segítségével és így definiálható a Lagrange-féle általános kinetikus potenciál
|
|
(2.111) |

akkor a  általános impulzus az alábbi alakot ölti:
általános impulzus az alábbi alakot ölti:
|
|
(2.112) |

Ebből az inhomogén lineáris (!) algebrai egyenletrendszerből  kifejezhető, mivel — mint azt korábban láttuk
kifejezhető, mivel — mint azt korábban láttuk  pozitív definitásának bizonyításánál — az
pozitív definitásának bizonyításánál — az  együttható mátrix determinánsa nem zérus:
együttható mátrix determinánsa nem zérus:
|
|
(2.113) |

és ezzel  helyett
helyett  bevezethető.
bevezethető.
2.2.9.2. A Hamilton-függvény
A  Hamilton-féle változók egy
Hamilton-féle változók egy  dimenziós teret határoznak meg. Ez az ún. fázistér, melyben a rendszer mozgásának egy adott pályán, ún. trajektórián mozgó pont feleltethető meg. Ennek a pontnak a mozgása összefüggésbe hozható egy
dimenziós teret határoznak meg. Ez az ún. fázistér, melyben a rendszer mozgásának egy adott pályán, ún. trajektórián mozgó pont feleltethető meg. Ennek a pontnak a mozgása összefüggésbe hozható egy  darab elsőrendű differenciálegyenletből álló rendszerrel. Ehhez vezessük be a Hamilton-függvényt:
darab elsőrendű differenciálegyenletből álló rendszerrel. Ehhez vezessük be a Hamilton-függvényt:
|
|
(2.114) |

Vizsgáljuk most  -nak
-nak  illetve
illetve  szerinti parciális deriváltjait:
szerinti parciális deriváltjait:
|
|

ahol az utóbbi kifejezésnél felhasználtuk a másodfajú Lagrange-egyenletet.
Ezzel a rendszer mozgását leíró  darab elsőrendű differenciálegyenlet, másnéven a Hamilton-féle kanonikus mozgásegyenletek a következők:[2]
darab elsőrendű differenciálegyenlet, másnéven a Hamilton-féle kanonikus mozgásegyenletek a következők:[2]
|
|
(2.115) |
Nézzük meg most a Hamilton-függvény idő szerinti teljes deriváltját:
|
|
(2.116) |
Ha tehát a Hamilton-függvény nem függ explicit az időtől, akkor
|
|
(2.117) |

és az ilyen rendszereket általános konzervatív rendszereknek,  -t pedig általános összenergiának nevezzük.
-t pedig általános összenergiának nevezzük.
Természetes rendszerekben
|
|
(2.118) |

ahol felhasználtuk a homogén kifejezésekre vonatkozó Euler-féle azonosságot.
A (2.118) egyenlet alapján a Hamilton-függvény tipikus rendszerekben:
|
potenciálos erőtérben |
általános pot. erők esetén | |
|
|
| |
|
reonom eset: |
|
|
|
szkleronom eset: |
|
|
|
konzervatív rendszer: |
|
|






Tehát a  Hamilton-függvény potenciálos erők esetén szkleronom
Hamilton-függvény potenciálos erők esetén szkleronom  illetve konzervatív rendszerben megegyezik a mechanikai összenergiával
illetve konzervatív rendszerben megegyezik a mechanikai összenergiával  . Amennyiben pedig csak az általános összenergia állandósága teljesül, általánosan konzervatív rendszerről beszélhetünk.
. Amennyiben pedig csak az általános összenergia állandósága teljesül, általánosan konzervatív rendszerről beszélhetünk.
2.2.10. Routh-egyenletek
2.2.10.1. Ciklikus koordináták
A rendszer helyzetét leíró általános koordináták között előfordulhatnak olyanok, melyeknek csak az idő szerinti deriváltja szerepel az  Lagrange-függvényben, és ezeket megkülönböztetve a mozgásegyenletek egy újabb formája vezethető le. Az
Lagrange-függvényben, és ezeket megkülönböztetve a mozgásegyenletek egy újabb formája vezethető le. Az  darab általános koordináta legyen tehát
darab általános koordináta legyen tehát
|
|
(2.119) |

melyek közül az első  darab
darab  képezi az ún. pozícionális koordinátákat, a maradék
képezi az ún. pozícionális koordinátákat, a maradék  darab
darab  pedig a ciklikus koordinátákat, melyekkel a Lagrange-függvény:
pedig a ciklikus koordinátákat, melyekkel a Lagrange-függvény:
|
|
(2.120) |

Az indexes jelölés helyett alkalmazzuk a vektoros jelölést, és legyen  a pozícionális koordináták vektora,
a pozícionális koordináták vektora,  pedig a ciklikus koordináták alkotta vektor:
pedig a ciklikus koordináták alkotta vektor:
|
|
(2.121) |

Tekintsük most a ciklikus koordinátákra vonatkozó Lagrange-egyenleteket:
|
|
(2.122) |
Írjuk fel most a Lagrange-függvényt az általános sebességek homogén kifejezéseinek összegeként:
|
|
(2.123) |
és eszerint
|
|
(2.124) |

Ebből, feltételezve, hogy , a ciklikus koordináta sebességek kifejezhetők:
, a ciklikus koordináta sebességek kifejezhetők:
|
|
(2.125) |

2.2.10.2. A Routh-függvény
Képezzük most a Hamilton-függvény mintájára az ún. Routh-függvényt az alábbi módon:
|
|
(2.126) |

Ebből a Hamilton-egyenletekhez hasonló levezetéssel a ciklikus koordinátákra kapjuk, hogy
|
|
(2.127) |
a (2.126)-ból  -t kifejezve és a pozícionális koordinátákra vonatkozó Lagrange-egyenletekbe beírva pedig, hogy
-t kifejezve és a pozícionális koordinátákra vonatkozó Lagrange-egyenletekbe beírva pedig, hogy
|
|
(2.128) |
Tehát a pozícionális koordinátákra vonatkozó egyenletek Lagrange-típusúak, míg a ciklikus koordinátákéi Hamilton-típusúak.
Mivel a Routh-függvény explicit nem függ a ciklikus koordinátáktól, a pozícionális koordinátákra vonatkozó — Lagrange-típusú — Routh-egyenletek is függetlenek lesznek  -től (a kezdeti feltételek által meghatározott állandó
-től (a kezdeti feltételek által meghatározott állandó  kifejezésen keresztüli függést leszámítva), ezért a ciklikus koordinátákat elhanyagolható koordinátáknak is nevezik. A ciklikus koordinátákra vonatkozó — Hamilton-típusú — egyenletek a mechanikai rendszer rejtett mozgását írják le, melyektől független a pozícionális koordináták által leírt mozgás.
kifejezésen keresztüli függést leszámítva), ezért a ciklikus koordinátákat elhanyagolható koordinátáknak is nevezik. A ciklikus koordinátákra vonatkozó — Hamilton-típusú — egyenletek a mechanikai rendszer rejtett mozgását írják le, melyektől független a pozícionális koordináták által leírt mozgás.
A pozícionális koordinátákra vonatkozó egyenletek megoldása
|
|
(2.129) |

ahol  integrálási állandónk van
integrálási állandónk van .
.
A rejtett mozgást pedig a következő mozgástörvény írja le:
|
|
(2.130) |

ahol újabb  darab integrálási állandó
darab integrálási állandó  jelenik meg (azaz összesen
jelenik meg (azaz összesen  darab).
darab).
2.2.10.3. Példa
Vizsgáljuk a vízszintes, sima asztallapon körbe-körbe mozgó  tömeget, amihez egy, az asztalon lévő furaton áthúzott
tömeget, amihez egy, az asztalon lévő furaton áthúzott  hosszúságú kötéllel egy másik
hosszúságú kötéllel egy másik  tömeget rögzítünk az asztal alatt.
tömeget rögzítünk az asztal alatt.
Feltételezve, hogy a kötél ideális és nem lazul meg, tehát egy tartós geometriai kényszert jelent a két test között, és az asztal alatti tömeg csak függőleges irányban mozdul el, két szabadságfokú mozgások alakulhatnak ki. Legyen az előbb leírt mechanikai rendszer helyzetét egyértelműen megadó két általános koordináta az asztallapon mozgó tömeg furattól mért  távolsága és a furat és az előbbi
távolsága és a furat és az előbbi  tömeg közötti kötéldarabnak az asztal széléhez viszonyított
tömeg közötti kötéldarabnak az asztal széléhez viszonyított  szöge:
szöge:
|
|
Ezekkel a rendszer  kinetikus és
kinetikus és  potenciális energiája:
potenciális energiája:
|
|

Az ezek által meghatározott Lagrange-függvény:
|
|

azaz látható, hogy a  koordináta ciklikus.
koordináta ciklikus.
Mivel a rendszer konzervatív, a  Hamilton-függvény megegyezik a mechanikai összenergiával:
Hamilton-függvény megegyezik a mechanikai összenergiával:
|
|

Határozzuk meg a  koordinátához tartozó
koordinátához tartozó  általános impulzust a definíció alapján:
általános impulzust a definíció alapján:
|
|

Írjuk fel a Routh-függvényt:
|
|

Erre azonban a Routh-egyenletek felírásához nincsen feltétlen szükség, hiszen a pozícionális koordinátához tartozó főmozgás differenciálegyenletét a másodfajú Lagrange-egyenletből is származtathatjuk:
|
|

amiből  -t az általános impulzus bevezetésével kiküszöbölhetjük.
-t az általános impulzus bevezetésével kiküszöbölhetjük.
A ciklikus koordináta rejtett mozgásának Hamilton-típusú egyenleteinek első felét az általános impulzusból kifejezett  képlete adja, a másik fele pedig
képlete adja, a másik fele pedig  ciklikussága miatt a
ciklikussága miatt a  egyenlet lesz:
egyenlet lesz:
|
| ||
|
|

Tehát a  általános impulzus a kezdeti feltételektől függő állandó:
általános impulzus a kezdeti feltételektől függő állandó:
|
|

és ezzel a főmozgás differenciálegyenlete:
|
|

Az egyenletből látszik, hogyha a kezdeti szögsebesség , akkor
, akkor , vagyis az asztallapon lévő tömeg egyenletes körmozgást fog végezni
, vagyis az asztallapon lévő tömeg egyenletes körmozgást fog végezni .
.
(További példák: forgó rúdon rezgő tömeg, rúd egyensúlyozás, gömbi inga.)

3. fejezet - Mozgások jellemzése és stabilitása
3.1. Egy szabadsági fokú csillapított rezgések
3.1.1. Szabad rezgések
A legtöbb egyszabadsági fokú mechanikai rendszer viselkedését kis kitérésű mozgásokra jól leírja a lineáris elemekből álló referencia modell mozgásegyenlete:
|
|

ahol  az ún. csillapítatlan sajátkörfrekvencia és
az ún. csillapítatlan sajátkörfrekvencia és  a relatív csillapítási tényező.
a relatív csillapítási tényező.
Az egyenlet megoldását a lineáris differenciálegyenletek elmélete alapján az alábbi alakban keressük:
|
|

A nem triviális megoldást a zárójelben szereplő karakterisztikus polinom gyökeivel a következőképpen írhatjuk fel (a  eset kivételével, ld. később):
eset kivételével, ld. később):
|
|

Vizsgáljuk meg az ún. gyökhelygörbét, ha  változik:
változik:
mivel
 ,
,  továbbá
továbbá  vagyis, ha
vagyis, ha  akkor a gyökök a komplex számsík baloldalán helyezkednek el, ha pedig
akkor a gyökök a komplex számsík baloldalán helyezkednek el, ha pedig  akkor a jobboldalán;
akkor a jobboldalán; esetén komplex konjugált gyökpár a megoldás
esetén komplex konjugált gyökpár a megoldás  mégpedig az origó középpontú
mégpedig az origó középpontú  sugarú körön:
sugarú körön: .
. esetén
esetén  kétszeres gyökök;
kétszeres gyökök; esetén
esetén  valósak;
valósak; esetén
esetén  valósak.
valósak.
A továbbiakban csak a  esetekhez tartozó megoldásokat vizsgáljuk:
esetekhez tartozó megoldásokat vizsgáljuk:
 :
:  a csillapított sajátkörfrekvencia (a lengésidő
a csillapított sajátkörfrekvencia (a lengésidő  ),
),
mivel
 , azaz
, azaz  (komplex konjugáltak). A csillapodó rezgés
(komplex konjugáltak). A csillapodó rezgés  alakban is felírható, melynek segítségével értelmezhetjük a csillapodási hányados
alakban is felírható, melynek segítségével értelmezhetjük a csillapodási hányados
ún. logaritmikus dekrementum fogalmát.
 : aperiodikus határeset; a kétszeres gyök miatt a megoldás kvázipolinom alakú:
: aperiodikus határeset; a kétszeres gyök miatt a megoldás kvázipolinom alakú:
 :
: , a jelenség exponenciálisan csökkenő aperiodikus mozgás:
, a jelenség exponenciálisan csökkenő aperiodikus mozgás:
ahol
 és
és  .
.
Rajzoljuk fel  grafikonjait a
grafikonjait a  komplex számsík néhány tipikus pontjában …!
komplex számsík néhány tipikus pontjában …!
3.1.2. Gerjesztett rezgések
A referencia modellt most kiegészítjük az  tömegre ható
tömegre ható  harmonikus gerjesztő erővel. Ezáltal a mozgásegyenlet új alakja:
harmonikus gerjesztő erővel. Ezáltal a mozgásegyenlet új alakja:
|
|

ahol  az ún. statikus kitérés vagy deformáció, ami az
az ún. statikus kitérés vagy deformáció, ami az  tömeg statikus elmozdulását adja meg konstans
tömeg statikus elmozdulását adja meg konstans  esetén (
esetén ( ).
).
A mozgásegyenlet most egy inhomogén közönséges differenciálegyenlet, melynek általános megoldását a homogén rész általános megoldásának és az inhomogén egyenlet partikuláris megoldásának összegeként kapjuk meg:
|
|

mivel kvázipolinomiális gerjesztő függvény esetén a partikuláris megoldást is a megfelelő fokú és frekvenciájú függvény alakjában keressük.
A  -t visszaírva a differenciálegyenletbe és
-t visszaírva a differenciálegyenletbe és ,
,  együtthatói szerint szétválasztva:
együtthatói szerint szétválasztva:
|
| ||
|
|


illetve  -tel való osztás után (a
-tel való osztás után (a  frekvenciaviszony vagy hangolás bevezetésével) mátrix alakba rendezve:
frekvenciaviszony vagy hangolás bevezetésével) mátrix alakba rendezve:
|
|
Az egyenletrendszer megoldása:
|
|

amiből kapjuk, hogy
|
|

Innen a nagyítás:
 , és
, és  a fázisszög (vagy fáziskésés — a gerjesztéshez képest).
a fázisszög (vagy fáziskésés — a gerjesztéshez képest).
A nagyítás függvény szélsőértékhelye megegyezik a gyökjel alatti kifejezés szélsőértékhelyével (mivel a  tartományon az
tartományon az  szigorúan monoton változik):
szigorúan monoton változik):
|
|

Innen a  szélsőértékhely és az
szélsőértékhely és az  szélsőérték:
szélsőérték:
|
|

Ha , akkor
, akkor , és
, és  – minőségi tényező, illetve
– minőségi tényező, illetve  – veszteségi tényező.
– veszteségi tényező.
3.2. Mechanikai rendszerek egyensúlya
Egyensúly alatt a mechanikai rendszer tartós nyugalmi állapotát értjük, azaz ha ( anyagi pont esetén)
anyagi pont esetén)
|
|
(3.1) |

Elnevezések: : egyensúlyi helyzet;
: egyensúlyi helyzet; : egyensúlyi állapot.
: egyensúlyi állapot.
3.2.1. Virtuális teljesítmény elve
(Bernoulli, 1717; Galilei: „A mechanika aranyszabálya”):
Egy rendszernek az (ideális) kényszerekkel összeférő  pozíciója egyensúlyi helyzet
pozíciója egyensúlyi helyzet  az
az  szabaderők virtuális teljesítményének összege ott tartósan zérus:
szabaderők virtuális teljesítményének összege ott tartósan zérus:
|
|
(3.2) |

Bizonyítás:  szükséges feltétel, hiszen a d'Alembert-elv alapján
szükséges feltétel, hiszen a d'Alembert-elv alapján
|
|

Másrészt, ha  tartósan zérus egy
tartósan zérus egy  helyzetben (és itt
helyzetben (és itt  azaz
azaz ), akkor megegyezik a ténylegesen lehetséges teljesítménnyel, mivel
), akkor megegyezik a ténylegesen lehetséges teljesítménnyel, mivel  megegyezik a lehetséges sebességekkel (vagyis az ilyen helyzet szkleronom, időtől független). Tehát
megegyezik a lehetséges sebességekkel (vagyis az ilyen helyzet szkleronom, időtől független). Tehát
|
|
(3.3) |
a teljesítménytétel értelmében. Viszont ha ez az  helyzet nyugalmi helyzet — azaz a
helyzet nyugalmi helyzet — azaz a  kinetikus energia zérus és egyben minimális, hiszen
kinetikus energia zérus és egyben minimális, hiszen — akkor a szabaderők zérus virtuális teljesítménye esetén a kinetikus energia változatlan, azaz zérus marad, tehát az adott helyzet tartós nyugalmi, vagyis egyensúlyi helyzet.
— akkor a szabaderők zérus virtuális teljesítménye esetén a kinetikus energia változatlan, azaz zérus marad, tehát az adott helyzet tartós nyugalmi, vagyis egyensúlyi helyzet.
Általánosabban megfogalmazva: mivel a nyugalmi állapot megszűnése csak
|
|
(3.4) |
esetén következhet be, az egyensúly szükséges és elégséges feltétele, hogy
|
|
(3.5) |

ami egyenlőtlenséggel megadott kényszerfeltételek mellett is alkalmazható.
Következmény: holonom mechanikai rendszernek  (
( ) egyensúlyi helyzete
) egyensúlyi helyzete  ha ott az általános erők tartósan zérusok:
ha ott az általános erők tartósan zérusok: , mivel
, mivel
|
|
(3.6) |
és  a kényszerfeltételeket kielégítik, így tetszőlegesek (függetlenek), tehát
a kényszerfeltételeket kielégítik, így tetszőlegesek (függetlenek), tehát 
 .
.
Konzervatív holonom szkleronom mechanikai rendszerekben a  egyensúlyi helyzetben
egyensúlyi helyzetben
|
|
(3.7) |

és mivel  -k függetlenek és tetszőlegesek az egyensúly szükséges és elégséges feltétele, hogy
-k függetlenek és tetszőlegesek az egyensúly szükséges és elégséges feltétele, hogy
|
|
(3.8) |


vagyis, hogy az  potenciál függvénynek az egyensúlyi helyzetben lokális szélsőértéke legyen.
potenciál függvénynek az egyensúlyi helyzetben lokális szélsőértéke legyen.
3.2.2. Dinamikus egyensúly
Potenciálos erőtérben mozgó holonom (reonom) mechanikai rendszer mozgásegyenlete az  alakú kinetikus potenciállal:
alakú kinetikus potenciállal:
|
|
(3.9) |
Egyensúly esetén ( ,
, ) az első, a második és a negyedik tag eltűnik:
) az első, a második és a negyedik tag eltűnik:
|
|
(3.10) |

mivel  és
és . Az idő szerinti teljes deriválás után csak a parciális derivált marad meg (mert a másik tag
. Az idő szerinti teljes deriválás után csak a parciális derivált marad meg (mert a másik tag  -tal szorzódna):
-tal szorzódna):
|
|
(3.11) |
és ennek az egyenletrendszernek a megoldása adja az egyensúlyi helyzetet. Ez persze nem függhet az időtől, ami tipikusan[3] akkor teljesül, ha ,
,  az időnek legfeljebb elsőfokú,
az időnek legfeljebb elsőfokú,  pedig nulladfokú kifejezése. Ebben az esetben
pedig nulladfokú kifejezése. Ebben az esetben
|
|
(3.12) |

Konzervatív erők (nem rendszer!) esetén  pedig a
pedig a
|
|
(3.13) |

feltétel határozza meg a ,
,  tulajdonsággal bíró
tulajdonsággal bíró  dinamikus egyensúlyi helyzetet, hiszen itt
dinamikus egyensúlyi helyzetet, hiszen itt  is lehetséges, ami alapján a kinetikus energia
is lehetséges, ami alapján a kinetikus energia , de az időben állandó (ld. kritikus fordulatszám legegyszerűbb modellje).
, de az időben állandó (ld. kritikus fordulatszám legegyszerűbb modellje).
3.2.3. Stabilitási alapfogalmak
Azt mondjuk, hogy az  differenciálegyenlet-rendszer (
differenciálegyenlet-rendszer ( egyenletrendszert kielégítő)
egyenletrendszert kielégítő)  egyensúlyi helyzete vagy pontmegoldása Ljapunov-stabilis, ha
egyensúlyi helyzete vagy pontmegoldása Ljapunov-stabilis, ha  számhoz
számhoz , hogy
, hogy
|
|
(3.14) |

Azaz bármilyen kis  számhoz megadható az
számhoz megadható az  egyensúlyi helyzetnek egy valamilyen (esetleg
egyensúlyi helyzetnek egy valamilyen (esetleg  -tól függő)
-tól függő)  sugarú környezete, hogy az abból indított megoldások mindig az egyensúlyi helyzet
sugarú környezete, hogy az abból indított megoldások mindig az egyensúlyi helyzet  sugarú környezetében maradjanak.
sugarú környezetében maradjanak.
Azt mondjuk, hogy az  differenciálegyenlet-rendszer
differenciálegyenlet-rendszer  egyensúlyi helyzete vagy pontmegoldása aszimptotikusan stabilis, ha Ljapunov-stabilis és
egyensúlyi helyzete vagy pontmegoldása aszimptotikusan stabilis, ha Ljapunov-stabilis és
|
|
(3.15) |

Az  állandó, valós együtthatós, homogén lineáris differenciálegyenlet-rendszer általános megoldása:
állandó, valós együtthatós, homogén lineáris differenciálegyenlet-rendszer általános megoldása:
|
|
(3.16) |

ahol ,
,  ,
,  ,
,  , továbbá
, továbbá  valamint
valamint  az
az  együtthatómátrix valamelyik
együtthatómátrix valamelyik  sajátértékével egyezik meg (ha az összes
sajátértékével egyezik meg (ha az összes  egyszeres gyök!).
egyszeres gyök!).
Az  rendszer
rendszer  (triviális) pontmegoldása (tetszőleges valós állandó
(triviális) pontmegoldása (tetszőleges valós állandó  mátrix esetén is)
mátrix esetén is)
aszimptotikusan stabilis, ha
Ljapunov-stabilis, ha
 és a
és a  gyökök multiplicitása egyszeres
gyökök multiplicitása egyszeres  mátrix minimálpolinomjában (ellenpélda:
mátrix minimálpolinomjában (ellenpélda:egyébként pedig instabil.
Példa Ha
|
|

tehát  a minimálpolinom és
a minimálpolinom és  nem korlátos megoldás. Viszont
nem korlátos megoldás. Viszont  esetén bár
esetén bár  ismét, de
ismét, de  lesz a minimálpolinom és korlátosak az
lesz a minimálpolinom és korlátosak az  alakú megoldások.
alakú megoldások.
3.3. Holonom szkleronom rendszerek kis mozgásai
3.3.1. A mátrix differenciálegyenlet
Időtől független gerjesztés esetén a másodfajú Lagrange-egyenletek holonom szkleronom rendszernél az alábbi alakot öltik:
|
|
(3.17) |

ahol
|
| ||
|
|


Vizsgáljuk a rendszer  egyensúlyi helyzetének környezetében történő mozgásokat (azaz
egyensúlyi helyzetének környezetében történő mozgásokat (azaz 
 megoldása a (3.17) egyenleteknek). Ekkor az
megoldása a (3.17) egyenleteknek). Ekkor az  potenciálfüggvény másodfokú tagokig történő és a
potenciálfüggvény másodfokú tagokig történő és a  általános erők első fokig történő sorfejtése az egyensúlyi helyzet körül:
általános erők első fokig történő sorfejtése az egyensúlyi helyzet körül:
|
| ||
|
|


Tehát az egyensúlyi helyzetben ( miatt)
miatt)
|
|
(3.18) |
amiből  meghatározható.
meghatározható.
Bevezetve a  koordinátákat a
koordinátákat a  összefüggés alapján, majd átparaméterezve az egyenleteket a
összefüggés alapján, majd átparaméterezve az egyenleteket a  koordinátákkal kifejezve és elhagyva a ~-t formailag a (3.17) egyenlettel azonos összefüggésre jutunk, azonban a vizsgált egyensúlyi helyzet a konfigurációs tér origójába kerül:
koordinátákkal kifejezve és elhagyva a ~-t formailag a (3.17) egyenlettel azonos összefüggésre jutunk, azonban a vizsgált egyensúlyi helyzet a konfigurációs tér origójába kerül:  (eredetileg
(eredetileg ). Azaz az általánosság megszorítása nélkül feltehetjük, hogy az általános koordináták mindig választhatók úgy, hogy egy egyensúlyi helyzetet (e.h.) a
). Azaz az általánosság megszorítása nélkül feltehetjük, hogy az általános koordináták mindig választhatók úgy, hogy egy egyensúlyi helyzetet (e.h.) a  koordinátaértékek azonosítsanak.
koordinátaértékek azonosítsanak.
Módosítsuk  -t és
-t és  -t a következő módon:
-t a következő módon:
|
|
(3.19) |

|
|
(3.20) |
|
|
Ezzel a másodfajú Lagrange-egyenletek kis mozgások esetén egy homogén lineáris másodrendű közönséges differenciálegyenlet-rendszert alkotnak, melyek az alábbi mátrix alakba rendezhetők:
|
|
(3.21) |

ahol a tömeg-, csillapítási és merevségi mátrix rendre
|
|
(3.22) |

Időtől független esetben, vagyis állandó ,
,  ,
,  esetén a (3.21) egyenletnek a homogén általános megoldása
esetén a (3.21) egyenletnek a homogén általános megoldása
|
|
(3.23) |

próbafüggvény (Ansatz) alakjában keresendő, amit ha beírunk a (3.21) mátrix differenciálegyenletbe, akkor egy homogén lineáris egyenletrendszerhez illetve sajátérték–sajátvektor feladathoz jutunk:
|
|
(3.24) |

ami  -től függetlenül kell, hogy teljesüljön. Viszont, ha
-től függetlenül kell, hogy teljesüljön. Viszont, ha  (nem triviális) megoldásokat (sajátvektorokat) keresünk, akkor az együttható mátrix determinánsának kell zérusnak lennie, azaz
(nem triviális) megoldásokat (sajátvektorokat) keresünk, akkor az együttható mátrix determinánsának kell zérusnak lennie, azaz
|
|
(3.25) |

ami a  sajátértékekre vonatkozó
sajátértékekre vonatkozó  -edfokú karakterisztikus egyenlet.
-edfokú karakterisztikus egyenlet.
A karakterisztikus egyenlet gyökei között lehetnek komplex konjugált párok, hasonló komplex konjugált sajátvektorokkal, vagyis
|
|

úgy hogy
|
|
(3.26) |

ahol már  valós vektorok és
valós vektorok és  a kezdeti feltételektől függő
a kezdeti feltételektől függő  darab valós szám (amennyiben a sajátértékek egyszeresek).[4]
darab valós szám (amennyiben a sajátértékek egyszeresek).[4]
3.3.2. Csillapítatlan rezgések
3.3.2.1. Sajátkörfrekvenciák, lengésképek
Amennyiben a  csillapítási mátrix zérus elemekből áll és az összes
csillapítási mátrix zérus elemekből áll és az összes  megoldás korlátos (pl. konzervatív rendszerekben), akkor az
megoldás korlátos (pl. konzervatív rendszerekben), akkor az
|
|
(3.27) |

hiányos másodrendű mátrix differenciálegyenlet sajátértékei tiszta képzetes gyökpárok lesznek, mivel a
|
|
(3.28) |
karakterisztikus egyenlet egy  -re
-re  -edfokú algebrai egyenlet lesz. Belátható, hogyha ennek gyöke egy
-edfokú algebrai egyenlet lesz. Belátható, hogyha ennek gyöke egy  pozitív valós szám, vagy egy
pozitív valós szám, vagy egy  konjugált képzetes gyökpár, akkor ezekhez tartozik pozitív valós részű
konjugált képzetes gyökpár, akkor ezekhez tartozik pozitív valós részű  gyök (
gyök ( ), ami az exponenciális kitevőben
), ami az exponenciális kitevőben  esetén a
esetén a  megoldások korlátosságának ellentmond.
megoldások korlátosságának ellentmond.
Viszont, ha  (valós szám), akkor
(valós szám), akkor  tiszta képzetes gyököket kapunk (ennek feltétele, hogy
tiszta képzetes gyököket kapunk (ennek feltétele, hogy  szimmetrikus pozitív definit mátrix legyen), aminek a
szimmetrikus pozitív definit mátrix legyen), aminek a
|
|
(3.29) |

homogén általános megoldás felel meg,  és
és  integrálási állandókkal. Tehát a megoldás harmonikus függvények lineáris kombinációja, melyeknek — azaz a magára hagyott rendszer szabad rezgéseinek — körfrekvenciája
integrálási állandókkal. Tehát a megoldás harmonikus függvények lineáris kombinációja, melyeknek — azaz a magára hagyott rendszer szabad rezgéseinek — körfrekvenciája . Mivel ezek értéke csak az
. Mivel ezek értéke csak az  tömegmátrixtól és az
tömegmátrixtól és az  merevségi mátrixtól függ — melyeket többnyire csak a rendszer fizikai, geometriai paraméterei határoznak meg, külső hatások nem —, ezért
merevségi mátrixtól függ — melyeket többnyire csak a rendszer fizikai, geometriai paraméterei határoznak meg, külső hatások nem —, ezért  -t a csillapítatlan rendszer
-t a csillapítatlan rendszer -edik sajátkörfrekvenciájának is nevezzük
-edik sajátkörfrekvenciájának is nevezzük , a
, a
|
|
(3.30) |

karakterisztikus egyenletet pedig frekvenciaegyenletnek.
Megfelelő kezdeti feltételekkel elérhető, hogy a megoldás tisztán az egyik vagy másik sajátkörfrekvenciájú rezgést tartalmazza. Ilyenkor az egyes általános koordináták értékeinek egymáshoz viszonyított arányai minden időpillanatban megegyeznek a megfelelő sajátvektor elemeinek egymáshoz képesti arányaival, és a koordináták egyszerre érik el a szélsőértékeiket illetve válnak zérussá. E fizikai tartalom miatt a sajátvektorokat az egyes sajátkörfrekvenciákhoz tartozó lengésképek vektorának is nevezzük.
3.3.3. Stabilitás
A mozgásegyenletet linearizálva a  egyensúlyi helyzet körül,
egyensúlyi helyzet körül,  bevezetésével kapjuk a következő mátrix együtthatós differenciálegyenlet-rendszert:
bevezetésével kapjuk a következő mátrix együtthatós differenciálegyenlet-rendszert:
|
|
(3.31) |

Az  próbafüggvényt behelyettesítve egy sajátérték-sajátvektor feladat homogén lineáris algebrai egyenletrendszerét kapjuk:
próbafüggvényt behelyettesítve egy sajátérték-sajátvektor feladat homogén lineáris algebrai egyenletrendszerét kapjuk:
|
|
(3.32) |
melynek akkor létezik nemtriviális  megoldása, ha
megoldása, ha . Az utóbbi karakterisztikus egyenletnek a
. Az utóbbi karakterisztikus egyenletnek a  gyökei valósak, mivel mind
gyökei valósak, mivel mind  , mind
, mind  valós szimmetrikus mátrixok, továbbá a megfelelő
valós szimmetrikus mátrixok, továbbá a megfelelő  sajátvektorok is valós eleműek (vagy tiszta képzetes konjugáltak, ami persze nem jelent érdemi különbséget).
sajátvektorok is valós eleműek (vagy tiszta képzetes konjugáltak, ami persze nem jelent érdemi különbséget).
Mivel  gyök esetén
gyök esetén , azaz az egyik gyök mindenképpen pozitív lenne és így
, azaz az egyik gyök mindenképpen pozitív lenne és így
|
|
(3.33) |
azaz  nem marad korlátos az egyensúlyi helyzet bármilyen kis mértékű megzavarása esetén, ezért csak a
nem marad korlátos az egyensúlyi helyzet bármilyen kis mértékű megzavarása esetén, ezért csak a  gyökök esetén lehet a
gyökök esetén lehet a  egyensúlyi helyzet stabilis. Ekkor
egyensúlyi helyzet stabilis. Ekkor , azaz
, azaz  , és
, és
|
|
(3.34) |
ami eleget tesz a Ljapunov-féle stabilitási kritériumnak (de nem aszimptotikusan stabilis!).
Visszahelyettesítve az előbb karakterisztikus egyenlet  megoldását és a hozzátartozó
megoldását és a hozzátartozó  sajátvektort a homogén lineáris egyenletrendszerbe és megszorozva azt balról
sajátvektort a homogén lineáris egyenletrendszerbe és megszorozva azt balról  -val, átrendezés után az alábbi kifejezéshez jutunk:
-val, átrendezés után az alábbi kifejezéshez jutunk:
|
|
(3.35) |
Mivel a Ljapunov-féle stabilitáshoz  szükséges és
szükséges és  szimmetrikus pozitív definit mátrix, a számláló pozitivitásának elégséges feltételét jelenti, ha
szimmetrikus pozitív definit mátrix, a számláló pozitivitásának elégséges feltételét jelenti, ha  mátrix illetve az
mátrix illetve az  potenciálfüggvény kvadratikus alakja az egyensúlyi helyzet környezetében is pozitív definit, azaz
potenciálfüggvény kvadratikus alakja az egyensúlyi helyzet környezetében is pozitív definit, azaz  -nak az egyensúlyi helyzetben lokális minimuma van. Tehát
-nak az egyensúlyi helyzetben lokális minimuma van. Tehát  mátrix összes sajátértéke pozitív valós szám, ami a Sylvester-féle tétel értelmében igaz,
mátrix összes sajátértéke pozitív valós szám, ami a Sylvester-féle tétel értelmében igaz,  ha
ha  összes sarokaldeterminánsa pozitív.
összes sarokaldeterminánsa pozitív.
A pozitív definitség  illetve
illetve  esetében szükséges feltétel is egyben: minthogy
esetében szükséges feltétel is egyben: minthogy  az összes gyökre értendő, ami az
az összes gyökre értendő, ami az  feltételt vonja maga után
feltételt vonja maga után  , amiből viszont az
, amiből viszont az  sajátvektorok
sajátvektorok  -re vonatkozó ortogonalitása miatt következik, hogy
-re vonatkozó ortogonalitása miatt következik, hogy 
 .
.
3.3.3.1. A sajátvektorok ortogonalitása
Ha a  megoldásokat behelyettesítjük a (3.27) egyenletbe, akkor a
megoldásokat behelyettesítjük a (3.27) egyenletbe, akkor a  -edik illetve
-edik illetve -adik sajátkörfrekvenciákhoz és
-adik sajátkörfrekvenciákhoz és  illetve
illetve  sajátvektorokhoz a következőket kapjuk:
sajátvektorokhoz a következőket kapjuk:
|
|
(3.36) |
|
|
(3.37) |

Az egyenleteket megszorozva balról  -val illetve
-val illetve  -vel majd kivonva őket egymásból:
-vel majd kivonva őket egymásból:
|
|
(3.38) |

mivel  és
és  szimmetrikussága miatt
szimmetrikussága miatt
|
|

A (3.38) egyenletből következik, hogy
|
|
(3.39) |

azaz a sajátvektorok ortogonálisak az  tömegmátrixra nézve.
tömegmátrixra nézve.
3.3.4. A saját-körfrekvenciák becslési módszerei
3.3.4.1. A Rayleigh-hányados
Legyen  a lengésképek valamilyen lináris kombinációjaként előállított tetszőleges vektor. Ekkor az
a lengésképek valamilyen lináris kombinációjaként előállított tetszőleges vektor. Ekkor az
|
|
(3.40) |

hányadost Rayleigh-hányadosnak nevezzük.
A kinetikus energia pozitív definit kvadratikus alakjából következik a szimmetrikus  mátrix pozitív definitsége. Így a korlátos, nem csillapodó rezgések kialakulásának feltétele, hogy a szimmetrikus
mátrix pozitív definitsége. Így a korlátos, nem csillapodó rezgések kialakulásának feltétele, hogy a szimmetrikus  mátrix is pozitív definit legyen:
mátrix is pozitív definit legyen:
|
|

Rendezzük sorba az  sajátkörfrekvenciákat úgy, hogy
sajátkörfrekvenciákat úgy, hogy
|
|
(3.41) |
és vizsgáljuk a Rayleigh-hányados számlálójában szereplő kifejezést:
|
|
(3.42) |

ahol  összefüggésben kihasználtuk a sajátvektorok ortogonalitását.
összefüggésben kihasználtuk a sajátvektorok ortogonalitását.
A (3.42)-ben megfogalmazott egyenlőtlenséget átrendezve kapjuk, hogy
|
|
(3.43) |
azaz az  Rayleigh-hányados tetszőleges
Rayleigh-hányados tetszőleges  vektor esetén felülről becsli az első (legkisebb) sajátkörfrekvencia négyzetét (a legnagyobb sajátkörfrekvenciájét pedig alulról). Természetesen minél jobb közelítést adunk
vektor esetén felülről becsli az első (legkisebb) sajátkörfrekvencia négyzetét (a legnagyobb sajátkörfrekvenciájét pedig alulról). Természetesen minél jobb közelítést adunk  -vel
-vel  -re, az első lengésképre,
-re, az első lengésképre,  is annál jobban közelíti
is annál jobban közelíti  -et.
-et.
3.3.4.2. Stodola-iteráció
A (3.36) egyenletet az  merevségi mátrix
merevségi mátrix  inverzével végigszorozva balról képezzük
inverzével végigszorozva balról képezzük  esetén az alábbi iterációs eljárást:
esetén az alábbi iterációs eljárást:
|
|
(3.44) |

Megmutatjuk, hogy ez az iteráció konvergens, és tipikusan  -hez, az első lengésképvektorhoz tart.
-hez, az első lengésképvektorhoz tart.
Az iterációnak több fixpontja is van, hiszen bármelyik  sajátvektort behelyettesítve a frekvenciaegyenlet átírt formáját kapjuk vissza, amit
sajátvektort behelyettesítve a frekvenciaegyenlet átírt formáját kapjuk vissza, amit  -k kielégítenek.
-k kielégítenek.
Az
|
|
(3.45) |

iterációt az  fixpont
fixpont  környezetében jól közelíti a
környezetében jól közelíti a  derivált tenzorral megadott lineáris leképezés, ami akkor konvergens, ha
derivált tenzorral megadott lineáris leképezés, ami akkor konvergens, ha  mátrixának spektrálsugara
mátrixának spektrálsugara
|
|
(3.46) |
vagyis az összes sajátértéke a komplex egységkör belsejében található.
Képezzük tehát a Stodola-iteráció jobb oldalán szereplő kifejezés gradiensét:
|
|
(3.47) |

mivel a második tagban a számláló zérus, hiszen , továbbá
, továbbá  és
és  szimmetrikus mátrixok (másképpen: mivel az
szimmetrikus mátrixok (másképpen: mivel az  Rayleigh-hányados
Rayleigh-hányados  esetén minimális, ezért ott a gradiense
esetén minimális, ezért ott a gradiense ).
).
Nézzük most az  mátrix sajátértékeit:
mátrix sajátértékeit:
|
|
(3.48) |

Belátható, hogy  -k a
-k a  frekvenciaegyenletből számítható sajátkörfrekvenciák négyzeteinek reciprokával egyenlőek:
frekvenciaegyenletből számítható sajátkörfrekvenciák négyzeteinek reciprokával egyenlőek:
|
|

amiből viszont
|
|
(3.49) |

és az egyenlőség csak  esetén áll fenn. Vagyis tetszőleges
esetén áll fenn. Vagyis tetszőleges  vektor esetén az
vektor esetén az  sajátvektoron kívüli altérbe eső komponensek előbb-utóbb eltűnnek, és a Stodola-iterációval
sajátvektoron kívüli altérbe eső komponensek előbb-utóbb eltűnnek, és a Stodola-iterációval  az
az  lengéskép által meghatározott első sajátirányhoz tart.
lengéskép által meghatározott első sajátirányhoz tart.
3.3.4.3. Rayleigh-elv
Ha a csillapítatlan (konzervatív) rendszer első lengésképhez tartozó megoldását nézzük, illetve ha a rendszer tisztán az első sajátrezgésével rezeg, vagyis
|
|
(3.50) |

akkor
|
|
(3.51) |
mivel a legnagyobb kitérésnél maximális az alakváltozási energia és ez egyben az  mechanikai összenergia is, hiszen a legnagyobb kitérésnél a kinetikus energia zérus
mechanikai összenergia is, hiszen a legnagyobb kitérésnél a kinetikus energia zérus .
.
A kinetikus energia  esetén lesz a legnagyobb (és ekkor
esetén lesz a legnagyobb (és ekkor ):
):
|
|
(3.52) |
Mivel konzervatív rendszerről van szó, a mechanikai összenergia állandó:
|
|
(3.53) |

Vagyis
|
|
(3.54) |

ami a Rayleigh-hányados általánosításaként az első sajátfrekvenciára kínál becslést végtelen szabadságfokú (kontinuum) rendszerek esetén is. Azaz a legkisebb sajátfrekvenciához tartozó lengésalakot megfelelően közelítve (becsülve), a hozzá tartozó  és
és  kifejezések hányadosának gyöke
kifejezések hányadosának gyöke  -hez közeli értéket ad eredményül.
-hez közeli értéket ad eredményül.
3.3.4.4. Dunkerley-becslés
Vizsgáljuk ismét a frekvenciaegyenletet:
|
|
(3.55) |
|
|

A  együtthatók a
együtthatók a  mátrix első, második, stb. skalárinvariánsait jelölik, tehát pl.
mátrix első, második, stb. skalárinvariánsait jelölik, tehát pl. , ami a
, ami a  mátrix nyomának felel meg.
mátrix nyomának felel meg.
A váltakozó előjelű együtthatójú, csupa valós gyökkel bíró karakterisztikus polinom analízisével megmutatható, hogy az  -nél magasabb fokú tagokat elhagyva az első két tag által alkotott másodfokú polinom az
-nél magasabb fokú tagokat elhagyva az első két tag által alkotott másodfokú polinom az  helyen negatív értéket vesz fel:
helyen negatív értéket vesz fel:
|
|
(3.56) |

vagy másképpen
|
|
(3.57) |

Olyan különleges esetekben, amikor az  tömegmátrix diagonális, akkor
tömegmátrix diagonális, akkor
|
|
(3.58) |
ahol  az eredeti mechanikai rendszerből képzett olyan egyszabadságfokú rendszerek sajátkörfrekvenciái, ahol csak az
az eredeti mechanikai rendszerből képzett olyan egyszabadságfokú rendszerek sajátkörfrekvenciái, ahol csak az  tömeget tartottuk meg és a többit elhagytuk, és az így kapott részmodell rugómerevsége
tömeget tartottuk meg és a többit elhagytuk, és az így kapott részmodell rugómerevsége  lett.
lett.
Példa Vizsgáljuk egy rezgető motor  hajlítómerevségű tengelyére erősített
hajlítómerevségű tengelyére erősített  mm magasságú és
mm magasságú és mm sugarú félhenger alakú
mm sugarú félhenger alakú  g-os rezgő tömeg alkotta rezgőrendszer sajátkörfrekvenciáit. A teljes henger tehetetlenségi nyomatéka
g-os rezgő tömeg alkotta rezgőrendszer sajátkörfrekvenciáit. A teljes henger tehetetlenségi nyomatéka  lenne, ahol az első tag a két félhengernek a henger
lenne, ahol az első tag a két félhengernek a henger  szimmetriasíkjáraszámított
szimmetriasíkjáraszámított  nagyságú tehetetlenségi nyomatékainak összegével egyezik meg. Ebből a félhengernek a
nagyságú tehetetlenségi nyomatékainak összegével egyezik meg. Ebből a félhengernek a  távolságra levő súlypontján átmenő
távolságra levő súlypontján átmenő  síkkal párhuzamos síkra számított tehetetlenségi nyomatéka a Steiner-tételt visszafelé alkalmazva:
síkkal párhuzamos síkra számított tehetetlenségi nyomatéka a Steiner-tételt visszafelé alkalmazva:
|
|

A továbbiakban az egyszerűség kedvéért feltesszük, hogy a tömeg súlypontja a motor tengelyén helyezkedik el,  mm távolságra a tengely csapágyazásától (
mm távolságra a tengely csapágyazásától ( mm a szabad tengelyhossz).
mm a szabad tengelyhossz).
Az  hosszúságú befogott rúd szabad végének
hosszúságú befogott rúd szabad végének  lehajlása és
lehajlása és  szögelfordulása a rúd végére ható
szögelfordulása a rúd végére ható  koncentrált erő és
koncentrált erő és  erőpár hatására:
erőpár hatására:
|
| ||
|
|

Így a szabad tengelyszakasztól  távolságra levő súlypont
távolságra levő súlypont  függőleges elmozdulása a ráható
függőleges elmozdulása a ráható  erő következtében:
erő következtében:
|
|

mivel  és
és  kis elmozdulások esetén.
kis elmozdulások esetén.
Azaz az egyenértékű rugómerevség illetve az abból számítható sajátkörfrekvencia:

Ha a tehetetlenségi nyomatékot is figyelembe vesszük, akkor egy két szabadsági fokú rendszert vizsgálhatunk, melynek kinetikus illetve potenciális (alakváltozási) energiája:


ahol
 és
és
Az
 mozgásegyenlet
mozgásegyenlet  tömegmátrixa és
tömegmátrixa és  merevségi mátrixa numerikusan:
merevségi mátrixa numerikusan:
és a karakterisztikus egyenlet:

amiből
 rad/s (1890 Hz) és
rad/s (1890 Hz) és  rad/s (28073 Hz).
rad/s (28073 Hz).Ha az első sajátfrekvenciával való rezgéshez tartozó rugalmas szál alakját a befogásnak megfelelő peremfeltételt
 kielégítő legegyszerűbb
kielégítő legegyszerűbb  függvénnyel közelítjük, valamint
függvénnyel közelítjük, valamint
akkor


amiből a Rayleigh-hányados szerint
 rad/s
rad/s  .
.A kinetikus energia előbbi kifejezésébe beleszámítva a tehetetlenségi nyomatékot is:

és így az első sajátkörfrekvencia javított becslése (vö. két szabadságfokú eset)

A rugalmas szál alakját magasabb fokszámú, több ismeretlen paramétert tartalmazó polinommal vagy más függvénnyel (pl.
 ) is közelíthetjük. Legyen most
) is közelíthetjük. Legyen most  , ami továbbra is megfelel a kinematikai peremfeltételnek. Ezzel
, ami továbbra is megfelel a kinematikai peremfeltételnek. Ezzel
A potenciális energia maximuma most:

a kinetikus energia pedig

Most is feltételezhetjük, hogy a sajátrezgések során a rezgő rendszer minden (anyagi) pontja egyszerre éri el a szélsőhelyzetét, amikor is
 és
és , valamint
, valamint  esetén
esetén , azaz
, azaz
mivel
 és
és  is homogén kvadratikus kifejezése az
is homogén kvadratikus kifejezése az  vektort alkotó
vektort alkotó  és
és  paramétereknek. Az
paramétereknek. Az  és
és  mátrixokat az
mátrixokat az  és
és  kifejezéseinek
kifejezéseinek  és
és  szerinti paricális deriválásából kaphatjuk meg:
szerinti paricális deriválásából kaphatjuk meg:
Triviálistól eltérő,
 vektort úgy kaphatunk, ha
vektort úgy kaphatunk, ha
vagyis visszakapjuk két szabadságfokú esetnél kiszámított eredményeket, ami nem meglepő, hiszen a köbös közelítés már elégséges a rugalmas szál pontos alakjához. Amennyiben a tengely tömege nem lenne elhanyagolható, a tengely
 mozgási energiáját is beszámítva a
mozgási energiáját is beszámítva a  -ba az eredmények pontossága tovább javítható.
-ba az eredmények pontossága tovább javítható.
Példa Az ábrán egy  tömegű
tömegű  sugarú tárcsa és a tetejére helyezett
sugarú tárcsa és a tetejére helyezett  magasságú,
magasságú,  hosszúságú homogén hasáb látható, melyet a hasáb végét és a falat összekapcsoló
hosszúságú homogén hasáb látható, melyet a hasáb végét és a falat összekapcsoló  merevségű rugó tart egyensúlyban. A tárcsa gördül a talajon, és a hasáb sem csúszik meg a tárcsa felszínén a kis kitérésű mozgások alatt. Határozzuk meg, hogy milyen paraméterértékek esetén lesz stabilis az egyensúlyi helyzet!
merevségű rugó tart egyensúlyban. A tárcsa gördül a talajon, és a hasáb sem csúszik meg a tárcsa felszínén a kis kitérésű mozgások alatt. Határozzuk meg, hogy milyen paraméterértékek esetén lesz stabilis az egyensúlyi helyzet!
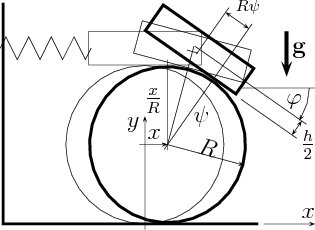
A stabilitás a rugó és a nehézségi erőtér potenciáljának pozitív definitásától függ. Mivel a tárcsa súlypontjának függőleges helyzete nem változik , csak a hasáb súlyponti helyvektorára van szükségünk:
, csak a hasáb súlyponti helyvektorára van szükségünk:
|
|
ahol  , azaz
, azaz 
Feltéve, hogy a rugó az egyensúlyi helyzetben feszítetlen, a megnyúlása egy tetszőleges kitérés esetén:
|
|

Ezzel az  potenciálfüggvény:
potenciálfüggvény:
|
|

melynek parciális deriváltjai és egyensúlyi helyzet körüli linearizálása:
|
| ||
|
| ||
|
| ||
|
|



A linearizált rendszer  merevségi mátrixa tehát:
merevségi mátrixa tehát:
|
|
és a determinánsa:
|
|

ahol  és
és  . Tehát a stabilitás feltételei (
. Tehát a stabilitás feltételei ( sarokaldeterminánsai alapján):
sarokaldeterminánsai alapján):
|
|


4. fejezet - Mechanizmusok vizsgálati módszerei
Mechanizmus alatt egymással kényszerkapcsolatban lévő merev testekből álló ún. kinematikai láncot (mechanikai rendszert) értünk. A szerkezeti vizsgálat a mechanizmust felépítő szerkezeti elemtípusok és kényszerkapcsolatok számba vételét és végső soron a mechanizmus szabadsági fokainak meghatározását jelenti. Mindezek segítségével a mechanizmusokat majd különböző csoportokba sorolhatjuk.
A geometriai vizsgálat során a mechanizmust alkotó merev testek, ún. tagok pozíciójának és orientációjának leírása, az egyes koordináták közötti — a kényszerek által meghatározott — kapcsolatok megadása jelenti a feladatot. A koordináták és a kényszereket leíró összefüggések ismeretében már kiválasztható az egész mechanizmus pillanatnyi helyzetének egyértelmű leírásához szükséges, a mechanizmus szabadságfokának megfelelő számú általános koordináta.
A kinematikai vizsgálat az egyes tagok illetve azok kiválasztott pontjainak sebesség- és gyorsulásviszonyait, a pillanatnyi és véges mozgásokat elemzi, míg a dinamikai vizsgálat alkalmával a newtoni elvek alapján felírható mozgásegyenleteket próbáljuk megoldani és abból kiszámítani a tagokat, ízületeket terhelő erőket, nyomatékokat, az aktuátorok teljesítményigényét.
4.1. Szerkezeti vizsgálat
A mechanizmust alkotó merev testeket a mechanizmus tagjainak nevezzük, és rendszerint arab számokkal jelöljük azokat. Ide soroljuk a rögzített állványt, mint 0. tagot is, melyhez a mechanizmus mozgó tagjai által alkotott rész csatlakozik:
|
0. tag |
állvány |
|
1. tag 2. tag … |
mozgó tagok |
4.1.1. Kinematikai pár, szabadsági fok
Az egyes tagok közötti kapcsolatokat meghatározó kényszereket (pl. csukló) kinematikai pároknak nevezzük. A mechanizmus térbeli konfigurációjának egyértelmű leírásához szükséges független skalárfüggvények száma jelenti a rendszer szabadsági fokát, ami meghatározható a mozgó tagok száma és a kinematikai párok által lekötött szabadsági fokok alapján (ld. később). Az egymáshoz kinematikai párokkal kapcsolódó tagok sorát kinematikai láncnak nevezzük.
Szorosabb értelemben akkor beszélünk mechanizmusról, ha a tagok zárt kinematikai láncot alkotnak és csak egy vagy két szabadsági fok marad. Így az ezeknek megfelelő tagokra előírt mozgással (többnyire egy motor általi állandó fordulatszámú forgatással) a mechanizmus kiválasztott tagjainak adott pontjai egy bizonyos pályát írnak le.
Ezzel szemben a robotmechanizmusok tipikusan nyílt kinematikai lánccal rendelkeznek, több szabadságfokúak, és az ezeknek megfelelő számú aktuátor időben alkalmasan változó mozgatásával a kinematikai lánc végén levő ún. manipulátor tag tetszőleges pályát írhat le a munkatérben.
Kinematikai párok osztályozása
A kinematikai párokat az elvett szabadsági fokok (vagy kötöttségi fok) száma alapján osztályozhatjuk. Mivel egy tagnak mint merev testnek legfeljebb 6 szabadsági foka lehet a térben ezért 1., 2., 3., 4., és 5. osztályú kinematikai párokat különböztethetünk meg, például:
|
ötödosztályú |
síkcsukló, síkcsúszka (sín), gördülő kerék |
|
negyedosztályú |
görgős (sima) támasz, csúszó kerék |
|
harmadosztályú |
gömbcsukló, síkmozgás |
|
… |
(kevésbé jelentősek) |
4.1.1.1. Mechanizmus szabadságfoka (DoF, szf.), mobilitása
A mechanizmus szabadsági vagy mobilitási fokát  az előzőekben bevezetett fogalmak segítségével az alábbi formula szerint számíthatjuk:
az előzőekben bevezetett fogalmak segítségével az alábbi formula szerint számíthatjuk:
|
|
(4.1) |

ahol  a mozgó tagok száma,
a mozgó tagok száma,  pedig az
pedig az  -ed osztályú kinematikai párok száma kinematikai láncban.
-ed osztályú kinematikai párok száma kinematikai láncban.
Síkbeli mechanizmus mobilitása ennek megfelelően:
|
|
(4.2) |

Szokás a kinematikai párokat a meghagyott szabadsági fokok szerint is csoportosítani illetve az állványt is a mechanizmus tagjai közé számítani és az azonos topológiájú kinematikai láncokat aszerint csoportosítani, hogy melyik tag az állvány. Ezzel a fenti képletek az alábbi alakot öltik:
|
|
(4.3) |

|
|
(4.4) |

ahol  a kinematikai láncot alkotó összes tag száma,
a kinematikai láncot alkotó összes tag száma,  pedig az
pedig az  szabadságfokú kinematikai párok száma (azaz
szabadságfokú kinematikai párok száma (azaz ).
).
Ha csak egy szabadsági fokú (azaz ötödosztályú) kinematikai párok találhatók kinematikai láncban, akkor kapjuk a mobilitásra vonatkozó Gruebler-féle formulát:
|
|

Példák forgattyús mechanizmus, Peaucellier-inverzor, …
4.1.2. Mechanizmusok csoportra bontása
A fenti képletek használata speciális geometriájú illetve ún. redundáns kényszereket tartalmazó mechanizmusok esetén ellentmondásra vezethet, azaz például egy láthatóan 1 szabadságfokú szerkezet esetén a képlet alapján 0 szabadságfokot kapunk. (Példa: parallel 4 csuklós mechanizmus kiegészítve egy harmadik párhuzamos csatlórúddal.)
Az ilyen paradoxonok magyarázata abban rejlik, hogy vannak ún. redundáns vagy passzív tagok, melyeknek nincs szerepe az input-output kapcsolat szabadságfokának meghatározásában és ezt a fenti képletek nem veszik figyelembe (azaz a redundáns tagokat elhagyva kinematikailag egyenértékű mechanizmust kapunk). Viszont, ha egy ilyen mechanizmus geometriáját kissé módosítjuk, akkor valóban a képlettel meghatározott szabadságfokot kapjuk. (A redundáns tagot tartalmazó parallel mechanizmus „befeszül”, ha a geometriát megváltoztatjuk.)
Bonyolultabb mechanizmusok szabadságfokának geometria függetlenségét csoportra bontással ellenőrizhetjük. Csoport alatt olyan 0 szabadságfokú kinematikai láncot értünk, amely nem bontható további 0 szabadságfokú részekre.
A kinematikai láncában megkülönböztethetünk a szabadságfokoknak megfelelő számú vezető (input) tagot és a többi tag által alkotott ún. vezetett részt. Ha a vezető tagokat rögzítjük, akkor a vezetett résznek nyilvánvalóan egy statikailag határozott szerkezetet kell alkotnia, azaz a vezetett rész szabadságfoka 0 kell, hogy legyen. Csak ötödosztályú kinematikai párokat tartalmazó síkbeli mechanizmus esetén tehát
|
|
(4.5) |


ahol  a vezetett rész tagjainak száma,
a vezetett rész tagjainak száma,  pedig a vezetett rész ötödosztályú kinematikai párjainak a száma. Mivel ezek egész számok, ezért az ilyen vezetett rész csak páros számú tagból állhat és 2, 4, 6, 8, stb. számú tag esetén az ötödosztályú kinematikai párok száma az alábbi táblázat szerint alakul:
pedig a vezetett rész ötödosztályú kinematikai párjainak a száma. Mivel ezek egész számok, ezért az ilyen vezetett rész csak páros számú tagból állhat és 2, 4, 6, 8, stb. számú tag esetén az ötödosztályú kinematikai párok száma az alábbi táblázat szerint alakul:
|
|
2 |
4 |
6 |
8 |
|
|
3 |
6 |
9 |
12 |


A mechanizmus tagjait megkülönbözethetjük aszerint is, hogy hány másik taghoz kapcsolódnak. Ennek megfelelően a 2, 3 illetve 4 másik taghoz kapcsolódó tagot bináris, ternáris illetve quaternáris tagnak nevezzük.
Példák A fenti táblázat szerint síkcsukló és síkcsúszka ötödosztályú kinematikai párokból 5 különböző kéttagú csoport alkotható. Egy négytagú csoport egy vagy két ternáris tagot (és 3 illetve 2 bináris tagot) tartalmaz. Egy hattagú csoportban 2 vagy 3 ternáris tag fodulhat elő.
Így egy egyszabadságfokú négytagú vagy egy kétszabadságfokú öttagú láncban egy kéttagú csoport alkotja a vezetett részt. Az egyszabadságfokú Watt- illetve Stephenson-féle hattagú kinematikai lánc vezetett része pedig két kéttagú vagy egy négytagú csoportból áll.
4.1.2.1. Kinematikai inverzió
Kinematikai inverziónak azt nevezzük, amikor ugyanazon kinematikai lánc más-más tagja lesz az állvány. Egy forgattyús mechanizmusnál elsőre látható az így kapott négy különböző működésű konstrukció.
A négycsuklós mechanizmus esetében a kinematikai inverzióval ugyan nem kapunk más topológiát, viszont a legrövidebb tagnak az állványhoz viszonyított helyzete alapján mégis három esetet különböztethetünk meg (a legrövidebb tag vagy az állványhoz kapcsolódik, vagy a csatló rúd szerepét tölti be, vagy maga az állvány). Amennyiben a hajtókart valamilyen motorral hajtjuk meg, fontos lehet annak eldöntése, hogy a 360 fokos körbe forgatásnak mi a feltétele. Ezt fejezi ki az alábbi, Grashof-féle összefüggés:
|
|
(4.6) |

ahol  és
és  a legrövidebb illetve leghosszabb karok hosszai,
a legrövidebb illetve leghosszabb karok hosszai,  és
és  pedig a maradék két tag hosszúságát jelöli. Amennyiben ez a feltétel teljesül, akkor a mechanizmustGrashof-típusúnak is szokták nevezni.
pedig a maradék két tag hosszúságát jelöli. Amennyiben ez a feltétel teljesül, akkor a mechanizmustGrashof-típusúnak is szokták nevezni.
Az egyszabadságfokú hattagú láncok esetében kinematikai inverzióval kétféle Watt-típusú mechanizmust és háromféle Stephenson-típusú mechanizmust kapunk:
|
Watt-I. |
egy bináris tag az állvány |
|
Watt-II. |
egy ternáris tag az állvány |
|
Stephenson-I. |
egy bináris tag az állvány, melyhez két ternáris tag csatlakozik |
|
Stephenson-II. |
egy bináris tag az állvány, melyhez egy bináris és egy ternáris tag csatlakozik |
|
Stephenson-III. |
az állvány egy ternáris tag |
5. fejezet - Robotok kinematikai és dinamikai alapegyenletei
5.1. Geometriai összefüggések
Bár az iparban alkalmazott robotok különböző felépítésűek lehetnek, jelentős részük merev tagokból álló nyílt láncú, elágazás nélküli olyan mechanizmusként modellezhető, melynek szomszédos tagjait egy szabadságfokú (transzlációs vagy rotációs) ízületek kapcsolják össze.
Egy nyílt láncú  -DOF robot esetén tehát az
-DOF robot esetén tehát az  -edik tag helyzetét (pozícióját és orientációját) csak a láncban őt megelőző tagok helyzete és a hozzá tartozó csuklóváltozó értéke határozza meg. A rögzített bázis vagy nullás tagot
-edik tag helyzetét (pozícióját és orientációját) csak a láncban őt megelőző tagok helyzete és a hozzá tartozó csuklóváltozó értéke határozza meg. A rögzített bázis vagy nullás tagot  -vel illetve 0-val jelöljük, míg a manipulátor tag az
-vel illetve 0-val jelöljük, míg a manipulátor tag az  -edik tag, melyet
-edik tag, melyet  -vel is szokás azonosítani.
-vel is szokás azonosítani.
5.1.1. Homogén transzformációk
Egy  pont helyzetét megadó, az
pont helyzetét megadó, az  -edik taghoz rögzített
-edik taghoz rögzített  koordiánátarendszerben értelmezett
koordiánátarendszerben értelmezett  helyvektor és a bázishoz rögzített
helyvektor és a bázishoz rögzített  koordinátarendszerben értelmezett
koordinátarendszerben értelmezett  helyvektorok között lineáris transzformációkkal adhatjuk meg a kapcsolatot. Ehhez tekintsük először az
helyvektorok között lineáris transzformációkkal adhatjuk meg a kapcsolatot. Ehhez tekintsük először az  és
és  vektorok közötti kapcsolatot:
vektorok közötti kapcsolatot:
|
|

ahol  a
a  koordinátarendszer
koordinátarendszer  origójába mutató helyvektor a
origójába mutató helyvektor a  -ben.
-ben.
Amennyiben a vektorokat a megfelelő koordinátákkal reprezentáljuk, akkor figyelembe kell venni a koordinátatengelyek közötti forgatási transzformációt is:
|
|
Itt tehát  a
a  -beli bázisvektoroknak
-beli bázisvektoroknak  -beli reprezentációjából felépített mátrix:
-beli reprezentációjából felépített mátrix:
|
|

Az egyes koordinátarendszerek közötti forgatási és eltolási transzformációt az alábbi homogén transzformációval is megadhatjuk:
|
|
azaz célszerű a háromdimenziós  helyvektorok helyett a négydimenziós
helyvektorok helyett a négydimenziós  vektort használni. A továbbiakban a helyvektorok alatt mindig ezt a négydimenziós változatot értjük és az egyszerűség kedvéért a ~-t elhagyjuk.
vektort használni. A továbbiakban a helyvektorok alatt mindig ezt a négydimenziós változatot értjük és az egyszerűség kedvéért a ~-t elhagyjuk.
Az  transzformáció mátrixa a Denavit–Hartenberg-koordináták segítségével algoritmizálva megadható, amennyiben
transzformáció mátrixa a Denavit–Hartenberg-koordináták segítségével algoritmizálva megadható, amennyiben
az
 -edik és
-edik és  -edik tag a
-edik tag a  ízületben csatlakozik;
ízületben csatlakozik;az
 -edik taghoz rögzített
-edik taghoz rögzített  koordinátarendszer
koordinátarendszer 
 ízület „tengelye”;
ízület „tengelye”;az
 tengely a
tengely a  és
és  tengelyek normáltranszverzálisa;
tengelyek normáltranszverzálisa;az
 origó az
origó az  és
és  metszéspontja;
metszéspontja;a
 pont az
pont az  és
és  metszéspontja;
metszéspontja; az
az  és
és  tengelyek távolsága (
tengelyek távolsága ( , pontosabban
, pontosabban ;
; az a szög, amellyel
az a szög, amellyel  -et
-et  körül elforgatva
körül elforgatva  -vel párhuzamos tengelyt kapunk:
-vel párhuzamos tengelyt kapunk: ;
; a
a  és
és  tengelyek távolsága (
tengelyek távolsága ( , pontosabban
, pontosabban , tehát
, tehát );
); pedig az a szög, amellyel
pedig az a szög, amellyel  -et
-et  körül elforgatva
körül elforgatva  -vel párhuzamos tengelyt kapunk:
-vel párhuzamos tengelyt kapunk: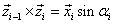 ;
;
Ezek közül
 ,
, : geometriai függő állandó;
: geometriai függő állandó; : forgó kapcsolatnál,
: forgó kapcsolatnál, : prizmatikus kapcsolatnál változik.
: prizmatikus kapcsolatnál változik.
Így az  -edik tag transzformációs mátrixa tehát a
-edik tag transzformációs mátrixa tehát a  tengely mentén történő
tengely mentén történő  eltolás és akörüli
eltolás és akörüli  elforgatás, valamint az
elforgatás, valamint az  tengely mentén történő
tengely mentén történő  eltolás és akörüli
eltolás és akörüli  elforgatás transzformációk egymásutánjaként is felfogható:
elforgatás transzformációk egymásutánjaként is felfogható:
|
|

ahol
|
|
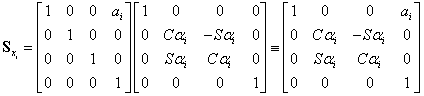
és
|
| ||
|
|
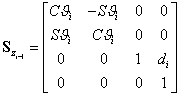
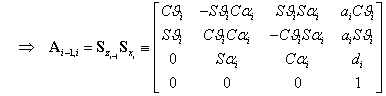
Ezzel tehát
|
|
és egy hat szabadságfokú nyílt láncú robot nullás és hatos tagjához rögzített koordinátarendszerben ugyanazon  pontot megadó
pontot megadó  és
és  helyvektorok közötti kapcsolat tehát:
helyvektorok közötti kapcsolat tehát:
|
|
A direkt kinematikai feladatban az egyes tagok relatív pozícióját közvetlenül meghatározó  általános koordináták (
általános koordináták ( vagy
vagy ) előírásával az
) előírásával az  transzformációs mátrix ismert és így
transzformációs mátrix ismert és így  is meghatározható
is meghatározható  ismeretében.
ismeretében.
Az inverz kinematikai feladatnál adott a manipulátorhoz rögzített  koordinátarendszer
koordinátarendszer  origójának
origójának  helyvektora és a koordinátarendszer tengelyeinek (azaz a manipulátornak) orientációja a
helyvektora és a koordinátarendszer tengelyeinek (azaz a manipulátornak) orientációja a  bázisvektorok által, tehát ismert az
bázisvektorok által, tehát ismert az  transzformáció mátrixa és keresett a
transzformáció mátrixa és keresett a  koordináták azon értéke, melyekkel
koordináták azon értéke, melyekkel  kiadódik.
kiadódik.
5.2. Kinematikai alapegyenletek
5.2.1. A robot Jacobi-mátrixa
Az  -edik tag súlypontjának hely- és sebességvektora:
-edik tag súlypontjának hely- és sebességvektora:
|
|
de vegyük észre, hogy
|
|

Tehát az  -edik tag súlypontjának sebességvektora:
-edik tag súlypontjának sebességvektora:
|
|
Az  -edik tag relatív szögsebessége (
-edik tag relatív szögsebessége ( ):
):
|
|

és így az  -edik tag abszolút szögsebessége:
-edik tag abszolút szögsebessége:
|
|

ahol
|
|
A robot egyes tagjainak súlypontba redukált kinematikai vektorkettőseit tartalmazó kinematikai vektor és az általános koordináták vektora között a Jacobi-mátrix teremt kapcsolatot:
|
|
5.3. Dinamikai egyenletek
A robot mozgásegyenleteit holonom (geometriai) kényszerek esetén a másodfajú Lagrange-egyenletek segítségével vezethetjük le. Ehhez az előzőekben meghatározott sebesség- és szögsebességvektorokkal fel kell írnunk a kinetikus energiát:
|
|

azaz
|
|

Ezzel a Lagrange-függvény a nehézségi erő és egyéb potenciálos erők potenciálfüggvényével:
|
|

A másodfajú Lagrange-egyenlet pedig a disszipatív tagoktól eltekintve:
|
|

ahol  a motornyomatékokból illetve egyéb erőkből származó
a motornyomatékokból illetve egyéb erőkből származó  -adik általános erő, amit az erők virtuális teljesítményéből határozhatunk meg.
-adik általános erő, amit az erők virtuális teljesítményéből határozhatunk meg.
5.4. Anholonom rendszerek mozgásegyenletei
Az korábban levezetett elsőfajú Lagrange-egyenletek az anyagi pontrendszerek általános mozgásegyenleteinek tekinthetők — mind geometriai, mind kinematikai kényszerek esetén érvényesek —, azonban a rendszer szabadsági fokánál több ismeretlen skalárfüggvényt (konfigurációs változót) tartalmaznak és az egyenletrendszer is kevert, ún. differenciál-algebrai egyenletrendszer (DAE).
Felmerül a kérdés, hogy holonom rendszerekre vonatkozó másodfajú Lagrange-egyenletekhez hasonló egyenletek felírhatók-e, illetve hogy a másodfajú Lagrange-egyenletek hogyan módosulnak kinematikai kényszerek, tehát anholonom rendszer esetén. A levezetéseket most is pontrendszerre végezzük el, amit általánosíthatónak tekintünk merev testekre is.
5.4.1. Routh–Voss-egyenletek
Tekintsük az  anyagi pontból álló térbeli mechanikai rendszert, melyek között
anyagi pontból álló térbeli mechanikai rendszert, melyek között  darab geometriai és
darab geometriai és  darab kinematikai kényszer írható fel. Válasszunk
darab kinematikai kényszer írható fel. Válasszunk  darab
darab  általános koordinátát, melyekkel az anyagi pontok
általános koordinátát, melyekkel az anyagi pontok  helyvektorai kifejezhetők és a geometriai kényszerfeltételek automatikusan teljesülnek:
helyvektorai kifejezhetők és a geometriai kényszerfeltételek automatikusan teljesülnek:
|
|

továbbá tegyük fel, hogy a kinematikai kényszerek a sebességvektorok lineáris kifejezései:
|
|

A sebességvektorok és az általános sebességek közötti összefüggéssel a kényszeregyenletek felírhatók az általános koordinátákkal és sebességekkel:
|
|
(5.1) |

ahol  és
és .
.
A virtuális sebességek közötti kapcsolat illetve feltétel:
|
|
(5.2) |
azaz most  -k nem függetlenek.
-k nem függetlenek.
Megismételve a másodfajú Lagrange-egyenletek levezetését a virtuális teljesítmény elvének a d'Alembert-elvre alkalmazott változatából
|
|
(5.3) |

kapjuk, hogy
|
|
(5.4) |

de itt most  -k nem függetlenek. A Lagrange-féle multiplikátor módszerrel kiegészítve a fenti összefüggést viszont megfelelő
-k nem függetlenek. A Lagrange-féle multiplikátor módszerrel kiegészítve a fenti összefüggést viszont megfelelő  együtthatókkal
együtthatókkal  -k már függetlennek tekinthetők:
-k már függetlennek tekinthetők:
|
|
(5.5) |

|
|

Példa bevásárló kocsi, gördeszka, korcsolya, …
5.4.2. Appell–Gibbs-egyenletek
Az előzőekben levezetett Routh–Voss-egyenletek tehát az elsőfajú Lagrange-egyenleteknél  -vel kevesebb, összesen
-vel kevesebb, összesen  darab ismeretlent (
darab ismeretlent ( -t és
-t és  -t) tartalmaznak, de az egyenletek a kinematikai kényszerekkel együtt is differenciál-algebrai egyenletrendszernek tekinthetők, mivel csak a
-t) tartalmaznak, de az egyenletek a kinematikai kényszerekkel együtt is differenciál-algebrai egyenletrendszernek tekinthetők, mivel csak a  általános koordinátáknak szerepelnek az idő szerinti első illetve második deriváltjai az egyenletekben.
általános koordinátáknak szerepelnek az idő szerinti első illetve második deriváltjai az egyenletekben.
5.4.2.1. A kvázisebességek
A kinematikai kényszeregyenletek kiküszöbölése általános koordinátákkal nem lehetséges. Pontosabban az általános koordináták közül kiválasztható  darab, melyek sebességeinek tetszőleges értékei esetében a kinematikai feltételek a többi általános sebesség megfelelő értékeivel még kielégíthetők. Általánosabban fogalmazva, választható
darab, melyek sebességeinek tetszőleges értékei esetében a kinematikai feltételek a többi általános sebesség megfelelő értékeivel még kielégíthetők. Általánosabban fogalmazva, választható  darab
darab  ún. kvázisebesség mint az általános sebességek bizonyos lineáris kombinációja:
ún. kvázisebesség mint az általános sebességek bizonyos lineáris kombinációja:
|
|
(5.6) |

Ez célszerűen úgy történik, hogy a kinematikai kényszerek (5.1) lineáris egyenletrendszerét kiegészítjük a fenti egyenletrendszerrel oly módon, hogy az így kapott
|
|
(5.7) |

lineáris egyenletrendszer  méretű (négyzetes) együtthatómátrixa reguláris, azaz invertálható legyen (
méretű (négyzetes) együtthatómátrixa reguláris, azaz invertálható legyen ( ,
, 
 stb.). Így már az általános sebességek kifejezhetők a kvázi sebességek lineáris kombinációjaként:
stb.). Így már az általános sebességek kifejezhetők a kvázi sebességek lineáris kombinációjaként:
|
|
(5.8) |

Ezzel a virtuális sebességvektorok és a virtuális kvázisebességek közötti kapcsolat:
|
|
(5.9) |
5.4.2.2. A Gibbs-féle gyorsulásenergia és a mozgásegyenletek
Vezessük be a kinetikus energia mintájára a következő, ún. Gibbs-függvényt és tekintsük a -k szerinti parciális deriváltját:
-k szerinti parciális deriváltját:
|
|
(5.10) |

mivel
|
|
(5.11) |

Ezzel a d'Alembert-elv:
|
|
(5.12) |

ahol már  -k tetszőlegesek, így a mozgásegyenleteknek a
-k tetszőlegesek, így a mozgásegyenleteknek a  kvázisebességekre és
kvázisebességekre és  általános koordinátákra vonatkozó Appell–Gibbs-féle, a kinematikai kényszerekkel is kiegészített elsőrendű rendszere:
általános koordinátákra vonatkozó Appell–Gibbs-féle, a kinematikai kényszerekkel is kiegészített elsőrendű rendszere:
|
|
(5.13) |
|
|
(5.14) |

ahol  az ún. kvázierő, amit a virtuális teljesítményből is meghatározhatunk:
az ún. kvázierő, amit a virtuális teljesítményből is meghatározhatunk:
|
|
(5.15) |
5.4.3. Merev test mozgásegyenletei
A merev test gyorsulásenergiája (Gibbs-függvény):
|
|

mivel  .
.
Ezzel az Appell–Gibbs-egyenletekből is származtathatjuk a Newton–Euler-egyenleteket szabad mozgás ( DOF) esetén:
DOF) esetén:
|
| ||
|
|

5.4.3.1. Bevásárló kocsi anholonom modellje
Modell: az  síkban mozgó
síkban mozgó  és
és  tömegpontok, melyeket
tömegpontok, melyeket  hosszúságú, tömeg nélküli merev rúd köt össze. A pontrendszer mozgását az
hosszúságú, tömeg nélküli merev rúd köt össze. A pontrendszer mozgását az  tömegre ható, rúdirányú
tömegre ható, rúdirányú  erővel, valamint az
erővel, valamint az  tömegre ható, a rúdra merőleges
tömegre ható, a rúdra merőleges  erővel befolyásoljuk. Az anholonom kényszert az
erővel befolyásoljuk. Az anholonom kényszert az  tömegpont sebességvektorára írjuk elő: ez szintén csak rúdirányú lehet (azaz az itteni kerekek tengelye rögzített).
tömegpont sebességvektorára írjuk elő: ez szintén csak rúdirányú lehet (azaz az itteni kerekek tengelye rögzített).
A kényszeregyenletek tehát:
|
|

Így az elsőfajú Lagrange-egyenletek:
|
| ||
|
|


amit kifejtve skaláregyenletrendszerré:
|
| ||
|
| ||
|
| ||
|
|


a két kényszeregyenlettel egy differenciál-algebrai egyenletrendszert kapunk ismeretlen  és
és  függvényekkel.
függvényekkel.
A  és
és  multiplikátorok az egyenletek alábbi lineáris kombinációjával kiküszöbölhetők:
multiplikátorok az egyenletek alábbi lineáris kombinációjával kiküszöbölhetők:
|
| ||
|
|


azaz
|
| ||
|
|


Az egyenletek egyszerűbb alakját kapjuk, ha a geometriai ( ) kényszeregyenleteknek megfelelő,
) kényszeregyenleteknek megfelelő,  darab általános koordinátát választunk
darab általános koordinátát választunk , azaz
, azaz
|
|

Viszont teljesülni kell még a kinematikai kényszeregyenletnek is:
|
|

Ezekkel a kinetikus energia és az erők virtuális teljesítménye:
|
| ||
|
|


A kinetikus energia deriváltjai:
|
| ||
|
| ||
|
| ||
|
|



A Routh–Voss-féle mozgásegyenletek  tehát:
tehát:
|
| ||
|
| ||
|
|



melyek a kinematikai kényszeregyenlettel együtt egy kevert másod- illetve elsőrendű differenciálegyenlet-rendszert alkotnak. Ezt Cauchy-átírással egy 7 dimenziós elsőrendű egyenletrendszerré lehet átírni, amiben viszont nem szerepelnek a  multiplikátor deriváltjai.
multiplikátor deriváltjai.
A kinematikai kényszeregyenleteket a  darab kvázisebesség
darab kvázisebesség  választásával küszöbölhetjük ki. Egészítsük ki a kinematikai kényszeregyenletet a kvázisebességek és az általános koordinátasebességek közötti olyan lineáris összefüggésekkel, melyek segítségével az egyenletrendszerből az általános koordinátasebességek kifejezhetők lesznek. Például:
választásával küszöbölhetjük ki. Egészítsük ki a kinematikai kényszeregyenletet a kvázisebességek és az általános koordinátasebességek közötti olyan lineáris összefüggésekkel, melyek segítségével az egyenletrendszerből az általános koordinátasebességek kifejezhetők lesznek. Például:
|
|

Az Appell–Gibbs-egyenletek:
|
|

melyek felírásához szükségünk lesz a Gibbs-féle gyorsulásenergiára és a virtuális teljesítményre is mint a kvázisebességek függvényei:
|
|

A tömegek gyorsulásai tehát:
|
|

A négyzetre emelés elkerülhető hiszen azaz az elsőrendű mozgásegyenletek a kinematikai kényszerekből nyert kifejezésekkel kiegészítve:
|
|


|
|


|
| ||
|
|


ahol az első két egyenlet függetlenül megoldható, és  ismeretében adott kezdeti feltételekkel
ismeretében adott kezdeti feltételekkel  is kiintegrálható.
is kiintegrálható.
Speciális mozgások A  és
és  paraméterű stacionárius mozgások feltétele az első két egyenletből
paraméterű stacionárius mozgások feltétele az első két egyenletből
|
|

A stacionárius mozgások stabilitás vizsgálatához nézzük a variációs rendszert:
|
| ||
|
| ||
|
|


illetve rendezzük át  alakra:
alakra:
|
|
A következő nemlineáris transzformációval normál formára rendezve (a  kritikus esetben):
kritikus esetben):
|
|

ahol
|
|

3. rész - Melléklet
- 1. Példa – Robot manipulátor vezérlésére
- 2. Példa – A manipulátor illesztése IBM AT kompatibilis számítógéphez
- 3. Példa – A robotvezérlő program használati utasítása
- 4. Példák – Tipikus nyíltláncú robotkarok
- 5. Példák – robotok csoportosítása
- 5.1. A robot definíciója
- 5.2. Robotok csoportosítása
- 5.3. Felhasználás szerinti csoportosítás
- 5.4. Ipari és szolgáltató robotok néhány különbsége
- 5.5. Szolgáltató robotok csoportosítása
- 5.6. Autonómia definíciója
- 5.7. Az ETO robot bemutatása
- 5.8. A robot fő jellemzői
- 5.9. A robot egységeinek részletes bemutatása
- 5.10. A szociális robotok típusai
- 5.10.1. Kompai
- 5.10.2. Biron
- 5.10.3. Hospi-Rimo
- 5.10.4. iRobiQ
- 5.10.5. Wakamaru
- 5.10.6. RoboVie R3
- 5.10.7. HAR (Home Assistant Robot)
- 5.10.8. PaPeRo
- 5.10.9. Cubo
- 5.10.10. Mamoru
- 5.10.11. Nao
- 5.10.12. iCat
- 5.10.13. Paro
- 5.10.14. Kobie
- 5.10.15. Rabie
- 5.10.16. Pomi
- 5.10.17. Beszéd
- 5.10.18. Gesztikuláció
- 5.10.19. Közvetlen betáplált információ
1. fejezet - Példa – Robot manipulátor vezérlésére
A robot manipulátor mechanikája öt részre tagolható (lásd a lenti ábrán). A manipulátor mozdulatlan része a törzs. A törzshöz a törzsízülettel kapcsolódik a váll. A vállhoz a vállízülettel a felkar, a felkarhoz a könyökízülettel az alkar kapcsolódik. Az alkarhoz a csuklóízület kapcsolja a megfogót. A csuklóízületet két független kúpkerék alkotja. A két kúpkerék egyidejű és megfelelő irányú mozgatása a megfogó egymástól független billenő és csavaró mozgását teszi lehetővé. A megfogó három nyitható-zárható rugalmas ujjból áll. A mozgást hat négyfázisú léptetőmotor végzi.
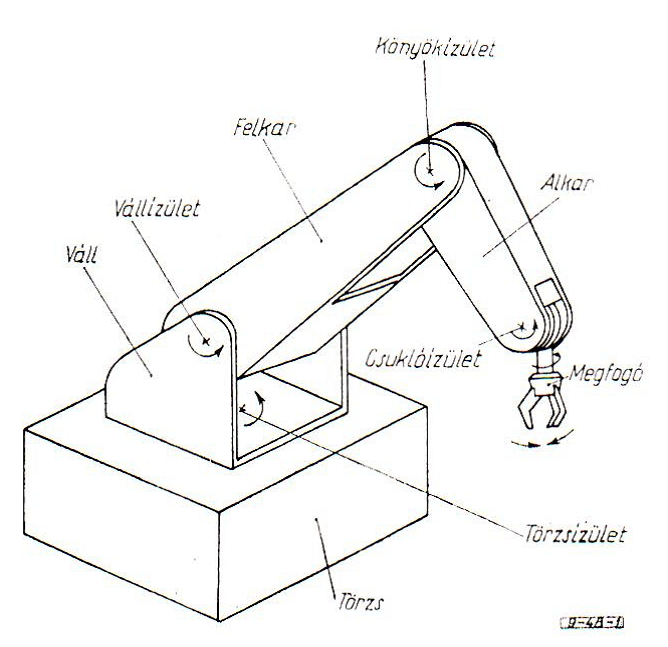
A vezérelt mozgás programozása alapvetően kétféle módon történhet. Az egyik lehetőség az, ha a mozgatni kívánt motorhoz rendelt billentyűk megfelelő sorrendű lenyomásával végigvezetjük a robot manipulátort a kívánt pályán, miközben a program a pálya bizonyos pontjaihoz rendelt koordinátákat tárolja.
A másik lehetőség a mozgás programozására az, ha a pálya pontjait világkoordinátákban közöljük a vezérlőprogrammal. A robot manipulátor jelenleg nincs érzékelőkkel ellátva, ezért bekapcsolás után vagy egy előre definiált (lásd a lenti ábrán) referenciahelyzetbe kell azt hozni, vagy világkoordinátákban közölni kell a programmal a robot manipulátor bekapcsolás pillanatában elfoglalt helyzetét.
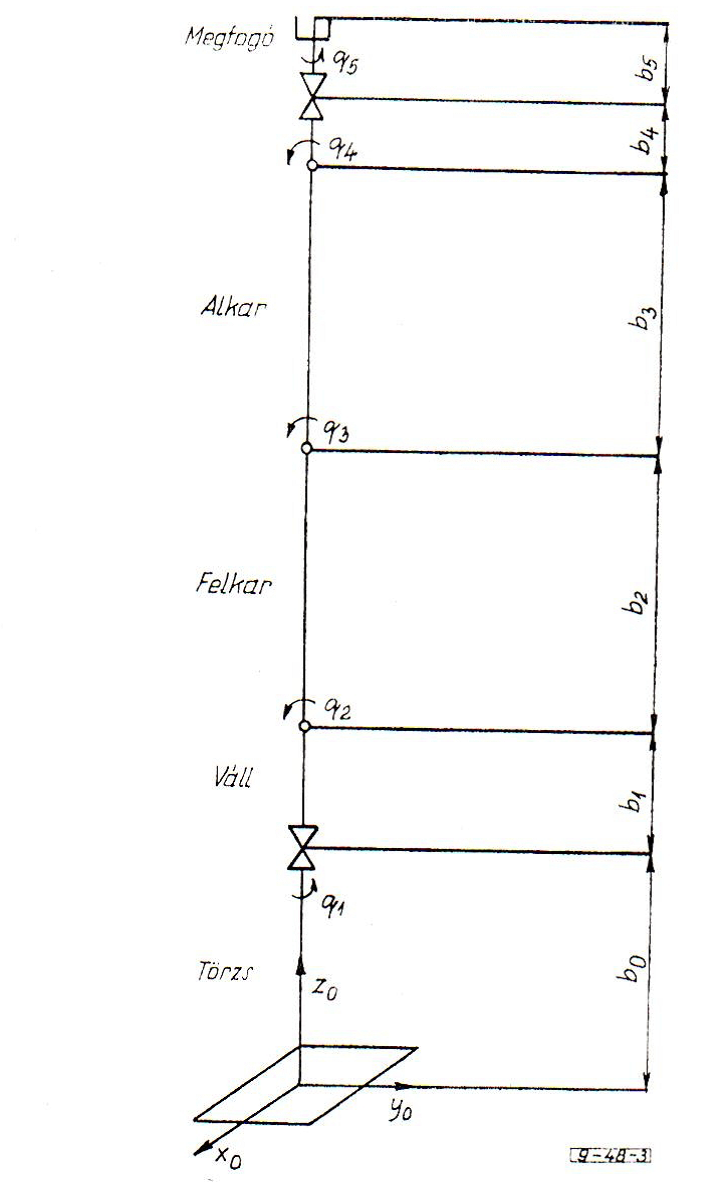
A robotirodalomban szokásos jelöléssel különböztettük meg a hajlító és a csavaró ízületeket. Az ízületi változókat  ‑vel, az ízületek távolságát
‑vel, az ízületek távolságát  ‑vel jelöltük. A robot manipulátor Denavit‑Hartenberg leírási mód szerinti geometriai paramétereit az alábbi táblázatban közöljük.
‑vel jelöltük. A robot manipulátor Denavit‑Hartenberg leírási mód szerinti geometriai paramétereit az alábbi táblázatban közöljük.
|
Tagok |
0 |
1 |
2 |
3 |
4 |
5 |
|
|
- |
0 |
|
|
|
0 |
|
|
- |
|
0 |
0 |
0 |
|
|
|
0 |
0 |
0 |
0 |
0 |
0 |
|
|
160 |
80 |
190 |
190 |
0 |
80 |









A referenciahelyzetben minden kartag tengelye merőleges az alapsíkra, az ízületi változók értéke nulla, a megfogó pozíciója [0, 0, 700].
A program mozgatása közben mindig azt tartja nyilván, hogy az egyes motorok hány lépés megtétele után kerülnek a robot manipulátor adott helyzetéből a referenciahelyzetbe. A programnak azt mindig tárolnia kell, hogy az egyes motorok milyen gerjesztési állapotban vannak.
A tárolt pályapontokon akár folyamatosan, akár pontonként előre-hátra pontonként vezethetjük végig a robot manipulátort, miközben lehetőségünk van a pálya módosítására, pontosítására.
A végigvezetéses pályatanítás közben a program akkor őriz meg egy pályapontot, ha
bármely motor az utolsó tárolt pályapont óta 121 lépésben többet tett meg (ez egy kartag kb. 6°-os elfordulását jelenti),
bármely motor mozgásiránya megváltozik (beleértve a motor elindulását és leállását),
egy fontosnak ítélt pontnál erre külön utasítást adunk.
1.1. Az inverz geometriai feladat bemutatása
Az inverz geometriai feladat megoldásakor a megfogó világkoordinátákban megadott állapotából (amelynek megadási módját a későbbiekben definiáljuk) az úgynevezett ízületi koordinátákat számítjuk ki. Az ízületi koordináták alatt az ízületeknek a referenciahelyzetből történő  elmozdulásait értjük.
elmozdulásait értjük.
Tekintsük az alábbi ábrát, ahol feltüntettük a Denavit‑Hartenberg leírási módszer szerint választott ízületi koordinátarendszereket. A megfogó állapotát világkoordinátákban a pozíciójával, az orientációjával és az ujjai helyzetével adjuk meg.
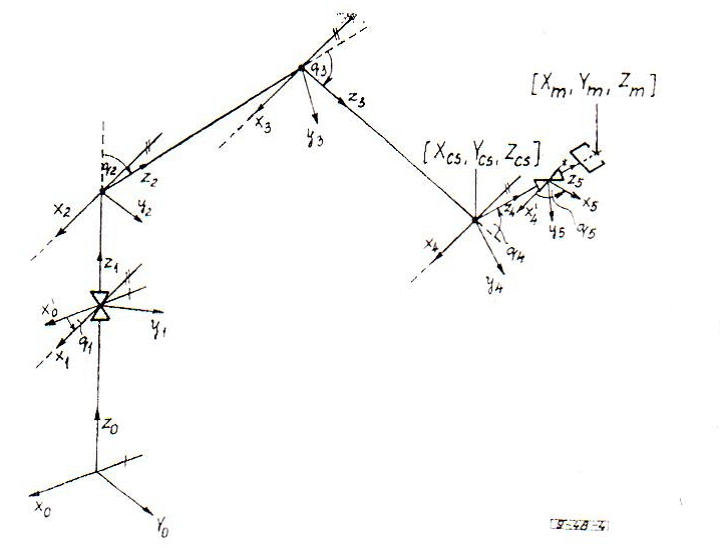
A pozíció három koordinátája  a robot manipulátor munkaterén belül tetszőlegesen előírható.
a robot manipulátor munkaterén belül tetszőlegesen előírható.
Az orientációt az úgynevezett Euler-szögekkel adjuk meg (lásd alábbi ábra) amelynek a világ- és a megfogó koordinátarendszere között teremtenek kapcsolatot.
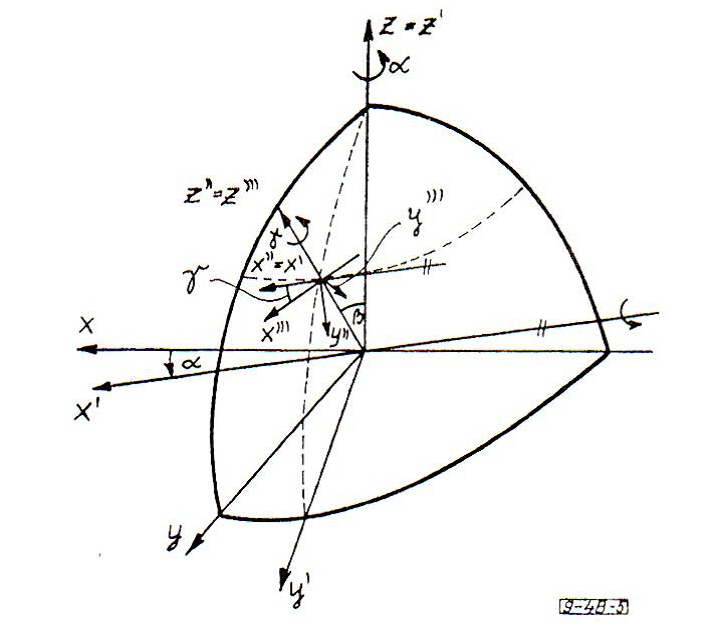
Mivel a robot manipulátor csak öt szabadságfokú, ezért az Euler-szögek csak a  és
és  választható tetszőlegesen. Az
választható tetszőlegesen. Az  szöget a pozíció határozza meg.
szöget a pozíció határozza meg.
A megfogó ujjak helyzetét azzal írjuk elő, hogy megadjuk annak a hengeres tárgynak az átmérőjét, amelyet még szorítás nélkül képes megfogni.
Ismeretes, hogy az inverz geometriai feladatnak általában több megoldása van. A program alapértelmezésben olyan megoldást keres, amikor a robot manipulátor a válltól előre nyúl, vagyis a váll koordinátarendszerében a megfogó pozíciójának  koordinátája nem negatív értékű.
koordinátája nem negatív értékű.
Továbbá az alapértelmezésben a könyök felső helyzetben van, tehát  . A program lehetőséget nyújt arra, hogy mozgatás során a robot manipulátor az alapértelmezéstől eltérő helyzetbe kerüljön. A világkoordinátákban megadott
. A program lehetőséget nyújt arra, hogy mozgatás során a robot manipulátor az alapértelmezéstől eltérő helyzetbe kerüljön. A világkoordinátákban megadott  és
és  szögek megegyeznek a csuklóízület
szögek megegyeznek a csuklóízület  és
és  elmozdulásaival.
elmozdulásaival.
Ha a megfogó pozícióját az  síkra vetítjük (lásd alábbi ábra) és figyelembe vesszük a váll koordinátarendszerére tett kikötést, akkor
síkra vetítjük (lásd alábbi ábra) és figyelembe vesszük a váll koordinátarendszerére tett kikötést, akkor  törzselfordulást egyértelműen meghatározhatjuk.
törzselfordulást egyértelműen meghatározhatjuk.
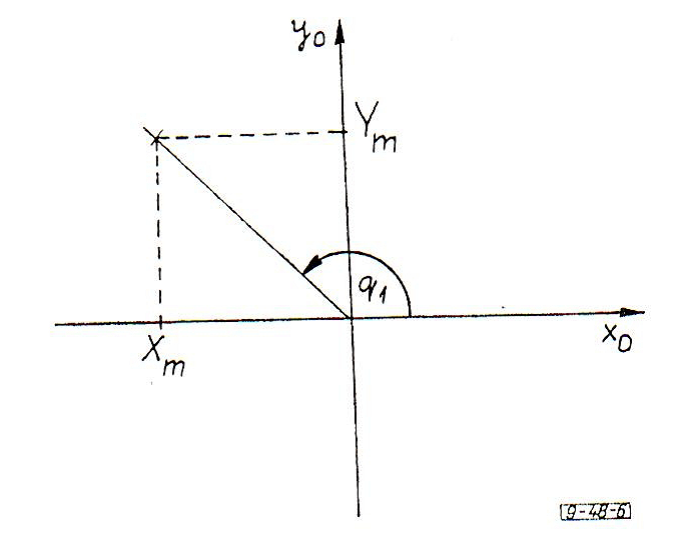
Ha  , akkor
, akkor
|
|
(1.1) |

Ha  , és
, és  , akkor
, akkor  értéke határozatlan. Ebben az esetben a törzs megtartja korábbi helyzetét.
értéke határozatlan. Ebben az esetben a törzs megtartja korábbi helyzetét.
A  elmozdulással a megfogó orientációja is ismertté válik, így következtethetünk a csuklóízület [
elmozdulással a megfogó orientációja is ismertté válik, így következtethetünk a csuklóízület [ ] pozíciójára
] pozíciójára
|
|
(1.2) |
Ha  , és
, és  , akkor
, akkor  értéke határozatlan. Ebben az esetben a törzs megtartja korábbi helyzetét.
értéke határozatlan. Ebben az esetben a törzs megtartja korábbi helyzetét.
A  elmozdulással a megfogó orientációja is ismertté válik, így következtethetünk a csuklóízület [
elmozdulással a megfogó orientációja is ismertté válik, így következtethetünk a csuklóízület [ ] pozíciójára
] pozíciójára
|
|
(1.3) |

|
|
(1.4) |

|
|
(1.5) |

Az alkar, a felkar és a megfogó a váll koordinátarendszerében mindig a  és
és  tengelyek által kifeszített síkba esik. Rajzoljuk meg e síkban az említett kartagokat (lásd az alábbi ábra). A csukló-, a könyök- és a vállízület alkotta háromszög két oldalát konstrukciós adatokból ismerjük. A harmadik oldal meghatározása érdekében számítsuk ki a csuklóízület pozícióját a (lásd az alábbi ábra) koordinátarendszerében.
tengelyek által kifeszített síkba esik. Rajzoljuk meg e síkban az említett kartagokat (lásd az alábbi ábra). A csukló-, a könyök- és a vállízület alkotta háromszög két oldalát konstrukciós adatokból ismerjük. A harmadik oldal meghatározása érdekében számítsuk ki a csuklóízület pozícióját a (lásd az alábbi ábra) koordinátarendszerében.
|
|
(1.6) |

|
|
(1.7) |

Térjünk át polár‑koordinátákra
|
|
(1.8) |
Ha  , akkor
, akkor
|
|
(1.9) |
|
|
(1.10) |
Ha  és
és  akkor
akkor
|
|
(1.11) |
A  és
és  eset nem lehetséges, kívül esik a robot manipulátor munkaterületén.
eset nem lehetséges, kívül esik a robot manipulátor munkaterületén.
Az említett háromszögben a  kiegészítő szögét a koszinusztétellel számítjuk ki. Figyelembe véve a könyök pozíciójára tett kikötést, a
kiegészítő szögét a koszinusztétellel számítjuk ki. Figyelembe véve a könyök pozíciójára tett kikötést, a  elmozdulást a következő egyenlettel kapjuk meg
elmozdulást a következő egyenlettel kapjuk meg
|
|
(1.12) |
Mivel az alkar és a felkar hossza megegyezik, vagyis a vizsgált háromszög egyenlő szárú, a  elmozdulás is könnyen meghatározható:
elmozdulás is könnyen meghatározható:
|
|
(1.13) |

Ezzel ismertté vált az összes ízületi elmozdulás nagysága, amelyeket az áttételek (beleértve a megfogó ujjak áttételét) ismeretében könnyen átszámíthatunk a motorok lépésszámaivá.
Két pályapont között a motorok állandó sebességgel mozognak. Ha azt szeretnénk, hogy az általunk megadott két pályapont között a robot manipulátor közelítőleg egyenes vonal mentén haladjon, akkor utasítást adhatunk arra, hogy a program a kezdő- és végpont közé generáljon adott számú az egyenes vonalú pályára eső pályapontot.
A program elsősorban oktatási céllal készült, ezért a felhasználó a számítógép képernyőjén mindig pontosan nyomon követheti a számításokat és a robot manipulátor helyzetét akár ízületi, akár világkoordináta-rendszerben. Az inverz geometriai feladat számítása közben a program ellenőrzi, hogy az adott ízületi elmozdulás nem ütközik-e a robot manipulátor konstrukciós korlátaiba, ugyanakkor jelzi a felhasználónak, ha a megfogó, vagy végberendezés adott állapotát a robot manipulátor az alapértelmezéstől eltérő módon is meg tudja valósítani.
A jövőben a robot manipulátort érzékelőkkel kívánjuk ellátni és az oktatási céloktól az ipari igények felé igyekszünk közelíteni.
2. fejezet - Példa – A manipulátor illesztése IBM AT kompatibilis számítógéphez
Az illesztés a számítógép párhuzamos printerpontján valósul meg. (A manipulátort előzőleg már egy Sinclair Spectrum számítógéphez is illesztettük, és az ott alkalmazott megoldást módosítottuk a szükséges mértékben.) Az illesztő áramkör az alábbi ábrán látható.
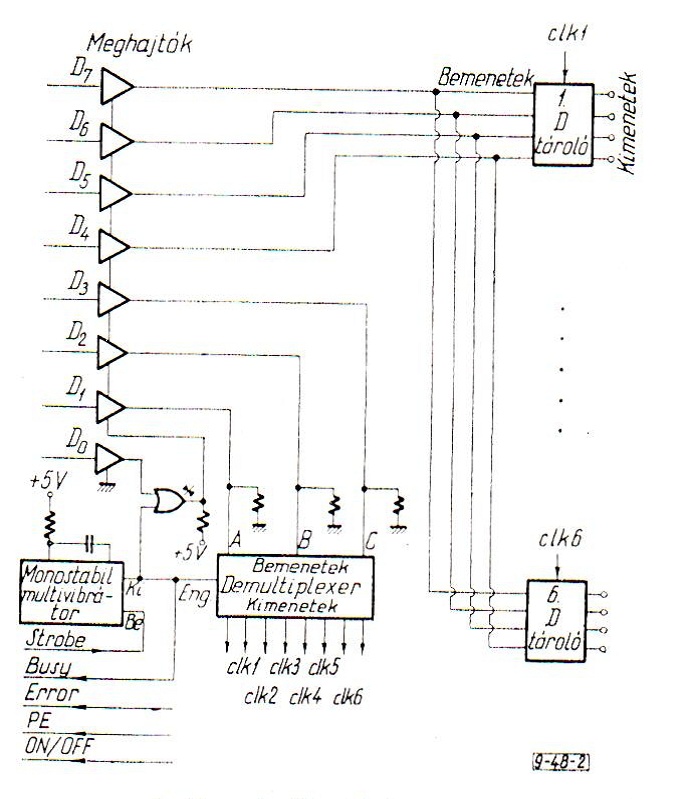
A motorok gerjesztési állapotát hat D tárolóból álló 4 bites memória írja elő. E D tárolók TTL-szintű kimeneteit feszültség- és teljesítményerősítés után kapcsoljuk a léptetőmotorok fázistekercseire.
A számítógép egyetlen output utasítással csak egyetlen motor léptetésére adhat parancsot. Az adott motor következő lépésének megfelelő gerjesztést a párhuzamos port a nyolc adatvonal közül a felső négy helyiértéken (D7-D4) közli. A léptetendő motor sorszámát a D3-D1 adatvezetékek tartalmazzák. A sorszám dekódolását egy demultiplexer végzi. A demultiplexer megfelelő kimenete ad engedélyt a léptetendő motorhoz tartozó D tárolónak a motor következő gerjesztési állapotát előíró adat fogadására.
A számítógép strobejele egy monostabil multivibrátor bemenetéhez csatlakozik. E multivibrátor a strobejel hatására a beállított ideig engedélyt ad a robot manipulátornak az adatok fogadására, ha közben a D0 adatvezeték a logikai nulla szintnek megfelelő potenciálon van.
A (2.1. ábra) ábrán feltüntettük a printerport azon bemeneteit, amelyeket a működés érdekében állandó potenciálra kell kapcsolni.
3. fejezet - Példa – A robotvezérlő program használati utasítása
A program betöltése: c:\ robot\ robvez
Az indítást követően a következő kérdésre kell választ adni: „Referencia helyzetben van a kar?” A válasz az I (igen) vagy az N (nem) betű leütése lehet. Ha a válasz N, akkor a program megkérdezi a megfogó pozícióját milliméterben és orientációját fokban. A fenti bejelentkezést követően a főmenü jelenik meg a képernyőn. (lásd alábbi ábra)
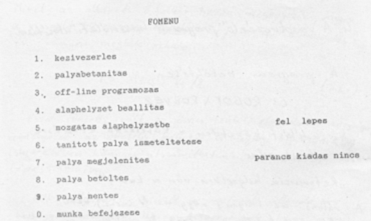
A menüpontok mellett a képernyő jobb oldalán két megjegyzést találunk: fél lépés, továbbá parancs kiadás nincs.
Mindkét megjegyzés a program egy-egy logikai változójának állapotára utal. Az első arra vonatkozik, hogy a léptető motorokat fél vagy egész lépésenként vezéreljük. E változó beállítása a főmenüben az E vagy az F betű leütésével történik. A másik jelző segítségével engedélyezhetjük vagy tilthatjuk a léptető motorok tényleges mozgását előidéző parancs kiadását. E jelző beállítása szintén a főmenüben történik a V (parancs kiadás van) illetve az N (parancs kiadás nincs) betűk leütésével.
A főmenüben az egyes menüpontok közötti választásunkat a menüpont előtt lévő sorszám leütésével közölhetjük a program számára.
3.1. Kézi vezérlés
Ebben az üzemmódban a kar manipulátorként működtethető (a mozgás programozására nincs mód). A képernyőn az alábbi ábrán jelenik meg, ahol leolvasható, hogy az egyes ízületek különböző irányú mozgásának melyik billentyű leütése felel meg. A mozgás közben a program folyamatosan csak azt tartja nyilván, hogy az adott pozícióból az egyes motorok hány lépés megteltével térhetnek vissza a kar referenciahelyzetébe. E menüpont a mozgás begyakorlását szolgálja.
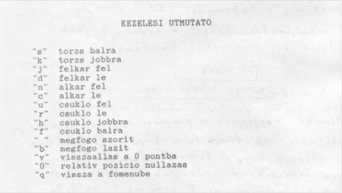
3.2. Pályatanítás
Az előző menüponthoz hasonló mozgatást tesz lehetővé, kiegészítse azzal, hogy a képernyő jobb oldalán folyamatosan megjelenik a léptetőmotorok megtett lépéseinekszáma. Továbbá a mozgatás közben a következő esetekben a program az adott pályapont relatív helyzetét eltárolja
ha bármely motor az utolsó tárolt pályapont óta 127 lépésnél többet tett meg (ez egy kartag kb. 6°-os elfordulását jelenti);
ha bármely motor mozgásiránya megváltozik (beleértve a motor elindulását és leállását);
ha egy fontosnak ítélt pontnál erre különutasítást adunk az M betű leütésével.
A pálya ismétlésekor a program ezeken a tárolt pontokon viszi végig folyamatosan a kart, de lehetőség van arra, hogy bizonyos pályapontokban a T betű leütésével várakozási időt írjunk elő. A várakozási időt miliszekundumban kell megadni. (lásd az alábbi ábrán) A pályatanítás egy almenüpontja a pálya editálására nyújt lehetőséget.
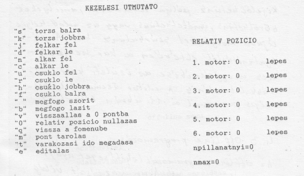
Kijelölhetünk pályaszakaszokat, amelyeket törölhetünk, ismételhetünk, vagy az adott helyre újabb mozgássort szúrhatunk be. A pályatanítástól eltérően a kar helyzetének megjelenítése az ízületi koordinátákkal történik. Az editor üzemmód lehetséges parancsait az alábbi ábrán láthatjuk.
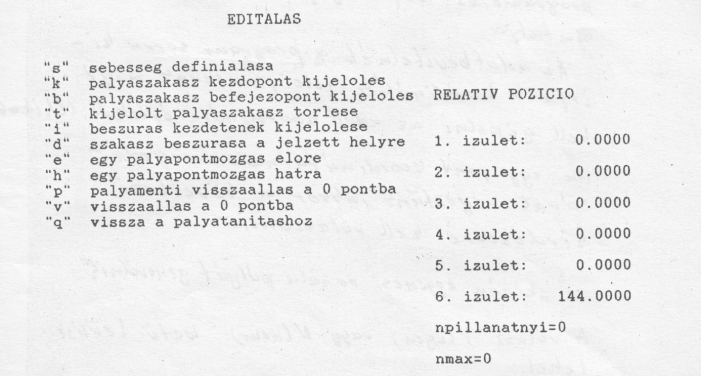
3.3. Off-line programozás
Az off-line programozás lehetőséget nyújt arra, hogy a robotkar mozgását világkoordinátákban írjuk elő. A pályapontok pozíciójának megadása milliméterben történik, a megfogó orientációját fokokban kell előírni. Az off-line programozás képernyőjét az alábbi ábra mutatja.
Az adatbevitelnél a program sorra kiírja a koordináták jeleit s nekünk mögé kell gépelni az adott koordináta értékét. (lásd az alábbi ábra) Ha egy pont koordinátáinak megadásával végeztünk, akkor a következő kérdésre kell válaszolni:
„kíván egyenes vonalú pályát generálni?”
A válasz I (igen) vagy N (nem) betű leütése lehet.
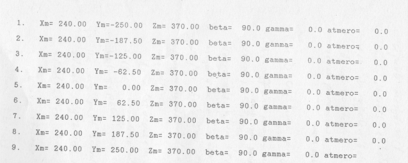
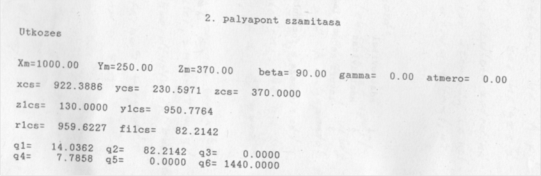
Ha a válaszunk I (igen), akkor meg kell adni, hogy az utolsó két pályapont között hány olyan pontot generáljon a program, amelyek a két pontot összekötő egyenesre esnek.
A következő kérdés:
„Kíván további pályapontot megadni?”
A válasz ismét az I vagy N betű leütése lehet. Ha I betűvel válaszolunk, akkor folytathatjuk a koordináták megadását, a másik esetben a (3.5. ábra) ábrán látható képhez térünk vissza. Az adatmódosításkor a megváltoztatni kívánt pályapont sorszámát kell megadni.
Az inverz geometriai feladat megoldása a korábbiakban ismertetett algoritmus szerint valósul meg. A megoldás során a program ellenőrzi, hogy a számított pozíciót a kar valóban fel tudja venni-e vagy sem.
Ha a koordinátákat rosszul adtuk meg, akkor a program (3.7. ábra) ábrán látható hibaüzenetet adja, kiírja az adott pont koordinátáit (amely a megfogóra vonatkozik), a csukló koordinátáit mind a világ koordinátarendszerben mind a váll koordinátarendszerében és az ízületi koordinátákat, így könnyen megkereshetjük a hiba okát. A program a pályát végül az egyes motorok lépésszámaira bontja le.
3.4. Alaphelyzet beállítása
Külső akadály előidézheti a léptető motorok lépéstévesztését, megcsúszását, ilyenkor a pozícióérzékelők hiányában a robotkart kézzel ismét a referencia helyzetbe kell vinni. E menüpont erre nyújt lehetőséget azzal, hogy lekapcsolja a léptető motorok gerjesztését, így megszűnik a motorok állónyomatéka. A beállítás befejezését a „space” billentyű leütésével jelezhetjük a programnak.
3.5. Mozgatás alaphelyzetbe
E menüpontban a program a referenciahelyzetbe viszi a robotkart.
3.6. A pálya ismételtetése
A vezérlő program ugyanolyan formátumban tárolja a kar mozgását, függetlenül attól, hogy azt a pályán végigvezetéssel (pályatanítással) vagy off-line üzemmódban programoztuk be. E menüpontban a program végigviszi a robotkart az előírt mozgássoron.
3.7. A pálya megjelenítése
E menüpontban nem grafikus, hanem koordinátákkal való megjelenítésről van szó. Végig mehetünk a pályapontokon és azok a képernyőn a 3.8. ábra formátumában jelennek meg.
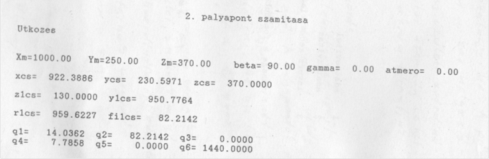
4. fejezet - Példák – Tipikus nyíltláncú robotkarok
A Denavit‑Hartenberg konvenció értelmében az egyetlen változó a  szög, a további paraméterek állandók. Továbbá a melléklet folyamán a következő egyszerűsített jelölést alkalmazzuk, amely a robotikai szakkönyvekben általános alkalmazott rövidítés, azaz
szög, a további paraméterek állandók. Továbbá a melléklet folyamán a következő egyszerűsített jelölést alkalmazzuk, amely a robotikai szakkönyvekben általános alkalmazott rövidítés, azaz
|
|


4.1. Síkbeli könyök manipulátor
Ahogy az ábrán is látható, a síkbeli könyök manipulátor (angolul: planar elbow manipulator) két kartagból áll.
![Síkbeli könyök manipulátor [1.]](images/image_IV_PIII_1.png)
A csuklók  tengelyei merőleges a lap síkjára, és kifelé mutatnak belőle. A manipulátor bázisát az
tengelyei merőleges a lap síkjára, és kifelé mutatnak belőle. A manipulátor bázisát az  koordináta rendszer jelzi. Fontos megjegyeznünk, hogy a koordináta rendszer felvétele során, a Denavit‑Hartenberg konvenciók értelmében a koordináta rendszer origóját, valamint a
koordináta rendszer jelzi. Fontos megjegyeznünk, hogy a koordináta rendszer felvétele során, a Denavit‑Hartenberg konvenciók értelmében a koordináta rendszer origóját, valamint a  tengely irányát tudjuk megválasztani, az
tengely irányát tudjuk megválasztani, az  tengely iránya tetszőlegesen megválasztható, ezáltal az
tengely iránya tetszőlegesen megválasztható, ezáltal az  tengely iránya kiadódik. A további
tengely iránya kiadódik. A további  és
és  koordináta rendszereket a Denavit‑Hartenberg konvenciók értelmében már definiálhatjuk.
koordináta rendszereket a Denavit‑Hartenberg konvenciók értelmében már definiálhatjuk.
A Denavit‑Hartenberg paramétereket az alábbi táblázatba foglaltuk össze
|
Kar |
|
|
|
|
|
1 |
|
0 |
0 |
|
|
2 |
|
0 |
0 |
|








Az  koordináta rendszert az
koordináta rendszert az  koordináta rendszerbe a
koordináta rendszerbe a  transzfomációs mátrixszal vihetjük át, azaz
transzfomációs mátrixszal vihetjük át, azaz
|
|
(4.1) |
Az  koordináta rendszert az
koordináta rendszert az  koordináta rendszerbe az
koordináta rendszerbe az  transzformációs mátrixszal vihetjük át, azaz
transzformációs mátrixszal vihetjük át, azaz
|
|
(4.2) |
Felhasználva a  és
és  transzformációs mátrixokat képezhetjük a
transzformációs mátrixokat képezhetjük a  transzformációs mátrixot, amely a végberendezés koordináta rendszerét átszámolja a bázis koordináta rendszerbe, azaz
transzformációs mátrixot, amely a végberendezés koordináta rendszerét átszámolja a bázis koordináta rendszerbe, azaz
|
|
(4.3) |

kifejtve
|
|
(4.4) |
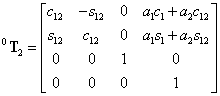
Elemezve a  transzformációs mátrixot, vegyük észre, hogy a transzformációs mátrix (1,4) illetve a (2,4) eleme reprezentálja az
transzformációs mátrixot, vegyük észre, hogy a transzformációs mátrix (1,4) illetve a (2,4) eleme reprezentálja az  origó x és y koordinátáit a bázis koordináta rendszerben leírva, azaz
origó x és y koordinátáit a bázis koordináta rendszerben leírva, azaz
|
|
(4.5) |

|
|
(4.6) |

amelyek továbbá a végberendezés koordinátái a bázis koordináta rendszerben. A  transzformációs mátrix forgatási része pedig az
transzformációs mátrix forgatási része pedig az  koordináta rendszer orientációját mutatja a bázis koordináta rendszerhez képest.
koordináta rendszer orientációját mutatja a bázis koordináta rendszerhez képest.
4.2. Hengeres robot
Ahogy az ábrán is látható, a hengeres robot (angolul: cylindrical robot) három kartagból áll.
![Hengeres robot [1.]](images/image_IV_PIII_2.png)
Az  origó az 1. csukló, talajhoz rögzített bázis koordinátarendszerének origója. A
origó az 1. csukló, talajhoz rögzített bázis koordinátarendszerének origója. A  tengely az origón fut keresztül és a csuklóból kifelé mutat (ezen tengely körül forog az 1. csukó). Az
tengely az origón fut keresztül és a csuklóból kifelé mutat (ezen tengely körül forog az 1. csukó). Az  tengely irány tetszőlegesen megválasztható, ami választásunk, hogy az
tengely irány tetszőlegesen megválasztható, ami választásunk, hogy az  tengely merőleges a lap síkjára. Ebben az esetben a
tengely merőleges a lap síkjára. Ebben az esetben a  paraméter értéke zérus. Ezután az
paraméter értéke zérus. Ezután az  tengely iránya már kiadódik.
tengely iránya már kiadódik.
A második csukló transzlációt hajt végre. Ez esetben a  és
és  tengelyek egymással párhuzamosak és ugyanabba az irányba mutatnak. Ebben az esetben is az
tengelyek egymással párhuzamosak és ugyanabba az irányba mutatnak. Ebben az esetben is az  tengely iránya tetszőlegesen megválasztható, de célszerű az
tengely iránya tetszőlegesen megválasztható, de célszerű az  tengellyel párhuzamosan és az
tengellyel párhuzamosan és az  tengellyel azonos irányba felvenni. A Denavit‑Hartenberg konvenciók értelmében
tengellyel azonos irányba felvenni. A Denavit‑Hartenberg konvenciók értelmében  és
és  tengelyek merőlegesek egymásra, valamint az
tengelyek merőlegesek egymásra, valamint az  origó a tengelyek metszéspontjában helyezkedik el. Az
origó a tengelyek metszéspontjában helyezkedik el. Az  tengelyt párhuzamosnak választjuk az
tengelyt párhuzamosnak választjuk az  tengellyel, tehát ebben az esetben
tengellyel, tehát ebben az esetben  paraméter értéke zérus. Végezetül a végberendezéshez rögzített koordináta rendszert alakítjuk ki, amelynek tengelyei párhuzamosak az
paraméter értéke zérus. Végezetül a végberendezéshez rögzített koordináta rendszert alakítjuk ki, amelynek tengelyei párhuzamosak az  koordináta rendszerrel, azonban a koordináta rendszer origója a végberendezés középpontjában található.
koordináta rendszerrel, azonban a koordináta rendszer origója a végberendezés középpontjában található.
A Denavit‑Hartenberg paramétereket az alábbi táblázatba foglaltuk össze
|
Kar |
|
|
|
|
|
1 |
0 |
0 |
|
|
|
2 |
0 |
-90 |
|
0 |
|
3 |
0 |
0 |
|
0 |








Az  koordináta rendszert az
koordináta rendszert az  koordináta rendszerbe a
koordináta rendszerbe a  transzfomációs mátrixszal vihetjük át, azaz
transzfomációs mátrixszal vihetjük át, azaz
|
|
(4.7) |
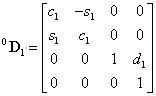
Az  koordináta rendszert az
koordináta rendszert az  koordináta rendszerbe az
koordináta rendszerbe az  transzformációs mátrixszal vihetjük át, azaz
transzformációs mátrixszal vihetjük át, azaz
|
|
(4.8) |
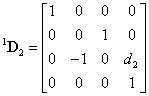
Az  koordináta rendszert az
koordináta rendszert az  koordináta rendszerbe az
koordináta rendszerbe az  transzformációs mátrixszal vihetjük át, azaz
transzformációs mátrixszal vihetjük át, azaz
|
|
(4.9) |
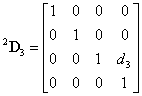
Felhasználva a  ,
,  és
és  transzformációs mátrixokat képezhetjük a
transzformációs mátrixokat képezhetjük a  transzformációs mátrixot, amely a végberendezés koordináta rendszerét átszámolja a bázis koordináta rendszerbe, azaz
transzformációs mátrixot, amely a végberendezés koordináta rendszerét átszámolja a bázis koordináta rendszerbe, azaz
|
|
(4.10) |
kifejtve
|
|
(4.11) |
4.3. Gömbi csukló
Az alábbi ábrán egy gömbi csukló, vagy Euler csukló látható (angolul: spherical wrist).
![Euler csukló [1.]](images/image_IV_PIII_3.png)
A gömbi csukló esetén a  és
és  tengelyek egy pontban metszik egymást, a 5. csukló koordinátarendszerének origójában. A Stanford manipulátor egy jó példája az ipari robotoknak, amely gömbi csuklóval rendelkezik. A Stanford manipulátor alapját egy RRP robot, vagy gömbkoordinátás robot képzi.
tengelyek egy pontban metszik egymást, a 5. csukló koordinátarendszerének origójában. A Stanford manipulátor egy jó példája az ipari robotoknak, amely gömbi csuklóval rendelkezik. A Stanford manipulátor alapját egy RRP robot, vagy gömbkoordinátás robot képzi.
A Denavit‑Hartenberg paramétereket az alábbi táblázatba foglaltuk össze
|
Kar |
|
|
|
|
|
4 |
0 |
-90 |
0 |
|
|
5 |
0 |
90 |
0 |
|
|
6 |
0 |
0 |
|
|








A gömbi csukló specialitása, hogy a 

 csuklóváltozók az Euler‑féle szögek, rendre
csuklóváltozók az Euler‑féle szögek, rendre  ,
,  , és
, és  az
az  koordináta rendszerben kifejezve. A korábbiak értelmében az
koordináta rendszerben kifejezve. A korábbiak értelmében az  koordináta rendszert az
koordináta rendszert az  koordináta rendszerbe a
koordináta rendszerbe a  transzfomációs mátrixszal vihetjük át, azaz
transzfomációs mátrixszal vihetjük át, azaz
|
|
(4.12) |
Az  koordináta rendszert az
koordináta rendszert az  koordináta rendszerbe az
koordináta rendszerbe az  transzformációs mátrixszal vihetjük át, azaz
transzformációs mátrixszal vihetjük át, azaz
|
|
(4.13) |
Az  koordináta rendszert az
koordináta rendszert az  koordináta rendszerbe az
koordináta rendszerbe az  transzformációs mátrixszal vihetjük át, azaz
transzformációs mátrixszal vihetjük át, azaz
|
|
(4.14) |
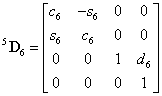
Felhasználva a  ,
,  és
és  transzformációs mátrixokat képezhetjük a
transzformációs mátrixokat képezhetjük a  transzformációs mátrixot, amely a végberendezés koordináta rendszerét átszámolja a bázis koordináta rendszerbe, azaz
transzformációs mátrixot, amely a végberendezés koordináta rendszerét átszámolja a bázis koordináta rendszerbe, azaz
|
|
(4.15) |
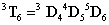
kifejtve
|
|
(4.16) |
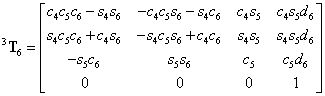
5. fejezet - Példák – robotok csoportosítása
- 5.1. A robot definíciója
- 5.2. Robotok csoportosítása
- 5.3. Felhasználás szerinti csoportosítás
- 5.4. Ipari és szolgáltató robotok néhány különbsége
- 5.5. Szolgáltató robotok csoportosítása
- 5.6. Autonómia definíciója
- 5.7. Az ETO robot bemutatása
- 5.8. A robot fő jellemzői
- 5.9. A robot egységeinek részletes bemutatása
- 5.10. A szociális robotok típusai
- 5.10.1. Kompai
- 5.10.2. Biron
- 5.10.3. Hospi-Rimo
- 5.10.4. iRobiQ
- 5.10.5. Wakamaru
- 5.10.6. RoboVie R3
- 5.10.7. HAR (Home Assistant Robot)
- 5.10.8. PaPeRo
- 5.10.9. Cubo
- 5.10.10. Mamoru
- 5.10.11. Nao
- 5.10.12. iCat
- 5.10.13. Paro
- 5.10.14. Kobie
- 5.10.15. Rabie
- 5.10.16. Pomi
- 5.10.17. Beszéd
- 5.10.18. Gesztikuláció
- 5.10.19. Közvetlen betáplált információ
5.1. A robot definíciója
A robot elektromechanikai szerkezet, amely előzetes programozás alapján képes különböző feladatok végrehajtására. Lehet közvetlen emberi irányítás alatt, de önállóan is végezheti a munkáját egy számítógép felügyeletére bízva.
5.2. Robotok csoportosítása
A robotokat rengeteg szempont alapján lehet csoportosítani. Ezek közül csak a legfontosabbakat említjük.
Mobilitásuk alapján:
mobil robotok
helyhez kötött robotok
Felhasználásuk alapján:
anyagmozgató
technológiai műveletet elvégző
szociális
Helyhez kötött robotok kinematikájuk alapján:
párhuzamos kinematikájú
láncolt kinematikájú
vegyes kinematikájú
Mobil robotok kinematikájuk alapján:
differenciális
holonomikus
egyéb
5.3. Felhasználás szerinti csoportosítás
Manapság a robotok szerteágazó feladatköröket töltenek be, mely folyamatosan bővül a technológia fejlődésével. Ebből adódóan a legcélszerűbb őket a feladatkörük szerint csoportosítani
Ipari robotok (Industrial robots)
Az ipari robotok közé sorolhatóak azok a robotok, amelyek a gyártás során végzik a feladatukat. Jellemzően ezek speciális robotkarok, amelyek különböző műveleteket hajtanak végre, az alkatrészek behelyezésétől a hegesztésen át egészen a festésig.
Takarító vagy háztartási robotok (Domestic or household robots)
Ide tartoznak a háztartási feladatokat ellátó robotok, amelyek megkönnyítik az emberek mindennapjait. Például: porszívó robot, medence takarító robot, sepregető robot, eresz takarító robot.
Orvosi robotok (Medical robots)
Azok a robotok, amelyeket a gyógyszeriparban és az orvostudomány területén alkalmaznak. Elsősorban a sebészeti robotok tartoznak ide.
Service robotok (Service robots)
Robotok, amelyeket feladatuk alapján egyik kategóriába se tartoznak. Ezek lehetnek különböző adatgyűjtő és feldolgozó robotok, amelyek segíthetnek például egy kutatást vagy valamilyen szolgáltatást.
Katonai robotok (Military robots)
Robotok, amelyeket a hadiiparban alkalmaznak. Ide tartoznak például a tűzszerész robotok, a különböző szállító robotok, vagy a távirányított felderítő repülőgépek.
Szórakoztató robotok (Entertainment robots)
Ebbe a kategóriába azok a robotok taroznak, melyeknek célja az emberek szórakoztatása. Például ilyenek a táncoló robotok, vagy a kerekeken guruló ébresztőóra.
Űr robotok (Space robots)
Ide tartoznak azok a robotok, amelyeket az űrben alkalmaznak, például a felderítő robotok, vagy a nemzetközi űrállomásokon használt robotok
Hobby robotok (Hobby and competition robots)
Hobby robotok, amelyeket a felhasználó építhet össze és programozhat be különböző feladatokra.
Természetesen vannak olyan összetettebb robotok, amelyek nem sorolhatóak be egyértelműen egy kategóriába, mivel több feladatra is alkalmasak.
5.4. Ipari és szolgáltató robotok néhány különbsége
Felhasználásuk szerint a robotokat tehát két nagy csoportra lehet bontani; ipari és szolgáltató robotokra. Az ipari robotok már hosszú ideje az ipari automatizálás részét képezik, a szolgáltató robotok azonban egyelőre még sokkal kevésbé elterjedtek. Az elmúlt két évtizedben azonban számos kutató és fejlesztő projekt irányult a szolgáltató robotokra, és a robotok felhasználási területe egyre inkább bővül. A Táblázat 5.1 szemlélteti az ipari és szolgáltató robotok közötti alapvető különbségeket
|
IPARI ROBOTOK |
SZOLGÁLTATÓ ROBOTOK | |
|
MUNKAKÖRNYEZET |
Ellenőrzött és jól meghatározott környezet |
Rendezetlenebb, nehezebben definiálható környezet |
|
FELHASZNÁLÓK |
Betanítás speciális feladatokra |
A betanítás a tevékenységek széleskörű skáláját öleli fel |
|
BIZTONSÁG |
Gépfüggő |
Robot és felhasználófüggő |
|
MUNKAFILOZÓFIA |
Robotok és emberek elkülönítése |
Robotoknak és embereknek meg kell osztozniuk a munka-területen, hogy szolgáltatást nyújtsanak/kapjanak |
|
GÉP TERVEZÉSE |
Megbízásra rugalmasan reagál |
Igényre rugalmasan reagál |
5.5. Szolgáltató robotok csoportosítása
Az alábbi táblázatok az ISO 13482 szabvány szerinti definíciók alapján mutatják be a szolgáltató robotokat, és azon belül részletesen a személyi gondozó robot típusait.
|
ROBOT | ||
|
Mozgásba hozott mechanizmus, két vagy több tengelye programozható, bizonyos fokú autonómiával rendelkezik, a környezetében mozog, hogy feladatokat hajtson végre. | ||
|
IPARI ROBOT |
SZOLGÁLTATÓ ROBOT | |
|
Az ipari robot egy automatikus irányítású, újraprogramozható, többcélú automatikus ipari feladatok elvégzésére használt manipulátor, három vagy több tengelye programozható, melyek lehetnek rögzítettek vagy mobilak. |
Olyan robot, amely hasznos feladatokat hajt végre emberek vagy berendezések számára, kivéve az ipari automatizáló berendezéseket. | |
|
KISZOLGÁLÓ ROBOT |
ORVOSI/EGÉSZSÉGÜGYI ROBOT | |
|
Olyan szolgáltató robot, mely lehetővé teszi a fizikai kontaktust az emberekkel, támogató tevékenységeket lát el, amelyek közvetlenül hozzájárul az egyének életminőségének javításához. |
Olyan robot vagy robotikai berendezés melyet orvosi elektromos berendezésnek használnak. | |
|
SZEMÉLYI GONDOZÓ ROBOT TÍPUSOK | ||
|
MOZGÓ SZOLGÁLTATÓ ROBOT |
FIZIKAI SEGÍTŐ ROBOT |
EMBERSZÁLLÍTÓ ROBOT |
|
Képes szabadon mozogni és egy tervezett feladatot ellátni, illetve tárgyakat fogni (kezelővel vagy anélkül). |
Segít az embernek egy feladat elvégzésévben, pótló vagy növelő képességek nyújtása által. A fizikai segítő robot egy gyenge vagy idős embert egy jó erőben lévő ember képességeivel látja el, vagy növeli egy jó erőben lévő ember teljesítményét. |
Embereket szállít különböző helyekre autonóm navigálással, irányítással és mozgással. |
|
|
|
|
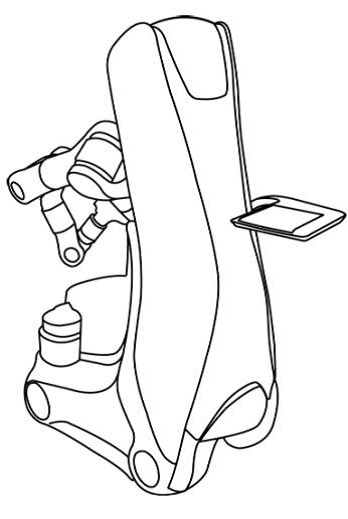
5.6. Autonómia definíciója
A szabvány az autonómia definícióját is meghatározza, mely elsősorban az orvosi robotoknál tölt be kulcsfontosságú szerepet.
Autonómia: Annak a képessége, hogy a robot az aktuális állapotból kiindulva és érzékelve, emberi beavatkozás nélkül feladatokat hajtson végre.
Autonómia foka: Rendelkezik egy dimenzióval, mely nem más, mint az operátor bevonásának mértéke.
Az autonómia fokának osztályozása:
Alacsony érték = Autonómia hiánya
Magas érték = Teljes autonómia
5.7. Az ETO robot bemutatása
A feladatunk során olyan megoldásokat és terveket kell készítenünk, amelyek kompatibilisek a MOGI tanszéken épülő robottal. A tervezésekor figyeltek arra, hogy a robotot a későbbiek során további funkciókkal is el lehessen látni. Hagytak rajta szabad helyet újabb alkatrészek számára és rögzítési pontokat is elhelyeztek rajta. Ennek tudatában első körben áttanulmányoztuk a robot felépítését, hogy a tervezés megkezdése előtt tudatában legyünk a szükséges információknak.

5.8. A robot fő jellemzői
A mozgásért felelős egység képzi a robot alapját. Ezen helyezkedik el a három kerék, a belsejében pedig a motorok, a szenzorok, a szabályzók és a takarító egység kapott helyet. Erre az alapra épül rá a robot többi része, a vázszerkezet, illetve az azon lévő egységek. A robot mozgását és funkcióit egy, a belsejében elhelyezett számítógép vezérli, a tájékozódását pedig egy Microsoft® Kinect® kamera segíti. Az egész szerkezet közel egy méter magas és 40 kg.
5.9. A robot egységeinek részletes bemutatása
Mozgás
A robot egyik fő tulajdonsága a szabad mozgása. Ennek köszönhetően közlekedés közben szabadon változtathatja a mozgás irányát és a robot elfordulását. Ez az összetett mozgás lehetővé teszi a precíz manőverezést és jobban hasonlít az élőlények mozgására.
Ezt a mozgást az úgynevezett holonomikus hajtással tudja elérni. Három 4"-os kerékkel rendelkezik a robot, amelyek egyenlő távolságban helyezkednek el a szerkezet sarkainál 120°-ban egymáshoz képest. A kerekek tulajdonsága, hogy a tengelyükre merőlegesen is el tudnak gördülni, emellett mindegyiknek a sebessége és forgásának iránya egymástól függetlenül szabályozható. Így a robot orientációjától függetlenül bármelyik irányba tud mozogni. Menet közben a kerekek szögelfordulásából tudja számítani a helyzetét, amit a kamera képének elemzésével és külső tájékozódási pontok használatával tud pontosítani. Ez a tulajdonsága előnyt jelent más területeken is, például tud úgy közlekedni, hogy a kamera képét egy kiválasztott objektumon tartja, ezzel kibővítve a felhasználási módjait a robotnak. A kerekek méretéből adódóan vannak korlátai is a felhasználási területnek, mivel csak kisebb szintkülönbségeken képes áthaladni.
A kerekek meghajtásához három 100 W-os kefés DC motort használnak, 1:7-es szíjáttétellel. Minden motorhoz külön motorvezérlő elektronika tartozik, a tápellátást pedig egy 24 amperórás 12 V-os ólomzselés akkumulátor biztosítja.


A robot végsebessége a 1,5-2 m/s-ot is elérheti. Mivel a robot tömege 40kg, és teljesen automatikusan, emberi beavatkozás nélkül közlekedik, ezért nagyon fontos odafigyelni a biztonságra, hogy el tudjon kerülni egy véletlen ütközést. Ennek érdekében 6 távolságérzékelőt helyeztek el körben a robot alsó részén, a sarkait pedig gumi ütközővel látták el. A távolságérzékelők 200-800 mm között adnak használható jelet, viszont ügyelni kell a felhasználási területen elhelyezett tárgyakra, ugyanis egyes anyagokat ez a rendszer nem képes megbízhatóan észlelni, mint például az üveget. A balesetek elkerülésére és megelőzésére egy vészleállító gombot is elhelyeztek a robot tetején.

Szerkezet
Az alapegységre épül rá a robot váza. Az egész szerkezet követi a kerekek kiosztásának körszimmetriáját. A robot magassága úgy lett megtervezve, hogy a kamerája még rálásson a legtöbb asztalra. Egy átlagos asztal magassága 700-750 mm, ehhez igazodva a kamerát 850 mm-es magasságban helyezték el. A szerkezet 10 és 5 mm-es vízvágott alumínium lemezekből, illetve 10x10 mm-es rudakból épül fel. A vízszintes lemezekre raszteres kiosztásban 4 mm-es lyukakat fúrtak az alkatrészek rögzítéséhez. Ezeket a lyukakat lehet további elemek rögzítésére is használni. A vázon egységesen M5-ös süllyesztett vagy sima fejű belső kulcsnyílású csavarokat használnak. A perifériákat ellátó hajtások 30 W-os kefés DC motorok 1:7 szíjáttétellel. A motorokat aktív hűtéses teljes H hidas teljesítmény elektronikák hajtják. Ezek a központi elektronikától kapják a referenciát CAN-buszon.

Kamera
A környezet megfigyelésére egy Kinect kamerát használ a robot. A kamerát két motor mozgatja vízszintes és függőleges irányba, amivel nagyban megnöveli annak látószögét. Ennél az egységnél fontos szempont a kamera stabila helyzete, hogy a képét pontosabban tudja elemezni a számítógép. A mozgató mechanizmus rendelkezik saját tápmodullal és egy vészleállító funkcióval is, ami váratlan ütközés esetén leállítja a motorokat. A Kinect a színes VGA kamera mellett két infra érzékelőt és két mikrofont is tartalmaz. Az infra érzékelőkkel érzékeli a távolságot és ezt veti össze a színes képpel, így egy úgynevezett 2,5 dimenziós képet kap a környezetéről. Az, hogy a képet milyen funkcióhoz használja fel a robot, már a programozáson múlik.


Számítógép
A vezérlés alapja egy PC, ami USB-n vagy Bluetooth-on keresztül csatlakozik a robot mozgást végző moduljához. A mesterséges intelligenciához szükséges számolási kapacitást külső számítógép bevonásával is növelhetjük. A központi elektronika kaphat referenciát és parancsokat, illetve adhat információt Bluetooth kapcsolaton keresztül és USB porton is a PC-nek. A tájékozódást segíti még egy 3 tengelyes giroszkóp, egy gyorsulásérzékelő és egy iránytű. Az egyéb kisebb perifériák mozgatására egy 24 portos USB csatlakozású RC szervo hubot is beépítettek.

Takarító egység
A robot aljában helyet kapott egy takarító egység, amivel közlekedés közben tisztán tudja tartani a bejárt területet. Egy forgó kefe szedi össze a koszt, amit egy fésű távolít el róla tartályba.
Akkumulátor
A robot jelenleg 5 darab 24 Ah-ás akkumulátort használ, ezzel 4 órát bír normál használat közben. Ezt lehetőség van tovább bővíteni. Az akkumulátorok egy kinyitható tárolón kaptak helyet a könnyebb szerelés érdekében.

Hangszóró
A roboton helyet kapott 2 hangszóró, amelyek a kommunikációjában vesznek részt.

Flipper kar
Extra funkcióként beépítettek egy flipper kart, amely labdaütögetésre képes. Ezt egy elektromágneses mechanika mozgatja. A robot aljának íves formája segít a labdát a karhoz terelni.
Ajtónyitó
A robot képes kinyitni a mágneskártyás ajtókat, ehhez egy felemelhető kart használ, amivel eléri a leolvasót.
Tálca
A robotra felszerelhető egy tálca, amin különböző tárgyakat tud szállítani.
5.10. A szociális robotok típusai
A következő példák áttekintést adnak azokról a fejlesztés alatt álló robotokról, melyek az emberek segítésére alkalmas jellemzőkkel bírnak.
5.10.1. Kompai
Fejlesztő: Robosoft
Bemutatás: 2010
Személyi asszisztensként használható több területen.
Emlékeztető: receptek, napirend
Internet hozzáférés: e-mailek, közösségi hálók, videokonferenciák
Mindennapi segítségnyújtás a felhasználónak
Kiállítási, múzeum: kölcsönhatásba lép a látogatókkal

5.10.2. Biron
Fejlesztő: Bielefeld University
Bemutatás: 2004
Mobil robot, személyi asszisztensként használható. Fel van szerelve egy pan-tilt (pásztázó-billenő) kamerával, egy pár mikrofonnal, valamint egy lézeres távmérővel. Megérti a beszédet és a kézmozdulatokat, azonosítja a tárgyakat és kölcsönhatásba tud lépni a személyekkel. A felhasználók tárgyakat és helyeket mutathatnak a robotnak a saját otthonukban, melyet a robot megjegyez és később is emlékezik rájuk.

5.10.3. Hospi-Rimo
Fejlesztő: Panasonic
Bemutatás: 2011
Kényelmes kommunikációt biztosít ágyhoz kötött illetve mozgáskorlátozott embereknek.

5.10.4. iRobiQ
Fejlesztő: Yujin Robot
Bemutatás: 2008
Képességei: 1000 beszéd alapú parancsot megért és reagál rájuk, önfeltöltő, képeket készít, híreket és recepteket mutat, felügyelő kamerával és karaoke programmal rendelkezik, angolt tanít.

5.10.5. Wakamaru
Fejlesztő: Mitsubishi Heavy Industries
Bemutatás: 2005
Mobil háztartási robot, kölcsönhatásba tud lépni az emberekkel, képes beszélni, kezet fogni, és természetes beszélgetésbe elegyedni. Sőt, emlékezteti a felhasználókat, hogy vegyék be a gyógyszerüket, és segítséget hív, ha arra utaló jeleket tapasztal, hogy valami baj lehet velük. Képességei: Hang és kép felismerés, csatlakoztatható az internethez, emlékezteti a felhasználót gyógyszer bevételére, segítséget hív baj esetén, ütközésérzékelés, pozíció mérése, IR és US szenzorok (hőmérsékletérzékelés).


5.10.6. RoboVie R3
Fejlesztő: V-Stone
Bemutatás: 2009
Idősek és mozgáskorlátozottak mindennapjainak segítésére tervezett robot. Humanoid, de körülbelül feleakkora, mint egy ember.

5.10.7. HAR (Home Assistant Robot)
Fejlesztő: Toyota
Bemutatás: 2009
Háztartási robot, egyszerű házimunkák elvégzésére képes, például a padló felmosására, mosásra, mosogatásra és még bútortologatásra is.

5.10.8. PaPeRo
Fejlesztő: NEC
Bemutatás: 2011
Képességei: beszélő kölcsönhatás, arcfelismerés, gesztikulációérzékelés, másik PaPePo robottal kommunikál, 8 mikrofon.
5.10.9. Cubo
Fejlesztő: IZI robotics
Bemutatás: 2006
Képességei: könyveket tud felolvasni gyerekeknek, angolt tanít, otthoni felügyeletet biztosít, időjárás jelentést és híreket mutat, ébresztő funkció, robot "levelet" kézbesít.

5.10.10. Mamoru
Fejlesztő: University of Tokyo
Bemutatás: 2008
Mamoru egy kisméretű idősgondozó robot, mely úgy néz ki, mint egy apró nagymama a kis műanyag kontyával. Segít az időseknek és fogyatékkal élőknek emlékezni, hogy hova tették a távirányítót vagy a papucsukat, és udvariasan figyelmeztet, ha itt az ideje a gyógyszerbevételnek. A tárgyak felismerésére nagy látószögű kamerát használ, hogy nyomon tudja követni a szobát, és képfelismerő szoftver segítségével megállapítja, hogy melyik tárgy micsoda.

5.10.11. Nao
Fejlesztő: Aldebaran Robotics
Bemutatás: 2007
A robot elsődleges célja: biztonsági támogatás, információ, otthoni támogatás, ezen kívül tud focizni, hangfelismerés funkciója is van.

5.10.12. iCat
Fejlesztő: Philips
Bemutatás: 2005
Az iCat egy user interface robot. Képes a hang és a beszéd azonosítására valamint felismeri a tárgyakat és arcokat egy kamera segítségével. Lehet csatlakoztatni az otthoni hálózathoz, hogy a háztartási készülékeket irányítsa, vagy az internethez, hogy információt szerezzen.

5.10.13. Paro
Fejlesztő: AIST
Bemutatás: 2001
Paro egy terápiás robot, mely lehetővé teszi az állatterápia bizonyított előnyeit olyan betegek környezetében, mint a kórházak és egyéb intézmények, ahol élő állatokat jelenléte nehézségekbe ütközik.

A 8. generációs kialakítását Japánban és Európa-szerte már 2003 óta használják. Ötféle szenzorral rendelkezik: tapintás, fény, hang, hőmérséklet és testtartás érzékelők, amelyekkel képes érzékelni az embereket és a környezetet. Megtanulja, hogy milyen viselkedést részesít előnyben a felhasználó, és reagál az új nevére.
A kimutatások szerint Paro:
Csökkenti betegek és a gondozók stressz-szintjét
Serkenti a betegek és a gondozók közötti interakciót
Fokozza a betegek kipihentségét és motivációját
Javítja a betegek egymás közötti szocializációját

5.10.14. Kobie
Fejlesztő: Electronics and Telecommunications Research Institute (ETRI)
Bemutatás: 2007
A koala alakú robot a Paro robothoz hasonló képességekkel rendelkezik.

5.10.15. Rabie
Fejlesztő: ETRI
Bemutatás: 2007
A nyúl alakú robot hét különböző érzelem kifejezésére képes, például boldogság, szomorúság és meglepődés. Az érzelmeit a szeménél található kijelző segítségével fejezi ki.

5.10.16. Pomi
Fejlesztő: ETRI
Bemutatás: 2008
A pingvin alakú robot kölcsönhatásba tud lépni az emberekkel, a neve POMI, ami a "Penguin Robot for Multimodal Interaction"-ból képzett egy mozaikszó (pingvin robot többféle interakció elősegítésére).
Képes látni, hallani, érinteni és arckifejezéseket létrehozni. A hangulatától függően mozgatja a szemöldökét, pupilláját, valamint a száját. Az egyik legérdekesebb tulajdonsága, hogy képes ténylegesen szagot kibocsátani, ami azt jelenti, hogy ha dühös, akkor kellemetlen szagot áraszt. A beépített szenzorok segítségével felismeri a hangokat és az emberek helyzetét. További érdekes tulajdonsága, hogy a hangulatától függően különböző szívverések létrehozására képes.

Robotok kommunikációja
A szolgáltató robotok környezettel való kölcsönhatása különböző módokon és kifinomultsággal valósulhat meg. A szolgáltató robotok által leggyakrabban alkalmazott interaktív módozatok a következők.
5.10.17. Beszéd
A beszélgetés a legtermészetesebb módja az emberek közötti társadalmi interakciónak, tehát a robotokkal való kommunikációnak is ez lenne a legkényelmesebb módja. Bár folyamatosan zajlanak kutatások a beszédfelismerés megvalósításáról zajos valós környezetben, azonban ez továbbra is nyitott probléma. A robot használhat mesterséges beszédgenerálást vagy előre felvett emberi hangot.

5.10.18. Gesztikuláció
Mivel a testbeszéd fontos összetevője az emberi kommunikációnak, hasznos lehet a robot és az ember közötti kommunikációban is. Az a képesség hogy rámutassunk, és elismerjük a tárgyat, melyre rámutattak, például segít a ráirányítani valamire a figyelmet és összefüggést teremt a mondanivalóval. Továbbá, fizikoterápiában a testhelyzet felismerés alapvető fontosságú és növelheti a kölcsönhatást a robot és a felhasználó között.
5.10.19. Közvetlen betáplált információ
A felhasználónak néha az a legmegfelelőbb, ha közvetlenül táplálhat be adatot a robotba. Így például, amikor a felhasználó egy térképen több hely közül választ, vagy menetrendet keres, akkor a verbális vagy gesztus parancsok fárasztóvá válnak. Ezekben az esetekben a kommunikáció rendkívül hatékonnyá tehető egy beviteli eszközzel, például egy egérrel vagy egy érintőképernyővel, még akkor is, ha a felhasználó egyébként nem szívesen használja ezeket az eszközöket társadalmi interakcióra.
Irodalomjegyzék
[1.] Robot Dynamics and Control. Wiley & Sons. New York . 1989.
[2.] Mechanika. Tankönyvkiadó. Budapest . 1988.
[3.] Mechanics. Springer-Verlag. Berlin, Heidelberg . 1990.
[4.] Lectures in Analytical Mechanics. Mir Publishers. Moscow . 1970.
[5.] Analitikus mechanika I. Műegyetemi Kiadó. Budapest . 1986.
[6.] Lengéstan példatár. Műegyetemi Kiadó. Budapest . 1990.
[7.] Design of Machinery (3rd edition). McGraw-Hill. 2004.
[8.] Mechanisms and Mechanical Devices Sourcebook (3rd edition). McGraw-Hill. 2001.
[9.] Computer-Aided Analysis of Mechanical Systems. Prentice-Hall. 1988.
[10.] Handbook of Robotics. Springer. 2008.
[11.] Advanced Robot Control. Akadémiai Kiadó. Budapest . 1997.
[12.] Robot Analysis and Control. John Wiley&Sons. 1986.
[13.] Robotika. Typotex. 2011.