3. fejezet - Robotok statikai jellemzése
A robotok mechanikai szempontból történő leírásának következő fontos eleme a statikai jellemzés, amelynek során a nyugalomban lévő robotokban ébredő erőkkel és forgatónyomatékokkal foglalkozunk. Ezt az indokolja, hogy sok esetben ismernünk kell, mekkora csuklóerők illetve nyomatékok szükségesek ahhoz, hogy a robot egy adott munkadarabot nyugalmi helyzetben meg tudjon tartani. A statikai leírást a 3.1. ábra segítségével követhetjük nyomon.
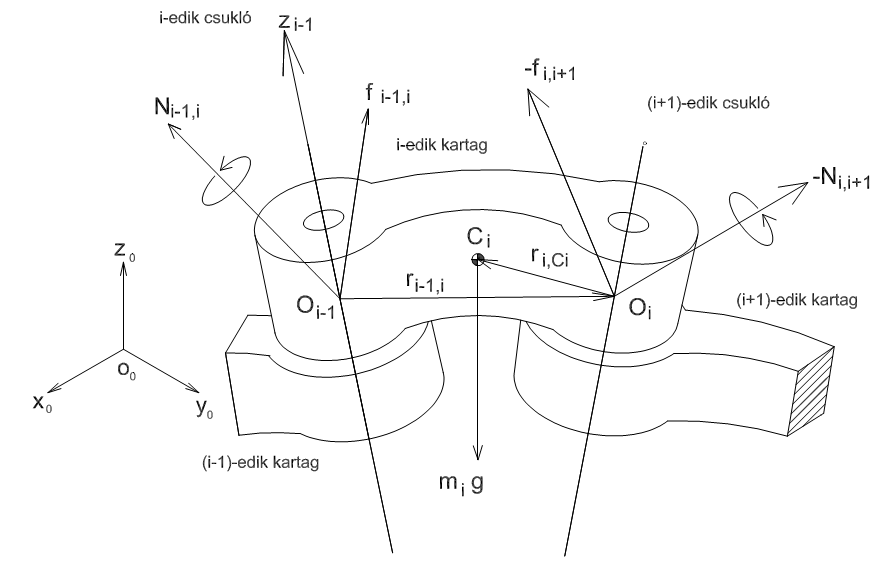
A kartagok, csuklók és koordináta rendszerek sorszámozása illetve indexelése az eddigi konvencióknak megfelelő. Írjuk fel először a nyugalomban lévő i‑edik kartagra az erők egyensúlyát kifejező egyenletet! Legyen az i‑edik kartag tömege , jelöljük továbbá az i‑edik kartag által az i‑edik kartagra kifejtett erőt ‑vel az i‑edik kartag által az (i+1)‑edikre kifejtett erőt pedig ‑gyel. Ekkor a következő egyenletet írhatjuk fel
|
, . |
(3.1) |
Ha a csuklókban ébredő forgatónyomatékokat (az erők leírásához hasonló indexelést alkalmazva) ‑vel illetve ‑gyel jelöljük, továbbá az 5. ábrán látható irányvektorokat figyelembe vesszük, akkor a forgatónyomatékok egyensúlyát az alábbi egyenlet fejezi ki
|
, . |
(3.2) |
Ha a kiszemelt i‑edik kartag a legutolsó vagyis az n‑edik, akkor is alkalmazhatjuk a fenti két egyenletet, azzal a kikötéssel, hogy a környezetet formálisan (n+1)‑edik kartagként vesszük számításba. Az utolsó kartag által a környezetre kifejtett erőket és forgatónyomatékokat együttesen a továbbiakban egy hatelemű F vektorral fejezzük ki, azaz
|
. |
(3.3) |
Bevezetjük továbbá az ún. ekvivalens csuklónyomatékok (angolul: equivalent joint torques) fogalmát. Az i‑edik csukló ekvivalens csuklónyomatéka erő, vagy nyomaték dimenziójú leehet. Nagysága egyenlő annak az erőnek vagy nyomatéknak a nagyságával, amelyet az i‑edik csukló aktuátora fejt ki a csuklótengely irányában, illetve a tengely körül. Az egyes csuklok ekvivalens csuklónyomatékaiból egy n (általában hat) elemű vektort képezhetünk
|
. |
(3.4) |
A vektor egyes elemei a korábbi jelölésekkel a következőképpen fejezhető ki
-
prizmatikus csukló esetén
.
(3.5)
-
rotációs csukló esetén
.
(3.6)
Keressünk kapcsolatot a (3.3) egyenlettel definiált F és a (3.4) egyenlettel definiált vektor között! Állításunk a következő
|
, |
(3.7) |
ahol a korábbiakban bevezetett Jacobi‑mátrix.
A bizonyításhoz a virtuális munka elvét fogjuk felhasználni. Ha a rendszer eredetileg egyensúlyban van, akkor az egyensúlyhelyzetből az adott geometriai kényszereknek eleget tevő virtuális elmozdulásokkal kimozdítva a rendszeren végzett eredő munka zérus.
Tegyük fel ezek után, hogy a robotot valamekkora virtuális elmozdulásoknak vetjük alá, amit kifejezhetünk egyrészt a végpont
|
, |
(3.8) |
másrészt a csuklókoordináták
|
|
(3.9) |
elmozdulás vektorával.
Valamennyi erő és forgatónyomaték hatását figyelembe véve a végzett virtuális munka a következőképpen írható fel, azaz
|
, |
amelyből
|
, |
továbbá
|
. |
(3.10) |
A levezetés során figyelembe vettük, hogy . Mivel az (3.10)‑ben felírt virtuális munka tetszőleges virtuális elmozdulásra zérus kell, hogy legyen, ez csak akkor teljesülhet, ha
|
. |
(3.11) |
A (3.11) összefüggést átrendezve valóban a bizonyítani kívánt (3.7) összefüggéshez jutunk.
A továbbiakban tovább fejlesztjük eredeti robotmodellünket. Mindeddig ugyanis – első közelítésként – feltételeztük, hogy a robot kartagjai ideális merev testek, csuklói és beavatkozó szervezi, azaz aktuátorai pedig kotyogásmentesek (holtjáték), továbbá feltételeztük azt is, hogy súrlódásmentesek. E feltételezések egyike sem külön teljesül igazából a valóságos robotoknál.
Modellünk pontosítása során elsőként a csuklókban elhelyezett aktuátorok korlátozott merevségének hatását fogjuk figyelembe venni. Szabályozástechnikai szempontból ugyanis döntő jelentőségű, hogy ha valamelyik csuklókoordináta az előírt értéktől valamekkora értékkel eltér, akkor erre a szabályozóval ellátott aktuátor egy megfelelő csuklónyomaték változással reagáljon. Egyelőre lineáris közelítést fogunk alkalmazni, ami az esetek többségében elfogadható eredményt ad.
Minden egyes csuklóra tehát egy
|
, |
(3.12) |
alakú lineáris összefüggést írunk fel, ahol tényezők egyfajta „rugóállandókként” értelmezhetők. A tényezőkből képezhetünk egy
|
|
(3.13) |
diagonális mátrixot, amelyet csuklómerevségi mátrixnak nevezünk.
Most arra a kérdésre keressük a választ, hogyan érvényesül az ekvivalens csuklónyomatékok megváltozásának (‑nak) a hatása a robot és a környezet közötti kölcsönhatást kifejező F vektor megváltozásában. Az (3.7) összefüggés most értelemszerűen
|
|
(3.14) |
alakban lesz érvényes. Másfelől a (3.12) és (3.13) egyenletek alapján írhatjuk, hogy
|
, |
(3.15) |
ha kihasználjuk, továbbá a jól ismert összefüggést. Ha a (3.12) egyenlettel definiált együtthatók egyike sem zérus (ami működésképes, szabályozott hajtásokkal ellátott robotoknál nyílván valóan fönnáll), akkor a K diagonális mátrix invertálható. A (3.12) - (3.15) egyenletek felhasználásával végül is a következő eredményt írhatjuk fel
|
, |
(3.16) |
ahol
|
|
(3.17) |
a robot úgynevezett végpontra vonatkoztatott engedékenységi (angolul: compliance) mátrixa.
A C engedékenységi mátrixról jegyezzük meg, hogy az – K csuklómerevségi mátrixszal ellentétben – általában nem diagonális mátrix. Ez abból adódik, hogy a robot egyetlen csuklójának mozgása is a végpont több szabadságfokú mozgását eredményezheti.