14. fejezet - Komplex mechatronikai projektfeladat
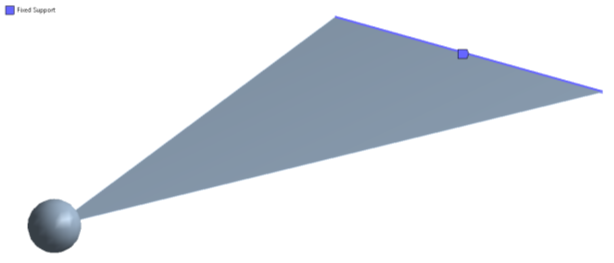
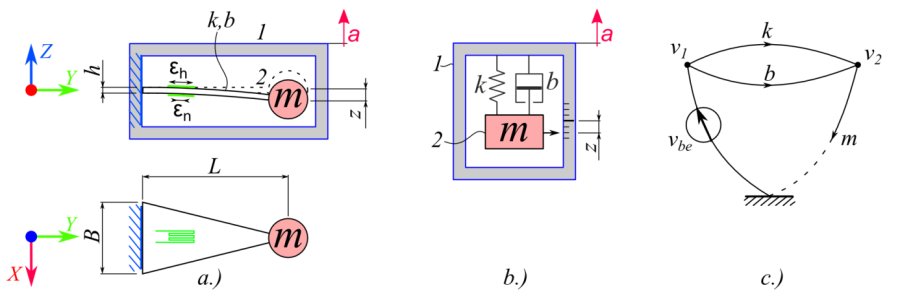
A feladat egy egyszerű nyúlásmérő bélyeges gyorsulásérzékelő tervezése. A legegyszerűbb konstrukció, egy mozgó házban konzolosan rögzített lemez, melynek a befogással ellentétes végén egy tehetetlen tömeg teremti meg a gyorsulás és a rúdvégre ható erő közötti kapcsolatot. A lemez alakját egyenszilárdságúra célszerű kialakítani, hogy a fajlagos nyúlás értéke állandó legyen a deformálódó lemez hossza mentén. Így kevésbé lesz érzékeny a nyúlásmérő bélyegek elhelyezésére. Az állandó vastagságú egyenszilárdságú tartó előkövetelménye, hogy a befogás helyétől a terhelés (az elhelyezett tömeg) támadáspontjáig lineárisan csökkenjen a szélessége. Tehát egy háromszög alakú lemezre van szükség, melynek oldalai a tömeg rögzítésnek középpontjában metszik egymást. Természetesen a kész jelátalakító geometriája ettől bonyolultabb, a rögzítési helyek megfelelő kialakítása miatt, de a vizsgálat szempontjából, elég az egyszerűsített modellel dolgozni.
14.1. Numerikus megoldás
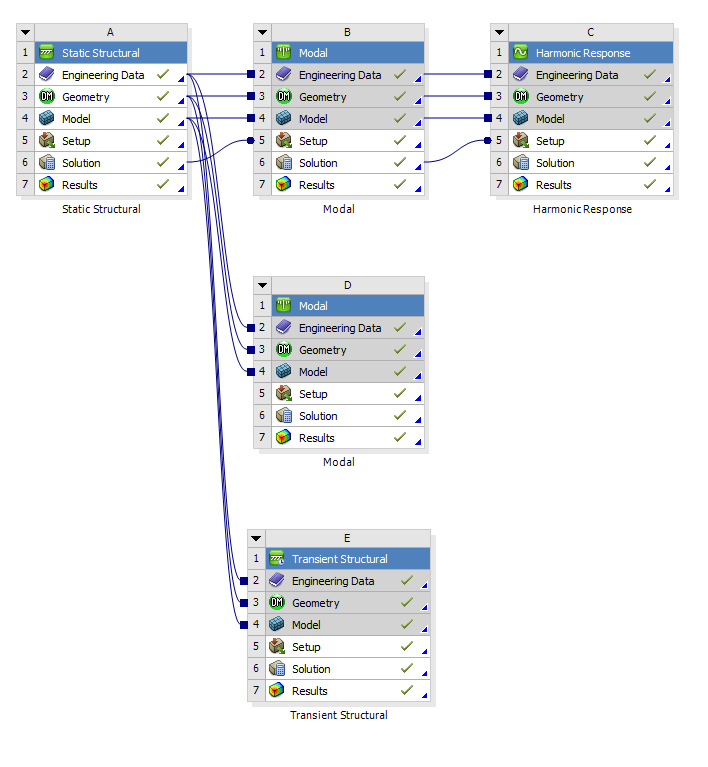
A feladat megoldására az ANSYS Workbench végeselem programot fogjuk használni. A projektszervező felületen látható, hogy statikai (jelátalakító statikus jelleggörbéjének a meghatározásához), modál, harmonikus és tranziens mechanikai analízist (a dinamikai átviteli tulajdonságok meghatározásához) fogunk végezni.
14.1.1. Statikai analízis
A következőekben egy statikai analízissel vizsgáljuk, hogy az egyik oldalán befogott egyenszilárdságú tartó, mekkora Z tengely irányú lehajlást és Y tengely menti fajlagos nyúlást szenved a Z irányú gyorsulás hatására.
Kiinduló adatok:
Méretek: B=10mm, L=20mm, vastagság: h=0,2mm;
Anyag: Rugóacél – E=200GPa, ν=0,3;
Tömeg a tartó végén: m=0,02kg;
Terhelés: a=1G, (9,8066m/s 2 ).
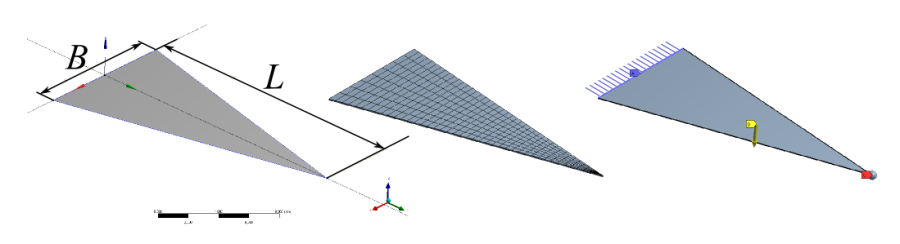
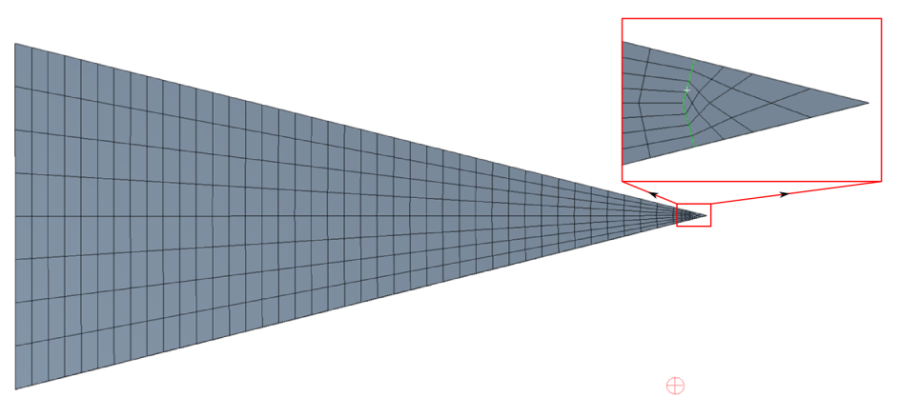
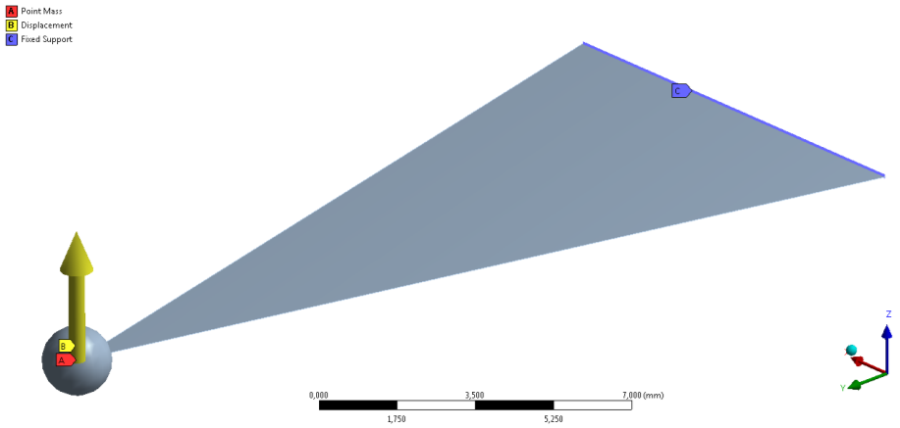
A geometriát célszerű felületmodellként létrehozni, így héjelemeket használhatunk a hálózás során. A rendezett háló érdekében célszerű a felület felosztása (14.3. ábra).
A lemez megtámasztása a széles végénél történik egy Fix kényszerrel (Fix Support) . A háromszög csúcsánál elhelyezünk egy tömegpontot (Point Mass) , és terhelésként a földi gravitációt (Standard Earth Gravity) alkalmazzuk.
A lehajlás számszerű lekérdezéséhez helyezzünk el egy konstrukciós vonalat (Path) , a lemez hossztengelye mentén.
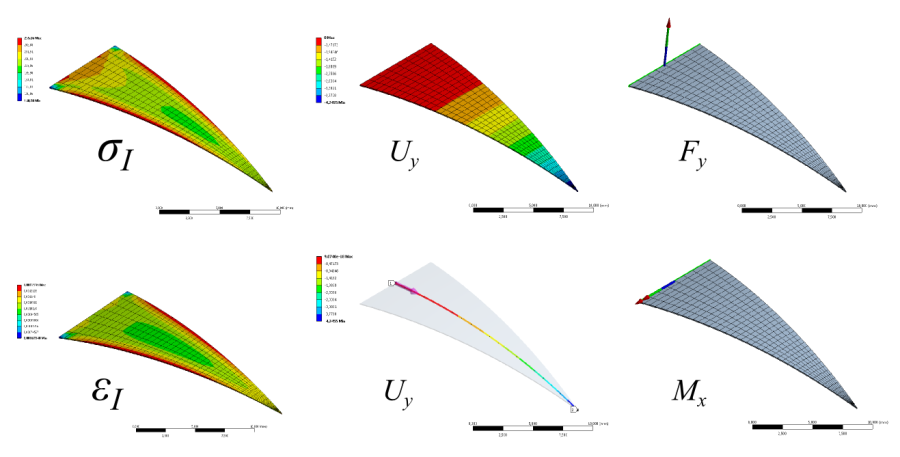
A futtatás után kérdezzük le az Z irányú lehajlás (Directional Deformation), valamint a főfeszültségek (Maximum Principal Stress) és főnyúlások (Maximum Principal Strain) értékeit. És ellenőrzésképpen lekérdezhetjük a befogás helyén ébredő reakcióerő (Force Reaction) és nyomaték (Reaction Moment) értékét (14.4. ábra).
Megjegyzés: Amennyiben nem, vagyunk biztosak az alakváltozási főirányokkal, célszerű ellenőrizni a helyi tenzorok megjelenítésével ( Strain/Vector Principal ). Ennek megfelelően célszerű lehet egy alkalmasan elhelyezett koordinátarendszer, valamely tengelye szerint lekérdezni a normálfeszültségek, ill. alakváltozások értékét (Normal Elastic Strain) , (pl. esetünkben, az hossztengely irányában (Y)). Nagy alakváltozások esetén, a kezdetben párhuzamos tengely nem követi a deformált alakot, ezért célszerűbb lehet a főnyúlás lekérdezése.
14.1.2. Modal analízis
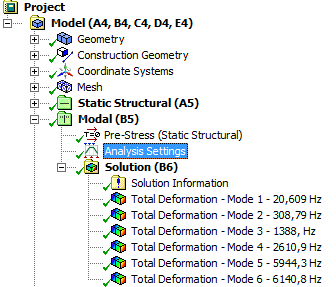
Egy gyorsulásérzékelő esetében nélkülözhetetlen a dinamikai tulajdonságok vizsgálata. Első lépésben határozzuk meg a szerkezet sajátfrekvenciáit (első 6-ot), és a hozzájuk tartozó lengésképeket. Megjegyzés: Valójában elég lenne az első sajátfrekvencia vizsgálata, mivel a jelátalakító működési tartománya ez alatt kell, hogy legyen. A többi csak a példa kedvéért mutatjuk meg.
A modál analízis során lehetőség van terheletlen és az előterhelt vizsgálat elvégzésére. Előfeszített, vagy előterhelt analízishez egy előzetesen lefuttatott statikai analízis jelenti terhelési és peremfeltételeket. Ehhez a projekt felületen, létrehozásakor a modál analízis panelt rá kell húzni a már meglévő statikai (Static Structural) megfelelő sorára. A megoldásra (Solution) húzva az előterhelt esetet, a végeselem modellre (Modell) húzva csak a beállításokkal ellátott terheletlen analízist hozzuk létre. A terheletlen analízisnél csupán a megfogást (Fix Suppoert) kell definiálni (14.5. ábra), a pontszerű tömeget, anyagmodellt és a hálózási beállításokat megörökli a végeselem modell a statikai analízistől. Figyeljük meg, hogy melyik analízisbe milyen elemek vannak bekötve (14.1. ábra).
A beállítások elvégzése után futtassuk mindkét analízist és hasonlítsuk össze az eredményeket.
|
Módus |
Terheletlenül f [Hz] |
Előterheléssel f [Hz] |
|---|---|---|
|
1. |
20,575 |
20,609 |
|
2. |
315,85 |
308,79 |
|
3. |
1877,1 |
1388, |
|
4. |
1937,5 |
2610,9 |
|
5. |
5933,1 |
5944,3 |
|
6. |
6019,1 |
6140,8 |
Mivel sem a sajátfrekvenciák értékében, sem pedig a lengésképek alakjában nincs jelentős különbség a kétfajta terhelési állapot során, itt csak a terhelt szerkezet lengésképeit mutatjuk.
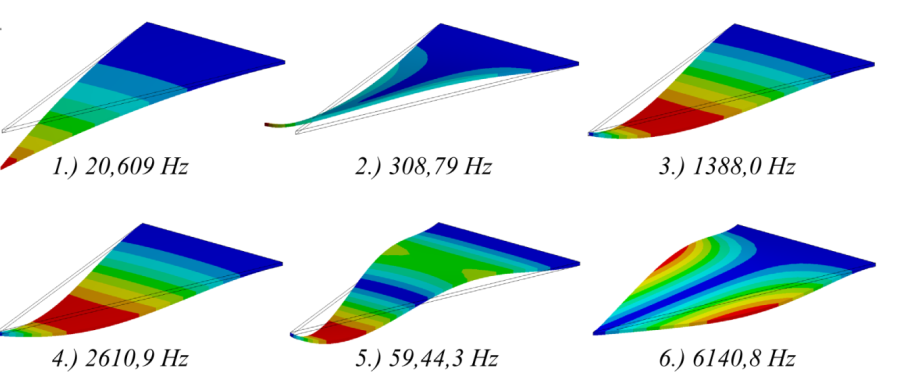
Mint már említettük számunkra az 1. sajátfrekvencia a lényeges, mert mint ahogy a hozzá tartozó lengésalak is mutatja, ez az első lengés, amelyik a mérés irányába esik.
14.1.3. Harmonikus
Hogy megvizsgáljuk a jelátalakító átviteli tulajdonságait a frekvenciatartományban, el kell végezni egy harmonikus válasz analízist (Harmonic Response) , amely a harmonikusan gerjesztett rendszer válaszát (kimeneti amplitúdóját) adja meg egy megadott frekvenciatartományon. Amint a 14.1. ábra mutatja, lehetőség van a modál analízis eredményeinek (Solution) felhasználására a harmonikus analízis során, a (Mode Superposition) beállítás alkalmazásával.
Az analízis beállításai során meg kell adni a vizsgálat frekvenciatartományát. Esetünkben az előzetes modál analízis eredményei alapján (f 0 =20,6Hz), ezt 0-50Hz tartományra állítjuk. Így csak, a számunkra érdekes, 1 rezonanciahely fog szerepelni a frekvenciadiagramon.
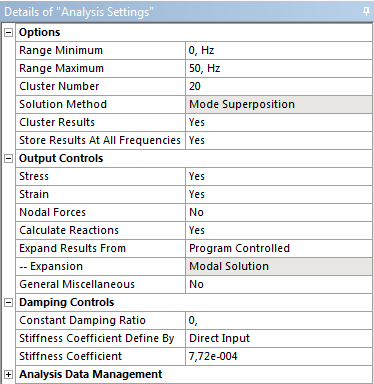
Ahhoz, hogy a számolási pontok, a frekvenciatartományon ne egyenletesen, hanem a számunkra fontos helyeken, a sajátfrekvenciák környékén, sűrűbben legyenek elosztva, be kell kapcsolnunk a Cluster Result opciót. Ez szükségessé teszi csillapítás megadását, mivel e nélkül a végtelenhez tartana az amplitúdó értéke ezen a helyen.
A csillapítást (Damping) definiálhatjuk a csillapítási fok (ξ=0,05; Constant Damping Ratio ), vagy a Rayleigh féle anyagcsillapítás merevségi tagjának (β R =2⋅ξ/ω= 0,0007746s; Stiffness Coefficient ) megadásával.
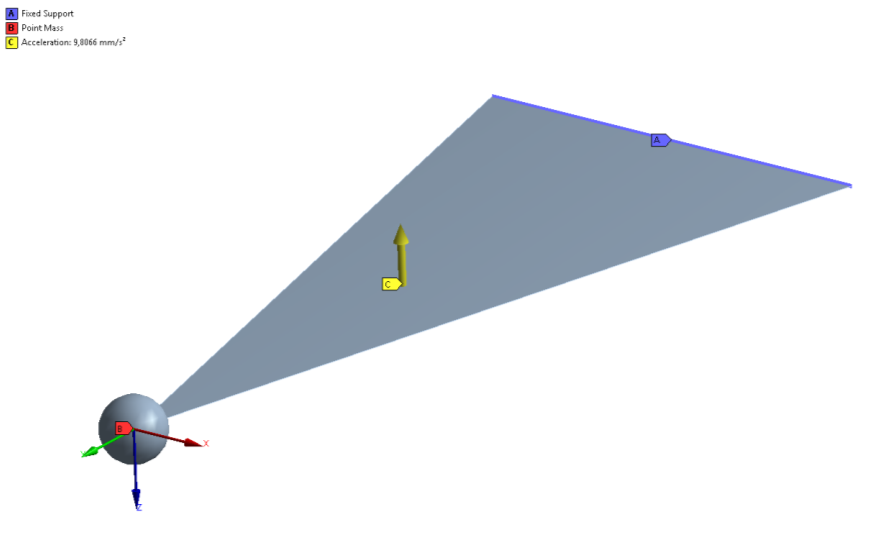
Ha a modál analízist felhasználtuk bemenetként, akkor a megtámasztást, anyagot, hálózást nem, csak a terhelést kell definiálnunk. Összességében az alábbi ábrán szereplő megtámasztásnak, gravitációs gyorsulásnak és egy koncentrált tömegpontnak kell szerepelnie a modellen (14.9. ábra). A terhelés amplitúdója megegyezik a statikai analízisnél alkalmazott földi gravitációs gyorsulás értékével (9,8066m/s 2 ), de egy általános célú gyorsulással (Acceleration) kell megadni. Mivel a harmonikus analízis során szinuszosan változik a terhelés értéke és előjele, tehát a földi gravitáció nem jöhet szóba mint terhelés.
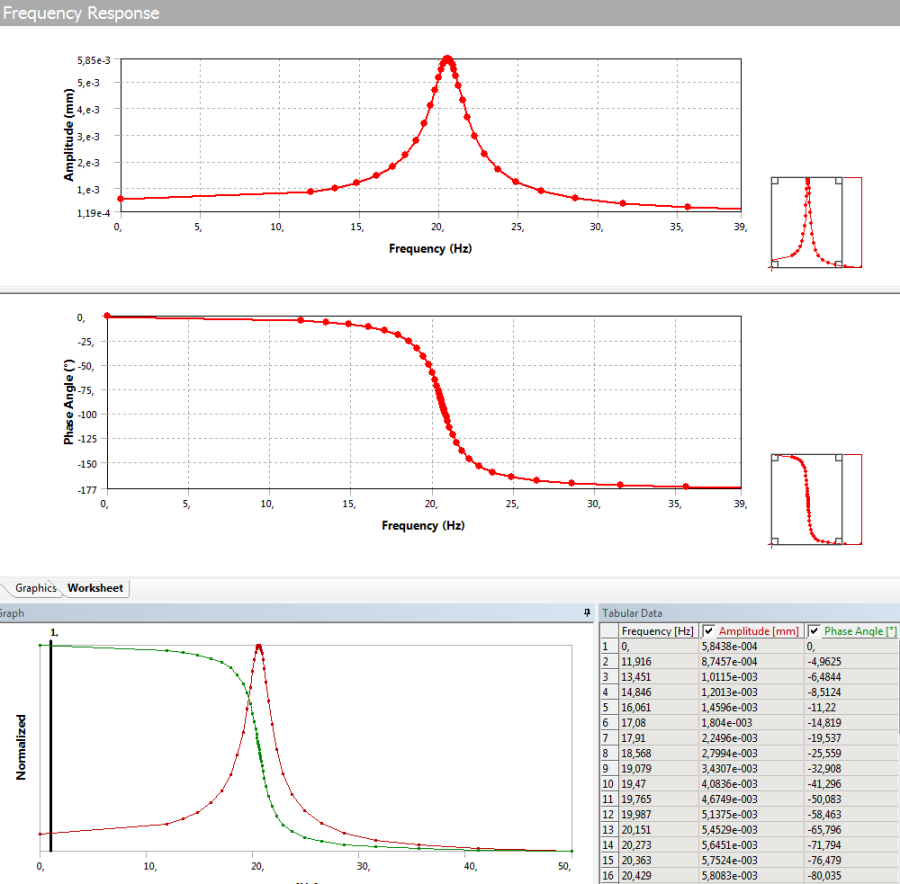
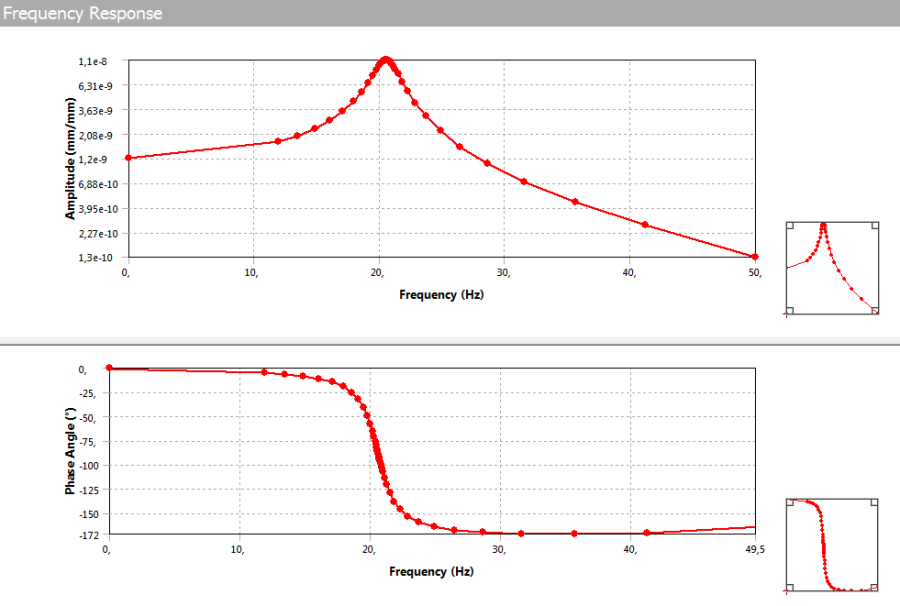
A beállítások elvégzése után futtassuk az analízist és kérdezzük le a konzolvég lehajlásának amplitúdóját és fázisát a frekvencia függvényében, vagyis egy Bode-diagramot. Ehhez a Frequency Response/Deformation parancs kiválasztása után jelöljük ki a konzol végpontját (a tömegpont közepén), és állítsuk át Z–re az irányt. A megjelenítés típusa alapértelmezetten Bode-diagram. Az adatokat a Tabular Data táblázatból egyszerűen vágólapra helyezve átvihetünk más programba adatfeldolgozás céljából.
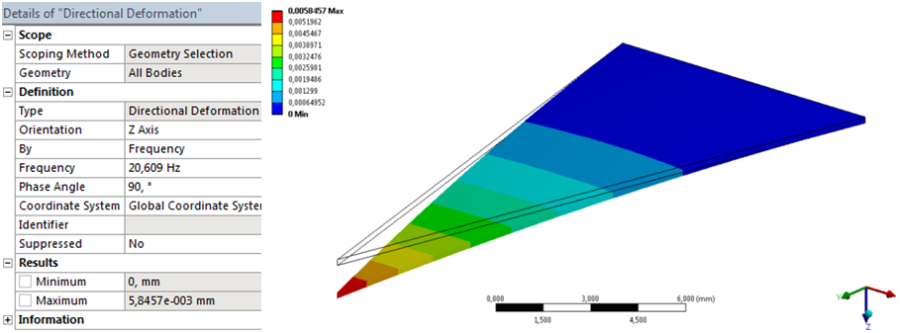
A statikai analízishez hasonlóan, itt is le tudjuk kérdezni a feszültség, alakváltozás és deformáció értékeit a teljes, vagy a kiválasztott geometriára vonatkoztatva, annyi kiegészítéssel, hogy a harmonikus analízis esetén a lekérdező parancsokban definiálnunk kell, hogy melyik frekvencián és milyen fázisszögben akarjuk tudni az adott mennyiséget (14.12. ábra).
14.1.4. Tranziens
A műszerünk időtartománybeli viselkedését, vagyis tranziens hatásokra adott időbeni válaszát a tranziens szerkezeti analízissel (Transient Structural) vizsgálhatjuk. A harmonikushoz hasonlóan a tranziens analízisnek is lehet bemenete egy modál analízis, de példánkon csak a geometriát, anyagot és hálózást tartalmazó végeselem modellt örökítettük át a statikai analízisről (14.1. ábra). Tehát a megtámasztást és a terhelést létre kell hoznunk az analízisen belül.
A megtámasztás továbbra is a tartó széles végének fix megfogása jelenti, de a terhelés most nem a gyorsulás lesz. Azt az esetet szeretnénk szimulálni, amikor bizonyos mértékig (1mm), meghajlított tartót elengedjük, és az csillapodó lengésbe kezd., vagyis az z 0 =1mm, és v 0 =0m/s, kezdeti feltétellel megadott, magára hagyott rendszer viselkedését szeretnénk vizsgálni.
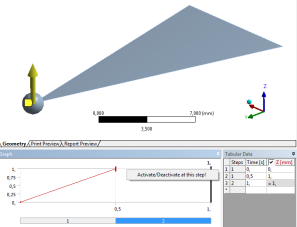
Ehhez definiálni kell a megtámasztást (Fix Support) és egy Z irányú, 1mm-es elmozdulás kényszert (Displacement), amit az 1mm elérésese után kikapcsolunk. Ezt 2 terhelési lépés (Step) beállításával oldjuk meg úgy, hogy az elmozdulás kezdeti értéke
az 1. lépés elején, t=0s időpillanatban z=0mm;
az 1. lépés végén t=0,5s időpillanatban z=1mm; és
a 2. lépésben kapcsoljuk ki a kényszert.
Ezt az elmozdulás mértékét jelző grafikonon (Graph), a 2. lépésben a terhelés vonalára jobb gombbal kattintva, majd az Activate/Deactivate… opciót választva tehetjük meg (14.14. ábra).
A következő fontos lépés a lépések felosztásának, vagyis az al-lépések időtartamának (Time Step) megadása. Egy rezgő rendszernél a rezonancia periódusideje, amit az (előzetes modál analízisből megkaptunk, Tp=1/f≈0,05s) nyújt támpontot az időlépések beállításában. Az elmozdulásfüggvény alakhű reprodukálásához a periódusidőtől legalább egy nagságrendel kisebb időlépést célszerű venni, de nemlineáris problémák esetén a konvergencia elősegítése érdekében további csökkentésre is szükség lehet. Így a példánkban szereplő szerkezet analízise során az 1. lépés 0,01s-os és a 2. lépés 0,0001-0,001s-os beállítása volt szükséges (14.15. ábra).
Az analízis beállításainál a numerikus csillapítás (Numerical Damping Value) és/vagy a Rayleigh féle merevségi csillapítás (Stiffness Coefficient) értékét tudjuk megadni. Ez utóbbi értékét a harmonikus analízishez hasonlóan állítsuk β R =2⋅ξ/ω= 0,0007746s-ra, és a numerikus csillapítást állítsuk 0-ra.
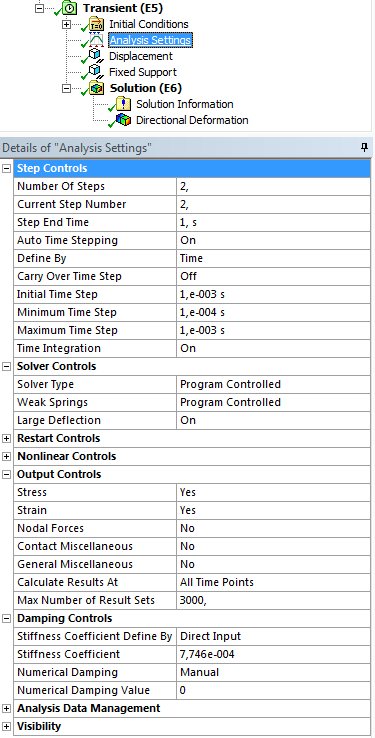
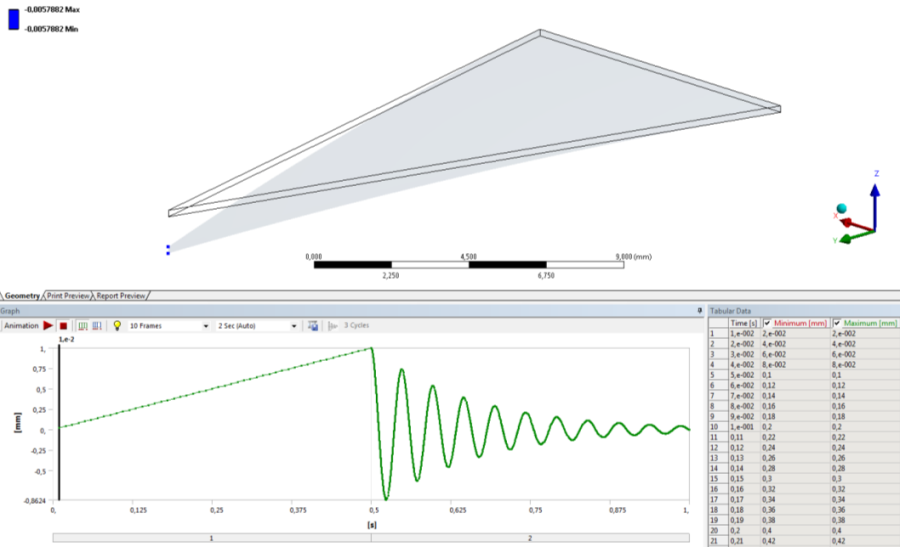
A nagy lehajlások (Large Deflections) bekapcsolása után indítsuk az analízist, majd kérdezzük le a végpont Z tengely menti elmozdulását (Directonal Displacement).
14.2. A komplex feladat analitikus megoldása
A végeselemes programok eredményének ellenőrzéseként oldjunk meg a feladatot a rugalmasságtan és a dinamika módszereivel. Kiindulásnak adva van egy az egyik oldalán befogott egyenszilárdságú tartó melynek másik oldalán koncentrált tömeget helyezünk el. A lemez síkjára merőlegesen hat a gravitációs gyorsulás, melynek hatását vizsgáljuk első lépésben.
Kiinduló adatok:
Méretek: B=10mm, L=20mm, vastagság: h=0,2mm;
Anyag: Rugóacél – E=200GPa, ν=0,3;
Tömeg a tartó végén: m=0,02kg;
Terhelés: a z =1G, (9,8066m/s 2 ).
14.2.1. Statikus lehajlás számolása
Mivel a tartó szélessége a befogástól távolodva lineárisan csökken (14.1), ezért a keresztmetszetet jellemző mennyiségek is a hely (z) függvényei.
|
|
(14.1) |
|
|
|
(14.2) |
|
|
|
(14.3) |
Ahol:
I – a másodrendű nyomaték,
K – a keresztmetszeti tényező,
h – a tartó vastagsága,
L – a tartó teljes hossza,
B – a tartó szélessége a „z=0” helyen,
b(z) – a tartó szélessége a „z” helyen,
A tartó egész térfogatára és a végén elhelyezett koncentrált tömegre ható Y irányú gyorsulás hatására a tartót M x (z) nyomaték terheli.
|
|
(14.4) |
Ennek hatására a külső szálakban σ z =M x (z)/K(z) normál feszültség,
és lineáris anyagmodellt feltétételezve, ε z =σ z /E fajlagos nyúlás ébred.
Ahol: E – az anyag rugalmassági modulusa.
A lehajlásfüggvényt a rugalmas szál differenciál egyenletéből számoljuk ki [25.] .
|
|
(14.5) |
Az egyenletet z szerint kétszer integrálva kapjuk a lehajlásfüggvényt,
|
|
(14.6) |
Mivel a befogás zérus elfordulás és elmozdulás peremfeltételeket jelent, ezért a C 1 és C 2 értéke szintén nulla. Ezzel a lehajlás Értéke a z=L helyen:
|
|
(14.7) |
Koncentrált tömeggel modellezve a (14.7) egyenletnek csak az 1. tagja marad meg:
|
|
(14.8) |
|
A konzol végének lehajlása |
y z [mm] |
|---|---|
|
Elosztott tömeggel számolva |
-0,5892 |
|
Koncentrált tömeggel számolva |
-0,5884 |
Látható, hogy a kétféle számolás eredménye nagy pontossággal megegyezik, ami azt jelenti, hogy a továbbiakban elegendő a koncentrált paraméterű modell alkalmazása. Persze ezt az egyszerűsítést csak akkor tehetjük meg, ha az elmozduló mérőtest tömege elhanyagolható a koncentrált tömeghez képest.
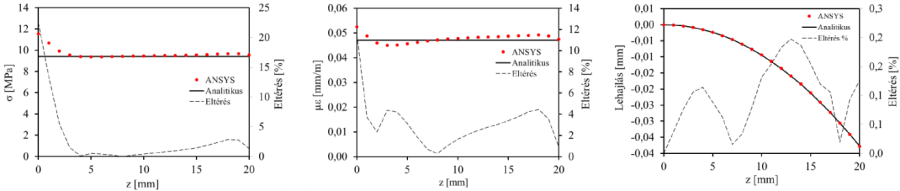
✎ A fenti egyenletek alapján rajzoltassuk ki diagramban a tartó szélső szálaiban ébredő feszültséget, fajlagos nyúlást és a rúd lehajlását. Hasonlítsuk össze a végeselemes programok eredményeivel.
14.2.2. Dinamikai számítás
A szenzor dinamikai vizsgálatához szükségünk lesz a koncentrált paraméterű modell paramétereinek meghatározására, ami esetünkben a rugómerevséget (k [N/m]), a csillapítási tényezőt (b [Ns/m]), és a tömeget (m [kg]) jelenti.
A tömeg értéke adott, mint a fenti számolásban láthattuk, ebben az esetben elegendő a tömeg koncentrált paraméterként történő modellezése.
Ami esetünkben a pontszerű tömeg: m=0,02kg.
A rugómerevség értékét a mérőtest végén ható tehetetlenségi erő (F) és fenti számolás (14.8) eredményeként kapott lehajlás (f y ) hányadosaként áll elő.
|
|
(14.9) |
A csillapítási tényező meghatározására nem mindig állnak rendelkezésére megfelelő adatok, mivel rendkívül összetett jelenség. Értékét jelen esetben az anyagcsillapítás, a terhelési állapot és a mozgó lemez körül áramló levegő által okozott csillapítás egyaránt befolyásolja, ezért pontos értékét csak kísérleti úton tudnánk meghatározni. A koncentrált paraméterű lineáris vizsgálat során a csillapítást is lineáris viszkózus csillapítással modellezzük. Jó közelítést jelent az irodalomban fellelhető csillapítási fok értéke, amely meghatározza az egész rendszer csillapítását [49.] .
Acél szerkezetre:
-
a csillapítási fok: ξ=0,00143; [49.] ,
-
a logaritmikus dekrementum: δ =0,009; [49.] ,
-
a csillapítási tényező: b=2 ⋅ ξ ⋅ (k ⋅ m) 1/2 =0,007384Ns/m
-
a Rayleigh féle merevségi csillapítás, β R =2⋅ξ/ω=0,00002215s; (a sajátfrekvencia értékére számolva, a Rayleigh féle tömegcsillapítás α R figyelmen kívül hagyásával).
Megjegyzés: Az eredmény és a csillapítás hatásának szemléletes megjelenítése miatt közel egy nagyságrenddel nagyobb értékkel mutatjuk be a példát, mint az irodalmi adat:
-
a csillapítási fok: ξ=0,05;
-
a csillapítási tényező: b=2 ⋅ ξ ⋅ (k ⋅ m) 1/2 = 0,2582Ns/m
-
a Rayleigh féle merevségi csillapítás, β R =2⋅ξ/ω= 0,0007746s; (a sajátfrekvencia értékére számolva, a Rayleigh féle tömegcsillapítás α R figyelmen kívül hagyásával).
A fenti struktúra gráf (14.17. ábra) segítségével felírhatjuk a rendszer csomóponti egyenletét. Mivel az 1-es csomópont (Ház) sebessége megegyezik a sebesség gerjesztéssel, egy ismeretlenünk marad így elég csak a 2. csomópontra (a mozgó tömegre) felírni az egyenletet. Az 1-es és a 2-es csomópont sebesség különbségéből számított elmozdulás jelenti majd a kimenő mennyiséget számunkra.
|
|
(14.10) |
Amelynek Laplace transzformálásával, a t időtartományból átlépve az s operátor tartományba jutunk. Végül a fizikai paramétereket (k,b,m) megfelelően összevonva, és bevezetve a rendszertechnikában szokásos jelöléseket, a másodrendű lengő rendszer átviteli függvényét kapjuk (14.14).
|
|
(14.11) |
|
|
|
(14.12) |
|
|
|
(14.13) |
|
|
|
(14.14) |
ahol:
A=m/k – a rendszer erősítése,
T=(m/k) 1/2 – a rendszer időállandója, (ω 0 =1/T, - a rendszer saját-körfrekvenciája),
ξ= b/2(k ⋅ m) 1/2 – a csillapítási fok, (definíció szerint: ξ=b/b k ; ahol: b k =2(k ⋅ m) 1/2 – a kritikus csillapítási tényező).
Az így felírt átviteli függvény nevezőjében szereplő karakterisztikus polinom megoldásával jutunk el a rezonanciafrekvencia meghatározásához.
|
|
(14.15) |
|
|
|
(14.16) |
A megoldáson látható, hogy csak ξ értékétől függ, hogy valós, vagy komplex gyököt kapunk.
-
Ha ξ>1, tehát nagy csillapítás esetén (b>b k ), az átviteli függvény két egytárolós tag szorzataként írható fel. A túlcsillapított rendszer rezgésre nem képes.
-
Ha ξ=1, (b=b k ), Ez az aperiodikus határesetet jelenti. Az egyenletnek egy valós gyöke van (s 1 =s 2 ).
-
Ha 0<ξ<1, tehát kis csillapítás esetén (b<b k ), Az egyenletnek egy konjugált komplex gyökpár a megoldása. A magára hagyott, alulcsillapított rendszer csillapodó rezgést végez.
-
Ha ξ=0, tehát nincs csillapítás. Az előző speciális esete (gyakorlatban nincs ilyen), melynél a magára hagyott, csillapítatlan rendszer, nem csillapodó rezgést végez.
Esetünkben a 3. esetnek van jelentősége, mivel 0<ξ<1értékű. Ebben az esetben az (14.16) egyenletet komplex összetevőivel felírva az alábbi összefüggést kapjuk.
|
|
(14.17) |
Az s operátor definíció szerinti komplex összetevői az s=σ+jω, innen a rezonancia körfrekvencia:
|
|
(14.18) |
ahol: ω 0 =1/T=(k/m) 1/2 – a sajátkörfrekvencia értéke, és β= ω 0 ⋅ ξ =b/2m – a csillapítási kitevő.
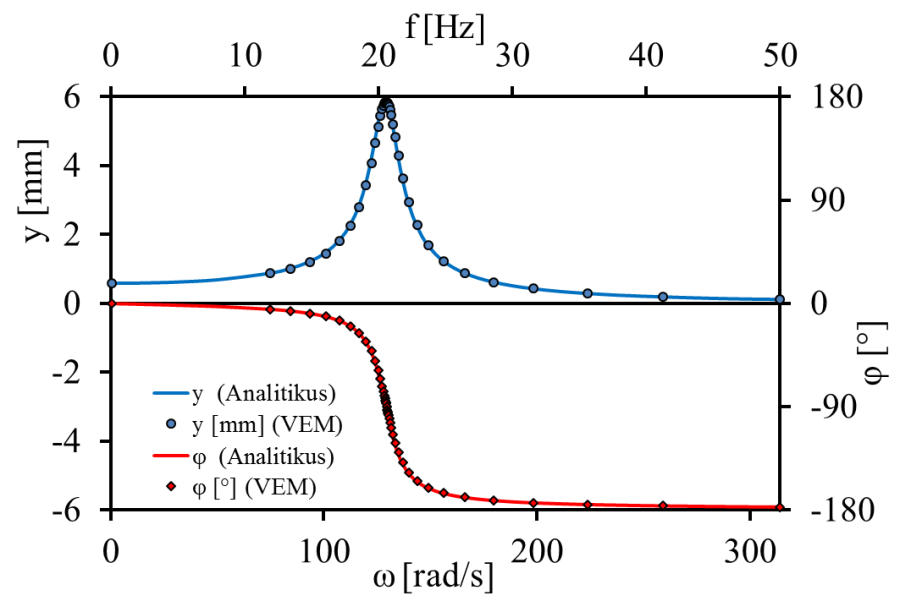
A Bode diagramon, frekvenciatartományban való ábrázoláshoz végezzük el a s=jω, helyettesítést a (14.14) egyenleten, majd rendezzük át az alábbi (14.19) egyenleten látható formában, a valós és a képzetes tagok csoportosításával a nevezőben. A gerjesztés hatására a kimenet amplitúdójának (14.20) és fáziskésése (14.21) az átviteli függvény komplex vektorának abszolút értékével és állásszögével adható meg.
|
|
(14.19) |
|
|
|
(14.20) |
|
|
|
(14.21) |
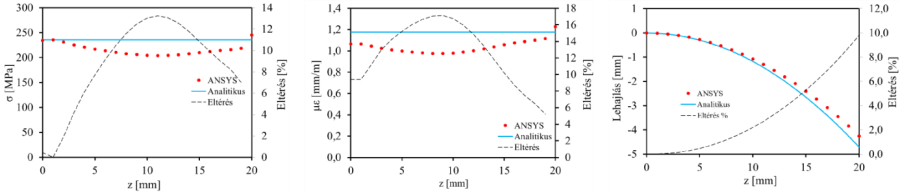
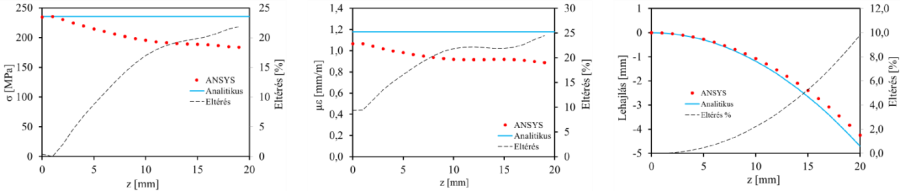
✎ A fenti egyenletek alapján számítsuk ki a jelátalakító sajátfrekvenciáját, és rezonancia frekvenciáját, a gyorsulás érzékelő végén lévő tömeg minimális és maximális elmozdulását. Továbbá, rajzoltassuk ki Bode-diagramban az elmozdulás amplitúdóját és fáziskésését a körfrekvencia függvényében. Hasonlítsuk össze a végeselemes programok eredményeivel.
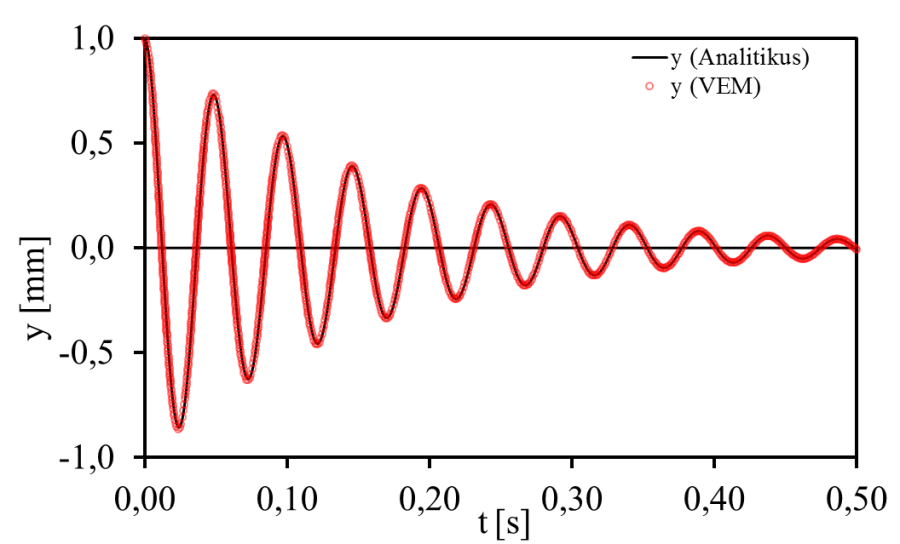
A szerkezet időtartománybeli tranziens viselkedésének vizsgálatához írjuk fel a gerjesztetlen, csillapított másodrendű rendszer differenciálegyenletének általános megoldását.
|
|
(14.22) |
Melynek A és B állandóinak a t=0, időpillanatban vett y(0)=y 0 , v(0)=0; kezdeti feltételekre megoldva kapjuk az alábbi alakot.
|
|
(14.23) |
✎ A fenti egyenletek alapján rajzoltassuk ki az y 0 =1, kezdeti feltételű, tranziens rezgést időtartományban. Hasonlítsuk össze a végeselemes eredménnyel.
|
Mennyiség |
Jelölés |
m.e. |
VEM |
Analitikus, kontinuum tömeggel |
Eltérés [%] |
Analitikus, pontszerű tömeggel |
Eltérés [%] |
|---|---|---|---|---|---|---|---|
|
Hajlítónyomaték a befogásnál |
M(z=0) |
Nmm |
3,93 |
3,93 |
0,06 |
3,92 |
0,21 |
|
Normálfeszültség a külső szálban |
σ |
MPa |
58,09 |
58,88 |
1,53 |
58,84 |
1,27 |
|
Fajlagos nyúlás a külső szálban |
ε |
- |
2,936E-04 |
2,944E-04 |
0,28 |
2,942E-04 |
0,22 |
|
Lehajlás a tartó végénél |
y(z=L) |
mm |
-0,586 |
-0,588 |
0,36 |
-0,589 |
0,49 |
|
Rugómerevség |
k |
N/m |
337 |
336 |
0,51 |
333 |
1,16 |
|
Saját-körfrekvencia |
ω 0 |
rad/s |
129,28 |
|
|
129,10 |
0,14 |
|
Sajátfrekvencia |
fo |
Hz |
20,58 |
|
|
20,55 |
0,14 |