9. fejezet - Összkerék kormányzás
- 9.1. Az összkerék kormányzás alkalmazása, előnyei, és hátrányai
- 9.2. Néhány példa az aktív összkerék kormányzású gépkocsikra
- 9.3. Az összkerék kormányzás konstrukciós megoldásai
- 9.4. Hidraulikus működésű aktív összkerék kormányzás
-
- 9.4.1. A rendszer bemeneti információi és az érzékelők
- 9.4.2. A működtető elektronika
- 9.4.3. Az összkerék kormányzás beavatkozó egységei
- 9.4.4. A gépkocsi menetviselkedésének összehasonlítása hagyományos és összkerék kormányzás esetén
- 9.4.5. A menetdinamikai szabályozó rendszerek egymáshoz kapcsolódása
- 9.5. Elektromechanikus működésű aktív összkerék kormányzás
- 9.6. Delphi Quadrasteer™ összkerék kormányzás
- 9.7. Passzív hátsó kerék kormányzás
- 9.8. Steer - by - wire
9.1. Az összkerék kormányzás alkalmazása, előnyei, és hátrányai
A kormányzással a gépkocsi kereszt irányú dinamikáját tudja megváltoztatni a vezető. Ennek segítségével irányíthatja a gépkocsit. Különböző kormányzási módokat alkalmaznak. a közúti járműveknél leggyakoribb az „Ackermann” féle tengelycsonk kormányzás az első kerekeknél. Speciális kivitelű gépkocsiknál alkalmazzák az összkerék kormányzást. Targoncáknál rakodó gépeknél inkább a hátsó kerék kormányzás a jellemző. Két részes felépítményű mezőgazdasági gépeknél és különböző munkagépeknél az ízelt kormányzással is találkozhatunk. Az összkerék kormányzású gépkocsik részaránya a teljes kínálathoz képest viszonylag kicsi. Ennek ellenére ebben a fejezetben összefoglaljuk a különböző változatokat.
Már a gépkocsik kezdeti fejlesztési időszakában is alkalmazták az összkerék kormányzási módot, hogy az első kerekekkel együtt a hátsókat is elkormányozzák. Ezt aktív összkerék kormányzásnak nevezzük. A fejezet végén a passzív változatról is szót ejtünk. A Mercedes-Benz 1937-ben gyártotta a képen látható G5 típusjelű összkerék kormányzású gépkocsit. Elsősorban katonai terepjáróknál, illetve újabban nagy sebességű személygépkocsiknál találkozhattunk ilyen megoldásokkal. Erre látunk példákat az alábbi képeken.

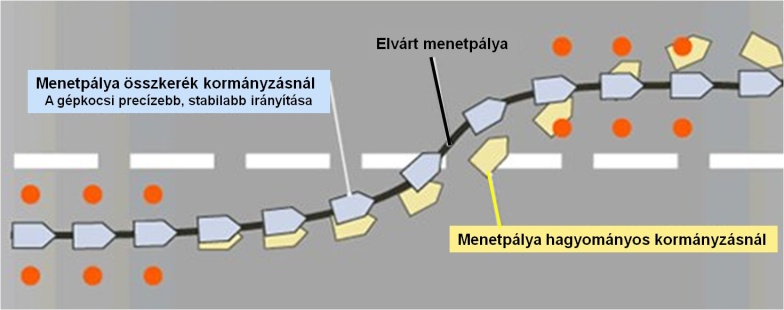
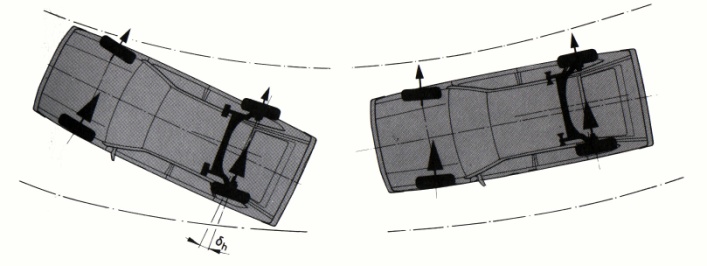
Az első képen látható, vagy ehhez hasonló konstrukciókkal jelenleg már csak a terep versenyeken résztvevő gépkocsiknál találkozunk. A jelenleg gyártott nagy sebességű, országúti autóknál azonban lényegesen kisebb elkormányzási szögeket alkalmaznak a hátsó kerekeknél, mint a katonai terepjáróknál, ráadásul az elkormányzás iránya és a szöghelyzet a sebességtől függően vagy azonos, vagy ellentétes az első kerekekével. Ezekben az esetekben más teszi indokolttá az összkerék kormányzás létjogosultságát.

A hagyományos kormányzásnál ugyanis a kormánykerék elfordítását csak némi késedelemmel követi a gépkocsi dinamikus reakciója. Összkerék kormányzásnál ez a késedelem lényegesen kisebb lesz. Stabilabbá válik a gépkocsi és javul a dinamikai viselkedése. Ehhez azonban az első és a hátsó kerekek kormányzását megfelelő módon össze kell hangolni. Ebben jelenleg már segítségül hívják az elektronikát is. Az összkerék kormányzás számos előnyén kívül hátrányként kell megemlíteni, hogy a kiegészítő szerelvények miatt drágábbá válik a gépkocsi. A bonyolultabb műszaki megoldás üzemeltetési és javítási költségei is növekszenek. Az sem elhanyagolható, hogy a tömege is egy kicsit nagyobbá válik.
9.2. Néhány példa az aktív összkerék kormányzású gépkocsikra
A 80-as, 90-es évektől folytak intenzív fejlesztések az összkerék kormányzással kapcsolatban. A japán gépkocsik voltak ezen a területen az élenjárók. A Mitsubishi Galant bizonyos típusváltozatainál például ebben az időben már a széria felszereltséghez tartozott az összkerék kormányzáson kívül, az összkerék hajtás, az aktív kerékfelfüggesztés és az ABS is. A Honda Prelude mechanikus összkerék kormányzást alkalmazott. A Honda Accordnál már sebességfüggő módon működött az összkerék kormányzás. A Mazda 626 –os típusnál 50 km/h sebesség felett vált aktívvá az összkerék kormányzás. A gépkocsi menetbiztonságára is nagy gondot fordítottak. Ha például a hidraulika rendszerben csőtörés, vagy más meghibásodás következik be a gépkocsi automatikusan első kerék kormányzásúvá válik. A Nissan például több típusában is a HICAS (High Capacity Actively Controlled Steering) rendszert alkalmazza, melyet 1985-ben mutattak be. Ennél a hátsó kerekek kormányzása is hidraulikusan történik. Az első kerekek szervokormányához alkalmazott, nagyobb teljesítményű szervo szivattyú látja el tápnyomással a hátsó kerekek kormányzását is.
Nem sokkal az ezredforduló után kezdték alkalmazni a Renault Laguna némely változatában az összkerék kormányzást. 2002-ben mutatták be és „4 control”-nak nevezték el. Ennél 60 km/ sebességig a hátsó kerekek elkormányzása az elsőkkel ellentétes irányú és a legnagyobb értéke 3,5˚. Ezért kisebb lesz a gépkocsi fordulóköre. Nagyobb sebességnél viszont azonos irányú lesz a hátsó kerekek elkormányzása, ami jelentősen növeli a kanyarstabilitást.
Az amerikai General Motors-hoz tartozó Delphi Corporation fejlesztette ki a Quadrasteer™ összkerék kormányzási rendszert, melyet 2002-ben mutattak be. Egyebek között a Chevy Silverado 2500 és a GMC Sierra 2500 pickup modellekben és a SUV kategória több típusában is alkalmazzák ezt.
9.3. Az összkerék kormányzás konstrukciós megoldásai
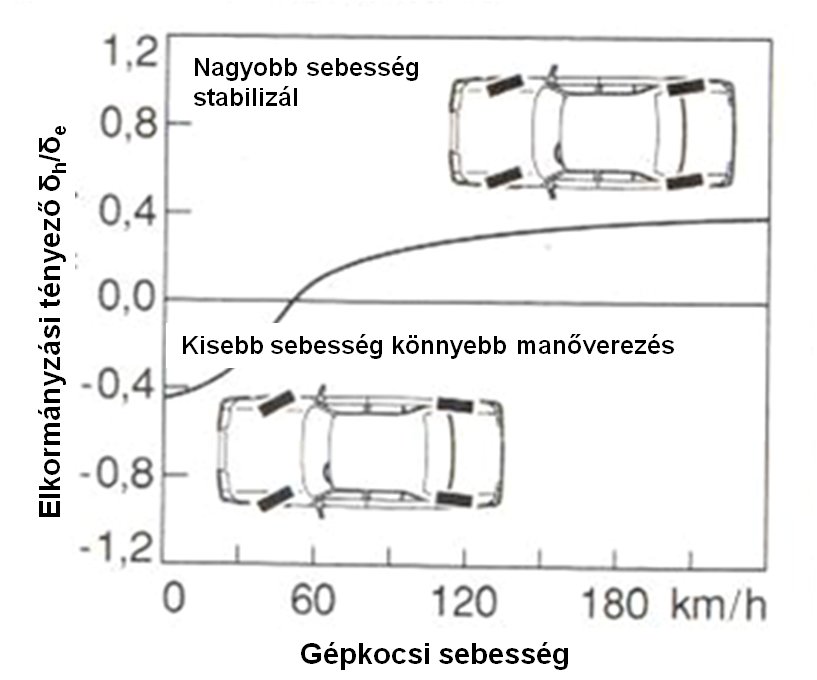
A konstruktőrök egyrészt azt a célt tűzték ki, hogy az összkerék kormányzással kis sebességnél csökkenjen a gépkocsi fordulókörének átmérője. Másrészt pedig, nagyobb sebességnél növekedjen a kanyarodási stabilitás. A célok ilyen megfogalmazásából az is következik, hogy az összkerék kormányzás hasonlóan a korszerű szervokormányokhoz, akkor éri el célját, ha működése sebességfüggő módon valósul meg. A működést jellemző paraméternek a hátsó és az első kerekek elkormányzási szögének hányadosát szokták tekintene, melyet a gépkocsi sebességének függvényében diagramban is ábrázolni szoktak, lásd az alábbi ábrát.
Az összkerék kormányzás konstrukciós megvalósítási lehetőségei:
-
mechanikus,
-
hidraulikus,
-
villanymotoros,
-
elektronikával kombinált mechanikus, illetve hidraulikus rendszerek összeépítése is lehetséges.
A kormányzási beavatkozások lehetőségei
-
aktív és
-
passzív összkerék kormányzási változatokkal is találkozunk.
Az aktív változatnál úgy az első, mint a hátsó kerekek hidraulikusan, vagy elektro-mechanikusan kormányozottak, melyek beavatkozásait egymással összehangolják.
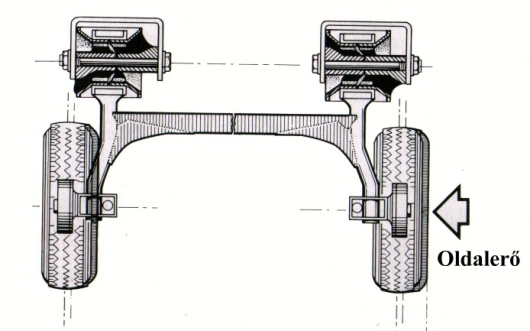
Passzív összkerék kormányzásnál a kanyarban ébredő oldalerőt használják a beavatkozásra. Ez a haszonjárművek iker hátsó kerekeinél alkalmazott megoldás, melyet talajerő kormányzásnak is szoktak nevezni. A független, vagy kapcsolt kerék-felfüggesztésű személygépkocsi futóműveknél például speciális kialakítású szilentblokkok segítségével kis mértékben megváltoztatják a kerekek geometriai beállítását és ezzel teszik a hátsó kerekeket is kormányzottá.
Az összkerék kormányzási rendszerek bemeneti információi:
Leggyakrabban két bemeneti információt szoktak alkalmazni, melyek:
-
a kormánykerék elfordítási szöge
-
a gépkocsi sebessége.
További bemeneti jellemzők figyelésével a gépkocsi dinamikai viselkedése tovább javítható. A felsorolt műszaki jellemzőket a biztonság érdekében megkettőzött módon egymással párhuzamosan érzékeli az elektronika. A jelek kiértékelése után összehasonlítja az eltárolt értékekkel, majd ez alapján ad beavatkozási parancsot a hátsó kerék elkormányozására. Egy dinamikus szabályozást valósítanak meg, melynél az elektronika érzékeli a munkahenger dugattyújának helyzetét, melyet figyelembe vesz, ha további beavatkozás válik szükségessé.
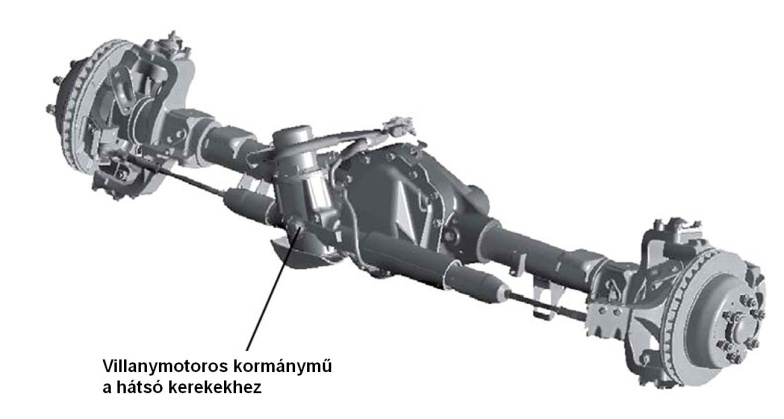
A hátsó kerekek nyomtávrúdját például néhány fokos elkormányzási szögnek megfelelően a hidraulikus munkahengeren kívül villanymotoros beavatkozó egység is végezheti kellően nagy mechanikus áttétellel.
9.4. Hidraulikus működésű aktív összkerék kormányzás
Ennél a változatnál hidraulika rendszer segítségével történik az első és a hátsó kerekek egymással összehangolt elkormányzása. működéséhez elektronikát is alkalmaznak.
9.4.1. A rendszer bemeneti információi és az érzékelők
9.4.1.1. Kormánykerék elfordítás
A kormánymű bemeneti részére szerelik fel az általában érintésmentes, induktív működésű érzékelőt. A teljes elkormányzási tartományban indirekt módon érzékeli az első kerekek elkormányzási szöghelyzetét. Ez egy durva jel. Ezen kívül fordulatonként periodikusan változó finom jelet is ad az érzékelő.
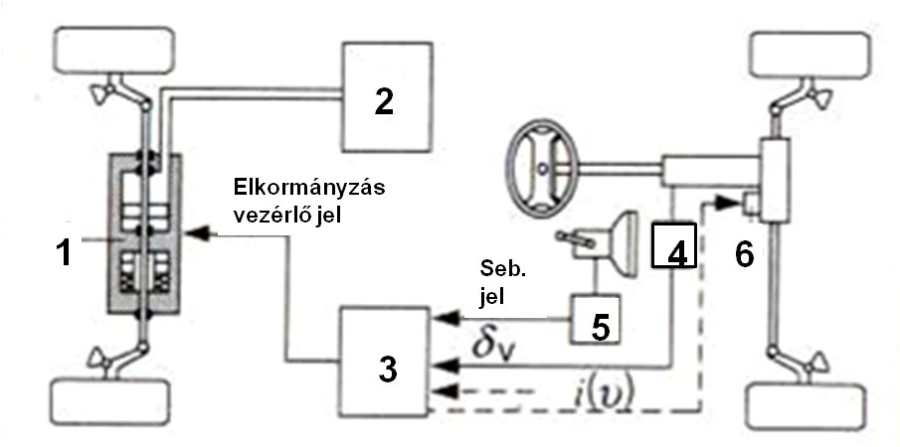
1 hátsó kerekeket kormányzó hidraulika; 2 hidraulikus tápnyomás; 3 működtető elektronika; 4 kormánykerék elfordítás érzékelő; 5 sebesség érzékelő; 6 első kerekek kormányzásának vezérlése; δ v első elkormányzási szög; i (v) sebességfüggő jel

9.4.1.2. A gépkocsi sebessége
Ezt az információt közvetítheti a gépkocsi sebességváltójára felszerelt jeladó. De újabban már a CAN hálózaton keresztül érkező ABS kerékfordulatszám érzékelőktől származó jelet használja az elektronika.
9.4.2. A működtető elektronika
Az elektronika a legtöbb változata a biztonság miatt kétcsatornás kivitelű. Két mikroprocesszort kötnek be egymással párhuzamosan. A működéshez szükséges jelek is megkettőzötten (redundáns módon) mindkét mikroprocesszorhoz eljutnak. Ezek közül az első mikroprocesszor egy gyors működésű programmal határozza meg a hátsó kerekek szükséges elkormányzási szöget és ennek megfelelően kiadja a beavatkozási parancsot. A második mikroprocesszor az elsővel párhuzamosan működik és a teljes rendszer ellenőrzést is elvégzi. Egy komplex modellel a teljes szabályozási folyamatot működés közben ellenőrzi. A hátsó kerekek elkormányzásához a kimenet jelszélesség modulált, a beavatkozó egységek működtetéséhez megfelelő teljesítményű jelet ad ki. A két mikroprocesszor a jeleket folyamatosan kölcsönösen összehasonlítja. Ha azok nem egyeznek, a működtető egységet a biztonsági koncepciónak megfelelően közép helyzetben reteszeli az elektronika. Ezt követően hagyományos első kerék kormányozás fog megvalósulni.
9.4.3. Az összkerék kormányzás beavatkozó egységei
Az összkerék kormányzás beavatkozó egységei a pillanatnyi menetállapotnak megfelelően a hátsó kerekek elkormányzási szögét állítják be különböző módon.
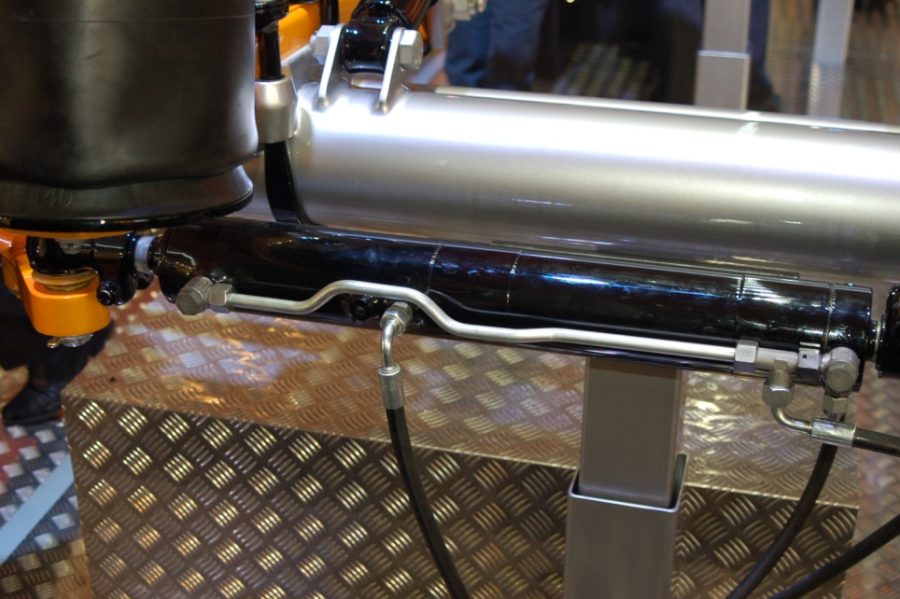
A hidraulikus változat megfelelő nagyságú állító erőt hoz létre és a beavatkozás gyorsasága is az igényeknek megfelelő. Ehhez a szivattyú által létrehozott olajnyomás energiáját használja fel. A hidraulikus munkahengert általában a futóművel párhuzamosan építik be. Lehet olyan kivitelű is, hogy ennek meghosszabbítása a hátsó kerekeket egymással összekötő nyomtávrúd. A beavatkozás ennek elmozdításával történik. Az állító munkahengerben a nyomást az elektronika elektromágneses szelep segítségével állítja be.
A működtetéshez leggyakrabban a belsőégésű motor által ékszíjjal hajtott radiál-dugattyús hidraulika szivattyút és nyomástárolót alkalmaznak. Nyomásérzékelők jelzik vissza a nyomásokat az elektronikának. A biztonságos működés érdekében, ha nincs elektromos tápfeszültség, vagy hidraulikus nyomás, az állító munkahenger két egymástól független egységgel mechanikusan reteszelődik.
Az újabb személygépkocsiknál az egyszerűbb kivitel lehetősége miatt szívesebben alkalmazzák a villanymotoros beavatkozó egységeket. Ez is beépíthető a nyomtávrudazatba. A villanymotor nyomatékát fogazott szíj áttétel és visszavezetett golyósoros csavarhajtás növeli a szükséges értére.

9.4.4. A gépkocsi menetviselkedésének összehasonlítása hagyományos és összkerék kormányzás esetén
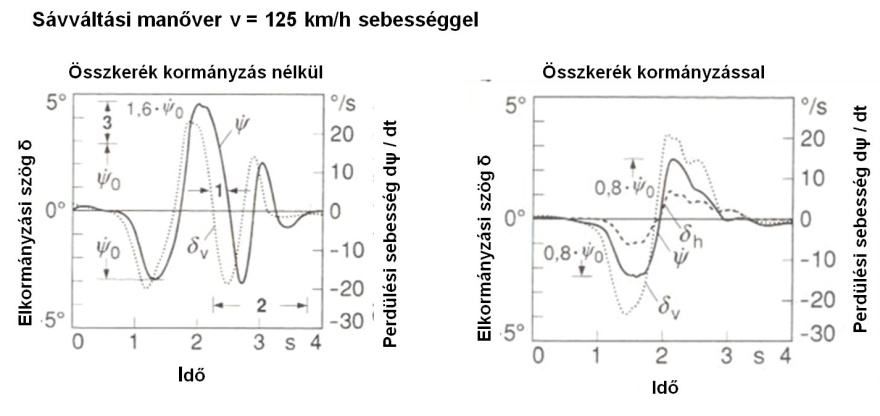
A kísérletek során az összkerék kormányzást jól tapadó és kis tapadási tényezőjű úton is kipróbálták. Sávváltás, kettős sávváltás, hirtelen kormánymozdulatok, szlalom menet és körpályán történő haladás is beletartozott a vizsgálati programba. Különböző működtető algoritmusoknak és a hozzájuk tartozó különböző jellegmezőknek a működésre gyakorolt hatását is megvizsgálták.
A normál egyszeres sávváltásnál például az adott ív kicsúszási határsebességének közelében autózva az összkerék kormányzással a gépkocsi perdülési sebessége hozzávetőleg a felére csökken, ha egy hagyományos kormányzású gépkocsival hasonlítjuk össze azonos körülmények között. Az összkerék kormányzásnál nem fog a gépkocsi túllendülni a kívánatos pályán, mint ahogy az normál kormányzásnál gyakran bekövetkezik. Ugyanez tapasztalható a kanyar után az egyenesbe történő visszakormányzásnál is. Ez a kedvező tulajdonság egyrészt vezetés közben tehermentesíti a gépkocsivezetőt, másrészt pedig nagyobb menetstabilitást eredményez.
9.4.5. A menetdinamikai szabályozó rendszerek egymáshoz kapcsolódása
Az összkerék kormányzással nagyobb menetstabilitás érhető el az ívmeneteknél és a hirtelen szükségszerűvé váló kitéréseknél. A perdítő nyomaték korlátozás, amely az ABS rendszerrel együtt valósítható meg hatékonyan növeli a gépkocsi iránystabilitását, amikor fékezés közben az útfelület bal és jobb oldalán a tapadási tényező jelentősen eltér egymástól. Az összkerék kormányzás alkalmas arra, hogy további menetdinamikai szabályozó rendszerekkel hatékonyan együttműködjön és így a gépkocsi menetstabilitása jelentősen javul.
9.5. Elektromechanikus működésű aktív összkerék kormányzás
A szervokormányokhoz hasonlóan az összkerék kormányzásnál is kifejlesztették az elektromechanikus változatot. A hidraulika rendszer hátránya ugyanis az, hogy folyamatos tápnyomást igényel annak ellenére, hogy a kormányzás normál körülmények között csak a teljes menetidő kb. 15%-ában működik. A hidraulika szivattyú folyamatos működése növeli a gépkocsi tüzelőanyag fogyasztását és a károsanyag kibocsátást is. Ezért az összkerék kormányzásnak is kifejlesztették azt a változatát, amelynél úgy az első, mint a hátsó futóműnél is villanymotoros beavatkozó egységet alkalmaznak. Az előző részben ismertetettekhez hasonló biztonsági koncepciót valósítanak meg ennél a rendszernél is. A nyomás érzékelő kivételével hasonló érzékelőket alkalmaznak. Találkozunk olyan összkerék kormányzási változattal is ahol az első futóműnél hidraulikus, a hátsónál pedig elektromechanikus kormányzást alkalmaznak.
9.6. Delphi Quadrasteer™ összkerék kormányzás
A Delphi Corporation által kifejlesztette Quadrasteer™ összkerék kormányzási rendszert, 2002-ben mutattak be. Az Amerikai Egyesült Államokban számos pickup modellben és a SUV kategóriában is sikerrel alkalmazzák.
Ennél a hagyományos hidraulikus első kerék kormányzást kombinálták elektromechanikus hátsó kerék kormányzással. A központi elektronika érzékelők segítségével figyeli a gépkocsi sebességét és az első kerekek elkormányzási szögét. Ennek alapján történik a hátsó kerekek kormányzása elektromechanikus módon a következőképpen:
-
Kis sebességnél, 64 km/h sebesség alatt a hátsó kerekeket az elsőkhöz képest ellentétesen kormányozza. A hátsó kerekek legnagyobb elkormányzási szöge ilyenkor 12˚. Ennek köszönhetően 20%-al kisebb lesz a fordulási sugár, ami megkönnyíti a manőverezést, illetve a parkolóhelyre történő beállást.
-
Közepes sebességnél a hátsó kerekek egyenes meneti helyzetbe kerülnek. Ez a semleges kormányzásnak felel meg.
-
Nagy sebességnél a hátsó kerekek elkormányzása azonos irányú lesz, mint az elsőké. Ezzel sáv váltásoknál nagyobb stabilitás érhető el.
Működhet automatikusan is az összkerék kormányzás, de a vezető ki-, illetve be- is kapcsolhatja azt. Bizonyos típusoknál a vezetőnek arra is lehetősége van, hogy különböző hátsó kerék kormányzási kondíciókat állítson be. A műszerfalon ellenőrző lámpa jelzi vissza az aktuálisan beállított működési módot.
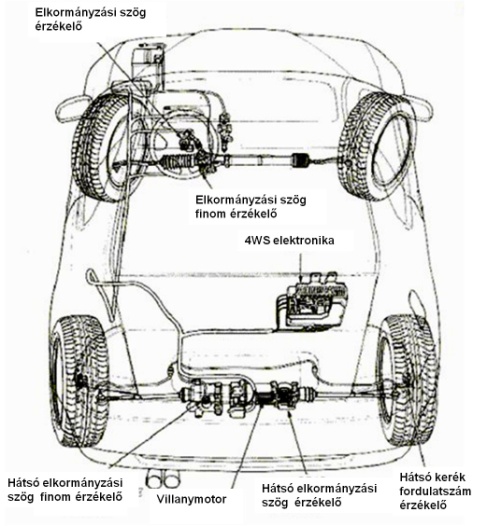
9.6.1. A rendszer érzékelői
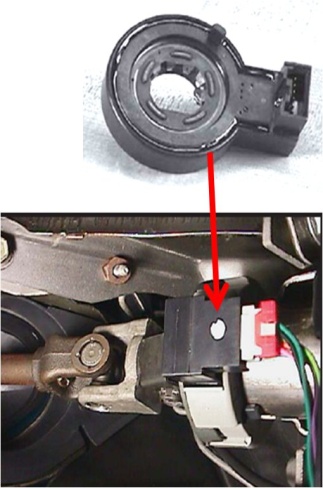
Kormánykerék elfordulás érzékelő
A kormánykerék tengelyére szerelt kardáncsukló közelében helyezik el. 5 V-os tápfeszültséggel működik, melyet az elektronika biztosít. Ez az érzékelő egy analóg és egy digitális jelet ad az elektronikának.
Az ennél a rendszernél alkalmazott további érzékelők:
-
perdülés és kereszt irányú gyorsulás érzékelő (hasonlóan az ESP rendszerekhez)
-
kerék fordulatszám érzékelők
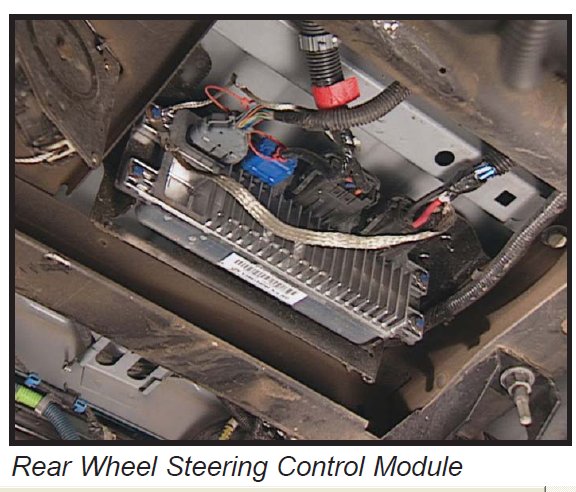
9.6.2. A működtető elektronika
A hátsó kerék kormányzását működtető elektronika a hátsó futómű közelében van elhelyezve. Tápfeszültséggel látja el az érzékelőket és a hátsó futóműre szerelt beavatkozó egységet. Fogadja és kiértékeli az érzékelők jeleit.
9.6.3. A hátsó kerekek elkormányzását végző beavatkozó egység
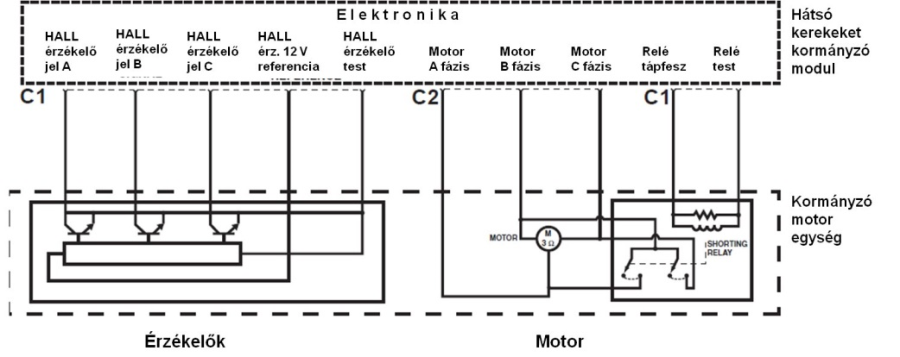
A differenciálmű közelében a hátsó futóműre szerelik fel a beavatkozó egységet. A kerékagyak közelében homokinetikus tengelycsuklókat építenek be, ami lehetővé teszi a merevhidas futóműnél egyrészt a hátsó kerekek elkormányzását a beszerelt függőcsapok körül, másrészt pedig a nyomatékátvitelt. A nyomtávrúd több tagból áll és gömbcsuklókkal kapcsolódik a kerekeknél kialakított irányító karokhoz. Az elkormányzási szöghelyzet érzékelőt a hajtó fogaskerék alsó részénél helyezik el. A villanymotor 45:1 –es bolygómű áttétellel forgatja a fogasléchez kapcsolódó kis fogaskereket. A beavatkozó egységet 3 fázisú szénkefe nélküli DC motor működteti. Forgórészét 3 db 12 V –os HALL helyzet érzékelővel is ellátják. A villanymotort relé segítségével kapcsolja be a működtető elektronika.
Az összkerék kormányzás elektronikus rendszere a TECH 2 diagnosztikai berendezéssel vizsgálható.
9.7. Passzív hátsó kerék kormányzás
A kanyarban ébredő oldal irányú erőt használja fel a hátsó kerekek néhány fokos szöggel történő elkormányozására, vagyis a kerekek szöghelyzetének megváltoztatására. Az előnye, hogy nagy sebességű kanyarvételnél növeli a gépkocsi stabilitását. Ellene hat az első kerék hajtású gépkocsik alulkormányozott viselkedésének. Általában független-, vagy kapcsolt hátsó kerék felfüggesztésű gépkocsiknál alkalmazzák.
9.8. Steer - by - wire
Ez a repülőgépeknél már évek óta alkalmazott „fly-by-wire” koncepció átültetése a közúti közlekedésnek megfelelően. Ez most a közúti járműveknél azt jelentené, hogy nincs mechanikus összeköttetés a kormánykerék és a kerekek között. Az elkormányzást szervo-motorral végzik az elektronika utasításának megfelelően. A beavatkozó egységgel csak elektromos vezeték létesít kapcsolatot. Ebből ered az elnevezése is. A hagyományos kormány rendszerből néhány mechanikus elemet is felhasználhatnak. A biztonság érdekében a megkettőzött energia ellátásnak és az adat átvitelnek nagy jelentősége van. A Steer – by – wire rendszer jelenleg hatóságilag még nem engedélyezett, ezért a közúti közlekedésnél nem alkalmazható.