6. fejezet - Hidraulikus fék, ABS, ASR rendszerek
- 6.1. Bevezetés és áttekintés
- 6.2. Hidraulikus rásegítővel működő fékrendszer
- 6.3. A hibrid és villanyautók kétféle fékezési lehetősége:
-
- 6.3.1. Energia visszatáplálásos fékezés
- 6.3.2. Fékezés hagyományos hidraulikus fékrendszerrel:
- 6.3.3. Energia visszatáplálásos fékezés
- 6.3.4. A kétféle fékezés összehangolása
- 6.3.5. Mitsubishi i-MiEV (2011) villanyautó fékrendszere
- 6.3.6. A fékrendszer
- 6.3.7. Az energia visszatáplálásos fékezés
- 6.3.8. iBooster az elektromechanikus fékrásegítő
- 6.4. Continental Teves MK C1 az integrált fékrendszer
-
- 6.4.1. Az Mk C1 rendszer részegységei:
-
- 6.4.1.1. A beépített hidraulikus fékrásegítő
- 6.4.1.2. Pedálút szimulátor
- 6.4.1.3. Kétkörös tandem főfékhenger (TMC)
- 6.4.1.4. Elektromágneses szelepek
- 6.4.1.5. Elektronika
- 6.4.1.6. Az elektromos rögzítő fék (EPB) működtetés
- 6.4.1.7. Dinamikus fékezés és vészfékezés
- 6.4.1.8. Drive Away Release
- 6.4.1.9. Opcionális működési lehetőségek:
- 6.4.1.10. Gyalogos védelem és az MK C1 fékrendszer
- 6.5. Az üzemi fékrendszert kiegészítő menetdinamikai szabályozó rendszerek:
-
- 6.5.1. Személygépkocsik blokkolásgátlói
- 6.5.2. Gép állapot szabályozás (state machine)
-
- 6.5.2.1. A kerék kerületi lassulás alapján történő szabályozás
- 6.5.2.2. Szűrési idő:
- 6.5.2.3. Az elektromágneses szelepek veszteség ideje:
- 6.5.2.4. Teljes veszteségidő:
- 6.5.2.5. Szabályozás a kerékcsúszás alapján
- 6.5.2.6. Kombinált szabályozás a kerék kerületi lassulása és a kerékcsúszás alapján
- 6.5.2.7. A személygépkocsik különböző futóműveinél alkalmazott beavatkozási változatok:
- 6.5.3. PID szabályozás
- 6.5.4. A blokkolásgátló rendszer működése
-
- 6.5.4.1. Az ABS működésének megvalósításánál azonban néhány problémával szembe kell nézni. Ezek a következők:
- 6.5.4.2. ABS szabályozás elve egy kiválasztott keréknél:
- 6.5.4.3. A szabályozás tapasztalati modellje
- 6.5.4.4. Blokkolási veszély esetén a beavatkozás, aszimmetrikus nyomáscsökkentés és növelés:
- 6.5.4.5. ABS hidraulikaegység és a fékrendszer felépítése – Fékfolyadék szivattyú:
- 6.5.4.6. Elektromágneses szelepek:
- 6.5.4.7. Az elektronika:
- 6.5.4.8. A kis tapadási tényezőjű útfelület felismerése („low µ“)
- 6.5.4.9. Hirtelen átmenet kis tapadásúról nagyobb tapadású útfelületre
- 6.5.4.10. Az extrém rossz út (terep) felismerése
- 6.5.4.11. A teljes gépkocsi ABS szabályozása
- 6.5.4.12. További működési jellemzők:
- 6.5.4.13. Az ABS rendszer részegységei
-
- 6.5.4.13.1. Kerékfordulatszám érzékelők
- 6.5.4.13.2. Passzív, vagyis induktív működésű kerékfordulatszám érzékelők
- 6.5.4.13.3. Az induktív ABS kerékfordulatszám érzékelők diagnosztikai vizsgálatának lehetőségei:
- 6.5.4.13.4. Aktív kerékfordulatszám érzékelők
- 6.5.4.13.5. Magneto-rezisztív elven működő érzékelők
- 6.5.4.13.6. HALL IC-s érzékelők
- 6.5.4.13.7. Az ABS elektronika
- 6.5.4.13.8. Az ABS öndiagnosztikája
- 6.5.4.13.9. A fékrendszer légtelenítéséhez diagnosztikai műszer kell
- 6.5.4.13.10. Nyitott és zárt rendszerű blokkolásgátlók
- 6.5.5. Az ABS -el szemben támasztott követelmények
- 6.5.6. Az ABS rendszerrel szemben támasztott nemzetközi követelmények összefoglalása:
- 6.6. A kipörgés gátló (ASR)
- 6.7. Blokkolásgátló terep fokozata
6.1. Bevezetés és áttekintés
6.1.1. A személygépkocsik hidraulikus fékrendszereinél alkalmazott mechatronikai alkalmazások
A fékrendszer működése révén lassítja, megállítja, illetve rögzített helyzetben tartja a járművet. Nagy jelentősége miatt a különböző országokban, és az egyes országokon átívelő nemzetközi hatósági előírások vonatkoznak rájuk. A fékrendszer a gépkocsik aktív biztonságának fontos eleme, ezért hatásosságukat és kialakításukat is rögzítik az előírások.
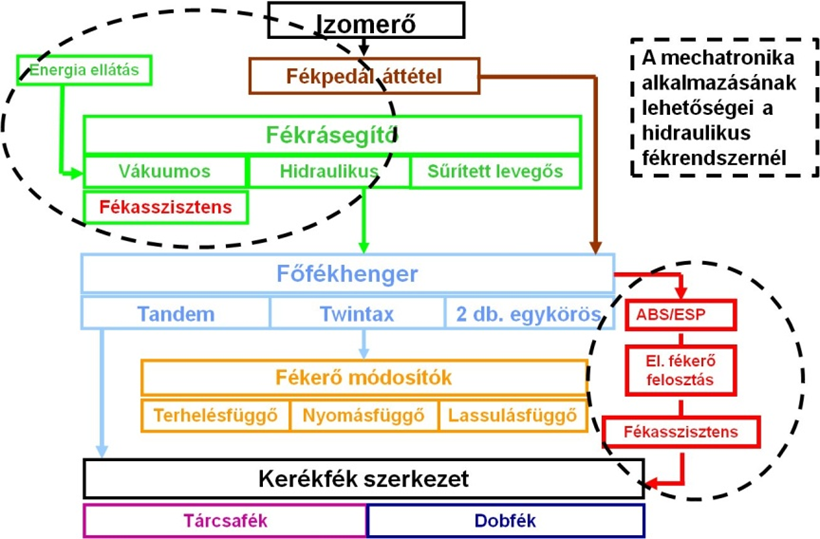
A személygépkocsik üzemi fékrendszerénél általában vákuumos, vagy hidraulikus rásegítővel ellátott hidraulikus féket alkalmaznak. A mechatronika alkalmazásának lehetőségei ezen a területen:
6.1.2. Az üzemi fék rásegítőinek energiaellátása:
-
vákuumszivattyúk, vagy a
-
hidraulikaszivattyúk működtetése vezérléssel, vagy szabályozással.
Dízel motoros gépkocsiknál és villanyautóknál szükséges a vákuumszivattyú a fékezéshez az energia előállítására. Újabban már az Otto-motoros járműveknél is alkalmazzák, mert így nagyobb vákuum hozható létre. Így egyrészt kisebb lehet a vákuumos fékrásegítő átmérője és emiatt a helyigénye, másrészt pedig komfortosabbá tehető a fékezési folyamat.
A fékasszisztens alkalmazásának kezdetén a vákuumos fékrásegítőt is kiegészítették elektronikával, fékpedál elmozdulás érzékelővel és elektromágneses szeleppel. Újabban a fékasszisztens az ABS rendszer kiegészítő rendszereként valósul meg.
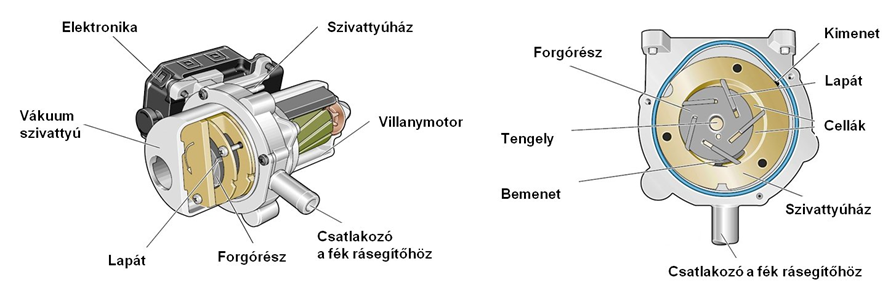
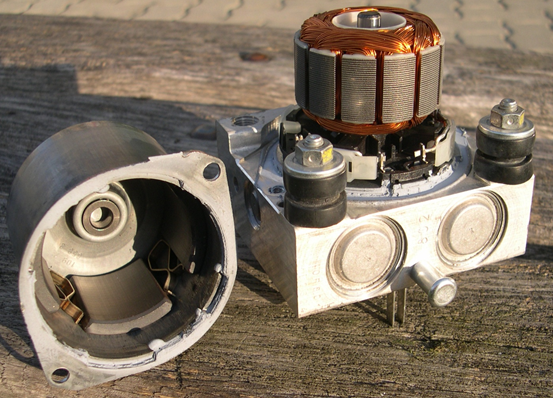
6.1.3. Villanymotoros vákuumszivattyú
Ez az egység a vákuumos fékrásegítő energia ellátását biztosítja. Egy egyenáramú villanymotorból és egy többnyire szárnylapátos működésű vákuumszivattyúból áll. Beépítése és működése független a belsőégésű motortól. Az excentrikus forgórészbe beillesztett lapátok forgás közben a centrifugális erő hatására felfekszenek a ház belső palástjára. A lapátok közötti folyamatosan növekvő térfogat hozza létre a vákuumot, melyet a vákuumos rásegítő működtetésére használnak fel. Elektromosan általában úgy kötik be, hogy a belsőégésű motor indítását követően néhány másodpercen belül működésbe lép a vákuumszivattyú is.
6.1.4. Vezérléssel működő villanymotoros vákuumszivattyú
Ennél a változatnál nem alkalmaznak nyomás érzékelőt, így tehát nincs visszacsatolás a szivattyú működéséről, melyet a motor elektronika felügyel. A vákuumos fékrásegítő által a rendszerben létrehozott nyomást az elektronika a következő működési paraméterek érzékelése alapján becsli meg:
-
a pillangó szelep helyzete,
-
a belsőégésű motor fordulatszáma,
-
a féklámpa kapcsoló nyitott, vagy zárt állapota.
Egy az elektronikában tárolt matematikai modell segítségével határozza meg a pillanatnyi nyomást. Ennek megfelelően a test rá-, vagy lekapcsolásával működteti a szivattyút hajtó villanymotort. Ennek a vezérlésnek természetesen egy bizonyos hiszterézise van.
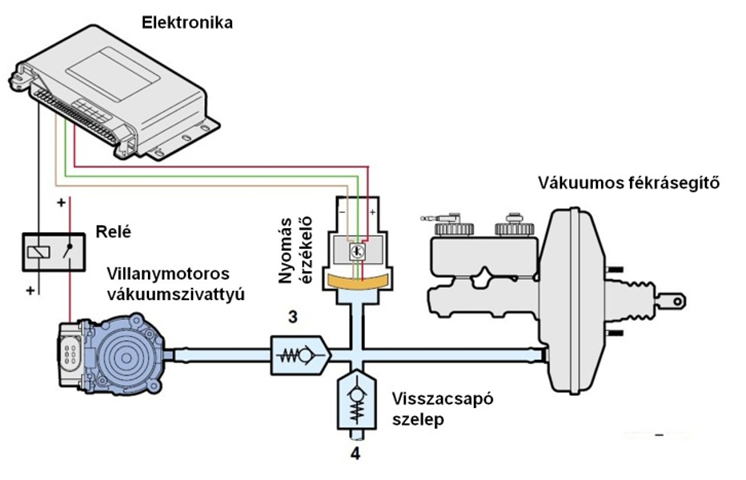
6.1.5. Szabályozással működő villanymotoros vákuumszivattyú
Ennél a változatnál nyomásérzékelőt alkalmaznak, melyet a vákuumszivattyú és a vákuumos fékrásegítő közötti csőszakaszba kötnek be. A membrános nyomásérzékelőt az elektronika a gyújtás bekapcsolása után folyamatosan ellátja 5 V tápfeszültséggel. Az aktuális nyomás okozta membrán deformációval arányos feszültség jelet a működtető elektronika folyamatosan kiértékeli és összehasonlítja az eltárolt szükséges értékkel. Ennek megfelelően működteti a szivattyút. A működési jelleggörbe az elektronikában el van tárolva. Ha a nyomásérzékelő meghibásodik, az elektronika automatikusan átkapcsol a vezérelt üzemmódra.
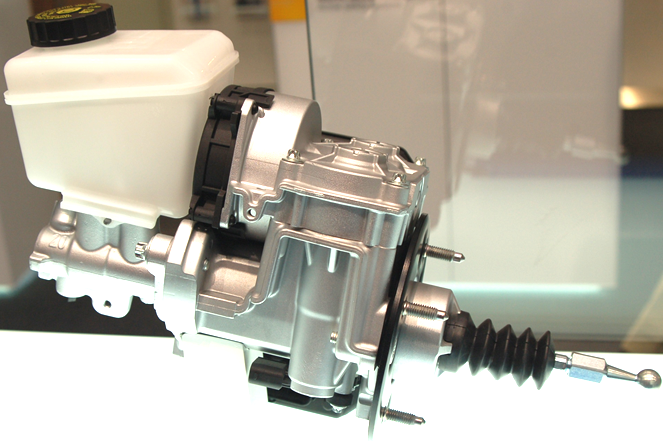
6.2. Hidraulikus rásegítővel működő fékrendszer
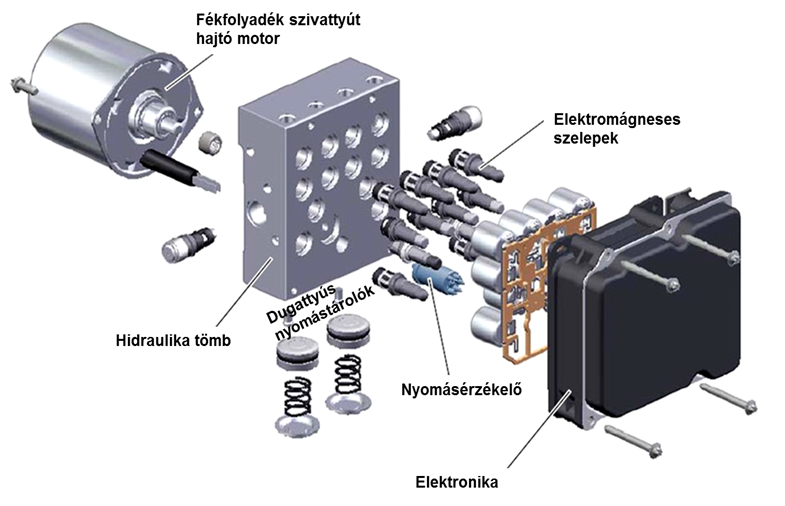
A Toyota Prius Hibrid hajtású gépkocsinál nem vákuumos, hanem hidraulikus fékrásegítőt alkalmaznak. A gépkocsi harmadik generációjának fékrendszerét a gyártója ECB-3 –nak nevezi az angol Electronic Controlled Brake megnevezés alapján. A Japán Aisin a beszállítója a rendszer fontosabb elemeinek. A fékrendszer a kerékfékszerkezeteken kívül két egységből áll:
-
Kompakt fékező egység az elektromágneses szelepekkel és az elektronikával.
-
Villanymotorból, szivattyúból, és nyomástárolóból álló egység.
A hidraulikus tápegységnél villanymotorral hajtott szivattyú hozza létre a fékezéshez szükséges rásegítő nyomást és egy nyomástárolót is felszerelnek az egységre. A villanymotorral hajtott hidraulika szivattyút a nyomáskapcsolók működtetik.


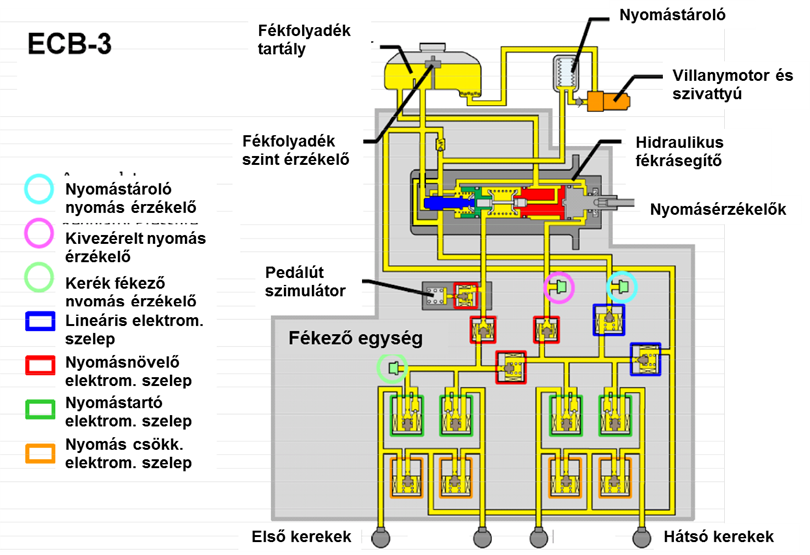
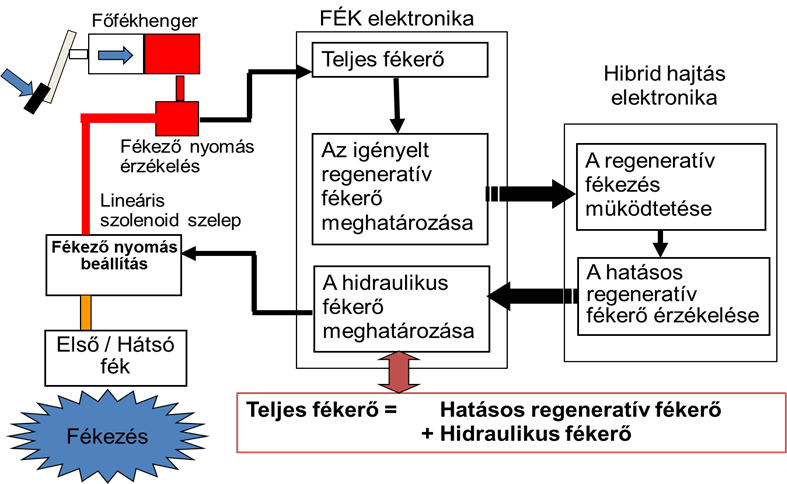
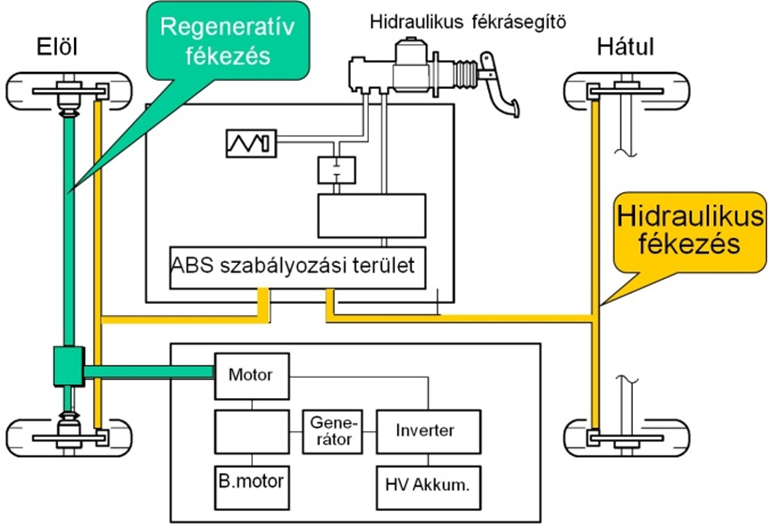
A fékezési folyamat úgy zajlik a Toyota Prius III -nál, hogy a fékpedál lenyomásakor a kialakult nyomást az érzékelő megméri, és az értéket továbbítja az elektronikának. Ez a vezető szándékának megfelelő teljes fékerő. Ebből az elektronika kikalkulálja, hogy mekkora fékező nyomaték valósítható meg regeneratív módon. A parancs kiadása után megméri, hogy ténylegesen mekkora az így megvalósult fékerő hányad. Ezután meghatározza, hogy a hidraulikus fékrendszernél mekkora fékező nyomás szükséges. Ezt felosztja az elő-, és a hátsó futóműnek megfelelő értékre. Ennek megfelelően elektromágneses szelepekkel módosítja a vezető által létrehozott nyomást az első és a hátsó futómű kerekeinél. Tehát a teljes fékerő két részből tevődik össze, a regeneratív és a hidraulikus fékerőből. Regeneratív fékezés természetesen csak a hajtott kerekeknél lehetséges. Az előbbiekben vázolt folyamat természetesen a valóságban a másodperc töredéke alatt zajlik le.
6.3. A hibrid és villanyautók kétféle fékezési lehetősége:
-
Hagyományos súrlódásos fékkel, általában hidraulikus működtetéssel.
-
Energia visszatáplálásos fékezéssel.
Ez utóbbi az előnyösebb, mert a gépkocsi mozgási energiáját át tudja alakítani másfajta energiává, mely újra hasznosíthatóvá válik. Az a hátránya viszont, hogy csupán a gépkocsi lassításra alkalmas. A teljes megálláshoz, illetve a rögzítve tartáshoz súrlódásos fékre van szükség. A kétféle fékezési mód összehangolását elektronika segítségével lehet megvalósítani.
6.3.1. Energia visszatáplálásos fékezés
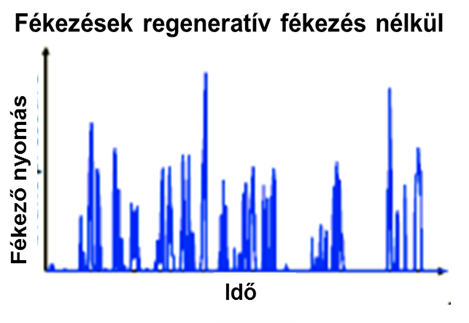
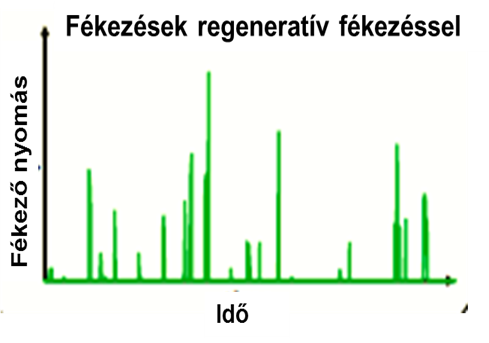
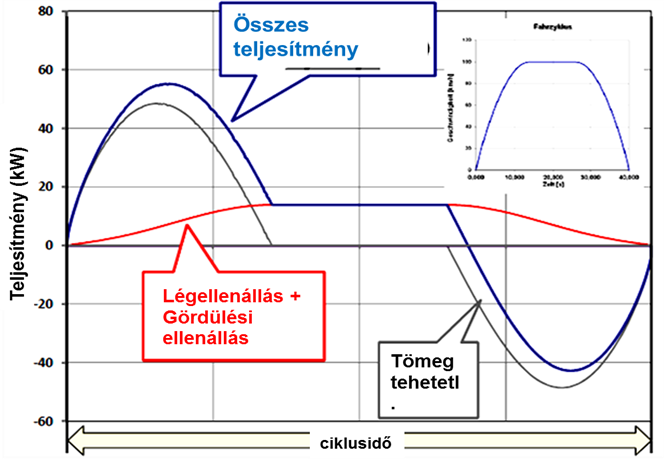
A gépkocsi menetciklusait megvizsgálva látható, hogy az energia visszatáplálásos fékezésnél lényegesen rövidebb ideig működik a hidraulikus fék berendezés. A gyorsításra felhasznált energia egy részét vissza lehet nyerni. Ezért a gépkocsi üzemeltetése gazdaságosabb lesz.
A menetciklus egyes szakaszai a gépkocsi felgyorsításából, állandó sebességű haladásból lassításból és megállásból tevődnek össze. A gyorsítás során felhasznált energia arra fordítódik, hogy le lehessen győzni a tehetetlenségi erőket, a gördülési ellenállást és a légellenállást.
A tömegtehetetlenség legyőzéséhez szükséges motor teljesítmény:

A légellenállás legyőzéséhez szükséges motor teljesítmény:
A gördülési ellenállás legyőzéséhez szükséges motor teljesítmény:

Ebből az energiából a következő lassításnál viszont csak a tehetetlenségi erővel arányos energia nyerhető vissza a generátoros fékezés segítségével.
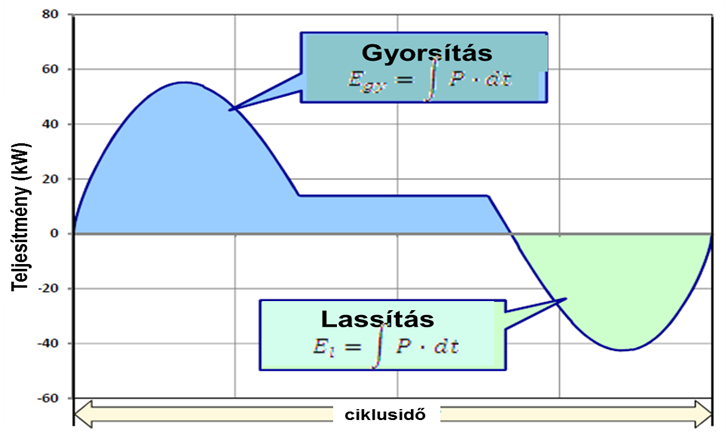
Az energia visszanyerési potenciál (Ep) a gyorsításhoz befektetett és a lassításnál visszanyerhető energia hányadosa:

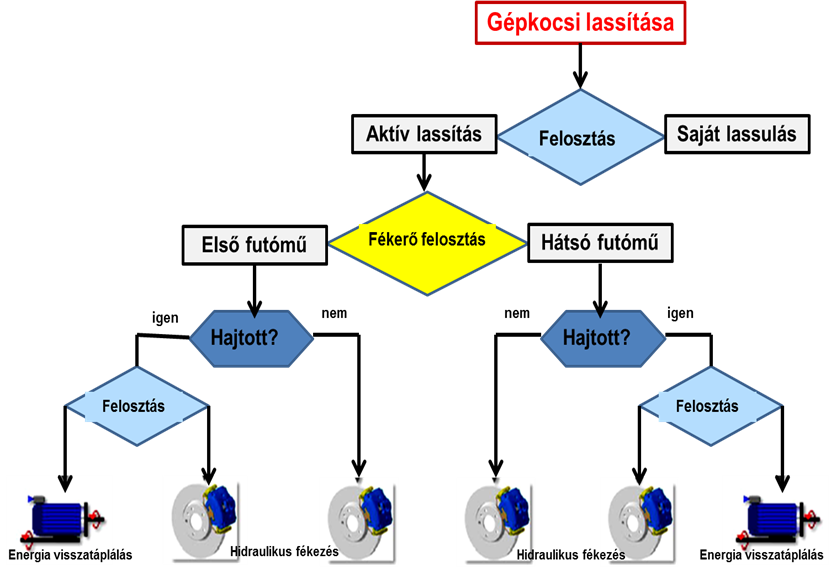
Az energia visszatáplálásos fékezés megvalósításának lehetőségei:
A hibrid, vagy villany autók fékezésénél az egyes futóművek közötti fékerő felosztáson kívül azt is figyelembe kell venni, hogy mely kerekek a hajtottak. A hidraulikus és a generátoros fékezés között is meg kell találni az optimális fékerő arányt. Ezt szemlélteti az alábbi ábra.
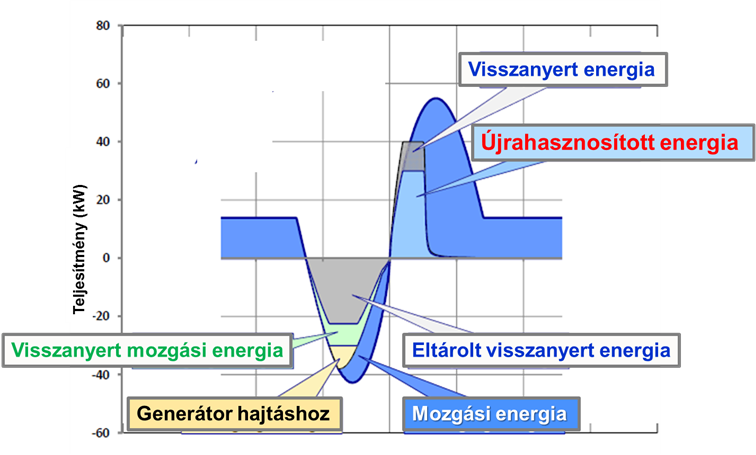
Az energia visszatáplálásos fékezéseknél különböző veszteségekkel is számolni kell. A teljes mozgási energia nem használható fel a generátor hajtására a súrlódásos és a ventillációs veszteségek miatt. Az akkumulátorban történő energia tárolásnál is kell veszteséggel számolni. Ezek miatt az újrahasznosítható energia kisebb, mint a gépkocsi mozgási energiája volt a fékezés pillanatában. Jelenleg a tervezéseknél 75% -os hatásfokot szoktak figyelembe venni az energia újrahasznosításnál.
A jelenleg megvalósított hibrid hajtás változatok:
-
mild hibrid, - többnyire egyszerű „start-stopp” működést tesz lehetővé
-
mikro hibrid - lehetővé teszi az energia visszatáplálásos fékezést és gyorsításkor a rásegítést
-
full hibrid – ennél a változatnál már tisztán elektromos hajtás is lehetséges.
Ez utóbbiak lehetnek soros és párhuzamos hibridek is.
A hibrid hajtású gépkocsikat, mint például a Toyota Prius is ECB (Electronically Controlled Brake) elektronikusan szabályozott fékrendszert építenek be, mely egyesíti a kétféle fékezés lehetőségét. A 2001 – 2003 között gyártott változatok hidraulikus fékrendszerét ABS -el és elektronikus fékerő felosztással is ellátták. A 2004 után gyártottaknál már olyan ESP rendszert szereltek be, mely az elektromechanikus szervokormányon keresztüli beavatkozásra is alkalmas, továbbá az elektronikus fékerő felosztáson kívül fékasszisztenssel is kiegészült.
A Toyota Prius -ba a belsőégésű motoron kívül két villamos gépet szerelnek, Az egyik rendszerint generátorként, a másik motorként működik. A három erőforrás között egy bolygóműves egység létesít kapcsolatot. A csomagtartóban helyezik el a 300 V névleges feszültségű akkumulátor egység. A három fázisú váltakozó áramú gép miatt inverre és transzformátorra is szükség van. A gépkocsiba beépített egyéb elektromos rendszerek a szokásos módon 12 V feszültséggel működnek, ezért egy normál akkumulátor sem nélkülözhető ennél a gépkocsinál.
6.3.2. Fékezés hagyományos hidraulikus fékrendszerrel:
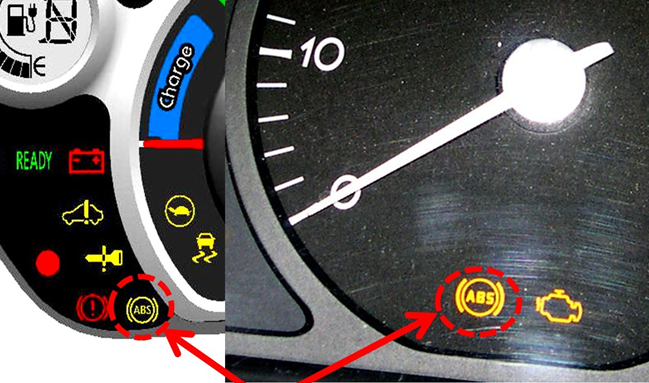
Ez a többi személygépkocsinál alkalmazott hidraulikus féknek megfelelően működik és mind a négy kerékre hat. A fékrendszer kiegészülhet ABS, illetve ESP szabályozással is. Az ABS, vagy az ESP meghibásodása esetén annak ellenőrző lámpája folyamatosan világít. A normál fékrendszer ilyenkor is működőképes marad. A Toyota Prius -nál hidraulikus fékrásegítőt alkalmaznak, mely fékezéskor hatékonyan csökkenti a szükséges pedálerőt. A nyomás energiát villanymotorral hajtott hidraulika szivattyú és nyomástároló biztosítja. A szivattyút hajtó villanymotort nyomáskapcsolók vezérlik. A hidraulikus rásegítő vezérlő egységét és a munkahengerét a főfékhengerre szerelik. A 2004 utáni modellnél a fékpedálhoz hidraulikus pedálút szimulátort is beszerelnek. Ezen található az elmozdulás érzékelő, amely a fékasszisztens működéshez szükséges.
Más hibrid autóknál alkalmazhatnak vákuumos fékrásegítőt is. Ilyen esetben villanymotoros hajtású vákuumszivattyút és nyomástárolót építenek be. Ha a fékrendszer energiaellátásában rendellenesség lép fel, pl. hiba a szivattyú villanymotorjának áramkörében, vagy nem megfelelő a rendszernyomás, a piros színű fék kontrollámpa világítása figyelmezteti a vezetőt és sípoló hangjelzés is hallható.
A hidraulikus fékrendszer általában az intenzív fékezéseknél aktív. A fékpedál elmozdulását és a lenyomási sebességét érzékeli az elektronika és ez alapján dönt a fékezés módjáról. A hidraulikus fékrendszernél a kerekeket tárcsafékek lassítják. Valamennyi kerékagynál fordulatszám érzékelőt is beépítenek. A rögzítő fék a Toyota Prius –nál a féktárcsa agy részébe beszerelt szimplex dobfék, mely egy külön elhelyezett, a többinél kisebb pedállal működtethető és oldható.
6.3.3. Energia visszatáplálásos fékezés
A fék elektronika a leggyakrabban, amikor nincs szükség vészfékezésre, az energia visszatáplálásos fékezést működteti. Ilyenkor az elektromos hajtó motor generátorként üzemel, mely természetesen csak a hajtott kerekek fékezésére képes. Az így létrehozott három fázisú 300 V os névleges értékű váltakozó áramot a konverter alakítja egyenárammá és transzformálja is. A 2004 utáni változatba a 12 V –os akkumulátor töltéséhez 28 db kondenzátorból összeállított telepet is beépítenek a gépkocsi csomagtartójába. Ez a töltőáram csúcsokat hivatott kissé kisimítani. Így valósítják meg a normál akkumulátor töltését. A regeneratív fékezés akkor valósul meg, amikor a fékpedált a gépkocsivezető nem hirtelen nyomja le. Az akkumulátor töltésére pillanatnyilag 21 kWh energia fordítható. A fékezések java részénél ennyi energia jön létre. Az ennél nagyobb energia, ha szükségessé válik a súrlódásos fékkel alakítandó hővé úgy, mint a többi gépkocsinál. A két fékrendszer működését az elektronika hangolja össze. Ha a regeneratív fékezés meghibásodik, csak a hidraulikus fékrendszer lassítja a gépkocsit.
6.3.4. A kétféle fékezés összehangolása
A kétféle fékezés lehetőségét a fék elektronika úgy hangolja össze, hogy a lehető legnagyobb energia hányad fordítódhasson az akkumulátorok töltésre. A kétféle fékerő összege pedig mindenkor meg kell feleljen a gépkocsivezető lassítási igényének. Ezt az információt a fékpedál elmozdulás érzékelője közvetíti az elektronikának. A fék elektronika a kerekeknél lévő munkahengerekben a nyomást növelni, vagy csökkenteni is tudja úgy, hogy a fékezés közbeni stabilitásnak és a lassítási igénynek is megfeleljen. A fékerők megosztása függ a gépkocsi sebességétől és a fékezés időtartamától is.
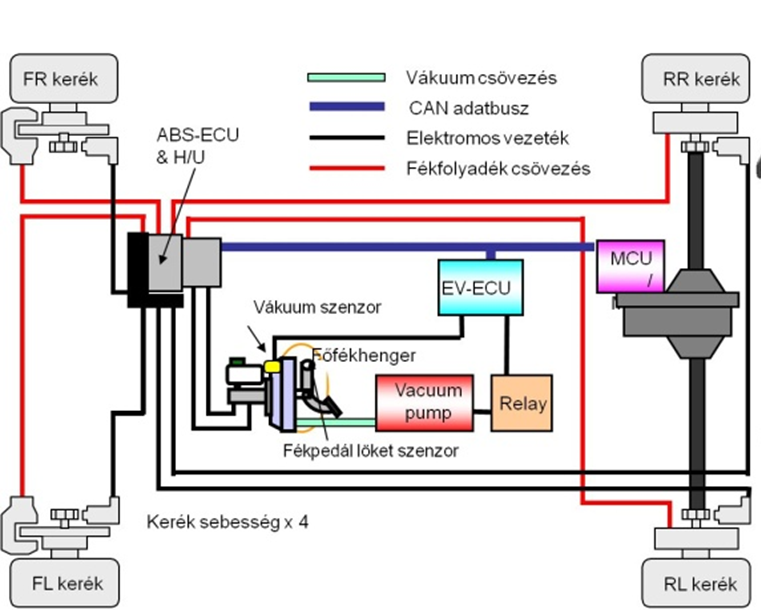
6.3.5. Mitsubishi i-MiEV (2011) villanyautó fékrendszere
Ennek a gépkocsinak nincs belsőégésű motorja. Az erőforrása a csomagtartó alá szerelt, tekercselt álló részű, állandó mágneses forgórészű háromfázisú, 49 kW teljesítményű vízhűtéses szinkronmotor. Legnagyobb nyomatéka 180 Nm, maximális fordulatszáma 8500 f/perc. Lassító áttételen keresztül hajtja a hátsó futómű differenciálművét. Az energia tárolására 330 V névleges feszültségű lithium-ion akkumulátor egységet építenek be. Kapacitása 16 kWh. Az ülések alatt található. Az akkumulátor egység egyenáramú tápfeszültségét az inverter alakítja át váltakozó árammá. Az Inverterbe 6db szigetelt bázisú bipoláris tranzisztort (IGBT) szerelnek. Ezeknek a megfelelő sorrendben való átkapcsolása az egyenáramot 3 fázisú váltakozó árammá alakítja át. Az invertert a motor mellett a csomagtartó alatti térben helyezték el.
6.3.6. A fékrendszer
A gépkocsi összetett fékrendszerrel látták el. A pedálműködésnek megfelelően az EU fék előírás szerinti fékerőket hoz létre
-
a hidraulikus fékrendszer
-
energia visszatáplálásos fékezés valósul meg a hajtott kerekeknél, mellyel az akkumulátorok tölthetők.
A mechanikus működésű fékasszisztens, és az ESP az európai kivitelek alapfelszereltségéhez tartozik. Azért, mert ebbe a gépkocsiba nem szereltek belsőégésű motort, a vákuumos fékrásegítő energia ellátását a csomagtartó alatt elhelyezett villanymotoros vákuumszivattyú biztosítja
Nyomásérzékelő jele alapján valósul meg a hajtó villanymotor vezérlése.
Mechanikus fékasszisztenssel kiegészített 9”-os vákuumos fékrásegítőt szerelnek a gépkocsiba. Ennek köszönhetően hirtelen fékpedál lenyomás esetén a lehető legnagyobb rásegítés valósul meg. A fékpedálra egy gyárilag beállított elmozdulás érzékelőt szerelnek.
Az első kerekeknél 257 mm átmérőjű hűtött féktárcsákat alkalmaznak. A munkahenger dugattyújának átmérője 51,1 mm. A hátsó kerekeknél dobféket találunk. A fékdob átmérője 203 mm, a munkahenger átmérője 19 mm.
A Mitsubishi az európai fogalmak szerinti ESP rendszert ASC-nek (Automatic Stability Control) nevezi. Az ESP rendszer rész működése a blokkolásgátló (ABS) és a kipörgésgátló (ASR). Ha a gépkocsi alul-, illetve túlkormányzott módon viselkedik, differenciális fékezéssel és hajtó motor nyomaték csökkentésével avatkozik be. Az ESP és az ASR működés a műszerfal bal oldalán elhelyezett kapcsolóval kikapcsolható. Ez az állapotot ellenőrző lámpa jelzi vissza.
6.3.7. Az energia visszatáplálásos fékezés
Az inverter segítségével a váltakozó áram fázisainak felcserélésével a lassító fékezés valósul meg, a villanymotor ilyenkor generátorként működik. Áramot fejleszt, amivel az akkumulátorok az inverteren keresztül tölthetők. Ezt nevezzük regeneratív fékezésnek. A visszatáplálásos fékezés nyomatékát az EV elektronika szabályozza a fékpedál elmozdulás érzékelő jele alapján. Ez az elektronika az ESP elektronika részét képezi. Amikor az ESP rendszer működik csökkenti az energia visszatáplálásos fékezés nyomatékát.
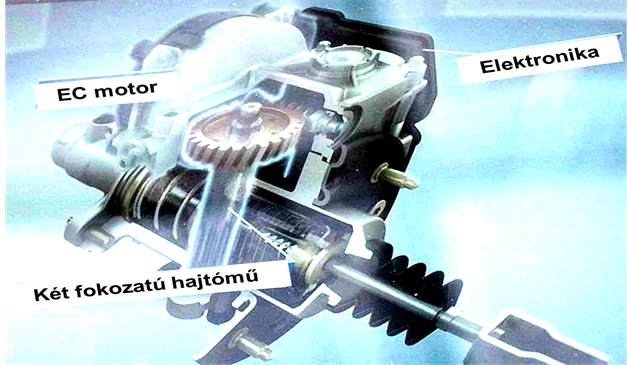
6.3.8. iBooster az elektromechanikus fékrásegítő
2013 –ban az IAA –n (nemzetközi automobil kiállítás) Frankfurtban mutatták be. A Robert Bosch GmBH ezt az új elektromechanikus fékrásegítőt elsősorban hibrid, illetve villany autókhoz fejlesztette ki, de jól használhatók a hagyományos kivitelű személygépkocsikhoz is. Előnye az, hogy kedvező együttműködésre képes a különböző asszisztens rendszerekkel. Gyártója az Automotive Technology, a Bosch Csoport legnagyobb tagja. 2013 –ban kezdték el a sorozatgyártást. Ez a változat nélkülözi a vákuumot és a hidraulikát. Közös egységet alkot:
-
az elektronikus kommutációjú villany motor,
-
a mechanikus hajtómű egység,
-
az elektronika és a
-
két körös főfékhenger.
Elsősorban az európai személygépkocsikba fogják beszerelni. Mivel a személygépkocsikban egyre szélesebb körben alkalmazzák a start/stop rendszereket egyre nagyobb a jelentősége ennek a rásegítőnek, hiszen az elektromos hálózat biztosítja az energia ellátását.
Műszaki jellemzők:
Az iBooster nyomáskivezérlése háromszor gyorsabb, mint a hagyományos vákuumos fékrásegítőé.
Rásegítő erő 5,5 kN (megfelel a 8+9” –os vákuumos fékrásegítőnek)
Működési feszültség > 9,8 V –nál.
Helyigény megfelel a 8+9” –os vákuumos fékrásegítőének.
Tömege 5 kg
Áramfelvétel: 10 bar –onként 1 A.
Motor teljesítmény 300 W.
Bemutatásakor elsősorban az Audi A4 –hez és az Opel Ampera –hoz ajánlották.
Ha például a gépkocsiba szerelt „emergency braking system” veszély helyzetet ismer fel a teljes fékezéshez szükséges nyomás 120 ms –on belül a vezetőtől függetlenül önállóan kivezérlődik.
6.4. Continental Teves MK C1 az integrált fékrendszer
Az elmúlt időszakban a személygépkocsik fékrendszerének fejlesztésénél a következő tendenciák tapasztalhatók:
-
Az ESP beszerelése a középkategóriás gépkocsikba csaknem széria felszereltséggé vált.
-
Az ACC (Automatic Cruise Control) a követési távolság szabályozó rendszer beépítése egyre szélesebb körben elterjedt.
-
A belsőégésű motoroknál a szívócső légtorkában keletkezett vákuum felhasználása helyett egyre szélesebb körben a villanymotoros vákuumszivattyút alkalmazzák.
-
A mikro-hibrid és az elektromos hajtású gépkocsik száma fokozatosan növekszik.
-
Az autógyárak törekszenek gépkocsiknál az optimális lassítás megvalósítására és a fékezési komfort növelésére.
-
A városi forgalomban egyre nagyobb jelentőséget kap a gázolásos baleseteknél a gyalogosvédelem.
A Continentel Teves által kifejlesztett integrális fékrendszer az MK C1 egyesíti a főfékhenger, a fékrásegítő, az ABS illetve az ESP fékezőnyomás modulátor működését egy kompakt egységben a működtető elektronikával egybeépítve. Ezt a fékező egységet a kis tömeg (4 kg) és kis helyigény jellemzi. Működéséhez nem szükséges vákuum. Hasonló fékhatás valósít meg, mint ami egy 8”/9” vákuumos fékrásegítővel érhető el.
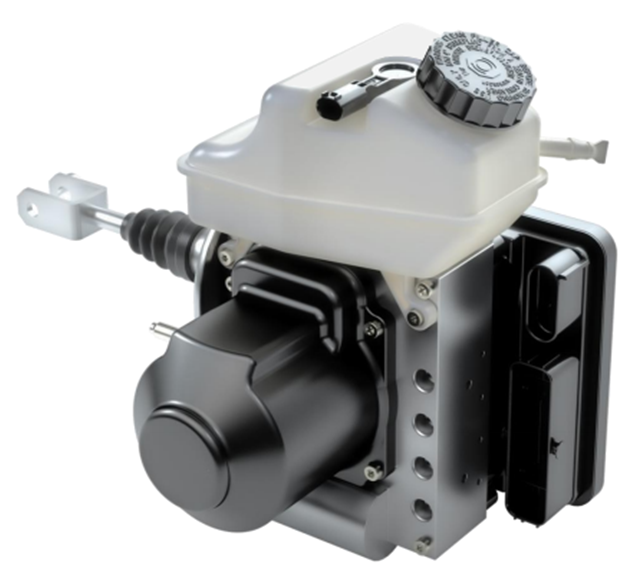
6.4.1. Az Mk C1 rendszer részegységei:
6.4.1.1. A beépített hidraulikus fékrásegítő
Szénkefe nélküli villanymotor nagy dinamikával, csavarorsó-csavaranya hajtással mozdítja el a rásegítő dugattyúját és ezzel létrehozza a fékező nyomást. Az elmozdulásról elektromos érzékelő ad visszajelzést az elektronikának. Ezzel az egységgel 500 bar/sec fékezőnyomás kivezérlés érhető el mind a négy keréknél.
-
A fékrásegítő működése hidraulikus pulzáció-, és zajmentes.
-
Minden hőmérsékleten nagy dinamikával működik. 150 ms-on belül teljes fékezőnyomás kivezérlés, a blokkolási határig megtörténik.
-
Hatékony és precíz működés jellemzi.
-
Hosszú élettartam.
6.4.1.2. Pedálút szimulátor
Ez a hidraulikaegység részét képezi. Egy szeleppel a hidraulikarendszerhez hozzákapcsolható, és lekapcsolható (meghibásodás esetén). Lehetővé teszi a gyártó által beállított biztonságos és komfortos fékpedál karakterisztika megvalósulását.
6.4.1.3. Kétkörös tandem főfékhenger (TMC)
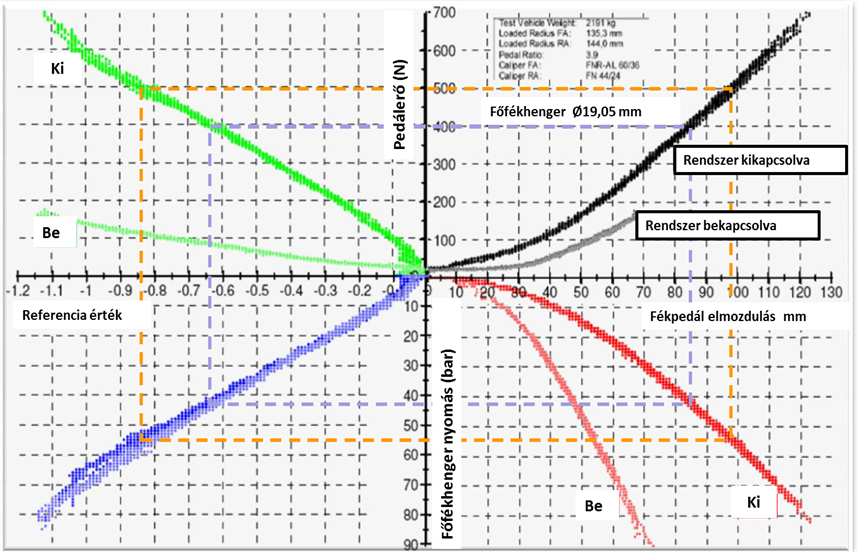
Kis átmérőjű kétkörös tandem főfékhenger (Tandem Master Cylinder), elektromos hiba esetén, például amikor nincs tápfeszültség, is kis működtető erőt igényel és nagy lassulás megvalósulását teszi lehetővé. 500 N pedálerőnél 6,44 m/s2 lassulás érhető el. Az ehhez szükséges fékpedál elmozdulás 100 mm. Az így elérhető lassulás érték jóval meghaladja a hatóság által a biztonsági fékre előírt értéket. A kivezérelt fékezőnyomásokat elektromos érzékelők jelzik vissza az elektronikának.
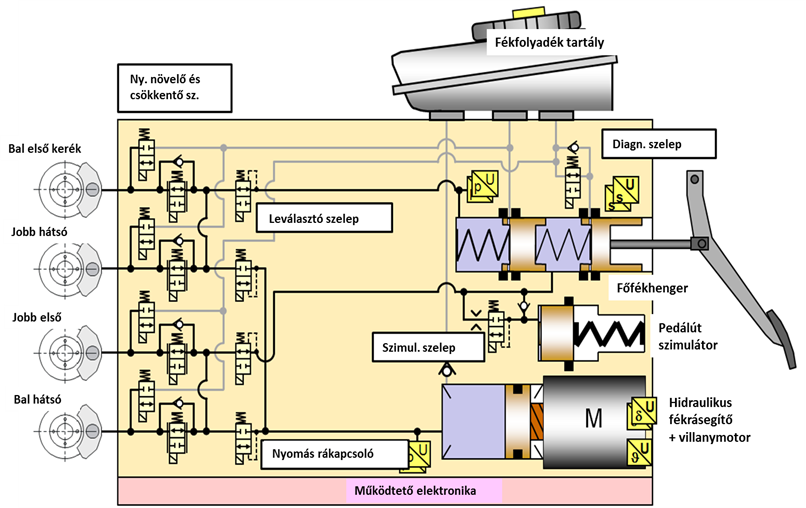
6.4.1.4. Elektromágneses szelepek
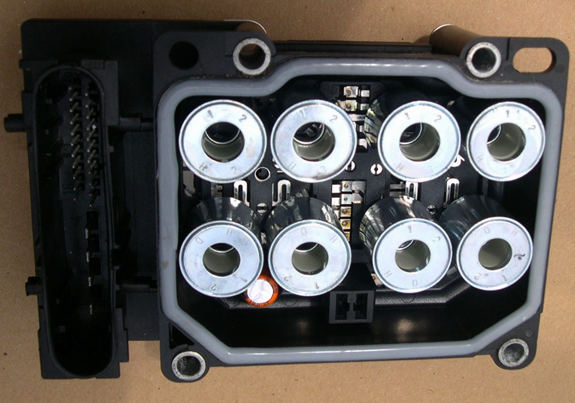
Ezeket a szelepeket a közvetlenül a fékezőegységre szerelt elektronika működteti. Az egyik elektromágneses szelepcsoport a kerekek egyedi fékezőnyomás modulációját teszi lehetővé az ABS/ASR és az ESP működésnél. Ehhez 4 db. nyomásnövelő és 4 db. nyomáscsökkentő szelep szükséges.
A másik elektromágneses szelepcsoport a brake by wire, és a biztonsági fék működésekhez szükségesek. 2 db fékrásegítőt a rendszerhez kapcsoló szelep és 2 db. elzáró szelepet építenek be.
6.4.1.5. Elektronika
A működtető elektronikát is a hidraulika egységre szerelik. Ez biztosítja a fékrásegítőt működtető villanymotor áramellátását. Működés közben fogadja a nyomás-, és az elmozdulás érzékelők jeleit. Az ABS/ASR és az ESP rendszer működtetését is ez az elektronika végzi, továbbá a teljes rendszer működését felügyeli. Ellátták hibakód tárolóval is.
6.4.1.6. Az elektromos rögzítő fék (EPB) működtetés
Ez a fékező egység alkalmas az elektronikus rögzítő fék DSe akuktuátoránál az elektromechanikus befékezésre és az oldásra, ha a gépkocsi sebessége kisebb 3 km/h –nál.
6.4.1.7. Dinamikus fékezés és vészfékezés
Amikor a gépkocsi sebessége nagyobb 3 km/h –nál az aktív fékrásegítővel megvalósítható az üzemi fék működtetése.
6.4.1.8. Drive Away Release
Az elektronika felismeri a vezető elindulási szándékát és automatikusan oldja az elektromechanikus rögzítő féket.
6.4.1.9. Opcionális működési lehetőségek:
A CAN hálózaton keresztül érkező külső fékezési parancsok fogadására is képes és hatására megvalósul a befékezés.
Működése:
Amikor a gépkocsivezető a fékpedálra lép, a nyomásérzékelő jelére gerjesztő áramot kap a fékrásegítőt működtető villanymotor. Az áttétel és a csavaranya – csavarorsó áttételen keresztül elmozdítja a tandem rendszerű hidraulikus egység dugattyúit és ezzel létrehozza a rásegítő nyomást. Az egyes kerekek fék munkahengereiben a fékező nyomásokat a pillanatnyilag fennálló tapadási tényezőnek megfelelően az elektromágneses szelepek állítják be. A kerekek mozgásállapotát az ABS rendszereknél használatos kerékfordulatszám érzékelők jelzik vissza az elektronikának, mely alapján működik a nyomás moduláció fékezés közben. Ha a vezető kissé visszaengedve a fékpedált, csökkenti a fékező nyomást, a nyomás érzékelő jelére az elektronika ellentétes polaritású gerjesztő áramot kapcsol a rásegítő villanymotorjára, az visszafelé mozgatja a dugattyúkat és ezzel csökkenti a rásegítő nyomást. Ehhez hasonlóan történik a teljes fékoldáskor a fékező nyomás megszűntetése.
Ha a gépkocsi fékrendszerét az ABS kerékfordulatszám érzékelőkön kívül kiegészítik az ESP rendszereknél használatos speciális érzékelőkkel: kormánykerék elfordítás érzékelő, perdülési sebesség és kereszt irányú gyorsulás érzékelő, az MK C1 is alkalmas ESP működésre.
A következő ábra diagramja az MK C1 integrális fékrendszer működési jellemzőit mutatja hibátlan és meghibásodás miatt kikapcsolt állapotban.
6.4.1.10. Gyalogos védelem és az MK C1 fékrendszer
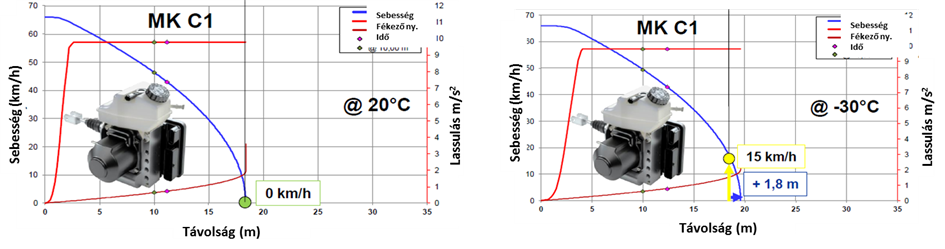
Ennél az új fékrendszernél a külső fékezési parancsok fogadására vonatkozó működésre jó példa az alábbiakban leírt, kedvező eredményeket adó kísérlet. Az EU előírásainak megfelelően egyre nagyobb figyelem irányul a gyalogosok védelmére. Az első lökhárítóba szerelt érzékelő, mely a gázolás pillanatában aktiválja a motorháztetőt kissé megemelő egységet és az első szélvédőre kívülről ráterülő légzsákot, a vezetőtől függetlenül aktiválni tudja ezt a fékrendszert is.

Az így végrehajtott vészfékezés 20˚C környezeti hőmérsékletnél megállítja a gépkocsit,
-30 ˚C környezeti hőmérsékleten pedig a sebességét 15 km/h sebességre mérsékli. Az első esetben az elgázolt személy sérülése a MAIS 1 fokozatba sorolható könnyű sérülés. A második esetben pedig MAIS 2 – 4 fokozatba sorolható közepesen súlyos sérülés. Ezek a 66 km/h sebességgel végrehajtott gázolási kísérletek fékezés nélküli esetekben, vagy amikor a vezető fékezett, az elgázolt dummykkal kiértékelve MAIS 5 – 6 fokozatúak, tehát halálos kimenetelűek.
Ellenőrző kérdések:
-
A személygépkocsik üzemi fék berendezéseinél milyen feladatokra alkalmazzák a mechatronikát?
-
Ismertesse a vezérléssel működő villanymotoros vákuumszivattyú működését!
-
Ismertesse a szabályozással működő villanymotoros vákuumszivattyú működését!
-
Ismertesse a hibrid autók fékezési lehetőségeit!
-
Mi hangolja össze és hogyan a hibrid autók kétféle fékezési módját?
-
Mi a különbség a „mild hibrid”, a „mikro hibrid” és a „full hibrid” autók között?
-
Foglalja össze a személygépkocsik fékrendszerének elemeit, megnevezve a mechatronika alkalmazásának lehetőségeit!
-
Hogyan működik az energia visszatáplálásos fékezés?
-
Foglalja össze a Robert Bosch GmBH iBooster mechanikus fékrásegítő működési elvét és előnyeit!
-
Foglalja össze a Continental Teves MK C1 integrális fékrendszer működési elvét és előnyeit!
6.5. Az üzemi fékrendszert kiegészítő menetdinamikai szabályozó rendszerek:
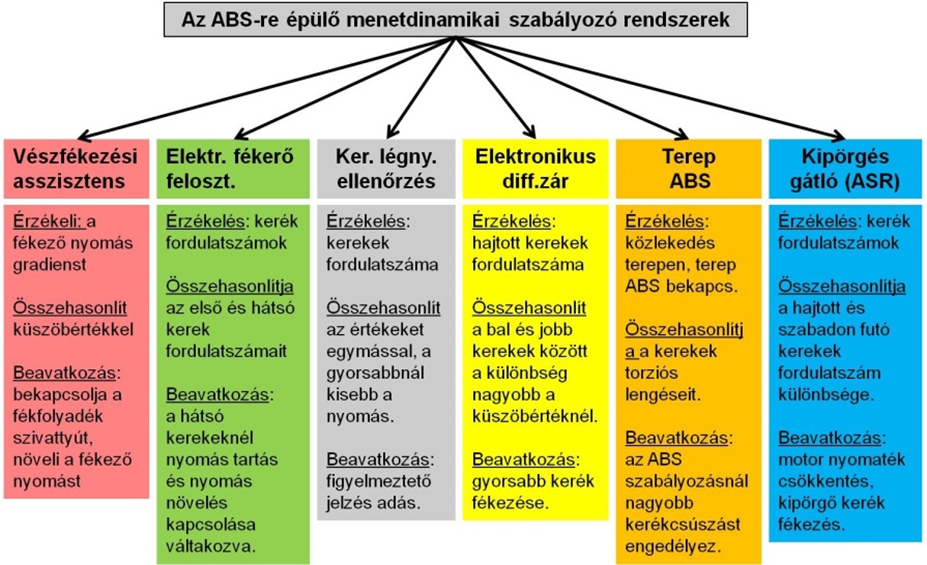
Az első, már digitális elektronikát alkalmazó elektronikus menetdinamikai szabályozó rendszer, a blokkolásgátló volt. Sorozatos beépítése a személygépkocsik hidraulikus fékrendszerébe 1978-ban kezdődött. Az elektronika folyamatos fejlesztése révén tömege folyamatosan csökkent, az elektronika teljesítőképessége egyre bővült és műveleti sebessége fokozódott. Lehetővé vált az is, hogy bizonyos peremfeltételek teljesülése alapján más algoritmusokkal különböző újabb és újabb elektronikus szabályozások valósulhassanak meg. Ezek az alapfeladat, az ABS működésének megtartása mellett bővítették a lehetőségeket. Leggyakrabban ezek az algoritmusok is ugyanazon érzékelők, például a kerékfordulatszám érzékelők jelei alapján működnek, de azokat más szempontok szerint értékelik ki. Ezeket a jeleket kiegészíthetik újabb információk, mint például a fékláma kapcsoló zárt, vagy nyitott állapota. Az újabb rendszerek működéséhez, mint például az ESP, kiegészítő érzékelőket is alkalmaznak, mit például a kereszt irányú gyorsulás, a fékpedál lenyomásának mértéke és gyorsasága, vagy a gépkocsi perdülési sebessége, illetve a kormánykerék elfordítása. Ezek a mechatronika segítségével megvalósított jelenleg használatos menetdinamikai szabályozó rendszerek, melyek a blokkolásgátlót egészítik ki a következők:
-
Vészfékezési asszisztens,
-
Elektronikus fékerő felosztás,
-
A blokkolásgátló terep fokozata,
-
Kerék légnyomás ellenőrző, illetve defekt előrejelző rendszer,
-
Elektronikus differenciálmű zár,
-
Kipörgés gátló rendszer,
-
Motor fékerő nyomaték szabályozás.
Az előzőekben felsorolt rendszerek a gépkocsi menet irányú, vagyis hosszdinamikáját képesek befolyásolni. A szintén az ABS –re épülő ESP rendszer már a gépkocsi kereszt irányú dinamikájára is hatással van. Ennek jelenleg már három féle beavatkozása is lehetséges:
-
A motor nyomatékának csökkentése,
-
Az egyik kerék szabályozott fékezése,
-
Kormánykorrekció az aktív szervokormány segítségével.
6.5.1. Személygépkocsik blokkolásgátlói
6.5.1.1. A blokkolásgátlók fejlesztésének kezdeti lépései
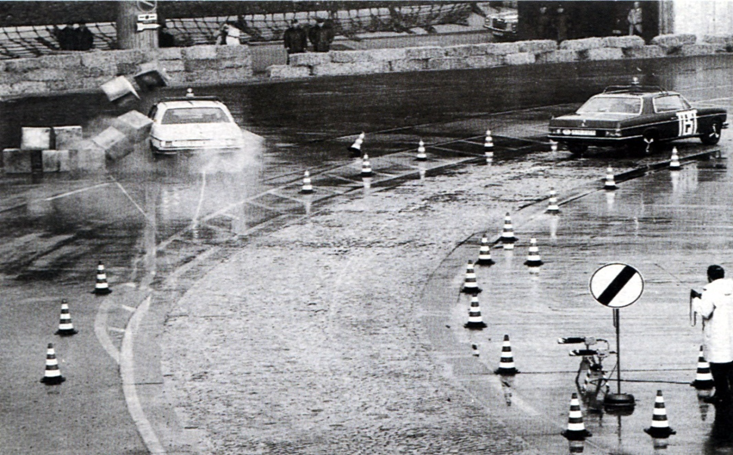
A Bosch ABS 1 és sajtóbemutatója 1970-ben volt. A több mint 2000 áramköri elemből összeállított analóg működésű elektronika megbízhatósága még nem volt megfelelő. Ez a rendszer még nem volt alkalmas a sorozatgyártásra. Ennek ellenére bebizonyította a blokkolásgátló előnyeit, rendkívül pozitív hatását a közlekedésbiztonságra. Az ABS –nélkül gépkocsi csúszós úton kanyarodás közben ha intenzív fékezés válik szükségessé, a blokkoló kerekek miatt megszűnik az oldalvezető erő. Ennek következménye, hogy a gépkocsi kitör, letér az útról, ezzel súlyos balesetet okoz. Ugyanilyen körülmények között ha az ABS -el felszerelt gépkocsit fékezik, kerekei nem blokkolnak. Nem éri meglepetés a gépkocsivezetőt, az autó nem tör ki, és lassulás közben is követi az út vonalvezetését. A blokkolásgátlóval ellátott gépkocsival tehát kanyarodás közben is végre lehet hajtani intenzív fékezést, méghozzá biztonságosan.
1970 –ben mutatták be az Amerikai Egyesült Államokban a mikroprocesszort. Hamarosan elkezdődött a gyártása. Szélesebb körű elterjedése újabb lendületet adott a különböző elektronikák fejlesztésének. A digitális elektronika megbízhatóvá, és gyors működésűvé tette a blokkolásgátlót is.
1978 –ban kezdődött el a Bosch ABS 2S sorozatgyártása és beépítése, kezdetben a Mercedes S osztályba, majd a Volvo 780 –as személygépkocsikba.
Ha a kerékcsúszás egy bizonyos határértéknél nagyobb, a tapadási tényező átvált a csúszó súrlódásnak megfelelő kisebb értékre. Ez okozza azt, hogy a kerék egy tized másodpercen belül blokkol. A mozgó gépkocsi és az álló kerék intenzív helyi abroncskopást eredményez. Az ABS, amely megakadályozza a kerék blokkolását, elkerülhetővé teszi a jelentős helyi kopást. Viszont a féknyom alig látható, amely megnehezíti a baleseti helyszínelést.
Az ABS tehát, mint a gépkocsik aktív biztonságának egyik fontos eleme, növeli a menetbiztonságot.
Ha működik az ABS, a gépkocsi pánikszerű fékezéskor is megőrzi kormányozhatóságát. Ezért számos baleset elkerülhetővé válik. Az esetek többségében, szilárd burkolatú úton rövidül a fékút is. Terepen, homokos, sóderos felületen, de laza friss hóban is a blokkoló kerék maga előtt a laza anyagból éket túr, ami alakzárásával csökkenti a fékutat. Ezt a jelenséget használják ki újabban az ABS terep fokozatánál, mely nagyobb kerékcsúszást engedélyez, mint a szilárd burkolaton működő algoritmus. A kezdeti alkalmazásoknál még a gépkocsivezetőre bízták az átkapcsolást. Az újabb ABS algoritmusok figyelik a kerekek torziós lengéseinek amplitúdóit és frekvenciáit, mely alapján felismeri, hogy a gépkocsi terepen közlekedik. Ilyenkor automatikusan aktiválja az ABS terep fokozati működését. Ez a lehetőség jelenleg még csak az újabb terepjáró személygépkocsiknál áll rendelkezésre.
6.5.1.2. Az ABS szabályozás
A fékezési kerékcsúszás szabályozás már a harmincas évek óta foglalkoztatja a fejlesztő mérnököket. Ez volt a diplomamunka feladata annakidején Fritz Ostwaldnak, a müncheni Egyetem fizika szakos hallgatójának. Sikeresen el is készítette a modellt, mely sűrített levegős fékkel működött és mechanikus kerékcsúszás érzékelőt alkalmazott. Ez volt tehát a blokkolásgátló őse.
Az egyik lehetséges ABS szabályozási kritérium
A szabadalmakban gyakran megjelenik az ABS szabályozási kritériumaként a következő összefüggés:

Ennek sikeres alkalmazásához a fékerőt és a nyomást a teljes működési tartományban legalább 2%-os pontossággal kellene mérni. A nyomás érzékelése és mérése még nem okozna problémát, de a fékerő esetében már komoly nehézségeket kellene megoldani.
A fékezés kezdetétől számított 120 – 130 ms-on belül blokkol a kerék, ha nem történik meg a megfelelő beavatkozás. Ezért tehát nagyon gyorsan kell megvalósítani a beavatkozáshoz szükséges adatnyerést, az adat feldolgozását, és a fékező nyomás módosítását.
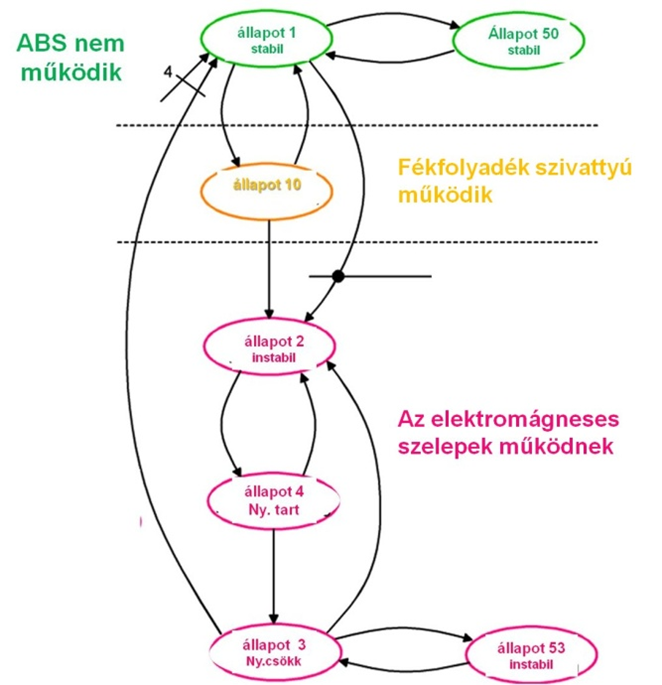
6.5.2. Gép állapot szabályozás (state machine)
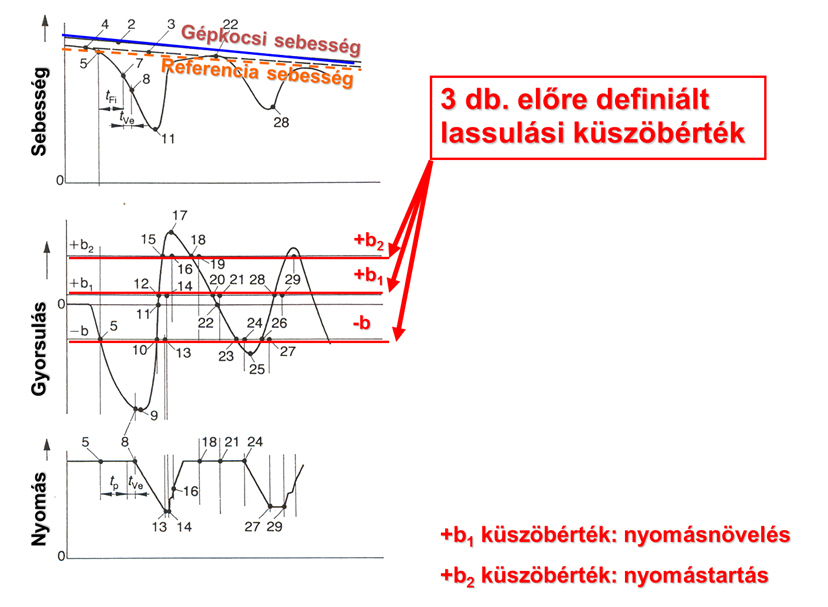
Ennél a szabályozási módnál az előre meghatározott fizikai állapotok bekövetkezésekor történnek a különböző beavatkozások. Ezt a módszert évtizedeken át alkalmazták az ABS szabályozásnál. Előre meghatároznak bizonyos küszöbértékeket. Ha ezt az érzékelt a fizikai mennyiségek meghaladják, akkor történik a beavatkozás, a fékező nyomás módosítása. A blokkolásgátlónál az elektronika a kerék kerületi lassulás, vagy a kerék csúszás küszöbérték átlépésekor működteti a nyomásszabályozó elektromágneses szelepeket. A különböző gyártók több küszöbértéket is meg szoktak határozni.
6.5.2.1. A kerék kerületi lassulás alapján történő szabályozás
Az ennél a szabályozási módnál alkalmazott kerék kerületi lassulás „-b” küszöbértéke a jól tapadó úton elérhető legnagyobb lassuláshoz igazodik. Értéke általában 14 m/s2 körüli. A szabályozás működése közben azonban bizonyos veszteségidőkkel is számolni kell, melyek a következők:
6.5.2.2. Szűrési idő:
A küszöbérték elérését követően az úgynevezett „szűrési idő” alatt határozza meg az elektronika a beavatkozás szükségességét. Csak ennek elteltével történhet meg a fékező nyomás változtatása. Az érzékelőhöz tartozó, a kerékagyra szerelt póluskerék jó néhány fogának el kell mozdulnia a kerékfordulatszám érzékelő előtt ahhoz, hogy a kerületi lassulás nagy biztonsággal meghatározható legyen.
6.5.2.3. Az elektromágneses szelepek veszteség ideje:
Az elektromágneses szelepnél például a mágneses erőtér felépüléséhez és a mozgó résznél a mechanikai súrlódások legyőzéséhez például 2 – 5 ms idő szükséges.
6.5.2.4. Teljes veszteségidő:
Az ezekből az előzőekben ismertetett értékekből összeadódó teljes veszteségidő közepes jármű sebességnél 12-15 ms körüli értékű.
Az előre meghatározott „+b1” küszöbérték átlépésekor nyomásnövelés fog bekövetkezni. A „+b2” küszöbérték átlépésekor pedig nyomástartás. Ennél a szabályozási változatnál például a kanyarbelső hátsókerék kerületi lassulása jóval a „–b” küszöbérték alá csökkenhet és akár blokkolhat is, amit ez a szabályozás nem fog felismerni, csupán a küszöbérték átlépését. De az is lehetséges, hogy a küszöb átlépése után azonnal megszűnik a további lassulás. Ezek alapján megállapítható, hogy a kerületi lassulás alapján történő szabályozás egy kerékhez megfelelő lehetne, de a teljes gépkocsiéhoz már nem.
6.5.2.5. Szabályozás a kerékcsúszás alapján
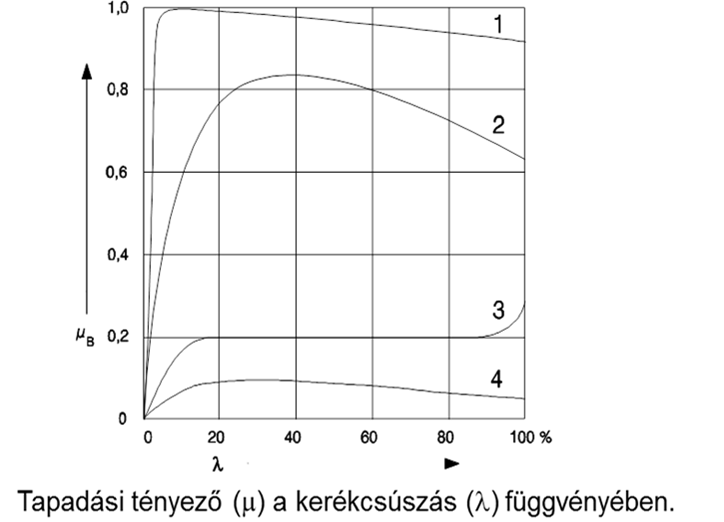
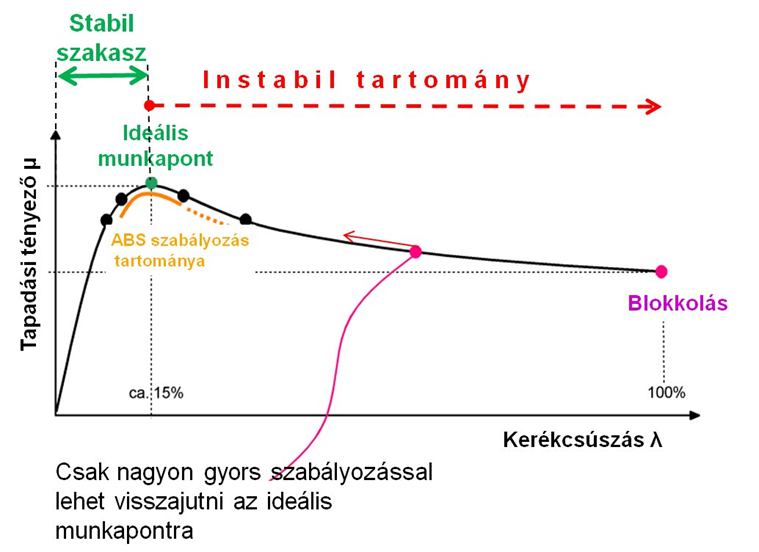
Fékezéskor mindig kialakul egy bizonyos kerékcsúszás. Ezért kézenfekvő, ez alapján megvalósítani a szabályozást. A kerékcsúszás a vizsgált kerék és a gépkocsi sebességek különbségeként határozható meg, melyet a gépkocsi sebességére vonatkoztatunk.
Mindkét sebesség a kerék síkjára vonatkoztatott érték. A szabadon gördülő keréknél a csúszás (szlip) 0%, a blokkoló keréknél a csúszás (szlip) 100%. A tapadási tényező egyrészt az útburkolat fajtájától, másrészt pedig az időjárási viszonyoktól, a környezeti hőmérséklettől függ. A tapadási tényező a fékezés kezdetén erőteljesen, szinte lineárisan növekszik. Ezt stabil szakasznak nevezzük. Addig tart, amíg a tapadási tényező eléri a maximális értékét.
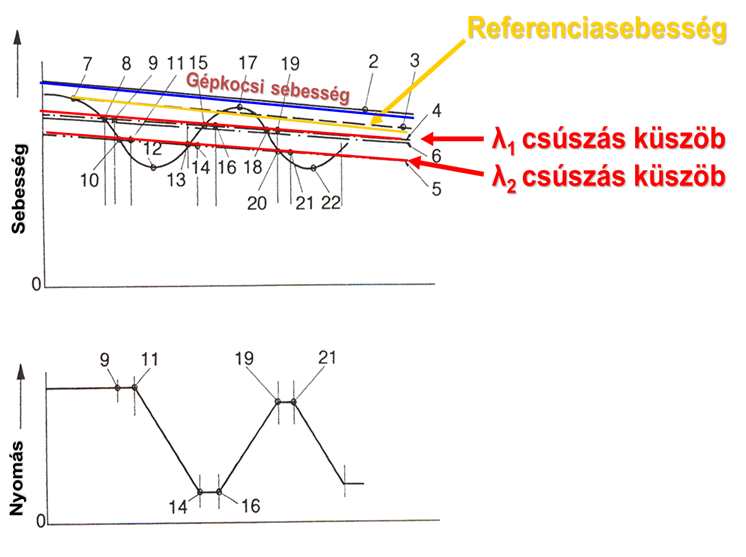
A gépkocsi sebességét nem ismerjük, de lehetőség van arra, hogy viszonylag pontosan megközelítsük az értékét. Ehhez az elektronika egy bizonyos algoritmus alapján a kerekek sebességeiből meghatározza az úgynevezett referencia sebességet. Ez nem tekinthető egy matematikai átlagnak, hanem bizonyos logikai feltételeket is figyelembe vesznek. Csak így valósulhat meg egy működőképes szabályozás.
A kerékcsúszás alapján történő szabályozáshoz az elektronika a referencia sebességhez képest meghatároz egy λ1 és egy λ2 kerék csúszás küszöbértéket. Ez után pedig azt figyeli, hogy a kerekek csúszása mikor lépi át ezeket a küszöbértékeket. Ennél a szabályozási változatnál nagy jelentősége van a referencia sebesség pontos meghatározásának. Ha a négy kerék sebességének átlagát tekintenénk referencia sebességnek, az egyik kerék blokkolása az értéket nagyon lecsökkentené és a szabályozás működése nem lenne megfelelő. Ezért ilyen esetben egy bizonyos ideig kizárják az átlag képzésből ezt a blokkoló kerék értékét.
6.5.2.6. Kombinált szabályozás a kerék kerületi lassulása és a kerékcsúszás alapján
Önállóan a fentiekben ismertetett egyik szabályozás sem lenne használható egy gépkocsi ABS működéséhez. Az alkalmazható eredményesen, ha a kerék kerületi lassulás alapján-, illetve a kerékcsúszás alapján történő szabályozások kombinációját használják.
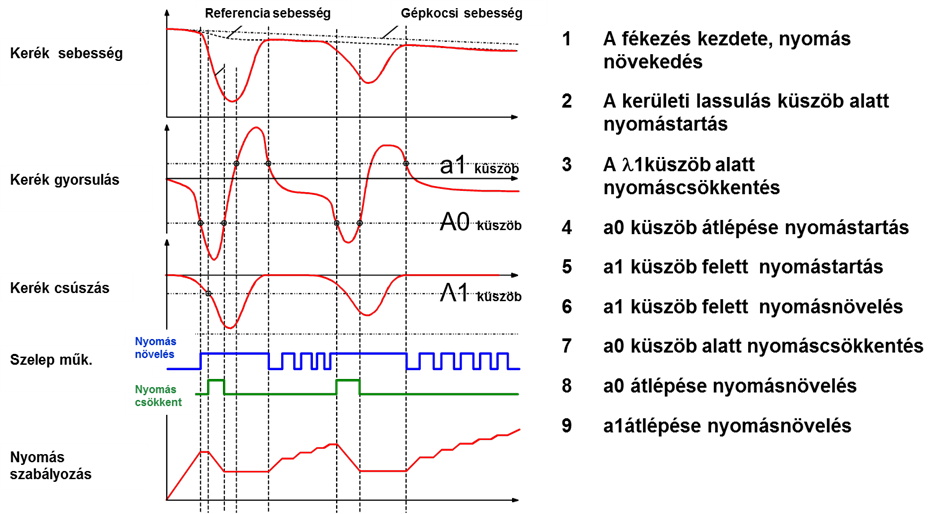
A „gép állapot” szabályozásnál az elektronika a gépkocsi pillanatnyi állapotát fizikai jellemzőinek mérése és azok bizonyos küszöbértékkel történő összehasonlítása alapján állapítja meg. Ezek az állapotok bizonyos beavatkozásokat fognak kiváltani. Ez az ABS-nél lehet az elektromágneses szelepek működtetése, vagy például a fékfolyadék szivattyú bekapcsolása. Hatásukra hirtelen változások fognak bekövetkezni. Ezeket nem csak az alkalmazott elektronikus érzékelők, hanem a gépkocsiban utazók is érzik. Az alábbi ábra szemlélteti ezt a szabályozási elvet. Bizonyos állapotokat, bizonyos beavatkozások követnek.
6.5.2.7. A személygépkocsik különböző futóműveinél alkalmazott beavatkozási változatok:
Egyedi szabályozás: az ABS elektronika mindegyik kerékhez a pillanatnyi tapadási tényezőnek megfelelő fékező nyomás vezérli ki. Így a lehető legrövidebb lesz fékút, de nagy perdítő nyomaték alakulhat ki, ha a jobb és a bal oldali kerekek között nagy a tapadási tényező eltérés.
Alsó szintű szabályozás: Az először megcsúszó keréknek megfelelő lesz a fékező nyomás a nagyobb tapadási tényezőjű útfelületen is. Ezért nagyon megnövekszik a fékút, viszont előnyös azért, mert a gépkocsira nem hat perdítő nyomaték. Nem alakul ki stabilitás vesztés.
Módosított egyedi szabályozás: ez a szabályozás úgy kezdődik, mint az alsó szintű, de a nagyobb tapadási tényezőjű felületen gördülő keréknél a fékező nyomást lassan fokozatosan növeli arra az értékre, amit a tapadási tényező lehetővé tesz. A gépkocsira ható perdítő nyomaték ilyenkor csak lassan, fokozatosan alakul ki. Értéke olyan, amit a vezető ellenkormányzással még képes kiegyenlíteni. Az eredmény: kedvező fékút, elfogadható és uralható perdítő nyomaték.
6.5.3. PID szabályozás
Az újabb ABS elektronikák már az úgynevezett PID szabályozást alkalmazzák, melynek az előnye az, hogy működése közben nem következnek be annyira drasztikus fékezőnyomás változások, mint a korábbi változatnál. Ez egyébként észlelhető fékezés közben a gépkocsi dinamikai viselkedésén is. Ennél a szabályozási módnál a kiválasztott fizikai jellemző, (itt a fékezőnyomás) integrális és differenciális tagjait számítja ki az elektronika, és veszi figyelembe a fékező nyomás pillanatnyi beállításánál, vagyis a szabályozásánál. A szabályozás elnevezése az alábbi rövidítésekből származik:
-
P tag (itt a fékező nyomás) = f (aktuális sebesség – cél sebesség)
-
I tag (integrális tag) = f ( ò(aktuális sebesség – cél sebesség)dt )
-
D tag (differenciális tag) = f ( D (aktuális sebesség – cél sebesség))
6.5.4. A blokkolásgátló rendszer működése
A blokkolásgátlók önálló rendszerként is beszerelhetők a gépkocsikba, de jelenleg egyre gyakrabban mint az ESP rendszer egyik részműködése kerülnek alkalmazásra.
Az ABS –nek, mint elektronikus menetdinamikai szabályozó rendszernek az a feladata, hogy a kerekek blokkolását fékezés közben lehetőleg minden helyzetben, és minden körülmények között megakadályozza. Ez úgy lehetséges, hogy a kerékfékszerkezetben olyan nyomás modulációt valósít meg, ami az adott kereket a lehető leghosszabb ideig az optimális csúszás tartományban tartja. Ez az alapelv egyúttal biztosítja a kerék jó oldalvezetését is, ami az egész gépkocsi menetdinamikájára kedvező hatással van. Ezt még további különleges beavatkozásokkal lehet javítani.
Ha sikerül a kerék blokkolását megakadályozni, az a következő előnyökkel jár:
-
a legtöbb helyzetben megközelítőleg optimális lesz a lassulás,
-
a gépkocsi irányíthatósága és stabilitása fenntartható marad,
-
a gumiabroncs egyenlőtlen kopása elkerülhetővé válik.
6.5.4.1. Az ABS működésének megvalósításánál azonban néhány problémával szembe kell nézni. Ezek a következők:
-
Nem ismerjük az adott gumiabroncsra vonatkozó ideális kerékcsúszást, és így nem határozható meg a kívánatosnak tartott érték sem.
-
A gépkocsi pontos sebessége is ismeretlen.
-
Továbbá nem határozható meg az egyes kerekek pontos, valóságos csúszás sem.
A kerék blokkolásának megakadályozása így tehát nem egyszerű, de nem is megoldhatatlan feladat.
6.5.4.2. ABS szabályozás elve egy kiválasztott keréknél:
Ha az elektronika azt érzékeli, hogy fékezés közben fokozódik a kerékcsúszás, ez azt jelenti, hogy a tapadási tényező – kerékcsúszás diagramon a maximális értéket, vagyis az ideális pontot már túlléptük. Nagyon gyors, de finoman szabályozott nyomáscsökkentéssel a kerék ismét a tapadási tényező – kerékcsúszás diagram stabil tartományba gyorsítható. Ez után már csak lassan növelhető a fékező nyomás az optimális munkapontig.
További problémákkal kell megküzdeni:
-
Végtelenül gyors szabályzás tudná minden pontban a kerék látszólagos stabil viselkedését megvalósítani.
-
A tapadási tényező (µ) és a kerékcsúszás (λ) diagramon nagyon sok optimális munkapont lehetséges a
-
a különböző útminőségekre,
-
a különböző gumiabroncs változatokra vonatkozóan.
6.5.4.3. A szabályozás tapasztalati modellje
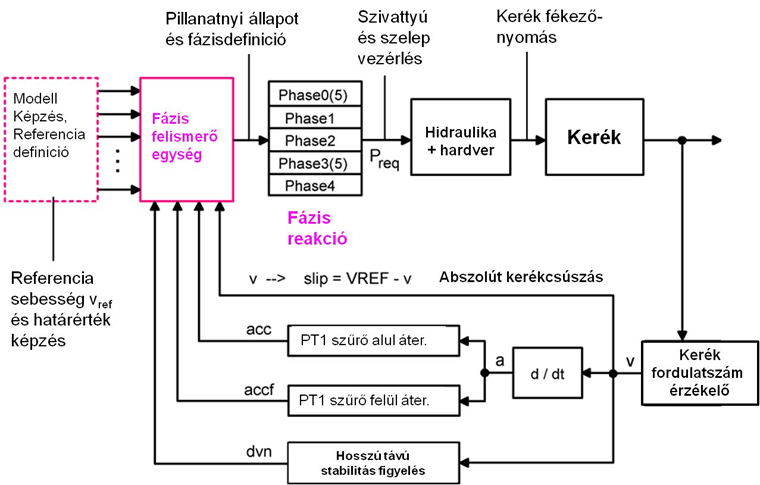
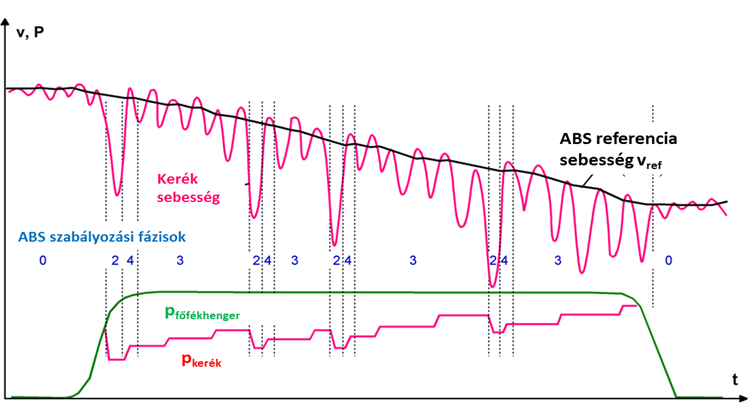
A gépkocsi az előzőekben ismertetett referenciasebességének (vref) és a különböző küszöbértékeknek a képzését az elektronika a beérkező kerékfordulatszám jelek és a tárolt adatok alapján végzi. Az említett küszöbértékek azért szükségesek, hogy:
-
felismerhető legyen a kerék instabil viselkedése,
-
a fékfolyadék szivattyú bekapcsolásához kiadható legyen az utasítás,
-
a nyomás modulációt végző elektromágneses szelepek működtetéséhez a jelek kiadhatók legyenek. (nyomáscsökkentő és nyomásnövelő fázisok).
A meghatározott küszöbértékek alapján működhet a kerék mozgásállapotát felismerő egység, mely a pillanatnyi „fázist” definiálja. Ez az úgynevezett „gép állapot szabályozás” alapja. Az egyes fázisoknak megfelelően történhet az ABS hidraulikaegységbe szerelt fékfolyadék szivattyú és az elektromágneses szelepek vezérlése, ami beállítja a kerekeknél a megfelelő fékező nyomást. A kerekek mozgásállapotának változásait a fordulatszám érzékelők jelei alapján tudja megállapítani az elektronika. Ez adja a szabályozáshoz a tulajdonképpeni visszacsatolást. A jelek különböző szűrőkön keresztül érkeznek, és ezekkel párhuzamosan van egy úgynevezett „stabil állapot figyelő” áramkör is bekötve.
A kerék instabil viselkedésének megítélése, és a szabályozási fázisok meghatározása a következő ismérvek alapján történik:
-
abszolút kerékcsúszás
-
keréksebesség változása
-
keréksebesség változás megszűrt jele
-
keréksebesség változás iránya
Ezeken kívül az elektronika még kiszámítja a megbecsült gépkocsi lassulást is. A referencia sebesség meghatározásánál még egyéb körülményeket is figyelembe vesz.
Összkerékhajtású gépkocsiknál például előfordulhat, bizonyos körülmények között, hogy mind a négy kerék kipörög. Emiatt nagyobbra adódik a referencia sebesség, ami hátrányosan befolyásolja az ABS működését, ha közvetlenül ez után történne egy intenzív fékezés. Ezt az állapotot felismeri a szoftver és a tényleges gépkocsi sebességnek megfelelően lecsökkenti a referencia sebességet a megfelelő értékre.
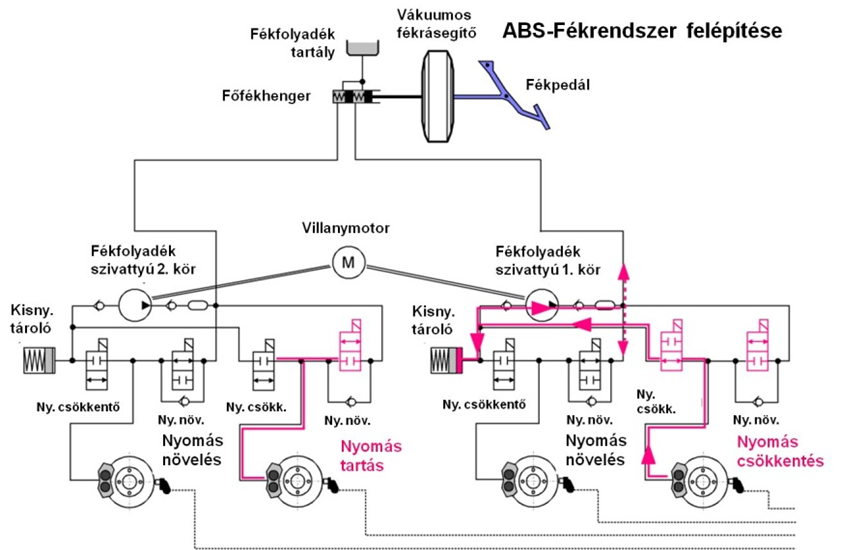
6.5.4.4. Blokkolási veszély esetén a beavatkozás, aszimmetrikus nyomáscsökkentés és növelés:
A gyors nyomáscsökkentés célja a blokkolási veszély további növekedésének megakadályozása, és a kerék mozgásállapotának stabilizálása.
Azért követi ezt egy lassú nyomásnövelés, hogy az optimális kerékcsúszás fokozatosan megközelíthető legyen és az optimális értéken tartása minél hosszabb ideig lehetővé váljon. A gyakorlatban alkalmazott szabályozásoknál általában az első nyomásnövelő impulzus az előző nyomáscsökkentéshez tartozó érték felével fogja növelni a fékező nyomást. Ezután a másik két nyomásnöveléssel a beavatkozás kezdetén megvalósított nyomást fogják visszaállítani, amennyiben az útfelület homogén.
6.5.4.5. ABS hidraulikaegység és a fékrendszer felépítése – Fékfolyadék szivattyú:
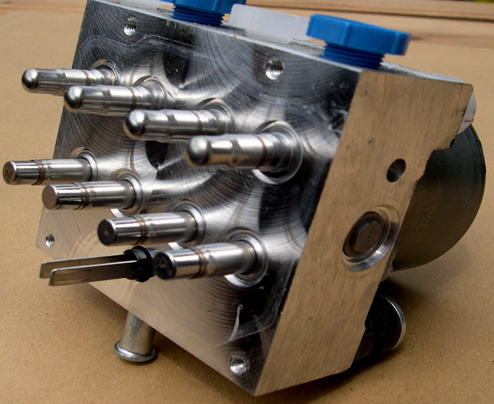
Az ABS hidraulikaegységbe a két fékkörnek megfelelően egy DC villanymotor által forgatott excenterrel működtetett kétkörös dugattyús fékfolyadék szivattyút építenek be. Ez szükséges ahhoz, hogy a nyomáscsökkentésekkel a fékrendszerből távozó energia pótolható legyen és felkészüljön a következő újrafékezésre. A dugattyús működés miatti nyomás lüktetését a szivattyú közelébe beépített két kis légüst csillapítja.
6.5.4.6. Elektromágneses szelepek:
A kerekenként kialakított egy - egy ABS csatornához egy nyomásnövelő és egy nyomáscsökkentő elektromágneses szelep tartozik. A nyomáscsökkentő szelep nyitásakor a fék munkahengerből kiáramló fékfolyadékot fékkörönként egy – egy kisnyomású dugattyús tároló tér fogadja. Innen juttatja vissza a szivattyú az adott fékkörbe a fékfolyadékot.
6.5.4.7. Az elektronika:
A hidraulika egységre szerelik fel a felületre szerelt technológiával készülő működtető elektronikát. A működéshez szükséges különböző algoritmusokat programosnak be.
6.5.4.8. A kis tapadási tényezőjű útfelület felismerése („low µ“)
Az elektronika a kis tapadási tényezőjű útfelületet arról ismerhető fel, hogy hirtelen nagy lesz a kerékcsúszás. Ilyenkor a kerék mozgásállapotának stabilizáláshoz jelentős nyomáscsökkentés szükséges. Ez az érték elérheti a 70% -ot is.
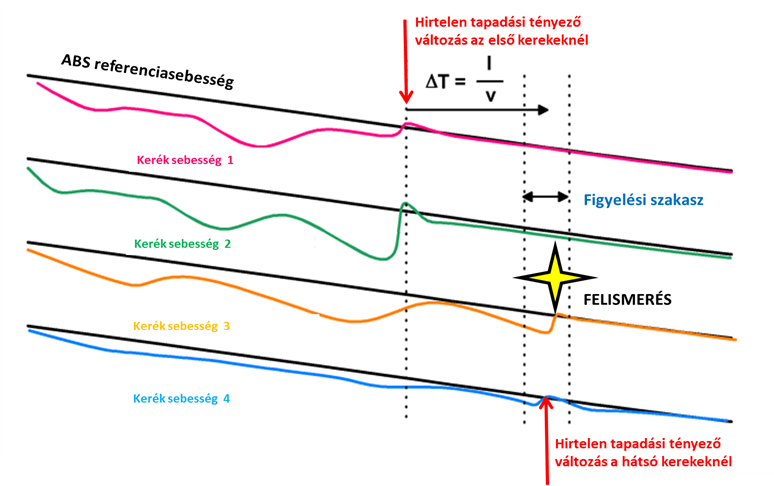
6.5.4.9. Hirtelen átmenet kis tapadásúról nagyobb tapadású útfelületre
A kis tapadási tényezőjű útszakasz elhagyása a váratlanul bekövetkező, jelentős kerékgyorsulásról ismerhető fel. Az első kerekeknél ez az érték akár 8g –t is elérheti, a hátsó kerekeknél pedig 4g -t. Ha ez a jelenség mind a két első keréknél bekövetkezik, és utána egy bizonyos rövid időn belül a hátsóknál is tapasztalható, jelentős tapadási tényező növekedés történt. Ezt követően aztán mind a négy keréknél légyegesen kisebb lesz a kerékcsúszás mint korábban. Az alábbi ábrán a könnyebb felismerhetőség miatt a függőleges irányban a keréksebesség jelek kissé szét vannak húzva, hogy egymástól jól megkülönböztethetők legyenek. A felsők az eső két kerék sebesség jele, a két alsó a hátsó kerekeké.
6.5.4.10. Az extrém rossz út (terep) felismerése
Rossz úton és terepen a kerék dinamikus terhelése nagyon szélsőséges értékek között változik. Arról ismerhető fel ez az állapot, hogy ilyenkor a keréksebesség változások egy bizonyos amplitúdóval, és egy bizonyos frekvencia tartományban észlelhetők. Periodikusan nagy kerékgyorsulás változások alakulnak ki anélkül, hogy azt a fékező nyomás változások indokolttá tennék.
A jelenség felismerését követően az elektronika megpróbál ilyenkor az átlagos dinamikus kerékterhelésnek és a jó útnak megfelelő, a legnagyobb tapadási tényezőnél egy kicsit kisebb értéknek megfelelő fékező nyomást beállítani és viszonylag kis nyomás modulációval hagyja a kereket lengeni.
Az ABS –nek a közelmúltban alkalmazott változatainál a nagyobb kerékcsúszásokat megengedő terep fokozatát a gépkocsivezetőnek egy gomb megnyomásával kellett aktiválnia. Ebben az üzemmódban folyamatosan villog a műszerfalon elhelyezett ABS ellenőrző lámpa. Hasonló megoldásokat alkalmaztak a terepjáró személygépkocsiknál és a haszonjárműveknél is.
Az újabb ABS elektronikák az előbb ismertetett módszerrel a megfelelő program segítségével képesek a rossz út, illetve a terep felismerésére és automatikusan átkapcsolnak a terep működésre. Ha a gépkocsi átlépi a 40 km/h sebességet a visszakapcsolás a normál ABS működésre automatikusan bekövetkezik.
6.5.4.11. A teljes gépkocsi ABS szabályozása
A gépkocsi ABS szabályozása kompromisszumok árán valósulhat meg. Az ABS működése közben bizonyos esetekben, egyes kerekek alulfékezettek lesznek, mert a gépkocsi fékezés közbeni stabilitása csak így őrizhető meg, illetve a gépkocsi uralhatósága csak így javítható tovább.
Ennek érdekében a legegyszerűbb intézkedés a „Select – Low Regelung” (alsószintű szabályozás) megvalósítása. Ami a hátsó kerekek azonos, a kisebb tapadási tényezőnek megfelelő nyomással történő fékezését jelenti. Az optimális lefékezettség szempontjából azonban az alsószintű szabályozás (Select – Low Regelung) kissé „gyengített” változata valósul meg a gyakorlatban. Jól tapadó úton, egyenes meneti fékezéskor, kis sebességnél és bizonyos manővereknél a hátsó kerekeknél megváltozik az alsószintű szabályozási koncepció. Fokozatosan nyomáskülönbség fog kialakulni annak érdekében, hogy rövidülhessen a fékút.
Emellett az is fontos, hogy a gépkocsi minden esetben „kielégítően“ kormányozható maradjon. Legyen könnyen irányítható kanyarmenetben, és ne törjön ki. A cél az, hogy a gépkocsi kanyarodás közben még teljes fékezéskor is uralható legyen. A gépkocsi stabilitása kerül előtérbe ilyenkor. A különböző menetállapotokban bekövetkező reakció változó tapadási viszonyok mellett se legyen kiszámíthatatlan. Fontos, hogy a tapadási tényező hirtelen változására gyorsan reagáljon az ABS. Elkerülhető legyen a túlfékezés, és főleg a kívánatosnál gyengébb fékezés. Ne növekedjék a fékút.
6.5.4.12. További működési jellemzők:
A hátsó kerekeknél tehát kissé módosították az alsó szintű szabályozást (Select – Low Regelung). Az első futóműnél a perdítő nyomaték csökkentés módosított egyedi szabályozással valósul meg. A kis és nagy tapadási tényező átmenetére érzékeny a szabályozás.
Az újabb ABS algoritmusoknál a részleges, és teljes fékezésnél is speciális „kanyarmeneti” blokkolásgátló működés valósul meg. Ez azt jelenti, hogy a kanyar-külső és a kanyar-belső kerekeknél az eltérő dinamikus kerékterheléssel arányos fékező nyomás valósul meg. Ezt a szabályozási módot korábban a különböző Continental Teves ABS típusváltozatoknál az „ABS – plus”, az „ESBS”, vagy a „CBC” működésnek nevezték. Ezek mindegyike a kanyar-belső kerekeken egy kis fékező nyomás csökkentést állít be. A kis nyomáskülönbség egy stabilizáló nyomatékot hoz létre a gépkocsi tömegközépponti függőleges tengelye körül. Teljes fékezésnél a nyomáskülönbséget kissé növeli az elektronika. Ez az utóbbi módosított szabályozás az egyszerűbb és ezért olcsóbb úgynevezett „standard ABS” változatoknál nem valósul meg.
6.5.4.13. Az ABS rendszer részegységei
6.5.4.13.1. Kerékfordulatszám érzékelők
Az ABS működés szempontjából nagyon fontos a kerékfordulatszámok pontos ismerete. Az érzékelő érintésmentesen méri mindegyik kerék fordulatszámát. Az elektronika részére a jel kiértékeléséhez egy teljes kerékfordulatnál kevesebb is elegendő. Az összetettebb szabályozásokhoz azonban pontosabb jelképzés szükséges. Jelenleg kétféle kerékfordulatszám érékelőt alkalmaznak.
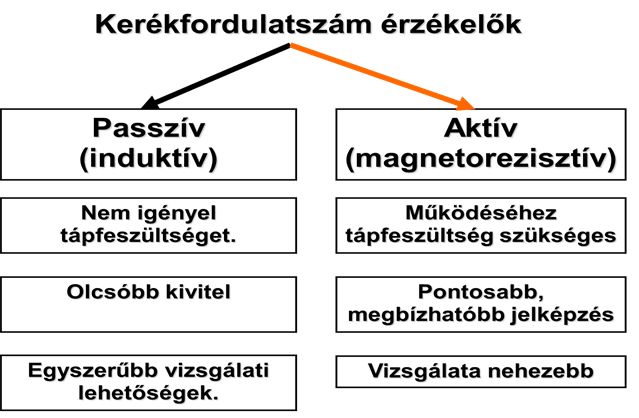
6.5.4.13.2. Passzív, vagyis induktív működésű kerékfordulatszám érzékelők
Állandó mágnesből, lágyvasból készült póluscsapból és az azt körülvevő tekercsből áll. A kerék forgástengelyéhez képest axiális, és radiális elhelyezésűek is lehetnek ezek az érzékelők.
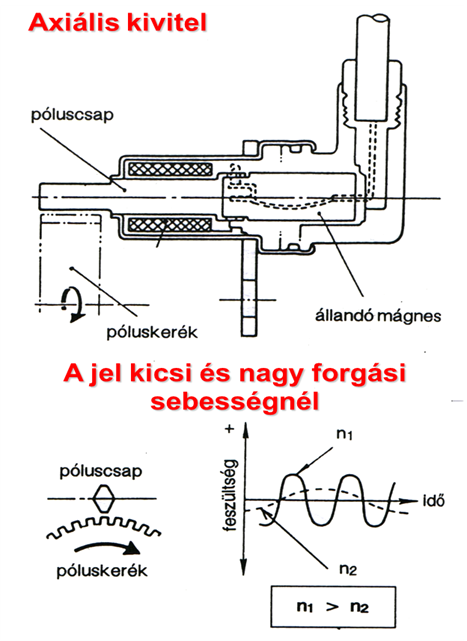
Az érzékelővel szemben a kerékagyra fogazott póluskereket szerelnek. A kerékagy forgása közben az egymást követő fogak és fogárkok az érzékelő állandó mágnes erőterének fluxusát a kerék kerületi sebességével arányosan váltakozóvá teszik. Emiatt a tekercsben a forgási sebességgel arányos frekvenciájú szinuszosan váltakozó feszültség indukálódik. Az ABS elektronika bemeneti információja a frekvencia, mert a feszültséget nem csak a forgási sebesség, hanem az érzékelő és a póluskerék közötti távolság is befolyásolja.
6.5.4.13.3. Az induktív ABS kerékfordulatszám érzékelők diagnosztikai vizsgálatának lehetőségei:
-
Tekercselési ellenállás mérése. Személygépkocsiknál 0,8-1,2 kW közötti.
-
A kerék forgatása közben váltakozó feszültség mérése. Másodpercenként egyszer körbefordítva 0,3 V váltakozó feszültség mérhető.
-
A kerék forgatása közben oszcilloszkópos jelalak vizsgálat. Egyenletes szinuszos jel látható az oszcilloszkópon. Az esetleges fogtörés csak így állapítható meg, mert ilyenkor a szinusz hullám megszakad, torzul.
A kerékcsapágy állapota is befolyásolja a jelképzést. Ha nagy a csapágyhézag, a kerékagy mozgása miatt változik a jel, melyet az elektronika nem tud kiértékelni, ezért hibajelzést ad.
6.5.4.13.4. Aktív kerékfordulatszám érzékelők
Ezek az érzékelők lényegesen kisebbek, mint az induktív változatok, jelképzésük kis sebességnél is sokkal pontosabb és jól kiértékelhető. A kerékkel mágnesesen kódolt gyűrű forog együtt. Ez lehet a zárt kerékcsapágy tömítő ajka is, vagy önálló jeladó gyűrű.

Elnevezésük onnan ered, hogy működésükhöz aktív tápfeszültség szükséges. Ennek az érzékelőnek a jelét más elektronikus rendszerek is használni tudják. Azokhoz a CAN hálózaton keresztül jut el. A kerékcsapágy közelében helyezik el, mert annak tömítő gyűrűjét látják el mágneses kódolással, ami a jelképzéshez szükséges.
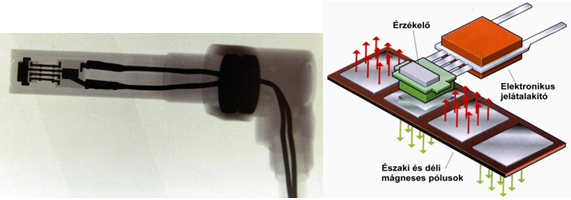
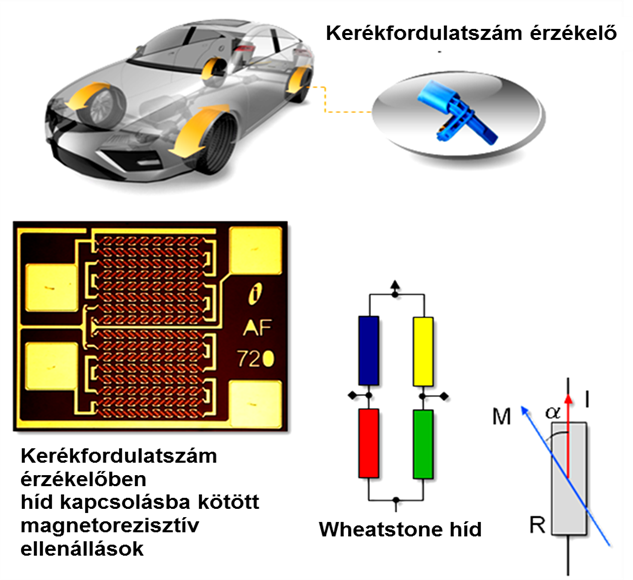
6.5.4.13.5. Magneto-rezisztív elven működő érzékelők
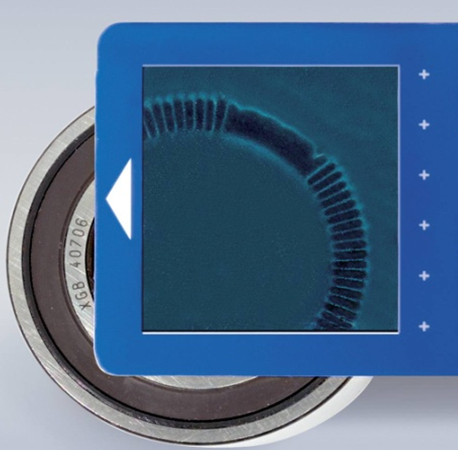
Az érzékelőbe két darab mágneses erőtér hatására változó ellenállást (magnetorezisztív, innen származik az elnevezése) és két darab referencia ellenállást kötnek Wheastone híd kapcsolásba. Ezzel a módszerrel ellenállás változásra visszavezethető nem elektromos mennyiségeket tudunk mérni. Az elkülöníthető kis egységbe szerelt érzékelőhöz négy vezetékkel csatlakozik az elektronikus jel átalakító és erősítő egység. Két vezeték a híd táplálását kettő pedig a jel fogadását szolgálja. Forgás közben a mágneses pólusok váltakozása hozza létre a jelet. A zárt kerékagycsapágy elasztomerből készült tömítő gyűrűje mágnesesen kódolt. Ennek helyzetét a csapágy beszerelése előtt az indikátor kártyával ellenőrizni kell. Ez láthatóvá teszi a mágneses pólusokat, melyek az érzékelő felőli oldalra kell kerüljenek.
Az aktív kerékfordulatszám érzékelő vizsgálatához célműszert fejlesztettek ki. Ez biztosítja a működéséhez a tápfeszültséget, és korlátozza az áramfelvételt is. A műszerbe szerelt LED diódák váltakozó felvillanása láthatóvá teszi a kerék forgatása közben a jelképzést. A műszer csatlakozási lehetőség biztosít az oszcilloszkóphoz, mellyel az érzékelő jelalakja is ellenőrizhető.

A ferromágneses vezetőből készült, a mágneses erőtér hatására érzékeny ellenállása értéke függ a saját mágnesezési irány (M kék) és az áram iránya között (I piros) bezárt (α) szögtől a következő egyenlet szerint:

Az alkalmazott ellenállások közötti eltérés csupán 2 – 3%. Az alkalmazott Wheatstone híd kapcsolás teszi az érzékelőt kellően érzékennyé. A különböző mágnesesen kódolt gyűrűk kompatibilisek a hozzájuk tervezett érzékelőkkel. A hatékony jelképzés érdekében egy érzékelőbe jó néhány híd kapcsolása kötött ellenállást építenek be, mint ahogy azt az alábbi ábra szemlélteti.
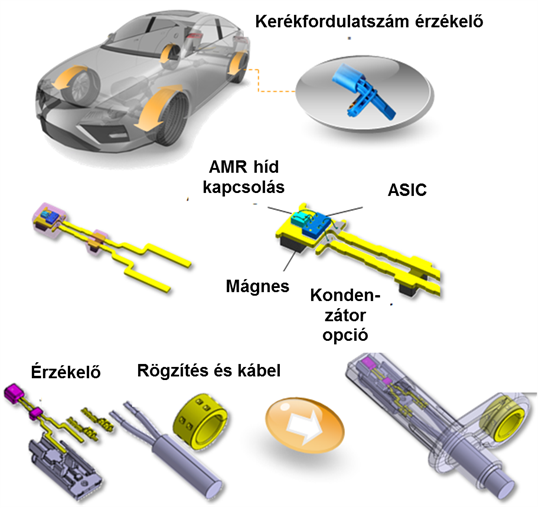
A híd kapcsolásba összeépített AMR (Anisotropic Magnetoresistive Resistance) érzékelő egységet és az erősítő áramkört közös epoxi műanyagból készült házba szerelik be, de előtte rásajtolják a csatlakozó vezetékeket. Az alkalmazott jelképző gyűrű fajtájától függően egyéb egységekkel is kiegészíthetik, mint például állandó mágnes. Ezt akkor alkalmazzák, ha mágnesesen vezető fogazott gyűrű a jelképzéshez alkalmazott póluskerék.
6.5.4.13.6. HALL IC-s érzékelők
Az érzékelőben a kerék forgása miatt a mágneses pólusok váltakozása periodikus Hall feszültséget hoz létre. Ezt a jelet az IC alakítja át négyszög jellé. Az érzékelő működéséhez szükséges tápfeszültséget is az ABS elektronika biztosítja, továbbá fogadja és kiértékeli a jeleket. A mágneses kódolás arra is lehetőséget ad, hogy megállapítható legyen a kerék forgási iránya. Ez a gépkocsi helyzetének meghatározásánál lehet fontos, mert nem mindegy, hogy egy adott referencia ponthoz képest előre, vagy hátra menetben haladt a gépkocsi.
Az újabb aktív érzékelők jelképzése pontosabb és kisebb sebességnél is megbízhatóan működik, mint a korábban alkalmazott induktív érzékelők.
6.5.4.13.7. Az ABS elektronika
A kezdeti időben az elektronikát alumínium lemezből készült kis dobozba szerelték be, és 32 pólusú csatlakozóval látták el. A gépkocsi utasterében, rezgésektől, szélsőséges hőmérsékletektől védett helyre építették be. Ha az ABS meghibásodott az elektronika az elektromágneses szelepeket relé segítségével tudja lekapcsolni. Egy másik relé pedig a fékfolyadék szivattyút hajtó villanymotort kapcsolja. A jelentős áramfelvétel miatt külön, a szokásosnál nagyobb áramra méretezett biztosítékokat alkalmaznak ezeknél az áramköröknél. Jelenleg a hibrid áramkörös elektronikák már az ABS vagy az ESP rendszer hidraulika egységének részét képezik. Ezzel nagyon leegyszerűsödött a vezetékhálózat és ezzel arányosan növekedett a megbízhatóság. A reléket pedig az elektronika részét képező kapcsoló tranzisztorok helyettesítik.
Az elmúlt évtizedek fejlesztői tevékenységének köszönhetően az elektronikák kapacitása rohamosan növekedett, az ABS hidraulika egységek tömege és helyigénye pedig csökkent.
A kerékfordulatszám érzékelők jelei alapján az elektronika megállapítja az úgynevezett referencia sebességet. Ehhez hasonlítja az egyes kerekek sebességét. Ha egy bizonyos küszöbértéknél nagyobb az eltérés, valamelyik keréknél, vagyis megközelíti a blokkolási határt beavatkozik a blokkolásgátló. Az elektronika az elektromágneses szelepek segítségével csökkenti, szinten tartja, illetve ha megszűnt a blokkolási hajlam, visszanöveli a fékező nyomást.
6.5.4.13.8. Az ABS öndiagnosztikája
A gyújtás bekapcsolásakor az ABS ellenőrző lámpa világít (kb. 5 – 10 másodpercig). Eközben az elektronika a rendszer ellenőrzését végzi. Hibamentes állapotban ezután kialszik az ellenőrző lámpa. Az öndiagnosztikai rendszer eközben rövid időre be- és ki kapcsolja az elektromágneses szelepeket és a fékfolyadék szivattyút hajtó villanymotort és ellenőrzi azok áramkörét. Amikor ez rendben van, kialszik az ABS ellenőrző lámpa. Az ezt követő szakaszban hajtja végre a dinamikus önellenőrzést. Ehhez az szükséges, hogy a gépkocsi sebessége nagyobb legyen 5-7 km/h –nál. Ekkor következik a kerékfordulatszám érzékelők jelének dinamikus ellenőrzése. Az elektronika megállapítja, hogy a jelszint eléri –e a kiértékeléshez szükséges küszöbértéket. Az elektronika menet közben is folyamatosan ellenőrzi a rendszer elemeit. Ha az ABS rendszer meghibásodik, az elektronika bekapcsolja a műszerfalon elhelyezett, narancssárga színű ABS ellenőrző lámpát és megjegyzi a hibakódot. Továbbá kikapcsolja az ABS működését. Ha a hiba megszűnik, az ABS visszakapcsol, az ellenőrző lámpa kialszik, a hibakód törlődik az aktív hibák közül. A hibakódok a régebbi ABS rendszereknél villogókódként, vagy a gépkocsi típusának megfelelő diagnosztikai műszerrel szöveges üzenetként olvashatók ki.
Külső diagnosztikai kapcsolat: a DIN/ISO 4797 előírásnak megfelelően az ABS elektronikát is el kell látni a K és az L jelű diagnosztikai vezetékkel. Az előbbi a két irányú, az utóbbi az egy irányú adatforgalmat teszi lehetővé, mellyel a villogókód kiolvasás aktiválható.
6.5.4.13.9. A fékrendszer légtelenítéséhez diagnosztikai műszer kell
Az ABS –el ellátott fékrendszerek légtelenítéséhez használni kell a diagnosztikai műszert, mellyel a légtelenítési módban ki lehet nyitni az egyébként zárt állapotban lévő nyomáscsökkentő szelepeket. Így teljességgel kizárható, hogy légbuborék maradjon a zárt szelep mögött.
6.5.4.13.10. Nyitott és zárt rendszerű blokkolásgátlók
A fékezéshez szükséges nyomás energiát a vákuumos fékrásegítő és a kétkörös főfékhenger hozza létre. A hidraulika egységbe szerelt elektromágneses szelepekkel az elektronika modulálja azt.
Még a nyolcvanas években is gyártottak nyitott és zárt rendszerű blokkolásgátló hidraulikus egységeket, melyeknél a fékező nyomást különböző működési elvű elektromágneses szelepek modulálták. A nyitott blokkolásgátlónál nyomáscsökkentéskor a fékfolyadékot az elektromágneses szelep a fékfolyadék tartályba engedi. Ha ez a szelep meghibásodik, nyitva marad a hozzá tartozó fékkörben nem lesz fékező nyomás. Jelenleg már csak a sokkal biztonságosabb zárt rendszerű ABS –eket gyártják. Ez csatornánként egy alaphelyzetben nyitott nyomásnövelő és egy alaphelyzetben zárt nyomáscsökkentő szeleppel látják el. Ezek árammentesek, amikor nincs ABS beavatkozás. A nyomásnövelő szeleppel párhuzamosan egy visszacsapó szelepet is beépítenek, mely lehetővé teszi a fékoldást akkor is, amikor az ABS szabályozás közben a nyomásnövelő szelep éppen zárva van, de a vezető visszaengedte a fékpedált.
A kerék blokkolásának megakadályozásához nyomáscsökkentés szükséges. Ilyenkor a munkahengerből a kinyíló nyomáscsökkentő szelep a fékfolyadékot egy dugattyús tárolótérbe juttatja. Ennek térfogata kisebb, mint a fékköré, ezért nem csökkenhet le teljesen a fékező nyomás. A nyomás csökkentéskor energiát vezetünk el a rendszerből, hiszen a fékfolyadék egy része egy dugattyús nyomástárolóba kerül. Ezt a hiányzó energiát pótolni kell, hogy a blokkolási veszély elmúltával a fékező nyomás ismét visszanövelhető legyen. Ha ez nem történne meg, nagyon hosszúvá válna a fékút. Ezért szerelnek be az ABS hidraulika egységbe fékfolyadék szivattyút, hogy visszanövelje a nyomásenergiát. Ez a szivattyú a fékköröknek megfelelően két körös kell legyen. Egyenáramú villanymotorral hajtott dugattyús működésű szivattyút alkalmaznak.
Jelenleg a blokkátlókat a legtöbb esetben kipörgésgátlóval (ASR) is kiegészítik. Ez további elektromágneses szelepek beépítését teszi szükségessé.
6.5.5. Az ABS -el szemben támasztott követelmények
Az ECE 13 fékezési előírás 13. melléklete vonatkozik a blokkolásgátlókra. Ebben fogalmazzák meg a rendszerrel szemben támasztott fontosabb követelményeket. Ezek közül néhány:
A lehető legrövidebb fékút elérése érdekében a tapadási tényező lehető legjobb kihasználása az egyik fontos cél.
A lehető legnagyobb lassulás legyen elérhető a gépkocsi stabilitásának és kormányozhatóságának megőrzése mellett az alábbi szélsőséges körülmények között is:
-
száraz, jól tapadó aszfalton és jeges, csúszós úton egyaránt,
-
akkor is, amikor a bal- és a jobb oldali kerekek között jelentősen eltér a tapadási tényező. (a különbség akár 5 – 8 szoros is lehet)
-
ha fékezés közben változik a tapadási tényező nagyról kicsire, vagy fordítva
-
a gépkocsi teljes sebességtartományában legyen működőképes a blokkolásgátló
-
kanyarodás közben is legyen hatékony.
-
Működés közben végezzen folyamatos önellenőrzést és meghibásodáskor figyelmeztesse a vezetőt.
-
Legyen karbantartásmentes.
-
A blokkolásgátló biztonságosan és megbízhatóan működjön a gépkocsi teljes élettartamában.
-
Korlátozások nélküli működjön, függetlenül az üzemállapottól, az útviszonyoktól, a gumiabroncsok állapotától, és a gépkocsi menettulajdonságaitól.
6.5.6. Az ABS rendszerrel szemben támasztott nemzetközi követelmények összefoglalása:
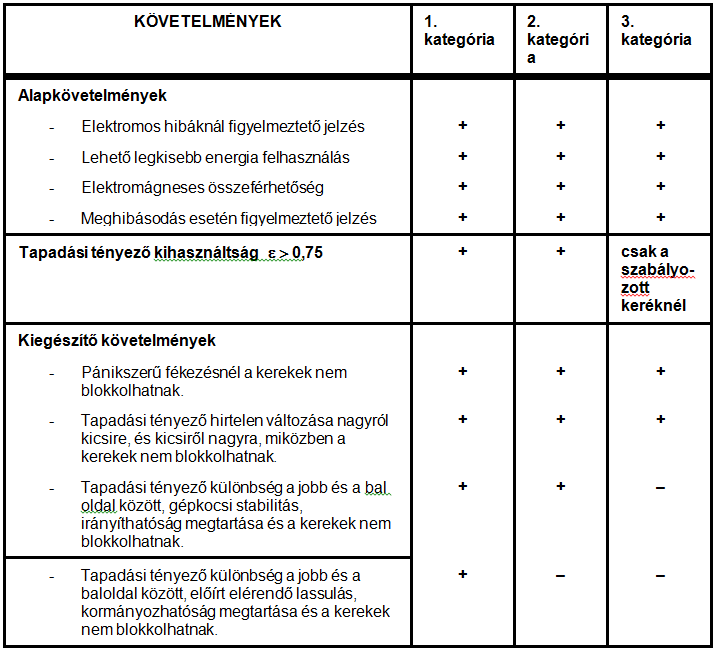
A különböző ABS rendszerek az alapján sorolhatók az 1. 2. illetve a 3. kategóriába, hogy hogyan teljesítik a kiegészítő követelményeket. A korszerű, elektronikus működésűek az első kategóriába tartoznak. A pótkocsiknál alkalmazott egyszerűbb szabályozást megvalósítók a második kategóriába, a kilencvenes években még gyártott hidromechanikus változatok pedig a harmadik kategóriába.
6.6. A kipörgés gátló (ASR)
A további menetdinamikai szabályozó rendszerek közül soknak az alapja a blokkolásgátló rendszer. Az első jelentősebb továbbfejlesztése az ABS-nek, amely fékezés közben javítja a gépkocsi hosszdinamikáját az ASR, vagyis a kipörgésgátló. Ez is a gépkocsi hosszdinamikáját javítja.
6.6.1. A kipörgésgátló, az ASR működési elve
A hagyományos differenciálművel szerelt gépkocsiknál amikor a bal, és a jobb oldali kerekek alatt a tapadási tényező jelentősen eltér egymástól, csak kis vonóerő valósulhat meg, de vannak esetek amikor a gépkocsival el sem lehet indulni. Ennek az oka az, hogy a differenciálmű fele – fele arányban osztja szét a nyomatékot és amikor az egyik hajtott kerék csúszik, a másik sem képes vonóerőt átvinni.
Amikor a kipörgésgátló csúszós úton, a kipörgő a túl nagy nyomatékot kapó kerék aktív és szabályozott fékezésével beavatkozik, a gépkocsi már el tud indulni, és utána stabil gyorsításra is képes. Tehát a blokkolásgátlót kiegészítő kipörgésgátló (ASR) különösen a csúszós utakon támogatja hatékonyan a vezetőt. Kis sebességnél a kipörgő kerék szabályozott lefékezésével avatkozik be. Ezáltal a másik hajtott keréken ki tud alakulni a megfelelő nyomaték. Nagyobb sebességnél ez a beavatkozás már veszélyezteti a menetstabilitást, ezért másféle intézkedés szükséges. Amikor a kipörgő kerék szabályozott fékezése nem elég hatékony, illetve ha a gépkocsi sebessége nagyobb 40 km/h-nál a CAN hálózaton érkező parancs hatására a motor elektronika csökkenti a hajtó nyomatékot. Ennek is jelentős stabilizáló hatása van a gépkocsira.
6.6.1.1. A kipörgésgátlóval kapcsolatos elnevezések
A szakma ezzel a menetdinamikai szabályozóval kapcsolatosan sokféle elnevezést és rövidítést használ. Az ASR például a német Antrieb Schlupf Regelung elnevezésből származik. Ugyanezt angolul Traction Control System –nek nevezik és a TCS rövidítést használják. A motor hajtó nyomatékának csökkentését, illetve leszabályozását Engine Traction Control –nak nevezik és ETC –nek rövidítik. A vonóerő átvitel kihasználásnak javítására használják kis sebességnél a Brake - Lock Differential kifejezést (BLD). Motorfék használatakor (toló üzem) a szabályozást Engine Dragtoque Controlnak nevezik, amit EDC –nek rövidítenek.
Mindkét oldalon a túlpörgő kerék nyomatékszintjére szabályoz az elektronika az ETC szabályzás révén. Ez hatékonyan növeli a gépkocsi menetstabilitását.
Amikor az útfelület két oldalán jelentősen eltérő a tapadási tényező, irányított nyomatékelosztás (torque vectoring) valósul meg. Ez különösen a nagyobb tapadási tényezőnél, illetve kanyarban 0 – 100 km/h közötti sebességtartományban valósul meg.
Elinduláskor és gyorsításkor is a tapadási tényezővel arányos az átvihető nyomaték. A kipörgésgátló (ASR) felismeri, ha a keréken a pillanatnyi tapadási tényezőhöz képest túl nagy a vonóerő és ezért túlpörög a hajtott kerék. Ezen állapot elkerülésére az ABS/ASR elektronika a CAN hálózaton keresztül a motor elektronikának küldött paranccsal csökkenti a motor hajtó nyomatékát. Ha a gépkocsi sebessége 40 km/h –nál kisebb, lefékezi a kipörgő kereket. Ehhez bekapcsolja a hidraulika egység fékfolyadék szivattyúját, hogy létre jöjjön a szükséges fékező nyomás. Ez azonban a többi elektromágneses szelep működtetése révén csak a kipörgő kerékhez jut el. Így elkerülhetővé válik a gépkocsi megfarolása, kitörése, ami súlyos balesethez vezetne.
Ottó motoroknál a nyomaték csökkentése többféle módon is megvalósulhat:
-
Előgyújtás vissza állítás. Ennek az eredménye nagyon gyors, de a katalizátor kímélése miatt csak rövid ideig használható.
-
A benzinbefecskendező szelepek kitöltési tényezőjének csökkentése. Az előző beavatkozásnál ez nagyobb nyomatékcsökkenést eredményez, de hatása annál lomhábban következik be. Nem szükséges viszont korlátozni, mert ez nem veszélyezteti a katalizátort.
-
A pillangószelep villanymotoros állítása zárás irányban. Ennek a legnagyobb a nyomaték csökkentő hatása, de a többinél lassabban vezet eredményre.
A különböző autógyárak ezeket a beavatkozási lehetőségeket kombinálni szokták. A dízel motorok nyomatékcsökkentése a dózis mérséklésével történik. A korszerű motoroknál ezek a beavatkozások az ABS/ASR elektronika és a motor elektronika közötti CAN hálózati adatátvitel révén valósulnak meg.
6.6.1.2. A hidraulika egység működése ABS szabályozáskor
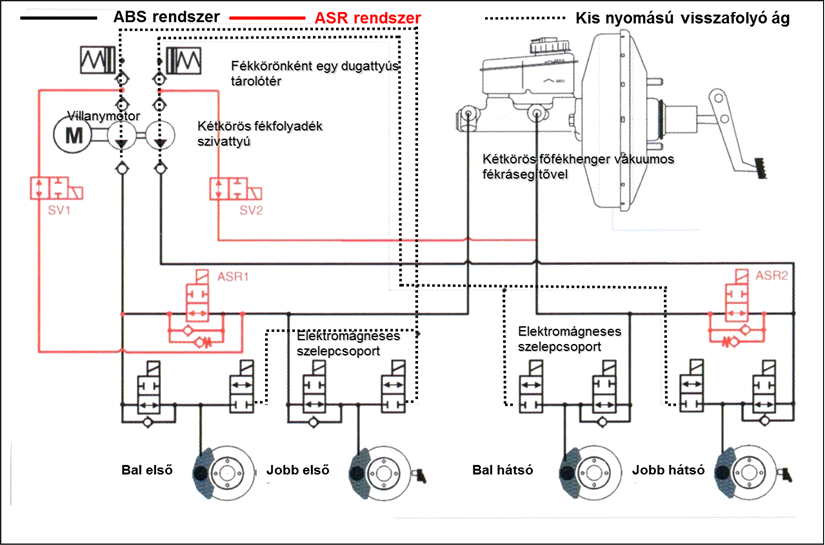
A kerékcsúszástól függően az elektronika parancsára a kerekenként beépített egy – egy nyomásnövelő és nyomáscsökkentő szelep modulálja a fékező nyomást. Nyomáscsökkentéskor a visszafolyó ágon keresztül a fékkörönként egy-egy dugattyús tárolótérbe kerül a fékfolyadék. Onnan a kétkörös fékfolyadék szivattyú vissza juttatja a fékkörbe.
6.6.1.3. A hidraulika egység működése ASR szabályozáskor
A két fékkörnek megfelelően nyitnak az SV1 és az SV2 szelepek. Azokon keresztül a közben az elektronika által bekapcsolt a fékfolyadék szivattyú a tartályból szív és a vezetőtől függetlenül létrehoz egy bizonyos fékező nyomást. Az elektronika az ASR1 és az ASR2, valamint a kerekenkénti elektromágneses szelepeket működtetve az éppen kipörgő kereket fékezi a szükséges mértékben.
6.7. Blokkolásgátló terep fokozata
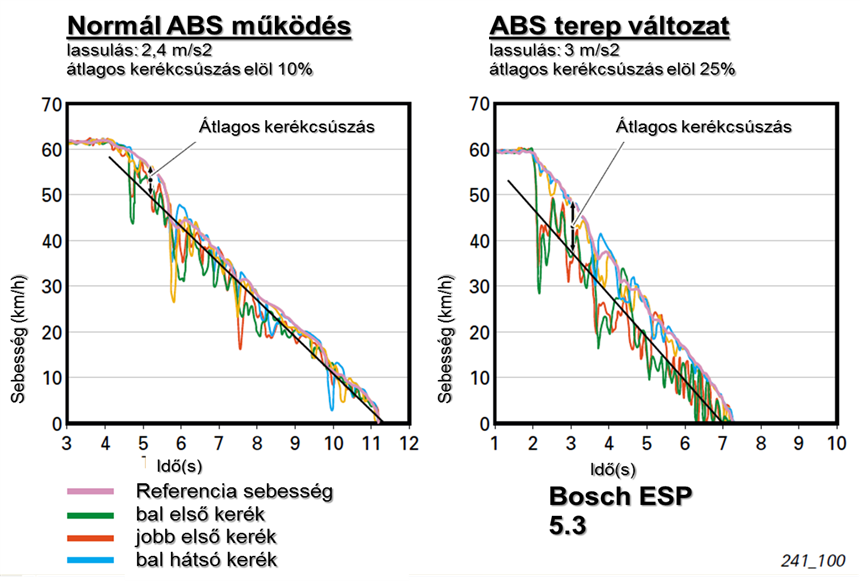
A terepjáró személygépkocsik ABS rendszerét ellátják terep fokozattal is. Erre azért van szükség, mert laza talajon (homok, sóder, sár, vagy laza friss hó) az ABS működése növeli a fékutat. Blokkolás közeli állapotban a kerekek ugyanis a laza anyagból éket túrnak, ami alakzárásával rövidíti a fékutat. A terep ABS tehát nagyobb kerékcsúszásokat enged meg, mint a normál országúti változat. Ezt az alábbi diagram jól szemlélteti, ahol a kerekek kerületi lassulása különböző színekkel rajzolódik ki. Az átlagos kerékcsúszás az országúti ABS-nél 10%-os és az elért lassulás 2,4 m/s2. Ha viszont a gépkocsivezető átkapcsol terep fokozatra az ABS ellenőrző lámpa folyamatosan villogni fog és az átlagos kerékcsúszás eléri a 25%-ot, a lassulás pedig a 3 m/s2 értéket. A normál országúti ABS működés visszakapcsolás, vagy a gyújtás ki- és visszakapcsolása után, vagy amikor átlépték a 40 km/h sebességet ez után lesz ismét aktív. Az újabb ABS változatok egy újabb szoftver segítségével a kerekek torzós lengései alapján automatikusan felismerik a terepen közlekedést és aktiválják az ABS terep fokozatát
6.7.1. Elektronikus fékerő felosztás
A blokkolásgátló elektronikát az ABS és ASR szabályozáson kívül újabb programmal is ellátják. Jelenleg már az elektronikus fékerő felosztás látja el a fékerő módosítók feladatát. Ezek a hátsó kerekek túlfékezettségét voltak hivatottak megakadályozni a gépkocsi terhelése, az alkalmazott fékező nyomás, vagy éppen az elért lassulás függvényében.
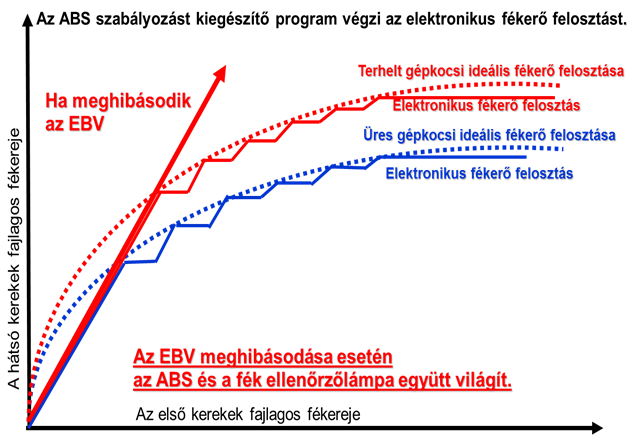
Az elektronikus fékerő felosztásnál az első kerekek átlagos sebességét a hátsók átlagához hasonlítja a blokkolásgátló elektronikája. Ha a hátsó kerekek átlagos sebessége kisebb, mint az elsőké, akkor azok túlfékezettek. Ekkor az elektronika rövid időre bezárja a hátsó kerekekhez tartozó nyomásnövelő szelepek. Ez az állapot nem maradhat így sokáig, mert nagyon megnövelné a fékutat. Ezért a szelep a következő pillanatban kinyit, majd ismét bezár. Ezek az állapotok sűrűn, egy bizonyos frekvenciával váltogatják egymást. Ennek a működési módnak az eredménye egy mérsékeltebb, lépcsőzetes nyomásnövekedés a hátsó kerekek fék munkahengereiben. Az így kialakuló nyomás alulról hozzásimul az adott gépkocsi ideális fékerő arányát jellemző parabolához. Ez azonos módon működik az üres és terhelt gépkocsinál a kerékcsúszás függvényében. Ezt nevezik elektronikus fékerő felosztásnak német rövidítése EBV (Elektronische Bremskraft Verteilung) az angol pedig EBD (Elektronic Brakeforce Distribution). Ez a beavatkozás már szabályozásnak nevezhető, mely a kerékcsúszás függvényében szabályozza a fékerőt. Feleslegessé teszi a hagyományos hidromechanikus fékerő módosítókat.
Ha meghibásodik az EBV, kritikus menetdinamikai állapot alakulhat ki a hátsó kerekek túlfékezettsége miatt. Erre az állapotra a piros színű fék- és a narancssárga ABS ellenőrző lámpa együttes világítása hívja fel a gépkocsivezető figyelmét. Ilyenkor lassan és óvatosan azonnal a szervizbe kell menni, hogy a hibát elhárítsák. Úgy alakították ki a szoftvert, hogy ha az egyik kerékfordulatszám érzékelő meghibásodik, a vele azonos futóműre szerelt másik kerékfordulatszám érzékelő jelét tekinti az átlagértéknek és továbbra is működőképes marad, bár kissé durvábbá válik a szabályozás. Ebben az állapotban az ABS már hibajelzést ad. Az EBV működéséhez nincs szükség továbbá az első kerekek elektromágneses szelepeire és a hátsók közül is csak a nyomásnövelők kellenek. Az EBV szabályozáshoz nem szükséges a villanymotoros fékfolyadék szivattyú sem. Így tehát az EBV meghibásodási valószínűsége sokkal kisebb, mint a blokkolásgátlóé.
6.7.2. A blokkolásgátló mint fékasszisztens
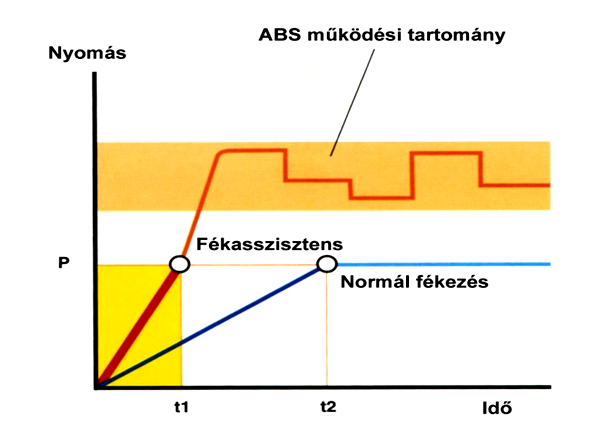
Számos baleset azért következik be, mert a gépkocsivezető figyelmetlen. Például nem veszi észre az előtte haladó gépkocsi sebességváltozását, illetve nem megfelelően reagál erre. A fékezési folyamat hatékonyságának növelésével számos baleset elkerülhetővé válik. Szimulátoros mérések során bebizonyosodott, hogy a vezetők bár kellő gyorsasággal reagálnak a veszély helyzetekre, de nem elég nagy erővel nyomják a fékpedált. Ennek az oka az, hogy viszonylag ritkán alakul ki veszélyes helyzet, így nem rendelkeznek kellő tapasztalattal arról, hogy hogyan is kell ilyenkor nyomni a fékpedált. Ezt a helyzetet tovább rontja az a tény, hogy a hirtelen fékezéseknél gyakran beavatkozik az ABS, melynek működése a fékpedál pulzálásával jár. Ettől sok vezető, különösen a kellő gyakorlattal nem rendelkezők megijednek és visszaengedik a fékpedált. Ezért a gépkocsiba beépített fékrendszer lehetőségeit nem tudják kihasználni. Ezen a helyzeten a fékasszisztens beszerelésével igyekeznek segíteni az autógyárak. Így a legtöbb típusba beszerelik a vészfékezési asszisztens valamely változatát. Ezek közül a következőkben csak azokat ismertetjük, melyeknél a mechatronika segíti a pánikszerű fékezést.
Az ABS rendszerre épülő fékasszisztens:
A bemeneti információk:
-
a fékezőnyomás érzékelő jele, az alkalmazott pedálerőről, illetve növekedésének sebességéről ad információt. Ebből meghatározható a nyomás-gradiens. Ha ez egy előre meghatározott küszöbértéknél nagyobb csak akkor lép működésbe a fékasszisztens. Általában piezo-elktromos érzékelőt alkalmaznak, mely korábban a Bosch ABS/ESP 5.3 rendszereknél külön egységet alkotott és a hidraulika egységbe csavarták be. Az újabb változatoknál a szeleptömb belsejébe szerelték be és kívülről nem volt látható. Az érzékelő jelét az öndiagnosztikai rendszer figyeli. Hiba esetén nem működik a fékasszisztens és hibakód tárolódik.
-
a féklámpa kapcsoló jele a fékezés kezdetéről informálja az elektronikát. Csak zárt féklámpa kapcsolónál működik a fékasszisztens.
-
a kerékfordulatszám érzékelők jelei alapján az elektronika a gépkocsi sebességét tudja.
Az elektronika amikor bekapcsolja a fékasszisztens működést, az ABS/ESP hidraulikaegységbe szerelt két fokozatú, kettős működésű fékfolyadék szivattyút kapcsolja be, mely megnöveli a fékező nyomást.
Fékasszisztens nélkül a gépkocsi később éri el az ABS beavatkozás tartományát és ezért hosszabb lesz a fékút.
Kezdetben a vákuumos fékrásegítőt elektronikával, fékpedál elmozdulás érzékelővel és elektromágneses szeleppel kiegészített fékasszisztens alkalmazták.
A blokkolásgátló a vákuumos fékrásegítőtől átvette a fékasszisztens feladatát. Az elektronika már nem a fékpedál lenyomásának sebességét, hanem egy nyomásérzékelő segítségével a nyomásgradienst figyeli. Ha ez átlép egy bizonyos küszöböt, az elektronika bekapcsolja a fékfolyadék szivattyút, mely jelentősen megnöveli a fékező nyomást. Viszonylag gyorsan el lehet így érni az ABS beavatkozási tartományt. Így elkerülhetővé válik a kerekek blokkolása és rövidül a fékút.
6.7.3. Blokkolásgátló gyártók, típusváltozatok és azok sajátosságai
6.7.3.1. Robert Bosch GmBH ABS 8
Ennek a típusváltozatnak az első sorozatbeépítése a Renault Megane II -be 2001-ben kezdődött. Hibrid áramkörös, továbbfejlesztett elektronikával látták el. A fejlesztési cél a tömeg és a helyszükséglet további csökkentése volt. A nyomásszabályozó szelepek mechanikus részét a hidraulikaegységbe sajtolják. A működtető elektromágneseket közvetlenül az elektronikára szerelik. A fékfolyadék szivattyút hajtó egyenáramú villanymotor tekercselt forgórészű és állandó mágneses állórészű. Ez a blokkolásgátló a korábbi változatoknál kisebb és könnyebb kivitelű
6.7.3.2. Robert Bosch GmBH ABS 9
Jelenleg a Robert Bosch GmBH az ABS 9 –típust, vagyis a kilencedik generációt gyártja. Ez a következetes továbbfejlesztések eredménye. Ennek a kompakt kivitelű ABS hidraulika egységnek a tömege csupán 1,1 kg. Ezzel a világ legkönnyebb blokkolásgátlójává vált. Kedvezően kicsi a helyigénye. Valamennyi személygépkocsi szegmensnél sikeresen alkalmazhatják. Elektronikáját az SMD technológiával gyártott optimalizált mikroprocesszoros technika jellemzi. Integrális részét képezi a hidraulika egységnek a nyomásérzékelő. Moduláris szoftver architektúra jellemzi, mely megfelel a legújabb műszaki megoldásoknak. FlexRay interface is lehetséges.
6.7.3.3. A Continental Teves blokkolásgátlók
Az Ate MK 20 típusú blokkolásgátlókat extrudált alumínium profikból 1995 –től kezdték gyártani. 1997 –ben készült el az MK 20 E változat. Ezek kompakt, moduláris felépítésű, hibrid elektronikás, zárt ABS rendszerek. Megvalósították az elektronikus fékerő felosztást (EBV), a motor fékezőnyomaték szabályozást (MSR). Melynél már CAN kommunikációval adott parancsot a motor elektronikának a nyomaték csökkentésére. A korábbi változatokhoz képest könnyebbé vált ez a kivitel.
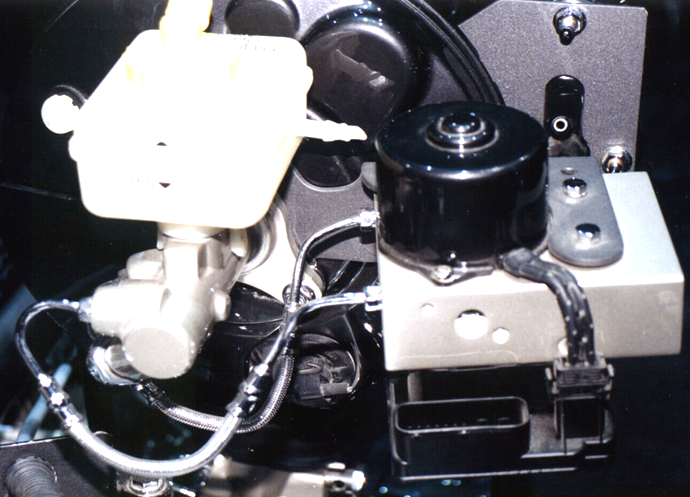
1994-1999 között az elektronika biztonsági koncepciója az aszimmetrikus redundancia lett. Ennek megfelelően egy 16 bites fő-, és egy 8 bites segédprocesszort kötöttek párhuzamosan. Így kiszűrhetővé vált az esetleges azonos gyártási hibából adódó egyformán helytelen eredmény is. A két különböző processzor ugyanis más technológiával és más gépen készül. A 8 bites segédprocesszor végzi a kerékfordulatszám érzékelők jeleinek előkészítését. A korábbi mechanikus reléket az elektronika alaplapjára szerelt kapcsoló tranzisztorok váltották fel. Az MK 20 ABS –t a Fiat Brava és Bravo modellekbe, valamint a VW Golf, Beetl, Skoda, Audi TT típusokba építették be. Ennél a típusnál már belső és külső CAN hálózattal működő hibrid áramkörös elektronikát alkalmaztak. A szelepek mechanikus részét a hidraulikaegységbe sajtolták, a működtető elektromágnesek tekercseit pedig közvetlenül az elektronika alaplapjára szerelték.
Az Audi TT-be kezdetben MK 20-as ABS-t és utána ESP rendszert szerelnek. Ezeknél széria tartozék a kipörgés gátló (ASR), az elektronikus fékerő felosztás (EBV), és a differenciális fékezéssel megvalósuló (EDS) működés.
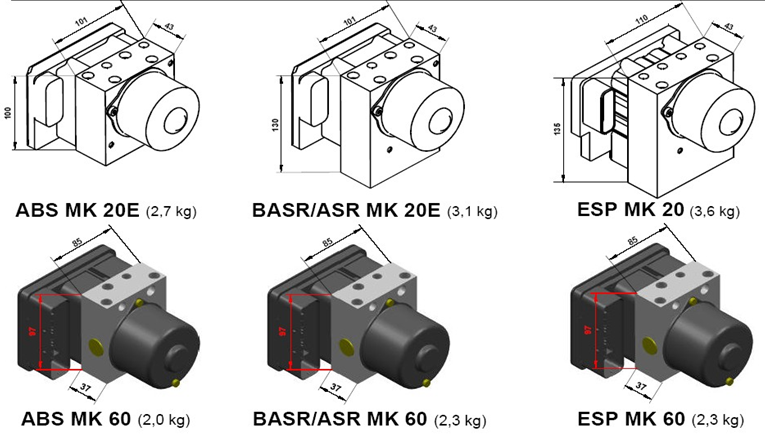
Ate MK 20 GI ABS már a gépkocsi kereszt irányú dinamikájának befolyásolására is képes. Fékezéskor a kerék fordulatszám érzékelők jeleiből az elektronika felismeri, ha nem elegendő az oldalvezető erő, és a gépkocsi a kanyar kiegyenesítésére törekszik. Csökkenti az első kerekek fékező nyomását, így nő az oldalvezető erő. A gépkocsi követi a kormánymozdulatot. Amikor pedig a hátsó kerekek csúszása miatt azoknál csökken az oldalvezető erő és a gépkocsi túlkormányozottá kezd válni, az elektronika a kanyarbelső kerekeknél csökkenti a fékező nyomását.
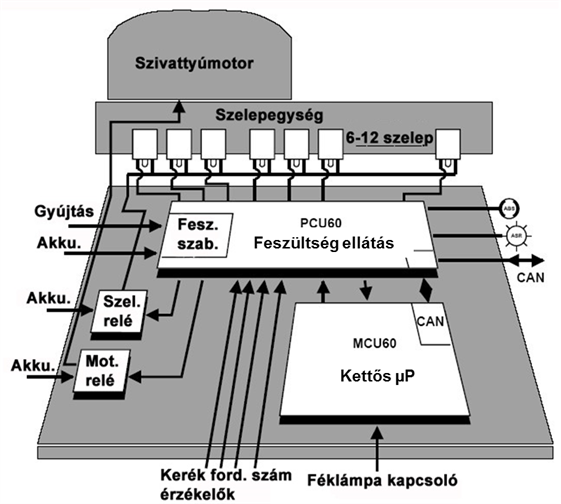
Ate MK 60 ABS változatot 2000 től gyártják. Ennél a típusnál új szelep konstrukciót alkalmaznak és új a fékfolyadék szivattyút hajtó motor is. Két magos mikroprocesszort alkalmaznak. Aktív kerékfordulatszám érzékelők adják a bemeneti jeletet. További súlycsökkentés történt és kisebb lett az ABS egység helyigénye is. Az elektronika jellemzői: nagy integráció, ezért kevés az áramköri elem. FLASH tárolóval látják el. Nagy teljesítményű 32 bites mikroprocesszort alkalmaznak, a félvezetős reléket az alaplapon helyezik el. A programozási nyelv C, így a szoftver újra felhasználható. 2000 –től már az úgynevezett „kern redundanciát” alkalmazzák. Az MK 60 –as blokkolásgátló elektronikák már Budapesten készülnek. Kezdetben a Temic vállalatnál, melyet aztán megvásárolt a Continental Teves. A BMW is a Continental Teves elektronikus fékrendszereit alkalmazza.
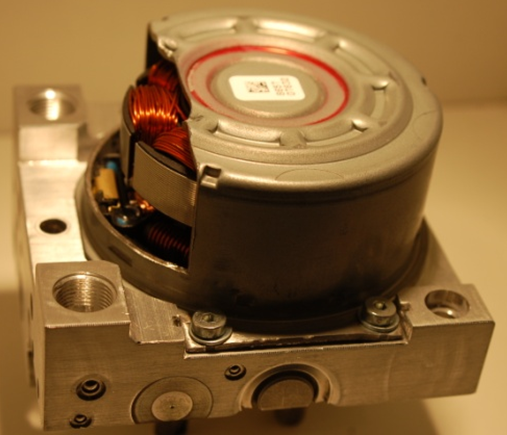
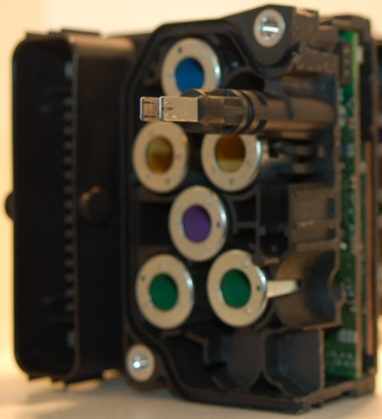
6.7.3.4. A BMW –nél alkalmazott összetett elektronikus menetdinamikai szabályozó rendszerek
A BMW alapfelszereltségéhez tartozik az ASC rendszer (Automatischen Stabilitäts Control). Azt a változatot, mely a fékezési beavatkozásokon kívül, a motor működését is befolyásolni tudja, DSC (Dinamischen Stabilitäts Control) rendszernek nevezik.
A BMW 1991–től kezdte alkalmazni a DSC1 menetdinamikai szabályozó rendszert, melynek része az ABS szabályozás is. A DSC egyrészt a vezető kívánsága szerint, másrészt pedig a pillanatnyi menetdinamikai állapotnak megfelelően avatkozik be. Menet közben folyamatosan menetbiztonsági ellenőrzést végez.
A 2004–től a BMW X3 és X5 a modellsorozatnál azt a gyors működésű, továbbfejlesztett ABS rendszert alkalmazzák, mely már képes a gépkocsi hossz- irányú dinamikáján kívül, egy kombinált hossz- és kereszt irányú dinamika befolyásolására is.
A DSC2, vagyis a második generációs változat már az ABS beavatkozási küszöbérték alatt is, a pillanatnyi menetállapotnak megfelelően oldalanként különböző nagyságú fékerőket is ki tud vezérelni. Ez az úgynevezett CBC (Cornering Brake Control) működésmód.
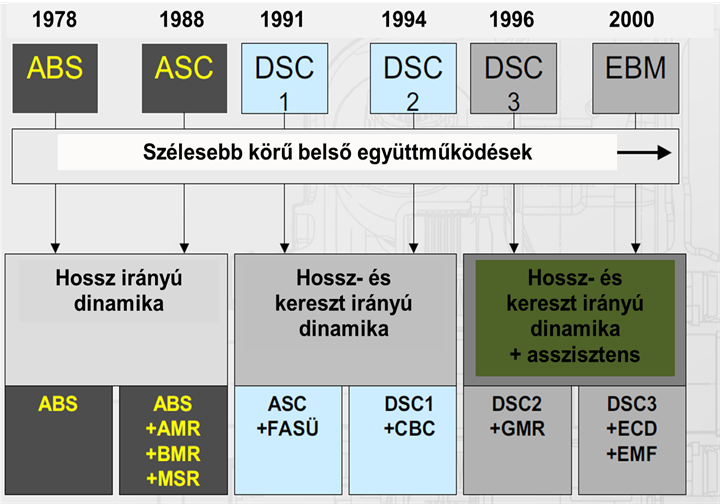
Az EMB (Elektronischen Bremsen Management) rendszer, melynek első sorozatbeépítése 2001 –ben volt a 7 -es BMW –be, már a fékezéssel kapcsolatos asszisztens működések megvalósítására is képes. Továbbá a futómű rendszerekkel is az eddiginél is több kapcsolata van. Ezek az eddig ismertetett elektronikus működésmódok az (ECM) Elektronische Chassies Management rendszerben öltenek testet.
Az egyre több, a fékrendszerrel kapcsolatos szabályozások és a vezetőt támogató asszisztens rendszerek és az EBM miatt egy koordinációs platformot valósítottak meg, mely a gépkocsi hossz- és kereszt irányú menetdinamikáját továbbá az asszisztens rendszereket felügyeli. Meghatározták az egyes beavatkozási lehetőségek határait is azért, hogy ne következhessenek be áttekinthetetlenné váló interferenciák az egyes beavatkozások között. Definiálták az egyes szabályozó rendszerektől független koordinátori feladatot. Így nem fordulhat elő, hogy az elméletileg lehetséges teljesítménypotenciált csak korlátozott mértékben lehessen kihasználni.
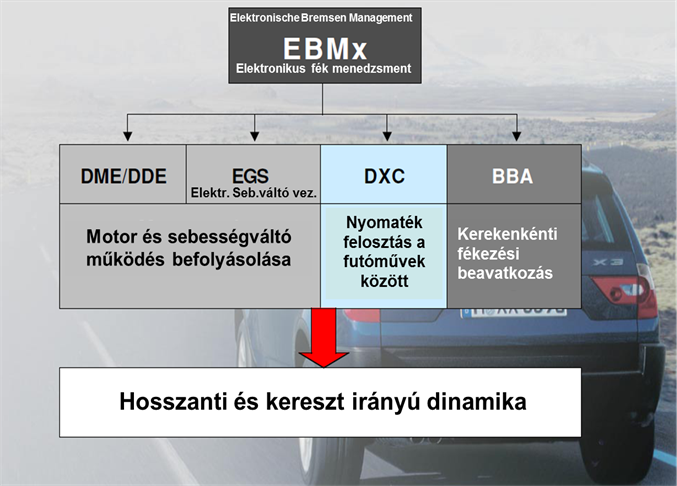
6.7.4. Az elektronikus rendszerek közötti integrációs lehetőségek:
Napjainkban a személygépkocsikba a blokkolásgátlókon kívül egyre több feladatot ellátó különböző elektronikus rendszereket szerelnek be. Ezek hatékony együttműködésének különböző lehetőségei vannak:
-
Központi architektúra,
-
Domén architektúra
-
Koordinációs megoldás választása
6.7.4.1. Központi architektúra
Ez a megoldás nem korlátozza az egyes rendszerek működését. A rendszer felügyelet és a redundancia vonatkozásában nincsenek különleges elvárások. Ennél egy koordinátor határoz az egyes beavatkozások menetdinamikai ésszerűségéről. Ha a koordinátor meghibásodik definiálni kell egy visszakapcsolási szintet. Ha egy menetdinamikai beavatkozó egység hibásodik meg, a továbbra is működőképes rendszerek kell megvalósítani a menetdinamikailag veszélytelen állapotot.
6.7.4.2. Domén architektúra
Menetdinamikai doménok lehetnek például,
-
a hossz dinamikát befolyásoló rendszerek,
-
kereszt, dinamikát befolyásoló rendszerek,
-
függőleges dinamikát befolyásoló rendszerek.
A teljes rendszerhez tartozó beavatkozókat a fő feladatuk alapján rendelik az egyes doménokhoz. Ugyanazt a beavatkozó egységet több domén is működtetheti. Például a függőleges dinamikai rendszerben egyenes menetben érkezhet parancs a stabilizátor szétkapcsolására, vagy éppen a billenés kiegyenlítésre is.
A kereszt irányú dinamikai beavatkozásnál ugyanaz az eredmény érhető el például az első kerekek aktív elkormányzásával az AFS rendszer (Aktíve Front Steering) segítségével és az aktív hátsókerék kormányzással AHK (Aktíve Hinterachs Kinematik) is.
Hasonló a helyzet az asszisztens rendszerek beavatkozásainál is. A követési távolságot szabályozó tempomattal, vagy más néven az ACC rendszerrel ugyanaz az eredmény érhető el, mint az aktív elektromechanikus rögzítő fékkel EMF (Elektro-mechanische Feststellbremse). A előbbiekben példaként említett rendszerek mindegyike hosszdinamikai beavatkozást végez, de mégis különböző doménekhez tartoznak. Belátható tehát, hogy a domén architektúrán belül elengedhetetlen egy koordinátori feladat elvégzése. Erre a célra vagy egy újabb elektronikát kell beépíteni, vagy valamelyik domént ennek a feladatnak megfelelően kialakítani.
A rendszer megítélésének fontos kritériumai
-
a teljes rendszer feltételek nélkül biztonságosan működtethető legyen,
-
az elektronikák száma a lehető legkevesebb legyen.
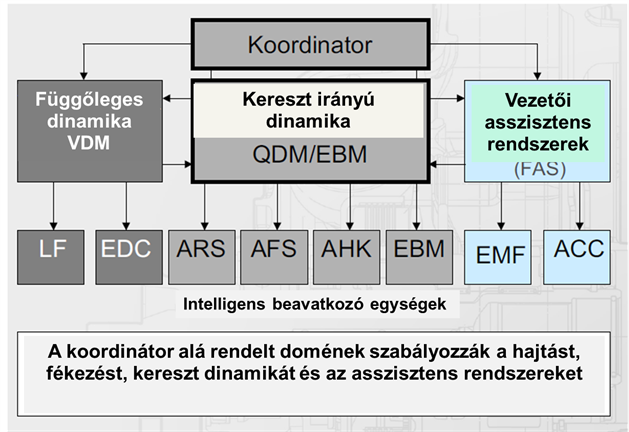
6.7.5. Delphi Brake Control DBC 7
Delphi Corporation 1994-ben vált függetlenné a GM-tól. 2002 óta használja ezt a nevet. Az Amerikai Egyesült Államokban, Michigenben van a központja. A Delphi Brake Control (DBC) 7 blokkolásgátló rendszert 1999-ben mutatták be a Buick Regal és a Century modellekben, továbbá a Chevrolet Tracker-ben. A többi európai rendszerekhez hasonlóan ABS csatornánként egy nyomásnövelő és egy nyomáscsökkentő elektromágneses szeleppel szabályozza a fékező nyomást. Ha ABS/ASR szabályozást valósít meg összesen 10 db elektromágneses szelepre van szükség. Nyomáscsökkentéskor a fékfolyadék a két fékkörnek megfelelően kialakított dugattyús tárolótérbe kerül.

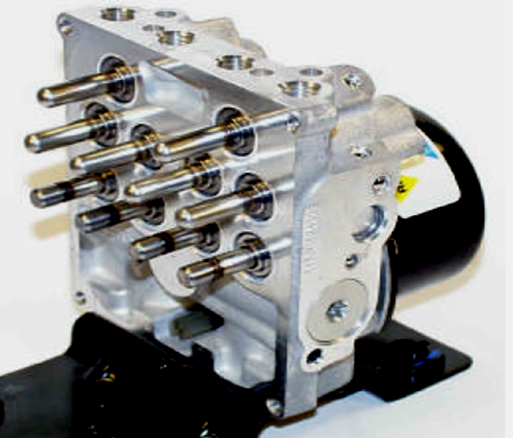


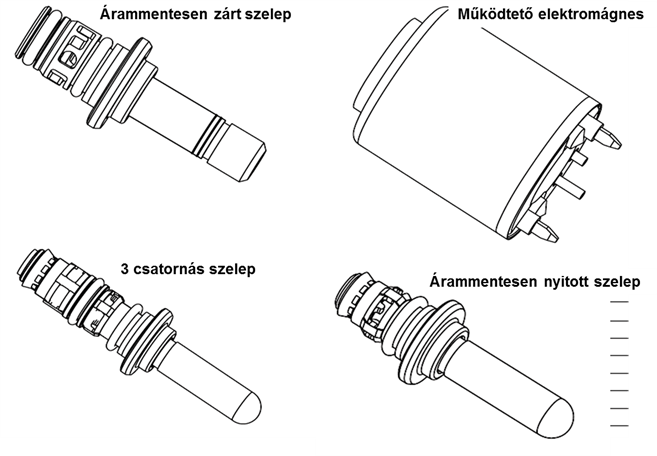
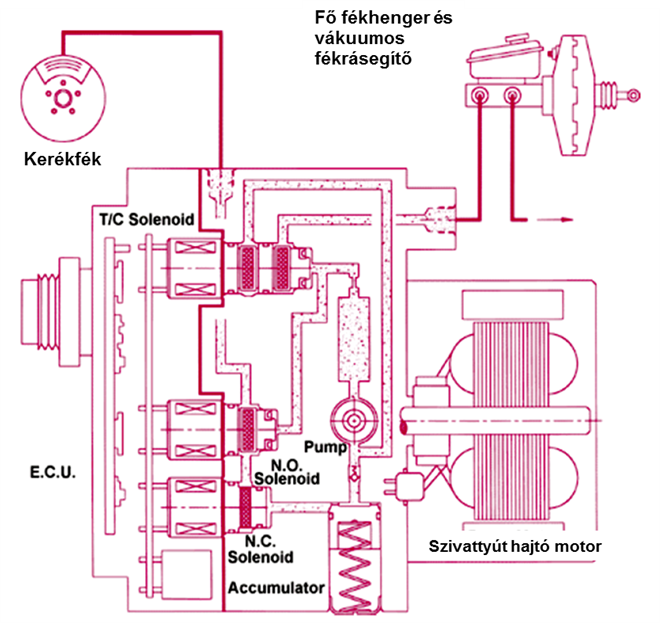
6.7.6. Sumitomo ABS
A Japán Sumitomo Corporation Bosch licenc alapján kezdte gyártani a blokkolásgátlókat. Így működési elvük is azonos azokkal a típusokkal. Az Európában is ismertebb gépkocsik közül ilyen blokkolásgátlót szerelnek a Honda Acura és Leged típusokba (1990-92 között), Mazda 626 (1987 –óta), a Toyota Yaris (1999 -óta) gépkocsikba. Az „add-on” rendszernek megfelelően a vákuumos fékrásegítővel és normál kétkörös főfékhengerrel ellátott alap fékrendszert egészíti ki.
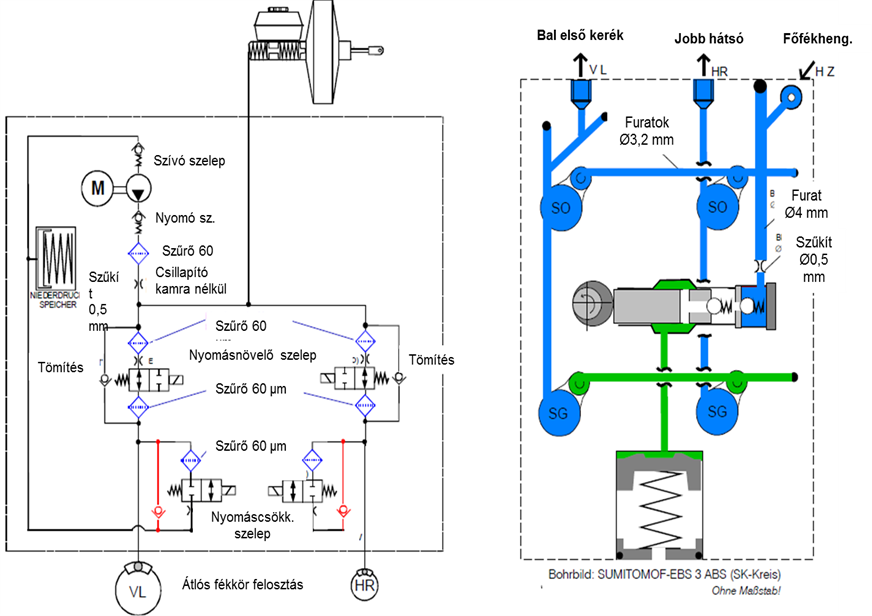
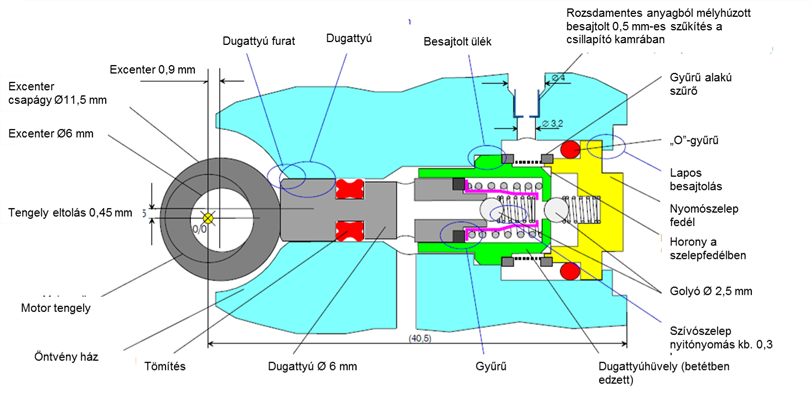
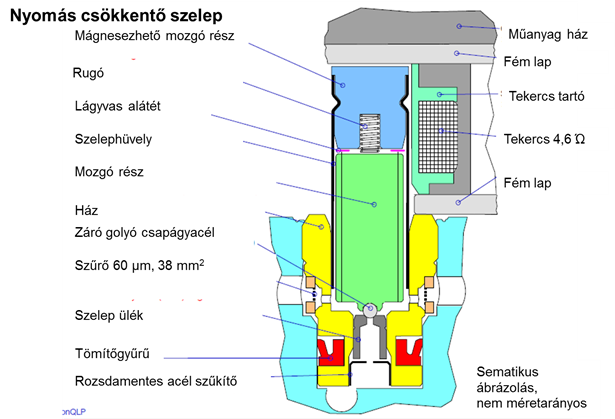
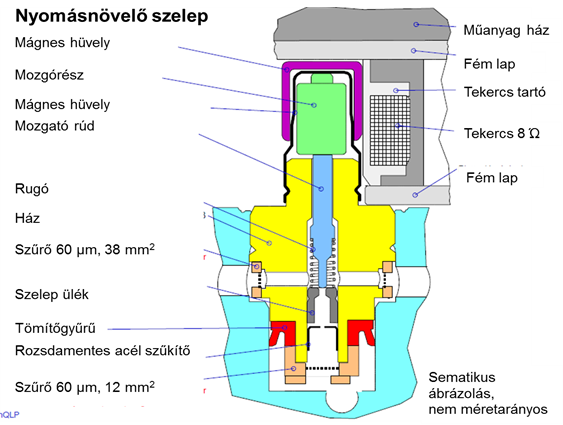
Összefoglalva tehát a blokkolásgátlók fejlesztése területén elért eredményeket elmondható, hogy a különböző szoftverbővítések révén jelenleg a következő feladatokat képes ellátni:
-
fékasszisztens
-
ABS/ASR szabályozás
-
elektronikus fékerő felosztás
-
terep működés