Chapter 7. Intelligent actuators
In highly automated driving mode the previously calculated and selected trajectory should be followed by the vehicle. The trajectory path is executed by an intelligent system that has the command vector as an input and drive-by-wire actuators on the output. The trajectory execution layer is composed of drive-by-wire (x-by-wire) subsystems like
-
Throttle-by-wire
-
Steer-by-wire
-
Brake-by-wire
-
Shift-by-wire
Drive-by-wire systems control the specific vehicle subsystem without mechanical connections, just through electronic (wire) control. The technology has a longer history in the aerospace industry, introducing the first full by-wire controlled aircraft, the Airbus A320 in 1987.
Up until the late 1980s most of the cars have had mechanical, hydraulic or pneumatic connection (such as throttle Bowden cable, steering column, hydraulic brake etc.) between the HMI and the actuator. Series production of the x-by-wire systems was introduced with the throttle-by-wire (electronic throttle control) applications in engine management, where the former mechanical Bowden was replaced for electronically controlled components. The electronic throttle control (ETC) was the first so called x-by-wire system, which has replaced the mechanical connection. The use of ETC systems has become a standard on vehicle systems to allow advanced powertrain control, meet and improve emissions, and improve driveability. Today throttle-by-wire applications are standard in all modern vehicle models. (Source: [89])
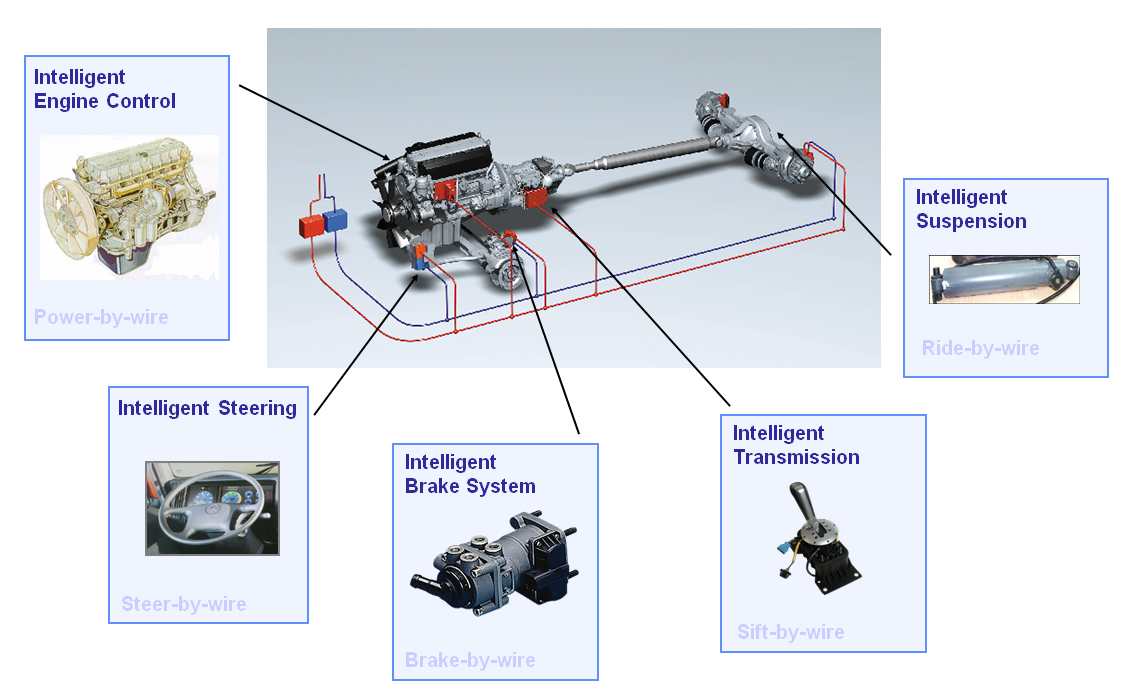
The figure above shows the intelligent actuators in the vehicle that has strong influence on the vehicle dynamics. Throttle–by-wire systems enables the control of the engine torque without touching the gas pedal, steer-by-wire systems allow autonomous steering of the vehicle, brake-by-wire systems delivers distributed brake force without touching the brake pedal, shift-by-wire systems enables the automatic selection of the proper gear.
For providing highly automated vehicle functions the intelligent actuators are mandatory requirements. For example for a basic cruise control function, only the throttle-by-wire actuator is required, but if we extend the functionality for adaptive cruise control the brake-by-wire subsystem will also be a prerequisite. While adding the shift-by-wire actuator one can provide even more comfortable ACC function. Steer-by-wire subsystems become important when not only the longitudinal, but also the lateral control of the vehicle is implemented e.g. lane keeping, temporary autopilot.
These intelligent actuators are each responsible for a particular domain of the vehicle dynamics control, while the whole vehicle movement (trajectory execution) is organized by the so-called powertrain controller. The powertrain controller separates and distributes the complex tasks for fulfilling the vehicle movement defined by the motion vector.
Another system should be noted here, namely the active suspension system. The suspension is not a typical actuator because generally it is a springing-damping system which connects the vehicle to its wheels, and allows relative movement between each other. The driver cannot influence the movement of the vehicle by direct intervention into the suspension. Modern vehicles can provide active suspension system primarily to increase the ride comfort and additionally to increase vehicle stability, thus safety. In this case an electronic controller can influence the vehicle dynamics by the suspension system.
7.1. Vehicular networks
In automotive industry several communication networks are used parallel, see [90]. In this subsection the CAN technology is detailed because it is the most widespread standard in the field of powertrain applications.
The Controller Area Network (CAN) is a serial communications protocol which efficiently supports distributed real-time control with a very high level of security. Its domain of application ranges from high-speed networks to low-cost multiplex wiring. In automotive electronics, electronic control units (ECU) are connected together using CAN and changing information with each-other by bitrates up to 1 Mbit/s.
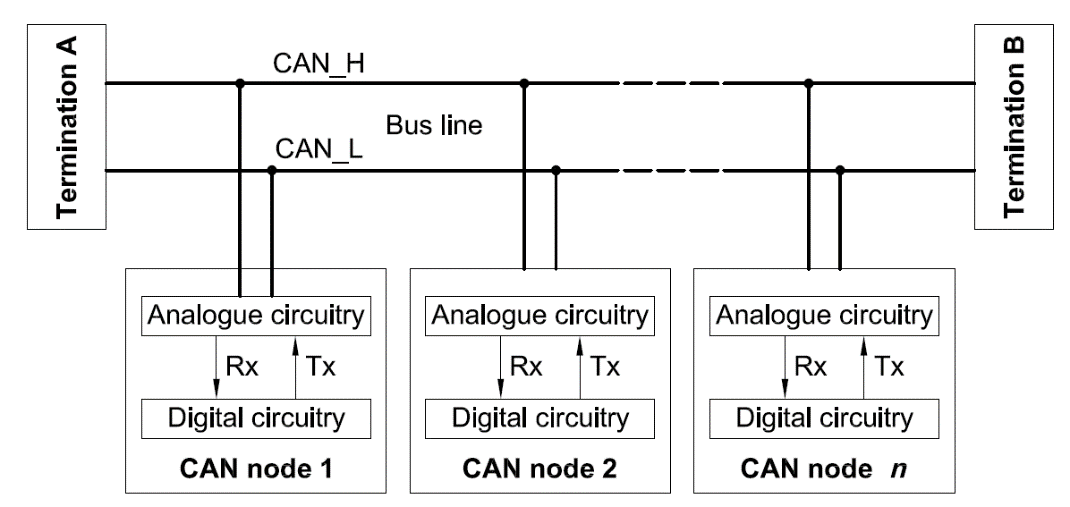
CAN is a multi-master bus with an open, linear structure with one logic bus line and equal nodes. The number of nodes is not limited by the protocol. Physically the bus line (Figure 6) is a twisted pair cable terminated by termination network A and termination network B. The locating of the termination within a CAN node should be avoided because the bus lines lose termination if this CAN node is disconnected from the bus line. The bus is in the recessive state if the bus drivers of all CAN nodes are switched off. In this case the mean bus voltage is generated by the termination and by the high internal resistance of each CAN nodes receiving circuitry. A dominant bit is sent to the bus if the bus drivers of at least one unit are switched on. This induces a current flow through the termination resistors and, consequently, a differential voltage between the two wires of the bus. The dominant and recessive states are detected by transforming the differential voltages of the bus into the corresponding recessive and dominant voltage levels at the comparator input of the receiving circuitry.
The CAN standard (see [91], [92]) gives specification which will be fulfilled by the cables chosen for the CAN bus. The aim of these specifications is to standardize the electrical characteristics and not to specify mechanical and material parameters of the cable. Furthermore the termination resistor used in termination A and termination B will comply with the limits specified in the standard also.
Besides the physical layer the CAN standard also specifies the ISO/OSI data link layer as well. CAN uses a very efficient media access method based on the arbitration principle called "Carrier Sense Multiple Access with Arbitration on Message Priority". Summarizing the properties of the CAN network the CAN specifications are as follows:
-
prioritization of messages
-
event based operation
-
configuration flexibility
-
multicast reception with time synchronization
-
system wide data consistency
-
multi-master
-
error detection and signalling
-
automatic retransmission of corrupted messages as soon as the bus is idle again
-
distinction between temporary errors and permanent failures of nodes and autonomous switching off of defect nodes
These properties enable the CAN technology to use in automotive environment and especially in safety critical systems. Although the limitations of CAN recently induced the development of new bus systems like FlexRay with higher bandwidth, deterministic time-triggered operation and fault-tolerant architecture, CAN still will be inevitable in the automotive industry for the next decade.
7.2. Safety critical systems
From safety point of view we can categorize the intelligent actuators into two groups, depending on whether a failure in the system may result is human injury and/or severe damage:
-
Safety critical subsystem (e.g. steer-by-wire, brake-by-wire, throttle-by-wire)
-
Not safety critical subsystem (e.g. shift-by-wire, active suspension)
These safety aspects have deterministic effect on the subsystem architecture. While in case of safety critical systems a fault tolerant architecture is a must requirement, there is no or limited backup function is required for non-safety critical systems.
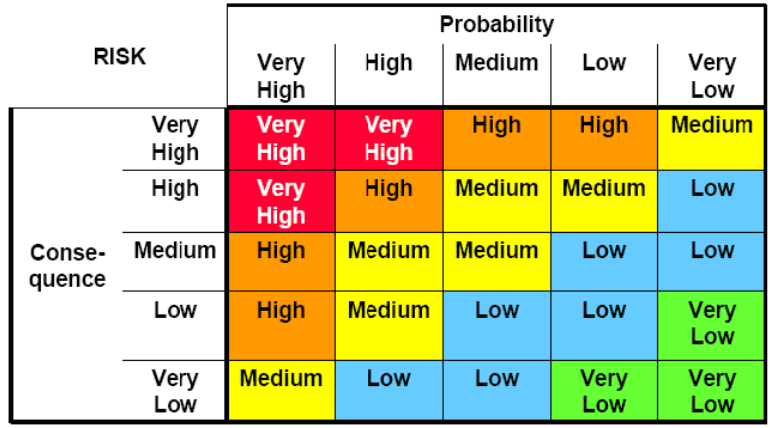
The required safety level can be traced back to the risk analysis of a potential failure. During risk analysis the probability of a failure and the severity of the outcome are taken into consideration. Based on this approach the risk of a failure can be categorized into layers, like low, medium or high as can be seen on the following figure:
The IEC61508 standard stands for “Functional safety of electrical/electronic/programmable electronic (E/E/PE) safety-related systems” The IEC61508 standard provides a complex guideline for designing electronic systems, where the concept is based on
-
risk analysis,
-
identifying safety requirements,
-
design,
-
implementation and
-
validation.
Source: IEC61508 “Functional safety of electrical/electronic/programmable electronic (E/E/PE) safety-related systems”
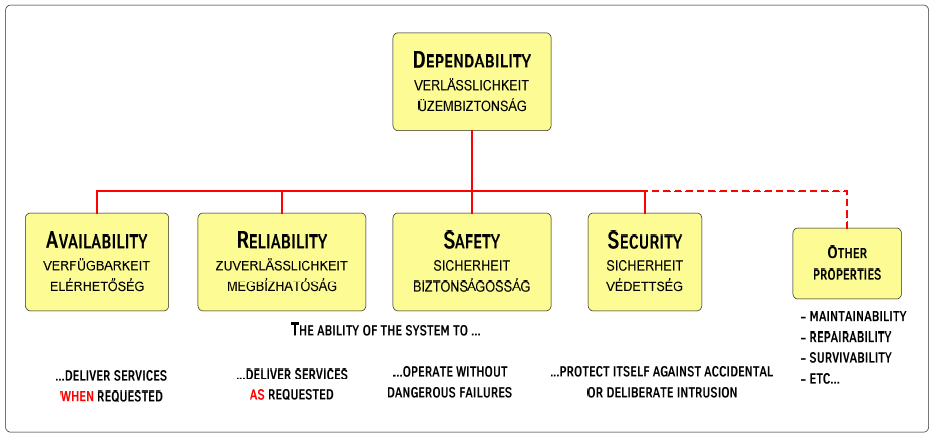
Dependability summarizes a system’s functional reliability, meaning that a certain function is at the driver’s disposal or not. There are different aspects of dependability, first of all availability, meaning that the system should deliver the function when it is requested by the driver (e.g. the vehicle should decelerate when the driver pushes the brake pedal). The subsequent aspect is reliability, indicating that the delivered service is working as requested (e.g. the vehicle should decelerate more as the driver pushes the brake pedal more). Safety in this manner implies that the system that provides the function operates without dangerous failures. Functional security ensures that the system is protected against accidental or deliberate intrusion (this is more and more important since vehicle hacking became an issue recently [93][94][95]). There are additional important characteristics can be defined as a part of dependability like maintainability, reparability that has real add value during operation and maintenance. The figure below shows a block diagram describing the characteristics of functional dependability.
Generally the acceptable risk hazard is below the tolerable risk limit, defined by market (end-user requirements expressed by the OEMs). The probability of a function loss should be inversely related to the probability of the safety level of the function. For example in the aviation industry (Airbus A330/A340) the accepted probability of a non-intended flap control is P < 1*10-9 (Source: Büse, Diehl). Such high requirements for the availability can only be fulfilled by so called fault-tolerant systems. This is the reason why automotive safety critical systems must be fault tolerant; meaning that one failure in the system may not reduce the functionality. Please remember the two independent circuits of the traditional hydraulic brake system, having the intension that if one circuit fails, there is still brake performance (but in this case not 100%!) in the vehicle. Such systems are called 2M systems, since there are two independent mechanical circuits in the architecture.
In today’s electronically controlled safety critical systems there are usually at least one mechanical backup system. As a result, the probability of a function loss with a mechanical backup (1E+1M - one electrical system and one mechanical system architecture) can be as low as P < 1*10-8, while the probability of a function loss without mechanical backup (1E - architecture alone) is around P < 1*10-4. The objective of the safety architectural design is to provide around P < 1*10-8 level of dependability (availability) in case of 2E system architectures (electronic system with electronic backup) without mechanical backup.
Safety architectural design means consideration of all potential failures and relevant design answers to all such issues. The easiest answer to produce a fault tolerant system, so as to avoid that one failure may result is a complete function loss is to duplicate the system and extend it with arbitration logic. In case of a redundant system extended it with arbitration logic the subcomponents are not simply duplicated, but there is a coordinating control above to enable (or disable) output control based on the comparison of the two calculated outputs of the redundant subsystems. In case both subsystems have the same output (and none of them identified errors) the overall system output is enabled. Even in case of redundancy there are several tricks to enhance the safety level of a system. For example safety engineers soon realized that it makes great difference if the redundant subsystems are composed of physically the same (hardware and software) or physically different components. Early solutions just used two physically same components for redundancy, but today the different hardware and software components are predefined requirements to eliminate the systematic failures caused by design and/or software errors.
Redundancy and supervision are not only issue in case of fault tolerant architectures, safety focused approach can also be observed in ECU (electronic Control Unit) design. Early and simple ECUs were only single processor systems; while later - especially in brake system control – the dual processor architectures became widespread. Initially these two processors were the same microcontrollers (e.g. Intel C196) with the same software (firmware) inside. In this arrangement both microcontrollers have access to all of the input signals, they individually perform internal calculations based on the same algorithm each resulting in a calculated output command. These two outputs then are compared to each-other and only in case both controllers came to the same result (without any errors identified) the ECU output is controlled. This so called A-A processor architecture was a significant step forward in safety (compared to single processor systems), but safety engineers quickly understood, that this approach does not prevent system loss in case of systematic failures (e.g. microcontroller hardware bug or software implementation error). This is the reason why the A-B processor architecture was later introduced. In the A-B processor approach the two controllers physically must differ from each other. Usually the A controller is bigger and more powerful (bigger in memory capacity, having more calculation power) than the B controller. The A controller is often identified as “main” controller, while B controller is often referred to as “safety” controller, since in this task distribution the A controller is responsible for the functionality, while the B controller has only tasks for checking the A controller. B controller has access also to the inputs of the A controller, but the algorithms inside are totally different. B controller also does calculations based on the input signals, but these are not detailed calculations, only basic calculations on a higher level “like rule of thumb” checking. The different hardware and the different software algorithms in A-B processor design have proved its superior reliability.
Besides the different controller architectures there are also different kinds of dedicated supervisory electronics used extensively by the automotive electronics industry. The most significant ones are the so called “watch-dog” circuits. The watch-dogs are generally separate electronic devices that have a preset internal alarm timer. If the watch-dog does not get an “everything is OK” signal from the main controller within the predefined timeframe, the watch-dog generates a hardware reset of the whole circuitry (ECU). There are not only simple watch-dog integrated circuits available, but also more complex ones (e.g. windowed watch-dogs), however the theory of operation are basically the same.
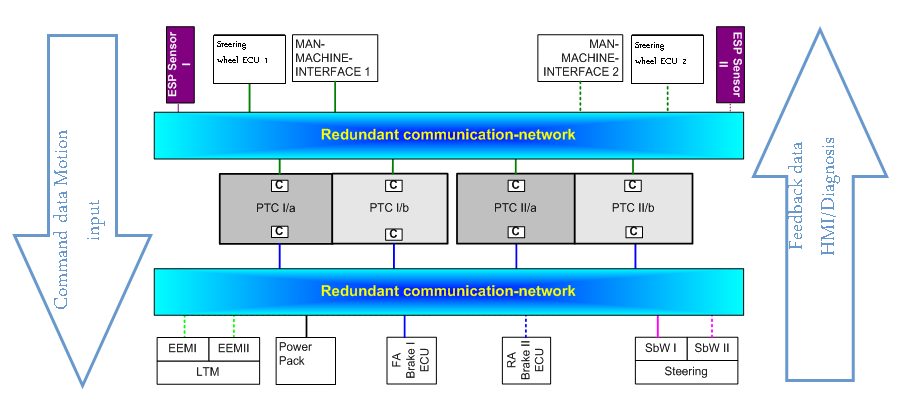
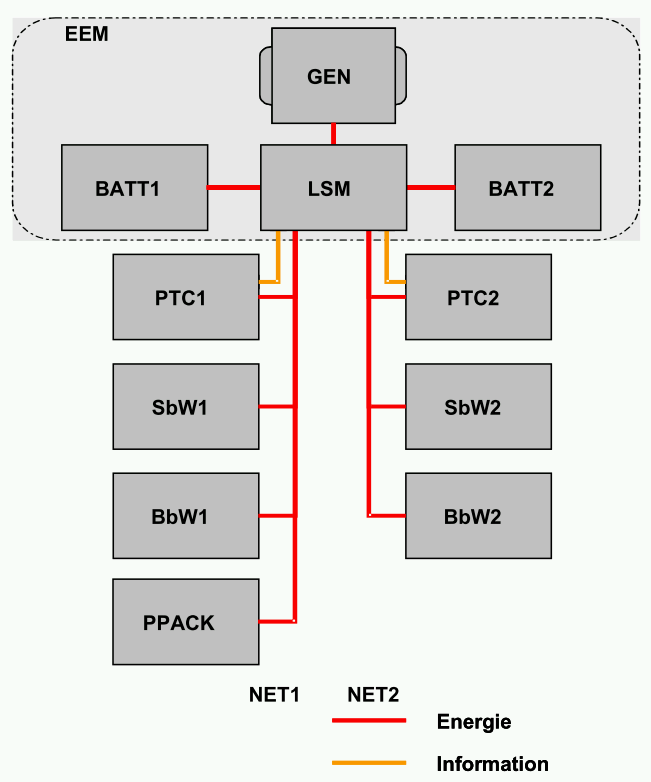
Up to now fault-tolerant requirements were only observed from functional point-of-view, while a simple failure in the energy supply system can also easily result in function loss. That is why a fail-safe electrical energy management subsystem is a mandatory requirement for safe electrical energy supply of safety related drive-by-wire subsystems (e.g. steer-by-wire, brake-by-wire). The following figure shows a block diagram of a redundant energy management architecture (where PTC stands for Powertrain Controller, SbW stands for Steer by Wire and BbW stands for Brake by Wire subsystems).
7.3. Steering
The steering system in today’s road vehicles uses mechanical linkage between the steering wheel and the steered wheels. The driver’s steering input (demand) is transmitted by a steering shaft through some type of gear reduction mechanism to generate a steering motion at the front wheels.
In the present day automobiles, power assisted steering has become a standard feature. Electrically power assisted steering has replaced the hydraulic steering aid which has been the standard for over 50 years. A hydraulic power assisted steering (HPAS) uses hydraulic pressure supplied by an engine-driven pump. Power steering amplifies and supplements the driver-applied torque at the steering wheel so that the required drive steering effort is reduced. The recent introduction of electric power assisted steering (EPAS) in production vehicles eliminates the need of the former hydraulic pump, thus offering several advantages. Electric power assisted steering is more efficient than conventional hydraulic power assisted steering, since the electric power steering motor only needs to provide assist when the steering wheel is turned, whereas the hydraulic pump must run continually. In the case of EPAS the assist level is easily adjustable to the vehicle type, road speed, and even driver preference. An added benefit is the elimination of environmental hazard posed by leakage and disposal of hydraulic power steering fluid. (Source: [96])
Although aviation industry proved that the fly-by-wire systems can be as reliable as the mechanical connection, automotive industry steps forward with intermediate phases like EPAS (electronically power assisted steering) as mentioned above and SIA (superimposed actuation) to be able to electronically intervene into the steering process.
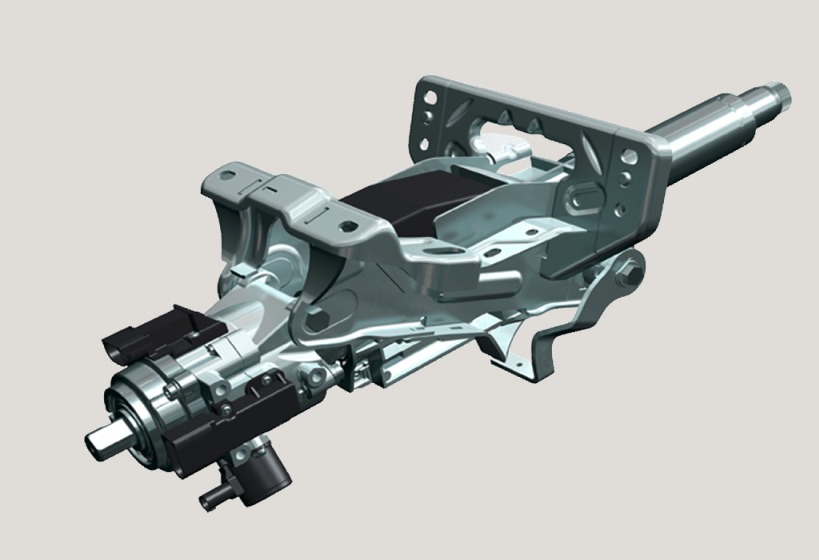
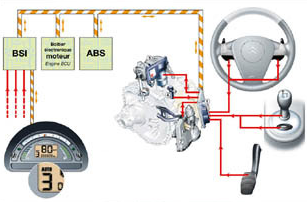
Electric power steering (EPAS) usually consists of a torque sensor in the steering column measuring the driver’s effort, and an electric actuator which then supplies the required steering support (see Figure 104 [97]).This system enables to implement such functions that were not feasible with the former hydraulic steering like automated parking or lane departure preventions.

Superimposed actuation (SIA) allows driver-independent steering input without disconnecting the mechanical linkage between the steering wheel and front axle. It is based on a standard rack-and-pinion steering system extended with a planetary gear in the steering column (see Figure 105 [98]). The planetary gear has two inputs, the driver controlled steering wheel and an electronically controlled electromotor and one output connected to the steering pinion at the front axle. The output movement of the planetary gear is determined by adding the steering wheel and the electro-motor rotation. When the electromotor is not operating, the planetary gear just passes through the rotation of the steering wheel; therefore the system also has an inherent fail silent behaviour. SIA systems may provide functions like speed dependent steering and limited (nearly) steer-by-wire functionality.
The future of driving is definitely the steer-by-wire technology. An innovative steering system allowing new degrees of freedom to implement a new human machine interface (HMI) including haptic feedback (by "cutting" the steering column, i.e. opening the mechanical connection steering wheel / steering system).
The steer-by-wire system offers the following advantages:
-
The absence of steering column simplifies the car interior design.
-
The absence of steering shaft, column and gear reduction mechanism allows much better space utilization in the engine compartment.
-
Without mechanical connection between the steering wheel and the road wheel, it is less likely that the impact of a frontal crash will force the steering wheel to intrude into the driver’s survival space.
-
Steering system characteristics can easily and infinitely be adjusted to optimize the steering response and feel.
Instead of a mechanical connection between the steering wheel and the steered axle (steering gear) the steer-by-wire system uses full electronic control. The steer-by-wire system has an electronically controlled clutch integrated into the steering rod that enables to cut or re-establish the mechanical connection in the steering system. For safety reasons this clutch can be opened by electromagnetic power, but it closes automatically (e.g. by a mechanical spring) when the electric power is missing. When the clutch is closed the steering system operates just like a “normal” mechanical steering system, where the mechanical link is continuous from the steering wheel to the steered wheels. In case the clutch is open the mechanical link no longer exists and the driver intention is detected by special sensors installed in the steering wheel. Input signal is the angle position (or steering torque) of the steering wheel, and output signal is the position of the steered wheels. The position of the steering actuator is controlled by a comparison of the desired and the actual value, which is usually measured by redundant angle sensors.
This above described solution is a 1E+1M architecture system, representing a steer-by wire system with full mechanical backup function. A similar system was installed in the PEIT demonstrator vehicle to validate steer-by-wire functionality.

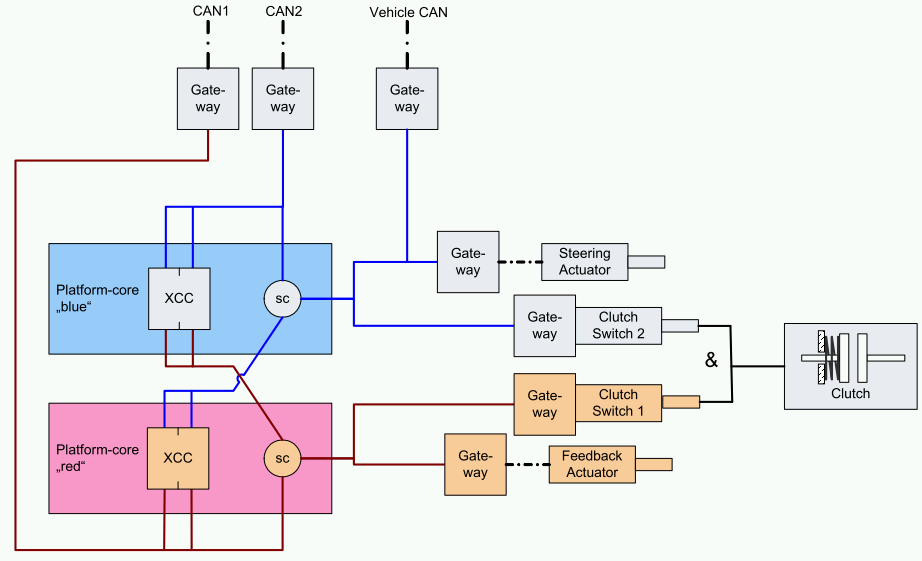
As steer-by-wire system design involves supreme safety considerations, it is not surprising that after PEIT the later HAVEit approach has extended the original safety concept with another electric control circuitry resulting in a 2E+1M architecture system. The following figure describes the safety mechanism of a steer-by-wire clutch control by introducing two parallel electronic control channels with cross checking functions [6].
Steer-by-wire systems also raise new challenges to be resolved, like force-feedback or steering wheel end positioning. In case of the mechanical steering the driver has to apply torque to the steering wheel to turn the front wheels either to left or right directions, the steering wheel movement is limited by the end positions of the steered wheels and the stabilizer rod automatically turns back the steering wheel into the straight position. In steer-by-wire mode when the clutch is open there is no direct feedback from the steered wheels to the steering wheel and without additional components there would be no limit for turning the steering wheel in either direction. Additionally there has to be a driver feedback actuator installed in the steering wheel to provide force (torque) feedback to the driver.
Mainly due to legal legislation traced back to safety issues steer-by-wire systems are not common on today’s road vehicles however the technology to be able to steer the wheels without mechanical connection exists since the beginning of the 2000s. Up to now only Infiniti introduced a steer-by-wire equipped vehicle into the market in 2013, but its steer-by-wire system contains a mechanical backup with a fail-safe clutch described later. The Nissan system debuted under the name of Direct Adaptive Steering technology, see [99]. It uses three independent ECUs for redundancy and a mechanical backup. There is a fail-safe clutch integrated to the system, which is open during electronically controlled normal driving situations (steer-by-wire driving mode), but in case of any fault detection the clutch is closed, establishing a mechanical link from the steering wheel to the steered axle, working like a conventional, electrically assisted steering system. Figure 108 illustrates DAS system architecture with the system components.

7.4. Engine
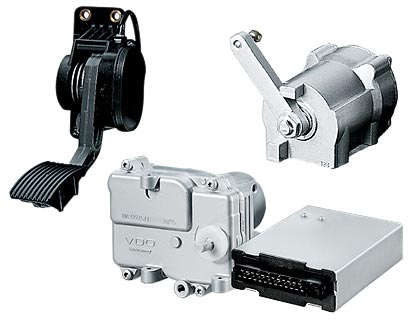
The earliest throttle-by-wire system in the automotive industry appeared on a 7 series BMW in the end of the 80s. In this case there is no mechanical Bowden coming from the accelerator pedal to the throttle valve on the engine, but there is a position sensor and a transmitter placed in the gas pedal unit, and the throttle valve is positioned by using an electric motor. A throttle-by-wire system architecture consists of a pedal module to translate the driver input to an electrical signal for the engine control module (ECM) and the electronic throttle body (ETB). The ETB receives the electrical signal command from the engine control module (ECM) and moves the throttle valve to allow airflow into engine. The ETB provides feedback of its relative position as measured by the throttle position sensor (TPS) from the throttle to the ECM.
Electronic throttle control enables the integration of features such as cruise control, traction control, stability control, pre-crash systems and others that require torque management, since the throttle can be moved irrespective of the position of the driver's accelerator pedal. Throttle-by-wire provides some benefit in areas such as air-fuel ratio control, exhaust emissions and fuel consumption reduction, and also works jointly with other technologies such as gasoline direct injection.
7.5. Brakes
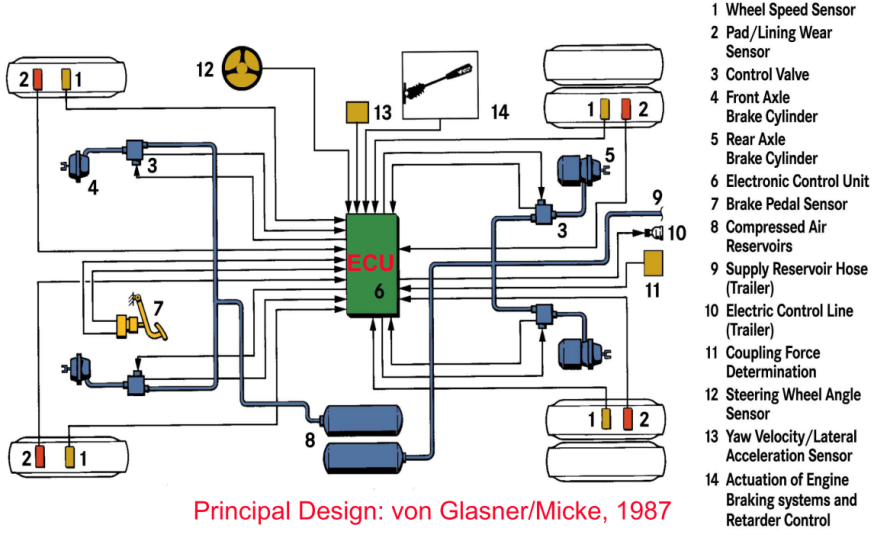
Brake-by-wire systems were initially introduced in the heavy duty commercial vehicle segment in the mid of the 90s. The so called EBS (Electronic Brake Control) systems are rather electronically controlled pneumatic brake systems, since the energy for braking is supplied by compressed air. Ten years later in the passenger car domain Daimler and Toyota started to use such systems, with limited success. These systems are still classic hydraulic wheel brakes where the energy for braking is supplied by an electro-hydraulic pump. The greatest advantage of an electronically controlled brake system is the capability of braking each wheel according to the corresponding friction situation under the wheels. The brake-by-wire systems are fully controlled by electronic circuits and electronic/electric commands/signals. Actuation however still pneumatic in case of commercial vehicles and hydraulic in case a passenger cars. The future brake-by-wire systems may be composed of fully electronic brakes where the hydraulic system is replaced by mechatronic actuators and the energy for braking also comes from electric energy, using so called EMB (Electro-Mechanic Brake) or EWB (Electronic Wedge Brake) applications. The theory of the electronically controlled braking system is closely linked together with Prof. Egon-Christian Von Glasner who designed the first architecture of an EBS in 1987 with his partner, Micke[100].
7.5.1. Electro-pneumatic Brake (EPB)
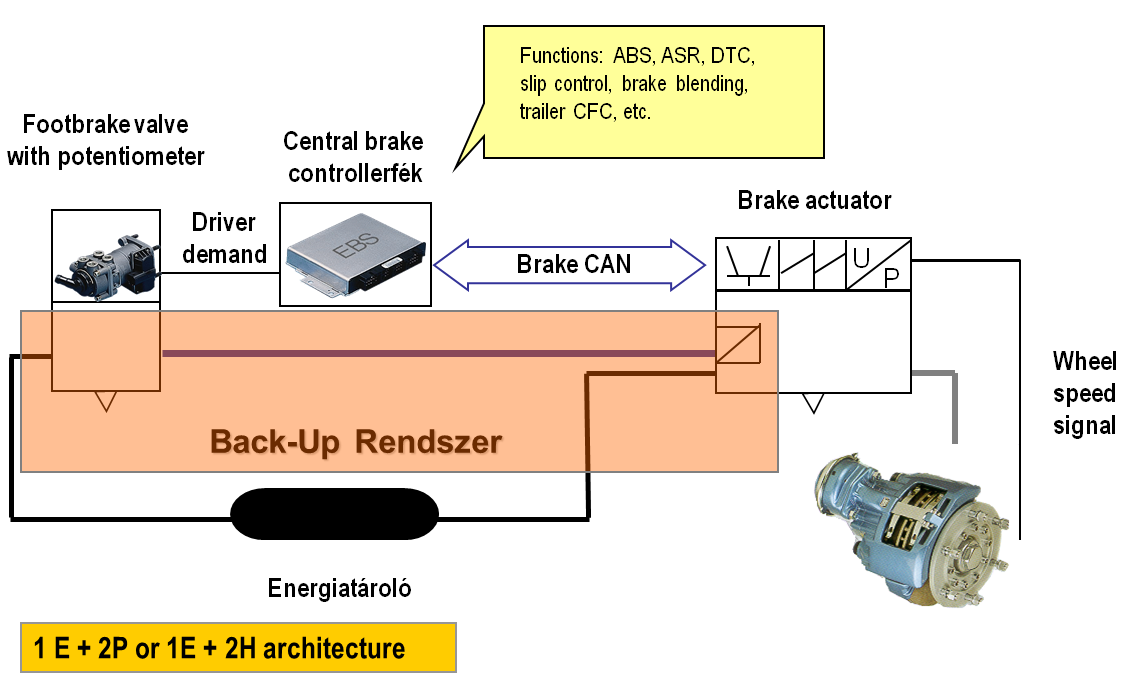
EPB stands for Electro Pneumatic Braking system, which is practically a brake-by-wire system with pneumatic actuators and pneumatic backup system. Today these systems, generally called as EBS are standard in all modern heavy duty commercial vehicles (motor vehicles and trailers). EBS was introduced by Wabco in 1996 as the series production brake system of Mercedes Benz Actros.
The basic functionality of the EBS can be observed in Figure 111 [101]. The driver presses the brake pedal which is connected to the foot brake module. It measures the pedal’s path with redundant potentiometers and sends the drivers demand to the central ECU. The EBS’s central ECU calculates the required pressure for each wheel and sends the result to the brake actuator ECUs. In this ECU there is closed loop pressure control software, which sets the air pressure in the brake chambers to the prescribed value. The actuator ECU also measures the wheel speed and sends this information back to the central EBS ECU. During the normal operation the actuator ECUs energize the so-called backup valves, which results in the pneumatic backup system’s deactivation. In case of any detected or unexpected error (and when unpowered) the backup valves are dropped and the conventional pneumatic brake system becomes active again.
The advantages of electronic control over conventional pneumatic control are shorter response times and build-up times in brake cylinders, reducing the brake distance and the integration possibility of several active safety and comfort functions like the followings.
-
Anti-lock Braking System (ABS)
-
Traction control (ASR,TCS)
-
Retarder and engine brake control
-
Brake pad wear control
-
Vehicle Dynamics Control (VDC/ESP)
-
Yaw Control (YC)
-
Roll-Over Protection (ROP)
-
Coupling Force Control (CFC) between the tractor and semi-trailer
-
Adaptive Cruise Control (ACC)
-
Hill holder
7.5.2. Elector-hydraulic Brake (EHB)
The intention of eliminating the hydraulic connection between the brake pedal and the actuator is primarily motivated by the need of integration of the several active safety functions such as ABS, ASR and VDC (ESP).
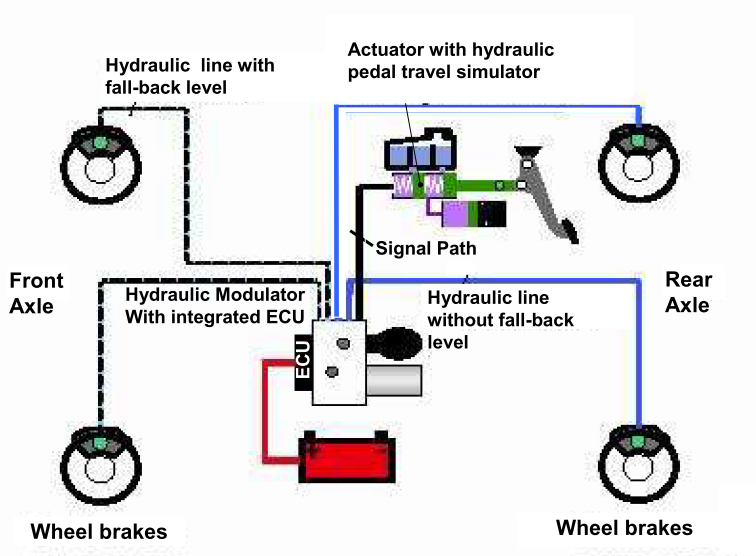
An Electro Hydraulic Brake system is practically a brake-by-wire system with hydraulic actuators and a hydraulic backup system. Normally there is no mechanical connection between the brake pedal and the hydraulic braking system. When the brake pedal is pressed the pedal position sensor detects the amount of movement of the driver, thus the distance the brake pedal travelled. In addition the ECU feedbacks to the brake pedal’s actuator which hardens the pedal to help the driver to feel the amount of the braking force. As a function of distance the ECU determines the optimum brake pressure for each wheel and applies this pressure using the hydraulic actuators of the brake system. The brake pressure is supplied by a piston pump driven by an electric motor and a hydraulic reservoir which is sufficient for several consecutive brake events. The nominal pressure is controlled between 140 and 160 Ba. The system is capable of generating or releasing the required brake pressure in a very short time. It results in shorter stopping distance and in more accurate control of the active safety systems. Should the electronic system encounter any errors the hydraulic backup brake system is always there to take over the braking task. The following figure shows the layout of an electronically controlled hydraulic brake system[100].
The first brake-by-wire system with hydraulic backup was born from the cooperation of Daimler and Bosch in 2001, which was called Sensotronic Brake Control (SBC). It was not a success story, because of software failures. The customers complained because the backup mode resulted in longer stopping distance and higher brake pedal effort by the driver. In May 2004, Mercedes recalled 680,000 vehicles to fix the complex brake-by-wire system. Then, in March 2005, 1.3 million cars were recalled, partly because of further unspecified problems with the Sensotronic Brake Control system. (Source: [102])
7.5.3. Electro-mechanic brake (EMB)
The EMB stands for electromechanical braking system, which is a fully brake-by-wire system. It does not use any hydraulic nor pneumatic actuators as shown on Figure 113 [100]. EMB reduces the stopping distance on account of its rapid brake response, eliminates the necessity of a brake cylinder, brake lines and hoses, as all these components are replaced by electric wiring. The use of electrics reduces maintenance expense, and also eliminates the expense of brake fluid disposal. EMB likewise measures the force of the driver's intention to brake the vehicle via sensors monitoring the system in the brake-pedal feel simulator. The ECU processes the signals received, links them where appropriate to data from other sensors and control systems, and calculates the force to be generated by the electronic brake caliper (e-caliper) of each wheel when pressing the brake pads onto the brake disc. The wheel brake modules essentially consist of an electric control unit, an electric motor and a transmission system. The electric motor and transmission system form the so-called actuator which generates the brake application forces in the brake caliper. These actuators are capable of delivering forces of up to several tons in just a few milliseconds. (Source: [103])
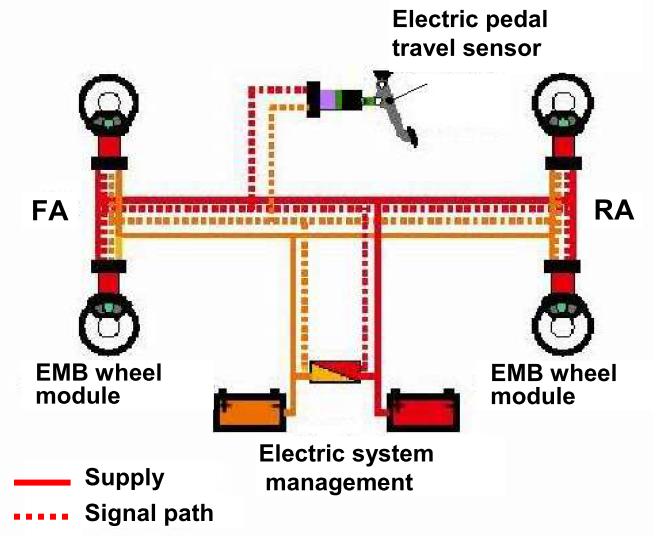
Power requirements for EMB are high and would overload the capabilities of conventional 12 volt systems installed in today's vehicles. Therefore the electro-mechanical brake is designed for a working voltage of 42 volts, which can be ensured with extra batteries.
7.6. Transmission
The torque and power of the internal combustion engine vary significantly depending on the engine revolution. The task of the transmission system mounted between the engine and the driven wheels is to adapt the engine torque according to the actual traction requirement. From highly automated driving point-of-view the automotive transmission system can be classified into two categories, namely the manual transmission and the automatic transmission. Manual transmissions cannot be integrated into a highly automated vehicle, there has to be at least an automated manual transmission or another kind of automatic transmission as will be explained later in this section.
In case of the manual transmission system, the driver has the maximum control over the vehicle; however using manual transmission requires a certain practice and experience. The manual transmission is fully mechanical system that the driver operates with a stick-shift (gearshift) and a clutch pedal. The manual transmission is generally characterized by simple structure, high efficiency and low maintenance cost.
Automatic transmission systems definitely increase the driving comfort by taking over the task of handling the clutch pedal and choosing the appropriate gear ratio from the driver. Regardless of the realization of the automatic transmission system, the gear selection and changing is done via electronic control without the intervention of the driver. There are different types of automatic transmission systems available, like
-
Automated Manual Transmission (AMT)
-
Dual Clutch Transmission (DCT/DSG)
-
Hydrodynamic Transmission (HT)
-
Continuously Variable Transmission (CVT)
7.6.1. Clutch
The purpose of the clutch is to establish a releasable torque transmission link between the engine and the transmission through friction, allowing the gears to be engaged. Besides changing gears it enables functions like smooth starting of the vehicle or stopping the car without having to stop the internal combustion engine. In traditional vehicles the clutch is operated by the driver through the clutch pedal that uses mechanical Bowden or a hydraulic link to the clutch mechanism. In clutch-by-wire applications there is no need for a clutch pedal, the release and engage of the clutch is controlled by an electronic system.
In the SensoDrive electronically controlled manual transmission system of Citroen there is no clutch pedal. The gear shifting is simply done by selecting the required gear with the gear stick or the paddle integrated into the steering wheel. During gear shifting the driver even does not have to release the accelerator pedal. The SensoDrive system is managed by an electronic control unit (ECU), which controls two actuators. One actuator changes gears while the other, which is equipped with a facing wear compensation system, opens and closes the clutch. The following figure illustrates the operation of the clutch-by-wire system of Citroen [104].
7.6.2. Automated Manual Transmission (AMT)
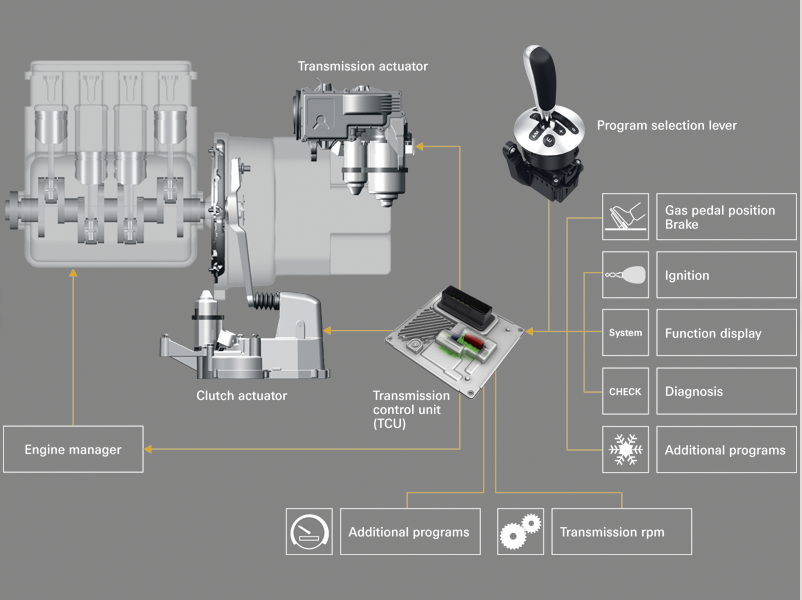
In case of an automated manual transmission (AMT) a simple manual transmission is transformed into an automatic transmission system by installing a clutch actuator, a gear selector actuator and an electronic control unit. The shift-by-wire process is composed of the following steps. After the clutch is opened by the electromechanical clutch actuator, the gear shifting operation in the gearbox is carried out by the electromechanical transmission actuator. When the appropriate gear is selected then the electromechanical clutch actuator closes the clutch and drive begins. These two actuators are controlled by an electronic control unit. If required, the system determines the shift points fully automatically, controls the shift and clutch processes, and cooperates with the engine management system during the shift process with respect to engine revolution and torque requests [105].
Automated Manual Transmissions have a lot of favourable properties; the disadvantage is that the power flow (traction) is lost during switching gear, as it is necessary to open the clutch. This is what automatic transmission systems have eliminated providing continuous traction during acceleration.
7.6.3. Dual Clutch Transmission (DTC/DSG)
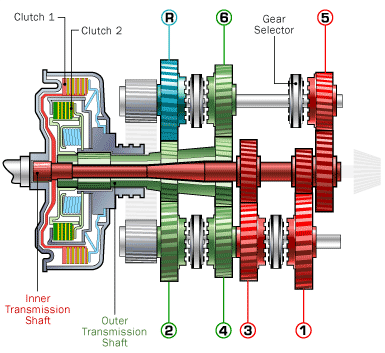
The heart of the Dual Clutch Transmission (DCT) is the combined dual clutch system. The DSG acronym is originally derived from the German word of “DoppelSchaltGetriebe” but it also has an English alternative of “Direct Shift Gearbox”. The reason for the naming is that there are two transmission systems integrated into one. Transmission one includes the odd gears (first, third, fifth and reverse), while transmission two contains the even gears (second, fourth and sixth). The combined dual clutch system switches from one to the other very quickly, releasing an odd gear and at the same time engaging a preselected even gear and vice versa. Using this arrangement, gears can be changed without interrupting the traction from the engine to the driven wheels. This allows dynamic acceleration and extremely fast gear shifting times that are below human perception[106].
7.6.4. Hydrodynamic Transmission (HT)
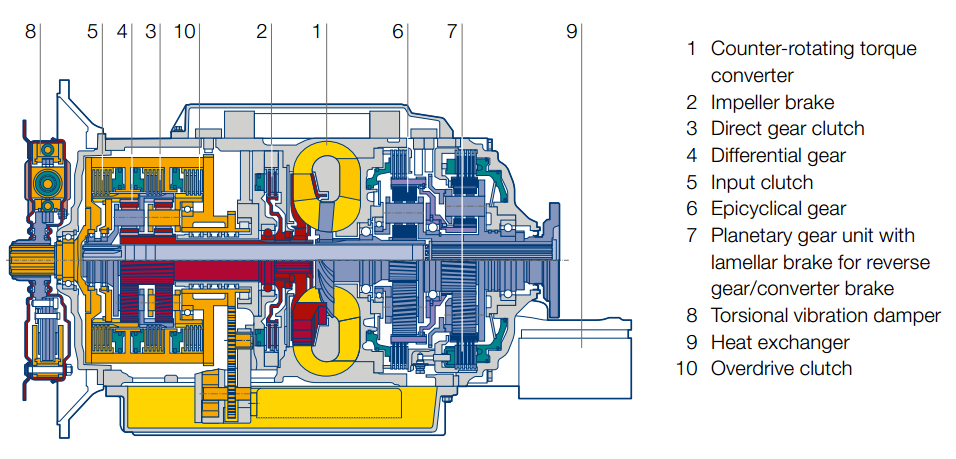
The hydrodynamic torque converter and planetary gear transmissions can be found in premium segment passenger cars, commercial vehicles and buses. The design of the hydrodynamic transmission with planetary gear is simple and clear as can be observed on the figure below[107]. The main piece is the hydrodynamic counter-rotating torque converter. Situated in front of it are the impeller brake, the direct gear clutch, the differential transmission, the input clutch and the overdrive clutch. A hydraulic torsional vibration damper at the transmission input reduces engine vibrations effectively. Behind the converter, an epicyclical gear combines the hydrodynamic and mechanical forces. The final set of planetary gears activates the reverse gear and, during braking, also the retarder Gear-shifting commands are placed by the electronic control system; gear shifting occurs electro-hydraulically, with solenoid valves. The transmission electronic control unit is in continuous data exchange with other ECUs like engine and the brake system management to provide a harmonized control.
7.6.5. Continuously Variable Transmission (CVT)
The Continuously Variable Transmission (CVT) ideally matches the needs of vehicle traction. This is also beneficial in terms of fuel consumption, pollutant emissions, acceleration and driving comfort. The first series production CVT appeared in 1959 in a DAF city car, but technology limitations made it suitable for engines with less than 100 horsepower. The enhanced versions with electronic control capable of handling more powerful engines can be found in the production line of several major OEM.
While traditional automatic transmissions use a set of gears that provides a given number of ratios there are no gears in CVT transmissions, but two V-shaped variable-diameter pulleys connected with a metal belt. One pulley is connected to the engine, the other to the driven wheels.
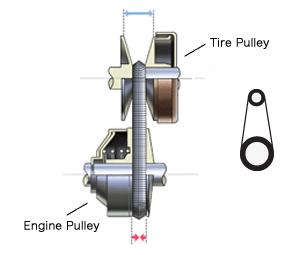
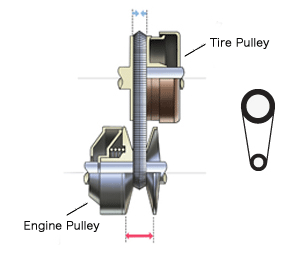
Changing the diameter of the pulleys varies the transmission ratio (the number of times the output shaft spins for each revolution of the engine). Illustrated in the figures above, as the engine (input) pulley width increases and the tire (output) pulley width decreases, the engine pulley becomes smaller than the tire pulley for the diameter of the part where the pulley and the belt are in contact. This is the state of being in low gear. Vice versa, as the engine pulley width decreases and the tire pulley width increases, the diameter of the part where belt and pulley are in contact grows larger for the engine pulley than the tire pulley, which is the state of being in high gear. The main advantage of the CVT is that pulley width can be continuously changed, allowing the system to change transmission gear ratio smoothly and without steps [108].
The controls for a CVT are the same as an automatic: Two pedals (accelerator and brake) and a P-R-N-D-L-style shift pattern.