3. fejezet - Villamos hajtások osztályozása
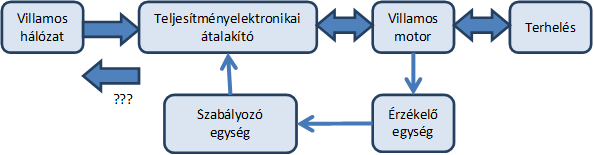
A villamos hajtások osztályozásának nehézségét az okozza, hogy a hajtások általában konkrét motortípusokhoz van dedikálva. Itt néhány alapvető jellemző alapján adunk egy átfogó képet és egyféle útmutatót arra, hogy milyen trendek figyelhetők meg a hajtások területén. Az első csoportosítási szempont, hogy egy elektronikával hány motort (tengelyt) működtetőnk így beszélhetünk egy és több tengelyes hajtásokról. A továbbiakban egytengelyes hajtásokkal foglalkozunk. A villamos hajtások főbb egységei a 3-1. ábran látható. A vastag nyíl az energiaáramlás irányát mutatja. Alkalmazástól függően teherélés esetén számítanunk kell kétirányú energiaáramlásra. Az elektromágneses motorok szintén alkalmasak a kétirányú energiaáramlásra, ezzel szemben a teljesítményelektronikai eszközöknél, főleg a korábbi típusoknál ez nem mindig biztosított.
Ismeretes, hogy a teljesítményelektronikában alapvetően négy átalakító típussal találkozunk:
-
Egyenáramról-egyenáramra átalakító (egyenáramú szaggató);
-
Egyenáramról-váltakozó áramra átalakító (inverter);
-
Váltakozó áramról-egyenáramra átalakító (egyenirányító);
-
Váltakozó áramról- váltakozó áramra átalakító (váltakozó áramú szaggató, tirisztoros ciklokonverter és tranzisztoros mátrix-konverter).
3.1. Egyszerű hajtások
A táplálás általában a váltakozó áramú hálózatról történik, ezért elegendő lenne az előző fejezetben említett két átalakító. Erre alacsonyabb minőségű, leginkább tirisztoros (vagy csak néhány tranzisztort tartalmazó) hajtásokban találunk példákat (ld. 3-2. ábra és 3-3. ábra). A 3-2. ábran az egyirányú nyilak azt fejezik ki, hogy a legtöbb esetben (bár nem kizárólagosan) egyirányú az energiaáramlás. A váltakozó áramú motorok esetén a tekercsekben kialakuló meddő (lengő) teljesítmény miatt még motoros üzemmódban is szükség van a kétirányú energiaáramlásra.


Elsősorban az egyenáramú hajtásoknál fontos osztályozási szempont, hogy a fordulatszám-nyomaték sík melyik síknegyedében (ld. 3-4. ábra) képes a hajtás működtetni az egyenáramú motort.
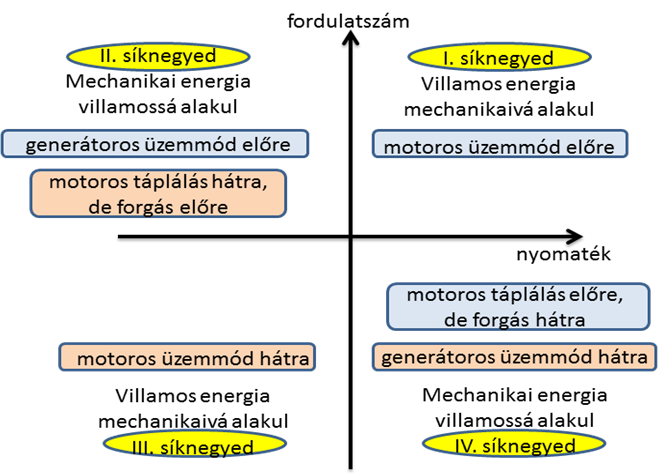
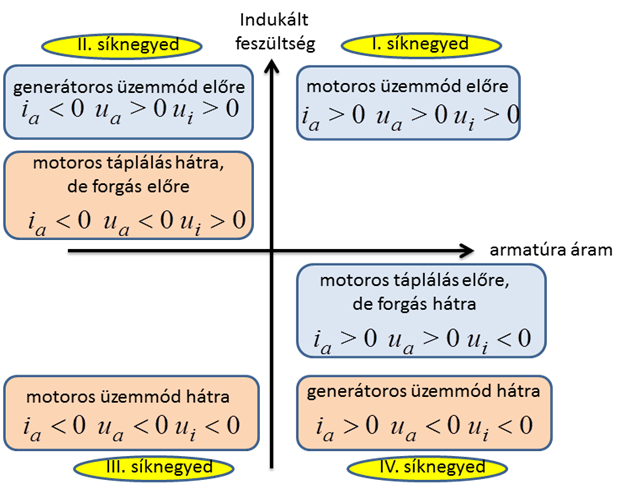
A táplálás szempontjából a négy negyedet a feszültség és az áram iránya határozza meg. Külsőgerjesztésű egyenáramú motort feltételezve legyen az armatúrafeszültség, az armatúraáram és az armatúratekercs indukált feszültsége. A 3-4. ábra síknegyedeiben a feszültségek és az armatúra áram előjele a 3-5. ábran látható.
Motoros üzemmódban a feszültség és az áram iránya megegyezik, a motor teljesítményt vesz fel a hálózatból (a villamos energia mechanikai energiává alakul). Az előre és hátraforgáshoz tartozó motoros üzemmód I. és a III. síknegyedben valósul meg. Ha az áramirány megfordul, akkor minden esetben a motor nyomatéka is előjelet vált, ha a feszültség és áram iránya ellentétes, akkor a villamos hálózat vesz fel teljesítményt (a mechanikai energia villamos energiává alakul), ezt nevezik generátoros üzemmódnak, amely a II. és a IV. síknegyedben valósulhat meg. Fontos megjegyezni, hogy és a II. és a IV. síknegyedbe az egyenáramú motor úgy is beléphet, hogy a feszültség és áramirány azonos (a motoros üzemmód) marad, de kényszerrel a motor forgásirányát megváltoztatjuk. Az egyenáramú motorokon kívül az aszinkronmotor is képes erre az üzemmódra, de a szinkron motoroknál ez az üzemmód nem létezik. A II. és a IV. síknegyedben minden esetben a mechanikai energia villamos energiává alakul, ugyanakkor, ha a feszültség és áram iránya megegyezik, akkor a motor a hálózatból is teljesítményt vesz fel. Vagyis mind a villamos, mind a mechanikai energia hővé alakul, ez a hajtás hatásfokára kedvezőtlen hatású. Részben azért, hogy a motor áramát korlátozzuk, részben azért, hogy a hő a motoron kívül, az ellenálláson termelődjön, a forgórész áramkörébe ellenállásokat kell iktatni (mind az egyenáramú, mind az aszinkronmotor esetén). Ez az üzemmód pl. daru- és liftalkalmazásokban a teher leeresztésekor a múltban volt fontos, amikor nem állt rendelkezésre elérhető áron olyan elektronika, amely a generátoros üzemmódot lehetővé tette tetszőleges fordulatszám mellett. Állandó feszültségről táplált motornál a generátoros üzemmód csak az üresjárási (aszinkronmotor esetén a szinkron) fordulatszám felett valósulhat meg. Elektronika szükséges a tápfeszültség folyamatos változtatásához. Négynegyedes szervohajtásokban a teher leeresztése motortípustól függetlenül csak generátoros üzemmódban valósul meg. A generátoros üzemmódról az elektronika gondoskodik.
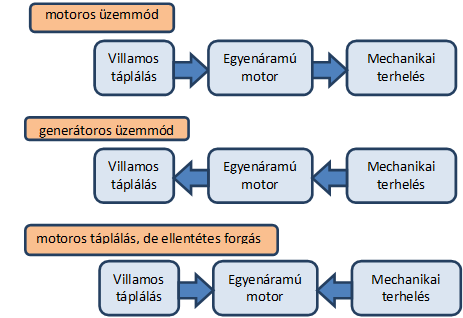
A három különböző üzemmód energiaáramlási irányait a 3-6. ábra mutatja
A váltakozó áramú szaggatóról táplált aszinkronmotor fordulatszáma csak erősen korlátozott mértékben változtatható, ezeket ebben a jegyzetben nem tárgyaljuk.
3.2. Négynegyedes szervohajtások
Elsőként megemlítjük, hogy igényes váltakozó áramú hajtások esetén is alkalmazhatunk közvetlen váltakozó áramról váltakozó áramra átalakítót (ld. 3-7. ábra), de a váltakozó áramú szaggató helyett a tranzisztoros mátrixkonvertert kell választanunk (a tirisztor és így a ciklokonverter inkább a múltat jelenti). Ezt a megoldást az ipar még nem alkalmazza, de előfordulhat, hogy a jövőben ez válik iparilag optimális megoldássá.

A legtöbb szervo hajtás négynegyedes és az átalakítás két lépcsőben valósul meg. Először a hálózati feszültséget egyenirányítjuk, így kialakul egy közbenső egyenáramú kör, majd egyenáramú motor esetén egy négynegyedes egyenáramú szaggatóval, váltakozó áramú motor esetén egy változtatható frekvenciájú inverterrel tápláljuk az adott motort (ld. 3-8. ábra).
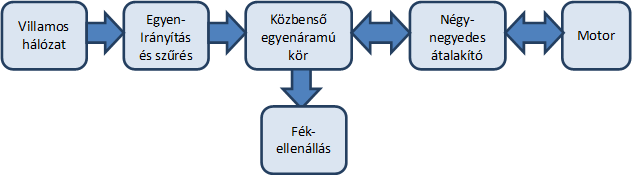
A 3-8. ábran a hálózat felé egyirányú energiaáramlást rajzoltunk, mert napjainkban ez a jellemző. A legolcsóbb és ezért legelterjedtebb egyenirányítók egyszerű diódásak, amelyek nem képesek az energiát a hálózat felé visszatáplálni. A fékellenállás arra szolgál, hogy hővé alakítsa a motor felől visszatáplált energiát. A diódás egyenirányítók esetén az egyirányú energiaáramlásnál sokkal nagyobb gondot jelent, hogy azok nem szinuszos áramot vesznek fel a hálózatból és ezért hálózati szennyezést okoznak. Sok esetben megmarad a diódás egyenirányítás, de a hálózatszennyezés csökkentése érdekében egy szűrő is található a hálózat és a diódás egyenirányító között. A szinuszos áramfelvétel vezérelt egyenirányítóval is megvalósítható, amely a szűrés mellett a kétirányú energiaáramlást is lehetővé teszi. Elképzelhető, hogy a jövőben ez a megoldás jobban elterjed, de ma még elvétve találunk ilyen ipari megoldásokat.
A feszültség és áram közül csak az egyiket tudjuk a motorra kényszeríteni, a másik kiadódik, ezért beszélhetünk feszültséggenerátoros és áramgenerátoros táplálásról. A megvalósítás szempontjából az előbbi az egyszerűbb, de az utóbbinak az előnye, hogy követlenebb a fizikai kapcsolata a nyomatékkal (ld. 2.1.1 pont), ezért követlen nyomatékszabályozást egyszerűbbé teszi. A nyolcvanas-kilencvenes években ipari alkalmazásig is eljutottak az ún. áraminverteres hajtások. Napjainkban a feszültséginverterek az egyeduralkodók. Ennek leginkább technológiai okai vannak, de azt nem lehet tudni, hogy a jövő technológiája merre fejlődik. Ugyancsak a nyolcvanas-kilencvenes években jelentek meg az ún. rezonáns konverterek és ehhez kapcsolódóan az ún. lágy kapcsolás.
A legtöbb motor képes mind a négy negyedben üzemelni.
A szinkronmotorok nyomatéka mindkét forgásirányban lehet pozitív és negatív, és két-két síknegyedbe nyúlik bele. Az előbbi esetben motorként az utóbbiban generátorként üzemel. A külsőgerjesztésű egyenáramú- és az aszinkronmotor azonos feszültségirány mellett három síknegyedbe is beléphet. A motoros üzemmódban a forgásirány megfordulhat.
3.2.1. Nyomatékérzékelés és –mérés
A legtöbb esetben a nyomatékot nem közvetlenül mérjük, hanem a villamos mennyiségekből számítjuk. A legegyszerűbb és a legpontatlanabb nyomatékbecslési mód, ha a hálózatból felvett teljesítményt az egyenáramú kör feszültségéből és áramából valamint a becsült hatásfokból számítjuk.
|
|
(3.1) |
Ezt a módszert egyenáramú- és aszinkronmotoros hajtások esetén egyaránt alkalmazzák, különösen az utóbbi esetben lényegesen bonyolultabb és ezért drágább egy pontosabb, közvetlen a motor áramán és feszültségén alapuló becslés.