5. fejezet - ESP rendszerek
- 5.1. Személygépkocsik ESP rendszerei
- 5.2. Az ESP összetett menetdinamikai szabályozó rendszer
- 5.3. Az ESP rendszer bemeneti információi és működése
- 5.4. Az ESP beavatkozások
- 5.5. Az ESP rendszer önellenőrzése
- 5.6. ESP hidraulika egység és elektronika
- 5.7. Az ESP rendszer perdülés érzékelője
- 5.8. Kereszt (és menet irányú) gyorsulás érzékelő
- 5.9. Kerékfordulatszám érzékelők legújabb változata
- 5.10. Az ESP rendszerek kormánykerék elfordítás érzékelői
- 5.11. Fékező nyomás érzékelő
- 5.12. Az aktív vákuumos fékrásegítő működése
- 5.13. Az újabb ESP rendszerek összetett menetdinamikai szabályozó rendszerré váltak
-
- 5.13.1. ESP beavatkozás kormánykorrekcióval
- 5.13.2. További kiegészítő ESP működések – A rögzítő fék dinamikus használata
- 5.13.3. Utánfutó stabilizálás
- 5.13.4. Szárazfék funkció
- 5.13.5. Offroad ABS
- 5.13.6. Offroad ESP és egy fokozatú ESP lekapcsolás
- 5.13.7. Az ESP kikapcsolható
- 5.13.8. Hidraulikus fading kompenzáció (HFC)
- 5.13.9. Az ESP vezérelte vészfékezés rögzítő fékkel
- 5.13.10. Hold assist
- 5.13.11. Sebességszabályozó
- 5.13.12. HDC hegyről lefelé ereszkedő asszisztens
- 5.13.13. Tetőcsomagtartó felismerés
- 5.13.14. Fékezés a bal- és a jobb oldalon eltérő a tapadási tényezőnél
- 5.13.15. ESP kormányzási beavatkozás túlkormányozott gépkocsinál
- 5.13.16. Az ESP kormányzási beavatkozás alulkormányozott gépkocsinál
- 5.13.17. Biztonsági koncepció a kormányzási beavatkozásnál
- 5.13.18. A Robert Bosch GmBH kilencedik generációt képviselő ESP rendszere
5.1. Személygépkocsik ESP rendszerei
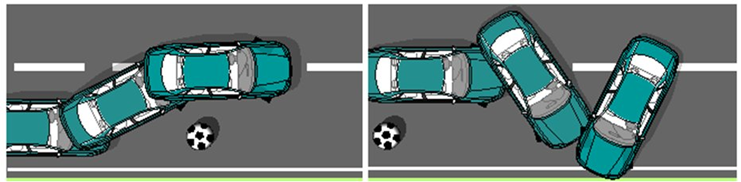
Az ESP rendszer a gépkocsik aktív biztonságának fontos eleme, hiszen a hossz- és a kereszt irányú dinamikai viselkedést is képes befolyásolni. Kifejlesztését a sokszor ”megmagyarázhatatlan” egy résztvevős balesetek indokolták, melyeknél a gépkocsivezető elvesztette uralmát autója felett. Gyakran ezek valódi oka vezetési hiba volt. Aminek következtében a gépkocsi kisodródott, megfarolt, és oldalával ütközött neki például egy útszéli fának, villanypóznának, vagy más objektumoknak. A statisztikai adatok alapján megállapítható, hogy a becsatolt biztonsági övvel bekövetkezett halálos balesetek 60%-a oldal irányú ütközés következménye volt. Ezek jelentős része elkerülhető lenne, ha a gépkocsiba ESP-t szerelnének. Ez az elektronikus stabilizáló program szélsőséges menetviszonyoknál is hatékonyan stabilizálja a gépkocsit a fizikai törvények határain belül.

A gépkocsi menetdinamikája akkor jó, ha pánikhelyzetben sem kényszerül a vezető a megszokottól eltérő cselekvésre. Ilyenkor ugyanis az ijedtség miatt gyakran helytelenül cselekszik.
Amikor a kerekek csúszás miatt lecsökkent az oldalvezető erő, a vezető a túlzott, és hirtelen kormánykorrekcióval gyakran a veszélyes helyzetet tovább rontja. A legkritikusabb körülmények között is uralhatóvá teszi az autót az ESP működése, mely megfelelően reagál a vezető helytelen cselekvéseire is, amikor például teljes gázt ad, vagy egyik irányban teljesen elrántja a kormányt.

A címben is olvasható elnevezésen kívül használatos még ugyanerre a menetdinamikai szabályozó rendszerre az Electronic Stability Control elnevezés is és az ebből származó ESC rövidítés. Ez egy klasszikus perdület-szabályozás, (a gépkocsi függőleges tömegközépponti tengelye körüli elfordulás sebességének a szabályozása), mely egy megadott járműmodell alapján működik. Ezt egészíti ki a kúszási szög változásának kompenzálása. Ez a rendszer már nem csak fékezéskor, vagy gyorsításkor avatkozik be, hanem akkor is, amikor a gépkocsi stabilitása azt megkívánja. Nem szabad azonban megfeledkezni arról, hogy ez is csak a fizikai törvények határain belül képes stabilizálni a gépkocsit.
Támogatja a gépkocsi iránytartását, erős terhelésváltás esetén. De javítja a menetstabilitást akkor is, amikor nagy nyomatékkal a motorféket használják. Könnyebbé teszi a dinamikus kormányzási akciót, megakadályozza a gépkocsi „túlfordulását”. Az újabb fejlesztéseknek köszönhetően egyre több különleges működéssel is kiegészült a beavatkozások sora. Ilyen például az utánfutó stabilizáló algoritmussal. Ez a vontató gépkocsira fejti ki hatását, amikor nagy sebességnél az utánfutó kezdi belengetni azt. Ez a szabályozási módot Trailer Stability Program –nak nevezik, és TSP –nek rövidítik. Ennek keretében egy valódi kúszási szög szabályozás valósul meg.
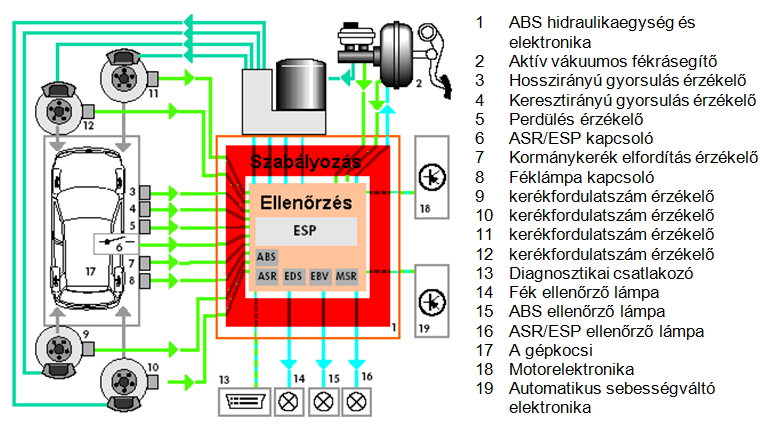
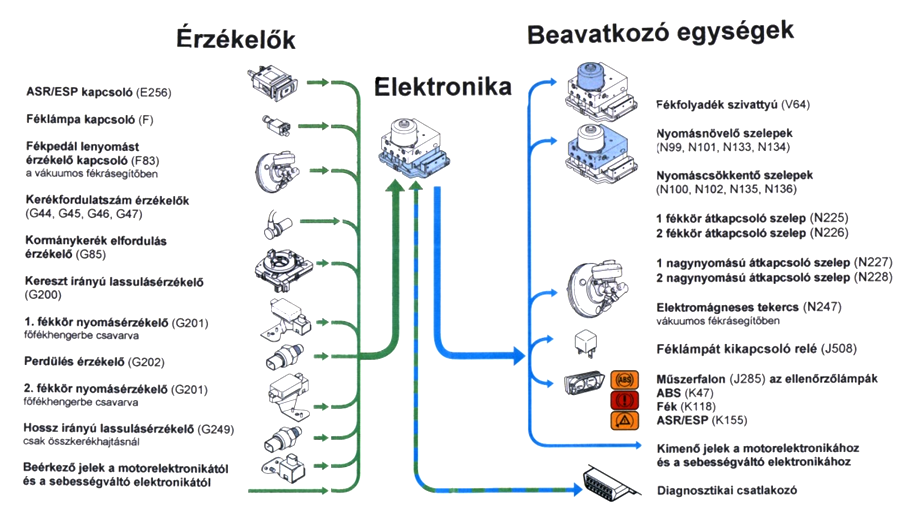
5.1.1. Az ESP rendszer részei
-
Elektro - hidraulikus szabályozó egység, mely hasonlatos az ABS / ASR hidraulikaegységhez
-
Aktív vákuumos fékrásegítő (ez hozza létre a vezetőtől függetlenül a fékező nyomást az egyes kerekeknél történő beavatkozásokhoz a Continental Teves ESP rendszernél)
-
Kormányzási szöghelyzet érzékelő,
-
CAN hálózati kommunikáció a motor nyomaték szabályozáshoz,
-
Kerékfordulatszám érzékelők (4 db),
-
Perdülés és keresztirányú gyorsulás érzékelő
5.2. Az ESP összetett menetdinamikai szabályozó rendszer
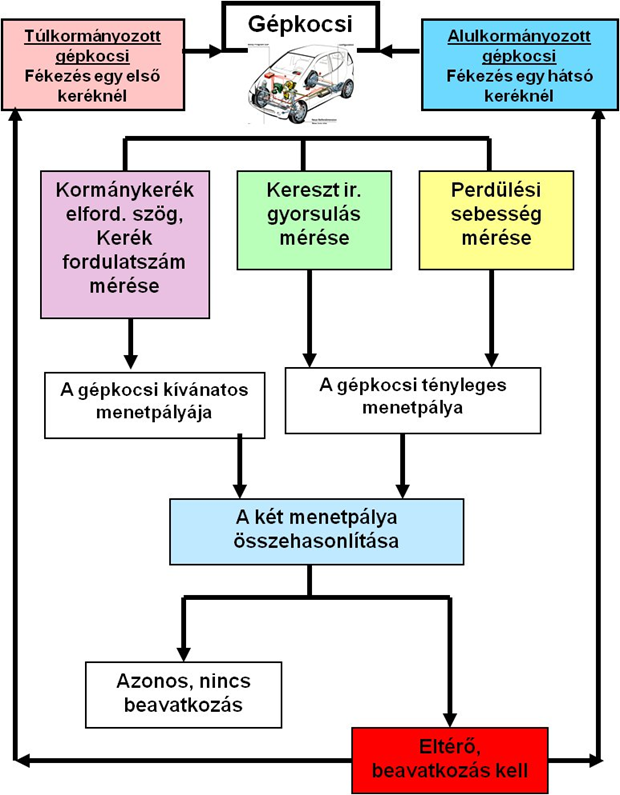
Azáltal, hogy a gépkocsi hossz-, és kereszt irányú dinamikáját is képes javítani beavatkozásaival, jelentősen növeli a gépkocsik aktív biztonságát. Ez az alapján történik, hogy minden hatodik milliszekundumban összehasonlítja a vezető által kívánatosnak tartott menetpályát, a gépkocsi tényleges menetpályájával a szoftver által tárolt matematikai modell alapján.
A vezető szándéka a kormánykerék elfordítási iránya, az elfordítás sebessége és szöghelyzete és hozzá hasonlóan a gáz, illetve a fékpedál helyzete és annak változása, valamint a sebesség alapján határozható meg.
A gépkocsi tényleges menetpályájára vonatkozó információk a perdülés, a kereszt-, illetve összkerékhajtásúaknál a hossz - irányú gyorsulás érzékelők-, továbbá a kerékfordulatszám érzékelők jeleinek kiértékelése révén válik ismertté. Ebből is kitűnik, hogy ezeknek a speciális érzékelőknek a kifogástalan működése nagyon fontos az ESP szabályozás szempontjából.
Az ESP működése során számos korábban önálló szabályozó algoritmus, most mint részprogram válik a rendszer részévé. Ezek közül az alábbiakban felsorolunk néhányat:
-
blokkolásgátló (ABS) és annak „terep fokozata”, mely nagyobb kerékcsúszást engedélyez a laza talajon, vagy a friss hóban.
-
kipörgésgátló ASR, (és annak nagyobb kerékcsúszást lehetővé tevő „terep fokozata”
-
perdülési nyomaték szabályozás GMR,
-
elektronikus fékerő felosztást EBV,
-
fékasszisztens működés.
-
utánfutó stabilizálás
5.2.1. ESP beavatkozás módja és hatása a közlekedésbiztonságra
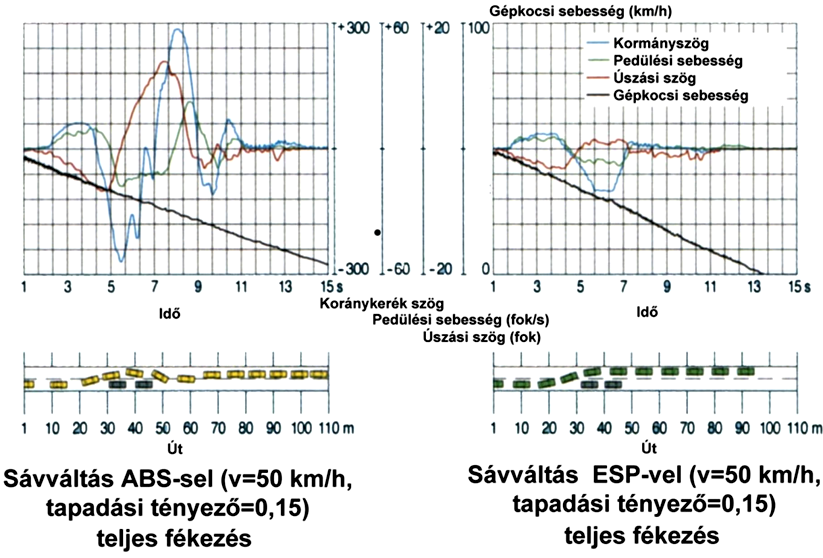
Az ESP megakadályozza a gépkocsi alulkormányzott, illetve túlkormányzott viselkedését. Ez a pillanatnyi menetállapottól függően, az egyik kerék szabályozott fékezésével valósulhat meg. Alulkormányzott esetben például a kanyar belső ívén futó hátsó kerék fékezésével történik a beavatkozás. Túlkormányzott esetben a kanyar a külső íven futó első kerék fékezésével stabilizálható a gépkocsi. Dinamikus kormányzási manőver esetén az ellenkormányzást könnyítheti meg az ESP, amikor a kanyarodást követően a gépkocsit vissza kell hozni egyenes menetbe. Ezeket a beavatkozásokat a motor hajtó nyomatékának csökkentésével is támogatja az elektronika.
5.2.1.1. Standard ESP
A gépkocsi perdületi gyorsulásának és kúszási szög változásának alapján történik a beavatkozás.
5.2.1.2. SESP
A rövidítés első „S” betűje a szenzitiv szót helyettesíti, mely magyarul „érzékeny” –t jelent. Ennek a szabályozásnak az előnyei különösen terhelésváltáskor mutatkoznak meg.
5.2.1.3. ARP
Active Rollover Prevention – ez a borulás elleni védelmet jelenti. Nagyon dinamikus sávváltásnál, illetve kitérés esetén növeli hatékonyan az aktív biztonságot.
5.2.1.4. TSP
Trailer Stability Program - utánfutó stabilizálás.
5.2.2. Continental Teves ESP hidraulika egységek
A Continental Teves MK 20 típusjelzésű ABS/ASR változat volt a vállalat első olyan hidraulika egysége, mely a speciális kiegészítő érzékelőkkel ESP szabályozásra alkalmassá vált. Külön egységet alkotott az optokapus kormánykerék elfordítás érzékelő,továbbá a speciális kettős hangvillához hasonlító speciális kvarckristályból kialakított perdülés érzékelő. Ez utóbbinak házába szerelték a kereszt irányú gyorsulás érzékelőt, illetve összkerék hajtású gépkocsiknál a hossz irányú lassulás érzékelőt is. Hamarosan ebből az egységből fejlesztették ki az intelligens, úgynevezett „sensor-cluster” –t. Ez saját maga kiértékeli az érzékelők jeleit, melynek eredményét a CAN hálózaton küldi az ESP elektronikának. Ennek az MK 20 rendszernek a gyártása 2000 –ig tartott. Ezt követték MK 60 típus, melyet 2000 - 2002 között szereltek a gépkocsikba. Az MK 70 változatot jelenleg is gyártják. Bizonyos speciális működésekre csak az MK25E, illetve az MK60E típusok képesek. Az MK 60 típusnál két kiegészítő nyomásérzékelőt is beszerelnek. A blokkolásgátló és a kipörgésgátló működése bizonyos változatoknál kiegészül a TPMS működéssel. Ez a többitől kisebb nyomású gumiabroncsot veszi észre a kerékfordulatszám érzékelők jeleinek kiértékelése alapján és figyelmezteti a gépkocsivezetőt az ellenőrzőlámpa segítségével. Az észlelés alapja az, hogy a kisebb nyomású, laposabb keréknek kisebb a gördülési sugara ezért egyenes menetben a többi keréknél nagyobb lesz a kerületi sebessége. Ezt a működésmódot a német szakirodalom Reifendruckverlust-Erkennungssystem –nek nevezi. Használatos még erre a működésmódra a DDS rövidítés is az angol „Deflation Detektion System” elnevezés alapján.
Az ESP rendszernek is egyik fontos kiegészítő működése a fékasszisztens, melyet a vállalat a Hydraulischer Bremsassistent elnevezés alapján HBA –nak rövidít. A lejtőn lefelé közlekedést teszi biztonságosabbá a Berg-Anfahrhilfe. Az elektromechanikus rögzítő fék dinamikus működtetésénél a CAN hálózaton keresztül érkező parancs működteti az ESP hidraulika egységet, amely elvégzi a fékezési beavatkozást.
5.3. Az ESP rendszer bemeneti információi és működése
Az ESP szabályozás különböző algoritmusai meghatározzák a gépkocsi sebességét és lassulását, a kerékcsúszást, a fékező nyomást. Ezek alapján a matematikai modell segítségével kiszámítja a ferdefutási szöget, a kerekek oldalkúszási szögét, a keresztirányú gyorsulást, a kerekeknél az oldalvezető erő nagyságát, a függőleges irányú terhelését és az eredő erőket. A ferdefutási szög meghatározásához a kétnyomú járműmodell mozgásegyenleteit használja fel az elektronika. Ezeket az egyenleteket azután linearizálja és diszkretizálja. Az oldalerők meghatározásához a HSRI gumiabroncs modellt alkalmazzák. Így kiküszöbölhetők a nem lineáris egyenletek és a kerekeknél meghatározhatók a hossz- és a kereszt irányú erők.
5.4. Az ESP beavatkozások
Az ESP rendszernek jelenleg már több beavatkozási lehetősége is van. A gépkocsi pillanatnyi menetdinamikai viselkedésétől függően:
-
egy kiválasztott kerék szabályozott fékezése,
-
motor nyomaték csökkentése,
-
az aktív szervokormány segítségével kormánykorrekció végrehajtása.
A kerék csúszás szabályozása a gépkocsivezetőtől függetlenül végrehajtott fékezésekkel valósul meg. Pontosan kell meghatározni, hogy mekkora kerékcsúszás változás szükséges. Túlkormányzott gépkocsinál előnyös, ha intenzív fékezés közben az ESP a külső íven haladó első keréknél a kerékcsúszást növeli, a belső íven pedig csökkenti. A két hátsó keréknél a csúszást fékezés közben nem módosítják.
Az egyik oldalon csúszós úton gyorsításkor a vonóerő a kisebb tapadási tényezőjű részen haladó kerék fékezésével növelhető (differenciálzár hatás). Ekkor a gépkocsira a vezető szándékától független perdítő nyomaték hat, melyet a kormánykerék elfordításával kompenzálni kell. Ha az ébredő perdítő nyomaték a gépkocsi gyártója szerint túl nagy, a csúszó keréknél a fékező nyomást és ezzel egyidejűleg a motor nyomatékát is csökkenteni kell.
Fékezéskor a szlip nagyságát a kerékcsúszás szabályozó egység állítja be. A fékezőnyomás modulációhoz a hidraulikaegység elektromágneses szelepeit működtetik. A kerékcsúszás nagyságát gyorsításkor a hajtott kerekeknél módosítja az ASR. A motor nyomatékát a motormenedzsment szabályozza a CAN hálózaton keresztül érkező üzenetnek megfelelően.


5.5. Az ESP rendszer önellenőrzése
Az ESP olyan aktív menetdinamikai szabályozó rendszer, amely a gépkocsi bármely sebességénél és manővernél a vezető szándékához hasonlítja a tényleges menetpályát és szükség esetén beavatkozik. Ha nem lenne hatékony az önellenőrzés, egy érzékelőtől érkező hibás jel súlyos következménnyel járna. Biztonsági okból az érzékelők redundanciája, azaz a megduplázás a kezdeti időben még jelentősen megdrágította a rendszert, ezért más módszert alkalmaztak.
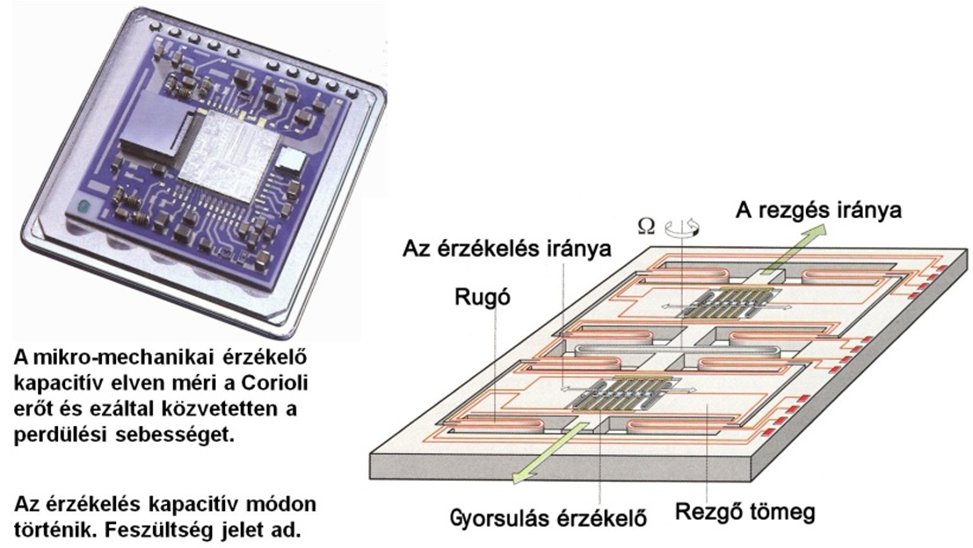
Az érzékelők jeleinek ellenőrzéséhez a légi közlekedésben alkalmazott elevet, az analitikus redundanciát használták. A gépkocsi matematikai modelljével a különböző érzékelők jelei között fizikai kapcsolatok állíthatók fel, mely jól használható az ellenőrzésre. A perdülési sebesség érzékelőnél például, a Bosch ESP rendszereknél két rugózottan megvezetett és egymással kapcsolatban lévő mikro-mechanikai tömegből áll, a Lorenz erőkkel rezonancia frekvenciájuknak megfelelően gerjesztik. Ha az érzékelő a vibrációs síkra merőlegesen elfordul a tömegekre Corioli gyorsulás hat, mely ennél a változatnál kapacitív módon mérhető. A Corioli gyorsulás növelhető, vagy csökkenthető az elektronika által gerjesztett zavaró erővel. Pontosan meghatározott zavaró erővel ellenőrizhető az érzékelő elektromos, elektronikus és mechanikus része. Ezzel a hibás jelek azonnal felismerhetők. Az elektronika a zavaró jelet 40 milliszekundumonként kapcsolja rá az érzékelőre. Ezzel megvalósítható a folyamatos ellenőrzése. Nemcsak az érzékelőben, hanem a jelátviteli láncban ébredő esetleges hibák is feltárhatók így. Jelenleg a gyártás már annyira felfutott, hogy olcsóbbá váltak az érzékelők is. Így már azok megduplázása a biztonság érdekében nem okoz gondot, mint a kezdeti időkben.
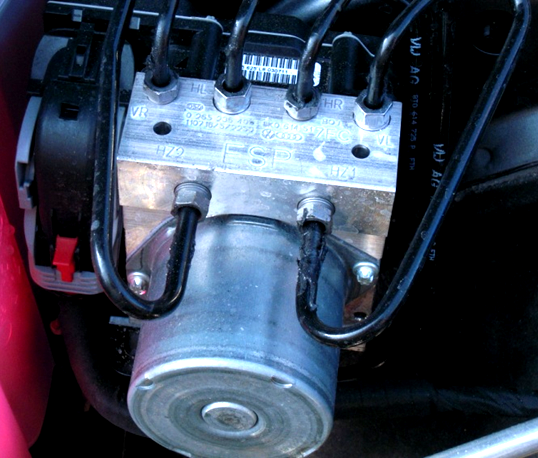
5.6. ESP hidraulika egység és elektronika
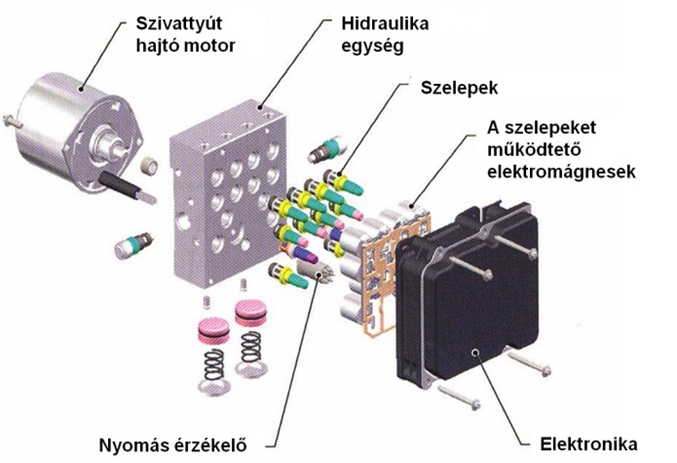
Az ESP hidraulikatömbje az ABS/ASR rendszerhez hasonlóan tartalmazza a két körös, dugattyús fékfolyadék szivattyút, melyet az elektronika által működtetett egyenáramú, szénkefe nélküli villanymotorral hajt. Ez hozza létre a gépkocsivezetőtől független fékezési beavatkozásokhoz a fékező nyomást. Amit például az EDS, vagy az ESP használ egy-egy kerék megfékezéskor, de ez biztosítja a megfelelő energiát a fékasszisztens működéséhez is. A Continental Teves ESP rendszernél az aktív vákuumos rásegítőt használják ugyan erre a célra.
A hidraulika egységbe sajtolják be a fékfolyadék nyomását szabályozó szelepek mechanikus részét. Kerekenként egy nyomásnövelő, egy nyomáscsökkentőt szelepen kívül fékkörönként egy átkapcsoló szelep és egy a fékfolyadékot a szivattyúhoz engedő szelepet is felszerelnek. A hidraulika egységben található továbbá a fékkörönként egy dugattyús nyomástároló egység is ahová nyomáscsökkentéskor kerül a fékfolyadék. Mivel ez az egység látja el a fékasszisztens feladatát is, ide szerelik be a nyomásérzékelőt is, amellyel az elektronika a nyomásgradienst méri fékezés közben. Fékkörönként egy-egy automatikus nullpont kiegyenlítésű nyomásérzékelőt alkalmaznak, melynek mérési tartománya 0-250 bar. Ez adja a visszajelzést is az elektronikának. A BMW az ESP rendszert DSC-nek (dinamikus stabilitás szabályozó rendszer) nevezi, elterjedt még az ESC rövidítés is, melynek „C” betűje a control szót helyettesíti. Van több más autógyár is, melyeknél a megszokottól eltérő megnevezéseket alkalmaznak, például a Mitsubishi ASC Automatikus Stabilitás Control. Közben az utóbbi években egyre több gépkocsitípusban az ESP rendszer már az alapfelszereltséghez tartozik.
Az SMD technológiával gyártott elektronikát, mely a mechanikai és más egyéb környezeti igénybevételeket jobban elviseli, már közvetlenül az ESP hidraulika egységre szerelik. Az elektronika nyomtatott áramköri paneljére szerelik fel a szelepeket működtető elektromágneseket. Az ESP elektronika mikrohibrid kivitelű. A mikrokontroller egyik változata lehet például az Intel 88C196BC 265kB ROM-al és 40 MHz működési frekvenciával. A tápfeszültséget közvetlenül a gépkocsi elektromos hálózatának 30-as kapcsáról kapja. Bekapcsolását egy külön Wake Up elektronikus elem végzi. Az elektronika gyárilag kódolatlan. A gépkocsi specifikus adatok automatikus kódolás útján rögzítődnek az elektronikában. Az ehhez szükséges információkat a gépkocsi elektromos hálózata alapján ismeri fel. A sikeres kódolás után az elektronika a gépkocsit az alvázszáma (VIN szám) alapján azonosítja.
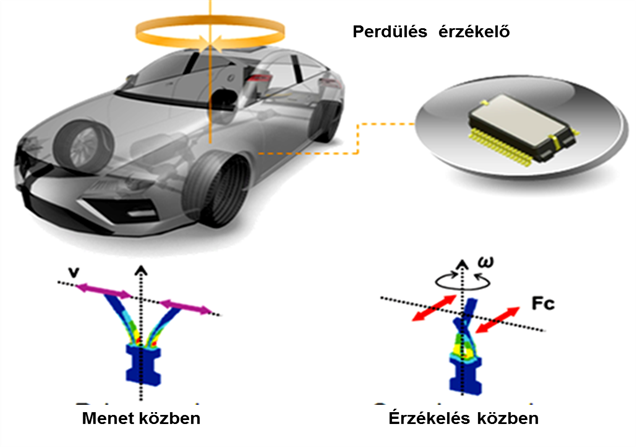
5.7. Az ESP rendszer perdülés érzékelője
A perdülés érzékelő a gépkocsi tömegközépponti függőleges tengely körüli elfordulás sebességét méri. Az első gépjárművekbe szerelt ilyen érzékelők a légiközlekedésben használatos változatok módosítása alapján készültek.
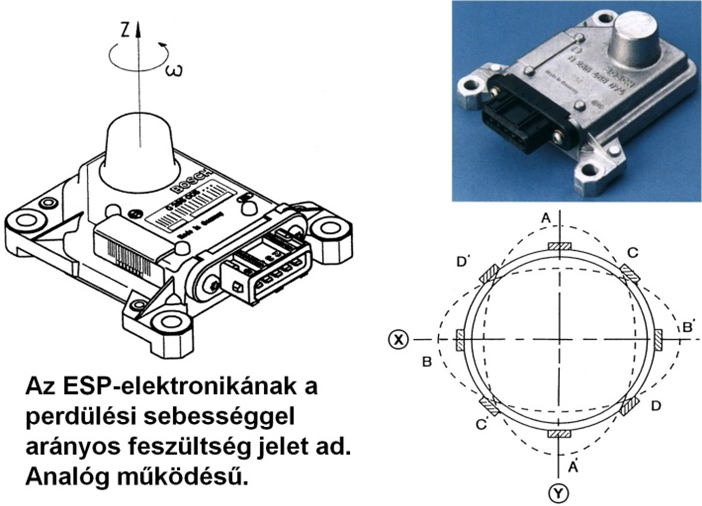
5.7.1. A Robert Bosch GmbH. perdülés érzékelők
A Bosch kezdetben piezo-kristályos érzékelőt alkalmazott. Az alábbi ábrán a torony szerűen, kissé kúposan kiemelkedő rész belsejében a magyarázó vázlaton bejelölt A – A’ és a B – B’ síkban elhelyezett piezo kristályokkal a réz hengert az önlengésszámnak megfelelő rezonanciában lebegve tartja. A hullám alakok szélső helyzeteit kissé felnagyítva a szaggatott vonallal megrajzolt ellipszisek szemléltetik. A C – C’ és a D – D’ síkban érzékelő piezo kristályokat helyeztek el. Ezek pontosan a rezgési „csomópontok”-ban vannak, ahol nincs elmozdulás. Ha a gépkocsi megperdül, vele együtt elmozdulnak a piezo kristályok is, de az önlengésszámmal rezgő és lebegő henger megtartja az eredeti helyzetét. Ezért az érzékelő kristályok most rezgést fognak detektálni. Annak intenzitása a perdülési sebességgel arányos. Ezt a kiértékelő elektronika feszültség jelként küldi az ESP elektronikának.
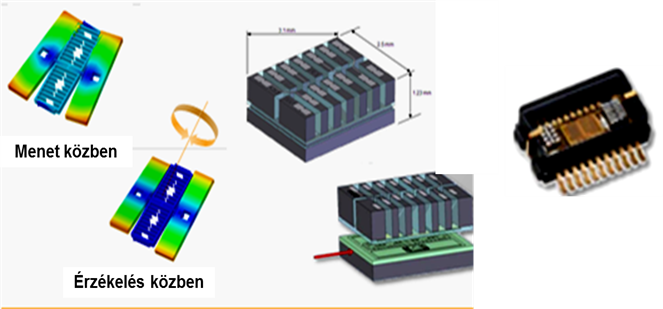
A fentiekben ismertetett változatot követte a jelenleg is használatban lévő második generációs mikromechanikai perdülés érzékelő. Nem csak személygépkocsiknál, de haszonjárműveknél is ezt alkalmazzák. Belsejében egy 7x7 mm-es szilícium chip található. Szerkezeti kialakítása csak 50 szeres nagyításban válik láthatóvá. A 600 µm vastagságú szilíciumlapkára viszik fel a szilíciumoxid-, majd egy 10 µm vastagságú poliszilícium réteget. Az érzékelő alaplapjából két 50 µm -es lapkát maratnak ki. Ezekből készülnek a rezgő tömegek, melyeket rugók tartanak a helyükön. A rezgési tengelyre merőlegesen poliszilíciumból készült kapacitív elven működő érzékelőt illesztenek rájuk. Hajszál vékony arany huzal létesít kapcsolatot az érzékelők és a kiértékelő elektronika között. Ez utóbbi a rezgő tömegek gerjesztéséhez szükséges feszültséget is létrehozza, továbbá kiértékeli a mérési eredményeket. Az érzékelőket, a kiértékelő áramkört és a felületre szerelt többi elektromos egységet egy közös kerámia lapkára szerelik, melyet fém foglalatban helyeznek el. A házat atmoszférikus nyomású, száraz nitrogén gáz tölti ki. A külső burkolata műanyagból készül. Ezen alakítják ki a gépkocsi specifikus elektromos csatlakozókat és a rögzítési helyeket.
A gyújtás bekapcsolásakor a beépített gerjesztő egység a két kis rezgő tömeget vízszintes síkban egymással ellenkező fázisban és ellentétes irányban mozgatja. Amikor az érzékelő belsejében az egyenes vonalú mozgást végző tömegekkel függőleges tengelye körül elfordul, a vízszintes síkban Corioli erő keletkezik. Ez hatást fejt ki a rezgő tömegeken elhelyezett kapacitív elven működő gyorsulásérzékelők szeizmikus tömegeire.
A gyorsulásérzékelő ellentétes fázisú feszültségei egymásból kivonódnak, így megszűnnek a lineáris összetevők és kétszeres nagyságú a Corioli erővel arányos jel keletkezik. Ennek nagysága attól függ, hogy mekkora volt a gépkocsi perdülete. Az érzékelő analóg jelet szolgáltat a menetdinamikai szabályozó elektronikának. Az újabb változatoknak már analóg és digitális jelkimenete is van. Ez biztosítja a kompatibilitást és az alkalmazhatósága is így szélesebb körűvé válik. A működéshez szükséges tápfeszültséget az ESP elektronika szolgáltatja. A rendszer a bekapcsolást követően egy másodpercen belül válik üzemképessé. Menet közben az ESP elektronika folyamatosan ellenőrzi az érzékelő mechanikus és elektronikus részeinek állapotát.
A perdülés érzékelő mérési tartománya ± 1,4 g keresztirányú gyorsulás és ± 100 ˚/s perdülési sebesség. Az érzékenysége ± 0,2 ˚/s .
Az újabb perdülés érzékelő változat típusjelölése DRS-MM1.1 mely a gépkocsi függőleges tömegközépponti tengely körüli elfordulását érzékeli. Ezzel egyidejűleg méri a kereszt irányú gyorsulást is. Az érzékelőt rezgéscsillapítóval is ellátták és PT-CAN hálózaton keresztül adja át a mért értékeket az ESP elektronikának. Működésellenőrzését szoftveresen úgy oldják meg, hogy az általa továbbított információkat összevetik a többi érzékelők jeleivel. Így végzi el az elektronika a plauzibilitás (elfogadhatósági) vizsgálatot.
5.7.2. Continental Teves perdülés érzékelő
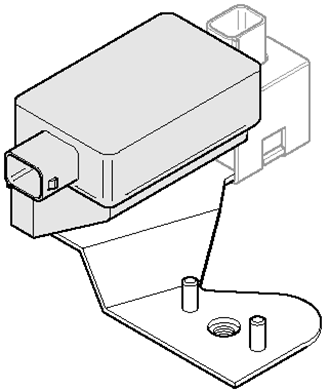
Kezdettől fogva más elven működő perdülés érzékelőt alkalmazott a Continental Teves vállalat, de eredetileg ez is a légiközlekedésből származik. A keresztirányú gyorsulás érzékelővel egy közös házba szerelték be és a gépkocsi tömegközéppontjához a lehető legközelebb helyezték el.
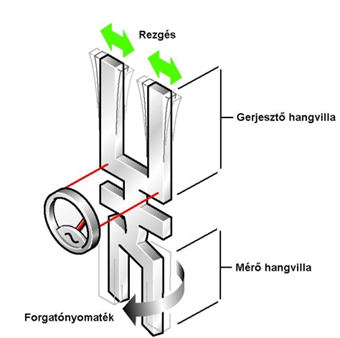
A kettős hangvillából álló mikromechanikai érzékelő a függőleges tengely körüli elfordulás sebességét méri. Ha meghibásodik az ESP nem működik.
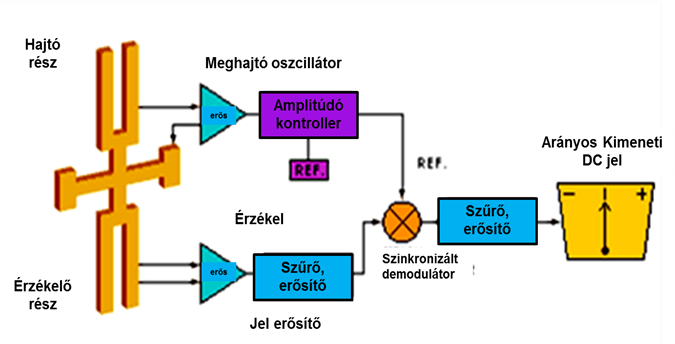
Az érzékelő szilícium kristályból készült kettős hangvillához hasonlító egyik része végzi a gerjesztést, a másik a mérést. 11 kHz-es váltakozó feszültséget rákapcsolva rezgésbe jön a gerjesztő rész. A mérő rész önfrekvenciája 11,33 kHz. A saját frekvenciával rezgő rész megtartja a rezgési síkját. A gépkocsi perdülésekor az érzékelőre ható erő csavaró nyomatékot fejt ki a szilícium kristályra, ezért elektromos töltés keletkezik benne. Ez előerősítő és erősítő áramkörök révén adja a jelet, amit az elektronika kiértékel.
A továbbfejlesztés során ez „intelligens érzékelővé” vált, mert saját kiértékelő elektronikával is ellátták, mely a perdüléssel és a kereszt irányú gyorsulással arányos jeleket feldolgozza és a mért értékeket a CAN hálózaton keresztüli adattáviratként küldi az ESP elektronikának. A működéséhez szükséges tápfeszültséget is az ESP központi elektronikától kapja.
A következő ábra szemlélteti a szilícium lapkából készített kettős hangvilla ként kialakított mikromechanikai érzékelő egyes belső áramköreinek kialakítását.
A jelenleg gyártásban lévő ESP MK 60 rendszernél a perdülés érzékelő már nem alkot külön egység. Közvetlenül az elektronikába szerelik be, melyet a vállalat budapesti üzemében gyártanak. A gépkocsi tömegközéppontjától eltérő elhelyezése miatt a szoftvernél ezt korrekciós tényezővel veszik figyelembe. A fentiekben ismertetettől eltérő mérési elvű mikro-mechanikai perdülés érzékelőt a Panasonic szállítja be.
A most használatban lévő perdülés érzékelő magába ötvözi a kereszt irányú gyorsulás érzékelőt is, ezért szerkezeti kialakítása kissé összetetté vált.
A perdülés érzékelő belső szerkezete és működési elve kissé megváltozott. A forgó villát használják a kocsiszekrény szögsebességének érzékelésére. A piezoelektromosan gerjesztett erő hatására menet közben a villára egy vibráció hat. A kocsiszekrény megpördülésekor az érzékelési módban a villára a Corioli erő hat. A rezgés és a rá szuperponálódó Corioli erő hatására a villa karjaiban elektromos töltés keletkezik, mely arányos a gépkocsi perdülési sebességével. Az egységbe szerelt erősítő ezt a jelet annyira felerősíti, hogy kiértékelhető legyen. A gerjesztett rezgés 8 kHz frekvenciájú. Két csatlakozó tömeg rezeg különböző módon.
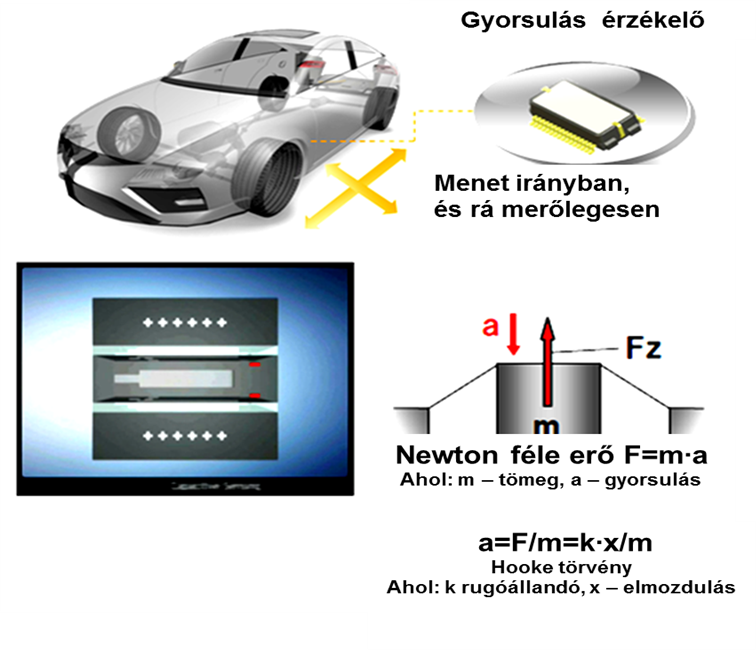
5.8. Kereszt (és menet irányú) gyorsulás érzékelő
Az érzékelés irányának megfelelően a gépkocsi tömegközéppontjának közelében helyezik el. Ennek jele alapján tudja az elektronika meghatározni, hogy milyen oldalgyorsulás hat a gépkocsira a pillanatnyi menetviszonyok között. Ez az információ fontos a gépkocsi stabilitásának megtartása miatt. A keresztirányú gyorsulás érzékelő meghibásodása esetén az ESP nem működik.
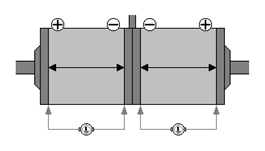
Működési elve kapacitív. Két, sorba kapcsolt kondenzátorból áll. Ha nincs keresztirányú gyorsulás a középső fegyverzet azonos távolságban van a szélsőtől. A beépített két kondenzátor kapacitása azonos.
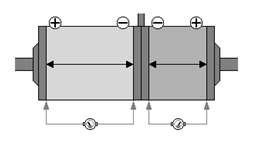
Keresztirányú gyorsuláskor a közös középső fegyverzet tömegére a tehetetlenségi erő hat, ezért elmozdul a felfüggesztő rugó ellenében és az érzékelő két részének kapacitása a kereszt irányú gyorsulással arányosan változik. Az érzékelő az alábbi diagram szerinti lineáris feszültség jelet adja, mely arányos a kereszt irányú gyorsulással.
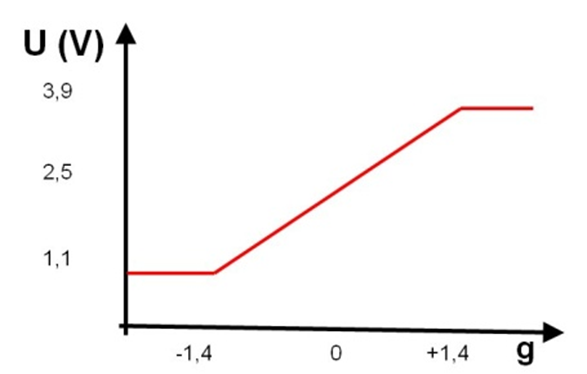
Az újabb kivitelű gyorsulás érzékelőnél a MEMS technológiával gyártott tömeget rugó tartja a helyén. Az érzékelt lassulás irányában a tömeg kitér a semleges helyzetéből. A kapacitív érzékelési elv a pillanatnyi lassulással arányos jelet hoz létre
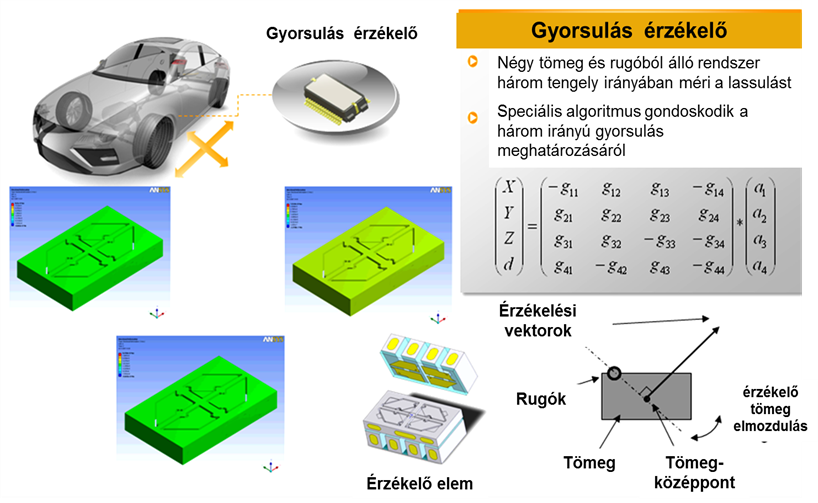
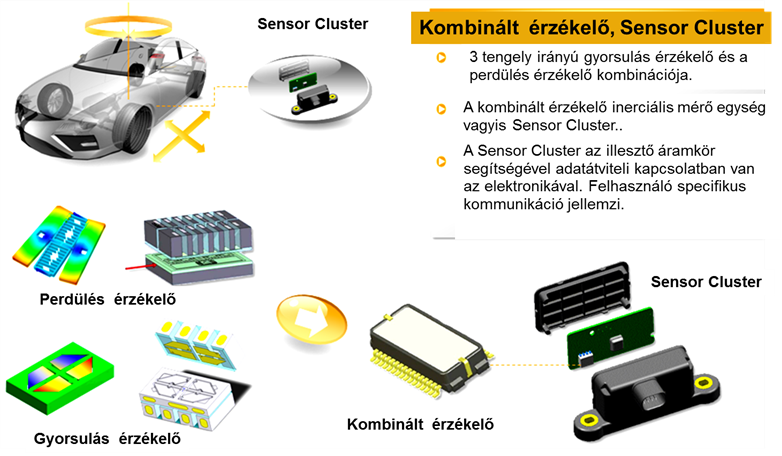
A gyorsulás érzékelő újabb változatai olyan kialakításúak, hogy a különböző irányú gyorsulások érzékelésére alkalmas a fizikailag egyetlen test. Ezt a változatot már könnyű kombinálni a perülés érzékelővel, mert mindkettőnek rendkívül kicsi a helyigénye. Így alkották meg aztán a „sensor cluster” újabb változata, mely lényegesen kisebb, mint a régebbi volt. Így tehát már a hidraulika egységre szerelt elektronikába beépíthető. Ezt az újabb elhelyezést korrekciós tényezőkkel kell figyelembe venni az ESP algoritmusánál. Ezzel az új kialakítással egyszerűsödött az ESP rendszer hálózata, amely hozzájárul a megbízhatóság növekedéséhez is.
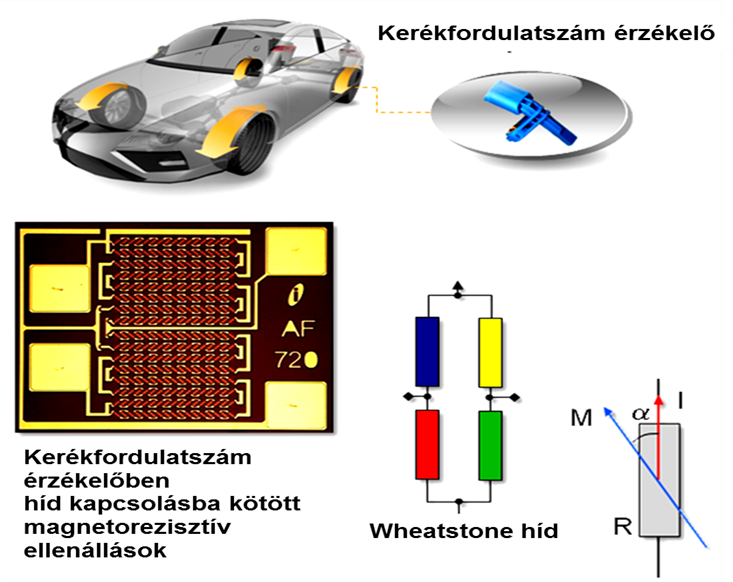
5.9. Kerékfordulatszám érzékelők legújabb változata
Az ESP rendszer működéséhez nélkülözhetetlenek a kerékfordulatszám érzékelők jelei. Ezeket az ABS -ről szóló részben már ismertettük. Jelenleg az aktív változatokat alkalmazzák, mely a mágneses kódolása alapján lehetővé teszi a forgásirány felismerését is. Ezek gyártásánál is történtek változások a közelmúltban. A működés precizitása miatt az ESP rendszernél különösen fontos ezen a területen is a minél pontosabb jelképzés. Ezt szolgálják az érzékelők újabb változatai.
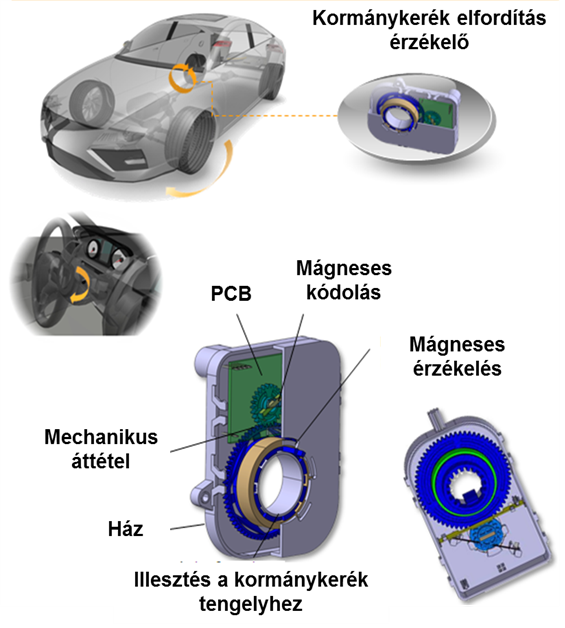
5.10. Az ESP rendszerek kormánykerék elfordítás érzékelői
A kormánykerék tengelyére szerelik fel. A gyártók különböző működési elvű változatokat szállítanak be az autógyáraknak. Az érzékelő a CAN hálózaton keresztül továbbítja a jeleket az ESP elektronikának. Innen kapja a működéséhez szükséges tápfeszültséget is.
Az érzékelő által küldött információk:
-
a kormánykerék elfordítási iránya,
-
a mozgás sebessége,
-
a pillanatnyi szöghelyzet.
5.10.1. Robert Bosch GmbH kormánykerék elfordítás érzékelő
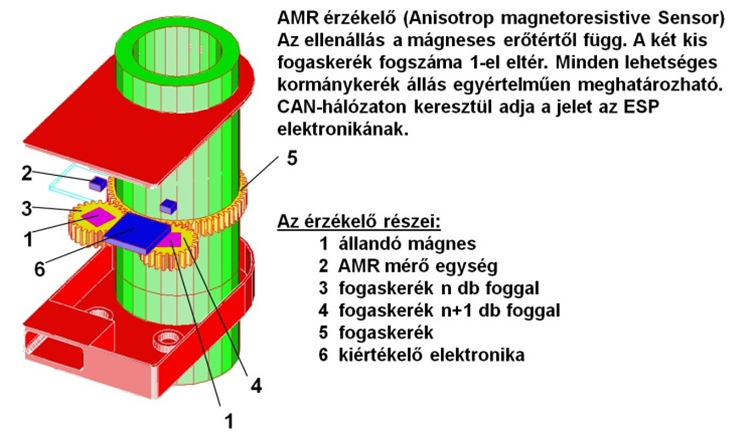
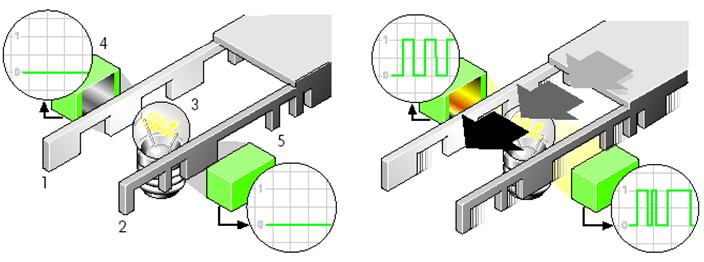
Az új fejlesztésű kormánykerék elfordítás érzékelő a kormányoszlopon elhelyezett különböző kapcsolókkal alkot közös egységet. Gyakran kombinálják a kormánykerék légzsák átvezető spiráljával is. Az alábbi elvi ábrán érzékelő belsejében elhelyezett nagy fogaskerék mechanikus kapcsolatban van a kormánykerék tengelyével. Hozzá két kisebb fogaskerék kapcsolódik, melyek fogszáma egymáshoz képest eggyel eltér, de ezek egymáshoz nem kapcsolódnak. Ezekre a kis fogaskerekekre egy-egy állandó mágnest szereltek. A fogszám különbség miatt eltérő a forgási sebességük. Mindkét érzékelőben egy-egy szinuszos jelet hoznak létre. Ebből a két jelből bármely időpillanatban egyértelműen meghatározható a kormánykerék szöghelyzete és az elfordítás iránya. Az egyik jel az idő függvényében pedig a kormánykerék elfordítási sebességét adja. Egy számláló mű pedig meghatározza a kormánykerék elfordításainak számát.
Önálló jelkiértékelő, diagnosztikai és hibakód tároló egységgel látják el. Kicserélése, vagy a kormányberendezésen, illetve a futóművön végzett megbontásos javítás után az egyenes meneti helyzetet újra kalibrálni kell. Ez az alapfeltétele az ESP kifogástalan működésének. Az érzékelő meghibásodása, vagy nem megfelelő kalibrálás esetén az ESP rendszer nem működik, de az ABS és az EBV aktív marad. A kalibráláshoz a gépkocsi típusának megfelelő diagnosztikai műszert kell használni és a megadottak szerint kell végezni a műveletet.
Continental Teves kormánykerék elfordítás érzékelő
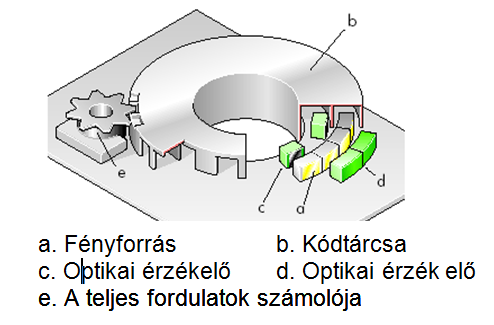
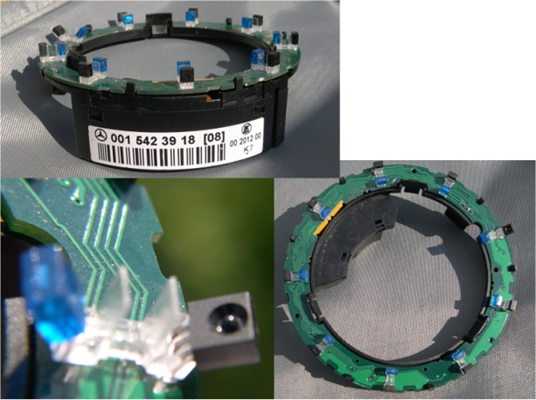
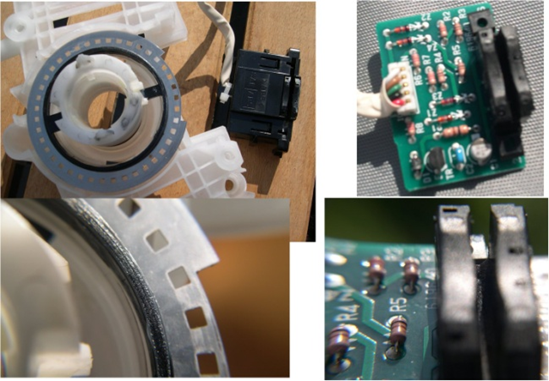
Az opto-kapus működési elvű érzékelőt a kormányoszlopon helyezik el. A légzsák átvezető spiráljával egy közös egységet alkot. Ha meghibásodik ez az érzékelő az ESP működésképtelenné válik. Az elektronika, vagy az érzékelő cseréje után újra kell kalibrálni a kormánykerék egyenes meneti állásának megfelelően. Ehhez a gépkocsi diagnosztikai műszerét kell használni. Az érzékelőbe beépített kódtárcsa két különböző jelet képező gyűrűből áll.
-
Az egyenletes osztású fog – fogárok az elfordítási sebességjel képzéséhez szükséges.
-
A hexadecimális kódolásút a szöghelyzet pontos meghatározásához szerelték be.
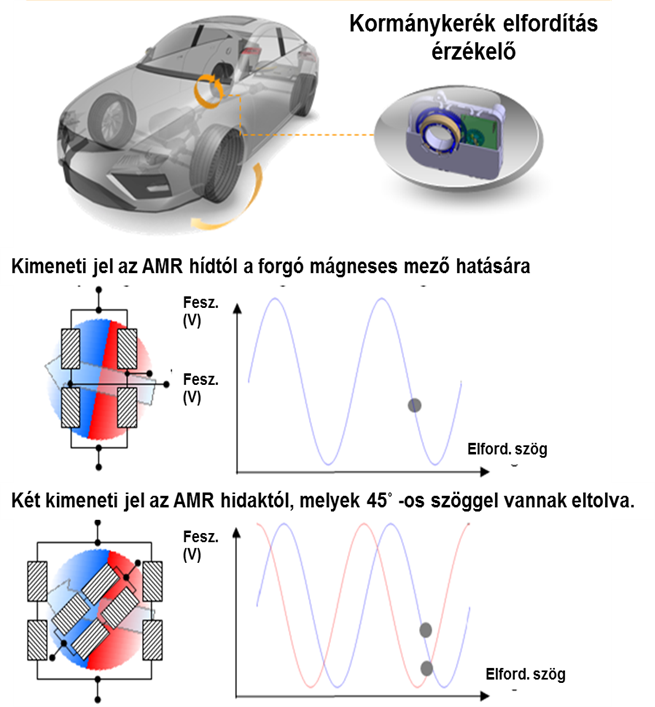
5.10.2. A Continental Teves újabb kormánykerék elfordítás érzékelője
Ez az érzékelő határozza meg a gépkocsivezető által helyesnek tartott kormánykerék elfordítási helyzetet.
Az érzékelőt a kormánykerék tengelyére szerelik fel. A szöghelyzet érzékelés magneto-rezisztív, módon történik. A belsejébe mechanikai hajtóművet szerelnek, amely az abszolút szöghelyzet meghatározásához szükséges. Összesen 4 kormánykerék körülfordítást tesz lehetővé. A biztonságos érzékeléshez két jel szükséges. Az egyik híd kapcsolású AMR egység ad egy jelet. A jelképzésbe további hasonló két egységet vonnak be, melyek egymáshoz képest 45˚ -os szöggel vannak elékelve. A színuszos jelelakok egy adott pillanatban megállapított metszékei alapján a kidolgozott matematikai algoritmus segítségével kellő pontossággal, egyértelműen meghatározható a:
-
a kormánykerék elfordítási helyzete,
-
az elfordítás iránya
-
az elfordítás sebessége.
5.11. Fékező nyomás érzékelő
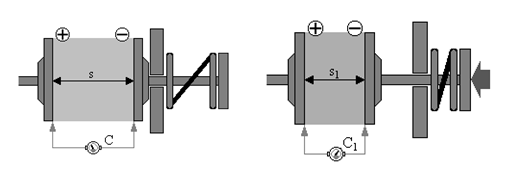
A régebbi Continental Teves ESP rendszereknél a főfékhengerhez csatlakoztatták, újabban már az ESP hidraulika egységbe szerelik be. A kivezérelt fékező nyomásról ad visszacsatolást az elektronikának. Korábban mindkét fékkörhöz beszereltek egyet. Ha az egyik meghibásodik, az ESP kikapcsol. A kapacitív elven működő érzékelőn kívül használnak még piezo-fóliás, változatot is.
A kapacitív érzékelőnél a kondenzátor egyik fegyverzete a házhoz rögzített, a másikat a dugattyú a nyomással arányosan rugó ellenében elmozdítja. A kondenzátor kapacitását a fegyverzetek közötti távolság határozza meg. Ha a fegyverzetek közelebb kerülnek egymáshoz a nyomás hatására, a kapacitás nagyobb lesz
5.12. Az aktív vákuumos fékrásegítő működése
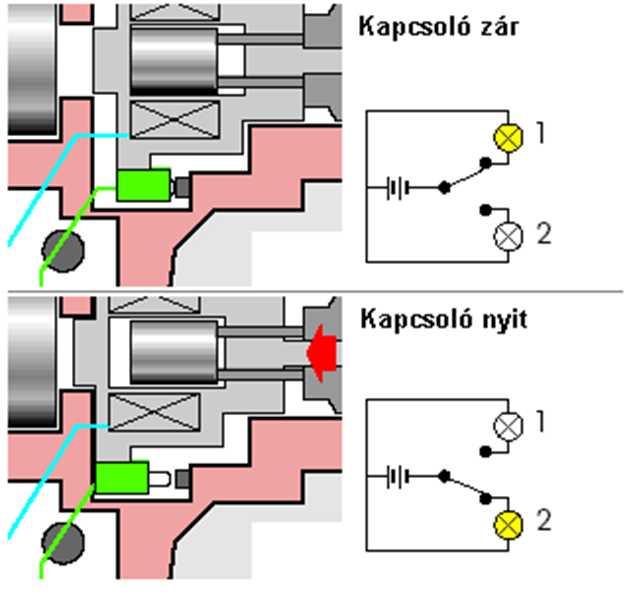
Az ESP elektronika a fékrásegítőbe szerelt elektromágnesre áramot kapcsol és ezzel elmozdítja annak szelepét. Hatására atmoszférikus nyomású levegő áramik a fékrásegítő membránjának jobb oldali kamrájába. Ez 10 bar-os fékezőnyomást hoz létre a főfékhenger dugattyúinak elmozdításával. Ha ennél nagyobb nyomásra van szükség az elektronika bekapcsolja hidraulikaegység fékfolyadék szivattyúját. Az így létrehozott nyomásból az ESP hidraulika egység elektromágneses szelepei tudják a szükséges értéket kivezérlni a fékezendő kerékhez. Az aktív fékrásegítő működését az abba beszerelt kapcsoló jelzi vissza az elektronikának.
5.13. Az újabb ESP rendszerek összetett menetdinamikai szabályozó rendszerré váltak
Az újabb ESP rendszerek két fokozatú beavatkozásra is alkalmasak, és számos újabb, a gépkocsivezető tevékenységét megkönnyítő működéssel is ellátták. Az egyik beavatkozás a hagyományos egy kerék szabályozott fékezésével járó működésmód, a másik beavatkozás pedig az aktív szervokormány működtetésével végrehajtott kormánykorrekció.
5.13.1. ESP beavatkozás kormánykorrekcióval
Az Audi és az újabb VW Passat több típusánál is az opcionális felszereltségéhez tartozik a „Dinamiklenkung”, dinamikus kormányzás nevű program és a hozzá tartozó aktív szervokormány. Ha az ESP nem az egyik kerék fékezésével, hanem kormánykorrekcióval avatkozik be a gépkocsi nem fog lassulni az ESP működése miatt. Így tehát nem veszít a lendületéből agilisabbá válik. Az ESP kormányzási beavatkozásnak az előnye az, hogy nagyobb szabályozási komfortot biztosít és a hosszdinamikát nem befolyásolja annyira, mint a régebbi ESP. A stabilizáláshoz szükséges elkormányzást az ESP elektronika határozza meg, melyet utasításként a CAN hálózaton keresztül átküld a dinamikus kormányzás elektronikának. Ennek megfelelően egészítették ki a szabályozási algoritmust, valamint ehhez igazították a hardvert is. Ennek a beavatkozásnak a hatására a kormánykerék nem fordul el. A kormánykerék szöghelyzetén kívül ennél a változatnál a kerekek elkormányzási szögét is méri az elektronika. A működés dinamikusabb állító tag beavatkozásokkal történik. Ez a rendszer az IEC61508 biztonsági előírásnak felel meg.
5.13.2. További kiegészítő ESP működések – A rögzítő fék dinamikus használata
Az újabb személygépkocsikat már elektromechanikus rögzítő fékkel is ellátják. Ha a rögzítő féket a gépkocsi mozgása közben működteti a gépkocsivezető a CAN hálózaton keresztül az ESP hidraulika egységhez érkező parancs hatására a fékfolyadék szivattyú bekapcsolásával hozza létre a szükséges fékező nyomást és az ESP hidraulikaegysége hajtja végre a fékezést.
5.13.3. Utánfutó stabilizálás
Ez is az ESP rendszer egy újabb kiegészítő programja. Az utánfutó lengései 1 Hz körüli frekvencián a vonókészüléken keresztül adódnak át a vontató gépkocsinak. Az ESP rendszer érzékeli az emiatt bekövetkező perdítő nyomaték lengéseket. Ha az a kritikus érték küszöbét átlépi elkezdődik a beavatkozás. Az elektronika visszaveszi a gázt és működteti a féket. Mind a négy kereket fékezi 0,15 g lassulással. Ha ez nem elegendő, a lassítás elérheti a 0,3 g értéket. A fékezés addig folytatódik, amíg nem szűnik meg az utánfutó lengése. Az ESP az utánfutó felől érkező kereszt irányú erőket a gépkocsi első kerekeinek váltakozva történő különböző nagyságú erővel történő fékezésével egyenlíti ki. Ennek eredményeként stabilizálás következik be és lassulás jön létre.
5.13.4. Szárazfék funkció
Az ESP rendszernek lehet egy úgynevezett ”szárazfék funkció”-ja is. Az eső érzékelő tudja automatikusan aktiválni ezt a működési módot. Ilyenkor ha a gépkocsi nem fékez és nem áll fenn biztonságkritikus menet állapot az ESP hidraulika egység néhány tized bar fékező nyomás kivezérlésével menet közben felfekteti a fékpofákat a féktárcsára. Ennek hatására azok megszáradnak és bármely pillanatban rendelkezésre áll a teljes fékező teljesítmény. Nem veszélyezteti a fading jelenség a közlekedésbiztonságot.
Az előzőekben felsoroltakon kívül az ESP rendszer alkalmas a sebesség szabályozásra is. Ha például a nagy sebességgel működő video rendszer sebességkorlátozó táblát érzékel, automatikusan beállítja az azon feltüntetett sebességet.
A Bosch ESP 8 rendszer alkalmas ezeknek a kiegészítő működésmódoknak a megvalósítására. Sajátosságai közé tartozik a hibrid áramkörös elektronika, melyet Texas Instrument mikrokontrollerekkel láttak el. 768 kB –os flash memory -t alkalmaznak. Két különböző, egymástól független radundáns processzor szolgálja a biztonságos működést. Az új nyomásérzékelőt a hidraulika egységbe integrálták, így az nem képez külön becsavarható egységet, mint korábban.
Ennél a rendszernél a gépkocsi stabilizálása különböző beavatkozásokkal történik, melyek a következők:
-
Motor nyomatékszabályozás.
-
Beavatkozás az automatikus sebességváltó fokozatkapcsolás dinamikájába.
-
Egy kerék szabályozott fékezése.
-
Kormányzási beavatkozás, mely különösen nagy sebességnél, kis beavatkozással hatékonyan stabilizál.
A kevesebb fékezési beavatkozásnak köszönhetően a gépkocsi azonos körülmények között agilisabban (dinamikusabban) halad és nem következnek be kritikus szituációk. Nagyobb lehet a gépkocsi átlagsebessége.
Az ESP rendszer alprogramját képező ABS szabályozás új algoritmussal működik.
5.13.5. Offroad ABS
A fejlesztési cél az volt, hogy ezzel a működési móddal a gépkocsival úgy a szilárd burkolatú úton, mint terepen a lehető legnagyobb lassulás legyen elérhető. Laza talajon a blokkolás közeli, majdnem csúszó kerekekkel rövidül a fékút, mert a kerekek éket túrnak maguk előtt az alattuk lévő laza anyagból. Az ABS új logikája figyeli a kerekek torziós lengéseit az aktív kerékfordulatszám érzékelők jelei alapján. Felismeri a laza talajt és automatikusan átkapcsolja az ABS működését nagyobb csúszást engedélyező működésmódra. A kerekenkénti és az elkormányzási szögtől is függő kerékcsúszás szabályozás révén a gépkocsi megőrzi a kormányozhatóságát. Ha a vezető bekapcsolja az offroad gombot, akkor az ABS terep fokozatának aktiválása egyértelműbbé és gyorsabbá válik.
5.13.6. Offroad ESP és egy fokozatú ESP lekapcsolás
Az ESPplus teszi lehetővé ezeket a működési módokat. A terep és a normál ESP működés között lényeges különbség van. Az ESP off gomb rövid megnyomásával az Offroad működés válik aktívvá és a kijelzőn az „ESP offroad” felirat jelenik meg és az ESP szimbólum világít. Ilyenkor kisebb sebességnél a motornyomaték csökkentő és a fékezési beavatkozások kisebbek lesznek. Ha az automatikus offroad felismerés válik aktívvá valamennyi offroad funkció erősödik. A gomb ismételt megnyomásakor a normál ESP működés kapcsol be.
5.13.7. Az ESP kikapcsolható
Újabban kétfokozatú kikapcsolási lehetőséggel látták el az ESP rendszereket.
-
Ha 5 másodpercnél rövidebb ideig nyomják meg az „ESP off” gombot, akkor először az ASR kapcsol ki. A kijelzőn az „ASR off” felirat tűnik fel, az ESP szimbólum pedig világít. Ekkor a motor nyomaték csökkentés és a fékezési beavatkozás is a sebességtől függően kikapcsol. Az „ESP off” nyomógomb ismételt megnyomására és egy bizonyos sebesség átlépésekor az ASR visszakapcsol.
-
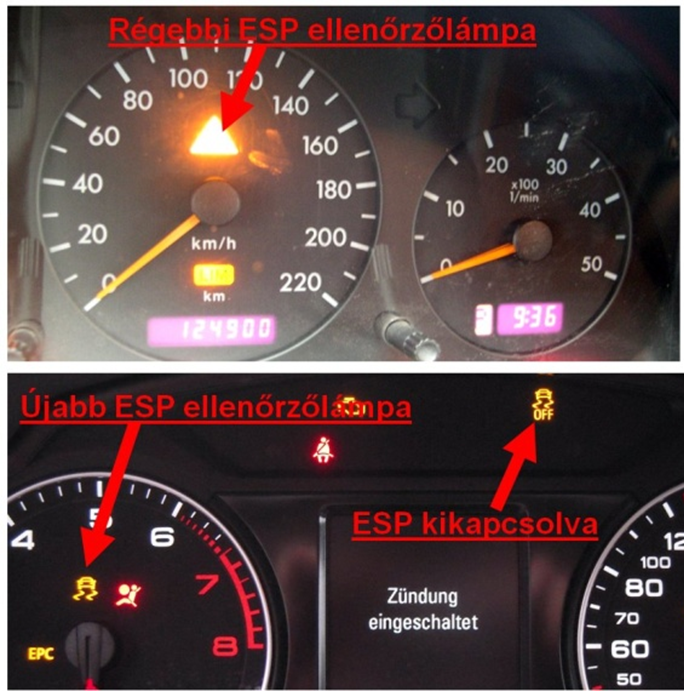
Ha az „ESP off” gombot 5 másodpercnél hosszabb ideig nyomva tartják kikapcsol az ESP és csak az ABS és az EDC marad bekapcsolva. A folyadékkristályos kijelzőn az „ESP switched off” felirat jelenik meg, más típusoknál az ESP szimbólum és alatta az „OFF” felirat. A gomb ismételt megnyomására az ESP működés visszakapcsol. A gyújtás ki-, majd visszakapcsolása után az ESP ismét bekapcsolt állapotba kerül.
5.13.8. Hidraulikus fading kompenzáció (HFC)
Ez a fékasszisztens működésének egyfajta kiterjesztése. Erőteljes, huzamos, illetve többször ismételt fékezésnél, amely jelentős melegedés miatt fékhatás csökkenéssel jár, ezt felismerve az ESP automatikusan megnöveli a hidraulikus működtető nyomást. A vezető így már a szokásos pedálerőnél eléri az ABS beavatkozási küszöböt.
5.13.9. Az ESP vezérelte vészfékezés rögzítő fékkel
A gépkocsikba újabban beszerelt elektromos rögzítő féknek van egy dinamikus működésmódja is. Ha a hidraulikus fékműködtetetés meghibásodik, az ESP parancsára az elektromos rögzítő fékkel 8 m/s –os lassulást tud megvalósítani. Ez lényegesen nagyobb, mint ami egy hagyományos rögzítő fékkel megvalósítható. Kis tapadási tényezőjű úton ABS szabályozás is működik eközben.
5.13.10. Hold assist
Az üzemi fék automatikus működtetésével és oldásával támogatja a vezetőt. Az aktiválása a műszerfalra szerelt nyomógombbal lehetséges. Ez a működésmód a fékezés után hidraulikus nyomással tartja befékezve a gépkocsit. Erről az állapotról visszajelző lámpa tájékoztatja a gépkocsivezetőt. Ha a fékhatás egy meredekebb szakaszon nem elegendő, még kétszer meg tudja növelni a fékező nyomást a rendszer. Ha még ez sem elegendő, működteti az elektromos rögzítő féket is. Elinduláskor a tengelykapcsoló lenyomásakor automatikusan oldja a féket. Emelkedőn a rögzítő fék csak akkor old, ha a motor nyomatéka elegendő a visszagurulás megakadályozásához. Ilyenkor az elektronika kiértékeli a bekapcsolt sebességfokozatot, az emelkedő meredekségét, a motor fordulatszámát és a motor nyomatékát.
5.13.11. Sebességszabályozó
Ez is egy vezetőt támogató asszisztens rendszer. A hagyományos ESP rendszer egy továbbfejlesztett változata. Hegyről lefelé menetnél fékezési beavatkozással tartani tudja a vezető által beállított sebességet. Ilyenkor az ESP hidraulika egység végzi a fékezést.
5.13.12. HDC hegyről lefelé ereszkedő asszisztens
A HDC program széria tartozék például az Audi Q5-nél, melyet a gépkocsivezető egy erre a célra beépített nyomógombbal tud be-, illetve kikapcsolni. A működés alapfeltétele, hogy a gépkocsi sebessége kisebb legyen 60 km/h -nál. A pillanatnyi állapotot LED dióda jelzi vissza. Az ESP rendszer részét képezi ez a komfortot növelő program. Mind a négy kereket fékezi a lejtőn lefelé, méghozzá annyira, hogy a gépkocsi tartja a vezető szándéka szerinti sebességet. Ha ehhez nem elegendő a motorfék, automatikusan működésbe lép a hidraulikus fékrendszer, mely a vezetőtől függetlenül létrehozza a szükséges fékező nyomást. Bizonyos határok között (9 km/h és 30 km/h) (10%-os és 50%-os lejtőn) a gáz-, illetve a fékpedál lenyomásával a sebesség szabályozható. 60 km/h feletti sebességnél automatikusan lekapcsol. Bekapcsolt és kikapcsolt sebességfokozatnál egyaránt használható. Ha például a hátrameneti fokozat van bekapcsolva, akkor a hátsó kerekekre jut a nagyobb fékhatás.
5.13.13. Tetőcsomagtartó felismerés
A menetkomfortra és a menetdinamikára nagy gondot fordítottak a fejlesztés során. Az offroad és az országúti jellemzők összehangolása is fontos volt. Az összes Q5-ös széria tartozéka a tetőcsomagtartó felismerés, melyhez egy speciális érzékelőt szereltek fel a tetőcsomagtartó rögzítési pontjához. Ez közvetlenül az ESP elektronikának ad jelet a megváltozott tömegközéppont helyzete miatt, mely a menetdinamika szempontjából az ESP -nek fontos információ.
5.13.14. Fékezés a bal- és a jobb oldalon eltérő a tapadási tényezőnél
A gépkocsit a jobban tapadó útfelületen kialakuló nagyobb fékerő erre az oldalra húzza. Az ESP a „dynamiklenkung” –al ellátott gépkocsinál automatikusan létrehozza a szükséges kormánykorrekciót, méghozzá gyorsabban, mint ahogy azt a gépkocsivezető egyébként meg tudná tenni. Ebből a vezető semmit nem vesz észre, mert közben a kormánykerék egyenes meneti helyzetben marad. A gépkocsi stabilizálása érdekében nem kell csökkenteni a fékerőt. Ez előnyös, mert nem hosszabbodik meg a fékút. Ehhez a működési módhoz nem szükséges kiegészítő kerékfék munkahenger nyomás érzékelő, mint más rendszereknél.
5.13.15. ESP kormányzási beavatkozás túlkormányozott gépkocsinál
A túlkormányozott viselkedésű gépkocsit az ESP rendszer a „dynamiklenkung” segítségével egy előre meghatározott ellenkormányzással stabilizál. Ez megakadályozza a gépkocsi hátsó részének kitörését. Különösen nagy sebesség esetén ez a beavatkozás sokkal hatékonyabb, mint egy kerék fékezése, ahol a megfelelő fékező nyomás kialakulásához egy bizonyos időre van szükség. Azért is előnyös ez a beavatkozás, mert sokkal komfortosabb, mint amikor fékezéssel történik. Továbbá nem lassul a gépkocsi a stabilizáló beavatkozás következtében, ami a fékezéses beavatkozásnál elkerülhetetlen. Különösen csúszós úton előnyösebb, amikor kormányzás végzi a korrekciót. A két beavatkozást (kormányzási és a fékezési) a gépkocsi instabilitásától függően egymásba integrálják. Enyhe instabilitásnál csak kormányzási beavatkozás valósul meg. Minél nagyobb a stabilitás vesztés, annál nagyobb lesz a fékezési beavatkozás. A kettő beavatkozás együtt hatékonyabb, mint ahogy a hagyományos ESP -nél ez hagyományosan megszokott volt.
5.13.16. Az ESP kormányzási beavatkozás alulkormányozott gépkocsinál
Alulkormányzott viselkedésnél az ESP a „dynamiklenkung” (aktív szervokormány) segítségével megváltoztatja a kormányáttételt, így a gépkocsivezető a tapadási tényező maximumát nem tudja olyan gyorsan elérni. Így az első kerekek csúszása és ezzel a gépkocsi elejének kisodródása, vagyis az alulkormányzott viselkedés nem fog kialakulni olyan gyorsan. Az alulkormányozott állapotot az ESP ismeri fel és a beavatkozás a „dynamiklenkung” –nál következik be. Az áttétel változás csupán olyan mértékű, hogy a vezető azt nem veszi észre, de ennek ellenére a stabilizáló hatás érvényesülni tud. Kisebb mértékű alulkormányozott viselkedésnél ez a beavatkozás előbb fog bekövetkezni, mint a fékezési stabilizálás. Nem érezhető annyira, mint a motor nyomaték csökkentés és az egyik kerék célzott lefékezése. A gépkocsival így sokkal dinamikusabban lehet közlekedni és a stabilitása is növekszik.
5.13.17. Biztonsági koncepció a kormányzási beavatkozásnál
Az ESP elektronika által meghatározott stabilizáló elkormányzási szög a gépkocsi CAN hálózatán keresztül üzenetként jut el a kormányzás elektronikájához. Mivel az aktív kormányzási beavatkozás nagyobb kockázatú, mint az egyik kerék megfékezése, biztonságtechnikailag ennek megfelelően készítették fel az ESP rendszert. Hardver vonatkozásában egy második perdülés és kereszt irányú gyorsulás érzékelővel is ellátják a rendszert, mely egy redundáns jelet ad. Így a perdülés érzékelő jelének elfogadhatósági vizsgálata biztonságosabb lesz. A szoftver oldalról pedig a kormányzási stabilizáló algoritmus kétprocesszoros kivitelben működik. Mindkettő eredményét folyamatosan bitenként összehasonlítják az ESP elektronikáéval. Amennyiben különbséget észlel az ESP elektronika kikapcsol és hibajelzést ad.
5.13.18. A Robert Bosch GmBH kilencedik generációt képviselő ESP rendszere
Ennél a vállalatnál elsőként az ESP gyártása és alkalmazása 1995 –ben kezdődött. Jelenleg a 9 generációhoz tartozó termékcsaládot kínálja az autógyáraknak. A legkülönbözőbb kategóriába sorolható gépkocsi változatokhoz fejlesztették ki. Ezek a változatok különböző működési módokat tesznek lehetővé. Jelenleg a következő változatokat gyártják:
-
ESP light
-
ESP base
-
ESP enhanced
-
ESP pus
-
ESP premium
Ezeket a változatokat egyre több kiegészítő működéssel is ellátták.
Az ESP premium-nál például az alap működés számos, a vezetőt támogató asszisztens rendszerrel egészülhet ki. Ennél a szokásos kettő helyett hat dugattyús fékfolyadék szivattyút építenek be a hidraulika egységbe. Ennek köszönhetően a fékező nyomás nagyon gyorsan kialakul, de ezen kívül maximális komfortot is biztosít, mert így sokkal kisebb a rezgés működés közben. Az SMI650 típusjelzésű kombinált érzékelőt (perdülés és kereszt irányú gyorsulás) már az elektronikába szerelik. Ennek az érzékelőnek integrális része a rezgéscsillapító egység. Így tovább egyszerűsödött a rendszer vezetékhálózata. Ez az elektronika már másodpercenként 25 -ször hasonlítja össze a vezető szándékát a gépkocsi pillanatnyi menetpályájával és ez alapján működik az ESP szabályozás.
