7. fejezet - Parkolást segítő rendszerek
Manapság egyre nagyobb igény mutatkozik a vezetést segítő és a biztonságot növelő elektronikák iránt. Így van ez a tolatást segítő modul esetében is. A parkolás asszisztens egy ultrahang alapú detektor, amely a jármű mögött vagy előtt, a vezető elől legtöbbször takarásban lévő akadályok detektálására alkalmas. A rendszer segítséget nyújt a vezetőnek a parkolási manőverben, ha a sebesség 15 km/h alá csökken. Általában 4 vagy 8 szenzoros rendszerek léteznek, annak függvényében, hogy csak hátul vagy elől is telepítettünk belőlük. A szenzorok az elülső és hátulsó lökhárítóba szerelve, ultrahang jeleket bocsátanak ki, melyek az útjukba kerülő akadályokról visszaverődnek. A visszaverődő ultrahangjeleket, azaz a visszhangot, a szenzor fogadja, majd az ultrahang kibocsátása és észlelése közt eltelt időből, valamint a hangsebesség ismeretéből meghatározható az akadály távolsága az adott szenzortól. Ezt a számítást az elektronikus vezérlőegység (Electronic Control Unit - ECU) végzi.

Azonban, az akadály szenzortól való távolsága nem feltétlenül egyezik meg az akadály autótól való távolságával. Ezt a következő ábra szemlélteti:
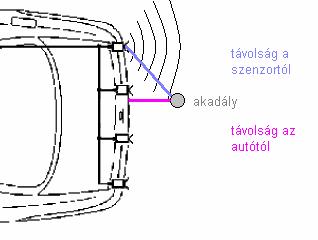
Ahhoz, hogy pontosan meghatározhassuk az akadály távolságát az autótól, legalább két szenzor akadálytól való távolságának ismerete szükséges. Az általuk szolgáltatott, immár két adattal, és a két szenzor ismert távolságával könnyen meghatározható az akadály autótól való távolsága is.
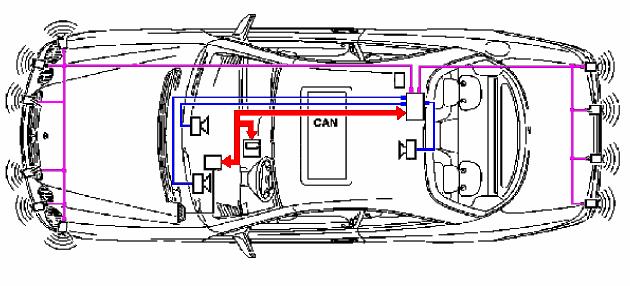
A mért adatok kiértékelését az ECU-ban mikrovezérlő végz, továbbá ez végzi a szenzorok és a hangszórók vezérlését, valamint menedzseli a diagnosztikai és teszt funkciókat, és ellenőrzi a feszültség szintet. A jeladók mechanikus és elektromos paramétereik megegyeznek. A lökhárítóba való integrálásuk egyszerűen megvalósítható.
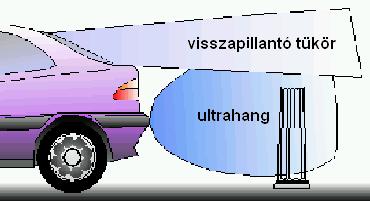
A tolatást segítő rendszer segíti a parkolást, de nem pótolja a visszapillantó tükör használatát és a teljes körültekintést. Ezen kívül a kis kiterjedésűtárgyakat, például a földből kiálló drótot, vékony fát a rendszer nem feltétlenül érzékeli, valamint a szenzorok nem szerelhetők fém lökhárítókba.
A legtöbb gyártó radarcsaládja négyféle kiépítésben kapható, attól függően, hogy csak hátulsó (4 érzékelős), első és hátulsó (8-10 érzékelős), LED kijelzővel kombinált, vagy vonóhorog kompatíbilis szettet választunk. A vonóhorog kompatíbilis radart a beszerelés után felprogramozzák a fixen kiálló tárgyra, és ezt követően erre nem jelez. Az autó sebességváltójának hátramenetbe kapcsolása után a modul két csipogással jelzi az aktív állapotot. A tolatóradar két zónában működik:
Az első– a figyelmeztetőzóna – általában 1,5 m és 30 cm között, csipogással figyelmeztet az autó útjában lévőakadályra.
A második – a veszélyzóna – a 30 cm-en belül levőakadályra figyelmeztet, folytonos sípoló hanggal.
A rendszer kiegészíthetőLED-es kijelzővel is, így az nem csak hanggal, hanem egy vizuális skálával is jelzi az aktuális veszélyforrás távolságát.
Az UPA rendszerek működése során az ECU egyszerre csak egy szenzornak adhatja ki az impulzusadási parancsot, ellenkezőesetben a vétel során nem tudjuk megállapítani, hogy az egyes visszhangoknak melyik szenzor volt a forrása. A vezérlésnek, ugyanezen okból, a visszhangok fogadására is elég időtkell hagynia, mielőtt egy újabb impulzus kiadására utasítást ad. Az impulzus kiadása után az ECU a szenzort, két szomszédjával együtt a visszhang fogadására programozza. Majd a három szenzortól kapott adatok alapján kiháromszögezi az akadály távolságát a járműtől, figyelembe véve, hogy a hang kétszer teszi meg ezt a távot. Értelemszerűen, ha valamelyik szélső szenzor keltette az impulzust, akkor csak az adott szenzor és egyetlen szomszédjának adatából történik meg a háromszögezés.
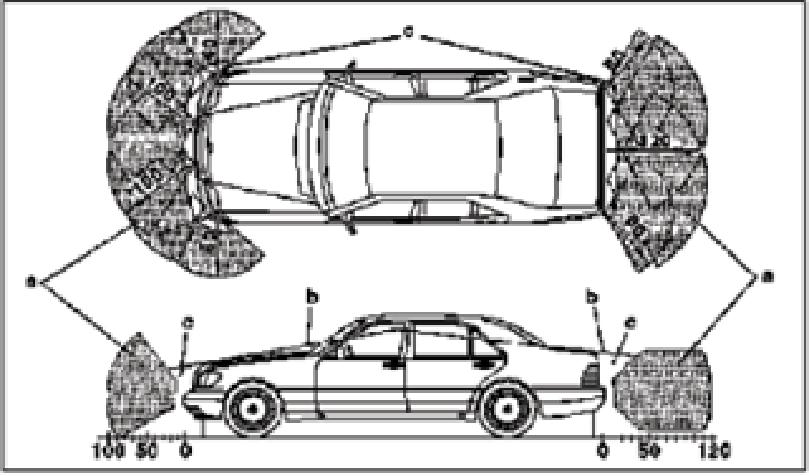
A legtöbb rendszer távolság adatai a következőképp definiáltak:
javasolt távolság középre= 150 cm
javasolt távolság a sarkokon= 60 cm
minimum/maximum távolság= 25 / 180 cm
az akusztikus mérés felbontóképessége= ±5 cm
a szenzor érzékelési szögtartománya
(horizontálisan és vertikálisan)= 30°
A szenzorok elhelyezési adatai :
ajánlott távolság a földtől= 40 – 50 cm
ajánlott szög (vertikálisan)= 0-10°
egymás közti távolság= 40-60 cm
A szenzor akkor jól pozícionált, ha a megadott észlelési terület rés nélkül le van fedve.
Az adatok ellenére a mérés távolsági adatait és a mérés pontosságát rendkívüli mértékben befolyásolja az időjárás és a légköri viszonyok. A hőmérsékleten kívül a levegő páratartalma is befolyásolja a hang terjedési sebességét, sőt a hangcsillapodás mértékét is. Erre példa, hogy nagy ködben lecsökken az érzékelési távolság. Ennél nagyobb gondot okoz az, hogy a jég, a hó és a koszréteg alapjában befolyásolják a szenzor, és ez által az UPA rendszer érzékenységét. A hóréteg csökkenti a szenzor membránja által keltett impulzus hangnyomását, és a visszhang rossz fogadását eredményezi. A nagyobb mennyiségű hó a membránon teljesen megbéníthatja a szenzor működését. Ezen kívül a hóval fedett akadály is rosszul veri vissza az ultrahanghullámokat, mivel szétszórja azokat. A rossz érzékenység, és a rossz visszaverődési tényező is csökkenést okoz az érzékelési területben. A szenzor és környezete közötti extrém hőmérsékletkülönbség is nagy problémát okoz, főleg magas abszolút páratartalom esetén. A rendszer ezen hiányosságaira jelen pillanatban még nincs megoldás, ennek ellenére nagy biztonsággal és megbízhatósággal működik.