6. fejezet - Futóművek fejlesztésének irányai, intelligens futóművek
6.1. A futóművek fejlesztésének általános kérdései
Napjainkban korszerű futóművek alatt azokat a konstrukciókat értjük, amelyek képesek valamilyen szinten a vezetőre, a járműre és a környezetére vonatkozó információkat érzékelni és értékelni, és ennek folyományaként jellemző paramétereit úgy változtatni, hogy növekedjen a jármű stabilitása, hogy növekedjen a jármű stabilitása, mozgási dinamikája, üzemeltetési paraméterei. A futómű fejlesztés tartalma és iránya mindezekből következik: a reagálás szintjének, vagyis az intelligenciájának kiterjesztése, növelése.
Az intelligens futóművek elnevezésére a szakirodalomban leggyakrabban két változatot találunk:
-
IDS - Intelligent Driving System
-
ISS – Intelligent Steering System
A két megjelölés használata leginkább divat kérdése, a konkrét tartalmat az adott futómű funkciójának és szerkezeti kialakításának elemzése alapján lehet megjelölni.
Általánosságban egy futóművet csak akkor minősíthetünk IDS vagy ISS jelzővel, ha annak a legjellemzőbb kinematikai vagy dinamikai paraméterei változnak a jármű menetbiztonságának vagy utazási kényelmének követelményei szerint.
Egy – egy korszerű futómű elnevezésére vagy minősítésére általában két vagy több hárombetűs kódot használnak. A második és a többi kód megjelöli azt a részrendszert, amelyre az intelligens vagy más elnevezéssel az interaktív szabályozás irányul.
Például:
-
IDS – intelligens futóművet jelöl,
-
IDS ABC – intelligens futómű, amelyik aktív felépítmény szabályozással (Active Body Control) rendelkezik,
-
IDS ABC CDC – intelligens futómű, mely folyamatos lengéscsillapító szabályozással (Continous Damping Control) valósítja meg a felépítmény aktív szabályozását,
-
IDS ABC CDC ASS – intelligens futómű, amely folyamatos lengéscsillapító szabályozással befolyásolja a felépítmény relatív mozgását ás additív kormányrendszerrel (Additív Steering System) rendelkezik.
A futóművek fejlesztésekor a különböző műszaki követelmények mellett gazdasági és jogi követelmények, és előírások elemzése és betartása is alapvető, meghatározó szempont. Ezt felismerve az ENSZ már az ötvenes évek elején létrehozott egy olyan nemzetközi szervezetet, amelyik a közúti közlekedés biztonságára kiható műszaki követelményeket világszinten koordinálja, és állásfoglalásaival, ajánlásaival, szabványaival irányítja. Ezek ECE TRANS, ENSZ EGB dokumentumokban jelennek meg.
A közúti járművek intelligens minősítése, szabályozása a blokkolásgátló rendszerrel kezdődött, mely 1979-ben kapott hivatalos, világszintű minősítést. Az elmúlt három évtizedben az intelligens rendszerek számos típusát fejlesztették ki, ezek különbözőképpen járultak hozzá a közúti járművek menetbiztonságának, utazási kényelmének jelentős javításához.
A legismertebb intelligens szabályozások jelölései, elnevezései, tartalma és a nemzetközi jóváhagyásának éve az alábbi táblázatban látható.
|
Kód |
Funkció leírása |
Jóváhagyás éve |
|---|---|---|
|
ABS |
(Antiblockier system, Antilock Braking System) a fékezett kerék megcsúszását megakadályozó rendszer |
1979 |
|
ASR |
(Antriebsschlupfregelung) a hajtott kerék kipörgését szabályozó rendszer |
1986 |
|
ESP |
(Elektronishes Stabilitätsprogram, Elektronic Stability Program) a jármű menetstabilitását szabályozó program |
1995 |
|
BA |
(Bremsassistent) fékasszisztens, mely vészfékezéskor növeli a fékerőt |
1996 |
|
EPS |
( Electrical Power Steering) elektromechanikus kormányzás |
1996 |
|
EAS |
( Elektronische Luftfeder, Electronical Airbag System) elektronikus légrugózás |
1998 |
|
ACC |
(Adaptive Cruise Control) útsáv követő rendszer |
1999 |
|
ABC |
(Active Body Control) aktív felépítmény szabályozás |
1999 |
|
EHB |
(Elektrohydraulische Bremse) elektrohidraulikus fék |
2001 |
|
CDC |
(Continuous Damping Control) folyamatos szabályozású lengéscsillapítás |
2002 |
|
AFS |
(Active Front Steering) aktív első kerék kormányzás |
2003 |
|
DDC |
(Dynamic Drive Control) dinamikus hajtás szabályozás |
2003 |
|
BBW |
(Brake by wire) elektromos vezetéken keresztül működtetett fékezés |
? |
|
SBW |
(Steer by wire) elektromos vezetéken át működtetett kormányzás |
? |
|
ACA |
(Anti Collision Avoidance) ütközést megakadályozó rendszer |
? |
|
APS |
(Automatic Parking System) autómatikus parkoló rendszer |
? |
|
SGC |
( Stop and go control) megállás és elindulás közbeni motorvezérlő rendszer |
? |
|
Megjegyzés: ? – még nincs jóváhagyva |
||
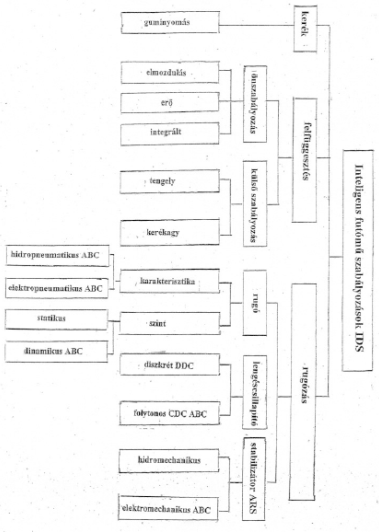
A futóművek intelligens vagy interaktív szabályozása a lengéscsillapítók szabályozásával kezdődött, majd kiterjedt az egész rugózási rendszerre is. Ma már szériatermék az intelligens felfüggesztésnek az önszabályozott konstrukciói. A kutatási programok már megjelentek az intelligens kerék fejlesztésében is. Az intelligens kerékfelfüggesztés és rugózás különböző szerkezeti variációit a 6.1. ábra mutatja be. A feltüntetett megoldások között vannak már sorozatban gyártott, nemzetközileg jóváhagyott rendszerek és még csak kísérleti jellegű prototípusok.
Ez az ismertetés kiterjed a futómű teljes szerkezetére, mind a három alkatrészcsoportjaira, mind alrendszereire.
6.2. A gépjármű futóművek járműmozgás szabályzó funkciója
A gépjármű mozgásszabályozás feladata – ebbe értendő a menetdinamikai szabályozás is – a gépjárműre ható, a kívánt nyomvonalon való haladást zavaró külső és belső hatások kiküszöbölésére való törekvés.
Miért van szükség mozgásszabályozásra?
Azért, hogy a gépjármű
-
irányítható maradjon (fékezés alatti irányítás, vonóerő átvihetőség), ABS, ASR funkció,
-
ne törjön ki (perdülés), ESP funkció
-
átlagos vezetői képességgel kezelhető legyen.
Külső zavaró hatás:
-
útpálya tapadási tényező változás, akár keréknyomonként,
-
útpálya hiba,
-
oldalszél.
Belső zavaró hatás:
-
kritikus gépjárművezetői irányítás,
-
gépjármű sebességfüggő sajátkormányzási tulajdonságok,
-
rakományból eredő zavarás.
A gépjármű közlekedésbiztonságát külső és belső tényezők határozzák meg. Meghatározó és továbbra is első helyen áll – minden korszerű technikai segítség ellenére is - a gépkocsi vezető magatartása, szituációs döntései és vezetéstechnikai tudása.
Technikai segítség (technikai asszisztencia) szükséges:
-
a rossz emberi szituációs járműirányítási döntések miatt (figyelmetlenségből, helytelen manőverek végrehajtásából, kényszerhelyzetek elkerüléséből eredően),
-
információhiányból (pl. észlelhetetlenség, pl. tapadási viszonyok nem ismerete, váratlan hatások) származóan.
A technikai segítség (technikai asszisztencia) lehet
-
információ szolgáltató, azaz érzékelést segítő, figyelmeztető (holt-tér figyelő, éjjellátó, távolságérzékelő stb.),
-
előrejelző, megelőző figyelmeztető, megelőző beavatkozó (prediktív),
-
irányíthatóság fenntartó (ABS), kitörésgátló (ESP),
-
következményi hatás mérséklő (aktív - vészfékező, kikerülő; passzív – sérülés csökkentő, pl.: légzsák, fejtámasz).
6.3. Intelligens kerék
A gépjármű menetstabilitását alapvetően befolyásolja a gumiabroncs rugalmassága, ferdefutási tulajdonsága, tapadása, gördülő ellenállása, vízkiszorító képessége. A futóműbe beépített gumiabroncs ezen tulajdonságai széles tartományban változhatnak a guminyomás függvényében. Ebből következően a menetbiztonság szempontjából lényeges követelmény az optimális nyomás beállítása és menet közbeni ellenőrzése, szabályozása.
A guminyomás menet közbeni ellenőrzésének két féle eljárása és konstrukciója is kialakult:
-
közvetlen mérés piezoelektromos úton, vagy forgócsatlakozós légvezetékkel;
-
közvetett mérés a jármű különböző szenzoraiból összegyűjtött adatok kiértékelése, megfelelő szoftver segítségével.
A mért adatok figyelmeztetik a vezetőt a guminyomás beállítására. Egyes terepjáró gépkocsiknál, katonai járműveknél ezt a vezető menet közben is el tudja végezni. Ezt a folyamatot statikus szabályozásúnak lehet minősíteni. Kísérletek folynak olyan dinamikus gumiabroncsok szabályozási rendszerek kifejlesztésére, amelyek a kerék dinamikus függőleges terhelését is figyelembe véve, a kerék függőleges lengési ciklusán belül is képes a nyomást változtatni. Ehhez 50 – 80 Hz frekvenciájú zárt ciklusú szabályozási kör szükséges.
Az Európa Parlament elrendelte a személyautók gumiabroncs-nyomásmérő/ellenőrző rendszerének szériafelszerelését 2012. november 1-jétől az új autók számára és 2014. november 1-jétől az újonnan forgalomba helyezett autók számára. Nemcsak a biztonság vezérelte a jogalkotókat, hanem az energiatakarékosság is. Felmérések szerint ugyanis az autóvezetők mintegy 65 százaléka túl kicsi abroncsnyomással közlekedik, ami veszélyes és a fogyasztást is növeli.
6.3.1. Gumiabroncs nyomás közvetett ellenőrzése
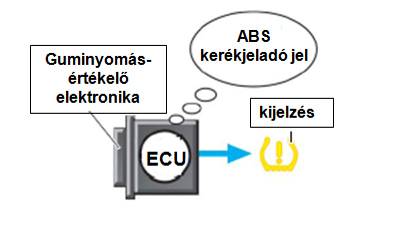
A gumiabroncs nyomásának egyszerűbb rendszere közvetett módon ad jelzést a gépkocsivezető számára. (6.2. ábra) Az ABS rendszer programját oly módon egészíti ki, hogy a kerék jeladóktól összegyűjtött jelekből a kerekek gördülési rezgése kiszámítható és annak változásából már lehet következtetni a gumiabroncs levegő nyomására. Ez a módszer kevésbé pontos, fényjelzéssel tájékoztatja a vezetőt a nyomásról:
-
zöld fény: megfelelő a guminyomás
-
sárga fény: figyelmeztetés, a nyomás 0,4-0,5 bar nyomással csökkent
-
vörös fény: riasztás, a nyomáscsökkenés 0,5 bárnál nagyobb is lehet, ez már veszélyes lehet a jármű menetbiztonságára.
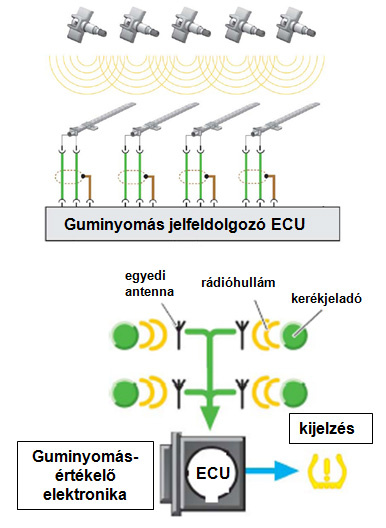
6.3.2. Gumiabroncs nyomás közvetlen mérése
A gumiabroncs nyomásának közvetlen mérése a gumiabroncs-kerékpánt légterében elhelyezett nyomás és hőmérséklet szenzorok jelei alapján folyik. A jeladók rádióhullámmal továbbítják az adatokat a megfelelő antennákhoz. Lehet egy központi antennát alkalmazni, vagy kerekenként a kerékjárati dobba felszerelni. (6.3. ábra)
A jeladó elhelyezése: (6.4. ábra)
-
a kerékpánt ágyban acélszalaggal rögzítve,
-
a szeleppel egységet képezve, szeleppel szerelve,
-
a gumiabroncs belső felületére rögzítve.
A jeladó tápfeszültség ellátása:
-
akkumulátor a jeladóban (élettartam 10 év is lehet),
-
jeladóra ható mozgással kiváltott feszültség-gerjesztés,
-
transzponder, induktív csatolás.
Kijelzés:
-
kerekenként (nyomás, nyomásváltozás, hőmérséklet, jeladó azonosítás (ID), jeladó akkumulátor töltöttség, kommunikáció státusz),
-
kerékfüggetlen, nyomás értékhatár átlépés figyelmeztetés.
Értékelés, figyelmeztetés:
-
nyomás értékhatár átlépés figyelmeztetés (0,3 – 0,4 bar közötti csökkenés = figyelmeztetés, 0,4 bar vagy nsgyobb csökkenés = riasztás), a határértékadat a kerekenkénti értékelőrendszernél beállítható.
-
nyomásváltozás trend figyelmeztetés (0,2 bar csökkenés percenként).

A TPMS keréknyomás-ellenőrző rendszert (Tire Pressure Monitoring System) az összes gépkocsiba ajánlott felszerelni, a defekttűrő vagy „defekten is futó” gumiabroncsok esetében abszolút követelmény. A 'RunOnFlat' gumiabroncsoknál a fedélzeti ellenőrző rendszer nélkül a vezető nem rendelkezne információval arra vonatkozóan, hogy történt-e defekt és a gumiabroncsnak szüksége van-e szervizre. Ezért a 'RunOnFlat' gumiabroncsok csak olyan gépkocsikra szerelhetők fel, amelyekben van TPMS rendszer.
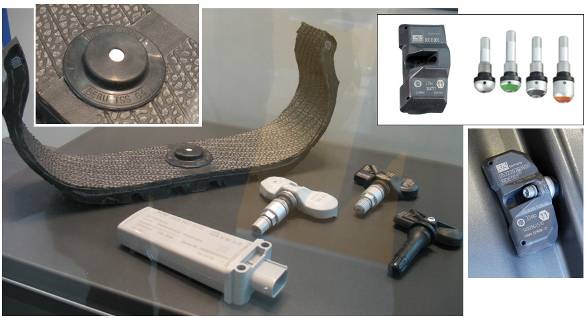
Az intelligens gumiabroncsnyomás-ellenőrző rendszer a jármű elektronikájának elküldi a következő adatokat is: a gumiabroncs típusa, sebesség- és terhelési index. A 7 gramm tömegű érzékelő modul egy speciális tartóban foglal helyet, melyet tartósan összekapcsolnak a gumiabroncs futófelületének belső oldalával (ragasztással, vulkanizálással). (6.5. ábra) Ezáltal sikerül egyrészt a felni relatív nagy hőmérsékleti ingadozásainak hatását lecsökkenteni, másrészt a szelepnél fellépő centripetális erőket redukálni az érzékelőnek a szeleptől való elválasztásával, melyek a tömítetlenség okozói lehetnek. Az összeszerelésnél elmentett adatokat (gyártás módja és ideje, végsebesség és töltőnyomás) az aktuális futómű- és kerékterhelés-eloszlásokkal összevetve optimalizálhatók az olyan vezetői biztonsági rendszerek, mint az ABS vagy az ESP. Ha az ABS tudja ugyanis, hogy az autó milyen típusú gumiabroncsokkal van szerelve, a 100 km/h-ról mért fékút lerövidíthető. Ehhez elegendő lenne a gumiabroncsokat teljesítményosztályokba sorolni, majd ezeket az információkat elküldeni a fékszabályzónak, amely így kiválaszthatja az optimális szabályozási algoritmust. Haszonjárművek esetén integrálnak egy pótlólagos kerékterhelés-szenzort is, amely például felismeri, ha elmozdult a rakomány, és vészjelzést ad le, vagy csökkenti a kanyarsebességet a motorra és az ESP-re való ráhatással.
6.4. Intelligens felfüggesztés
Az intelligens felfüggesztések a kerékgeometria azon paramétereinek szabályozását célozzák, amelyek alapvetően befolyásolják a jármű menetstabilitását. Ezek a következők:
-
kerékdőlés,
-
kerékösszetartás,
-
keréktalppont keresztirányú mozgása.
Ezek szabályozási célfüggvényeit a rendszer referencia jelének függvényében határozzák meg az adott futóművekre. A referencia jel lehet:
-
a kerék felépítményhez viszonyított ki – berugózása,
-
a járműre ható oldalgyorsulás,
-
a fékerő,
-
a vonóerő,
-
a kormánykerék elfordítási szöge,
-
a felépítmény oldalbillenési szöge,
-
a felépítmény bólintó mozgási szöge,
-
a jármű függőleges tengely körüli szöglengése.
A felfüggesztés szabályozás, vagyis a meghatározott célfüggvény szerinti kerékmozgatás történhet számítógéppel irányított külső energia bevezetésével vagy önszabályozással.
6.4.1. Felfüggesztés önszabályozással
Az önszabályozású felfüggesztés nem igényel külső energiát a kerékgeometria célfüggvény szerinti változtatásához. A konstrukció olyan felépítésű, amely saját maga képezi a referencia jel szenzorjait és a végrehajtás szerveit (aktuátorait). Valójában ezeknél az önszabályozott rendszereknél a szoftver benne van a hardverben.
A referencia jel lehet:
-
a kerék ki – berugózása,
-
oldalirányú erő,
-
fékerő,
-
vonóerő.
Az aktuátorok szerepét a megfelelő hosszúságú és beépítési szögű lengő rudak és lengőkarok, valamint a nagy térfogatú gumiágyazások (elasztométerek) töltik be. Az önszabályozott felfüggesztések lehetnek:
-
elmozdulás szabályozása;
-
erőszabályozású;
-
integrált szabályozású
6.4.1.1. Elmozdulás szabályozás
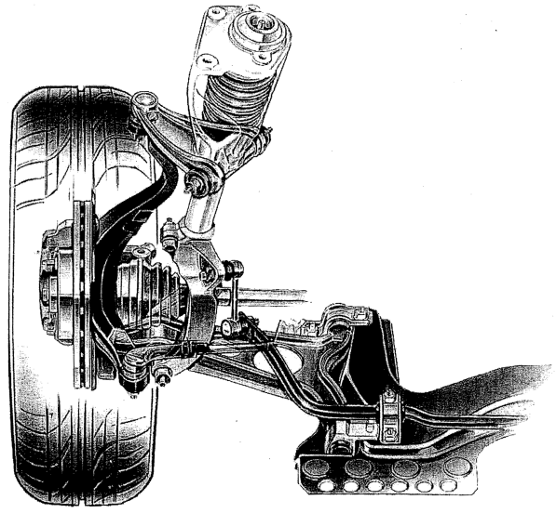
A rövid felső lengőkar befelé és hátrafelé lejt, ennek következtében a kerék ki-berugózásakor változtatja a kerékdőlést, a csapterpesztést és a csaphátradőlést. (6.6. ábra) Mindezek következtében a kerékdőlés a jármű oldalgyorsulásától függő kerékmozgás függvényében változik. Kis járműsebességnél parkolás közben a kerékdőlés nem változik. A kocsitest dőlését szabályzó (ABC) rendszer az intelligens háromszög-trapéz keresztlengőkaros futóműveknél csökkenti az önszabályozás intervallumát.
Az egy hosszlengőkaros, három keresztlengőkaros futóművek (lásd: 5.43. ábra - 5.45. ábra) is elmozdulás szabályzásúak, tehát azok is igénylik a felépítmény oldalbillenését.
6.4.1.2. Erőszabályozás
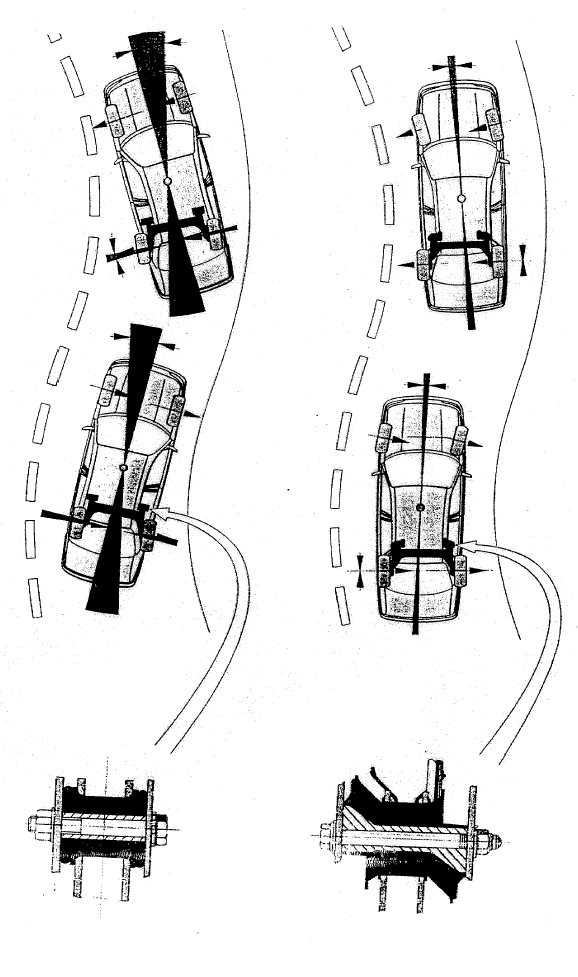
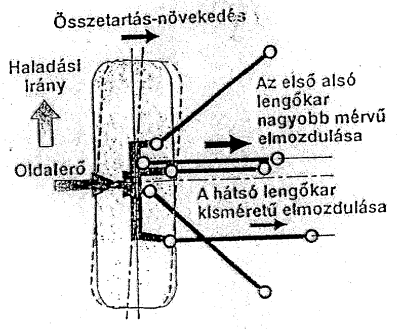
A csatolt hosszlengőkaros hátsó futóműveknél alkalmazott aszimmetrikus nagytérfogatú gumiágyazás következtében a kanyarodás közben fellépő oldalerő hatására az egész futómű a függőleges tengely körül elfordul, ezáltal változik a kerékösszetartási szöge, ami csökkenti a jármű hátsó részének sodródását (kifarolását) vagyis a jármű túlkormányzását. (6.7. ábra)
6.4.1.3. Integrált szabályozás
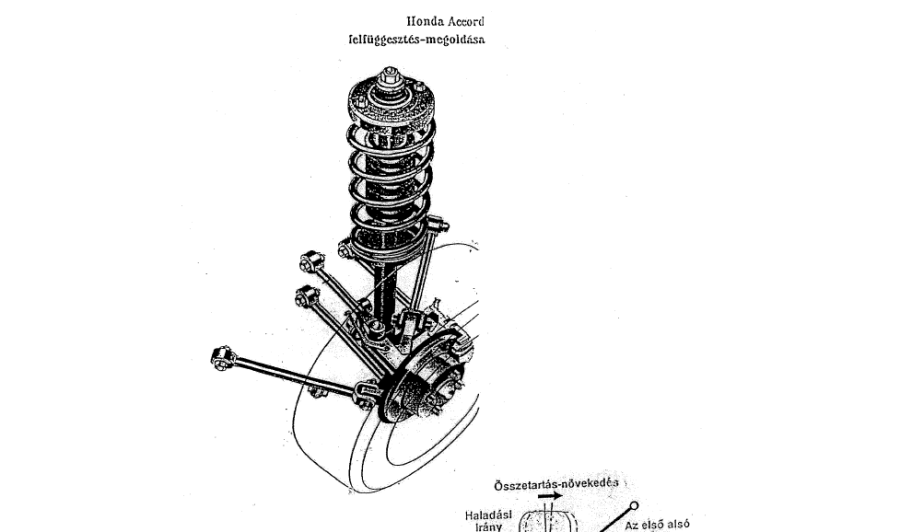
Az oldalerő hatására bekövetkező összetartás növekedés megakadályozza a jármű oldalcsúszását, túlkormányzását. (6.9. ábra) A kerék ki-berugózásakor változik a kerékdőlés szöge. Az erő és az elmozdulás alapú önszabályozás kiegészíti egymást. Az integrált szabályozású futóművek nem érzékenyek a felépítmény billenésének csökkentésére, szabályozására.
A kanyarodás közben fellépő oldalerő hatására a szabályozó (regulátor) rudak a belső nagytérfogatú gumiágyazásuk következtében keresztirányba elmozdulnak és elfordítják a tengelycsonkokat. A kanyar külső oldalán a szabályozó rúd befelé mozdul, vagyis a kerékösszetartás növekszik, míg a belső oldalon a rúd kifelé mozdul, ott a kerékösszetartás csökken, esetleg széttartásba vált.
6.4.2. Felfüggesztés külső szabályozással
A külső szabályzású futóműveknél a jármű menetstabilitását alapvetően befolyásoló kerékgeometriai paramétereket (kerékdőlés, kerékösszetartás, keréktalppont, oldalirányú mozgása) számítógépes zártciklusú rendszer változtatja a megtervezett célfüggvények szerint. A fedélzeti számítógép összegyűjti a jármű menetstabilitásának jellemzésére vonatkozó információkat, meghatározza a kerékgeometriai beállítandó paraméter értékeket és a kerékkörnyezetében működő aktuátor azokat beszabályozza, az új értékeket visszacsatolja a számítógéphez.
Az aktuátor lehet:
-
hidraulikus;
-
pneumatikus;
-
elektrohidraulikus;
-
elektromechanikus;
-
elektrodinamikus.
A pneumatikus aktuátorok csak lassú szabályozású rendszerekben a statikus állításokhoz használhatóak, miután nagy az időkésedelmük.
Az eddig ismertetett külső szabályozású futóművek még kísérleti jellegűek. Ezeknél az aktuátoroknak a feladatát elektromos irányítású hidraulikus munkahengerek vagy elektromechanikus hullámhajtóműves aktuátorok látják el. Az elektrodinamikus aktuátorok valójában lineáris egyenáramú elektromotorok, fejlesztésük még kezdeti stádiumban van.
6.4.2.1. Tengelycsonk külső szabályozása
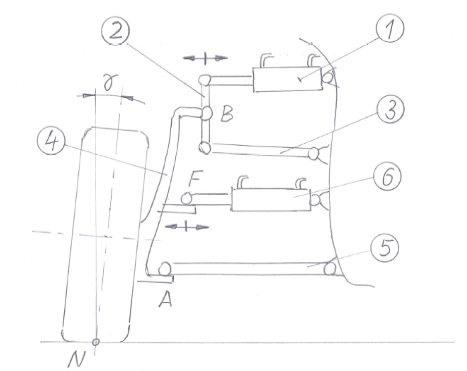
A fedélzeti számítógép utasítására a hidraulikus munkahenger (aktuátor) (1) a tengelycsonk felső nyúlványát (4) a felső lengőkarhoz (3) támaszkodó szabályozó himba (2) segítségével mozgatja, ezáltal megváltoztatja a kerékdőlési szöget (δ) és a kerék talppontjának (N) pozícióját. A kerékösszetartást a második aktuátor (6) szabályozza. Hátsó futóműnél az ilyen konstrukcióval a jármű összkerékkormányzása is megvalósítható. (6.11. ábra)
Az első futómű esetén a kerékösszetartás külső szabályozása a kormányrendszer alapvető átalakítását igényli. A két kerék összetartásváltozása egymástól eltérő irányú és méretű lehet, ami a trapézmechanizmus kiiktatását feltételezi és helyette a számítógépes irányítású, a kormánykerekekhez csak elektromos vezetékkel kapcsolt úgynevezett steer by wire rendszert kell alkalmazni. Ezt a rendszert azonban a nemzetközi előírások még nem engedélyezik. A kísérleti járművekben az első és hátsó futóművek külső szabályozási rendszerei jól működnek és javítják a jármű menetstabilitását.
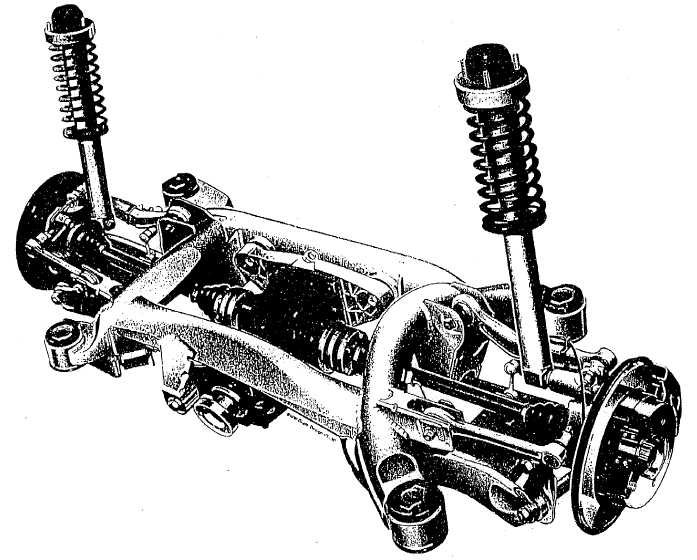
Már elkészült a BMW gépkocsi hátsó futóművéhez egy olyan multilink típusú konstrukció, amelynél a kerék összetartását szabályzó rudat elektromechanikus hullámhajtóműves aktuátorral helyettesítették. (6.12. ábra)
A kerekek összetartásának szabályozott változtatásával tulajdonképpen az összkerék kormányzást lehet megvalósítani, annak a jármű menetstabilitására gyakorolt valamennyi kedvező hatásával együtt.

6.4.2.2. Tengely külső szabályozása
Az autóbuszok merev hidas hátsó futóművének intelligens szabályozására is már bemutattak prototípus modelleket. A négy lengőrudas légrugós hátsó futómű külső szabályozásához a két menetirányú lengőrudat váltják ki a fedélzeti számítógéppel irányított hidraulikus munkahengerekkel.
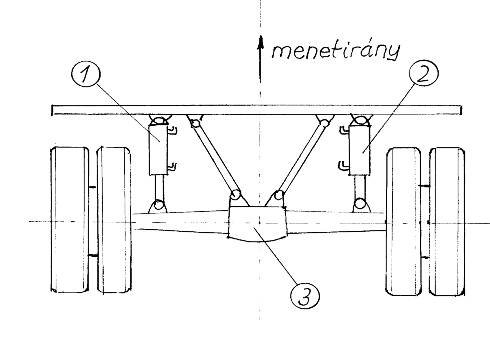
A hidraulikus munkahengerek (1,2) az egész hátsó hidat (3) ± 6 ÷ 8° szögtartományban forgatják el, ezáltal csökkenthető az autóbusz a hátsó részének sodródása, túlkormányzása. A külső szabályozású felfüggesztési rendszerek a jövőben a kormány alapú ESP szabályozásnak is eszközei lehetnek.
6.5. Rugózás intelligens szabályozása
A rugózási rendszer intelligens szabályozása irányulhat a lengéscsillapítóra, a hordrugóra, a stabilizátorra. A felépítmény függőleges lengéseinek szabályozása az energia származása szerint lehet:
-
passzív;
-
félaktív;
-
aktív.
A passzív rugózásnál nincs külső energia bevitel. A kerekeket és a felépítményt a kerekek berugózásakor a hordrugókban összegyűjtött potenciális energia mozgatja. A lengéscsillapító az összegyűjtött energia egy részét szétszórja, disszipálja. A rugó és lengéscsillapító paramétereit előzetesen optimalizálják, menetközben azokat már nem szabályozzák.
A félaktív rugózás esetén sincs külső energia felhasználás. A szabályozott lengéscsillapító a disszipálódó energia mennyiségét a lengéskényelmi követelményekhez, az útviszonyokhoz igazítja. Ezért ezt a szabályozást adaptívnak is nevezik.
Aktív rugózás esetén már külső energia is bekerül a rendszerbe. A bevitel történhet a lengéscsillapítón, a hordrugón, a stabilizátoron keresztül vagy közvetlenül a felépítményt mozgató valamilyen aktuátor segítségével. A rugózás szabályzásának jelenlegi legkorszerűbb rendszere a felépítmény mozgásának aktív szabályozása (Active Body Control - ABC)
6.5.1. Hordrúgó szabályozás
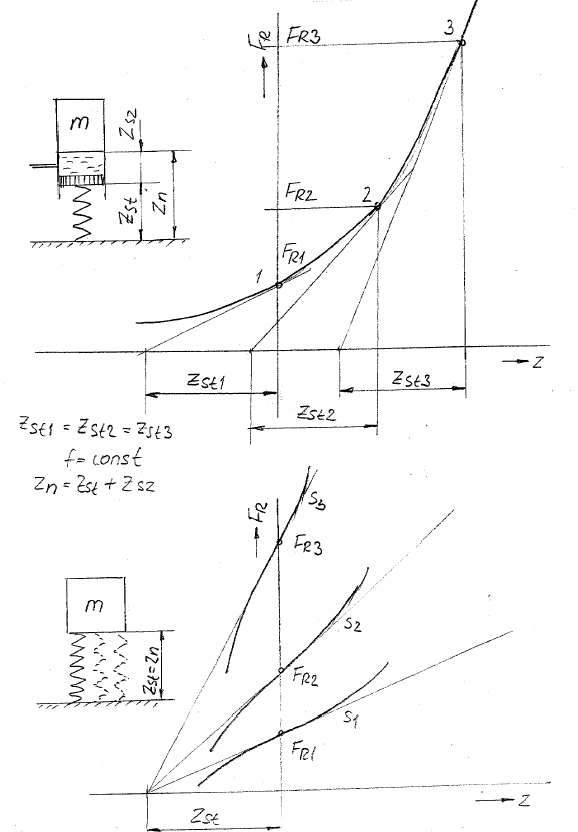
Zst=Zn; f=konstans
A hordrugó szabályozás történhet:
-
szintszabályozás
-
karakterisztika szabályozás formában.
Szintszabályozás esetén a rugó merevségi tulajdonsága, karakterisztikája változatlan marad, a szabályozás a felépítmény lengésének munkapontjára irányul, ami konkrétan a padlószint magasságát jelenti. Ez a szabályozás lehet statikus vagy dinamikus. (6.14. ábra) Statikus szintszabályozás a felépítmény padlószintjének (hasmagasságának) álló helyzeti beállítását továbbá egyes megoldásoknál, mint például autóbuszoknál a kocsitest leültetését jelenti. A dinamikus szintszabályozás képes menetközben is a padlószintet változtatni. Ha ez 4 – 6 Hz frekvenciával történik, akkor már általa a felépítmény aktív szabályozása (ABC) is megvalósítható.
Karakterisztika szabályozás esetén a rugó merevségi tulajdonsága is változik a lengéskényelmi és menetstabilitási igényeknek megfelelően. Ebbe a kategóriába tartozik a hidropneumatikus rugózás (pl. Citroen) és az elektropneumatikus rugózás. Mindkét típus alkalmas az ABC szabályozás megvalósítására.
6.5.1.1. Hidropneumatikus rugózás
A hidraktiv rugózás legfejlettebb rendszerét a Citröen C5 típusú gépkocsikban találjuk. Ez a rendszer számos elemet integrál.
Érzékelők:
-
Kormánykerék elfordítás érzékelő
Az opto-elektronikus jeladó előtt a kormánykerék tengelyére szerelt nyílásokkal ellátott tárcsa fordul el. A mozgás irányról, a szögsebességéről és az elfordítási szöghelyzetről ad információt.
-
Gázpedál szöghelyzetét érzékelő
A beszerelt potenciométer a gázpedál lenyomásának és visszaengedésének gyorsaságát érzékeli. Az elektronika azt érzékeli, hogy mennyi idő szükséges a gázpedál teljes elmozdulásának 10%-ához.
-
Fékezőnyomás érzékelő
Az első fékkörhöz csatlakozik, egy bizonyos nyomásküszöb felett keményebb rugózási fokozatra kapcsol.
-
Kocsiszekrény elmozdulás érzékelő
Az első futómű kereszt-stabilizátorára szerelik, mely az elfordulást optikai úton érzékeli. Ez arányos a felépítmény elmozdulásával és annak sebességével. Ki- és be-rugózáskor, ha az amplitúdó egy bizonyos küszöböt átlép, keményebb fokozatra kapcsol.
-
Sebesség érzékelő
A sebességváltóra szerelik. Jele alapján számítja ki az elektronika a gépkocsi gyorsulását és lassulását, melyet a küszöbértékekkel hasonlít össze. Így az átkapcsolás és a prioritás sebességfüggő lehet. Kis járműsebességnél az elsődleges beavatkozási jelet a kocsiszekrény elmozdulás érzékelője, nagy járműsebességnél pedig a kormánykerék elfordulás érzékelője adja.
Elektronika
Memóriája jellegmezőket tárol, melyekkel a mikroprocesszor folyamatosan összehasonlítja az érzékelők jeleit. Megállapítja, hogy mikor kell változtatni a felfüggesztés paraméterein. A végfokozaton keresztül 0,05 másodpercen belül működteti a beavatkozó elektromágneses szelepeket.
A hidraulika rendszer
A hagyományos hidro-pneumatikus rendszerhez hasonló egységek:
-
gázrugók
-
lengéscsillapító szelepek
-
A szintszabályzó szelep, melyet a stabilizátor közepére felszerelt rudazat működtet. A terhelés függvényében szabályozza a lengéscsillapítókban a nyomást.
A nagynyomású csövek keresztmetszetét az alap rendszerhez képest jelentősen megnövelték. Ez alapján felismerhető a Hydractive felfüggesztés.
Kiegészítető egységek
Futóművenként egy kiegészítő gázrugó és lengéscsillapító szelep, elektromágnessel működtetett tolattyús átkapcsoló szelep, mellyel az elektronika a rugózási és a csillapítási fokozatokat változtatja.
A gépjármű vezetője kétféle szabályozási fokozatot állíthat: sport és automata működésmódot.
A sport fokozatban az elektromágneses szelep alaphelyzetben marad. Ekkor a rugózás és a csillapítás kemény marad. Automatikus fokozatban az elektromágneses szelep gerjesztést kap, és így lágy rugókarakterisztikára és kis csillapításra kapcsol. Ha az érzékelők jelei alapján az elektronika a tárolt jellegmezőkkel történő összehasonlítás alapján szükségesnek ítéli meg automatikusan átkapcsol kemény fokozatra.
Keményebb fokozat
Az elektromágneses szelep árammentes nyugalmi helyzetben van. Ez az alaphelyzet, így elektromos hiba esetén ezzel a kevésbé kényelmes, de biztonságos fokozattal lehet autózni. A tolattyúk leválasztják a rendszerről a középső gázrugó elemeket és lengéscsillapító szelepeket. Optimális útfekvés, rövid rugóút, keményebb csillapítás jellemzi. Kanyarban kisebb lesz a kocsiszekrény dőlése, mert a bal- és a jobboldali hidraulikaterek egymástól elválasztódnak. Fékezéskor és gyorsításkor a rugózási és csillapítási paraméterek megváltozása miatt csökken a kocsiszekrény bólintása.
Lágy rugózás, komfort fokozat
Ha az útviszonyok és a vezetési stílus lehetővé teszi, az elektronika bekapcsolja az elektromágneses szelepet. A rugó ellenében a tolattyú elmozdul és futóművenként egy-egy gázrugót hozzákapcsol. Növekszik a gázrugó térfogat és lágyabb lesz a rugózás. A lengéscsillapító szelepekkel párhuzamosan még egy-egy bekapcsolódik, ezért nagyobb az átáramlási keresztmetszet és a csillapítás kisebb lesz. A jobb és baloldali kerékfelfüggesztés egymással összekapcsolódik. Hosszabb rugóút és kisebb csillapítás.

6.5.1.2. Elektropneumatikus rugózás
Az elektropneumatikus rugózási rendszereket elsősorban a nagyobb kategóriás luxus személygépkocsikon alkalmazzák (Audi, Mercedes). A levegőellátást integrált egység szolgáltatja, amelyik elektromotoros meghajtású kompresszorból, nyomás szabályozó és levegőtisztító egységekből (6.18. ábra), légtartályból áll. A rugózó elem gördülőmembrános tömlős légrugó és vele egybeépítve CDC szabályozású lengéscsillapító. (6.17. ábra) A légrugók szabályozását elektronikus szintszabályzó szelepek végzik. A dinamikus elektronikus szintszabályozás és a fokozat nélküli lengéscsillapítás szabályozás együttesen a felépítmény mozgásának aktív irányítását (ABC) lehetővé teszi. Az elektropneumatikus légrugózást szabályzó központi egység számára a minden egyes kerékhez és a felépítményhez kapcsolt gyorsulásszenzorok, irány és sebességérzékelők továbbítják az információkat.
6.6. Lengéscsillapító intelligens szabályozásai
A lengéscsillapító szabályozására jelenleg két rendszert alkalmaznak:
-
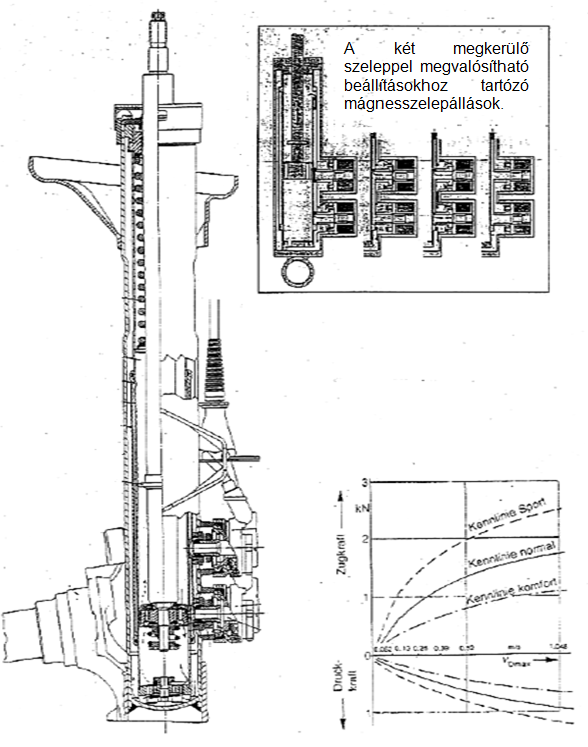
DDC- (Diskret Damping Control) a lengéscsillapító különböző konkrét beállítása;
-
CDC- (Continuous Damping Control) a lengéscsillapító folyamatos (fokozatmentes) szabályozása.
A DDC szabályozás általában három fokozatba állítható:
-
normál
-
komfort
-
sportos
Az egyes fokozatok beállítását a jármű vezetője végzi, tehát nem automatikus, szubjektív érzeten alapul.
A CDC szabályozás során a lengéscsillapító karakterisztikája széles mezőt ír le, a beavatkozás automatikus, elsősorban a felépítmény billenő és bólintó mozgását szabályozó aktuátor funkcióját teljesítheti. Az egész jármű számítógépes rendszerébe integrálva már alkalmas a felépítmény billenő és bólintó mozgásának dinamikus szabályozására (ABC).
A lengéscsillapító keménysége három fokozatban állítható be. Az állítást a vezető végezheti a műszerfalon elhelyezett háromfokozatú kapcsoló beállításával. Így a beállítás teljes egészében a vezető szubjektív érzetétől függ. A három fokozat:
-
normál
-
kényelmes
-
sportos
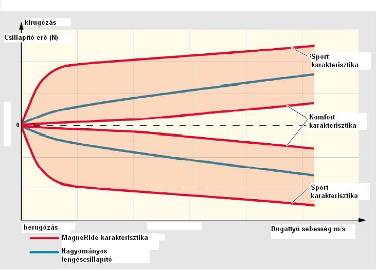
CDC szabályzás esetén a lengéscsillapító karakterisztikája összenyomás és a széthúzás ütemében is széles szabályzási sávban fokozatmentesen változik. (6.20. ábra)
A fokozatmentes szabályozásra különböző műszaki megoldásokat fejlesztettek ki:
-
A hidraulikus lengéscsillapító két munkatere közötti szelep fokozatmentes elektronikus mozgatásával lehet változtatni a hidraulika olaj áramlását, és ezáltal a csillapító erőt.
-
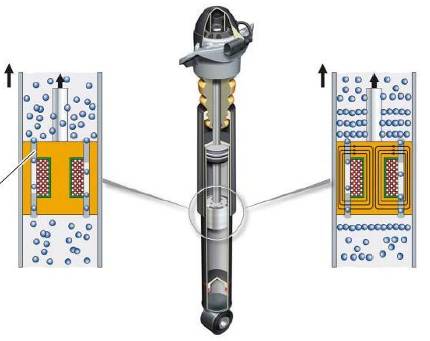
Működési elvében is újszerű a mágneses folyadékos lengéscsillapító, amelyben a csillapító olaj áramlását nem szelepekkel, hanem elektronikusan változtatható erősségű mágneses térrel szabályozzák. (6.21. ábra) A „magnetic ride”-nak nevezett folyadékban mágnesezhető részecskék lebegnek, amelyek szabadon, egyenletesen oszlanak el a folyadékban. Ilyenkor a furatokon átáramló folyadék a legkisebb ellentmondást fejti ki. A dugattyúba beépített tekercsben folyamatosan változtatható mágneses mező építhető fel, amely hatására a mágnesezhető részecskék a dugattyú mozgására merőleges sorban, láncba rendeződnek, megnő a hidraulikus ellenállás és így a lengéscsillapítás ereje is.
6.6.1. A felépítmény mozgásszabályozása
A gépjármű felépítménye menetközben a futóműhöz, illetve a talajhoz képest különböző mozgásokat végezhet:
-
mozoghat függőlegesen a z tengely irányában, a rugózás következtében,
-
oldalra billenhet a kerékfelfüggesztés billenési momentum tengelye körül,
-
előre-hátra bólinthat a kerékfelfüggesztés bólintási centruma körül.
Ezek a mozgások károsak a lengéskényelem és a kerék-talaj kapcsolat szempontjából egyaránt. Mindhárom irányú mozgás a dinamikus kerékterhelések véletlenszerű változását okozza, amivel közvetlen dinamikusan változik a kerék által a talajon felvehető reakcióerők nagysága. Ezt a szakirodalom kerék átterhelődésnek nevezi, mely a jármű hossz és keresztirányú stabilitását károsan befolyásolja. Az ABC (Active Body Control) rendszer a kocsitest mindhárom irányú mozgásának szabályozására irányul . Több korszerű műszaki megoldást fejlesztettek ki, ezek különböző konstrukciós elven működnek, például:
-
a lengéscsillapító fokozatmentes szabályozása (CDC – Continuous Damping Control),
-
a nem szabályozott hordrugóval szorosan összekapcsolt hidraulikus állító egység,
-
szabályozott (változtatható rugómerevségű) hordrugóval és CDC lengéscsillapítóval.
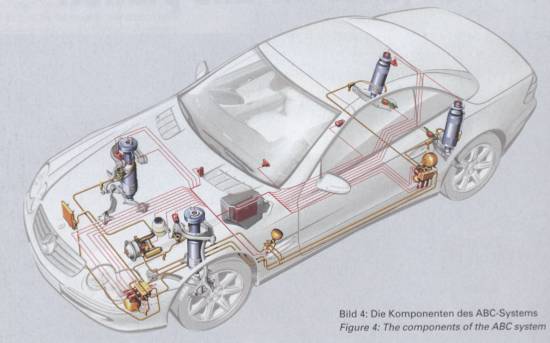
Napjainkban két különböző ABC rendszert találunk a korszerű személygépkocsikban:
-
Elektrohidraulikus aktuátorral sorba kapcsolt acélrugós rendszer.
-
Elektropneumatikus légrugós rendszer
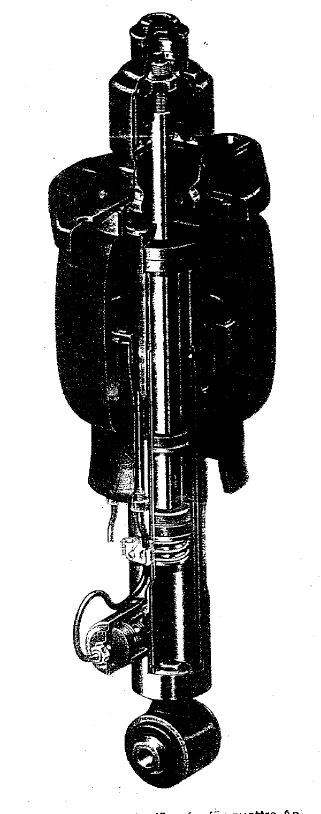
ABC rendszer acélrugókkal
A felépítmény mozgatását végző munkahenger az acélrugó tányérjára támaszkodik, a rendszer harmadik eleme a hidraulikus lengéscsillapító, mely lehet DDC vagy CDC típusú. (6.22. ábra)
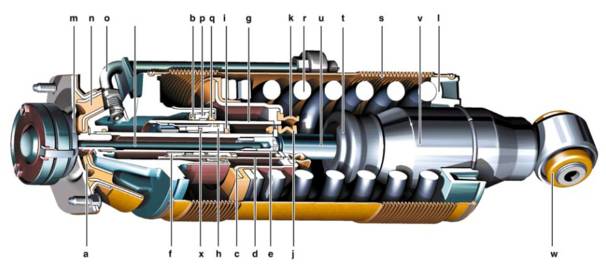
a - berugózási ütköző, b – olajlehúzó felül, c – rugótányér felül, d - dugattyú, h - vezetőpersely alul, i – lehúzó alul, j és k - belső ütközők, l - rugótányér alul, m - kirugózási rugóütköző, gumi-fém csapágy, q - nagynyomású tömítés, r - tekercsrugó, s - védőmandzsetta, t - hidraulikahenger ütköző lent, u - lengéscsillapító rúd, v - lengéscsillapító, f - pozíció mágnes, g - hidraulika munkahenger, n - rugóláb támasztócsapágy, o - hidraulikavezeték, p - felső vezetőhüvely, w – gömbcsukló
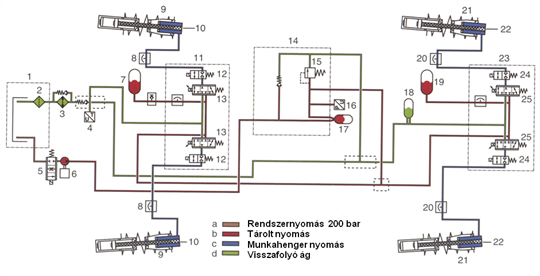
A hidraulikus munkahenger nyomása fokozatmentesen változik annak érdekében, hogy a felépítmény úttest feletti magassága a kerekek lengőmozgása ellenére alig változzon. A hidraulikus rendszer normál üzemben 180 és 200 bar közötti nyomáson üzemel, a motorról ékszíjjal hajtott radiáldugattyús szivattyú 11 liter/perc szállítási teljesítményű.
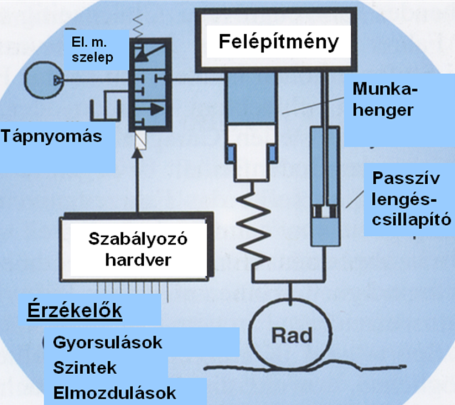
A hidraulikus rendszer is részt vesz felépítmény mozgásának csillapításában. A rugózást és a csillapítást a kocsiszekrény kisebb frekvencia tartományban 5-6 Hz-ig a hidraulikus rendszer látja el. Ennél nagyobb frekvenciájú tartományban a csillapítás az önálló lengéscsillapító veszi át.
Különleges szoftver alkalmazása révén a vezető különböző körülményekhez optimalizált futómű tulajdonságokat programozhat be. Nagyon sportos, kevésbé sportos, vagy komfortos változatok közül választhat. Ezen változatok mindegyikénél a gépkocsi mindig biztonságos marad. Olyanok a futóművek konstrukciói, hogy mindegyik rugóhoz kettős működésű hidraulikus munkahengert szerelnek, amivel nagyon érzékeny szabályzást lehet megvalósítani, menet közben a kerekek és a felépítmény között ébredő erőket tudják megváltoztatni. Egy olyan szabályozási folyamatot valósítanak meg, amely állandóan figyelembe veszi a különböző érzékelők jeleit.
A fontosabb alapadatok:
-
a perdülés szögsebessége,
-
a hosszanti gyorsulás
-
a keresztirányú gyorsulás,
-
a felépítmény függőleges irányú gyorsulásai,
-
a kerék és a felépítmény közötti relatív elmozdulás.
Ezek a paraméterek folyamatosan kiegyenlítődnek. Kanyarban például nem dől meg a kocsiszekrény, de elmarad a bólintás a hirtelen fékezéskor, vagy lassításkor.
Ez a rendszer számos előnnyel rendelkezik. Gyorsan alkalmazkodik a mindenkori útviszonyokhoz, elsőrangú útfekvést téve lehetővé. A különösen dinamikus autózás érdekében 60 km/h fölött körülbelül 10 milliméterrel lesüllyeszti a kocsiszekrényt a sebességfüggő szintszabályozás. Ezáltal csökken a légellenállás és a fogyasztás, illetve fokozódik a komfort és a biztonság. Az elindulási és fékezési bólintás éppúgy jelentősen csökken, mint kanyarban az oldaldőlés. A kerekekre ható terhelés eloszlásából a rendszer felismeri az erős oldalszelet és segít a vezetőnek irányban tartani a járművet. Ugyanakkor ennek a rendszernek a felépítéséből következő elvi hiányossága, hogy az acélrugó karakterisztikája adott, azt nem tudja szabályozni, így a kerék-talaj kapcsolatot csak kismértékben javítja.
6.6.2. ABC rendszer légrugózással
A légrugózással kombinált ABC rendszer a kocsitest mindhárom szabadságfokú mozgását képes felügyelni és szabályozni. A gördülő membrános légrugók dinamikus levegőellátást szabályozva lehetővé teszi a jármű lengéskényelmének szabályozását. Ez különösen előnyös a változó terhelés esetén is a legnéskényelmi mutatók (percenkénti lengésszám, sajátfrekvencia, VDI lengéskényelmi mutató, ISO lengéskényelmi érték) kedvező érétken tartáshoz. De képes szabályozni a kocsitestnek a talajtól mért távolságát, vagy kézi kiválasztott érték szerint, vagy dinamikusan a jármű menetstabilitásának érdekében, például nagyobb sebességnél csökkenti a beállított szintet. Tehát megvalósítja a dinamikus padlószint (hasmagasság) szabályzását.
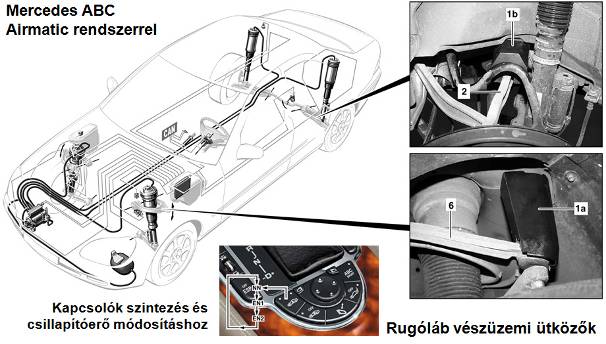
Az Airmatic rendszer légrugóit elektromotorral hajtott kompresszor integrált levegőelőkészítő, nyomásszabályzó és szintszabályzó egységeken keresztül táplálja. A járművezető a műszerfal középkonzolján elhelyezett kezelőszerven keresztül tud beavatkozni a szintállítás és a lengéscsillapítás paramétereibe.
6.7. Intelligens stabilizátorok
A karosszéria (felépítmény, kocsitest) oldaldőlésének szabályozására leggyakrabban a torziós keresztstabilizátort alkalmazzák. A keresztstabilizátor egy rúd formájú torziós rugó, mely két rugalmas csapággyal a kocsitesthez kapcsolódik. A torziós rúd két végéhez csavaró nyomaték kifejtésére alkalmas karok csatlakoznak. Ezek a karok a kerék melletti tengelycsonk nyúlványokhoz, vagy merev tengelytesthez kapcsolódnak rugalmas gumi csapágyakkal vagy kétcsuklós rudakkal. A kocsitest függőleges lengésekor a két kerék azonos fázisban ki-berugózik, így nem kap csavarónyomatékot a torziós rúd, ezáltal a lengési jellemő paramétereket nem befolyásolja. A kocsitest dőlésekor viszont a két kerék ellentétesen mozog a felépítményhez képest. A torziós rúdcsavarodik, ezáltal a billenést akadályozó ellennyomatékot szolgáltat. Tehát megállapítható, hogy sima útfelületen oldalszél, vagy kanyarodáskor fellépő oldalerők ellenében a torziós keresztstabilizátor kedvező szerepet tölt be: mérsékli a kerék függőleges irányú átterhelődését vagyis segíti a menetstabilitást. Ugyanakkor egyenes haladáskor keresztirányban egyenetlen, hullámos útfelületen haladó járműnek az egy futóműhöz tartozó kerekei ellentétesen ki-berugózhatnak, ilyenkor a hagyományos passzívnak minősíthető keresztstabilizátor a felépítményt az útegyenetlenséget követő káros billenő mozgásra kényszeríti. Az ilye egyszerű, nem szabályozott passzív stabilizátorokat csak kompromisszumos méretűre tervezik: oldalerőre valamelyest kisebb csillapítást szolgáltat, de kevésbé billenti a felépítményt keresztirányú útegyenetlenségeken.
Az intelligens stabilizátor torziós rúdja két félből áll, közöttük különböző elvi működésű és konstrukciójú elem teremti meg a kapcsolatot. Félaktív stabilizátorokban ez a kapcsolat kétállású: a két rúdrészt vagy teljesen összekapcsolja vagy szétválasztja. Aktív stabilizátor esetén a ketté választott rúd közepén egy feszülő lengő szerkezet helyezkedik el, amelyik külső energia bevitelével fokozatmentesen szabályozza a két rúd közötti torziós nyomaték áramlását és így lényegében a stabilizátor merevségét fokozatmentesen változtatja nulla és maximális érték között. A feszítő szerkezet lehet hidraulikus vagy elektromechanikus rendszerű.
6.7.1. Félaktív stabilizátor
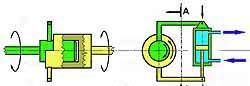
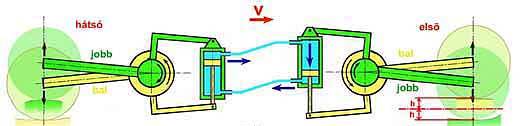
A Tenneco félaktív stabilizátor hidraulikus szerkezettel teremti meg a kapcsolatot a torziós rúd kétfelé szétválasztott részei között. Az egyik félhez szögemelővel egy különálló hidraulikus munkahenger háza, a másik félhez a dugattyúja kapcsolódik. A munkahengernek a dugattyúval kettéválasztott részei között az olaj áramlását szelepek szabályozzák.
Ha a szelepek zárva vannak, a folyadék megakadályozza a stabilizátor felek egymáshoz képesti elfordulását. A teljes hidraulikus egység merev testként viselkedik. Ilyenkor hagyományos stabilizátorként működik. Kanyarodáskor az egyik végén megjelenő csavaró nyomaték megjelenik a másik végén, a felépítmény oldaldőlése mérsékelt marad.
Nyitott szelepeknél létre tud jönni a folyadék áramlás, a stabilizátor mindkét vége szabadon elmozdulhat. Nem alakul ki csavaró nyomaték a stabilizátorban ez az állapot használatos terepen.
Az előző két eseten kívül a valóságban végtelen sokféle kombináció fordulhat elő, mint például kanyarodás terepen, vagy nem egyforma kerék elmozdulások. Ezért tehát a szerkezet nem mindig működik ideálisan, de mindig jobban, mint a hagyományos stabilizátor.
6.7.2. Aktív stabilizátorok
Az aktív stabilizátorok félbevágott torziós rúdjait hidraulikus lengőmotor vagy elektromechanikus hullámhajtóműves szerkezet köti össze. Az első és hátsó aktív stabilizátorok között elektronikus kapcsolat van, így a szabályzó rendszer lehetővé teszi a felépítmény oldaldőlésének és bólintásának mérséklését.
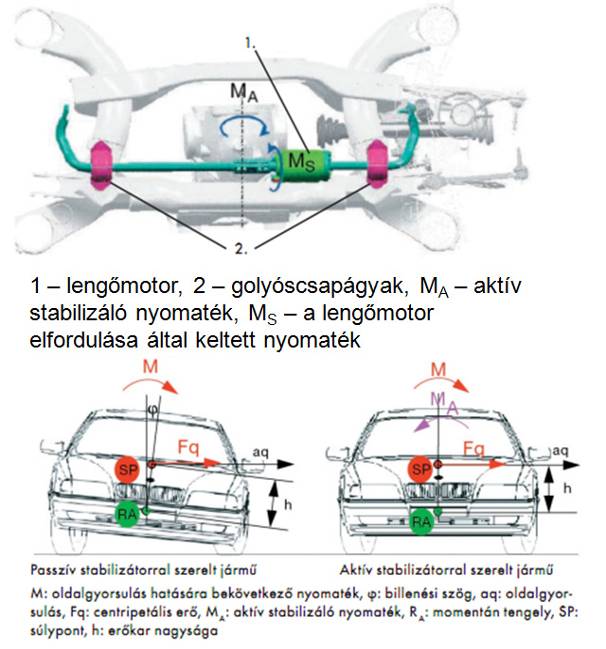
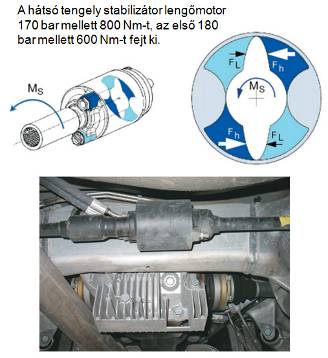
BMW Dynamic Drive (DD) rendszerében „félbevágott” stabilizátor rudakat egy lengőmotor, illetve az abban lévő hidraulikaolajjal köti össze. A nyomás nagyságát az első és hátsó tengelyekre a DD központi irányítóegysége az oldalgyorsulás függvényében vezérli ki, az előre programozott és tanult jellegmezőknek megfelelő mértékben. Adott nyomás kivezérlésének hatására a stabilizátorrúd-felek egymáshoz képest elfordulnak a lengőmotor hosszanti tengelye körül. Az elfordulás hatására nyomaték ébred (Ms). Az aktív stabilizáló nyomaték a BMW E65 esetében 0,3 g oldalgyorsulásig teljesen meg tudja szüntetni a felépítmény dőlését. A 0,3 g feletti oldalgyorsulás hatására a felépítmény már megdől. A lengőmotorban a nyomás rendkívül gyorsan tud felépülni, az ECU által meghatározott értékre. Az oldalgyorsulás mértékétől függően elöl 5–80 barig, hátul 5–170 barig változhat a nyomás nagysága. Az útváltó szelep a folyadék áramlásának irányát határozza meg.
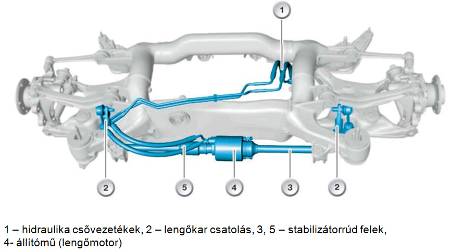
Ennek az aktív stabilizátornak az aktuátora egy szárnylapátos hidraulikus lengőmotor. A motor háza a félbevágott torziós rúd egyik feléhez, míg a szárnylapát a másik feléhez csatlakozik. A két párból összetevődő munkaterekhez irányított olaj nyomásának fokozatmentes szabályozásával lehet beállítani a szükséges relatív elmozdulást a két fél rúd között.
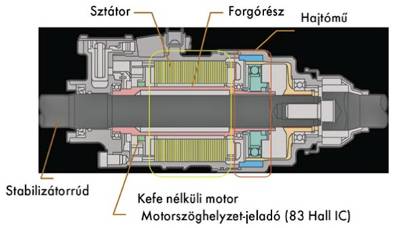
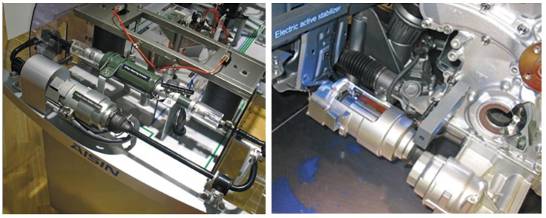
A Lexus aktív stabilizáló rendszer esetében a félbevágott stabilizátorrudakat egy kefe nélküli DC-motor köti össze. Az egyik fél a villamos motor forgórészéhez, a másik pedig a házhoz van erősítve, közéjük egy nagy áttételű hullámhajtóművet szereltek. A két stabilizátor rúd egymáshoz viszonyított elfordulását, az első és hátsó stabilizátor rudakhoz tartozó ECU határozza meg
-
az elkormányzási szög,
-
a járműsebesség,
-
a legyezésiszög-sebesség és
-
az oldalgyorsulás
érzékelőinek jelei alapján.
Ez a rendszer ívmenetben, sávváltáskor, fékezéskor, gyorsításkor egyaránt csökkenti a felépítmény billenő, bólintó mozgását, ezáltal javítja az utazási kényelmet és a jármű sajátkormányzási tulajdonságát, csökkenti a jármű sodródását. A szabályzó motorokra kivezérelt feszültségarányában a két stabilizátor rúd és a két futómű stabilizátorai között stabilizáló nyomaték ébred. Az ABC szabályzás ebben a fázisban kiterjed a lengéscsillapítóra is, az AVS (Adaptive Variable Suspension System = alkalmazkodóan változó lengéscsillapító rendszer) „sport” fokozatra átvált.