9. fejezet - Közúti járművek kényszerkormányzási és sajátkormányzási tulajdonságai
9.1. A különböző kormányzási tulajdonságok elemzése
A közúti járművek kanyarodási vizsgálata során különböző kormányzási tulajdonságok fordulnak elő:
-
Kényszerkormányzás,
-
Sajátkormányzás,
-
Önkormányzás,
-
Talajkormányzás,
-
Vezetéken keresztül történő kormányzás (steer-by-wire)
Kényszerkormányzást gyakorol a jármű vezetője, amikor a kormánykerekeket elfordítja és a kormánykerékkel közvetlen mechanikus kapcsolatban álló kormányzott kerekeket meghatározott kinematikai összefüggések szerint elfordítja, és ezáltal kijelöli a kanyarodás sugarát és középpontját. Ennek a vezérlési folyamatábrája a (9.1. ábra) ábrán látható.
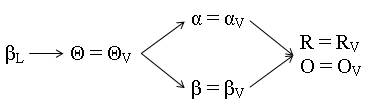
A 9.1. ábra jelölései:
|
βL |
– kormánykerék elfordítási szög |
|
|
Θ |
– a kormányzott futómű közepére vonatkoztatott elkormányzási szög |
|
|
ΘV |
– a futómű középpont sebességvektorának irányszöge a jármű hossztengelyéhez viszonyítva. |
|
|
α |
– a külső kerék elkormányzási szöge, vagyis a kerék középsíkjának, szimmetria síkjának elkormányzási szöge. |
|
|
αV |
– a külső kerék sebességvektorának irányszöge. |
|
|
β |
– a belső kerék sebességvektorának irányszöge. |
|
|
βV |
– a belső kerék sebességvektorának irányszöge. |
|
|
R |
– a névleges, kiszámított kanyarodási sugár. |
|
|
RV |
– valós kanyarodási sugár. |
|
|
O |
– a kanyarodás névleges, kiszámított középpontja. |
|
|
OV |
– a valós középpont. |
Ha a jármű minden zavaró körülménytől mentesen kanyarodik, akkor a kerék sebességvektora belesimul a kerék középpontjába, szakkifejezéssel a kerék a saját síkjában gördül. Ilyenkor az elméletileg kiszámított, névleges paraméter értékek azonosak a valós, tényleges értékekkel. A 8. fejezet fejezetben ezeket a paraméter értékeket határoztuk meg.
Kényszerkormányzásnak minősíthető a hátsókerék kormányzású csuklós autóbuszokon a hátsó kocsitest kanyarodásának irányítása is. Az első kocsitest kényszerkormányzását a kormánykerék szög irányítja, míg a hátsó kocsitest kormányzását a kormánykerék szög által meghatározott becsuklási szög (γ) vezérli. Ennek a kormányzásnak a folyamatábráját a 9.2. ábra szemlélteti.
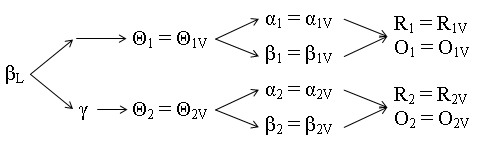
A 9.2. ábra jelölései:
|
Θ1 |
– az első kocsitest első futóművének tengelyközepére vonatkoztatott kerék elkormányzási szög. |
|
|
γ |
– a két kocsitest közötti becsuklás szöge. |
|
|
1 index |
– az első kocsitestre vonatkozó paraméterek. |
|
|
2 index |
– a hátsó kocsitestre vonatkozó paraméterek. |
A paraméterek egyenlősége azt fejezi ki, hogy mind a két kocsitest kerekei a saját síkjukban gördülnek, a kanyarodási sugár és középpont a névleges kiszámított értékeket megtartja, vagyis a névleges a valós helyzetet is jelenti egyben.
A sajátkormányzás a gumiabroncs rugalmas viselkedéséből következik. A rugalmas abroncsú kerekekre egyenes haladás vagy kanyarodás közben valamilyen oldalerő hat, amit előidézhet centrifugális erő, oldalszél, az útfelület oldalirányú lejtése, aminek következtében a gumiabroncs deformálódik és a saját síkjával meghatározott δ szögben, ferdén gördül, vagyis a kerék sebességének vektora δ szöget zár be a kerék síkjával. Ennek következtében megváltoznak a kormányzási paraméterek valós értékei, miközben a vezető által kivezérelt értékek változatlanok maradnak. Az eltérés utolsó mozzanataként megváltozik a kanyarodás sugara és a kanyarodás középpontja is. Tehát a jármű önállóan, saját maga kormányzási műveletet végez. Innen ered a sajátkormányzás megnevezés. A sajátkormányzással kiegészített, megváltozott kanyarodás folyamatábrája a (9.3. ábra) ábrán követhető.
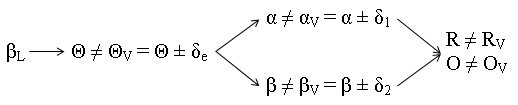
A 9.3. ábra új jelölései:
|
δe |
– a valós sebességvektor és a kivezérelt elkormányzási irány által bezárult ferdefutási szög az első futómű tengelyközepén. |
|
|
δ1 |
– a kanyar külső kerekének síkja és a valós sebességvektor által bezárt ferdefutási szög. |
|
|
δ2 |
– a kanyar belső kerekének síkja és a valós sebességvektor által bezárt ferdefutási szög. |
A változó nagyságú oldalerő hatására a jármű változó kanyarodási sugarakat ír le, vagyis változó pályán halad, miközben a kormánykerék elkormányzási szöge, a kerekek elkormányzási szögei nem változnak, tehát a jármű sajátkormányzást folytat.
Önkormányzást az intelligens futóművek végeznek, amikor ki-berugózás, erőhatás változására a kerekek összetartását módosítják, vagyis ténylegesen a kerekeket a kormánykerék rögzített állásában is képesek elkormányozni. Ezt magyarázza a 9.4. ábra.
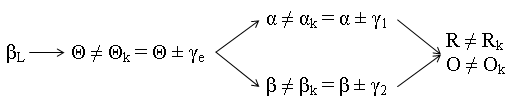
A 9.4. ábra új jelölései:
|
Θk |
– az első futómű tengelyközepéhez tartozó sebességvektor irányszöge a jármű hossztengelyéhez viszonyítva a kerekek összetartásának változása után. |
|
|
γe |
– az első futómű tengelyközepéhez tartozó sebességvektor irányszögének változása a kerekek összetartásának változása után. |
|
|
αk |
– a külső kerék módosult elkormányzási szöge összetartásának változása után. |
|
|
γ1 |
– a külső kerék összetartás változásának szöge. |
|
|
βk |
– a belső kerék módosult elkormányzási szöge, összetartás változása után. |
|
|
γ2 |
– a külső kerék összetartás változásának szöge. |
|
|
Rk |
– a jármű módosult kanyarodási sugara a kerekek önkormányzása következtében |
|
|
Ok |
– a kanyarodás módosult középpontja a kerekek önkormányzása következtében |
A talajkormányzás, más néven önbeálló kormányzás nem igényel mechanizmust. A kerék csapgeometriájának megfelelő értékei, elsősorban nagy utánfutás (na) esetén a saját síkjának irányában gördül és nem vesz fel oldalerőt, a kerék talppontja (N) mindig az elkormányzási tengelynek az útfelülettel képzett döféspontját (D) követi.
A talajkormányzott kerék csak a tengelyterhelés felvételben vesz részt, de a jármű iránystabilitását nem támogatja.
Vezetéken keresztüli kormányzás (steer-by-wire) rendszerében a jármű vezetője nincs mechanikus kapcsolatban a kormányzott kerekekkel. A haladás irányára, annak megváltoztatására csak szándékát fejezi ki, majd a fedélzeti számítógép a jármű állapotára, a közeli és távoli környezetére vonatkozó információk alapján elkormányozza a jármű kerekeit. A rendszer meghibásodása esetén nem tudja a jármű menetirányát változtatni, az esetleges balesetveszélyt elhárítani. A nemzetközi előírások jelenleg még nem engedélyezik a teljes steer-by-wire rendszert. Az új kutatások, fejlesztések arra irányulnak, hogyan lehetne egymástól független többkörös szabályzási rendszert beépíteni a teljes biztonság érdekében.
A felsorolt kormányzási tulajdonságok a jármű kanyarodása közben különféle variációkban jelentkezhetnek. Például egy multilink futóműves jármű nagy oldalgyorsulású kanyarodásakor a kényszerkormányzás paramétereit módosítja a kerekek ferdefutás és a kerekek összetartás változása is. Viszont parkolás közben nincs jelentősége a sajátkormányzási tulajdonságnak és a kerekek önkormányzási képességének. Egyenes haladásakor oldalszélben a jármű kényszerkormányzás nélkül is kanyarodni kényszerül, éppen a gumiabroncsok ferdefutása miatt. A következőkben a kényszerkormányzás és a sajátkormányzás együttes dinamikai hatását vizsgáljuk kéttengelyes jármű esetén.
9.2. A rugalmas gumiabroncs ferdefutása, jellemző paraméterek
A rugalmas gumiabronccsal rendelkező járműkerék oldalerő hatására eldeformálódik. Ha a deformálódott kerék gördül az útfelületen, akkor a sebesség vektor nem simul bele a kerék szimmetria síkjába, hanem azzal egy meghatározott szöget zár be, vagyis a kerék oldalra gördül. Ha ez az oldalazás csak olyan mértékű, hogy a kerék felfekvő felülete nem csúszik oldalra, akkor a szakirodalom ezt a gumiabroncs ferdefutásának nevezi. (9.5. ábra)
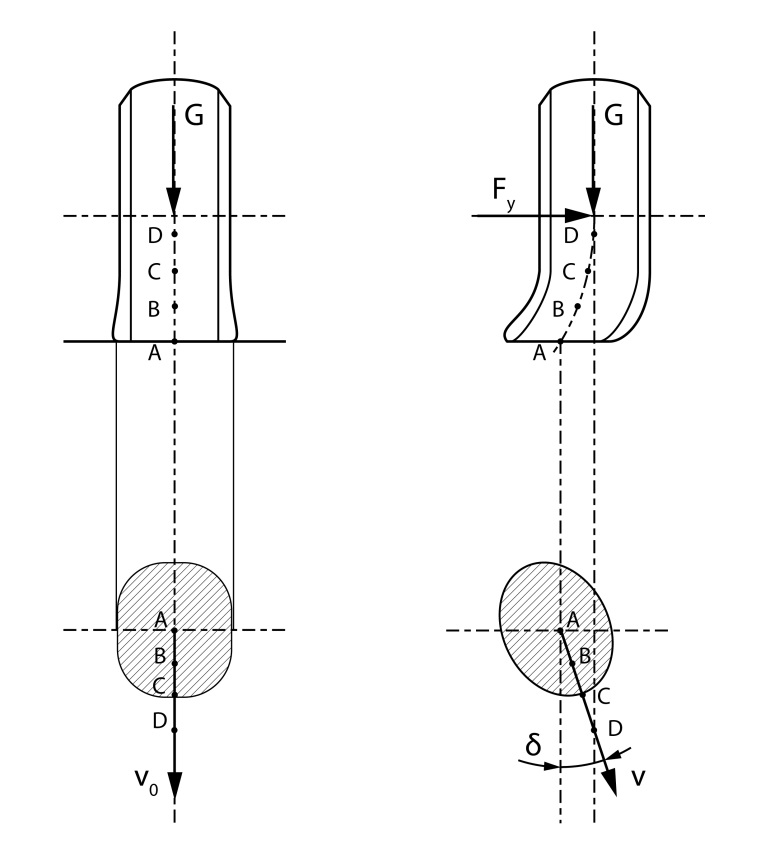
A δ szöggel határolt ferdefutási tartomány egy biztonsági zónát jelent, amelyen belül nincs még makroszkópikus oldalirányú csúszás, így a hossz - és keresztirányú erőkapcsolati viszonyok alig változnak. A δ szög egy adott gumiabroncsra, annak beépítési és működési körülményeire vonatkoztatható. Nagyságát befolyásolja a gumiabroncs mérete, mintázata, anyaga, szövetvázának szerkezete, felületi hőmérséklete, kerék függőleges és oldalirányú terhelése, a jármű sebessége, az útfelület minősége, szennyezettsége, nedvessége, az út felületi hőmérséklete. Az oldalirányú megcsúszást még nem okozó δ ferdefutási határszög elnevezése a kerék saját ferdefutási szög. Ezzel szemben megkülönbözteti az úgynevezett kikényszerített ferdefutási szöget, melyet általában α-val jelölünk. A kikényszerített ferdefutás leginkább a kerék dőléséből, összetartásából, széttartásából, nyomtáv megváltozásából, hibás kormánygeometriából adódik. A két szög egymáshoz mért nagysága alapvetően befolyásolja a gumiabroncs kopását, és a jármű menetstabilitását. Ha a kikényszerített ferdefutási szög (α) kisebb a kerék oldalcsúszást még nem okozó saját ferdefutási szögnél (δ), akkor a gumiabroncs felfekvő felülete nem csúszik oldalra (nem radíroz), a kerék továbbra is felveszi a hossz és keresztirányú erőket (vonóerő, fékerő, centrifugális erő), a jármű haladása stabil marad, a gumiabroncs nem kopik rendellenesen (fűrészfogasan). Ezzel szemben, ha különböző műszaki okokból (leginkább kompromisszumokból) összeadódó, kikényszerített ferdefutású szög (α) nagyobb a kerék saját ferdefutású szögénél (δ), akkor a kerék oldalra megcsúszik, aminek a következtében gumikopás lép fel, a kerék által a felvehető hossz és keresztirányú erők hirtelen lecsökkennek, a jármű elvesztheti a stabilitását. Ez különösen a kanyarodás közbeni fékezéskor lehet veszélyes mértékű.
Az utóbbi időben egyes korszerű gépkocsiknál is jelentkező gumikopások, nagyrészt erre az egyenlőtlenségre vezethetőek vissza.
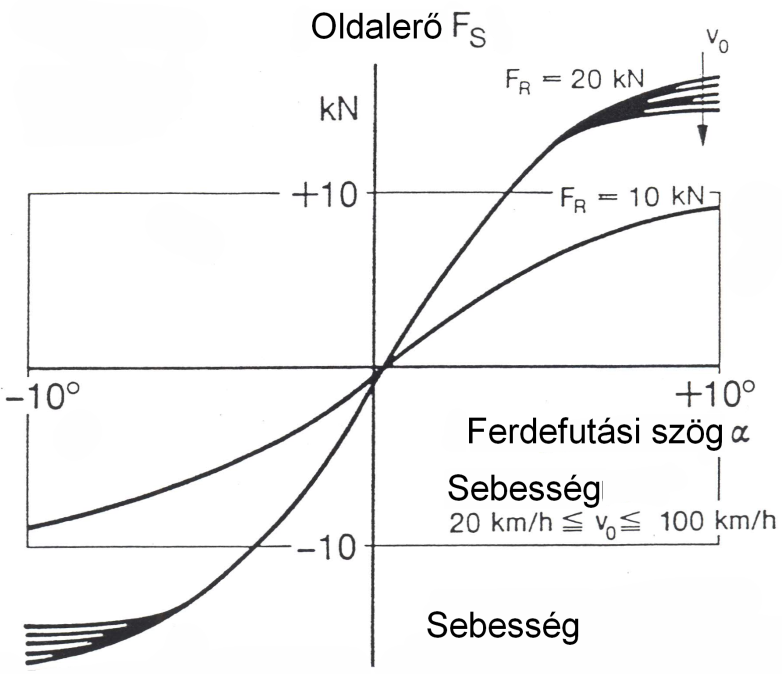
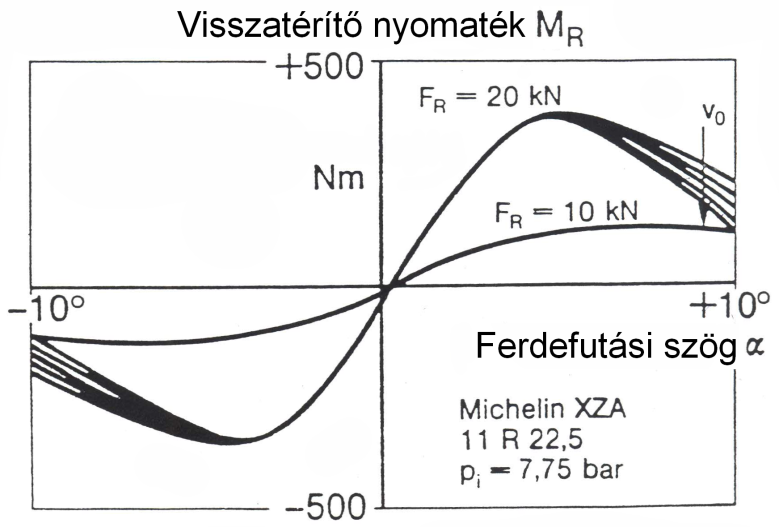
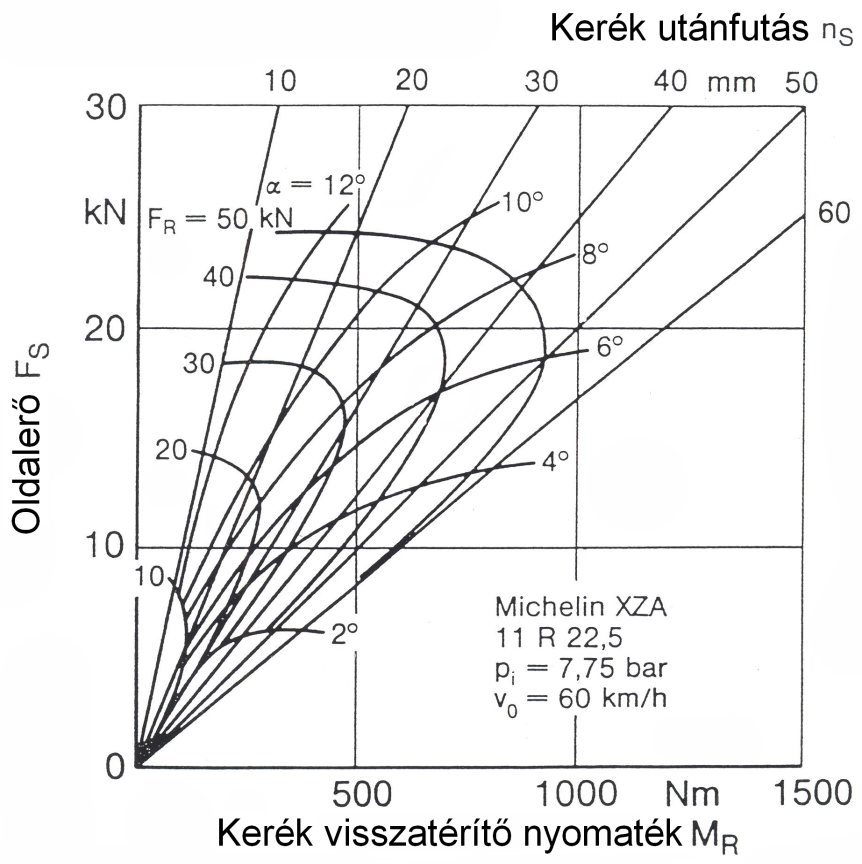
A gumiabroncs ferdefutási tulajdonságának leírására különböző paraméterek, karakterisztikák szolgálnak. Ezeket számítógépes modellezéssel, laboratóriumi és országúti tesztelésekkel határozzák meg. Ezek a paraméterek a futómű tervezés és beszabályozás kiinduló adatai. A legértékesebb karakterisztikák a gumiabroncs függőleges terhelése, a kerék által felvett oldalerő, a kerék visszatérítő nyomatéka, a jármű sebessége, a gumiabroncs utánfutása és a gumiabroncs ferdefutási szöge közötti összefüggéseket ábrázolják. Ezeket a karakterisztikákat egy korszerű autóbusz gumiabroncsára vonatkoztatva mutatja be a (9.6. ábra, 9.7. ábra, 9.8. ábra) ábrán.
9.3. A kanyarodó jármű dinamikus mozgásviszonyai
A gumiabroncs ferdefutási tulajdonságai a jellemző paraméterek értékeitől függően jelentősen megváltoztatják a jármű kanyarodás közbeni viselkedését, menetstabilitását. A (9.9. ábra) ábrán kinematikailag jól követhető az a változás, melyet a rugalmas gumiabroncs ferdefutása idéz elő.
A Θ elkormányzási szöggel kanyarodásra kényszerített jármű lassú sebességen, ideális köríven halad, melynek sugara:
|
|

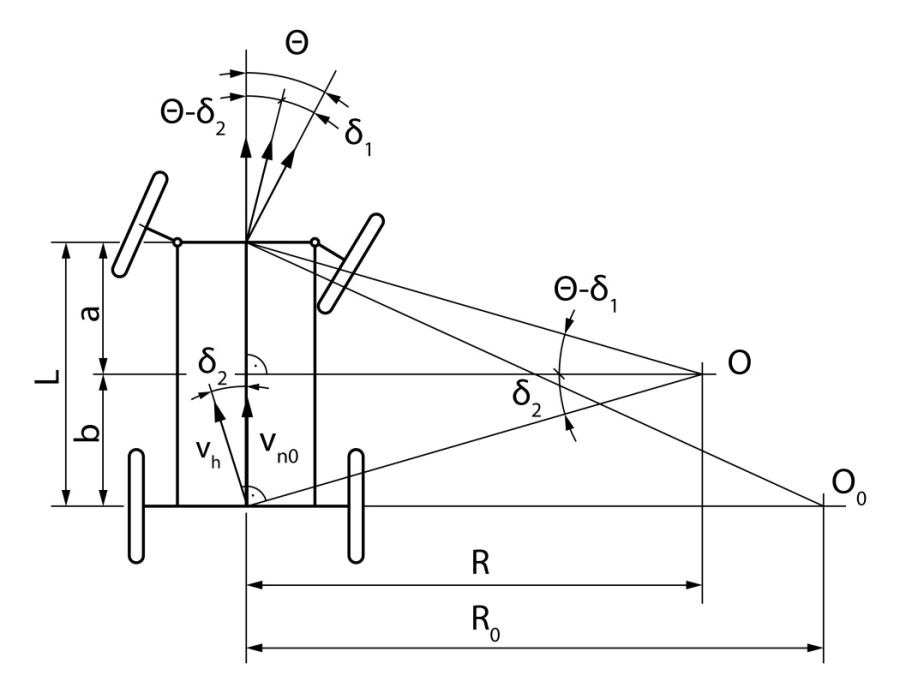
A kerékre nem hat oldalerő, mindegyik kerék oldalcsúszás nélkül a saját síkjában gördül, vagyis a kerekek sebességvektorai belesimulnak a kerék szimmetria síkjába, a futóművek közepének sebességvektorai irányukat, nagyságukat tekintve egyértelműen meghatározhatóak. A sebesség növelésével a kerekekre ható centrifugális erő fokozódik, a rugalmas gumiabroncsok deformálódnak, és ferdefutásba kezdenek. Ennek eredményeként a jármű oldalirányba kúszik, és letér a kényszerkormányzás által kijelölt körpályáról. De mindaddig, amíg a kerekek nem csúsznak meg oldalra, vagyis ferdefutásuk nem oldalra, vagyis ferdefutásuk nem lépi túl a ferdefutási határsebességet, addig mozgása korrigálható, menetstabilitását nem veszti el. Ebben a stabil tartományban nevezhetjük ezt a dinamikai mozgásállapotot a jármű sajátkormányzásának. A kerekek ferdefutásából adódóan kialakulnak az első és hátsó futóművek eredő ferdefutási (oldalkúszási) szögei, vagyis a futóművek tényleges sebességvektorainak irányai eltérnek a kormánykerék elfordításából következő eredeti irányoktól, ezáltal a kanyarodás középpontja eltolódik, a kanyarodás sugara megváltozik. Úgy tűnik, mintha a jármű saját magát elkormányozná, miközben a kormánykerék elfordítási pozíciója, és így a kerekek elkormányzási szögei változatlanok maradnak.
A 9.9. ábra jól mutatja a rugalmas gumiabroncs okozta dinamikai változásokat. A kerekek ferdefutási szögeinek eredőjeként kialakul a jármű első és hátsó futóműveinek középpontjára vonatkoztatott sebességvektorok irányszögének változása, azaz eltérése a statikus mozgás irányaitól. Az első futóműnél az eltérési, kúszási szög δ1, a hátsó futóműnél δ1. A kanyarodás középpontja (O) eltolódik, a kanyarodás sugara módosul (R). A geometriai adatokkal felírható változás:
|
|
(9.1) |

A kanyarodás effektív, valós sugara:
|
|
(9.2) |
Az összefüggések további elemzéséhez egy olyan kanyarodási szituációt választunk, amikor a kormányzott futómű elkormányzási szöge (Θ) kisebb 8 foknál. Ilyen kis szögeknél a tangens függvény helyett magát a szögértéket vehetjük figyelembe, de radián egységben kifejezve. Így a kanyarodás sugara jó közelítéssel:
|
|
(9.3) |
Ebből az összefüggésből jól kiolvasható, hogy a jármű valós kanyarodási sugara a két futómű oldalkúszási szögének különbségétől függ. Ez alapján három jellemző dinamikai helyzetet lehet megkülönböztetni:
-
δ1 > δ2 – ebből következik R > R0, a jármű nagyobb sugarú íven fordul, „egyenesíti a kanyart”, úgy viselkedik, mintha a vezető nem fordította volna el eléggé a kormánykereket. A jármű sajátkormányzási viselkedése alulkormányzott.
-
δ1 < δ2 – ebből következik R < R0, a jármű hátulja sodródik, kisebb ívre fordul: túlkormányzott a jármű.
-
δ1 = δ2, R = R0, a jármű semleges viselkedésű.
A jármű vezethetősége szempontjából kedvező a semleges vagy az alulkormányzott, kedvezőtlen a túlkormányzott jármű. Alulkormányzott jármű dinamikus vezetése közben a vezető a kormánykereket a kanyarodás kezdetekor βL szöggel fordítja el, de a jármű a vártnál nagyobb íven kanyarodik. A vezetőnek korrekciós mozdulatot kell végeznie, tovább kell a kormánykereket (ΔβL) szöggel fordítani, tehát a vezérlő jel βL0 és a ΔβL korrekciós jel azonos előjelű, a szabályzás stabilnak minősíthető. A túlkormányzott járműnél βL0 vezérlőjel hatására a jármű kisebb körön kanyarodik, a kormánykerekeket visszafelé kell fordítani, a korrekciós jel -ΔβL. A negatív szabályozás következtében a jármű hajlamos a túllendülésre, a vezető elbizonytalanodik, fennáll a stabilitás teljes elvesztésének veszélye.
Általánosságban alulkormányzott sajátkormányzású az orrmotoros elsőkerék-hajtású jármű, és túlkormányzott a farmotoros, hátsókerék-hajtású jármű. De megismételve a 2. fejezet fejezetben a járművek sajátkormányzásának vizsgálatára irányuló előírásokat és teszteket, összefoglalásként kijelenthető, hogy a járművek sajátkormányzási tulajdonsága az oldalgyorsulás növekedésével megváltozhat, kedvezőtlenebbé is válhat. A különböző intelligens rendszerek a kedvezőtlen változásokat mérsékelhetik.