2. fejezet - A mechatronikai modellezés eszköztára
2.1. Energia módszer
A modellalkotás folyamatával kapcsolatosan már szó volt arról, hogy a mechatronikai rendszerek szabályozott rendszerek. Ez a megállapítás alapvetően a komplex rendszerekre vonatkozik, de nem zárja ki azt sem, hogy egyes komponenseket (szenzorok, aktuátorok stb.) is mechatronikai rendszereknek (részrendszereknek) tekintsünk. Ebben az anyagban mindkét rendszerformára látunk példákat.
A műszaki mechanika tudományterületén, világszerte túlnyomóan a Lagrange és Euler nevével fémjelzett energia módszert alkalmazzák dinamikai modellezésre. Ugyancsak az energia módszeren alapul a Rayleigh-módszer, amellyel elosztott paraméterű modellek kezelhetőek.
A Lagrange függvény a konzervatív rendszerekben fellépő két energiatípusra alapul. A Lagrange függvény általános koordinátákkal írja le a két energia összegét:
|
|

ahol
|
L |
L=T-U, a Lagrange függvény |
|
|
T |
a rendszer kinetikai (mozgási) energiája |
|
|
U |
a rendszer potenciális (helyzeti) energiája |
|
|
q i |
az i-edik szabadságfok általános koordinátája |
|
|
|
a qi általános koordináta idő szerinti deriváltja |

Lagrange mozgási egyenlete másodfajú rendszerre általánosan ismert, és alkalmazott modellezési célra a mechanika területén:
|
|
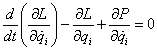
A fenti egyenletben „P” a rendszerben található energiatermelők és energiadisszipálók teljesítménye.
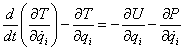
Feltételezve, hogy a potenciális energia nem függ a  -től, a Lagrange egyenlet az alábbi alakba írható:
-től, a Lagrange egyenlet az alábbi alakba írható:
|
|
A módszer előnye, hogy lineáris és nemlineáris mechanikai rendszerek esetében egyaránt alkalmazható. Elvben nem kizárt passzív villamos hálózatok modellezése sem, de igen bonyolulttá, nehezen kezelhetővé válhat a feladat. Egy mechatronikában szokványos elektromechanikai rendszer esetében például az általános koordinátákban való megállapodás után meg kell határozni az energia, illetve teljesítményfüggvényeket. Vigyázni kell a Rayleigh-féle disszipációs függvény helyes alkalmazására. Végül a Lagrange egyenletből létrejön a villamos és a mechanikai szimultán differenciálegyenlet. Laplace transzformálás és mátrix-vektor műveletekkel akár az átviteli függvény is felírható.
A fentiek illusztrálására a korlátozott terjedelem miatt legyen elegendő három egyszerű példát bemutatni!
Kéttárolós mechanikai rendszer modellje
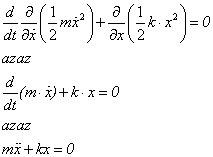
Elsőként nézzünk egy konzervatív (gerjesztetlen), két energiatárolós (másodfajú) transzlációs mechanikai rendszert, amely egy koncentrált tömegből és egy ideális (lineáris karakterisztikájú és veszteségmentes) rugóból áll:
|
|
Fizikai inga modellje
A második példában egy fizikai inga modelljét mutatjuk be. Ez a rendszer, mint szabályozott szakasz, inverz formában és különféle szabadságfokokkal, a mechatronika egyik kedvelt példája. A rendszer stabilitása kizárólag állapotszabályozás révén biztosítható. A negatív inga egyik technikai megvalósítása a világszerte elterjedőben lévő „segway” elnevezésű egytengelyű, kerekes jármű. Ugyanakkor inverz formában kedvelt példája a biomechatronikának is, hiszen az álló (és járó) ember - valamint jó néhány más élőlény - stabilitása kifejezetten csak ilyen módon modellezhető.
Ha az egyszerű fizikai ingát (síkban mozgó) tetszőleges „φ” szöghelyzetben meg kívánjuk állítani, akkor ehhez „M” forgatónyomatékra van szükség.
Az szabályozáshoz szükséges matematikai modell, a nemlineáris differenciálegyenlet, az energia módszerrel írható fel, ahol a forgáspont és a súlypont közötti távolságot „l” jelöli:
|
|

A potenciális energia a gravitációs erőtérben negatív előjellel jelenik meg. A PM az a teljesítmény, amelyet a szabályozás révén a rendszerbe beviszünk, és PS a nemlineáris súrlódás veszteségi teljesítménye.
A mozgásegyenlet nemlineáris és a csapágyazás valóságos állapotot közelítő súrlódási nyomatéka miatt nem állandó együtthatós. MS a nemlineáris súrlódó nyomatékot jelöli:
|
|

DC motor modellje
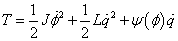
A harmadik példa egy külső (villamos) gerjesztésű egyenáramú motor modellje, energia módszerrel. A motor ug gerjesztő feszültsége állandó. A gerjesztő tekercs és az armatúratekercs fluxuskapcsolódása Ψ(φ), amely függ a rotor szöghelyzetétől. A motor amatúra ellenállása „R”, nyugalmi induktivitása pedig „L”. „J” a motor tengelyére redukált (erről a későbbiekben még esik szó) tehetetlenségi nyomaték. A motor csapágyazásából eredő súrlódási veszteséget a „B” csillapítási együtthatóval modellezzük, mert viszkózus súrlódást feltételezünk. Az általános koordináták a „q” villamos töltés és a „φ” mechanikai szögelfordulás. A motor armatúrájára „uK” kapocsfeszültséget kapcsolunk. Potenciális energia nincs a rendszerben, mert nincs villamos kapacitás és nincsen mechanikai rugalmasság. Együtt van minden elem, amelyek segítségével az energia egyenlet felírható.
Az elektromechanikus rendszer összes kinetikus energiája:
|
|
Az energia disszipálók összteljesítménye:
|
|
Ezt a disszipációs teljesítményt felezni kell. A „P” teljesítmény parciális deriváltja ugyanis a  általános sebességkoordináta szerint általánosított erőt ad, feltéve, hogy az általánosított erő maga nem függ a
általános sebességkoordináta szerint általánosított erőt ad, feltéve, hogy az általánosított erő maga nem függ a  sebességkoordinátától. A disszipatív elemek esetében a Rayleigh-féle disszipációs függvényt kell behelyettesíteni, hogy a megfelelő általános erőösszetevőt megkapjuk:
sebességkoordinátától. A disszipatív elemek esetében a Rayleigh-féle disszipációs függvényt kell behelyettesíteni, hogy a megfelelő általános erőösszetevőt megkapjuk:
|
|

Az elektromechanikus rendszerbe villamos oldalról „viszünk be” teljesítményt:
|
|

A Lagrange egyenleteket a két koordinátára külön-külön írjuk fel.
A megfelelő parciális deriválások elvégzése után a „q” koordinátára az alábbi egyenletet kapjuk:
|
|
A mozgási indukció révén a motorban keletkező un. „belső” feszültségről tudjuk, hogy a motor szögsebességével van összefüggésben:
|
|

Az egyenáramú motor esetében jó közelítéssel elfogadható, hogy a fluxus kapcsolódás szögfüggése állandó, a szakirodalom ezt nevezi gépállandónak, vagy nyomatékállandónak:
|
|

A Lagrange egyenlet a „φ” koordinátára:
|
|
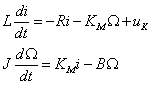
A két Lagrange egyenlet összefoglalható két egymással összefüggő, elsőrendű differenciálegyenlet formájában is:
|
|
Ennyi elegendő az energia módszer szerepének tárgyalására, mert ennek a munkának nem feladata a műszaki mechanika modellezési módszereinek ismétlő jellegű bemutatása. Ugyanakkor elengedhetetlen, hogy mielőtt a mechatronika két igen hatékony modellezési módszerét – a hálózati, és az impedancia módszert - öt fizikai-műszaki rendszertípusra kiterjesztve, általánosítottan ismertetnénk, hangsúlyozottan felhívjuk a figyelmet ezeknek, a mechatronikában igen hatékony modellezési módszereknek a korlátaira is.
A villamos, és egyszerűbb feladatok esetében a hőtechnikai és az áramlástechnikai rendszerek (beleértve az akusztikát is) tárgyalási módját vizsgálva a szakirodalomban, gyakran a hálózati módszerekkel találkozhatunk, amelyek alapja zárt rendszerek esetében természetesen ugyancsak az energia és anyag megmaradás törvénye. A „zárt rendszer” fogalom kihangsúlyozása nem véletlen, tudjuk, hogy a zárt rendszer határait a modellezés kívánalmainak megfelelően, de mi jelöljük ki.
2.2. Hálózati módszerek alapjai
A mechatronikai összetett rendszereket hálózati és impedancia módszerrel fogjuk modellezni. Ezek a módszerek a mechatronikára jellemző öt fizikai-technikai rendszertípus közül csaknem korlátozás nélkül alkalmazhatóak a
villamos hálózatok,
korlátozásokkal a
hőtechnikai
áramlástechnikai (folyadékos, pneumatikus és akusztikai)
és lineáris rendszerek esetén a
mechanikai transzlációs és
mechanikai rotációs
rendszerek leírásához.
A hálózati módszer természetesen az anyag- és energiamegmaradáson alapszik, és a módszer egy speciális „alfaja” az impedancia módszer, amely révén közvetlenül a rendszer átviteli függvényéhez jutunk. Az impedancia módszerrel jellegzetesen a villamosmérnöki gyakorlatban találkozhatunk, de bizonyos mértékben alkalmazzák egyéb műszaki területeken is. Egy leendő mechatronikai mérnöknek elengedhetetlen ismernie azokat a módszereket, amelyeket főként a villamosmérnökök alkalmaznak, hiszen a mechatronikai mérnök a gépészmérnökök mellett, a villamosmérnökökkel működnek együtt a legszorosabb formában. Lehetetlen, hogy az együttműködést éppen a „közös modellezési nyelv” hiánya akadályozza! Ez a közös modellezési nyelv pedig a hálózati és az impedancia módszer. Ebben a jegyzetben éppen ezért ezekkel a módszerekkel részletesen foglalkozunk, és kiemelt hangsúlyt helyezünk a gráfelmélet felhasználására a modellalkotás folyamatában, hiszen a struktúra gráfok a hálózati és az impedancia módszerek hatékony alkalmazásának eszköztárához tartoznak, különösen a mechanikai és termikus, valamint a vegyes, villamos-mechanikai-fluid-termikus rendszerek esetében. Ezeket a régebbi szakirodalomban elektromechanikus rendszerek kifejezés alatt találjuk meg, pl. A. Lenk: Elektromechanische Systeme 1. [2.1.] munkájában.
A vegyes technikai rendszerek hálózati és impedancia módszerekkel történő első igényes bemutatását R. H. Cannon: Dynamics of Physical Systems [2.2.] 1967-ban megjelent művében találhatjuk. A könyvben közölt ismeretanyag egyaránt alkalmas az egyetemi és a posztgraduális oktatásban való alkalmazásra. Ebben az időben még szó sem esett „mechatronikáról”, a tananyag a szabályozástechnikához elengedhetetlen modellezési munkához nyújtott segítséget. A rendszertechnikára alapuló modellezési szemlélet Európában sok helyütt csak igen lassan hódított tért, gépész területen általánosan jellemző volt a konzervatív elzárkózás. Németországban egyes műszaki egyetemeken viszonylag hamarabb, az 1970-es évek elején már kötelező jelleggel oktatták Elektromechanische Systeme, Elektromechanische Netzwerke, és hasonló elnevezések alatt. Magyarországon, a gépész oktatásban, az 1970-es évek végén került a „tűrt” kategóriában a szabadon választható tárgyak körébe, majd a 80-as években néhány szakirányban, az irányításelmélethez csatolva, alapozó, kísérő témaként a tantervekben is megjelent.
Jelen időszak mechatronikai témájú modellezési feladatait túlnyomó részben meg lehet oldani a hálózati és az impedancia módszerrel. Létezik azonban a mechanikai szakaszoknak egy szűkebb csoportja, amelyek modellezéséhez továbbra is csak az energia módszer alkalmazható. Ebbe a kategóriába tartozik a korábban, az energia módszernél említett „segway”, és minden hasonló, fordított ingát tartalmazó rendszer, hacsak nem elégszik meg a modellező a mozgás linearizálható tartományának szabályozásával. Ugyancsak energia módszerrel lehetséges csak modellezni az eddig megjelent legújabb „adaptronikai” rendszerek szakaszait, mert ezek többnyire nemlineáris, elosztott paraméterű rendszerek.
2.3. A hálózati és impedancia módszer energetikai háttere
A fizika a rendszerek leírásához állapotjelzőket alkalmaz. Ezek lehetnek extenzív (megmaradó) és intenzív (lokális, helyhez kötött) mennyiségek, valamint ezek leszármaztatott mennyiségei. Tekintettel arra, hogy a modern szabályozástechnika általánosan az állapottér modellt alkalmazza, kézenfekvő, hogy technikai rendszereink modellezéséhez ugyancsak az energetikai állapotjelzőket használjuk.
A témához kapcsolódóan ajánljuk Korondi Péter Rendszertechnika című elektronikus jegyzetének tanulmányozását.
Az extenzív mennyiség olyan fizikai mennyiség, amelyeknek értéke a rendszer mennyiségétől – ami az alkotó részecskék számával arányos – függ. Ezzel szemben az intenzív mennyiség független a rendszer mennyiségétől, nagyságától. Az extenzív mennyiségek additívak, mindig előjelesen összegződnek.
Az extenzív mennyiségek többsége zárt rendszerben un. megmaradó mennyiség, ezek a mechatronikában szokásos rendszerekben az impulzus, a perdület, a villamos töltés és a térfogat (összenyomhatatlan folyadékok esetében), illetve a tömeg.
A termikus rendszereket külön kell kezelni, mert a hőtanban másként értelmezik a zárt és nyitott rendszer fogalmát. A hőtani entrópiát és energiát jellege miatt ugyan az extenzív mennyiségek közé sorolják, így pl. Bihari P.: Műszaki termodinamika című jegyzetében [2.3.], de ezek nem megmaradó mennyiségek. Ugyancsak nem megmaradó mennyiség gázok esetében a térfogat sem. A hálózati modellezési módszer ennek ellenére sikeresen alkalmazható egyszerűbb feladatok esetében.
Az extenzív mennyiségek mellett léteznek intenzív, lokális, helyhez „kötött” mennyiségek is. Ezek az előbbi rendszertípus sorrendben a következők: sebesség, szögsebesség, villamos feszültség, nyomás és hőmérséklet. Ezeket a mennyiségeket nevezik a hálózatelméletben kereszt-vagy kapocsváltozónak (across varable, Differenzvariable, vagy Klemmvariable).
A kétféle mennyiség szorzatával a rendszerek többségében energiát kapunk, kivétel a termikus rendszer, ahol a hőenergia árama (teljesítmény), azaz a hőáram az átmenő változó. A hőtechnikai rendszerben „akadozik” a többi rendszerféleségre felírt „megmaradó mennyiség” kategória alkalmazása, hiszen a hőtechnikai folyamatokban sem az entrópia, sem a hőenergia nem megmaradó mennyiség.
Ha a tér két pontjának lokális változói (intenzívek) eltérő értékűek, és a két pont között passzív elem (energiatároló, vagy disszipatív elem) helyezkedik el, akkor az intenzív mennyiségek különbsége χ2-χ1=Δχ kiváltja a passzív elemen a megmaradó mennyiség áramlását, áramát. Ezt a változót nevezik a hálózatelméletben átmenő változónak (flow variable, Flussvariable).
Az energiatárolás jelenségét a hálózatelméletben nem az energia típusa (potenciális, kinetikai), hanem az energiatárolásban szerepet játszó átmenő változó, vagy a keresztváltozó segítségével írjuk le.
Fontos kiemelni több alapvető különbséget a termikus és a többi rendszertípus között. Erre utal az (Táblázat 2.1) táblázatban látható vastagabb elválasztó vonal a termikus rendszer felett. Egy hőtani rendszer akkor zárt, ha a tömeg-kölcsönhatás kivételével minden más energia jellegű kölcsönhatás megengedett. A többi fizikai rendszertípus esetében azért könnyebb a modellezés zárt rendszerként (nem hőtani értelmezésben), mert ezek esetében a fizikai folyamtok a környezettel való hőcsere idejéhez képest lényegesen rövidebb idő alatt lezajlanak. A disszipatív elemek pontosan azért jelennek meg az elemtáblázatban, mert tudjuk, hogy a modellezett folyamatainkban az energia egy része visszafordíthatatlanul hővé alakul.
A termikus rendszerek igen összetettek, energia és anyag áramlása, továbbá átalakulása jellemzi ezeket. A folyamatok leírása állapotjelzőkkel történik, ezek a pillanatnyi anyag és energia eloszlási állapotokat tükrözik. Az állapot leírása a hőtanban makroszkópikus mennyiségekkel történik. A rendszertechnika hálózatelméleti módszerének segítségével csak egyszerűbb termikus feladatok modellezhetőek, erre említünk két esetet. Ilyen lehet például a hőveszteségek modellezése egy villanymotor esetében. Tudjuk, hogy működés közben mechanikai és villamos energia alakul át hőenergiává, és feladatunk annak meghatározása, hogy a motor állórészén, valamint alkatrészein miként tárolódik a hőenergia, és miként terjed a hőáram (hőteljesítmény). Ugyancsak jól modellezhető például egy termoelektromos szenzor dinamikus viselkedése is. A dinamikus jelleg nem villamos, hanem termikus eredetű, a szerkezet hőellenállásaival és hőkapacitásaival (energia tárolók) van összefüggésben.
A termikus rendszerben az extenzív mennyiség energia, pontosan hőenergia, és ennek következtében az átmenő változó a teljesítmény lesz. A többi rendszer típus esetében az extenzív és az intenzív mennyiségek szorzata ad energiát. A hőenergia áramlása (hőáram, teljesítmény) mindig a magasabb hőmérsékletű ponttól az alacsonyabb irányában jön létre. A termikus rendszerekben nem található olyan passzív elem, amely a hőteljesítmény időbeli megváltozása révén energiát lenne képes tárolni. Ezért a termikus rendszerekben nincsen átmenő változóval energiát tároló elem.
Hasonlóképpen nincsen a pneumatikus rendszerekben sem „induktív” jellegű energiatárolás, mert a jellemző üzemi nyomáskülönbségek mellett nem jöhet létre visszafelé áramlás. Szabad térben, az akusztikában a kétirányú áramlásnak a csekély nyomáskülönbség miatt nincs akadálya, ezért egy hosszú csőhöz kapcsolódó üreg együttesen rezonancia jelenséget tud mutatni (üregrezonátor).
Az extenzív és az intenzív mennyiségeket, a hozzájuk kapcsolódó átmenő és keresztváltozókat, valamint az energiatárolókat a következő táblázatban foglaltuk össze.
|
Rendszer típus |
Intenzív (Keresztváltozó) |
Extenzív |
Extenzív árama (Átmenő változó) |
Energiatárolás keresztváltozóval |
Energiatárolás átmenő változóval |
|
|---|---|---|---|---|---|---|
|
Mechanikai transzlációs |
Δv |
I=m ⋅ v |
|
|
|
|
|
Mechanikai rotációs |
ΔΩ |
π=J ⋅ Ω |
|
|
|
|
|
Villamos |
Δu |
q |
|
|
|
|
|
Fluid |
Folyadékos |
Δp |
V, m |
|
|
|
|
Akusztikai |
q,v |
|
|
|||
|
Pneumatikus |
q v |
|
nincs |
|||
|
Termikus |
Δυ |
Q (ld.: szöveg) |
|
|
nincs |
|
|
Megjegyzés: elemek Az akusztikai rendszerek esetében csillaggal jelöltünk két energiatároló elemet. A magyarázatot a passzív elemek táblázatánál láthatjuk. Az extenzív mennyiségek nem minden rendszer típusban tekinthetők megmaradó mennyiségeknek. |
||||||

















Szakirodalom
[2.1.] Elektromechanische Systeme 1. Verlag Technik. Berlin . 1971.
[2.2.] Dynamics of Physical Systems. McGraw Hill B. C.. New York – Tokyo . 1967.
[2.3.] Műszaki termodinamika. BME Elektronikus jegyzet. 2001.
[2.4.] Rendszertechnika. TÁMOP Elektronikus jegyzet. 2014.