11. fejezet - A második prototípus
11.1. Seiko robot
A Seiko D-TRAN TT 4000SC (11-1. ábra) szintén scara típusú robot, de az Adept-tel ellentétben TRRR elrendezésű. A motorok mérete többszöröse az Adeptnek és a névleges feszültségük is 100 volt. A robot mérete, súlya szintén nagyban eltér, a sebessége viszont lassabb.

11.2. Konstrukciós különbségek
11.2.1. Gépház
Az első prototípusnál sok probléma volt a gépház elrendezésével, fizikai méretével, alkatrészsűrűség, melegedés, és elsősorban szerelhetőség miatt. A Seiko méretéből adódóan nagyobb teljesítményelektronikai alkatrészekre, többféle tápra, több modulra van szükség. Az új rendszert egy rack szekrénybe (11-2. ábra) építettem. A legfelső szinten helyezkedik el a PC, a PCI kártya, és a gép specifikus jeleket elosztó eletronika, egy rack dobozban. Az alatta lévő fiók a DC végfokok, IO, AD és DA modulok helye. A legalsó fiókban pedig a trafók, pufferek, biztosítékok, kismegszakítók, fék ellenállások, relék kerültek beépítésre. A robot csatlakozói közül mindegyik a neki megfelelő fiók hátsó lapján került beépítésre. Az összes kábel a szekrény hátuljában húzódik végig és a szekrény alján hagyott résen fut a robot felé. A felső fiókból csatlakoznak a PC (11-3. ábra) és a PCI kábelei (táp, LCD táp, VGA, USB, CAN, RS485, homing és végállás jelek), a második fiókból az enkóderek és a TCP jelei, a harmadik fiókból a motorok táp kábele, és az AC teljesítmény táp. A gépház ajtaja zárható plexi. Az oldala leszerelhető, a fiókok pedig kihúzhatóak. A rendszer gyakorlatilag szétszedés nélkül javítható, hangolható és fejleszthető.


11.2.2. Teljesítmény elektronika
A teljesítmény elektronika változott a legnagyobb mértékben az első verzióhoz képest. Az AC teljesítmény táp átmegy egy fojtó tekercsen, majd továbbhalad biztosítékokon keresztül a trafók felé. A rendszerben van 12 volt DC feszültség a végfokok digitális táp ellátására, 24 volt DC a periféria áramkörökhöz, IO, AD és DA modulokhoz, valamint 100 volt DC a motorok számára és 200 volt AC a fő reléhez, illetve ventillátorokhoz. A rendszer fő reléje egy alapértelmezett nyitott kontaktuson keresztül kapcsolja a DC buszt. A relé előtt 6800 uF puffer utána pedig 1000 uF puffer van. Alapértelmezett zárt kontaktusok pedig a relé előtti és relé utáni kondenzátorokra kapcsolják a nagy teljesítményű ellenállásokat, hogy kisüssék azokat. Egy diódákkal leosztott referencia feszültség pedig bekapcsol egy IGBT-n keresztül egy fék ellenállást, ha a DC busz feszültsége 110 volt felé emelkedik. A három legnagyobb motorhoz tartozik egy-egy kismegszakító is állítható leoldással. A kismegszakítók alapértelmezett zárt kontaktusain pedig sorba kötve áthalad az E-stop, így a túl nagy áramfelvétel (zárlat, ütközés) is okozhat leállást. A különböző feszültségszintek előállítása trafókkal, teljes grates hidakkal és puffer kondenzátorokkal történik. (11-4. ábra)

11.2.3. Tanító pult
A tanítópultot elsősorban méretében és súlyában szeretném csökkenteni. A második verzióba keret nélküli LCD kerül, valamint lecseréltem a Z irányú kapcsolót rugós változatra. A digitális jelek pedig RS485-ön fognak a PCI kártyához csatlakozni. Az EMC2-nek több kezelőfelülete is van, ezek közül a touchy érintő képernyőhöz íródott, így az LCD felületen megoldható a gép betanítása, programozása, tesztelése.
11.2.4. Az új PCI kártya
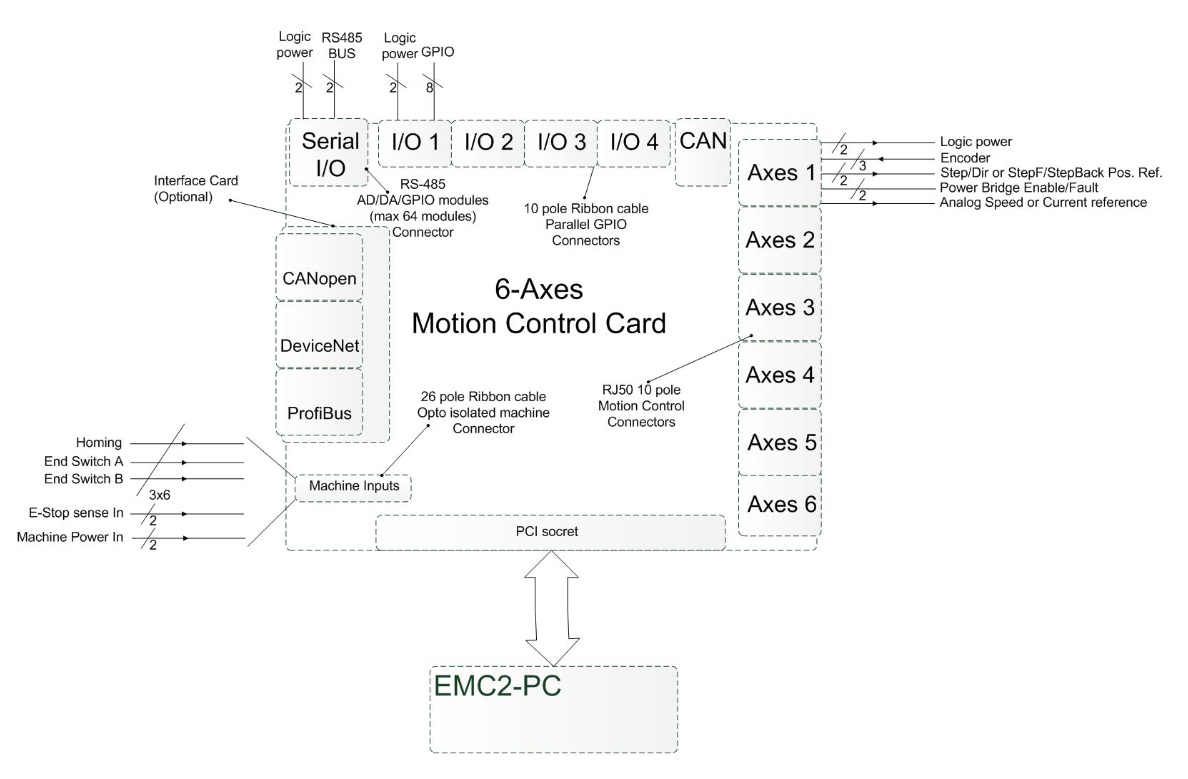
A PCI kártya 1.1-es verziója rengetek kiegészítést kapott az előző változathoz képest. A legfontosabb, hogy a második változat rendelkezik CAN-bus, és RS485 kommunikációval. A CAN szabványos ipari kommunikációs. CAN-en visszajelzést is kaphatunk a végfokoktól hibáról, pozícióról, hőmérsékletről stb. A kártya alapvetően STEP/DIR rendszerű, analóg és CAN-es végfokokat szolgál ki referenciával. A régi robotok esetében sokszor csak a vezérlő elektronika megy tönkre és a nagyobb költségű teljesítmény elektronika működőképes maradt, viszont csak analóg referenciát fogad. A PIC kártya ezt is ki tudja szolgálni, ebben az esetben a mozgásszabályozást az EMC2 végzi a kártyára bejött enkóder jelek alapján. Az RS485-re köthetőek az új IO modulok, AD és DA átalakítók. Ezekből összesen 64 darab fűzhető fel. Megmaradt az előző kártya pinenként konfigurálható 4x8 IO portja is, valamint a gép specifikus jelek 26 pólusú csatlakozója. Egy kiegészítő kártya segítségével, pedig elérhető lesz a jövőben CANopen, DeviceNet és ProfiBus protokol is. (11-5. ábra)
11.2.5. Az új IO, AD és DA modulok
Az előző verzió IO moduljai mellett fejlesztésre került az RS485-ön kommunikáló kimeneti, bemeneti, analóg-digitális és digitális-analóg konverter is. DIN sínes dobozban tervezve, ahogy a rendszer többi modulja is.
11.2.6. DC végfok
Az új DC végok is Géza munkája. Az eddigi SPI referencia helyett a végfok STEP/DIR jelet és CAN-bust fogad. A másik fontos változtatás, hogy a teljesítmény elektronika és a vezérlő elektronika külön nyomtatott áramkörön kap helyet a FET-ek kapcsolásakor történő zavarok, a processzor resetelése, a nagy áramfelvételek és a sönt ellenállások melegedése miatt. A rendszer lelke egy 8bit-es Atxmega16 mikrokontroller. A hangoló programon láthatjuk a referenciát, a pozíciót, a hibát és az áram jelet. Beállíthatjuk a monitorok tengelyeinek skálázását, a pozíció és áram szabályozás tagjainak súlyát, az enkóder osztását és a referencia jel tulajdonságait. (ld. 11-6. ábra és 11-7. ábra)
![A DC végfok blokkvázlata, [2]](images/image_191.jpeg)
![A hangoló program kezelőfelülete, [2]](images/image_192.jpeg)