4. fejezet - Hosszirányú modellezés és irányítás
A hosszirányú járműdinamikai modellezés két fő témaköre a következő: egyrészt a menetellenállások, mint például a gördülési ellenállás, kanyarellenállás, légellenállás, emelkedési ellenállás, gyorsítási ellenállás, vizsgálata. Másrészt, mivel a gumiabroncsnak kitüntetett szerepe van a hajtóerők és fékerők átvitele szempontjából, a modellezés célja a gumiabroncs és a talaj közötti erőátvitel leírása.
A dinamikai hatások jó része a jármű és környezet kölcsönhatásaként jön létre, például súrlódás, légellenállás, út és kerék kontaktus. Szimulációk során cél ezeknek a hatásoknak minél élethűbb modellezése és reprodukálása. A járműirányítás tervezése során azonban a cél ezeknek a hatásoknak minél egyszerűbb, de a tervezési célok tekintetében releváns modellezése.
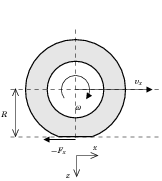
Amíg az útmodellek célja az útgerjesztés leírása, addig a kerékmodellek az út-kerék kölcsönhatás leírását adják meg. A vízszintes úton gördülő járműkerékre ható erők lehetnek egyrészt aktív erők, másrészt passzív erők.
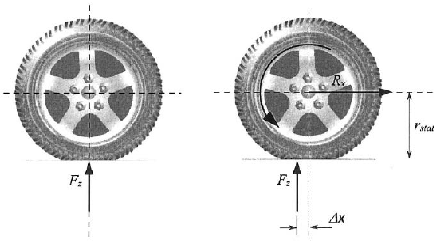
Az aktív erők közül a kerék középpontján halad keresztül a függőleges terhelőerő, ami a kerék együttes tömegéből és a gépjármű tömegének a kerékre eső részéből tevődik össze. Aktív erő a vízszintes vonóerő, amivel a gépjármű tengelye tolja vagy húzza a kereket (valójában a kerék és az út érintkezési pontján ébred). A kereket a középpontja körül igyekszik elforgatni a forgató/fékező-nyomaték
Vízszintes úton gördülő járműkerékre ható passzív erők csak akkor ébrednek, ha valamilyen aktív erő hat. Így például a reakcióerő, a kerék és a talaj felfekvési felületén ébred: mivel a kerék nem pontban, hanem felületen érintkezik a talajjal, a reakcióerő egy elosztott erőként jelentkezik, amelyet azonban a számításokban egy koncentrált erővel helyettesítenek. A reakcióerő támadáspontja a függőleges szimmetriatengelyhez viszonyítva a haladás irányában eltolódik.
Passzív erőként jelentkezik a légellenállás: a levegő ellenállást fejt ki a kerék haladásával szemben, valamint a vonóerő reakcióereje, azaz a tapadási erő.
Egyenletes sebességet feltételezve a kerék szempontjából az alábbi tipikus eseteket különböztethetjük meg:
-
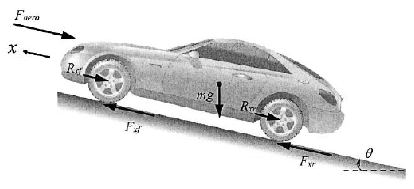
Forgatott (hajtott) vontató kerék, emelkedőn felfele: ilyenkor a motornak nyomatékot kell kifejtenie a kerékre, hogy a jármű meg ne álljon. A hajtott kerék toló/vonóerőt fejt ki a tengelyen keresztül a járműre.A reakcióerő eredője a kerék talppontjától a menetirányban eltolva hat, s függőleges komponense a súlyerővel tart egyensúlyt. A reakcióerő vízszintes komponense előre mutat és a vonóerővel tart egyensúlyt.
-
Csak forgatott (hajtott) kerék, vízszintes úton: ekkor a motornak nyomatékot kell kifejtenie a kerékre az egyenletes haladás érdekében. Ebben az esetben nincs vonóerő, s a reakcióerő eredője a függőleges terhelőerővel tart egyensúlyt, nyomatéka pedig a forgatónyomatékkal.
-
Forgatott (hajtott) és vontatott kerék enyhe lejtőn: ebben az esetben a jármű súlyából adódik egy haladás irányú vonóerő, de ez még nem akkora, hogy a motornak ne kelljen nyomatékot kifejtenie a kerékre. A reakcióerő függőleges komponense a terhelőerővel tart egyensúlyt a vízszintes komponense a haladással ellentétes irányba mutat és a vonóerővel tart egyensúlyt.
-
Csak vontatott kerék, lejtőn: ilyenkor a jármű súlyából adódó vonóerő éppen legyőzi a gördülési ellenállást, azaz ekkor nincs forgatónyomaték.
-
Fékezett és vontatott kerék meredek lejtőn: ebben az esetben a jármű motornyomaték kifejtése nélkül is gyorsulna. Az egyenletes sebesség biztosításához tehát a járművet fékezni kell. Ez eredményezi a keréken a fékező nyomatékot. Ekkor ugyan van forgatónyomaték, de most a kerék forgásirányával ellentétes irányban hat.
Mint azt már láttuk, a gumiabroncs biztosítja az erőátvitelt a jármű és az út között. A jármű súlya képviseli a függőleges irányú (útra merőleges) erőket, a gyorsulás/lassulás a hosszirányúakat, a kanyarodáskor pedig oldalirányú erők hatnak. Ezeket az erőket az abroncs egy igen kis helyen adja út illetve veszi fel, ezért a gumiabroncsnak olyannak kell lennie, hogy mindezeket az intenzív erőhatásokat elviselje.
4.1. Tapadás és csúszás modellezése
A kerék és útfelület kölcsönhatását tekintve általában az jellemző, hogy csak a gumiabroncs nyomódik be, az útfelület nem deformálódik. A kerék és a pálya érintkezése nem egy pont, hanem ellipszis és a nyomás egy ellipszoid mentén oszlik el. Ha a kerék áll és a függőleges terhelőerőn kívül más aktív erő nem hat, a reakcióerő a kerék talppontjánál szimmetrikusan hat, eredője függőleges és átmegy a kerék középpontján.
A függőleges terhelés következtében a gumiabroncs deformálódik: egy adott része hol összenyomódik, hogy megnyúlik és a talajon egy felfekvő felületet alkot. Ha a kerék gördül, akkor a gördülés alatt a nyomás eloszlása a felfekvő felületen nem egyenletes. Így a fellépő erő már nem szimmetrikus a függőleges terhelőerőhöz képest, az eredő vertikális erő nem a kerék talppontjában, a felület középpontjánál, hanem attól a haladás irányában eltolva, előtte hat. Ez lesz a gördülési ellenállás karja. Ennek az eltolódásnak a következtében a reakcióerő nyomatékot fejt ki a kerékre, ezért kell egy aktív forgatónyomaték a kerék forgásban tartásához: ez nem más, mint a gördülési ellenállás.
A deformáció során a befektetett mechanikai energia egy része elnyelődik, azaz hővé alakul. Ennyivel több energiát kell befektetni a gumiabroncs mozgásban tartásához, gördüléséhez. Ezért ha nem fektetnünk be folyamatosan energiát, akkor a gördülési ellenállástól egy idő után megállna a gördülő kerék, ugyanúgy, mint a súrlódástól. A gördülő ellenállás általában sokkal kisebb, mint a száraz csúszó súrlódás. A gumiabroncs deformációja miatt a befektetett energia nem nyerhető vissza teljesen, egy része elvész. A gumiabroncs deformációja a normál kerékterhelés aszimmetrikus eloszlását is eredményezi.
A mechanikából ismeretes a tiszta csúszósúrlódás valamint a tiszta nyugvósúrlódás. Mindkettőt azzal a fajlagos erővel jellemezhetjük, amely szükséges a csúszás fenntartásához, illetve megindításához. A kerék gördülésekor fellépő tapadás nem egyszerűen a nyugvósúrlódáson alapszik. Vannak gumiabroncsszemcsék, amelyek pillanatnyilag mozdulatlanok, de vannak olyan szemcsék is az abroncs és az út érintkezési felületén, amelyek csúsznak. A talaj és a gumiabroncs között fellép egy vákuumos szívóhatás is, ami az abroncsfelület elválását nehezíti meg. Így a gördülő kerék tapadását nem jellemzi egyértelműen sem a csúszó-, sem a nyugvósúrlódási tényező. Erre a célra külön tényező, tapadási tényező bevezetése szükséges, mely alatt azt a maximális vonóerőt értjük, amelynél a gördülés éppen tiszta csúszásba megy át.
Az így bevezetett tapadási tényező értéke több elemtől függ: például az út minőségétől és állapotától, a gumiabroncs minőségétől és állapotától, bizonyos mértékig függ a jármű sebességétől valamint kisebb mértékben függ a gumiabroncs légnyomásától. Ugyancsak kismértékben függ a függőleges terhelőerőtől.
Csúszó súrlódásról akkor beszélünk, ha a kerekek nem gördülnek, hanem csúsznak a felületen. A csúszó súrlódási tényező értéke mindig kisebb, mint a tapadási tényezőé. A két érték közötti átmenet folytonos, amit az úgynevezett szlippel lehet kifejezni.
A tapadási és súrlódási tényezők a hosszirányú és oldalirányú komponensek vektoriális eredőjeként foghatók fel, amelyek segítségével a hosszirányú gyorsulások (gyorsítás, fékezés) és az oldalirányú mozgások leírhatók.
Ennek megfelelően a jármű mozgásához szükséges hajtóerő összességében az alábbi ellenállás komponenseket győzi le:
|
|
(144) |

ahol
-

: gördülési ellenállások az első és hátsó kerekeken,
-

: a légellenállás,
-

: az emelkedési ellenállás,
-

: a kanyarellenállás,
-

: pedig a gyorsítási ellenállás.
A gördülés során a terhelés eloszlása nem egyenletes, az  eredő vertikális erő a felület középpontja előtt
eredő vertikális erő a felület középpontja előtt  távolságban hat.
távolságban hat.
|
|
(145) |

ahol  a gördülés ellenállási tényező.
a gördülés ellenállási tényező.
A gyorsulás nélkül gördülő keréken a nyomatékok egyensúlya alapján:  , ahol
, ahol  a statikailag terhelt kerék sugara. Ebből a gördülési ellenállás:
a statikailag terhelt kerék sugara. Ebből a gördülési ellenállás:  , ahol
, ahol  . Mivel
. Mivel  változó nem mért, ezért
változó nem mért, ezért  ellenállást az
ellenállást az  normálerővel arányosan modellezzük.
normálerővel arányosan modellezzük.
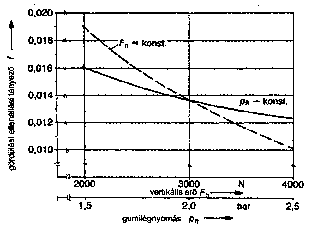
A gördülési ellenállás tényezője a gumi légnyomásától, a gumiabroncs típusától (összetételétől) és a kerékterhelésétől függ. Ezeken a gumi összetétele van rá hatással. Terepen a talaj minősége játszik fontos szerepet. A gördülési ellenállási tényező egy a sebességtől független állandóból és a sebességtől függő tagokból tevődik össze:
|
|
(146) |

Normális (150  ) sebességig az összefüggés lineáris (
) sebességig az összefüggés lineáris ( . Nagy sebességnél a tapasztalati összefüggés:
. Nagy sebességnél a tapasztalati összefüggés:
|
|
(147) |
Nedves talajon, bizonyos vízrétegvastagság felett a gördülési ellenállást növeli a lökéshullámból adódó ellenállás, amely a talaj és a gumiabroncs közé ékszerűen benyomuló víz kiszorítása miatt lép fel. A lökéshullám ellenállása a sebességtől, az abroncs szélességétől és a vízréteg vastagságától függ. magasabb vízréteg és nagyobb sebesség esetén a kerék felúszhat és vízen csúszás keletkezhet.
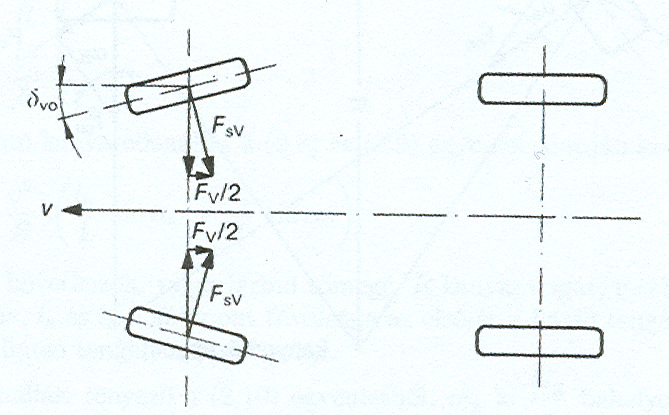
A gördülési ellenállást növeli a kerékösszetartásból eredő ellenállás is. A kerékösszetartási ellenállás ( ) a gumi felfekvő felületének oldalirányú deformációja miatt keletkezik.
) a gumi felfekvő felületének oldalirányú deformációja miatt keletkezik.
A kerékösszetartási szögből ( ) eredő oldalerő (
) eredő oldalerő ( ) hosszirányú komponense a menetiránnyal ellentétesen hat, ezért növeli a kerékellenállást:
) hosszirányú komponense a menetiránnyal ellentétesen hat, ezért növeli a kerékellenállást:
|
|
(148) |
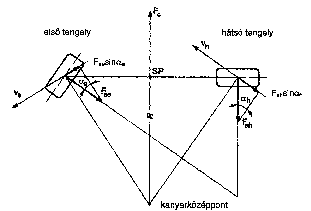
A kanyarellenállás ívmenetben a gumiabroncs oldalirányú deformációja következtében keletkezik. A kanyarellenállás a kerekeken ívmenetben fellépő oldalerők ( ) mozgással ellentétes irányban ható komponenseiből számítható.
) mozgással ellentétes irányban ható komponenseiből számítható.
A kerékoldalerő mozgással ellentétes irányú komponense  a jármű mozgását fékezi. A kanyarellenállás ekkor
a jármű mozgását fékezi. A kanyarellenállás ekkor
|
|
(149) |

ahol  az első és hátsó tengely kúszási szöge.
az első és hátsó tengely kúszási szöge.
A kanyarmenetben fellépő centrifugális erő ( ) által generált nyomaték egyensúlyban van a tengely oldalerők (
) által generált nyomaték egyensúlyban van a tengely oldalerők ( ) által generált nyomatékkal.
) által generált nyomatékkal.
|
|
(150) |

ahol a centrifugális erő közelítése:  , ahol
, ahol  a jármű tömege,
a jármű tömege,  a kanyarsugár,
a kanyarsugár,  sebesség,
sebesség,  tengelytáv,
tengelytáv,  a súlypont távolsága az első és hátsó tengelytől.
a súlypont távolsága az első és hátsó tengelytől.
A járműre ható kanyarellenállás:
|
|
(151) |

azaz
|
|
(152) |

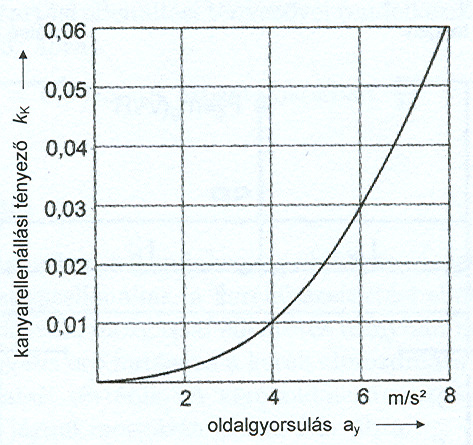
ahol  kanyarellenállási tényező:
kanyarellenállási tényező:
|
|
(153) |
A 31. ábra a kanyarellenállási tényező változását mutatja az oldalgyorsulás függvényében.
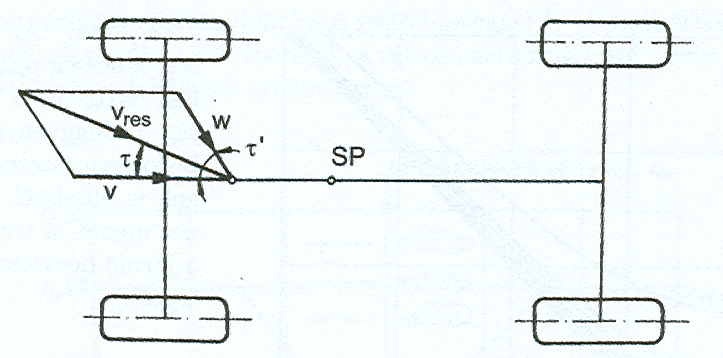
A mozgásban lévő járművön a menetszél következtében a mozgás irányával ellentétesen ható erő,  légellenállás keletkezik. A légellenállás nagysága a jármű alakján kívül elsősorban az áramlási sebességtől függ. Az eredő áramlási sebesség a menetszélből (
légellenállás keletkezik. A légellenállás nagysága a jármű alakján kívül elsősorban az áramlási sebességtől függ. Az eredő áramlási sebesség a menetszélből ( ) és a természetes szélből (
) és a természetes szélből ( ) tevődik össze:
) tevődik össze:  .
.
Ha a természetes szél iránya nem egyezik meg a menetszél irányával, az eredő erő háromszögeléssel számolható:
|
|
(154) |

ahol  a természetes szélsebesség iránya és a jármű hossztengelye közötti szög.
a természetes szélsebesség iránya és a jármű hossztengelye közötti szög.
Oldalszél esetén az eredő áramlási sebesség és az áramlási szög:
|
|
(155) |
A természetben az áramlási szög állandóan változik, mert a szélsebesség és az útirány is változik. Az áramlási veszteségek az áramlási sebesség négyzetével nőnek. A légellenállás a következő összefüggésből számítható:
|
|
(156) |
ahol  a levegő sűrűsége,
a levegő sűrűsége,  a légellenállási tényező,
a légellenállási tényező,  a jármű homlokfelülete,
a jármű homlokfelülete,  az áramlási szélsebesség. Megjegyzés:
az áramlási szélsebesség. Megjegyzés:  értéke a jármű hosszirányába ható szélsebességgel egy szélcsatornában határozható meg.
értéke a jármű hosszirányába ható szélsebességgel egy szélcsatornában határozható meg.
Az emelkedési ellenállás a jármű tömegéből és a lejtő szögéből számítható.
|
|
(157) |
Gyorsításkor a jármű transzlációs és rotációs mozgást végző tömegeinek tehetetlenségi ellenállását kell leküzdeni. Ezek alapján a gyorsítási ellenállás két részből tevődik össze:
|
|
(158) |
ahol  a jármű tömege,
a jármű tömege,  a gyorsulás,
a gyorsulás,  a forgó tömegeknek a kerékre redukált tehetetlenségi nyomatéka,
a forgó tömegeknek a kerékre redukált tehetetlenségi nyomatéka,  a kerék szöggyorsulása és
a kerék szöggyorsulása és  a dinamikus keréksugár. A kerék szöggyorsulását átszámíthatjuk transzlációs gyorsulássá:
a dinamikus keréksugár. A kerék szöggyorsulását átszámíthatjuk transzlációs gyorsulássá:  . A gyorsítási ellenállás:
. A gyorsítási ellenállás:
|
|
(159) |
ahol  forgási tömegtényező a rotációs és transzlációs tömegek viszonyát fejezi ki.
forgási tömegtényező a rotációs és transzlációs tömegek viszonyát fejezi ki.

meghatározásához a forgó tömegek tehetetlenségi nyomatékát az  szögsebességgel forgó kerékre kell redukálni.
szögsebességgel forgó kerékre kell redukálni.
A hajtótengely  és a motor
és a motor  szögsebességét a differenciálmű áttételével (
szögsebességét a differenciálmű áttételével ( ) és a hajtóműáttétellel (
) és a hajtóműáttétellel ( ) kell a kerékre átszámítani:
) kell a kerékre átszámítani: 

A kerékre redukálandó tehetetlenségi nyomatékok összege ennek megfelelően
|
|
(160) |

ahol  a hajtótengely kerékre redukált tehetetlenségi nyomatéka és
a hajtótengely kerékre redukált tehetetlenségi nyomatéka és  a motor forgó részeinek kerékre redukált tehetetlenségi nyomatéka.
a motor forgó részeinek kerékre redukált tehetetlenségi nyomatéka.
4.2. Kerék és út
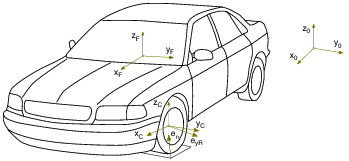
A kerék erők leírása során több koordináta rendszert használhatunk. Ezek lehetnek például földhöz rögzített  , a járműhöz rögzített
, a járműhöz rögzített  , kerék hordozóhoz rögzített
, kerék hordozóhoz rögzített  , kerék forgéstengelyhez rögzített
, kerék forgéstengelyhez rögzített  , valamint a lokális útfelület dőléséhez rögzített
, valamint a lokális útfelület dőléséhez rögzített  koordináta rendszerek.
koordináta rendszerek.
Minden ponton, ahol a gumiabroncs érintkezik az út felületével merőleges (normális) erők és súrlódási erők ébrednek. Az abroncs profiljának kialakítása miatt azonban a felfekvő felület nem feltétlenül alkot összefüggő területet. A kontakterők hatása leírható egyetlen eredő erővel ami az érintkezési felület egy rögzített pontján hat és egy nyomaték vektorral. Mivel egyenetlen úton a  kontakt pont meghatározása nem egyszerű, ezért a kontakt pont geometriáját úgy kaphatjuk meg, hogy egy becsült
kontakt pont meghatározása nem egyszerű, ezért a kontakt pont geometriáját úgy kaphatjuk meg, hogy egy becsült  pontot a tényleges útra vetítve kapunk egy
pontot a tényleges útra vetítve kapunk egy  közelítést a kontakt pontra, ahol a kerékre ható erőket tételezzük.
közelítést a kontakt pontra, ahol a kerékre ható erőket tételezzük.
4.2.1. Kerékre ható erők és nyomatékok
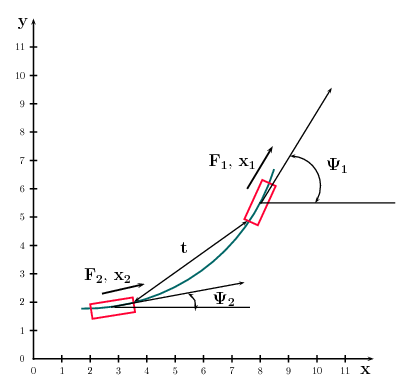
A vektorok komponenseit egy, a pályához rögzített, koordináta rendszerben fejezhetjük ki, ahol a  tengely merőleges a pályára, az
tengely merőleges a pályára, az  tengely merőleges a
tengely merőleges a  tengelyre és a kerekek
tengelyre és a kerekek  forgási tengelyére. Az
forgási tengelyére. Az  tengely irányát a jobbkezes rendszer szerint rögzítjük.
tengely irányát a jobbkezes rendszer szerint rögzítjük.
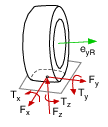
Ebben a koordináta rendszerben a kerék erő és nyomaték komponensei a következőek:
-

hosszirányú, síkbeli longitudinális (fék, hajtás) erő,
-

oldalirányú, síkbeli laterális (kanyarodás) erő
-

függőleges (kerék-terhelés) erő,
-

dőlési/billenő, (kerék dőlését létrehozó) nyomaték,
-

gördülő nyomaték
-

nyomaték, ami a síkbeli erőkből jön létre azáltal, hogy azok támadáspontja nem közvetlenül a kerék középpontja alatt van.
A függőleges (kerék-terhelés) erőnek van egy statikus és egy dinamikus komponense:
|
|
(161) |

ahol a statikus komponens a kerék elhajlás (tire deflection,  ) és a kerék elhajlás változási sebességének (
) és a kerék elhajlás változási sebességének ( ) nemlineáris függvénye, míg a dinamikus komponens kifejezése
) nemlineáris függvénye, míg a dinamikus komponens kifejezése  .
.
A kerék síkja általában nem merőleges az útra. A kerékdőlési szög ( ) a kerék síkjának oldalirányú kitérését méri. Ez főleg motorkerékároknál jelentős, de bizonyos felfüggesztési megoldások hatására is jelentkezhet, amikor a tengelyterhelés változik. A rugalmas kapcsolatok eredményeképp kanyarodáskor is jelentkezik oldalirányú kitérés.
) a kerék síkjának oldalirányú kitérését méri. Ez főleg motorkerékároknál jelentős, de bizonyos felfüggesztési megoldások hatására is jelentkezhet, amikor a tengelyterhelés változik. A rugalmas kapcsolatok eredményeképp kanyarodáskor is jelentkezik oldalirányú kitérés.
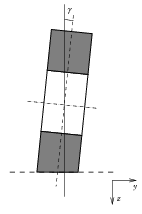

dőlési/billenő, (kerék dőlését létrehozó) nyomaték kifejezése
|
|
(162) |

A dőlés hatására akkor is lesznek oldalirányú erők, ha nincs csúszás. Kis dőlési szögekre ennek közelítése
|
|
(163) |

ahol  dőlési együttható (tipping stiffness).
dőlési együttható (tipping stiffness).
Az  gördülő nyomatékot általában lineáris tagként modellezzük:
gördülő nyomatékot általában lineáris tagként modellezzük:
|
|
(164) |

Pontosabb modelleknél a kerékspecifikus  faktor a jármű sebességétől is függ. Egy további veszteségforrás lehet a hosszirányú erő nyomatéka:
faktor a jármű sebességétől is függ. Egy további veszteségforrás lehet a hosszirányú erő nyomatéka:
|
|
(165) |

ahol  az effektív gördülési sugár.
az effektív gördülési sugár.
4.2.2. A kerék kinematikája
A gumiabroncs kerületén ébredő hosszirányú erők a következő tényezőktől függnek: hosszirányú szlip, a függőleges kerékterhelés és a tapadási tényező. Hajtónyomaték vagy fékező nyomaték hatása alatt a gumiabroncs felfekvő felületén lévő gumirészecskék parciális csúszása miatt sebességkülönbség keletkezik a jármű sebessége és a kerék gördülési sebessége között. Emiatt kerék által megtett távolság nem egyezik meg a kerék forgási szögéből számítható távolsággal, úgynevezett hosszirányú szlip keletkezik.
A hosszirányú szlip ( ) a
) a  menetsebesség és a kerék/talaj közötti
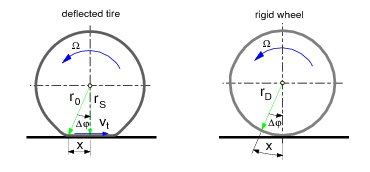
menetsebesség és a kerék/talaj közötti  relatív sebesség különbségéből határozható meg. A dinamikus keréksugár
relatív sebesség különbségéből határozható meg. A dinamikus keréksugár  a gumiabroncs legördülési kerületéből adódik. A legördülési kerület egyenlő a szabadon gördülő kerék által egy fordulat alatt megtett úttal. Így a kerék dinamikus gördülési sugarát a következő definíció alapján határozhatjuk meg:
a gumiabroncs legördülési kerületéből adódik. A legördülési kerület egyenlő a szabadon gördülő kerék által egy fordulat alatt megtett úttal. Így a kerék dinamikus gördülési sugarát a következő definíció alapján határozhatjuk meg:
|
|
(166) |

ahol  a kerék fordulatszáma. Tehát a dinamikus keréksugár az az effektív
a kerék fordulatszáma. Tehát a dinamikus keréksugár az az effektív  keréksugár, amivel az
keréksugár, amivel az  fordulatszámmal a kerék által elért sebesség adódna.
fordulatszámmal a kerék által elért sebesség adódna.
A dinamikus keréksugár összefüggése alapján:
|
|
(167) |
ahol  a terheletlen kerék sugara és
a terheletlen kerék sugara és  a terhelt kerék sugara. Ennek egy közelítő értékét az alábbiak szerint kaphatjuk meg:
a terhelt kerék sugara. Ennek egy közelítő értékét az alábbiak szerint kaphatjuk meg:
|
|
(168) |
Látható, hogy
|
|
(169) |

Egy meghajtó kerék esetén (elsőkerék hajtású jármű első kereke) a forgásból számított sebesség nagyobb a jármű sebességénél, azaz  . Egy meghajtott kerék esetén a jármű sebessége nagyobb a kerék forgásából számított sebességénél, tehát
. Egy meghajtott kerék esetén a jármű sebessége nagyobb a kerék forgásából számított sebességénél, tehát  . Hajtás esetén a következő sebességkülönbség adódik:
. Hajtás esetén a következő sebességkülönbség adódik:  .
.
A dinamikai jármű modellekben szereplő egyik legfontosabb paraméter a  longitudinális csúszási együttható (szlip), ahol:
longitudinális csúszási együttható (szlip), ahol:
|
|
(170) |
A hosszirányú szlip hajtás és fékezés esetén a következőképpen definiálható: a fékezési szlip
|
|
(171) |
míg a hajtási szlip
|
|
(172) |
Az álló járművön kipörgő kerék, illetve a fékezéskor blokkoló kerék egyaránt  szlipet jelent.
szlipet jelent.
Összefoglalva, a kerék kinematikáját meghatározó legfontosabb tényezők az alábbiak: a jármű  sebessége, a
sebessége, a  kerék kerületi sebessége valamint a
kerék kerületi sebessége valamint a  csúszási sebesség. Az
csúszási sebesség. Az  effektív gördülési sugár értékét a szabadon futó (fék/hajtás=
effektív gördülési sugár értékét a szabadon futó (fék/hajtás= ) kerék
) kerék  szögsebessége határozza meg. Bevezetjük még az
szögsebessége határozza meg. Bevezetjük még az  a csúszási szöget valamint a csúszási sebesség
a csúszási szöget valamint a csúszási sebesség  irányát.
irányát.

A kerékerők a tapadási és csúszási együtthatók függvényei. A különböző együtthatók definíciói és a köztük levő kapcsolatok az alábbiak:
|
|
(173) |
|
|
(174) |
|
|
(175) |

Mivel  a csúszási együttható (slip ratio):
a csúszási együttható (slip ratio):
|
|
(176) |
|
|
(177) |
|
|
(178) |

Az ISO és SAE szabványok szerint a hosszirányú csúszás kifejezése  [%] míg az oldalirányú csúszás
[%] míg az oldalirányú csúszás  [deg].
[deg].
A gyakorlatban használt irányítási célú járműmodellek linearizált erőkkel és nyomatékokkal számolnak:
|
|
(179) |
|
|
(180) |
azaz
|
|
(181) |

|
|
(182) |
|
|
(183) |

ahol például  longitudinális merevség (szlip) és
longitudinális merevség (szlip) és  pedig a kanyarodási (cornering) merevség.
pedig a kanyarodási (cornering) merevség.
4.3. Erőátvitel modellezés
A kerékre ható, úttartást és menetstabilitást befolyásoló tényezők a csúszási szög az oldalerő és az általa generált nyomaték. Amennyiben a jármű a tapadási viszonyokhoz képest nagy sebességgel halad az ívben, a tapadás jelentős részét felemészti az íven tartás biztosítása: a tapadási tényező oldalirányú komponense megközelíti az útpálya és gumiabroncs közötti tapadási tényező értékét. Ha a két komponenst összegezzük, előfordulhat, hogy nincs akkora tapadás, mint amekkorára az adott manővernél szükség lenne: a jármű kicsúszik a kanyarban.
A horizontális síkban maximálisan átvihető erőt az abroncs és a talaj érintkezési síkjában ható súrlódási viszonyok határozzák meg. A jármű hosszirányú mozgásához szükséges erők:
|
|
(184) |
ahol  a leküzdendő menetellenállások összege,
a leküzdendő menetellenállások összege,  és
és  a hosszirányú erő az első és hátsó kerekeken.
a hosszirányú erő az első és hátsó kerekeken.
Mint azt már láttuk, a maximális hosszirányú erő ( ) arányos a függőleges erővel (
) arányos a függőleges erővel ( ):
):
|
|
(185) |

ahol  arányossági tényező a gumiabroncs és az út közötti tapadási tényező. Ha a keréken ennél nagyobb hajtó vagy fékerő lép fel, akkor a gumiabroncs nem tud a talajon tapadni és kipörög vagy blokkol. Ebben az állapotban átvihető erő a
arányossági tényező a gumiabroncs és az út közötti tapadási tényező. Ha a keréken ennél nagyobb hajtó vagy fékerő lép fel, akkor a gumiabroncs nem tud a talajon tapadni és kipörög vagy blokkol. Ebben az állapotban átvihető erő a  csúszási tényező nagyságától függ:
csúszási tényező nagyságától függ:
|
|
(186) |

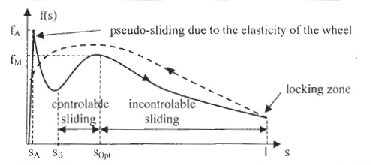
Egy tipikus  szlip görbe maximuma a
szlip görbe maximuma a  tapadási tényező, ami a maximális erőkapcsolat kihasználást jelenti. Fékezéskor a tapadási tényező növekvő kerékcsúszás esetén intenzíven, kezdetben lineárisan majd kevésbé növekedve éri el maximális értékét. Ezt stabil tartománynak tekintjük.
tapadási tényező, ami a maximális erőkapcsolat kihasználást jelenti. Fékezéskor a tapadási tényező növekvő kerékcsúszás esetén intenzíven, kezdetben lineárisan majd kevésbé növekedve éri el maximális értékét. Ezt stabil tartománynak tekintjük.
Ha a szlip görbe maximumán túl növekszik, akkor a súrlódási tényező leesik a  csúszási tényező értékére. A görbének ez a szakasza az instabil tartomány, ami azt jelenti, hogy a szlip a görbe maximumának átlépésekor növekszik és a kerék a csúszás állapotába megy. Ez egy önmagát gerjesztő folyamat, melynél ha nem csökkentik a fékező nyomást, a kerék hamarosan blokkolni fog.
csúszási tényező értékére. A görbének ez a szakasza az instabil tartomány, ami azt jelenti, hogy a szlip a görbe maximumának átlépésekor növekszik és a kerék a csúszás állapotába megy. Ez egy önmagát gerjesztő folyamat, melynél ha nem csökkentik a fékező nyomást, a kerék hamarosan blokkolni fog.
A jármű iránytartása szempontjából a gumiabroncs oldalvezetési tulajdonságai jelentősek. A kormány működtetésével a kerék elfordul eredeti síkjától. Ekkor a gumiabroncs felfekvő felületében a talajon tapadó gumirészecskék rugalmas deformációja lép fel.
A kerék emiatt nem a középsíkja irányában, hanem az úgynevezett  kúszási szög alatt gördül le. A kerék sebességvektora a kerék középsík tengelyével
kúszási szög alatt gördül le. A kerék sebességvektora a kerék középsík tengelyével  szöget zár be. A felfekvő felületen fellépő
szöget zár be. A felfekvő felületen fellépő  oldalcsúszási sebesség oldalirányú szlipet okoz.
oldalcsúszási sebesség oldalirányú szlipet okoz.
|
|
(187) |

A kúszási szög az első és hátsó kerekeken a következő:
|
|
(188) |

|
|
(189) |

ahol  a kormányszög. Kis szögek esetén a kúszási szögek a következő módon közelíthetők:
a kormányszög. Kis szögek esetén a kúszási szögek a következő módon közelíthetők:
|
|
(190) |

|
|
(191) |

ahol  a hosszirányú és oldalirányú sebességek,
a hosszirányú és oldalirányú sebességek,  a perdülés szöge.
a perdülés szöge.
Az oldalirányú erő a függőleges normál erőtől függ:
|
|
(192) |

ahol  az arányossági oldalsúrlódási tényező. Az oldalerő kis szögek esetén arányos a kúszási szöggel
az arányossági oldalsúrlódási tényező. Az oldalerő kis szögek esetén arányos a kúszási szöggel
|
|
(193) |

Az oldalvezető erő nem a gumiabroncs talajérintkezési felületének közepén hat, hanem  távolságban mögötte. Emiatt egy visszatérítő kúszási nyomaték keletkezik, ami a kúszási szöget csökkenteni akarja:
távolságban mögötte. Emiatt egy visszatérítő kúszási nyomaték keletkezik, ami a kúszási szöget csökkenteni akarja:
|
|
(194) |

A  kerékdőlés is oldalerőt generál, amely irányától függően kanyarban növeli vagy csökkenti a centrifugális erőből adódó oldalerőt. Kis dőlésszögek esetén jó közelítéssel
kerékdőlés is oldalerőt generál, amely irányától függően kanyarban növeli vagy csökkenti a centrifugális erőből adódó oldalerőt. Kis dőlésszögek esetén jó közelítéssel
|
|
(195) |

4.4. Kerékmodellek
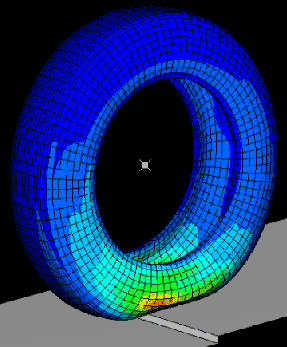
Szimulációs célból a keréknek különböző bonyolultságú modelljeit használhatjuk. Vannak strukturális, komplex kerék modellek, mint például a végeselem modellek, ahol a kerék kis elemekre van bontva, az egyes elemekre és kölcsönhatásaira felírt (parciális) differenciálegyenletekkel. Ezeknek a modelleknek azonban igen nagy a számítási igényük.
Az ennél valamivel egyszerűbb dinamikus kerék modellek közül megemlíthetők a kefe modellek, ahol a gumiabroncs szeletekre van bontva, és ezeknek a szeleteknek a mozgása, mintha egy kefe sörtéi lennének, van modellezve. Ebben a modellben az egyes cellákra vonatkoztatott erők és a szlip alakja:
|
|
(196) |

|
|
(197) |
|
|
(198) |

|
|
(199) |
|
|
(200) |

A dinamikus szemi-empirikus modellek figyelembe veszik, hogy a manőverezés során a kerékerők kialakulásához idő kell, azaz
|
|
(201) |
ahol  a kerékerőket meghatórozó slip,
a kerékerőket meghatórozó slip,  a tényleges (mért) slip, míg
a tényleges (mért) slip, míg  az úgynevezett relaxációs hossz. Az
az úgynevezett relaxációs hossz. Az  oldalirányú relaxációs hossz az
oldalirányú relaxációs hossz az  kerékerő és az oldalirányú szlip függvénye.
kerékerő és az oldalirányú szlip függvénye.
Egy egyszerüsített kefe modell a LuGre modell, ahol
|
|
(202) |
|
|
(203) |
A dinamikus kerék modellek általában túl bonyolultak ahhoz, hogy irányítási célú modellekben használjuk őket. Ilyen célokra megfelelőbbek a stacionárius kerék modellek, ahol a szlip egy stacionárius nemlineáris kifejezésként van modellezve. Ilyen például a Pacejka féle "mágikus" formula:
|
|
(204) |

ahol  a
a  ,
, ,
, párok valamelyike és
párok valamelyike és
-
merevségi faktor;
-

alak faktor;
-
csúcs faktor;
-

görbületi faktor.
A teljes szimulációs célú modell jóval több (kb.  ) paramétert tartalmaz amit mért adatokkal való összevetéssel kalibráltak be. Tervezés során természetesen a paraméterek számának csökkentése a kívánatos.
) paramétert tartalmaz amit mért adatokkal való összevetéssel kalibráltak be. Tervezés során természetesen a paraméterek számának csökkentése a kívánatos.
4.5. Egyszerű hosszirányú jármű modell
Egy egészen egyszerű longitudinális jármű modell egyenletei
|
|
(205) |

|
|
(206) |

ahol  a jármű tömege,
a jármű tömege,  a jármű sebessége,
a jármű sebessége,  az inercia együttható és
az inercia együttható és  a kerék sugara. Ebben az egyszerű modellben a kerék felfüggesztését és a gumiabroncs összenyomódási mértékét nem vesszük figyelembe.
a kerék sugara. Ebben az egyszerű modellben a kerék felfüggesztését és a gumiabroncs összenyomódási mértékét nem vesszük figyelembe.  a hajtási vagy fékezési nyomaték.
a hajtási vagy fékezési nyomaték.
Az állandósult állapotban a keletkezett kerék erők és nyomatékok a hosszirányú és oldalirányú csúszás függvényei. Ennek megfelelően az  hosszirányú erő a hosszirányú
hosszirányú erő a hosszirányú  csúszási együttható függvénye, ahol
csúszási együttható függvénye, ahol
|
|
(207) |

és ahol  szolgál, ebben ez az egyszerű megközelítésben, dinamikus gördülési sugárként is.
szolgál, ebben ez az egyszerű megközelítésben, dinamikus gördülési sugárként is.
Normál vezetési körülmények között  igen kicsi, és a kerék közel áll a
igen kicsi, és a kerék közel áll a
|
|
(208) |

szabadon gördülési feltételhez. Ekkor a  és
és  állapottól való eltérés
állapottól való eltérés
|
|
(209) |

és
|
|
(210) |

Kis eltérések esetén a hosszirányú csúszási együttható alakja
|
|
(211) |

A már látott módon a linearizált longitudinális erő  így a kapott longitudinális modell
így a kapott longitudinális modell
|
|
(212) |

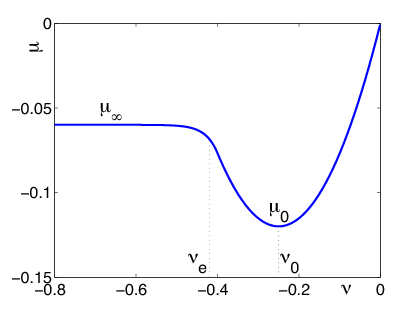
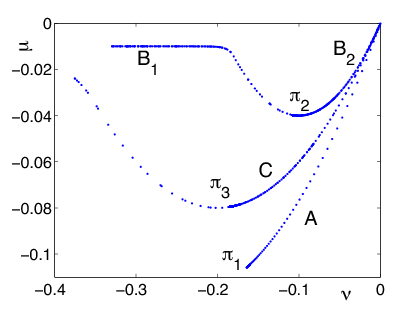
4.5.1. Példa: vasúti kerék szimulált fékezése
Ennek az egyszerű longitudinális modellnek az alkalmazására álljon itt a vasúti kerék csúszásának vizsgálata fékezéskor. Láttuk, hogy a  szlip értékei
szlip értékei  (szabadon futó kerék) és
(szabadon futó kerék) és  (blokkolt kerék) között lehetnek. A valós és a modellezett
(blokkolt kerék) között lehetnek. A valós és a modellezett  adhéziós görbát, ahol a tribológiai környezet a
adhéziós görbát, ahol a tribológiai környezet a  paraméterekkel van modellezve, a 38. ábra szemlélteti.
paraméterekkel van modellezve, a 38. ábra szemlélteti.
A szimulációhoz használt modell alakja
|
|
(213) |
ahol
|
|
(214) |
|
|
(215) |
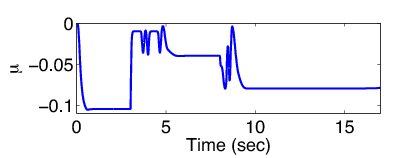
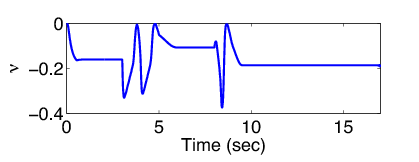
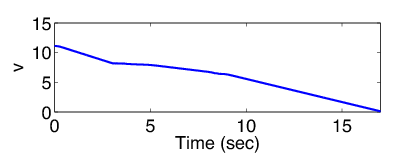
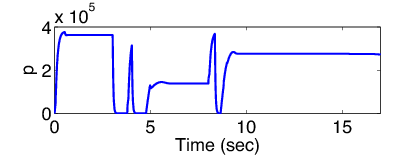
A modell alapján egy blokkolásgátló fékezés lett tervezve. Ennek a fékezésnek a működését szemlélteik az 40 és 41 ábrák. A szimuláció során beállított tribológiai paraméterek értékei az alábbiak voltak:



4.6. Sebesség és távolságtartó irányítások
Egy hagyományos sebességtartó irányítás a vezető által megadott sebességérték tartására képes. Az adaptív sebességszabályozás feladata a hagyományos menetsebesség szabályozáson nyugszik, ami tartja a megadott sebességet. A szabályozás képes váltakozó forgalmi körülményekhez automatikusan igazodni: gyorsítani, gázadást csökkenteni, fékezni. Ezáltal képes egy előtte haladó jármű sebességéhez is igazodni egy hosszirányú követési távolság figyelembe vételével.
A szabályozási feladat az igényelt sebesség ( ) és az aktuális sebesség (
) és az aktuális sebesség ( ) közötti különbség csökkentéséhez kiszámítja a szükséges gyorsulás (lassulás) értékét és azt realizálja:
) közötti különbség csökkentéséhez kiszámítja a szükséges gyorsulás (lassulás) értékét és azt realizálja:
|
|
(216) |
A jármű mozgásához szükséges hajtóerő komponensei:
|
|
(217) |

ahol  a gyorsítási ellenállás és
a gyorsítási ellenállás és  a zavaró tényezők eredője (gördülési ellenállás, légellenállás, kanyarellenállás, emelkedési ellenállás). Az
a zavaró tényezők eredője (gördülési ellenállás, légellenállás, kanyarellenállás, emelkedési ellenállás). Az  hosszirányú erő egyszerűsített összefüggése:
hosszirányú erő egyszerűsített összefüggése:
|
|
(218) |

ahol  a jármű tömege,
a jármű tömege,  pedig a jármű gyorsulása.
pedig a jármű gyorsulása.
Az irányítási feladatot például egy PI típusú szabályozóval oldhatjuk meg. A szabályozó struktúrája ekkor
|
|
(219) |

A szabályozó bemenete a megkívánt sebesség ( ) és az elért sebesség (
) és az elért sebesség ( ) közötti különbség: A szabályozó komponenseinek hatása a sebességekre:
) közötti különbség: A szabályozó komponenseinek hatása a sebességekre:
|
|
(220) |

Definiáljuk a referencia pozíciót: (folyt.)
ahol  az igényelt referencia sebességhez tartozó pozíció. Az
az igényelt referencia sebességhez tartozó pozíció. Az  aktuális pozíció hasonlóan felírható.
aktuális pozíció hasonlóan felírható.
Az igényelt gyorsulás és a szabályozó komponenseinek hatása:
|
|
(221) |

A felsőszintű szabályozás tervezése rutinfeladat. Ha az irányítójel nagyságát meg akarjuk szorítani, akkor az elérendő minőségi tulajdonságokat bővítjük:
-
megfelelő referenciajel-követést kell biztosítania;
azaz az előírt sebesség és a tényleges sebesség közötti különbség legyen minimális,
-
minél kisebb hosszirányú erőt használjon a rendszer.

A szabályozótervezés kritériuma a következőképpen fogalmazható meg:
|
|
(222) |
ahol  és
és  a skalár tervezési súlyok.
a skalár tervezési súlyok.
A hosszirányú erőt a hajtási vagy a fékezési rendszerekkel kell létrehozni. Hajtáskor a motor fojtószelep beállításával állítjuk elő a hajtáshoz szükséges nyomatékot (táblázat). A sebességváltásról a fordulatszám és az optimális fogyasztás alapján döntünk. Fékezéskor a féknyomásokat állítjuk be ( például táblázat alapján).
Ha a jármű előtt nem halad másik jármű, akkor standard sebességtartó irányítási feladatot kell megoldani. Ha a jármű előtt egy másik jármű jelenik meg, akkor döntési feladatot kell először megoldani. Ha az előttünk lévő jármű távolsága és sebessége alapján nincs szükség a sebesség változtatására, akkor továbbra is sebességtartó irányítást kell megoldani. Ha az aktuális sebesség nem tartható, akkor a továbbiakban egy távolságtartó irányítási feladatot kell megoldani.
Az irányítási feladatban közúti járműhöz tervezünk szabályozót, amely képes a járművet egy előző járműtől előre megadott távolságban vezetni. Az irányítástervezés feladata a szükséges hosszirányú erő (hajtáslánc és fékrendszer) meghatározása. A szabályozási feladat a két jármű közötti relatív távolság minimalizálása:
|
|
(223) |

ahol  és
és  az egyes járművek elmozdulásai.
az egyes járművek elmozdulásai.
A járművek  hosszirányú erőinek összefüggése:
hosszirányú erőinek összefüggése:
|
|
(224) |

|
|
(225) |

ahol  a jármű tömege,
a jármű tömege,  a járművek elmozdulása. Az egyenleteket a következő alakban célszerű megfogalmazni:
a járművek elmozdulása. Az egyenleteket a következő alakban célszerű megfogalmazni:
|
|
(226) |

|
|
(227) |
ahol  relatív távolság.
relatív távolság.
A szabályozott rendszernek a következő minőségi tulajdonságokat kell kielégítenie:
-
megfelelő referenciajel-követést kell biztosítania
|
|
(228) |
azaz az előírt relatív távolság és a tényleges közötti különbség legyen minimális
-
minél kisebb hosszirányú erőt használjon a rendszer
-

(229)
A szabályozótervezés kritériuma a következőképpen fogalmazható meg:
|
|
(230) |
ahol  és
és  a skalár tervezési súlyok.
a skalár tervezési súlyok.
Az adaptív távolságtartó irányítási feladatban a járműnek egy előre megadott követési távolságot kell tartania.

Az oszlopban haladó járművek irányítása azt a jellegzetes forgalmi szituációt kísérli meg automatizálás által biztonságosabbá és költséghatékonyabbá tenni, amikor több jármű, hosszú távon, azonos útszakaszon halad. Emellett a környező járművek aktuális pozíciójának pontos ismerete segítheti a ráfutásos balesetek kiküszöbölését is. Az oszlopban haladó járművek esetén a cél a minél kisebb követési távolság megvalósítása. Az oszlopban haladó járművek közötti kommunikáció kihasználásával a követési távolságot a normál követési távolságnál lényegesen kisebbre választjuk.
Normál működési körülmények esetén a követőjárművek irányítása szétcsatolható egy sebességszabályozási feladatra (hosszirányú irányítás) és a sávon belüli pozícionálásra (oldalirányú irányítás). A sebességszabályozó kimenete a féknyomás vagy a pillangószelep-állás, amelyek a jármű gyorsulásának beállítására szolgálnak. A szabályozó bemenetei az alkalmazott irányítási módszertől függően változhatnak, de a vezető vagy közvetlenül a vizsgált jármű előtt haladó jármű gyorsulás, sebesség és pozíció (távolság) adatai rendszerint szükségesek.
Ebben a feladatban alapvető szerepet játszanak a szenzorfúziós eljárások és a járművek közötti kommunikációs módszerek. A szokásos pozíciómeghatározási módszereket (GPS) a járművön megtalálható egyéb érzékelők (sebesség, oldalgyorsulás, radar) adataival kiegészítve kezeljük. Az oszlopban haladó járművek közötti kommunikáció kihasználásával a követési távolságot a normál követési távolságnál lényegesen kisebbre csökkentjük.
Kétféle stabilizálási feladatot kell megoldani: az egyedi járműveknek meg kell oldaniuk, hogy az őt megelőző járműtől való távolság minél kisebb (illetve az előírt értékű) legyen. Meg kell oldani a teljes járműoszlop stabilitását, az úgynevezett string stabilitási feladatot. A string stabilitás biztosítja, hogy az egyes járművek elérjék a számukra előírt pozíciót a járműoszlopon belül, továbbá garantálja, hogy a konvoj elején - például a vezető jármű hirtelen fékezése miatt - keletkező követési hiba folyamatosan csökkenő hibát okozzon a járműoszlop mentén. Ezzel elkerülhető, hogy egy hirtelen fékezés ráfutásos ütközést váltson ki a konvoj végén.
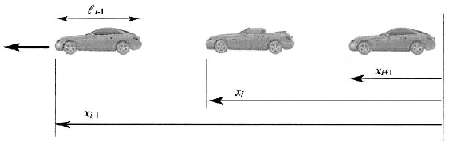
Az egyedi járműveknek meg kell oldaniuk, hogy az őt megelőző járműtől való távolság minél kisebb (illetve az előírt értékű) legyen. Legyen  az
az  -edik jármű aktuális pozíciója. A járművek között
-edik jármű aktuális pozíciója. A járművek között  távolságot akarunk tartani, melynek meghatározása során figyelembe vettük a járművek hosszát is. A követő járművek közötti távolság hibája
távolságot akarunk tartani, melynek meghatározása során figyelembe vettük a járművek hosszát is. A követő járművek közötti távolság hibája
|
|
(231) |

Az egyedi irányítás biztosítja a stabilitást, ha a következő követelmény teljesül:
|
|
(232) |
Az irányítási feladat a megadott távolság tartása az előző jármű mozgását figyelembe véve.
Meg kell oldani a teljes járműoszlop stabilitását, az úgynevezett string stabilitási feladatot. A string stabilitási feladat azt jelenti hogy a konvoj elején keletkező követési hiba ne növekedjen a járműoszlop mentén a később érkező járművek irányában. A string stabilitásra többféle megoldás létezik: állandó távolság tartása vagy állandó időköz tartása, amikor a távolság nem állandó, hanem a sebességgel arányosan változik.
A szabályozó bemenetei az alkalmazott irányítási módszertől függően változhatnak, de a vezető vagy közvetlenül a vizsgált jármű előtt haladó jármű gyorsulás, sebesség és pozíció (távolság) adatai rendszerint szükségesek. Ha az irányítási stratégia a vezető jármű alapján (1. módszer) történik, akkor
|
|
(233) |
ahol  a vezető jármű pozíciója. Ekkor a követési hiba dinamikája:
a vezető jármű pozíciója. Ekkor a követési hiba dinamikája:  azaz
azaz  . String stabilitás szempontjából ez biztosítja a leghatékonyabb megoldást, hiszen hibamentes megoldást ad. A stratégia nem biztonságos, mivel nem veszi figyelembe a vizsgált jármű előtt haladó jármű adatait.
. String stabilitás szempontjából ez biztosítja a leghatékonyabb megoldást, hiszen hibamentes megoldást ad. A stratégia nem biztonságos, mivel nem veszi figyelembe a vizsgált jármű előtt haladó jármű adatait.
Ha az irányítási stratégia csak a vizsgált jármű előtt haladó jármű adatai alapján (2. módszer) történik, akkor a módszer a vizsgált jármű előtt haladó jármű pozíció és sebesség adatai alapján dolgozik:
|
|
(234) |
Ekkor a követési hiba dinamikája  alapján
alapján
|
|
(235) |

Az első járműre
|
|
(236) |
ahol  az első jármű gyorsulása. Az átviteli és a frekvencia függvény:
az első jármű gyorsulása. Az átviteli és a frekvencia függvény:
|
|
(237) |

Azokon a frekvenciákon, ahol  a hiba erősítve terjed tovább a járművek mentén. Ilyenkor a string stabilitás nem teljesül.
a hiba erősítve terjed tovább a járművek mentén. Ilyenkor a string stabilitás nem teljesül.
Ha az irányítási stratégia csak a vizsgált jármű előtt haladó jármű adatai alapján (3. módszer) történik, és a módszer a vizsgált jármű előtt haladó jármű pozíció és sebesség adatain kívül a vizsgált jármű előtt haladó jármű gyorsulás adatát is figyelembe veszi, akkor:
|
|
(238) |
A követési hiba dinamikája ekkor  alapján
alapján
|
|
(239) |

Az első járműre  , i=1, ahol
, i=1, ahol  az első jármű gyorsulása. Az átviteli függvény:
az első jármű gyorsulása. Az átviteli függvény:
|
|
(240) |
Ha  , akkor lehetnek frekvenciák, amelyeknél a hiba erősítve terjed tovább a járművek mentén. Ezért
, akkor lehetnek frekvenciák, amelyeknél a hiba erősítve terjed tovább a járművek mentén. Ezért  (
( ) választás célszerű a string stabilitáshoz.
) választás célszerű a string stabilitáshoz.
Ha az irányítási stratégia a vezető jármű és a közvetlenül a vizsgált jármű előtt haladó jármű adatait egyaránt felhasználja. (4. módszer), akkor
|
|
(241) |

A módszer nagyszámú információt használ, azonban ebben az esetben a string stabilitás garantálható.
A változó távolságot biztosító irányítási stratégiában minden jármű a közvetlenül előtte haladó jármű pozíció, sebesség és gyorsulás adatából dolgozik (5. módszer).
Ekkor
|
|
(242) |

Ez a módszer is nagyszámú információt használ, azonban ebben az esetben is a string stabilitás garantálható.
A továbbiakban az ezekben a feladatokban felmerülő jelkövető irányítástervezésre adunk néhány módszer.
4.6.1. Állapot szeparálás módszere
Induljunk ki az alábbi integráló tulajdonságú rendszerből, melynek állapottér reprezentációja a következő:
|
|
(243) |

|
|
(244) |

Integráló tulajdonságú rendszerhez jelkövetést biztosító szabályozó struktúra egy output visszacsatolt soros kompenzátort kombinál az állapot-visszacsatolással.
Ha a rendszer maga integráló tulajdonságú, és a rendszer kimenetét is visszacsatoljuk, akkor ez a struktúra automatikusan biztosítja a referencia jelkövetést és az állapot-visszacsatolás a pólusok megfelelő elhelyezését.
Válasszuk meg az állapotvektort úgy, hogy az első komponense éppen a rendszer kimenete legyen. Ebben a rendszerben az  állapotjelet nem csatoljuk vissza, helyette a rendszer kimenőjelét csatoljuk vissza negatívan és az így képzett különbséget erősítjük a
állapotjelet nem csatoljuk vissza, helyette a rendszer kimenőjelét csatoljuk vissza negatívan és az így képzett különbséget erősítjük a  értékkel.
értékkel.
Ekkor a bemenőjel és a kimenőjel az állapotvektor elemeivel a következőképpen írható fel:


|
|
(245) |

|
|
(246) |

ahol
|
|
(247) |

az állapotvisszacsatolás komponensei.
Az input jelet az állapotegyenletbe helyettesítve a következő egyenletet kapjuk:

|
|
(248) |
A követési hiba:
-
A szabályozott rendszer pólusai az
 mátrix sajátértékei, ami azt jelenti, hogy a fenti struktúra alkalmazásával a pólus allokációs technika gyakorlatilag változtatás nélkül használható.
mátrix sajátértékei, ami azt jelenti, hogy a fenti struktúra alkalmazásával a pólus allokációs technika gyakorlatilag változtatás nélkül használható. -
A szabályozott rendszer állapotmátrixa:
 és input vektora:
és input vektora:  .
.
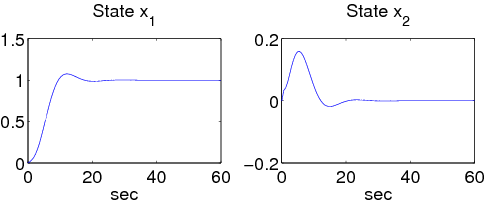
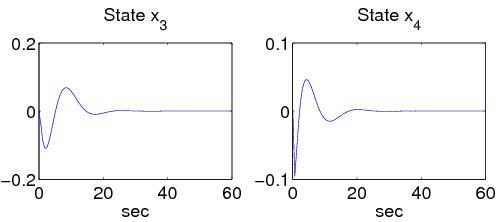
Példa 5.1: Tekintsük példaként a következő integráló tulajdonságú rendszert:
|
|
(249) |
|
|
(250) |
Az első állapot azonos a rendszer kimenetével. Tervezzünk jelkövető szabályozást LQ módszerrel. Az LQ tervezés súlyozó tényezői:
|
|
(251) |
Az LQ tervezés eredménye:
|
|
(252) |
A zárt rendszer állapottér reprezentációja:
|
|
(253) |
|
|
(254) |
A megoldás szimulációját az alábbi ábrasor illusztrálja:
Megjegyzés: állapottér átalakítása
A megoldásban feltételeztük, hogy az állapotváltozókat sikerült úgy összeállítani, hogy a rendszer kimenete azonos az első állapotváltozóval.
Ha ez nincs így, akkor egy transzformációt kell végrehajtani.
Tegyük fel, hogy a rendszer átviteli függvénye a következő:
|
|
(255) |

Az első állapotváltozót úgy választjuk meg, hogy az azonos legyen a rendszer kimenetével:  . A többi állapotváltozó megválasztása a következőképpen történik:
. A többi állapotváltozó megválasztása a következőképpen történik:



|
|
(256) |
ahol  ,
,  ,
,  , ...,
, ...,  .
.
Végül az  elsőrendű deriváltjára a következő alakot kapjuk:
elsőrendű deriváltjára a következő alakot kapjuk:
|
|
(257) |

ahol  .
.
A fentiek alapján az állapottér reprezentáció a következő alakot kapjuk:
|
|
(258) |
|
|
(259) |

A hasonlósági transzformációval kapott állapottérben az első állapotváltozó a kimenőjellel azonos.
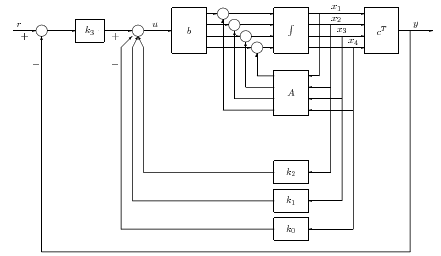
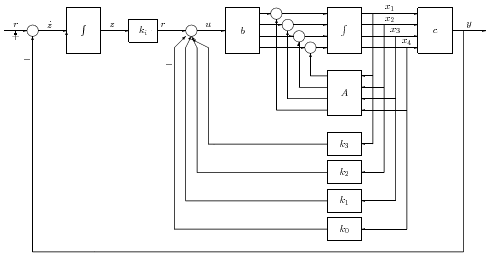
4.6.1.1. Struktúra módosítás
Egy integrátort nem tartalmazó rendszer esetén a jelkövetést úgy kell megoldani, hogy integráló típusú soros kompenzátort alkalmazunk a visszacsatolásban.
Ez állapot-visszacsatolást tartalmazó rendszerben azt jelenti, hogy az állapot-visszacsatolt struktúrát egy olyan output visszacsatolással kombináljuk, amely integráló tulajdonságú. Ebben a struktúrában valamennyi állapot vektort visszacsatoljuk a rendszer bemenetére. Ezen túlmenően egy integráló elemet építünk a rendszer előrevető ágába és ezt  -vel erősítjük. Fentiek miatt ebben a struktúrában
-vel erősítjük. Fentiek miatt ebben a struktúrában  számú erősítést alkalmazunk.
számú erősítést alkalmazunk.
Egy új állapotváltozót definiálunk:
|
|
(260) |

Az állapot-visszacsatolt struktúrával a rendszer állapottér reprezentációja a következő:
|
|
(261) |

|
|
(262) |

|
|
(263) |

|
|
(264) |
Az állapot-visszacsatolt struktúrában a bemenőjelet az  ,
,  ,
,  komponenseken kívül az
komponenseken kívül az  hibajel figyelembe vételével állítjuk elő. A rendszer állapottér struktúráját a
hibajel figyelembe vételével állítjuk elő. A rendszer állapottér struktúráját a  komponenssel bővítjük és ebben a bővített rendszerben végezzük el a tervezést.
komponenssel bővítjük és ebben a bővített rendszerben végezzük el a tervezést.
Az állapotegyenletek a következők:
|
|
(265) |

|
|
(266) |
A kimeneti egyenlet:
|
|
(267) |

A bővített rendszer állapottér reprezentációja:
|
|
(268) |

|
|
(269) |
Az irányítójel összefüggése:
|
|
(270) |

Az állapottér reprezentáció:

|
|
(271) |
|
|
(272) |
A követési hiba:
Ezzel a struktúrával automatikusan elérjük, hogy a szabályozott rendszer jelkövetést biztosítson. A pólus allokációt a bővített rendszerben végezzük el. A továbbiakban a hagyományos pólus allokációs technika használható.
Az állapotvisszacsatoilt erősítés  komponensű:
komponensű:
|
|
(273) |

Az állapotvisszacsatolás tervezésének feltétele, hogy az irányíthatósági mátrix teljes rangú legyen:
.
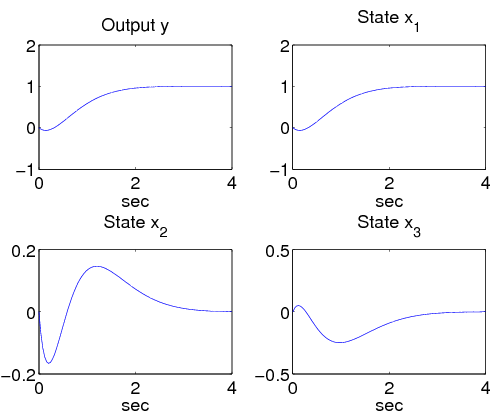
Példa 5.2:
Tekintsük példaként a rendszert:
|
|
(274) |
|
|
(275) |
A bővített rendszer állapottér reprezentációja:
|
|
(276) |
|
|
(277) |
Az LQ tervezés súlyozó tényezői:
|
|
(278) |
Az LQ tervezés eredménye:
|
|
(279) |

A zárt rendszer állapottér reprezentációja:
|
|
(280) |
|
|
(281) |
A megoldás szimulációját az 5.2 ábrasor illusztrálja.