9. fejezet - Irányítástervezés állapot-visszacsatolással
9.1. Pólusallokációs módszer
Adott egy rendszer  -dimenziós
-dimenziós  állapottér reprezentációja:
állapottér reprezentációja:

|
|
(333) |

A rendszer karakterisztikus polinomja:
|
|
(334) |

Módosítsuk a rendszer dinamikáját az  állapot visszacsatolásával, azaz legyen a bemenőjel
állapot visszacsatolásával, azaz legyen a bemenőjel
|
|
(335) |

ahol  egy külső alap-, vagy referencia jel a
egy külső alap-, vagy referencia jel a  pedig az állapot visszacsatolás erősítési tényezője:
pedig az állapot visszacsatolás erősítési tényezője:
|
|
(336) |

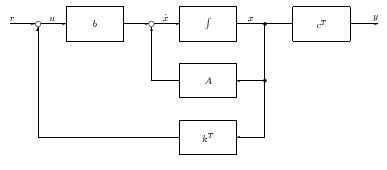
Behelyettesítve a bemenőjel alakját az állapotegyenletbe, a zárt rendszer állapotegyenlete a következő lesz:
|
|
(337) |
|
|
(338) |

amiből a zárt rendszer karakterisztikus egyenletére azt kapjuk, hogy
|
|
(339) |

Az alábbiakban megmutatjuk, hogy a  erősítés megfelelő megválasztásával a zárt rendszer karakterisztikus polinomja tetszőlegesen beállítható, ha az
erősítés megfelelő megválasztásával a zárt rendszer karakterisztikus polinomja tetszőlegesen beállítható, ha az  rendszer irányítható.
rendszer irányítható.
Mivel minden irányítható állapottér reprezentáció irányítható alakra hozható, tegyük fel hogy az alábbi rendszert irányítható alakra hoztuk.

|
|
(340) |

Ekkor a visszacsatolással módosult állapotmátrix:

|
|
(341) |
A zárt rendszer karakterisztikus polinomja:

|
|
(342) |

Ha a zárt rendszer pólusait előírjuk, akkor rögzítjük a  pólusokat, amiből az
pólusokat, amiből az  karakterisztikus polinom számítható:
karakterisztikus polinom számítható:

|
|
(343) |

Ebben a kifejezésben  -k az állapot visszacsatolással módosított karakterisztikus polinom együtthatói. A
-k az állapot visszacsatolással módosított karakterisztikus polinom együtthatói. A  ,
,  és
és  együtthatók közötti kapcsolat:
együtthatók közötti kapcsolat:
|
|
(344) |

A kompenzátor elemeinek számítása:
|
|
(345) |

ahol  -k az eredeti, míg
-k az eredeti, míg  -k a módosított karakterisztikus polinom együtthatói.
-k a módosított karakterisztikus polinom együtthatói.
A tervezés során tehát előbb meghatározzuk az eredeti rendszer, majd a tervezett rendszer karakterisztikus polinomját. Az eredeti rendszer karakterisztikus polinomja:
|
|
(346) |

A tervezett zárt rendszer karakterisztikus polinomja:
|
|
(347) |

Az együtthatók közötti összefüggések:
|
|
(348) |

Az állapot visszacsatolás értékei:
|
|
(349) |

Ha a rendszer irányítható, de nem irányíthatósági alakban adott, akkor egy  nem szinguláris transzformációs mátrix segítségével irányíthatósági alakra hozható. Az irányíthatósági alakban jelöljük
nem szinguláris transzformációs mátrix segítségével irányíthatósági alakra hozható. Az irányíthatósági alakban jelöljük  és
és  -vel az állapotegyenlet együtthatóit.A tervezés ebben az irányíthatósági alakban történik, ami azt jelenti, hogy a tervezés eredményeként egy olyan
-vel az állapotegyenlet együtthatóit.A tervezés ebben az irányíthatósági alakban történik, ami azt jelenti, hogy a tervezés eredményeként egy olyan  állapot-visszacsatolást tervezünk, amely az irányíthatósági állapottér reprezentációra működik.
állapot-visszacsatolást tervezünk, amely az irányíthatósági állapottér reprezentációra működik.
A tervezett állapot visszacsatolt erősítőt vissza kell transzformálni az eredeti rendszer állapotterére. A transzformálás összefüggése az alábbi:
|
|
(350) |

A tervezési lépések a következők:
(a) Az irányíthatóság ellenőrzése. Ha a rendszer nem irányítható, akkor az állapot visszacsatolás módszere nem alkalmazható.
(b) A rendszert irányíthatósági alakra hozzuk, azaz meghatározzuk  nem szinguláris mátrixot, amely a rendszert irányíthatósági alakúra hozza.
nem szinguláris mátrixot, amely a rendszert irányíthatósági alakúra hozza.
|
|
(351) |

Ha a rendszer eleve irányíthatósági alakban adott, akkor  mátrixot egységmátrixnak választjuk, azaz
mátrixot egységmátrixnak választjuk, azaz  .
.
Megjegyezzük, hogy az új állapottérbe való transzformálás tényleges elvégzésére nincs szükség, elegendő a transzformációs mátrix meghatározása.
(c) Meghatározzuk az eredeti rendszer karakterisztikus polinomját:
|
|
(352) |

Ezután meghatározzuk a tervezett rendszer karakterisztikus polinomját:
|
|
(353) |

Ezekhez a műveletekhez az eredeti rendszer  mátrixát és a szabályozott rendszertől megkövetelt új pólusokat kell felhasználni.
mátrixát és a szabályozott rendszertől megkövetelt új pólusokat kell felhasználni.
(d) A kompenzátor komponenseit kiszámítjuk:
|
|
(354) |

ahol  ,...,
,...,  ,
,
(e) Meghatározzuk az eredeti rendszerre vonatkozó erősítés együtthatóit.
|
|
(355) |

Az irányítójel az alábbi:
|
|
(356) |

Megjegyzés 8.1 A fenti lépéseket egyetlen összefüggésbe sűríthetjük:
|
|
(357) |

ahol a  az irányíthatósági alak előállítására szolgáló transzformációs mátrix. Az állapotvisszacsatolt erősítő:
az irányíthatósági alak előállítására szolgáló transzformációs mátrix. Az állapotvisszacsatolt erősítő:
|
|
(358) |

Az összefüggést az állapotvisszacsatolás erősítésének meghatározására szolgáló Bass Gura formulának nevezzük.
Összefoglalás:
(a) A pólusallokációs módszer alkalmazásának feltétele:
* Az állapotvektor elemei mértek legyenek.
* Az állapottér reprezentáció teljesítse az irányíthatósági feltételt.
* A szabályozott rendszer pólusai adottak legyenek.
(b) A pólusallokációs módszer előnyei:
* A módszer végrehajtása egyszerű mátrix műveletekkel történik.
* A szabályozott rendszer stabilis.
(c) A pólusallokációs módszer hátrányai:
* Az irányítójel tetszőlegesen nagy lehet.
* A pólusok elhelyezkedése és a minőségi tulajdonságok közötti kapcsolat bonyolult, heurisztikus szabályokra és mérnöki intuíciókra hagyatkozva kell a pólusok helyét előírni.
* A szabályozott rendszer minőségi tulajdonságai az állapot-visszacsatolt erősítő megtervezése után utólagosan vizsgálandók.
Példa 8.1
Adott a
|
|
(359) |
átviteli függvénnyel jellemzett rendszer. Írja fel a rendszer állapottér reprezentációját diagonális alakban! Tervezzen az így felírt állapottér reprezentációhoz állapot-visszacsatolást a
 ,
,
 pólusokkal!
pólusokkal!
A feladat megoldása:
Diagonális alak előállítása:
|
|
(360) |
|
|
(361) |
|
|
(362) |
Vezessük be új változóként az  ,
,  változókat, ahol
változókat, ahol
|
|
(363) |
|
|
(364) |
|
|
(365) |

Az állapottér reprezentáció diagonális alakban:
|
|
(366) |
|
|
(367) |

Az eredeti rendszer karakterisztikus polinomja:
|
|
(368) |

Szabályozott rendszer karakterisztikus polinomja:
|
|
(369) |

Állapotvisszacsatolás erősítései: 
|
|
(370) |
Ha a rendszer irányítható, de nem irányíthatósági alakban adott, akkor egy  nem szinguláris transzformációs mátrix segítségével irányíthatósági alakra hozható.
nem szinguláris transzformációs mátrix segítségével irányíthatósági alakra hozható.

ahol  a transzformációs mátrix. Az állapotvisszacsatolt-erősitő összefüggése: a hasonlósági transzformáció alapján az alábbi:
a transzformációs mátrix. Az állapotvisszacsatolt-erősitő összefüggése: a hasonlósági transzformáció alapján az alábbi:
|
|
(371) |

Transzformációs mátrix:
|
|
(372) |
ahol
|
|
(373) |
|
|
(374) |

Transzformációs mátrix:
|
|
(375) |
Az eredeti állapottérbe transzformálva:
|
|
(376) |

|
|
(377) |
