3. fejezet - Rendszerek modellezése állapottérben
3.1. Az állapottér elmélet alapjai
A rendszer állapota egy időpontbeli információ (olyan jelek ismerete), amelyből az , bemenőjel ismeretében a rendszer válasza minden időpontra meghatározható.A rendszer válasza a jövőbeli, időpontra vonatkozó állapotokat és a kimenőjeleket jelenti. A rendszer állapotait leíró jeleket, illetve ezek függvényeit, a rendszer állapotváltozóinak nevezzük.
Példa 2.1
Tekintsük az alábbi felfüggesztési rendszert. Az erő hatására az tömeg függőleges irányban ( ) elmozdul. Írjuk fel az erő és az elmozdulás közötti kapcsolatot. A feladat numerikus adatai: , , .
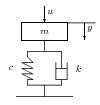
A feladat megoldása: A rendszer differenciálegyenlete:
|
|
(72) |
|
|
(73) |
Állapotváltozók megválasztásának egy természetes módja a következő:
|
|
(74) |
Ezzel a választással az állapotegyenletek alakja:
|
|
(75) |
|
|
(76) |
|
|
(77) |
míg az állapottér reprezentáció:
|
|
(78) |
|
|
(79) |
Természetesen egy másik állapottér megválasztás is lehetséges:
|
|
(80) |
Ezzel a választással az állapotegyenletek alakja
|
|
(81) |
|
|
(82) |
|
|
(83) |
a hozzá tartozó állapottér reprezentáció pedig:
|
|
(84) |
|
|
(85) |
Fentiek alapján látható, hogy a bemenőjelek és kimenőjel közötti kapcsolat állapottér reprezentációja többféle alakban felírható és az állapottér alakja nem egyértelmű.
Az állapotegyenlet, mint egy elsőrendű differenciálegyenlet megoldása két lépésben történik. Előbb megoldjuk a homogén egyenletet, majd megkeressük az inhomogén egyenlet egy partikuláris megoldását. A homogén egyenlet alakja:
|
|
(86) |
az kezdeti feltétellel és megoldása:
|
|
(87) |
ahol az mátrix-exponenciális függvényt a következőképpen értelmezzük:
|
|
(88) |
Például diagonál reprezentációk esetén, azaz () választással ennek alakja:
Az inhomogén egyenlet alakja:
|
|
(89) |
ahol egyenlet megoldása a következő:
|
|
(90) |
A fentiek alapján az elsőrendű differenciálegyenlettel leírt állapotegyenlet megoldása:
|
|
(91) |
|
|
(92) |
Példa 2.2
Határozzuk meg a rendszer válaszát egységugrás bemenet esetén.
A feladat megoldása:
1. lépés A homogén rész megoldása:
|
|
(93) |
|
|
(94) |
|
|
(95) |
A példában:
|
|
(96) |
A homogén rész megoldása a mátrix tagjainak inverz Laplace transzformációjával történik:
|
|
(97) |
2. lépés Az inhomogén rész megoldása zérus kezdeti érték feltételezésével:
|
|
(98) |
|
|
(99) |
|
|
(100) |
A példában:
|
|
(101) |
Az inhomogén rész megoldása a mátrix tagjainak inverz Laplace transzformációjával történik:
|
|
(102) |
A teljes megoldás:
|
|
(103) |
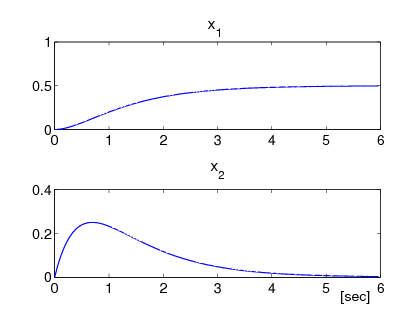
Ha a kezdeti értékek zérusok, azaz és :
|
|
(104) |
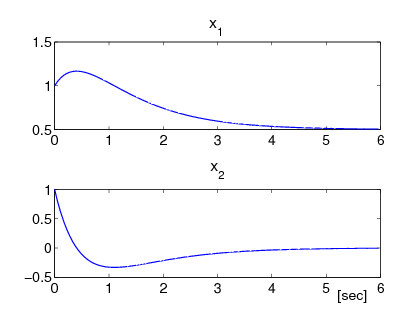
Ha a kezdeti értékek egységnyiek, azaz és , akkor:
|
|
(105) |
zérus kezdeti értékeknem zérus kezdeti értékek
3.1.1. Állapottér és átviteli függvény kapcsolata
Általánosan egy lineáris dinamikus rendszer állapottér reprezentációját a következő alakban írhatjuk:
|
|
(106) |
|
|
(107) |
Az állapottér reprezentáció alapján a rendszer átviteli függvényét a Laplace transzformáció alkalmazásával kapjuk meg:
|
|
(108) |
ebből az állapot Laplace transzformáltja:
|
|
(109) |
ahol a kezdő állapot a időpontban. Az feltétel mellett
|
|
(110) |
A átviteli függvény:
|
|
(111) |
Az átviteli függvény pólusai tehát az
|
|
(112) |
egyenlet gyökei.
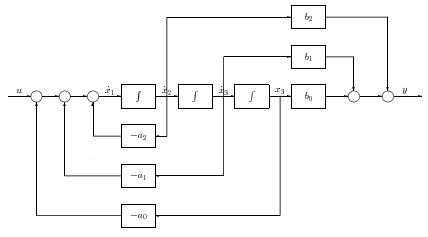
3.1.2. Irányíthatósági állapottér reprezentációk
Az irányíthatósági alakú állapottér reprezentáció a 9 ábrával illusztrálható és az alábbi alakban írható fel:
|
|
(113) |
|
|
(114) |
Induljunk ki egy általános rendszerből, melynek átviteli függvényét az alábbi alakban fogalmaztuk meg:
|
|
(115) |
ahol és polinomiális függvények, például és . A bemenőjel Laplace transzformáltja és a kimenőjel Laplace transzformáltja közötti kapcsolatot ekkor a következőképp írhatjuk:
|
|
(116) |
Vezessük be a változót az alábbi módon:
|
|
(117) |
Ekkor a bemenőjel és a kimenőjel Laplace transzformáltja:
|
|
(118) |
|
|
(119) |
Inverz Laplace transzformációval a differenciálegyenlet:
|
|
(120) |
Vezessük be a következő új változókat, amelyeket állapotváltozóknak nevezünk:
|
|
(121) |
Figyelembe véve, hogy és , az alábbi elsőrendű differenciál egyenletekhez jutunk, melyek az állapotdinamika egyenletrendszerét alkotják:
|
|
(122) |
|
|
(123) |
Az állapotváltozókból a rendszer kimenőjele a következőképp kapható meg. Ez az úgynevezett megfigyelési egyenlet.
|
|
(124) |
Az állapotegyenletek mátrixos alakban felírva:
|
|
(125) |
|
|
(126) |
ahol
|
|
(127) |
Vizsgáljuk meg egy két állapotú rendszerben, hogy az irányíthatósági alak egyértelműségét. Induljunk ki az (125)-(126) kétállapotú általános leírásból. Az átviteli függvény és az állapottér reprezentáció közötti összefüggés alapján írjuk fel az átviteli függvényt:
|
|
(128) |
Az átviteli függvény alapján jól látható, hogy az irányíthatósági alak egyértelműen felírható. Az mátrix első sorának elemei az átviteli függvény nevezőjének együtthatóiként, míg a vektor elemei az átviteli függvény számlálójának együtthatóiként jelennek meg.
3.1.3. Megfigyelhetőségi állapottér reprezentációk
Az irányíthatósági alak és a megfigyelhetőségi alak felírási módja között a dualitás teremt kapcsolatot. A két állapottér ekvivalens alakjai:
|
|
(129) |
|
|
(130) |
|
|
(131) |
Vizsgáljuk meg az irányíthatósági és a megfigyelhetőségi alakok ekvivalenciáját. Írjuk fel az átviteli függvényt mindkét esetben egy kétállapotú állapottér reprezentáció esetére. Az irányíthatósági alakot (125) és (125) szerint vesszük:
|
|
(132) |
Vizsgáljuk meg a megfigyelhetőségi alakot is. Az állapotegyenletek mátrixos alakban felírva:
|
|
(133) |
|
|
(134) |
ahol
|
|
(135) |
Vizsgáljuk meg egy két állapotú rendszerben, hogy az irányíthatósági és a megfigyelhetőségi alakok ekvivalensek. Induljunk ki az (125)-(126) kétállapotú általános leírásból. Az átviteli függvény és az állapottér reprezentáció közötti összefüggés alapján írjuk fel az átviteli függvényt:
|
|
(136) |
Az átviteli függvények alapján jól látható, hogy az irányíthatósági alak és a megfigyelhetőségi alakok ekvivalensek.
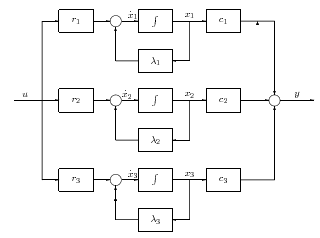
3.1.4. Diagonális állapottér reprezentációk
Az diagonális alakú állapottér reprezentáció a 10 ábrával illusztrálható és az alábbi alakban írható fel:
|
|
(137) |
|
|
(138) |
Tegyük fel, hogy adott egy rendszer kimenete az átviteli függvényének parciális tört alakú felbontásával:
|
|
(139) |
ahol , az karakterisztikus egyenlet gyökei, , pedig a , gyökökhöz (a átviteli függvény pólusaihoz) tartozó rezidumok:
|
|
(140) |
|
|
(141) |
Megjegyezzük, hogy ennél a felírásnál és konvex pólusok is lehetnek. Vezessük be új változóként az , változókat, melyekre
|
|
(142) |
|
|
(143) |
|
|
(144) |
amiből az alábbi egyenletek írhatók fel:
|
|
(145) |
|
|
(146) |
Az állapotegyenletek mátrixos alakban felírva:
|
|
(147) |
|
|
(148) |
ahol az jelölésben a index az mátrix diagonális alakjára utal,
|
|
(149) |
Vizsgáljuk meg egy két állapotú rendszerben a diagonális alak egyértelműségét. Induljunk ki az (147)-(148) kétállapotú általános leírásból. Mivel sem sem alakjára nézve nincs megkötés, ezért ezeket válasszuk meg a következőképpen:
|
|
(150) |
Az átviteli függvény és az állapottér reprezentáció közötti összefüggés alapján írjuk fel az átviteli függvényt:
|
|
(151) |
Az átviteli függvény alapján látható, hogy a diagonális alak felírása nem egyértelmű. Habár az átviteli függvény nevezője alapján egyértelműen felírható (a pólusok sorrendjének megválasztásától eltekintve), és elemeinek megválasztása nem egyértelmű.
Példa 2.3
Határozzuk meg a 1.2 ábrán látható egyszerűsített gépjármű felfüggesztési modelljét irányíthatósági alakban. A feladata numerikus adatai: , , k= .
A feladat megoldása: a 1.2 példa megoldása alapján induljunk ki az átviteli függvény alakból:
|
|
(152) |
Vezessünk be egy új változót:
|
|
(153) |
Inverz Laplace transzformációval:
|
|
(154) |
Az állapotváltozókat a deriváltjai csökkenő rendje szerint választjuk: és . Ekkor az állapotok deriváltjai: és . A kimeneti jel: . Az állapottér reprezentáció irányíthatósági alakban:
|
|
(155) |
|
|
(156) |
3.1.5. Állapottér transzformációk
Vizsgáljuk azt az esetet, amikor egy adott állapotvektorból egy új állapotvektort képezünk az alábbi módon:
|
|
(157) |
ahol egy méretű nemszinguláris transzformációs mátrix, és , . Ha az állapotvektor az állapottér reprezentációhoz tartozik, azaz
|
|
(158) |
|
|
(159) |
Határozzuk meg az állapotvektor
|
|
(160) |
|
|
(161) |
egyenletekben szereplő mátrixokat. Mivel , ezt behelyettesítve az állapotegyenletbe kapjuk, hogy
|
|
(162) |
|
|
(163) |
azaz
|
|
(164) |
|
|
(165) |
Állapottér reprezentációk közötti kapcsolat
|
|
(166) |
|
|
(167) |
|
|
(168) |
Az és mátrixok közötti fenti kapcsolatot hasonlósági transzformációnak nevezzük. Egy rendszer adott dimenziós állapottér reprezentációi egymásból hasonlósági transzformációval kaphatók.
Az irányíthatósági alakú állapottér reprezentációt előállító transzformációs mátrix alakja:
|
|
(169) |
ahol n dimenziós állapottér esetén az irányíthatósági mátrix:
|
|
(170) |
és egy dimenziós Toeplitz-mátrix:
|
|
(171) |
amelynek elemei a karakterisztikus egyenlet együtthatói:
|
|
(172) |
Ekkor az irányíthatósági állapottér alak
|
|
(173) |
A diagonális alakú állapottér reprezentációt előállító transzformációs mátrix alakja:
|
|
(174) |
ahol egy dimenziós Vandermonde-mátrix:
|
|
(175) |
A diagonális állapottér alak:
|
|
(176) |
Példa 2.4
Határozzuk meg az alábbi rendszer irányíthatósági alakját előállító transzformációs mátrixot.
|
|
(177) |
A feladat megoldása: az irányíthatósági alak transzformációs mátrixa:
|
|
(178) |
ahol
|
|
(179) |
|
|
(180) |
Az irányíthatósági alak:
|
|
(181) |
3.2. Irányíthatóság és megfigyelhetőség
Állapot megfigyelhetőség: adott . Mi a feltétele annak, hogy az állapotokat minden a időpontra meghatározhassuk a rendszer jövőbeli input és output függvényeinek ismeretében?
Definíció 2.1
Az mátrixot a rendszer megfigyelhetőségi mátrixának nevezzük.
|
|
(182) |
Tétel 2.1 Kálmán-féle rangfeltétel
Egy pár megfigyelhető akkor és csak akkor, ha megfigyelhetőségi mátrixuk rangja megegyezik az állapottér dimenziójával, azaz
|
|
(183) |
Állapot irányíthatóság: adott , és a időpontban. Mi a feltétele annak, hogy találjunk olyan , irányítást, amely a rendszert véges idő alatt az állapotból egy tetszőleges , állapotba vigye?
Definíció 2.2
Az mátrixot a diszkrét idejű rendszer irányíthatósági mátrixának nevezzük.
|
|
(184) |
Tétel 2.2 Kálmán-féle rangfeltétel
Egy pár akkor és csak akkor irányítható, ha irányíthatósági mátrixuk rangja megegyezik az állapottér dimenziójával, azaz
|
|
(185) |
Definíció 2.3
Egy rendszer állapottér reprezentációja minimál reprezentáció, ha együttesen irányítható és megfigyelhető, azaz
|
|
(186) |
A minimál reprezentációkhoz tartozó állapotér dimenziója a legkisebb az összes olyan állapottér reprezentációkat tekintve, amelyekre
|
|
(187) |
ahol a rendszer átviteli függvénye.
Kálman féle dekompozíció: az irányíthatóság és megfigyelhetőség koncepciója lehetővé teszi, hogy megértsük egy lineáris rendszer struktúráját.
Lineáris rendszerek négy alrendszerre bonthatók:
(a) irányítható és megfigyelhető
(b) irányítható és nem megfigyelhető
(c) nem irányítható és megfigyelhető
(d) nem irányítható és nem megfigyelhető
Példa 2.5
Vizsgáljuk az alábbi diagonális állapottér reprezentáció megfigyelhetőségét és irányíthatóságát:
|
|
(188) |
|
|
(189) |
A feladat megoldása: a megfigyelhetőségi mátrix alakja:
|
|
(190) |
A rangfeltételt a következőképp vizsgálhatjuk: akkor, ha . Az adott feladatban: , azaz a megfigyelhetőség teljesül, ha akkor és csak akkor, ha .
Az irányíthatósági mátrix:
|
|
(191) |
Az irányíthatósági mátrix rangja éppen ha
|
|
(192) |
azaz
Példa 2.6
Vizsgáljuk meg az alábbi állapottér reprezentációval adott rendszer irányíthatóságát és megfigyelhetőségét.
|
|
(193) |
A feladat megoldása: Írjuk fel az irányíthatósági mátrixot:
|
|
(194) |
Megfigyelhetőség ellenőrzése: egy mátrix rangja elemi mátrixműveletekkel vizsgálható. A teljes rang vizsgálata a mátrix determinánsának kiszámításával is meghatározható: . A rendszer tehát irányítható. Írjuk fel a megfigyelhetőségi mátrixot:
|
|
(195) |
Mivel , ezért a rendszer megfigyelhető.