5. fejezet - Példák – robotok csoportosítása
- 5.1. A robot definíciója
- 5.2. Robotok csoportosítása
- 5.3. Felhasználás szerinti csoportosítás
- 5.4. Ipari és szolgáltató robotok néhány különbsége
- 5.5. Szolgáltató robotok csoportosítása
- 5.6. Autonómia definíciója
- 5.7. Az ETO robot bemutatása
- 5.8. A robot fő jellemzői
- 5.9. A robot egységeinek részletes bemutatása
- 5.10. A szociális robotok típusai
-
- 5.10.1. Kompai
- 5.10.2. Biron
- 5.10.3. Hospi-Rimo
- 5.10.4. iRobiQ
- 5.10.5. Wakamaru
- 5.10.6. RoboVie R3
- 5.10.7. HAR (Home Assistant Robot)
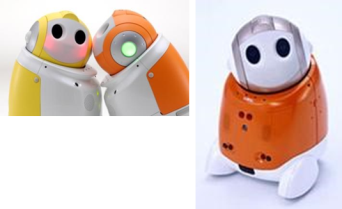
- 5.10.8. PaPeRo
- 5.10.9. Cubo
- 5.10.10. Mamoru
- 5.10.11. Nao
- 5.10.12. iCat
- 5.10.13. Paro
- 5.10.14. Kobie
- 5.10.15. Rabie
- 5.10.16. Pomi
- 5.10.17. Beszéd
- 5.10.18. Gesztikuláció
- 5.10.19. Közvetlen betáplált információ
5.1. A robot definíciója
A robot elektromechanikai szerkezet, amely előzetes programozás alapján képes különböző feladatok végrehajtására. Lehet közvetlen emberi irányítás alatt, de önállóan is végezheti a munkáját egy számítógép felügyeletére bízva.
5.2. Robotok csoportosítása
A robotokat rengeteg szempont alapján lehet csoportosítani. Ezek közül csak a legfontosabbakat említjük.
Mobilitásuk alapján:
-
mobil robotok
-
helyhez kötött robotok
Felhasználásuk alapján:
-
anyagmozgató
-
technológiai műveletet elvégző
-
szociális
Helyhez kötött robotok kinematikájuk alapján:
-
párhuzamos kinematikájú
-
láncolt kinematikájú
-
vegyes kinematikájú
Mobil robotok kinematikájuk alapján:
-
differenciális
-
holonomikus
-
egyéb
5.3. Felhasználás szerinti csoportosítás
Manapság a robotok szerteágazó feladatköröket töltenek be, mely folyamatosan bővül a technológia fejlődésével. Ebből adódóan a legcélszerűbb őket a feladatkörük szerint csoportosítani
Ipari robotok (Industrial robots)
Az ipari robotok közé sorolhatóak azok a robotok, amelyek a gyártás során végzik a feladatukat. Jellemzően ezek speciális robotkarok, amelyek különböző műveleteket hajtanak végre, az alkatrészek behelyezésétől a hegesztésen át egészen a festésig.
Takarító vagy háztartási robotok (Domestic or household robots)
Ide tartoznak a háztartási feladatokat ellátó robotok, amelyek megkönnyítik az emberek mindennapjait. Például: porszívó robot, medence takarító robot, sepregető robot, eresz takarító robot.
Orvosi robotok (Medical robots)
Azok a robotok, amelyeket a gyógyszeriparban és az orvostudomány területén alkalmaznak. Elsősorban a sebészeti robotok tartoznak ide.
Service robotok (Service robots)
Robotok, amelyeket feladatuk alapján egyik kategóriába se tartoznak. Ezek lehetnek különböző adatgyűjtő és feldolgozó robotok, amelyek segíthetnek például egy kutatást vagy valamilyen szolgáltatást.
Katonai robotok (Military robots)
Robotok, amelyeket a hadiiparban alkalmaznak. Ide tartoznak például a tűzszerész robotok, a különböző szállító robotok, vagy a távirányított felderítő repülőgépek.
Szórakoztató robotok (Entertainment robots)
Ebbe a kategóriába azok a robotok taroznak, melyeknek célja az emberek szórakoztatása. Például ilyenek a táncoló robotok, vagy a kerekeken guruló ébresztőóra.
Űr robotok (Space robots)
Ide tartoznak azok a robotok, amelyeket az űrben alkalmaznak, például a felderítő robotok, vagy a nemzetközi űrállomásokon használt robotok
Hobby robotok (Hobby and competition robots)
Hobby robotok, amelyeket a felhasználó építhet össze és programozhat be különböző feladatokra.
Természetesen vannak olyan összetettebb robotok, amelyek nem sorolhatóak be egyértelműen egy kategóriába, mivel több feladatra is alkalmasak.
5.4. Ipari és szolgáltató robotok néhány különbsége
Felhasználásuk szerint a robotokat tehát két nagy csoportra lehet bontani; ipari és szolgáltató robotokra. Az ipari robotok már hosszú ideje az ipari automatizálás részét képezik, a szolgáltató robotok azonban egyelőre még sokkal kevésbé elterjedtek. Az elmúlt két évtizedben azonban számos kutató és fejlesztő projekt irányult a szolgáltató robotokra, és a robotok felhasználási területe egyre inkább bővül. A Táblázat 5.1 szemlélteti az ipari és szolgáltató robotok közötti alapvető különbségeket
|
IPARI ROBOTOK |
SZOLGÁLTATÓ ROBOTOK |
|
|
MUNKAKÖRNYEZET |
Ellenőrzött és jól meghatározott környezet |
Rendezetlenebb, nehezebben definiálható környezet |
|
FELHASZNÁLÓK |
Betanítás speciális feladatokra |
A betanítás a tevékenységek széleskörű skáláját öleli fel |
|
BIZTONSÁG |
Gépfüggő |
Robot és felhasználófüggő |
|
MUNKAFILOZÓFIA |
Robotok és emberek elkülönítése |
Robotoknak és embereknek meg kell osztozniuk a munka-területen, hogy szolgáltatást nyújtsanak/kapjanak |
|
GÉP TERVEZÉSE |
Megbízásra rugalmasan reagál |
Igényre rugalmasan reagál |
5.5. Szolgáltató robotok csoportosítása
Az alábbi táblázatok az ISO 13482 szabvány szerinti definíciók alapján mutatják be a szolgáltató robotokat, és azon belül részletesen a személyi gondozó robot típusait.
|
ROBOT |
||
|
Mozgásba hozott mechanizmus, két vagy több tengelye programozható, bizonyos fokú autonómiával rendelkezik, a környezetében mozog, hogy feladatokat hajtson végre. |
||
|
IPARI ROBOT |
SZOLGÁLTATÓ ROBOT |
|
|
Az ipari robot egy automatikus irányítású, újraprogramozható, többcélú automatikus ipari feladatok elvégzésére használt manipulátor, három vagy több tengelye programozható, melyek lehetnek rögzítettek vagy mobilak. |
Olyan robot, amely hasznos feladatokat hajt végre emberek vagy berendezések számára, kivéve az ipari automatizáló berendezéseket. |
|
|
KISZOLGÁLÓ ROBOT |
ORVOSI/EGÉSZSÉGÜGYI ROBOT |
|
|
Olyan szolgáltató robot, mely lehetővé teszi a fizikai kontaktust az emberekkel, támogató tevékenységeket lát el, amelyek közvetlenül hozzájárul az egyének életminőségének javításához. |
Olyan robot vagy robotikai berendezés melyet orvosi elektromos berendezésnek használnak. |
|
|
SZEMÉLYI GONDOZÓ ROBOT TÍPUSOK |
||
|
MOZGÓ SZOLGÁLTATÓ ROBOT |
FIZIKAI SEGÍTŐ ROBOT |
EMBERSZÁLLÍTÓ ROBOT |
|
Képes szabadon mozogni és egy tervezett feladatot ellátni, illetve tárgyakat fogni (kezelővel vagy anélkül). |
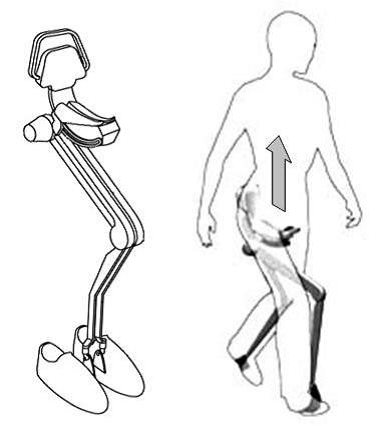
Segít az embernek egy feladat elvégzésévben, pótló vagy növelő képességek nyújtása által. A fizikai segítő robot egy gyenge vagy idős embert egy jó erőben lévő ember képességeivel látja el, vagy növeli egy jó erőben lévő ember teljesítményét. |
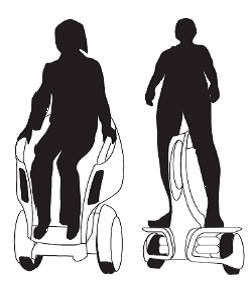
Embereket szállít különböző helyekre autonóm navigálással, irányítással és mozgással. |
|
|
|
|
5.6. Autonómia definíciója
A szabvány az autonómia definícióját is meghatározza, mely elsősorban az orvosi robotoknál tölt be kulcsfontosságú szerepet.
Autonómia: Annak a képessége, hogy a robot az aktuális állapotból kiindulva és érzékelve, emberi beavatkozás nélkül feladatokat hajtson végre.
Autonómia foka: Rendelkezik egy dimenzióval, mely nem más, mint az operátor bevonásának mértéke.
Az autonómia fokának osztályozása:
Alacsony érték = Autonómia hiánya
Magas érték = Teljes autonómia
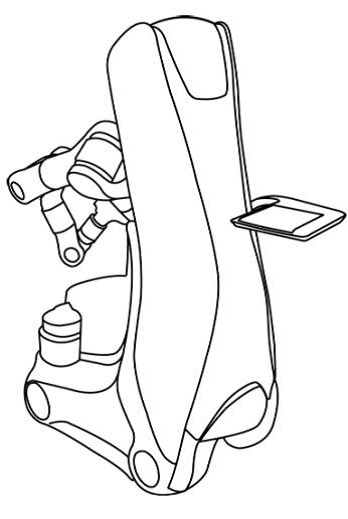
5.7. Az ETO robot bemutatása
A feladatunk során olyan megoldásokat és terveket kell készítenünk, amelyek kompatibilisek a MOGI tanszéken épülő robottal. A tervezésekor figyeltek arra, hogy a robotot a későbbiek során további funkciókkal is el lehessen látni. Hagytak rajta szabad helyet újabb alkatrészek számára és rögzítési pontokat is elhelyeztek rajta. Ennek tudatában első körben áttanulmányoztuk a robot felépítését, hogy a tervezés megkezdése előtt tudatában legyünk a szükséges információknak.

5.8. A robot fő jellemzői
A mozgásért felelős egység képzi a robot alapját. Ezen helyezkedik el a három kerék, a belsejében pedig a motorok, a szenzorok, a szabályzók és a takarító egység kapott helyet. Erre az alapra épül rá a robot többi része, a vázszerkezet, illetve az azon lévő egységek. A robot mozgását és funkcióit egy, a belsejében elhelyezett számítógép vezérli, a tájékozódását pedig egy Microsoft® Kinect® kamera segíti. Az egész szerkezet közel egy méter magas és 40 kg.
5.9. A robot egységeinek részletes bemutatása
Mozgás
A robot egyik fő tulajdonsága a szabad mozgása. Ennek köszönhetően közlekedés közben szabadon változtathatja a mozgás irányát és a robot elfordulását. Ez az összetett mozgás lehetővé teszi a precíz manőverezést és jobban hasonlít az élőlények mozgására.
Ezt a mozgást az úgynevezett holonomikus hajtással tudja elérni. Három 4"-os kerékkel rendelkezik a robot, amelyek egyenlő távolságban helyezkednek el a szerkezet sarkainál 120°-ban egymáshoz képest. A kerekek tulajdonsága, hogy a tengelyükre merőlegesen is el tudnak gördülni, emellett mindegyiknek a sebessége és forgásának iránya egymástól függetlenül szabályozható. Így a robot orientációjától függetlenül bármelyik irányba tud mozogni. Menet közben a kerekek szögelfordulásából tudja számítani a helyzetét, amit a kamera képének elemzésével és külső tájékozódási pontok használatával tud pontosítani. Ez a tulajdonsága előnyt jelent más területeken is, például tud úgy közlekedni, hogy a kamera képét egy kiválasztott objektumon tartja, ezzel kibővítve a felhasználási módjait a robotnak. A kerekek méretéből adódóan vannak korlátai is a felhasználási területnek, mivel csak kisebb szintkülönbségeken képes áthaladni.
A kerekek meghajtásához három 100 W-os kefés DC motort használnak, 1:7-es szíjáttétellel. Minden motorhoz külön motorvezérlő elektronika tartozik, a tápellátást pedig egy 24 amperórás 12 V-os ólomzselés akkumulátor biztosítja.


A robot végsebessége a 1,5-2 m/s-ot is elérheti. Mivel a robot tömege 40kg, és teljesen automatikusan, emberi beavatkozás nélkül közlekedik, ezért nagyon fontos odafigyelni a biztonságra, hogy el tudjon kerülni egy véletlen ütközést. Ennek érdekében 6 távolságérzékelőt helyeztek el körben a robot alsó részén, a sarkait pedig gumi ütközővel látták el. A távolságérzékelők 200-800 mm között adnak használható jelet, viszont ügyelni kell a felhasználási területen elhelyezett tárgyakra, ugyanis egyes anyagokat ez a rendszer nem képes megbízhatóan észlelni, mint például az üveget. A balesetek elkerülésére és megelőzésére egy vészleállító gombot is elhelyeztek a robot tetején.

Szerkezet
Az alapegységre épül rá a robot váza. Az egész szerkezet követi a kerekek kiosztásának körszimmetriáját. A robot magassága úgy lett megtervezve, hogy a kamerája még rálásson a legtöbb asztalra. Egy átlagos asztal magassága 700-750 mm, ehhez igazodva a kamerát 850 mm-es magasságban helyezték el. A szerkezet 10 és 5 mm-es vízvágott alumínium lemezekből, illetve 10x10 mm-es rudakból épül fel. A vízszintes lemezekre raszteres kiosztásban 4 mm-es lyukakat fúrtak az alkatrészek rögzítéséhez. Ezeket a lyukakat lehet további elemek rögzítésére is használni. A vázon egységesen M5-ös süllyesztett vagy sima fejű belső kulcsnyílású csavarokat használnak. A perifériákat ellátó hajtások 30 W-os kefés DC motorok 1:7 szíjáttétellel. A motorokat aktív hűtéses teljes H hidas teljesítmény elektronikák hajtják. Ezek a központi elektronikától kapják a referenciát CAN-buszon.

Kamera
A környezet megfigyelésére egy Kinect kamerát használ a robot. A kamerát két motor mozgatja vízszintes és függőleges irányba, amivel nagyban megnöveli annak látószögét. Ennél az egységnél fontos szempont a kamera stabila helyzete, hogy a képét pontosabban tudja elemezni a számítógép. A mozgató mechanizmus rendelkezik saját tápmodullal és egy vészleállító funkcióval is, ami váratlan ütközés esetén leállítja a motorokat. A Kinect a színes VGA kamera mellett két infra érzékelőt és két mikrofont is tartalmaz. Az infra érzékelőkkel érzékeli a távolságot és ezt veti össze a színes képpel, így egy úgynevezett 2,5 dimenziós képet kap a környezetéről. Az, hogy a képet milyen funkcióhoz használja fel a robot, már a programozáson múlik.


Számítógép
A vezérlés alapja egy PC, ami USB-n vagy Bluetooth-on keresztül csatlakozik a robot mozgást végző moduljához. A mesterséges intelligenciához szükséges számolási kapacitást külső számítógép bevonásával is növelhetjük. A központi elektronika kaphat referenciát és parancsokat, illetve adhat információt Bluetooth kapcsolaton keresztül és USB porton is a PC-nek. A tájékozódást segíti még egy 3 tengelyes giroszkóp, egy gyorsulásérzékelő és egy iránytű. Az egyéb kisebb perifériák mozgatására egy 24 portos USB csatlakozású RC szervo hubot is beépítettek.

Takarító egység
A robot aljában helyet kapott egy takarító egység, amivel közlekedés közben tisztán tudja tartani a bejárt területet. Egy forgó kefe szedi össze a koszt, amit egy fésű távolít el róla tartályba.
Akkumulátor
A robot jelenleg 5 darab 24 Ah-ás akkumulátort használ, ezzel 4 órát bír normál használat közben. Ezt lehetőség van tovább bővíteni. Az akkumulátorok egy kinyitható tárolón kaptak helyet a könnyebb szerelés érdekében.

Hangszóró
A roboton helyet kapott 2 hangszóró, amelyek a kommunikációjában vesznek részt.

Flipper kar
Extra funkcióként beépítettek egy flipper kart, amely labdaütögetésre képes. Ezt egy elektromágneses mechanika mozgatja. A robot aljának íves formája segít a labdát a karhoz terelni.
Ajtónyitó
A robot képes kinyitni a mágneskártyás ajtókat, ehhez egy felemelhető kart használ, amivel eléri a leolvasót.
Tálca
A robotra felszerelhető egy tálca, amin különböző tárgyakat tud szállítani.
5.10. A szociális robotok típusai
A következő példák áttekintést adnak azokról a fejlesztés alatt álló robotokról, melyek az emberek segítésére alkalmas jellemzőkkel bírnak.
5.10.1. Kompai
Fejlesztő: Robosoft
Bemutatás: 2010
Személyi asszisztensként használható több területen.
-
Emlékeztető: receptek, napirend
-
Internet hozzáférés: e-mailek, közösségi hálók, videokonferenciák
-
Mindennapi segítségnyújtás a felhasználónak
-
Kiállítási, múzeum: kölcsönhatásba lép a látogatókkal

5.10.2. Biron
Fejlesztő: Bielefeld University
Bemutatás: 2004
Mobil robot, személyi asszisztensként használható. Fel van szerelve egy pan-tilt (pásztázó-billenő) kamerával, egy pár mikrofonnal, valamint egy lézeres távmérővel. Megérti a beszédet és a kézmozdulatokat, azonosítja a tárgyakat és kölcsönhatásba tud lépni a személyekkel. A felhasználók tárgyakat és helyeket mutathatnak a robotnak a saját otthonukban, melyet a robot megjegyez és később is emlékezik rájuk.

5.10.3. Hospi-Rimo
Fejlesztő: Panasonic
Bemutatás: 2011
Kényelmes kommunikációt biztosít ágyhoz kötött illetve mozgáskorlátozott embereknek.

5.10.4. iRobiQ
Fejlesztő: Yujin Robot
Bemutatás: 2008
Képességei: 1000 beszéd alapú parancsot megért és reagál rájuk, önfeltöltő, képeket készít, híreket és recepteket mutat, felügyelő kamerával és karaoke programmal rendelkezik, angolt tanít.

5.10.5. Wakamaru
Fejlesztő: Mitsubishi Heavy Industries
Bemutatás: 2005
Mobil háztartási robot, kölcsönhatásba tud lépni az emberekkel, képes beszélni, kezet fogni, és természetes beszélgetésbe elegyedni. Sőt, emlékezteti a felhasználókat, hogy vegyék be a gyógyszerüket, és segítséget hív, ha arra utaló jeleket tapasztal, hogy valami baj lehet velük. Képességei: Hang és kép felismerés, csatlakoztatható az internethez, emlékezteti a felhasználót gyógyszer bevételére, segítséget hív baj esetén, ütközésérzékelés, pozíció mérése, IR és US szenzorok (hőmérsékletérzékelés).


5.10.6. RoboVie R3
Fejlesztő: V-Stone
Bemutatás: 2009
Idősek és mozgáskorlátozottak mindennapjainak segítésére tervezett robot. Humanoid, de körülbelül feleakkora, mint egy ember.

5.10.7. HAR (Home Assistant Robot)
Fejlesztő: Toyota
Bemutatás: 2009
Háztartási robot, egyszerű házimunkák elvégzésére képes, például a padló felmosására, mosásra, mosogatásra és még bútortologatásra is.

5.10.8. PaPeRo
Fejlesztő: NEC
Bemutatás: 2011
Képességei: beszélő kölcsönhatás, arcfelismerés, gesztikulációérzékelés, másik PaPePo robottal kommunikál, 8 mikrofon.
5.10.9. Cubo
Fejlesztő: IZI robotics
Bemutatás: 2006
Képességei: könyveket tud felolvasni gyerekeknek, angolt tanít, otthoni felügyeletet biztosít, időjárás jelentést és híreket mutat, ébresztő funkció, robot "levelet" kézbesít.

5.10.10. Mamoru
Fejlesztő: University of Tokyo
Bemutatás: 2008
Mamoru egy kisméretű idősgondozó robot, mely úgy néz ki, mint egy apró nagymama a kis műanyag kontyával. Segít az időseknek és fogyatékkal élőknek emlékezni, hogy hova tették a távirányítót vagy a papucsukat, és udvariasan figyelmeztet, ha itt az ideje a gyógyszerbevételnek. A tárgyak felismerésére nagy látószögű kamerát használ, hogy nyomon tudja követni a szobát, és képfelismerő szoftver segítségével megállapítja, hogy melyik tárgy micsoda.

5.10.11. Nao
Fejlesztő: Aldebaran Robotics
Bemutatás: 2007
A robot elsődleges célja: biztonsági támogatás, információ, otthoni támogatás, ezen kívül tud focizni, hangfelismerés funkciója is van.

5.10.12. iCat
Fejlesztő: Philips
Bemutatás: 2005
Az iCat egy user interface robot. Képes a hang és a beszéd azonosítására valamint felismeri a tárgyakat és arcokat egy kamera segítségével. Lehet csatlakoztatni az otthoni hálózathoz, hogy a háztartási készülékeket irányítsa, vagy az internethez, hogy információt szerezzen.

5.10.13. Paro
Fejlesztő: AIST
Bemutatás: 2001
Paro egy terápiás robot, mely lehetővé teszi az állatterápia bizonyított előnyeit olyan betegek környezetében, mint a kórházak és egyéb intézmények, ahol élő állatokat jelenléte nehézségekbe ütközik.

A 8. generációs kialakítását Japánban és Európa-szerte már 2003 óta használják. Ötféle szenzorral rendelkezik: tapintás, fény, hang, hőmérséklet és testtartás érzékelők, amelyekkel képes érzékelni az embereket és a környezetet. Megtanulja, hogy milyen viselkedést részesít előnyben a felhasználó, és reagál az új nevére.
A kimutatások szerint Paro:
-
Csökkenti betegek és a gondozók stressz-szintjét
-
Serkenti a betegek és a gondozók közötti interakciót
-
Fokozza a betegek kipihentségét és motivációját
-
Javítja a betegek egymás közötti szocializációját

5.10.14. Kobie
Fejlesztő: Electronics and Telecommunications Research Institute (ETRI)
Bemutatás: 2007
A koala alakú robot a Paro robothoz hasonló képességekkel rendelkezik.

5.10.15. Rabie
Fejlesztő: ETRI
Bemutatás: 2007
A nyúl alakú robot hét különböző érzelem kifejezésére képes, például boldogság, szomorúság és meglepődés. Az érzelmeit a szeménél található kijelző segítségével fejezi ki.

5.10.16. Pomi
Fejlesztő: ETRI
Bemutatás: 2008
A pingvin alakú robot kölcsönhatásba tud lépni az emberekkel, a neve POMI, ami a "Penguin Robot for Multimodal Interaction"-ból képzett egy mozaikszó (pingvin robot többféle interakció elősegítésére).
Képes látni, hallani, érinteni és arckifejezéseket létrehozni. A hangulatától függően mozgatja a szemöldökét, pupilláját, valamint a száját. Az egyik legérdekesebb tulajdonsága, hogy képes ténylegesen szagot kibocsátani, ami azt jelenti, hogy ha dühös, akkor kellemetlen szagot áraszt. A beépített szenzorok segítségével felismeri a hangokat és az emberek helyzetét. További érdekes tulajdonsága, hogy a hangulatától függően különböző szívverések létrehozására képes.

Robotok kommunikációja
A szolgáltató robotok környezettel való kölcsönhatása különböző módokon és kifinomultsággal valósulhat meg. A szolgáltató robotok által leggyakrabban alkalmazott interaktív módozatok a következők.
5.10.17. Beszéd
A beszélgetés a legtermészetesebb módja az emberek közötti társadalmi interakciónak, tehát a robotokkal való kommunikációnak is ez lenne a legkényelmesebb módja. Bár folyamatosan zajlanak kutatások a beszédfelismerés megvalósításáról zajos valós környezetben, azonban ez továbbra is nyitott probléma. A robot használhat mesterséges beszédgenerálást vagy előre felvett emberi hangot.

5.10.18. Gesztikuláció
Mivel a testbeszéd fontos összetevője az emberi kommunikációnak, hasznos lehet a robot és az ember közötti kommunikációban is. Az a képesség hogy rámutassunk, és elismerjük a tárgyat, melyre rámutattak, például segít a ráirányítani valamire a figyelmet és összefüggést teremt a mondanivalóval. Továbbá, fizikoterápiában a testhelyzet felismerés alapvető fontosságú és növelheti a kölcsönhatást a robot és a felhasználó között.
5.10.19. Közvetlen betáplált információ
A felhasználónak néha az a legmegfelelőbb, ha közvetlenül táplálhat be adatot a robotba. Így például, amikor a felhasználó egy térképen több hely közül választ, vagy menetrendet keres, akkor a verbális vagy gesztus parancsok fárasztóvá válnak. Ezekben az esetekben a kommunikáció rendkívül hatékonnyá tehető egy beviteli eszközzel, például egy egérrel vagy egy érintőképernyővel, még akkor is, ha a felhasználó egyébként nem szívesen használja ezeket az eszközöket társadalmi interakcióra.