7. fejezet - Hajtómű dinamikai modelljei, a mechanikai időállandó kérdése
A mozgásátalakítók között „előkelő” helyet foglal el ez a transzformátor jellegű energia-átalakító. Kis fáradsággal a gyártók honlapjairól és a katalógusokból kideríthető, hogy a DC motorok optimális üzeme 3200…5000 ford/perc tartományában található, és az is, hogy ezen aktuátorok névleges forgatónyomatéka igen csekély. Így tehát ezen aktuátor család gyakorlati alkalmazása elképzelhetetlen hajtómű csatlakoztatása nélkül. A módosítások, szükség esetén, elérhetik akár az i=10 000 értéket is. Ha az általános gyakorlat nem is ez, de jellemző az i=1000 körüli módosítás.
Kisebb hajtóművek esetében szükségtelen a hajtómű különálló dinamikai modellezése, az esetek többségében a DC motort és a vele egybeépített hajtóművet egy közös elsőrendű átviteli tagként modellezzük. Kifutási mérésekkel bárki meggyőződhet arról, hogy a DC motor elektromechanikus időállandója (a nyugalmi induktivitás nélkül a motor szintén elsőrendű tag) önmagában nagyobb, mint a hajtóművel egybeépített motoré. A különbség általában nem számottevő, de méréssel kimutatható. A következő diagram egy 5 V-os DC mikromotor önállóan, valamint i=124 módosítással rendelkező hajtómű (és a golyósorsós pozicionáló asztal) csatlakoztatása után felvett „kifutási” görbéit mutatja. Ebből számunkra jelenleg kettő lényeges, a terheletlen és a hajtóművel egybeépített motoré.
Az ábra függőleges tengelyén a motorral egybeépített tachogenerátor kapocsfeszültsége látható, miután a tápfeszültséget lekapcsoltuk. A tacho-jel aluláteresztő szűrőn lett átbocsátva, így a jel nagysága a fordulatszámmal arányos. A vízszintes tengely az időtengely.
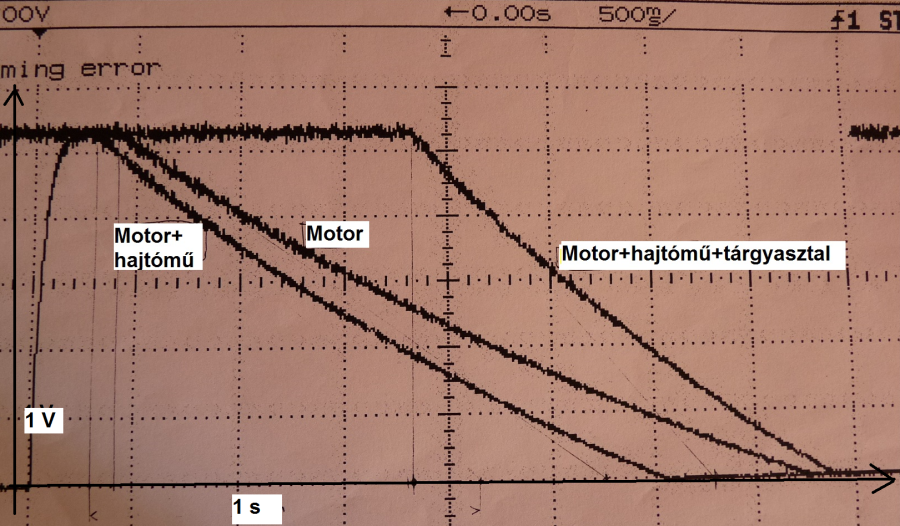
A kifutási görbe felvétele a finommechanika jellegzetes mérési módszere egy hajtómű súrlódásának vizsgálatára. A kifutási vizsgálat modelljét, amelyre a vizsgálat alapul, az (1.3. szakasz) fejezetben mutatjuk be. A mérés során a motort, vagy hajtóművet névleges fordulatszámra gyorsítjuk, majd egy t=t0 kezdeti időpillanatban a gerjesztést kikapcsoljuk, és a rendszert szabadon hagyjuk kifutni. Ez tulajdonképpen a „homogén megoldás” technikai változata. Azért technikai, mert nem a t(0+) „kezdeti érték”, hanem a t(0-) „kiindulási érték” áll rendelkezésre. A vizsgált esetben a két érték azonos, tehát jogos a homogén megoldás megnevezés.
Mit jelent a DC motor „nagyobb” üresjárati, és „kisebb” hajtóművel kombinált időállandója? Nos, semmi esetre sem azt, hogy pusztán az időállandó nagysága alapján bárki elhamarkodott véleményt mondhatna egy mechanikai rendszer dinamikájáról. Az időállandó önmagában nem elegendő egy elsőrendű mechanikai rendszer minősítéséhez. Az időállandót az átviteli függvény arányos együtthatójával, tehát az átviteli függvény számlálójával együtt szabad csak vizsgálni. Hajtóművel kapcsolt motorunk kisebb időállandója egyből „elveszti” jelentőségét, ha az (1.3. szakasz) fejezetben látható módon vizsgálni kezdjük az átmeneti függvényt és a Bode diagramot. A részletes modellezést ezen a helyen nem ismételjük meg, de a könnyebb megértés kedvéért álljon itt az átmeneti függvényeket bemutató diagram:
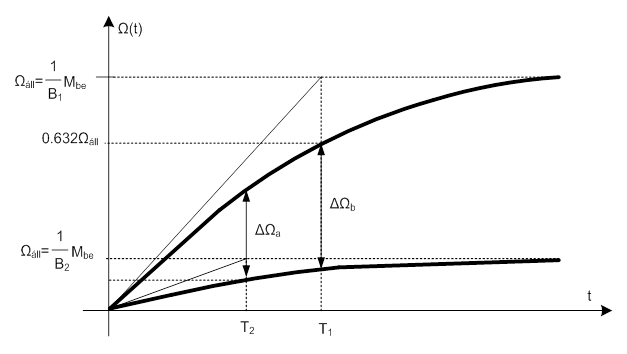
Ugyanakkora gerjesztő forgatónyomaték hatására a kisebb időállandójú, hajtóművel egybeépített motor lényegesen alacsonyabb szögsebességre (fordulatszámra) gyorsítható, mint a terheletlen, de nagyobb időállandójú motor. E helyen is megismételjük, hogy a kifutás vizsgálat modellje nem analógiája a villamos, passzív RC-tag aluláteresztő szűrőnek! A mechanikai rendszerben a két modell-elem párhuzamos kapcsolású, és a mechanikai időállandóban (T=J/B, T=m/b) a csapágy- és vezeték-súrlódással összefüggő csillapítási tényező (B,b) nem ellenállás, hanem vezetőképesség jellegű. Azaz, minél kisebb a csillapítási tényező értéke, a súrlódási viszonyait tekintve annál jobb, és nagyobb időállandójú és kisebb veszteségű a mechanikai rendszer.
Ez csak első pillanatban tűnhet modellezési szempontból különösnek, mert az egybeépített motor-hajtómű egységnél, a megnövekedett tehetetlenségi nyomaték miatt, esetleg mást várnánk. Alaposabban elemezve a szerkezetet, be kell látnunk, hogy az eredő tehetetlenségi nyomaték ugyan valóban nő, de sokkal nagyobb arányban nő a súrlódási veszteségek szerepe. A finommechanikai ismeretekkel rendelkezők jól ismerik azt a szabályt, hogy kisméretű és miniatűr konstrukciós mérettartományban nem a tömegerők, hanem a súrlódó erők dominálnak. Így van ez a DC mikromotorok esetében is.
A modellezéssel foglalkozó tananyag azonban nem mellőzheti azt, hogy a robottechnikában, pozicionáló rendszerekben szokásos méreteken túl, más mechatronikai feladatok esetében szükség lehet a hajtómű dinamikai sajátosságainak figyelembe vételére is.
A hajtómű dinamikai modelljében három paraméter-csoportot szoktak figyelembe venni. Két csoportot képez a bemeneti, valamint a kimeneti oldal eredő (jellemző) tehetetlenségi nyomatéka és súrlódási nyomatéka, a harmadik az eredő rugómerevség, amely a tengelyek és a fogak rugalmasságait foglalja magába. Kísérleti úton is vizsgálható ez a rugómerevség, ha a hajtómű kimenetét mechanikailag „rövidre zárják”, azaz a házhoz rögzítik a kimenő tengelyt, és a bemenetet fokozatosan növekvő forgatónyomatékkal terhelik. A tehetetlenségi nyomatékok közül rendszerint a domináns értékekkel számolnak, ezek a nagyobb átmérőjű fogaskerekekhez köthetők.
A hajtóművek veszteségeit a szakirodalom öt pontban szokta összefoglalni:
-
Fogsúrlódási veszteségek
-
Csapágyazások veszteségei
-
Kenőanyag keverési veszteség
-
Légkeverési veszteség
-
Tömítés-súrlódási veszteségek
Ezek közül kétség kívül az első kettő játssza a legnagyobb szerepet, és szakirodalmi tapasztalatok szerint átlagos esetben (átlagos terhelés, kenési viszonyok, homlokkerekes konstrukció) a fogsúrlódási veszteség és a csapágysúrlódási veszteség összemérhető mértékű.
Az itt bemutatatott valós hajtómű egyszerűsített gráfjában szereplő B1 és B2 csillapítási tényezők a fogsúrlódást és a csapágysúrlódásokat együttesen fogják modellezni. Első pillanatban az összevonás különösnek tűnhet, de szigorúan ragaszkodva a hazai és a nemzetközi szakirodalomban bemutatott számításokhoz bemutatjuk, hogy az összevonás megalapozott. Érdekesség, hogy a mechatronikai tervezéssel foglalkozó művekben, a hajtóművekkel foglalkozó fejezetekben, nem említik külön a fogsúrlódást, ezekben csak a csapágysúrlódás modellezését találjuk meg. A fogsúrlódás különálló modellezése csak elvétve, és közvetetten található meg, így például Bögelsack [7.1.], és Isermann [7.2.] munkájában. A fizikai jelenségek részletes tárgyalása helyett a hajtómű hatásfokával számolnak.
Az átlagos fogsúrlódási tényező meghatározása összetett feladat. A súrlódás nagymértékben függ a konstrukciótól (belső, külső fogazás, hajtómű típus, stb.), fogak anyagától, a felületi minőségtől, a terheléstől, és a kenési állapottól.
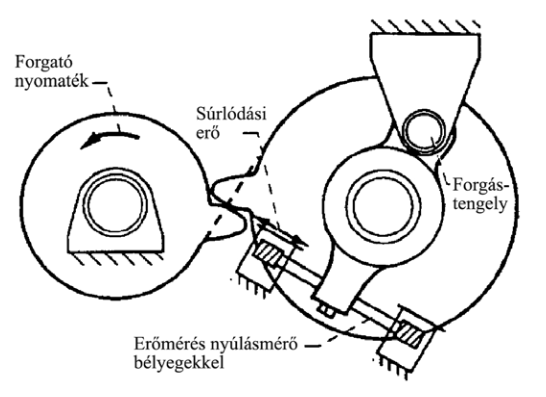
A soron következő három ábrát Keresztes R. Zs. [7.3.] disszertációjából vettük át azért, hogy a fogsúrlódás mérésével kapcsolatos kutatásokat illusztrálni tudjuk.
Az első ábrán Benedict és Kelley [7.4.] által összeállított mérőrendszer vázlata látható.
Az elrendezés a pillanatnyi fogsúrlódás mérését tette lehetővé, dinamikus jelenségek vizsgálatára nem volt alkalmas.
A következő négy ábra Keresztes R. Zs. [7.3.] és Csobán Attila PhD disszertációjából [7.6.] származik, és nagyon jól alátámasztják az általunk javasolt gráf modell helyességét.
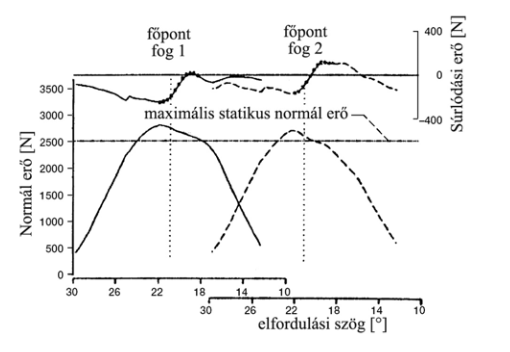
A dinamikus fogterhelés mérésére Rebbechi [7.5.] nyúlásmérő bélyeges erőmérést alkalmazott. A mérési elrendezést bemutató ábrán látható a nyúlásmérő bélyegek elrendezése a fogtő-lekerekítéseknél, a 30°-os érintő irányában.
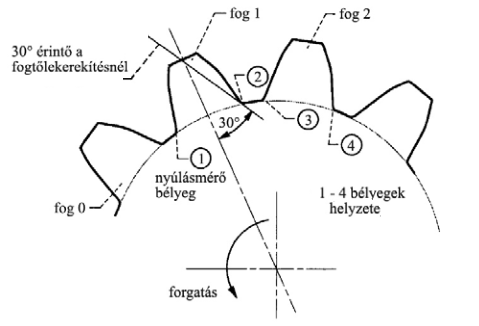
A kalibrálás során a normál és tangenciális erőkomponenseket szétválasztották. A dinamikus normál irányú erőt és a fogsúrlódási erőt különböző nyomatékokkal, szögsebességekkel és terhelésekkel kapott mérési eredményekből számították ki. Példaként, a kapott eredmények illusztrálására, következő ábrán 800/min fordulatszámon és 71,1 Nm terhelő nyomaték mellett kapott dinamikus erőértékeket látjuk.
A legfrissebb, témával foglalkozó, hazai tudományos munkák közül Csobán Attila PhD disszertációját [7.6.] azért emeljük ki, mert az általa feldolgozott szakirodalom mennyisége tiszteletet érdemlő. A dolgozat irodalomjegyzésében 38(!) forrásmunka foglalkozik a fogsúrlódás elméleti és kísérleti meghatározásával.
A fogsúrlódás témájával PhD disszertációjában ugyancsak átfogóan foglalkozott a már említett munkájában Keresztes R. Zs. [7.3.] is. A dolgoztában több fogsúrlódási számítási módot mutat be, ezek között idézi a Shell cég által közölt tapasztalati képletet is:
|
|

ahol
|
μ |
Fogsúrlódási tényező |
|
|
η [mm2/s] |
Kinematikai viszkozitás |
|
|
r [mm] |
Kapcsolódó fogaskerekek egyenértékű sugara a főpontban |
|
|
vt [m/s] |
Tangenciális sebességek összege a főpontban |
A szakirodalom tanulmányozása során megállapíthatjuk, hogy sokan és sokféle módon kísérelték meg a fogsúrlódási tényező előzetes becslését, hiszen ez a hajtómű tervezéséhez elengedhetetlenül fontos. Ez a jegyzet nem vállalkozhat arra, hogy a problémát teljes mélységében bemutassa, szerepe csak annyi, hogy felhívja a figyelmet azokra a tényezőkre, amelyek a pontos modellezést nehezítik.
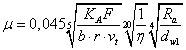
Még egy, a tervezői körökben ismert számítási módot bemutatunk, azért, hogy a probléma összetettségét érzékeltethessük. A fent bemutatott számításhoz képest a Niemann [7.7.] által javasolt formula kisebb súlyt helyez a kinematikai viszkozitási tényezőre, de megjelenik benne az üzemtényező (KA), a kerületi erő (F), a fogak szélessége (b), a kiskerék gördülőkörének átmérője (dw1) és az átlagos felületi érdesség (Ra) is. A többi jelölés az előző képletben is megtalálható:
|
|
A Shell-féle és a Niemann-féle képlet - többek mellett - mindkét fent említett disszertációban is szerepel.
A műszaki műanyag és acél fogaskerék párosítás tribológiai viszonyaival foglalkozó munkában [7.3.] olvashatjuk, hogy az evolvens fogfelületeken keletkező vs csúszási sebesség az érintőlegesen fellépő vt1 és vt2 sebességek különbsége:
|
|

A következő ábrán az idézett szerző által definiált a geometriai viszonyok láthatóak, a tangenciális sebességek meghatározásához:
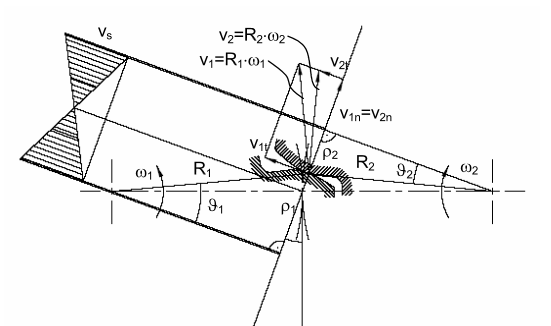
Keresztes szerint az érintőleges sebességek a geometria alapján az alábbiak szerint számíthatóak:
|
|
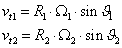
Az összefüggések átalakíthatóak az érintkező evolvensek ρ1 és ρ2 görbületi sugarainak felhasználásával:
|
|

És a fentiekkel:
|
|

Ez a két összefüggés már alkalmas a struktúra gráfban való megjelenítésre. A csúszási sebesség is meghatározható:
|
|
Tekintettel arra, hogy a csúszási sebesség felületek között egyenes vonalú mozgás formájában lép fel, a struktúra gráfban a fogaskerekek szögsebessége mellett, szükség van két olyan váltó jellegű átalakítóra, amelyek a két tangenciális sebességet előállítják. A gráfban mindkét tangenciális sebesség egy-egy csillapítási tényező egyik csomópontjaként jelenik meg, a másik csomópont mindkettőnél a referencia.
A hajtóműből „kicsatolt” legfontosabb veszteségi teljesítmények (csapágyazás, fogsúrlódás) így ábrázolhatóak a legegyszerűbben.
A gráf továbbá arra is lehetőséget ad, hogy a referenciára vonatkoztatott tangenciális sebességek (vt1 és vt2) különbségével a fogsúrlódási erőt kifejezhessük:
|
|

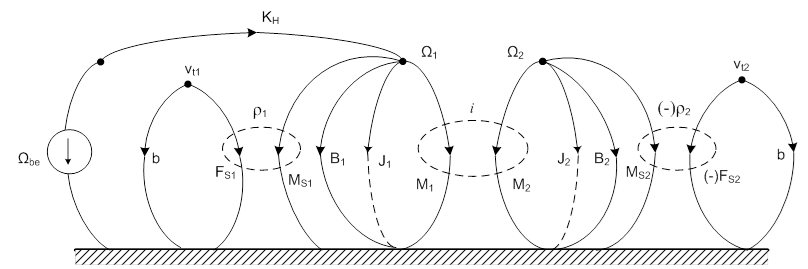
A gráf jobbszélén látható transzformátor negatív előjel jelzi, hogy a fogsúrlódási erő a két tangenciális sebesség különbségével függ össze. Ugyanakkor az előjelet zárójelbe tettük, mert ezzel szeretnénk érzékeltetni, hogy a tervezés fázisában jobb nagyobb veszteséget becsülni, és ezért az egyszerűsített gráfban ezt az előjelet nem vesszük figyelembe. A csapágysúrlódási veszteségek a gyártók adatai alapján becsült értékek, és mérés nélkül előzetesen csak nagyságrendjük becsülhető. Vannak a hajtóművekben további veszteségek is, amelyeket a gráfban nem tüntettünk fel. Tehát, figyelembe véve, hogy a szakirodalomban fellelhető mérési eredmények egyöntetűen jelzik a fogsúrlódási és a csapágyazási veszteségek összemérhetőségét, célszerű élni a gráf által felkínált egyszerűsítési lehetőséggel.
Az impedancia módszernél bemutatott eljárással átszámítjuk a fogsúrlódással kapcsolatos csillapítási tényezőt a csapágysúrlódásokhoz:
|
|
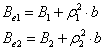
Az átszámítás révén a párhuzamos csillapítási tényezők összeadódnak, és a gráf leegyszerűsödik.
A további számításokban, amikor például a hajtóművet a DC-motorhoz kapcsoljuk, a csillapítási tényezők jelölésénél az eredőre utaló „e” betűt nem alkalmazzuk, minden esetben feltételezzük, hogy a hajtómű két legfontosabb súrlódásos vesztesége a forgó csillapítási tényező segítségével, összevontan modellezhető.
A részletes bemutatás célja az volt, hogy a hajtóműben lejátszódó dinamikai jelenségek jobban követhetővé váljanak.
A rendszer forrása keresztváltozó (fordulatszám, szögsebesség), amint az DC motorok és léptetőmotorok esetében, az összekapcsolás révén, érthető is. Ha a forrás forgatónyomaték lenne, akkor a forrással sorba kapcsolt rugómerevség szerepe megszűnne, ezen az előírt forrásérték „áthalad”, és nem szükséges csomóponti egyenlet a hajtómű kimeneti szögsebességének felírásához sem, hiszen az átviteli függvény ebben az esetben impedancia módszerrel egy egyszerű fizikai egyenlettel adódik (általános Ohm törvény).
A rendszer keresztváltozó forrás esetében másodrendű, mert a rugómerevség mellett nem két tehetetlenségi nyomaték, hanem egy eredő lesz a mértékadó. Azért eredő, mert Ω1 és Ω2 változók nem függetlenek egymástól. A referencia közös, a két érték pedig az „i” módosítás révén összefügg. A dinamikai modell szempontjából Ω1 érdektelen, ezért mind a most bemutatásra kerülő csomóponti módszernél, mind pedig a később ismertetett impedancia módszer esetében elimináljuk.
7.1. Hajtómű modell csomóponti módszerrel, ideális hajtómű, „redukció”
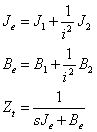
A csomóponti módszert azért alkalmazzuk, mert Ωbe és Ω2 keresztváltozók között keresett a matematikai kapcsolat. A fentiek alapján a két csomópont valójában egy, de első lépésben külön-külön kezeljük őket. Legyenek a csomópontokból kifelé mutató gráf élek előjelei pozitívak:
|
|
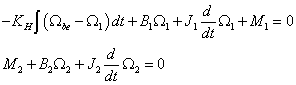
A két csomóponti egyenlet egymásba fűzhető, ha társítjuk hozzájuk a transzformátor két nélkülözhetetlen egyenletét is. Ezek, mint tudjuk, az „ideális” hajtómű egyenletei. Ideális azért, mert semmilyen paramétert (energiatárolás, súrlódás) nem veszünk figyelembe, az átalakítás veszteségmentes:
|
|
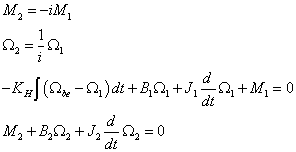
Egymásba helyettesítés után az alábbi egyenletet kapjuk:
|
|

Laplace transzformáljuk a behelyettesítés után kapott egyenletet, és a változók szerint rendezzük:
|
|

Rendezés, és az operátorral való szorzás után kapjuk az alábbi alakot:
|
|

Végül az operátortól független taggal való osztást követően kapjuk a másodrendű rendszer egy lehetséges matematikai modelljét, az átviteli függvényt:
|
|
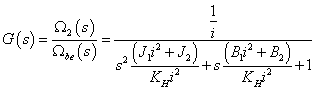
Az átviteli függvény nevezőjében jellegzetes tagokat látunk. A gráf baloldalán szereplő, és a kiiktatott változóhoz tartozó együtthatók rendre i2 szorzóval jelennek meg. Ezt redukciónak nevezi néhány, a hajtómű témával foglalkozó irodalom, ami azt jelenti, hogy a hajtómű kimeneti paramétereihez a bemeneti oldali paraméterei nem közvetlenül, hanem csak a transzformátor-állandó négyzetével súlyozottan adhatók hozzá. A redukciót (és az eddig bemutatott modellt) csak kotyogásmentes hajtások esetén lehet alkalmazni, különben az egyes részeket külön-külön kell vizsgálni „free-body” diagramjaik alapján. Fontos ezen a helyen megjegyezni, hogy amennyiben a bemeneti oldalra „redukáljuk” a kimenetit, akkor viszont a kimeneti oldal kell paramétereit (1/i)2 súlyzótényezővel kell figyelembe venni a bemeneti oldalon. Ez utóbbi eset fordul elő akkor, ha a hajtó motor „szemszögéből” vizsgáljuk azt, hogy mekkora eredő tehetetlenségi nyomatékot kell figyelembe venni a gyorsításnál. Erre a számításra látunk a későbbiekben példát is, amikor a golyósorsós finompozicionáló tervezését mutatjuk be.
Az átviteli függvény arról tanúskodik, hogy a hajtómű, rezgésre hajlamos, csillapított másodrendű rendszer.
7.2. Hajtómű modell meghatározása impedancia módszerrel
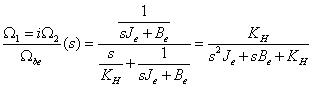
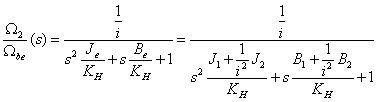
A gráf struktúrája szinte „kínálja” az impedancia módszerrel való műveleteket, a kapcsolást lényegesen egyszerűsítő összevonásokat. Az impedancia módszer „rajzos”, egyszerűsítő eljárás, amelynek célja a kimenő változóhoz illeszkedő „osztó” kapcsolás előállítása. Esetünkben keresztváltozó a kimenőjel, tehát keresztváltozó osztót kell létrehoznunk. A redukció során kevesebb elemet kell átszámolni, ha a kimeneti oldal egyenértékeit keressük a bemeneti oldalon. A keresett változó természetesen nem Ω1, hanem Ω2, de ez nem jelent gondot, mert közöttük a módosítás teremt kapcsolatot.
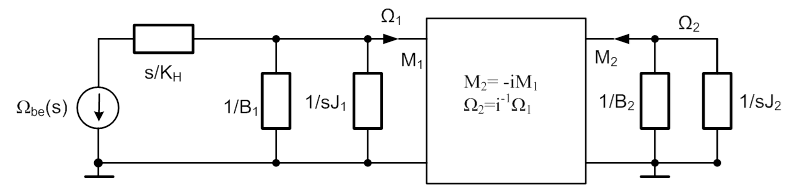
A redukció és az összevonások után az alábbi egyszerű keresztváltozó osztót kapjuk. A csillapítások és a tehetetlenségi nyomatékok eredő impedanciáit természetesen ugyancsak össze kell vonnunk, és az osztó egyben az átviteli függvény implicit formája lesz:
|
|
A keresett átviteli függvény tehát a legegyszerűbb felírási módszerrel:
|
|
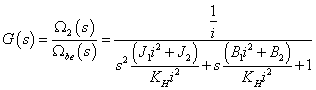
A végső forma - némi átalakítás után - az alábbi lesz:
|
|
Vegyük észre, hogy ez az átviteli függvény megegyezik a csomóponti módszerrel kiszámított matematikai modellel. Ha ugyanis a nevezőben azoknál a tört együtthatóknál, amelyekhez a Laplace operátor kapcsolódik, a számlálót és a nevezőt is beszorozzuk i2-tel, akkor a már korábban látott alakhoz jutunk.
|
|
A példában szándékosan redukáltunk először a kimeneti, majd az impedancia módszernél a bemeneti oldalra, hogy didaktikai szempontból meggyőző legyen az olvasó számára a redukció eredménye mindkét irányban.
7.3. Kotyogásos hajtómű nemlineáris modellje
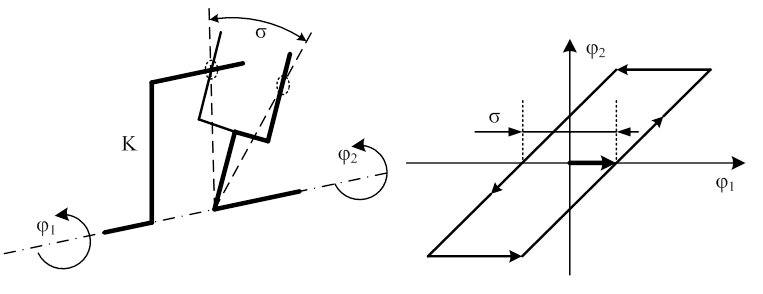
A hajtómű, és más forgó mechanikai rendszerek kotyogásainak (holtjátékának, irányváltási hibájának) modellezésére többféle változat létezik, egy lehetséges formát tárgyal az E. Kallenbach és G. Bögelsack szerzőpáros a Gerätetechnische Antriebe című munkában [7.1.]. Egy, az idézett műben található modell módosított változatát mutatjuk be a következő ábrán. A szemléletesség kedvéért a leíró függvény erősen torzított, a kotyogás aránytalanul fel van nagyítva.
Hasonló modellel dolgozik D. Strobl [7.8.], aki nemlineáris mechatronikai rendszerek (építőelemek) szimulációját és szabályozását neurális hálóval és megfigyelővel végezte el, valamint M.J. Reiner [7.9.] is, a rugalmas és nemlineáris robotstruktúrákkal foglalkozó munkájában.
Forgó mozgás esetére, például hajtóművek kotyogásának modellezésére mindhárom, előbb idézett munkában találhatunk példákat.
A modellben a bemeneti oldalon φ1, a kimenetin φ2 szög látható. A kotyogás szögét, amely a foghézagok eredőjét testesíti meg, σ jelöli. A modell magyarázó ábráján két hajtókart látunk, amelyek közül az egyik villás kiképzésű. A bemeneti hajtókar forgástengelyre vonatkoztatott felütközési pontjai között található a kotyogás (holtjáték) szöge. A jelenséget leíró függvény egy lehetséges változata az ábra mellett, jobbra látható. A kiindulási pontot a holtjáték közepére tettük. A modellben feltételezhetünk egy „K” torziós tengelyrugalmasságot is.
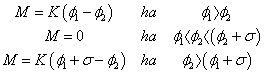
Reiner [7.9.] disszertációjában a következő modellt találhatjuk:
|
|
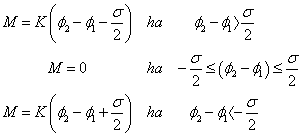
A kotyogás leírását némiképp eltérő megfogalmazását látjuk a [7.1.] munkában:
|
|
Pozicionáló rendszerek esetében a tervezők mindent elkövetnek, hogy a holtjátékot kiküszöböljék, hiszen ez a nemlinearitás gondot okozhat a szabályozás tervezése során.
A probléma megoldása régóta ismert, a kotyogásmentes hajtómű formájában. Ebben található egy olyan osztott fogaskerék, amelyeknek fogai torziós rugóval vannak egymáshoz képest szögben megfeszítve. A holtjátékot golyósorsós mozgás-átalakító esetében kettős anya közötti rugós feszítéssel szűntetik meg. Az előfeszítés egyik esetben sem lehet akkora, hogy a kopást lényegesen megnövelje. A gyártók a várható terhelés függvényében történő előfeszítés mértékére irányértékeket szoktak adni.
Szakirodalom
[7.1.] Gerätetechnische Antriebe. Verlag Technik GmbH. Berlin . 1991.
[7.2.] Mechatronische Systeme. Springer Verlag. Berlin . 1999.
[7.3.] Műszaki műanyag/acél csúszópárok tribológiai kutatása PhD Disszertáció. SzIE. 2009.
[7.4.] Instantaneous Coefficients of Gear Tooth Friction. ASLE Transactions. PP 59-70.. 1961.
[7.5.] Measurement of Gear Tooth Dynamic Friction NASA Technical Memorandum 107279. Army Research Lab.. 1996.
[7.6.] Bolygóművek hő-teherbírásának meghatározása PhD Disszertáció. BME. 2011.
[7.7.] Maschinenelemente Bd. II. Springer Verlag. Berlin . 1989.
[7.8.] Identifikation nichtlinearer mechatronischer Systeme mittels neuronaler Beobachter. Herbert Utz verlag. München . 1999.
[7.9.] Modellierung und Steuerung von strukturelastischen Robotern. PhD Dissertation. TU München . 2010.