13. fejezet - Szervopneumatikus rendszer szakaszának modellje
- 13.1. A munkahenger modellezési problémái
- 13.2. A szervopneumatikus pozícionáló rendszer bemutatása
- 13.3. A munkahenger, mint szakasz modellje
- 13.4. A szervopneumatikus rendszer állapottér modellje
- Szakirodalom
13.1. A munkahenger modellezési problémái
A 6.2. szakasz fejezetben a pneumatikus munkahenger modelljének egyszerűsített változata már bemutatásra került, amely modell elsősorban a fordító váltó típusú rendszerek modellezésének bemutatását tartotta szem előtt. A valós rendszer működését pontosabb közelítéssel leíró összefüggések ettől természetesen részben eltérnek, hiszen más célból kerültek megfogalmazásra, felírásra. A pneumatikus munkahengerekkel felépített rendszerre jellemző nehéz pozícionálhatóság több tényező eredménye, amelyek a hatékony működtetés szempontjából nem elhanyagolhatóak. A modellezés során mechatronikai szemszögből több rendszertípust (mechanikai egyenes vonalú, fluid, villamos, termikus) egy berendezésen belül egyszerre alkalmazunk, mely a műszaki ismereteink alapján megalapozott elhanyagolásokkal együtt is összetett rendszerleírást eredményez. A szervopneumatikus rendszer modelljéhez alapvetően két úton is eljuthatunk. Az egyik, a 6.2. szakasz fejezetben bemutatott út, amikor a rendszert eleve átgondoltan linearizált energiatárolókból és disszipatív elemekből építjük fel. A másik úton a mechanika, termodinamika, áramlástan alapösszefüggéseit felhasználó egyenletrendszerből kiindulva jutunk el a rendszer matematikai modelljének felírásáig, bemutatva az egyes összefüggések nemlineáris jellegét.
13.2. A szervopneumatikus pozícionáló rendszer bemutatása
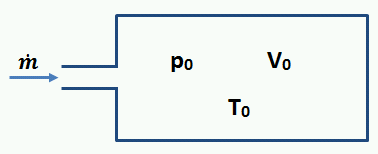
A szabályozott szakasz bármely dugattyúrudas, vagy dugattyúrúd nélküli hengerre érvényes, amelyekbe a beáramló tömegáram szabályozását proporcionális szervo szelepek végzik. A szervopneumatikus pozícionálás elvi felépítését az alábbi ábra szemlélteti.
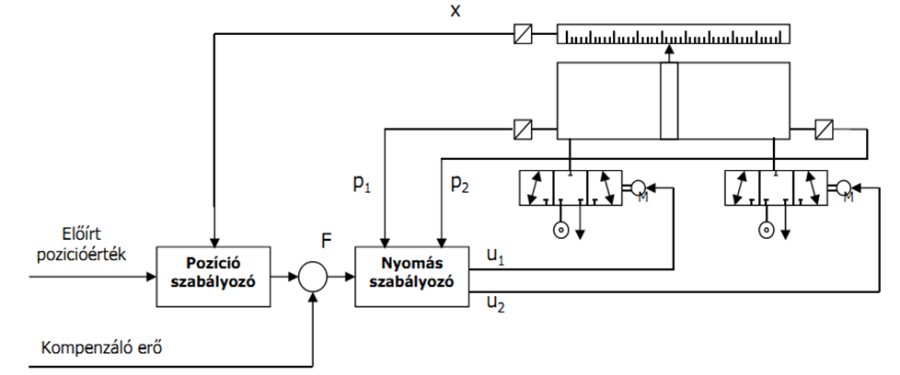
A modellezés szempontjából elsődleges fontosságú a szabályozott szakasz, amibe jelenleg a beavatkozó szervet is (jelen esetben a szelepet) beleértjük. A rendszerben a szelepek feszültségének állításával befolyásoljuk a szervoszelepeken átáramló levegő mennyiségét. A munkahengerbe áramló levegő hatására a munkahenger kamrái között nyomáskülönbség jön létre, mely a munkahenger dugattyújára erőt fejt ki. Amennyiben a nyomáskülönbségből fakadó erő a súrlódás leküzdéséhez elegendő, a dugattyú elmozdul. A modell felírása során kapcsolatot kívánunk teremteni a szelepet vezérlő feszültség (u) és a munkahenger dugattyújának elmozdulása (x) között.
13.3. A munkahenger, mint szakasz modellje
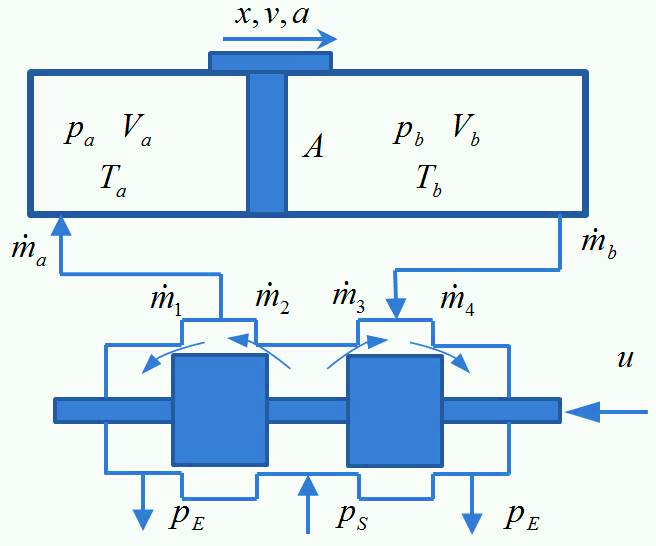
A szervopneumatikus rendszerek döntő többségében a munkavégző elem egy dugattyúrúd nélküli munkahenger, melynek felépítése az alábbi ábrán látható. Ez a típus modellezés szempontjából a dugattyúrudas kivitelű munkahengerekhez képest éppen a dugattyúrúd hiánya miatt előnyös, hiszen ebben az esetben a dugattyú kamranyomásokkal terhelt keresztmetszete mindkét oldalt azonos nagyságú.
![Dugattyúrúd nélküli munkahenger felépítése [13.4.]](images/image_XIII_2.png)
A munkahengert két változó térfogatú kamraként modellezzük, melynek elmozduló falait a dugattyú egy-egy oldala alkotja. A rendszer leírásához meg kell határoznunk az összefüggéseket a dugattyú mozgása, a kamrákban lévő levegő állapotváltozói, és a kamrákba beáramló levegő tömegáramai közt.
A pneumatikus rendszer modellezése során szereplő fizikai mennyiségek:
|
x |
[m] |
pozíció |
|
|
v |
[m/s] |
sebesség |
|
|
a |
[m/s2] |
gyorsulás |
|
|
l |
[m] |
munkahenger lökethossz |
|
|
m |
[kg] |
mozgatott tömeg |
|
|
F |
[N] |
erő |
|
|
p |
[Pa] |
nyomás |
|
|
k |
[N/m] |
rugómerevség |
|
|
T |
[K] |
hőmérséklet |
|
|
A |
[m2] |
dugattyú keresztmetszet |
|
|
A sz |
[m2] |
szelep átömlési keresztmetszet |
|
|
|
[kg/s] |
tömegáram |
|
|
Q |
[J] |
közölt hőmennyiség |
|
|
W f,1→2 |
[J] |
térfogati munka |
|
|
ρ |
[kg/m3] |
sűrűség |
|
|
v g |
[m/s] |
gáz áramlási sebesség |
|
|
c |
[J/(kg*K)] |
fajlagos hőkapacitás |
|
|
κ |
[-] |
adiabatikus kitevő |
|
|
R |
[J/(mol*K)] |
specifikus gázállandó |
|
|
|
[m3/s] |
térfogatáram |
|
|
α |
[-] |
átömlési tényező |
|
|
Ψ |
[-] |
tömegáram paraméter |
|
|
u |
[V] |
feszültség |


13.3.1. A munkahenger mozgásegyenlete
Elsőként írjuk fel a mozgásegyenletet a dugattyúra, mely az erők egyensúlyi egyenletének felírásával történik. A felíráshoz valamely irány pozitív előjelű kijelölése szükséges, azaz példának okáért a jobbra haladó mozgásirány legyen pozitív előjellel jelölve. Ez akkor teljesül, ha az „a” oldali kamranyomás a „b” oldali kamranyomásnál legalább annyival nagyobb erőt fejt ki a dugattyúra amekkora a súrlódás leküzdéséhez szükséges. Az ezen felüli erőkülönbség a dugattyú –és a mozgatott tömeg- gyorsítására fordítódik.
|
|
(13.1) |
A dugattyú a illetve b oldalán levő nyomásból származó dugattyúra ható erő Fa és Fb:
|
|
(13.2) |
|
|
|
(13.3) |


a dugattyú sűrített levegővel érintkező felülete az a illetve b kamrarészben, pa, és pb a kamrákban uralkodó nyomás.
A rendszer dinamikus viselkedését a súrlódás, különösen a közeg –sűrített levegő- összenyomhatósága miatt, nagymértékben befolyásolja. A súrlódás leírására az egyszerűbb esetekben a kvázi statikus súrlódási modellek alkalmazhatóak, amikor is a mozgás iránya gyakran változik, a dugattyú mozgásának sebessége pedig nem túl nagy. A modellek közül az egyik legegyszerűbb a Coulomb súrlódás, mely két szilárd test között lép fel és egy konstans nagyságú, a mozgás irányával ellentétes irányba ható erővel írható le. Fontos megjegyezni, hogy míg a mechanikai rendszerek nagy részében a Coulomb súrlódás a felületek közötti normálerő és a köztük jelentkező súrlódási együtthatóból az  összefüggéssel felírható, addig a pneumatikus rendszereknél a súrlódást jelentős részben a dugattyú tömítésének hengercsőbe feszülése okozza, mely az összeszerelés pillanatától jellemzi a munkahengert. Ez ahhoz vezet, hogy a súrlódás Coulomb összetevője (FC) az imént említett összefüggéssel nem számítható. A súrlódás leírását tovább nehezíti, hogy a legtöbb munkahengerben ajakos tömítés található, melyeknél - a tömítés alakja miatt- a kamrában uralkodó nyomás az ajakos részt a hengercsőnek feszíti, így egy nyomástól is függő súrlódási erőt okoz. Ha utóbbitól eltekintünk a Coulomb súrlódás összefüggése:
összefüggéssel felírható, addig a pneumatikus rendszereknél a súrlódást jelentős részben a dugattyú tömítésének hengercsőbe feszülése okozza, mely az összeszerelés pillanatától jellemzi a munkahengert. Ez ahhoz vezet, hogy a súrlódás Coulomb összetevője (FC) az imént említett összefüggéssel nem számítható. A súrlódás leírását tovább nehezíti, hogy a legtöbb munkahengerben ajakos tömítés található, melyeknél - a tömítés alakja miatt- a kamrában uralkodó nyomás az ajakos részt a hengercsőnek feszíti, így egy nyomástól is függő súrlódási erőt okoz. Ha utóbbitól eltekintünk a Coulomb súrlódás összefüggése:
|
|
(13.4) |
A jelenség egy másik megközelítése a viszkózus súrlódás, mely főként a folyadékokra jellemző, az anyag belső súrlódását írja le. A viszkózus súrlódási erő egyenesen arányos a mozgás sebességével, iránya azzal ellentétes:
|
|
(13.5) |

ahol b a folyadékra jellemző csillapítási tényező.
Az említett két súrlódási modell eredője még mindig nem ad pontos közelítést a nulla körüli sebességek esetében, arra jó közelítéssel a Stribeck-féle modell alkalmazható, melyet a következő egyenlet ír le:
|
|
(13.6) |
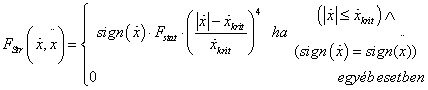
ahol Fstat a tapadási súrlódási, vagy álló helyzetben fellépő maximális súrlódási erő.  az a kritikus sebesség, mely alatt az akadó csúszás jelensége figyelhető meg. Ezt legegyszerűbben úgy képzelhetjük el, mintha egy rugó segítségével mozgatnánk a testet: ha elkezdjük húzni a rugót állandó sebességgel, a test nem mozdul, amíg a rugón keresztül átadódó erő el nem éri az Fstat-ot, eközben a rugó nyúlik. Amikor átlépjük a maximális súrlódási erőt, akkor mivel a csúszási súrlódási együttható kisebb, mint a tapadási, nagyobb sebességgel indul el a test, mint amivel a rugót húzzuk, így elkezdi behozni lemaradását, kvázi utoléri azt. A rugó megnyúlása, ezáltal a rugón keresztül átadódó erő csökken, aminek következtében a test újra megáll, és a jelenség kezdődik elölről. Ezt a jelenséget hívják akadozó-csúszási súrlódásnak (stick-slip). Az akadozó csúszás kevésbé érvényesül, ha nagyobb sebességgel mozgatjuk a testet, illetve egy kritikus sebesség (
az a kritikus sebesség, mely alatt az akadó csúszás jelensége figyelhető meg. Ezt legegyszerűbben úgy képzelhetjük el, mintha egy rugó segítségével mozgatnánk a testet: ha elkezdjük húzni a rugót állandó sebességgel, a test nem mozdul, amíg a rugón keresztül átadódó erő el nem éri az Fstat-ot, eközben a rugó nyúlik. Amikor átlépjük a maximális súrlódási erőt, akkor mivel a csúszási súrlódási együttható kisebb, mint a tapadási, nagyobb sebességgel indul el a test, mint amivel a rugót húzzuk, így elkezdi behozni lemaradását, kvázi utoléri azt. A rugó megnyúlása, ezáltal a rugón keresztül átadódó erő csökken, aminek következtében a test újra megáll, és a jelenség kezdődik elölről. Ezt a jelenséget hívják akadozó-csúszási súrlódásnak (stick-slip). Az akadozó csúszás kevésbé érvényesül, ha nagyobb sebességgel mozgatjuk a testet, illetve egy kritikus sebesség ( ) felett a hatása elhanyagolható. Ezt a tendenciát írja le a fenti Stribeck-féle modell. A határsebességet az alábbi képlet írja le:
) felett a hatása elhanyagolható. Ezt a tendenciát írja le a fenti Stribeck-féle modell. A határsebességet az alábbi képlet írja le:
|
|
(13.7) |
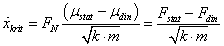
Ahol k a mozgatott rendszer rugóállandója, m a tömege. FN a felületeket összeszorító normál erő, mely egy állandónak tekinthető a dugattyúhoz csatolt rendszer tömegét és az összeszerelés szorító erejét leíró erőből, és egy változó, a munkahenger kamrájában lévő nyomástól (mely a dugattyún lévő tömítőgyűrűt a kamra oldalához szorítja), a kamrában lévő hőmérséklettől, és emiatt (a dugattyú sokáig egy helyben áll akkor letapad) időtől függő erőből áll.
A munkahengert, két változó térfogatú kamraként modellezzük. A modellezés szempontjából a kamrák nyomásának az idő függvényében leírt változása lényeges. A folyamatok végiggondolásával belátható, hogy egy kamrában a nyomás változását az alábbi módokon következhet be:
-
a kamra térfogata változik (dugattyú elmozdul)
-
a kamrában található anyagmennyiség változik (a kamrába sűrített levegőt juttatunk, vagy engedünk ki)
-
a kamra falán keresztül a kamrában található gáz és a környezet között hőcsere megy végbe (a termikus folyamat időállandója az előző két változáshoz képest nagyobb - hatását lényegesen lassabban fejti ki-, így -a modellezést némileg egyszerűsítve- ezzel a továbbiakban nem számolunk, azaz adiabatikus folyamatot feltételezünk).
A fejezetrészben az említett folyamatok részletes leírására kerül sor.
A nemlineáris modellel kapcsolatban az alábbi kikötéseket, egyszerűsítéseket tesszük meg:
-
A kamrában adiabatikus folyamatok mennek végbe, így a hőátadást a kamrák és a környezet között elhanyagoljuk,
-
A kamrában lévő gáz ideális,
-
A kialakuló áramlások egy dimenziósak,
-
stacionáriusak.
A gáz állapotváltozóinak meghatározásához, alábbi egyenleteket használjuk fel. Mivel a leírás a szakirodalomban több helyen részletes bemutatásra kerül, itt csak az egyenletek rövid magyarázattal kerülnek bemutatásra:
-
Állapotegyenlet (itt m a gáz tömegét jelöli):

(13.8)

(13.9)
-
Termodinamika I. Főtétele zárt rendszer esetén, ahol Q a közölt hőmennyiség; Wf a térfogati munka:
(13.10)
Ahol
 ;
;  ,
, melyre érvényes:

-
A specifikus gázállandó:

(13.11)
-
Az adiabatikus kitevő:

(13.12)
A kamrában lévő levegő nyomásviszonyait, a nyomást leíró függvény változásának vizsgálatával érthetjük meg:
|
|
(13.13) |

Az egyes tagok vizsgálatára a következő fejezetrészben kerül sor.
13.3.2.1. A nyomás változása hőmérsékletváltozás hatására
|
|

A nyomás megváltozását írja le a hőmérsékletváltozás hatására, miközben a térfogat és a gáz tömege állandó. A térfogat és a tömeg állandóságából következik, hogy hőmérsékletváltozás csak hőközlés útján jöhet létre. Mivel adiabatikus folyamatváltozást tételeztünk fel, ettől a tagtól, ahogy a bevezetőben már említésre került, a továbbiakban eltekintünk.
13.3.2.2. A nyomás változása a térfogatváltozás hatására
|
|

Írja le a nyomás megváltozását a térfogatváltozás hatására, miközben a kamrában lévő hőmérséklet és a gáz tömege állandó. A térfogat megváltozását, a munkahenger dugattyújának elmozdulása okozza. A dugattyú munkáját felírva a rendszerre (mely a tömeg állandóságából következően zártnak tekinthető), az energiaegyenlet (13.10) (izochor folyamatváltozás esetében):
|
|
(13.14) |

Felhasználva az ideális gáz állapotegyenletét (13.8) és a szorzatfüggvények deriváltjára vonatkozó szabályt:
|
|
(13.15) |

Rendezve, és behelyettesítve az izochor és izobár fajhők közti összefüggést (13.12) az alábbi alakot kapjuk:
|
|
(13.16) |

Az adiabatikus kitevőre vonatkozó összefüggést (13.12) behelyettesítve:
|
|
(13.17) |

Ez alapján a nyomás megváltozása:
|
|
(13.18) |
13.3.2.3. A nyomás változása az anyagmennyiség változásának hatására
|
|

A gáz nyomásának megváltozását írja le a tömeg változásának hatására, miközben a kamra térfogata, és a gáz hőmérséklete állandó. Mivel a kamra térfogata állandó, a tömegváltozás a sűrűség megváltozását eredményezi:
|
|
(13.19) |

mivel V állandó, így:
|
|
(13.20) |

Az állapotegyenletből (13.13) kifejezve p-t, behelyettesítve az adiabatikus állapotváltozásra vonatkozó egyenletbe, megkapjuk a nyomás változását a sűrűség függvényében:
|
|
(13.21) |
Ezt a sűrűség szerint deriválva:
|
|
(13.22) |
A (13.21) egyenletet (13.22)-be helyettesítve:
|
|
(13.23) |

A gáztörvényt (13.9) behelyettesítve kapjuk:
|
|
(13.24) |

Tehát a nyomás megváltozása a tömegváltozás hatására:
|
|
(13.25) |
(13.18) és (13.25) felhasználásával a nyomás változása a munkahengerben:
|
|
(13.26) |

Felhasználható, hogy a térfogatváltozás a dugattyú mozgásából adódik (a henger keresztmetszete nem változik):
|
|
(13.27) |

Behelyettesítve (13.26)-ba:
|
|
(13.28) |
Az összefüggések levezetése után most már figyelembe vehető, hogy a dugattyú jobbra történő elmozdulása - a feltételezett pozitív irányt szem előtt tartva - a bal oldali kamra térfogatának növelésével, míg a jobb oldalinak csökkenésével jár. Az összefüggésben V0a és V0b a két kamra holtterének térfogatát, illetve l a munkahenger lökethosszát jelöli.
|
|
(13.29) |
|
|
|
(13.30) |


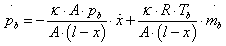
Ugyan általában a gáz az egyik kamrába befelé, míg a másikból kifelé áramlik, ez csak a szelepmodell során lesz figyelembe véve. Itt mindkét kamra töltését leíró egyenlet látható. A munkahenger bal oldali kamrájára:
|
|
(13.31) |

A jobb oldali kamrájára:
|
|
(13.32) |

13.3.3. A nyomáskülönbség hatására fellépő tömegáramok meghatározása [13.3.]
A munkahenger modelljének leírásához meg kell határoznunk az egyes kamrákba be, illetve kiáramló levegő tömegáramát, mely a szelep viselkedése leírásához döntő fontosságú. A rendszer viselkedésére tett kikötések a kamrák nyomásviszonyait vizsgáló fejezetben leírtakkal azonosak. A felíráshoz a továbbiakban felhasználjuk:
-
a gázok áramlásának leírására a Bernoulli egyenletet:
|
|
(13.33) |
-
valamint az adiabatikus állapotváltozásra vonatkozó egyenletet:
|
|
(13.34) |

A tömegáram meghatározásához először a Bernoulli egyenletet (13.33) az áramvonal mentén a kamrából kiáramló gázra kell felírni, feltételezve, hogy a kamrában lévő gáz kvázistatikus állapotban van, így annak sebessége zérus.
|
|
(13.35) |

Az 1-es indexszel a kamrában lévő állapotokat, 2-es indexszel a kiáramló gáz állapotváltozóit jelöljük. Az állapotegyenletből (13.9) kifejezve p-t, behelyettesítve az adiabatikus állapotváltozásra vonatkozó egyenletbe (13.34), megkapjuk a sűrűség változását a nyomás függvényében:
|
|
(13.36) |

ahol p0 a légköri nyomás, illetve ρ0 a légköri nyomáson a levegő sűrűsége. (13.36)–t behelyettesítve (13.35)-be, majd elvégezve az integrálást:
|
|
(13.37) |
A behelyettesítéseket elvégezve, egyszerűsítve, kifejezve v-t megkapjuk a kamrából kiáramló gáz átlagsebességét:
|
|
(13.38) |
Feltételezve, hogy a kiáramló gáz sűrűsége a kiáramlási pontnál időben állandó (stacionárius az áramlás), a tömegáram számítására az alábbi (13.40) összefüggést használhatjuk, valamint, hogy a térfogatáram kiszámítására (13.39) összefüggés érvényes:
|
|
(13.39) |
|
|
|
(13.40) |
|
|
|
(13.41) |


A sűrűségváltozásra vonatkozóan (13.36)–t behelyettesítve a kifejezést alakítsuk át az alábbi formára:
|
|
(13.42) |
Az összefüggést megvizsgálva a szakirodalom a (13.42) összefüggés első gyökjel alatti részét tömegáram paraméternek nevezi, melyet a továbbiakban Ψ-vel jelöljük
|
|
(13.43) |
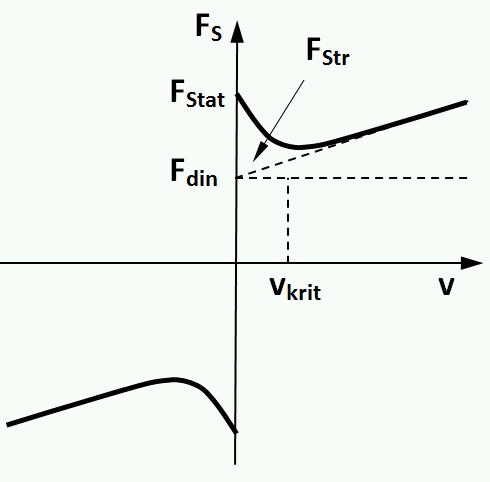
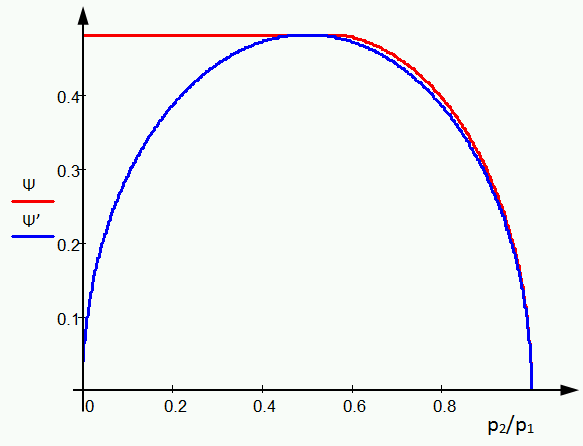
Ψ –t p2/p1 nyomásviszony függvényében ábrázolva, ahol p2 a kilépő oldali illetve p1 a belépő oldali nyomásértéket jelöli.:
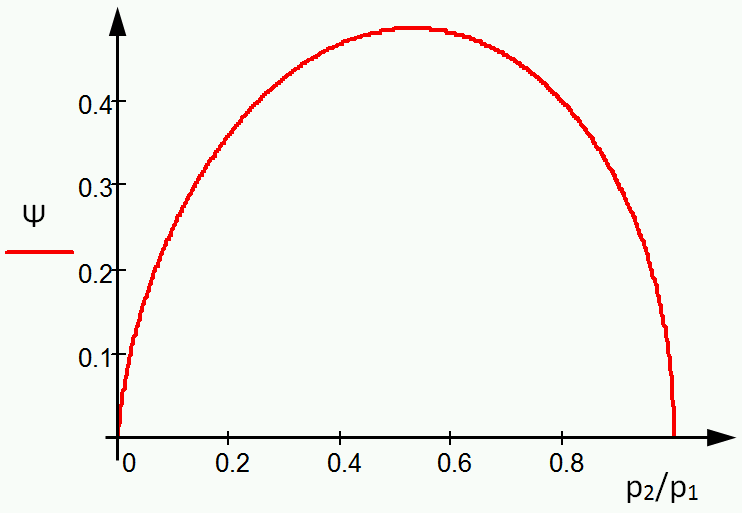
Amint azt láthatjuk, a függvénynek maximuma van. A szélsőérték meghatározásához írjuk fel a függvény deriváltját, majd az alábbi egyenletet megoldva:
|
|
(13.44 |
|
|
|

Az egyenletnek csak a középső tényezője lehet zérus, melyből:
|
|
(13.45) |
Tehát a kritikus nyomásviszony, ideális kétatomos gáz (κ=1.4) esetén
|
|
(13.46) |
A kritikus nyomás kialakulásának megértéséhez vizsgáljuk meg a kiáramló gáz sebességét a kritikus nyomásnál, (13.38)-ba behelyettesítve a (13.9) gáztörvényt:
|
|
(13.47) |
A kilépő gáz hőmérsékletét megkapjuk, ha az adiabatikus állapotváltozásra vonatkozó (13.34) összefüggésbe behelyettesítjük a kritikus nyomás (13.46) értékét.
|
|
(13.48) |

Ezt (13.48) behelyettesítve a sebességképletbe (13.47) azt kapjuk, hogy a kiáramlási sebesség megegyezik a gázban a hang adott hőmérsékletre vonatkozó terjedési sebességével.
|
|
(13.49) |

Ahogy elkezdjük növelni a nyomást a tartályban (vagy a külső nyomást csökkenteni), a nyomáskülönbség által áramlás alakul ki, melynek sebessége a nyomásviszonyoktól függ. A kritikus nyomásviszonyt elérve azt tapasztaljuk, hogy a kiáramlási sebesség és a kilépő gáz állapotváltozói nem változnak. Ezt azzal magyarázhatjuk, hogy a gázokban a nyomásváltozás nyomáshullámként jön létre, mely nyomáshullám terjedési sebessége éppen a hangsebességgel egyenlő, így ha a kilépő gáz sebessége eléri a hangsebességet, a nyomásváltozás nem képes átlépni a kiáramlási keresztmetszetet, a nyomásviszony változása tehát nem tudja módosítani a nyomásmegoszlást a kamra és a kilépési pont között.
Tehát a kritikus nyomásviszony fölött az a tömegáram paraméter állandó marad. A számítások egyszerűsítése végett a paramétert a különböző szakirodalmakban alkalmazott alábbi közelítő függvénnyel közelítjük:
|
|
(13.50) |
A tömegáram alakulása a munkahenger kamráinál:
|
|
(13.51) |
A sűrűségtől való függés, a gáztörvény (13.9) felhasználásával megszüntethető:
|
|
(13.52) |
A tömegáramok számításánál a veszteségek (súrlódás, hő) és az áramlási keresztmetszet geometriai sajátosságai következtében korrekciós együtthatót kell alkalmazzunk, mely α átömlési tényezővel kerül számításra. Ez a korrekciós együttható empirikus módon, az alábbi összefüggés érvényességét szem előtt tartva kerül meghatározásra, melyre a szakirodalomban [13.5.] találunk mérési eljárást, becsült értékeket
|
|
(13.53) |
13.3.4. A szervoszelep modellje
Az alkalmazások jelentős részében egy szervoszelep a tolattyú fordítása, vagy lineáris mozdítása révén szabályozza a munkahenger kamráiba beáramló, illetve az onnan kiáramló tömegáramokat. A szelep a bemenő feszültség alapján változtatja a tolattyú szöghelyzetét vagy pozícióját, mely a szelep átömlési keresztmetszetére van hatással. A tömegáramokat az átömlési keresztmetszetek változása, és a szelep egyes kamráiban uralkodó nyomások befolyásolják. A szelep modelljét az alábbi ábra segítségével érthetjük meg jobban.
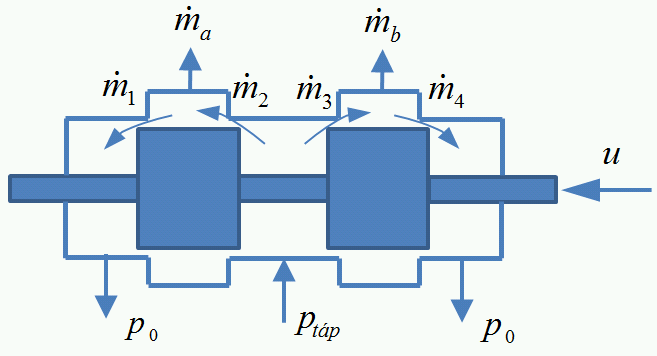
A szelep alsó középső csatlakozójához kötjük a tápnyomást (továbbiakban ptáp, a másik két alsó csatlakozó a leszellőzést biztosítja. A rendszerből távozó levegő nyomását p0-val jelöljük.
A munkahenger levegőellátását a szelep a tápnyomáson keresztül a felső csatlakozókon biztosítja. Az ábrának megfelelően mind a két kamra esetében a kamrát töltő tömegáram ( és
és  ) pozitív. Ugyan fizikai értelemben az ábrán látható szelepkonstrukció esetében ez, hogy egyszerre töltsük mindkét kamrát, nem lehetséges, azonban a tolattyú elmozdulásának megfelelő nyitási keresztmetszetek miatt
) pozitív. Ugyan fizikai értelemben az ábrán látható szelepkonstrukció esetében ez, hogy egyszerre töltsük mindkét kamrát, nem lehetséges, azonban a tolattyú elmozdulásának megfelelő nyitási keresztmetszetek miatt  tömegáramok értékei az egyik kamra tömegáramra negatív előjelet eredményeznek, melyet az alábbi összefüggések írnak le:
tömegáramok értékei az egyik kamra tömegáramra negatív előjelet eredményeznek, melyet az alábbi összefüggések írnak le:
|
|
(13.54) |
|
|
|
(13.55) |


A tömegáramok számítása az előző fejezetrészben tárgyalt módon a tartályból való kiáramlás képletével történik. Miszerint:
|
|
(13.56) |
|
|
|
(13.57) |
|
|
|
(13.58) |
|
|
|
(13.59) |
A szelep tolattyúja másodrendű csillapított rendszerként működik, ahol a rendszer energiatárolóit a tolattyú tehetetlensége, valamint a súrlódásból és kamranyomás ellenállásából adódó csillapítás alkotja.
Matematikailag az alábbi differenciálegyenlettel írható fel, ahol xsz a tolattyú elmozdulása, a Fsz szelep tekercse által a tolattyúra kifejtett erő, mely a szervo-szelepet szabályozó feszültségtől u függ:
|
|
(13.60) |

ahol ω a rendszer körfrekvenciája ξ a csillapítás foka.
A szi szelep geometriai kialakításától függően feltételezzük, hogy a szelep csatlakozójának átömlési keresztmetszete közelítően egyenesen arányos a tolattyú elmozdulásával xsz.
13.4. A szervopneumatikus rendszer állapottér modellje
Az alábbi fejezetrészekben levezetett összefüggések numerikus szimulációval minden további nélkül használhatóak, a munkahenger dugattyújának pozíciója a szelep működtetésének függvényében meghatározható. A rendszer modellezésének szempontjából legfontosabb összefüggések a mozgásegyenlet (13.1) valóságos működést minél jobban megközelítő súrlódási modellel felírt összefüggése, illetve a kamrák nyomásának kialakulása (13.31) (13.32). Amennyiben munkaponti linearizálást használunk, illetve élünk néhány egyszerűsítési lehetőséggel, a rendszer működését leíró legfontosabb négy állapotjelzőhöz köthető modellt kapunk (az állapottér modell részletesebb leírás az 1. fejezet és 5. fejezet fejezetekben található). A mozgásegyenlet ezúttal csak viszkózus súrlódást figyelembe véve:
|
|
(13.61) |
A nyomás kialakulást leíró egyenletek amennyiben a kamrák holtterétől eltekintünk:
|
|
(13.62) |
|
|
|
(13.63) |

Az utóbbi egyenletekből (13.61), (13.62) és (13.63) Látszik, hogy az állapotjelzők (a rendszer működését leíró energiatárolók töltöttségi állapotát leíró állapotjelzők) vektora, kiegészítve a pozícióval a következő:
|
|
(13.64) |

Az állapottér modell főegyenlete:
|
|
(13.65) |
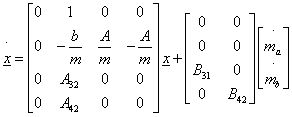
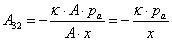
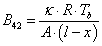
ahol a nyomás kialakulását leíró összefüggések nem csak egy változótól függenek, ezért kezelésük a hagyományos módon nem lehetséges. Így a rendszermátrixban jelölt összefüggések:
|
|
(13.66) |
|
|
|
(13.67) |

a bemeneti mátrix esetében:
|
|
(13.68) |
|
|
|
(13.69) |

Az állapottér modell segédegyenletével határozható meg a keresett változó, esetünkben a pozíció értéke. Ez közvetlenül a kimeneti mátrix egyszerű felírásából kaphat, hiszen a pozíció az egyik állapotjelző is:
|
|
Fontos kihangsúlyozni, hogy ez a felírás csak minden egyes pontban linearizált esetre igaz, továbbá jelen állapottér modell a szelep működését leíró nyitási keresztmetszet, illetve áramlási karakterisztikáit nem tartalmazza! Ezzel együtt látható, hogy a működés szempontjából legfontosabb összefüggés a mozgásegyenlet. A nyomások kialakulását leíró összefüggésekkel jelen a felírás csak becslést ad a dugattyú mozgására.
A rendszer működésének valósághű modellezésére, a fejezetben leírtaknak megfelelően, csak teljes körűen megalkotott, és a valós paraméterek (súrlódási együttható, nemlineáris karakterisztikák) identifikációval történő meghatározása után nyílik lehetőség.
Szakirodalom
[13.1.] Az áramlástan alapjai. Budapest . 1992.
[13.2.] Grundlagen der Gasdynamik. Springer-Verlag. 1976.
[13.3.] Grundlagen der Pneumatik. Carl Hanser Verlag. 2012.
[13.4.] Modular Pneumatic Linear Drive Systems catalouge. Hoerbiger-Origa.
[13.5.] Pneumatikus teljesítmény-átviteli rendszerek áramlástani jellemzői Ph. D. értekezés. Budapest. 2008.
[13.6.] Grundlagen der Fluidtechnik: Teil 2: Pneumatik. Shaker Verlag. 2006.