16. fejezet - A mérésadatgyűjtő számítógép algoritmusai
Algoritmus: valamely feladat megoldási lépéseinek leírása.
Típusi: periodikus , nem periodikus (kezelő vagy egy esemény váltja ki)
Állapot változók: a mérési folyamat állapotát leíró, vagy működését meghatározó analóg illetve mintavételes változók.
Típusai:
-
mért: egy bemenet mérése alapján meghatározott változó érték
-
számított: két vagy több mért értéke alapján képzett (számított) változó érték
16.1. Az analóg és digitális jelek mérése, és előzetes feldolgozása
A mérési feladat elemei a számítógép számára:
-
mintavételezés
-
átkódolás
-
méréskorrekció
-
digitális szűrés
-
átszámítás fizikai értékre
Ezeket a műveleteket a mérést irányító számítógép periódikusan hajtja végre.
16.1.1. Mintavételezés
Csak az állandó mintavételezési idejű rendszerekkel foglalkozunk.
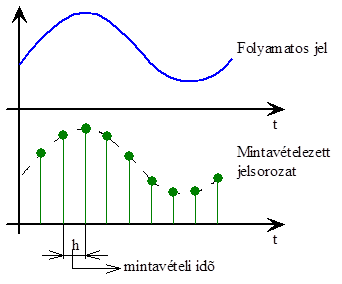
A mintavételezési törvény alkalmazása
Ha a mintavételezendő jel sáv korlátozott, vagyis megadható egy fmax frekvencia, amelynél nagyobb frekvenciájú jelet nem tartalmaz, a mintavételezendő jelet egyértelműen jellemzi az fmax frekvencia kétszeresénél nagyobb frekvenciával vett minták sorozata. A helyesen megválasztott mintavételezési frekvencia tehát:
|
f s > 2*f max |
(16.1) |
ahol
|
a mintavételezés frekvenciája, |
||
|
a mérendő jelben előforduló legmagasabb frekvenciájú komponens. |
Ha csak a feltétellel megadott mintavételi frekvenciát alkalmazzuk, azaz az fmax frekvencia kétszeresével mintavételezünk, nem kapjuk meg azt a mintavételezett jelet, amelyből visszaállíthatnánk az eredeti mintavételezett jelet, mint ahogy azt a 16.2. ábra ábra mutatja.
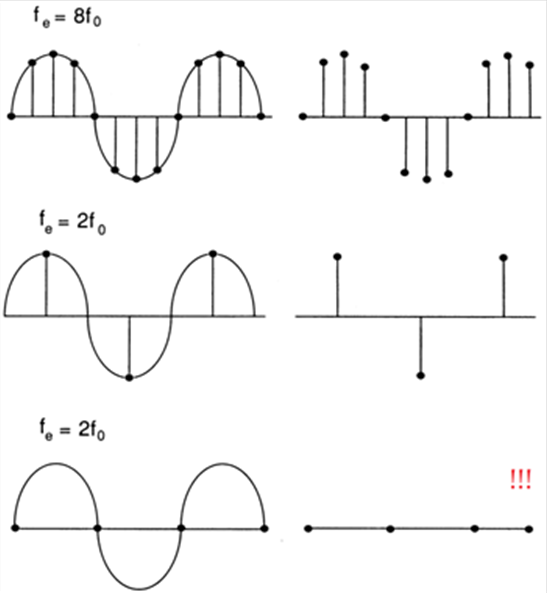
A valóság azonban az, hogy a jelek nem sávkorlátozottak, ezért gyakorlati javaslatot kell adni arra vonatkozóan, hogy milyen értékű legyen a mintavételezés frekvenciája. Ez egy közepes bonyolult matematikai formula, amelyből meghatározható, hogy az alul mintavételezéssel milyen torzítást okozunk.
A gyakorlatban az f max értékének 6-25-szeresével meghatározott mintavételi frekvenciát alkalmazunk ipari berendezésenként f sample -ként!
16.1.2. Átkódolás és kódkonverzió
Átkódolásra szükség van mind az analóg, mind a digitális bemeneti és kimeneti jeleknél egyaránt.
Az analóg bemeneteknél az analóg érték mintavételes átalakításához szükséges lépéseket kell megtennünk. Így az A/D átalakító által szolgáltatott számábrázolási formát át kell alakítani a számítógépben történő számábrázolási formára.
Mivel a digitális jelek ábrázolása a számítógépben az adatátviteli kódoktól eltérő, a megfelelő átkódolási műveleteket programmal kell végrehajtani.
Átkódolásra van szükség az analóg kimenetek és a kezelő számára a megfelelő formátumú táblázatok, naplók előállításához is.
Átkódoláshoz soroljuk a fixpontos/lebegőpontos , illetve a lebegőpontos/fixpontos átalakításokat is. Erre azért van szükség, mert az A/D átalakítók által adott adat, illetve a D/A átalakítók beállításához szükséges adat egész típusú, fixpontos , míg a számítógép általában lebegőpontos formátumban végzi a műveleteket.
Az adatátvitel biztonsága érdekében a digitális be/kimeneti jeleket is sokszor redundáns módon kódolják (a feltétlenül szükséges információn túl további kiegészítő információkat is kódolnak).
A redundáns kódok a torzult információ felismerését, illetve a hiba kijavítását teszik lehetővé.
16.1.3. Méréskorrekció
A méréskorrekció célja a mért értékek pontosságának növelése. A korrekció történhet korrekciós egyenletek alapján, vagy ezek sorba fejtésével kapott közelítő egyenletek alapján, illetve táblázatban megadott adatok felhasználásával. Gyakran alkalmazott korrekciótípus a mérőműszer referencia feltételének megváltozását figyelembe vevő méréskorrekció.
Például
hőelemes hőmérsékletmérés referencia hőmérsékletének megváltozása
|
|
(16.2) |
ahol
|
hőelem által adott feszültség érték |
||
|
a mérendő hőmérséklet |
||
|
hőelem típustól függő konstans érték |
||
|
a környezeti hőmérséklet, kompenzáció hőmérsékleti hely |
Gázmennyiség szűkítő elemes mérésénél alkalmazható korrekciós egyenlet:
|
|
(16.3) |
ahol
|
mért mennyiség |
||
|
mért sűrűség |
||
|
mért hőmérséklet |
||
|
mért nyomás érték |
||
|
névleges sűrűség ([kg/m^3]) |
||
|
névleges hőmérséklet (20 fokC) |
||
|
névleges nyomás érték (1 bar) |
16.1.4. Digitális szűrések megvalósítása a gyakorlatban
A digitális szűrés a számítógépben levő jeleken tetszőleges algoritmussal leírható digitális jelfeldolgozási algoritmus.
16.1.4.1. Átlagoló szűrő
Az átlagoló szűrőt, amely egy FIR típusú aluláteresztő szűrő, a bemeneti mintevételes jel zajszűrésénél alkalmazzák.
|
|
(16.4) |
ahol
|
y[k] |
a kimenő jel az pillanatban |
|
|
u[k-i] |
a bemenő jel az pillanatban |
Az n-edik időpillanatban a jel átlag-értéke (az előző N pont átlaga).
16.1.4.2. Exponenciális szűrő
Az exponenciális szűrőt, a bemeneti mintavételes jel zajszűrésénél alkalmazzák.
|
|
(16.5) |
ahol
|
y[k] |
a kimenő jel az pillanatban |
|
|
y[k-1] |
a kimenő jel az pillanatban |
|
|
u[k-1] |
a bemenő jel az pillanatban |
A szűrő az egytárolós tag mintavételes megfelelője.
Az aluláteresztő szűrő mintavételes algoritmusa:
|
|
(16.6) |
|
|
|
(16.7) |
|
Differenciálegyenlet megoldása, amelynek a differencia egyenlettel történő helyettesítése megadott mintavételi időtartammal:
|
|
(16.8) |
Általánosan
|
|
(16.9) |
A következő időpillanatban a jel értéke rekurzív formulával adható meg (h mintavételi idő esetén.).
16.1.4.3. Logikai adaptív szűrő
A bemeneti jelen megjelenő kiugró értékű véletlenszerű zavarok hatásának kiküszöbölésére alkalmazható.
Az algoritmussal minden egyes mérésnél (mintavételezésnél) meghatározunk (D k ) értékeket, az N darab korábbi értékre vonatkozó jelváltozás gradiens értékét (D k , D k-1 ,..... D k-(N-1) ).
|
|
(16.10) |
|
|
|
(16.11) |
Meghatározzuk ezek átlagértékét és szórását és ennek alapján avatkozunk be a jel szűrésébe.
Ha
|
|
(16.12) |
akkor változatlan szűrőegyenletet alkalmazunk.
Ha
|
|
(16.13) |
A bemeneti jelen nagy értékű pillanatnyi zavarjel jelenik meg, akkor a szűrő kimenetét „befagyasztják”.
|
|
(16.14) |
Ha adott mintavételi idő után a feltétel még mindig fennáll , az azt jelenti, hogy a bemeneti jel megváltozott, ekkor
|
|
(16.15) |
a szűrő algoritmus a megváltozott bemeneti jel környezetében dolgozik tovább.
16.1.4.4. Másodrendű szűrő
|
|
(16.16) |
Differenciálegyenlet differencia egyenletté alakításával kapjuk.
|
|
(16.17) |
|
|
|
(16.18) |
|
|
|
(16.19) |
Látható, hogy a kimenet meghatározásához a k. időpillanatban a megelőző két mintavételi időpillanatban szükséges a kimenet ismerete. Ez általánosan is igaz, ahányad rendű a szűrő, annyi korábbi mintavételi időpillanatbeli kimeneti jel értékre van szükségünk a szűrési egyenlet kiszámításához.
16.1.5. Átszámítás fizikai értékekre
A fizikai értékekre való átszámítás az A/D átalakító által szolgáltatott mintavételes adatot visszaalakítja fizikai mértékegységekben kifejezett értékké annak érdekében, hogy a folyamatváltozó feldolgozásakor közvetlenül a folyamatváltozó valós értékét alkalmazhassuk.
Az átszámítás lineáris jelleggörbéjű jeladó esetén az adat lineáris transzformációját jelenti.
|
|
(16.20) |
ahol
|
m |
a folyamatváltozó fizikai mértékegységben kifejezett értéke |
|
|
m kezdő |
a folyamatváltozó fizikai mértékegységben kifejezett kezdőértéke |
|
|
m végső |
a folyamatváltozó maximális értéke A/D átalakítónál |
|
|
p |
a folyamatváltozó A/D átalakítás utáni számértéke |
|
|
p kezdő |
kezdőérték az A/D átalakításnál |
|
|
p végső |
végérték az A/D átalakításnál |
|
|
(16.21) |
|
folyamatváltozó |
m kezdő = 10at |
m = 17.5 at |
m végső = 25 at |
|---|---|---|---|
|
áramtávadó |
4 mA |
12 mA |
20 mA |
|
áram-feszültség átalakító (250 ohm-mal) |
2 V |
6 V |
10 V |
|
A/D átalakító 11 bites átalakító [ ] |
pkezdő = 409 |
p = 1228 |
pvégső = 2047 |
|
|
(16.22) |
Nem lineáris jelleggörbéjű érzékelő esetén:
Szakaszonkénti lineáris (egyenesekkel) közelítéssel
Közelítő polinommal
számítjuk át az értékeket.
Általánosan alkalmazott harmadrendű polinom:
|
|
(16.23) |
ahol
|
m |
a folyamatváltozó fizikai mértékegységben kifejezett értéke |
|
|
p |
a folyamatváltozó A/D átalakítás utáni számértéke |
az ak értékeket (k=0..3) az adott átalakításhoz meg kell határoznunk.
16.2. Számított állapotváltozók képzése
A számított állapotváltozókat a számítógép mért, vagy más számított állapotváltozókkal végzett aritmetikai, illetve logikai műveletek eredményeként állítja elő. Az ilyen típusú állapotváltozókat abban az esetben szokás képezni, ha
a jel méréssel történő meghatározása aránytalanul költséges,
fizikailag nem lehetséges,
célszerűen egy algoritmussal meghatározható az értéke egy adott időtartamra vonatkozó mérési adatok alapján.
Számított állapotváltozók a következők lehetnek:
-
A mért és számított értékek idő szerinti első deriváltja.
-
A mért és számított értékek idő szerinti integrálja.
-
Egyéb tetszőleges érték meghatározása.
16.2.2. Idő szerinti integrálási formulák
Az integrálási formulák közös tulajdonsága, hogy az adott időpillanatig meghatározott integrál értéket az y[k] kimenő változóban tárolják.
A y[k] kimenő változó értéke a k=0 mintavételi időpontban az integráló tag kezdeti értéke .
Az integrálási értékek meghatározása csak a mintavételi időpontokban történik. Ez azt jelenti, hogy az aktuális mintavételi időpontot megelőző mintavételi pontig meghatározott integrál értékhez hozzáadjuk a aktuális bemeneti jellel (és korábbi értékeivel) meghatározott adott lépéshez tartozó részintegrál értékét.
16.2.2.1. Téglány (Euler) integrálás
Az integrálási eljárás a bemenő jel nulladrendű tartós közelítését alkalmazza.
|
|
(16.25) |
16.2.2.2. Trapéz integrálás
Az integrálási eljárás a bemenő jel elsőrendű polinomiális közelítését alkalmazza.
|
|
(16.26) |
Irodalmak
[16.1.] Analog And Digital Control System Design. Sounders College Publishing . 2006.
[16.2.] Linear System Theory and Design. Oxford University Press. 1999.
[16.3.] Modern Control Systems Engineering. 1996.