1. fejezet - Bevezetés
A rendszertechnika tananyag célja az, hogy különböző fizikai jelenségeket, műszaki objektumok működését egy egységesített matematikai eszköztárral írja le, hogy feltárhatóvá tegye a teljesen különböző fizikai jelenségek és műszaki objektumok működésbeli hasonlóságát. E működésbeli hasonlóságok alapján a fizikai jelenségek és a műszaki objektumok a konkrét megjelenésüktől függetlenül kategorizálhatók. Ez azzal az előnnyel jár, hogy az azonos kategóriába tartozó, egymástól teljesen eltérő fizikai jelenségeknek, műszaki objektumok működésének akár passzív elemzésekor vagy akár a működés aktív szabályozásakor a konkrét objektumtól független, általános matematikai módszerek lesznek alkalmazhatók. Gyakori eset, hogy egy műszaki részterületen pl. a villamos áramkörök számítására kidolgoznak egy matematikai eljárást és azt egy más területen. pl. mágneses körök számítására, csőhálózatokban folyadékáramok leírására vagy hőtani problémákra alkalmazzák. Az impedancia fogalma leginkább az áramkörök számításánál fordul elő, de használatos a robotok erőszabályozásánál is. Ezek a példák bizonyítják legjobban a rendszertechnika létjogosultságát. E tananyagban olyan matematikai technikákat kívánunk bemutatni, amelyek a mérnöki gyakorlatban előforduló bizonyos típusú problémák megoldását segítik.
A világ folyamatosan változik. Volt olyan időszak, amikor a tömegtermelés kicsit elnyomta a mérnökök matematika iránti igényét. A 21. században ismét olyan időket élünk, amikor a matematikatudás a mérnöki munkában felértékelődik. Az ún. hightech (repülőgép, robot, alakfelismerés stb.) matematika igénye talán közismert. Ahhoz, hogy a humanoid robotok most még furcsa járásán csiszoljunk, és pl. megtanítsuk őket balettozni, az irányítási algoritmusok matematikai mélységeit kell növelni. De a matematikai algoritmusok továbbfejlesztése kell ahhoz, hogy a robot a képi információ alapján fel tudja ismerni, hogy mi történik körülötte. De ki gondolná, hogy a liftekben a hangtalan és gyors működés érdekében egy egyszerű behúzó mágnes (amelyiknek az a feladata, hogy a liftszekrényt rögzítse, ha megáll egy emeleten) mellé is néha odatesznek egy mikroprocesszort, amelyik a mágnes differenciálegyenletét folyamatosan számítva gondoskodik az optimális működésről. Régen a tekercsre rákapcsolták a feszültséget, és az áram által keltett mágneses tér végezte a dolgát, persze közben mi hallottunk egy csattanást, amikor a liftszekrényt rögzítő fémpofák felütköztek a tartókeretre. Most tranzisztorok kapcsolgatásával az áramot és ezen keresztül a rögzítő fémpofák mozgását folyamatosan kézben tartjuk és nincs ütközési hang, de ehhez folyamatosan számolni kell a szerkezet differenciálegyenletét. Ez nem lenne bonyolult, ha minden paramétert pontosan tudnánk, de valamilyen mértékű paraméter bizonytalanság mindig van, ráadásul több paraméter változik a működés közben, ezért mérésekből a differenciálegyenlet paramétereit is folyamatosan becsülni kell, és korábban nagyon egyszerűnek számító tervezési rutinfeladatból egy egész komoly matematikai probléma kerekedett. Az elektronika és a mikroprocesszorok ára annyira lecsökkent, hogy egészen hétköznapi olcsó (tömegtermeléssel gyártott) eszközökben is megjelenhetnek a bonyolultabb matematikai algoritmusok. A differenciálegyenletekre a mindennapos mérnöki gyakorlatban is szükség lehet, és megszűnőben van az a helyzet, amikor matematikára igazán csak a mérnök társadalom elitrétegének volt szüksége. Hidat kell építeni a matematika és a mérnöki tudományok között, és ennek a hídnak a legfontosabb eleme a rendszertechnika tárgy.
A fentiekből következően e tananyag felépítése a következő. Először a mérnöki gyakorlatban előforduló fizikai jelenségek matematikai leírásának lehetséges módjait tekintjük át röviden, majd ezt követi annak a matematikai eszköztárnak a számbavétele, amellyel az absztrakt modellek viselkedése elemezhető, általános érvényű összefüggései kimutathatók. A mérnöki munkának sokszor kulcseleme a fizikai valóság és az elvont matematika közötti kapcsolat megteremtése. A tananyag törekszik arra, hogy mind a két oldalról rávilágítson erre a kapcsolatra. Pl. ha egy matematikai képletben mód van egyfajta egyszerűsítésre, akkor annak mi lehet a fizikai háttere, és fordítva, a fizikai modell megváltoztatása milyen matematikai következménnyel járhat. Mivel a célunk az, hogy a mérnökök kezébe a mérnöki gyakorlatban használható matematikai eszközöket adjunk, ezért a matematikai tárgyalásban olyan mélységig ásunk le, amely mélység szükséges az adott eszköz pontos használatához, az alkalmazás feltételeinek és korlátainak megértéséhez. Ahogy egy lézeres távolságmérő használati útmutatójában sem mellékelik a teljes lézerfizikai hátteret, úgy terjedelmi okokból itt sincs mód arra, hogy minden érintett matematikai területet (pl. lineáris algebra, valós és komplex függvénytan, közönséges és parciális differenciálegyenletek elmélete, funkcionálanalízis, mértékelmélet, disztribúcióelmélet, gráfelmélet, stb.) az alapoktól kezdve részletesen leírjunk. Ha ezt megtennénk, akkor ez a tananyag sok ezer oldalasra duzzadna, és azért válna kezelhetetlenné. Általában azt feltételezzük, hogy az olvasó ismeri a mérnöki alapképzésben oktatott matematikát. Az ezen túlmutató matematikai ismereteket megpróbáljuk egzakt, de egyszerűsített formában, a lényeget kiemelve leírni és a részletes bizonyításokat és levezetéseket mellőzzük.
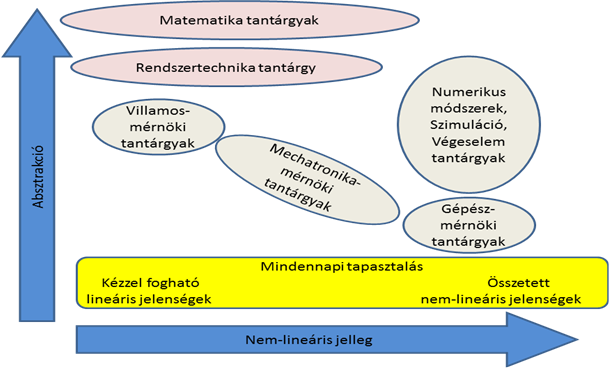
A rendszertechnika tantárgy a mérnöki tantárgyak közé tartozik, de nagyon közel áll a matematika tantárgyakhoz, mivel a legtöbb mérnöki tantárgynál jelentősebb absztrakciót igényel, és bizonyos értelemben közelebb áll sok villamosmérnöki tantárgyhoz, mivel a villamosmérnöki tantárgyak is több absztrakciót igényelnek, mint a gépészmérnöki tantárgyak. Egy másik megközelítésben a gépészmérnöki tantárgyakban a nem lineáris jelenségek nagyobb szerepet játszanak, kevésbé lehet azokat lineáris megkötések mellett tárgyalni, mint ahogy ezt a villamosmérnöki tárgyakban megtesszük (ld. 1-1. ábra). Tipikus példa lehet villamos feszültségek és áramok, valamint a csőhálózatban kialakuló nyomások és a keringő víz összehasonlítása. Egy akkumulátor által táplált zseblámpa izzón áthaladó áram nem annyira kézzel fogható, mint a csőhálózatban szivattyúval keringtetett folyadék. Viszont az ellenállás hálózat számításához lineáris egyenletek általában elegendőek, ezzel szemben a csőhálózatok esetén a legegyszerűbb esetben is számolni kell nem-lineáris jelenségekkel.
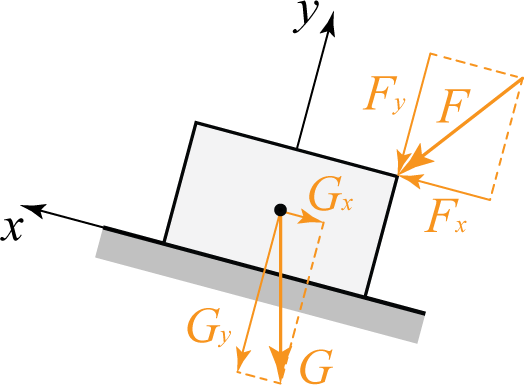
A rendszerek vizsgálatában nagyon fontos szerepet tölt be a frekvencia- és Laplace-operátoros tartomány. Korábbi tanulmányainkból megszokott lehet, hogy bizonyos fizikai mennyiségeket (jeleket) a számítás megkönnyítése érdekében komponensekre bontunk (ld. 1-2. ábra)
Ezzel szemben egy általános időfüggvény komponensekre bontása a frekvencia- és Laplace-operátoros tartományban egy olyan absztrakciót igényel, ami nehezen építhető a korábbi mindennapi tapasztalatokra.
Egy komoly szemléletváltásnak lehetünk tanúi. Korábban egy probléma egzakt megoldásának azt tekintettük, ha matematikailag zárt alakú megoldást tudtunk előállítani. Napjainkban a mérnöki területen egyre nagyobb szerepet játszanak a numerikus módszerek és egyre kevésbé törekszünk az analitikus megoldásokra. Egyre inkább elfogadott, hogy egy rendszer működőképességét numerikus szimuláció igazolja. Teljesen természetes, hogy egy összetett új berendezés tervezése a szimulációs modell elkészítésével kezdődik. Bármiféle hardver megépítésére csak akkor gondolunk, ha a szimuláció biztató eredményeket mutat. A szimulációs modell elkészítését a rendszertechnikai elemzés előzi meg.
1.1. Jelölési és rövidítési jegyzék
Különböző tudományterületen a jelölésekre különböző konvenciók léteznek, e tananyag több területet fog át és így szinte lehetetlen tekintettel lenni minden, időnként egymásnak ellentmondó konvencióra, így előfordul, hogy egy betű különböző fejezetekben mást és mást jelent. Ahol lehetséges, ott indexeléssel próbáljuk feloldani ezt az ellentmondást. Igyekszünk azt a konvenciót tartani, hogy a változókat kisbetűvel, a konstansokat nagybetűvel, a skaláris mennyiségeket dőlt betűvel és a vektorokat vastag betűvel jelöljük. Kivételt olyan esetekben teszünk, ahol a szakirodalom is többé-kevésbé egységesen eltér ettől a konvenciótól. A numerikus példákban számítógéppel számított eredményeket közlünk, melyek tizedespontot és nem tizedes vesszőt használnak.
A rövidítéseknél mindig az angol megfelelőt használjuk, mert ezeket önálló jelentéssel bíró magyarrá váló jövevény szakszavaknak tekintjük, így a magyar kiejtés és magyar ragozás szabályai szerint használjuk.
rendszerre jellemző mátrix
-
állapottér-modellben rendszermátrix
-
gráfelméletben csomóponti (vagy adjacencia) mátrix
Fourier-sorokban a fázistolás nélküli i-edik szinuszos felharmonikus amplitúdója
polinom együtthatója
mágneses indukció vektor
rendszerre jellemző mátrix
-
állapottér-modellben bemeneti mátrix
-
gráfelméletben hurokmátrix
Fourier-sorokban a fázistolás nélküli i-edik koszinuszos felharmonikus amplitúdója
polinom együtthatója
rendszerre jellemző mátrix
-
állapottér-modellben kimeneti mátrix
Fourier-sorokban a fázistolásos i-edik koszinuszos felharmonikus amplitúdója
eltolási vektor
rendszerre jellemző mátrix
-
állapottér modellben a bemenet követlen hatása a kimenetre
egy rendszer zavaró jele (disturbance) folytonos időben
indexben: diszkrét idejű rendszerre utal
Elektromos térerősség vektor
folytonos idejű skalár időfüggvény
az függvény baloldali határértéke helyen
az függvény jobboldali határértéke helyen
olyan folytonos idejű skalár időfüggvény, amelynek az értelmezési tartománya
folytonos idejű skalár időfüggvény értéke a időpillanatban
folytonos idejű skalár időfüggvény Fourier-transzformáltja
folytonos idejű skalár időfüggvény Fourier-transzformáltjának értéke az frekvencia esetén
folytonos idejű skalár időfüggvény Laplace-transzformáltja
folytonos idejű skalár időfüggvény Laplace-transzformáltjának értéke helyettesítéssel
diszkrét idejű skalár időfüggvény
olyan diszkrét idejű skalár időfüggvény, amelynek az értelmezési tartománya
diszkrét idejű skalár időfüggvény értéke a K-adik lépésben
frekvencia
mágneses térerősség vektor
i
-
indexben és index nélkül: a futó sorszám,
-
indexszel: áramerősség
jképzetes egység
diszkrét időlépések
természetes számok halmaza
egy racionális törtfüggvény i-edik pólusa
valós számok halmaza
Laplace operátor
taz idő
T0a vizsgálat kezdő időpontja, általában T0=0
TKa K-dik időlépés
Tsa mintavételezési időlépés
Thaz időkéseltetés nagysága
Tpiracionális törtfüggvénnyel leírható rendszer i-dik pólusához tartozó töréspont reciproka
Tziracionális törtfüggvénnyel leírható rendszer i-dik zérusához tartozó töréspont reciproka
index nélkül, vagy sorszámra utaló indexszel: egy rendszer beavatkozó jele folytonos időben
index nélkül, vagy sorszámra utaló indexszel: egy rendszer beavatkozó jele diszkrét időben
egy nem sorszámra utaló indexszel: egy feszültség
egy rendszer átmeneti függvénye (ugrásválasza)
egy rendszer súlyfüggvénye (impulzusválasza) folytonos időben
egy rendszer súlyfüggvénye (impulzusválasza) diszkrét időben
egy rendszer állapotváltozója folytonos időben
egy rendszer állapotváltozója diszkrét időben
X0az állapotváltozó kezdeti értéke, ha az állapot
X-0az állapotváltozó kezdeti értékének baloldali határértéke
X+0az állapotváltozó kezdeti értékének jobboldali határértéke
egy rendszer kimenőjele folytonos időben
egy rendszer kimenőjele diszkrét időben
egy racionális törtfüggvény i-edik zérusa
egész számok halmaza
pozitív egész számok halmaza
negatív egész számok halmaza
0 vagy 1 értéket felvevő változó
diszkrét idejű egységimpulzus
folytonos idejű egységimpulzus (Dirac-impulzus)
permittivitás
diszkrét idejű egységugrás
folytonos idejű egységugrás
mátrixok sajátértéke
permeabilitás
körfrekvencia
egy motor szögsebességeánek folytonos idejű időfüggvénye
ARMAautoregresszív mozgó átlag (AutoRegressive Moving Average)
BIBO(Bounded Input Bounded Output)
EMFelektromotoros erő (Electro Motive Force)
FIRvéges impulzusválaszú (Finite Impulse Response)
IIRvégtelen impulzusválaszú (Infinite Impulse Response)
MIMO több bemenetű több kimenetű rendszer (Multiple Input Multiple Output)
MISO több bemenetű egy kimenetű rendszer (Multiple Input Single Output)
MMFmagnetomotoros erő (Magneto Motive Force)
LPVlineáris változó paraméterű rendszer (Linear Parameter Varying)
LTI lineáris időinvariáns rendszer (Linear Time Invariant).
LTVlineáris idő variáns (időben változó) rendszerek (Linear Time Varying).
SIMOegy bemenetű több kimenetű rendszer (Single Input Multiple Output)
SISOegy bemenetű egy kimenetű rendszer (Single Input Single Output)