11. fejezet - Megfigyelőtervezés és szeparációs elv
11.1. Tervezési feladat
Az eddigiekben feltételeztük, hogy a rendszer állapotát mérni tudjuk. Az állapot ismerete szükséges az állapot-visszacsatolt szabályzó tervezéséhez. Ha nem ismerjük az  állapotvektort, akkor egy olyan
állapotvektort, akkor egy olyan  (azonos dimenziójú) mennyiséget képzünk, mely aszimptotikusan közelíti az eredeti állapotot, tehát
(azonos dimenziójú) mennyiséget képzünk, mely aszimptotikusan közelíti az eredeti állapotot, tehát
|
|
(450) |

miközben  .
.
Ha ismert  akkor
akkor
|
|
(451) |
|
|
(452) |

|
|
(453) |

ahol az állapot-becslés hibája  minden
minden  . Az állapotbecslés hibájának időbeli változását annak differenciál egyenlete adja meg:
. Az állapotbecslés hibájának időbeli változását annak differenciál egyenlete adja meg:
|
|
(454) |
Levezethető, hogy  kezdeti értékkel egy homogén lineáris differenciál-egyenlet:
kezdeti értékkel egy homogén lineáris differenciál-egyenlet:
|
|
(455) |

Vizsgáljuk az egyenlet megoldását:
|
|
(456) |
|
|
(457) |

|
|
(458) |

Ha  nem zérus, akkor az állapothiba lecseng, feltéve hogy az
nem zérus, akkor az állapothiba lecseng, feltéve hogy az  mátrix stabil azaz,
mátrix stabil azaz,  ,
,  . és így
. és így  miközben
miközben  .
.
Megjegyzés: Ha  instabil, illetve ha a tervező befolyásolni akarja az
instabil, illetve ha a tervező befolyásolni akarja az
állapothiba lecsengését, akkor visszacsatolást kell alkalmazni.
Az állapotegyenlet:
|
|
(459) |

ahol  ,
,  -nek
-nek  sora van. Ekkor az állapothiba
sora van. Ekkor az állapothiba
|
|
(460) |
|
|
(461) |
ha adott  akkor
akkor  . Így az
. Így az  minden elemét módosítani tudjuk, és minden sajátértékét tetszőlegesen meg tudjuk választani.
minden elemét módosítani tudjuk, és minden sajátértékét tetszőlegesen meg tudjuk választani.
11.2. Állapotmegfigyelő tervezése
A megfigyelhetőségi és az irányíthatósági alakok között a dualitás teremt kapcsolatot. A két állapottér ekvivalens állapotterek:
|
|
(462) |

|
|
(463) |

|
|
(464) |

A megfigyelő tervezés adott  esetén, ismert
esetén, ismert  mellett
mellett  (
( ) megválasztásával történik.
) megválasztásával történik.
A módosult állapotmátrix alakja a következő:
|
|
(465) |
A megfigyelő  erősítésére vonatkozó összefüggést dualitással kapjuk, ahol elvégezzük az alábbi megfeleltetéseket:
erősítésére vonatkozó összefüggést dualitással kapjuk, ahol elvégezzük az alábbi megfeleltetéseket:
|
|
(466) |

|
|
(467) |

|
|
(468) |

amivel ellenőrizhető, hogy  .
.
|
|
(469) |

A dualitási elvből levezetett és a megfigyelő tervezésére vonatkozó Bass Gura formula az alábbi:
|
|
(470) |

ahol  a megfigyelő karakterisztikus egyenletének együtthatóiból képzett vektor. Az állapotmegfigyelővel ellátott körben a megfigyelő, mint dinamikus rendszer
a megfigyelő karakterisztikus egyenletének együtthatóiból képzett vektor. Az állapotmegfigyelővel ellátott körben a megfigyelő, mint dinamikus rendszer
|
|
(471) |
|
|
(472) |

Példa 10.1
Tervezzen megfigyelőt az alábbi megfigyelhetőségi állapottér reprezentációban ismert rendszerre:
|
|
(473) |
A tervezést pólusallokációs módszerrel végezze el  és
és  pólusokkal. Írja fel a megfigyelő állapotegyenletét! Adja meg a megfigyelő állapotegyenletének
pólusokkal. Írja fel a megfigyelő állapotegyenletét! Adja meg a megfigyelő állapotegyenletének  vektorát!
vektorát!
A feladat megoldása:
Az eredeti rendszer karakterisztikus polinomja:


A megfigyelt rendszer karakterisztikus polinomja:


Az eredeti és tervezett karakterisztikus polinom együtthatók alapján az megfigyelő erősítései a következők: 
|
|
(474) |
Példa 10.2
Tervezzen megfigyelőt
 és
és
 pólusokkal az alábbi állapottér reprezentációban ismert rendszerre:
pólusokkal az alábbi állapottér reprezentációban ismert rendszerre:
|
|
(475) |
A megfigyelő tervezését az állapotvisszacsatolásnál megismert elvek alapján végezzük el. Az irányíthatósági alakból a megfigyelhetőségi alak közvetlenül megkapható:
|
|
(476) |
A megfigyelő tervezését az  és
és  mátrixok alapján végezzük el pólusallokációs módszerrel. Vegyük észre, hogy ez a rendszer nem irányíthatósági alakú, ezért a transzformációs mátrixot meg kell határozni.
mátrixok alapján végezzük el pólusallokációs módszerrel. Vegyük észre, hogy ez a rendszer nem irányíthatósági alakú, ezért a transzformációs mátrixot meg kell határozni.
A rendszer karakterisztikus polinomja:
|
|
(477) |


A szabályozott rendszer karakterisztikus polinomja:
|
|
(478) |


Az eredeti és tervezett karakterisztikus polinomok együtthatói alapján az erősítések a következők:  . Az erősítő a megfigyelhetőségi alakra alkalmazható, ezért át kell transzformálni az eredeti állapottérbe.
. Az erősítő a megfigyelhetőségi alakra alkalmazható, ezért át kell transzformálni az eredeti állapottérbe.
A transzformációs mátrix számítása:
|
|
(479) |
|
|
(480) |
Az erősítő számítása:
|
|
(481) |

A dualitás elvét használva a megfigyelő értéke:
|
|
(482) |
11.3. Dinamikus állapotvisszacsatolás
A szabályozást a becsült állapotvisszacsatolással képezve kimenőjel visszacsatolásról beszélünk.
|
|
(483) |

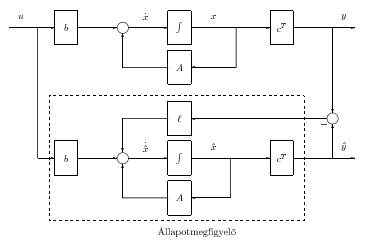
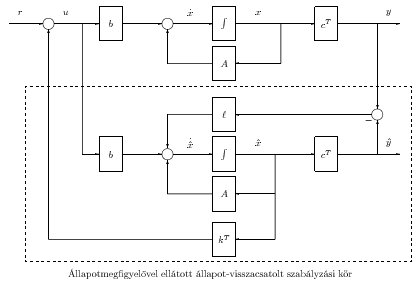
Kombinált állapot visszacsatolást és megfigyelőt tartalmazó szabályozó struktúra:
Rendszer
|
|
(484) |

|
|
(485) |

Megfigyelő
|
|
(486) |
|
|
(487) |

Irányítás:
|
|
(488) |

A becsült állapot dinamikája:

|
|
(489) |

A becslés hibája:  ,
,
továbbá a hiba dinamikája:  .
.
Részletesen kifejtve:


|
|
(490) |

Kombináljuk ezt az egyenletet a rendszer állapot egyenletével:
|
|
(491) |
Figyelembe véve a control inputot:
|
|
(492) |

az állapotegyenlet:


|
|
(493) |

Kombinált rendszer:
|
|
(494) |
A zárt rendszer karakterisztikus polinomja:
|
|
(495) |

A szabályozott rendszer karakterisztikus egyenlete a következő két egyenlettel (és azok megoldásával) azonos:
|
|
(496) |
|
|
(497) |
Következtetés:
A szabályozott rendszer pólusai az LQ rendszer karakterisztikus egyenletének és a megfigyelő rendszer karakterisztikus egyenletének megoldásai.
Tétel 10.1 A megfigyelővel és állapot-visszacsatolt szabályzóval ellátott zárt rendszer karakterisztikus polinomja
|
|
(498) |

Következmény 10.1 Az állapot-visszacsatolt szabályzó és a megfigyelő függetlenül tervezhető. Az optimális állapot visszacsatolás és a megfigyelő tervezés egymástól függetlenül végrehajtható. A szabályozott rendszer struktúrájában az egyes tervezési eredményeket kombináljuk.
-  megválasztásával az állapotvisszacsatolást tervezzük és a pólusokat az alábbi értékekbe helyezzük:
megválasztásával az állapotvisszacsatolást tervezzük és a pólusokat az alábbi értékekbe helyezzük:
|
|
(499) |

-  megfigyelő tervezésével a pólusokat a következő helyekre tesszük:
megfigyelő tervezésével a pólusokat a következő helyekre tesszük:
|
|
(500) |
