6. fejezet - Minőségi tulajdonságok elemzése
6.1. Minőségi jellemzők
A minőségi kritériumok vizsgálata mindig a szabályozott rendszer (zárt kör) vizsgálatával történik: A zárt rendszer átviteli függvénye:
|
|
(250) |
ahol a hurokátviteli függvény és az előrevezető ág eredő átviteli függvénye. Az alábbiakban az időtartományi és frekvencia tartományi jellemzőket soroljuk fel.
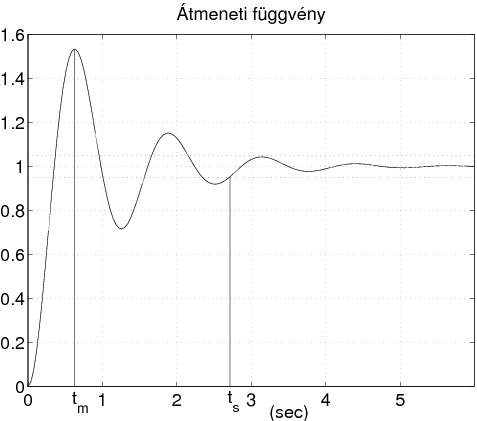
6.1.1. Időtartományi jellemzők
-
A rendszer állandósult állapotban felvett értékét beállási értéknek nevezzük, amit -sel jelölünk.
-
A szabályozási idő () annak időtartama, amely eltelte után a rendszer kimenete a beállási értéktől -nál nagyobb mértékben nem tér el.
-
A szabályozási eltérés a megkívánt érték és az állandósult állapotbeli érték különbsége: ,
-
túllendülési idő (): a kimeneti jel maximális értékének időpontja,
-
túllendülés mértéke (): százalékban kifejezett viszonyszám, ami a maximális és beállási érték közötti különbség beállási értékhez való viszonyát fejezi ki:
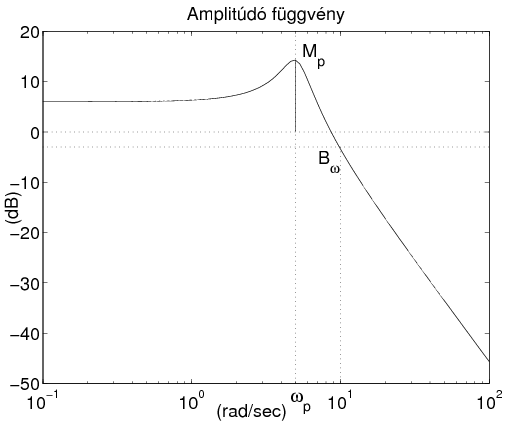
6.1.2. Frekvencia tartományi jellemzők
-
rezonancia csúcs : az amplitúdó görbe maximális értéke,
-
rezonancia frekvencia : a rezonancia csúcshoz tartozó frekvencia érték,
-
A sávszélesség fogalmát a kiegészítő érzékenységi függvény segítségével a következőképp adhatjuk meg. A rendszer sávszélessége az a frekvencia tartomány, amelyben a kiegészítő érzékenységi függvény Bode diagramja -re csökken.
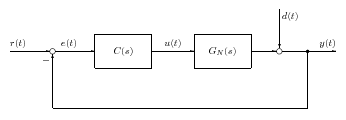
6.2. Érzékenységfüggvény
Vizsgáljuk a zárt rendszer kimenetét különböző bemenetek esetén:
|
|
(251) |
|
|
(252) |
ahol .
Bevezetjük a szabályozási körben értelmezett érzékenységi függvényt és a kiegészítő érzékenységi függvényt:
|
|
(253) |
|
|
(254) |
Az érzékenységi függvény azt mutatja meg, hogy a zavaró jellemző hogyan befolyásolja a zárt rendszer kimenetét.
|
|
(255) |
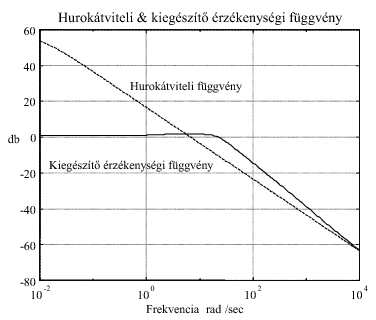
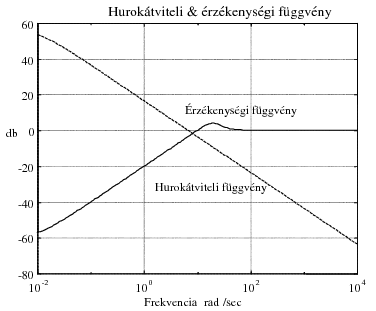
Az érzékenységi függvény közelítő ábrázolását Bode-diagramon a felnyitott hurok frekvenciafüggvénye alapján a következőképp végezhetjük el.
Az érzékenységi függvény definíció szerint:
|
|
(256) |
Kis és nagy körfrekvenciákra a következő közelítést használhatjuk:
|
|
(257) |
A kiegészítő érzékenységi függvény a referencia jel és a kimenő jel közötti átviteli függvény.
|
|
(258) |
A kiegészítő érzékenységi függvény közelítő ábrázolását Bode-diagramon a felnyitott hurok frekvenciafüggvénye alapján a következőképp végezhetjük el. A kiegészítő érzékenység függvény definíció szerint:
|
|
(259) |
Kis és nagy körfrekvenciákra a következő közelítést használhatjuk:
|
|
(260) |
Az érzékenységi és kiegészítő érzékenységi függvények közötti összefüggés az alábbi:
|
|
(261) |
6.3. Aszimptotikus jelkövetés
Követő szabályozásoknál a kimenőjelnek a referencia jeltől való eltérését követési hibának nevezzük:
|
|
(262) |
Vizsgáljuk meg, hogy adott referencia jelre aszimptotikusan mekkora lesz az eltérés, azaz a követési hiba. A követési hiba jel és a referencia jel Laplace-transzformáltjai közötti kapcsolatot az érzékenységi függvény írja le. Alkalmazva a határérték tételeket:
|
|
(263) |
Vizsgálhatjuk a tipikus referencia jelek, mint egységugrás vagy egység sebesség ugrás jelek aszimptikus követését.
6.3.1. 1. eset: Egységugrás bemenetre adott válaszfüggvény
Vizsgáljuk meg a válaszfüggvényt , bemenetre. Ekkor
|
|
(264) |
Ha arányos jellegű, azaz ha , akkor
|
|
(265) |
ahol a hurokerősítési tényező. A követési hiba értéke függ a hurokerősítési tényező értékétől.
Ha integráló jellegű, azaz ha ,
alakú, akkor
|
|
(266) |
tehát a követési hiba aszimptotikusan zérus.
Ha 2 típusú (kétszeres integrátort tartalmaz), azaz ha , alakú, akkor
|
|
(267) |
tehát a követési hiba aszimptotikusan zérus.
6.3.2. 2. eset: Egységsebesség bemenetre adott válaszfüggvény
Vizsgáljuk meg a válaszfüggvényt , bemenetre. Ekkor
|
|
(268) |
Ha arányos jellegű, azaz ha ,
akkor
|
|
(269) |
azaz a kimenet nem korlátos.
Ha integráló jellegű, azaz ha ,
alakú, akkor
|
|
(270) |
tehát a követési hiba aszimptotikusan nem zérus értékhez tart.
6.4. Zavarkompenzálás
Az aszimptotikus zavarkompenzálást az aszimptotikus alap- vagy referencia jelkövetéshez hasonlóan vizsgálhatjuk. Tipikus zavaró jelek, mint egységugrás, egység sebességugrás jelek, a zavaró jel hatását a kimenő jelben zérus referencia jel feltételezése mellett vizsgáljuk. Ehhez felírjuk a kimenő jel és a zavaró jel Laplace - transzformáltjai közötti összefüggéseket és alkalmazzuk a határérték tételeket.
A kimenő és a zavaró jel közötti átviteli függvény az érzkenységi függvény. Ennek alapján a kimenőjel Laplace - transzformáltja
|
|
(271) |
Alkalmazva a határérték tételt:
|
|
(272) |
Legyen például , .
6.4.1. 1. eset: Arányos rendszer vizsgálata
Vizsgáljuk meg az arányos rendszer viselkedését. A hurokátviteli függvény alakja . Ekkor
|
|
(273) |
ahol a hurokerősítés tényező. Tehát a zavaró jel hatása megjelenik a kimeneten.
6.4.2. 2. eset: Integráló rendszer vizsgálata
Legyen például , és tegyük fel, hogy a hurokátviteli függvény integráló alakú, azaz . Ekkor
|
|
(274) |
tehát a zavaró jel hatását a rendszer aszimptotikusan teljesen elnyomja, kompenzálja. Megjegyezzük, hogy a 2-típusú integráló tulajdonságú rendszer is kompenzálja a hibajelet.