16. fejezet - Golyósorsós pozícionáló szabályozásának tervezése és szimulációja
A 9. fejezet fejezetben szereplő golyósorsós mozgásátalakító matematikai modell struktúrájának előállítására mutatunk egyet a lehetséges módszerek közül.
A matematikai modell (átviteli függvény) paraméterezéséhez katalógusból válogatott adatokat használunk.
A matematikai modellel adott rendszer dinamikai (idő- és frekvenciatartománybeli) vizsgálata után szabályozót tervezünk, az ilyen jellegű valóságos rendszerekkel szemben támasztott irányítási célok figyelembe vételével. Elsődleges elvárás természetesen a stabilitás, mégpedig aperiodikus viselkedéssel, túllendülések nélküli, gyors és pontos (hibamentes) alapjel követéssel.
16.1. Matematikai modell előállítása
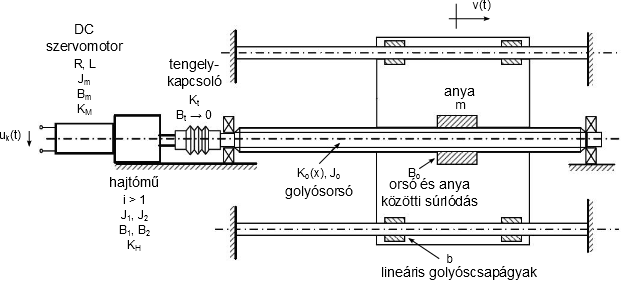
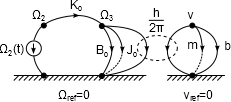
A vázlat nem géprajzi, hanem a működést szemlélteti. Ugyanakkor érdekes konstrukciós probléma a vezetékek rögzítése a keretben, és a tengely csapágyazása. Erről a 11. fejezet fejezet elején találunk rövid ismertetést. A rendszer működését ábrázoló „műszaki vázlat” alapján elkészíthetjük a struktúragráfot.

Az ábrán (és a további modellekben) szereplő fizikai mennyiségek:
|
u [V] |
feszültség |
|
|
R [Ω] |
ellenállás |
|
|
L [H=Vs/A] |
induktivitás |
|
|
nv1=KM [Nm/A=Vs/rad] |
az elektrodinamikai energiaátalakító (váltó) ún. motorállandója |
|
|
Ω [rad/s] |
szögsebesség |
|
|
J [kg m2] |
tehetetlenség |
|
|
B [Ns/rad] |
transzlációs mechanikai rendszerben értelmezett csillapítási tényező |
|
|
K [Nm/rad] |
torziós rugómerevség |
|
|
nt = i |
a hajtómű mint energiaátalakító (transzformátor) állandója |
|
|
nv2=h/2π [m/rad] |
a forgó és haladó mozgás közötti energiaátalakító (váltó) állandója |
|
|
m [kg] |
tömeg |
|
|
b [Ns/m] |
transzlációs mechanikai rendszerben értelmezett csillapítási tényező |
Ugyan már a vázlatban is alkalmaztunk elhanyagolásokat (például a tengelykapcsolóban fellépő veszteséget elhanyagoljuk, Bt → 0), de modellünk még mindig igen összetett. Az energiatárolók száma: egy villamos (L), összevonással két torziós rugalmas (K), négy torziós tehetetlenség (J), valamint egy transzlációs mechanikai (m). Összesen nyolc energiatárolót számolhatunk össze, sőt ha külön részmodellként kezeljük a rugalmasságokat, még magasabb rendű rendszermodellt kapunk. Eddigi – legalább részrendszerenként értelmezhető – domináns póluspárokra vonatkozó ismereteinket és tapasztalatainkat megerősítik a konkrét katalógusadatok (fizikai mennyiségek) helyettesítésével számított matematikai modellek.
Az összevonható mennyiségek és az egyes részegységek sajátságai figyelembe vételével egyszerűsíthetjük a gráfot és két részrendszerre bonthatjuk.
Az alábbi konstrukciós adottságokból indulunk ki:
-
a DC motor induktivitása mint energiatároló a rendszerben lévő többi tárolóhoz képest gyors dinamikájú (nagyságrendekkel kisebb időállandójú), ezért elhanyagoljuk.
-
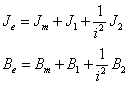
a hajtómű KH rugómerevsége nagy, ezért Ωm és Ω1 szögsebességek azonosak. A motor mechanikai paraméterei közül a Bm csapágycsillapítást és a Jm tehetetlenséget a hajtómű hasonló, de nagyobb értékű paramétereivel összevonva vesszük figyelembe (B1, B2 csillapítások és J1, J2 tehetetlenségek). Az egyszerűbb jelölés miatt a továbbiakban Je és Be paraméterekkel számolunk, de tudjuk, hogy:
|
|
-
A hajtómű módosítása legyen olyan nagy értékű, hogy az Ω2 kimenő szögsebesség értékét a terhelés ingadozása nem befolyásolja. A hajtómű kimenetét ezért az Ω2 jelű generátorként vesszük figyelembe, mint a második részrendszer gerjesztését. A motor-hajtómű egység lehetséges modell-formáiról szól a 8. fejezet fejezet. A példában a 8.1.1. szakasz fejezetben bemutatott változatot alkalmazzuk, a tulajdonságok részletes leírását ott találjuk meg.
-
A golyósorsó és mechanikai környezete összes rugómerevségét egyetlen eredővel, Ko-val vesszük figyelembe. A részletes modellezés a 11. fejezet fejezetben látható. Az itt bemutatott példa a 11.2. szakasz fejezetben van részletesebben leírva, az „Elsőrendű motor és hajtómű egységgel” bekezdésben.
A fenti ábrán a bal oldali részrendszer a motort és a hajtómű hajtott oldalát tartalmazza, a második részrendszer tartalmazza a hajtott részrendszert.
A két részrendszer matematikai modelljét célszerű az átviteli függvényt eredményező hálózati (más néven impedancia) módszerrel, esetleg csomóponti vagy hurokmódszerrel előállítani, hiszen a sorba kapcsolt részrendszerek eredő átviteli függvénye az összetevők átviteli függvényének szorzata.
Az átviteli függvényes felírás miatt az időfüggvényként adott jeleket Laplace-operátoros tartományba transzformáljuk. Ha a csomóponti módszert (vagy a hurokmódszert) választjuk, szintén transzformálnunk kell a jeleket, sőt a modell jellegétől függően integráljukat és deriváltjukat. (A második részrendszer modelljét csomóponti módszerrel állítjuk elő.)
16.1.1. A hajtó részrendszer modellje
Az impedancia a keresztváltozó és az átmenő változó hányadosaként írható fel Laplace-operátoros tartományban.
-
a villamos rendszer általános impedanciája így
-
a rotációs mechanikai általános impedanciája így
Az egyes impedanciák:
-
a villamos oldalon
-
a disszipatív elem impedanciája

-
az induktív energiatárolót elhanyagoljuk, (impedanciája egyébként
 )
)
-
-
a mechanikai oldalon
-
a disszipatív elem impedanciája

-
az energiatároló impedanciája

-
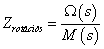
a párhuzamosan kapcsolt elemek eredő impedanciája:
-
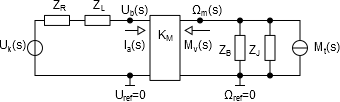
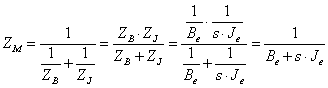
A rendszerben forrásként jelenik meg a villamos motorra kapcsolt Uk feszültség. A visszahatásból származó Mt terhelő nyomatékot elhanyagoljuk.
Az elektrodinamikai energiaátalakító (váltó) egyenletei
|
|
(16.1) |
|
|
|
(16.2) |

ahol M [Nm] a forgatónyomaték, I [A] a villamos áram, Ω [rad/s] a szögsebesség, U [V] a feszültség és KM [Nm/A=Vs/rad] az energiaátalakító állandója.
A váltó egyenleteivel felírhatjuk a villamos résznek megfeleltethető mechanikai impedanciát
|
|
(16.3) |

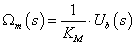
Mivel a forgatónyomaték felel meg a villamos áramnak, a feszültségforrást szögsebesség forrással helyettesíthetjük. Így az egyszerűsített modellt villamos feszültségosztó analógiájaként szögsebesség osztóként (keresztváltozó osztóként) modellezhetjük.
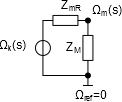
A szögsebesség-osztó egyenlete és egyben a hajtó részrendszer átviteli függvénye
|
|
(16.4) |
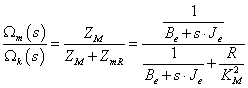
Egyszerűsítve
|
|
(16.5) |

Időállandós alakra átírva (és a szögsebességgel helyettesített feszültséget visszaírva) látszik a modell jellege (elsőrendű, azaz P-T1)
|
|
(16.6) |
16.1.2. A hajtott részrendszer modellje
Oktatási célból a hajtott rendszer átviteli függvényét időtartományból kiindulva, csomóponti egyenletek felhasználásával határozzuk meg. Ezt azért tesszük, mert a 11. fejezet fejezetben, ahol a golyósorsós szakasz tervezését és méretezését találjuk, az átviteli függvényt impedancia módszerrel határoztuk meg. A két módszer lépései és munkaigénye így összehasonlíthatóvá válnak.
A stuktúragráf alapján a csomóponti egyenletek:
|
|
(16.7) |
|
|
|
(16.8) |


Az egyes passzív elemekre vonatkozó összefüggések idő- és Laplace-operátoros tartományban (a deriválásnál zérus kezdeti értéket feltételezve):
-
a rotációs mechanikai rendszerben (figyelembe véve, hogy
 )
)-
az egyik energiatároló (torziós rugó) egyenlete:

-
a másik energiatároló egyenlete:


-
a passzív elem egyenlete:


-
-
a transzlációs mechanikai rendszerben (figyelembe véve, hogy
 )
)-
az energiatároló (tömeg) egyenlete:

-
a passzív elem egyenlete:

-
A csomóponti egyenletekbe helyettesítjük a Laplace-operátoros tartománybeli összefüggéseket:
|
|
(16.9) |
|
|
|
(16.10) |


Átrendezve
|
|
(16.11) |
|
|
|
(16.12) |


Az rotációs-transzlációs mechanikai energiaátalakító (transzformátor) egyenletei
|
|
(16.13) |
|
|
|
(16.14) |
Behelyettesítve a váltóegyenleteket
|
|
(16.15) |
|
|
|
(16.16) |

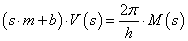
Mindkét egyenletből kifejezve az M forgatónyomatékot az átviteli függvény meghatározására alkalmas egyenletet kapunk (egyik változó kimenő jel, azaz a v sebesség V(s) Laplace-transzformáltja, a másik a bemenő jel, az Ω2(s) szögsebesség).
|
|
(16.17) |

A változókat csoportosítva és együtthatóikat s-hatványai szerint rendezve
|
|
(16.18) |

Az egyenlet mindkét oldalát s-sel szorozva
|
|
(16.19) |

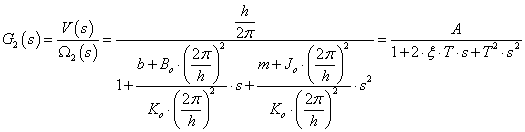
A hajtott részrendszer átviteli függvénye
|
|
(16.20) |

Átrendezve
|
|

|
|
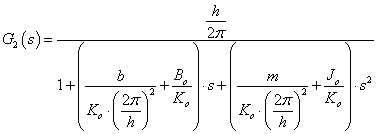
Időállandós alakra átírva látszik a modell jellege (másodrendű, azaz P-T2)
|
|
(16.21) |
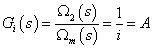
16.1.3. A hajtómű modellje
A hajtómű egyszerűsített modellje az i áttételnek megfelelő arányos (P) taggal állítható elő, a hajtó részrendszer Ωm szögsebességét és hajtott rendszer Ω2 szögsebességét felhasználva az átviteli függvény felírásához.
|
|
(16.22) |
16.1.4. A teljes szakasz modellje
A kapott három átviteli függvény (G1 hajtó részrendszer, Gi hajtómű és G2 hajtott részrendszer) soros eredőjeként (szorzataként) állítható elő a bemenő Uk feszültség és a mozgatott rendszer v sebessége közötti kapcsolat.
|
|
(16.23) |

Mivel számunkra nem a sebesség, hanem az elmozdulás lényeges, az x elmozdulás és v sebesség közötti összefüggést is figyelembe kell vennünk (a sebesség az elmozdulás idő szerinti deriváltja).
|
|
(16.24) |
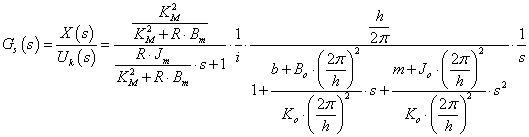
Ezzel a x elmozdulás és az Uk feszültség között felírható átviteli függvény
|
|
(16.25) |

Behelyettesítve
|
|
(16.26) |
A rendszer harmadrendű integráló (I-T3) típusú
|
|
(16.27) |

16.2. Szimulációs modell
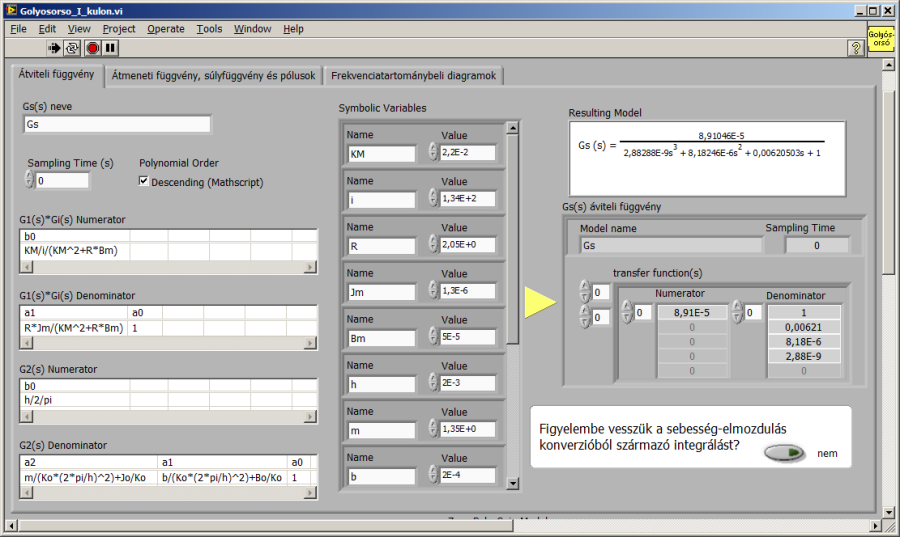
A matematikai modell előállításához és a szabályozó tervezéséhez konkrét komponensek kiválasztása és a szükséges paraméterek behelyettesítése után kapott átviteli függvényt használunk.
|
Elektromechanikus energiaátalakító (váltó) állandója |
KM = 0,022 Nm/A |
|
Hajtómű áttétele |
i = 134 |
|
Motor ellenállása |
R = 2,05 Ω |
|
A motor és hajtómű tehetetlenségi nyomatéka |
Je = 13*10-7 kg/m2 |
|
A motor és hajtómű csillapítási tényezője |
Be = 5*10-5 Ns/rad |
|
A golyósorsó menetemelkedése |
h = 0,002 m |
|
A mozgatandó tömeg |
m = 1,35 kg |
|
Az anya és orsó közötti csillapítási tényező |
b = 2*10-4 Ns/m |
|
Az orsóra számított eredő torziós rugómerevség |
Ko = 2,107 Nm/rad |
|
Az orsó csillapítási tényezője |
Bo = 3,5*10-3 Ns/rad |
|
Az orsó tehetetlenségi nyomatéka |
Jo = 1,2*10-6 kg/m2 |
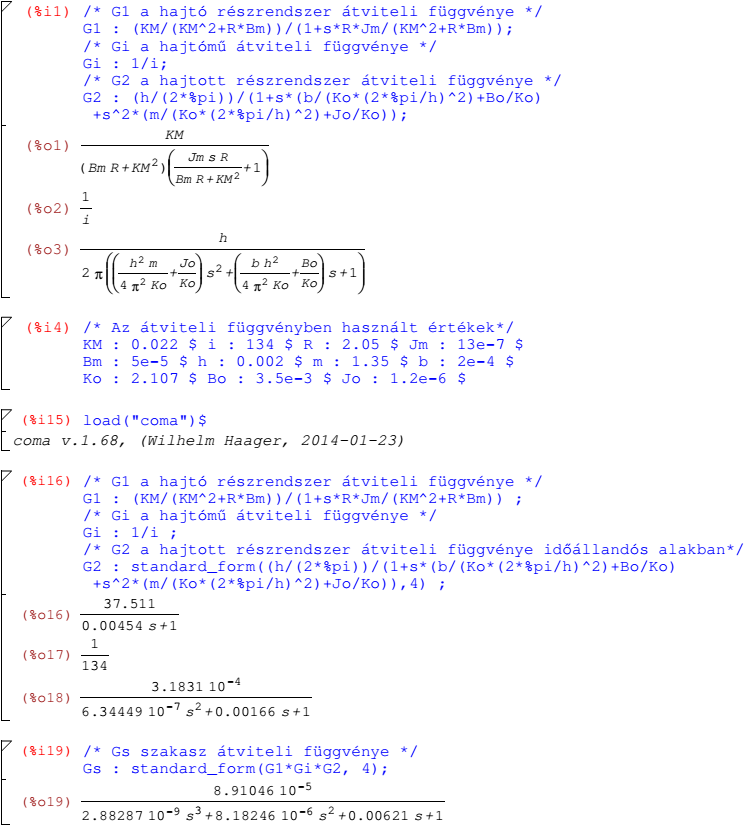
A GNU GPL licenc által szabályozott hozzáférésű Maxima (http://maxima.sourceforge.net/) számítógépes algebra rendszerrel számoljuk a katalógusadatok alapján az átviteli függvény együtthatóit. A Maxima rendszer hivatalos dokumentációja [16.4.] mellett az interneten igen sok oktatóanyag és mintapélda található. A COMA (COntrol engineering with MAxima) szabályozástechnikai számításokat megkönnyítő kiegészítő [16.5.] angol és német leírása mellett mintapéldákat is letölthetünk.
Az átviteli függvény együtthatóinak meghatározása wxMaxima programmal:
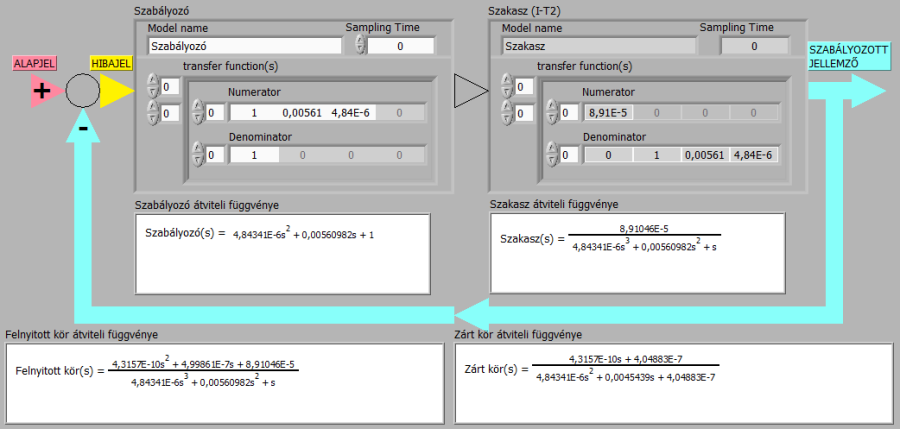
A National Instruments cég LabVIEW (Laboratory Virtual Instrumentation Engineering Workbench) szoftvercsomagja (http://www.ni.com/labview/) 2009-es verziójában, a Control Design and Simulation Module (http://www.ni.com/labview/cd-sim/) elemkészletével készült az átviteli függvény szimbolikus leképezése. A LabVIEW és a kiegészítő használatában a [16.1.], [16.2.], [16.3.] hivatalos források mellett szintén találhatunk interneten hozzáférhető segédanyagokat és mintapéldákat.
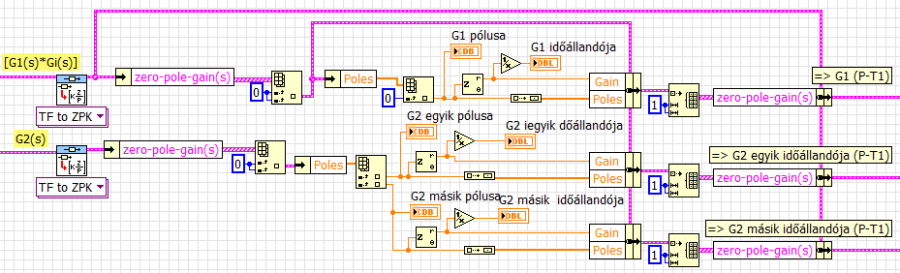
Az áttekinthetőség érdekében a G1(s), Gi(s) átviteli függvények soros eredőjéhez szükséges számláló és nevező együttható képletek külön szerepelnek a hajtott részrendszer G2(s) átviteli függvény előállításához szükséges összefüggésektől.
A két – szimbolikus átviteli függvényével adott – sorba kapcsolt rendszer eredőjét előállító programrészletet könnyen elkészíthetjük a Control Design & Simulation/Control Design/Model Interconnection/CD Series.vi használatával.
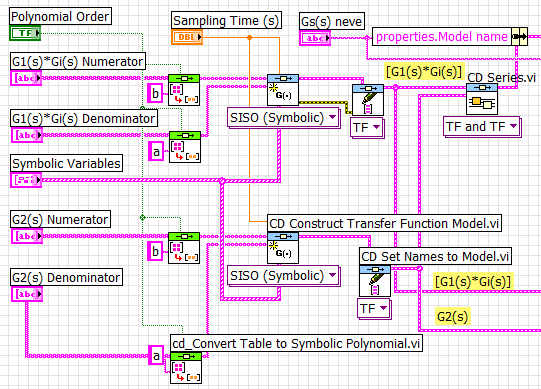
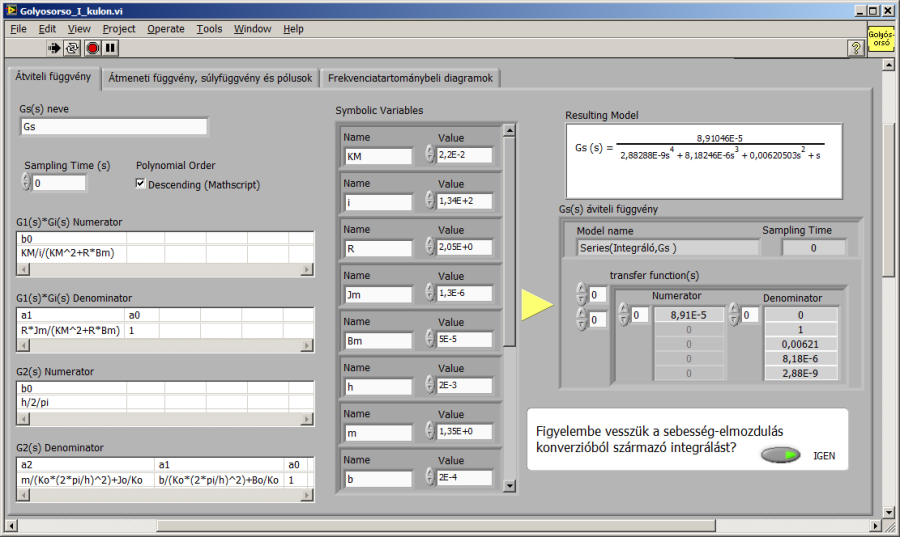
A sebesség-elmozdulás átalakításhoz szükséges integrálást 1/s átviteli függvényével, az előzőleg kapott átviteli függvénnyel szintén sorba kapcsolva vesszük figyelembe. A későbbiekben erre „szakasz integrálással” néven hivatkozunk.
Valamennyi szimuláció SI mértékegységekkel történt. A soron következő, „.vi” fájlokkal megjelenített diagramokon az alábbi SI prefixum jelöléseket látjuk:
u: mikro; n: nano; m: mili
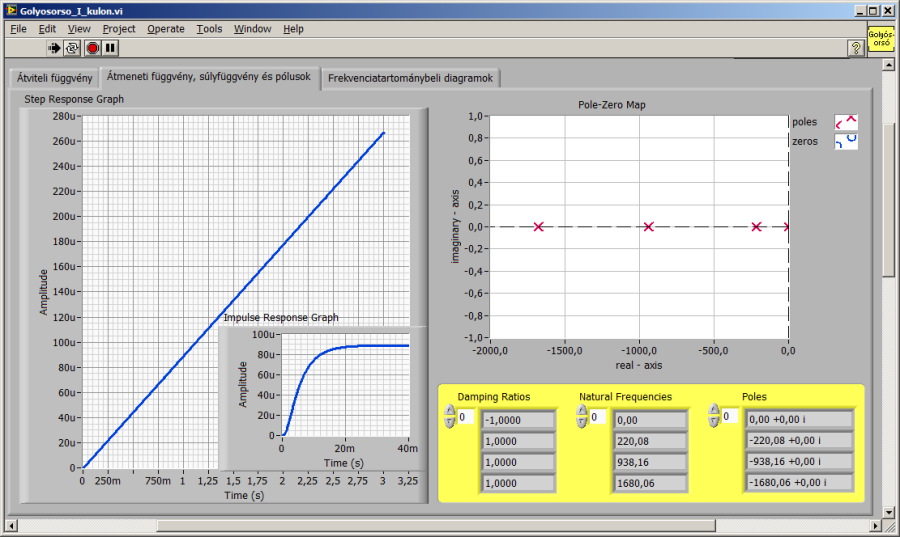
A későbbiek szempontjából fontos megjegyeznünk, hogy az integrátor nélküli szakaszban nincs konjugált komplex gyökpár, azaz a szakasz nem lengő jellegű.
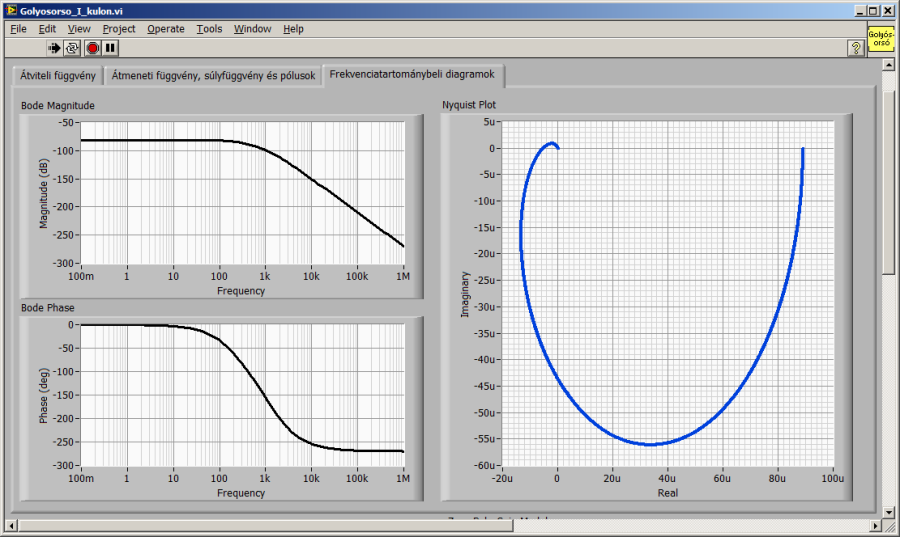
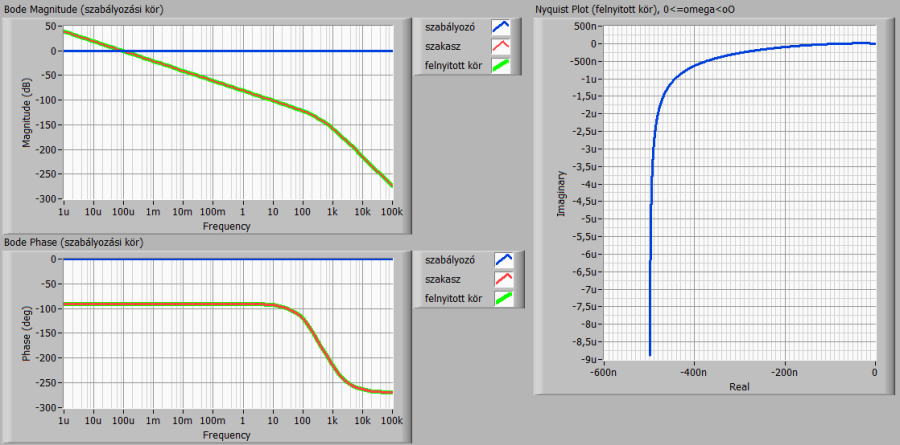
A következő ábrán a „szakasz integrálással” frekvenciatartománybeli leképezései szerepelnek.
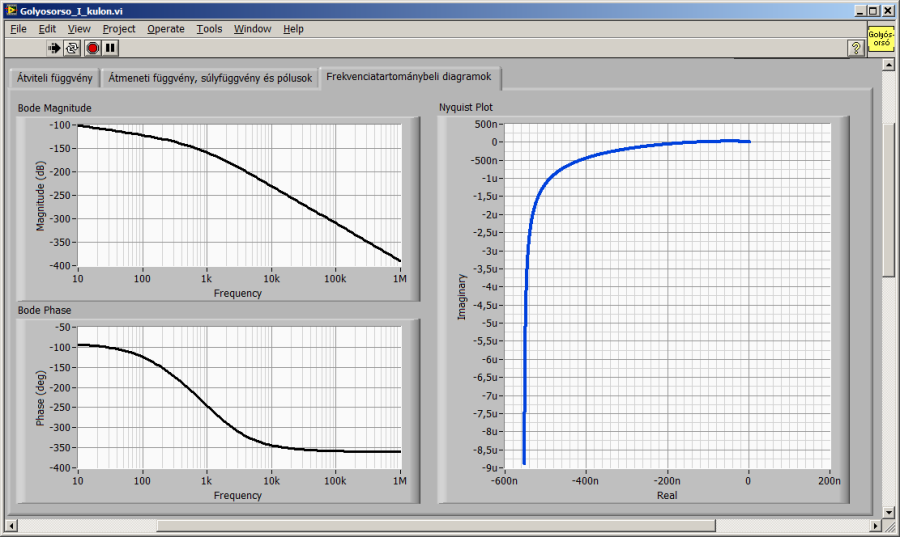
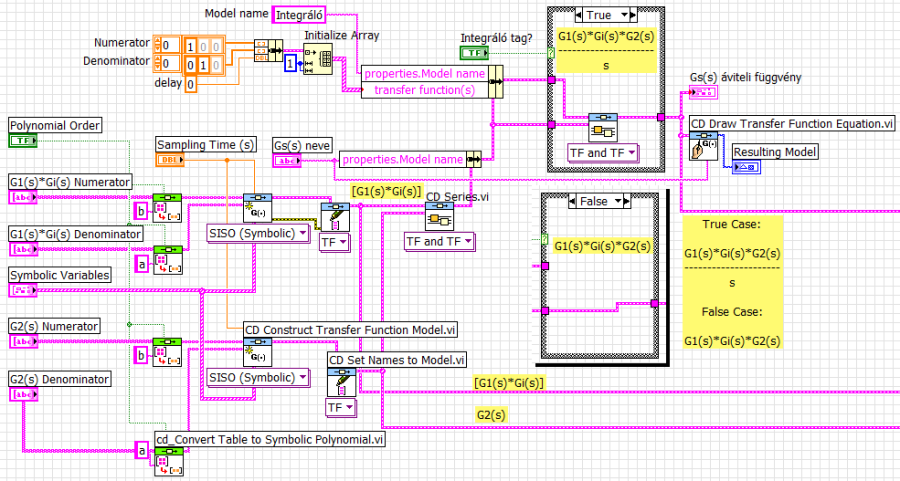
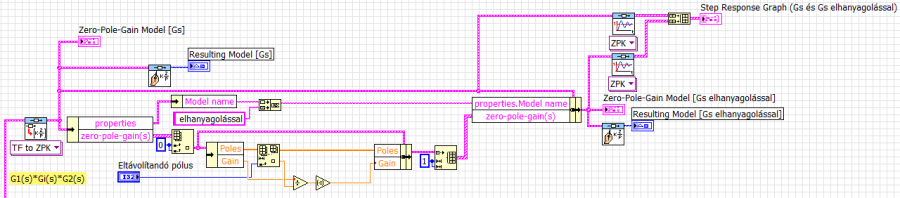
A szakasz dinamikai tulajdonságainak szemléletes ábrázolása miatt érdemes az integrálás nélkül is ábrázolni a jellegzetes idő- és frekvenciatartománybeli diagramokat. A sebesség-elmozdulás konverzió miatt szükséges integrálást a programunk előlapján lévő kapcsolóval vehetjük figyelembe. A megoldás az alábbi programrészleten látható, az előlapi logikai (Boolean adattípusú) kapcsoló neve „Integráló tag?”, az elágazás (Case struktúra) igaz (True) lapján a konstansként összeállított integráló tag és a G1(s)·Gi(2) G2(s) integráló nélküli szakasz soros eredője. A hamis (False) lapon az integráló hatást nem vesszük figyelembe, a G1(s)·Gi(2) G2(s) átviteli függvényt vezetjük tovább.
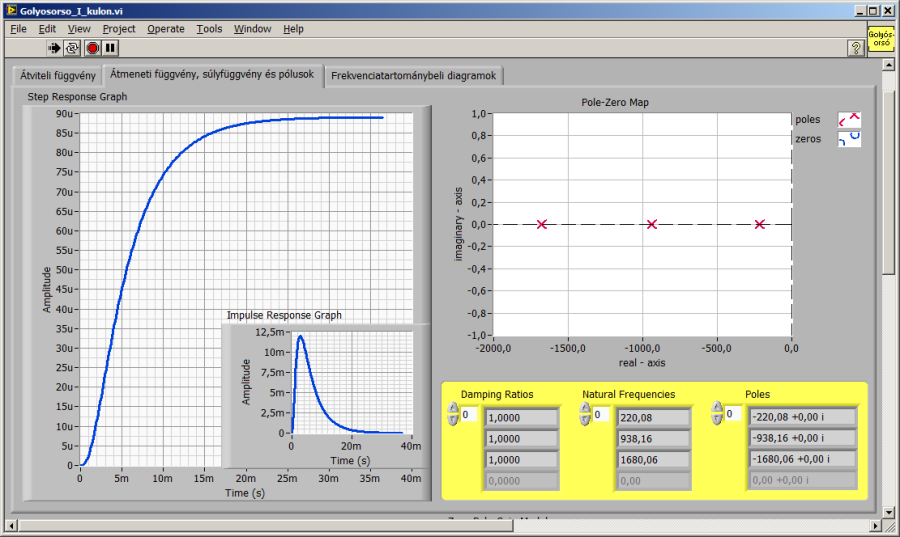
Az alábbi ábrákon az integráló hatás nélküli átviteli függvény és az idő- és frekvenciatartománybeli leképezései szerepelnek.
16.3. A modell egyszerűsítése a számított eredmények alapján
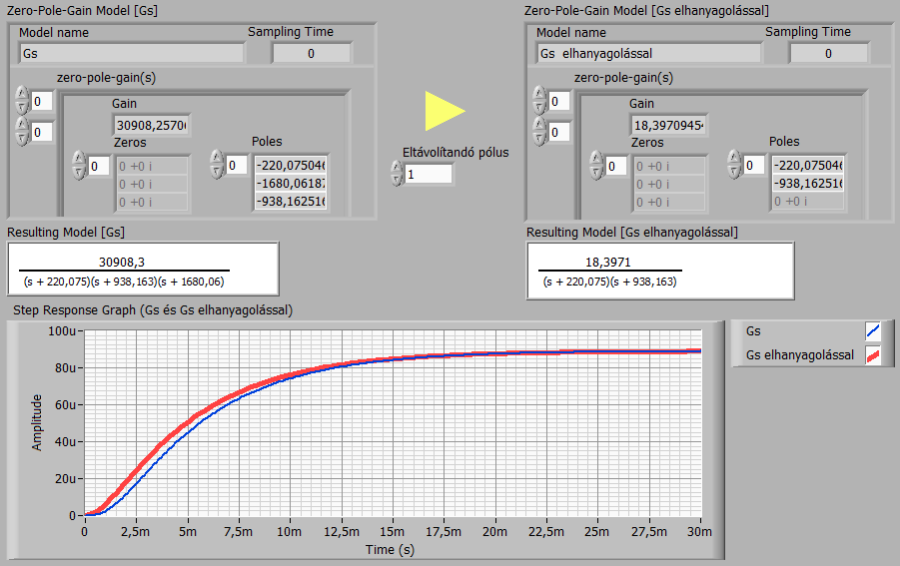
A szabályozó tervezéshez vizsgáljuk meg a szakasz hajtó részrendszerének egyetlen, valamint a hajtott részrendszer két pólusát (és a belőlük számítható időállandókat). Az átviteli függvényből (TF, Transfer Function) a zérus-pólus-erősítés (ZPK, Zero-Pole-Gain) matematikai modellt a Control Design & Simulation/Control Design/Model Conversion/CD Convert to Zero-Pole-Gain model.vi használatával kapjuk. A három időállandót egyszerűen számíthatjuk a pólusokból.
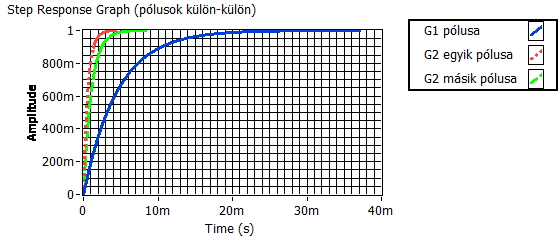
A pólusokból számított időállandóakkal megrajzolhatjuk a három, egységnyi erősítésűnek választott elsőrendű rendszer alább látható átmeneti függvényét.
|
pólusa |
időállandója |
|
|
G1 |
-220,075 +0 i |
4,544E-3 |
|
G2 egyik |
-1680,06 +0 i |
5,952E-4 |
|
G2 másik |
-938,163 +0 i |
1,066E-3 |
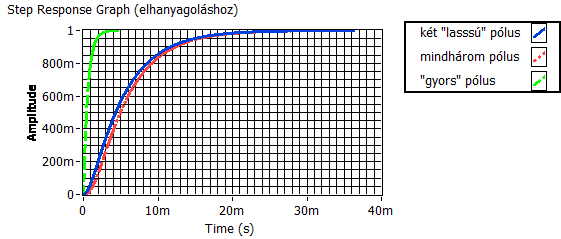
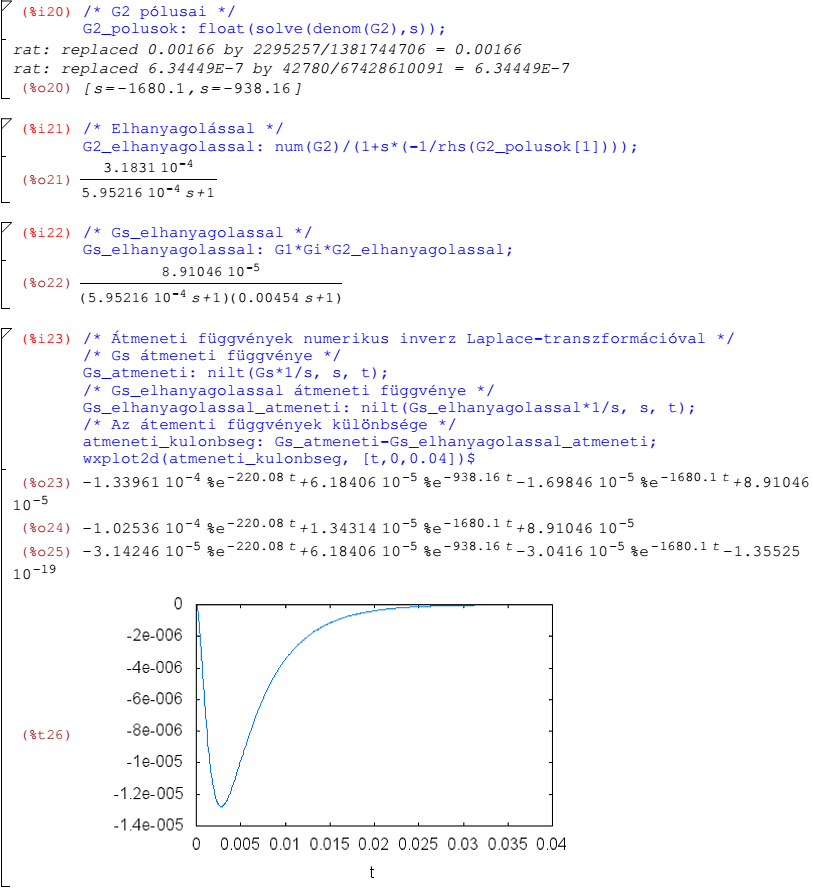
A szabályozótervezéshez figyelembe vehető elhanyagolást az átmeneti függvények ábrázolása alapján is indokolhatjuk. Az alábbiakban a két „lassú” pólusú másodrendű rendszert hasonlítjuk össze a háromtárolós modellel és feltüntetjük a szabályozásba nem bevont „gyors” pólus dinamikáját, szintén átmeneti függvényen.
Az elhanyagoláshoz szükséges számításokat a wxMaxima munkafüzetben is elvégezzük és ebben ábrázoljuk az eredeti és az elhanyagolás utáni rendszer átmeneti függvényének különbségét.
A harmadrendű szakasz egyszerűsítése másodrendűvé és az elhanyagolás létjogosultsága wxMaxima programmal:
Az elhanyagolás indoklását alátámaszthatjuk a három elsőrendű rendszer Bode-diagramjával is. Az alábbi diagramokon látszik, hogy a két „lassú” pólus („G1 pólusa” és „G2 egyik pólusa”) között nincs jelentős eltérés (az időállandók viszonya durván 4,3). A „gyors” pólusnak („G2 másik pólusa”) megfelelő töréspont viszont hozzávetőleg egy dekáddal jobbra esik az előzőektől.
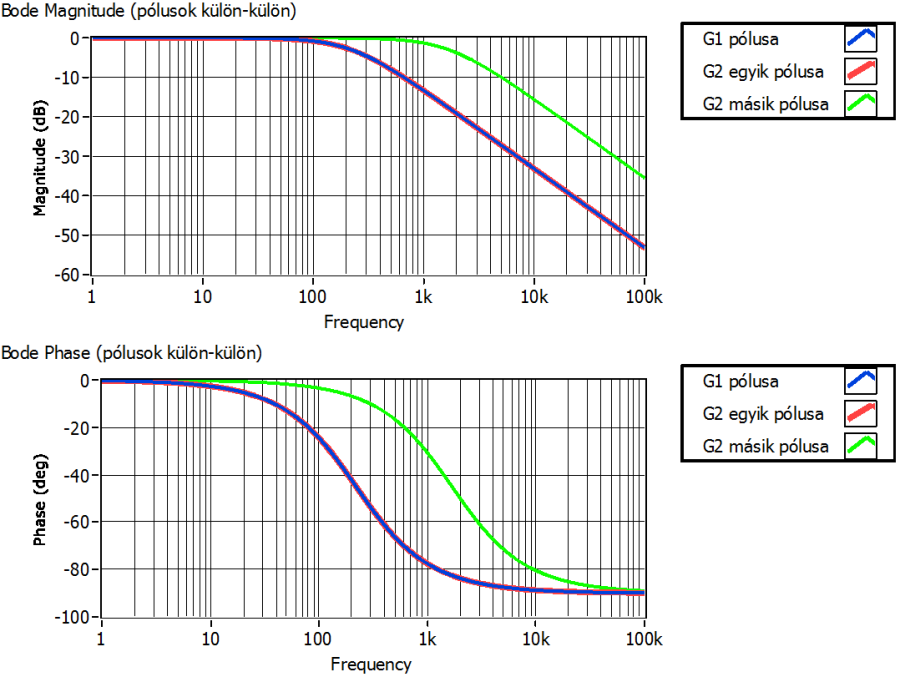
E megfontolás alapján a szakaszt a G1(s) hajtó rész, a Gi(s) hajtómű és a G2(s) hajtott rész domináns időállandót tartalmazó elsőrendűvé? (csak a gyors pólust hagytuk el, tehát másodrendű lett a szakasz) egyszerűsített modelljével közelítjük.
16.4. Szabályozás tervezése
Először szabályozó nélkül (tulajdonképpen egységnyi átviteli tényezőjű P-szabályozóval), a szabályozási kör visszacsatoló ágában szintén egységnyi átviteli tulajdonságot feltételezve vizsgáljuk az egyszerűsített másodrendű rendszert.
A visszacsatoló ágban lévő egységnyi átvitel megfelelően közelíti az egyébként szabályozási körökben használatos érzékelő és jelátalakító dinamikai tulajdonságait.
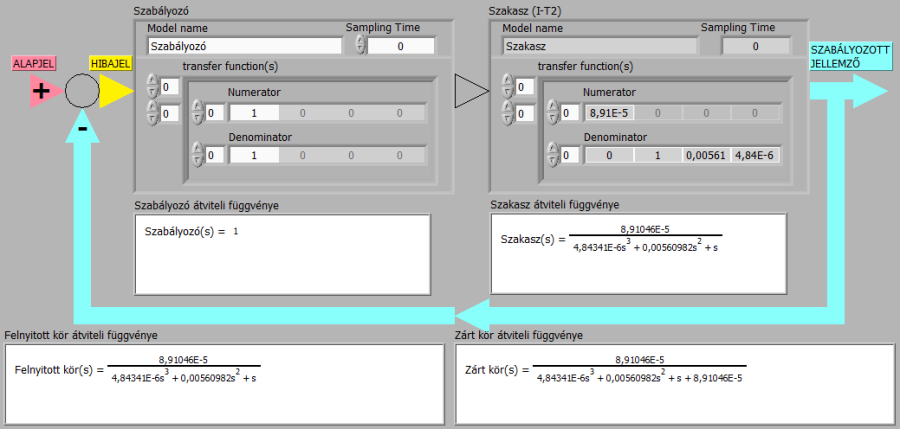
A szabályozás minőségét a tartalékok (fázis- és erősítési tartalék), a zárt kör átmeneti függvénye, valamint a szakasz és a zárt pólusaival értékelhetjük.
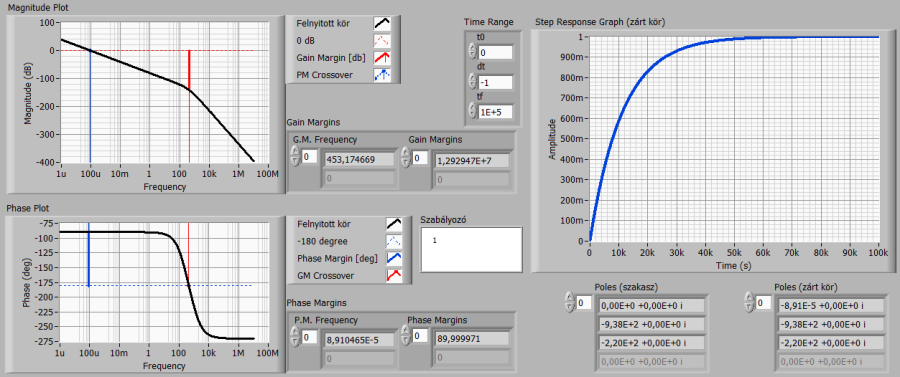
A kapott eredményekből – főleg a zárt kör átmeneti függvényéből – látszik, hogy az egységnyi erősítésű P-szabályozóval
-
ugyan a kívánt aperiodikus beállást érjük el,
-
nincs maradó követési hiba a szakasz melletti (a sebesség-elmozdulás konverzió miatt szükséges) integrálás miatt, azonban
-
a szabályozás rendkívül lassú!
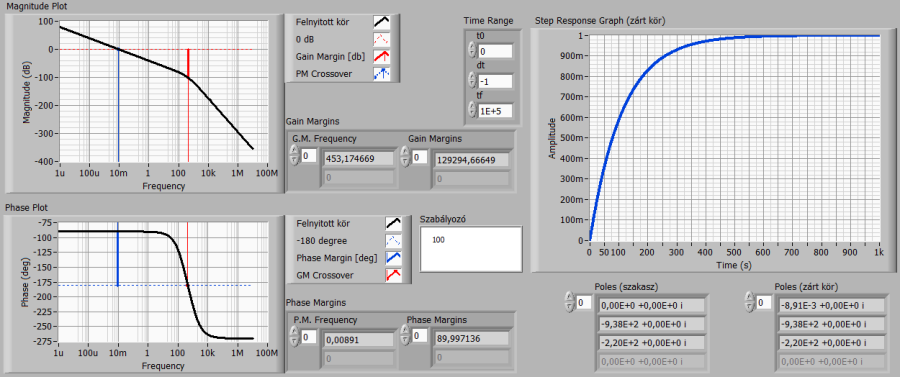
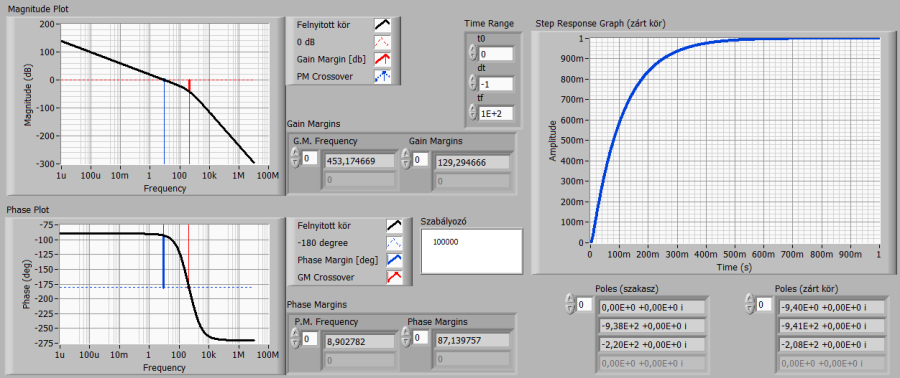
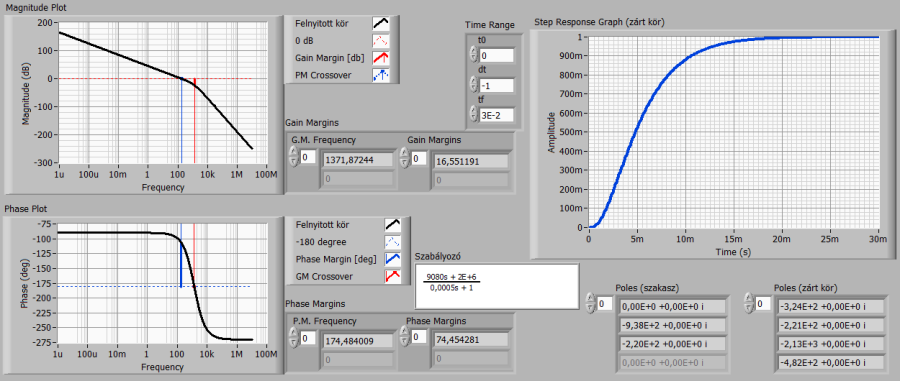
Az arányos szabályozó erősítését növelve a vágási körfrekvencia jobbra tolódik, a zárt kör gyorsul. 100-szoros erősítésű arányos szabályozót választva az eredmény az alábbi ábrán látható.
Az elméleti – pontosabban szimulációs – vizsgálódást folytatva, az arányos szabályozó erősítését 10000-re választva tovább gyorsíthatjuk a rendszert. Az alábbi ábrán látható, hogy a szakasz másodrendű részének dinamikáját még mindig nem tudtuk eléggé megközelíteni.
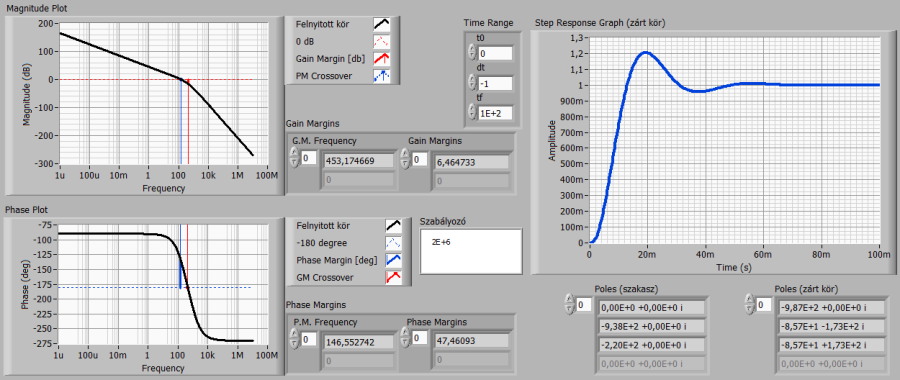
Próbálkozzunk az erősítés további növelésével! AZ előző érték 20-szorosát, vagyis 2000000-szoros erősítést választva még mindig nem értük el a szakasz gyorsaságát, viszont a rendszerünk lengő beállást mutat. Az erősítés további növelése fokozza a lengési hajlamot. A golyósorsós pozícionáló esetében lengéseket semmiképpen nem engedhetünk meg, így a legegyszerűbb arányos szabályozónál összetettebb struktúrára lesz szükségünk.
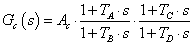
Válasszunk PD-jellegű töréspontáthelyező algoritmust (azaz párhuzamosan kapcsolt arányos és megvalósítható differenciáló tulajdonságú tagból álló szabályozót)!
|
|
(16.28) |
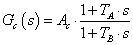
A szabályozó (1+TAs) gyöktényezőjével „semlegesítjük” a szakasz kisebb törésponti körfrekvenciájú (vagyis nagyobb időállandójú) elsőrendű komponensét. A TB időállandó reciprokának megfelelő töréspontot és az Ac erősítést úgy választjuk meg, hogy a zárt kör továbbra is aperiodikusan követi az egységugrás alapjelet és gyorsasága legyen összemérhető a szakasz integrálás nélküli, másodrendűként közelített részével.
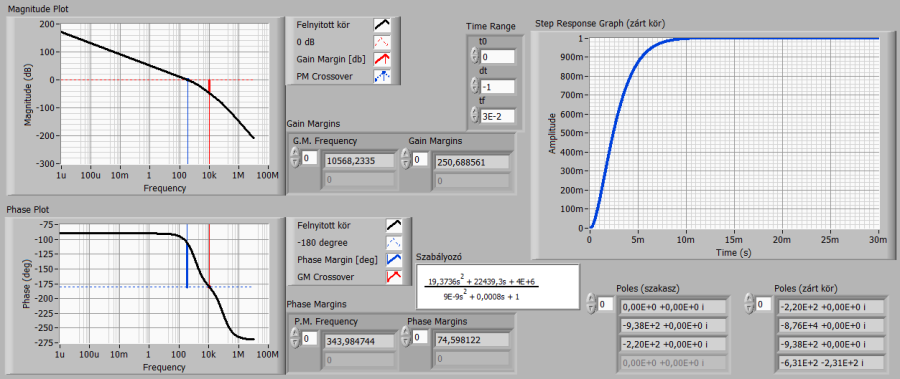
A PD-jellegű töréspontáthelyező további hangolásával (erősítés növelése, töréspont további jobbra mozgatása) elérhetjük a szabályozó lehetőségeinek határát. Ekkor célszerű olyan PID-jellegű struktúrát választani, amiben nincs soros integráló hatás, hiszen az a szakaszban már van. Így a szakasz másodrendűen közelített részében lévő pólusok áthelyezését biztosító szabályozó struktúrát választunk.
A választott PID-jellegű struktúra a kettős töréspontáthelyező algoritmus. A szakasz két töréspontját (pólusát) a szabályozó két (a TA és TC időállandónak megfelelő) zérusa kompenzálja, az előírt dinamikai tulajdonságokat biztosító felnyitott szabályozási körbeli gyököket pedig a szabályozó (TB és TD időállandónak megfelelő) zérusai adják. Az AC erősítési tényezővel biztosíthatjuk, hogy a vágási körfrekvencia az előírt stabilitási és gyorsasági feltételeket biztosítsa. A szakaszban lévő integráló tulajdonság miatt az ugrásszerű alapjelet a szabályozás mindenképpen hiba nélkül követi.
|
|
(16.29) |
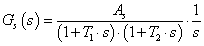
A szakasz (egyszerűsített) átviteli függvény két elsőrendű és egy integráló tag soros eredőjeként felírva
|
|
(16.30) |
A felnyitott kör átviteli függvénye a szabályozó Gc(s) és a szakasz Gs(s) átviteli függvényének soros eredője (szorzata)
|
|
(16.31) |

Először vizsgáljuk meg a szakasz T1 és T2 időállandójának megfelelő pólust közömbösítő, nem megvalósítható szabályozó átviteli függvényt.
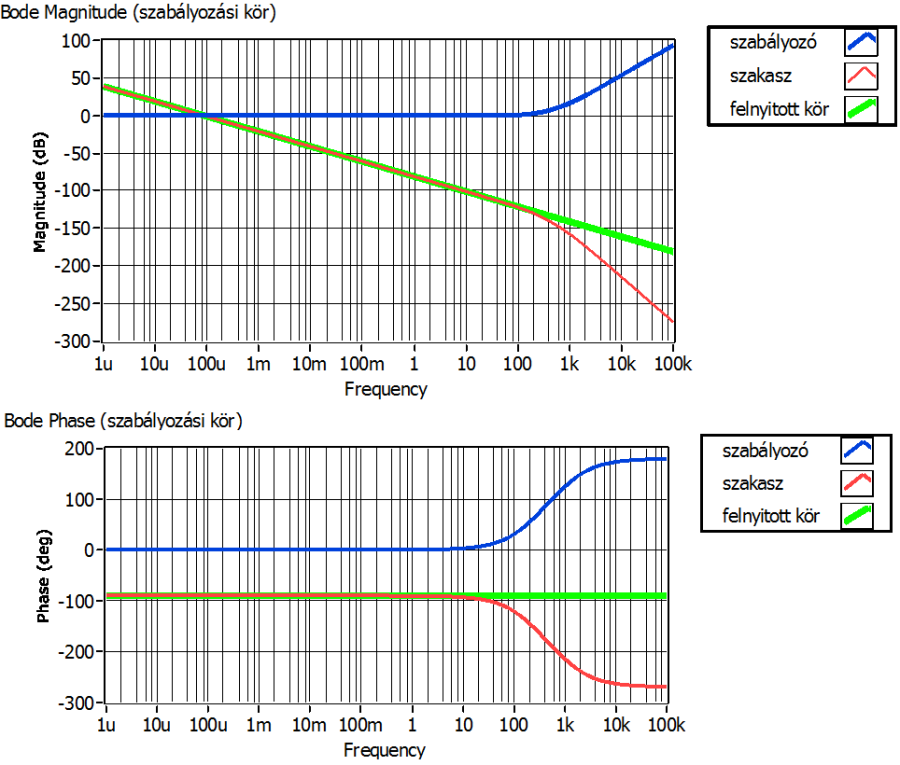
Ezzel a – hangsúlyozottan nem megvalósítható – szabályozóval a felnyitott kör integráló, a zárt kör egytárolós arányos jellegű. A zárt kör előírt dinamikáját biztosító – a vágási körfrekvencia reciprokaként értelmezhető – zárt kör időállandót a szabályozó megfelelő értékű erősítésével lehetne beállítani.
A szabályozó megvalósíthatóságához elengedhetetlen, hogy átviteli függvényében a számláló polinom fokszáma ne legyen alacsonyabb a nevező polinom fokszámánál. Ha az előző ábrákon látható módon a szabályozó zérusaival semlegesítjük a szakasz nullától különböző pólusait, a szabályozó pólusaival definiálhatjuk a felnyitott kör és természetesen ezen keresztül a kör zárt pólusait.
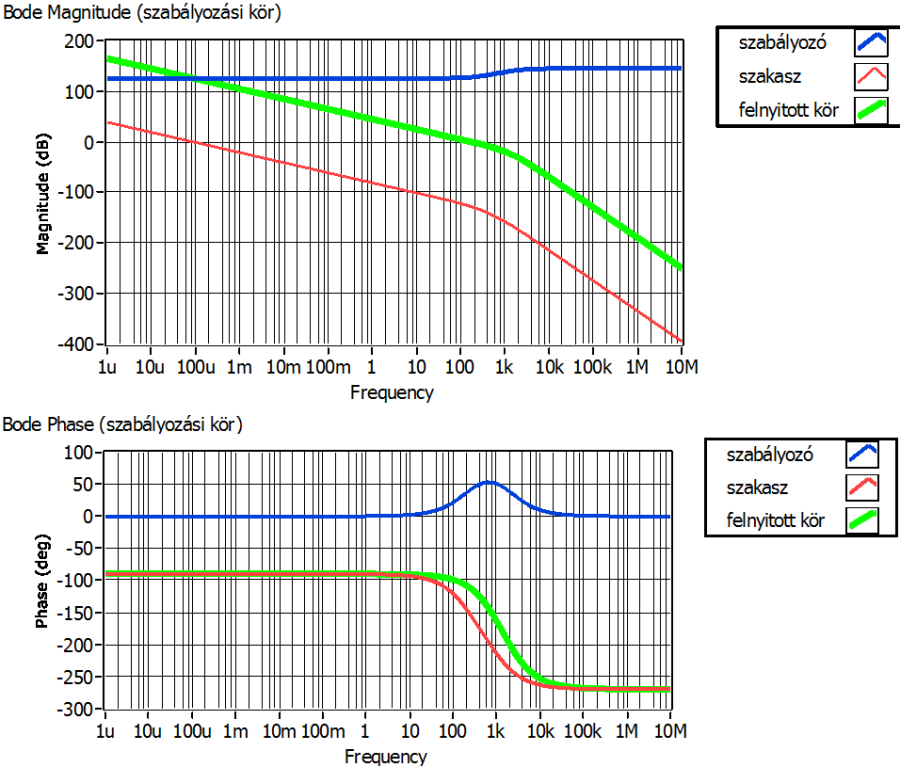
A szakasz integráló jellegét figyelembe véve úgy kell a pólusokat áthelyeznünk, hogy az előírt gyorsaságot biztosító vágási körfrekvenciától elegendően messze jobbra essenek a felnyitott kör töréspontjai a Bode-diagramon.
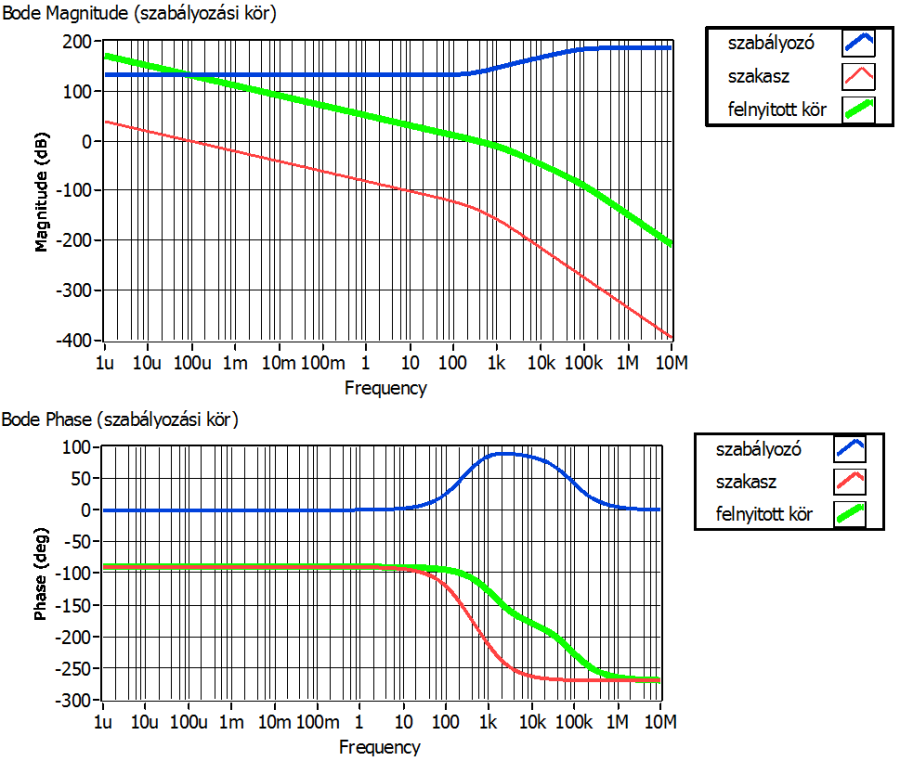
A szabályozó paramétereit folyamatosan változtatva és futtatva a szimulációs programot tovább tudjuk alakítani a zárt kör válaszát, hogy a célul kitűzött zárt rendszer dinamikai sajátságokat elérhessük.
Szakirodalom
[16.1.] LabVIEW 2009 Help http://www.ni.com/pdf/manuals/371361f.zip.
[16.2.] LabVIEW Control Design User Manual, June 2009 http://www.ni.com/pdf/manuals/371057g.pdf.
[16.3.] LabVIEW 2009 Control Design and Simulation Module Help http://www.ni.com/pdf/manuals/371894d.zip.
[16.4.] Maxima, a Computer Algebra System: Documentation http://maxima.sourceforge.net/documentation.html.
[16.5.] COMA, Control Engineering with Maxima és Regelungstechnik mit Maxima http://www.austromath.at/daten/maxima/zusatz/Control_Engineering_with_Maxima.pdf.