2. fejezet - Példa – A manipulátor illesztése IBM AT kompatibilis számítógéphez
Az illesztés a számítógép párhuzamos printerpontján valósul meg. (A manipulátort előzőleg már egy Sinclair Spectrum számítógéphez is illesztettük, és az ott alkalmazott megoldást módosítottuk a szükséges mértékben.) Az illesztő áramkör az alábbi ábrán látható.
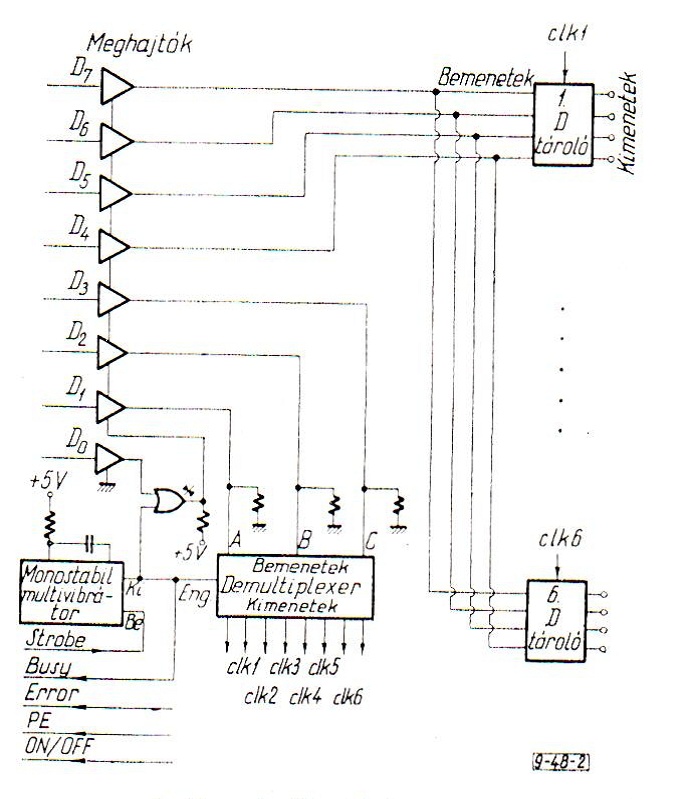
A motorok gerjesztési állapotát hat D tárolóból álló 4 bites memória írja elő. E D tárolók TTL-szintű kimeneteit feszültség- és teljesítményerősítés után kapcsoljuk a léptetőmotorok fázistekercseire.
A számítógép egyetlen output utasítással csak egyetlen motor léptetésére adhat parancsot. Az adott motor következő lépésének megfelelő gerjesztést a párhuzamos port a nyolc adatvonal közül a felső négy helyiértéken (D7-D4) közli. A léptetendő motor sorszámát a D3-D1 adatvezetékek tartalmazzák. A sorszám dekódolását egy demultiplexer végzi. A demultiplexer megfelelő kimenete ad engedélyt a léptetendő motorhoz tartozó D tárolónak a motor következő gerjesztési állapotát előíró adat fogadására.
A számítógép strobejele egy monostabil multivibrátor bemenetéhez csatlakozik. E multivibrátor a strobejel hatására a beállított ideig engedélyt ad a robot manipulátornak az adatok fogadására, ha közben a D0 adatvezeték a logikai nulla szintnek megfelelő potenciálon van.
A (2.1. ábra) ábrán feltüntettük a printerport azon bemeneteit, amelyeket a működés érdekében állandó potenciálra kell kapcsolni.