3. fejezet - Példa – A robotvezérlő program használati utasítása
A program betöltése: c:\ robot\ robvez
Az indítást követően a következő kérdésre kell választ adni: „Referencia helyzetben van a kar?” A válasz az I (igen) vagy az N (nem) betű leütése lehet. Ha a válasz N, akkor a program megkérdezi a megfogó pozícióját milliméterben és orientációját fokban. A fenti bejelentkezést követően a főmenü jelenik meg a képernyőn. (lásd alábbi ábra)
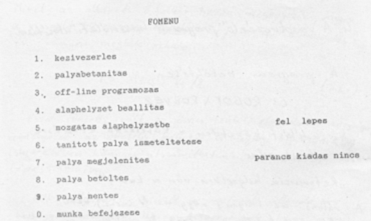
A menüpontok mellett a képernyő jobb oldalán két megjegyzést találunk: fél lépés, továbbá parancs kiadás nincs.
Mindkét megjegyzés a program egy-egy logikai változójának állapotára utal. Az első arra vonatkozik, hogy a léptető motorokat fél vagy egész lépésenként vezéreljük. E változó beállítása a főmenüben az E vagy az F betű leütésével történik. A másik jelző segítségével engedélyezhetjük vagy tilthatjuk a léptető motorok tényleges mozgását előidéző parancs kiadását. E jelző beállítása szintén a főmenüben történik a V (parancs kiadás van) illetve az N (parancs kiadás nincs) betűk leütésével.
A főmenüben az egyes menüpontok közötti választásunkat a menüpont előtt lévő sorszám leütésével közölhetjük a program számára.
3.1. Kézi vezérlés
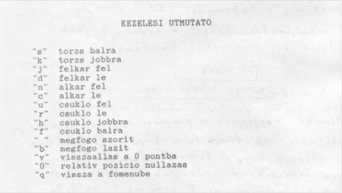
Ebben az üzemmódban a kar manipulátorként működtethető (a mozgás programozására nincs mód). A képernyőn az alábbi ábrán jelenik meg, ahol leolvasható, hogy az egyes ízületek különböző irányú mozgásának melyik billentyű leütése felel meg. A mozgás közben a program folyamatosan csak azt tartja nyilván, hogy az adott pozícióból az egyes motorok hány lépés megteltével térhetnek vissza a kar referenciahelyzetébe. E menüpont a mozgás begyakorlását szolgálja.
3.2. Pályatanítás
Az előző menüponthoz hasonló mozgatást tesz lehetővé, kiegészítse azzal, hogy a képernyő jobb oldalán folyamatosan megjelenik a léptetőmotorok megtett lépéseinekszáma. Továbbá a mozgatás közben a következő esetekben a program az adott pályapont relatív helyzetét eltárolja
-
ha bármely motor az utolsó tárolt pályapont óta 127 lépésnél többet tett meg (ez egy kartag kb. 6°-os elfordulását jelenti);
-
ha bármely motor mozgásiránya megváltozik (beleértve a motor elindulását és leállását);
-
ha egy fontosnak ítélt pontnál erre különutasítást adunk az M betű leütésével.
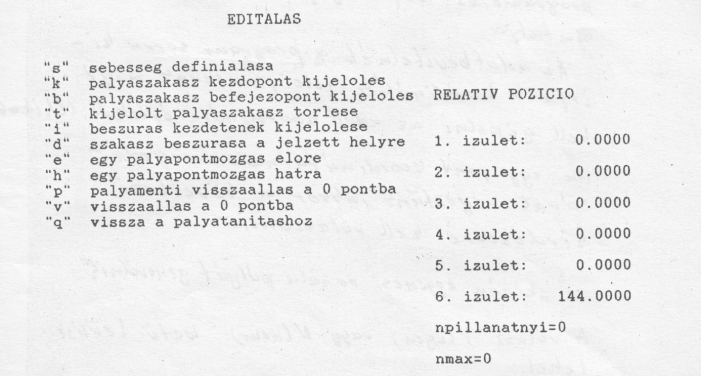
A pálya ismétlésekor a program ezeken a tárolt pontokon viszi végig folyamatosan a kart, de lehetőség van arra, hogy bizonyos pályapontokban a T betű leütésével várakozási időt írjunk elő. A várakozási időt miliszekundumban kell megadni. (lásd az alábbi ábrán) A pályatanítás egy almenüpontja a pálya editálására nyújt lehetőséget.
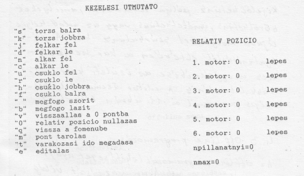
Kijelölhetünk pályaszakaszokat, amelyeket törölhetünk, ismételhetünk, vagy az adott helyre újabb mozgássort szúrhatunk be. A pályatanítástól eltérően a kar helyzetének megjelenítése az ízületi koordinátákkal történik. Az editor üzemmód lehetséges parancsait az alábbi ábrán láthatjuk.
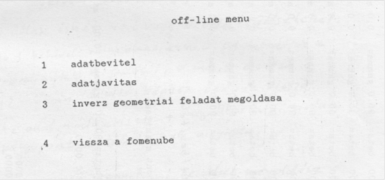
3.3. Off-line programozás
Az off-line programozás lehetőséget nyújt arra, hogy a robotkar mozgását világkoordinátákban írjuk elő. A pályapontok pozíciójának megadása milliméterben történik, a megfogó orientációját fokokban kell előírni. Az off-line programozás képernyőjét az alábbi ábra mutatja.
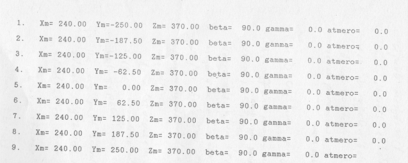
Az adatbevitelnél a program sorra kiírja a koordináták jeleit s nekünk mögé kell gépelni az adott koordináta értékét. (lásd az alábbi ábra) Ha egy pont koordinátáinak megadásával végeztünk, akkor a következő kérdésre kell válaszolni:
„kíván egyenes vonalú pályát generálni?”
A válasz I (igen) vagy N (nem) betű leütése lehet.
Ha a válaszunk I (igen), akkor meg kell adni, hogy az utolsó két pályapont között hány olyan pontot generáljon a program, amelyek a két pontot összekötő egyenesre esnek.
A következő kérdés:
„Kíván további pályapontot megadni?”
A válasz ismét az I vagy N betű leütése lehet. Ha I betűvel válaszolunk, akkor folytathatjuk a koordináták megadását, a másik esetben a (3.5. ábra) ábrán látható képhez térünk vissza. Az adatmódosításkor a megváltoztatni kívánt pályapont sorszámát kell megadni.
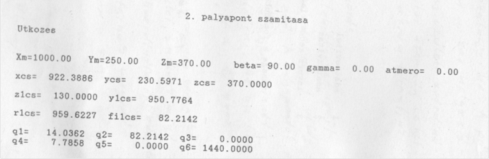
Az inverz geometriai feladat megoldása a korábbiakban ismertetett algoritmus szerint valósul meg. A megoldás során a program ellenőrzi, hogy a számított pozíciót a kar valóban fel tudja venni-e vagy sem.
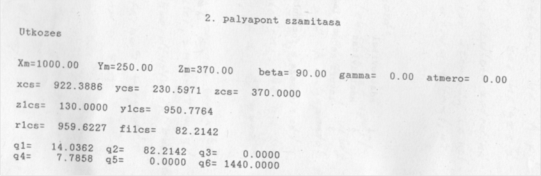
Ha a koordinátákat rosszul adtuk meg, akkor a program (3.7. ábra) ábrán látható hibaüzenetet adja, kiírja az adott pont koordinátáit (amely a megfogóra vonatkozik), a csukló koordinátáit mind a világ koordinátarendszerben mind a váll koordinátarendszerében és az ízületi koordinátákat, így könnyen megkereshetjük a hiba okát. A program a pályát végül az egyes motorok lépésszámaira bontja le.
3.4. Alaphelyzet beállítása
Külső akadály előidézheti a léptető motorok lépéstévesztését, megcsúszását, ilyenkor a pozícióérzékelők hiányában a robotkart kézzel ismét a referencia helyzetbe kell vinni. E menüpont erre nyújt lehetőséget azzal, hogy lekapcsolja a léptető motorok gerjesztését, így megszűnik a motorok állónyomatéka. A beállítás befejezését a „space” billentyű leütésével jelezhetjük a programnak.
3.5. Mozgatás alaphelyzetbe
E menüpontban a program a referenciahelyzetbe viszi a robotkart.
3.6. A pálya ismételtetése
A vezérlő program ugyanolyan formátumban tárolja a kar mozgását, függetlenül attól, hogy azt a pályán végigvezetéssel (pályatanítással) vagy off-line üzemmódban programoztuk be. E menüpontban a program végigviszi a robotkart az előírt mozgássoron.
3.7. A pálya megjelenítése
E menüpontban nem grafikus, hanem koordinátákkal való megjelenítésről van szó. Végig mehetünk a pályapontokon és azok a képernyőn a 3.8. ábra formátumában jelennek meg.