4. fejezet - Példák – Tipikus nyíltláncú robotkarok
A Denavit‑Hartenberg konvenció értelmében az egyetlen változó a  szög, a további paraméterek állandók. Továbbá a melléklet folyamán a következő egyszerűsített jelölést alkalmazzuk, amely a robotikai szakkönyvekben általános alkalmazott rövidítés, azaz
szög, a további paraméterek állandók. Továbbá a melléklet folyamán a következő egyszerűsített jelölést alkalmazzuk, amely a robotikai szakkönyvekben általános alkalmazott rövidítés, azaz
|
|


4.1. Síkbeli könyök manipulátor
Ahogy az ábrán is látható, a síkbeli könyök manipulátor (angolul: planar elbow manipulator) két kartagból áll.
![Síkbeli könyök manipulátor [1.]](images/image_IV_PIII_1.png)
A csuklók  tengelyei merőleges a lap síkjára, és kifelé mutatnak belőle. A manipulátor bázisát az
tengelyei merőleges a lap síkjára, és kifelé mutatnak belőle. A manipulátor bázisát az  koordináta rendszer jelzi. Fontos megjegyeznünk, hogy a koordináta rendszer felvétele során, a Denavit‑Hartenberg konvenciók értelmében a koordináta rendszer origóját, valamint a
koordináta rendszer jelzi. Fontos megjegyeznünk, hogy a koordináta rendszer felvétele során, a Denavit‑Hartenberg konvenciók értelmében a koordináta rendszer origóját, valamint a  tengely irányát tudjuk megválasztani, az
tengely irányát tudjuk megválasztani, az  tengely iránya tetszőlegesen megválasztható, ezáltal az
tengely iránya tetszőlegesen megválasztható, ezáltal az  tengely iránya kiadódik. A további
tengely iránya kiadódik. A további  és
és  koordináta rendszereket a Denavit‑Hartenberg konvenciók értelmében már definiálhatjuk.
koordináta rendszereket a Denavit‑Hartenberg konvenciók értelmében már definiálhatjuk.
A Denavit‑Hartenberg paramétereket az alábbi táblázatba foglaltuk össze
|
Kar |
|
|
|
|
|
1 |
|
0 |
0 |
|
|
2 |
|
0 |
0 |
|








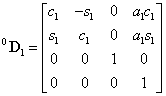
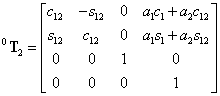
Az  koordináta rendszert az
koordináta rendszert az  koordináta rendszerbe a
koordináta rendszerbe a  transzfomációs mátrixszal vihetjük át, azaz
transzfomációs mátrixszal vihetjük át, azaz
|
|
(4.1) |
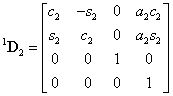
Az  koordináta rendszert az
koordináta rendszert az  koordináta rendszerbe az
koordináta rendszerbe az  transzformációs mátrixszal vihetjük át, azaz
transzformációs mátrixszal vihetjük át, azaz
|
|
(4.2) |
Felhasználva a  és
és  transzformációs mátrixokat képezhetjük a
transzformációs mátrixokat képezhetjük a  transzformációs mátrixot, amely a bázis koordináta rendszert átszámolja a végberendezés koordináta rendszerébe, azaz
transzformációs mátrixot, amely a bázis koordináta rendszert átszámolja a végberendezés koordináta rendszerébe, azaz
|
|
(4.3) |

kifejtve
|
|
(4.4) |
Elemezve a  transzformációs mátrixot, vegyük észre, hogy a transzformációs mátrix (1,4) illetve a (2,4) eleme reprezentálja az
transzformációs mátrixot, vegyük észre, hogy a transzformációs mátrix (1,4) illetve a (2,4) eleme reprezentálja az  origó x és y koordinátáit a bázis koordináta rendszerben leírva, azaz
origó x és y koordinátáit a bázis koordináta rendszerben leírva, azaz
|
|
(4.5) |

|
|
(4.6) |

amelyek továbbá a végberendezés koordinátái a bázis koordináta rendszerben. A  transzformációs mátrix forgatási része pedig az
transzformációs mátrix forgatási része pedig az  koordináta rendszer orientációját mutatja a bázis koordináta rendszerhez képest.
koordináta rendszer orientációját mutatja a bázis koordináta rendszerhez képest.
4.2. Hengeres robot
Ahogy az ábrán is látható, a hengeres robot (angolul: cylindrical robot) három kartagból áll.
![Hengeres robot [1.]](images/image_IV_PIII_2.png)
Az  origó az 1. csukló, talajhoz rögzített bázis koordinátarendszerének origója. A
origó az 1. csukló, talajhoz rögzített bázis koordinátarendszerének origója. A  tengely az origón fut keresztül és a csuklóból kifelé mutat (ezen tengely körül forog az 1. csukó). Az
tengely az origón fut keresztül és a csuklóból kifelé mutat (ezen tengely körül forog az 1. csukó). Az  tengely irány tetszőlegesen megválasztható, ami választásunk, hogy az
tengely irány tetszőlegesen megválasztható, ami választásunk, hogy az  tengely merőleges a lap síkjára. Ebben az esetben a
tengely merőleges a lap síkjára. Ebben az esetben a  paraméter értéke zérus. Ezután az
paraméter értéke zérus. Ezután az  tengely iránya már kiadódik.
tengely iránya már kiadódik.
A második csukló transzlációt hajt végre. Ez esetben a  és
és  tengelyek egymással párhuzamosak és ugyanabba az irányba mutatnak. Ebben az esetben is az
tengelyek egymással párhuzamosak és ugyanabba az irányba mutatnak. Ebben az esetben is az  tengely iránya tetszőlegesen megválasztható, de célszerű az
tengely iránya tetszőlegesen megválasztható, de célszerű az  tengellyel párhuzamosan és az
tengellyel párhuzamosan és az  tengellyel azonos irányba felvenni. A Denavit‑Hartenberg konvenciók értelmében
tengellyel azonos irányba felvenni. A Denavit‑Hartenberg konvenciók értelmében  és
és  tengelyek merőlegesek egymásra, valamint az
tengelyek merőlegesek egymásra, valamint az  origó a tengelyek metszéspontjában helyezkedik el. Az
origó a tengelyek metszéspontjában helyezkedik el. Az  tengelyt párhuzamosnak választjuk az
tengelyt párhuzamosnak választjuk az  tengellyel, tehát ebben az esetben
tengellyel, tehát ebben az esetben  paraméter értéke zérus. Végezetül a végberendezéshez rögzített koordináta rendszert alakítjuk ki, amelynek tengelyei párhuzamosak az
paraméter értéke zérus. Végezetül a végberendezéshez rögzített koordináta rendszert alakítjuk ki, amelynek tengelyei párhuzamosak az  koordináta rendszerrel, azonban a koordináta rendszer origója a végberendezés középpontjában található.
koordináta rendszerrel, azonban a koordináta rendszer origója a végberendezés középpontjában található.
A Denavit‑Hartenberg paramétereket az alábbi táblázatba foglaltuk össze
|
Kar |
|
|
|
|
|
1 |
0 |
0 |
|
|
|
2 |
0 |
-90 |
|
0 |
|
3 |
0 |
0 |
|
0 |








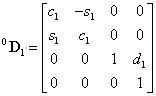
Az  koordináta rendszert az
koordináta rendszert az  koordináta rendszerbe a
koordináta rendszerbe a  transzfomációs mátrixszal vihetjük át, azaz
transzfomációs mátrixszal vihetjük át, azaz
|
|
(4.7) |
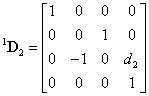
Az  koordináta rendszert az
koordináta rendszert az  koordináta rendszerbe az
koordináta rendszerbe az  transzformációs mátrixszal vihetjük át, azaz
transzformációs mátrixszal vihetjük át, azaz
|
|
(4.8) |
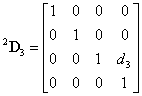
Az  koordináta rendszert az
koordináta rendszert az  koordináta rendszerbe az
koordináta rendszerbe az  transzformációs mátrixszal vihetjük át, azaz
transzformációs mátrixszal vihetjük át, azaz
|
|
(4.9) |
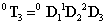
Felhasználva a  ,
,  és
és  transzformációs mátrixokat képezhetjük a
transzformációs mátrixokat képezhetjük a  transzformációs mátrixot, amely a bázis koordináta rendszert átszámolja a végberendezés koordináta rendszerébe, azaz
transzformációs mátrixot, amely a bázis koordináta rendszert átszámolja a végberendezés koordináta rendszerébe, azaz
|
|
(4.10) |
kifejtve
|
|
(4.11) |
4.3. Gömbi csukló
Az alábbi ábrán egy gömbi csukló, vagy Euler csukló látható (angolul: spherical wrist).
![Euler csukló [1.]](images/image_IV_PIII_3.png)
A gömbi csukló esetén a  és
és  tengelyek egy pontban metszik egymást, a 5. csukló koordinátarendszerének origójában. A Stanford manipulátor egy jó példája az ipari robotoknak, amely gömbi csuklóval rendelkezik. A Stanford manipulátor alapját egy RRP robot, vagy gömbkoordinátás robot képzi.
tengelyek egy pontban metszik egymást, a 5. csukló koordinátarendszerének origójában. A Stanford manipulátor egy jó példája az ipari robotoknak, amely gömbi csuklóval rendelkezik. A Stanford manipulátor alapját egy RRP robot, vagy gömbkoordinátás robot képzi.
A Denavit‑Hartenberg paramétereket az alábbi táblázatba foglaltuk össze
|
Kar |
|
|
|
|
|
4 |
0 |
-90 |
0 |
|
|
5 |
0 |
90 |
0 |
|
|
6 |
0 |
0 |
|
|








A gömbi csukló specialitása, hogy a 

 csuklóváltozók az Euler‑féle szögek, rendre
csuklóváltozók az Euler‑féle szögek, rendre  ,
,  , és
, és  az
az  koordináta rendszerben kifejezve. A korábbiak értelmében az
koordináta rendszerben kifejezve. A korábbiak értelmében az  koordináta rendszert az
koordináta rendszert az  koordináta rendszerbe a
koordináta rendszerbe a  transzfomációs mátrixszal vihetjük át, azaz
transzfomációs mátrixszal vihetjük át, azaz
|
|
(4.12) |
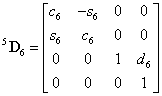
Az  koordináta rendszert az
koordináta rendszert az  koordináta rendszerbe az
koordináta rendszerbe az  transzformációs mátrixszal vihetjük át, azaz
transzformációs mátrixszal vihetjük át, azaz
|
|
(4.13) |
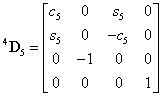
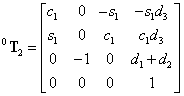
Az  koordináta rendszert az
koordináta rendszert az  koordináta rendszerbe az
koordináta rendszerbe az  transzformációs mátrixszal vihetjük át, azaz
transzformációs mátrixszal vihetjük át, azaz
|
|
(4.14) |
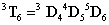
Felhasználva a  ,
,  és
és  transzformációs mátrixokat képezhetjük a
transzformációs mátrixokat képezhetjük a  transzformációs mátrixot, amely a bázis koordináta rendszert átszámolja a végberendezés koordináta rendszerébe, azaz
transzformációs mátrixot, amely a bázis koordináta rendszert átszámolja a végberendezés koordináta rendszerébe, azaz
|
|
(4.15) |
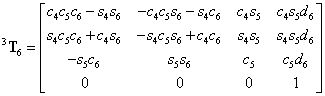
kifejtve
|
|
(4.16) |