8. fejezet - PID szabályozások tervezése
8.1. Tervezés frekvencia tartományban
Soros kompenzátor tervezése előírt fázistartalék elérése érdekében történik. A tervezési elv ismertetése érdekében első lépésben arányos soros kompenzátor tervezését mutatjuk be.
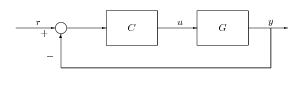
A zárt rendszer átviteli függvénye:
|
|
(285) |
ahol a hurokátviteli függvény és az előrevezető ág eredő átviteli függvénye.
Vizsgáljuk meg első lépésben egy arányos kompenzátor tervezését. Kihasználjuk azt, hogy egy C=A arányos tag amplitúdója , míg fázisa a teljes frekvencia tartományban. Következtetés: Egy arányos tag az amplitúdó függvényt önmagával párhuzamosan eltolja, mégpedig esetén felfelé, míg esetén lefelé, ugyanakkor a fázisfüggvényt nem módosítja.
A soros kompenzátort úgy kell megválasztani, hogy vágási körfrekvenciához tartozó fázisszög éppen az előírt legyen.
Olvassuk le a fázisszöghöz tartozó amplitúdó értékét és jelöljük ezt előjelhelyesen -szel Az arányos soros kompenzátort úgy kell megválasztani, hogy az amplitúdó függvényt önmagával párhuzamosan -szel eltolja (miközben a fázisfüggvényt változatlanul hagyja).
Tehát -t a következőképpen kell megválasztani:
|
|
(286) |
ahol az ábráról leolvasott érték, s ebből kiszámítható:
|
|
(287) |
Összefoglalva a soros kompenzátor tervezés lépései a következők:
(a) választással felrajzoljuk a felnyitott hurok Bode diagramját.
(b) Leolvassuk a -hez tartozó előjeles értékét és kiszámítjuk soros kompenzátor értéket.
Megjegyzés: Ha az amplitudó függvényt lefelé kell eltolni, akkor , míg ha felfelé, akkor erősítést várunk.
(c) Megvizsgáljuk a zárt (szabályozott) rendszer minőségi tulajdonságait.
Ha a cél egy dinamikus kompenzátor tervezése, akkor a tervezést megpróbáljuk visszavezetni arányos soros kompenzátor tervezésére:
|
|
(288) |
ahol a kompenzátor átviteli függvényének ismert komponense.
Például:
|
|
(289) |
azaz és . A felnyitott hurok átviteli függvénye a következő:
|
|
(290) |
ahol . Ha a rendszer átviteli függvényét a komponenssel módosítjuk, akkor átviteli függvényhez jutunk.
A tervezés során a átviteli függvénnyel adott rendszert tekintjük szabályozandó rendszernek, amihez egy arányos kompenzátort kell terveznünk.Természetesen a tervezett soros kompenzátort alakú.
Példa 7.1
Legyen az irányítandó rendszer átviteli függvénye:
|
|
(291) |
Tervezzünk fokos fázistartalékot biztosító arányos soros kompenzátort.
A feladat megoldása: Válasszunk kiindulásként arányos soros kompenzátort:
|
|
(292) |
Szerkesszük meg a felnyitott hurok Bode diagramját.
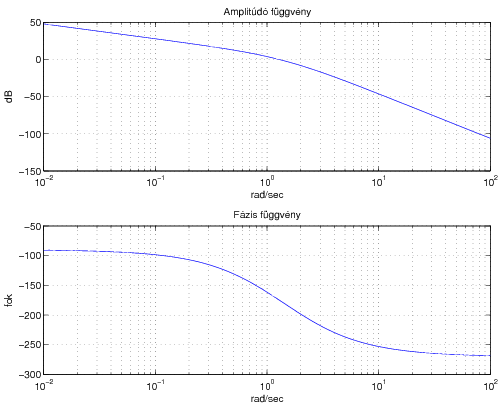
Változtassuk meg -t úgy, hogy a fázistartalék fokos legyen, azaz és a fázisszög -nél: . Kihasználjuk azt, hogy egy C=A arányos tag amplitúdója , míg fázisa a teljes frekvencia tartományban.
• Jelen esetben arányos soros kompenzátor oldja meg a feladatot ( fokos fázistartalékot biztosít).
Példa 7.2
Legyen az irányítandó rendszer átviteli függvénye:
|
|
(293) |
Tervezzünk jelkövetést biztosító soros kompenzátort, amelyik fokos fázistartalékot is garantál.
A feladat megoldása: A jelkövetés akkor biztosítható, ha a soros kompenzátor integráló tulajdonságú. Emiatt a soros kompenzátort a következő alakban választjuk meg:
|
|
(294) |
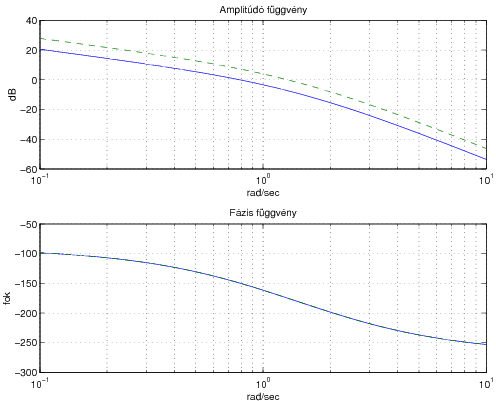
A felnyitott hurok átviteli függvénye a következő:
|
|
(295) |
Ha a rendszer átviteli függvényét -nek tekintjük, akkor a továbbiakban egy arányos soros kompenzátort kell terveznünk az . példában leírtakhoz hasonló módon.
A következőkben megvizsgáljuk, hogy a modell alapján megtervezett szabályozó vajon stabilizálja-e a valós rendszert. Ehhez a modell bizonytalansági struktúráiból indulunk ki.
Tekintsük a bizonytalanságot additív struktúrában.
|
|
(296) |
A továbbiakban feltesszük, hogy a rendszer névleges modelljén kívül ismerjük a szabályozó modelljét. Tegyük fel, hogy a kompenzált névleges rendszer stabilis. Vizsgáljuk meg, hogy a aktuális rendszer stabilitásához milyen feltételnek kell teljesülnie.
Tétel 7.1 Legyen az ismert névleges modell, amelyet a tervezett soros kompenzátor stabilizál. Tegyük fel, hogy a névleges modell és az aktuális rendszer közötti additív hiba felső korlátját a teljes frekvencia tartományban ismerjük. Ekkor a névleges modellre tervezett szabályozó az aktuális rendszer stabilitását is biztosítja, ha a következő feltétel teljesül:
|
|
(297) |
Ez a robusztus stabilitás feltétele additív hiba struktúra esetén.
Tekintsük a bizonytalanságot multiplikatív struktúrában.
|
|
(298) |
A továbbiakban feltesszük, hogy a rendszer névleges modelljén kívül ismerjük a szabályozó modelljét. Tegyük fel, hogy a kompenzált névleges rendszer stabilis. Vizsgáljuk meg, hogy a aktuális rendszer stabilitásához milyen feltételnek kell teljesülnie.
Tétel 7.2 Legyen az ismert névleges modell, amelyet a tervezett soros kompenzátor stabilizál. Tegyük fel, hogy a névleges modell és az aktuális rendszer közötti multiplikatív hiba felső korlátját a teljes frekvencia tartományban ismerjük. Ekkor a névleges modellre tervezett szabályozó az aktuális rendszer stabilitását is biztosítja, ha a következő feltétel teljesül:
|
|
(299) |
Ez a robusztus stabilitás feltétele multiplikatív hiba struktúra esetén.
8.2. PID struktúra
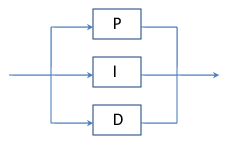
A PID egy arányos, egy integráló és egy differenciáló tag párhuzamos kapcsolata. A PID szabályozó tervezésekor az erősítéseket és az időállandókat kell megfelelően beállítani (hangolni). Megjegyezzük, hogy a valóságban időtárolós differenciáló tag van az ideális differenciáló tag helyett.
A szabályozó átviteli függvénye:
|
|
(300) |
ahol az arányos tag erősítése, az integráló tag időállandója, a differenciáló tag időállandója.
Az jel és hibajel közötti kapcsolat:
|
|
(301) |
Zérus kezdeti feltételekkel Laplace transzformálva:
|
|
(302) |
Példaként tekintsük a átviteli függvényű rendszert, amit különböző arányos taggal szabályoztunk.
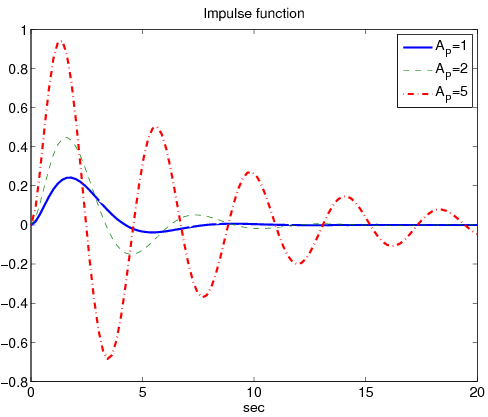
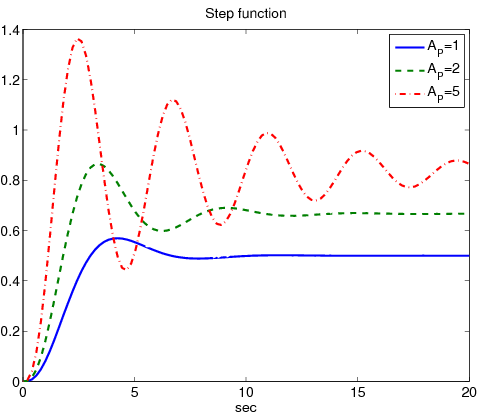
Növekvő erősítések mellett a szabályozási eltérés csökken ugyan, de a válaszfüggvény oszcillációja jelentősen növekszik. Tekintsük ugyanazt a átviteli függvényű rendszert. Ezúttal PI taggal végeztük a szabályozást. Rögzítsük az arányos tagot -re és változtassuk az integráló tag időállandóját..
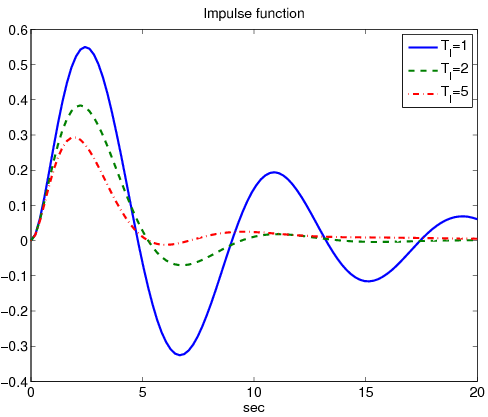
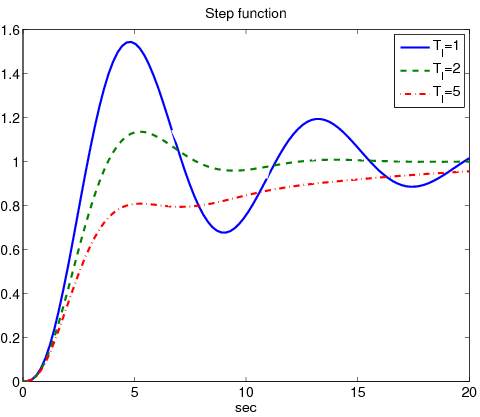
Az integráló hatás eredményeként az állandósult állapotú hiba eltűnik. A válaszfüggvény oszcillációja növekedésével jelentősen csökkenthető, viszont ezzel együtt a beállási idő jelentősen növekszik.Tekintsük ugyanazt a átviteli függvényű rendszert. Ezúttal PID taggal végeztük a szabályozást. Rögzítsük az arányos tagot -ra, rögzítsük az integráló tag időállandóját -re és változtassuk a differenciáló tag időállandóját..
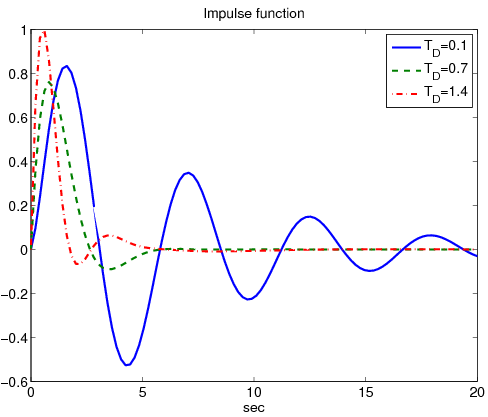
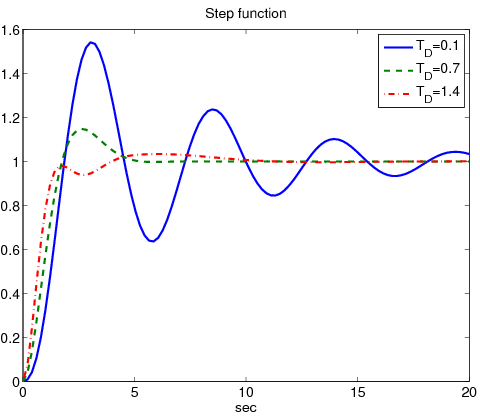
A növekedésével a beállási idő jelentősen csökkenthető és a lengések jelentősen csillapíthatók. A differenciáló hatás a szabályozást gyorsítja.
A PID szabályozó egy arányos, egy integráló és egy differenciáló tag párhuzamos kapcsolataként értelmezhető.
|
|
(303) |
A PID szabályozó egy másik alakja egy arányos, egy PI tag és egy PD tag soros kapcsolataként értelmezhető. Ekkor az egyes komponensek egymással kölcsönhatásban vannak.
|
|
(304) |

A kétféle felírás között a következő kapcsolat írható fel. A klasszikus alak komponensei:
|
|
(305) |
|
|
(306) |
|
|
(307) |
A soros alak komponensei:
|
|
(308) |
|
|
(309) |
|
|
(310) |
Megjegyzés: A soros alak felírásának feltétele, hogy . A klasszikus alak általánosabb, mint a soros alak. Gyakran a tervezés (tuningolás) szempontjából a soros alak ledvezőbb. A két felírás P, PI, PD típusú struktúrák esetén ekvivalens. Különböző PID struktúrák választása esetén a két felírás paraméterei különböznek, azokat az összefüggéseknek megfelelően kell számítani.
A PID struktúra egy másik elterjedten használt alakja:
|
|
(311) |
Ez az alak a klasszikus PID alakkal ekvivalens.
A két alak közötti kapcsolat:
|
|
(312) |
|
|
(313) |
|
|
(314) |
és az időállandók: , .
A PID szabályozók tervezésekor a következő négy szempontot kell figyelembe venni:
- Zajszűrés.
- Referenciajel súlyozás.
- Beavatkozó telítődése.
- Tuningolás, hangolás.
8.3. PID tervezési módszer
8.3.1. Zajszűrés
A deriválási művelet mindig érzékeny a zajra.
Tekintsük az alábbi példát: Tegyük fel, hogy a jel a következő alakú:
|
|
(315) |
ahol a zaj alakú, frekvenciájú szinusz jel. A deriválást elvégezve:
|
|
(316) |
ahol . Az eredmény azt mutatja, hogy habár az zaj hatása az eredeti jelre , de a derivált alakban ez az arány . A zaj aránya tetszőlegesen nagy lehet, ha nagy értékű. Deriválási művelet esetén a magas frekvenciás komponens hatását csökkenteni kell. Ennek érdekében az ideális PD tag helyett egy egytárolós komponenssel módosított tagot alkalmazunk:
|
|
(317) |
A komponens erősítése a nagyfrekvencia tartományban értékre van korlátozva. Következésképpen megakadályozzuk, hogy az zaj jelre való hatása túl nagy értékre növekedjen.
A PID szabályozó általános alakja a következőképpen módosul:
|
|
(318) |
Nagyfrekvenciás tartományban az erősítés értéke:
|
|
(319) |
növelésével a sávszélesség növekszik, ami stabilitási szempontból kedvezőtlen. Emiatt további elsőrendű szűrőket alkalmazunk:
|
|
(320) |
ahol a filter állandója, ami kölcsönhatásban van a szabályozó időállandóival. célszerű megválasztása .
Egy példa a szűrő lehetséges megválasztására:
|
|
(321) |
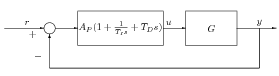
8.3.2. Referenciajel súlyozás
Gyorsan változó alapjel (egységugrás) esetén a szabályozó jelen impulzusszerű gyors válaszok jelenhetnek meg. Ezt a nemkívánatos jelenséget a referenciajel szűrésével oldhatjuk meg. Egy másik megoldási lehetőség a referenciajel megfelelő erősítésével történhet, amit referenciajel súlyozási eljárásnak nevezzük. A klasszikus PID esetén az jel:
|
|
(322) |
A módosított PID szabályozó esetén az jel:
|
|
(323) |
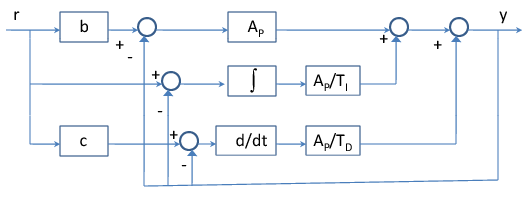
Az integrátort közvetlenül a hibajelre alkalmazzuk, viszont az arányos komponenst és a deriválás komponensét a súlyozott referenciajel és a kimenőjel különbségére alkalmazzuk. A bemenőjel összefüggése:
|
|
(324) |
|
|
(325) |
Az összefüggés azt mutatja, hogy a szabályozó struktúra elvileg két-szabadságfokú, melyeket egyrészt a referenciajelre, másrészt a kimenőjelre kell alkalmazni: , ahol
|
|
(326) |
|
|
(327) |
A referenciajel értékét egyrészt erősítéssel, másrészt erősítéssel módosítjuk.
|
|
(328) |
|
|
(329) |
Megfelelő megválasztásukkal (hangolásukkal) a nagy tranziensek és túllendülések elkerülhetők.
Példa 7.3
Példaként tekintsük a átviteli függvényű rendszert, amit PID kompenzátorral szabályoztunk: . A példában a súlyokat rendre és értékekre választottuk. Az ábra a erősítés hatását mutatja.
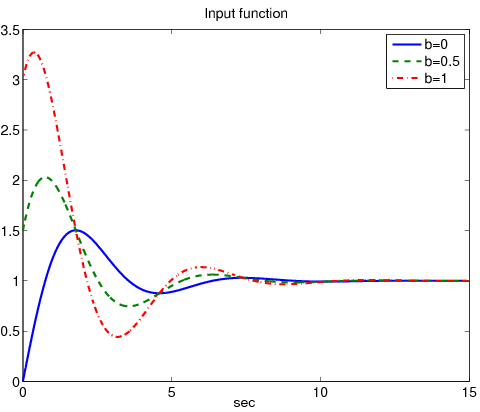
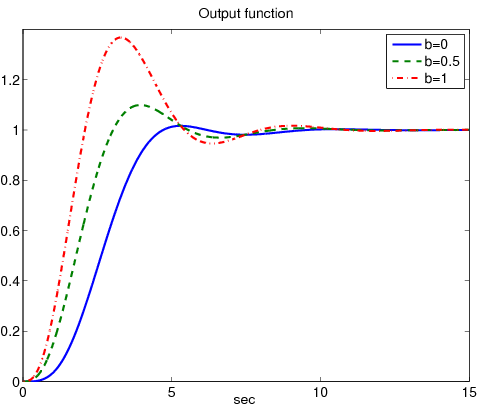
A legkisebb túllendülést esetén értük el, ami azt jelenti, hogy a referenciajelet az arányos komponensbe nem vittük be. Növekvő mellett a túllendülés növekszik.
8.3.3. Beavatkozó telítődése
Minden beavatkozó elemnek vannak korlátai. Ha a beavatkozó működése során telítésbe megy, akkor a rendszer nyílt hurokként működik, hiszen a beavatkozó nem tud nagyobb értéket generálni, bármit is kíván a szabályozó. Ha a szabályozó integrátort tartalmaz és az aktuátor telítésbe megy, akkor a rendszer kimenetén egyre nagyobb érték jelenik meg, azaz nagy tranziensek keletkeznek. Több módszer van a windup elkerülésére.
- Referenciajel korlátozás: Annak érdekében, hogy elkerüljük az integrátor által okozott növekvő tranziensű jeleket, a referenciajel értékét korlátozzuk. Ez a megoldás konzervatív eredményhez és gyenge minőségi tulajdonságokhoz vezet.
- Sebesség algoritmus: Az algoritmus kiszámítja az irányítójel változásának (sebességének) értékét. Abban az esetben, ha az aktuátor telítésbe ment, az integrátorra adott jelet korlátozzuk, s ezzel megakadályozzuk a tranziensek növekedését. Tulajdonképpen az irányítójel változásának értékét korlátozzuk.
- Beavatkozójel számítása: Ha az aktuátor telítésbe megy, akkor az integrál jel értékét kiszámítjuk és módosítjuk annak érdekében, hogy a kimenetének korlátozását figyelembe vegyük.
Az ábrán látható szabályozó egy további visszacsatolást tartalmaz, ami a beavatkozóra kiadott jel és a számított jel közötti különbségét alkalmazza. A két jel között egy sebességjel korlátozás van.
- Ha a nincs telítés, akkor a hibajel zérus és a visszacsatolásnak nincs hatása. Ha a jel telítésbe megy, akkor a nem zérus hibajelet a visszacsatoláson keresztül a szabályozó figyelembe veszi.
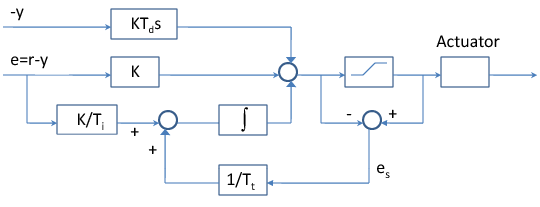
Az integrátor bemenete: ahol a követési hiba, a szaturációs blokk bemenete és kimenete közötti eltérés.
Az integrátor bemenete:
|
|
(330) |
ahol a követési hiba. Állandósult állapotban az integrátor bemenetén zérus van, ezért az állandósult állapotú jel értéke . Mivel
|
|
(331) |
az irányítójel értéke:
|
|
(332) |
ahol az irányítójel telítési értéke. Ez azt jelenti, hogy a jel a telítési értékre beáll és azt csak rövid ideig haladja meg. A visszacsatolásban alkalmazott időállandó megválasztása az integrátorra való hatás dinamikáját szabja meg.
8.3.4. Tuningolás, hangolás
A szabályozó hangolásának egyik legegyszerűbb módszere a felnyitott hurok átmeneti függvénye alapján dolgozik. PI és PID szabályozóra a hurokerősítés az I hatás kiiktatásával történik. az úgynevezett lappangási idő (holtidő és késleltetés), míg a felfutási idő.
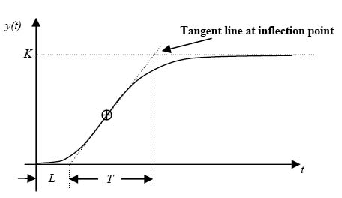
Az ábráról leolvasott értékek alapján a hurokerősítés, az integrálási időállandó és a deriválási időállandó beállítható.
|
|
|
|
|
|
P |
|
|
|
|
PI |
|
|
|
|
PD |
|
|
|
|
PID |
|
|
|
- PI szabályozásban a hurokerősítést a P szabályozáshoz képest célszerű lecsökkenteni. Ennek az oka, hogy a PI kompenzáció a meredekségű szakaszt a kisfrekvenciák irányába tolja el az amplitudó görbét. A stabilitási tartalék növeléséhez emiatt a hurokerősítést célszerű kissé lecsökkenteni.
- PD és PID szabályozások esetén a hurokerősítés valamelyest növelhető a P szabályozáshoz képest. Ennek oka, hogy a PD és PID kompenzáció esetén a meredekségű szakasz a nagyobb frekvenciák tartományában is folytatódik. A stabilitási tartalék még megfelelő marad, ha a hurokerősítést kissé növeljük.
A szabályozó hangolásának Ziegler-Nichols módszere a szabályozási kör belengetése alapján dolgozik. A módszer lényege, hogy a szabályozást a hurokerősítés növelésével az állandósult lengés állapotába hozzuk. A stabilitás határhelyzetében megmérjük a lengések periódusidejét és a beállított kritikus hurokerősítést. A meghatározott értékek alapján a hurokerősítés, az integrálási időállandó és a deriválási időállandó beállítható.
|
|
|
|
|
|
P |
|
|
|
|
PI |
|
|
|
|
PID |
|
|
|