9. fejezet - Irányítástervezés állapot-visszacsatolással
9.1. Pólusallokációs módszer
Adott egy rendszer -dimenziós állapottér reprezentációja:
|
|
(333) |
A rendszer karakterisztikus polinomja:
|
|
(334) |
Módosítsuk a rendszer dinamikáját az állapot visszacsatolásával, azaz legyen a bemenőjel
|
|
(335) |
ahol egy külső alap-, vagy referencia jel a pedig az állapot visszacsatolás erősítési tényezője:
|
|
(336) |
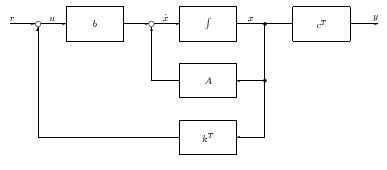
Behelyettesítve a bemenőjel alakját az állapotegyenletbe, a zárt rendszer állapotegyenlete a következő lesz:
|
|
(337) |
|
|
(338) |
amiből a zárt rendszer karakterisztikus egyenletére azt kapjuk, hogy
|
|
(339) |
Az alábbiakban megmutatjuk, hogy a erősítés megfelelő megválasztásával a zárt rendszer karakterisztikus polinomja tetszőlegesen beállítható, ha az rendszer irányítható.
Mivel minden irányítható állapottér reprezentáció irányítható alakra hozható, tegyük fel hogy az alábbi rendszert irányítható alakra hoztuk.
|
|
(340) |
Ekkor a visszacsatolással módosult állapotmátrix:
|
|
(341) |
A zárt rendszer karakterisztikus polinomja:
|
|
(342) |
Ha a zárt rendszer pólusait előírjuk, akkor rögzítjük a pólusokat, amiből az karakterisztikus polinom számítható:
|
|
(343) |
Ebben a kifejezésben -k az állapot visszacsatolással módosított karakterisztikus polinom együtthatói. A , és együtthatók közötti kapcsolat:
|
|
(344) |
A kompenzátor elemeinek számítása:
|
|
(345) |
ahol -k az eredeti, míg -k a módosított karakterisztikus polinom együtthatói.
A tervezés során tehát előbb meghatározzuk az eredeti rendszer, majd a tervezett rendszer karakterisztikus polinomját. Az eredeti rendszer karakterisztikus polinomja:
|
|
(346) |
A tervezett zárt rendszer karakterisztikus polinomja:
|
|
(347) |
Az együtthatók közötti összefüggések:
|
|
(348) |
Az állapot visszacsatolás értékei:
|
|
(349) |
Ha a rendszer irányítható, de nem irányíthatósági alakban adott, akkor egy nem szinguláris transzformációs mátrix segítségével irányíthatósági alakra hozható. Az irányíthatósági alakban jelöljük és -vel az állapotegyenlet együtthatóit.A tervezés ebben az irányíthatósági alakban történik, ami azt jelenti, hogy a tervezés eredményeként egy olyan állapot-visszacsatolást tervezünk, amely az irányíthatósági állapottér reprezentációra működik.
A tervezett állapot visszacsatolt erősítőt vissza kell transzformálni az eredeti rendszer állapotterére. A transzformálás összefüggése az alábbi:
|
|
(350) |
A tervezési lépések a következők:
(a) Az irányíthatóság ellenőrzése. Ha a rendszer nem irányítható, akkor az állapot visszacsatolás módszere nem alkalmazható.
(b) A rendszert irányíthatósági alakra hozzuk, azaz meghatározzuk nem szinguláris mátrixot, amely a rendszert irányíthatósági alakúra hozza.
|
|
(351) |
Ha a rendszer eleve irányíthatósági alakban adott, akkor mátrixot egységmátrixnak választjuk, azaz .
Megjegyezzük, hogy az új állapottérbe való transzformálás tényleges elvégzésére nincs szükség, elegendő a transzformációs mátrix meghatározása.
(c) Meghatározzuk az eredeti rendszer karakterisztikus polinomját:
|
|
(352) |
Ezután meghatározzuk a tervezett rendszer karakterisztikus polinomját:
|
|
(353) |
Ezekhez a műveletekhez az eredeti rendszer mátrixát és a szabályozott rendszertől megkövetelt új pólusokat kell felhasználni.
(d) A kompenzátor komponenseit kiszámítjuk:
|
|
(354) |
ahol ,..., ,
(e) Meghatározzuk az eredeti rendszerre vonatkozó erősítés együtthatóit.
|
|
(355) |
Az irányítójel az alábbi:
|
|
(356) |
Megjegyzés 8.1 A fenti lépéseket egyetlen összefüggésbe sűríthetjük:
|
|
(357) |
ahol a az irányíthatósági alak előállítására szolgáló transzformációs mátrix. Az állapotvisszacsatolt erősítő:
|
|
(358) |
Az összefüggést az állapotvisszacsatolás erősítésének meghatározására szolgáló Bass Gura formulának nevezzük.
Összefoglalás:
(a) A pólusallokációs módszer alkalmazásának feltétele:
* Az állapotvektor elemei mértek legyenek.
* Az állapottér reprezentáció teljesítse az irányíthatósági feltételt.
* A szabályozott rendszer pólusai adottak legyenek.
(b) A pólusallokációs módszer előnyei:
* A módszer végrehajtása egyszerű mátrix műveletekkel történik.
* A szabályozott rendszer stabilis.
(c) A pólusallokációs módszer hátrányai:
* Az irányítójel tetszőlegesen nagy lehet.
* A pólusok elhelyezkedése és a minőségi tulajdonságok közötti kapcsolat bonyolult, heurisztikus szabályokra és mérnöki intuíciókra hagyatkozva kell a pólusok helyét előírni.
* A szabályozott rendszer minőségi tulajdonságai az állapot-visszacsatolt erősítő megtervezése után utólagosan vizsgálandók.
Példa 8.1
Adott a
|
|
(359) |
átviteli függvénnyel jellemzett rendszer. Írja fel a rendszer állapottér reprezentációját diagonális alakban! Tervezzen az így felírt állapottér reprezentációhoz állapot-visszacsatolást a , pólusokkal!
A feladat megoldása:
Diagonális alak előállítása:
|
|
(360) |
|
|
(361) |
|
|
(362) |
Vezessük be új változóként az , változókat, ahol
|
|
(363) |
|
|
(364) |
|
|
(365) |
Az állapottér reprezentáció diagonális alakban:
|
|
(366) |
|
|
(367) |
Az eredeti rendszer karakterisztikus polinomja:
|
|
(368) |
Szabályozott rendszer karakterisztikus polinomja:
|
|
(369) |
Állapotvisszacsatolás erősítései:
|
|
(370) |
Ha a rendszer irányítható, de nem irányíthatósági alakban adott, akkor egy nem szinguláris transzformációs mátrix segítségével irányíthatósági alakra hozható.
ahol a transzformációs mátrix. Az állapotvisszacsatolt-erősitő összefüggése: a hasonlósági transzformáció alapján az alábbi:
|
|
(371) |
Transzformációs mátrix:
|
|
(372) |
ahol
|
|
(373) |
|
|
(374) |
Transzformációs mátrix:
|
|
(375) |
Az eredeti állapottérbe transzformálva:
|
|
(376) |
|
|
(377) |