10. fejezet - Lineáris kvadratikus szabályozótervezés
Az irányítástervezés során gyakran szeretnénk egy irányítás paramétereit úgy megválasztani, hogy valamilyen előre meghatározott minőségi tulajdonság (performancia előírás) teljesüljön. Az optimalizálási feladatokban olyan paraméterek választása a cél ami maximalizál vagy minimalizál egy adott kritérium-függvényt. Ebben a fejezetben megmutatjuk, hogyan lehet megválasztani azokat a paramétereket amik optimalizálnak egy adott kvadratikus specifikációt és amelyek a lehető legkisebb költséggel maximalizálják a megkívánt performanciát.
Tekintsük az alábbi kritérium-függvényt
|
|
(378) |
a következő dinamikus feltételek mellett
|
|
(379) |
ahol az kezdeti feltétel adott és . Ez egy korlátozások melletti optimalizálási feladat, ahol egy olyan megengedett trajektóriát keresünk ami minimalizálja a perem pontokban korlátozott költségfüggvényt
|
|
(380) |
Az tag az integrál költség míg a végső, terminális költség. A függvény a terminális korlátozások egy halmazát határozza meg. A korlátozások menlleti optimalizálási feladatoknál szokásos módon egy
|
|
(381) |
Hamilton függvényt definiálunk, ahol bevezetjük az időfüggő társváltozókat.
Tétel 9.1 (Maximum elv) Ha optimális akkor létezik és úgy, hogy
|
|
(382) |
adott , peremfeltételekkel, ahol és
|
|
(383) |
minden esetén.
A maximum elv nemlineáris dinamikák esetén is alkalmazható valamint abban az esetben is ha a szabályozó bemenet egy halmaz által van korlátozva. Korlátozások néklül, , és differenciálható esetén az optimalitás egy szükséges feltétele, hogy
|
|
(384) |
Ha létezik, akkor felhasználható mint optimális szabályozó jel.
A bizonyítás elve a következő: a Lagrange féle multiplikátorok módszerét alkalmazva a költségfüggvény alakja
|
|
(385) |
ami a Hamilton függvény felhasználásával
|
|
(386) |
alakba írható. Az optimális megoldás környezetében linearizálva, azaz , , és esetén, kapjuk, hogy
|
|
(387) |
ahol a deriváltak az optimális megoldás mentén értendők.
Parciális integrálással elimináljuk a -tól való függést
|
|
(388) |
Mivel adott, az első tag eltűnik és kapjuk, hogy
|
|
(389) |
Az optimalitáshoz megköveteljük,hogy minden és esetén, így megkapva a tétel feltételeit.
A továbbiakban a lineáris kvadratikus (LQ) optimális szabályozási feladatot tekintjük: a dinamikus rendszer lineáris időinvariáns és a költségfüggvény kvadratikus, azaz
|
|
(390) |
|
|
(391) |
ahol az állapothibát bünteti, a szabályozó bemenetet és a végső állapotot súlyozza.
A és tervezési paraméterek meghatározzák az állapotok lineáris kombinációinak és az input energia fontosságát (súlyát):
- A funkcionálban szereplő tag a rendszer minőségi jellemzőit súlyozza, a rendszer teljes energiáját bünteti egy súlymátrix segítségével
- A funkcionálban szereplő tag a rendszerbe betáplált szabályozó energiát súlyozza, mátrix segítségével.
Gyakran a feladatot úgy módosítjuk, hogy egy adott pálya követése legyen az elérendő cél, a költségfüggvényt ehhez a és tagokkal írjuk át. Van, amikor célszerű a végső pontot is előírni, ilyenkor egy általánosabb megszorítást használhatunk. Amikor minden komponensre megszorítás van, azaz , a vonatkozó specifikáció alakja lesz. Ilyenkor elhagyható, mivel értéke rögzített.
Fontos eset, amikor és , azaz a végtelen horizontú LQ feladat.
10.1. Lineáris kvadratikus regulátor
10.1.1. Véges horizontú LQR
A véges horizontú lineáris kvadratikus regulátor(LQR) feladat alakja
|
|
(392) |
az alábbi költségfüggvénnyel:
|
|
(393) |
ahol .
A feladathoz tartozó Hamilton függvény
|
|
(394) |
A maximum elv alkalmazásával az alábbi szükséges feltételeket kapjuk:
|
|
(395) |
|
|
(396) |
|
|
(397) |
Innen az optimális irányítás alakja
|
|
(398) |
Az optimális irányítás előállításához egy peremértékfeladatot kell megoldani és peremfeltételekkel, ami általában egy nehéz feladat.
A társváltozót a alakban keressük, így
|
|
(399) |
azaz
|
|
(400) |
amit Riccati differenciál egyenletnek nevezünk.
10.1.2. Végtelen horizontú LQR feladat
A esetben a feltételből adódik a költségfüggvény alakja:
|
|
(401) |
Mivel végső értékére nincs megszorítás, a helyett állandó mátrixot véve kapjuk a
|
|
(402) |
algebrai Riccati egyenletet, és a hozzá tartozó
|
|
(403) |
szabályozót.
Míg feltételnek mindég teljesülni kell, tipikusan . A alakot véve a költségfüggvény
|
|
(404) |
Az optimális irányítás létezéséhez az párnak detektálhatónak kell lenni.
Tétel 9.2 Tekintsük a
|
|
(405) |
lineáris rendszert a
|
|
(406) |
költségfüggvénnyel, ahol az pár stabilizálható és az megfigyelhető.
Az optimális szabályozó alakja
|
|
(407) |
ahol a
|
|
(408) |
algebrai Riccati egyenlet stabilizáló megoldása. A minimális költség .
Bizonyítás 9.1 Ha stabil a
|
|
(409) |
Lyapunov egyenletnek egyértelmű megoldása van: , minden esetén. Ha vagy és megfigyelhető, akkor .
Ha stabil akkor az -hoz tartozó megoldás . Ha stabilizálható, akkor van stabilizáló visszacsatolás melyre . E pálya mentén
|
|
(410) |
|
|
(411) |
vagyis az optimális költség véges..
Egy t -vel minden -ra, melyre tekintsük a kvadratikus funkcionált. Mivel
|
|
(412) |
minden stabil pálya mentén a
|
|
(413) |
költség invariáns a visszacsatolásra. Teljes négyzetté való kiegészítéssel kapjuk, hogy
|
|
(414) |
ahol választással -re előírható, hogy kielégítse az
|
|
(415) |
algebrai Riccati egyenletet. Ekkor az optimális irányítás és az optimális költség .
A megfigyelhetőség szerepének illusztrálására tekintsük a stabil zárt kört. Ekkor algebrai Riccati egyenletből
|
|
(416) |
vagyis a zárt kör pályája mentén
|
|
(417) |
Így . Ha nemszinguláris lenne, létezne egy kezdeti érték, melyre , ami ellent mond megfigyelhetőségének. .
Másrészt ha és egy sajátvektor, sajátérték párja -nek, akkor
|
|
(418) |
azaz . Feltéve, hogy , következik, hogy és , vagyis .Ebből adódna, ami ellentmond megfigyelhetőségének. Tehát a pozitív definit megoldás stabilizáló a megfigyelhetőségi feltétel mellett.
Az egyértelműség kimutatásához tekintsünk és megoldásokat úgy, hogy és stabilis.
Következik, hogy
|
|
(419) |
A Sylvester operátor akkor és csak akkor szinguláris ha és közös sajátértékekkel rendelkezik. Mivel és stabil, ezért az egyedüli megoldás .
10.1.3. Általános végtelen horizontú LQR feladat
Általános performancia jelet tekintve a költségfüggvény a
|
|
(420) |
alakot veszi fel.
Ennek a feladathoz ugyancsak az algebrai Riccati egyenlet stabilizáló megoldása
|
|
(421) |
szolgáltatja az optimális szabályozót:
|
|
(422) |
a optimális költséggel.
Példa 9.1
Tervezzen LQ optimális szabályozást a
|
|
(423) |
átviteli függvénnyel leírt rendszerre, ha az irányíthatósági állapottér reprezentációjában mérjük a rendszer állapotait a következő költségfüggvény minimalizálásával:
|
|
(424) |
ahol az súly adott. Tervezze meg a súly értékét! Tervezze meg az optimális állapotvisszacsatolást!
A feladat megoldása:
Az állapottér reprezentáció irányíthatósági alakban:
|
|
(425) |
|
|
(426) |
A feladatot visszavezetjük az optimalizálás standard alakjára az összefüggés felhasználásával:
|
|
(427) |
azaz az állapotokat súlyozó mátrix .
A Riccati egyenlet megoldása:
|
|
(428) |
ahol , , , . A megoldás: .
Az állapot-visszacsatolt erősítő:
|
|
(429) |
azaz az optimális irányítójel: .
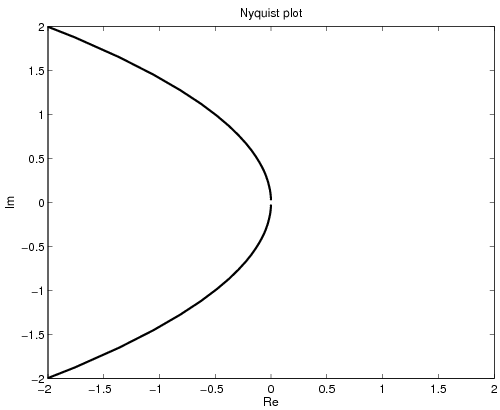
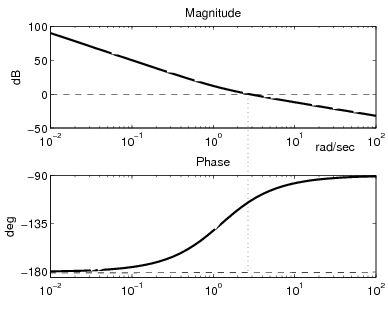
Az LQ megoldás robusztussága
- A zárt rendszer mindig stabil lesz. Az LQ tervezés a szabályozott rendszer pólusait automatikusan a bal oldali félsíkba helyezi.
- Az LQ optimális megoldás a végtelen erősítési tartalékot és a -os fázistartalékot biztosít.
|
|
(430) |
|
|
(431) |
Példa 9.2
Tervezzünk optimális állapot visszacsatolást LQ módszerrel a következő rendszerhez:
|
|
(432) |
A tervezési paraméterek: és .
A feladat megoldása:
(a) Riccati egyenlet megoldása:
|
|
(433) |
A CARE megoldása: .
(b) számítása:
|
|
(434) |
Az optimális állapotvisszacsatolás:
és
az optimális irányítójel: .
|
|
(435) |
|
|
(436) |
10.2. Pólusok és zérusok
A szabályozott rendszer pólusai a karakterisztikus egyenlet megoldásai. A Hamilton mátrix tartalmazza az optimális irányítás megoldásait, így sajátértékei az optimális megoldás pólusait is megadják.
|
|
(437) |
Felhasználva a összefüggést, felírhatjuk a Hamilton mátrixra vonatkozó karakterisztikus egyenletet:
|
|
(438) |
|
|
(439) |
A karakterisztikus egyenlet (a levezetést mellőzve) a következő alakra hozható:
|
|
(440) |
|
|
(441) |
A Hamilton rendszer pólusai tartalmazzák a zárt rendszer pólusait, valamint a pólusok ellenkező előjelű értékeit egyaránt.
Vizsgáljuk meg, hogy a szabályozó tervezésben alkalmazott súlyozás hogyan hat a szabályozott rendszer pólusaira. Válasszuk meg az irányítójelre adott súlyt a következőképpen:
ahol rögzített és értékét változtatjuk.
Válasszuk az irányítójelre adott súlyt nagy értékre: .
Az irányítási feladatot minél kisebb irányítójellel kívánjuk megoldani.
A karakterisztikus egyenlet a következő alakhoz tart:
|
|
(442) |
A szabályozott rendszer pólusai megközelítik az eredeti rendszer stabil pólusait, valamint az eredeti rendszer nemstabil pólusainak a képzetes tengelyre való tükörképét.
Válasszuk az irányítójelre adott súlyt kis értékre: .
Az irányítási feladatban nincs előírás az irányítójel nagyságára nézve.
A karakterisztikus egyenlet a következő alakhoz tart:
|
|
(443) |
|
|
(444) |
Átalakítva:
|
|
(445) |
A szabályozott rendszer pólusai megközelítik az eredeti rendszer bal félsíkra eső zérusait vagy az eredeti rendszer jobb oldali zérusainak a képzetes tengelyre való tükörképét, illetve végtelenül nagy negatív értéket vesznek fel.
Példa 9.3
Tervezzünk optimális állapot visszacsatolást LQ módszerrel a következő rendszerhez:
|
|
(446) |
|
|
(447) |
A rendszer pólusai , zérusai . A tervezési paraméterek: és változó. Megjegyzés: Az első állapotváltozót tekintjük kimenetnek, a többi állaptváltozóra súlyt alkalmazunk a tervezésben.
A feladat megoldása:
- választással a Hamilton mátrix sajátértékei: , míg a tervezett szabályozott rendszer pólusai: ,
- választással a Hamilton mátrix sajátértékei: , míg a tervezett szabályozott rendszer pólusai: ,
Példa 9.4
Tervezzünk optimális állapot visszacsatolást LQ módszerrel a következő nem minimálfázisú rendszerhez:
|
|
(448) |
|
|
(449) |
A rendszer pólusai , zérusai (pozitív). A tervezési paraméterek: és változó. Megjegyzés: Az első állapotváltozót tekintjük kimenetnek, a többi állaptváltozóra súlyt alkalmazunk a tervezésben.
A feladat megoldása:
- választással a Hamilton mátrix sajátértékei:
,
míg a tervezett szabályozott rendszer pólusai: ,
- választással a Hamilton mátrix sajátértékei:
,
míg a tervezett szabályozott rendszer pólusai: ,
A módszer alkalmazásának feltétele:
- Az állapotvektor elemei mértek legyenek.
- Az állapottér reprezentáció teljesítse az irányíthatósági feltételt.
A módszer előnyei:
- A szabályozott rendszer stabilis.
- A szabályozással szemben megfogalmazott minőségi követelmények a és súlyok megválasztásával beépíthetők a szabályozás tervezésbe.
A módszer hátrányai:
- A különböző minőségi követelmények közötti ellentmondások és konfliktusok miatt a súlyok megválasztása bonyolult feladat. A súlyok tervezése során törekedni kell a minőségi követelmények közötti összhang megteremtésére. Emiatt az elért minőségi tulajdonságokat utólagosan ellenőrizni kell.
- A Riccati egyenlet megoldása numerikusan nehéz feladat.