7. fejezet - Több alkatrészes, statikai analízis
Az összeállítások, vagyis a több alkatrészes modellek analízisénél az un. kontaktok testesítik az egyes alkatrészek közötti kapcsolatokat, vagyis a csomóponti elmozdulások és erők átadását az alkatrészek kapcsolódó felületein keresztül. Mivel így az egyes alkatrészek terhelési és peremfeltételét a kontaktok adják, nagy jelenetősséggel bírnak az analízis eredményét illetően. A valós fizikai kontaktok bonyolult viselkedésének leírására számos modellt dolgoztak ki, de a jegyzetünk csak a valóságot lényegesen leegyszerűsítő, a végeselemes programokban beépített megoldások bemutatására szorítkozik. Az alábbiakban nézzük meg a statikai analízisben használatos kontaktok csoportosítását.
7.1. A kontaktok csoportosítása
Az alap kontaktokat könnyen átláthatjuk, ha a szerint csoportosítjuk őket, hogy a két kapcsolódó alkatrész a kapcsolódó felületre (vagy élre) merőlegesen (normális irányban), és azzal párhuzamos, vagy érintő (tangenciális) irányban milyen elmozdulásokat tehet. Az előbbi jelentése, hogy a két kapcsolódó elem el tud-e távolodni, esetleg egymásba hatolni, vagy az érintkező elemek mindig egy felületbe (vonalba) esnek. A felülettel párhuzamos, vagy tangenciális elmozdulást gyakorlatilag a súrlódási tényezővel definiálhatjuk. Ez alapján a következő csoportokba sorolhatjuk az idealizált kontaktokat:
|
Az érintkező felületek |
||
|---|---|---|
|
A súrlódási tényező: |
eltávolodhatnak egymástól |
nem távolodhatnak el egymástól |
|
µ=0 |
Ideális súrlódásmentes |
Elválás nélküli kapcsolat |
|
0<µ<∞ |
Súrlódásos |
- |
|
µ=∞ |
Ideálisan érdes, tapadó |
Ragasztott |
-
Súrlódásos (Frictional) – a valós fizikai kapcsolatot a legjobban modellező kontakt. A felületek eltávolodhatnak és a súrlódási erő ellenében elcsúszhatnak egymáson. A két geometria között idealizált súrlódásos kapcsolat van, ekkor definiálni kell a súrlódási tényezőt. Ebben az esetben a két felület/él között tapadás van, mely a súrlódási tényezőből adódó feszültséget elérve megszűnik és a két felület/él egymáson elcsúszik, eközben azonban súrlódási veszteség lép fel.
-
Súrlódásmentes (Frictionless) – Idealizált csúszó kontakt. A kacsolódó felületek/élek egymáson súrlódás nélkül, akadálymentesen (tehát veszteség nélkül) elcsúszhatnak egymáson és eltávolodhatnak egymástól. Ilyen kontakt alkalmazása esetén különös figyelmet kell fordítanunk a megfogások és terhelések definiálásánál, hogy ne jöjjön létre olyan eset, amikor a súrlódásmentes elcsúszás végtelen elmozdulást eredményezhet.
-
Elválás nélküli kapcsolat (No-separation) – A súrlódásmentes speciális esete, amikor a felületek/élek akadálymentesen elcsúszhatnak egymáson, de nem eltávolodhatnak el egymástól.
-
Tapadó (Rough) – Idealizált csúszásmentes kontakt. A súrlódási tényező végtelennek tekinthető, tehát a felületek nem csúszhatnak el egymáson, de a kontaktfelületre merőleges irányban eltávolodhatnak egymástól, (pl. egy dörzshajtás modellezése).
-
Ragasztott (Bonded) – minden szabadságot megkötő, a kapcsolódó felületeket egymáshoz fixen rögzítő kontakt. A súrlódási tényező végtelennek tekinthető, de a két felültet egymástól nem tud elmozdulni semmilyen irányba. Ezt nevezhetjük ragasztott, vagy hegesztett kontaktnak is. Használhatjuk abban az esetben is, mikor a két geometria külön modellezésének csak az az oka, hogy más anyagminőséggel rendelkezik, és ezt szükséges volt definiálni. Több esetben, mikor több alkatrészből álló geometriákat modellezünk és a kontaktok milyensége elhanyagolhatóan befolyásolja a szimuláció végeredményét, akkor pl. a csavarkötések helyett is lehetséges csupán ragasztott kontaktot használni. Természetesen az ilyen esetekben körültekintően meg kell vizsgálni, hogy valóban nem befolyásolja-e ez az egyszerűsítés a végeredményt.
A legtöbb véges elemes szoftver a kapcsolódó felületeket automatikusan felismeri, de általában mód van a kontaktok kézi definiálására is. Ez utóbbi esetnek akkor van kiemelt jelentősége, amikor az alkatrészek egymáshoz képesti elmozdulása viszonylag nagy, és olyan felületek is kontakt kapcsolatba kerülnek a szimuláció közben, amelyek az elején még egymástól távolabb helyezkednek el. Ilyenkor a későbbi helyzetet ismeretében mindenképp érdemes az összes szimuláció során érintkező felület közötti kontakt beállítása már a szimuláció előtt. (Természetesen, ha nem látható előre a terhelés hatására fellépő geometriai helyzet, akkor egy előzetes szimuláció után is finomíthatóak a beállítások.)
7.2. Példa - kontaktfeladat az alkatrészek közötti alapvető kapcsolat típusok bemutatására
Az alábbi példában egy egyszerű geometrián fogjuk bemutatni az alkatrészek közti kapcsolatok típusait. A két alkatrészből álló összeállítás és a terhelési és anyagmodellek minden esetben ugyanolyanok, így egyedül a két alkatrész közötti fizikai kapcsolat lesz más és más. Annak érdekében, hogy az eredmény látványosabb legyen két egymástól eléggé eltérő anyagot definiálunk az alkatrészek anyagának. A modell egy hosszú, az egyik végén befogott szerkezeti acél konzolból és egy rajta lévő lekerekített szélű polietilén téglatestből áll.
Kiinduló adatok.
A konzol méretei:
Hossz (X irányban): 50mm,
Vastagság (Y): 2mm,
Szélesség (Z – a szimulációnál kell megadni): 10mm,
A konzolon lévő test méretei:
10mm élhosszúságú kocka (a 2D-s modellben négyzet),
Saroklekerekítés sugara 2mm,
Konzol anyaga: Structural Steel,
A lévő lekerekített szélű négyzet anyaga: Polyethilene.
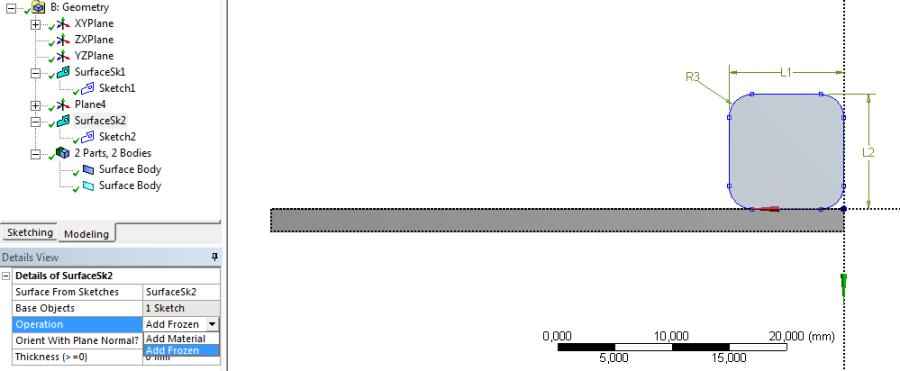
A feladatot 2D-s analízissel oldjuk meg, a geometriát tehát az ANSYS Design Modeller moduljában az XY síkra kell rajzolni, és a projektfelületen a geometria tulajdonságai között, a geometria típusát 2D-re kell átállítani az analízis hozzácsatolása előtt. A geometria elkészítésénél ügyeljünk arra, hogy a két alkatrész külön vázlattal legyen létrehozva. A második alkatrész vázlatának rajzolásakor a téglalap parancs kiadásakor bejelölhetjük az automatikus lekerekítés opciót (Draw/Rectangle/Auto-Fillet) , így később ezzel nem kell külön foglalkoznunk. A második felület létrehozásakor (Concept/Surfces From Sketches) , a „fagyasztott hozzáadása” művelet (Details/Operation/Add Frozen) legyen kiválasztva. Ennek hatására a két felület, mint két különálló alkatrész szerepel majd a modellfa utolsó sorában. Tehát így hozhatunk létre összeállításokat a Design Modeller –ben, (7.1. ábra).
Megjegyzés: Kontakt feladatok esetén fontos lehet az alkatrészeken található lekerekítés is, így ilyen feladatok esetén nem szabad a geometria egyszerűsítésekor a kontakt szempontjából releváns lekerekítéseket mellőzni.
A geometria elkészítése után lépjünk át az anyagkönyvtárat tartalmazó Engineering Data felületre és rendeljük hozzá az analízisünkhöz a fentebb definiált anyagmodelleket. Majd átlépve a szimulációs környezetbe rendeljük hozzá őket a megfelelő geometriához.
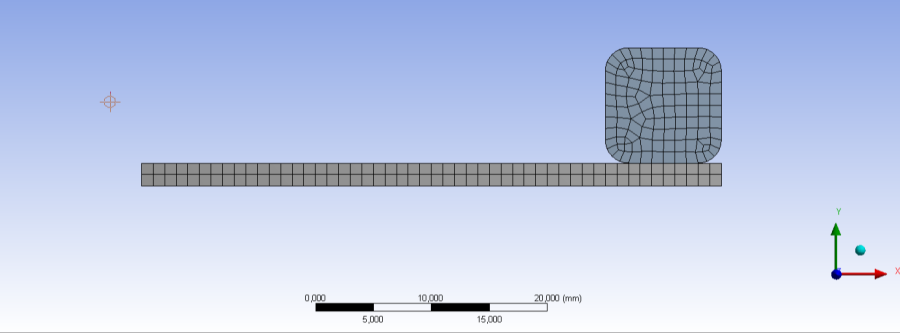
A hálózáskor 1mm-es elemméretet használva végezzük el, így a teljes modell 219 véges elemet tartalmaz. A hálózott modellt a következő 7.2. ábra szemlélteti.
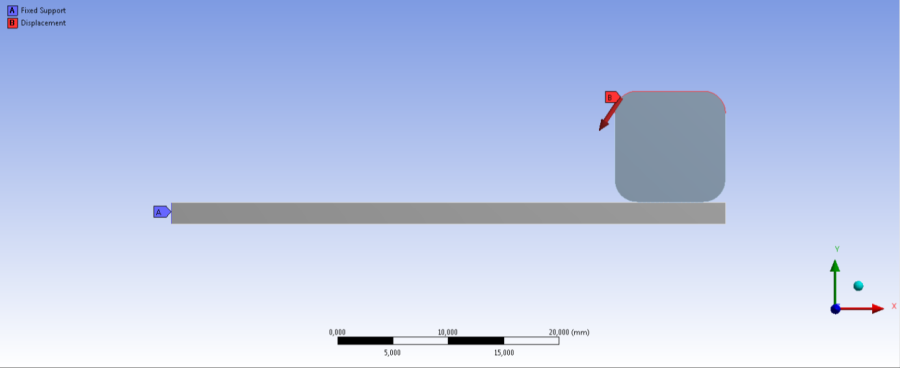
A pontos összehasonlíthatóság miatt a konzol fix megfogása (Fix Support) a rajta lévő testre elmozdulás típusú terhelés kerül (Displacement) . Ezen terhelés nagysága irányonként definiálva: X irányban -2mm és Y irányban -3mm nagyságú. A terhelési modell az alábbi ábrán látható. Az ábrán kék jelzéssel a fix megfogás helye, míg piros jelzéssel az elmozdulás típusú terhelés helye és iránya látható (7.3. ábra).
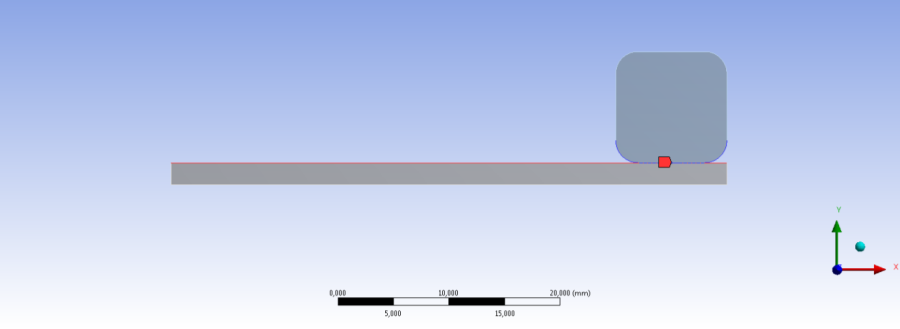
A fenti beállítások után hozzuk létre a két alkatrész megfelelő felületei között lévő kontaktot az Add Manual Contact Region parancs alkalmazásával. Majd válaszuk ki a kapcsolatban résztvevő, a Details panelen jelzett, Contact és Target éleket (7.5. ábra). Az alábbi ábrán kék illetve piros vonallal van jelölve az érintkező felületeket jelentő kontúrvonal (7.4. ábra). Fontos, hogy a lekerekítéseket is vegyük bele a kontakt hatókörébe, mivel azok az alkatrészek deformációjakor érintkezésbe léphetnek a konzol felső élével.
A modellfában megjelenő kontaktot kijelölve, a Details panelen tudjuk átállítani a kontakt típusát (alapértelmezettként Bonded ), és egyéb tulajdonságát (7.5. ábra). A következőkben végezzük el az alábbi beállításokat és futtassuk a szimulációt mindegyik kontakt típussal, majd hasonlítsuk össze az alkatrészek viselkedését.
7.2.1. Súrlódásos kapcsolat (Frictional)
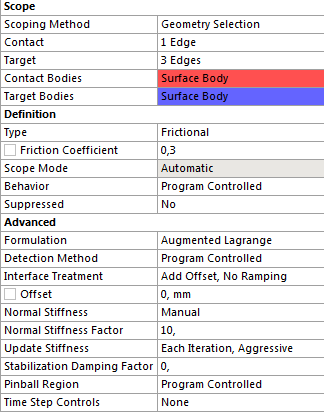
A legáltalánosabban használt kapcsolat típus a súrlódásos kapcsolat (Details/Definition/Type: Frictional) . Mivel ez áll a legközelebb az érintkező felület valós viselkedéséhez, ez a leggyakrabban használt kapcsolat-típus a több alkatrészből álló szerkezetek viselkedésének modellezésénél.
A súrlódási tényezőt (Friction Coefficient) 0,3-ra állítjuk (ez megfelel az acél és a polietilén közötti átlagos súrlódási tényezőnek).
A beállításoknál még fontos a szoftver által használt számítási formula kiválasztása, a pontosabb eredmény érdekében súrlódásos kapcsolatnál célszerű a kiterjesztett Lagrange típusú (Augmented Lagrange) számítási formulát választani, valamint a merevségi mátrix újraszámítását (Update Stiffness) minden iteráció után (Each Iteration, Agressive) . Előfordulhat, hogy a kontaktfelületek elemei közötti rugómerevséget (Normal Stiffness) is definiálni kell. Jelen példánkban ezt a merevségi értéket (Normal Stiffness Facor) 10-re választjuk. Az összes, súrlódásos kapcsolatkor használt beállítást tartalmazza a 7.5. ábra.
7.2.2. Súrlódásmentes kapcsolat (Frictionless)
Súrlódásmentes kapcsolatnál a súrlódási tényező nulla, melyre külön típus van definiálva a kontakt típusok között (Details/Definition/Type: Frictionless) . Az összes többi beállítás megegyezik a súrlódásos kapcsolatnál használt beállításokkal. Végezzük el a beállításokat és futtassuk a szimulációt.
7.2.3. Elválás nélküli kapcsolat (No separation)
Ebben az esetben a két alkatrész kontakt felülete között a súrlódási tényező nulla, azonban a két alkatrész a kontakt felületeinél nem válhat szét. Az összes többi szimulációs beállítás megegyezik az első két típusú kontaktnál használttal. Végezzük el a beállításokat és futtassuk a szimulációt.
7.2.4. Végtelen súrlódású kapcsolat (Rough)
Ebben az esetben a két alkatrész közti kontakt felületek közti súrlódási tényező végtelen, azonban a két alkatrész normál irányban elmozdulhat egymáshoz képest. Ebben a példában az előzőekhez képest annyi a különbség, hogy kiterjesztett Lagrange formula helyett Normál Lagrange formulát használjunk. Ebben az esetben nem történik meg a két alkatrész között egymásba nyomódás. Végezzük el a beállításokat és futtassuk a szimulációt.
7.2.5. Ragasztott-hegesztett típusú kapcsolat (Bonded)
Ebben az esetben a súrlódási tényező a két alkatrész mereven kapcsolódik egymáshoz. A beállításoknál ebben a példában annyiban tértünk el a súrlódásos kapcsolathoz képest, hogy a két alkatrész közti normál merevséget nem definiálunk. (Mivel itt a két alkatrész nem fog egymáshoz képest elmozdulni, így egyszerűbb ezt a szoftver által konrollált értéken hagyni a számítási idő csökkentése végett.)
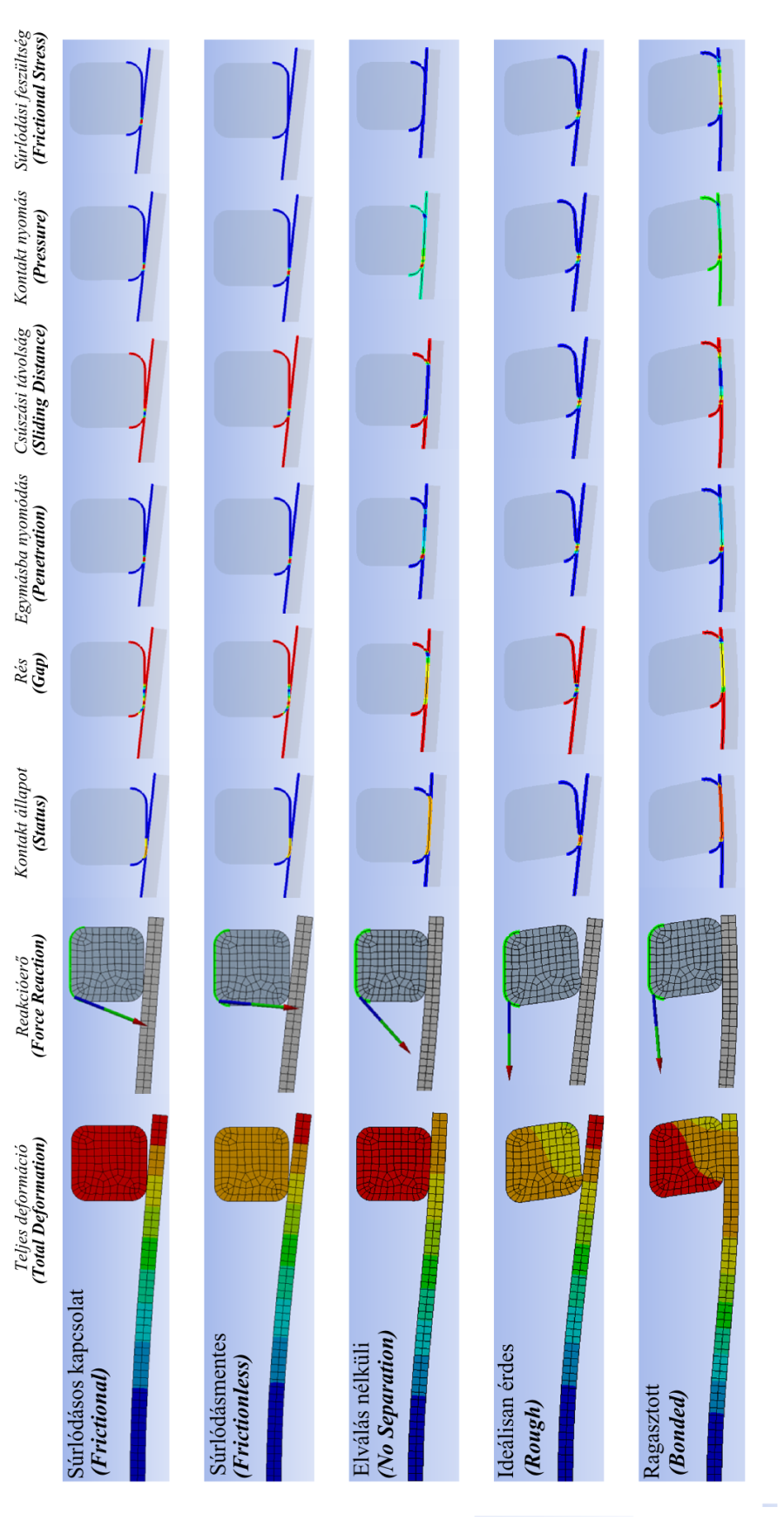
7.2.6. Eredmények
Az ötféle kontakttípus viselkedésének jellegzetességeit, első lépésben vizsgáljuk meg a teljes deformáció (Total Deformation) , és az elmozdulás kényszeren eső reakcióerő (Force Reaction) lekérdezésével. A csúszás folyamatának vizsgálatakor, a felhasználói felület alján lévő Graph fülön grafikusan (és mellette táblázatos formában is) nyomon követhetjük a reakcióerő (Force reaction) komponenseinek változását az elmozdulás (idő) függvényében.
A kontaktfelületeken végbemenő folyamatok vizsgálatára a Contact Tools eszköz szolgál, melynek segítségével az alábbi eredményeket lehet lekérdezni:
-
Kontakt állapot (Status) – megadja, hogy a két felület milyen kapcsolatban áll egymással:
-
távol van (Far), – kék színnel jelölve,
-
közel van (Near), – sárga színnel jelölve,
-
csúszik (Sliding), – narancs színnel jelölve,
-
tapad (Sticking), – piros színnel jelölve.
-
-
Rés (Gap) - a két alkatrész közötti rés mértékét adja meg. (A piros részeken nulla a rés mértéke, míg a kék szín felé negatív értelmű rés található.)
-
Egymásba nyomódás (Penetration) – a két alkatrész kapcsolódó felületének (elemeinek) egymásba hatolását adja meg. (Kék színnel a nulla értékű részek, míg piros szín felé közeledve egyre nagyobb, pozitív értelmű egymásba nyomódás figyelhető meg.)
-
Csúszási távolság (Sliding Distance) – a két kapcsolódó felület egymáson való tangenciális irányú relatív elmozdulásának, vagyis elcsúsznak mértékét adja meg.
-
Kontakt nyomás (Pressure) – az érintkezési felületeken eső, a felületekre merőleges irányú normál feszültség, vagyis palástnyomás értékét adja meg.
-
Súrlódási feszültség (Frictional Stress) – az érintkezési felületeken eső, a felületekkel párhuzamos tangenciális, vagyis csúsztató feszültség értékét adja meg.
Az eredményeket a könnyebb átláthatóság érdekében táblázatos formában összegeztük (7.6. ábra).
7.3. Példa - Érintkezési feszültség és benyomódás
Az alábbi példában egy acélgolyó és egy alumínium sík lap érintkezésénél fellépő feszültséget és alakváltozást vizsgáljuk meg. A golyót a síkra merőleges irányú F erő nyomja a sík laphoz.
Kiinduló adatok:
A golyó sugara: R = 10 mm,
A terhelőerő: F = 100 N,
A sík felületű test anyaga – acél: Rugalmassági modulus: E 1 = 200 GPa, Poisson tényező: ν 1 = 0,30,
A golyó anyaga – alumínium: Rugalmassági modulus: E 2 = 71 GPa, Poisson tényező: ν 2 = 0,33.
7.3.1. Analitikus megoldás
A két érintkező test érintkezési helyén ébredő feszültséget és deformációt számoljuk ki Hertz módszerével [25.] . Kiindulásnak adva van egy végtelen félsík és a vele érintkező R sugarú gömb melyet a sík felületre merőleges F erő terhel. Feltételezzük, hogy a testek anyaga homogén, izotróp és érvényes rájuk a Hooke törvény, valamint a testek között súrlódásmentes kapcsolatot tételezünk fel.
Határozzuk meg az érintkezés helyén ébredő maximális palástnyomás és a két test közeledésének mértékét.
Gömb és sík érintkezésénél a maximális palástnyomás értéke:
|
|
(7.1) |
A két test közeledésének mértéke
|
|
(7.2) |
A benyomódott, (érintkező) felület sugara
|
|
(7.3) |
ahol:
|
|
(7.4) |
ν – az adott anyag Poisson-tényezője,
E – az adott anyag rugalmassági modulusa.
A számolás eredményei:
|
Maximális palástnyomás: |
p max =871,4MPa |
|
|
A két test közeledése: |
δ=0,00548mm |
|
|
A érintkező felület sugara: |
a=0,23409mm |
7.3.2. Numerikus megoldás
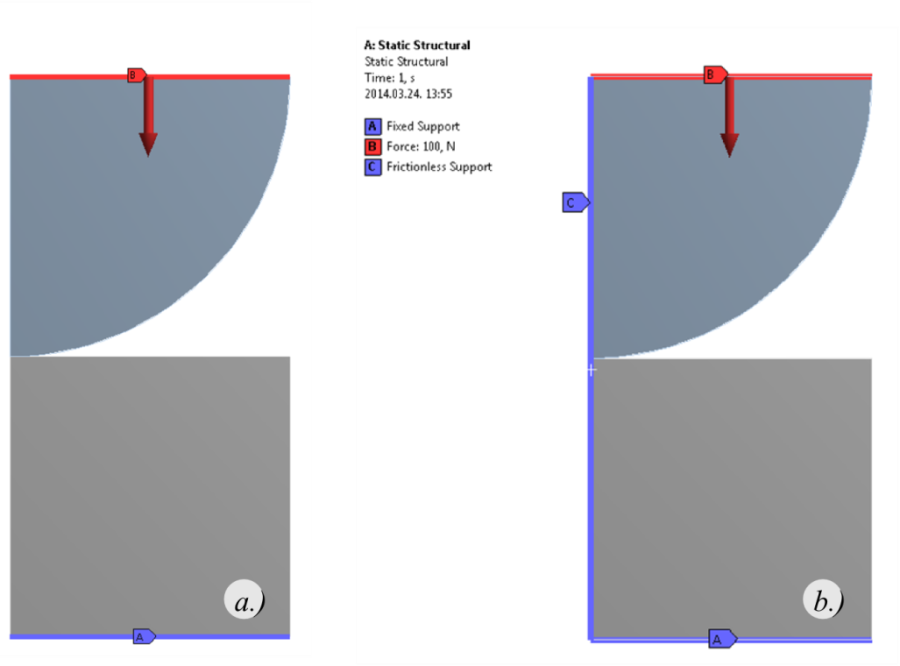
A fenti problémát ANSYS Workbench-ben, 2D-s Tengelyszimmetrikus feladatként oldjuk meg, mivel mind a geometria, mind pedig a terhelési és peremfeltételek tengelyszimmetrikusak. Ennek előfeltétele, hogy a projektfelületen (a tulajdonságok panelen) átváltsuk a geometria típusát 2D-re, és a rajzolás során az XY sík +X térfelén dolgozzunk. Készítsük el az ábrán látható geometriát, úgy, hogy a golyónak csak a „jobb” alsó (R=10mm) negyedét rajzoljuk meg. A függőleges felezés a tengelyszimmetria miatt szükséges, a vízszintes tengely menti kettévágást pedig azért tehetjük meg, mert a felső rész már nem fog érdemi hatást gyakorolni az érintkezési pontban ébredő feszültségi állapotra, és alakváltozásokra. Érdemes úgy létrehozni a vázlatot, hogy az érintkezési pont a koordinátarendszer origójába essen. Az alsó síkfelület modellezésére egy 10x10mm-es négyzetet használunk (7.7. ábra).
A geometria megrajzolása után adjuk hozzá az anyagkönyvtárunkhoz (Engineering Data) az alumínium ötvözet (Aluminium Alloy) és a szerkezeti acél (Structural Steel) anyagmodelleket, majd átlépve a szimulációs felületre, rendeljük hozzá őket a megfelelő alkatrészekhez.
A modellfában a geometriát kiválasztva, állítsuk át az analízis típusát tengelyszimmetrikusra (Outline/…/Geometry => Details /Definition/2D Behavior: /Axisymmetric) .
A terhelések és peremfeltételek megadásánál definiáljunk a golyó felső sík felületére egy (lefelé ható), –Y irányú 100N nagyságú erőt a komponenseivel megadva (Loads/Force) . A négyzet alsó élén lévő fix megtámasztás (Fix Support) már kellő mértékben meghatározza a szerkezetünk viselkedését, ugyanis a szimmetriatengelyre ható kényszer automatikusan érvényesül (7.7. ábra, a.). Viszont, mint majd később látni fogjuk, némiképp befolyásolja az eredményeket, ha manuálisan is hozzárendeljük a forgástengely oldalirányú elmozdulását megkötő kényszert (Frictionless Support) , (7.7. ábra, a.).
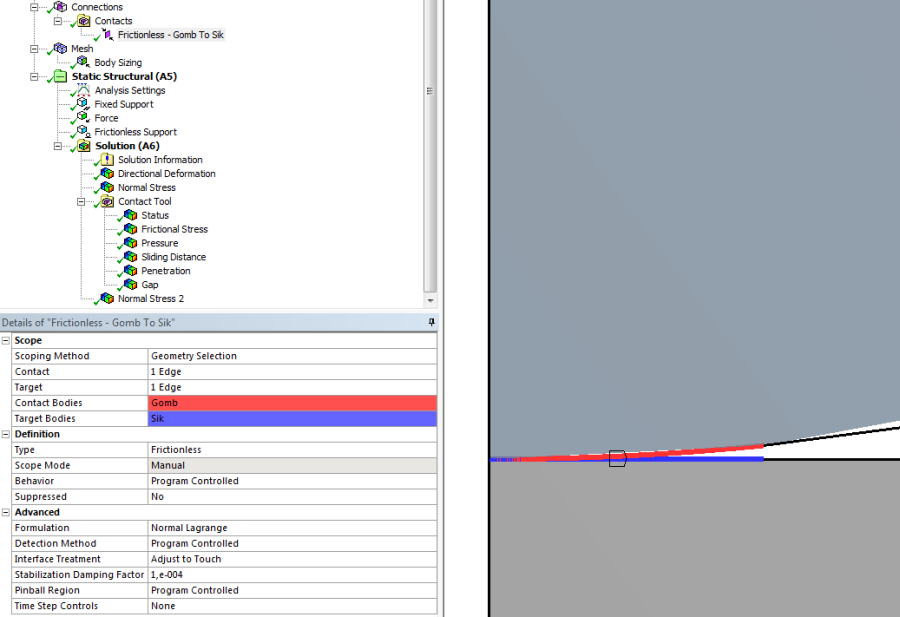
Következő lépésben hozzuk létre a két alkatrész közötti kapcsolatot. Beállítástól függ, hogy a geometria importálásakor automatikusan felismeri-e az egymáshoz közel lévő felületeket/éleket, vagy manuálisan kell megadni azokat. Ha automatikus kontakt definíció történt akkor csak a beállításokat kell megváltoztatni (ugyanis az alapértelmezetten, mindig ragasztott, vagyis Bonded kontaktot rendel hozzá a program). Ha nem jött létre a kontakt automatikusan, akkor az Add Manual Contact Region parancsal megtehetjük. Az érintkező élek kijelölése után állítsuk át a kontakt típusát súrlódásmentesre (Details/Definition/Type:Frictionless) . Az összehasonlíthatóság kedvéért nem használunk súrlódásos kapcsolatot, ugyanis az analitikus összefüggések súrlódásmentes érintkezést feltételeznek. Használjuk a 7.8. ábra beállításait.
Megjegyzés: Ha az érintkező éleket nem egy folytonos vonallal rajzoljuk meg, hanem két folytatólagosan elhelyezett, és a megfelelő kényszerekkel ellátott vonalszakaszból, akkor lehetőség van az él lokális kijelölésére. Így nem vesznek részt a kontaktban olyan területek, amelyek biztosan nem fognak érintkezésbe lépni a szimuláció során (7.8. ábra).
Mivel egy nemlineáris kontaktról van szó, a konvergencia elősegítése érdekében, érdemes csökkenteni az időlépéseket (Outline/…/Analisis Settings => Details/Step Controls) . Ezért végezzük el az alábbi beállításokat:
Details/Step Controls:
Auto Time Stepping: On,
Defined By: Substeps,
Initial Substeps: 10,
Minimum Substeps: 10,
Maximum Substeps: 1000.
Details/Solver Control: Large Deflection: On.
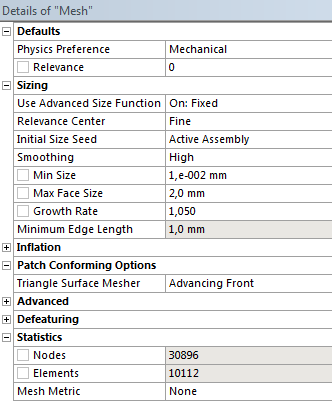
A hálózás globális beállításánál alkalmazzuk a fix méretfunkciót (Details/Sizing/Use Advanced Size Funktion: „On:Fixed”) , amellyel többek között megadhatjuk az elemek minimális (Min size: 0,01mm), maximális (Max Face Size: 2mm) méretét, és a növekmény (Growth Rate: 1,05) értékét (7.9. ábra).
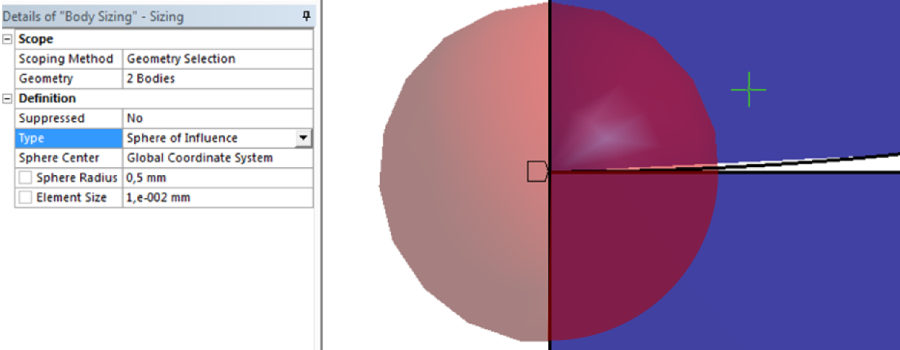
Az érintkezés helyén történő hálósűrítést egy Sizing parancs hozzáadásával érhetünk el, melynek hatókörét a teljes modellre kivetjük (Details/Geometry: 2 Bodies) , típusát Sphere of Influence -re állítjuk, melynek középpontjául a globális koordinátarendszert választjuk. A gömb sugarát (Sphere Radius) 0,5mm-re, a gömbön belül elhelyezkedő elemek méretét (Element Size) pedig 0,01mm-re választjuk (7.10. ábra).
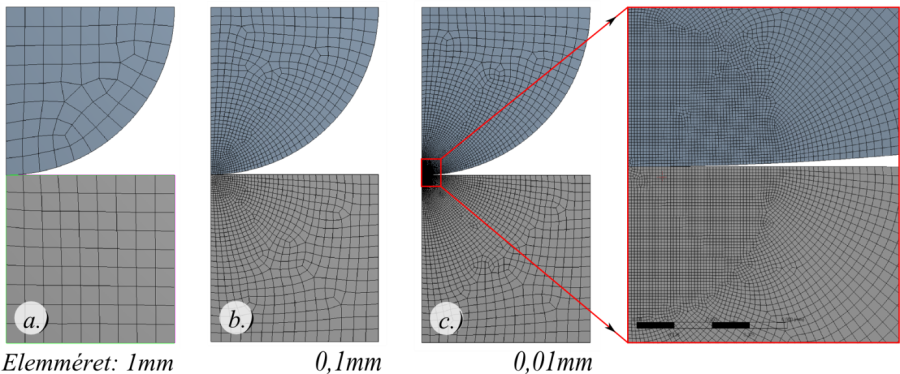
Az analízist elvégezhetjük a lokális hálósűrítés elemméretének változtatásával (7.11. ábra), hogy megfigyeljük az elemméret eredményre gyakorolt hatását (7.15. ábra).
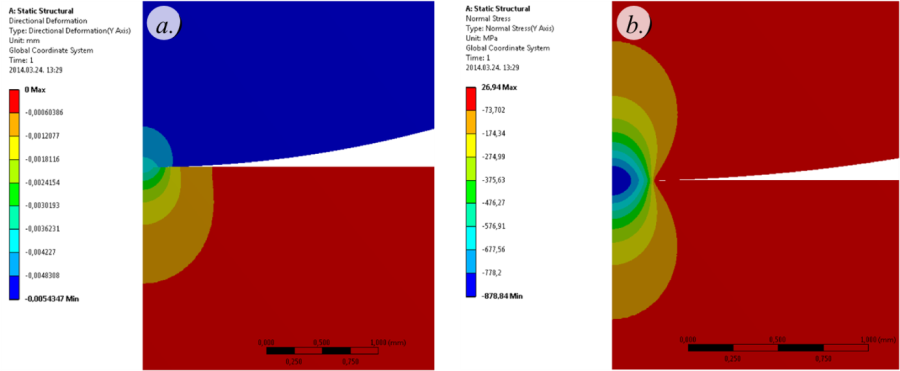
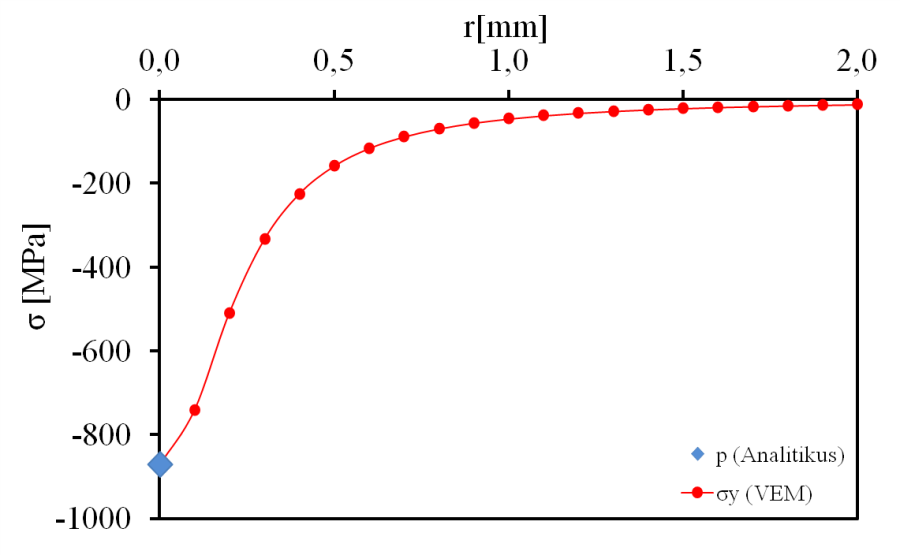
A háló beállítása után futtassuk a szimulációt, és kérdezzük le az Y irányú deformáció (Directional Deformation) , (7.12. ábra, b.), és normálfeszültség (Normal Stress) , (7.12. ábra, b.) értékét a teljes modellre, valamint az Y tengely mentén futó 2mm hosszú konstrukciós vonalra (Path) , (7.13. ábra).
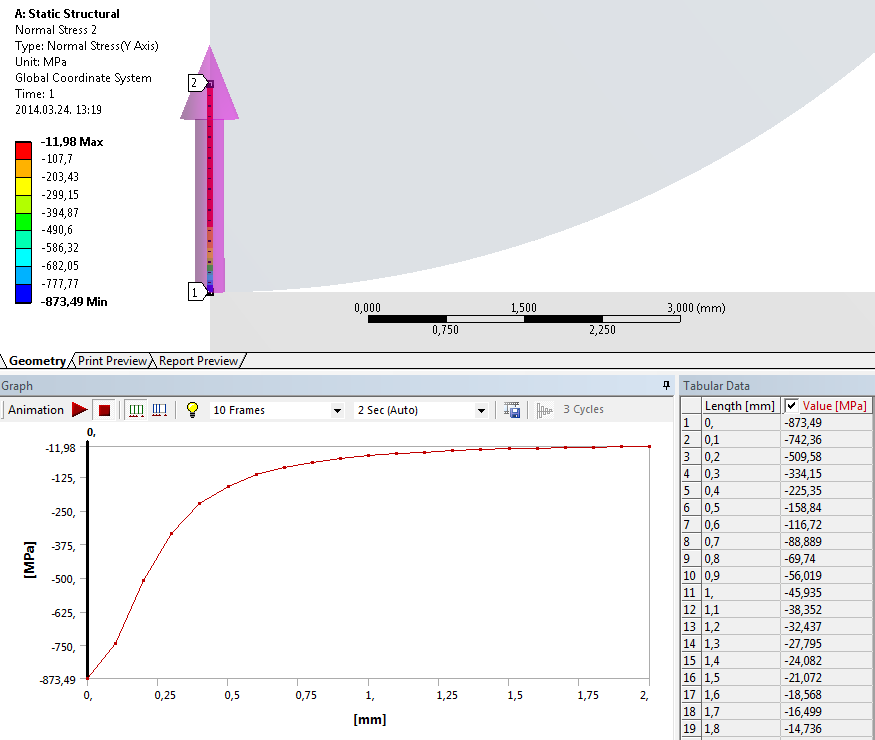
Megjegyzés: Egy (a tengelyszimmetrikus analízisnél elvileg szükségtelen), a tengelyt oldalirányban megkötő Frictionless kényszer hozzáadásával a Normal Lagrange eljárással számolt kontaktnyomás (Contct Tool/Pressure) értéke 873,42MPa, ami 0,23%-os eltérést eredményezett az elméleti értékhez képest. A tengelyt megkötő Frictionless kényszer nélkül a Normal Lagrange kontaktnyomás (Contct Tool/Pressure) értéke teljesen fals értéket ad, az Augmented Lagrange és a Pure Penalty pedig 849 MPa-t, ami egy nagyságrenddel nagyobb (2,5%-os) hiba az előzőhöz képest, de még így is elfogadhatónak számít.
7.3.3. Összefoglalás
A numerikus analízis és az analitikus számolás eredményeit az alábbi ábrákon foglaljuk össze.
a.) Az érintkezési pontban lekérdezett Y irányú normál feszültség és a kontaktnyomás értéke. b.) A két test közeledésének (benyomódás) mértéke, és a számítási idő az elemméret függvényében.
Az analízis különböző elemmérettel történő futtatásának eredményeiből látható, hogy megfelelő kontaktbeállítás és hálófinomítás mellett az elméleti és a numerikus eredmény jó egyezést mutatnak.
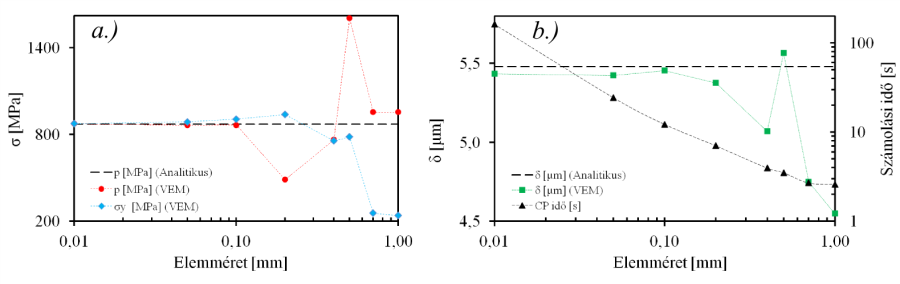
a.) Az érintkezési pontban lekérdezett Y irányú normál feszültség és a kontaktnyomás értéke. b.) A két test közeledésének (benyomódás) mértéke, és a számítási idő az elemméret függvényében.
|
Elemméret [mm] |
δ [μm] |
p [MPa] |
σ y [MPa] |
CP idő [s] |
Elemszám |
|---|---|---|---|---|---|
|
0,01 |
5,43 |
873,4 |
873,5 |
160,7 |
10112 |
|
0,05 |
5,42 |
863,8 |
886,0 |
24,2 |
2486 |
|
0,10 |
5,45 |
864,2 |
905,9 |
12,2 |
1490 |
|
0,20 |
5,37 |
486,0 |
937,5 |
7,0 |
809 |
|
0,40 |
5,07 |
763,2 |
755,1 |
3,9 |
383 |
|
0,50 |
5,57 |
1602,9 |
783,3 |
3,5 |
314 |
|
0,70 |
4,75 |
954,9 |
254,1 |
2,7 |
194 |
|
1,00 |
4,55 |
954,8 |
238,8 |
2,6 |
151 |
|
Analitikus: |
5,48 |
871,4 |
871,4 |
- |
- |