Chapter 10. Vehicle to Environment interactions (V2E)
Not only the highly automated vehicles with intelligent sensors can position the vehicle in the surrounding environment, but the environment can also sense and position the vehicle with intelligent infrastructure.
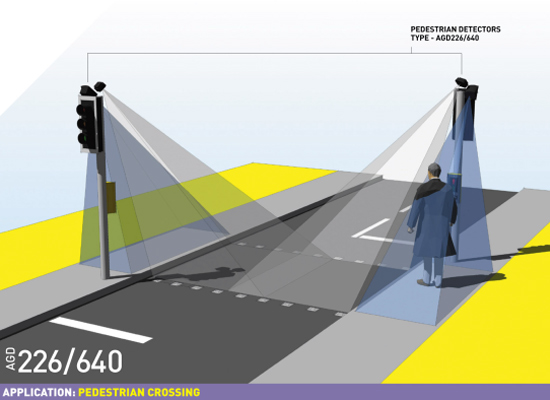
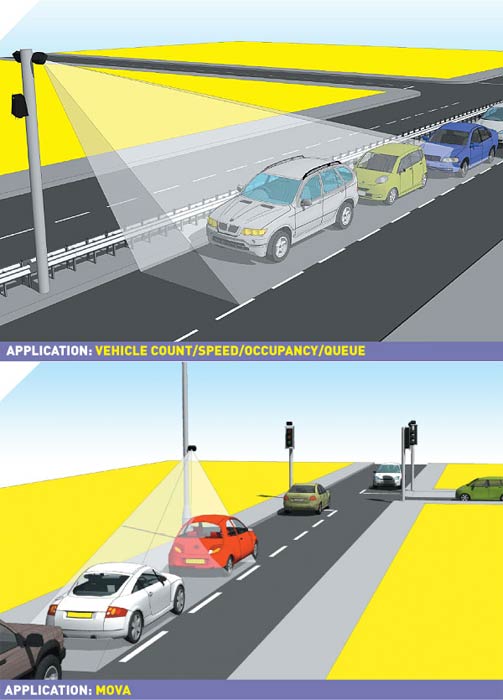
These technologies can support (even with the help of V2V and V2I) vehicle detection and movement measurement, furthermore the detection of pedestrians and cyclists and essential for the Intelligent Transportation Systems (ITS).
The following subsections will introduce the elements of this intelligent infrastructure.
10.1. Conventional technologies
Conventional (often called "in-situ") technologies refer to traffic data measured by the means of detectors located along the roadside. A short overview is presented in the following chapters based on [122]. Generally, traffic count technologies can be split into two categories: the intrusive and non-intrusive methods. The intrusive methods basically consist of a data recorder and a sensor placing on or in the road. They have been utilized for many years and the most important ones are briefly described hereafter.
Pneumatic road tubes: rubber tubes are placed across the road lanes to detect vehicles from pressure changes that are produced when a vehicle tire passes over the tube. The pulse of air that is created is recorded and processed by a counter located on the side of the road. The main drawback of this technology is that it has limited lane coverage and its efficiency is subject to weather, temperature and traffic conditions. This system may also not be efficient in measuring low speed flows.
Piezoelectric sensors: the sensors are placed in a groove along roadway surface of the lane(s) monitored. The principle is to convert mechanical energy into electrical energy. Indeed, mechanical deformation of the piezoelectric material modifies the surface charge density of the material so that a potential difference appears between the electrodes. The amplitude and frequency of the signal is directly proportional to the degree of deformation. This system can be used to measure weight and speed.

Magnetic loops: it is the most conventional technology used to collect traffic data. The loops are embedded in roadways in a square formation. The detector powers the loop that generates a magnetic field. The loop resonates at a constant frequency that the detector monitors. When a large metal object, such as a vehicle, moves over the loop, the resonance frequency changes, thus the vehicle passing by can be detected. The information is then transmitted to a counting device placed on the side of the road. This has a generally short life expectancy because it can be damaged by heavy vehicles, but is not affected by bad weather conditions. This technology has been widely deployed in Europe (and elsewhere) over the last decades. However, the implementation and maintenance costs can be expensive.
A non-intrusive solution is the passive magnetic sensors, which are fixed under or on top of the roadbed. They count the number of vehicles, their type and speed. However, in operating conditions the sensors have difficulties in differentiating between closely spaced vehicles.
10.2. Camera-based systems
For camera technologies please refer to the Section 3.3. Here some specialties and applications are introduced.
Passive and active infra-red: the presence, speed and type of vehicles are detected based on the infrared energy radiating from the detection area. The main drawbacks are the performance during bad weather, and limited lane coverage.
Video image detection is also used in traffic flow measurement: video cameras record vehicle numbers, type and speed by means of different video techniques e.g. trip line and tracking.

Video image detection can also be used for functions based on vehicle identification like parking garage control, highway toll collect control, or average speed detection. Long term average speed detection is based on the identification (number plate) of the vehicle at different fixed points of the infrastructure (e.g. highway). As the distance between the fixed measuring points are known the average vehicle speed can be calculated from the time of appearance. The system can be sensitive to meteorological conditions.
10.3. Radar, ultrasonic and laser detectors
For radar, laser and ultrasonic technologies please refer to the Section 3. Here some specialties and applications are introduced.
Microwave radar: this technology can detect moving vehicles and speed (Doppler radar). It records count data, speed and simple vehicle classification and is not affected by weather conditions. Not only the police use fixed or portable radar (LIDAR) systems for speed control of the vehicles, but local communities are operating the same technology for setting up fixed speed warning signs at the entrance of the city (village) or just before a dangerous curve.

Ultrasonic and passive acoustic: these devices emit sound waves to detect vehicles by measuring the time for the signal to return to the device. The ultrasonic sensors are placed over the lane and can be affected by temperature or bad weather. The passive acoustic devices are placed alongside the road and can collect vehicle counts, speed and classification data. They can also be affected by bad weather conditions (e.g. low temperatures, snow).
10.4. Floating Car Data (FCD)
The principle of FCD is to collect real-time traffic data by locating the vehicle via mobile phones or GPS over the entire road network. This basically means that every vehicle is equipped with mobile phone or GPS which acts as a sensor for the road network. Data, such as car location, speed and direction of travel are sent anonymously to a central processing centre. After being collected and extracted, useful information (e.g. status of traffic, alternative routes) can be redistributed location based to the drivers on the road. FCD is an alternative or rather complement source of high quality data to existing technologies. They will help improve safety, efficiency and reliability of the transportation system. They are becoming crucial in the development of new Intelligent Transportation Systems (ITS). (Source: [122])